STARS-2 (Space Tethered Autonomous Robotic Satellite-2)
Non-EO
JAXA
Quick facts
Overview
| Mission type | Non-EO |
| Agency | JAXA |
| Launch date | 27 Feb 2014 |
STARS-2 (Space Tethered Autonomous Robotic Satellite-2)
Overview Spacecraft Launch Tether deployment system Mission Status References
STARS-2 (also referred to as STARS-II) is a nanosatellite technology demonstration mission of Kagawa University, Takamatsu, Kagawa, Japan, consisting of a mother-daughter satellite configuration. The primary object of STARS-2 is the technical verification of a tethered electrodynamic robotic system. The mother satellite features a tether deployment system and a tension control system. The daughter satellite consists of a tethered robotic system. 1) 2) 3) 4)
STARS-2 is a follow-on mission of STARS-1 which was launched on January 23, 2009 on the H-IIA vehicle from the Tanegashima Space Center, Kagoshima, Japan. STARS-1 was a secondary payload of the GOSAT mission.
The tethered space robot is a new type of a space robotic system. It differs significantly from the TSS-1R (Tethered Satellite System) mission of ASI and NASA, deployed from Space Shuttle STS-75 in 1996, in three aspects.
1) It is assumed that the STARS-2 tether is to be extended at a relatively short distance.
2) The project does not envision either gravity force nor centrifugal force to be an influence on the tether extension. Instead, a tether extension strategy is employed, assisted by the initial translation momentum of the subsystem.
3) The tethered subsatellite is envisioned to be a multi-body system. The major advantage of the multi-body nature of the subsatellite is that its attitude can be controlled under tether tension by its own link motion. This can be done by applying methods developed in free-flying space robot studies.
The objective of the STARS-2 mission is to harness space debris and make orbital lanes safe for exploration.
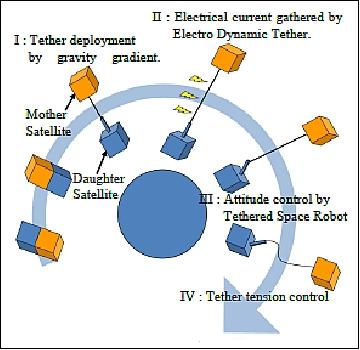
Deployment Strategy of STARS-2 (Figure 1)
1) The EDT (Electrodynamic Tether) deployment sequence is done by gravity gradient forces:
It is necessary to deploy the daughter satellite into the direction of the Earth for the experiment. The initial mother-daughter satellite attitude is controlled under the docking condition. The attitude is controlled by a magnetic torquer and torque by tension control system. When the daughter satellite is facing into the nadir direction, the electrodynamic tether is deployed by deployment springs, which provide an initial velocity to the daughter satellite. Subsequently, the extended system can be stabilized by gravity gradient methods.
2) In the extended configuration, electrical current can be gathered by the electrodynamic tether:
Electrons in the space plasma are gathered by the bare electrodynamic tether; they are emitted from the daughter satellite. As a result, electrical current is passed through the electrodynamic tether.
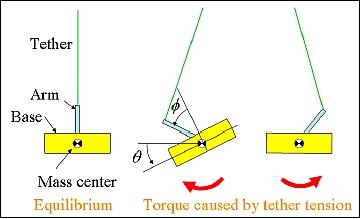
3) The attitude is controlled by the arm link motion based on the tether tension due to gravity gradient:
The daughter satellite controls its attitude by the arm link motion using the tether tension (on the electrodynamic tether), which is applied by gravity gradient.
4) Tether deployment and retrieval by tether tension control:
The electrodynamic tether is connected to a Kevlar tether at its end. By a reel tension control of the Kevlar tether, the relative positions of the mother satellite and daughter satellite can be controlled.
Success Levels of the STARS-2 Mission
1) Minimum success: Minimum success is defined as technical learning for development and operation. In this level, the requirements were already demonstrated on STARS-1 (nicknamed Kukai, launched on January 23, 2009).
