UNITEC-1 (UNISEC Technology Experiment Carrier-1)
Non-EO
Quick facts
Overview
| Mission type | Non-EO |
| Launch date | 20 May 2010 |
| End of life date | 21 May 2010 |
UNITEC-1 (UNISEC Technology Experiment Carrier-1)
UNISEC (University Space Engineering Consortium) is an inter-university non-profit organization of Japan which supports in particular space engineering activities in education programs of Japanese universities.
The collaborative space mission, named UNITEC-1, was started in 2008 under the umbrella of UNISEC. As a consequence of a nationwide initiative, 22 Japanese universities and colleges committed their support and creative efforts to the UNISEC project and are now jointly developing an interplanetary small microsatellite mission to planet Venus. 1) 2) 3) 4) 5)
The main objective of the UNITEC-1 mission is a survival demonstration contest - to subject and evaluate several UOBC (University On-board Computer) designs on a flight to Venus which are being developed by various university teams in a competitive manner. Obviously, the deep space mission will encounter harsher radiation and thermal environments as those experienced in LEO (Low Earth Orbit) missions. Hence, the equipment survival is of great importance to the mission success. The winning team is the one whose microprocessor design turns out to be the longest survivor throughout the mission. The information will be downlinked via a low-speed communication link.
The following mission implementation requirements and constraints were defined for the design phase of the project:
1) A very short development period of the UNITEC-1 spacecraft is allocated (Aug. 2008 to Jan. 2010) to meet the launch schedule of the main payload
2) The communication equipment on the ground for UNITEC-1 is confined to the use of simple and inexpensive radio equipment (i.e. only small downlink antennas will be available for mission support)
3) The budget of the project is indeed very stringent
4) The safety and simplicity of the satellite is considered as the top priority of the project
5) Collaboration with the amateur radio community (HAM engineers) is welcomed and can be anticipated.
The communication is one of the most difficult issues on this low-budget project and is considered to be treated with special care, because of the restriction 2), and the fact that the attitude of UNITEC-1 will not be controlled - due to the requirements 1), 3), 4).
The UNITEC-1 project adopted the use of a very low-speed CW (Continuous Wave) beacon transmitter (1 bit/s) as the primary communication link for all housekeeping data of the spacecraft.
Activity or Subsystem | Task allocation to University and/or College |
Project management | University of Tokyo, Hokkaido Institute of Technology, Tokyo Metropolitan College |
C&DH subsystem | Tokyo Science University |
Structure and thermal design | Hokkaido University, Kyushu University, Tsuyama College, Aichi Institue of Tech.nology., Tohoku University |
Communication subsystem | Kagoshima University Soka University, Akita University |
Power subsystem | Osaka Prefecture University, Kagawa University, Keio University, Tokyo Metropolitan College, Osaka Prefecture College |
Radiation Counter | Kouchi Institute of Technology |
Ground test | Kyushu Institute of Technology |
Ground station | Akita University, Tohoku University |
