XSat (also spelled as X-Sat)
EO
Operational (extended)
IRIS
NTU
Quick facts
Overview
| Mission type | EO |
| Agency | NTU |
| Mission status | Operational (extended) |
| Launch date | 20 Apr 2011 |
| Instruments | IRIS |
| CEOS EO Handbook | See XSat (also spelled as X-Sat) summary |
X-Sat of NTU (Nanyang Technological University), Singapore
Overview Spacecraft Launch Mission Status Sensor Complement Ground Segment References
XSat (also spelled as X-Sat) is a microsatellite technology demonstration mission of CREST (Centre for Research in Satellite Technologies), a joint venture of NTU(Nanyang Technology University), and DSO (Defence Science Organization) National Laboratories, Singapore. CREST was established for this purpose. The overall objective is to demonstrate technology in support of high-resolution imaging capabilities and to analyze and implement onboard parallel processing algorithms, thereby demonstrating improved mission achievements for generally downlink-limited small satellite imaging missions. 1) 2) 3) 4) 5)
Background: The X-Sat project was initiated in 2000 as an internally funded, inter-school project, to be designed and constructed entirely in the NTU, as a technology demonstration mission, with the original objectives of (a) Earth observation and imaging for environmental applications such as monitoring of forest fires and ocean red tides, and (b) satellite-based data acquisition/distribution and messaging using mobile terminals. In 2001, the DSO National Laboratory joined the project with additional funding for acquisition of a 10 m resolution multispectral (three spectral bands in the visible and near infrared spectrum) instrument as a primary payload. SI (Satrec Initiative Ltd.) of Daejeon, Korea was selected for the development of the imager.
Spacecraft
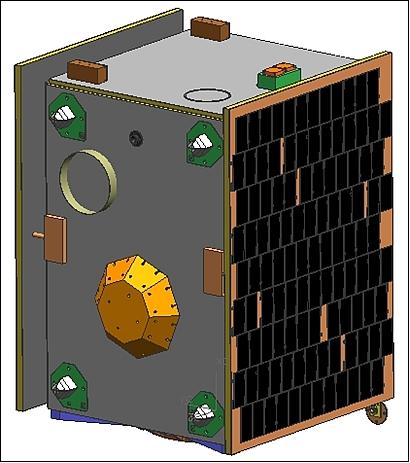
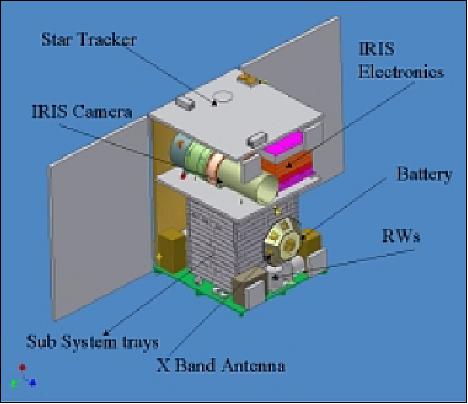
The X-Sat spacecraft design and development is being provided by the DSO National Laboratories. The bus structure has dimensions of 600 mm x 600 mm x 800 mm and a total mass of 106 kg. The box design is made of a honeycomb panel structure, which carries the individual components mounted on the respective panels. In addition to the six body panels a central shelf is provided. X-Sat employs a tray structure, there are up to 16 stacked trays with different electronics mounted inside.
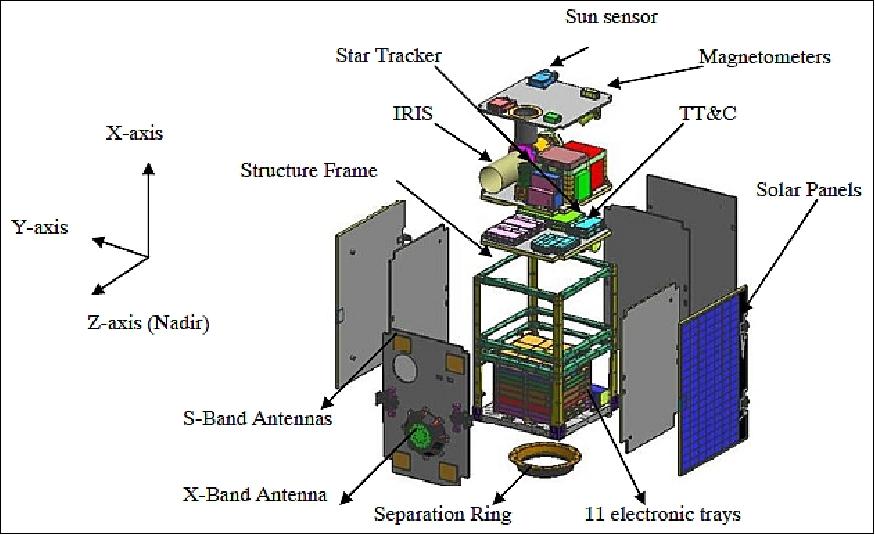
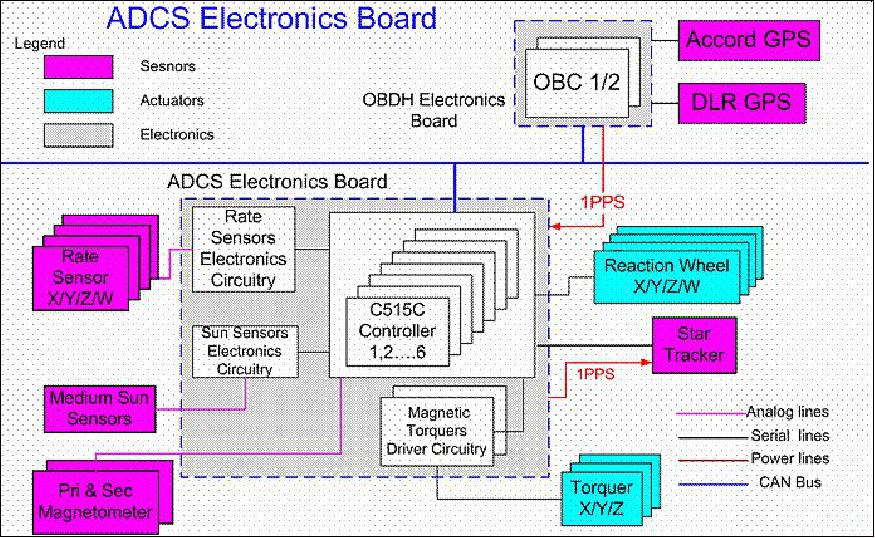
The S/C is 3-axis stabilized providing a body-pointing capability in cross-track of ±40º. Attitude is sensed by three sun sensors, one star tracker, three rate sensors, and two 3-axis vector magnetometers. Four reaction wheels (3 orthogonal and one spare) and three magnetic torquers serve as actuators. The attitude knowledge accuracy is 0.06º (200 arcsec) about each axis with the requirement for the yaw axis slightly relaxed. The ADCS (Attitude Determination and Control Subsystem) is implemented as a software task on the OBC (Onboard Computer) for orbit determination and control of the S/C. ADCS is also required to steer the satellite up to ±40º in roll to provide increased revisit opportunities (body-pointing capability). 6) 7) 8) 9) 10)
