SmallGEO (Small Geostationary Satellite Platform) Initiative / Hispasat AG1 Mission / H36W-1
Non-EO
ESA
DLR
Quick facts
Overview
| Mission type | Non-EO |
| Agency | ESA, DLR |
| Launch date | 28 Jan 2017 |
SmallGEO (Small Geostationary Satellite Platform) Initiative / Hispasat AG1 Mission / H36W-1
Spacecraft Propulsion Launch Mission Status Payload References
Overview
SGEO (or SmallGEO) is an ESA and DLR funded project with the objective to develop a general-purpose small geostationary satellite platform followed by a subsequent mission which will enable European industry to play a significant role on the commercial telecommunications market for small platforms. The contract is an element of ESA's ARTES-11 (Advanced Research in Telecommunications Systems) program which calls for: 1) 2) 3)
• The development of a generic Small Geostationary Platform capable of supporting a payload mass of up to 300 kg, a payload power of up to 3 kW, and a lifetime of up to 15 years.
• The second part involves the development and launch of a Small Geostationary Satellite and associated mission to provide flight qualification as well as in-orbit demonstration for the platform.
The ultimate goal of SGEO is the establishment of a general purpose, small geostationary satellite product, which will be competitive in the commercial telecom market for small platforms and which may also be used for institutional applications.
In November 2008, ESA signed a contract with the respective industrial primes, namely: OHB- System AG of Bremen, Germany and Hispasat S. A. of Madrid, Spain. The core team of companies (consortium) which is jointly developing the platform and will subsequently commercialize it, includes OHB-Sweden AB [formerly SSC (Swedish Space Corporation)], Oerlikon Space of Switzerland (note: in 2009, Oerlikon Space was acquired by RUAG Space of Switzerland), OHB-System AG of Bremen and its Luxembourg-based subsidiary LuxSpace.
The activities/studies towards SGEO started already in 2005. The consortium was formed in 2007 and has been working on the preliminary development of SGEO. The main goal is to qualify the platform on orbit with a mission representative of the target (commercial) application. 4) 5) 6)
As far as the SGEO mission is concerned, Hispasat, the leading operator for the Spanish- and Portuguese-speaking markets, has put together the necessary industrial team to implement all the mission elements. OHB-System AG is acting as the project prime contractor. Tesat GmbH of Backnang, Germany will be the Payload Prime and will be responsible for the integration of the Transparent Repeater (produced by Tesat) and the REDSAT payload.
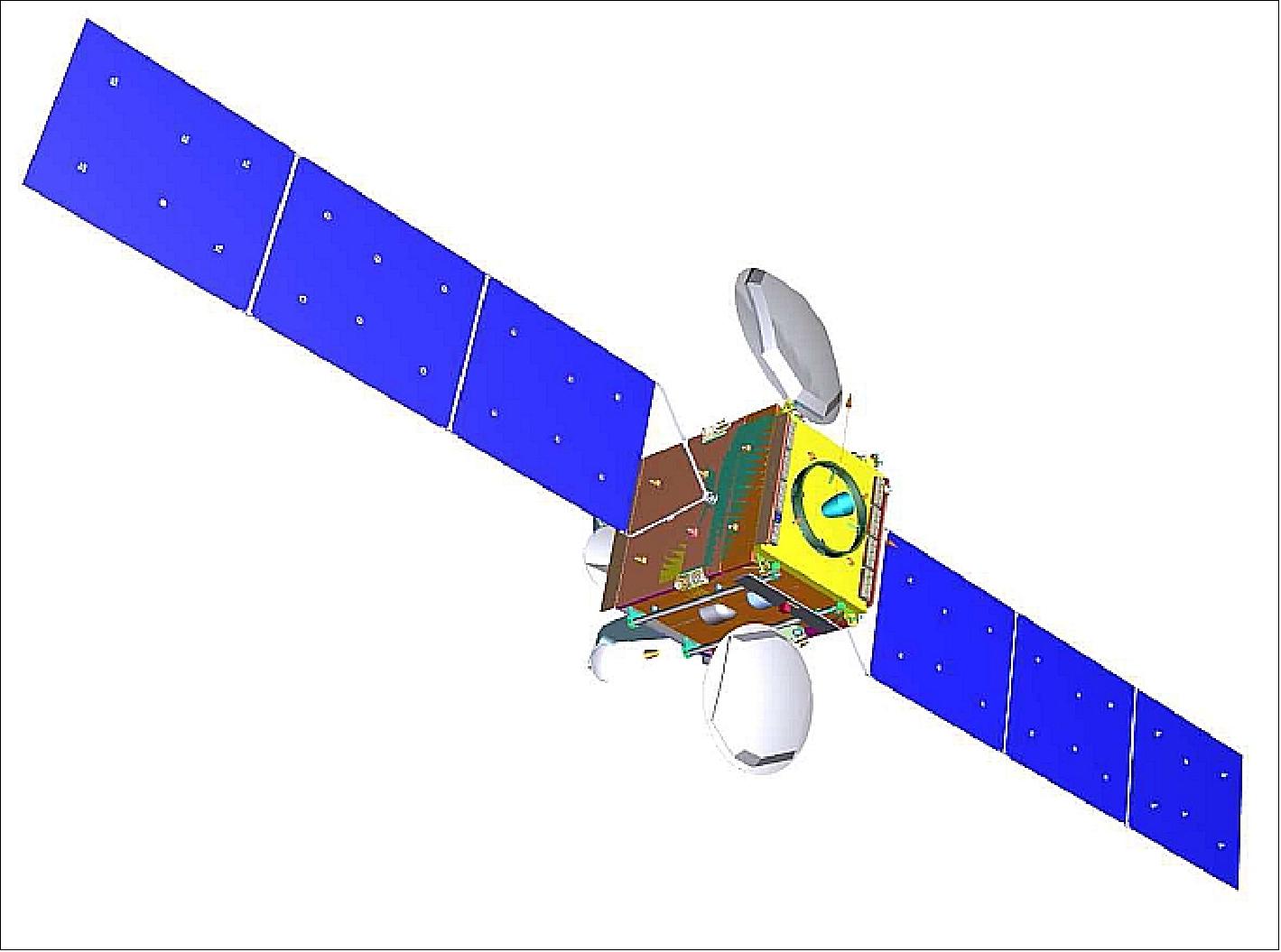
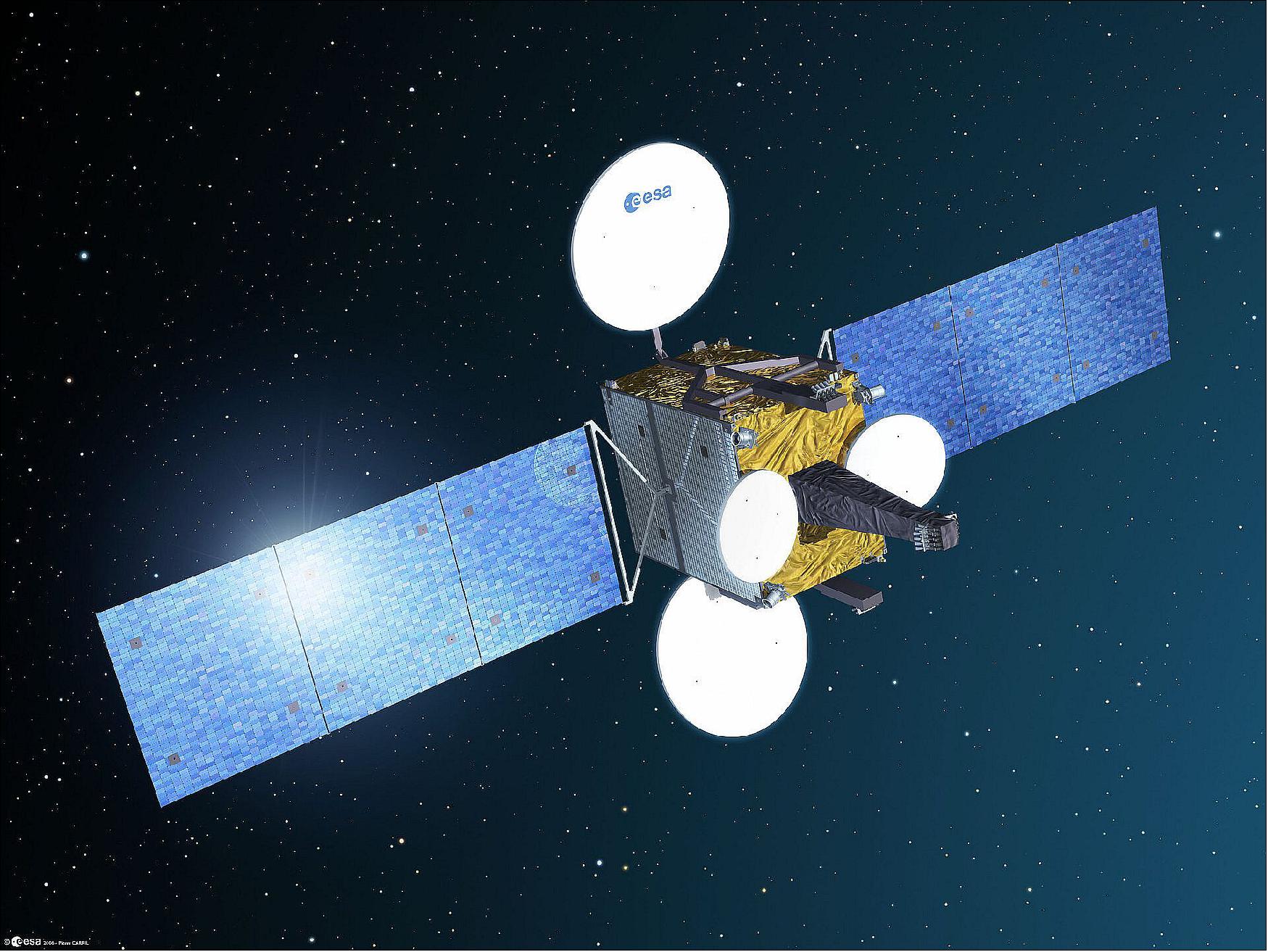
The resulting satellite, Hispasat-AG1 (Advanced Generation satellite 1), will be placed into a geostationary orbit at an altitude of ~36,000 km, where it will supply Spain, Portugal, the Canary Islands and South America with multimedia services. It will serve as an important and distinctive asset in Hispasat’s satellite fleet, delivering:
• A communications capacity of up to 24 transponders in Ku-band and 3 transponders in Ka-band
• A highly innovative REDSAT payload, a project led by Spanish industry. The REDSAT payload will include an active direct radiating array antenna providing four reconfigurable uplink beams in Ku-band and an advanced onboard processor offering four regenerative channels of 36 MHz. The goal is to supply Spain, Portugal, the Canary Islands, and South America with broadband multimedia services.
Development of the REDSAT payload will be led by Thales Alenia Space España, which will coordinate a group of mainly Spanish companies with Thales Alenia Space España TAS-E) being responsible for the OBC (Onboard Computer), and EADS CASA responsible for the reflector and DRA (Dual Receive Antennas).
On Sept. 30, 2011, ESA/TIA (Telecommunications & Integrated Applications) and OHB System AG signed an extension to the contract for development of the SmallGEO geostationary satellite platform. The added features in this extension contract will optimize the SmallGEO platform for a number of different commercial satellite services beyond the Hispasat AG1 mission. 7) 8)
Background
The SGEO bus has been selected as the baseline platform for the EDRS (Data Relay Satellite) of ESA. The contract for the first commercial mission, using the Luxor bus (OHB refers to the commercial version of the SGEO bus as “Luxor”), was signed in November 2008 between ESA and Hispasat S. A. of Spain. In June 2009, OHB-System AG and Hispasat S. A. signed in turn a contract for the manufacture of Hispasat-AG1. Hispasat-AG1, due for launch in 2014, will be the first satellite to use Europe’s new SmallGEO platform, developed through a PPP (Public–Private Partnership) between ESA and Germany’s OHB.
The Hispasat-AG1 satellite includes the advanced communications payload REDSAT that will permit a more efficient use of its power and features. The REDSAT regenerative system is fully compliant with two European standards: DVB-RCS (Digital Video Broadcast-Return Channel Satellite) and the recently issued DVB-S2 (Digital Video Broadcasting-Second Generation). 9) 10)
The Hispasat-AG1 spacecraft will be launched into GTO. A bi-propellant system on-board will provide the injection into geosynchronous orbit. Final orbit transition and placement is however performed with the EP (Electric Propulsion) system. Electric propulsion is then used for all nominal station-keeping and momentum management for the entire lifetime of 15 years (Ref. 14).
Spacecraft
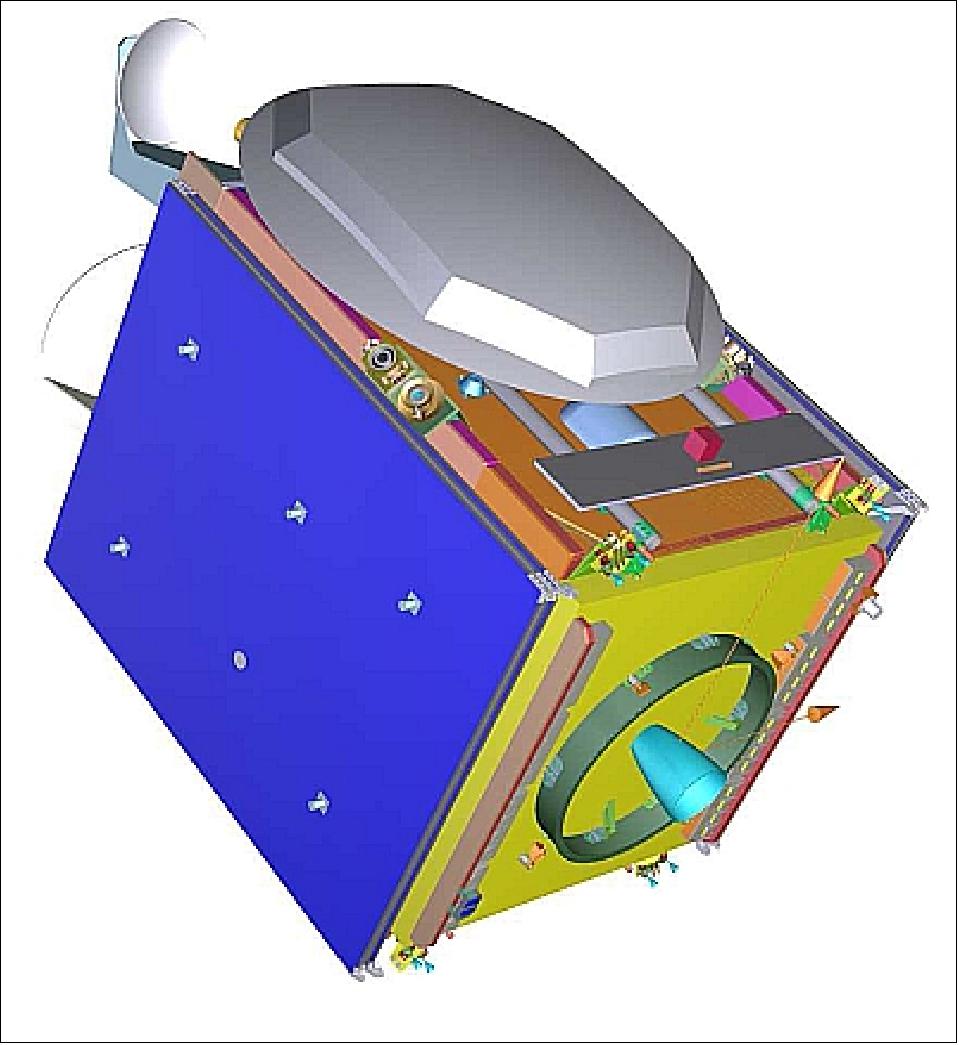
SGEO offers a highly flexible and modular geostationary platform, able to accommodate a wide range of payloads and a fast recurring delivery time of 18 to 24 months. ITAR free subsystems & components based on European technologies are envisaged. The platform design provides the capability for direct injection into a geostationary orbit as well as injection into GTO (Geostationary Transfer Orbit), both configurations offer a high mass efficiency. In the GTO configuration, the platform will have a launch mass of ≤ 3200 kg.
