TecSAR (SAR Technology Demonstration Satellite)
EO
Mission complete
ISA
Launched in January 2008, TecSAR is a spaceborne radar minisatellite technology demonstration mission of Israel’s Ministry of Defense (MoD). Developed by Israel Aerospace Industries Ltd. (IAI), the mission provides high resolution Synthetic Aperture Radar (SAR) imagery for military use.
Quick facts
Overview
| Mission type | EO |
| Agency | ISA |
| Mission status | Mission complete |
| Launch date | 21 Jan 2008 |
| End of life date | 03 Jul 2024 |
| CEOS EO Handbook | See TecSAR (SAR Technology Demonstration Satellite) summary |

Summary
Mission Capabilities
TecSAR features an X-band Synthetic Aperture Radar (XSAR). The instrument can operate in four modes: Spotlight, Stripmap, Wide coverage ScanSAR or Mosaic mode, dictated by the various polarisation combinations.
Performance Specifications
XSAR operates at a centre frequency of 9.59 GHz and has viewing acquisition of 20 - 45°. For Stripmap mode, XSAR performs synchronous imaging on wide geographical swaths with a ground resolution of 3 m. Spotlight mode focuses on a preassigned target at resolution of less than 1 m, whilst Mosaic mode focuses on a number of spots in a target area at a resolution of 1.8 m. By using three beams for the coverage of a nominal wide coverage area, ScanSAR mode covers a swath width of up to 100 km with a ground resolution varying between 8 m and 20 m. TecSAR undergoes a slight elliptical orbit of altitude 450 km x 580 km at an inclination of 41°. It completes 15.22 orbits per day for a repeat cycle of 36 days.
Space and Hardware Components
Developed by government owned company Israel Aerospace Industries Ltd (IAI), the TecSAR spacecraft features a low-mass design of 260 kg with low moments of inertia about the roll axis to provide maximum pointing agility. Now referred to as the OptSat-2000 platform, the newly developed bus features 3-axis stabilisation features an Attitude and Orbit control Subsystem (AOCS) and an onboard storage capacity of 240 Gbit, with high-rate X-band data downlink. TecSAR has far outlasted its initial planned lifetime of five years, being still operational in its fifteenth year, as of November 2022.
TecSAR (SAR Technology Demonstration Satellite)
Overview Spacecraft Launch Mission Status Sensor Complement References
TecSAR (also spelt TechSAR) is the first spaceborne radar minisatellite technology demonstration mission of Israel's MoD (Ministry of Defense), designed and developed by IAI/MBT (Israel Aerospace Industries Ltd.) formerly known as Israel Aircraft Industries Ltd., a government-owned company. The prime objective is to provide high-resolution SAR imagery, day and night, in all weather conditions, at an affordable cost. 1) 2) 3) 4)
Note: The military nature of the mission does not allow to provide any more specifics to the description of this mission. This applies in particular to such items as “swath width.” Some information on spatial resolutions is provided (Table 1).
Spacecraft
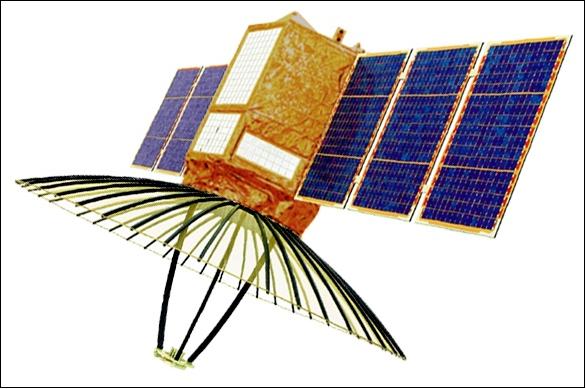
The spacecraft features a low-mass design and a configuration (shape of bus with low moments of inertia about the roll axis), to provide maximum of pointing agility. Combining high manoeuvrability with electronic antenna beam steering, TecSAR offers high-resolution coverage of large areas in various observation modes, among them also the mosaic form (event monitoring capability). 5)
The spacecraft is 3-axis stabilized, using a newly developed bus, with a launch mass of < 300 kg (260 kg dry mass, including a payload mass of 100 kg). The design keeps the bus and payload well separated so that changes due to growth potential in either one element will have a minimum effect on the other element. Electrical power of 750 W (EOL) is provided by two solar panels. The AOCS (Attitude and Orbit Control Subsystem) provides a high degree of pointing accuracy. An onboard data storage capacity of 240 Gbit is provided. The spacecraft design life is 5 years (minimum).