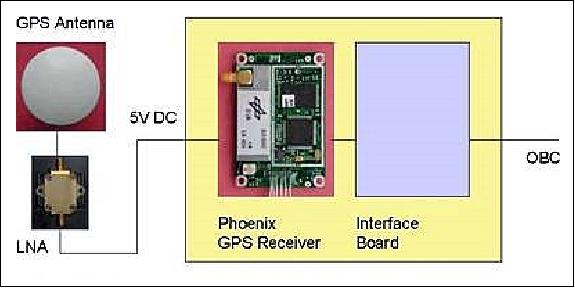
Two GPS receivers provide positioning information not just to the ADCS, but also to the payloads. One of the GPS receivers is the Phoenix low-cost GPS receiver developed by DLR/GSOC. It provides L1 C/A code and carrier tracking in twelve channels making use of a 32 bit ARM/TDMI microprocessor. With its built-in special navigation system it is capable of providing high precision onboard orbit determination as well as orbit forecasts. The second GPS receiver is NAV2000HDCP of Accord, India. 11)
Parameter | Specification | Comments |
Pointing accuracy | 0.3º in pitch and roll, 1º in roll | Based on 90% for useful swath |
Attitude knowledge accuracy | 0.06º in pitch and roll, 0.2º in yaw | To meet the 1 km location error on the image |
Stability: Allowable roll rate amplitude | 0.02º/s in mid-frequency (340 Hz) | To keep the roll oscillations to within 1% of GSD during one line integration |
Orbital position knowledge accuracy | 200 m in geodetic position | To meet the 1 km location error on the image |
PSS (Power Supply Subsystem): Spacecraft power is provided by two deployable GaAs solar panels covering a total area of 0.9 m2. Two Li-ion batteries (bus voltage of 16-30.5 ) provide power during orbital eclipse phases. 12)
The PSS consists of two major modules, namely the PCM (Power Control Module) and the PDM (Power Distribution Module).
Architecture | DET (Direct Energy Transfer) |
Solar array size | 342 cells in 19 series 18 parallel configuration |
Solar cell efficiency, solar cell type | ~ 27%, Triple Junction GaAs |
Power output | Between ~380 W @ -50ºC and ~260 W @+110ºC |
Battery capacity, battery voltage | 13.5 Ah (340 Wh), nominal 25.2 V, maximum 29.4 V |
Main bus voltage | 16.0 V to 30.5 V |
BCR efficiency, MBR efficiency | > 90%, > 85% |
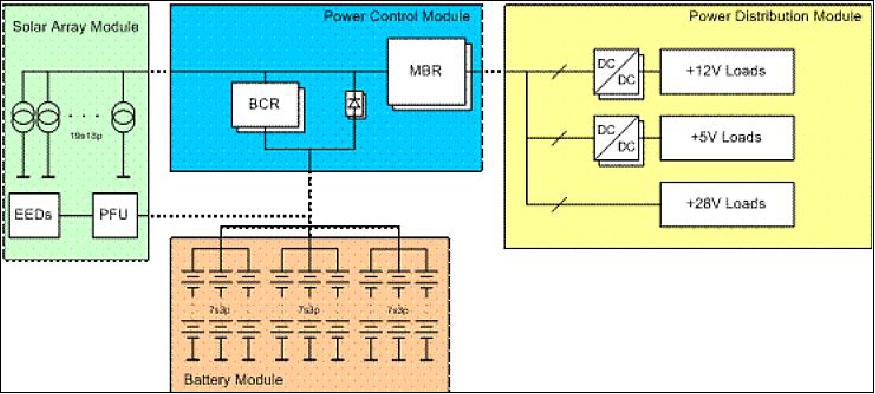
In general, the satellite's orbit can be broken down into two phases, namely the sunlight phase and the eclipse phase. The solar array converts the sunlight into electrical energy during the sunlight phase. Moreover, it also supplies the power to the subsystem and charges the batteries through the BCR (Battery Charge Regulator) during this phase. During the eclipse phase, the batteries supply the power to the subsystem through a discharge diode. The voltage of the main bus is converted by the MBR to an unregulated 16 V to 30.5 V at the output of PCM (Power Control Module). The energy transfer between the solar array, batteries and subsystems ensures that the power is available to the subsystems throughout the mission.

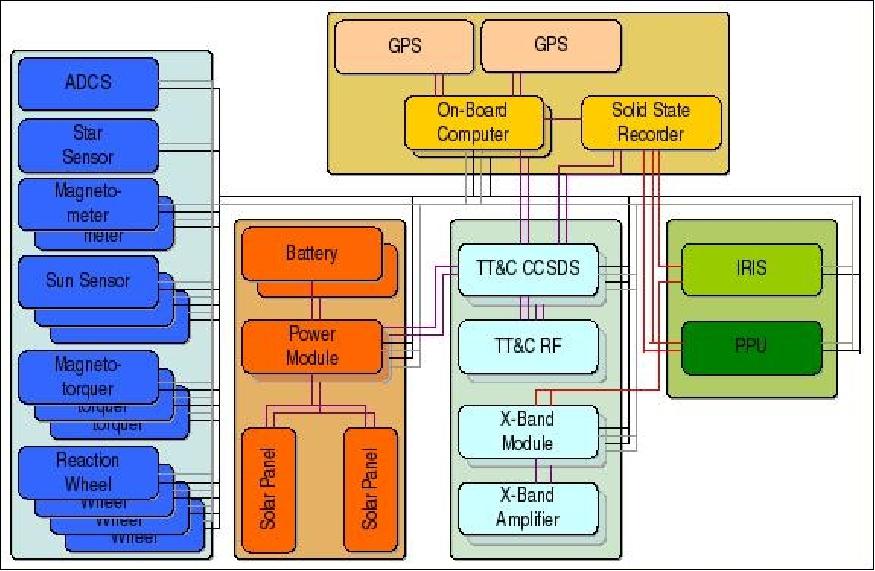
The OBDH (Onboard Data Handling) system consists of three basic elements: 13)
• the dual-redundant OBC (Onboard Computer) and an OIM (OBC Interface Module)
• the SSR (Solid State Recorder) for payload and housekeeping data of 2 GByte storage capacity
• the dual-redundant CAN bus.
