TARANIS (Tool for the Analysis of RAdiations from lightNIngs and Sprites)
EO
Atmosphere
Mission complete
CNES
Quick facts
Overview
| Mission type | EO |
| Agency | CNES |
| Mission status | Mission complete |
| Launch date | 17 Nov 2020 |
| End of life date | 17 Nov 2020 |
| Measurement domain | Atmosphere |
| Measurement category | Lightning Detection |
| Measurement detailed | Total lightning density |
| Instruments | IME-HF, MEXIC, IMM, IDEE, MCP, XGRE, IME-BF |
| CEOS EO Handbook | See TARANIS (Tool for the Analysis of RAdiations from lightNIngs and Sprites) summary |
TARANIS (Tool for the Analysis of RAdiations from lightNIngs and Sprites)
Spacecraft Launch Sensor Complement References
Overview
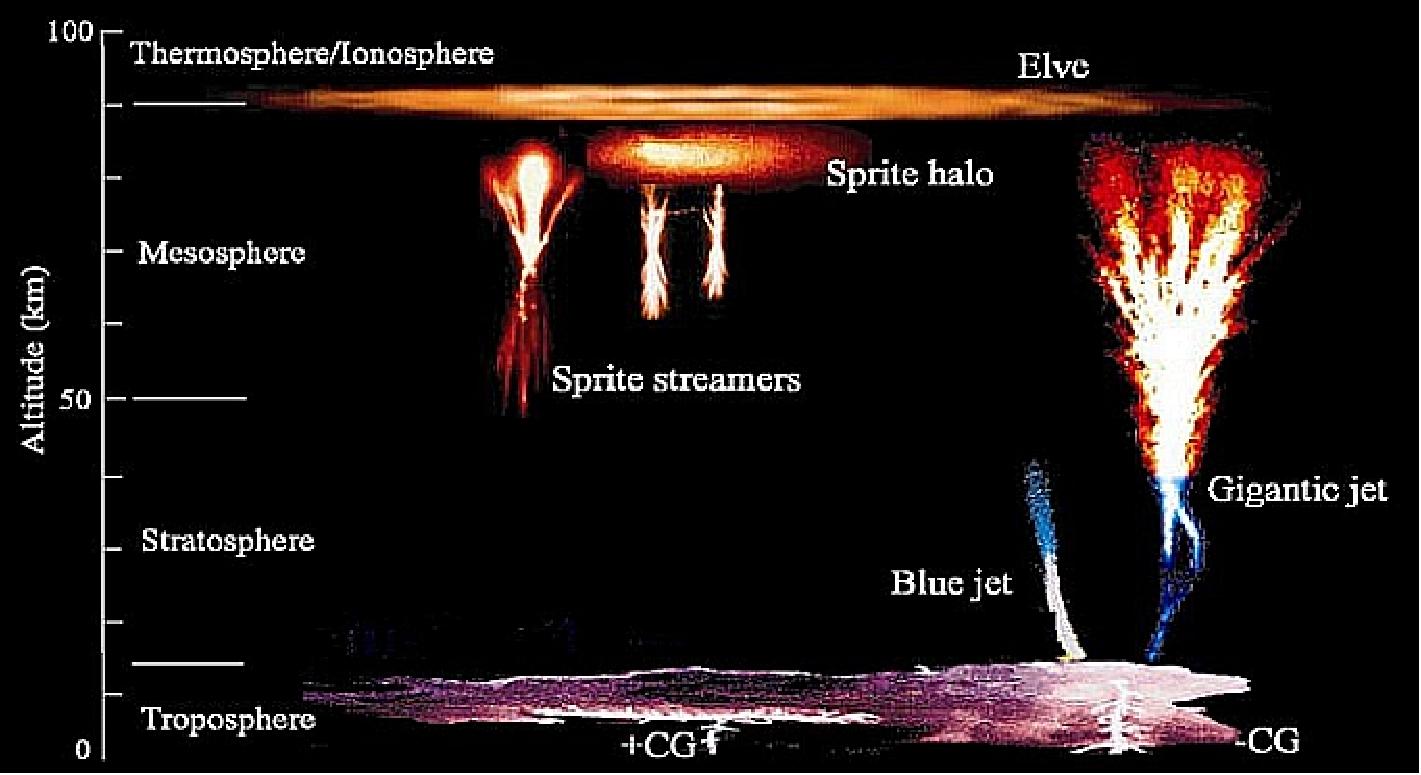
TARANIS is a CNES microsatellite mission, proposed by LPCE (Laboratoire de Physique et de Chimie de l'Environnement), and CEA (Commissariat a l'Energie Atomique) of France in collaboration with institutions from USA, Denmark, Japan, the Czech Republic and Poland. The TARANIS mission is devoted to the study of transient event energetic mechanisms that generate transient luminous emissions and gamma ray flashes in the terrestrial atmosphere above the thunderstorm areas. These emissions are a manifestation of a coupling between atmosphere, ionosphere and magnetosphere via intense transitory processes implying avalanching relativistic electrons with energies up to 30 MeV.
Note: In ancient mythology, TARANIS was the Gallic god of thunder and lightning.
The science objectives include: 1) 2) 3) 4) 5) 6) 7) 8) 9) 10) 11)
• Identification and characterization of all possible emissions:
- TLEs (Transient Luminous Events) including sprites, jets, elves, and halos
- TGFs (Terrestrial Gamma-ray Flashes)
• Global mapping and occurrence rates, relation of TLEs, TGFs, associated electromagnetic emissions and high energy electrons
• Characterization of the parent lightning that cause TLEs and TGFs and precipitate electrons, investigation of WPIs leading to precipitated [LEP (Light induced Electron Precipitation)] and accelerated (runaway) electrons, effects on the radiation belt of low altitude sources, tracking of the variability of the radiation belts from electron and wave measurements, effects on thermospheric parameters (ionization rate, NOx, O3).
• Determination of the nature of the triggering processes and the source mechanisms
• Study of the explosive dissipation of energy in the ionosphere and magnetosphere.
- The project is in Phase B as of 2009. The PDR (Preliminary Design Review) took place in June 2009.
- The TARANIS Project received the go-ahead from the CNES Board of Directors on Dec. 9, 2010 (Ref. 12).
- The CDR (Critical Design Review) of the spacecraft has been completed in April 2013. The CDR complement for the scientific instruments is planned in June 2014 (Ref. 11).
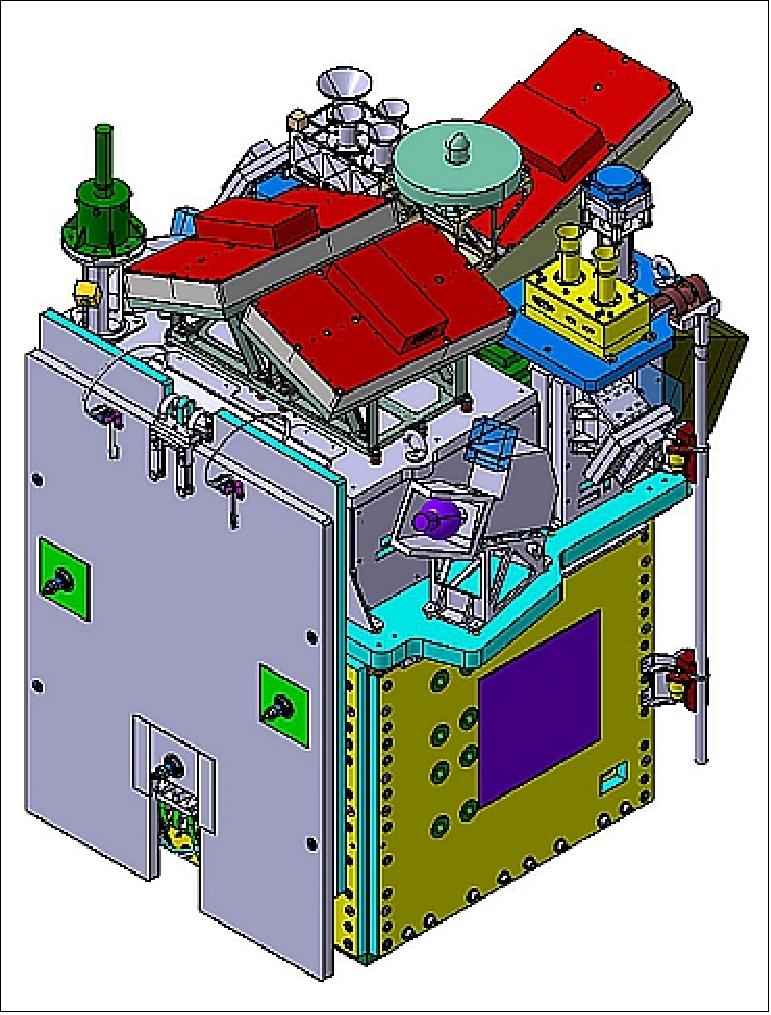
Spacecraft
TARANIS is a minisatellite is of the CNES Myriade series, which started with the DEMETER microsatellite, launched in June 2004. The structure consists of four vertical struts and of four lateral panels made of alloy honeycomb. The general design concept allows having systematically one satellite face in the shadow. This face supports low temperature equipment and the star sensor, which requires not only low temperature, but also a FOV (Field of View) without any sun parasitic illumination. The thermal subsystem is partly passive, relying on the use of paints, MLI and SSM, and partly active using heaters. 13)
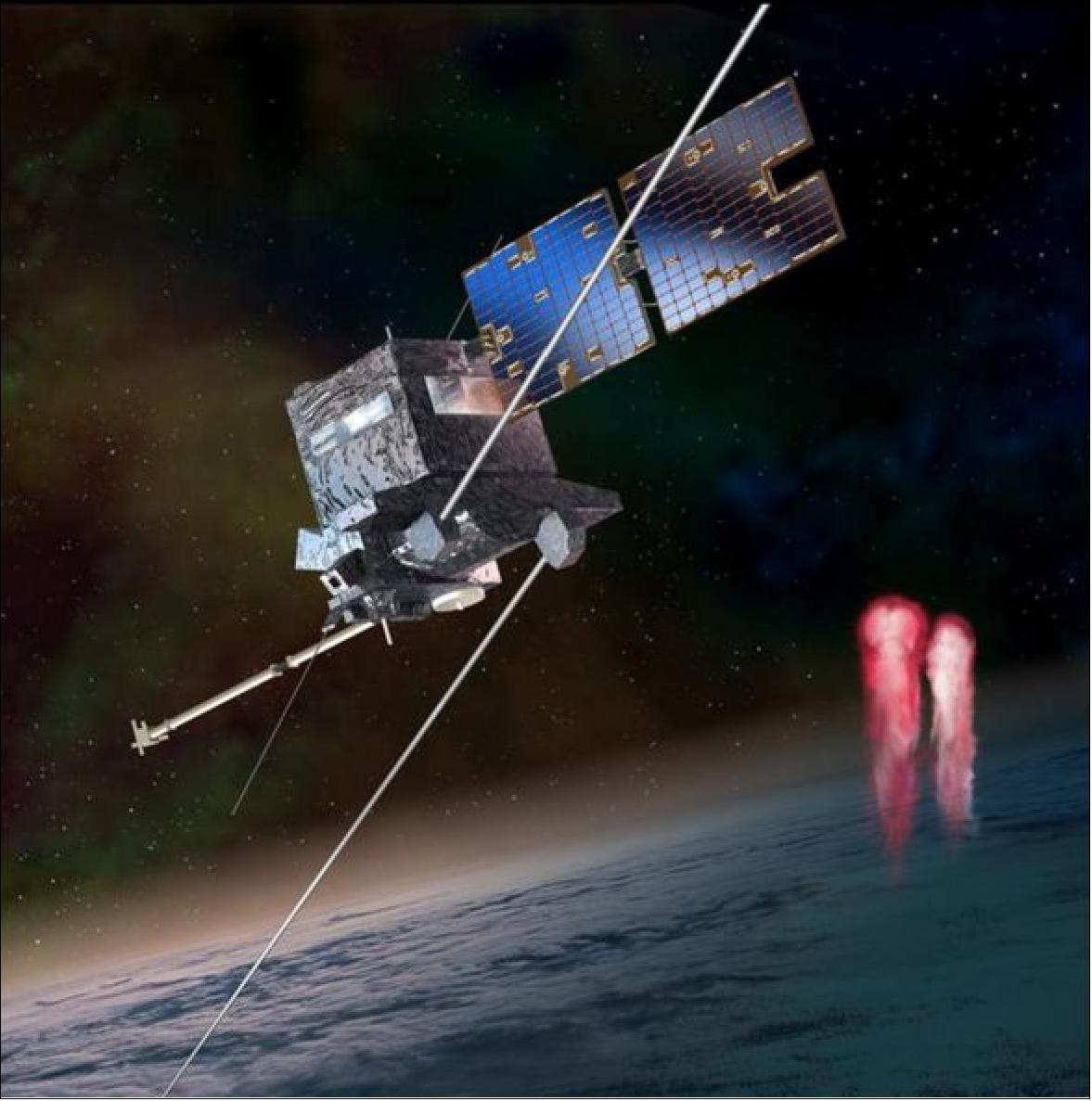
The TARANIS spacecraft is 3-axis stabilized requiring nadir pointing. The AOCS (Attitude Orbit and Control Subsystem) uses reaction wheels which are unloaded using magneto torquers. Control is achieved by reaction wheels, which are unloaded by magneto torquers. The AOCS for TARANIS has been upgraded with respect to Myriade. The main upgrade has been realized with respect to the AOCS Myriade product line: (Ref. 11)
- The creation of a "Moon" MCO (Orbit Control Mode) submode
- The ability to group the thruster commanded pulse in MCO.
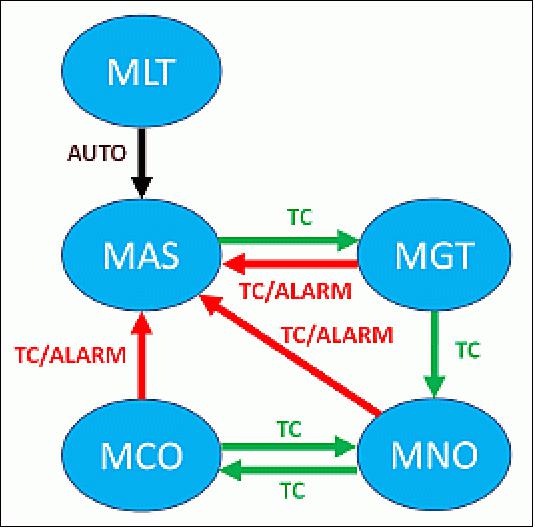
The SST (Star Tracker) is the main sensor in the MNO mission mode and drives the pointing performance. The AOCS subsystem is organized with the 5 following modes: MLT, MAS, MGT, MNO, MCO.
1) The MLT mode is used just after satellite injection. No attitude control or attitude estimation is performed by the AOCS, all the AOCS equipments are switched off.
2) MAS (Mode Acquisition and Safe-hold): MAS is used after separation from the launcher and later in case of anomaly detection. It consists in an orientation of the satellite in the direction of the Sun, with a slow rotation around the X-axis for thermal reasons.
