SMAP (Soil Moisture Active/Passive)
EO
NASA
Land
Operational (extended)
Launched in January 2015, the Soil Moisture Active Passive (SMAP) mission consists of an imaging radar satellite whose operations are led by the National Aeronautical and Space Administration (NASA), with assistance from the Canadian Space Agency (CSA). SMAP uses radio waves to map soil moisture and determine the freeze or thaw state of the same area.
Quick facts
Overview
| Mission type | EO |
| Agency | NASA, CSA |
| Mission status | Operational (extended) |
| Launch date | 31 Jan 2015 |
| Measurement domain | Land |
| Measurement category | Soil moisture |
| Measurement detailed | Soil moisture at the surface |
| Instruments | L-band Radar (SMAP), L-band Radiometer (SMAP) |
| Instrument type | Imaging multi-spectral radiometers (passive microwave), Imaging microwave radars |
| CEOS EO Handbook | See SMAP (Soil Moisture Active/Passive) summary |
Summary
Mission Capabilities
SMAP carries two instruments, an L-band radar and an L-band radiometer. The L-band radar emits radio waves and receives the reflected radio waves (making up the “active” component). The amount of backscatter is dependent on the amount of moisture in the soil, the more moisture in the soil the more backscatter detected. A similar dependency allows it to detect the freeze/thaw state of an area. Meanwhile, the L-band radiometer exclusively receives radio waves emitted by the Earth’s surface (making up the “passive” component). Warmer objects, such as dry soil, radiate more energy than colder objects, such as moist soil. This energy difference is detected by the radiometer and used to map soil moisture with the assistance of the radar.
Performance Specifications
The L-band radar has a centre frequency of 1.26 GHz, while the radiometer has a centre frequency of 1.41 GHz. SMAP rotates at 14.6 revolutions per minute, allowing for a swath width of 1000 km. The generated soil moisture maps have a spatial resolution of 9 km and freeze/thaw maps have a resolution of 3 km.
SMAP undertakes a sun-synchronous orbit with an altitude of 685 km, an inclination of 98°, a period of 98.5 minutes, and a repeat cycle of eight days. A complete global map of soil moisture and freeze/thaw states can be generated every three days.
Space and Hardware Components
Weighing 944 kg, SMAP was launched onboard a Delta II launch vehicle, manufactured by United Launch Alliance (ULA), from the Vandenberg Space Force Base in the United States.
Radio communications for Telemetry, Tracking, and Command (TT&C) are performed via S-band frequencies with a downlink data rate of 2.5 Mbit/s. Payload data is transferred via X-band at a rate of 130 Mbit/s.
An error was experienced by the SMAP radar in July 2015 and as such, data from the C-band radar instrument aboard the European Space Agency’s (ESA’s) Sentinel-1 constellation is now used as a substitute.
SMAP (Soil Moisture Active/Passive) Mission
Spacecraft Launch Mission Status Sensor Complement Ground Segment References
SMAP is a NASA mission under development within the ESSP (Earth System Science Pathfinder) program. In January 2007, the Panel on Water Resources and the Global Hydrologic Cycle of NRC (National Research Council) released a report "Earth Science and Applications from Space: National Imperatives for the Next Decade and Beyond" in which the SMAP mission was ranked with the highest priority among all proposed missions, and the report recommended it for implementation in the first phase of new missions (2010-2013).
The overall objective of SMAP is to monitor global soil moisture mapping with unprecedented resolution, sensitivity, area coverage, and revisit times. The SMAP instrument concept draws heavily upon the heritage of the Hydros (Hydrosphere State) project which was cancelled by NASA due to budget constraints in late 2005. - As a consequence of the NRC report, NASA/HQ held a two-day workshop on July 9-10, 2007 to evaluate the SMAP mission as defined in the report and to identify the ancillary measurements (if any) required to accomplish mission goals. 1) 2) 3) 4) 5) 6) 7) 8) 9) 10) 11) 12) 13) 14)
Science goals: The SMAP data will help characterize the relationship between soil moisture, its freeze/thaw state, and the associated environmental constraints to ecosystem processes including land-atmosphere carbon, water and energy exchange, and vegetation productivity. Soil moisture is a key control on evaporation and transpiration at the land-atmosphere boundary. Since large amounts of energy are required to vaporize water, soil control on evaporation and transpiration also has a significant impact on the surface energy fluxes. Therefore, soil moisture variations affect the evolution of weather and climate over continental regions. Initialization of numerical weather prediction (NWP) models and seasonal climate models with correct soil moisture information enhances their prediction skill and extends their skillful lead-times.
Equally important are the likely societal benefits to be derived from SMAP measurements. Many of these application areas and the approach to their improvement and modernization are also present in GEOSS (Global Earth Observation System of Systems). The application areas directly addressed by SMAP measurements of soil moisture and freeze/thaw state, acquired globally and at high spatial and temporal resolutions, are as follows (Ref. 2):
1) Weather and Climate Forecasting. Soil moisture variations affect the evolution of weather and climate over continental regions. Initialization of numerical weather prediction and seasonal climate models with accurate soil moisture information enhances their prediction skills and extends their skillful lead times. Improved seasonal climate predictions will benefit climate-sensitive socioeconomic activities, including water management, agriculture, fire, flood, and drought hazards monitoring.
2) Droughts. Soil moisture strongly affects plant growth and hence agricultural productivity, especially during conditions of water shortage and drought. Currently, there is no global in situ network for soil moisture monitoring. Global estimates of soil moisture and plant water stress must be derived from models. These model predictions (and hence drought monitoring) can be greatly enhanced through assimilation of space-based soil moisture observations.
3) Floods. Soil moisture is a key variable in water-related natural hazards including floods and landslides. High-resolution observations of soil moisture and landscape freeze/thaw status will lead to improved flood forecasts, especially for intermediate to large watersheds where most flood damage occurs. The surface soil moisture state is key to the partitioning of precipitation into infiltration and runoff, and thus is one of the major pieces of information which drives flood prediction modeling. Similarly, soil moisture in mountainous areas is one of the most important determinants of landslides. In cold land regions, the timing of thawing (which can be derived from satellite radar measurements) is coincident with the onset of seasonal snowmelt, soil thaw, and ice breakup on large rivers and lakes. Hydrologic forecast systems initialized with mapped high-resolution soil moisture and freeze/thaw fields will therefore open up new capabilities in operational flood forecasting.
4) Agricultural Productivity. SMAP will provide information on water availability and environmental stress for estimating plant productivity and potential yield. The availability of direct observations of soil moisture status and the timing and extent of potential frost damage from SMAP will enable significant improvements in operational crop productivity and water stress information systems, by providing realistic soil moisture and freeze/thaw observations as inputs for agricultural prediction models.
5) Human Health. Improved seasonal soil moisture forecasts using SMAP data will directly benefit famine early warning systems particularly in sub-Saharan Africa and South Asia, where hunger remains a major human health factor and the population harvests its food from rain-fed agriculture in highly monsoonal (seasonal) conditions. In the temperate and extra-tropical latitudes, freeze/thaw measurements from SMAP will benefit environmental risk models and early warning systems related to the potential expansion of many disease vectors that are constrained by the timing and duration of seasonal frozen temperatures. SMAP will also benefit the emerging field of landscape epidemiology (aimed at identifying and mapping vector habitats for human diseases such as malaria) where direct observations of soil moisture and freeze/thaw status can provide valuable information on vector population dynamics. Indirect benefits will also be realized as SMAP data will enable better weather forecasts that lead to improved predictions of heat stress and virus spreading rates. Better flood forecasts will also lead to improved disaster preparation and response.
6) National Security. Information on surface soil moisture and freeze/thaw is critical to ground trafficability and mobility. Weather models also need maps of the soil moisture and freeze/thaw variables to initialize forecasts for low-level fog, aviation density altitude, and dust generation. SMAP soil moisture and freeze/thaw information exceed current capability in terms of resolution, sensitivity, coverage, and sensing depth. Furthermore, radar observations over oceans and water bodies yield information on ice cover at high resolution and regardless of illumination.
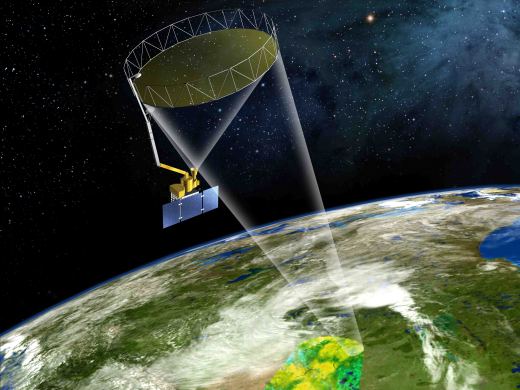
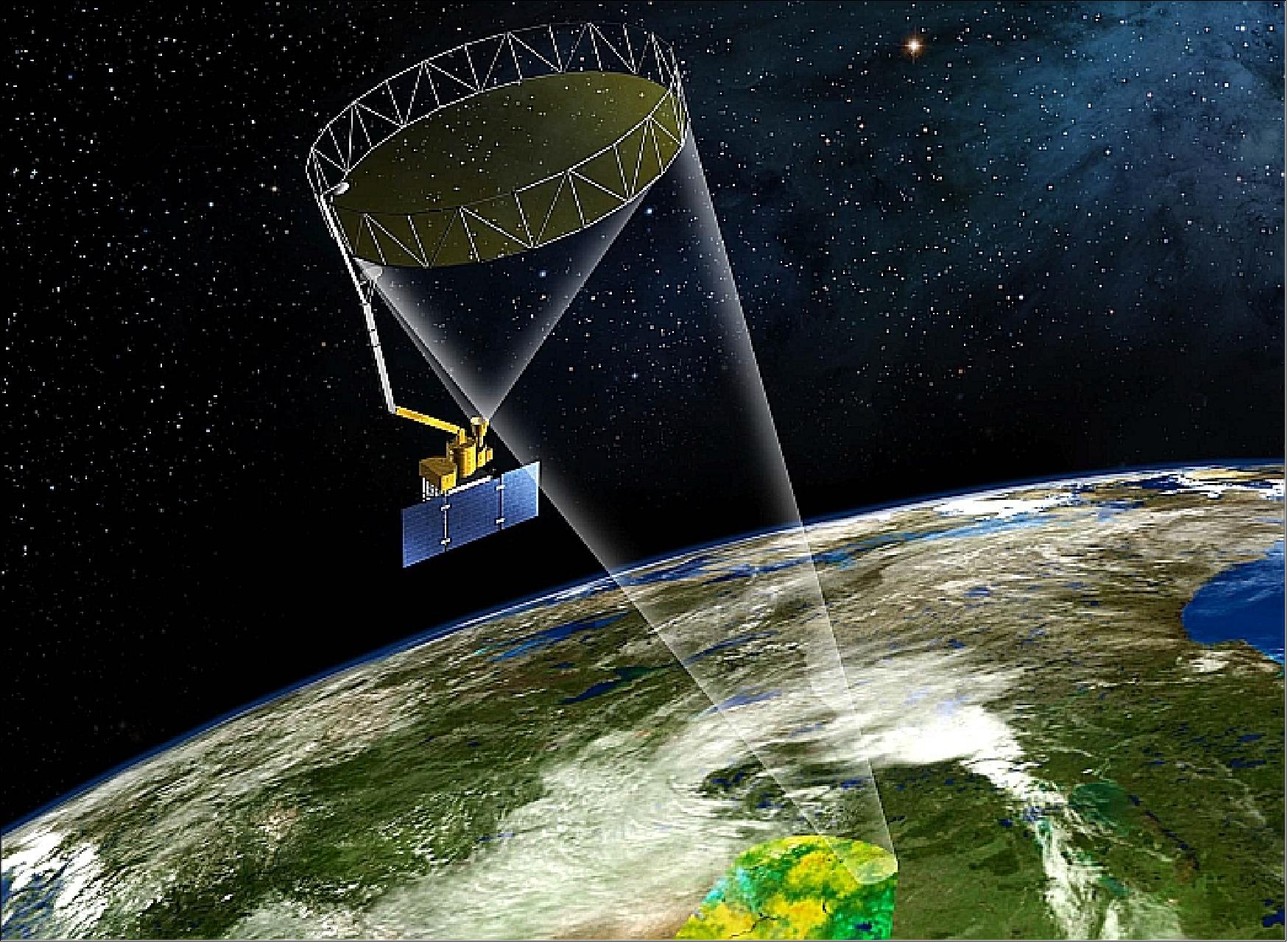
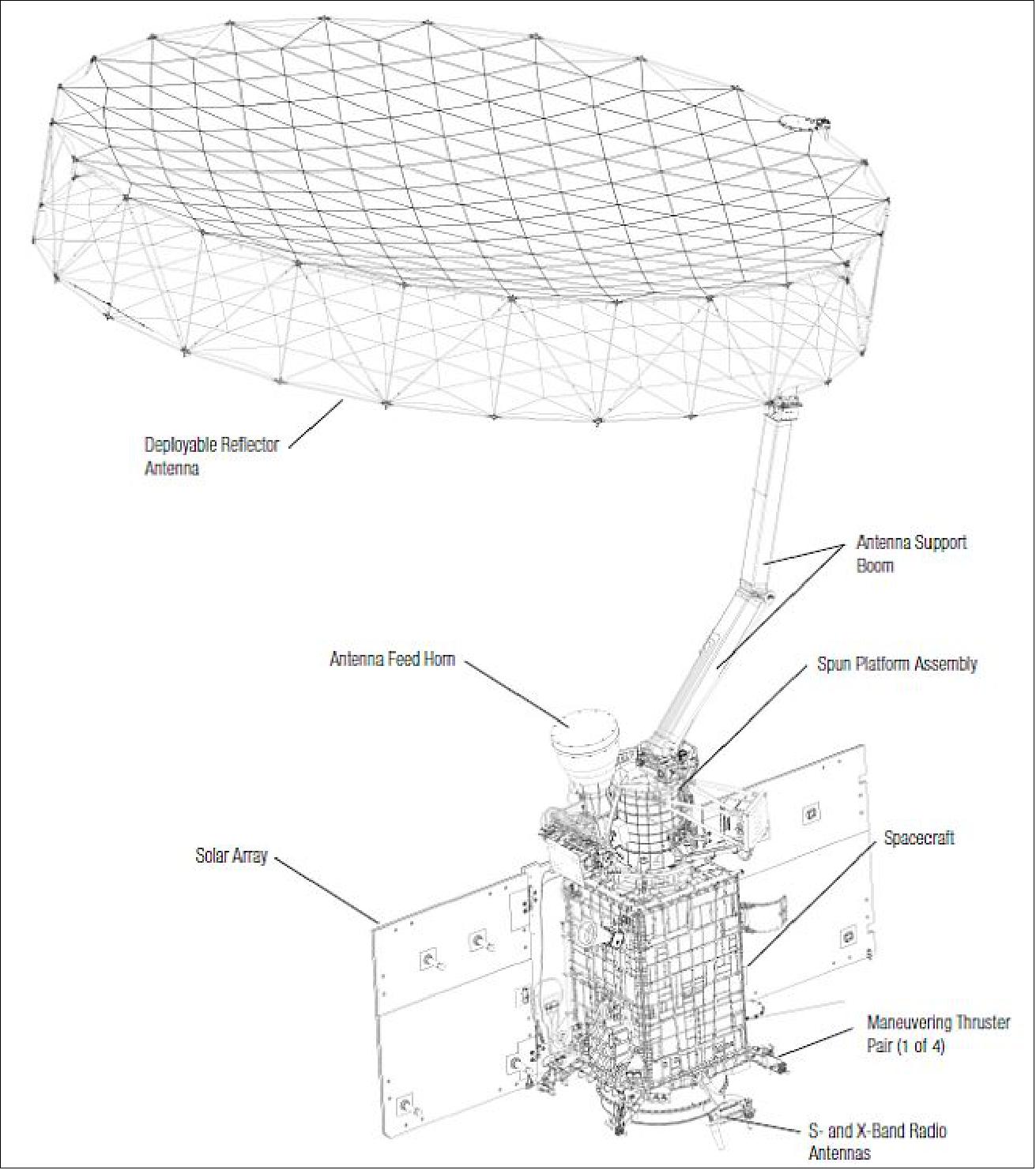
The SMAP mission concept includes an L-band radiometer and an L-band high-resolution radar that share a single feedhorn and parabolic mesh reflector. The radar operates with VV, HH, and HV/VH transmit-receive polarizations, and uses separate transmit frequencies for the H (1.26 GHz) and V (1.29 GHz) polarizations. The radiometer operates with V, H and U (third Stokes parameter) polarizations at 1.41 GHz. The reflector is offset from nadir and rotates about the nadir axis at 13.0 rpm, providing a conically scanning antenna beam with a surface incidence angle of approximately 40º. The reflector diameter is approximately 6 m, providing a radiometer footprint of about 40 km defined by the one-way 3 dB beamwidth.
The SMAP project is managed for NASA by the Jet Propulsion Laboratory (JPL), with participation by the Goddard Space Flight Center (GSFC). SMAP builds on the heritage and risk-reduction activities of the NASA ESSP Hydros mission.
- The SMAP Mission Concept Review was conducted on June 24, 2008. On Sept. 24, 2008, SMAP was formally approved to initiate Phase A.
- The Phase-B of SMAP started in January 2010.
- In 2011, the instrument system has completed the preliminary design review (PDR) stage, and detailed instrument design has begun.
- In May 2012, SMAP successfully passed the Key Decision Point-C (KDP-C) review and is now in Phase C of the mission.
- SMAP succesfully completed its CDR (Critical Design Review) in July, 2012.
- In May 2013, a NASA team at GSFC delivered the SMAP radiometer to JPL where it will be integrated into the SMAP spacecraft along with the L-band radar (SAR) instrument developed by JPL. 15)
Parameter | Scientific measurement requirements | Instrument functional requirements |
Soil moisture | ±0.04 m3 m-3 volumetric accuracy in top 2-5 cm for vegetation water content < 5 kg m-2 | L-band Radiometer (1.41 GHz): Polarization: V, H, U, Resolution: 40 km, Relative accuracy: 1.5 K |
Hydrometeorology at ~10 km | L-band Radar (1.26 GHz): Polarization: VV, HH, HV, Resolution: 10 km, Relative accuracy: 0.5 dB (VV and HH), | |
Freeze/thaw state: | Capture freeze/thaw state transitions in integrated vegetation-soil continuum with two-day precision, at the spatial scale of landscape variability (~3 km). | L-band Radar (1.26 GHz): Polarization: HH, Resolution: 3 km, Relative accuracy: 0.7 dB (1 dB per channel if 2 channels are used), |
| Sample diurnal cycle at consistent time of day (6 hours,18 hours) | Swath Width: ~1000 km from an orbit of 670 km |
| Observation over minimum of three annual cycles | Baseline of three-year mission life |
Why Study Soil Moisture? (Ref. 26)
At any given time, very little of Earth's water is lodged in the top few feet of soil — only about one-thousandth of 1% of the total. Even leaving out the saltwater oceans, soil moisture is still only 0.05% of fresh water. Life could not exist on Earth without water, of course. But why send a mission to space to study this tiny fraction?
Soil is where our food grows, and new measurements from the SMAP mission have the potential to improve forecasts of upcoming growing seasons. Beyond that, better knowledge of soil moisture can improve our forecasts of how prone a region is to flooding or whether a drought might persist. Changes in future water resources are a critical societal impact of climate change, and a scientific understanding of how these changes may affect water supply and food production is helpful for policy makers.
These practical benefits, however, are not the main motivation for SMAP. There are basic scientific questions that turn on knowing more accurately how this tiny percentage of water is distributed on Earth and how it changes throughout the year. A better knowledge of soil moisture is a skeleton key to unlock an improved understanding of three of Earth's important cycles: the cycling of water between the surface and the atmosphere, the cycling of energy from the sun down to Earth and back up into the atmosphere, and the cycling of carbon among plants, the atmosphere and the soil. Soil moisture plays a critical role linking these three cycles. If we can better understand and model these building blocks of the Earth system, we can better forecast how our changing climate will affect them and better prepare for the changes already in store.
Another important question about moisture in soil is whether it is in solid or liquid form, that is, whether the soil is frozen or thawed. The freeze/thaw state of soil is the on/off switch that controls when plants are active and when they are dormant. Because most of Earth's land surfaces are covered by vegetation, the huge global flows of water, energy and carbon from land to the air mostly begin with a minuscule transfer of water from soil into the roots of a plant. Knowing exactly when and where plants are taking up water is an important part of understanding the global cycles.
Linking Earth's Cycles:
Although each of these three intertwined cycles — water, energy and carbon — can be studied individually, nothing that happens on Earth is truly isolated. A process or component may appear to play a major role in one cycle and a bit part in another, but that small role could be just as important for keeping the second cycle stable. Global climate change has taught us that changes to any part of the Earth system can set off a chain reaction that reverberates across many cycles, and that small changes sometimes have unexpectedly large impacts.
Soil moisture is an important participant in the three cycles. Without it, the cycles would have evolved very differently. Understanding the role of soil moisture in each cycle is a critical part of understanding future climate change and preparing to deal with it.
You probably learned about the water cycle in a school science class: Water cycles from the air to the land or ocean surface mainly by rain and snow, and it cycles back from the surface to the air mainly by evaporation. Your teacher may not have mentioned that evaporation cycles not only water but also energy in the form of heat. As cooks know, it takes heat to change water from a liquid to a gas — to bring a pot of water to a boil, for example. That means evaporation is important in Earth's energy cycle as well as its water cycle.
Evaporation, both from bare ground and from plants growing in the ground, is the predominant way that land sheds the solar energy it receives every day. It is the first process to kick in when the ground starts heating up, and it continues as long as there is moisture in soil that can evaporate. Evaporation from soil uses up to half of the total solar energy that falls on land surfaces.
Soil moisture evaporation builds clouds, which temper and moderate Earth's weather and climate. The heat energy that changed soil moisture into water vapor does not disappear. It is what keeps the water molecules moving fast enough that the water stays in a gaseous state. You might say that the energy is "stored" in the water vapor. When the rising water vapor encounters colder air at high altitudes, it condenses back into liquid water to form clouds. During that process, the water throws off the stored heat energy into the surrounding air. The energy warms the high-altitude air and may add to the cloud-building process.
By contrast, in deserts and other places where there is no soil moisture to evaporate, the Earth's surface gets hotter and hotter until it heats the air above it solely by contact, just as your hands get warmer when you hold a cup of hot coffee. The desert air becomes very turbulent, creating high winds and other weather extremes. However, its temperature plummets as soon as the sun goes down. Thus the evaporation of soil moisture protects Earth and makes our home planet more comfortable.
Because most land surfaces are covered with vegetation, most soil moisture evaporation comes not from bare soil but through plants. In photosynthesis, plants use sunlight to synthesize foods from carbon dioxide gas in the air and water that they have absorbed from the soil through their roots. Some water is given off by plant leaves during the process. Scientists call this evaporation from plant leaves transpiration.
For tens of thousands of years, photosynthesis kept Earth's carbon cycle spinning smoothly: animals exhaled carbon dioxide, and plants used it to grow. When humans started burning fossil fuels, however, we began force feeding more and more carbon dioxide into the air. Plants are able to absorb about half of our carbon dioxide emissions through photosynthesis, but we do not know whether they can continue to do so indefinitely. Because water is as essential as carbon for plant growth, understanding its availability is critical to understanding and preparing for our high-carbon future.
Understanding the Role of Northern Forests:
The immense northern forests of Alaska, Canada and Siberia are warming at a faster pace than the mid-latitudes and tropics. Trees take in carbon dioxide in photosynthesis and store it in their leaves and wood, so healthy and undisturbed forests generally remove carbon from the atmosphere. That makes them what scientists call a carbon sink. Global climate change has brought longer growing seasons and higher atmospheric carbon dioxide to the northern forests, and these changes promote faster and more widespread growth. More plant growth of any kind means more carbon dioxide removed from the air, so greening is one of the rare benevolent effects of our warming climate.
However, decaying leaves and wood on the ground and in the soil release carbon back into the atmosphere. Droughts and wildfires can also release enormous amounts of carbon into the atmosphere from dead and burned vegetation. Climate change has also increased the frequency and extent of these events in the high northern latitudes.
It's an open question whether the increasing output of carbon will outpace the increased rate of plant growth, and carbon absorption, over the long term. In that case, the forests will become a source of carbon to the atmosphere rather than a sink.
There are also huge stores of carbon from dead plants and animals locked in permafrost soils — ground that remains frozen for at least two continuous years. Much permafrost has been frozen for thousands of years. But with Arctic warming, more and more permafrost is thawing. Carbon in unfrozen soil can decompose and be released into the atmosphere in the form of the greenhouse gases carbon dioxide and methane. The release could happen slowly or in a giant burst that would further accelerate the pace of climate change.
Knowing the length of time each year that soils remain unfrozen would help scientists understand which of these climate-change-induced shifts will prevail. But the vast extent of the boreal forests has few permanent settlements or even roads, so measurements are very sparse and mostly come from dedicated field campaigns. Ongoing, regular measurements are virtually nonexistent. SMAP's space-based measurement will create a higher-resolution and more complete data set than has ever been available of the timing of the winter freeze and spring thaw.
Improving Weather and Climate Forecasts:
SMAP's goal is not only to improve understanding of the role of soil moisture in the Earth system, but to estimate the quantities of water and energy that are exchanged between the land surface and the atmosphere. These exchanges are critical components for weather and climate models.
Soil moisture's importance in weather forecasting has to do with its persistence. Precipitation and temperature do not linger, limiting their value as indicators of future weather. In other words, if it is raining today, it may or may not rain tomorrow, and a hot day can follow a cold day. By comparison, soil moisture is long-lived. On top of the importance of soil moisture in controlling heating and cooling in the atmosphere through evaporation, its persistence makes it a factor in weather and climate models.
Weather forecasting models all over the world use soil moisture in calculating their forecasts. However, data are so sparse that soil moisture is estimated from other, better quantified data such as temperature and precipitation. This workaround is only moderately accurate. Experiments comparing forecasts made with real soil moisture measurements and with estimates have shown that more accurate soil moisture leads to a more realistic forecast. Similar experiments have shown that soil moisture is also important in forecasting climate for next season and further into the future. Climate models set up with observed soil moisture in the top few feet of soil have proven that the resulting predictions are more accurate than those with less realistic soil moisture.
One intriguing possibility is that soil moisture in one region and season may influence the next season's weather hundreds of miles away. A modeling study has uncovered a possible correlation between rainy Aprils in the Pacific Northwest and dry Julys in the Great Plains. Ongoing, global measurements will help clarify this and other possible links.
There is a third, intermediate kind of modeling that falls between short-term weather forecasts and long-range climate predictions: seasonal outlooks of specific quantities such as water availability and drought or flooding potential. Soil moisture measurements will have considerable impact on these outlooks.
Improving Flood Prediction and Drought Monitoring:
Increasingly, scientists say we are in for more, and more extreme, floods and droughts as average global temperatures rise. However, it is hard enough to predict accurately where and how much rain will fall next week. Forecasting next season's rainfall is even harder. A data set that can improve the prediction of floods and droughts offers tremendous societal and economic value. SMAP's measurements have the potential to do just that.
We think of floods as the result of too much rain, but that is only part of the story. If soil is dry, it can soak up a heavy rain like a sponge. Soil that is already saturated, however, cannot absorb more moisture. Frozen ground also is unable to absorb much water from rain or snowmelt. A rainstorm that would cause no problem falling on dry soil will create a devastating flood if it falls on sodden or frozen terrain.
When, where or whether a flood occurs depends on weather conditions that cannot be known very far in advance. For this reason, hydrologists forecast an area's long-range flood potential rather than forecasting specific floods. SMAP's measurements of freeze/thaw timing and soil moisture will increase their understanding of flood potential, enabling them to make better-informed decisions about matters such as the amount of water to retain in reservoirs.
Moving to the opposite end of the water availability spectrum, SMAP's measurements can also help with monitoring droughts. Agricultural drought — the lack of adequate soil moisture where plant roots need it — can occur even in the absence of a widespread, ongoing shortfall in precipitation, and because of the persistence factor mentioned above, it can linger long after regional rainfall returns to normal. An improvement in our ability to monitor and forecast agricultural drought could help improve famine early warnings in the most food-insecure countries of the world.
Spacecraft
The radar and spacecraft have been developed in-house at JPL, leveraging previous Earth mission radar experience and adapting power and avionics elements from a recent JPL planetary mission. The radiometer is being developed at GSFC leveraging previous Earth mission radiometer experience. Mission operations and science data processing will be conducted by JPL with GSFC support.
The spacecraft design was developed concurrently and synergistically with the instrument to reduce overall observatory complexity and therefore, development effort. The spacecraft development addressed the unique challenges associated with instrument accommodation and implementation approach. Planetary avionics from a previous JPL mission were adapted to support SMAP's high data volume and data rates, and also to support the high degree of functional integration between the instrument and spacecraft.
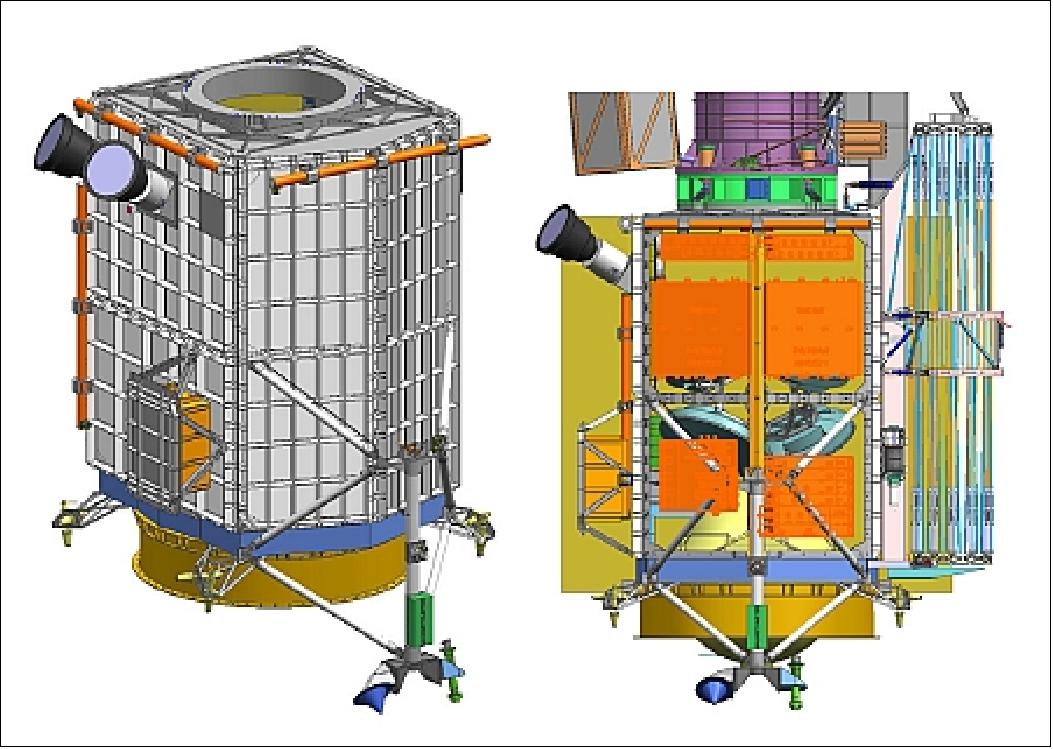
In addition, the spacecraft was required to maintain compatibility with several launch vehicles including the Minotaur -4+, Atlas V, Falcon 9, and most recently the Delta-2 until relatively late in the design lifecycle without slowing the development or delaying the launch ready date (the Delta-2 was selected by NASA for SMAP at CDR-time). From the spacecraft and observatory packaging and volume standpoint, a key challenge was packaging the RBA (Reflector Boom Assembly) within the most constraining vehicle: Minotaur IV+ with the 2.34 m fairing. Designing for electromagnetic compatibility was also a challenge given the sensitivity of the instruments (and especially the radiometer) to L-band emissions. The RBA and SIA (Spun Instrument Assembly) also posed a challenge to the spacecraft's pointing control design. This also posed a challenge for the fault protection design, primarily to ensure that minor faults do not result in a spin down of the observatory with the additional loss of science observation time that would impose (Ref. 97).
The key challenge for the Observatory configuration is in meeting the needs of the science and the supporting subsystems (many of which have stringent demands as well) and ensuring that the spacecraft could meet all operational, pointing, environmental, and launch vehicle requirements. A major trade for the mission design is deciding "what spins". One approach is to spin the entire Observatory, while another approach is to spin just the instrument (Ref. 12). 16) 17) 18) 19) 20)
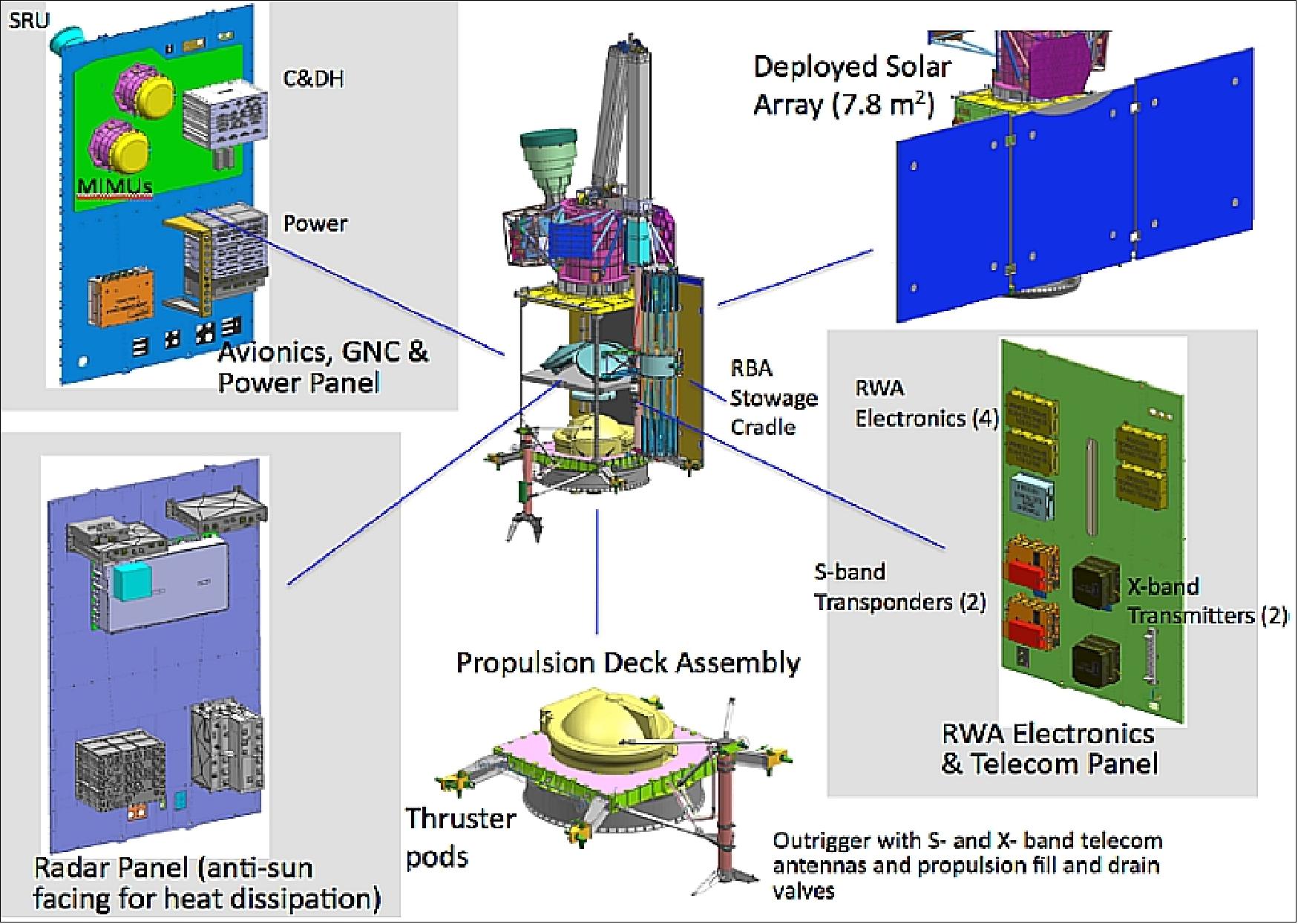
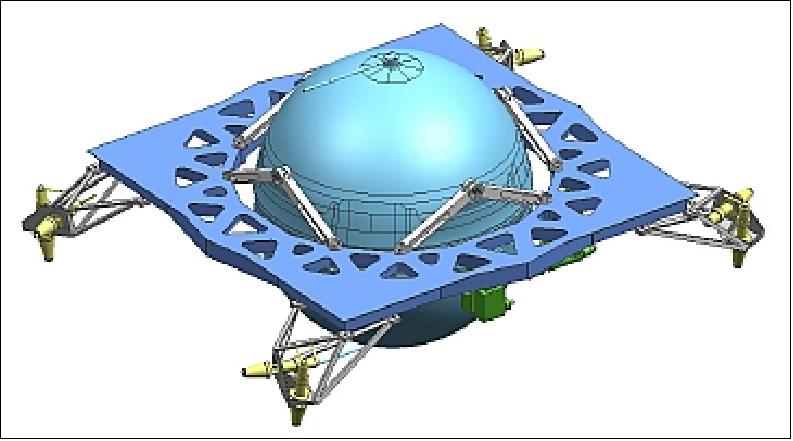
The spacecraft is three axis–stabilized and employs momentum compensation via reaction wheels to accommodate the angular momentum of the spinning instrument. The spacecraft has an aluminum primary structure with a zenith deck provided for mounting the SIA and an anti-sun facing panel for mounting the radar electronics. The bus structure of the spacecraft bus employs a pentagonal box shape (size of 1.5 m x 0.9 m x 0.9 m) with internal components, including a semi-permanent frame structure with removable panels. Removable panels are organized by subsystem and serve as thermal radiators. The structure uses aluminum and aluminum honeycomb construction.
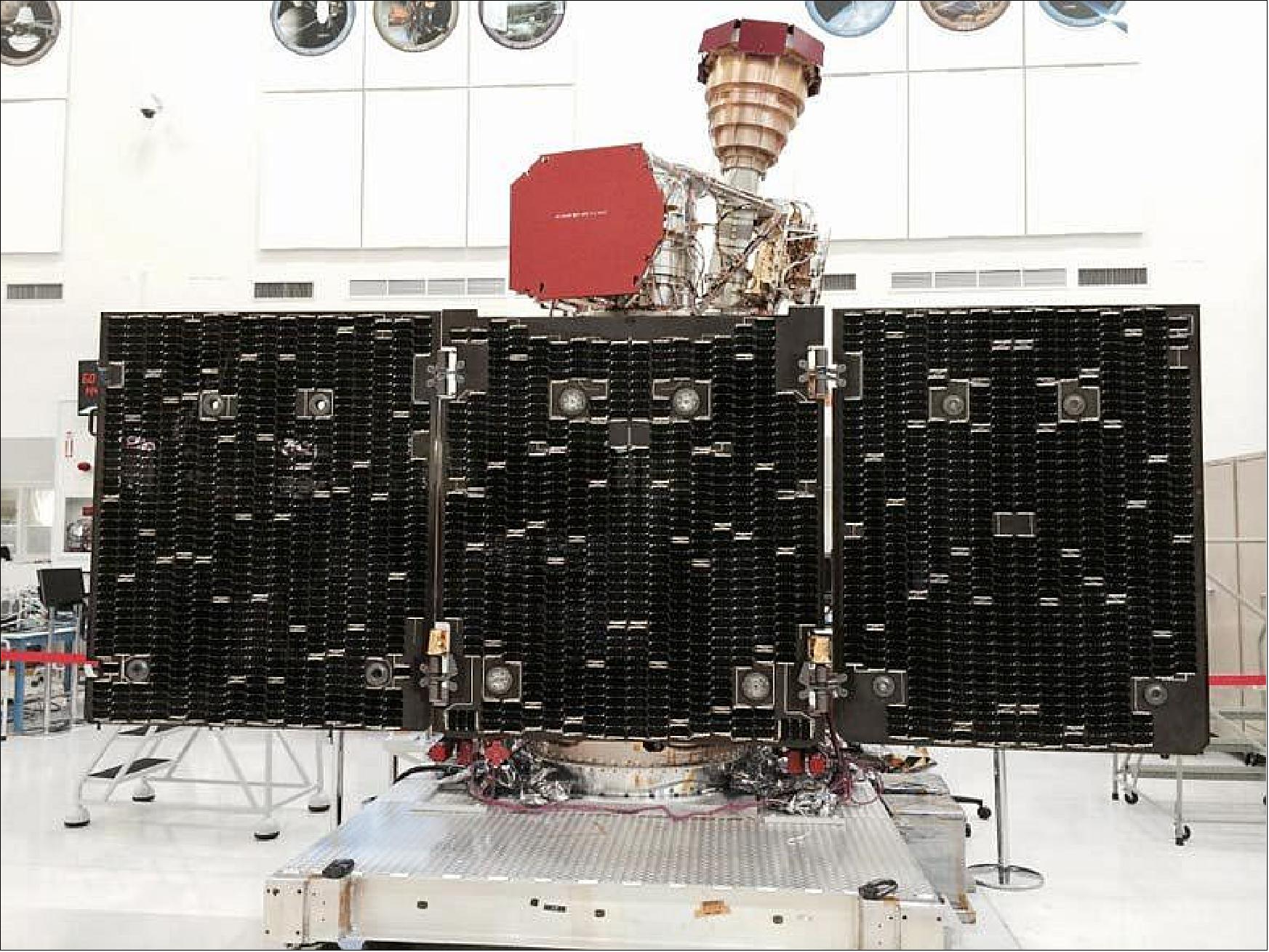
A modular design for accommodating subsystems, each on a panel, provides for ease of integration (Figure 2). A deployable, fixed solar array with three panels is utilized as the primary power source and provides about 1400 W for the observatory. Spacecraft batteries have a total 74 Ah capacity using Li-ion small cell chemistry based on NASA Aquarius/Argentina's/CONAE Satélite de Aplicaciones Científicas-D (Satellite for Scientific Applications or SAC-D) and Kepler spacecraft heritage.
SMAP spacecraft avionics and power electronics leverage a JPL planetary heritage design based on the commercial RAD750 flight computer and PCI (Peripheral Component Interconnect) bus architecture for the C&DH (Command and Data Handling) subsystem , 1553 data bus as the observatory command and telemetry backbone, built-to-print design for telecommunication and instrument interfaces, power bus architecture (including power converters, switches, and pyro-firing circuits) for the Power and Pyrotechnic subsystem, as well as the control electronics for the Reaction Control System (thrusters and latch valves). A small number of new capabilities were added, including a 128 GB NVM (Non-Volatile Memory) capable of accommodating much larger science data storage volumes and transmission rates (130 Mbit/s downlink rate vs. 6 Mbit/s typical for planetary missions' maximum X-band downlink rate), new engineering interface control, a high-capacity solar array interface, and a new power bus controller.
The ACS (Attitude Control Subsystem) employs high-heritage, flight-proven attitude sensors and control mechanisms. Attitude knowledge is provided by a star tracker and 12 sun sensors, which also support safing and attitude reinitialization. Redundant inertial measurement units propagate attitude knowledge between stellar attitude updates. Three large reaction wheels, with a 4th wheel used for momentum compensation, maintain momentum balance between the spacecraft and the SIA and counteract any disturbance torques. Three magnetic torque assemblies are used to manage the reaction wheel momentum and are controlled based on on-orbit magnetic field information from a single 3-axis magnetometer. Orbit position is determined via two-way Doppler tracking and propagated on-board the spacecraft.
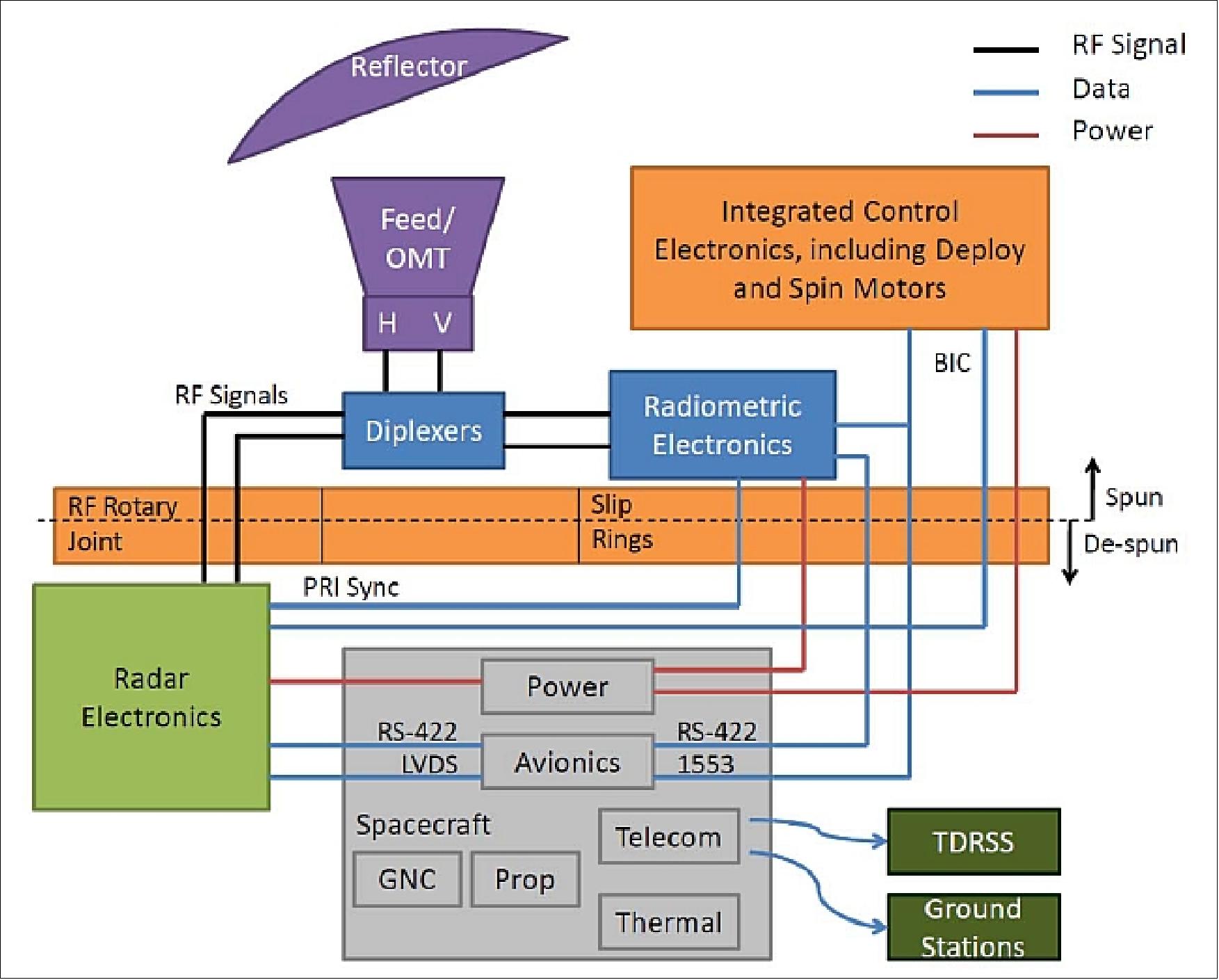
The SMAP mission is composed of three elements – the instrument system, the spacecraft bus system, and the ground system. Together, the instrument and the spacecraft bus form the observatory, which collects information and relays it to the ground. The observatory has one portion that is 3-axis stabilized and one portion that will spin at 13 revolutions per minute. 21)
The spacecraft is responsible for avionics [including C&DH (Command and Data Handling) as well as FSW (Flight Software )], GNC (Guidance Navigation and Control), propulsion, communication to the ground and to the instruments, thermal maintenance of the de-spun portion, propulsive maneuvers, and power.
The thermal subsystem is based on a passive design. MLI coverage is optimized for survival heater power and ability to reject electronic heat. Heaters may be added as needed. The battery is thermally isolated from the supporting radiator panel, externally mounted, with dedicated radiator/MLI/heaters.
Propulsion subsystem: The monopropellant (hydrazine) propulsion subsystem employs a blow-down design. All components and processes have flight heritage, and include single titanium, diaphragm propellant tank (ROCSAT design made by ATK), eight 4.5 N monopropellant thrusters identical to MER & MSL cruise stage, redundant latch valves and pressure transducers. One of the key requirements for the thermal aspects of propulsion is to meet all range safety requirements.
RF communications: The subsystem is composed of redundant S-band transponders for uplink/downlink command and telemetry functions to the NASA Earth Network and Space Network (single access mode). The transponder provides for coherent Doppler tracking to support orbit determination. The high rate X-band data downlink is provided by redundant X-band transmitters (8 W output). The telecommunication antennas are mounted on a fixed (nondeployable) outrigger at the nadir end of the spacecraft. The payload downlink is in X-band at 130 Mbit/s, the TT&C data link is in S-band at 2.5 Mbit/s.
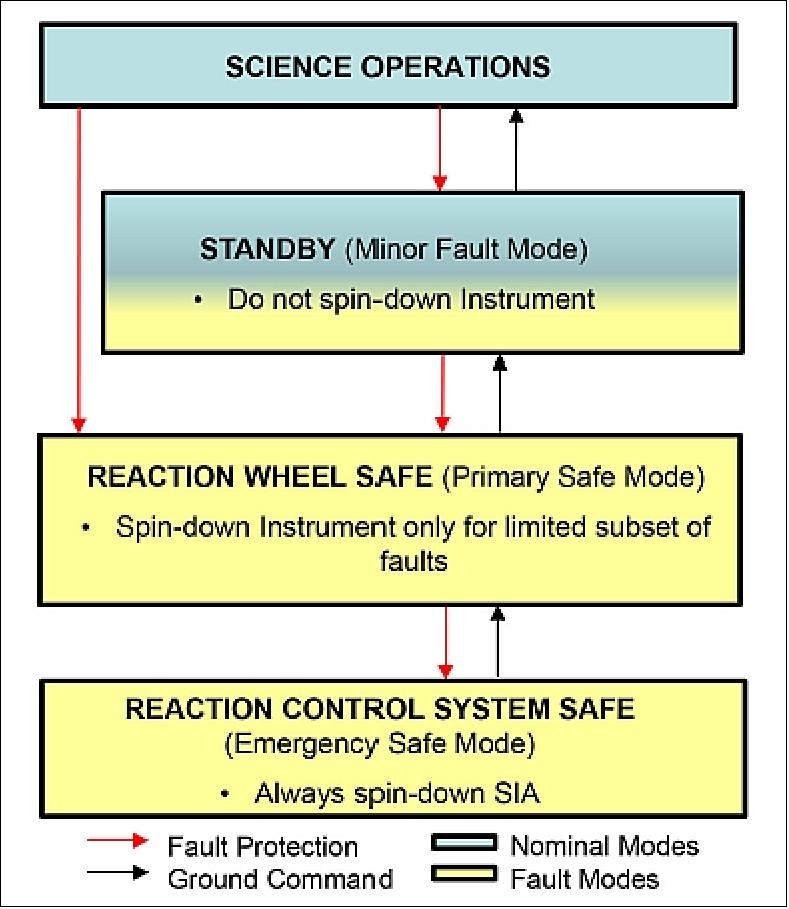
SMAP uses a single-string architecture with selective redundancy. Graceful degradation features have also been designed into the observatory where practical. The transponders, transmitters, and IRUs (Inertial Reference Units) are redundant. Propulsion latch valves are mounted in parallel for redundancy and all the thrusters are placed on a single branch. The reactions wheels are oriented and sized so that a failure in an individual wheel can be tolerated. Each magnetic torque assembly is internally redundant (via redundant windings) and magnetic field information can be provided via a ground-based model in the case of a magnetometer failure. Survival heaters and many instrument slip rings are redundantly wired. All actuators include redundant windings.
Particular attention has been paid to fault protection design to reduce the likelihood and mission impact of specific faults and also to minimize the number of fault events that cause the instrument to despin. The observatory is designed to robustly and autonomously recover attitude following the momentum change associated with a despin, but the return to science operations is a longer process resulting in undesirable science data loss. For this reason, the instrument remains spinning for all but the most severe faults (Figure 6).
System | Mass | Power |
SMAP instrument | 356 kg | 448 W |
Spacecraft (dry) | 686 kg | 903 W |
Propellant | 81 kg |
|
Total | 1123 kg | 1351 W |
Launch
The SMAP spacecraft was launched on January 31, 2015 (14:22:00 UTC) on a Delta-2 7320-10C vehicle from VAFB, CA. 23) 24)
- The SMAP spacecraft arrived at VAFB in October 2014. 25) 26)
- NASA contracted ULA (United Launch Services LLC) in July 2012. 27)
Orbit: Sun-synchronous dawn/dusk orbit, altitude = 685 km, inclination = 98º, period = 98.5 minutes, LTAN (Local Time of Ascending Node) = 18:00 hours, exact repeat cycle = 8 days after 117 orbits, (near-global coverage of Earth can be obtained every three days, 44 orbits). — The radar data will provide the freeze/thaw measurement with 3 km spatial resolution at an interval of every two days for each location north of 45º north latitude — about the latitude of Minneapolis.
Secondary (Auxiliary) Payloads
ELaNa X (Educational Launch of Nanosatellite X), which consists of three P-PODs (Poly Picosatellite Orbital Deployers) containing a total of four CubeSats (representing three CubeSat missions). The three CubeSat projects on ELaNa X include (Ref. 26): 28)
• GRIFEX (GEO-CAPE ROIC In-Flight Performance Experiment), a 3U CubeSat flight test experiment and a collaborative mission of the University of Michigan with NASA ESTO (Earth Science Technology Office) and JPL (Jet Propulsion Laboratory.
• ExoCube,a space weather nanosatellite (3U CubeSat) developed by the California Polytechnic State University (Cal Poly), San Luis Obispo. The payload is developed by NASA/GSFC.
• FIREBIRD-2 A and B (Focused Investigations of Relativistic Electron Burst Intensity, Range, and Dynamics), each a 1.5U CubeSat collaborative mission of the University of New Hampshire, Montana State University, LANL (Los Alamos National Laboratory), and the Aerospace Corporation.
Orbit of secondary payloads: The CubeSats will be deployed after separation of the SMAP (Soil Moisture Active Passive) observatory, into an elliptical orbit of 440 km x 670 km of 99.12º inclination.
Mission Status
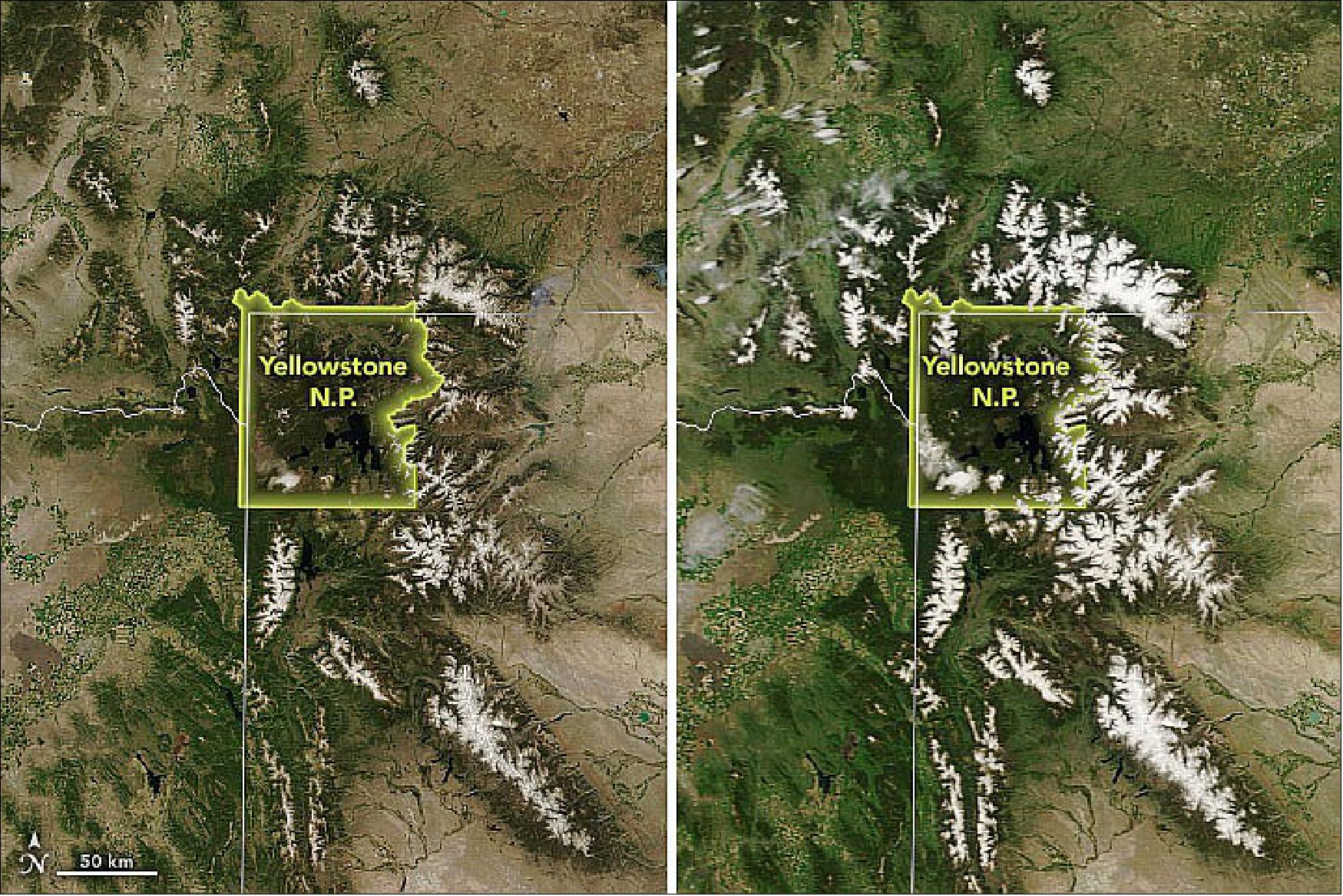
• June 23, 2022: This year has been historic for Yellowstone National Park in more ways than one. Founded in 1872, America's first national park is celebrating its 150th anniversary. It also experienced historic flooding, with rivers cresting at heights not seen in 100 years. 30)
- In the second week of June 2022, an atmospheric river—a narrow band of tropical moisture—soaked the Pacific Northwest before dumping several inches of rain on northern Wyoming and southern Montana. The inundation coincided with a warm spell that exacerbated melting of the heavy snowpack.
- "This led to flooding rarely or never seen before across many area rivers and streams," according to the National Weather Service (NWS) in Billings, Montana.
- On June 13, park officials closed Yellowstone—which spans 2.2 million acres (8,900 km2) in northwest Wyoming, southwest Montana, and eastern Idaho—and announced the evacuation of more than 10,000 visitors due to safety concerns. Campsites were flooded, roads were washed out, and rocks tumbled onto roadways.
- Between June 10 and 13, the Absaroka and Beartooth ranges received between 0.8 and 5 inches of rain, which combined with 2 to nearly 5 inches of snowmelt, according to the Billings NWS. The combined rain and snowmelt, equivalent to 4 to 9 inches (10 to 22 cm) of rain, flowed over already damp soils.
- The runoff deluged the Yellowstone, Stillwater, and Clarks Fork rivers and their tributaries. At Corwin Springs, north of Gardiner, Montana, the Yellowstone River crested at 13.88 feet on June 13, 2022, breaking the previous record of 11.5 feet set on June 14, 1918. A record river discharge of 51,400 cubic feet per second was also measured that day, breaking the previous record-high flow of 32,200 cubic feet per second in 1996, according to U.S. Geological Survey stream gauges.
