STARS (Space Tethered Autonomous Robotic Satellite)
Non-EO
Quick facts
Overview
| Mission type | Non-EO |
| Launch date | 23 Jan 2009 |
STARS (Space Tethered Autonomous Robotic Satellite)
STARS is a mother-daughter nanosatellite technology demonstration mission, a joint project of Kagawa University and Takamatsu National College of Technology, Takamatsu, Kagawa, Japan. The primary objective of the STARS project is the technical verification of the TSR (Tethered Space Robot) system. The project started in 2005 under the leadership of Kagawa University. 1) 2) 3) 4)
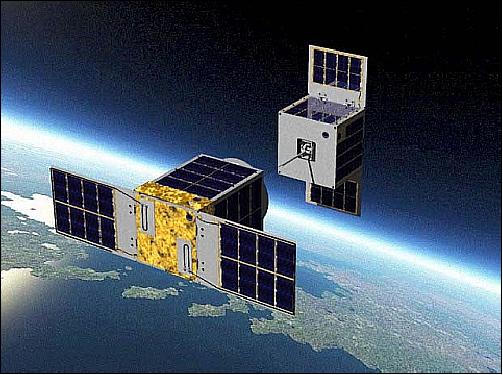
STARS consists of mother and daughter subsatellites (nanosatellites) connected by a short tether of 10 m in length. The mother satellite deploys the tether connected to the daughter satellite, which is a space robot. The attitude of the daughter satellite is controlled by its own arm link motion, and a camera mounted on the daughter satellite takes a photograph of the mother satellite during deployment.
The mother satellite has a function to deploy and retrieve the tether; the daughter satellite has the TSR function, that is to establish attitude control by its own link motion under tether tension. The experimental mission is performed under the following scenario:
1) The mother satellite gives an initial velocity to the daughter satellite
2) The daughter satellite is deployed and retrieved under tether control by the mother satellite
3) The daughter satellite docks with the mother satellite.
Operational Sequence of the Tether Mission
The nominal operational configuration of the STARS system is the docked condition of both subsatellites. The mother and the daughter subsatellites will separate only to execute the main mission sequence of short duration (it lasts approximately 30 seconds).
As shown in Figure 2, the two spacecraft are initially docked and the mission begins with a command from the ground station.
• Phase A: First, electrical power is supplied to the control devices on the both satellites. Since tether deployment and robot motion are controlled by motor actuation and need high electrical power, electrical power is supplied only during the mission.
• Phase B: Next, the mother satellite releases the daughter satellite, and the daughter satellite begins to control its attitude by its own arm link motion
• Phase C: The daughter satellite, whose attitude is controlled during deployment, takes a photograph of the mother satellite when the tether length becomes long enough to take a picture.
• Phase D: Finally, the daughter satellite docks with the mother satellite.
After a mission sequence is terminated, the mission data and picture data are transmitted to the ground station.
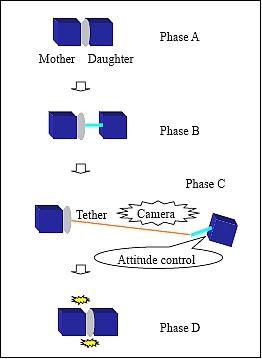
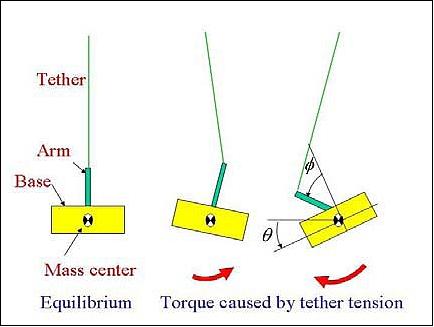
Figure 3 illustrates schematically the attitude control technique used for the daughter subsatellite. The model is simple: the tethered space robot consists of a base and a link arm. The base attitude is in equilibrium when the mass center of the robot is located on the tether extension line. The tether tension torque acts on the robot when the mass center deviates from the tether extension line. Because the tether is attached to the end of the arm link, the tether tension torque can be controlled by an arm link operation.
It should be noted that attitude control is possible around the vertical axes with respect to the tether extension line, and the arm link needs two degrees of freedom. Hence, the arm motion around the axis of the tether extension line, and the TSR (Tethered Space Robot) attitude can be controlled around two vertical axes of the tether extension line.
