TSX-5 (Tri-Service Experiments Mission 5)
EO
Atmosphere
Atmospheric Temperature Fields
Mission complete
Quick facts
Overview
| Mission type | EO |
| Agency | DoD (USA) |
| Mission status | Mission complete |
| Launch date | 07 Jun 2000 |
| End of life date | 01 Jul 2006 |
| Measurement domain | Atmosphere, Gravity and Magnetic Fields |
| Measurement category | Atmospheric Temperature Fields, Gravity, Magnetic and Geodynamic measurements |
| Measurement detailed | Atmospheric stability index |
| Instruments | Imager |
| Instrument type | Earth radiation budget radiometers, Space environment, Magnetic field, Other, Atmospheric chemistry, Communications, Data collection, Hyperspectral imagers, Gravity instruments |
| CEOS EO Handbook | See TSX-5 (Tri-Service Experiments Mission 5) summary |
TSX-5 (Tri-Service Experiments Mission 5)
A US DoD (Department of Defense) technology demonstration mission of AFRL (Air Force Research Laboratory, Kirtland AFB, NM) within the STP (Space Test Program). TSX-5 hosts two DoD payloads, STRV-2 (Space Test Research Vehicle-2), sponsored by the BMDO (Ballistic Missile Defense Organization), and CEASE (Compact Environmental Anomaly Sensor), sponsored by the Air Force's Phillips Geophysics Laboratory. TSX-5 is managed at the Space and Missiles Center, Test and Evaluation (SMC/TELS) at Kirtland Air Force Base, New Mexico.
The objective is to operate two experimental payloads - STRV-2 and CEASE for a period of six months with a one year goal.

Spacecraft
The TSX-5 spacecraft was built by OSC (Orbital Sciences Corporation) of Dulles, VA, containing two experiment suites, STRV-2 and CEASE. The external configuration has four main components: the spacecraft or core module, the separation system, the STRV-2 experiment module, and the fixed-geometry solar arrays. The core module is a 12-sided structure measuring 0.95 m point to point. Constructed entirely of aluminum, it has a honeycomb core plate with sheet metal panels mounted to milled longerons.
The STRV-2 payload, in length of 0.82 m, is mounted on top of the spacecraft. A Marman ring of 0.97 m diameter, and V-band separation system transfer launch loads between the space vehicle and launch vehicle, and permit separation of the space vehicle after insertion into orbit. The total mass of the in-flight space vehicle is nominally 249.5 kg (minisatellite). 1) 2)
TSX-5 has an electrical power subsystem, a C&DH (Command and Data Handling) subsystem, a communication subsystem, and an ADCS (Attitude Determination and Control Subsystem). The subsystem electronic components and the CEASE experiment are mounted internal to the spacecraft on the wake-oriented core plate. The subsystems and payloads are designed for a six-month mission life with a one-year goal and reliability exceeding 90%.
Launch
The launch of TSX-5 took place on June 7, 2000 on a Pegasus XL vehicle over the Pacific, some 80 km west of VAFB (OSC's L-1011 jumbo jet - dubbed Stargazer - dropped the launch vehicle and payload from its belly). 3) 4)
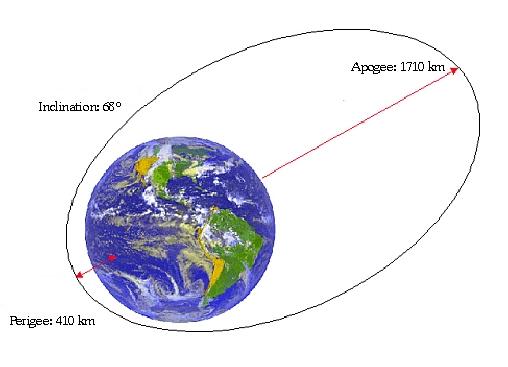
Orbit
Elliptical orbit of 410 km x 1710 km, inclination = 68º, period of 106 minutes.
RF Communications
A conventional RF TT&C communication system was used (in parallel to the laser TT&C).
