StudSat-1 (Student Satellite-1)
EO
Mission complete
Land
Multi-purpose imagery (land)
Quick facts
Overview
| Mission type | EO |
| Agency | ISRO |
| Mission status | Mission complete |
| Launch date | 12 Jul 2010 |
| End of life date | 12 Oct 2010 |
| Measurement domain | Land |
| Measurement category | Multi-purpose imagery (land), Landscape topography |
| Measurement detailed | Land surface imagery, Earth surface albedo, Land cover |
| Instrument type | Other, Data collection |
StudSat-1 (Student Satellite-1)
StudSat is a student satellite project and initiative of Indian Engineering Colleges of Hyderabad and Bangalore. The initiative started in the aftermath of the IAC (International Astronautical Congress) 2007, which took place in Hyderabad, India.
The StudSat consortium consists of seven Engineering colleges from Hyderabad and Bangalore who formed as a team and signed a MOU (Memorandum of Understanding) among themselves in order to sponsor the project financially. ISRO (Indian Space Research Organization) is supporting the StudSat project providing a free launch on PSLV (a MOU was also signed with ISRO). The consortium consists of following colleges (a group of about 40 undergraduate students). 1) 2) 3) 4) 5) 6)
- Nitte Meenakshi Institute of Technology (NMIT), Bangalore (lead institution)
- M. S. Ramaiah Institute of Technology (MSRIT), Bangalore
- Rashtreeya Vidyalaya College of Engineering (RVCE), Bangalore
- B. M. S. Institute of Technology (BMSIT), Bangalore
- Chaitanya Bharathi Institute of Technology (CBIT), Hyderabad
- Institute of Aeronautical Engineering (IARE), Hyderabad
- Vignan Institute of Technology & Science (VITS), Hyderabad.
StudSat is a picosatellite project with the objective to promote space technology in educational institutions and encourage research and development in the design of a miniaturized satellite along with all the experiences, enthusiasm and efforts necessary to bring such a project to completion.

Spacecraft
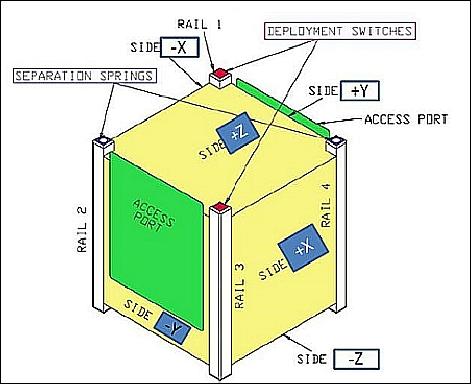
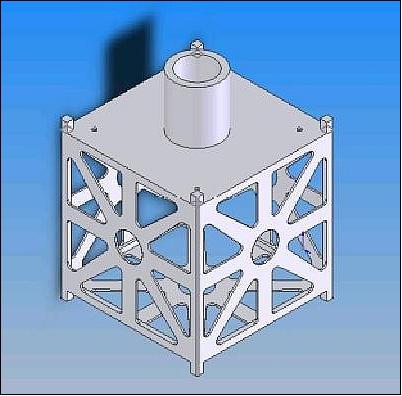
The picosatellite has a size of 10 cm x 10 cm x 13.5 cm with a total mass of 1.3 kg (close to the dimensions of a CubeSat). A high grade aluminum alloy bus structure is used (Al 7075 T6). The individual units used in the assembly of the principal framework are of “L” cross section in order to reduce the mass and also increase the inner cubical volume.
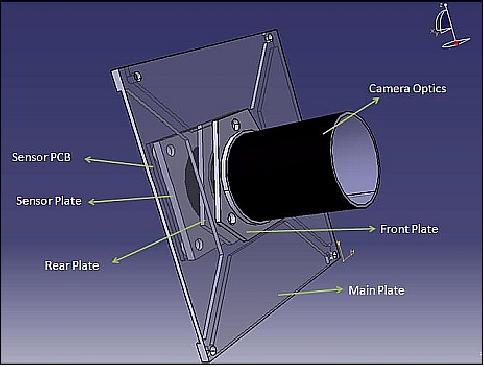
The internal structural composition is such that the camera lens systems is mounted in the middle of the +Z side. The payload, in this case, the camera, is mounted on the +Z axis and the lens is protruded outside to incorporate the PCBs. On the remaining four sides, the PCBs would be aligned parallel to them, with one side previously left out for the camera and another face doubling up as a provision for access ports which also acts as a cold face, a medium for heat dissipation.