The satellite concept features: 11) 12)
• Electrical propulsion is being used for all stationkeeping functions.
• An AEM (Apogee Engine Module) for GTO transfer with a bipropellant
• All band communication payloads (P, L, S, C, X, Ku, and Ka-band)
• Payload capacity up to 400 kg & 3.5 kW.
• 3-axis stabilization
• Spacecraft 4.5 kW EOL average power
• Platform wet mass < 1700 kg (GEO), < 3200 kg (GTO)
• Mission lifetime of up to 15 years
• Spacecraft dimensions of 2.3 m x 1.9 m x 2.5 m (height)
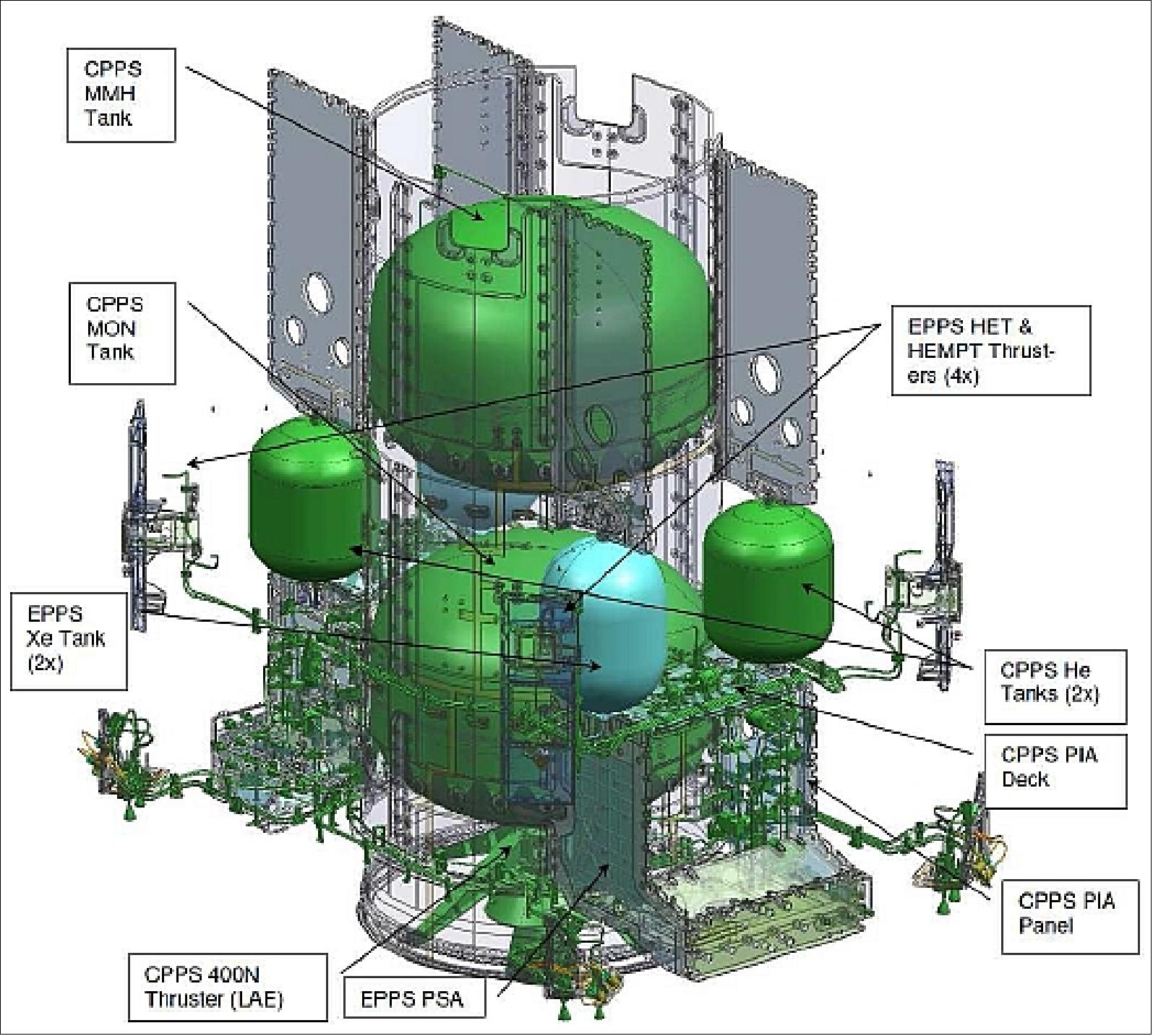
The satellite structure has been designed to be compatible with two different launch scenarios: a direct launch into GEO orbit and a GTO injection with successive transfer phase to GEO. The architecture difference between these two scenarios lies in the implementation of the CPPS (Chemical Propulsion Subsystem)) for GTO transfer. The EPPS (Electrical Propulsion Subsystem) is mainly used for GEO operations; it is based on the combination of the EPTA and the CGTA, both fed with xenon propellant (Ref. 20).
The SGEO platform was born to support mainly telecommunication missions, but its modular structure is flexible to accommodate different types of payloads. The actual configuration can board payload mass up to 400 kg and payload power up to 3.5 kW at end of life. The design lifetime of the platform is 15 years, after this time the satellite will be transferred to a disposal orbit. The payload capacity for SGEO is extended by the innovative electric propulsion subsystem, as well as the possible launch opportunities. Indeed the satellite is compatible with the two launch scenarios of a standard geo-transfer orbit and a direct-to-geosynchronous orbit injection.
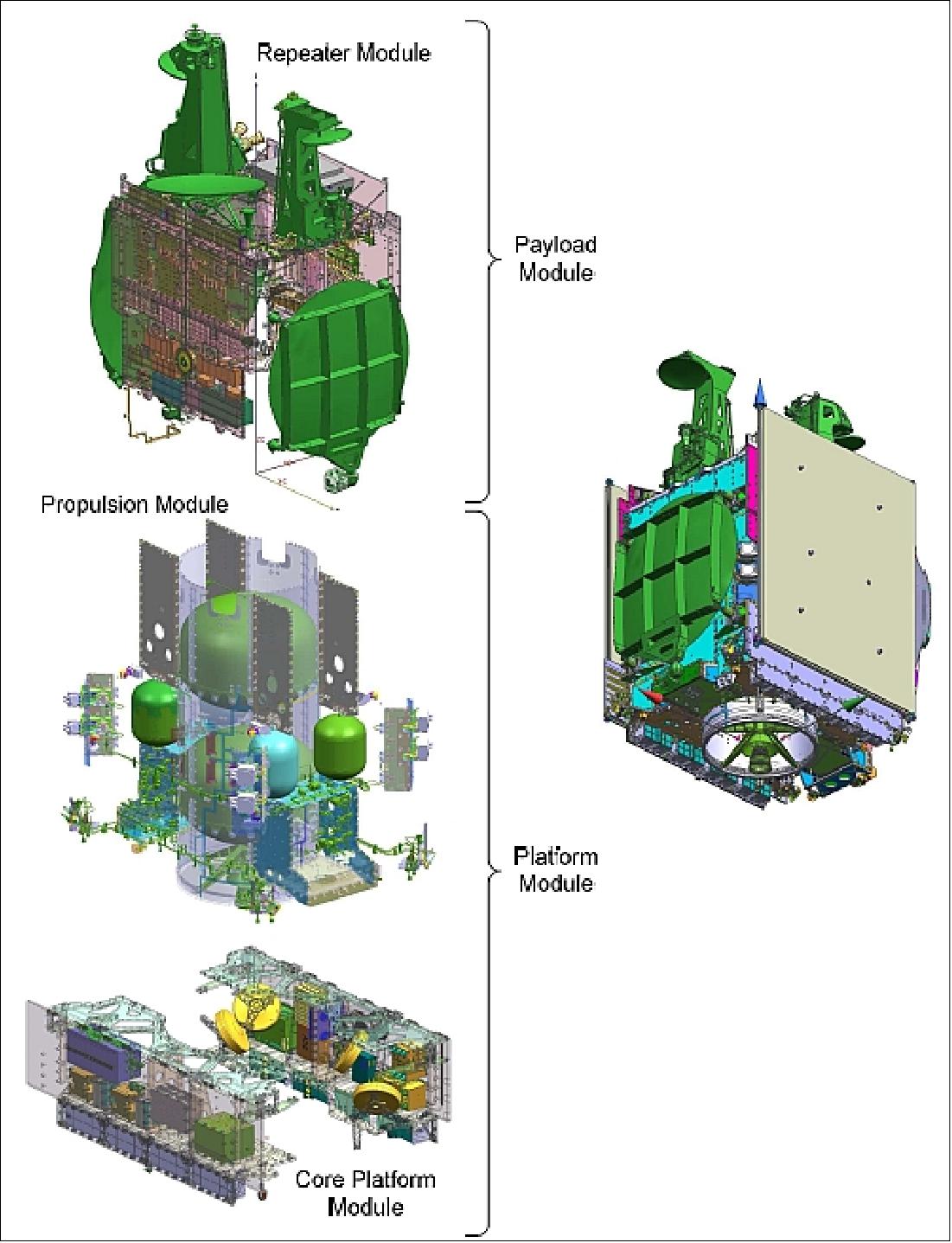
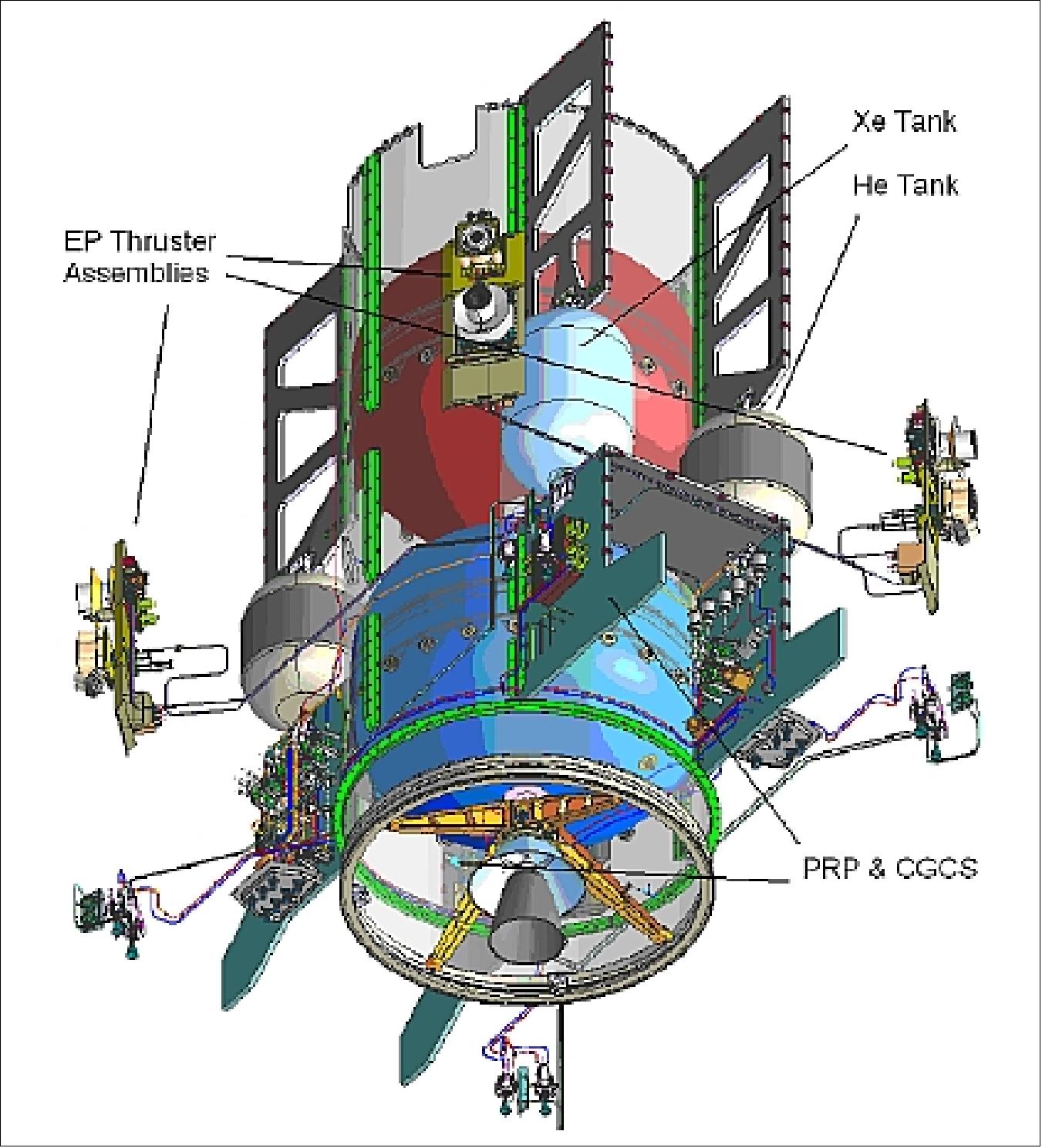
Figure 2 depicts the SGEO modules. The satellite design follows a modular approach: the core platform module, the propulsion module and the repeater module with the antenna assemblies are separately integrated and then mated during the last satellite integration phases.
The payload antennas are deployed from the East and West panels, the boresights are parallel to the positive z-axis (nadir). The y-axis points to South and the x-axis is oriented positive towards the orbital velocity vector. The apogee engine nozzle protrudes from the negative z-axis (zenith) side of the satellite. - The repeater module hosts the payload, manufactured by Tesat.
The central tube is the main structural element; the propulsion module is built around it. The CPPS propellant tanks are installed inside the central tube, while the helium and xenon tanks are symmetrically placed around it and as close as possible to the z-axis in order to minimize the excursion of the center of gravity.
The spacecraft structure, made of aluminum and composite materials in order to minimize the platform weight, develops from the central tube. The core platform module accommodates the electronic units which belong to the satellite subsystems and the reaction wheels. Heat pipes run across the north and south panels to remove the heat dissipated by the units. The batteries are accommodated on the anti-nadir panel.