STRV-2 (Space Technology Research Vehicle-2)
STRV-2, sponsored by BMDO and the UK MoD (Ministry of Defense) is a multi-national, highly integrated suite of experiments designed to push the envelope of space-based imaging technology, satellite vibration suppression, and material science.
The STRV-2 spacecraft structure, built and integrated by OSC of Dulles, VA, uses a LeoStar bus of the STEP (Space Test Experiment Platform) program heritage (a nominal 95 cm point-to-point 12-sided structure). The all-aluminum structure consists of a honeycomb core plate with sheet metal panels mounted to milled longerons or stringers. The 0.82 m long STRV-2 payload is mounted to the top of the spacecraft structure. The S/C subsystems include: EPS (Electrical Power Subsystem, C&DH (Command and Data Handling), communications, and an attitude determination and control subsystem. The electronic components of the subsystems and the CEASE experiment are mounted internal to the S/C on the -x or wake oriented core plate. 5)
Background
STRV-2 builds on the STRV-1 missions (dual launches in 1994 and 2000), a collaborative program, sponsored by DERA (UK) and by BMDO. The STRV-2 program, like the companion STRV-1 program, validates the viability of multi-national, multi-agency collaborations to provide cost effective acquisition of space test data.

The prime objectives include demonstration of operation of optical instruments (MWIR and Lasercom) on a low-cost, non-precision platform, downlinking of data via Lasercom, obtaining infrared background data in selected wavelength bands at low and high altitudes, and assessing performance of candidate components in the space environment.
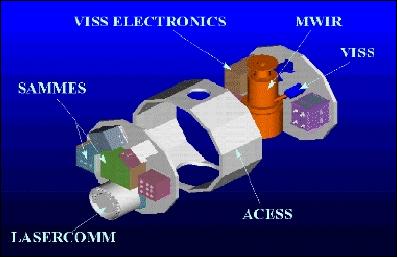
Additional objectives of STRV-2 are the testing of the following experiments: ACCESS, SAMMES, VISS, and ETB; they include characterization of the space environment (radiation, micrometeoroid and debris), vibration isolation and suppression, assessment of contamination transport and effects aboard a low-cost satellite, and the demonstration of a modular architecture for autonomous command, control and data handling. The minimum success criteria for STRV-2 include collection of infrared background data for phenomenal analysis, demonstration of a laser communication downlink, demonstration of vibration isolation and suppression technology, and collecting six months data on the space environment and its effects on candidate components. 6)
All the data obtained from the BMDO STRV-2 experiments, applicable to the design and operation of civilian and commercial spacecraft, are made available to scientific investigators for analysis and interpretation.

Status of Mission
• The TSX-5 spacecraft was retired in late July 2006. From June 2000 through July 2006, the TSX-5 satellite measured proton fluxes in Earth's magnetosphere using its CEASE instrument. A review of the satellite data by scientists at AFRL/VSBX revealed an unanticipated, recurring bi-modal structure in histograms of the proton counts. This research identified the bi-modal behavior as anisotropic in nature, and the result of two separate processes. At low altitudes the anisotropy was well described by the classic “East-West Effect” (Ref. 25).