The highly agile bus design in combination with the body-pointing parabolic antenna dish system permits greatly increased viewing capabilities from the spacecraft. The spacecraft/antenna system may be dynamically redirected into any direction of the flight path (i.e. in the cross-track as well as in the along-track direction). Thus, a wide FOR (Field of Regard) within the incidence-angle range may be obtained on either side of the ground track for event monitoring coverage.
Note: In retrospect, the TecSAR spacecraft bus is referred to as OptSat-2000 platform (Ref. 8).
Launch
The launch of TecSAR took place on January 21, 2008, on a PSLV launcher of ISRO (Indian Space Research Organization) from SDSC (Satish Dhawan Space Center) at Sriharikota, India. IAI signed a launch contract with Antrix Corporation in Nov. 2005. 6) 7)
Note: Despite the advantages of the Indian carrier over a Shavit rocket, the policy of the Ministry of Defence - preservation of Israel's independent launch capability - remains unchanged. 8)
Orbit: Slight elliptical orbit, altitude of 450 km x 580 km, inclination = 41º, 15.22 orbits/day, repeat cycle of 36 days.
RF communications: High-rate X-band downlink. The system is operated with a number of ground stations.
Mission Status
• The TecSAR spacecraft and its payload are operating nominally in the summer of 2014. Since the start of the operational phase, The TecSAR mission provides a few thousand images per month to the customer. 9)
- Image quality checks are performed on a regular basis several times a year. Since launch, no degradation in image quality was observed, and the ISLR and PSLR figures remain stable.
- As of 2014, a second-generation satellite, TecSAR-2, is under development. This satellite is characterized by a larger antenna, longer imaging ranges and multi-polarization capabilities. Due to the modular design of the TecSAR spacecraft, the implementation of these improvements does not require major changes to the hardware design.
• The TecSAR spacecraft and its payload are operating nominally in 2012. TecSAR has been producing thousands of high-quality images per month since its launch in January 2008, to the users' full satisfaction. In Feb. 2012, IAI (Israel Aerospace Industries), the developer of TecSAR, won the Technological Innovation award at the "Technologies" group's annual International Aerospace Conference and Exhibition in Jerusalem. 10)
• The TecSAR spacecraft and its payload are operating nominally in 2010.
• In June 2009, the Trinidad program (see below) hadn't received any funding so far from DoD due to budgetary problems. However, a US-Israeli team demonstrated the imaging capability of the TecSAR spacecraft in performance tests in Florida (3 weeks in June 2009). SAR imagery was downlinked, delivered and processed twice a day in a matter of 15 minutes for analysis by a user team. The demonstration validated to the military management the very responsive operational capability of the system. 11)
• After the IOT was successfully completed, the system was handed over to the customer for the operational phase.
- A quality check performed on the images reveals the excellent characteristics of the images. Indeed, the ISLR (Integrated Side Lobe Ratio) level is around 18 dB, while the PSLR (Peak Side Lobe Ratio) is about -30 dB. These measurements were performed during the IOT.
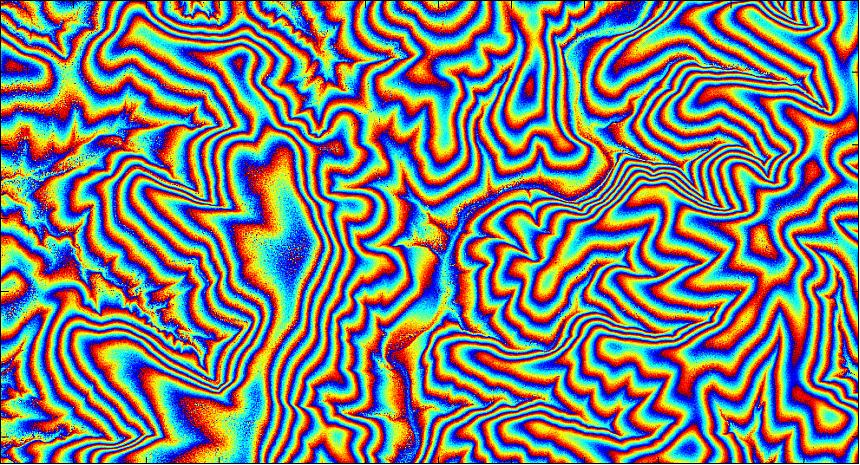
- Also, some repeat pass imagery was taken during IOT over several sites in Israel to test the interferometric capabilities of the system. The system's high spatial resolution leads to enhanced interferometric performance with potentially fine DEM production capabilities.