• Orbital injection
• Status monitor by HK data (housekeeping data is transmitted after orbit injection).
2) Mission success: Mission success is defined as technical verification of the tether deployment and stabilization by the gravity gradient method.
Level | Requirement |
Minimum | Orbit injection of STARS-2: The status is monitored by HK (Housekeeping) data |
Mission | - The attitude of STARS-2 is controlled under the docking condition |
Full | - Electrical current is being gathered by the electrodynamic tether |
Spin-off | - Technology exchange between radio ham and students |

Spacecraft
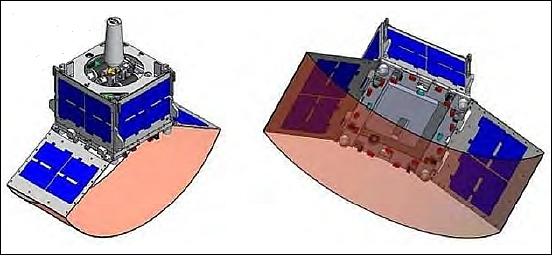
The STARS-2 mission consists of the mother and daughter satellite configuration as shown in Figure 2. The mother satellite is on top in the figure; both satellites are connected by a tether. Each satellite features two solar paddles covered with solar cells, an antenna and a GPS system. The basic parameters of the satellites are:
Mother satellite: mass = 5 kg; bus size 160 mm x 160 mm x 253 mm (without solar paddles and cone).
Daughter satellite: mass = 4 kg; bus size: 160 mm x 160 mm x 158 mm (without solar paddles and cone).

COMM (Communication subsystem), same as that od STARS-1: The two satellites provide intercommunication via Bluetooth protocol link during any tether sequence mission. In the deployment mission, the mother satellite controls two motors for the deployment and the reel mechanisms. In a similar manner, the daughter satellite controls two motors for the joint mechanism. The same electrical hardware can be applied to both satellites, and control software is implemented for each control function.
In STARS-2, the SPA (Solar Paddle Antenna), which has been reformed for to obtain a higher gain, is mounted on Daughter satellite. The antenna wire is mounted on the film which is attached to the solar paddles, as shown in Figure 4.
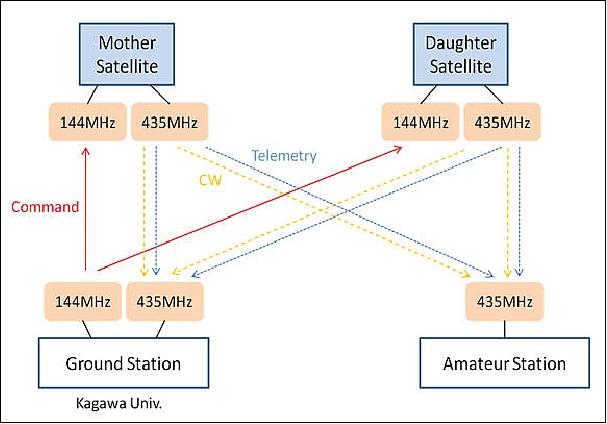
The communication subsystem communicates with the ground station through amateur radio frequencies (UHF, VHF). The basic function of the COMM is transmitting FM telemetry data from the C&DH, and receiving a command data from the ground station and sending it to the C&DH. STARS performs only a FMCW (Frequency Modulation Continuous Wave) downlink. During a station pass only the EPS and COMM subsystems are working in parallel.
The uplink is in VHF (144 MHz); the downlink is in UHF (430 MHz). The Ax.25 communication protocol is used.
Launch
The STARS-2 microsatellite was launched as a secondary payload on the H-IIA 202 vehicle of JAXA on February 27, 2014 (at 18:37:00 UTC). The primary payload on this flight was the GPM (Global Precipitation Measurement) mission of NASA and JAXA. The launch site was the Tanegashima Space Center, Japan. 5) 6) 7)
The secondary Japanese payloads manifested by JAXA on the GPM Core mission were: 8)
• ShindaiSat (Shinshu University Satellite), also known as Ginrei, is a microsatellite (35 kg) to demonstrate LED light as an optical communications link.