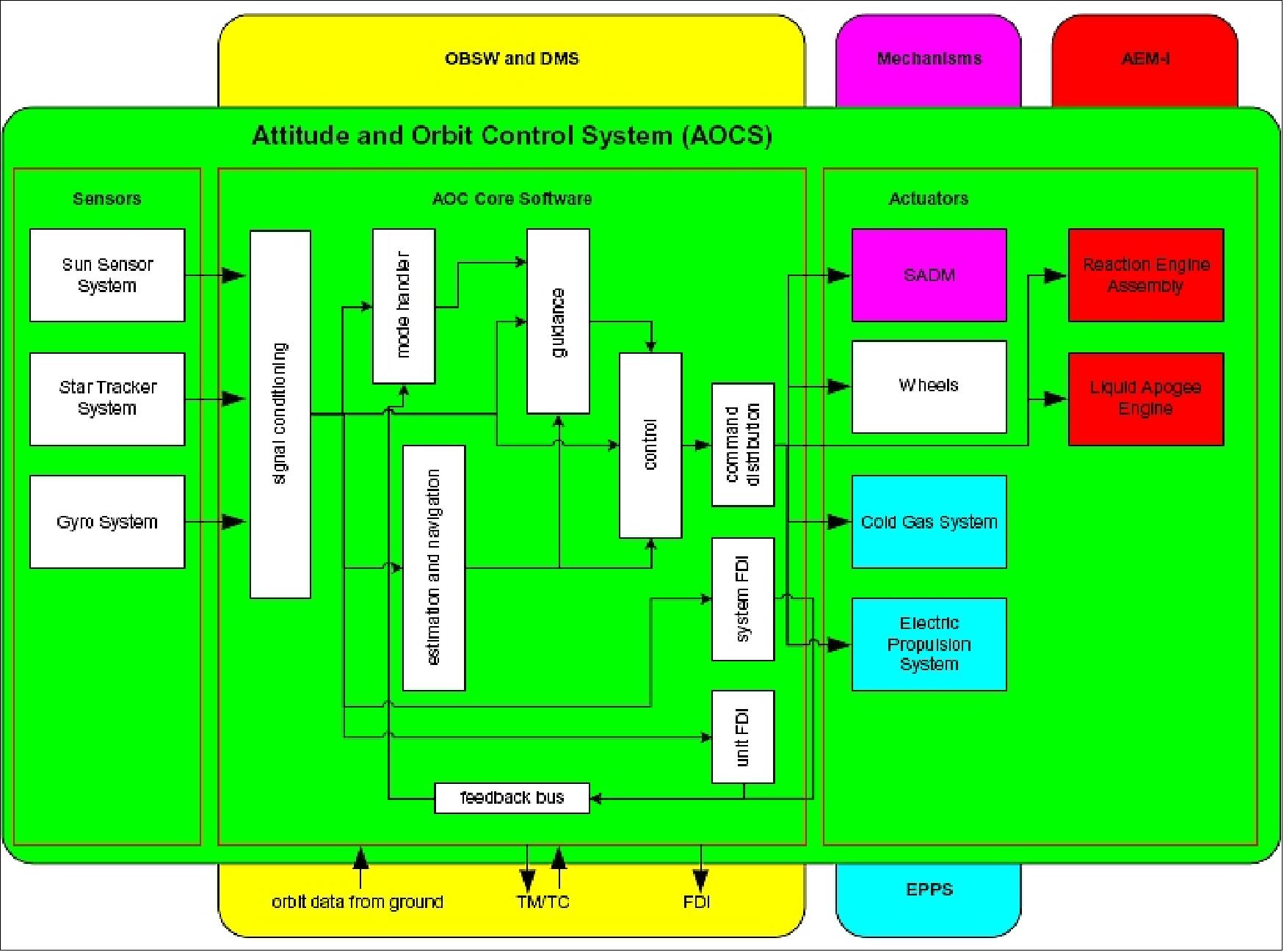
AOCS (Attitude and Orbit Control System)
The AOCS architecture is a three-axis stabilized system using a reaction wheel assembly for attitude control, star trackers for attitude control, and the EPPS (Electric ProPulsion Subsystem) for orbit maintenance. The AOCS design is characterized by a number of advances in technology beyond traditional telecom satellite designs. Perhaps the largest deviation from a traditional design is complete reliance on EPPS for orbit control. Angular momentum management of the reaction wheels relies solely upon EPPS in the nominal modes. The EPPS is not used in the safe modes and therefore a cold gas system is included on-board. The cold gas system is very efficient in terms of mass because it uses Xenon, the same fuel as used by the EPPS. The AOCS and EPPS are supplied by OHB-Sweden. 13) 14) 15) 16)
Another advance is the reliance upon APS-based star trackers. APS (Active Pixel Sensor) star trackers have a number of advantages over their CCD-based cousins in terms of robustness. As backup as well as for failure detection and for GTO, medium performance gyros are being used. The traditional fine sun sensor is simplified to a fault tolerant system of solar cells with 4π steradian coverage giving low, but more than adequate, accuracy.
The AOCS commands the following actuation devices based upon inputs from the following sensors: SPS (Sun Presence Sensors), GYR (gyros), and ST (Star Trackers).
- RWA (Reaction Wheel Assembly)
- Cold gas thrusters (XREA)
- EPPS (Electric ProPulsion Subsystem)
- Vernier thrusters (VREA)
- LAE (Liquid Apogee Engine)
- SADM (Solar Array Drive Mechanism)
Sun sensor
The chosen sun sensor is supplied by Bradford Engineering. It has redundant detection elements each with a near hemispherical field of view. The outputs approach a cosine function of the angle of incidence of the sunlight onto the detection elements. For this reason the redundant device is named CoSS (Cosine Sun Sensor). The design exploits the extensive heritage of dual chip devices used by TNO in its Sun Acquisition Sensor flying in a variety of space programs.
Gyrometer
The baseline gyrometer is the Honeywell MIMU. Two units are used in cold redundancy. The gyro should support the Safe modes. Its reliability is not high enough to ensure continuous operation during the whole 15-year long mission, but its performance is good enough to enable bridging of ST outages, up to 10 minutes, even at start-up. The gyro is also used as a support to the ST measurements during more demanding mission phases (GTO transfer, platform commissioning, station acquisition, orbit relocation and graveyard orbit insertion).
Star Tracker
The ASTRO-APS of Jena-Optronik system of redundant star trackers has been selected by the project. The STAR1000 detectors (Cypress) of the ASTRO-APS device represent the most radiation hard CMOS APS (Active Pixel Sensor) on the market. The APS technology provides an individual readout scheme for each pixel, thereby avoiding “blooming” of charge over to neighboring pixels. This improves performance with bright objects in the field of view, e.g. the moon. The centroid calculations are done on the same integrated circuit resulting in tracking rates, e.g. 10 Hz, that are much faster than CCD-based star trackers. Built-in software algorithms automatically identify and compensate for anomalies such as white spots. A Peltier cooler is included. The star sensor is a single unit with camera head, electronics, and a shorter baffle than on CCD-based star trackers. 17)

GNSS receiver experiment
SGEO will carry a GNSS receiver as an experiment onboard. The experiment will demonstrate in orbit the feasibility to use GPS signals in 36.000 km altitude for satellite position determination. Use of the Mosaic GPS receiver of Astrium. The device has a mass of 3.9 kg, a power consumption of 10 W, and a size of 272 mm x 284 mm x 92 mm. The expected accuracy in GEO is 150 m (3σ). 18)
EPS (Electrical Power Subsystem)
The SGEO solar array is provided by Astrium GmbH and is mechanically composed of fully qualified and flight proven EuroStar-3000 & Alphabus equipment and components. The electrical components are qualified in the frame of E2000+, ARTES 3 EuroStar-3000 second generation (SG), Alphabus and Galileo. The generic SGEO solar array is based on panels of size of 2730 mm (length) x 2216 mm (width). All panels of the solar array are equipped with 3G triple junction solar cells with integrated bypass diode. 19)
The EPS is based on a 50 V regulated main bus powered by GaAs triple-junction solar cells disposed on six steerable solar panels. The 9 m solar arrays are deployed after orbit acquisition. The main bus is capable to distribute more than 6.5 kW power at BOL to the spacecraft, roughly divided in 4.1 kW to the payload and 2.4 kW to the platform in nominal mode. At EOL, the payload available power reduces to 3.5 kW including margins.
SGEO propulsion systems
The architecture of SGEO has been designed to account for a direct GEO injection or a GTO injection. The sole difference between the launch types lies in the implementation of a chemical propulsion system for GTO transfer. 20)
SGEO is a hybrid version where the spacecraft will rely on the Electric Propulsion Subsystem (EPPS) for all routine propulsive tasks once in GEO (Geostationary Orbit) after orbit raising with chemical propulsion. The orbital maneuvers include station acquisition; station keeping for a service life of 15 years; momentum management during GEO mission using reaction wheels; intermediate repositioning, if required; and transfer to graveyard orbit at end of life. 21)
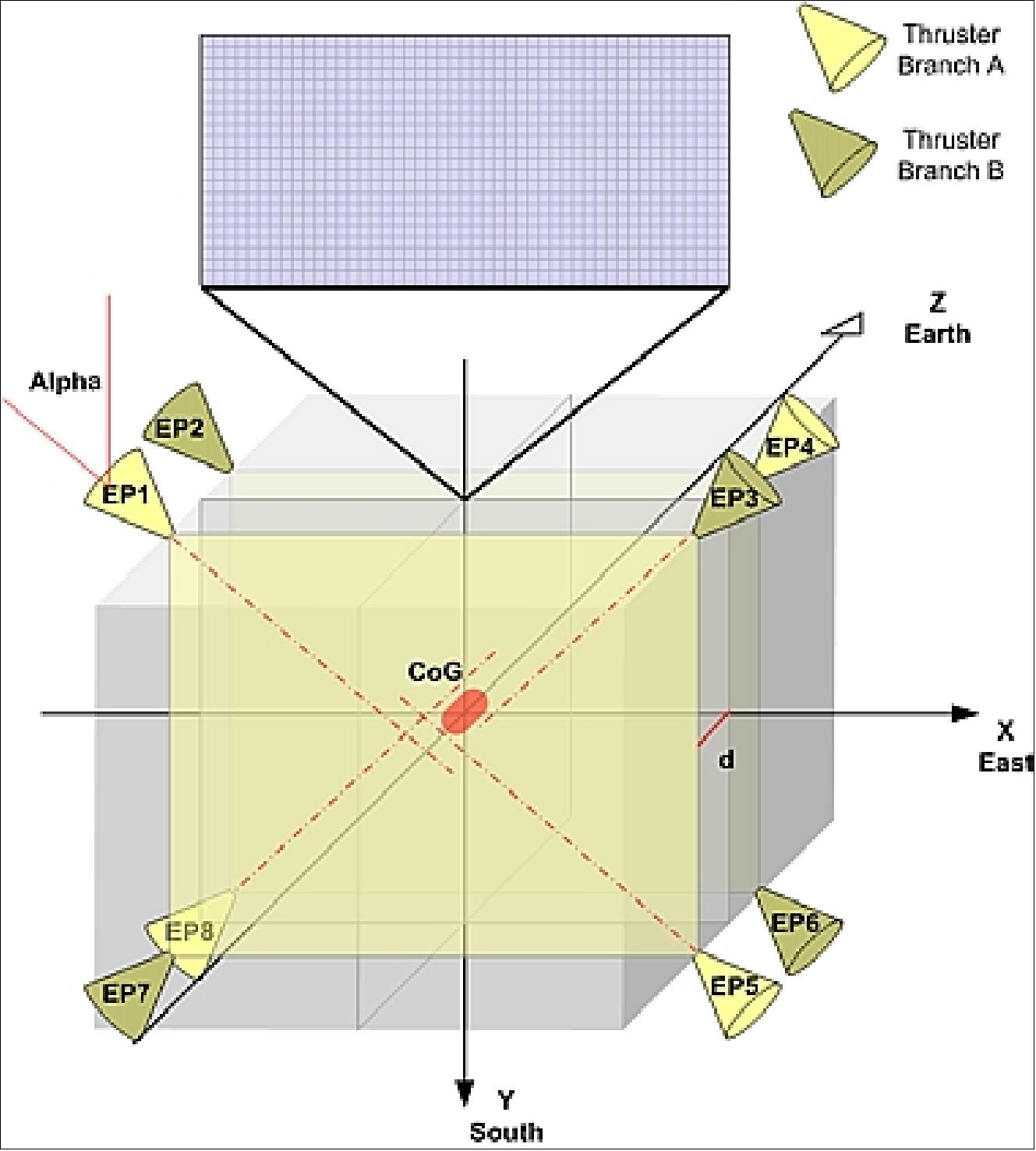
For this purpose, the EPPS baselined on the SGEO platform comprises two independent (redundant) branches of four thruster units each, where the eight thrusters are hard-mounted onto the satellite walls, with no thrust pointing mechanism. This is in similar fashion, for example, to the Russian GALS, Express, Sesat, Kazsat, and Yamal family of telecommunications satellites.
The propulsion systems (Figure 8) of the SGEO platform consist of: 22) 23) 24)
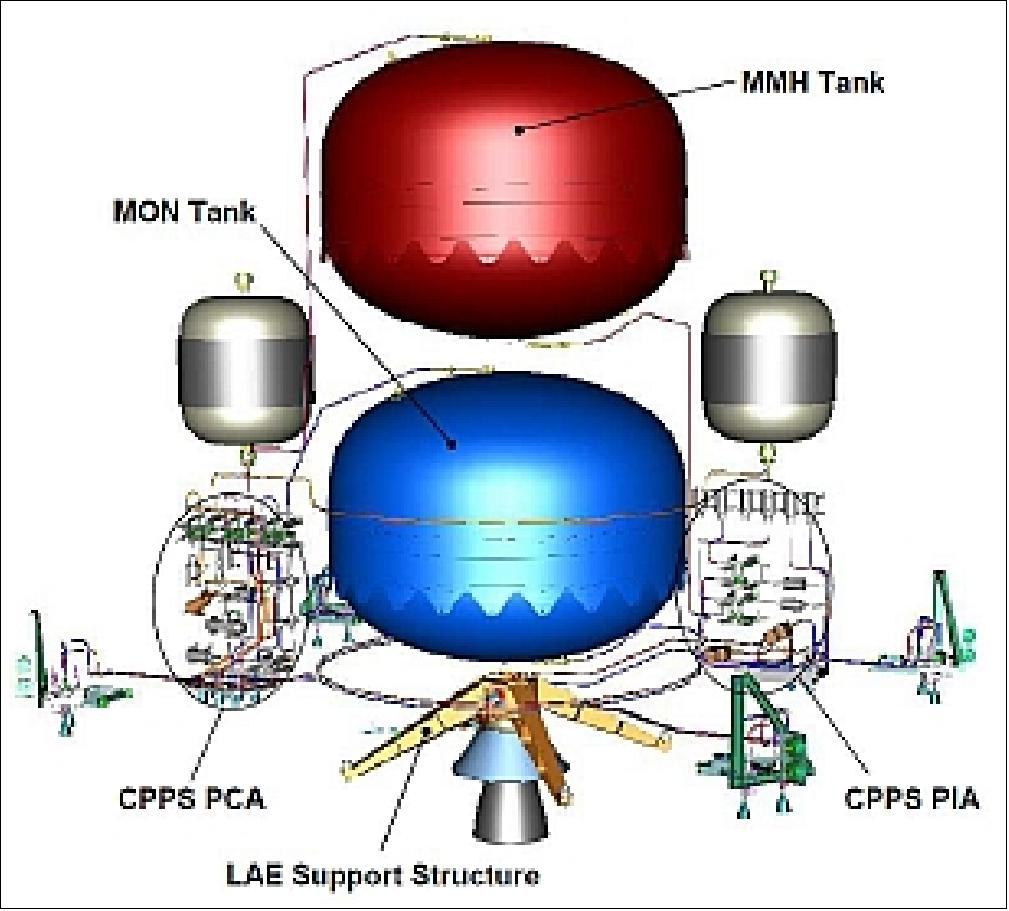
• CPPS (Chemical ProPulsion System): A bipropellant MMH/NTO (Mono-Methyl Hydrazine / Nitrogen and Tetroxide) system for GTO-GEO insertion. CPPS consists of one 400 N LAE (Liquid Apogee Engine) and 4 main + 4 redundant reaction control (RCT) 10 N bipropellant thrusters for the stabilization of the satellite during transfer. The CPPS is only used for orbit transfer from GTO to GEO, nominally with four LAE burns of varying length. The Vernier thrusters are used for attitude control before, during, and after the LAE burn. In case of LAE failure, the subsystem is dimensioned for transfer with Vernier thrusters only. Upon successful transfer, the subsystem can be passivated with two opposing vents.
• Two different EPPS (Electric Propulsion Systems) for GEO orbital maneuvers
• A Xenon cold gas system for detumbling and safe mode operations, referred to as CGTA (Cold Gas Thruster Assembly). The EPPS includes in addition eight fixed Cold Gas thrusters, operating with a common Xenon supply.