3) The MGT mode is a transition mode from acquisition or safe-hold mode (MAS) to normal mode (MNO). The objective is to reach an attitude close to the nominal geocentric one in order to enable the acquisition of stars in the star sensor's field of view. This is a recovery condition to switch-over to normal mode. The control during this mode does not need any attitude measurement but the satellite pointing requires knowing the orbit position.
4) MNO (Mode Normal Orbit): MNO is the normal mode in which the scientific mission is carried out. The satellite is 3-axis stabilized by three reaction wheels (one of the two Y-axis wheels is switched off). Attitude is only given by the star sensor, which imposes some strategy to cope with possible drops of measurement. During the normal mode, the magnetorquer bars are used to unload the kinetic momentum of the 3 RWs (Reaction Wheels). To reduce the magnetic disturbances on the scientific mission, the unloading of the wheels by the MTB (Magnet-Torquer Bars) are only performed around the poles.
5) MCO (Orbit Control Mode): This mode is nominally dedicated to perform the orbit maneuvers. During the thrust, the attitude control is performed using four tilted thrusters in off modulation, in order to be able to create a torque around the 3 axis. Attitude is provided by integration of the gyrometers measurements.
Electric power (200 W) is provided by two foldable panels. Each panel is covered with 7 strings of 18 cells (triple junction AsGa) having an efficiency of 26%. The solar array is articulated by a micro-step drive mechanism with a resolution of 1/64º. The Li-ion battery has a capacity of 15 Ah, consisting of 10 x 8 cells. A PCDU (Power Control and Distribution Unit) provides regulation and distribution.
The data handling concept uses a central OBC (Onboard Computer), an in-house development with low power consumption and use of COTS parts. The integrated OBC provides the following features:
- Processor: transputer T805 @ 20 MHz with four high-speed data exchange links @ 5 Mbit/s, and a processing capacity of 2 MIPS
- Radiation hardened: 15 krad, SEL and SEU immune
- Telemetry and telecommand data coding and decoding according to CCSDS standards
- 1 Gbit RAM protected by EDAC
- Input and output configurable with micro software and addition of boards. A standard configuration includes 10 serial links RS-422, RS-485, acquisition of 16 analog input 12-bit coded control signals.
- The OBC power consumption is 6 W max, the mass is 3 kg. The OBC handles all S/C and payload functions.
The propulsion module is a blow-down system using hydrazine (4.5 kg corresponding to a ΔV of 80 m/s). It uses 4 thrusters with a 1 N thrust each. The propulsion module is being used for orbital maintenance as well as for EOL orbit maneuvers to allow a spacecraft reentry within a period of 25 years.
The spacecraft has a mass of ~165 kg, size: 98 cm x 107 cm x 115 cm. The design life is 2 years. The mass of the payload is ~ 35 kg.
RF communications: The source data are stored onboard in mass memory of 16 Gbit capacity. The communication links are in X-band to the CNES control station at Toulouse. The downlink data rate is 16.8 Mbit/s. The receivers are in hot redundancy, the OBC being locked on the first one from which a signal is received. The transmitters are in cold redundancy. The data volume is ~ 4 GB/day.
Launch
The TARANIS spacecraft of CNES was launched on 17 November 2020 (01:52:20 UTC) as a secondary payload to the SEOSat/Ingenio spacecraft of Spain on a Vega vehicle (designated VV17) from Kourou.
A launch failure occurred 8 minutes after liftoff of Vega mission VV17, following the first ignition of the engine of the AVUM upper stage, a deviation of trajectory was identified, entailing the loss of the mission. 15)
Orbit: Sun-synchronous circular orbit, altitude = 670 km, inclination = 98º, LTDN (Local Time on Descending Node) at 10:30 hours, repeat cycle = 38 days.
Vega flight VV17 failure: Arianespace and ESA appoint an independent Inquiry Commission
• On Tuesday 17 November 2020, Arianespace announced the loss of the Vega VV17 mission, carrying two payloads: SEOSAT-Ingenio for ESA and TARANIS for the French space agency, CNES.
- Two and a half months after Vega's successful return to flight, the Vega launch vehicle lifted off as scheduled on 17 November at 02:52 CET / 22:52 local time on 16 November from Europe's Spaceport in Kourou, French Guiana. The first three stages functioned nominally until the ignition of the AVUM upper stage, eight minutes after departure from the launch pad. At that time, a degraded trajectory was detected, followed by a loss of control of the vehicle and the subsequent loss of the mission.
