STP-1
Non-EO
DoD (USA)
Quick facts
Overview
| Mission type | Non-EO |
| Agency | DoD (USA) |
| Launch date | 09 Mar 2007 |
STP-1 (Space Test Program-1) / Orbital Express
Spacecraft Launch Mission Status ESPA References
STP-1 is a US multi-satellite technology demonstration mission of DoD, sponsored mostly by DARPA (Defense Advanced Research Projects Agency) and involving numerous institutions and agencies. The SMC (Space Missile Systems Center) at Kirtland AFB, Albuquerque, NM, is responsible for the integration of the STP-1 mission (Boeing is the prime integrating contractor). Major Boeing team members include: BATC (Ball Aerospace and Technologies Corporation) of Boulder, CO; NGST (Northrop Grumman Space Technologies), Redondo Beach, CA; MD Robotics, Brampton, Ontario, Canada; and Charles Stark Draper Laboratory Inc., Cambridge, MA.
Background
STP-1 was initially planned for launch in 2000 and subjected to several re-manifestations until 2004. Five of the six original satellites on the mission were replaced, among them also the GIFTS/IOMI (Geostationary Imaging Fourier Transform Spectrometer/Indian Ocean METOC Imager) mission of NASA and NRL.
The STP-1 rideshare mission consists of a six-vehicle payload, these are: 1) 2) 3)
• Orbital Express (OE) consisting of ASTRO and NextSat
• MidSTAR-1 (Midshipmen Space Technology Applications Research-1) of USNA (US Naval Academy)
• STPSat-1 (Space Test Program Satellite-1) of AFRL (Air Force Research Laboratory)
• NPSat-1 (Naval Postgraduate School Satellite-1) of NPS (Naval Postgraduate School).
Note: NPSat-1 was originally manifested on STP-1. However, it is not ready for the launch date. A mass simulator will be flown in its place on the ESPA ring. The instrumentation of the mass simulator is being used to capture data to better understand and characterize the EELV/ESPA environment for use of future missions. Specific areas of interest are shock events, engine start and cut-off transients, spacecraft separations and how the vibrations propagate through the ESPA ring itself.
• CFESat (Cibola Flight Experiment Satellite) of LANL (Los Alamos National Laboratory), Los Alamos, NM
• FalconSat-3 of USAFA (US Air Force Academy)
Launch
A launch of STP-1 took place on March 9, 2007 (UT) from the Cape Canaveral Air Force Station launch complex on an Atlas-5-401 launch vehicle. The launch provider was ILS (International Launch Services). This rideshare/auxiliary mission concept represents the first ever flight of ESPA (EELV Secondary Payload Adapter) technology. 5)
Orbit (LEO): The STP-1 mission launch profile must deal with the deployment of six satellites into two orbital planes at two different altitudes (requiring a total of 3 burns for the upper stage of the Atlas-V launch vehicle).
• The Orbital Express (OE, primary payload) was deployed at T+ 18 minutes into the flight. Then, at T+22 minutes, the MidSTAR-1 spacecraft was released in the first orbit at an altitude of 492 km and an inclination of 46º.
• After two more centaur burns, the remaining ESPA payloads, STPSat-1, NPSat-1, CFESat, and FalconSat-3, were being inserted into the second orbit at an altitude of 560 km and an inclination of 35.4º.
Spacecraft operations of these six satellites is being coordinated through five different control centers. Two spacecraft, OE and STPSat-1, are being controlled by RSC (Range Control Center) at Kirtland AFB, NM. CFESat is being operated from LANL, NPSat-1 from NPS in Monterey, CA, FalconSat-3 from the USAFA in Colorado Springs, CO, and MidSTAR-1 from the USNA in Annapolis, MD.
OE (Orbital Express)
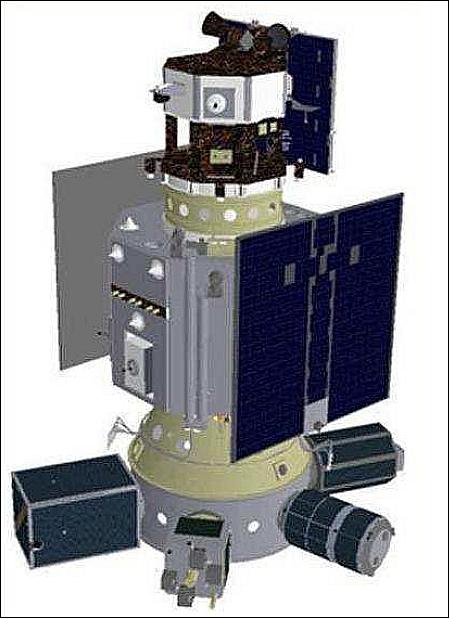
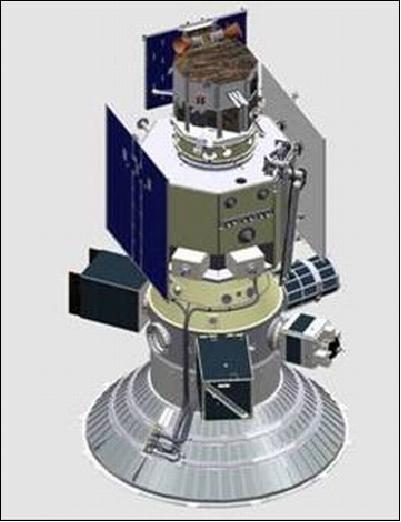
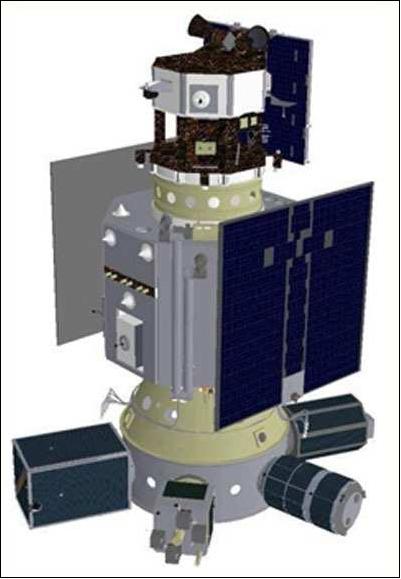
The OE demonstration system of DARPA is the primary payload on STP-1 with a total mass of 1,400 kg and a height of about 2.5 m. The spacecraft consists of two independently developed structures, ASTRO and NextSat, combined for the launch; they will operate as two separate satellites on-orbit. 6) 7) 8)
The objective of this DARPA program is to demonstrate cost-effective robotic servicing solutions using industry-wide standards for autonomous satellite servicing - including fully autonomous rendezvous and proximity operations. Other goals are:
• To demonstrate a soft capture and mating
• Fluid and ORU (Orbit Replaceable Unit) transfers (i.e., refueling). Transfer of hydrazine monopropellant between ASTRO and NextSat
• Robotic arm demonstrations
- Detach and reattach a flight computer from a bay onboard ASTRO
- Use of the arm to detach a battery from its bay on ASTRO and transfer it to a similar bay onboard NextSat
- Use of ASTRO's arm to couple to a NextSat grappling fixture and "berth" the spacecraft, allowing a separate capture mechanism to perform final docking
• Complex ground infrastructures in support of on-orbit operations.
A key factor in maximizing these new on-orbit capabilities is the development of a non-proprietary satellite servicing interface standard that can be implemented by any satellite manufacturer. NASA is a partner in the Orbital Express Program providing the sensors and software developed for autonomous rendezvous and proximity operations to enable future commercial resupply of ISS (International Space Station) - and in particular for a possible use with a HST (Hubble Space Telescope) robotic servicing/deorbit mission, being referred to as HRSDM (HST Robotic Servicing and Deorbit Mission). 9)
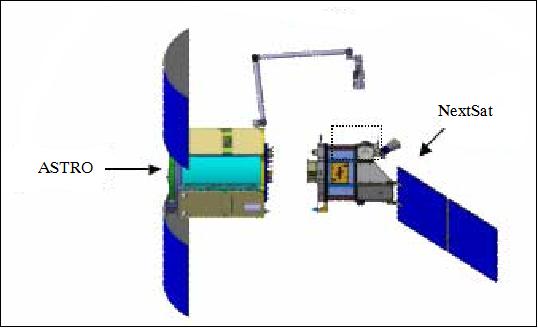
In the overall satellite-servicing scenario, the OE ASTRO (Autonomous Space Transfer and Robotic Orbiter) satellite functions as the unmanned service vehicle, while NextSat/CSC (Next Generation Satellite and Commodities Spacecraft) functions as the vehicle to be serviced (the target).