EPPS (Electric ProPulsion Subsystem)
EPPS is being developed at OHB Sweden (EPPS is based on the Smart-1 mission heritage): The objective of the EPPS is to perform all on-orbit maneuvers (stationkeeping, intermediate repositioning, transfer to graveyard orbit) including momentum management during all phases except for the transfer from GTO to GEO. 25) 26) 27)
EPPS is a fully redundant system consisting of two branches with 4 EPPS thrusters each is used. The thruster layout as illustrated in Figure 10 is chosen such that the center of mass (CoM) movement during the lifetime is bounded by the eight thrust vectors, with an additional margin to ensure that torques can always be generated for wheel unloading.
The EPPS consists of the following subassemblies:
- XTA (Xenon Tank Assembly). XTA consists of two 60 liter composite-overwrapped titanium liner tanks. Each tank will house 110 kg of Xenon at 186 bar.
- PSA (Pressure Supply Assembly). The primary function of the PSA is to decrease the Xenon storage pressure to the operational pressure range required both by the EP thrusters and the cold gas thrusters. 28)
- CGTA (Cold Gas Thruster Assembly). The CGTA is used for initial de-tumbling after separation from the launch vehicle and for safe mode. The two groups of EPPS thrusters are powered by a separate electronic unit (PPU/TSU), which allows to operate any of the four thrusters within its group as commanded by the AOCS.
- EPTA (Electric Propulsion Thruster Assembly). The EPTA and the CGTA will be fed with Xenon stored in two tanks by the same propellant supply assembly. Its main function is to decrease the Xenon pressure from the main inlet tank pressure (150 bar BOL) down to a regulated pressure of 2.2 bar at the outlet. The Xe flow rate to each EPPS thruster is regulated by the XFC (Xe Flow Control) unit.
The EPTA includes two EP types. Four fixed HEMPT (High Efficiency Multistage Plasma Thruster) and the PSCU compose the nominal (EPTA1) branch, while the redundant branch (EPTA2) contains four SPT-100, the PPU, the ETSU and FUs. The XTA and the PSA are shared with the CGTA.
The high pressure of the xenon contained in the XTA is decreased to the values required by the thrusters via the PSA. The PSA provides pressure regulation and a central distribution system to multiple thruster branches; it consists of the fluidic hardware (PRP) produced by IberEspacio and the electronic control unit (SCE) provided by Crisa Astrium. The actual design reduces the propellant pressure from 186 bar (BOL) to 2.2±0.11 bar at the output. The PSA is designed around a bang-bang regulator mechanism to fulfill the different mass flow rate requirements of the propulsion assemblies. The architecture is similar to the one used on SMART-1.
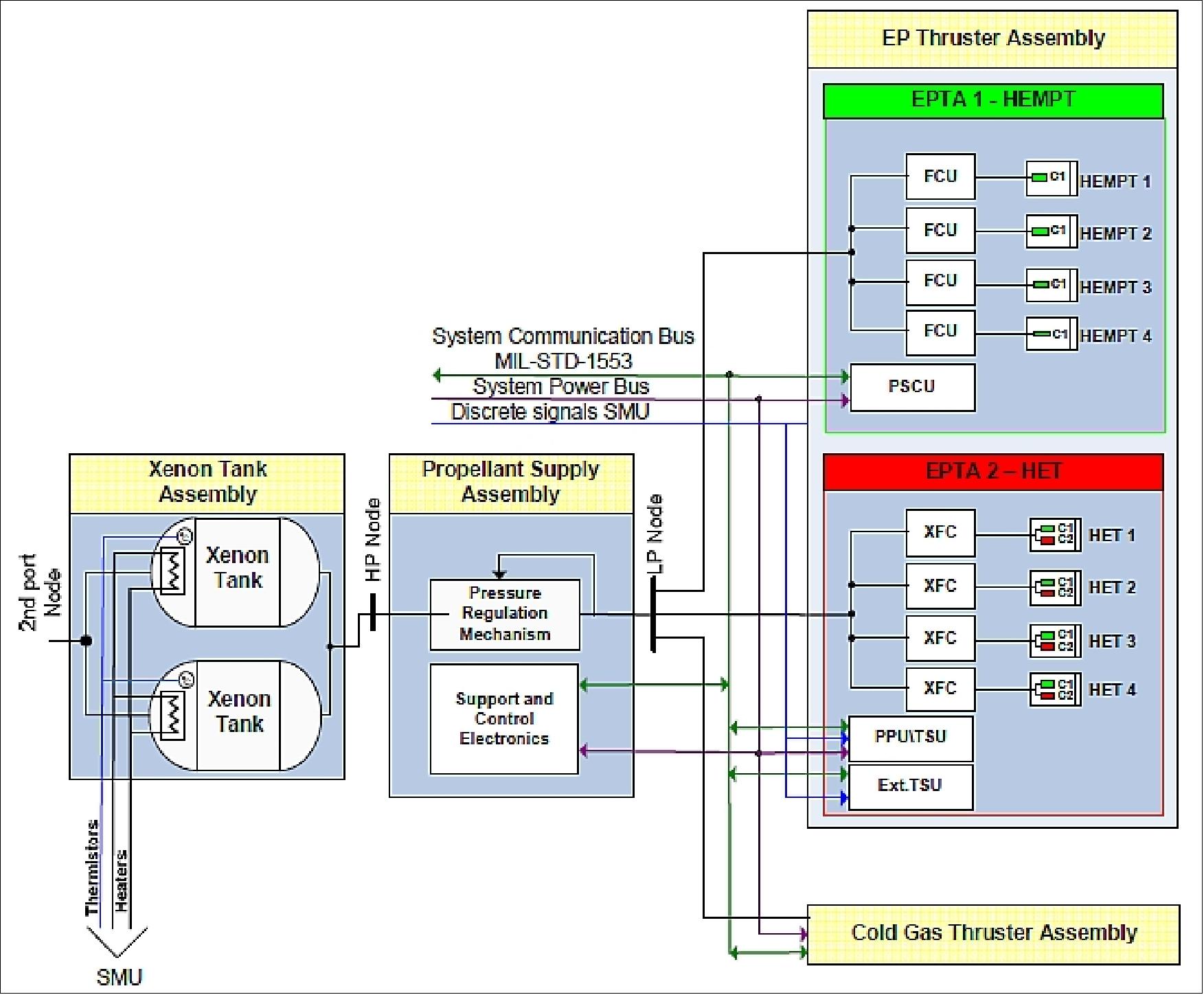
The thrusters are mounted in pairs as depicted in the Figure 10 with thrust directions symmetrically oriented around the nadir vector. In nominal SK (Station Keeping) operations, each thruster has thrust vector components in the directions orthogonal to the orbital plane and tangential to the satellite velocity vector in inertial space.
The HET (Hall Effect Thruster) assembly is procured from Snecma (France) and consists of four flight proven SPT-100 thruster modules including XFC (Xe Flow Controller) and two cathodes, one PPU (Power Processing Unit) and one ETSU (External Thruster Switching Unit). The PPU includes an internal TSU (Thruster Switching Unit) allowing the selection of two thrusters. In order to switch between four thrusters, the ETSU has been added. The HET features for SGEO are:
- Thrust: > 75 mN
- Average Isp: > 1500 s EOL
- Operational duration: < 3000 h
- Cycles: < 6500
- PPU input power: < 1600 W.
HEMPT (High Efficiency Multistage Plasma Thruster)
THALES Electronic Systems (TES) of Ulm, Germany is developing and qualifying a novel type of ion propulsion system based on HEMPT technology in the course of DLR’s HEMPTIS project (HEMPT In-Orbit Verification on SmallGEO). The EPTA1 is based on the HEMPT assembly and is intended for being integrated on OHB’s SmallGEO satellite platform to perform attitude and orbit control maneuvers. 29) 30) 31) 32) 33) 34) 35)
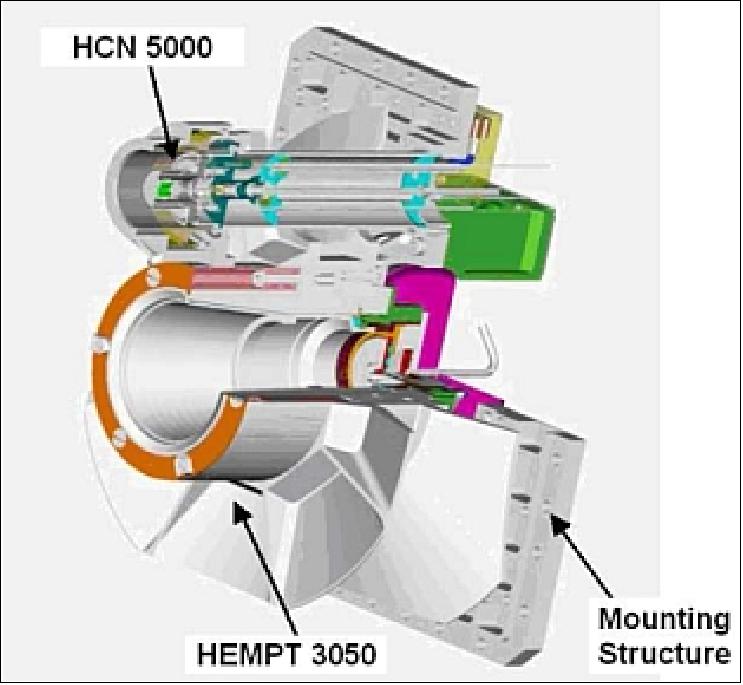
The HEMPT assembly consists of four HTM (HEMP Thruster Modules), including 4 XFC (Xenon Flow Controller) and neutralizers, and a single PSCU (Power Supply and Control Unit) developed by Astrium (Germany). The PSCU supplies the HEMPT modules with electric power and controls their operation. Each of the HEMPT modules integrates a HEMPT 3050 ion thruster, an HCN 5000 (Hollow Cathode Neutralizer) and a FCU (Flow Control Unit) which doses the Xenon propellant into the thruster.The FCU is produced by Bradford MOOG. The particular positioning of the four HEMPT modules on SmallGEO allows for all necessary position correction maneuvers in GEO and for momentum wheel off-loading, respectively.
The HEMPT 3050 is a new thruster design and is currently under development at TES. The thruster has successfully passed the PDR and EM units are undergoing endurance tests. The development program of the HEMPT foresees the full qualification before its integration on the SGEO platform and a full dual lifetime test before the launch of the satellite. 36)
The HEMPT performance parameters for SGEO are:
- Nominal Thrust: ≥ 44 mN
- Average Isp: > 2500 s EOL
- Operational duration: < 4800 h
- Cycles: < 6500
- PSCU Input Power: < 1600 W.
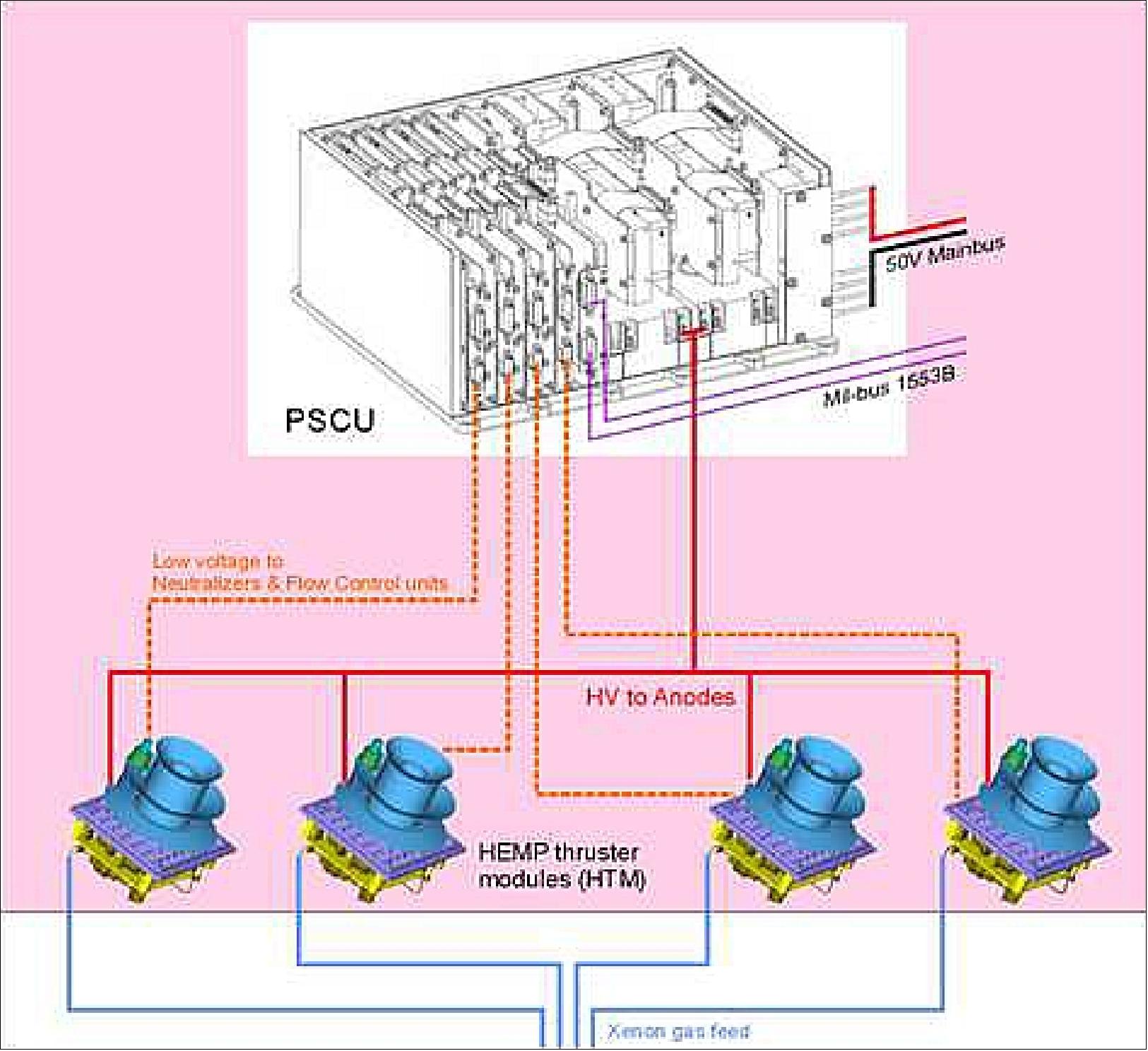
Legend to Figure 11: The 4 HEMPT modules and the PSCU are shown as 3D drawings, the electrical and propellant harness are indicated schematically as orange/red and blue lines, respectively.
The HEMPT is based on a particular magnetic confinement of the Xenon propellant discharge which at the same time allows for efficient propellant ionization and ion acceleration. Besides its performance the HEMPT exhibits the unique feature of negligible thruster erosion and therefore shows excellent long-life capabilities. In addition, the HEMPT design concept and operational characteristics enable ion propulsion system architecture with minimum complexity and thus high reliability and cost efficiency.
Flight hardware status: Manufacturing of HTM FM1.4 has been accomplished. The PSCU manufacturing has also been completed (Ref. 32).
CPPS (Chemical Propulsion System)
CPPS is provided by AVIO as system prime and is composed of a well proven EADS S400 – 12 LAE (Liquid Apogee Engine) and 4 main and 4 redundant well proven EADS S 10-18 RCT (Reaction Control Thrusters). The main performance parameters of the LAE and RCTs are:
- LAE thrust: 420 N, Isp: 318 s
- RCT thrust 10N, Isp > 287 s.
The propellant is stored in two 700 liter propellant tanks allocated inside the central CFRP tube. The CPPS carries up to roughly 1300 kg and is capable to provide the nominal delta V of 1500 m/s for GTO to GEO insertion. The GTO sequence depends on the chosen launcher but is expected to be performed with 3-4 burns. At the end of the orbit insertion into GEO and before the station acquisition, the pressurant section is passivated and only the electric propulsion systems and the Xe cold gas thrusters are then used for all orbital maneuvers including end of life disposal.
