Swarm (Geomagnetic LEO Constellation)
EO
ESA
CNES
Operational (extended)
Launched in November 2013, Swarm is a constellation of three satellites operated by the European Space Agency (ESA) with the purpose of mapping Earth’s magnetic field.
Quick facts
Overview
| Mission type | EO |
| Agency | ESA, CNES, CSA |
| Mission status | Operational (extended) |
| Launch date | 22 Nov 2013 |
| Measurement domain | Gravity and Magnetic Fields |
| Measurement category | Gravity, Magnetic and Geodynamic measurements |
| Measurement detailed | Magnetic field (scalar), Magnetic field (vector), Gravity field, Electric Field (vector) |
| Instruments | Laser Reflectors (ESA), STR, ACC, GPS Receiver (Swarm), EFI, ASM, VFM |
| Instrument type | Space environment, Magnetic field, Precision orbit |
| CEOS EO Handbook | See Swarm (Geomagnetic LEO Constellation) summary |
Related Resources

Summary
Mission Capabilities
All three Swarm satellites carry the same instruments: a Vector Field Magnetometer (VFM) that measures the direction of the magnetic field; an Absolute Scalar Magnetometer (ASM) that measures the strength of the magnetic field; an Electric Field Instrument (EFI) that measures the plasma density, drift, and acceleration; as well as a Micro Accelerometer-04 (MAC-04) that measures the air drag, winds, Earth albedo, and solar radiation pressure.
Performance Specifications
VFM has a sampling rate of 50 Hz, and ASM has an absolute accuracy of less than 0.3 nT.
The first and third satellites, Swarm-A and Swarm-C, share the same non-sun-synchronous orbit with an altitude of 450 km and an inclination of 87.4°. They travel in parallel with an east-west separation of 1-1.5° and an orbital time difference of fewer than 10 seconds. The second satellite, Swarm-B, maintains a non-sun-synchronous orbit with an altitude of 530 km and an inclination of 88°.
Space & Hardware Components
Communications are performed via S-band radio frequency for Telemetry, Tracking, and Command (TT&C) as well as data transmission; the downlink data rate is 6 Mbit/s and the uplink rate is 4 kbits/s.
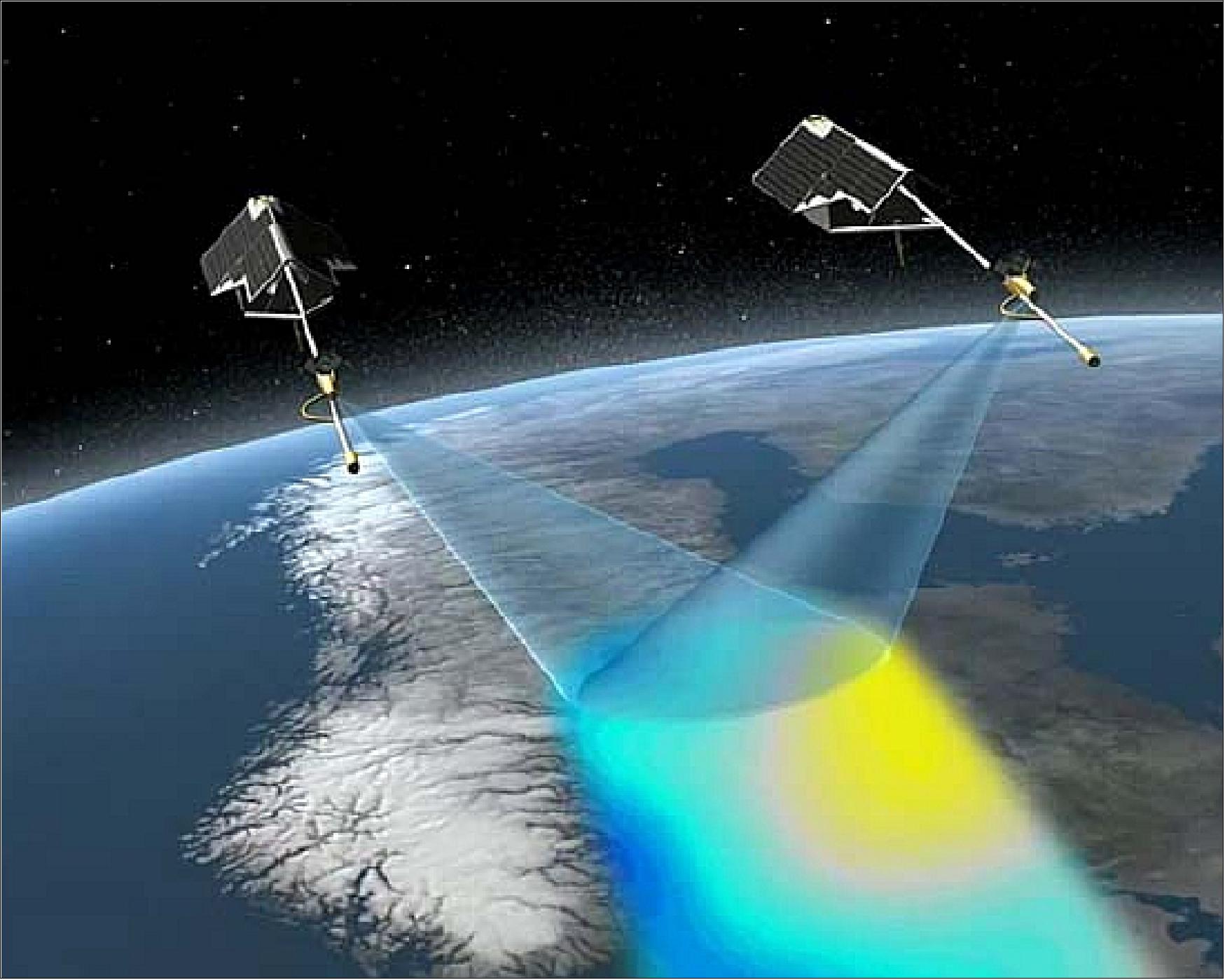
The different orbits taken by the Swarm constellation optimise the sampling in space and time to distinguish different magnetic sources and their strengths.
Swarm (Geomagnetic LEO Constellation)
Space segment concept Launch Swarm's Orbits Mission Status Sensor ComplementGround Segment References
Swarm is a minisatellite constellation mission within the Earth Explorer Opportunity Program of ESA, proposed under the lead of DNSC (Danish National Space Center) of Copenhagen, Denmark (formerly DSRI). In January 2007, DNSC became DTU Space, an institute at the Technical University of Denmark. The Swarm mission will be the 4th mission in ESA's Earth Explorer Program, following GOCE, SMOS, and CryoSat-2.
The first mission to ever map the Earth's magnetic field vector at LEO was the NASA MagSat spacecraft (launch Oct. 30 1979). Due to the low perigee (perigee=350 km, apogee=551 km), MagSat remained in orbit for only seven and a half months until June 11, 1980. About 20 years later, the Danish Ørsted micro satellite (1999-), the German CHAMP (2000-), the Argentine SAC-C (2000-) have been designed specifically for mapping the LEO magnetic field. Common to these recent missions is the magnetometry package, which utilizes a vector field magnetometer co-mounted with a star tracker (2 in the case of CHAMP) on an optical bench. As the accuracy of the instrument package has constantly increased, as well as the modelling methods have been improved towards optimized signal decomposition, it has been realized that simultaneous data from several points in space is needed, if the ultimate modelling barrier, the spatial-temporal ambiguity, has to be broken.
The overall objective of the Swarm mission is to build on the Ørsted and CHAMP mission experiences and to provide the best ever survey of the geomagnetic field (multi-point measurements) and its temporal evolution, to gain new insights into the Earth system by improving our understanding of the Earth's interior and climate. 1) 2) 3) 4) 5) 6) 7) 8) 9) 10) 11) 12) 13) 14) 15) 16) 17) 18)
This will be done by a constellation of three satellites, two will fly at a lower altitude, measuring the East-West gradient of the magnetic field, and one satellite will fly at a higher altitude in a different local time sector. Other measurements will also be made to complement the magnetic field measurements. Together these multipoint measurements will allow the deduction of information on a series of solid-Earth processes responsible for the creation of the fields measured.
Background on the Discovery of Electromagnetism
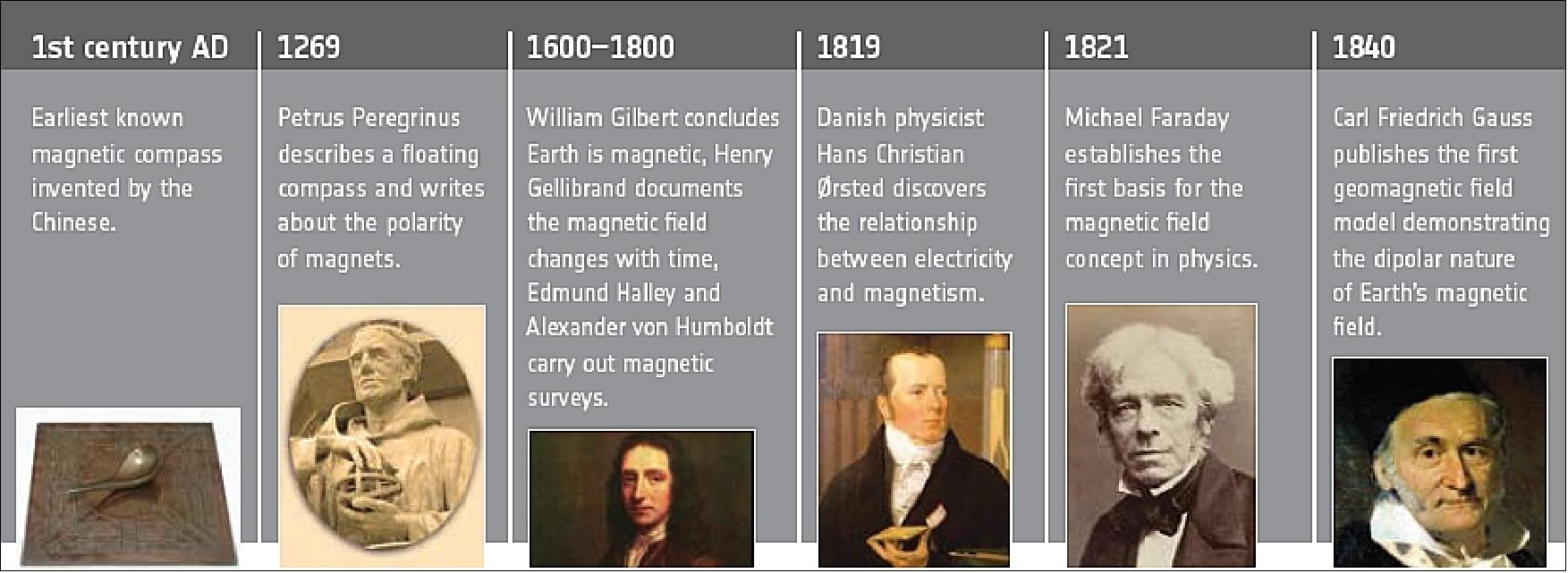
The history of magnetic discovery goes back to about 110 B.C., when the earliest magnetic compass was invented by the Chinese. They noticed that if a “lodestone” (natural magnets of iron-rich ore) was suspended so it could turn freely, it would always point in the same direction, toward the magnetic poles. This directional pointing property of magnetic material was eventually introduced into the making of an early compass and used for maritime navigation . By the 13th century, the directive property of magnetism was widely recognized and used in navigation. The mariner’s magnetic compass is the first technological application of magnetism and, one of the oldest scientific instruments.
Until 1820, the only magnetism known was that of iron magnets and of lodestones. It was the Danish physicist Hans Christian Ørsted, professor at the University of Copenhagen, who, in 1820, was first to discover the relationship between the hitherto separate fields of electricity and magnetism. Ørsted showed that a compass needle was deflected when an electric current passed through a wire, before Faraday had formulated the physical law that carries his name: the magnetic field produced is proportional to the intensity of the current. Magnetostatics is the study of static magnetic fields, i.e. fields which do not vary with time. 19) 20)
Magnetic and electric fields together form the two components of electromagnetism. Electromagnetic waves can move freely through space, and also through most materials at pretty much every frequency band (radio waves, microwaves, infrared, visible light, ultraviolet light, X-rays and gamma rays). Electromagnetic fields therefore combine electric and magnetic force fields that may be natural (the Earth's magnetic field) or man-made (low frequencies such as electric power transmission lines and cables, or higher frequencies such as radio waves (including cell phones) or television (Ref. 21).
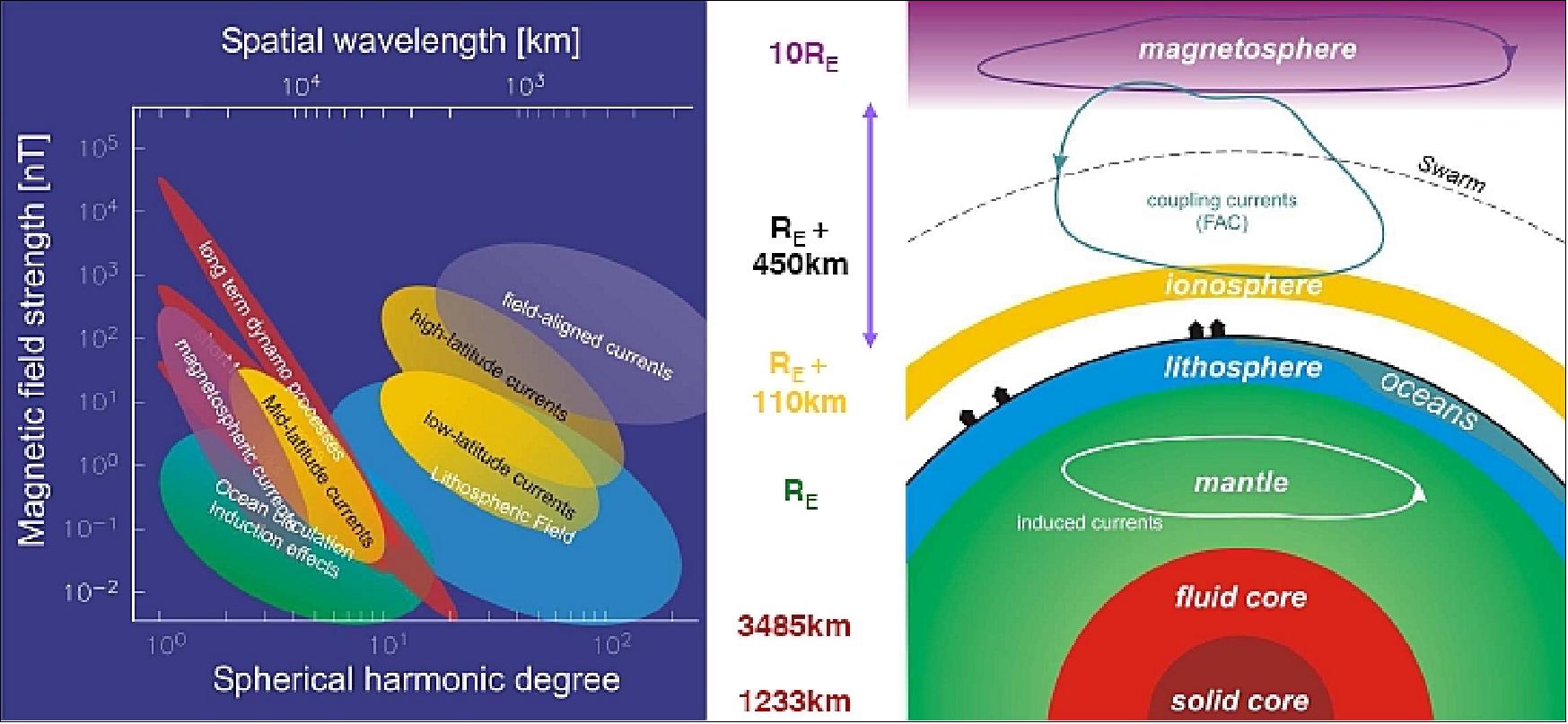
Background on the Earth's Magnetic Field
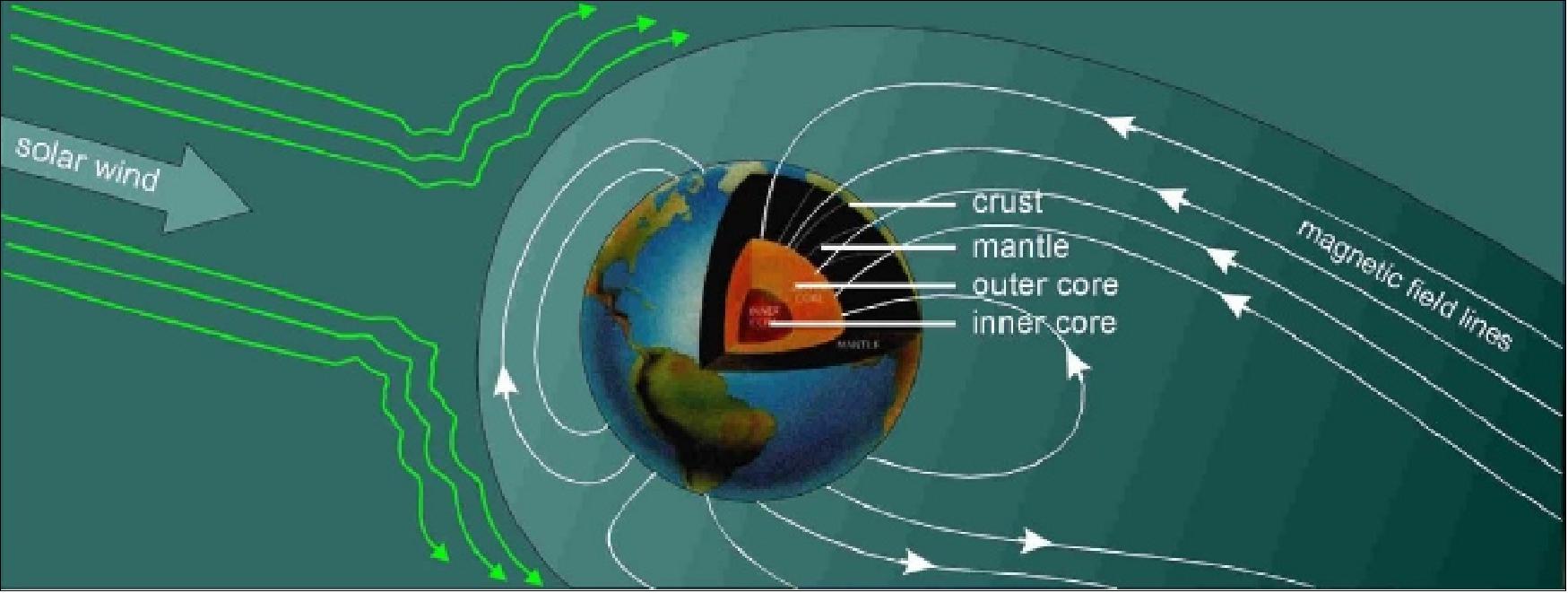
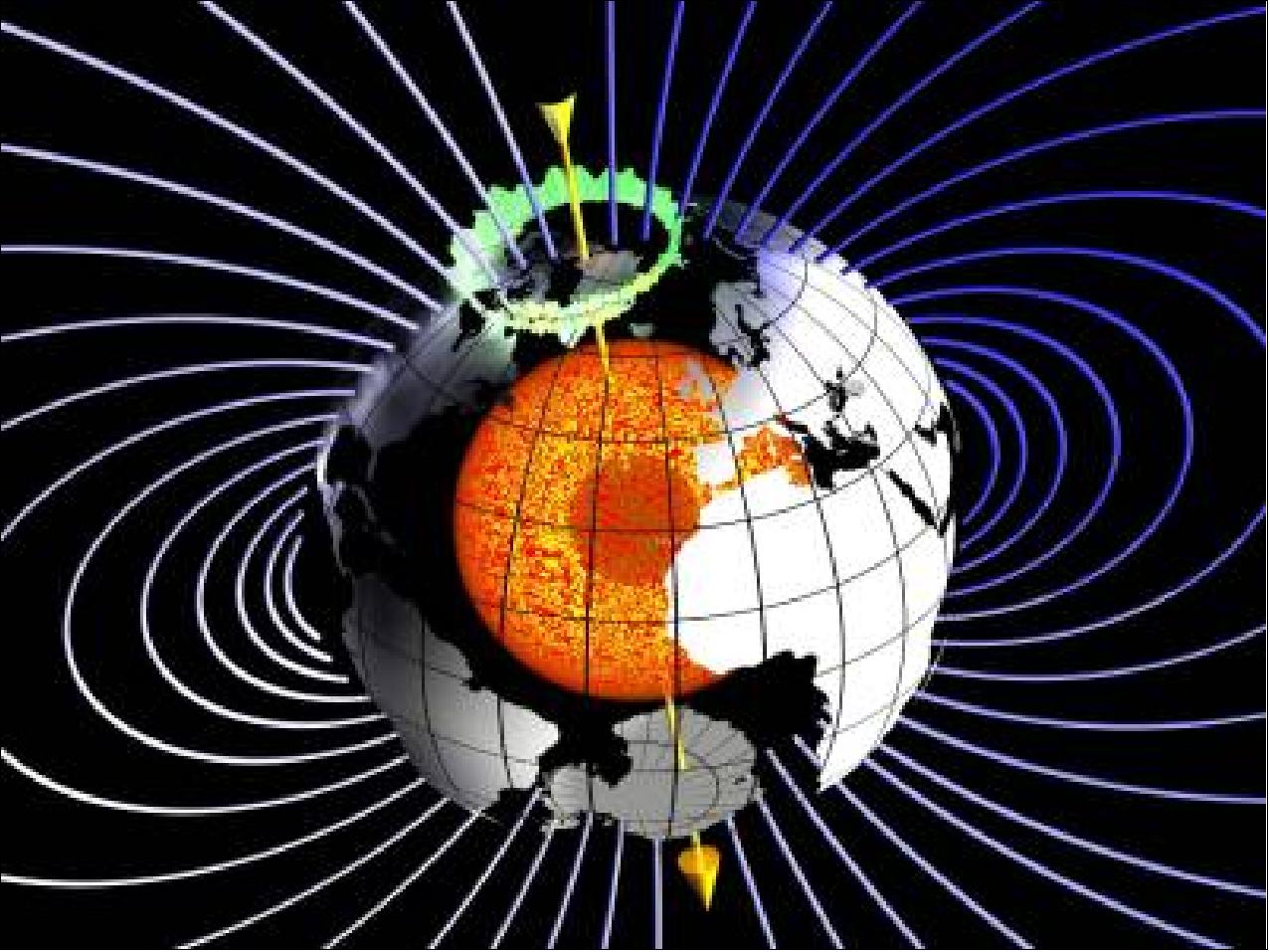
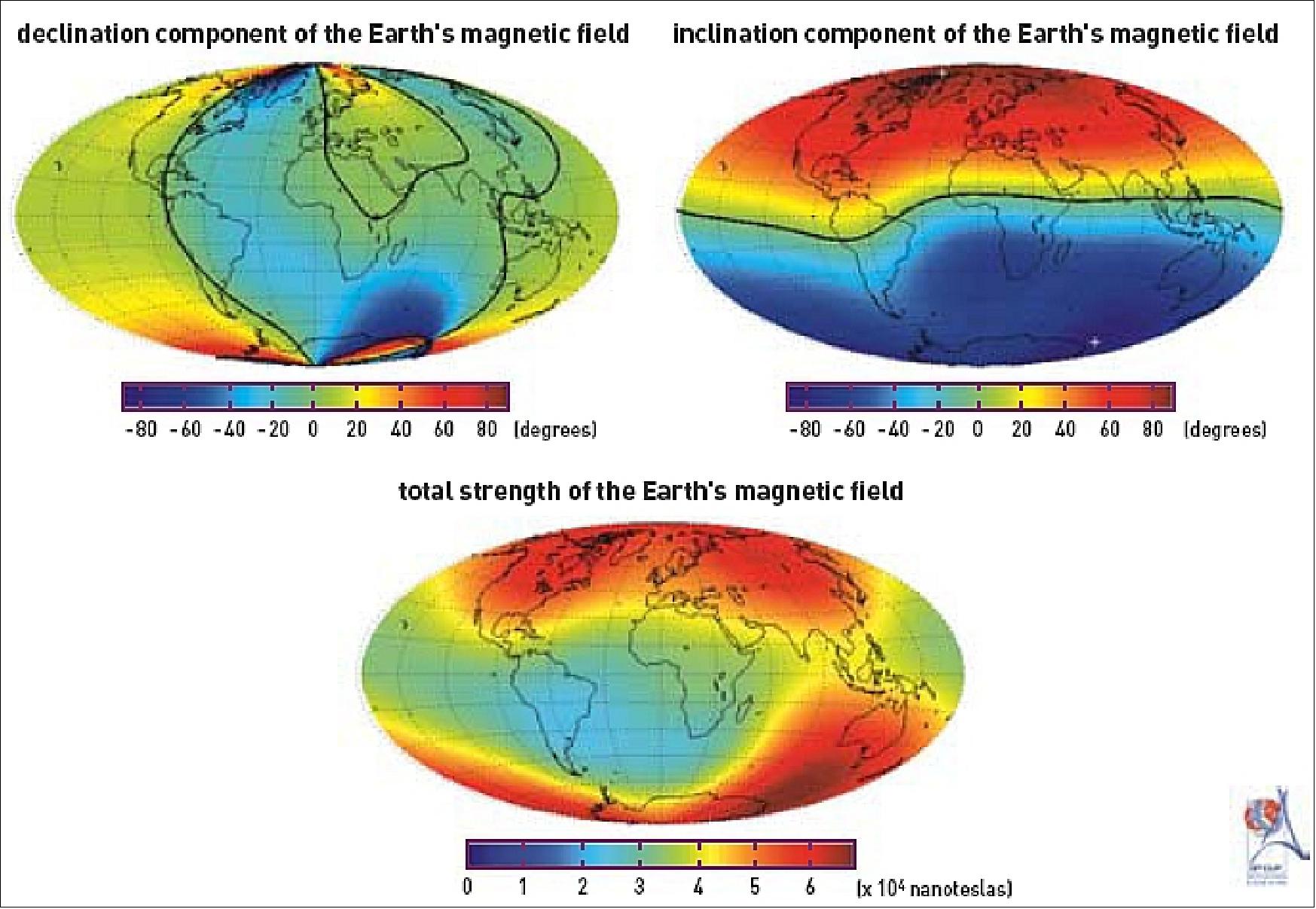
The Earth has its own magnetic field, which acts like a giant magnet. Geomagnetism is the name given to the study of this field, which can be roughly described as a centered dipole whose axis is offset from the Earth's axis of rotation by an angle of about 11.5º. This angle varies over time in response to movements in the Earth's core. The angle between the direction of the magnetic and geographic north poles, called the magnetic declination, varies at different points on the Earth's surface. The angle that the magnetic field vector makes with the horizontal plane at any point on the Earth's surface is called the magnetic inclination.
This centered dipole exhibits magnetic field lines that run between the north and south poles. These field lines convergent and lie vertical to the Earth's surface at two points known as the magnetic poles, which are currently located in Canada and Adélie Land. Compass needles align themselves with the magnetic north pole (which corresponds to the south pole of the 'magnet' at the Earth's core).
The Earth's magnetic field is a result of the dynamo effect generated by movements in the planet's core, and is fairly weak at around 0.5 gauss, i.e. 5 x 10-5 tesla (this is the value in Paris, for example). The magnetic north pole actually 'wanders' over the surface of the Earth, changing its location by up to tens of km every year. Despite its weakness, the Earth's dipolar field nevertheless screen the Earth from charged particles and protect all life on the planet from the harmful effects of cosmic radiation. In common with other planets in our solar system, the Earth is surrounded by a magnetosphere that shields its surface from solar wind, although this solar wind does manage to distort the Earth's magnetic field lines.
The Earth’s magnetic field shows deviations, called anomalies, from the idealized field of a centered bar magnet. These anomalies can be quite large, affecting areas on a regional scale. One example is the SAA (South Atlantic Anomaly), which affects the amount of cosmic radiation reaching the passengers and crew of any plane and spacecraft led to cross it (Ref. 21).
The primary research topics to be addressed by the Swarm mission include: 23)
• Core dynamics, geodynamo processes, and coremantle interaction. - The goal is to improve the models of the core field dynamics by ensuring long-term space observations with an even better spatial and temporal resolution. Combining existing Ørsted, CHAMP and future Swarm observations will also more generally allow the investigation of all magnetohydrodynamic phenomena potentially affecting the core on sub-annual to decadal scales, down to wavelengths of about 2000 km. Of particular interest are those phenomena responsible for field changes that cannot be accounted for by core surface flow models. 24)
• Lithospheric magnetization and its geological interpretation. - The increased resolution of the Swarm satellite constellation will allow, for the first time, the identification from satellite altitude of the oceanic magnetic stripes corresponding to periods of reversing magnetic polarity. Such a global mapping is important because the sparse data coverage in the southern oceans has been a severe limitation regarding our understanding of plate tectonics in the oceanic lithosphere. Another important implication of improved resolution of the lithospheric magnetic field is the possibility to derive global maps of heat flux. 25) 26)
• 3-D electrical conductivity of the mantle. - Our knowledge of the physical and chemical properties of the mantle can be significantly improved if we know its electrical conductivity. Due to the sparse and inhomogeneous distribution of geomagnetic observatories, with only few in oceanic regions, a true global picture of mantle conductivity can only be obtained from space.
• Currents flowing in the magnetosphere and ionosphere. - Simultaneous measurements at different altitudes and local times, as foreseen with the Swarm mission, will allow better separation of internal and external sources, thereby improving geomagnetic field models. In addition to the benefit of internal field research, a better description of the external magnetic field contributions is of direct interest to the science community, in particular for space weather research and applications. The local time distribution of simultaneous data will foster the development of new methods of co-estimating the internal and external contributions.
The Secondary Research Objectives Include...
• Identification of the ocean circulation by its magnetic signature. - Moving sea-water produces a magnetic field, the signature of which contributes to the magnetic field at satellite altitude. Based on state-of-the-art ocean circulation and conductivity models it has been demonstrated that the expected field amplitudes are well within the resolution of the Swarm satellites. 27)
• Quantification of the magnetic forcing of the upper atmosphere. - The geomagnetic field exerts a direct control on the dynamics of the ionized and neutral particles in the upper atmosphere, which may even have some influence on the lower atmosphere. With the dedicated set of instruments, each of the Swarm satellites will be able to acquire high-resolution and simultaneous in-situ measurements of the interacting fields and particles, which are the key to understanding the system.
Historic background of Swarm: Ref. 13)
• The first Swarm proposal was made in 1998, prior to launch of the Ørsted mission.
• In early 2002, the Swarm mission was proposed to ESA by Eigil Friis-Christensen of DNSC (Copenhagen, Denmark), Hermann Lühr of GFZ (GeoForschungszentrum, Potsdam, Germany), and Gauthier Hulot of IPG (Institut de Physique du Globe, Paris, France) with support from scientists in seven European countries and the USA. In the meantime, the Swarm team comprises participation of 27 institutes on a global scale. The mission was selected for feasibility studies in 2002. The initial mission proposal considered a Swarm constellation of 4 spacecraft. 28)
• In May 2002 there were three mission candidates: ACE+, EGPM and Swarm; they were chosen for a feasibility study.
• At the end of two parallel feasibility studies, the Swarm mission was selected as the 5th mission in ESA's Earth Explorer Program in May 2004. Phase A was completed in Nov. 2005, resulting in a constellation of 3 spacecraft.
• New Concept – Constellation to characterize external sources:
- The external contributions are highly influenced by solar activity and local time
- Simultaneous satellites in different orbital planes are necessary in order to overcome the time-space ambiguity in the measurements. The optimum constellation depends on the scientific objectives.
- But, measurements of high accuracy are not sufficient! A better understanding of the various sources is equally important, in particular when doing measurements with unprecedented precision, where new phenomena appear in the data. For this, additional and independent key information is needed: a) electric field, b) ionospheric conductivity.
• In 2006, the Swarm project was in Phase B, ending with the PDR (Preliminary Design Review) in the summer 2007.
The construction of the Swarm constellation commenced in November 2007 with the Phase C/D kick-off meeting. The Swarm project CDR (Critical Design Review) took place on Oct. 14, 2008 at ESA/ESTEC. 29)
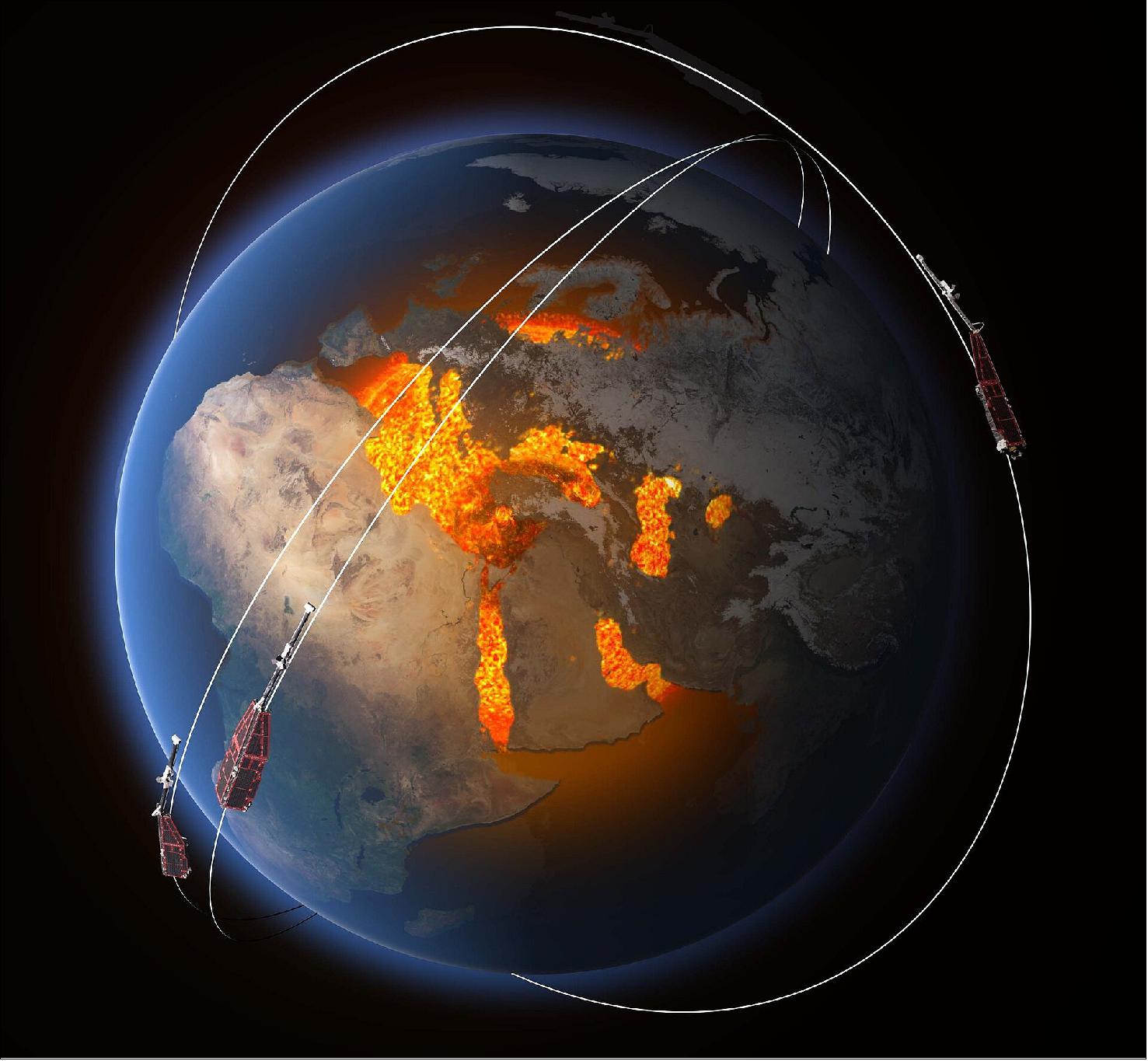
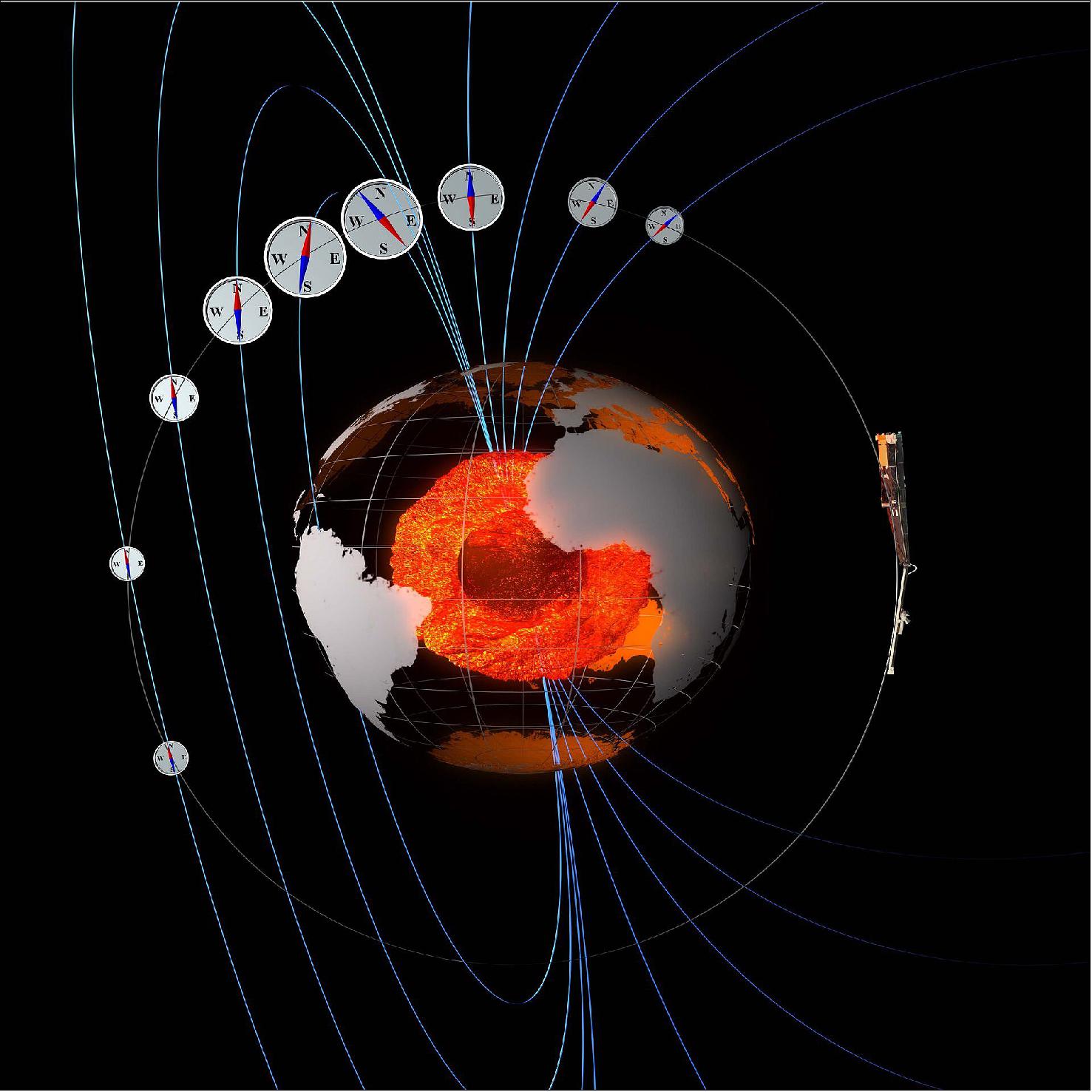
Legend to Figure 6: The magnetic field and electric currents near Earth generate complex forces that have immeasurable impact on our everyday lives. Although we know that the magnetic field originates from several sources, exactly how it is generated and why it changes is not yet fully understood. ESA’s Swarm mission will help untangle the complexities of the field.
Space Segment Concept
The Swarm mission architecture is driven by the requirement for separation of the various sources contributing to the Earth's magnetic field. Hence, the space segment concept employs a three-minisatellite constellation with the following characteristics:
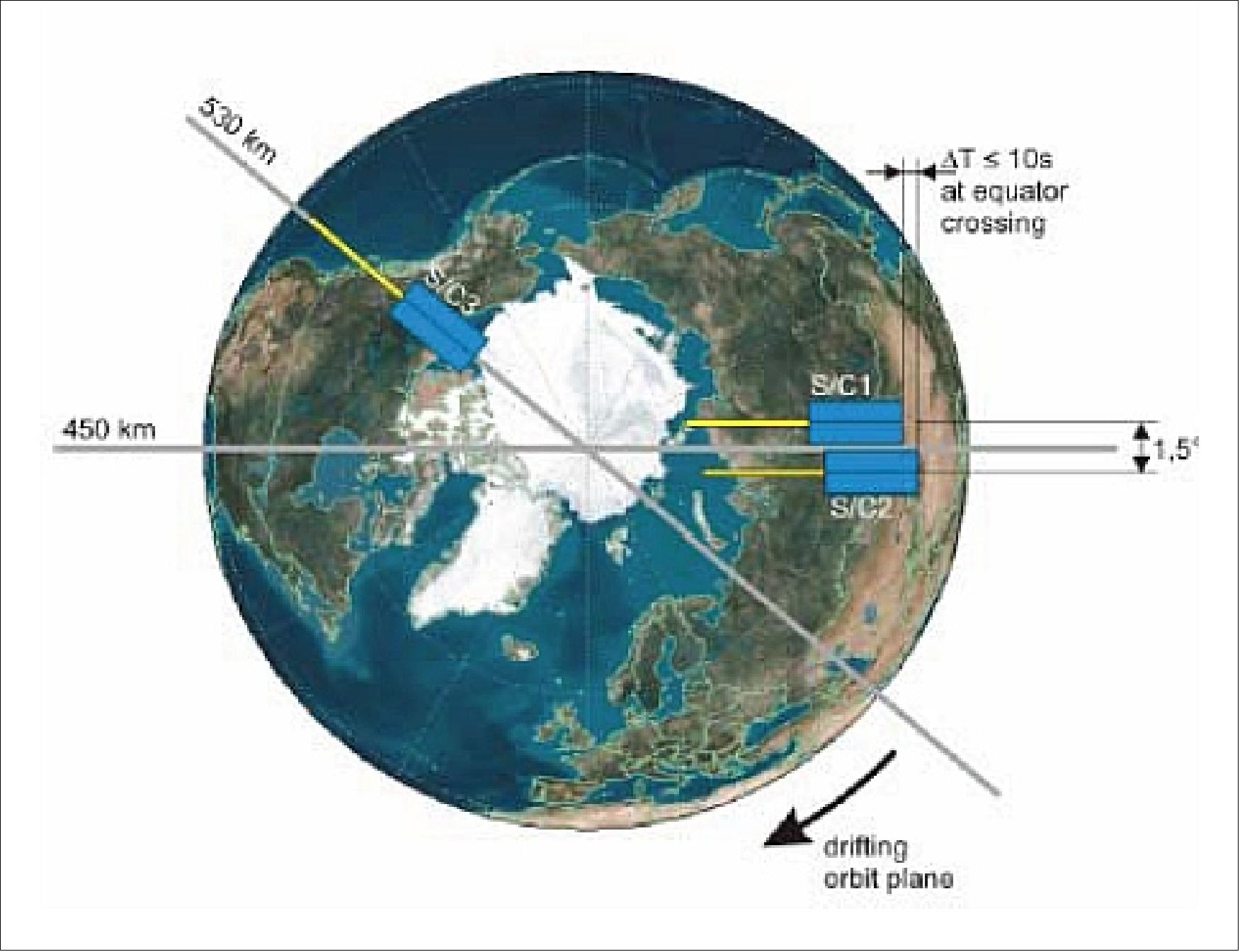
- Three spacecraft in two different orbital planes, with two satellites in a plane of 84.7º inclination and with one satellite in a plane of 88º inclination
- The two satellites in the 87.4º inclination orbit will fly at a mean altitude of 450 km, their east-west separation will be 1-1.5º, and the maximum differential delay in orbit will be about 10 s.
- The satellite in the higher inclination orbit (88º) will fly at a mean altitude of 530 km.
- The spacecraft require some degree of active orbit maintenance to control the relative positions in the constellation (this is an element of formation flight to support flight operations). 31) 32)
In November 2005, ESA selected EADS Astrium GmbH, Friedrichshafen, Germany as the prime contractor for the Swarm spacecrafts. The Swarm consortium (main subcontractors) consists of: 33)
- EADS Astrium Ltd., UK (mechanical, thermal, AIV)
- GFZ Potsdam, Germany (end-to-end system simulator, calibration & validation)
- DTU Space, Copenhagen, Denmark [level 1b processor and instruments (VFM magnetometer and STR star tracker)]
The spacecraft design is governed by the following requirements:
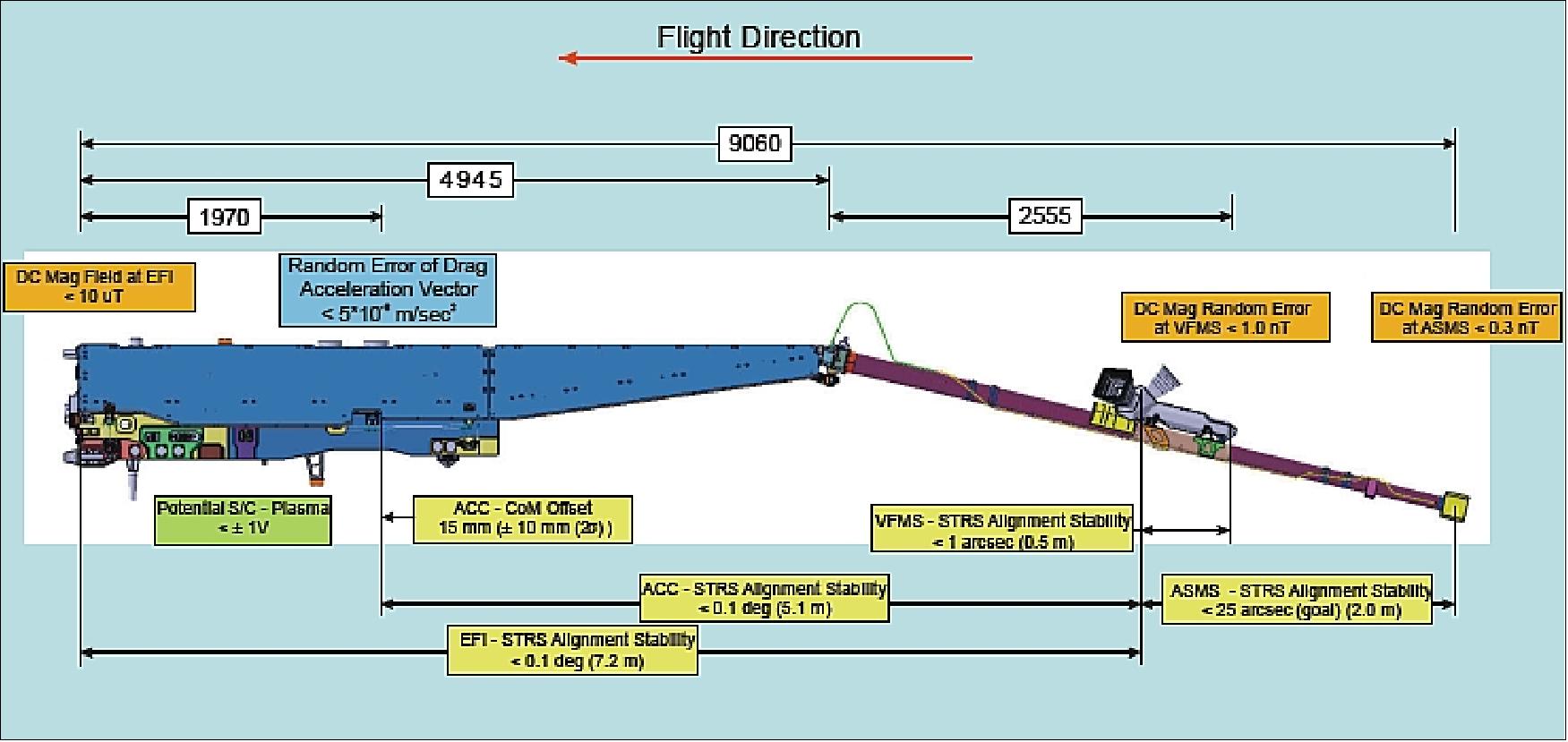
1) Magnetic cleanliness: magnetometers on deployable boom, non-magnetic materials and caution during handling
2) Magnetic field vector attitude knowledge: ultra-stable connection between VFM (Vector Field Magnetometer) and STR (Star Tracker) assembly on the optical bench
3) Ballistic coefficient: small ram surface in flight direction to minimize air drag
4) Accelerometer proof-mass vs satellite CoG (Center of Gravity) location.
An important design measure is the accommodation of the magnetometer package at a distance from the main body/platform sufficient to minimize any magnetic disturbance. A boom ensures a magnetically 'clean' environment and provides very stable accommodation for the magnetometer package. Due to envelope constraints of the launcher fairing, the boom must be deployable. 34)
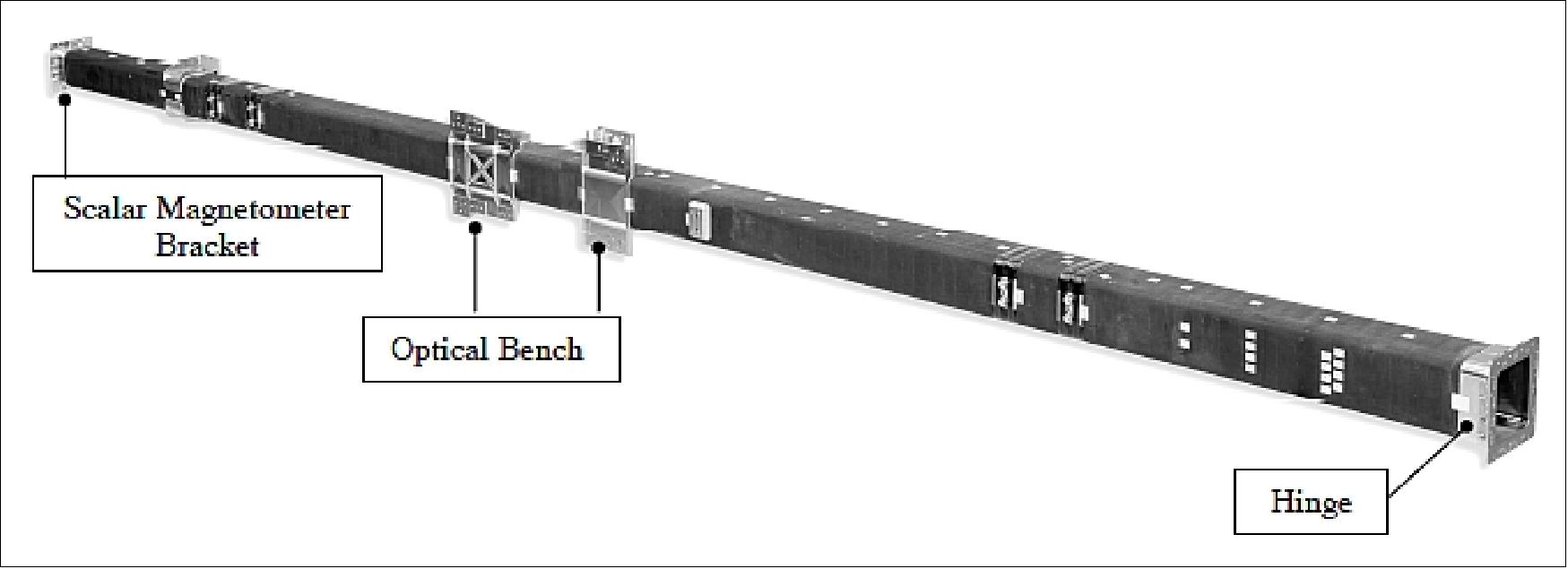
Optical bench: The vector magnetometer is mounted on an ultra-stable silicon carbide-carbon fiber compound structure (the SWARM optical bench). Both optical bench and scalar magnetometer are installed on a deployable conical tube of square cross section. The position tolerance of the optical bench to its tube interface has to be fixed within 0.2 mm. 35) 36)
The design driver of the composite tube assembly of Swarm is thermal stability. The main cause for observed thermal distortion is the non-uniformity of the cross-sections arising from the different adaptations of the filament winding process in order to manufacture the carbon fiber reinforced structure. The manufacture of the structure required use of thermally controlled high precision bonding jigs to join the composite tubes to the metallic fittings.
The scalar magnetometer and optical bench are fixed to a deployable large beam of square cross section, the SWARM (Carbon-fiber Tube Assembly (CTA) which fulfils the following main functions (Figure 8):
• Separate the sensitive instruments from the spacecraft to comply with the very high magnetic cleanliness requirements
• Provide a suitable stable structure for the fixation of instruments.
The chosen manufacturing technology for the SWARM tube was filament winding. The SWARM tube has a conical taper. Since the amount of fibers in a cross section is constant the tube had two main characteristics: the wall thickness increased linearly from the root to the tip and due to nature of the winding process the fiber angle became steeper at the tip than at the root. The overall effect is a variation of properties along the length of the tube.
The Swarm carbon-fiber tube assembly was subjected to various tests: Thermal distortion was measured by establishing a 65ºC gradient between the tip and the hinge and a 10ºC gradient between opposite sides of the CTA. The hole pattern of the optical bench was accurate to within 0.2 mm (Ref. 35).
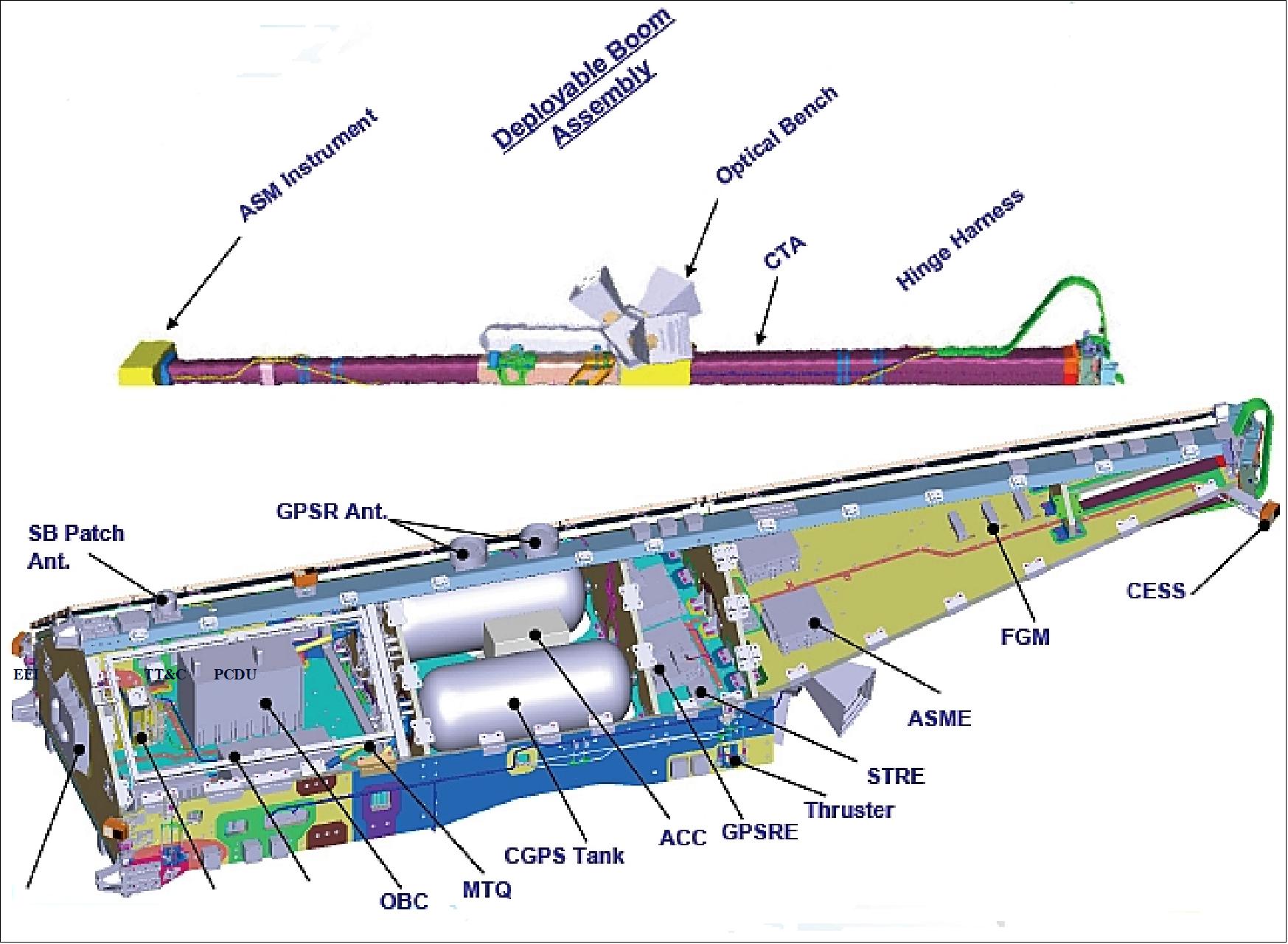
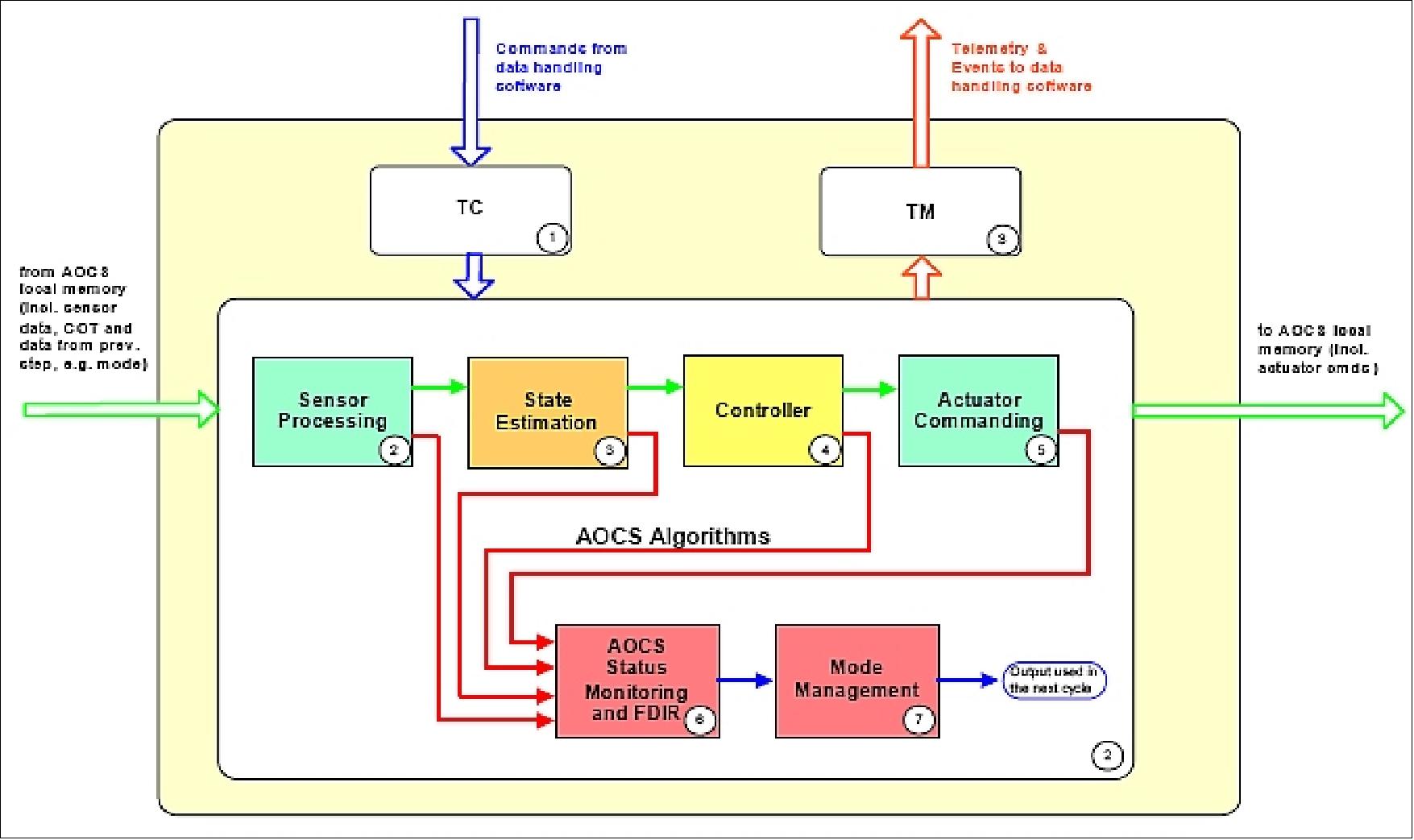
The three identical Swarm minisatellites consist of the payload and the platform elements. The platform comprises the following subsystems: structure/mechanisms, power, RF communications, AOCS (Attitude and Orbit Control Subsystem), thermal control, and onboard data handling.
The AOCS design is based to a maximum extent on the CryoSat AOCS design of EADS Astrium. The gyro-less AOCS provides 3-axis stabilization with an Earth pointing attitude control in all modes. The requirements call for: 37)
- An attitude pointing control within a band of < 5º about all axis (roll, pitch, and yaw), the pointing stability is < 0.1º/s
- Provision of a sufficient torque capability for launcher tip-off rate damping and attitude acquisition
- Minimize acceleration and magnetic stray field disturbances to scientific instruments
- Provision of a high ΔV capability for orbit & attitude control maneuvers.
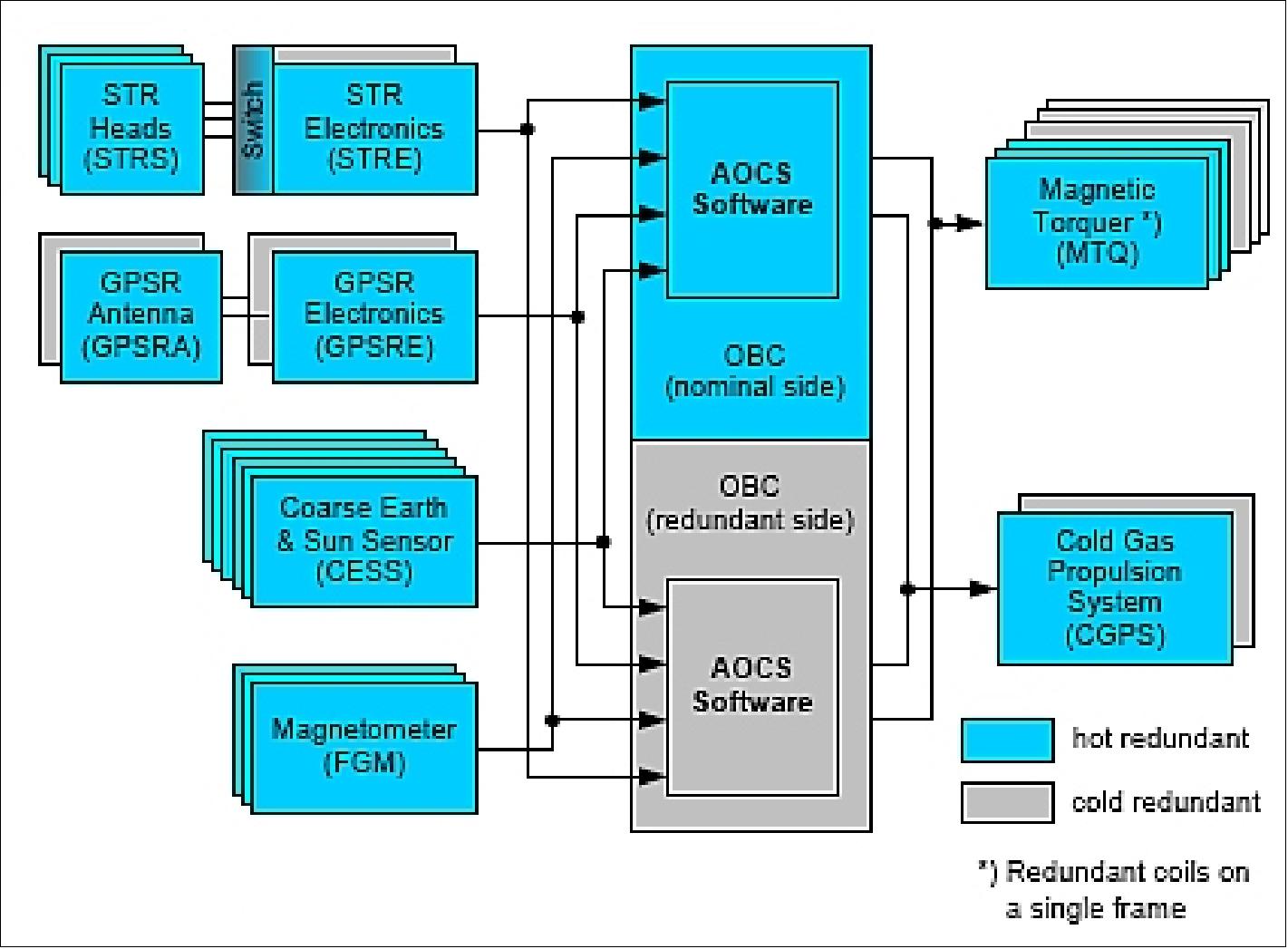
The AOCS is tightly coupled with the propulsion subsystem. Actuation is provided by a cold gas propulsion subsystem, referred to as OCS (Orbit Control Subsystem), and magnetic torquers (used for ΔV maneuvers and to complement the magnetic torquers). The cold gas propulsion system is provided by AMPAC-ISP, UK. - Attitude sensing is provided by a star tracker assembly (3 star tracker heads), 3 magnetometers, and a CESS (Coarse Earth and Sun Sensor) assembly used in safe mode situations and in initial acquisition sequences, respectively (CESS is of CHAMP, GRACE, and TerraSAR-X heritage). A dual frequency GPS receiver (GPSR) is used to provide PPS (Precise Positioning Service) to the OBC and instruments for on-board datation.
Note: the star tracker (STR) assembly and optical bench are described below under a separate heading.
The nominal attitude has a nadir orientation. Rotation maneuvers of S/C about roll, pitch and yaw are used for instrument calibration and orbit Control. The safe mode is Earth-oriented. Pointing requirements are 2º about all axes, with limitations on use of actuators.
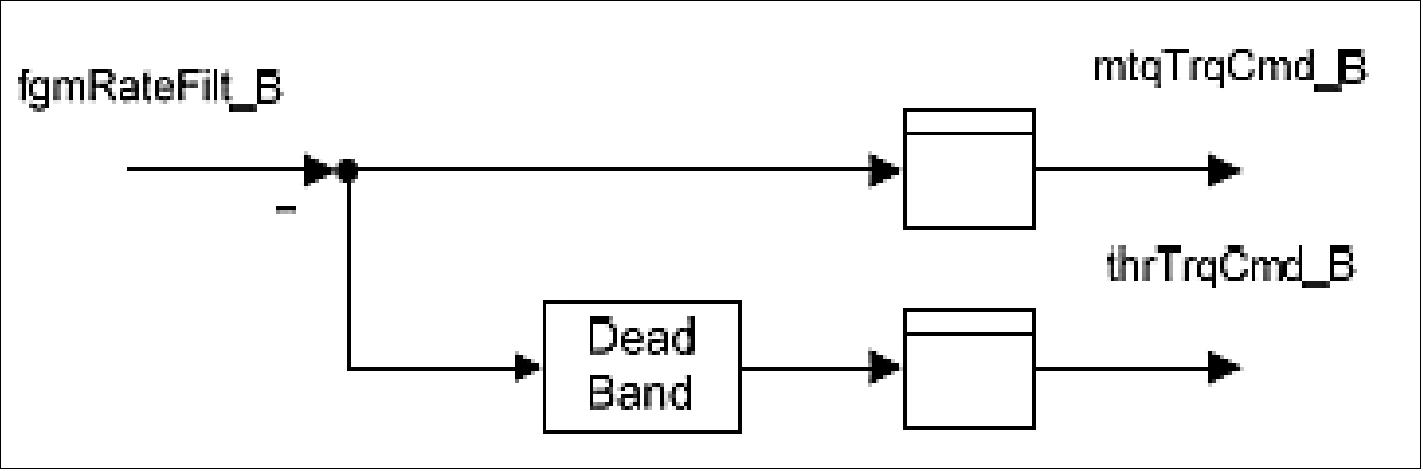
The Swarm rate damping design, in support of the critical spacecraft deployment phase, employs magnetic rate damping - magnetometers in combination with magnetic torquers and thrusters - to provide a significantly cheaper implementation than with the use of gyroscopes. From a control theory point-of-view, rate damping with magnetometers using 2-axis measurement is as “safe” as with gyroscopes using 3-axis measurement: Global asymptotical stability is achieved except for the case when the magnetic field does not change. This is only in near-equator orbits possible with perfect field symmetry which is in practice not realistic. The result is confirmed by the evaluation of the observability criterion where no loss of this property could be detected except for the mentioned case. Since SWARM is in a polar inclination orbit, the control concept is considered “clean”. 38)
Rate damping design: The RDM controller is a simple proportional controller on the S/C rate with reference rate zero. The S/C rate is computed by processing and derivation of the FGM measurements. The controller outputs the torque commands for the torquer and the thruster. A dead band for the thruster inhibits the thruster activation for low rates which can be covered by the torque rod.
Each spacecraft features 2 propellant tanks, each with a capacity of 30 kg of N2. The thrusters provide thrust levels of 20 and 40 mN. The cold gas thruster system was developed and space qualified by Ampec-ISP, Cheltenham, UK consisting of 24 OCT (Orbit Control Trusters) and 48 ACT (Attitude Control Thrusters) for the Swarm constellation. The assembly and test of Ampac's SVT01 series of cold gas thrusters has included design modifications, full qualification and verification of suitability to operate with a new propellant. In 2010, a set of 72 units has been supplied and integrated into the constellation of three Swarm spacecraft. 39)
A GPS receiver provides the functions of timing and position determination. The spacecraft dry mass is about 370 kg.
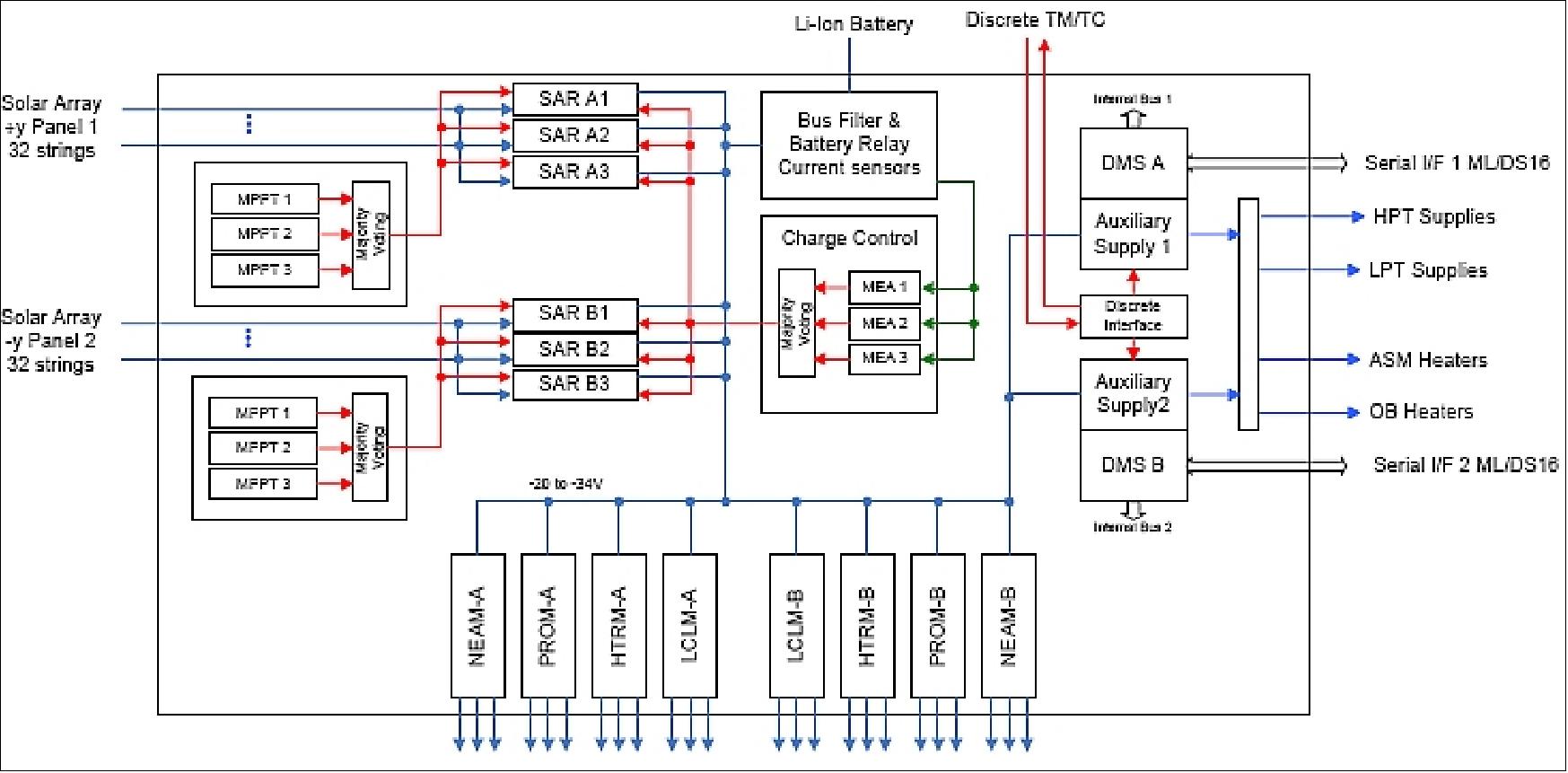
EPS (Electrical Power Subsystem): The two body-mounted solar arrays and the varying orbits of the satellites require a MPPT (Maximum Power Point Tracking) system. Important requirements are related to the magnetic cleanliness of the satellites and result in following specific PCDU (Power Conditioning and Distribution Unit) design requirements: 40)
- Minimization of magnetic moment i.e. minimizing of magnetic materials and current loops
- Selection of switching frequencies outside the ‘forbidden’ frequency ranges
- Minimizing spacecraft surface charging by use of negative bus voltage concept (battery + is connected to spacecraft structure).
The PCU part of the PCDU covers all tasks to control the power flow in the unit from the different sources and performs the communication with the OBC (On Board Computer).
During eclipse and battery recharge mode, the bus voltage varies with the state of charge of the battery. In taper charge mode, the bus is controlled by the MEA (Main Error Amplifier) to a predefined (commandable) value.
The main power requirements for the PCDU are defined as follows:
- Solar array input: 0 to -125 V, max. 21 A (each of 2 panels)
- Maximum power per panel: 750 W
- Main bus voltage range -22 V to -34 V
- Maximum battery charge current 24 A
- Continuous discharge current 0 to 14 A.
Maximum discharge current/power up to 0.5 h: 20 A / 440 W.
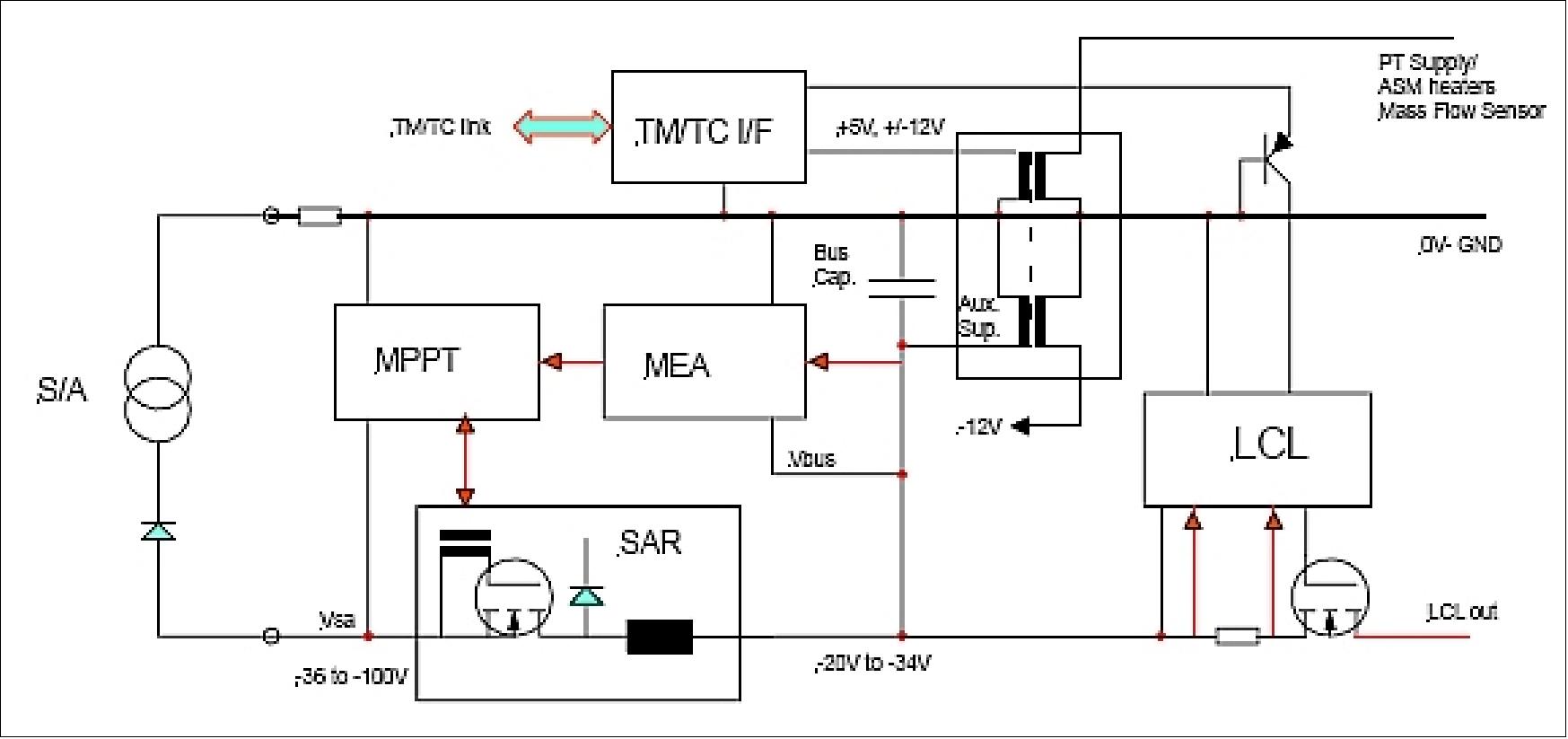
Negative bus voltage concept: The Swarm satellite requires the positive line of the power system connected to structure. This implies that all bus protection functions have to be allocated in the ‘hot’ negative line. As all essential functions, ( i.e. bus voltage control) need to be independent from the auxiliary supplies, they have to be supplied by the negative bus voltage. Figure 15 shows a principle grounding/power supply diagram of the main functional blocks in the PCDU.
Power control concept: The PCDU uses a simple concept for control of the battery state of charge and the bus voltage:
- Whenever the bus voltage and the charge current are below the limits, the MPPTs are active
- When the either the bus voltage attains the ‘battery end-of-charge voltage or the battery attains the charge current limit, the MEA (Main Error Amplifier) supersedes the tracker operation.
A bus overvoltage detection logic has been implemented in the PCDU, which performs a rapid ramp-down of the solar regulator current by using hysteresis control.
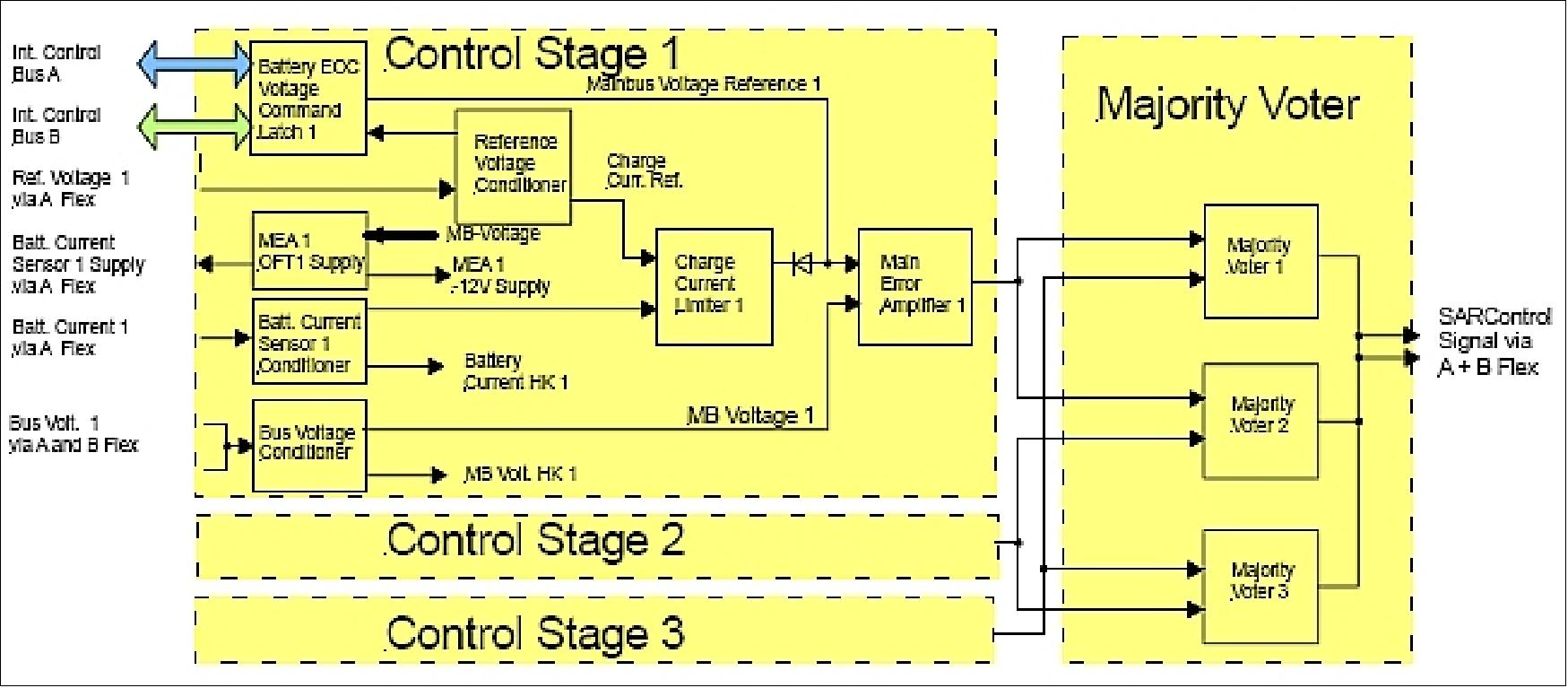
The MEA is composed of 3 identical separated control stages and a majority voter. Each control stage has a dedicated set of sensors and receives the relevant set commands for the bus voltage via redundant internal control busses. The charge current limitation is implemented in a ‘cascade configuration’, using the output of the current error amplifier as a set signal for the voltage amplifier. This assures a low and constant bus impedance during all MEA control modes. The implementation of the regulation concept is given in Figure 16.
Spacecraft mass | Dry mass of ~369 kg |
Spacecraft dimensions | Length: 9.1 m; width: 1.5 m (S/C body); height: 0.85 m; ram surface: ~0.7 m2 |
Boom length | 5.1 m |
AOCS | - 3-axis stabilized; magnetometers; CESS; GPS; STR, magnetorquers; thrusters |
AOCS sensors | - STR (Star Tracker) with 3 sensor heads |
AOCS control modes | - Rate damping: rates are measured by the FGMs, main actuation by THR |
EPS (Electrical Power Subsystem) | Total power: 608 W nominal; solar cells: GaAs triple junction; solar panel positive grounding; a set of batteries: Li-ion with a capacity of 48 Ah |
RF communications | S-band; downlink data rate: 6 Mbit/s; 4 kbit/s uplink, data volume: 1.8 Gbit/day; 1 dump/day to Kiruna ground station, data storage capability: 2 x 16 Gbit |
Mission duration | 3 months of commissioning followed by 4 years of nominal operations |
RF communications: S-band for TT&C spacecraft monitoring services and for science data transmission.