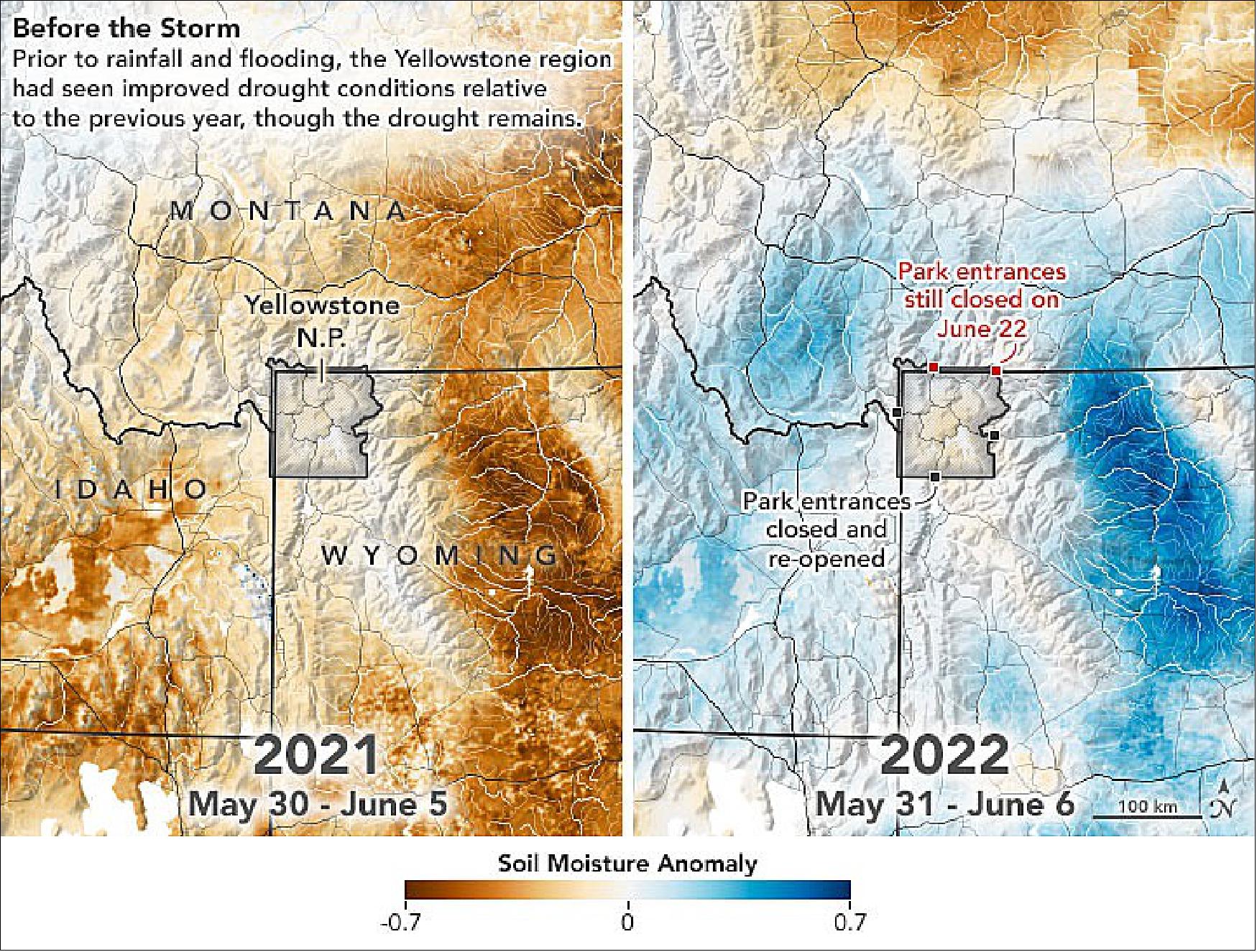
- North of the park, Gardiner and Cooke City were isolated by the rising floodwaters, which washed-out roads and bridges, swept away multiple houses, and flooded hundreds more. Rock Creek took out several bridges and flooded businesses in the historic downtown of Red Lodge, Montana. The flooding also caused power outages and compromised drinking water supplies in several towns.
- The northern part of the park, where the river flows through steep canyons, suffered the most damage as the Yellowstone River cut a new course. The road between Gardiner and the park headquarters near Mammoth Hot Springs, a main supply route into the park, was washed out and it is expected to take months to repair.
- The southern part of the park saw less damage from the flooding. On June 22, 2022, the west, south, and east entrances were re-opened along with the southern loop road, giving visitors access to Old Faithful. The north and northeast entrances to the park are closed indefinitely.
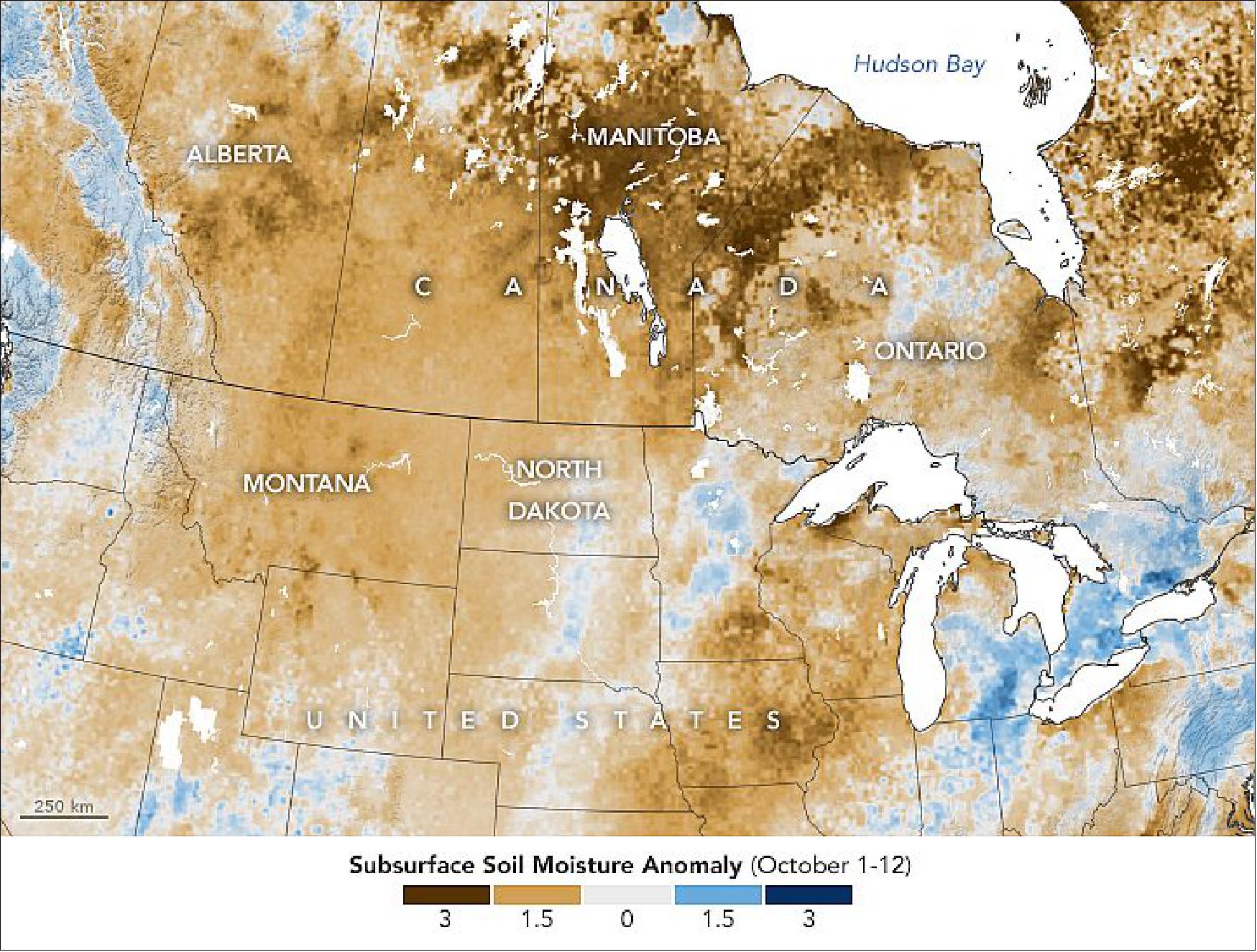
• October 19, 2021: Decades of drought across the U.S. Southwest has led some scientists to classify the intense, prolonged dryness as a "megadrought." But drought in North America took a different shape in 2021, affecting areas that do not face long-term or intense drought as often. The northern Great Plains has been coping with drought for months. 31)
- According to the U.S. and Canadian drought monitors, "extreme" drought first took hold in North Dakota and Manitoba in mid-March 2021. By summer, extreme and "exceptional" drought (the worst classification) had spread to parts of Montana, Minnesota, Alberta, and Saskatchewan. Recent autumn rainfall has lessened the impact in some areas, but for the most part soils remain parched.
- Drought in the northern Great Plains can affect the production of crops, as well as forage for livestock. When assessing drought and its potential to affect agriculture, scientists look at a wide range of indicators such as precipitation, temperature, evapotranspiration, and how much moisture is held in the soil.
- "Earth observation data can tell us a lot about environmental conditions that impact agricultural production fairly early in the growing season, and of course throughout," said Mary Mitkish, assistant manager for NASA Harvest, an applied sciences program advancing the use of Earth observations for agriculture and food security. "By combining satellite data with weather and other datasets, we can thoroughly monitor crop conditions and anticipate expected impacts on production."
- One of those indicators—soil moisture—is shown in the map above. Specifically, the map shows soil moisture anomalies; that is, how the water content in the top meter (3 feet) of soil from October 1-12, 2021, compared to normal conditions for the time of year. This layer of soil, called the "root zone," is the most relevant layer for agriculture. Too little water here can prevent seed germination or stunt plant growth.
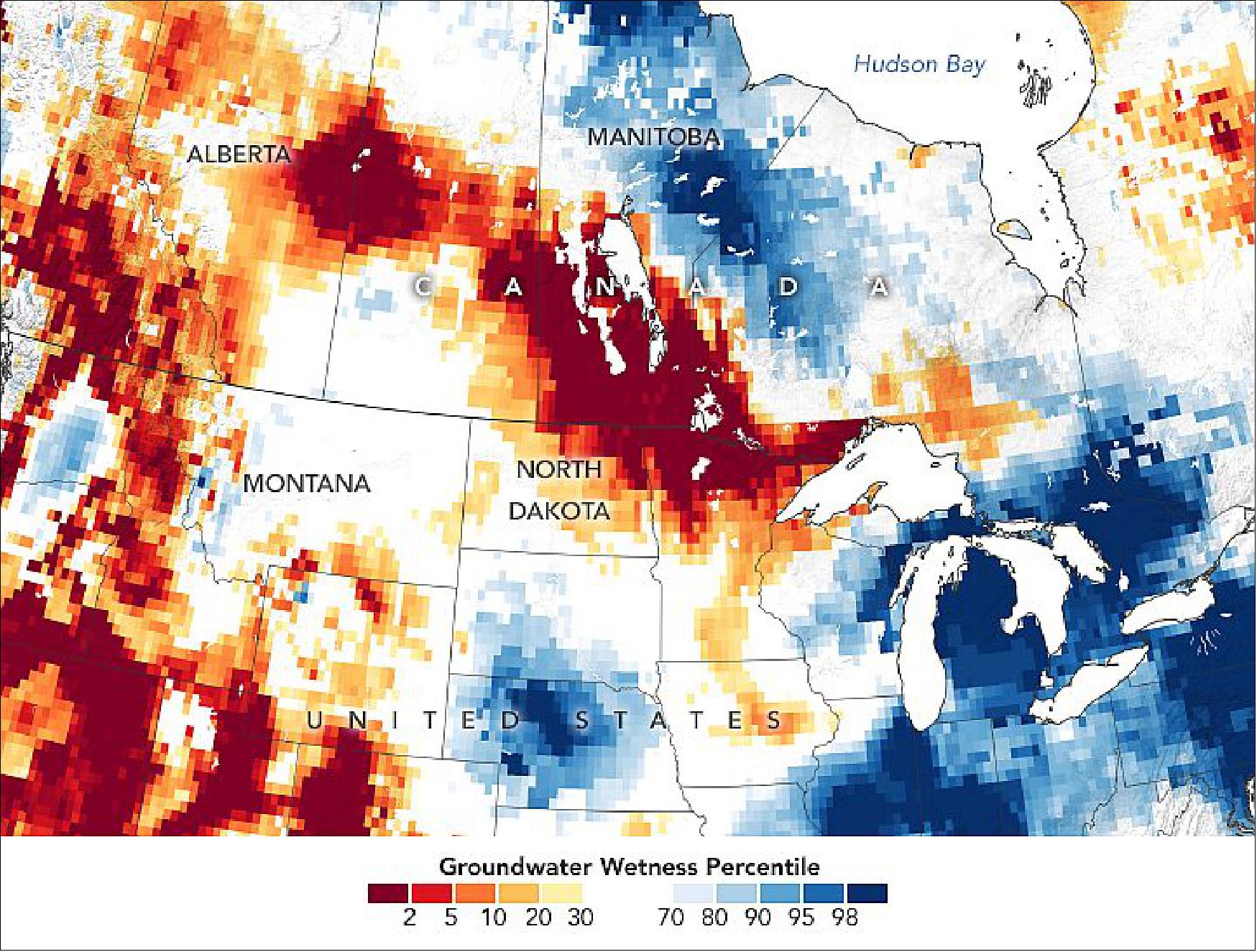
- The Canadian Drought Monitor reported that by the end of September, 67 percent of Alberta was in moderate to severe drought, including 97 percent of the province's agricultural land. Sixty-four percent of Saskatchewan and 43 percent of Manitoba were in moderate to exceptional drought, encompassing 100 percent of the agricultural land in both provinces. High temperatures and a lack of rain throughout the summer led to low yields of crops, especially wheat. Reduced feed for livestock has led some ranchers in the Canadian Prairies to cull their herds.
- In the United States, drought throughout the summer also hit hard in areas growing spring wheat, which is harvested from late summer to early fall. USDA crop reports indicate that in mid-August—around the most critical time for spring wheat—crop conditions were mostly fair to very poor in the Dakotas, Montana, and Minnesota.
- Soils in parts of Iowa and Wisconsin also appeared to be unusually dry. Still, in early autumn, the condition of corn crops was mostly good to fair.
- It remains to be seen how the ongoing drought will affect yields of winter wheat, which is planted in autumn and harvested in spring. Entering autumn, almost half of the winter wheat crops grown in the U.S. were still facing drought.
• March 8, 2021: Farmers, researchers, meteorologists, and others now have access to high-resolution NASA data on soil moisture, thanks to a new tool developed by the U.S. Department of Agriculture (USDA)'s National Agricultural Statistics Service (NASS), NASA and George Mason University. 32)
- The app, Crop Condition and Soil Moisture Analytics (Crop-CASMA), provides access to high-resolution data from NASA's Soil Moisture Active Passive (SMAP) mission and the Moderate Resolution Imaging Spectroradiometer (MODIS) instrument in an easy-to-use format. Soil moisture data are critical for professionals in the agriculture and natural resources sectors who use soil moisture in tandem with other data to plan crop planting, forecast yields, track droughts or floods, and improve weather forecasts. Crop-CASMA is available for free online at https://cloud.csiss.gmu.edu/Crop-CASMA/.
- The tool provides more thorough spatial coverage and consistency than other soil moisture measurement methods, said Rajat Bindlish, a research associate in Earth science remote sensing at NASA's Goddard Space Flight Center in Greenbelt, Maryland.
- "Soil moisture is a very important piece of information for agricultural yield and productivity," said Bindlish. "This will provide a means of using NASA remote sensing data to guide predictions of moisture conditions and water availability. Information on the field conditions is important for agricultural operations."
- Some of Crop-CASMA's primary users will be USDA NASS researchers and statisticians, who release weekly Crop Progress Reports that currently classify states into moisture categories (very short, short, adequate, surplus) to aid farmers and farm managers. The reports also track crops' health and growing progress.
- USDA researchers and statisticians will incorporate the tool into applications from spotting flooded fields to identifying conditions that might prevent planting, said NASS Spatial Analysis Research lead Rick Mueller.
- "There are also challenges deriving early season crop estimates," Mueller said. "Early in the growing season before crops emerge, traditional remote sensing methods do not work for identifying planted crop type. Crop-CASMA can help identify areas that could not be planted because of wet, saturated, frozen, excessively dry, or inaccessible fields."
- In addition to supporting agricultural operations, it will enable research into sustainability and the impact of extreme weather events, Mueller said. "These satellite-derived vegetation condition indices and soil moisture condition maps show firsthand the ever-changing landscape of U.S. agriculture."
- The tool is formatted to be accessible to private users, including farmers, researchers, and students, said Crop-CASMA project leader Zhengwei Yang, a USDA geographer and co-investigator of the High-Resolution Soil Moisture Development Project. This work was supported by NASA Applied Sciences' Earth Science Division's Western Water Applications Office (WWAO), part of the Applied Sciences Program, and the NASA Terrestrial Hydrology Program.
- "We created an easy-to-use interface, so you don't need any technical background to use it," said Yang. "There's a tool to select an area and create a map you can save as a PDF, and you can also download data from the web to input into your model."
- The SMAP data that are the foundation for Crop-CASMA are from the topsoil and root zone levels, or from the surface to roughly 3 feet (1 meter) underground. Raw SMAP data have a 36-kilometer (roughly 20-mile) spatial resolution, meaning each data "footprint" is about the size of a county. The team also developed a data analysis method to estimate a higher-resolution soil moisture product using SMAP and land surface data, giving users information at 1-kilometer (0.62-mile) resolution.
- Having the data in finer resolution allows users to more accurately pinpoint areas of high or low moisture, said Yang.
- "Our current reports are at the state level," Yang said. "One state may be categorized on average as ‘wet,' but the whole state might not actually be wet. For instance, one area of a state might be wet, while another might be dry. These new data deliver localized moisture readings – this is what matters to the farmer."
- Crop-CASMA was developed in cooperation with the Center for Spatial Information Science and Systems (CSISS) at George Mason University, NASA's Goddard Space Flight Center, and NASA's Jet Propulsion Laboratory. JPL manages the SMAP mission for NASA, and Goddard produces the SMAP 9-km root zone and 1-kilometer surface soil moisture products. Hosted and maintained by the CSISS, the online tool is operated by NASS's Research and Development Division.
- "Having the SMAP soil moisture data going directly to the users at NASS realizes one of the key goals of the mission," said Simon Yueh, SMAP project scientist at JPL. "A strong collaboration between NASA and USDA has made this possible."
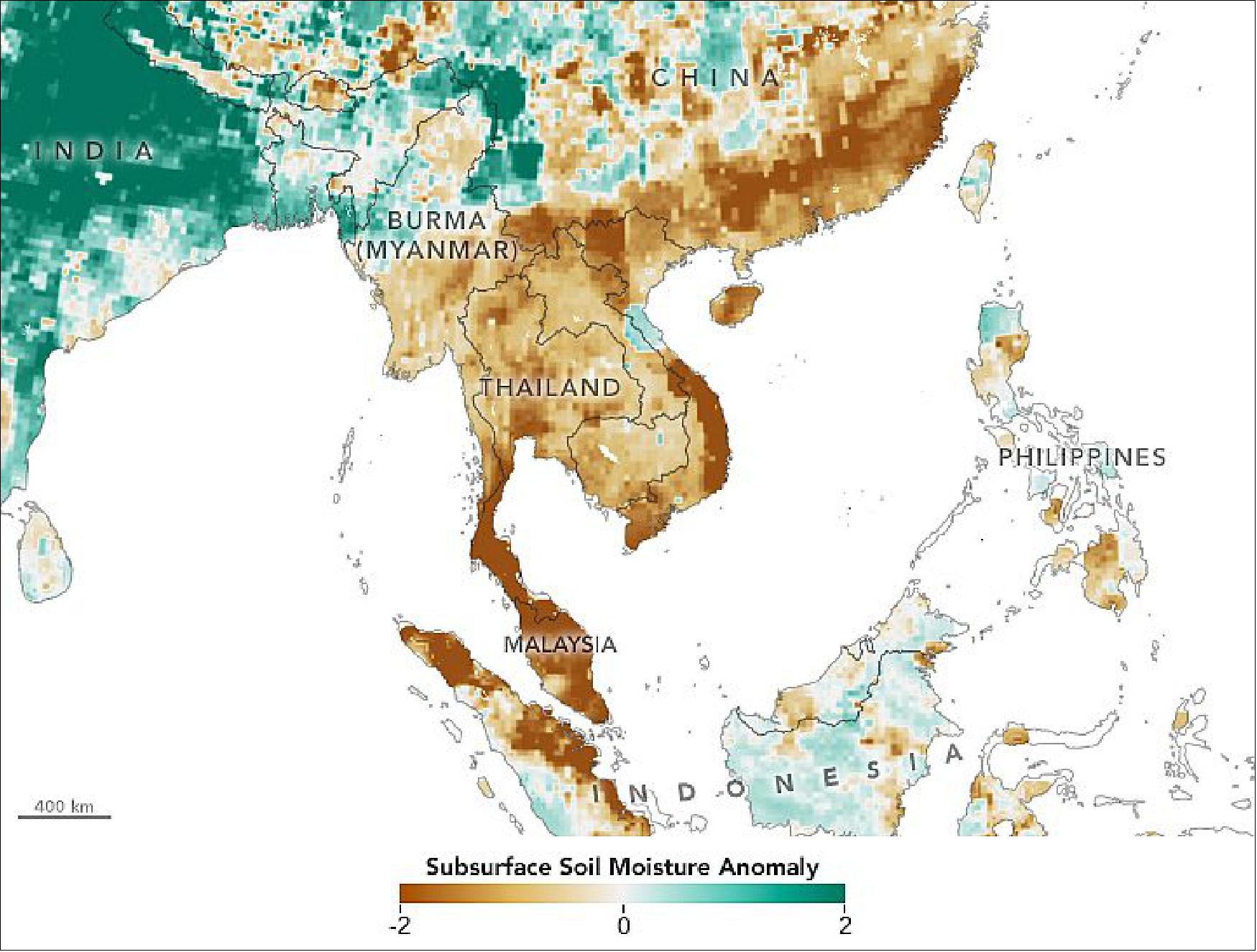
• February 15, 2020: Thailand is experiencing its worst drought in possibly four decades. About half of the major reservoirs in the country stand below 50 percent of capacity. River levels are so low that saltwater from the ocean is creeping upstream and affecting drinking water supplies. And in a country where 11 million people work in farming, crop production and the economy are expected to suffer. 33)
- The drought conditions in Thailand were caused by a shorter-than-normal monsoon season and below-average annual rainfall in 2019. According to the Mekong River Commission (MRC), the monsoon rains arrived almost two weeks later and departed three weeks earlier in the Lower Mekong Basin, which includes Lao PDR (Laos), Thailand, Cambodia, and Vietnam. The MRC also stated an El Niño event created abnormally high temperatures and high evapotranspiration. Thailand was predicted to be affected particularly hard; the country is only two months into the dry season and reservoirs for irrigation and drinking are already low.
- The drought has caused saltwater intrusion in some areas in Thailand's water supplies, where water from the sea is encroaching up the river. There's not enough fresh river water flowing down to the push saltwater away from cities, said Senaka Basnayake, the Director of Climate Resilience at the Asian Disaster Preparedness Center in Thailand.
- "This is one of the signs showing the drought situation in low-lying areas in Thailand this year is worse than before," said Basnayake, who is also a member of the SERVIR-Mekong team. SERVIR-Mekong is a joint project between NASA and United States Agency for International Development (USAID) that uses remote sensing to provide support for several areas in the Mekong River Basin, such as protection of food and water resources, disaster risk reduction, and sustainable development.
- The SERVIR-Mekong team develops several drought-related products to generate drought and crop yield forecasts in the Mekong area. The information is used by the MRC to help provide accurate information for farmers trying to plan their water usage. According to the team's Regional Drought and Crop Yield Information System, the drought severity in Thailand is above 90 percent across the country and could persist at that level until the end of March.
- Thailand, one of the world's leading sugar exporters, is expected to produce up to 30 percent less sugar compared to previous years, making this possibly the worst season in five years. On February 17, the Department of Royal Rainmaking and Agricultural Aviation (DRRAA) is expected to begin its annual relief plan, which includes filling local reservoirs.
- Other countries in the Lower Mekong Basin are also expecting a severe dry season in the upcoming months. According to Vietnam's Ministry of Agriculture and Rural Development, the Mekong Delta located in southwestern Vietnam received about 8 percent less precipitation during last year's rainy season. Vietnam has already started to experience saltwater intrusion, which are damaging many rice fields in the Trá Vinh province. More than 10,000 hectares of winter-spring rice are experiencing a water shortage in the province. If water supplies continue to run low and saltwater intrusion continues, about 94,000 hectares of rice fields could be affected across the Mekong River Basin area.
• November 19, 2019: Getting stuck on a muddy road is a hassle for anyone, but for the U.S. Army it could be far more serious - a matter of life and death in some parts of the world. That's one of the reasons the U.S. Air Force HQ 557th Weather Wing is now using data about soil moisture from a NASA satellite in the weather forecasts, warnings and advisories that it issues for the Army and the Air Force. 34)
- NASA's Soil Moisture Active Passive (SMAP) spacecraft, launched in 2015 and managed by NASA's Jet Propulsion Laboratory in Pasadena, California, measures the amount of water in the top two inches (5 cm) of soil. Near-real-time SMAP data began flowing into Air Force computers on Nov. 19 to be used within the modeling environment powered by NASA's Land Information System (LIS). This implementation will be the first instance of assimilating SMAP data in an operational, near-real-time environment in the world.
- Besides dictating how muddy or dry the land surface is, soil moisture is also a key weather-maker: It evaporates into water vapor, rises and condenses into clouds. "The forecasting model output is going to be different depending on whether soil is dry or moist," said Frank Ruggiero, the lead engineer for USAF's Numerical Weather Modeling program, run by Hanscom Air Force Base in Lexington, Massachusetts. "Sometimes those differences can significantly affect the overall forecast."
- In 2005, the Air Force's 557th Weather Wing at Offutt Air Force Base near Omaha, Nebraska, was looking to replace its existing Land Information System. That year, they partnered with NASA's Goddard Space Flight Center in Greenbelt, Maryland, to collaborate on the development of the LIS, a software framework that integrates satellite and ground-based data using advanced mathematical techniques to improve performance of weather and climate computer models.
- "The initial idea was to use NASA's state-of-the-art modeling system to move new research findings and data sources into Air Force operations more rapidly," said Goddard's Sujay Kumar, who, with Christa Peters-Lidard, is the technical lead for transitioning the LIS to the Air Force. "That kick-started a 15-year relationship with the Air Force."
- The NASA-Air Force LIS team began researching the feasibility of adding SMAP data to the Land Information System even before the satellite was launched. The Air Force forecasting tools were already using soil moisture data from older satellites, Kumar said. "But once we had SMAP data and conducted several studies to look at the quality of it, we were pleased to find that its high information content was likely to improve the accuracy of the soil moisture characterization in the Air Force systems," Kumar added.
Military Weather Forecasts Are Different
- The Army and Air Force have specific information needs that civilian weather forecasts don't address. "We tend to be very focused on weather impacts, and some are unique compared to impacts for civilians," Ruggiero said. "You, as a regular person, might want to know if it's mostly sunny or mostly cloudy so you'll know if it's a good beach day. But clouds affect the signal of a lot of the instrumentation we use, so we need detailed, 3D cloud depiction to know how much our signal is going to be affected."
- That doesn't mean, however, that the military has to build a weather forecasting model from scratch. Instead, it enhances a civilian weather model - the Unified Model, developed by the United Kingdom's Met Office - to create a system that can produce the tailored forecasts its users need.
- The Air Force is a partner of the Met Office and about 10 other weather agencies that utilize and adapt the Unified Model. It has been using the model - considered one of the best in the world - as the basis for its own primary forecasting model since 2015. Because other U.S. coalition partners, including the U.K., Australia and South Korea, also use it, the Air Force is assured that in joint actions, the partners operate with the same basic weather assumptions.
A Wide, and Widening, Value
- Scientists in the Met Office also look at new capabilities created by the partners and can choose to adopt them into the Unified Model. Jerry Wegiel, a NASA Goddard support scientist stationed at Offutt Air Force Base is NASA Goddard's lead liaison for the Unified Model partnership. "The developers of the Unified Model are in the process of adopting [NASA's Land Information System] as a result of this multi-agency collaboration. It's currently under validation and verification, but they're going down the road of transferring this capability into their own operational suites in the future," Wegiel said. "The Air Force is providing value back to the Unified Model partnership."
- Wegiel pointed out that the LIS has other users besides weather forecasters, among them, the USDA (U.S. Department of Agriculture). "The USDA was one of the very first adopters. Once a month they produce agricultural forecasts that are used in places like the Chicago Mercantile Exchange, and that affects U.S. policies on global agriculture sectors as we try to position U.S. commodities to remain world leaders on the competitive stage." With users in a wide array of fields, including military and civilian weather forecasters worldwide, SMAP's soil moisture data in the LIS are benefiting people around the globe.
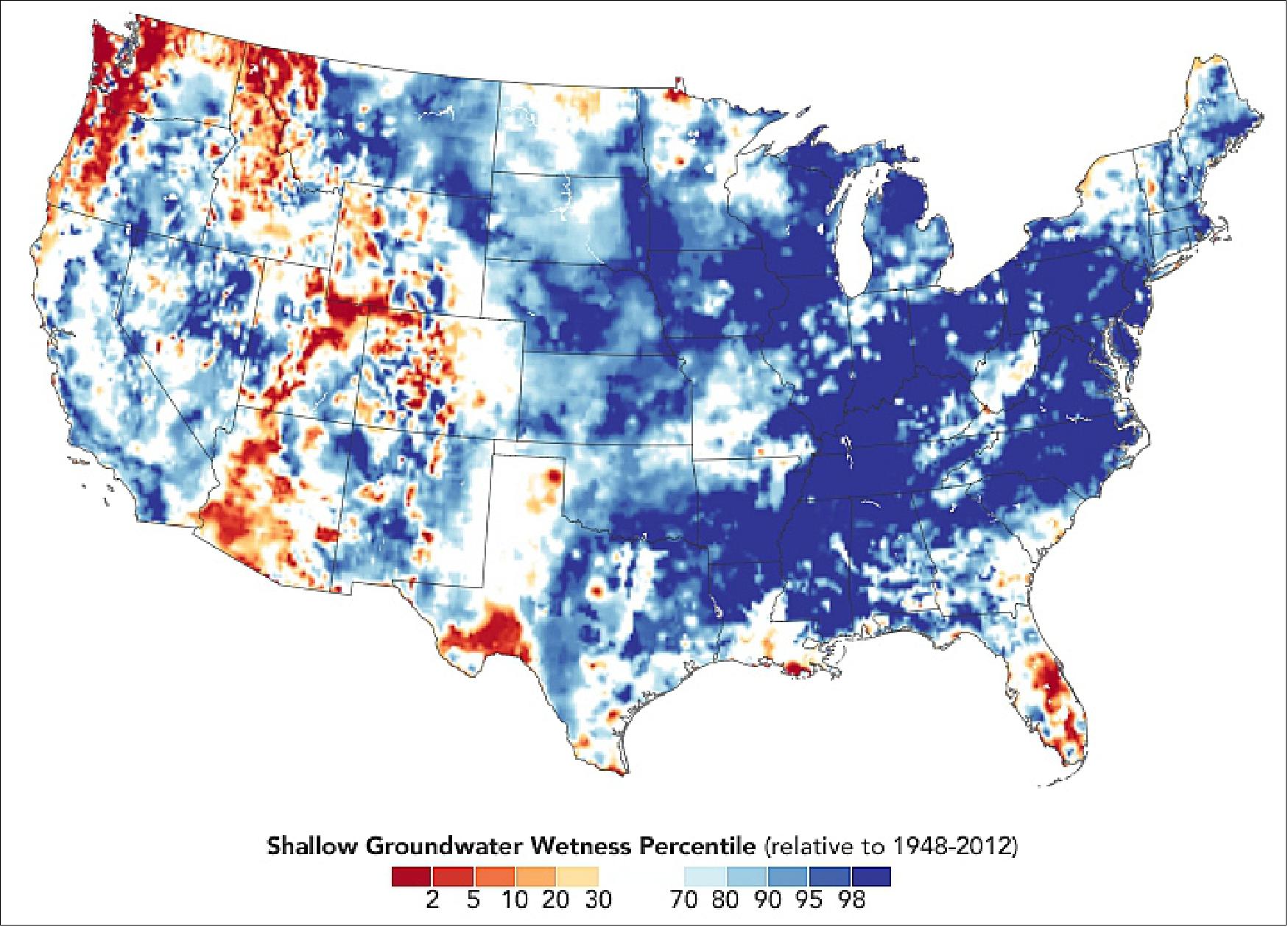
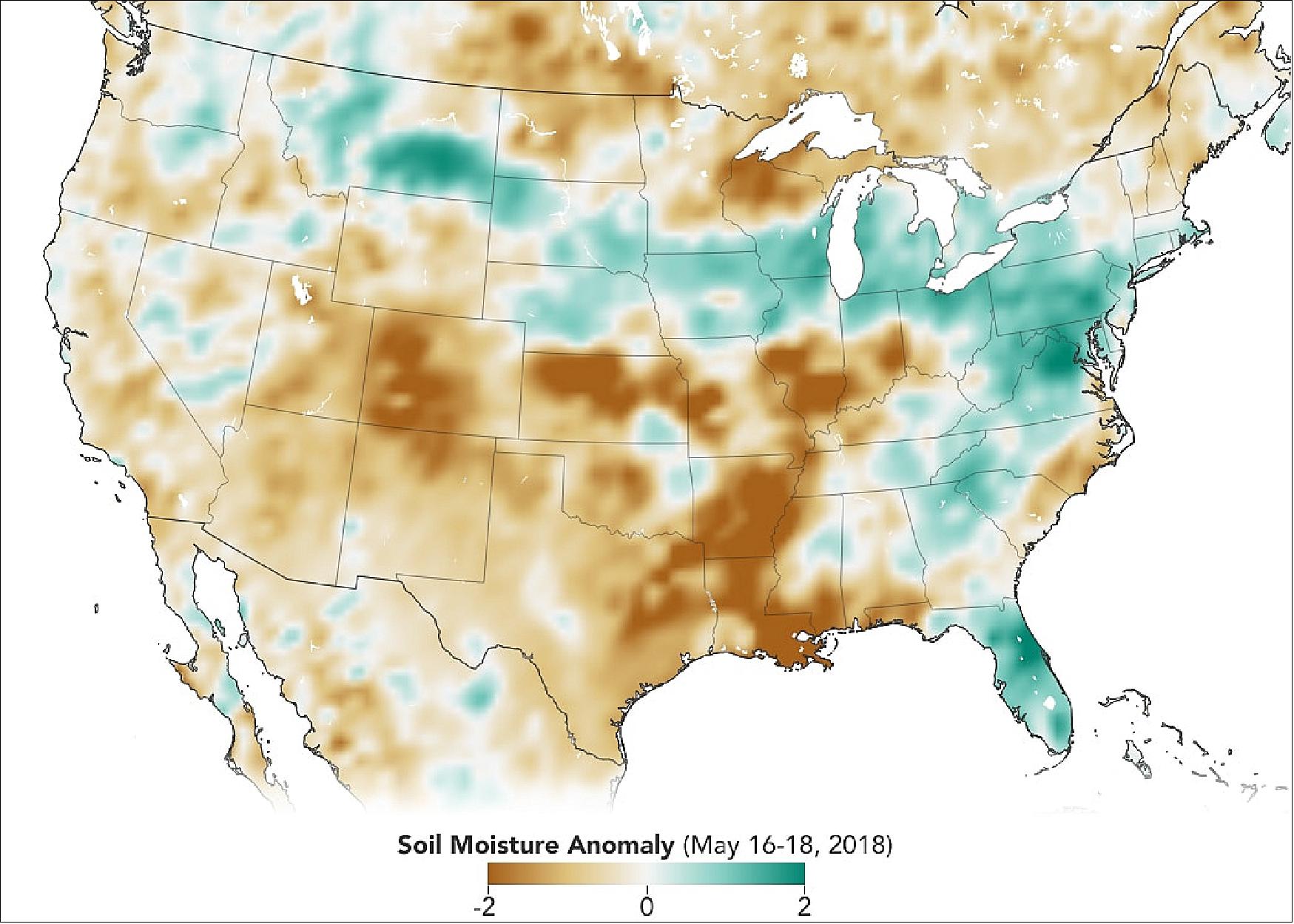
• May 28, 2019: The continental United States recently finished its soggiest 12 months in 124 years of modern recordkeeping. The results are visible in satellite measurements of fresh water. 35)
- From May 1, 2018, to April 30, 2019, the lower 48 states collectively averaged 36.20 inches (919.48 mm) of precipitation, a full 6.25 inches (158.75 mm) above the mean. The previous record (April 2015 to March 2016) was 35.95 inches. According to the National Centers for Environmental Information, ten U.S. states had their wettest 12 months, and three others were in the top three. Many of them were clustered in the Mid-Atlantic and Midwest regions.
- According to the May 21 report from the U.S. Drought Monitor, just 2.72 percent of the contiguous U.S. was in drought, among the lowest levels in two decades of records. California is completely out of drought for the first time since 2011. As recently as February 2018, one-third of the United States was in drought.
- The map of Figure 20 shows soil moisture anomalies, or how much the water content near the land surface was above or below the norm on May 11–13, 2019. The measurements are derived from data collected by the SMAP (Soil Moisture Active Passive) mission, the first NASA satellite dedicated to measuring the water content of soils. SMAP's radiometer can detect water in the top 5 cm of the ground. Scientists use that surface layer data in a hydrologic model to estimate how much water is present even deeper in the root zone, which is important for agriculture.
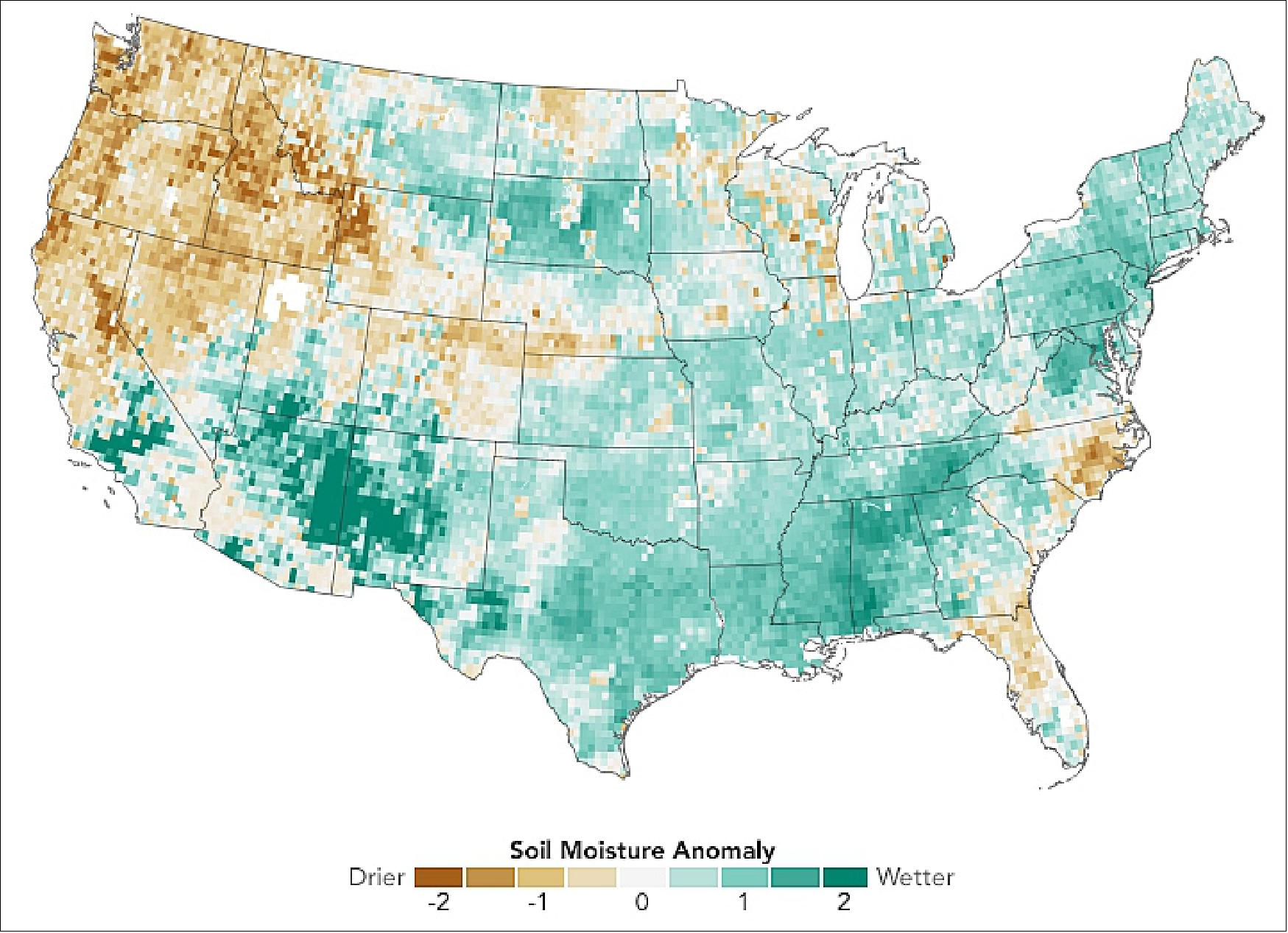
- Much of the East and Midwest had an extremely damp autumn in 2018; land-falling category 5 hurricanes Michael and Florence dropped copious amounts of rainfall in the late summer; and California has been soaked by sporadic atmospheric river events and the effects of a mild El Niño. But there is no one explanation for the extreme precipitation of the past year. It does, however, fit with long-term increases in overall precipitation and with heavy rainfall events in our changing climate.
- "I do not have an explanation for the weather systems that caused the heavy precipitation, but sea surface temperatures in the western Atlantic and Gulf of Mexico have been generally well above normal over the past year. This has surely added to the atmospheric water vapor content available to the precipitating weather systems," said Ken Kunkel, a climatologist with the National Oceanic and Atmospheric Administration. "The pattern of precipitation over the past 12 months indicates general wetness over most parts of the U.S. but does not match projections of the future, which show increases mostly in the northern U.S. Thus, the recent wetness probably has explanations in addition to, or instead of, just anthropogenic forcing."
- In the Fourth National Climate Assessment, released by the U.S. Global Change Research Program in 2018, scientists reported: "a national average increase of 4 percent in annual precipitation since 1901 is mostly a result of large increases in the fall season. Heavy precipitation events in most parts of the United States have increased in both intensity and frequency since 1901...The frequency and intensity of heavy precipitation events are projected to continue to increase over the 21st century. Mesoscale convective systems (organized clusters of thunderstorms) in the central United States are expected to continue to increase in number and intensity in the future."
- Writing for The Washington Post, meteorologist Jason Samenow reflected on a record-setting year of rain in the nation's capital: "The historic rainfall over the past year is somewhat of a random occurrence. It is mostly a result of weather patterns that have frequently arranged themselves, by chance, in an optimal way to squeeze water from the sky. Yet, at the same time, this record-wet year has occurred against a longer-term backdrop of climate warming and increasing precipitation extremes. In other words, climate change probably intensified the rain and increased the chance it would become a record breaker."
• May 17, 2019: Our oceans and the complex "conveyer belt" system of currents that connects them play an important role in regulating global climate. The oceans store heat from the Sun, and ocean currents transport that heat from the tropics to the poles. They release the heat and moisture into the air, which moderates climate nearby. But what happens if part of that conveyer belt jams? 36)
- It's not a theoretical question. Scientists have observed that a major ocean current called the Indonesia Throughflow, which provides the only tropical connection between the Pacific and Indian oceans, slows dramatically near the surface during the Northwest Asia monsoon season - usually December through March. And a team of scientists, led by Tong Lee of NASA's Jet Propulsion Laboratory in Pasadena, California, has figured out why.
- "We have found that this current, which is a very important element of the global ocean current system, is significantly affected by local precipitation," Lee said. "It is fairly common knowledge that winds drive ocean currents. In this case, however, the precipitation is actually a dominant factor during the monsoon season."
- It's a discovery that will improve our understanding of complex Earth processes. During this season, about 10 feet (3 meters) of rain fall over the maritime continent, a region of Southeast Asia between the Indian and Pacific oceans through which the Indonesia Throughflow current travels. This influx of local rain reduces the pressure force that drives the current through the region.
- How does that work?
- Gravity causes water to travel "downhill" from areas of relatively higher sea level toward areas of lower sea level unless opposed by another force. In the tropical Pacific, trade winds also influence the flow of water. They blow from east to west, causing ocean currents to transport large amounts of water from the U.S. westward toward Asia. This raises the sea level on the Asian side of the Pacific Ocean and provides enough force to keep the Indonesia Throughflow moving, connecting the two oceans.
- However, the influx of rain during monsoon season temporarily but significantly raises the local sea level in the Indonesian seas that sit between the Pacific and Indian oceans enough to essentially eliminate the downhill flow. Think of it like a ball rolling freely downhill versus a ball on a flat surface, which has little momentum to move forward.
- Although the slowing of this current is primarily seasonal, it still affects the amount of heat transported from the Pacific Ocean to the Indian Ocean, which can change regional climate in Southeast Asia.
- "The increase in local sea level due to the seasonal freshening of seawater pushes against the normally higher sea level from the Pacific Ocean," said Lee. "It restricts the surface flow of this current during the monsoon season, which prevents a lot of the heat normally carried by the current from making its way to the Indian Ocean."
- Furthermore, since all of these currents are connected globally, less warm water is transported into the Indian Ocean, and in turn, less warm water is transported from the Indian Ocean to the Atlantic Ocean over the long term. So the Indonesia Throughflow - one element of a much larger system - can have a significant effect thousands of miles away from where it flows.
- The results of this study will help to improve climate models by enabling scientists to factor in these effects and changes. Titled "Maritime Continent water cycle regulates low-latitude chokepoint of global ocean circulation," the study was recently published in Nature. 37)
- NASA satellite data, particularly ocean salinity measurements from the Soil Moisture Active Passive (SMAP) satellite, were instrumental in these findings. Although SMAP was designed primarily to measure soil moisture, its radiometer is also able to measure sea surface salinity. The results of this paper demonstrate the utility of SMAP salinity data in exploring changes in the water cycle, sea level, ocean circulation and climate.
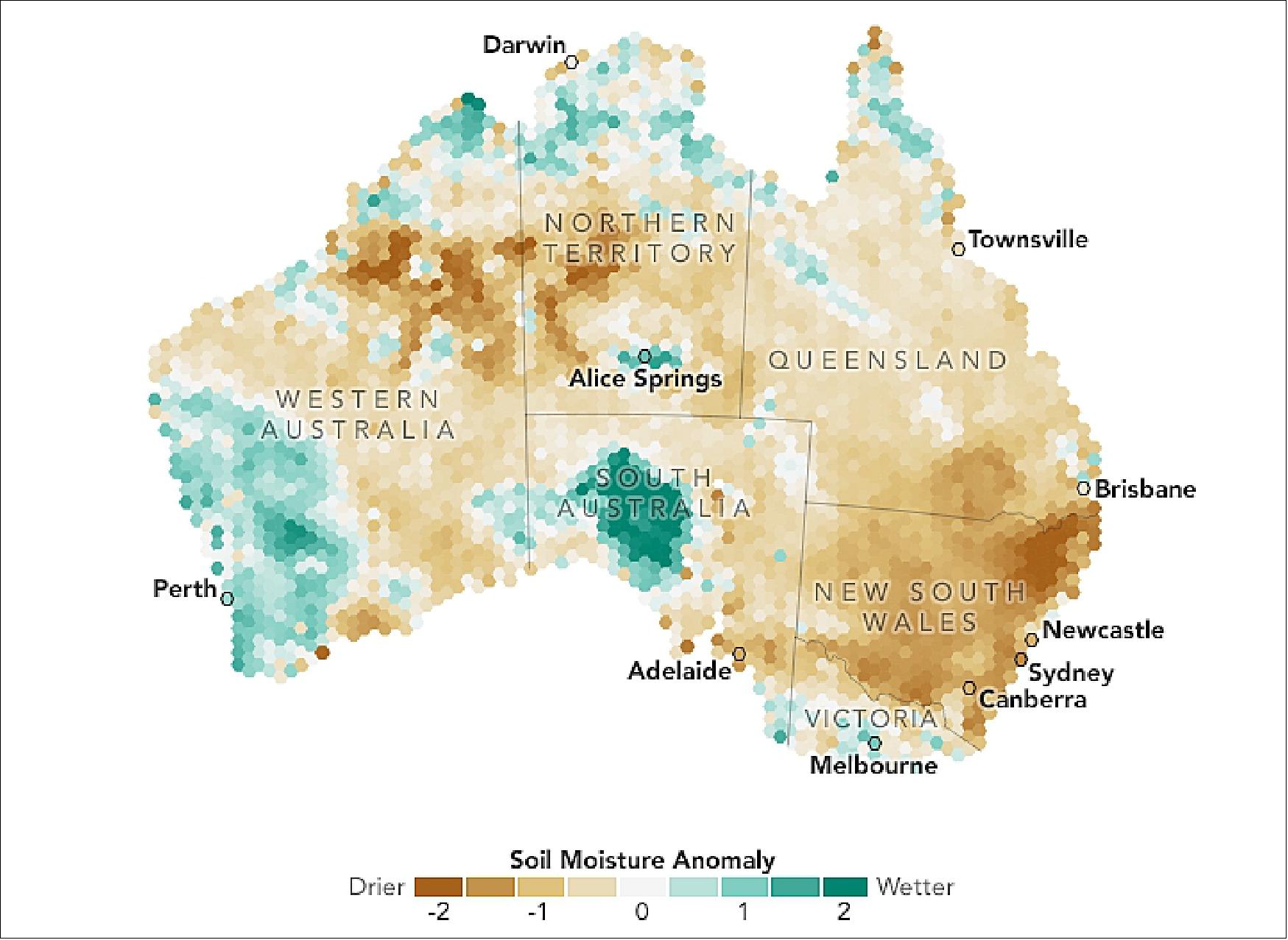
• August 10, 2018: July 2018 was the driest July in Australia since 2002. The dry month exacerbated an ongoing drought that had already ruined large swaths of grazing land and cropland. New South Wales has been hit the hardest, according to a news reports. About 99 percent of the state was in drought heading into August. 38)
- Drought becomes relevant to farmers and ranchers when there are deficits in the amount of water available to plants in the "root-zone," which generally includes the top 200 cm (80 inches) of soil (Figure 22).
- "Agricultural drought can irreversibly damage crops and hamper yield formation, leading to economic losses and food insecurity," said Iliana Mladenova, a scientist at NASA's Goddard Space Flight Center.
- The map is derived from data collected by the SMAP (Soil Moisture Active Passive) mission, the first NASA satellite dedicated to measuring the water content of soils. SMAP's radiometer can detect the amount of water in the surface layer of the soil; that is, the top 5 cm (2 inches) of the ground. Scientists use that surface layer data in a hydrologic model to estimate how much water is present even deeper in the root zone. Analyzing this moisture can tell you whether there is enough water for plants to function properly and to achieve an optimal yield.
- "Timely and accurate knowledge of the root-zone soil moisture is very important for farmers, stakeholders, and agricultural agencies," Mladenova said. "Soil moisture provides the necessary information to track and monitor drought development and occurrence, and predict its impact on end-of-season yields."
• June 1, 2018: Data from the first NASA satellite mission dedicated to measuring the water content of soils is now being used operationally by the U.S. Department of Agriculture (USDA) to monitor global croplands and make commodity forecasts. 39)
- The SMAP (Soil Moisture Active Passive) mission, launched in 2015 , has helped map the amount of water in soils worldwide. Now, with tools developed by a team at NASA's Goddard Space Flight Center in Greenbelt, Maryland, SMAP soil moisture data are being incorporated into the Crop Explorer website of the USDA's Foreign Agricultural Service, which reports on regional droughts, floods and crop forecasts. Crop Explorer is a clearinghouse for global agricultural growing conditions, such as soil moisture, temperature, precipitation, vegetation health and more.
- "There's a lot of need for understanding, monitoring and forecasting crops globally," said John Bolten, research scientist at Goddard. "SMAP is NASA's first satellite mission devoted to soil moisture, and this is a very straightforward approach to applying that data."
- Variations in global agricultural productivity have tremendous economic, social and humanitarian consequences. Among the users of these new SMAP data are USDA regional crop analysts who need accurate soil moisture information to better monitor and predict these variations.
- "The USDA does crop forecasting activities from a global scale, and one of the main pieces of information for them is the amount of water in the soil," said Iliana Mladenova, a research scientist at Goddard.
- The USDA has used computer models that incorporate precipitation and temperature observations to indirectly calculate soil moisture. This approach, however, is prone to error in areas lacking high-quality, ground-based instrumentation. Now, Mladenova said, the agency is incorporating direct SMAP measurements of soil moisture into Crop Explorer. This allows the agriculture analysts to better predict where there could be too little, or too much, water in the soil to support crops.
- These soil moisture conditions, along with tools to analyze the data, are also available on Google Earth Engine. There, researchers, nonprofit organizations, resource managers and others can access the latest data as well as archived information.
- "If you have better soil moisture data and information on anomalies, you'll be able to predict, for example, the occurrence and development of drought," Mladenova said.
- The timing of the information matters as well, she added — if there's a short dry period early in the season, it might not have an impact on the total crop yield, but if there's a prolonged dry spell when the grain should be forming, the crop is less likely to recover.
- With global coverage every three days, SMAP can provide the Crop Explorer tool with timely updates of the soil moisture conditions that are essential for assessments and forecasts of global crop productivity.
- For more than a decade, USDA Crop Explorer products have incorporated soil moisture data from satellites. It started with the Advanced Microwave Scanning Radiometer-E instrument aboard NASA's Aqua satellite, but that instrument stopped gathering data in late 2011. Soil moisture information from ESA's (European Space Agency) SMOS (Soil Moisture and Ocean Salinity) mission is also being incorporated into some of the USDA products. This new, high-quality input from SMAP will help fill critical gaps in soil moisture information.
- SMAP is managed for NASA's Science Mission Directorate in Washington by the agency's Jet Propulsion Laboratory in Pasadena, California, with instrument hardware and science contributions made by Goddard.
• Spring 2018: The Amazon is the largest river in the world in terms of the amount of freshwater it carries and discharges into the Atlantic Ocean. This animation clearly shows the freshwater discharges into the Atlantic, seen as dark blue. 40)

• August 30, 2017: Images of soil moisture conditions in Texas near Houston, generated by NASA's SMAP (Soil Moisture Active Passive) satellite before and after the landfall of Hurricane Harvey can be used to monitor changing ground conditions due to Harvey's rainfall. As seen in the left panel, SMAP observations show that soil surface conditions were already very wet a few days before the hurricane made landfall (August 21/22), with moisture levels in the 20 to 40 percent range. Such saturated soil surfaces contributed to the inability of water to infiltrate more deeply into soils, thereby increasing the likelihood of flooding. After Harvey made landfall, the southwest portion of Houston became exceptionally wet, as seen in the right panel image from August 25/26, signaling the arrival of heavy rains and widespread flooding. 41)

• January 16, 2017: The top 5 cm of topsoil on all of Earth's landmasses contains an infinitesimal fraction of the planet's water—less than 0.001%. Yet because of its position at the interface between the land and the atmosphere, that tiny amount plays a crucial role in everything from agriculture to weather and climate, and even the spread of disease. The behavior and dynamics of this reservoir of moisture have been very hard to quantify and analyze, however, because measurements have been slow and laborious to make. 42)
- That situation changed with the launch in 2015 of the NASA SMAP (Soil Moisture Active Passive) satellite, designed to provide globally comprehensive and frequent measurements of the moisture in that top layer of soil. SMAP's first year of observational data has now been analyzed and is providing some significant surprises that will help in the modeling of climate, forecasting of weather, and monitoring of agriculture around the world. These new results are reported in a study of MIT (Massachusetts Institute of Technology). 43) 44)
- The SMAP observations are providing an unprecedented level of detailed, worldwide information on the amount of water in those top 5 cm of soil, collected globally every two to three days. Dara Entekhabi says this is important because this thin layer is a key part of the global water cycle over the continents, and also a key factor in the global energy and carbon cycles.
- Precipitation on land, and the evaporation of that moisture from the land, "transfers large amounts of energy" between the continents and the atmosphere, Entekhabi says, and the Earth's climate would be drastically different without this element. The oceans, containing 97% of Earth's water, provide a major role in storing and releasing heat, but over land that role is provided by the moisture in the topmost layer of the soil, albeit through different mechanisms. That moisture "is a tiny, tiny fraction of the water budget, but it's sitting at a very critical zone at the surface of the land, and plays a disproportionately critical role in the cycling of water," he says. "It plays a significant role in moderating climate, on seasonal and annual timescales."
- Understanding these cycles better, thanks to the new data, could help make weather predictions more accurate over longer timescales, which could be an important boon for agriculture. Several federal agencies have already begun using the SMAP data, Entekhabi says, for example, to help make forecasting of drought and flood conditions more accurate. "The satellite is providing an extraordinary quality of surface soil moisture information that makes this analysis possible," he says. The satellite's primary mission of three years is about halfway over, he says, but the team is working on applying for an extended mission that could last as much as a decade.
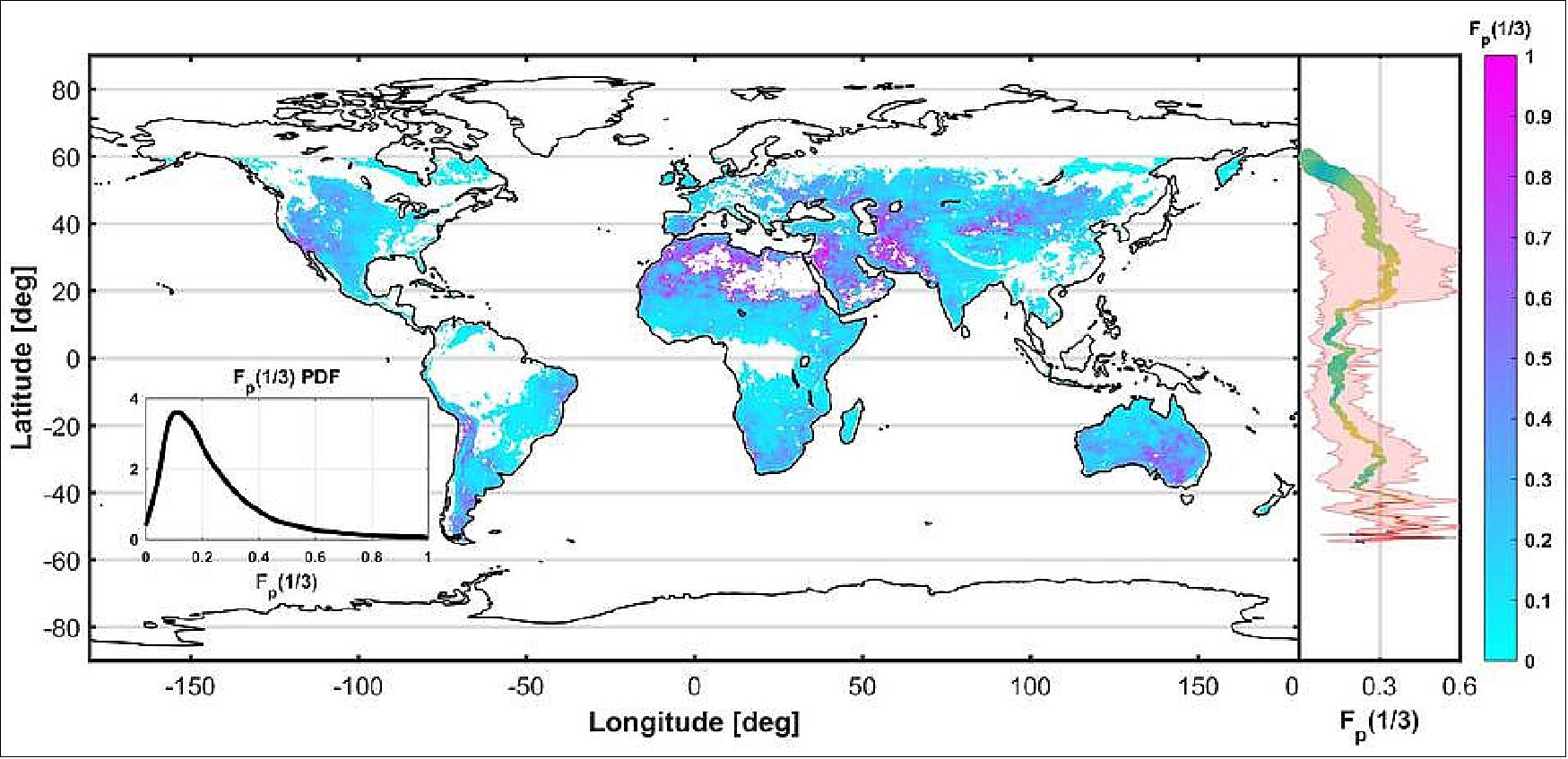
- One of the big surprises from the new data is that this top level of soil preserves a "memory" for weather anomalies, more so than had been predicted from theory and earlier, sparser measurements. Memory refers to the persistence of effects from unusually high or low amounts of rainfall. Contrary to most researchers' expectations, it turns out that these effects persist for a matter of days, rather than just a few hours. On average, about one-seventh of the amount of rain that falls is still present in that topmost layer of soil three days after it falls—and this persistence is greatest in the driest regions.