• As of June 2005, TSX-5 is still being flown out of the SMC Detachment 12 at Kirtland AFB. All of the experiments on the STRV-2 and CEASE payload were successfully demonstrated. The STRV-2 payload has been turned off in 2002 but the CEASE payload is still active. 7)
• On July 11, 2000, OSC (Orbital Sciences Corporation) announced that the U.S. Air Force declared the TSX-5 mission as “fully functional” nearly two weeks earlier than the scheduled 30 day in-orbit "checkout" period. 8)
Sensor/Experiment Complement of STRV-2 Payload
MWIR (Medium Wave Infrared Imager)
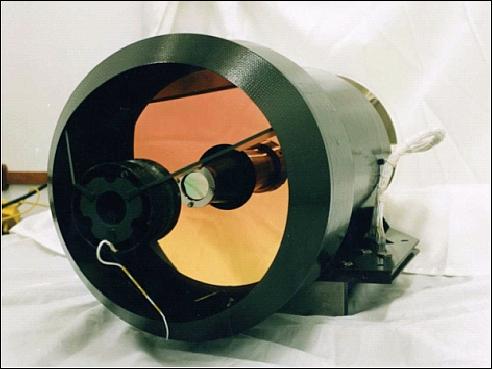
MWIR is a UK sponsored instrument built by QinetiQ [formerly DERA (Defence Evaluation and Research Agency), Farnborough, UK]. MWIR has a mass of 23 kg and power consumption of < 60 W. The instrument main features are: 9) 10)
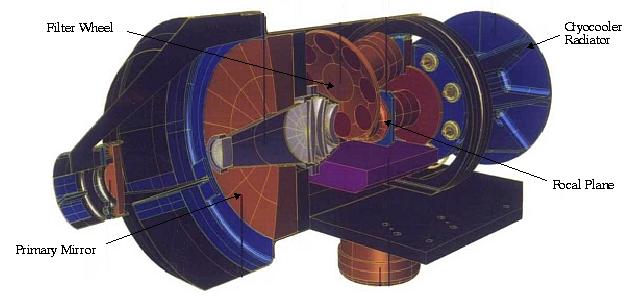
• The optics of the Dall-Kirkham reflective telescope comprise: a 200 mm aperture primary mirror, a secondary mirror and a refractive relay lens system to provide a fully cold shielded thermal imagery. A filter wheel, containing 6 filters, is used to select the required waveband. The contains two relative calibration sources. They are imaged at the pre- and post-image instant to give a “flat field” calibration across the focal plane.
• An FPA (Focal Plane Assembly) of two staggered CMT arrays, each of size 2 x 512 elements, the detectors are separated in the along-track direction. The instrument operates in a dual pushbroom fashion, obtaining two near-simultaneous images in parallel.
• A Stirling cycle cryocooler, developed by Texas Instruments Inc., provides 1 W of cooling to the FPA; the operating temperature is 80 K. This is a COTS design, the STRV-2 mission represents its first use on a spaceborne platform.
• Carbon fiber composite telescope structure of DERA.
• Control electronics, pre-amplifier and memory of DERA.
The imager filter wheel carries filters for spectral ranges from 4.3 to 5.15 µm and 5.4 to 6.0 µm and a reference source system. The imager is designed for nadir Earth viewing; however, the 5.4 to 6.0 µm band is in the water absorption region, hence unable to see to the ground. The detector arrays produce a ground resolution of 35 m (at perigee) on a ground swath of 15 km.
QinetiQ acquires MWIR data to evaluate the instrument's capability to detect aircraft movement (non-afterburning aircraft from space using passive detection). At the resolution of 35 m, most aircraft will still be sub-pixel in size. This means that the thermal contrast may not be visible in the natural variation of the background radiance or clutter. The two near-simultaneous images are co-registered and subtracted from each other to reduce this clutter. The resultant “frame-differenced” image removes the background features.
Measurements are made to determine the detectable limits for a variety of backgrounds (ocean, urban, rural). The data provide missile designers information necessary to develop effective detection/tracking algorithms. A secondary objective of the MWIR experiment is to collect earth background data as a function of seasonal variation. 11) 12)
MWIR was designed to detect and classify military aircraft flying beneath the satellite (spotting them against a variety of backgrounds - including urban, marine and rural settings). The instrument has successfully met its mission objectives within its 12month of operational life; it had obtained 90 images in its first 6 months of operation.
Concept of operations: Aircraft movement through the air results in aerodynamic heating of the aircraft surface, which in turn results in a thermal contrast between the aircraft and the surrounding background. If the aircraft is at low level where the ambient air temperature is warm, the aircraft will appear hotter than the background. Therefore the aircraft will be in positive thermal contrast. Conversely, at high altitude, this aerodynamic heating is not sufficient to offset the low ambient air temperature and will appear colder than the ground underneath it (negative thermal contrast). At intermediate altitudes, aircraft and background radiances are similar and so a region of “zero contrast” exists. 13)
MWIR was also used to build up a library of images that provide information on the different land cover types that can be discerned at MWIR wavelengths (4 to 6 µm). The instrument has operated perfectly and delivered over 300 images during the 18 months of the TSX-5 mission.