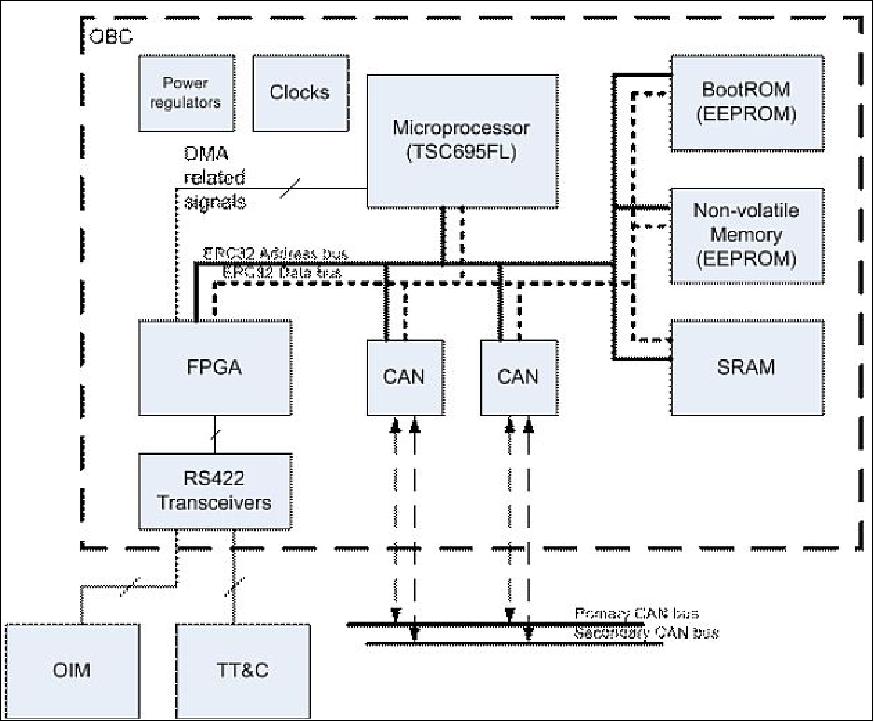
The design features a cold dual-redundant OBC (distributed architecture), based on the ERC-32 processor of ATMEL and a radiation-hardened FPGA (Field Programmable Gate Array). The OBC is connected to all subsystems and payloads via two redundant CANs (Controller Area Network). Only one communication bus is operational at a given moment in time while the second bus acts as a backup. Dedicated connections are preferred for high reliability, broad bandwidth [100 Mbit/s LVDS (Low-Voltage Differential Signaling) links], and power connections.
The OBDH performs also failure detection, identification, and recovery functions besides its nominal support functions. The OBC is equipped with 16 MByte of memory and uses error detection and correction (EDAC) to maintain program and data validity. The OBC uses the VxWorks RTOS (Real-Time Operating System) as the base layer for all mission software. 14) 15)
While the OBC is the primary processor for ADCS operations, an important feature of X-Sat is the event/condition monitoring capability provided by a dedicated StrongARM processor. In this context, event monitoring is applied to onboard system performance evaluation, in particular ADCS. To realize this, all the performance parameters as obtained from any ground segment tests are made available to the event monitoring computer. The performance evaluation software logs in the data from all onboard subsystems and estimates the performance parameters (comparing the evaluated parameters with those in the database). The StrongARM SA1110 is being used in the ADCS controller (1 processor) as well as in the PPU (20 processors).
The orientation of X-Sat is such that the solar panels are always pointed towards the sun, except during imaging or downlinking operation during certain orbits over a small portion of its period. 16)
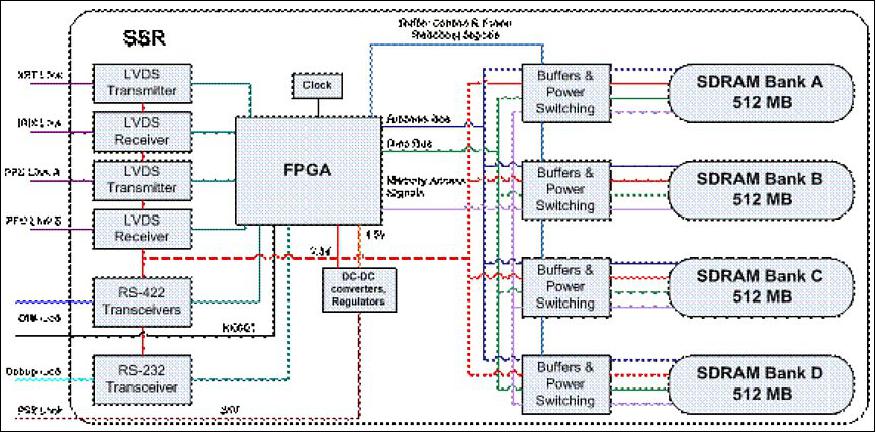
SSR (Solid State Recorder): The SSR is the high volume data storage module of the OBDH subsystem. It provides data storage and retrieval services to various sub-systems onboard X-SAT. It operates under complete control of the OBC, through OIM (OBC Interface Module). The SSR aims to use commercial and hence low-cost memory modules for data storage and adopts a principle of reliability through redundancy. This sees the division of the total storage space into several banks of memory that can be powered-up and utilized by the controller unit on the SSR. The division of the storage space into independent banks allows the isolation of faults such as SEUs and latch-ups caused by environmental factors and prevent such faults from propagating throughout the module. The SSR also enhances the integrity of stored data through the use of an EDAC (Error Detection and Correction) scheme. The SSR does not contain any microcontroller/processors. Instead, a FPGA is used to implement all the required functionality.
The SSR provides a differential UART link to the OIM module from which it receives all its operating commands and scenarios. This link is also utilized for the low speed transfer of stored payload data to the ground as well as some ground upload data consisting of application codes for other subsystems. The SSR provides high speed differential LVDS links to the XBT subsystem and IRIS and PPU payloads. These links are primarily used for the transfer of image data.
RF communications (use of CCSDS protocol standards).
The TT&C subsystem uses S-band (2 GHz, command uplink and telemetry downlink) communication links with the ground station at NTU, Singapore (TT&C link). The S-band link features four pairs of transmitter/receiver antennas with transmission rates of 4 kbit/s (uplink) and downlink rates of up to 500 kbit/s. Use of CCSDS protocol. 17)
XBT (X-band Transmitter): X-Sat provides X-band (8.3025 GHz, imagery downlink). The X-band transmission rates are selectable at: 12.5, 25, or 50 Mbit/s (output power of of 10.5 W). The modulation in X-band and S-band is QPSK.
