VENuS (Vegetation and Environment monitoring on a New MicroSatellite)
EO
Mission complete
Imaging multi-spectral radiometers (vis/IR)
Land
Venus is a dual purpose Earth observation microsatellite. It is a scientific mission, with the goal of vegetation and environment monitoring, and a technological mission, with the goal of testing the IHET in orbit maintenance and transfer.
Quick facts
Overview
| Mission type | EO |
| Agency | CNES, ISA |
| Mission status | Mission complete |
| Launch date | 02 Aug 2017 |
| End of life date | 30 Aug 2024 |
| Measurement domain | Land |
| Measurement category | Multi-purpose imagery (land), Vegetation, Albedo and reflectance |
| Measurement detailed | Land surface imagery, Vegetation type, Leaf Area Index (LAI), Normalized Differential Vegetation Index (NDVI), Photosynthetically Active Radiation (PAR), Fraction of Absorbed PAR (FAPAR) |
| Instruments | VSC |
| Instrument type | Imaging multi-spectral radiometers (vis/IR) |
| CEOS EO Handbook | See VENuS (Vegetation and Environment monitoring on a New MicroSatellite) summary |

Summary
Mission Capabilities
The VENµS mission carries a single sensor, the VSSC (VENµS SuperSpectral Camera) and is equipped with a pair of IHETs.
The VSSC is a high-resolution optical imager, operating across 12 VNIR (Visible and Near-Infrared) channels, with the aim of biomass and vegetation observation with applications in ecosystem monitoring, agricultural studies, biodiversity, and environmental research. The mission also carries a pair of Israeli Hall Effect Thrusters (IHETs), with the aim of testing their applications in orbit maintenance, as well as demonstrating a LEO-LEO (Low Earth Orbit) orbit transfer.
VENµS will operate in three mission phases, denoted VM1-3 (VENµS Mission 1-3), to fulfil its objectives.
VM1 lasted 2.5 years and was mainly focused on the scientific objectives of the mission. During this period, the spacecraft engaged in imaging at an altitude of 720 km, with monthly two-day operation periods for testing of the IHETs in LEO-LEO orbit transfer and general manoeuvring.
VM2 is an orbit transfer phase lasting 6 months, dedicated solely to the technological mission through testing of the IHETs in orbit transfer, bringing the microsatellite from an altitude of 720 km to 410 km, and was completed in August 2020.
The final stage of the VENµS mission, VM3, will operate both the technological and scientific missions in the same period, using an interleaving method, in which IHET firings and imaging will be constantly alternated between.
Upon completion of VM3, the VENµS mission will enter a fourth, unplanned operational phase, in which it will continue its imaging operation for a further 2.5 years.
Performance Specifications
This VSSC instrument utilises a pushbroom scanning technique with a swath width of 28 km and a tilting capability of ±30° in cross and along the track, allowing for a 720 km FOR (Field of Regard). Its 12 bands (B1-12) have central wavelengths from 420-910 nm, bandwidths ranging from 16-20 nm, with an SNR (Signal to Noise Ratio) at 10 m GSD (Ground Sampling Distance) ranging from 50-100.
The IHETs operate at a power range of 250-600 W, with an estimated operating life of upwards of 1000 hours. When operating at the standard 300 W, the thrusters have a specific impulse of 1300 N/s, and a thrust of 15 mN.
The first phase of the VENµS mission operated in a sun-synchronous orbit of altitude 720 km, inclination 98.28° and LTDN (Local Time on Descending Node) 1030 hours.
The third phase will operate under the same orbital parameters but at an altitude of 410 km.
The unplanned fourth phase will have an altitude of 560 km.
Space and Hardware Components
The VENµS mission uses an IMPS (Improved Multi-Purpose Satellite) minisatellite platform, funded by ISA, and designed and developed by the Israeli government firm Rafael (Advanced Defence Systems Ltd.) and IAI/MBT (Israel Aerospace Industries/Missiles Division) Ltd.
- The spacecraft is three-axis stabilised, with a cylindrical structure 1.6 m in height and 1.2 m in diameter.
- The total launch mass of 268 kg launch mass includes 16 kg of Xenon for the IHETs, and 7 kg of hydrazine for its four 1N thrusters.
- In terms of RF communications, VENµS uses S-band transmissions for TT&C (Tracking, Telemetry and Command), and an X-band data downlink with a 2 x 155 Mbit/s data rate, as well as 30 GB onboard storage capacity.
The satellite initially had an estimated lifetime of 4.5 years but was extended through a fourth, unplanned operational phase, for an additional 2.5 years.
VENµS (Vegetation and Environment monitoring on a New MicroSatellite)
Spacecraft Launch Mission Status Sensor Complement Ground Segment References
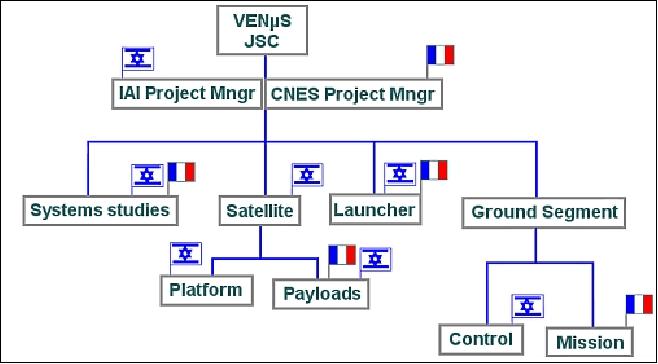
VENµS is the first cooperative Earth observation program of Israel (ISA) and France (CNES). The minisatellite mission is being developed jointly by ISA (Israel Space Agency) and CNES, under a memorandum of understanding between the two space agencies, signed in April 2005. In this setup, ISA and CNES are sharing responsibilities for the VENµS program. ISA is responsible for the spacecraft bus, satellite integration, engineering data, and the satellite control centre including mission operations. CNES is responsible for the science mission centre, including the science data processing centre and programming centre. CNES is also providing the superspectral camera and is in charge of the launcher interface. 1) 2) 3) 4) 5) 6) 7) 8) 9) 10) 11) 12) 13) 14)
The main program participants are: ISA, CNES, CESBIO (Centre d'Etudes Spatiales de la BIOsphère, Toulouse, France), ELOp (Elbit Systems Ltd. Electro-Optics of Rehovot, Israel), BGU/BIRD/RSL (Ben Gurion University of the Negev/Jacob Blaustein Institute for Desert Research/Remote Sensing Laboratory), IAI/MBT Space Division (Israel Aerospace Industries Ltd.), and Rafael.
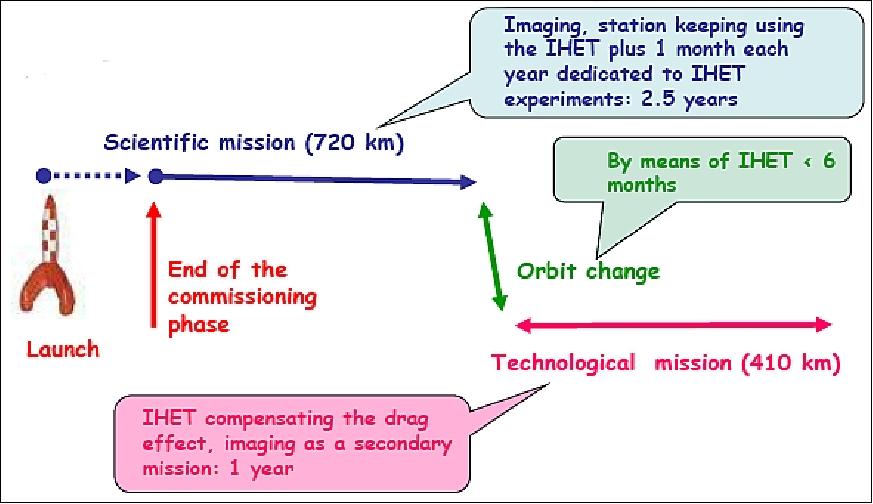
The satellite carries two missions, a Scientific mission and a Technological mission. 15) 16) 17)
Scientific Mission (VM1)
Global models of biosphere processes and dynamics have been developed in the past few years and are used for carbon cycle studies. Today, they are mainly based on ground measurements provided by networks of experimental stations. On the other hand, the water cycle is driving important research activities on the interface between land and atmosphere for improving atmospheric models. A major limitation of these approaches is the lack of consistent ground networks and measurements and the imperfection of models. The development of Earth observation data assimilation techniques and aggregation or desegregation procedures is leading to more promising integrated approaches.