- The data also show a significant feedback effect that can amplify the effects of both droughts and floods, Entekhabi says. When moisture evaporates from wet soil, it cools the soil in the process, but when the soil gets too dry that cooling diminishes, which can lead to hotter weather and heat waves that extend and deepen drought conditions. Such effects "had been speculated," he says, "but hadn't been observed directly."
- The ongoing SMAP mission also provides educational opportunities that help to verify and calibrate the satellite data. With minimal equipment, students can participate in hands-on lessons in data collection, using measurement methods that are considered the gold standard. For example, they can gather a sample of soil in a fixed volume such as a tuna can, and weigh it before and after drying it out. The difference between the two masses gives a precise measure of the soil's moisture content in that volume, which can be compared with the satellite's moisture measurement.
- Even young students "can carry out 'gold standard' measurements, and all it takes is a kitchen scale and an oven," Entekhabi says. "But it's very labor-intensive. So we have engaged with schools around the world to do these measurements."
• December 2016: The SMAP was launched in January 2015 and has been providing science data since April 2015. Though designed to measure soil moisture and despite the demise of its radar in July 2015, the SMAP sensor is very capable to measure ocean winds in storms at a resolution of 40 km. The L-band radiometer V-pol and H-pol channels keep excellent sensitivity to ocean surface wind speed even at very high wind speeds and they are only very little impacted by rain. The presence of polarimetric channels, which measure all 4 Stokes parameters on the SMAP radiometer, also allows retrieving wind direction. 45)
- L-band satellite radiometers allow measuring the intensity of tropical and extratropical storms. The reason is that the wind-induced surface emission at L-band increases approximately linearly with wind speed between 18 and 65 m/s and shows no signs of saturation at any wind speeds nor is it significantly affected by rain. This provides a distinct advantage over many other active and passive spaceborne sensors, whose signal saturates in high winds or which degrade in rain. The spatial resolutions of spaceborne passive L-band sensors that are currently operating (SMOS and SMAP) are limited to about 40 km.
• October 20, 2016: A NASA analysis of a 2015 Texas flood is the first to document the full life cycle and impacts of a flood on both land and ocean. Using data from NASA's SMAP satellite and other satellite instruments, the study traced the event's chronology — starting with rains that fell weeks before the flood and ending with an unusually shaped plume of freshwater that lingered in the Gulf of Mexico months later, with a potential for significant impacts on the gulf's marine life. 46) 47)
- The flood occurred in southeastern Texas on May 23-24, 2015, when record rainstorms topped off weeks of sustained rainfall. According to the National Weather Service, 37.3 trillion gallons of water (14 x 109 m3) fell on Texas in May 2015 — enough to cover the entire state 20 cm deep in water (Texas has a size of 694100 km2). "The sheer amount of water was shocking," said coauthor J. T. Reager of NASA's Jet Propulsion Laboratory, Pasadena, California. "Of course it had an impact on land — 11 people died, and property was lost. We thought, this has to have an impact on the ocean as well."
- The research team used measurements from SMAP with observations from five other NASA satellites to create a comprehensive timeline and map of the flood and its regional effects. SMAP measures both soil moisture (water retained in the top several cm of the ground) and sea surface salinity, which allows scientists to calculate how much freshwater is mingled with the saltwater of the ocean.
- When so much rain fell on waterlogged soils, there was nowhere for it to go but downstream. South Texas is one of the parts of the country most in need of stream gauges, according to the U.S. Geological Survey, so ground-level streamflow data are limited. The new analysis found that eight Texas rivers drained huge volumes of water into the Gulf of Mexico, with peak discharge rates as high as 1,700 m3/s of water.
- Ocean currents carried this large plume of freshwater eastward along the Louisiana coastline during June 2015. In July, it merged with the Mississippi River's outflow, the downstream product of spring precipitation and snowmelt high water from 40% of the contiguous United States.
- The combined Texas and Mississippi plumes formed what Reager calls "a huge, very weird, horseshoe shape" with legs extending southward into the central gulf. "We had never seen a plume shaped like this in six years of observations of sea surface salinity," Fournier said, referring to the European SMOS (Surface Moisture and Ocean Salinity) satellite data. "Looking at the circulation in the gulf, you can say the unusual features of this plume are not due to the Mississippi River. They're due to the Texas flood."
- A strong ocean current in the east of the gulf and a warm eddy in the west played roles in forming the horseshoe and pulling its legs southward toward the central gulf (Figure 27).
- Although river water is called freshwater, that doesn't mean it's pure H2O and nothing else. Rivers carry pollutants to the sea, and that's what makes the location and size of the freshwater plume important. "Riverine waters bring lots of nutrients to the ocean, and that can have impacts," Fournier explained. Ocean algae use nitrogen and phosphorus in the runoff — mainly the product of fertilizers — to grow and multiply, and the algae concentrations can become much larger than normal. When these overabundant algae die, they sink and decompose in a process that uses up the oxygen in seawater, sometimes creating dead zones that are so oxygen-starved no fish or plants can live there.
- The Gulf of Mexico has a variable but huge dead zone, usually ranked largest or second largest in the world. Its average area is about the same as the state of Connecticut. The gulf is also one of the world's largest seafood providers. When its dead zone expands, there are impacts to both fish and the regional economy; for example, fishing boats have to travel farther off shore to find fish, leading to higher fuel costs and a less profitable industry.
- After the Texas flood, the gulf's dead zone was about 28% larger than average: the size of Connecticut and Rhode Island combined. Fournier will delve deeper into the biogeochemical impacts of the flood on the gulf waters in a follow-up study. This type of research could lead to predictive models for the influences of the high levels of pollution on gulf fisheries.
- Reager noted that the complementary land and ocean measurements of SMAP greatly facilitated the team's analysis. "With the existing suite of NASA satellites, we have the opportunity to see the full extent of regional water cycle extremes and the impacts of heavy rains, saturation flooding and intense runoff on both land and ocean," he said. "SMAP really provides a new and important complement to the tools in the NASA Earth science tool belt."
- Besides SMAP's measurements, the study used a wide array of other NASA observations: precipitation data from the TRMM (Tropical Rainfall Measuring Mission) and GPM (Global Precipitation Measurement) mission, water storage observations from the GRACE (Gravity Recovery And Climate Experiment) mission, ocean color observations from the MODIS (Moderate Resolution Imaging Spectrometer), and altimetric satellite measurements of ocean currents from the Jason series of satellites.
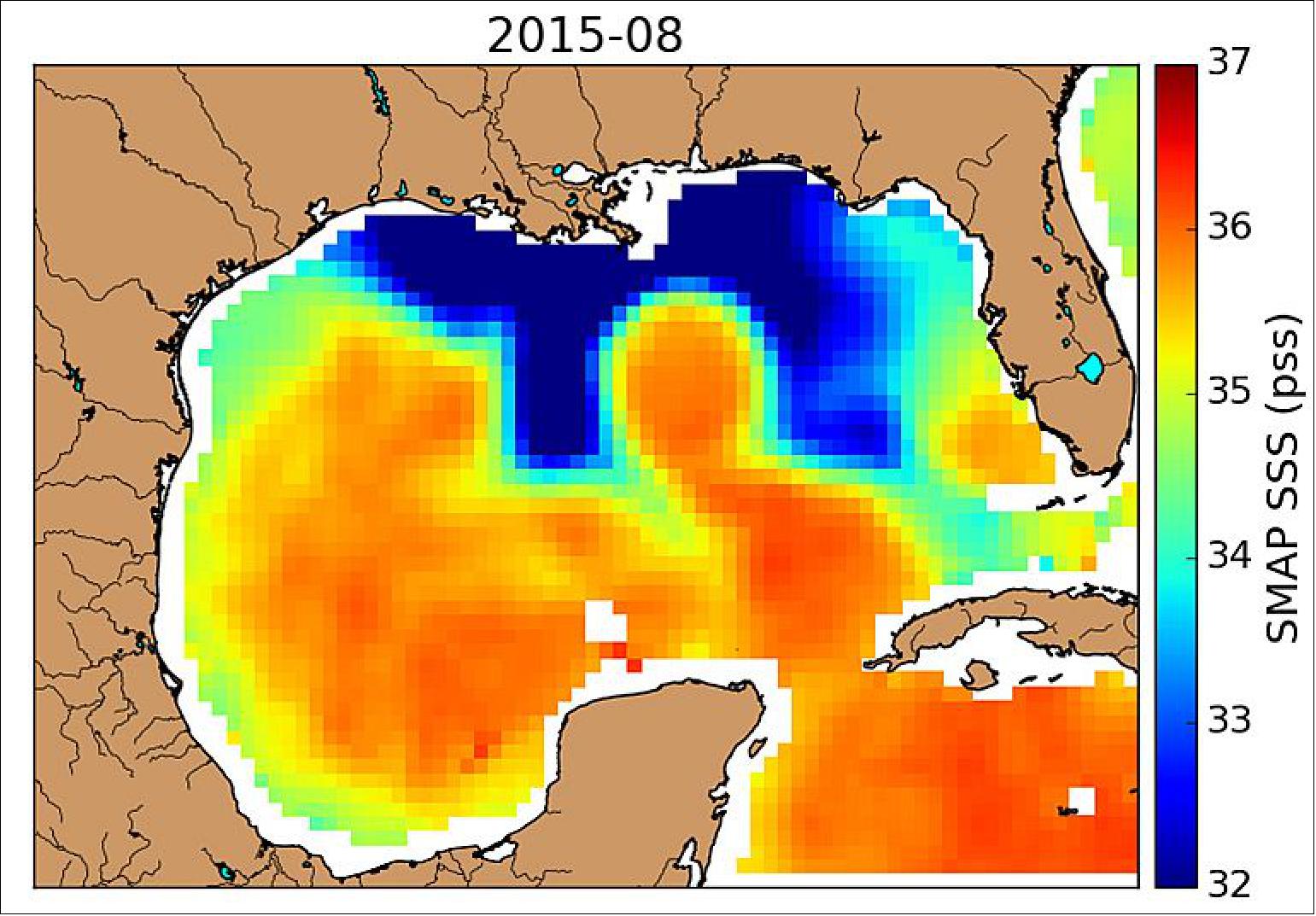
Legend to Figure 27: SSS = Sea Surface Salinity. PSS =Practical Salinity Scale (to derive salinity from precise instrument measurements of seawater electrical conductivity, temperature and pressure).
• July 2016: Since the loss of the radar, the SMAP project has been conducting two parallel activities to enhance the resolution of its soil moisture products. The first explores the Backus Gilbert optimum interpolation and de-convolution techniques based on the oversampling characteristics of the SMAP radiometer. The second investigates the disaggregation of the SMAP radiometer data using the European Space Agency's Sentinel-1 C-band SAR (Synthetic Aperture Radar) data to obtain soil moisture products at about 1 to 3 km resolution. In addition, SMAP's L-band data have been found useful for many applications, including vegetation opacity, ocean surface salinity and hurricane ocean surface wind mapping. Highlights of these new applications will be provided. 48)
- The SMAP project has been conducting a Cal/Val (Calibration/Validation) program to assess the quality of soil moisture and freeze/thaw products. The Cal/Val program includes the comparison of data with many core Cal/Val sites, where spatially distributed in situ sensors are deployed within the reference grids, data comparison with sparse in-situ networks, intersatellite comparison, and field campaigns.
- The preliminary Cal/Val assessment has indicated excellent quality of the soil moisture and freeze/thaw products. The key findings include 1) the ubRMSE (unbiased Root Mean Square Error) of the passive soil moisture product has met the 4 percent volumetric accuracy requirement, 2) soil moisture retrieval bias for some Cal/Val sites or land cover types remains to be reduced, and 3) the detection of freeze/thaw states has well exceeded the requirement of 80 percent classification accuracy.
- Figure 28 illustrates a comparison of the passive soil moisture product with the in situ data acquired from the TxSON (Texas Soil Moisture Observation Network) Cal/Val site. The time series comparison clearly indicates the changes of soil moisture due to precipitation events and subsequent dry downs. All three algorithms produce very similar ubRMSE and correlation. The bias is smaller for SCA-V (Single Channel V-pol), leading to a smaller RMSE than the other two algorithms for the TxSON site. However, the SCA-H (Single Channel Algorithm H-pol) has a better performance for some other sites. After we average the statistics using the data from all core Cal/Val sites, SCA-V has a slightly better performance overall for the beta-level products, and is consequently selected as the current baseline product for L-2 radiometer-only soil moisture.
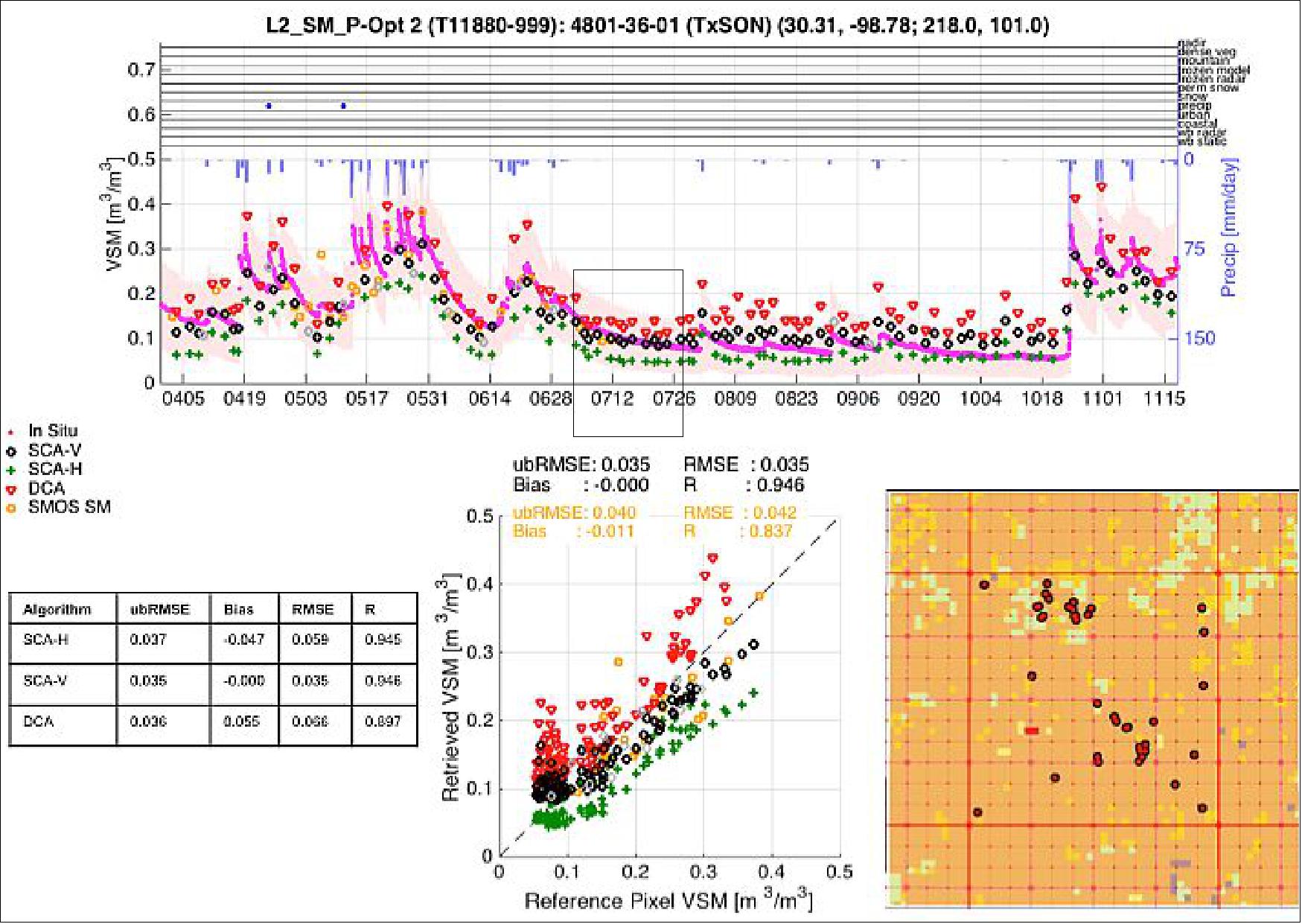
- Science recovery: One of SMAP's key science requirements is to produce soil moisture products at a spatial resolution of better than 10 km for hydrometeorology applications. This was to be achieved by using high-resolution radar data to disaggregate brightness temperatures on 9 km resolution grids. Unfortunately the SMAP radar transmitter ceased operation on July 7, 2015. Since then the SMAP project has been conducting two tasks to enhance the resolution of radiometer data products. One of the tasks will take advantage of the oversampling characteristics of the SMAP radiometer data along scan and along track. Two resolution enhancement techniques are being considered, including the Backus Gilbert (BG) optimum interpolation and deconvolution. The other task will match up the SMAP radiometer data and Sentinel-1's C-band SAR data, and will then apply the SMAP AP (Active-Passive) algorithm to produce the higher resolution soil moisture products. These two tasks will produce complementary products; it is expected that the BG or deconvolution techniques will lead to a global product with a spatial resolution of about 20 to 30 km resolution, while the SMAP/Sentinel-1 AP algorithm will produce soil moisture with resolution as high as 1 km, but only for regions where the Sentinel-1 data are available.
- Figure 29 provides an illustration of the BG interpolation algorithm applied to a half orbit of simulated SMAP radiometer brightness temperatures. The interpolation was carried out on 3 km grids aligned with the along-track and across-track coordinate system. The interpolated data will then be averaged to produce data on the EASE-2 (Equal-Area Scalable-2 Earth Grid) at 9 or 18 km resolution.
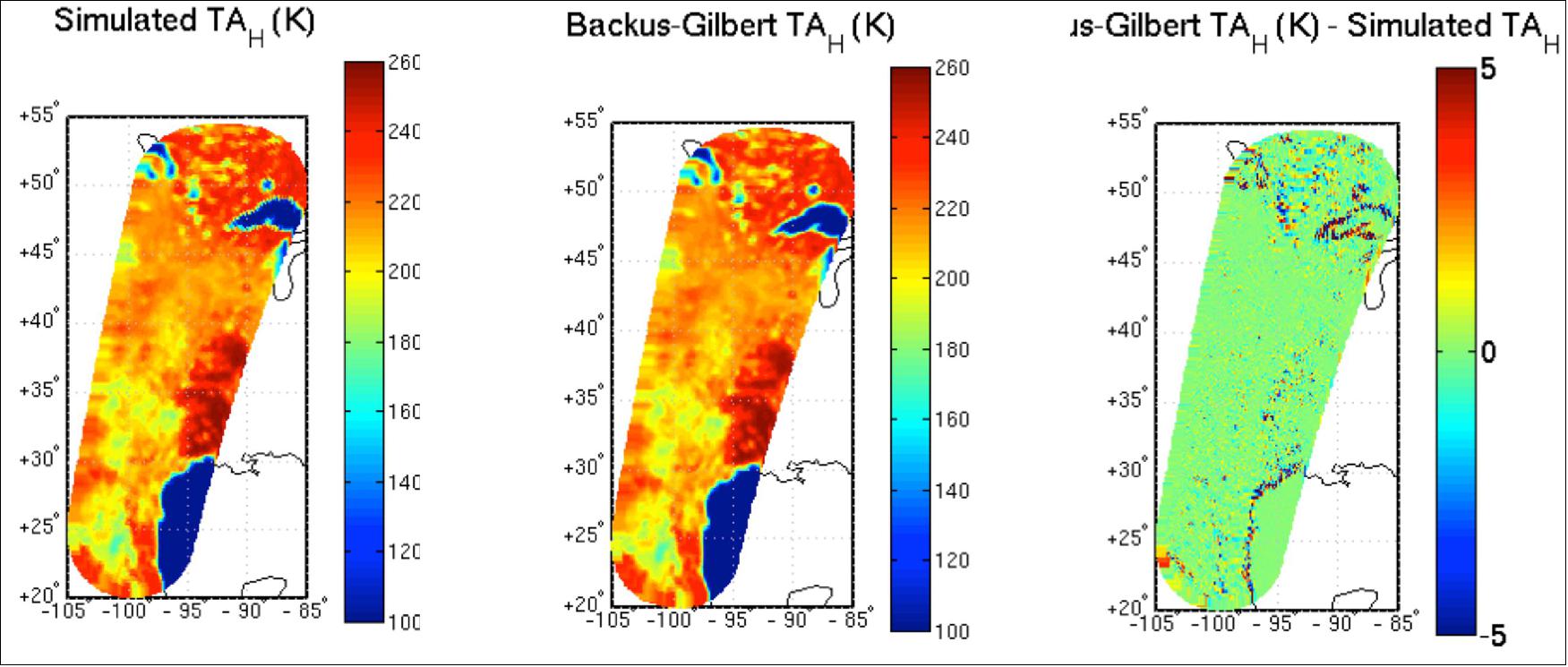
- The potential of the AP soil moisture algorithm for combined SMAP radiometer/Sentinel-1 radar data is indicated in Figure 30. The Sentinel-1 SAR data was used to disaggregate the SMAP radiometer data at a spatial resolution of 1 km for a site in Southern Canada. The high-resolution features are clearly visible in the soil moisture image although the algorithm parameters require optimization. We will be applying the SMAP Cal/Val program to the SMAP/Sentinel-1 AP soil moisture product, and will be conducting the SMAPVEX campaign in 2016 for direct validation of the disaggregated brightness temperature data.
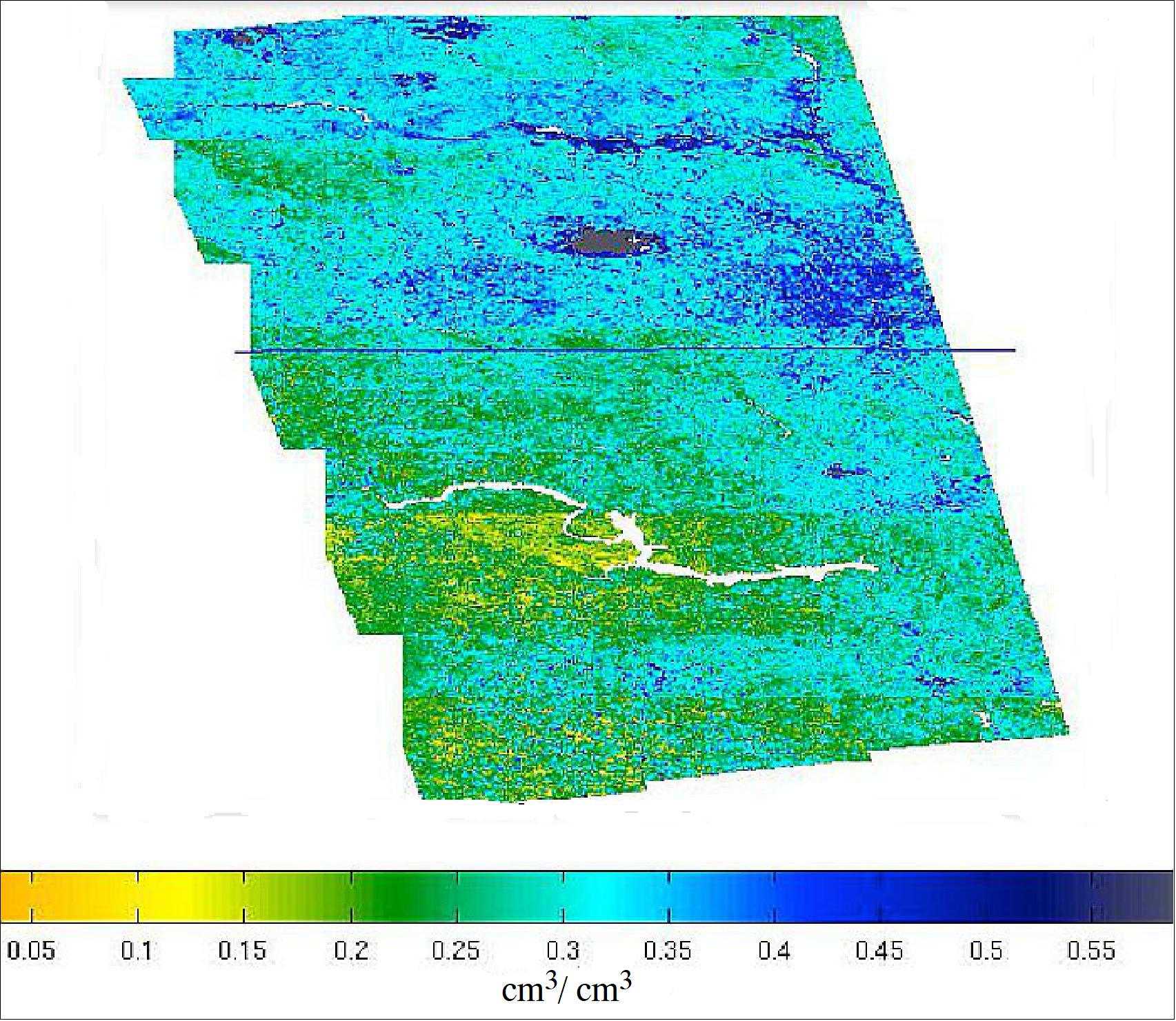
- In spite of the loss of SMAP radar in July 2015, the SMAP radiometer has been performing very well. The radiometer soil moisture products have been used to monitor the severe flooding caused by heavy rainfall in Texas in May-June and in South Carolina in early October 2015. More recent flooding events in Missouri and South America in December 2015 were also indicated in the SMAP soil moisture products (Ref. 48).
• June 2016: NASA submitted a paper at the EUSAR conference 2016, presenting an analysis of the short coverage period of the SMAP L-band SAR which experienced a malfunction in July 2015. 49)
- In summary, the surface soil moisture was retrieved globally by systematically correcting for the effects of vegetation and soil surface roughness. The retrieval is enabled by employing physical-models of radar forward scattering for individual vegetation types to account for vegetation scattering and absorption, and by constraining the surface roughness effect using time-series observations. The L-band SMAP multi-polarized (HH/VV/HV) σ°data acquired globally every three days were used from mid-April to early July, 2015. Assessment was conducted over 13 rigorously-chosen core validation sites covering a wide range of biomass types, biomass amount, and soil conditions (Figure 31). The soil moisture retrieval reached an accuracy of 0.063 m3/m3 RMSE (Root Mean Square Error), a bias of -0.002 m3/m3, and a correlation of 0.54. The successful retrieval demonstrates that the physically-based retrieval method is capable of characterizing soil moisture over diverse conditions of soil moisture, surface roughness, and vegetation on a global scale.
- Figure 32. shows a global image developed using the SMAP algorithms. The regions that are expected to be very dry (i.e., the Sahara desert) and wet (i.e., the Amazon Basin) reflect the expected levels of retrieved soil moisture. The global patterns show the expected soil moisture variability. Compared with the radiometer-based retrievals in the inset of Figure 32, the global spatial patterns are in agreement but there are some regional bias differences between the two. The radar-based retrievals are less dry over the Sahara desert than the radiometer-based estimates. The bare surface forward model assumes no topography and no penetration, while the topography in the area is expected to increase σº (more than the topography does on the radiometer data) and penetration depth may reach 1 m. Subsurface feature such as rocky terrain may cause retrieval errors. Over shrublands, the two products match well in Namibia, the southwest of the United States, southern Argentina, and Australia. The rainforest appears wetter in the radar product than in the radiometer output, but this is an area where the performance of both products is expected to be poor.
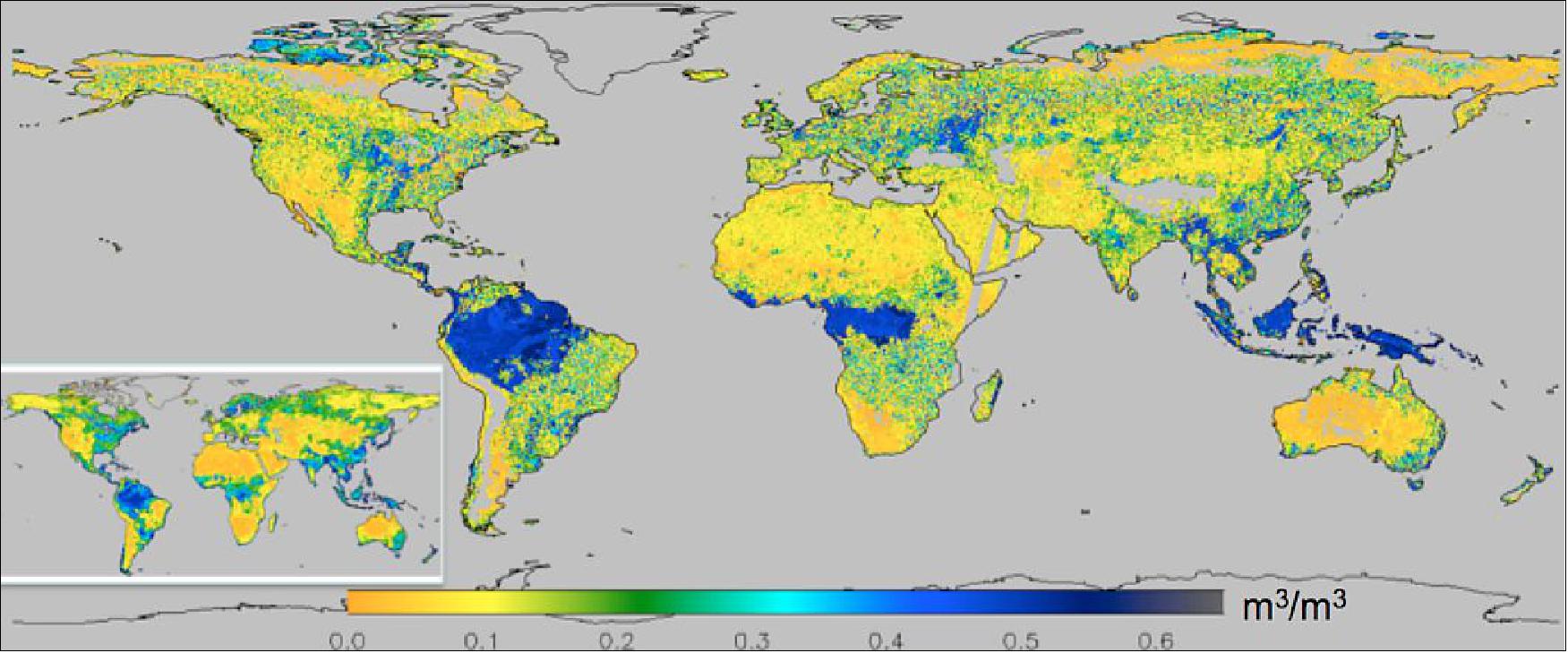
• April 19, 2016: In 2015, Ethiopia endured its worst drought in decades. While there is an indication that this April has been drier than normal in some areas, the strength of the drought this year will not be known until farther along in 2016. 50)
- For now, satellite data can help show the state of conditions on the ground important for agriculture (Figure 33). Ethiopia is now in its secondary crop season—the "belg"—a short rainy season from March to May. Successful harvest of belg crops depends on adequate rainfall.
- Planting in the highlands was already underway in early March 2016, as the belg rains had an early start in February. But rainfall since February has been unevenly distributed across Ethiopia, according to the NOAA Climate Prediction Center. Moisture deficits have grown in the central, southwestern, and eastern parts of the country. The situation could change in coming weeks, as heavy rainfall was forecasted for eastern and southern Ethiopia, which would help to reduce the deficit.
- Another way to gauge growing conditions is by analyzing the NDVI (Normalized Difference Vegetation Index), a measure of how plants absorb visible light and reflect infrared light. Drought-stressed vegetation reflects more visible light and less infrared than healthy vegetation.
- The map of Figure 34 is based on data from MODIS (Moderate Resolution Imaging Spectroradiometer) on NASA's Aqua satellite. The map shows the NDVI anomaly: it contrasts vegetation health from March 29 to April 5, 2016, against the long-term average from 2000–2015. Brown areas show where plant growth, or "greenness," was below normal. Greens indicate vegetation that is more widespread or abundant than normal for the time of year. Grays depict areas where reliable data were not available, usually due to cloud cover.
- Most of the country's food is produced during the main growing season, the "meher," which is a longer rainy season that begins in June and runs through at least August. While it remains to be seen what the 2016 meher will bring, the effects of the 2015 drought are still being felt. According to news reports, more than 10 million Ethiopians are relying on food aid, and others need farming supplies to revive the area's agriculture.
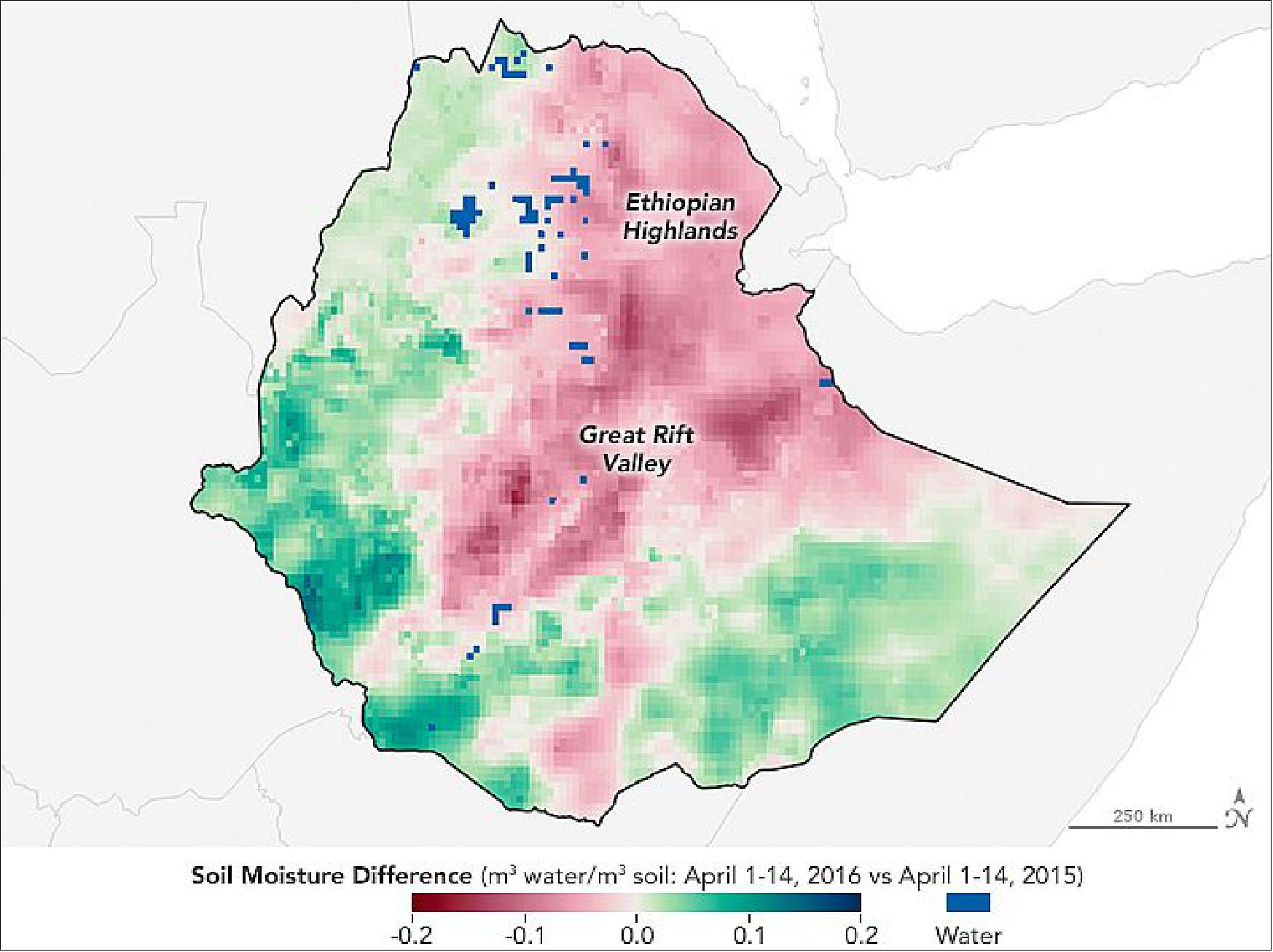
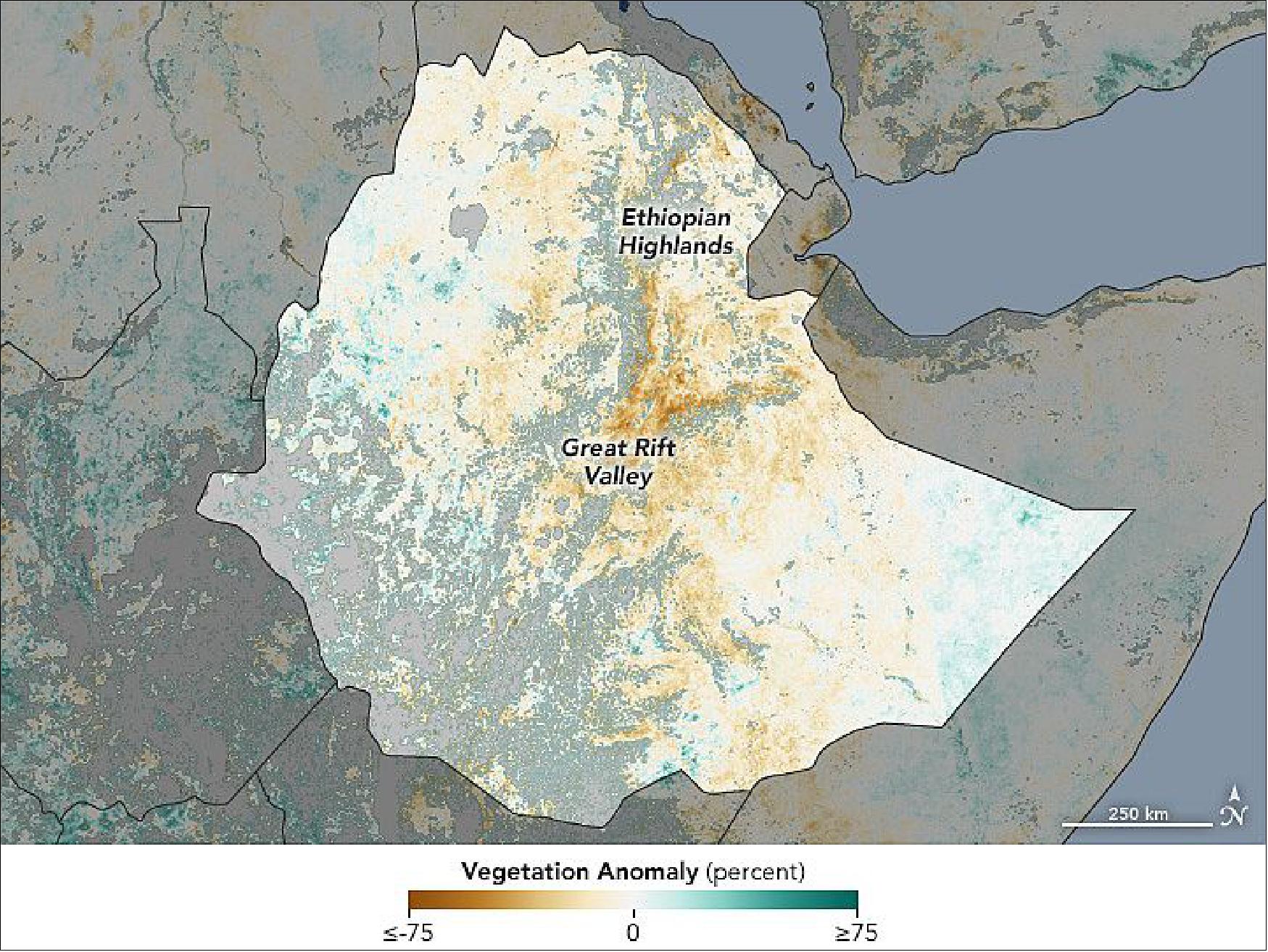
• Nov. 27, 2015: NASA scientists are auditioning the radar aboard Sentinel-1A European satellite to see how well it stands in for the radar that broke down aboard the U.S. space agency's newly launched Soil Moisture Active Passive (SMAP) satellite in July. Sentinel's C-band radar is not the only radar flying in space — or even the closest substitute for the lost SMAP L-band radar — but it is the only one that will trail SMAP closely enough to gather timely radar images of the swath of Earth that SMAP covers with its radiometer. 51)
• Nov. 25, 2015: Compared to the amount of water stored elsewhere on the planet, the amount in the soil is minuscule. But that small volume has great significance around the world. Measurements of soil moisture are relevant for a variety of applications, particularly farming. There's more to it, however, than the simple fact that plants need water to grow. 52)
- Knowing something about the moisture in the soil is important before, during, and after the growing season. For example, will mud prevent a tractor from safely plowing through the fields? How much water will fruits, nuts, and vegetables have available at each stage of growth, from germination through harvest? What is the forecast for crop yields around the world? How will the amount of moisture and agricultural output affect trade policy and food aid? Satellite and ground-based sensors are helping scientists find out.
- The colors of the map (Figure 35), whose data was acquired in the period May 27-31, 2015 with the radar and radiometer instruments on SMAP, show the volume of water contained in a volume of soil. Dark green and blue areas are progressively wetter, up to a ratio of about 0.5; at that point, the ground is considered saturated.
Note: the radar instrument stopped transmitting data in July 2015, but the radiometer is still active.
- At the same time, ground-based sensors monitor soil moisture over small areas — typically less than one square meter. The image of Figure 36 shows the locations of more than 1,200 ground-based stations across the United States.
- Networks of ground-based stations have become expansive in the United States, particularly in Oklahoma. In that state, stations are part of an environmental monitoring network called Mesonet, which was conceived after a disastrous flood struck Tulsa, Oklahoma, in 1984. Today, more than 100 stations across Oklahoma measure soil moisture at depths down to 60 cm. Mesonet is just one of 31 networks, which together account for nearly 1,500 stations in North America.
- Data from ground sensors, updated every 30 minutes, can help farmers quickly figure out where there is inadequate moisture in their fields. The plot below the map shows the level of detail provided by data from the Coastal Sage UCI (University of California, Irvine) station in California.
- These in situ networks do not cover all areas of the United States, and certainly not all of the planet. To fill in the gaps, some scientists estimate global soil moisture by running computer models loaded with precipitation, temperature, and humidity data. Gathering all of the data to run such models can take as long as two to three months, which makes realtime applications impossible.
- "What we really want is soil moisture information that can be used to understand how plants are growing and what's going on in the atmosphere right now," said Susan Moran, a hydrologist with USDA's Agricultural Research Service and chair of the SMAP Applications Working Group. "We have to get soil moisture information to the agriculture community, and the only way to do that is from satellites."
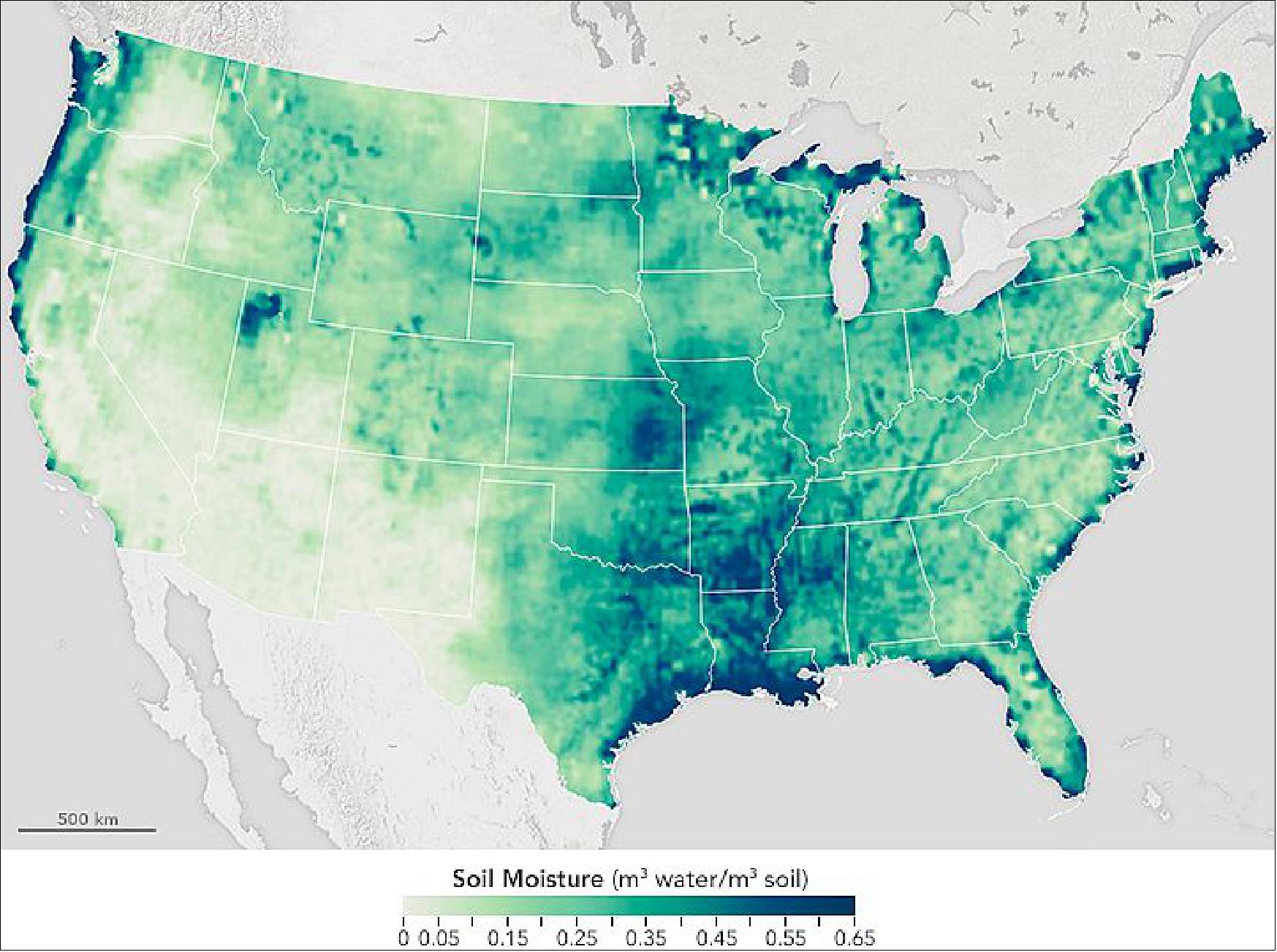
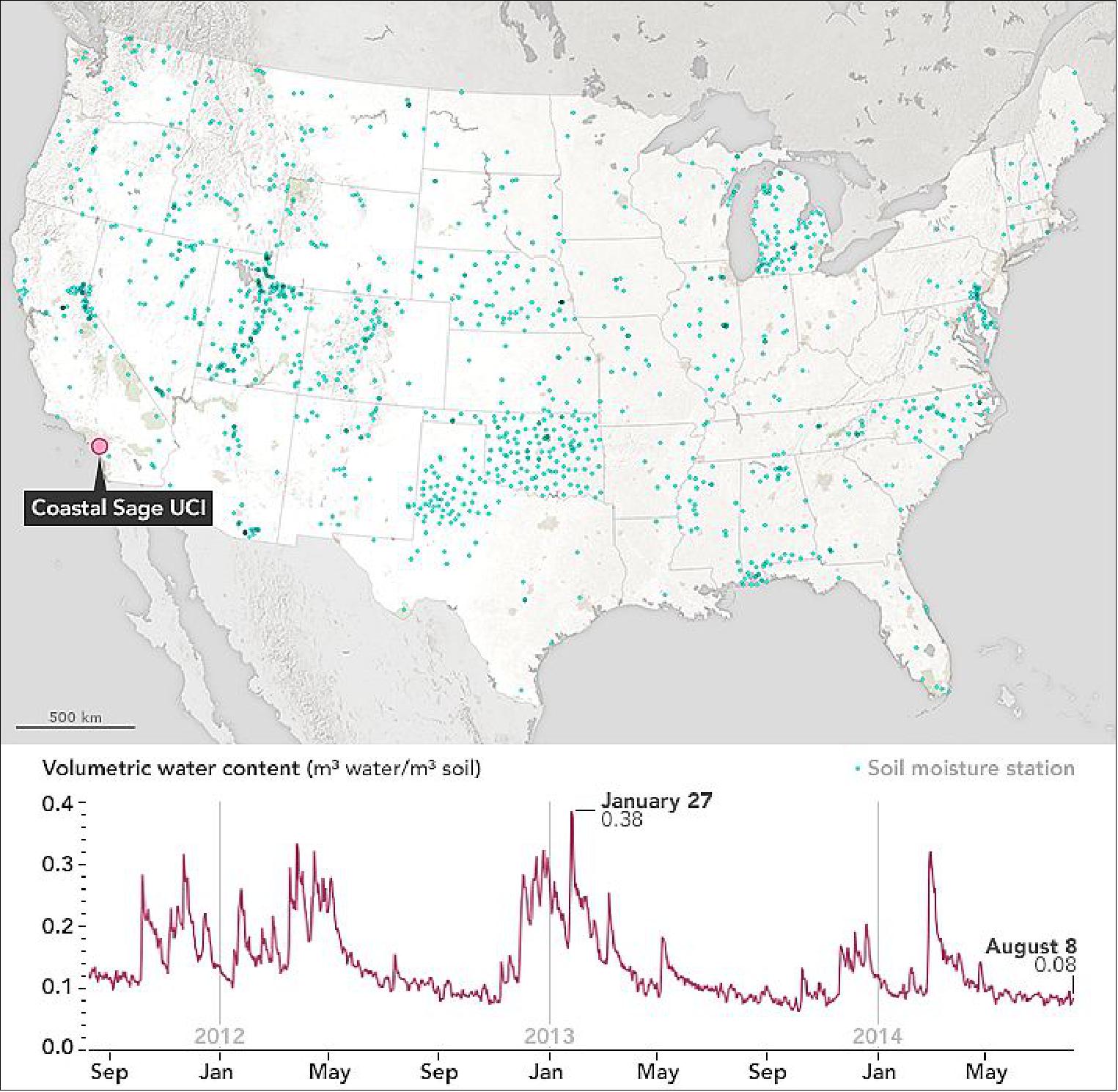
• October 23, 2015. SMAP data so far: 53)
- Exceptional quality global L-band radiometry – science acquisition continuing
- SMAP data provides overlapping global L-band radiometry together with SMOS
- Potential for long-term and high-revisit water cycle observations (land and ocean)
- SMAP radar loss on July 7 is set-back for community
- Science recovery efforts now underway taking advantage of substantial SMAP radiometer oversampling and Sentinel-1A (and -1B) joint observations
- Science uses of SMAP in characterizing both land and ocean branches of the water cycle underway at the same time.
• October 8, 2015: It was rain that wouldn't quit. A weather system fueled by warm moisture streaming in from the Atlantic Ocean on Oct. 3 and 4 relentlessly dumped between 0.3 and 0.6 meters of rain across most of South Carolina. The result was rivers topping their banks and dams bursting. Catastrophic flooding followed across most of the state, which has left residents in some areas without power or clean drinking water. 54)
- Tracking and predicting the deluge, both as rain and then as floodwater, are the first steps to help protect people in harm's way. State and federal emergency managers have been on the front lines of this natural disaster since it began, armed with weather and flood forecasts from the National Weather Service. NASA has supported these efforts with information based on data from Earth-observing satellites in space.
- The GPM (Global Precipitation Measurement) mission of NASA and JAXA provided regular data on the amount of rain falling across the region. These data, managed by NASA's Goddard Space Flight Center in Greenbelt, Maryland, confirmed the record-breaking rainfall totals and fed into other systems that helped forecast the extent of the flooding in the region.
- As essential as following the rain is knowing what happens when it reaches the ground. The NASA SPoRT (Short-term Prediction Research and Transition Center) at MSFC (Marshall Space Flight Center) in Huntsville, Alabama, runs a computer simulation model called the NASA Land Information System for most of the central and eastern United States, including the Carolinas. The SPoRT Project used rainfall data from the GPM mission and measurements from NASA's SMAP (Soil Moisture Active Passive) satellite in this near realtime simulation, and provided the NWS (National Weather Service) forecast offices with experimental soil moisture data that can aid short-term flood forecasting. Soil moisture describes the ability of the ground to absorb water, like a sponge. During the record-setting rainfall event, soil moisture across South Carolina reached 75 to 100 % saturation. At these high levels of saturation, the soil no longer has the sponge capacity to hold the water, so it flows over the land — leading to flash floods.
- GPM rainfall data are used in another NASA-funded flood prediction tool that follows water on the ground, the Global Flood Monitoring System, developed and run by researchers at the University of Maryland, College Park. The Global Flood Monitoring System takes current satellite rain data and combines them with a model of the land surface — showing slopes, streams and rivers — and soil moisture to project the likelihood of flooding based on when rivers broke their banks in the past. The FEMA (Federal Emergency Management Agency) and the Department of Homeland Security use these maps to help tell where the flooding is now, after the rainfall, and where flooding may continue in the days ahead as floodwaters move downstream.
- Even before the storm clouds cleared, efforts to assess the damage from space had begun. NASA's ARIA (Advanced Rapid Imaging and Analysis) project at NASA/JPL in Pasadena, California, developed plans to analyze before-and-after data from synthetic aperture radars (SAR) flown by ASI (Italian Space Agency) and JAXA. These data can see through clouds to detect changes in the urban environment, such as storm damage to buildings and roads.
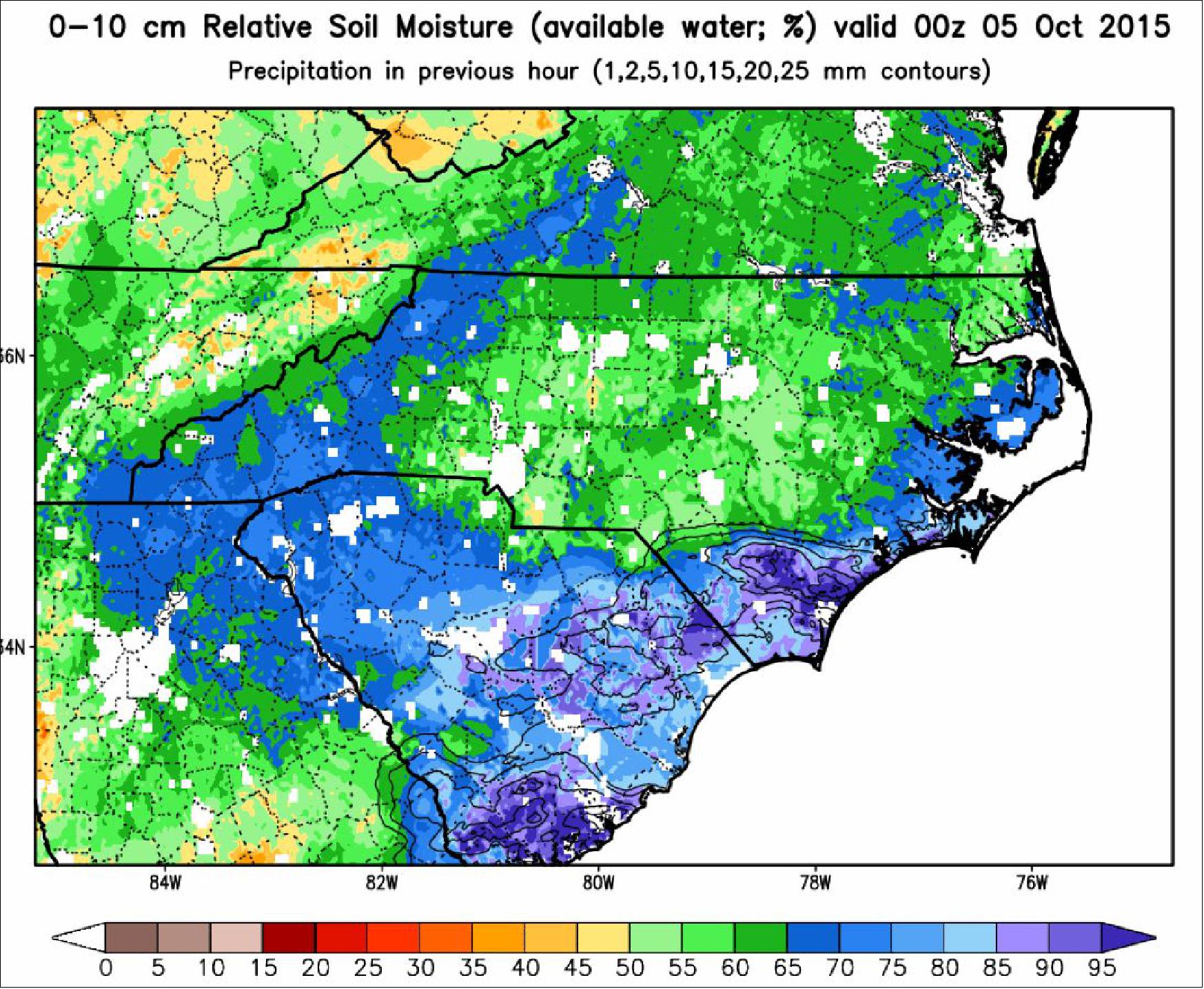
• October 5, 2015: The beta version of Level-2 and Level-3 radiometer data from NASA's SMAP (Soil Moisture Active Passive) mission is now available at the NSIDC/DAAC (NASA National Snow and Ice Data Center/ Distributed Active Archive Center). These data use input L-band brightness temperature measurements retrieved from the SMAP radiometer to produce global soil moisture estimates. 55)
- As of Sept. 9, 2015, the SMAP Science Data System (SDS) has begun forward processing of the beta (Version 1) Level-2 and -3 radiometer data, which will be made available at the NSIDC/ DAAC within 24 hours of satellite observation for the Level-2 data and within 50 hours for the Level-3 data. Note that reprocessing of the data from March 31, 2015 to Sept. 9, 2015 to Version 1 will begin at the end of October 2015.
