SMOS (Soil Moisture and Ocean Salinity) Mission
EO
ESA
Ocean
Land
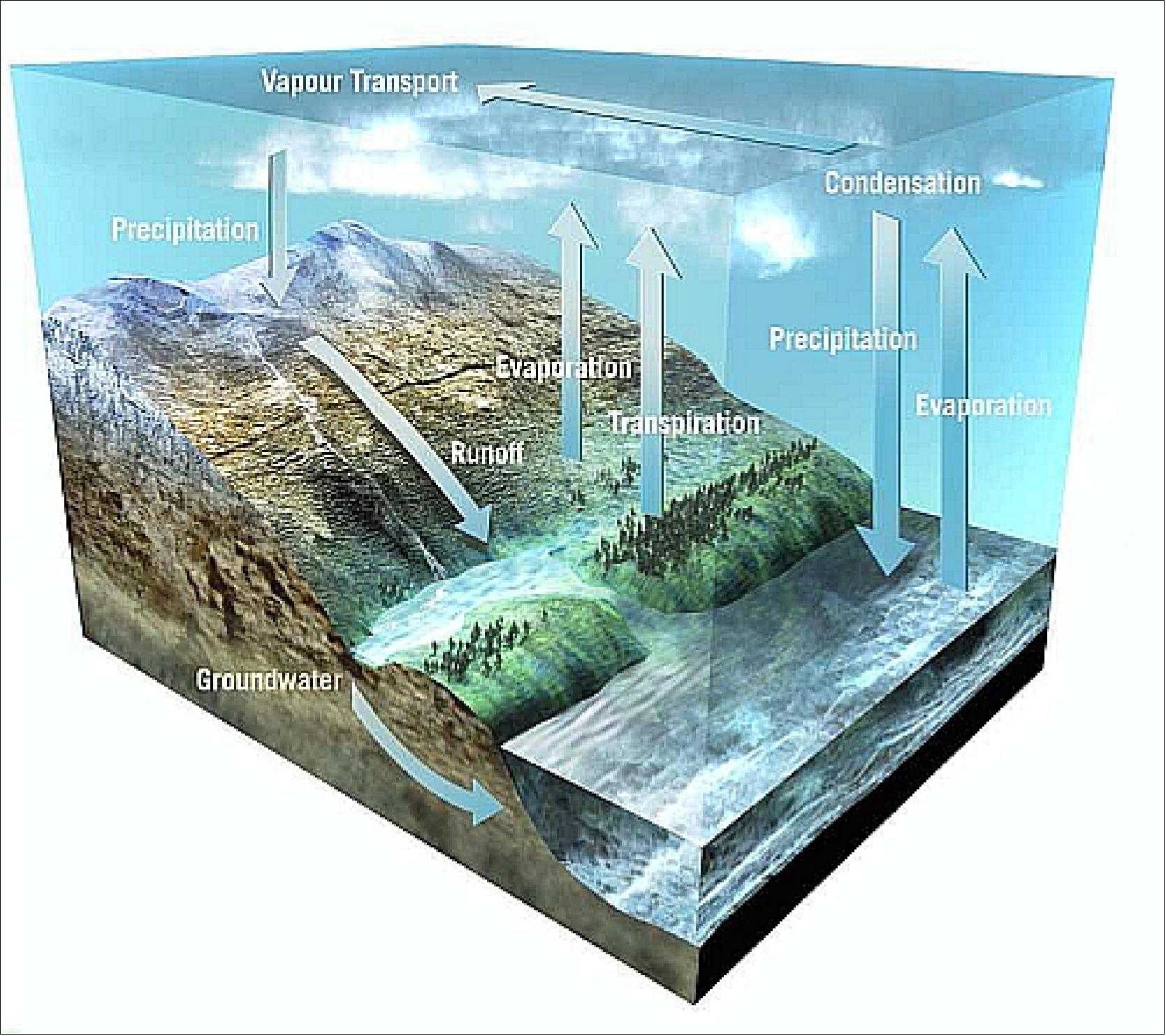
Soil Moisture and Ocean Salinity (SMOS) mission is a microwave imaging satellite whose operation is led by ESA as part of their Earth Explorer missions. SMOS provides global observations on soil moisture and ocean salinity to improve our understanding of the water cycle and our weather forecasting ability.
Quick facts
Overview
| Mission type | EO |
| Agency | ESA, CNES, CDTI |
| Mission status | Operational (extended) |
| Launch date | 02 Nov 2009 |
| Measurement domain | Ocean, Land |
| Measurement category | Soil moisture, Ocean Salinity |
| Measurement detailed | Soil moisture at the surface, Sea Surface salinity |
| Instruments | MIRAS (SMOS) |
| Instrument type | Imaging multi-spectral radiometers (passive microwave) |
| CEOS EO Handbook | See SMOS (Soil Moisture and Ocean Salinity) Mission summary |
Related Resources

Summary
Mission Capabilities
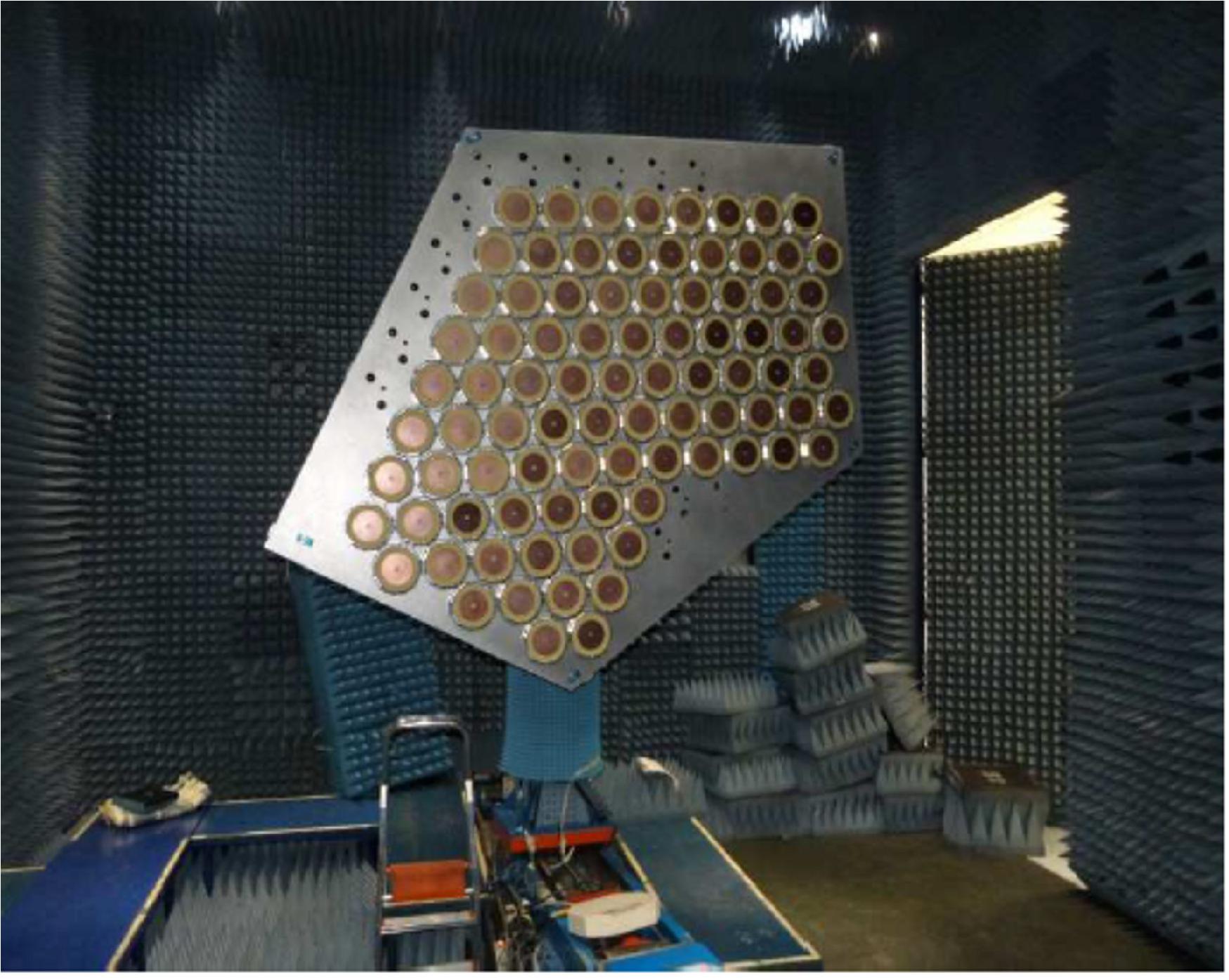
SMOS has a single instrument on board, named the Microwave Imaging Radiometer using Aperture Synthesis (MIRAS). It uses its 69 receivers to measure the phase difference of incident radiation from an area at different angles, allowing for a much more detailed image compared to that of a single receiver. Moisture and salinity decrease the emissivity of soil and seawater respectively, and thereby affect the amount of microwave radiation emitted. This information on soil moisture and ocean salinity improves both our knowledge of the water cycle and our weather forecasting ability.
Performance Specifications
MIRAS detects L-band radio waves with a frequency of 1.41 GHz and observes over a swath width of 1050 km. It has a spatial resolution of 35 - 50 km and measures soil moisture with an accuracy of 4% and ocean salinity with an accuracy of 0.5 - 1.5 practical salinity units.
MIRAS has three operational modes:
- dual-polarisation mode, in which all receivers are switched to either Horizontal (H) or Vertical (V) polarisation;
- full polarisation mode, in which segments of the array are switched according to a predefined sequence between H and V;
- and calibration mode, in which internal systems are calibrated.
The full polarisation mode has been the default operational mode since June 2010.
SMOS undertakes a sun-synchronous orbit with an altitude of 758 km and an inclination of 98.45°. It has a period of 100.1 minutes and a repeat cycle of 149 days.
Space and Hardware Components
Using a Proteus bus developed by CNES and Alcatel Alenia Space, SMOS was launched from the Plesetsk Cosmodrome in Russia aboard a Eurockot Rockot launch vehicle.
Radio communications performed for Telemetry, Tracking, and Command (TT&C) are managed by CNES via S-band radio frequencies with a downlink data rate of 722 kbit/s and an uplink rate of 4 kbit/s. Payload data acquisition is managed by CDTI via X-band at a rate of 18.4 Mbit/s.
Originally designed as a five-year mission, SMOS mission operations have been approved for extension beyond 2025.
SMOS (Soil Moisture and Ocean Salinity) Mission
Spacecraft Launch Mission Status Sensor Complement Ground Segment References
SMOS is an ESA Explorer Opportunity science mission, a technology demonstration satellite project in ESA's Living Planet Program, in cooperation with CNES (France) and CDTI (Center for Technological and Industrial Development), Madrid, Spain. 1) 2) 3) 4) 5)
Known as ESA’s ‘Water Mission’, SMOS will improve our understanding of Earth’s water cycle, providing much-needed data for modelling the weather and climate, and increasing the skill in numerical weather and climate prediction. One of the highest priorities in Earth science and environmental policy issues today is to understand the potential consequences of modification of Earth’s water cycle due to climate change. The influence of increases in atmospheric greenhouse gases and aerosols on atmospheric water vapour concentrations, clouds, precipitation patterns and water availability must be understood in order to predict the consequences for water availability for consumption and agriculture. 6)
The main science objective of the SMOS mission is to demonstrate observations of SSS (Sea Surface Salinity) over oceans and SM (Soil Moisture) over land to advance climatologic, meteorologic, hydrologic, and oceanographic applications. Soil moisture is a key variable in the hydrologic cycle. Overland, water and energy fluxes at the surface/atmosphere interface are strongly dependent upon soil moisture. SM is an important variable for numerical weather and climate models as well as in surface hydrology and in vegetation monitoring. Knowledge of the global distribution of salt in the oceans and of its annual and inter-annual variability is crucial for understanding the role of the ocean and the climate system. Ocean circulation is mainly driven by the momentum and heat fluxes through the atmosphere/ocean interface, it is dependent on water density gradients, which in turn can be traced by the observation of SSS and SST (Sea Surface Temperature). 7) 8) 9) 10) 11) 12) 13) 14) 15)
Soil moisture can be retrieved from brightness temperature observations. Due to the large dielectric contrast between dry soil and water, the soil emissivity "epsilon" at a particular microwave frequency depends upon the moisture content. At L-band in particular, the sensitivity to soil moisture is very high, whereas sensitivity to atmospheric disturbances and surface roughness is minimal. 16) 17) 18)
Parameter | Requirement | Comment |
Soil | 0.04 m3 m-3 (i.e. 4% volumetric soil moisture) or better | For bare soils, for which the influence of near-surface soil moisture on surface water fluxes is strong, it has been shown that a random error of 0.04 m3 m-3 allows a good estimation of the evaporation and soil transfer parameters. |
Spatial | < 50 km | For providing soil-moisture maps to global atmospheric models, a 50 km resolution is adequate and will allow hydrological modelling with sufficient detail for the world's largest hydrological basins. |
Revisit time | 2.5 to 3 days | A 3 to 5-day revisit cycle is sufficient to retrieve a dose-zone soil-moisture content and evapotranspiration, provided ancillary rainfall information is available. To track the quick-drying period after the rain has fallen, which is very informative about the soil's hydraulic properties, a one- or two-day revisit interval is optimal. The stipulated 2.5 to 3-day bracket will satisfy the first objective always, and the second one most of the time. |
Observation time |
| The precise time of the day is not critical for data acquisition, but the early morning (about 06:00 h) is preferable when ionospheric effects can be expected to be minimal and conditions are as close as possible to thermal equilibrium. The retrievals will then be more accurate, but dew and morning frost can sometimes affect the measurements. |
For seawater, the dielectric constant is determined by the electrical conductivity and the microwave frequency. The ocean surface emissivity is a function of the dielectric constant and the state of the surface roughness. In principle, it is possible to retrieve SSS from brightness temperature observations. -
Mission requirements call for typical values to resolve specific phenomena:
• Barrier layer effects on the tropical Pacific heat flux: accuracy of 0.2 psu (practical salinity unit), with a spatial resolution of 100 km x 100 km, and a revisit time of 30 days.
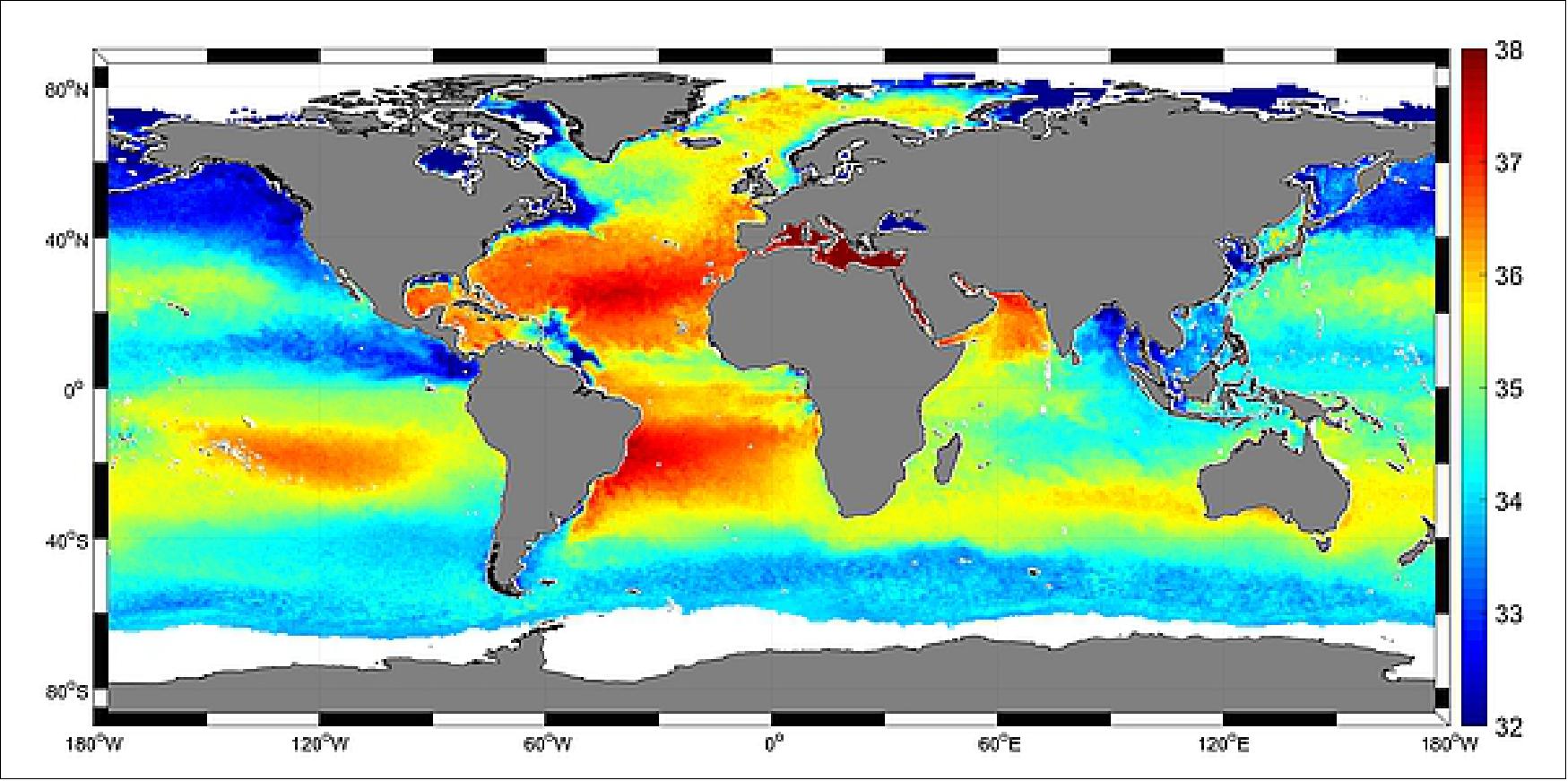
Note: SSS is defined in practical salinity units (1 psu = 0.1%) and ranges from about 32 to 37 psu. In other words, salinity describes the concentration of dissolved salts in water; the psu value expresses the conductivity ratio. The average SSS is 35 psu, which is equivalent to 35 grams of salt in 1 liter of water. The sensitivity of brightness temperature to salinity is about 0.5 K/psu at a water temperature of 20ºC, decreasing to about 0.25 K/psu at 0ºC.
Salinity links the climatic variations of the global water cycle and ocean circulation: 20)
- Salinity is required to determine seawater density, which in turn governs ocean circulation
- Salinity variations are governed by freshwater fluxes due to precipitation, evaporation, runoff and the freezing and melting of ice.
• Halosteristic adjustment of heat storage from the sea level: 0.2 psu, a spatial resolution of 200 km x 200 km, and a repeat cycle of 7 days
• North Atlantic thermohaline circulation: 0.1 psu, a spatial resolution of 100 km x 100 km, and a repeat cycle of 30 days
• Surface freshwater flux balance: 0.1 psu, a spatial resolution of 300 km x 300 km, and a revisit time of 30 days.
Background on SMOS development: Twenty-six years after the first attempt to retrieve soil moisture from space (Skylab L-band radiometer experiment in 1973, referred to as S-194) and following seven years of technology development at ESA (since 1992), the SMOS Earth Explorer Mission was selected for implementation in November 1999 by ESA's Program Board for Earth Observation (PB/EO). Since then, a successful Phase A feasibility study (2000-2001) and a Phase B (2002) for further definition and critical breadboarding have been completed (the Phase B payload design was completed in Oct. 2003). Approval for full implementation was given in Nov. 2003. The SMOS project is now well consolidated, and the payload implementation Phase C/D started in mid-2004. The CDR (Critical Design Review) of the payload took place in Nov. 2005. Delivery of the fully tested payload PFM (Proto-Flight Model) to Alcatel Cannes is scheduled for the end of 2006. 21)
In addition to SMOS, the SAC-D/Aquarius mission is currently under joint development by NASA and CONAE (Argentinian Space Agency). Aquarius will follow up the successful Skylab demonstration mission and employs a combined L-band real-aperture radiometer with an L-band scatterometer. The combined measurements will be focused on the measurement of global sea-surface salinity. A launch of SAC-D/Aquarius is scheduled for 2010. Aquarius will cover the oceans in 8 days with a spatial resolution of 100 km, though its sensitivity to salinity will be better than that of SMOS due to its different design.
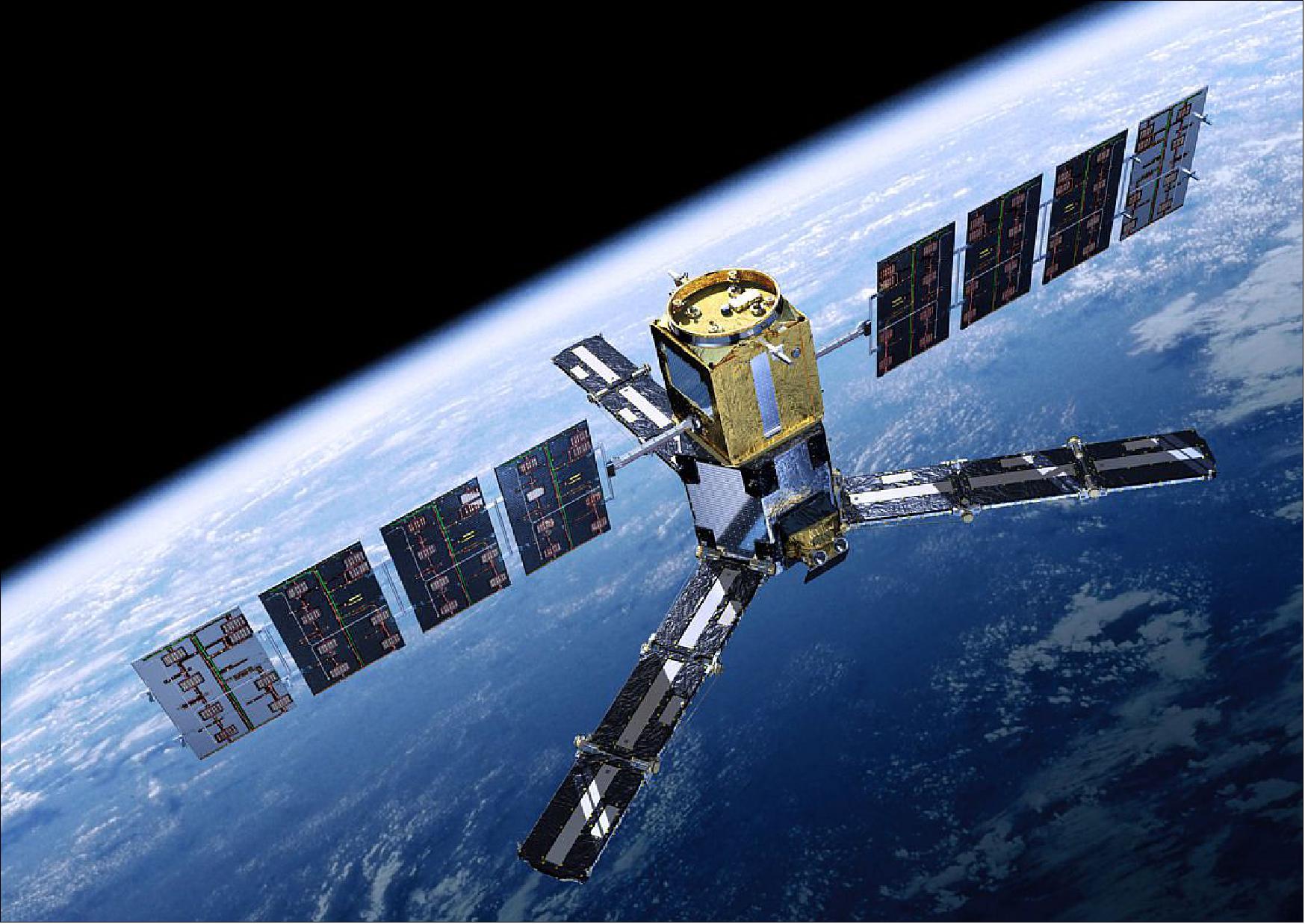
Spacecraft
The SMOS satellite uses the generic Proteus bus developed by CNES and Alcatel Alenia Space (formerly Alcatel Space Industries). This standard platform has been designed to accommodate a wide field of missions, orbits, attitudes, instruments, and launch vehicles. Proteus has simple, well-defined interfaces. The platform architecture is generic. Adaptations are limited to minor changes in software modules and the launch vehicle interface.
The S/C bus is a box, nearly 1 m per side, with all the equipment units accommodated on four lateral panels and the lower plate. The platform TCS (Thermal Control Subsystem) relies on passive radiators and active regulation with heaters. Electrical power is generated by two symmetric wing arrays with single-axis step motors. Each wing is composed of four deployable panels (1.5 m x 0.8 m) covered with silicon cells which provide 685 W orbital average after 3-year mission (EOL). The power is distributed through a single non-regulated primary electrical bus (23/36 V) using a Li-ion battery.
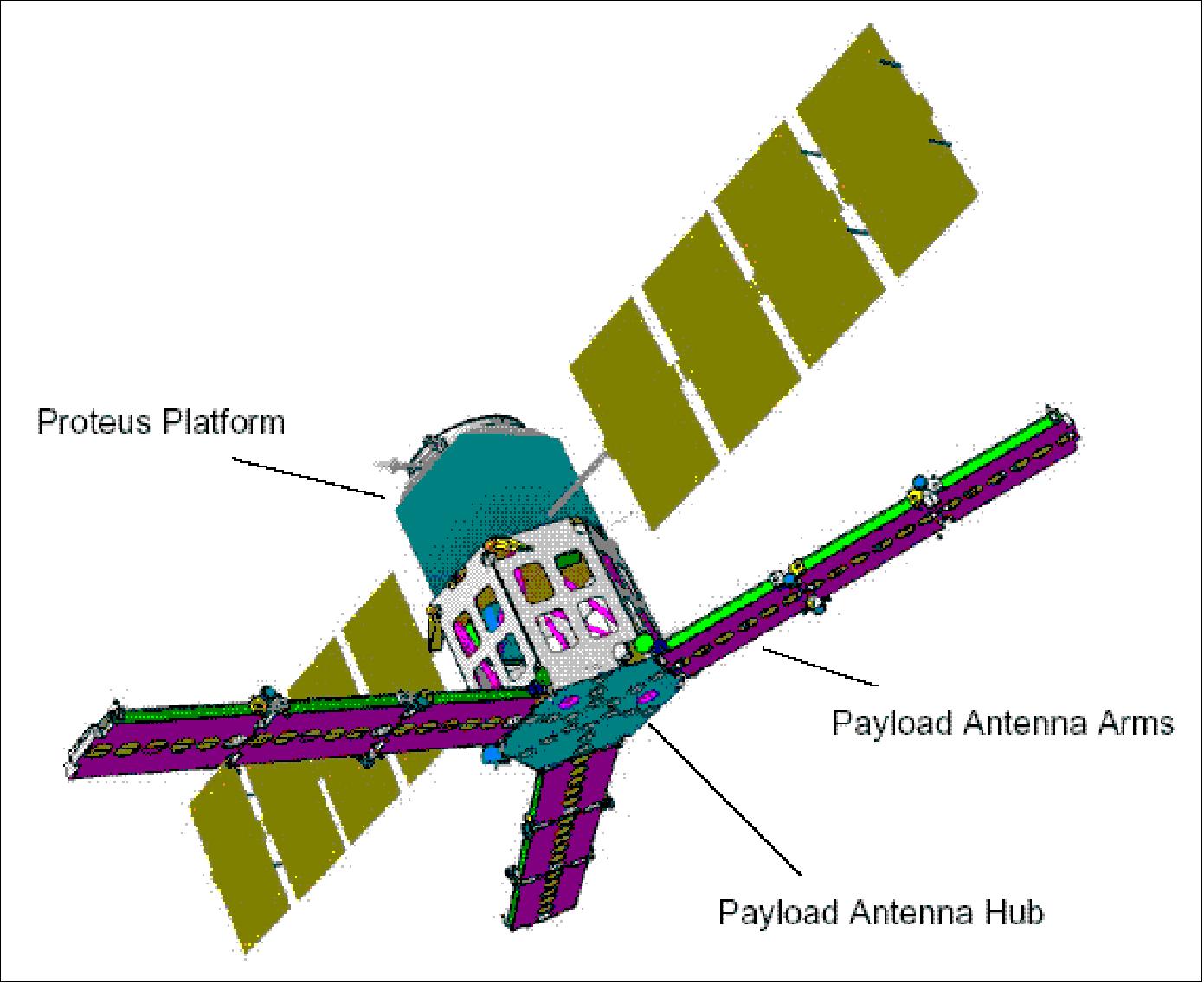
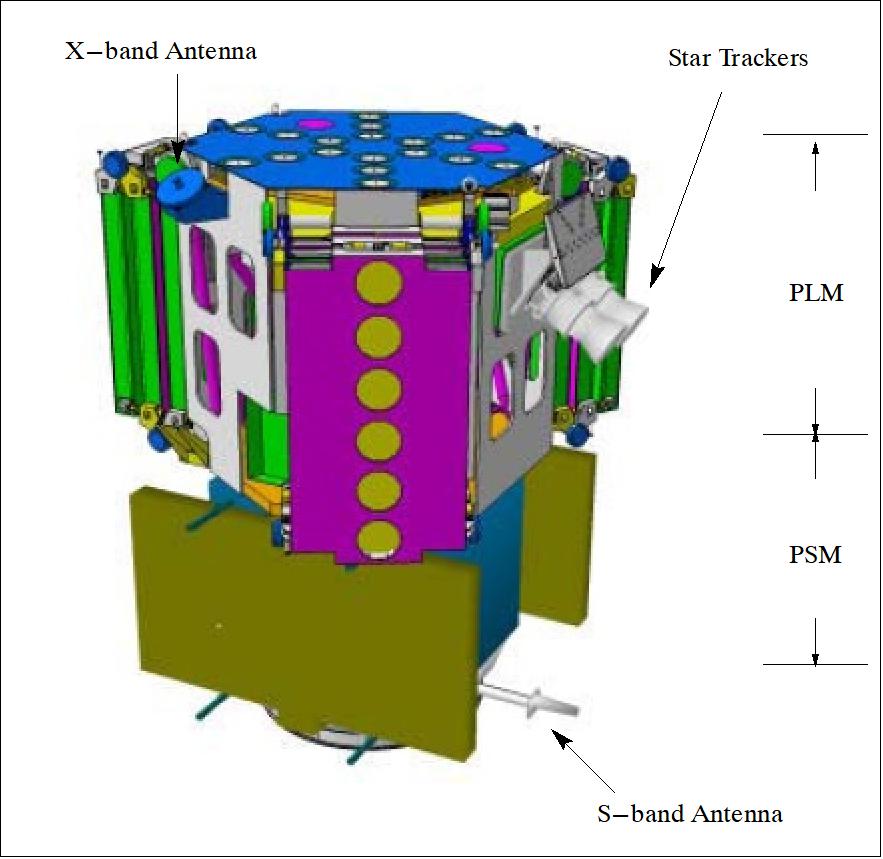
The S/C is three-axis stabilized consisting of a PSM (Proteus Service Module) and a PLM (Payload Module). Typical pointing performance of better than 0.05º (3 σ) is provided by a control system with four reaction wheels and gyro-stellar attitude determination [attitude is provided by two STA (Star Tracker Assembly)]. Coarse sun sensors (8) and two 3-axis magnetometers provide attitude measurement and magnetic torquers generate torque. In addition, two of the four reaction wheels are used to provide gyroscopic stiffness. A GPS receiver provides S/C location data for accurate orbit determinations and onboard time delivery. 22) 23)
Due to the high variety of pointings to be handled with (earth pointing, yaw steering motion, inertial pointing, etc.), the AOCS concept has been based from the beginning on a gyro stellar hybridation with reaction wheel actuators unloaded through magnetotorquer bars, while safe hold mode only relies on kinetic momentum, coarse sun sensors and magnetic sensors and actuators, without the use of the four 1N thrusters in blow down mode limited to orbit control manoeuvres. This design has a proven robust behaviour on all the LEO orbits which have been used in the realized missions.
The onboard command and data handling rely on a fully centralized architecture. The DHU (Data Handling Unit) performs most of the tasks through the central processor running the satellite software. It also supports the management of the communication links with all the satellite units either via discrete point-to-point lines or via a MIL-STD-1553B bus.
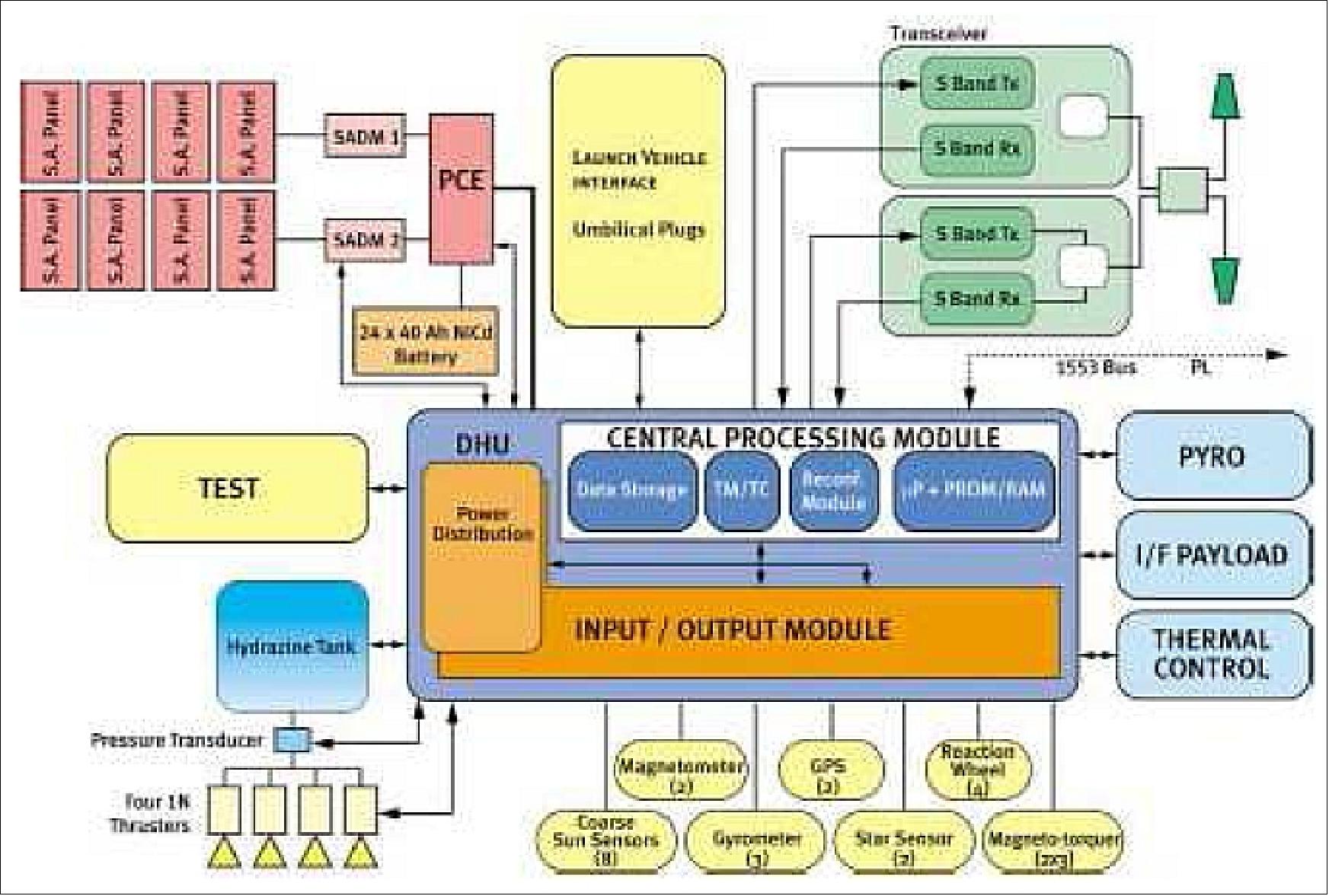
SMOS is designed to operate mostly in an autonomous mode using the FDIR (Failure Detection Isolation and Recovery) concept (this permits to reduce drastically the working hours per day from the ground).
The S/C bus is designed to operate in five distinct satellite modes:
1) normal autonomous operations mode,
2) safe hold mode,
3) star acquisition mode,
4) orbit correction mode with 2 thrusters,
5) orbit correction mode with 4 thrusters.
The SMOS spacecraft has a total mass of 658 kg (bus dry mass of 275 kg, 28 kg of hydrazine, four 1 N thrusters, payload module (PLM) of 355 kg). The design life is three years with a goal of five years.
The SMOS spacecraft features an attitude in which the boresight of the antenna is forward tilted by 32.5º with respect to nadir. This configuration enables measurements at line-of-sight angles between 0º - 50º. The satellite employs yaw steering about the local normal.
Spacecraft mass | Launch mass of 670 kg |
Spacecraft power | Up to 1065 W (511 W available for payload); 78 AH Li-ion battery |
Mission duration | Minimum of 3 years |
Spacecraft bus | Proteus platform of CNES |
Payload interface | Dedicated MIL-STD 1553 bus, 160 kbit/s + dedicated TM/TC |
Data storage | 500 Mbit bus + 2 Gbit fpr payload data at EOL (End of Life) |
Spacecraft Operations & Control Center | CNES, Toulouse, France |
Payload Mission and Data Center | ESAC, Villafranca, Spain |
RF communications | S-band for TT&C support, downlink data rate at 722 kbit/s, uplink at 4 kbit/s |
TCS (Thermal Control Subsystem): The TCS is required to maintain all the payload equipment (MIRAS) within the specified temperature range with minimum heater power consumption. The most challenging requirements in operation are relevant to the stringent temperature control of the LICEF (Lightweight Cost-Effective Front-end) receivers. The TCS is based mainly on a passive design, supported by heater systems. All six LICEF receivers in each segment and the eighteen LICEF receivers on the Hub are installed on an aluminum doubler to minimize the gradients among them. 24)
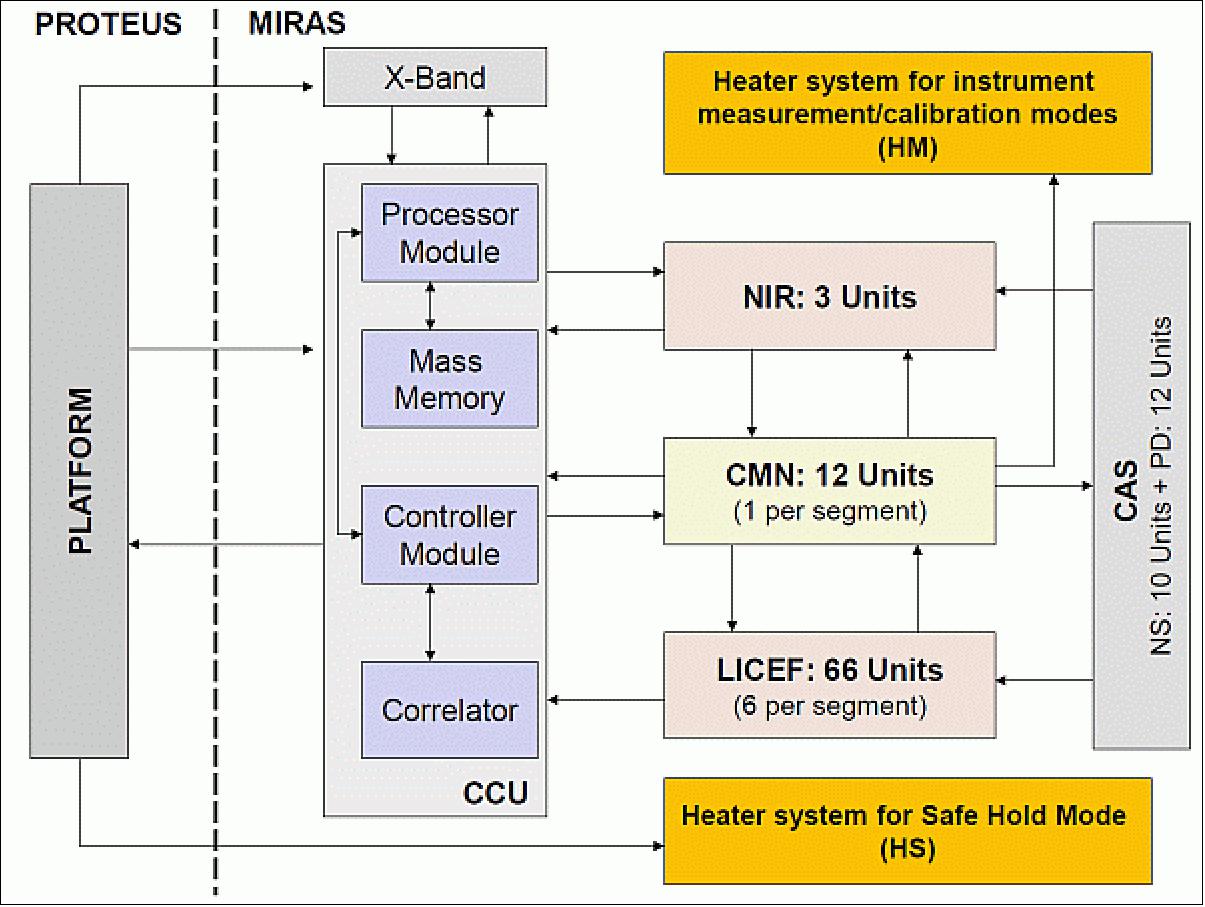
Legend to Figure 5: The TCS has two separate parts:
(1) HM used for Measurement and Calibration Modes and controlled through CCU-CMN (Correlator and Control Unit-Control and Monitoring Node) chain,
(2) HS used for SHM (Safe Hold Mode) and controlled through Proteus platform.
• Passive Thermal Control Design: The passive thermal control hardware incorporates: FSSM (Flexible Second Surface Mirror coatings) for thermal radiators, MLIs (Multi-Layer Insulation Blankets), Germanium-coated black Kapton foil, black paint, aluminized tapes/low emissivity surface treatments, thermal doublers, interface fillers and thermal washers.
• Active Thermal Control Design: The two heater systems in the payload are named HM and HS (Figure 5).
- Electrical resistance heaters (HM in Figure 5) are installed on thermal doublers, on CMN Units and on segments structure and they are powered through CMN commands. This heater system is used to control the electronic equipment temperature in the instrument measurement/calibration modes and in PLM Off modes.
- The HS heaters (Figure 5) are installed on thermal doublers, on CMNs, on CCU, on X-band transmitter, on pyro unit, and on Lower Platform Optical Splitter. The HS heaters are powered from Proteus and controlled by thermostats. This heater system is used to keep equipment temperatures above the minimum non-operational limits (–20 ºC for most of the units) during satellite SHM and PLM Off modes. The system is fully redundant.
The TCS, as well as the rest of the payload design, has a distributed architecture. The central computer of the payload controls in closed loop remotely distributed units (12 in total) named CMN (Control and Monitoring Node) units. Each CMN unit acquires the telemetry of the temperature sensors (6 per heater line) for the heater control lines distributed in the Arms and in the Hub. The TCS is enabled during all payload operational modes including measurement and calibration.
Launch: The SMOS spacecraft was launched on November 2, 2009, on a Rockot launch vehicle (the 3rd stage of Rockot is Breeze-KM) of ELS (Eurockot Launch Services) from the Plesetsk Cosmodrome, Russia. The first burn of Breeze-KM is to acquire an elliptical transfer orbit. The second burn serves to circularize the orbit to its nominal parameters. A secondary payload on this flight is the PROBA-2 spacecraft of ESA. 25) 26) 27)
Some 70 minutes after launch, SMOS successfully separated from Rockot’s Breeze-KM upper stage. Shortly thereafter, the satellite’s initial telemetry was acquired by the Hartebeesthoek ground station, near Johannesburg, South Africa. The upper stage then performed additional maneuvers to arrive at a slightly lower orbit and PROBA-2 was released too, some 3 hours into the flight.
Note: The SMOS satellite has been in storage at Thales Alenia Space's facilities in Cannes, France since May 2008 awaiting a third stage of the Rockot launcher to be assigned to the mission and a slot given for launch from the Russian Plesetsk Cosmodrome. SMOS is the second of ESA's Earth Explorer missions to launch after the GOCE (Gravity field and steady-state Ocean Circulation Explorer), which was launched on March 17, 2009.
Orbit: Sun-synchronous polar orbit, mean altitude = 758 km, inclination = 98.45º, local equator crossing time at 6:00 AM on ascending node maintained within ±15 minutes, period of 100 minutes. The repeat cycle is 149 days. 28)
RF communications: An onboard solid-state recorder has a capacity of 3 Gbit for payload and TT&C data. Standard TT&C S-band communications are used (the downlink data rate is 722.116 kbit/s with QPSK modulation; the uplink has a data rate of 4 kbit/s). The CCSDS protocol is used for TT&C support. - The TT&C station is located in Kiruna (Sweden), operated by CNES (mission operations at CNES). Science data acquisition is in X-band at a data rate of 18.4 Mbit/s, and the ground station is located at Villafranca, Spain.

Mission Status
• June 10, 2021: Forest degradation has become the largest process driving carbon loss in the Brazilian Amazon, according to a recent study using ESA satellite data. 29)
- While both deforestation and forest degradation are damaging to forest health, there is a difference between the two. Deforestation occurs when forests are cleared and converted completely. When forests are degraded, their health declines and they lose their capacity to support wildlife and people.
- Forests play a crucial role in Earth’s carbon cycle by absorbing and storing large amounts of carbon from the atmosphere, keeping our planet cool. However, forest degradation and deforestation, particularly in tropical regions, are causing much of this stored carbon to be released back into the atmosphere, exacerbating climate change.
- A recent study, published in Nature Climate Change, investigated the dynamics of forest carbon in the Brazilian Amazon from 2010–2019. The authors estimated that the Brazilian Amazon experienced a cumulative gross loss of 4.45 Pg C against a gross gain of 3.78 Pg C – resulting in a net loss of 0.67 Pg C of above-ground biomass over the last decade. 30)
- According to co-author Philippe Ciais, “This net loss of carbon from the Brazilian Amazon forest is equivalent to seven years of fossil carbon dioxide emissions by the UK.” Philippe Ciais is also the science leader for the Regional Carbon Cycle Assessment and Processes project, as part of ESA’s Climate Change Initiative.
- He adds, “The study shows that climate spells, like the severe El Niño of 2015, which resulted in extensive drought and heat over the Amazon, switched the carbon balance of intact forests from a sink to a large source of carbon dioxide, and so can amplify global warming.”
- The authors of the study used all-weather microwave data from ESA’s Soil Moisture and Ocean Salinity (SMOS) mission, specifically the vegetation optical depth dataset designed by INRAE Bordeaux, along with forest area change datasets from NASA’s Moderate Resolution Imaging Spectroradiometer and JAXA’s Phased Array type L-band Synthetic Aperture Radar.
Forest Degradation – More Important than Thought
- Over the past half-century, terrestrial ecosystems have absorbed a third of year-on-year carbon dioxide emissions, despite emissions almost doubling over the same period. Tropical rainforests, including the Amazon, contributed significantly to this process as a particularly efficient carbon sink.
- Professor Ciais points out that the study shows that human activities that ‘nibble away’ at forest carbon stocks by degradation induced by fires, logging and landscape fragmentation, contribute three times more to gross carbon loss from above-ground biomass compared to deforestation.
- He says, “Forest degradation is difficult to measure directly using optical satellite data because it often occurs at very small scales, for instance only the largest trees are removed by selective logging. The advantage of using the SMOS microwave data is that despite their coarse resolution, they capture the net biomass loss from all processes in a given region.”
- According to the study authors, reducing forest degradation must be a policy priority in the Brazilian Amazon to reach the requirement of Reducing Emissions from Deforestation and Forest Degradation (REDD+) and the carbon emission reduction commitment of the 2015 Paris Agreement.
- Given the importance of measuring biomass, ESA’s Climate Change Initiative has recently released a series of maps that provide a global view of above-ground biomass. These maps are pertinent in helping to support forest management, emissions reduction and sustainable development policy goals.
- The maps are derived from a combination of data, depending on the year, from the Copernicus Sentinel-1 mission, Envisat’s ASAR instrument and JAXA’s Advanced Land Observing Satellite (ALOS-1 and ALOS-2), along with additional information from Earth observation sources.

![Figure 9: This map shows cumulative forest loss from 2001 to 2020 in the Amazon basin. Forest loss in this dataset is defined as a ‘stand-replacement disturbance’, or a change from a forest to non-forest state for every pixel of the dataset. The forest loss data, from the University of Maryland, has been overlaid onto the 2018 above ground biomass dataset, generated by ESA’s Climate Change Initiative (image credit: ESA [data sources: CCI Biomass project and Hansen/UMD/Google/USGS/NASA)]](https://eoportal.org/ftp/satellite-missions/s/SMOS-110621/SMOS_Auto50.jpeg)
Looking to the Future
- ESA’s upcoming Biomass mission will provide crucial information about the state of our forests and how they are changing. From over 650 km above, the Biomass satellite will be able to ‘see’ through the leafy forest canopy to return information about the forest structure that can be used to calculate forest height and biomass.
- The mission will take forest counting to a new level by using a type of instrument that has never been flown in space before: a ‘P-band’ synthetic aperture radar – the longest radar wavelength available to Earth observation.
- Information from the Biomass mission will lead to a better understanding of the state of Earth’s forests, how they are changing over time, and advance our knowledge of the carbon cycle.
• May 5, 2021: The MIRAS (Microwave Imaging Radiometer using Aperture Synthesis) instrument is a passive microwave 2-D interferometric radiometer (L-Band, 1.4 GHz, 21 cm) onboard the SMOS satellite. It picks up faint microwave emissions from Earth's surface to map levels of soil moisture, sea surface salinity, sea ice thickness and other geophysical variables such as wind speed over the ocean and freeze/ thaw soil state. It remains the first, and so far the only, one of its kind in space. The main feature of MIRAS is that it obtains two-dimensional images at every snapshot without needing any mechanical scanning of its antenna, distinct from traditional scanners or push-broom radiometers. But, different error sources cause different effects on the SMOS brightness temperature images. Bias and ripples appear in images acquired over any region of the Earth, be it land, ice or coastlines. The bias is interpreted as a spatial ripple of an infinite spatial wavelength, the cause and existence of which was already studied before SMOS launch. 31)
- Further investigations conducted since the spatial ripple was previously analyzed, along with SMOS's full data record, has allowed a better understanding of the ripple's origins. A new activity with TDE and Airbus, Spain, has demonstrated, using measurements performed with real hardware, that an interferometer could be built with a significantly lower spatial ripple, which is important for future radiometer missions using aperture synthesis and will improve the image quality of any follow on SMOS missions.
- The activity demonstrated experimentally that a two-dimensional radiometer such as MIRAS, i.e. with a hexagonal geometry, can be built having one order of magnitude lower noise floor by both reducing the element spacing of SMOS and surrounding every active antenna element by ‘dummy’ elements.
- While adding three rows of dummy antenna elements adjacent to the active elements improved the similarity and still resulted in a hexagonal symmetry of the patterns, adding a fourth row shows no further improvement in terms of symmetry.
• March 24, 2021: For well over a decade, ESA’s SMOS satellite has been delivering a wealth of data to map moisture in soil and salt in the surface waters of the oceans for a better understanding of the processes driving the water cycle. While addressing key scientific questions, this exceptional Earth Explorer has repeatedly surpassed expectations by returning a wide range of unexpected results, often leading to practical applications that improve everyday life. Adding to SMOS’ list of talents, new findings show that what was considered noise in the mission’s data can actually be used to monitor solar activity and space weather, which can damage communication and navigation systems. 32)
- The SMOS satellite carries a novel interferometric radiometer that operates at a frequency of 1.4 GHz in the L-band microwave range of the electromagnetic spectrum to capture ‘brightness temperature’ images. These images correspond to radiation emitted from Earth’s surface, which scientists then use to derive information on soil moisture and ocean salinity.
- However, because of the wide field of view of SMOS’ antenna, it doesn’t just capture signals emitted from Earth’s surface, but also signals from the Sun – which creates noise in the brightness temperature images. Therefore, as a matter of course, a specific algorithm is used during the imaging processing procedure to remove this noise so that the data is fit for purpose.
- Scientists started to wonder if these Sun signals could contribute to monitoring solar activity.
- We think of the Sun as providing the light and warmth to sustain life, but it also bombards us with dangerous charged particles in the solar wind and radiation. Changes in the light coming from the Sun, known as solar flares, or in the solar wind, which carries coronal mass ejections, are referred to as space weather.
- These flares or mass ejections can damage communication networks, navigation systems such as GPS, and other satellites. Severe solar storms can even cause power outages on Earth. Understanding and monitoring space weather is, therefore, important for early warnings and taking precautionary measures.
- Manuel Flores-Soriano, from the University of Alcalá in Spain, said, “We found that SMOS can detect solar radio bursts and even weaker variations in emissions from the Sun, such as the 11-year solar cycle.
- “Solar radio bursts detected by SMOS brightness temperature signals from the Sun are generally observed during flares that are associated with coronal mass ejections. We have also found a correlation between the amount of solar flux released at 1.4 GHz and the speed, angular width and kinetic energy of coronal mass ejections.”
- These new results published in Space Weather describe how SMOS has the unique ability to observe the Sun continually with full polarimetry – making it a promising instrument for monitoring solar interference affecting Global Navigation Satellite Systems such as GPS and Galileo, radar and wireless communications, and for early warnings of solar coronal mass ejections. 33)
- Raffaele Crapolicchio, who works in the SMOS mission team at ESA, noted, “It is very exciting to see how an idea I initially proposed at the European Space Weather Week back in 2015 has turned into these fruitful results.”
- ESA’s Diego Fernandez added, “This research carried out though our Science for Society program is further proof of how versatile the SMOS mission is and how we push the limits of our missions well beyond their main scientific objectives. Here we see a mission designed to observe our planet is also able to observe solar activity. More work will now be needed to build upon these initial results and create a dedicated retrieval algorithm for the L-band Sun signal and to generate products for solar observations.”
• June 23. 2020: In orbit for more than a decade, ESA’s Earth Explorer satellite SMOS has not only exceeded its planned lifespan but also surpassed its original scientific goals. Built to demonstrate new technology in space and address gaps in our scientific understanding of how Earth works as a system, this remarkable mission is now also being used for a number of practical applications. With drought seemingly more commonplace, entrepreneurs are using the information on soil moisture from SMOS and data from other satellites to generate commercial data products for the insurance market, ultimately bringing benefits to farmers. 34)
• May 18, 2020: The prolonged period of dry weather in the Czech Republic has resulted in what experts are calling the ‘worst drought in 500 years.’ Scientists are using ESA satellite data to monitor the drought that’s gripped the country. 35)
- Recent maps, produced by the Dutch company VanderSat (Haarlem, The Netherlands), show the extent of the recent drought in the Czech Republic. The maps show drier-than-usual soil moisture conditions from 10 April to 10 May 2020, compared to the average observations over the same period over the past six years (2015-2020).
- Some areas display a 30% difference compared to the average, with the Olomouc and Ústí regions appearing to be the most affected.
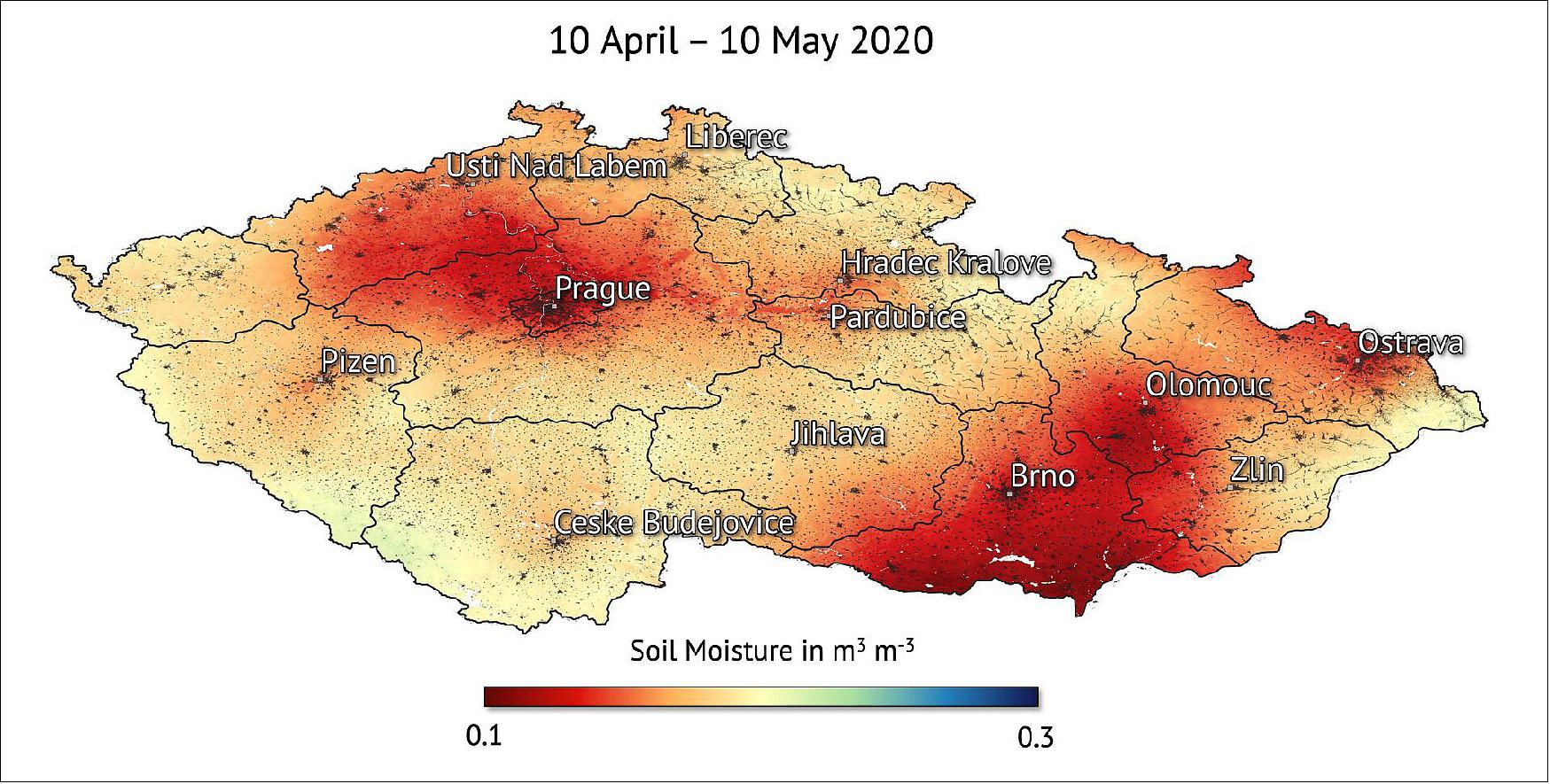
- Richard de Jeu, from VanderSat, comments, “When compared to the average, or what we consider ‘normal’ conditions, a 30% difference in spring can be considered catastrophic for agriculture and nature if this drought persists throughout the summer.”