Background
Orbital Express project began as a three-contractor spacecraft-servicing study in 2000. In 2002, DARPA selected Boeing Phantom Works as the prime contractor for the follow-on design, development, and space demonstration of technologies for autonomous on-orbit refueling and reconfiguration of satellites. The program held its CDR (Critical Design Review) in 2003, and completed the ASTRO servicing spacecraft and NextSat client satellite in 2005. Boeing conducted system testing of the two spacecraft throughout the following year, and, in September 2006, shipped the two satellites to Astrotech, Titusville, FLA, for payload processing.
ASTRO (Autonomous Space Transfer and Robotic Orbiter) of OE
ASTRO functions as a micro-shuttle to OE (i.e., ASTRO is the servicing spacecraft). The objective is to demonstrate the capability to host and to provide bus services to microsatellites; this will enable the design of new-generation satellites capable of on-orbit refueling and electronics upgrade, thus further reducing launch costs while providing life-extending services/configuration and operational benefits.
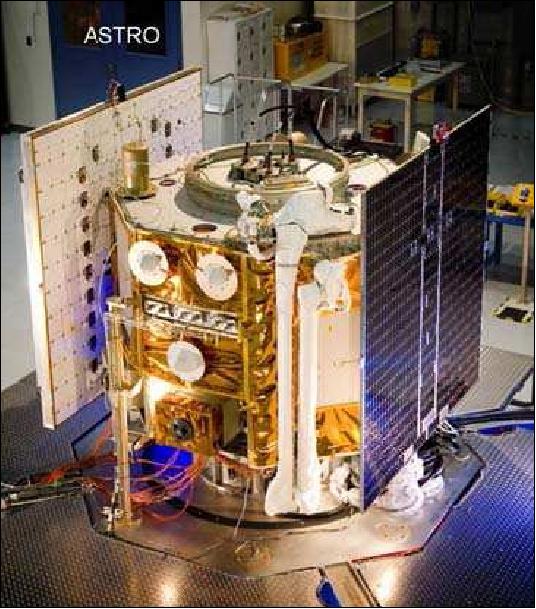
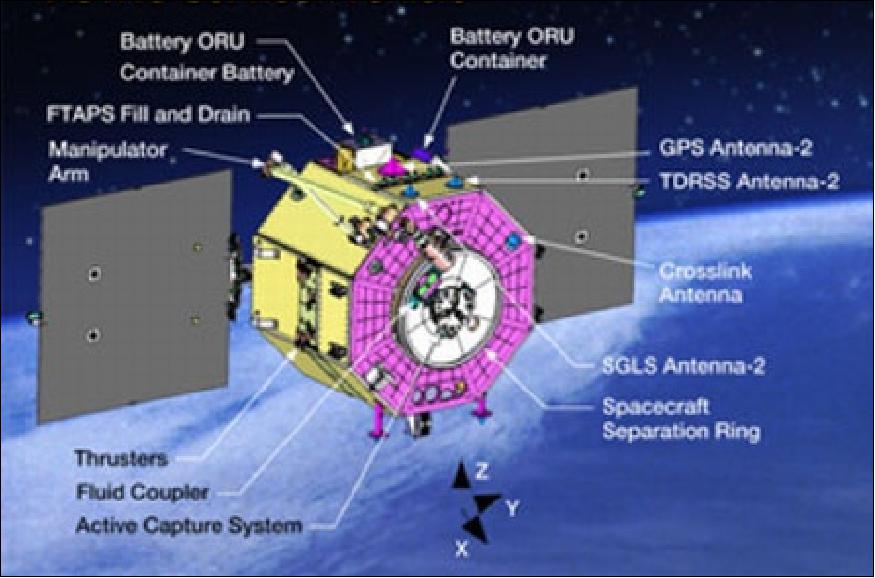
ASTRO is a medium-class satellite, developed and integrated by Boeing Phantom Works, Huntington Beach, CA. Other team members include Boeing Advanced Network and Space Systems; NASA; Northrop Grumman Space Technology; MacDonald, Dettwiler and Associates Ltd (MDA) of Richmond, BC; the Charles Stark Draper Laboratory Inc.; and SpaceDev (formerly Starsys Research).
The spacecraft has a dry mass of ~900 kg, the bus has a diameter of 1.65 m and a length of 1.64 m. The total fuel (hydrazine) of ASTRO is about 135 kg. The power is 1.56 kW, the solar array has a span of 5.6 m. The ASTRO spacecraft features a robotic arm developed at MDA.
The service functions of the spacecraft are:
• Avionics/fuel canister capture, transport
• Autonomous satellite rendezvous & docking.
• Fuel/Orbital Replacement Unit delivery
• Inspection
• Host platform for microsatellites
The OE demonstration is being done with the servicing spacecraft ASTRO and a surrogate next generation serviceable satellite (NextSat). The two spacecraft have the ability to berth and to dock to each other on orbit by two different methods:
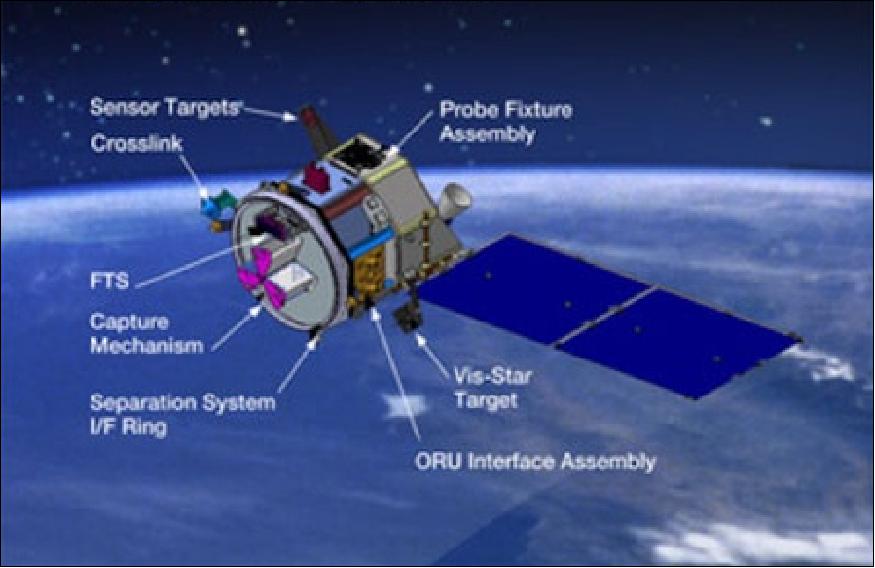
1) Through the grappling arm that is attached to ASTRO (it can grab onto a special hook built into the NextSat, then guide itself to a precise mating using sensors and sensor targets
2) Or by the three-pronged SpaceDev/Starsys docking mechanism referred to as OECS (Orbital Express Capture System).
Once the two spacecraft are attached, the other service functions of fuel and battery transfer can be supported.