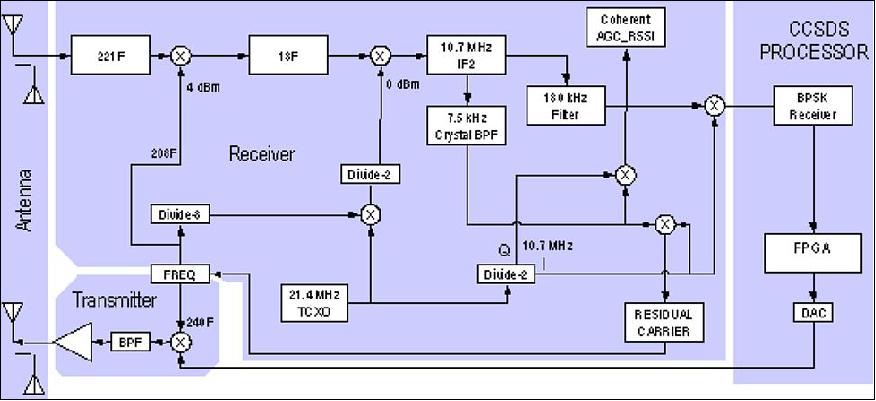
The TTC Rx is comprised of 4 modules:
1) LNA (Low Noise Amplifier)
2) 208F Frequency Synthesiser
3) 10M7 Phase Detector
4) Power Supply.
The function of the Receiver module is to acquire the residual carrier from the ground station and extract the 16 kHz subcarrier for the telecommand demodulator inside the CCSDS processor.


Launch
X-Sat, Singapore's first remote sensing satellite with a mass of 106 kg, was launched on April 20, 2011 as a secondary payload to ISRO's (Indian Space Research Organization) ResourceSat-2 spacecraft. The launch site was SDSC-SHAR, and the launch vehicle is PSLV-C16. 20) 21) 22)
• Another secondary payload on the flight was YouthSat of ISRO with a mass of 92 kg.
Note, the launch of X-Sat has been delayed since 2007.
Orbit: Sun-synchronous circular orbit, altitude = 817 km, inclination = 98.73º, orbital period = 101.35 minutes; LTDN (Local Time on Descending Node) is at 10:30 hours.
Mission Status
• On April 20, 2016, XSAT was on orbit for 5 years and continues operating nominally. 23)
• On April 20, 2014, XSAT of NTU (Nanyang Technological University) was on orbit for 3 years and continues operating nominally. During this time, the microsatellite has traveled nearly 700 million kilometers, captured 8,000 photographs and has completed 4,400 successful commands while orbiting Earth. All these events were achieved while the satellite survived several solar storms, hazardous radiation and more than 30 near-collisions with space debris. 24) 25) 26)
• The XSAT mission is operating nominally in December 2013. 27)
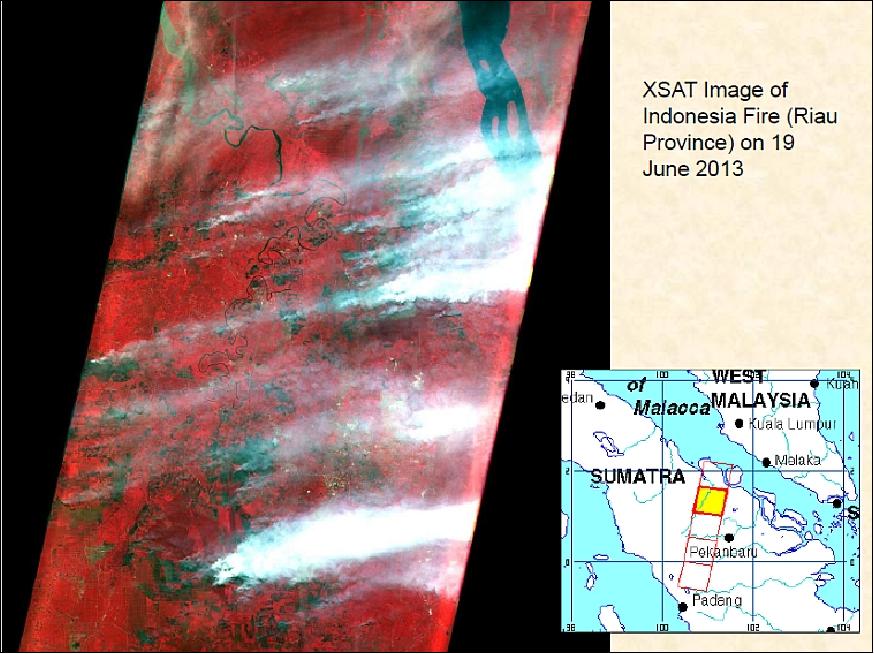

• On April 20, 2013, X-Sat was two years on orbit. The homegrown spacecraft survived solar storms, radiation and 15 near-collisions with large chunks of space debris. X-Sat has taken almost 5,000 photographs of Earth, helping researchers to monitor sea pollution, forest fires and other environmental changes. 28)
• April 20, 2012, marked the first year of X-Sat on orbit. The X-Sat spacecraft and its payload are operating nominally in 2012. The spacecraft has not only captured images of Sumatra's forest fires and the Bangkok floods, but also had a few near misses with floating debris. 29) 30) 31)
- Since May 2011, X-Sat has downlinked more than 1000 images from space to help researchers on the ground monitor the effects of environmental changes.

• The IOT activities for the X-Sat mission have been conducted for the period from April 20, 2011 to June 16, 2011. The main milestones of solar panel deployment, transition from sun acquisition to sun tracking as well as IRIS Camera checkout and imaging operations had been carried out satisfactorily. 32)
- There were also many lessons learnt during the IOT and they will form the recommendations to be considered for future programs.
- The main objective of X-Sat project, to perform imaging and downlink the imagery data within the same orbital pass has been achieved. The project is considered a success.
• On May 5, 2011, the first imaging operation was conducted. Since then, the satellite has progressed into normal operations, i.e. near real-time imaging missions which involved sending down to the ground segment in Singapore the imagery data within the same orbital pass (Ref. 32).
• Three days after launch, a ground command was sent up to the microsatellite to fire the pyrotechnic cable-cutters holding the 2 deployable solar panels. This was followed by a series of IOTs (In-Orbit-Tests) of various subsystems of the satellite (Ref. 32).