- Droughts are major natural hazards and have wide-reaching economic, social and environmental impacts. Globally, severe droughts are considered the number one threat to farmers – regularly endangering crop yield and business for farmers.
- Climate change is exacerbating drought in many parts of the world – increasing its frequency, severity and duration. With 2020 expected to be one of the hottest years on record, drought monitoring is crucial.
- VanderSat uses data from ESA’s SMOS satellite and the EU’s Copernicus Sentinel missions, combined with data from NASA and the Japanese space agency JAXA missions, to measure soil moisture across the globe. These data can help farmers to insure and protect themselves against the impact of agricultural drought for specific regions of interest.
- Richard continues, “Satellite soil moisture data serves as a crucial layer for agricultural drought insurance across the globe and is heavily used to support agricultural practices. It is thanks to data from ESA’s SMOS satellite and the Copernicus Sentinels missions that make our soil moisture service possible.”
- Klaus Scipal, ESA’s SMOS Mission Manager, says, “It is impressive to see that even after 10 years of operations, SMOS is still in a very healthy condition and it keeps on delivering high-quality data to support sectors like the agribusiness and many others. SMOS delivers 96% of its data in less than three hours of sensing, which allows companies like Vandersat to make their observations instantly available to the agribusiness sector.”
- Launched in 2009, SMOS is one of ESA’s Earth Explorer missions that form the science and research element of the Living Planet Program. The SMOS satellite carries a novel interferometric radiometer that captures ‘brightness temperature’ images. These images are used to derive global maps of soil moisture every three days, achieving an accuracy of 4% at a spatial resolution of about 50 km – comparable to detecting one teaspoon of water mixed into a handful of soil.
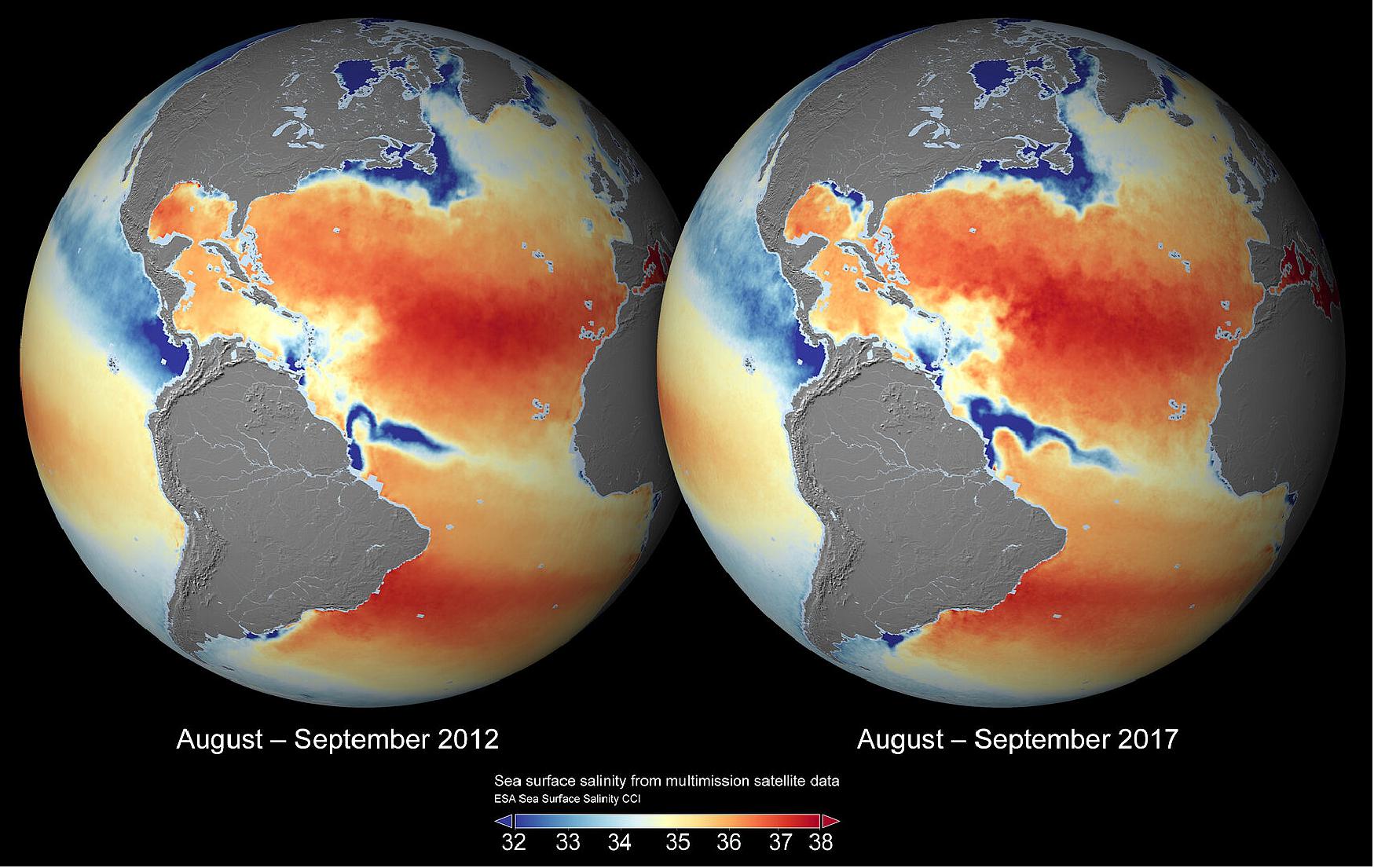
• November 30, 2019: Since the saltiness of ocean surface waters is a key variable in the climate system, understanding how this change is important to understanding climate change. Thanks to ESA’s Climate Change Initiative, scientists now have better insight into sea-surface salinity with the most complete global dataset ever produced from space. 36)
- If you’re a keen sea swimmer, you may have noticed that the water can be saltier in some places than others. This is because the saltiness of the water depends on nearby additions of freshwater from rivers, rain, glaciers or ice sheets, or on the removal of water by evaporation.
- The salinity of the ocean surface can be monitored from space using satellites to give a global view of the variable patterns of sea-surface salinity across the oceans.
- Unusual salinity levels may indicate the onset of extreme climate events, such as El Niño. Global maps of sea-surface salinity are particularly helpful for studying the water cycle, ocean-atmosphere exchanges and ocean circulation, which are all vital components of the climate system transporting heat, momentum, carbon and nutrients around the globe.
- A new and ongoing project for ESA’s Climate Change Initiative (CCI) – a research program dedicated to generating accurate and long-term datasets for 21 Essential Climate Variables, required by the United Nations Framework Convention on Climate Change and the Intergovernmental Panel on Climate Change – has generated the most complete global dataset of sea-surface salinity from space to date.
- “The project aims to make a significant improvement to the quality and length of the datasets available for monitoring sea-surface salinity across the globe,” says Susanne Mecklenburg, head of ESA’s Climate Office. “We are keen to see this new dataset used and tested in a variety of applications, particularly to improve our understanding of the fundamental role that oceans have in climate.”
- The research team, led by Jacqueline Boutin of LOCEAN and Nicolas Reul of IFREMER, has merged data from three satellite missions to create a global timeseries that spans nine years, with maps produced every week and every month at a spatial resolution of 50 km.
- They used observations of brightness temperature to derive sea-surface salinity from microwave sensors onboard the SMOS, Aquarius, and Soil Moisture Active Passive satellite missions.
- Dr Boutin said, “By combining and comparing measurements between the different sensors, the team has been able to improve the precision of maps of sea-surface salinity by roughly 30%.”
- Salinity measurements taken since the 1950s indicate that globally, the more saline areas of the ocean are becoming saltier, and the freshwater areas are becoming fresher. The data for this, however, are relatively coarse, taken by ships.
- It is only since the beginning of the 21st century that ocean floats called Argo have been installed, on average every 300 km, to provide subsurface salinity vertical profiles between approximately 5 m and 2000 m depth at 10-day intervals.
- “Monitoring salinity from space helps to resolve spatial and temporal scales that are poorly sampled by in situ platforms that make direct observations, and fills gaps in the observing system,” says Dr Boutin.
- Ocean–atmosphere exchanges are driven by winds around the globe, as well as by exchanges between the surface and subsurface ocean owing to changes in the density of the water itself. Water density depends on both temperature and salinity. Warm water is less dense than cold water, but salty water is denser than freshwater. At depth, ocean circulation is powered by differences in density between masses of water.
- Studying the global changes in salinity at the ocean surface can help climate scientists to model exchanges between the atmosphere and the ocean surface and between the ocean surface and the deeper ocean layers and predict change. Regional changes in salinity are linked to periodic inter-annual climate events such as El Niño. Salinity is also implicated in the intensification of the global water cycle.
- To demonstrate the benefits of the new dataset, ESA’s CCI Sea Surface Salinity project is carrying out a number of climate studies. These are focused on an improved understanding of the water cycle in the Bay of Bengal, an area prone to severe tropical cyclones, and in the Gulf of Guinea; on understanding the role of salinity on the stratification of the upper layer of the ocean and its effect on the air-sea exchanges; and on a climate variability reconstruction in the Atlantic that encompasses the recently-observed North Atlantic salinity anomaly.
- The team is currently working with climate scientists to compare the new dataset with in situ observations from Argo floats and ships, and with the output from models.
- The dataset is freely available for download from the CCI Open Data Portal.
• November 28, 2019: This week, the UN World Meteorological Organization announced that concentrations of greenhouse gases in the atmosphere have reached yet another high. This ongoing trend is not only heating up the planet but also affecting the chemical composition of our oceans. Until recently, it has been difficult to monitor ‘ocean acidification’, but scientists are exploring new ways to combine information from different sources, including from ESA’s SMOS mission, to shed new light on this major environmental concern. 37)
- As the amount of atmospheric carbon dioxide continues to rise, our oceans are playing an increasingly important role in absorbing some of this excess. In fact, it was reported recently that the global ocean annually draws down about a third of the carbon released into the atmosphere by human activities.
- While this long-term absorption means that the planet isn’t as hot as it would be otherwise, the process is causing the ocean’s carbonate chemistry to change: seawater is becoming less alkaline – a process is commonly known as ocean acidification.
- In turn, this is altering bio-geo-chemical cycles and having a detrimental effect on ocean life.

- With the damaging effects of ocean acidification already becoming evident, it is vital that the current shift in pH is monitored closely. Covering over 70% of Earth’s surface, ocean well-being also has a bearing on the health and balance of the rest of the planet.
- Recent advances in data capture have included state-of-the-art pH instruments on ships and floats, but we can gain a global view by taking measurements from space. However, at present,x there aren’t any spaceborne sensors that can measure pH directly.
- The use of satellites has not yet been thoroughly explored as an option for routinely observing ocean surface chemistry, but a paper published recently in Remote Sensing of Environment describes how scientists are testing new ways of merging different datasets to estimate and ultimately monitor ocean acidification.
- The animation of Figure 17 illustrates how marine chemistry can be studied using four parameters: partial pressure of carbon dioxide in the water, dissolved inorganic carbon, alkalinity and pH. Any two of these parameters, along with measurements of salinity and temperature, allow us to understand the complete carbon chemistry of the ocean.
- ESA’s SMOS mission and NASA’s Aquarius mission, which both provide information on ocean salinity, have been key to the research. The work was made possible through access to thousands of collated and quality-controlled measurements collected by the international community from ships and research campaigns.
- Lead author, Peter Land, from the Plymouth Marine Laboratory, UK, said, “The advent of salinity measurements from space, pioneered by SMOS, has opened up the exciting possibility of continuously monitoring the ocean carbonate chemistry, identifying areas most at risk, and helping us to understand this threat to our oceans.”
- Jamie Shutler, from the University of Exeter, UK, added, “We were able to carry out this research through ESA’s Earth Observation Science for Society program. We hope that the view from space can be used to help understand how ocean acidification is likely affecting our fisheries and marine ecosystems, on which we rely for food, health and tourism.”
- This work is now being continued within the ESA's Ocean SODA (Satellite Oceanographic Datasets for Acidification) project as part of the ESA Ocean Science Cluster.
• November 4, 2019: As ESA’s SMOS satellite celebrates 10 years in orbit, yet another result has been added to its list of successes. This remarkable satellite mission has shown that it can be used to measure how the temperature of the Antarctic ice sheet changes with depth – and it’s much warmer deep down. 38)
- The Antarctic ice sheet is, on average, about 2 km thick, but in some places, the bedrock is almost 5 km below the surface of this huge polar ice cap.
- Most of us would probably think that the temperature of ice, no matter how thick, remains pretty much the same throughout: basically very cold.
- However, although the surface of the ice sheet is cold, the temperature increases with depth primarily because of the basal geothermal heating from beneath Earth’s crust. In places, it is warm enough to melt the ice, which accounts for the presence of lakes and a vast hydrological network at the bedrock.
- Nevertheless, there is little accurate information on exactly how temperature varies with depth other than from ice core borehole locations.
- Since the massive white ice sheets that blanket Antarctica and Greenland reflect incident solar radiation back out into space, they are extremely important regulators in the climate system and, therefore, play a key role in the health of our planet.
- But, ice sheets are also victims of climate change. For example, this year scientists discovered that warming ocean waters have caused the ice to thin so rapidly that a quarter of the glacier ice in West Antarctica is now unstable.
- With melting ice sheets largely responsible for rising sea levels, which, in turn, threaten hundreds of millions of people around the world, it is vital that more is understood about how temperature influences ice-sheet dynamics.
- Satellite data are used, in particular, to measure changes in the height of ice sheets and consequently their ‘mass balance’, where the ice sheet ends and the floating ice shelves begin – their grounding lines, their surface temperature and how fast ice streams flow.
- However, the temperature is one of the things that determines ice viscosity and how ice flows and slides over the bedrock beneath. In turn, ice flow affects the temperature profile through strain heating – so it’s a complicated process.
- Temperature information is also fundamental for understanding the presence of aquifers inside or at the bottom part of ice sheets. This can be relevant for indicating the presence of sub-glacial lakes, for example, which, in turn, influence ice-sheet dynamics.
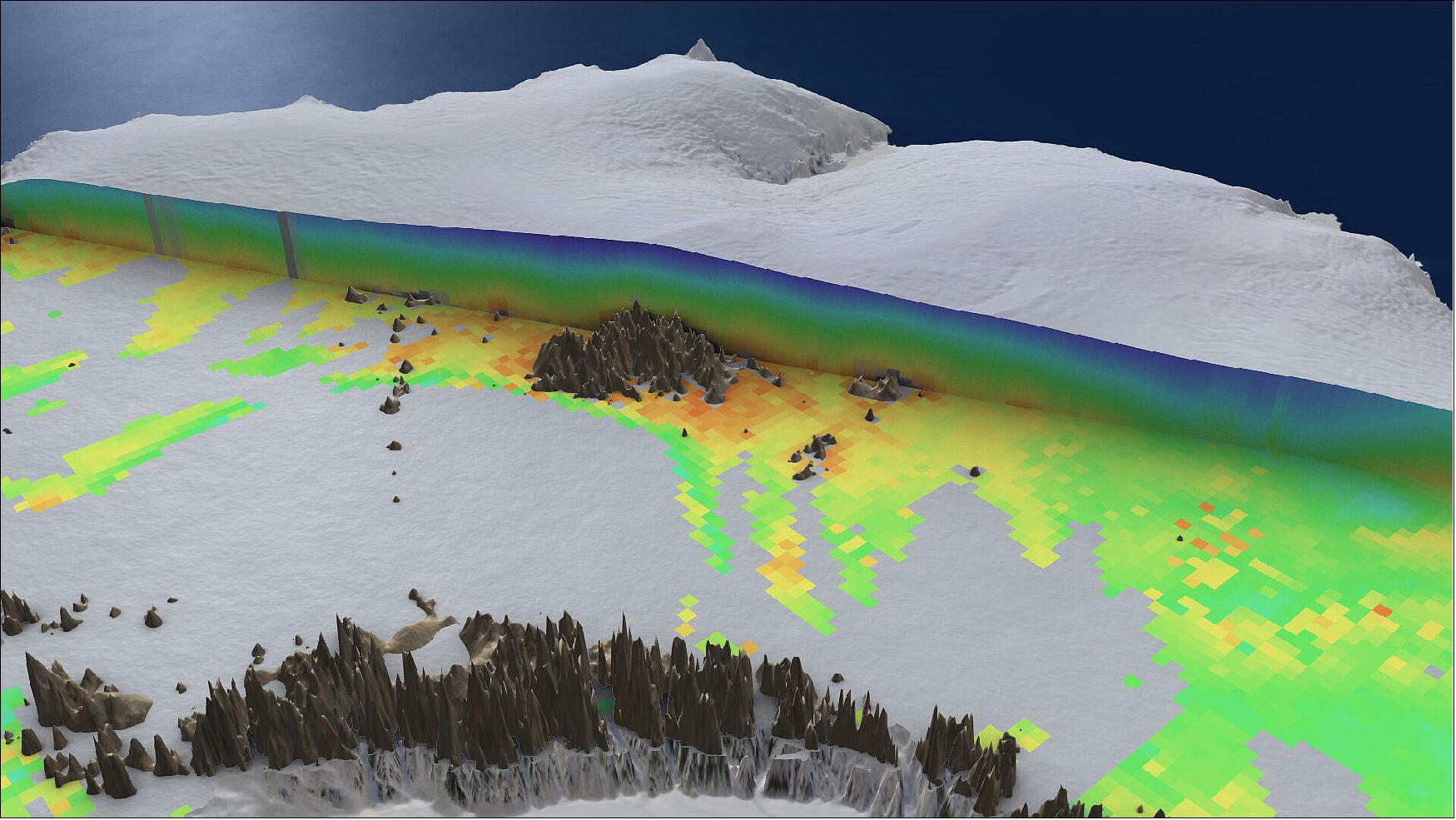
- How temperature varies according to the depth of the ice is not something that could be measured from space until now – but according to a paper published recently in Science Direct, SMOS is opening up new opportunities to do so. 39)
- Giovanni Macelloni from the Institute of Applied Physics ‘Nello Carrara’ of the National Research Council (IFAC-CNR) in Italy, said, “We typically get ice-sheet temperature profiles from models, or from in situ measurements taken in boreholes – but these are obviously fairly sparse.”
- Information on temperature from space has, so far, been limited to the surface or just below the surface from thermal-infrared sensors and microwave sensors.
- The researchers from IFAC-CNR and the Institute of Environmental Geosciences in France, therefore used ESA’s SMOS satellite to see if there is a way of gaining this information rather than relying on models and boreholes.
- “We combined SMOS’ L-band passive microwave observations over Antarctica with glaciological and emission models to infer information on glaciological properties of the ice sheet at various depths, including temperature,” continued Dr Macelloni.
- “With temperature playing such an important role in ice-sheet dynamics, we are happy to say that our research, when compared with models, shows a better estimation of temperature increase with depth, with the largest differences close to the bedrock. -SMOS is clearly opening up more possibilities that we ever thought when it was launched 10 years ago.”
• October 31, 2019: SMOS has been in orbit for a decade. This remarkable satellite has not only exceeded its planned life in orbit, but also surpassed its original scientific goals. It was designed to deliver data on soil moisture and ocean salinity which are both crucial components of Earth’s water cycle. By consistently mapping these variables, SMOS is not only advancing our understanding of the water cycle and the exchange processes between Earth’s surface and the atmosphere but is also helping to improve weather forecasts and contributing to climate research as well as contributing to a growing number of practical everyday applications. 40)
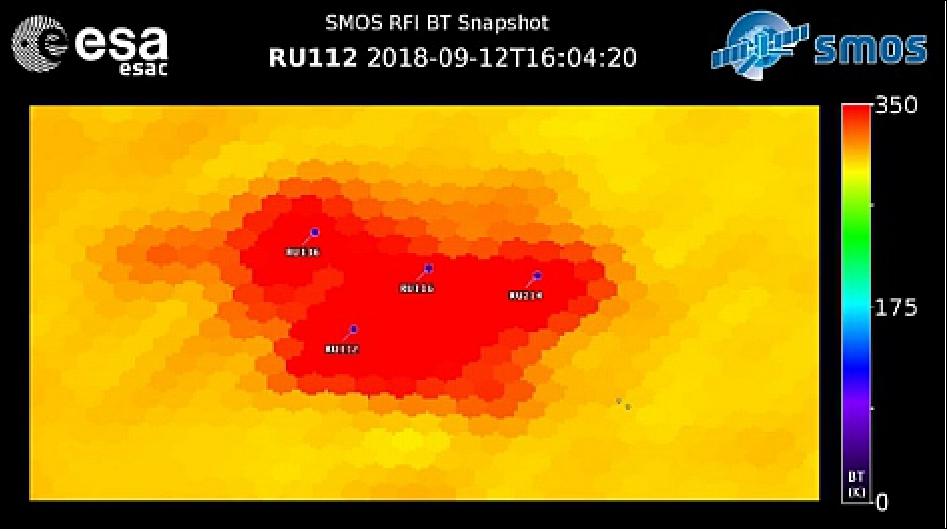
• August 2019: The SMOS satellite was launched on 2 November 2009, and it is the ESA's second Earth Explorer Opportunity mission. After almost 10 years of successful Operations, the status of the SMOS mission is excellent. However, SMOS observations are significantly affected by RF interference (RFI) in several world areas. 41)
- Since the first SMOS mission observations, its radiometer in the passive band 1400-1427 MHz detected RFI sources. Any emission in this band is prohibited by ITU Radio Regulations (RR No.5340). To successfully accomplish the decrease in the global number of interfering sources, two parties are required: SMOS RFI team – to detect, monitor and report the cases of harmful interference – and national regulatory authorities – to investigate and take remedial actions to solve the RFI case (i.e. remove unauthorized devices, fix malfunctioning equipment or optimize operational settings). Some examples of devices causing interference are presented in this paper, showing the impact on the SMOS science data according to the topology of the interfering device.
Worldwide RFI Status
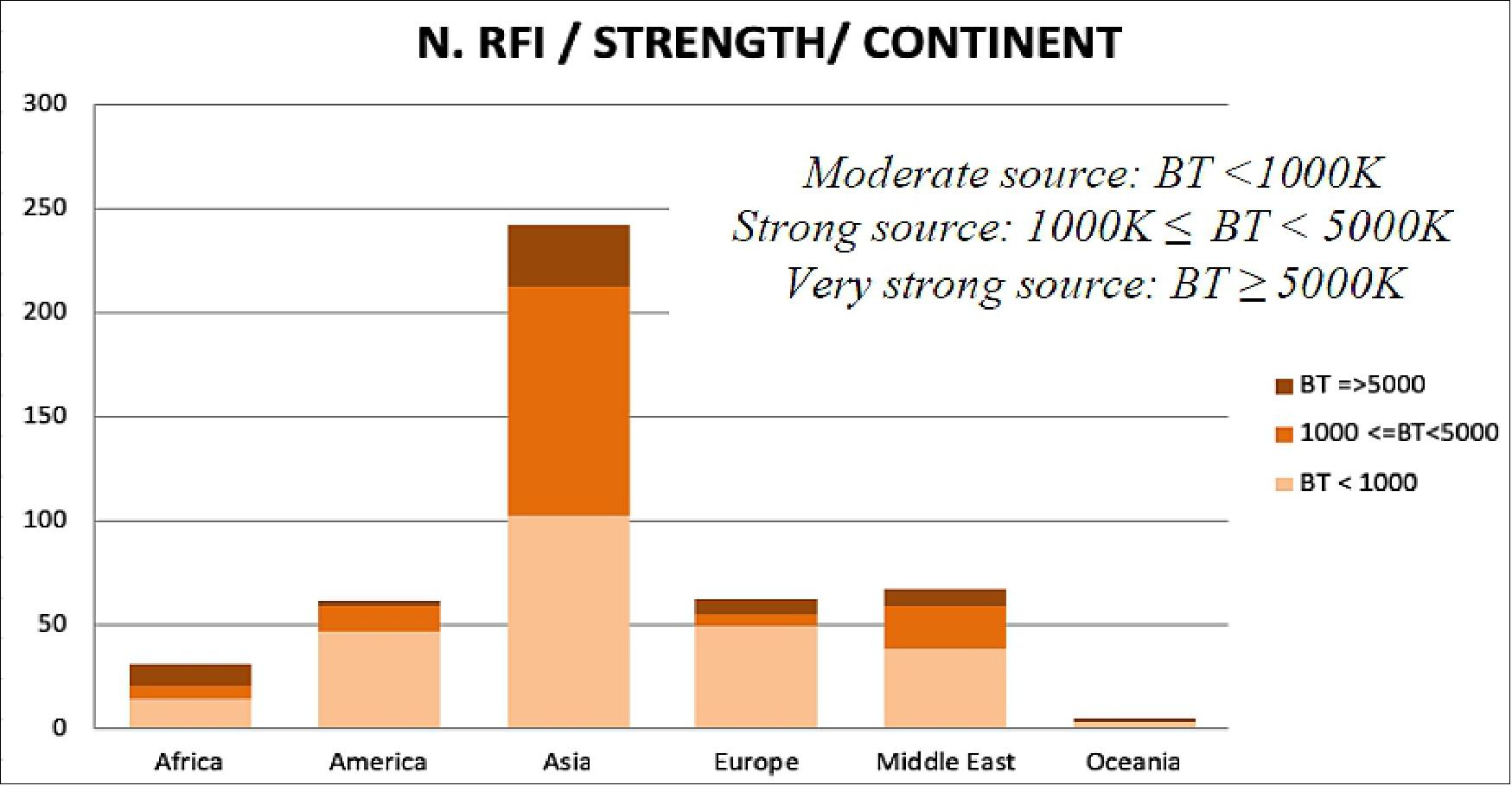
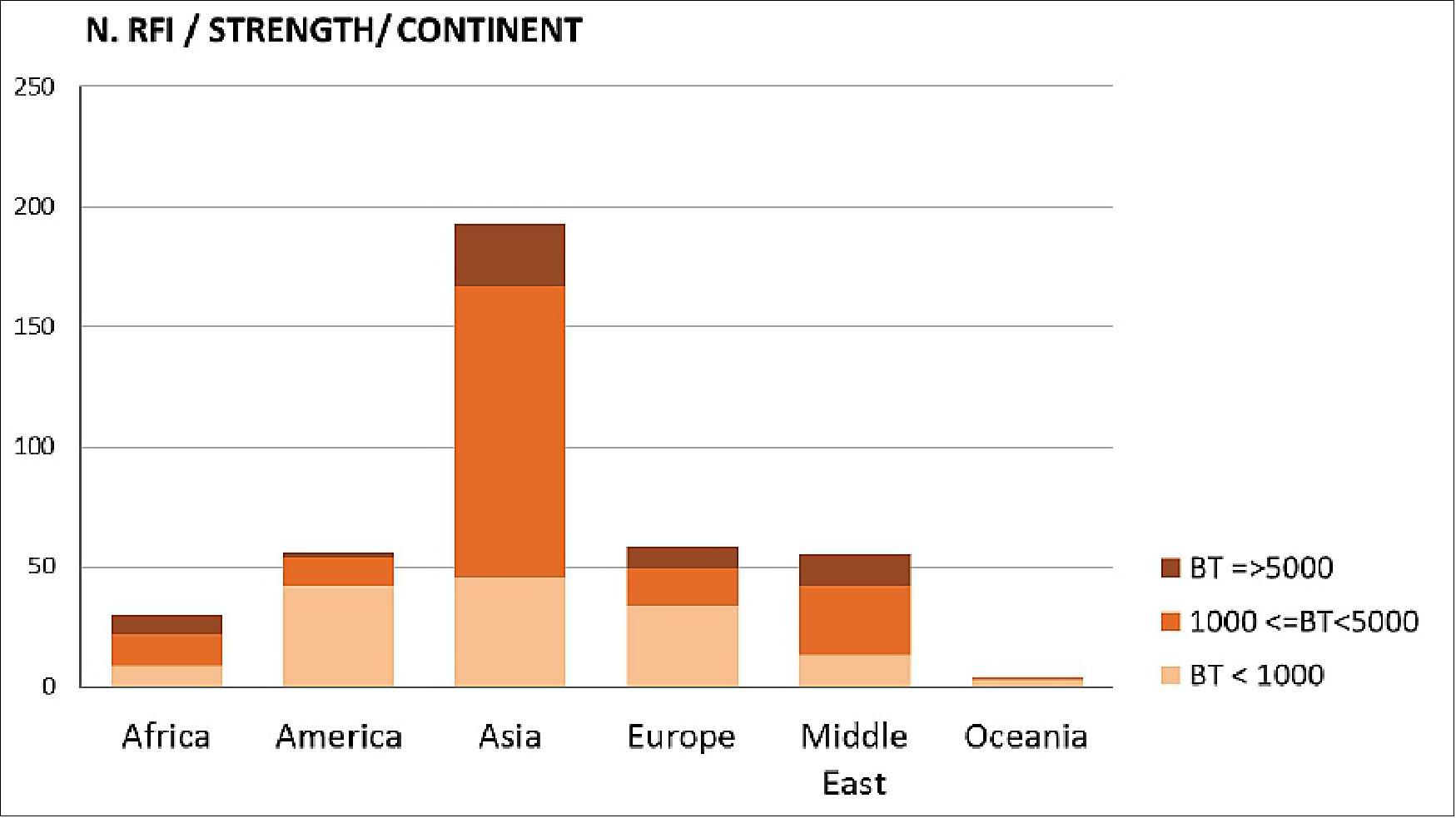
- As the SMOS satellite measures the brightness temperature (BT) in the surface of the Earth, the detected RFI sources are classified in three levels: moderate, strong and very strong sources.
- In Europe, North America and China, the improvement in the RFI scenario between 2010 and nowadays is mostly a consequence of the actions taken by spectrum management national authorities following the RFI reports provided by ESA. In other areas such as Middle-East and Southern Asia, it can be observed a quite dynamic scenario of the RFI emissions that are switched on/off without any specific reporting action initiated by ESA. 42)
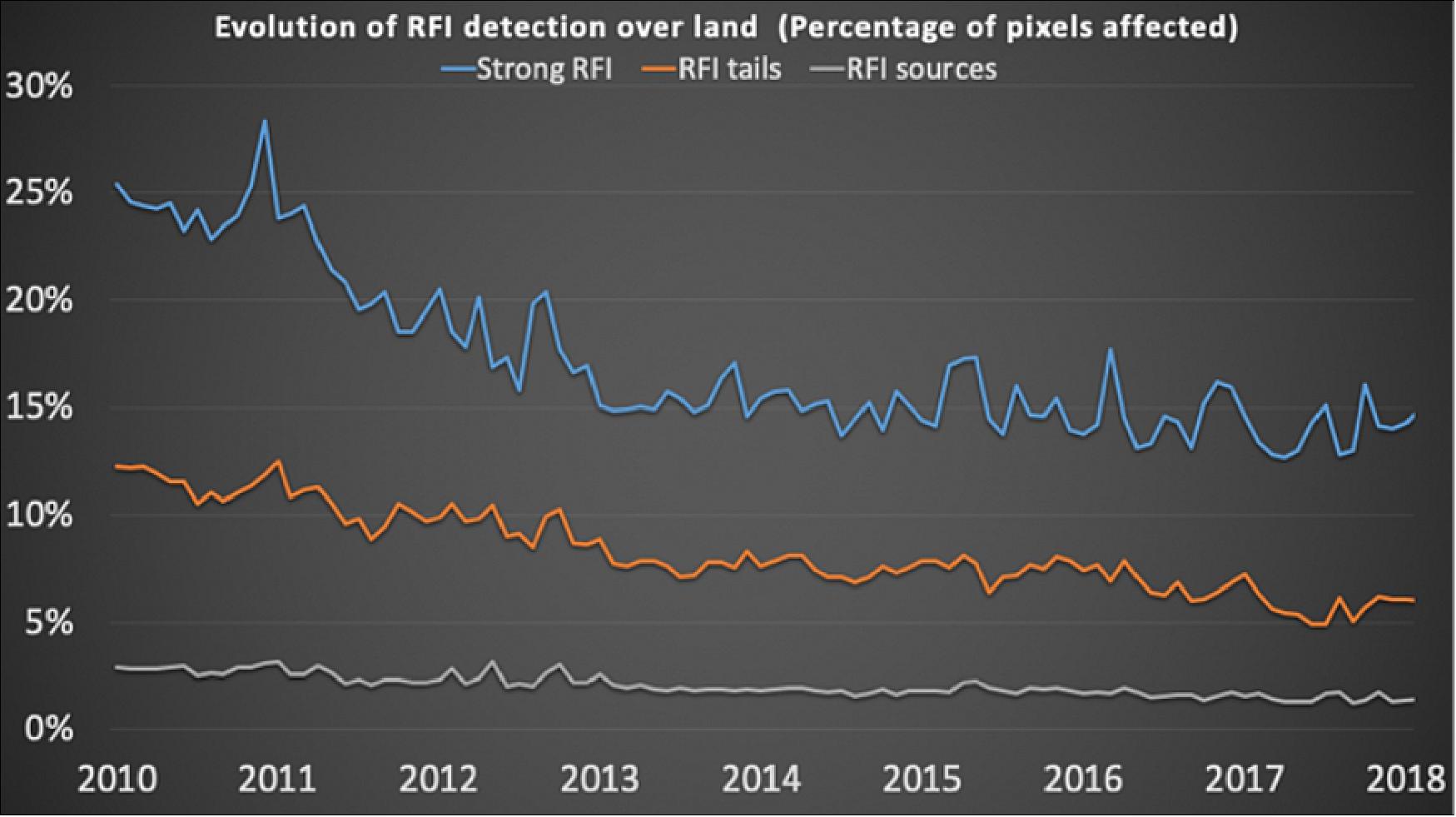
- Taking into account the science pixels affected due to the interfering signals, the improvement is clear, especially during the early years of the SMOS mission, as extremely powerful sources were detected and switched off, cleaning large areas of polluted data as can be seen in Figure 23. 43)
Interfering Devices
- During these years, the SMOS RFI team has found several types of interference sources according to their topology, power and behaviour. 44)
They can be broken down:
by intensity: high power (a) vs low power (b);
by emission features: omnidirectional (c) vs directive (d) vs pulsed (e) probably scanning beam;
or by spatial distribution: extended (f) vs isolated (g).
Three types of RFI sources have been detected in the purely passive band 1400-1427 MHz:
(a) In-band emissions from either unauthorized or malfunctioning equipment,
(b) Excessive out-of-band emissions from radar systems operating in the lower adjacent band,
(c) spurious emissions (intermodulation, harmonic and parasitic emissions) from devices operating in the upper adjacent band.
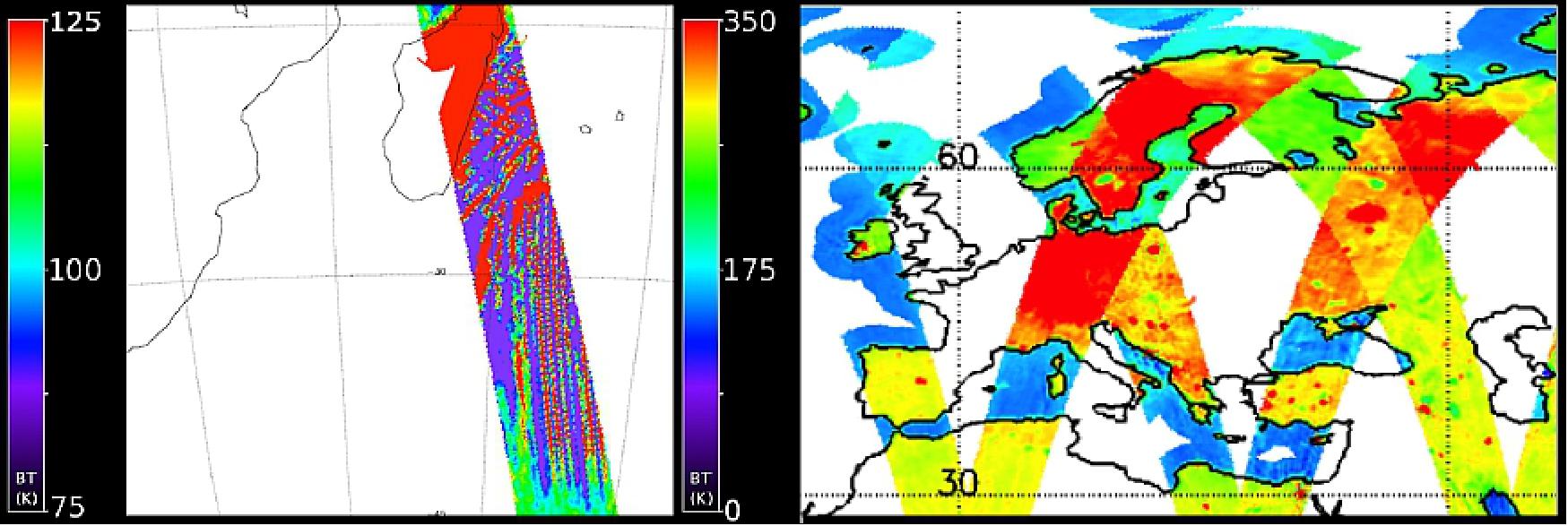
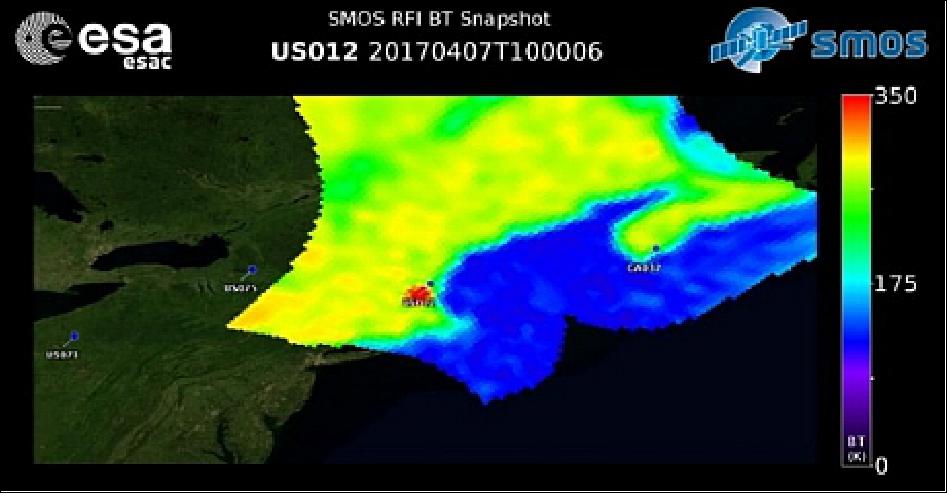
(a) Intensity: Very strong power emitters
- Very strong emitters (BT>5000 K) are the most damaging sources of scientific data, some of which achieving more than 1 million Kelvin manage to blind the entire instrument of the satellite, allowing large parts of data to be polluted (Figure 24, right). When the interfering source is close to the sea, it causes the same annoying effects on the SMOS ocean products, polluting large areas of ocean data (Figure 24, left).
(b) Intensity: Moderate power emitters
- Although some interfering devices transmit with low power (<1 W) within 1400 -1427 MHz band, they are perfectly observed by the instrument, reaching a brightness temperature up to 1000 K. This low power makes geolocation by SMOS difficult as well as its location in the field. In some cases, the cause of the interfering signal is a leak in poorly isolated RF equipment, making it even more difficult to locate the source. In the following figures (Figures 25 and 26) an interfering television amplifier due to poor filtering is shown next to its observation on a SMOS Level-1 Land map.

(c) Emission Pattern: Omnidirectional Antennas
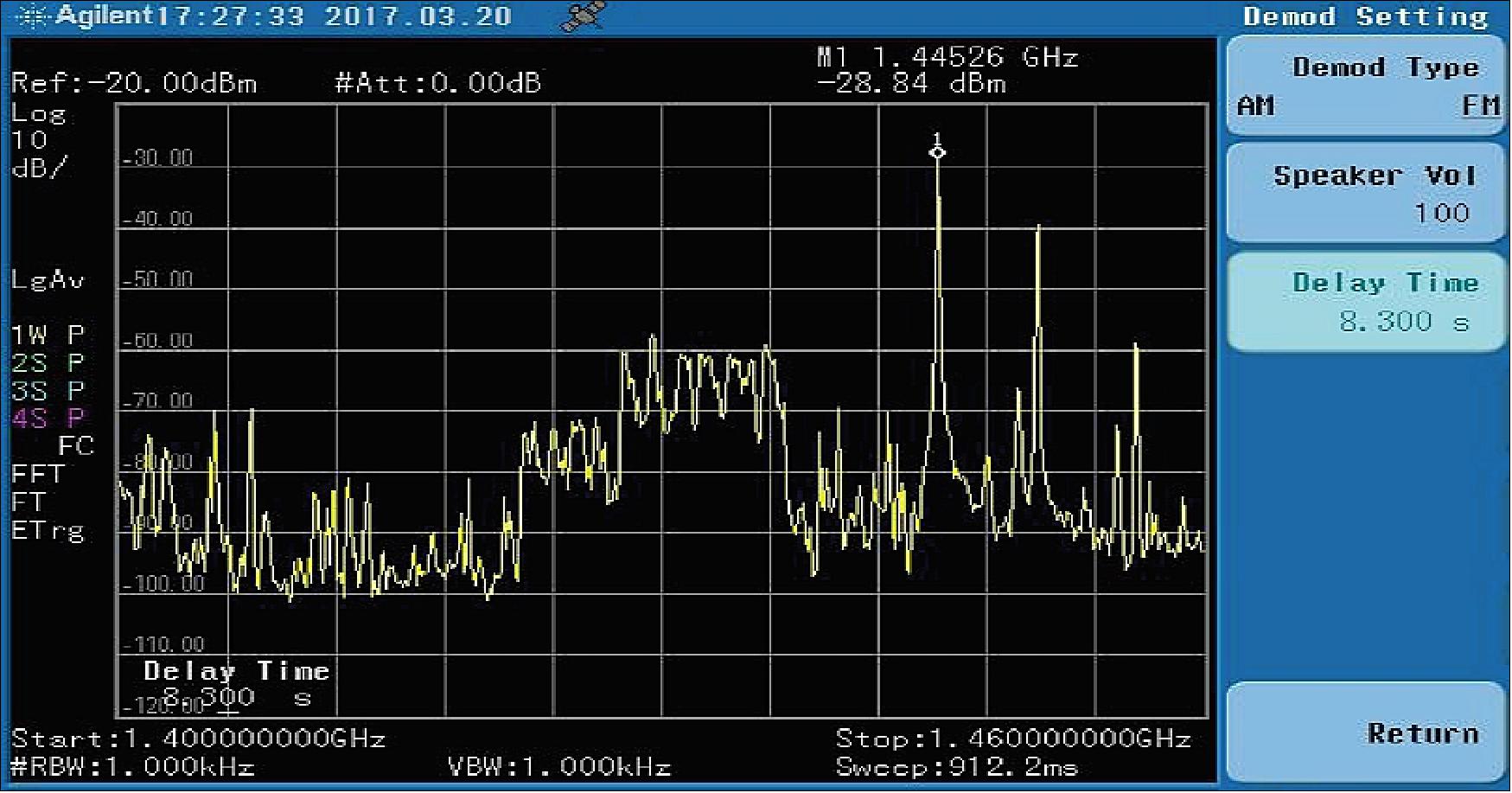
- Omnidirectional antennas are observed in all the products of SMOS regardless of the direction of the passes. They are used for broadcasting applications, such as push-to-talk systems, TV/radio stations, etc. As an example, interference was detected in Albania due to a TV/Radio broadcasting system (Figure 27).
- During measurements performed by Albanian authorities (AKEP Albania) by a spectrum analyzer in the band 1400-1427 MHz, resulted that the source of interference was a broadcaster subject with audiovisual signal, "TV 6 + 1" and "Radio 6 + 1" which transmits analog TV and radio FM signal.
(d) Emission Pattern: Directional Antennas
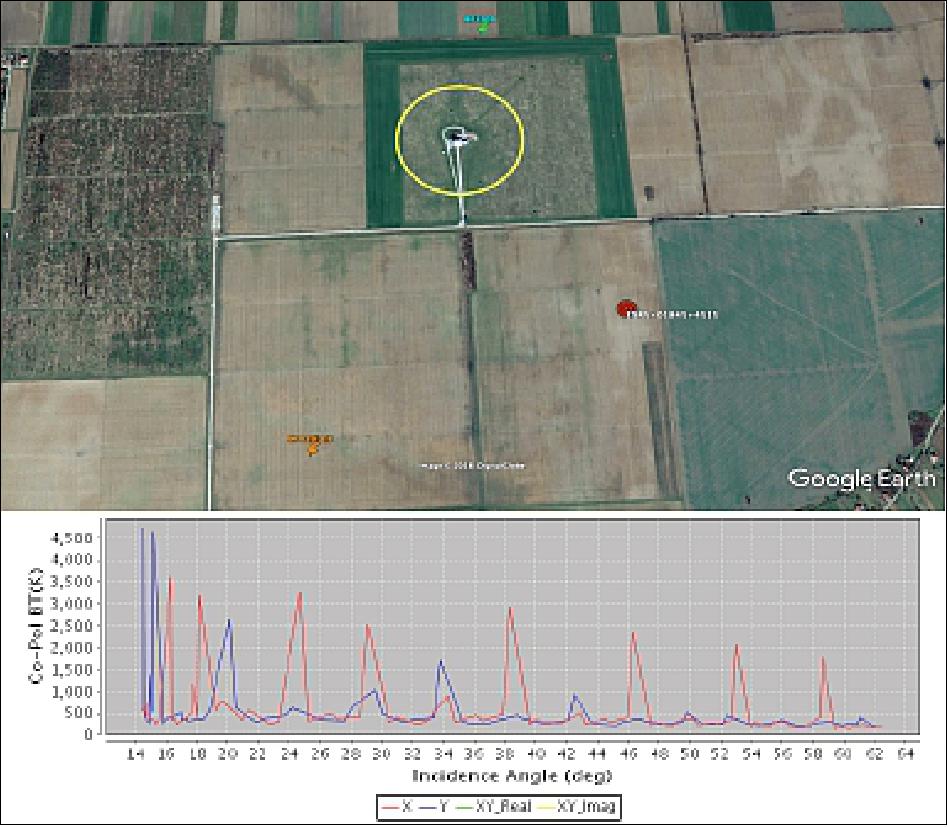
- Considering the radiation pattern of the transmission device, we can distinguish the interfering directional antennas, by analyzing the differences between ascending and descending passes of SMOS. This type of source is usually observed with different powers in the ascending and descending passes. In the ideal case, when the direction of the antennas is aligned with the satellite direction, they are observed in one direction, while not in the other.
- These types of sources are usually terrestrial radiolinks with different objectives: wireless CCTV cameras (Figure 28), point-to-point communication networks, data transmission systems, etc.

(e) Emission Pattern: Pulsed signals
- The most common sources of this kind are radars with excessive unwanted emission levels and they are very difficult to improve. Unwanted emissions limits to maximum levels are defined in RR Res.750 (rev WRC-15). They are easy to locate from space (<1km error) and also in the field. As they are usually very powerful sources, the impact on SMOS data is very harmful. An example of a pulse-shaped signal in the time domain is shown in Figure 29.
(f) Spatial Distribution: Extended areas
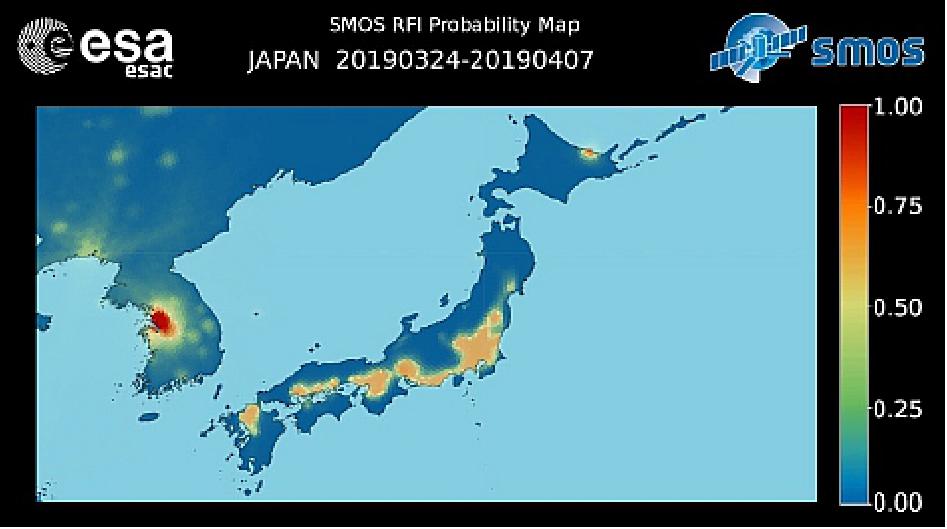
- Regardless of their power, large areas of extended sources are observed in some urban zones. This distribution of interferences makes it very difficult to locate each source since they could overlap each other and it is impossible to know exactly how many devices are interfering.
In the following figures, several cases can be observed:
- Japan, where multiple low-power emitters create a large area of interference,
- South Korea, where a mixture of powerful and weak emitters composes an area of overlapped interferences (Figure 30);
- Moscow, where more than four powerful emitters blind its entire urban area (Figure 31).
- Summary: The experience of SMOS with radio frequency interference these ten years shows that it is essential to protect the passive band 1400–1427 MHz from both illegal and excessive unwanted emissions. ESA and the SMOS RFI teams have devoted considerable resources to the detection and reporting of interference cases worldwide, with the associated impact on cost, manpower and definition of RFI processes. Important efforts have also been dedicated to increasing awareness about the negative impact of RFI on scientific observations and about the importance to reinforce the ITU Radio Regulations at a national level. It is necessary to emphasize that most of the interfering sources are due to excessive unwanted emissions from radars and TV/video transmitters in adjacent bands, and also to in-band unauthorized equipment (typically low-cost surveillance cameras). As shown in this paper, it is not necessary to emit too much power to pollute the science data of a satellite radiometer such as that of SMOS, and this pollution is equally impacting other types of scientific instruments such as radar satellites or radio telescopes. This is the reason why the 1400-1427MHz band is purely passive and the Radio-Regulation prohibit all emissions in the band (like other bands in other parts of the spectrum) and this is why all the involved parties have to be very careful not to transmit in these frequencies.
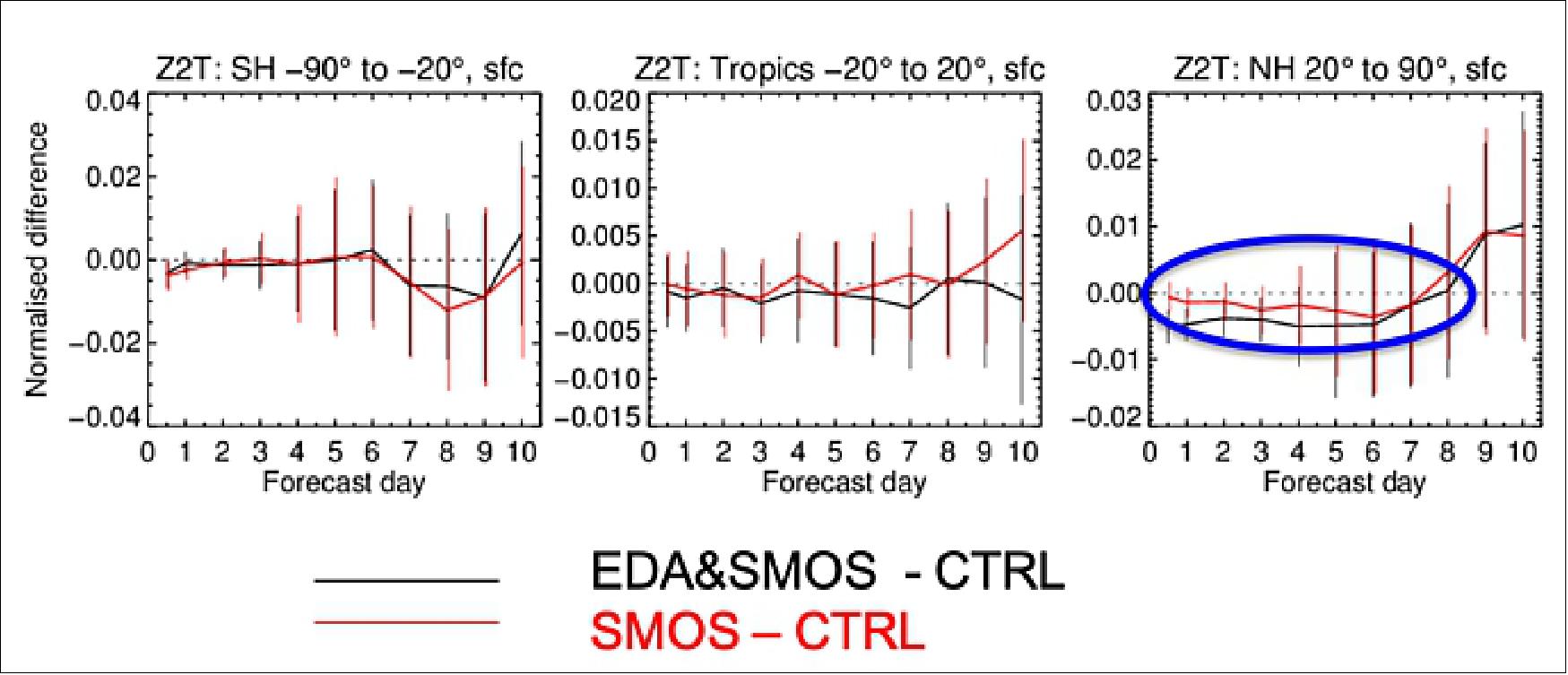
• June 12, 2019: As of 11 June 2019, measurements from ESA’s SMOS mission are being fully integrated into ECMWF’s forecasting system, allowing for a more accurate description of water content in the soil. 45)
- Since its launch in 2009, ESA’s SMOS (Soil Moisture and Ocean Salinity) mission has been providing global observations of emissions from Earth’s surface, particularly soil moisture and ocean salinity – two important variables in the water cycle.
- Accurate weather forecasts are paramount for both commercial and leisure activities. The ECMWF (European Centre for Medium-Range Weather Forecasts) is the leading agency to provide global accurate weather forecasts. Its IFS (Integrated Forecasting System), a gigantic numerical weather prediction model, provides weather predictions 24 hours a day, seven days a week.
- Patricia de Rosnay, the Coupled Assimilation team leader at ECMWF comments that “When using SMOS measurements in our operational forecasting system, we get a better description of the spatial distribution of the water in the soil.
- “These are important measurements to understand the complex interactions between the land surface and the atmosphere, which is crucial for our forecasting system.”
- The weather is a complex process and a good prediction largely depends on the knowledge of Earth’s atmosphere provided through a variety of observations from satellites, in situ data, balloons, buoys and other observing systems.
- These data need to be available fast in order to be beneficial for predictions. Producing geophysical soil-moisture measurements takes around eight hours after sensing.