• The first SAR imagery of TecSAR was received 10 days after launch in January 2008 (in the IOT phase).
Future uses of the TecSAR system: As of April 2007, Northrop Grumman Space Technology (NGST) of Redondo Beach, CA is partnering with Israel Aerospace Industries to adopt IAI's TecSAR satellite for use in future versions of ”operationally responsive space” applications of the US DoD. For this purpose, NGST will modify the satellite with additional payloads and specialized software. The upgraded satellite will be called ”Trinidad” and be available 28 months after the contract signature.
NGST will combine its proven intelligence, surveillance and reconnaissance (ISR) mission systems engineering and systems integration capability with IAI's TecSAR high-resolution, synthetic aperture radar imaging satellite. Mission assurance capabilities, including secure communications and other US system requirements, will be incorporated into the spacecraft by NGST. Based on IAI's TecSAR multi-mode X-band radar imaging satellite, this new system can provide significant, near-term, day/night and all-weather point and area collection capability to meet the immediate needs of warfighters in theatre as well as those of the broader intelligence community. 12) 13) 14) 15)
The satellite will be operated with a compact, portable ground system that provides the flexibility to perform tasking and data dissemination from the continental USA or from any operational theatre. The satellites can be individually launched from a low-cost Minotaur or Falcon 1 rocket, or as a group of four or more on an EELV-class launcher.
• The IOT (In Orbit Test) period started immediately after the spacecraft was launched.
Sensor Complement
XSAR (X-band Synthetic Aperture Radar)
XSAR was designed and developed by Elta Systems Ltd. of Ashdod, Israel, a subsidiary of IAI. The XSAR system has an airborne predecessor, a fully polarimetric X-band multimode instrument also of Elta Systems design and manufacture. Elta's multimode radar was flown on an airborne platform, a Boeing 737 (timeframe 2004), and data were provided at a resolution of 1m/ pixel. This airborne sensor served as a testbed for the XSAR payload of the TECSAR satellite. 16)
XSAR operates at a centre frequency of 9.59 GHz (3.1 cm wavelength) with a revisit period of 3 or 4 days and a repeat cycle of 14 days, the look angle can vary from 20-45º and the instrument is capable of acquiring data from both left and right look directions of the subsatellite track.
The XSAR instrument consists of five major subsystems: 17) 18)
- RSC (Radar Signaling and Control) system
- MTT (Multi-Tube Transmitter)
- Deployable paraboloid mesh antenna with electronic beam steering
- OBR (Onboard Recorder) of 256 Gbit capacity
- DLTU (Data-Link Transmission Unit).
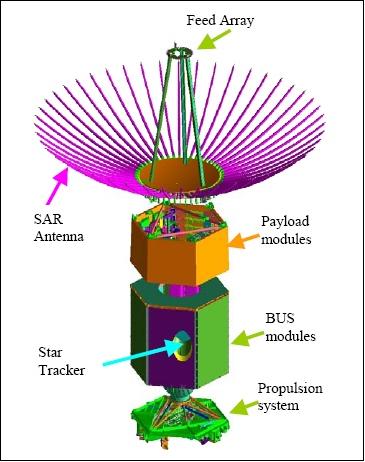
The payload modules are separated from the bus so that only cables and wires connect the two. The payload modules occupy a section close to the antenna (Figures 5 and 9). The OBR and DLTU components are part of the bus modules.