Legend to Figure 19: Attached to the tailor-made launch adapter, the three Swarm satellites sit just centimeters apart. This novel part of the rocket keeps the satellites upright within the fairing during launch and allows them to be injected simultaneously into orbit. 41)
DBA (Deployable Boom Assembly): The Swarm DBA, consisting of a 4.3m long CFRP tube and a hinge assembly, is designed to perform this function by deploying the CFRP tube plus the instruments mounted on it. mounted on a 4.3m long deployable boom. Deployment is initiated by releasing 3 HDRMs (Hold Down Release Mechanisms) , once released the boom oscillates back and forth on a pair of pivots, similar to a restaurant kitchen door hinge, for around 120 seconds before coming to rest on 3 kinematic mounts which are used to provide an accurate reference location in the deployed position. The motion of the boom is damped through a combination of friction, spring hysteresis and flexing of the 120+ cables crossing the hinge. Considerable development work and accurate numerical modelling of the hinge motion was required to predict performance across a wide temperature range and ensure that during the 1st overshoot the boom did not damage itself, the harness or the spacecraft. - Due to the magnetic cleanliness requirements of the spacecraft, no magnetic materials could be used in the design of the hardware. 42)
Launch
The Swarm constellation was launched on Nov. 22, 2013 (12:02:29 UTC) on a Rockot vehicle from the Plesetsk Cosmodrome, Russia. The launch was provided by Eurockot Launch Services. Some 91 minutes after liftoff, the Breeze-KM upper stage released the three satellites into a near-polar circular orbit at an altitude of 490 km. 43) 44) 45) 46) 47)
The launch was planned for the fall of 2012, but due to the recent Breeze-M (Briz-M) failure the launch was postponed to permit proper investigations of the cause. In Nov. 2012, ESA is still expecting, from the Russian Ministry of Defence, the launch manifest for the year 2012/13 for Rockot launchers indicating the launch date for Swarm. 48) 49)
Note: Rockot, a converted SS-19 ballistic missile, has been grounded since February 1, 2011 when the Rockot vehicle with the Breeze-KM upper stage failed to place the Russian government’s GEO-IK2 geodesy satellite of 1400 kg (Kosmos 2470) into its intended orbit of 1000 km. However, in the meantime, the Rockot/Breeze-KM vehicle demonstrated its reliability by lifting 4 Russian spacecraft (Gonets-M No.3, Gonets-M No.4, Strela-3/Rodnik, and Yubileiny-2/MiR) successfully into orbit on July 28, 2012.
On April 9, 2010, ESA awarded a contract to Eurockot, for the launch of two of its Earth observation missions. The contract covers the launch of ESA's Swarm magnetic-field mission and a 'ticket' for one other mission, yet to be decided. Both will take place from the Plesetsk Cosmodrome in northern Russia using a Rockot/Breeze-KM launcher. Eurockot is based in Bremen, Germany and is a joint venture between Astrium and the Khrunichev Space Center, Moscow. 50) 51) 52) 53)
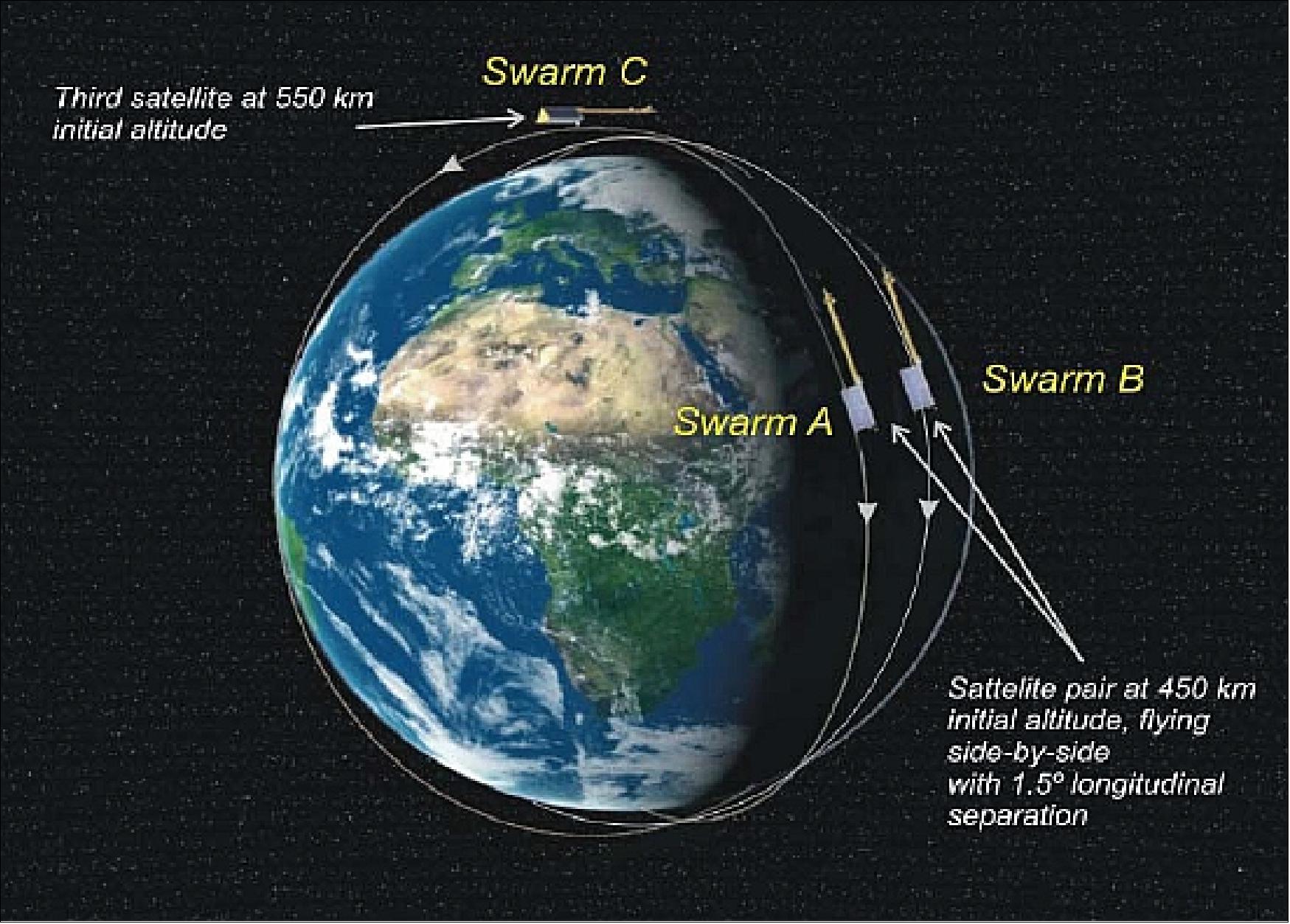
After release from a single launcher, a side-by-side flying lower pair of satellites at an initial altitude of 460 km and a single higher satellite at 530 km will form the Swarm constellation. The constellation deployment and maintenance require a total ΔV effort of about 100 m/s.
In LEOP (Launch and Early Orbit Phase), at least three ground stations will be involved. LEOP is expected to last 3 days for the full activation of the satellites, followed by an orbit acquisition phase of up to three months. In parallel with the orbit acquisition phase, the commissioning phase will start in order to check out all satellite subsystems and the payload. The commissioning phase is currently expected to last three months. After the commissioning phase the nominal mission phase of 4 year starts.
Orbits of the Swarm Constellation
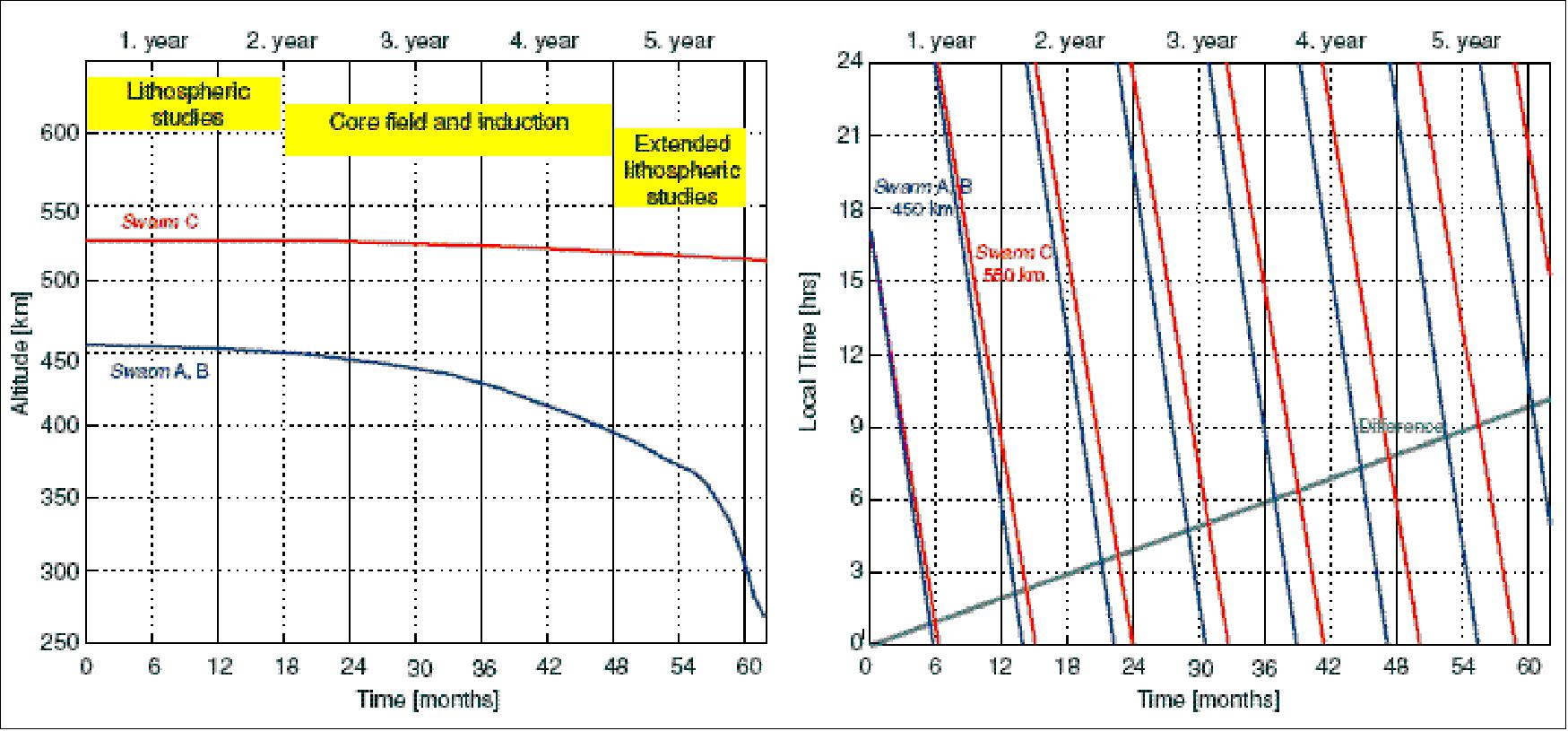
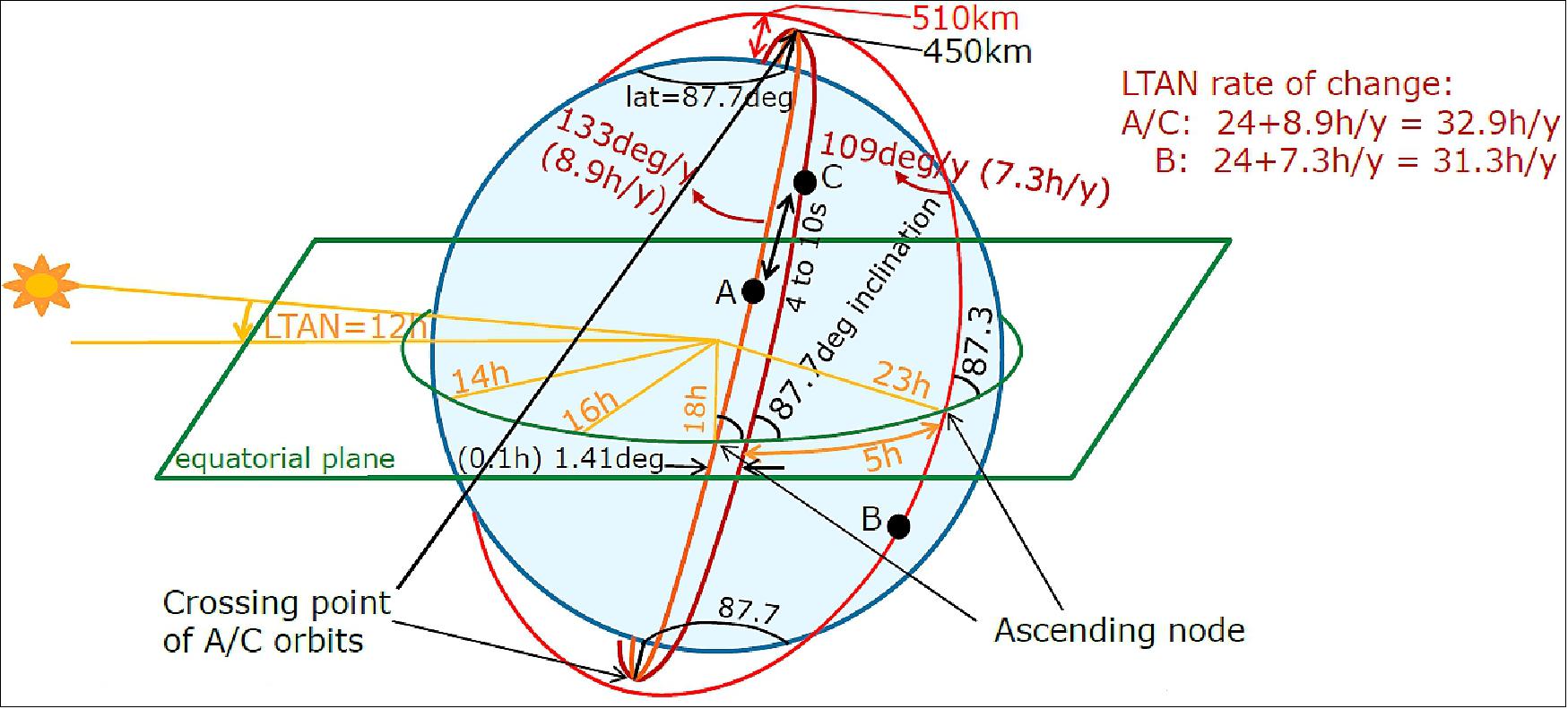
Accurate determination and separation of the large-scale magnetospheric field, which is essential for better separation of core and lithospheric fields, and for induction studies, requires that the orbital planes of the spacecraft are separated by 3 to 9 hours in local time. For improving the resolution of lithospheric magnetization mapping, the satellites should fly at low altitudes - thus experiencing some drag, but commensurate with the goals of a multi-year mission lifetime. The three satellites are being flown in 3 orbital planes with 2 different near-polar inclinations to provide a mutual orbital drift over time (Figure 20 and 21).
• Two satellites (Swarm A+B) are in a similar plane of 87.4º inclination. The satellite pair of 87.4º inclination will fly at a mean altitude of 450 km, their east-west separation shall be 1-1.4º, and the maximal differential delay in orbit shall be about 10 s. The formation-flying aspects concern the satellite pair, a side-by-side formation, requiring some formation maintenance.
• One higher orbit satellite (Swarm C) in a circular orbit with 88º inclination at an initial altitude of 530 km. The right ascension of the ascending node is drifting somewhat slower than the two other satellites, thus building up a difference of 9 hours in local time after 4 years.
Note: Due to ASM instrument problems on Swarm-C (Charlie), it was decided prior to launch to place Charlie with Alpha on the lower orbit, and Bravo on the higher orbit.
Parameter | Swarm-A (Alpha) | Swarm-C (Charlie) | Swarm-B (Bravo) |
Orbital altitude | ≤ 460 km (initial altitude of satellite pair) | ≤ 530 km | |
Orbital inclination | 87.4º | 88º | |
ΔRAAN (Right Ascension of Ascending Node) | 1.4º difference between A and B | ~0-135º difference | |
Mean anomaly at epoch | Δt = 2-10 s difference between A and B | N/A | |
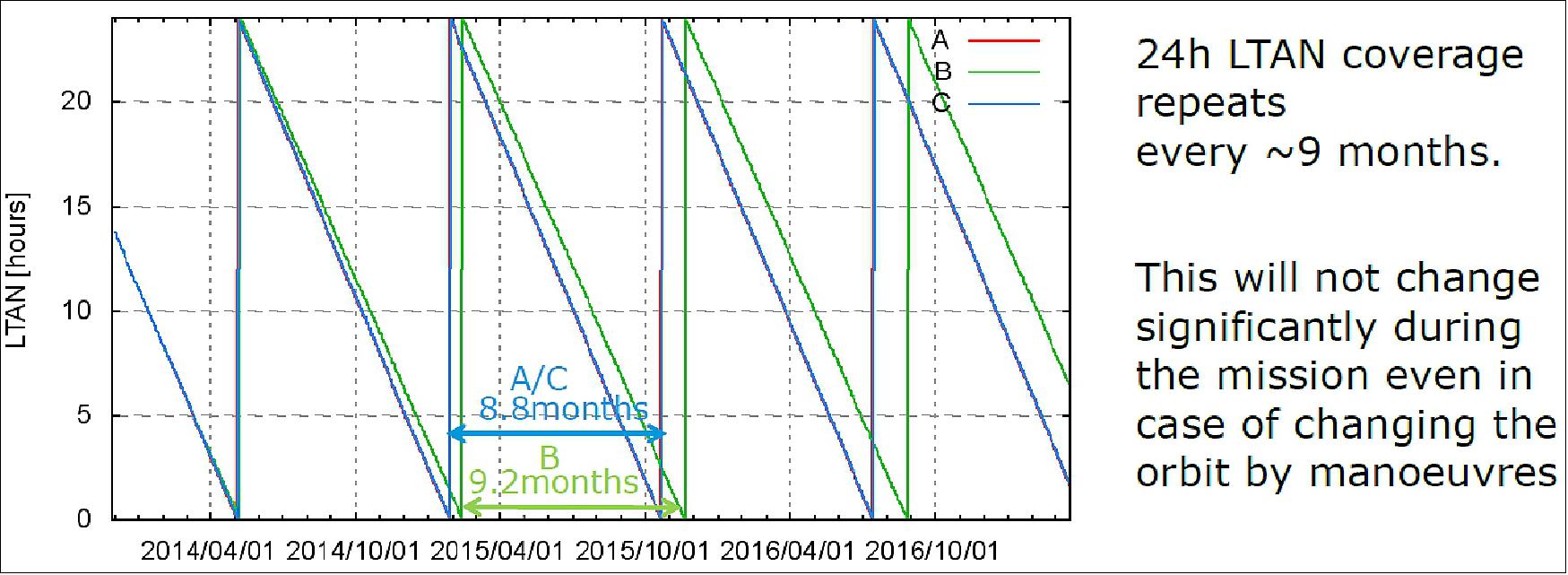
LTAN evolution (Figure 20, right-hand side) | 24 hours of local time coverage every 7-10 months | ||
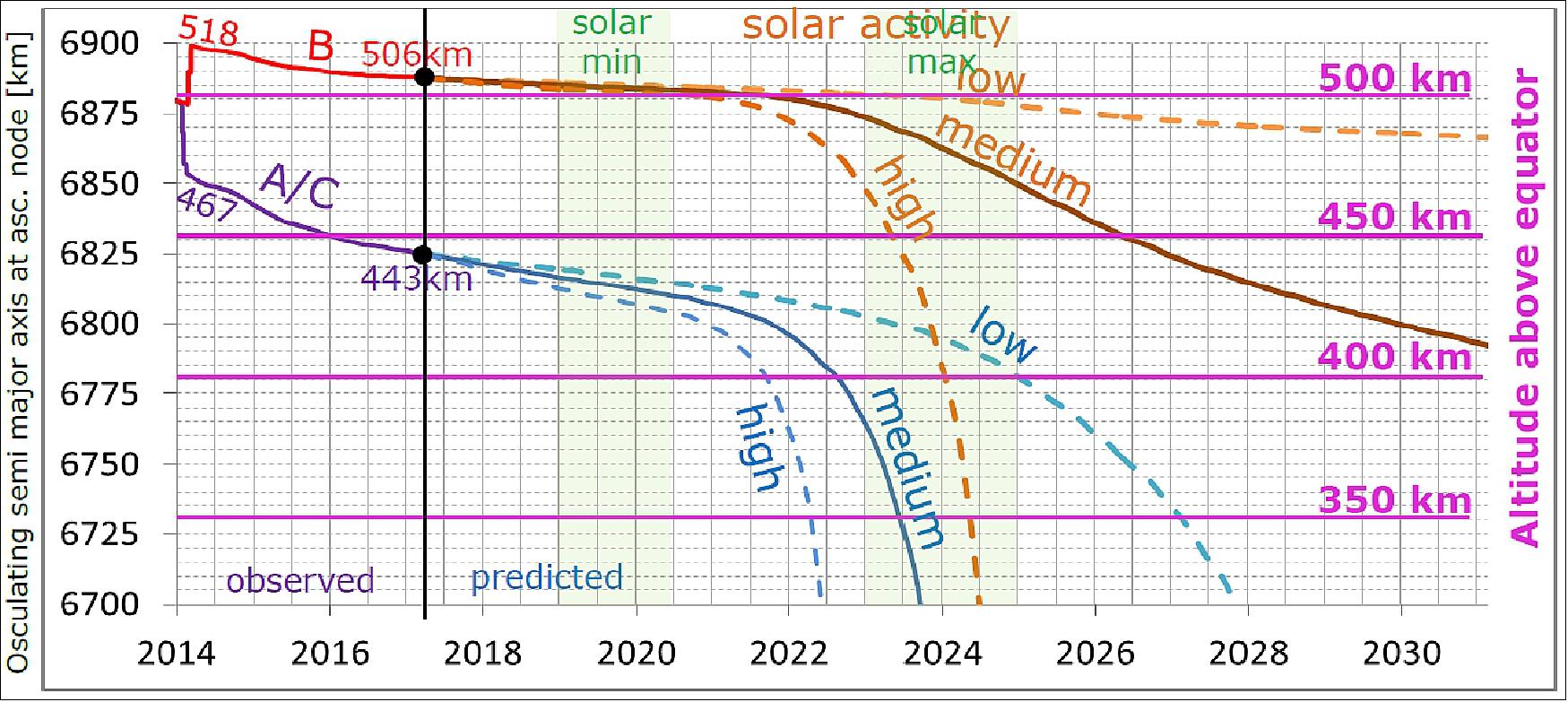
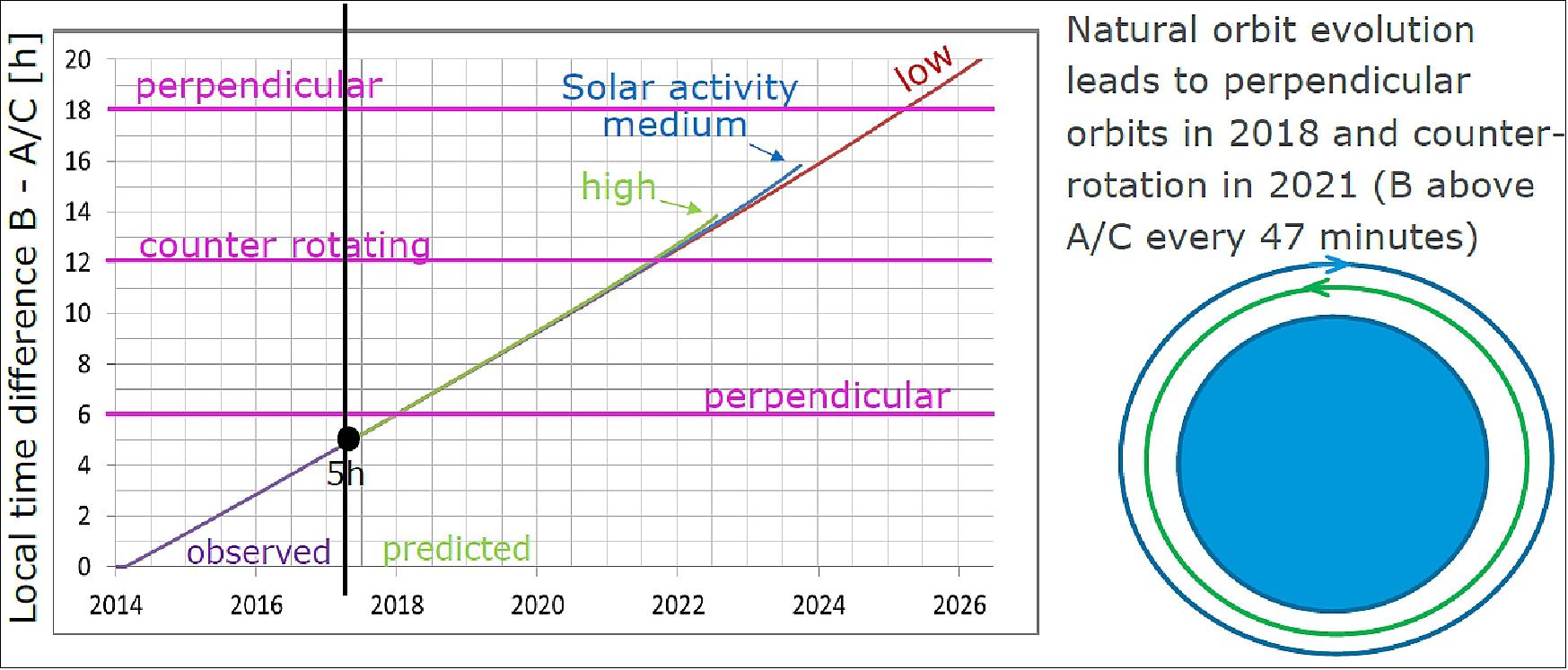
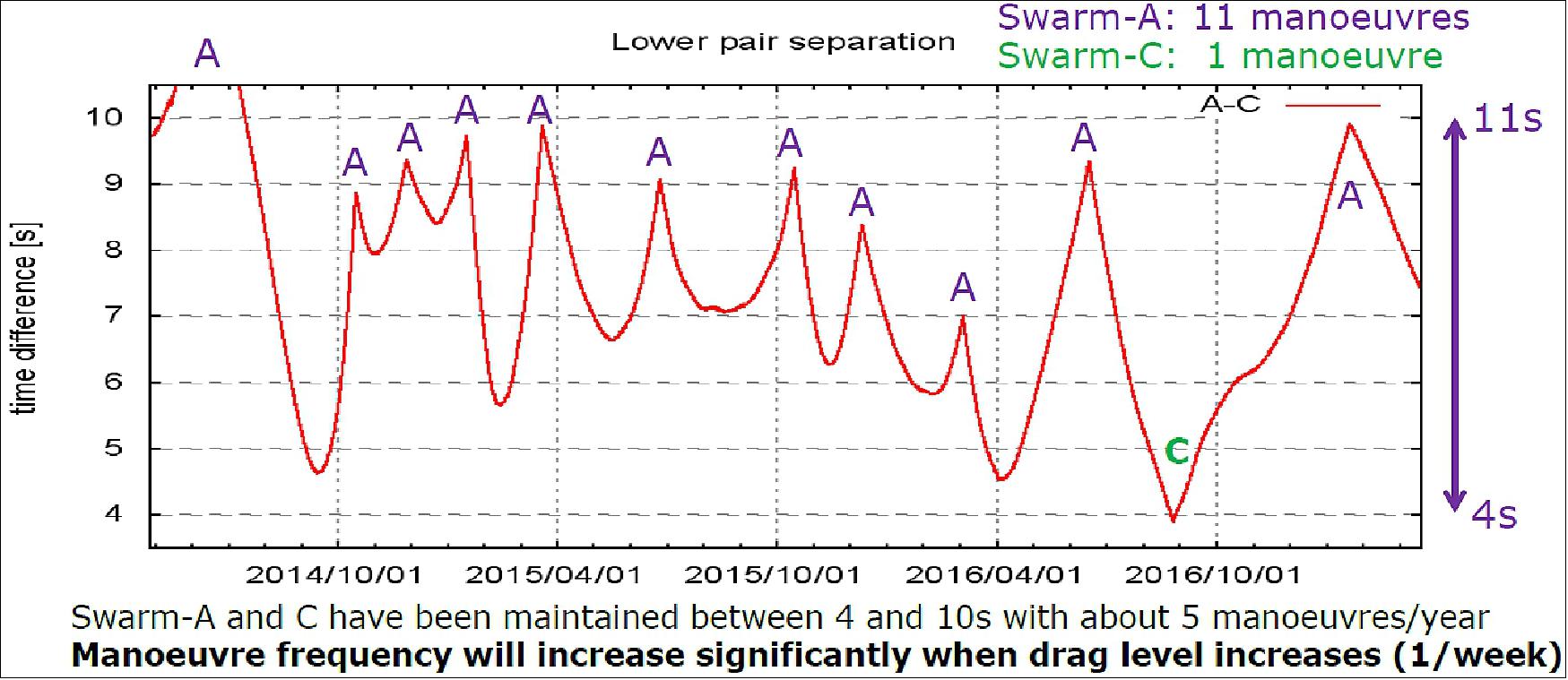
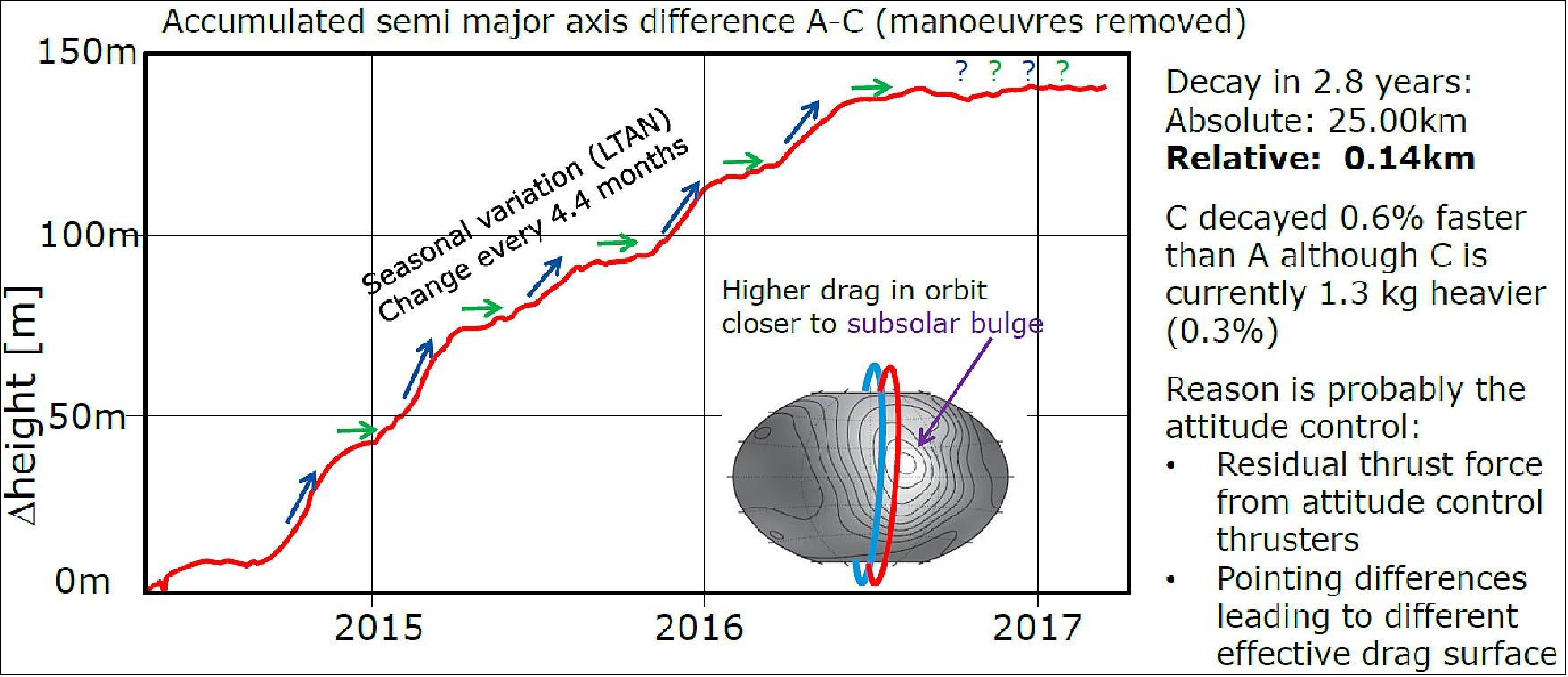
Swarm Mission Orbit Update Information as of March 2017
The following 8 Figures (Figure 24 to 32), dealing with the Swarm constellation flight dynamics, were provided by Detlef Sieg of ESA. They were presented at the 4th Swarm Science Meeting & Geodetic Workshop in Banff, Canada. 56)
Mission Status
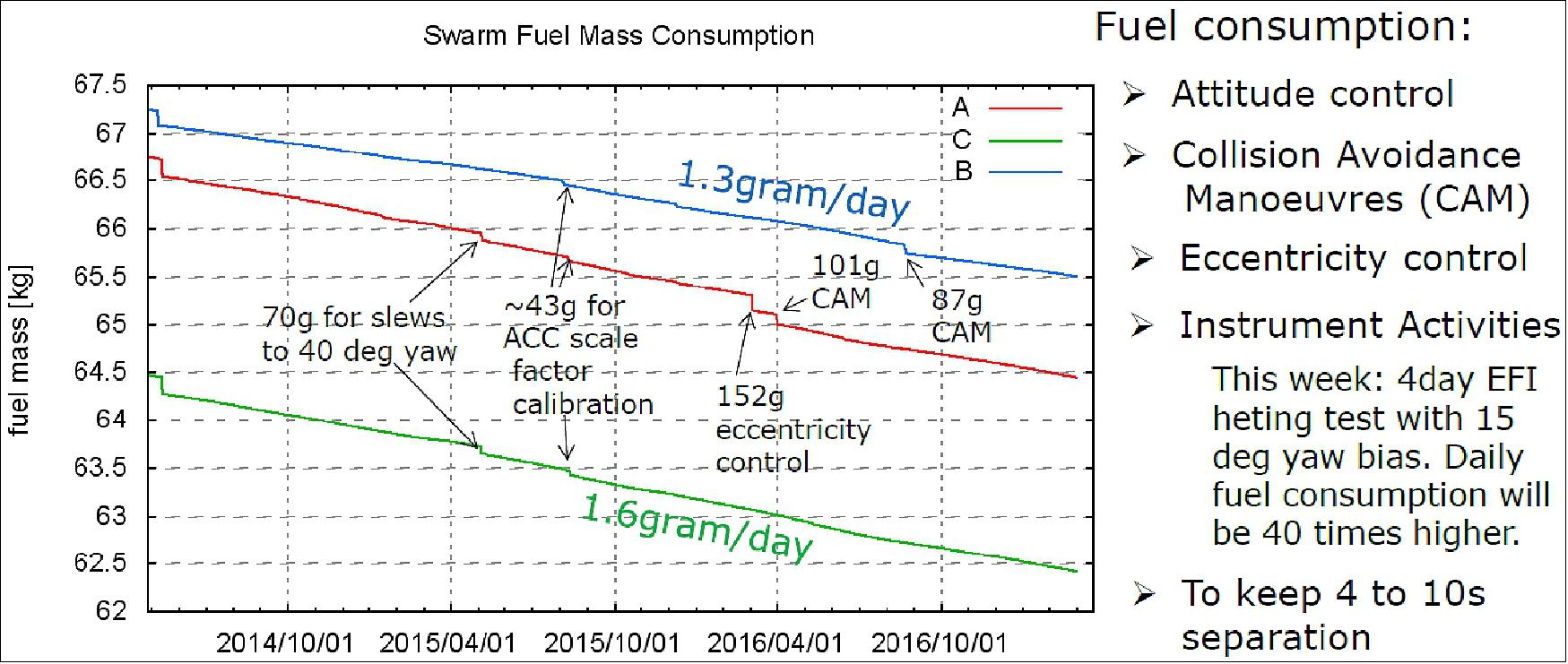
• July 14, 2022: The pressure is on at ESA’s mission control. An ESA satellite dodges out of the way of a mystery piece of space junk spotted just hours before a potential collision. 57)
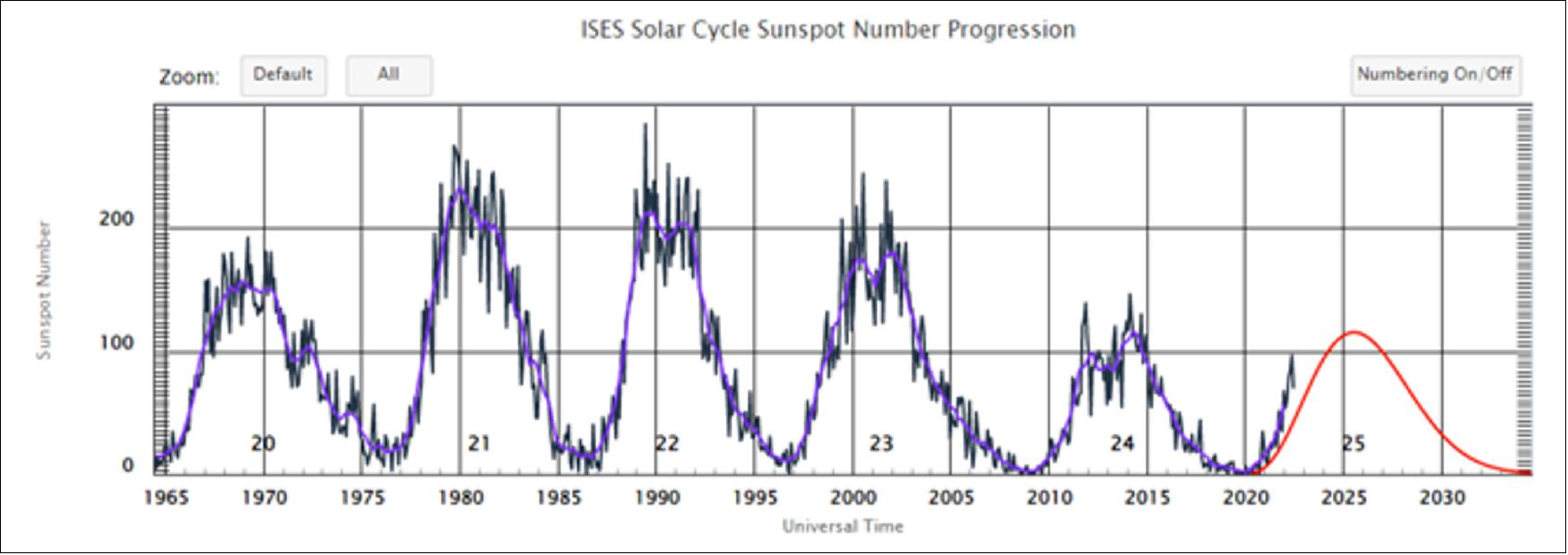
- Now a crucial step in the spacecraft’s ongoing journey to safer skies has to be quickly rescheduled, as violent solar activity related to the ramping up of the solar cycle warps Earth’s atmosphere and threatens to drag it down out of orbit.
A swarm? Of bugs?
- Not quite – Swarm is ESA’s mission to unravel the mysteries of Earth’s magnetic field. It’s made up of three satellites, A, B and C – affectionately known as Alpha, Bravo and Charlie.
What happened?
- A small piece of human-made rubbish circling our planet – known as space debris – was detected hurtling towards Alpha at 16:00 CEST, on 30 June. A potential collision was predicted just eight hours later, shortly after midnight. The risk of impact was high enough that Alpha needed to get out of the way – fast.

There’s rubbish in space?
- A lot of it. Old satellites, rocket parts and small pieces of debris left over from previous collisions and messy breakups. Each little piece can cause serious damage to a satellite, larger ones can destroy a satellite and create large amount of new debris.
Was this the first time this has happened?
- That day? Maybe. Ever? No way. Each one of our satellites has to perform on average two evasive manoeuvres every year – and that’s not including all the alerts we get that don’t end up needing evasive action.
Then what’s the big deal?
- Carrying out evasive action – known as a ‘collision avoidance manoeuvre’ – requires a lot of planning. You have to check that you’re not moving the satellite into a new orbit that puts it at risk of other collisions and you have to calculate how to get back to your original orbit using as little fuel and losing as little science data as possible.
- ESA’s Space Debris Office analyses data from the US Space Surveillance Network and raises the warning of a potential collision to ESA’s Flight Control and Flight Dynamics teams, usually more than 24 hours before the piece of debris comes closest to the satellite.
- In this case, we only got eight hours’ notice.
- And worse, the alert meant that the Swarm team was now suddenly racing against two clocks. Another manoeuvre was planned for just a few hours after the potential collision and had to be cancelled to give Alpha enough time to duck out of the way of the debris. That manoeuvre was also very time sensitive and had to be entirely replanned, recalculated and carried out within a day.
What was the other manoeuvre?
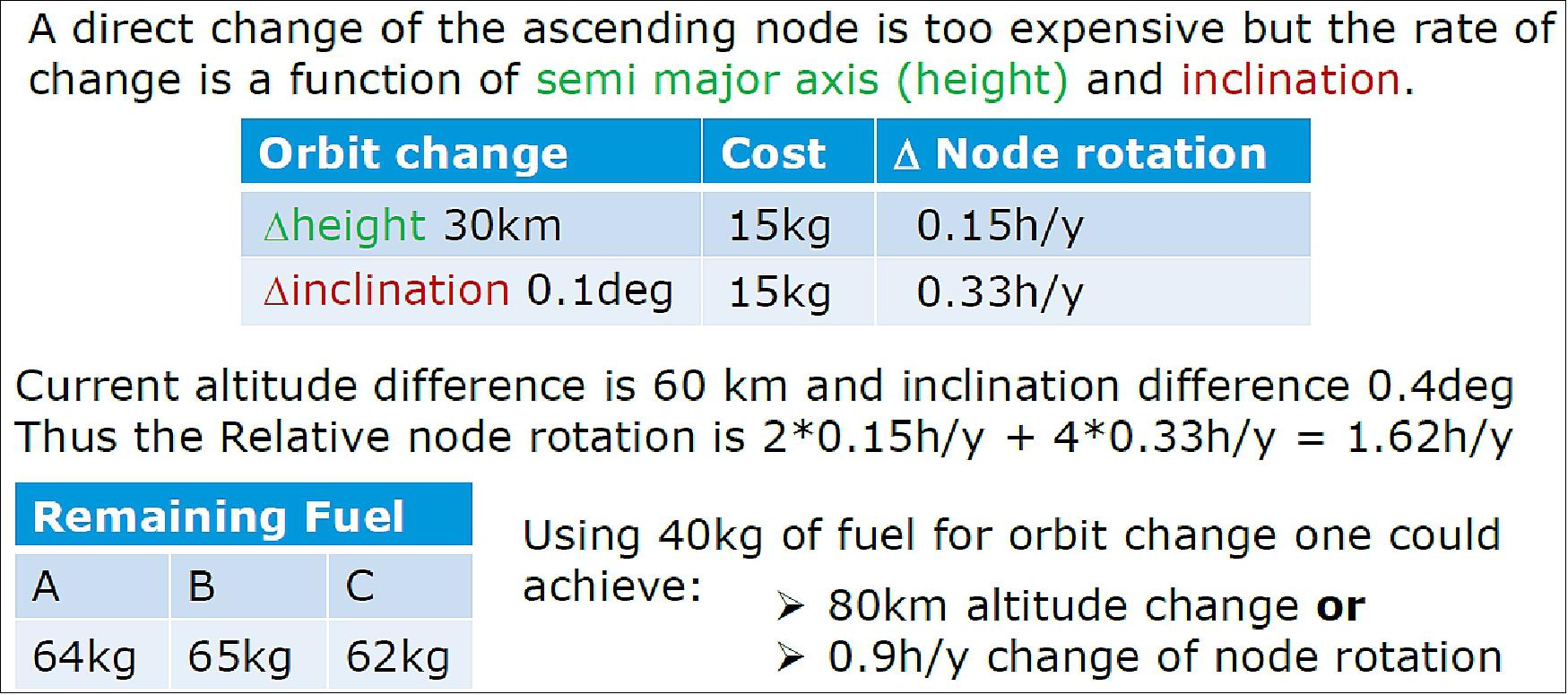
- Alpha and Charlie were climbing to escape the wrath of the Sun. Both satellites needed to carry out 25 manoeuvres over a period of 10 weeks to reach their new higher orbits. One of Alpha’s manoeuvres was planned for just a few hours after the possible collision.
Wait, the Sun is killing satellites?
- Our Sun is entering a very active part of its ‘solar cycle’ right now. This activity is increasing the density of Earth’s upper atmosphere. Satellites are running through ‘thicker’ air, slowing them down and requiring them to use up more limited onboard fuel to stay in orbit. Alpha and Charlie were moving up into a less dense part of the atmosphere where they can stay in orbit and collect science data hopefully for many more years and mission extensions!
What would have happened without this manoeuvre?
- Alpha would have drifted towards Charlie and the orbits of the two satellites would have soon crossed. This would have left the overall Swarm mission ‘cross-eyed’, limiting its ability to do science until another set of manoeuvres realigned Alpha and Charlie.
Is Swarm OK now?
- The Swarm team got to work with a reaction time to rival an Olympic sprinter. Working together with the Flight Dynamics team at ESA’s mission control, they planned and carried out the evasive action in just four hours, and then replanned and carried out the other manoeuvre within 24 hours.
- Alpha is now safe from a collision with that piece of debris and has completed its climb to safer skies alongside Charlie. But there is lots of debris out there, and this shows with how little warning it can threaten a satellite.
How are your teams keeping up with all these collision alerts?
- With new tech and more sustainable behaviour. We’re building new technology to track more debris, developing new computational tools that will help us plan and carry out the rapidly increasing number of evasive manoeuvres, and working on guidelines that limit the amount of new rubbish we and other satellite operators add to the problem. We’re even working on ways to grab larger pieces of debris and remove them from orbit using a ‘space claw’.