The SGEO satellite can recover the transfer GTO – GEO phase in case of the LAE failure. In this contingency event the CPPS will utilize all 8 RCT thrusters and the electric propulsion system. Around 90% of the required total impulse will be provided by the RCTs and the remaining 10% will be delivered with the electric propulsion system.
CGTA (Cold Gas Thruster Assembly)
The CGTA, a subsystem of the EPPS, and developed and manufactured by TAS-I (Thales Alenia Space-Italia), consists of the following elements: 37)
- CGCS (Cold Gas Conditioning System)
- 4 main + 4 redundant Thrusters Units (TV). The TV functions are to provide: a) the thrust according to a calibrated relationship vs. inlet pressure with the required accuracy and fast time response, and b) thruster closure of the nozzle throat with very low leakage.
- ADE (Actuator Drive Electronics)
- Piping and harness.
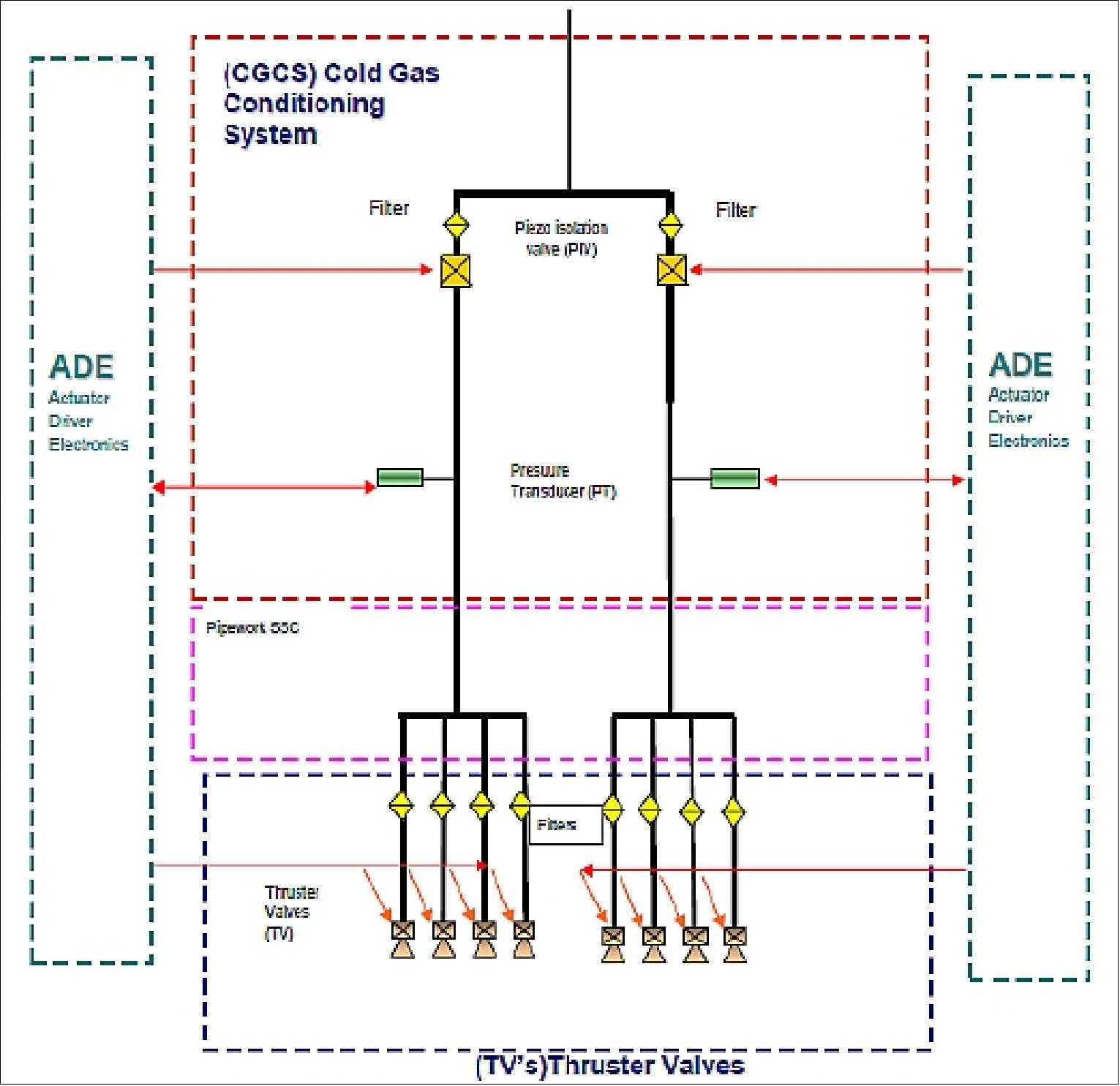
The function of the CGTA is to provide reaction control torques to the spacecraft for the detumbling after separation from the launch vehicle and momentum management of sun pointing in Safe mode. For these tasks the total required Xenon budget over the life is in the order of 5 kg. As Xenon is already available on the platform from the EPPS, Xenon cold gas was preferred compared to an additional Nitrogen cold gas system.
The size of the thrusters guarantee a minimum thrust of 50 mN and an Isp higher than 25 s over the life. The thrust is generated by an on-off command of a pressurized piezo thruster (nozzle) valves which are driven by a dedicated redundant electronic (ADE) The ADE provides TM/TC interface, power interface with the S/C, monitor the pressure sensors inside the CGCS, and actuates all the valves.
General | |
Launcher compatibility | For GTO injection: Ariane 5, Proton, Land Launch, Sea Launch, Falcon 9. |
Satellite lifetime | 15 year design after IOT (In Orbit Test), >15 year maneuver life |
Satellite mass (incl. margins) | Wet ≤ 3200 kg |
Power consumption | < 5000 W (BOL) and 4500 W (EOL) without EPPS operation in GEO |
Eclipse capability | 100 % payload operation; battery max. 75% EOL |
Satellite platform size | 2.26 m x 1.9 m x 2.53 m |
Payload | |
Repeater subsystem | - Transparent Ku-band repeater with 24 (BOL) / 20 (EOL) simultaneously operating transponders at saturation |
Antenna subsystem | - 2 Ku-band receive/transmit reflector antennas. |
Continuous, effective P/L power | < 3500 W (EOL) |
Total payload mass | 400 kg |
TT&R (Telemetry, Telecommand & Ranging) | |
Frequency (receive/transmit) | Ku-band |
TT&R antennas | LEOP, contingency: near-omni directional antennas. |
Secure communication | Authentication for TC, no encryption in TM or TC |
Propulsion Subsystem | |
On-station | Electrical propulsion and cold gas |
GTO transfer | Chemical bipropellant MMH/ MON |
EPS (Electrical Power Subsystem) | |
Bus voltage | Regulated 50 Vdc ± 0.5% |
Energy storage | Li-ion technology |
Solar array (2 wings) | Triple-junction GaAs solar cells |
AOCS (Attitude and Orbit Control System) | |
Stabilization | 3-axis stabilized |
Station keeping accuracy | Better than ±0.05º North-South/East-West |
Antenna pointing accuracy | < 0.1º (3σ) half cone |
Command & Data Handling | |
Data bus | MIL-Standard-1553B |
Flight processor | LEON II – FT |
Launch
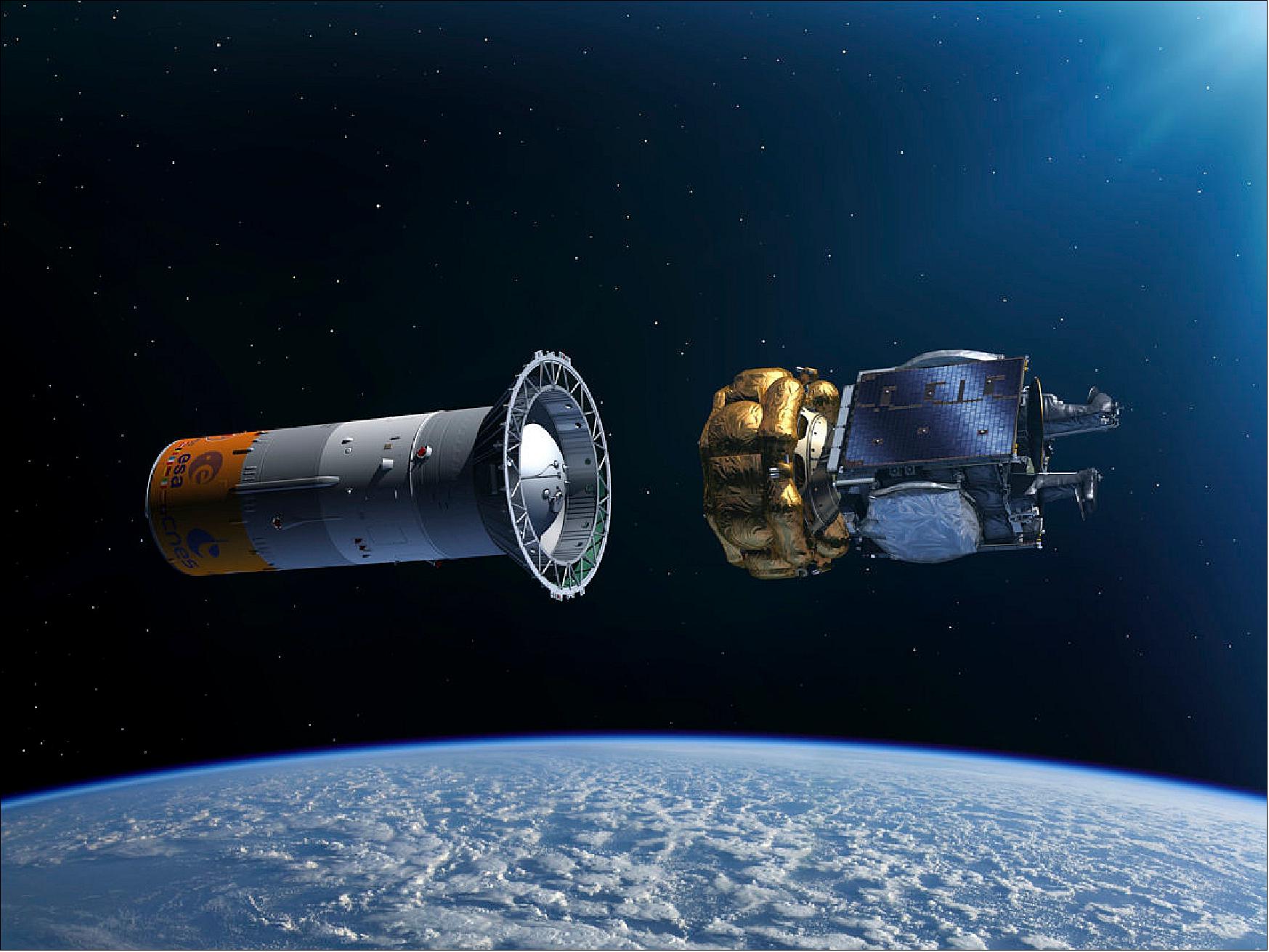
The first SmallGEO platform, known as Hispasat AG1 (Advanced Generation 1), was launched on January 28, 2017 (01:03:34 UTC) on board a Soyuz ST-B / Fregat-MT (VS16) vehicle from Kourou. The Hispasat AG1 mission is also designated Hispasat 36W-1, a Spanish communications satellite which will be part of the Hispasat fleet to serve Spain, Portugal and the Americas. 44) 45)
The 3200 kg satellite was released by Soyuz into its GTO (Geosynchronous Transfer Orbit) 29 minutes after liftoff. This was the first mission wherein Arianespace’s medium-lift Soyuz has performed for a GTO deployment while operating from the Spaceport. Hispasat AG1 will now use its own thrusters to make its way to its final destination over the course of the next few weeks. OHB will test the satellite’s health and performance, making sure the sensitive technology made it unscathed through the violence of the launch. After all is deemed well, they will hand the control over to Hispasat and the satellite will begin providing broadband services to Europe, South America and the Canary Islands. 46)
Orbit: Geostationary orbit, altitude ~ 35786 km, longitude = 36º W.
Mission status
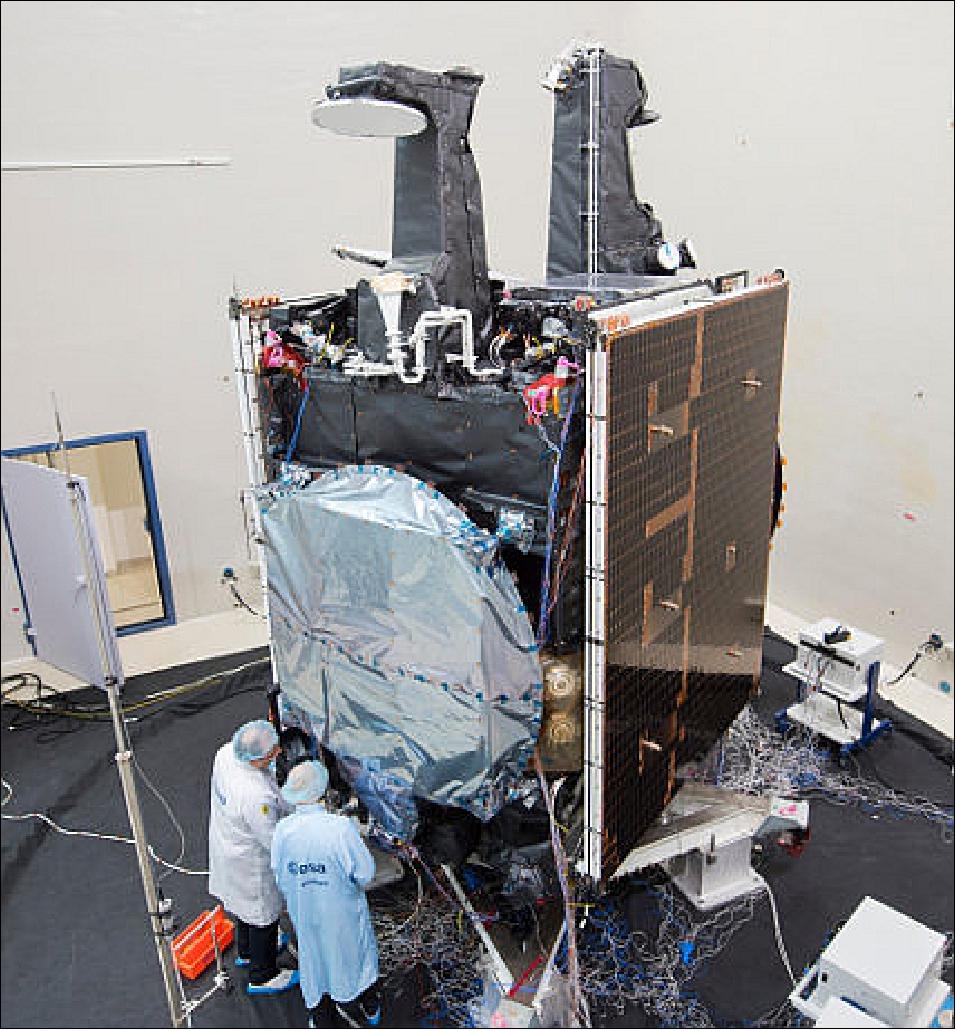
- December 1, 2016: The first telecom satellite built using the SmallGEO platform arrived in Kourou today after completing its final tests at IABG in Germany. It will now start being prepared for launch on a Soyuz rocket in January 2017. 38)
- Andrea Cotellessa, ESA’s project manager, noted: “This shipment marks the end of a development that started almost eight years ago. Hispasat 36W-1 is now ready to fly and we are quite impatient to deliver it to orbit, where our partner Hispasat will operate it for the next 15 years.”
- SmallGEO was designed and built by OHB System AG, as was the three-ton Hispasat 36W-1, the newest satellite developed for the world leader in Spanish and Portuguese broadcasting, Hispasat.