The main scientific objectives of the Earth observation missions for terrestrial environment monitoring are:
• to monitor and analyse surface functioning under the influence of environmental factors (climate, topography, soils etc.) as well as human activities
• to study processes and their interactions with natural and human factors
• to develop and validate natural and cultivated ecosystem functioning models and to improve and validate global carbon cycle models
• to develop remote sensing data assimilation techniques within vegetation and surface flux models
• to define theoretical and practical methods for scale transfer, i.e. up and downscaling
• to interpret data collected by those low spatial resolution sensors
• to develop, validate and implement integrated modelling platforms.
Technological Mission (VM2, VM3)
There are two main objectives for the Technological mission:
1) Hall Effect Thruster verification
2) validation in space.
The verification is achieved by operating the thrusters in the space environment. Its performances will be tested and qualified. Validation will be demonstrated for some mission enhancement operations.
The Technological mission is split into 3 parts:
• orbit maintenance and small experiments combined with the Scientific mission
• transfer to a lower altitude orbit from 720 km SSO to 410 km SSO (VM2)
• low altitude orbit keeping, compensating drag, while continuing to image as a secondary mission (VM3).
VENµS is a research demonstrator mission for the GMES (Global Monitoring for Environment and Security) program, a joint initiative of the ESA (European Space Agency) and the EC (European Commission). Dedicated to monitoring vegetation, it will lay the foundations of an operational GMES observatory designed to keep track of the environment and manage natural resources.
The basic requirements call for 18) 19) 20)
• Land use mapping. In this respect, VENµS is opening new horizons. Every 2 days, the satellite will cover 50 sites representative of the world's main inland and coastal ecosystems in 12 spectral bands in the visible and near-infrared.
• By mapping vegetation at high resolution using a superspectral camera, the satellite will make it possible to derive enhanced information from this type of data. More significantly, it will also help to automate and improve thematic mapping procedures.
• Other VENµS applications include assessment of carbon flux and monitoring and management of crop production and water resources. The mission will also be used to characterise water colour for applications in continental hydrology and coastal oceanography.
The nominal science mission at an altitude of 720 km is planned to last for 2.5 years. This is being followed by a 1-year technology mission at an altitude of 410 km. In addition, the mission is used for a technology demonstration/validation of a new instrument: IHET (Israeli Hall Effect Thruster).
Applications
Although Venµs is primarily designed for vegetation studies, scientific and applied applications are numerous in a wide range of subjects:
a) Monitoring and analysis of ecosystems functioning under the influence of environmental factors (climate, topography, soils etc.) and of human activities
b) Land-cover and land use mapping, change detection, including frequent updating and near real-time classification, for instance for agriculture applications
c) Biodiversity and more generally environmental studies
d) Studies in the field of agriculture: crop types mapping, monitoring of crop growth conditions, agri-environmental policies, precision farming, assessment of policy impacts
e) Development and validation of natural and cultivated ecosystem functioning models: vegetation phenology, surface energy budget, biogeochemical fluxes and budget (CO2, H2O, N2O, CH4 ...), vegetation growth simulation, biomass and yield estimates, soil-vegetation-atmosphere exchanges
f) Modeling of snow cover, snow melt, and glacier flow
g) Monitoring of water turbidity and analysis of the driving factors (river flow and tides in estuaries for instance)
h) Water management issues, diffuse pollution assessment.
The Venµs mission has been carried out in the frame of French-Israeli cooperation.
It comprises two missions:
- the Scientific mission (defined above) which will last 2.5 years with the satellite at an altitude of 720 km
- the Technological mission (demonstration of the advantages to use plasma engine thrusters vs hydrazine ones for station keeping, LEO to LEO transfer, and drag compensation at low altitude). This electric propulsion system will bring the satellite down to 410 km – once the 2.5 years are over - and will maintain this altitude for one year (autonomous close loop navigation). The scientific mission will go on, in parallel.
Spacecraft
The minisatellite is funded by ISA. It uses an IMPS (Improved Multi-Purpose Satellite) platform, designed and developed by IAI/MBT (Israel Aerospace Industries) Ltd. and Rafael (Advanced Defense Systems Ltd.). Rafael is a former sub-division of the Israeli Defense Ministry and is considered a governmental firm.
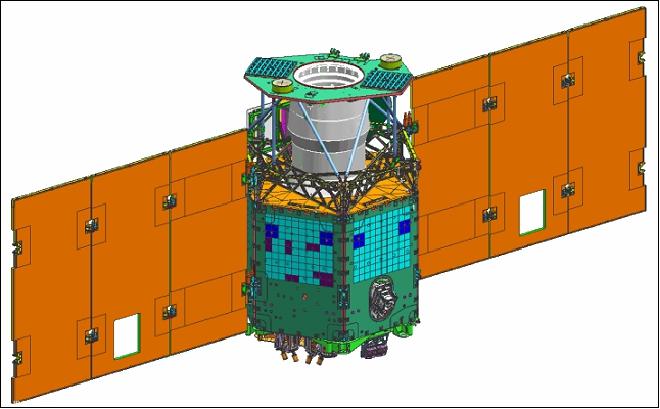
The spacecraft is 3-axis stabilised using a modified IMPS (Improved Multi-Purpose Satellite) platform of IAI/MBT (the same minisatellite bus is being used on the TecSAR and OPSat missions of ISA) - and is referred to as OptSat-2000. The spacecraft bus is a cylinder, 1.6 m in height x 1.2 m in diameter. The spacecraft features a tilting capability of ±30º in cross-track or along-track direction - thus, providing a FOR (Field of Regard) of 720 km. The estimated launch mass is 260 kg, the power is 800 W, and the planned lifetime is 4.5 years.
The IMPS modifications concern mainly the base plate - to accommodate the two IHET engines and the tanks - and the solar panels - to provide the amount of power needed for the IHET. As the S/C contains two different propulsion systems, it has one hydrazine tank of 7 kg to feed four 1 N (+4 redundant 1 N) thrusters, and one xenon tank of 16 kg for one (+1 redundant) IHET.
The power management system size can drive the high energy demand of the IHET system (operating range of up to 600 W).