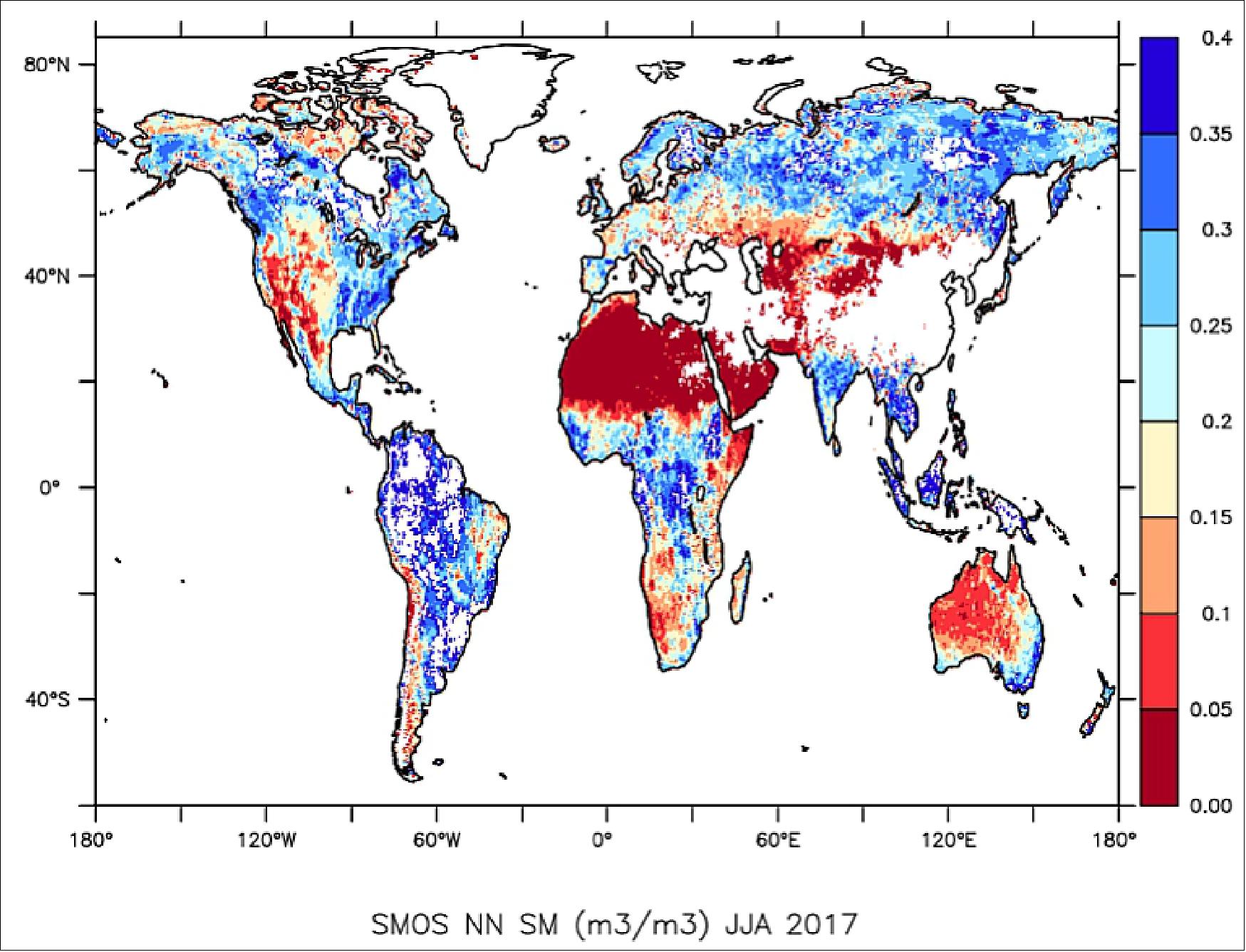
- A clever technique used to accelerate the production of these data is machine learning, for example using an artificial ‘neural network’, which computes values of soil moisture from the satellite within seconds. It was adapted by CESBIO and LERMA to generate the information needed for operational forecasts.
- “Machine learning techniques are computationally efficient and are very fast tools to process large datasets quickly. Using neural networks was the key for the integration of SMOS measurements in time for the weather forecast,” says Nemesio Rodriguez-Fernandez from CESBIO, who designed and trained the neural network prior to the operational integration done by ECMWF.
- Using measurements from an Earth explorer satellite in 24/7 operations is a major achievement. So far, only SMOS measurements over land are being used to support general weather forecasts. Considering SMOS provides information in all weather conditions, SMOS also delivers new information for tracking hurricanes and measuring thin sea ice.
- In the future, the information provided by SMOS over oceans and the polar regions may also be used in combination with Earth-system models and data assimilation systems.
- ESA’s SMOS mission scientist, Matthias Drusch, said, “Integrating SMOS measurements into ECMWF’s forecasting system has been a major endeavor that started more than 15 years ago. This success story shows how models and even operational applications benefit from new observations.”
- So far, SMOS is the only Earth explorer satellite providing measurements operationally for global medium-range weather forecasts. Currently, data from ESA’S Aeolus mission are being tested at ECMWF for an operational forecasting system to be used in the near future.
• May 14, 2019: The length and precision with which climate scientists can track the salinity, or saltiness, of the oceans is set to improve dramatically according to researchers working as part of ESA’s Climate Change Initiative. — Sea-surface salinity plays an important role in thermohaline ocean circulation. 46)
- The research team, led by Jacqueline Boutin of LOCEAN (Laboratoire d'Océanographie et du Climat: Expérimentations et Approches Numériques) and Nicolas Reul of Ifremer, have generated the longest and most precise satellite sea-surface salinity global dataset to date.
- Spanning nine years, the dataset is based on observations from the three satellite missions that measure sea-surface salinity from space: ESA’s SMOS and the US SMAP and Aquarius missions.
- “By combining and comparing measurements from the missions’ various radiometers, the precision of sea-surface salinity maps is improved by roughly 30% thanks to the increased number of measurements and reduced inter-calibration error,” comments Dr Boutin.
- The research project forms part of ESA’s Climate Change Initiative, a program focused on generating global, long-term satellite-derived data products for 22 essential climate variables.
- Based on 40 years of empirical observations from space, the initiative supports the United Nations Framework Convention on Climate Change and Intergovernmental Panel on Climate Change – the bodies that assess and synthesize scientific evidence into information for policy and decision-makers.
- Sea-surface salinity is linked directly to density-driven ocean circulation patterns that transfer heat from the Tropics to the poles. Regional changes are also linked to periodic interannual climate events such as El Niño.
- Salinity is implicated in the intensification of the global water cycle. Measurements of sea-surface salinity and sea-surface temperature, which determine the thickness of the surface mixed layer, have the potential to help understand the development of extreme weather events such as cyclones.
- Salinity measurements taken since the 1950s indicate global trends of saline areas of the ocean becoming saltier, and freshwater areas becoming fresher. The data for this, however, is relatively coarse, as it is taken from ships. Only since the beginning of the 21st century has a fleet of ocean buoys, called Argo, provided subsurface-salinity measurements.
- According to Dr Boutin, “Monitoring salinity from space helps to resolve spatiotemporal scales that are not adequately sampled by in-situ platforms and fills gaps in the observing system.
- The team is currently working with climate scientists to compare this observational dataset with in-situ datasets and the output of models. This checks that the models are operating effectively and helps to refine and improve performance.
- To demonstrate the benefit of the new data, the project will use the new salinity data in a number of climate investigations to improve the understanding of the water cycle in the Bay of Bengal, an area prone to severe tropical cyclones.
- It will allow scientists to understand the role of salinity in the stratification of the upper layer of the ocean and air-sea exchanges.
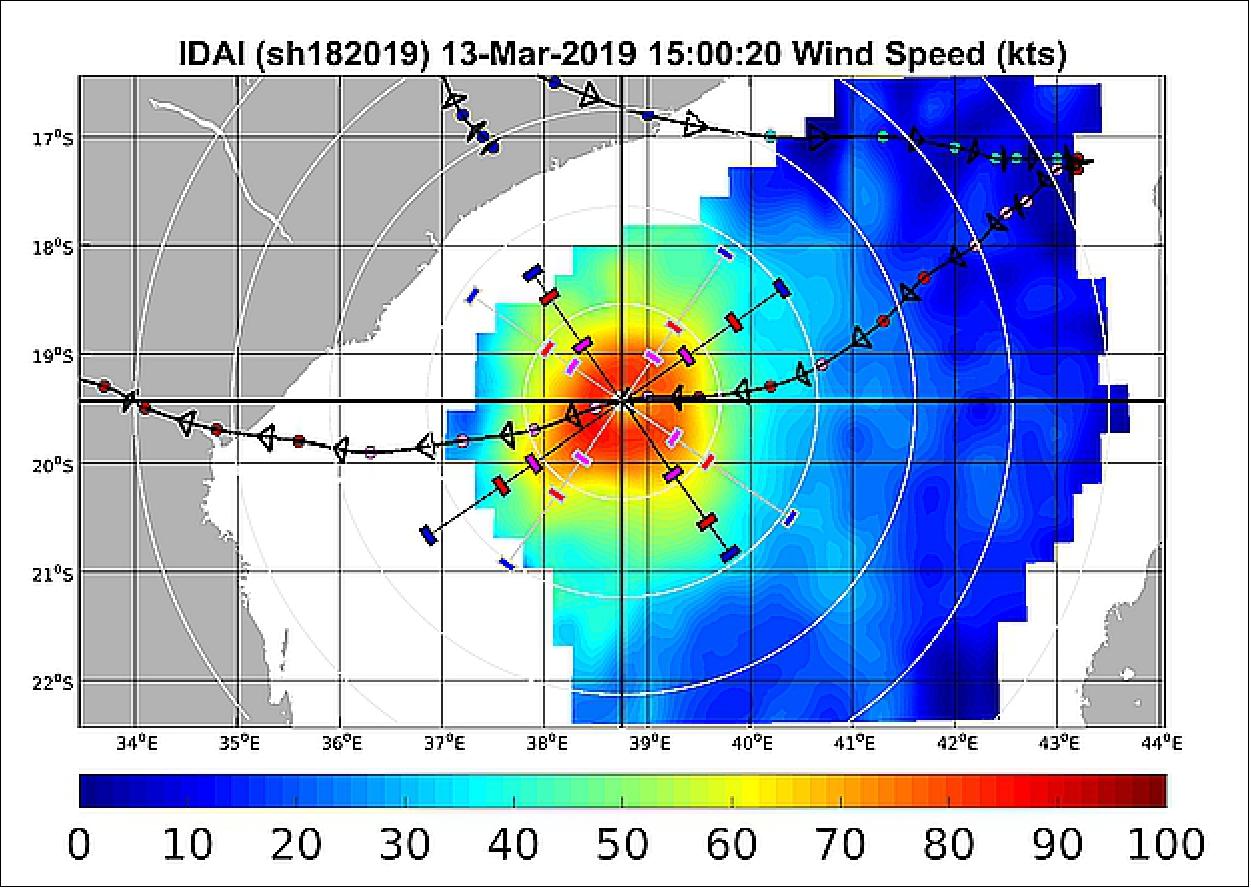
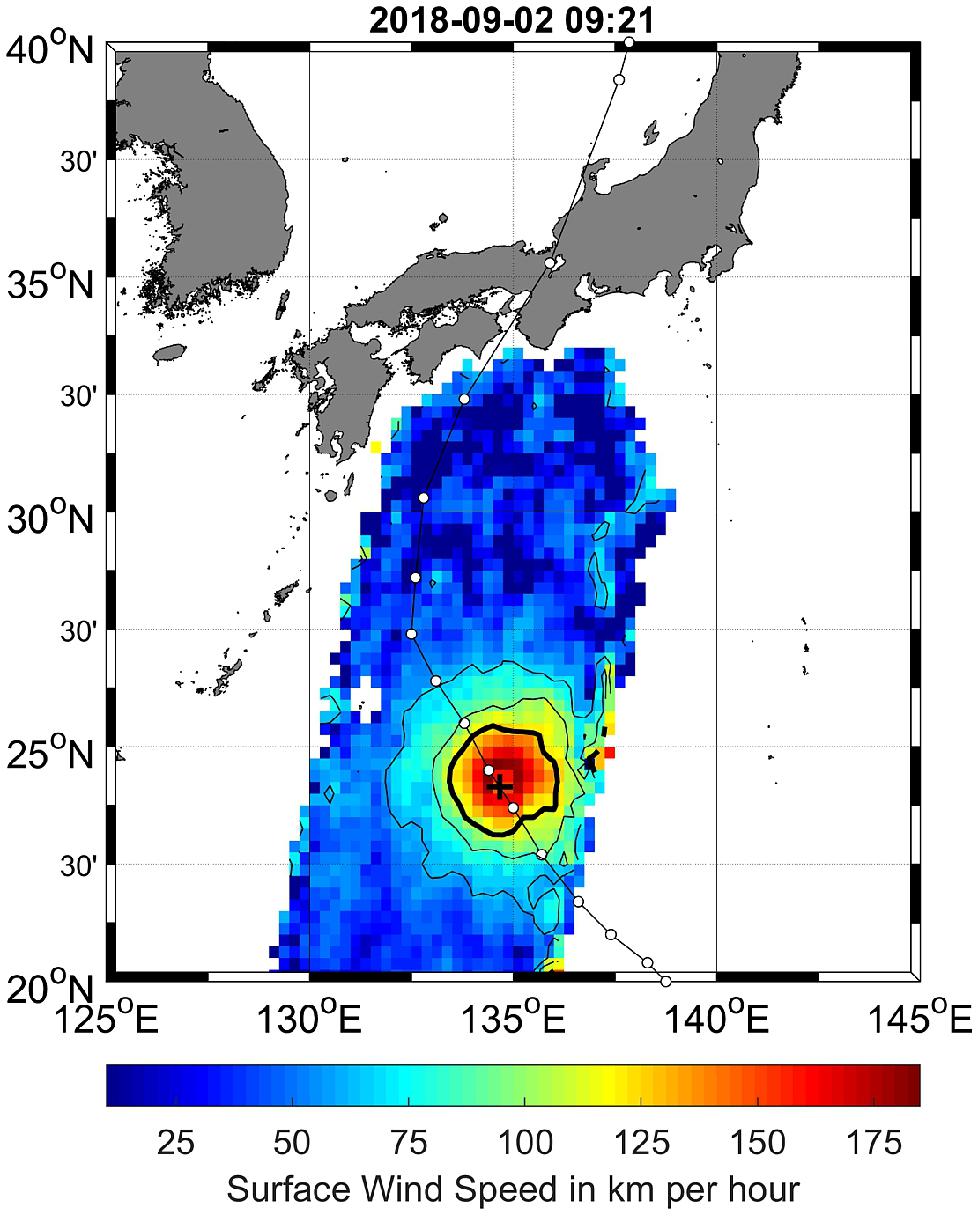
• May 14, 2019: Just within the last couple of months, Cyclones Fani, Idai and Kenneth have brought devastation to millions. With the frequency and severity of extreme weather like this expected to increase against the backdrop of climate change, it is more important than ever to forecast and track events accurately. And, an ESA satellite is helping with the task at hand. 47)
- Soon to celebrate 10 years in orbit, SMOS was built to measure soil moisture and ocean salinity to better understand the water cycle. While science benefits from its measurements, the SMOS portfolio is being expanded to help with some everyday applications that include monitoring and improving forecasting of large storms.
- The problem with observing hurricanes and cyclones from space is that satellites carrying camera-like instruments cannot see through masses of thick spinning clouds to measure wind speeds.
- Traditionally, satellite scatterometer instruments have been the main source of information to measure wind speed over ocean waters, but SMOS can offer additional information when storms are severe.
- SMOS carries a microwave radiometer to capture images of brightness temperature. Measurements correspond to radiation emitted from Earth’s surface, which is then used to derive information on soil moisture and ocean salinity.
- Strong winds over oceans whip up waves and whitecaps, which, in turn, affect the microwave emission from the surface. This means that the changes in radiation can be linked directly to the strength of the wind over the sea.
- Nicolas Reul, from Ifremer, said ”While advances in our understanding of the physics underpinning the life cycle of tropical storms and their development into hurricanes and cyclones is advancing all the time, there is no substitute for improved measurement capability that can help define the character of a given storm.
- “Although SMOS data have a spatial resolution of 40 km, the wide-swath regular repeat coverage and ability to provide measurements of surface-wind speed structure at hurricane force in the presence of heavy precipitation is unique.”
- The fact that SMOS can be used to estimate ocean-surface wind speeds in extreme weather has been known for a while – but as highlighted at this week’s Living Planet Symposium, this is being put into practice.
- Experiments show that SMOS can, for example, help improve errors in forecast lead times by 36–72 hours in the extratropics.
- Working together, ESA, OceanDataLab and Ifremer have started a SMOS wind-data service, which provides near-real-time (3–6 hours from sensing) ocean-surface wind speeds.
- Since September 2018, the services have been ‘pre-operational’, providing data to selected users such as the NOAA National Hurricane Center, the U.S. Naval Research Laboratory and the Joint Typhoon Warning Center who are assessing the potential benefits.
- The importance of this goes beyond the SMOS mission as the continuity of these kinds of measurements is now being studied within the context of one of six potential future Copernicus missions.
- ESA’s Craig Donlon, explains, “The Copernicus Imaging Microwave Radiometer concept is a global coverage mission, but with a focus on the rapidly changing Arctic region, where both high winds and salinity play a major role in the ocean system. - There is no doubt that SMOS has allowed us to explore and further develop the enormous potential of L-band microwave radiometer measurements for the ocean.”
• November 2018: ESA in collaboration with OceanDataLab (ODL) and IFREMER has started the implementation of a SMOS wind data service, which will provide, in near real-time (3-6 hours from sensing), ocean surface wind speeds derived from SMOS data. The service is now pre-operational and has been tested with some expert users such as the NOAA National Hurricane Center, the U.S. Naval Research Laboratory (NRL) and the Joint Typhoon Warning Center (JTWC) in order to assess the potential benefit to use SMOS wind data for operational storm forecasting. The first feedback from these operational users has been very positive. 48)
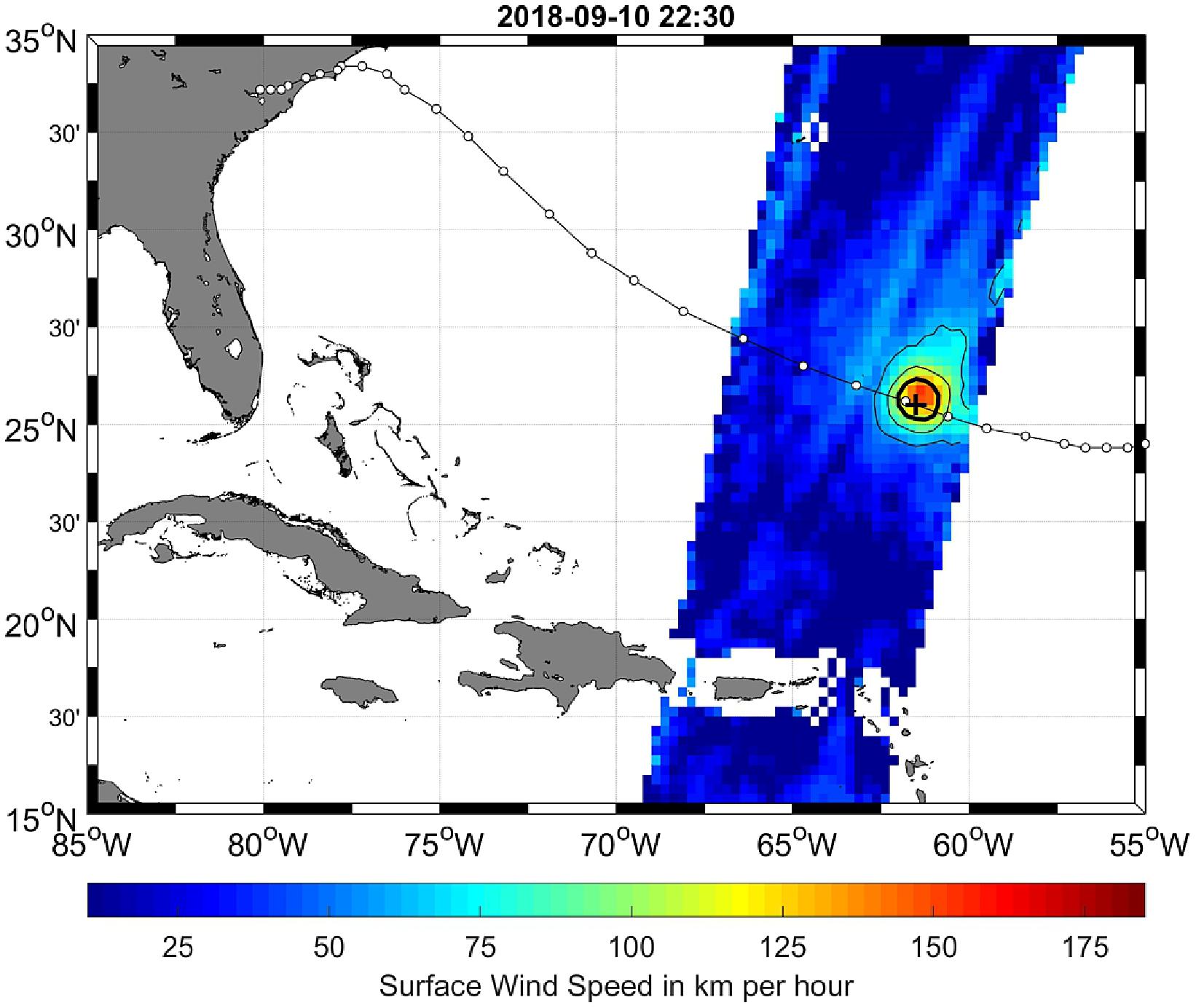
• September 25, 2018: With recent events in the news about the devastation brought by hurricanes and typhoons to the US and Asia, we are reminded of how important it is to predict the paths of these mighty storms and also learn more about how they develop. Many satellites have eyes on storms, but ESA’s SMOS mission can offer an entirely new perspective. 49)
- Tracking and forecasting hurricanes across the ocean brings obvious benefits to those at sea and to those who live in places where they make landfall. While forecasters have excellent tools to hand to make these predictions, ESA’s Soil Moisture and Ocean Salinity (SMOS) mission is now ready to add valuable information to help make these predictions even more accurate.
- SMOS was built for scientific research, mainly into Earth’s water cycle. The satellite carries a novel microwave sensor to capture images of ‘brightness temperature’. These images correspond to radiation emitted from Earth’s surface, which is then used to collect information on soil moisture and ocean salinity.
- Strong winds over oceans whip up waves and whitecaps, which in turn affect the microwave radiation from the surface. This means that although strong storms make it difficult to measure salinity, the changes in radiation can, however, be linked directly to the strength of the wind over the sea.
- The mission has a real advantage over satellites that carry optical images, which cannot see through the thick cloud of a hurricane, for example. Effectively, seeing through the storm, SMOS can deliver unique information on the speed of the wind near the sea surface at the base of the storm.
- While scientists have known how SMOS can do this for a few years now, the mission is now being tested to see if it can supply this information for operational hurricane services.
- Recently, SMOS has been used to image and track the wind under Hurricane Florence, Typhoon Mangkhut and Typhoon Jebi.
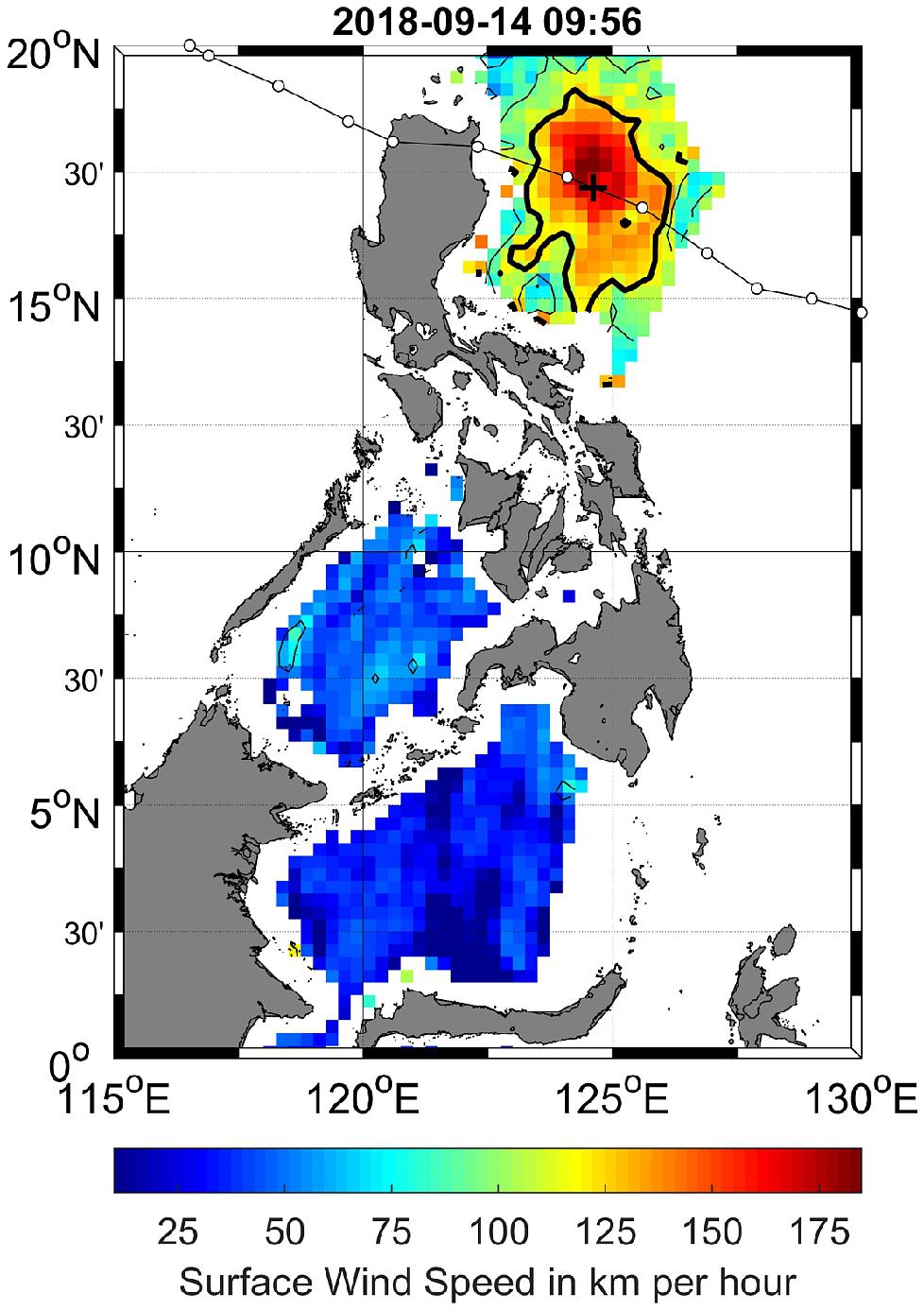
- Buck Sampson from the US Naval Research Laboratory said, “ESA’s SMOS mission can give us really interesting new information for operational storm forecasting, which we hope to use along with our traditional sources of data. SMOS measurements can help us keep track of the structure of a dangerous storm. Combining SMOS data with that from its US counterpart SMAP mission, will give us more timely information which is essential for monitoring major storms.”
- Susanne Mecklenburg, ESA’s SMOS mission manager, added, “While SMOS is still delivering important information to further our scientific understanding of Earth, it will be really exciting to see it being used for practical applications once this testing phase finishes at the end of the year. Every year, hurricanes bring misery to many people around the world, so the hope is that SMOS will be useful to make better predictions, and ultimately help decision-makers with their damage mitigation strategies.”
• August 23, 2018: SMOS online Science data are now freely available on the SMOS Online Dissemination Service, without needing to take additional registration steps to access the data. Products can be openly searched and browsed, but login with an ESA EO-SSO account is required in order to download files. This applies also to users already registered to SMOS data. — Additional information on the available SMOS data and how to access them can be found on the SMOS Data Access page. 50)
• July 2018: ESA's SMOS (Soil Moisture and Ocean Salinity) mission has been in orbit for over 8 years, and its Microwave Imaging Radiometer with Aperture Synthesis (MIRAS) in two dimensions is working well. The data for this whole period has been and is being processed with the operational version of the current Level-1 processor (version v620). Also, a representative part of the same data set has been processed with a working version of a new processor (v720) which is now in preparation so that homogenous records of brightness temperatures have been made available. These rich and long data records have allowed learning important lessons from the in-flight experience, and shall eventually lead to the consolidation of the new Level-1 processor version (v720) with its corresponding auxiliary calibration and configuration files. Once the improvements are confirmed the new processor version shall be recommended for the operational chain. 51)
- The over 8-year flight experience of SMOS is very valuable for the definition of future L-band missions, in particular, but not only, when considering an interferometric radiometer. The lessons learnt tell us how SMOS could be improved to attain better sensitivity, spatial resolution, swath (coverage or revisit time), robustness against RFI and stability. The improvements include system parameters such as element spacing or array geometry, subsystem improvements at all levels (antenna, receiver, harness and correlator), as well as calibration approaches and image reconstruction. In summary, the SMOS experience could be used to define a cost-effective SMOS follow-on mission.
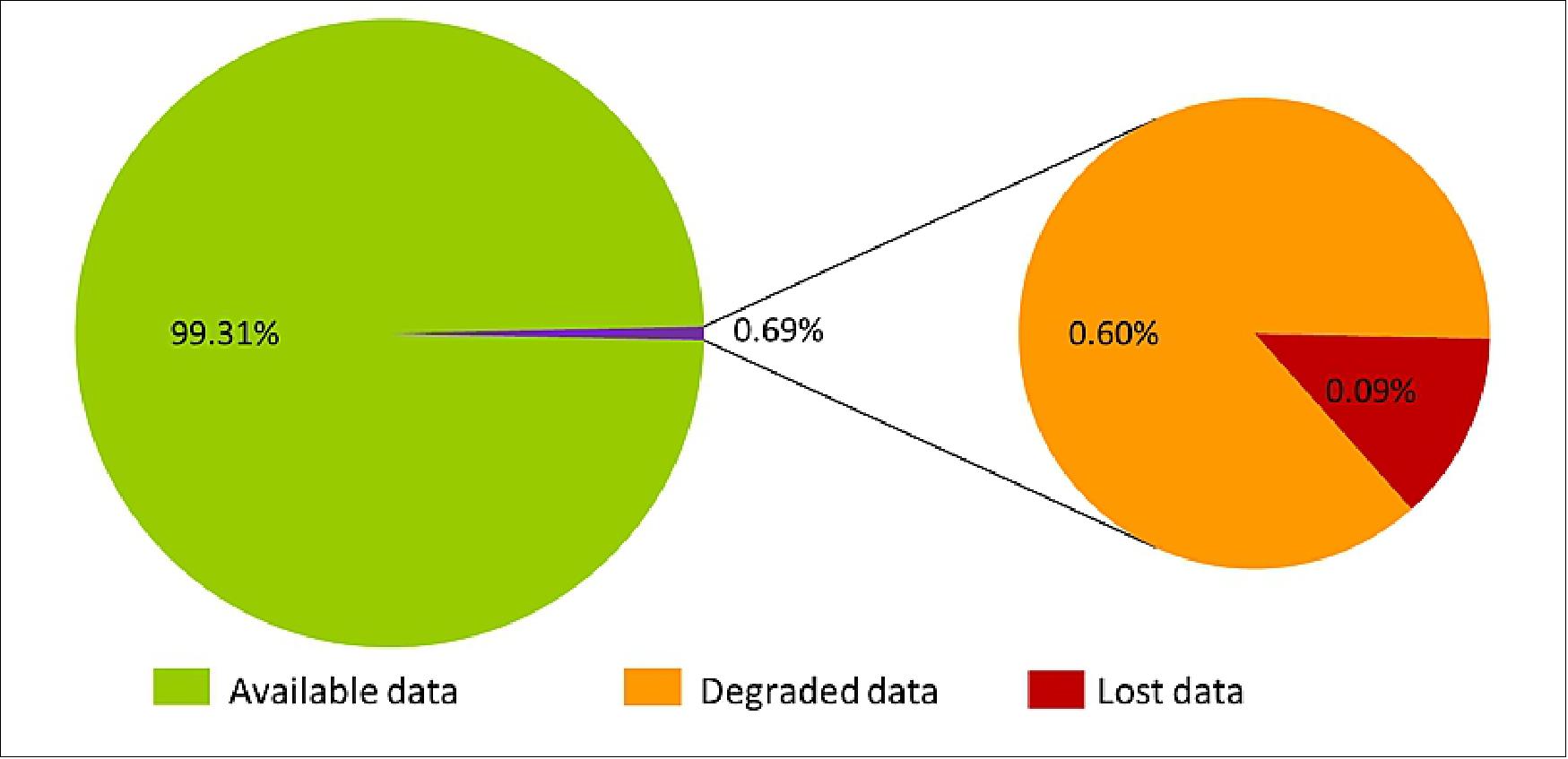
• July 2018: The SMOS instrument MIRAS is operating nominally with the exception of some known onboard anomalies described in the MIRAS anomaly document. The cumulative data loss due to MIRAS instrument unavailability since the beginning of the routine operational phase (May 2010) amounts to 0.09% and the degraded data amounts to 0.60% (Figure 41). No data loss has occurred during the acquisition of MIRAS raw data at the ground stations since the beginning of the routine operational phase (May 2010). This result has been achieved by implementing an onboard data recording overlap strategy. 52)
- Instrument calibration and data quality: Several onboard calibration activities are performed regularly and an overview of the calibration strategy implemented for the MIRAS instrument can be found in the SMOS calibration summary document. During calibration activities science data are not generated, therefore data users should consult the calibration plan for expected data unavailability.
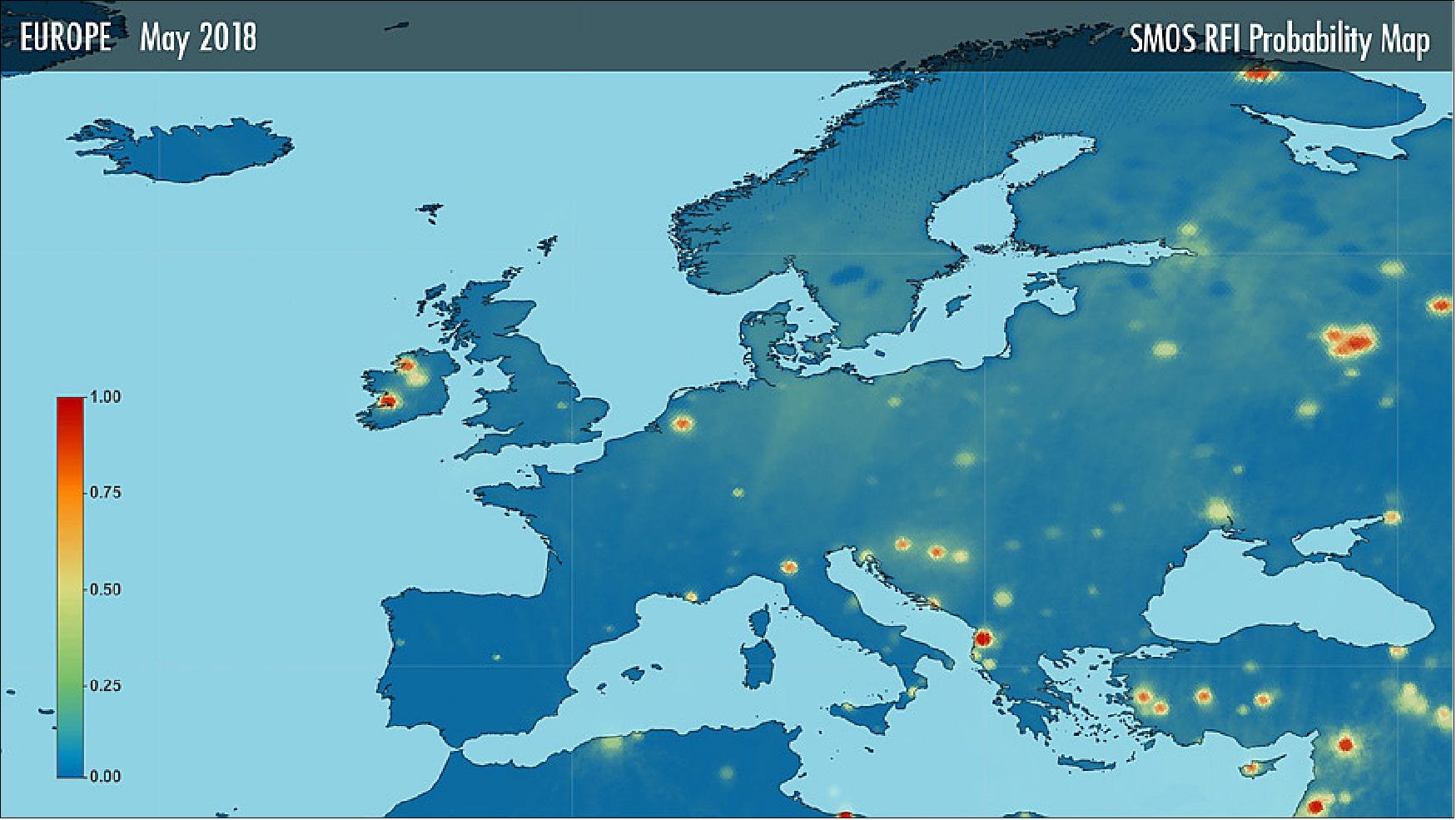
- Radio Frequency Interference (RFI): Active RFI sources are continuously monitored in terms of intensity and geographical distribution as illustrated in Figure 42 and Figure 43. Information about the evolution of the RFI contamination can be found on the frequently updated RFI probability maps for land surfaces, generated fortnightly by CESBIO and available on the SMOS blog.
• April 11, 2018: A new methodology using a combination of debiased non-Bayesian retrieval, DINEOF (Data Interpolating Empirical Orthogonal Functions) and multifractal fusion has been used to obtain 6 years of SMOS SSS (Sea Surface Salinity) fields over the North Atlantic Ocean and the Mediterranean Sea. This product has been developed by the Barcelona Expert Center and the GHER (GeoHydrodynamics and Environment Research) group at the University of Liège (Belgium), under the ESA STSE project “SMOS sea surface salinity data in the Mediterranean Sea (SMOS+ Med)”. SMOS+ Med was lead by Dr. Aida Alvera-Azcarate, from GHER. 53) 54)
• September 2017: Current operations have been extended to 2019 and beyond, pending an extension review in 2018. CNES is reviewing the mission operations extension beyond 2017. Future data products include severe wind speed over oceans and freeze/thaw information over land. There has been a decrease in radio frequency interference, in particular over Europe, with more than 70% of sources being switched off. 55)
• September 5, 2017: Despite the welcome showers at the weekend, abnormally low soil moisture conditions persist in central Italy (Figure 46). Scientists are using satellite data to monitor the drought that has gripped the country. - Wildfires, water scarcity and billions of euros worth of damage to agriculture are just some of the effects of this summer’s drought in Italy – not to mention the relentless heat. News of potential water rationing in the capital has even made headlines worldwide. As local authorities work to mitigate the drought, scientists are turning their eyes to the sky for answers. 56)
- Satellite data on soil moisture show that soils in southern Tuscany have been drier than normal since December 2016. Even though drier-than-normal conditions occur regularly, the current situation is uniquely intense and persistent, similar to the droughts in 2007 and 2012.
- “In the first six months of 2017, we saw less than half of average rainfall in central Italy,” said Luca Brocca from Italy’s Research Institute for Geo-Hydrological Protection, of the National Research Council (IRPI-CNR). “The combination of low rainfall and high temperatures has led to drought, and we will need a significant amount of rainfall to replenish the water lost in the last eight months.”
- “The combination of low rainfall and high temperatures has led to drought, and we will need a significant amount of rainfall to replenish the water lost in the last eight months.”
- IRPI-CNR is closely monitoring the drought situation using a new, long-term and globally available near-real-time extension of the satellite soil-moisture dataset from ESA’s Soil Moisture CCI (Climate Change Initiative) project. The dataset has been developed by the Vienna University of Technology TU Wien and the Dutch company VanderSat B.V. and will soon be made available through the Copernicus Climate Change Service.

Legend to Figure 45: Above-average (blue) and below-average (red) soil moisture for Italy from 1997 to 2017. Extremely low soil moisture was witnessed in 2003, 2013 and 2017. The data were compiled by ESA’s Soil Moisture CCI project and includes information from active and passive microwave sensors (such as those on the ERS, MetOp, SMOS, Aqua and GCOM-W1 satellite missions).
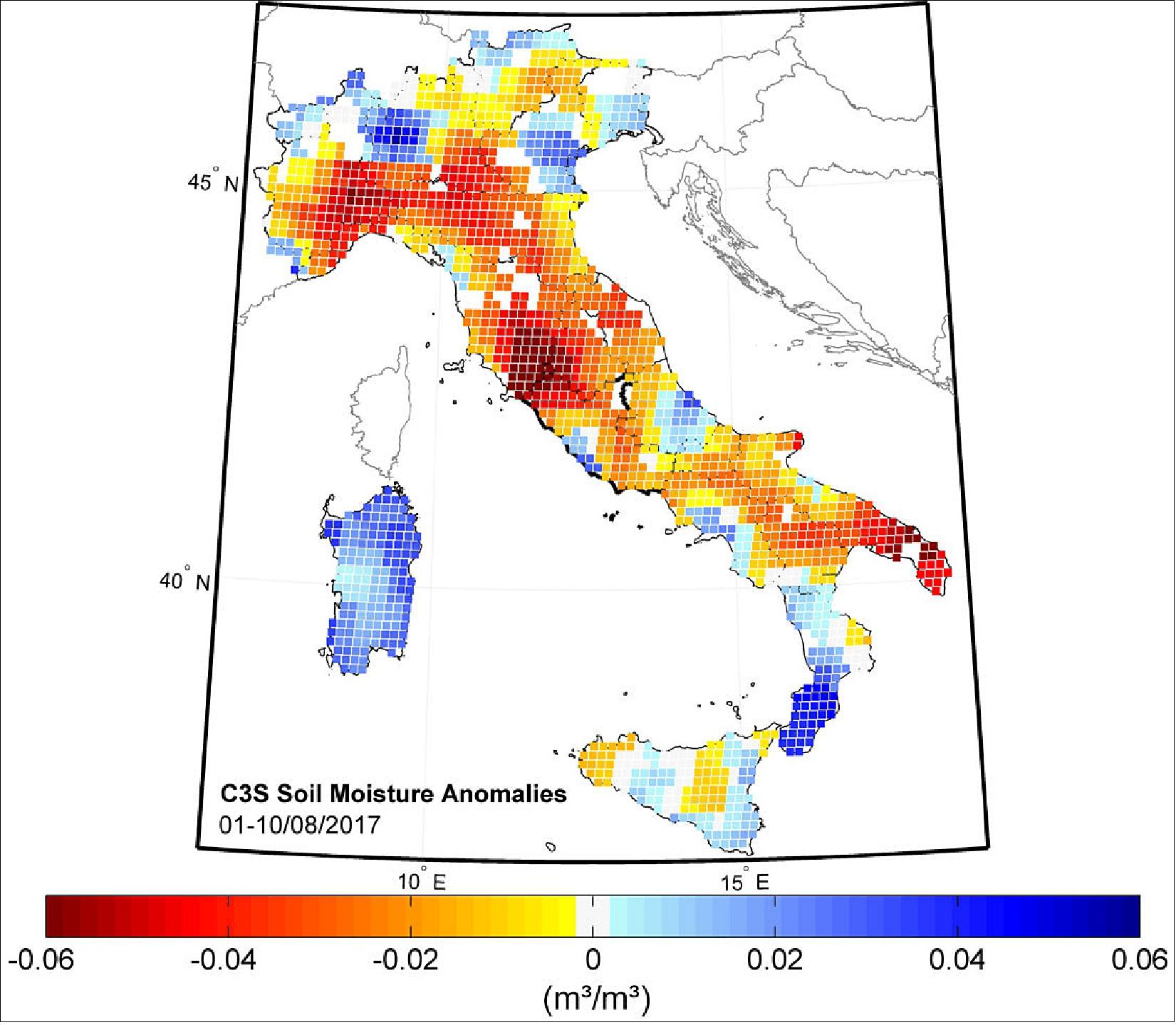
Legend to Figure 46: Soil moisture in Italy during early August 2017 was particularly low in some areas (red). The data were compiled by ESA’s Soil Moisture CCI project and includes information from active and passive microwave sensors (such as those on the ERS, MetOp, SMOS, Aqua and GCOM-W1 satellite missions).
- Italy isn’t the only country to have suffered from drought this summer: France and the Balkans have also been extremely dry – but central Italy exceeds the rest of Europe for abnormally low soil-moisture levels.
- Soil moisture data are collected by satellites measuring microwaves reflected or emitted by Earth’s surface. The intensity of the measured signal depends on the amount of water in the soil. This information is important for improving short- and medium-term meteorological forecasting, as well as predicting hazardous events such as floods, droughts and heatwaves.
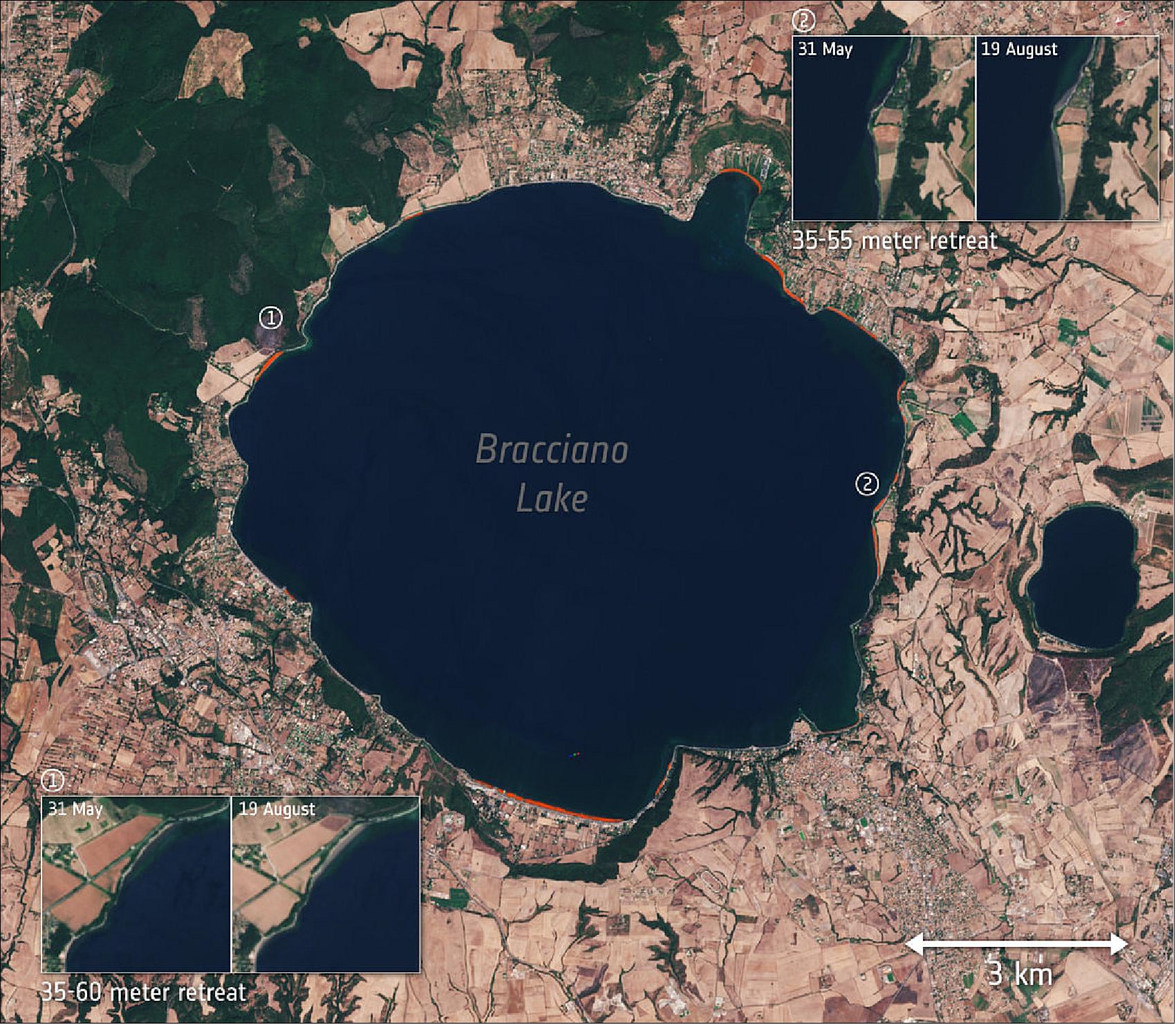
- Other spaceborne sensors can monitor the effects of drought, such as the lowering of water levels in lakes. Some 30 km northwest of Rome, Lake Bracciano has seen a significant drop in water level. The receding shoreline is so prominent that it has become visible in optical satellite data. While this may mean more beach space for holidaymakers, it indicates a depleted supply of water for the Italian capital.
- Lake Bracciano’s water level is closely monitored by local authorities but, in remote parts of the world, water levels of other large lakes can also be monitored by satellite radar altimeters, helping governments better manage water resources.
- Scientists will continue to use space-based tools to monitor drought conditions across Europe, as well as offer support to authorities dealing with water scarcity.
• July 2017: ESA's SMOS mission has been in orbit for over 7 years, with its MIRAS (Microwave Imaging Radiometer with Aperture Synthesis) instrumentation functioning well. This 7-year period has provided a wealth of information which has enabled us to understand and consolidate the performance of the payload in great detail. More importantly, we know now the things that work well, those that need improvement, and how the instrument could be enhanced if we were to build it again. 57)
The lessons learnt are being grouped into the following main headings:
1) RFI (Radio-Frequency Interference)
The 1400-1420 MHz band protected by international Radio Regulations was found to be heavily polluted by illegal emissions in the band, by adjacent band emissions having strong leakage in band, as well as by unwanted emissions in the band due to faulty equipment mostly. Moreover, the temporal, spatial and dynamic evolution of these sources around the world could be seen, their distribution and intensity changing over time.
A major effort was undertaken by ESA to switch off as many of these RFI sources as possible. Despite the success in eliminating several hundred of them, there are still as many which are active. A follow-on mission should be designed taking into account this fact and while continuing the effort in eliminating RFI sources, a new instrument would have to have RFI mitigation measures.
RFI mitigation can be dealt with at 3 levels, namely, array geometry and similarity, view geometry and onboard electronic counter-measures (similar to NASA’s Aquarius and SMAP missions).
2) Brightness Temperature (Level-1) over Ocean
SMOS ocean brightness temperature images are mainly affected by sensitivity, spatial ripple, temporal fluctuations (mostly orbital and seasonal), Sun tails, Sun in the back, Sun and galactic glint, and land-sea contamination. Each of these is underlined and addressed separately next.
The radiometric sensitivity of SMOS could be boosted by factor 4 by widening the field of view of the sensor and the parallelizing receiver electronics. The spatial ripple present in the ocean images is currently removed through the so-called OTT (Ocean Target Transformation). This ripple is caused by a combined effect of aliasing, antenna pattern differences and brightness temperature outside the main field of view. Such spatial ripple could be reduced by making the antenna patterns more similar and decreasing the element spacing at the same time. A 50% reduction of the spatial ripple should be possible, pending our ability to produce an array with the required antenna pattern similarity.
Ocean images present temporal fluctuations correlated with those experienced by the physical temperature of the antenna elements. For example, there are some differences in the brightness temperature between ascending and descending passes along the orbit, and most noticeable, at the transitions into and out of the eclipse, the latter showing the most prominent effects. Two measures have been identified to reduce such thermally induced fluctuations, namely, a higher orbital altitude and an improved antenna design.
Sun tails are the side lobes of the point spread response of MIRAS at the position of the real Sun. The level of the Sun tails could be reduced by at least 10 dB, and the tails would be spaced further apart through the same techniques mentioned above to reduce the spatial ripple.
Sun in the back refers to the contamination of the Sun through the back lobes of MIRAS when the Sun is situated behind the antenna array. This contamination can be most effectively reduced by pointing the instrument nadir, providing at least one out of 2 views of every pixel free of this Sun contamination per overpass.
Sun and galactic glint are produced by diffused scattering of their brightness temperature over the ocean or land surface. Typically the Sun glint is generated outside the extended alias-free region, but in very rough sea state conditions the Sun glint area can enter into the extended field of view. On the contrary, the galactic glint can happen within the alias-free or extended alias-free field of views, depending on season and pass (ascending or descending). Both the Sun and the galactic glint effects can be minimized by pointing the instrument nadir, to enable two looks with different view angle geometry for every pixel, at least one of them with much-reduced degradation.
Land-sea contamination is known to extend up to 1000 km from the coastlines in the current SMOS ocean images. A correction of this effect has only been possible at Level-2 thanks to the long data record, spanning over 7 years now. Land-sea contamination could be reduced at Level-1 by improving the synthetic beam efficiency and the use of the so-called ALL-LICEF mode with a 0.98 correction factor found experimentally.
3) Spatial Resolution over Land
The spatial resolution of SMOS, 41 km at boresight, would need a major improvement to address much-demanded hydrological applications at kilometre scale. There are several ways to approach this objective beyond the obvious one of enlarging the size of the instrument: through the array geometry and by synergistic use with SAR data.
A hexagon-shaped array achieves a factor 1.22 better spatial resolution than a Y-shaped array as SMOS for the same envelope. As an example, a 6.5 m diameter hexagon (thus smaller than the 8 m Y shape array of SMOS) flying at the same altitude as SMOS would achieve 33 km at boresight, better than SMOS. The spatial resolution performance could be further improved in proportion to the size of the array: an 8.5 m diameter hexagonal instrument would lead to 25 km at boresight (assuming the same altitude).
Even more drastic improvements in spatial resolution in the near future could result by overlapping the field of view with that from a SAR mission, as ESA’s Sentinel-1 (this SAR operates at C-band; in the future, there might even be a SAR mission working at L-band). That would allow using pixel disaggregation techniques resulting in highly improved spatial resolution by data combination.
4) Calibration Strategy
These are a number of areas of the calibration system of MIRAS where potential improvements have been identified: removal of the NIR (Noise Injection Radiometer) units, centralization of the calibration of the phase of the LO (Local Oscillators), reduction of the temporal fluctuations in the offset of the detector outputs, removal of the effect of heater status on the detector outputs and centralization of the noise injection for phase calibration. Each of these topics is discussed below.
Removal of the NIR units. Before the launch of SMOS, it was considered critical to measure the antenna temperature accurately and without temporal fluctuations. Therefore it was decided to launch 3 Noise Injection Radiometers for this purpose. The in-orbit experience has shown that the average antenna temperature of the 66 LICEF (Lightweight Cost-Effective Front-end) total power receivers is as stable, if not more, than that provided by the NIR units. The NIR units could thus be removed, resulting in a major simplification of both, overall instrument design (all receivers of a single type: the LICEF), more importantly, in calibration strategy (the LICEF would be directly calibrated using the Cold Sky external maneuvers together with their internal matched load) and operations (much-simplified calibration commands).
Better calibration of the LO phase. The LOs in SMOS are located inside the CMN (Control and Monitoring Node) units. There is one CMN unit per instrument segment (every arm, as well as the hub, has every 3 segments). The physical temperature of every CMN is controlled by a different part of the thermal control system, and hence the LO phases evolve independently of each other. The LO phase calibration requires periodic injections of correlated noise every 10 minutes to track their temporal evolution, this LO calibration being the most important contributor (1 %) to the total time spent in calibration (1.64%). Using LO parts less sensitive to physical temperature and having all LOs in the same box, i.e. using a centralized LO signal distribution, would allow spacing the LO calibrations to one-quarter of the orbital period (25 minutes) if not removing their need entirely, reducing the total calibration time below 1%.
Temporal fluctuations in the detectors offsets. Rapid random changes in the offset of PMS (Power Measuring System) detectors of the LICEF receivers have been observed to happen. This has led to the need of introducing a weekly PMS offset calibration. Although the impact of such calibration is very limited (less than 0.02% of the total calibration time), such PMS offset fluctuations do affect the temporal stability of the ALL-LICEF mode. It is believed these PMS offset variations are mostly due to EMC (Electro-Magnetic Compatibility) effects within the LICEF receivers. Hence improving the EMC design of the PMS detectors and using voltage-to-frequency translation could mitigate those fluctuations greatly and improve the temporal stability of the ALL-LICEF mode.
Heater status impact on the detectors. The ON-OFF heater approach of the current thermal control in SMOS has been seen to affect the value of the LICEF PMS detector offsets, and moreover, such effect depends on whether MIRAS is in calibration or in nominal observation mode. An exponential heater correction is in place currently, but there is a residual error affecting the antenna temperature due to this dependence of the PMS offsets on the heater status. This dependence is believed to be produced by a combination of EMC and thermal effects. A more robust PMS design from the EMC point of view but also from the thermal aspects could mitigate if not remove this unwanted effect. It would be necessary to add a PMS-heater sensitivity test within the payload test campaign to ensure the effect is indeed not happening. A thermal control based on a PID law as opposed to an ON-OFF approach would as well smooth its effects on the PMS offset.
Centralization of the noise injection for LO phase calibration. Currently, the CAS (Calibration System) is based on a distributed approach of overlapping 1-to-12 receiver signal distribution trees. This responded to the practical difficulty of implementing a centralized 1-to-72 receiver distribution network. The distributed approach requires 2 steps to activate the first half of the CAS noise sources, and then the other half, which consumes time, and leads to some error propagation. Similarly, the calibration of the fringe-washing function parameters of baselines not connected to the same CAS noise source has to follow a stepped approach based on phase closure relationships. A centralized noise injection distribution would today be possible thanks to the advance in optoelectronics, i.e. using optical cables and components instead of coaxial cables. The CAS signal could be thus generated centrally in a redundant unit and distributed to all receivers following a single distribution tree. Such an approach would solve both limitations above described, i.e. the need for 2-step calibration and the propagation of errors, resulting potentially in a more accurate calibration and simplifying greatly the commanding of the calibration mode.