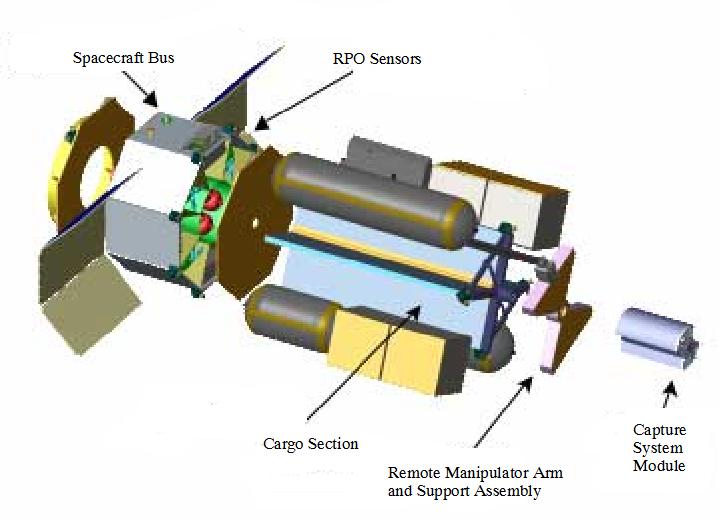
ARCSS (Autonomous Rendezvous and Capture Sensor System)
The ARCSS sensor suite is part of the ASTRO spacecraft GN&C system with the objective to aid AR&D (Automated Rendezvous and Docking) efforts. The ARCSS sensors consist of a set of two visible light cameras, an infrared camera, a laser rangefinder, and the AVGS (Advanced Video Guidance Sensor), a near-field proximity operations sensor. The objective of AVGS is to provide relative state knowledge to the ASTRO GN&C system. 10)
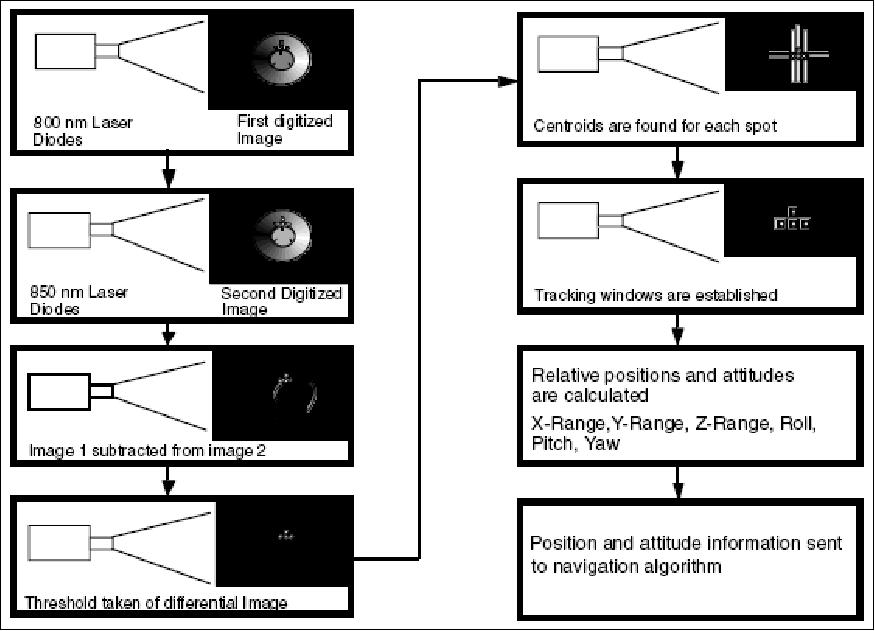
The AVGS sensor was designed and developed at NASA/MSFC, Huntsville, AL in cooperation with Advanced Optical Systems (AOS) and Orbital Sciences Corporation (OSC). The AVGS instrument consists of two sets of laser diodes at wavelengths of 800 and 850 nanometers, a mirror through which the lasers fire, a camera that images the return from the lasers, and hardware, software, and firmware that process the returned images into relative position and attitude data. The sensor is designed to interact with a retro-reflective target. The target has filters that allow one wavelength of AVGS laser to pass through and be reflected while blocking the other wavelength. The target retro-reflectors are arranged in a pattern known to the AVGS software.
The sensor fires one set of lasers and captures an image, then it fires the second set of lasers and captures a second image. When this second image is subtracted from the first image and an intensity threshold is used, virtually all of the background clutter is eliminated. This feature played a significant role for Orbital Express in challenging lighting conditions. The remaining data is the target pattern. Once a set of spots matching the target is found, the software computes the relative position and attitude between the target and the sensor. On Orbital Express, this data was output from the sensor and fed into the ARCSS computer for use by the G&RN (Guidance and Relative Navigation) algorithms, and was stored for telemetry to the ground. Figure 7 illustrates the laser illumination and processing sequence that the AVGS follows.
There are several modes of operation for the AVGS. The primary AVGS modes of operation used during the OE mission were the following:
3) Standby mode, in which the sensor sends out status messages while awaiting further commands
4) Acquisition mode, in which the sensor is actively seeking a target
5) Track mode, in which the sensor is actively tracking a target.
The accuracy specifications for the OE AVGS are shown in Table 1. Due to the limited trajectories planned, the AVGS was never expected to be used beyond 120 m, and the primary test facility was limited to 100 m, so that was the maximum range tested on the ground.
The specifications become more stringent as range decreases, because the greatest accuracy is required at docking. AVGS exhibits these characteristics, since it uses an imager chip and a fixed-focus lens, and the sensor's accuracy improves as the range decreases. There are two specifications from 10 to 30 m, since the AVGS OE target has both a Long Range Target (LRT) and Short Range Target (SRT), which are tracked over different ranges of operation.
AVGS is a laser-based system that is capable of providing bearing at midrange distances and full 6-DOF (Six Degree of Freedom) knowledge at near ranges. The sensor fires lasers of two different wavelengths to illuminate retroreflectors on the LRT) and the SRT mounted on NextSat. The retroreflector filters allow one laser wavelength to pass through and be reflected, while blocking the other wavelength. Subtraction of one return image from the other image removes extraneous light sources and reflections from anything other than the corner cubes on the LRT and SRT. The very bright spots that remain in the subtracted image are processed to provide bearing or 6-DOF relative state information.
Operating range (m) | Range (mm) | Azimuth, elevation (º) | Roll (º) | Pitch (º) |
1-3 | ±12 | ±0.033 | ±0.13 | ±0.20 |
AVGS was operational during the Orbital Express unmated scenarios and the sensor checkout operations. The OE unmated scenarios ranged from 10 m to 7 km ending in either a docking or a free-flyer capture. When the target was pointed toward the AVGS and in the AVGS operating range and FOV (Field of View), i.e. along the approach corridor of the NextSat, the AVGS provided full 6-DOF measurements.
The two visual cameras of ARCSS : One is providing a FOV of 6.5º, the other is providing a FOV of 40º. Each is fixed focus, and the wider unit is used at close ranges. A spotlight provides illumination starting at about 25 m. There is a long-wave infrared imager with an uncooled microbolometer sensor that can detect NextSat from its normal heat. A laser rangefinder completes the ARCSS package. The ARCSS sensors feed the Boeing program Vis_STAR (Vision-based Software for track, Attitude and Ranging) to give bearing, range and relative attitude of the target.
In summary, the AVGS played a vital role in supporting the extremely successful Orbital Express mission. The sensor performed significantly better than required in a number of categories, including extending the SRT track range and outstanding repeatability between different mated operations. The solutions from the SRT and the LRT during dual track had excellent correlation.
The autonomous rendezvous and capture demonstrated by Orbital Express can be useful to multiple future missions such as servicing satellites on orbit which will extend their useful life, transporting spacecraft to proper orbits when the launch process has failed to do so, and delivering supplies to astronauts stationed at ISS or on the moon. This technology will continue to be explored and refined to ensure the ability to dock safely with costly human-rated vehicles.
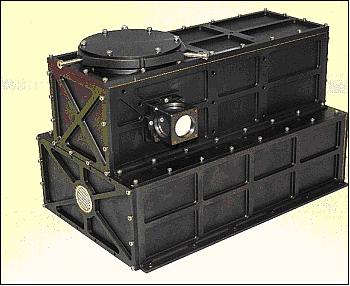
Accommodation parameters: The AVGS was a single box that contained all of the necessary components. It had a mass of 9 kg, the size was about 18 cm x 25 cm x 30 cm. The instrument consumed about 14 W in standby mode and 35 W in tracking mode (the most power intensive mode of operation).
Background: AVGS is of VGS (Video Guidance Sensor) heritage, first flown as demonstration experiments on the Shuttle mission STS-87 (Nov. 19 - Dec. 5, 1997), then on STS-95 (Oct. 29 - Nov. 7, 1998). The VGS unit was tested using a Hardware-in-the-Loop (HWIL), closed loop methodology. Functional tests of VGS were conducted on the two Shuttle flights with targets installed on the Spartan spacecraft. During the STS-85 flight, the VGS was mounted in the Shuttle cargo bay, and its target was mounted on the Spartan spacecraft being carried on this mission. The VGS unit accurately tracked Spartan in all of the positions the Space Shuttle's Remote Manipulation System (RMS) placed it. During the STS-95 re-flight of Spartan and VGS, the crew used VGS during the successful retrieval of the Spartan free-flyer spacecraft and flew the straightest terminal approach in Shuttle history.
In the two VGS Shuttle flights, both long range and short range data were gathered under a variety of lighting conditions, orbital exposure times, and temperatures. The flight experiment sensor was designed to operate from 1.5 meter range out to 110 m range, with a field-of-view of 16º x 21º. The VGS tracked its target at a 5 Hz rate and returned 6 DOF (6-degree-of-freedom) information on the target's position and attitude relative to the sensor. The VGS is a sensor designed to allow an automated vehicle to dock with a spacecraft equipped with a passive target.
After the flight experiments aboard the Shuttle missions, NASA/MSFC started with the development of AVGS (Advanced Video Guidance Sensor). A flight unit was initially developed for the DART (Demonstration of Automated Rendezvous Technology) mission of DARPA (Defense Advanced Research Projects Agency). DART was launched on April 15, 2005 with the objective to demonstrate autonomous rendezvous and docking with another spacecraft in orbit, namely MUBLCOM. However, only a partial success with AVGS could be realized since the rendezvous was prematurely ended at very close proximity of both spacecraft (a few meter)- due to a GPS receiver error and other complications.
NGAVGS (Next Generation Advanced Video Guidance Sensor) instrument: After the OE mission was successfully completed in 2007, NASA/MSFC began the development of the NGAVGS. The overall objective of NGAVGS is to provide a capability of supporting automated operations for spacecraft rendezvous, spacecraft proximity operations, spacecraft docking, spacecraft free-flyer capture, fluid transfers, and Orbital Replacement Unit (ORU) transfers.
