Non-EO
ESA
Technology and Research
Quick facts
Overview
| Mission type | Non-EO |
| Agency | ESA |
| Launch date | 27 Sep 2003 |
| End of life date | 03 Sep 2006 |
SMART-1 (Small Mission for Advanced Research in Technology)
Spacecraft Launch Mission Status Sensor Complement References
Overview
SMART-1 is an ESA minisatellite technology mission to the moon (part of the ESA Horizons 2000 Science plan) with the objective to demonstrate innovative and key technologies for scientific deep-space missions. SMART-1 is also a "first-ever" low-budget small mission for science at ESA and in this sense it explores and tests new ways of implementing cost-effective procurement and efficient management.
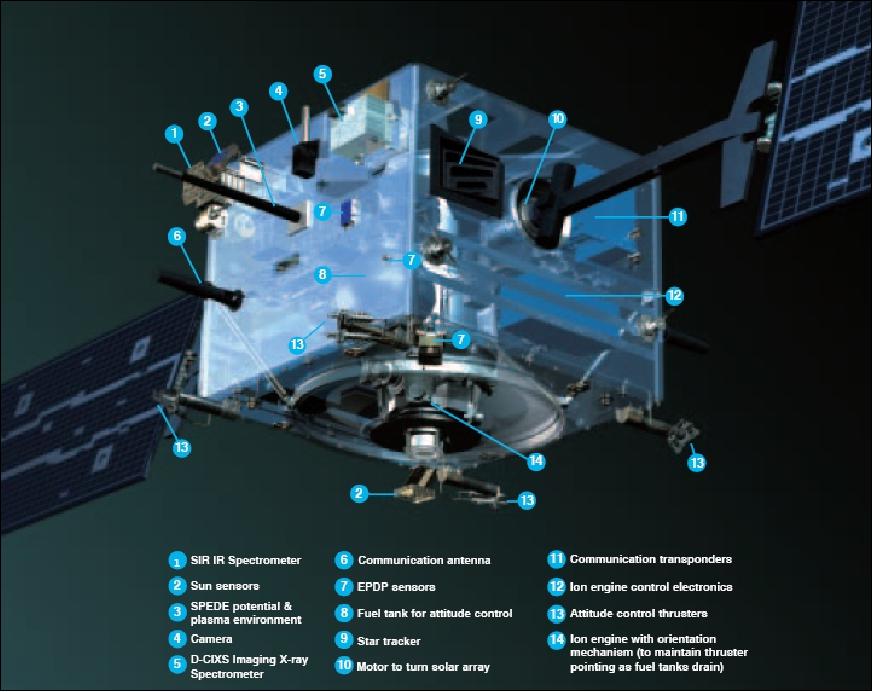
A key objective is to qualify solar electric propulsion (ion drive, but also the peculiar flight dynamics and orbit control concepts) as the primary means of propulsion in deep-space missions, tested in a transfer and gravity-assisted orbital trajectory to the moon. A mission goal is to spend six months in orbit around the moon, using a suite of instruments to study its composition. Science objectives are to address key questions about the moon: the origin of the Earth-Moon system and the role of accretionary processes, long-term volcanic and tectonic activity on Earth's natural satellite, the thermal and dynamic processes responsible for lunar evolution and the external processes on the moon's surface such as erosion, and ice deposition. SMART-1 demonstrates also a new approach in terms of implementation strategy (low-cost) and procurement for ESA. 1) 2) 3) 4) 5) 6)

Spacecraft
The prime contractor for the SMART-1 platform is the Science Systems Division of SSC (Swedish Space Corporation) of Solna, Sweden. The AOCS (Attitude Orbit and Control Subsystem) architecture is inherited from the Odin satellite by using star trackers and reaction wheels as the primary sensors and actuators. A major AOCS design driver has been the need to accommodate the electric propulsion system. The ASC (Advanced Stellar Compass) of the attitude system is manufactured by DTU, Denmark (heritage of Astrid-2, TEAMSAT, CHAMP, SAC-C, ADEOS-II, GRACE, and PROBA).
S/C is three-axis stabilized | - Two autonomous star trackers of DTU, ASC (Advanced Stellar Compass) |
Solar power | 1975 W BOL with triple-junction cascade solar cells (GaAs) |
Batteries | Five Li-ion battery cells, each with 130 Ah |
Xenon propellant mass | ≤ 82.5 kg (for PPS-1350-G) |
Hydrazine thrusters (8) | The thrusters are used in detumble mode and for momentum management. No delta-V thrust can be produced by the system |
Communication | Two S-band TT&C transponders, 65 Kbit/s data rate, the mass of the TT&C system is <10kg |
S/C launch mass, payload mass | 367 kg, 19 kg |
S/C size | 157 cm x 115 cm x104 cm, (14 m across with solar panels deployed) |
The AOCS features four modes and several sub-modes. These are:
- Detumble mode: This is the entrance mode after launcher separation. It reduces high body rates to an acceptable level. The detumble mode may be entered during any mission phase.
- Safe mode: This represents the base mode for all other modes and the recovery mode for emergency situations. Its purpose is to ensure power generation and ground communication using a minimum of on-board resources.
- Science mode: It is used for scientific operations. It is also used for pointing of the narrow beam antenna.
- EPS (Electric Propulsion System) control mode: Default mode for firing the electric propulsion system to modify the orbit. The pointing control function is the same for science and EP control and it has two gradations: slew and fine.
- The AOCS design solves the problem of a changing center of mass as the EP thruster consumes fuel by using the gimballed mounting mechanism (EPMEC) of the EP thruster in closed-loop to continuously align the thrust vector with the center of mass.
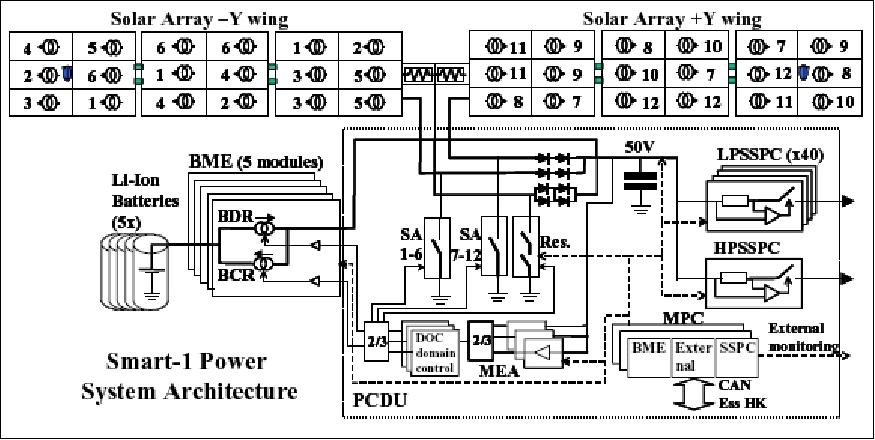
The SMART-1 spacecraft structure is a box (aluminum structure of about 1 m3 volume), consisting of four sidewall panels and deck plates. The satellite has two solar panels 1850 W EOL), when deployed the S/C has a span of 14 m. The solar array is connected to a 50 V DC regulated bus, based on the S3R principle (Sequencing Switching Shunt Regulator), and 5 Li-ion batteries, each consisting of a single 40 Ah cell. The mainbus regulation, power distribution and a triple redundant power controller are combined in the PCDU (Power Control and Distribution Unit), and the battery charge and discharge functions in the BME (Battery Management Electronics). 7) 8)
Unit | Solar array | PCDU | BME | Batteries |
Manufacturer | Dutch Space (array | Omnisys | Crisa | SAFT Groupe SA, France |
Mass | 48 kg | 12 kg | 7.5 kg | 1.55 kg (x 5) |
Size | 2 wings: 6320x960x22 | 346 x 181 x 199 | 270 x 264 x 155 | 272 x 54 (Ø) x 65 |
Power/energy | 1848(1767)W BOL | 2160 W input in sun | 5x80W discharge | 135 Wh (x5) nominal capacity |
Layout | 6 sections per wing, | 1 HPSSPC, tunable 16-31A | 5 modules parallel in one box | 5 single battery cells in parallel |
Others | GaInP2/GaAs/Ge cells, 3.85x6.32cm, 200 µm coverglass BOL 25% efficiency | MB-capacitor 1.6mF | Taper charge >4.1V |
|
Voltage | 52.3 V at interface | 50 V DC regulation | 2.9-4.1 V / 50 V | 2.8-4.1 V |
The payload is externally mounted. The Xenon tank, with a mass of 82.5 kg, is located inside the central cone structure. The electrical propulsion system (PPS-1350-G) is mounted on a two-axis gimbal providing the thrust vector to be directed inside a cone of 10º. 9) 10) 11) 12)
SMART-1 is controlled by a spacecraft controller, a combination of the main processor and a mass memory board. The spacecraft controller connects the two spacecraft buses, the system bus and the payload bus. The two buses are based on the CAN (Controller Area Network) protocol. The serial CAN bus has a net bit rate of 400 kbps and a net data rate of 60 kbps. The spacecraft platform units are connected to the system CAN bus and the payload (scientific instruments) are connected to the payload CAN bus. The system unit consists of 8 cards, a 20 MHz microprocessor (TCS695E single-chip ERC-32 processor of Atmel), 4Gbit DRAM mass memory, TM/TC, Pyro and four RTUs (Remote Terminal Units).