5) Open Areas
As introduced above, it has been empirically verified that in the ALL-LICEF mode, there is an efficiency factor of 0.98 that, when applied to all visibility samples outside the origin (0,0), shows to reduce the land-sea contamination. The explanation behind such an efficiency factor has not been found yet but certainly reveals its effects only thanks to the fact, that we are measuring V(0,0) with different hardware than the rest of the visibility samples. It is hence expected that removing the NIR units (as proposed earlier) shall also remove the need for such a correction factor of unknown origin.
A consolidated result is the existence of a noise floor limit in the amplitude of systematic spatial ripple in SMOS images, below which, it is not possible to reach. The noise floor is determined by the combination of element spacing and antenna pattern similarity. The further away the element spacing is from that one for which no aliases can appear (0.58 times the central wavelength of the radiation in the case of hexagonal sampling, as it is SMOS), and the more dissimilar the antenna patterns are from each other, the larger the amplitude of the systematic spatial ripple is.
A second contributor to spatial ripple is the lack of perfect knowledge of antenna patterns. Currently, the SMOS Calibration and Level-1 team is working on techniques to reduce this contribution, such as the Initial Guess based Techniques (dubbed ‘Gibbs’ approaches), the Floor Error Mask, the Pre-Distorted G-matrix and the Average Pattern Reconstruction.
• June 13, 2017: Satellites are helping to predict favourable conditions for desert locusts to swarm, which poses a threat to agricultural production and, subsequently, livelihoods and food security. 58)
- Desert locusts are a type of grasshopper found primarily in the Sahara, across the Arabian Peninsula and into India. The insect is usually harmless, but when they swarm they can migrate across long distances and cause widespread crop damage.

- During the 2003–05 plague in West Africa, more than eight million people were affected. Up to 100% losses were reported on cereals, 90% on legumes and 85% on pasture. It took nearly $600 million and 13 million liters of pesticide to bring the plague under control.
- Swarming occurs when a period of drought is followed by good rains and rapid vegetation growth. These conditions trigger a period of abundant breeding and overcrowding, and the increased contact with other locusts can lead to the formation of large swarms. This behaviour makes locusts more dangerous than grasshoppers.
- A 1 km2 swarm contains about 40 million locusts, which eat the same amount of food in one day as about 35,000 people. In other words, a swarm the size of the capital of Mali or the capital of Niger will eat the same amount of food as half the entire population of the respective country.
- Satellites can monitor the conditions that can lead to swarming locusts, such as soil moisture and green vegetation. ESA recently teamed up with international partners from Algeria, France, Mali, Mauritania, Morocco, Spain and the UN Food and Agriculture Organization (FAO) to test how data from satellites such as ESA’s SMOS (Soil Moisture and Ocean Salinity mission), can be used to predict locust plagues.
- At FAO, we have a decades-long track record of forecasting plagues and working closely with countries at greatest risk to implement control measures,” said Keith Cressman, FAO’s Senior Locust Forecasting Officer. “By bringing our expertise together with ESA’s satellite capabilities we can significantly improve timely and accurate forecasting. Early warning means countries can act swiftly to control a potential outbreak and prevent massive food losses.”
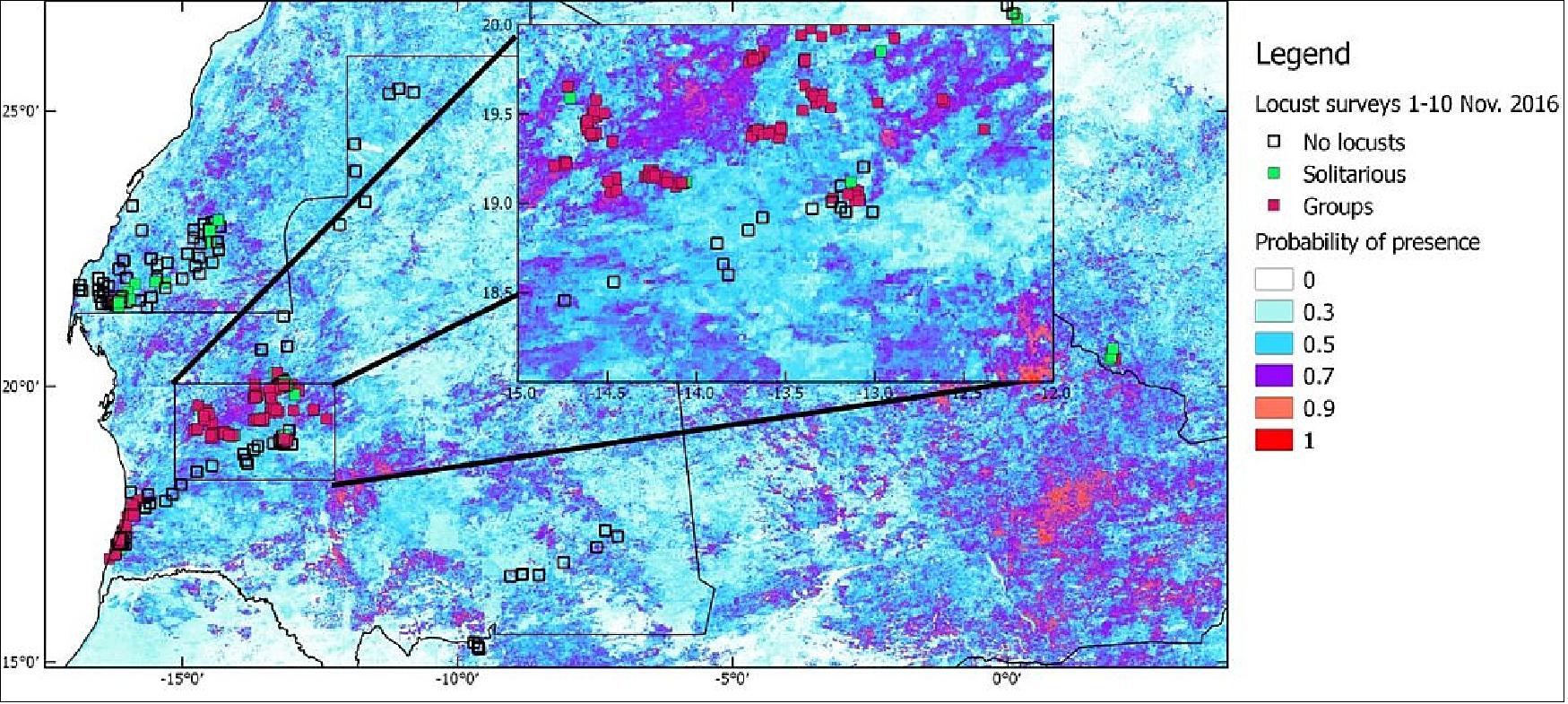
- The SMOS satellite captures images of ‘brightness temperature’ that correspond to radiation emitted from the Earth’s surface, which can be used to gain information on soil moisture at a resolution of 50 km per pixel.
- By combining this information with medium-resolution coverage from the MODIS instrument on NASA’s Aqua and Terra satellites, the team downscaled SMOS soil moisture to a resolution of 1 km per pixel. The measurements were then used to create maps showing areas with favourable locust swarming conditions about 70 days ahead of the November 2016 outbreak in Mauritania.
- In the past, satellite-based locust forecasts were derived from information on green vegetation, meaning the favourable conditions for locust swarms were already present. This allowed for a warning period of only one month.
- Information on soil moisture, on the other hand, indicates how much water is available for eventual vegetation growth and favourable locust breeding conditions and can therefore forecast the presence of locusts 2–3 months in advance. The additional time is essential for the local and national authorities to organize preventive measures.
- “I use the data products to understand the current situation, as well as the evolution of locust outbreaks,” said Ahmed Salem Benahi, Chief Information Officer for Mauritania’s National Center for Locust Control. “We now have the possibility to see the risk of a locust outbreak one to two months in advance, which helps us to better establish preventive control.”
- While the current data products are based on the SMOS and MODIS missions, information from the Copernicus Sentinel-3 mission will soon be integrated to ensure the long-term availability of the locust warnings.
- The team is also working on a similar product downscaling SMOS soil moisture with Sentinel-1 observations, which will allow a further increase of resolution to 100 m.
• May 11, 2017: ESA’s SMOS mission maps variations in soil moisture and salt in the surface waters of the open oceans. When the satellite was designed, it was not envisaged that it would be able to measure salinity in smaller seas like the Mediterranean, but SMOS has again surpassed expectations. The satellite carries a microwave instrument to capture images of ‘brightness temperature’, which correspond to microwave radiation emitted from the Earth’s surface and can be related to soil moisture and ocean salinity. While this information is fulfilling the mission’s core objective of improving our understanding of Earth’s water cycle, SMOS has found a multitude of other uses such as tracking hurricanes, measuring thin ice floating in the polar oceans and improving crop-yield forecasts. 59)
- Its measurements of salinity in the open oceans not only help us understand how our oceans are responding to climate change, but are also improving our understanding of issues such as ocean acidification and large-scale events like El Niño. However, these processes take a long time so smaller seas such as the Mediterranean, where processes occur over much shorter timescales, offer an ideal laboratory to study ocean dynamics. For instance, salinity maps are needed to understand how the flow of water from the Atlantic Ocean through the Strait of Gibraltar forms the Alboran Gyre in the western Mediterranean Sea.
- Until recently, SMOS’ observations of salinity in the Mediterranean were hampered for two reasons. The biggest issue, and one that was understood when the mission was designed, was one of ‘land–sea contamination’. This is because measurements taken over the surrounding land leach into the ocean data and affect the quality. The other problem, which was not foreseen, is the extent of radio interference.
- Once SMOS was launched in 2009, it transpired that its signal was being interrupted by numerous illegal transmitters around the world. However, by working with national frequency protection authorities, 75% of these transmitters have now been shut down. - Nevertheless, this is a laborious process and some regions, such as the Libyan coast and the eastern Mediterranean Sea, remain contaminated where mitigation strategies have not yet been successful.
- Thanks to the determination of scientists to address these problems and with the support of ESA’s Earth Observation Support to Science Element, SMOS can now map salinity in much of the Mediterranean Sea.
- The Barcelona Expert Center in Spain has addressed both the problem of land-sea contamination and also reduced the effects of interference by making changes to the standard data processing chain. Antonio Turiel from the center said, “We look out over the Mediterranean Sea every day from our institute in Barcelona and we were determined to get to grips with the problem. “The solution we came up with actually meant going back to each individual measurement of brightness temperature and filtering and processing it in a different way.”
- The University of Liege in Belgium has also tackled this issue by proposing a method for reducing noise. Aida Alvera Azcárate from the University of Liege said, “Land–sea contamination and radio-frequency interference in the Mediterranean Sea cause the level of an unwanted signal in the data to be rather high. “We have developed an approach to extract the actual geophysical signal from the noisy data, increasing the accuracy of the final dataset.”
- ESA’s SMOS mission manager, Susanne Mecklenburg, said, “Both institutes have done fabulous work in addressing the limitations we were facing when looking at changes of salinity in the Mediterranean Sea. Their work extends the catalogue of applications that SMOS can support to benefit science and society at large. “Once again we see SMOS deliver way beyond its original promise – and I’m sure there will be more successes to come.”
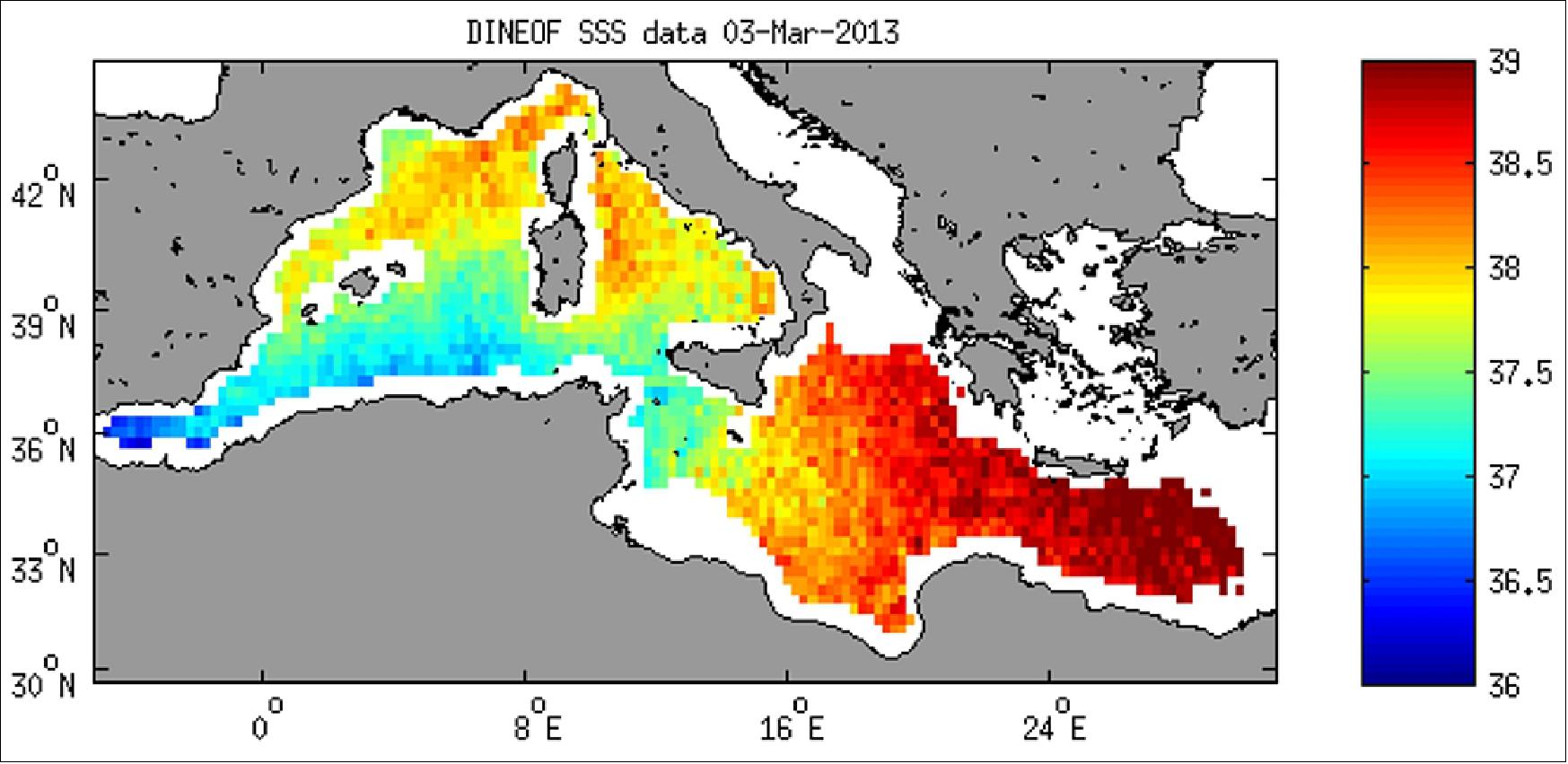
• December 16, 2016: Although not designed to deliver information on ice, ESA’s Earth Explorer SMOS satellite can detect thin sea-ice. Since its cousin, CryoSat-2, is better at measuring thicker ice scientists have found a way of using these missions together to yield an even clearer picture of the changing Arctic. 60)
- Carrying a radiometer, SMOS was designed capture images of brightness temperature. While these images can be turned into information on soil moisture and ocean salinity to improve our understanding of the water cycle, it turns out that these data can also be used to measure sea ice.
- In contrast, CryoSat carries a radar altimeter that measures freeboard of sea ice, which is the distance between the waterline and the top of the ice.
- This is being used to work out how the thickness of sea ice is changing and, in addition, how the volume of Earth’s ice is being affected by the climate.
- Despite the two missions being very different, scientists from the University of Hamburg and the AWI (Alfred Wegener Institute) in Bremerhaven, Germany, who are involved in both Earth Explorer missions, have found a way of combining data from both satellites to gain a more complete picture of changes in the thickness of ice floating in Arctic waters. — While the accuracy of measurements from CryoSat-2 increases with increasing ice thickness, SMOS data are more accurate when the sea ice is relatively thin, less than about a meter.

- CryoSat measurements yield high-spatial resolution information and cover the Arctic every month. While SMOS offers daily images, they are a much coarser resolution than those of CryoSat-2. Robert Ricker from AWI said, “By combining ice-thickness estimates from CryoSat-2 and SMOS, we obtain a more accurate and comprehensive view on the actual state of Arctic sea ice. Users need timely information across the entire Arctic and we can meet their needs by combing information from these two different, but complementary satellite missions.”
- The University of Hamburg is already using SMOS to provide daily maps of Arctic sea-ice thickness during the winter. These maps are produced within 24 hours of the measurements being taken in space. SMOS is also helping to improve the accuracy of sea-ice forecasts, which could help marine traffic operators to determine the safest and most economic routes through waters such as the Northwest Passage and the Northern Sea Route as the ice becomes thinner owing to climate change.
- In addition, both missions’ archived data have been merged to generate information on thin sea-ice going back to 2010.
- This will make an important contribution to studies into the fragile component of the Earth system and help to understand annual variations and climate change. Lars Kaleschke, from the University of Hamburg, emphasized, “It is good see how information from two different types of measurements can be combined into one product to advance science and improve operational applications. It has now been demonstrated that using ice thickness information from SMOS improves the model computations and forecasts. It will be interesting to see how ocean current and air temperature models will benefit from a better understanding of the sea-ice fields.”
• October 14, 2016: While ESA’s water mission was built to advance our understanding of Earth, it continues to show how well it is suited to delivering information for numerous applications that improve everyday life. Taking this a step further, soil moisture data products are now available within three hours of measurement, which is essential for many applications. 61)
- The satellite captures images of ‘brightness temperature’, which correspond to radiation emitted from the Earth’s surface and can be used to gain information on soil moisture and ocean salinity. - As well as being used to study how Earth works as a system, SMOS’ readings of brightness temperature have proved to be a completely new source of information for tracking hurricanes, measuring thin ice floating in the polar seas, assessing fire risk, and more.
- However, for SMOS to benefit society even more, its data need to be available fast – in what is termed ‘near-real time’, which means within three hours of sensing. To accommodate this, the process of translating brightness temperature measurements into soil moisture products has been completely redesigned. It involved developing an artificial ‘neural network’, akin to the vast network of neurons in a brain. After being trained with old soil moisture data, this neural network is now able to compute values of soil moisture from the satellite’s observations within seconds.
- ESA’s SMOS mission scientist, Matthias Drusch, said, “Short latency and fast access to data products are very important for many applications such as weather prediction and flood forecasting. The neural network approach, developed at CESBIO, has allowed us to integrate state-of-the-art science into operational processing, opening the door for operational agencies.”
- The operational data processing is being done at the ECMWF (European Centre for Medium-Range Weather Forecasts) in Reading, UK and the final data products can be obtained through EUMETSAT's EUMETCast system. The fact that soil moisture data are available within three hours of sensing also makes it easier to combine SMOS data with similar information from other satellites.
- In fact, SMOS and NASA’s SMAP (Soil Moisture Active Passive) satellite can provide accurate coarse-resolution soil moisture information. Measurements from the Copernicus Sentinel-1 satellite can then be applied to improve the resolution to ‘field scale’. By combining measurements from different sensors the spatial resolution is increased from 25 km x 25 km to 100 m x 100 m.
- VanderSat, a Dutch company that focuses on adding value to satellite data products, produces these images regularly, furnishing more than 3000 users with essential information. VanderSat’s Richard de Jeu said, “The new data fusion method provides cost-effective and information-rich soil moisture information. This means that more informed decisions can be made – whether you are monitoring crops, predicting the weather, performing predictive analysis or preventing forest fires.”
- Susanne Mecklenburg, SMOS mission manager, said, “A single satellite cannot provide high-accuracy datasets, high spatial resolution and fast global coverage. Therefore, a constellation of satellites with complementary instrumentation is needed to address the needs of agriculture, hydrology, weather forecasting, and climate applications.”
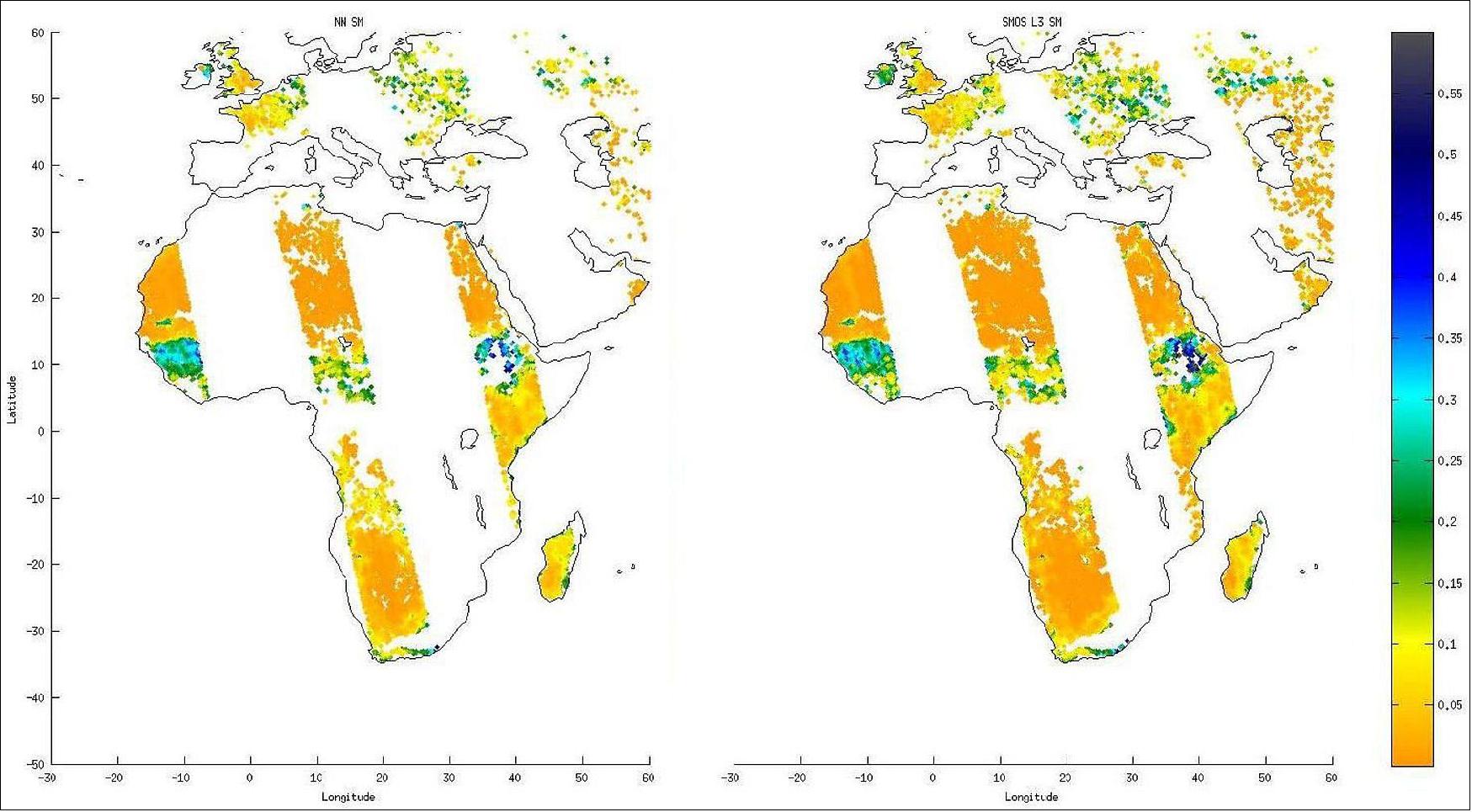
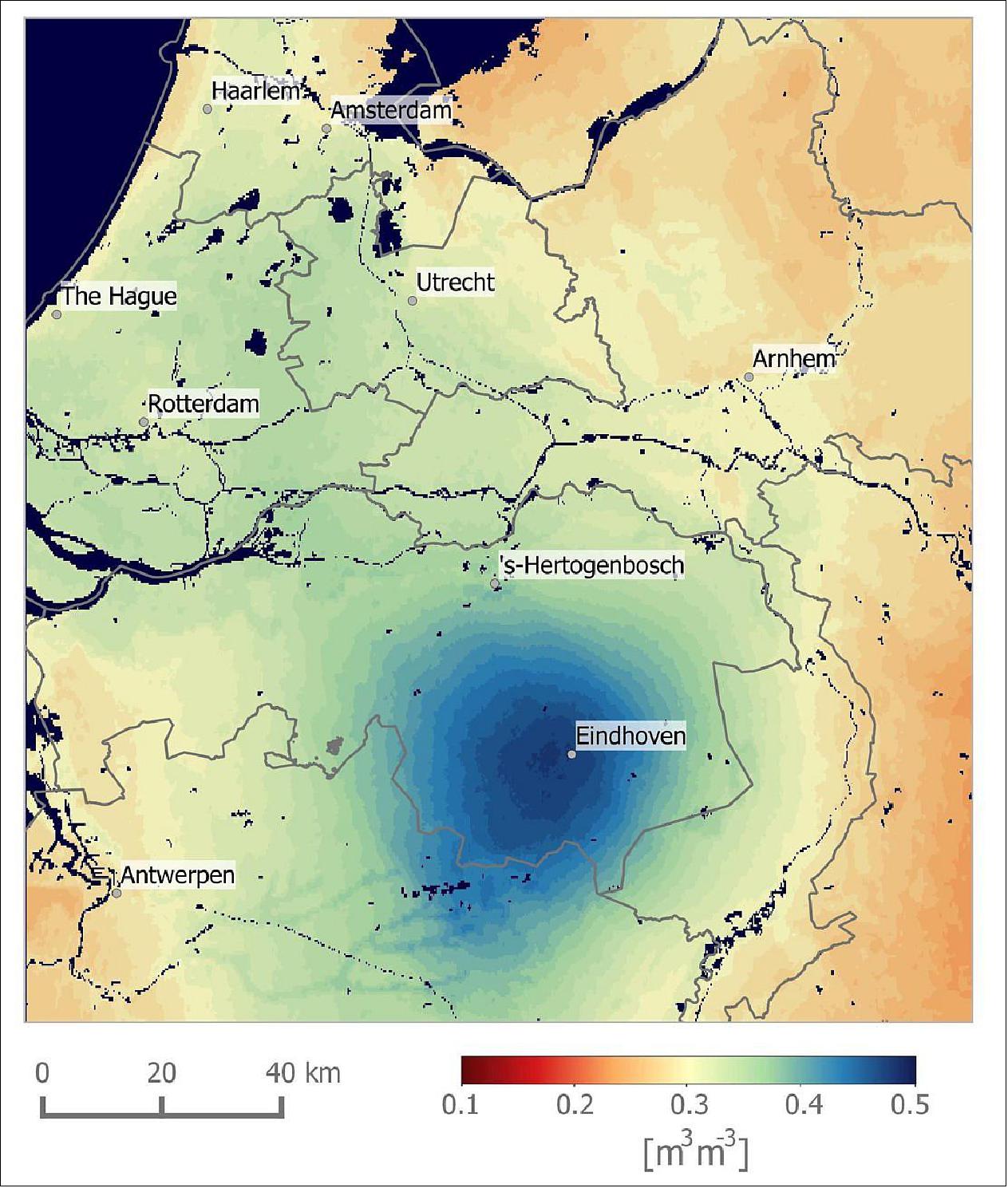
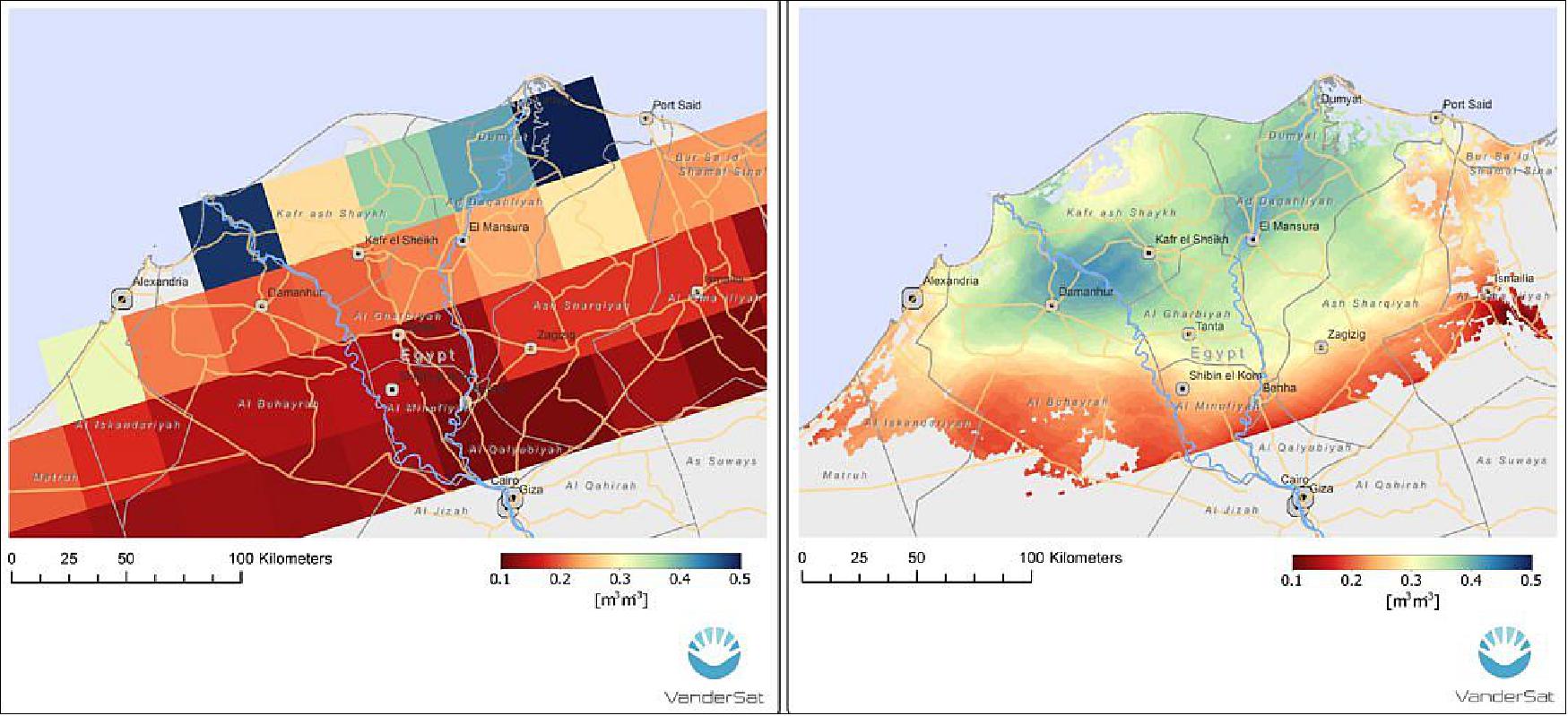
• July 2016: The SMOS MIRAS data for almost the entire mission period (over 6 years) has been reprocessed with the new fully polarimetric version (v620) of the Level-1 processor which also includes a refined calibration scheme for the antenna losses. This reprocessing has allowed the assessment of an improved performance benchmark, a better understanding of the observations, and the preparation of a new version (v700) of the Level-1 processor with further potential. 65)
6) Systematic spatial ripple: A consolidated result is the existence of a noise floor limit in the amplitude of systematic spatial ripple in SMOS images, below which, it is not possible to reach. The noise floor is determined by the combination of element spacing and antenna pattern similarity. The further away the element spacing is from that one for which no aliases can appear (0.58 times the central wavelength of the radiation in the case of hexagonal sampling, as it is with SMOS), and the more dissimilar the antenna patterns are from each other, the larger the amplitude of the systematic spatial ripple is.
A second contributor to spatial ripple is the lack of perfect knowledge of antenna patterns. Currently, the SMOS Calibration and Level-1 team is working on techniques to reduce this contribution, such as the Initial Guess based Techniques (dubbed ‘Gibbs’ approaches), the Floor Error Mask, the Pre-Distorted G-matrix and the Average Pattern Reconstruction.
7) Sun and RFI (Radio Frequency Interference) tails: The side lobes from the Sun and strong RFI sources degrade SMOS images. To correct for them, some methods have been put in place and are subject to continuous improvement. These techniques used either an estimated point source instrument response, a real Sun acquisition or a variety of RFI source detection algorithms to mitigate their impact or, at least, flag images or pixels contaminated by them. The preliminary correction of the Sun effect when it is located in the back of the antenna array has been quite successful. Recently new developments, like the nodal sampling, based on the image covariance matrix have given a new insight into the instrument impulse response, with the potential to improve the performance of SMOS in RFI-contaminated seas.
8) Land and Sea contamination: Land-sea contamination refers to an excess of brightness temperature measured around continental masses. An important contributor to this signal has been identified, this being an unbalance of about 2% between the amplitude of the visibility at the origin and any other. The most recent v700 of the Level-1 processor has implemented the so-called ALL-LICEF branch, with which the correction of such an unbalance has successfully been demonstrated. In parallel, at Level-2 (sea surface salinity retrieval), an empirical technique built up, using the whole mission data set, has been devised to remove the land-sea contamination very effectively.
9) Orbital variations: Orbital variations are studied by comparing SMOS brightness temperature observations in ascending and descending passes over the same ocean area. With the new v620 Level-1 processor, orbital variations are well constrained within ±0.4 K, except for the eclipse season, when they can reach 3 times this level. Accordingly, the efforts are directed at finding a correction for the eclipse season. A critical parameter is the amplitude of the noise injection generated by the 3 NIR (Noise Injection Radiometer) units of MIRAS, which appears to be affected by the physical skin temperature and its gradient.
10) Seasonal variations: The Hovmöller plots over the ocean of SMOS descending passes of the (Stokes 1)/2 parameters had always shown some warm deviation around October. The 6-year long data record has allowed the computation of correlation factors with a high confidence level, and the best candidate for the mentioned deviation has turned out to be the reflected galaxy signal. That is, the instrument is more stable than initially thought, the October variation being due to a geophysical miss-modelled effect.
11) In-orbit calibration strategy: The in-orbit calibration strategy of SMOS has changed very little since the start of its operational phase in June 2010. However, a more precise analysis of the external calibration maneuvers has shown the impact of thermal effects. There is evidence that these effects happen when the skin temperature of the antenna is colder than about 0ºC. To avoid the impact of cold temperatures, external maneuvers have been programmed, since October 2014, at a moment such that the Sun has some positive elevation angle over the antenna to keep it warm enough. These ‘warm’ calibrations are providing more consistent noise injection calibration temperatures since they were introduced.
12) Image reconstruction: Improvements in image reconstruction are continuous. The current work includes the implementation of the ‘Gibbs-2’ technique, which should reduce land-sea contamination, and a better correction of the Sun and RFI sources effects. A new version of the Level-1 processor (v710) should be ready by October 2016 with this technique implemented.
• Summer 2016: After more than 6 years on orbit SMOS is in excellent technical condition, and is providing high-quality data products to the scientific and operational communities. The mission operations have been extended to 2017 by both ESA and CNES, which are jointly operating the SMOS mission. There are no technical limitations to prevent a further mission extension even beyond 2017. The instrument performance fulfils the requirements. RFI (Radio Frequency Interference) contamination has been significantly reduced in Europe and the Americas but remains a constraint in Asia and the Middle East. The mission’s objectives have been achieved over land and are being approached over oceans. As an Earth Explorer mission, SMOS has delivered a vast amount of new science that has led to societal benefits across a wide range of disciplines.66)
- Over land, SMOS has been providing the most direct observations of soil moisture at an unprecedented accuracy for areas not contaminated by RFI. This information is used to monitor flood and drought events and supports risk assessments during severe storms with associated heavy rainfall. For the generation of long-term data records using different observation types, it is expected that SMOS measurements can be used as a yardstick. Future products over land will include vegetation optical depth data, which will contribute to agricultural applications and food security, and a soil freeze/thaw product, which will contribute to the quantification of latent heat fluxes. Both of these products will further our understanding of carbon and land surface modelling.
- SMOS observations have shown great potential for operational applications, and data products continue to evolve. Three new products have been introduced: sea ice thickness, important for ship routing but also for climate research; soil moisture in near-realtime based on a statistical approach, providing valuable input data and appropriate timelines for hydrological applications; and severe winds, to improve forecasts of severe storms.
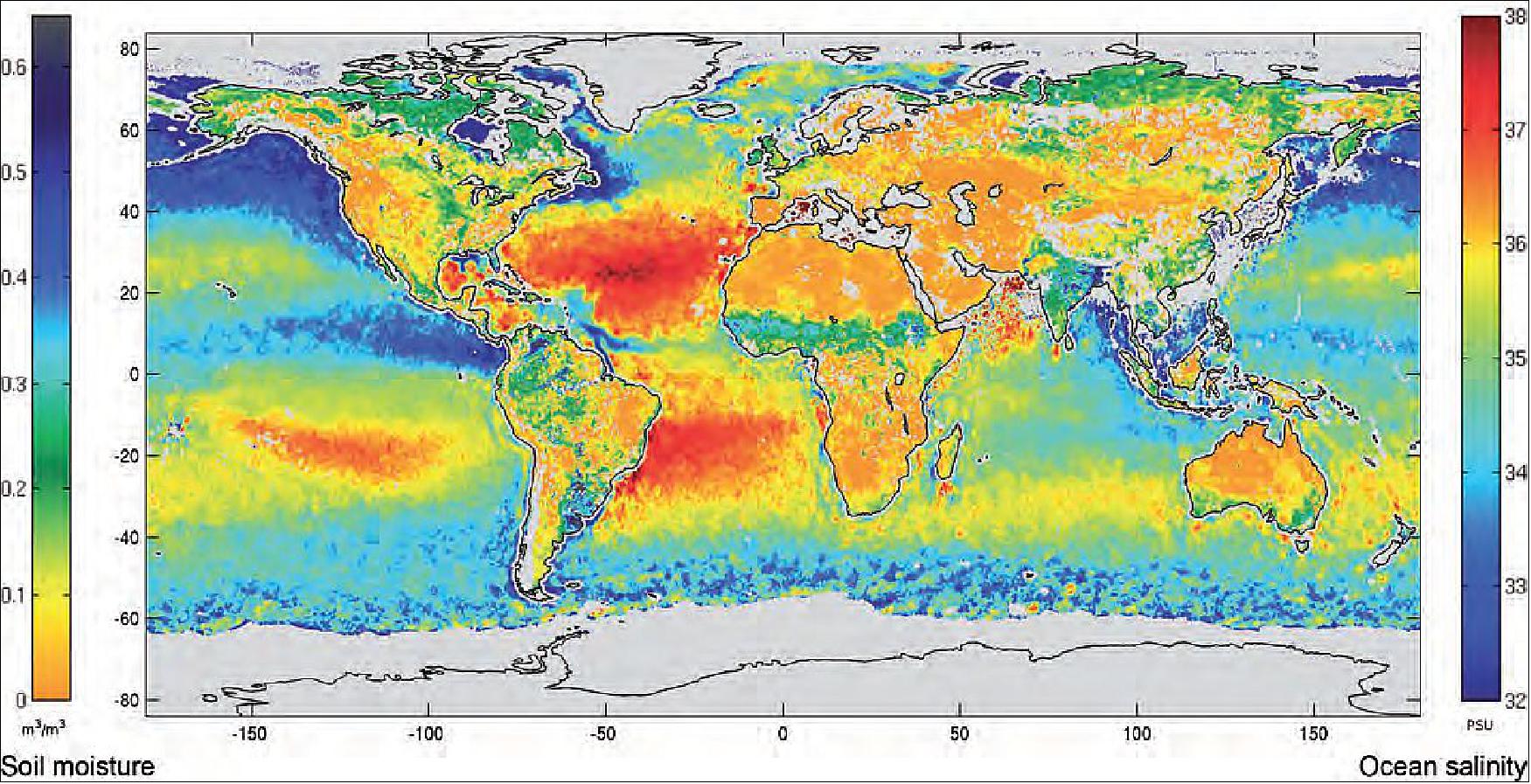
• October 2015: SMOS provides novel observations of 2-dimensional images of rain imprint on SSS (Sea Surface Salinity) just after a rain event. These observations are very complementary to routine in situ observations and to satellite rain measurements (difficult because of the intermittency of rain). 67)
- SMOS SSS is a very good tracer of instantaneous Rain Rate.
- It is linearly related to instantaneous RR (Rain Rate) from individual satellites (RemSS retrieval) but non-linearly when RR CMORPH is used; at moderate wind speed (3-12 m/s), the signature of rainfall on SMOS SSS ~-0.2 pss mm-1 hr
- Dependency of SMOS SSS wrt RR same order of magnitude as of drifters in situ SSS.
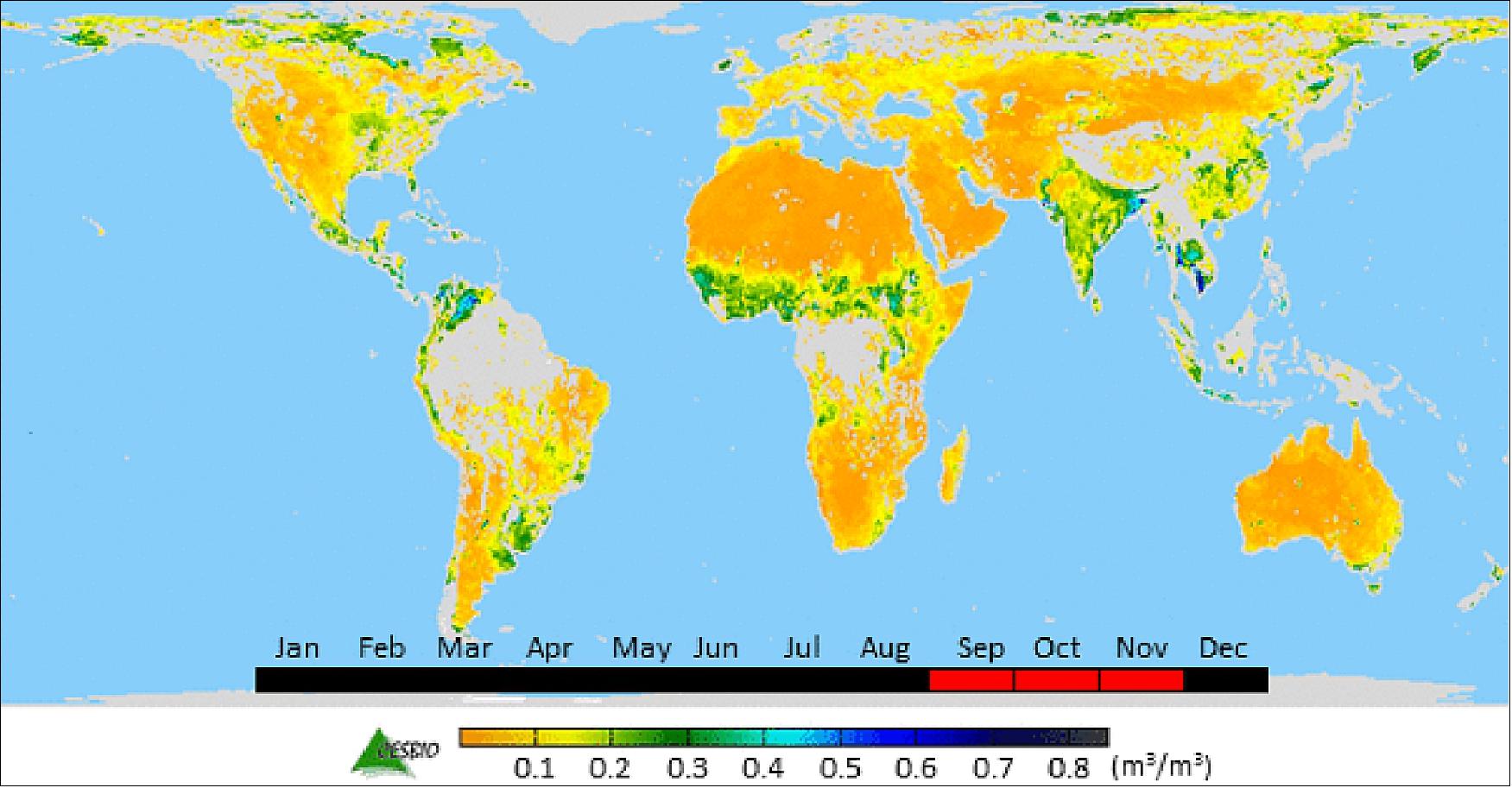
• Sept. 30, 2015: ESA’s SMOS and two other satellites are together providing insight into how surface winds evolve under tropical storm clouds in the Pacific Ocean. This new information could help predict extreme weather at sea. This year, a particularly strong El Niño is resulting in much higher surface ocean temperatures than normal. The surplus heat that is being drawn into the atmosphere is helping to breed tropical cyclones – Pacific Ocean monsters. With eight major hurricanes already, this year’s hurricane season is the fifth most active in the Eastern Tropical Pacific since 1971. 69)
13) At the end of August, three category-4 hurricanes developed in parallel near Hawaii. A collage from NASA’s Terra satellite captured the Kilo, Ignacio and Jimena hurricanes beautifully (Figure 61).
- However, a special set of eyes is needed to see through the clouds that are so characteristic of these mighty storms so that the speed of the wind at the ocean surface can be measured. This information is essential to forecast marine weather and waves, and to predict the path that the storm may take so that mariners receive adequate warning of danger.
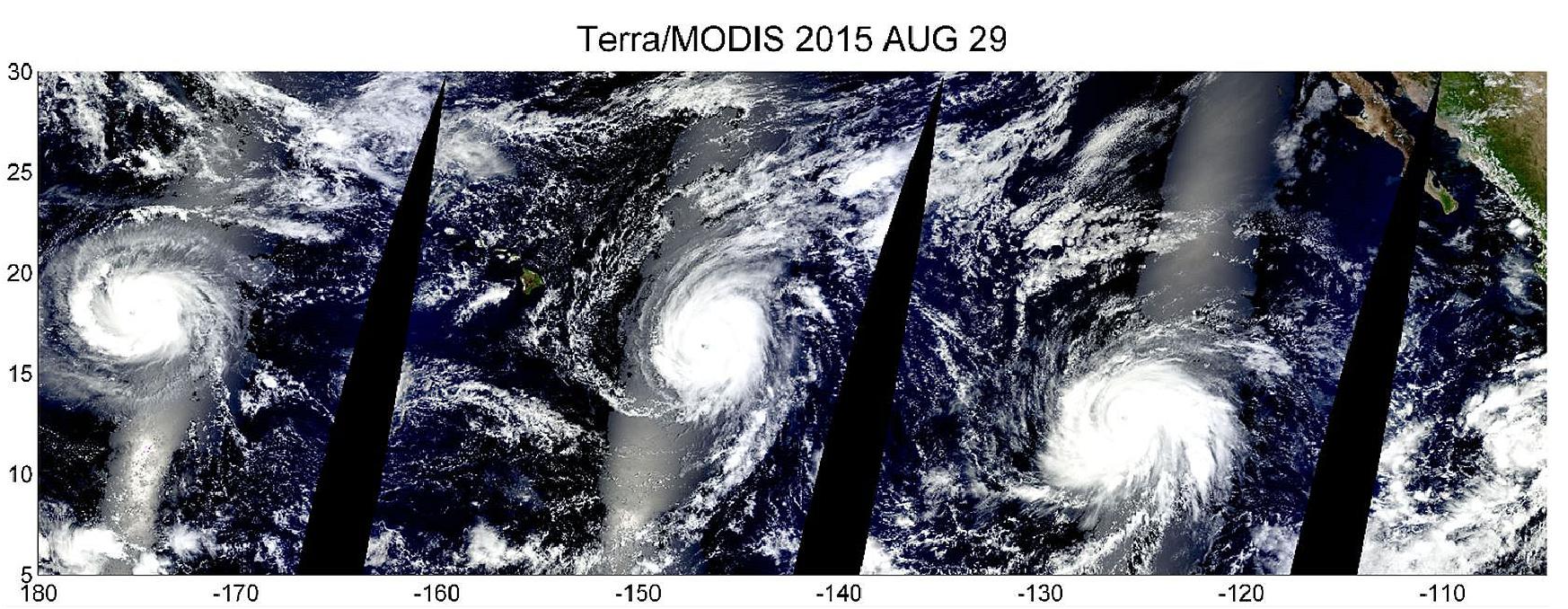
Legend to Figure 61: All three were category-4 hurricanes and spanned the central and eastern Pacific basins. The bright bands in the images are sunglint where solar radiation from the Sun has reflected from Earth back to the satellite sensor. The Copernicus Sentinel-3A satellite, expected to be launched in late 2015, will provide images such as these at 300 m resolution and in 21 bands from its OLCI (Ocean and Land Color Imager) along with thermal infrared images from its SLSTR (Sea and Land Surface Temperature Radiometer).
14) The microwave detector on SMOS yields information on soil moisture and ocean salinity. Going beyond its original scientific objectives, ESA pioneered the application of SMOS measurements to study wind speeds over the ocean.
- Taking this even further, measurements from two other satellites, NASA’s SMAP and Japan’s GCOM-W, which carry differing low-frequency microwave instruments, are being used with readings from SMOS to glean new information about surface winds under hurricanes.
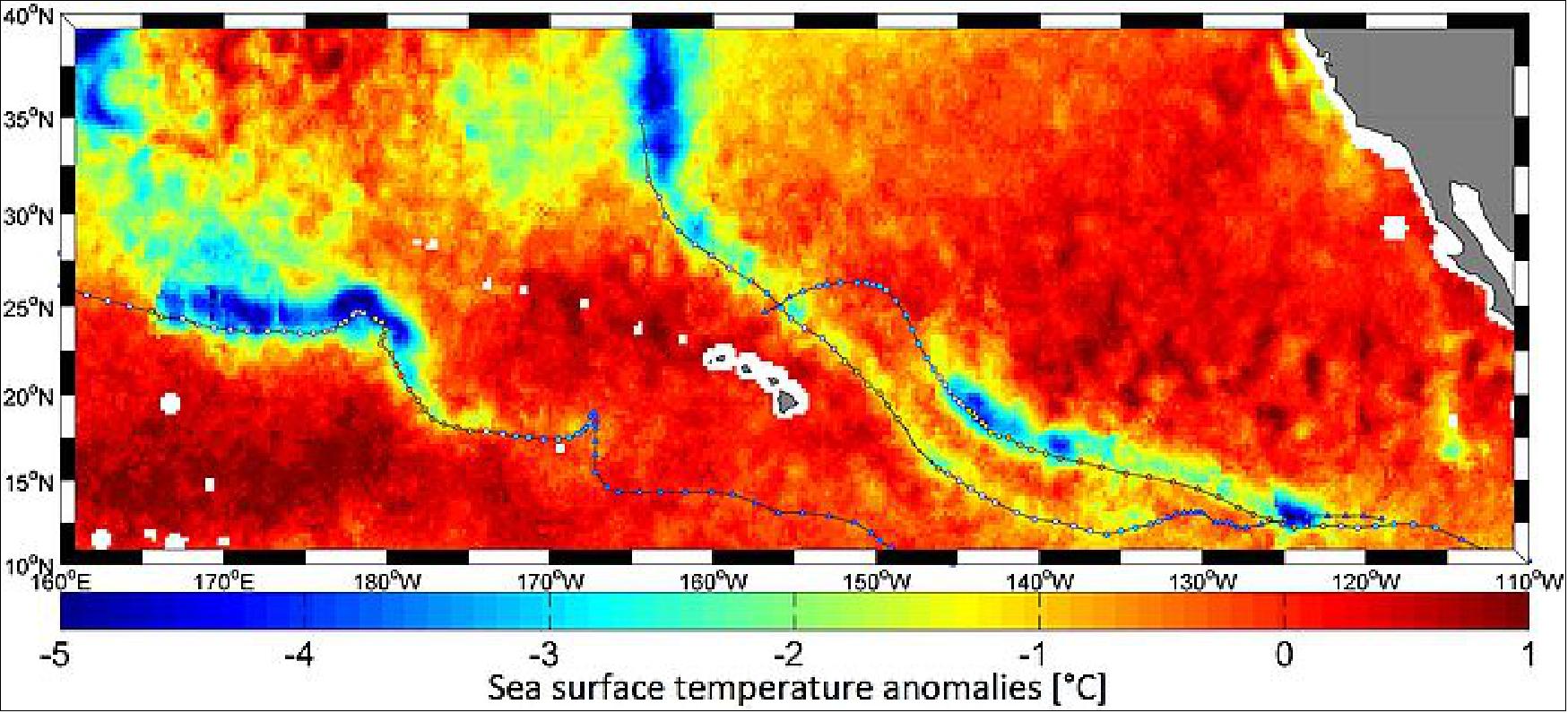
Legend to Figure 62: Sea-surface temperature anomalies reveal cold-water wakes trailing behind the Kilo, Ignacio and Jimena hurricanes, highlighting the power these winds have in stirring the upper ocean and bringing cooler deep waters to the ocean surface. Air-sea interaction on this scale has implications for modelling teams at hurricane forecasting centers and for ocean forecasting systems such as the Copernicus Marine Environmental Monitoring Service.
15) Combining data from multiple satellites in this way provides a unique view of how the surface wind speed evolves under tropical storms in unprecedented detail. This will greatly improve the information on the initial conditions of tropical cyclones fed into weather forecasting, and hence their prediction.
- Scientists from Ifremer in France and the Met Office in the UK are assessing these new data and how they could be integrated into hurricane forecasting.
- Measurements of sea-surface temperatures reveal cold-water wakes trailing the three recent hurricanes, highlighting the power these winds have in stirring the upper ocean and bringing cooler deep waters to the surface.
- Interactions between the sea and atmosphere on this scale have implications for hurricane forecasting centers and for ocean forecasting systems such as Europe’s Copernicus Marine Environmental Monitoring Service.
- Nicolas Reul from Ifremer said, “In addition to improving marine forecasting, the combination of data from sensors on different satellites will definitively enhance our understanding of ocean-atmosphere interactions in intense storms. “Yet the future of this type of satellite measurement remains uncertain, as follow-on missions are not guaranteed.”