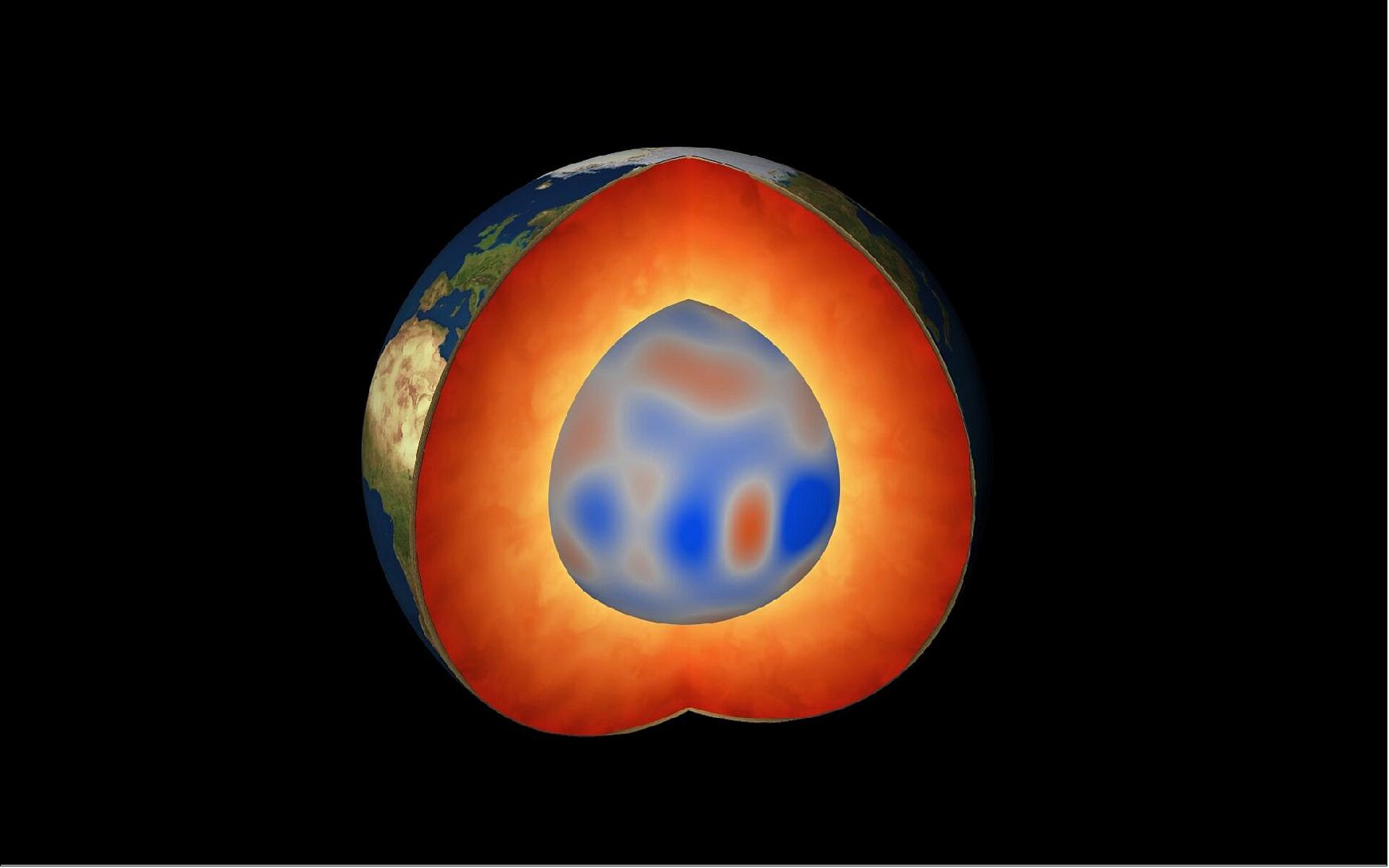
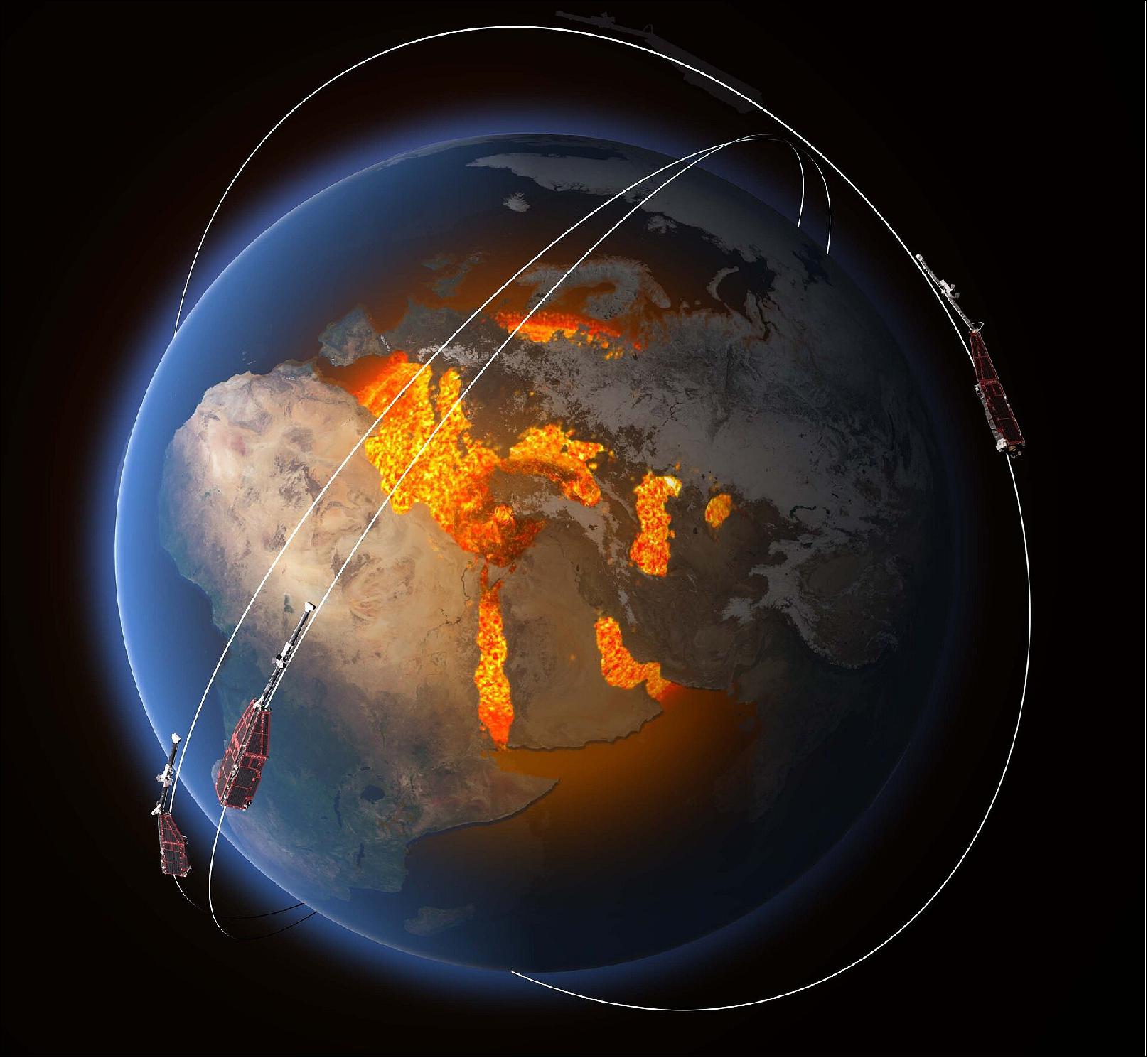
• May 23, 2022: While volcanic eruptions and earthquakes serve as immediate reminders that Earth’s insides are anything but tranquil, there are also other, more elusive, dynamic processes happening deep down below our feet. Using information from ESA’s Swarm satellite mission, scientists have discovered a completely new type of magnetic wave that sweeps across the outermost part of Earth’s outer core every seven years. This fascinating finding, presented today at ESA’s Living Planet Symposium, opens a new window into a world we can never see. 58)
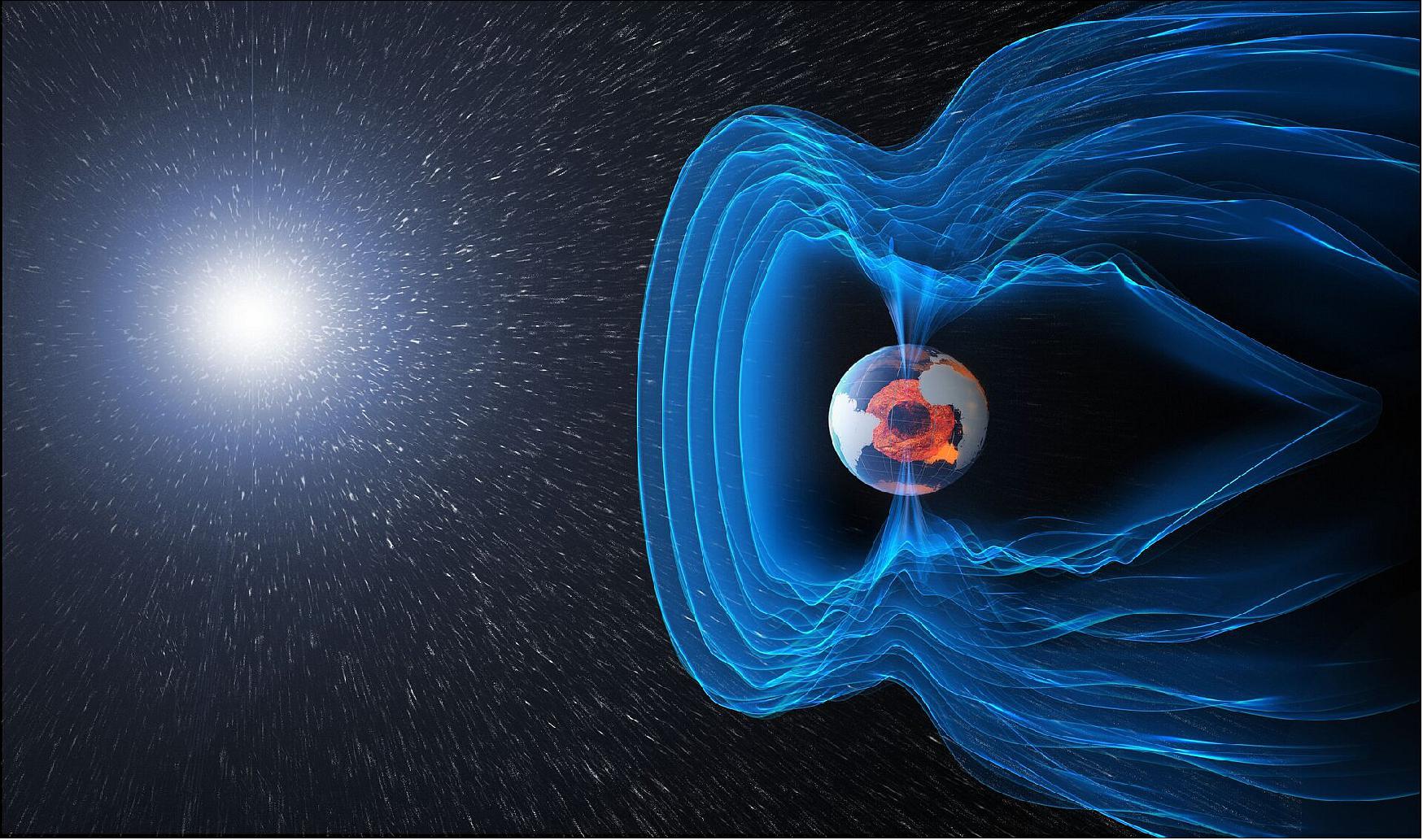
- Earth’s magnetic field is like a huge bubble protecting us from the onslaught of cosmic radiation and charged particles carried by powerful winds that escape the Sun’s gravitational pull and stream across the Solar System. Without our magnetic field, life as we know it would not exist.
- Understanding exactly how and where our magnetic field is generated, why it fluctuates constantly, how it interacts with solar wind and, indeed, why it is currently weakening, is not only of academic interest but also of benefit to society. For example, solar storms can damage communication networks and navigation systems and satellites, so while we can’t do anything about changes in the magnetic field, understanding this invisible force helps to be prepared.
- Most of the field is generated by an ocean of superheated, swirling liquid iron that makes up Earth’s outer core 3000 km under our feet. Acting like the spinning conductor in a bicycle dynamo, it generates electrical currents and the continuously changing electromagnetic field.
- ESA’s Swarm mission, which comprises three identical satellites, measures these magnetic signals that stem from Earth’s core, as well as other signals that come from the crust, oceans, ionosphere and magnetosphere.
- Since the trio of Swarm satellites were launched in 2013, scientists have been analysing their data to gain new insight into many of Earth’s natural processes, from space weather to the physics and dynamics of Earth’s stormy heart.
- Measuring our magnetic field from space is the only real way of probing deep down to Earth’s core. Seismology and mineral physics provide information about the material properties of the core, but they do not shed any light on the dynamo-generating motion of the liquid outer core.
- But now, using data from the Swarm mission, scientists have unearthed a hidden secret.
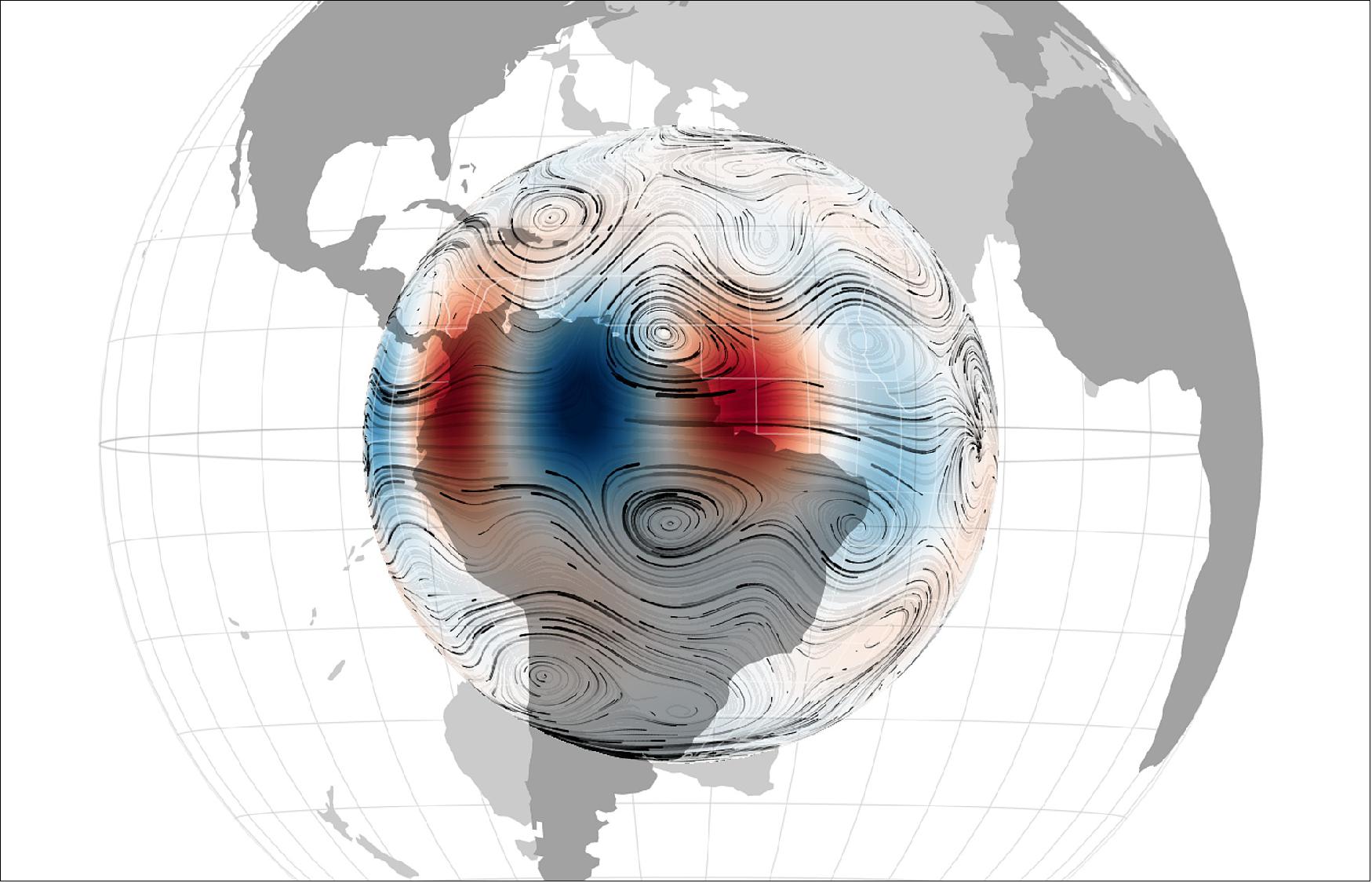
- A paper, published in the journal Proceedings of the National Academy of Sciences, describes how a team of scientists detected a new type of magnetic wave that sweeps across the ‘surface’ of Earth’s outer core – so where the core meets the mantle. This mysterious wave oscillates every seven years and propagates westward at up to 1500 km a year. 59)
- Nicolas Gillet, from the University Université Grenoble Alpes and lead author of the paper, said, “Geophysicists have long theorised over the existence of such waves, but they were thought to take place over much longer time scales than our research has shown.
- “We combined satellite measurements from Swarm, and also from the earlier German Champ mission and Danish Ørsted mission, with a computer model of the geodynamo to explain what the ground-based data had thrown up – and this led to our discovery.”
- Owing to Earth’s rotation, these waves align in columns along the axis of rotation. The motion and magnetic field changes associated with these waves are strongest near the equatorial region of the core.
- While the research exhibits magneto-Coriolis waves near seven-year period, the question of the existence of such waves that would oscillate at different periods, however, remains.
- Dr Gillet added, “Magnetic waves are likely to be triggered by disturbances deep within the Earth's fluid core, possibly related to buoyancy plumes. Each wave is specified by its period and typical length-scale, and the period depends on characteristics of the forces at play. For magneto-Coriolis waves, the period is indicative of the intensity of the magnetic field within the core.
- “Our research suggests that other such waves are likely to exist, probably with longer periods – but their discovery relies on more research.”
- ESA’s Swarm mission scientist, Ilias Daras, noted, “This current research is certainly going to improve the scientific model of the magnetic field within Earth’s outer core. It may also give us new insight into the electrical conductivity of the lowermost part of the mantle and also of Earth’s thermal history.”
• December 15, 2021: The notion of living in a bubble is usually associated with negative connotations, but all life on Earth is dependent on the safe bubble created by our magnetic field. Understanding how the field is generated, how it protects us and how it sometimes gives way to charged particles from the solar wind is not just a matter of scientific interest, but also a matter of safety. Using information from ESA’s Cluster and Swarm missions along with measurements from the ground, scientists have, for the first time, been able to confirm that curiously named bursty bulk flows are directly connected to abrupt changes in the magnetic field near Earth’s surface, which can cause damage to pipelines and electrical power lines. 60)
- The magnetosphere is a teardrop-shaped region in space that begins some 65,000 km from Earth on the day side and extends to over 6,000,000 km on the night side. It is formed through interactions between Earth’s magnetic field and supersonic wind flowing from the Sun.
- These interactions are extremely dynamic and comprise complicated magnetic field configurations and electric current systems. Certain solar conditions, known as space weather, can play havoc with the magnetosphere by driving highly energetic particles and currents around the system, sometimes disrupting space-based hardware, ground-based communication networks and power systems.
- In an elliptical orbit around Earth, up to 100,000 km away, ESA’s unique four-spacecraft Cluster mission has been revealing the secrets of our magnetic environment since 2000. Remarkably, the mission is still in excellent health and is still enabling new discoveries in the field of heliophysics – the science examining the relationship between the Sun and bodies in the Solar System, in this case, Earth.
- Launched in 2013, ESA’s trio of Swarm satellites orbit much closer to Earth and are used largely to understand how our magnetic field is generated by measuring precisely the magnetic signals that stem from Earth’s core, mantle, crust and oceans, as well as from the ionosphere and magnetosphere. However, Swarm is also leading to new insights into weather in space.
- The complementarity of these two missions, forming part of the ESA Heliophysics Observatory, gives scientists a unique opportunity to dig deep into Earth’s magnetosphere and further understand the risks of space weather.
- In a paper published in Geophysical Research Letters, scientists describe how they used data from both Cluster and Swarm along with measurements from ground-based instruments to examine the connection between solar storms, bursty bulk flows in the inner magnetosphere and perturbations in the ground level magnetic field which drive ‘geomagnetically induced currents’ on and below Earth’s surface. 61)
- The theory was that intense changes in the geomagnetic field driving geomagnetically induced currents are associated with currents flowing along the magnetic field direction, driven by bursty bulk flows, which are fast bursts of ions typically travelling at more than 150 km per second. These field-aligned currents link the ionosphere and magnetosphere and pass through the locations of both the Cluster and Swarm. Until now this theory had not been confirmed.
- Malcolm Dunlop, from the Rutherford Appleton Laboratory in the UK, explained, “We used the example of a solar storm in 2015 for our research. Data from Cluster allowed us to examine bursty bulk flows – bursts of particles in the magnetotail – which contribute to large-scale convection of material towards Earth during geomagnetically active times, and which are associated with features in the northern lights known as auroral streamers. Data from Swarm showed corresponding large perturbations closer to Earth associated with connecting field-aligned currents from the outer regions containing the flows.
- “Together with other measurements taken from Earth’s surface, we were able to confirm that intense magnetic field perturbations near Earth are connected to the arrival of bursty bulk flows further out in space.”
- ESA’s Swarm mission manager, Anja Strømme, added, “It’s thanks to having both missions extended well beyond their planned lives, and hence are having both missions in orbit simultaneously, that allowed us to realise these findings.”
- While this scientific discovery might appear somewhat academic, there are real benefits for society.
- The Sun bathes our planet with the light and heat to sustain life, but it also bombards us with dangerous charged particles in the solar wind. These charged particles can damage communication networks and navigation systems such as GPS, and satellites – all of which we rely on for services and information in our daily lives.
- As the paper discusses, these storms can affect Earth’s surface and subsurface, leading to power outages, such as the major blackout that Quebec in Canada suffered in 1989.
- With a rapidly growing infrastructure, both on the ground and in space, that supports modern life, there is an increasing need to understand and monitor weather in space to adopt appropriate mitigation strategies.
- Alexi Glover, from ESA’s Space Weather Office, said, “These new results help further our understanding of processes within the magnetosphere which may lead to potentially hazardous space weather conditions. Understanding these phenomena and their potential effects is essential to develop reliable services for end users operating potentially sensitive infrastructure.”
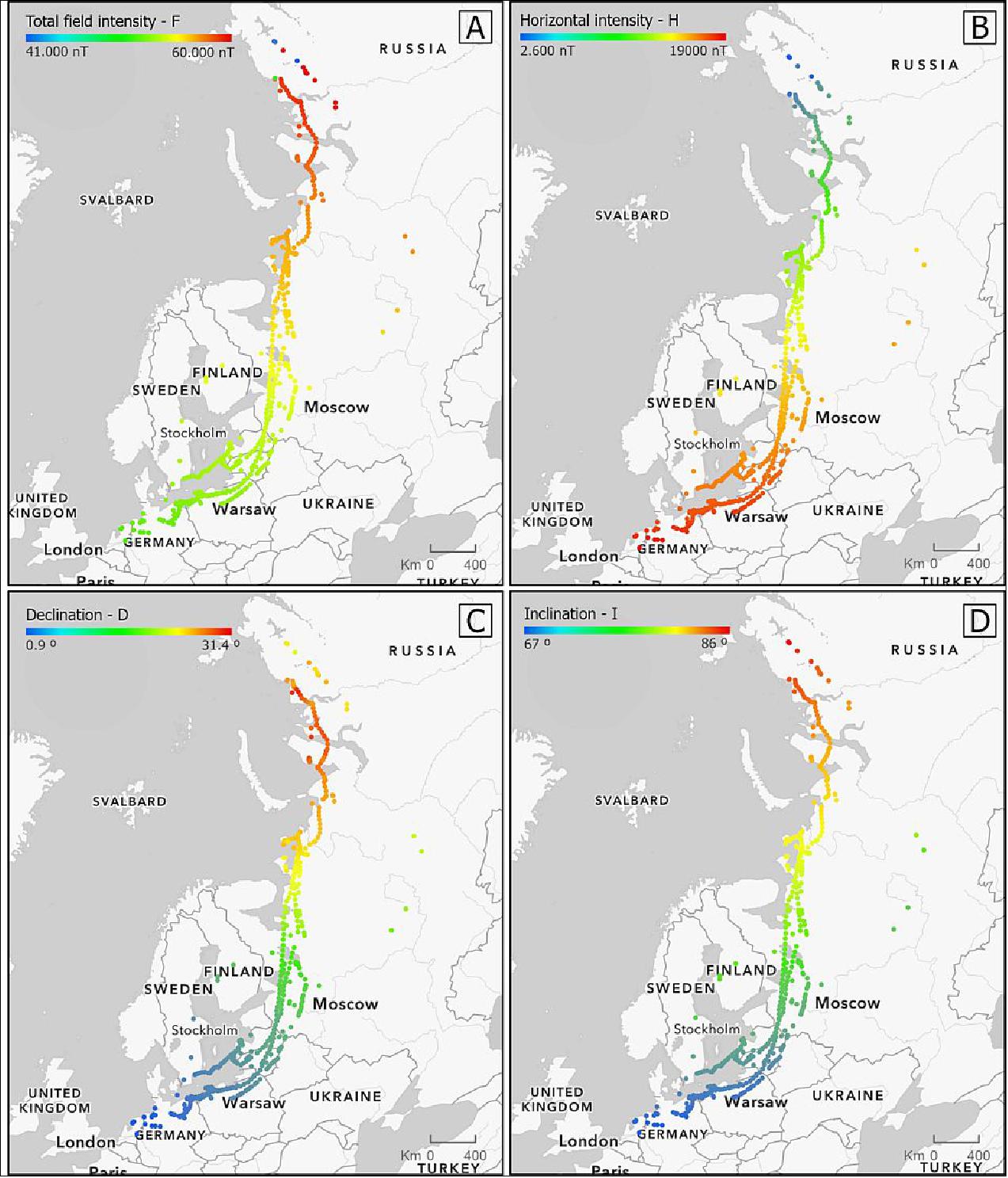
• July 9, 2021: Using measurements from ESA’s Earth Explorer Swarm mission, scientists have developed a new tool that links the strength and direction of the magnetic field to the flight paths of migrating birds. This is a huge step forward to understanding how animals use Earth’s magnetic field to navigate vast distances. 62)
- These days, it is almost unimaginable for us to set off on a long journey without being equipped with some form of satellite navigation, or at least a map. Migratory animals, however, manage to cross entire oceans and continents, navigating with exceptional skills of their own. In spite of decades of research, we still do not understand fully how these remarkable animals are able to find their way – although it has been suspected that Earth’s magnetic field lines are among the cues that guide them.
- Recent advances in GPS and the miniaturization of tracking devices have allowed ecologists to tag migratory animals, from birds to whales, to understand how they travel from A to B. However, while animal tracking data are now common, little investigation has been made into how animals respond to real geomagnetic conditions, since the magnetic field changes continuously across the globe, particularly during geomagnetic storms.
- Until recently, there was no way to assess accurately the strength of the magnetic field at the time and location that animals pass by, which would allow ecologists to study how they use this natural force for navigation.

- However, a new tool allows ecologists, for the first time, to compute the strength and direction of the magnetic field along animal migratory paths.
- Developed by spatial data scientists from the University of St Andrews in Scotland in collaboration with researchers from the British Geological Survey and Canada’s University of Western Ontario, the new tool combines data from ESA’s Swarm magnetic field mission with data stored in Movebank. Movebank is a free database of millions of locations and times of birds and mammals, such as bats and whales, on the move.
- The research, which has been published recently in Movement Ecology, explains how the values were computed and gives examples applied to greater white-fronted geese, which fly from Siberia to Germany on their autumn migration. 63)
- Developed by spatial data scientists from the University of St Andrews in Scotland in collaboration with researchers from the British Geological Survey and Canada’s University of Western Ontario, the new tool combines data from ESA’s Swarm magnetic field mission with data stored in Movebank. Movebank is a free database of millions of locations and times of birds and mammals, such as bats and whales, on the move.
- Urška Demšar, from the University of St Andrews, explains, “We used the time and GPS locations of the animal to find the nearest Swarm data. This then let us compute the expected magnetic field at the animal’s location due to the magnetic field generated by Earth’s core, and accounted for local influence from the geology and the instantaneous effect of the ionosphere and magnetosphere.
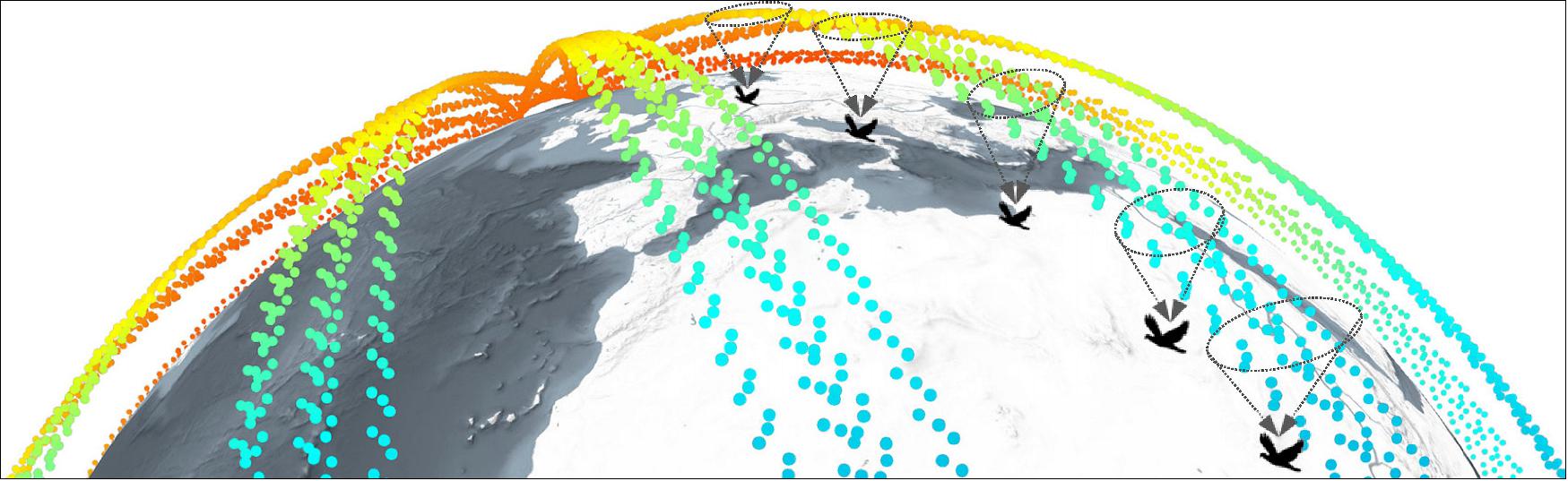
- “These contributions were summed and appended to the GPS data, including Swarm measurements from the nearest satellite flyovers for each GPS location. This gives us the best possible estimate of the magnetic field at the animal’s location.”
- This new research means that the study of animal movement can now combine tracking data with geophysical information and lead to new insights on migration behavior.
- This is demonstrated in the Movement Ecology paper by a small biological example, which shows that during geomagnetic storms, the geese were affected and generally veered away from the straight migratory direction towards the North. This is just a small example that cannot yet be generalized, but it shows the possibilities that are now open for study of animal migration with contemporaneous real magnetic data.
- Without the availability of Swarm data, models and the supporting software (viresclient), it would not have been possible to create such an easy-to-use tool for analysis.
- “This is the first direct use of Swarm data in ecology and so represents an exciting new avenue of research between geophysicists, spatial data scientists and ecologists,” notes Ciarán Beggan from the British Geological Survey.
- Dr Demšar emphasizes that, “Adding in a new set of magnetic data will allow us to explore how animals migrate using a whole new set of environmental parameters that was unavailable before Swarm.”
• May 18, 2021: We are all familiar with the bolts of lightning that accompany heavy storms. While these flashes originate in storm clouds and strike downwards, a much more elusive type forms higher up in the atmosphere and shoots up towards space. So, what are the chances of somebody taking photographs of these rarely seen, brief ‘transient luminous events’ at the exact same time as a satellite orbits directly above with the event leaving its signature in the satellite’s data? 64)
- The likelihood of this happening might seem pretty remote, but, remarkably, an observer for the Czech Institute of Atmospheric Physics who is also an avid ‘lightning hunter’ has taken photographs of these transient luminous events that not only coincide with measurements taken by ESA’s Swarm satellite mission, but also with recordings taken from the ground.
- This extraordinary three-way coincidence is leading to better insight into how this type of lightning propagates into space. In addition, these new findings could potentially improve scientific models of the ionized part of Earth’s upper atmosphere – the ionosphere.
- Transient luminous events are optical phenomena that occur high up in the atmosphere and they are linked to electrical activity in underlying thunderstorms. They are very brief, lasting from less than a millisecond to two seconds, and rarely seen from the ground. They are usually only captured by sensitive photographic equipment and, because they emit weak light, photographs can only be taken at night.

- There are several different types of transient luminous events such as sprites, jets and elves, each with their own characteristics.
- Sprites, for example are large electrical discharges that occur at an altitude of around 50–90 km, above large thunderstorm systems. They appear as large, but weak flashes of red and usually happen at the same time as the cloud-to-ground lightning we all know.
- Scientists have long been interested in understanding if lightning propagating to higher in the ionosphere can cause fluctuations in Earth’s magnetic field. The ionosphere is very active part of the atmosphere, responding to the energy it absorbs from the Sun. Gases in the ionosphere are excited by solar radiation to form ions, which have an electrical charge.
- Ewa Slominska, from a small company cooperating with Poland’s Space Research Centre, explained, “Lightning can generate ultralow frequency fluctuations that leak into the upper ionosphere. This means that some lightning bolts are so powerful that they trigger disturbances in Earth's magnetic field and propagate hundreds of kilometers upwards from the thunderstorm, reaching the altitude of Swarm’s orbit.
- “Although Swarm’s main goal is to measure slow changes in the magnetic field, it is apparent that the mission can also detect fast fluctuations in the field. However, Swarm can only do this if one of the satellites is in close proximity to the active thunderstorm and if the lightning is strong enough.”
- Janusz Mlynarczyk, from AGH University of Science and Technology in Krakow, added, “Using the three stations of the WERA system, we are able to locate powerful atmospheric discharges that occur anywhere on Earth and reconstruct their most important physical parameters. This is possible because of a very low attenuation of Extremely Low Frequency (ELF) electromagnetic waves that these discharges generate.
- “Powerful ELF waves can even propagate around the world a few times and still be visible in our recordings. Such powerful sources include sprite-associated discharges. The accumulated electrostatic energy released and observed by Swarm was close to 120 GJ, which is equivalent to the energy released in the detonation of 29 tons of TNT.
- “Although we know that every lightning strike carries a lot of energy, it is clear that this class of lightning is much more powerful. A single bolt of ordinary lightning, which is invisible to Swarm’s instruments, carries enough energy to charge 20 electric cars, but the energy produced by a transient luminous event would be enough to charge more than 800 vehicles.”
- A remarkable aspect to all of this is that one of the scientific team members, Martin Popek, is passionate about capturing sprites, jets and elves on camera. His photographs are proving a very valuable to the team’s research as they have coincided with measurements taken by Swarm and by the ground array.
- ESA’s Swarm mission scientist, Roger Haagmans, commented, “It’s astonishing that Martin manages to capture such fleeting events on camera, but what’s really remarkable is that his dedication to this kind of photography has coincided with measurements from our Swarm mission. His photos add another dimension to the research and we are certainly reaping the benefits of his commitment to hanging outside in the cold and dark!”

• March 9, 2021: For the first time, an international team of scientists has used magnetic data from ESA’s Swarm satellite mission together with aeromagnetic data to help reveal the mysteries of the geology hidden beneath Antarctica’s kilometers-thick ice sheets, and link Antarctica better to its former neighbors. 66)
- Not only is Antarctic sub-ice geology important to understand global supercontinent cycles over billions of years that have shaped Earth’s evolution, it is also pivotal to comprehend how the solid Earth itself influences the Antarctic ice sheet above it.
- The research team from Germany’s Kiel University, the British Antarctic Survey (BAS) and National Institute of Oceanography and Applied Geophysics, and Witwatersrand University in South Africa has today published their findings in the Nature journal Scientific Reports. 67)
- Their new study shows that combining satellite and aeromagnetic data provides a key missing link to connect Antarctica’s hidden geology with formerly adjacent continents, namely Australia, India and South Africa – keystones of Gondwana.
- The fact that Antarctica is about as remote as you can get and the land below is covered by a massive ice sheet, makes collecting geophysical information both challenging and expensive. Fortunately, satellites orbiting above can see where humans cannot.
- Thanks to magnetic data from the Swarm mission along with airborne measurements, scientists are paving the way towards understanding Earth’s least accessible continent. This new research links Antarctica to its ancient neighbors with which it has shared a long tectonic history – and that needs piecing together like a jigsaw puzzle.
- The team processed aeromagnetic data from aircraft from over southern Africa, Australia and Antarctica in a consistent manner with the help of Swarm satellite magnetic data.
- Aeromagnetic data do not cover everywhere on Earth, so magnetic models complied from Swarm data help to fill the blanks, especially over India were aeromagnetic data are still not widely available. Furthermore, satellite data help to homogenize the airborne data, which were acquired over a period of more than 60 years with varying accuracy and resolution.
- Jörg Ebbing, from Kiel University, explains, “With the available data, we only had pieces of the puzzle. Only when we put them together with satellite magnetic data, can we see the full picture.”
- The resulting combined datasets provide a new tool for the international scientific community to study the cryptic sub-ice geology of Antarctica, including its influence on the overlying ice sheets.
- Gondwana was an amalgam of continents that incorporated South America, Africa, Arabia, Madagascar, India, Australia, New Zealand and Antarctica. As the tectonic plates collided in the Precambrian and early Cambrian times some 600–500 million years ago, they built huge mountain ranges comparable to the modern Himalayas and Alps. This supercontinent started to breakup in the early Jurassic, about 180 million years ago, ultimately leaving Antarctica stranded and isolated at the South Pole, and covered in ice for around 34 million years.
- “Using the new magnetic data, our animation illustrates how the tectonic plates have moved over millions of years after the breakup of Gondwana,” explains Peter Haas, PhD student at Kiel University.
- Fausto Ferraccioli, Director of Geophysics at the National Institute of Oceanography and Applied Geophysics in Italy, and also affiliated with the British Antarctic Survey, said, “We have been trying to piece together the connections between Antarctica and other continents for decades. We knew that magnetic data play a pivotal role because one can peer beneath the thick Antarctic ice sheet to help extrapolate the geology exposed along the coast into the continent interior.
- “But now we can do much better. With the satellite and aeromagnetic data combined, we can look down deeper into the crust. Together with tectonic plate reconstructions, we can start building tantalizing new magnetic views of the crust to help connect geological and geophysical studies in widely separated continents. Ancient cratons and orogens in Africa, India, Australia and East Antarctica are now better connected magnetically than ever before.”
- ESA’s Roger Haagmans, said, “This research has been carried out within ESA’s Science for Society 3D Earth study where we are using gravity data from the GOCE mission and magnetic data from the Swam mission to understand the structure and dynamic processes deep within Earth. In this instance, Swarm’s magnetic data have played a starring role.”

• January 12, 2021: Using information from ESA’s Swarm satellite constellation, scientists have made a discovery about how energy generated by electrically-charged particles in the solar wind flows into Earth’s atmosphere – surprisingly, more of it heads towards the magnetic north pole than towards the magnetic south pole. 68)
- The Sun bathes our planet with the light and heat to sustain life, but it also bombards us with dangerous charged particles in the solar wind. These charged particles have the potential to damage communication networks, navigation systems such as GPS and satellites. Severe solar storms can even cause power outages, such as the major blackout that Quebec in Canada suffered in 1989.
- Our magnetic field largely shields us from this onslaught.
- Generated mainly by an ocean of superheated, swirling liquid iron that makes up the outer core around 3000 km beneath our feet, Earth’s magnetic field is like a huge bubble protecting us from cosmic radiation and the charged particles carried by powerful winds that escape the Sun’s gravitational pull and sweep across the Solar System.
- Like a bar magnet, Earth’s magnetic field at the surface is defined by the north and south poles that align loosely with the axis of rotation.
- The aurorae offer visual displays of the consequences of charged particles from the Sun interacting with Earth’s magnetic field.
- Until now, it was assumed the same amount of electromagnetic energy would reach both hemispheres. However, a paper, published in Nature Communications, describes how research led by scientists from the University of Alberta in Canada used data from ESA’s Swarm mission to discover, unexpectedly, that the electromagnetic energy transported by space weather clearly prefers the north. 69)
- These new findings suggest that in addition to shielding Earth from incoming solar radiation, the magnetic field also actively controls how the energy is distributed and channelled into the upper atmosphere.
- The paper’s lead author, Ivan Pakhotin who is carrying out this research as part of ESA’s Living Planet Fellowship, explains, “Because the south magnetic pole is further away from Earth’s spin axis than the north magnetic pole, an asymmetry is imposed on how much energy makes its way down towards Earth in the north and south. There seems to be a differential reflection of electromagnetic plasma waves, known as Alfven waves.
- “We are not yet sure what the effects of this asymmetry might be, but it could also indicate a possible asymmetry in space weather and perhaps also between the Aurora Australis in the south and the Aurora Borealis in the north. Our findings also suggest that the dynamics of upper-atmospheric chemistry may vary between the hemispheres, especially during times of strong geomagnetic activity.”
- Ian Mann from the University of Alberta said, “The Sun’s activity, such as mass coronal ejections, can have potentially serious consequences for our modern way of living. Therefore, studying the underlying physics of space weather and the complexities of our magnetic field is very important to building up early warning systems and designing electrical grids better able to withstand the disturbances the Sun throws at us.
- “We are fortunate that we have ESA’s three Swarm satellites in orbit, delivering key information that is not only vital for our scientific research, but can also lead to some very practical solutions for our daily lives.”
- In orbit since 2013, the three identical Swarm satellites have not only returned information about how our magnetic field protects us from the dangerous particles in solar wind, but about how the field is generated, how it varies and how the position of magnetic north is changing.
• August 17, 2020: A small but evolving dent in Earth’s magnetic field can cause big headaches for satellites. -Earth’s magnetic field acts like a protective shield around the planet, repelling and trapping charged particles from the Sun. But over South America and the southern Atlantic Ocean, an unusually weak spot in the field – called the South Atlantic Anomaly (SAA) – allows these particles to dip closer to the surface than normal. Particle radiation in this region can knock out onboard computers and interfere with the data collection of satellites that pass through it – a key reason why NASA scientists want to track and study the anomaly. 70)
- The South Atlantic Anomaly is also of interest to NASA’s Earth scientists who monitor the changes in magnetic field strength there, both for how such changes affect Earth's atmosphere and as an indicator of what's happening to Earth's magnetic fields, deep inside the globe.
- Currently, the SAA creates no visible impacts on daily life on the surface. However, recent observations and forecasts show that the region is expanding westward and continuing to weaken in intensity. It is also splitting – recent data shows the anomaly’s valley, or region of minimum field strength, has split into two lobes, creating additional challenges for satellite missions.
- A host of NASA scientists in geomagnetic, geophysics, and heliophysics research groups observe and model the SAA, to monitor and predict future changes – and help prepare for future challenges to satellites and humans in space.
It’s what’s inside that counts
- The South Atlantic Anomaly arises from two features of Earth’s core: The tilt of its magnetic axis, and the flow of molten metals within its outer core.
- Earth is a bit like a bar magnet, with north and south poles that represent opposing magnetic polarities and invisible magnetic field lines encircling the planet between them. But unlike a bar magnet, the core magnetic field is not perfectly aligned through the globe, nor is it perfectly stable. That’s because the field originates from Earth’s outer core: molten, iron-rich and in vigorous motion 1800 miles below the surface. These churning metals act like a massive generator, called the geodynamo, creating electric currents that produce the magnetic field.
- As the core motion changes over time, due to complex geodynamic conditions within the core and at the boundary with the solid mantle up above, the magnetic field fluctuates in space and time too. These dynamical processes in the core ripple outward to the magnetic field surrounding the planet, generating the SAA and other features in the near-Earth environment – including the tilt and drift of the magnetic poles, which are moving over time. These evolutions in the field, which happen on a similar time scale to the convection of metals in the outer core, provide scientists with new clues to help them unravel the core dynamics that drive the geodynamo.
- “The magnetic field is actually a superposition of fields from many current sources,” said Terry Sabaka, a geophysicist at NASA’s Goddard Space Flight Center in Greenbelt, Maryland. Regions outside of the solid Earth also contribute to the observed magnetic field. However, he said, the bulk of the field comes from the core.
- The forces in the core and the tilt of the magnetic axis together produce the anomaly, the area of weaker magnetism – allowing charged particles trapped in Earth’s magnetic field to dip closer to the surface.
- The Sun expels a constant outflow of particles and magnetic fields known as the solar wind and vast clouds of hot plasma and radiation called coronal mass ejections. When this solar material streams across space and strikes Earth’s magnetosphere, the space occupied by Earth’s magnetic field, it can become trapped and held in two donut-shaped belts around the planet called the Van Allen Belts. The belts restrain the particles to travel along Earth’s magnetic field lines, continually bouncing back and forth from pole to pole. The innermost belt begins about 400 miles from the surface of Earth, which keeps its particle radiation a healthy distance from Earth and its orbiting satellites.
- However, when a particularly strong storm of particles from the Sun reaches Earth, the Van Allen belts can become highly energized and the magnetic field can be deformed, allowing the charged particles to penetrate the atmosphere.
- “The observed SAA can be also interpreted as a consequence of weakening dominance of the dipole field in the region,” said Weijia Kuang, a geophysicist and mathematician in Goddard’s Geodesy and Geophysics Laboratory. “More specifically, a localized field with reversed polarity grows strongly in the SAA region, thus making the field intensity very weak, weaker than that of the surrounding regions.”
A pothole in space
- Although the South Atlantic Anomaly arises from processes inside Earth, it has effects that reach far beyond Earth’s surface. The region can be hazardous for low-Earth orbit satellites that travel through it. If a satellite is hit by a high-energy proton, it can short-circuit and cause an event called SEU (Single Event Upset). This can cause the satellite’s function to glitch temporarily or can cause permanent damage if a key component is hit. In order to avoid losing instruments or an entire satellite, operators commonly shut down non-essential components as they pass through the SAA. Indeed, NASA's ICON (Ionospheric Connection Explorer) regularly travels through the region and so the mission keeps constant tabs on the SAA's position.
- The International Space Station, which is in low-Earth orbit, also passes through the SAA. It is well protected, and astronauts are safe from harm while inside. However, the ISS has other passengers affected by the higher radiation levels: Instruments like the GEDI (Global Ecosystem Dynamics Investigation) mission, collect data from various positions on the outside of the ISS. The SAA causes “blips” on GEDI’s detectors and resets the instrument’s power boards about once a month, said Bryan Blair, the mission’s deputy principal investigator and instrument scientist, and a lidar instrument scientist at Goddard.
- “These events cause no harm to GEDI,” Blair said. “The detector blips are rare compared to the number of laser shots – about one blip in a million shots – and the reset line event causes a couple of hours of lost data, but it only happens every month or so.”
- In addition to measuring the SAA’s magnetic field strength, NASA scientists have also studied the particle radiation in the region with the SAMPEX (Solar, Anomalous, and Magnetospheric Particle Explorer) – the first of NASA’s Small Explorer missions, launched in 1992 and providing observations until 2012. One study, led by NASA heliophysicist Ashley Greeley as part of her doctoral thesis, used two decades of data from SAMPEX to show that the SAA is slowly but steadily drifting in a northwesterly direction. The results helped confirm models created from geomagnetic measurements and showed how the SAA’s location changes as the geomagnetic field evolves.
- “These particles are intimately associated with the magnetic field, which guides their motions,” said Shri Kanekal, a researcher in the Heliospheric Physics Laboratory at NASA Goddard. “Therefore, any knowledge of particles gives you information on the geomagnetic field as well.”
- Greeley’s results, published in the journal Space Weather, were also able to provide a clear picture of the type and amount of particle radiation satellites receive when passing through the SAA, which emphasized the need for continuing monitoring in the region.
- The information Greeley and her collaborators garnered from SAMPEX’s in-situ measurements has also been useful for satellite design. Engineers for the Low-Earth Orbit, or LEO, satellite used the results to design systems that would prevent a latch-up event from causing failure or loss of the spacecraft.
Modelling a safer future for satellites
- In order to understand how the SAA is changing and to prepare for future threats to satellites and instruments, Sabaka, Kuang and their colleagues use observations and physics to contribute to global models of Earth’s magnetic field.
- The team assesses the current state of the magnetic field using data from the European Space Agency’s Swarm constellation, previous missions from agencies around the world, and ground measurements. Sabaka’s team teases apart the observational data to separate out its source before passing it on to Kuang’s team. They combine the sorted data from Sabaka’s team with their core dynamics model to forecast geomagnetic secular variation (rapid changes in the magnetic field) into the future.
- The geodynamo models are unique in their ability to use core physics to create near-future forecasts, said Andrew Tangborn, a mathematician in Goddard’s Planetary Geodynamics Laboratory.
- “This is similar to how weather forecasts are produced, but we are working with much longer time scales,” he said. “This is the fundamental difference between what we do at Goddard and most other research groups modeling changes in Earth’s magnetic field.”
- One such application that Sabaka and Kuang have contributed to is the IGRF (International Geomagnetic Reference Field). Used for a variety of research from the core to the boundaries of the atmosphere, the IGRF is a collection of candidate models made by worldwide research teams that describe Earth’s magnetic field and track how it changes in time.
- “Even though the SAA is slow-moving, it is going through some change in morphology, so it’s also important that we keep observing it by having continued missions,” Sabaka said. “Because that’s what helps us make models and predictions.”
- The changing SAA provides researchers new opportunities to understand Earth’s core, and how its dynamics influence other aspects of the Earth system, said Kuang. By tracking this slowly evolving “dent” in the magnetic field, researchers can better understand the way our planet is changing and help prepare for a safer future for satellites.
• May 20, 2020: In an area stretching from Africa to South America, Earth’s magnetic field is gradually weakening. This strange behavior has geophysicists puzzled and is causing technical disturbances in satellites orbiting Earth. Scientists are using data from ESA’s Swarm constellation to improve our understanding of this area known as the ‘South Atlantic Anomaly.’ 71)
- Earth’s magnetic field is vital to life on our planet. It is a complex and dynamic force that protects us from cosmic radiation and charged particles from the Sun. The magnetic field is largely generated by an ocean of superheated, swirling liquid iron that makes up the outer core around 3000 km beneath our feet. Acting as a spinning conductor in a bicycle dynamo, it creates electrical currents, which in turn, generate our continuously changing electromagnetic field.
- This field is far from static and varies both in strength and direction. For example, recent studies have shown that the position of the north magnetic pole is changing rapidly.
- Over the last 200 years, the magnetic field has lost around 9% of its strength on a global average. A large region of reduced magnetic intensity has developed between Africa and South America and is known as the South Atlantic Anomaly.
- From 1970 to 2020, the minimum field strength in this area has dropped from around 24,000 nanoteslas (nT) to 22,000, while at the same time the area of the anomaly has grown and moved westward at a pace of around 20 km per year. Over the past five years, a second center of minimum intensity has emerged southwest of Africa – indicating that the South Atlantic Anomaly could split up into two separate cells.
- Earth’s magnetic field is often visualized as a powerful dipolar bar magnet at the center of the planet, tilted at around 11° to the axis of rotation. However, the growth of the South Atlantic Anomaly indicates that the processes involved in generating the field are far more complex. Simple dipolar models are unable to account for the recent development of the second minimum.
- Scientists from the Swarm Data, Innovation and Science Cluster (DISC) are using data from ESA’s Swarm satellite constellation to better understand this anomaly. Swarm satellites are designed to identify and precisely measure the different magnetic signals that make up Earth’s magnetic field.
- Jürgen Matzka, from the German Research Center for Geosciences, says, “The new, eastern minimum of the South Atlantic Anomaly has appeared over the last decade and in recent years is developing vigorously. We are very lucky to have the Swarm satellites in orbit to investigate the development of the South Atlantic Anomaly. The challenge now is to understand the processes in Earth’s core driving these changes.”
- It has been speculated whether the current weakening of the field is a sign that Earth is heading for an eminent pole reversal – in which the north and south magnetic poles switch places. Such events have occurred many times throughout the planet’s history and even though we are long overdue by the average rate at which these reversals take place (roughly every 250,000 years), the intensity dip in the South Atlantic occurring now is well within what is considered normal levels of fluctuations.
- At surface level, the South Atlantic Anomaly presents no cause for alarm. However, satellites and other spacecraft flying through the area are more likely to experience technical malfunctions as the magnetic field is weaker in this region, so charged particles can penetrate the altitudes of low-Earth orbit satellites.
- The mystery of the origin of the South Atlantic Anomaly has yet to be solved. However, one thing is certain: magnetic field observations from Swarm are providing exciting new insights into the scarcely understood processes of Earth’s interior.
• May 14, 2020: For some years now, scientists have been puzzling over why the north magnetic pole has been making a dash towards Siberia. Thanks, in part, to ESA’s Swarm satellite mission, scientists are now more confident in the theory that tussling magnetic blobs deep below Earth’s surface are at the root of this phenomenon. 72)
- Unlike our geographic north pole, which is in a fixed location, magnetic north wanders. This has been known since it was first measured in 1831, and subsequently mapped drifting slowly from the Canadian Arctic towards Siberia.
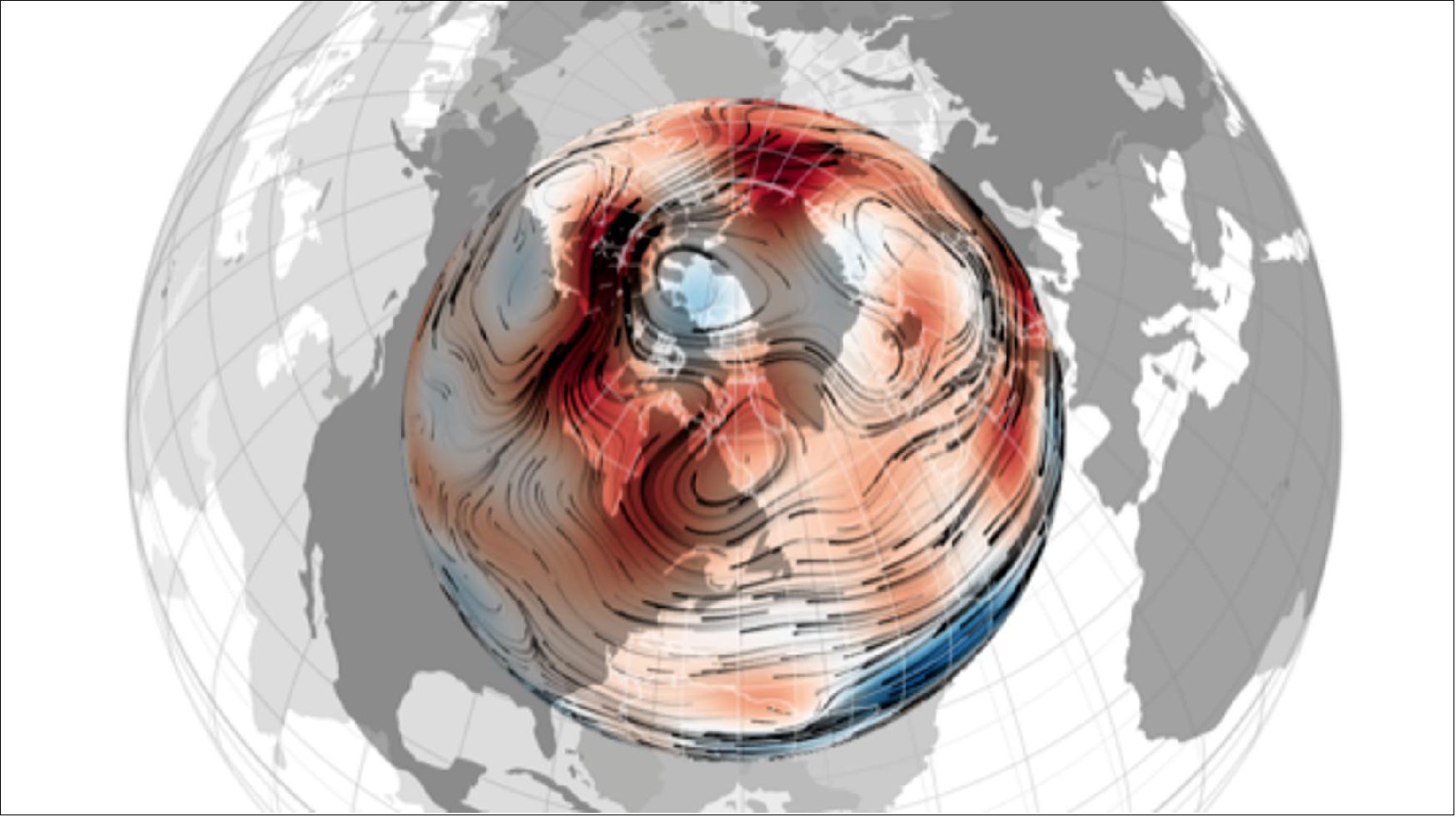
- However, since the 1990s, this drift has turned into more of a sprint – going from its historic wandering of 0–15 km a year to its present speed of 50–60 km a year. This shift in pace has meant that the World Magnetic Model has had to be updated more frequently, which is vital for navigation on smart phones, for example.
- Our magnetic field exists because of an ocean of superheated, swirling liquid iron that makes up the outer core. Like a spinning conductor in a bicycle dynamo, this moving iron creates electrical currents, which in turn generate our continuously changing magnetic field.
- Numerical models based on measurements from space, including from ESA’s Swarm mission, have allowed scientists to construct global maps of the magnetic field. Tracking changes in the magnetic field can tell researchers how the iron in the core moves.
- During ESA’s Living Planet Symposium last year, scientists from the University of Leeds in the UK reported that these satellite data showed that the position of the north magnetic pole is determined largely by a balance, or tug-of-war, between two large lobes of negative flux at the boundary between Earth’s core and mantle under Canada.
- Following on from this, the research team has recently published their latest findings in Nature Geoscience.
- Phil Livermore, from the University of Leeds, said, “By analyzing magnetic field maps and how they change over time, we can now pinpoint that a change in the circulation pattern of flow underneath Canada has caused a patch of magnetic field at the edge of the core, deep within the Earth, to be stretched out. This has weakened the Canadian patch and resulted in the pole shifting towards Siberia.”
- The big question is whether the pole will ever return to Canada or continue heading south.
- “Models of the magnetic field inside the core suggest that, at least for the next few decades, the pole will continue to drift towards Siberia,” explained Dr Livermore.
- “However, given that the pole’s position is governed by this delicate balance between the Canadian and Siberian patch, it would take only a small adjustment of the field within the core to send the pole back to Canada.”
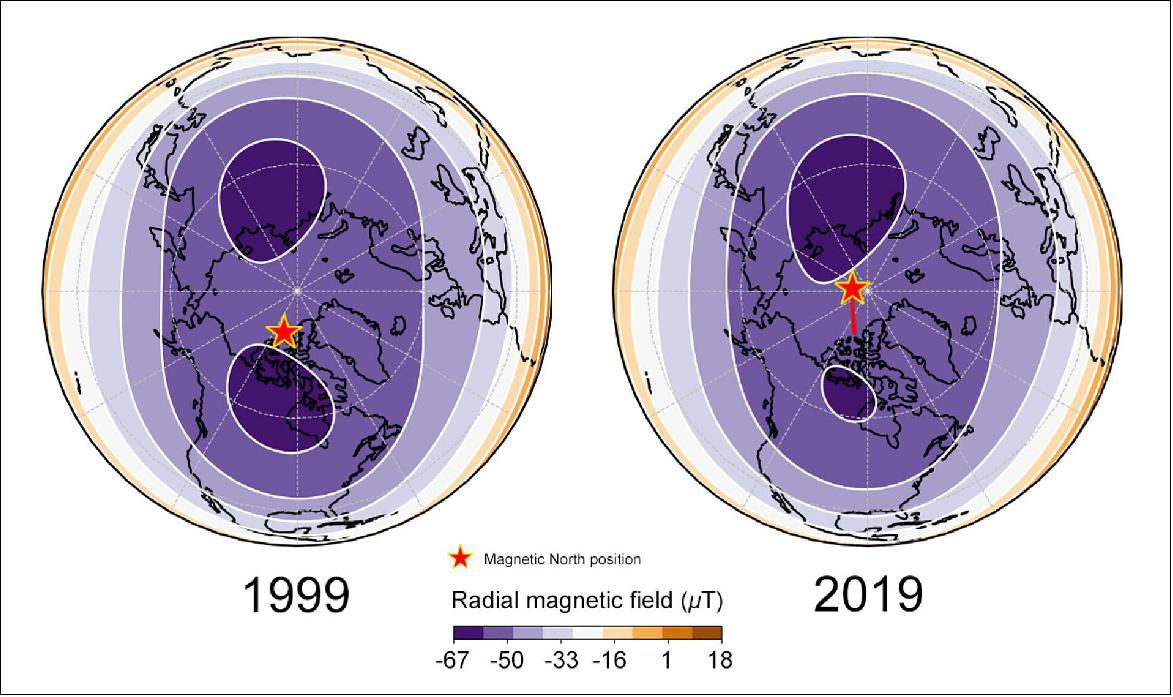
• November 27, 2019: Strange ribbons of purple light that appeared in the sky – known as Steve – became the subject of debate in 2017, as their origins were unbeknown to scientists. Now, photographs of this remarkable phenomena have been studied to understand their exact position in the night sky. 73)
- Steve was first spotted by citizen scientists who posted photos of the unusual purple streaks of light in the Aurora Chasers Facebook group. Sometimes Steve was seen accompanied by smudges of green lines – nicknamed ‘picket fences’ owing to their appearance.
- Unsure of what it was and how to refer to it, the name ‘Steve’ was chosen from a scene from the animated movie Over the Hedge, where characters choose a name for something unknown to them.
- Scientists were able to compare ground sightings with data from ESA’s Swarm mission, which showed that Steve actually comprises a fast-moving stream of extremely hot atomic particles.
- Since then, scientists have been trying to better understand the science behind the phenomenon.

- A recent paper published in Geophysical Research Letters, describes how a group of scientists approached the Alberta Aurora Chasers to provide photos of Steve from two different locations and angles. Stars were identified in the background of these photographs using the SkySafari application. The stars were then used to precisely orient the photographs. This facilitated the triangulation of the altitude ranges of the two phenomena. 74)
- They estimate that the optical emissions of Steve range from 130 to 270 km in altitude, while the green picket fence ranges from 95 to 150 km in altitude. As well as this, they found that Steve and the picket fence align with each other along very similar magnetic field lines.
- Although the picket fence is triggered by raining electrons, there is no evidence that Steve is as well. The fact that the two phenomena are exactly aligned is another clue in understanding the origin and dynamics of Steve.
- William Archer, from the University of Calgary says, “It is remarkable to see that originally citizen scientists of the Alberta Aurora Chasers triggered the curiosity of scientists to study Steve. I’m excited they were able to extend our understanding of Steve using photographs taken by citizen scientists.”
- He continues, “The Canadian government has also shown interest in Steve and has recently minted a coin featuring Steve and the picket fence.”
What’s the difference between Steve and the aurora?
- Typical aurora is caused by energetic electrons traveling down Earth’s magnetic field. When those electrons collide with the atmosphere roughly 100 km above Earth’s surface, they excite atoms which then emit red, green, and violet light. In contrast, Steve does not appear to be caused by energetic electrons, and is white in color.
- According to Eric Donovan's presentation of the Swarm satellite data in 2017, Steve was caused by a 25 km wide ribbon of hot gasses at an altitude of 300 km with a temperature of 3000 °C. The phenomena flowed at a speed of 6 km/s and occurred in sub-auroral regions. In a follow-up study, no evidence was found that Steve is caused in the same way as auroras.
- ESA’s Roger Haagmans says, “Although this is a conceptually straightforward result, it contributes significantly to our understanding of Steve. The combination of Swarm data along with photographic observations may help enable us to unravel the mystery that is Steve.”
• May 01, 2019: Our protective magnetic field is always restless, but every now and then something weird happens – it jerks. Although scientists have known about these rapid shifts for some 40 years, the reason why they occur has remained a frustrating mystery, until now. 75)
- Since geomagnetic jerks were discovered in 1978 scientists have been trying to work out why the magnetic field suddenly and unexpectedly accelerates.
- Looking back at measurement records from the worldwide network of ground-based magnetic observatories, they found that these jerks, which appear as sharp V-shaped features in graphs of magnetic-field changes, date back as far as 1901, and that the phenomenon occurs about every three to 12 years. Also, they are not consistent across the globe. In 1949, for example, a jerk was measured in North America, but was not detected in Europe.
- Since they occur relatively randomly and the mechanism that drives them has been poorly understood, these jerks have frustrated attempts to forecast changes in the magnetic field, even for a few years ahead.
- Forecasts are important because the magnetic field protects us from solar storms, which have the potential to disrupt power supplies, communication links and navigation systems, for example.
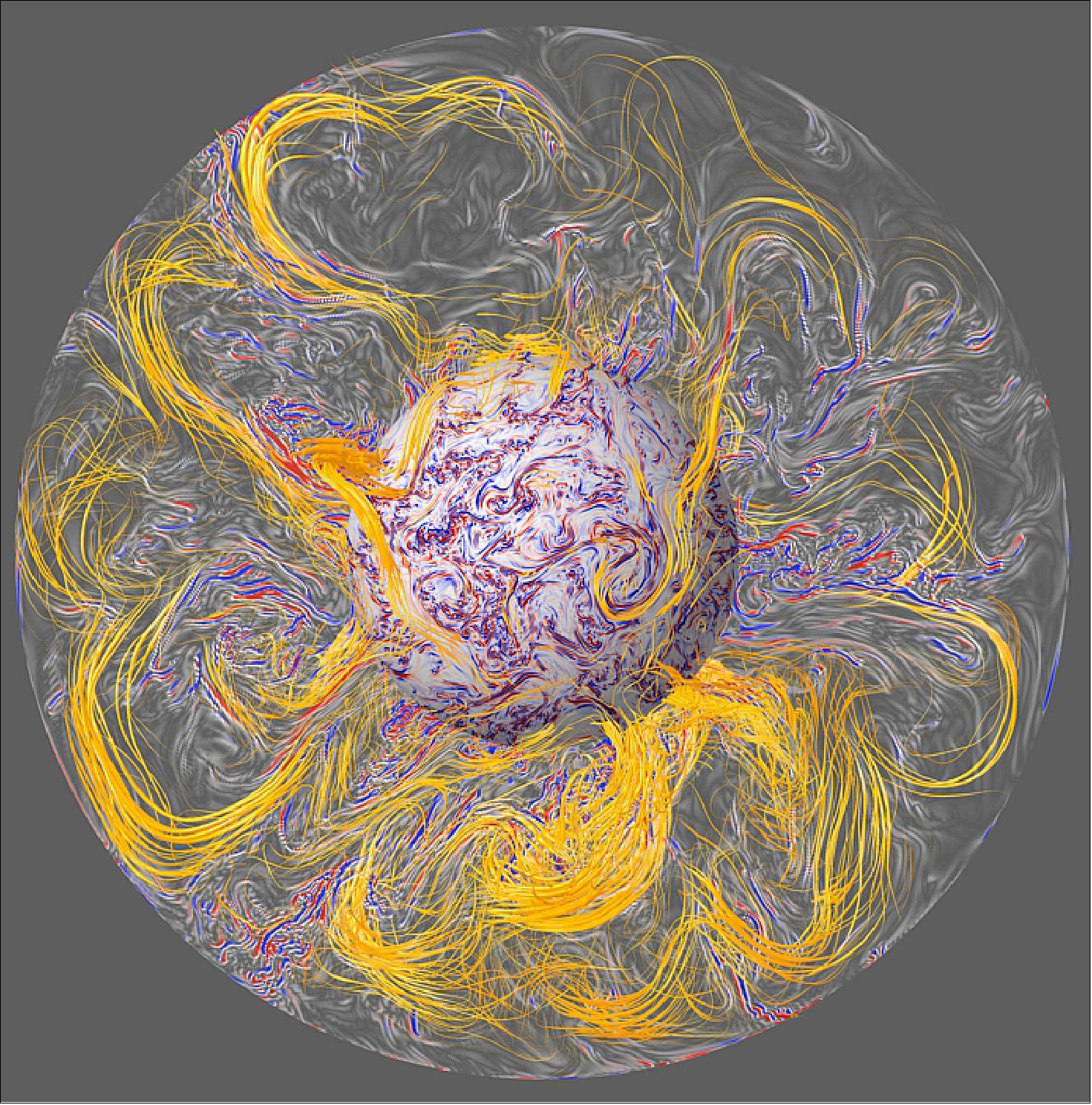
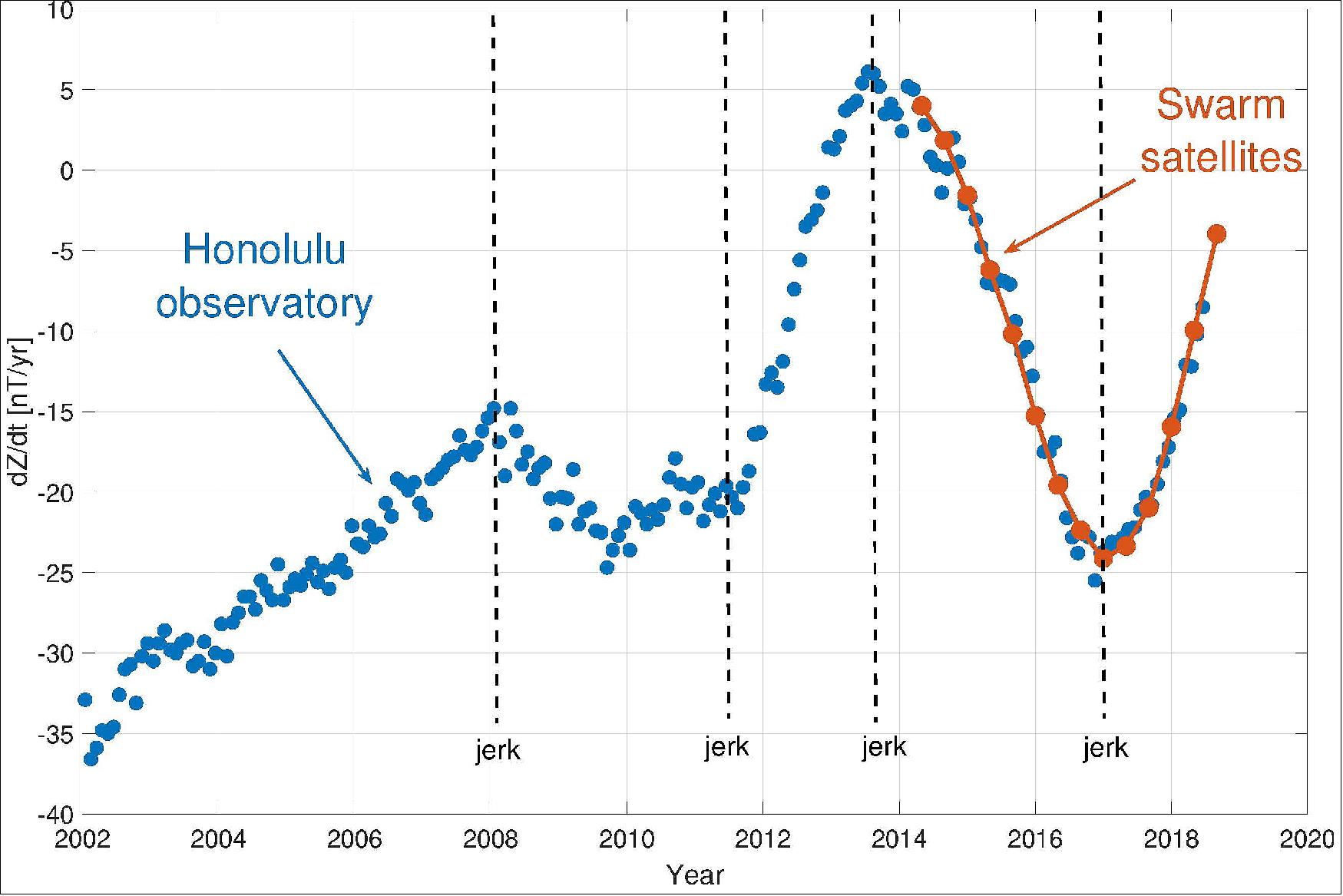
- Bearing in mind that ground-based magnetic observatories are built on land, information about these jerks has been incomplete as the ocean, of course, covers 70% of Earth’s surface. But thanks to ESA’s trio of Swarm satellites, which measure variations in Earth’s magnetic field from space, scientists can now study the global structure of geomagnetic jerks.
- In a paper published recently in Nature Geoscience scientists from the Paris Institute of Earth Physics and the Technical University of Denmark describe how they created a computer model for geomagnetic jerks and they have offered an explanation as to why they happen. 76)
- Our magnetic field is generated mainly by the churning of fluid within Earth’s core. Researchers know of two types of movement that cause different variations in the magnetic field: those resulting from slow convection movement, which can be measured on the scale of a century, and those resulting from rapid hydromagnetic waves, which can be detected over a few years.
- They suspected that the latter type play a role in the jerks, but the interaction of these fast waves with slow convection, along with their mechanism of propagation and amplification, had yet to be revealed.
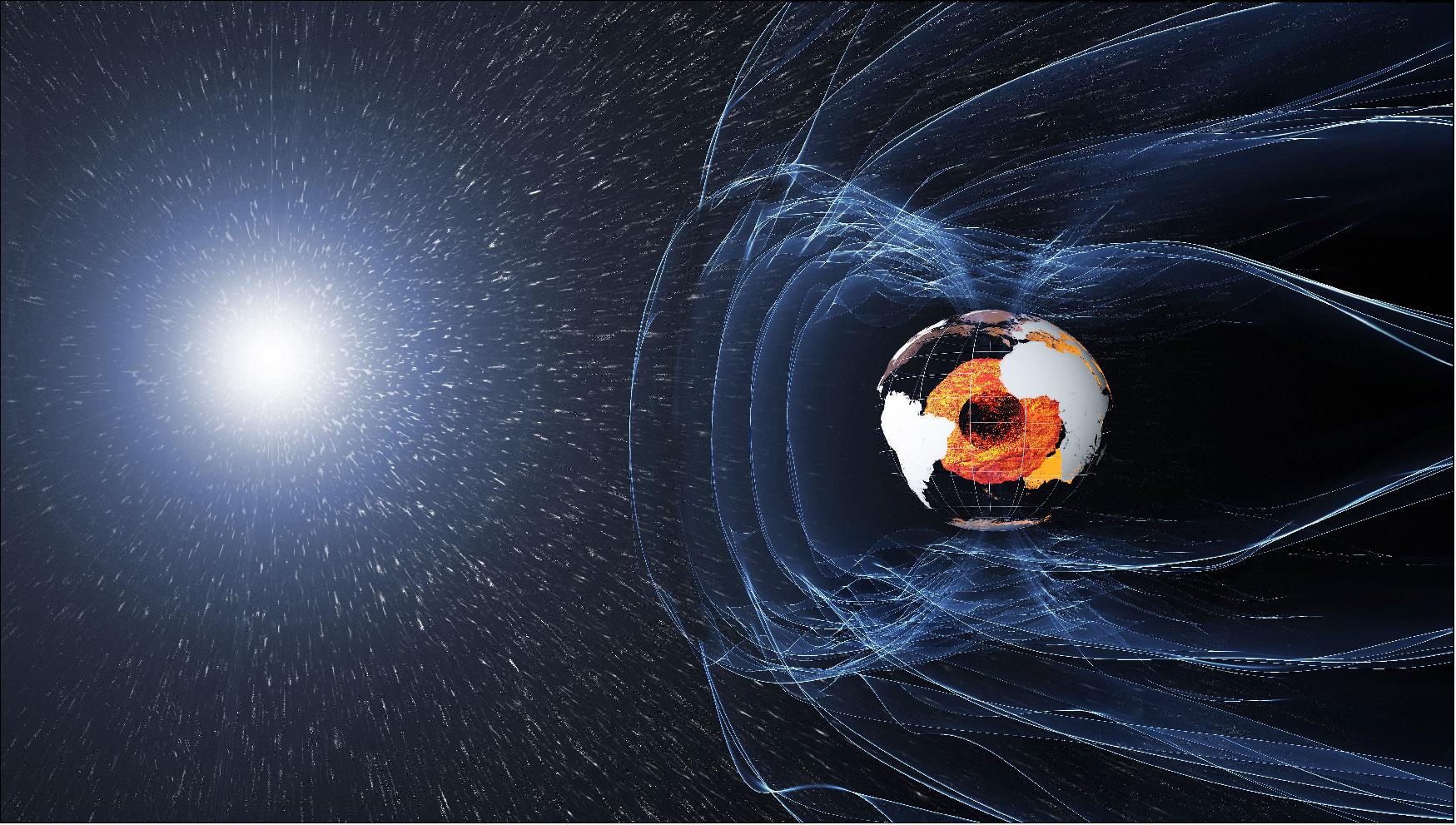
- Now, the researchers have been able to document the series of events that lead to jerks which, in the simulation, arise from hydromagnetic waves emitted within the core. As molten matter rises up to reach the outer surface of the Earth’s core, it produces powerful waves along the magnetic field lines near the core. The team explained that this results in sharp changes in the flow of liquid beneath the magnetic field.
- The jerks originate in rising blobs of metal that form in the planet’s core 25 years before the corresponding jerk takes place. These current findings are part of a longer-term project in which scientists hope to predict the evolution of the geomagnetic field over the coming decades.
- Chris Finlay, from DTU Space, said, “Swarm has made a real contribution to our research, allowing us to make detailed comparisons, in both space and time, with physical theories on the origin of these magnetic jerks. While our findings make fascinating science, there are some real-world benefits of understanding how our magnetic field changes. Many modern electronic devices such as smart phones, rely on our knowledge of the magnetic field for orientation information. Being able to better forecast field changes will help with such systems.”
• April 25, 2019: The recently-discovered atmospheric glow is both like typical auroras and distinct from them, new research finds. The celestial phenomenon known as STEVE is likely caused by a combination of heating of charged particles in the atmosphere and energetic electrons like those that power the aurora, according to new research. In a new study, scientists found STEVE’s source region in space and identified two mechanisms that cause it. 77)