LaserCom (Laser Communication Experiment)
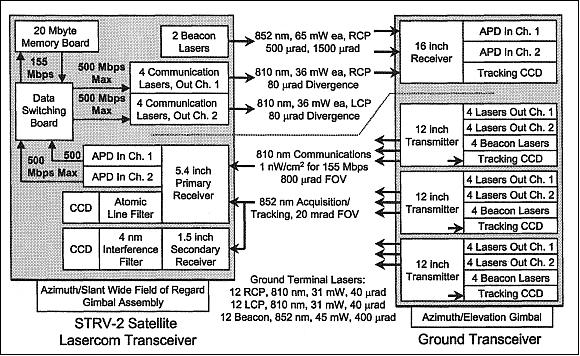
LaserCom is a JPL experiment, sponsored by BMDO, and developed by AstroTerra Corporation, San Diego, CA. The prime objectives are to demonstrate high data rate infrared laser communications between a satellite and other platforms, and to establish the practicality and benefits of free-space laser communications. Secondary objectives are to downlink stored data from the MWIR instrument at data rates between 50 and 100 Mbit/s and to demonstrate data rates in a repeater mode between 270 - 1000 Mbit/s. JPL's ground station at its Table Mountain facility attempted to acquire the STRV-2 signals from LaserCom, but acquisition could not be established. 14) 15)
LaserCom has a mass of 14.3 kg including the transceiver telescopes and gimbal, the electronics module, and a deployment mechanism. It utilizes a single 13.8 cm diameter Schmidt-Cassegrain telescope as a receiver (satellite and ground stations have identical configurations); eight solid-state communications lasers with integral telescopes (125mW each at 810 nm wavelength, 80 µrad divergence); and two acquisition/tracking lasers (100 mW each at 852 nm, 500/1500 µrad divergence). Four of the communications lasers form one 600 Mbit/s channel, transmitting with right-hand circular polarization and the other four form the other channel, transmitting with left-hand circular polarization. In the receiving telescope, cesium atomic line filters separate the communications signal from the tracking beacon, sending each in two separate directions. The communications signal is then separated into the two channels by polarizers and passed to two avalanche photodiodes for conversion into an electrical digital signal, which is then decoded. The acquisition/tracking signal is focused onto a CCD camera detector which tracks the spot and drives the gimbal system. The transmitted data is modulated onto the lasers by power switching (on-off keying) the laser diodes.
Unfortunately, no LaserCom link from space was achieved because the satellite terminal had troubles acquiring and tracking the ground terminal beacons. The acquisition sequence was designed based on a spacecraft interface specification. The primary reason for the lack of acquisition was that the ephemeris and spacecraft attitude control was out of specification.
The acquisition sequence required that the ground terminal beacons illuminate the satellite. The divergence of the ground terminal beacons was designed to the ephemeris specification, which stated that ephemeris be within ± 100 m cross-track and ± 500 m in-track error would be provided prior to a satellite pass. Post track analysis showed radial ephemeris errors up to 3 km. The interface specification also stated that the yaw of the spacecraft would be maintained to within 1.0º. However, post-track analysis showed yaw angles of up to 6º. Although no data was passed from space to ground via a LaserCom link, technology developed during the STRV 2 LaserCom program has been successfully transferred to commercial lasercom ventures. 16)
Access (All Composite Experiment Spacecraft Structure)
The objective is to demonstrate the performance of composite spacecraft, and show the advantages relative to conventional designs.