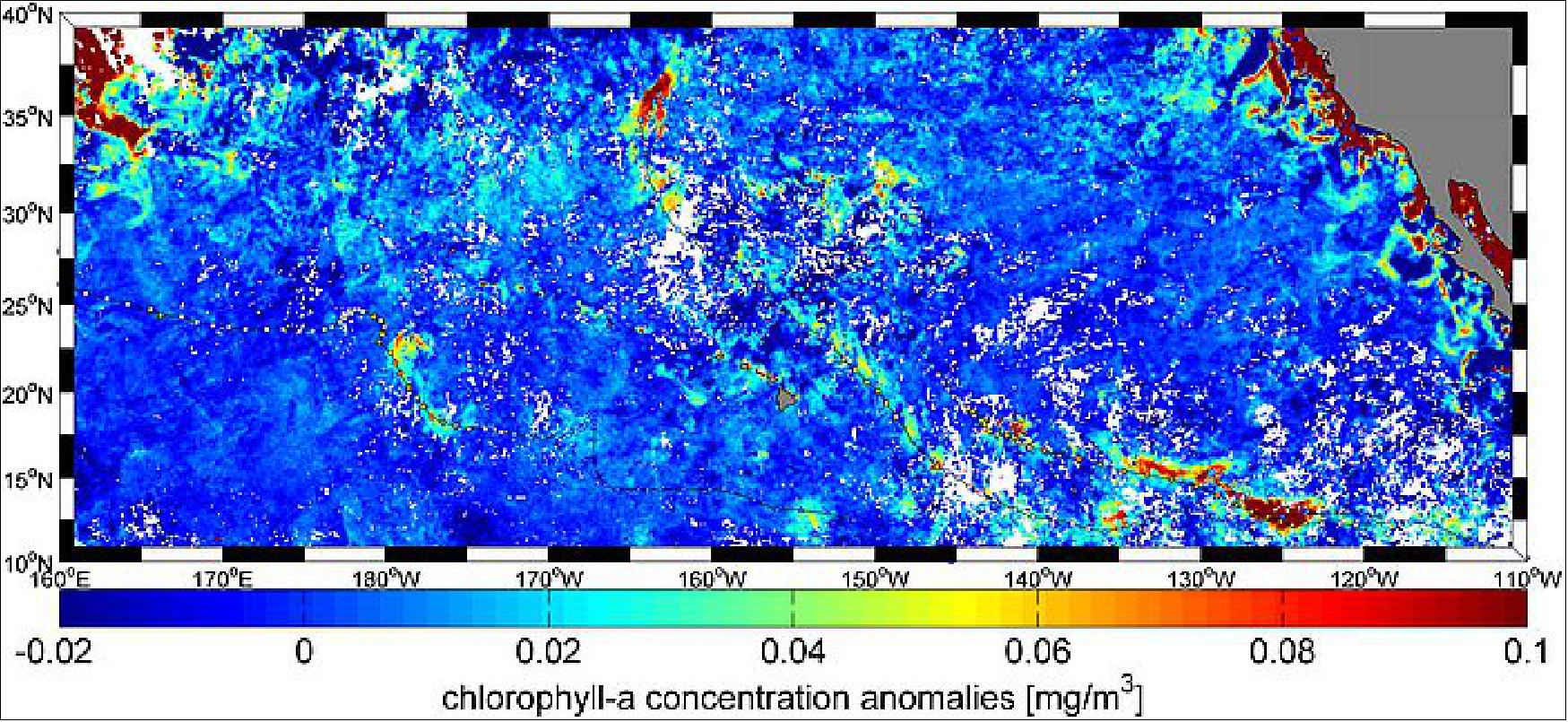
• August 2015: After more than 5 years on orbit, SMOS has so far provided very reliable instrument operations, data processing and dissemination to users. The extension of the SMOS mission operations to 2017 also provides an environment for the continuous provision of observation data sets, which is an important prerequisite for developing (pre-) operational applications and establishing their use with operational users. SMOS data have significant potential for operational applications, which is recognizable in the fact, that for the extension phase, a new mission objective has been added, namely daily sea ice thickness estimates. 70) 71)
- The MIRAS (Microwave Imaging Radiometer with Aperture Synthesis) instrument is working well. The data for almost this whole period has been reprocessed with the new fully polarimetric version (v620) of the Level-1 processor which also includes refined calibration schema for the antenna losses. This reprocessing has allowed the assessment of an improved performance benchmark. The spatial tilt existing in the images produced with the previous version of the Level-1 processor, in the two main polarizations X and Y, has been considerably decreased, removing the negative trend at low incidence angles and reducing the overall standard deviation of the spatial ripples. The expected improvement in the third and fourth Stokes parameters, after correcting the use of the cross-polar antenna patterns, has been confirmed, enabling accurate retrieval of the Faraday rotation angle, total electron content in the ionosphere and the start of the development of fully polarimetric retrieval schemes at Level-2. The mitigation of the side lobes of the Sun and the RFI (Radio Frequency Interference) sources in the images continue to remain a challenge, although a much more precise Sun and RFI flagging strategy has been implemented, allowing for the removal of the affected data with as little impact as possible in the overall number of observations. Also, a new nodal image reconstruction technique is currently under evaluation with positive results. Further effort is being directed towards a more accurate modelling of the Sun and the galactic glint. 72)
- In terms of bias, the new version of the Level-1 processor produces slightly warmer ocean images resulting in an increased average deviation with respect to the geophysical models. The portioning of this positive bias into instrumental and forward model contributions is not perfectly known. In any case, this bias does not compromise the accuracy of the sea surface salinity retrievals as the Ocean Target Transformation removes it. A problem which does persist in the new Level-1 data is the land-sea contamination, caused mainly by visibility amplitude calibration errors and the side lobes of the impulse response of MIRAS. The different image reconstruction techniques which have been tried to reduce this bias, which makes waters around continental masses appear fresher, have had, so far, very limited success. However, in parallel, an empirical correction has been proposed, based on the accumulated record of brightness temperatures since launch, showing very promising results against models and in situ measurements. More importantly, recent progress in the calibration investigations has shed new light on the origin of the land-sea contamination, linking it to visibility amplitude calibration errors. Thus, future versions of the Level-1 processor will have very much reduced land-sea contamination.
- Regarding temporal variations, the long-term drift exhibited by the previous processor version has been significantly mitigated thanks to a better calibration of the antenna losses and the use of only the most accurate NIR (Noise Injection Radiometer) out of the 3 units available in MIRAS. These improvements have also reduced the orbital and seasonal variations, although residual drifts still remain, in particular during October (which might be due to galactic glint) and the eclipse season. External calibration maneuvers follow, since October 2014, a different strategy and are scheduled so that the Sun shines at a low elevation over the antenna horizon, keeping it warm. This new strategy should result in more accurate retrieval of the antenna losses which are one of the main drives for the MIRAS calibration.
- The SMOS Calibration and Level-1 Processor team continues working on new image reconstruction algorithms, a more accurate thermal model of the instrument, the determination of antenna pattern mismodeling, the Sun correction, and better handling of RFI effects. A simpler mode of operation of MIRAS, called ALL-LICEF, is being assessed with the hope that it could bring a more stable behaviour at orbital and seasonal scales (Ref. 72).
• July 2, 2015: While ESA’s water mission (SMOS) continues to deliver key information on soil moisture and ocean salinity to advance our understanding of Earth, it is becoming increasingly important for ‘real world’ applications, further demonstrating the societal benefit of Earth observation. The Continuity of L-band observations is of fundamental importance for operational agencies and numerical weather prediction. 73)
- During the 2nd SMOS Science Conference held May 25-29, 2015 at ESA/ESAC (European Space Astronomy Center) near Madrid, Spain, operational agencies such as Mercator Ocean, ECMWF (European Centre for Medium-Range Weather Forecasts), and the Deputacío de Barcelona emphasized the potential for applications that benefit everyday life.
- SMOS data have already shown their value for weather forecasting as soil moisture information is crucial for predictive skill beyond the medium range. SMOS data also have the potential to provide additional capabilities for re-analyses and the Copernicus Climate Change service in future.
- The Deputació de Barcelona has been using SMOS information in their summer forest fire prevention campaigns since 2012. Together with land-surface temperatures, SMOS’s daily soil moisture data provide a valuable all-weather tool to detect dry areas susceptible to wildfires. “By using SMOS data, our ability to assess the risk of fire is now significant, with the overall fire detection rate now being at 87%,” said Ramon Riera from Deputació de Barcelona. “Areas of more than 3000 hectares that are at risk of fire can now be detected, and even smaller areas of 500 hectares under threat are predicted correctly 60% of the time.”
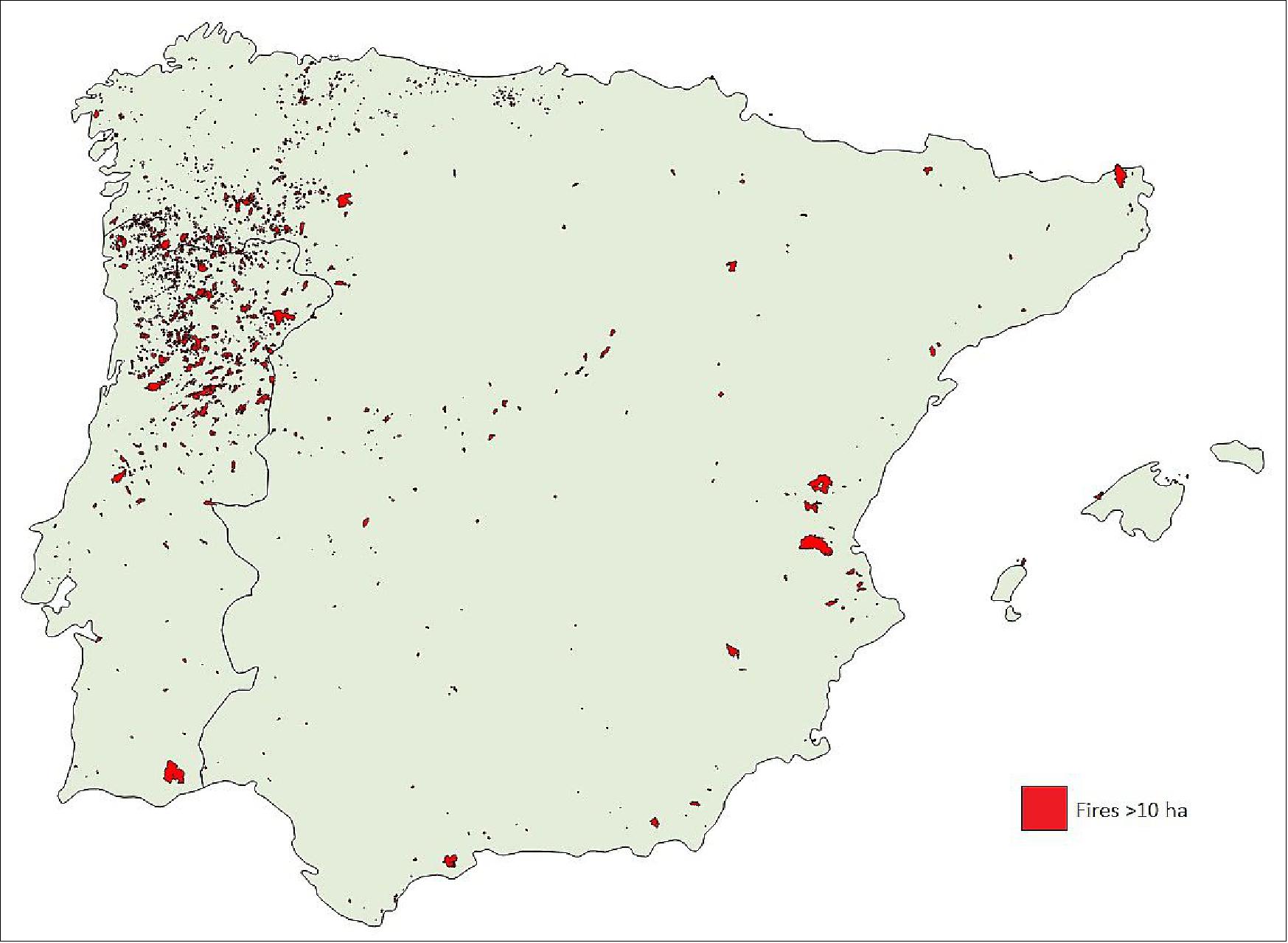
Legend to Figure 64: This image shows all regions on the Iberian Peninsula where fires spreading over an area of more than 10 hectares occurred between 2010 and 2014. The high density of the fires underlines the importance of fire risk protection. The information by the Deputacio Barcelona helps to prevent large areas from burning and protect human lives.
- Over the Arctic, SMOS data have been used to derive the thickness of sea ice. The navigability in ice-infested waters critically depends on the ice thickness. Prof. L. Kaleschke from the University of Hamburg has integrated these observations into computer models, improving the accuracy of sea-ice forecasts.
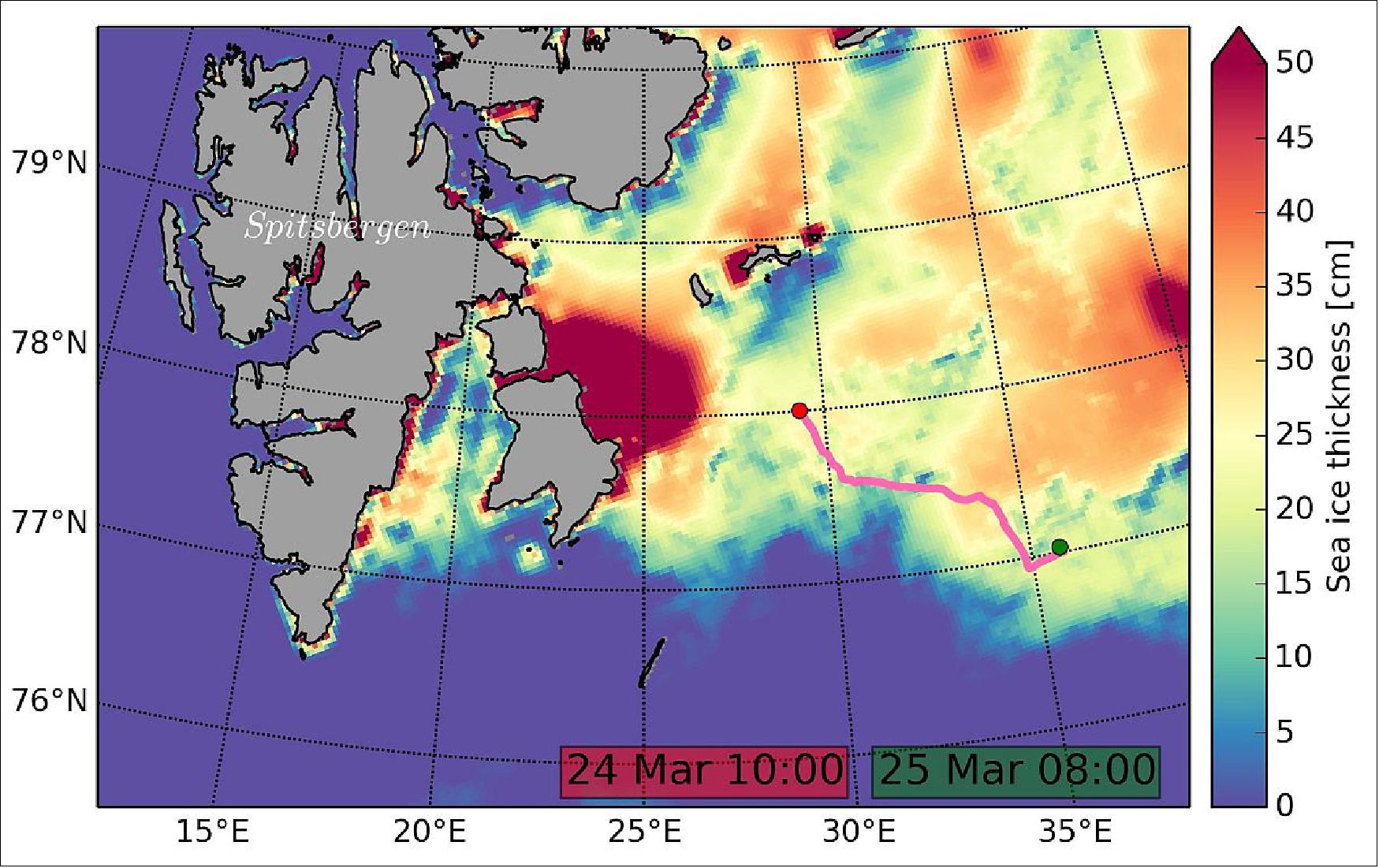
Legend to Figure 65: This ship navigation system uses ice thickness data from SMOS to help ships find the best route through ice-covered waters. The suggested optimized route (pink line) from A (red dot) to B (green dot) is not the shortest distance but suggests a shipping route that avoids difficult ice conditions.
- A prototype navigation system predicted the fastest and most economic routes through the ice-covered Barents Sea when tested back in March 2014. In the future, such a system could support travel along the Northwest Passage and Northern Sea Route, as the shortest link between Europe and East Asia, and also the extraction and transportation of raw materials from the Arctic.
- After more than five years in orbit, results are clearly showing the great potential the SMOS data have for operational applications as well as climate research. SMOS could also complement new missions, such as NASA’s SMAP, launched in January 2015. -In addition, using SMOS data with those from the Copernicus Sentinel missions – in particular, Sentinel-1 and Sentinel-3 – will provide interesting synergistic datasets over oceans.
• Dec. 18. 2014: Measurements of salt held in surface seawater are becoming ever more important for us to understand ocean circulation and Earth’s water cycle. ESA’s SMOS mission is proving essential to the quest. SMOS is monitoring changes in the amount of water held in the surface layers of soil and concentrations of salt in the top layer of seawater – both of which are a consequence of the continuous exchange of water between the oceans, the atmosphere and the land. Launched in 2009, SMOS has provided the longest continuous record of sea-surface salinity measurements from space. 74)
- The salinity of surface seawater is controlled largely by the balance between evaporation and precipitation, but fresh water from rivers and the freezing and melting of ice also change the concentrations. Along with temperature, salinity drives ocean circulation, which, in turn, plays a key role in the global climate.
• On November 2, 2014, the SMOS spacecraft was 5 years on orbit to improve our understanding of Earth's water cycle. Marking its fifth birthday, all the data collected over land and ocean have been drawn together to show how moisture in the soil and salinity in the ocean change over the year. 75) 76)
- Carrying a novel sensor, it captures images of ‘brightness temperature’. These images correspond to microwave radiation emitted from Earth’s surface and can be related to soil moisture and ocean salinity – two key variables in Earth’s water cycle.
- Over oceans, measurements from SMOS, the longest continuous record from space, show monthly differences in sea-surface salinity with respect to the average salinity – and show large deviations in the tropical Pacific Ocean and in the Indian Ocean. This is linked to the occurrence of La Niña, which is associated with cooler than normal sea-surface temperatures in the eastern Pacific, and the Indian Ocean Dipole, which describes sea-surface temperature differences between the eastern and western equatorial Indian Ocean.
- While these results are of interest to understanding aspects of the water cycle, information from SMOS is being used for a number of practical applications. In fact, 18 TB of SMOS data are distributed every year, of which around 13 TB are used by scientists and around 5 TB for near-realtime applications by operational users.
- For example, integrating these accurate near-real-time observations into the ECMWF (European Center for Medium-Range Weather Forecasts) system is helping to improve air temperature and humidity forecasts near the surface. In addition, the inclusion of SMOS observations is helping to improve the prediction of rain.
- This is particularly true for the southern hemisphere, where the number of conventional in situ observations is comparably low. In fact, ECMWF is processing and quality-controlling SMOS data operationally to realize some 600 images every day, totalling more than one million figures since the satellite was launched. - Applications include forecasting river runoff, monitoring drought and forecasting crop yield. Again, the novel satellite measurements are most beneficial over regions lacking dense on-ground observation networks.
• September 2014: The SMOS mission operations have been extended to 2017. Both ESA and CNES, jointly operating the mission, have confirmed the extension in their respective reviews. New challenging objectives have been set for this mission extension, focusing on the: 77)
- Synergistic scientific exploitation of SMOS data with other in-orbit and future Earth observation missions, e.g., Aquarius, SMAP, Sentinels.
- Need of enhanced process understanding on time-scales exceeding the initial mission lifetime, e.g. for geophysical phenomena like El Niño and El Niña or droughts, and merged data products of SMOS data with other L-band observations for the generation of long-term data sets and thematic data records, given that soil moisture and ocean salinity have been identified as ECV (Essential Climate Variable).
- Pre-operational need for continuous observation data sets: Operational and scientific users have expressed the need for data continuity in (semi-) operational applications following the maturation of the SMOS data products.
The SMOS instrument – MIRAS – is operating nominally with the exception of some known onboard anomalies. The cumulative data loss due to instrument unavailability since the beginning of the routine operations phase in May 2010 amounts to 0.09% and the degraded data amounts to 1.07% (Ref. 77).
• July 2014: SMOS is not only delivering key information on soil moisture and ocean salinity for science but its data are also being used for a growing number of practical applications. Reflecting this versatility along with new synergistic opportunities, the mission will now remain operational until at least 2017. Currently, the SMOS mission is in its 5th year on orbit. 78)
- Going way beyond its original scientific brief of delivering critical information to understand Earth’s water cycle, it continues to demonstrate its suitability for new uses. The most recent examples from this multi-talented mission include being able to provide information to measure thin ice floating in the polar seas accurately enough for forecasting and ship routing. Sea ice that is less than 50 cm thick is particularly important for weather and climate as it controls the exchange of heat and water between the ocean and the atmosphere.
- While it wasn’t designed to measure ice, radiation emitted by the ice allows SMOS to ‘see’ through the surface, yielding ice-thickness measurements down to 50 cm – mainly the thinner younger ice at the edge of the Arctic Ocean. In recent years, this information has been much sought after by operational users. Taking data from SMOS, a product has been developed by the University of Hamburg and, with ESA’s help, has now been set up as a service.
- By piggybacking on Germany’s IRO-2 (Ice Forecast and Route Optimization) project, through which a prototype system for sea-ice forecasting and ship routing is being developed, ESA carried out the SMOS-ice field campaign earlier this year to validate the new data product.
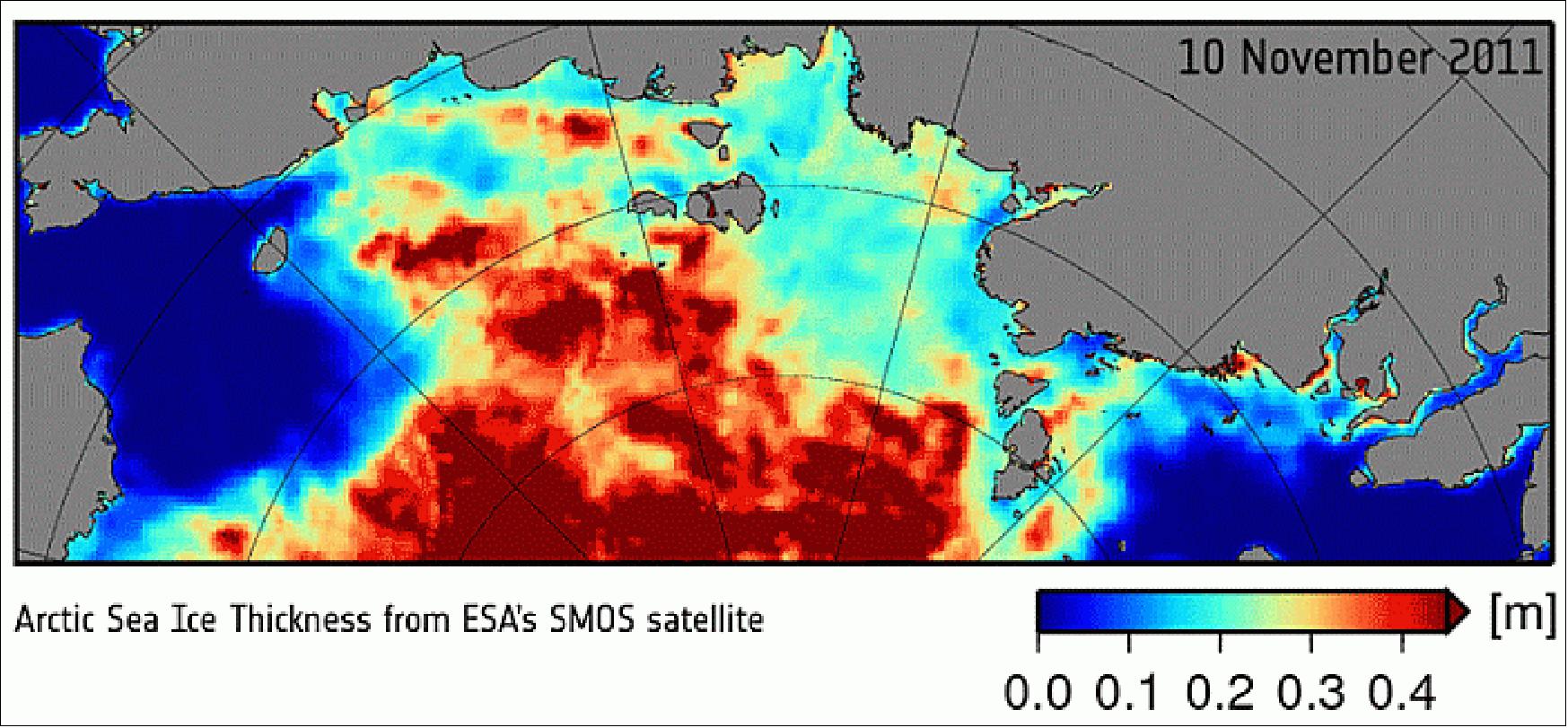
- Based on achievements such as these and the fact that the satellite is still in very good health, ESA’s Member States and the French space agency, CNES, which is responsible for operating the satellite platform, have decided to extend the mission’s original planned life of five years. The extension gives the project more opportunities to look at new scientific and pre-operational applications which otherwise wouldn’t have been done. Moreover, new synergies will now be possible. For example, SMOS data can be combined with those of NASA’s SMAP (Soil Moisture Active Passive) mission, which will be launched in November of 2014. There are also opportunities to combine SMOS with the data from the Copernicus Sentinel missions. For example, the sea-surface salinity data from SMOS could be used in synergy with sea-surface temperature and sea-surface height information from Sentinel-3 (Ref. 78).
• May 2014: ESA's SMOS mission has gone beyond its original scientific brief of delivering critical information for understanding the water cycle – this versatile satellite is now being used to predict drought and improve crop yield in regions prone to famine. 79)
- The US Department of Agriculture (USDA) uses satellite images and soil moisture data to help identify abnormal weather that may affect the production and yield of crops. Using this information, they publish monthly estimates of world production, supply and distribution. — This data offers traders and commodity markets a source of unbiased information. The estimates provide decision-makers with critical information for countries that may need food aid as a result of severe droughts.
- Identifying when and where there may be a risk of famine involves measuring soil moisture in the ‘root-zone’ during the growing season, and detecting the onset and severity of drought. Analysts use the information linked to drought from a range of observing systems to compile these crop production forecasts.
- Through SMOS, the USDA service obtains timely information on soil moisture patterns, which help to predict how the health of plants will change and, therefore, how productive they will be. Testing the SMOS readings for this purpose, they received very positive feedback from analysts in southern Africa. This is a challenging area because there are very few working rain gages. — The new product is available on the Crop Explorer website of USDA. 80)
• May 2014: The TCS (Thermal Control Subsystem) for MIRAS, comprising 69 single antenna elements, has stringent thermal requirements. They were for the receivers of the 69 antennas to guarantee the validity of the scientific data: the target temperature of the receivers is 22ºC with a maximum spatial gradient of 6ºC among all of them and a maximum orbital excursion of 4ºC (Ref: 24).
The results are:
- Fulfilment of the thermal requirement for LICEF receivers: THe LICEF receiver's temperature evolution does not show any degradation of the thermal control loop. The average temperature of all LICEF receivers is centered at 22ºC showing a seasonal variation. The dispersion between receivers meets the requirement of < 6 ºC except marginally on the equinoxes. Orbital temperature excursions for LICEF receivers are < 4 ºC, in some cases as low as 1ºC.
- Thermal seasonal variations for LICEF receivers: LICEF receivers show a seasonal variation depending on the month (due to sun illumination), and cycles are identified with changes in the start and end of eclipse periods and also when the sun elevation and azimuth angles are nearly constant.
- Thermal seasonal variations for NIR antennas: NIR antennas have thermal fluctuations in the range – of 5ºC to 30ºC, varying much according to the external environment. Temperature seasonal variations occur due to sun illumination, as observed also for LICEF receivers.
- NIR antennas cooling effect during the first 8 months of the mission: A cooling effect of the NIR antennas took place. At the beginning of the mission, the temperature range of the units was 4ºC to 27ºC, while after 8 months it was –5 ºC to 30 ºC. The stabilization of components in the space environment appears to be the reason for this effect.
- NIR_AB antenna temperature jump: A sudden temperature jump took place on the antenna NIR_AB, and it recovered by itself in a few weeks. This quite unusual event was due to a pure thermo-mechanical effect in the ground plane of the antenna (the structure around the antenna which is made of several layers of material).
- In-orbit failure of B1 segment temperature readings: One sector of the Y-shape antenna (Sector B1) had a permanent failure in January 2011, and the redundancy of Arm B was changed to continue the operations. The failure was due to a chip malfunctioning in the Thermal Acquisition Board of the CMN that controls sector B1.
- Alternative thermal control for B1 segment: It could be possible to return to the side of Arm B where a failure of Sector B1 occurred. It can be accomplished by using an Alternative Thermal Control, which uses the temperatures measured from thermistors in the instrument that has similar evolution to those in the segment that failed. It was shown that the quality of the scientific data is within acceptable ranges when this type of Alternative Thermal Control is used (Ref: 24).
• January 2014: The SMOS mission is operating nominally, continuing to provide global soil moisture and ocean salinity data.
Most interesting results were obtained by the DOME-Cair (airborne) field campaign that was carried out in January 2013 (12-day campaign) at the Concordia research station at Dome-C in Antarctica to validate data from ESA’s SMOS and GOCE missions (Ref. 138). This campaign revealed a remarkable similarity between spatial patterns observed by the microwave and gravity instruments (see the chapter below: SMOS preparatory and in-flight validation campaigns). 81)
• May-June 2013: As parts of central Europe are battling with the most extensive floods in centuries, forecasters are hoping that ESA’s SMOS satellite will help to improve the accuracy of flood prediction in the future. SMOS monitors the amount of water held in the surface layers of the soil and the concentration of salt in the top layer of seawater. This information is helping scientists understand more about how water is cycled between the oceans, atmosphere and land – Earth’s water cycle. It is also helping to improve weather forecasts. 82)
- The massive flooding that central Europe is currently suffering was brought about by a wet spring and sudden heavy rains. Prior to the torrential rains, SMOS showed that soils in Germany were showing record levels of moisture – in fact, the highest ever observed.
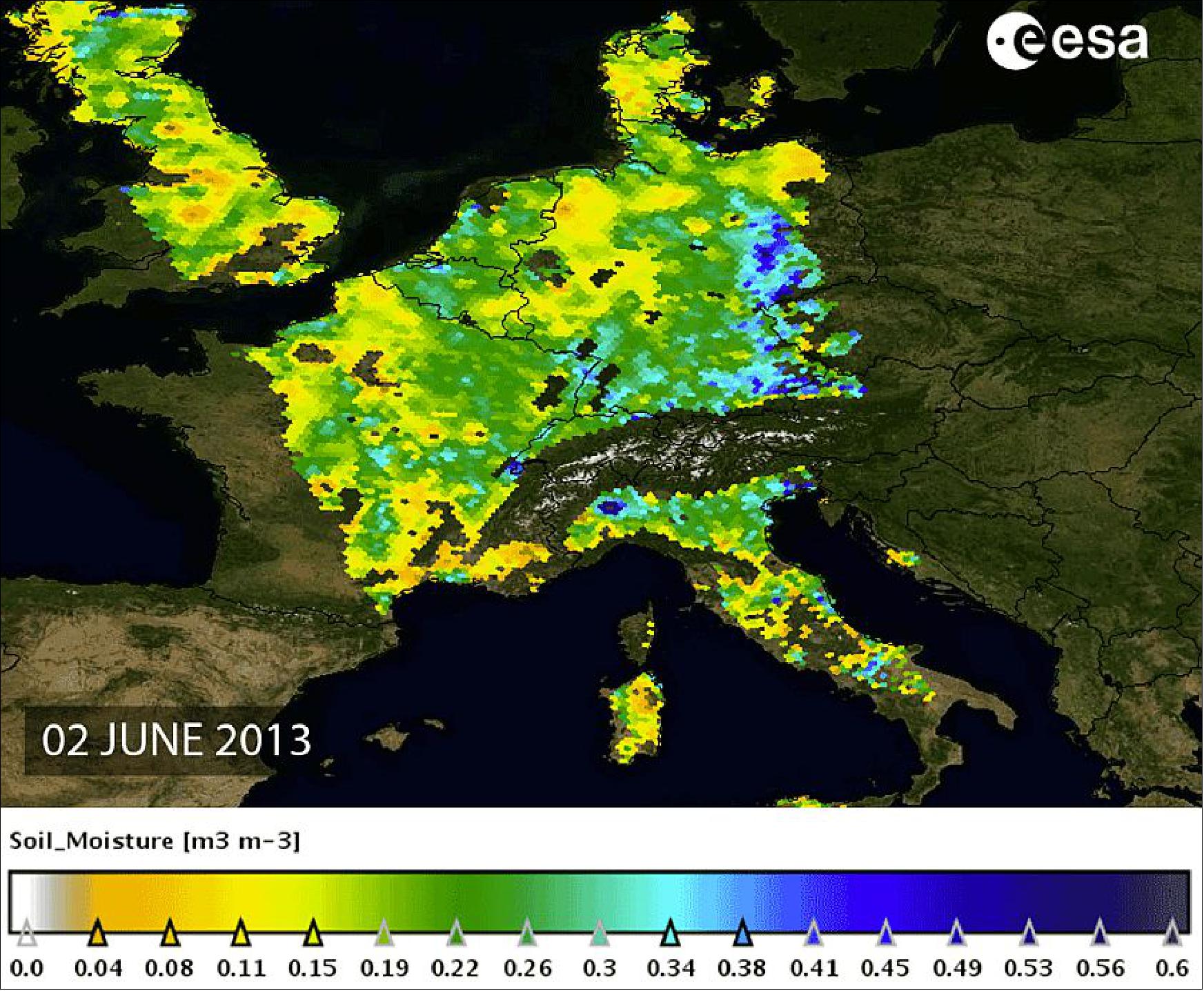
- At the end of May, we see that the soil was almost fully saturated, with record values for moisture (Figure 68). More rain meant that it immediately ran off as the surplus water could not soak into the soil, and this resulted in these terrible floods.
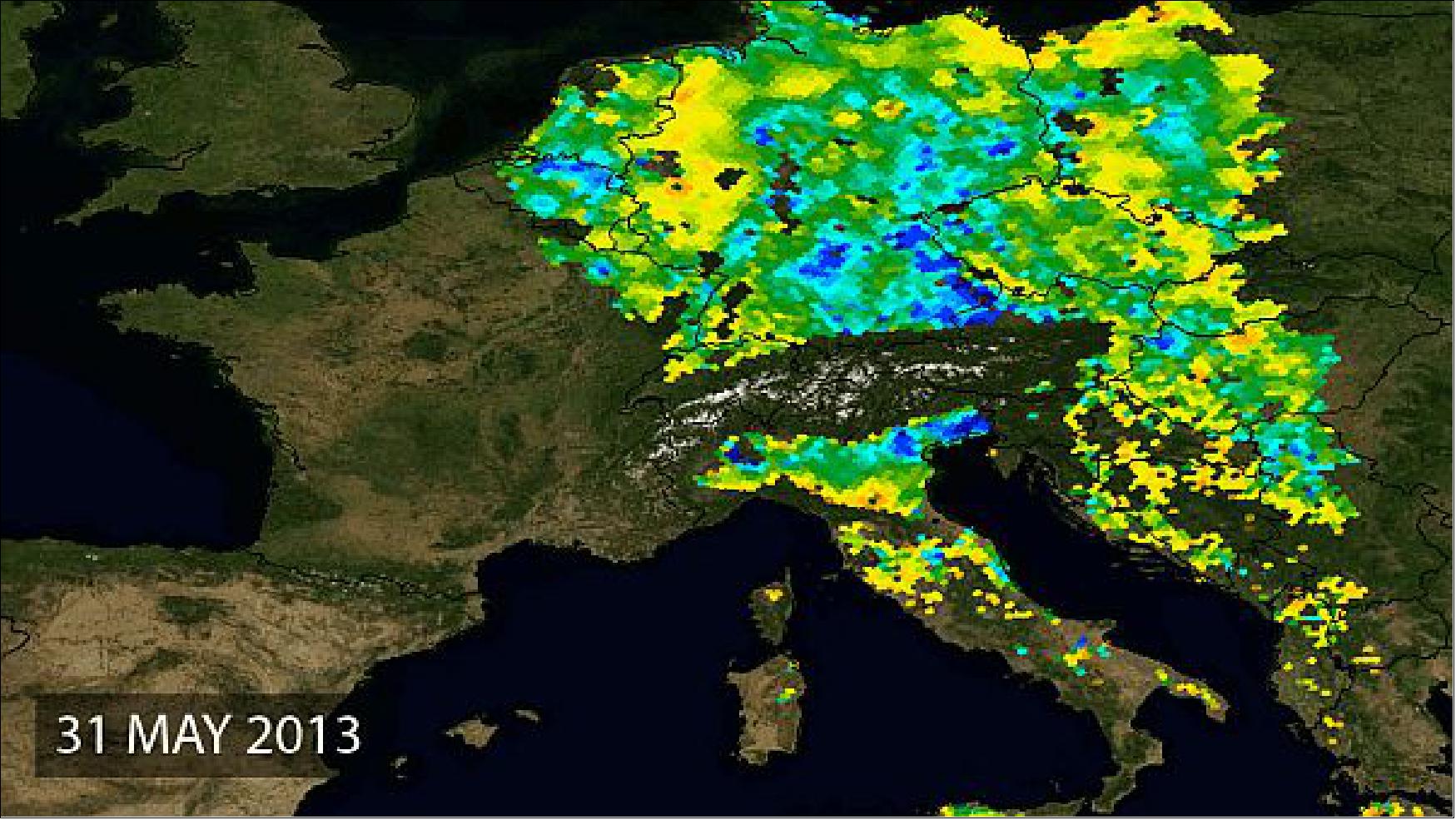
• December 2013: The SMOS instrument – MIRAS – is operating nominally with the exception of some well-known on-board anomalies. The cumulative data loss due to instrument unavailability since the beginning of the routine operations phase in May 2010 amounts to 0.11% and the degraded data amounts to 1.42%. 83)
- No data loss has occurred during the acquisition of MIRAS raw data at the ground stations since the beginning of the routine operations phase in May 2010. This result has been achieved by implementing an onboard data recording overlap strategy.
• In May 2013, ESA is reporting that the RFI (Radio Frequency Interference) situation with regard to the SMOS mission keeps improving in particular over Europe and North America, which has greatly improved the sea surface salinity data over the northern hemisphere above 60° latitude. 84)
• April 2013: The saltiness of the oceans is being closely monitored from space by both ESA’s SMOS and NASA’s Aquarius missions but in slightly different ways. By joining forces, researchers are exploiting these complementary missions to benefit climate science even further. 85)
Salinity is controlled largely by the balance between evaporation and precipitation, so it is an important component of Earth’s water cycle and closely coupled to weather and climate. It is also an important driver in ocean circulation, which in turn, is crucial in moderating the climate. - In fact, ocean salinity is an 'essential climate variable' – a key parameter of climate change.
ESA’s SMOS satellite and NASA’s Aquarius sensor carried on Argentina’s SAC-D satellite of CONAE, both use an L-band radiometer to map ocean salinity but offer different resolutions and revisit times. - For example, Aquarius provides better ‘pixel’ accuracy than SMOS, whereas SMOS provides higher revisit times and spatial resolution.
While it has been shown clearly that their datasets agree and provide similar information (Figure 69), the differences in the data can be exploited to yield even more detail about variations in the salinity of our oceans.
The benefits and complementarity of both missions were discussed by scientists of both projects at SMOS & Aquarius Science Workshop, IFREMER, Brest, France, April 15-17, 2013. 86)
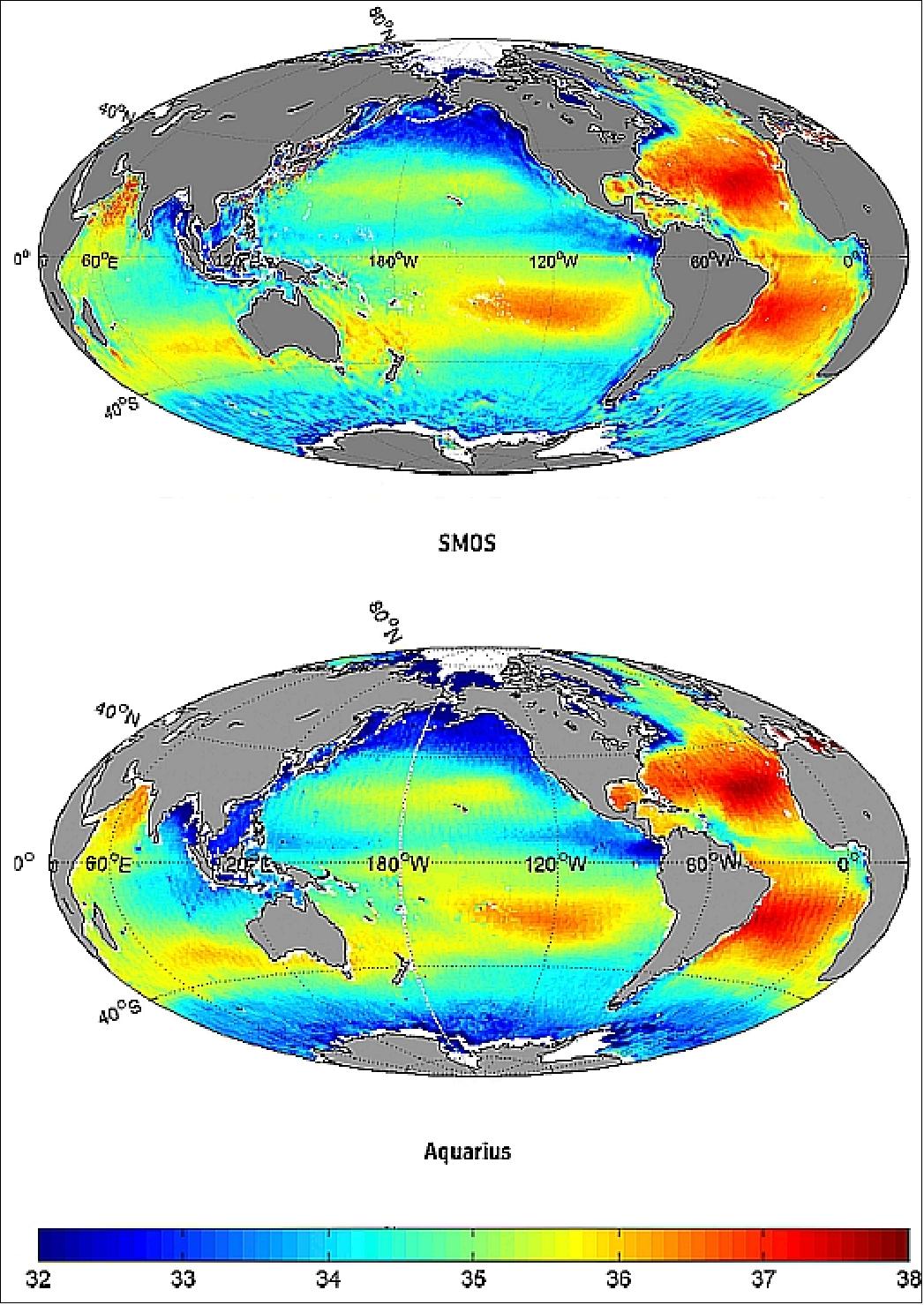
• Feb. 22, 2013: New results unveiled at ESA's ESAC (European Space Astronomy Centre) in Villanueva de la Cañada, near Madrid, Spain show that SMOS is now providing new insights into the movement of the Gulf Stream – one of the most intensely studied current systems. -Originating in the Caribbean and flowing towards the North Atlantic, the current plays an important role in the transfer of heat and salt, influencing the climate of North America’s east coast and Europe’s west coast. 87)
Salinity observations from SMOS show that warm, salty water being carried north by the Gulf Stream meets the colder, less-salty water transported southward along North America’s east coast by the Labrador Current, mixing the water masses off Cape Hatteras (NC, USA). SMOS can distinguish between and follow the resulting eddies that are ‘pinched off’ from the current and form little parcels of warm and salty water in the Labrador Current, and the colder, fresher water in the Gulf Stream.
• November 2012: The SMOS spacecraft and its payload are in very good shape technically at the end of their nominal mission lifetime (3 years in Nov. 2012); thus, they are able to continue to provide data beyond 2012. 88)
New data products provided by SMOS have been opening the door for novel applications. Soil moisture and sea-surface salinity are two variables in Earth’s water cycle that scientists need on a global scale for a variety of applications, such as oceanographic, meteorological and hydrological forecasting, as well as research into climate change.
Moisture and salinity decrease the ‘emissivity’ of soil and seawater respectively, and thereby affect microwave radiation emitted from Earth’s surface. To observe soil moisture over Earth’s landmasses and salinity over the oceans, SMOS effectively measures the microwave radiation emitted from Earth’s surface. MIRAS picks up faint microwave emissions to map levels of moisture in the ground and the saltiness of the oceans, and these are provided as 2D images, or ‘snapshots’, of ‘brightness temperature’.
SMOS data are currently being used in weather and flood forecasting. Drought monitoring systems based on SMOS observations are under development, as well as crop yield forecasting systems. Each of these areas is highly relevant to our everyday lives. Improved weather forecasts, especially of extreme events, can potentially help mitigate impacts and save billions of euros.
Recently, new data products provided by SMOS have been opening the door for novel applications. For example, it was found that the freeze-thaw cycle of soils can be determined, and this could result in the improved monitoring of the active surface layer in permafrost regions and a more accurate description of the gas exchange between land surfaces and the atmosphere, which is highly relevant for our climate system.
Soil moisture is a key variable determining the exchange of water and energy between the land surface and the atmosphere. SMOS soil moisture data have their own scientific value because they provide an independent estimate of the current state of the land surface. Monitoring the spatial and temporal global dynamics of soil moisture is important for a variety of applications, such as water resources management, weather forecasting, agriculture, flood prediction and climate research. An additional socio-economic value of these Earth observation data comes from their use in forecasting systems and the subsequent decision-making process.
Early studies by ECMWF (European Centre for Medium-Range Weather Forecasts) indicated that the use of satellite-derived soil moisture estimates reduces the errors in the temperature and humidity forecasts and influences a variety of weather parameters.
The first soil frost depth datasets based on SMOS observations were derived by the Finnish Meteorological Institute for two consecutive winter periods starting in 2010. Key elements, such as the southward progression of soil freezing in autumn and early winter, were monitored successfully as well as the late onset of winter in northern Europe in 2011.
These results are potentially interesting for climate applications because they could enhance our understanding of the temporal behaviour of the active layer in permafrost regions and the gas exchange process. - More research involving the climate modelling community will be dedicated to this topic over the next few years when multi-year time series of SMOS observations will allow the analysis of seasonal and inter-annual variations (Ref. 88).
The SMOS radiometer operates within the EESS (Earth Exploration Satellite Service) passive band L-band at 1400-1427 MHz . Since its launch in November 2009, SMOS images have been strongly impacted by man-made RFI (Radio Frequency Interference). So far approximately 500 RFI sources distributed worldwide have been detected. Some of the strongest RFI sources might mask other weaker RFI underneath, hence it is expected the total number of RFI detected may increase as strong ones are progressively located and switched off. Most RFIs are located in Asia and Europe, which together hold approximately 80% of the active sources and more than 90% of the strongest interference. International regulation for the protection of the 1400-1427 MHz band: The EESS for passive sensing has a primary frequency allocation in the 1400 – 1427 MHz band and all emissions are prohibited in this band according to the ITU-R (International Telecommunication Union -Radiocommunications). Furthermore, the WRC-07 (World Radiocommunication Conference 2007) adopted Resolution 750 on the “Compatibility between the EESS-passive and relevant active services”. Resolution 750 resolves “to urge administrations to take all reasonable steps to ensure that unwanted emissions of active services do not exceed the specific recommended maximum levels, noting that EESS passive sensors provide worldwide measurements that benefit all countries”. This resolution contains all the unwanted emission limits applicable to the whole range of ITU-R neighbouring services. To improve SMOS RFI situation, ESA has reported the interference cases to the Spectrum Management authorities of the different countries so that they can initiate investigations, identify the type of emitter and take appropriate actions. This procedure is time-consuming and not always successful, but it has proved to be effective allowing to improve the interference scenario over extensive areas. ESA has contacted more than 45 administrations, reporting the detection of almost 500 RFI sources. - So far approximately 40% of the RFI sources have been identified and switched off, most of them in Europe (128), Canada (22) and the United States of America (14). Since early 2012, some improvement is also observed in Asia, with 32 RFI sources switched off in China, although the area still remains very polluted by RFI. The distribution worldwide of the remaining RFI is shown in Figure 70. While the solution of the RFI due to illegal emissions can be achieved with the cooperation of the national authorities, the solution of the excessive unwanted emissions problem requires regulatory action and compliance with the levels adopted in ITU-R Resolution 750 (WRC-07). |
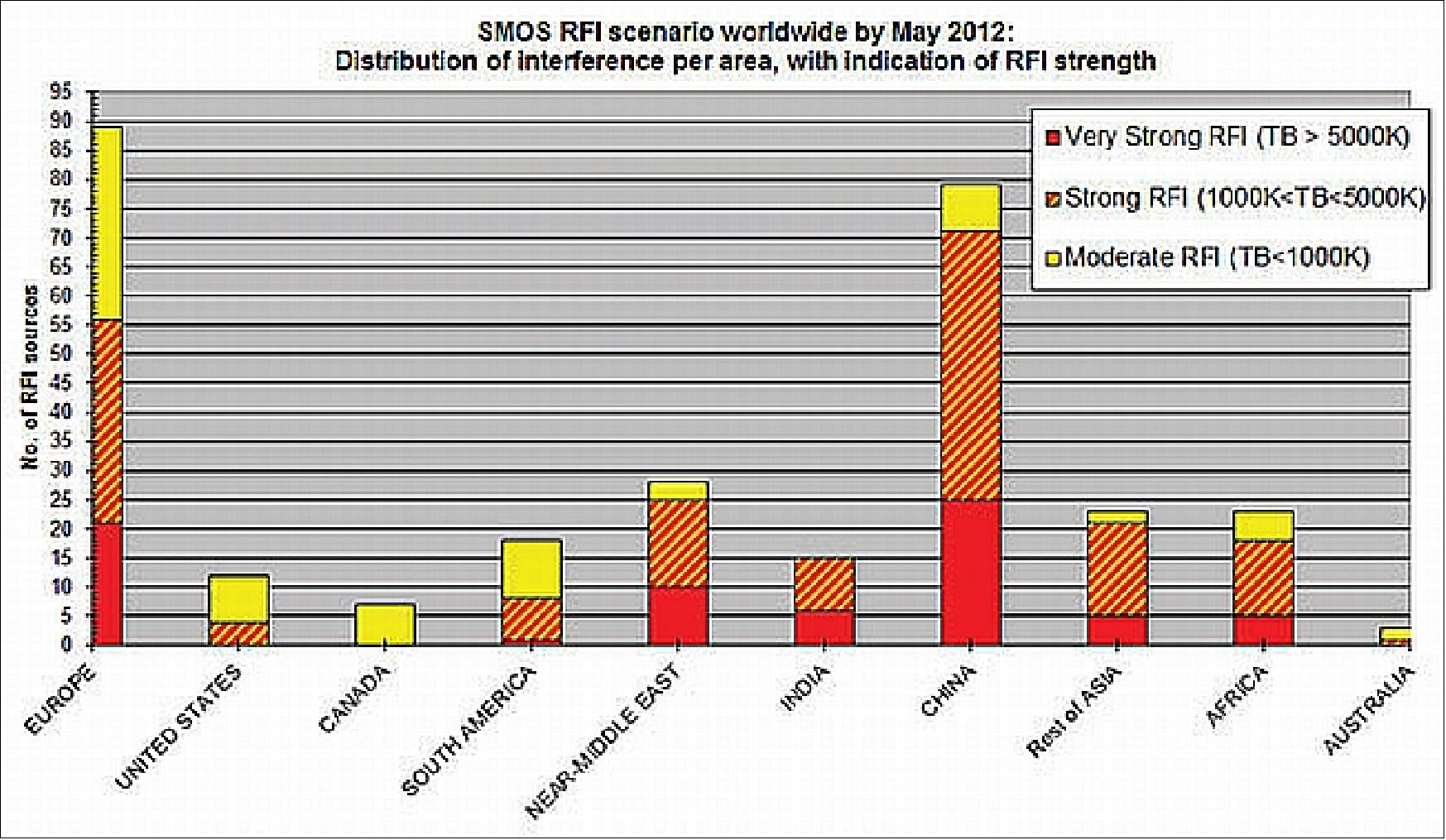
• July 2012: Over a dozen radio signals, that have hindered data collection on ESA’s SMOS water mission, have been switched off. The effort also benefits satellites such as NASA’s Aquarius mission, which measures ocean salinity at the same frequency. 91)
It may be recalled, that the SMOS mission immediately after launch revealed that many unlawful signals were being transmitted around the world in this frequency range, rendering some of its measurements unusable for scientific purposes. Over the years, ESA has investigated exactly where the interference is coming from. As national authorities have collaborated with ESA to pinpoint the origin and switch these unlawful emissions off, the interference has waned. - One of the largest areas of contamination in the northern hemisphere is over the North Pacific and Atlantic oceans, primarily from military radars.
At least 13 sources of interference have now been switched off in the northern latitudes. This has significantly improved SMOS observations at these high latitudes, which were previously so contaminated that accurate salinity measurements were not possible above 45 degrees latitude as the satellite headed north (Ref. 91).
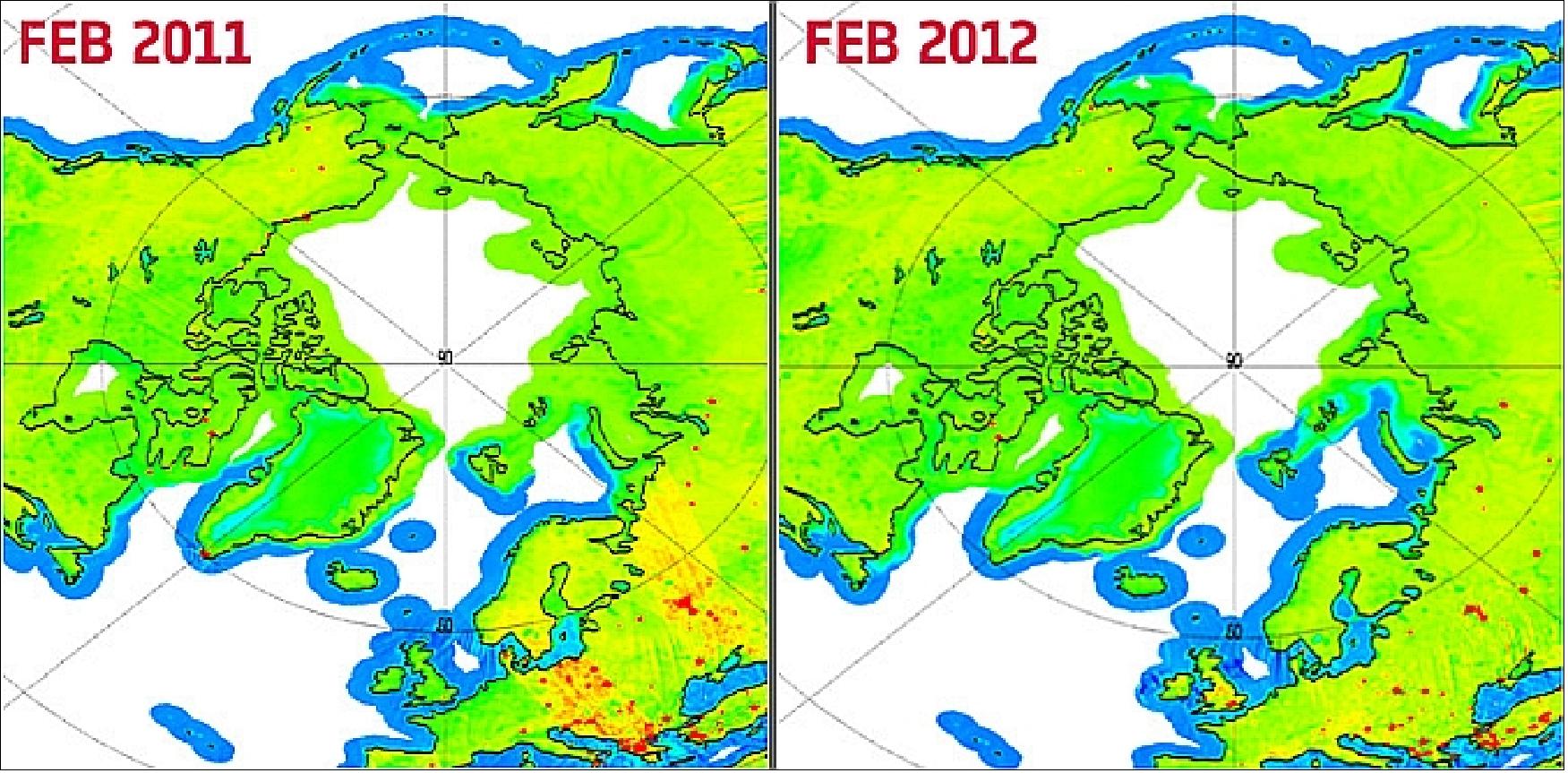
Legend to Figure 71: The two images show the RFI at northern latitudes in February 2011 and February 2012. Several radars are observed (the red ‘dots’, visible because they exceed the natural variability for brightness temperature measurements over land) over Northern Canada and at the southern tip of Greenland. The authorities from Canada and Greenland were informed and requested to take action. Canada started to refurbish their equipment in the autumn of 2011, while Greenland switched off their transmitters in March 2011.
• In December 2011, ESA is reporting that the data of SMOS are being analyzed by FMI (Finnish Meteorological Institute) scientists to detect and map frozen soils. Not only can the extent be mapped, but also the depth of the frozen layer can be inferred. 92)
- ESA's SMOS mission is proving to be extremely versatile. Not only does this pioneering satellite offer crucial data on soil moisture and ocean salinity, but it can also map the thickness of ice floating in the polar seas. The measurement of the brightness temperature of the SMOS MIRAS instrument can also be used to map the extent and thickness of sea ice. The Institute of Oceanography at the University of Hamburg has developed algorithms to interpret the MIRAS data accordingly. This new information will be very useful in monitoring ice as it grows in the winter and recedes in the spring. It will be used to investigate the exchange processes to improve our understanding of warming in the Arctic region. 93)
• First instrument performance assessment in the summer of 2011:
For SMOS, being a truly Earth Explorer mission carrying a new and innovative payload, the learning slope within its first 1½ years on orbit has been pretty steep. The consolidation of the calibration techniques and strategy, as well as of the baseline image reconstruction algorithms, the selection of the operational mode of operation, the assessment of the technical performance of the instrument, the initial validation of the scientific products and the ways to handle the encountered RFI (Radio-Frequency Interference) from illegal ground transmissions have all been accomplished. It can be concluded that presently SMOS is very close to fulfilling its objective of 4% volumetric soil moisture accuracy while achieving 0.3-0.5 psu sea surface salinity accuracy to be compared against a more stringent 0.1 psu mission goal. New applications such as permafrost and thawing monitoring in the boreal forest, ice thickness determination in the Arctic Ocean and hurricane wind observations have been demonstrated. 94)
Nonetheless, there is still much work to be done, as a more precise assessment of the accuracy in the 3rd and 4th Stokes parameters, the full understanding of the cold sky images, and the further improvement of the image reconstruction at Level-1 and the scientific parameters retrieval algorithms at Level-2, just to broadly name the main tasks.