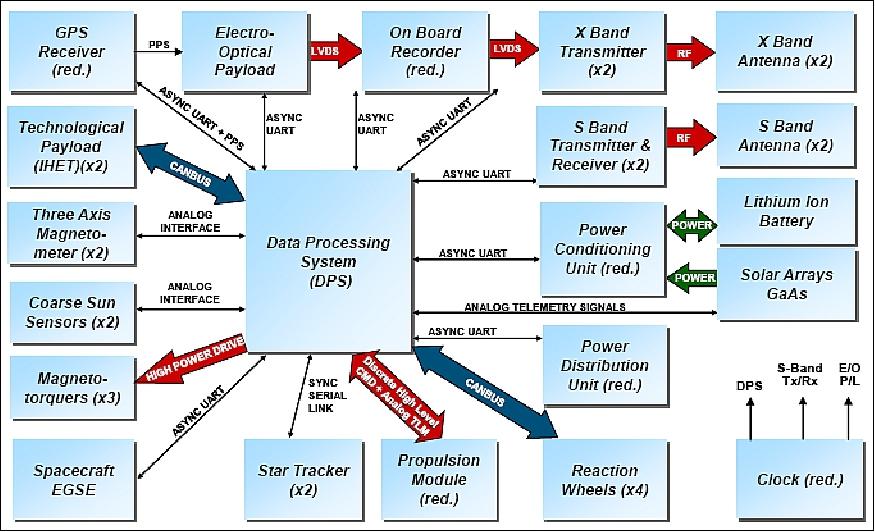
The AOCS features star trackers, a GPS receiver and reaction wheels, providing good pointing accuracy performance during imaging periods.
Spacecraft Platform | OptSat-2000 |
Spacecraft mass, power | 268 kg, 800 W |
Spacecraft size | 1.6 m x 1.2 m (in stowed configuration) |
Spacecraft design life | 4.5 years |
Spacecraft agility | Body pointing capability of ±30º into any direction, FOR = 720 km |
AOCS (Attitude & Orbit Control Subsystem) | Provision of 2-star trackers, a GPS receiver and reaction wheels |
IHET (Israeli Hall Effect Thruster): | -1 x IHET redundant, 16 kg Xenon |
RF communications: The TT&C communication is in S-band. The science data are downlinked in X-band (data rate of 2 x 155 Mbit/s). An onboard data storage capacity of 30 GByte is provided.
Launch
The VENµS spacecraft of ISA/CNES, along with OptSat-3000 of the Italian Ministry of Defense, was launched on August 02, 2017, on a Vega vehicle (VV10) from the Guiana Space Center in Kourou. 21) 22) 23)
Arianespace and the Italian company CGS S.p.A. signed a launch contract for OptSat-3000 and for the VENµS satellite with IAI in Feb. 2014. 24)
Optsat-3000 will provide Italy's Ministry of Defense with global high-resolution images. With a mass of 368 kg, it was the first to be released after about 42 minutes. The 264 kg VENµS was released 49 minutes later. - VENµS, sponsored by France and Israel will study vegetation and the environment, and demonstrate a new electrical propulsion system. Optsat-3000 has a design life of seven years and Venµs four and a half years. 25)
Orbit: Sun-synchronous orbit: altitude = 720 km, inclination = 98.28º, LTDN (Local Time on Descending Node) = 10:30 hours. The repeat cycle is 2 days with 29 orbits per cycle. The instrument swath allows 27 km x 27 km individual images at the nadir.

Spacecraft Operations
The operational mission time is divided into three distinct phases.
1) VM1 (VENµS Mission 1): VM1 will start after the IOT (In Orbit Test) phase; it will mainly be devoted to the science mission objectives and is planned to last for 2.5 years. During VM1, the spacecraft will acquire images from the nominal orbit at 720 km altitude.
Once a month, the IHET will be operated for a couple of days, performing various experiments as well as orbit control to return the satellite to its nominal VM1 orbit. Once a year, between mid-October and mid-November, when normally no crops or agricultural grows are being monitored, the entire month will be dedicated to the technology demonstration mission.
2) VM2 (VENµS Mission 2): VM2 is the orbit transfer phase in which the spacecraft will descend to a new lower operational orbit. The phase will last for up to six months during which no imaging is taking place. The technological mission is being performed during this period in which IHET will be operated in each orbit until the spacecraft reaches the new VM3 orbit at a nominal altitude of 410 km.
3) VM3 (VENµS Mission 3): In the VM3 phase, the technological mission and the science mission will be operated in an interleaving mode - requiring the spacecraft to alternate constantly between imaging and IHET firings. The IHET is expected to correct the orbit after every three imaging orbits due to the increased drag rate. - The VM3 mission phase is planned for 1 year after which the spacecraft will be disposed of.
At the altitude of 410 km, VENµS will keep on imaging in a circular sun-synchronous orbit while maintaining the 2-day revisit ground track. Since the VENµS satellite was not designed for a very low altitude, its cross-section area is quite large and the atmospheric drag at this altitude plays a significant role. The thrusters will have to be used intensively, to keep the imaging requirements accurate. This task is hardly achievable by a comparable traditional chemical propulsion system. In this phase, the image resolution increases and its swath decreases with respect to the scientific mission phase.
The challenge at 410 km is to comply with as many scientific mission requirements as possible and to accomplish the combined mission, of achieving the scientific goals with the proper technology use.
Parameter / VENµS mission phase | VM1 (high orbit) | VM3 (low orbit) |
Orbit type | Sun-synchronous, circular | Sun-synchronous, circular |
Altitude | 720 km | 410 km |
Revisit time | 2 days (29 orbits) | 2 days (31 orbits) |
Swath width | 27.5 km | 13 km |
Imaging resolution | 5.3 m | 3.0 m |
LTDN (Local Time on Descending Node) | 10:30 hours | 10:30 hours |
Mission Status
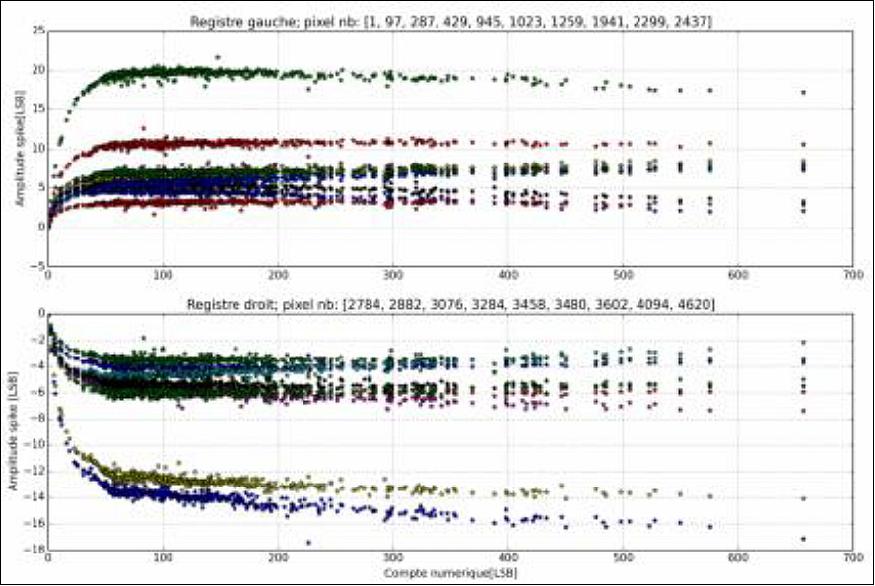
• July 2018: For an Earth observation mission, the commissioning phase consists of three major parts as far as image quality is concerned: geometric calibration, radiometric calibration and performance assessment. Various in-depth studies were conducted in the frame of the radiometric calibration because of VENµS singularities. Radiometric spikes, important stray light and the possibility of having SNO (Simultaneous Nadir Observations) with Sentinel-2 were specific to this commissioning phase. 28)An unusual behaviour has been observed on hundreds of pixels, called "radiometric spikes", on each band on VENµS images (in-flight as well as providing from ground measurements). This is an offset variation which depends on the incoming radiance. Their amplitude and location depend on the spectral band but all spikes have the same shape (Figure 7). One spike affects four consecutive pixels and in an opposite way whether the pixels are on the left or right register. The location of these spikes is the same on the ground as in-flight so they can be considered stationary. Likely due to the detector, the first of the four pixels is odd in the left register and even in the right register.