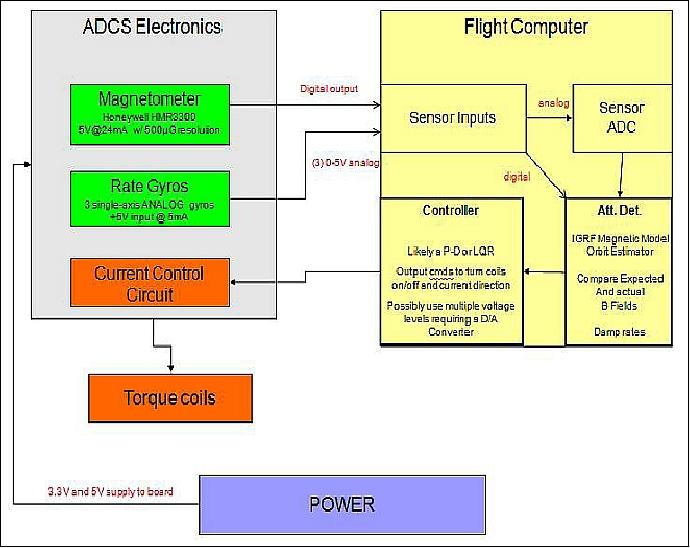
ADCS (Attitude Determination and Control Subsystem)
3-axes stabilized system. Attitude is sensed with 3 magnetometers (HMR 3300) and three orthogonal MEMS-based rate gyros from Analog Devices. The attitude is determined to a tolerance of 1º. Actuation is provided by custom designed magneto torque coils (passive stabilization). 7)
The magnetic torquers are conducting coils wound square shaped which are the only actuators employed on StudSat. The current flowing through the torquers creates a magnetic dipole which reacts with the geomagnetic field to produce torque on the satellite. The coils produce a torque of 2.2302 x 10-6 Nm with 376 turns of coil of diameter 130.20 µm. The total mass of the torque coils is calculated to be 37.68 gram which consumes a power of maximum 240 mW.
ADCS Control Modes
- The detumbling mode of the satellite uses a B.dot control law which uses the 3-axis magnetometer information and reducing gradually the rotational kinetic energy of the satellite or angular momentum of the angular momentum of the satellite with respect to the magnetic field of Earth.
- The nadir pointing mode of the satellite uses full state feedback constant gain LQR (Linear Quadratic Regulator) controller for nadir stabilization.
The extended Kalman filter is used for predicting the states of the satellite. An improved simple orbit propagator is employed onboard of the satellite in order to track the satellite position in 3D space which incorporates mainly J2 perturbations, perturbations by the sun and the moon neglecting the atmospheric drag on the satellite in assistance with the Keplerian elements uploaded in regular intervals obtained from NORAD.
EPS (Electric Power Subsystem)
The Clyde-Space EPS kit is used for the power distribution and controlling unit, a custom designed solar arrays, and a Li-Polymer batteries for source and energy storage system. Use of surface-mounted triple junction solar cells with an efficiency of 26.8%. The Li-polymer batteries have a capacity 1.24 Ah.
OBC (On-Board Computer)
Centralized 32-bit microcontroller with 90 MIPS of maximum execution speed. Use of I2C bus for on-board communications. Atmel’s ARM based AVR32 UC3A0512 microcontroller is used. The OBC features an 18 pin SOIC with embedded crystal with I2C protocol for commanding and kicking. Another important feature is it's battery back-up for the RTC.
The C&DH (Command and Data Handling) subsystem includes a 512 kB FRAM (Ferroelectric Random Access Memory) non-volatile memory. It has enough space to store one image and telemetry data. FRAM technology is radiation resistant and reliable even at higher temperatures. Data can be written at a maximum rate of 9 MB/s so the data can be directly transferred into memory from the CMOS sensor.
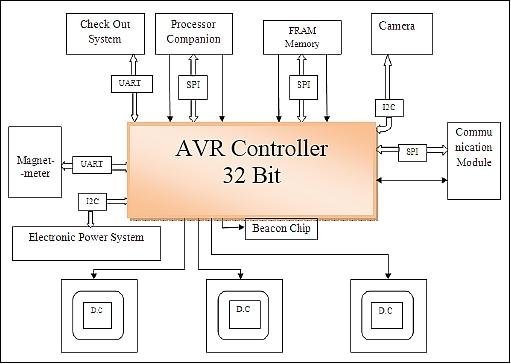
The OBC software is based on RTOS (Real Time Operating System).The RTOS provides multi-tasking of various programs to ensure real-time response of the system. The different modules in the application layer control and perform various essential functions of the satellite. The RTOS is responsible for coordinating all satellite systems, acquiring sensor data and storing it in memory, encoding and decoding of data, and communicating with the ground station. The on board computer team has chosen VxWorks as the RTOS.