- The launcher fell in a completely uninhabited area close to the drop zone planned for the Zefiro-9 stage.
- Initial investigations, conducted overnight with the available data, indicate that a problem related to the integration of the fourth-stage AVUM nozzle activation system is the most likely cause of the loss of control of the launcher.
- In accordance with their standard protocols, Arianespace and ESA will set up an independent Inquiry Commission jointly chaired by Daniel Neuenschwander, Director of Space Transportation at ESA, and Stéphane Israël, Arianespace Chief Executive Officer, on 18 November. The Commission will provide detailed evidence to explain why steps were not taken to identify and correct the integration error. The Commission will formulate a road map for Vega's return to flight under conditions of complete reliability. Arianespace and ESA will jointly present the findings of this commission.
- "My thoughts are with all teams in particular at CDTI and at CNES for their hard work on the two lost satellites," commented ESA Director General Jan Wörner. "I will personally make sure that we fully understand the root cause, but also that we bring Vega back to the robustness and reliability of service it has shown since its first launch in 2012."
- ESA developed SEOSAT–Ingenio as a Spanish national mission as a result of an international collaborative effort. It was funded by Spain's Centre for the Development of Industrial Technology (CDTI) of the Ministry of Science and Innovation. Other partners included Airbus Defence and Space, being the prime industrial contractor of the satellite.
- The Spanish high-resolution imaging mission, SEOSAT-Ingenio, was designed to provide high-resolution images of Earth's land cover. By imaging in remarkable detail, this satellite mission would have benefitted society in various ways such as for monitoring land use, for planning urban development and for managing water resources. With its capability to look sideways, it would have been able to access any point on Earth within three days, and could have helped map natural disasters such as floods, wildfires and earthquakes.
- ESA's Director of Earth Observation Programs, Josef Aschbacher, said, "We are all very sad for the loss of the SEOSAT-Ingenio land monitoring mission. But despite this loss, I want to recall that we have fully achieved the other objective, which is to build up a strong expertise in space systems in Spain. This was recently demonstrated by the signature of the industrial contract with Spanish industry as Prime of the Copernicus LSTM Expansion mission."
- Also on this flight was TARANIS, Tool for the Analysis of RAdiation from lightNIng and Sprites, an Earth observation microsatellite for the French space agency, CNES. It was designed to observe luminous, radiative and electromagnetic phenomena occurring at altitudes of 20 to 100 km over thunderstorms.
Launch Loss Investigation of an IEC (Independent Enquiry Commission)
• December 18, 2020: On November 17, Arianespace announced the loss of the Vega VV17 mission, which was carrying two payloads, SEOSAT-Ingenio, an Earth-science observation satellite for the European Space Agency (ESA), on behalf of Spain's Center for Development of Industrial Technology (CDTI), and TARANIS for France's National Centre for Space Studies (CNES). The first three stages functioned nominally until the ignition of the AVUM upper stage, eight minutes after liftoff. At that time, a degraded trajectory was detected, followed by a loss of control of the vehicle and the subsequent loss of the mission. 17)
- Initial investigations, conducted right after the launch with the available data, identified a problem related to the integration of the fourth-stage AVUM Thrust Vector Control (TVC) system as being the most likely cause of the loss of control of the launcher.
- Arianespace (the launch service provider) and the European Space Agency (ESA – the launch system development authority) immediately set up an Independent Enquiry Commission (IEC). The Commission provided the detailed report and conclusions confirming initially identified root causes to the failure, comprehensively explaining what went wrong in the integration process and why the error was not detected before flight. According to its findings, the Commission has accordingly formulated a road map for a robust Vega return to flight.
- More precisely, the IEC concludes that the VV17 cause of failure is not attributable to a flaw in the qualification of the design but to the wrong routing and connection of the control lanes of the electromechanical actuators of the AVUM upper stage Thrust Vector Control (TVC) system, inverting steering commands and causing trajectory degradation leading to the loss of the vehicle. The detailed series of causes are described as (i) a misleading integration procedure causing (ii) an inversion of electrical connections, not detected through (iii) the different control steps and tests executed between the integration of the AVUM upper stage and the final acceptance of the launcher due to some inconsistencies between specific requirements and prescribed controls.
- A comprehensive set of both immediate and permanent recommendations has been presented by the IEC to ensure safe and prompt return to flight, as well as to ensure launch vehicles reliability on the long term. The first set of recommendations include additional inspections and tests on the next two Vega launchers, whose hardware is already totally or partially produced, and workmanship. Permanent recommendations have been proposed to further mitigate the identified root causes, regarding the manufacturing, integration and acceptance processes on Vega assembly lines in Italy and its final acceptance in French Guiana.
- Starting this week, a task force steered by ESA and Arianespace has started implementing the roadmap proposed by the IEC and will thoroughly follow its implementation. A set of actions will be implemented by Vega's prime contractor Avio, under the supervision of Arianespace, as launch service provider, and ESA, as launch system development authority, in order to make possible the next Vega launch, VV18, still scheduled by Q1 2021 from French Guiana, and the following ones.
- "Thanks to their hard work in less than one month, the members of the Commission have confirmed the cause initially identified after the loss of control of the mission VV17," said Stéphane Israël, CEO of Arianespace. "The clarity of the conclusions presented by the Independent commission opens the way to immediate implementation by Avio, Vega's prime contractor, of the recommendations on their integration line, with the support from Arianespace and ESA. It may allow a return to flight by end Q1 2021, in full confidence to Vega's quality and competitiveness on the market."
- Daniel Neuenschwander, ESA Director of Space Transportation, said: "In the past few weeks, members of the Independent Inquiry Commission have done an exceptional work, with the support of the prime contractor Avio. The Commission has drawn a set of recommendations that once implemented should enable robust, reliable and even swift return to flight of Vega, contributing to secure Europe's autonomy of access to space."
Sensor Complement
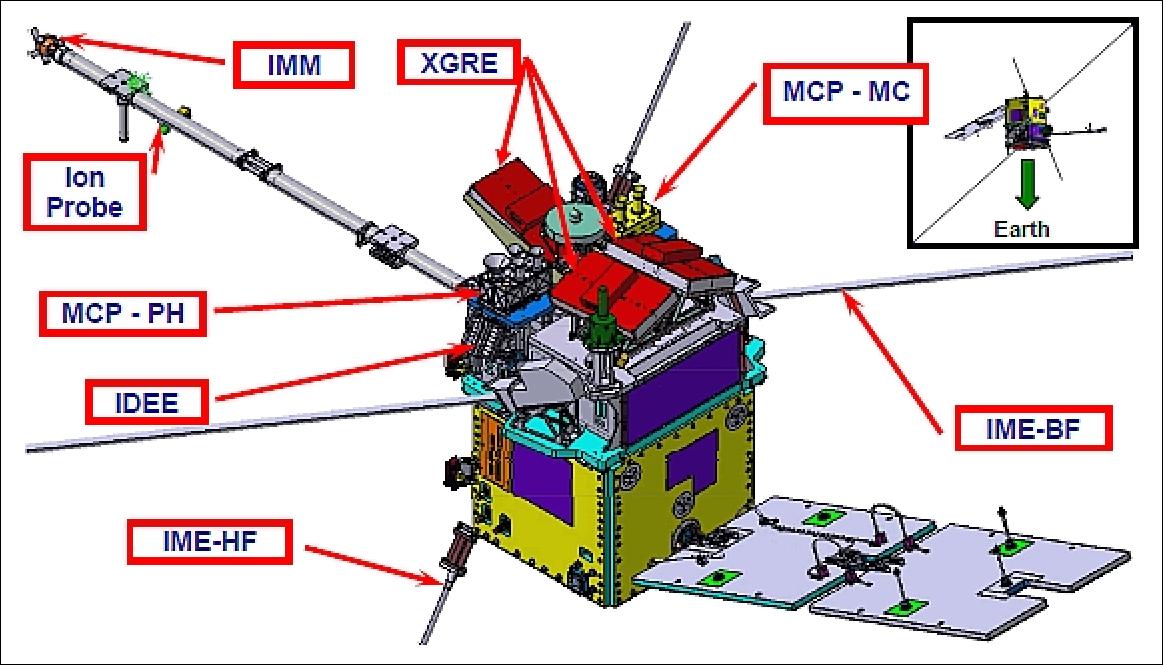
The payload is constituted by electric and magnetic antennas, 2 cameras, 4 photometers and X-ray and Gamma-ray (γ-ray) sensors. The onboard measurements will be complimented with ground-based observations and dedicated measurement campaigns. The sensor complement has a mass of ~35 kg and a power consumption of ~35 W (37 W on nightside, 21 W on the dayside of the orbit).
The science objectives of the TARANIS mission are into three broad categories: 18) 19)
• Advance physical understanding of the links between TLEs and TGFs, in their source regions, and the environmental conditions (lightning activity, variations in the thermal plasma, occurrence of extensive atmospheric showers, etc)
• Identify the generation mechanisms for TLEs and TGFs and, in particular, the particle and wave field events which are involved in the generation processes or which are produced by the generation processes
• Evaluate the potential effects of TLEs, TGFs, and bursts of precipitated and accelerated electrons (in particular lightning induced electron precipitation and runaway electron beams) on the Earth atmosphere or on the radiation belts.
To maximize the scientific return of the data collected by TARANIS, the scientific payload is operated as a single instrument. The strategy adopted is twofold: a continuous monitoring of low resolution optical, field and particle data is performed and transmitted (the survey mode). Under alert, all TARANIS instrument analyzers will initiate a synchronized high resolution data mode (the event mode). Each analyzer includes memory to store high resolution data for a time interval including the event detection time (Ref. 19).