• STARS-2 (Space Tethered Autonomous Robotic Satellite-2) nanosatellite technology mission of Kagawa University, Takamatsu, Kagawa, Japan
• TeikyoSat-3, a bioscience microsatellite (~20 kg) of Teikyo University
• ITF-1 (Imagine The Future-1), a 1U CubeSat of the University of Tsukuba, Tsukuba, Japan.
• OPUSat (Osaka Prefecture University Satellite), a 1U CubeSat
• INVADER (INteractiVe satellite for Art and Design Experimental Research) of Tama Art University, a 1U CubeSat
• KSat-2 (Kagoshima University Satellite-2), a CubeSat mission with a mass of ~ 1.5 kg. 9)
After the release of the GPM Core Satellite, the second stage performed attitude maneuvers and slightly changed its orbit for the deployment of the seven secondary payloads that include small spacecraft and CubeSats dedicated to scientific missions, technical demonstrations and outreach projects. 10)
Orbit: Non-sun-synchronous near circular orbit, altitude of ~400 km, inclination = 65º, period = 92.02 minutes.
Launch event | Time (minutes:seconds) | Altitude (km) | Inertial speed (km/s) |
Liftoff | 0:00 | 0 | 0.4 |
Solid rocket booster burnout | 1:39 | 47 | 1.5 |
Solid rocket booster jettison (thrust strut cutoff) | 1:48 | 55 | 1.5 |
Payload fairing jettison | 4:05 | 140 | 2.5 |
1st stage engine (main engine) cutoff (MECO) | 6:36 | 230 | 5.0 |
1st and 2nd stages separation | 6:44 | 236 | 5.0 |
2nd stage ignition (SEIG) | 6:50 | 239 | 5.0 |
2nd stage engine cutoff (SECO) | 14:58 | 399 | 7.7 |
GPM-Core separation | 15:49 | 398 | 7.7 |
ShindaiSat cubesat separation | 24:09 | 400 | 7.7 |
STARS-2 CubeSat separation | 28:19 | 403 | 7.7 |
TeikyoSat-3 microsatellite separation | 32:29 | 406 | 7.7 |
ITF-1 CubeSat separation | 36:39 | 408 | 7.7 |
OPUSAT CubeSat separation | 37:59 | 408 | 7.7 |
INVADER CubeSat separation | 39:19 | 408 | 7.7 |
KSat-2 CubeSat separation | 40:39 | 408 | 7.7 |
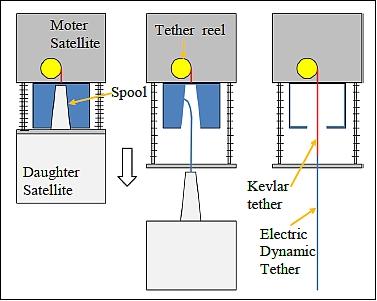
Tether Deployment System
Figure 6 shows the tether deployment system accommodated on the mother satellite. The ring is supported by 4 springs which are compressed. The daughter satellite is deployed when the ring is pushed up and the springs are extended. The EDT (Electrodynamic Tether) of about 300 m in length is wound on a spool. The spool is also an arm of the tethered space robot. After deployment of the EDT, the Kevlar tether is deployed. The Kevlar tether is turned around the tether reel.
In the STARS-2, the EDT is an aluminum cable strand, and it is stowed by the spool. So, it will become coil configuration. And it has elasticity. The elasticity of the tether and spring effect of coil configuration are considered to be causally-related to rebounds.
The maximum tether extension length is about 350 m (EDT: 300 m, Kevlar tether: 50 m). The tether extension length cannot be directly measured because EDT is stowed on the spool.