The NGAVGS builds on the technology of the AVGS, incorporating requirements to support longer ranges, up to 3000 meters, and real-time video output. Since one of the key technologies required to support the International Space Station (ISS) re-supply as well as the NASA Constellation Program is Automated Rendezvous and Docking (AR&D), AR&D sensor robustness is vital. Thus, radiation is a bigger concern at present, than it was for the Orbital Express (OE) Mission. 11) 12)
While working through design options for the NGAVGS, It became clear that to meet the needs of the various mission applications, the MSFC team needed to develop more flexibility into the NGAVGS sensor design packaging. As a result, there is a one box configuration which minimizes the mass and physical integration requirements, and a two box design that allows the sensor head to be mounted externally and the laser and electronics box to be mounted internally to reduce environmental effects.
The NGAVGS functions in a fashion similar to the AVGS – it takes two sequential pictures illuminated by different wavelengths of laser light, subtracts one picture from the other, creates spots from the lit pixel image data, matches spots to the known target geometry, and computes the relative position vector and relative attitude information.
The NGAVGS, with the ability to measure bearing out to 5 km and measure relative 6-DOF information at closer ranges, is able to support the Constellation and COTS (Commercial Orbital Transportation Services) programs as well as other systems requiring automated rendezvous and docking.
NextSat (Next Generation Satellite) of OE
NextSat/CSC (Commodities Spacecraft) is a modular and reconfigurable spacecraft and payload with standardized modules and interfaces. The objective is to demonstrate serviceable satellite feasibility, mission utility from on-orbit avionics upgrades, increased design flexibility, and lower costs.
Specific objectives are:
- Autonomous component exchange (backup battery)
- First US refueling
- Autonomous rendezvous and docking.
The dual-satellite mission includes ASTRO (Autonomous Space Transfer and Robotic Orbiter), built by Boeing, and NextSat/CSC, launched in a "stacked" or mated flight configuration. NextSat/CSC has a dual role in the Orbital Express mission. It will emulate the 'client' spacecraft needing service, and as the 'commodities' spacecraft. In an active spacecraft constellation the commodities spacecraft would be an orbiting depot storing fuel and replacement or upgraded spacecraft components.
Spacecraft
NextSat is a minisatellite, built by BATC as contractor to Boeing. NextSat employs the architecture of the Impactor module of the Deep Impact mission, including software, command and data handling, and power switching, as well as elements from BCP-2000 (Ball Commercial Platform-2000). Power (> 550 W, EOL) is provided by a solar array using triple-junction solar cells with an efficiency of 27.5 %. The spacecraft has a wet mass of about 224 kg and a bus length of 99 cm. The design life is 1 year.

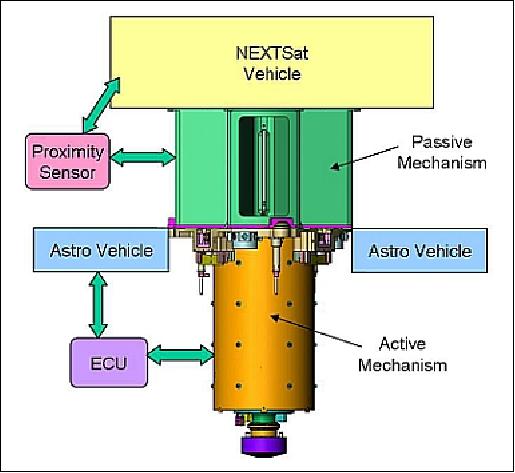
OECS (Orbital Express Capture System)
The capture system, developed at SpaceDev of Louisville, CO (formerly Starsys Research Corporation), consists of an active side and a passive side. The active side contains the grappling arms and the drive system; this side would normally be part of the supply spacecraft. The passive side provides capture features and a sensor to indicate proper engagement of the grappling arms; this side would normally be a part of the client spacecraft. 13)
The following steps are part of a capture sequence:
1) The linkages of the active mechanism begin in a deployed (open) state. The passive structure is held in a station keeping envelope within the capture capability of the active mechanism.
2) Upon receipt of command, the motor begins to actuate a ball screw which translates an internal piston along the length of the active mechanism canister. The piston moves three separate four-bar linkages that make up the grappling linkages. The linkages then move downward over a roller feature. The camming action of the roller causes the linkages to constrict, engaging the passive structure. The wedge shaped architecture of the passive structure guides the tips of the linkages into center grooves. Capture is achieved as the passive structure is constrained within the bounds of the linkages.
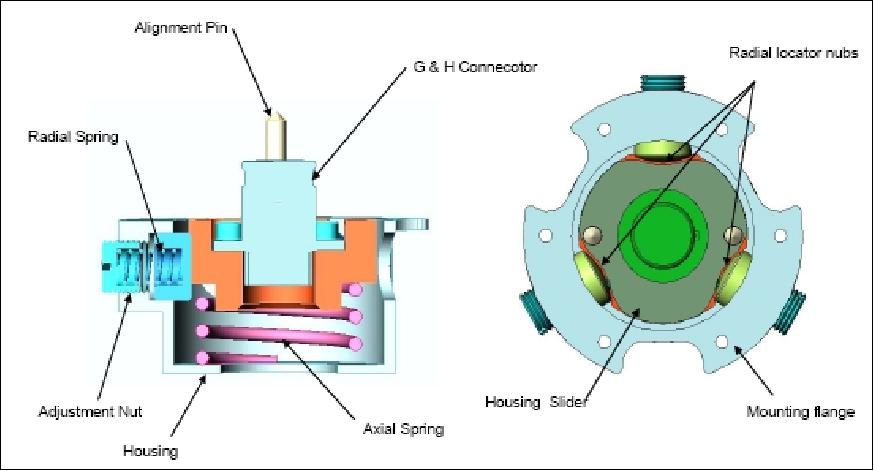
3) As the linkage tips move down along the grooves, they engage a shelf feature, allowing the active and passive structures to be drawn together. As retraction proceeds, alignment occurs in stages. Continued motion of the linkages causes the interface plate of the passive structure to contact push-off rod struts that act as a three point alignment mount on the active mechanism. The alignment features each consist of a spring loaded pin with conical ends that seat into tapered cups on the passive structure. These features provide a gross alignment. With further retraction, additional features align the electrical couplers within their allowable tolerance.
4) At the final stages of retraction, the passive structure becomes fully constrained by a final set of cup/cone features. Rigidization then occurs as the motor applies the necessary preload to provide the required interface stiffness.
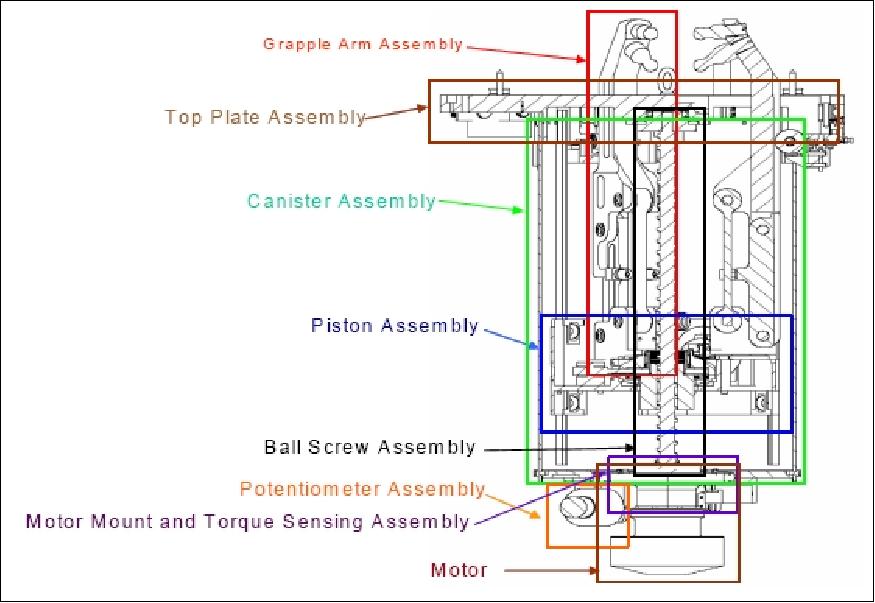
Active mechanism: The active mechanism is composed of a top plate assembly to which the canister assembly is attached (Figure 13). Within the canister assembly is a drive train consisting of a motor, ball screw, and radial/thrust bearings which transfer load into the housing. All three linkages are fixed to a piston which is connected to a ball screw via a ball screw nut. The linkages consist of one upper grappling linkage and two lower linkages which make up a four bar connection. Mounted to the canister is a reaction roller that guides the linkages through deployment. Alignment occurs via two separate features: push-off rods, and alignment pins. The three push-off rods are spring-loaded features that seat into alignment cups on the passive end to provide gross alignment. The cone mounts are hard mounted features that also seat into cup features on the passive side. This geometry provides a statically determinate final position after mate.