- Last year, the obscure atmospheric lights became an internet sensation. Typical auroras, the northern and southern lights, are usually seen as swirling green ribbons spreading across the sky. But STEVE is a thin ribbon of pinkish-red or mauve-colored light stretching from east to west, farther south than where auroras usually appear. Even more strange, STEVE is sometimes joined by green vertical columns of light nicknamed the “picket fence.”
- Auroras are produced by glowing oxygen and nitrogen atoms in Earth’s upper atmosphere, excited by charged particles streaming in from the near-Earth magnetic environment called the magnetosphere. Scientists didn’t know if STEVE was a kind of aurora, but a 2018 study found its glow is not due to charged particles raining down into Earth’s upper atmosphere.
- The authors of the 2018 study dubbed STEVE a kind of “sky-glow” that is distinct from the aurora, but were unsure exactly what was causing it. Complicating the matter was the fact that STEVE can appear during solar-induced magnetic storms around Earth that power the brightest auroral lights.
- Authors of a new study published in AGU’s journal Geophysical Research Letters analyzed satellite data and ground images of STEVE events and conclude that the reddish arc and green picket fence are two distinct phenomena arising from different processes. The picket fence is caused by a mechanism similar to typical auroras, but STEVE’s mauve streaks are caused by heating of charged particles higher up in the atmosphere, similar to what causes light bulbs to glow.
- “Aurora is defined by particle precipitation, electrons and protons actually falling into our atmosphere, whereas the STEVE atmospheric glow comes from heating without particle precipitation,” said Bea Gallardo-Lacourt, a space physicist at the University of Calgary and co-author of the new study. “The precipitating electrons that cause the green picket fence are thus aurora, though this occurs outside the auroral zone, so it’s indeed unique.”
- Images of STEVE are beautiful in themselves, but they also provide a visible way to study the invisible, complex charged particle flows in Earth’s magnetosphere, according to the study’s authors. The new results help scientists better understand how particle flows develop in the ionosphere, which is important goal because such disturbances can interfere with radio communications and affect GPS signals.
Where does STEVE come from?
- In the new study, researchers wanted to find out what powers STEVE and if it occurs in both the Northern and Southern Hemispheres at the same time. They analyzed data from several satellites passing overhead during STEVE events in April 2008 and May 2016 to measure the electric and magnetic fields in Earth’s magnetosphere at the time.
- The researchers then coupled the satellite data with photos of STEVE taken by amateur auroral photographers to figure out what causes the unusual glow. They found that during STEVE, a flowing “river” of charged particles in Earth’s ionosphere collide, creating friction that heats the particles and causes them to emit mauve light. Incandescent light bulbs work in much the same way, where electricity heats a filament of tungsten until it’s hot enough to glow.
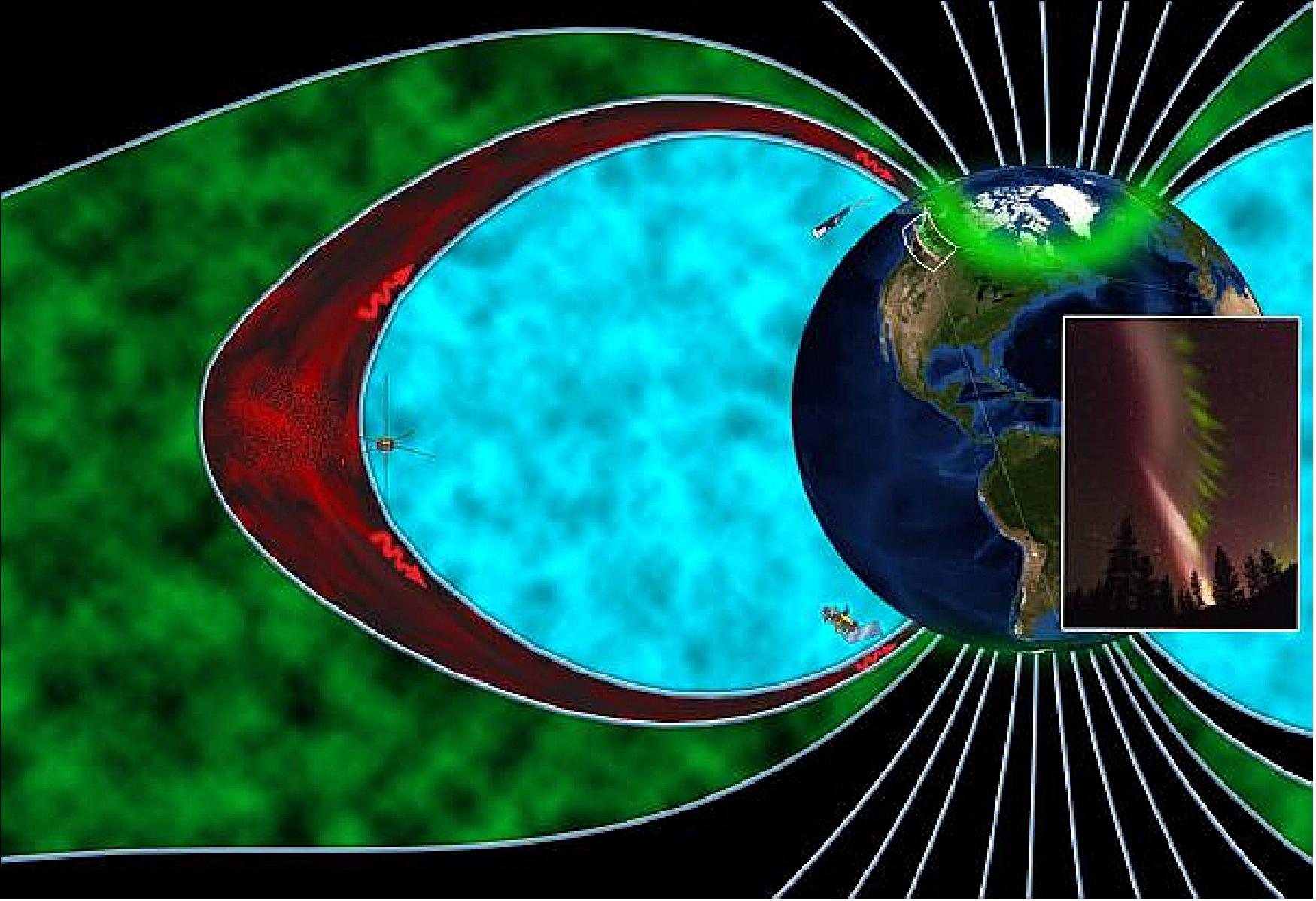
- Interestingly, the study found the picket fence is powered by energetic electrons streaming from space thousands of kilometers above Earth. While similar to the process that creates typical auroras, these electrons impact the atmosphere far south of usual auroral latitudes. The satellite data showed high-frequency waves moving from Earth’s magnetosphere to its ionosphere can energize electrons and knock them out of the magnetosphere to create the striped picket fence display.
- The researchers also found the picket fence occurs in both hemispheres at the same time, supporting the conclusion that its source is high enough above Earth to feed energy to both hemispheres simultaneously.
- Public involvement has been crucial for STEVE research by providing ground-based images and precise time and location data, according to Toshi Nishimura, a space physicist at Boston University and lead author of the new study.
- “As commercial cameras become more sensitive and increased excitement about the aurora spreads via social media, citizen scientists can act as a ‘mobile sensor network,’ and we are grateful to them for giving us data to analyze,” Nishimura said.
• February 8, 2019: Since it was first measured in 1831, we have known that the magnetic north is constantly on the move. However, its tendency to slowly roam has stepped up a pace recently – so much so that the World Magnetic Model has had to be updated urgently with the pole’s new location, vital for navigation on smartphones, for example. ESA’s magnetic field Swarm mission has been key for this update. 78)
- The World Magnetic Model, the basis for many navigation systems used by ships, Google maps and smartphones, relies on the accurate knowledge of Earth’s magnetic field. Since magnetic north never stands still, the model has to be revised periodically – but a surge in pace has meant that an update was needed ahead of schedule.
- Driven largely by the churning of fluid in Earth’s core, which generates the magnetic field, the magnetic north pole has always drifted, and geological evidence shows that every few hundred thousand years or so it even flips, so that north becomes south.
- Around 50 years ago, the pole was ambling along at around 15 km a year, but now it is sprinting ahead at around 55 km a year. In 2017, it crossed the international date line, leaving the Canadian Arctic and heading towards Siberia.
- The World Magnetic Model is used to keep track of changes in the magnetic field and is updated every five years by the US National Oceanic and Atmospheric Administration and the British Geological Survey.
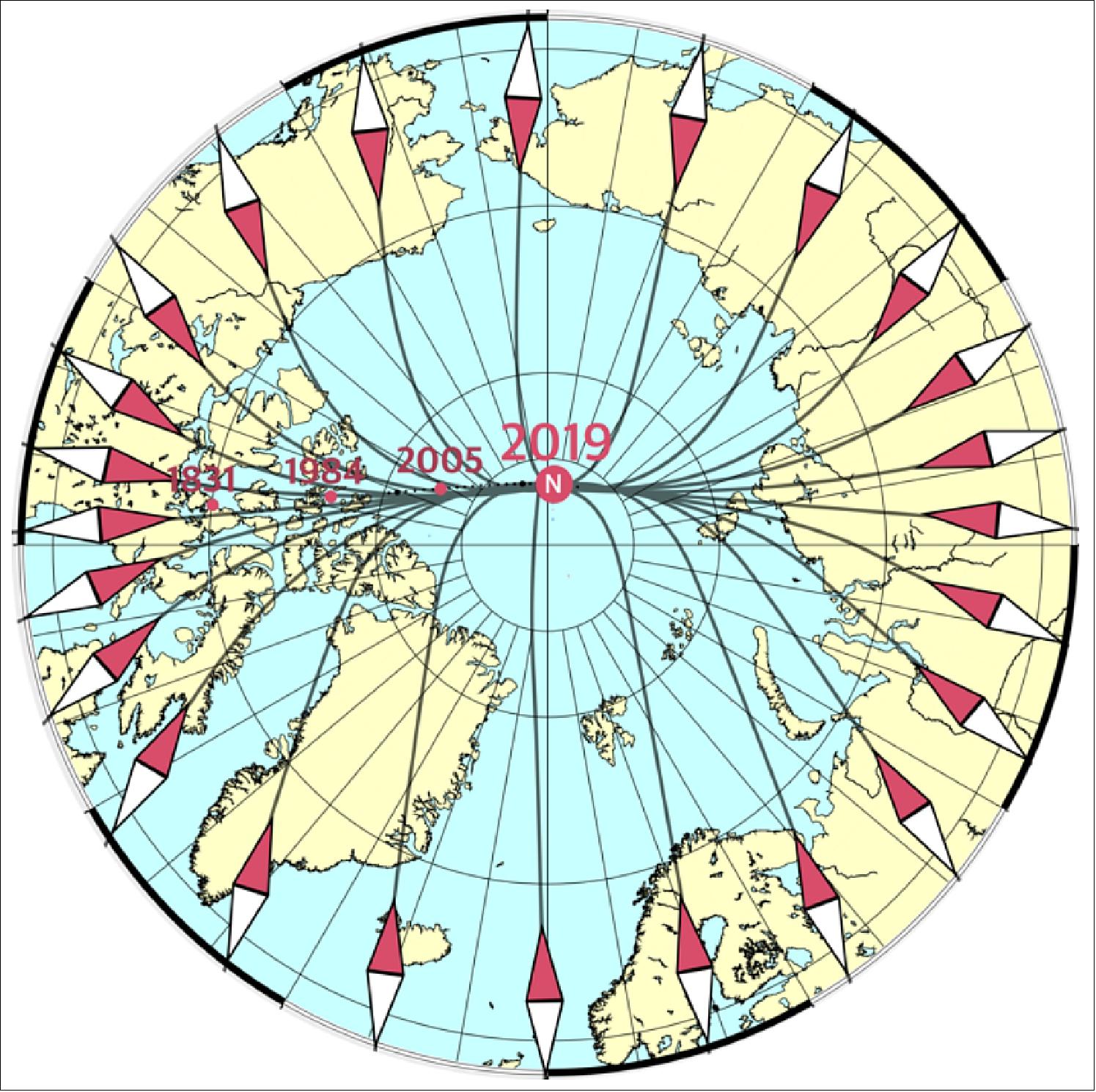
- The next update was due at the end of this year. However, thanks in part to ESA’s Swarm mission, researchers found that the pole is drifting in a way that wasn’t expected. This meant that model was simply too inaccurate for it to remain until the next planned revision. So, an ‘out-of-cycle’ update has just been issued.
- Since the mission was launched in 2013, ESA’s Swarm constellation has been tracking variations in Earth’s magnetic field, and also the position of the magnetic north pole.
- While measurements from Swarm are used to advance our scientific understanding of Earth’s magnetic field, they also have clear practical uses as demonstrated by their contribution to this urgent update of the World Magnetic Model, which is used every day by billions of people in their smartphones, even if they are unaware of it.
- Nils Olsen from DTU Space said, “Your smartphone contains a magnetometer that measures Earth’s magnetic field. “In order to make sense of this information, Android and iOS operating systems use the magnetic model to correct the measurements to true geographic north. So, in this model update, the latest Swarm data have been used to provide up-to-date information for users of numerous navigation systems.”
• November 7, 2018: Researchers have tested a clever new method of monitoring the impact of solar storms on Earth’s magnetic field, based on harnessing the compass-like magnetometers that space missions used to check their orientation. 79)
- Some satellites carry extremely sensitive magnetometers for scientific studies; these instruments are placed on booms, away from stray magnetic field sources inside the parent satellite.
- But many more satellites host less sensitive magnetometers, called ‘platform magnetometers’ that work like compasses, measuring Earth’s magnetic field to check satellites are pointed in the correct position.
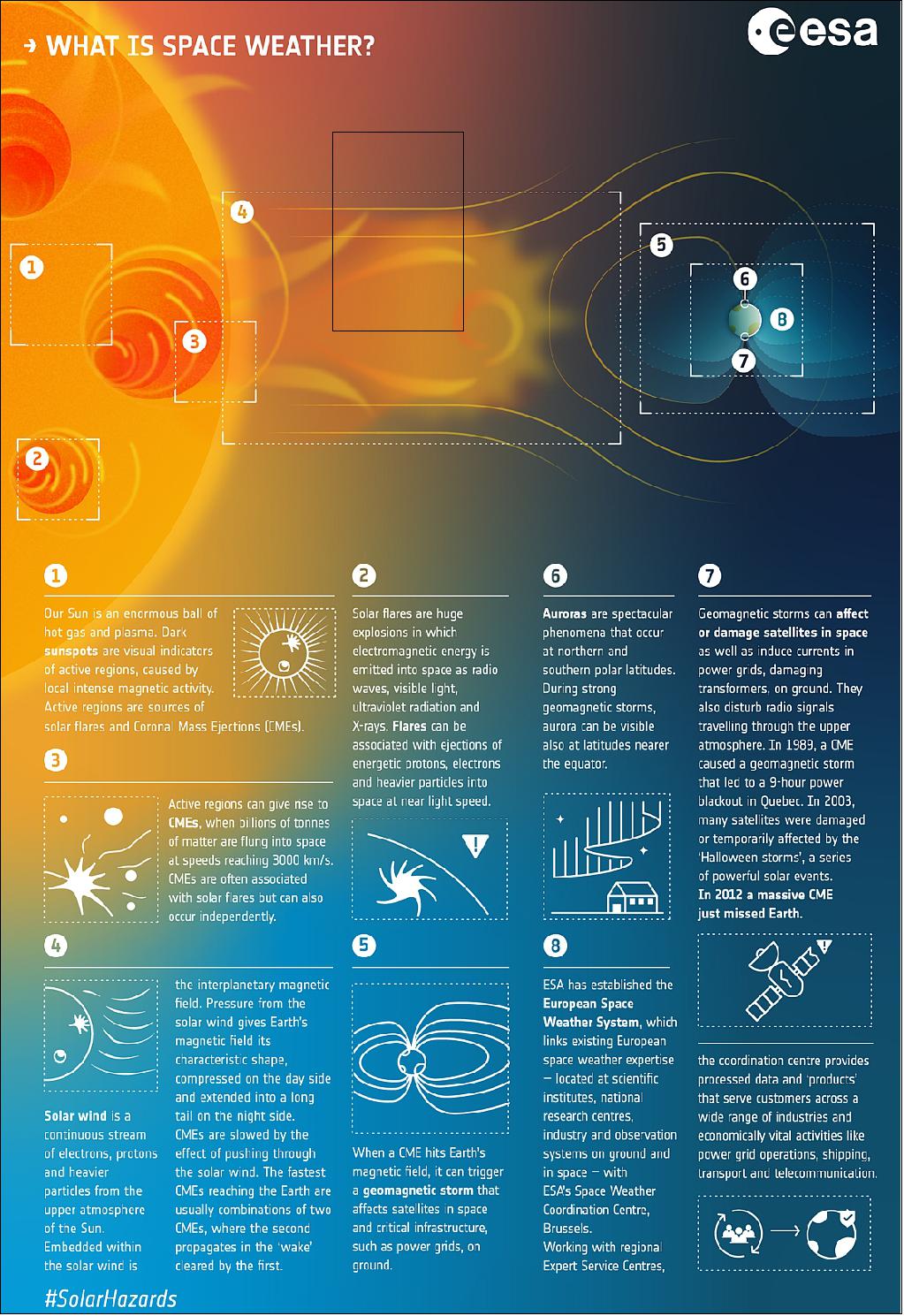
- Might these platform magnetometers also be used to monitor space weather? An ESA-led research team consisting of Delft University of Technology and the GFZ German Research Center for Geosciences mounted an investigation.
- ESA space environment researcher Fabrice Cipriani explains: “Quantifying the effects that solar storms have on Earth is extremely important to monitor and assess the impacts on sensitive infrastructure and so we want to exploit as many sources of data as possible that can provide meaningful information, especially when there are no major development costs involved.”
- Researchers looked at data from ESA’s magnetic-field-mapping Swarm, gravity-mapping GOCE and technology-testing LISA Pathfinder missions to probe whether platform magnetometer data could also be used for monitoring changing space weather.
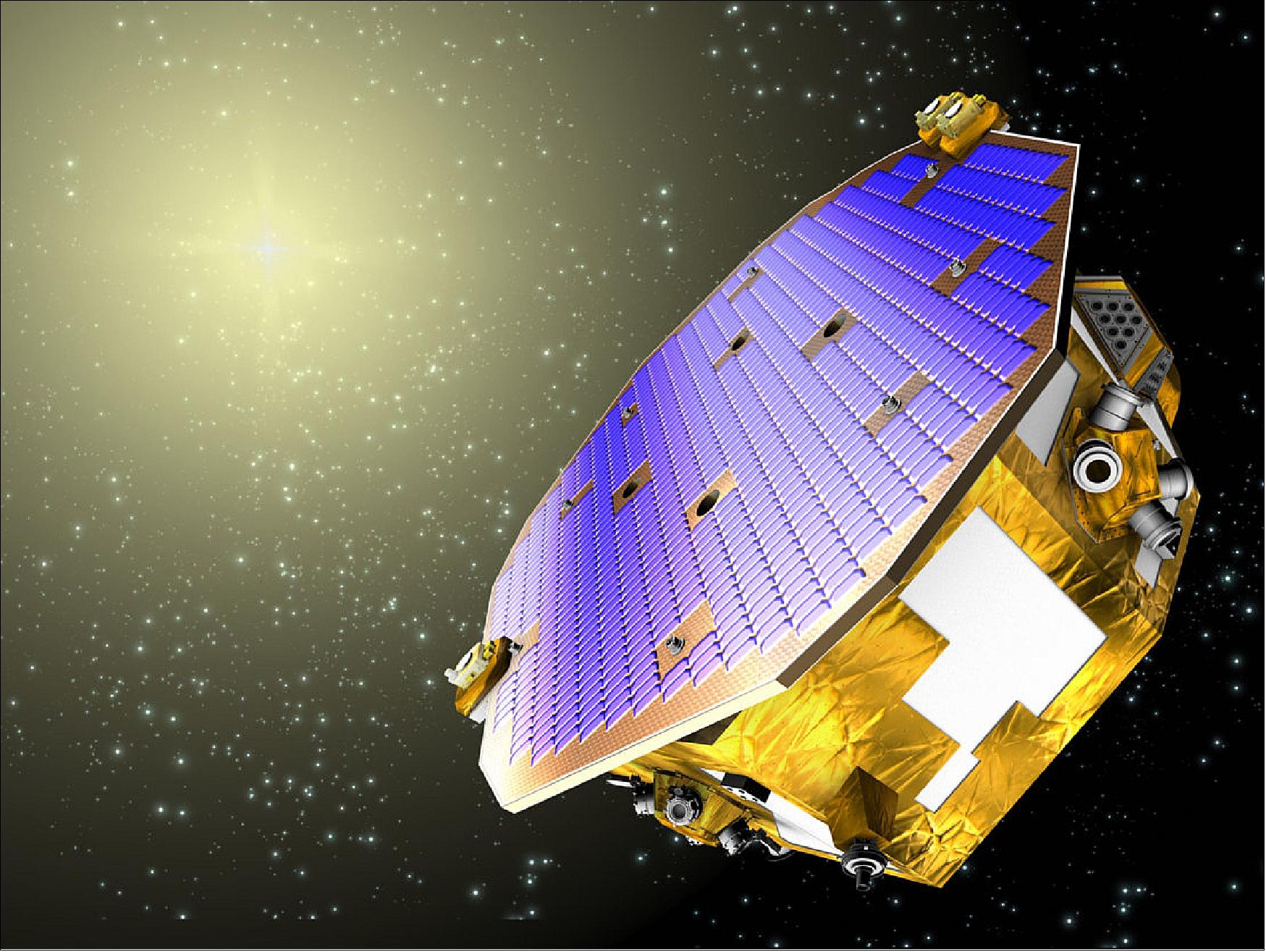
- The team compared the data from Swarm’s scientific magnetometer with its platform magnetometer to determine the accuracy of the latter. They then applied this knowledge to an analysis of GOCE’s magnetometer. These were both low-Earth orbiting missions, providing a lot of information about Earth’s response to space weather. LISA Pathfinder, conversely, operated from an Earth-Sun Lagrange Point, 1.5 million km away.
- Eelco Doornbos, from TU Delft explains: “LISA Pathfinder is positioned between Earth and the Sun, outside Earth’s magnetosphere. This gives it a great view of the solar wind.”
- LISA Pathfinder’s platform magnetometer data was compared with that of US space weather observatories WIND, ACE and DSCOVR.
- “We investigated data from LISA Pathfinder, which can observe the solar wind, and from Swarm and GOCE, observing magnetic field currents closer to Earth,” adds Dr. Doornbos. “In both cases the platform magnetometer data was good enough to receive a good signal, even when the magnetometer is not very precise and is close to other instruments.”
- The team found that platform magnetometers can indeed provide excellent insights into space weather. Their usage could be fostered in future through developing new data processing techniques, relatively low cost compared to developing dedicated instruments and missions.
- Traditionally platform magnetometer data are only sent to Earth so that engineers can check a satellite is working properly. The next step is to make this data accessible to more people.
- Fabrice adds: “We want to encourage data users to be involved at an early design phase when developing new spacecraft, to help figure out how to enable easier access to the this data. - Space weather is such a complicated system that changes so rapidly that the more observations you have, the better,” concludes Dr. Doornbos. “That’s why it’s great to get as many satellites as possible looking into it.”
• June 28, 2018: A team of researchers, supported under ESA’s Basic Activities, has recently investigated a resourceful new method of monitoring space weather. They analyzed data from spacecraft magnetometers typically used for attitude control — so-called “platform magnetometers”— to see if these devices could also be used to investigate the impact of solar storms on the magnetic field around Earth. 80)
- From a distance, the Sun appears to be a serenely glowing ball of light and warmth. But this seemingly gentle star has a violent temper. It goes through periods of intense activity, during which it can send powerful blasts of charged particles through space, which can be hazardous if they head in our direction.
- This variation in the space environment between Earth and the Sun, and in particular its impact on Earth, is known as space weather. Luckily, Earth is protected from most space weather events by its magnetic field, but some solar activity can still affect vital infrastructure, including telecommunication and navigation satellites in space, and power grids on the ground.
- Space weather events can be monitored using devices that measure magnetic fields, called magnetometers. Some spacecraft carry extremely sensitive magnetometers for scientific studies — these instruments are placed on booms, away from stray magnetic field sources inside the spacecraft. But many more spacecraft host less-sensitive magnetometers on board, called platform magnetometers, to keep the spacecraft pointed in the right direction. Could these platform magnetometers also be used to monitor space weather? In late 2016, ESA’s General Studies Program invited research groups to find out.
- The investigation was taken on by a team consisting of scientists from TU Delft and the GFZ German Research Center for Geosciences, who recently presented their findings at ESTEC. The group looked at data from Swarm, GOCE and LISA Pathfinder to investigate whether platform magnetometer data could also be used for space weather diagnostics.
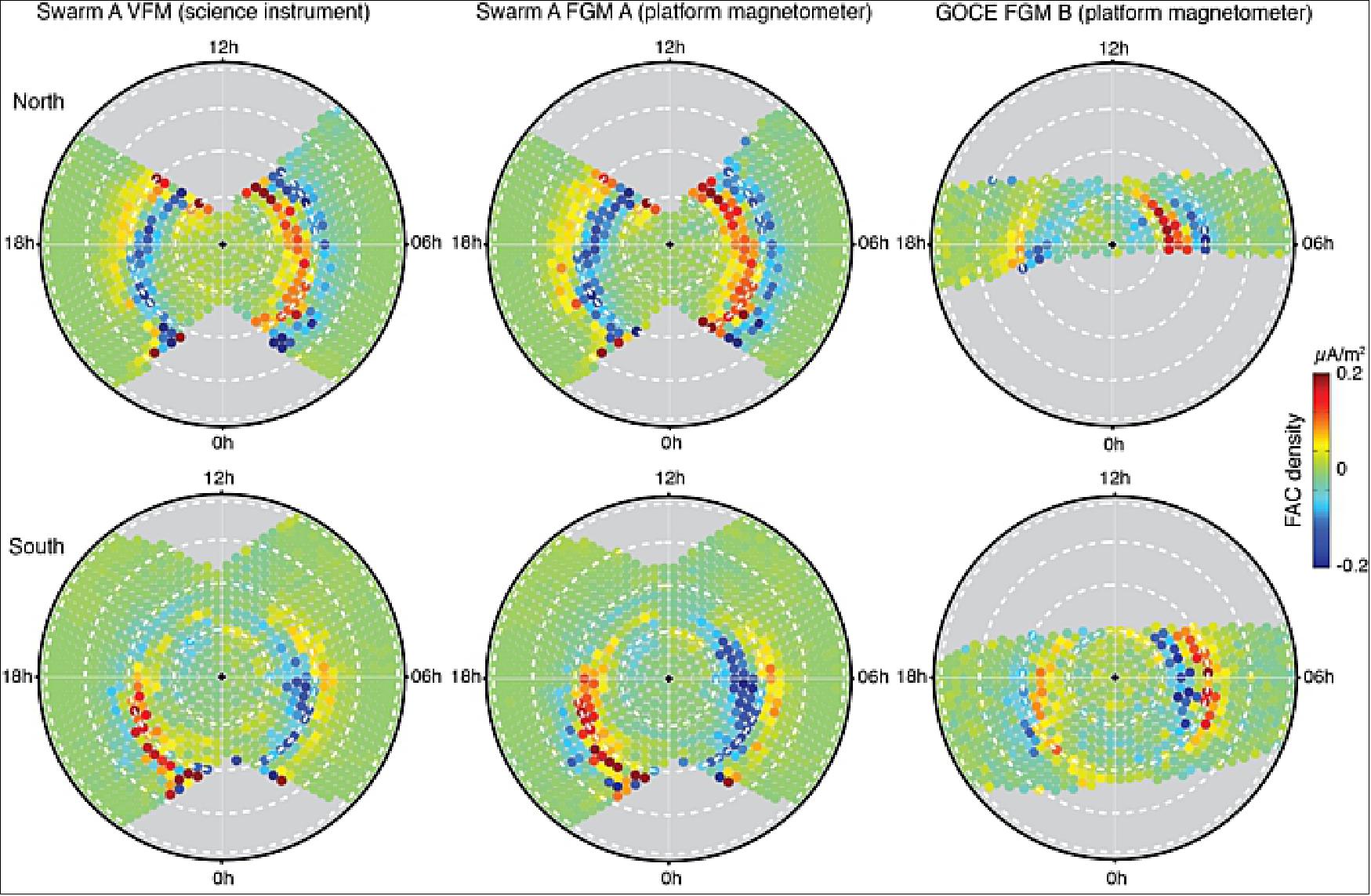
- Fabrice Cipriani, responsible for the project from ESA’s side, explains: “This was a bit of an exploratory study for us. Quantifying the effects that solar storms have on Earth is extremely important to monitor and assess the impacts on sensitive infrastructure and so we want to exploit as many source of data as possible that can provide meaningful information, especially when there are no major development costs involved.”
- The team compared the data from Swarm’s scientific magnetometer with its platform magnetometer to determine the accuracy of the latter, before applying this knowledge to an analysis of GOCE magnetometer data. As Swarm and GOCE are both in low-Earth orbit, they can tell us a lot about how Earth responds to space weather. A magnetometer was also hosted on board LISA Pathfinder to keep an eye on the satellite’s precise measurement system.
- Eelco Doornbos, from Delft University of Technology, elaborates: “LISA Pathfinder is positioned between Earth and the Sun, outside Earth’s magnetosphere. This gives it a great view of the solar wind.”
- LISA Pathfinder’s platform magnetometer data was compared with that from American space weather observatories WIND, ACE and DSCOVR.
- “We investigated data from LISA Pathfinder, which can observe the solar wind, and from Swarm and GOCE, which can observe magnetic field currents closer to Earth. In both cases the platform magnetometer data was good enough to recover a good signal, even when the magnetometer is not very precise and is close to other instruments,” adds Eelco.
- The team concluded that platform magnetometers can provide excellent insight into space weather. Their contribution to monitoring this phenomenon can be significantly increased by initiating coordination between different groups and developing new data processing techniques, both of which are relatively low cost compared to developing dedicated instruments and missions.
- Traditionally platform magnetometer data is only sent to Earth so that engineers can check that a spacecraft is working properly. The next step is to make this data accessible to more people.
- Fabrice explains, “We want to encourage data users to be involved at an early design phase when developing new spacecraft, to help figure out how to enable easier access to this data.”
- “Space weather is such a complicated system that changes so rapidly that the more observations you have, the better. This is why it’s great to get as many satellites as possible looking into it,” Eelco concludes.
• April 13, 2018: Swarm latest mission operations news of ESA: 81)
The batch of new results from ESA’s Swarm mission has not only included the highest-resolution map of the magnetic field generated by Earth’s crust and a map of the tiny magnetic signals from the oceans, but also, remarkably, some unexpected insight into lightning in the upper atmosphere and geomagnetic storms. 82)
- These latest findings are wowing this year’s European Geosciences Union meeting in Vienna, Austria. This week-long event draws scientists from all over the world to share discoveries about our planet. - One of these findings relates to the coupling between the weather we experience on the ground and its counterpart in space.
- Discharging massive busts of electricity, lightning is one of nature’s most dangerous yet beautiful displays. By the laws of physics, the flashes we witness from the ground must also propagate upwards. However, much is yet to be learnt about the other end of a lightning bolt.
- Although not designed to do so, it turns out that Swarm can measure this ionospheric counterpart.

- We are all used to seeing bursts of light unleashed by lightning, but they also carry very low-frequency electromagnetic waves.
- Early on in the mission, each of the three Swarm satellites’ magnetometers was run temporarily in a higher frequency mode than normal. Data from this time have been reanalyzed and revealed that, surprisingly, the instruments detected these waves. Converted into sound, they are known as whistlers. The whoosh of these lightning whistlers can be heard in the animation of Figure 80.
- Gauthier Hulot from the Institut de Physique du Globe de Paris said, “Although few whistlers at such unusual frequencies have been measured from space before, Swarm detected some 4000 in just four days, which is a particularly rich dataset. This gives us a unique opportunity to investigate the nature of the ionosphere and also see how lightning signals escape the atmosphere and propagate into space.”
- In addition, Swarm is now contributing to our understanding of how storms in the upper atmosphere develop. During a geomagnetic storm, solar wind interacts with Earth’s magnetic field, transferring large amounts of energy into the upper atmosphere in the form of electric currents.
- While some of this energy can fuel auroras, most is transferred into heat in a process called Joule heating, which causes the upper atmosphere to expand.
- Eelco Doornbos from Delft University of Technology explained, “Swarm has given us a novel view of how this heat is dispersed in the upper atmosphere. The animation of Figure 81 shows that when the storm begins, heat enters the auroral zone. In response, the atmospheric gas above the aurora expands and is lifted to higher altitudes. It then falls in waves that cover the entire globe in a matter of hours. This is a truly massive movement of gas in the upper atmosphere.”
- Rune Floberghagen, ESA’s Swarm mission manager, noted, “The mission was built to give us new insight into the magnetic field, which it is doing spectacularly. And, while it continues to deliver on its promise, we see a steady stream of ground-breaking scientific results that ultimately help us understand the world we live in and the space around it. The remarkable results that just keep coming from Swarm never cease to amaze me.”
• April 10, 2018: This is the most detailed map ever of the tiny magnetic signals generated by Earth’s lithosphere (Figure 82). The map, which is being used to understand more about Earth’s geological history, is thanks to four years’ of measurements from ESA’s trio of Swarm satellites, historical data from the German CHAMP satellite and observations from ships and aircraft. 85) 86)
- Erwan Thebault from the University of Nantes in France said, “This is the highest resolution model of the lithospheric magnetic field ever produced. With a scale of 250 km, we can see structures in the crust like never before. And, we have gained even finer detail in some parts of the crust, such as beneath Australia, where measurements from aircraft have mapped at resolution of 50 km. — This combined use of satellite and near-surface measurements gives us a new understanding of the crust beneath our feet, and will be of enormous value to science.”
- Most of Earth’s magnetic field is generated deep within the outer core by an ocean of superheated, swirling liquid iron, but there are also much weaker sources of magnetism. The Swarm constellation has been used to yield some discoveries about these more elusive signals, such as that from Earth’s lithosphere. A small fraction of the magnetic field comes from magnetised rocks in the upper lithosphere, which includes Earth’s rigid crust and upper mantle. This lithospheric magnetic field is very weak and therefore difficult to detect from space. As new oceanic crust is created through volcanic activity, iron-rich minerals in the upwelling magma are oriented to magnetic north at the time and solidified as the magma cools. Since magnetic poles flip back and forth over time, the solidified magma due to mantle upwelling at mid-oceanic ridges forms magnetic ‘stripes’ on the seafloor which provide a record of Earth’s magnetic history. These magnetic imprints on the ocean floor can be used as a sort of time machine, allowing past field changes to be reconstructed and showing the movement of tectonic plates from hundreds of million years ago until the present day.
• March 16, 2018: Steve – a strange shimmering ribbon of purple light in the night sky – was discovered in 2016, but now, thanks to ESA’s Swarm mission, more is known about this weird feature of the aurora. - Dedicated aurora chasers may have pondered for some time about this eerie light show, which is sort of like a normal aurora .... but not. Researchers first became aware of what was to be named Steve when members of the Aurora Chasers Facebook group began posting photos of unusual purple streaks in the night sky. 87)
- Since the Steve phenomenon hit the headlines, scientists have been trying to figure out exactly what it is. And, despite the somewhat ordinary name, it turns out Steve is a pretty complicated guy.
- During 2015 and 2016, these independent citizen scientist auroral photographers captured hundreds of images of the subauroral arc on at least 30 dates. In many cases, multiple independent observers recorded the arc, thus increasing data quality. Observations typically corresponded to nights of enhanced auroral activity predicted over Alberta, either strong substorms or geomagnetic storms of any magnitude. The arc is typically observed during premidnight hours [in MLT (Magnetic Local Time)], lasting for approximately an hour. With no accurate scientific classification for the arc available, the citizen scientists named the arc “Steve” in place of the misnomer proton arc . 88) Later in 2016, Steve was given the backronym “Strong Thermal Emission Velocity Enhancement” (STEVE) because of data obtained from the satellite measurements reported below.

- A team led by Elizabeth MacDonald, a space physicist at NASA, has used information from ESA’s Swarm magnetic field satellites, to publish a paper in Science Advances that goes some way in unveiling the mystery of Steve. 89)
- On 25 July 2016, an expert aurora chaser from Regina, Saskatchewan, used a Nikon D810 camera to record a series of time lapse photographs over a period of 19 minutes. Between each 4 s exposure frame is a 4 s gap. Several key features of STEVE can be observed in Figure 85 (A to C). The images in Figure 85 are taken pointing to the WNW (west-north-west). First, in the unfiltered white-light STEVE is a narrow purple band with the strongest emissions saturating to white. Over a several-minute period, unstable green features resembling a picket fence were observed propagating west. Up to six localized structures at a time were observed, typically for only one or two frames (of 4 s per frame). Their appearance suggests an unstable, turbulent, instability driven locally in the ionosphere, although the visibility of these features at these latitudes has rarely been documented. STEVE shows motion westward in both purple and green colors. The active typical aurora is visible in Figure 85 far to the north in typical well-understood emission lines. 90)
![Figure 85: An observation of the subauroral arc (purple) known as STEVE, recorded on 25 July 2016 (05:51 to 06:10 UT) from Regina, Saskatchewan. The arc is located ~4º equatorward of the main auroral oval [green glow, bottom right in (A) and(B)] and runs across the sky in the east-west direction. Small green auroral features, resembling a picket fence, are also observed in (B) and (C). All images in the sequence can be found in the video linked to in the Supplementary Materials (image credit: STEVE Study Team)](https://www.eoportal.org/ftp/satellite-missions/s/Swarm_140722/Swarm_Auto3B.jpeg)
- The STEVE structure was also observed by one of the University of Calgary ASIs (All-Sky Imagers) between 05:48 and 07:10 UT on 25 July 2016. The University of Calgary and the University of California, Berkeley, operate more than 40 ASIs across North America that continuously image the night sky. This network of ASIs provides the opportunity to examine auroral morphology and characteristics on both local and large scales. In addition, MSPs (Meridian Scanning Photometers) operated by the University of Calgary and Athabasca University provide information on the latitude of the proton aurora. 91)
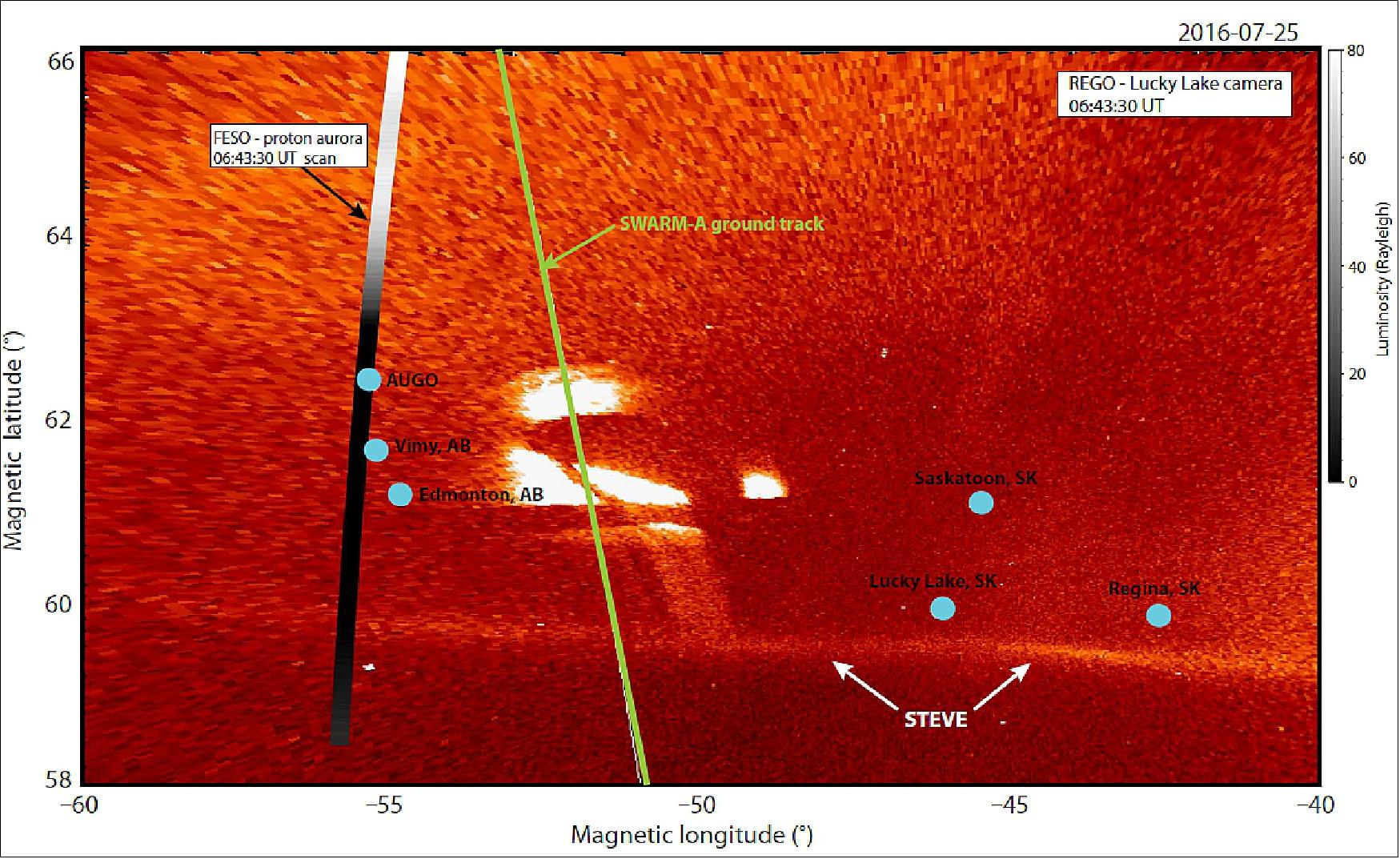
- The ground observations described above established that STEVE is a previously undescribed optical auroral phenomenon. A conjugate and coincident fly-through by a low-altitude spacecraft, such as Swarm, was needed to determine the in situ nature of STEVE. Each Swarm spacecraft carries precision magnetometers and electric field instruments, which directly measure ion flow velocity, ion and electron temperatures, and plasma density.
- Figure 87A presents the intensity of the STEVE arc measured by the Lucky Lake REGO ASI along the trajectory of the Swarm A satellite (dashed line in Figure 86). The intensity is mapped-down magnetic field lines to three different altitudes, because the exact altitude of emission of an arc at zenith cannot be determined from a single ground observation. Despite the uncertainty regarding the exact altitude of the emission, the arc was found just below 60º MLAT across the assumed range of emission heights.
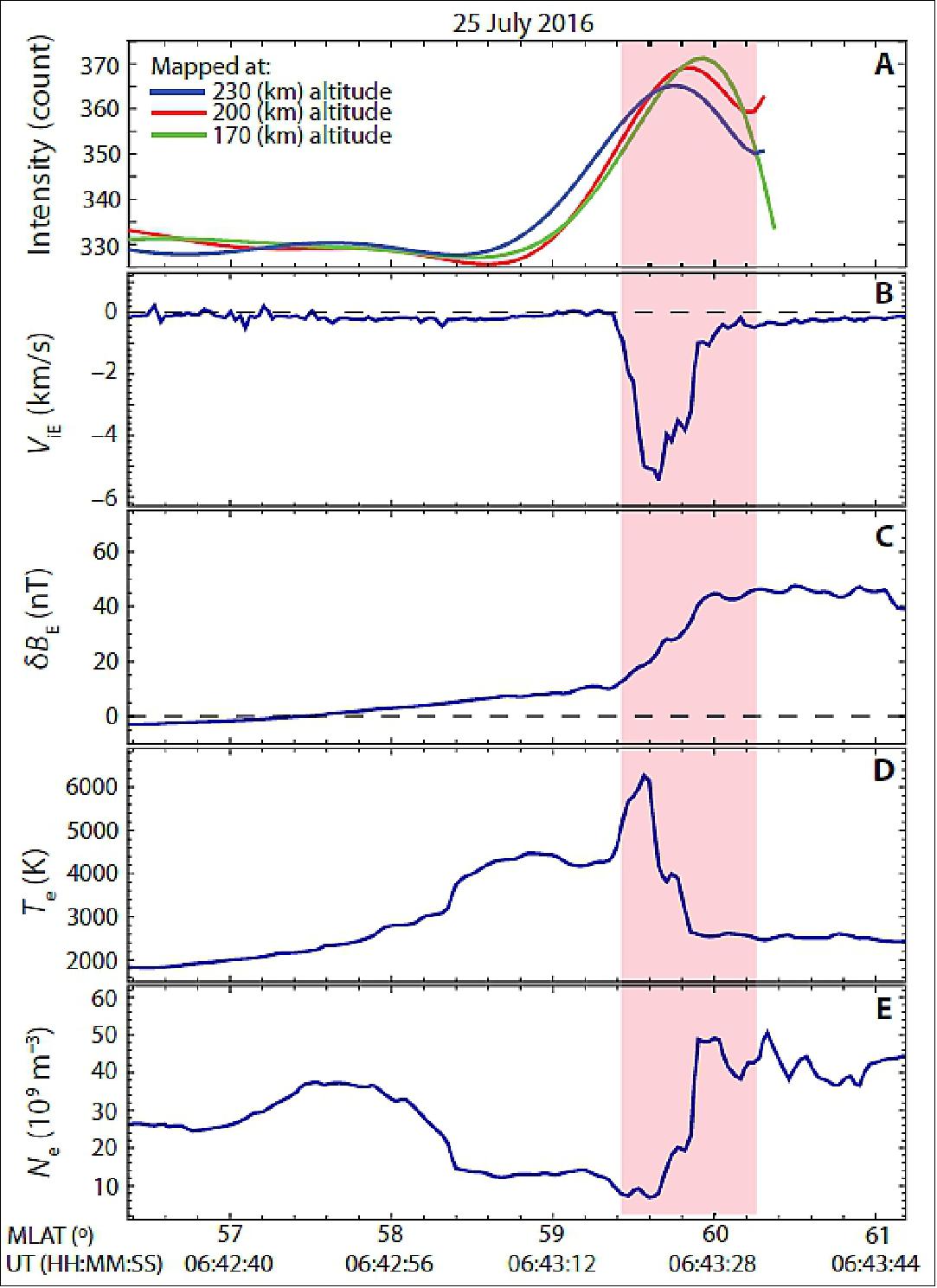
- The pink region highlights the full width at half maximum of the emission intensity at 170 km. Plotted in Figure 87B is the ion velocity,which demonstrates a clear westward (negative) flow that reaches 5.5 km/s during the peak STEVE optical emission. The flow’s full width at half maximum is less than 0.5° centered on 59.5° (magnetic) latitude. As determined by subtracting the International Geomagnetic Reference Field from the Swarm vector field magnetometer measurements, an increase in the eastward magnetic field perturbation of ~30 nT is observed crossing STEVE (Figure 87C). By applying Ampere’s law, this positive gradient in magnetic field corresponds to a small downward FAC (Field-Aligned Current). Bearing in mind that the measurement corresponds only to the net current per unit area, we cannot resolve the association of STEVE with precipitating electrons (upward FAC). Swarm also measures ambient electron density and temperature with its Langmuir probe. The region of the arc corresponds to an elevated electron temperature of 6000 K (Figure 87D) and a minimum density of 1 x 1010 m-3 (Figure 87E). Equatorward of the STEVE arc, an electron density trough of 1010 m-3 extends for 1° (MLAT), whereas on the poleward side of the arc, the electron density rapidly increases to around 5 x 1010 m-3. Correspondingly, the electron temperature is enhanced by a factor of ~2 in the equatorward trough and rapidly decreases to background levels on the poleward side of the arc.
• February 22, 2018: With the aim of making the best possible use of existing satellites, ESA and Canada have made a deal that turns Swarm into a four-satellite mission to shed even more light on space weather and features such as the aurora borealis. 92)
- In orbit since 2013, ESA’s three identical Swarm satellites have been returning a wealth of information about how our magnetic field is generated and how it protects us from dangerous electrically charged atomic particles in the solar wind.
- Canada’s Cassiope satellite carries three instrument packages, one of which is e-POP (Enhanced Polar Outflow Probe). It delivers information on space weather which complements that provided by Swarm. Therefore, the mission teams began looking into how they could work together to make the most of the two missions.
- To make life easier, it also just so happens that Cassiope’s orbit is ideal to improve Swarm’s readings.
- And now, thanks to this international cooperation and formalized through ESA’s Third Party Mission program, e-POP has effectively become a fourth element of the Swarm mission. It joins Swarm’s Alpha, Bravo and Charlie satellites as Echo.
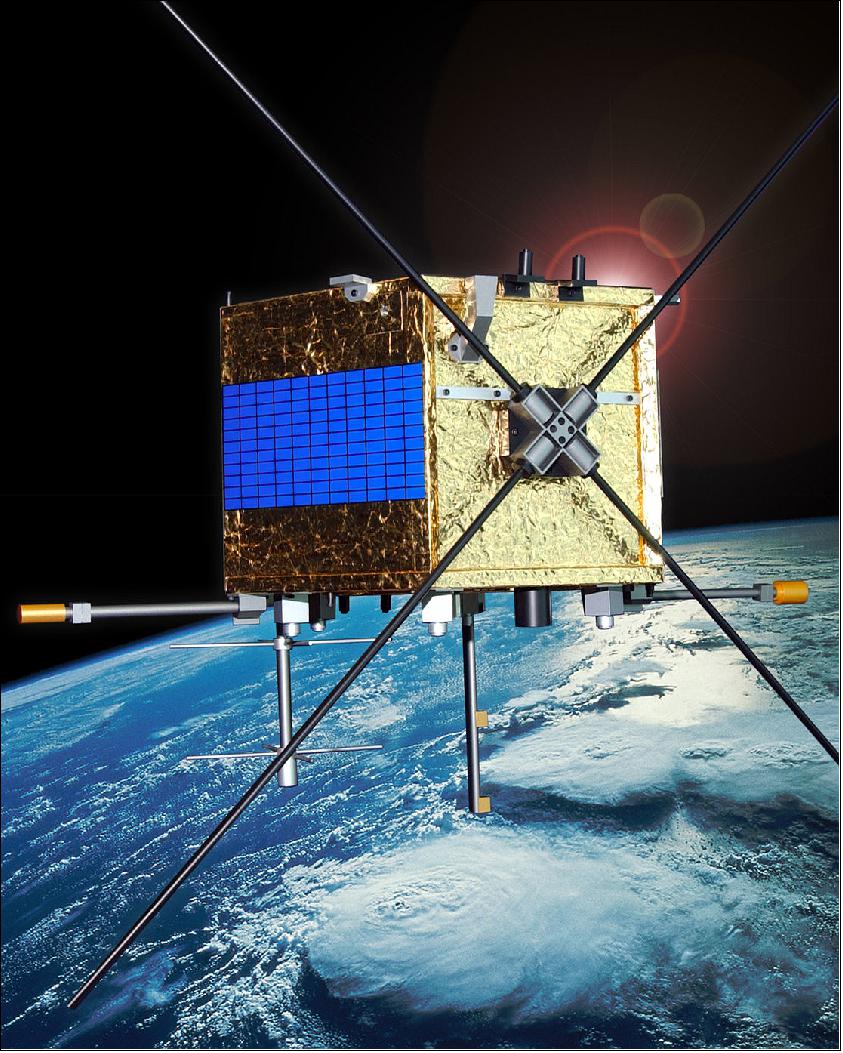
- Josef Aschbacher, ESA’s Director of Earth Observation Programs, noted, “This is a textbook example of how virtual constellations and collaborative initiatives can be realized, even deep into the missions’ exploitation phases. We embrace the opportunity to include e-POP in the Swarm mission, especially because it is clear that the more data we get, the better the picture we have of complex space weather dynamics. ESA is looking forward to seeing the fruits of this collaboration and the improved return on investment for both Europe and Canada.”
- Andrew Yau from the University of Calgary added, “Swarm and e-POP have several unique measurement capabilities that are highly complementary. By integrating e-POP into the Swarm constellation, the international scientific community will be able to pursue a host of new scientific investigations into magnetosphere–ionosphere coupling, including Earth’s magnetic field and related current systems, upper-atmospheric dynamics and aurora dynamics.”
- John Manuel from the Canadian Space Agency noted, “We are pleased to see e-POP join ESA’s three Swarm satellites in their quest to unravel the mysteries of Earth's magnetic field. Together, they will further improve our understanding of Earth's magnetic field and role it plays in shielding Canada and the world from the effects of space weather.”
- Giuseppe Ottavianelli, Third-Party Mission Manager at ESA concluded, “I am pleased that the e-POP ensemble is now formally integrated into our Swarm constellation. This milestone achievement confirms the essential role of ESA’s Earthnet program, enabling synergies across missions, fostering international cooperation, and supporting data access.”
- While e-POP changes its name to Echo as part of the Swarm mission, it will also continue to provide information for its original science investigations.
- Note: The Cassiope mission of CSA (Canadian Space Agency) along with e-POP and its sensor complement are described separately in the Cassiope file on the eoPortal.
• February 15, 2018: The Sun bathes our planet in the light and heat it needs to sustain life, but it also bombards us with dangerous charged particles in solar wind. Our magnetic field largely shields from this onslaught, but like many a relationship, it’s somewhat complicated. Thanks to ESA’s Swarm mission the nature of this Earth–Sun coupling has been revealed in more detail than ever before. 93)
- Earth’s magnetic field is like a huge bubble, protecting us from cosmic radiation and charged particles carried by powerful winds that escape the Sun’s gravitational pull and sweep across the Solar System.
- The trio of Swarm satellites were launched in Nov. 2013 to improve our understanding of how the field is generated and how it protects us from this barrage of charged particles.
- Since our magnetic field is generated mainly by an ocean of liquid iron that makes up the planet’s outer core, it resembles a bar magnet with field lines emerging from near the poles.
- The field is highly conductive and carries charged particles that flow along these field lines, giving rise to field-aligned currents.
- Carrying up to 1 TW of electrical power – about six times the amount of energy produced by wind turbines in Europe – these currents are the dominant form of energy transfer between the magnetosphere and ionosphere.
- The shimmering green and purple light displays of the auroras in the skies above the polar regions are a visible manifestation of energy and particles travelling along magnetic field lines (Figure 90).

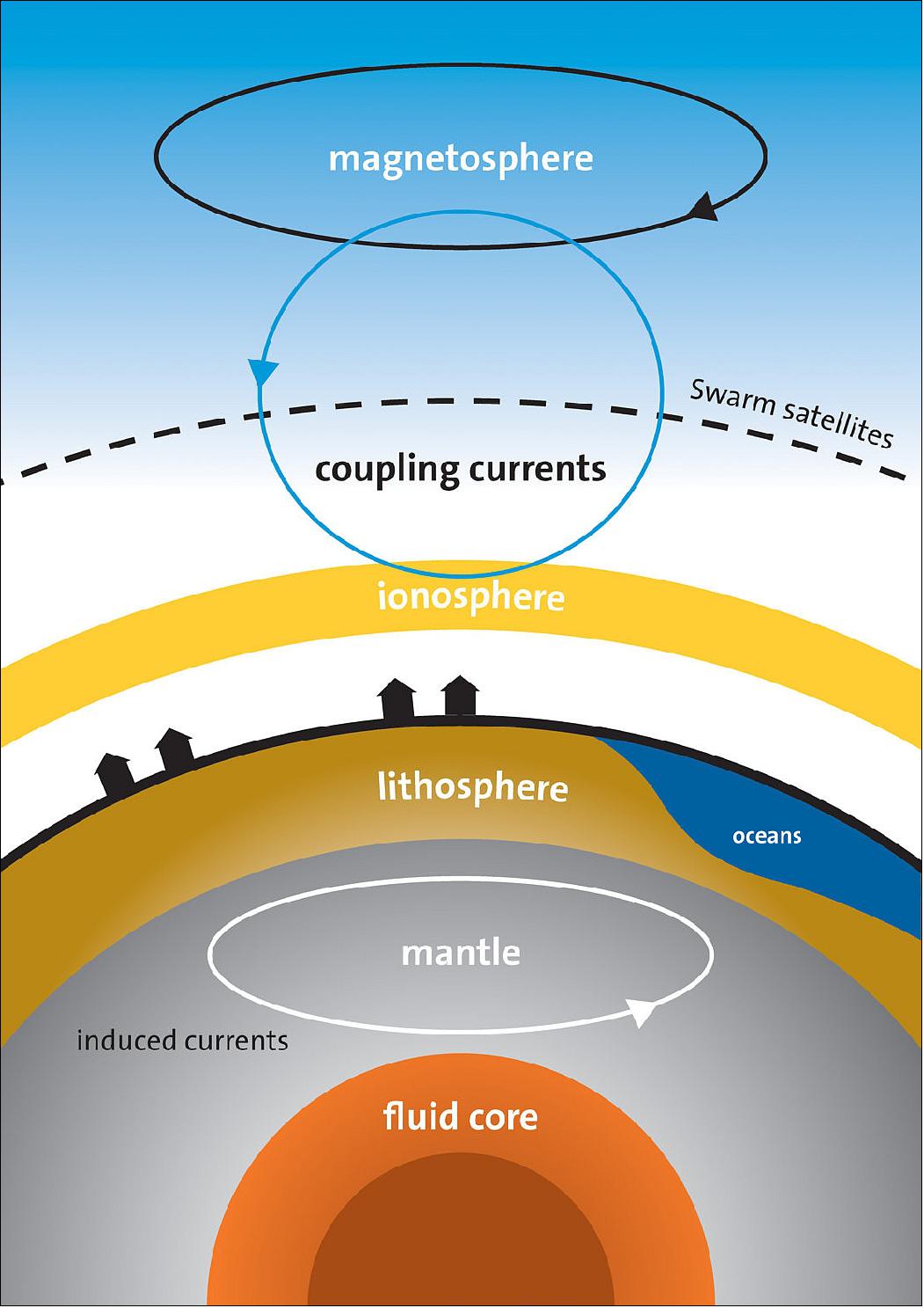
- The theory about the exchange and momentum between solar wind and our magnetic field actually goes back more than 100 years, and more recently the AMPERE (Active Magnetosphere and Planetary Electrodynamics Response Experiment) satellite network has allowed scientists to study large-scale field-aligned currents. AMPERE collects magnetic perturbation data from engineering grade magnetometers aboard 66 spacecraft in the Iridium commercial communication constellation (11 satellites in 6 different orbital planes), each with an orbital period of 104 min and altitude of 780 km.
- However, the Swarm mission is leading to exciting new wave of discoveries. A new paper explores the dynamics of this energetic coupling across different spatial scales – and finds that it’s all in the detail. 94)
- Ryan McGranaghan from NASA’s Jet Propulsion Laboratory said, “We have a good understanding of how these currents exchange energy between the ionosphere and the magnetosphere at large scales, so we assumed that smaller-scale currents behaved in the same way, but carried proportionally less energy.”
- “Swarm has allowed us to effectively zoom in on these smaller currents and we see that, under certain conditions, this is not the case.
- “Our findings show that these smaller currents carry significant energy and that their relationship with the larger currents is very complex. Moreover, large and small currents affect the magnetosphere–ionosphere differently.”
- Colin Forsyth from University College London noted, “Since electric currents around Earth can interfere with navigation and telecommunication systems, this is an important discovery. It also gives us a greater understanding of how the Sun and Earth are linked and how this coupling can ultimately add energy to our atmosphere. This new knowledge can be used to improve models so that we can better understand, and therefore, ultimately, prepare for the potential consequences of solar storms.”
- ESA’s Swarm mission manager, Rune Floberghagen, added, “Since the beginning of the mission we have carried out projects to address the energy exchange between the magnetosphere, ionosphere and the thermosphere. - But what we are witnessing now is nothing short of a complete overhaul of the understanding of how Earth responds to and interacts with output from the Sun. In fact, this scientific investigation is becoming a fundamental pillar for the extended Swarm mission, precisely because it is breaking new ground and at the same time has strong societal relevance. We now wish to explore this potential of Swarm to the fullest.”
• As of 22 November 2017, the Swarm mission is four years on orbit, continuously collecting ground-breaking data on the various components of the magnetic field and on the near-Earth environment and their dynamics. 95)
- At its 172nd meeting on 15-16 November the Earth Observation Program Board approved the extension of Swarm until the end of 2021. The mission team is now busy implementing extensions of all the relevant activities under contract, as well as a good number of new ones. 96)
• June 2017: The presentations of the Fourth Swarm Science Meeting, Banff, Alberta, Canada, 20-24 March 2107 are available at http://esaconferencebureau.com/2017-events/17c04/presentations 97)
• April 21, 2017: Thanks to social media and the power of citizen scientists chasing the northern lights, a new feature was discovered recently. Nobody knew what this strange ribbon of purple light was, so .... it was called Steve. — ESA’s Swarm magnetic field mission has now also met Steve and is helping to understand the nature of this new-found feature. 98)
- Speaking at the recent Swarm science meeting in Banff, Canada, Eric Donovan from the University of Calgary explained how this new finding couldn’t have happened 20 years ago when he started to study the aurora.
- While the shimmering, eerie, light display of auroras might be beautiful and captivating, they are also a visual reminder that Earth is connected electrically to the Sun. A better understanding of the aurora helps to understand more about the relationship between Earth’s magnetic field and the charged atomic particles streaming from the Sun as the solar wind.
- “In 1997 we had just one all-sky imager in North America to observe the aurora borealis from the ground,” said Prof. Donovan. “Back then, we would be lucky if we got one photograph a night of the aurora taken from the ground that coincides with an observation from a satellite. Now we have many more all-sky imagers and satellite missions like Swarm so we get more than 100 a night.”
- And now, social media and citizen scientists also have an increasingly important role. — For instance, the Aurorasaurus website makes it possible for a large number of people to communicate about the aurora borealis. It connects citizen scientists to scientists and trawls Twitter feeds for instances of the word ‘aurora’. In doing so, it does an excellent job of forecasting where the aurora oval will be.

- At a recent talk, Prof. Donovan met members of another social media group on Facebook: the Alberta Aurora Chasers. The group attracts members of the general public who are interested in the night sky and includes some talented photographers.
- Looking at their photographs, Prof. Donovan came across something he hadn’t seen before. The group called this strange purple streak of light in the night sky captured in their photographs a ‘proton arc’ but for a number of reasons, including the fact that proton aurorae are never visible, he knew this had to be something else.
- However, nobody knew what it actually was so they decided to put a name to this mystery feature: they called it Steve.
- While the Aurora Chasers combed through their photos and kept an eye out for the next appearances of Steve, Prof. Donovan and colleagues turned to data from the Swarm mission and his network of all-sky cameras. - Soon he was able to match a ground sighting of Steve to an overpass of one of the three Swarm satellites.
- Prof. Donovan said, “As the satellite flew straight though Steve, data from the electric field instrument showed very clear changes. The temperature 300 km above Earth’s surface jumped by 3000°C and the data revealed a 25 km-wide ribbon of gas flowing westwards at about 6 km/s compared to a speed of about 10 m/s on either side of the ribbon. It turns out that Steve is actually remarkably common, but we hadn’t noticed it before. It’s thanks to ground-based observations, satellites, today’s explosion of access to data and an army of citizen scientists joining forces to document it. Swarm allows us to measure it and I’m sure will continue to help resolve some unanswered questions.”
- ESA’s Swarm mission scientist, Roger Haagmans, added, “It is amazing how a beautiful natural phenomenon, seen by observant citizens, can trigger scientists’ curiosity. The ground network and the electric and magnetic field measurements made by Swarm are great tools that can be used to better understand Steve. This is a nice example of society for science.”
• March 2017: The three Swarm platforms are working remarkably well. The spacecraft are successfully controlled by a small team shared with ESA Earth-Explorer missions; operations are running smoothly and without major anomalies. 99)
- Payload operations are more complex and resources consuming than what was defined in the specifications. Testing and fine-tuning activities, especially for the EFI (Electrical Field Instrument), are a continuous challenge for the team.
- It is already clear that the Ground Segment can support a mission extension. Technical details and budgetary considerations are currently under study but there are no reasons to expect any show-stopper. — In particular, the execution of another constellation maneuver campaign would imply a commissioning-like effort for the whole Flight Operations.
Overview of payload operations (Ref. 99)
• VFM (Vector Field Magnetometer): The VFMs are healthy and producing data at 50 Hz in all three spacecraft. Regular monitoring and checks are in place to detect any anomalous behavior.
• ASM (Absolute Scalar Magnetometer): ASM has failed on Swarm-C but is producing good science in vector mode on the other two satellites. A residual bias, presumably related to thermal effects, has been identified between VFM and ASM. To characterize this effect, calibration campaigns were performed slewing the satellites by 90 degrees at regular intervals.
• GPSR (GPS Receiver): Several software patches and a stepwise increase of field-of-view to 88 degrees have been implemented to improve performance for better scientific exploitation and to minimize the failures due to loss of synchronization.
• ACC (Accelerometer Instrument): Multiple complex thermal tests have been performed to study the unexpected dependence of accelerometer data with temperature variations. Regular scale factor calibrations are executed to compare accelerometer measurements with well known accelerations generated by dedicated thruster activations in all three axes.
• EFI (Electrical Field Instrument): Continuous operations of the EFI Thermal Ion Imager (TII) is not possible due to image degradation in the three satellites. Now it is operated over a limited (yet stepwise increasing) number of orbits per day. This has required a new interface between ESOC and the EFI team for the provision of science and calibration activation times which are ingested directly into the ESOC Mission Planning System. Such direct exchange of planning data does not exist for any other Earth-Explorer Mission.
- Many tests have been carried out, on all satellite to understand the source of the degradation and improve image quality.