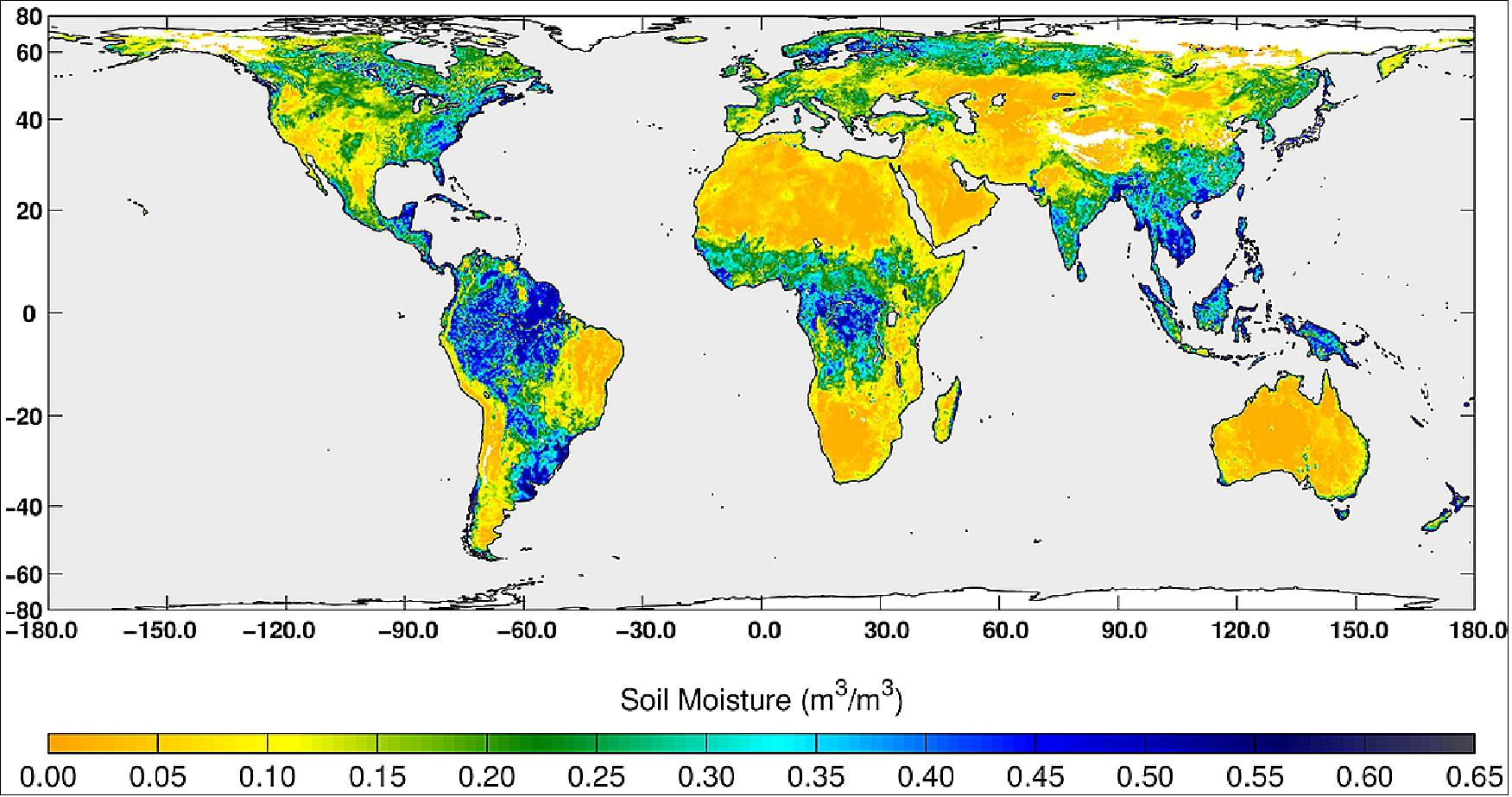
• September 2, 2015: Managers of the SMAP observatory have determined that its radar, one of the satellite's two science instruments, can no longer return data. However, the mission, which was launched in January to map global soil moisture and detect whether soils are frozen or thawed, continues to produce high-quality science measurements supporting SMAP's objectives with its radiometer instrument. 56)
- The SMAP spacecraft continues normal operations, and the first data release of soil moisture products is expected in late September. "Although some of the planned applications of SMAP data will be impacted by the loss of the radar, the SMAP mission will continue to produce valuable science for important Earth system studies," said Dara Entekhabi, SMAP Science Team lead at the Massachusetts Institute of Technology in Cambridge.
- On July 7, 2015, SMAP's radar stopped transmitting due to an anomaly involving the radar's high-power amplifier (HPA). The HPA is designed to boost the power level of the radar's pulse to more than 500 W, ensuring the energy scattered from Earth's surface can be accurately measured. The SMAP project at NASA/JPL formed an anomaly team to investigate the HPA issue and determine whether normal operation could be recovered. A series of diagnostic tests and procedures was performed on both the spacecraft and on the ground using flight spare parts.
- Following an unsuccessful attempt on Aug. 24 to power up the radar unit, the project had exhausted all identified possible options for recovering nominal operation of the HPA and concluded the radar is likely not recoverable.
- NASA has appointed a mishap investigation board to conduct a comprehensive review of the circumstances that led to the HPA anomaly in order to determine how the anomaly occurred and how such events can be prevented on future missions. JPL also will convene a separate failure review board that will work with the NASA investigation.
- The nearly three months of coincident measurements by the two instruments are a first of their kind. The combined data set allows scientists to assess the benefit of this type of combined measurement approach for future missions. Scientists now are developing algorithms to produce a freeze-thaw data product at 40 km resolution from the radiometer data. They also are evaluating whether the 40 km radiometer soil moisture resolution can be improved.
- Based on the available SMAP mission data, scientists have identified other useful science measurements that can be derived from the radiometer data, such as sea surface salinity and high winds over the ocean surface. Over the next several months, the SMAP project and NASA will work to determine how to implement these new measurements into the project's data products.
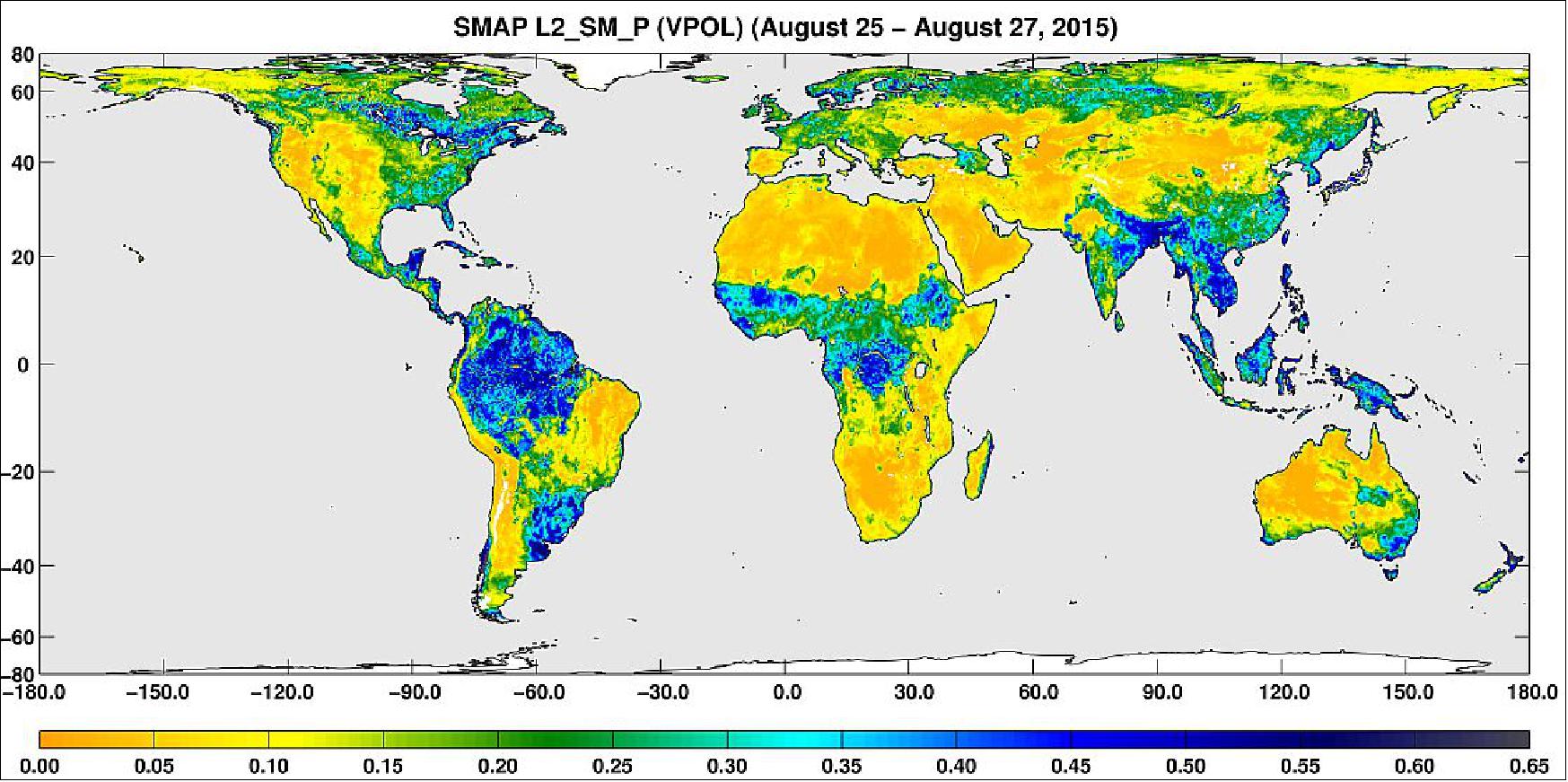
• August 6, 2015: In a major milestone, scientists have completed their initial calibration of the two instruments on NASA's new Soil Moisture Active Passive (SMAP) satellite observatory, launched Jan. 31, 2015. The work paves the way for upcoming activities to validate SMAP science data against ground measurements, leading to the planned release of SMAP soil moisture data products to the international science community this fall and the release of fully validated data next spring. 58)
- The calibration activities reveal SMAP's radar calibration stability to be within 1 decibel, and SMAP's radiometer calibration stability within 1 Kelvin. The calibration work allows SMAP data users to familiarize themselves with partially calibrated, or "beta" data, while the full calibration activities are being completed. The "beta-level" radiometer and radar data products were made available for public release July 31 through the NSIDC (National Snow and Ice Data Center) in Boulder, CO and the ASF (Alaska Satellite Facility) in Fairbanks, AK. The fully calibrated data will be released in early November of 2015.
- SMAP's minimum three-year mission will map global soil moisture and detect whether soils are frozen or thawed. The mission will help scientists understand the links between Earth's water, energy and carbon cycles; help reduce uncertainties in predicting weather and climate; and enhance our ability to monitor and predict natural hazards such as floods and droughts.
- SMAP radiometer data have been processed to map microwave emissions from Earth's surface, expressed as brightness temperatures in Kelvin and at a horizontal spatial resolution of about 40 km. SMAP's radar began regular operations on April 13, but stopped transmitting July 7 due to an anomaly that is still being investigated by the SMAP team at JPL. The available radar data have been processed to produce coarse-resolution 5 km x 30 km global data products and high-resolution (1 km) data products over land surfaces and coastal oceans.
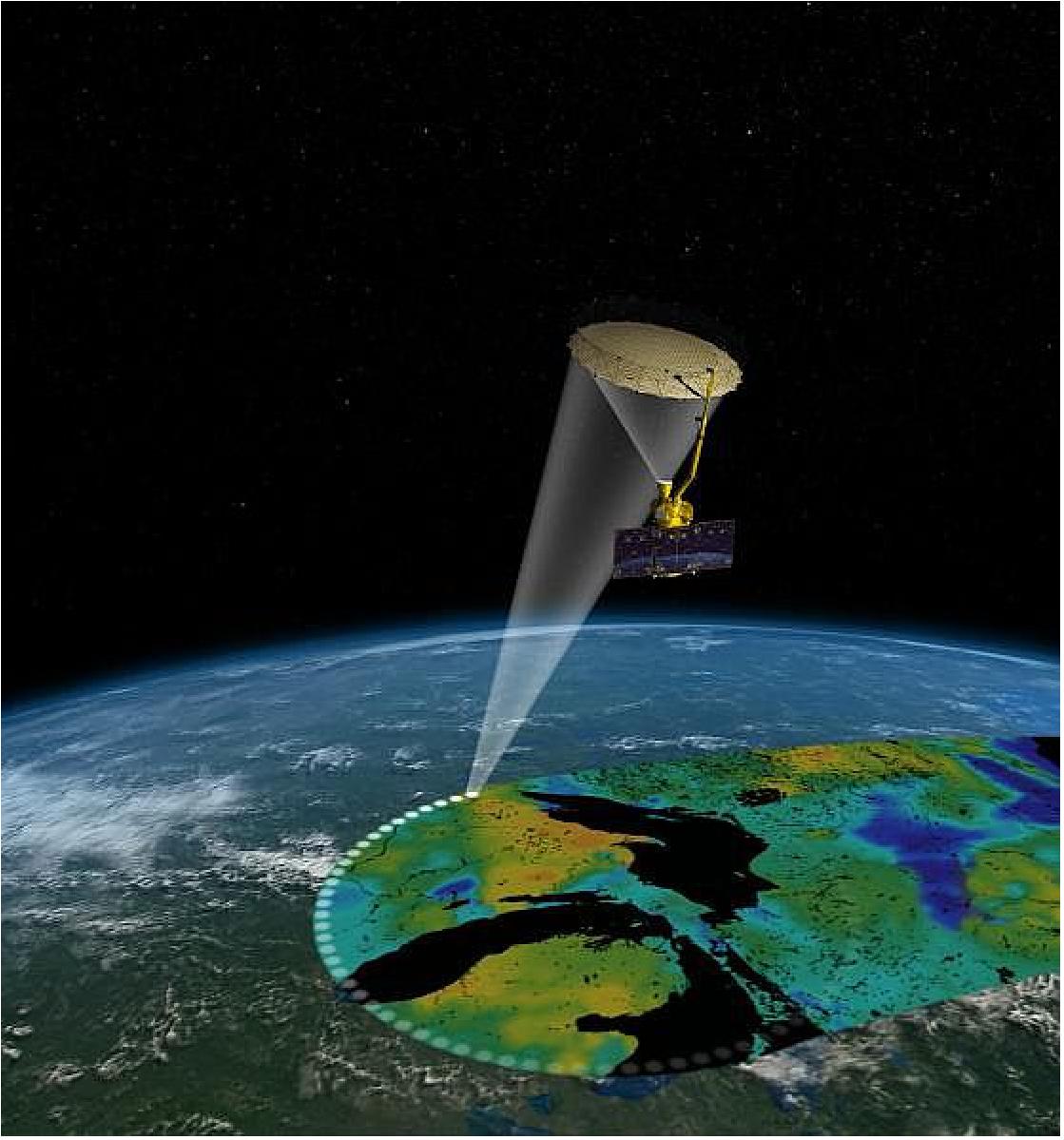
• August 5, 2015: The JPL SMAP mission team continues to troubleshoot the anomaly that occurred on SMAP's radar instrument on July 7. The radar remains in safe mode. SMAP's radiometer instrument continues to operate nominally and is collecting valuable science data. 59)
- Detailed analyses by the team have isolated the radar anomaly to the low-voltage power supply for the radar's HPA (High Power Amplifier). The HPA boosts the power level of the radar's pulse to ensure the energy scattered from Earth's surface is strong enough to be accurately measured by the SMAP radar instrument. The team identified several candidate faults within the low-voltage power supply that could fit the observed telemetry behavior.
- Although several attempts to recover the radar have been unsuccessful, ongoing analyses have recovered valuable diagnostic data that are assisting the team in better understanding the nature and source of the issue.
The calibration of the SMAP radar data takes place in several steps 60) 61)
1) Pre-Launch Calibration: Pre-launch, radar instrument parameters that contribute to calibration were carefully measured at the component level (e.g., antenna gain, calibration loop-back loss, etc.). The emphasis of pre-launch calibration was to establish that the instrument is stable and "calibratable" once it reaches orbit. It is understood that absolute biases may still exist, and will need to be removed during post-launch calibration. 60)
2) Post-Launch Commissioning Phase: During the post-launch commissioning phase (first three months on orbit), the pre-launch test results are confirmed. Further, the radar is configured into a final operational state by removing pointing biases and by choosing an operational frequency that minimizes RFI (Radio Frequency Interference).
3) Post-Launch Radiometric Calibration Against Terrestrial Standard Targets: The ultimate means of calibrating the SMAP radar is to use known terrestrial targets as calibration standards to detect and remove calibration biases. The primary targets used for SMAP calibration are the ocean and the Amazon. An ocean backscatter model function relating SMAP backscatter cross-section to model-based wind speed and direction is compared to that derived from the NASA Aquarius and JAXA PALSAR missions. Differences between these model functions are used to adjust the SMAP calibration to the standards established by earlier missions. Amazon backscatter from the JAXA PALSAR missions is used to establish spatial consistency of the SMAP radiometric calibration.
4) Post-Launch Calibration Using Active Polarimetric Source: An active calibration source will be utilized which is capable of receiving and measuring the transmitted signal from SMAP, as well as transmitting a signal upwards to SMAP. Consequently, the active calibrator will have the equivalent functionality of a very large know reflector on the surface. (Reasonably sized corner reflectors will not be adequately visible for calibration purposes given the SMAP radar's relatively coarse spatial resolution). This active source will be used for image quality assessment, radiometric calibration, polarimetric calibration, and radiometric drift measurements.
SMAP Level 2/3 Soil Moisture Products: 61)
- L2SMP is based on the SMAP radiometer measurements and has a spatial resolution of about 40 km and the product is gridded on a 36 km EASE-2 (Equal-Area Scalable Earth grid version 2)
- L2SMAP utilizes SMAP radar measurements to disaggregate the radiometer measurements down to 9-km resolution (the product is gridded on a 9 km EASE-2 grid) before retrieving soil moisture.
- L2SMA is based on the SMAP synthetic aperture radar (SAR) measurements and has a spatial resolution of about 3 km (the product is gridded on a 3 km EASE-2 grid).
The products are swath based and produced separately. A daily L3 composite product is generated from each of the products as well.
Core validation sites: In an effort to ensure the geographic distribution and diversity of conditions of the core validation sites, SMAP has partnered with investigators across the globe. These Cal/Val Partners play a crucial role in the execution of the SMAP Cal/Val Plan. Table 5 lists all the sites that are candidates for core sites and Figure 41 shows their location (Ref. 61).
Because different SMAP Level 2 soil moisture products have different spatial scales, the suitability of the various sites for validation of the different products must be assessed for each site while considering several factors. The sites are being qualified in two categories: (a) the confidence in the representativeness of a site at a certain spatial scale is high enough for using the site as a basis of computing the performance metrics (core validation site), and (b) the site can be utilized for algorithm testing but the confidence of the representativeness is not high enough for using the site in the metrics computations. Table 5 indicates the sites, which have so far been qualified for the core validation site level.
The SMAP baseline retrieval domain is defined by the requirements of the mission: surfaces with permanent ice and snow, urban areas, wetlands, and vegetated areas with vegetation water content more than 5 kg/m2 (mostly forests) are excluded. Currently qualified core validation sites are found for land cover types that together extend over about 70 % of the retrieval domain. Upgrading some of the current candidate sites up to the core site level would change this figure to close to 100 %. The land cover classes are those of IGBP (International Geosphere-Biosphere Program) of ICSU.
Site Name | Site PI | Area | Climate Regime | IGBP Land Cover |
Tonzi Ranch | M. Moghaddam | USA (California) | Temperate | Savannas woody |
Walnut Gulch* | M. Cosh | USA (Arizona) | Arid | Shrub open |
Reynolds Creek* | M. Seyfried | USA (Iowa) | Arid | Grasslands |
Fort Cobb* | M. Cosh | USA (Oklahoma) | Temperate | Grasslands |
Little Washita* | M. Cosh | USA (Oklahoma) | Temperate | Grasslands |
South Fork* | M. Cosh | USA (Iowa) | Cold | Croplands |
St. Josephs* | M. Cosh | USA (Indiana) | Cold | Croplands |
Little River* | M. Cosh | USA (Georgia) | Temperate | Cropland/natural mosaic |
Millbrook | M. Temini | USA (New York) | Cold | Forest deciduous broadleaf |
Kenaston* | A. Berg | Canada | Cold | Croplands |
Carman* | H. NcNaim | Canada | Cold | Croplands |
Casselman* | H. NcNaim | Canada | Cold | Croplands |
Tabasco | J. Ramos | Mexico | Tropical | Croplands |
Monte Buey* | M. Thibeault | Argentina | Arid | Croplands |
Bell Ville | M. Thibeault | Argentina | Arid | Croplands |
REMEDHUS* | J. Martínez-Fernández | Spain | Temperate | Croplands |
Valencia* | E. Lopez-Baeza | Spain | Arid | Savannas woody |
EURAC | C. Notarnicola | Italy | Polar | Shrub open |
Twente* | B. Su | Holland | Cold | Cropland/natural mosaic |
TERENO | C. Montzka | Germany | Temperate | Forest mixed |
HOAL | W. Dongo | Austria | Temperate | Mixed forest |
Sodankyla | J. Pulliainen | Finland | Cold | Savannas woody |
Kuwait | H. Jassar | Kuwait | Temperate | Barren/sparse |
Mpala | K. Caylor | Kenya | Temperate | Grasslands |
Niger | T. Pellarin | Niger | Arid | Grasslands |
Benin | T. Pellarin | Benin | Arid | Savannas |
Naqu | B. Su | Tibet | Polar | Grasslands |
Maqu | B. Su | Tibet | Cold | Grasslands |
Ngari | B. Su | Tibet | Arid | Barren/sparse |
MAHASRI | JAXA | Mongolia | Cold | Grasslands |
Yanco* | J. Walker | Australia | Arid | Croplands |
Kyeamba | J. Walker | Australia | Temperate | Croplands |
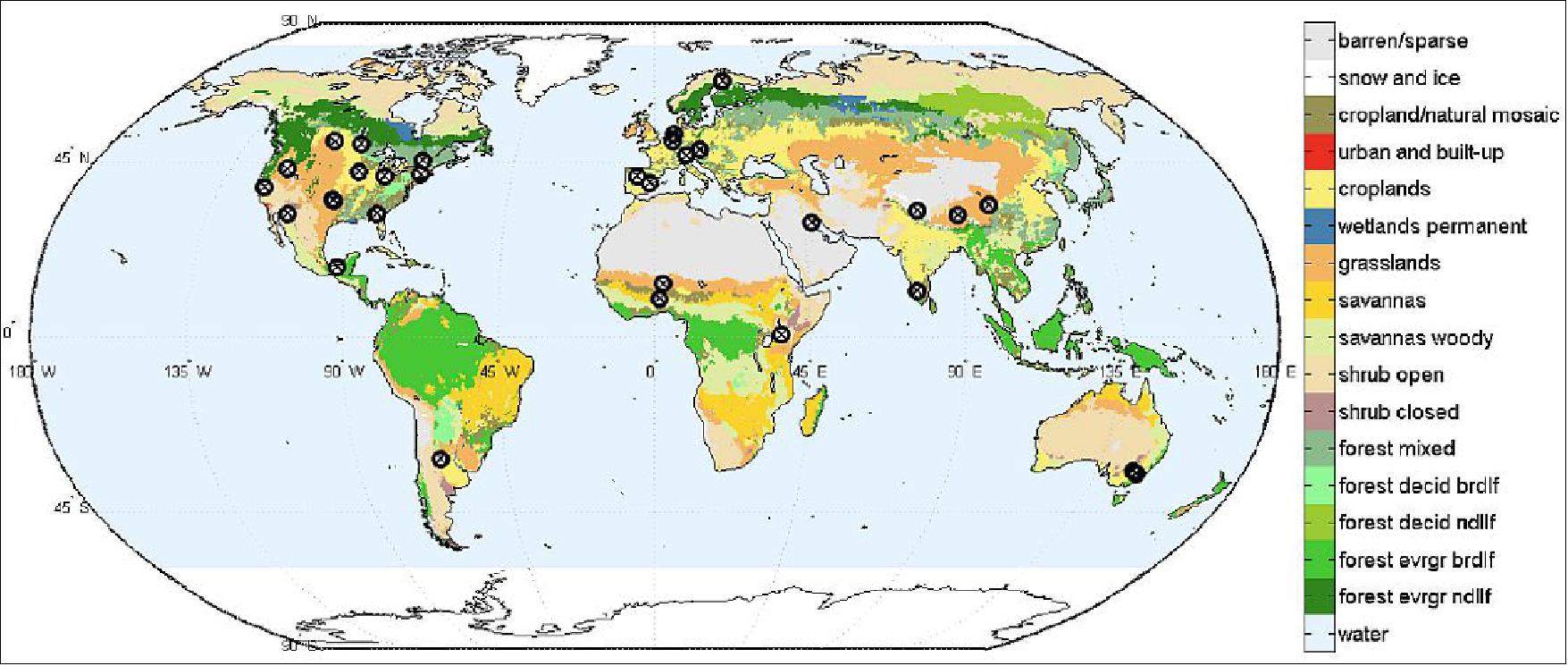
The performance of the SMAP soil moisture products will be assessed over the core validation sites. Root mean square difference (RMSD), unbiased RMSD (ubRMSD), bias and correlation are computed for each site. The mission success is evaluated based on the average of the metrics. Figure 42 shows an example of the comparisons for assessing the SMAP soil moisture products over one of the core validation sites (Little Washita, OK, USA in this case). These reports are used to track the performance of the SMAP products and updated weekly with latency of the in situ data ranging from 1 day to 1 month, and upon product updates.
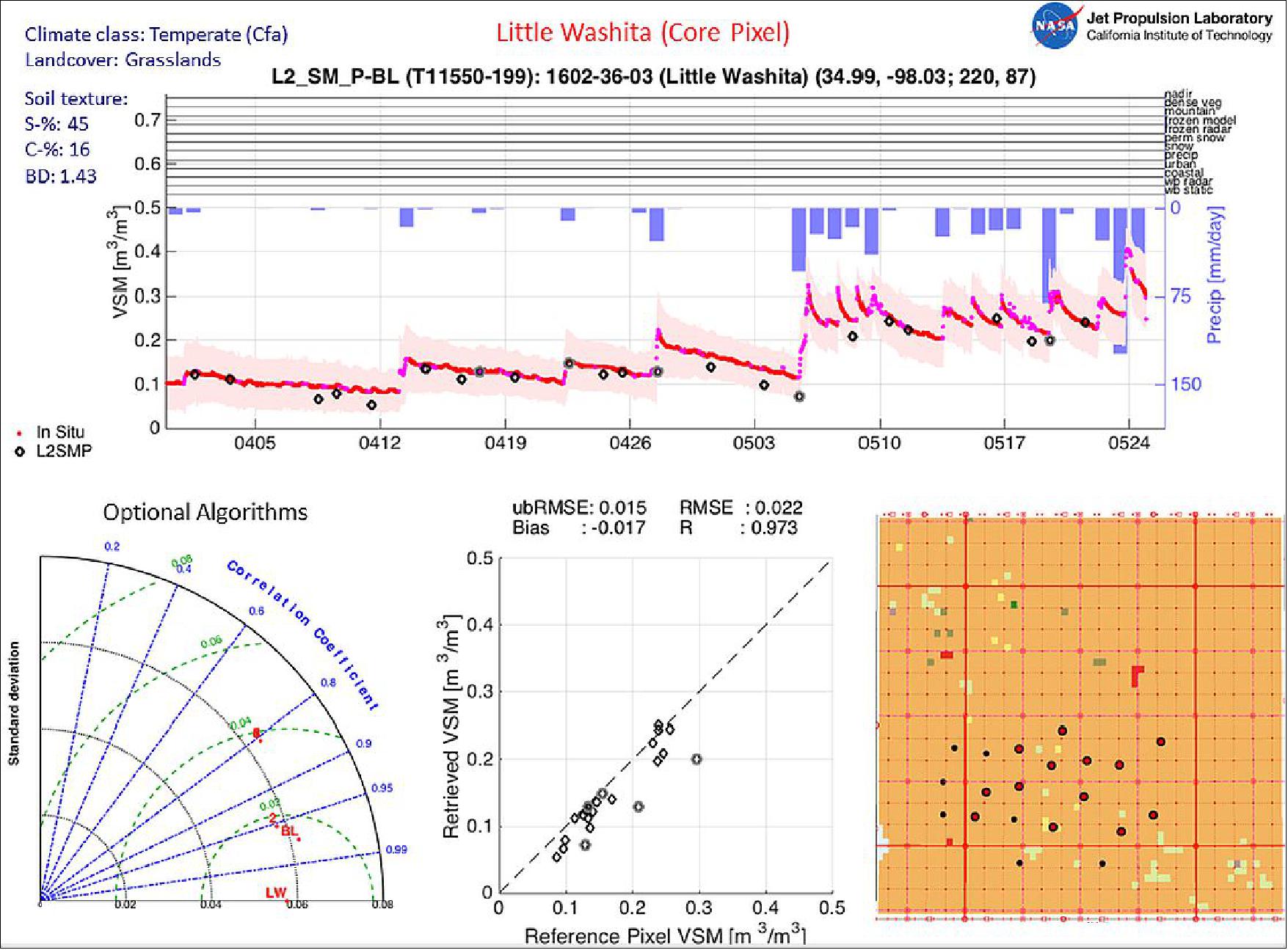
• August 2015: The following references deal with the validation of the SMAP data at various core validation sites, of algorithm development, of radiometer calibration techniques, of initial RFI results, etc. - reported at IGARSS 2015. 62) 63) 64) 65) 66) 67) 68) 69) 70) 71) 72) 73) 74) 75) 76) 77) 78)
• July 28, 2015: The Canadian government has announced funding projects at five Canadian universities to analyze and compile measurements collected by NASA’s Soil and Moisture Active Passive (SMAP) satellite. 79)
- The SMAP mission will provide measurements of soil moisture and determine whether the ground is frozen or thawed in the Canadian boreal environment and other cold areas of the world. These measurements will help to produce global maps of soil moisture, helping scientists to better understand how changes in weather and climate affect the cycling of Earth’s water and carbon. This data could help improve weather forecasting including more accurate flood and drought predictions. With new insights into changing weather and water conditions, Canadian farmers will be able to better understand crop yields and get early warnings of soil conditions that could lead to crop-damaging pests.
• July 10, 2015: Mission managers at NASA/JPL, Pasadena, California, are assessing an anomaly with the radar instrument on NASA's SMAP (Soil Moisture Active Passive) satellite observatory. The radar is one of two science instruments on SMAP used to map global soil moisture and detect whether soils are frozen or thawed. 80)
- On July 7, at about 2:16 P.M. PDT, SMAP’s radar halted its transmissions. All other components of the spacecraft continued to operate normally, including the radiometer instrument that is collecting science data. - An anomaly team has been convened at JPL and is reviewing observatory and instrument telemetry and science data. Telemetry indicates no other issues with the spacecraft.
• May 19, 2015: NASA begins SMAP science mission operations. — During SMAP's first three months in orbit, referred to as SMAP's “commissioning phase”, the observatory was first exposed to the space environment, its solar array and reflector boom assembly containing SMAP's 6 m reflector antenna were deployed, and the antenna and instruments were spun up to their full speed, enabling global measurements every two to three days. The commissioning phase also was used to ensure that SMAP science data reliably flow from its instruments to science data processing facilities at NASA/JPL in Pasadena, California, and at NASA/GSFC (Goddard Space Flight Center) in Greenbelt, Maryland. 81)
- "Fourteen years after the concept for a NASA mission to map global soil moisture was first proposed, SMAP now has formally transitioned to routine science operations," said Kent Kellogg, the SMAP project manager at JPL. "SMAP's science team can now begin the important task of calibrating the observatory's science data products to ensure SMAP is meeting its requirements for measurement accuracy."
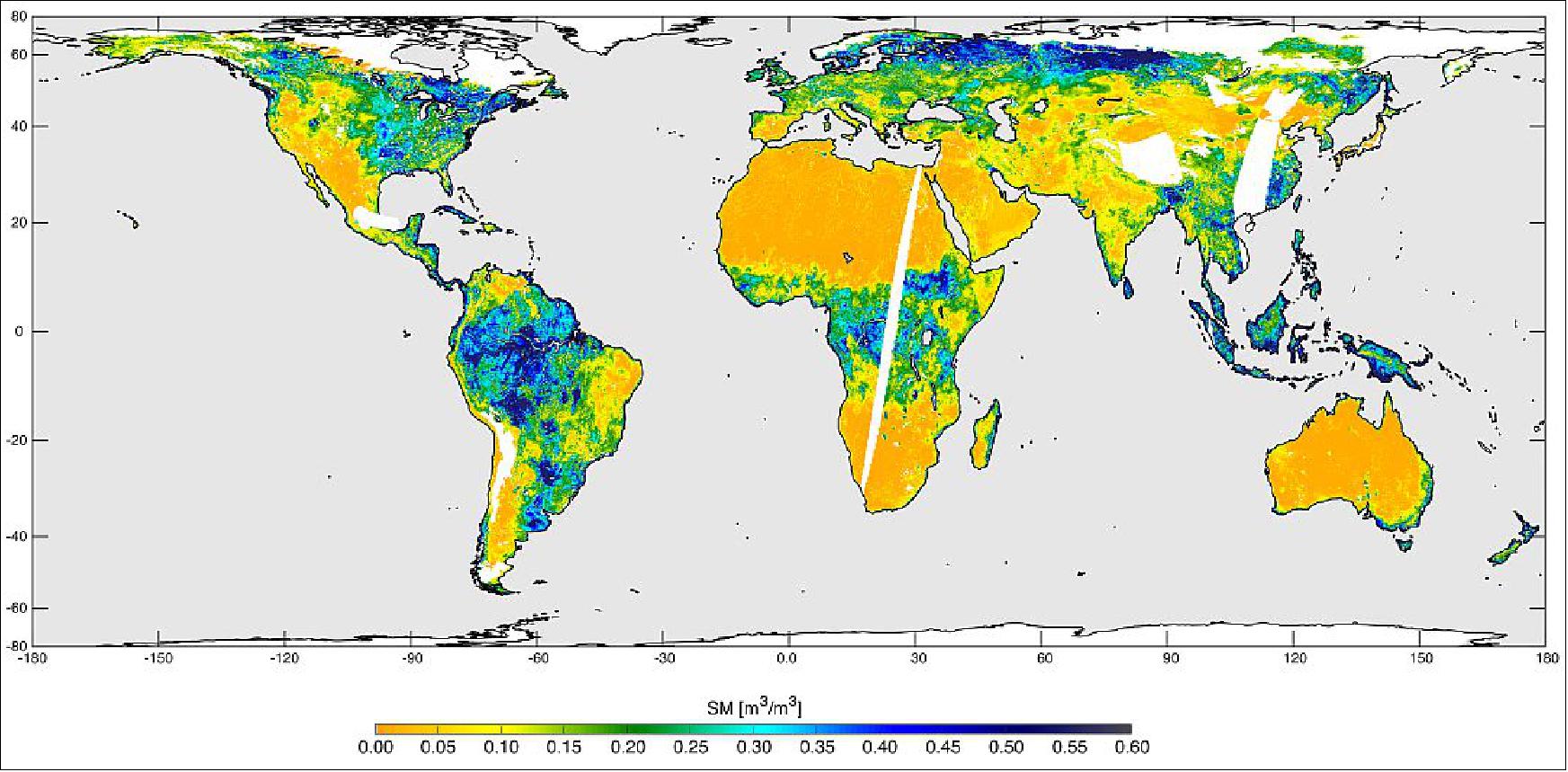
- Together, SMAP's two instruments, which share a common antenna, produce the highest-resolution, most accurate soil moisture maps ever obtained from space. The spacecraft’s radar transmits microwave pulses to the ground and measures the strength of the signals that bounce back from Earth, whereas its radiometer measures microwaves that are naturally emitted from Earth’s surface.
- "SMAP data will eventually reveal how soil moisture conditions are changing over time in response to climate and how this impacts regional water availability,” said Dara Entekhabi, SMAP science team leader at MIT (Massachusetts Institute of Technology) in Cambridge, MA. “SMAP data will be combined with data from other missions like NASA's GPM (Global Precipitation Measurement), SAC-D/Aquarius and GRACE (Gravity Recovery and Climate Experiment) to reveal deeper insights into how the water cycle is evolving at global and regional scales."
- The first global view of SMAP's flagship product (Figure 43), a combined active-passive soil moisture map with a spatial resolution of 9 km, shows dry conditions in the Southwestern United States and in Australia's interior. Moist soil conditions are evident in the U.S. Midwest and in eastern regions of the United States, Europe and Asia. The far northern regions depicted in these SMAP maps do not indicate soil moisture measurements because the ground there was frozen.
- Over the next year, SMAP data will be calibrated and validated by comparing it against ground measurements of soil moisture and freeze/thaw state around the world at sites representing a broad spectrum of soil types, topography, vegetation and ground cover. SMAP data also will be compared with soil moisture data from existing aircraft-mounted instruments and other satellites.
- Preliminary calibrated data will be available in August 2015 at designated public-access data archives, including the National Snow and Ice Data Center in Boulder, Colorado, and Alaska Satellite Facility in Fairbanks. Preliminary soil moisture and freeze/thaw products will be available in November, with validated measurements scheduled to be available for use by the general science community in the summer of 2016 (Ref. 81).
• May 7, 2015: SMAP ground truth campaign. SMAPEx-4 (Soil Moisture Active Passive Experiments-4) field campaign in Australia. Around 40 scientists are studying the Australian soil from the ground and air — the first major soil moisture field campaign conducted since SMAP launched Jan. 31, 2015. The three-week study, conducted from May 2 to May 22, is designed to validate soil moisture measurements from SMAP. 82)
- The location of the Yanco region in Australia is a remote region, about 600 km west of Sydney. The aircraft, also carrying a radar and radiometer, provides microwave backscatter and brightness temperature observations at high resolution to help verify SMAP’s products. The aircraft flies for about six hours during a SMAP overpass and mimics SMAP’s readings in terms of wavelength, viewing angle and resolution ratio.
- On foot, scientists are measuring soil moisture directly. They use probes that stick into the ground and measure the amount of water in the top inches of the soil. These data are used to evaluate the calculated soil moisture measurements from aircraft and SMAP. The Yanco region has a diverse climate, soil, vegetation and land cover, which allows for more rigorous testing of the SMAP algorithm over a variety of surface types and conditions.
- Instrumentation and sampling strategy: 83)
The main instruments used to collect coincident SMAP observations are the Polarimetric L-band Multi-beam Radiometer (PLMR) and the Polarimetric L-band Imaging Synthetic aperture radar (PLIS). As shown in Figure 44(b), PLMR and PLIS will be configured in pushbroom mode on a scientific aircraft, achieving a swath width of 6 km at altitude of 1 km. PLMR is a dual-polarized (Vertical and Horizontal) radiometer operating at a center frequency of 1.413 GHz. Six beams of PLMR have viewing angles of ±7°, ±21.5° and ±38.5°, resulting in 1 km resolution and 90° across track field of view. PLIS is a quad-polarized (HH, HV, VH, and VV) radar operating at frequency of 1.245-1.275 GHz. Its two 2x2 patch array antennas incline at an angle of 30° from the horizontal on both sides of the aircraft, thus the antenna gain is within 2.5 dB of the maximum gain between 15° and 45°, resulting in ~7 m resolution and a ~2 km gap in the middle of 6 km swath.
In SMAPEx-4, eight replicated flights over the SMAP flight area are planned in coincidence with SMAP coverage, plus one flight for the Aquarius flight area on the day when both SMAP and Aquarius overpasses are coincident. Flight lines are designed with a spacing of 5 km so that the outer beams of PLMR will be overlapped with adjacent flight lines to ensure a full coverage of PLMR over the entire flight area for SMAP. Meanwhile all six focus farms will also be observed by PLIS (Figure 45). Being limited by maximum flight duration, over half of the flight area of Aquarius will be observed by PLMR to represent pixel soil moisture variability. Additionally, a RFI detector and multi-spectral sensors in visible, near infrared, short wave infrared, and thermal infrared bands will be used on the aircraft to provide supplementary information on RFI, vegetation water content, and land surface temperature.
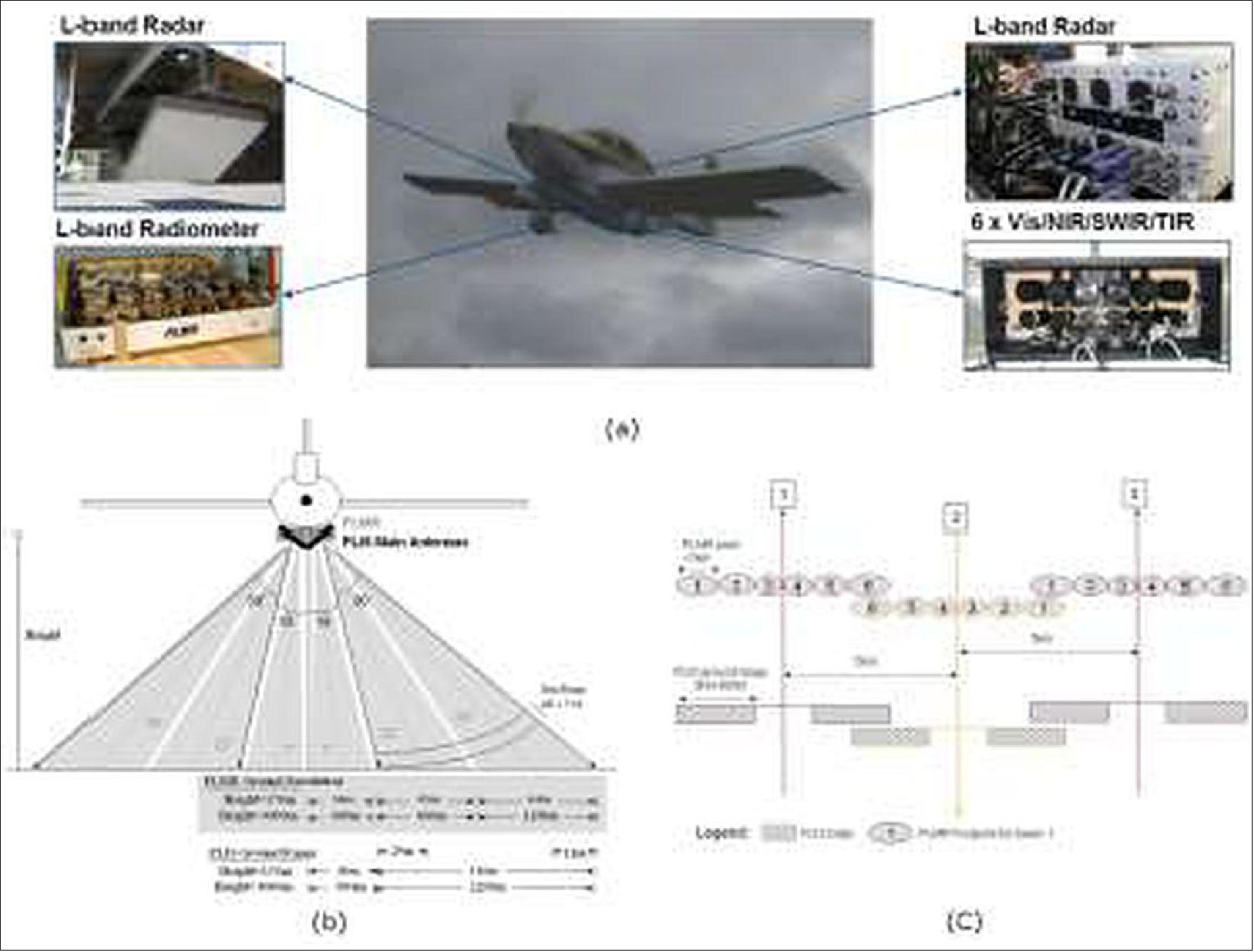
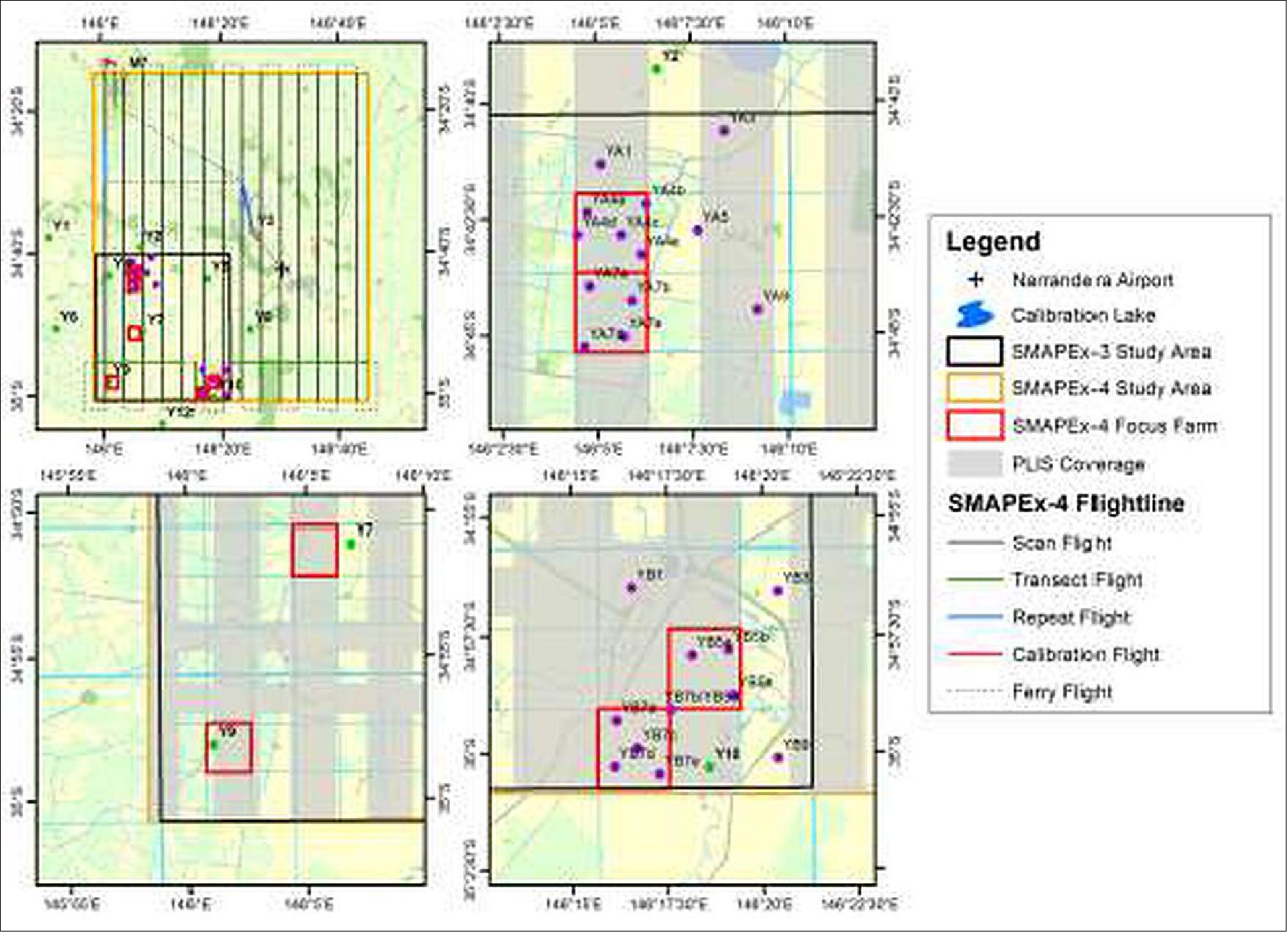
• May 6, 2015: The maps (Figure 46) of global soil moisture were created using data from the radiometer instrument on NASA's SMAP (Soil Moisture Active Passive) observatory. Each image is a composite of three days of SMAP radiometer data, centered on April 15, 18 and 22, 2015. The images show the volumetric water content in the top 5 cm of soil. Wetter areas are blue and drier areas are yellow. White areas indicate snow, ice or frozen ground. Evident in the image sequence are regions of increased soil moisture and flooding caused by precipitation during this period in Southeast Australia, Bangladesh and Argentina. 84)
- These as yet uncalibrated soil moisture images will be evaluated and improved during the calibration and validation phase of SMAP's science mission, which begins on May 10, 2015.
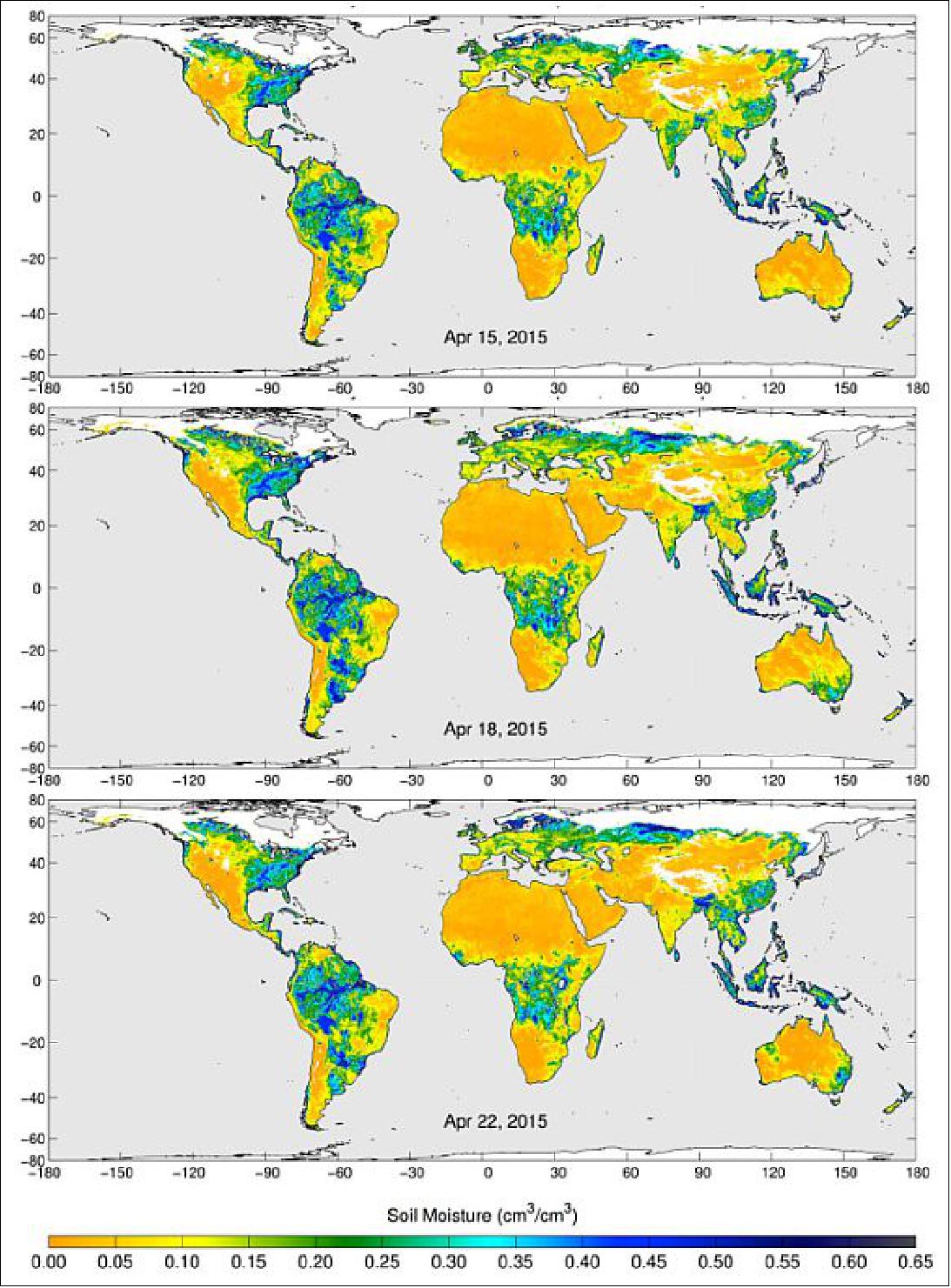
• April 21, 2015: With its antenna now spinning at full speed, the SMAP observatory has successfully re-tested its science instruments and generated its first global maps, a key step to beginning routine science operations next month. 85)
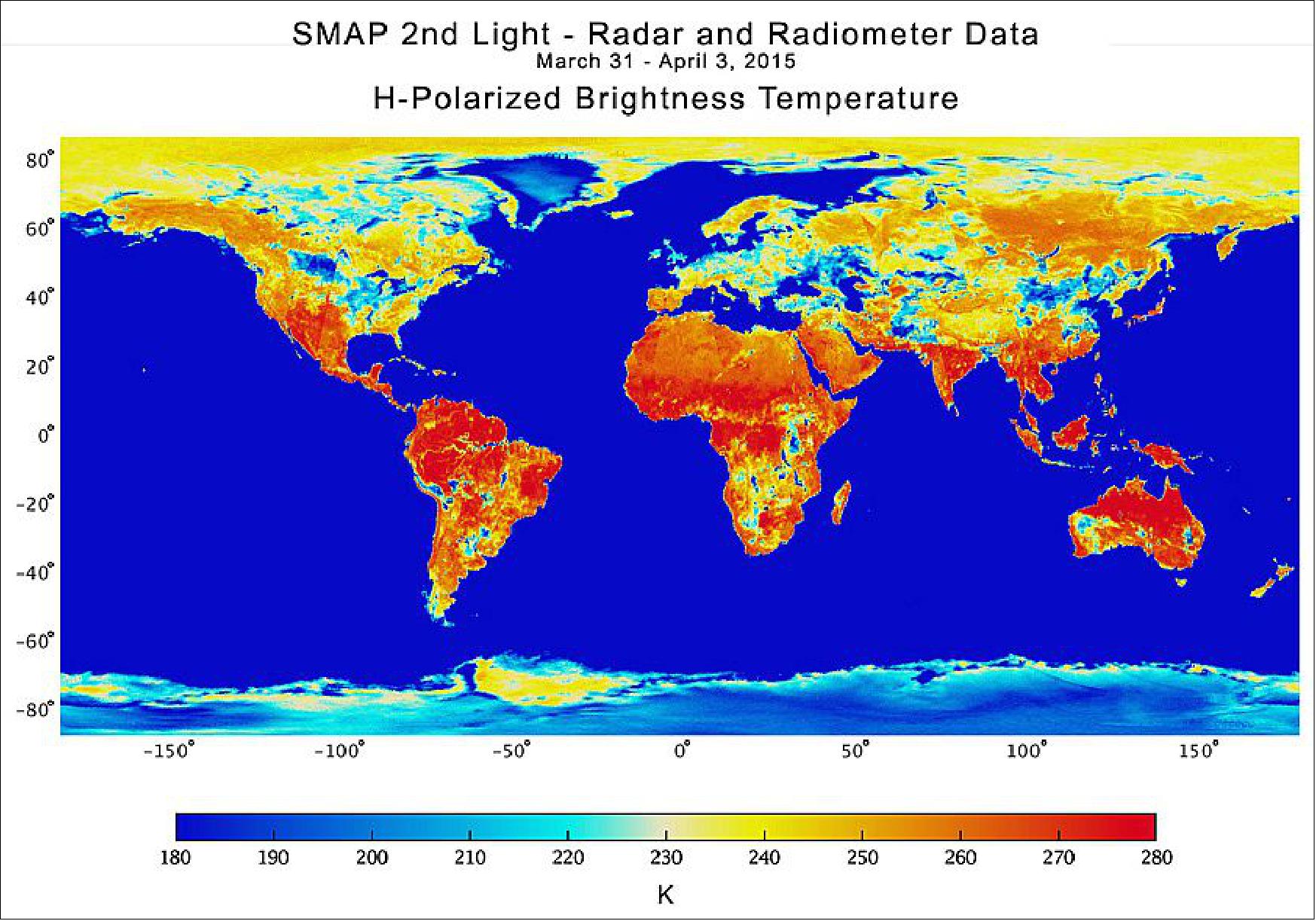
- The radiometer data from the instrument test have been processed to map microwave emissions from Earth's surface, expressed as brightness temperatures in Kelvin and at a horizontal spatial resolution of about 40 km. The Amazon and Congo rainforests produced strong emissions, depicted in red shades, due to their large volumes of biomass. Brightness temperatures in the Sahara Desert reach about 300 Kelvin due to its low moisture content. The impact of soil moisture is evident over a large region south of the Great Lakes, where an increase in soil moisture due to precipitation in March resulted in relatively cool brightness temperatures of about 200 K. Similar impacts of rain on soil moistures and brightness temperatures are seen in Namibia and Botswana, Africa, where there was significant rainfall in late March.
- With its spin-up activities complete, the observatory's radar and radiometer instruments were powered on from March 31 to April 3 in a test designed to verify the pointing accuracy of the antenna and the overall performance of the radar and radiometer instruments. The radar data acquired from the test have been processed to generate instrument data products with a spatial resolution of about 30 km.
- SMAP's radiometer detects differences in microwave pulses transmitted to the ground by the instrument that are caused by water in soil. It measures Earth's natural microwave emissions at the frequency of 1.4 GHz. Around the globe, the most striking difference in these natural emissions is between water and land surfaces. A desert emits microwaves at about three times the rate a lake does. Because the difference is so large, even a small amount of moisture in soil causes a change that a radiometer can measure accurately.
- The SMAP mission is required to produce high-resolution maps of global soil moisture and detect whether soils are frozen or thawed. SMAP's radar has two data acquisition functions: one for SAR (Synthetic Aperture Radar) processing to produce radar measurements at a spatial resolution of 1 to 3 km, and another for low-resolution processing to produce radar measurements at a spatial resolution of 30 km. The SAR function will be used over land surfaces and coastal oceans during routine science operations, while low-resolution processing will be exercised over land as well as over global ocean areas. - Since the SAR function was only turned on for limited durations during the March 31 - April 3 test, mission scientists did not obtain enough SAR data to produce global high-resolution maps. Beginning April 13, SMAP will start conducting regular SAR observations that will enable high-resolution global mapping of land surfaces about every two to three days.
- Scientists will combine measurements from SMAP's radar and radiometer sensors to capitalize on the strengths of each and work around their weaknesses. The radar alone can produce a soil moisture measurement with a spatial resolution of about 3 km, but the measurement itself is less accurate than the one made by the radiometer. The radiometer alone achieves a highly accurate observation of soil moisture but with a much poorer spatial resolution of about 40 km. By combining these separate measurements through advanced data processing, SMAP will provide the user community with a combined soil moisture measurement that has high accuracy and a resolution of 9 km. The advanced processing required to combine these active and passive measurements is now being functionally checked out, and is the last step in SMAP's postlaunch checkout process. SMAP will offer the individual radar and radiometer data, among other data products.
• March 27, 2015: SMAP completes procedure to spin up its antenna to final science measurement rate. The 6 m reflector antenna is now ready to wrangle up high-resolution global soil moisture data, following the successful completion of a two-part procedure to spin it up to full speed. On March 26, mission controllers at NASA/JPL commanded SMAP's spun instrument assembly to increase its rotation speed from the initial rate of 5 rpm achieved on March 23 to its final science measurement rate of 14.6 rpm. 86)
- Throughout the gradual process, which took approximately 80 minutes, onboard guidance, navigation and control software managed the spin-up acceleration level, allowing the spacecraft to maintain its Earth-pointing (nadir) attitude. Initial data indicate the antenna spin-up procedure went as planned. Mission controllers will now analyze the spin-up process and the stability of the observatory at its final spin rate.