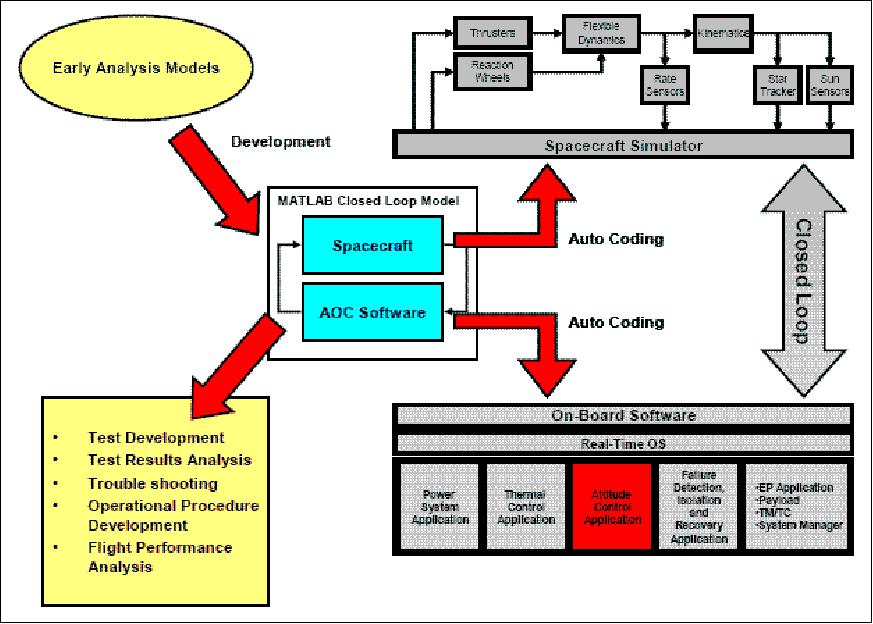
Extensive use of automatic coding techniques were used in the development of AOCS. In fact, the complete AOCS on-board software was automatically generated from MATLAB/Simulink models and the code was developed exclusively by a small team of control engineers without the involvement of software engineers. The availability of complete software models for simulation has resulted in a highly predictable behavior of the real-time code.
All the software, including AOCS (Attitude and Orbit Control Subsystem), runs on one single ERC32 processor with a clock rate of 20 MHz. The remote terminal units are interfaces to platform devices that do not have an integrated CAN bus connection, i.e. reaction wheels/gyros, hydrazine thruster system, star trackers/sun sensors/BAPTA, thermal control system, electric propulsion system. These units are completely self contained but are placed inside the main system unit cabinet.
Onboard autonomy: The use of an electric thruster as main propulsion system requires an autonomous spacecraft, both in the capability of engine control and in the identification of anomalies and failures. The objective of autonomy is to reduce the long-term operational costs of ground system services.
SMART-1 uses two major mechanisms to achieve these objectives: a) a mission timeline handler, and b) a complex hierarchical FDIR (Failure Detection, Isolation and Recovery) system. The mission timeline is a standard onboard service holding sequence and commands and their intended execution time. The FDIR system is a sophisticated software package that monitors the health parameters of the S/C and takes decision on the need of reconfiguration in case of a failure detection requiring a final decision of the overall FDIR authority. The AOCS core determines several types of of failure in the unit that controls and reports to FDIR for recovery actions to be taken. Upon detection of failure, SMART-1 reconfigures the onboard unit without falling into a safe mode - unless the detected failure would effect S/C safety.
Launch
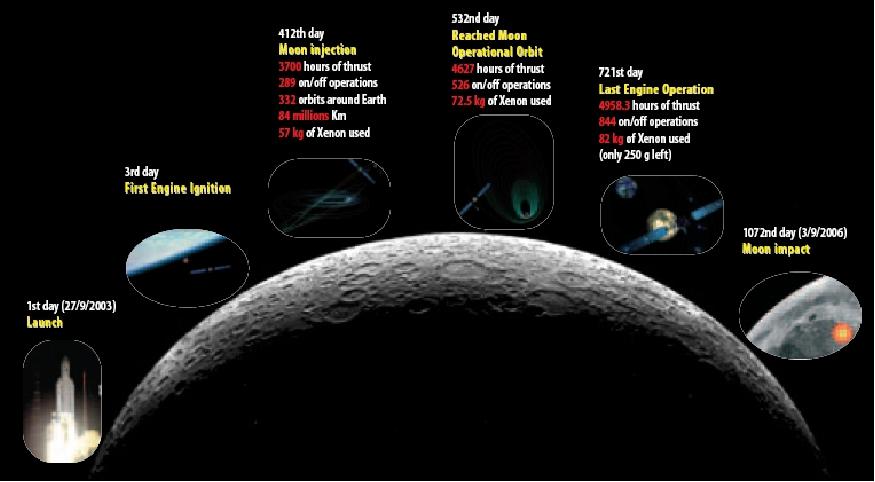
The SMART-1 minisatellite was launched on 27 September 2003 as an auxiliary payload on an Ariane-5G launch vehicle from Kourou, French Guiana. The primary payloads were INSAT-3E of ISRO and e-Bird-1, a communication satellite of Eutelsat.
Orbit
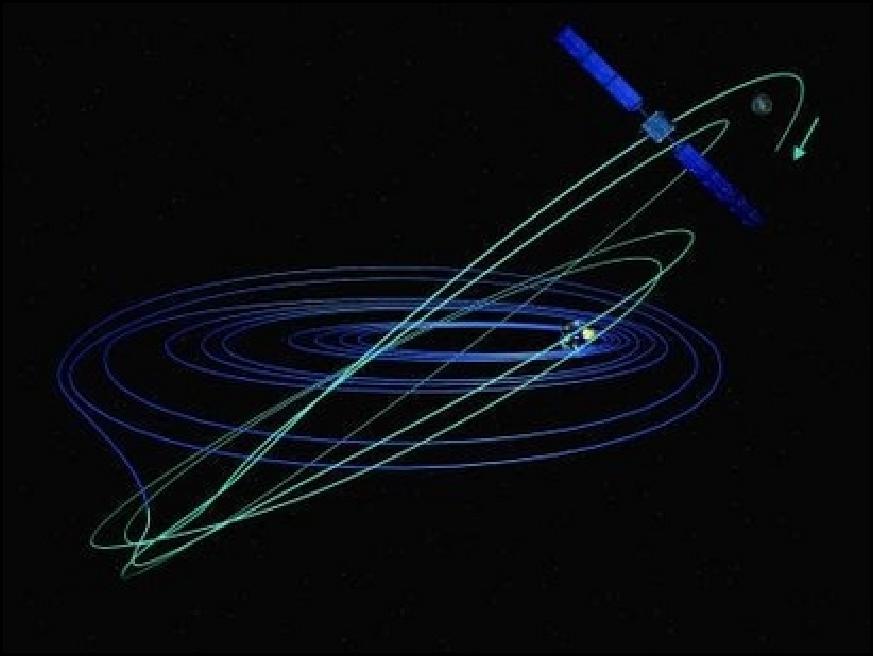
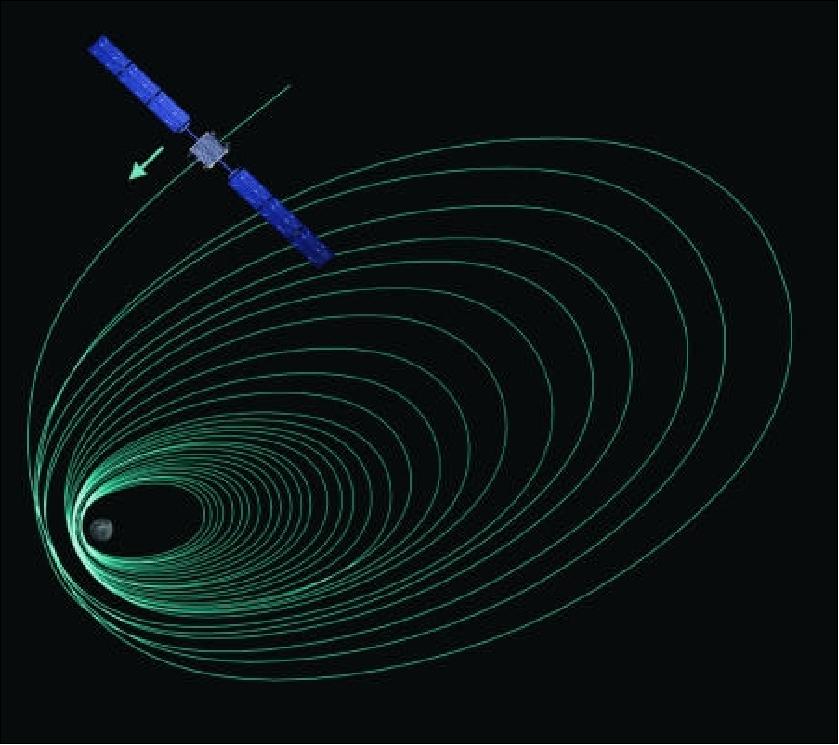
The SMART-1 S/C reaches lunar orbit starting from GTO (Geostationary Transfer Orbit) by using only electric propulsion. The overall mission can therefore be divided into the following phases:
• Launch and early GTO phase. The standard GTO of Ariane has an apogee of 35781 km and a perigee of 622 km. SMART-1 first orbits the Earth in ever-increasing ellipses (thrust around perigee only to raise the apogee radius).