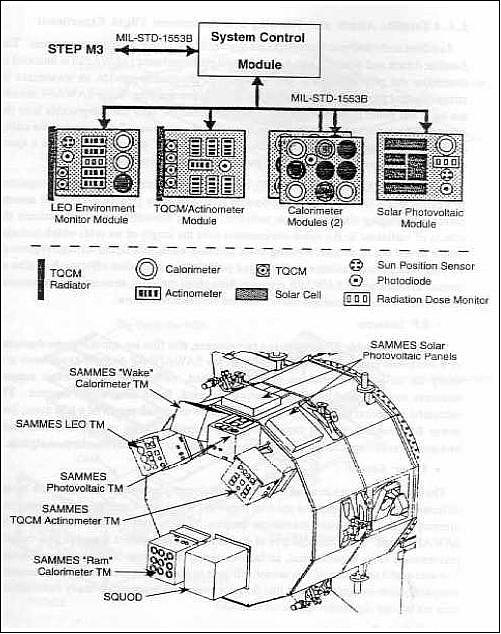
SAMMES (Space Active Modular Materials Experiment System)
SAMMES was developed by Physical Sciences Inc. The objectives are to: a) demonstrate the utility of on-board monitoring of spacecraft subsystem performance, including the effects of contamination and the ambient environment; b) to obtain environmental degradation data for selected spacecraft materials and components in lower MEO orbit; c) to improve the quantitative knowledge of the energetic radiation environment in lower MEO orbit.
SAMMES is designed to provide long-term, time-variant engineering performance data on materials exposed on the exterior of spacecraft and to quantify the phenomena of contamination deposition and effects.
SAMMES consists of a SCM (System Control Module) connected electrically to five Test Modules (TM). The TMs are an LEO environmental monitor module, a ”ram” (direction in face of flight) calorimeter module, a ”wake” (direction at the rear of flight) calorimeter module, a Temperature-controlled Quartz Crystal Microbalance (TQCM)/actinometer module, and a solar photovoltaic module. 17)
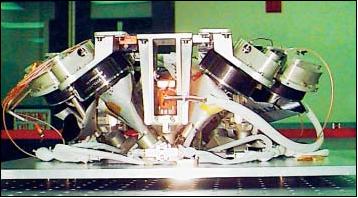
VISS (Vibration, Isolation, Suppression and Steering System)
VISS is an AFRL instrument, designed and developed by Honeywell Satellite Systems (Glendale, AZ) as prime contractor. The assembly is a self-contained precision vibration control device designed to provide an ultra-quiet environment for sensitive optical sensors, laser transmitters, and other detection and measurement devices. VISS is designed to isolate a precision payload from spaceborne disturbances using passive isolation in combination with voice coil actuators. VISS is a platform which is mounted to a satellite bus via six actuators arranged in a hexapod (Stuart platform) configuration. In the low-frequency range, the passive design is supplemented by a voice-coil-based system mounted in parallel to the D-strut. This portion is actively controlled to provide vibration isolation (in all six degrees of freedom) from the satellite to the payload (optics, etc.), suppression of vibration generated within the payload (cryocooler, etc.), and steering about any or all of the three rotational axes.
The objective is to achieve the following goals: >20 dB vibration isolation, >20 dB vibration suppression, ± 0.3º steering of the payload at a rate of 2 Hz. The payload for VISS in the STRV-2 configuration is the DERA-built MWIR telescope. Accelerometer data is recorded to determine the system performance. 18) 19)
ETB (Engineering Test Bed)
ETB includes the MDIM (Meteoroid and Debris Impact Monitor) and the Meteoroid Impact Sensor of BMDO. ETB enables demonstrating the durability of advanced micro-electronic components and COTS (Commercial Off-The Shelf) devices in the space environment. ETB provides system designers with an opportunity to test device designs proposed for incorporation in future space systems.
MDIM (Meteoroid and Debris Impact Monitor)
MDIM is of NASA/LaRC (an element of the SEE (Space Environments and Effects) program. The objective is to monitor populations of small-mass particles as a function of altitude. The MDIM experiment is of OMDC (Orbiting Meteoroid & Debris Counting) heritage flown on the Clementine S/C. MDIM utilizes 48 MOS detectors which are mounted on the exterior of the STRV2 spacecraft. When space debris or meteoroids impact the detector, the sensor location and time of impact is stored and down linked for data analysis. From this information, space debris flux and directionality can be assessed. The MDIM device has a mass of about 0.7 kg and requires 1.5 W of power. 20)

DHS (Data Handling System). DHS is an AFRL development package with the objective to establish a plug-and play space experiment brokering system. The ETB (Electronics Testbed)/DHS is flown on two satellites: 21) 22)
• STRV-2 (Space Technology Research Vehicle-2) which is part of the TSX-5 (Tri-Service Experiments Mission 5) mission of AFRL. TSX-5 was launched June 7, 2000. This interface was developed so that it can be used on other space missions (STRV-1d, etc).