Electrical coupling: The transfer of power across the mated interface represents a critical aspect of the servicing operation. The prototype hardware had used off-the-shelf electrical couplers, and had tested these couplers under a variety of conditions. However, the demands of the OE program require a flight qualified connector. The OECS is designed with flight qualified G&H brand connectors. The connectors are mounted on spring loaded devices (patent pending) that allow for misalignment while mating (Figure 14). During demate, the connector mechanism moves back to the connector nominal position.
Torque sensing mechanism: Running the motor/actuator until proper preload is achieved was accomplished using a torque sensing mechanism (Figure ). To apply a preload in the mated position, a specific torque from the motor is required. The torque sensing mechanism is adjusted to activate limit.
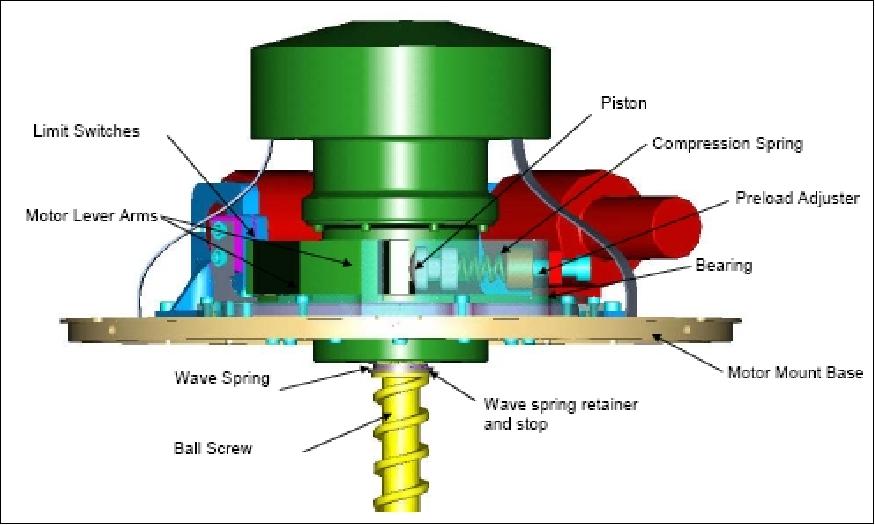
ECU (Electronic Control Unit): The active system side of the mechanism also includes an electronic control unit to drive the two phase stepper motor. The ECU was based on a heritage design and was modified specifically for OE requirements. The motor driver incorporated micro-stepping capability to create smooth operation with the stepper motor. The ECU also acted to receive commands and communicate telemetry through a MIL-STD-1553 serial interface.
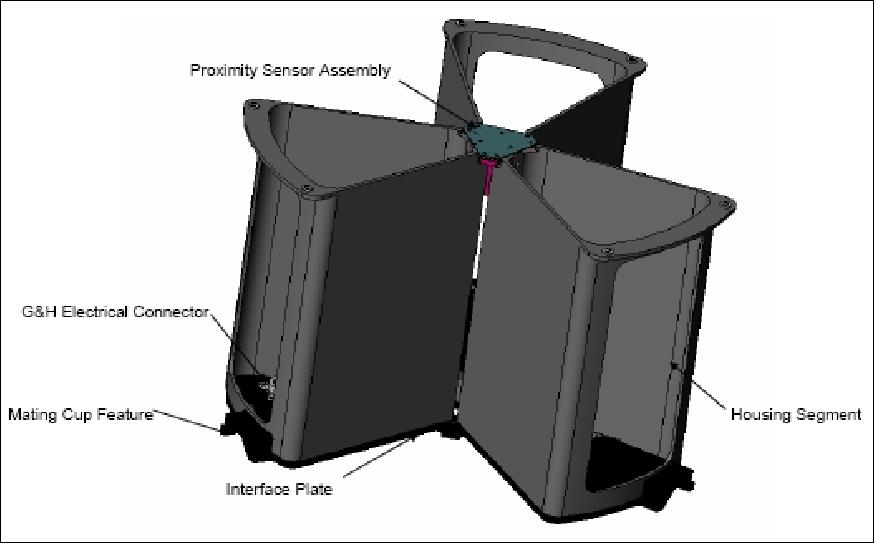
Passive assembly: The passive assembly is a three wedge shaped trefoil. The faces of each wedge terminate at a center groove that runs along its length. The passive interface consists of an interface plate that is mounted to the three trefoils. Part of this geometry includes retention lips, or shelves, which provide the linkage with a positive feature to grapple. The interface also includes kinematic cup features which help to align the structure and institute preload. The flight passive structure was significantly changed from the prototype passive structure.
The OECS flight mechanism performed as expected and has demonstrated the effectiveness of the soft docking approach enabled by the design. The blending of technology and vision yielded a simple and effective concept. Through a series of design trades and system testing, the application of minimal mechanisms, and the use of common proven technology (i.e. motors, lead screws, and linkages), a highly functional design resulted. The system has contributed to demonstrating the feasibility of autonomous docking and un-docking of independent spacecraft.
Mission Status of OE (Orbital Express)
• The OE (ASTRO) spacecraft, launched on March 9, 2007, reentred Earth's atmosphere on Oct. 25, 2013 into the Indian Ocean. 14)
• The OE mission was operational from launch (March 9, 2007) until mid-July 2007 demonstrating its various servicing functions in orbit. The different operations performed during the OE mission were completely automated and consisted of multiple spacecraft rendezvous, spacecraft proximity operations, spacecraft docking, spacecraft free-flyer capture, fluid transfers, and Orbital Replacement Unit (ORU) transfers.
The Orbital Express mission has given the U.S. its first successful autonomous docking experience in space. This technology will continue to be explored and refined to ensure the ability to dock safely with costly human-rated vehicles.
OE was decommissioned on July 22, 2007 (after 136 days on orbit) bringing the successful satellite servicing and robotics demonstration to an end. 15) 16) 17)
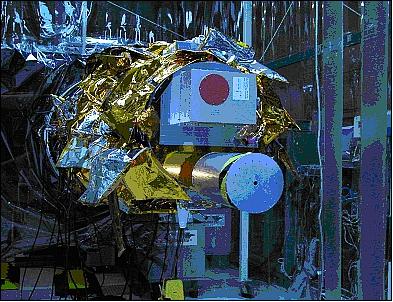
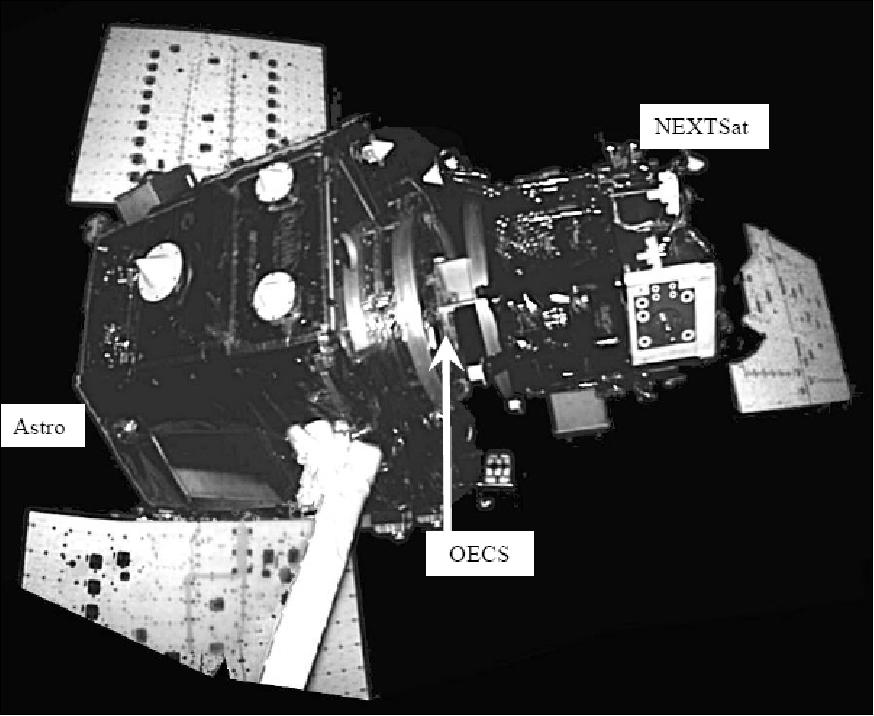
• Following launch (March 9, 2007), the ASTRO spacecraft experienced an anomaly with the guidance and control systems. To allow time to correct the problem, control of the mated pair was shifted from ASTRO to NextSat and the OE team used NextSat's guidance system to successfully point the mated stack towards the sun. Since then, revised software has been successfully loaded and validated, and the ASTRO vehicle is again controlling the OE stack in the planned nominal mode. 18)
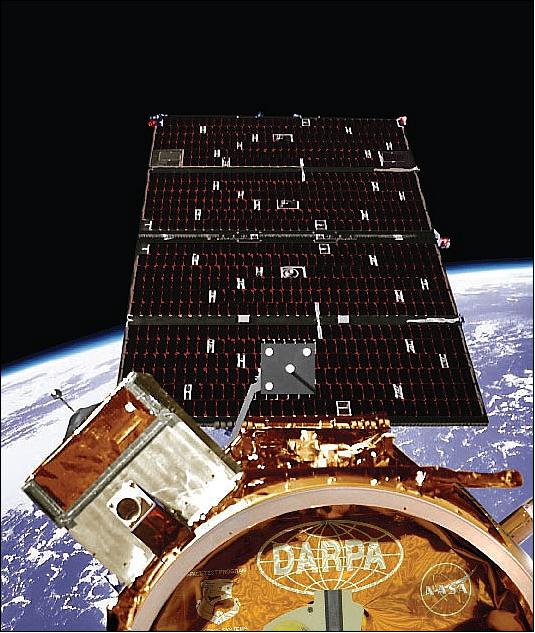
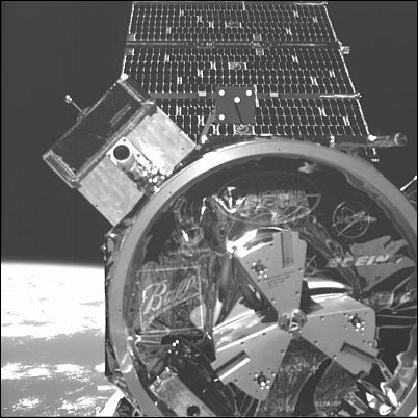
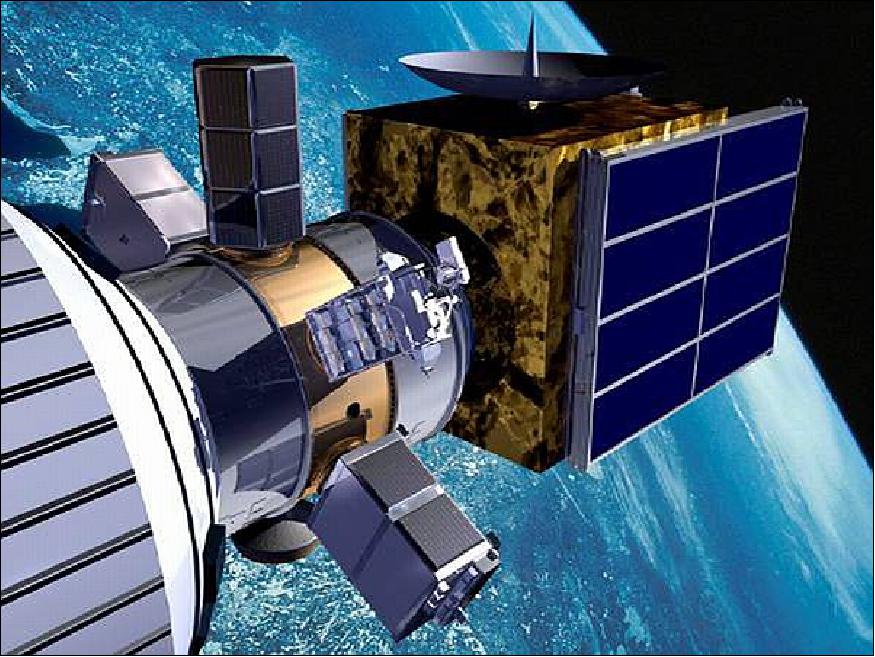
Early orbit anomaly: Within several hours after launch, ASTRO entered "sun safe" mode. Commanding, based on coarse sun sensor inputs, resulted in the vehicle moving opposite its intended direction, away from the sun. The controller diverged and the vehicle ended up with anomalously high rates (~5º/s). Attempts to correct the problem were unsuccessful, even detrimental, and within 22 hours of launch, ASTRO had experienced a nearly complete discharge of its batteries. This prevented further communication with the ASTRO spacecraft and left the mission operations team with only NextSat to command. While NextSat was still mated to ASTRO (Figure 17) and thus experiencing equivalent problems with sun pointing, its batteries had not fully discharged.
The NextSat team was able to initialize its spacecraft in a single pass and command it to sun pointing. While control was sluggish, it was sufficient to fully charge both spacecraft batteries within a single orbit and permit the mission operations team to conclude its anomaly investigation—this required an additional week of telemetry review and design discussions. Had NextSat not been able to perform this function, it is clear that both spacecraft would have been lost on the first day of the mission.