• Van Allen Belt Escape. Continuous thrust strategy to quickly raise the perigee radius. Escape phase completed by Dec. 22, 2003, orbit: 20,000 km x 63,427 km.
• The cruise phase to the moon lasts for about 12 months (up to L1 of the Earth-Moon system, the L1 point is about 55,000 km out from the moon in the Earth direction)
• A considerable part of the perigee raising was obtained by including moon resonances. From an apogee radius of 200,000 km known onwards, the moon starts to significantly perturb the orbit when it is in the vicinity of the spacecraft at apogee.
• Moon capture phase and descent to the operational orbit. As of Nov. 15, 2004, SMART-1 is no longer orbiting the Earth... it's orbiting the moon! SMART-1 reached its closest point to the lunar surface so far - its first "perilune" - at an altitude of about 5000 km (on Nov. 15, 2004).
• In all, SMART-1 clocked up 332 orbits around Earth. It fired its engine 289 times during the cruise phase, operating for a total of about 3700 hours since GTO. Only 59 kg of xenon propellant were used (out of 82.5 kg). Overall, the engine performed extremely well, enabling the spacecraft to reach the moon two months earlier than expected. 13) 14) 15)
• Lunar descent. The period of the initial lunar orbit was 89 hours. The apolune height of the moon operational orbit was reduced from the originally planned 10,000 km to 3,000 km at a cost of 5.5 kg of fuel to improve science observations. The period was continuously being reduced due to thrust by the ion engine. Operational orbit 2,200 km x 4,600 km.
• Lunar observation phase (start of science operations in January 2005). Lunar science until the end of lifetime in September 2006, interrupted only by a one-month reboost phase in September 2005 to optimize the lunar orbit.
• Lunar orbit reboost in June/July 2006 using the attitude thrusters to adjust the impact date and time.

Pericenter distance | 2189.702 km |
Apocenter distance | 4644.004 km |
Semimajor axis | 3416.853 km |
Eccentricity | 0.359146 |
Inclination | 90.188º |
Ascending node | 237.721º |
Argument of pericenter | 292.930º |
True anomaly | 180.000º |
Osculating orbital period | 4.978457 hours |
RF communications: The S-band TT&C subsystem consists of two transponders including diplexers, three switches, two omnidirectional LGA (Low Gain Antennas) providing a downlink rate of 2 kbit/s, and one MGA (Medium Gain Antenna) providing 66 kbit/s. The modulation scheme is PCM/PSK/PM for the low data rate and PCM/SP-L/PM for the high data rate. The ranging signal in the ranging channel of the transponder directly phase-modulates (PM) the downlink carrier. The uplink frequency is 2058.2 MHz, the downlink frequency is 2235.1 MHz.
Mission Status
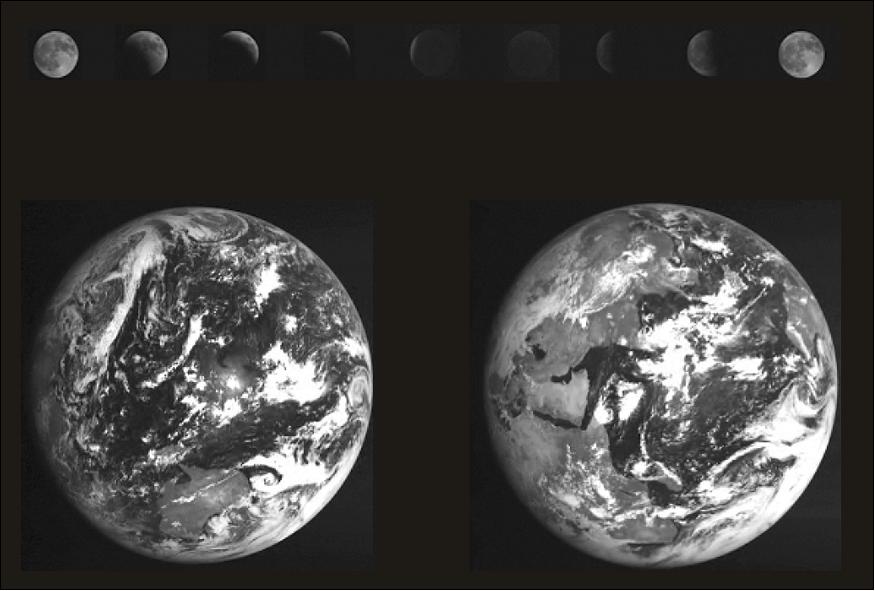
- July 15, 2019: SMART-1, ESA's first mission to the Moon, captured this series of unique images of our home planet Earth and the Moon during a total lunar eclipse on its way to the Moon in 2004. 16)
- The images (Figure 8) were taken in visible light. Those of the Moon are shown in time sequence, from left to right, covering a period of about three and a half hours. The ‘totality' phase, in the middle of the sequence when the Moon is completely inside of the Earth's shadow, lasted about an hour.
- The images of the Earth were taken just before and after the eclipse. The size of the Earth and Moon is exactly as seen by SMART-1, but the distance between the two bodies, is not to scale (Earth and the Moon were farther apart than the field of view of AMIE and could not simultaneously fit within a single image). Earth is about 3.7 times larger than that of the Moon; their diameters are about 12,800 km and 3,500 km, respectively. As SMART-1 was farther away from the Moon than from Earth, the difference appears exaggerated.
- A partial lunar eclipse will be visible for many Earth-based observers this week, on 16-17 July 2019. For observers in Europe it will begin late in the evening of 16 July and conclude in the early hours of 17 July. Partial lunar eclipses occur when the Earth moves between the Sun and the full moon, but they are not precisely aligned, so only part of the Moon's surface moves into the darkest part of Earth's shadow.
- SMART-1 (Small Missions for Advanced Research and Technology-1) was launched on 27 September 2003. For 14 months it followed a long, spiralling trajectory around Earth towards the Moon as it tested new technologies, including solar electric propulsion. It orbited the Moon from 15 November 2004 until 3 September 2006, providing a comprehensive inventory of key chemical elements in the lunar surface and taking thousands of images.
- The Moon has provided the focus of many missions subsequently, but it did not receive human visitors since 1972. ESA and international partners are now looking forward to the next era of human exploration, and to better understand the resources available on the Moon to support human missions longer-term. While Apollo 11 touched down for the first time on the near side of the Moon 50 years ago, it is time to explore the far side, examine different types of lunar rocks there to probe deeper into the Moon's geological history and to find resources like water-ice that are thought to be locked up in permanently shadowed craters near the Moon's south pole.
- September 3, 2018: This greyscale, mottled image (Figure 9) shows a patch of the Moon's surface, and features an intriguing shape towards the top of the frame. This was actually made by a spacecraft – it marks the final resting place of ESA's SMART-1 (Small Missions for Advanced Research in Technology-1). 17)
- Launched in 2003, SMART-1 was a Moon-orbiting probe that observed our cosmic companion for roughly three years. On 3 September 2006 the mission's operations came to an end and the spacecraft was sent down to deliberately crash into the Moon, bouncing and grazing across the lunar surface at a speed of 2 km/s achieving Europe's first lunar touchdown.
- After the impact, a bright flash was seen at the boundary between lunar day and night by the Canada-France-Hawaii Telescope in Hawaii. However, as no other spacecraft were currently in orbit at the time to watch the event unfurl, it was not possible to pinpoint exactly where SMART-1 crashed. Scientists used orbit tracking, Earth-based simulations, and observations of the bright impact flash to estimate the location of the landing site, but the mission's precise resting place remained unknown for over a decade.
- Last year, high-resolution images from NASA's Lunar Reconnaissance Orbiter (LRO) revealed the whereabouts of SMART-1 – as shown here. The spacecraft carved out a 4 m-wide and 20 m-long gouge as it impacted and bounced at 34.262° south, 46.193° west. It cut across a small crater and sent lunar soil flying outwards from its skidding, ricocheting path, creating the brighter patches of material seen either side of the crater, with debris from spacecraft and oblique dust ejecta coming to a halt several to tens of kilometers in the forward stream direction.
- Alongside searching for water ice on the Moon and observing and photographing our nearest celestial neighbor, SMART-1 played a key role in testing ion propulsion – an efficient type of propulsion that uses electrical energy to propel a spacecraft through space.
- SMART-1 was ESA's first mission to travel to deep space using this type of propulsion. Ion propulsion will also be used on the joint ESA-JAXA BepiColombo mission when it launches in October of this year towards Mercury.
- The field of view in the image is 50 m wide (north is up), with solar illumination coming from the west. SMART-1 touched down from north to south.