The MTT is composed of 10 RF TWT amplifiers referred to as CTWTA (Channeled Traveling Wave Tube Amplifier). Only 8 CTWTAs (out of 10) are being used during an imaging phase; the other two are kept as cold redundancy. The MTT arrangement supports graceful degradation even if only seven of the ten CTWTAs remain in working order. The reflected signal passes through the feeder to a Front End (FE) that contains a circulator and LNA (Low Noise Amplifier). A fast electronic switch at the receiver input selects the power coming from one out of the eight FEs. This power is amplified and sampled by a fast A/D (Analog/Digital) converter. The sampled data passes through a 6 to 3-bit per sample BFPQ (Block Floating Point Quantization) compression algorithm. The source data is then recorded onto the OBR (Onboard Recorder).
In the TecSAR system design, a derivative of the BFPQ algorithm is used, namely MBFPQ (Modified Block Floating Point Quantization). The MBFPQ algorithm exploits the fast CPU computing power of the payload (80486DX2 CPU) thus avoiding the need to assume a Gaussian distribution of the data. 19)
All electronics and RF devices (MTT and RSC) of the XSAR payload are part of the hexagonal container as shown in Figure 9.
The radiating element of XSAR is the parabolic antenna, a deployable umbrella reflector, with a rigid CFRP (Carbon Fiber Reinforced Plastic) central dish and a set of knitted mesh gores stretched by skeleton ribs. The ribs lie on the surface of a parent paraboloid where each gore surface has a paraboloid cylinder contour. The configuration of the antenna is shown in Figures 5 and 7. A high paraboloid reflector surface accuracy is achieved by ribs position adjustment after mesh gores mounting. The antenna measurement technique was verified using the method of stereo photogrammetry. The entire reflector mesh has a mass of < 0.5 kg.
High peak power dictates the overall mission power requirements. TecSAR needs 1.6 kW of power during imaging and the bus is designed to give 750 W (EOL).

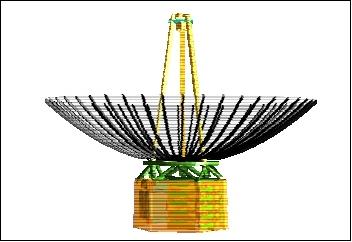
The electronic beam steering capability is achieved by using an antenna feed array in the focal plane (the power generated in the MTT is directed toward different feeders in the antenna feed array). Each feeder has a different position relative to the antenna focal point: hence, a multi-beam pattern is created (Figure 6). The antenna includes a TTD (True Time Delay) function for the electronic steering with a very wideband beam. As a consequence of the wideband antenna and the TTD feature, the system's range resolution is not limited as in the case of an active phased array antenna.

All electronic circuits and RF modules are of the payload are installed into a hexagonal container, including the MTT and the RSC (Figure 9). The OBR and DLTU are mounted in the bus section of the spacecraft.

Modes of Operation
The multi-mode payload employs electronic beam steering, which can be operated in various observation modes including various polarization combinations (optional): HH, HV, VH, VV.
• Stripmap mode: the synthetic apertures are targeted on wide geographical swaths. The spacecraft performs synchronous imaging and does not change its orientation during observations except for some small maneuvers due to the need to keep the imaging strip parallel to the ground track. Squinted strip imaging is possible.
• Wide coverage ScanSAR. The coverage of large strips is achieved by electronic beam steering. Three beams are used in the nominal wide coverage mode which create three footprints (subswaths) in the target area. The ground resolution in this mode is decreasing since the integration time is split up among the subswaths.
The swath width can be increased by using more antenna beams. In principle, the swath width may get to more than 100 km for some incidence angles. However, this reduces the ground resolution to about 20 m.
• Spotlight mode: this focuses on a specific, pre-assigned target. In spotlight, the spacecraft performs mechanical steering to halt the antenna footprint in a specific target area. The longer integration time over the spot target area yields an improved azimuth resolution. The range resolution is achieved by adjusting the bandwidth to the incidence angle. The TecSAR ability for spotlight imaging in squint allows for multi-look imaging without any loss in resolution. To obtain a multi-look image of a given target area, a number of spotlight images are observed, each at a different squint angle.
• Mosaic mode: the radar imager slews its focus on a number of spots in the same general target area. The mosaic mode enables extending the limited coverage of the spot mode by using the electronic steering capability of XSAR. In mosaic mode, the radar beam scans in the range direction while the mechanical manoeuvring advances the strip line in the azimuth direction. Hence, this mode may also be interpreted as the spot version of ScanSAR.