Tether control subsystem: The electrodynamic tether is wound around the spool. The spool is an arm of the tethered space robot. After deployment of the electrodynamic tether, the Kevlar tether is deployed. The Kevlar tether is turned around the tether reel. The electrodynamic tether is connected to the Kevlar tether at its end. During the electrodynamic tether deployment, the tether tension is rather small. Hence, the daughter satellite almost never rebounds. When all the Kevlar tether is deployed , an over-tension is generated. This diminishes the deployment velocity by tension control.
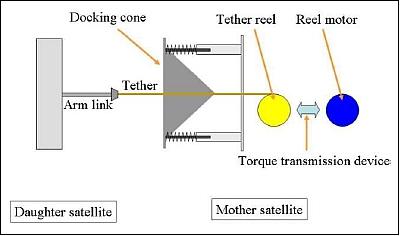
The tether tension is controlled to be constant by the tether reel system. As shown in figure 5, the tether reel system consists of a tether reel and a reel motor [2224-006SR (3.71:1): Minimotor SA] connected through a torque transmission device [permanent wave torque EC: Koshin Seikosho Co. Ltd.], which transmits a constant torque from the reel motor to the tether reel, then the tether is in a controlled tension state.
Mission Status
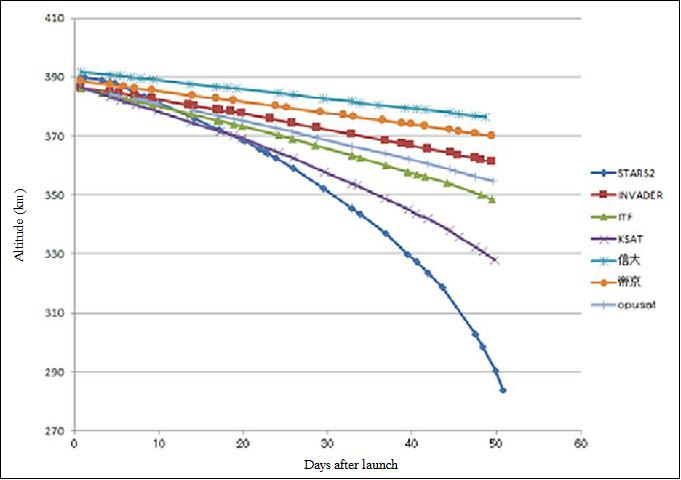
• Descent orbit: Figure 9 shows the orbital altitude of the seven secondary satellites on the H-IIA flight #25, derived from Two Line Element delivered on Space Track Home Page. Also, Table 3 shows the area-to-mass ratio of each satellite. Theoretically, the orbital lifetime of a 50 kg satellite has a longer orbital life than that of a CubeSat (Ref. 11).
- The STARS-2 condition could be inferred by telemetry through the CW beacons and the change of the orbit.
- After nearly two months in orbit, STARS-2 reentered Earth's atmosphere on 26 April 2014.
Satellite name | Area-to mass ratio | Remarks |
STARS-2 | 0.0065 | Minimum |
ShindaiSat | 0.0069 | 50 kg |
TeikyoSat-3 | 0.0052 | 50 kg |
ITF-1 | 0.0115 | CubeSat |
INVADER | 0.0178 | CubeSat |
OPUSat | 0.0215 | CubeSat |
K-Sat2 | 0.0215 | CubeSat |
• A few days after launch, the CW beacon from the DS became to be week. It is inferred that solar battery power was low due to its small body. Then, a few weeks later, the CW beacon from the DS could not be received anymore. On the other hand, the CW beacon from the MS became to be strong. It is inferred that the solar paddles and antennas were deployed by re-starting, and then the C&DH was not starting because of the same sequence which occurred just after the separation (Ref. 11).