- October 5, 2015: The pockmarked landscape captured in this image from ESA's SMART-1 mission (Figure 10) is the surface of our Moon. Some of the many craters scattered across the lunar surface are clearly visible, records of the many impacts that have plagued it. 18)
- At the very center of this image is the lunar north pole, captured in detail during ESA's SMART-1mission. The image shows the characteristic craters of the Moon, present in all shapes and sizes. The largest in view is Rozhdestvenskiy, sandwiched between Hermite to the northeast and Plaskett to the southwest.
- SMART-1 orbited the moon from 2004 to 2006 collecting around 32, 000 images of small areas. In order to create an image covering a large region like this one (60º in width) and showing the peaks and craters in context, hundreds of these individual images had to be pieced together into a mosaic – no easy task.
- The biggest challenge in creating this mosaic was the changing lighting conditions. Despite the "dark side of the Moon" misnomer, both sides of the Moon do experience night and day in the same way. The far, or ‘dark', side has ‘days' of two weeks just like the nearside and is ‘dark' only in the sense that it was unknown to humans before the arrival of space probes.
- At the Moon's north pole, pictured here, as is the case across all areas of the Moon, the Sun illuminates from different directions. As the Sun moves across the Moon's sky, new areas are illuminated and shadows spread and move. This means that many of the images used for the mosaic are lit from different directions. This is why, on close inspection, faint squares can be found in the mosaic where two images of different illumination butt up against one another.
- The overall effect however, was worth the labor, and the resulting image gives us a fresh perspective on our natural satellite. Astronomers can use images like these to identify peaks on the north pole that are almost always lit and areas deep inside its largest craters that may never see daylight. These areas of constant shadow are of particular interest because frozen within them could be water ice and clues to the history of the Solar System.
![Figure 10: A pockmarked landscape mosaic of the Moon's north pole [image credit: ESA/SPACE-X (Space Exploration Institute); acknowledgments: J. Manuel Fonseca, M. Costa & A. Mora (UNINOVA); B. Grieger & M. Almeida (ESA)]](/api/cms/documents/163813/4736006/Smart1_AutoF.jpeg)
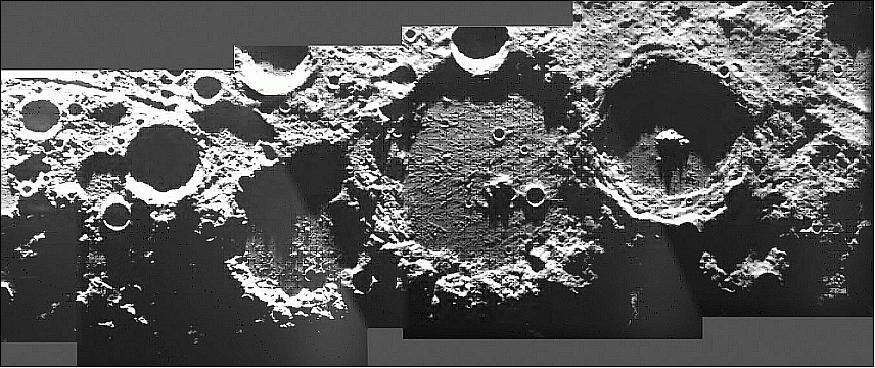
- September 2014: The greyscale pattern of dark and light blotches on the Moon is a familiar sight to stargazers. However, there are regions that remained relatively mysterious to us until surprisingly recently – most notably the Moon's polar regions, which astronomers have dubbed ‘Luna Incognita', or ‘the unknown Moon'. 19)
In recent years, missions including ESA's SMART-1 have shed light on these regions of the lunar surface, and they are now better known. The mosaic of Figure 11 covers about 700 km by 220 km and was taken by the AMIE (Advanced Moon Imaging Experiment) on SMART-1. It shows a trio of craters very near to the Moon's north pole, on the edge of the Luna Incognita. From right to left, these craters are named Plaskett, Rozhdestvenskiy and Hermite.
Hermite (104 km diameter) is perched right on the edge of the Moon's northern limb, while Plaskett (109 km diameter) and Rozhdestvenskiy (177 km diameter) overlap the lunar far side.
We only ever see the same hemisphere of the Moon due to ‘tidal locking' – this causes the Moon to orbit Earth once in the same time it takes to spin once about its axis. However, we actually see around 59% of the lunar surface owing to factors such as the eccentricity of the Moon's orbit, its orientation with respect to Earth, and the rotation of Earth. Over time, these little variations add up and the Moon appears to oscillate slowly, allowing us to peer a bit further around the lunar surface at its edges. This effect is known as libration.
Plaskett's location is within one of the zones that seems to oscillate. For just a few days during a few months each year, Earth can be seen from Plaskett's northern rim – one of the key reasons it may make a suitable lunar outpost for simulating a mission to Mars. This infrequent contact would be ideal to test how astronauts cope with being isolated from Earth, without requiring the additional separation or risk involved in actually travelling to the Red Planet.
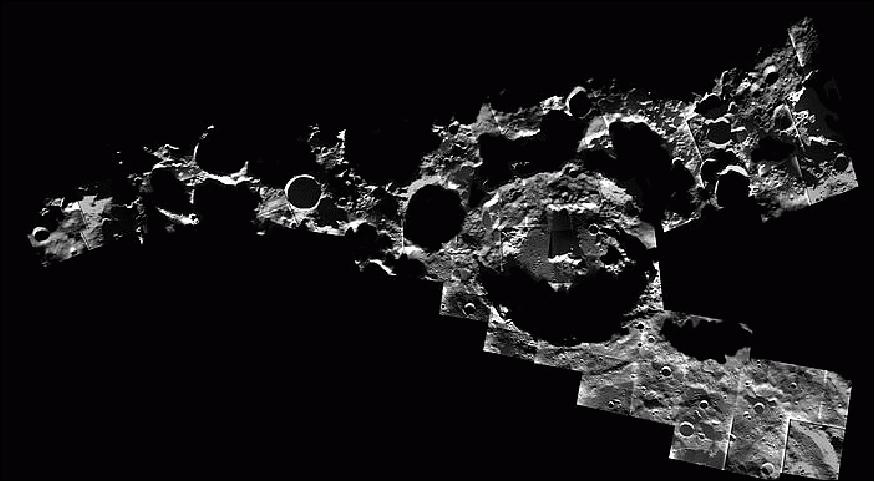
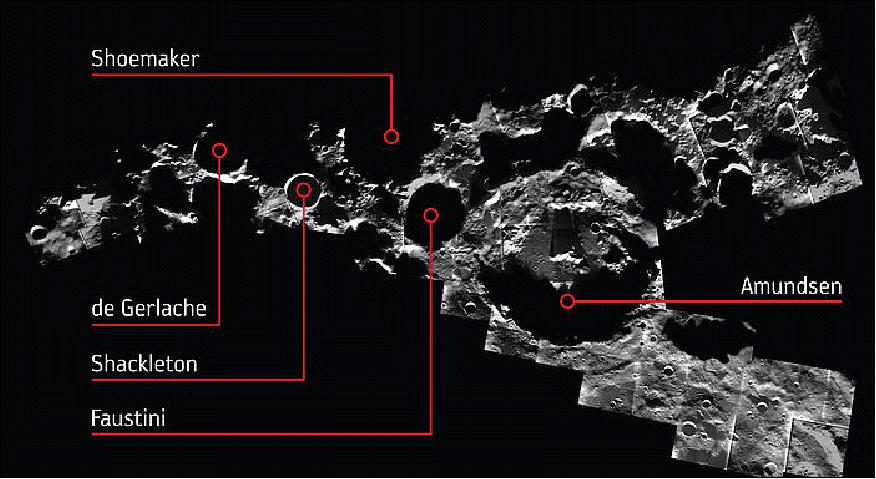
- May 2014: ESA released the image of Figure 12 on March 12, 2008 and in May 2014. Imaged during the summertime in the Moon's southern hemisphere by the AMIE (Advanced Moon Imaging Experiment) camera on ESA's SMART-1 spacecraft, this mosaic shows a crater-riddled region spanning the lunar south pole. It is made up of around 40 individual images taken between December 2005 and March 2006, and covers an area of about 500 x 150 km. 20)
- The craters visible here include (from right to left, starting with the largest round shape visible in the frame) the Amundsen, Faustini, Shoemaker, Shackleton and de Gerlache craters (Figure 13).