- The instrument design induces unwanted scattering of optical surfaces of the instrument, and multiple reflections between the detector and filter or filter window, or lenses. There are two different types of stray light: a reflection of one band onto itself (local stay light, type 1) and a reflection on one band on the other bands (cross-talk stray light, type 2). Even if the origin of the spikes is still unknown, the VENµS radiometric model is now robust to these radiometric artefacts. The significant stray light effect has been well-modelled with ground measurements and is now mostly reduced thanks to accurate in-flight tuning. For now, the SNO method allows us to compare absolute calibration coefficients between VENµS and Sentinel-2 but we can imagine other applications as low-frequency equalisation and perhaps high-frequency equalisation at best. Moreover, Sentinel-2 and VENµS can also be useful to each other.
• August 23, 2017: A few days after being placed into orbit, the Venµs vegetation-monitoring satellite delivered its first images, offering a glimpse of the kind of data it is set to acquire in the years ahead to bring new insights into the processes driving climate change, its impacts and future coping strategies. 29) CNES acquired the imagery from different regions of the globe starting on Thursday 17 August. The images were recorded on board the satellite, downloaded to the Kiruna receiving station in Sweden and then processed at the Toulouse Space Centre (CST).

- Marseille is prone to frequent wildfires that are posing an increasing threat as a result of long periods of heatwaves and drought conditions due to the influence of climate change. VENµS will help scientists to develop new methods for characterising the Mediterranean's ecosystems, understanding their underlying mechanisms and devising risk-reduction solutions. With a mean annual temperature of 24°C and precipitations amounting to no more than 200 mm per year, crops like alfalfa, cotton and citrus fruits can only be grown in Arizona, USA with irrigation. In the context of a changing climate, data from VENµS will serve to develop models for optimising consumption and saving water.

- The images shown here are just a foretaste of Venµs's potential for regular and frequent monitoring of land surfaces and delivering data for improving land cover maps, studying biodiversity and building models of carbon flux, crop yields and irrigation management. Venµs's revisit rate, high spatial resolution, constant viewing angles and rich spectral detail will enable scientists to better understand and model land surface change being driven by climate and human activities.
Sensor Complement
VSSC (VENµS Superspectral Camera)
The prime objective of the VENµS science mission is to provide digital imagery to be able to study the monitoring, analysis, and modelling of land surface parameter behaviour. The goal is also to demonstrate the relevance of superspectral, high spatial resolution observations with frequent revisit capabilities in the context of the European Copernicus/GMES (Global Monitoring for Environment and Security) program.
CNES is responsible for the provision of the camera and the image ground segment. The camera, being built by ELOp under CNES contract, is of MSRS (Multi-Spectral high-Resolution Sensor) heritage which was developed by ELOp and OHB System of Bremen, Germany. The camera provides 12 simultaneous overlapping Earth images (12 parallel detector arrays in the focal plane) with high spatial and high spectral resolution. With 12 narrow spectral bands in the VNIR (Visible Near Infrared) spectral region and 5.3 m ground resolution, the VENµS camera introduces a new level of superspectral high spatial resolution Earth imaging for a wide range of commercial and scientific applications.
VSSC is a 12-band imager with the following characteristics: 30) 31) 32) 33) 34) 35) 36) 37) 38)
• Swath: 27.56 km
• Spatial resolution: 5.3 m
• Number of spectral bands: 12 (VNIR)
• Spacecraft body tilting capability: ±30º in cross-track and along-track
• Data quantisation: 10 bit
• Lmin (minimum radiance) defined for the mission.
Band | Center wavelength (nm) | Bandwidth (nm) | Lmin (W/m2/sr/µ) | SNR @ 10 m GSD | Main objective |
B1 | 420 | 40 | 40 | 50 | Atmospheric correction |
B2 | 443 | 40 | 50 | 80 | Aerosols, clouds |
B3 | 490 | 40 | 30 | 100 | Atmospheric correction, water |
B4 | 555 | 40 | 30 | 100 | Land |
B5 | 620 | 40 | 20 | 100 | Vegetation indices |
B6 | 620 | 40 | 20 | 100 | DEM, image quality |
B7 | 667 | 30 | 20 | 100 | Red edge |
B8 | 702 | 24 | 15 | 100 | Red edge |
B9 | 742 | 16 | 20 | 100 | Red edge |
B10 | 782 | 16 | 30 | 100 | Red edge |
B11 | 865 | 40 | 30 | 100 | Vegetation indices |
B12 | 910 | 20 | 30 | 50 | Water vapor |
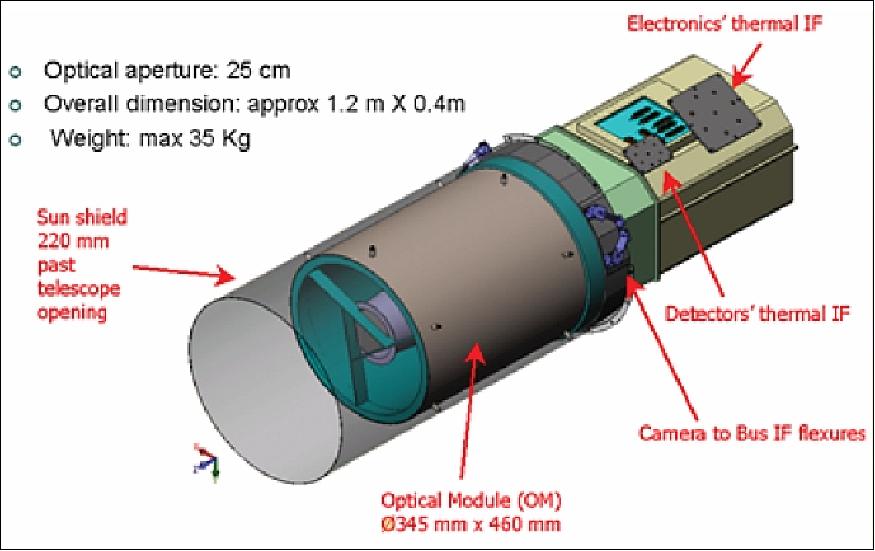
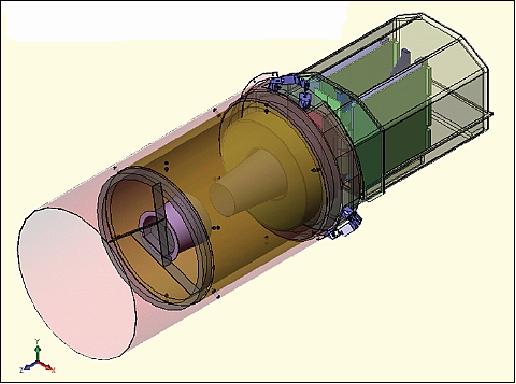
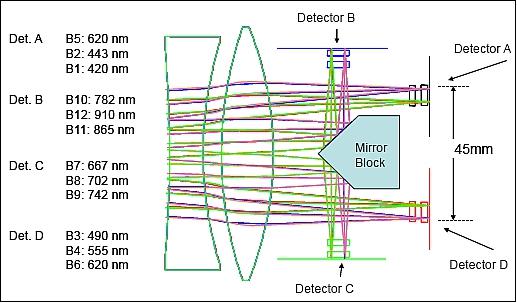
VSSC is a pushbroom-type imager consisting of the following major elements:
• A catadioptric objective
• A focal plane with 4 detector units, each with 3 separate CCD-TDI arrays
• Operating electronics and interface to the satellite transmitter
• Thermal control
• A sun shield and thermal shield.