• March 23, 2017: Information from ESA’s magnetic field Swarm mission has led to the discovery of supersonic plasma jets high up in our atmosphere that can push temperatures up to almost 10,000°C. Presenting these findings at this week’s Swarm Science Meeting in Banff, Canada, scientists from the University of Calgary explained how they used measurements from the trio of Swarm satellites to build on what was known about vast sheets of electric current in the upper atmosphere. 100)
- The theory that there are huge electric currents, powered by solar wind and guided through the ionosphere by Earth’s magnetic field, was postulated more than a century ago by the Norwegian scientist Kristian Birkeland (1867-1917).
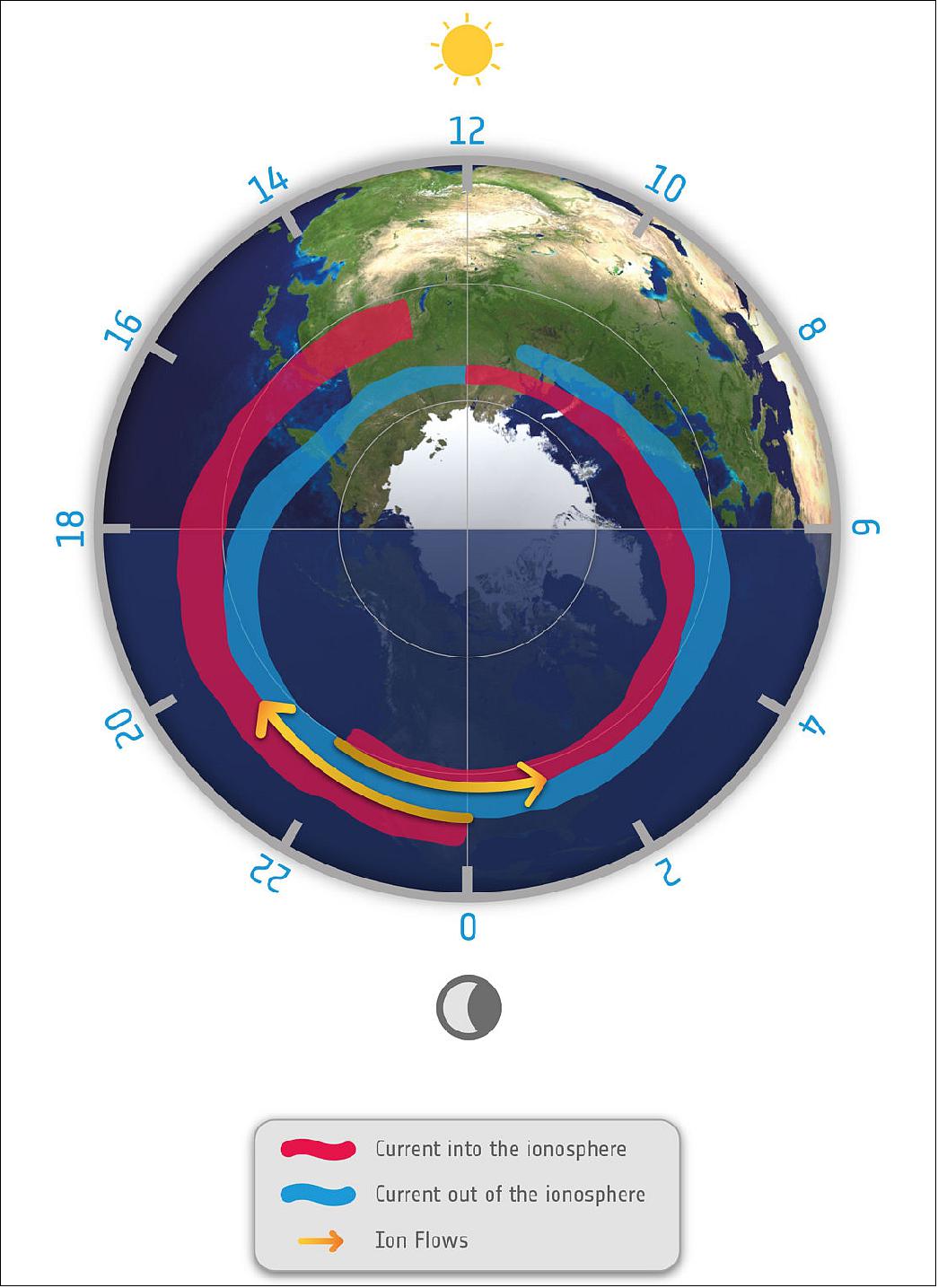
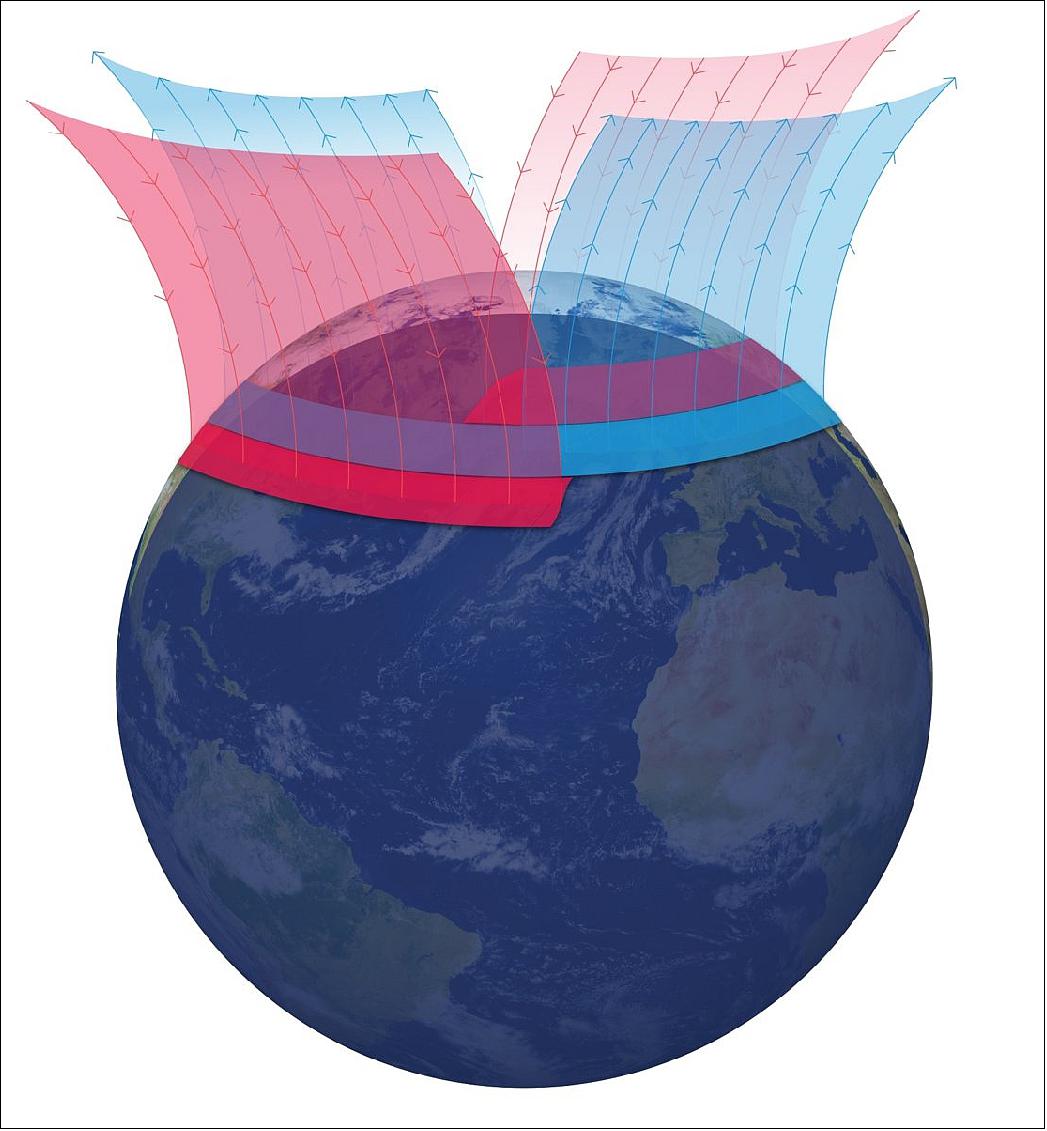

- These fields, which are strongest in the winter, occur where upwards and downwards Birkeland currents connect through the ionosphere.
- Bill Archer from the University of Calgary explained, “Using data from the Swarm satellites’ electric field instruments, we discovered that these strong electric fields drive supersonic plasma jets. The jets, which we call ‘Birkeland current boundary flows’, mark distinctly the boundary between current sheets moving in opposite direction and lead to extreme conditions in the upper atmosphere. They can drive the ionosphere to temperatures approaching 10 000°C and change its chemical composition. They also cause the ionosphere to flow upwards to higher altitudes where additional energization can lead to loss of atmospheric material to space.”
- David Knudsen, also from the University of Calgary, added, “These recent findings from Swarm add knowledge of electric potential, and therefore voltage, to our understanding of the Birkeland current circuit, perhaps the most widely recognized organizing feature of the coupled magnetosphere–ionosphere system.”
- This discovery is just one of the new findings presented at the week-long science meeting dedicated to the Swarm mission. Also presented this week and focusing on Birkeland currents, for example, Swarm was used to confirm that these currents are stronger in the northern hemisphere and vary with the season.
- Rune Floberghagen, ESA’s Swarm mission manager, said, “The electric field instrument is the first ionospheric imager in orbit so it’s very exciting to see such fantastic results that are thanks to this new instrument. The dedication of scientists working with data from the mission never ceases to amaze me and we are seeing some brilliant results, such as this, discussed at this week’s meeting. Swarm is really opening our eyes to the workings of the planet from deep down in Earth’s core to the highest part of our atmosphere.”
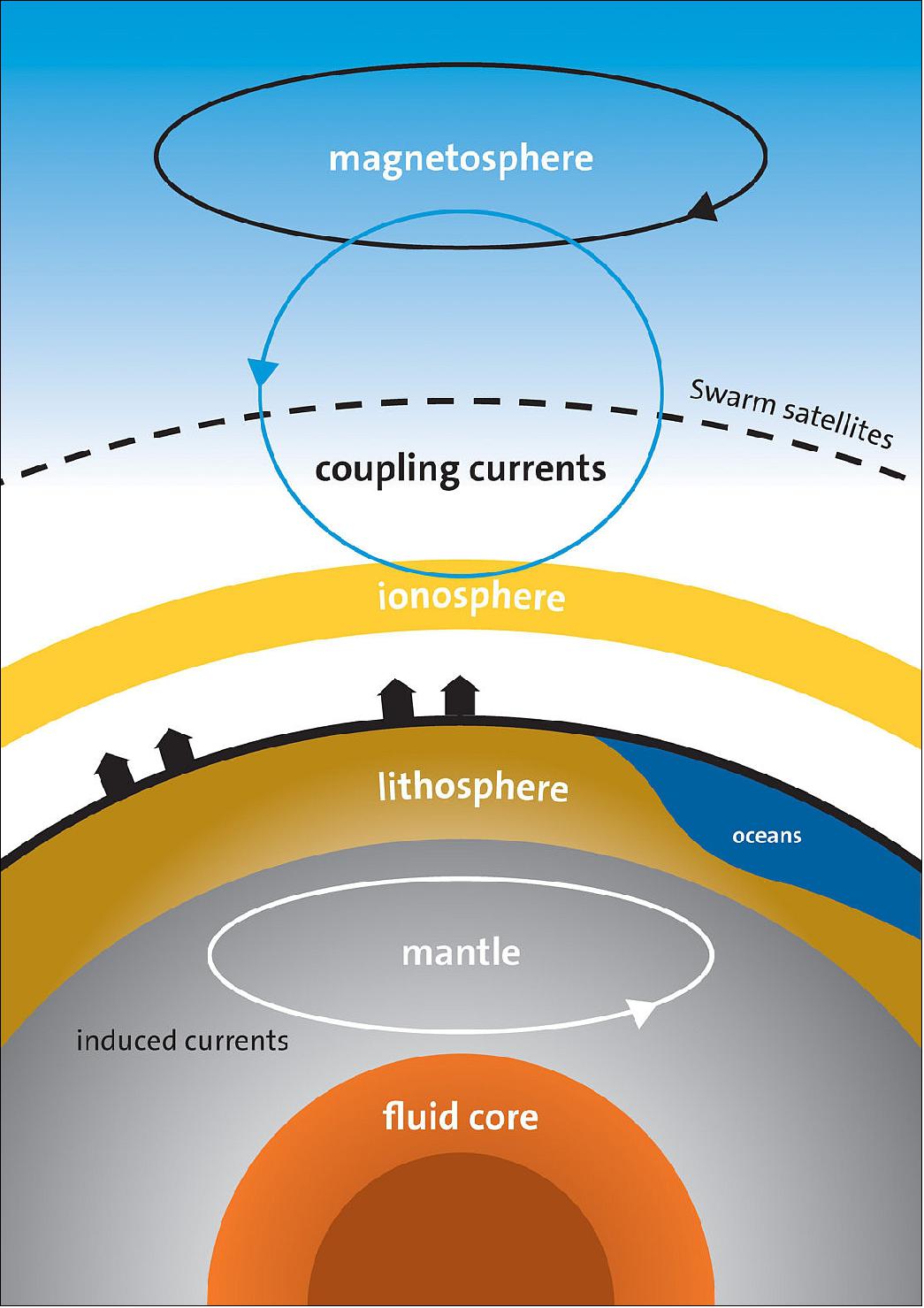
• March 22, 2017: Strong electric currents in the upper atmosphere are known to vary according to the season, but ESA’s Swarm mission has discovered that this seasonal variation is not the same in the north and south polar regions. Named after Kristian Birkeland, the scientist a century ago who first postulated that the ‘northern lights’ were linked to electrically charged particles in the solar wind, these currents flow along Earth’s magnetic field lines in the polar regions. 101)
- Magnetic field measurements from ESA’s Swarm satellite constellation are allowing scientists to understand more about these powerful currents, which carry up to 1 TW of electric power to the upper atmosphere. This is about 30 times the energy consumed in New York during a heatwave.
- It is important to understand the interplay between these Birkeland currents and the solar wind that bombards our planet and that can potentially cause power and communication blackouts.
- New findings, presented this week at the Swarm science meeting in Banff, Alberta, Canada, show how three years of measurements from the mission were combined with measurements from Germany’s earlier Champ satellite to produce global climatological maps of these currents (Figure 98).
- Moreover, these results show differences between currents in the northern and southern hemisphere, how they change with the season and how they vary according to the strength of the solar wind.
- Karl Laundal, from the Birkeland Center for Space Science, explained, “Interaction between Earth’s magnetic field and the interplanetary magnetic field – meaning part of the Sun’s magnetic field carried by solar wind – depends on how the interplanetary field is orientated. While this sounds complicated, it means that hardly any solar wind can enter the magnetosphere and arrive at Earth if the interplanetary magnetic field points north, parallel to Earth’s magnetic field. - On the other hand, if the interplanetary field points south, the opposite is true and this allows a connection to be made with Earth’s magnetic field. Part of the energy in solar wind then further energizes the charged particles that are responsible for the visible light displays of the auroras.”
- Birkeland currents therefore tend to be weak for a northwards interplanetary field and strong for a southwards field.
- Importantly, these new results also reveal that the strength of the currents is not the same in both hemispheres. These hemispheric differences may relate to asymmetry in Earth’s main magnetic field. In fact, the two geomagnetic poles are not geometrically opposite to one another, and the magnetic field intensity is also not the same in the north as in the south.
- Karl Laundal said, “The main reason for this probably has to do with differences in Earth’s main field. Such differences imply that the ionosphere–magnetosphere coupling is different in the two hemispheres. -In particular, the magnetic pole is more offset with respect to the geographic pole in the south compared to the north, which leads to different variations in sunlight in the ‘magnetic hemispheres’. Because of these differences, the two hemispheres do not respond symmetrically to solar wind driving or changing seasons. Swarm is a fantastic tool for space science studies. The high-quality measurements and the fact that there are three satellites working in concert hold many new clues about how our home planet interacts with the space around it. It’s a fascinating time.”
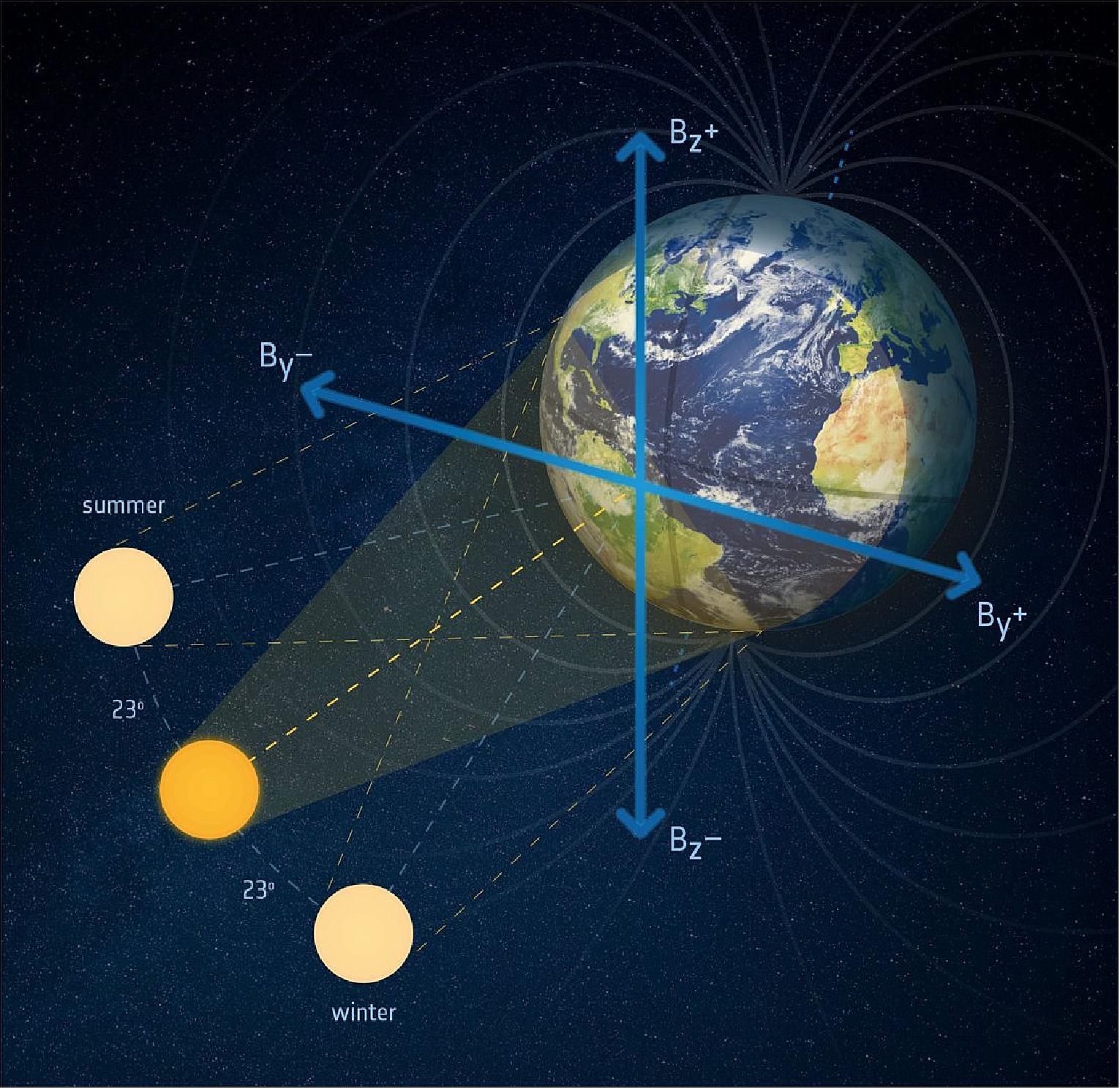
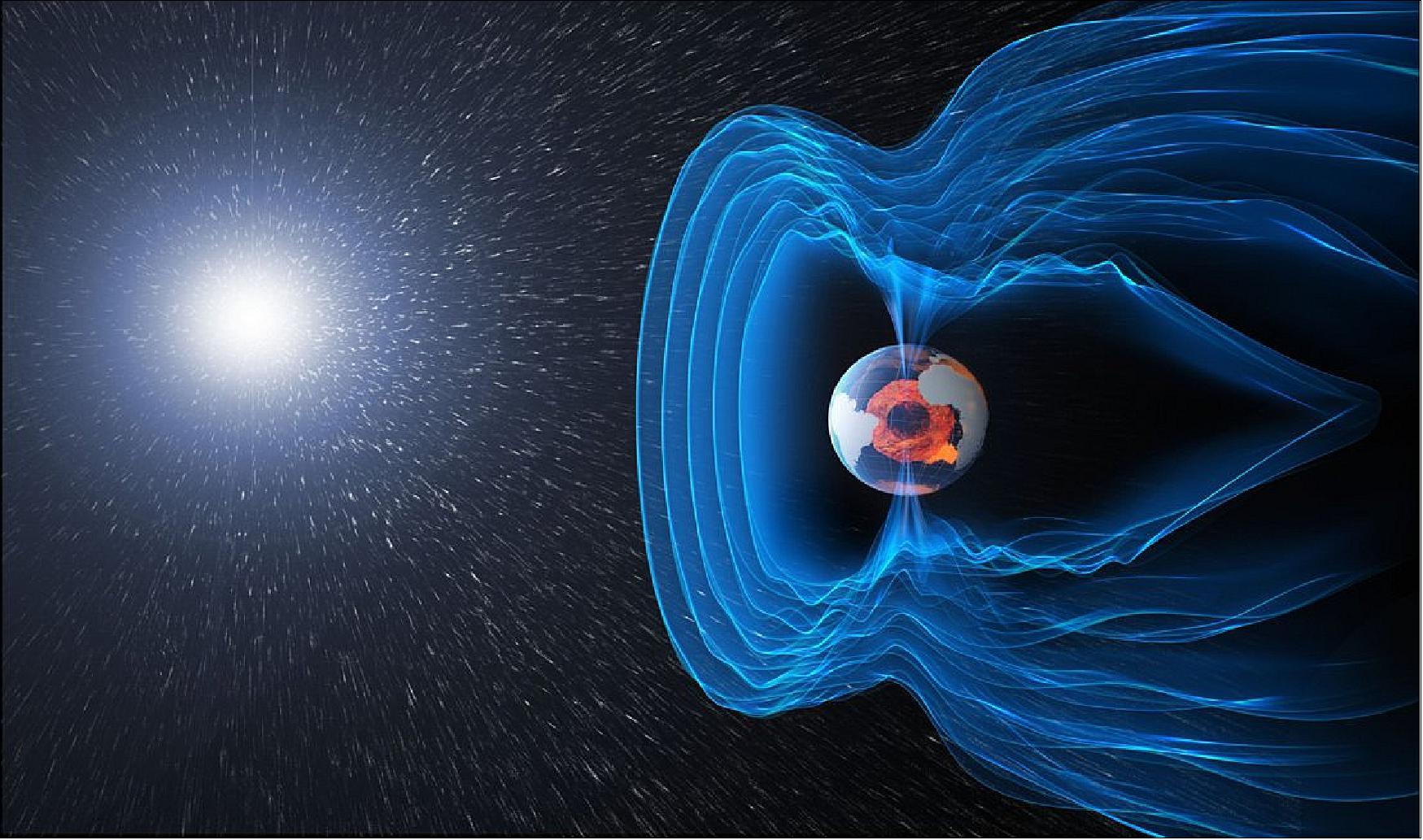
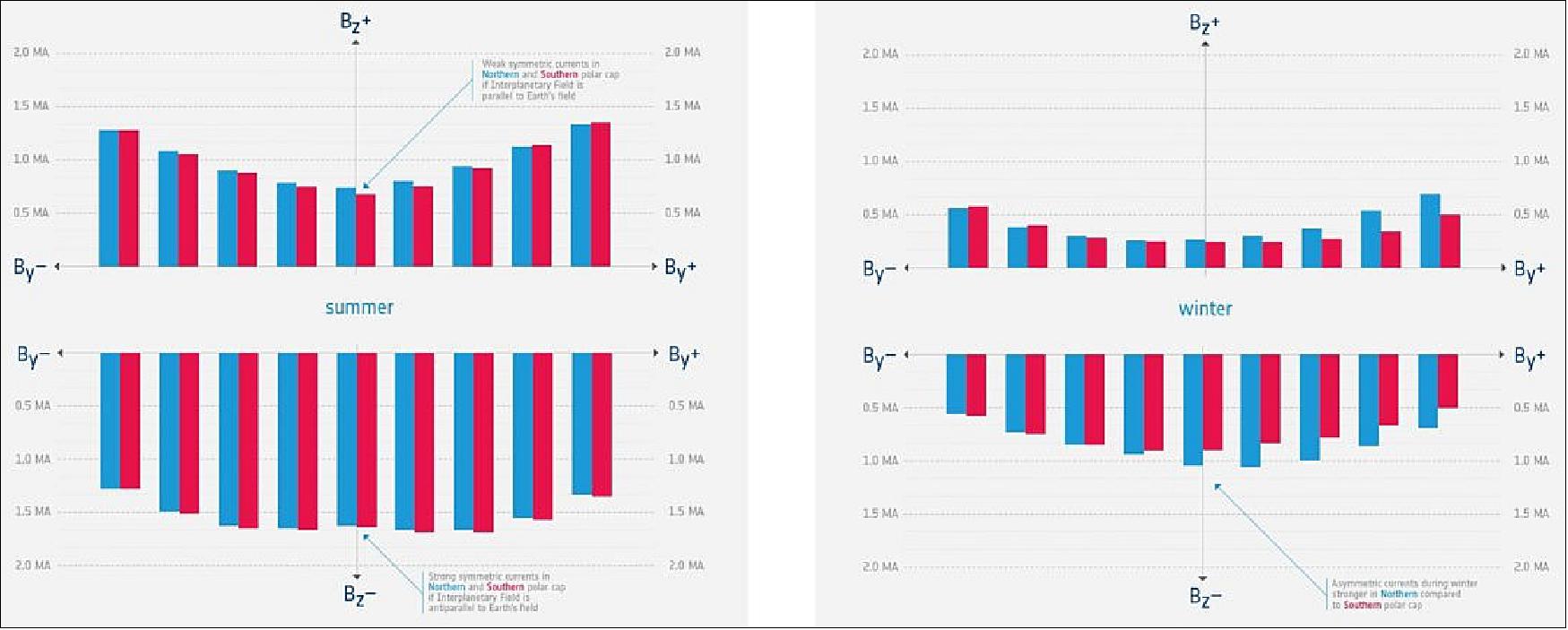
• March 21, 2017: ESA’s Swarm satellites are seeing fine details in one of the most difficult layers of Earth’s magnetic field to unpick – as well as our planet’s magnetic history imprinted on Earth’s crust. 102)
- Earth’s magnetic field can be thought of as a huge cocoon, protecting us from cosmic radiation and charged particles that bombard our planet in solar wind. Without it, life as we know it would not exist. Most of the field is generated at depths greater than 3000 km by the movement of molten iron in the outer core. The remaining 6% is partly due to electrical currents in space surrounding Earth, and partly due to magnetized rocks in the upper lithosphere – the rigid outer part of Earth, consisting of the crust and upper mantle.
- Although this ‘lithospheric magnetic field’ is very weak and therefore difficult to detect from space, the Swarm trio is able to map its magnetic signals. After three years of collecting data, the highest resolution map of this field from space to date has been released. “By combining Swarm measurements with historical data from the German CHAMP satellite, and using a new modelling technique, it was possible to extract the tiny magnetic signals of crustal magnetization,” explained Nils Olsen from the Technical University of Denmark, one of the scientists behind the new map. ESA’s Swarm mission manager, Rune Floberghagen, added: “Understanding the crust of our home planet is no easy feat. We can’t simply drill through it to measure its structure, composition and history. Measurements from space have great value as they offer a sharp global view on the magnetic structure of our planet’s rigid outer shell.”
- Presented at this week’s Swarm Science Meeting in Banff, Alberta, Canada, the new map shows detailed variations in this field more precisely than previous satellite-based reconstructions, caused by geological structures in Earth’s crust.
- One of these anomalies occurs in Central African Republic, centered around the city of Bangui, where the magnetic field is significantly sharper and stronger. The cause for this anomaly is still unknown, but some scientists speculate that it may be the result of a meteorite impact more than 540 million years ago (Figure 101).
- The magnetic field is in a permanent state of flux. Magnetic north wanders, and every few hundred thousand years the polarity flips so that a compass would point south instead of north. When new crust is generated through volcanic activity, mainly along the ocean floor, iron-rich minerals in the solidifying magma are oriented towards magnetic north, thus capturing a ‘snapshot’ of the magnetic field in the state it was in when the rocks cooled.
- Since magnetic poles flip back and forth over time, the solidified minerals form ‘stripes’ on the seafloor and provide a record of Earth’s magnetic history.
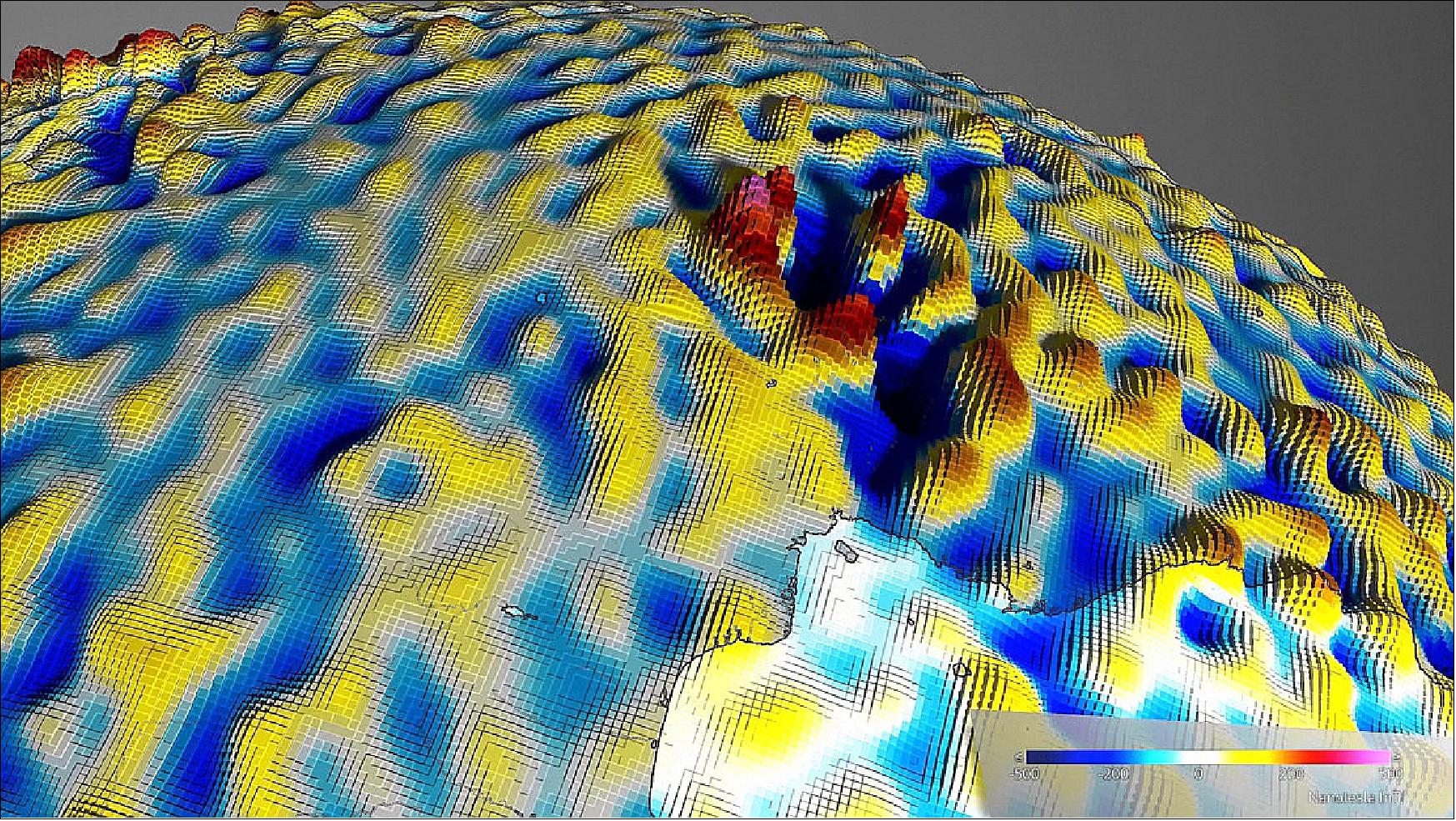
• February 1, 2017: A space debris avoidance maneuver planned for ESA's Swarm mission proved unnecessary last week, but the close encounter highlighted the growing risk from space debris. It's an increasingly common occurrence: ESA's Space Debris Office starts monitoring a piece of debris - there are over 22,000 tracked in space now - that could pass near one of the Agency's satellites. 103)
- Additional tracking data indicate the object – maybe a chunk of some old satellite already long abandoned – might pass too close, within the ‘risk threshold’ that surrounds each active spacecraft.
- Upon closer look, uncertainty in the object’s track combined with uncertainty in the satellite’s orbit mean that a collision cannot be excluded. The only solution is for mission controllers to boost the satellite out of harms’ way. It’s time to take action.
- This is exactly what happened on 24 January, when space debris experts at ESA/ESOC mission control center in Darmstadt, Germany, alerted the Swarm flight control team that one of their three satellites, Swarm-B, would have a close call from a 15 cm chunk of the former Cosmos 375.
- The close encounter between Swarm-B and the debris was forecast to take place on 25 January at 23:11 GMT on the following day.
- At that point, a ‘team of teams’ began taking action to assess the situation, plan a debris avoidance maneuver and upload a set of commands to execute the maneuver – all before the forecast flyby just 39 hours away.
- The situation was complicated by the fact that there were only two communication slots – a radio link established when Swarm-B flies over its ground station at Kiruna, Sweden – prior to the flyby.
- Following a first coordination meeting on Tuesday morning, engineers from the Swarm mission control team began working with specialists from flight dynamics, from the Space Debris Office and from the Swarm project team at ES/ESRIN in Frascati near Rome to prepare the maneuver.
- Following a detailed analysis by the flight dynamics and space debris experts, it was determined that boosting Swarm-B higher in its orbit by about 35 m would do the trick.
- “There was at this point still some uncertainty in our knowledge of the debris object’s trajectory, but we were confident that this boost would reduce the risk of a too-near flyby, or even an actual collision, to below the acceptable threshold set by the mission managers,” said Holger Krag Head of ESA’s Space Debris Office. - The boost would require the satellite to fire its cold-gas thrusters for about 44 seconds.
- Flight control engineers used data files provided by flight dynamics to prepare a set of commands for upload to Swarm-B. The craft would be commanded to shut down its science instruments, reorient itself in space, execute the maneuver on its own (out of contact with ground) and then reconfigure to resume science, all overnight between 25–26 January, starting around 45 minutes before the encounter.
- Just after breakfast on Wednesday morning (Jan. 25), 15 hours before the flyby, the commands were uplinked, fully enabled and ready to execute automatically without any further action from mission control.
- “This was a good plan, and it had the primary aim of ensuring spacecraft safety now and to provide some good margin against a possible future encounter with this debris object,” said Swarm mission manager Rune Floberghagen.
- On Wednesday morning, however, two new batches of information were received. First, during the same ground station communication slot when the maneuver commands were being uploaded, Swarm-B also sent down a fresh set of GPS data recorded during the previous 20 hours. The highly precise data provided a record of the satellite’s actual current orbit. “This allowed us to make a fresh orbit determination and prediction, and this could be used to reduce uncertainty in the satellite’s position at the forecast conjunction time this evening to very small values,” said Detlef Sieg, the flight dynamics specialist assigned to Swarm.
- Second, the Space Debris Office received a fresh set of tracking information from the debris tracking radar system operated by the US armed forces, JSpOC (Joint Space Operations Center), providing new and more precise data on the impending object’s orbital trajectory.
- “As this was acquired less than 24 hours prior to the forecast conjunction, it had lower uncertainty related to the object’s position during the conjunction than previous tracking data,” said Klaus Merz an analyst in the Space Debris Office. Klaus and his team ran a number of detailed manual calculations using the new object tracking data and ESA’s own debris assessment software tools, assessing the risk of a collision if the avoidance maneuver was performed – and if one was not.
- “As a result of the reduced uncertainties in the object’s trajectory, the risk of collision is now well below the mission’s threshold,” said Klaus.
- Knowing that time was crucial, mission manager Rune Floberghagen asked everyone for their recommendations at a final ‘go/no-go’ meeting at 10:40 GMT on Wednesday morning.
- With close flyby now no longer presenting an unacceptable risk, it was clear the satellite could be left in its current orbit.
- “Furthermore, we could confirm that removing the uploaded commands could be done in a very safe way and would have no effect on the continuing operation of Swarm,” said spacecraft operations manager Elia Maestroni.
- “Therefore the decision was taken to abort the maneuver and return the satellite to its usual science-gathering timeline.” — And Swarm-B – a marvelous satellite on a vital science mission 500 km above our heads – continued safely on its way, oblivious to all the human activity focused on its wellbeing in the past 36 hours.
• December 19, 2016: We would normally associate jet streams with the weather but, thanks to ESA’s magnetic field mission, scientists have discovered a jet stream deep below Earth’s surface – and it’s speeding up. Launched in 2013, the trio of Swarm satellites are measuring and untangling the different magnetic fields that stem from Earth’s core, mantle, crust, oceans, ionosphere and magnetosphere. Together, these signals form the magnetic field that protects us from cosmic radiation and charged particles that stream towards Earth in solar winds. 104)
- Measuring the magnetic field is one of the few ways we can look deep inside our planet. As Chris Finlay from the Technical University of Denmark noted, “We know more about the Sun than Earth’s core because the Sun is not hidden from us by 3000 km of rock.” The field exists because of an ocean of superheated, swirling liquid iron that makes up the outer core. Like a spinning conductor in a bicycle dynamo, this moving iron creates electrical currents, which in turn generate our continuously changing magnetic field. Tracking changes in the magnetic field can, therefore, tell researchers how the iron in the core moves.
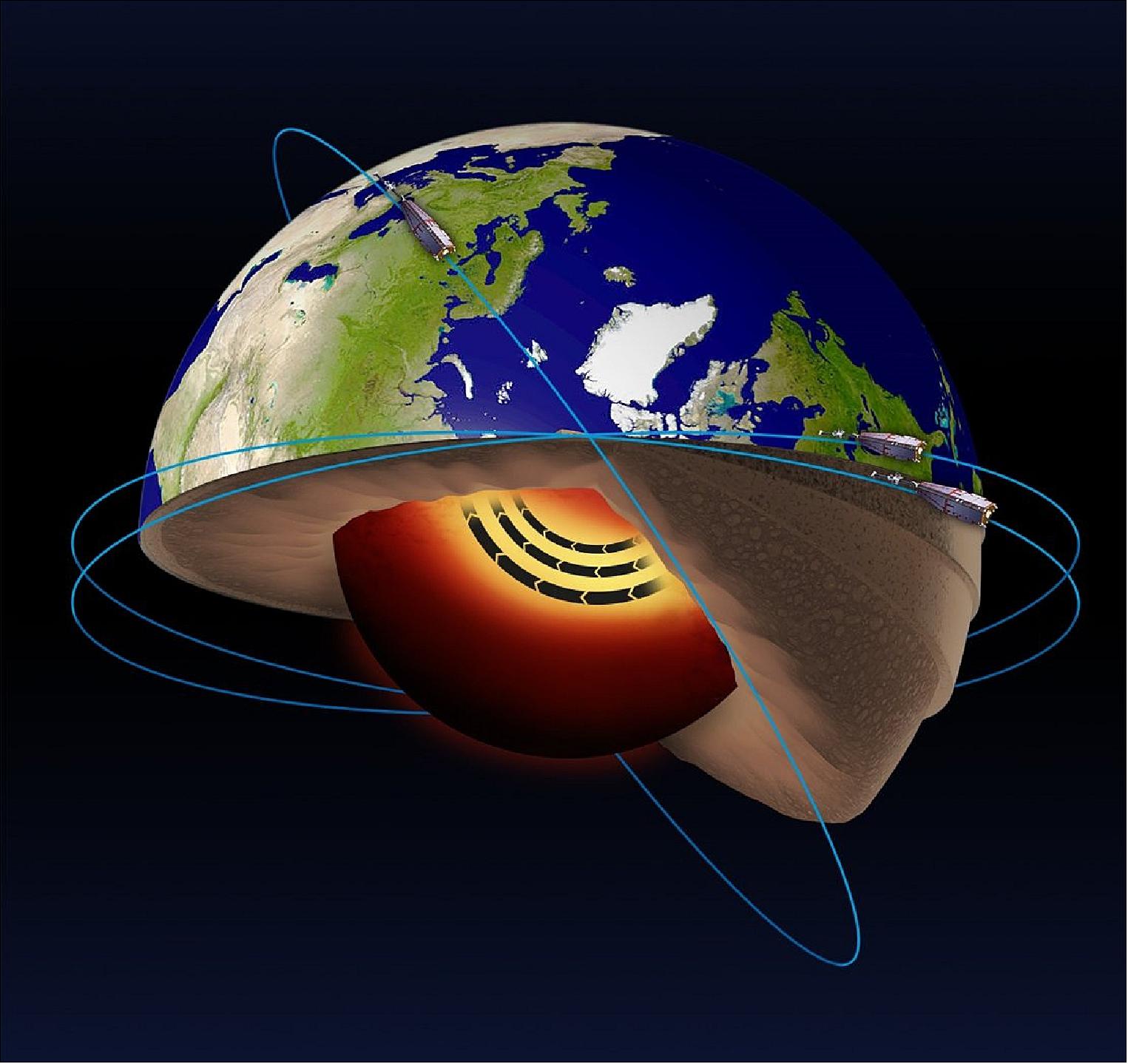
- The accurate measurements by the unique constellation of Swarm satellites allow the different sources of magnetism to be separated, making the contribution from the core much clearer. A paper published today in Nature Geoscience describes how Swarm’s measurements have led to the discovery of a jet stream in the core. 105)
- Phil Livermore from the University of Leeds in the UK and lead author of the paper said, “Thanks to the mission we have gained new insights into the dynamics of Earth’s core and it’s the first time this jet stream has been seen, and not only that – we also understand why it’s there.” One feature is a pattern of ‘flux patches’ in the northern hemisphere, mostly under Alaska and Siberia. “These high-latitude flux patches are like bright spots in the magnetic field and they make it easy to see changes in the field,” explained Dr Livermore.
- Swarm reveals that these changes are actually a jet stream moving at more than 40 km a year – three times faster than typical outer-core speeds and hundreds of thousands of times faster than Earth’s tectonic plates move. “We can explain it as acceleration in a band of core fluid circling the pole, like the jet stream in the atmosphere,” said Dr Livermore.
- So, what is causing the jet stream and why is it speeding up so quickly? The jet flows along a boundary between two different regions in the core. When material in the liquid core moves towards this boundary from both sides, the converging liquid is squeezed out sideways, forming the jet. “Of course, you need a force to move the fluid towards the boundary,” says Prof. Rainer Hollerbach, also from the University of Leeds. “This could be provided by buoyancy, or perhaps more likely from changes in the magnetic field within the core.” As for what happens next, the Swarm team is watching and waiting.
- Rune Floberghagen, ESA’s Swarm mission manager, added, “Further surprises are likely. The magnetic field is forever changing, and this could even make the jet stream switch direction.This feature is one of the first deep-Earth discoveries made possible by Swarm. With the unprecedented resolution now possible, it’s a very exciting time – we simply don’t know what we’ll discover next about our planet.”
• October 28, 2016: Satellite engineers have been puzzling over why GPS navigation systems on low-orbiting satellites like ESA’s Swarm constellation, sometimes black out when they fly over the equator between Africa and South America. Thanks to Swarm, it appears ‘thunderstorms’ in the ionosphere are to blame. 106) 107)
- Launched in 2013, the Swarm trio is measuring and untangling the different magnetic fields that stem from Earth’s core, mantle, crust, oceans, ionosphere and magnetosphere – an undertaking of at least four years.
- As with many satellites, ESA’s three Swarm satellites carry GPS receivers as part of their positioning system so that operators keep them in the correct orbits. In addition, GPS pinpoints where the satellites are making their scientific measurements. — However, sometimes the satellites lose their GPS connection. In fact, during their first two years in orbit, the link was broken 166 times.
- The new study (Ref. 107) connects these losses of GPS signal to EPIs (Equatorial Plasma Irregularities), which occur when the electron density in the ionosphere’s F region undergoes large, rapid changes. EPIs mostly occur close to Earth’s magnetic equator, which might explain why the loss of GPS signal to Swarm satellites also occurred most frequently when the satellites were at low latitudes.
- Nearly all of the 166 loss of GPS signal events adhered to this pattern, and the researchers confirmed that the 161 low-latitude events coincided with EPIs that caused significant depletion of the ionospheric electron density. The other five events at high latitudes corresponded to polar patches or increased geomagnetic activity. In addition, when a Swarm satellite flew through an area of strong EPIs, it experienced loss of GPS signal for at least one channel about 95% of the time. These results indicate that EPIs play a critical role in causing loss of GPS signal for satellites in low Earth orbit.
- The authors noted other distinct patterns. Swarm B, for example, underwent fewer GPS signal loss events than Swarm A or C: Swarm B’s orbit keeps the satellite 50 km higher above Earth than Swarm A and C, which means it inhabits an area with lower electron density. The authors indicate that the lower background density limits the magnitude of local density depletions, protecting the satellite from the most intense EPIs.
- This finding suggests that satellites flying at higher altitudes could be at lower risk for loss of GPS signal. Also, the bandwidth of the Swarm satellites’ GPS receivers was updated in 2015, which may help decrease issues with GPS signal in the future. With further study and more data over time, researchers may soon determine how best to limit loss of GPS signal, whether that be through further changes to the GPS receivers or adjusted orbits.
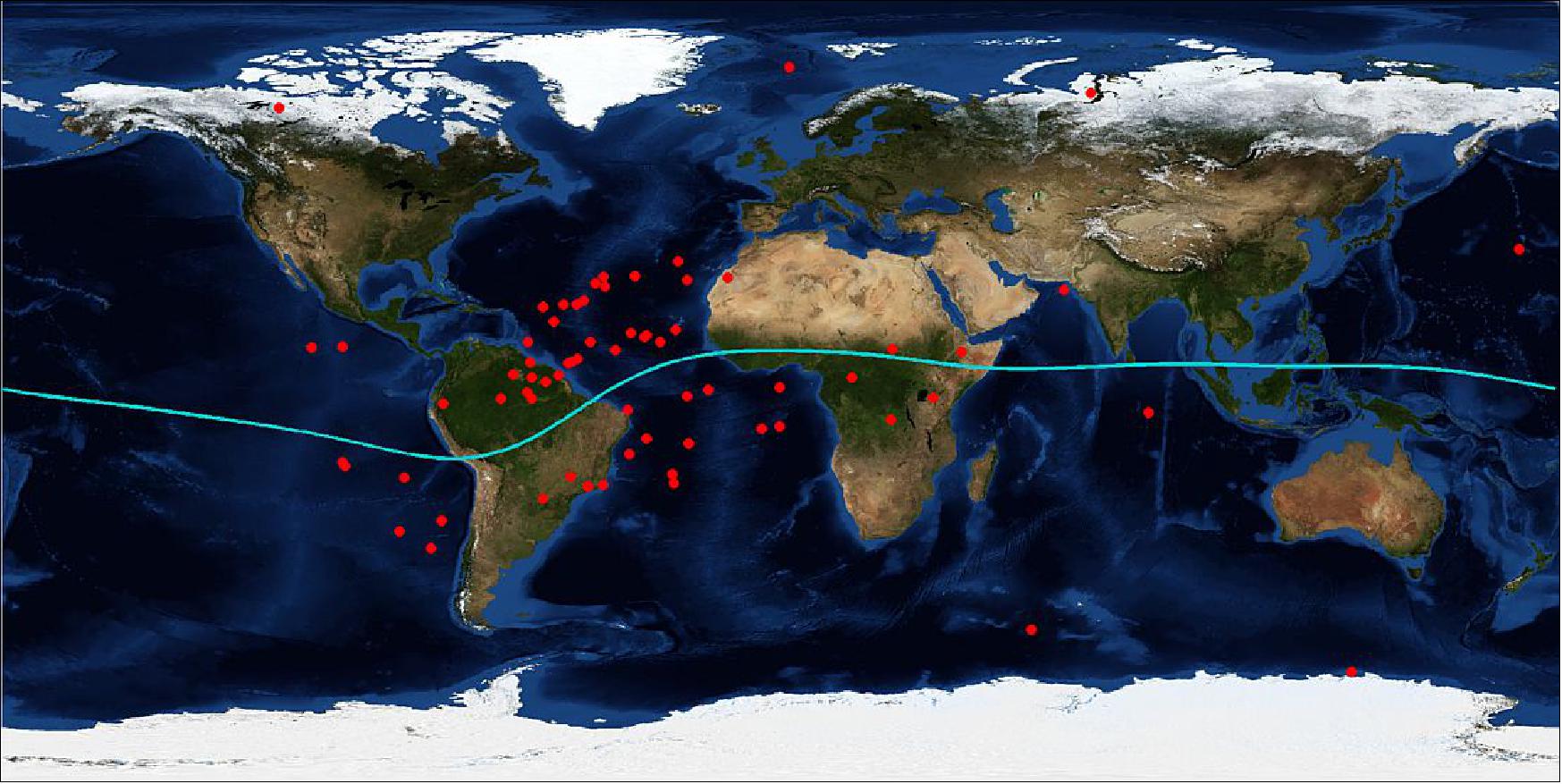
Claudia Stolle from the GFZ research center in Potsdam, Germany said, “Ionospheric thunderstorms are well known, but now we have been able to show a direct link between these storms and the loss of connection to GPS. “This is thanks to Swarm because it is the first time that high-resolution GPS and ionospheric patterns can be detected from the same satellite.”
These thunderstorms occur when the number of electrons in the ionosphere undergoes large and rapid changes. This tends to happen close to Earth’s magnetic equator and typically just for a couple of hours between sunset and midnight. As its name suggests, the ionosphere is where atoms are broken up by sunlight, which leads to free electrons. A thunderstorm scatters these free electrons, creating small bubbles with little or no ionized material. These bubbles disturb the GPS signals so that the Swarm GPS receivers can lose track.
Resolving the mystery of blackouts is not only good news for Swarm, but also for other low-orbiting satellites experiencing the same problem. It means that engineers can use this new knowledge to improve future GPS systems to limit signal losses.
Christian Siemes, who works at ESA on the mission, said, “In light of this new knowledge, we have been able to tune the Swarm GPS receivers so they are more robust, resulting in fewer blackouts. Importantly, we are able to measure variations in the GPS signal which is not only interesting for engineers developing GPS instruments, but also interesting to advance our scientific understanding of upper-atmosphere dynamics.”
ESA’s Swarm mission manager, Rune Floberghagen, added, “What we see here is a striking example of a technical challenge being turned into exciting science, a true essence of an Earth Explorer mission such as Swarm. These new findings demonstrate that GPS can be used as a tool for understanding dynamics in the ionosphere related to solar activity. Perhaps one day we will also be able to link these ionospheric thunderstorms with the lightning we see from the ground” (Ref. 106).
• October 3, 2016: Oceans might not be thought of as magnetic, but they make a tiny contribution to our planet’s protective magnetic shield. Remarkably, ESA’s Swarm satellites have not only measured this extremely faint field, but have also led to new discoveries about the electrical nature of inner Earth (Figure 105). 108) 109)
- The magnetic field shields us from cosmic radiation and charged particles that bombard Earth from the Sun. Without it, the atmosphere as we know it would not exist, rendering life virtually impossible. Scientists need to learn more about our protective field to understand many natural processes, from those occurring deep inside the planet, to weather in space caused by solar activity. This information will then yield a better understanding of why Earth’s magnetic field is weakening. Although we know that the magnetic field originates in different parts of Earth and that each source generates magnetism of different strengths, exactly how it is generated and why it changes is not fully understood.
- While the mission is already shedding new light on how the field is changing, this latest result focuses on the most elusive source of magnetism: ocean tides. When salty ocean water flows through the magnetic field, an electric current is generated and this, in turn, induces a magnetic response in the deep region below Earth’s crust – the mantle. Because this response is such a small portion of the overall field, it was always going to be a challenge to measure it from space.
- Last year, scientists from the Swiss Federal Institute of Technology, ETH Zurich, showed that if it could be measured from space – never done before – it should also tell us something about Earth’s interior. However, this all remained a theory – until now. 110)
- Thanks to Swarm’s precise measurements along with those from Champ – a mission that ended in 2010 after measuring Earth’s gravity and magnetic fields for more than 10 years – scientists have not only been able to find the magnetic field generated by ocean tides but, remarkably, they have used this new information to image the electrical nature of Earth’s upper mantle 250 km below the ocean floor.
- Alexander Grayver, from ETH Zurich, said, “The Swarm and Champ satellites have allowed us to distinguish between the rigid ocean ‘lithosphere’ and the more pliable ‘asthenosphere’ underneath.” The lithosphere is the rigid outer part of the earth, consisting of the crust and upper mantle, while the asthenosphere lies just below the lithosphere and is hotter and more fluid than the lithosphere. “Effectively, ‘geo-electric sounding from space’, this result is a first for space exploration,” he continues. “These new results are important for understanding plate tectonics, the theory of which argues that Earth’s lithosphere consists of rigid plates that glide on the hotter and less rigid asthenosphere that serves as a lubricant, enabling plate motion.”
- Roger Haagmans, ESA’s Swarm mission scientist, explained, “It’s astonishing that the team has been able to use just two years’ worth of measurements from Swarm to determine the magnetic tidal effect from the ocean and to see how conductivity changes in the lithosphere and upper mantle. Their work shows that down to about 350 km below the surface, the degree to which material conducts electric currents is related to composition. In addition, their analysis shows a clear dependence on the tectonic setting of the ocean plate. These new results also indicate that, in the future, we could get a full 3D view of conductivity below the ocean.”
- Rune Floberghagen, ESA’s Swarm mission manager, added, “We have very few ways of probing deep into the structure of our planet, but Swarm is making extremely valuable contributions to understanding Earth’s interior, which then adds to our knowledge of how Earth works as a whole system.”
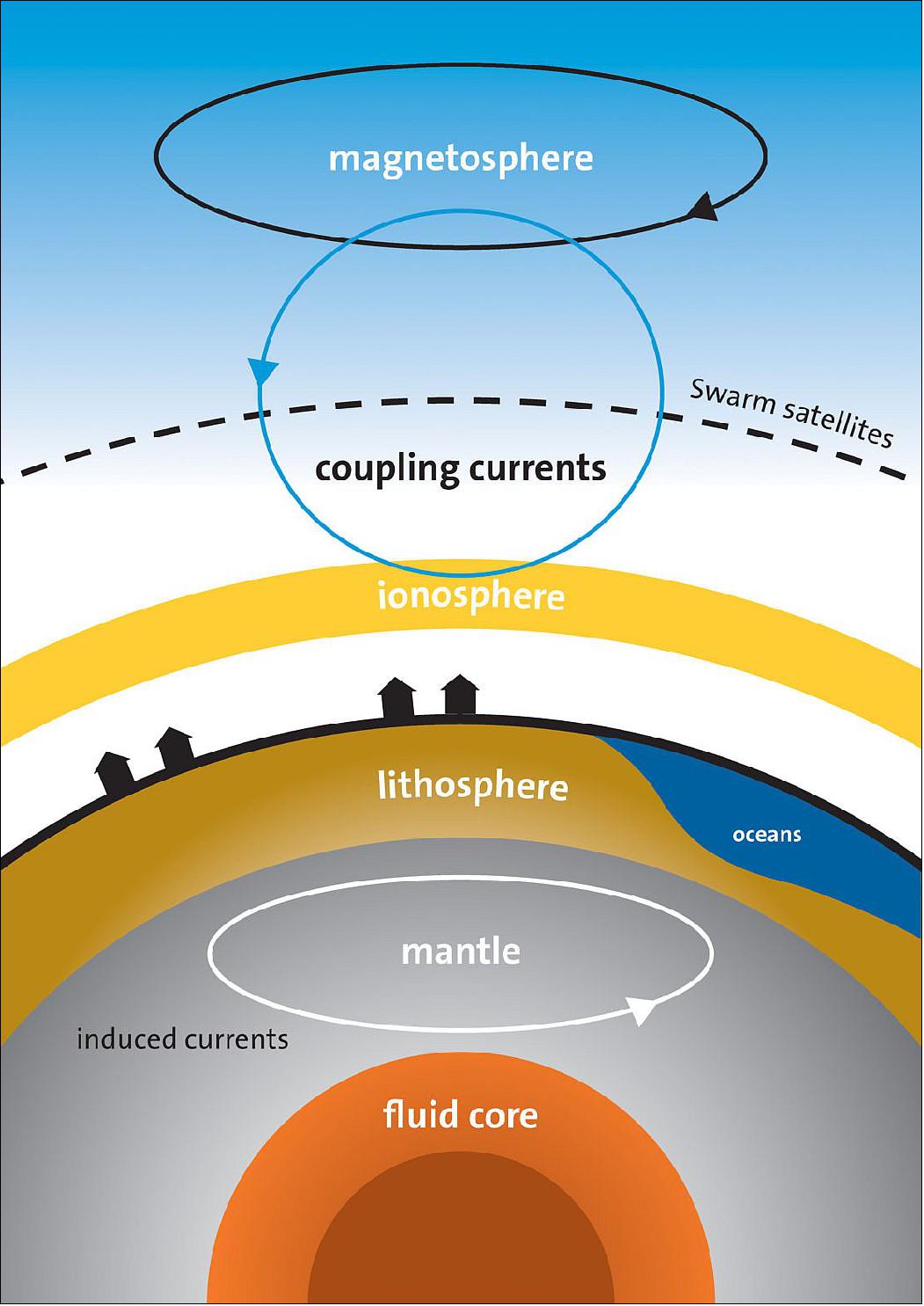
• August 2016: The proceedings of the ‘Living Planet Symposium 2016’, held in May 2017 in Prague, were only available in mid-August 2016. The current mission status of the Swarm ground segment and a summary of the major operational challenges since launch are covered mostly in the Ground segment chapter (at the end of the file, Ref. 160). Only the platform operations are stated here.
- After a challenging commissioning and orbit acquisition phase to achieve the target constellation, the three satellites are working remarkably well and the complete flight operations segment is running smoothly and without major interruptions despite the additional complexity of a multi-spacecraft mission. The Swarm platform has proven to be very robust and is behaving remarkably well. All units, nominal and redundant, are working as expected on all three spacecraft, and there have been few anomalies since launch.
- The main platform related activity has been the redefinition of the strategy to handle the different errors in the on-board MMU (Mass Memory Unit). The new approach takes into account the error type and the error area to better decide when to ignore and when to re-initialize the memory. It is particularly important to differentiate between SEFI (Single Event Functional Interruptions) and SSB (Single Stuck Bits); as both disturbances are regularly observed in Swarm MMUs. Table 3 summarizes the non-correctable errors reported by the three spacecraft.
Parameter | SWA (Swarm-A) | SWB (Swarm-B) | SWC (Swarm-C) |
SEFI (Single Event Functional Interruptions) | 6 | 6 | 15 |
SSB (Single Stuck Bit) | 1 | 41 | 1 |
- With the old strategy, all non-correctable errors (single/multi) detected by the memory scrubber were recovered from ground by performing an MMU re-initialization, which resulted in about 30 minutes of data loss each time. From launch until early 2015, about 5 hours (in total for the three satellites) of data were lost due to unnecessary MMU resets.
- In case of a SEFI, the decision is based on the impacted area; the MMU re-initialization is not performed if the affected area is storing housekeeping and science data and not MMU meta-data, since the anomaly condition disappears after the affected memory is rewritten.
- Finally, in order to improve the performance of the GPSR (GPS Receivers) – as another platform subsystem - for better scientific exploitation and to minimize the failures due to loss of synchronization, a number of GPSR setting changes were commanded by patching the GPSR on-board software. The updates include a stepwise increase of the GPS field-of-view up to 88º in order improve performance of the GPS with a reduced number of satellites in tracking.
• August 2016: Since completion of the orbit acquisition phase in April 2014 one satellite (Swarm-B) is flying in a higher orbit with an inclination of 87.8º and an altitude decaying from 520 km. The other two satellites are Swarm-A (trailing) and Swarm-C (leading). They form the lower pair with an initial altitude of 473 km, an inclination of 87.4º and an ascending node difference of 1.4º. 111)
- The original mission analysis foresaw a decay of the lower pair down to 300 km altitude within 4 years after launch. The target altitude of the launcher injection orbit was selected accordingly with some margin due to uncertainties in the solar activity prediction. However the final altitude selection had to be provided more than half a year before launch. Following several launch delays, the major part of the mission falls now beyond the maximum of the current solar cycle. Because of the lower radio flux and geomagnetic activity, the air drag forces are now much lower and the actual decay takes longer.
- As a first countermeasure the target for the inclination difference between Swarm-B and Swarm-A/C was reduced to 0.4º shortly before the start of the orbit acquisition maneuver sequence early 2014 such that the LTAN drift between the orbit planes of Swarm-B and A/C has been reduced to 1.5 h per year to avoid a too large difference towards the end of the mission.
• May 10, 2016: With more than two years of measurements by ESA’s Swarm satellite trio, changes in the strength of Earth's magnetic field are being mapped in detail. Launched at the end of 2013, Swarm is measuring and untangling the different magnetic signals from Earth’s core, mantle, crust, oceans, ionosphere and magnetosphere – an undertaking that will take several years to complete. 112)
- Although invisible, the magnetic field and electric currents in and around Earth generate complex forces that have immeasurable effects on our everyday lives. The field can be thought of as a huge bubble, protecting us from cosmic radiation and electrically charged atomic particles that bombard Earth in solar winds. However, it is in a permanent state of flux.
- New results from the constellation of Swarm satellites show where our protective field is weakening and strengthening, and importantly how fast these changes are taking place. It shows clearly that the field has weakened by about 3.5% at high latitudes over North America, while it has strengthened about 2% over Asia. The region where the field is at its weakest – the South Atlantic Anomaly – has moved steadily westward and weakened further by about 2%. — In addition, the magnetic north pole is wandering east, towards Asia.
- Chris Finlay, senior scientist at DTU Space in Denmark, said, “Swarm data are now enabling us to map detailed changes in Earth's magnetic field, not just at Earth's surface but also down at the edge of its source region in the core. “Unexpectedly, we are finding rapid localized field changes that seem to be a result of accelerations of liquid metal flowing within the core.”
- Rune Floberghagen, ESA’s Swarm mission manager, added, “Two and a half years after the mission was launched it is great to see that Swarm is mapping the magnetic field and its variations with phenomenal precision. “The quality of the data is truly excellent, and this paves the way for a profusion of scientific applications as the data continue to be exploited.”
- It is clear that ESA’s innovative Swarm mission is providing new insights into our changing magnetic field. Further results are expected to lead to new information on many natural processes, from those occurring deep inside the planet to weather in space caused by solar activity.