Spacecraft
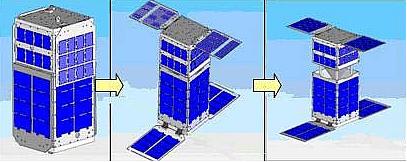
As shown in Figure 1, STARS consists of the mother satellite, which is the tether deployment system, and the daughter satellite, which is the tethered space robot (TSR).
Mother satellite | Mass | 4.2 kg |
| Size (without antenna and solar paddle) | 160 mm x 160 mm x 253 mm |
Daughter satellite | Mass | 3.8 kg |
| Size (without antenna, solar paddle and arm link) | 160 mm x 160 mm x 158 mm |
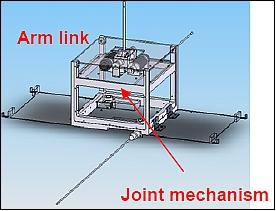
Figures 4 and 5 illustrate the primary mechanisms of STARS. The mother satellite consists of a deployment mechanism, reel mechanism, and docking corn. The daughter satellite has a link arm, which is actuated by a joint mechanism.
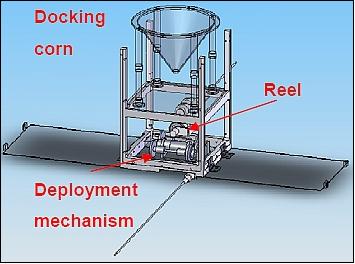
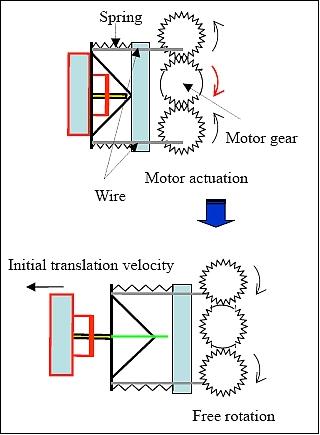
Deployment mechanism: The release mechanism, mounted on the mother satellite, gives an initial translation velocity to the daughter satellite. The release subsystem consists of springs, wires, pulleys, and a motor whose gear has gearless parts (Figure 6). Initially, the the wires are wound up by the pulleys, rotated by the motor. When the wires are wound enough to compress the springs for extending the tether, the gearless part of the motor comes to the pulley gears, the pulleys rotate freely, and then the springs are extended. As a result, an initial translation velocity is given to the daughter satellite. This sequence is repeatable; therefore, the deployment mission can be performed many times in orbit.
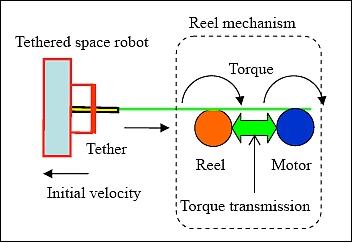
Reel mechanism: The reel mechanism controls the tether tension during deployment and the retrieval of the daughter satellite. The tether is deployed and retrieved by the reel rotated at a constant torque, which is controlled by the torque transmission device actuated by the motor. As a result, the daughter satellite is deployed and retrieved at a constant tether tension: that is, excessive tether tension change can be avoided. The reel mechanism is shown in Figure 7.
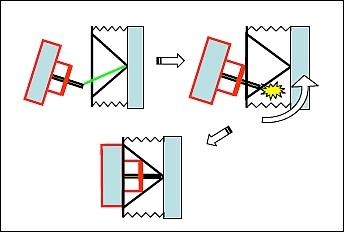
Docking mechanism: The daughter and mother satellites dock at the end of the deployment mission. The docking corn on the mother satellite makes it possible to dock smoothly with the daughter satellite and to keep the relative attitudes of both satellites such that the daughter satellite keeps the arm link at its normal position (Figure 8).
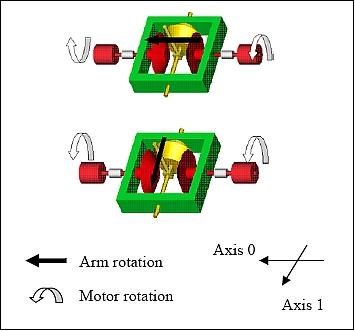
Joint mechanism: A differential gear mechanism is employed for attitude control of the vertical axes of the tether extension line (Figure 9). The rotation axes of the two motors are the same, and they are denoted by axis 0 and axis 1, which is vertical to the tether extension line. The two motors are fixed on the satellite body. Both motors rotate as shown in the upper half of Figure 9: the arm link rotates around the 1 axis, and when the two motors rotate, as in the lower half, the arm links rotate around the 0 axis.