The objective is a Ritchey-Chrétien type with auxiliary lenses for field correction and telecentricity. There is no refocus mechanism but properties are maintained thanks to the careful choice of materials and processes and a close thermal control loop which maintains the constant temperature of the camera. The VSSC focal length is 1.75 m, with an objective aperture diameter of 0.25 m.
The optics subsystem employs a Ritchie-Cretien reflective type objective fitted with auxiliary lenses for the correction of aberrations. Narrow-band interference filters are used to ensure the required wavelength characteristics. The primary and secondary lenses are made of Zerodur; they are lightweight to reduce the camera mass. The optics subsystem is maintained at a constant temperature of 20 ±3ºC to ensure proper focusing of the system.
Optical aperture diameter | 250 mm |
Focal length, f/number | 1750 mm, 7.0 |
FOV (Field of View) | 2.2º (cross-track direction) |
Swath width, GSD | 27.8 km, 5.35 m at nadir |
Data quantisation | 10 bit |
Overall instrument size | ~ 1.2 m x 0.4 m |
Instrument total mass | ~40 kg |
Focal plane assembly (FPA): Four detector units, each with 3 separate CCD-TDI (Time Delay Integration) arrays, are combined in the focal plane assembly. The detectors selected are triple-junction units. Each array has 32 TDI rows with 5200 pixels per row. The number of TDI stages may be selected individually for each array. The TDI options are 1, 2, 4, 8, 16, or 32 rows.
The physical layout of the focal plane is shown in Figure 14. Two of the detectors receive the image directly from the objective while in the other two, the image is reflected by a folding mirror. This enables the distance between the outermost bands in the focal plane to be minimised.

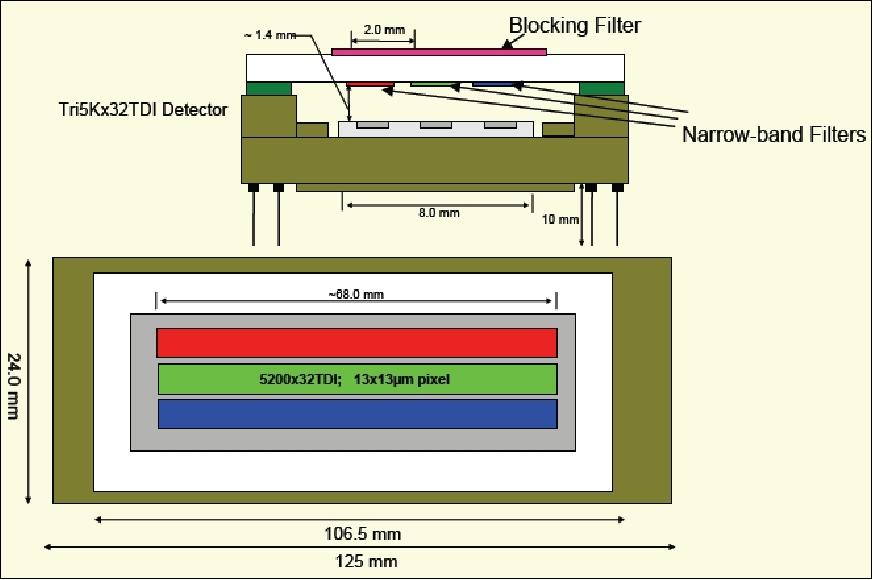
The telescope structure consists of a lightweight bezel of titanium to which the primary mirror is fixed and a composite-material tube which keeps the secondary mirror at the correct distance. The focal plane uses invar material to provide a stable thermal environment for the detector units. In front of each detector, the unit is a field stop, on which the absorption filters are mounted.
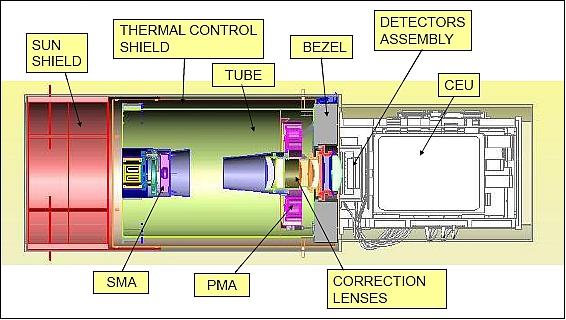
The objective is covered with a cylindrical shield which extends also in front of the telescope thereby acting as a sun shield. The inner part of the telescope, referred to as TCSA (Thermal Control Shield Assembly), provides thermal control to the optical subsystem.
Instrument calibration: Without the availability of an onboard calibration system, periodic imaging of known targets (instrumented sites) will be used together with occasional imaging of the moon at a specific phase. Also, extensive pre-launch calibration of the instrument will be carried out (Ref 33).
The VSSC data will be acquired over existing or planned experimental sites with sizes ranging from 27 km x 27 km to 27 km x 54 km or more. All data for a given site will be acquired with the same observation angle in order to minimise directional effects. The baseline product for these selected sites is time composite images of geometrically registered surface reflectances at 10 m resolution. Strong efforts are devoted to providing high-quality data, both in terms of radiometry (e.g. SNR around 100), geometry (e.g. multitemporal registration better than 3 m), and atmospheric corrections.
Particular attention is paid to stray light since it has a serious impact on radiometric performances. The sources of stray light are diverse, either scattering due to mirror roughness and contamination or ghost images due to reflection on the surfaces of the optics. The camera baffle design was done in order to minimise the stray light and keep the particle contamination level on optical surfaces at a maximum of 300 ppm.
IHET (Israeli Hall Effect Thruster)
IHET was developed by Rafael Ltd., Israel for the technological mission. The IHET will be used for autonomous orbit maintenance to enable the continuation of the scientific mission. The newly developed instrument is to be space qualified during a separate technology demonstration mission at the end of the science mission. The objective of IHET is to provide the capabilities of general orbit maintenance as well as to demonstrate a LEO-LEO orbit transfer (Ref 3). IHET is also codenamed HET-300. 39) 40) 41) 42) 43)
The electric thruster will first be used with the satellite in its orbit at an altitude of 720 km (science mission of 2.5 years). Following a descent phase down to an altitude of 410 km, the plasma motor will then be used to compensate for drag and to keep the satellite at that altitude for one year.
The orbit change and orbit maintenance shall be performed by operating the EPS (Electric Propulsion System) autonomously in a cyclic mode according to power availability at each orbit. In total, each thruster will be activated for about 2500 cycles and will accumulate more than 1000 operating hours to accomplish the above-mentioned missions.
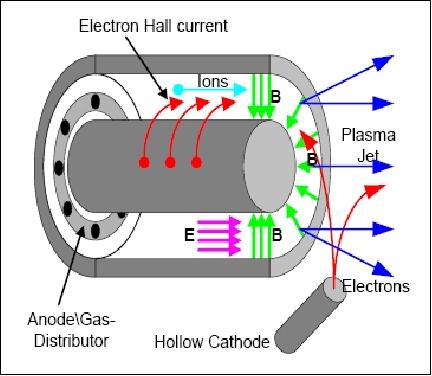
Thruster operating principles:
- Xe gas directed to the distribution channel (Anode)
- Electrons emitted from the cathode, collide with Xe atoms, and ionise them
- Applied magnetic field, spiral electrons in the thruster channel
- Electric field accelerate ions out of the channel
- Ions neutralisation at the exit by electrons from the cathode.