- Hispasat 36W-1 carries several new technologies. In addition to a conventional commercial payload of 20 Ku-band transponders, it also sports three Ka-band transponders developed by TESAT Spacecom under funding from DLR (German Aerospace Center).
- It also boasts a new-generation ‘active antenna’, which receives and reconfigures radio frequency beams over the visible Earth disc. Along with its onboard processor, this REDSAT payload will allow Hispasat to provide more flexible multimedia and broadcasting services over Europe, the Canary Islands and South America.
- Both the SmallGEO platform and Hispasat 36W-1 mission were developed under ESA’s ARTES (Advanced Research in Telecommunications Systems) program that transforms research and development investments into commercial products. This helps to secure the futures of Europe and Canada in the worldwide satcom market.

- Dec. 1, 2016: Telecommunications satellite H36W-1 of Bremen satellite manufacturer OHB has arrived at Europe’s Spaceport in Kourou, French Guiana. The overall design of the satellite belonging to the SmallGEO series) was verified during an extensive test campaign. 39)
- “The completion of our first geostationary communications satellite is an important milestone in the history of our company”, says Marco R. Fuchs, CEO of OHB System AG, and adds: “This will spur on our other SmallGEO projects, EDRS-C, Electra and Heinrich Hertz”.
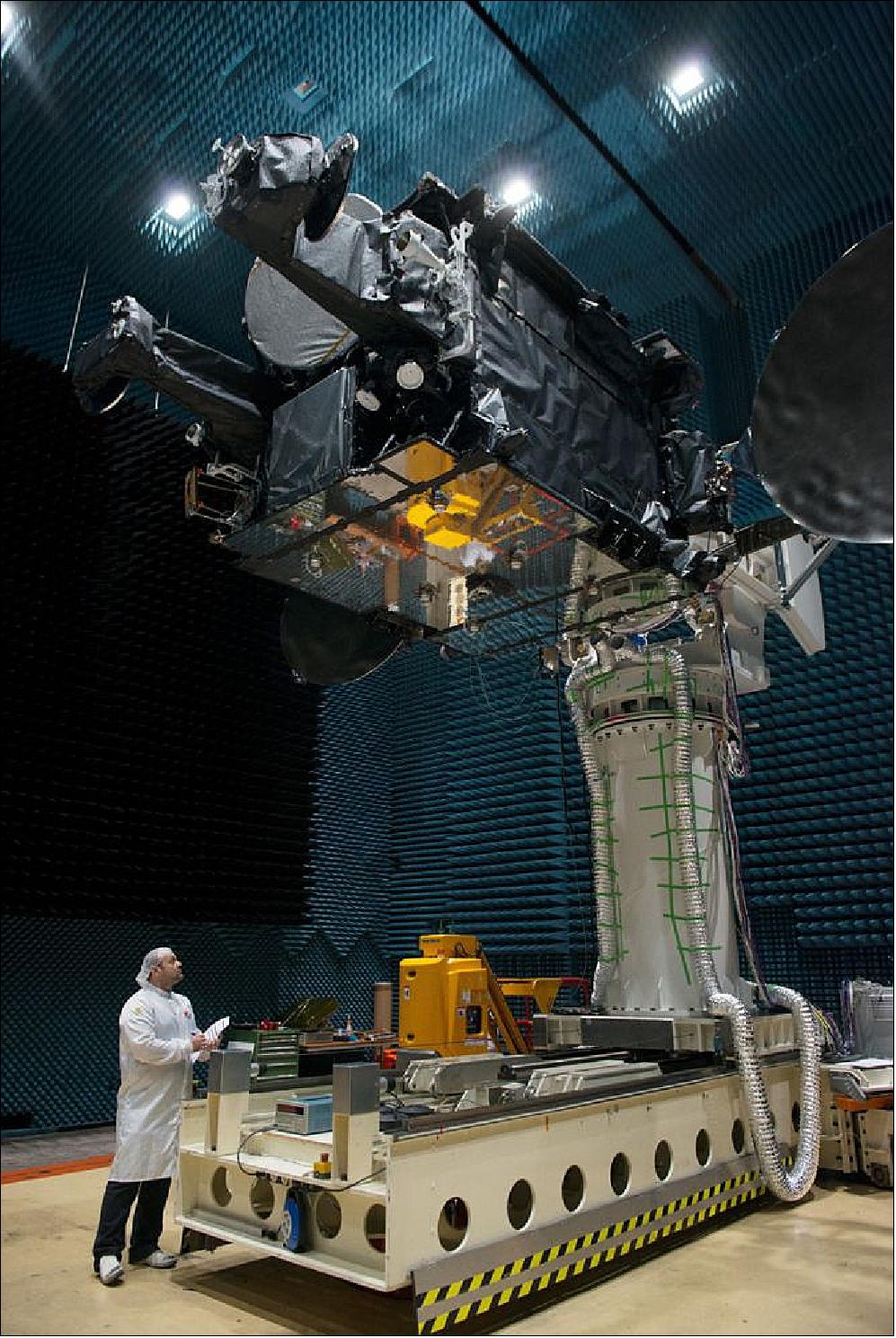
- January 15, 2016: The Hispasat AG1 satellite has successfully completed the first step of the environmental test campaign. The spacecraft, in a fully representative flight configuration, has been exposed to a combination of sine vibrations and acoustic noise mechanical loads to demonstrate with the required margins that it will be able to handle safely the stresses it will experience during its ride towards its orbital destination on the Ariane-5 launcher. 40)
- This test follows the successful completion of the previous satellite test phase, with checks on the electrical performance of the platform and the payload, the integration of the solar arrays and deployable reflectors, and the loading of fuel in the propellant tanks.
- The Hispasat AG1 team will continue its ground test program to complete the design and performance verification prior to the shipment to the European Spaceport in Kourou, French Guiana, for the launch campaign.
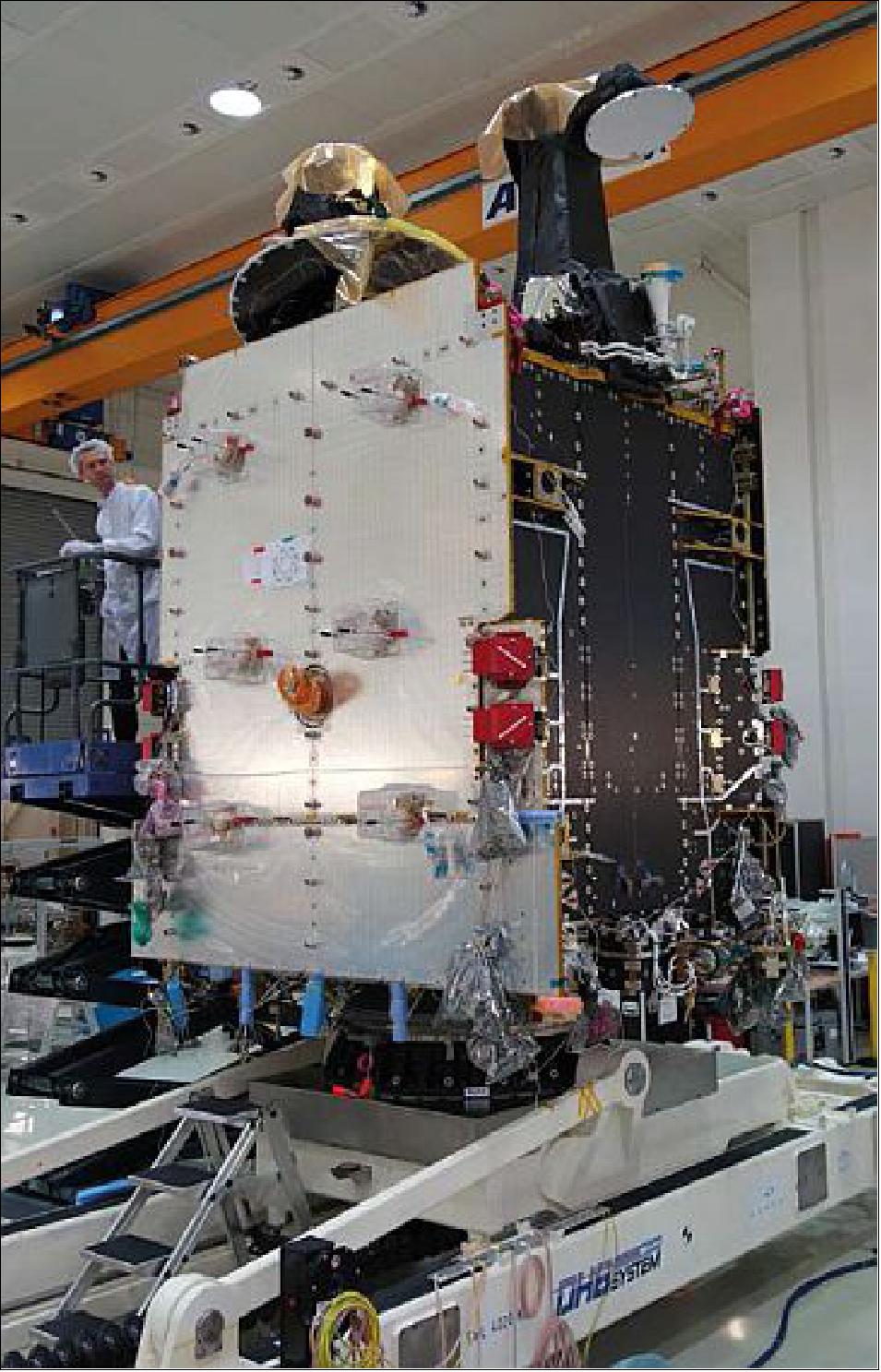
- Feb. 18, 2015: The SmallGEO Hispasat AG1spacecraft has left the integration hall in Bremen. After successful system testing at the end of the integration phase at OHB, the environmental impact test is being conducted at IABG in Ottobrunn near Munich. During environmental impact testing, the satellite is placed in a thermal vacuum chamber, where its functions are being tested under space conditions in both heat and cold and in vacuums. Further functional testing entails the simulation of mechanical and also electro-magnetic strain on the satellite. 41)
- August 19, 2014: With the successful mating of the payload and platform modules, another important milestone has been reached in the development of the SmallGEO Hispasat AG1 spacecraft. The completion of this crucial step means that Bremen-based OHB can embark upon the next stage: the integrated satellite system and performance tests. These will be completed later this year and will be followed by environmental testing at IABG's facilities in Ottobrunn, Germany. 42)
- February 7, 2014: With the arrival of the repeater module at OHB facilities in Bremen, the payload of the Hispasat Advanced Generation 1 satellite can now be mated with the satellite platform, SmallGEO, developed by OHB. This marks an important stage in the deployment of SmallGEO, the general-purpose small geostationary satellite platform that should give European industry the opportunity to play a significant role in the commercial satellite communications market. 43)
- September 9, 2020: The telecommunications satellite developed under ESA’s SmallGEO Partnership Project has just passed three years of service in orbit. 47)
- ESA initiated the SmallGEO Partnership Project in response to the market demand for smaller, lighter and more versatile geostationary telecommunications satellites.
- The 10-year program culminated in the launch of the Hispasat 36W-1 telecommunication satellite, built on the SmallGEO platform, in January 2017 and the satellite entered service six months later. Hispasat 36W-1 complements Hispasat’s existing fleet of telecommunications satellites, providing a Spanish-language commercial broadband service over Europe, the Canary Islands and the Americas.
- Developed and built by manufacturer OHB Systems AG, Hispasat 36W-1 represents the first time the German satellite manufacturing company has been the prime contractor for a telecommunications satellite mission. Its Hispasat payload marks the first ESA partnership with a Spanish operator.
- Three years after entering service, the flawless operations in orbit of the SmallGEO platform demonstrates OHB’s capability to design and build a modular and versatile platform.
- Indeed, OHB has since been able to use its platform for a large variety of missions, including the second satellite in the European Data Relay System, the most sophisticated laser communication network ever designed that speeds the flow of information from Earth-observation satellites to people on the ground.
- ESA Partnership Projects allow European industry to maintain and continue developing their competitiveness on the worldwide commercial market and enable greater risk sharing, where ESA bears the risks related to the development of innovative solutions and the partner assumes the commercial risks to respond to market needs.
- According to an independent study by Euroconsult in partnership with Technopolis and Oxford Economics, job creation, industry and government revenues as well as business opportunities derived from the Hispasat 36W-1 mission are thought to have generated more than €2.5 billion over a 10-year period.
- Eric Villette, ESA’s SmallGEO project manager, said: “After three-and-a-half years in orbit, the Hispasat 36W-1 satellite has made a great start to its 15-year-long operational life. We, at the ESA Partnership Project, are very proud to have made possible the delivery to Hispasat of this new satellite. This is the result of several years of tremendous work carried out with OHB and their suppliers as satellite prime and with our partner Hispasat as satellite operator.”
- June 2, 2017: The Hispasat H36W-1 telecommunications satellite, supplied by OHB System AG, has been handed over to the Spanish satellite operator HispaSat following the completion of an In Orbit Test period of more than 80 days. This trial confirms the design and configuration of the new European SmallGEO satellite platform, simultaneously testifying to the fact that the German space industry has regained system capabilities for telecommunications satellites. 48) 49)
- H36W-1 is the first satellite based on the SmallGEO platform. It was completed in the form of a private-public partnership comprising ESA (European Space Agency), OHB and Hispasat.
- H36W-1 will complement Hispasat’s existing fleet of telecommunications satellites, providing a commercial broadband service over Europe, the Canary Islands and the Americas.
- May 26, 2017: The satellite is now located in its final orbital position at 36° West and will begin to offer its first services after testing in space. This new satellite offers coverage over South America and Europe, including the Canary Islands, and has 20 transponders on the Ku-band as well as additional capacity on the Ka-band. 50)
- January 28, 2017: During LEOP (Launch and Early Orbit Phase), Hispasat36W-1 is being monitored and controlled at the DLR/GSOC site in Oberpfaffenhofen and at the ground station in Weilheim, bringing the satellite into GEO. This is followed by in-orbit tests, which mainly include payload tests with the transponders and antennas. A few weeks later, the satellite is handed over to the control center of the Spanish satellite operator Hispasat near Madrid. 51)
- DLR/GSOC received the first “sign of life” from the satellite just under one hour after launch via the ground centers in Kumsan, South Korea, and Uralla, Australia. Hispasat H36W-1 will be reaching its geostationary test position in 12 days’ time, where the spacecraft will be calibrated and placed in operation over a period of approximately five weeks. After a voyage of a further nine days, the satellite will reach the final position at 36 degrees longitude west, where communications services for Europe, the Canary Islands and South America will be provided by Spanish operator Hispasat over a period of more than 15 years. 52)
Payload/experiment complement
The first SGEO mission based on the new satellite platform will be launched with a payload for the Spanish satellite operator HISPASAT S. A. as HAG1 (Hispasat Advanced Generation 1). HAG1 will provide multimedia services for Spain, Portugal, the Canary Islands and South America. The telecom operator HISPASAT will be integrating HAG1 in its existing fleet of geostationary communications satellites. The name "Advanced Generation 1" shows that new technologies will be tested with this mission for their use in space. Hispasat AG1, as the first SmallGEO mission, marks the first time in more than 25 years that Germany has assumed system management for telecommunications satellites. 53)
Telecommunication payload
The telecommunication payload for HAG1 is supplied by Tesat Spacecom of Backnang, Germany. 54)
Optical interfaces: Telecommand and telemetry (TM/TC) data of satellite payload equipment is nowadays mostly accomplished by using discrete electrical signals, i.e. high level pulse signals for on/off switching and commanding, and digital or analog signals for telemetry acquisition. This involves a high number of individual electrical lines which have to be routed to each payload equipment leading to a complex and heavy TM/TC harness. By using a single optical fiber instead of several electrical lines, the complexity and mass of the TM/TC harness can be reduced considerably. Moreover, optical data transmission is insensitive to electro-magnetic interference and provides inherent galvanic isolation. These characteristics make optical fibers an ideal candidate for substituting electrical TM/TC interfaces in future satellite payloads.