• STRV-1d (Space Test Research Vehicle-1d) of DERA, UK (launch of STRV-1d on Nov. 16, 2000). The AFRL science payload on STRV-1d consists of ETB, nine sub-experiments, and DHS, which in turn interfaces with OBC (On-Board Computer) of STRV-1d (this is an advanced version of the DHS flown on STRV-2).
The STRV-2 DHS features a MIL-STD-1553 bus throughout, whereas the STRV-1d spacecraft employes a simpler RS-422 interface.
The ETB/DHS (referred to simply DHS) is a self-contained computer that provides a large number of general-purpose interface ports, analog sampling, isolated power conversion, and expanded memory management capability. The DHS design simplifies some of the complexities to be faced by individual sub-experimenters by providing a less complex interface for operation and measurement of advanced electronics radiation performance in the harsh STRV1-space environment. The DHS improves on-orbit use of individual sub-experiment resources by recording experimental results, storing them locally, and then communicating those results to the spacecraft for download to the ground station.
The intent of DHS is to reduce the risk to the mission by providing a degree of separation between the spacecraft and less-proven new technologies contained in each experiment, and by providing a similar degree of separation between the experiments. In the process of developing the ETB DHS, a simple 12-conductor interface was employed. This interface was based on the RS-422 standard communication, standard voltage outputs, and analog data inputs. Using various novel approaches to the design, a high functionality was reached while preserving valuable spacecraft power and weight, which allowed additional experiments to be manifested.
Feature/parameter | STRV-2 DHS (launch Jun. 7, 00) | STRV-1d DHS (launch Nov. 16, 00) |
CPU | 8086 rad-hard | 8051 rad-hard |
Power | 6 W | 3 W |
SCI ports | Six RS-422, MIL-STD-1553 S/C bus | Eleven RS-422 |
RAM | 512 k | 1024 k |
PROM | 32 k PROM | 32 k PROM |
Total mass of assembly | 2 kg | 1.2 kg |
Analog channels | None | Sixteen |
Power to sub-experiments | 28 V isolated | +5 V, ±12 V |
Radiation hardness | about 100 krad | about 100 krad |
Each ETB sub-experiment was provided with a number of stringent design requirements, which included fitting within 17.6 cm2, with a ceiling height of less than 54 mm. The average mass of sub-experiments was 250 gram, and peak power consumption of any sub-experiment was < 5 W.
The STRV-1d DHS included further features above those of STRV-2. This included the addition of individually regulated “triplet” power supplies for each sub-experiment, the addition of analog sampling capability for most sub-experiments, and a doubling of on-board data storage to 1 MB versus the 512 kB used in the STRV-2 DHS.
The architecture of the DHS was organized around the principle that a simple microcontroller could be extended in capability through the addition of logic resources. The DHS Storage System. The DHS contains 32 kbyte of radiation-hardened PROMs (Programmable Read-Only Memory) permitting the buffering of three days worth of science data. The DHS software design employs the concept of EST (Event Schedule Table) that governs the sequencing of sub-experiment activity. The EST for the STRV-1d DHS is comprised of entries, which populate schedules. The DHS operates in a cyclic fashion, commanding the sub-experiments, one at a time, in a cycle that is repeated every 60 s. Each sub-experiment is allotted 5 seconds to accommodate polling, commanding, data transfer, and sampling of one or both its analog channels. The DHS allows sub-experiments to operate using three models: 1) processor-based; 2) state-machine based; and 3) analog only.
1) The processor-based sub-experiments adhere to a strict protocol for communications. This protocol permits the issuance of mode change commands, viewing of status information, and reading of experiment data in the form of analog voltages on the two analog channels per sub-experiment, as well as data packets of up to 255 bytes per time slice.
2) In state-machine sub-experiments, the DHS sends a poll character on its RS-422 interface to serve as a trigger, advancing a finite state machine to a new state. In such experiments, only analog information is recorded, with a reading on one or both channels corresponding to each advance of the state machine.