EPS Configuration
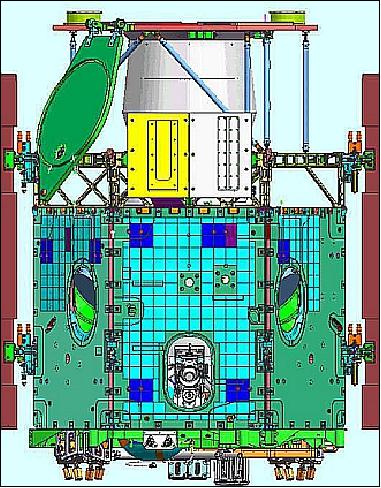
The PBA (Propulsion Base Assembly) is designed, manufactured and tested as a standalone module by Rafael. The PBA includes two propulsion systems: the HPS (Hydrazine Propulsion System) and the EPS, as shown in Figure 20. The two Hall thrusters of the EPS are positioned on opposite edges of the plate where their thrust vectors are aimed toward the satellite COG (Center of Gravity).
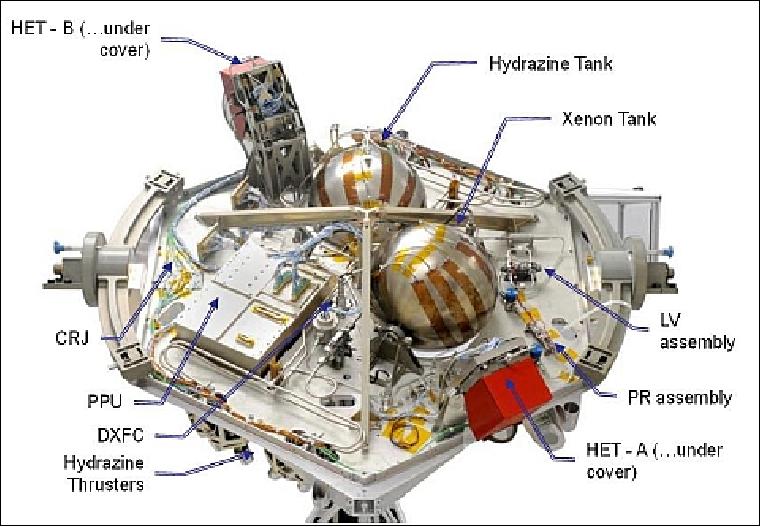
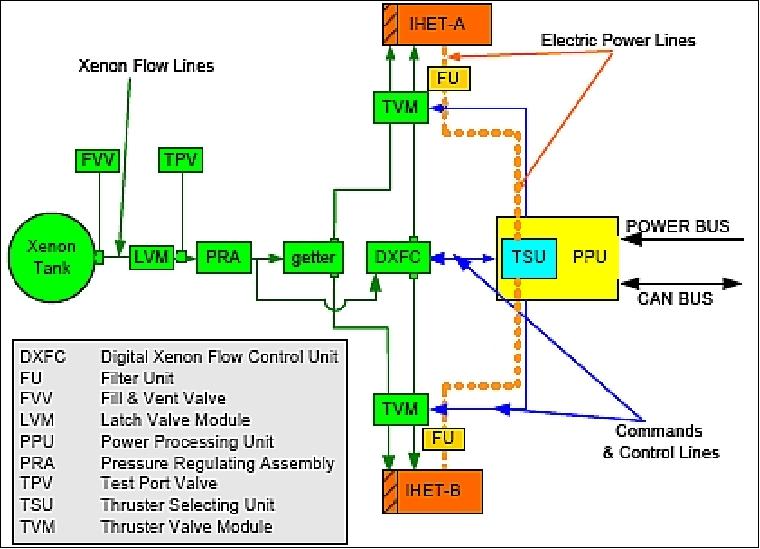
Figure 21 shows a schematic flow diagram of the EPS. Xenon at a pressure of 86 bar is stored in the propellant tank and locked by the high-pressure LVM (Latch Valve Module). Pressure is then reduced by the pressure regulator assembly to 1.9 bar absolute. Xenon flow is distributed to the cathodes and the anodes line. Cathode lines include a common getter for the two cathodes and at the end of each line, there is a CVM (Cathode Valve Module) which shut/open the flow to the selected cathode. The CVM includes flow restrictors that control the flow rate to the cathode. The two anode lines include a single DXFC (Digital Xenon Flow Controller) that delivers a controlled mass flow rate according to mission requirements.
The active thruster to be fired is selected by the TSU (Thruster Selecting Unit) and the active AVM (Anode Valve Module), which open/shut the flow path to the relevant thruster. The AVM and the CVM constitute the TVM (Thruster Valve Module). In case of a power failure, the TVM's solenoid valves shall shut off and will prevent Xenon loss to space. The PPU (Power Processing Unit) that incorporates the TSU and the SCU (Sequence Control Unit) supplies electric power to operate the thrusters and electricity to the active valves. The SCU controls the thruster power level by commanding the DXFC setting i.e. Xenon flow rate in a close loop with the discharge current.

Isp (specific impulse) | > 1300 s @ 300 W input |
Thrust | ≥15 mN @ 300 W (anodic power) |
Power operations range | 250-600 W |
Total impulse | > 90 kNs |
Operating life | > 1000 hours |
Number of operations | > 2000 on/off |
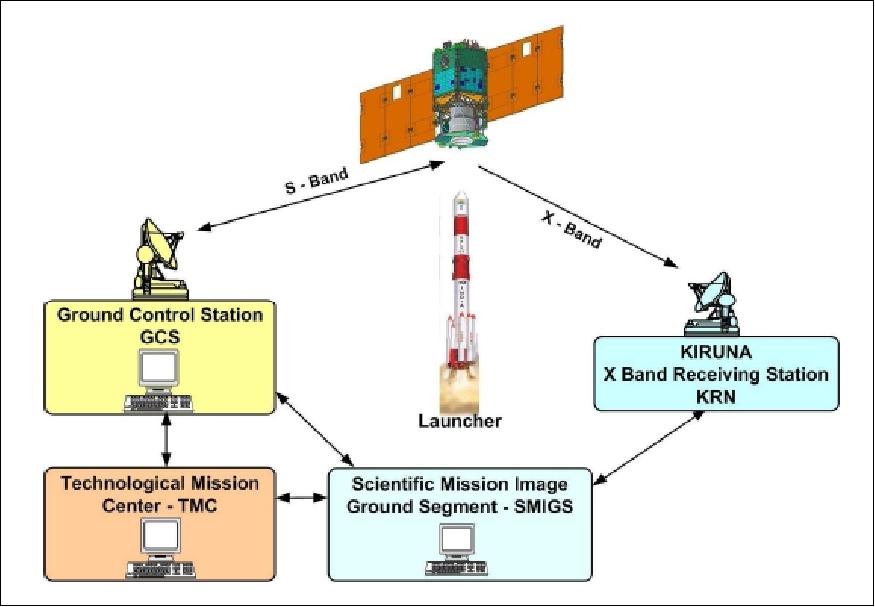
Ground Segment
Two ground facility locations will be used to process and analyse the data. SMIGS (Scientific Mission Image Ground Segment) is the processing facility for imaging data, located at CNES in France. The objective is to command the spacecraft imager for the imaging targets and to process and distribute the products to the scientific community. The TMC (Technological Mission Center) takes care of the technological mission operations in space. It will also process the data and analyse the performance of the IHET. TMC is located in Rafael in Israel. 45)
CNES is responsible for the provision of the camera and the image ground segment. ISA is in charge of the platform (provided by IAI - Israel Aerospace Industry and RAFAEL - Advanced Defense Systems), the IHET system, the satellite control center and the operation of the satellite.
The ground segment consists of:
• Command and control center (IAI/MBT, Israel)
• X-band receiving station (Kiruna, Sweden), in charge of receiving the imaging data from the satellite.
• A Data Processing Ground Segment in charge of acquiring, processing, archiving and distributing the VENµS scientific and associated data generated in-orbit with:
- Scientific Mission Image Ground Segment (SMIGS), located at CNES processes the data from raw telemetry to level 1, 2 and 3 products, and performs the image quality check
- VENµS Products Distribution Server (VPDS), hosted by POSTEL for the interface with the scientific community for VENµS products.