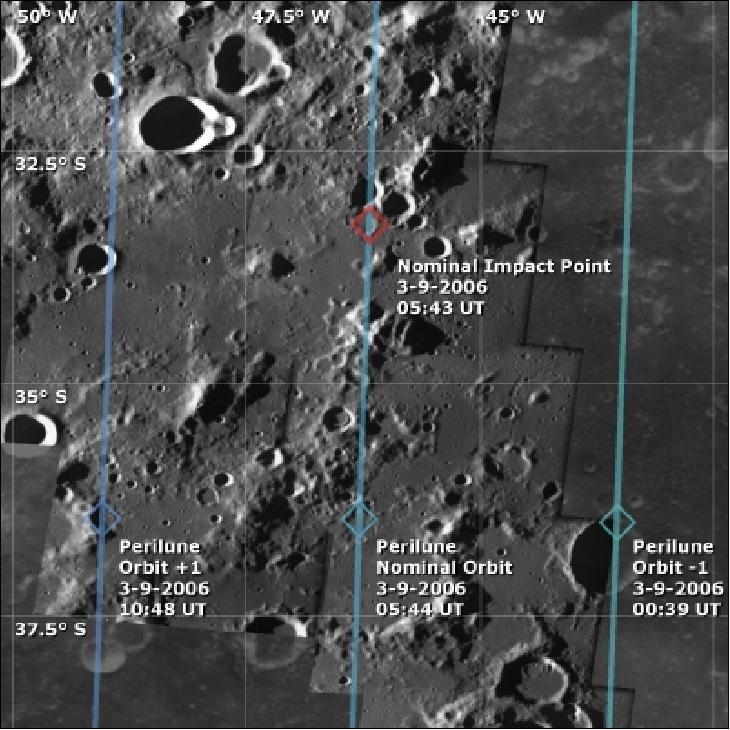
- On Sept. 3, 2006, the SMART-1 spacecraft impacted onto the lunar soil, in the `Lake of Excellence' region. Right up to its final orbits, SMART-1 continued delivering valuable data. The planned impact concluded a successful mission that, in addition to testing innovative space technology, had been conducting a thorough scientific exploration of the moon for about a year and a half, gathering data about the morphology and mineralogical composition of the surface in visible, infrared and X-ray light.
The impact took place on the near side of the Moon, in a dark area just near the terminator, at a "grazing" angle between 5º and 10º and a speed of about 2 km/s. The impact time and location was planned to favor observations of the impact event from telescopes on Earth. Professional and amateur ground observers all around the world were watching before and during the small SMART-1 impact, hoping to spot the faint impact flash and to obtain information about the impact dynamics and about the lunar surface excavated by the spacecraft. 21) 22)
SMART-1 has not only achieved its primary objective of testing and validating operationally the use of Electric propulsion for interplanetary missions, but it has fulfilled all secondary objectives in what concerns technology demonstration and science.
The mission has permitted ESA gaining a valuable expertise in navigation techniques for low trust propulsion systems and experimenting with innovative cost-effective operations concepts for a fraction of a medium science mission (120 M€).
- However, analysis showed that if the current orbit (mid-2006) would be allowed to continue without further correction, the spacecraft would impact the lunar far side - away from any ground contact and visible observations. To allow scientists to observe the impact, a series of perilune raising maneuvers (by about 90 km) were required to shift the impact location to the lunar near side - with an impact date of Sept. 3, 2006. In total, a delta-velocity (ΔV) of ~12 m/s was required to achieve this result.
Since the electric propulsion resources were depleted, the attitude hydrazine subsystem was used for the orbit raising maneuver. The reboost strategy involved a series of reaction wheel off-loadings that transferred the spacecraft angular momentum between the spacecraft +Y and -Y axis, generating a small ΔV in the direction of flight.
- The thrust spiral started on August 2, 2005. On Sept. 17, 2005 the electric engine (PPS-1350-G) was shut down (all Xenon was used down to a rest mass of 0.280 kg) thus ending all electric propulsion operations of the mission. This leaft the spacecraft in a natural orbit determined by lunar gravity and perturbations caused by gravitational influence of the Earth and Sun. The electric engine on SMART-1 provided a total operational life of 4958.3 hours of active firing using a total of 82.5 kg of Xenon fuel.
Orbit analysis indicated that SMART-1 would end its life naturally, through impact on the moon's surface, estimated to occur in early 2007. Observations of the moon continued with systems/payload operating nominally. 23)
- Reboost of lunar orbit: The objective was to increase the argument or perilune since the effect of the Earth would cause its decrease an ultimately the impact on the moon in 2006. The strategy consisted of using all the usable Xenon (4.2 kg out of 6 kg available in the tank). It also foresaw a possible utilization of the remnant 1.8 kg (theoretically not usable).
- SMART-1 payload commissioning sequences were run in April 2005. The actual operational phase of SMART-1 in moon orbit started on May 19, 2005.
- After moon capture, a new phase started to decrease the lunar orbit to the final operational one. SMART-1 arrived in its final operational moon orbit in February-March 2005 -an elliptical polar orbit of 500 km x 3000 km. Also in Feb. 2005, ESA's SMART-1 mission was extended by at least one year. The mission extension had not only the objective of impeding the spacecraft impact on the moon in September 2005, but the optimization of the orbit for science.
- After S/C separation, ESOC took over the control of the S/C, executing the commission of the satellite platform, and initiating the orbit rising phase. In this period, the spacecraft went through the Van Allen radiation belts and a number of resonances before the moon captured it on November 15th 2004 (start of lunar orbit). 24) 25)
- SMART-1 was launched on September 27, 2003 as a secondary payload from Kourou
Sensor Complement
The SMART-1 payload is conducting 7 experiments and 10 investigations. 26) 27)
1) Testing of new techniques on the way to the moon by: EPDP and SPEDE; KATE and RSIS; Laser link; OBAN (evaluation of a computer technique for onboard autonomous navigation)
2) Performing cruise science: D-CIXS, XSM & AMIE
3) Observing the moon: AMIE, SIR, D-CIXS and XSM; SPEDE and RSIS
SMART-1 science investigations include studies of the chemical composition of the moon, of geophysical processes (volcanism, tectonics, cratering, erosion, deposition of ices and volatiles) for comparative planetology, and high resolution studies.
PPS-1350-G
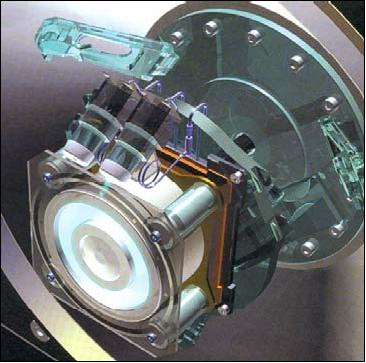
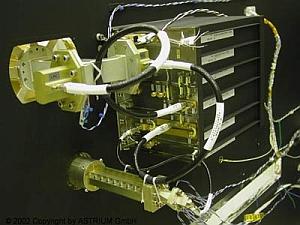
PPS-1350-G (Propulseur Plasmique Stationaire) or Stationary Plasma Thruster-1350-G. PPS-1350 is a Hall-effect thruster, developed by SNECMA of France (thruster) and ETCA, Charleroi, Belgium (power processing unit). The 1350 label designates the nominal input power (in Watt). The PPS-1350 belongs in the category of Hall-effect thrusters and is an evolution of the SPT-100 (Stationary Plasma Thruster), built by the Fakel Design Bureau in Kaliningrad, Russia.
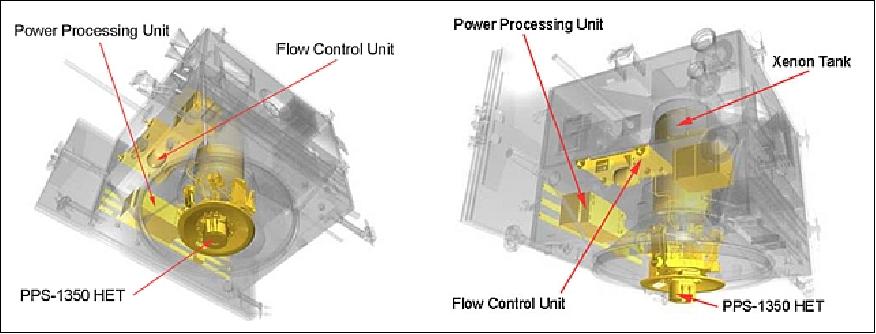
The demonstration of the electric propulsion and attitude control actuator functions are primary objectives for the SMART-1 mission (the S/C achieves lunar orbit by means of the electric propulsion). The duration to reach the moon after injection into a standard Ariane-V GTO (apogee=35781 km, perigee=622 km), is of the order 16 months. Together with the electric propulsion, a series of gravity assists by the moon are also exploited to reduce the amount of fuel consumed. The main elements of PPS-1350-G are: 28) 29)
• Power processing unit, which controls the electrical functions of the thruster
• Pressure regulator, which supplies gas from the storage tank to the flow control unit at the required pressure
• Remote terminal unit, which interfaces the propulsion system components to the spacecraft command and telemetry systems
• Electrical filter unit, which suppresses the conducted electromagnetic emissions produced by the discharge current
• Xenon flow control unit, which modulates the mass flow rate of gas entering the thruster
• PPS-1350 has an exit diameter of 100 mm
• Propellant storage tank with a volume of 49 liter, capable of storing 82.5 kg of xenon at a pressure of 150 bar. A device called the BPRU (Bang-Bang Pressure Regulation Unit) regulated the xenon down to a constant low pressure around 2 bar. This low-pressure xenon was then fed into the adjustable flow regulator, called the XFC (Xenon Flow Controller) that provided fine control of xenon mass flow rate in order to keep the anode current, thrust and power constant.
• Thruster orientation mechanism, referred to as EPMEC (Electric Propulsion Mechanism) to allow adjustment of the direction of thrust relative to the spacecraft axes. EPMEC is one of the actuators in the AOCS subsystem providing two-axis reorientation capability for the PPS-1350-G. The EPMEC orients the thruster to ensure that the thrust vector is aligned with the changing center of mass. EPMEC was developed by Contraves Space AG, Switzerland.