3) In analog only sub-experiments, which are defined as experiments that do not exploit any communications with the DHS, the DHS reads one or both analog channels, but performs no other operation on its RS-422 interface. In this manner very simple sub-experiments, based only the requirement to read a voltage, can be accommodated.
CEASE (Compact Environmental Anomaly Sensor Experiment)
CEASE, sponsored by AFRL, Hanscom Air Force Base, Bedford, MA, is an environmental scanner, providing the S/C with essential knowledge about its surrounding space (the instrument was built by Amptek Inc. of Bedford, MA). CEASE uses this flight to prove its near spacecraft environmental assessment capabilities. The overall objectives are to develop and demonstrate on-orbit, autonomous, compact, light weight, low-power instrumentation to monitor the environment around a spacecraft, and to provide alerts whenever the environment is likely to cause any of the following anomalies: surface charging, deep dielectric charging, single event upsets (SEU's), or radiation dose effects.
The instrument also provides on request detailed data on particle fluxes incident on the spacecraft over the 72 hours prior to the request. This feature allows the S/C operator, once an anomaly has occurred, to have sufficient data to analyze and understand the cause of the anomaly. CEASE's output can be used to distinguish between natural effects and those caused by other (possibly hostile) actions. By on-board analysis of its measured space-environment data using decision making algorithms in its microprocessor, CEASE provides alerts/warnings in terms of a series of ascending order flags, indicating the likelihood and severity of the forthcoming anomalies. 23) 24) 25)
The instrument has a size of 10 cm x 10 cm x 8.2 cm, a mass of 1 kg, and power consumption of <1.5 W. An RS-422 or 1553B interface is used. The instrument is flown on the following missions: TSX-5, STRV-1c (of DERA, launch Nov. 16, 2000), and DSP-21 [(Defense Support Program-21) satellite, launch Aug. 6, 2001].

Parameter | CEASE-1 | CEASE-2 |
Size | 10 cm x 10 cm x 8.2 cm | 10 cm x 10 cm x 8.2 cm |
Instrument mass | 1 kg | 1.3 kg |
Power consumption | 1 W | 1.7 W |
Standard interface | RS-422 or MIL-STD-1553B | RS-422 or MIL-STD-1553B |
Telemetry (minimum) | 10 byte/min | 10 byte/min |
Diagnostic sensors | Lightly Shielded Dosimeter | Lightly Shielded Dosimeter |
References
1) M. L. La Grassa, J. R. Farmin, “TSX-5: Another Step Forward for Space-Based Research,” Crosslink, Summer 2001, pp. 30-37, http://www.aero.org/publications/crosslink/pdfs/V2N2.pdf and: http://www.aero.org/publications/crosslink/summer2001/04.html
2) http://www.spaceandtech.com/spacedata/logs/2000/2000-030a_tsx-5_sumpub.shtml
3) http://spaceflightnow.com/pegasus/tsx5/000606tsx5.html
4) “Tri-Service Experiment (TSX-5),” Orbital, June 7, 2000, URL: http://www.orbital.com/SatellitesSpace/ImagingDefense/TSX5/index.shtml
5) http://www.aero.org/publications/crosslink/summer2001/04_sidebar1.html
6) https://navcon.com/www/content/satellite-tsx-5-modal-survey
7) Information provided by SMC Public Affairs of Los Angeles, CA
8) “U.S. Air Force declares the Orbital-built TSX-5 satellite Functional Ahead of Schedule,” July 11, 2000, Space Ref, URL: http://www.spaceref.com/news/viewsr.html?pid=632
9) J. Shoemaker, P. Brooks, E.-J. Korevaar,G. S. Arnold, A. Das, J. Stubstad, R. G. Hay, “Space Technology Research Vehicle (STRV)-2 program,” Proceedings of SPIE's 45 th Annual Meeting, San Diego, CA, July 30-Aug. 4, 2000, Small Payloads in Space, Vol. 4136, Eds. B. J. Horais; R. J. Twiggs