The event data are on-board recorded on triggering alerts only. The alert signals will be generated by the photometers (MCP-PH), the gamma detectors (XGRE), the electron detectors (IDEE), or the HF wave sensor (IME-HF). All the event management is made by MEXIC. To identify an electromagnetic signature associated with TGFs and TLEs, the parent lightning, a possible relationship between TGFs and TLEs, or an associated relativistic runaway electron beam, it is mandatory to collect simultaneously high resolution data from all TARANIS instruments. The relative time accuracy between the TARANIS instruments will be less than 10 ns, allowing meaningful intercomparison of the data sets. To allow the comparison with ground based and balloon measurements the absolute time accuracy onboard will be less than 1 ms. The available onboard mass memory and telemetry available are such that up to about 2 GB of high-resolution data (event mode) will be downloaded per day.
Instrument | Description | PI, organizations |
MCP | Lightning micro-camera, TLE micro-camera, | PI: E. Blanc, CEA/LDG (France) + Hokkaido University (Japan) |
XGRE | A set of 3 X- and γ-ray detectors | PI: P-L. Blelly, IRAP (France) + APC (France) |
IDEE | Two e- detectors with one analyzer per detector: [70 keV – 4 MeV] | PI: J-A. Sauvaud, IRAP (France) + University of Prague (Czech Republic) |
IMM | Triaxial search coil magnetometer: [5Hz – 20kHz] | PI: J-L. Pinçon, LPC2E (France) + Stanford University (USA) |
IME-BF | LF-E (Low Frequency-Electric) antenna: [DC–1 MHz] | PI: E. Seran, LATMOS (France) + GSFC (USA) |
IME_HF | HF-E antenna: [100 kHz – 35 MHz] | PI: J-L. Rauch, LPC2E (France) + Prague University, IAP (Czech Republic) |
MEXIC | Power/Management of the payload | PI: M. Parrot, LPC2E (France) + SRC (Poland) |
MCP (Micro Cameras and Photometers)
MCP is an instrument of CEA (Commissariat Energie Atomique - or the Atomic Energy Commission of France) + Tohoku University and Riken University (Japan). The objectives of the MCP experiment are: 20)
- To identify and characterize the TLEs (sprites, halos, elves, etc.), that is determining their duration, their brightness at different wavelengths, their size, relative location to their parent lightning....
- To locate the source regions of TLEs over the world
- To identify and characterize the strongest lightning flashes
- And to trigger other TARANIS instruments which may point out associated events.
The MCP instrument is comprised of two MicroCameras (MCP-MC) and four photometers (MCP-PH). MCP-MC will be used to locate lightning flashes and TLEs and to classify TLEs in their different categories (column or carrot sprites, elves, jets...). MCP-PH will be used to detect on board TLEs and strong lightning flashes and to characterize them temporally and spectrally.
MCP-MC: The concept of discriminating TLEs from images taken at the nadir has been validated by the LSO (Lightning and Sprites Observations) experiment onboard the ISS. It was suggested to distinguish TLEs from lightning by their spectral content. The concept is to observe simultaneously the same scene with two cameras. One of them, the "Lightning camera", measures the lightning flashes in a spectral broad band. The other camera, the "Sprite camera", is especially designed to maximize the contrast between the TLE and lightning events.
For TARANIS, the "sprite camera", named MCS, will use a narrowband filter of 10 nm FWHM (Full Width at Half Maximum) centered at 762 nm while the "lightning camera", named MCE, will use a narrowband filter at 777 nm of 10 nm FWHM instead of the broadband used by LSO. This narrowband includes one of the strongest emission bands of lightning flash due to atomic oxygen excitation. It was used in three last spaceborne instruments dedicated to lightning detection and location (OTD, LIS, and FORTE). The lightning brightness through this band is thus well documented. The TLE-producing thunderstorm size is hundreds of kilometers. A disk of ~500 km diameter is then a good compromise to detect TLEs. A sampling of about 1 km at nadir is convenient for space sprite observations.
The distance between TLEs and parent lightning flashes ranges from a few km to ~50 km. This 1 km resolution will allow having on the same or on successive images both TLEs and their parent lightning flashes. Measurements of the structures inside TLEs as sprite tendrils are performed from the ground. Recent ground-based observations use a very rapid camera (more than 10,000 frames/s) to describe the streamer physics inside sprites.
The space observations are adapted to the measurement of different emissions (including gamma emissions) and to obtain statistics which are more difficult to be performed from the ground. Such studies do not need high space and time resolutions. Standard video cameras (30 frames/s) are used by most of the observers all around the world. A frame rate of 10/s is acceptable to detect sprites from space and to separate the different strokes which make up a lightning flash.
The sources and the cameras have been modeled in order to evaluate the performances of MCP-MC. The sources are lightning flashes and TLEs. Lightning flashes are modeled as radiating surface located at the height of the cloud top (i.e. from 10 to 20 km altitude). Realistic shapes of lightning flashes are given by LSO observations. The radiance range for MCE is given by LIS measurements. The MCS lightning radiance range is deduced from the calculated ratio between wideband and narrowband measurement performed by LSO. For TLEs, a 3D finite element model of sprite has been developed. Column sprites are represented by 3 km diameter columns from 55 to 85 km altitude. Carrot sprites are modeled as truncated cones with a diameter of 3 km at the cone base (45 km altitude) and 15 km at its top (85 km altitude). A sprite volume radiance of 1.1 x 1012 photons/s/m3/sr at 762 nm (~9 x 10-7 W/m2 on the entrance pupil) has been calculated from ISUAL observations. Elves are modeled as radiating surfaces located altitudes of ~90 km altitude. Their shape is like a ring centered on the lightning flash. Their radiance is deduced from the ISUAL (Imager of Sprite Upper Atmospheric Lightning) instrument observations flown on FormoSat-2 (launch May 20, 2004).
The cameras are modeled taking into account optic design (distortion, PSF, focal length, aperture, transmission, ...), relative misalignment between cameras, CCD characteristics (quantum efficiency, dark current and its specific noises). They are intended to be on board the TARANIS spacecraft at an orbital altitude of ~ 700 km. The photon number arriving at the pupil level is calculated taking into account the source radiance and its duration, the characteristics of the optics and the filter and the distance from the source to the satellite. The number of photons is then converted in photoelectrons measured by each pixel of the CCD using its quantum efficiency.
MCP-PH: Most of the TLEs are triggered by a lightning flash. The delay between the lightning flash and the TLE varies from 0.5 ms to several tens of milliseconds. This delay depends on the physical mechanism at the origin of the different TLEs. An elve event generally occurs ~0.5 ms after the lightning flash. This time is a bit larger from 0.5 to 1 ms for halos and varies from 0.5 ms to few milliseconds for sprite columns. Carrot sprites can be delayed of several tens of milliseconds. The duration of an optical lightning flash observed from space is several hundred µs while elves and sprites last a few ms. Jets exhibit the longest events with duration exceeding hundreds of milliseconds. Hence, photometers need a better time resolution than the cameras for observing these time differences. MCP has to alert the TARANIS payload of a TLE occurrence. Triggering with cameras is more difficult than with photometers because the resolution in time is lower and the whole image processing is only possible on ground.
TLEs are mainly due to the excitation of vibrational levels of molecular nitrogen. These different levels require different electron energies. Photometric measurements at different wavelengths can then give important information on the physical mechanisms which produce TLEs.
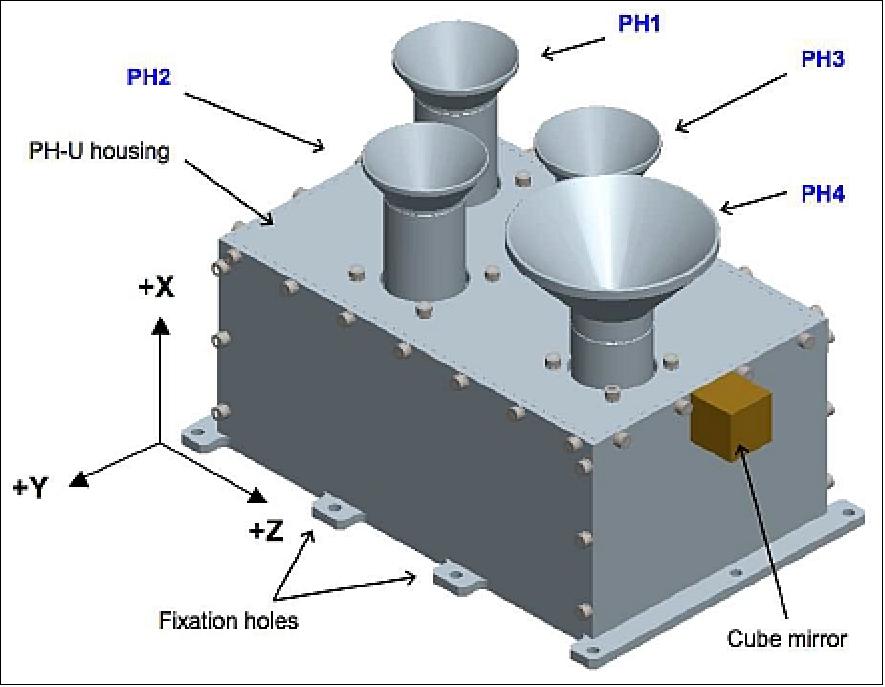
MCP-PH will measure the irradiance in four different spectral bands:
• PH1: inside the N2 Lyman‐Birge‐Hopfield (LBH) UV band system from 160 to 260 nm
• PH2: the most intense line of the N2 second positive (UV) band at 337 ± 5 nm for TLEs
• PH3: the most intense line of the N2 first positive (NIR) band at 762 ± 5 nm for TLEs
• PH4: from 600 to 900 nm. This last spectral band will be dedicated to lightning flash measurements. This band has been used by the FORTE satellite to detect lightning from a similar orbit.