Website management | Tokai University (Tokyo) |
UOBC development only | University of Electro-Communications, Tokyo Institute of Technology (Tokyo Tech) |
Spacecraft
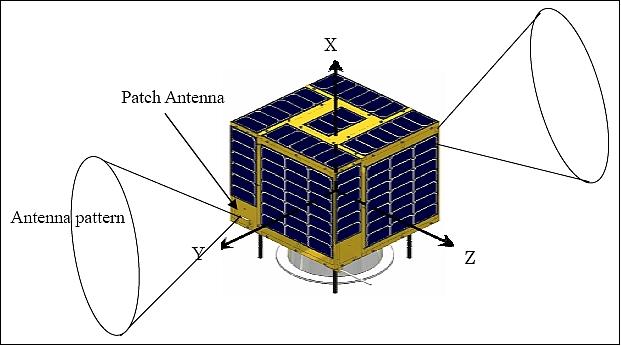
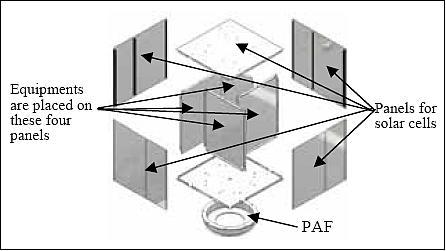
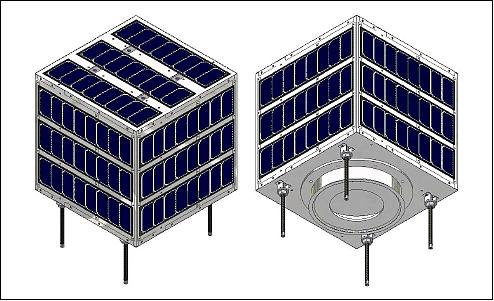
The UNITEC-1 spacecraft features a cube structure of 35 cm in side length and a mass of ~16 kg. The main structure is composed of several panels (Figure 2). All the subsystem equipments will be attached to the vertical main structure panels inside of UNITEC-1 (Figure 3), and the two horizontal panels (upper and lower panels) and the four outside panels (on which solar cells are attached) do not hold any equipment. This strategy channels the main payload acceleration forces directly onto the PAF (Payload Attachment Fitting) during the launch phase.
Thermal subsystem: The thermal design boundary conditions of the UNITEC-1 spacecraft are as follows: 6)
• When UNITEC-1 is released from the H-IIA vehicle, its temperature should be fairly low because after the faring opening and main satellite (Planet-C) release, UNITEC-1 will be placed in the shadow made by the Planet-C spacecraft and H-IIA, and no heat is generated inside. Hence, the lowest temperature in this situation should be made as high as possible.
• When the trajectory is approaching Venus, the solar heat input becomes higher, and so the thermal design should deal with a variable heat input environment.
• The temperatures at the locations where the 6 UOBCs are implemented should be as uniform as possible to provide fair test conditions.
• Without any attitude control implemented, the satellite body will be in a slow tumbling mode, which means that the solar heat input can be considered almost equal to all of the surfaces in the thermal design.
The following strategy has been adopted for the thermal design of UNITEC-1:
- The design is focused on the initial phase when MOBC wakes up and when the UNITEC-1 spacecraft is in near-Earth orbit. It is acceptable even if the inside temperature of UNITEC-1 becomes near 60ºC when it approaches the Venus orbit.
- The solar heat input depends only on the averaged area of UNITEC-1 which faces the sun. It is between 1.436 and 1.559 times the surface area of one face (35 cm x 35 cm).
- A heater is used to warm up the inside of UNITEC-1 when UNITEC-1 is released from H-IIA. The RF transmission should start about 30 minutes after the release, and therefore at least the battery part should be warmed up to 0ºC within 30 minutes.
C&DH (Command & Data Handling Subsystem): A radiation hardened MCM (Multi-Tip-Module) is used as the MOBC (Main On-board Computer). The information interfaces between MOBC and other equipment are serial line (RS-422), considering the simplicity and modest speed requirement. As all the sequences are controlled by MOBC and no uplink commands are being used, the timer of MOBC is very important; it should be kept valid during the entire journey of about 200 days. Therefore, in case when the MOBC should be reset due to some radiation event (SEL or SEU), the timer information should be stored in some onboard ROM. The interval of writing timer information to ROM should be carefully designed, considering the requirement for timer accuracy and the amount of additional CPU time required.