Legend to Figure 106: The magnetic field is thought to be produced largely by an ocean of molten, swirling liquid iron that makes up our planet’s outer core, 3000 km under our feet. Acting like the spinning conductor in a bicycle dynamo, it generates electrical currents and thus the continuously changing electromagnetic field. Other sources of magnetism come from minerals in Earth’s mantle and crust, while the ionosphere, magnetosphere and oceans also play a role. ESA’s constellation of three Swarm satellites is designed to identify and measure precisely these different magnetic signals. This will lead to new insight into many natural processes, from those occurring deep inside the planet, to weather in space caused by solar activity. - It is thought that accelerations in field strength are related to changes in how this liquid iron flows and oscillates in the outer core.
• December 22, 2015: The Swarm team is pleased to inform the users that an ASM-VFM Residual dataset produced for the investigations of the scalar residuals between the readings of the scalar magnetometer (ASM) and the vector magnetometer (VFM) is now available in the "Advanced" folder of the ESA FTP server covering the period from the beginning of mission until 17 July 2015 for all Swarm spacecraft. 114)
• July 2015: With the excellence of the science data from the three-satellite constellation, mission exploitation continues at a rapid pace. Scientific productivity is extremely high in all mission areas, ranging from the deep interior outer core via the mantle, lithosphere and crust, through to the thermosphere and magnetosphere. Swarm has meanwhile produced its initial field models in areas while also demonstrating beyond all doubt that its constellation approach is instrumental in the disentanglement and separation of the complex and dynamic contributors to the total magnetic and electric field measurements. 115)
- Constellation maintenance activities are proceeding very well, in particular keeping the lower pair at optimum operation for measurement of magnetic field gradients. This is especially relevant and important for achieving the best possible estimate of all contributors to the total measured magnetic field.
- Spring saw the release of the first official geophysical models following a period of validation activities. Likewise, in terms of external fields and geospace measurements, Swarm instruments continue to demonstrate their feasibility to detect current systems and ionospheric features, additionally underlining the high quality of mission data. This holds for both elements of the electric field instrument – the Langmuir probe and the thermal ion imager.
- The mission’s calibration/validation effort continues, with particular emphasis on detailed assessment of instrument data quality. As a direct result, significant improvement to all mission products have been achieved through lessons learned from onboard tests and/or processing algorithm evolution.
• June 22, 2015: After about 1 1/2 a years on orbit, the three Swarm satellites have provided a first glimpse inside Earth and started to shed new light on the dynamics of the upper atmosphere – all the way from the ionosphere about 100 km above, through to the outer reaches of our protective magnetic shield. 116)
- A series of scientific papers published recently in Geophysical Research Letters and collected in a special issue, confirms the remarkable potential of this unique mission. 117) 118) 119) 120)
- Rune Floberghagen, ESA’s Swarm Mission Manager, said, “These results show that all the meticulous effort that went into making Swarm the best-ever spaceborne magnetometry mission is certainly paying off.”
- “For the time being, the priority is to make sure that the science community can take advantage of the first results of the mission,” remarks Nils Olsen, who leads the Swarm Satellite Constellation Application and Research Facility, a consortium of European, US and Canadian institutes in charge of producing advanced models of the various sources of the geomagnetic field from Swarm data.
• May 2015: Swarm continues to acquire excellent science data. Satellite constellation maintenance operations are proceeding, this is particularly relevant and important to achieving the best possible estimate of all contributors to the total magnetic field. Last year, early mission data were used to derive candidate solutions for the 2015 International Geomagnetic Reference Field (IGRF) model. The IGRF is a main field model that (by convention) is updated every five years, and which is used by practically all applications communities and services in need of geomagnetic data. IGRF-12, as the final 2015 model is called, is based on a combination of Swarm, historical satellite data and ground-based observatory data. In addition, a Swarm Initial Field Model, which includes also the computation of the crustal magnetic field at high spatial resolution, has been produced and made available to the community. 121) 122)
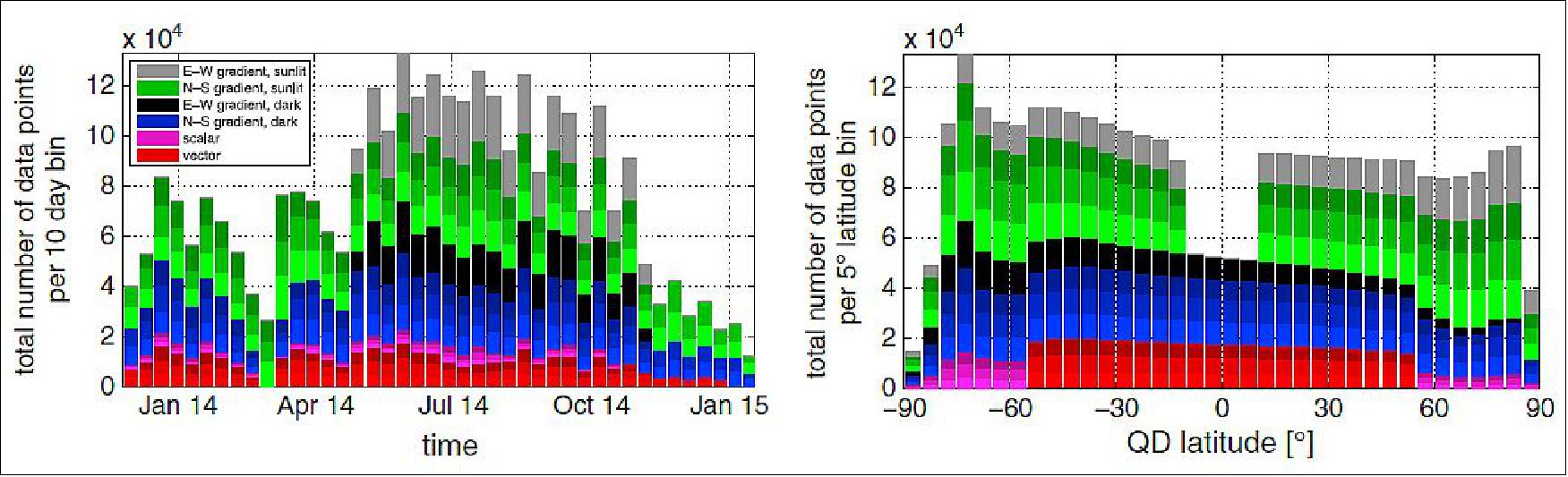
• On November 22, 2014, the three Swarm spacecraft were 1 year on orbit. 123)
- The three-satellite constellation continues to acquire excellent quality science data from the seven identical instruments on board. Over the summer, early mission data were reprocessed in order to support the development of candidate solutions for the 2015 IGRF (International Geomagnetic Reference Field) model, for which the delivery date was 1 October. Such candidate models have been produced by various members of the Swarm science team, using data from both classes of magnetometers. The IGRF is a main field model that (by convention) is updated every five years, and which is used by practically all applications communities and services in need of geomagnetic data. 124)
• October 2014: Early results of the Swarm ASM (Absolute Scalar Magnetometer). 125)
- The ASM instruments have been operating on the three Swarm satellites, since November 26, 2013. The first results confirm that our initial goals are fully met.
- For the last nine months, the ASM instruments have been providing simultaneous scalar and vector data at a 1 Hz sampling rate, continuously except some days where specific operations were carried out. — The new burst mode confirmed to be a powerful tool to analyze the instruments’ functioning during the commissioning phase, and allowed to demonstrate the very low noise of the magnetometers and the cleanliness of the electromagnetic environment in the ASM band. Further analysis of the signals collected during the commissioning phase is currently being carried out by IPGP to look for potential geophysical signals of interest.
- The ASM scalar data offers the best performance ever attained in space and the consistency of the readings delivered by the different instruments has been demonstrated. This should allow the scientists to study very tiny signals, which were not detectable before Swarm. Moreover, despite the challenge it represented, a direct in-orbit verification of the Swarm mission’s requirement for the accuracy of the magnetic field’s magnitude has been carried out, by taking full advantage of the constellation configuration.
- The vector mode experiment has also proven itself very successful and the ASM ability to function simultaneously as an absolute scalar magnetometer and an autonomous vector field magnetometer is now validated in orbit, which is a world first ! It provides thus a unique opportunity to cross calibrate in orbit two different types of vector instruments (the Vector Fluxgate Magnetometer and the ASM in vector mode). - The vector mode data have demonstrated to have their own scientific merit, and may become an official product of the Swarm mission at some point. The ASM data is presently being used to build a geomagnetic field model, independently of the VFM.
- The primary role of the ASM is to provide absolute measurements of the magnetic field’s strength at 1 Hz, for the in-flight calibration of the VFM (Vector Field Magnetometer). As the Swarm magnetic reference, the ASM scalar performance is crucial for the mission’s success. Thanks to its innovative design, the ASM offers the best precision, resolution and absolute accuracy ever attained in space, with similar performance all along the orbit. In addition, thanks to an original architecture, the ASM implements on an experimental basis a capacity for providing simultaneously vector measurements at 1 Hz. This new feature makes it the first instrument capable of delivering both scalar and vector measurements simultaneously at the same point. Swarm offers a unique opportunity to validate the ASM vector data in orbit by comparison with the VFM’s. Furthermore, the ASM can provide scalar data at a much higher sampling rate, when run in “burst” mode at 250 Hz, with a 100 Hz measurement bandwidth. An analysis of the spectral content of the magnetic field above 1 Hz becomes thus possible. These different ASM new capabilities have been operated on the three Swarm satellites since the beginning of the mission, nine months ago. The calibration and validation activities have been carried out until the end of June 2014.
- The ASM instruments early health check occurred after the first switch on, 4 days after launch on Nov. 26, 2013 and tested in their various operating modes. First, the good health was assessed, thanks to the different diagnosis modes which are available on board. Then the different measurement modes were exercised: scalar mode (scalar measurements only at 1 Hz), burst mode (scalar measurements only at 250 Hz), vector mode (simultaneous scalar and vector measurements at 1 Hz). All the functional verifications were successful on the 3 satellites. A quick look at the magnetometers’ intrinsic noise confirmed their excellent resolution, around 1 pT/√Hz, in accordance with the ground measurements.
The same verifications were then carried out on the redundant models. The same successful results were obtained on Swarm Alpha and Bravo, whereas the redundant ASM on Swarm Charlie showed a major malfunction, with no resonance signal. This model had been tested on ground during the launch campaign at Plesetsk and proved to be fully operational. Unfortunately, it did not survive the launch and is now considered as definitively lost. Since the ASM nominal model is fully operational on Charlie and designed for the specified four-year nominal lifetime, this failure should not impact the mission. This was detected before the beginning of the orbit change maneuvers. As the mission’s lifetime of the upper satellite is likely to be extended, it was considered preferable to have a redundant model available on this satellite. Therefore it was decided, among other considerations, to place Charlie with Alpha on the lower orbit, and Bravo on the higher orbit. — After these early functional verifications, the detailed assessment of the ASM performance started, on the nominal models only, on each satellite.
• June 19, 2014: The first set of high-resolution results from ESA’s three-satellite Swarm constellation reveals the most recent changes in the magnetic field that protects our planet. 126) 127)
Launched in November 2013, Swarm is providing unprecedented insights into the complex workings of Earth’s magnetic field, which safeguards us from the bombarding cosmic radiation and charged particles. Measurements made over the past six months confirm the general trend of the field’s weakening, with the most dramatic declines over the Western Hemisphere. But in other areas, such as the southern Indian Ocean, the magnetic field has strengthened since January. The latest measurements also confirm the movement of magnetic North towards Siberia.
These changes are based on the magnetic signals stemming from Earth’s core. Over the coming months, scientists will analyze the data to unravel the magnetic contributions from other sources, namely the mantle, crust, oceans, ionosphere and magnetosphere. This will provide new insight into many natural processes, from those occurring deep inside our planet to space weather triggered by solar activity. In turn, this information will yield a better understanding of why the magnetic field is weakening.
The field is particularly weak over the South Atlantic Ocean – known as the SAA (South Atlantic Anomaly). This weak field has indirectly caused many temporary satellite ‘hiccups’ (called Single Event Upsets) as the satellites are exposed to strong radiation over this area.
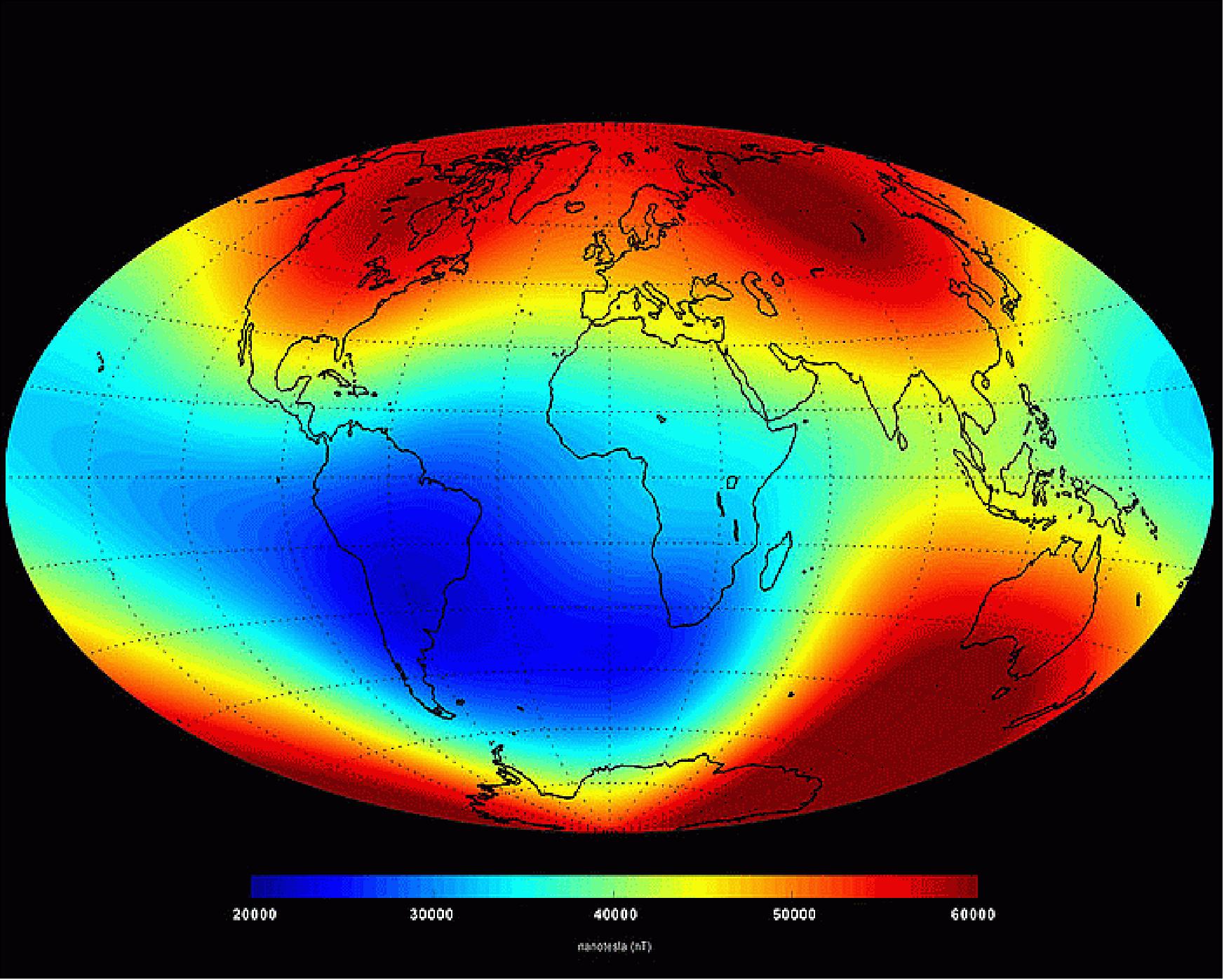
Legend to Figure 108: The image is a 'snapshot' of the main magnetic field at Earth’s surface as of June 2014 based on Swarm data. The measurements are dominated by the magnetic contribution from Earth’s core (about 95%) while the contributions from other sources (the mantle, crust, oceans, ionosphere and magnetosphere) make up the rest. Red represents areas where the magnetic field is stronger, while blues show areas where it is weaker.
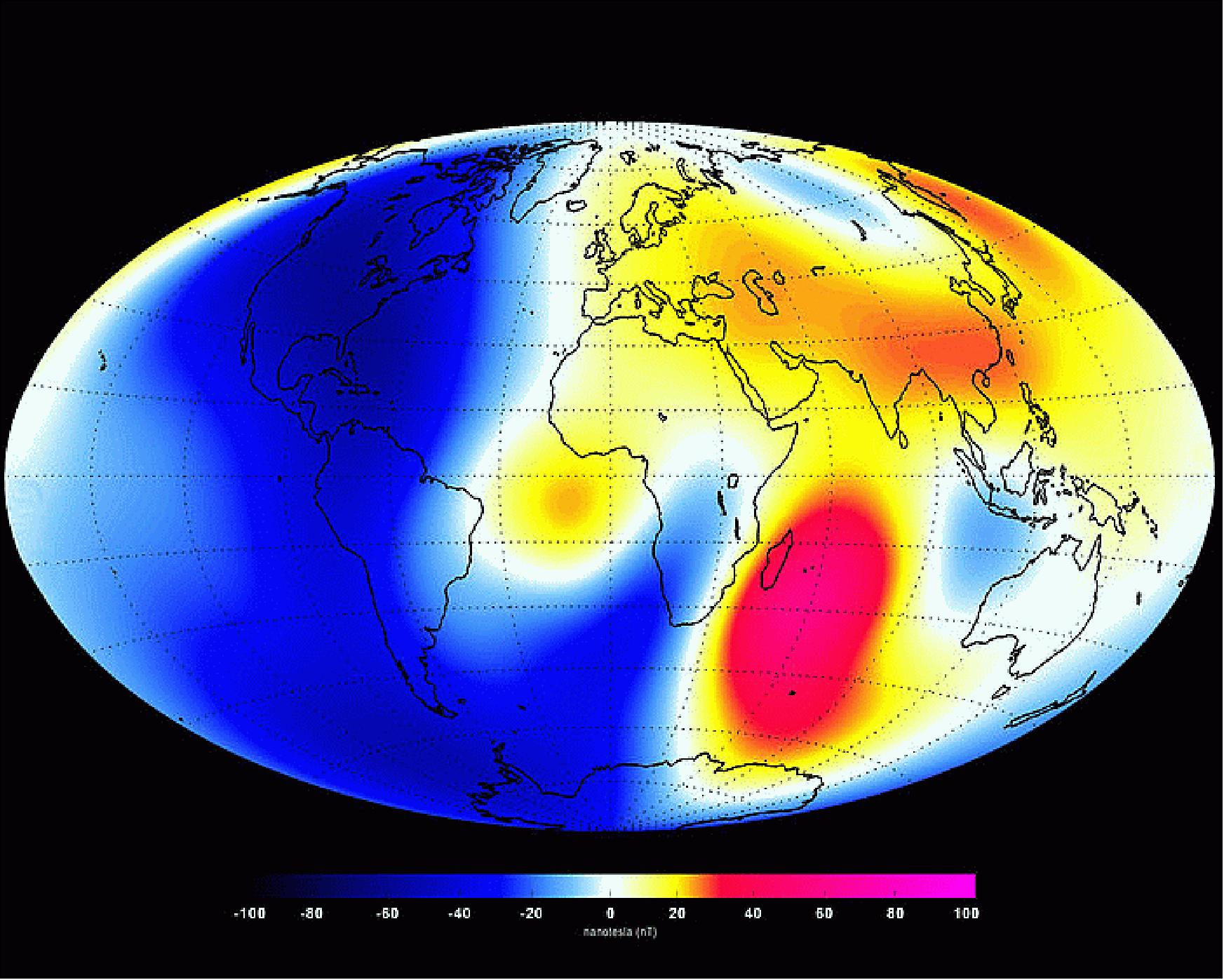
Legend to Figure 109: These changes are based on the magnetic signals that stem from Earth’s core. Shades of red represent areas of strengthening, while blues show areas of weakening over the 6-month period.
• May 7,2014: Although they were launched only five months ago, ESA’s trio of Swarm satellites are already delivering results with a precision that took earlier missions 10 years to achieve. 128) 129)
- Engineers have spent the last five months commissioning the identical satellites and carefully guiding them into their orbits to provide the crucial measurements that will unravel the mysteries of Earth’s magnetic field.
- The commissioning phase was completed and operations Phase-E2 began on April 9,2014. The final orbital constellation was reached on April 17, where the lower pair is formed by Swarm ‘Alpha’ and ‘Charlie’, and Swarm ‘Bravo’ is in the upper orbit.
- Swarm has a challenging task ahead. Together, the satellites will measure and untangle the different magnetic readings that stem from Earth’s core, mantle, crust, oceans, ionosphere and magnetosphere. In addition, information will also be provided to calculate the electric field near each satellite – an important counterpart to the magnetic field for studying the upper atmosphere.
- Two satellites are now orbiting almost side by side and have started their operational life at 462 km altitude. The third is higher, at 510 km. The readings made at different locations will be used to distinguish between the changes in the magnetic field caused by the Sun’s activity and those signals that originate from inside Earth.
- Swarm is now in its fine-tuning phase but it has already produced enough information to build models of the magnetic field for comparison with existing models. This proves that only a few months of Swarm data agree very well with a decade or more of predecessor missions.
- Scientists will start to have access to the mission’s magnetic field data in a couple of weeks.
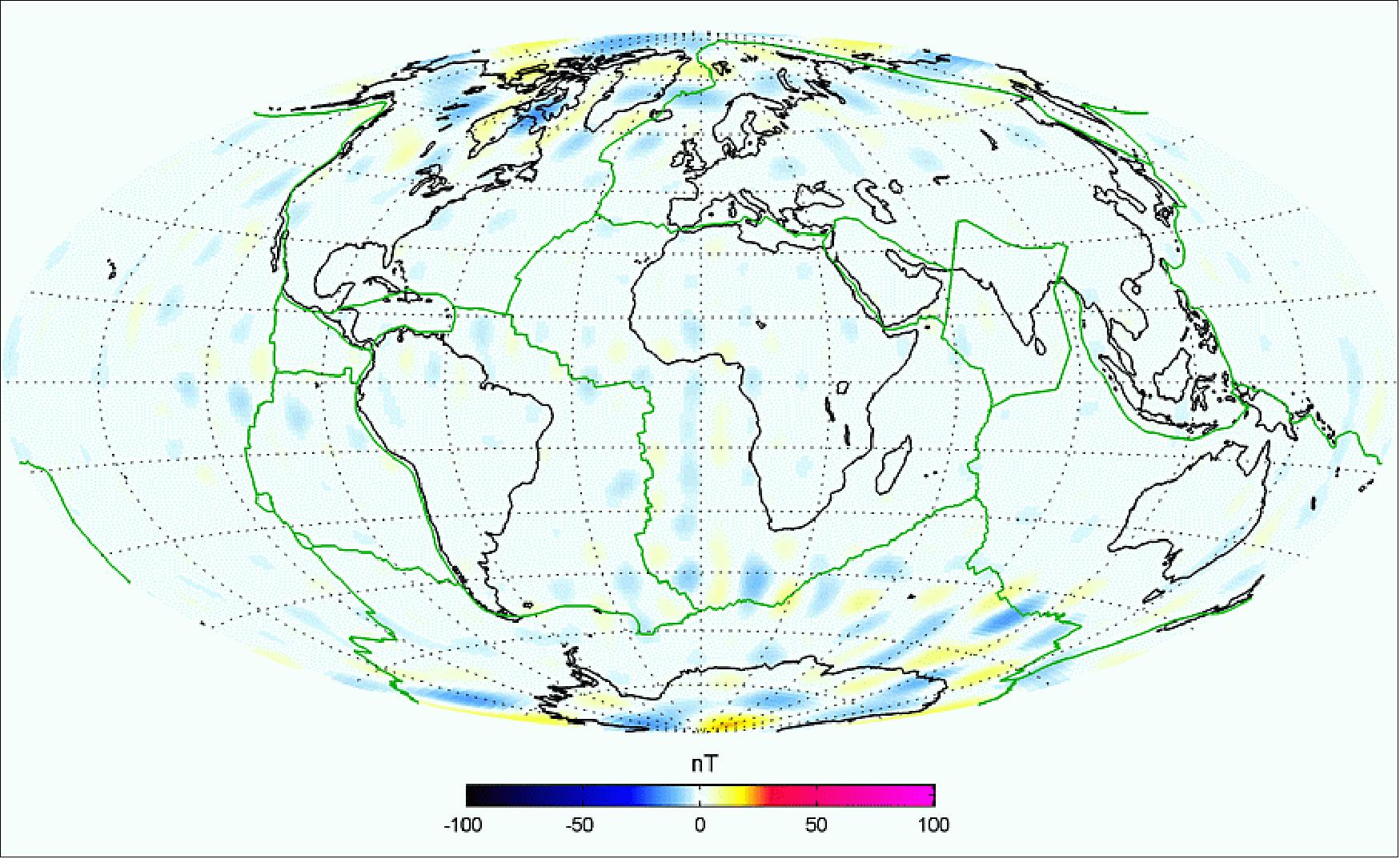
Legend to Figure 110: Data from Swarm were used to generate a model of the magnetic field from Earth’s lithosphere. The image compares the Swarm model with the Chaos-4 model and shows good agreement, especially considering Swarm is still only in the calibration and validation phase of the mission. The colors in the image show differences between the two models.
• February 2014: Since the Swarm constellation was launched last November, engineers have been busy putting the satellites through their paces to make sure that the craft and instruments are working correctly. This commissioning phase is an essential part of the mission before it starts providing data to further our understanding of the complex and constantly changing magnetic field. 130)
- Some tricky maneuvers are now under way to steer the trio of Swarm satellites into their respective orbits so that they can start delivering the best-ever survey of Earth's magnetic field.
- Since the intensity of solar activity is currently lower than anticipated, the original plan of where to place the satellites at the beginning of science operations has been reviewed recently by the scientific community and experts in ESA. Low solar activity means the satellites experience lower atmospheric drag, as clearly demonstrated by ESA’s GOCE mission.
• On Nov. 26, 2013, a significant milestone for ESA’s magnetic field mission was reached, the Swarm satellites have completed the critical first phase of their new mission. 131)
• Immediately following separation, the three satellites started transmitting their first signals to Earth, marking the start of the critical ‘launch and early orbit phase’, known as LEOP (Launch and Early Orbit Phase). After separation, the project acquired signals from the first two Swarm satellites 91 minutes into the mission, followed by the third at the 95-minute mark — starting the LEOP phase. Around 23 hours GMT on Nov. 22, each of the three satellites deployed their 4 m-long boom carrying instruments essential to the mission’s scientific success. LEOP was formally declared as completed by Flight Operations Director Pier Paolo Emanuelli on Nov. 24, 2013 at 19:30 GMT (Ref. 131).
• First contact was established with the trio a few minutes after deployment through the Kiruna station in Sweden and the Svalbard station in Spitsbergen, Norway. All three satellites are controlled by ESA teams at ESOC (European Space Operation Center) in Darmstadt, Germany (Ref. 43). The ESA control team gave nicknames to the trio of spacecraft, namely: Alpha, Bravo and Charlie.
Sensor Complement
High-precision and high-resolution measurements of the strength, direction and variation of the magnetic field, complemented by precise navigation, accelerometer and electric field measurements, will provide the necessary observations that are required to separate and model various sources of the geomagnetic field. 132) 133)
The observation concept is mainly determined by the following drivers set by the scientific payload: Each of the satellites carries an identical payload:
• High magnetic cleanliness required by the magnetometers (sub nT-range for VFM and ASM)
• EFI (Electrical Field Instrument) requires in-flight pointing with control accuracy of 5º
• ACC (Accelerometer) requires precise and stable accommodation in CoG (Center of Gravity).
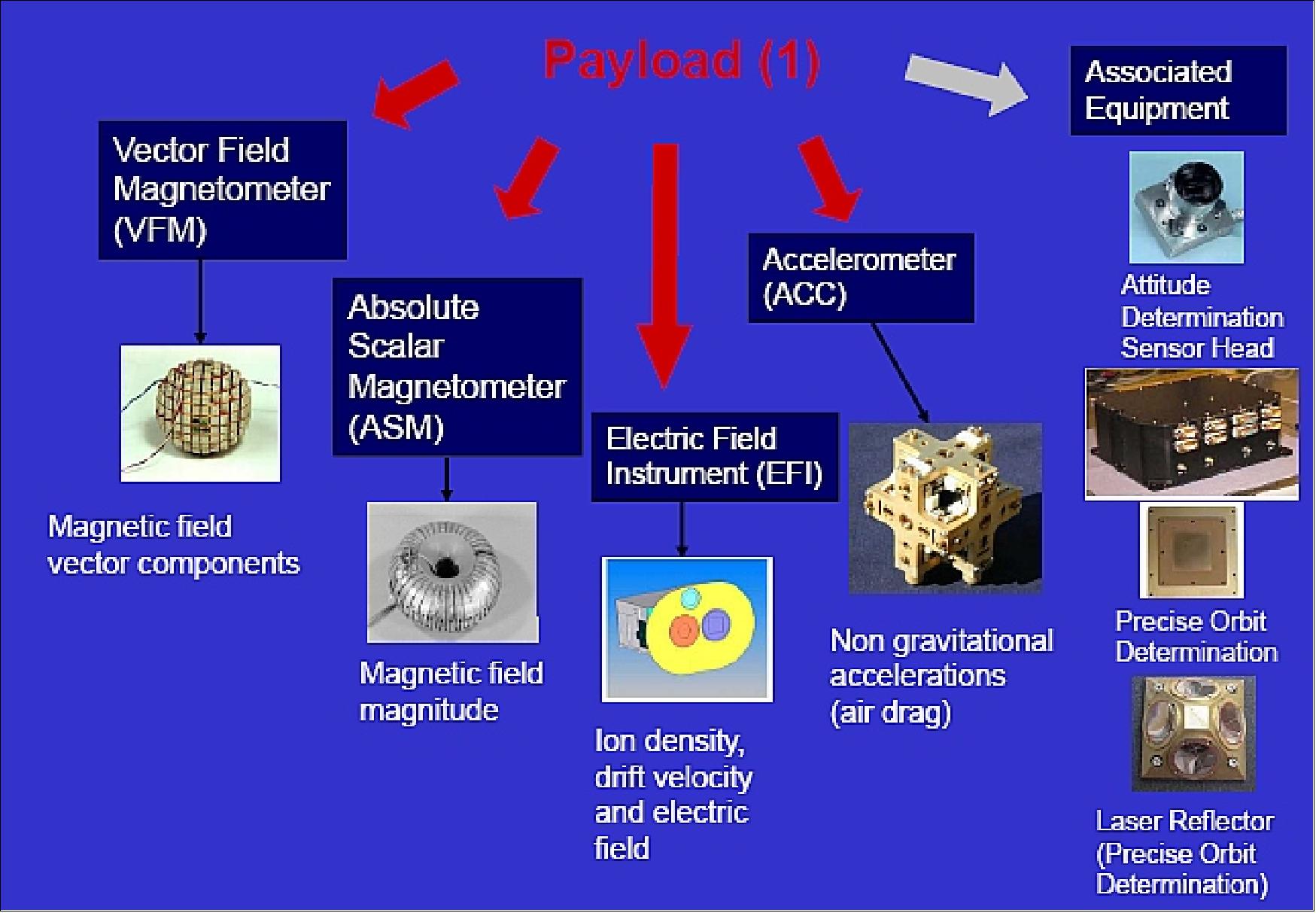
Magnetic Field (all values 2σ) | - In-Situ magnitude with a random error < 0.3 nT |
Attitude knowledge | better than 0.1º |
Satellite position | - POD (Precise Orbit Determination) < 10 cm (rms) – L2 products |
Air drag (all values 2σ) | Vector components with a random error < 5 x 10-8 ms-2 |
Electrical field (all values 2σ) | - Vector Components with a random error < 10 mV/m |
VFM (Vector Field Magnetometer)
VFM is the prime instrument of the Swarm mission developed at DTU Space. The objective is to measure the magnetic field vector, on the boom, together with the star tracker for precise attitude measurement. The boom mounted Swarm vector magnetometer instrument consist of a triple star sensor block and a CSC (Compact Spherical Coil) vector magnetometer sensor, mounted on a stable optical bench (Figure 8). Each satellite contains the optical bench with one CSC and three CHU (Camera Head Unit). 134) 135) 136)
The three star sensor units are arranged with the boresights 90º from each other so as to ensure that only one CHU may be affected by Sun or Moon intrusion at any given time. Hereby an attitude solution accurate in all three degrees of freedom can be delivered to the CSC throughout the entire mission. The CSC sensor and the triple star sensor block are mounted on either end of a highly stable mechanical structure.
The CSC vector sensor is supported by a zero CTE (Coefficient of Thermal Expansion) CFRP (Carbon Fiber Reinforced Polymer) adapter that on the one end matches the zero CTE CFRP tube, used to displace the CSC sensor from the star sensor heads (CHU), and on the other end matches the 32 ppm CTE CSC sensor, by means of a finger section. The rotational symmetry of this design ensures an excellent angular stability.
The other end of the CFRP tube is attached to a CSiC bracket holding the three CHUs. The CSiC exhibit a heat distribution capacity second to none, minimizing thermal biases of this section, from the inevitable thermal gradient induced when the sun happens to illuminate any of the three CHUs. Because the CSiC is weakly magnetic, this material can only be used at distances larger than 20 cm from the CSC sensor.
Each CHU is fitted with a straylight suppression system that is thermally decoupled from the optical bench. This separation minimizes thermal excursions from the time varying sun impingement over an orbit to less than a few degrees C. The straylight suppression system is mechanically mounted on an external thermal CFRP shroud, which also provides for thermal control of the entire optical bench. The material selection for all thermal protection has been performed to suppress soft or hard magnetic parts as well as parts that can generate magnetic fields under thermal gradients.
VFM instrument: The VFM (fluxgate type) is based on the fluxgate transducer using a ringcore with amorphous magnetic material, which has a very low noise (10-20 pT rms). It has an extremely high stability < 0.05 nT/year. VFM consists of a CSC (Compact Spherical Coil) sensor, non redundant, mounted on the deployable boom, an internally redundant data processing unit (DPU) and the connecting harness. The spherical coils that create a homogeneous vector field inside the sphere are mounted on an isotropic and extremely stable mechanical support. In feedback conditions the sensor is used as a nulling device and the coils define uniquely the magnetic axes of the sensor. The VFM exhibits high linearity (< 1ppm), a component accuracy of 0.5 nT and precision of 50 pT rms.
The operation of the fluxgate sensor is based on the extreme symmetry of the positive and negative magnetic saturation levels of the ferromagnetic sensor core material. Continuous probing of the core saturation levels by a high frequency excitation magnetization current enables the sensor to detect deviations from the zero field with only tens of pT noise and sub-nT long term stability.
The mounting of the VFM sensor is using a sliced adaptor ring. The optical bench ensures mechanical stability of the system. Three star trackers provide full accuracy attitude.
Instrument mass, power consumption | 1 kg, 1 W |
Dimension of sensor head (CSC) | 82 mm Ø |
Dimension of DPU | 100 x 100 x 60 mm |
Data rate |
|
Dynamic range | ±65536.0 nT to 0.0625nT (21 bit) |
Omnidirectional linearity | ±0.0001% of full scale (±0.1nT in ±65536nT) |
Intrinsic sensor noise | 15 pTRMS in the band 0.01-10 Hz (6.6 pTRMS Hz-1/2 at 1 Hz) |
Intrinsic electronics noise | 50 pTRMS in the band 0.01-10 Hz (15 pTRMS Hz-1/2 at 1 Hz) |
Sampling rate | 50 Hz, linear phase filter, -3dB frequency 13.1 Hz |
Temperature range | -20ºC to +40ºC (Operating performance) |
Thermal behavior |
|
Zero stability (thermal & long term) | < ± 0.5 nT |
Absolute accuracy of Ørsted magnetometer parameters (relative to ASM & STR): | |
- Offset | < 0.2 nT (~120 dB) |
- Scale factors | < 0.0005% |
- Axes orthogonality | < 0.0006º (~2 arcsec) |
- Axis alignment | < 0.0002º (~7 arcsec) |
Ørsted magnetometer with 3 offsets, 3 scale factors & 3 angles for 6.5year: | |
Accuracy | < 0.5 nT |
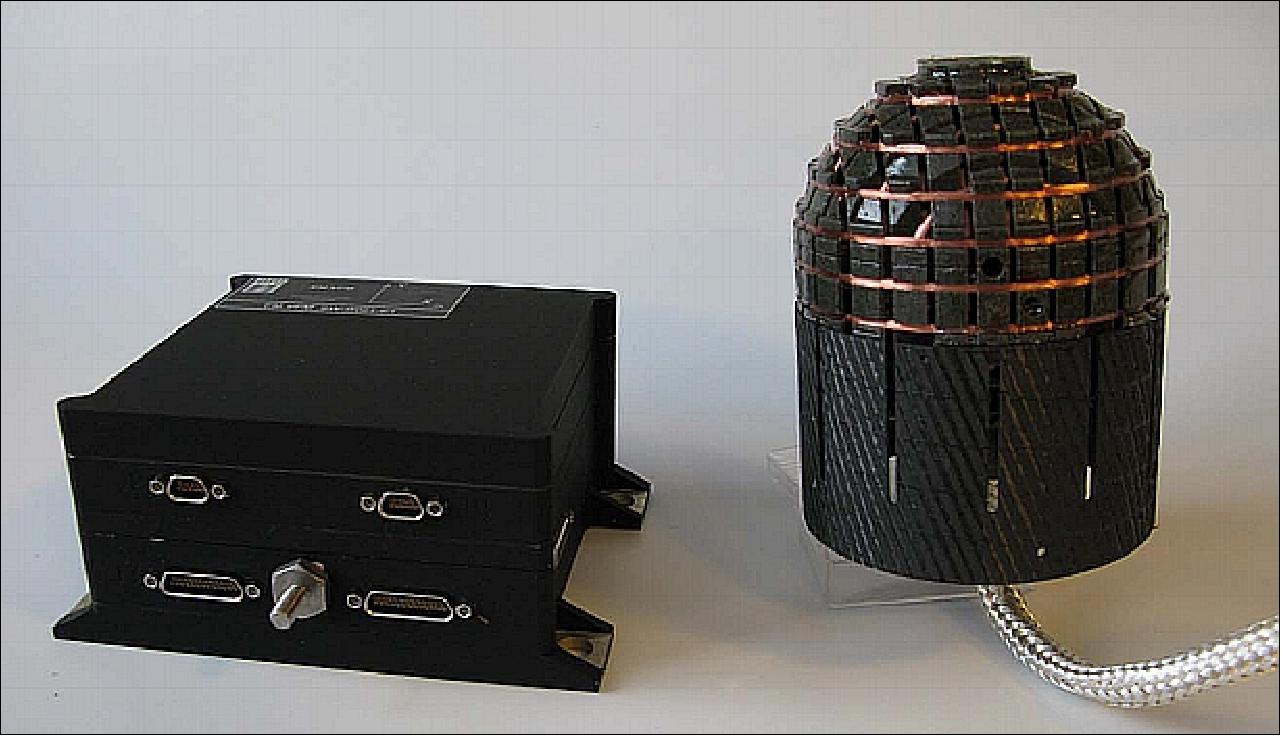
The µASC (micro Advanced Stellar Compass) of DTU Space provides the high accuracy, inertial attitude determination for the Swarm vector magnetometer. The microASC is a fully autonomous, internally hot/cold redundant star tracker, featuring up to four cameras. The microASC features a split DPU (Data Processing Unit) and CHU (Camera Head Unit) enabling the low power dissipation and very low magnetic disturbance CHU, to be placed close to many types of science instruments, including the CSC sensor (see µASC description below).
Inter-calibration: determining the internal angels between the CSC and the three CHUs: The optical bench provides a mechanically stable platform for the CSC and the three CHUs and will ideally fixate the internal angles between these. The prime objective of the inter-calibration is to establish the internal angles with the highest possible accuracy. The measurement frame of the CSC sensor is defined by the orientation of the compensation coils on the outside of the CSC sensor sphere. These coils form a nearly orthogonal triad, which has been thoroughly calibrated and orthogonalized prior to the mounting on the bench structure. Similarly the measurement frame of any of the CHUs is defined by the mechanical arrangement of the optics relative to the CCD sensor of the unit. Also this measurement frame has been established prior mounting the unit on the bench.
Despite the effort to minimize thermo-elastic deformations and the effort to make the platform as stiff and stable as possible, small residual variations exists. A secondary objective for the inter-calibration is therefore to assess the size of these residual errors, e.g. gravity release effects.
Finally, the mounting of the sensor units to the stiff optical bench will cause stresses to be built into the mounting interfaces. These stresses may cause minute changes to the internal calibration of the sensors. A third objective of the inter-calibration is therefore to verify the pre mounting calibration of the sensor units.
ASM (Absolute Scalar Magnetometer)
ASM is provided by CNES (French Space Agency) and CEA-LETI (French Atomic Energy Commission - Laboratoire d'Electronique de Technologie et d'Instrumentation), Grenoble, France. The objective is to measure magnetic field strength and to calibrate the VFM device to maintain the absolute accuracy during the multi-year mission. ASM is positioned at the very tip of the boom. The required main performance characteristics of the ASM are: absolute accuracy of < 0.3 nT (2σ), resolution < 0.1 nT within its full-scale range of 15000-65000 nT. 137) 138) 139) 140) 141) 142) 143) 144) 145)
Measurement concept: To overcome the limitations of the OVM (Overhauser Magnetometers) identified during the Oersted and Champ programs, a new magnetometer has been designed for the Swarm mission. The ASM pumped helium magnetometer relies on a low pressure helium vapor as the sensing medium (Figure 113), with the optical pumping process the counterpart of the dynamic nuclear polarization. 146) 147)
One important difference is however due to the fact that the optical pumping is a much more efficient polarization method, leading to an almost complete polarization. As a consequence, the signal amplitude does no longer depend on the magnetic field strength and a resolution of 1 pT/ (Hz)1/2 is now obtained over the complete measurement range.
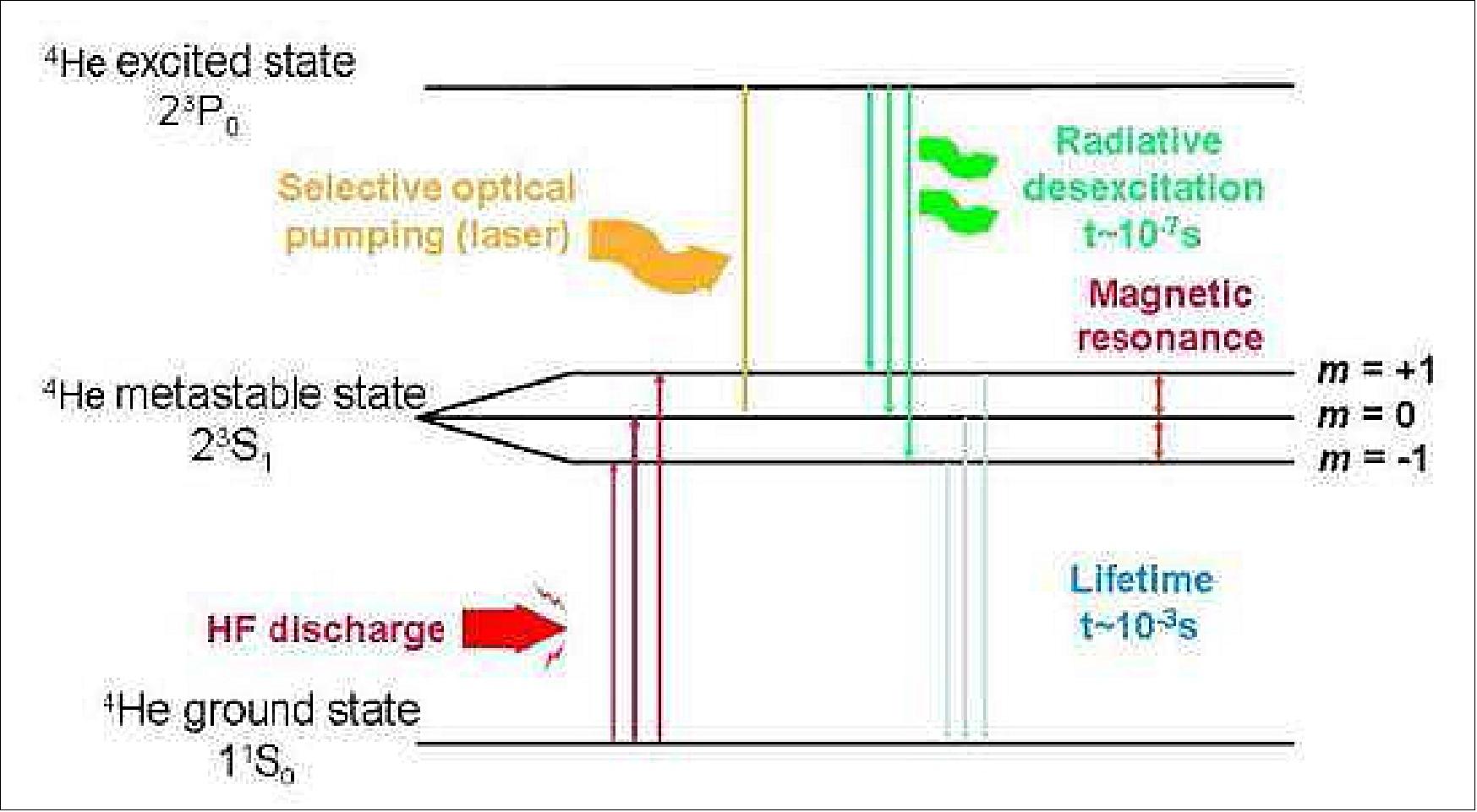
As compared to most optically pumped magnetometers, the ASM operates with linearly polarized pumping light instead of circularly polarized light. The main reasons for that choice are the following:
- the strong interaction between the laser pumping beam and the helium atoms can in general affect their energy level and result in so-called light shifts whenever the pumping light wavelength is detuned from the helium transition center wavelength. Now using linearly polarized light suppresses this effect, thus significantly increasing the instrument’s accuracy.
- the key parameter governing the optical pumping angular dependence is then the direction of the laser polarization, whereas it is the propagation direction of the pumping beam that matters in circularly polarized light. Now when trying to design an isotropic instrument, i.e an instrument whose performances are independent of the sensor attitude, it is obviously easier to control the direction of the linear polarization than to rotate the whole sensor in order to align it properly with respect to the magnetic field direction. In our case the isotropy is thus simply achieved thanks to the use of an amagnetic piezoelectric motor which permanently controls the laser polarization and the RF magnetic field directions so that they are both perpendicular to the static magnetic field. The resulting magnetometer architecture is illustrated in Figure 114.
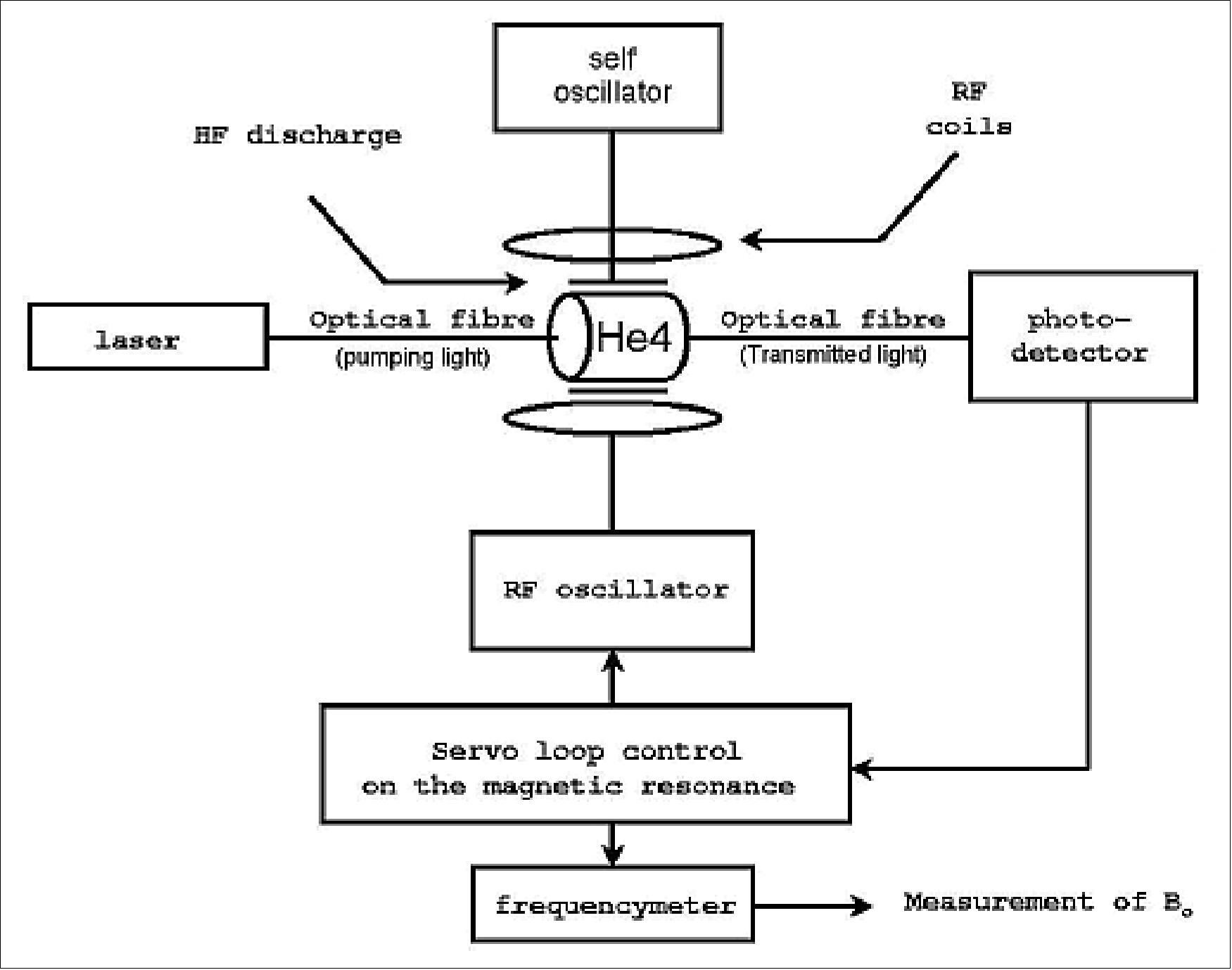
Contrary to the Overhauser solution based on a design trade-off between instrument’s resolution and omnidirectionality, the helium magnetometer is always operated in the optimal operational conditions thanks to this servo loop, but this is achieved at the expense of the use of a dedicated mechanism. As for the sensor anisotropy, resulting from a combination of induced and remanent contributions, a typical signature corresponding to the flight configuration is presented in Figure 115.
As for the environment susceptibility, the ASM significantly broader resonance line (close to 70 nT as compared to less than 7 nT for the OVM) reduces the impact of inhomogeneous magnetic fields on the magnetometer performances, while the principles of operation and architecture of the helium device makes it robust to low frequency radiated magnetic fields, thus making the EMC specifications much easier to meet in that respect.
Last but not least, the short metastable helium relaxation time (of the order of one millisecond) results in a much higher bandwidth for the helium magnetometer than was the case for the NMR sensors. While this feature is of no direct interest for the calibration of the vector instruments (the scalar data are sampled for that purpose at a fixed 1 Hz frequency), it opens new opportunities for the exploitation of the scalar instrument.
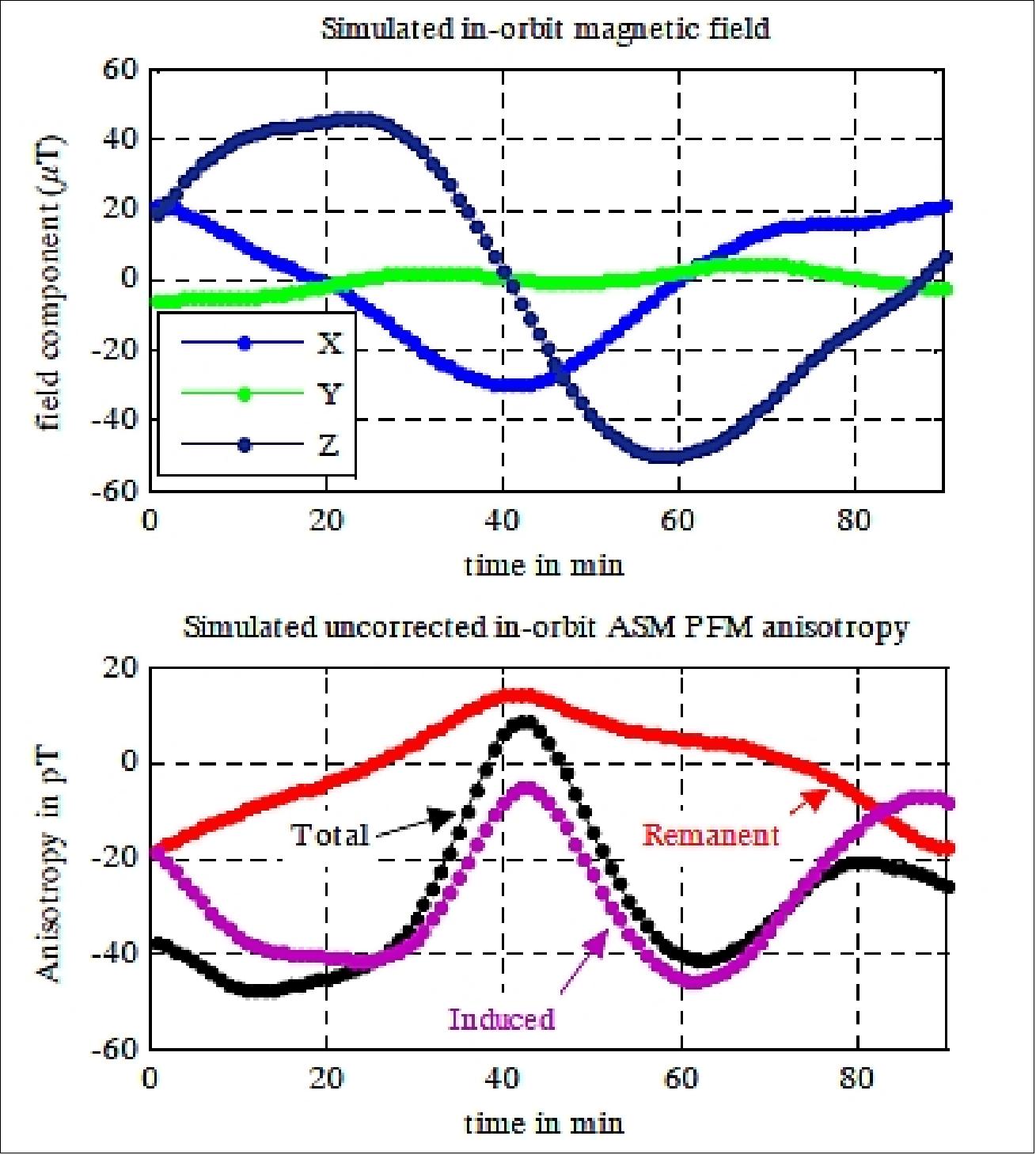
Instrument: The ASM magnetometer is based on the ESR (Electron Spin Resonance) principle and makes use of the Zeeman effect which splits the emission and absorption lines of atoms in an ambient magnetic field. The pattern and amount of splitting is a signature of the magnetic field strength. The optically pumped helium magnetometer uses a High Frequency (HF) discharge within a gas cell to excite 4He atoms from the ground state to the metastable state. This metastable level is split by the Earth magnetic field into 3 Zeeman sublevels. The separation of those sublevels is directly proportional to the ambient field strength and equals half the gyro frequency (eB/2m - where m is the electron mass).
Given the role of the laser in the ASM instrument, the following specifications have to be met:
• Wavelength stability with piezoelectric modulation piezoelectric modulation around the D0 transition : λ=1082.908 nm in air standard (std)
• RIN (Relative Intensity Noise) lower than -135 dB (Hz)1/2 at 1 kHz and 2 mW of output optical power
• Spectral linewidth lower than the D0 absorption width of 1.7 GHz
• Specific space environment and space design requirements.
The fiber laser consists of a pump laser diode, a WDM (Wavelength Division Multiplexer), an Yb doped FBG (Fiber Bragg Grating), an optical isolator and a splitter to allow a feedback control. In this architecture, the noise reduction loop acts on the pump diode current by detecting the low frequency fluctuations of the output optical power from the dedicated photodiode located in the 20 % splitter output. The corresponding block diagram is presented in Figure 116.
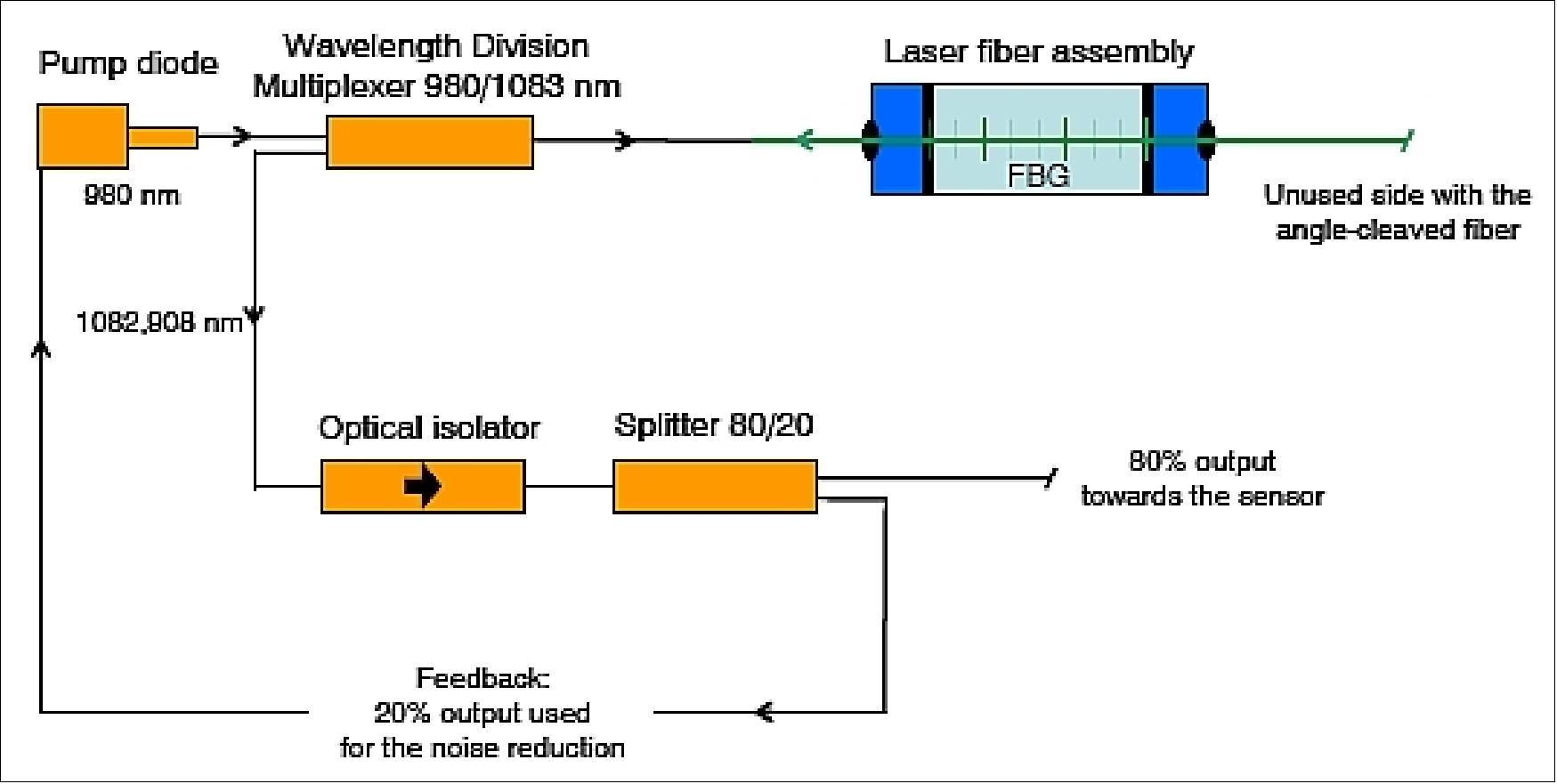
Athermal design of the LFA (Laser Fiber Assembly): The ASM laser has to be able to pump the 4He at 1082.908 nm (in air std) within the temperature range of [-5ºC; +50ºC] which is the specified qualification operating temperature range of the ASM electronics on the Swarm satellites. One of the main challenges to take up for the LFA conception was to reduce the thermal wavelength drift as much as possible in a passive way. We could have used, for example, a 1083 nm laser diode with a thermo-electric Peltier device but the laser consumption would have been highly increased.
The role of the piezoelectric actuator (made by the CEDRAT Group) is to modulate and to allow a fine tuning of the laser wavelength around the 4He D0 transition. A picture of the final LFA design is given in Figure 117.
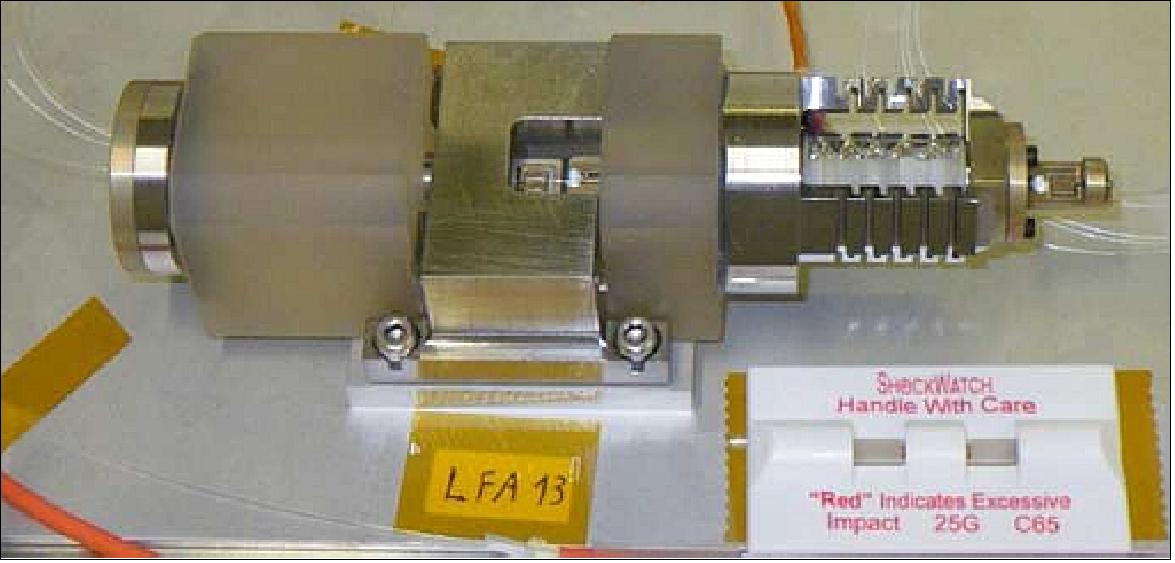
Legend to Figure 117: The pre-stressed piezoelectric actuator on the right is glued on the Zerodur®; the LFA is then fixed in the ASM electronics box with the titanium bridge put upon the Zerodur®.
Another challenge to take up was the design of a suitable fixation system of the LFA allowing it to comply with the shocks and vibrations specifications. A solution has been developed using a titanium bridge, coned-disc springs (also known as Belleville washers) and elastomers (with suitable thickness and hardness, and a low outgassing characteristic). - The pieces of elastomer are located under the LFA and between the titanium bridge and the LFA in order to dampen any tri-axis vibrations or shocks. This fixation system has successfully passed the vibrations and shocks qualification tests. The final titanium fixation bridge is shown on the LFA of Figure 117.
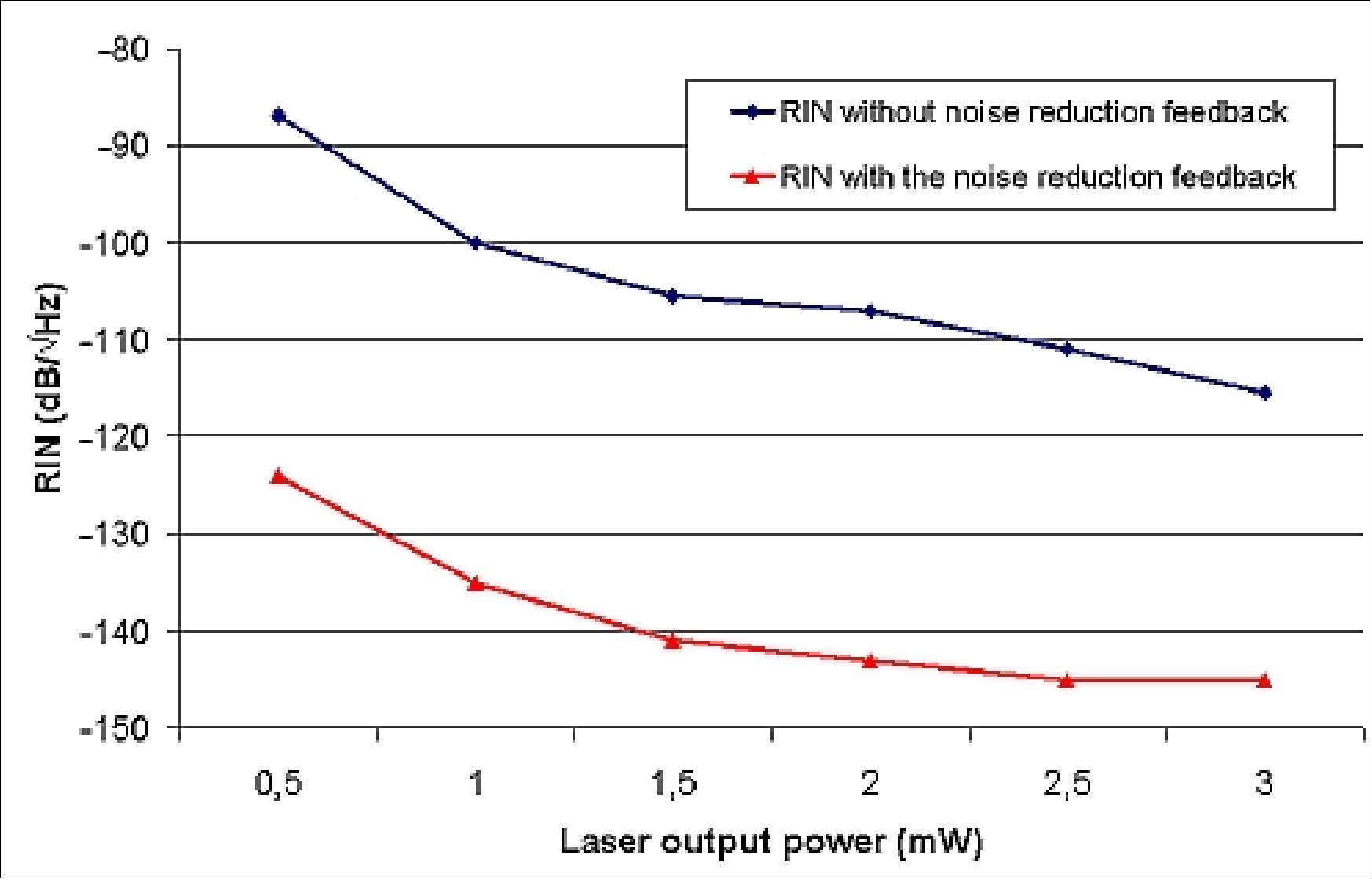
RIN performance: For both consumption and simplicity reasons, in the ASM instrument it has been chosen to detect the magnetic resonance signals coming from the 4He cell around 1 kHz, which corresponds to the 1 kHz modulation of the continuous part of the LA0 magnetic resonance signals between the Zeeman sub-levels. This signal is high enough to allow the measurement of the magnetic field with a low noise laser: the corresponding RIN measurement of the ASM laser is shown in Figure 118 (obtained from an electronic spectrum analyzer and an InGaAs photodiode). As shown, the low frequency feedback control loop presents the opportunity to reduce the RIN from about -105 dB (Hz)1/2 at 2 mW of output power around 1 kHz down to -140 dB (Hz)1/2. The low noise laser specifications are thus met.
Instrument mass, power consumption | 3 kg, 5.3 W |
Size of sensor head | 40 mm x 60 mm |
Size of DPU | 200 mm x 150 mm x 100 mm |
Dat rate | 0.35 MByte/ day |
Dynamic range | 15000 - 65000 nT full scale |
Absolute accuracy | < 0.3 nT (2σ) |
Omni-directional response | < 0.1 nT angular dependence |
The instrument assembly consists of a DPU (Digital Processing Unit) and a separately installed sensor connected to the electronic box by a bundle of optical fibers and electrical cables (harness). A specific sensor bracket is designed to mechanically interface 2 identical sensors with the satellite boom (a cold redundancy has been chosen for Swarm, each sensor being connected to a dedicated DPU located within the satellite main body).
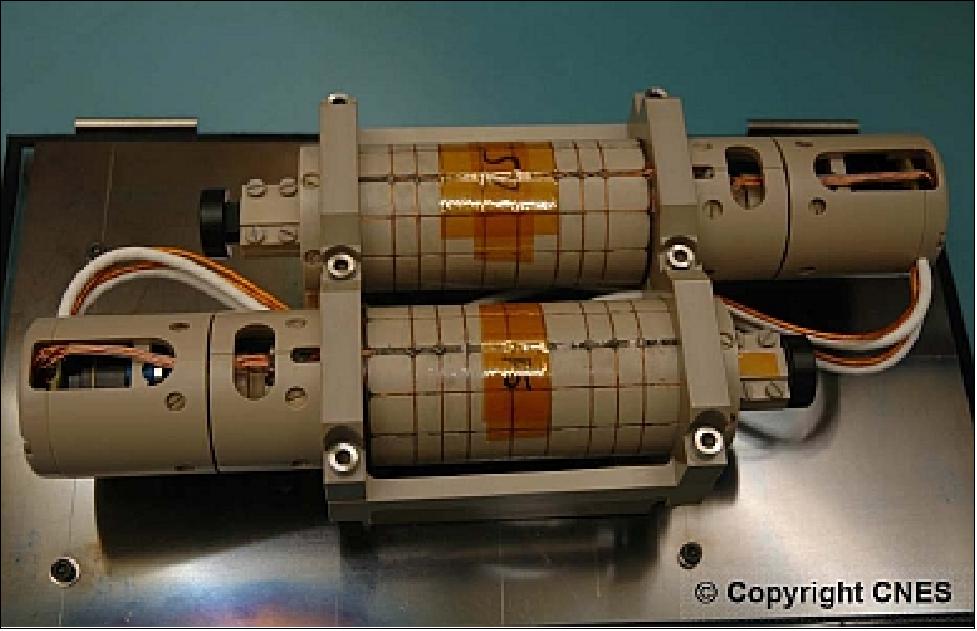
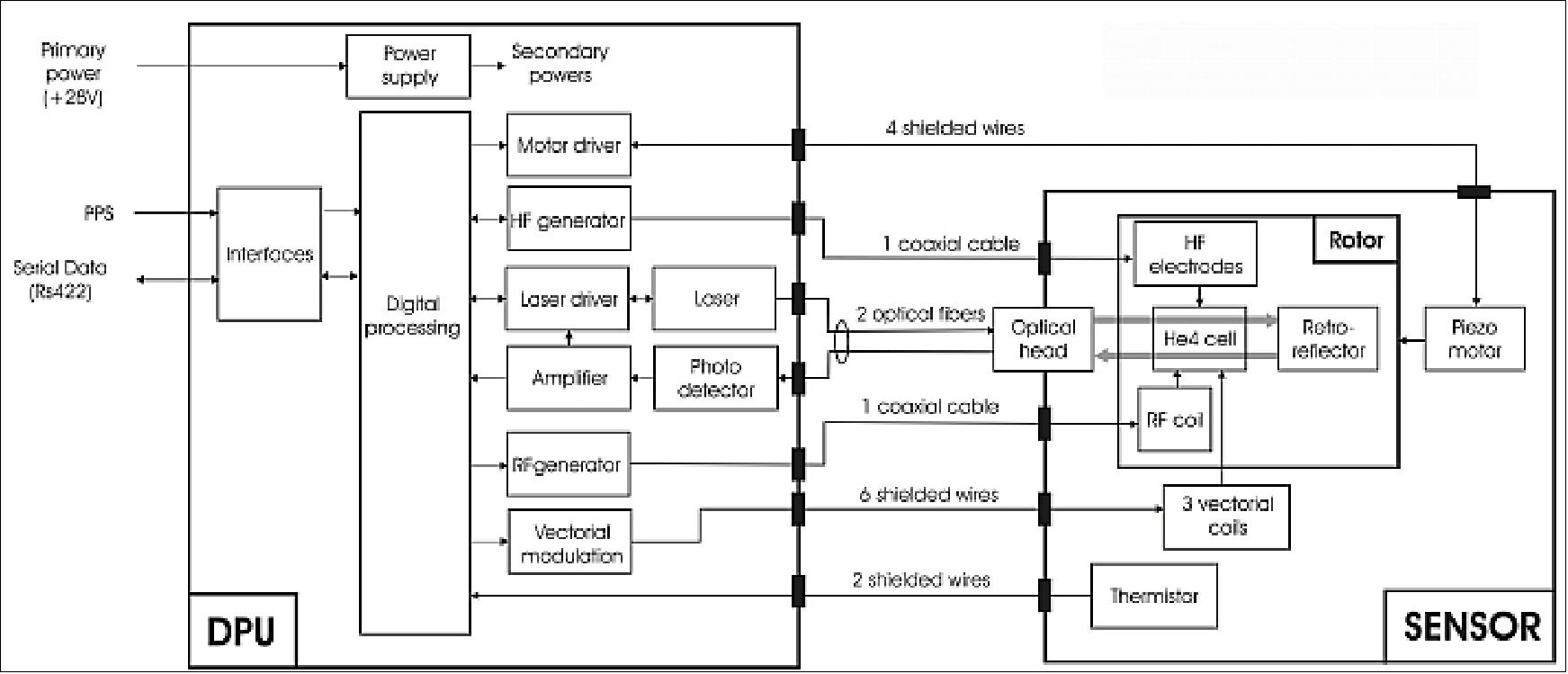