The major benefits of optical interfaces with respect to electrical interfaces are:
• Galvanic isolation
• No electromagnetic interference (EMI)/ electromagnetic compatibility (EMC)
• Reduced mass
• Ease of integration
• No damage of payload equipment through erroneous harness or connector mating
• Potential for higher transmission data rates (>> 100 Mbit/s)
• Potential for longer cable distances (> 10 m).
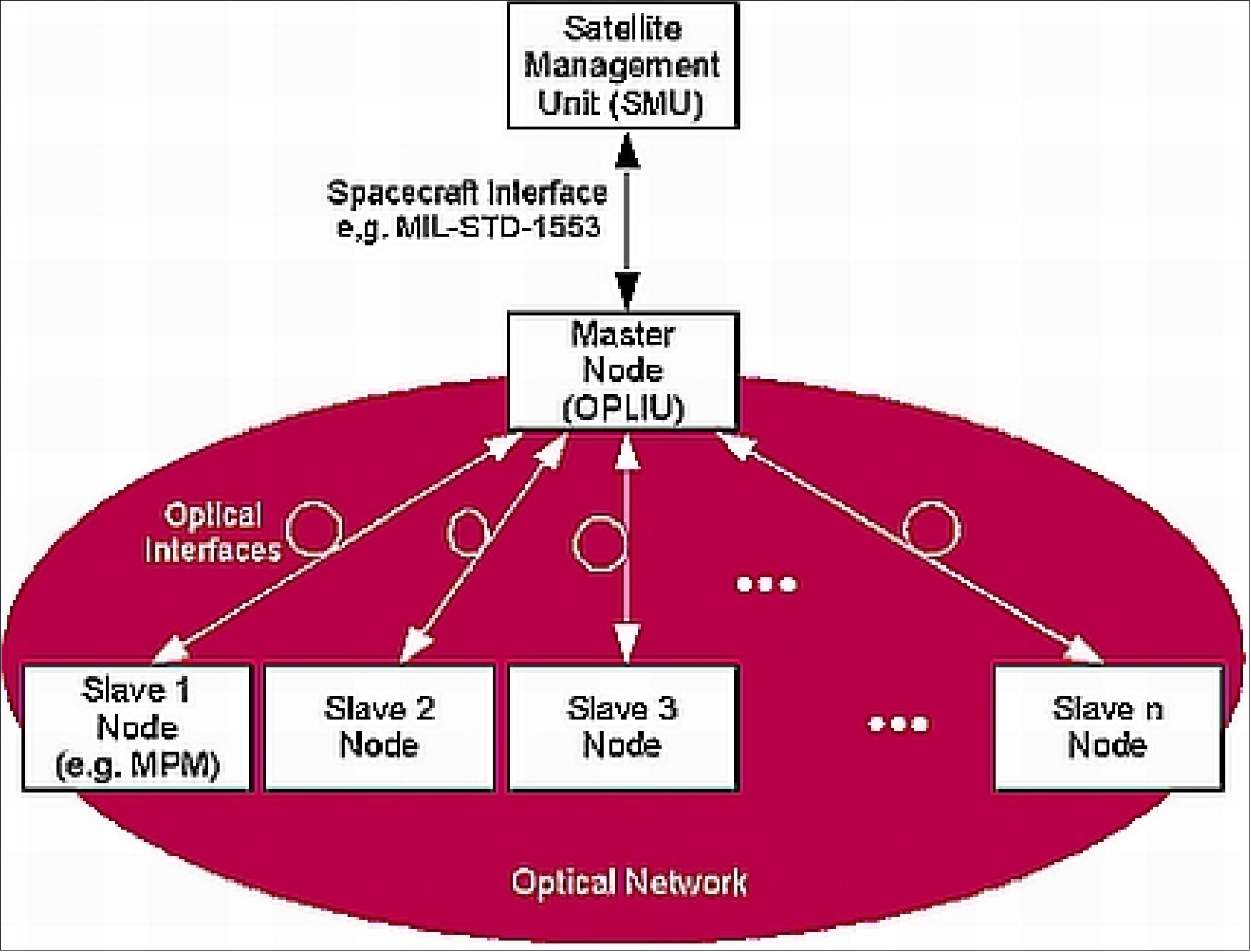
Tesat-Spacecom has developed MPM (Microwave Power Module) with an optical interface and an OPLIU (Optical Payload Interface Unit), satisfying the need of controlling new complex payload equipment with the benefits of optical interfaces.
The optical network is comprised of a master node and several slave nodes. The master node controls the transfers on the optical network and forwards telecommands or telemetry requests received from the SMU (Satellite Management Unit) to the addressed slave. The slave node itself sends only telemetry data to the master node, when the telemetry was requested by the master. The master node transfers the gathered telemetry data to the SMU via the Spacecraft interface e.g. MIL-STD-1553 bus. Figure 23 illustrates the network architecture.
Network protocol: The data link layer used for the optical network is based on the CAN protocol, ensuring reliable data transmission between the OPLIU and the payload equipment and cutting the overall costs for equipment integration and test. The CAN protocol provides sufficient transmission data rate (1 Mbit/s) and address space, supports variable packet lengths and is robust. The protocol stack is illustrated in Figure 24.
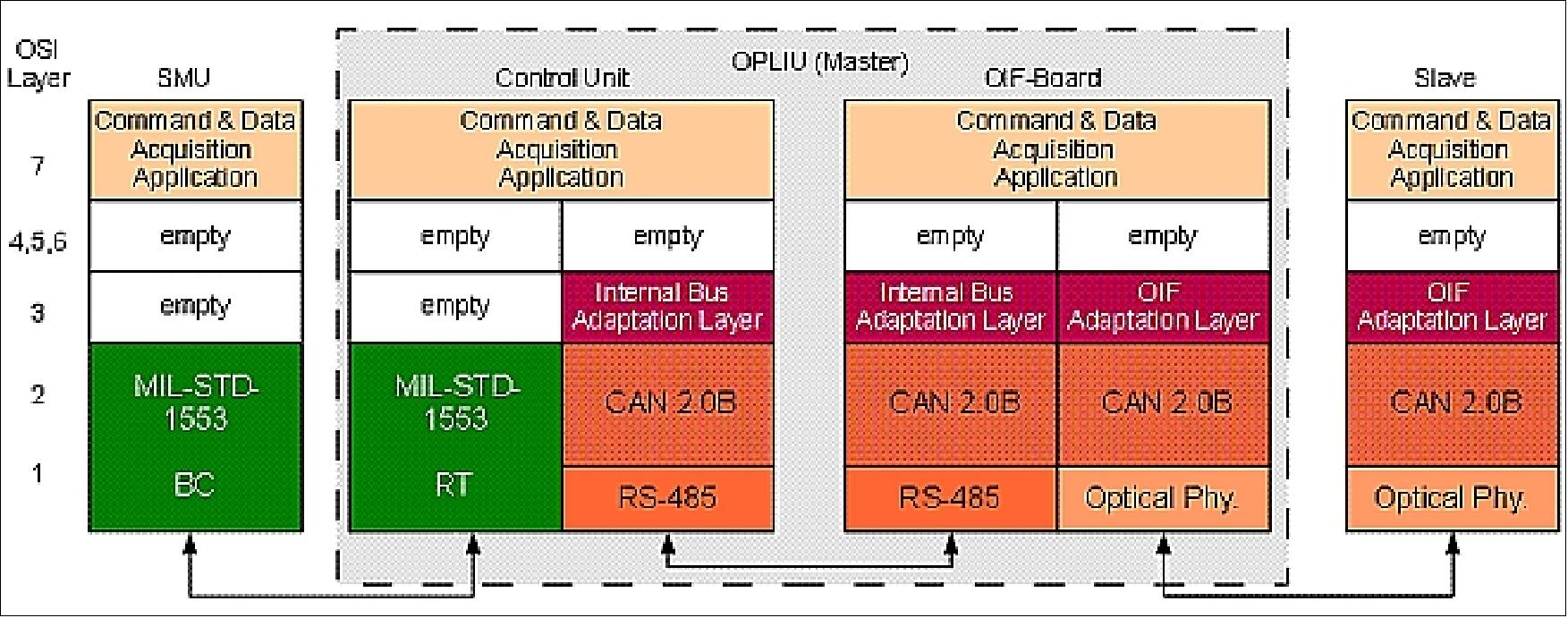
Each data transfer on the network is either be acknowledged by the CAN-Acknowledge or by the 1553 Status Word. If a message transfer error occurs on the optical network, the sending node will retransmit the message again. The maximum retry attempts are limited. Additionally, the master node implements a timeout function for salves which are not responding.
Optical cables and connectors: Commercial fiber assemblies are being used to cut the overall costs for the optical harness.
• Radiation hard fiber assembly - tested up to TID of 80 Mrad
• Optical fiber: Multimode step index, 50/125 µm diameter; Wide temperature range -65ºC to +300ºC
• Space qualified cable: Low mass: 6.4 gram/meter; Wide temperature range: -40ºC to +160ºC
• Space qualified connectors AVIM: Compact, lightweight, 5.9 gram; Excellent performance (typical insertion loss 0.2 dB, return loss type < 45dB); Temperature range: -40ºC to +85ºC.

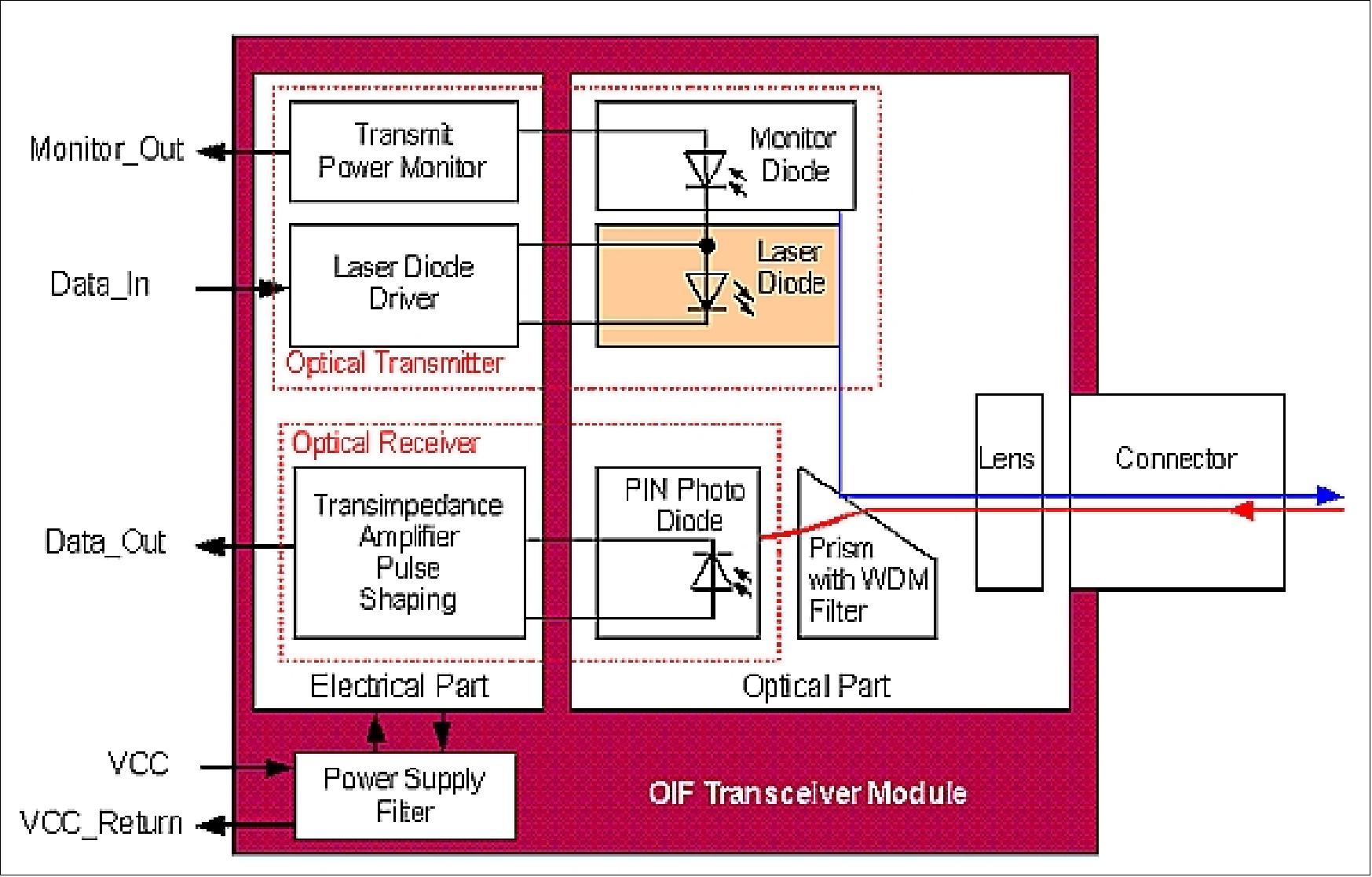
Optical transceiver: Tesat is currently qualifying an optical transceiver for space application, which originally has been developed for commercial data communication purposes. This transceiver operates at wavelengths of 1310 nm and 1530 nm and relies on a Fabry-Perot laser diode, two PIN photo diodes and micro-optics. It allows full-duplex data transfer on a single fiber. A block diagram is illustrated in Figure 26. The optical transceiver has the following features:
• Operating Temperature: -40ºC to +85ºC
• Integrated WDM filters for dual wavelength Tx/Rx operation at 1310 nm / 1530 nm
• Transmission rate: DC to 5 Mbit/s (FP laser diode transmitter and PIN diode receiver suitable for data rates up to 1.25 Gbit/s)
• Hermetically sealed optical Tx and Rx path.
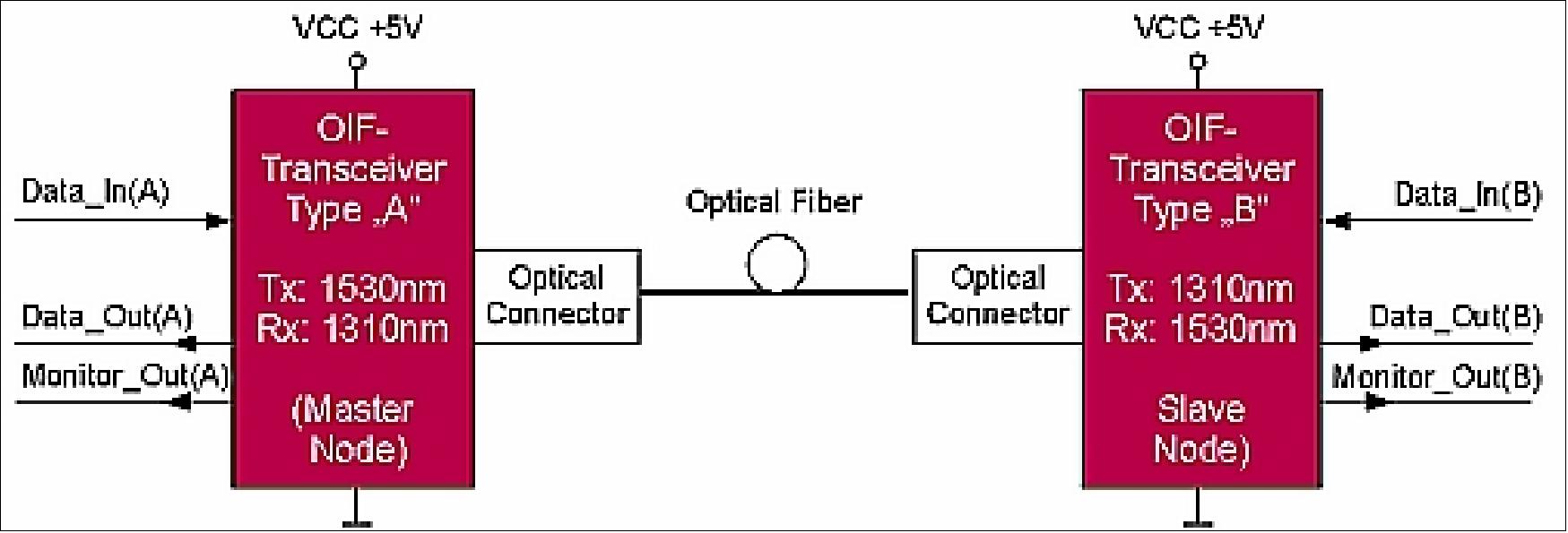
Two different types of transceivers are used to establish a point-to-point connection (Figure 27). The master node uses transceiver which emits light at a wavelength of 1530 nm and receives at a wavelength of 1310 nm. In slave nodes transceiver emit light at 1310 nm and receive at 1530 nm.