On 10 March, it was determined that ASTRO's Y-axis (pitch) reaction wheel was installed opposite its traditional mounting scheme to improve packaging and allow all three wheels to be integrated onto a single spacecraft panel; the mounting change had not been addressed in flight software. The polarity of the command to the Y-axis wheel was changed via software upload on March 13, 2007.
This serious anomaly offers a resounding lesson in the value of on-orbit servicing, albeit an unloked-for one. While it is apparent that there are ground-based mitigation strategies to ensure that hardware installation and software development are appropriately synchronized, just a single error of this kind can result in a catastrophic mission failure. NextSat was able to assume the role of "spacecraft servicer," taking over a basic housekeeping function and providing the operations team with the time needed to adequately understand and remedy ASTRO's problem (Ref. 17).
• The first OE refueling demonstration, scenario-01, was successfully conducted on April 1, 2007 - when ASTRO transferred a volume of 14.6 kg of hydrazine to the NEXT spacecraft. The demonstrations occurred at the lowest levels of spacecraft autonomy, which required several ground-based "approval to proceed" (ATP) confirmations. The team initiated ATPs to closely monitor and evaluate the operations.
• The first autonomous transfer of a component from one vehicle to another using a closed-loop servo vision system was performed on April 6, 2007 when the battery orbital replacement unit (ORU) shown in Figure 19 was autonomously transferred from ASTRO to NextSat using ASTRO's robotic arm.
Six more battery ORU transfers were conducted between NextSat and ASTRO during the course of the Orbital Express mission. Some were performed after unmated operations were initiated, in order to demonstrate the ability to re-register the ORU's position after NextSat had undocked and been subsequently recaptured.
• As of April 2007, the two OE spacecraft, ASTRO and NextSat, are in the first month of a three-month mission (nominally) to demonstrate for the first time fully autonomous rendezvous and capture of client spacecraft, satellite-to-satellite refueling, and replacement of battery and flight-computer orbital replacement units.
So far, OE spacecraft activation checkouts have been completed along with a robotic video survey of the vehicles, successful demonstrations of autonomous refueling with the Fluid Transfer System, and robotic transfer of a battery ORU (Orbital Replacement Unit) between the ASTRO and NextSat/CSC.
• On April 17, 2007, ASTRO and NextSat were separated with the use of the ASTRO's robotic arm, and the launch ring between them was safely ejected. Following the ring ejection, the robotic arm placed NextSat close by the ASTRO spacecraft. The NextSat was then grasped by the capture mechanism on ASTRO and the two spacecraft returned to a mated configuration for characterization and calibration of the ASTRO's rendezvous and capture sensors. 19)
• Early May 2007: Using its onboard cameras and AVGS (Advanced Video Guidance Sensor), the ASTRO servicing spacecraft separated from the NextSat client spacecraft, backed away to a distance of 10 m, maintained proximity flight with NextSat for a full orbit, and then approached and captured NextSat with its docking mechanism. The demonstration occurred at full spacecraft autonomy to mark the first on-orbit rendezvous and capture operation performed with no active exchange of relative navigation information or any intervention or control from the ground. - The AVGS system was developed at NASA/MSFC representing a key technology of ASTRO. 20)
• In mid-May 2007, an unexpected flight computer failure on ASTRO caused a docking maneuver to abort at 10 m. ASTRO initiated an autonomous abort response, separating to 120 m from NextSat - before the vehicles re-mated. Over the next few days, ASTRO and NextSat drifted more than 6 km apart. On May 19th, at about 150 m - greater than any distance ground tested for Orbital Express - AVGS locked on and began to track NextSat. 21)
• During a 5-hour test on June 16, 2007, the ASTRO servicing spacecraft separated from the OE spacecraft, made an automated fly around, and then re-attached. The important thing was that the entire maneuver was done autonomously. It simulated the approach that a servicing spacecraft would take when docking with a spacecraft, making sure to avoid its antennas and cameras. 22)
• On June 22, 2007 ASTRO successfully performed the first-ever autonomous capture of a satellite by another satellite using only a robotic arm. During this scenario, ASTRO backed away from the NextSat and retreated along the negative velocity vector (-V-bar) to a distance of 4 km. All sensors worked well throughout. Upon reaching its turnaround point, the ASTRO initiated a series of maneuvers to close with the NextSat and remate. The firing plan first targeted 1 km, then 120 m, where the ASTRO proceeded to stationkeep for one orbit before continuing. ASTRO transitioned from 120 m to 60 m, entering NextSat's approach corridor and deploying the robotic arm in preparation for grappling. NextSat maintained a solar inertial pointing state during the approach. ASTRO then entered the capture box (< 1 m separation) and successfully grappled NextSat. ASTRO's arm then executed a move to bring NextSat to the pre-berth position, and later, berth position. Next, the direct-capture mechanism was engaged, the arm released and retracted, and ASTRO and NextSat were fully remated (Ref. 17).