MIRAS instrument performance:
The in-orbit radiometric performance of MIRAS is summarized in Table 4. It has been assessed by comparing SMOS-measured brightness temperature images against:
- (a) the sky map surveyed by terrestrial radio-telescopes
- (b) the modelled brightness temperature of a uniform portion of the Pacific Ocean and
- (c) Antarctica brightness temperature, simply assuming that this is a time-space invariant target.
Of the three targets, the cold sky is the best known but it is imaged in non-nominal pointing and thermal conditions. On the other hand, the Pacific Ocean and Antarctica are observed in nominal conditions but some effects may be mismodelled, such as the galactic glint, the sea surface roughness or the ice sheet reflectivity changes due to surface wind-ice interaction, to name a few.
System parameter | Specified Value | Measured Value |
Systematic Error | 1.5 K rms ( B ) | 0.33 K rms (E, sky) |
Level-1 SM Radiometric Sensitivity | 3.5 K rms ( B ) | 2.5 K rms (B, Antarctica) |
Level-1 OS Radiometric Sensitivity | 2.5 K rms ( B ) | 2.0 K rms (B, ocean) |
Short Term Stability | 4.1 K rms ( E ) | 3.5 – 3.8 K rms (E, ocean) |
Long Term Stability | 0.03 K / 2 months | 0.14 K / year (sky) |
Pointing | 400 m | 221 m (ascending orbit) |
Overall, MIRAS fulfils specifications except in two cases:
(a) the systematic error over the ocean
(b) the long-term stability.
The systematic error consists of a stable spatial ripple error across the image, mainly coming from an imperfect knowledge of the antenna patterns and residual calibration errors. Reaching several Kelvin this spatial error is a major problem in the retrieval of sea surface salinity.
The long-term stability of MIRAS needs still to be better assessed, and probably, improved. When evaluated using the cold sky, the instrument long-term stability is within the desired limit of 0.18 K/year (this limit is to be consolidated with the oceanographers), but when measurements are compared against the ocean model or Antarctica (assuming this target is time-space invariant) then a drift of 0.49 K or 1.46 K is obtained, respectively. It is difficult to quantify how much of this drift is due to mismodelling of the ocean and Antarctica views and what fraction is truly due to instrument variation. Furthermore it will be necessary to accumulate several years of data before the seasonal variations can be separated from long-term variations.
MIRAS evolution: Some clear improvements to MIRAS have been identified based on the in-orbit experience, to achieve better radiometric accuracy, precision and robustness against RFI. These improvements could be applied to a future SMOSops follow-on operational mission.
The main modifications which have been identified are:
1) Enlargement of the alias-free field of view by reducing the spacing between elements
2) Hexagonal array instead of a Y-shaped array to improve significantly side lobe levels against RFI
3) Parallel H-V channels with higher sampling rate to improve sensitivity
4) Stable Local Oscillator units to minimize relative phase fluctuations
5) All LICEF operation to simplify calibration and instrument operation
6) Centralized CAS system using opto-electronics to simplify calibration
7) Improved thermal design of antennas and overall system to improve long-term stability
8) Shortened integration time and increased downlink data rate to become more robust against RFI.
It is estimated that such MIRAS evolution would allow improving the sensitivity by a factor of 2, at least, from SMOS, achieving a 1000 km alias-free swath, at 40 km spatial resolution, in a truly polarimetric mode and with better radiometric accuracy (Ref. 94).
• RFI (Radio Frequency Interference) problem in June 2011: A major international effort to shut down radio signals that have, at times, been blinding the instrument (MIRAS) on ESA’s SMOS water satellite is producing a marked improvement in the quality of the mission’s data. MIRAS operates in the L-band spectrum (1400–1427 MHz), capturing snapshots of ‘brightness temperature’ that correspond to microwave radiation emitted from Earth’s surface. From this information, the amount of moisture held in the surface layers of soil and salinity in the surface waters of the oceans can be derived. 95)
According to radio regulations set by the ITU (International Telecommunications Union), the 1400–1427 MHz frequency range is allocated to the Earth Exploration Satellite Service, space research and radio astronomy – other transmissions in this band are prohibited. - However, soon after SMOS was launched, the data revealed there were many signals being transmitted within this protected passive band, rendering some of the data unusable for scientific purposes.
In June 2011, SMOS is well on the way to meeting its research objectives over areas free of this radio-frequency interference. However, the mission has clearly not been reaching its full potential because significant amounts of data have had to be discarded.
• On Feb. 7, 2011, following the return to nominal operations on January 12 of the MIRAS instrument after the onboard anomaly experienced from December 31, 2010, had been resolved, the necessary recalibration activities have now been completed and nominal data quality restored from 7 February 2011 at 09:40 UTC. 96)
• January 24, 2011: Following the anomaly related to the anomalous temperature readings in one segment of antenna arm B, the SMOS instrument MIRAS is now back to nominal operations as of 12 January 2011. - To return to nominal data production re-calibration activities are necessary to ensure the quality of the SMOS data delivered to the user, which are presently performed and assessed. 97)
SMOS experienced a sequence of anomalies related to the temperature readings on one of the antenna segments of arm B since January 5, 2011. The interruption of the (correct) temperature readings has made the SMOS instrument MIRAS temporarily unavailable for providing scientifically meaningful data.
• On November 2, 2010, SMOS celebrated its first year on orbit. All data (brightness temperatures (level-1) and soil moisture and ocean salinity data (level-2)) have been released to the science community at large. 98)
• 2010: The first global map of both soil moisture and ocean salinity was delivered by the SMOS Earth Explorer. By consistently mapping soil moisture and ocean salinity, SMOS is advancing our understanding of the exchange processes between Earth's surface and atmosphere and also helping to improve weather and climate models. 99)
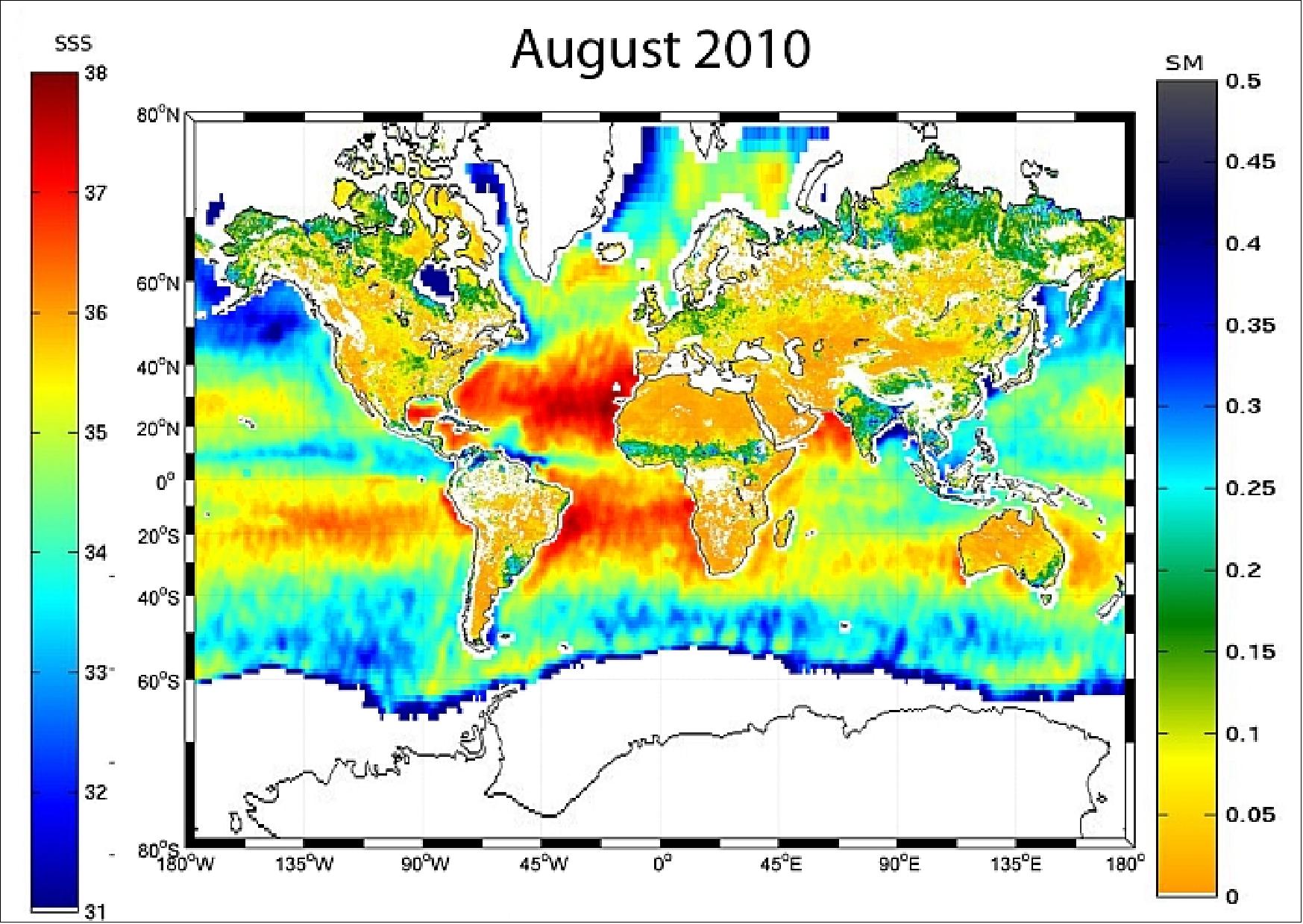
Legend to Figure 72: For the first time, data on soil moisture and sea-surface salinity have been combined on one map. The map was generated by combining global measurements acquired in August 2010. The SSS data have a spatial resolution of 1º x 1º. Comparison with in situ measurements in the oceans averaged over 1º x 1º in August reveals a quasi-global accuracy of 0.4 practical salinity units, which is very promising after just one year in orbit.
• RFI (Radio Frequency Interference) problem in the fall of 2010: Although the results of the SMOS mission have been impressive so far, the observations of the MIRAS instrument, operating in the L-band in the range of 1400-1427 MHz, have been bugged by patches of interference from radar, TV and radio transmissions in what should be a protected band. Painstaking efforts to reduce these unwanted signals are now paying off. 100) 101) 102)
Soon after the SMOS (Soil Moisture and Ocean Salinity) mission was launched, it was realized that, in some places, the data were being badly contaminated by RFI. At times, this interference was effectively blinding the instrument, rendering the data over certain areas unusable. Nevertheless, SMOS was still clearly meeting its scientific requirements in areas free of RFI. However, to maximize the benefits of the mission the RFI issue needed to be addressed, which could only come about through international collaboration.
The MIRAS instrument revealed that there were many incidences of signals within this ITU (International Telecommunications Union) protected band, particularly in southern Europe, Asia, the Middle East and some coastal zones - that violate the ITU standards. The main culprits appear to be TV transmitters, radio links and networks such as security systems. Also, terrestrial radars appear to cause interference. ESA embarked upon the tricky and lengthy process of having the illegal transmissions shut down and the excessive out-of-band emissions reduced (Ref. 100).
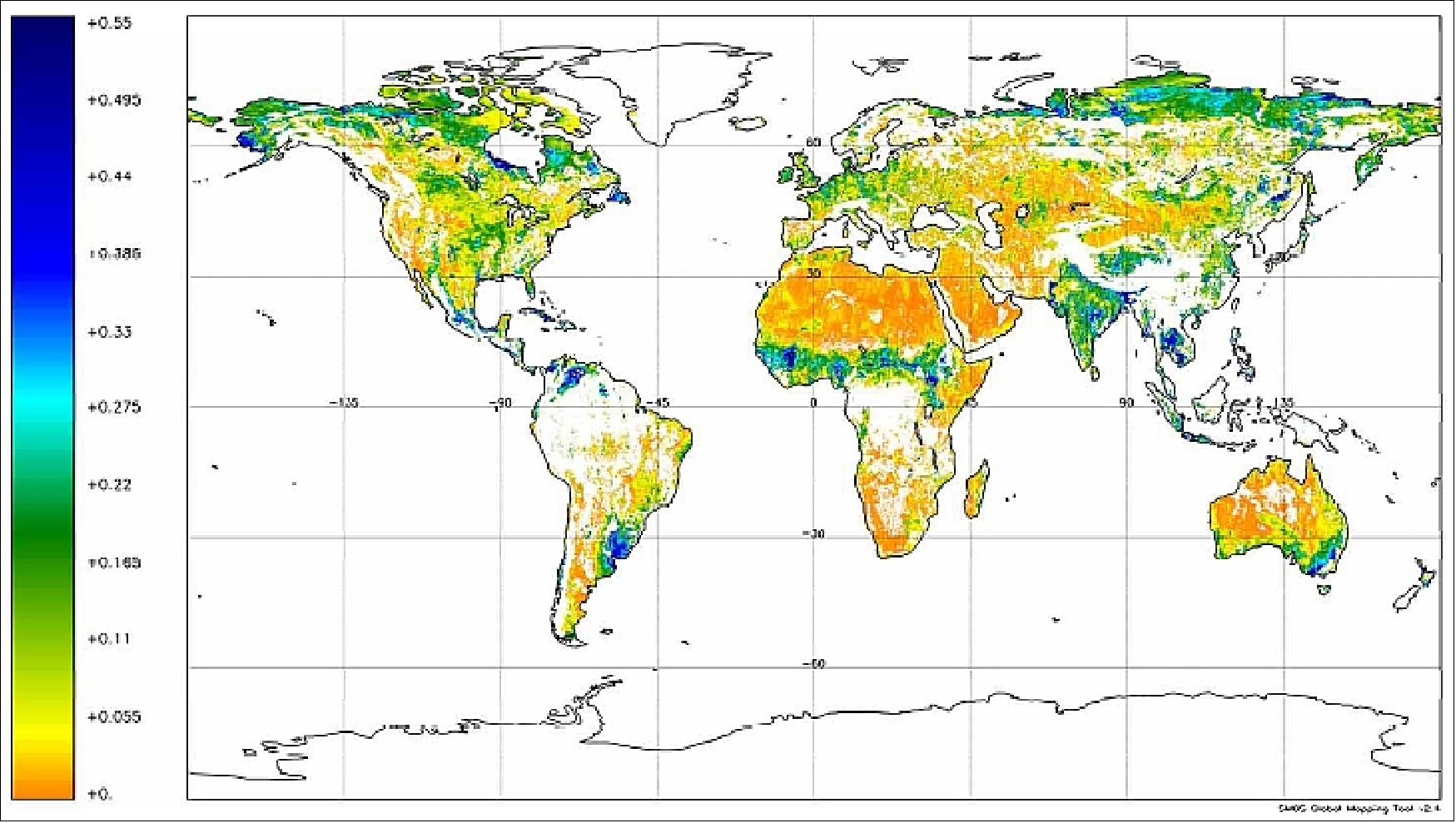
• The SMOS mission has been delivering observations of 'brightness temperature' to the science community since mid-July 2010. As a measure of radiation emitted from the Earth's surface, this information can be used to derive global maps of soil moisture every three days and maps of ocean salinity at least every 30 days. 104)
• During the week of May 21, 2010, ESA's SMOS satellite completed its six-month commissioning and formally began operational life. This milestone means the mission is now set to provide much-needed global images of soil moisture and ocean salinity to improve our understanding of the water cycle. - The SMOS Team came to this result after a three-day review meeting in Avila, Spain. 105)
• During the spring of 2010, the HUT-2D (Helsinki University of Technology 2D Radiometer), an airborne 1.41 GHz interferometric radiometer of the Aalto University (Espoo, Finland) was used to measure three SMOS validation target areas, one in Denmark and two in Germany. In addition to the HUT-2D radiometer system, a novel L-band polarimetric radiometer EMIRAD (Electromagnetics Institute Radiometer) of DTU (Technical University of Denmark) was installed in the research aircraft. The radiometer system includes two fully polarized receivers. One of the EMIRAD’s antennas one pointed to nadir and the other one is tilted 40º off nadir. The half-power beam width of the antennas is approximately 36º. The test areas were: 106)
- The Upper Danube Catchment (UDC), a temperate agricultural area situated mostly in Southern Germany, is one of two major SMOS validation test sites in Europe covering 77.000 km2.
- The second test site in Germany, referred to as REC (Rur Erft Catchment), encompasses the catchment basins of the rivers Rur and Erft, which are located in the Belgian-Dutch-German border region near the city of Aachen.
- The third test site is situated within the Skjern river catchment in Western Denmark (ca. 2500 km2) at a short distance from the coastline.
• After mid-Feb. 2010, in less than four months since launch, the first calibrated images are being delivered by ESA’s SMOS mission. These images of 'brightness temperature' translate into clear information on global variations of soil moisture and ocean salinity to advance our understanding of the water cycle. 107)
Since its launch on Nov. 2, 2009, engineers and scientists from various institutes in Europe have been busy commissioning the SMOS satellite and instrument. This commissioning phase, which will continue until the end of April, initially involved testing the Proteus platform – a generic 'satellite bus' developed by the French space agency CNES and Thales Alenia Space – and the all-important MIRAS instrument developed by EADS-CASA in Spain under contract to ESA. Both platform and instrument have shown excellent performance during their first four months in orbit.
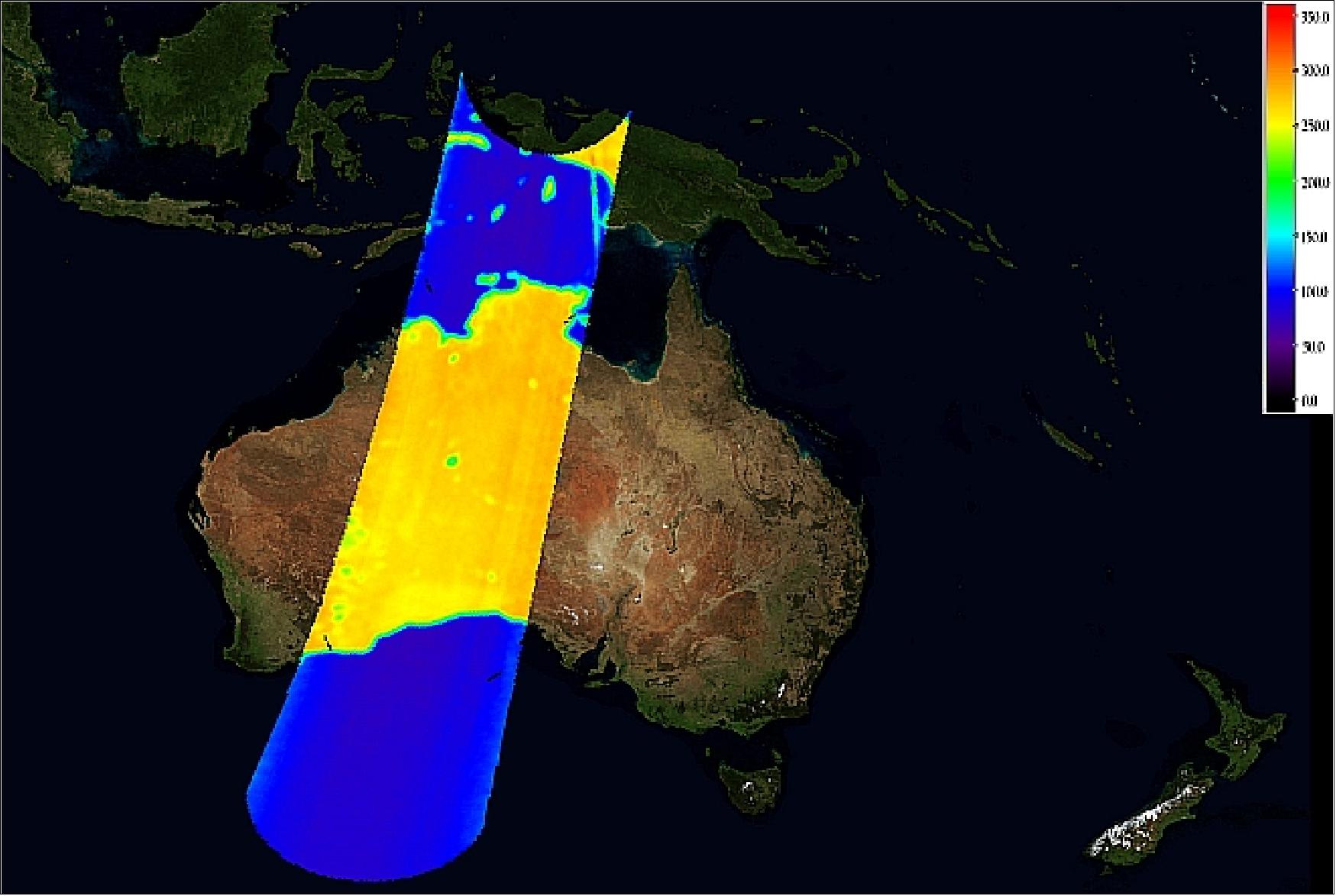
• In early December 2009, SMOS completed its first phase of life in orbit – the Launch and Early Orbit Phase (LEOP), which means that all the systems are working as they should and the satellite is ready for full commissioning. The MIRAS instrument will now undergo the various calibrations that are needed to ensure that the best possible data are delivered.
Instrument calibration and fine-tuning of the data processors is ongoing and it is expected to release the first routine processed data products to the calibration/validation team by end of March 2010. After a quick look at the initially processed data, it is already obvious that there is a lot of radio frequency interference within the protected band, which is, normally, reserved for radio astronomy and passive remote sensing (Ref. 110).
• The MIRAS instrument has been switched on (Nov. 17, 2009) and is operating nominally (initial functional verification test). MIRAS is working beautifully well with all key subsystems, including all of the receivers, the optical fibers and the correlator unit, in perfect functioning condition. With the critical launch and early orbit phase completed, the engineers can now evaluate the quality of the downlinks and concentrate on the calibration of the MIRAS instrument. 108)
• CNES, responsible for operating the satellite, confirmed on Nov. 2. 2009 that the MIRAS instrument’s three antenna arms have deployed as planned and that the instrument is in good health. 109)
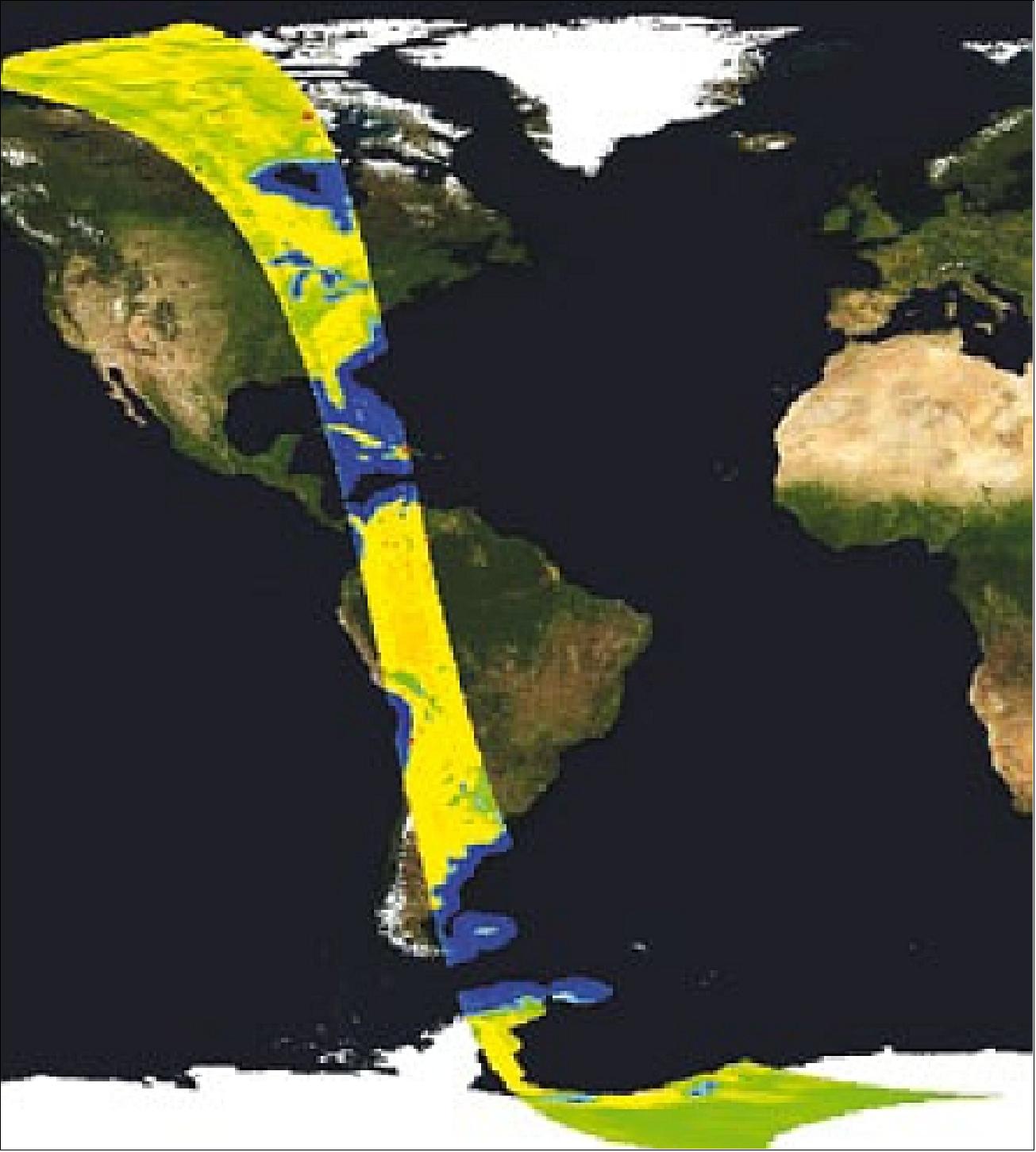
Sensor Complement
MIRAS (Microwave Imaging Radiometer using Aperture Synthesis)
MIRAS was developed by the prime contractor EADS-CASA Espacio, Madrid, Spain. The SMOS sensor assembly (the only instrument of the PLM) is a dual polarized 2-D interferometer operating at L-band (1.41 GHz) and based on the MIRAS concept of several airborne campaigns (Note: in 2004 the name MIRAS was also adopted for the instrument on the SMOS spacecraft).
The overall objective of MIRAS is to provide records of pixel brightness temperatures over incidence angles from 0º up to 55º across a 900 km swath, with a spatial resolution in the range of 30-50 km. From these profiles and auxiliary information, like surface physical temperature, roughness and ionospheric total electron content among others, soil moisture and sea surface salinity will be retrieved.
The design of the passive spaceborne instrument uses three coplanar arms consisting of an elementary antenna regularly spaced (0.875 λ, maximum redundancy) in a Y-shaped configuration (also referred to as a sparsely populated antenna, a thinned array is substituted for a filled array, each deployable antenna arm has a length of 4 m). In this concept, an interferometric Fourier synthesis is applied to derive images from the correlations between each pair of antenna elements (small independent receivers) operating in the microwave region. The 2-D SMOS interferometer permits the brightness temperature to be measured simultaneously at different incidences, and at two polarizations. Moreover, the instrument records an entire scene instantaneously. As the S/C moves, a given point within the 2-D FOV is observed from different view angles. A series of independent measurements is obtained permitting the derivation of surface parameters with improved accuracy. The brightness temperature field of such a design is reconstructed with a resolution corresponding to the spacing between the outmost receivers. 111) 112) 113) 114) 115) 116) 117) 118) 119) 120) 121)
MIRAS, operating at L-band (1.4-1.427 GHz, or 21 cm wavelength), employs a Y-shaped antenna arrangement, consisting of three arms, separated at 120º. Every antenna arm supports a row of evenly spaced receivers along its span. Each arm consists of three deployable segments.
There are 69 antenna elements - the so-called LICEF (Lightweight Cost-Effective Front-end) receivers -, which are equally distributed over the three arms and the central structure (hub). Each LICEF is an antenna-receiver integrated unit (four-probe patch antenna with a combiner/polarization circuit) that measures the radiation emitted from the Earth at L-band (1404-1423 MHz). The LICEF units are built by MIER Comunicaciones SA, Barcelona, Spain, and include a dual-polarized antenna and a critical bandpass filter.
Each LICEF measures the thermal noise emitted by the Earth in the L-band by means of a complex amplification chain and filtering in RF and IF comprised of MMIC (Monolithic Microwave Integrated Circuit) for reducing consumption and weight. The result is a 1 or a 0 quantization of the in-phase and quadrature components of the received signal, depending upon the noise uptake level. LICEF is a highly frequency-selective receiver that avoids capturing disturbing signals from adjacent bands that would corrupt the noise sought from earth for measurement. 122) 123)
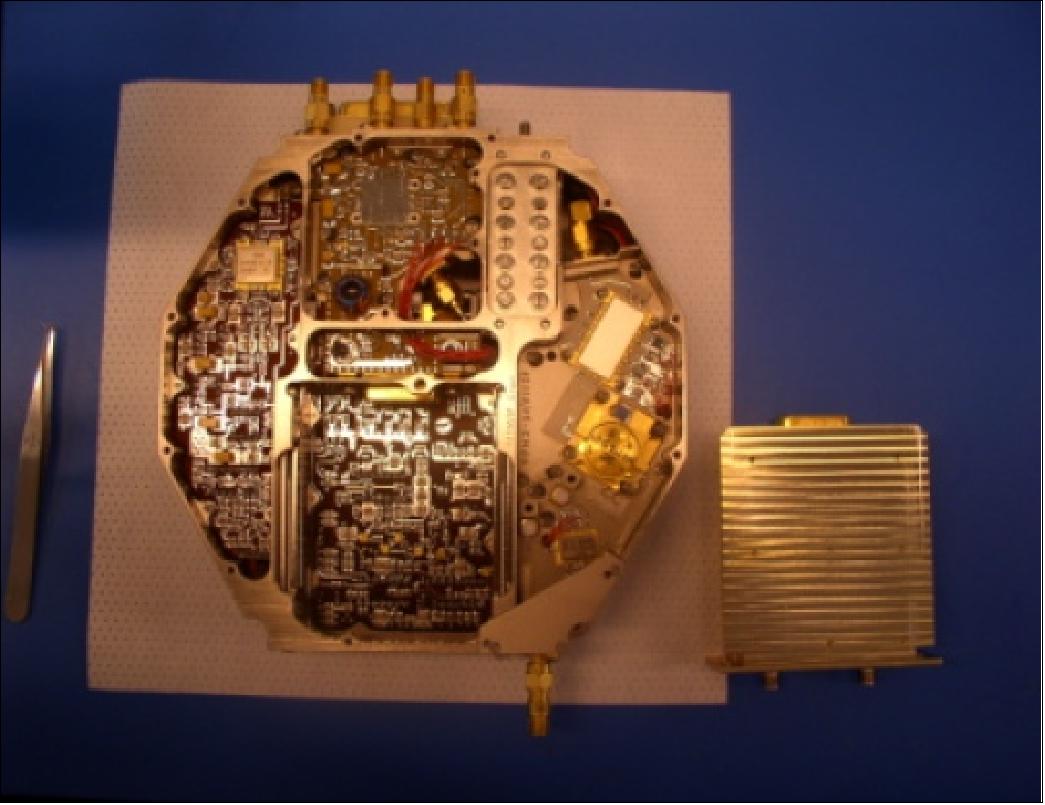
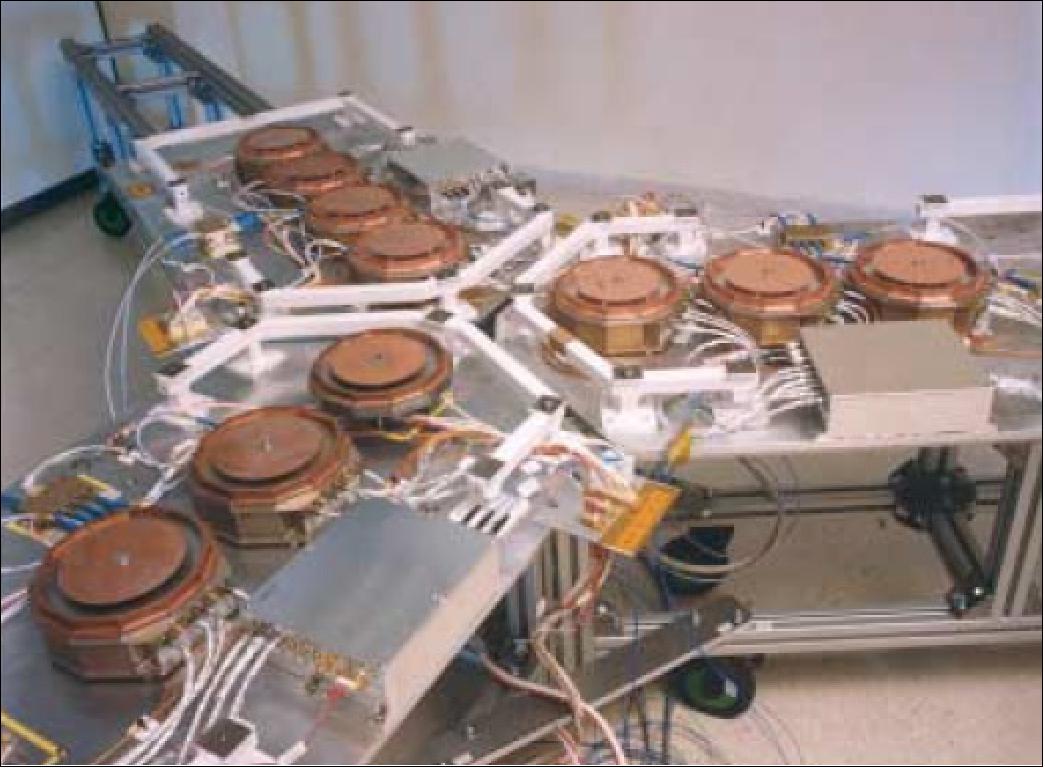

The total deployed arm length is about 4 m. The hub interfaces with the platform and houses some common equipment, such as a total-power radiometer for absolute calibration. The instrument structure (modular design) uses CFRP (Carbon Fiber Reinforced Plastic) material for reasons of stiffness. Each receiver can be commanded to measure either H and V polarization, or an internal load. The calibration network (subsystem) enables correlative measurements for the entire array.
It consists of the following elements (noise sources that are being fed into the receivers):
• A central redundant noise diode, distributed to all receivers of the hub
• Distributed noise diodes on each arm segment; this allows measurements not only of the segment receivers but also of the adjacent ones on either side of the hub or the next element.
Furthermore, three NIR (Noise Injection Radiometer) at the hub are measuring the H and V polarization simultaneously to enable the “zeroth baseline” correlation. All individual receivers digitize the measured I and Q signals and send them, via a point-to-point optical fibre connection, to DICOS (Digital Correlator System), in which the correlations between all possible receiver pairs are made and accumulated for the duration of the integration period (1.2 s). The calibration frequency depends on the thermal gradient and the receiver behaviour with the temperature. The operating temperature of MIRAS is kept within a range of 0 to 50ºC. 124)
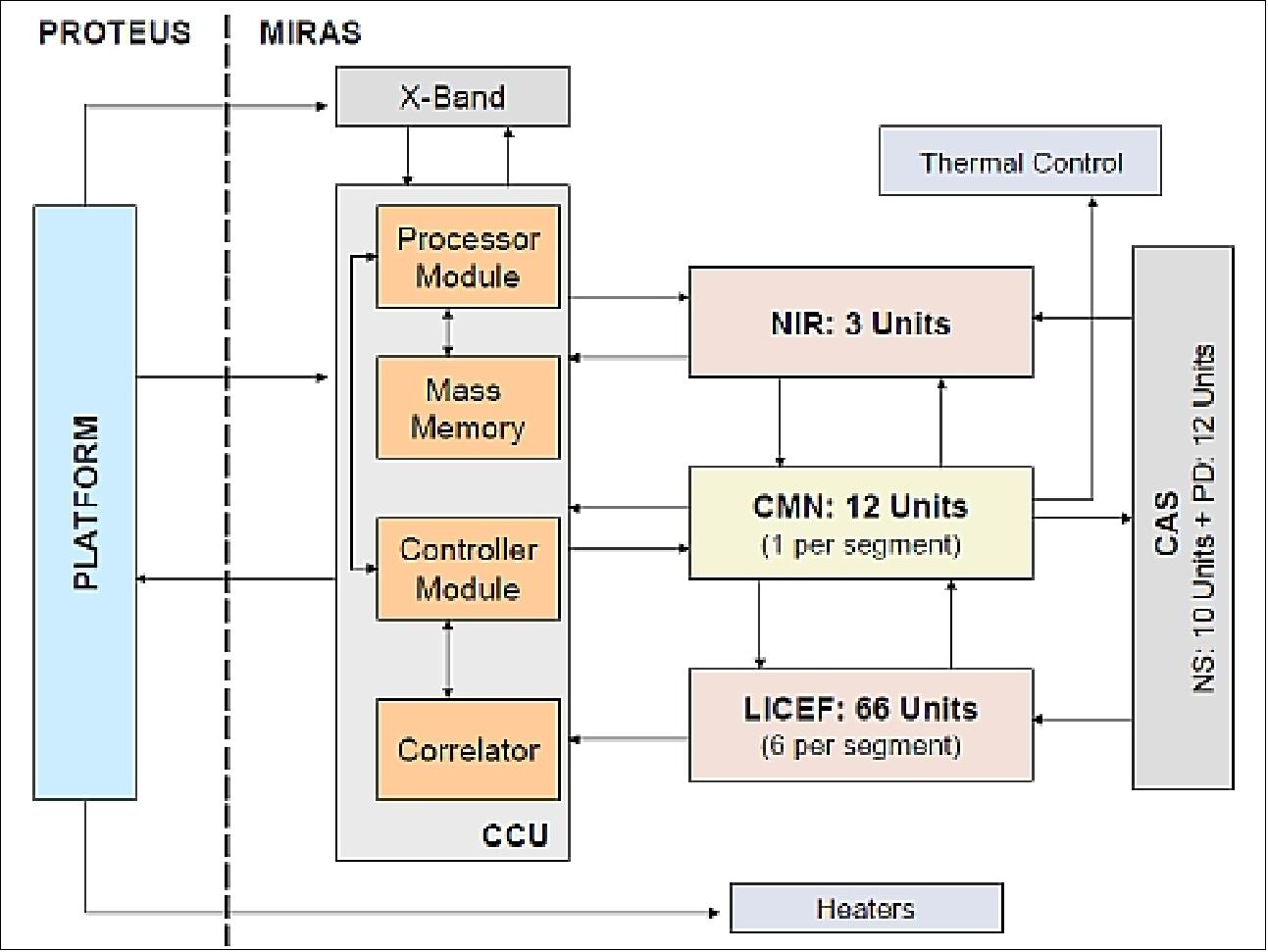
Background on L-band radiometry: Operating the radiometer in the L-band provides the maximum sensitivity of the emissivity to both SM (Soil Moisture) and OS (Ocean Salinity). However, it implies antenna diameters of several meters in order to meet the spatial resolution requirement for SM mapping which, for the design of SMOS, has been set at 50 km. A large real-aperture antenna on an LEO satellite poses a number of practical difficulties. A problem also arises from the need to achieve global coverage of the Earth within three days, which implies a large instrument swath. Microwave imaging by aperture synthesis provides an effective alternative to more classical solutions like the use of mechanically or electrically steered antennas and pushbroom instruments. This interferometric approach to microwave radiometry, inspired by the techniques developed in radio-astronomy over several decades, is based on the use of many small antenna/receiver units, geometrically arranged so as to sample the signal that would have been received by a real-aperture antenna. This sampling in the spatial domain, enabled by the use of multiple antenna elements, provides a scanning capability through a wide swath by means of (ground) signal processing only. 126) 127)
Background on main instrument characteristics of MIRAS: Each antenna/receiver unit is based on a patch antenna without a dielectric substrate with about 70º half-power beamwidth, a directivity of about 8 dB and provides both H and V polarizations with excellent cross-polarization characteristics (co-polarization/cross-polarization ratio > 25 dB). A single receiver chain per antenna element is available, so each unit can operate on either H or V polarization upon command from a control unit. In each receiver, the antenna signal is filtered to the selected bandwidth (1404 to 1423 MHz, in a region of the spectrum reserved for passive measurements), amplified and finally sampled and converted to a 1-bit digital signal. The MIRAS output data stream, combining both I and Q components at a rate of about 130 Mbit/s, is transmitted to the correlator unit by means of an optical fibre link. Each element also receives (via a second optical fibre link) a centrally-generated reference clock signal in order to perform the frequency down-conversion and the sampling with phase coherence among all elements. An oversampling by a factor of about 2 with respect to the Nyquist criterion is achieved in each receiver, which improves the radiometric sensitivity. In the correlator unit, after conversion from optical to electrical signals, a massive bank of 1-bit/2-level correlators implemented in dedicated integrated circuits performs the cross-correlations between all signals. Horizontal and vertical polarization images are interlaced and the cross-correlation for each polarization is performed over a 0.3 s period. Up to 5 images are then averaged, so two images (one per polarization) are available every 3 s.
Each antenna arm provides 3 x 6 receivers with a polarization capability in H+V. The antenna features four balanced feeds to obtain a co/crosspolarized ratio >25 dB over an angular extension of ±30º.; there is also an intermediate stage for E- and H-radiation pattern alignment. Each receiver outputs the I- and Q-digitized signals. Each receiver is furnished with a suitable filter to reject interference from adjacent bands and to shape the frequency response. A multiplexer converts the eight parallel I- and Q-level bit streams from each group of four receivers into a ten-bit serial data stream (quantization) which is fed into a central demultiplexer for serial/parallel conversion. The digital correlator, at the end of the processing chain, performs a complex correlation (at zero delays) between each pair of antenna elements of the interferometric array, resulting in the so-called “visibility function” at the spatial frequency defined by that particular antenna element baseline. The visibility function is ideally the Fourier transform of the brightness temperature of the scene, weighed by the element gain pattern, and recovered by the inverse Fourier transform. The output is the visibility map.
A typical MIRAS receiver includes the following elements:
1) RF device (with an input switch, a filter and an amplifier),
2) a phase/quadrature frequency down converter,
3) two two-level quantizers and samplers.
The RF bandwidth is limited to 1400-1427 MHz, the input RF filter band is fixed at 1404-1423 MHz (interference avoidance). The I (In-phase) and Q (Quadrature) outputs of all receivers are processed by a matrix of 1-bit digital correlators, located in the hub. 128)
The MIRAS configuration provides a FOV (swath) of about 900 km (the FOV has a hexagon-like shape at an orbital altitude of 763 km, sufficient for a 3-day equatorial revisit time. The antenna boresight is tilted at an incidence angle of 32.5º in the forward along-track direction for nominal radiative flux observations. The instrument tilt maximizes the footprint area for a given resolution goal and antenna spacing ratio. The tilted antenna footprint is represented by the sum of the overlapping individual antenna receivers, each representing a pixel of a distorted hexagon shape with curved sides; all pixel projections are of various sizes and incidence angles.
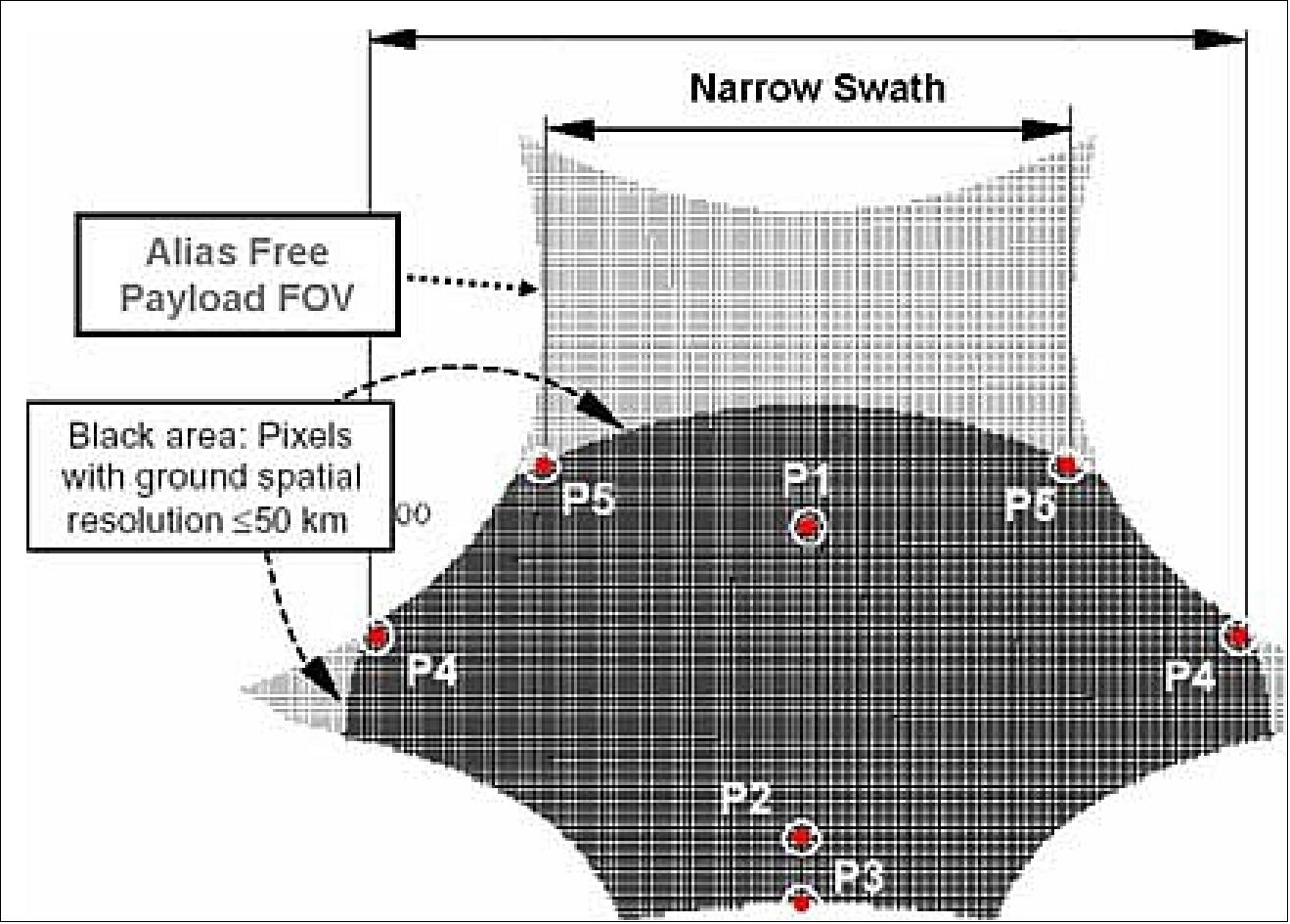
A snapshot brightness temperature map of the FOV is taken every 0.3 seconds with an average resolution of about 5 K over 200 K. Due to the platform motion in orbit, each pixel is measured several times with different spatial and radiometric resolutions and incidence angles. The minimum FOV along-track dimension is about 800 km, this corresponds to 380 snapshots at 0.3 s each. Ground data processing must account for all observation variations in size, shape, angles, overlapping conditions, weighing and averaging schemes, etc., resulting eventually in a brightness temperature map for each snapshot as well as for the accumulated and averaged along-track observation incidences within FOV. The repetitive measurement scheme of radiation, from varying footprints and incidences, has a similar summation effect on the retrieval of the overall signal, as a TDI (Time Delay Integration) scheme for an optical imager.
The overall instrument mass is 369 kg, power ~ 375 W. MIRAS data processing requires the introduction of corrections due to atmospheric, ionospheric, and galactic effects over ocean surfaces. In addition, SSS retrieval requires knowledge of sea surface temperature and sea roughness. For observations over land surfaces, knowledge of the surface temperature is needed with an accuracy of 2 K. These reference parameters have to be obtained from instruments of other missions.
Parameter | Desired | Acceptable | |
Soil Moisture (SM) | SSS (Sea Surface Salinity) | ||
Coverage | Global (separate) | Global | Global (separate) |
Mission duration | 3-5 years | 3-5 years | 3 years |
Frequency | L-band | L+C-Band | L-band |
Polarization | H+V | - | H+V |
Spatial resolution | 10 km | 20 km | 50 km |
Revisit time | 1-3 days | 1-10 days | 3 days |
Radiometric accuracy | 1 K | 0.5 K | 2 K |
Radiometric sensitivity | 1 K | 0.25 K | 3 K |
MIRAS instrument command and data handling. The ICU (Instrument Control Unit) interfaces with the MIL-STD-1553B bus of the S/C. The S/C time signal is used to generate time stamps for the science data, generated and packetized in DICOS. The ICU interfaces with the receivers and the calibration network via CMN (Command and Monitoring Nodes), located on the hub of each arm segment.
The CMN provides a number of functions:
1) switching of receivers and calibration network,
2) acquiring some housekeeping information,
3) providing some power conversion and distribution to the receivers,
4) providing the receivers with a local oscillator signal derived from DICOS.
The MIRAS instrument has three main operational modes:
• Dual-polarization mode, in which all receivers are switched synchronously to either H or V polarization
• Full polarimetric mode, in which segments of the array are switched according to a predefined sequence between H and V
• Calibration modes, in which measurements of the internal load, the noise diodes, or the so-called “fringe washing function” are determined.
Note: After the commissioning phase, one of the two operational modes (dual-polarization or full-polarimetric) will be selected and from that point onwards, MIRAS will be operated in the selected mode.
In-orbit Calibration
MIRAS has two types of in-orbit calibration:
1) external, in which the instrument makes a maneuver to point to the cold sky,
2) internal, in which noise is injected to the receivers.
This one in turn has two modes, one of short duration carried out periodically interspersed with scene measurements, and the other lasting a full orbit and used to obtain the more stable parameters and the sensitivity of all parameters with temperature. 129) 130)
Calibration mode | Type | Objectives |
Sky view | External | - NIR absolute calibration: |
Long calibration | Internal | - U-noise injection (Visibility offset) |
Short calibration | Internal | C-noise injection: |
Selfcalibration | Internal | Calculation of normalized complex correlations |
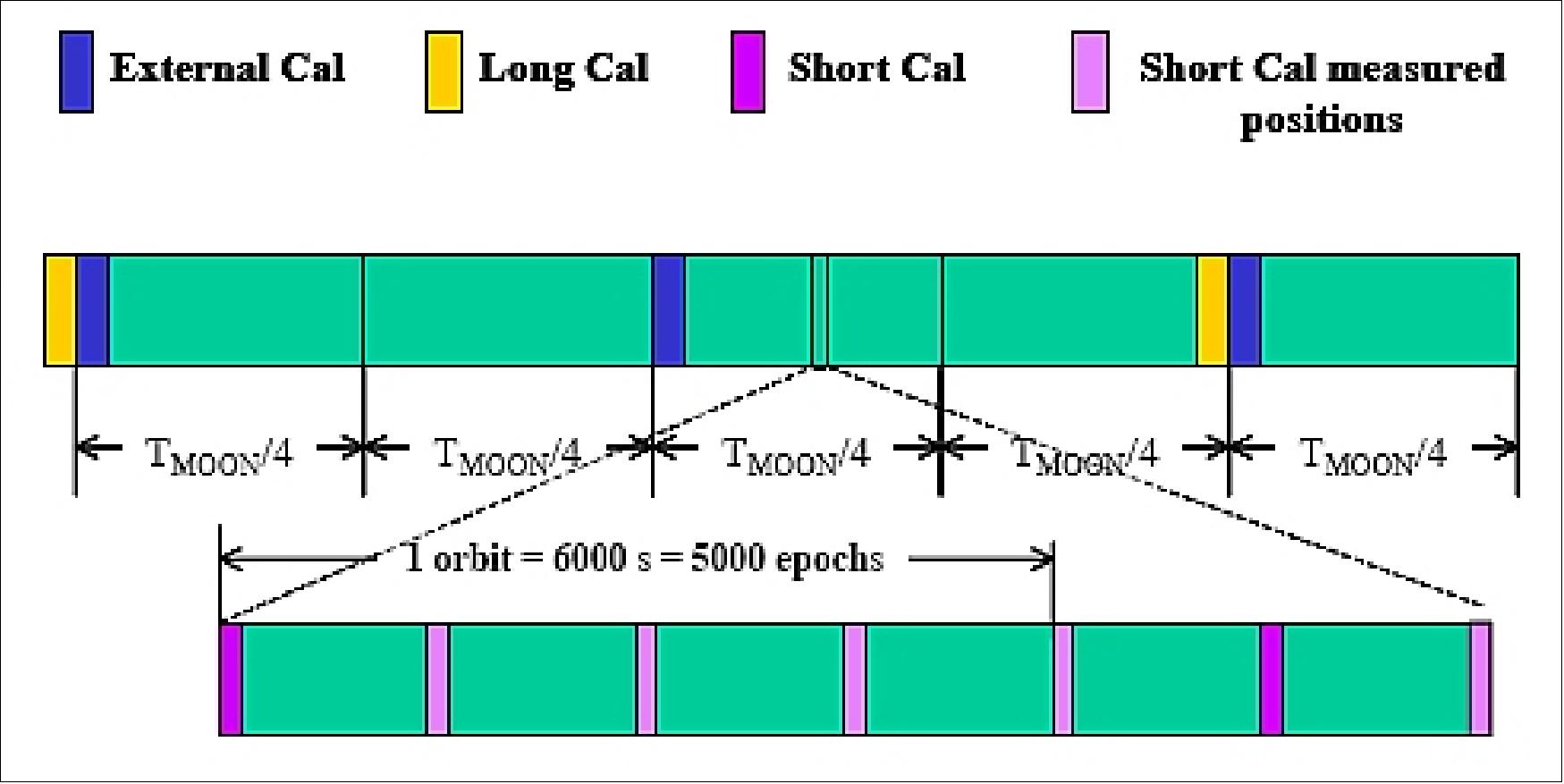
Internal calibration is based on periodically injecting noise to all receivers via dedicated input switches. Due to the difficulty of making a large noise distribution network, a distributed noise approach is used for large baselines. Internal calibration also includes a so-called selfcalibration mode that is used for automatically correcting samplers offset and quadrature error 131)
External calibration: Part of an orbit is devoted to observing the sky to complete the in-orbit calibration, in particular those parameters that cannot be properly calibrated by internal calibration. They are the following: NIR units, Deviations in the antenna patterns and Parametric G-matrix. In one month there will be two identical external calibration events every two weeks. The calibration is carried out by observing an external target selected in the sky in an inertial attitude for part of the orbit.
Internal calibration: Various onboard means are provided to measure the accuracy and stability of the payload data.
These are:
• Matched loads in each of the receivers
• Centralized noise source/network on the hub
• Distributed noise sources/networks in the arms
• Fringe wash function in the CCU (Correlator and Control Unit)
In all calibration activities, the antenna proper is not involved; this represents the “unknown” factors. Therefore, provisions have been made to perform “external” calibrations, by pointing the entire spacecraft to specific targets: either to deep space, the moon, the sun, or known ground targets.
The LICEF (Lightweight Cost-Effective Front-end) receiver parameters of MIRAS are sensitive to temperature and ageing. Hence, they need to be calibrated in flight to ensure that the accuracy requirements of the mission can be met.
For this purpose MIRAS has been provided with:
1) 3 accurate NIR (Noise Injection Radiometer) subsystems as reference radiometers
2) An onboard CAS (Calibration Subsystem)
Both subsystems were developed by Ylinen Electronics (Finland) and HUT (Helsinki University of Technology) or TKK, Helsinki, Finland - as subcontractors to EADS-CASA Espacio of Spain.