• In less than 10 hours after launch, NTU established contact with the X-Sat microsatellite. The telemetry received by the team from the first-ever satellite built from scratch in Singapore by NTU and DSO Laboratories, show that it is in good working condition with its solar panels deployed and operating well. 33)
Sensor Complement
IRIS Imager
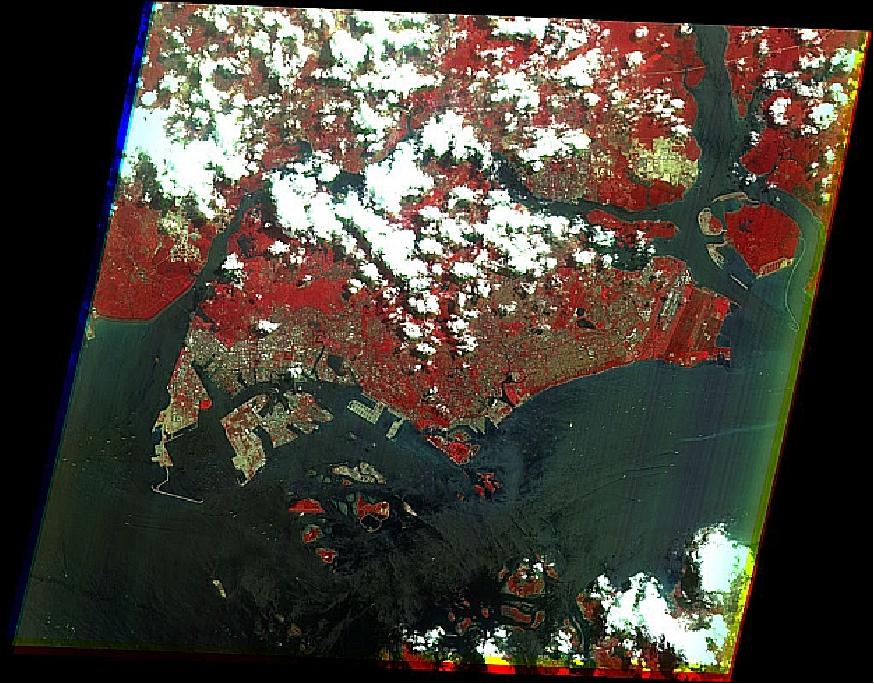
IRIS (Greek goddess of the rainbow and the messenger of the gods). The objective is to provide multispectral imagery in the visible and near-infrared wavelength range. Specific objectives are:
• To demonstrate X-Sat capabilities for remote sensing in the South East Asia region
• To take imagery and collect spatial and radiometric information of land to monitor and manage forests, plantations, urban areas and urban infrastructure
• To detect significant environmental events, such as forest fires, floods and landslides, as quickly as possible and provide timely coverage to monitor the development of these events.
The IRIS camera is being funded by DSO National Laboratories and designed and built by SI (Satrec Initiative Co. Ltd.) of Daejeon, Korea; SI is the commercial spin-off from SaTReC), the contractor to NTU. The IRIS instrument is an upgraded version of the KITSAT-3 multispectral imager. IRIS development at SI was initiated in April 2002. 34) 35) 36)
IRIS consists of an optical module called EOU (Electro-Optical Module) and an electronics module, called PCU (Processing and Control Unit). The optical module in turn consists of mirrors, lenses, baffles, detectors, detector front-end electronics, and structural parts. The electronics module consists of the power supply module, control module, and an IRIS-internal mass storage module. IRIS provides also a logical LVDS (Low Voltage Differential Signaling) interface to the PPU (via a RAMDisk) for real-time access to the raw data.
The IRIS instrument design features a pushbroom scanner with three spectral bands: green (520 - 600 nm), red (630 - 690 nm), and NIR (760 - 890 nm). Each of the three linear detector arrays consists of 5000 active elements, which were all manufactured on the same wafer and subsequently coated with different interference filters to select the appropriate spectral characteristic (the FPA houses a quad-linear detector array and the proximity electronics). The design provides a high degree of band-to-band alignment, i.e. 0.1 pixels. The spatial resolution is 10 m GSD (Ground Sample Distance) on a swath of 50 km. The IRIS optics employs a Mangin telescope design with a primary and secondary mirror as well as two correction lenses; the aperture diameter is 120 mm.
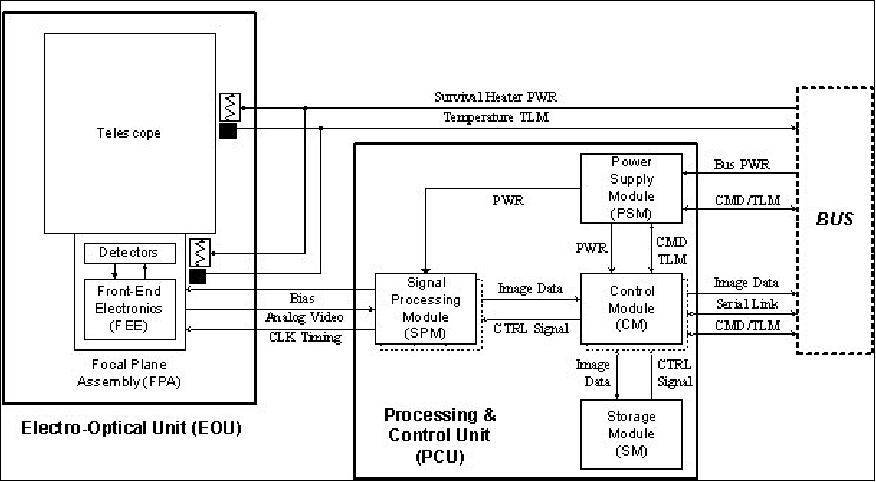
Internally the IRIS is equipped with a redundant signal processing and control module (based on a PowerPC architecture) which preprocesses the image data (along with Reed Salomon coding) prior to storage in the 8 Gbit memory module (independent of the RAM-Disk). Access to the image data is through a 50 Mbit/s LVDS link that reads the encoded data from the storage after image acquisition and an 81 Mbit/s link that enables realtime access during imaging.