• On July 2, 2007 OE completed its final and most challenging unmated rendezvous and capture scenario. The operation was completely autonomous, with the two satellites operating at distances of up to 7 km apart, and often with only passive optical and infrared imaging for guidance. The mission marked the second successful grapple and capture of the NextSat by the ASTRO, using its robotic arm.
• DARPA decided in early July to conduct a modified end-of-life maneuver, which would include long-range sensor characterization effort to demonstrate that the ASTRO servicer could transition between an absolute (externally supplied) navigation state to a relative navigation provided by its on-board sensors, at a range of up to 400 km, and then enter back into a track mode with the NextSat client satellite.
This last sequence of maneuvers was initiated July 16, with ASTRO demating and moving away from the NextSat. ASTRO's sensor suite and navigation system lost track of NextSat at a distance of 310 km. At that point, ground operations provided ASTRO with a Space Surveillance Network-derived navigation fix for NextSat, and ASTRO started moving towards that predicted position. ASTRO was successful in re-acquiring NextSat with its onboard sensors and moved to a "racetrack" position between 500 and 1,000 m behind NextSat.
After remaining in the racetrack for 24 hours, ASTRO maneuvered to 500 m in front of NextSat. Ground operations then commanded the ASTRO to maneuver to a co-elliptic orbit, drifting backwards at ~ 70 km/hr. This maneuver was intended to ensure that ASTRO and NextSat do not re-encounter each other following decommissioning. The ground operations team next started the decommissioning sequence for the NextSat, opening solar array switches, turning solar panels away from the sun, and shutting down onboard computers. The team confirmed successful decommissioning of NextSat early July 21. The decommissioning for the ASTRO consisted of jettisoning remaining propellant and placing a non-operational software image on its flight computers. Final decommissioning of ASTRO was confirmed on July 22, ending the Orbital Express mission.
All mission success criteria were met. - The Orbital Express team encountered and resolved a number of pertinent problems during the course of its mission that are likely to recur during future on-orbit servicing activities. It is expected that the lessons learned by the OE team will be useful in the design, construction, and flight of the next generation of servicing spacecraft.
Summary of OE in-orbit Firsts
- Capturing and servicing a satellite without help from the target satellite.
- Using onboard navigation and guidance to approach and station-keep (hold position) within 10 cm of another satellite.
- Using an IEEE 1394–standard high-speed data connection — known on personal computers as a FireWire connection — that allowed ASTRO to remove and replace its own sensor computer.
- Transferring propellant from one space vehicle to another using U.S.-built technology.
- Capturing a free-flying space vehicle and transferring components using an autonomously operated robotic arm with its own onboard video sensors, and with the ability to correct for errors without outside inputs.


ESPA (EELV Secondary Payload Adapter)
The launch of the multiple secondary satellites on the STP-1 mission represents also the demonstration of ESPA (EELV Secondary Payload Adapter) technology, funded by STP and managed by AFRL at Kirtland AFB, Albuquerque, NM, and Air Force SMC (Space and Missile Systems Center).
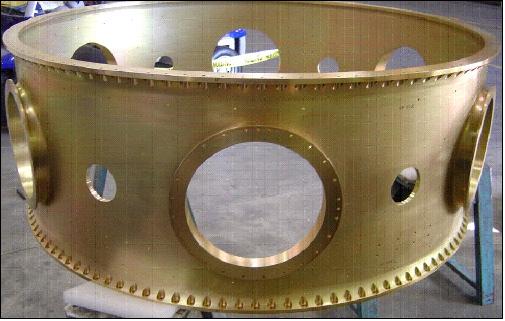
The ESPA structure underwent extensive engineering analysis and a qualification test program to demonstrate its capability to withstand the harsh launch vibration environment. In the timeframe 1999-2002 there were the following ESPA contractors: The Aerospace Corporation, CSA Engineering Inc., Northrop Grumman, and Dynacs Engineering. The ESPA ring was finally built by CSA Engineering Inc. of Mountain View, CA, within an SIBR (Small Innovative Business Research) contract of AFRL to support the STP (Space Test Program) of DoD. The objective of the ESPA concept is to increase future launch capabilities of secondary payloads at affordable costs. 23) 24) 25) 26)
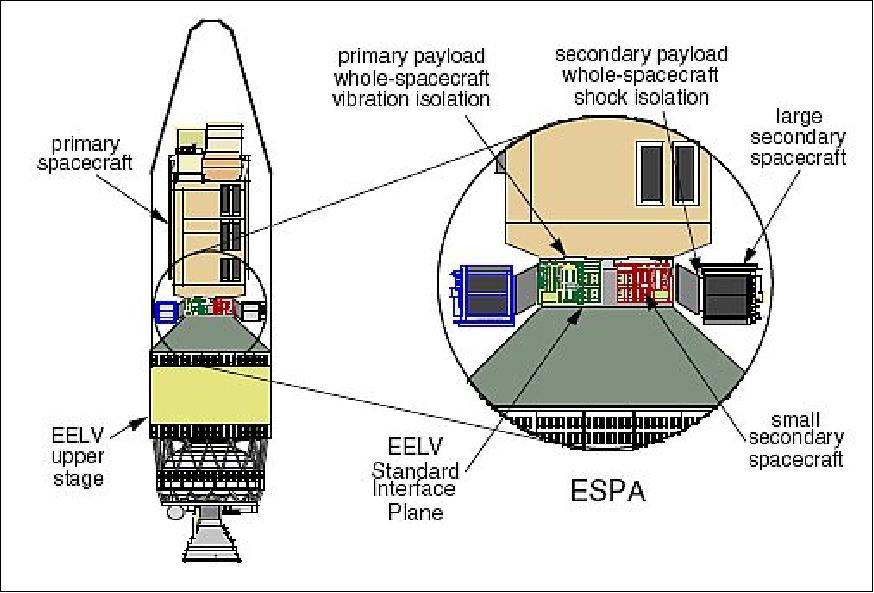
The ESPA concept is to provide a low-cost option for small satellite access to space. The ESPA standard interface consists of a ring that is installed between the rocket's upper stage and the primary payload. Up to six small (≤ 180 kg each) secondary payloads may be carried with the ESPA configuration. The ring is about 2.58 m in diameter, 61 cm in height, made of aluminum of 12 mm in thickness with a mass of about 110 kg. The ESPA ring mounts one primary spacecraft (a mass up to 6,800 kg) and features six standardized secondary payload (SPL) mounting locations found on the perimeter of this ring. All secondary satellites mount radially on the ESPA adapter (the maximum allowable radial length of a payload is 0.98 m).

The first flight of the ESPA technology will be on the STP-1 mission, launched on a Atlas-5-401 vehicle with OE (Orbital Express) as the primary payload. [Note: ESPA may also be flown on a Delta-4 launch vehicle of the EELV (Evolved Expendable Launch Vehicle) family].
The OE separation uses the MLB (Motorized LightBand) separation system. Each secondary payload will be deployed using the SLB (Standard Lightband) separation system of Planetary Systems Corporation, Silver Spring, MD. The deployment sequence does not use onboard propulsion of its secondary payloads for collision avoidance maneuvers (STPSat-1 and NPSat-1 have no onboard propulsion and therefore cannot maneuver to avoid a close approach; the TechSats do have onboard propulsion, but it would take several orbits of checkout after deployment, at least, before they are ready to execute a maneuver). The SLB design is a spring-deployment system, offering separation velocities (ΔV) in the range of 0.06 -0.5 m/s. The deployment strategy disperses the secondaries in a way that allows them to naturally separate and provides adequate separation from the upper stage prior to GTO ignition. 27) 28)
On-going ESPA development by Moog CSA Engineering provides in the meantime various ESPA designs for a number of possible applications.