Spacecraft Subsystems of the Two Nanosatellites
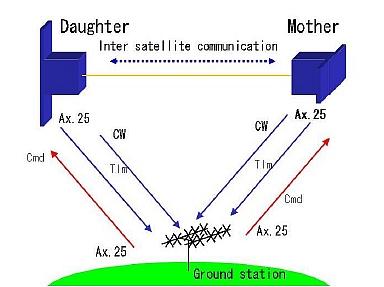
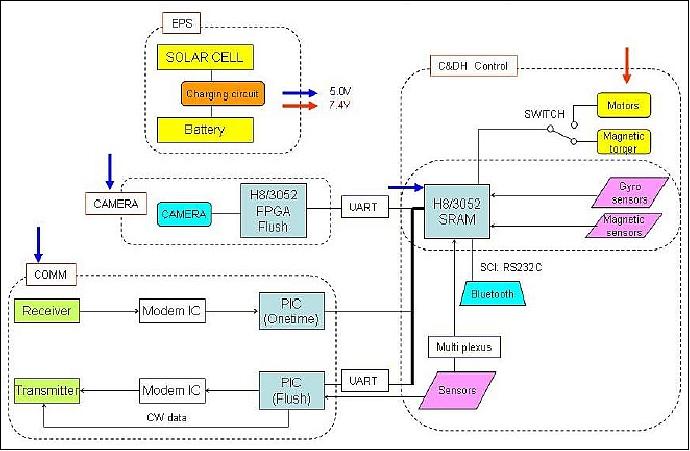
Each nanosatellite (mother and daughter) features its own common set of subsystems as illustrated in Figure 11. Hence, the two satellites function as independent radio stations.
• COMM (Communication subsystem): One ground station is set up for the communication link of STARS at Kagawa University. A further downlink is availlable for the amateur radio community.
The two satellites provide intercommunication via Bluetooth protocol link during any tether sequence mission. In the deployment mission, the mother satellite controls two motors for the deployment and the reel mechanisms. In a similar manner, the daughter satellite controls two motors for the joint mechanism. The same electrical hardware can be applied to both satellites, and control software is implemented for each control function.
The communication subsystem communicates with the ground station through amateur radio frequencies (UHF, VHF). The basic function of the COMM is transmitting FM telemetry data from the C&DH, and receiving a command data from the ground station and sending it to the C&DH. STARS performs only a FMCW (Frequency Modulation Continuous Wave) downlink. During a station pass only the EPS and COMM subsystems are working in parallel.
The uplink is in VHF (144 MHz); the downlink is in UHF (430 MHz). The Ax.25 communication protocol is used.
• EPS (Electrical Power Subsystem): Power is provided by solar cells from the deployed solar panels as well as from the surface-mounted cells. A power distribution system manages the onboard voltage and controls the charging and discharging of the batteries. The battery power is needed to actuate the motors; the minimum function, which is communication with the ground station, is operated only by solar power.
• C&DH (Command & Data Handling subsystem): C&DH performs the data handling of STARS, control of the deployment mission, and control of the camera. Sensor data is temporally stored on the C&DH and transmitted to the ground station by the ground command. A deployment mission is started by ground command and executed based on the cooperative control by intersatellite communication through Bluetooth. C&DH manages the electrical power to the Camera and the motors; the latter ones consume a considerable amount of power.
• Camera (Camera subsystem): see Figure 11. Images are taken during the tether deployment and retrieval periods to confirm the proper motion of each sequence.
• ADS (Attitude Determination Subsystem): Attitude is sensed by a magnetometer and a gyroscope. A magnetorquer is used to stabilize the spacecraft with the help of Earth's magnetic field.
Launch
A launch of the STARS spacecraft took place on January 23, 2009 on the H-IIA vehicle. The launch site is the Yoshinobu Launch Complex at the Tanegashima Space Center, Kagoshima, Japan. STARS is a secondary payload on the GOSAT mission. The other secondary payloads on this mission are: KKS-1, Kagakaki (SORUNSat-1), PRISM, SOHLA-1, SpriteSat, and SDS-1.
Orbit: Sun-synchronous near-circular orbit, altitude = 666 km, inclination = 98.06º.