Parameter | Value | Parameter | Value |
Spectral bands (3) | 0.52 - 0.60 µm (green) | Swath width | 50 km |
GSD | 12 m at nadir | Data quantization | 8 bit |
IFOV | 14.60 µrad | FOV (field of View) | 4.2º (corresponding to about 50 km @ 685 km altitude) |
Instrument mass | 12 kg (max) | Instrument power | ≤ 25 W |
MTF | ≥ 15% (@Nyquist frequency) | SNR | ≥ 100 |
Optics volume | 180 mm diameter x 530 mm | Electronics volume | 320 mm x 210 mm x 150 mm |

PPU (Parallel Processing Unit)
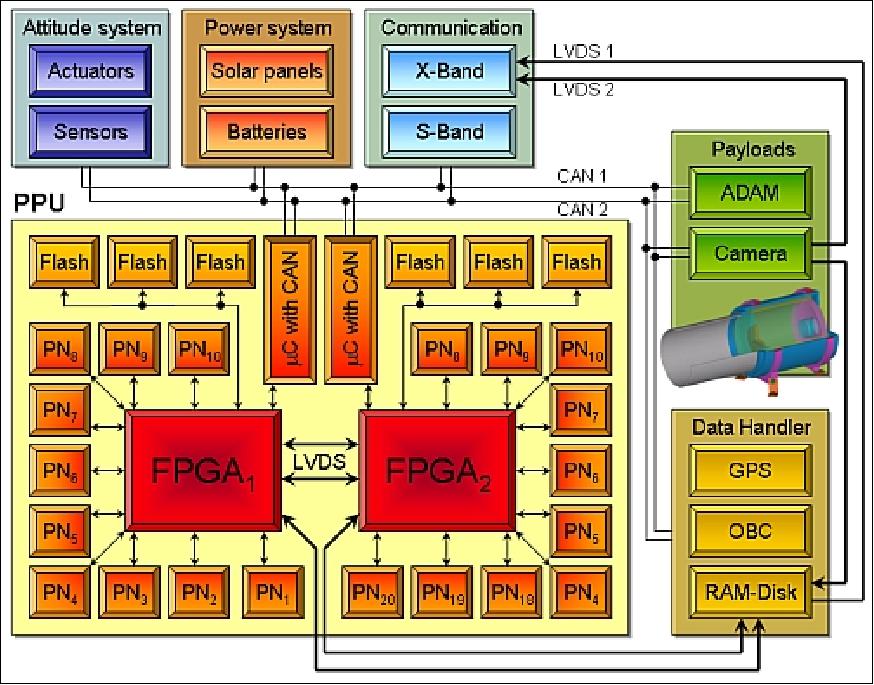
The PPU is an onboard technology demonstration payload of NTU for onboard image selection, classification and compression. The objective is the support of image processing functions (onboard image compression and feature extraction) on a high-performance architecture built from COTS (Commercial Off-The-Shelf) components. The payload data processing operations are essentially offline and are based on stored data in the RAMDisk. However, it will provide the capability for real-time or near real-time processing (depending on the actual application) of imagery or data in terms of processing speed versus acquisition speed. The PPU has two high-speed, 200 Mbit/s LVDS (Low Voltage Differential Signaling) interfaces for data to and from the RAM-Disk. Both can be operated at the same time to enable simultaneous read-and-write transfer. The OBC controls the PPU through a series of telecommands. The PPU receives the commands via CAN to configure itself for the desired application. 37) 38) 39)
The PPU hardware on X-Sat is comprised of 20 SA1110 StrongARM microprocessors interconnected via 2 central FPGAs. The network topology between the processors is provided by two anti-fuse technology FPGAs (each hosting ten processing nodes) that enable the flexible adaptation of the computer architecture to the actual application as well as additional real-time processing capabilities. Every node comprises a StrongARM SA-1110 microprocessor (266 MHz, 64 MByte of local SDRAM memory).
The objective of the massive onboard processing power of the PPU is to counteract (by pre-processing and analysis of the imaging data) the downlink data transmission bottleneck (10 min/pass) of a single ground station support configuration at CRISP, Singapore. The following scenario is given:
• A maximum of 3.6 GByte of imagery per pass can be transmitted in a single pass. This corresponds to 52 standard scenes of 5000 x 5000 pixels.
• The main mission objective, however, is to obtain as much imagery over Singapore and surrounding areas as possible. On average, the volume of downlinkable data is much likely reduced to 2/3 resulting in approximately 34 scenes per pass, due to parallel observation requirements during the station overpass.
• PPU performs image compression by using content-based JPEG2000. The novel concept utilizes a so-called compression map which assigns continuously adjustable weights to different regions according to their contribution to the user-defined mission. Hence, compression ratios beyond those generally known from JPEG2000 can be achieved while at the same time preserving the regions-of-interest to a much higher degree. Selectable lossy or lossless compression parameters will allow for more image data to be downlinked.
• In addition, image analysis is being performed, in particular in support of event monitoring functions (detection of fires, haze, etc.). An additional lossless realtime implementation within the FPGAs of the PPU enables to simultaneous acquire as well as downlink the data.
The PPU distributed cluster uses the first distributed Linux operating system in space. 40)
The PPU system is intended to operate in orbit segments which are not used by the primary payload (IRIS). In total the PPU operates at a maximal power consumption of 22 W with an operational consumption of approximately 15 W.
ADAM (Advanced Data Acquisition and Messaging System)
ADAM is developed by ITR (Institute for Telecommunications Research) at the University of South Australia in Adelaide, Australia [funded by CRCSS (Cooperative Research Center for Satellite Systems), Canberra, Australia]. ADAM is a bi-directional onboard DCS (Data Collection System) to acquire environmental monitoring data from ground segment stations (in particular oceanic data from autonomously operating buoys).
Note: ADAM was originally part of the payload; however, as of fall 2005, ADAM was deleted from the X-SAT mission due to the project's shortcoming in manpower.
Ground Segment
The ground segment for XSAT consists of 2 elements:
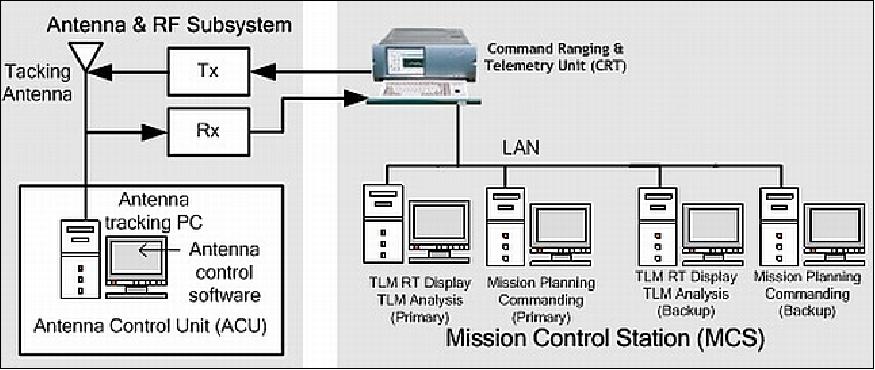
• The TT&C mission ground station, located at the Technoplaza of NTU, including the MCS (Mission Control System)
• Payload data reception (X-band) at CRISP (Centre for Remote Imaging and Sensing and Processing), located at NUS (National University of Singapore). The X-band antenna of CRISP has a diameter of 13 m.