Figure 25 shows the integrated payload stack of STP-1 with the four small ESPA payloads mounted radially (lower portion of the Figure).
Note: The current ESPA design represents only one solution of secondary payload (SP) support options. The following list represents the various SP options of DoD which are at varying levels of design maturity (2006) ranging from conceptual to flight qualified hardware. 29)
• ESPA (EELV Secondary Payload Adapter)
• IPC (Integrated Payload Carrier)
• DPC (Dual Payload Carrier)
• Atlas V Booster XPC (X-ternal Payload Carrier)
• TTC (Type-C Carrier)
• ABC (Aft Bulkhead Carrier)
Secondary Payloads of STP-1
The four secondary payloads, mounted on the ESPA ring of the STP-1 mission are: MidSTAR-1, STPSat-1, (NPSat-1 is not flown), CFESat, and FalconSat-3; all of which are mounted radially onto the ESPA ring (Figures 25). The secondary payloads are being described as separate missions on the eoPortal.
References
1) R. L. Galik, "Space Test Program-1 (STP-1) First of its kind," Proceedings of the AIAA/USU Conference on Small Satellites, Logan, UT, Aug. 9-12, 2004, URL: http://digitalcommons.usu.edu/smallsat/2004/All2004/7/
2) Tim Sumrall, "Demonstrating Low Cost Access to Space for Small Satellites: Space Test Program-1 Mission," 1st Responsive Space Conference, Redondo Beach, CA, April 1-3, 2003, URL: https://web.archive.org/web/20060515233150/http://www.responsivespace.com/Papers/RS1/SESSION9/SUMRALL/9004C.pdf
3) J. S. Wisecup, S. Stephens, "Space Test Program-1 (STP-1) - Raising the Standard," Proceedings of the 57th IAC/IAF/IAA (International Astronautical Congress), Valencia, Spain, Oct. 2-6, 2006, IAC-06-B.5.5.02
4) Barbara Manganis Braun, Sam Myers Sims, James McLeroy, Ben Brining, "Breaking (Space) Barriers for 50 Years: Past, Present, and Future of the DoD Space Test Program," 31st Annual AIAA/USU Conference on Small Satellite, Logan UT, USA, Aug. 5-10, 2017, paper: SSC17-X-02, URL: http://digitalcommons.usu.edu/smallsat/2017/all2017/137/
5) http://spaceflightnow.com/atlas/av013/status.html
6) S. Clark, "Robotic satellite servicer rehearsal underway in orbit," Spaceflight Now, April 3, 2007, URL: http://spaceflightnow.com/news/n0704/03orbitalexpress/
7) J. R. Wilson, "Satellite hopes ride on Orbital Express," Aerospace America, Feb. 2007, pp. 30-35
8) Caroline Chouinard, Russell Knight, Grailing Jones, Daniel Tran, "Orbital Express Mission Operations Planning and Resource Management using ASPEN," 2008, URL: http://trs-new.jpl.nasa.gov/dspace/bitstream/2014/41407/1/08-0656.pdf
9) S. Stamm, P. Motaghedi, "Orbital express capture system: concept to reality," Proceedings of the SPIE, `Spacecraft Platforms and Infrastructure,' edited by P. Tchoryk, M. Wright, Vol. 5419, 2004, pp. 78-91
10) R. T. Howard, A. F. Heaton, R. M. Pinson, C. K. Carrington, "Orbital Express Advanced Video Guidance Sensor," Proceedings of the 2008 IEEE Aerospace Conference, Big Sky, MT, USA, March 1-8, 2008
11) T. C. Bryan, R. Howard, J. E. Johnson. J. E. Lee, L. Murphy, S. H. Spencer, "Next Generation Advanced Video Guidance Sensor," Proceedings of the 2008 IEEE Aerospace Conference, Big Sky, MT, USA, March 1-8, 2008, paper: 8.0805
12) Richard T. Howard, Thomas C. Bryan, Jimmy Lee, Bryan Robertson, "Next Generation Advanced Video Guidance Sensor Development and Test," Proceedings of the 32nd AAS Guidance and Control Conference, Breckenridge, CO, USA, Jan. 31.- Feb. 4, 2009, AAS 09-064
13) S. Christiansen, T. Nilson, "Docking System for Autonomous, Un-manned Docking Operations," Proceedings of the 2008 IEEE Aerospace Conference, Big Sky, MT, USA, March 1-8, 2008
14) "Rentry Prediction of OE (ASTRO)," The Aerospace Corporation, Oct. 28, 2013, URL: http://www.aerospace.org/cords/reentry-predictions/upcoming-reentries/2007-006a/
15) " Orbital Express Mission Updates (DARPA)," July 22, 2007, URL: http://archive.darpa.mil/orbitalexpress/mission_updates.html
16) B. Berger, "After Successful Mission, Orbital Express Put Out to Pasture," Space News, July 30, p. 11
17) Fred G. Kennedy III, "Orbital Express: Accomplishments and Lessons Learned," Proceedings of the AAS Guidance and Control Conference, Breckenridge, CO, USA, Feb. 1-6, 2008, AAS 08-071
18) T. Malik, "Prototype Satellites Demonstrate IN-Orbit Refueling," Space News, April 9, 2007, p. 42
19) "Orbital Express Satellites Successfully Separate, Remate," SpaceRef, April 18, 2007, URL: http://www.spaceref.com/news/viewpr.html?pid=22409
20) "Boeing Orbital Express Completes First Autonomous Free Flight And Capture," Space Daily, May 11, 2007, URL: http://www.spacedaily.com/reports/Boeing_Orbital_Express_Completes_First_Autonomous-Free_Flight_And_Capture_999.html
21) D. Coulter, "The Adventures of ASTRO and NextSat," SpaceMart, July 5, 2007, URL: http://www.spacemart.com/reports/The_Adventures_Of_ASTRO_And_NextSat_999.html
22) Fraser Cain, "Servicing Spacecraft Makes an Automated Fly Around," Universe Today, June 25, 2007, URL: http://www.universetoday.com/2007/06/25/servicing-spacecraft-makes-an-automated-fly-around/
23) M. Marlow, R. Ripley, C. Badgett, H. Walden, "The DoD Space Test Program-Standard Inter face Vehicle (STP-SIV) Evolved Expendable Launch Vehicle (EELV) Standard Payload Adapter (ESPA) Class Program," Proceedings of the 20th Annual AIAA/USU Conference on Small Satellites, Logan, UT, Aug. 14-17, 2006, paper: SSC06-III-5
24) J. R. Maly, S. A. Haskett, P. S. Wilke, E. C. Fowler, D. Sciulli, T. E. Meink, "ESPA: EELV Secondary Payload Adapter with whole-spacecraft isolation for primary and secondary payloads," Proceedings of SPIE, Vol. 3989, March 6, 2000, Newport Beach, CA, USA, URL: http://www.moog.com/literature/Space_Defense/Vibration_Control/MoogCSA_ESPA0710.pdf
25) J. E. Higgins, B. J. Arritt, E. R. Fosness, P. M. Wegner, S. J. Buckley, "Multiple Payload Adapters; Opening the Doors to Space," 16th Annual AIAA/USU Conference on Small Satellites, Loan, UT, USA, Aug. 12-15, 2002, SSC02-VII-5
26) B. Minelli, A. Haase, M. Barton, J. Borges, C. A. Hunt, J. Miller, "Designing for ESPA: The Challenges of Designing a Spacecraft for a Launch Accommodation Still in Development," Proceedings of the AIAA/USU Small Satellite Conference, Logan, UT, USA, Aug. 11-14, 2003, SSC03-II-7
27) D. E. Keenan, "A Deployment Strategy for Multiple Secondary Payloads on the MLV-05 Mission," Proceedings of AIAA/USU Conference on Small Satellites, Logan, UT, Aug. 12-15, 2002,
28) J. S. Goodwin, P. Wegner, "Evolved Expendable Launch Vehicle Secondary Payload Adapter: A New Delivery System for Small Satellites," Proceedings of AIAA/USU Conference on Small Satellites, Logan, UT, Aug. 13-16, 2001.
29) G. Szatkowski, G. F. Sowers, J. England, J. C. Andrews, E. F. Rodgers, "The Atlas Secondary Experience - Yesterday, Today, and Beyond," Proceedings of the 20th Annual AIAA/USU Conference on Small Satellites, Logan, UT, Aug. 14-17, 2006, paper: SSC06-IX-6
The information compiled and edited in this article was provided by Herbert J. Kramer from his documentation of: "Observation of the Earth and Its Environment: Survey of Missions and Sensors" (Springer Verlag) as well as many other sources after the publication of the 4th edition in 2002. - Comments and corrections to this article are always welcome for further updates (eoportal@symbios.space).
Spacecraft Launch Mission Status ESPA References Back to top