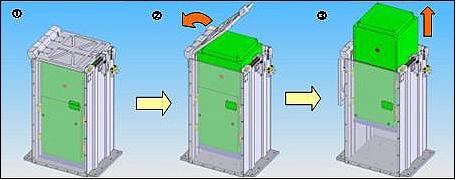
The STARS spacecraft was stowed in a T-POD system (mother and daughter docked) and deployed on orbit as shown in Figure 12. The configuration (deployment sequence of mother and daughter) of STARS just after deployment from the rocket (i.e. T-POD) is shown in Figure 13.
Mission Status
• In December 2009, the housekeeping data of STARS is being monitored closely to integrate the “lessons learned” information into the design of the follow-up mission. 5)
• In October 2009, the mother satellite obtained a stable condition, and then turned again into an unstable condition. The housekeeping data has been analyzed for stable and unstable conditions.
• In June 2009, the daughter satellite became unstable due to electrical power shortage (the daughter satellite has an inferior power generation capability when compared to the mother). Since then, housekeeping data has been monitored continuously.
• In April 2009, the deployment of the tether was put on hold due to the fact that the mother satellite experienced an instability.
• At the beginning of March 2009 (after the tether deployment), robotic motion of the daughter satellite was confirmed. The arm link was actuated by the ground commanding, and it was also controlled based on feedback information of the gyro sensors.
• At the end of Feb. 2009, after problem resolving, the project was able to conduct the tether deployment mechanism (along with confirmation of the deployment). This was followed by extending the tether from initially a few centimeters to several decimeters. The extension of the tether was imaged by a camera onboard the daughter satellite.
• After the Feb. 2 incident, the project was able to carry out maintenance on the ground station facilities and resolved the problem that caused the malfunction.
• On Feb. 2, 2009, the project tried to deploy the mother and daughter satellites (Figure 13), and to conduct the tether deployment experiment. The deployment/separation was successfully conducted; however, the execution of the tether deployment experiment failed. The deployment system simply malfunctioned due to poor communications with the ground station. 6)
• About one week after the successful launch on January 23, 2009, initial checks with the spacecraft were completed, including inter-satellite communication through Bluetooth, and taking camera pictures and their downlink.
• After orbit injection and T-POD deployment, the STARS twin spacecraft were nicknamed KUKAI, the mother satellite was called KU and a daughter satellite was referred to as as KAI.
References
1) Masahiro Nohmi, “Mother-Daughter Satellite STARS for Short Tether ,” The Fourth Asian Space Conference 2008, Taipei, Taiwan, October 1-3, 2008, URL: http://www2.nspo.org.tw/ASC2008/4th%20Asian%20Space%20Conference%202008/oral/S11-05.pdf
2) Masahiro Nohmi, Takeshi Yamamoto, Hideki Yoshihara, Kenji Tanaka, Kazunori Matsushita, “Development Concept for Space Tethered autonomous Robotic Satellite-1,” Proceedings of 'The 8th International Symposium on Artificial Intelligence, Robotics and Automation in Space (iSAIRAS)’, Munich, Germany, Sept. 5-8, 2005, (ESA SP-603, August 2005), URL: http://robotics.estec.esa.int/i-SAIRAS/isairas2005/posters/nohmi01.pdf
3) M. Nohmi, “Development of Space Tethered Autonomous Robotic Satellite,” Proceedings of the 3rd International Conference on Recent Advances in Space Technologies (RAST 2007), Istanbul, Turkey, June 14-16, 2007, URL: http://stars1.eng.kagawa-u.ac.jp/img/462_RATS07.pdf
4) Masahiro Nohmi, Takeshi Yamamoto, Akira Andatsu, “Technical Verification Satellite “STARS” for Tethered Space Robot,” URL: http://robotics.estec.esa.int/i-SAIRAS/isairas2008/Proceedings/POSTER%20SESSION/m003-Nohmi.pdf
5) Informatrion was provided by Masahiro Nohmi of Kagawa University, Takamatsu, Kagawa, Japan
6) Masahiro Nohmi, “Report on Current Operational Status of Small Satellite "KUKAI", April 23, 2009, URL: http://www.aprsaf.org/feature/feature_89.html
The information compiled and edited in this article was provided by Herbert J. Kramer from his documentation of: "Observation of the Earth and Its Environment: Survey of Missions and Sensors" (Springer Verlag) as well as many other sources after the publication of the 4th edition in 2002. - Comments and corrections to this article are always welcome for further updates (eoportal@symbios.space).