• Technological Mission Center (Rafael, Israel), in charge of planning the Technological Mission, analysing and archiving the VENµS Technological Payload (IHET) data.
The scientific mission program activities are split between the French SMIGS and the GCS (Ground Segment Center) located at IAI/MBT in Israel. 46)
• GCS is responsible for the overall satellite command and control. It includes a SCC (Satellite Control Center) and a TT&C for S-band communications. In addition, there is an X-band station for optional direct downloads of images.
• The TMC (Technological Mission Center) at Rafael (Israel) processes the IHET telemetry. TMC has also the task of to program the satellite during IHET operations.
• VRS (VENµS Receiving Station), an X-band station in Kiruna, receives the image raw data and some auxiliary data. This auxiliary data includes AOCS, GPS, and star tracker data, but also some IHET auxiliary data.
• SMIGS at CNES is responsible for the programming of the scientific mission and the processing of the imaging products.

VENµS image products (Ref. 15):
The ground processing center provides 3 product levels:
• Level 1 will provide geolocated top of atmosphere reflectances with a sub-pixel multi-date registration.
• Level 2 provides surface reflectances ("Top of Canopy"). Its aim is to suppress as much as possible the atmospheric contribution to the signal. During this process, a high quality cloud and cloud shadow mask is generated.
• The Level 3 product is a 10 day composite of level 2 products. The aim is to provide the users with cloud-free, easy to use images of surface reflectances, every 10 days.
The ground sampling distance of level 2 and 3 products will be 10 m, whereas the level 1 product is delivered at 5 m resolution.
The level 2 and 3 algorithms for cloud detection and atmospheric correction intensively use the VENµS unique characteristics: frequent observations at high resolution with constant viewing angles. Thanks to these features, the evolutions between two successive images are very likely to be related to changes in the atmosphere rather than in the surface. These characteristics are used to detect clouds and aerosols before atmospheric correction. In addition, Clouds altitude detection benefits from the stereoscopic viewing feature of VENµS.
References
1) "Joint French-Israeli VENµS mission," July 2005, URL: http://www.cnes.fr/web/CNES-en/3766-joint-french-israeli-vens-mission.php
2) http://smsc.cnes.fr/VENUS/index.htm
3) J. Herscovitz, "Systems Engineering in Venµs Satellite," 9th Annual Systems Engineering Conference, NDIA (National Defense Industrial Association) 2006, San Diego, CA, USA, Oct. 23-26, 2006, URL: http://www.dtic.mil/ndia/2006systems/Tuesday/her.pdf
4) http://www.tau.ac.il/acad-sec/grantsite/
abroad/Venus_Research_Announcement_4Jun06.pdf
5) http://www.bgu.ac.il/bidr/research/phys/remote/03-Venus.htm
6) J. Herscovitz, A. Karnieli, "VENµS Program: Broad and New Horizons for Super-Spectral Imaging and Electric Propulsion Missions for a Small Satellite," Proceedings of the 22nd Annual AIAA/USU Conference on Small Satellites, Logan, UT, USA, Aug. 11-14, 2008, SSC08-III-1
7) P. Ferrier, P. Crebassol, G. Dediu, O. Hagolle, A. Meygret, F. Tinto, Y. Yaniv, J. Herscovitz, "The Venµs Mission," Proceedings of the IAA Symposium on Small Satellite Systems and Services (4S), Rhodes, Greece, May 26-30, 2008, ESA SP-660, August 2008
8) Philippe Crebassol, "The VENµS Mission," Proceedings of the 7th IAA Symposium on Small Satellites for Earth Observation, Berlin, Germany, May 4-7, 2009, paper: IAA-B7-0204, URL of presentation: http://media.dlr.de:8080/erez4/erez?cmd=get&src=os/
IAA/archiv7/Presentations/0204_VENUS%20presen
tation%20IAA%20B7%200204%20CREBASSOL.pdf
9) Pierric Ferrier, Philippe Crebassol, Gerard Dedieu, Olivier Hagolle, Aime Meygret, Francesc Tinto, Yoram Yaniv, Jacob, Herscovitz, "VENµS (Vegetation and Environment monitoring on a New MicroSatellite)," Proceedings of the 60th IAC (International Astronautical Congress), Daejeon, Korea, Oct. 12-16, 2009, IAC-09-B1.1.9
10) Fred Ortenberg, "Israel in Space - Twenty Years of Exploration (1988-2008)," book, 2009, printed at Technion Press, Haifa, Israel, ISBN: 987-965-555-457-1
11) Pierric Ferrier, Philippe Crebassol, Gerard Dedieu, Olivier Hagolle, Aime Meygret, Francesc Tinto, Yoram Yaniv, Jacob, Herscovitz, "VENµS (Vegetation and Environment monitoring on a New MicroSatellite)," Proceedings of IGARSS (IEEE International Geoscience and Remote Sensing Symposium) 2010, Honolulu, HI, USA, July 25-30, 2010
12) Pierric Ferrier, "VENµS Mission Status," VenµS users meeting, January 2010, URL: http://www.cesbio.ups-tlse.fr/data_all/VENUS/meetings/1st
/4.0-Ven%C2%B5s-Project-Status_PF.ppt
13) Zvi Kaplan, "The Israel Space Agency FP7 & GMES Initial Operation Symposium," Lisbon, Portugal, May 25-27, 2011, URL: https://web.archive.org/web/20110702115307/www.gppq.mctes.pt/fp7space-gio-symposium/_docs/27_0920_ZviKaplan.pdf
14) Benoit Boissin, "Earth Observation – The French Connection to GEOSS," June 3, 2008, URL: http://www.earthzine.org/2008/06/03/earth-observation-the-french-connection-to-geoss/
15) P Ferrier, P Crebassol, G Dedieu, O Hagolle, A Meygret, F Tinto, "VENµS (Vegetation and ENvironment monitoring on a New Micro Satellite)," Proceedings of the 4S (Small Satellites Systems and Services) Symposium, Port Petro, Majorca Island, Spain, May 26-30, 2014
16) Pierric Ferrer, Gerard Dedieu, Aime Meygret, Olivier Hagolle, Philippe Crebassol, Yoram Yanive, Jacob Herscovitz, "VENµS - An innovative satellite for the study and modelling of land surface processes," Proceedings of the 66th International Astronautical Congress (IAC 2015), Jerusalem, Israel, Oct.12-16, 2015, paper: IAC-15-B1.2.1
17) Pierric Ferrier, Aimé Meygret, Olivier Hagolle, Philippe Crebassol, Gerard Dedieu, "Venµs ‐ An innovative satellite for the study and modelling of land surface processes," Proceedings of the 4S (Small Satellites, System & Services) Symposium, Valletta, Malta, May 30-June 3, 2016
18) Gerard Dedieu, Olivier Hagolle, "VENµS - A GMES demonstration mission: New processing chains for innovative products," URL: [web source no longer available]
19) Gérard Dedieu, Olivier Hagolle, "A new perspective for Earth observation missions: towards really operational applications in the areas of agriculture and environment," URL: [web source no longer available]
20) G. Dedieu, O. Hagolle, A. Karnieli, S. Cherchali, P. Ferrier, Y. Yaniv, "The VENµS mission: Earth Observation with High Spatial and Temporal Resolution Capabilities," URL: http://www.cesbio.ups-tlse.fr/data_all/VENUS/meetings/1st/3-Ven%C2%B5s-mission_GD.pdf