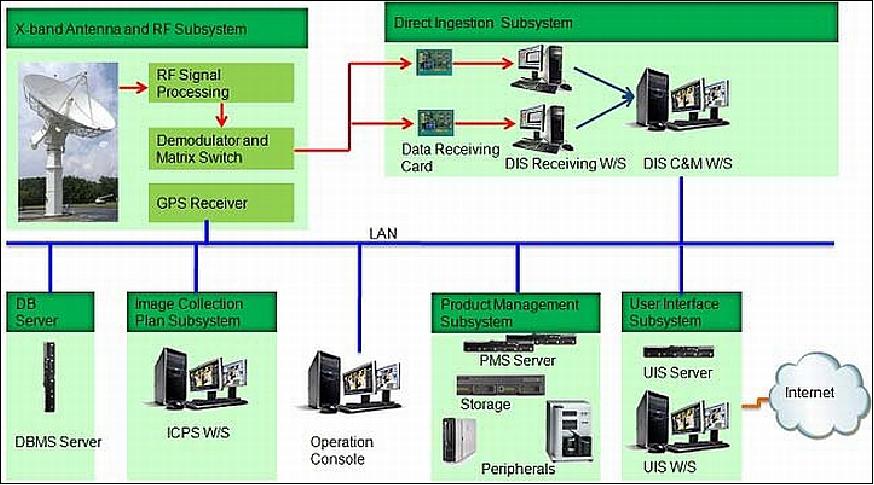
CRISP operates a satellite ground station to acquire data from remote sensing satellites, and processes the archived data to standard or value-added products for distribution and research. 41)
The prime ground station for image data reception, processing and archiving is located at CRISP, Singapore of NUS. TT&C operations are provided by NTU using an antenna dish of 6.1 m diameter. 42)
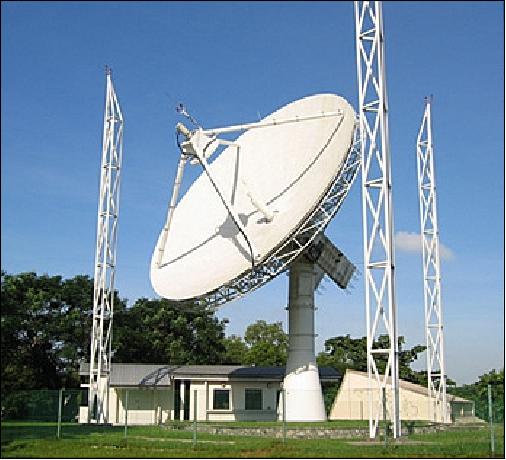
CRISP (since 1992) is a research facility of NUS. As of December 2013, CRISP operates 4 X-band antennas (Ref. 27):
- the 13 m antenna was installed in 1995
- a 6 m antenna was installed in 2000
- a 8.5 m antenna was installed in 2009
- a 6 m antenna was installed in Dec. 2013.
CRISP receives currently (2013) satellite data from the following missions:
5) TERRA MODIS (NASA, USA, March 2001)
6) Ikonos (DigitalGlobe, USA, August 2001) – 0.82 m resolution
7) AQUA MODIS (NASA, USA, July 2002)
8) SPOT-5 (CNES, France, October 2002) – 2.5 m resolution
9) GeoEye-1 (DigitalGlobe, USA, June 2009) – 0.41 m resolution
10) Worldview-I & -II (DigitalGlobe, USA, Nov. 09) – 0.47 m resolution
11) XSAT – May 2011
12) Suomi-NPP (NASA/NOAA, USA) – July 2012
13) CBERS-03 – 2014 (collaboration with Chinese CRESDA and Brazil INPE, receiving data for ASEAN countries). However, CBERS-03 experienced a launch failure on Dec. 09.2013.
References
1) T. Bretschneider, "Singapore's Satellite Mission X-Sat," 4th IAA Symposium on Small Satellites for Earth Observation, Berlin, Germany, April 7-11, 2003
2) http://www.ntu.edu.sg/eee/newsletters_reports/research_report2004/report/2004/pdf/sec.pdf
3) B L Tan, N Nagarajan, S H Tan, K Arichandran, "Investigation of Solar Panel Deployment Options and Power Generation for X-Sat ," Proceedings, IEEE 3rd International Conference on Information, Communications and Signal Processing (ICICS-2001), Singapore, Oct. 15-18, 2001
4) N Nagarajan, K Arichandran, S H Tan, "Assessment of Target Pointing Attitude Maneuver Requirements for X-Sat," Proceedings of ICICS-2001, Singapore, Oct. 15-18, 2001
5) T. Bretschneider, S. H. Tan, C. H. Goh, K. Arichandran, W. E. Koh, E. Gill, "X-Sat Mission Progress," Proceedings of the 5th IAA Symposium on Small Satellites for Earth Observation, Berlin, Germany, April 4-8, 2005
6) Yu Qing, Yu Haoyong, Choong Wai Fook, Tai Siew Hoong, Goh Cher Hiang, "The X-SAT Project and Description of the Configuration and Structure Design," Proceedings of the 2nd Asian Space Conference, Hanoi, Vietnam, Nov. 8-11, 2005
7) Information provided by Timo Bretschneider of NTU (Nanyang Technological University), Singapore
8) T.-S Hie, G.-C. Hiang, K. Arichandran, K.-W. Eng, "X-Sat Mission : Development and Operation," Proceedings of ASC (Asian Space Conference), Chiang Mai, Thailand, Nov. 22-26, 2004
9) N. Nagarajan, G. S. Gein, T. S. Hie, K. Arichandran, "Attitude Determination and Control System (ADCS) Design for X-Sat Mission," Proceedings of ASC (Asian Space Conference), Chiang Mai, Thailand, Nov. 22-26, 2004
10) "X-SAT Attitude Determination and Control System (ADCS)," URL: http://www3.ntu.edu.sg/crest/XSAT_ADCS.htm
11) E. Gill, O. Montenbruck., K. Arichandran S. H. Tan, T. Bretschneider, "High Precision On-board Orbit Determination for Small Satellites - The GPS based XNS on X-Sat.," 6th Symposium on Small Satellite Systems and Services, La Rochelle, France, Sept. 20-24, 2004
12) "X-SAT Power Supply Subsystem," URL: http://www3.ntu.edu.sg/crest/XSAT_Power_supply_subsystem.htm
13) "X-SAT On-Board Data Handling Subsystem," URL: http://www3.ntu.edu.sg/crest/XSAT_OBDH.htm
14) B. Ramesh, D. Mohan, I. V. McLoughlin, N. Madhusudhanan, "On-Board Data Handling System for the X-Sat Mission," Proceedings of ASC (Asian Space Conference), Chiang Mai, Thailand, Nov. 22-26, 2004
15) B. Ramesh, D. Mohan, T. Bretschneider, I. V. McLoughlin, "Centralized Computation Service Architecture for the X-Sat Microsatellite," Proceedings of the 5th IAA Symposium on Small Satellites for Earth Observation, April 4-8, 2005, Berlin, Germany, URL: http://www.dlr.de/iaa.symp/Portaldata/49/Resources/dokumente/archiv5/1105P_Bretschneider.pdf
16) J. Zhanli, S. C. Joshi, S. C. Fan, Yu Qing, N. Nagarajan, S. Shukla, "Challenges in Meeting Thermal,Structural, and Power Requirements for X-Sat," Proceedings of ASC (Asian Space Conference), Chiang Mai, Thailand, Nov. 22-26, 2004
17) "Telemetry Tracking and Communication (TT&C) System," URL: http://www3.ntu.edu.sg/crest/XSAT_TTC.htm
18) "RESOURCESAT-2, YOUTHSAT and X-SAT integrated with PSLV-C16," ISRO, URL:
http://www.isro.gov.in/update/09-apr-2011/pslv-c16-resourcesat-2-launch
-april-20-2011
19) http://www.sarc.eee.ntu.edu.sg/Research/Projects/Pages/XSAT.aspx
20) "Singapore delighted at ISRO's launch of X-Sat," The Hindu, April 20, 2011, URL: https://web.archive.org/web/20121024235434/http://www.thehindu.com/news/international/article1712789.ece
21) Note: A launch agreement between Antrix Corporation (ISRO) and NTU was signed on Jan. 24, 2003.