• On the first pass on launch day, the CW beacon from the DS (Daughter Satellite) was received on the Kagawa University ground station. On a follow-up pass, the CW beacon from the MS (Mother Satellite) was received on another amateur radio station (JD1GDE) in Japan. From the CW beacon data, STARS-2 was successfully separated from the rocket, and the satellite system started. However, it was noted from the data, that the C&DH also started, though it should not start just after the separation. According to the STARS-2 design, the C&DH starting suggests that the solar paddles and antennas were not deployed. 11)
- In addition, the CW beacon from the DS was much stronger than that from the Mother. The DS and the MS employ dipole and monopole antennas, respectively. It is inferred that the DS antenna could well transmit the CW beacon though it was not deployed.
References
1) Atsuko Uchida, Masahiro Nohmi, "STARS-II mission design for space experiment of tethered robotic system," Proceedings of i-SAIRAS (International Symposium on Artificial Intelligence, Robotics and Automation in Space), Turin, Italy, Sept. 4-6, 2012, URL: http://robotics.estec.esa.int/i-SAIRAS/isairas2012/Papers/Session%207B/07B_02_uchida.pdf
2) A. Uchida, M. Nohmi, "STARS-II Space Verification Experiment for Future Debris Removal Mission," Proceedings of the 2nd IAA Conference on University Satellite Missions and CubeSat Workshop, IAA Book Series , Vol. 2, No 2, Editors: Filippo Graziani, Chantal Cappelletti, Rome, Italy, Feb. 3-9, 2013, paper: IAA-CU-13-02-04
3) "Kagawa satellite development project STARS-II," URL: http://stars1.eng.kagawa-u.ac.jp/english/index.html
4) "STARS-II Amateur Radio Satellite," Amateur Radio, PEØSAT, Dec. 6, 2011, URL: http://www.pe0sat.vgnet.nl/2011/stars-ii-amateur-radio-satellite/
5) "Launch Result of H-IIA Launch Vehicle No. 23 with GPM Core Observatory onboard," MHI, JAXA, Feb. 28, 2014, URL: http://www.jaxa.jp/press/2014/02/20140228_h2af23_e.html#ref
6) Information provided by Masahiro Nohmi, Kagawa University, Takamatsu, Kagawa, Japan.
7) Ruth Netting, "GPM (Global Precipitation Measurement)," NASA Science Missions, April 30, 2013, URL: http://science1.nasa.gov/missions/gpm/
8) Toshinori Kuwahara, Kazaya Yoshida, Yuji Sakamoto, Yoshihiro Tomioka, Kazifumi Fukuda, Nobuo Sugimura, Junichi Kurihara, Yukihoro Takahashi, "Space Plug and Play Compatible Earth Observation Payload Instruments," Proceedings of the 9th IAA Symposium on Small Satellites for Earth Observation, Berlin, Germany, April 8-12, 2013, Paper: IAA-B9-1502, URL: http://media.dlr.de:8080/erez4/erez?cmd=get&src=os/IAA/archive9/Presentations/IAA-B9-1502.pdf
9) http://leo.sci.kagoshima-u.ac.jp/~n-lab/KSAT-HP/Ksat2_E.html
10) Patrick Blau, "GPM Core - Mission Updates," Spaceflight 101, Feb. 27, 2014, URL: http://www.spaceflight101.com/gpm-core-mission-updates.html
11) M. Nohmi, "Initial Orbital Performance Result of Nano-Satellite STARS-II," International Symposium on Artificial Intelligence, Robotics and Automation in Space (I-SAIRAS), Montreal, Canada, June 17-19, 2014, URL: http://robotics.estec.esa.int/i-SAIRAS/isairas2014/Data/Session%203b/ISAIRAS_FinalPaper_0057.pdf
The information compiled and edited in this article was provided by Herbert J. Kramer from his documentation of: "Observation of the Earth and Its Environment: Survey of Missions and Sensors" (Springer Verlag) as well as many other sources after the publication of the 4th edition in 2002. - Comments and corrections to this article are always welcome for further updates (eoportal@symbios.space).
Overview Spacecraft Launch Tether deployment system Mission Status References Back to top