Equipment | Quantity | Mass (g) | Size (mm) |
RF transmitter | 1 | 700 | 230 x 136 x 30 |
RF receiver | 1 | 200 | 70 x 60 x 30 |
MOBC (Main OBC) | 1 | 2050 | 269 x 202 x 64 |
UOBC (University OBC) | 6 | 500 x 6 | 125 125 x 50 |
PCU (Power Control Unit) | 1 | 1000 | 150 x 120 x 40 |
Battery | 1 | 1500 | 225 x 70 x 60 |
Camera | 1 | 200 | 60 x 43 x 42 |
Radiation Counter | 1 | 280 | 124 x 105 x 28 |
Structure |
| 4830 |
|
Harness |
| 1000 |
|
Solar cells |
| 1000 |
|
Total mass |
| 15760 |
|
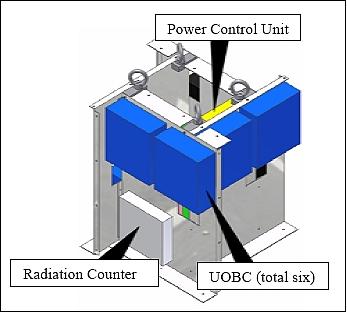
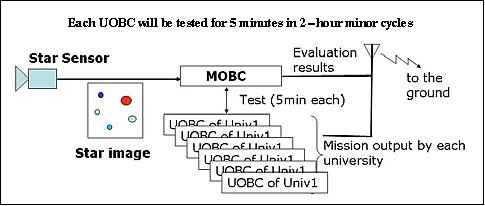
UOBCs (University Onboard Computers): There are a total of six UOBCs which will be occasionally tested onboard by the MOBC (Main OBC), who plays the role of “test supervisor.” The current plan of operations calls for a sequential UOBC test of 5 minute duration for each unit. The test is being repeated in 2-hour cycles. The test includes several typical functions which are required by any nominal onboard computer - such as receiving information from an onboard sensor, checking of the error detecting code, analyzing the incoming data and outputting the calculation results.
RF Communications
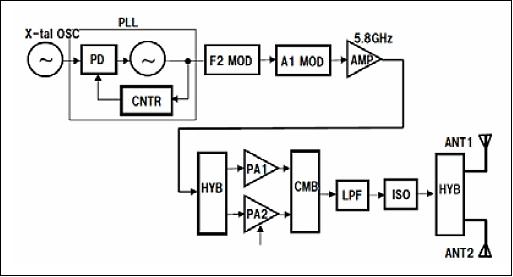
The prime downlink of the communications subsystem is provided by the CW transmitter at a data rate of 1 bit/s. The uplink is only needed when there is a need to stop the downlink signal. The main considerations for this design are system reliability and stable operation.
CW (Continuous Wave) Transmitter | RF transmit power: 9.6 W |
Receiver | Frequency: 435 MHz band (UHF) |
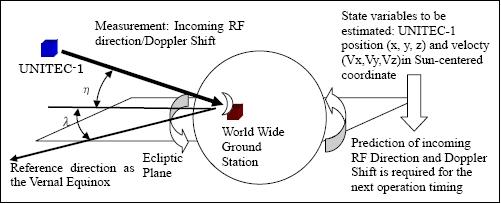
Satellite tracking: Satellite tracking is a very important function to stay in contact with the UNITEC-1 satellite while it travels into deep space from Earth in a transfer orbit to Venus (Figure 8). The information to be used for tracking UNITEC-1 is the direction of the incoming RF signal which corresponds to the relative direction of UNITEC-1 with respect to the Earth position, and the Doppler shift of the received RF wave, which corresponds to the relative velocity (more precisely, the speed of the distance change) of UNITEC-1 with respect to the Earth. The tracking concept is shown in Figure 6.
EPS (Electrical Power Subsystem): The EPS uses surface-mounted triple-junction solar cells and a Ni-MH (Nickel-Metal Hydride) rechargeable battery for spacecraft power generation and for and power storage. The CW transmitter receives its power directly from the battery line; the other equipment is serviced via DC/DC converters.