• Harness and piping connecting the various components together.
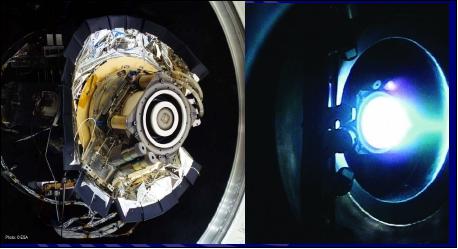
Principle of operation of the ion engine which uses Xenon as propellant: Electrons from an external cathode enter a ceramic discharge chamber (10 cm in diameter), attracted by an anode. On their way to the anode, the electrons encounter a radial magnetic field created between inner and outer coils, causing cyclotron motion around the magnetic field lines. Collisions between drifting electrons and xenon propellant create the plasma. The ions created are then accelerated by the negative potential existing near the exit of the chamber due to the Hall effect. The external cathode acts also as a neutralizer, injecting electrons into the thrust beam to maintain zero-charge equilibrium both in the beam and on the spacecraft.
This type of thruster provides a nominal thrust of 70 mN at 16,000 m/s specific impulse (Isp) and 1350 W of nominal input power from the solar array. PPS-1350 has a dry mass of 29 kg. The qualified lifetime of the thruster is 7000 hours at maximum power, corresponding to a total impulse of 2 x 106 Ns. 30) 31) 32)

Even though the truster can operate at a maximum discharge power of 1500 W, it has also demonstrated its capability to start-up and function at much reduced power (480 W). Data retrieved from the first part of the mission have verified a thrust of 70.6 mN, a power consumption of about 1285 W, and an Isp of 16,000 m/s.
The PPF-1350-G assembly is composed of the following elements (in addition to the engine itself):
- PPU (Power Processing Unit) which controls the functions of the thrusters
- A bang-bang PRU (Pressure Regulation Unit) providing the regulated pressure level required by the thrusters
- PRE (Pressure Regulation Electronics) which control the PRU and interfaces with the spacecraft
- FU (Electrical Filter Unit) which filters the conducted emission produced by the thruster discharge current
- A redundant XFC (Xenon Flow Control) unit which modulates the mass flow rate entering the thrusters
- Xenon tank for storage piping and harness between the relevant units.
The Xenon gas is stored in a cylindrical carbon composite tank of 49 liter volume with aluminum liner. The tank, from Lincoln Composites (USA), has a maximum storage capacity of 82 kg at a maximum effective operating pressure of 150 bar and a maximum temperature of 50ºC.
EPDP (Electric Propulsion Diagnostic Package), provided by Laben/Proel of Florence, Italy, is a technology payload to study the plasma environment around the SMART-1 spacecraft and the contamination on its external surfaces, when the electric propulsion system is both on and off. EPDP consists of a suite of sensors, comprising a proximity Langmuir probe, a Retarding Potential Analyzer and two Deposition sensors (a solar cell and a Quartz Crystal Micro-balance). EPDP performs key measurements to characterize the electric propulsion system and its influence on the spacecraft environment. The total mass of EPDP is 2.3 kg, power = 18 W.
Operation history summary of PPS:-1350-G: 33)
• From a technology point of view, it was the first time that a Hall-effect plasma thruster was used for primary propulsion in a spacecraft mission.
• The electric propulsion system was used in the variable power mode, especially at start-up, but the thruster power used remained close to its maximum (1140 W vs. 1190 W). The average measured thrust over almost 5000 hours was well within the predicted average thrust range (67 mN vs. 65.7-9.1 mN).
• Up to 1.3 million valve activations were counted, with no signs of propellant leakage even though the qualification limit of 1 million cycles was well exceeded. The procedures developed during flight allowed the residual xenon mass in the tank to be reduced from 1.8 kg to 0.28 kg.
• The truster always started at the first ignition pulse on the cathode (844 times). Thus SMART-1 proved this type of hollow cathode developed by SNECMA.
• None of the instrument's performance parameters was affected by the artificial plasma surrounding the spacecraft or by the periodic oscillation of the spacecraft potential.
• In the initial stage of the mission, the main effect on SMART-1 from its environment was on the solar cells, damaged by the protons in the radiation belts. Taking into account the Earth-Sun distance changing with season, the solar array power fell by around 8%, which included the effect of the very intense solar flare of October 2003. The degradation ended after only 2 months, when the perigee altitude rose above 5900 km. The solar array was sized to cover a 12.3% drop in power at 40ºC, and 17.7% at the maximum cell temperature of 100ºC. Most of the time during PPS operation, the cell temperature was around 60ºC.
• From the analyzed EPDP flight data, the artificially generated plasma from the propulsion system had no critical effect on SMART-1. No indication of increased erosion or contamination was found; no surface-charging effects were detected.
• The spacecraft potential was extremely neutral, stable and fully independent of the surrounding natural plasma, including that of the proton and electrons belts. This would have certainly not been the case for a spacecraft without EP and unprotected by a dense, surrounding artificial plasma. Furthermore, the small variations in spacecraft potential are fully understood and exactly correlated to specific thruster operating conditions and solar array attitude with respect to the thruster plume.
• By exceeding its mission objectives, SMART-1 has made a very significant contribution to the promotion of electric propulsion (EP). The impressive results from Europe's first scientific lunar experiments have also helped EP enormously in gaining a larger audience around the world.
• On Nov. 11, 2004, SMART-1 became the first ever mission to escape Earth using electric propulsion, and the first to use it for capture by the gravitational field of another celestial body.
SPEDE (Spacecraft Potential, Electron and Dust Experiment)
SPEDE was jointly developed by FMI (Finnish Meteorological Institute), Helsinki, ESA/ESTEC, IRFU (Uppsala Sweden) and KTH (Stockholm, Sweden). SPEDE consists of two electric sensors mounted on the ends of 60 cm booms. These sensors can be driven either as a Langmuir probe or as an Electric Field probe. The instrument complements the EPDP diagnostic package in monitoring the solar electric propulsion, by measuring potential and induced currents by means of a Langmuir probe accommodated on the tips of the booms. The objective is to measure the energy range of a few tens of eV, with plasma density from 1/10 to 1000 particles/cm3. It also performs cruise science and lunar orbit science by monitoring the space/time variations of the plasma and electron environment, especially coupled to solar wind effects. The mass of SPEDE is 0.8 kg, power = 1.8 W.
RSIS (Radio Science Investigation Series)
RSIS is a set of radio-science investigations conceived by the University of Rome, Italy. RSIS aims at validating the technique of measuring the rotational state of a celestial body from the orbit (in particular the physical librations in latitude) by combining orbit and attitude determination with accurate imaging. RSIS is testing this method on the well-known moon librations making use of the capabilities KaTE Deep-space transponder for precise Doppler and ranging measurements, preparing also for future high precision geodesy and relativity experiment. In addition, RSIS is monitoring the dynamic performance of the electric propulsion system, by precision tracking during thrusting periods.
KaTE (X/Ka-band TT&C Experiment)
KaTE was built by Astrium GmbH and managed by ESA/ESTEC. KaTE is an experimental deep-space telecommunication subsystem operating in the X-band (8 GHz) and Ka-band (32/34 GHz) frequencies (data rate of up to 500 kbit/s from lunar orbit). KaTE demonstrates telecommunication capabilities with superior data rate and high accuracy, it characterizes the Ka-channel and performs experiments of all the key TT&C functions (uplinking commands in X-band, downlinking data in X- and Ka-band, ranging, tracking etc.). A new encoding/decoding technique (Turbo code) is also being tested, and possibly also the operation of VLBI (Very-Large Baseline Interferometry). In addition, KaTE supports the RSIS experiment, thereby permitting the characterization of the electric propulsion. With its high-data rate downlinking capability, KaTE contributes to the transmission of science data from the SMART-1 spacecraft. KaTE has a mass of 6.2 kg, power=28 W. 34)
Note: The KATE technology is essential to future missions like BepiColombo and Solar Orbiter. The Ka-band transponder allows to perform a radio science investigation to monitor both the dynamical performance of the electric propulsion system and to measure the rotational rate state of the moon. In addition, it enables to assess the entire end-to-end X/Ka link for precise Doppler and ranging measurements to prepare future high-precision geodesy and general relativity experiments.