• March 24, 2015: Mission controllers at NASA/JPL have commanded the 6 m antenna on SMAP to begin spinning for the first time. The partial spin-up is a key step in commissioning the satellite in preparation for science operations. - Last week, mission controllers sent commands to release the locking mechanism that prevented the observatory's spun instrument assembly — the part that spins — from rotating during launch and deployment of the reflector. The spun instrument assembly includes the spin control electronics, radiometer instrument and reflector antenna. - Yesterday, in the first step of a two-step procedure, the spun instrument assembly was spun up to its initial rate of five revolutions per minute (rpm), a process that took about a minute. Initial data indicate the partial antenna spin-up procedure went as planned. 87)
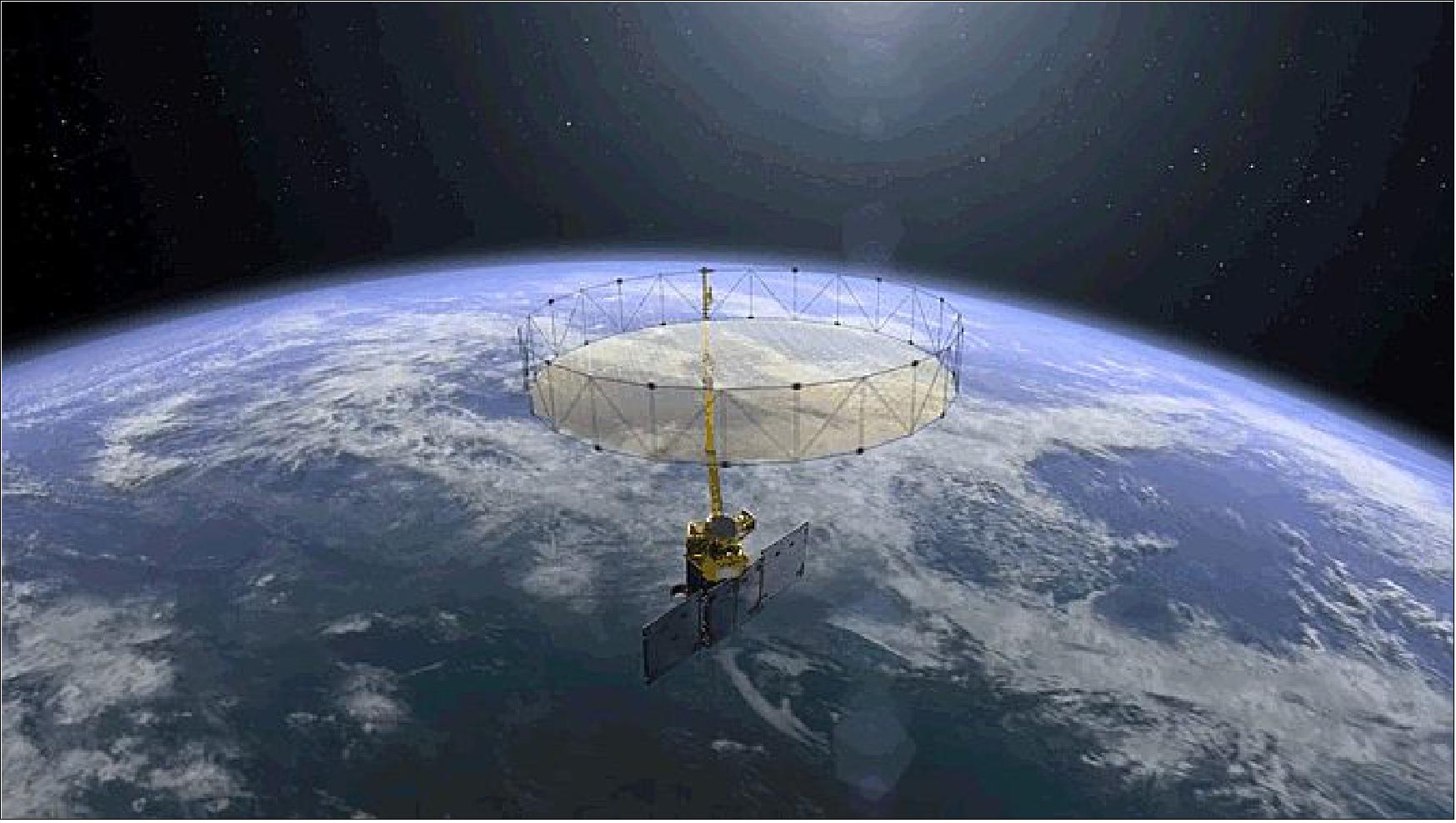
- Because of the large size (mass) of the spun instrument assembly and its relatively rapid angular acceleration during spin-up, SMAP's spacecraft bus rotated in the opposite direction during this process to balance the angular momentum. It reached a peak rate of up to 11 degrees per second. Once the spun instrument assembly spin rate stabilized at five rpm, the spacecraft’s reaction wheels quickly restored the spacecraft bus to a non-rotating, stable attitude. Onboard flight software then turned the observatory back to its science-gathering orientation, with the spin axis pointing straight down to the ground and SMAP's solar array pointed toward the sun.
- The observatory will remain in its current configuration with the spun instrument assembly rotating at five rpm for about three days to allow ground controllers to assess the observatory's performance at this spin rate before proceeding to the next step. On March 26, after ground analysis of this first antenna spin-up step is completed, mission controllers plan to increase the antenna's spin speed to its final rate of approximately 15 rpm.
• March 13, 2015: One ecosystem where scientists would most like to understand the effects of changing freeze/thaw cycles is boreal forests, the great ring of green covering the land nearest the North Pole. The forests of Alaska, Canada, Scandinavia and Siberia cover almost 15 percent of Earth's land surface. The Arctic is warming more quickly than lower latitudes, and the way these forests respond to this rapid change could provide valuable clues about our planet's warmer future. 88)
- But we know very little about how the boreal forests are changing. Millions of square miles have no roads or even villages. "What we have now are very sparse, seasonal measurements from the ground, according to John Kimball of the University of Montana, Missoula, and a member of the science team for NASA's SMAP mission. We do have long-term, global satellite data sets that are sensitive to freeze-thaw, but they tend to be very coarse. That means each measurement averages the status of a large area. Like a mosaic made of large tiles, these data cannot show much detail.
- That's about to change. By the end of April, SMAP will begin monitoring the frozen or thawed state of the landscape north of 45º north latitude (about the latitude of Minneapolis) every two days. The primary mission of SMAP is to measure the amount of moisture in the top few cm of soil globally, but it also detects whether that moisture is frozen or in liquid form. SMAP's radar measurements, with "tiles" only 1 km by 3 km across, will reveal far more detail than scientists now have about the freeze/thaw status of the land surface.
- Why is greater detail needed? In the Arctic, the timing of the spring thaw can vary considerably within a small area. Because the returning sun is low on the horizon, the shadowed north side of a hill may remain icy many days after plants have started growing again on the sunlit south side. Those early spring weeks are critical in the short Arctic growing season. According to John Kimball, once the vegetation thaws, boom! Photosynthesis takes off. The highest rates of photosynthesis can be obtained within a few weeks after the thaw, and a later thaw can mean much lower vegetation growth for the season. We need observations at what I call the landscape level to more precisely monitor those patterns and changes.
- During photosynthesis, plants absorb carbon dioxide from the air. The carbon stays in their wood, roots and leaves, and when they die, most of it remains in the soil. That makes undisturbed forests what scientists call carbon sinks — places that remove carbon from the atmosphere. Longer unfrozen seasons in the Arctic give forests more time to grow and spread, increasing the extent of the carbon sink.
- On the other hand, climate warming has increased the occurrence of droughts and wildfires in the Arctic. A burning forest spews enormous amounts of carbon into the atmosphere; in scientific terms, it is a carbon source. Thus, global climate change is causing the northern forests both to absorb and to release more carbon.
• March 9, 2015: NASA's SMAP observatory has successfully completed a two-day test of its science instruments. The observatory's radar and radiometer instruments were successfully operated for the first time with SMAP's antenna in a non-spinning mode on Feb. 27 and 28. The test was a key step in preparation for the planned spin-up of SMAP's antenna to approximately 15 rpm in late March. The spin-up will be performed in a two-step process after additional tests and maneuvers adjust the observatory to its final science orbit over the next couple of weeks. 89)
- Based on the data received, mission controllers concluded the radar and radiometer performed as expected. The controllers are based at NASA's Jet Propulsion Laboratory, Pasadena, California; and NASA's Goddard Space Flight Center, Greenbelt, Maryland.
- The first test image illustrates the significance of SMAP's spinning instrument design in producing more comprehensive maps. For this initial test with SMAP's antenna not yet spinning, the observatory's measurement swath width — the strips observed on Earth in the image — was limited to 40 km. When fully spun up and operating, SMAP's antenna will measure a 1,000 km swath of the ground as it flies above Earth at an altitude of 685 km. This will allow SMAP to map the entire globe with high-resolution radar data every two to three days, filling in all of the land surface detail that is not available in this first image.
- The radar data illustrated in the upper panel of Figure 49 show a clear contrast between land and ocean surfaces. The Amazon and Congo forests in South America and Africa, respectively, produced strong radar echoes due to their large biomass and water content. Areas with no vegetation and low soil moisture, such as the Sahara Desert, yielded weaker radar echoes. As expected, the dry snow zone in central Greenland, the largest zone of the Greenland ice sheet where snow does not melt year-round, produced weaker radar echoes. Surrounding areas in Greenland's percolation zone, where some meltwater penetrates down into glaciers and refreezes, had strong radar echoes due to ice lenses and glands within the ice sheet. Ice lenses form when moisture that is diffused within soil or rock accumulates in a localized zone. Ice glands are columns of ice in the granular snow at the top of glaciers.
- The test shows that SMAP's radiometer is performing well. The radiometer's brightness temperature data are illustrated in the lower panel of Figure 49. Brightness temperature is a measurement of how much natural microwave radiant energy is traveling up from Earth's surface to the satellite. The contrast between land and ocean surface is clear, as it is in the radar image. The Sahara Desert has high brightness temperatures because it is so hot and has low soil moisture content. The India subcontinent is currently in its dry season and therefore also has high brightness temperatures. Some regions, such as the northeast corner of Australia, show low brightness temperatures, likely due to the high moisture content of the soil after heavy rainfall from Cyclone Marcia in late February.
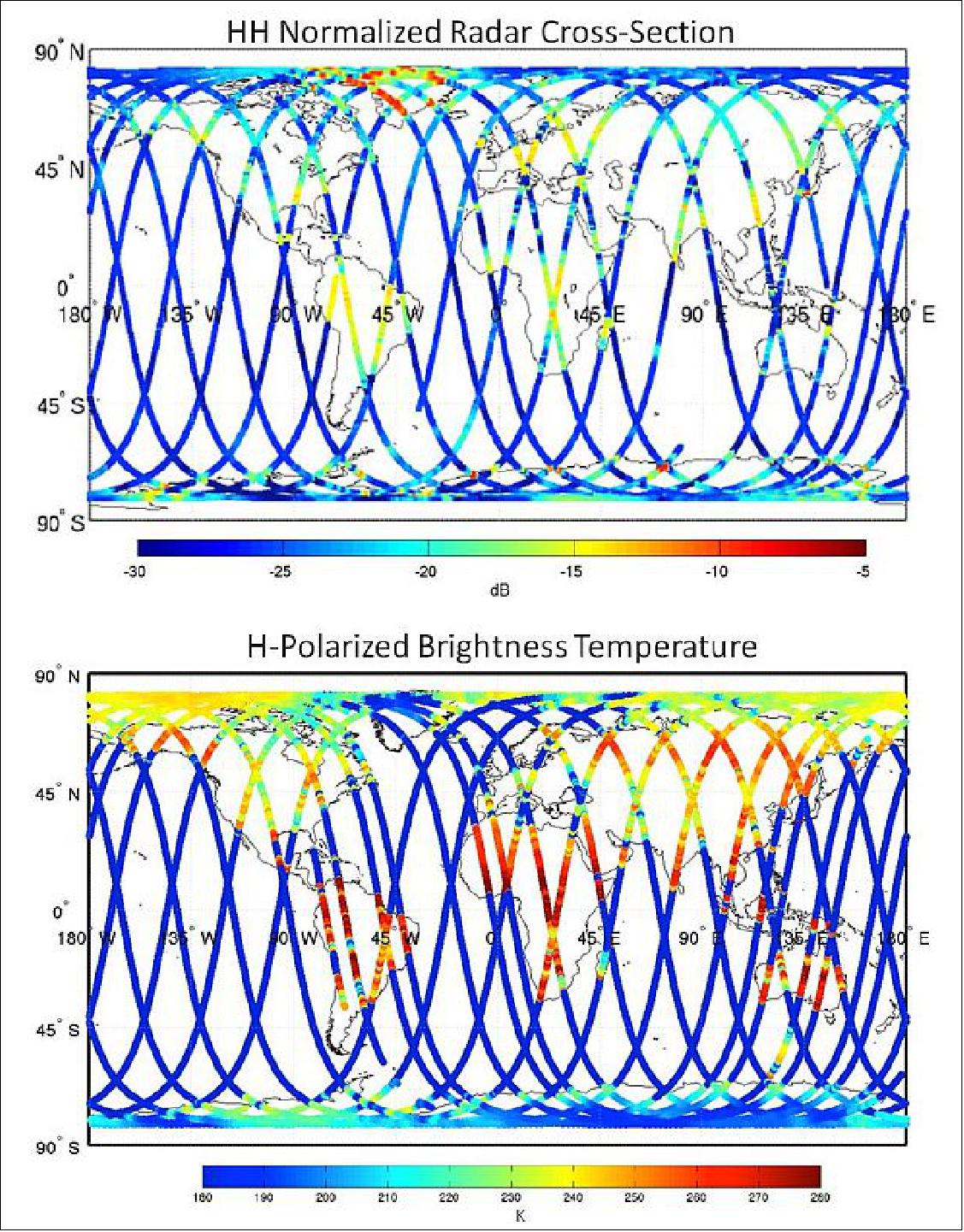
• Feb. 26, 2015: The JPL control team is reporting the successful deployment of the boom and antenna in two separate steps — comparing this important event prosaically with a cowboy at a rodeo raising his arm (boom) to unfurl a huge golden lasso (antenna) that will soon spin up to rope the best soil moisture maps ever obtained from space. - The deployment of the boom and the mesh reflector (antenna) onboard of SMAP represents in effect a key milestone on its mission to provide global measurements of soil moisture. 90)
- Following its picture-perfect launch and insertion into orbit, mission controllers performed a series of health checks of the observatory's subsystems. They also ran successful initial health checks of SMAP's radiometer and radar science instruments, powering them on for 30 hours in receive-only mode and processing the data. Then on Feb. 18, mission controllers successfully commanded SMAP's 5 m two-hinged boom to unfold and extend.
- On Feb. 24, the team commanded SMAP's reflector antenna at the end of the boom to deploy. SMAP's reflector boom assembly is an advanced, low-mass rotating deployable mesh reflector antenna system that supports the collection of SMAP's radar and radiometric measurements in space. It is the first-ever spinning and precision mass-balanced deployable mesh reflector antenna, and is the largest spinning mesh reflector ever deployed in space.
- Astro Aerospace experts have preliminarily determined that the deployed natural frequency of the reflector boom assembly in orbit is nearly identical to prelaunch model predictions. This provides confidence in the health of the deployed reflector and in its performance once spun up.
- For launch, the flexible mesh antenna, which is edged with a ring of lightweight graphite supports called a perimeter truss, had been tightly folded and stowed into a volume of just 30 cm x 120 cm. Upon deployment, the truss slowly opened, like a camp chair, to its full diameter of almost 6 m. Despite its size, the reflector has a mass of only 25 kg. With its supporting boom and launch restraints, the entire reflector and boom assembly has a mass of just58 kg.
- Kent Kellogg, the SMAP project manager at JPL said: "Deploying large, low-mass structures in space is never easy and is one of the larger engineering challenges NASA missions can confront in development. This week's result culminates more than six years of challenging reflector and boom assembly development, system engineering and an extensive test campaign. With this key milestone in our rear-view mirror, the team now looks forward to completing the remainder of our commissioning activities and beginning routine science operations for this important mission with broad applications for science and society."
- Later this week, SMAP's science instruments will be checked out with the deployed reflector antenna in a non-spinning configuration. This will mark the observatory's first operation with the reflector and boom assembly functioning as an antenna to view Earth. It will also mark the first time SMAP's radar high-power amplifier will transmit a signal.
- In about a month, after additional tests and maneuvers to adjust the observatory to its final 685 km, near-polar operational science orbit, SMAP's "lasso" antenna will do a sort of Texas two-step, spinning up in a two-stage process to 14.6 revolutions per minute. By rotating, the antenna will be able to measure a 1,000 km swath of Earth below, allowing SMAP to map the globe every two to three days.
• All four ELaNa CubeSats were ejected from the second stage per the mission timeline (1 hr and 45 minutes after liftoff), and are flying free. Prior to the deployment, the second stage of the Delta-2 rocket performed an 8 second retrograde maneuver to lower the orbit of the vehicle for the release of the CubeSats. Three P-PODs were installed on the second stage, filled with two 3U CubeSats and two 1.5U satellites.
• About 57 minutes after liftoff, SMAP separated from the rocket's second stage into an initial 661 x 685 km orbit. After a series of activation procedures, the spacecraft established communications with ground controllers and deployed its solar array. Initial telemetry shows the spacecraft is in excellent health (Ref. 23).
Sensor Complement
The instrument name is the same as the mission name. As with most microwave instruments, the antenna is the dominant instrument subsystem that both determines the ultimate measurement performance and governs spacecraft accommodation.
The key instrument requirements were determined by the SMAP science working group to be:
1) dual-polarization (linear H and V) L-band passive radiometer measurements at spatial resolution of 3 km
2) linear HH, VV and HV L-band radar (SAR) measurements
3) a wide swath to ensure global three-day refresh time for these measurements (1000 km swath at the selected orbit altitude of 685 km).
4) co-located L-band active radar measurements and passive radiometer measurements at a constant incidence angle near 40º
The radiometer and radar resolution requirements at L-band dictate that a relatively large antenna aperture must be employed. A shared antenna/feed approach is utilized for accomplishing the required simultaneous radiometer and radar requirements. The overall SMAP architecture is shown in Figure 53, which includes the rotating RBA (Reflector Boom Assembly), feed assembly, radiometer electronics subsystem, and radar electronics subsystem. 91) 92) 93) 94) 95)
A deployable conically-scanning antenna structure of 6 m diameter is selected for the instrument design. In 2009, Astro Aerospace (Carpinteria, CA, a business unit of Northrop Grumman) received a contract from JPL for the design and development of RBA. The antenna consists of an AstroMeshTM reflector and a single feed horn shared by an L-band radar and an L-band radiometer. Whereas the radiometer resolution is defined in the standard manner as the real-aperture antenna footprint, the higher resolution radar measurements are obtained by utilizing SAR (Synthetic Aperture Radar) processing (Figure 64).
Two design modifications were introduced in 2011 (Ref. 91):
• The addition of active thermal control to the instrument spun side to provide a more stable, settable thermal environment for the radiometer electronics
• A “sequential transmit” strategy for the two radar polarization channels which allows a single high-power amplifier to be used.
Because the rotating RBA is shared by the radiometer and radar, the RF signals from the Earth must be separated by diplexers into the active and passive bands, respectively. These diplexers are located on the spun side and are shown as part of the radiometer subsystem. All of the radiometer electronics are located on the spun side of the interface to minimize front-end losses, with slip rings providing a telemetry, signal, and power interface to the spacecraft. The more massive and more thermally dissipative radar electronics are on the fixed side, with the transmit/receive pulses routed to the spun side via a two channel RF rotary joint.
A major milestone in the development of the RBA CDR (Critical Design Review) was completed on December 13-14, 2011 for the SMAP payload. The spun portion of the RBA has a nominal mass of 49 kg; the entire RBA, including launch restraint equipment, has a mass of 65 kg. The launch restraint equipment attaches the compact, stowed reflector to the side of the spacecraft for launch. 96)
SMAP Instrument
The radiometer measures microwave emissions for H and V polarization brightness temperatures, and provides 3rd and 4th stokes parameters that are used for RFI mitigation. The radiometer digital electronics includes digital spectral filtering for RFI mitigation. The key to high radiometric measurement accuracy is achieving repeatable, characterizable, and monotonic responses over temperature and time. Therefore, the thermal design employs passive design features for short-term stability, such as the use of a titanium thermal isolator and radome for the feed. In addition, active thermal control is used for additional seasonal stability, as well as for temperature set-point adjustment, which enables the operational temperature to be changed on-orbit to avoid gain non-linearities. This set-point feature was added to the design as a result of lessons learned from other microwave radiometer missions that exhibited this undesirable behavior. Radiometer performance requirements are summarized in Table 6. 97)
A frequency diplexer allows the radar and radiometer to share a common instrument antenna. The diplexer simultaneously provides high RF isolation between the radar and radiometer frequencies and pre-select filtering for RFI (Radio Frequency Interference) rejection in a compact and low-RF-loss package. It also accommodates high-power handling capability for the radar.
The overall SMAP instrument architecture is shown in Figure 50. Because the rotating reflector is shared by the radiometer and radar, the RF signals from the Earth must be separated by frequency diplexers into the active and passive bands. These diplexers are located on the spun side of the observatory as shown in Figure 50. Note that all of the radiometer electronics are located on the spun side of the interface to minimize front-end losses, with slip rings providing a telemetry, signal, and power interface to the spacecraft. The more massive and more thermally dissipative radar electronics are on the fixed side, with the transmit/receive pulses routed to the spun side via a two-channel RF rotary joint.
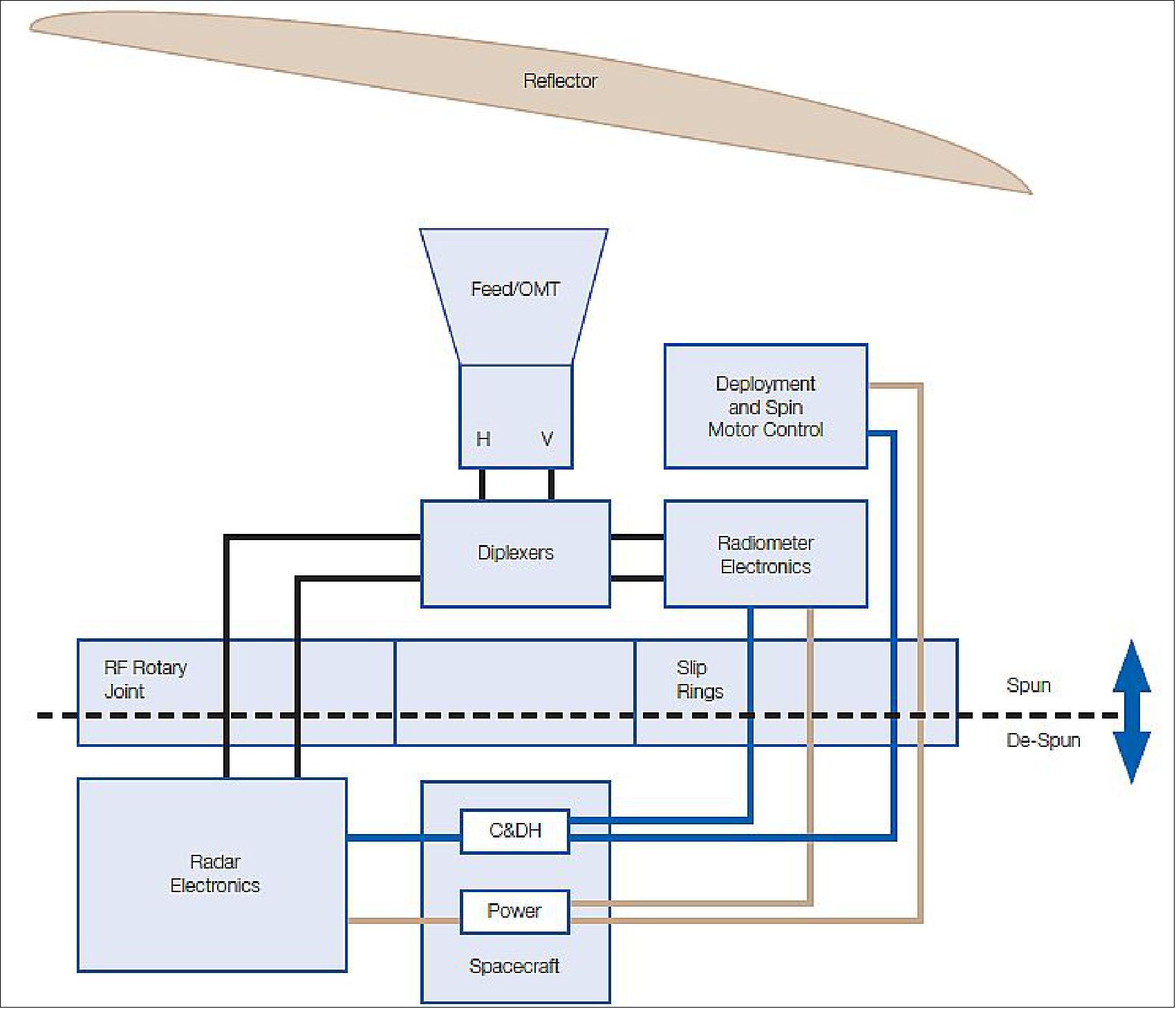
Parameter | L-band radar | L-band radiometer |
Instrument type | Synthetic Aperture Radar (non-imaging/unfocused) | Passive Microwave Radiometer |
Frequency range | 1217-1298 MHz | 1400-1427 MHz |
Polarization | VV,HH,HV (not fully polarimetric) | V, H, 3rd and 4th Stokes parameters |
Accuracy | 1.0 dB co-polarization | 1.3 K |
Resolution | 3 km | 40 km |
Data rate | 35 Mbit/s | 4.3 Mbit/s |
Transmit power | 500 W peak, 9% duty cycle, 2850 Hz PRF | N/A |
RFI mitigation | Frequency hopping over 1217-1298 MHz using 1 MHz/15 µs chirps | Spectral filtering |
Antenna type | Offset-fed deployable parabolic reflector |
Projected aperture | 6 m |
Focal length | 4.2 m (f/D = 0.7) |
Antenna gain | >35.5 dBi (radar) |
Gain stability | <0.07dB (radar) |
Sidelobe level | <-45 dB in nadir direction (radar) |
Integrated cross polarization | <-18 dB (radar) |
Beamwidth | <2.8º for radar; <2.5º for radiometer |
Main beam efficiency | >87% (radiometer) |
Antenna temperature | <0.5 K (radiometer) |
Reflector emissivity | <0.0035; <.001 knowledge (radiometer) |
Reflector temperature knowledge uncertainty | <60ºC (radiometer) |
Pointing | 35.5º from spin axis; <0.02º knowledge |
Reflector surface | 20 OPI (Openings per inch), gold-plated molybdenum mesh |
Feed type | Waveguide feed & OMT (WR-650) |
Radome | Expanded Polystyrene (EPS) |
The instrument antenna design is an offset-fed reflector arrangement (0.7 f/D) with a 6 m projected aperture and vertical and horizontal linear polarizations selectable through an OMT (Orthomode Transducer). Zenith deck mounting offered a number of system design and performance advantages including (1) lowest overall spun mass/inertia; (2) lowest RF transmission line losses to the radiometer and radar; and (3) lowest overall system noise temperature for radiometer measurements because most feed spillover ‘sees’ cold space. The zenith mounting location and conical scanning requirement, however, posed a significant constraint on the flight system design to avoid intrusions into the instrument antenna FOV (Field of View), the solar array design was a particular challenge (Figure 51). The zenith location also partially but significantly blocks visibility to the GPS (Global Positioning System)—this contributed to a decision in Formulation to forego on-board GPS capability for orbit position and ephemeris and to instead use Doppler tracking and ground-based time synchronization. The most significant design drivers on the antenna came from the radiometer: beam efficiency, reflector surface emissivity, and temperature knowledge to achieve the antenna noise temperature requirements. Radar drivers on the antenna performance were gain stability, sidelobes, and cross polarization levels. Key instrument antenna performance requirements are summarized in Table 7.
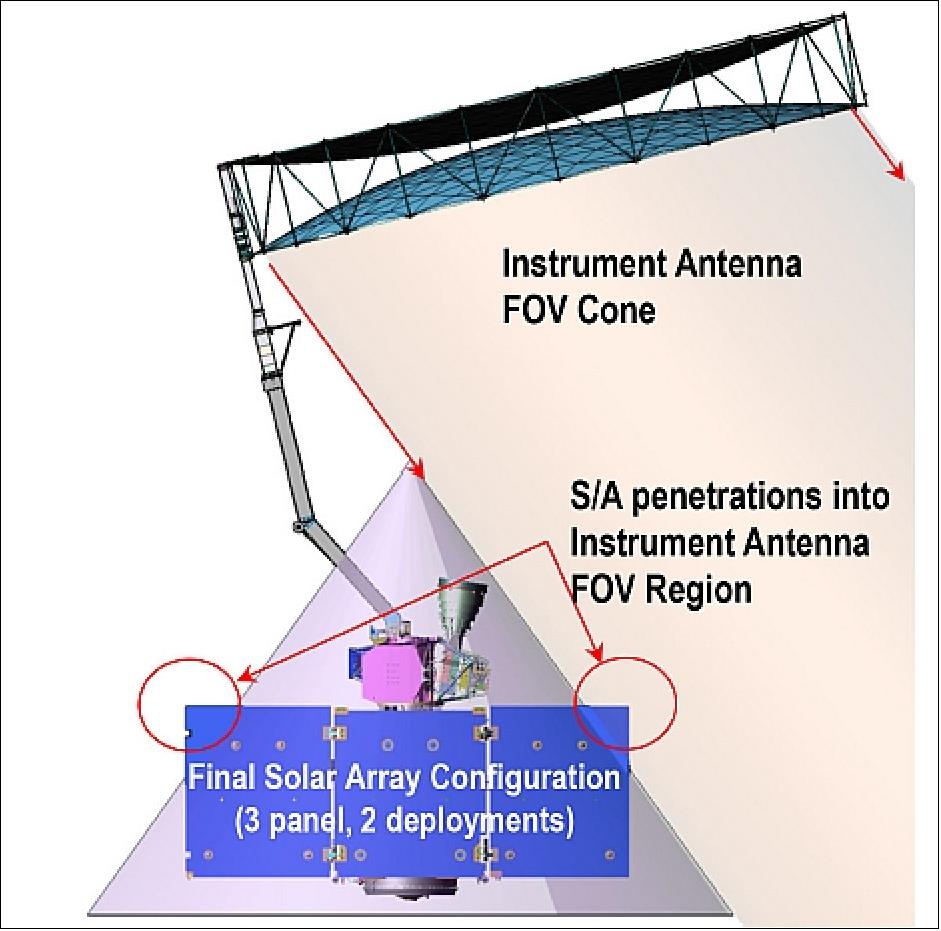
Legend to Figure 51: As power requirements matured in the design, the solar array was simplified to a three-panel configuration (with only two deployments) that protruded slightly into the instrument antenna FOV. The resulting RF pattern and performance perturbations from the intrusion can be removed in ground science data processing; however, high-fidelity RF analysis (confirmed by scale model testing) showed that perturbations are very minor and may be negligible. The stowed configuration was also significantly driven by launch vehicle fairing packaging and resulted in having no exposed cells when stowed. This iterative design example is representative of the close interaction between science, instrument, and spacecraft design teams to arrive at the least complex design to satisfy mission requirements.
Mechanically, the spin subsystem and spun platform assembly provide the spin function; launch lock and release; mechanical support for the radiometer, feed and RBA (Reflector Boom Assembly); and spun-side electrical control functions (RBA deployment motors control, thermal control, telemetry, etc.). The heart of the spin subsystem is a Boeing-provided BAPTA (Bearing and Power Transfer Assembly) that includes the spin motor, bearings, 65 slip rings for power and digital telemetry transfer across the spinning interface, and the RF rotary joint used by the radar. The BAPTA is enclosed within the cylindrical instrument core structure that also provides the mounting platform for all spun-side assemblies. ICE (Integrated Control Electronics) control the RBA deployment motors, spun-side thermal control, and radiometer command and telemetry. The Radiometer Front-End Electronics and passive RF components such as the diplexer are mounted to the feed horn. The Radiometer Electronics and Spin Control Electronics are mounted to separate structures to optimize spun mass properties. A CCA (Cone-Clutch Assembly) is the structural interface between the spun platform assembly and the spacecraft, and also locks the spun platform and offloads the BAPTA bearings during launch. Design features are incorporated to attenuate pyroshock levels for the spun electronics and bearings.
Instrument subsystem | Mass | Power |
Radar electronics | 56 kg | 287 W |
Radiometer electronics | 40 kg | 65 W |
Antenna (Feed + RBA) | 79 kg | - |
Spin subsystem | 41 kg | 36 W |
Structure (includes thermal control and harnesses) | 141 kg | 59 W |
Total | 356 kg | 448 W |
Collectively, the instrument spinning elements form the SIA (Spun Instrument Assembly). The SIA is largely balanced, by design, by adjusting the antenna optical prescription, by appropriately offsetting the feed and spun electronics assemblies from the spin axis using varying strut lengths, and by including small pre-launch adjustable ballast/balance masses at key locations (mostly on the RBA) in the design. An aggressive mass properties management program insures that as-built spun-side mass properties are tracked; the prelaunch adjustable ballast/balance masses allow correction for as-built mass characteristics to ensure proper on-orbit balance is achieved. Extensive analysis and modeling of the system dynamics and control behavior demonstrated that robust and stable balance is achieved by the fixed instrument balance design approach coupled with the spacecraft pointing control authority. Practical SIA on-orbit adjustable balance mechanisms could only provide a small fraction of total available pointing margin and were therefore not included in the design. The spun momentum of the SIA is compensated by the spacecraft’s reaction wheels and ACS (Attitude Control System ). This arrangement simplified the instrument design as well as overall control and fault protection design for the observatory; however, it places a constraint on the maximum spun momentum of the SIA of 364 Nms (at CDR the estimated spun momentum was 326 Nms). Another instrument configuration benefit is that most of the spun mass is concentrated near the rotation axis, which greatly reduces the sensitivity of spun momentum to mass growth.
Instrument RBA (Reflector Boom Assembly)
The 6 m shared reflector posed a number of unique challenges for SMAP:
• Packaging and deployment to accommodate fairing volume and spacecraft constraints
• Spinning and pointing control of such a structure
• Use of a mesh deployable for radiometric measurements
• Accurate pre-launch RF pattern characterization, accounting for spacecraft interaction effects.
The NGAS (Northrop Grumman Aerospace System's) deployable AstromeshTM (AM) reflector was selected and its mass properties are ideally suited for SMAP’s application. These reflector designs have been used in geosynchronous communications satellite applications including MBSAT (Mobile Broadcasting Satellite) of Thuraya, Inmarsat-4, and Alphasat. SMAP uses a derivative of Astro’s heritage antenna design, AM-Lite (Figure 52), which accommodates smaller aperture sizes and fits within a smaller stowed volume.
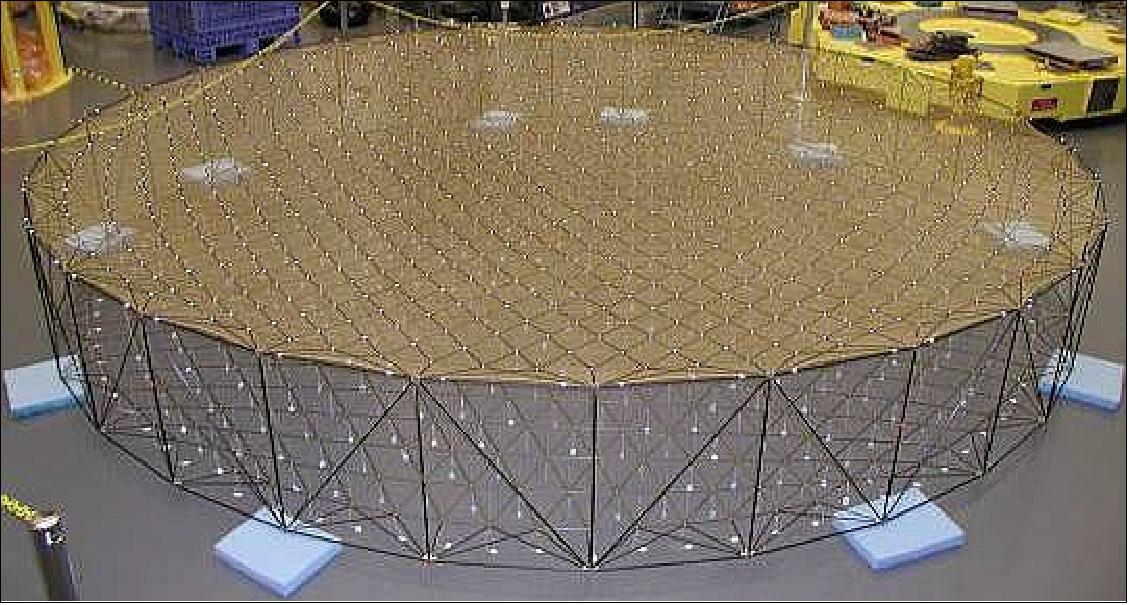
This is the first known application of this kind of deployable reflector design within a high-performance microwave radar and radiometer antenna system, operating in LEO and also in a spinning configuration. Each of these ‘firsts’ poses unique challenges for SMAP that have been addressed within the mission and system design, and in the verification and validation (V&V) approach. The overall configuration and basic components of the stowed and deployed reflector are shown in Figure 53.
The reflector uses a perimeter truss consisting of composite tubes to support front and rear webs of fiber-reinforced tape. The reflector surface is a 20 OPI, gold-plated molybdenum wire mesh held in place with a net that attaches to a front web to provide the proper spacing to form the mesh’s parabolic shape. The perimeter truss is attached to a prime batten, which in turn attaches to the two-segment boom. The boom is made of two graphite/epoxy tubes connected by hinges that allow the furled reflector to be stowed for launch to fit within the launch vehicle fairing. Pyro-initiated releases are required to open launch restraints before the boom can be deployed.
The RBA deployment is a significant driver to the mission and observatory design. The boom and reflector are deployed separately (boom first, followed nominally by the reflector two days later). The LEO orbit drove the thermal designs to ensure there were no “hot spots” that could either overheat or introduce large thermal gradients, which could add deployment risk. An operational constraint is imposed to idle spacecraft guidance and attitude control during deployment to eliminate ACS reaction loads on the RBA. This, in turn, places requirements and constraints on the deployment duration to be completed within 40 minutes (a spacecraft power constraint). Heritage reflectors have been deployed over long periods (hours) to prevent motor overheating, so new motor and thermal designs were required for SMAP to accommodate the short deployment time and thermal loading.
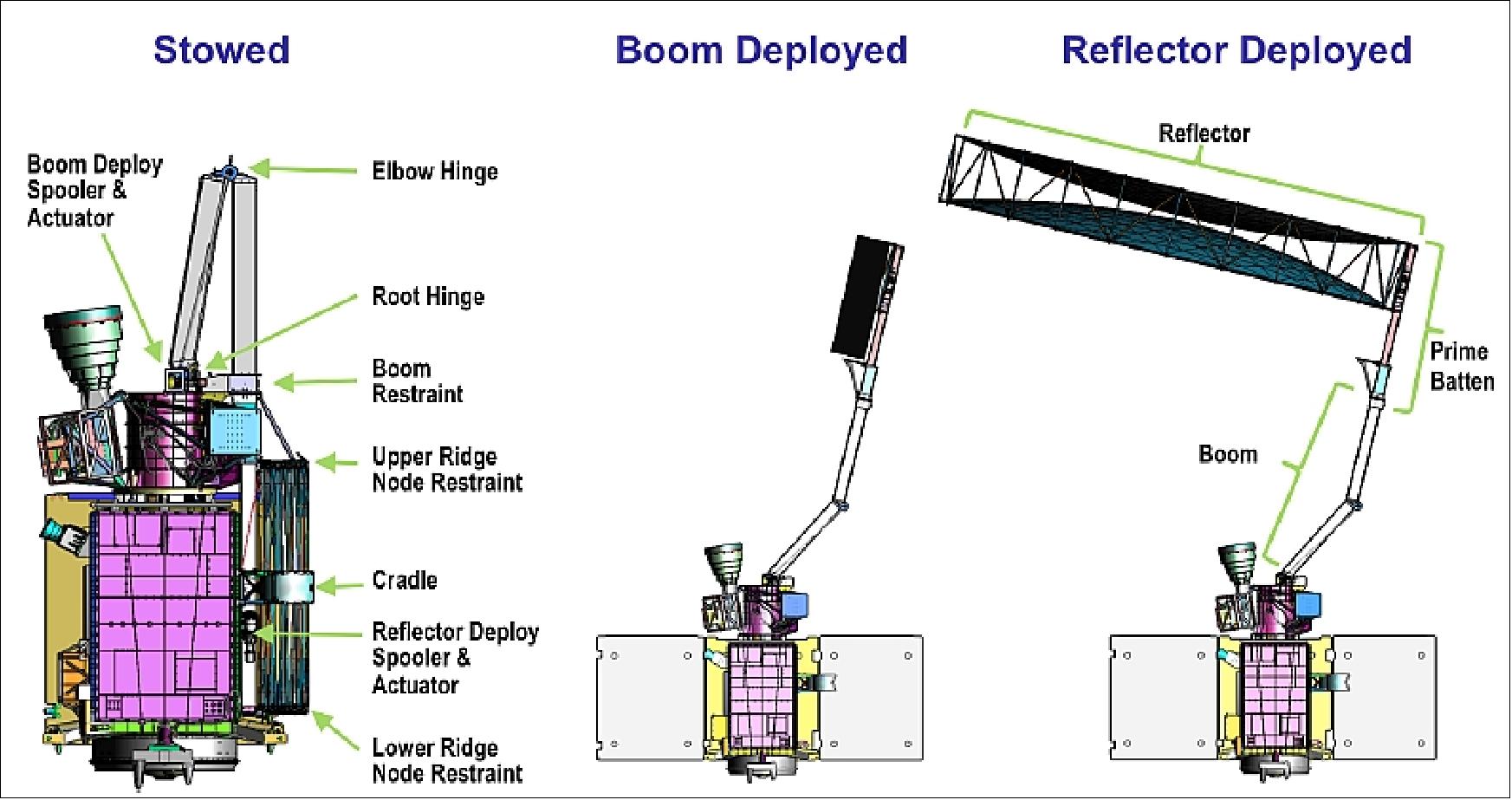
The <0.5 K radiometer antenna temperature calibration requirement places challenges on the mesh and web RF emissivity and mesh temperature knowledge (mesh emissivity < 0.0035, mesh emissivity knowledge to 0.001, mesh temperature known to 60ºC). Early measurements of mesh materials were completed to confirm it was acceptable for soil-moisture applications (Figure 54). The mesh density (OPI) was assessed to meet the L-band emissivity requirements. 20 OPI was selected as the best trade between mass properties and RF performance (lower mass and easier to stow and manage than 40 OPI density, and although the 10 OPI mesh has lower mass it was found to be too lossy for L-band radiometer measurements). The mesh temperature knowledge is another key parameter required for antenna pattern correction. The mesh temperature cannot be measured directly on-obit, so it will be determined by ground test-verified models to provide on-orbit temperature estimates.
Heritage reflectors have been flown in geosynchronous orbits. The LEO environmental effects on the mesh had to be considered during the mesh qualification, including effects of the extensive thermal cycling on-orbit, effects of atomic oxygen, solar ultraviolet (UV) radiation, ESD (Electrostatic Discharge) charging, solid particles, and PIM (Passive Intermodulation) concerns. The mesh qualification program determined that “cold welding” from thermal cycling or gold flaking due to CTE mismatch were not credible failure modes. The mesh is not susceptible to oxidizing from the atomic oxygen. The RF performance would be negligibly impacted if there were a small hole or tear in the mesh from a solid particle micrometeroids. PIM was determined not to cause an interference concern for science or telecom functions. In communication applications of the mesh reflector, the webs are typically painted with a conductive paint for ESD considerations. However, for SMAP, this type of paint contributed too much radiometric loss and had a significant impact in the overall antenna error budget, so an effort was made to eliminate the use of the paint. However, it was determined that the un-painted webs would degrade unacceptably in the vacuum UV environment, so a paint was ultimately selected that was both low loss and tolerant to atomic oxygen and UV. This is an example of how critical RF performance had to be carefully balanced with other design considerations such as operating in LEO.

Another challenge related to the RBA has been the extensive modeling and component level testing for a piecewise verification of the antenna RF performance. Radar and radiometer performance are highly dependent on antenna pattern characteristics such as gain, half-power beamwidth, sidelobe and cross-polarization levels, and electrical pointing. SMAP’s large antenna size and gravity effects make it impractical and high risk to conduct an end-to-end antenna test on the ground in a flight-like configuration and environment (to “test as you fly”). The antenna pattern RF performance is being verified by a combination of test and analysis. Scattering from the boom, solar panels, and other parts of the observatory structure affect the antenna pattern. Moreover, the radar and radiometer have stability requirements for pattern characteristics. GRASPTM (Geodetic Reference Antenna in Space) is used to model the antenna in the presence of the observatory to determine the effects that could change the antenna pattern, such the FOV changes as the antenna rotates, reflector and boom thermal distortions, and dynamic distortions from spacecraft. As an independent verification, a high-fidelity 1/10th scale model of the observatory was tested to confirm the GRASPTM model (Figure 55). The flight feedhorn pattern characteristics will be measured and applied to the GRASPTM RF model to form the final-prelaunch antenna performance. The performance will be verified and uncertainties will be refined during post-launch commissioning and during the science calibration and validation campaign.

RFI (Radio Frequency Interference) Mitigation
The L-band spectrum region (Figure 56) is heavily used and SMAP’s measurements are made over land areas, where most potential interferers are located. This contrasts with the similar L-band Aquarius mission, where the primary target is the relatively RFI-quiet ocean. It’s also worth noting here that RFI is evolving and generally increasing over time and that trend is expected continue into the future; SMAP must therefore be prepared to operate not only in the RFI environment as it exists today, but also in the RFI environment that may exist later in this decade. To meet radiometric accuracy requirements, SMAP has adopted aggressive measures to identify and mitigate the effects of RFI. Because SMAP is a global mapping mission with continuous, near-real-time generation of data products, any RFI mitigation techniques must lend themselves to reliable automation in ground processing software. The nature of the RFI threat differs somewhat for the radiometer and radar channels, which are treated in turn (Ref. 97).
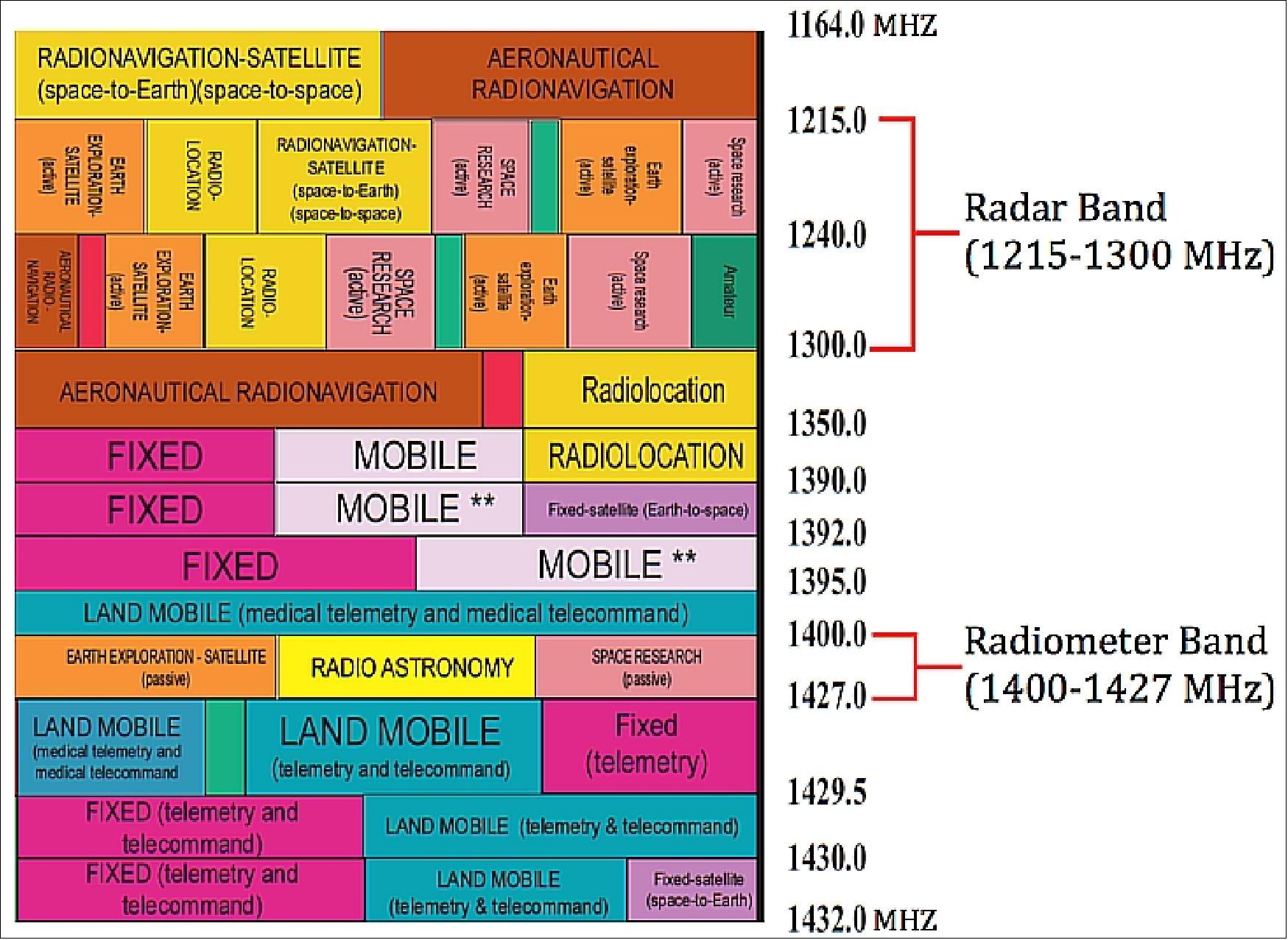
Radiometer: The RFI power in the radiometer’s 24 MHz bandwidth will positively bias the observed brightness temperature, resulting in an erroneous dry bias in soil moisture estimates if uncorrected. While large RFI impacts (> ~40–50 K) can be detected and discarded, causing data loss, smaller RFI contributions are more difficult to detect and more likely to impact science product accuracy. Errors resulting from RFI corruption of even ~0.5 K are significant, therefore the radiometer includes a digital receiver to enable RFI detection and mitigation.
An extensive effort has been conducted to characterize the RFI environment expected for the radiometer. Two primary sources of RFI information have been utilized: a set of airborne observations in the United States and observations from the SMOS (Soil Moisture and Ocean Salinity) L-band radiometer mission of ESA (European Space Agency). The results show a variety of sources are present, including pulsed and narrowband, with some limited evidence of “broadband” continuous sources. SMOS data do not provide detailed RFI source information, but do provide a global characterization of observed RFI power levels. In particular, SMOS data show increased RFI levels in global regions outside the Americas.
Available characterization data shows RFI sources are either pulsed or narrow-band [i.e., continuous wave (CW)–like] in nature. Pulsed sources can be detected in the time-domain, if the radiometer detector is sampled at a sufficiently high temporal resolution. The radiometer has a fundamental sampling frequency at the radar PRF of 3.2 kHz, which allows ground-based sub-millisecond RFI detection and mitigation using simple time-domain pulse thresholding strategies. To detect and mitigate CW sources, the radiometer’s 24 MHz bandwidth is digitally filtered into 16 x 1.5 MHz subbands (Figure 57). Detected powers in these subbands will be telemetered to the ground at ~ 1 ms temporal resolution. The resulting ~ 1.5 MHz x 1 ms spectrogram dataset can be utilized in a variety of RFI detection methods, including channelized pulse detection, cross-frequency algorithms, or “peak-picking” methods.
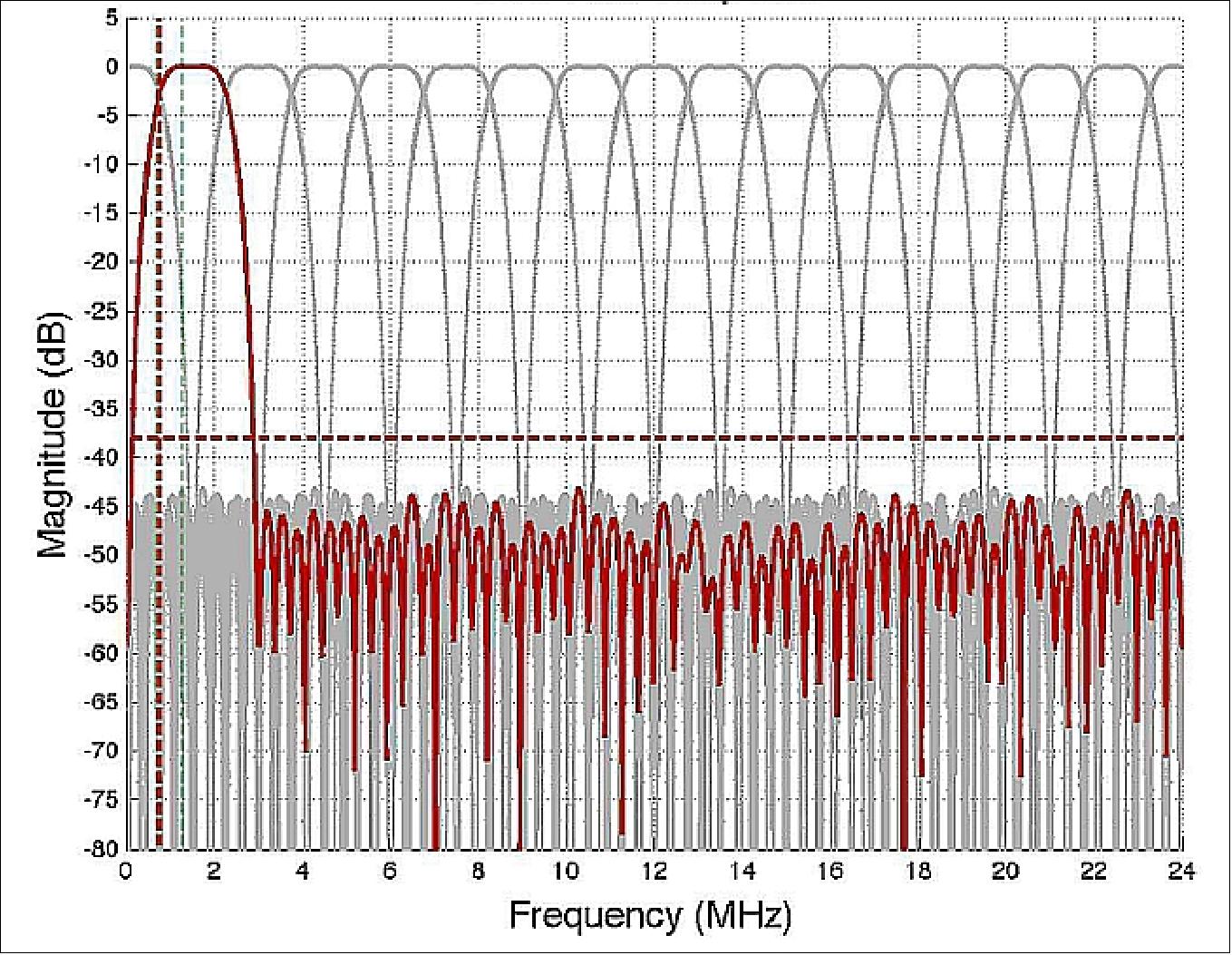
In addition to time/frequency discrimination, the radiometer digital subsystem will also compute the first through fourth moments of observed fields both in the 24 MHz “full-band” (i.e., 3.2 kHz) and 1.5 MHz “subband” (16 channel x 1 ms) datasets. The availability of these moments will enable computation of the full-band and subband kurtosis for RFI detection, which has also been shown effective against several source types.
Radiometer electronics design: The SMAP radiometer electronics design is largely adopted from the Aquarius design with one major difference: the SMAP radiometer uses a superheterodyne digital receiver to enable advanced RFI mitigation and full Stokes polarimetry. The system design includes a highly linear microwave receiver with internal calibration sources and a digital signal processor for RFI detection. The frontend comprises an RF cable-based feed network, with frequency diplexers and coupled noise source, and a radiometer frontend (RFE) electronics package. Internal calibration is provided by reference switches and a common noise source inside the RFE. The RF backend (RBE) downconverts the two 1413 MHz channels (for vertical and horizontal polarizations) to an intermediate frequency (IF) of 120 MHz. The IF signals are sampled two analogtodigital converters (ADCs) in the radiometer digital electronics (RDE). The RBE local oscillator and RDE digital clocks are syncrhonized to ensure coherency between the sampled IF signals. The RDE performs additional filtering, subband channelization, crosscorrelation for measuring third and fourth Stokes parameters, and detection and integration of the first four raw moments of the signals. These data are packetized and sent to the ground for calibration and further processing. 98)
A block diagram of the radiometer electronics is shown in Figure58 with photographs of hardware accompanying each block. Starting on the right, external noise source and directional couplers, diplexers, RFE and RBE compose the the radiofrequency (RF) electronics subsystem. Testing shows the noise figure is approximately 1.5 dB. The RF signal enters the system and the radiometer band is selected by the diplexers. The RFE amplifies the signal and applies calibration sources. The RBE shifts the frequency of the L-band signal an IF suitable for sampling by the ADCs in the RDE. Special consideration was given to specifying system linearity because of the of the system (~80 dB) and presumed presence of RFI. Measurements indicate the system operates at most 25 dB below 1 dB compression, resulting in <0.2 K of nonlinearity error before correction. Testing was performed to characterize the nonlinearity and residual error after correction is shown in Figure 59.
The RDE performs digital signal processing to the vertical and horizontal polarization channels output by the RF subsystem. The RDE will be the first spaceflight processing to produce radiometer data in all four Stokes parameters and first four raw moments integrated across the fullband channel and 16 subband channels. This new capability enables aggressive RFI mitigation to be applied to the data. In the DSP algorithm, a
polyphase filter bank is used to separate a 24 MHz bandpass into 16 x 1.5 MHz channels. Testing shows there is greater than 40 dB isolation between every other adjacent channel, which provides the ability to isolate RFI in individual channels while successfully making science measurements in others.
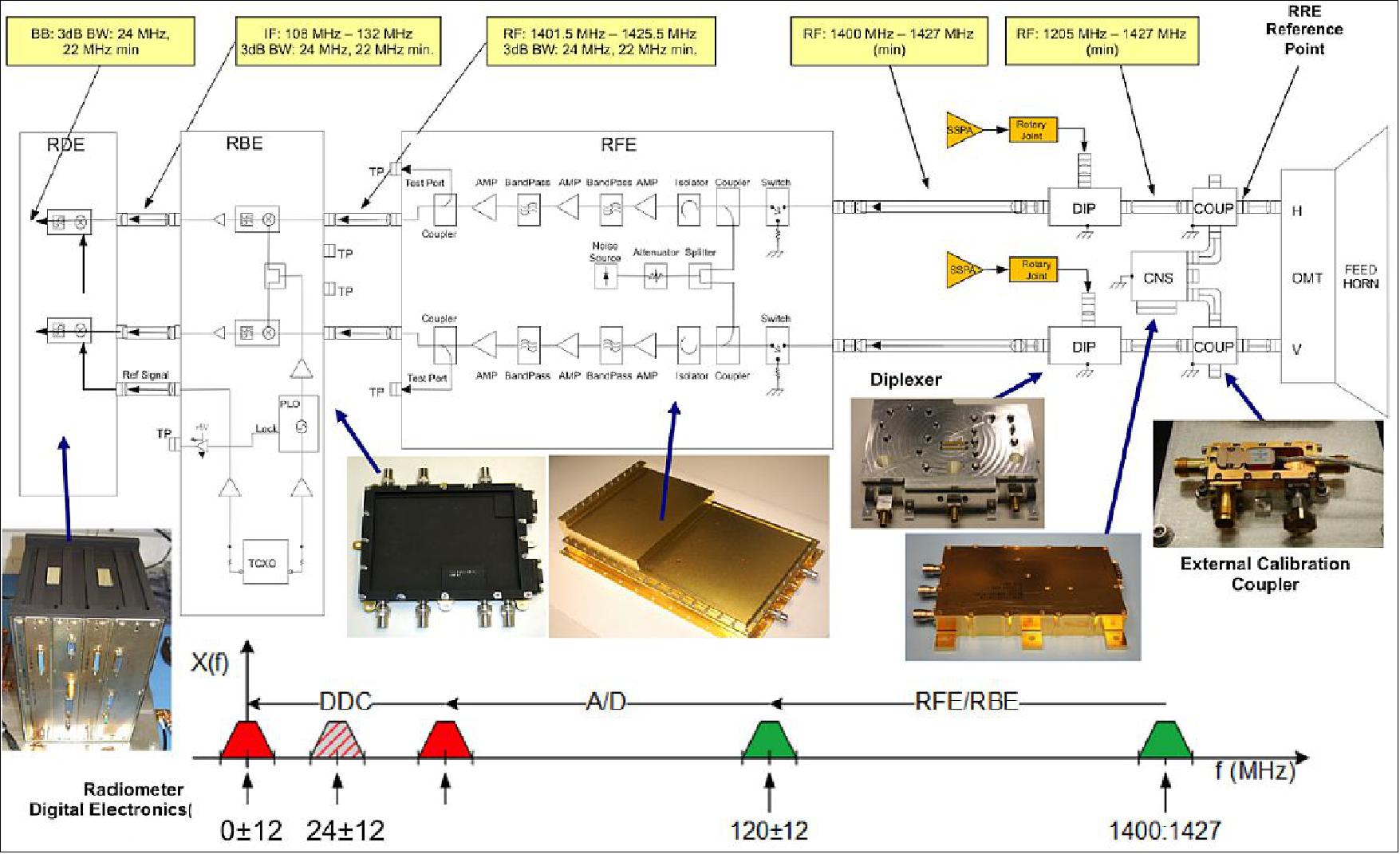
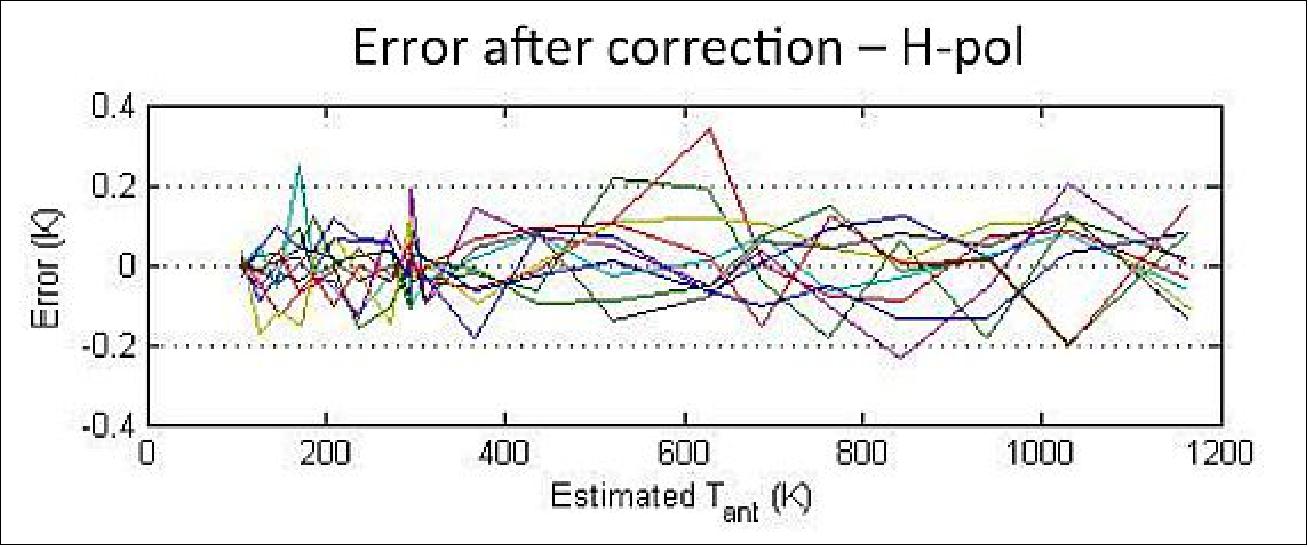
A repeatability test was done in thermal vacuum testing in part because of these new features. The radiometer hardware was thermal cycled while observing a stable coldFET at its input. The changes in calibrated output between test plateaus is shown in Figure 60. The project team found the performance to be comparable to the Aquarius radiometer pre-launch test results.