RF Communications
Half duplex communication in the UHF band (437.5 MHz, 1 W output)) at a data rate of 4.8 kbit/s in downlink and uplink. Two sets of 2 monopole antennas are used, the modulation scheme is FSK. In addition, a CW (Continuous Wave) UHF beacon is used (20 bit/s in uplink and downlink, ASK Morse code modulation). The AX.25 protocol is used for data transmissions.
Launch
StudSat-1 was launched as a secondary payload on July 12, 2010 on the PSLV vehicle of ISRO (PSLV-C15). The launch site was SDSC (Satish Dhawan Space Center) SHAR, the ISRO launch center on the south-east coast of India, Sriharikota. The primary spacecraft on this flight was CartoSat-2B of India (694 kg) of ISRO. 8)
Further secondary payloads on this flight were:
• AlSat-2A, a high-resolution optical imaging satellite of CNTS (Algerian National Space Technology Centre), developed by EADS Astrium SAS of France. AlSat-2A has a mass of 116 kg.
• AISSat-1 (Automatic Identification System Satellite-1), a nanosatellite (6.5 kg) of Norway with program management by the FFI (Norwegian Defense Research Establishment). AISSat-1 was built by UTIAS/SFL (University of Toronto, Institute for Aerospacestudies/Space Flight Laboratory), Toronto, Canada.
• TISat-1 (Ticino Satellite-1), a CubeSat of 1 kg developed by students of SUPSI (University of Applied Sciences of Southern Switzerland), Lugano-Manno, Switzerland.
AISSat-1 and TISat-1 were deployed into space using the XPOD (Experimental Push Out Deployer) provided by UTIAS/SFL. UTIAS/SFL refers to this service as NLS-6 (Nanosatellite Launch Service-6). 9)
Orbit
Sun-synchronous near-circular orbit, altitude = 635 km, inclination = 97.71º, period = 97.44 minutes, local time on descending node (LTDN) = 9:30 hours.
Mission Status
• The satellite mission was terminated officially 3 months after launch in October 2010. Overall, the project StudSat was very successful in providing hands-on experience in developing a spacecraft for students and the academic community. The mission criteria were met by receiving the beacon signal, followed by reception of telemetry data. However, the telemetry data could not be decoded because of the high noise levels encountered. Therefore, the StudSat-1 project/mission is considered to be 85% completed (Ref. 6).
• The beacon and telemetry data from STUDSAT-1 was received for the duration of about one month. After that the project did not acquire anymore data from the satellite (Ref. 6).
• NASTRAC (Nitte Amateur Satellite Tracking Center) received the Telemetry Data with packets separated and confirmed the satellite is in mission mode.
• First telemetry of the StudSat was received about 70 minutes after the launch at the ground station of NMIT (Nitte Meenakshi Institute of Technology), Bangalore, India. 10)
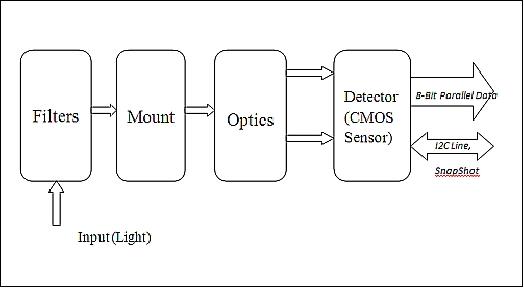
Sensor Complement
The payload consists of a CMOS (Complementary Metal Oxide Semiconductor) camera. The overall objective is to obtain monochrome imagery of Earth's surface with a spatial resolution of about 95 m. The camera has a focal length of 50 mm, an aperture diameter of 12.5 mm, and f-number of 4. The FOV (Field of View) is 5.56º providing a target scene of 45 km x 60 km.
The CMOS detector array is the KAC-9618 device of Kodak with 664 x 504 pixels. It is a high performance, low power, 1/3” VGA CMOS APS (Active Pixel Sensor) capable of capturing grey-scale digital still or motion images and converting them to a digital data stream. In addition to the active pixel array, an on-chip 12 bit A/D convertor, fixed pattern noise elimination circuits, a video gain, and separate color gain are provided.
Furthermore, an integrated programmable smart timing and control circuit allows the user maximum flexibility in adjusting integration time, active window size, and gain and frame rate. Various control, timing and power modes are also provided. The excellent linear dynamic range of the sensor can be extended to above 100 dB by programming a non linear response curve that matches the response of the human eye.
An image frame has a size of 3.62 MB. Use of JPEG2000 compression to reduce the imagery for downlink transmission.