The CAS device of MIRAS includes a total of ten Noise Source (NS) units, twelve two-to-six Power Divider units (PD), and interconnecting RF cables. CAS forms a noise distribution network that generates and distributes correlated noise to all the receivers of MIRAS at two different noise levels (hot and warm). There are two different configurations of NS units; each of the arm segments has an ANS (Arm Noise Source) connected to adjacent PD units from two outputs (Figure 82). The hub section (Figure 83), has one HNS (Hub Noise Source). The HNS has three outputs, which are connected to three PD units on the hub. 132) 133) 134)
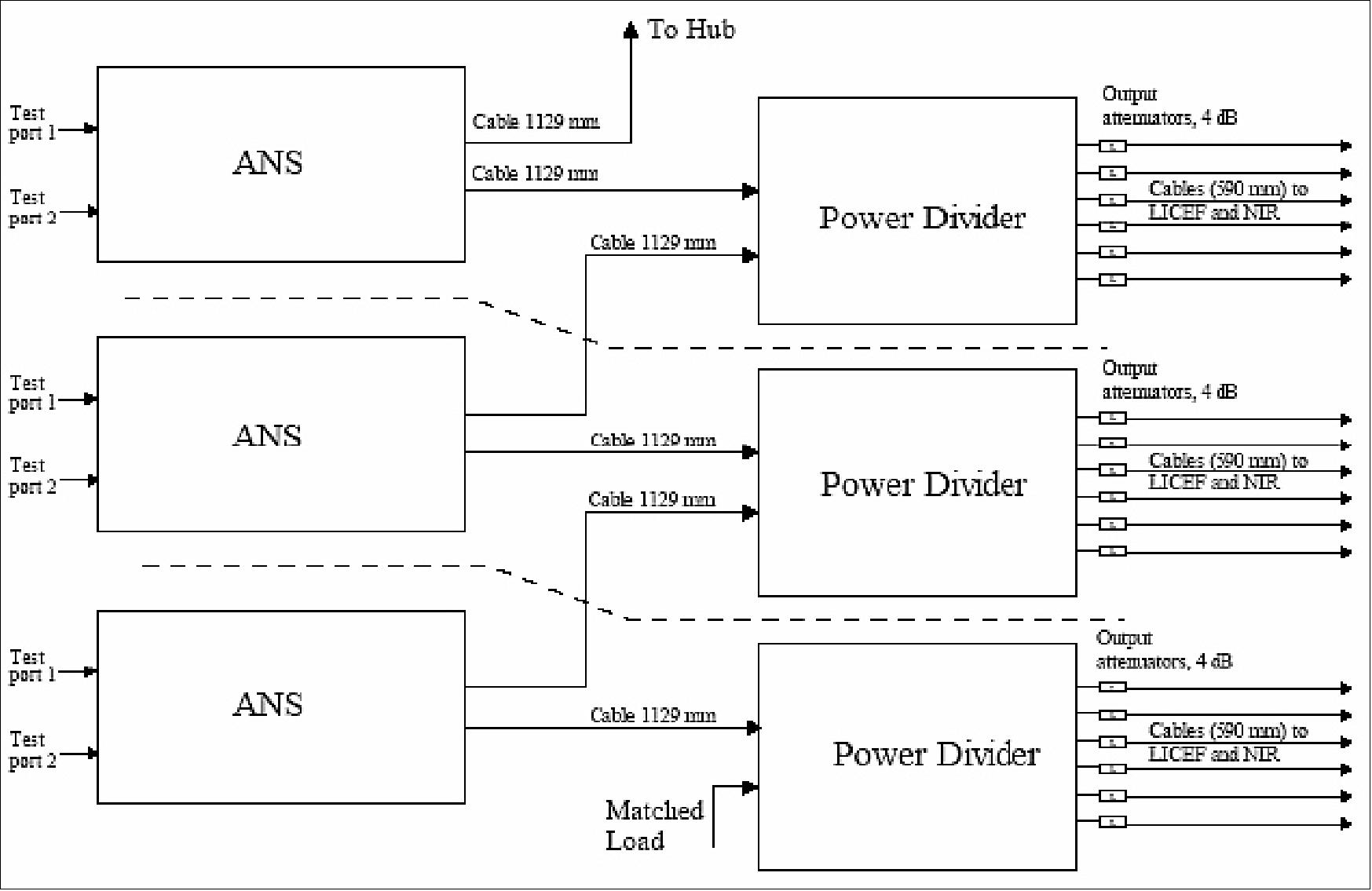
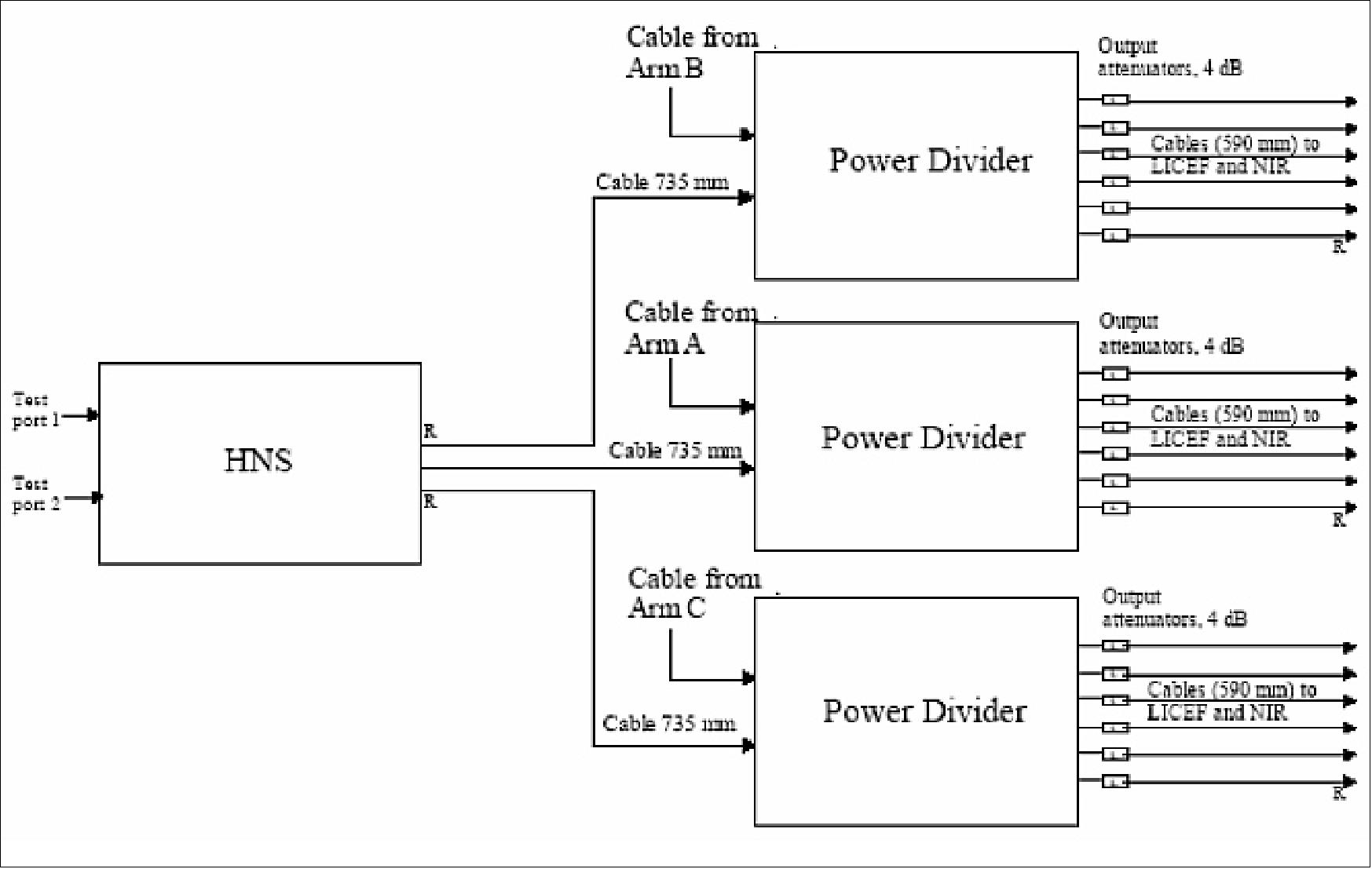
The configuration of the noise distribution network enables each individual radiometer receiver to be fed by two different NS units. The overlapping scheme enables to keep track of the signal over the whole calibration network and thus, establishes a relationship between phase and amplitude among the receivers. The three NIR units are used as absolute reference. The distributed noise generation concept is adopted due to mass and volume constraints of the satellite payload; centralized noise generation (using a single noise source and sufficient division) would require a much larger cable harness.
The block diagram of one HNS is presented in Figure 84. The ANS units are identical with the exception that one of the three outputs is internally terminated. Test ports 1 and 2 are being used on-ground to characterize the relative attenuation and phase differences between the output ports of a NS unit.
Using the RF switches, three distinct noise temperature levels can be generated at the NS output; hot level (approx. 65000 K), warm level (approx. 5000 K), and ambient. Reduced to the output of the CAS subsystem (i.e., the input of individual receivers), the correlated noise levels (thermal noise subtracted) are approximately 1200, 75 and 0 K, respectively.
One ANS device is shown in Figure 85 HNS is otherwise identical to ANS, but it has three outputs instead of two. The mass of the units is approx. 135 g, 295 g and 300 g for PD, ANS, and HNS, respectively. The dimensions of PD and NS units are 95 mm x 57 mm and 85 mm x 115 mm, respectively, not including mounting feet and connectors.
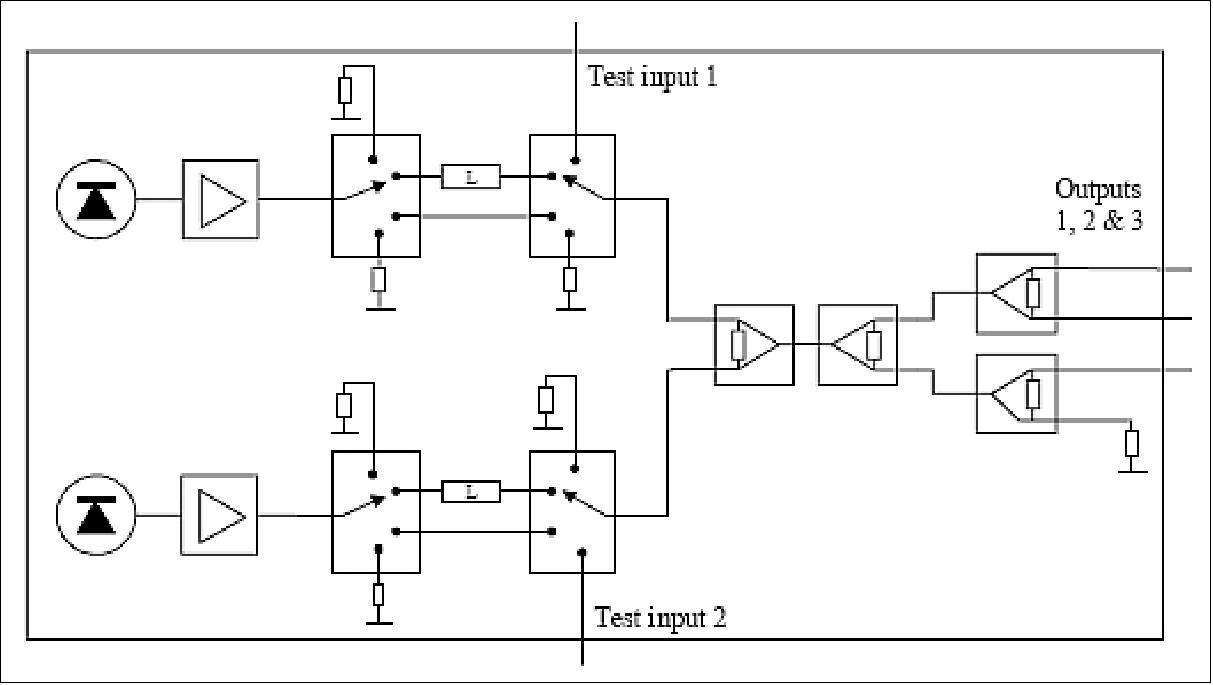

The NIR (Noise Injection Radiometer) subsystem, which consists of three NIR units, works as part of the MIRAS instrument.
The main objectives of NIR are: 135)
• To provide precise measurements of the average brightness temperature scene for absolute calibration of the MIRAS image map
• To measure the noise temperature level of the internal active calibration source for individual receiver calibration CAS (Calibration Subsystem).
• To form interferometer baselines with the regular receivers units in the MIRAS array (so-called mixed baselines).
The NIR performance is of great importance to the SMOS mission.
The measurement challenges are based on the following scenario:
- There is only one accurate external target (cold sky)
- The individual antennas have a wide field of view
- The temperature of the NIR is not actively stabilized varying about 1.5º C per orbit
- Certain calibration parameters cannot be measured on orbit, but on ground only.
The NIR instrument consists of:
• Two radiometer receivers, one for vertical and one for horizontal polarization. The NIR receivers, manufactured by MIER Telecomunicaciones, Spain, are almost identical to the regular LICEF receivers of MIRAS.
• A controller. The controller incorporates an antenna that receives the target noise (Figure ).
• Four-phase stable low-loss RF cables that connect the controller to the receivers.
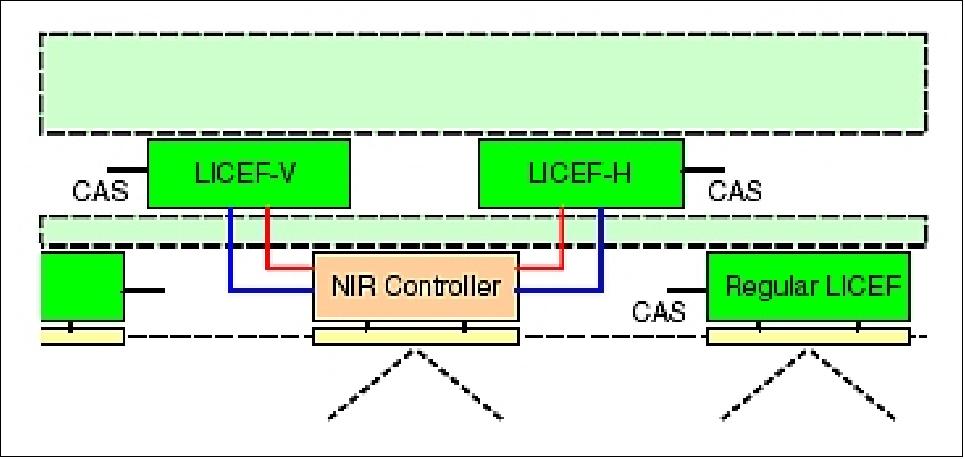
The functions of the controller are to:
a) inject reference noise into the two receiver chains,
b) regulate the amount of the injected noise to keep the system balanced with antenna temperature or with the calibration noise from CAS,
c) control the switches of NIR (Dicke-switches of the receivers and the noise switches of the controller) according to the selected operation mode.
The NIR subsystem has several operational modes for measuring the antenna and CAS noise temperature and for calibration. The antenna temperature is measured using a noise injection mode called the NIR-A mode, and the CAS noise level is measured using a noise injection mode called the NIR-R mode. Also, total power modes are used, for example, to solve the receiver noise temperature.
The NIR calibration approach includes two steps:
1) certain parameters are characterized on-ground,
2) these parameters are applied during orbital calibration, which is carried out frequently.
The in-orbit calibration is based on the measurement of the cold sky, which has a well-known brightness temperature level.
The following parameters were solved during on-ground characterization:
1) antenna and front-end loss,
2) the phase imbalance of antenna and front-end,
3) non-linearity correction,
4) the temperature dependency of noise injection level.
The measured performance meets the requirements set for the NIR subsystem of SMOS. The retrieved ground calibration parameters will be applied during in-orbit calibration when the level of the noise injection, receiver noise temperature and phase imbalance of the channels are solved. After this, the correction for the non-linearity is applied to the measured level of brightness temperature.
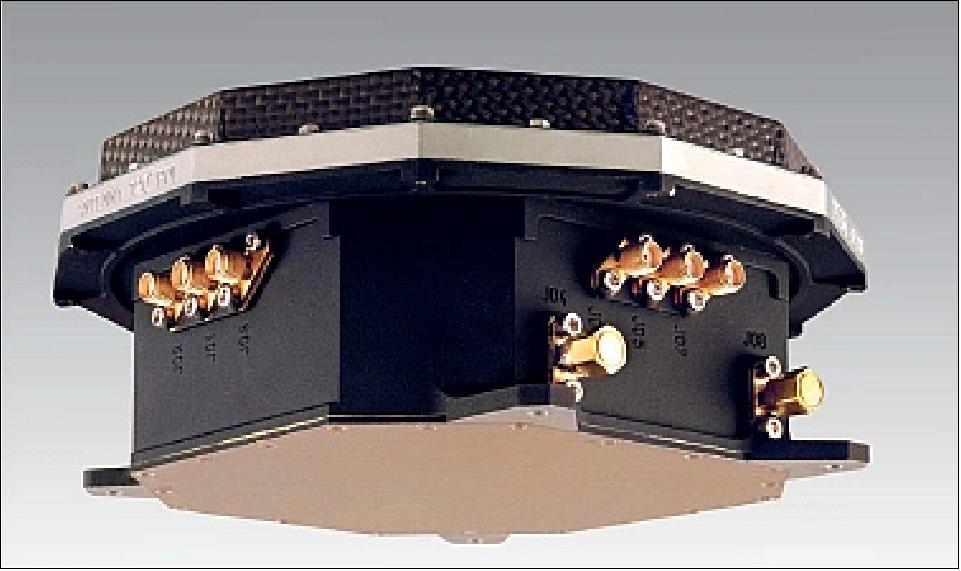
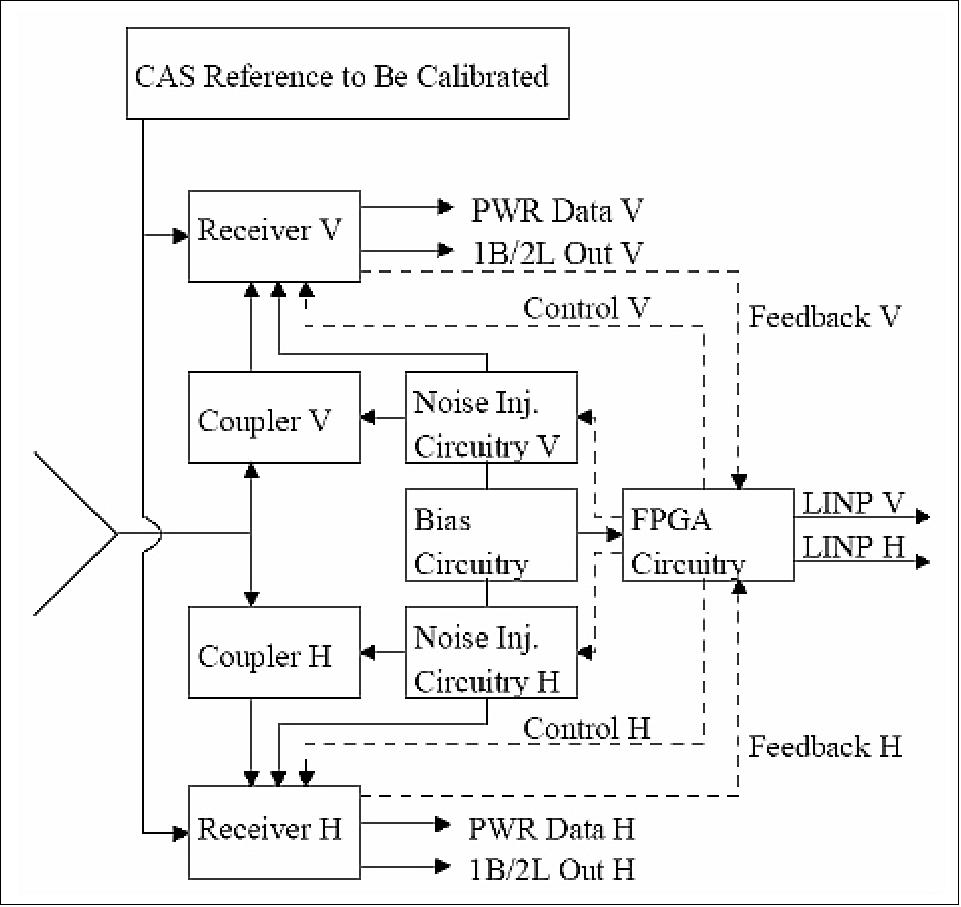
MIRAS (Microwave Imaging Radiometer with Aperture Synthesis) Technology Development
The MIRAS instrument technology development represents a rather complex program of ESA research and validation activities over an extended period which started in1997 with feasibility studies (in 2000 the SMOS Phase-A definition of a space-borne mission was superimposed on this framework effecting in turn the layout of the MIRAS instrument) and is documented in the following reference. Only a few items are mentioned here. 136) 137)
In 1998, ESA started MDPP-1 (MIRAS Demonstrator Pilot Project-1) to provide a technology solution to the inherent challenges of L-band radiometry. The initial objective was to build a representative element of the MIRAS instrument (one entire segment of the arm) to test the technology of a distributed system. This activity was performed by EADS-CASA (Spain) and ended in Oct. 2002 with all critical areas of technology validated.
The MDPP-1 included:
• The SMOS parametric mission design
• The STM (Structure and Mechanisms) for a complete segment, including a deployment mechanism
• Four LICEF (Lightweight Cost-Effective Front-end) antenna receivers. Each LICEF is an antenna-received integrated unit that measures the radiation emitted from Earth at L-band.
• The CAS (Onboard Calibration System) to service one entire segment and the complete hub
• The MOHA (MIRAS Optical Harness) to service one entire segment of the hub. MOHA employs the IEEE 1393-1999 SFODB (Spaceborne Fiber Optic Data Bus), a redundant, cross-strapped, ring-based configuration to provide the following services/functions:
- Connection of the radiometer receivers to the central correlation unit in a star topology
- Synchronous, one-directional data transmission at 112 Mbit/s data rate
- 1300 nm laser diode transmitter and InGaAs PIN photodiode receiver
Note: MIRAS is the first satellite payload to rely critically on fiber optics communications. There are 144 links at 110 Mbit/s (72 to and 72 from the antenna elements). Typical characteristics of the fiber optics implementation are:
- very low EM emission levels (from Tx/Rx)
- galvanic isolation
- mechanically flexible and lightweight
- better phase stability when bent.
In 2000, a parallel and follow-on activity was started at ESA, referred to as MDPP-2, with the objective to demonstrate the following critical aspects of the program:
• A deployment demonstration test for one complete arm of MIRAS (three segments)
• An image validation test using a 12-LICEF MIRAS array.
• Proof-of-concept activities involving: 1) a NIR (Noise-Injection Radiometer), 2) an advanced DISCOS-2 (Digital Correlator System-2), and 3) an advanced BPF-2 (Band-Pass Filter-2)
• The breadboarding of MOHA-3, the optical harness from SMOS Phase-A.
The end of MDPP-2 was in the fall of 2003.
MOHA: The connections between the various elements of the instrument are performed with an optical fiber digital network called MOHA (MIRAS Optical Harness). The choice for optical interconnects as opposed to the more classical solutions with copper wires was driven by the following inherent advantages of such a system:
• Low electromagnetic emissions, which is vitally important for MIRAS
• Good phase stability, by comparison with coaxial, over temperature and when bent
• Insensitivity to ground differential voltages (galvanic isolation)
• Optical fiber cables are light-weight and very flexible.
The TCXO in the MOHA/CCU module generates the master reference clock for the instrument. This clock signal is converted to an optical signal and distributed via optical fibers and optical splitters to all the units in the instrument, where the integrated MOHA modules perform the reverse conversion to an electrical clock signal. The multiplexed IQ data generated by the LICEF receivers is then transported via an optical fiber link to the MOHA Rx modules (one fiber per receiver). After conversion to electrical signals, the IQ data is de-multiplexed and presented via LVDS lines as I and Q data streams to the correlator module in the CCU. The reference clock is also distributed to the CMN units, where it is up-converted to form the LO signal for the LICEF receivers.
Overall, the MOHA subsystem contains 74 solid-state lasers, 168 optical receiver diodes and approximately 800 m of optical fiber cable. These elements are distributed over 91 optoelectronic modules and 13 optical splitters. SMOS is the first ESA mission with an optical harness (manufacturer: Contraves, Switzerland).
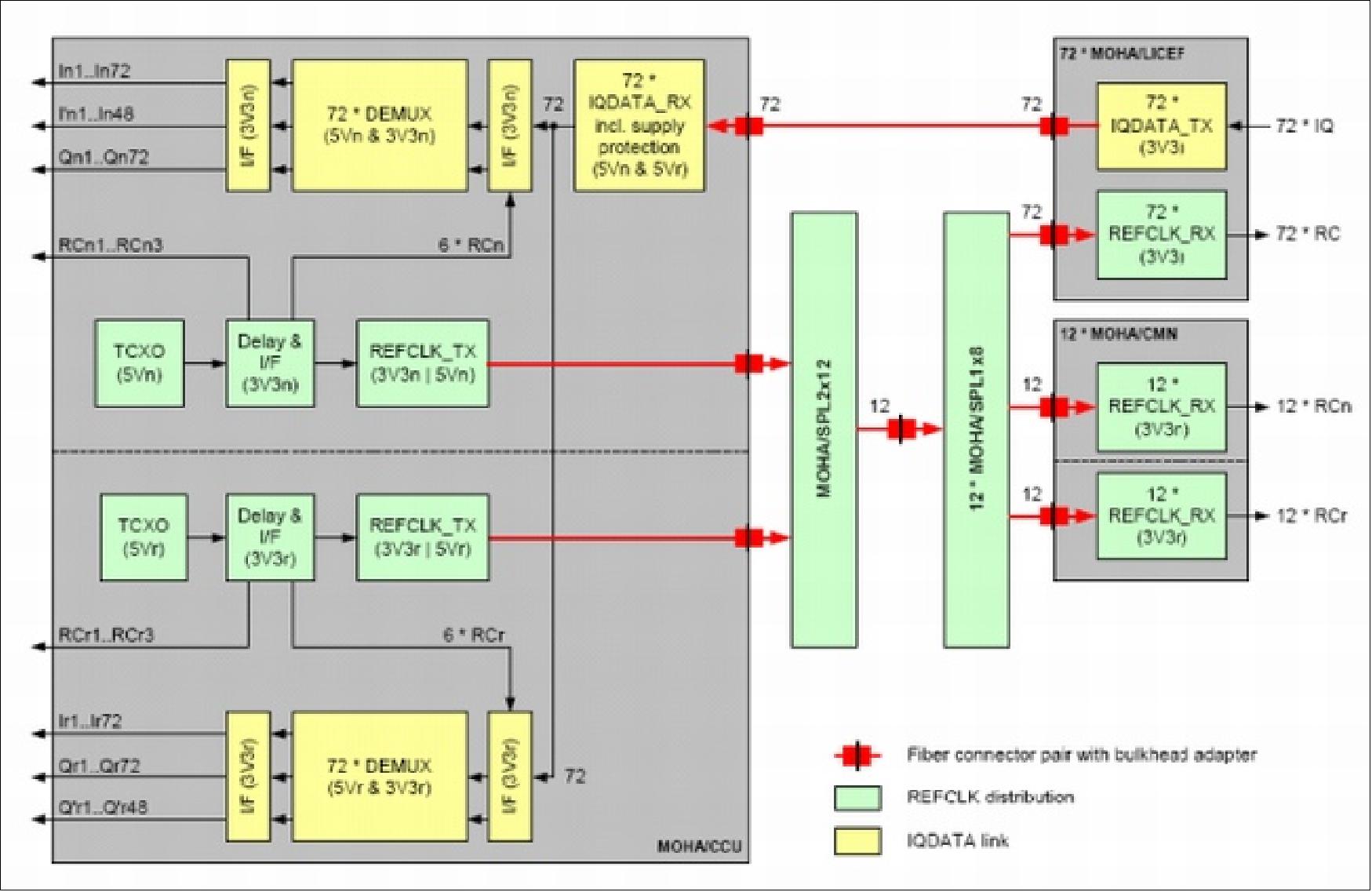
SMOS preparatory and in-flight validation campaigns (technology verification)
• The DOME-Cair (airborne) field campaign was carried out in January 2013 (12-day campaign) at the Concordia research station at Dome-C in Antarctica to validate data from ESA’s SMOS and GOCE missions. The results were presented to ESA in late 2013. This campaign revealed a remarkable similarity between spatial patterns observed by the microwave and gravity instruments (Figure 92). The images also show the flight tracks during the campaign. This could lead to completely new scientific discoveries beneath the surface of the Antarctic ice. 138) 139)
The DOME-Cair campaign was conducted by AWI (Alfred Wegener Institute for Polar and Marine Research) of Bremerhaven, Germany and by DTU [Danmarks Tekniske Universitet (Technical University of Denmark), Lyngby, Denmark].
- The campaign was followed by data quality checks, data processing and the first scientific analyses.
- The aircraft was the AWI Polar-6
- The L-band microwave instrument was the EMIRAD-2 developed by DTU 140)
- The gravimeter (airborne) was the AWI LaCoste-Romberg-Gravimeter.
Based at the isolated Concordia research station at Dome-C, the campaign involved spending two weeks flying a Basler-67 airplane over an area of 350 km2. The plane carried two key sensors: a radiometer used to record surface microwave emissions to verify SMOS data and a gravity meter.
The results of the campaign were presented in late 2013 to ESA and included some major surprises: SMOS and GOCE use completely different types of instruments to measure completely different aspects of Earth. Nevertheless, the measurements taken from the aircraft’s two sensors show similar patterns across the Antarctic ice surveyed by the plane.
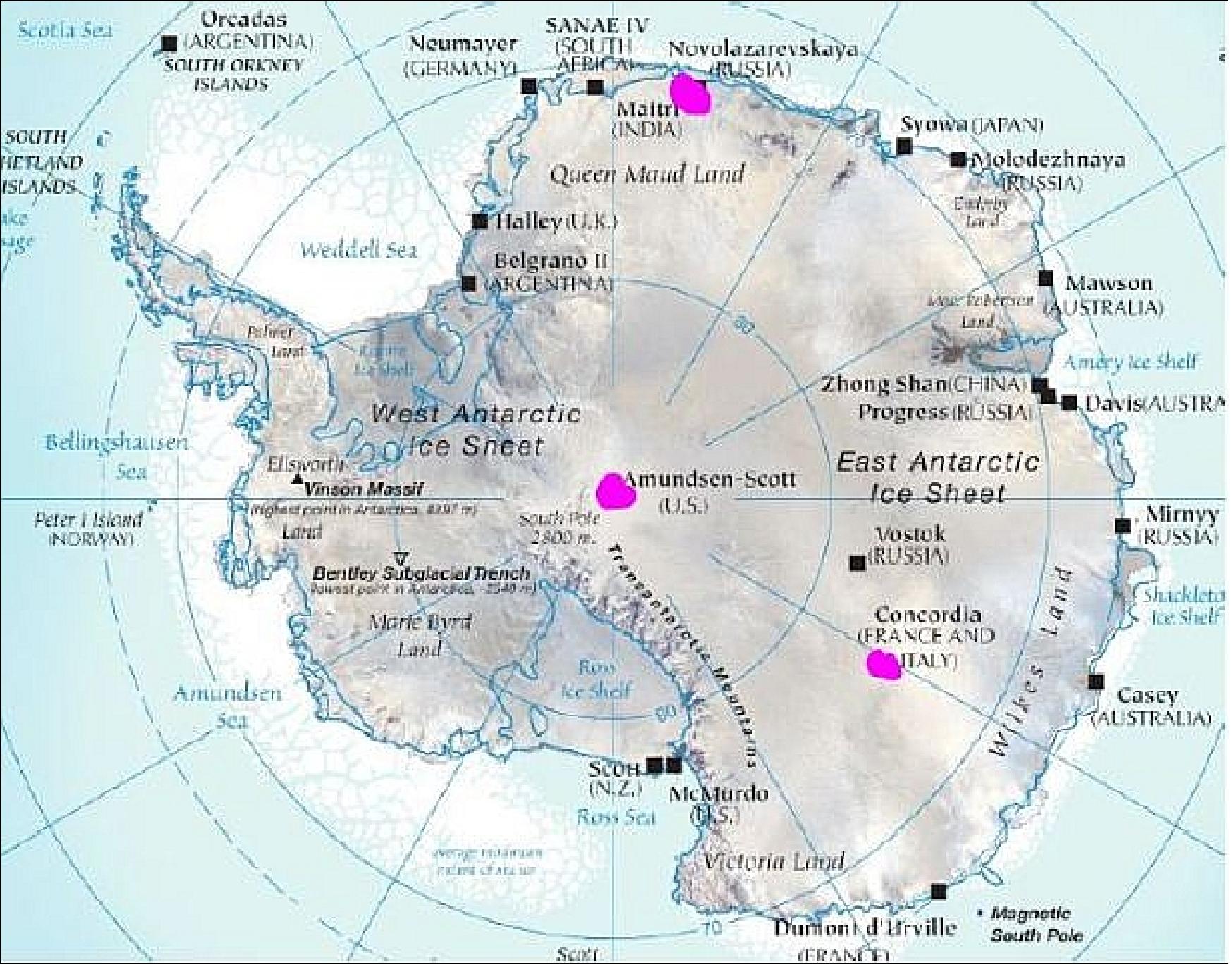
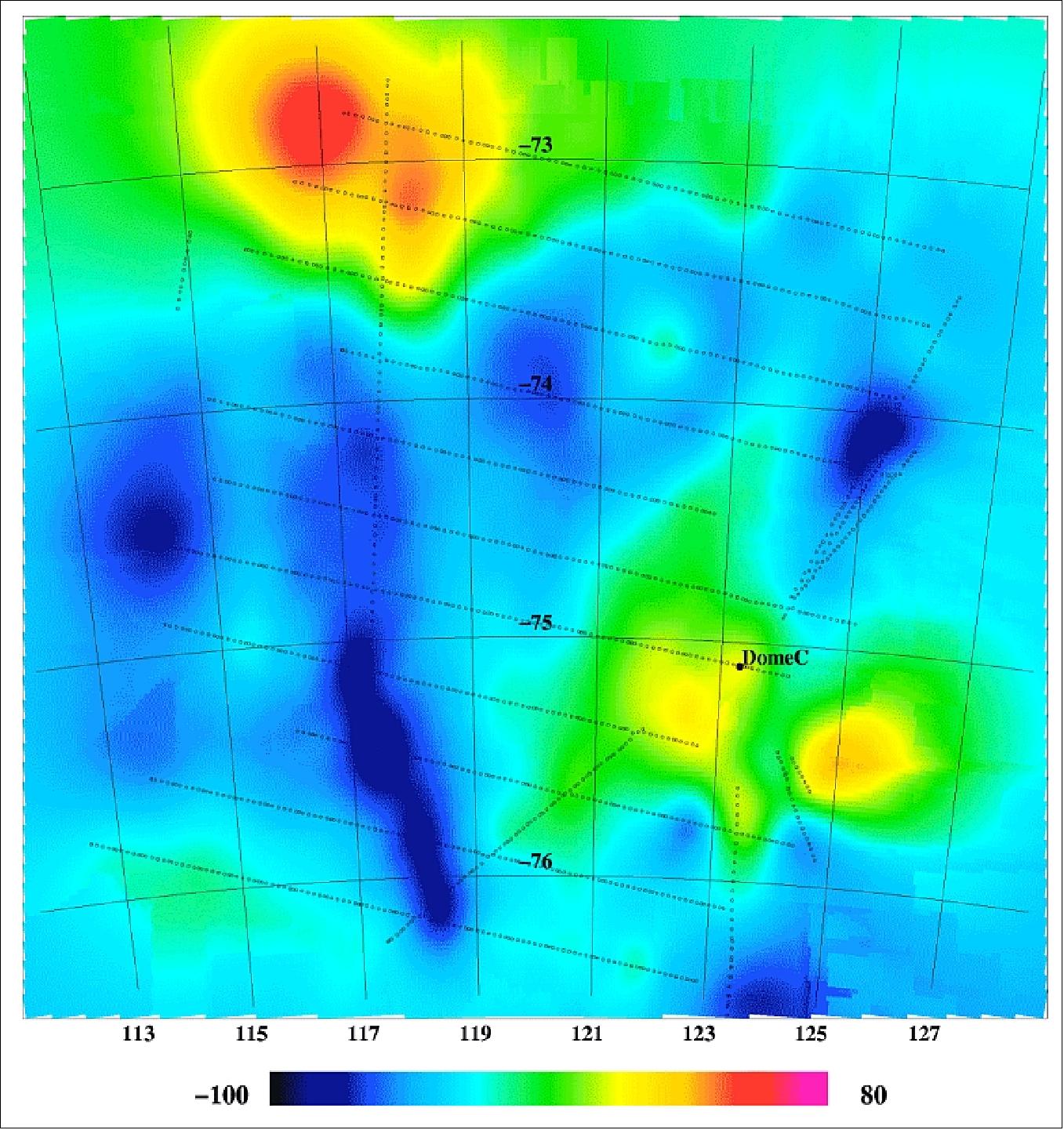
Fully polarimetric (i.e. 4 Stokes) brightness temperatures at the L-band were measured, and are now available on request, along with the final report from DTU (Technical University of Denmark). Figure 93 shows the measured brightness temperature at nadir for vertical (left panel) and horizontal (right panel) polarization over 11 tracks that were acquired over the test area.
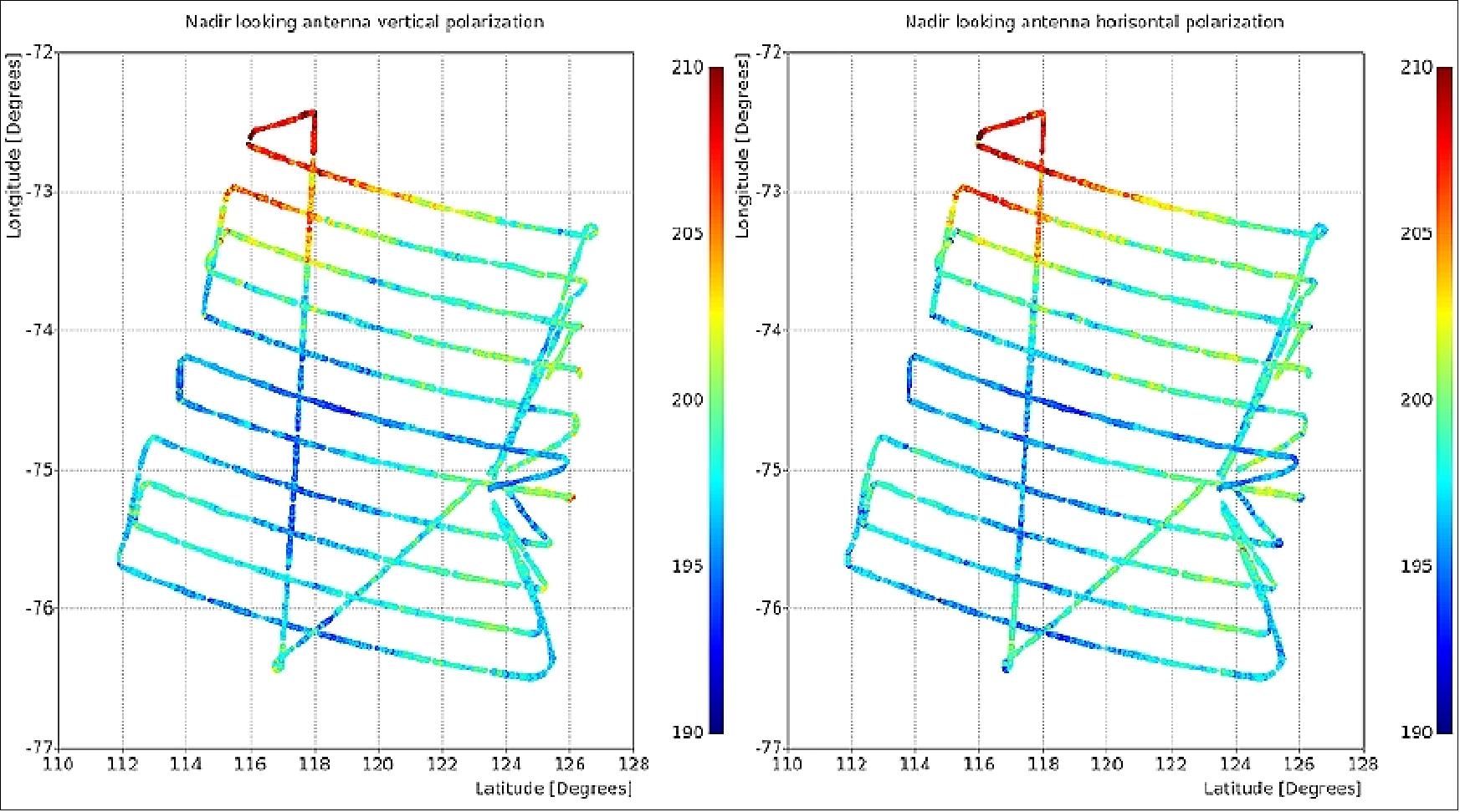
• DOMEX-3 campaign (period: Dec. 2012 to Dec. 2015) at the location DOME-C, Antarctica, providing multi-year, continuous observations of the ice sheet at the Concordia research station in Antarctica. The measurements are made by a new multi-frequency, dual-polarization, passive microwave radiometer positioned on a tower. 141)
This new instrument is based on the Radomex radiometer built by IFAC-CNR’s Institute of Applied Physics in Florence, Italy, which operated successfully in 2008–2010. However, Radomex was not designed for long autonomous operation in the extremely harsh Antarctic climate. The newly designed radiometer will be able to operate autonomously and transmit data to Europe remotely, despite the demanding environment. The radiometer has been calibrated, tested and prepared for shipping to the Concordia station. It is expected to start operations in late 2012, during the austral summer. This multi-year experiment is in support of ESA’s SMOS (Soil Moisture Ocean Salinity) mission.

The objectives are:
- Continuous measurement data from the surface of the ice sheet by simultaneous observations from a multi-frequency dual-polarization radiometer and a collocated thermal infrared radiometer over a period of time, spanning multiple annual cycles.
- Collection of time-series brightness temperature measurements at L-band with sufficient calibration accuracy, stability, drift, and of sufficient duration to allow analyses of seasonal variances owing to changes in emission and temperature of the observed snow and ice layers.
- Mitigation and correction for interference sources in the data.
- Provision of external ice-sheet target calibration reference brightness temperature, and the basis for calibration monitoring, and/or verification of brightness temperature products in support of the SMOS mission, especially for re-processing exercises.
- Evaluation of the TEC (Total Electron Content) impact on the temporal stability of the SMOS h-, v-polarised and 1st Stokes parameter measurements in a peak period of Sun activity using Total Electron Content data collected onsite for the duration of the experiment.
DOMEX-3 has so far documented the stability of L-band brightness temperatures over long time periods and hence the suitability of DOME-C for vicarious calibration of L-band radiometers (e.g. SMOS, SMAP and AQUARIUS). 142) 143) 144)
• As ESA's SMOS mission nears the end of its commissioning phase in May 2010, a new ground network, referred to as ISMN (International Soil Moisture Network), will provide harmonized global datasets of soil moisture measurements collected from the ground, ensuring the data received from space are as accurate as possible. 145)
ISMN was set up collaboratively by the following partner institutions: GEWEX (Global Energy and Water Cycle Experiment), GEO (Group on Earth Observations), CEOS (Committee on Earth Observation Satellites), and ESA. ISMN provides an integrative platform to host quality-controlled soil moisture measurements emerging from various ground validation campaigns and operational networks to share freely with the scientific community.
As an important part of the SMOS mission, a number of field campaigns are being carried out to validate the observed data. Both the observed brightness temperature data and the derived data products for soil moisture from SMOS need to be validated.
The soil moisture data from field campaigns can now be fed into ISMN where they are brought into a common volumetric soil moisture unit to allow for accurate comparison with data received from the SMOS spacecraft. This is not as trivial as it may seem because there is neither a standard measurement technique nor a standard protocol for measuring soil moisture. - Hence, the ISMN will advance the process of validation of remotely sensed soil moisture datasets from SMOS and NASA's future SMAP (Soil Moisture Active/Passive) mission, as well as modelled soil moisture data.
Funded by ESA, the Institute of Photogrammetry and Remote Sensing at the Vienna University of Technology (TU Wien, Austria) is responsible for the network (ISMN) and data distribution. ISMN bridges the gap between organizations measuring soil moisture on the ground and people interested in using these data. - For improved worldwide validation of satellite and model estimates of soil moisture, all campaign and operational soil moisture networks are welcome to share their data with the scientific community through the ISMN (International Soil Moisture Network).
ESA's SMOS campaigns: Three preparatory campaigns were conducted during the Phase-A study period to analyze signal dependence and validate existing and improved models. The campaigns were: 146) 147) 148)
• WISE (Wind and Salinity Experiment). WISE was conducted in 2000 (Nov. 25 to Dec. 18, 2000) and 2001 (Jan. 9 to 16, 2001) from an oil rig, about 50 km off the coast of Tarragona in the northwest Mediterranean. The experiments were conducted by UPC (Technical University of Catalonia), and ICM (Institute of Marine Sciences) both of Barcelona, Spain. The LAURA (UPC L-band AUtomatic RAdiometer) was deployed in REPSOL's Casablanca oil rig, in conjunction with other oceanographic and meteorological instrumentation. Study of the impact on the brightness temperature of sea state, as well as the effect of wave development, swell, currents, rain, and oil spills; retrieval of sea surface salinity from multi-angular polarimetric L-band radiometric data. 149) 150) 151) 152)
• EuroSTARRS (Salinity Temperature and Roughness Remote Scanner in Europe). The objective of EuroSTARRS-2001 was to acquire SMOS-like observations for addressing the critical issues relevant to the soil-moisture objectives of the SMOS mission. STARRS, owned by NRL (Washington, DC), was operated during the campaign aboard a Dornier-228 by DLR, Oberpfaffenhofen.
• LOSAC (L-band Ocean Salinity Campaign). The objective of LOSAC was to address azimuthal dependence of the first two Stokes parameters (Tb,v and Tb,h) on wind speed and direction. The EMIRAD polarimetric L-band radiometer of TUD (Technical University of Denmark) was used aboard the C130 aircraft operated by the Royal Dutch Air Force over the North Sea. First flights were conducted in 2001. Overall, the campaign lasted until 2003. 153)
• DOMEX (Microwave Emission of the East Antarctica Plateau): An experimental campaign (DOMEX) with ground based radiometers was carried out at Dome-C in the summer 2004/2005 to control the stability of L- and C -band emission at a monthly scale, within the framework of the ESA-SMOS calibration and validation activities. The DOMEX campaign was organized with CNR-IFAC, Florence, Italy. The campaign (tower-based measurements) took place in Dec. 2004 at DOME-CONCORDIA in Antarctica. The campaign concluded in 2005.
• CoSMOS-2, Airborne measurements in Australia in Nov. 2005 (Aero Commander aircraft of Flinders University, Adelaide), dedicated to SM (Soil Moisture) observations. Cooperation with the Australian University of Melbourne, Newcastle in the framework of the National Australian Field Experiment (NAFE). Participation of European Teams [Free University of Amsterdam, (The Netherlands), University of Valencia (Spain), CESBIO (France)]. The objective of the CoSMOS airborne campaign was to perform a “long-term” acquisition of data under different geo/bio-physical as well as meteorological and oceanographic conditions to address open issues related to the retrieval and validation of the SMOS products.
• CoSMOS-OS with the goal to map sea surface salinity: An airborne campaign (4 weeks) in Norway in April 2006 using the second generation EMIRAD (Electromagnetics Institute Radiometer) digital detection instrument of TUD (Technical University of Denmark) on the Skyvan aircraft of HUT/TKK (Helsinki University of Technology), Finland. The objective was to perform the acquisition of data under different oceanographic conditions to address open issues related to the retrieval and validation of the SMOS products. For all flights, the time at the target has been chosen to coincide with an ENVISAT/ASAR overpass to obtain information about the actual surface roughness, and meteorological information was provided from oil-drilling installations in the target area. 154) 155)
• SAM (Small-scale Airborne prototype of MIRAS). ESA-CASA is developing SAM as prime contractor within the framework of the MDPP-3 project (MIRAS Demonstrator Pilot Project-3), sponsored by ESA. Several European institutions are participating in the development of the MDPP-3 instrument and test campaigns (UPC, HUT, etc.). The SAM demonstrator consists of 12 LICEF receivers (4 per arm), 1 reference radiometer (NIR) and includes the same internal calibration system scheme as foreseen for MIRAS. 156)
In the near future, SAM will be flown in a light aircraft, the Skyvan of the LST/HUT (Laboratory of Space Technology/Helsinki University of Technology), to undertake several airborne campaigns over land and sea. These airborne campaigns are devised to test the capability of SMOS calibration and retrieval algorithms to provide soil moisture and ocean salinity in the natural environment.
• TuRTLE (Topography effects on RadiomeTry at L-band Experiment). UPC (Spain) carried out a set of experiments to study the impact of different soil and vegetation properties on land emission: 157)
- The vine canopy, observation position, and soil moisture (SMOS REFerence pixel L-band Experiment, REFLEX, 2003 and 2006
- The soil type, and moisture profile (MOnitoring Underground Soil Experiment, MOUSE, 2004, and the soil roughness (Terrain-Roughness EXperiments T-REX, 2004 and 2006
The objective of TuRTLE was to acquire radiometric measurements of pixels with changing topography and to compare them to existing brightness temperature models. TuRTLE 2006 was carried out in a mountainous area about 50 km North of Barcelona (Spain). Radiometric measurements covering the mountain slope, and up to the sky were acquired. Concurrently, ground truth and meteorological data were registered. Radiometric measurements have been compared to the emissivity obtained by simulation using a facet model which considers the high-resolution digital elevation model and land cover map of the area. Polarization mixing due to surface tilting and integration over the antenna pattern has also been included in the simulator, and the results agree with the radiometric measurements.
The campaign was carried out in May 12-19, 2006. The radiometric data was acquired by the UPC full-polarimetric, Dicke radiometer LAURA (L-band AUtomatic RAdiometer. The mountainous scene in front of the radiometer was observed at seven elevation (from 45º-to 105º referred to nadir, in 10º steps) and nine azimuth angles, covering the mountain slope terrain and the mountain-sky transition.
• AMIRAS (Airborne MIRAS) is a new instrument that is similar to the MIRAS radiometer on SMOS. AMIRAS, however, is much smaller than MIRAS and designed to operate from an aircraft to provide scientists with data similar to those expected from the SMOS mission. In Dec. 2006, AMIRAS has successfully delivered images from its maiden flight over Finland. AMIRAS consists of a Y-shaped array with four antennae elements per arm. It had its maiden flight onboard the Helsinki University of Technology's (HUT, also referred to as TKK) Skyvan in June 2006 covering both land and sea areas around Helsinki, Finland. EADS-CASA Espacio, Spain, is the prime contractor for AMIRAS. The AMIRAS instrument consists of 12 receivers (4 per arm), and 1 reference radiometer (NIR) and includes the internal calibration system foreseen for MIRAS. 158) 159)
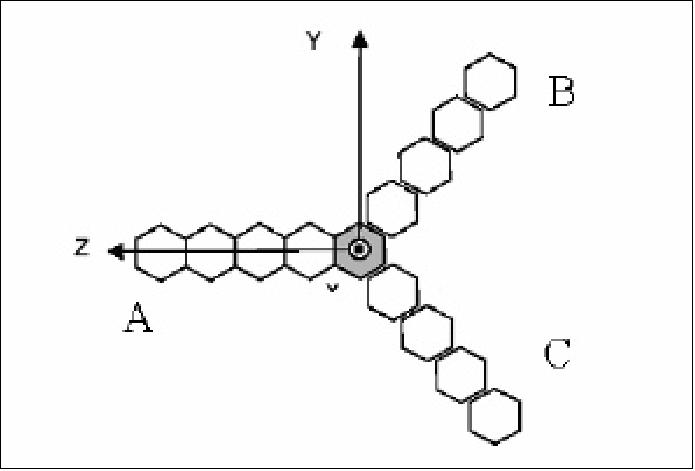
• HUT-2D (Helsinki University of Technology 2D Radiometer). HUT-2D is an airborne L-band two-dimensional interferometric radiometer using aperture synthesis. The instrument was designed and manufactured at LST (Laboratory of Space Technology) of HUT (Helsinki University of Technology) in cooperation with Ylinen Electronics Ltd., Finland. The HUT-2D radiometer instrument consists of 36 receivers, a local oscillator subsystem, a calibration subsystem and a one-bit digital correlator unit. Each pair of receivers (baseline) builds a correlating receiver. The cross-correlation of the receiver outputs are processed in the correlator unit. The radiometer has been accommodated below the fuselage of the HUT remote sensing aircraft (Short SC-7 Skyvan) using three specifically designed attachment points.
In 2006 and 2007, the HUT-2D instrument represented a significant contribution to the SMOS mission preparatory campaigns in providing the first successful airborne demonstration of the complete system. This complex and sophisticated instrument has been used in calibration and validation campaigns to assess retrieval algorithms for soil moisture and ocean salinity. The instrument, even though the antennas are in a different configuration (U-shape vs Y-shape on MIRAS), is very suitable for various verification and validation methods for the MIRAS instrument of SMOS. 160)
• AACES (Australian Airborne Calibration/Validation Experiments for SMOS). The AACES campaign was underway between mid-January and the end of February 2010 in the Murrumbidgee catchment in southern New South Wales, Australia. Given the recent launch of SMOS (Nov. 2, 2009), AACES represents the first extensive and probably most comprehensive of such experiments undertaken during the commissioning and later operational phase of SMOS. The project was led by Jeff Walker and Chris Rudiger from the University of Melbourne and supported by the invaluable help of their PhD students. Moreover, thanks to the generosity of various research institutes from France, Germany, Denmark, Poland, and the Netherlands in addition to the flights covered by ESA, a total of 14 people have joined this campaign to boost the manpower of the sampling teams. 161) 162) 163)
The Murrumbidgee catchment is unique as it comprises a distinct variety of topographic, climatic and land cover characteristics, and therefore represents an excellent validation site for the land component of this satellite mission. A total of 10 patches of 100 km x 50 km (aligned with the synthetic SMOS grid, and therefore including two independent SMOS footprints) are covered by an aircraft carrying an L-band radiometer and VIS/NIR/SWIR/TIR sensors. 164)
With a flight altitude, the ground pixel resolution is 1km, resulting in almost complete coverage of the catchment transect of 500 km. The aircraft flights are aligned with SMOS morning overpasses. At the same time, two ground teams are covering an area of 5km x 2km each, collecting soil moisture (50 m spacing along the 5 km transects), soil temperature, and soil salinity. A sub-group of each team was in parallel collecting LAI, dew, destructive vegetation samples, and hyperspectral measurements of the surface conditions.

SMOS Ground Segment
SMOS is an ESA Earth Explorer mission with significant national contributions provided by the French and Spanish space agencies, CNES and CDTI. The collaborative approach for the development of the SMOS mission will be continued in the operations phase, with the ground segment consisting of different stations covering various functions. For the operations phase, ESA will be responsible for the overall coordination of the mission and the ground segment operations, and CNES will be operating the spacecraft. 165)
The main stations for day-to-day running will be ESA’s European Space Astronomy Centre (ESAC), in Spain, hosting the main part of the Data Processing Ground Segment (DPGS), and CNES at Toulouse, hosting the Satellite Operations Ground Segment (SOGS). Global soil moisture data are important variables for operational meteorological applications.
The SMOS ground segment is composed of the following components: 166) 167) 168) 169)
1) SOGS (Satellite Operations Ground Segment) located at CNES in Toulouse, France.
2) DPGS (Data Processing Ground Segment) of ESA/CDTI (ESA/Centro para el Desarrollo Technologico Industrial), located at ESA/ESAC (European Space Astronomy Centre) in Villafranca, Spain - and at ESA/ESRIN (user interface) in Frascati, Italy. DGPS is devoted to acquire, process, and dispatch the SMOS data product levels L1 and L2 (L1A, L1B, L1Csm, L1Cos, L2Csm, L2Cos) to the user community (Figure 99).
The following elements provide the main functions for DPGS: 170) 171)
- SPGF (SMOS Plan Generation Facility): Instrument and acquisition planning information
- Data are acquired with the 3.5 m XBAS (X-Band Acquisition System) receiving antenna
- PXMF (Payload X-Band Monitoring Facility) is part of PLPC development. It provides a means for the operator to monitor the X-band telemetry
- CEC (Calibration Engineering Centre). CEC provides product quality [SPQC (SMOS Product Quality Control)], calibration and validation tools, and system-level monitoring.
3) CATDS (Centre Aval de Traitement des Donnees SMOS) is at CNES, dedicated to process, archive, and dispatch the SMOS data product levels L3 and L4 (Figure 100). The product levels L3 and L4 are derived from the L1 and L2 levels. Note: IFREMER will be in charge of CATDS operations to optimize costs and the maximum reuse of data. 172)
4) PLPC (Payload Operations and Programming Centre) at ESA/ESAC, Villafranca, Spain.
In 2006, ESA member states approved an add-on to the original mission configuration by introducing another X-band receiving station at Svalbard, Norway, which will guarantee this service. Above the Arctic Circle, Svalbard will provide 10 out of the 14 orbits per day that ESAC is not able to acquire in real-time due to its geographical location (Ref. 165).