10) “Medium Wave Infra Red Telescope,” [web source no longer available]
11) S. J. Cawley, S. Murphy, A. Willig, P. S. Godfree, “The Space Technology Research Vehicle 2 Medium Wave Infrared Imager,” Proceedings of the 3rd International Symposium of IAA, Berlin, April 2-6, 2001, URL: http://www.dlr.de/iaa.symp/Portaldata/49/Resources/dokumente/archiv3/0301.pdf
12) K. D. Erickson, K. D. Kelleher, J. T. Kenny, L. D. Wigglesworth, “STRV-2 payload early orbit experience and findings,” Proceedings of IEEE Aerospace Conference 2001, Vol. 1, Big Sky, MT, USA, March 10-17, 2001, pp. 171-179
13) S. J. Cawley, S. Murphy,A. Willig, P. S. Godfree, “The Space Technology Research Vehicle 2:Medium Wave Infrared Imager,” Acta Astronautica, Volume 52, Issues 9-12, May-June 2003, pp. 717-726, also in: http://www.dlr.de/iaa.symp/Portaldata/49/Resources/dokumente/archiv3/0301.pdf
14) http://www.asi.org/adb/04/03/02/laser-com.html
15) Michael Enoch, Sabrina Herrin, Roberta Ewart, Dennis Mansell, “Optical Tracking Telemetry and Commanding (TT&C) For Small
Satellites,” Proceedings of the AIAA/USU Conference on Small Satellites, Logan, UT, Aug. 23-26,1999, SSC99-IIB-4, URL: http://www.docstoc.com...
16) I.. Kim, B. Riley, N. M. Wong, M. Mitchell, W. Brown, H. Hakakha, P. Adhikari, E. J. Korcvaar, “Lessons learned from the STRV-2 satellite-to-ground lasercom experiment,” Proceedings of SPIE Vol. 4272, 2001, 'Free-Space Laser Communication Technologies XIII,' G. Stephen Mecherle, Editor, pp. 1-15,
17) “SAMMES Instrument Modules and Location,” 2-11 to 2-19, URL: http://www.globalsecurity.org/space/library/report/enviro/step3EA.pdf
18) K. K. Denoyer, R. S. Erwin, R. R. Ninneman, “Advanced SMART Structures Flight Experiments for Precision Spacecraft,” Acta Astronautica, Vol. 47, No 2-9, 2000, pp. 389-397
19) R. G. Cobb, J. M. Sullivan,Alok Das,L. P. Davis,T. T. Hyde, T. Davis, Z. H. Rahman, J. T. Spanos, “Vibration isolation and suppression system for precision payloads in space,” Smart Materials and Structures, Vol. 8, 1999, pp. 798-812
20) http://setas-www.larc.nasa.gov/strv2/strv2.html
21) J. Lyke, P. Brezna, K. Avery, “BMDO/AFRL Partnership: Advances In Data Handling Systems For Space Experiment Control,” Proceedings of AIAA-98-09-06, St. Louis Missouri, URL: https://web.archive.org/web/20100714155000/http://klabs.org:80/richcontent/MAPLDCon00/Abstracts/lyke3_a.pdf
22) S. M. Khanna et al., “Quantum Well Infrared Photo Detectors and Light Emitting Diodes for Infrared Imaging for Space Surveillance,” NATO Symposium SCI-98 on Use of Space Systems, Lisbon, Portugal, May 21-23, 2001
23) B. K. Dichter,W. R. Turnbull, D. H. Brautigam, K. P. Ray, R. H. Redus, “Initial On-Orbit Results From the Compact Environmental Anomaly Sensor (CEASE),” IEEE Transactions on Nuclear Science,Vol. 48,No 6, December 2001
24) http://www.amptek.com/cease.html
25) Shaun M. Easley, “Anisotropy in the South Atlantic Anomaly,” Thesis, Air Force Institute of Technology, Wright-Patterson Air Force Base, Ohio, March 2007, URL: http://www.dtic.mil...
The information compiled and edited in this article was provided by Herbert J. Kramer from his documentation of: ”Observation of the Earth and Its Environment: Survey of Missions and Sensors” (Springer Verlag) as well as many other sources after the publication of the 4th edition in 2002. - Comments and corrections to this article are always welcome for further updates (eoportal@symbios.space).