Ground Station
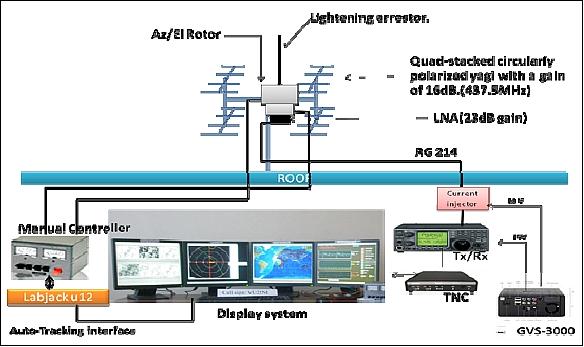
NASTRAC (Nitte Amateur Satellite Tracking Centre) is a part of the student picosatellite program (StudSat-1). It is a satellite tracking facility set-up by undergraduate students at Nitte Meenakshi Institute Of technology. The objectives of NASTRAC are to track amateur satellites orbiting in the LEO (Low Earth Orbit), establish communication links with these satellites and to test some of the in-house developed software on the data received from the satellites. The ground station with respect to StudSat can process the data received from the satellite to display the health monitoring parameters and the image captured.
• The antenna system is a quad-stacked array of circularly polarized Yagi-uda antenna with a gain of 16 dBi. The signal received is given to a LNA (Low Noise Amplifier), which has a gain of 23 dB and a noise figure of 0.6 dB.
• The tracking system comprises of azimuth 0-360º and Elevation 0-180º rotors on which the quad-stacked array of antenna system is mounted. These rotors can be controlled manually using the manual controller or by interfacing it to a satellite tracking software which can automatically point the antenna towards the desired satellite.
• The communication system of NASTRAC comprises of a UHF/VHF transceiver capable of transmission power up to 75 W at UHF and 100 W at VHF. The demodulated data is then sent to a TNC (Terminal Node Controller) that acts like a modem and performs the packet radio protocol to retrieve the data sent by the satellite. The transceiver is also controlled by the tracking software to tune the transceiver for Doppler shift in frequency.
References
1) http://www.teamstudsat.com/
2) Information provided by Jharna Majumdar, project coordinator of StudSat, NMIT, Bangalore, India
3) C. Dixit, StudSat Team, “The Jounney of StudSat,” 61st IAC 2010, Prague, Czech Republic, Sept. 27 to Oct. 1, 2010, URL: http://www.iafastro.com/docs/2010/iac/nanosat/8_Dixit.pdf
4) Chetan Angadi, K. C. Sudeep, Shanti Swaroop Kandala, Shwetha Prasad, Swetha Kotichintala, Ramavaram Harish Rao, “StudSat- A Student pico satellite for imaging,” Proceedings of the 59th IAC (International Astronautical Congress), Glasgow, Scotland, UK, Sept. 29 to Oct. 3, 2008, IAC-08-E2.3.4
5) T. S. Subramanian, “The speech that inspired Studsat project,” The Hindu, July 12, 2010, URL: https://web.archive.org/web/20111009015743/http://www.thehindu.com/news/national/article512468.ece
6) Chetan Angadi, Zhora Manjiyani, Chetan Dixit, Vigneswaran K, Avinash G.S, Prithvi Raj Narendra, Shwetha Prasad, Harish Ramavaram, Mamatha R.M, Karthik G, Arpan H.V, Sharath A.H, Sashi Kiran P, Visweswaran K, “StudSat: India’s First Student Pico-Satellite Project,” 2011 IEEE Aerospace Conference, Big Sky, MT, USA, March 5-12, 2011
7) Harish Rao Ramavaram, Chetan Angadi, Meduri Uday Kiran Maharshi, R. M. Mamatha, G. S. Avinash, “Attitude Determination & Control System (ADCS) of Pico-Satellite,” Proceedings of the 61st IAC (International Astronautical Congress), Prague, Czech Republic, Sept. 27-Oct. 1, 2010, IAC-10-E2,3,4,x7939
8) “Launch of CartoSat-2B, ALSat-2A, AISSat-1, TISat-1 and StudSat by PSLV-C15,” ISRO, July 09, 2010, URL: http://www.isro.org/news/pdf/BG_PSLV-C15.pdf
9) https://web.archive.org/web/20160530030414/http://www.utias-sfl.net/NLS-6/
10) “One Tiny Satellite In Space, Whiz Kids Plan Two More,” Space Daily, July 19, 2010, URL: http://www.spacedaily.com/reports/One_Tiny_Satellite_In_Space_Whiz_Kids_Plan_Two_More_999.html
The information compiled and edited in this article was provided by Herbert J. Kramer from his documentation of: ”Observation of the Earth and Its Environment: Survey of Missions and Sensors” (Springer Verlag) as well as many other sources after the publication of the 4th edition in 2002. - Comments and corrections to this article are always welcome for further updates (eoportal@symbios.space).