The FOV of PH1, PH2 and PH3 has to be the same as that of the camera. The mutual covering of photometer and camera FOV must be very high (more than 95%). PH4 will have a much larger FOV (disk of 700 km radius) than the other photometers to be similar to the FOV of other TARANIS instruments. The irradiance range requirement for PH1, PH2 and PH3 is derived from the ISUAL observations. This instrument is the first one to provide calibrated photometric observation in a wide spectral range. For the PH4 design, the statistics of the FORTE measurements have been used. The phenomena dynamics requires a sampling frequency of at least 20 kHz. The four photometers must be synchronized to be able to compare the recorded waveforms.
To detect onboard TLEs, special attention has been paid to find a way to discriminate efficiently TLEs from lightning flashes. One important ISUAL feedback is the confirmation that TLEs radiate in the LBH band system. At these wavelengths, the atmosphere fully absorbs the radiation coming from altitudes lower than 20 km, where lightning events occur. The upper part of the PH1 filter bandwidth (260 nm) is then chosen to remove by atmospheric filtering all lightning radiation which could reach TARANIS. With such a filter, PH1 will then measure only TLEs. The triggering strategy is to search the occurrence of a sharp peak inside each photometer waveform. A peak is detected when the signal level exceeds a fixed threshold over a determined time window. Threshold and time window will be adjustable during the flight. To send an alert, the TLE detection must be confirmed simultaneously by two or more photometers including PH1. These precautions are taken to avoid any false alerts due to high energy particle interaction with the photometers.
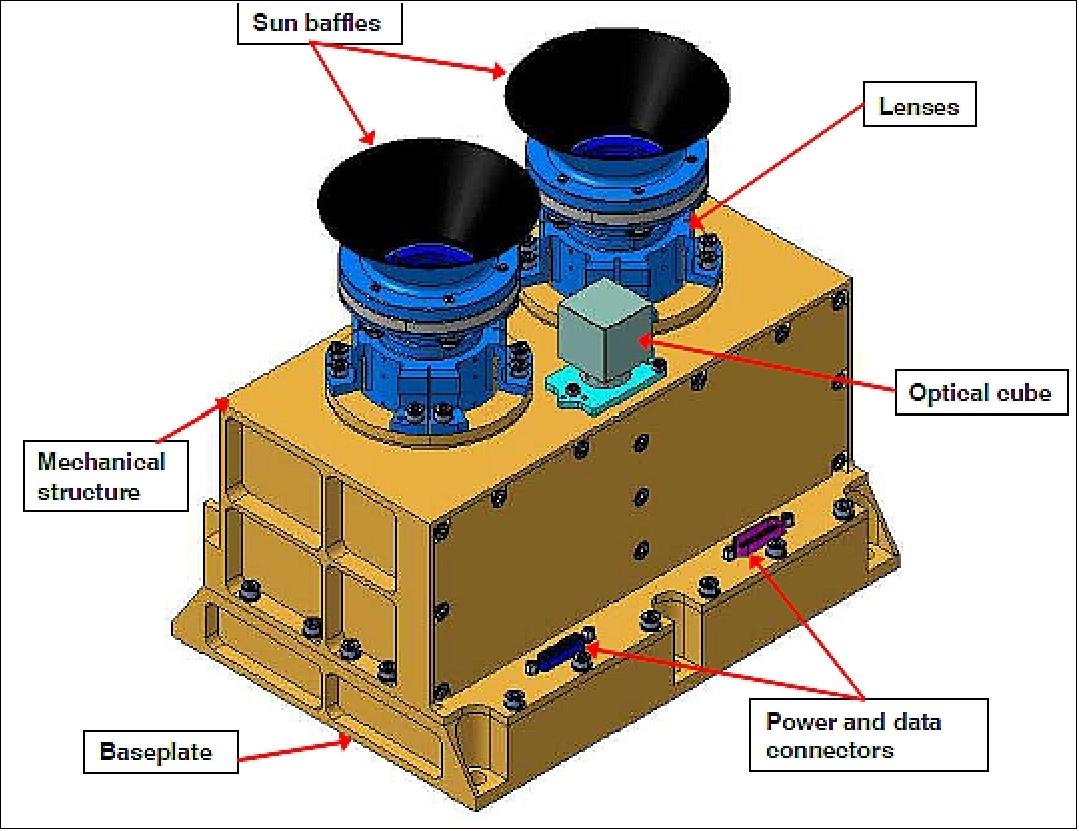
MCP-MC (Micro Cameras and Photometers-MicroCamera-Unit)
The MCP-MC instrument is comprised of the following elements:
• An optical module MC-U (MicroCamera-Unit) containing:
- Two optical heads, each one dedicated to a specific wavelength (762 nm for sprite and 777 nm for lightning with 10 nm FWHM)
- Two detection sub-assemblies, based on a cooled CCDs
- A CCD proximity electronic board, used for data quantization of the signals
- A mechanical structure.
• An electronics module, allocated 1m away from the optical one, containing:
- An electronics board for data compression and data formatting
- A mechanical structure allowing integration into a rack with the other electronics modules of the payload.
Spectral band filter | @ 762 nm | @ 777 nm | ||
Observation event / Unit | Radiances | Equivalent radiances | Radiances | Equivalent radiances |
Sprites | 0.5 to 5 | 0.13 to 1.3 | 0.5 to 5 | 0.128 to 1.28 |
Lightning | 0.003 to 1.23 | 7.8 x 10-4 to 0.3 | 0.056 to 22.6 | 1.4 x 10-2 to 5. |
The MC-U device has a volume of about 125 mm x 180 mm x 165 mm. The mass is estimated to be ~ 2 kg and its power consumption is < 4.5 W.
Detection subassembly: The detection subassembly is based on a qualified technology, used on many EADS Sodern star-trackers of the SED-6 and HYDRA family. The subassembly is based on a CCD 4720 from E2V, front illuminated, NIMO (Non Inverted Mode Operation). It's a frame transfer CCD, with a circular mask on the image zone, which produces circular pictures of the observed scenes. The detector is cooled by a two-stage TEC (Thermoelectric Cooler).
MCP-PH (Micro Cameras and Photometers-Photometer)
The photometer instruments are composed of a sensor module PH-U and an "analyzer" module, i.e. an electronic board that is plugged into the MEXIC module.
6) The sensor module (PH-U):
The main choice was to dedicate one optical path per spectral band. Indeed sharing optics between several bands would have saved space, but it would have lead to more complex focal planes and optical coatings, at the limit of feasibility. Thus, the sensor is composed of four optical and electronic chains as depicted in Figure 8. The optics is composed of two stages, front and back to the spectral filter.
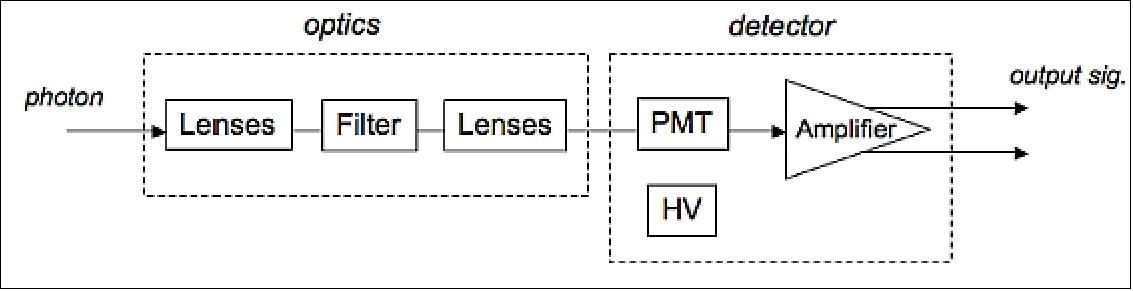
The filter of each band defines the narrow spectral band, and has to be placed in a telecentric configuration so that each point of the FOV sees the same spectral band. The filters have one technical difficulty due to their narrowness. Moreover for PH1, the wavelengths are in the UV, and a low rejection ratio in the visible is mandatory.
Given the very low irradiance produced by the optical phenomena to be observed (down to a few tenths of a µW/m2), the detection module will be a photomultiplier, except for PH4 where the signal is 100 times higher. For that reason the focal planes include HV (High Voltage) modules to drive the cathodes of the photomultipliers. These HV modules provide a voltage up to several hundred volt from the 5 V power supply. The high voltage is defined on ground for each orbit in order to adapt the detection gain to the radiance of the TLEs and lightning. Furthermore, the amplifier module will have four possible gain factors that will be chosen, for each orbit, to fit to the dynamic range of the ADC in the analyzer. The detailed definition of the photomultiplier (material of the window and the photocathode) will be chosen with respect to the spectral performances.
A further issue has to be taken into account: the vibration levels that the module has to endure. Its most fragile components are the photomultipliers. Special care will have to be paid in the choice of the model, or in its accommodation. A damping mechanical system is currently under consideration.
The module has a size of 205 mm x 125 mm x 200 mm and a mass of ~ 2.5 kg with a power consumption of < 3.5 W.
7) The analyzer module (PH-A):
The PH-A is a PCB (Printed Circuit Board) to be inserted into the MEXIC module. It is dedicated to the photometer instrument. It is in charge of the following main functions. In interface with the sensor:
• Driving the HVs of the photomultipliers
• Driving the power supply of the calibration sources
• Providing the necessary power lines (+5V, ±12 V) and switching them on and off
• Acquiring (including data quantization) signals from the sensor.