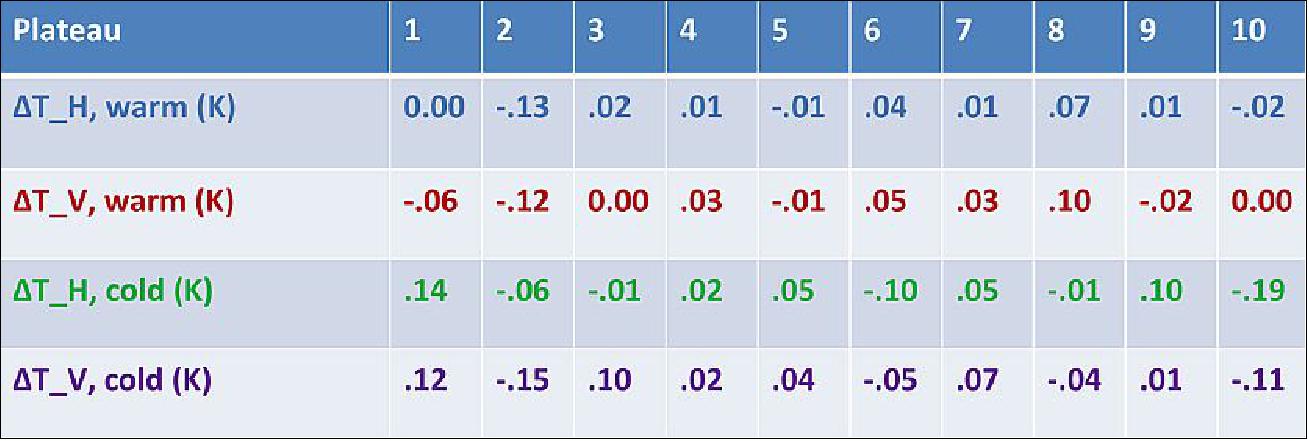
The proliferation of RFI in the terrestrial environment is a major driver to the SMAP radiometer spaceflight electronics design. The implemented design contains features specifically developed to mitigate RFI and to meet or exceed science mission requirements. The design implementation employed both hardware and software applications that work in concert to enable the detection and removal of RFI-saturated data. The hardware architecture includes a digital channelized radiometer/polarimeter with a superheterodyne frontend. To process the science data and remove RFI-saturated data, a complex ground algorithm is employed. The system outputs data packets containing time, frequency, polarization, and statistical diversity (8 packets with 360 samples each) that are processed by the ground algorithm to detect and remove RFI. RFI. Figure 61 shows the Radiometer electronics installed to the SMAP Observatory. After a successful ground integration and test campaign, including extensive thermal and electrical testing, the electronics are awaiting launch no earlier than January 2015 and subsequent on-orbit checkout.
Radar: In contrast to the radiometer, the SMAP radar operates in a "shared" band between 1215 and 1300 MHz with other services including FAA and DOD aircraft navigation systems. Very strong interference from these systems is expected, and indeed has been observed by previous L-band radar missions. Most potential interfering emissions at L-band are relatively narrow band. Because the SMAP radar itself is a narrow band system (1 MHz linear chirp), a key RFI avoidance strategy for SMAP is to make the center transmit frequency adjustable. If persistent RFI is encountered in a given band over a given region, the center frequency is simply commanded to a different location in the spectrum. Despite best efforts to operate the SMAP radar in a "clear" band, however, it is inevitable that some RFI contamination will be observed. Therefore, RFI detection and removal will be performed as part of the ground data processing.
As with the radiometer, an extensive effort has been made to characterize the RFI environment expected for the radar. An examination of currently operating L-band systems indicates that 87% of RFI is from "pulsed" sources, and 13% is from "other" sources such as CW emitters. A simulation, developed to model RFI and the effectiveness of mitigation algorithms, uses the database of known emitters over North America. RFI emitter characteristics are varied in different runs of the simulation to assess sensitivities. To validate the RFI simulation, it was run assuming the Aquarius instrument parameters and orbit. When compared against the actual Aquarius data, the agreement was found to be excellent (Figure 62). In order to estimate the impact of other regions of the world where the RFI is observed to be somewhat worse (e.g., Europe and East Asia), the simulation can be run with an increased number of emitters, with higher duty cycles, higher powers, etc.
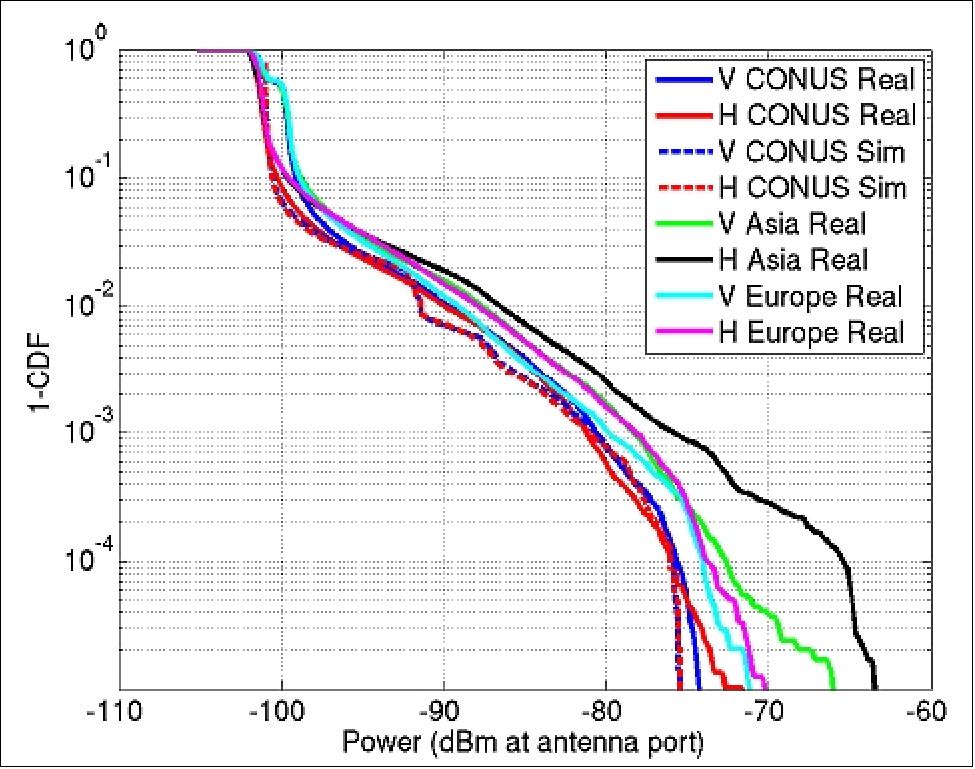
Legend to Figure 62: Complementary cumulative distribution functions of real and simulated Aquarius radar noise-only data for sets of passes over different geographical regions. Power levels above the radar noise floor are due to RFI.
The primary detection/correction algorithm for pulsed interferers is STT (Slow-Time Thresholding). Here, SMAP leverages the fact that RFI signal pulse rates are usually slower than SMAP's radar pulse rate. The STT technique looks at the slow-time series associated with a given range bin, sets an appropriate threshold, and flags any azimuth samples that exceed this threshold as RFI events. When the STT is applied to the results of the North American simulation described above, it is observed that the overall measurement errors due to RFI will be well within the budgeted allocation of 0.4 dB RMS. Further, this mitigation technique appears robust to artificially intensifying the RFI environment in the simulation to approximate regions other than North America (Ref. 97). 99) 100)
SMAP Instrument
The unique aspect of the SMAP application is the necessity for rotating the large antenna. At the nominal SMAP altitude of 685 km, the reflector must be rotated at a rate of 13-14.6 rpm to maintain contiguity (i.e., minimum overlap, SMAP is designed for 14.6 rpm) of the measurements in the along-track direction. Key requirements that must be met by the reflector assembly include:
1) All RF performance requirements (gain, beam efficiency, etc.) must be met under the spinning conditions
2) The total momentum generated must be within the amount the spacecraft is capable of compensating
3) The disturbances resulting from residual imbalances must be sufficiently small as to not affect overall pointing or impart excessive loads to the spin motor bearings.
The deployable antenna is attached to the structure of the SPA (Spun Platform Assembly). The SPA includes the primary and secondary structures. The former provides the backbone of the SMAP instrument, while the radiometer electronics and IFA (Integrated Feed Assembly) are supported by the secondary structure. The feed assembly design employs a single horn, capable of dual-polarization and dual frequency (the radiometer frequency at 1.41 GHz, and the radar frequencies between 1.22 and 1.30 GHz). In order to minimize the moment of inertia, the horn is designed to be as small, compact, and lightweight as possible. To meet measurement performance requirements, the antenna beamwidth of the radiometer frequency band is between 2.3º to 2.5º, and the antenna gain at the radar band is better than 35.5 dBi.
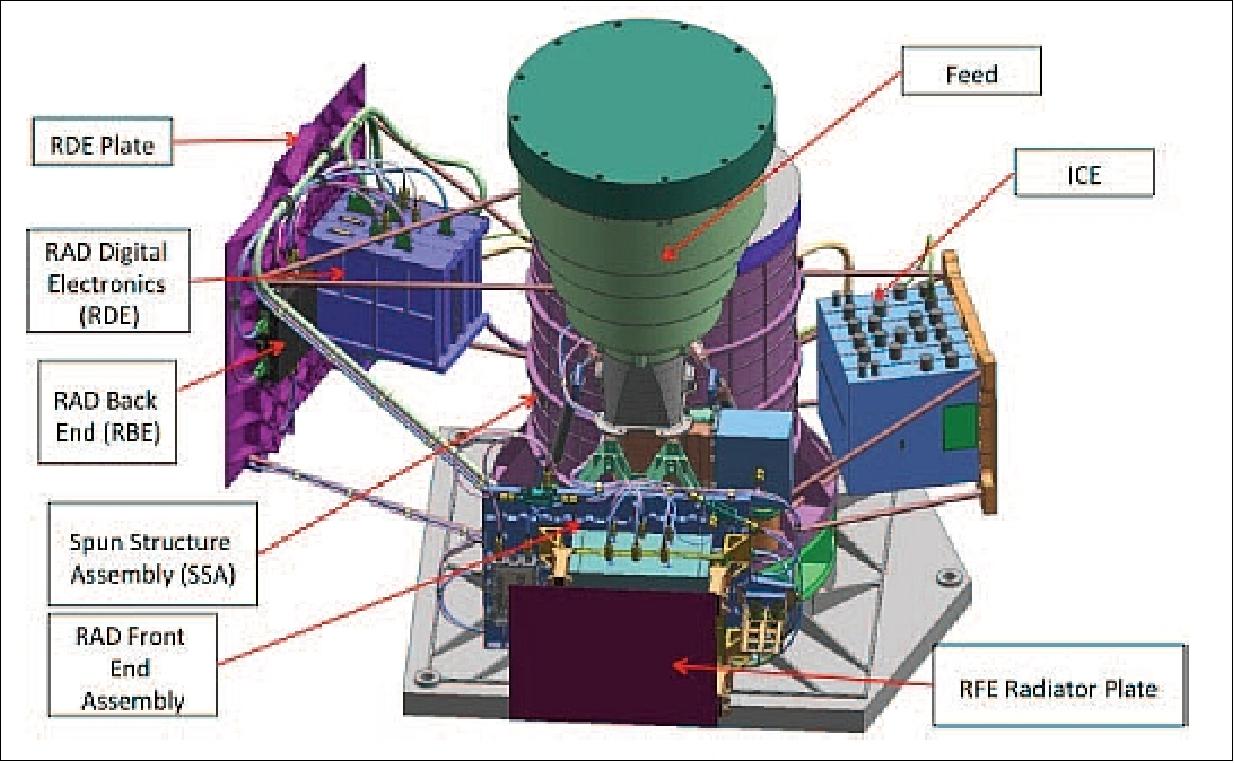
Key parameters of the antenna | |
Configuration | Conically-scanning reflector forming a 1000 km wide swath |
Beamwidth (1-way, 3 dB) | 2.7º |
Look angle, incidence angle | 35.5º, 40.0º |
Peak gain | 36 dBi |
Rotation rate | 14.6 rpm |
Key parameters of the radiometer | |
Center frequency | 1.41 GHz (L-band) |
Resolution (root footprint area) | 40 km |
Channels | Tv, Th, T3, T4 |
Bandwidth, integration time | 22 MHz, 65 ms |
Precision (Tv and Th) | 0.93 K |
Calibration stability (Tv and Th) | 0.65 K |
Total error (Tv and Th) | 1.1 K |
Key parameters of the radar | |
Transmit carrier frequencies | Tunable from 1.22 to 1.30 GHz (Center frequency=1.26 GHz) |
Channels | HH, VV, HV (or VH) |
PRF (Pulse Repetition Frequency), Pulse length | 2.9 kHz, 15 µs |
Azimuth dwell time | 42 ms |
Transmit bandwidth | 1 MHz |
Peak transmit power | 500 W (at output of amplifier) |
Single-look resolution (broadside) | 250 m x 400 m |
NESZ (Noise Equivalent Sigma Zero), or σο (broadside) | -29 dB |
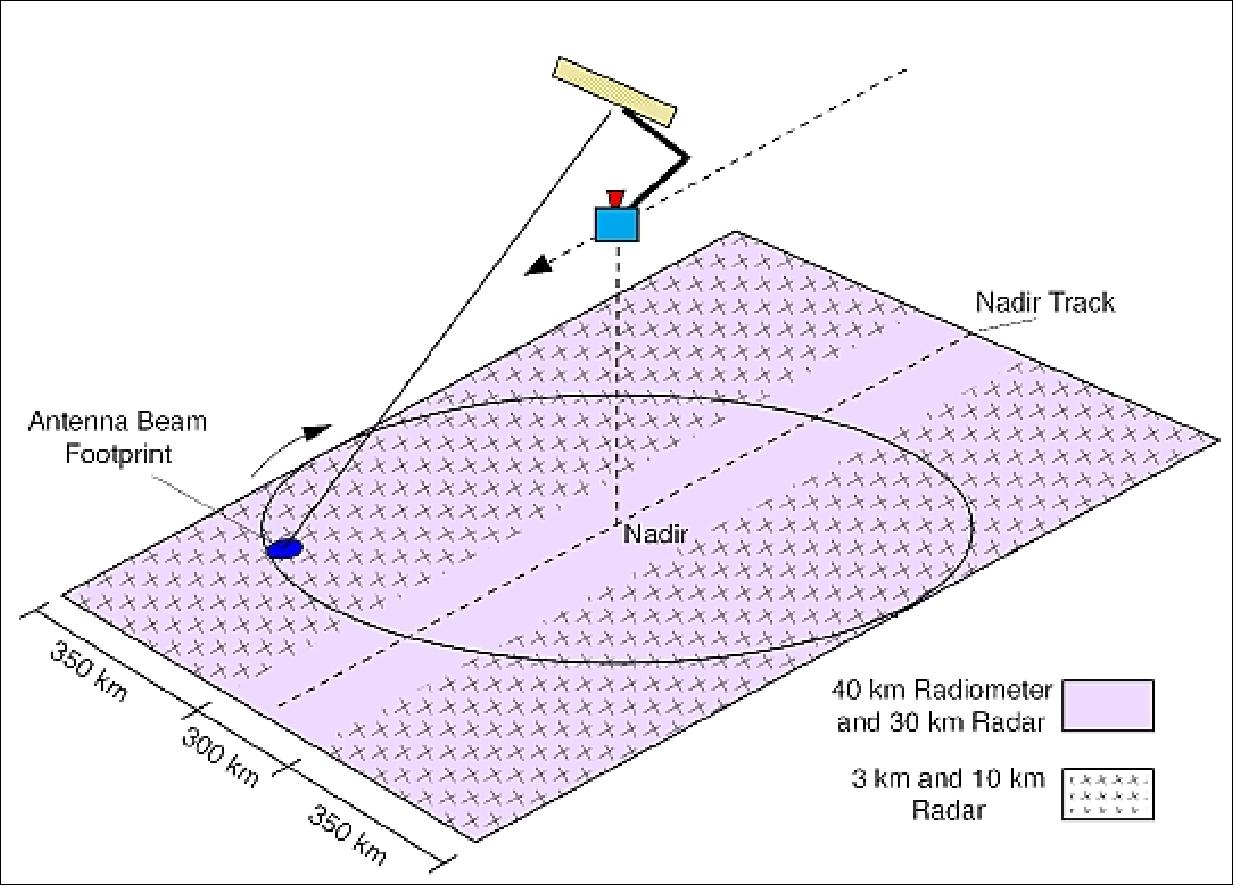
Radiometer parameters: Measurement precision for a radiometer is principally affected by NEDT. NEDT (0.65 K) is set by the system noise temperature (777 K), bandwidth (22 MHz), and net integration time (65 ms for a 30 km x 30 km grid cell, including both fore and aft looking radiometer samples). Many other factors contribute to the measurement imprecision, including antenna pattern instability. Altogether, measurement precision is 0.95 K. The radiometer calibration stability is 0.62 K. Calibration stability is achieved by frequent observation of internal calibration sources, observation of stable earth and space targets, and stable thermal design. The root-sum-square of the 0.62 K stability and the 0.95 K precision estimates yields a total error of 1.1 K, satisfying the 1.3 K requirement of the soil moisture science objective. 101) 102)
Initially the radiometer was designed with passive thermal control, and analysis demonstrated that the required thermal stability could be met. Achieving anomaly free performance over a large thermal range, however, carries a development risk due to potential for thermo-mechanically induced calibration shifts associated with internally calibrated radiometers; these have been observed in the prelaunch testing of SAC-D/Aquarius, Jason-2/AMR, and Juno/MWR. It was therefore decided to implement an active thermal control augmentation to the existing passive thermal design. The temperature of the RAD front end (Figure 63) is settable to within ±2ºC over a 15ºC range within the acceptable flight temperature range.
Radar parameters: To obtain the required 3 km and 10 km resolution for the freeze/thaw and soil moisture products, the radar will employ pulse compression in range and Doppler discrimination in azimuth to sub-divide the antenna footprint. This is equivalent to the application of SAR (Synthetic Aperture Radar) techniques to the conically scanning radar case.
Due to squint angle effects, the high-resolution products will be somewhat degraded within the 300 km band of the swath centered on the nadir track (Figure 64 and Figure 65), with azimuth resolution capability decreasing over this region as the target area approaches the nadir track. The baseline system has both V- and H-pol channels. An additional channel measures the HV (or VH)cross-pol return.
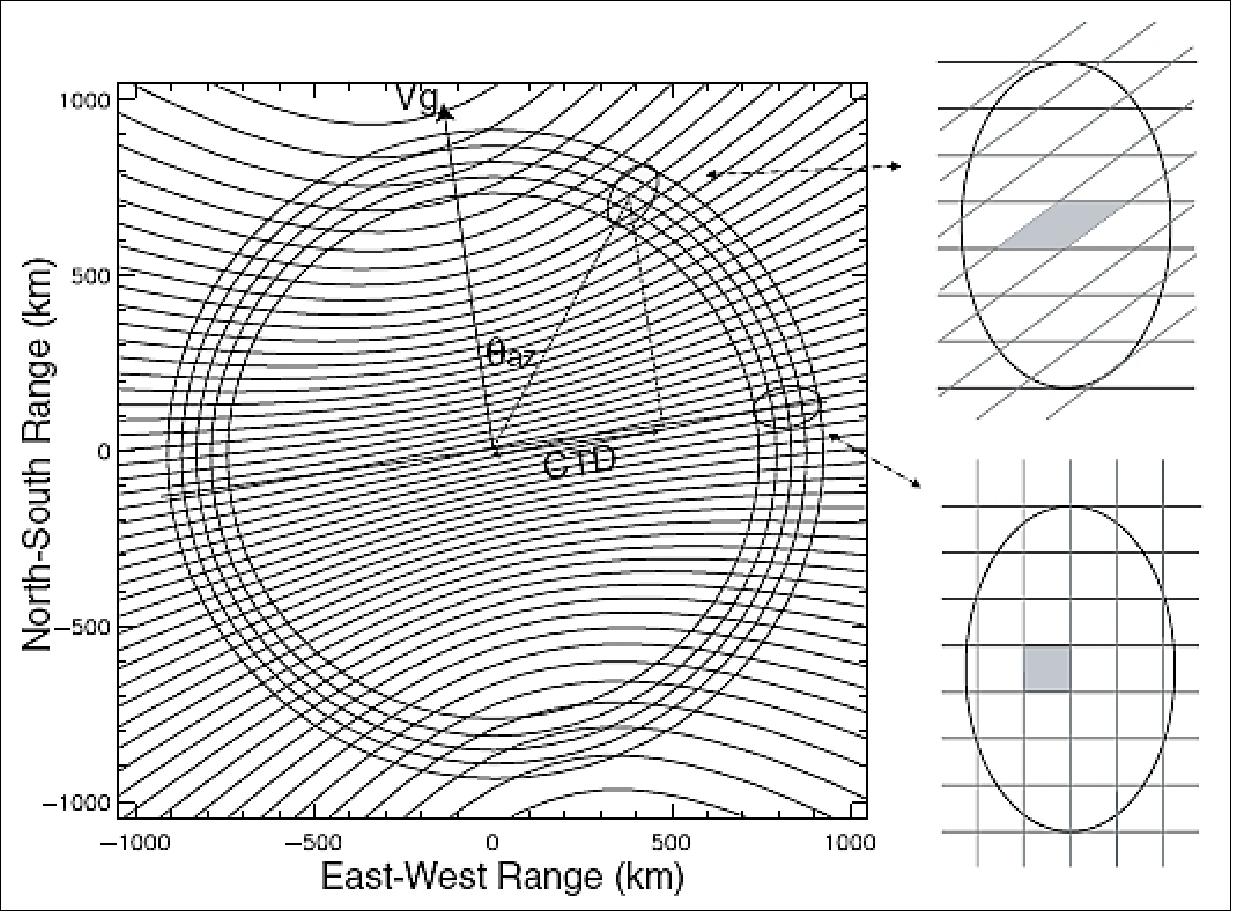
Legend to Figure 65: The spacecraft velocity vector is shown as vg. Also shown are the iso-range and iso-Doppler contours that govern the radar pixel formation.
There are two requirements placed on the radar relative error. The soil moisture measurement requirement places a 0.5 dB relative error on both the vertical and horizontal copolarized backscattering coefficient measurements at 10 km resolution. The freeze/thaw state measurement places a 1 dB requirement on the relative error of each vertical and horizontal co-polarized backscatter measurement at 3 km resolution.
The radar relative error depends on the signal-to-noise ratio (SNR) and the number of independent samples, or "looks", averaged in each measurement, as well as the relative calibration error. Looks will be obtained by averaging in both range and azimuth. The 1 MHz bandwidth will yield a ground range resolution of approximately 250 m and will result in a minimum of 12 looks in range for 3 km cells and 40 looks for 10 km cells.
The Doppler diversity (Figure 65) will be maximized at a scan angle perpendicular to the platform velocity, leading to a single-look azimuth resolution of approximately 400 m. The single-look resolution will degrade as the scan angle approaches the platform velocity vector (θaz = 0 in Figure 65), reaching 1500 m at the inner swath edge (150 km cross-track).
To ease volume and mass issues encountered in the spacecraft design, a decision was made to generate both linearly polarized transmit signals sequentially by switching a single high-power amplifier. The current sequential transmit scheme is shown in Figure 66. In this timing configuration, the duration of the total transmit event has been extended, and the nominal PRF (Pulse Repetition Frequency) is lowered to approximately 2.9 kHz in order to accommodate the temporal width of both echo returns. As was the case in the previous design, the two polarized returns are isolated by transmitting signals at offset frequencies (f1 and f2) as shown in Figure 67. This scheme maintains the same science performance.
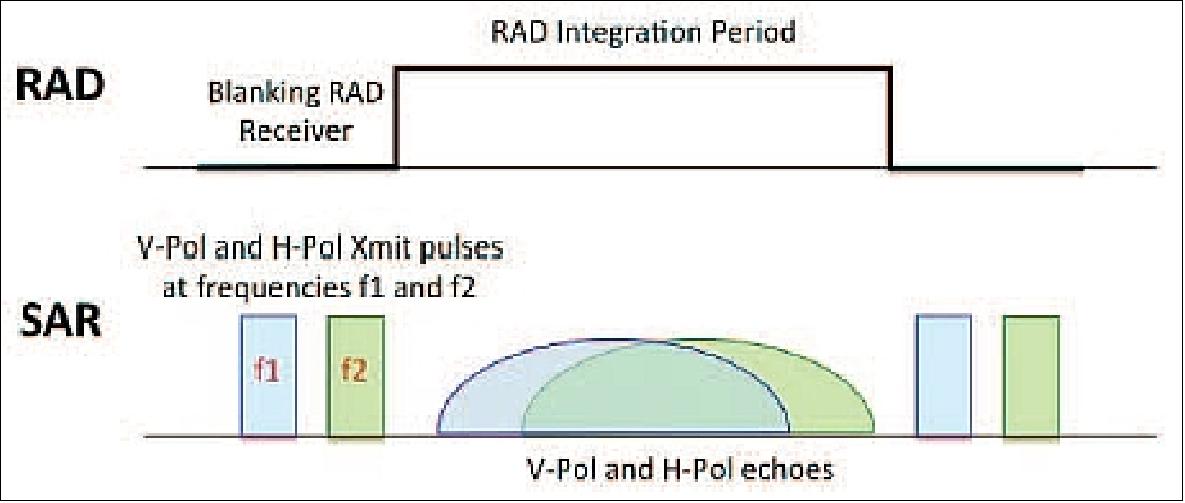
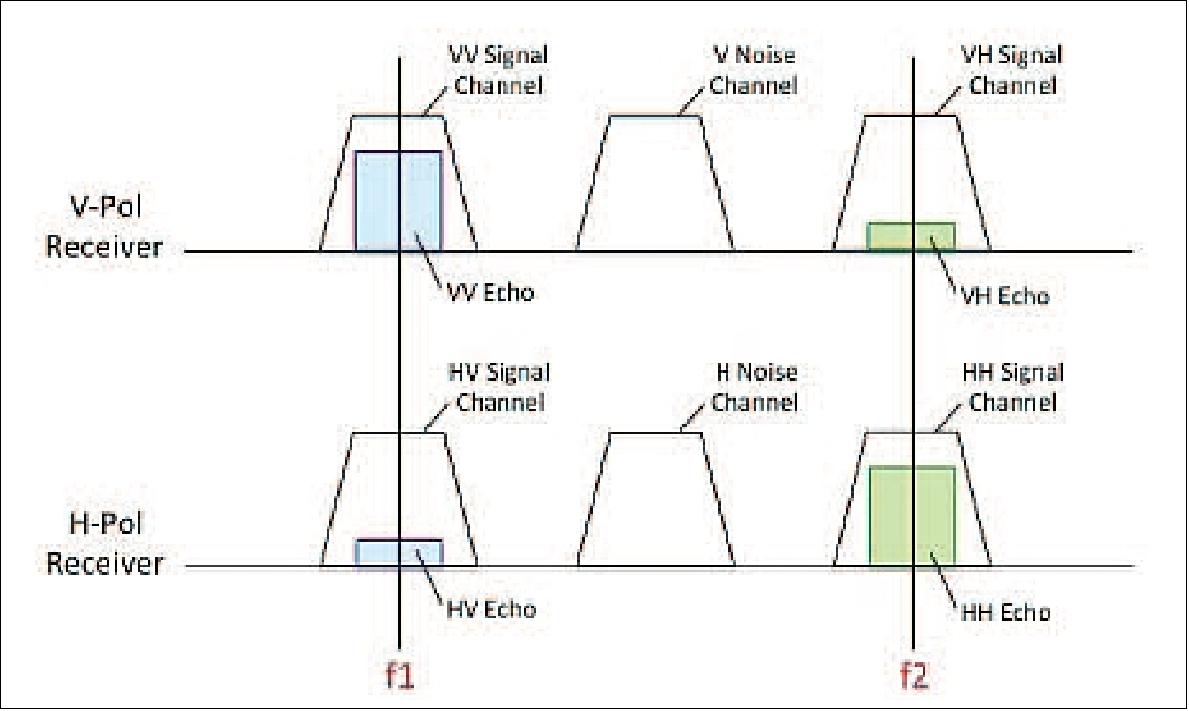
The active radar will utilize onboard SAR processing in order to obtain the sub-footprint resolution necessary for the geophysical retrievals. The OBP (Onboard Processor) software package receives the capability to turn raw data into low-resolution and high-resolution data ready to be downlinked for further ground processing into low-resolution and high-resolution radar products. 103)
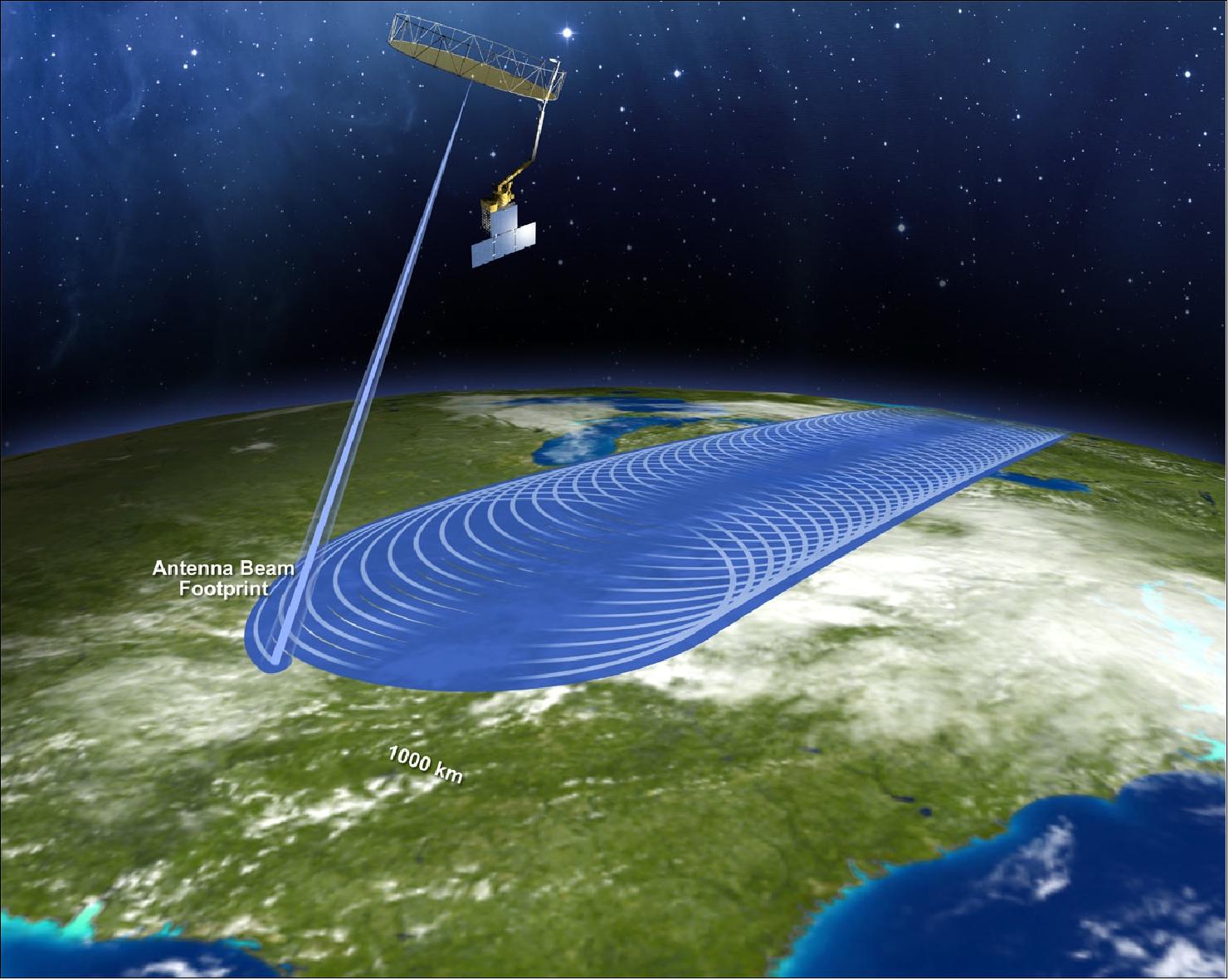
The SMAP RDE (Radiometer Digital Electronics)
The SMAP radiometer has an entirely digital back-end processor for its DSP (Digital Signal Processing) and RFI (Radio Frequency Interference) mitigation. The mission of SMAP is to provide global high-resolution mapping of soil moisture and its freeze/thaw state to link terrestrial water, energy, and carbon cycle processes. Fusion of SMAP's L-band SAR data and L-band microwave radiometer data will enable this mission. In addition, both of SMAP instruments include new technology that enables mitigation of RFI via ground processing. In particular, the SMAP radiometer employs the first spaceborne digital back-end processor subsystem called the RDE (Radiometer Digital Electronics). The RDE is a FPGA-based digital signal processing system that uses time, frequency, statistical and polarization diversity to detect and flag RFI during its mission lifetime 104)
The SMAP radiometer can be thought of as three major subsystems: the RFE (Radiometer Front End ), RBE (Radiometer Back End), and RDE (Radiometer Digital Electronics). 105)
The RFE includes a calibrated noise source and interfaces to a 6 m conical-scanning deployable mesh antenna that is shared with the radar. The RFE and RBE subsystems together form a polarimetric heterodyne radiometer that downconverts predetected horizontal and vertical polarization component signals to an IF (Intermediate Frequency) of 120 MHz using highside local oscillator injection at 1533.5 MHz. Both channels are subsequently digitized and processed by the RDE at 96 MHz with 14 bit resolution.
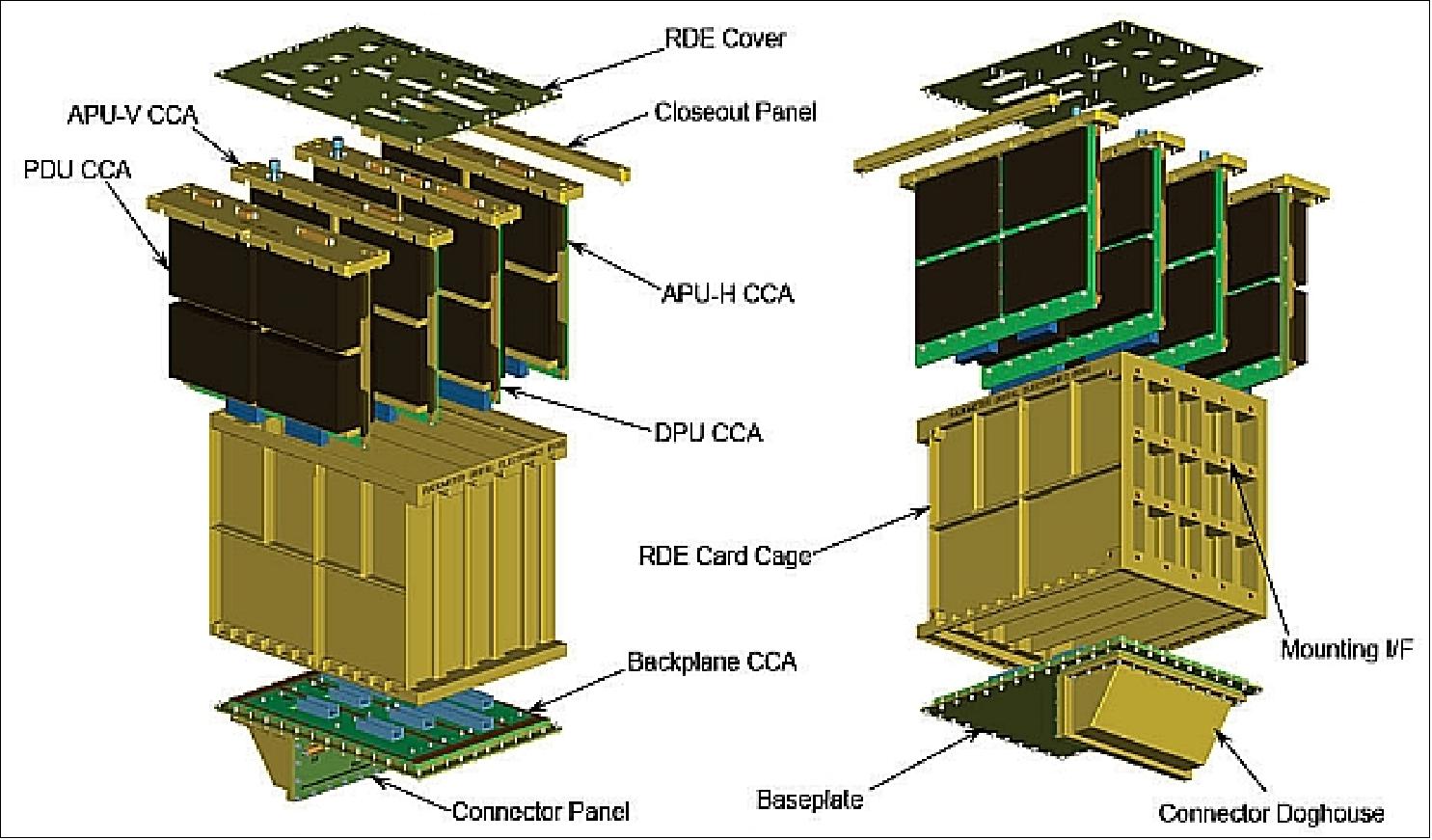
In addition, the RDE interfaces with the spacecraft for commanding/telemetry and science data pipeline, provides the instrument power conditioning and distribution, command/control, housekeeping and overall timing and synchronization. The RDE consists of five CCAs (Circuit Card Assemblies), an enclosure, a baseplate, a connector panel and cover shown in Figure 3. Two identical CCAs, APU-H (Analog Processing Unit-Horizontal) and APU-V, perform quadrature down-conversion, subbanding and generation of the first 4 raw sample moments for fullband and 16 adjacent frequency channels of subband data for each polarization.
The DPU (Data Processing Unit) orchestrates control of the radiometer, processing, timing and packetization of data within the RDE. The DPU also digitizes analog telemetry from the RFE, RBE, and platinum resistance thermometers throughout the radiometer. Furthermore, the DPU correlates fullband and subband signals, producing complex-valued counts for generating the third and fourth Stokes parameters (C3 and C4).
The PDU (Power Distribution Unit) accepts primary power from the spacecraft in the range of 22 to 36 volts. The PDU produces the secondary voltages for the RDE as well as voltages for powering the RBE and RFE subsystems. The last CCA is the high-speed digital backplane that connects the two APU cards to the DPU (Ref. 105).
SMAP Instrument Antenna Control
SMAP's attitude control and pointing system performs the key on-orbit operations needed to implement the conical scanning scheme employed for data acquisition by the radar and radiometer. The observatory uses a zero momentum bias, dual-spin architecture to rotate its large antenna at a spin rate of 13–14.5 rpm, while the spacecraft bus provides a three-axis controlled platform that maintains both itself and the instrument section's spin axis in a nadir-pointed orientation. The major pointing and control functional aspects and design characteristics are illustrated in Figure 70. A key challenge with the spinning antenna stems from its large spin axis moment of inertia, which at almost 240 kgm2 is larger than that of the spacecraft bus at about 190 kgm2(Ref. 97).
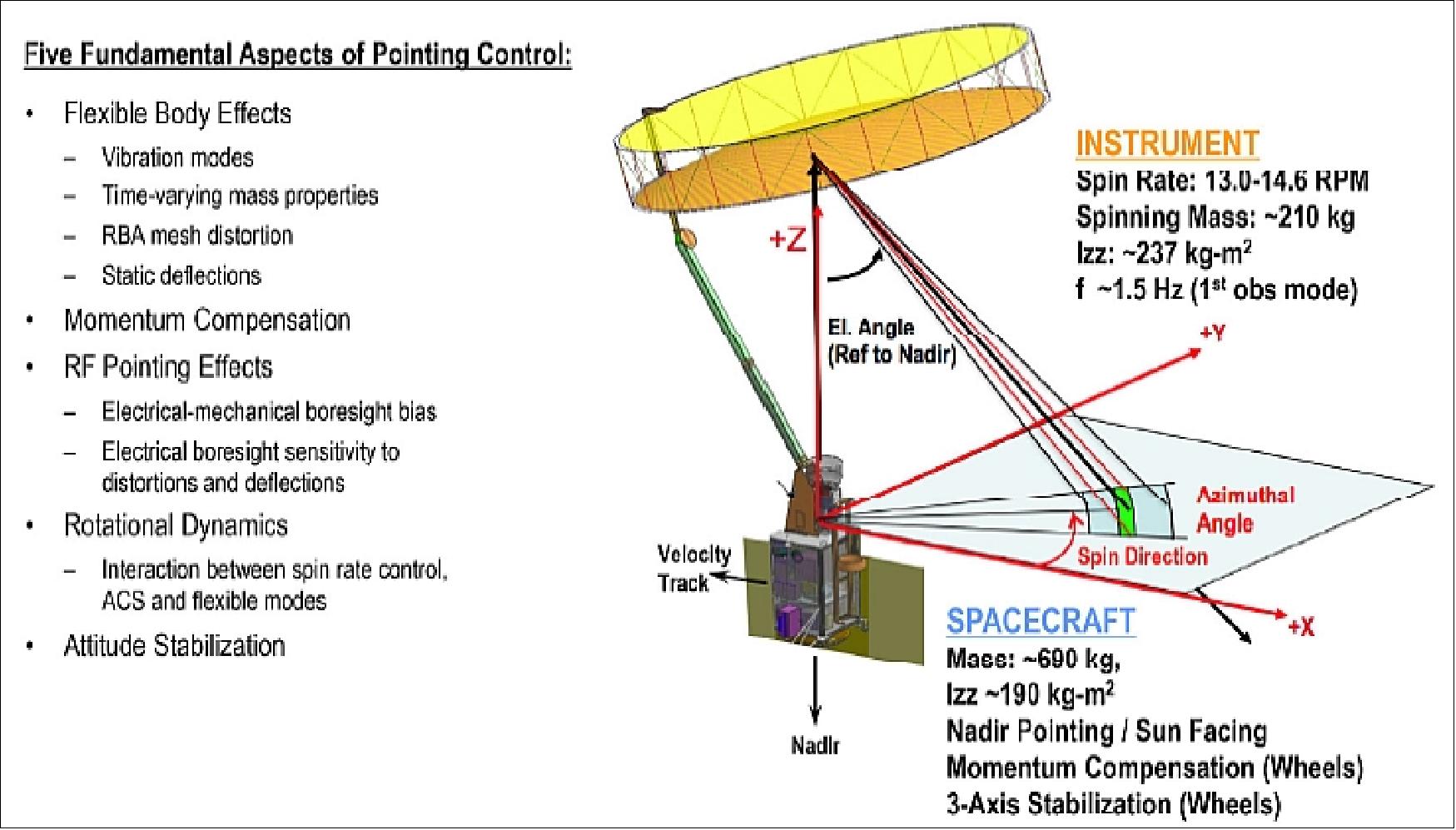
Figure 71 shows the sensor and actuator suite and locations. This control system configuration was informed by a prior design concept for the NROSS (Navy Remote Ocean Sensing System) satellite, which would have employed a similar sized-rotating antenna and nadir-pointing scheme (NROSS development was halted after Preliminary Design Review in the 1980s). From a control standpoint, SMAP took an integrated approach to momentum management, with momentum compensation for the spun side and three-axis control accomplished with a single set of four RWAs (Reaction Wheel Assemblies), rather than using a dedicated momentum wheel for spun-side momentum compensation. In a recent operational example of a nadir-pointing observatory employing a momentum-compensated rotating antenna, WindSat/Coriolis, a dedicated momentum wheel was also used to counteract the antenna's angular momentum, in a manner similar to that planned for NROSS. SMAP's approach provides a degree of functional redundancy for wheel failure and reduces control complexity.
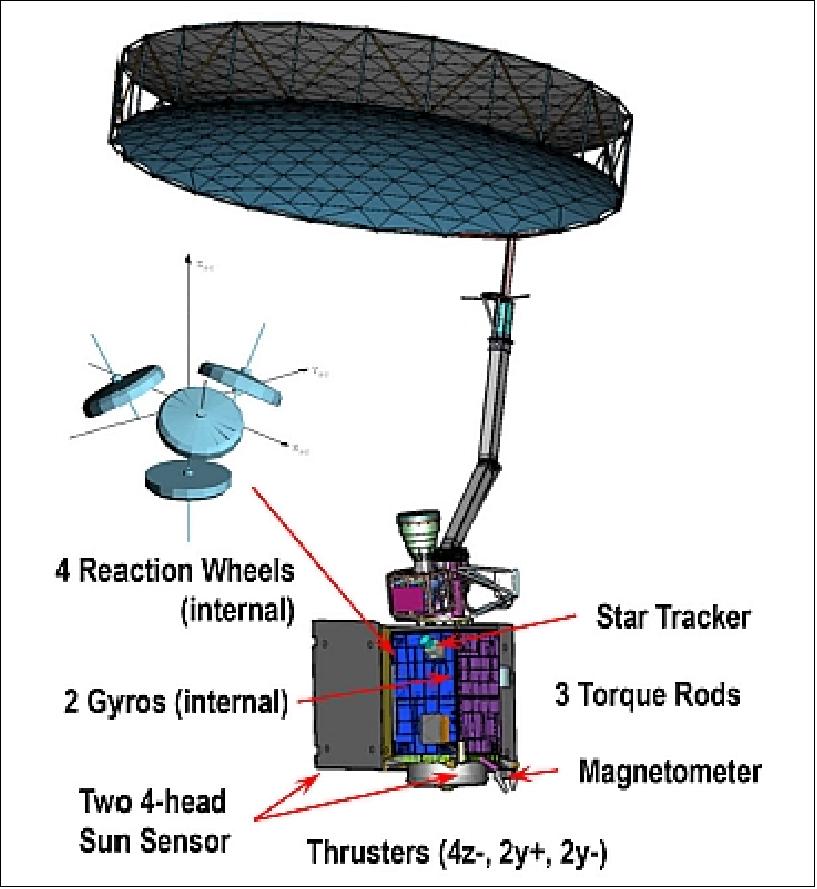
The system architecture is illustrated in Figure 72, encompassing the attitude and spin rate determination functions, attitude control modes for both RWA and RCS (Reaction Control System) based three-axis control, spun-side momentum compensation, and the torque rod-based scheme employed for RWA momentum management. For translational maneuvers (needed for orbit altitude maintenance) and select contingency scenarios, the RCS is used due to the much larger control authority offered by the thrusters. For nominal mapping operations, this system can control nadir pointing errors due to precession and nutation to within 0.5º, with a stability tolerance of ±0.3º (3σ).
From a design and verification standpoint, the key challenge for pointing and control is accommodating the flexible modes, especially for the large antenna and its supporting boom, while simultaneously controlling the antenna spin rate and nadir orientation to within the required tolerances. This has been accomplished via careful engineering of the primary frequencies associated with these various elements, to ensure adequate separation and avoid the potential for interference or undesired resonance effects. Frequency distribution of these system components is shown in Figure 73 to illustrate this aspect of the design. The minimum 1st flexible mode frequencies of the solar array, as well as the antenna and boom, became key design requirements on the structure to ensure adequate separation from the spin control system and the observatory's attitude control bandwidth.
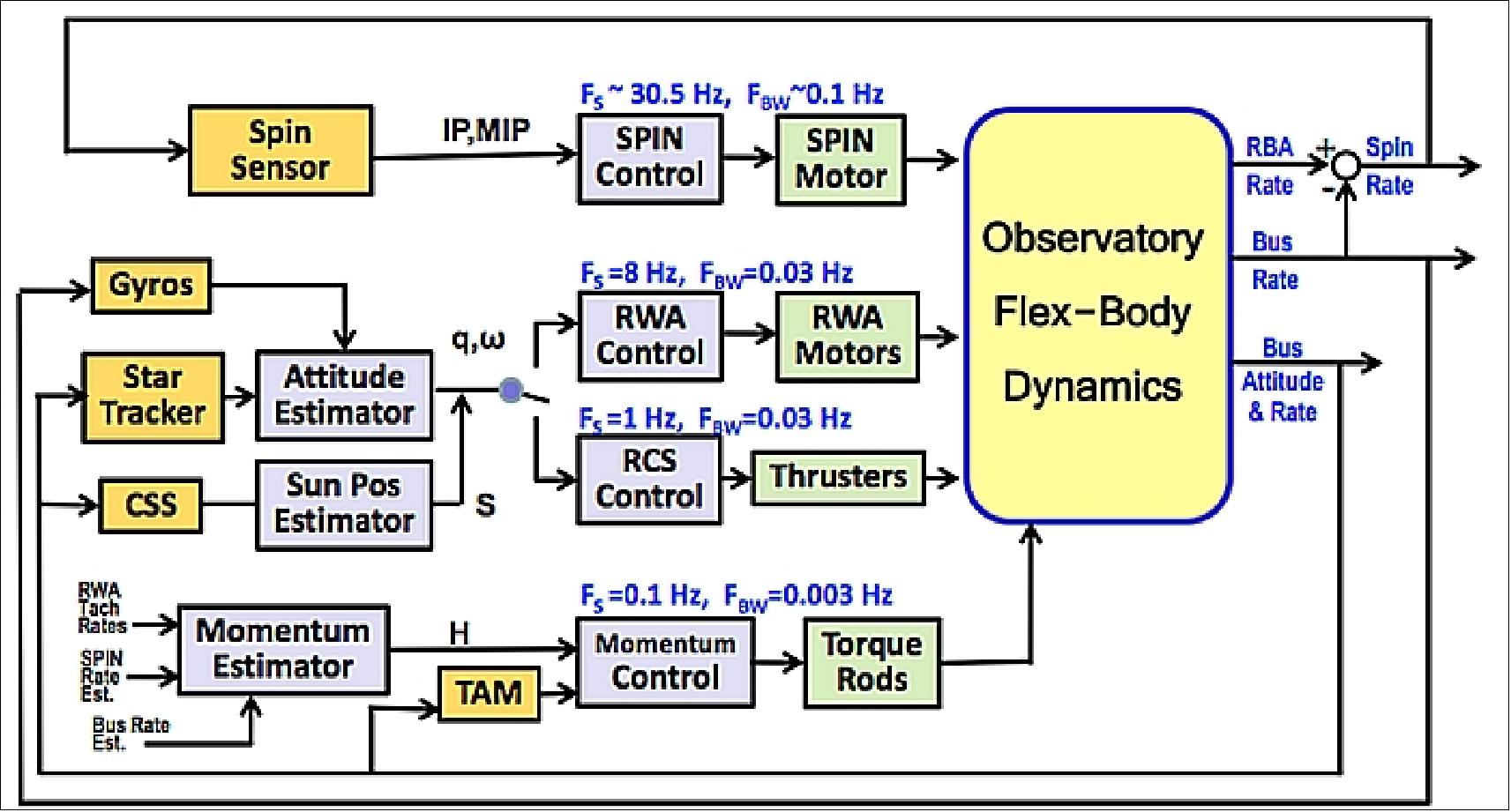
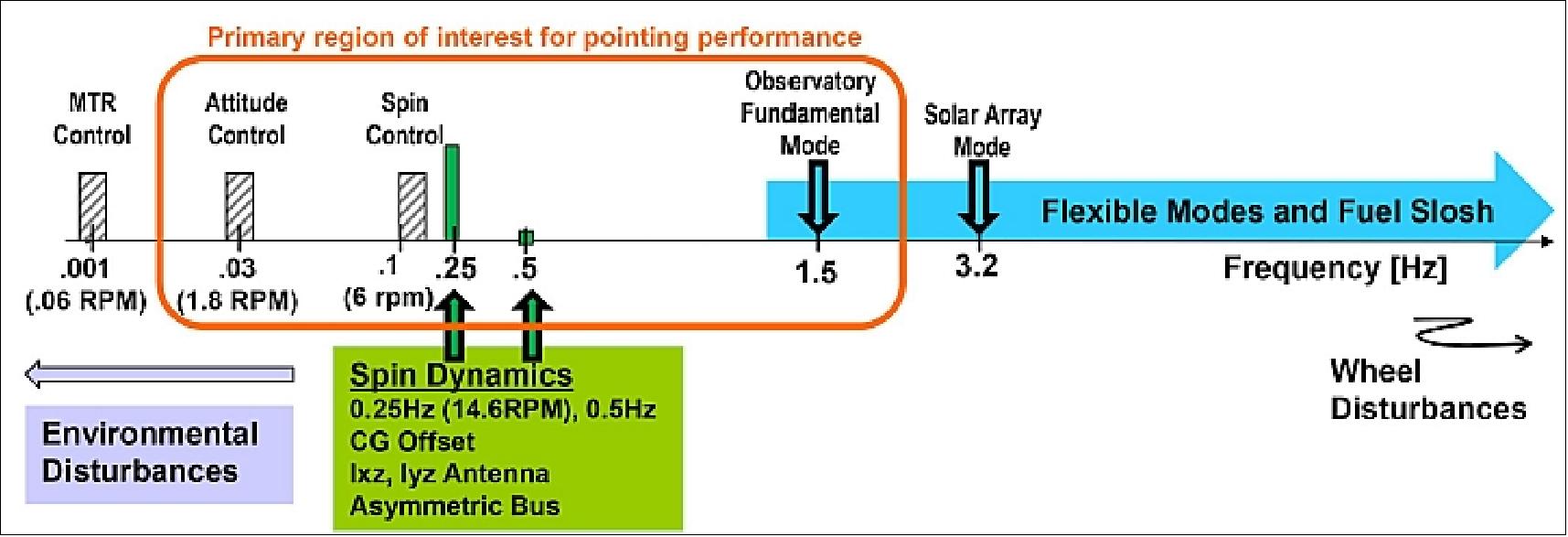
GDS (Ground Data System)
The ground data system being developed for SMAP is composed of many heterogeneous subsystems, ranging from those that support planning and sequencing to those used for real-time operations, and even further to those that enable science data exchange. The SMAP mission shares in common many characteristics as those of Jason-1 and WISE. One of the mission objectives is to achieve similar cost savings as done by Jason-1 and WISE, through automation of real-time operations. However, the SMAP mission has selected a different GDS subsystem element in place of the one that provides the automation services for Jason-1 and WISE [Note: The GDS subsystem that provides automation of engineering operations for Jason-1 and WISE missions is the JPL ESMC (Earth Science Mission Center)]. The SMAP GDS will use NASA's AMPCS [AMMOS (Advanced Multi-Mission Operations System) Mission Data Processing and Control System] to provide telemetry processing, storage, reporting, display, and a subset of automation capabilities for real-time operations. 106)
Figure 74 shows the four main facilities that support the SMAP mission and the functions executed at each facility. Figure 75 illustrates the SMAP communications paths. Operations are centered at the MOC (Mission Operations Center) of NASA/JPL. Communications with the observatory are handled through the ground and space assets of the NEN (Near-Earth Network) and SN (Space Network). Scheduling and pass reporting for the NEN and SN assets are handled through the DSMC (Data Services Management Center) at the WSC (White Sands Complex), where the primary TDRS (Tracking and Data Relay Satellite) ground terminals are located (Ref. 19).
Science telemetry from the NEN stations flows to the EOS EDOS (Data and Operations System) LZPF (Level Zero Processing Facility) at NASA/GSFC, which formats the data into files and passes the radar and radiometer data to the SDS (Science Data System). Engineering data from the NEN and SN stations flows to the MOC at JPL, which generates displays and other products to support both mission operations and science processing.
The primary path for commanding the observatory and returning science and engineering data is through three northern-hemisphere tracking stations and one southern-hemisphere station in Antarctica. Data return at the northern-hemisphere stations is via 11.3 m antennas located at WGS (Wallops Ground Station), Virginia, ASF (Alaska SAR Facility) at Fairbanks, Alaska, and SGS (Svalbard Ground Station), Norway. Data return at the southern-hemisphere station is via the 10 m antenna at MGS (McMurdo Ground Station), Antarctica. Table 10 gives the characteristics of the four stations and average contact statistics from the science orbit. Since SMAP is in a near-polar orbit, the higher latitude stations have more frequent contact opportunities.