The ASM characteristics make the instrument ideally suited not only for the traditional role of scalar magnetometers as absolute references for the calibration of the on-board vector instruments, but also for extended operational capacities, such as higher frequency scalar measurements (of potential interest for magnetosphere studies for the low frequency part of the spectrum) or autonomous scalar / vector operations. Last but not least, the helium magnetometer can be operated in a zero field configuration with only very minor evolutions in the sensor overall design, thus extending its initial capabilities to new missions in planetary exploration (Ref. 146).
Electromagnetic cleanliness: Differential scalar measurements have been performed throughout the ASM development phases up to the satellite final ground magnetic tests. This allowed first to select the sensors parts in order to minimize their residual magnetic signature and second to evaluate the accuracy of the magnetic data that will be delivered by the ASMs for the three satellites of the Swarm constellation both at instrument and satellite level. This differential method has been adapted to the various rather challenging tests configurations met within the Swarm program. It allowed to demonstrate that the ASM performances meet the mission requirements, with measurement uncertainties below 25 pT. It finally contributed to improve the quality of the magnetic measurements that were carried out at satellite level and check the perturbation models that had been established. 148)
Characterization and removal of thermomagnetic perturbations onto ASM instrument. 149)
A step-by-step perturbation identification and removal process has then been set up in order to characterize the global perturbation and has resulted in several hardware upgrades. Thanks to dedicated scalar differential measurements performed in the CEA-Leti Magnetic Characterization Facility of Herbeys, all elements which have been characterized as sources of thermomagnetic perturbations have been progressively removed or replaced.
The test process has led to several hardware upgrades (3 in total) of both the mechanical interface of the ASM with the satellite boom and later even some ASM components. The original titanium interface bracket including the heaters for the ASM thermal control has been replaced by CFRP (Carbon Fiber Reinforced Polymer) components and the ASM internal harness connectors have been removed. These successive evolutions can be simply summarized as follows: the less metallic material submitted to thermal gradient in the vicinity of the ASM, the smaller
the perturbation, which makes perfectly sense with thermomagnetic generated effects.
In the end, this exhaustive test campaign has demonstrated the very efficient reduction of thermomagnetic perturbations generated in the close environment of the ASM: the remaining maximum effects have been characterized in the 20-30 pT +/- 5 pT peak-to-peak range (Figure 4) which is well below the accuracy specification of 300 pT (2σ) allowed for ASM for the Swarm mission
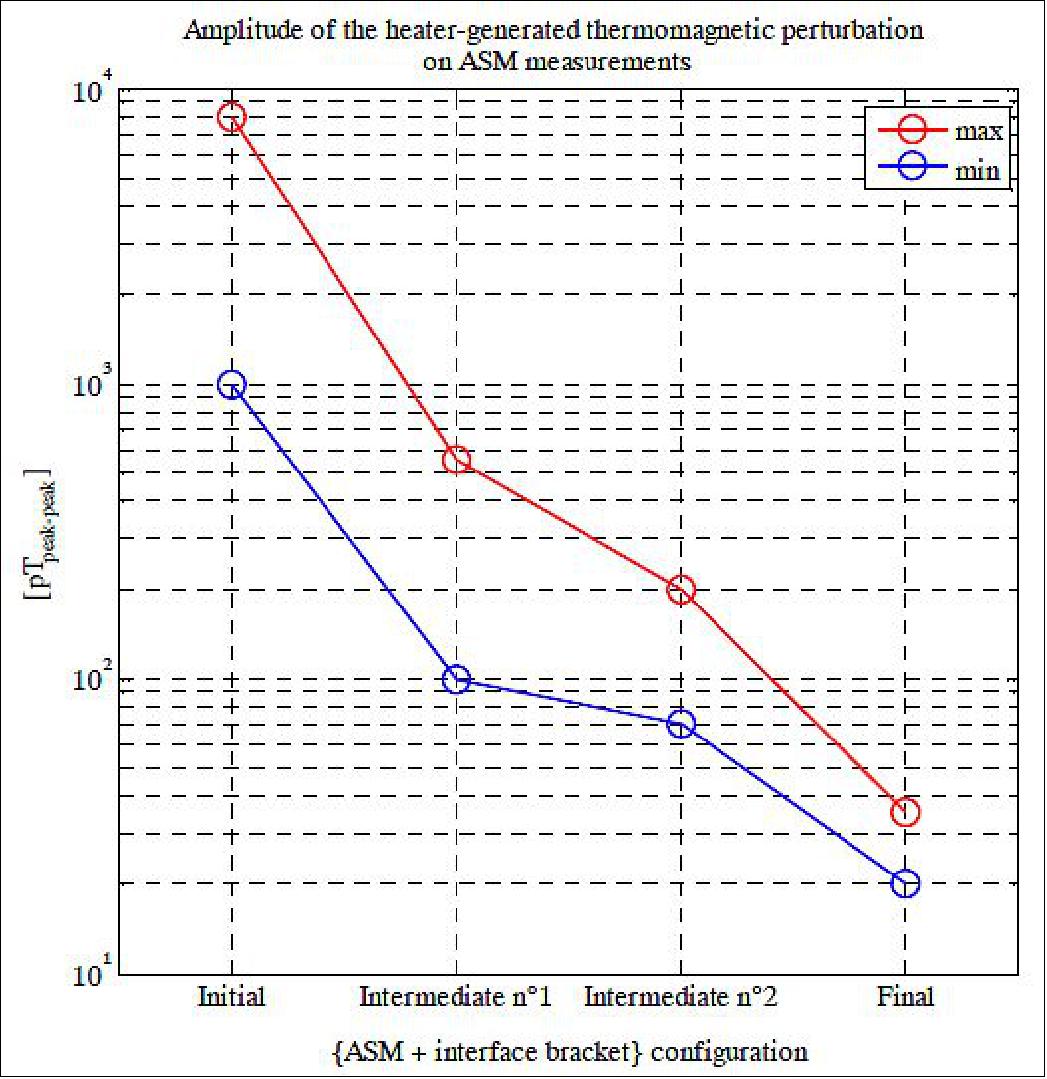
Thanks to the removal and/or replacement of metallic components in the close environment of the ASM sensor, it has been possible to get rid of these perturbations before the launch of the Swarm satellites. The study puts further emphasis on one of the basic design rules for the conception and integration of magnetic sensors on-board space vehicles: avoid as much as possible metallic elements in the vicinity of these instruments, even if they do not show any static magnetic signature. They can still give rise to magnetic perturbations if they are submitted to thermal gradients, which turn to be very difficult to compensate for by modelling as these elements are never simple in shape and as it also requires a very precise 3D knowledge of their internal temperature distribution.
EFI (Electrical Field Instrument)
EFI, also referred to as CEFI (Canadian Electric Field Instrument), is provided by Canada (CSA funding, design by the University of Calgary, with ComDev Ltd. of Cambridge, Ontario as instrument manufacturer). The CEFI sensor is based on SII (Suprathermal Ion Imager)-a Canadian particle detector design that has already proven its capability - to gather precise measurements of ion winds. The goal of the CEFI instrument is to characterize the electric field about the Earth by measuring the plasma density, drift, and acceleration at high resolution; also for plasma density mapping in conjunction with GPS.. CEFI derives its heritage from the CPA (Cold Plasma Analyzer) instrument on Freja, the Nozomi TPA instrument and the CUSP, JOULE and GEODESIC sounding rocket missions. 150) 151) 152) 153) 154)
The plasma ion measurements are derived from energy-angle distributions that are generated by two orthogonal 2D electrostatic analyzers on each satellite. The ion bulk flow velocity and temperature are related to the distribution moments by transfer functions whose form are determined from simulations of the analyzers. The electric field is determined from measurements of the ion velocity and the magnetic field. 155)
The main sources of error come from uncertainties in the instrument transfer functions, the sensor-to-plasma potential difference, particle Poission noise, galactic cosmic ray event, and detector gain variations.
The CEFI instrument is comprised of three main parts: the SII (Suprathermal Ion ImagerI) sensors, the LP (Langmuir Probe) sensors, and the Electronics Assembly. The electronics assembly contains all of the electronics necessary to support power supply, sensor data acquisition, instrument control and communications with the spacecraft bus. The electronics assembly and SII sensors will be positioned on the ram face of each Swarm spacecraft along with the Langmuir probes positioned preferably on the ram and nadir faces of each spacecraft and connected to the electronics assembly with wire harnesses.
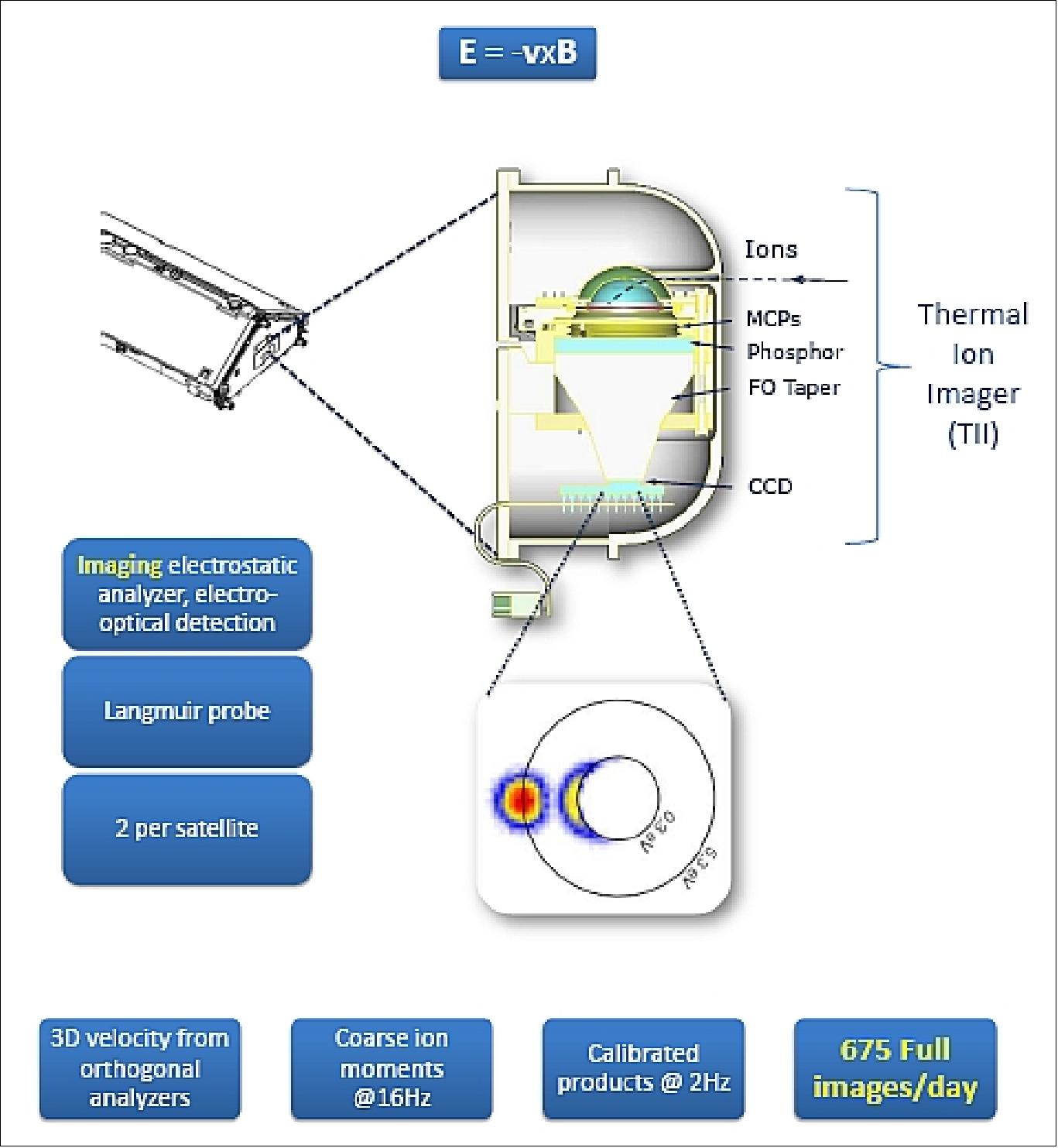
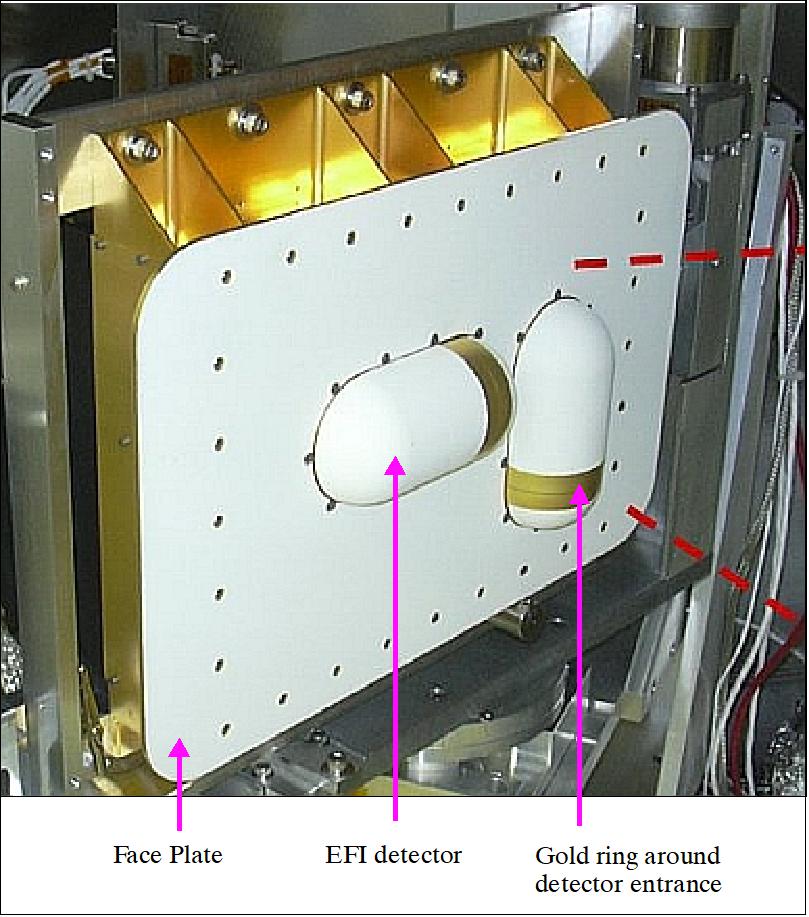
The SII sensors are of CPA heritage; they are using a unique particle focusing scheme developed at the University of Calgary. Ions enter a narrow aperture slit and are then deflected by a pair of hemispherical grids that create a region having electric fields directed radially inward. Incoming low-energy positive ions are accelerated toward the center of the spherical system, whereas ions with larger kinetic energies travel farther toward the edge of the detector, creating an energy spectrum as a function of detector radius (Figure 125).
Particles arriving from out of the plane of Figure 125 land at different azimuths on the image plane. The resulting image from each SII sensor is a 2D cut through the ion distribution function, from which one can calculate ion density, drift velocity (2D), temperature, and higher-order moments. The two SII sensor head assemblies are oriented such that the aperture slits are oriented perpendicularly to each other, enabling 3D characterization of the ion distribution.
Range of operational conditions:
• Natural variability
- Ion densities (108-10 m-3)
- Ion and electron temperatures (0.1-0.5eV)
- Ionospheric plasma flow (~200 m/s)
• Active biasing of face plate
• Passive biasing of material components associated with different work functions and contact potentials.
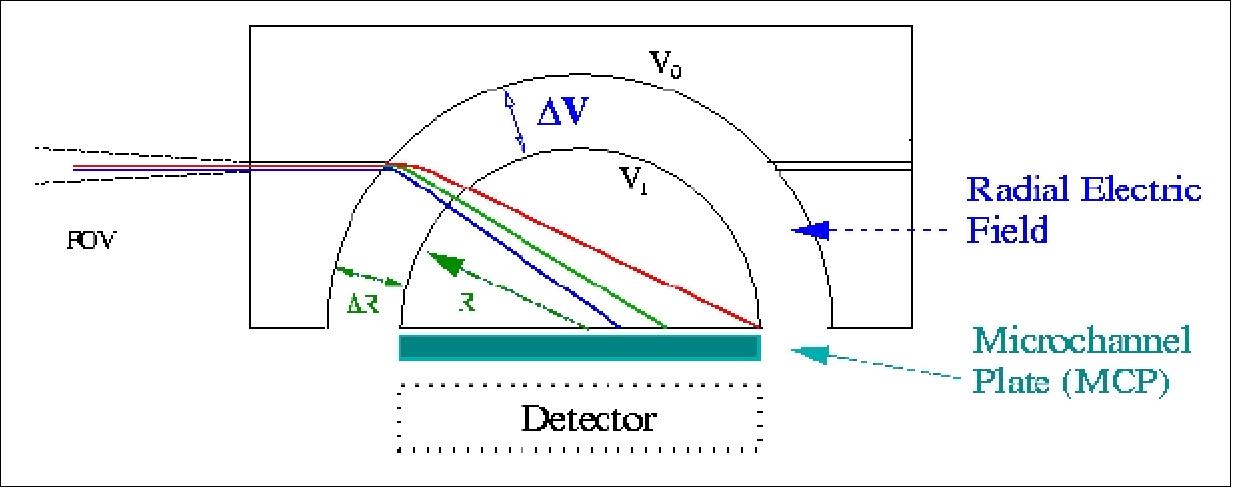
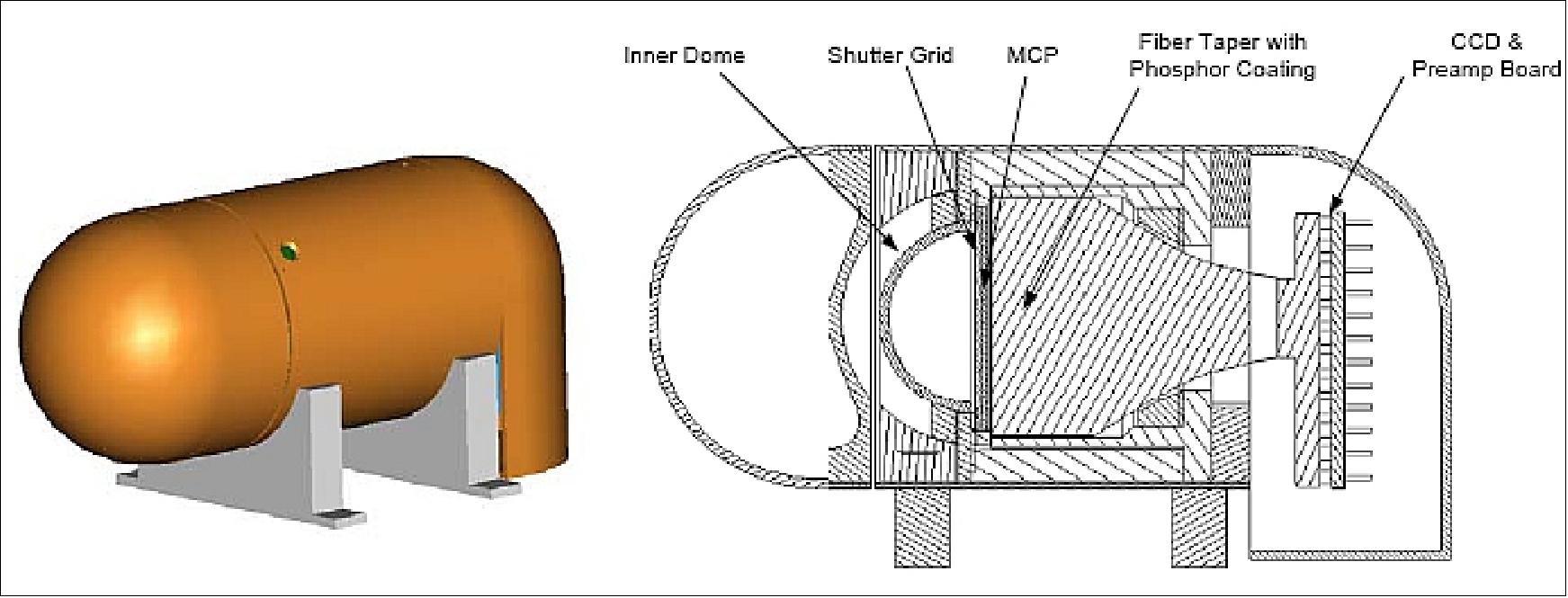
When the charged particles strike the MCP Microchannel Plate) detector, the signal is amplified through secondary emission processes. The voltage applied across the MCP controls the gain of the device. In parts of the orbit where ion flux is high, the voltage applied to the front surface is reduced to limit the gain of the device and preserve its life. This gain adjustment is part of an automatic gain control realized through the use of a feedback loop using the CEFI instrument faceplate current as a control input. Where sufficient gain control cannot be achieved via the MCP voltage alone, an electrostatic shutter will gate the incoming ions with duty cycles ranging from 100% to well below 1%.
A Langmuir Probe assembly is part of the CEFI device to provide measurement of electron density, electron temperature and spacecraft potential. The LP design is based on hardware flown on the Cluster and Rosetta missions of ESA and was developed by the Swedish Institute of Space Physics. The overall height of the LP sensor is 10 mm.
The instrument electronics assembly includes the following electrical subsystems:
• Instrument controller
• Detector readout electronics
• HVPS (High Voltage Power Supply)
• LVPS (Low Voltage Power Supply). The primary function of the LVPS is to generate low voltages for other electronics within the Swarm CEFI instrument.
• Langmuir probe assemblies.
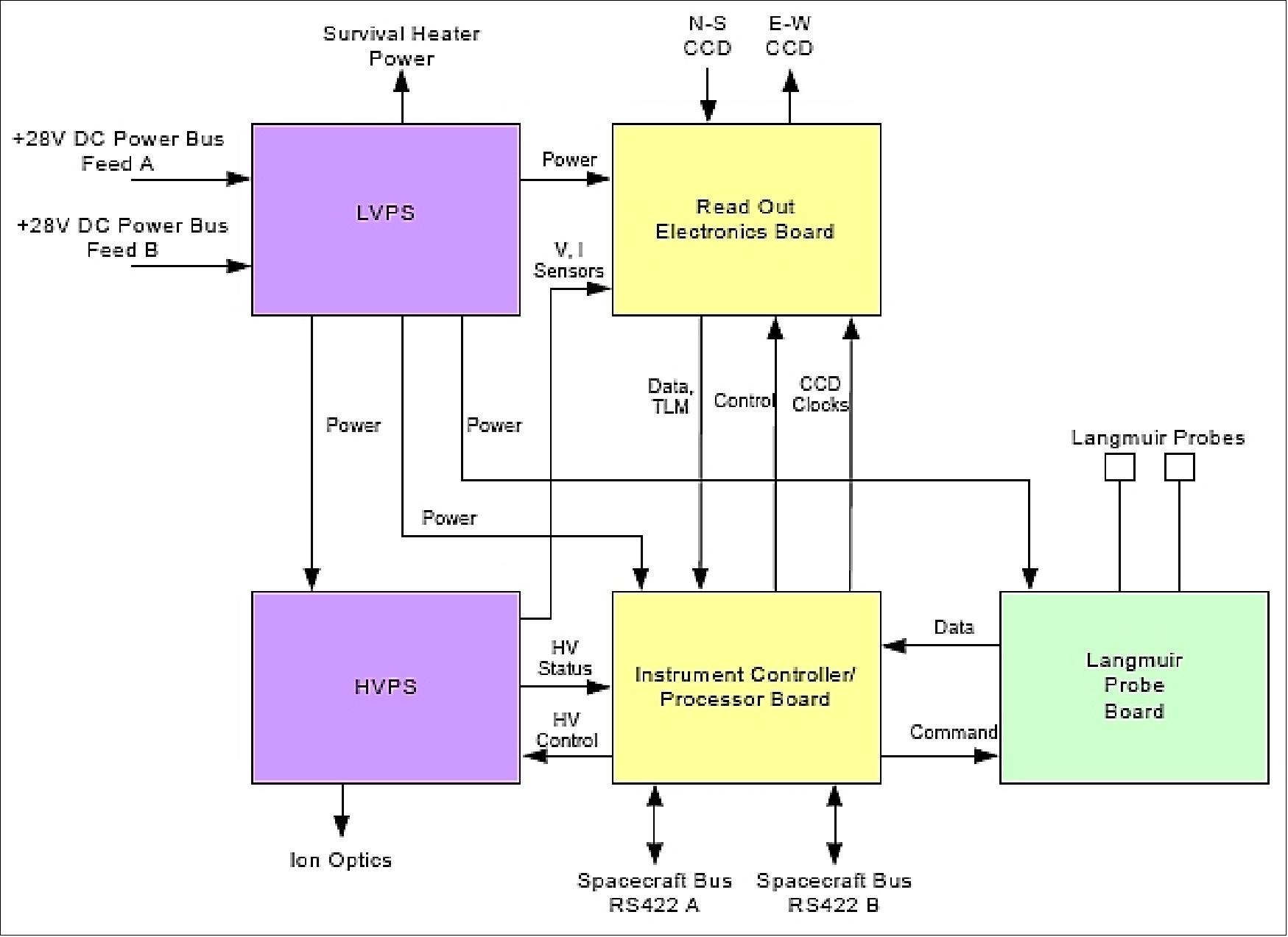
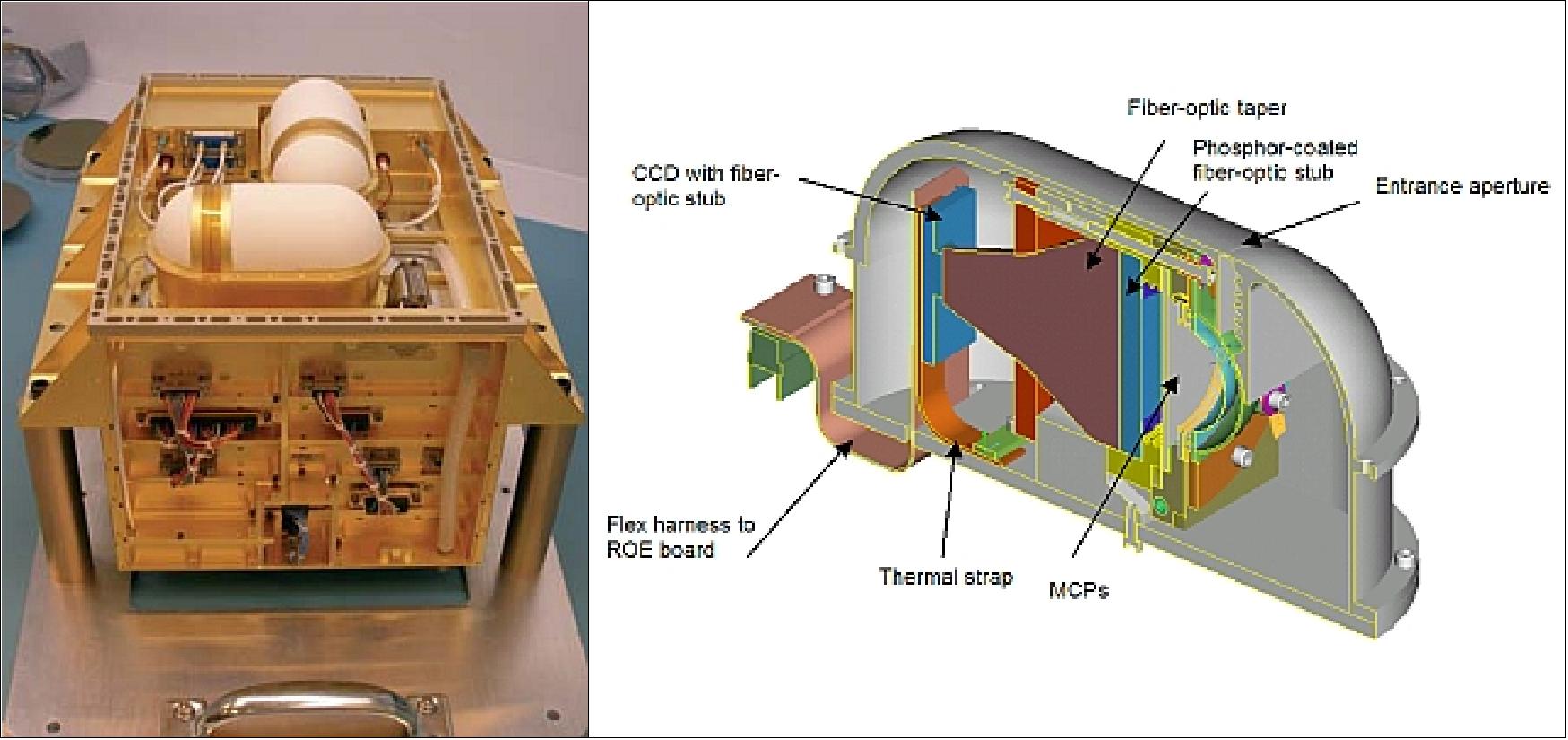
MAC-04 (Micro Accelerometer-04)
MAC-04, or simply ACC, is an electrostatic accelerometer instrument assembly designed and developed at VZLU (Výzkumný a zkušební letecký ústav, a.s. - Aeronautical Research and Test Institute), Prague, Czech Republic. EADS Astrium (as prime contractor to ESA for the Swarm mission) awarded the MAC-04 contract to VZLU in March 2008. VZLU is the lead of a MAC-04 consortium, involving 14 Czech institutions and companies. 156)
The overall objective is to measure non-gravitational perturbing accelerations (time and spatial variability), such as air drag, winds, Earth albedo (reflected solar radiation from the cloud/snow coverage and the thermal radiation of the Earth), and solar radiation pressure on the spacecraft. In-situ air density measurements together with magnetic data can be used to obtain new insights on the geomagnetic forcing of the upper atmosphere.
Typical magnitudes of non-gravitational forces are presented in Table 7. For spacecraft altitudes below 800 km the atmospheric drag is the dominant acceleration; at higher altitudes, the direct solar radiation pressure and other radiative forces are increasing in dominance.
Acceleration origin | Acceleration magnitude (ms-2) |
Atmospheric drag | 10-4 to 10-9 |
DSRP (Differential Solar Radiation Pressure) | 2.9 x 10-8 |
Albedo | 10-8 to 10-9 |
Reflected infrared radiation | 4 x 10-9 |
All these radiation effects have a common feature – namely a slow change of magnitude with time and position in orbit. However, for the solar radiative effects, the illumination of the spacecraft is a precondition for any acceleration detection in its orbital path.
The solar activity has a direct impact on atmospheric drag. The thermosphere usually expands and contracts in line with the sun's 11 year solar cycle. During solar maximum when solar activity increases, it causes the thermosphere to heat up — reaching temperatures of 1100ºC — and expand. The opposite happens during solar minimum. As solar activity increases, EUV (Extreme Ultraviolet) radiation heats our planet's gaseous envelope, causing it to swell and reach farther into space than normal. However, despite of the sun's possible rapid fluctuations, Earth's thermosphere response is a fairly slow process. These considerations led to the design performances of the MAC-04 accelerometer as shown in Table 8.
Linear acceleration range | ± 10-4 m s-2 |
Angular acceleration range | ± 3 x 10-8 rad s-2 |
Measurement bandwidth range | 10-4 to 10-1 Hz |
Resolution for linear acceleration better than | 10-9 m s-2 |
Resolution for angular acceleration better than | 10-7 rad s-2 |
Overall random error better than | 5 x 10-10 m s-2 |
The accuracy of a component of the linear acceleration vector shall be better than 0.2% of the measured value | |
Measurement Principle
The MAC-04 assembly is composed of a cubic proof mass which is free-floating in the cubic cavity. The center of the sensor will be accommodated in the spacecraft’s center of gravity. The proof mass is separated from external influences by the satellite structure and the construction of the micro-accelerometer.
Free motion of the proof mass is realized by virtue of the gravitational law. The cavity is rigidly connected to the satellite body. The gravitational as well as all perturbing forces acting on a satellite produce their acceleration contributions which are identical to the one of cavity. The difference between the acceleration of the cavity and the acceleration of the proof mass is the sum of all accelerations produced by the non-gravitational forces acting on a satellite.
A precise measurement of the proof mass position enables to properly detect its small relative displacements with respect to the satellite-fixed cavity. Applying a known electrostatic force, the instrument can compensate and measure the action of the non-gravitational forces. This proof mass position control is performed by a feedback loop of the servo control electronics.
A block diagram of the sensor control circuit is shown in Figure 129. Part of the block diagram placed in the dashed border represents the dynamics of the proof mass. The constants A1, A2 and A3 represent the shape and geometry of the electrodes and their distance to the proof mass.
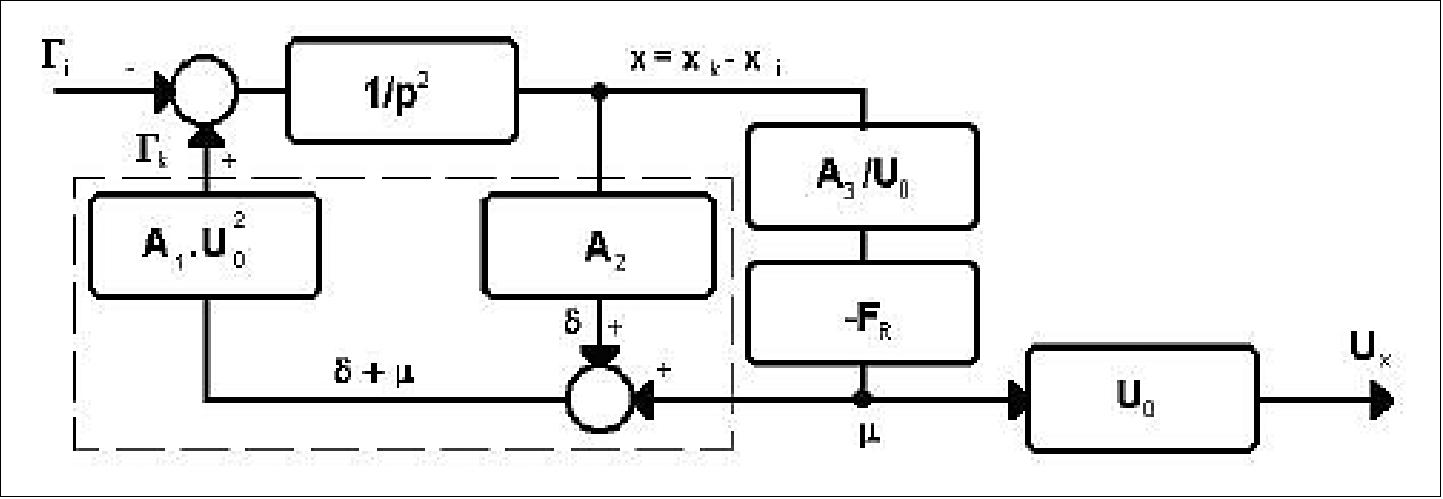
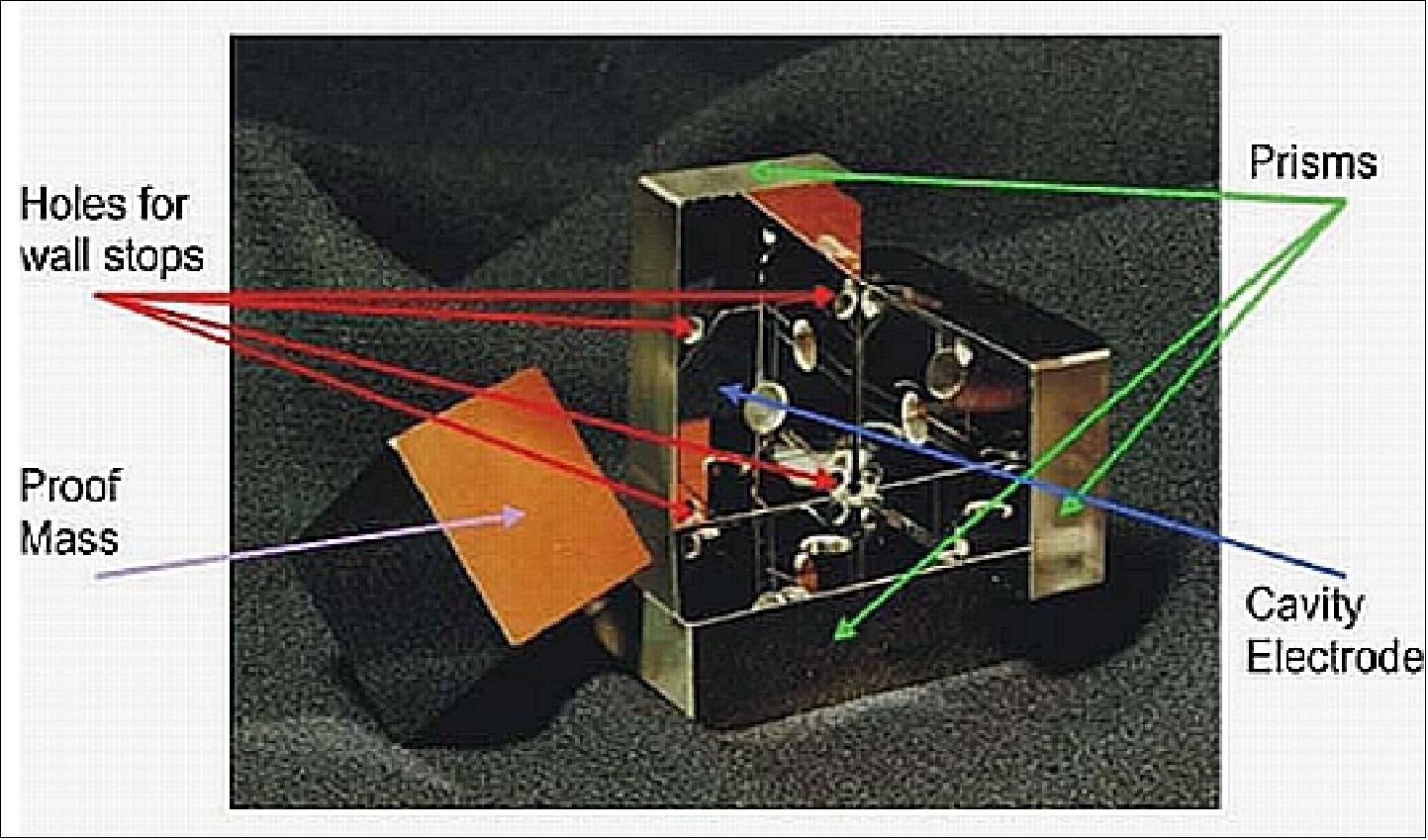
MAC-04 science data output 1Hz rate:
- Linear acceleration: 3 vector components
- Angular acceleration: 3 vector components
- Linear positions: 3 vector components
- Angular positions: 3 vector components
- Temperatures: 8 sensor values.
Some Background of Czech Accelerometer Instrument Projects in Spaceflight
During the last two decades, the Czech Republic has developed several accelerometer instrument models within the framework of the non-gravitational accelerometer program. There is great interest among the theoreticians in satellite dynamics since our understanding of the non-gravitational effects is rather limited. In many cases, only rough phenomenological models are available. In situ measurements of the non-gravitational effects have thus great importance for checking the theoretical concepts. The MAC (Micro Accelerometer) program (formerly referred to as MACEK) is devoted to such measurements with an expected threshold up to 5 x 10-11 ms-2 .
Table 9 provides an overview of the various spaceborne missions whose payload included a MAC instrument. The obtained measurements are of different quality. The first two instrument models (flown on Resurs-F1 and on the STS-79 flight of the Space Shuttle) were mainly of in-flight technology verification nature. The MIMOSA project was the first small satellite dedicated to the research of the thermosphere. Unfortunately the failure of unlocking in one axis spoiled the mission goal.
The first MAC-04 instrument of VZLU, developed under in the frame of the project TEASER (Technological Experiment And Space Environment Resistance), was launched with the Russian Tatiana-2 mission in Sept. 2009. The project was funded Ministry of Industry and Trade of the Czech Republic. - However, after spacecraft separation from the upper stage of the launch vehicle, the satellite stabilization system did not work correctly (infrared Earth sensor failed). When all trouble shooting didn't bring any tangible results, the communication with the spacecraft was terminated after one month of “operations” with the spacecraft.
As of mid-2010, the development of the MAC-04 instrument for the Swarm mission is completed and instrument qualification for the mission is underway. Although the measurement principle is quite simple, past experiments showed high demands on the precise adjustment of the accelerometer in ground conditions. Moreover the complexity and the high precision adjustment of the sensor mechanical parts in combination with electronics properties (e.g. temperature dependence) represent a challenging task in the MAC-04 accelerometer verification.
Launch of mission, Instrument model ⇒ | MAC-01 | MAC-02 | MAC-03 | MAC-04 |
June 23, 1992 | Resurs-F1 (proof of concept flight) |
|
|
|
Sept. 16-26, 1996 |
| STS-79 |
|
|
June 30, 2003 |
|
| MIMOSA |
|
Sept. 17, 2009 |
|
|
| Tatiana-2 |
2012 |
|
|
| Swarm |
Instrument model ⇒ | MAC-01 | MAC-03 | MAC-04 |
Linear range (ms-2) | ±4 x 10-4 | ±5 x 10-5 | ±2 x 10-4 |
Angular range (rad s-2) | ±9 x 10-3 | ±9 x 10-3 | ± 9 x 10-3 |
Resolution for linear acceleration (ms-2) | 3 x 10-10 | 2 x 10-10 | 2 x 10-10 |
Temperature resolution (ms-2 K-1) | 10-7 | 3 x 10-9 | 3 x 10-9 |
Stability (ms-2 day-1) | - | 10-8 | 10-8 |
The Czech Republic formally became ESA's 18th Member State on 12 November 2008. Already in 1996, Czech Republic signed the formal Framework Cooperation Agreement. In November 2003, however, the Czech Republic became an ESA European Cooperating State by signing the Plan for European Cooperating States Agreement (PECS Agreement) and entering the ESA PECS Program. 157)
LRR (Laser Retro Reflector)
The LRR instrument is being provided by GFZ Potsdam. The objective is spacecraft POD (Precise Orbit Determination) to cm-level accuracy by SLR (Satellite Laser Ranging).
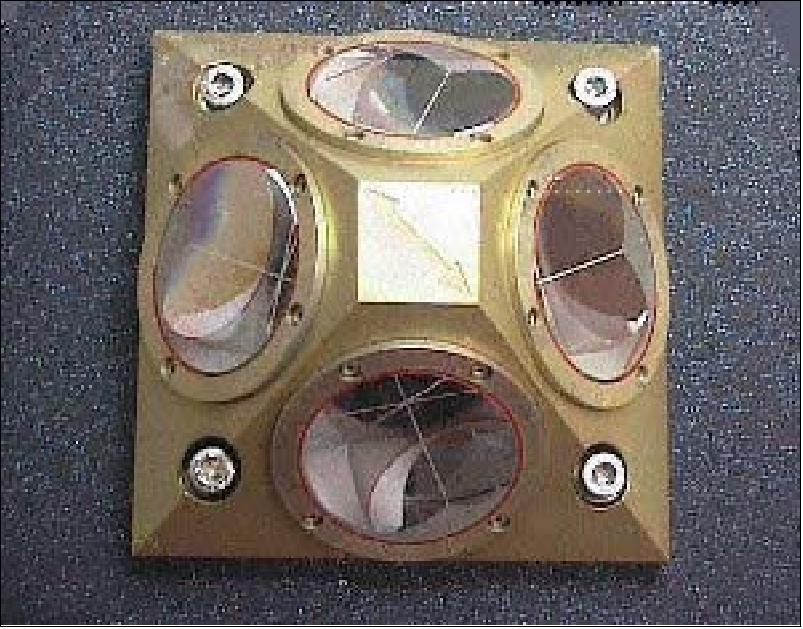
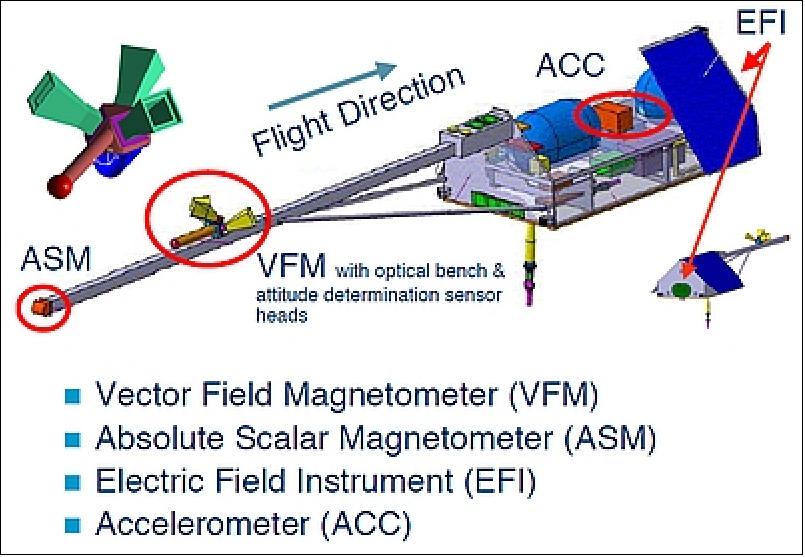
Internal Field Components | |||||
Research objective | Time range | Spatial range | Signal range | Signal at certain wavelength (wl) | Measurement |
Core dynamics and geodynamo processes | static | 300 km to global | < 65000 nT | 2.35 nT @ 3000 km wl | B-field vector, attitude & position |
3 months to decades | 2500 km to global | ±200 nT/year | 0.025 nT/3 months @ 2850 km wl | ||
Lithospheric magnetization | decades to static | 300-3000 km | ±25 nT | 2.35 nT @ 3000 km wl | B-field vector, attitude & position |
3-D mantle conductivity | 1.5 hrs to 11 years | 300 km to global | ± 200 nT | NA (modelled as conductivity) | B-field vector, attitude & position |
Ocean circulation | 12 hrs to 2 years | 600-10,000 km | ± 5 nT | 0.5 nT@ 10000 km wl | B-field vector, attitude & position |
External Field Components | |||||
Research objective | Time range | Spatial range | Signal range | Measurement | |
Ionosphere-magnetosphere recurrent systems | 0.1 s to 11 years | 1 km to global | B-field:±1000 nT | B-field, E-field, and ion drift velocity vectors, attitude and position | |
Ionosphere-magnetosphere recurrent systems | 10 s to 3 months | 10 km to global | Ion drift velocity: ± 4000 m/s | ||
Magnetic forcing of the upper atmosphere | 10 s to 2 years | 20 km to global | Plasma density: 1 x 108 - 5 x 1013 m-3 | B-field and E-field vectors, ion and electron temperature and plasma density, acceleration, attitude and position | |
10 s to 3 months | 200 km to global | Ion and electron temperature: 103-105 K | |||
Star Tracker Assembly and OB (Optical Bench)
The STR (Star Tracker) assembly provides the attitude of the VFM. Both instruments are co-mounted in a common optical bench to ensure proper alignment for the determination of the highly accurate magnetic field components. The µASC (Micro Advanced Stellar Compass) of DTU Space is being used in the star tracker assembly. It features two fully cold/hot redundant DPU's. With full cross-strapping, each DPU can control one to four CHU's (Camera Head Unit). Mission specific baffles can be designed for optimum performance. The attitude is autonomously calculated based on all brighter stars in the FOV of the CHUs; µASC can provide 22 true solutions per second. The absolute accuracy is < 1 arcsec. The instrument mass is < 1.4 kg (3 x CHU, BFL's & DPU). The power is < 5.7 W (3 x CHU+DPU). The instrument can also support asteroid science - Near Earth Object (NEO) detection and planets triangulation.