The board is composed of power drivers, DAC and ADC in interface with the sensor, a FPGA to process all the data (it has about 130 in/out ports and its clock frequency is 20 MHz), a second FPGA for the interface with MEXIC, and a rolling memory. This 32 Mbit memory stores the high definition data in a rolling stack. In case of an "event" alert, the data are formatted and sent to MEXIC, with a time range starting before the event. If no event occurs, the high definition data are erased, only survey compressed data are sent. - The size of the PCB is 115 mm x 190 mm.
Calibration: A coarse calibration, or good health test, can be played onboard thanks to calibration sources inserted into the sensor module. Its architecture is as simple as possible: in each optical tube, a LED is mounted beside the detector. It is directed towards the outside that is under the optical filter. So its light, when powered on, will be reflected by the filter to the detector. The uniformity of this beam is not an issue, the only goal is the check that the signal delivered by the detectors are similar to those measured on the ground prior to launch. The four LEDs will be driven by the same power supply in parallel.
Fine calibrations will use vicarious targets, as dark oceans to get the dark level, and well known desert areas under moonlight to get the gain of each channel. Several orbits will be dedicated to the calibration of each instrument during the life of Taranis, including MCP.
XGRE (X-ray, γ-ray and Relativistic Electron experiment)
XGRE is an instrument of IRAP (Institut de Recherche en Astrophysique et Planétologie) of the University of Toulouse, and of APC (Astro Particule et Cosmologie) of the University of Paris, France. The objectives are:
• To provide measurements that can determine unambiguously the mechanism(s) that generate transient TGF (Terrestrial Gamma-ray Flash) events.
• To quantify:
- The total energy released per event
- The atmospheric altitude at which the burst is initiated
- the geophysical parameters that control the evolution of TGFs.
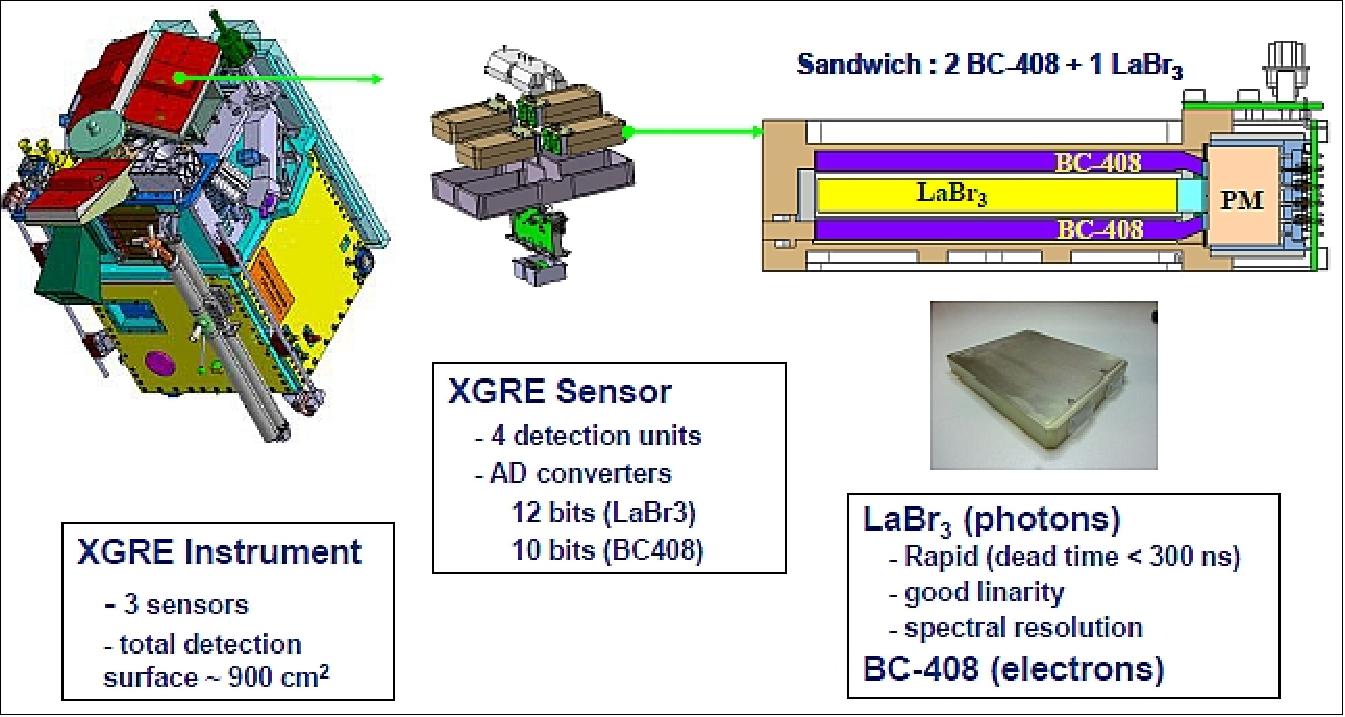
Instrument: The XGRE instrument is comprised of: 3 sensors for the detection of X-rays, γ-rays, and relativistic electrons
- Photon energy range: 20 keV-10 MeV
- Measurement of rise time: 10-100 µs; event duration: 10-100 ms; (1 µs relative time resolution)
- Range of relativistic electrons: 1 MeV - 10 MeV
- NaI scintillators: 900 cm2 detector area
- BC400 plastic scintillator in anti-coincidence (relativistic electron)
- Real-time alert for triggering event mode.
With a total area of 900 cm2, the instrument has to distinguish electrons and photons and measure their energy deposits in the range 20 keV - 10 MeV. It will time tag each TGF with an accuracy of about one microsecond and will be able to trigger the other instruments. In addition, it must locate coarsely (30°) the emitting zone and measure as precisely as possible the position of the low energy cutoff. The instrument comprises 3 sensors, sandwiches made up of 2 plastic scintillators enclosing a lanthanum bromide scintillator (LaBr3). The plastic scintillators are well adapted to the detection of the electrons and LaBr3 is a new scintillator, good gamma-ray spectrometer and very fast. From the relative counts between these 3 detectors, the direction of propagation of the particles can be deduced. The 3 sensors of 300 cm2 area each are planar and present between them angles of about 40°. From their relative counts, one will deduce the direction of the emitting zone. 21)
XGRE measurement requirements:
1) Speed:
• High count rate per cm2 (104 – 105 cm-2 s-1)
- Dead time < 300 ns (106 s-1)
• Datation
- triggers with 300 ns relative time accuracy
- events (TGFs) with 1 µs relative time accuracy
2) Detection:
• Separation between γ-rays and electrons
• γ-rays
- Energy range: 20 keV-12 MeV
- 30 % accuracy at 20 keV
- 9 % accuracy at 511 keV
• Electrons
- Energy range: < 1 MeV to >10 MeV
• Minimize risk of missing TGF
- Storage capacity of 200 000 photons
- Burst and survey algorithms
3) Localization:
• Ascending or descending particle motion
• Zenithal and azimuthal direction (~30° resolution).
Three sensors on the platform are oriented towards Earth + 1 oriented towards space.
IDEE (Instrument for the Detection of high Energy Electrons)
IDEE is a device of IRAP (Research Institute in Astrophysics and Planetology), CNRS/University of Toulouse) + University of Prague (Czech Republic). The objectives are to detect and characterize impulsive electron beams: 22)
• Up-going: runaway electron beam
• Down-going: lightning/TLE-induced electron precipitation
The instrumentation is comprised of 2 spectrometers for the measurement of high energy electrons. One spectrometer is accommodated with a sight axis making an angle of 60° with nadir; the second spectrometer is making an angle of 30° with the anti-nadir direction.
- IME-BF 1 component, DC - 1 MHz
- IME HF 1 component, 100 kHz - 30 MHz
Measurement of bursts:
- from ~ 150 keV to 4 MeV (higher energies are covered by XGRE)
- along B0 (2 detection modulus) and with discrimination in pitch (2 detection modulus) and with discrimination in pitch angles
- with time resolution of the order of 1 ms (or less).
IMM (Instrument for Magnetic Measurements)
IMM is a device of LPC2E (Laboratoire de Physique et de Chimie de l'Environnement, Orleans) of CNRS, France and of the Stanford Very Low Frequency (VLF) Group, Stanford University, Stanford, CA, USA. The objectives are to build an FPGA (Field Programmable Gate Array) to automatically detect the occurrence of a special kind of electromagnetic wave known as 0+ whistlers. The information provided by the 0+ whistler detector will allow for the unambiguous association of lightning with TLEs and TGFs, which in turn will offer a better understanding of the physical mechanisms behind them. Furthermore, variation in TLEs and TGFs is most likely driven by variations in the parent lightning strike that also generates a 0+ whistler. 23)
Note: "Whistlers" and "Sferics"are interchangeable terms of Earth's audible radio emissions: The term "sferics" refers to radio waves produced by a lightning discharge (an abbreviation of "atmospherics"). Lightning pulses that travel all the way to the magnetosphere and back are highly dispersed, much more so than tweeks; they are called 'whistlers' because they sound like slowly descending tones. Whistlers are dispersed, not because of the waveguide cutoff effect, but rather because they travel great distances through magnetized plasmas, which are strongly dispersive media for VLF signals. 24)
The objectives are to:
• Identify heating sources
- Sferics associated with TLEs and TGFs.
- Perturbations of VLF source signals associated with TLEs and TGFs
• Identify ES or/and EM wave fields generated by electron beams and other processes
The instrumentation is a compound triaxial system of search-coil magnetometers to measure the alternative magnetic field in the low and medium frequency ranges and the medium frequency wave analyzer (electric and magnetic). IMM is comprised of:
• 2 magnetic antennas (IMM): LF (DC-20 kHz), and MF (10 kHz-1 MHz)
• 3 electric antennas called IME (Instrument for Electric Measurements): 2 LF/MF (10 Hz-20 kHz), and 1 HF (100 kHz - 30 MHz)
- Detect and characterize transient signals in a wide frequency band
- Monitor ES or/and EM wave fields which could be used to trace electron beams
IME-BF (Instrument for Electric field Measurements-Low Frequency)
The IME-BF instrument is developed by the CNRS/LATMOS (Laboratoire Atmosphères, Milieux, Observations Spatiales) team in collaboration with LPCE (Laboratoire de Physique et de Chimie de l'Environment) of Orleans, and NASA. The objective of IME-BF (IME-BF stands for "Instrument de Mesure du champ Electrique Basse Fréquence") is to measure the electric field in the low frequency range and the low frequency wave analyzer (electric and magnetic).