Ground Station | Antenna | Latitude | Average No of contacts/day | Average coverage minutes/day |
Svalbard (SGS) Norway | 11.3 m | 78.2º N | 10.3 | 88.3 |
Fairbanks (ASF) Alaska | 11.3 m | 64.9º N | 6.8 | 53.7 |
Wallops (WGS) Virginia | 11.3 m | 37.9º N | 3.3 | 25.8 |
McMurdo (MGS) Antarctica | 10.0 m | 77.8º S | 10.4 | 90.7 |
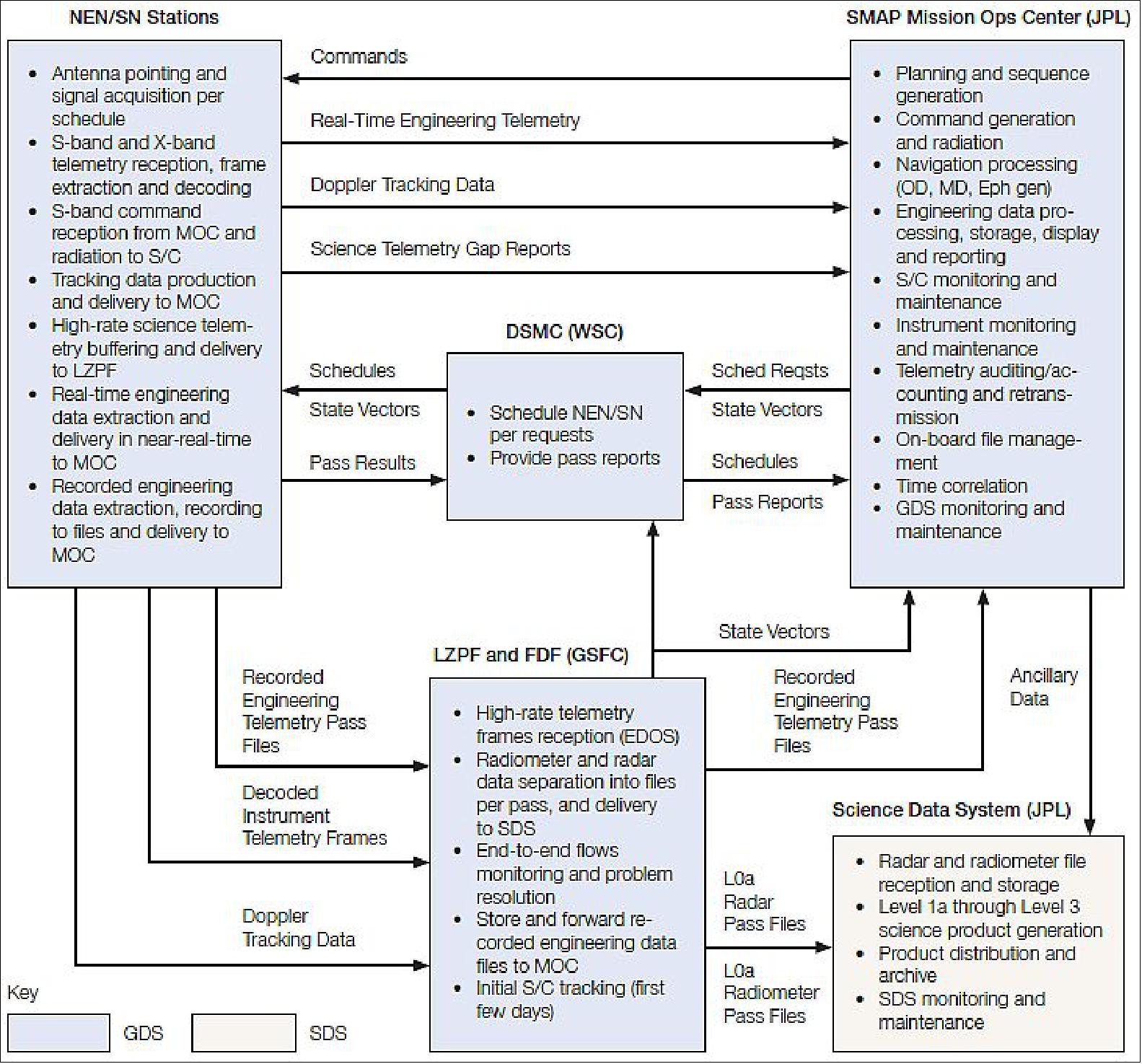
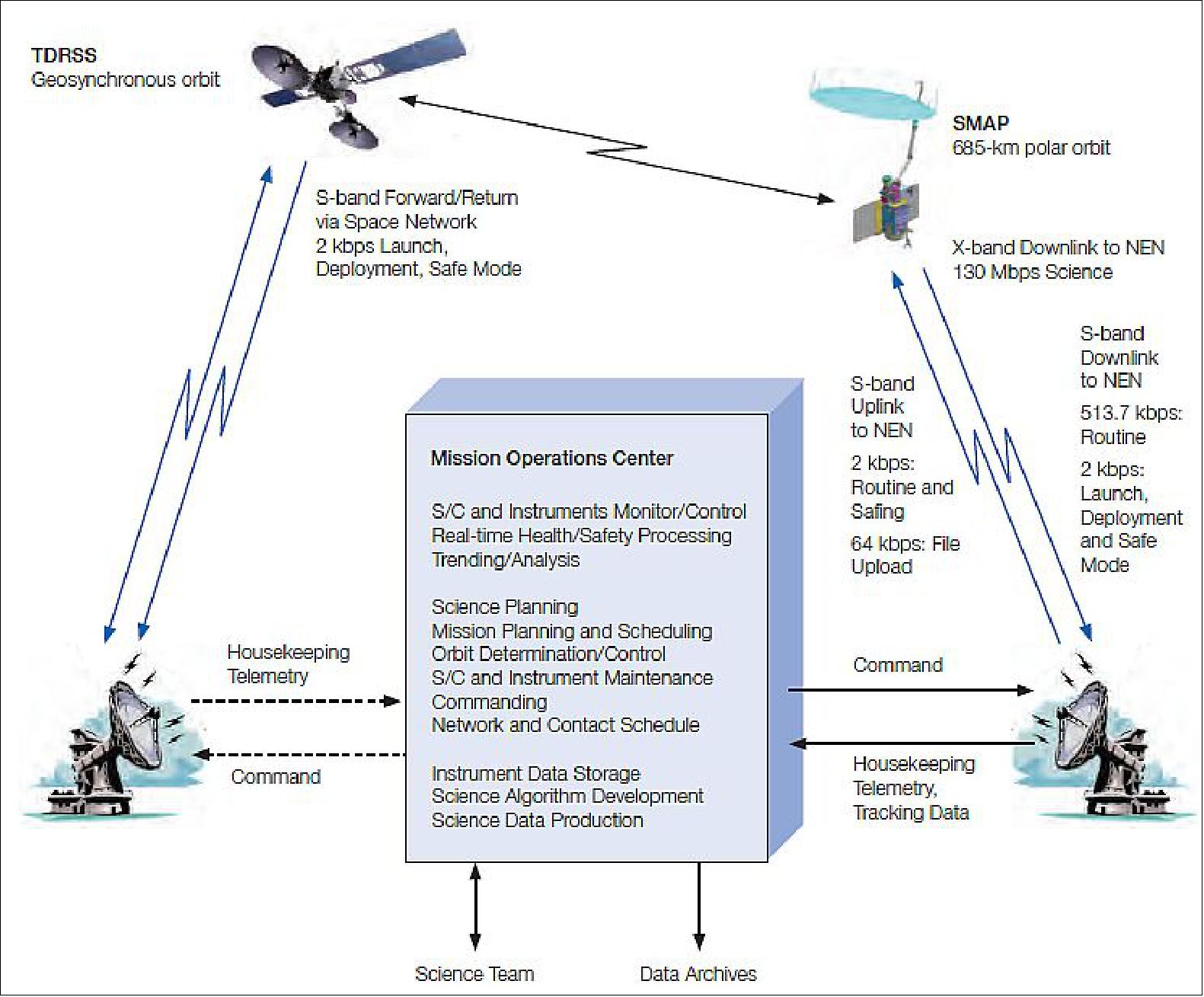
Mission Operations
Mission operators at JPL control the observatory and coordinate the needed infrastructure on the ground that is required to communicate with observatory and return the instrument data for processing. The observatory requires updated ‘instructions' daily so that it is kept current on how to make its measurements and when various ground stations are scheduled to receive its data. Operators gather updates and requests from scientists, ground stations, and other stakeholders to prepare these instructions in a format that can be understood by the observatory. Operators also monitor the health and well being of the observatory and ensure that all of its systems are operating properly. Occasionally, the observatory encounters problems that may interrupt its measurements – operators must then diagnose the problem and prepare additional instructions for the observatory to correct it. 107)
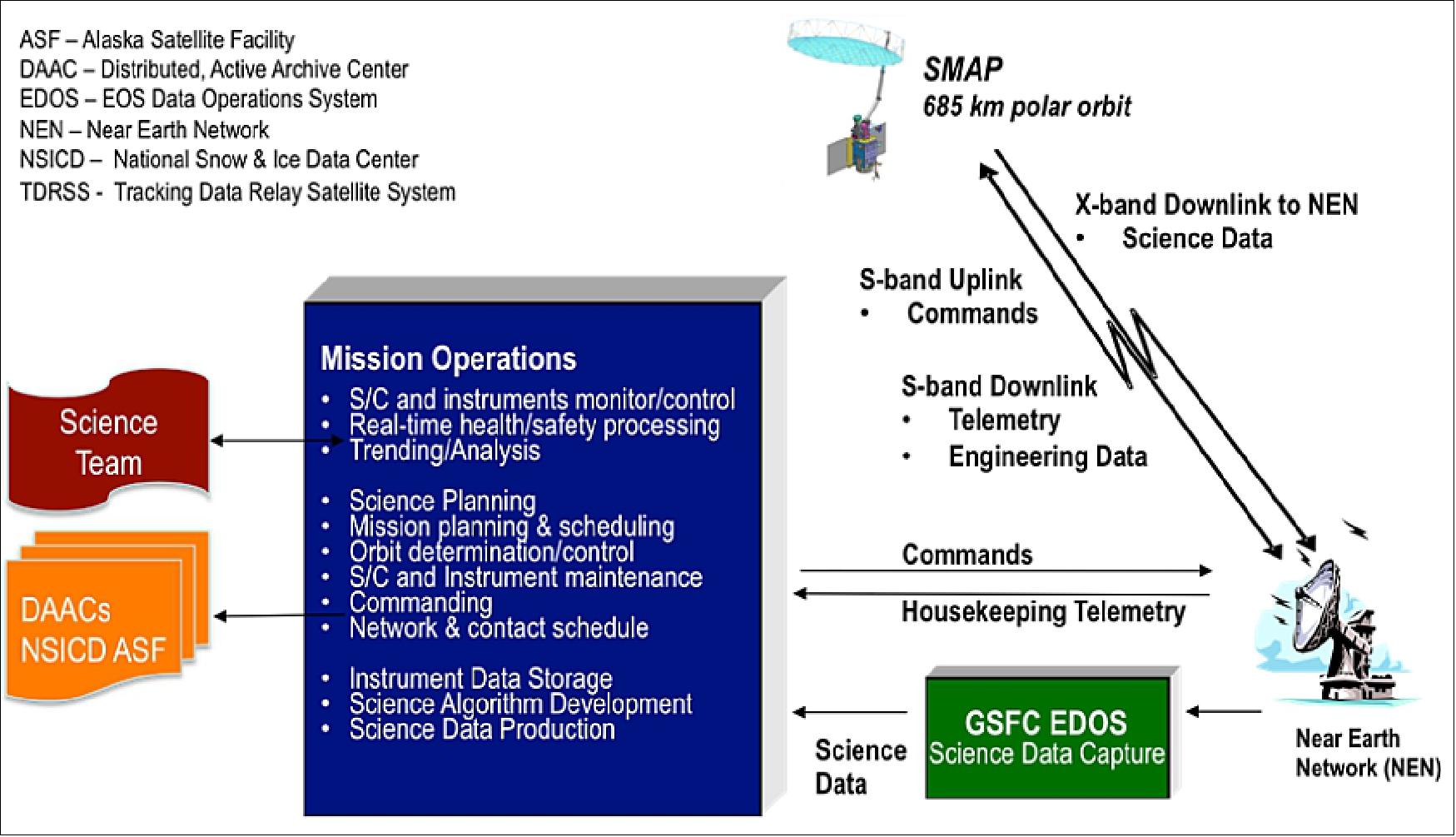
Mission operators communicate with the observatory and receive instrument data through NASA's NEN (Near Earth Network). SMAP produces an average volume of 135 GB/day of science data – this is like downloading more than 30 DVD full-length feature movies every day!
Because the observatory makes a complete orbit over the Earth every 98 minutes, it is only within range of individual ground stations (located at Wallops, Virginia, Fairbanks, Alaska, Svalbard Island, Norway, and at McMurdo Station, Antarctica) for a few minutes at a time. Scientists are anxious to have SMAP's data products as quickly as possible after the instrument takes the data. For these reasons, SMAP typically has one or two downlink sessions per orbit and because of the brief time during which the observatory is in range as it passes overhead, each downlink session can receive between 5-15 GB of data. It is up to the mission operators to manage the limited on-board memory usage by balancing the rate at which it fills with instrument and other data against the rate at which it is emptied during downlink sessions with ground stations.
All SMAP data products are sent to NASA Data Centers where they are available for everyone – scientists, applications users, and the public. The Data Centers also provide a long term archive for all SMAP data. After it is released, SMAP data are delivered to two archives:
- Radar data: Alaska Satellite Facility Data Center
- Other SMAP data: National Snow & Ice Data Center.
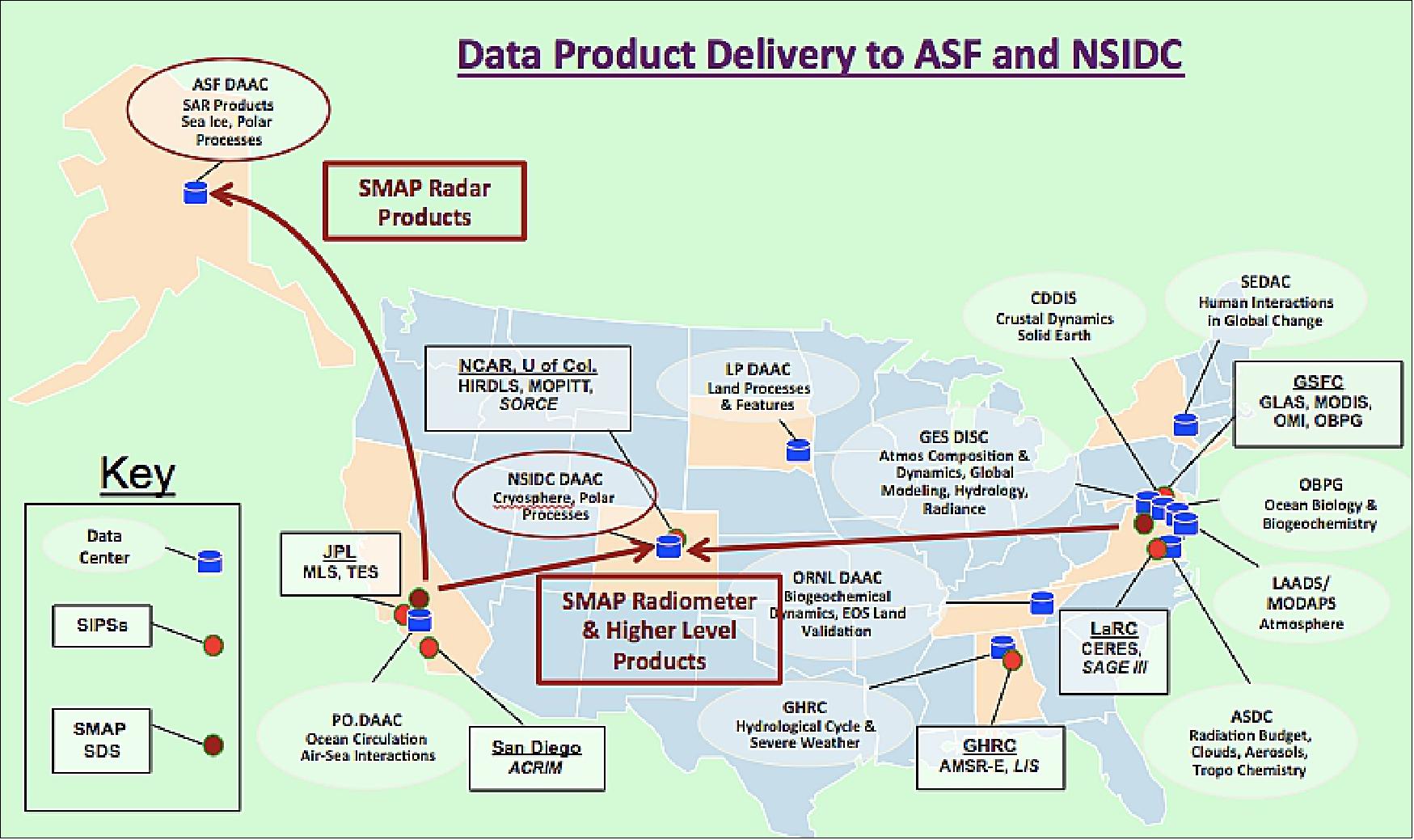
SDS (Science Data System)
The science data system provides the hardware and software to process the radar and radiometer instrument data and the supporting engineering data into science data products for the science team, applications users, and the public. Files of radar and radiometer data derived from the downlink telemetry are delivered from the GSFC EDOS/LZPF, and engineering ancillary data, including timing, pointing, and ephemeris information, are delivered from the MOC. Algorithms developed before launch are used to process the data into science data products.
The SDS has data latency requirements on delivering data products to the science team and to operational users: Level 1 products (within 12 hours of acquisition), Level 2 (within 24 hours), Level 3 (within 50 hours), and Level 4 (within 7 days for soil moisture and 14 days for carbon net ecosystem exchange). Data latency is defined here as from the time of data acquisition by the observatory to the time data products are available to the public at the NASA DAACs. SMAP data will be archived by the NASA-designated Earth science data centers at the National Snow and Ice Data Center and the Alaska Satellite Facility. During the first year of routine science collection (which comprises the formal mission cal/val period), all SMAP data product algorithms are updated as needed by comparing SMAP estimates of soil moisture and freeze/thaw state with data collected on the ground at specific cal/val sites.
The key SDS operations functions are:
• Ingest instrument and ancillary data and generate higher-level data products. The range of higher-level products is Level 1A (L1A) through Level 4 (L4). The definition of what the SDS produces is dictated by the science requirements.
• Support calibration and validation of science data products
• Provide science data accounting/auditing
• Provide data access to Project, Science, and Flight Engineering Teams
• Manage long-term data storage (products, metadata, test data, etc.); prepare and make available validated products to a public archive data center
• Maintain the SDS production and testbed systems.
The SDS implementation organizations include:
• SMAP Science—responsible for the L1 radiometer and L2-L4 algorithms and science software
• JPL SDS—responsible for L1 radar algorithms and L1-L3 production code and product generation
• GMAO (GSFC Global Modeling & Assimilation Office) — responsible for Level 4 soil moisture and Level 4 carbon production code and product generation.
The SDS architecture and data flow among different entities are summarized in Figure 78.
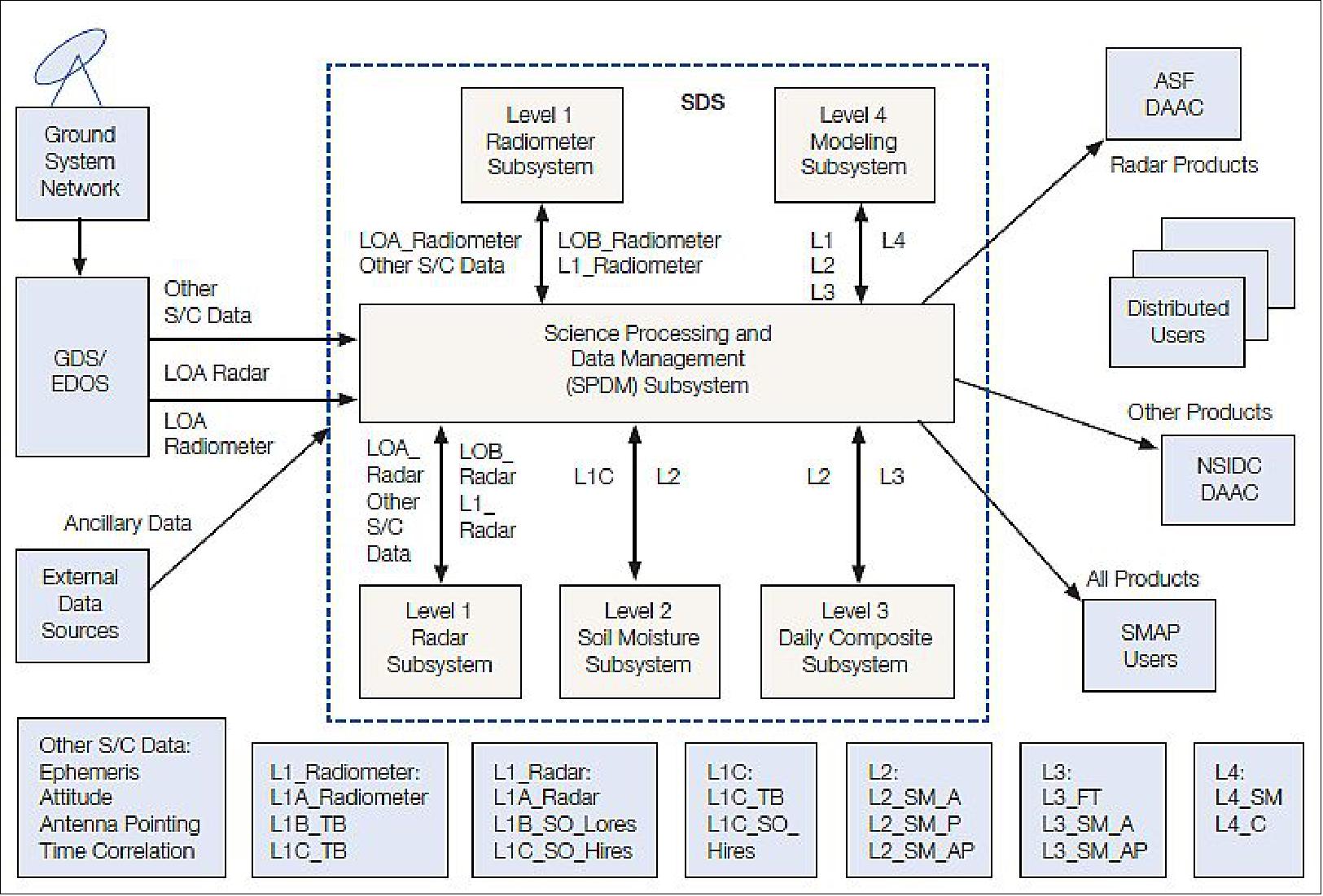

The SMAP GDS consists of numerous subsystems that provide specific and necessary services. Although many GDS functional elements will automate routine operations activities, the AOE (Automated Operations Element) will not directly control all of them. 108)
The SMAP GDS team is applying the following strategy to achieve reliable lights-out operations of the SMAP mission:
• Leveraging of core JPL multi-mission GDS capabilities
• Leveraging of architecture from prior JPL Earth Science missions
• Application of test-as-you-fly principles throughout the GDS lifecycle
• Automation ‘hooks' for manual operations processes
• GDS system monitoring.
The SMAP GDS team has identified the following automation patterns that are sufficient to address the SMAP automated operations use cases:
• Pass Driven Automation
- Utilizes a Pass Automation Daemon to provide automation of unattended tracking passes.
• File Driven Automation
- Utilizes a File Notification Service to provides file detection, notification, and workflow automation for files deposited into the SMAP mission file system.
• Time Driven Automation
- Utilizes a generic Automation Scheduler to provide workflow automation driven by user-specified schedules.
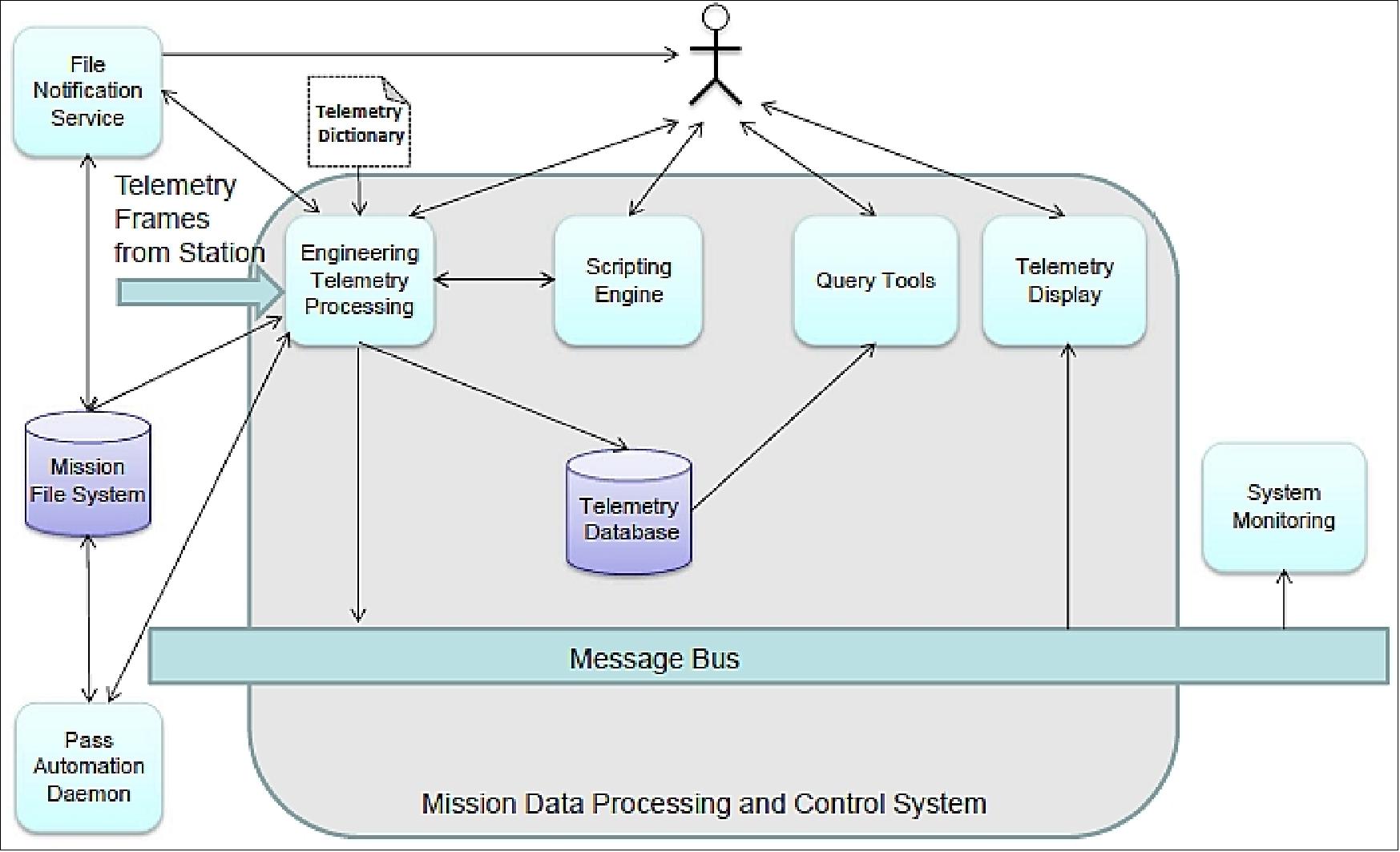
NowCast: Product Development
The SMAP Applications program is designed to first increase and then sustain the interaction between application users and scientists involved in mission development. The SMAP project has sponsored several applications meetings and workshops. To better reach the applications users, some of these have been held at user locations such as the USDA (U.S. Department of Agriculture), USGS (U.S. Geological Survey), and NOAA headquarters, among others. Feedback from user communities is formally and actively reported to mission scientists to broaden and facilitate eventual SMAP data access and enhance opportunities to use mission data to address societal needs. For example, collaboration between the SMAP mission and the USDA's FAS (Foreign Agriculture Service) has elicited the requirements of yield forecasting and familiarized analysts with soil moisture data. Another example pertains to the Emergency Response and Operational users, who have worked with the SMAP mission to plan for providing data in friendly formats (KMZ and GeoTIFF) for a more rapid ingestion of soil moisture data into decision-making environments. 109)
The SMAP Applications program is groundbreaking and serves as an example for other NASA missions to expand their focus to include user communities' needs in the early phases of mission development. Through a team that includes an applications lead on the SDT (Science Definition Team), leadership from the mission, and an applications coordinator, the applications program works to characterize the community of mission data users through workshops and applied research. The project has also initiated a program of Early Adopters to promote application research in the prelaunch stages of the mission, in order to provide a better understanding of how SMAP data products can be scaled and integrated onto organizations' policy, business, and management activities. These efforts will expand the use of the data after launch, and increase the societal benefit of the mission.
Product | Description | Gridding (resolution) | Latency* | Data source designation |
L1A_Radiometer | Radiometer data in time-order | — | 12 h |
|
L1A_Radar | Radar data in time-order | — | 12 h | |
L1B_TB | Radiometer TB in time-order | (36 km x 47 km) | 12 h | |
L1B_S0_LoRes | Low-resolution radar σo in time-order | (5 km x 30 km) | 12 h | |
L1C_S0_HiRes | High-resolution radar σo in half-orbits | 1 km (1-3 km)** | 12 h | |
L1C_TB | Radiometer TB in half-orbits | 36 km | 12 h | |
L2_SM_A | Soil moisture (radar) | 3 km | 24 h |
|
L2_SM_P | Soil moisture (radiometer) | 36 km | 24 h | |
L2_SM_AP | Soil moisture (radar + radiometer) | 36 km | 24 h | |
L3_FT_A | Freeze/thaw state (radar) | 9 km | 50 h |
|
L3_SM_A | Soil moisture (radar) | 3 km | 50 h | |
L3_SM_P | Soil moisture (radiometer) | 3 km | 50 h | |
L3_SM_AP | Soil moisture (radar + radiometer) | 9 km | 50 h | |
L4_SM | Soil moisture (surface and root zone) | 9 km | 7 days | Science value-added |
L4_C | Carbon Net Ecosystem Exchange (NEE) | 9 km | 14 days |
Legend to Table 11: * Mean latency under normal operating conditions. Latency is defined as the time from data acquisition by the instrument to its availability in a designated data archive. The SMAP project will make a best effort to reduce these latencies.
** Over outer 70% of swath.
The overall strategy for the SMAP applications program is to develop a community of end users and decision makers who are interested in using SMAP products in their applications by providing opportunities to learn about SMAP's unique capabilities and scientific objectives. The SMAP science objectives are to acquire spaceborne hydrosphere state measurements to 1) understand processes that link the terrestrial water, energy, and carbon cycles; 2) estimate global water and energy fluxes at the land surface; 3) quantify net carbon flux in boreal landscapes; 4) enhance weather and climate forecast abilities; and 5) develop improved flood prediction and drought-monitoring capabilities. To meet its scientific goals, SMAP will fly a dedicated satellite in a near-polar, sun synchronous orbit, crossing the equator at 6:00 a.m. and 6:00 p.m. local time. The satellite will carry an L-band (1.26 GHz) radar and an L-band (1.4 GHz) radiometer that share a deployable lightweight mesh parabolic reflector, which provides a conically scanning antenna beam with a constant surface incidence angle of approximately 40º and will measure a swath approximately 1000 km wide. The combined observations from the two sensors will allow accurate estimation of soil moisture and freeze/thaw states at spatial scales valuable for both hydrometeorological (10 km) and hydroclimatological (40 km) studies.
After launch, the satellite's instruments will be calibrated (an expected time period of three months). Once calibrated, the SMAP mission will deliver estimates of soil moisture in the top 5 cm of soil with an accuracy of 0.04 cm3/cm3 volumetric soil moisture, at 10-km resolution, with 3 day average intervals (Table 11). Global maps will also be available of landscape freeze/thaw state derived from L-band radar at 3 km spatial resolution with a 2 day refresh rate for the high northern latitudes (i.e., latitudes above 45ºN). Measurements will be made over the global land area, excluding regions of snow and ice, mountainous topography, open water, and areas of extremely dense vegetation such as tropical forests.
In addition to the instrument measurements and derived products for the surface layer, SMAP will also provide Level 4 data assimilation products by ingesting active and passive observations into land surface models to provide root-zone soil moisture (to a depth of 100 cm). A net ecosystem exchange product will also be developed that integrates freeze/thaw measurements into a carbon model to provide ecosystem exchange at 9 km resolution. As these two products are intended to serve a broad community, there is an opportunity for user engagement now to optimize the design of these products so that they can ultimately satisfy user requirements (Ref. 109).
Background: The SMOS interferometric radiometer of ESA observes L-band passive microwave emission at a range of incidence angles at a resolution of about 40 km (varying with incidence angle) and with a measurement error standard deviation of approximately 4 K. The SMAP mission will make simultaneous active (radar) and passive (radiometer) measurements in the 1.26-1.43 GHz range (L-band). Similar to SMOS, the SMAP radiometer measurements will be at about 40 km resolution. Unlike SMOS, SMAP will observe brightness temperature at a constant incidence angle of 40º and with a design accuracy of 1.3 K. 110)
SMAP and SMOS observations are directly connected to surface soil moisture (in the top 5 cm of the soil column). Several of the key applications targeted by SMAP, however, require knowledge of root zone soil moisture (~top 1 m of the soil column), which is not directly measured by SMAP. The foremost objective of the SMAP L4_SM product is to fill this gap and provide estimates of root zone soil moisture that are informed by and consistent with SMAP observations. Such estimates are obtained by merging SMAP brightness temperature observations with estimates from a land surface model in a soil moisture data assimilation system (Figure 81). The land surface model component of the assimilation system, the NASA Catchment land surface model, is driven with observations-based surface meteorological forcing data, including precipitation, which is the most important driver for soil moisture. The model also encapsulates knowledge of key land surface processes, including the vertical transfer of soil moisture between the surface and root zone reservoirs. A radiative transfer model is added to the land surface model to simulate microwave radiances. The horizontally distributed ensemble Kalman filter ("3d EnKF") update step considers the respective uncertainties of the model estimates and the observations, resulting in a soil moisture and soil temperature analysis at 9 km resolution that is, in theory, superior to satellite or model estimates alone. Moreover, error estimates for the L4_SM product are generated as a by-product of the data assimilation system.
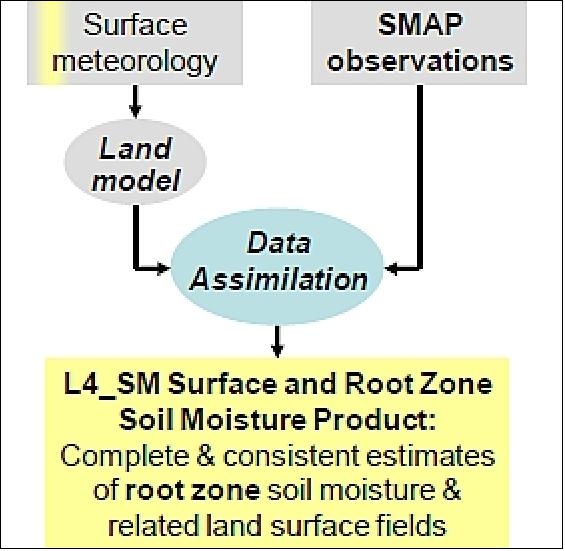
SMOS has been providing multi-angular, global passive microwave observations at L-band since its launch in November 2009. These observations are highly valuable for the science development of the SMAP L4_SM algorithm. In a first step, the multi-angular SMOS observations were used to calibrate the L4_SM microwave radiative transfer model. In a second step, multi-angular SMOS observations were assimilated into the prototype L4_SM algorithm. The results show that the assimilation estimates of surface and root zone soil moisture are superior to estimates derived from the model alone. The assimilation of SMOS observations represents an important step in the prelaunch calibration of the SMAP L4_SM algorithm.
Development of a Ground Network of Sensors for Product Validation
NASA is developing a wireless sensor network, control system, and data analysis technologies for dynamic and near-real-time validation of the spaceborne soil moisture measurements of the SWAP mission. Soil moisture fields are functions of variables that change over time across the range of scales from a few meters to several kilometers. Sensor placement rules are being developed based on spatial statistics of soil moisture. For each location, dynamic scheduling policies are being defined based on physical models of soil moisture temporal dynamics and microwave sensor models for heterogeneous landscapes. Furthermore, the ground-based estimates of the true mean to the spaceborne estimates are being related through a physics-based landscape simulator and statistical aggregation procedure.
An energy-efficient integrated communication and actuation platform was developed and used to command the sensors and transmit their data to a base station in near-real time. Full-scale field experiments were initiated in August 2010 with the deployment of the first full-scale wireless sensor network in Canton, Oklahoma, using the custom-built Ripple-1 architecture. 111) 112)
This project introduces a new concept for a smart wireless sensor web technology for optimal measurements of surface-to-depth profiles of soil moisture using in-situ sensors. The objective is to enable a guided and adaptive sampling strategy for the in-situ sensor network to meet the measurement validation objectives of spaceborne soil moisture sensors. The validation of SWAP mission data products is only one potential application of this technology. The project is being carried out at the University of Michigan (Umich) and at MIT (Massachusetts Institute of Technology) through a grant from the NASA/ESTO (Earth Science Technology Office).
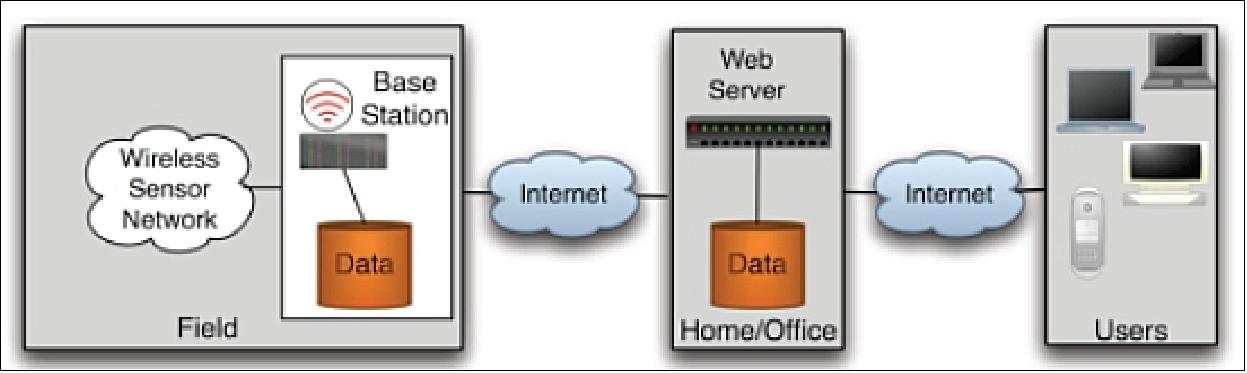
The wireless sensor network will communicate with a coordinator, and actuate measurements only when their measurement significantly adds value to the across-network computation of the field mean. The principal technology innovations that make this possible are:
• Optimal design of sensor node placement and scheduling based on modeled soil moisture spatial statistics, and joint placement, scheduling and mean estimation
• Strategies for deriving large-scale spaceborne estimates of heterogeneous soil moisture that are compatible with ground-based estimates of true mean of soil moisture fields
• Wireless communication protocols and actuation systems that configure the sampling within the network to yield large-scale field mean conditions.
Upon successful completion of the baseline project in 2012, the TRL (Technology Readiness Level) is expected to be at 6, on-track for integration into an operational scenario for SMAP by the time it launches in the 2015 timeframe.
Ripple-1 network deployment in Canton, Oklahoma:
A conceptual and architectural depiction of the Ripple data collection system is illustrated in the Figure 83. The system consists of a field element and a remote element. A wireless sensor network is deployed over a target field, along with a base station that performs data collection and sensing control, and a database collocated with the base station for local data storage. At each sensing site (where a sensor node is placed), 3 moisture sensors are deployed at different depths with wire connection to the sensor node on the ground. The base station receives sensing data from each sensor node, but can also control the sensor measurement schedules on demand. It also periodically (every half an hour) uploads the collected sensor data through a 3G connection to a database server. The database server and web server constitute the remote element of the architecture.
The Ripple-1 (Figure 83) system is built using the ZigBee (IEEE 802.15.4 plus higher layer specifications) standard. ZigBee allows the formation and self-configuration of a multi-hop network, which can potentially provide the required coverage. In addition, ZigBee is a relatively mature technology with many products on the market to choose from, which can significantly shorten the development and production cycle. - The disadvantage with this choice is that a router node under the ZigBee specification cannot be put to sleep mode, which means it will consume significantly more energy and will require larger batteries and larger solar panels. For the end device, the project selected to use the Xbee Pro SOC as both the MCU Microcontroller Unit) and radio.
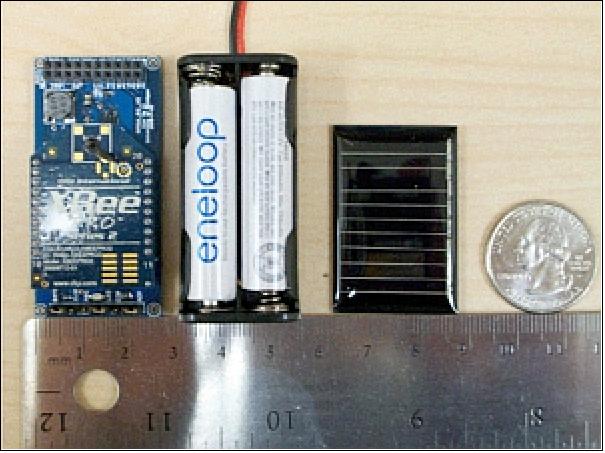
Prelaunch SMAP Campaigns
SMAPVEX12 (SMAP Validation Experiment 2012) Field Campaign and Aircraft Observations
SMAPVEX12 is the primary prelaunch field campaign for SMAP established to provide data for algorithm evaluation and testing and applications development. Several agencies in the U.S. and Canada are cooperating in the SMAPVEX12 data acquisition, processing and analysis.
The SMAP Algorithm Development Teams were asked to provide an assessment of what outstanding issues could be addressed with a field campaign. All of the soil moisture algorithms had two common requirements for a field campaign; an extended time series and diverse vegetation conditions. Data sets that supported the combined active passive algorithm were considered the top priority, which necessitated an aircraft instrument suite that could provide data to simulate the SMAP sensor system. This evaluation also indicated that it was critical that any campaign be conducted as soon as possible in order for the algorithm teams to effectively utilize the results.
In response to the issues identified, a field campaign SMAP Validation Experiment 2012 (SMAPVEX12) was designed and executed. The primary objectives were as follows (Ref. 117):
• Collect an extended times series of concurrent active and passive microwave observations
- Capture a wide range of soil moisture conditions
- Observe a wide range of vegetation conditions including variable types and growth stages
- Multiple resolution observations for scaling.
• Find ways to better mitigate low-level RFI effects observed in North America
• Improve the parametrization of vegetation (and its water content) and soil roughness
• Contribute to establishing an in situ Cal/Val site for SMAP post-launch validation.
The ground and airborne data acquisition phase of SMAPVEX12 took place over a period of approximately six weeks from June 6 to July 19, 2012 in an agricultural region south of Winnipeg, Manitoba (Canada). The campaign was organized jointly with the Canadian SMAP Science Team who were responsible for coordinating the site logistics and ground data sampling.
The site in the Carmen-Elm Creek area of Manitoba was chosen due to the existing soil moisture monitoring stations that have been installed on private farms in the region over the past growing season, and is expected to serve as a long-term site for assessing the satellite data post-launch. During this campaign, NASA conducted flights carrying instruments similar to the SMAP satellite several times per week over the selected study area covering forested and agricultural land. The study area had a size of of ~13 km x 70 km. 113) 114) 115)
SMAPVEX12 was funded by several agencies in Canada (CSA, AAFC, EC, and NSERC) and US (NASA). It complements the Canadian Experiment for Soil Moisture in 2010 (CanEx-SM10) by providing extensive data sets for the development and validation of SMAP passive and active soil moisture retrieval algorithms. 116)
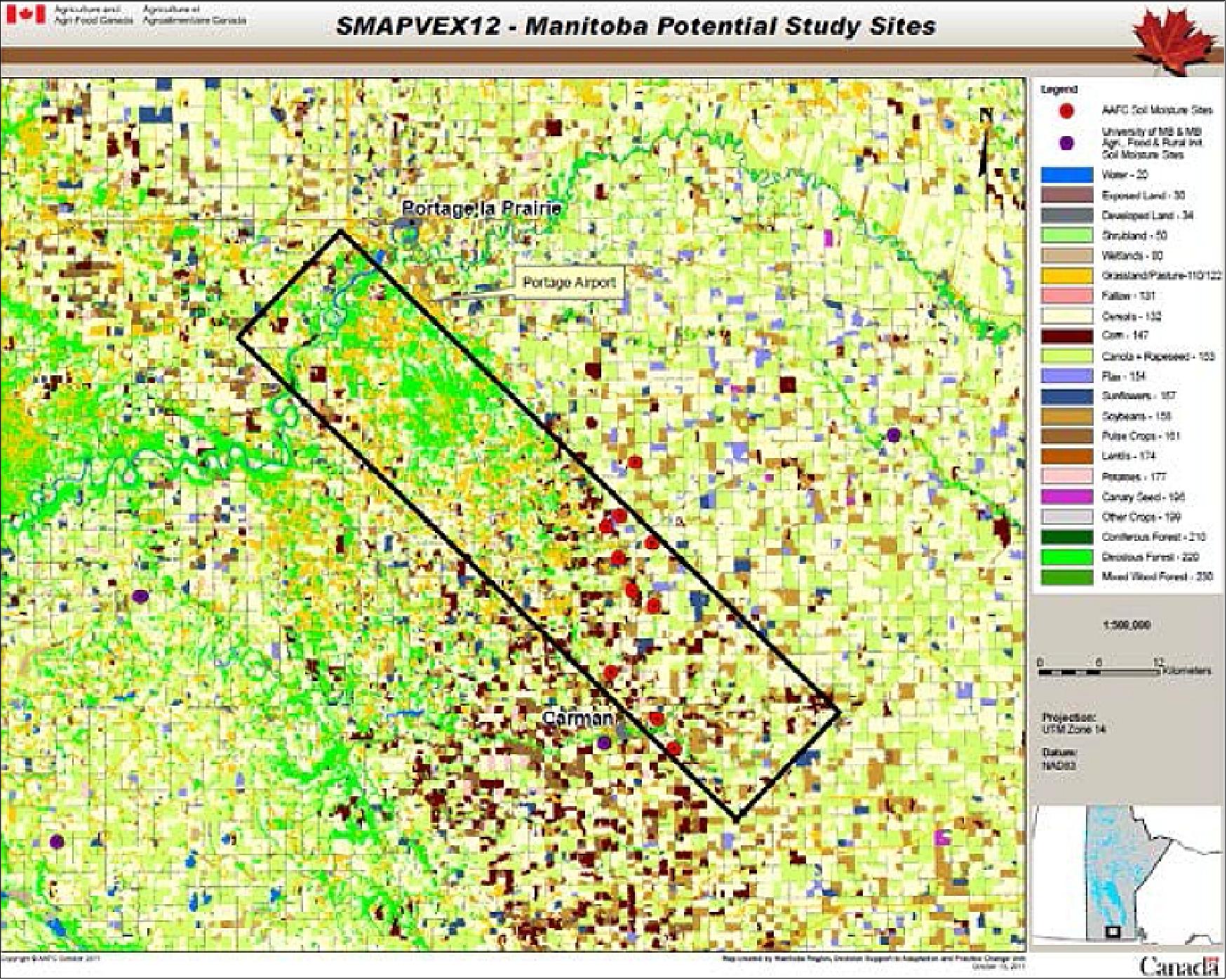
Aircraft observations: 117)
Two aircraft-based instruments were deployed for SMAPVEX12 on different aircraft; the PALS (Passive/Active L-band Sensor) and the UAVSAR (Uninhabited Aerial Vehicle Synthetic Aperture Radar).
• PALS provides both radiometer (vertically and horizontally polarized brightness temperatures) and radar products (normalized radar backscatter cross-section for V-transmit/V-receive, V-transmit/H-receive, H-transmit/H-receive, and H-transmit/V-receive). In addition, it can also provide the polarimetric third Stokes parameter measurement for the radiometer and the complex correlation between any two of the polarized radar echoes (VV, HH, HV and VH).
PALS was mounted at a 40 º incidence angle looking to the rear of the aircraft, a Twin Otter. The lowest elevation that PALS can operate at is determined by the minimum distance for radar data acquisition (~1000 m), which results in a spatial resolution of ~350 m cross-track and 650 m along-track for the low altitude flights. The highest flight altitude for SMAPVEX12 was determined by the operational and available maximum altitude of ~2500 m, which corresponds to a spatial resolution of 900 m cross-track and 1500 m along-track.
The PALS flightlines were designed to satisfy the major objectives of SMAPVEX. Four low altitude lines were used to provide high spatial resolution data for fields with homogeneous vegetation conditions. An attempt was made to locate many of the sampled fields directly on these lines. High altitude lines mapped a larger region and provide data for simulating SMAP combined algorithms. A total of eight lines covered a domain ~12.8 by 70 km. Lines were spaced ~ 1.6 km apart.
• UAVSAR is an aircraft based fully polarimetric L-band radar that is also capable of interferometry. It is currently implemented on a NASA Gulfstream-III aircraft. For SMAPVEX12, the nominal flight altitude was 13 km. UAVSAR looks to the left of flight direction and collects data over a swath between 25 and 65º, which is a nominal swath of 21 km. The most relevant portion of the data swath for SMAP, which has an incidence angle of 40º, are data collected between ~35 and 45º, which is a narrower swath of ~3.8 km. In order to provide coverage of the study domain, four overlapping flight lines were used. Spatial resolution can be as high as 3 m.
Outcome and Outlook
Both the weather conditions and instrument performance exceeded expectations resulting in SMAPVEX12 being very successful. A total of seventeen days of flights were conducted with supporting ground observations over 42 days (June 7-July 19, 2012). This simulated the temporal frequency expected from SMAP at mid-latitudes.
Following the first flight, which had moderate soil moisture levels, there was a series of rain events that resulted in very wet conditions for several days. This wet period was followed by an extended drying of the soils that lasted over two weeks. The remainder of the campaign had mixed conditions. - Many of the crops were near bare soil conditions at the outset of SMAPVEX12 and reached peak biomass/vegetation water content by its end. Winter wheat reached its peak biomass early in the campaign and then entered senescence.
Both instruments/aircraft were able to collect data on every flight day; however,, there were a few dates that only one of the two aircraft flew.. Very little data was lost due to RFI or instrument failure. Based upon the wide range of soil moisture and vegetation conditions that existed and that we were able to sample with both the ground-based and aircraft instruments, SMAPVEX12 was highly successful in achieving its objectives. Data processing is currently underway. Following a data quality and team evaluation period, all data will be archived at a public website.
SLAP (Scanning L-band Active/Passive)
SLAP is a recently-developed NASA airborne instrument specially tailored to simulate the new Soil Moisture Active Passive (SMAP) satellite instrument suite. SLAP conducted its first test flights in December, 2013 and participated in its first science campaign—the IPHEX ground validation campaign of the GPM mission—in May, 2014. Here are the results from additional test flights and science observations scheduled for 2015. 118)
SLAP has both passive (radiometer) and active (radar) microwave L-band imaging capabilities. The radiometer observes at 1.4 GHz using duplicate front end hardware from the SMAP satellite radiometer. It also includes a duplicate of the digital backend development unit for SMAP, thus the novel RFI (Radio Frequency Interference) detection and mitigation features and algorithms for SMAP are duplicated with very high fidelity in SLAP. The digital backend provides 4-Stokes polarization capability. The real-aperture radar operates as a scatterometer in the 1215-1300 MHz band with quad-pol capability. Radar and radiometer share one antenna via diplexers that are spare units from the Aquarius satellite instrument.
Previous flight results: SLAP's initial flights were conducted in December 2013 over the eastern shore of Maryland and successfully demonstrated radiometer imaging over 2 full SMAP 36 x 36 km grid cells at ~1km resolution within 3 hrs (Figure 85). A second flight on the same day also demonstrated SLAP's quick-turn abilities and high-resolution/wideswath capabilities with 200 m resolution across a 1500 m swath from 2000 ft AGL (About Ground Level), Figure 86. Additional flights were conducted as part of the GPM iPHEX campaign in May, 2014. Figure 87 is an example of simultaneous radiometer and radar imagery from this campaign. Imagery from these previous flights will be reviewed.
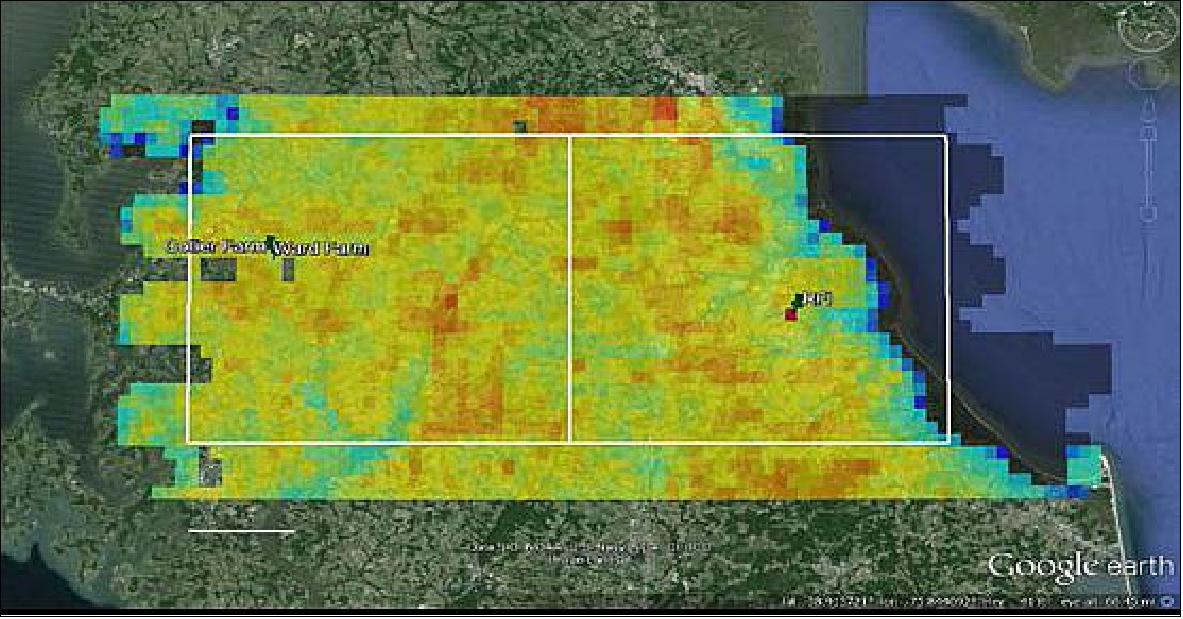
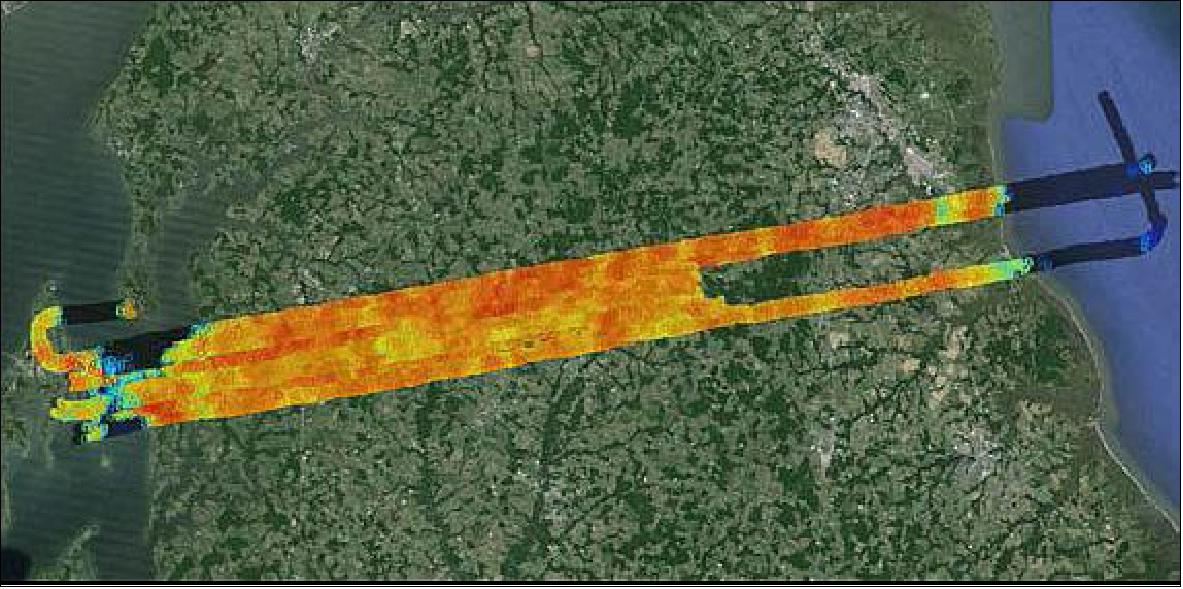
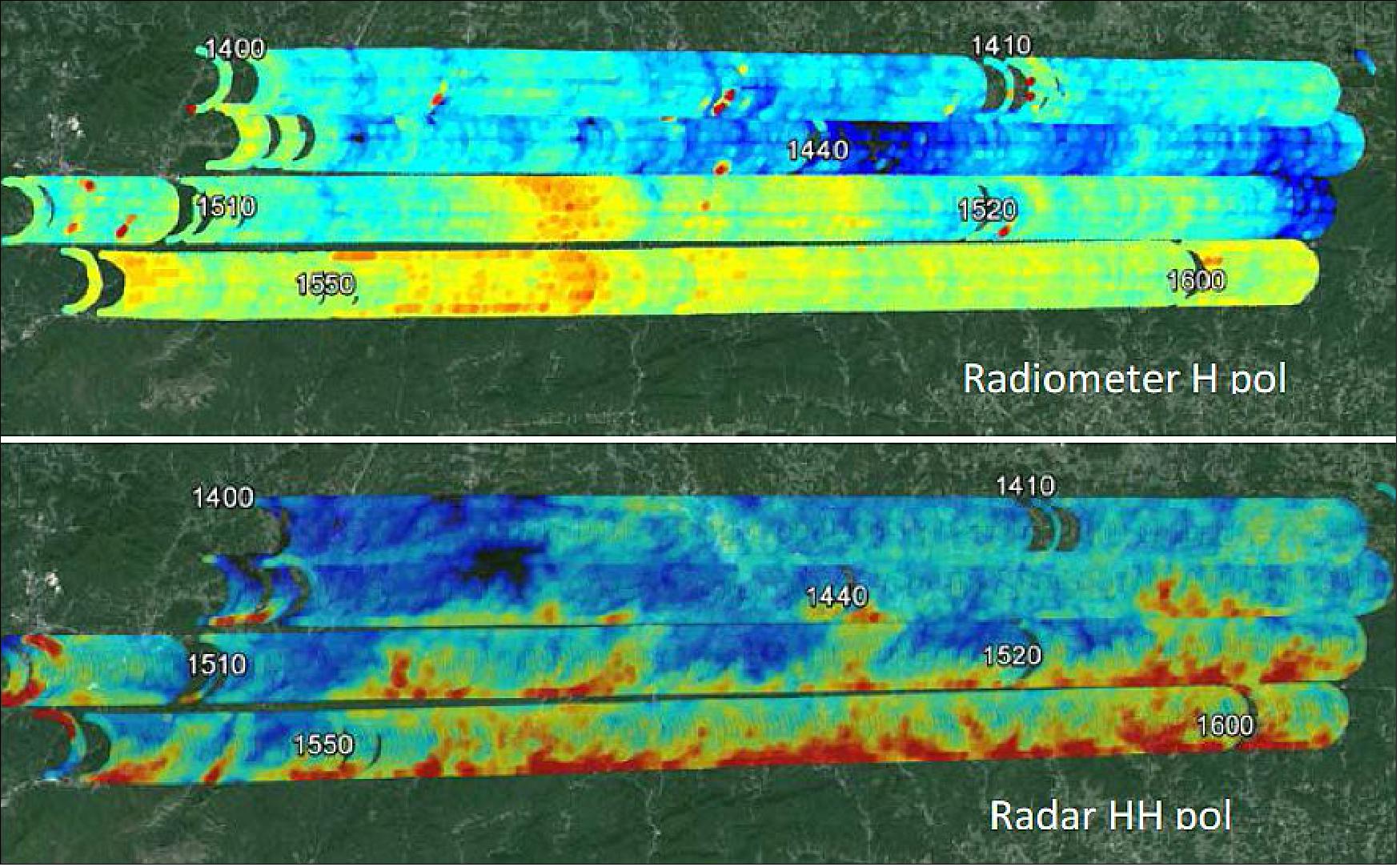
ComRAD Ground-Based SMAP Simulator
The ComRAD (Combined Radar/Radiometer) microwave instrument system used in this investigation has been developed jointly by NASA/GSFC and George Washington University. ComRAD includes a dual-pol 1.4 GHz radiometer and a quad-pol 1.24-1.34 GHz radar sharing a new 1.22 m Cassegrain parabolic dish antenna and subreflector to achieve a very low loss system. The absolute accuracy and the sensitivity of the instrument are ±1 K and ±0.1 K, respectively. External calibration is achieved using cold sky and ambient microwave absorber targets for the radiometer, and flat plates and dihedral reflectors for the radar. 119)
When deployed in the field, ComRAD is mounted on a 19 m hydraulic boom truck (Figure 88 top) and can operate over a range of incidence angles from 0º to 175º and a 300º range in azimuth. The mounting platform can also accommodate additional small instruments such as a CropScan visible/infrared sensor for vegetation reflectance measurements and a thermal infrared sensor for scene physical temperature.