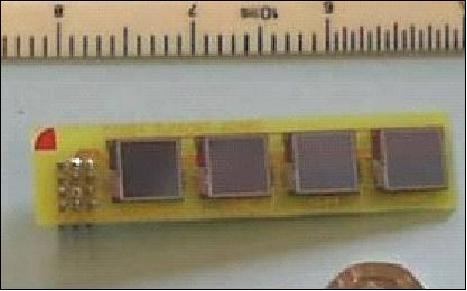
D-CIXS (Demonstration of a Compact Imaging X-ray Spectrometer)
The D-CIXS design was led by RAL (Rutherford Appleton Laboratory) of UK (the D-CIXS team includes members from the University of Helsinki; University of Sheffield; MPAe of Katlenburg-Lindau, Germany; IRF of Kiruna, Sweden; and NOAA of Boulder, CO). The objective is to demonstrate a radically new approach to greatly reduce the mass and volume of the instrument. D-CIXS represents a new generation of X-ray imagers for planetary observation, based on the use of an advanced dual microstructure collimator and X-ray detector technologies. D-CIXS includes also XSM (X-ray Solar Monitor), provided by the Observatory of the University of Helsinki, for absolute calibration and solar X-ray flux monitoring. The D-CIXS instrument images high-throughput fluorescence X-rays from the SMART-1 target object, as a means to carry out spatially resolved material analysis of the moon's surface. Mapping of the composition of the moon, in particular key elements like iron, silicon, magnesium, sodium, carbon, and oxygen with a spatial resolution of 30 km in the energy range from 0.5 to 10 keV. This permits to test formation theories of the Earth-Moon system. D-CIXS provides the first high-resolution global map of moon-surface chemistry and the relative abundances of the major lunar rock types. The instrument mass is 5.2 kg including XSM, power=20 W. 35) 36) 37) 38)
The spectrometer design is based on "swept charge detectors" (SCD), developed by EEV, Chelmsford, UK, and "micro-collimator X-ray optics." Each of the 24 detectors has a 10 mm x 10 mm sensitive area with an energy resolution > 200 eV, they operate at near room temperature and have a higher tolerance to radiation doses than conventional CCDs. The other innovative feature of the spectrometer is its "micro-collimator X-ray optics" which ensures that only X-rays from a single well defined direction reach the detectors. The collimator with its associated filters also rejects solar wind particles and radiated heat from the lunar surface.
Telescope FOV | 12º x 32º |
Detector array, SCD pixel size | 24 SCDs (Swept Charge Detectors), 10 mm x 10 mm |
Quantum efficiency | 40% @ 0.5 keV to 80% @ 5 keV |
Operating temperature | 270 K |
Energy band, energy resolution | 0.5 keV to 10 KeV, 140 eV |
Sampling rate | 50 Hz |
Source data rate | 2.74 kbit/s |
The XSM (X-ray Solar Monitor), covering the spectral range 1-20 keV, is an auxiliary instrument of D-CIXS with the objective to monitor throughout the whole mission duration the X-ray activity of the sun, and to calibrate D-CIXS measurements when it is pointed to a celestial object, and during the final phase of the mission, to the moon. The electronics of the XSM consists of a) pre-amplifier stages, which are identical in the two sensor units, and b) an electronics board in the main D-CIXS instrument box, which includes further stages of the signal processing electronics.
SIR (SMART-1 Infrared Spectrometer)
SIR was designed and built at MPAe (Max Planck Institut für Aeronomie), Katlenburg-Lindau, Germany. SIR is a technology demonstration instrument with the primary objective to space-qualify and to miniaturize an existing, commercially available, small and very low mass near-infrared (NIR) monolithic grating spectrometer (Carl Zeiss, Jena). SIR consists of three basic modules: a) the optics module including the isostatic mount and the radiator; b) the sensor head [0.8 kg including housing sensor, and sensor head printed circuit board (PCB)], attached to the optics box, which contains the spectrometer; c) a separate electronics box located inside the S/C. The highly compact and monolithic grating point spectrometer employs an optical entrance or `slit' for selecting its view of a target source or area, a collimator which focuses the infrared rays into a parallel beam, a grating which disperses the light and a linear array InGaAs detector which sequentially records the incident light, creating a spectrum (detector cooling with a cold finger). The instrument covers the spectral range of 0.9 to 2.4 µm, the spectral resolution is 6 nm, the field-of-view is about 1 mrad (256 channels) providing 300 m spatial resolution at peri-selene (closest approach to the moon in moon orbit). SIR provides the capability of mineral mapping, including olivine, pyroxene, and feldspar detection. The total instrument mass is 2.3 kg, power = 4.2 W. The SIR and AMIE instruments have the same alignment allowing simultaneous and complementary observations. 39)
Parameter | Value | Parameter | Value |
Type of instrument | Grating NIR spectrometer | Spectral range | 0.94 - 2.4 µm |
Spectral resolution | Δλ = 6 nm | Dynamic range | 16 bit |
QE (quantum efficiency) | 0.06 to 0.11 | Angular resolution | 1.11 mrad |
Aperture diameter | 72 mm | Focal length; f-number | 180 mm, 2.5 |
Detector type | Hamamatsu G8180-256W | Nr. of pixels | 256 x 256 |
Integration range | Variable up to 528 ms | Mass, power | 2.3 kg, 4.2 W |
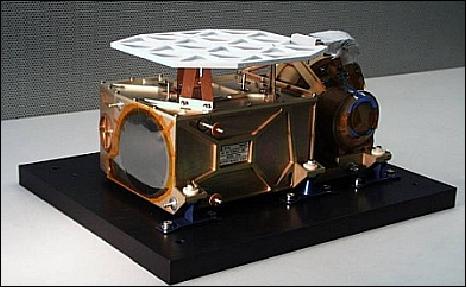
AMIE (Advanced Moon micro-Imager Experiment)
AMIE was developed in the framework of ESA's Technology Research Program in conjunction with CSEM (Swiss Center for Electronics and Microtechnology) of Neuchatel, Switzerland (there are AMIE partners in France, Italy, Finland, and Switzerland). The overall objectives are to study the moon's morphology, topography and surface texture. The specific objectives of the tiny camera are to: a) provide imagery of the lunar south pole (Aitken basin), b) to obtain imagery for the study of the permanently shadowed regions of the moon (ice deposits), c) to investigate eternal light (crater rims), and d) to obtain imagery of high latitudes regions (south) mainly at far side of the moon.

The AMIE micro-imager employs a very compact design, a package of dedicated optics, electronics and mechanical interfaces with a total mass of 2.2 kg and power of 9 W. This feat has been achieved by using new microtechnology in terms of micro-mechanics, micro-optics and 3D-stack packaging. AMIE features a FOV of 5.3º x 5.3º miniaturized multispectral camera with a 4-band fixed filter (0.75, 0.9 and 0.95 µm wideband mineralogical filters, and a 0.847 µm narrow-band filter for LaserLink). At closest orbital distance of 300 km (pericenter), a footprint of 27 km x 27 km is provided. The pixel size for the 1024 x 1024 CCD array is therefore 27 m x 27 m at pericenter. The main system functions are:
• To take images with color information
• To keep image data in a memory buffer
• To perform image processing (data compression, image subtraction)
• To allow the downloading of the images by the OBC (On Board Computer)
The AMIE electronics are composed of:
• A microprocessor board (CSEM) for the instrument management
• A micro DPU (Digital Processing Unit) for data compression
• A S/C interface board.
AMIE is working closely in conjunction with the SIR and D-CIXS instruments. Its infrared filter overlaps and complements the SIR spectrometer (900 nm - 2400 nm) permitting studies of the different lunar rock types. Information obtained by AMIE and D-CIXS helps to establish abundance maps of the elements present on the lunar surface.
In addition, AMIE is supporting three guest experiment/technology demonstrations
• LaserLink experiment: involving the demonstration of acquisition of a deep-space laser link from the ESA OGS (Optical Ground Station), located at the Observatorio del Teide at Tenerife, and validation of advanced atmospheric communication technique (sub-aperturing). The OGS transmitter uses a Ti:Sapphire laser pumped by a 28 W Argon laser. The LaserLink experiment is being performed by pointing the spacecraft's AMIE camera towards the Earth. Apart from a laser line filter which covers a section of the CCD imaging array of the camera, there is no specific LaserLink equipment aboard SMART-1. The aim of the experiment is to prepare for deep-space laser communication link, by demonstrating acquisition of the LaserLink up to lunar distance and to validate a novel beam arrangement in four sub-apertures for mitigating the effect of atmospheric turbulence on the laser beam.
• Measurement of lunar libration in coordination with the radio-science experiment RSIS (Radio Science Investigation Series).