22) Information provided by Cher-Hiang Goh, project director of XSAT at NTU, Singapore
23) Information provided by Dr. Kay-Soon Low, Associate Prof. at NTU (Nanyang Technological University), Singapore.
24) "NTU's X-SAT satellite to mark 3 years in space on Sunday," NTU, April 19, 2014, URL: http://www3.ntu.edu.sg/CorpComms2/Documents/2014/04_Apr/STonline_140419_%20NTUs%20X-SAT%20satellite%20to%20mark%203%20years%20in%20space%20on%20Sunday.pdf
25) Chek-Wu Tan, "System Design for Better Survivability and Adaptability: In‐Orbit Experience from X‐Sat," Proceedings of the 4S (Small Satellites Systems and Services) Symposium, Port Petro, Majorca Island, Spain, May 26-30, 2014
26) "X-SAT Microsatellite," NTU News & Events, April 19, 2014, URL: http://www.sarc.eee.ntu.edu.sg/NewsnEvents/Pages/X-SAT.aspx
27) Leong Keong Kwoh, "Singapore Country Report," The 20th Session of the APRSAF (Asia-Pacific Regional Space Agency Forum), Hanoi, Vietnam, December 3-6, 2013, URL: http://www.aprsaf.org/annual_meetings/aprsaf20/pdf/program/day3/D3_1445_2_singapore.pdf
28) "NTU satellite, X-SAT, marks two years in space," NTU, April 22, 2013, URL: http://www.sarc.eee.ntu.edu.sg/Pages/Home.aspx
29) http://www.sarc.eee.ntu.edu.sg/Pages/Home.aspx
30) Jermyn Chow, "Ayes all round for S'pore eye in the sky," The Sunday Times, April 22, 2012, p. 24, URL: http://www3.ntu.edu.sg/CorpComms2/Documents/2012/Apr/TheSundayTimes_120422
_24_Ayes%20all%20round%20for%20Spore%20eye%20in%20the%20sky.pdf
31) "X-SAT Micro-satellite Project," NTU, URL: http://www.sarc.eee.ntu.edu.sg/Project/Pages/XSAT.aspx
32) Cher-Hiang Goh, "Launch and In-Flight-Experience of Singapore X-SAT Microsatellite," Proceedings of the 4S (Small Satellites Systems and Services) Symposium, Portoroz, Slovenia, June 4-8, 2012
33) "NTU scientists make contact with X-SAT," NTU, April 27, 2011, URL: https://web.archive.org/web/20201130071028/http://news.ntu.edu.sg/pages/newsdetail.aspx?URL=http://news.ntu.edu.sg/news/Pages/Media2001_Apr27.aspx&Guid=d5c8d42a-da08-45e1-b1dd-4e2d35e2e12e&Category=Media+Reports
34) E.-E. Kim, Y.-W. Choi, M.-S. Kang, S.-K. Jeong, "Development of Earth Observation Sensors for Small Satellites in SaTReC Initiative," Proceedings of the 5th IAA Symposium on Small Satellites for Earth Observation, April 4-8, 2005, Berlin, Germany
35) "IRIS Primary Payload," NTU, URL: http://www3.ntu.edu.sg/CREST/XSAT_IRIS_Primary.htm
36) http://www.sarc.eee.ntu.edu.sg/CREST/XSATSubSystems/SpaceSegment/Pages/IRIS.aspx
37) T. Bretschneider, T. Vladimirova, S. Yuhaniz, "Image Processing Capabilities On-Board Micro-Satellites for Disaster Monitoring," Proceedings of the 2nd Asian Space Conference, Hanoi, Vietnam, Nov. 8-11, 2005
38) S. Lim Siok Lin, I. McLoughlin, T. Bretschneider, H. Schröder, "Fault Tolerant, High Performance Computing Payload for Space Missions," International Conference on Military and Aerospace Programmable Logic Devices 2003, Sept. 9-11, 2003, Washington, DC
39) "Parallel Processing Unit (PPU) (Secondary Mission Payload)," NTU, URL: http://www3.ntu.edu.sg/crest/XSAT_PPU%20Secondary1of2.htm
40) I. McLoughlin, T. Bretschneider, B. Ramesh, "First Beowulf Cluster in Space," Linux Journal, July 28, 2005, URL: http://www.linuxjournal.com/article/8097
41) http://www.crisp.nus.edu.sg/
42) T. W. Chua, K. I. Timothy, K. Y. Li Cary, Y. W. Yeap, E. C. Teh, L. S. L. Tan, K. Arichandran, "X-Sat Communications System," Proceedings of ASC (Asian Space Conference), Chiang Mai, Thailand, Nov. 22-26, 2004
The information compiled and edited in this article was provided by Herbert J. Kramer from his documentation of: "Observation of the Earth and Its Environment: Survey of Missions and Sensors" (Springer Verlag) as well as many other sources after the publication of the 4th edition in 2002. - Comments and corrections to this article are always welcome for further updates (eoportal@symbios.space).
Overview Spacecraft Launch Mission Status Sensor Complement Ground Segment References Back to Top