Battery | Ni-MH (HR-3UTG) |
Bus voltage | 12.0 V |
Secondary voltage | ± 5 V |
Battery serial panel | 10 serial x 3 parallel |
Maximum DOD | 30% |
Solar cells | 26% triple junction GaAs |
Cell connection | 8 serial x 3 parallel on 1 surface |
Solar cell mountings | Body mounted on 5 outer surfaces |
Power control method | Shunt regulator |
Launch
The UNITEC-1 spacecraft was launched on an H-IIA vehicle of JAXA on May 20, 2010 as a secondary payload to Planet-C, the primary payload VCO (Venus Climate Orbiter) of the mission, which was designed and developed at JAXA/ISAS. The objective of VCO is to study the atmospheric dynamics of Venus.
Further seondary playloads to Planet-C are:
• IKAROS (Interplanetary Kite-craft Accelerated by Radiation Of the Sun) of JAXA
• NEGAI, a CubeSat of Soka University, Japan.
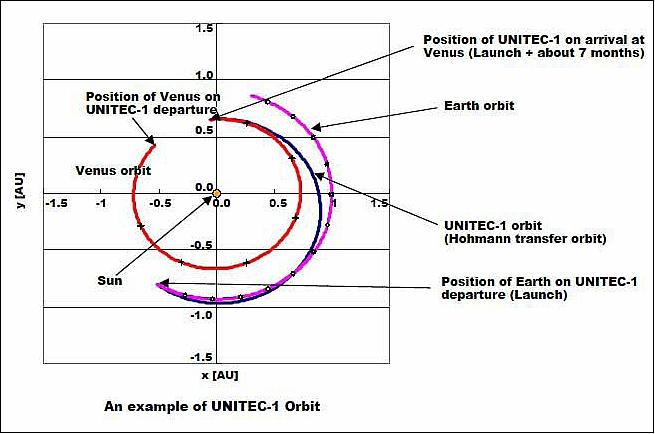
Orbit: The transfer orbit of the Planet-C/VCO spacecraft along with the UNITEC-1 spacecraft is shown in Figure 8. The transfer orbit will last about 6-7 months so that an arrival date at Venus can be expected in December 2010.
Sensor Complement
Radiation Counter
The radiation counter is the only scientific instrument onboard the spacecraft to measure the incoming radiation in 8 energy channels. The data are being sent to the MOBC via a serial interface.
References
1) Shinichi Nakasuka, “UNITEC-1 and Onboard Computer Survival Competition in Interplanetary Environment,” Proceedings of the 27th ISTS (International Symposium on Space Technology and Science) , Tsukuba, Japan, July 5-12, 2009, paper: 2009-f-06
2) Shunsuke Onishi, Keiichi Okuyama, “Structural Design of UNITEC-1,” Proceedings of the 27th ISTS (International Symposium on Space Technology and Science) , Tsukuba, Japan, July 5-12, 2009, paper: 2009-c-26
3) Shinichi Nakasuka, “Students' Challenges towards New Frontier -Enlarging Activities of UNISEC and Japanese Universities,” Proceedings of the 26th ISTS (International Symposium on Space Technology and Science) , Hamamatsu City, Japan, June 1-8, 2008, paper: 2008-Keynote-01v
4) UNITEC-1 Development Team UNISEC, “Call for Support on Tracking and Receiving RF Signal for First Interplanetary University Satellite UNITEC-1,” May 29, 2009, URL: http://k1rqg.com/net%20notes/UNITEC-1operation%5B1%5D.pdf
5) http://unitec-1.cc.u-tokai.ac.jp/en/news_en
6) Tsuyoshi Totani,, Haruaki II, Masashi Wakita, Harunori Nagata, “Preliminary Thermal Design of UNITEC-1,” Proceedings of the 27th ISTS (International Symposium on Space Technology and Science) , Tsukuba, Japan, July 5-12, 2009, paper: 2009-f-07
The information compiled and edited in this article was provided by Herbert J. Kramer from his documentation of: "Observation of the Earth and Its Environment: Survey of Missions and Sensors" (Springer Verlag) as well as many other sources after the publication of the 4th edition in 2002. - Comments and corrections to this article are always welcome for further updates (eoportal@symbios.space).