Operation mode | Resolution |
Wide coverage ScanSAR mode | 8 m |
Stripmap mode | 3 m |
Super stripmap (mosaic) mode | 1.8 m |
Spotlight mode | < 1 m |


References
1) Y. Sharay, U. Naftaly, “TecSAR Satellite -Novel Approach in Space SAR Design,” Proceedings of IRSI (International Radar Symposium India) 2005, Bangalore, India, Dec. 20-22, 2005
2) U. Naftaly, “TecSAR - Performances, Design and Status,” Proceedings of EUSAR 2004, Ulm, Germany, May 25-27, 2004
3) IAI at the 2007 Paris Air Show,” URL: http://www.iai.co.il/SIP_STORAGE/files/7/35047.pdf
4) Y. Sharay, U. Naftaly, “TecSAR: design considerations and programme status,” IEE proceedings of Radar, Sonar & Navigation, Vol. 153, No 2, 2006
5) Ury Naftaly, Ronit Levy-Nathansohn, “Overview of the TECSAR Satellite Hardware and Mosaic Mode,” Geoscience and Remote Sensing Letters, IEEE Geoscience and Remote Sensing Letters, IEEE Vol. 5, Issue 3, July 2008, pp.:423 - 426
6) “Israel Chooses Indian PSLV To Launch New Spy Satellite,” URL: http://www.rantburg.com/poparticle.php?ID=134831&D=2005-11-12&HC=2
7) “TecSAR: Small SAR Satellite, Large Footprint,” IAI news, First Quarter 2008, Issue 25, pp. 6-7, URL: http://www.iai.co.il/SIP_STORAGE/files/0/35920.pdf
8) Fred Ortenberg, “Israel in Space - Twenty Years of Exploration (1988-2008),” book, 2009, printed at Technion Press, Haifa, Israel, ISBN: 987-965-555-457-1
9) Uri Naftaly, Ori Oron, “TecSAR Program Status,” Proceedings of EUSAR 2014 (10th European Conference on Synthetic Aperture Radar), Berlin, Germany, June 3-5, 2014
10) Israel Aerospace Industries' TecSAR Satellite wins “Technologies” Group Technological Innovation Award,” IAI, Feb. 9, 2012, URL: http://www.iai.co.il/32981-43758-en/MediaRoom_News.aspx
11) Barbara Opall-Rome, “U.S. - Israel Team Demonstrate TecSAR Abilities to Pentagon,” Space News, June 29, 2009, p. 5
12) “Northrop Grumman And IAI To Offer Rapid Response Operational Surveillance Satellites,” Spacedaily, April 12, 2007, URL: http://www.spacewar.com/reports/Northrop_Grumman_And_IAI-To_Offer_Rapid_Response_Operational_Surveillance_Satellites_999.html
13) B. Iannotta, “Northrop To Market Israeli TecSAR Platform to Pentagon,” Space News, April 16, 2007, p. 12
14) “Operationally Responsive SAR Satellite Offered by a US-Israeli Team,” URL: http://www.defense-update.com/products/t/tecsar.htm
15) B. Opall-Rome, “Northrop Hopes To Ride TecSAR into US Responsive Space Market,” Space News, Jan. 28, 2008, p. 5
16) D. G. Blumberg, “High Resolution X-band SAR Imagery for precise Agriculture and Crop Monitoring,” POLinSAR 2007, 3rd International Workshop on Science and Applications of SAR Polarimetry and Polarimetric Interferometry, ESA/ESRIN, Frascati, Italy, Jan. 22-26, 2007 URL: http://earth.esa.int/workshops/polinsar2007/papers/267_blumberg.pdf
17) Y. Sharay, U. Naftaly, “ TecSAR: design considerations and programme status,” IEE Proceedings- Radar, Sonar and Navigation, Vol. 153, Issue 2, April 13, 2006, pp. 117-121, ISSN: 1350-2395
18) R. Levy-Nathansohn, U. Naftaly, “Overview of the TecSAR Satellite Modes of Operation,” Proceedings of EUSAR 2006, Dresden, Germany, May 16-18, 2006
19) Ury Naftaly, “The Modified BFPQ algorithm,” Proceedings of EUSAR 2008, 7th European Conference on Synthetic Aperture Radar, June 2-5, 2008, Friedrichshafen, Germany