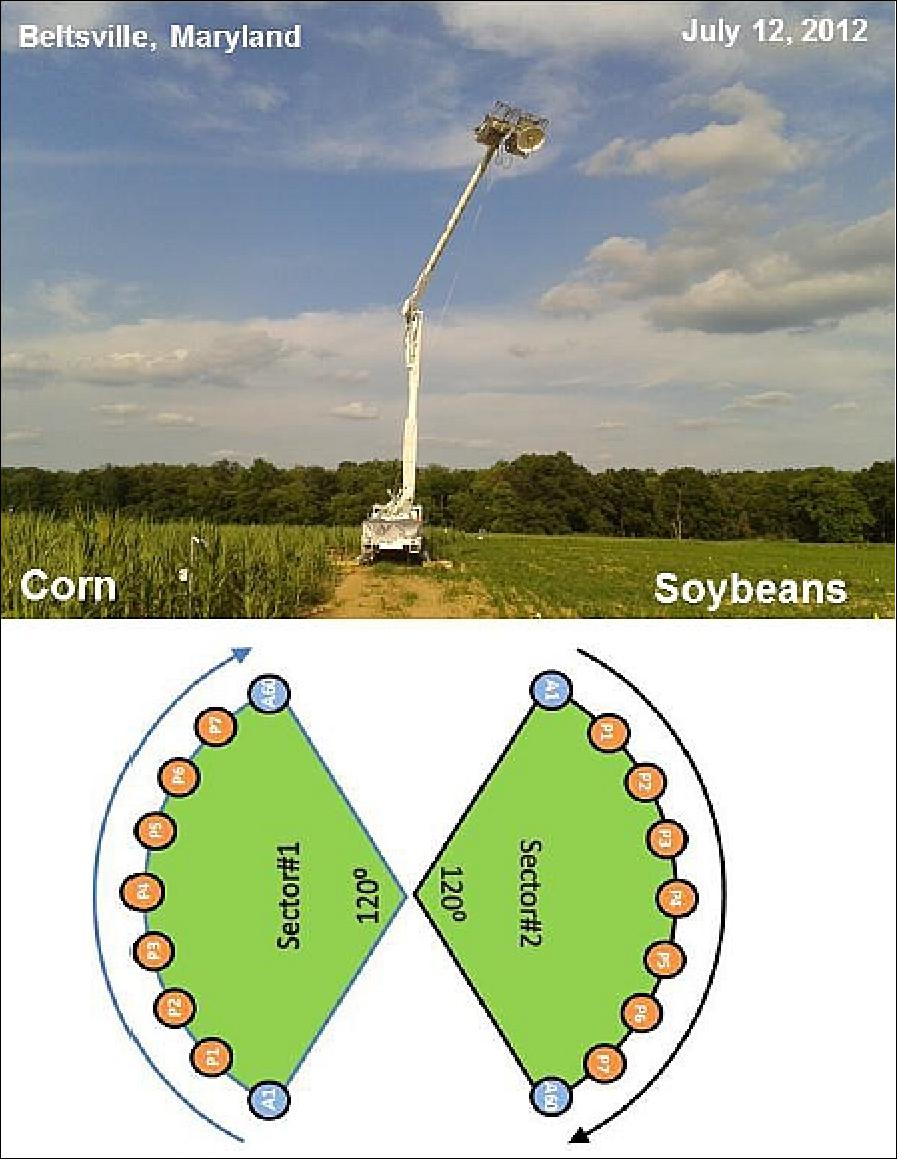
Field Experiment
An extensive field experiment from crop planting through senescence was conducted from June to October, 2012 at the heavily instrumented USDA/ARS (U.S. Department of Agriculture/Agricultural Research Service) OPE3 (Optimizing Production Inputs for Economic and Environmental Enhancement) test site in Beltsville, MD, to acquire data needed to address active/passive microwave algorithm needs for accurate soil moisture retrieval. Vegetation cover in the experiment consisted of two crops, corn and soybeans, planted on either side of the ComRAD truck staging area (Figure 88 top). Corn was planted at the site on May 16 and harvested on October 17-18; soybeans were planted approximately one month later on June 14 and harvested on October 26. In situ soil moisture, soil temperature, and leaf wetness sensors were installed by USDA to provide continuous ground truth data.
These data were supplemented by additional soil moisture data collected manually twice a week by USDA personnel, along with weekly plant architectural, water content, and density measurements. The OPE3 site also contains a SCAN meteorological station and a flux tower which record precipitation and other micrometeorological data. ComRAD microwave measurements at the SMAP incidence angle of 40° were made on 75 days between June 1 and October 24, 2012. Active and passive data were acquired autonomously every 90 minutes (weather permitting) accordingly to the schematic in Figure 88 bottom. Manual calibration of the radiometer was performed weekly.
Analysis: Time series data from the 2012 ComRAD field experiment will be used to refine soil moisture retrieval algorithms being developed for the SMAP mission. An example of a ComRAD time series over corn from a 5-day period in late summer is shown in Figure 89. Diurnal patterns as well as an overall drying trend can be seen in the plotted data. Similar data throughout the growing season should prove useful to improving the parametrizations (related to both changing vegetation conditions and to simultaneous active/passive responses) in many of the SMAP baseline algorithms.
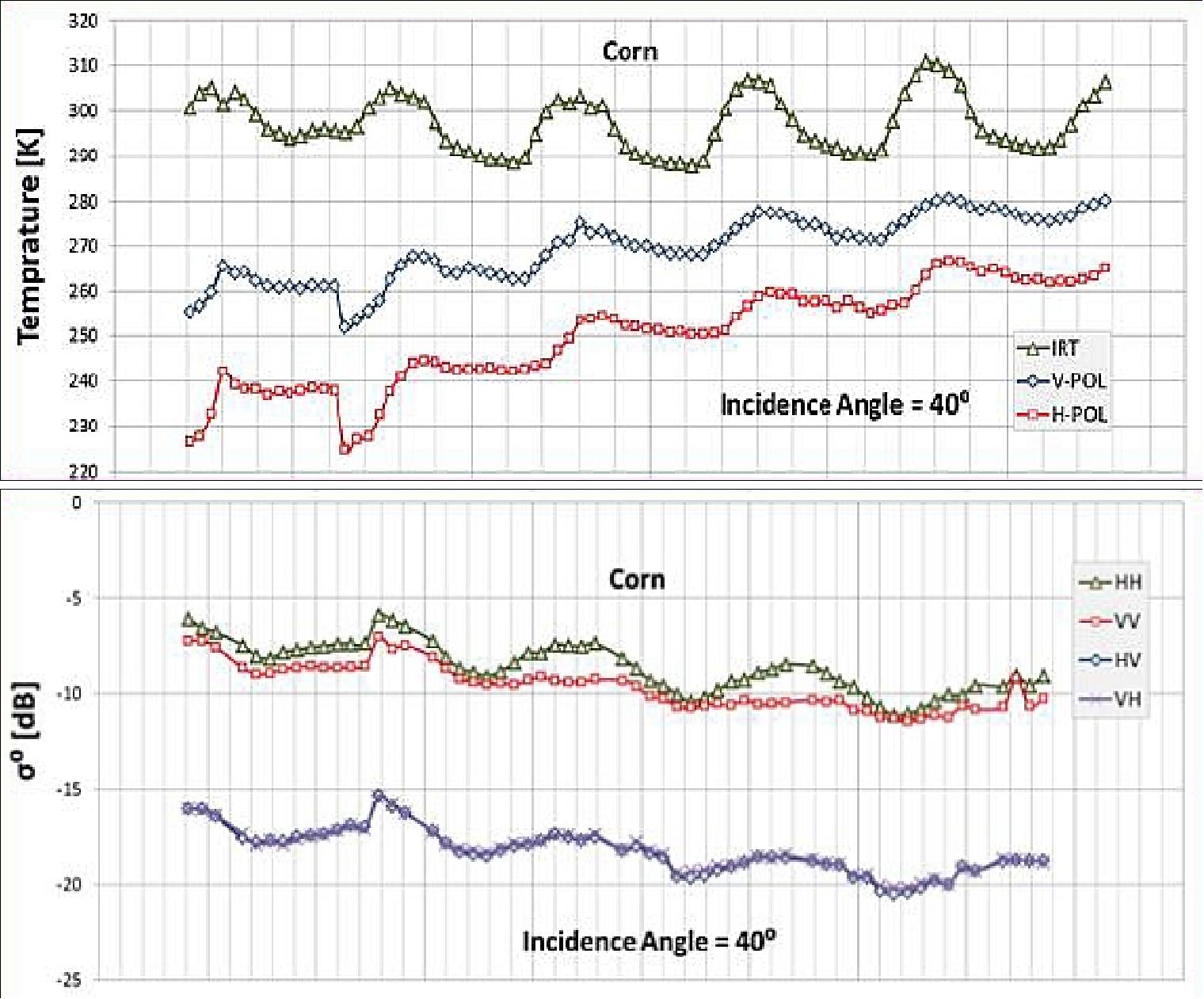
SMAPEx (Soil Moisture Active Passive Experiments) Campaign -Australia
The SMAPEx field campaigns utilized airborne and ground data to contribute to the development of radar-only and combined radar-radiometer soil moisture retrieval algorithms for SMAP. A key objective is calibration and scaling of an Australian cal/val site for post-launch validation of SMAP products over Australia. The Australian SMAPEx program is led by: Jeffrey Walker of Monash University and Rocco Panciera of the University of Melbourne. 120)
The study site is located in the semi-arid agricultural area near Yanco, in the Murrumbidgee Catchment, south-eastern Australia (Figure 90). This site has been extensively monitored for soil moisture with in-situ stations since 2003, and has been the focus of several airborne field experiments. It is also listed as an official SMAP core calibration/validation site. The SMAPEx campaign, held in this site consist of a series of three field campaigns specifically designed to contribute to the development of radar and radiometer soil moisture retrieval algorithms for the SMAP mission. 121) 122) 123) 124) 125)
The airborne data were collected using a SMAP simulator, which included the PLMR (Polarimetric L-band Multibeam Radiometer) and the PLIS (Polarimetric L-band Imaging Synthetic aperture radar) aboard the same aircraft. The system provided brightness temperature and backscatter coefficient at 1km and 10 m, respectively, from an altitude of 3,000 m. Such data can be used to replicate the SMAP data stream for validating algorithms applicable to the SMAP mission viewing configuration. The main SMAPEx flights included simulation of a time series of SMAP observations by coverage of a 36 km x38 km area (equivalent to a pixel of the SMAP AS grid at S latitude) with a 2-3 days revisit time. Ground sampling of soil moisture, vegetation and roughness data were conducted concurrently with the airborne flights, in order to provide ancillary and validation data. The radiometer and radar data used in this study were from the third SMAPEx campaign (SMAPEx-3, September 5-23, 2011).
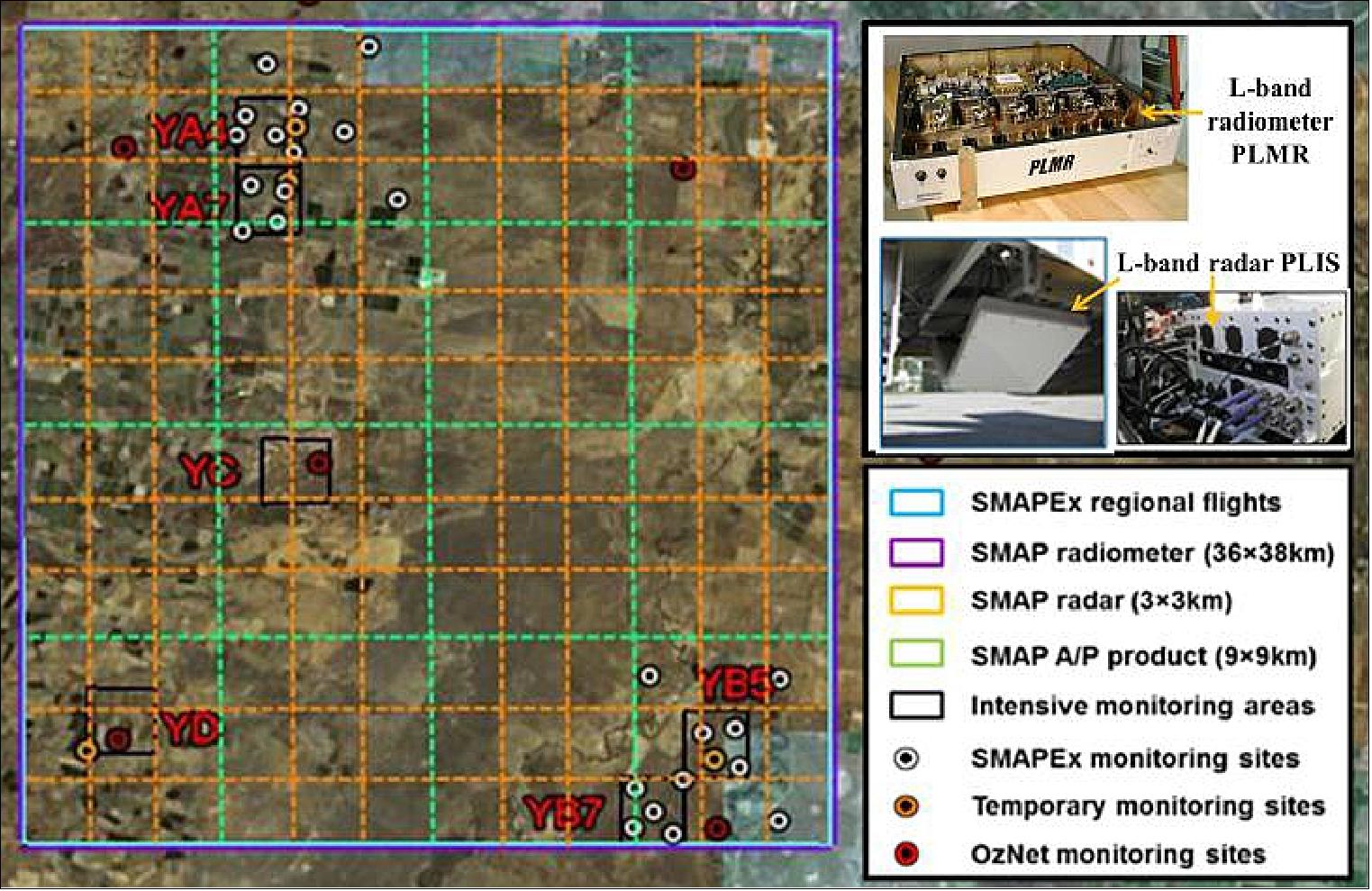
Methodology and results: Before testing the baseline downscaling algorithm with SMAPEx data, the airborne observations were processed to closely represent the SMAP data stream in terms of spatial resolution, incidence angle, and azimuth direction. Consequently, the PLMR brightness temperatures observed at ±7º, ±21.5º, and ±38.5º incidence angles, and the PLIS backscattering observed at incidence angles ranging from 15º to 45º, were both normalized to the 40º of SMAP. Subsequently, the 10 m resolution PLIS and 1km resolution PLMR were upscaled to 1km and 36 km, respectively, being the SMAP radar and radiometer L1 product resolution. The impact of changes in the azimuthal view angle was also assessed and found to be unimportant at these spatial resolutions.
An example of the resulting radar and radiometer observations is shown in Figure 91. These data were then used to test the baseline downscaling algorithm for SMAP, which is based on the hypothesis of a near linear relationship between radiometer brightness temperature and radar backscatter observations at the same resolution.
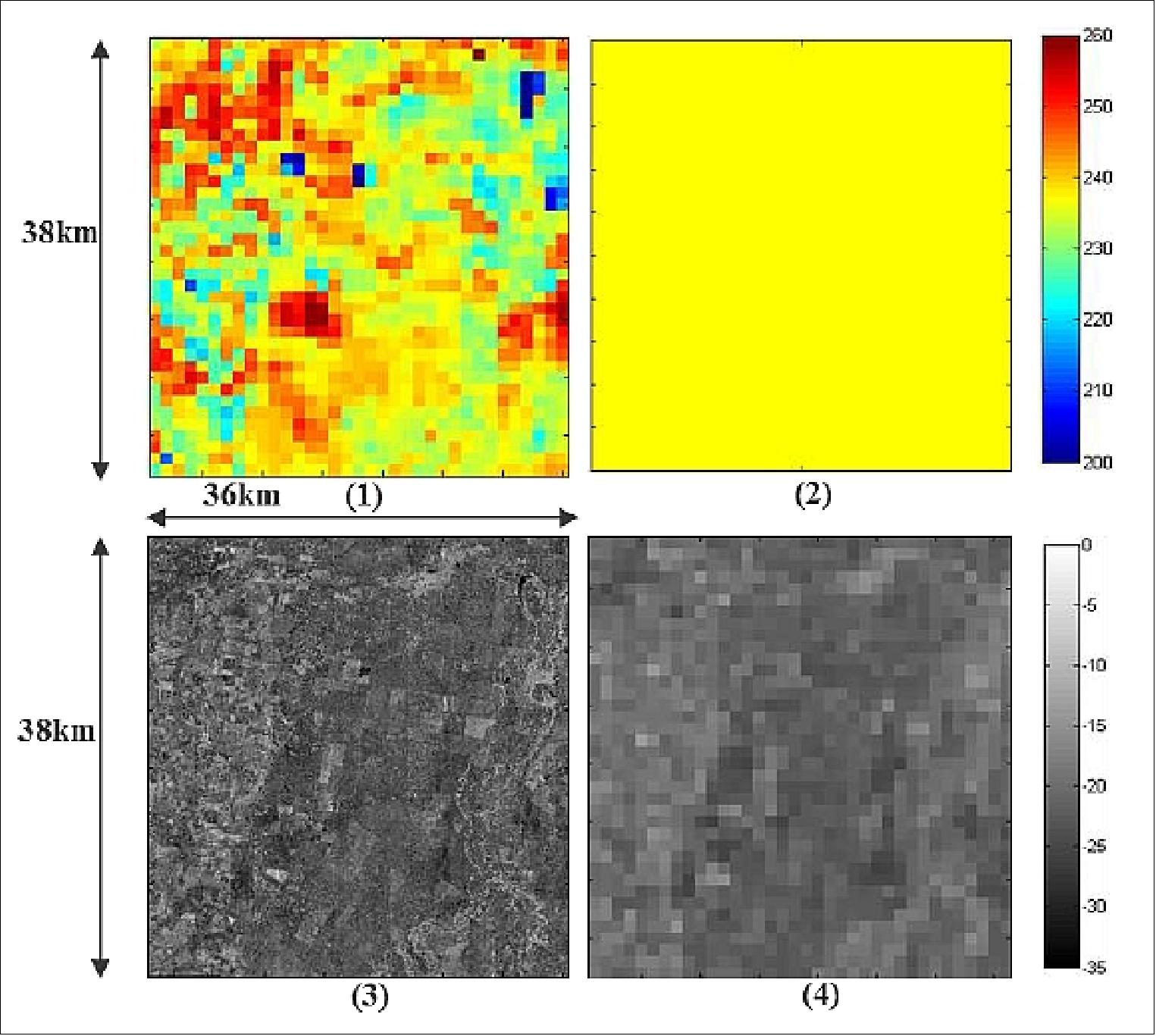
Application of the algorithm involves three main steps:
1) estimation of a parameter β using a time-series of vv-pol radar and h-pol radiometer data at coarse scale
2) estimation of a parameter γ using the same time-series of radar data but at hv-pol and at vv-pol
3) estimation of vegetation conditions by the respective variation of radar backscatter at hv- and vv-pol across the entire area.
Figure 92 shows an example of the downscaling results at 1km resolution obtained from this downscaling algorithm. The RMSE (Root Mean Square Error) of the downscaled brightness temperatures with respect to the PLMR observed brightness temperatures is approximately 8-9 K at 1 km resolution and 2-4 K at 9 km resolution.
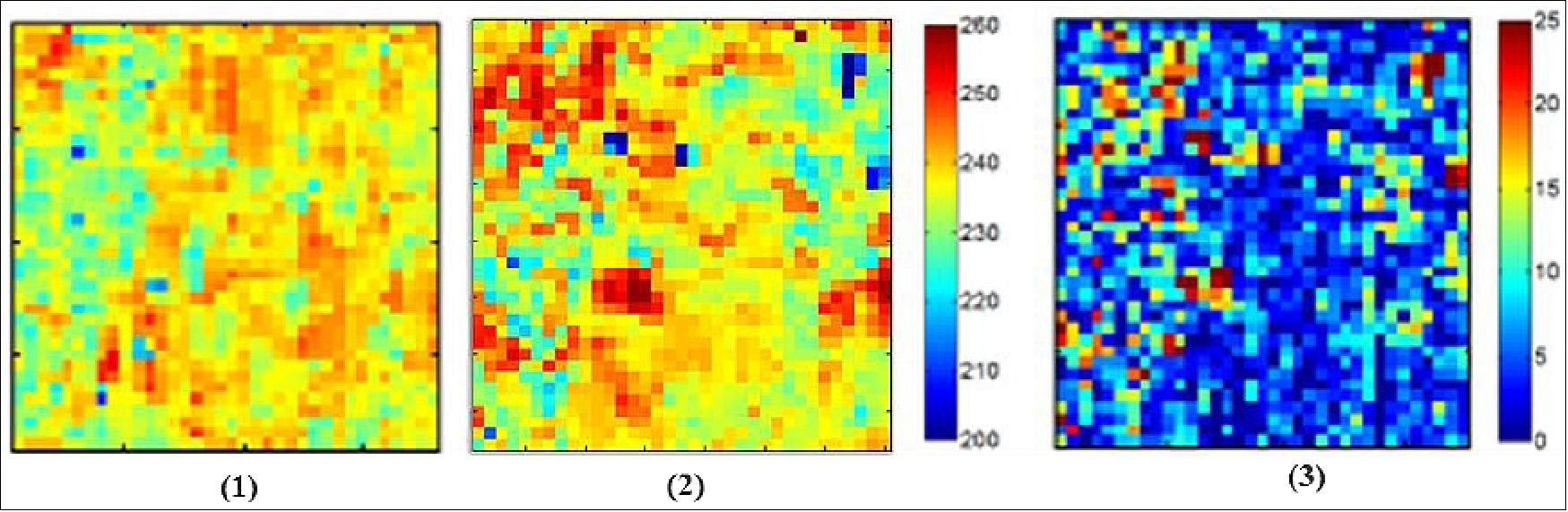
This study has tested the baseline active passive downscaling algorithm that has thus far received quite limited evaluation using experimental data. Based on an airborne simulation of the SMAP data stream from the SMAPEx field campaigns, the downscaling algorithm was found to yield an accuracy of downscaled brightness temperature between 8 and 9 K at 1km for h-pol. The accuracy improved to between 2 and 4 K when applied at 9 km resolution. The performance of the algorithm was slightly better at v-pol (improvement of 0.7 K) than at h-pol at 9 km. The results also indicated that the error of downscaled brightness temperature is generally smaller in grassland than in crop areas by about 1 K at 9 km. The accuracy of the downscaled brightness temperature from this study also depends on the robustness of β and γ estimates derived from the SMAPEx data. Based on the downscaled brightness temperature results, it should be possible to achieve a soil moisture product at medium resolution within the specified accuracy requirement.
References
1) Dara Entekhabi, Eni Njoku, Peggy O'Neill, Kent Kellogg, Jared Entin, "The NASA soil Moisture Active Passive (SMAP) Mission Formulation," Proceedings of IGARSS (International Geoscience and Remote Sensing Symposium), Vancouver, Canada, July 24-29, 2011
2) Dara Entekhabi, Eni G. Njoku, Peggy E. O'Neill, Kent H. Kellogg, Wade T. Crow, Wendy N. Edelstein, Jared K. Entin, Shawn D. Goodman, Thomas J. Jackson, Joel Johnson, John Kimball, Jeffrey R. Piepmeier, Randal D. Koster, Neil Martin, Kyle C. McDonald, Mahta Moghaddam, Susan Moran, Rolf Reichle, J. C. Shi, Michael W. Spencer, Samuel W. Thurman, Leung Tsang, Jakob Van Zyl, "The Soil Moisture Active Passive (SMAP) Mission," Proceedings of the IEEE, Vol. 98, No. 5, May 2010, URL: [web source no longer available]
3) Soil Moisture Active/Passive (SMAP) Mission NASA Workshop Report," URL: http://nasascience.nasa.gov/earth-science/decadal-surveys/Volz1_SMAP_11-20-07.pdf
5) Stephen Volz, "NASA Earth Science New Mission Concepts for the Future," 5th SORCE Science Meeting, Santa Fee, NM, Feb. 7, 2008, URL: http://lasp.colorado.edu/sorce/news/2008ScienceMeeting/doc/Session4/S4_08_Volz.pdf
6) Dara Entekhabi, Eni Njoku, Peggy O'Neill, Michael Spencer, Tom Jackson, Jared Entin, Eastwood Im, Kent Kellogg, "The Soil Moisture Active/Passive Mission (SMAP)," Proceedings of IGARSS 2008 (IEEE International Geoscience & Remote Sensing Symposium), Boston, MA, USA, July 6-11, 2008
7) Dara Entekhabi, Eni Njoku, Peggy O'Neill, "The Soil Moisture Active and Passive Mission (SMAP): Science and Applications," Proceedings of the 2009 IEEE Radar Conference, Pasadena, CA, USA, May 4-8, 2009, paper: 3172
8) Peggy O'Neill, "Soil Moisture Active and Passive (SMAP) Mission," 4th NAFE (National Airborne Field Experiment) Workshop, Melbourne, Australia, Sept. 22-23, 2008, URL: http://www.civenv.unimelb.edu.au/~jwalker/data/nafe/4thWorkshop/Talks/Day1/PO.ppt
9) E. Njoku, P. O'Neill, D. Entekhabi, K. Kellogg, "The Soil Moisture Active and Passive Mission (SMAP)," Earth Observation and Water Cycle Science - Towards a Water Cycle Multi-mission Observation Strategy, ESA/ESRIN, Frascati, Italy, Nov. 18-20, 2009, (ESA SP-674, January 2010)
10) K. Kellogg, E. Njoku, P. O'Neill, D. Entekhabi, "The Soil Moisture Active and Passive Mission (SMAP)," Canadian SMAP Applications and Cal/Val Workshop, Montreal, Canada, October 6-7, 2009, URL: http://smap.jpl.nasa.gov/files/smap2/c1_Njoku_Entekhabi.pdf
11) Stephen Volz, "Soil Moisture Active/Passive (SMAP) Mission," NASA Workshop Report, Arlington, VA, July 9-10,, 2007, URL: http://science.nasa.gov/media/medialibrary/2010/03/31/Volz1_SMAP_11-20-07.pdf
12) Alexander Eremenko, Jason Kastner, Pamela Hoffman, "SMAP Observatory Configuration, from Concept to Preliminary Design," Proceedings of the 2010 IEEE Aerospace Conference, Big Sky, MT, USA, March 6-13, 2010
13) Peggy O'Neill, Dara Entekhabi, Eni Njoku, Kent Kellogg, "The NASA Soil Moisture Active Passive (SMAP) Mission: Overview," Proceedings of IGARSS (IEEE International Geoscience and Remote Sensing Symposium) 2010, Honolulu, HI, USA, July 25-30, 2010
14) J. Eric Belz, Bryan L. Huneycutt, Michael W. Spencer, "A Study of Radio Frequency Interference in the Space-to-Earth Exploration Allocation at L-Band," 2011 IEEE Aerospace Conference, Big Sky, MT, USA, March 5-12, 2011
15) Lori Keesey, "NASA Builds Sophisticated Earth-Observing Microwave Radiometer," Space Daily, June 10, 2013, URL: http://www.spacedaily.com/reports/NASA_Builds_Sophisticated_Earth_Observing_Microwave_Radiometer_999.html
16) Alexander Eremenko, Jason Kastner, "SMAP Observatory Concept – A Configuration of Compromises," 2011 IEEE Aerospace Conference, Big Sky, MT, USA, March 5-12, 2011
17) Matthew D. Stegman, "SMAP Antenna Feed Radome: Design, Development, and Test," 2011 IEEE Aerospace Conference, Big Sky, MT, USA, March 5-12, 2011
18) Dara Entekhabi, Eni Njoku, Peggy O'Neill, Kent Kellogg, Jared Entin, "The NASA Soil MOISTURE Active Passive (SMAP) Mission Formulation," Proceedings of IGARSS (International Geoscience and Remote Sensing Symposium), Vancouver, Canada, July 24-29, 2011
19) "SMAP Handbook Soil Moisture Active Passive Mapping Soil Moisture and Freeze/Thaw from Space," NASA/JPL, July 2014, URL: http://smap.jpl.nasa.gov/system/internal_resources/details/original/178_SMAP_Handbook_FINAL_1_JULY_2014_Web.pdf
20) Heather Hanson, Brian Campbell, "SMAP: Mapping Soil Moisture and Freeze/Thaw State from Space," NASA, The Earth Observer, January-February 2015, Vol. 27, Issue 1, pp: 14-19, URL: http://eospso.gsfc.nasa.gov/sites/default/files/eo_pdfs/JanFeb2015_color_508.pdf
21) Elizabeth Deems, Chris Swan, Barry Weiss, "End-to-End Data Flow on the Soil Moisture Active Passive (SMAP) mission," Proceedings of the 2012 IEEE Aerospace Conference, Big Sky, Montana, USA, March 3-10, 2012, URL of presentation: [web source no longer available]
22) "Mission description," NASA/JPL, URL: http://smap.jpl.nasa.gov/mission/description
23) Steve Cole, Alan Buis, NASA Launches Groundbreaking Soil Moisture Mapping Satellite ," NASA, Release 15-016, Jan. 31, 2015, URL: http://www.nasa.gov/press/2015/january/nasa-launches-groundbreaking-soil-moisture-mapping-satellite/#.VM3oYC7-Y_c
24) "United Launch Alliance Successfully Launches Important Earth Science Mission for NASA," ULA, Jan. 31, 2015, URL: http://www.ulalaunch.com/ula-successfully-launches-nasa-smap.aspx
25) Alan Buis, Steve Cole, "NASA Soil Moisture Mapper Arrives at Launch Site," NASA News, October 15, 2014, URL: http://www.jpl.nasa.gov/news/news.php?CFID=14cc5a2a-fa60-4d51-83de-c2cf270e758a&CFTOKEN=0&feature=4338
26) Steve Cole, Alan Buis, Rani Gran, Jessica Rye, George Diller, "Soil Moisture Active Passive Launch," NASA Press Kit, January 9, 2015, URL: http://www.jpl.nasa.gov/news/press_kits/smaplaunch.pdf
27) Joshua Buck, George H. Diller, "NASA Selects Launch Services Contract for Three Missions," NASA, July 16, 2012, URL: http://www.nasa.gov/home/hqnews/2012/jul/HQ_C12-028_RSLP-19_Launch_Services.html
28) "ELaNa X, Educational Launch of Nanosatellites," NASA, URL: http://www.nasa.gov/mission_pages/smallsats/elana/#.VLex1HvGX_V
29) Simon Yueh, Dara Entekhabi, Kent Kellogg, Eni Njoku, Peggy ONeill, "NASA soil moisture active passive mission status," Proceedings of the IGARSS (International Geoscience and Remote Sensing Symposium) 2015, Milan, Italy, July 26-31, 2015
30) "Catastrophic Flooding in Yellowstone," NASA Earth Observatory, Image of the Day for 23 June 2022, URL: https://earthobservatory.nasa.gov/images/150010/catastrophic-flooding-in-yellowstone
31) "Drought in the Northern Great Plains," NASA Earth Observatory, Image of the Day for 19 October 2021, URL: https://earthobservatory.nasa.gov/images/148970/drought-in-the-northern-great-plains
32) Teresa White, Jane Lee, and Jessica Merzdorf, "NASA Data Powers New USDA Soil Moisture Portal," NASA/JPL, 08 March 2021, URL: https://www.jpl.nasa.gov/news/nasa-data-powers-new-usda-soil-moisture-portal
33) "Drought Hits Thailand," NASA Earth Observatory, Image of the Day for 15 February 2020, URL: https://earthobservatory.nasa.gov/images/146293/drought-hits-thailand
34) "NASA Soil Data Joins the Air Force," NASA/JPL News, 19 November 2019, URL: https://www.jpl.nasa.gov/news/news.php?feature=7544
35) "Record-Setting Precipitation Leaves U.S. Soils Soggy," NASA Earth Observatory, 28 May 2019, URL: https://earthobservatory.nasa.gov/images/145101/record-setting-precipitation-leaves-us-soils-soggy?src=eoa-iotd
36) "Seasonal Monsoon Rains Block Key Ocean Current," NASA/JPL News, 17 May 2019, URL: https://www.jpl.nasa.gov/news/news.php?feature=7404&utm_source=iContact&utm_medium=email&utm_campaign=nasajpl&utm_content=earth-20190517-1
37) Tong Lee, Séverine Fournier, Arnold L. Gordon & Janet Sprintall, "Maritime Continent water cycle regulates low-latitude chokepoint of global ocean circulation," Nature Communications, Volume 10, Article number: 2103, Published: 08 May 2019, https://doi.org/10.1038/s41467-019-10109-z, URL: https://www.nature.com/articles/s41467-019-10109-z.pdf
38) "A Mid-winter Drought in Australia," NASA Earth Observatory, Image of the day for August 10, 2018, URL: https://earthobservatory.nasa.gov/images/92583/a-mid-winter-drought-in-australia
39) "NASA Soil Moisture Data Advances Global Crop Forecasts," NASA/JPL News, 1 June 2018, URL: https://www.jpl.nasa.gov/news/news.php?feature=7143&utm_source=iContact&utm_medium=email&utm_campaign=NASAJPL&utm_content=weekly20180601-6
40) "Salinity Data Show the Movement of Freshwater From the Amazon," NASA/JPL, Spring 2018, URL: https://smap.jpl.nasa.gov/resources/97/salinity-data-show-the-movement-of-freshwater-from-the-amazon/
41) "NASA Shows How Harvey Saturated Areas in Texas," NASA/JPL, 30 Aug. 2017, URL: https://smap.jpl.nasa.gov/news/1264/nasa-shows-how-harvey-saturated-areas-in-texas/
42) "Study tracks 'memory' of soil moisture," MIT, Jan. 16, 2017, URL: https://phys.org/news/2017-01-tracks-memory-soil-moisture.html
43) Kaighin A. McColl, Seyed Hamed Alemohammad, Ruzbeh Akbar, Alexandra G. Konings, Simon Yueh, Dara Entekhabi, "The global distribution and dynamics of surface soil moisture," Nature Geoscience, Published online 16 January 2017, doi:10.1038/ngeo2868, URL of acstract: http://www.nature.com/ngeo/journal/vaop/ncurrent/full/ngeo2868.html
44) "Study Tracks ‘Memory' of Soil Moisture," NASA, Jan. 25, 2017, URL: https://web.archive.org/web/20170129134511/https://www.nasa.gov/feature/jpl/study-tracks-memory-of-soil-moisture
45) Thomas Meissner, Lucrezia Ricciardulli, Frank Wentz, "Ocean vector winds in storms from the SMAP L-band radiometer," Proceedings of the EUMETSAT 2016 Meteorological Satellite Conference, Darmstadt, Germany, Sept. 26-30, 2016, availability of the proceedings at the end of December 2016, URL: http://www.eumetsat.int/website/home/News/ConferencesandEvents/DAT_2833302.html
46) Alan Buis, Carol Rasmussen, "The Life Cycle of a Flood Revealed," NASA/JPL News, URL: http://www.jpl.nasa.gov/news/news.php?feature=6656
47) S. Fournier, J. T. Reager, T. Lee, J. Vazquez-Cuervo, C. H. David, M. M. Gierach, "SMAP observes flooding from land to sea: The Texas event of 2015, " Geophysical Research Letters, Vol. 43, Oct. 6, 2016, doi:10.1002/2016GL070821.
48) Simon Yueh, Dara Entekhabi, Peggy O'Neill, Eni Njoku, Jared Entin, "NASA Soil Moisture Active Passive Mission Status and Science Performance," Proceedings of the IEEE IGARSS (International Geoscience and Remote Sensing Symposium) Conference, Beijing, China, July 10-15, 2016
49) S. Kim, J. Johnson, M. Moghaddam, L. Tsang, J. van Zyl, A. Colliander, S. Dunbar, T. Jackson, S. Jaruwatanadilok, R. West, A. Berg, T. Caldwell, M. Cosh, E. Lopez-Baeza, M. Thibeault, J. Walker, D. Entekhabi, S. Yueh, "Global retrieval of surface soil moisture using L-band SMAP SAR data and its validation," Proceedings of EUSAR 2016, 11th European Conference on Synthetic Aperture Radar, Hamburg, Germany, June 6-9, 2016
50) "Soil Moisture in Ethiopia," NASA Earth Observatory, April 19, 2016, URL: http://earthobservatory.nasa.gov/IOTD/view.php?id=87886&src=eoa-iotd
51) Dan Leone, "NASA Focused on Sentinel as Replacement for SMAP Radar," Space News, Nov. 27, 2015, URL: http://spacenews.com/nasa-focused-on-sentinel-as-replacement-for-smap-radar/
52) "Soil Moisture in the United States," NASA Earth Observatory, Nov. 25, 2015, URL: http://earthobservatory.nasa.gov/IOTD/view.php?id=87036
53) Dara Entekhabi, Simon Yueh, Peggy E. O'Neill, Eni Njoku, Kent Kellogg, Jared Entin, "ESA and GEWEX Earth Observation for Water Cycle Science 2015, Frascati, Italy, 20-23 October, 2015, URL: http://www.eo4water2015.info/
54) Alan Buis, "NASA Eyes on Earth Aid Response to Carolina Flooding," NASA/ JPL, Release 2015-314, Oct. 5, 2015, URL: http://www.jpl.nasa.gov/news/news.php?feature=4735
55) "SMAP Soil Moisture Data Available at NASA National Snow and Ice Data Center ," NASA/JPL, Oct. 5, 2015, URL: http://smap.jpl.nasa.gov/news/1250/
56) Alan Buis, Steve Cole, "NASA Soil Moisture Radar Ends Operations, Mission Science Continues," NASA News Release 2015-290, Sept. 2, 2015, URL: http://www.jpl.nasa.gov/news/news.php?feature=4710
57) http://www.nasa.gov/press-release/nasa-soil-moisture-radar-ends-operations-mission-science-continues
58) Alan Buis, "NASA's SMAP Releases First Calibrated Data," NASA/JPL, Aug. 6, 2015, URL:http://www.nasa.gov/jpl/nasas-smap-releases-first-calibrated-data
59) Alain Buis, "SMAP Team Investigating Radar Instrument Anomaly," NASA/JPL, Aug.5, 2015, URL: http://smap.jpl.nasa.gov/news/1244/
60) Michael Spencer, Richard West, Adam Freedman, Sermsak Jaruwatanadilok, Mario Chaubell, Samuel Chan, Curtis Chen, Gregory Neumann, Kamal Sarabandi, Leland Pierce, "Early assessment of SMAP L-band radar calibration," Proceedings of the IGARSS (International Geoscience and Remote Sensing Symposium) 2015, Milan, Italy, July 26-31, 2015
61) A. Colliander, T. Jackson, S. Chan, N. Das, S. Kim, S. Dunbar, R. Bindlish, L. Dang, L. Pashaian, A. Berg, T. Rowlandson, K. Caylor, M. Cosh, H. al Jassar, E. Lopez-Baeza, J. Martínez-Fernández, A. González-Zamora, H. McNairn, A Pacheco, M. Moghaddam, C. Montzka, C. Notarnicola, G. Niedrist, T. Pellarin, J. Pulliainen, K. Rautiainen, J. Ramos, M. Seyfried, B. Su, Y. Zeng, R. van der Velde, M. Temimi, M. Thibeault, W. Dorigo, M. Vreugdenhil, J. Walker, X. Wu, A. Monerris-Belda, M. Spencer, P. O'Neill, D. Entekhabi, S. Yueh, E. Njoku, "Early assessment of SPMAP level 2 / 3 soil moisture products over core validation sites," Proceedings of the IGARSS (International Geoscience and Remote Sensing Symposium) 2015, Milan, Italy, July 26-31, 2015
62) M. Thibeault, J. M. Cáceres, D. Dadamia, A. G. Soldano, M. Uriburu Quirno, J. M. Guerrieri, R. Edrosa, M. Palomeque, L. Romaldi, J. Pucheta, J. Mogadouro, E. De Luca, S. Bustos, S. Agüero, I. Pascual, M. Mariotti, "Spatial and temporal analysis of the Monte Buey SAOCOM and SMAP core site," Proceedings of the IGARSS (International Geoscience and Remote Sensing Symposium) 2015, Milan, Italy, July 26-31, 2015
63) H. K. AlJassar, P. Petrov, D. Entekhabi, M. Temimi, N. Kodiyan, M. Ansari, "Preliminary field results of soil moisture from Kuwait desert as a core validation site of SMAP satellite," Proceedings of the IGARSS (International Geoscience and Remote Sensing Symposium) 2015, Milan, Italy, July 26-31, 2015
64) Wade Crow, Fan Chen, Andreas Colliander, Michael Cosh, "Application of Triple Collocation for the Ground-based Validation of Soil Moisture Active/Passive (SMAP) Soil Moisture Data Products," Proceedings of the IGARSS (International Geoscience and Remote Sensing Symposium) 2015, Milan, Italy, July 26-31, 2015
65) Venkat Lakshmi, Bin Fang, "Downscaling satellite soil moisture for the NASA SMAP mission," Proceedings of the IGARSS (International Geoscience and Remote Sensing Symposium) 2015, Milan, Italy, July 26-31, 2015
66) Fabio Fascetti, Nazzareno Pierdicca, Luca Pulvirenti, "A multitemporal algorithm for SMAP data: Overview and preliminary results using experimental data," Proceedings of the IGARSS (International Geoscience and Remote Sensing Symposium) 2015, Milan, Italy, July 26-31, 2015
67) Prashant K. Srivastava,Peggy O'Neill,Michael Cosh, Roger Lang, Alicia Joseph, "Evaluation of radar vegetation indices for vegetation water content estimation using data from ground-based SMAP simulator," Proceedings of the IGARSS (International Geoscience and Remote Sensing Symposium) 2015, Milan, Italy, July 26-31, 2015
68) T. Jagdhuber, D. Entekhabi. Hajnsek, A. G. Konings, K. A. McColl, S. H. Alemohammad, N. N. Das, C. Montzka, "Physically -based active-passive modelling and retrieval for SMAP soil moisture inversion algorithm," Proceedings of the IGARSS (International Geoscience and Remote Sensing Symposium) 2015, Milan, Italy, July 26-31, 2015
69) Kamal Sarabandi, Mani Kashanianfard, Adib Nashashibi, Ryan Hampton, Leland Pierce, "A Polarimetric Active Transponder with Extremely Large RCS for Absolute Radiometric Calibration of SMAP Radar," Proceedings of the IGARSS (International Geoscience and Remote Sensing Symposium) 2015, Milan, Italy, July 26-31, 2015
70) Jinzheng Peng, Giovanni De Amici, Priscilla N. Mohammed, Edward Kim, Jeffrey R. Piepmeier, "Soil moisture active/passive (SMAP) radiometer level 1B data product validation," Proceedings of the IGARSS (International Geoscience and Remote Sensing Symposium) 2015, Milan, Italy, July 26-31, 2015
71) Jeffrey R. Piepmeier, Jinzheng Peng, Derek Hudson, David Le Vine, Emmanuel Dinnat, Sidarth Misra, Edward Kim, Giovanni DeAmici, Priscilla N. Mohammed, "SMAP L-band microwave radiometer calibration," Proceedings of the IGARSS (International Geoscience and Remote Sensing Symposium) 2015, Milan, Italy, July 26-31, 2015
72) Priscilla N. Mohammed, Jeffrey R. Piepmeier, Joel T. Johnson, Mustafa Aksoy, Alexandra Bringer, ""Soil Moisture Active Passive (SMAP) microwave radiometer Radio-Frequency Interference (RFI) mitigation: initial on-orbit results," Proceedings of the IGARSS (International Geoscience and Remote Sensing Symposium) 2015, Milan, Italy, July 26-31, 2015
73) Shannon Brown, Sidharth Misra, Chun Sik Chae, "Persistent Undetected L-band Radio Frequency Interference Entering through the Antenna Sidelobes: Impact on Soil Moisture and Salinity from SMAP and Aquarius," Proceedings of the IGARSS (International Geoscience and Remote Sensing Symposium) 2015, Milan, Italy, July 26-31, 2015
74) R. West, M. Chaubell, S. Chan, A. Freedman, S. Jaruwatanadilok, M. Spencer, C. Chen, "SMAP radar processing and the detection and mitigation of radio frequency interference," Proceedings of the IGARSS (International Geoscience and Remote Sensing Symposium) 2015, Milan, Italy, July 26-31, 2015
75) N. N. Das, D. Entekhabi, S. Yueh, P. O'Neill, E. Njoku, "Early results for the SMAP Active-Passive soil moisture product," Proceedings of the IGARSS (International Geoscience and Remote Sensing Symposium) 2015, Milan, Italy, July 26-31, 2015
76) S. Chan, P. O'Neill, E. Njoku, T. Jackson, R. Bindlish, M. Cosh, "An overview of production and validation of the SMAP passive soil moisture product," Proceedings of the IGARSS (International Geoscience and Remote Sensing Symposium) 2015, Milan, Italy, July 26-31, 2015
77) J. van Zyl, S. Kim, J. Johnson, M. Moghaddam, L. Tsang, A. Colliander, T. Jackson, D. Entekhabi, P. O'Neill, S. Yueh, J. Ouellette, "SMAP radar-only soil moisture retrievals: first results and evaluation," Proceedings of the IGARSS (International Geoscience and Remote Sensing Symposium) 2015, Milan, Italy, July 26-31, 2015
78) Xiaolan Xu, R. Scott Dunbar, Andreas Colliander, Chris Derksen, Youngwook Kim, John Kimball, "Preparation for the Soil Moisture Active Passive (SMAP) freeze-thaw product using Aquarius data," Proceedings of the IGARSS (International Geoscience and Remote Sensing Symposium) 2015, Milan, Italy, July 26-31, 2015
79) "Space Research Supporting Canadian Farmers - MP Lawrence Toet announces support for research to help farmers better understand crop yields," July 28, 2015, CNW, URL: http://www.newswire.ca/en/story/1576547/space-research-supporting-canadian-farmers
80) Alan Buis, "SMAP Team Investigating Radar Instrument Anomaly," NASA/JPL, July 10, 2015, URL: http://smap.jpl.nasa.gov/news/1244/
81) Steve Cole, Alan Buis, "NASA Soil Moisture Mission Begins Science Operations," NASA, May 19, 2015, Release 15-099, URL: http://www.nasa.gov/press-release/nasa-soil-moisture-mission-begins-science-operations
82) Kasha Patel, "SMAP Gathers Soil Data in Australia," NASA Earth Observatory, May 7, 2015, URL: http://earthobservatory.nasa.gov/blogs/fromthefield/2015/05/07/smap-campaign-collects-data-from-soil-sky-and-space/
83) Nan Ye, Jeffrey Walker Christoph Rüdiger, Xiaoling Wu, Thomas Jackson , Dara Entekhabi, Richard DeJeu, Olivier Merlin, Edward Kim, Luigi Renzullo, "The fourth SMAP Experiment (SMAPEx-4): towards validation of SMAP observations and soil moisture retrievals," Proceedings of the IGARSS (International Geoscience and Remote Sensing Symposium) 2015, Milan, Italy, July 26-31, 2015
84) "SMAP's Radiometer Captures Views of Global Soil Moisture," NASA/JPL, May 6, 2015, URL: http://smap.jpl.nasa.gov/news/1236/
85) "NASA Soil Moisture Mission Produces First Global Radiometer Map," NASA/JPL, April 21, 2015, URL: http://www.jpl.nasa.gov/spaceimages/details.php?id=PIA18057
86) Alan Buis, "It's 'Full Spin Ahead' for NASA Soil Moisture Mapper," NASA/JPL, March 27, 2015, URL: http://www.jpl.nasa.gov/news/news.php?feature=4529
87) Alan Buis, "NASA's New Soil Moisture Mapper Goes for a Spin," NASA/JPL, March 24, 2015, URL: http://www.nasa.gov/jpl/smap/nasas-new-soil-moisture-mapper-goes-for-a-spin/
88) Alan Buis, Carol Rasnussen, "Let It Go! SMAP Almost Ready to Map Frozen Soil," NASA/JPL, March 13, 2015, URL: http://www.jpl.nasa.gov/news/news.php?feature=4510
89) Alan Buis, "NASA's Soil Moisture Mapper Takes First 'SMAPshots'," NASA/JPL. March 9, 2015, URL: http://www.nasa.gov/jpl/smap/nasas-soil-moisture-mapper-takes-first-smapshots/
90) Alan Buis, "New NASA Space Cowboy Successfully Deploys Its 'Lasso'," NASA/JPL, Feb. 26, 2015, URL: http://www.jpl.nasa.gov/news/news.php?feature=4494
91) Michael Spencer, Kevin Wheeler, Samuel Chan, Jeffrey Piepmeier, Derek Hudson, James Medeiros, "The Planned Soi l Moisture Active Passive (SMAP) Mission L-Band Radar/Radiometer Instrument," Proceedings of IGARSS (International Geoscience and Remote Sensing Symposium), Vancouver, Canada, July 24-29, 2011
92) Michael Spencer, Kevin Wheeler, Chris White, Richard West, Jeffrey Piepmeier, Derek Hudson, James Medeiros, "The Soil Moisture Active Passive (SMAP) Mission L-Band Radar/Radiometer Instrument," Proceedings of IGARSS (IEEE International Geoscience and Remote Sensing Symposium) 2010, Honolulu, HI, USA, July 25-30, 2010
93) Michael Spencer, Samuel Chan, Louise Veilleux, Kevin Wheeler, "The Soil Moisture Active/Passive (SMAP) Mission Radar: a Novel Conically Scanning SAR," Proceedings of the 2009 IEEE Radar Conference, Pasadena, CA, USA, May 4-8, 2009, paper: 3189
94) E. Njoku, K. Kellogg, D. Entekhabi, P. O'Neill, T. Jackson, J. Entin, "Soil Moisture Active Passive Mission SMAP - Algorithm & Cal/Val Activities and Synergies with SMOS and Other L-band Missions," SMOS Science Workshop, September 27-29, 2011, Arles, France, URL: [web source no longer available]
95) A. J. Mastropietro, Eug Kwack, Rebecca Mikhaylov, Michael Spencer, Pamela Hoffman, Douglas Dawson, Jeff Piepmeier, Derek Hudson, James Medeiros, "Preliminary Evaluation of Passive Thermal Control for the Soil Moisture Active and Passive (SMAP) Radiometer," 41st ICES (International Conference on Environmental Systems), Portland, OR, USA, July 17-21, 2011, URL: http://smap.jpl.nasa.gov/files/publications/ICES_2011_Mastropietro.pdf
96) "Northrop Grumman's Astro Aerospace Unit Completes Critical Design Audit of Reflector Boom Assembly for SMAP Mission," Astro Aerospace, January 9, 2012, URL: http://www.irconnect.com/noc/press/pages/news_releases.html?d=242340
97) Kent Kellogg, Sam Thurman, Wendy Edelstein, Michael Spencer, Gun-Shing Chen, Mark Underwood, Eni Njoku, Shawn Goodman, Benhan Jai, "NASA's Soil Moisture Active Passive (SMAP) Observatory," Proceedings of the IEEE Aerospace Conference, Big Sky, MT, USA, March 2-9, 2013
98) Robert Estep, James Medeiros, Derek Hudson, Kevin Horgan, Cliff Brambora, Jeffrey Piepmeier, "SMAP L-band microwave radiometer built to mitigate terrestrial radio frequency interference," Proceedings of the IGARSS (International Geoscience and Remote Sensing Symposium) 2015, Milan, Italy, July 26-31, 2015
99) Samuel Chan, Mark Fischman, Michael Spencer, "RFI Mitigation and Detection for the SMAP Radar," Proceedings of IGARSS (International Geoscience and Remote Sensing Symposium), Vancouver, Canada, July 24-29, 2011
100) Michael Spencer, Samuel Chan, Eric Belz, Jeffrey Piepmeier, Priscilla Mohammed, Edward Kim, "Radio Frequency Interference Mitigation for the Planned SMAP Radar and Radiometer," Proceedings of IGARSS (International Geoscience and Remote Sensing Symposium), Vancouver, Canada, July 24-29, 2011
101) T. J. Jackson, M. Cosh, W. T. Crow, A. Colliander, J. P. Walker, "In Situ Validation of the Soil Moisture Active Passive (SMAP) Satellite Mission," ISPRE-34 (International Symposium on Remote sensing of Environment), Sidney, Australia, April 10-15, 2011, URL: http://www.isprs.org/proceedings/2011/ISRSE-34/211104015Final00133.pdf
102) Ed Kim, J. Piepmeier, P. Mohammed, J. Peng, G. De Amici, D. Hudson, D. Dawson, "Soil Moisture Active Passive Mission SMAP," 4th Cal/Val Workshop, Pasadena, CA, November 5-7, 2013, URL: https://smap.jpl.nasa.gov/files/smap2/203%20-%20Kim.pdf
103) Charles Le, Michael W. Spencer, Louise Veilleux, Samuel Chan, Yutao He, Jason Zheng, Kayla Nguyen, "SMAP's Radar OBP Algorithm Development," Proceedings of the 2009 IEEE Radar Conference, Pasadena, CA, USA, May 4-8, 2009, paper: 3280
104) Sidharth Misra, Priscilla N. Mohammed, Baris Güner, Christopher S. Ruf, Jeffrey R. Piepmeier, Joel T. Johnson, "Microwave Radiometer Radio-Frequency Interference Detection Algorithms: A Comparative Study," IEEE Transactions on Geoscience and Remote Sensing, Vol. 47, No 11, Nov. 2009, pp.3742-3754, URL: [web source no longer available]
105) Damon Bradley, Cliff Brambora, Ali Feizi, Rafael Garcia, Lynn Miles, Priscilla Mohammed, Jinzheng Peng, Jeff Piepmeier, Kamdin Shakoorzadeh, Mark Wong, "Preliminary results from the Soil Moisture Active/Passive (SMAP) Radiometer Digital Electronics Engineering Test Unit (ETU)," Proceedings of IGARSS (International Geoscience and Remote Sensing Symposium), Munich, Germany, July 22-27, 2012
106) Joshua S. Choi, Antonio L. Sanders, "Cost-Effective Telemetry and Command Ground Systems Automation Strategy for the Soil Moisture Active Passive (SMAP) Mission," Proceedings of SpaceOps 2012, The 12th International Conference on Space Operations, Stockholm, Sweden, June 11-15, 2012, URL: http://www.spaceops2012.org/proceedings/documents/id1275978-Paper-004.pdf
107) "SMAP Operations," NASA/JPL, URL: http://smap.jpl.nasa.gov/observatory/operations/
108) Antonio Sanders, "Achieving Lights-Out Operation of SMAP using Ground Data System Automation," GSAW (Ground System Architectures Workshop) 2013, March 18-21, 2013, Los Angeles, CA, USA, URL: http://sunset.usc.edu/GSAW/gsaw2013/s10/sanders.pdf
109) Molly E. Brown, Vanessa Escobar, Susan Moran, Dara Entekhabi, Peggy E. O'Neill, Eni G. Njoku, Brad Doorn, Jared K. Entin, "NASA's Soil Moisture Active Passive (SMAP) Mission and Opportunities for Applications Users," BAMS (Bulletin of the American Meteorological Society), Vol. 94, Issue 8, August 2013, pp. 1125-1128, URL: http://journals.ametsoc.org/doi/pdf/10.1175/BAMS-D-11-00049.1
110) Rolf Reichle, Gabrielle De Lannoy, Wade Crow, John Kimball, Randal Koster, Qing Liu, Clara Draper, "Using SMOS Observations for Science Development of the SMAP Level 4 Surface and Root Zone Soil Moisture Algorithm," Proceedings of IGARSS (IEEE International Geoscience and Remote Sensing Symposium), Melbourne, Australia, July 21-26, 2013
111) M. Moghaddam, M. Burgin, A. Castillo, D. Entekhabi, Y. Goykhman, A. Kakhbod, K. Li, M. Liu, A. Nayyar, A. Silva, D. Teneketzis, Q. Wang, X. Wu, "Soil Moisture Sensing Controller And optimal Estimator (SoilSCAPE): First Deployment of the Wireless Sensor Network and Latest Progress on Soil Moisture Satellite Retrieval Validation Strategies," ESTF 2011 (Earth Science Technology Forum 2011), Pasadena, CA, USA, June 21-23, 2011, URL: http://esto.nasa.gov/conferences/estf2011/papers/Moghaddam_ESTF2011.pdf; URL of presentation: http://esto.nasa.gov/conferences/estf2011/presentations/Moghaddam_ESTF2011.pdf
112) SoilSCAPE - Wireless Soil Moisture Smart Sensor Web Using Physics-Based Optimal Control," URL: [web source no longer available]
113) "SMAP Validation Experiment 2012 (SMAPVEX12)June 6 - July 19, 2012,Winnipeg, Canada," NASA/JPL, URL: http://smap.jpl.nasa.gov/science/Validation/Campaigns/SMAPVEX12/
114) http://smap.jpl.nasa.gov/files/smap2/Expt_Plan_120522.pdf
115) "SMAPVEX12 -NASA & AAFC Validation Experiment of the Soil Moisture Active Passive (SMAP) Satellite," Grant Wiseman, Sept. 24, 2012, URL: [web source no longer available]
116) "SMAP Validation Experiment 2012," URL: [web source no longer available]
117) T. J. Jackson, H. McNairn, G. Wiseman, A. Colliander, A. Berg, P. Bullock, R. Magagi, M. Moghaddam, S. Kim, M. Cosh, E. Njoku, S. Belair, "SMAP Validation Experiment 2012 (SMAPVEX12): Overview and Outlook," Proceedings of IGARSS (IEEE International Geoscience and Remote Sensing Symposium), Melbourne, Australia, July 21-26, 2013
118) Edward Kim, " Scanning L-band Active/Passive (SLAP) - Recent results from an airborne simulator for SMAP," Proceedings of the IGARSS (International Geoscience and Remote Sensing Symposium) 2015, Milan, Italy, July 26-31, 2015
119) P. O'Neill, M. Kurum, A. Joseph, J. Fuchs, P. Young, M. Cosh, R. Lang, "L-band active/passive time series measurements over a growing season using the ComRAD ground-based SMAP simulator," Proceedings of IGARSS (IEEE International Geoscience and Remote Sensing Symposium), Melbourne, Australia, July 21-26, 2013
120) "Soil Moisture Active and Passive Experiments (SMAPEx), Australian Soil Moisture Field Campaigns," URL: http://smap.jpl.nasa.gov/science/Validation/Campaigns/SMAPEx/
121) R. Panciera, J. P. Walker, T. J. Jackson, D. A. Gray, M.A. Tanase, D. Ryu, A. Monerris, H. Yardley, C. Rüdiger, N. Wu, Y. Gao, J. M. Hacker, "The Soil Moisture Active Passive Experiments (SMAPEx): Towards Soil Moisture Retrieval from the SMAP Mission," IEEE Transaction on Geoscience and Remote Sensing, Vol. PP, Issue 99, 13 March 2013, DOI: 0.1109/TGRS.2013.2241774
122) J. P. Walker, R. Panciera, D. Ryu, "SMAPEx: Soilmoisture active passive remote sensing experiment for SMAP algorithm development," Proceedings of IGARSS (IEEE International Geoscience and Remote Sensing Symposium) 2010, Honolulu, HI, USA, July 25-30, 2010, URL: http://www.smapex.monash.edu.au/Data/publications/IGARSS10-2.pdf
123) X. Wu, J. P. Walker, N.N. Das, R. Panciera,C. Rüdiger, "Towards a medium resolution brightness temperature product from active and passive microwave observations," Proceedings of IGARSS (IEEE International Geoscience and Remote Sensing Symposium), Melbourne, Australia, July 21-26, 2013
124) SMAPEx Project - Soil Moisture Active Passive Experiment," Monash University, URL: http://www.smapex.monash.edu.au/
125) J. P. Walker, X. Wu, Y. Gao, A. Monerris, R. Panciera, T. Jackson, P. O'Neil, N. Das, D. Gray, D. Ryu, "The Soil Moisture Active Passive Experiments: SMAPEx," Monash University, URL: http://smap.jpl.nasa.gov/files/smap2/9_Walker.pdf
Spacecraft Launch Mission Status Sensor Complement Ground Segment References Back to top