21) "The 10th Vega launcher orbited 2 satellites from the Guiana Space Centre on the night of 1/2 August: OptSat 3000 and Venµs," CNES, August 2, 2017, URL: https://vega.cnes.fr/en/live-vega-launch-venus-august-first-2017
22) "CNES & ISA launch VENuS on 1 Aug. 2017," Cinematography & Editing by Frederic Eger, URL: https://vimeo.com/222238864
23) Jean-Yves Le Gall, "Space for Mankind's Future," 11th Ilan Ramon International Space Conference, IAF Center, Herzliya, Israel, Feb. 2-3, 2016, URL: http://www.israelscienceinfo.com/en/physique/france-israel-
le-cnes-participe-a-herzliya-a-la-11eme-ilan
-ramon-international-space-conference-space-for-mankinds-future/
24) "Arianespace to launch OPTSAT 3000 and VENµS satellites," Arianespace, Feb. 20, 2014, URL: http://www.arianespace.com/news-press-release/
2014/2-19-2014-Contract-Optsat3000-Venus.asp
25) "Vega lofts two satellites on second launch this year," ESA, 2 August 2017, URL: http://m.esa.int/Our_Activities/Space_Transportation/
Vega_lofts_two_satellites_on_second_launch_this_year
26) Judy Siegel-Itzkovich ,"Israel's First Environmental Research Satellite Venus Ready to Go," The Jerusalem Post, May 24, 2017, URL: http://www.jpost.com/Business-and-Innovation/Health-and-Science/
Israels-first-environmental-research-satellite-to-soon-launch-493780
27) Pierric Ferrier, Philippe Crébassol, Gerard Dedieu, Olivier Hagolle, Philippe Gamet, Moti Yakoov, Jacob Herscovitz, Jean-Louis Raynaud, Renaud Binet, Françoise De Lussy, "VENµS: First images and first electric propulsion experiment results for this French-Israeli mission," Proceedings of the 69th IAC (International Astronautical Congress) Bremen, Germany, 1-5 October 2018, paper: IAC-18.B1.1.4, URL: https://iafastro.directory/iac/proceedings/IAC-18/
IAC-18/B1/1/manuscripts/IAC-18,B1,1,4,x42322.pdf
28) Arthur Dick, Philippe Gamet, Sébastien Marcq, CNES, France; Gérard Dedieu, Olivier Hagolle, CESBIO, France; Philippe Crébassol, Jean-Louis Raynaud, CNES, France; Emmanuel Hillairet, Silvia Juglea Enache, "VENµS commissioning phase: Specificities of radiometric calibration," Proceedings of IGARSS (International Geoscience and Remote Sensing Symposium), Valencia, Spain, July 23-27, 2018
29) "France-Israel space cooperation Venus vegetation-monitoring satellite sends back first images," CNES Press Release, 23 Aug. 2017, PR127-2017, URL: https://presse.cnes.fr/sites/default/files/drupal/201708/default/cp127-2017_-_venus_premieres_images_final_va.pdf
30) H. Vadon, M. Poncet, "Venµs Micro Satellite Mission Programming, in the Frame Work of International Cooperation: Concept and Implementation," Proceedings of the IAA Symposium on Small Satellite Systems and Services (4S), Rhodes, Greece, May 26-30, 2008, ESA SP-660, August 2008
31) J. Topaz, F. Tinto, O. Hagolle, "The VENµS super-spectral camera," Proceedings of SPIE, 'Sensors, Systems, and Next-Generation Satellites X', Edited by Roland Meynart, S. P. Neeck, H. Shimoda, Vol. 6361, Stockholm, Sweden, Sept. 2006, pp. 63611E, DOI:10.1117/12.690008
32) Jeremy Topaz, Tuvia Sprecher, Francesc Tinto, Oliver Hagolle, "VENµS - a super-spectral satellite camera," Proceedings of the 58th IAC (International Astronautical Congress), International Space Expo, Hyderabad, India, Sept. 24-28, 2007, IAC-07-B1.2.09
33) Jeremy Topaz, Tuvia Sprecher, Francesc Tinto, Pierre Echeto, Oliver Hagolle, "Calibration of the Venµs super-spectral camera," Proceedings of the 7th ICSO (International Conference on Space Optics) 2008, Toulouse, France, Oct. 14-17, 2008
34) Arnon Karnieli, "Vegetation and Environmental New Micro Spacecraft (VENµS)," May 2006, URL: http://www.bgu.ac.il/BIDR/research/phys/remote/VENuS/VENuS-SciMission.htm
35) VENµS Super-Spectral Camera," URL: http://www.bgu.ac.il/BIDR/research/phys/
remote/VENuS/Documents/Venus_SS_camera.pdf
36) I. Herrmann, A. Pimstein, A. Karnieli, Y. Cohen, V. Alchanatis, J. D. Bonfil, "Utilizing the VENµS red-edge bands for assessing LAI in crop fields," ISPRS Archive, Vol. 38, Haifa, Israel, 2010, URL: http://www.isprs.org/proceedings/XXXVIII/4_8_2-W9/papers/final_66_LAI_VENUS_proceedings_Herrmann_ISPRS_March_2010.pdf
37) Ilan Porat, "ELOP in Space," Elbit Systems, 5th session International Conference on Space-based Techologies for Risk Management, UNOOSA (United Nations Office for Outer Space Affairs), New York, Nov. 25-27, 2013, URL: http://asri.technion.ac.il/files/2013/12/UN-space-nov-2013_1.pdf
38) http://space.gov.il/en/node/1057
39) J. Herscovitz, D. L. Barnett, "Decision Analysis for Design Trades for A Combined Scientific-Technological Mission Orbit on Venus Micro Satellite," INCOSE 2007 (International Council on Systems Engineering), San Diego, CA USA, June 24 -28, 2007
40) S. Oghienko, V. Bilokon, A. Oranskyi, A. Bober " A Study of Some Physical Processes in the Hall Thruster, Operated in the Discharge Voltage up to 1000 V," The 30th International Electric Propulsion Conference, IEPC 2007-11, Florence, Italy, Sept. 17-20, 2007
41) http://www.bgu.ac.il/BIDR/research/phys/
remote/VENuS/VENuS-TechMission-inner.htm
42) Jacob Herscovitz, Lina Teper, Igal Tidhar, Abraham Warshavsky, "The Venµs IHET Payload – Mission and Reliability Considerations in the Design of a Technological Payload," Proceedings of the 48th Israel Annual Conference on Aerospace Sciences, Tel Aviv and Haifa, Israel, Feb. 27-28, 2008
43) A. Warshavsky, L. Rabinovitch, D. Reiner, J. Herscovitz, G. Appelbaum, "Qualification and Integration of the Venµs Electrical Propulsion System," Proceedings of Space Propulsion 2010, San Sebastian, Spain, May 3-6, 2010
44) Zvika Zuckerman, Shimson Adler, Gillon Shear, Jacob Herscovitz, "The Evolution of Mono Propellant & Electrical Propulsion Systems Supports the Developing "Plug & Play" Approach, while Creating a New Business Case," Proceedings of IAC 2011 (62nd International Astronautical Congress), Cape Town, South Africa, Oct. 3-7, 2011, paper: IAC-11.C4.6.11
45) Idit Wechsler, Hélène Vadon, "The VENµS mission operation concept," GSAW (Ground System Architectures Workshop), March 23-26, 2009, Torrance, CA, USA, URL: http://sunset.usc.edu/gsaw/gsaw2009/s6/wechsler.pdf
46) H. Vadon, M. Poncet, W. Idit, "Venµs Micro Satellite Mission Programming, in the Frame Work of International Cooperation: Concept and Implementation," Proceedings of the IAA Symposium on Small Satellite Systems and Services (4S), Rhodes, Greece, May 26-30, 2008
Spacecraft Launch Mission Status Sensor Complement Ground Segment References
Back to Top