OB (Optical Bench): The purpose of the OB is the transference of the attitude from the extremely precise star trackers to the magnetometer field components. The OB ensures a highly mechanical stable platform for the magnetometer and the star trackers. A exhaustive thermo mechanical design and analysis is carried out to determine and minimize any thermal gradient that could cause a shift in the relative attitude between the two systems.
The star trackers are very magnetically clean; the separation between the two instruments (STR and VFM) is about 40 cm to reduce magnetic perturbation from the STRs. The exploitation of the symmetric system has resulted in a cylindrical tube holding the VFM sensor, minimizing transversal thermal gradients. Emphasis has been on the matching of material parameters, the use of iso-static support interfaces, and a detailed analysis of the loads. The instruments are calibrated as stand alone, and once integrated in the OB, an intercalibration and system verification is carried out to determine the relative orientation between the VFM and STR and to verify that the stability is as required.
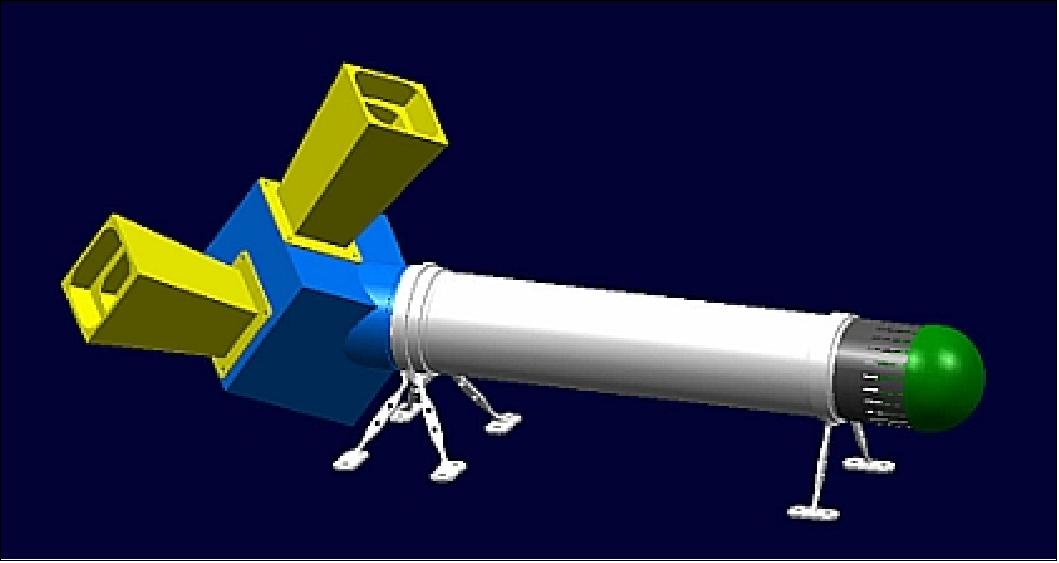
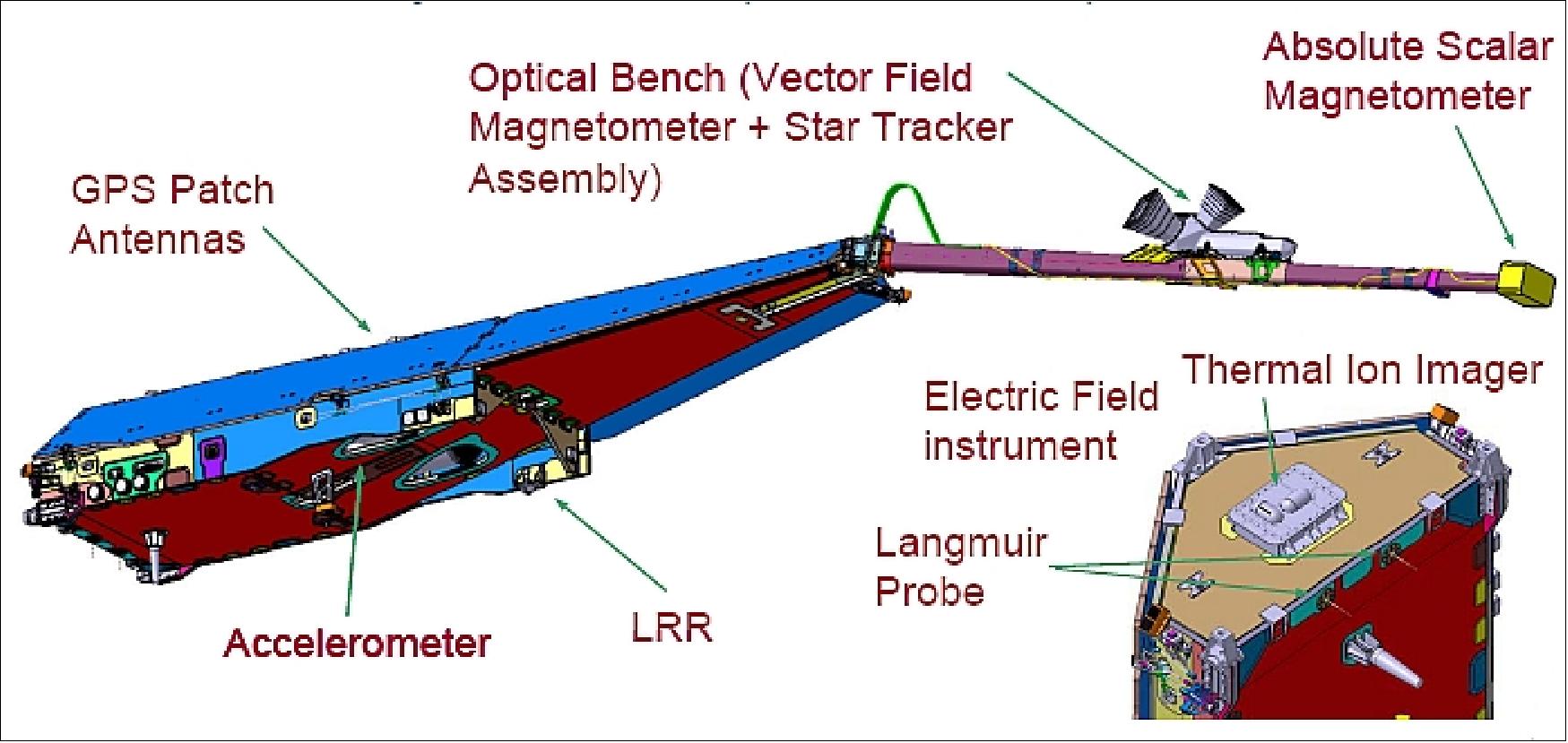
Ground Segment
The ground segment consists of the following elements: 159)
1) CDAE (Command and Data Acquisition Element), located at the Kiruna ground station, Kiruna, Sweden.
2) FOS (Flight Operations Segment), located at ESA/ESOC, Darmstadt, Germany. ESOC is in charge of monitoring and planning of satellite operations.
3) PDGS (Payload Data Ground Segment), located at ESA/ESRIN, Frascati, Italy. The main tasks of PDGS are the generation of data products from the science data, data archiving, and data distribution to the user community.
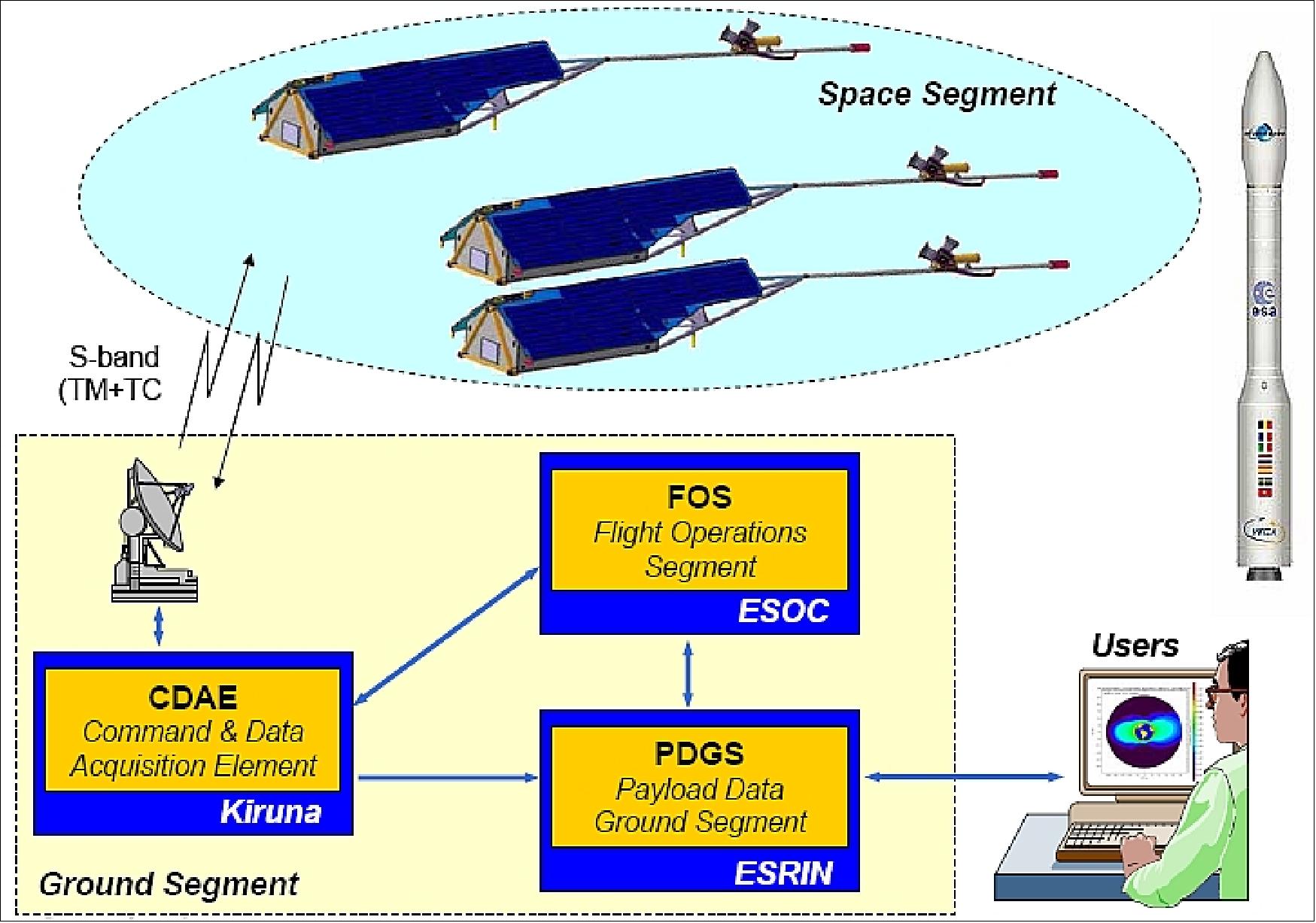
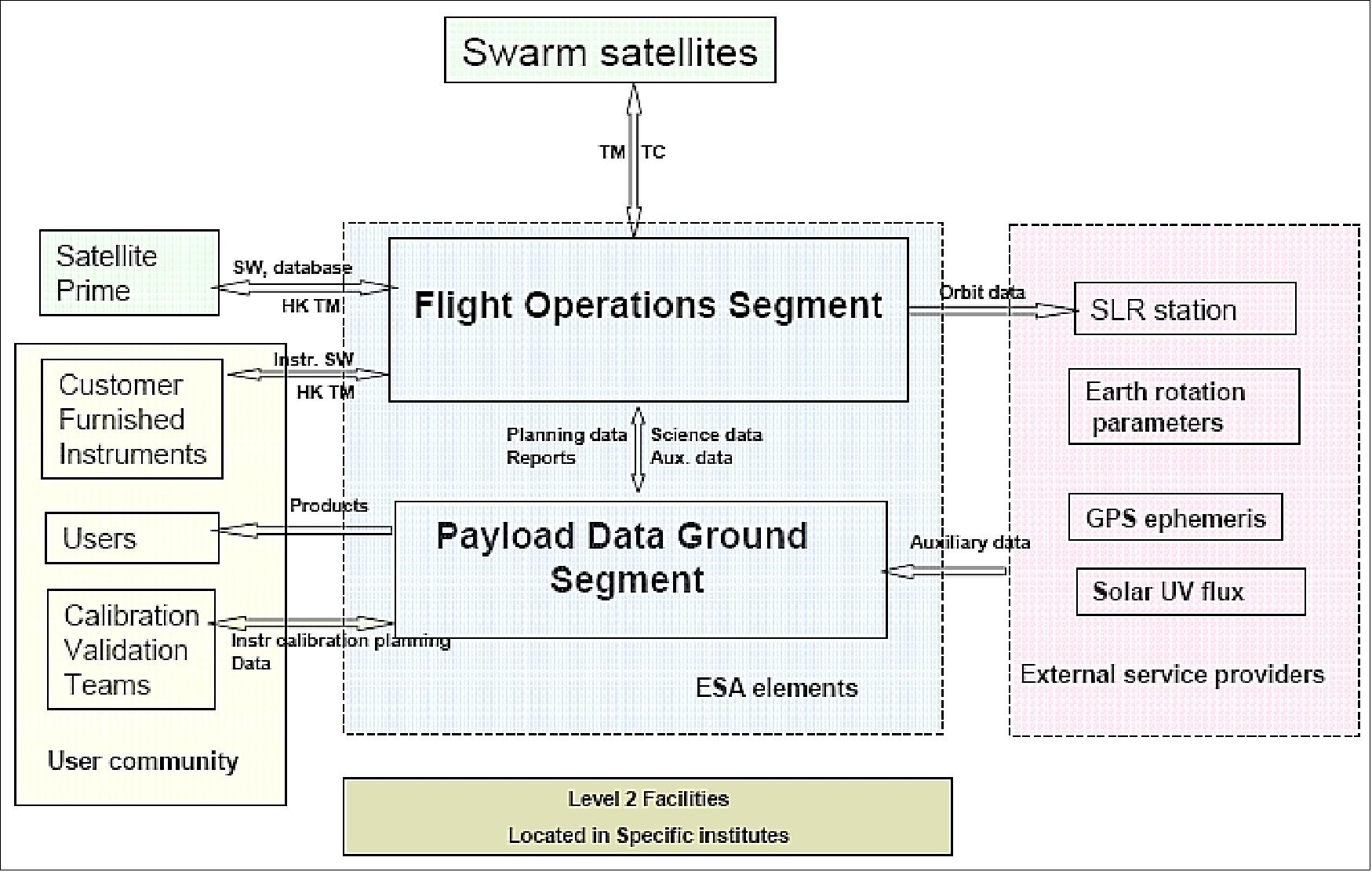
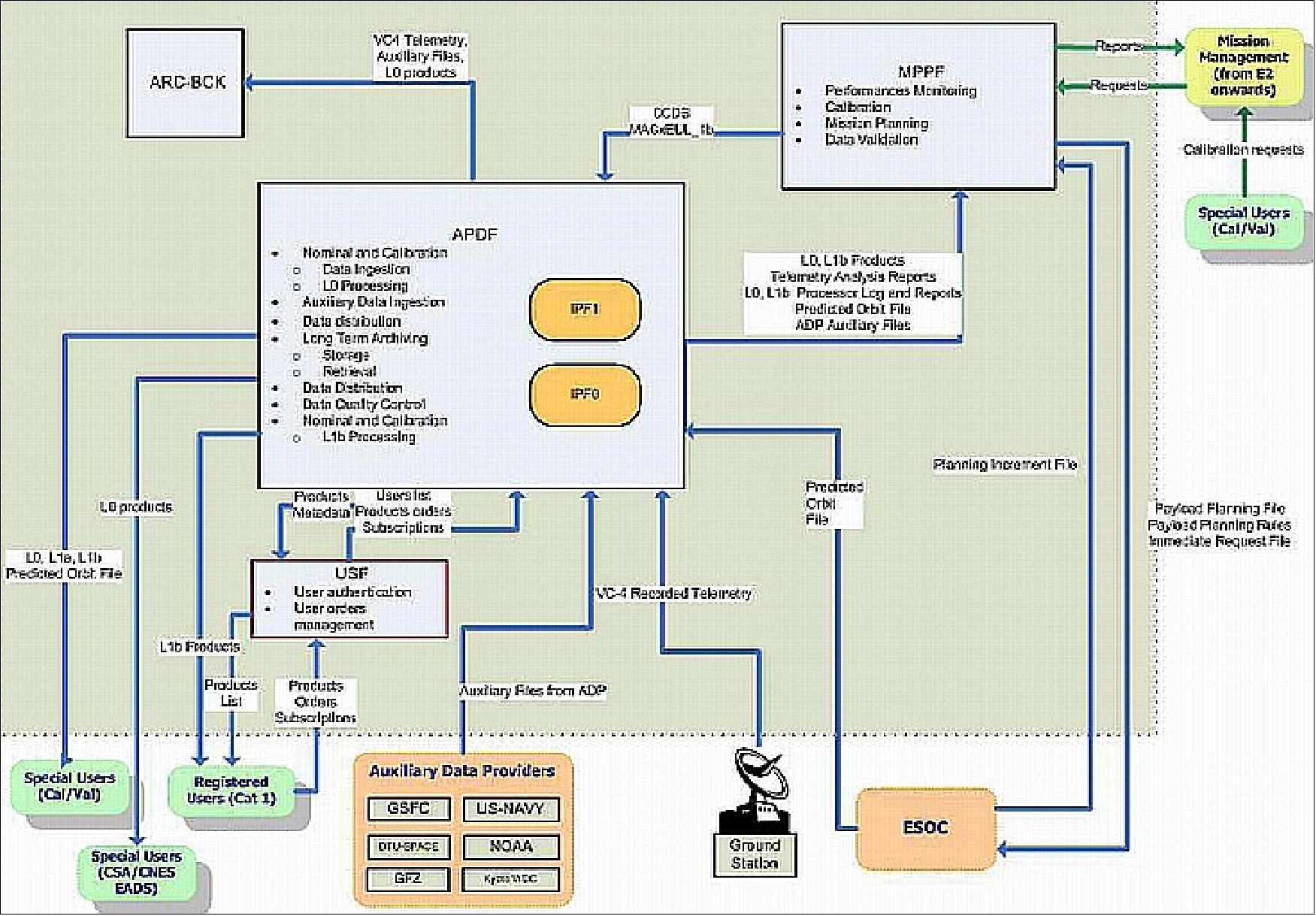
A Ground Segment for Multisatellite Operations
The concept for control of the SWARM mission during the routine phase is presented in Figure 141. It is based on the use of a single control center at ESOC, in conjunction with a prime ground station at Kiruna, augmented by external stations (Svalbard and Esrange) when required, and interconnected by a general purpose, highly available ground network. This is collectively called the FOS (Flight Operations Segment). 160)
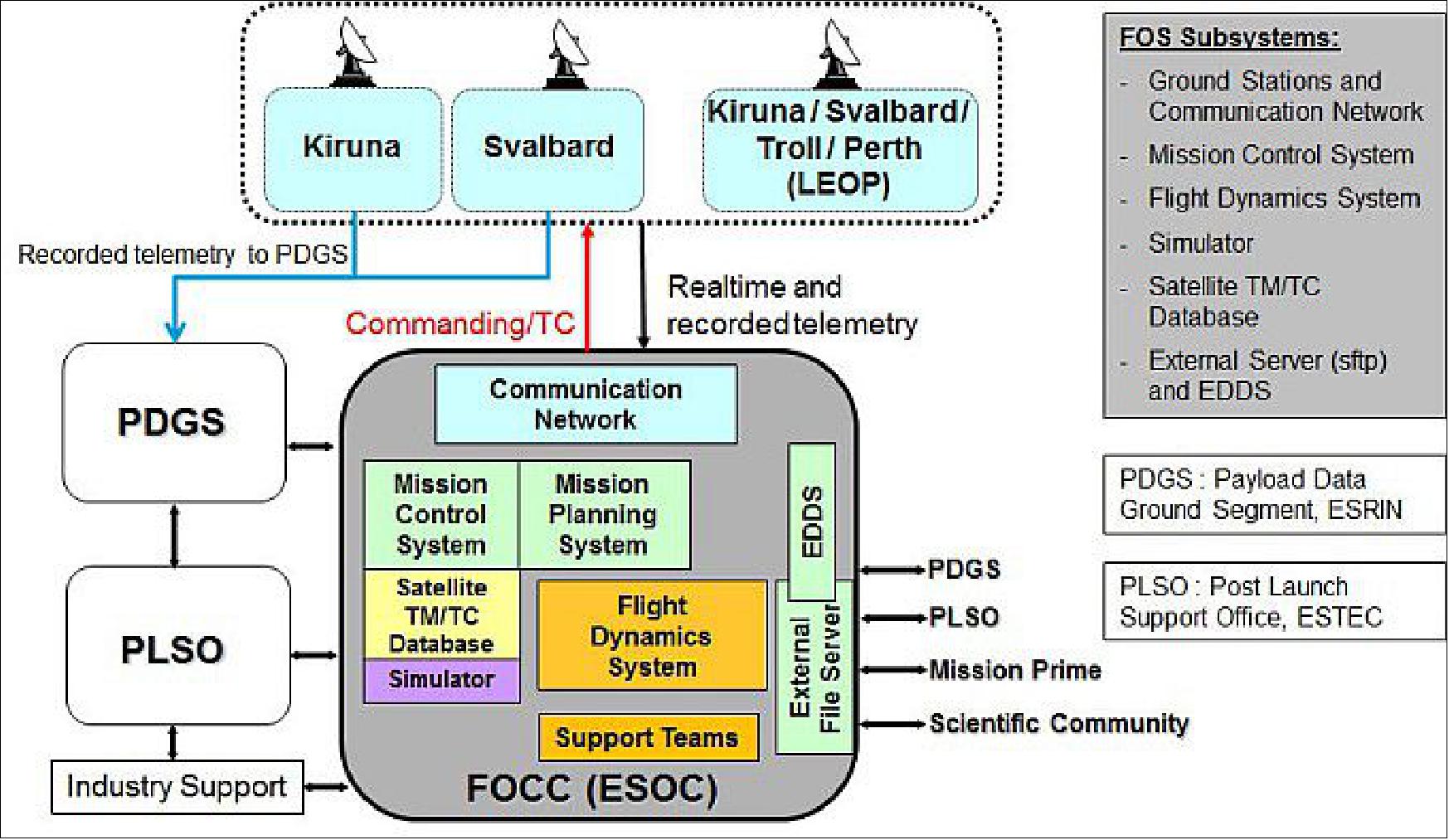
The control center, otherwise referred to as the FOCC (Flight Operations Control Center) in ESA parlance, is comprised of the following systems:
- The SWARM MCS (Mission Control System) to support, with both hardware and software, the data archiving and processing tasks essential for controlling the mission. Together with the MCS, the EDDS (EGOS Data Dissemination System) takes care of providing the Swarm data to all external interfaces.
- The SWARM MPS (Mission Planning System), supporting command request handling and the scheduling of spacecraft/payload operations.
- The FD (Flight Dynamics) System, supporting all activities related to attitude and orbit determination and prediction, preparation of slew and orbit maneuvers, spacecraft dynamics evaluation and navigation in general.
- The Spacecraft Simulator, to support procedure validation, operator training and the simulation campaign before each major phase of the mission.
Data acquired by the FOS is retrieved directly from the ground stations by the PGDS (Payload Data Ground Segment) located at ESRIN, which is in charge of processing the raw data to generate scientific products and making them available to the scientific community. Additionally, satellite housekeeping data is provided through the EDDS server to the PLSO (Post-Launch Support Office) located at ESTEC and to the spacecraft prime contractor providing industrial support.
Mission Control System and Mission Planning
The main challenge of the FOS was the multi-satellite system of Swarm, which necessitated the development of a multi-domain MCS distributed across several servers, and organized in a nominal and a backup chain. This was driven by the need for flexibility for constellation operations and parallel activities.
The Swarm MCS is based on ESOC’s generic SCOS-2000 (Spacecraft Control & Operation System-2000) infrastructure software and implements three separate domains in hardware and software, one per spacecraft, while a fourth domain handles all processes common to the three main domains. The system allows the control of the three spacecraft at the same time when required, as demonstrated during the LEOP phase, when two satellites were commanded in parallel and data was received, processed and archived for the three of them: real-time telemetry (VC0 and VC1 data streams) and recorded TM from the on-board mass memories (VC2 and VC4 data streams). In routine, only one satellite is commanded at a time, but processing of the recorded telemetry dumped during the passes may occur in parallel for the three satellites depending on the separation between spacecraft passes.
Commanding is supported by the MPS, which generates two command schedules, the SIGR (Schedule Increment Ground Schedule) and the SIOS (Schedule Increment On-Board Schedule).
The SIGR contains commands to be sent in real time and is typically related to automated pass operations by setting up the link configurations to the respective ground stations and management of the on-board mass memory (start and suspend transmission of stored data and deletion of old data).
The SIOS provides time-tagged telecommands to be loaded into the satellite MTL (Mission Timeline) on-board and mainly controls the critical data downlink strategy (transponder switch on/off, on-board statistics housekeeping, instrument mode transitions, etc.).
The default planning interval is based on seven days corresponding to a calendar week from Monday 00:00:00 UTC until Sunday 23:59:59 UTC. It is nominally prepared on Thursday of week N-1 with an execution time starting on Monday of week N and is uplinked on Friday.
All for Less: A Data Downlink Strategy
The data downlink strategy is based on just two ground station passes per satellite per day during working hours; with each pass allowing 4 to 9 minutes of commanding.
During the first pass a long data dump after the overnight out-of-coverage is performed while the second pass is a few hours after the first contact and allows to dump any remaining data that could not be retrieved during the first pass. The second pass makes the schedule more robust against outages and guarantees that the backlog is quickly recovered in case a pass is lost. It also allows recalling any data from previous passes and offers a second commanding window, which is crucial for complex payload and platform special operations that cannot be performed in a single pass.
After each pass, old data is partially deleted. This strategy ensures that always up to three days of science data (fill status of packet store up to 70%) and up to two days of housekeeping data (fill status of packet store up to 50%) are available on-board. Any data gap larger than 5 minutes detected on ground is systematically recovered by re-dumping the data. An example of the evolution of the mass memory fill level for one satellite and one week is presented in Figure 142.
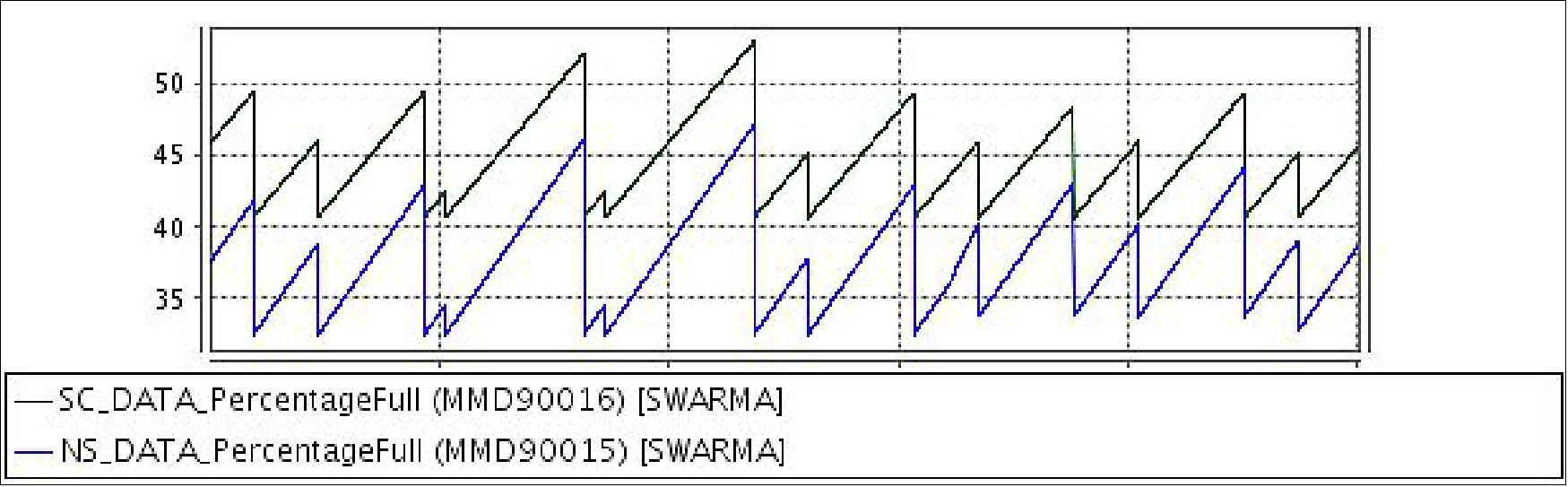
Aspects on Maneuvering the Swarm Satellite Constellation
Orbit Acquisition
The three months of commissioning in 2014 were characterized by a very tight and dynamically changing schedule of activities. All operational issues could be solved during that time, including the challenging orbit acquisition phase to achieve the final constellation.
The near polar orbit for good global coverage and regular 24 hours local time coverage about every 9 months was achieved straight away due to the nominal injection into the common separation orbit. It remained to establish the relative differences between the lower pair formed by Swarm-A/Swarm-C and the upper satellite Swarm-B. The targets in altitude and inclination difference were selected to be 50 km and 0.4º. Mainly the latter determines the relative drift rate of the LTAN (Local Time of Ascending Node) of the orbital planes between the lower pair and Swarm-B. This drift is still on-going and the LTAN difference will reach 4 hours in October 2016 and should then ideally remain within 6h ± 2h during the continuous natural decay down to 300 km until 2022 or later. To achieve this, another maneuver campaign will be needed to slow down the relative drift.
In addition, after launch the lower pair had to be separated by 5-6 minutes in LTAN and maneuvered to fly side by side with less than 10 seconds along track difference. The LTAN separation of the lower pair was achieved indirectly by performing the inclination changes of Swarm-A and Swarm-C at different times leaving, on average, six weeks in between with different nodal precession. The firing direction of the maneuvers was selected such that the semi-major axis was lowered at the same time. To achieve the required delta-v of 32m/s with the low thrust cold gas system capable of 2x0.05N, each satellite had to perform more than 130 maneuvers. The finalization of all maneuvers was completed during only 12 weeks, whereby each week was dedicated to a batch of maneuvers with a single satellite only. For each satellite a small test batch was performed to obtain a first thruster calibration. The subsequent batches consisted of 22-34 consecutive orbits with a 20 minutes maneuver around each ascending and descending node and slews in between. Here the main challenge was to come up with a robust strategy, which could be adjusted easily in case of maneuver failures and excluded any collision risk when Swarm-A approached the side-by-side configuration after completion of four additional revolutions during the six weeks drift phase. The original pre-launch maneuver plan is shown in Figure 143.
This paid off when the first Swarm-A maneuver sequence did, indeed, abort after 69% of the planned delta-v due to an on-board software problem with a shared memory address. 161)
About 36% of the loaded fuel was consumed for the orbit acquisition. This leaves enough fuel for a later maneuver campaign to slow down the relative node precession in the near future in order to stay within a LTAN difference of 6 h ±2 h. The decision about when and how far to slow down needs to be taken by the end of 2016 at the latest and requires also the best possible prediction and planning of the further decay from 440 km down to about 300 km altitude. 162)
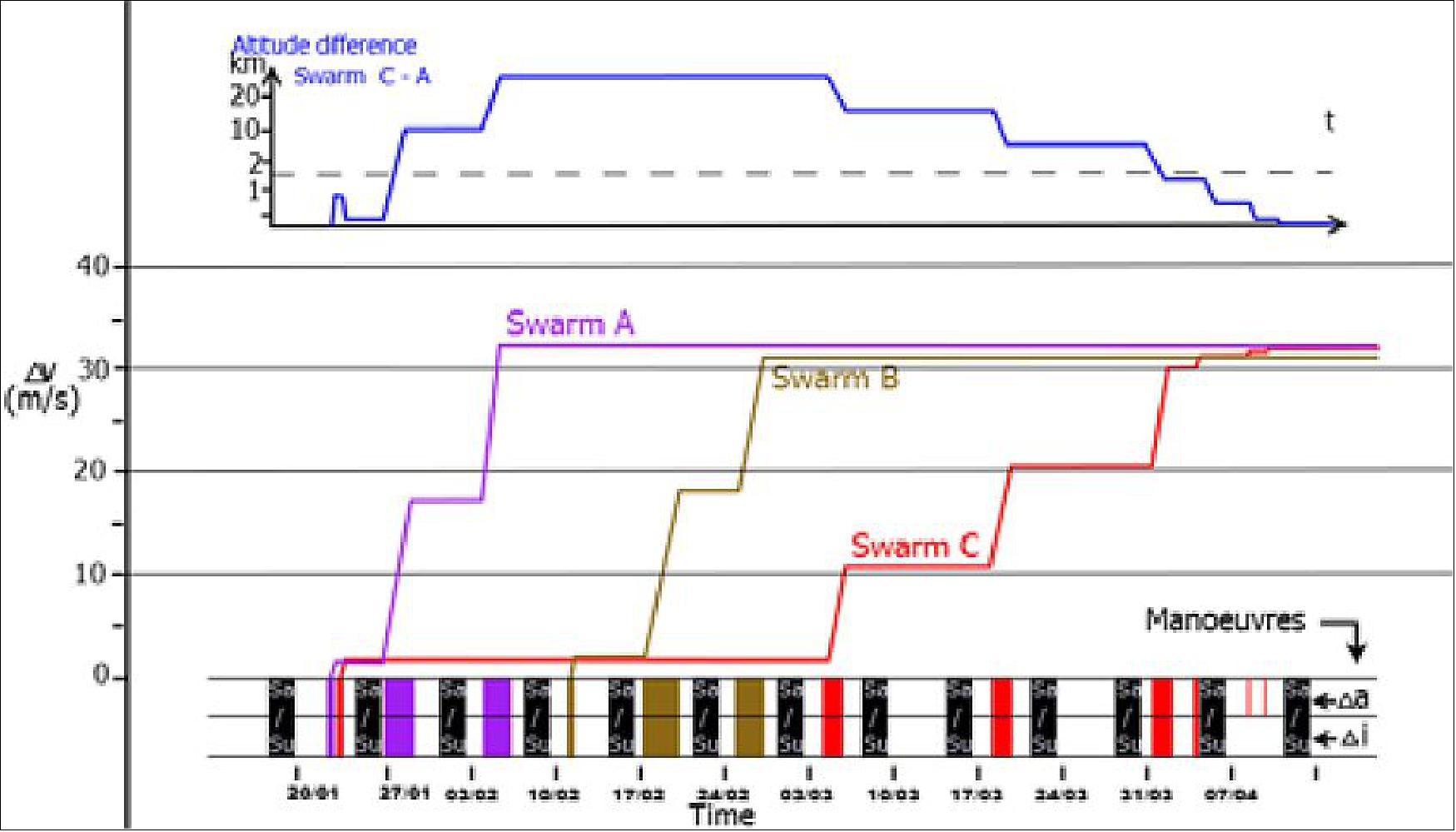
Routine and Non-routine Maneuvers
The initial orbit for the lower pair, Swarm-A and Swarm-C, was targeted at an altitude of 468 km and an inclination of 87.35 º. It is now maintained in a side-by-side constellation separated along track such that their ascending node crossing time differences are between 4 and 10 seconds. The lower limit guarantees that both spacecraft will not accidentally collide even in the case of anomalies on-board.
In addition, their eccentricity vectors are to be kept close enough to ensure an altitude difference of always less than 5 km. Also for mitigating collision risks, the eccentricities are kept as close as possible. Since the end of commissioning, 9 maneuvers on Swarm-A have been performed using a total of approximately 80 g and none on Swarm-C until now.
The other spacecraft, Swarm-B, was placed in a higher orbit (altitude circa 516 km), with an inclination higher than the lower pair by 0.4º at 87.75º. Its orbit is not controlled after the orbit acquisition phase except for necessary collision avoidance maneuvers.
Two collision avoidance maneuvers had to be executed so far, one on Swarm-B and one on Swarm-A each using around 30 g of fuel to avoid debris that endangered the safety of the satellite.
Several attitude slews were also performed to calibrate various instruments on board. Slew maneuvers were for instance performed in May 2014 to characterize the observed residuals of the two magnetometers VFM and ASM. They required careful preparation in order to ensure that they would not affect the power or thermal budget of the satellite and were compatible with the flight domain of the AOCS. Furthermore, during the routine phase the on-board fuel is spent for normal attitude maintenance (12 g per week on average).
Parameter | SWA (Swarm-A) | SWB (Swarm-B) | SWC (Swarm-C) |
Initial fuel | 105.3 | 105.0 | 102.7 |
Orbit acquisition | 38.6 | 37.7 | 38.2 |
Constellation maintenance | 0.080 | 0 | 0 |
Collision avoidance | 0.030 | 0.030 | 0 |
Normal attitude maintenance since routine phase | 1.63 | 1.23 | 1.54 |
Remaining fuel | 64.96 | 66.04 | 62.96 |
Challenges of Swarm Operations
Payload Operations
Although the actual spacecraft commissioning phase was concluded in spring 2014, the investigations for some payload instruments are still on-going.
One of the payloads of the Swarm constellation is the EFI (Electrical Field Instrument) in cooperation with the University of Calgary (UoC) in Canada and devoted to the measurement of spacecraft potential, electron temperature, ion properties and ultimately the electric field. Two Langmuir probes (LP) are used to measure the electron properties and spacecraft potential, while a Thermal Ion Imager (TII) is used to capture the plasma particles and produce 2D maps with two CCD sensors.
The intended concept of the TII was full-time operations of the imager, but, in practice, some indications of image degradation arose after a period of continuous operation depending on the satellite. Therefore, in order to maximize the scientific return, it was decided to operate the TII for just a limited and fixed number of orbits per day, in order to ensure good quality data in regions where the physical phenomena, especially at high latitudes, are of higher interest. The LPs are not affected and are always producing good quality data.
This modified concept required the need of a formal coordination between the FOS and the scientific community in order to define the times of activation: in particular a new data interface called OPF (Operations Planning File) has been defined to automatically process the inputs created by UoC and integrate them in the mission planning process at ESOC.
In parallel with the scientific measurements, several tests were carried out, mainly for Swarm-C, in order to raise the TII voltages and the temperatures of the inner instrument and to scrub possible contaminants from inside the chamber, suspected as the possible source for the image degradation. After these tests, several parameter setting updates were applied and, during the last year, the number of orbits used for science operations has successively increased, a sign of the improvement in the continuous and step-by-step fine tuning of the instrument operations. Moreover, a periodic calibration of the CCD gain maps was performed for the two sensors of each TII separately, in order to provide the conditions for good data exploitation.
Table 13 summarizes the different kind of tests performed in order to characterize the TII image anomaly. All these unforeseen activities, far beyond the original assumptions, resulted in a significant extra workload for the FCT. Large efforts were necessary to prepare, schedule and execute all the tests in a setup closer to a “extended commissioning phase” than routine operations.
Special activities performed | SWA (Swarm-A) | SWB (Swarm-B) | SWC (Swarm-C) |
CCD gain map updates | 5 | 5 | 4 |
Fixed MCP (Microchannel Plate) voltage tests | 1 | - | 6 |
Correction of AGC (Antenna Gain Control) settings | > 20 | ||
Inner dome scrubbing tests | >5 | ||
Phosphor screen voltage updates | >20 | ||
Shutter duty cycle tests | >5 | ||
The health status of the VFM (Vector Field Magnetometers) and the ASM (Absolute Scalar Magnetometers) is excellent, with the exception of the failure of both ASMs on Swarm-C just after launch (this was one of the reasons for the selection of Swarm-B as the upper satellite). The ASMs on Swarm-A and Swarm-B are routinely operated in Vector Mode and the three active VFMs are producing data at 50 Hz on the three spacecraft. Careful monitoring of temperatures, voltages, currents and other payload parameters is performed by the FCT (Flight Control Team) on a regular basis to detect any anomalous behavior.
A residual bias was identified between the measurement of the VFM and the ASM, which was presumably related to a thermal effect of the instruments. In order to characterize this behavior, Swarm-B was slewed four times by 90º. The spacecraft remained in this special attitude for 5 orbits. This operation was performed together with coordinated slews of Swarm-A and Swarm-C, four times by 90º in the reverse direction and offset by 3 orbits. The two satellites remained in each attitude position for 6 orbits.
Additional tests became also necessary for the ACC (Accelerometer) instruments on-board the Swarm satellites. The dependency of the ACC performance with respect to temperature variations appeared to be more complex than anticipated during the design phase. Tests were created in order to reduce thermal variations by using different On/Off heater strategies, in some cases with the nominal and the redundant heaters used in parallel. Those tests required careful preparation to schedule and execute more than 6000 commands synchronized with Sun eclipses.
Figure 144 shows an example of heater profile activation for one of the tests performed. The heater profiles are designed to analyze the impact of various delay activations versus start and end of eclipses in order to achieve stabilization of the ACC temperature. The tmax and tmin times closely match the entry and exit of Sun eclipses and are used as reference for the heater activation.
Test campaigns with attitude thruster activations were conducted to deduce ACC scale factors needed to adjust accelerometer deviations for all satellites. All three axes were calibrated using dedicated thruster activations designed to minimize the impact on the attitude and the orbit.
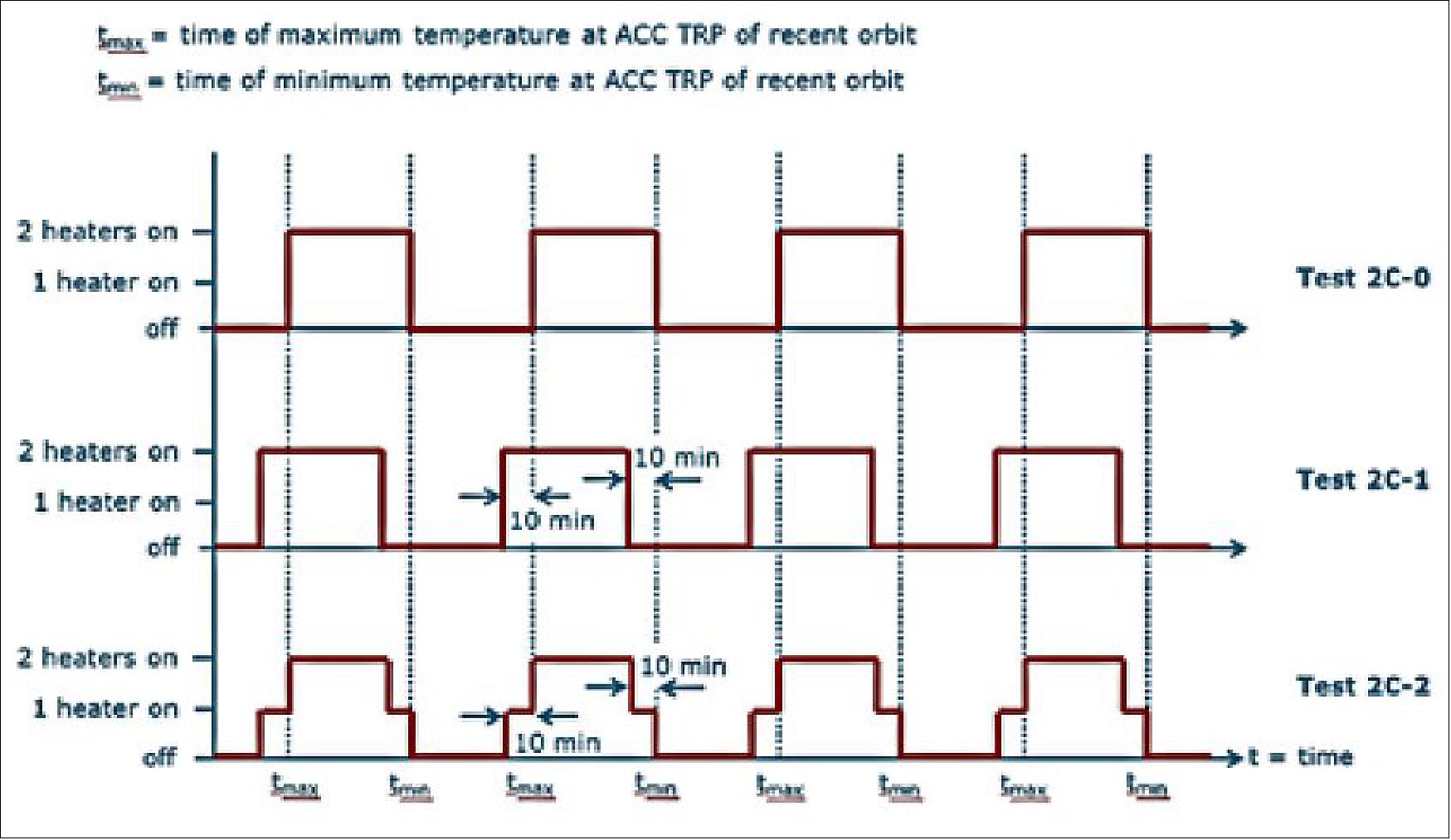
Figure 145 shows an example of the along track scale factor calibration scenario used for all Swarm satellites. It shows the impact of the thruster activations selected on the orbit and rotation of the satellite. It consisted in four separated firings designed to test along-track acceleration in both positive and negative direction and to bring the satellite back to its original position and rotation at the end of the operation. Those tests required a de-activation of the AOCS and had to be geolocalized for best performance. They, therefore, required a very careful preparation and analysis from the FCT before their execution. Currently, a six months calibration campaign is on-going to verify the stability of the scale factor over time.
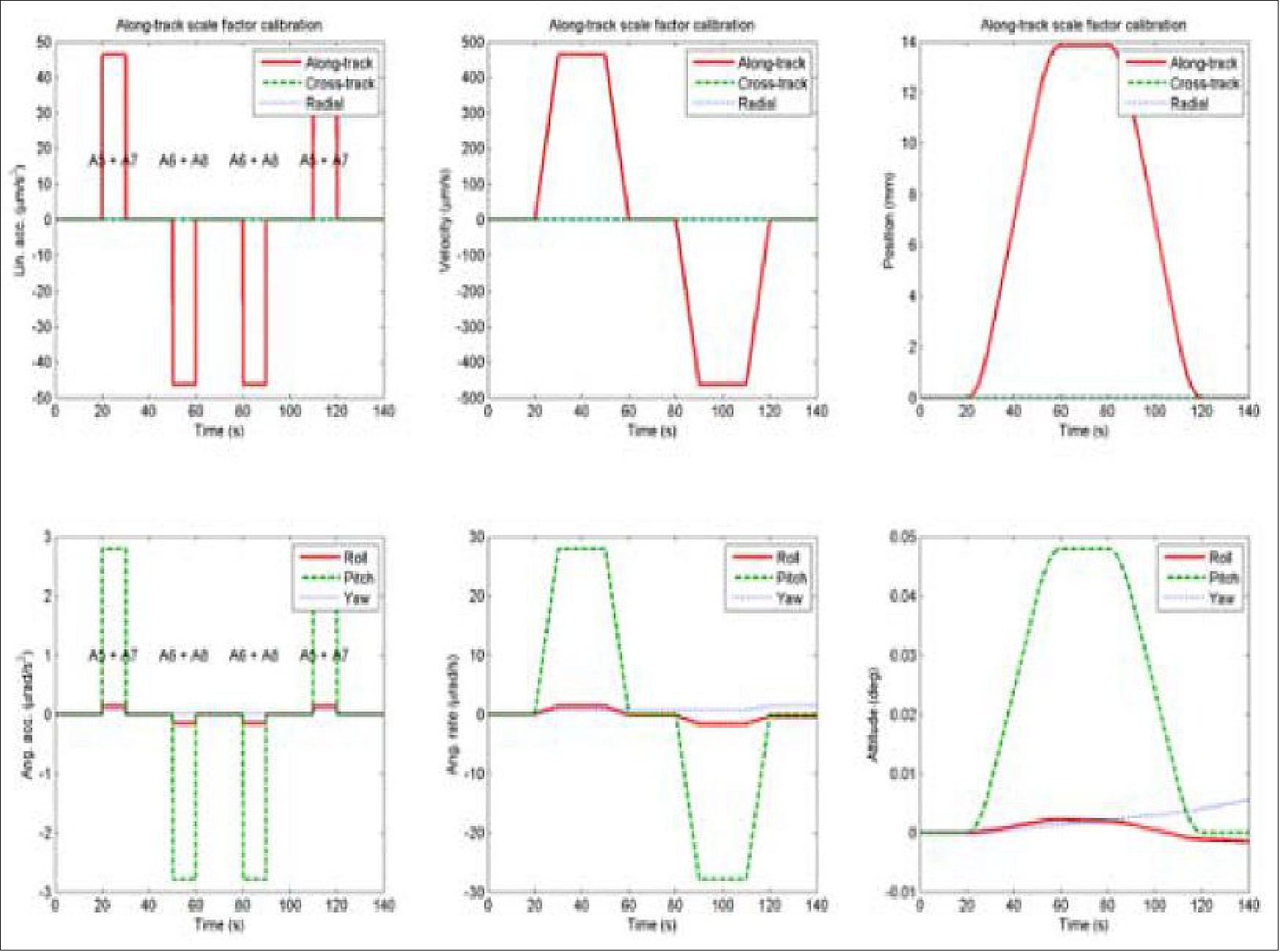
References
1) N. Olsen, R. Haagmans, T. J. Sabaka, A. Kuvshinov, S. Maus, M. E. Purucker, M. Rother, V. Lesur, M. Mandea, “The Swarm End-to-End mission simulator study: A demonstration of separating the various contributions to Earth's magnetic field using synthetic data,” Earth Planets Space, Vol. 58, 2006, pp. 359-370
2) “ESA's Magnetic Field Mission Swarm,” URL: http://www.esa.int/esaLP/ESA3QZJE43D_LPswarm_1.html
3) M. Thomsen, J. M. G. Merayo, “Data Handling System for Magnetic Nanoprobe SWARM (MAGNAS),” Proceedings of IAC 2004, Vancouver, Canada, Oct. 4-8, 2004, IAC-04-U.4.01
4) A. Schönenberg, R. Haagmans, A. Regan, A. Ginati, Y. Menard, “Swarm - Three Explorers of the Earth Magnetic Field and its Environment,” 5th IAA Symposium on Small Satellites for Earth Observation, Berlin, Germany, April 4-8, 2005
5) “A 'Swarm' of satellites for a unique look inside the Earth,” June 3, 2004, http://www.esa.int/esaCP/SEMXZH2VQUD_index_0.html
6) Y. Menard, R. Bock, E. Neri, R. Haagmans, “Swarm Mission Concept,” Proceedings of the First Swarm International Science Meeting, Nantes, France, May 3-5, 2006, WPP-261
7) http://www.esa.int/esaMI/Operations/SEM27Z8L6VE_0.html
8) E. Friis-Christensen, H. Lühr, D. Knudsen, R. Haagmans, “Swarm – An Earth Observation Mission investigating Geospace,” Advances in Space Research, Volume 41, Issue 1, 2008, pp. 210-216
9) Roger Haagmans, “ESA's supporting activities related to Mass Transport in the Earth System,” Joint GSTM and DFG SPP Symposium, GFZ Potsdam, Oct. 15-17, 2007, URL: http://www.massentransporte.de/fileadmin/20071015-17-Potsdam/mi_1410_07_haagmans.pdf
10) Max Pignède , Mario Merri, Vemund Reggestad, Peter Fritzen, Michael Irvine, “The Swarm constellation simulator - A brand new, but still operationally responsive development,” Proceedings of the Ground System Architectures Workshop (GSAW 2009), Torrance, CA, USA, March 23-26, 2009, URL: http://sunset.usc.edu/gsaw/gsaw2009/s4/pignede.pdf
11) Nils Olsen, Juliane Maries, “From Ørsted to Swarm – Challenges for exploring the Earth’s magnetic field from Space,” Nordic Space Volume 15, No 2, 2007, pp.9-12, URL: http://www.spacecenter.dk/~nio/papers/NSA188-Olsen-2007.pdf
12) Proceedings of ESA's Second Swarm International Science Meeting, June 24-26, 2009, Potsdam, Germany, URL: http://www.congrex.nl/09c24/programme.html
13) Eigil Friis-Christensen, “Scientific goals of Swarm,” Proceedings of ESA's Second Swarm International Science Meeting, June 24-26, 2009, Potsdam, Germany, WPP-303, URL: http://www.congrex.nl/09c24/S1/S1_00_Friis-Christensen_presentation.pdf
14) Yvon Menard, “Swarm Mission Status,” Proceedings of ESA's Second Swarm International Science Meeting, June 24-26, 2009, Potsdam, Germany, WPP-303, URL: http://www.congrex.nl/09c24/S1/S1_02_Menard_presentation.pdf
15) R. Haagmans, R. Bock, H. Rider, K. Fletcher, “Swarm - ESA's Magnetic Field Mission,” ESA, BR-302, October 2012, URL: http://esamultimedia.esa.int/multimedia/publications/BR-302/offline/download.pdf
16) “Swarm : Why magnetism matters,” Astrium, Oct. 4, 2013, URL: https://web.archive.org/web/20131101001634/http://www.astrium.eads.net/en/news2/why-magnetism-matters.html
17) Richard Holme, “Swarm-Near-Earth Multi-Satellite Probing of the Geomagnetic Field,” 2012 NCEO / CEOI (National Centre for Earth Observation/Centre for EO Instrumentation)Joint Science Conference, Nottingham Jubilee Campus, UK, Sept. 17-20, 2012, URL: http://www.nceo.ac.uk/assets/presentations/2012_conference_NOTTINGHAM/NCEOCONF2012_0918_Holme.pdf
18) “Swarm - The Earth's Magnetic Field and Environment Explorers,” ESA, Earth Explorers Users Consultation Meeting, 19-20 April 2004, URL: http://esamultimedia.esa.int/docs/EEUCM/Swarm_handout.pdf
19) “Magnetic Fields -- History,” NASA, URL: http://www-spof.gsfc.nasa.gov/Education/whmfield.html
20) Yvon Menard, Roger Haagmans and the Swarm Project Team, Rune Floberghagen, Juan Piñeiro, “Swarm: ESA’s magnetic field mission - A Journey to Earth's Core,” ESA Bulletin No 151, August 2012, pp.2-15, URL: https://earth.esa.int/c/document_library/get_file?folderId=131556&name=DLFE-3101.pdf
21) Jean-Michel Léger, “Spaceborne scalar magnetometers to map the Earth’s magnetic field,” CLEFS CEA, No 56 , Winter 2007-2008, URL: http://www.cea.fr/var/cea/storage/static/gb/library/Clefs56/pdf-gb/Clefs%2056_p100_102_LegerGB.pdf
22) Roger Haagmans, Gernot Plank, “Swarm: the Earth’s Magnetic Field and Environment Explorers,” URL: http://pcwww.liv.ac.uk/~holme/RAS/haagmans.pdf
23) E. F. Christensen, “Scientific Goals of Swarm,” Proceedings of the First Swarm International Science Meeting, Nantes, France, May 3-5, 2006, WPP-261
24) N. Olsen, R. Haagmans, T. J. Sabaka, A. Kuvshinov, S. Maus, M. E. Purucker, M. Rother, V. Lesur, M. Mandea, “The Swarm End-to-End mission simulator study: A demonstration of separating the various contributions to Earth's magnetic field using synthetic data,” Earth Planets Space (special issue on Swarm), Vol. 58, No 4, April 2006, pp. 359-370, URL: http://www.dsri.dk/~nio/papers/EPS_58040359.pdf
25) S. Maus., H. Lühr, M. Purucker, “Simulation of the high-degree lithospheric field recovery for the Swarm constellation of satellites,” Earth Planets Space (special issue on Swarm), Vol. 58, No 4, April 2006, pp. 397-407, URL: http://www.geomag.us/info/Smaus/Doc/swarm_e2e_Maus.pdf
26) E. Thébault, “Global lithospheric magnetic field modelling by successive regional analysis,” Earth Planets Space (special issue on Swarm), Vol. 58, No 4, April 2006, pp. 485-495, URL: http://www.terrapub.co.jp/journals/EPS/pdf/2006/5804/58040485.pdf
27) C. Manoj, A. Kuvshinov, S. Maus, H. Lühr, “Ocean circulation generated magnetic signals,” Earth Planets Space (special issue on Swarm), Vol. 58, No 4, April 2006, pp. 429-437, URL: http://www.geomag.us/info/Smaus/Doc/Manoj_EPS_swarm.pdf
28) “ESA selects new Earth-observation Missions,” May 29, 2002, URL: http://www.esa.int/esaEO/ESA87RG18ZC_index_2.html
29) “Construction of Swarm satellites to begin,” Nov. 8, 2007, URL: http://www.esa.int/esaLP/SEMQXVUOM8F_LPswarm_0.html
30) ESA's Swarm trio on its way to watch over our Planet's magnetic shiled,” ESA, Nov. 22, 2013, URL: http://www.esa.int/Our_Activities/Observing_the_Earth/The_Living_Planet_Programme/Earth_Explorers/Swarm/ESA_s_Swarm_trio_on_its_way_to_watch_over_our_planet_s_magnetic_shield
31) W. Xiang, J. L. Joergensen, “Formation Flying: A Subject Being Fast Unfolding in Space,” Proceedings of the 5th IAA Symposium on Small Satellites for Earth Observation, April 4-8, 2005, Berlin, Germany
32) Nils Olsen, Terence J. Sabaka, Luis R. Gaya-Pique, “Study of an Improved Comprehensive Magnetic Field Inversion Analysis for Swarm,” Danish National Space Center, Scientific Report 1/2007, URL: http://esamultimedia.esa.int/docs/DNSC-Scientific-Report_1_2007.pdf
33) “EADS Astrium selected for Swarm Satellites,” Nov. 17, 2005, URL: http://www.comspacewatch.com/news/viewpr.html?pid=18338
34) Albert Zaglauer, “Swarm Satellite Status,” Proceedings of ESA's Second Swarm International Science Meeting, June 24-26, 2009, Potsdam, Germany, WPP-303, URL: http://www.congrex.nl/09c24/S1/S1_01_Zaglauer_presentation.pdf
35) Carlos Pereira, Christian Oram, Cornel Boesch, Sascha Svilar, Jacques Viertl, Andreas Fix, “Comparative Development of Dimensionally Stable Structures for the Deployable Sunshield Assembly of GAIA and Composite Tube Assembly of SWARM,” Proceedings of IAC 2011 (62nd International Astronautical Congress), Cape Town, South Africa, Oct. 3-7, 2011, paper: IAC-11.C2.2.2
36) Carlos Pereira , Ian Rathband, “The Composite Tube Assembly of Swarm,” Proceedings of the 12th European Conference on Spacecraft Structures, Materials & Environmental Testing, ESA/ESTEC, Noordwijk, The Netherlands, March 20-23, 2012, SP-691
37) Thomas Usbeck, Stefan v. d. Nüll, Domenico Reggio, “The SWARM AOCS - Tailored from the CryoSat AOCS to the Specifics of a Magnetic Mission,” Proceedings of the 7th International ESA Conference on Guidance, Navigation & Control Systems (GNC 2008), June 2-5, 2008, Tralee, County Kerry, Ireland
38) Peter Zentgraf, Domenico Reggio, “Magnetic Rate Damping for Satellites in LEO,” Proceedings of the 32nd AAS Guidance and Control Conference, Breckenridge, CO, USA, Jan. 31.- Feb. 4, 2009, AAS 09-074
39) Simon Edwards, Nicholas Solway, Peter Smith, “Development of a cold gas thruster for Swarm,” Proceedings of Space Propulsion 2010, San Sebastian, Spain, May 3-6, 2010
40) Nikolaus Breier, Bernhard Kiewe, Olivier Mourra, “The Power Control and Distribution Unit for the Swarm Satellites,” Proceedings of the 8th European Space Power Conference, Constance, Germany, Sept. 14-19, 2008, ESA SP-661, Sept. 2008
41) “Satellites packed like sardines,” ESA, Nov. 8, 2013, URL: http://www.esa.int/Our_Activities/Observing_the_Earth/Swarm/Satellites_packed_like_sardines
42) Paul McMahon, Hans-Juergen Jung, Jeff Edwards, “Swarm Deployable Boom Assembly (DBA) Development of a Deployable Magnetometer Boom for the swarm Spacecraft,” Proceedings of the 15th ESMATS (European Space Mechanisms and Tribology Symposium) 2013, Noordwijk, The Netherlands, Sept. 25-27, 2013, ESA, SP-718, URL: http://www.esmats.eu/esmatspapers/pastpapers/pdfs/2013/mcmahon.pdf
43) “ESA’s Swarm trio on its way to watch over our planet’s magnetic shield,” ESA, Nov. 22, 2013, URL: http://www.esa.int/Our_Activities/Observing_the_Earth/Swarm/ESA_s_Swarm_trio_on_its_way_to_watch_over_our_planet_s_magnetic_shield
44) “Swarm Satellites Launched Successfully,” Eurockot, Nov. 22, 2013, URL: http://www.eurockot.com/2013/11/swarm-satellites-launched-successfully/
45) “SWARM – Earth's magnetic field to be accurately measured by three European satellites flying in formation,” DLR, Nov. 22, 2013, URL: http://www.dlr.de/dlr/en/desktopdefault.aspx/tabid-10081/151_read-8817/year-all/#gallery/13060
46) “Satellite trio to explore the Earth's magnetic field,” Space Daily, Nov. 27, 2013, URL: http://www.spacedaily.com/reports/Satellite_trio_to_explore_the_Earths_magnetic_field_999.html
47) Marie-Helene Thibeault, “University of Calgary technology part of European Space Agency mission launched into space,” University of Calgary, Nov. 22, 2013, URL: http://www.ucalgary.ca/utoday/issue/2013-11-22/university-calgary-technology-part-european-space-agency-mission-launched-space
48) “Swarm Mission Control ready for Tripple Launch,” ESA, Nov. 19, 2013, URL: http://www.esa.int/Our_Activities/Operations/Swarm_mission_control_ready_for_triple_launch
49) “Preparing to launch Swarm,” ESA, Sept. 13, 2013, URL: http://www.esa.int/Our_Activities/Observing_the_Earth/The_Living_Planet_Programme/Earth_Explorers/Swarm/Preparing_to_launch_Swarm
50) “Eurockot to launch two ESA Earth observation missions,” ESA, April 9, 2010, URL: http://www.esa.int/esaEO/SEM2GI0OK7G_index_0.html
51) Peter Freeborn, York Viertel, Anna Zorina, “Meeting the Future Launch Demand for Earth Observation Missions,” 8th IAA (International Academy of Astronautics) Symposium on Small Satellites for Earth Observation, Berlin, Germany, April 4-8, 2011; URL of presentation, IAA-B8-0501, http://media.dlr.de:8080/erez4/erez?cmd=get&src=os/IAA/archiv8/Presentations/IAA-B8-0501.pdf
52) “Swarm constellation heads north,” ESA, Feb. 17, 2012, URL: http://www.esa.int/esaEO/SEMBHGZXHYG_index_0.html
53) Peter Freeborn, York Viertel, “Eurockot launch services for ESA Earth observation swarm satellites,” Proceedings of the 63rd IAC (International Astronautical Congress), Naples, Italy, Oct. 1-5, 2012, paper: IAC-12-D2.2.10
54) Nils Olsen and the Swarm Mission Simulator Team, “Swarm Magnetic Field Models and Other Derived Data Products,” IAGA 2005, Toulouse. France, July 19, 2005, URL: http://www.geos.ed.ac.uk/research/geospace/presentations/pub_store/serial110.pdf
55) “Swarm: magnetic field satellites get their bearings,” ESA, Oct. 27, 2011, URL: http://www.esa.int/esaEO/SEMLV3HURTG_index_0.html
56) Detlef Sieg, Francesco Petrucciani, Gerald Ziegler, ”Swarm Flight Dynamics Operations Experiences and Mission Analysis,” Fourth Swarm Science Meeting & Geodetic Missions Workshop, Banff, Alberta, Canada, March 20-24, 2017, Presentation provided by Detlef Sieg
57) ”Swarm dodges collision during climb to escape Sun’s wrath,” ESA Space Safety, 14 July 2022, URL: https://www.esa.int/Space_Safety/Swarm_dodges_collision_during_climb_to_escape_Sun_s_wrath
58) ”Swarm unveils magnetic waves deep down,” ESA Applications, 23 May 2022, URL: https://www.esa.int/Applications/Observing_the_Earth/FutureEO/Swarm/Swarm_unveils_magnetic_waves_deep_down
59) Nicolas Gillet, Felix Gerick, Dominique Jault, Tobias Schwaiger, Julien Aubert, Mathieu Istas, ”Satellite magnetic data reveal interannual waves in Earth’s core,” PNAS, Vol. 119, No13, March 21, 2022, https://doi.org/10.1073/pnas.2115258119
60) ”Swarm and Cluster get to the bottom of geomagnetic storms,” ESA Applications, 15 December 2021, URL: https://www.esa.int/Applications/Observing_the_Earth/Swarm/Swarm_and_Cluster_get_to_the_bottom_of_geomagnetic_storms
61) Dong Wei, Malcolm W. Dunlop, Junying Yang, Xiangcheng Dong, Yiqun Yu, Tieyan Wang, ”Intense dB/dt Variations Driven by Near-Earth Bursty Bulk Flows (BBFs): A Case Study,” Geophysical Research Letters, Volume48, Issue4 , 28 February 2021, e2020GL091781, First published: 20 January 2021, https://doi.org/10.1029/2020GL091781
62) ”Swarm yields new insight into animal migration,” ESA Applications, 9 July 2021, URL: https://www.esa.int/Applications/Observing_the_Earth/Swarm/Swarm_yields_new_insight_into_animal_migration
63) Fernando Benitez-Paez, Vanessa da Silva Brum-Bastos, Ciarán D. Beggan, Jed A. Long & Urška Demšar, ”Fusion of wildlife tracking and satellite geomagnetic data for the study of animal migration,” Movement Ecology, Volume 9, Article No 31, Published: 11 June 2021, https://doi.org/10.1186/s40462-021-00268-4, URL: https://movementecologyjournal.biomedcentral.com/track/pdf/10.1186/s40462-021-00268-4.pdf
64) ”The curious incident of Swarm and sprites in the night-time,” ESA Applications, 18 May 2021, URL: https://www.esa.int/Applications/Observing_the_Earth/Swarm/The_curious_incident_of_Swarm_and_sprites_in_the_night-time
65) M. Strumik, J. Slominski, E. Slominska, J. Mlynarczyk, J. Blecki, R. Haagmans, A. Kulak, M. Popek, K. Martynski, R. Wronowski, ”Experimental Evidence of a Link Between Lightning and Magnetic Field Fluctuations in the Upper Ionosphere Observed by Swarm,” Geophysical Research Letters, Volume48, Issue4, 28 February 2021, e2020GL091507, https://doi.org/10.1029/2020GL091507, URL: https://agupubs.onlinelibrary.wiley.com/doi/epdf/10.1029/2020GL091507
66) ”Antarctica’s magnetic link to ancient neighbors,” ESA Applications, 9 March 2021, URL: https://www.esa.int/Applications/Observing_the_Earth/Swarm/Antarctica_s_magnetic_link_to_ancient_neighbours
67) Jörg Ebbing, Yixiati Dilixiati, Peter Haas, Fausto Ferraccioli & Stephanie Scheiber-Enslin, ”East Antarctica magnetically linked to its ancient neighbors in Gondwana,” Nature Journal Scientific Reports, Volume 11, Article No 5513, Published: 09 March 2021, https://doi.org/10.1038/s41598-021-84834-1
68) ”Energy from solar wind favors the north,” ESA Applications, 12 January 2021, URL: https://www.esa.int/Applications/Observing_the_Earth/Swarm/Energy_from_solar_wind_favours_the_north
69) P. Pakhotin, I. R. Mann, K. Xie, J. K. Burchill & D. J. Knudsen, ”Northern preference for terrestrial electromagnetic energy input from space weather,” Nature Communications, Volume 12, Article No 199, Published: 08 January 2021, https://doi.org/10.1038/s41467-020-20450-3,
70) Mara Johnson-Groh and Jessica Merzdorf, ”NASA Researchers Track Slowly Splitting 'Dent' in Earth’s Magnetic Field,” NASA Feature, 17 August 2020, URL: https://www.nasa.gov/feature/nasa-researchers-track-slowly-splitting-dent-in-earth-s-magnetic-field
71) ”Swarm probes weakening of Earth’s magnetic field,” ESA / Applications / Observing the Earth / Swarm, 20 May 2020, URL: http://www.esa.int/Applications/Observing_the_Earth/Swarm/Swarm_probes_weakening_of_Earth_s_magnetic_field
72) ”Magnetic north and the elongating blob,” ESA / Applications / Observing the Earth / Swarm, 14 May 2020, URL: http://www.esa.int/Applications/Observing_the_Earth/Swarm/Magnetic_north_and_the_elongating_blob
73) ”Steve over the picket fence,” ESA / Applications / Observing the Earth / Swarm, 27 November 2019, URL: http://www.esa.int/Applications/Observing_the_Earth/Swarm/Steve_over_the_picket_fence
74) W. E. Archer, J.-P. St.- Maurice, B. Gallardo-Lacourt, G. W. Perry, C. M. Cully,E. Donovan,D. M. Gillies,R. Downie,J. Smith, and D. Eurich, ”The Vertical Distribution of the Optical Emissions of a Steve and Picket Fence Event,” Geophysical Research Letters, Vol. 46, 10,719–10,725, Published online: 11 October 2019, URL: https://agupubs.onlinelibrary.wiley.com/doi/epdf/10.1029/2019GL084473
75) ”Swarm helps explain Earth’s magnetic jerks,” ESA, 01 May 2019, URL: http://www.esa.int/Our_Activities/Observing_the_Earth/Swarm/Swarm_helps_explain_Earth_s_magnetic_jerks
76) Julien Aubert & Christopher C. Finlay, ”Geomagnetic jerks and rapid hydromagnetic waves focusing at Earth’s core surface,” Nature Geoscience, Vol. 12, pp: 393-398, Published: 22 April 2019, https://doi.org/10.1038/s41561-019-0355-1
77) ”Scientists discover what powers celestial phenomenon STEVE,” AGU (American Geophysical Union), 25 April 2019, URL: https://news.agu.org/press-release/scientists-discover-what-powers-celestial-phenomenon-steve/
78) ”Swarm helps pinpoint new magnetic north for smartphones,” ESA 8 February 2019, URL: http://www.esa.int/Our_Activities/Observing_the_Earth/Swarm/Swarm_helps_pinpoint_new_magnetic_north_for_smartphones
79) ”Satellite ‘compasses’ open new window on space weather,” ESA, 7 November 2018, URL: http://m.esa.int/Our_Activities/Space_Engineering_Technology/Satellite_compasses_open_new_window_on_space_weather
80) ”ESA's unexpected fleet of space weather monitors,” ESA, 28 June 2018, URL: http://www.esa.int/Our_Activities/Preparing_for_the_Future/Discovery_and_Preparation/ESA_s_unexpected_fleet_of_space_weather_monitors
81) URL: https://earth.esa.int/web/guest/missions/esa-operational-eo-missions/swarm
82) ”Swarm turns to whistlers and storms,” ESA, 13 April, 2018, URL: http://m.esa.int/Our_Activities/Observing_the_Earth/Swarm/Swarm_turns_to_whistlers_and_storms
83) ”Electric nature,” ESA, 12 April 2018, URL: http://m.esa.int/spaceinimages/Images/2018/04/Electric_nature
84) ”St. Patrick's Day Storm,” URL: http://m.esa.int/spaceinvideos/Videos/2018/04/St._Patrick_s_Day_storm
85) ”Magnetic lithosphere detailed,” ESA, 10 April 2018, URL: http://m.esa.int/spaceinvideos/Videos/2018/04/Magnetic_lithosphere_detailed
86) ”Swarm tracks elusive ocean magnetism,” ESA, 10 April 2018, URL: http://m.esa.int/Our_Activities/Observing_the_Earth/Swarm/Swarm_tracks_elusive_ocean_magnetism
87) ”Getting to know Steve,” ESA, 16 March, 2018, URL: http://m.esa.int/Our_Activities/Observing_the_Earth/Swarm/Getting_to_know_Steve
88) Jacey Fortin, ”That Ghostly, Glowing Light Above Canada? It’s Just Steve,” The New York Times, 25 April 2018, URL: https://www.nytimes.com/2017/04/25/science/aurora-borealis-steve.html
89) Elizabeth A. MacDonald, Eric Donovan, Yukitoshi Nishimura, Nathan A. Case, D. Megan Gillies, Bea Gallardo-Lacourt, William E. Archer, Emma L. Spanswick, Notanee Bourassa, Martin Connors, Matthew Heavner, Brian Jacke, Burcu Kosar, David J. Knudsen, Chris Ratzlaff, Ian Schofield, ”New science in plain sight: Citizen scientists lead to the discovery of optical structure in the upper atmosphere,” Science Advances,” Vol. 4, No. 3, 02 March 2018, URL: http://advances.sciencemag.org/content/advances/4/3/eaaq0030.full.pdf
90) T. N. Davis, ”Observed characteristics of auroral forms,” Space Science Review, Vol. 22, 77–113 (1978)
91) C. W. Unick, E. Donovan, M. Connors, B. Jackel, ”A dedicated H-beta meridian scanning photometer for proton aurora measurement,” Journal of Geophysical Research, Space Physics, Vol. 122, pp: 753–764, 2017
92) ”Swarm trio becomes a quartet,” ESA, 22 Feb. 2018, URL: http://m.esa.int/Our_Activities/Observing_the_Earth/Swarm/Swarm_trio_becomes_a_quartet
93) ”Swarm details energetic coupling,” ESA, 15 Feb. 2018, URL: http://m.esa.int/Our_Activities/Observing_the_Earth/Swarm/Swarm_details_energetic_coupling
94) Ryan M. McGranaghan, Anthony J. Mannucci , Colin Forsyth, ”A Comprehensive Analysis of Multiscale Field-Aligned Currents: Characteristics, Controlling Parameters, and Relationships,” Journal of Geophysical Research: Space Physics, Vol. 122, pp: 11,931–11,960, https://doi.org/10.1002/2017JA024742, Published online 5 Dec. 2017, URL: http://onlinelibrary.wiley.com/doi/10.1002/2017JA024742/epdf
95) ”Swarm celebrates its 4th anniversary in space,” ESA, 22 November 2017, URL: https://earth.esa.int/web/guest/missions/esa-eo-missions/swarm/results-news/-/article/swarm-celebrates-its-fourth-anniversary-in-space
96) ”ESA Member States approve Swarm extension,” ESA, 20 Nov. 2017, URL: https://web.archive.org/web/20180105233555/https://earth.esa.int/web/guest/missions/esa-eo-missions/swarm/operational-news/-/article/esa-member-states-approve-swarm-extension
97) Information provided by Nils Olsen on June 22, 2017
98) ”When Swarm met Steve,” ESA, April 21, 2017, URL: http://www.esa.int/Our_Activities/Observing_the_Earth/Swarm/When_Swarm_met_Steve
99) Elia Maestroni, Ignacio Clerigo, Frank-Jürgen Diekmann, ”Three Times Three: Three Years of Swarm Routine Operations and Beyond,” Fourth Swarm Science Meeting & Geodetic Missions Workshop, Banff, Alberta, Canada, March 20-24, 2017, The ”poster presentation” was provided by Elia Maestroni of ESA/ESOC, Darmstadt, Germany.
100) ”Supersonic plasma jets discovered,” ESA, March 23, 2017, URL: http://m.esa.int/Our_Activities/Observing_the_Earth/Swarm/Supersonic_plasma_jets_discovered
101) ”Swarm detects asymmetry,” ESA, March 22, 2017, URL: http://m.esa.int/Our_Activities/Observing_the_Earth/Swarm/Swarm_detects_asymmetry
102) ”Unravelling Earth’s magnetic field,” ESA, March 21, 2017, URL: http://m.esa.int/Our_Activities/Observing_the_Earth/Swarm/Unravelling_Earth_s_magnetic_field
103) ”Anatomy of a debris incident,” ESA, Feb. 1, 2017, URL: http://m.esa.int/Our_Activities/Operations/Anatomy_of_a_debris_incident
104) ”There’s a jet stream in our core,” ESA, Dec. 19, 2016, URL: http://m.esa.int/Our_Activities/Observing_the_Earth/Swarm/There_s_a_jet_stream_in_our_core
105) Philip W. Livermore, Rainer Hollerbach, Christopher C. Finlay, ”An accelerating high-latitude jet in Earth’s core,” Nature Geoscience, Dec. 19, 2016, doi:10.1038/ngeo2859
106) ”Swarm reveals why satellites lose track,” ESA, Oct. 28, 2016, URL: http://m.esa.int/Our_Activities/Observing_the_Earth/Swarm/Swarm_reveals_why_satellites_lose_track
107) Chao Xiong, Claudia Stolle, Hermann Lühr, ”The Swarm satellite loss of GPS signal and its relation to ionospheric plasma irregularities,” Space Weather, Volume 14, Issue 8, August 13, 2016, pp: 563–577, DOI: 10.1002/2016SW001439, URL of abstract: http://onlinelibrary.wiley.com/doi/10.1002/2016SW001439/abstract
108) ”Magnetic oceans and electric Earth,” ESA, Oct. 3, 2016, URL: http://m.esa.int/Our_Activities/Observing_the_Earth/Swarm/Magnetic_oceans_and_electric_Earth
109) Alexander V. Grayver, Neesha R. Schnepf, Alexey V. Kuvshinov, Terence J. Sabaka, Chandrasekharan Manoj, Nils Olsen, ”Satellite tidal magnetic signals constrain oceanic lithosphere-asthenosphere boundary,” Science Advances, 30 Sept. 2016: Vol. 2, no. 9, e1600798, DOI: 10.1126/sciadv.1600798, URL: http://advances.sciencemag.org/content/advances/2/9/e1600798.full.pdf
110) N. R. Schnepf, A. Kuvshinov, T. Sabaka, ”Can we probe the conductivity of the lithosphere and upper mantle using satellite tidalmagnetic signals?,” Geophysical Research Letters, Vol. 42, article online 8 APR 2015, doi:10.1002/2015GL063540, URL: https://www.ethz.ch/content/dam/ethz/special-interest/erdw/geophysics/epm-dam/images/Tides/Schnepf_Kuvshinov_Sabaka_2015_GRL.pdf
111) Detlef Sieg, Frank Diekmann, ”Options for Further Orbit Evolution of the Swarm Mission,” Proceedings of the Living Planet Symposium 2016, Prague, Czech Republic, May 9-13, 2016 (ESA SP-740, August 2016)
112) Earth's magnetic heartbeat,” ESA, May 10, 2016, URL: http://www.esa.int/Our_Activities/Observing_the_Earth/Swarm/Earth_s_magnetic_heartbeat
113) ”Swarm constellation,” ESA, >Oct. 15, 2013, URL: http://www.esa.int/spaceinimages/Images/2013/10/Swarm_constellation
114) ”Swarm ASM-VFM Residual dataset,” ESA, Dec. 22, 2015, URL: https://earth.esa.int/web/guest/missions/esa-operational-eo-missions/swarm/news
115) ”Programs in Progress - Status at end of July 2015 -Swarm,” ESA Bulletin No 163, 3rd quarter 2015, pp: 57-58, URL: http://esamultimedia.esa.int/multimedia/publications/ESA-Bulletin-163/offline/download.pdf
116) “Magnetic complexity begins to untangle,” ESA, June 22, 2015, URL: http://www.esa.int/Our_Activities/Observing_the_Earth/Swarm/Magnetic_complexity_begins_to_untangle
117) P. Alken, S. Maus, A. Chulliat, P. Vigneron, O. Sirol,G. Hulot, “Swarm equatorial electric field chain: First results,” Geophysical Research Letters, Volume 42, Issue 3,16 February 2015, pp: 673–680, doi: 10.1002/2014GL062658
118) Hermann Lühr, Jaeheung Park, Jesper W. Gjerloev, Jan Rauberg, Ingo Michaelis, Jose M. G. Merayo, Peter Brauer, “Field‐aligned currents' scale analysis performed with the Swarm constellation,” Geophysical Research Letters, Volume 42, Issue 1, 16 January 2015, pp: 1–8, doi: 10.1002/2014GL062453
119) A. Spicher, T. Cameron, E. M. Grono, K. N. Yakymenko, S. C. Buchert, L. B. N. Clausen, D. J. Knudsen, K. A. McWilliams, J. I. Moen, “Observation of polar cap patches and calculation of gradient drift instability growth times: A Swarm case study,” Geophysical Research Letters, Volume 42, Issue 2, 28 January 2015, pp: 201–206, doi: 10.1002/2014GL062590
120) Gauthier Hulot, Pierre Vigneron, Jean‐Michel Léger, Isabelle Fratter, Nils Olsen, Thomas Jager, François Bertrand, Laura Brocco, Olivier Sirol, Xavier Lalanne,Axel Boness, Viviane Cattin, “Swarm's absolute magnetometer experimental vector mode, an innovative capability for space magnetometry,” Geophysical Research Letters, Volume 42, Issue 5, 16 March 2015, pp: 1352–1359, doi: 10.1002/2014GL062700
121) ESA Bulletin No 161, May 11, 2015, p. 74, URL: http://esamultimedia.esa.int/multimedia/publications/ESA-Bulletin-161/offline/download.pdf
122) Nils Olsen, Gauthier Hulot, Vincent Lesur, Christopher C. Finlay, Ciaran Beggan, Arnaud Chulliat, Terence J. Sabaka, Rune Floberghagen, Eigil Friis-Christensen, Roger Haagmans, Stavros Kotsiaros, Hermann Lühr, Lars Tøffner-Clausen, Pierre Vigneron, “The Swarm Initial Field Model for the 2014 geomagnetic field,” Geophysical Research Letters, Vol. 42, doi:10.1002/2014GL062659.URL: ftp://ftp.space.dtu.dk/pub/cfinl/publications/2015_Olsen_Hulot_Lesur_Finlay_etal.pdf
123) “Swarm celebrates one year in orbit,” ESA, Nov. 24, 2014, URL: https://earth.esa.int/web/guest/missions/esa-operational-eo-missions/swarm/news/-/article/swarm-celebrates-one-year-in-orbit
124) “Swarm,” ESA Bulletin, No 160, November 2014, p. 73
125) Isabelle Fratter, Jean-Michel Leger, Francois Bertrand, Thomas Jager, Gauthier Hulot, Laura Brocco, Pierre Vigneron, “Swarm Absolute Scalar Magnetometers first in-orbit results,” Proceedings of the 65th International Astronautical Congress (IAC 2014), Toronto, Canada, Sept. 29-Oct. 3, 2014, paper: IAC-14,B1,3.1
126) “Swarm reveals Earth's changing magnetism,” ESA, June 19, 2014, URL: http://www.esa.int/Our_Activities/Observing_the_Earth/Swarm/Swarm_reveals_Earth_s_changing_magnetism
127) “Earth’s ever-changing magnetic field,” ESA, June 19,2014, URL: http://www.esa.int/spaceinvideos/Videos/2014/06/Earth_s_ever-changing_magnetic_field
128) “Swarm's precise sense of magnetism,” ESA, May 7, 2014, URL: http://www.esa.int/Our_Activities/Observing_the_Earth/Swarm/Swarm_s_precise_sense_of_magnetism
129) R. Mackenzie, R. Bock, D. Kuijper, P. Ramos-Bosch, D. Sieg, G. Ziegler, ”A Review of Swarm Flight Dynamics Operations from launch to routine phase,” Proceedings of 24th International Symposium on Space Flight Dynamics, Laurel, Maryland, USA, 5 - 9 May, 2014, URL: http://issfd.org/ISSFD_2014/ISSFD24_Paper_S14-4_Mackenzie.pdf
130) “Swarm heads for new heights,” ESA, Feb. 6, 2014, URL: http://www.esa.int/Our_Activities/Observing_the_Earth/Swarm/Swarm_heads_for_new_heights
131) “End of the beginning for Swarm Trio,” ESA, Nov. 26, 2013, URL: http://www.esa.int/Our_Activities/Operations/End_of_the_beginning_for_Swarm_trio
132) J. M. G. Merayo, J. L. Jørgensen, E. Friis-Christensen, P. Brauer, F. Primdahl, P. S. Jørgensen, T. H. Allin, T. Denver, “The Swarm Magnetometry Package,” Proceedings of the 6th IAA Symposium on Small Satellites for Earth Observation, Berlin, Germany, April 23 - 26, 2007
133) “Swarm - The Earth's Magnetic Field and Environment Explorers Technical and Programmatic Annex,” ESA, Annex to ESA SP-1279(6) April 2004, URL: http://esamultimedia.esa.int/docs/EEUCM/SWARM_TPA.pdf
134) Peter S. Jørgensen, José Merayo, John L. Jørgensen, “Pre-Flight Calibration of the Swarm Vector Magnetometer Package,” Proceedings of ESA's Second Swarm International Science Meeting, June 24-26, 2009, Potsdam, Germany, WPP-303, URL: http://www.congrex.nl/09c24/S1_Posters/S1_P01_Jorgensen_paper.pdf
135) Jose M. G. Merayo, “The Vector Field Magnetometer (VFM) on Swarm,” Proceedings of ESA's Second Swarm International Science Meeting, June 24-26, 2009, Potsdam, Germany, WPP-303
136) Jos é M. G. Merayo, John L. Jørgensen, Eigil Friis-Christensen, Peter Brauer, Fritz Primdahl, Peter S. Jørgensen, Thomas H. Allin, Troelz Denver, “The Swarm Magnetometry Package,” Springer Netherlands, April 2008, ISBN: 978-1-4020-6942-0
137) http://smsc.cnes.fr/SWARM/GP_instrument.htm
138) http://smsc.cnes.fr/SWARM/Instr_Descript_Archi.pdf
139) http://smsc.cnes.fr/SWARM/ASM_Principle.pdf
140) Jean-Michel Leger , François Bertrand, Thomas Jager, Matthieu Le Prado, Isabelle Fratter, Jean-Claude Lalaurie, “Swarm absolute scalar and vector magnetometer based on helium 4 optical pumping,” Proceedings of ESA's Second Swarm International Science Meeting, June 24-26, 2009, Potsdam, Germany, WPP-303, URL: http://www.congrex.nl/09c24/S1/S1_05_Leger_paper.pdf
141) W. Fourcault, J-M. Léger, V. Costes, I. Fratter, L. Mondin, “Athermal Fiber Laser for the Swarm Absolute Scalar Magnetometer,” ICSO 2010 (International Conference on Space Optics), Rhodes Island, Greece, Oct. 4-8, 2010, URL: http://smsc.cnes.fr/SWARM/PDF/LEGER_ICSO_PAPER.pdf
142) Isabelle Fratter, Jean-Michel Léger, François Bertrand, Thomas Jager, Matthieu Le Prado, William Fourcault, “Development and Space Qualification of the Swarm Absolute Scalar Magnetometer,” IEEE sensors 2010, Waikoloa, HI, USA, Nov. 1-4, 2010, paper No 1291, URL: http://smsc.cnes.fr/SWARM/PDF/Sensors2010_paper_1291_FRATTER_2_IEEE.pdf
143) D. Ramecourt, T. Guettler Sergeant, T. Buret, C. Rougane, I. Fratter, D. Veyrié, O. Gilard, V. Costes, J. M. Léger, B. Charrat, “SWARM laser: qualification and integration of the optical fiber components,” ICSO 2010 (International Conference on Space Optics), Rhodes Island, Greece, Oct. 4-8, 2010, URL: http://smsc.cnes.fr/SWARM/PDF/ICSO-DRA.pdf
144) I. Fratter, J.-C. Lalaurie, M Venet , J.-M. Léger, T. Jager, F. Bertrand, S. Moralès, “The Swarm Absolute Scalar Magnetometer : new features, capabilities and performances,” 25th IUGG (International Union of Geodesy and Geophysics) General Assembly, Melbourne, Australia, June 28 to July 7, 2011, URL: http://smsc.cnes.fr/SWARM/PDF/IAGA_13.2_presentation.pdf
145) http://smsc.cnes.fr/SWARM/index.htm
146) Jean-Michel Leger, Francois Bertrand, Thomas Jager, Isabelle Fratter, “Spaceborne scalar magnetometers for Earth’s field studies," Proceedings of IAC 2011 (62nd International Astronautical Congress), Cape Town, South Africa, Oct. 3-7, 2011, paper: IAC-11-B1.3.9
147) T. Jager, J-M. Léger, F. Bertrand, I. Fratter, J-C. Lalaurie, “Swarm Absolute Scalar Magnetometer accuracy: analyses and measurement results,” IEEE sensors 2010, Waikoloa, HI, USA, Nov. 1-4, 2010, paper No 1564, URL: http://smsc.cnes.fr/SWARM/PDF/Sensors2010_Paper_3.pdf
148) F. Alcouffe, F. Bertrand, T. Jager, M. Le Prado, J-M. Léger, I. Fratter, “The Swarm Absolute Scalar Magnetometer Magnetic Cleanliness Program,” Proceedings of 2012 ESA Workshop on Aerospace EMC, Venice, Italy, May 21-23, 2012, SP-702
149) T. Jager, J. M. Léger, I. Fratter, P. Lier, P. Pacholczyk, ”Magnetic Cleanliness and thermomagnetic effect: Case staudy of the Absolute Scalar Magnetometer and its environment on Swarm satellites,” Proceedings of the 2016 ESA Workshop on Aerospace EMC(Electromagnetic Compatibility), Valencia, Spain, May 23-25, 2016, (ESA SP-738, May 2016)
150) Brian Moffat, John Hackett, David Knudsen, Jan-Erik Wahlund, Lennart Åhlén, Nico Stricker, “Overview of the Canadian Electric Field Instrument (CEFI) for Swarm,” Proceedings of the 13th Canadian Astronautics Conference, ASTRO 2006, Montreal, QC, Canada, organized by CASI (Canadian Astronautics and Space Institute), April 25-27, 2006
151) http://www.asc-csa.gc.ca/eng/sciences/knudsen_dave.asp
152) David Knudsen, Johnathan Burchill, Laureline Sangalli, “Electric Fields from Ion Distribution Images on Swarm,” IPELS (International Workshop on the Interrelationship between Plasma Experiments in Laboratory and Space), Aug. 6-10,, 2007, Cairns, Australia, URL: http://wwwrsphysse.anu.edu.au/~web112/ipels2007/knudsen_ipels2007_invited.pdf
153) David Knudsen, Johnathan Burchill, Anders Eriksson, “Swarm Electric Field Instrument and Langmuir Probe,” Proceedings of ESA's Second Swarm International Science Meeting, June 24-26, 2009, Potsdam, Germany, WPP-303
154) R. Marchand, J. Burchill, D. Knudsen, “Modelling sheath effects and particle distributions in the Swarm EFI,” Proceedings of ESA's Second Swarm International Science Meeting, June 24-26, 2009, Potsdam, Germany, WPP-303, URL: http://www.congrex.nl/09c24/S1_Posters/S1_P03_Marchand_presentation.pdf
155) J. K. Burchill, D. J. Knudsen, “Error Sources for the EFI Ion Velocity, Ion Temperature, and Electric Field L1B Products,” Proceedings of ESA's Second Swarm International Science Meeting, June 24-26, 2009, Potsdam, Germany, WPP-303, URL: http://www.congrex.nl/09c24/S1_Posters/S1_P02_Burchill_paper.pdf
156) Radek Peresty, Milan Chvojka, Viktor Fedosov, “Use of the highly sensitive electrostatic accelerometer for orbit perturbation effects investigation on board of LEO spacecraft,” Proceedings of the 61st IAC (International Astronautical Congress), Prague, Czech Republic, Sept. 27-Oct. 1, 2010, IAC-10.B1.3.2
157) “Czech Republic has signed the ESA Convention,” ESA July 16, 2008, URL: http://www.czechspace.cz/en/node/1916
158) http://www.esa.int/SPECIALS/Operations/SEM27Z8L6VE_1.html
159) Rune Floberghagen, “Ground Segment and Data Products,” Proceedings of ESA's Second Swarm International Science Meeting, June 24-26, 2009, Potsdam, Germany, WPP-303, URL: http://www.congrex.nl/09c24/S1/S1_07_Floberghagen_presentation.pdf
160) Frank-Jürgen Diekmann, Ignacio Clerigo, Giuseppe Albini, Laurent Maleville, Alessandro Neto, David Patterson, Ana Piris Niño, Detlef Sieg, ”A Challenging Trio in Space 'Routine' Operations of the Swarm Satellite Constellation,” Proceedings of the Living Planet Symposium 2016, Prague, Czech Republic, May 9-13, 2016 (ESA SP-740, August 2016)
161) R. Mackenzie, D. Kuijper, P. Ramos-Bosch, D. Sieg, G. Ziegler, “A review of Swarm flight dynamics operations from launch to routine phase”, 24th International Symposium on Space Flight Dynamics, May 9, 2014
162) D. Sieg, F. J. Diekmann, “Options for the further orbit evolution of the Swarm mission”, Proceedings of the Living Planet Symposium 2016, Prague, Czech Republic, May 9-13, 2016 (ESA SP-740, August 2016)
The information compiled and edited in this article was provided by Herbert J. Kramer from his documentation of: ”Observation of the Earth and Its Environment: Survey of Missions and Sensors” (Springer Verlag) as well as many other sources after the publication of the 4th edition in 2002. - Comments and corrections to this article are always welcome for further updates (eoportal@symbios.space).
Space segment concept Launch Swarm's Orbits Mission Status Sensor Complement
Ground Segment References Back to Top