• OBAN (On-Board Autonomous Navigation). OBAN validates navigation algorithms by planetary body tracking. It makes use of the S/C star trackers and of AMIE images. The overall objective is to test navigation algorithms with respect to their workability in a real-mission environment. The OBAN experiment is designed to function in what is termed an `open loop', obtaining all the data an autonomous navigation system would require, but instead of being processed onboard, this information is downlinked to be processed on Earth. The experiment involves the spacecraft looking at certain celestial objects or at `beacons', taking images of them with the AMIE camera. These time-tagged pictures, together with information from the attitude and control system of SMART-1, allows the OBAN ground system to determine the lines of sight to the beacons, and to calculate the precise trajectory. Subsequently all the parameters that would be required to carry out a correction in the spacecraft's course can be obtained. The picture analysis algorithms and computations are rather complex, but the principles of the experiment are those of elemental triangulation geometry. 40)

References
1) A. E. Marini, R. Lumb, G. D. Racca, B. H. Foing, M. Dias-Almeida, "Technology and Science from Earth to Moon: SMART-1 Experiments and their operations," Proceedings of 36th ESLAB Symposium, June 3-8, 2002, ESA/ESTEC, Noordwijk, The Netherlands
2) G. D. Racca, A. Elfving, A. Marini, et al., "SMART-1 mission description and development status", Submitted to Planetary and Space Science, MS-No: PSS 79, October 30, 2000
3) G. D. Racca, G. P. Whitcomb, B. H. Foing, "The SMART-1 Mission," ESA Bulletin 95, Aug. 1998, pp. 72-81, URL: http://www.esa.int/esapub/bulletin/bullet95/RACCA.pdf
4) http://www.esa.int/export/esaMI/SMART-1/
5) M. Alonso, J. De Bruin, D. Milligan, D. Gestal, O. Camino, L. Stagnaro, P. Bodin, "SMART-1 Lunar Mission: Operational Experience with its Automatic Attitude and Orbit Control Subsystem and its Relation with Electric Propulsion system," Proceedings of the 6th International ESA Conference on Guidance, Navigation and Control Systems, Loutraki, Greece, Oct. 17-20, 2005 (ESA SP-606, Jan. 2006)
6) B. H. Foing, G. D. Racca, A. Marini, D. J. Heather, D. Koschny, M. Grande, J. Huovelin, H. U. Keller, A. Nathues, J. L. Josset, A. Malkki7 W. Schmidt, G. Noci, R. Birkl, L. Iess, Z. Sodnik, P. McManamon, "Smart-1 Mission to the Moon: Technology and Science Goals," URL: http://sci2.esa.int/smart1/docs/COSPAR_2002_ASR.pdf
7) P. Rumler, G. Dudley, N. De-Angelis, H. Evans, "SMART-1 Power System Performance after 1.5 Years in Orbit," Proceedings of 7th European Space Power Conference, Stresa, Italy, May 9-13, 2005
8) J.-P. Semerie, G. Dudley, "In Orbit Performance of the SMART-1 Li-Ion Battery," Proceedings of 7th European Space Power Conference, Stresa, Italy, May 9-13, 2005
9) J. Kugelberg, P. Rathsman, P. Bodin, S. Berge, L. Meijer, A. Edfors, A. Mörtsell, S. Grahn, et al., "SMART-1 Operational Concept," Proceedings of the 54th IAC, Bremen, Germany, Sept. 29, - Oct. 3, 2003
10) B. H. Foing, G. Racca, A. Marini, et al., "Status of SMART-1 ESA Mission to the Moon," 31st Lunar and Planetary Science Conference, March 13-17, 2000, Houston, TX
11) P. Rathsman, P. Bodin, S. Berge, J. Kugelberg, S. Grahn, F. Sjöberg, G. Racca, "SMART-1: Development and Lessons Learnt," Proceedings of IAC 2004, Vancouver, Canada, Oct. 4-8, 2004, IAC-04-IAA.4.11.2.06
12) G. D. Racca, L. Stagnaro, "Europe en Route to the Moon: SMART-1 Mission Description and Early Flight Data," Proceedings of the 27th annual AAS Guidance and Control Conference, Breckenridge, CO, Feb. 4-8, 2004, Volume 118, edited by J. D. Chappel and R. D. Culp, ASS 04-067
13) http://www.esa.int/esaCP/SEM2S8WJD1E_index_0.html
14) J. De Bruin, O. Camino, Per Bodin, P. Rathsman, M. Alonso, J. Schoenmaekers, G. Schwehm, B. Foing, D. Gestal, R. Blake, S. Ricken, P. Pardo, J. Fortuno, "SMART-1 Lunar Mission: From Capture to Impact," Proceedings of the 57th IAC/IAF/IAA (International Astronautical Congress), Valencia, Spain, Oct. 2-6, 2006, IAC-06-A3.6.6
15) http://sci.esa.int/science-e/www/object/index.cfm?fobjectid=39723
16) "Earth and an eclipsed Moon," ESA Space Science Image of the Week, 15 July 2019, URL: http://www.esa.int/spaceinimages/Images/2019/07/Earth_and_an_eclipsed_Moon
17) "SMART-1's crash site," ESA, Space Science Image of the Week, 03 September 2018, URL: http://m.esa.int/spaceinimages/Images/2018/09/SMART-1_s_crash_site
18) "A Lunar Pox," ESA Space Science Image of the Week, released on Oct. 5, 2015, URL: http://www.esa.int/spaceinimages/Images/2015/10/A_Lunar_Pox
19) "Craters on the edge," ESA, Sept. 29, 2014, URL: http://www.esa.int/spaceinimages/Images/2007/02/Craters_on_the_edge
20) "A peppering of craters at the Moon's south pole," ESA, released on March 03, 2008, URL: http://www.esa.int/spaceinimages/Images/2014/05/A_
peppering_of_craters_at_the_Moon_s_south_pole
21) http://www.esa.int/SPECIALS/SMART-1/SEM7A76LARE_0.html
22) O. Camino,J. de Bruin, J. Schoenmaekers, P. Rathsman, J. Kugelberg, Per Bodin, "Smart-1 Impact on the Moon - Moon Science, Orbit Reboots and Impact Observations," ESA Bulletin No 131, Aug. 2007, pp. 38-45, URL: http://www.esa.int/esapub/bulletin/bulletin131/bul131e_camino.pdf
23) http://sci.esa.int/science-e/www/object/index.cfm?fobjectid=38067
24) O. Camino, M. Alonso, D. Gestal, J. de Bruin, P. Rathsman, J. Kugelberg, P. Bodin, S, Ricken , R. Blake, P. Pardo Voss, L. Stagnaro, "SMART-1 Operations Experience and Lessons Learnt," Proceedings of the 57th IAC/IAF/IAA (International Astronautical Congress), Valencia, Spain, Oct. 2-6, 2006, IAC-06 B5.3.8
25) B. Foing, "ESA's SMART-1 Mission at the Moon: Highlights of results after one year," Proceedings of the 57th IAC/IAF/IAA (International Astronautical Congress), Valencia, Spain, Oct. 2-6, 2006, IAC-06-A5.P.07
26) G. Racca, B. Foing, and the SMART-1 Project Team, "The SMART-1 Mission," ESA Bulletin No 113, Feb. 2003, pp. 14-21, URL: http://www.esa.int/esapub/bulletin/bullet113/chapter2_bul113.pdf
27) B. Foing, "SMART-1 Instrument Technology, Planetary Science & Exploration," ESA Bulletin No 113, Feb. 2003, pp. 22-27
28) http://sci.esa.int/science-e/www/object/
index.cfm?fobjectid=34201&fbodylongid=1539
29) Per Bodin, Luca Stagnaro, "SMART-1 flight experience: the first European interplanetary mission with electric propulsion system," Proceedings of the 29th Annual AAS GNC 2006 (Guidance & Navigation Conference), Breckenridge, CO, USA, Feb. 4-8, 2006, AAS 06-085
30) D. M. Di Cara, D. Estublier, "SMART-1: An Analysis of Flight Data," Proceedings of IAC 2004, Vancouver, Canada, Oct. 4-8, 2004, IAC-04-IAF-S.4.02
31) M. Prioul, F. Marchandise, P. Dumazert, L. Jolivet, D. Estublier, A. Lazurenko, V. Vial, A. Bouchoule, P. Lasgorceix, L. Albarède, S. Mazouffre, D. Pagnon, P. Echegut, "PPS 1350 Qualification Status and Performances," Proceedings of 4th International Spacecraft Propulsion Conference, Sardinia, Italy, June 2-4, 2004
32) http://www.esa.int/SPECIALS/SMART-1/SEMLZ36LARE_0.html
33) D. Estublier, G. Saccoccia, J. Gonzalez del Amo, "Electric Propulsion on SMART-1 - A Technology Milestone," ESA Bulletin No 129, Feb. 2007, pp. 44-46, URL: http://www.esa.int/esapub/bulletin/bulletin129/bul129e_estublier.pdf
34) http://www.esa.int/techresources/ESTEC-Article
-fullArticle_par-28_1109337137507.html
35) http://sspg1.bnsc.rl.ac.uk/Share/d-cixs.htm
36) M. Grande, et al., "Lunar Elemental Composition and Investigations with D-CIXS X-Ray Mapping Spectrometer on SMART-1," 31st Lunar and Planetary Science Conference, March 13-17, 2000, Houston, TX
37) S. K. Dunkin, M. Grande, et al., "The D-CIXS X-Ray Spectrometer on ESA's SMART-1 Mission to the Moon: Science Objectives," 31st Lunar and Planetary Science Conference, March 13-17, 2000, Houston, TX
38) http://sci.esa.int/science-e/www/object/in
dex.cfm?fobjectid=31415&fbodylongid=861
39) U. Mall, A. Nathues, U. Keller, "SIR - a flexible, compact, low mass, near-infrared spectrometer," Proceedings of SPIE's Remote Sensing Europe, Barcelona, Spain, Sept. 8-15, 2003
40)) "Onboard Autonomous Navigation (OBAN)," ESA, URL: http://sci.esa.int/smart-1/31415-instruments/?fbodylongid=858
The information compiled and edited in this article was provided by Herbert J. Kramer from his documentation of: "Observation of the Earth and Its Environment: Survey of Missions and Sensors" (Springer Verlag) as well as many other sources after the publication of the 4th edition in 2002. - Comments and corrections to this article are always welcome for further updates (eoportal@symbios.space).
Spacecraft Launch Mission Status Sensor Complement References Back to top