The instrument consists of two components: 25)
• IME: Electric field antenna of the dipole double sphere type, which measures the electric field from DC to 3.3 MHz . Two sphere sensor are boom mounted to measure:
- 1 component of the electric field
- from DC to 3.3 MHz
- ULF frequency range: 0 – 64 Hz
- VLF frequency range from few Hz to 20 kHz (with a frequency resolution of 94 Hz)
• BF-Analyzer: on-board data processing of three instruments, i.e.
- electric field antenna (IME/LATMOS)
- magnetic field antenna (IMM/LPCE) and
- Ion probe (SI/NASA)

IME-HF (Instrument for Electric field Measurements-High Frequency)
The IME-HF instrument (IME-HF stands for "Instrument de Mesure du champ Electrique Haute Fréquence") has the objective to record waveform measurements of fluctuating electric fields in the frequency range from a few kHz up to 37 MHz, with the following scientific goals:
- Identification of possible wave signatures associated with transient luminous phenomena during storms
- Characterization of lightning flashes from their HF electromagnetic signatures
- Identification of possible HF electromagnetic or/and electrostatic signatures of precipitated and accelerated particles
- Determination of characteristic frequencies of the medium using natural waves properties
- Global mapping of the natural and artificial waves in the HF frequency range, with an emphasis on the transient events.
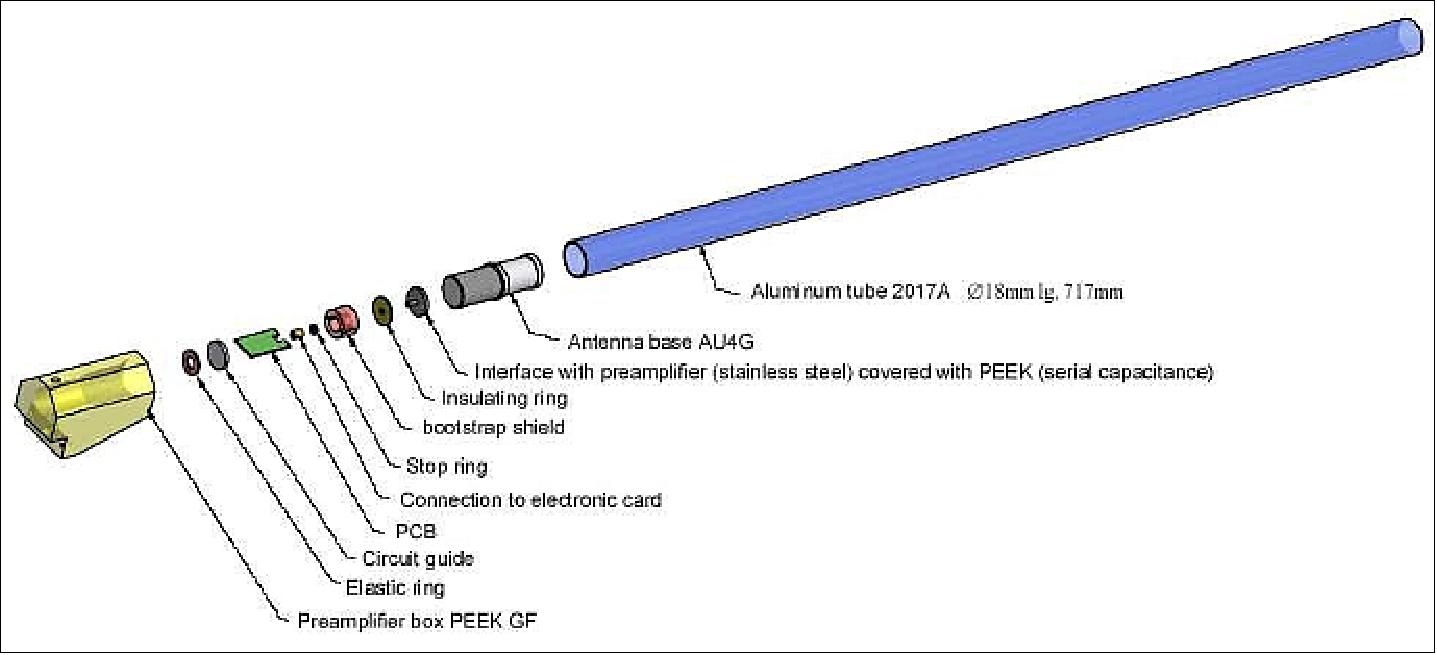
The IME-HF instrument consists of a double-wire Hertz dipole (the sensor) and the HF-A analyzer circuit. The sensor is intended to measure one component of the electric field from 100 kHz to 30 MHz along the axis of the two aligned wire antennas. This allows to measure events like TIPPs and contrary to ALEXIS or FORTE, the frequency range contains the plasma frequency of the ionosphere. Each antenna is equipped with a preamplifier. The antenna is shown in Figure 12 and its connection to the HF-A is shown in Figure 13. 26)
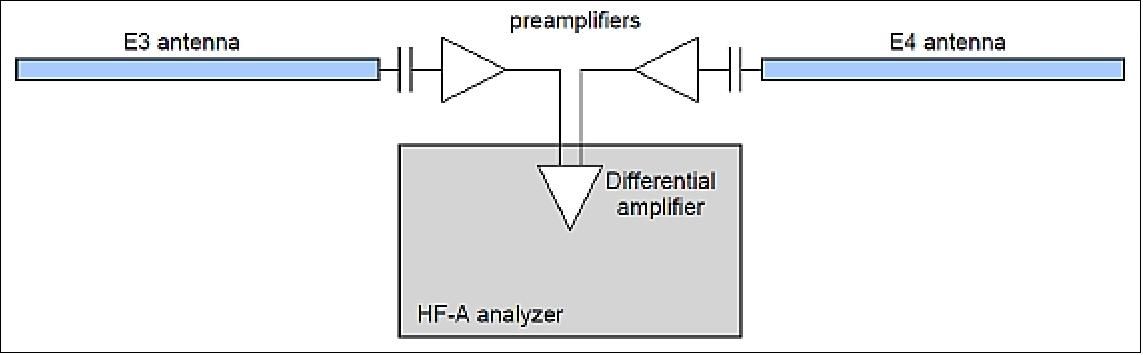
The analyzer is mainly dedicated to the data processing of the HF signal with 12 bit depth on the sampling frequency of 80 MHz. The block diagram of the HF-A is presented in Figure 14. Initially the IME HF-A performs a difference between the potentials measured by the antennas. This difference is fed through the 10th order bandpass anti-aliasing input filter. This signal is then processed in two ways.
Firstly, there is the "fast" serial A/D converter (fADC) with the sampling frequency of 80 MHz and 14 bit depth. Only 12 bits are transmitted further and processed. There is a gain control to select the desired 12 bit range. The 12 bit data from the fADC are stored in the circular RAM buffer for further processing and event detection by the FPGA.
Secondly, there is the "slow" signal path. The signal is divided by 9th order bandpass filters into 12 channels across the whole frequency range. The center frequencies of these bandpass filters are: 1.5, 4.5, 7.5, 10.5, 13.5, 16.5, 19.5, 22.5, 25.5, 28.5, 31.5 and 34.5 MHz. Each channel further contains its own amplifier and a 12 bit "slow" serial A/D converter (sADC) with a 12 µs time interval between samples. Data from the 12 channels are fed to the FPGA and processed there.
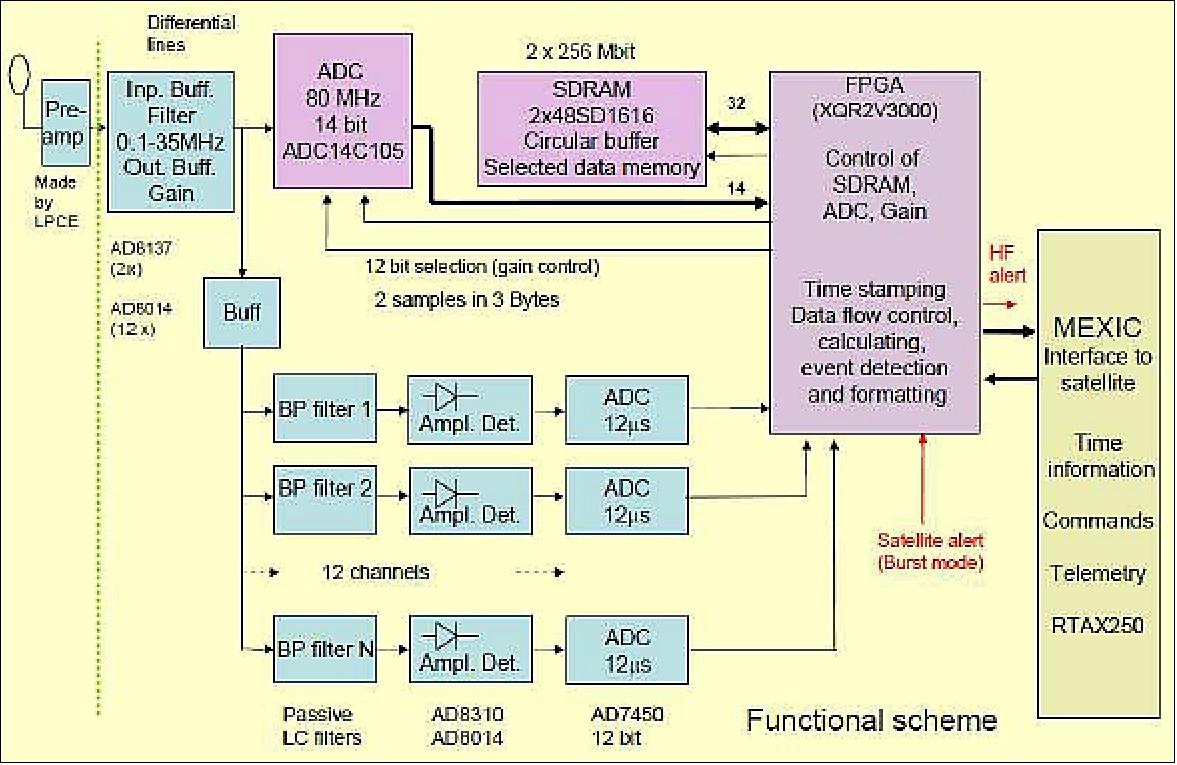
The outside world communication of the IME-HF is provided by the MEXIC interface connected to the FPGA. Beside the telecommand/telemetry (TC/TM) the FPGA is responsible for data formatting, event detection and driver for the other hardware peripherals.