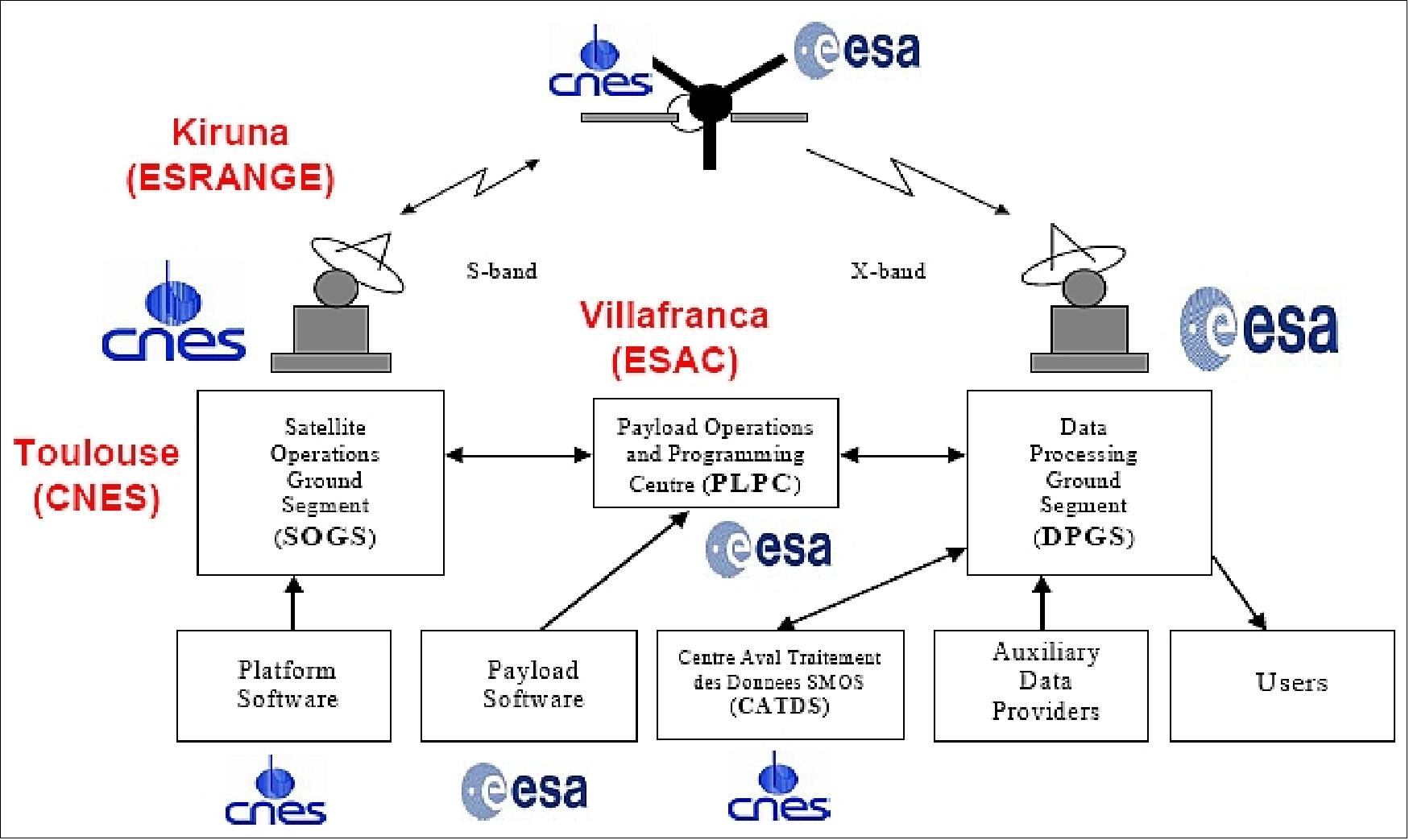

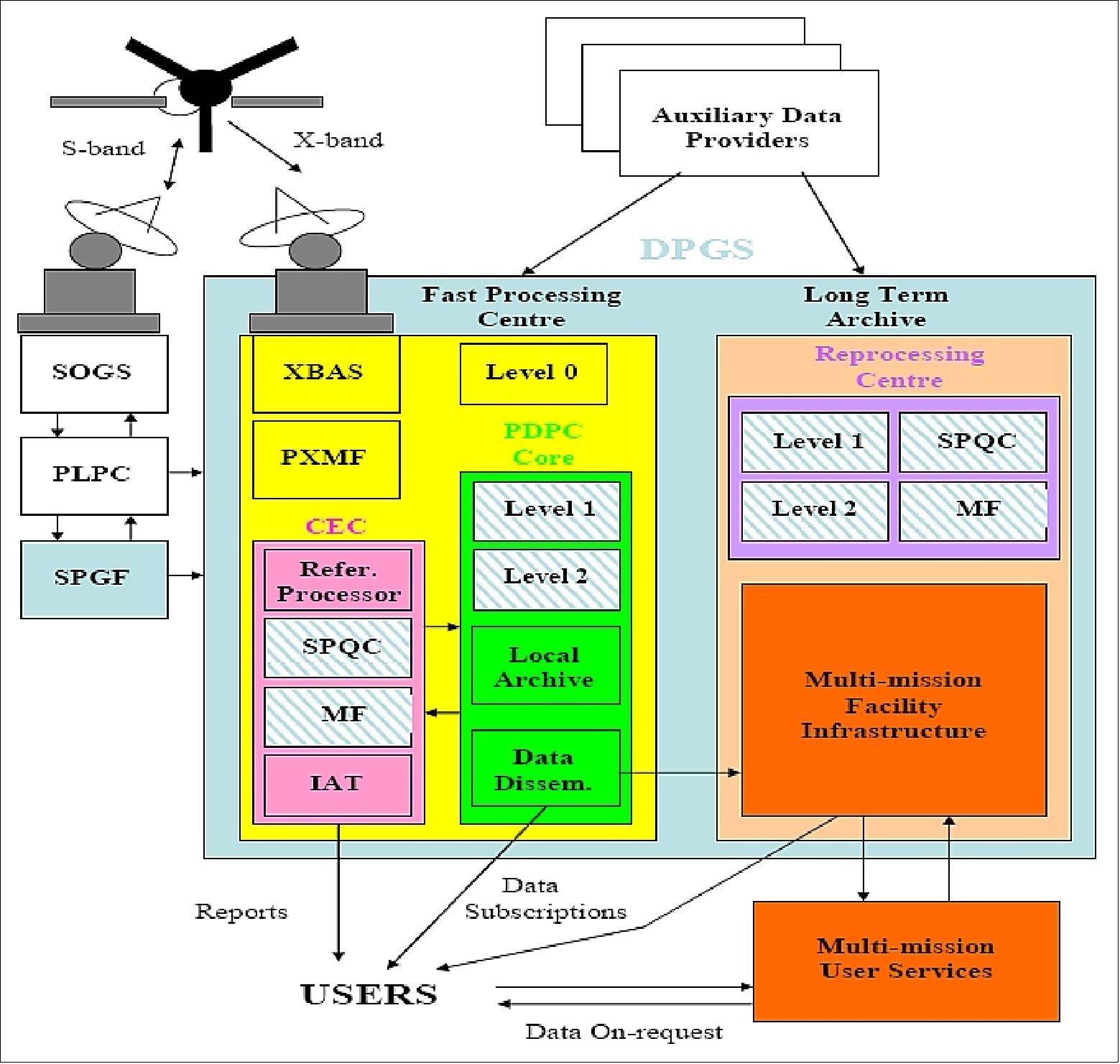
In addition, further data services will be provided:
• IFREMER [Institut Francais de Recherche pour L'Exploration de la Mer (French Ocean Agency in Brest, France)] will provide the oceanographic community with a homogeneous time series of value-added data relevant to the sea surface state (wind fields, fluxes, waves or sea-ice)
• CESBIO [Centre d'Études Spatiales de la Biosphére (Toulouse, France)] will host the SM Expertise Centre; and will deliver the L3+L4 algorithms specifications and mock-up (with the help of the other laboratories involved in L3/L4 SM)
• IFREMER will host the OS Expertise Centre; and will deliver the L3+L4 algorithms specifications and mock-up (with the help of the other laboratories involved in L3/L4 OS)
• ECMWF [European Centre for Medium-Range Weather Forecasts (Reading, UK)] will provide key auxiliary data of ocean and land
• Spain (CDTI, UPC, INDRA Espacio). Spain will develop CP34, another ground-segment dedicated to SMOS L3+L4 products processing
• etc.
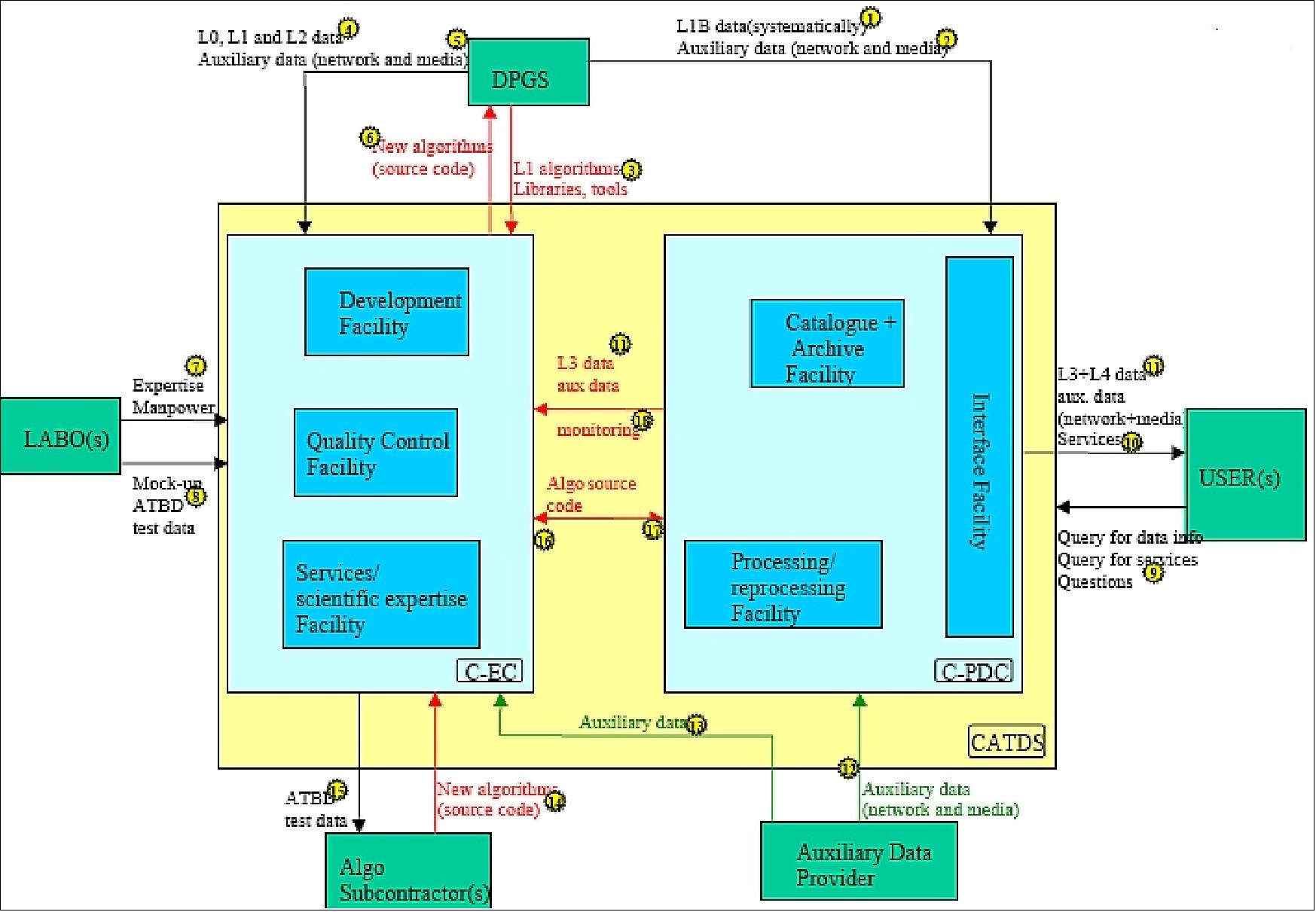
SMOS data product level objectives:
- L1/L2: The SMOS SM (Soil Moisture) objective is accuracy of 4% on volumetric soil moisture, with three days revisit and a sampling step better than 50 km.
- L1/L2: The SMOS OS (Ocean Salinity) objective is an accuracy better than 0.1 PSU, with 10 days to monthly grid scale (200 km). Knowing that a single measurement will be poor (~1 PSU), spatial and temporal averages will be needed to reduce the noise.
- L3: L3SM will consist of soil moisture global maps (regular grid 0.15º x 0.15º), produced every day and based on the three previous days.
- L3 OS maps are produced every day with GODAE (Global Ocean Data Assimilation Experiment) specifications (5-10 days sliding maps with a 200 km x 200 km resolution).
References
1) M. Martin-Neira and the SMOS Project Team, “The Soil Moisture and Ocean Salinity (SMOS) Mission,” URSI 2005 Commission F Symposium on Microwave Remote Sensing of the Earth, Oceans, Ice, and Atmosphere, Ispra, Italy, April 20-21, 2005
2) P. Silvestrin, M. Berger, Y. H. Kerr, J. Font, ”ESA's Second Earth Explorer Opportunity Mission: The soil Moisture and Ocean salinity Mission - SMOS.” IEEE Geoscience and Remote Sensing Newsletter (118), 2001, pp.11-14
3) J. Blouvac, B. Lazaed, J. M. Martinuzzi, “ CNES Small Satellites Earth Observation Scientific Future Missions, IAA 2nd International Symposium on Small Satellites for Earth Observation, Berlin, April 12-16, 1999, pp. 11-14
4) Y. H. Kerr, P. Waldteufel, J.-P. Wigneron, J. Font, M. Berger, “The Soil Moisture And Ocean Salinity Mission,” Proceedings of IEEE/IGARSS 2003, Toulouse, France, July 21-25, 2003
5) H. M. J. P. Barre, B. Duesmann, Y. H. Kerr, “SMOS: The Mission and the System,” IEEE Transactions on Geoscience and Remote Sensing, Vol. 46, No 3, March 2008, pp. 587-593
6) Mark Drinkwater, Yann Kerr, Jodi Font, Michael Berger, “Exploring the Water Cycle of the 'Blue Planet',” ESA Bulletin, No 137, Feb. 2009, pp. 6-15
7) M. Martin-Neira, J. Font, M. Srokosz, I. Corbella, A. Camps, “Ocean Salinity Observations with SMOS Mission,” Proceedings of the IEEE IGARSS 2000 Conference, Honolulu, HI, July 24-28, 2000
8) Y. H. Kerr, P. Waldteufel, J.-P. Wigneron, J. Font, “The Soil Moisture and Ocean Salinity Mission: The Science Objectives of an L-band 2-D Interferometer,” Proceedings of the IEEE IGARSS 2000 Conference, Honolulu, HI, July 24-28, 2000
9) Y. Kerr, J. Font, et al., “Next Generation Radiometers: SMOS - A Dual Pol L-band 2-D Apertures Synthesis Radiometers,” 2000 IEEE Aerospace Conference, March 2000, Montana,USA
10) Y. H. Kerr, J. Font, P. Waldteufel, M. Berger, “The Soil Moisture and Ocean Salinity Mission -SMOS,” ESA Earth Observation Quarterly, No 66, July 2000, pp. 18-26
11) Y. H. Kerr, P. Waldteufel, J. P. Wigneron, J. Font, “Description of the Soil Moisture and Ocean Salinity Mission,” COST 712 -WG 3 report, 2001, European Union, Brussels
12) http://www.cesbio.ups-tlse.fr/us/indexsmos.html
13) M. Berger, A. Camps, J. Font, Y. Kerr, et al., “Measuring Ocean Salinity with ESA's SMOS Mission,” ESA Bulletin 111, Aug. 2002, pp. 113-121
14) F. Bermudo, M. Venet, M. Le du, Y. Kerr , H. Barre, “SMOS: An L-band Interferometric Radiometer Mission,” 5th IAA Symposium on Small Satellites for Earth Observation, April 4-8, 2005, Berlin, Germany
15) http://www.esa.int/esaLP/ESAL3B2VMOC_LPsmos_0.html
16) J. P. Wigneron, A. Chanzy, P. Waldteufel, J. C. Calvet, O. Marloie, J. P. Hanocq, Y. H. Kerr, “Retrieval capabilities of L-Band 2-D interferometric radiometry over land surfaces (SMOS Mission), VSP, Netherlands, 2000
17) J. P. Wigneron, P. Waldteufel, A. Chanzy, J. C. Calvet, Y. H. Kerr, ”Two-D microwave interferometer retrieval capabilities of over land surfaces (SMOS Mission),” Remote Sensing Environment, Vol. 73, No 3, 2000, pp. 270-282
18) “SMOS: ESA's Water Mission,” BR-224, June 2004, brochure of 20 pages, URL: http://esamultimedia.esa.int/docs/br_224.pdf
19) M. Berger, Y. Kerr, J. Font, J.-P. Wigneron, et al., “Measuring the Moisture in the Earth's Soil - Advancing the Science with ESA's SMOS Mission,” ESA Bulletin No 115, Aug. 2003, pp. 40-45, URL: http://www.esa.int/esapub/bulletin/bullet115/chapter5_bul115.pdf
20) Y. Kerr, P. Waldteufel, F. Cabot, A. Hahne, S. Mecklenburg, Thierry Pellarin, “The SMOS Mission Current Status,” Earth Observation and Water Cycle Science - Towards a Water Cycle Multi-mission Observation Strategy, ESA/ESRIN, Frascati, Italy, Nov. 18-20, 2009
21) M. Martin-Neira, “MIRAS - A Two-Dimensional Aperture-Synthesis Radiometer for Soil-Moisture and Ocean-Salinity Observations,” ESA Bulletin No 92, Nov. 1997, URL: http://www.esa.int/esapub/bulletin/bullet92/b92marti.htm
22) Francois Bermudo, Michel Venet, Michel Ledu, Yann Kerr, “SMOS - An L-band Interferometric Radiometer Mission,” Proceedings of the 60th IAC (International Astronautical Congress), Daejeon, Korea, Oct. 12-16, 2009, IAC-09-B1.1.2
23) Michel Le Du, Roger Jegou, “SMOS Mission, a Successful Cooperation based on the Flight Proven PROTEUS Platform,” Proceedings of the Symposium on Small Satellite Systems and Services (4S), Funchal, Madeira, Portugal, May 31-June 4, 2010
24) Mariano Kornberg, Elena Checa, Silvio Dolce, Manuel Martin-Neira, Pilar Rubiales, Josep Closa, Guillermo Buenadicha, Jorge Fauste, “Thermal Control in SMOS Payload Operations: Anomalies, Seasonal Effects, Failure & Recovery Issues,” SpaceOps 2014, 13th International Conference on Space Operations, Pasadena, CA, USA, May 5-9, 2014
25) “Two new ESA satellites successfully lofted into orbit,” ESA, Nov. 2, 2009, URL: http://www.esa.int/esaCP/SEMNEYAOE1G_index_0.html
26) “Final look at ESA’s SMOS and Proba-2 satellites,” ESA, Oct. 21, 2009, URL: http://www.esa.int/esaCP/SEMMX8ZRA0G_index_0.html
27) http://earth.esa.int/SMOS/
28) Note: The revisit cycle is the frequency at which any point on the globe is seen again at any position within the swath. The repeat cycle is the frequency at which any point on the globe is seen again at the same position within the swath.
29) ”Forest degradation primary driver of carbon loss in the Brazilian Amazon,” ESA / Applications / Observing the Earth / Space for our climate, 10 June 2021, URL: https://www.esa.int/Applications/Observing_the_Earth/Space_for_our_climate
/Forest_degradation_primary_driver_of_carbon_loss_in_the_Brazilian_Amazon
30) Yuanwei Qin, Xiangming Xiao, Jean-Pierre Wigneron, Philippe Ciais, Martin Brandt, Lei Fan, Xiaojun Li, Sean Crowell, Xiaocui Wu, Russell Doughty, Yao Zhang, Fang Liu, Stephen Sitch & Berrien Moore III, ”Carbon loss from forest degradation exceeds that from deforestation in the Brazilian Amazon,” Nature Climate Change, Vol. 11, pp: 442-448, Published: 29 April 2021, https://doi.org/10.1038/s41558-021-01026-5
31) ”The ripple effect: Solving source of irregularities in images sent back by SMOS,” ESA Enabling & Support, 05 May 2021, URL: https://www.esa.int/Enabling_Support/Space_Engineering_Technology
/The_ripple_effect_Solving_source_of_irregularities_in_images_sent_back_by_SMOS
32) ”Water mission takes on space weather,” ESA Applications, 24 March 2021, URL: http://www.esa.int/Applications/Observing_the_Earth/SMOS/Water_mission_takes_on_space_weather
33) M. Flores‐Soriano, C. Cid, R. Crapolicchio, ”Validation of the SMOS mission for Space Weather operations: The potential of near real‐time solar observation at 1.4 GHz,” AGU Space Weather, Published: 08 February 2021, https://doi.org/10.1029/2020SW002649
34) ”SMOS monitoring droughts,” ESA Applications, 23 June 2020, URL: http://www.esa.int/ESA_Multimedia/Videos/2020/06/SMOS_monitoring_droughts
35) ”Czech Republic drought visible from space,” ESA / Applications / Observing the Earth / SMOS, 18 May 2020, URL: http://www.esa.int/Applications/Observing_the_Earth
/SMOS/Czech_Republic_drought_visible_from_space
36) ”New maps of salinity reveal the impact of climate variability on oceans,” ESA / Applications / Observing the Earth / Space for our climate, 30 November 2019, URL: http://www.esa.int/Applications/Observing_the_Earth/Space_for_our_climate/
New_maps_of_salinity_reveal_the_impact_of_climate_variability_on_oceans
37) ”Space is key to monitoring ocean acidification,” ESA / Applications / Observing the Earth / SMOS, 28 November 2019, URL: http://www.esa.int/Applications/Observing_the_Earth
/SMOS/Space_is_key_to_monitoring_ocean_acidification
38) ”Revealing interior temperature of Antarctic ice sheet,” ESA / Applications / Observing the Earth / SMOS, 04 November 2019, URL: http://www.esa.int/Applications/Observing_the_Earth
/SMOS/Revealing_interior_temperature_of_Antarctic_ice_sheet
39) Giovanni Macelloni, Marion Leduc-Leballeur, Francesco Montomoli, Marco Brogioni, Catherine Ritz, Ghislain Picard, ”On the retrieval of internal temperature of Antarctica Ice Sheet by using SMOS observations,” Remote Sensing of Environment, Volume 233, November 2019, 111405, https://doi.org/10.1016/j.rse.2019.111405
40) ”SMOS 10 years in orbit,” ESA, 31 October 2019, URL: http://www.esa.int/ESA_Multimedia/Videos/2019/10/SMOS_10_years_in_orbit
41) E. Uranga, A. Llorente, A. de la Fuente, E. Daganzo, R. Oliva and Y. Kerr, ”Radio frequency interference devices: The SMOS experience,” Proceedings of the 39th annual IGARSS (International Geoscience and Remote Sensing Symposium) 2019, Yokohama, Japan, 28 July - 2August 2019
42) E. Uranga, A. Llorente, R. Oliva, A. de la Fuente, E. Daganzo and Y. Kerr, "Monitoring of Smos Rfi Sources in the 1400-1427mhz Passive Band," IGARSS 2018 - 2018, IEEE International Geoscience and Remote Sensing Symposium, Valencia, 2018, pp. 1241-1244
43) R. Oliva, E. Daganzo, P. Richaume, Y. Kerr, F. Cabot, Y. Soldo, E. Anterrieu, N. Reul, A. Gutierrez, J. Barbosa, and G. Lopes, “Status of Radio Frequency Interference (RFI) in the 1400–1427MHz passive band based on six years of SMOS mission”, Remote Sensing of Environment, Vol. 180, July 2016, pp. 64-75
44) E. Uranga, Á. Llorente and A. de la Fuente, “Database of SMOS RFI sources in the 1400-1427MHz passive”, IEEE Global Conference on Signal and Information Processing, Anaheim, California, USA, November 2018.
45) ”SMOS joins forces with top weather forecasting system,” ESA, 12 June 2019, URL: http://www.esa.int/Our_Activities/Observing_the_Earth
/SMOS/SMOS_joins_forces_with_top_weather_forecasting_system
46) ”Mapping salty waters,” ESA, Space for our climate, 14 May 2019, URL: http://www.esa.int/Our_Activities/Observing_the_Earth
/Space_for_our_climate/Mapping_salty_waters
47) ”New potential for tracking severe storms,” ESA Observing the Earth, 14 May 2019, URL: http://www.esa.int/Our_Activities/Observing_the_Earth
/SMOS/New_potential_for_tracking_severe_storms
48) ”SMOS severe winds over ocean – first operational data products tested,” SMOS Newsletter, Issue 16, November 2018, URL: https://earth.esa.int/
documents/10174/234899/SMOS-Newsletter-16-November-2018
49) ”SMOS offers new perspective on hurricanes,” ESA, 25 September 2018, URL: http://m.esa.int/Our_Activities/Observing_the_Earth/
SMOS/SMOS_offers_new_perspective_on_hurricanes
50) ”SMOS simplified data access,” ESA, 23 August 2018, URL: [web source no longer available]
51) Manuel Martín-Neira, Roger Oliva, Ignasi Corbella, Francesc Torres, Nuria Duffo, Israel Durán, Juha Kainulainen, Josep Closa, Alberto Zurita, François Cabot, Ali Khazaal, Eric Anterrieu, Jose Barbosa, Gonçalo Lopes, Joe Tenerelli, Raúl Díez-García, Jorge Fauste, Antonio Turiel, Verónica González-Gambau, Raffaele Crapolicchio, Martin Suess,”SMOS instrument performance after more than 8 years in orbit and lessons learned for future L-band missions,” Proceedings of IGARSS (International Geoscience and Remote Sensing Symposium), Valencia, Spain, July 23-27, 2018
52) ”SMOS Newsletter — 'Data an Processors' p. 3,” 15 July 2018, URL: https://earth.esa.int/documents/10174/234899/SMOS-Newsletter-15-July-2018
53) ”Six years of the new SMOS SSS maps in the Mediterranean Sea now available!,” BEC (Barcelona Expert Center), 6 April 2018, URL: http://bec.icm.csic.es/
six-years-of-the-new-smos-sss-maps-in-the-mediterranean-sea-now-available/
54) Estrella Olmedo, Isabelle Taupier-Letage, Antonio Turiel, Aida Alvera-Azcárate, ”Improving SMOS Sea Surface Salinity in the Western Mediterranean Sea through Multivariate and Multifractal Analysis,” Remote Sensing, 2018, 10(3), 485; doi:10.3390/rs10030485, URL: http://www.mdpi.com/2072-4292/10/3/485/pdf
55) ”Programs in Progress: SMOS,” ESA Bulletin No 170, 22 September 2017, p.52, URL: http://www.esa.int/About_Us/ESA_Publications/ESA_Publications_Bulletin/ESA_Bulletin_170_2nd_quarter
56) ”Italy’s drought seen from space,” ESA, 5 Sept. 2017, URL: http://m.esa.int/Our_Activities/Observing_the_Earth/Italy_s_drought_seen_from_space
57) Manuel Martín-Neira, Roger Oliva, Ignasi Corbella, Francesc Torres, Nuria Duffo, Israel Durán, Juha Kainulainen, Josep Closa, Alberto Zurita, François Cabot, Ali Khazaal, Eric Anterrieu, José Barbosa, Gonçalo Lopes, Joe Tenerelli, Raúl Díez-García, Jorge Fauste, Verónica González-Gambau, Antonio Turiel, Steven Delwart, Raffaele Crapolicchio, Martin Suess, Susanne Mecklenburg, Matthias Drusch, Roberto Sabia, Elena Daganzo-Eusebio, Yann Kerr, Nicolas Reul, ”Lessens learnt from SMOS after 7 years in orbit,” Proceedings of IGARSS 2017 (IEEE International Geoscience and Remote Sensing Symposium), Fort Worth, Texas, USA, July 23–28, 2017
58) ”Satellites forewarn of locust plagues,” ESA, June 13, 2017, URL: http://m.esa.int/Our_Activities/Observing_the_Earth/Satellites_forewarn_of_locust_plagues
59) ”SMOS brings Mediterranean salinity into focus,” ESA, 11 May 2017, URL: http://m.esa.int/Our_Activities/Observing_the_Earth/
SMOS/SMOS_brings_Mediterranean_salinity_into_focus
60) ”Satellite cousins have ice covered,” ESA, Dec. 16, 2016, URL: http://m.esa.int/Our_Activities/Observing_the_Earth/SMOS/Satellite_cousins_have_ice_covered
61) ”SMOS on speed,” ESA, Oct. 14, 2016: URL: http://m.esa.int/Our_Activities/Observing_the_Earth/SMOS/SMOS_on_speed
62) ”Soil moisture processed two ways,” ESA, Oct. 14, 2016, URL: http://m.esa.int/spaceinimages/Images/2016/10/Soil_moisture_processed_two_ways
63) ”Wet soils following extensive rainfall,” ESA, Oct. 14, 2016, URL: http://m.esa.int/spaceinimages/Images/2016/10/Wet_soils_following_extensive_rainfall
64) ”Zooming in on moisture,” ESA, Oct. 14, 2016, URL: http://m.esa.int/spaceinimages/Images/2016/10/Zooming_in_on_moisture
65) Manuel Martín-Neira, Roger Oliva, Ignasi Corbella, Francesc Torres, Núria Duffo, Israel Durán, Juha Kainulainen, Josep Closa, Alberto Zurita, François Cabot, Ali Khazaal, Eric Anterrieu, Jose Barbosa, Gonçalo Lopes, Joe Tenerelli, Raúl Díez-García, Jorge Fauste, Verónica González-Gambau, Antonio Turiel, Steven Delwart, Raffaele Crapolicchio, Martin Suess, ”SMOS instrument performance and calibration after 6 years in orbit,” Proceedings of the IEEE IGARSS (International Geoscience and Remote Sensing Symposium) Conference, Beijing, China, July 10-15, 2016
66) Michael Rast, ”ESA’s Report to the 41st COSPAR Meeting,”(ESA SP-1333, June 2016), Istanbul, Turkey, July-August 2016, ”Soil Moisture and Ocean Salinity (SMOS),” pp: 28-32, URL: http://esamultimedia.esa.int/multimedia/publications/SP-1333/SP-1333.pdf
67) J. Boutin, N. Martin, G. Reverdin ,J. L. Vergely, ”Rainfall Imprint on SMOS Sea Surface Salinity,” Earth Observation for Water Cycle Science 2015, Frascati, Italy, 20-23 October, 2015, URL: http://www.eo4water2015.info/
68) Yann Kerr, ”SMOS The Water Cycle Mission: An Overview,” Earth Observation for Water Cycle Science 2015, Frascati, Italy, 20-23 October, 2015, URL: http://www.eo4water2015.info/
69) ”SMOS meets ocean monsters,” ESA, Sept. 30, 2015, URL: http://www.esa.int/Our_Activities/Observing_the_Earth/SMOS/SMOS_meets_ocean_monsters
70) S. Mecklenburg, M. Drusch, Y. Kerr, J. Font, N. Reul, M. Martin-Neira, S. Delwart, R. Crapolicchio, J. Fauste, E. Daganzo-Eusebio, A. de la Fuente, M. Kornberg, “ESA’s Soil Moisture and Ocean Salinity Mission -From science to operational applications,” Proceedings of the IGARSS (International Geoscience and Remote Sensing Symposium) 2015, Milan, Italy, July 26-31, 2015
71) Yann H. Kerr, Susanne Mecklenburg, Steven Delwart, Jacqueline Boutin, Paolo Ferrazzoli, Jordi Font, Ali Mahmood, Nicolas Reul, Philippe Richaume, Jean-Pierre Wigneron, “SMOS observations over land and ocean: an overview,” Proceedings of the IGARSS (International Geoscience and Remote Sensing Symposium) 2015, Milan, Italy, July 26-31, 2015
72) Manuel Martín-Neira, Ignasi Corbella, Francesc Torres, Israel Durán, Nuria Duffo, Juha Kainulainen, Roger Oliva, Josep Closa, François Cabot, Ali Khazaal, Eric Anterrieu, Jose Barbosa, Gonçalo Lopes, Joe Tenerelli, Raúl Díez-García, Jorge Fauste, Verónica González, Antonio Turiel, Steven Delwart, Raffaele Crapolicchio, Martin Suess, “SMOS instrument performance and calibration after 5 years in orbit,” Proceedings of the IGARSS (International Geoscience and Remote Sensing Symposium) 2015, Milan, Italy, July 26-31, 2015
73) “SMOS sings the song of ice and fire,” ESA, July 2, 2015, URL: http://www.esa.int
/Our_Activities/Observing_the_Earth/SMOS/SMOS_sings_the_song_of_ice_and_fire
74) “Salinity matters,” ESA, Dec. 18, 2014, URL: http://www.esa.int/Our_Activities/Observing_the_Earth/SMOS/Salinity_matters
75) “Five years of soil moisture, ocean salinity and beyond,” ESA, Nov. 3, 2014, URL: http://www.esa.int/Our_Activities/Observing_the_Earth/
SMOS/Five_years_of_soil_moisture_ocean_salinity_and_beyond
76) Yann Kerr, “Happy Birthday SMOS,” Nov. 3, 2014, URL: http://www.cesbio.ups-tlse.fr
/SMOS_blog/?p=4712
77) “ESA's Water Mission,” SMOS Newsletter, Issue 8, September 2014, URL: https://earth.esa.int/documents/10174/234899/SMOS_Newsletter_8
78) “Versatility extends life of water mission,” ESA, July 18, 2014, URL: http://www.esa.int/Our_Activities/Observing_the_Earth/SMOS/Versatility_extends_life_of_water_mission
79) “Water Mission Boosts Food Security,” ESA, May 21, 2014, URL: http://www.esa.int/Our_Activities/Observing_the_Earth
/SMOS/Water_mission_boosts_food_security
80) http://www.pecad.fas.usda.gov/cropexplorer/
81) Information provided by Malcolm Davidson of ESA/ESTEC, Head of ESA's EO campaign section
82) “SMOS maps record soil water before flood,” ESA, June 7, 2013, URL: http://www.esa.int/Our_Activities/Observing_the_Earth/The_Living_Planet_Programme
/Earth_Explorers/SMOS/SMOS_maps_record_soil_water_before_flood
83) “Data and Processors, Data availability,” SMOS Newsletter, Issue 6, Dec. 2013, URL: https://earth.esa.int/documents/10174/234899/SMOS_Newsletter-6_December_2013
84) “SMOS status,” ESA Bulletin No 154, May 2013, p. 70
85) “Taking two bites at ocean salinity,” ESA, April 23, 2013, URL: http://www.esa.int/Our_Activities/Observing_the_Earth/SMOS/Taking_two_bites_at_ocean_salinity
86) “SMOS-Aquarius Science Workshop Summary,” URL: http://www.congrexprojects.com
/docs/default-source/13c07_docs3/workshop-summary-new.pdf?sfvrsn=0
87) “SMOS: The Golbal Success Story continues,” ESA, Feb. 22, 2013, URL: http://www.esa.int
/Our_Activities/Observing_the_Earth/SMOS/SMOS_the_global_success_story_continues
88) Matthias Drusch, Susanne Mecklenburg, Yann Kerr, “SMOS over Land - New applications for ESA’s water mission,” ESA Bulletin No 152, November 2012, pp: 38-49, URL: http://esamultimedia.esa.int/multimedia/publications/ESA-Bulletin-152/offline/download.pdf
89) Elena Daganzo-Eusebio, Roger Oliva, Yann H. Kerr, Sara Nieto, Philippe Richaume, Susanne Mecklenburg, “SMOS radiometer in 1400-1427 MHz: Impact of the RFI environment and approach to its mitigation and cancellation,” Proceedings of IGARSS (International Geoscience and Remote Sensing Symposium), Munich, Germany, July 22-27, 2012
90) Steen S. Kristensen, Jan Balling, Niels Skou, Sten S. Søbjærg, “RFI in SMOS Data Detected by Polarimetry,” Proceedings of IGARSS (International Geoscience and Remote Sensing Symposium), Munich, Germany, July 22-27, 2012
91) “SMOS satellite measurements improve as ground radars switch off,” ESA, July 3, 2012, URL: http://www.esa.int/esaCP/SEMQT12VW3H_index_0.html
92) “SMOS detects freezing soil as winter takes grip,” ESA, Dec. 14, 2011, URL: http://www.esa.int/esaCP/SEM4C38XZVG_index_0.html
93) “SMOS versatility offers sea ice mapping,” ESA, Dec. 20, 2011, URL: http://www.esa.int/esaEO/SEM361BX9WG_index_0.html
94) M. Martín-Neira, M.A. Plaza, I. Corbella, J. Kainulainen, R. Oliva, F. Cabot, F. Torres, J. Closa, F. Martín-Porqueras, J. Tenerelli, R. Castro, A. Gutierrez, J. Barbosa, G. Buenadicha, J. Benito, A. Zurita, E. Daganzo, S. Mecklenburg, “SMOS Results and MIRAS Evolution Studies,” Proceedings of the 3rd Workshop on Advanced RF Sensors and Remote Sensing Instruments (ARSI), Noordwijk, The Netherlands, Sept. 13-15, 2011
95) “SMOS gains clearer view as illegal transmitters shut down,” ESA, June 14, 2011, URL: http://www.esa.int/esaEO/SEMASMXSROG_index_0.html
96) “SMOS MIRAS - return to nominal data quality,” ESA, Feb. 11, 2011, URL: http://earth.esa.int/object/index.cfm?fobjectid=7480
97) “SMOS MIRAS instrument back to nominal operations,” ESA, January 24, 2011, URL: http://earth.esa.int/object/index.cfm?fobjectid=7435
98) “SMOS status,” ESA Bulletin, No 145, February 2011, p. 82
99) “ESA missions highlighted at world's largest scientific conference,” ESA, Dec. 17, 2010, URL: http://www.esa.int/esaEO/SEMCJOSRJHG_index_0.html
100) “SMOS water mission winning battle with interference,” ESA, Oct. 6, 2010, URL: http://www.esa.int/SPECIALS/smos/SEMB5USOREG_0.html
101) “European satellite 'blinded' by radio interference,” Space Daily, Oct. 6, 2010, URL: http://www.spacedaily.com/reports/European_satellite_blinded_by_radio_interference_999.html
102) Jerome Benveniste, “ESA Earth Observation Program and Missions Status,” 2010 OSTST (Ocean Surface Topography Science Team) meeting, Lisbon, Portugal, Oct. 18-20, 2010, URL http://www.aviso.oceanobs.com/fileadmin/documents/OSTST/2010/oral/Benveniste.pdf
103) Yann H. Kerr, P. Waldteufel, J. Font, A. Hahne, S. Mecklenburg, “SMOS .... Almost 1 Year in Orbit,” URSI (International Union of Radio Science) Commission F, Microwave Signatures 2010, Specialist Symposium on Microwave Remote Sensing of the Earth, Oceans, and Atmosphere, Florence, Italy, Oct. 4-8, 2010, URL: http://www.ursif2010.org/sites/default/files/Kerr.pdf
104) “Water mission reveals insight into Amazon plume,” ESA, Sept. 3, 2010, URL: http://www.esa.int/SPECIALS/smos/SEM1Y7EODDG_0.html
105) “ESA's SMOS water mission goes live,” May 21, 2010, URL: http://www.esa.int/SPECIALS/smos/SEMD97U889G_0.html
106) J. Kainulainen, K. Rautiainen, P. Sievinen, J. Seppänen, E. Rouhe, M. Hallikainen, J. Dall’Amico, F. Schlenz, A. Loew, S. Bircher, C. Montzka, “SMOS Calibration and Validation Activities with Airborne Interferommetric Radiometer HUT-2D During Spring 2010,” Proceedings of IGARSS (IEEE International Geoscience and Remote Sensing Symposium) 2010, Honolulu, HI, USA, July 25-30, 2010
107) “First images from ESA’s water mission,” ESA Feb. 23, 2010, URL: http://www.esa.int/SPECIALS/smos/SEMOGN3KV5G_0.html
108) “SMOS satellite instrument comes alive,” ESA, Nov. 19, 2009, URL: http://www.esa.int/esaCP/SEMQRJOC02G_index_0.html
109) “SMOS forms three-pointed star in the sky,” ESA, Nov. 3, 2009, URL: http://www.esa.int/SPECIALS/smos/SEMM1MCUE1G_0.html
110) ESA Bulletin Nr. 141, Feb. 2010, p. 71
111) Mark Drinkwater, Kevin McMullan, Joel Marti, Michael Brown, Manuel Martín-Neira, Willy Rits, Sten Ekholm, Jerzy Lemanczyk, Yann Kerr, Jordi Font, Michael Berger, “Star in the Sky - The SMOS payload: MIRAS,” ESA Bulletin, No 137, February 2009, pp. 16-22
112) K. D. McMullan, M. A. Brown, M. Martin-Neira, W. Rits, S. Ekholm, J. Marti, J. Lemanzyk, “SMOS: The Payload,” IEEE Transactions on Geoscience and Remote Sensing, Vol. 46, No 3, March 2008, pp. 594-605
113) http://www.esa.int/esaLP/ESAQGA2VMOC_LPsmos_0.html
114) P. Waldteufel, J. Boutin, Y. Kerr, “Selecting an optimal configuration for the Soil Moisture and Ocean Salinity mission,” Radio Science, Vol. 38, No 3, 2003, pp. MAR 16-1 - 16-16
115) P. Waldteufel, E. Anterrieu,J. M. Goutoule, Y. H. Kerr, “Field of view characteristics of a 2-D interferometric antenna, as illustrated by the MIRAS/SMOS L-band concept, VSP, 2000
116) Y. H. Kerr, J. Font, P. Waldteufel, A. Camps, J. Bará, et al., “Next Generation Radiometers: SMOS A dual pol L-band 2-D Aperture Synthesis Radiometer,” IEEE Aerospace Conference, Big Sky, Montana, March 18-25, 2000
117) A. Camps, I. Corbella, F. Torres, N. Duffo, M. Vall-llossera, J. Bará, S. Blanch, A. Aguasca, “Contributions of the Technical University of Catalonia to the SMOS mission (1993-2005): From the MIRAS instrument to geophysical parameters retrieval,” URSI 2005 Commission F Symposium on Microwave Remote Sensing of the Earth, Oceans, Ice, and Atmosphere, Ispra, Italy, April 20-21, 2005
118) A. Borges and the SMOS-PLM Team, “SMOS Mission & MIRAS Instrument. Synthetic Aperture Radiometer in Space,” Proceedings of the 12th European GAAS (Gallium Arsenide and other Compound Semiconductors Application Symposium), Amsterdam, The Netherlands, Oct. 11-12, 2004
119) .J. M. Bajo, M. A. Gil, M. A. Plaza, “Mechanical Qualification Testing of the SMOS Payload Module,” Proceedings of the 57th IAC/IAF/IAA (International Astronautical Congress), Valencia, Spain, Oct. 2-6, 2006, IAC-06-C2..1.0.6
120) A. Borges, A. Hahne, K. D. McMullan, “SMOS: Earth's Water Monitoring Mission,” Proceedings of the 57th IAC/IAF/IAA (International Astronautical Congress), Valencia, Spain, Oct. 2-6, 2006, IAC-06-B1.2.5
121) Francois Bermudo, Michel Venet, Michel Ledu, Yann Kerr, “SMOS - (An L-band Interferometric Radiometer Mission,” Proceedings of the 60th IAC (International Astronautical Congress), Daejeon, Korea, Oct. 12-16, 2009, IAC-09-B1.1.2
122) A. Hahne, “SMOS activities,” 6th SMOS Workshop, DTU (Technical University of Denmark), Copenhagen, Denmark, May 15-17, 2006
123) M. Martin-Neira, A. Hahne, K. McMullan, W. Rits, S. Ekholm, J. Marti, J. Lemanczyk, F. Garat, “MIRAS: the 2D L-band Interferometer on board SMOS,” Proceedings of the Advanced RF Sensors for Earth Observation 2006 (ASRI), Workshop on RF and Microwave Systems, Instruments & Sub-Systems, ESA7ESTEC, Noordwijk, The Netherlands, Dec. 5-6, 2006
124) A. Colliander, S. Tauriainen, T. I. Auer, J. Kainulainen, J. Uusitalo, M. Toikka, M. T. Hallikainen, “MIRAS Reference Radiometer: A Fully Polarimetric Noise Injection Radiometer,” IEEE Transactions on Geoscience and Remote Sensing, Vol. 42, No 5, May 2005, pp. 1135-1143
125) Mariano Kornberg, Guillermo Buenadicha, Josep Closa, Miguel Canela, “SMOS Payload performance maintenance: Impact of anomalies and operational strategies,” Proceedings of SpaceOps 2012, The 12th International Conference on Space Operations, Stockholm, Sweden, June 11-15, 2012, URL: http://www.spaceops2012.org/proceedings/documents/id1254731-Paper-001.pdf
126) J.-P. Wigneron, P. Ferrazzoli, J.-C. Calvet, T. Pellarin, P. Waldteufel, Y. Kerr, “Monitoring land surface soil moisture from multiangular SMOS observations,” IEEE/IGARSS 2003, Toulouse, France, July 21-25, 2003
127) J. Font, G. Lagerloef, D. Le Vine, A. Camps, O. Zanife, “The Determination of Surface Salinity with SMOS - Recent Results and Main Issues,” IEEE/IGARSS 2003, Toulouse, France, July 21-25, 2003
128) I. Corbella, F. Torres, et al., L-band Aperture Synthesis Radiometry: Hardware Requirements and System Performance,” Proceeding of the IEEE IGARSS 2000 Conference, Honolulu, HI, July 24-28, 2000
129) I. Corbella, F. Torres, N. Duffo, A. Camps, M. Vall-llossera, V. Gonzalez, “MIRAS In-Orbit Calibration,” Proceedings of IGARSS 2007 (International Geoscience and Remote Sensing Symposium), Barcelona, Spain, July 23-27, 2007
130) Manuel Martín-Neira, Ignasi Corbella, Francesc Torres, Juha Kainulainen, Roger Oliva, Josep Closa, François Cabot, Rita Castro, José Barbosa, Antonio Gutierrez, Eric Anterrieu, Joe Tenerelli, Fernando Martín-Porqueras, Guillermo Buenadicha, “SMOS Instrument Performance and Calibration,” Proceedings of IGARSS (International Geoscience and Remote Sensing Symposium), Munich, Germany, July 22-27, 2012
131) I. Corbella, F. Torres, A. Camps, A. Colliander, M. Martin-Neira, S. Ribo, K. Rautiainen, N. Duffo, M. Vall-llossera, “MIRAS end-toend calibration. Application to SMOS L1 processor,” IEEE Transactions on Geoscience and Remote Sensing, Vol. 43, No. 5, pp. 1126-1134, May 2005.
132) J. Lemmetyinen, J. Uusitalo, K. Rautiainen, J. Kainulainen, N. Fabritius, M. Levander, V. Kangas, H. Greus, J. Pihlflyckt, A. Kontu, S. Kemppainen, M. Hallikainen, J. Lahtinen, “SMOS Calibration Subsystem,” Proceedings of IGARSS 2006 and 27th Canadian Symposium on Remote Sensing, Denver CO, USA, July 31-Aug. 4, 2006
133) A. Colliander, J. Lemmetyinen, J. Uusitalo, J. Suomela, K. Veijola, A. Kontu, S. Kemppainen, J. Pihlflyckt, K. Rautiainen, M. Hallikainen, J. Lahtinen, “Ground Calibration of SMOS: NIR and CAS,” Proceedings of IGARSS 2007 (International Geoscience and Remote Sensing Symposium), Barcelona, Spain, July 23-27, 2007
134) Andreas Colliander, Juha Kainulainen, Francesc Torres, Ignasi Corbella, Roger Oliva, Manuel Martin-Neira, “Calibration parameters of SMOS reference radiometers: revisited,” Proceedings of IGARSS (IEEE International Geoscience and Remote Sensing Symposium), Melbourne, Australia, July 21-26, 2013
135) A. Colliander., L. Ruokokoski, J. Suomela, K. Veijola, J. Kettunen, V. Kangas, M. Levander, H. Greus, M. Hallikainen, J. Lahtinen, “Reference Radiometer of SMOS: Development and Calibration,” Proceedings of IGARSS 2006 and 27th Canadian Symposium on Remote Sensing, Denver CO, USA, July 31-Aug. 4, 2006
136) M. Martin-Neira, P. Piironen, S. Rib, E. Panaro, J. Font-Rossello, J. Martí-Canales, I. Zayer, A. Martín-Polegre, P. Iversen, A. Rivada, R. Roumeas, M. Aguirre, P. Silvestrin, “The MIRAS Demonstrator Pilot Project - Towards SMOS,” ESA Bulletin 111, Aug. 2002, pp. 123-131
137) “COTS Fibre Optic Components in SMOS/MOHA,” ESA-NASA Working Meeting on Optoelectronics, October 5t-6, 2005, URL: http://misspiggy.gsfc.nasa.gov/tva/meldoc/ESA-NASA/2005/Contraves.pdf
138) “What lies beneath?,” ESA, January 9, 2014, URL: http://www.esa.int/Our_Activities
/Observing_the_Earth/The_Living_Planet_Programme/Campaigns/What_lies_beneath
139) Daniel Steinhage, Steen Savstrup, “Antarctica wraps up,” ESA campaigns at work, 2013, URL: http://blogs.esa.int/campaignearth/tag/domecair/
140) Niels Skou, Steen S. Kristensen, Sten S. Søbjærg, Jan E. Balling, “DOMECAIR: An airborne campaign in Antarctica supporting SMOS calibration,” Proceedings of the ESA Living Planet Symposium, Edinburgh, UK, Sept. 9-13, 2013 (ESA SP-722, Dec. 2013)
141) “DOMEX-3,” ESA, URL: http://www.esa.int/Our_Activities/
Observing_the_Earth/The_Living_Planet_Programme/Campaigns/DOMEX-3
142) Information provided by Malcolm Davidson of ESA/ESTEC, Head of ESA's EO campaign section
143) Giovanni Macelloni, “Scientists brave the elements to support ESA’s water mission, ESA, URL: http://blogs.esa.int/campaignearth/tag/domex-3/
144) Marco Brogioni, Giovanni Macelloni, Simone Pettinato, Fabiano Monti, Elio Padoan, Tania Casal, Malcolm Davidson, “L-band brightness temperature at Dome-C Antarctica: intercomparison between DOMEX-3, SMOS and Aquarius data,” SMOS & Aquarius Science Workshop, Brest , France, April 15-17, 2013, URL: http://aquarius.umaine.edu/docs/aqsmos2013_brogioni.pdf
145) “New global network validates SMOS soil moisture data,” ESA, May 14, 2010, URL: http://www.esa.int/esaLP/SEM9UI19Y8G_LPcampaigns_0.html
146) P. Wursteisen, “The SMOS Field Campaigns,” 6th SMOS Workshop, Copenhagen, Denmark, May 15-17, 2006, URL: http://www.cesbio.ups-tlse.fr/data_all/SMOS_WS/WS6/mondayAm/8-Wursteisen.pdf
147) S. S. Søbjerg, J. Balling, S. S. Kristensen, N. Skou, “Preparing for SMOS: Sea Salinity Campaigns and Results,” Proceedings of IGARSS 2006 and 27th Canadian Symposium on Remote Sensing, Denver CO, USA, July 31-Aug. 4, 2006
148) J. Font, Y. Kerr, M. Berger, “Measuring Ocean Salinity from Space: the European Space Agency's SMOS Mission,” Backscatter (Alliance for Marine Remote Sensing Association), Vol. 11, No 3, 2000, pp. 17-19
149) R. Villarino, A. Camps, I. Corbella, et al., “Sea Surface Emissivity at L-band. Results of the WInd and Salinity Experiments WISE 2000 and 2001 and preliminary results from FROG 2003,” Proceedings of SPIE, Remote Sensing 2003, Barcelona, Spain, Sept. 8-12, 2003, Vol. 5233
150) A. Camps, J. Font, J. Etcheto, V. Caselles, et al., “Sea Surface Emissivity Observations at L-band: First Results of the Wind and Salinity Experiment WISE 2000,” IEEE Transactions on Geoscience and Remote Sensing, Vol. 40, No 10, Oct. 2002, pp. 2117-2130
151) R. Villarino, A. Camps, I. Corbella, et al., “Sea Surface Emissivity at L-band. Results of the Wind and Salinity Experiments WISE 2000 and 2001 and preliminary results from FROG 2003,” Proceedings of SPIE, Vol. 52233, Remote Sensing of the Ocean and Sea Ice 2003, Barcelona, Spain, Set. 9-12, 2003, pp. 296-307
152) A. Camps, J. Font, M. Vall-llossera, R. Villarino, C. Gabarró, L. Enrique, J. Miranda, I. Corbella, N. Duffo, F. Torres, S. Blanch, A. Aguasca, R. Sabia, “From the Determination of Sea Emissivity to the Retrieval of Salinity: Recent Contributions to the SMOS mission from the UPC and ICM,” Proceedings of IGARSS 2006 and 27th Canadian Symposium on Remote Sensing, Denver CO, USA, July 31-Aug. 4, 2006
153) J. Rotbøll, S. S. Søbjerg, N. Skou: ”A Novel L-band Polarimetric Radiometer Featuring Subharmonic Sampling,” Radio Science, Vol 38, No. 3, May-June 2003, pp 11-1 - 11-7.
154) N. Skou, S. S. Søbjerg, J. Balling, S. S. Kristensen, “A Second Generation L-band Digital Radiometer for Sea Salinity Campaigns,” Proceedings of IGARSS 2006 and 27th Canadian Symposium on Remote Sensing, Denver CO, USA, July 31-Aug. 4, 2006
155) S. Misra, S. S. Kristensen, S. S. Søbjærg, N. Skou, “CoSMOS: Performance of Kurtosis Algorithm for Radio Frequency Interference Detection and Mitigation,” Proceedings of IGARSS 2007 (International Geoscience and Remote Sensing Symposium), Barcelona, Spain, July 23-27, 2007
156) S. Beraza, V. González, F. Torres, N. Duffo, I. Corbella, S. Blanch, A. Camps, M. Vall-llossera, J. L. Álvarez, S. Ribó, M. Martín-Neira, “MIRAS-SMOS demonstrator test campaigns at Polytechnic University of Catalonia,” Proceedings of IGARSS 2006 and 27th Canadian Symposium on Remote Sensing, Denver CO, USA, July 31-Aug. 4, 2006
157) A. Monerris, P. Benedicto, M. Vall-llossera, A. Camps, M. Piles, E. Santanach, R. Prehn, “Topography Effects on the L-band Emissivity of
Soils: TuRTLE 2006 Field Experiment,” Proceedings of IGARSS 2007 (International Geoscience and Remote Sensing Symposium), Barcelona, Spain, July 23-27, 2007
158) http://www.esa.int/esaLP/SEMJVPOFHTE_LPsmos_0.html
159) N. Duffo, F. Torres, I. Corbella, V. González, S. Blanch, A. Camps, M. Vall-llossera, J. L. Álvarez, S. Ribó, M. Martin-Neira, “Some results of the MIRAS-SMOS demonstrator campaigns,” Proceedings of IGARSS 2007 (International Geoscience and Remote Sensing Symposium), Barcelona, Spain, July 23-27, 2007
160) J. Kainulainen, K. Rautiainen, M. Hallikainen, M. Takala, “Radiometric Performance of Interferometric Synthetic Aperture Radiometer HUT-2D,” Proceedings of IGARSS 2007 (International Geoscience and Remote Sensing Symposium), Barcelona, Spain, July 23-27, 2007
161) “Australian field campaign validates SMOS data,” ESA, March 9, 2010, URL: http://www.esa.int/SPECIALS/smos/SEMZCE9KF6G_0.html
162) http://www.cesbio.ups-tlse.fr/SMOS_blog/?tag=aaces
163) http://www.spacenewsfeed.co.uk/index.php/
free-content/3993-australian-field-campaign-validates-smos-data
164) “PLMR - Polarimetric L-band Multibeam Radiometer & Thermal Imager,” URL: http://www.plmr.unimelb.edu.au/
165) Susanne Mecklenburg, Norrie Wright, Catherine Bouzinac, Steven Delwart, “SMOS operations and products,” ESA Bulletin, No 137, February 2009, pp. 24-30
166) N. Wright, “The ground segment activities,” 6th SMOS Workshop, Copenhagen, Denmark, May 15-17, 2006
167) Agenda of 6th Workshop, May 15-17, 2006, TUD Lyngdby, URL:
http://www.cesbio.ups-tlse.fr/data_all/SMOS_WS/WS6/Agenda.htm
168) http://www.cesbio.ups-tlse.fr/data_all/SMOS_WS/WS6/mondayAm/4-wright.pdf
169) Guillermo Buenadicha, Sandrine Burgaud, Bertrand Raffier, Blanca Sánchez Rojo, “SMOS ESA/CNES operations: Multiplying two agencies’ efforts,” Proceedings of SpaceOps 2012, The 12th International Conference on Space Operations, Stockholm, Sweden, June 11-15, 2012, URL: http://www.spaceops2012.org/proceedings/documents/id1265363-Paper-001.pdf
170) M. Zundo, “SMOS L1 Project Status,” 6th SMOS Workshop, Copenhagen, Denmark, May 15-17, 2006, URL: http://www.cesbio.ups-tlse.fr/data_all/SMOS_WS/WS6/mondayAm/5-Zundo%20(NXPowerLite).pdf
171) S. Delwart, “SMOS L2 Development,” 6th SMOS Workshop, Copenhagen, Denmark, May 15-17, 2006 , URL: http://www.cesbio.ups-tlse.fr/data_all/SMOS_WS/WS6/mondayAm/6-Delwart.pdf
172) R. Moreno, Y. Kerr, F. Bermudo, “CATDS : SMOS levels 3 and 4 ground segment,” 6th SMOS Workshop, Copenhagen, Denmark, May 15-17, 2006, URL:
http://www.cesbio.ups-tlse.fr/data_all/SMOS_WS/WS6/mondayAm/7-moreno.pdf
The information compiled and edited in this article was provided by Herbert J. Kramer from his documentation of: ”Observation of the Earth and Its Environment: Survey of Missions and Sensors” (Springer Verlag) as well as many other sources after the publication of the 4th edition in 2002. - Comments and corrections to this article are always welcome for further updates (eoportal@symbios.space).
Spacecraft Launch Mission Status Sensor Complement Ground Segment References Back to top