HFPE Experiment: Apart from the study of TLEs and TGFs, the mission will also test the possibility to communicate with the spacecraft, even when it is out of visibility from ground antenna. The instrument IME-HF is well suited to validate the technique envisioned. In case of success this technique would allow to keep the contact with low altitude satellites whatever their position along the orbit (Ref. 11).
MEXIC (Multi Experiment Interface Controller)
MEXIC is a device of LPCE + CBK (Poland) used for payload management. The instrument is a set of 2 electronic boxes comprised of the 8 analyzers associated with the instruments, providing electronic power to the instruments, management of the payload modes and the interface with the Mass Storage and the platform computer. MEXIC also ensures the synchronization of the instruments from events detections by the photometers. 27)
The main functions of MEXIC are:
- provide secondary voltage to the various instruments
- receive data from the platform computer and decode the time tagged commands from the PL workplan established by the CMS, commands processed one-by-one (without having to manage due dates)
- receive and decode immediate commands sent by the platform (SHM, for example)
- manage the instruments (ON/OFF, configuration, modes)
- monitor correct operation of PL (Temperatures, consumption, etc.)
- implement the trigger strategy for instruments according to the event
- manage the acquisition sequence triggered by an event
- format and date data, both scientific and housekeeping in X-band
- format and date housekeeping data in S-band
- manage the transfer of data to the mass storage
- serve as a host structure for instrumentation analyzers
- make it possible make in-flight modifications to analyzer software
- make it possible to make in-flight modifications to the MEXIC software.
References
1) E. Blanc , F. Lefeuvre, "TARANIS: a microsatellite project dedicated to the study of impulsive transfers of energy between the Earth atmosphere - ionosphere and magnetosphere," 36th COSPAR Scientific Assembly Beijing, China, July 16-23, 2006
2) F. Lefeuvre, E. Blanc, R. Roussel-Dupre, J. Sauvaud, "The Taranis project: Scientific objectives and instrumentation," American Geophysical Union, AGU Fall Meeting 2005, San Francisco, Dec. 5-9, 2005, paper: AE13A-08
3) C. Bastien-Thiry, F. Lefeuvre, E. Blanc, D. Lagoutte, "TARANIS a Myriade mission dedicated to sprites characterization," Proceedings of the 4S Symposium: `Small Satellite Systems and Services,' Chia Laguna Sardinia, Italy, Sept. 25-29, 2006, ESA SP-618
4) F. Lefeuvre, E. Blanc, "The TARANIS project: Complementarity and coordination with the ASIM mission," ASIM (Atmosphere-Space Interactions Monitor) Science Workshop June 26-27, 2006, Noordwijk, The Netherlands
5) T. Neubert, "On Sprites and Their Exotic Kin," Science, Vol. 300, May 2, 2003
6) E. Blanc , F. Lefeuvre, R. Roussel-Dupré, J. A. Sauvaud, "TARANIS: a microsatellite project dedicated to the study of impulsive transfers of energy between the Earth atmosphere, the ionosphere, and the magnetosphere," Advances in Space Research, Vol. 40, Issue 8, 2007, pp. 1268-1275 , URL: http://nova.stanford.edu/~vlf/IHY_Test/Tutorials/TLEs/Papers/Blanc2007.pdf
7) Christophe Bastien-Thiry, "TARANIS a CNES Scientific Mission," Workshop on Coupling of Thunderstorms and Lightning Discharges to Near-Earth Space, June 23-27, 2008, Corte, France
8) J.-L. Pinçon, "TARANIS - A microsatellite dedicated to the study of impulsive transfers of energy between the Earth atmosphere, the ionosphere, and the magnetosphere," SuperDARN 2009 Workshop, May 11-15, 2009, Cargèse, Corsica, France
9) F. Lefeuvre, E. Blanc, J. L. Pinçon, and the TARANIS team, "TARANIS - a satellite project dedicated to the physics of TLEs and TGFs," Workshop on Coupling of Thunderstorms and Lightning Discharges to Near-Earth Space, June 23-27, 2008, Corte, France
10) J-L. Pinçon, E. Blanc, P-L. Blelly, F. Lebrun, M. Parro, J-L. Rauch, J-A. Sauvaud, E. Seran, "The TARANIS mission," URL: http://www.asdc.asi.it/10thagilemeeting
/dwl.php?file=workshop_files/10.Blelly_AGILE_10th_WS.pdf
11) J. Lefebve, L. Boissier, L. Privat, JC. Damery, S. Mary, C. Bastien-Thiry, "TARANIS: Mission overview and AOCS design presentation," Proceedings of the 4S (Small Satellites Systems and Services) Symposium, Port Petro, Majorca Island, Spain, May 26-30, 2014
12) "TARANIS satellite to study lightning," CNES, March 1, 2011, URL:http://www.cnes.fr
/web/CNES-en/9128-gp-taranis-satellite-to-study-lightning.php
13) http://smsc.cnes.fr/TARANIS/index.htm
14) APC (AstroParticle et Cosmologie) Laboratory, http://www.apc.univ-paris7.fr
/APC_CS/en/experience/taranis/presentation
15) "Arianespace – Flight Vega VV17 – SEOSAT-Ingenio / TARANIS: Mission failure," Arianespace Press Release, 16 November 2020, URL: https://www.arianespace.com/press-release/
arianespace-flight-vega-vv17-seosat-ingenio-taranis-mission-failure/
16) "Nº 23–2020: Vega flight VV17 failure: Arianespace and ESA appoint an independent Inquiry Commission," ESA Press Release Nº 23-2020, 17 November 2020, URL: https://www.esa.int/Newsroom/Press_Releases/
Vega_flight_VV17_failure_Arianespace_and_ESA_appoint_an_independent_Inquiry_Commission
17) "Loss of Vega Flight VV17: Independent Enquiry Commission announces conclusions," Arianespace Press Release, 18 December 2020, URL: https://www.arianespace.com/press-release/
loss-of-vega-flight-vv17-independent-enquiry-commission-announces-conclusions/
18) http://taranis.latmos.ipsl.fr/Satellite.html
19) J.-L. Pinçon, E. Blanc, P-L Blelly, M. Parrot, J-L Rauch, J-A Savaud, E. Séran, "TARANIS - scientific payload and mission strategy," General Assembly and Scientific Symposium, 2011 , 30th URSI, Orleans, France, Aug. 13-21, 2011, URL: http://www.ursi.org/proceedings/procGA11/ursi/GHE1-5.pdf
20) Elisabeth Blanc, Thomas Farges, Augustin Jehl, Renaud Binet, Philippe Hébert,Fanny Le Mer-Dachard ,Karen Ravel ,Mitsuteru Sato, "Taranis MCP: a joint instrument for accurate monitoring of Transient Luminous Event in the upper atmosphere," Proceedings of the ICSO (International Conference on Space Optics), Ajaccio, Corse, France, Oct. 9-12, 2012, paper: ICSO-134
21) http://www.apc.univ-paris7.fr/APC_CS/en/experience/taranis/presentation
22) J.-A. Sauvaud, A. Fedorov, P. Devoto, C. Jacquey, L. Prech, Z. Nemecek, F. Lefeuvre, "IDEE, The Electron Spectrometer of the Taranis Mission," Workshop on Coupling of Thunderstorms and Lightning Discharges to Near-Earth Space, June 23-27, 2008, Corte, France
23) "Automated Detection of Whistlers for the TARANIS Spacecraft Overview of the Project," Stanford VLF Group, URL: http://vlf.stanford.edu/research/automated-detection-whistlers-taranis-spacecraft
24) "Earth Songs," NASA, URL: http://science.nasa.gov/science-news/science-at-nasa/2001/ast19jan_1/
25) http://taranis.latmos.ipsl.fr/Instrumentation.html
26) Petr Váňa, "Modelling the electromagnetic storms and simulation of the IME-HF Analyser onboard the TARANIS satellite," Mater's Thesis, Université Paul Sabatier, Toulouse, France, 2009, URL: http://epubl.ltu.se/1653-0187/2009/102/LTU-PB-EX-09102-SE.pdf
27) http://smsc.cnes.fr/TARANIS/GP_satellite.htm
The information compiled and edited in this article was provided by Herbert J. Kramer from his documentation of: "Observation of the Earth and Its Environment: Survey of Missions and Sensors" (Springer Verlag) as well as many other sources after the publication of the 4th edition in 2002. - Comments and corrections to this article are always welcome for further updates (eoportal@symbios.space).