The major advantage of this full-duplex operation mode is that only one fiber is needed for a point-to-point connection with the opportunity of bidirectional data transfer. So the weight of the optical harness will be reduced compared to a optical connection which needs two fibers for bidirectional data transmission.
The optical transceivers will be set to an optical output power of about 1.8 dBm ex fiber over the temperature range of -40ºC to +85ºC. The power control is realized by a passive stabilization network adjusting the laser diode current regarding the operation temperature of the transceiver.
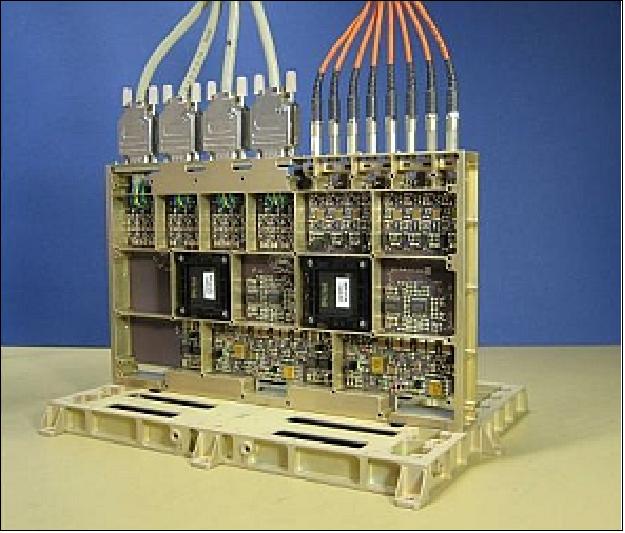
OPLIU architecture: Since the currently available SMUs (Satellite Management Units) and PLIUs (Payload Interface Units) do not provide optical interfaces, Tesat Spacecom has developed a so called OPLIU (Optical Payload Interface Unit). The OPLIU has a modular architecture and can control up to 40 MPMs. The MPMs are connected in a star topology to the OPLIU.
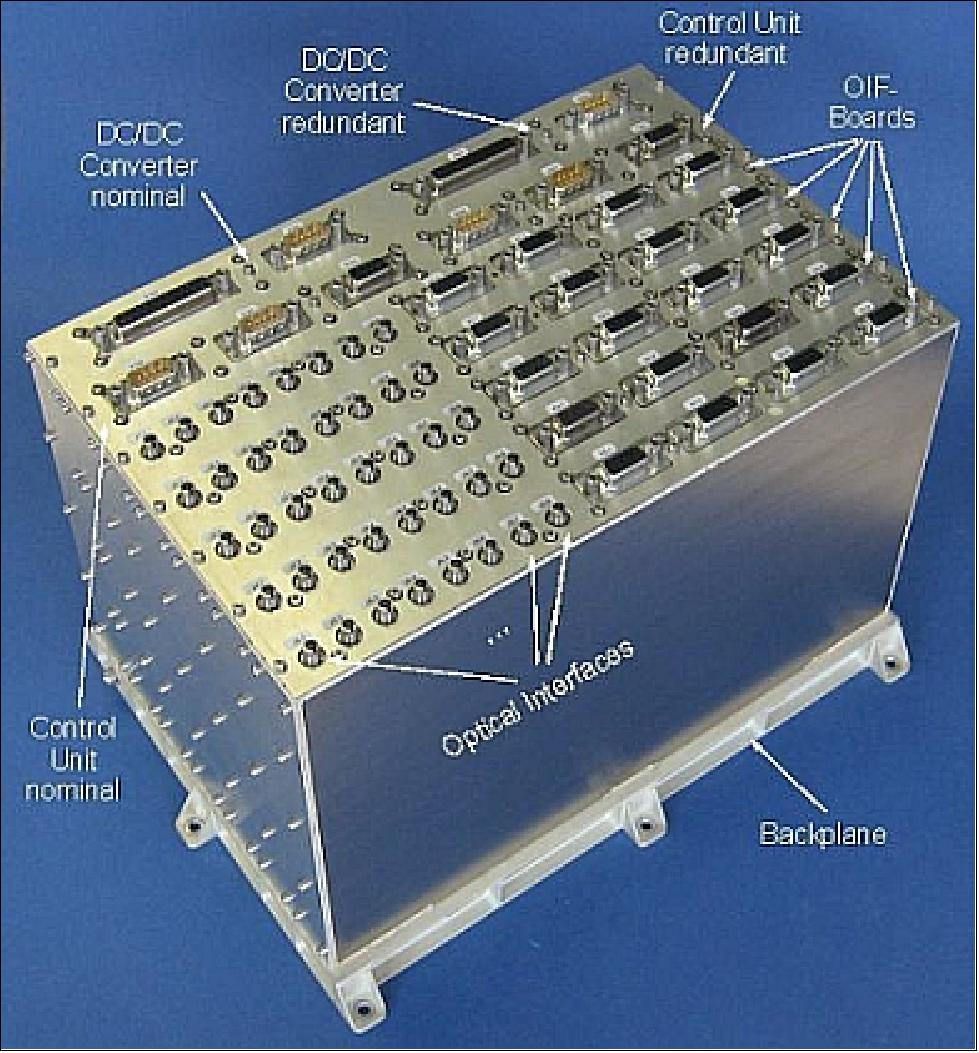
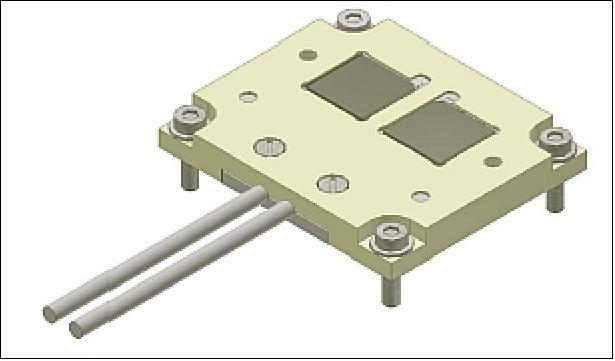
The OPLIU is comprised of a nominal and redundant control unit, a nominal and redundant DC/DC converter (power supply unit), a backplane and up to five independent OIF (Optical Interface) boards. The mechanical outline of the OPLIU is shown in Figure .
The backplane is mounted in plane with the mounting plate. All other units are mounted perpendicular to the mounting plate. All external electrical and optical interfaces are accessible on the top side of the OPLIU assembly. A redundant internal serial bus is used for interconnection of the OIF-boards and the control unit. The internal bus is based on the CAN protocol with transceivers according to the RS-485 standard.
OPLIU accommodation parameters:
• 50 V main bus interface
• Mass of ~ 6 kg
• Power consumption 10 W (typically)
• Dimensions L x W x H = 190 mm x 280 mm x 190 mm
• High reliability.
OPLIU interfaces:
• Discrete TM/TC (DC/DC converter on/off commands, primary current, bi-level status, temperature)
• MIL-STD-1553B
• 40 optical interfaces
• 80 high level pulse commands to switch the payload equipment on or off, respectively.
• 40 bi-level status signals, which represent the power status (on/off) of the connected payload equipment.
DC/DC converter: The OPLIU internal DC/DC converter is dual redundant. Each converter is split into two parts. One part powers the control unit, whereas the other part powers the optical interface boards. Each converter is overvoltage and overcurrent protected.
Control unit: The main function of the control unit is to decode and execute the telecommands received via the MIL-STD-1553B bus from the spacecraft. The command decoding and execution is implemented in hardware with a radiation tolerant FPGA. Four different command types/transfers are supported:
• On/off command: Used to switch payload equipment or OPLIU internal power supplies on/off.
• Register load command: Provides write access to the OPLIU internal or to the payload equipment internal memory.
• 8 bit serial digital data acquisition: Provides 8 bit telemetry data from the OPLIU internal memory or payload equipment memory.
• 128 bit serial digital data acquisition: Provides 128 bit telemetry data from the OPLIU internal memory or payload equipment memory.
In addition, the control unit supports functions to supervise and control the OPLIU internal equipment e.g. the supervision of the DC/DC converter voltages.

OIF (Optical Interface) boards: Each OIF board is designed to control up to eight Tesat MPMs (Microwave Power Modules). All electrical parts except the optical transceivers are redundant on the OIF board. The power for the nominal and the redundant parts of the OIF board can be switched on by the control unit. The routing functions between the internal bus and the optical interfaces are implemented in a radiation tolerant FPGA. The power consumption of one OIF board is about 1 W.
OIF board interfaces:
• 8 optical interfaces
• 16 high level pulse commands
• 8 bi-level status signals.
In Feb. 2014, the repeater module, developed at Tesat, arrived at the OHB facilities in Bremen. Before this, the repeater module underwent several months of intensive testing at Tesat's facilities. The results confirmed the outstanding performance of the Ku- and Ka-band repeaters designed by Tesat. The Ku-band repeaters also feature the new-generation regenerative on-board processor units (DVB-RCS/DVB-S2), designed and manufactured by Thales Alenia Space. The repeater module was also tested with the direct radiating array ELSA antenna designed and manufactured by CASA, which permits the generation and control of four receiving spot beams in the Ku-band. 55)
The AG1 repeater includes a number of advanced technologies, such as the digitally controlled MPM (Microwave Power Module) which allows the output power range of the appropriate traveling-wave tube to be adjusted in a range of ~4 dB with a minimum reduction of efficiency. An innovative payload interface unit provides the electrical interfaces for controlling the MPMs of the Ka- and Ku-band repeater via TM/TC lines. The modular and redundant master/slave architecture is designed to control up to 40 MPMs via the CAN-Bus protocol.
REDSAT (Regenerative Processor System)
The REDSAT payload is based on the initiative started in the framework of the Spanish Space National Program. This payload includes a receive active antenna and all the subsidiary RF units needed to provide the service in the areas defined as coverages across the land masses of the orbital slot. The system provides 4 reconfigurable uplink beams in Ku-band and up to 4 regenerative channels of 36 MHz to provide broadband services in Ku-band or Ka-band.
REDSAT is an advanced communication OBP (On-Board Processor) developed by TAS-E (Thales Alenia Space España) which also includes EADS CASA Espacio. The REDSAT payload includes a regenerative on-board processor based on the DVB S2/DVB RCS standard, and an advanced Ku- band active antenna. 56) 57)
Note: DVB-RCS (Digital Video Broadcasting - Return Channel via Satellite). It is a specification for an interactive on-demand multimedia satellite communication system initially formulated in 1999 by the DVB consortium.
The REDSAT payload features two major innovations: a broadband multimedia system and an advanced antenna system.
• The broadband multimedia DVB system is an end-to-end advanced communication system based on an OBP (OnBoard Regenerative Processor) and providing DVB-RCS/DVB-S2 capabilities including an IP router in the space. Thales Alenia Space España will define, develop and produce the whole system.
• The advanced antenna system will allow the AG1 mission to meet its performance specifications for both the transparent and regenerative repeaters in the Ku-band frequency. EADS CASA Espacio will develop and produce the reflector and the DRA-ELSA (Direct Radiating Array-Electronically Steerable Antenna).
The Redsat OBP also features two Thales L-band processor units, one Mier Communicaciones Ku-/L- band down and up converter unit and a box of Thales filters with its flight harness. It is able to simultaneously process four 36 MHz communication channels. The OBP is in charge of demultiplexing, demodulation and decoding the received DVB-RCS uplink signals, and re-multiplexing the received data in order to build four DVB-S2 compliant downlink TDM (Transport Data Mechanisms). 58)

DRA-ELSA (Direct Radiating Array-Electronically Steerable Antenna)
DRA-ELSA is an active array specifically designed for new satellite telecommunication missions and future needs of the broadcasting market (DVB-S2). The dedicated receive antenna, to be operated in the Hispasat AG1 mission, will mainly allow on-demand high flexibility and electrical steerable capabilities as differential features when compared to standard products and services currently offered. 59) 60) 61)
Parameter | Requirements |
Dimensions | 900 mm x 700 mm x 400 mm |
Frequency band | Rx / Ku-band; 14.25 – 14.50 GHz |
Polarization | Linear Horizontal |
Number of beams | 4 |
Half cone beamwidth | 0.75º |
G/T EOC (External Outer Carrier)) | > 5 dBK; (Post-antenna NF from 22 to 25 dB) |
Output power | -59.0 to -30 dBm; (In-band PFD -68 to -50 dBm/m2) |
Power consumption | < 81 W; (Nominal 40 W / Max 70 W) |
Output CI3 | 49 dBc |
The DRA-ELSA allows the reception of Ku-band carriers over four simultaneous spot beams working in horizontal polarization. The antenna is able to synthesize each one of these spot beams in any direction over the Earth from the defined orbital position with the required sidelobes level by means of controlling the excitations (amplitude and phase) of the array radiating elements. Primarily designed to operate with steerable pencil or spot beams, each beam can be independently pointed at any Earth location readily whenever requested by command.
Additionally, DRA-ELSA can support beam hopping capabilities, that is, time sharing service based on switching automatically the beams between a set of pre-defined locations and configurations. This feature would introduce adaptability to the presented array antenna.
The driving parameter of the DRA-ELSA RF architecture has been to provide simultaneously:
• The required G/T over the four simultaneous spot beams withstanding the antenna temperature and the DRA-ELSA noise temperature and directivity for each beam, as well as the S/C post-DRA noise figure.
• The output power within the required range considering the PFD of the in-band signals, the antenna directivity and the gain and losses of the architecture needed to fulfil the G/T requirement.
• The required linearity of the architecture.
DRA-ELSA architecture: The antenna provides 4 independent and fully reconfigurable beams, working in the uplink Ku sub-band from 14.25 to 14.50 GHz in linear polarization.
The array, which follows a modular approach, comprises 100 radiating elements (subarrays) arranged in a square configuration with a total aperture of 650 mm x6 50mm. Figure 32 shows a 3D model of the antenna. The radiating square array is under the shaded green area (thermal blanket isolation). The total dimension of the antenna is 900 mm x 700 mm and 400 mm of height with a total mass close to 60 kg. The antenna is firmly supported by four legs that are attached to the top floor of the spacecraft.
Power consumption | 40 W nominal (70 W max) |
Frequency | 14.25-14.50 GHz |
Polarization | Linear |
Number of beams | 4 |
Beamwidth (half cone) | 0.75º |
SLL (Side Lobe Level) | < -25 dB |
XPI (Cross-Polar Isolation) | > 28 dB |
Linearity of C/I (Carrier to Interference) value | > 50 dBc |
G/T (*) | > 6 dB/K (PLD NF > 22 dB) |
Input PFD range (*) | -68 to -50 dBm/m2 |
Output power range (*) | -50 dBm to -30 dBm |
Legend to Table 3: The values designated with (*) can be optimized for any mission and payload interface specification. Values are an example of mission scenario (not necessarily those of Hispasat AG1).
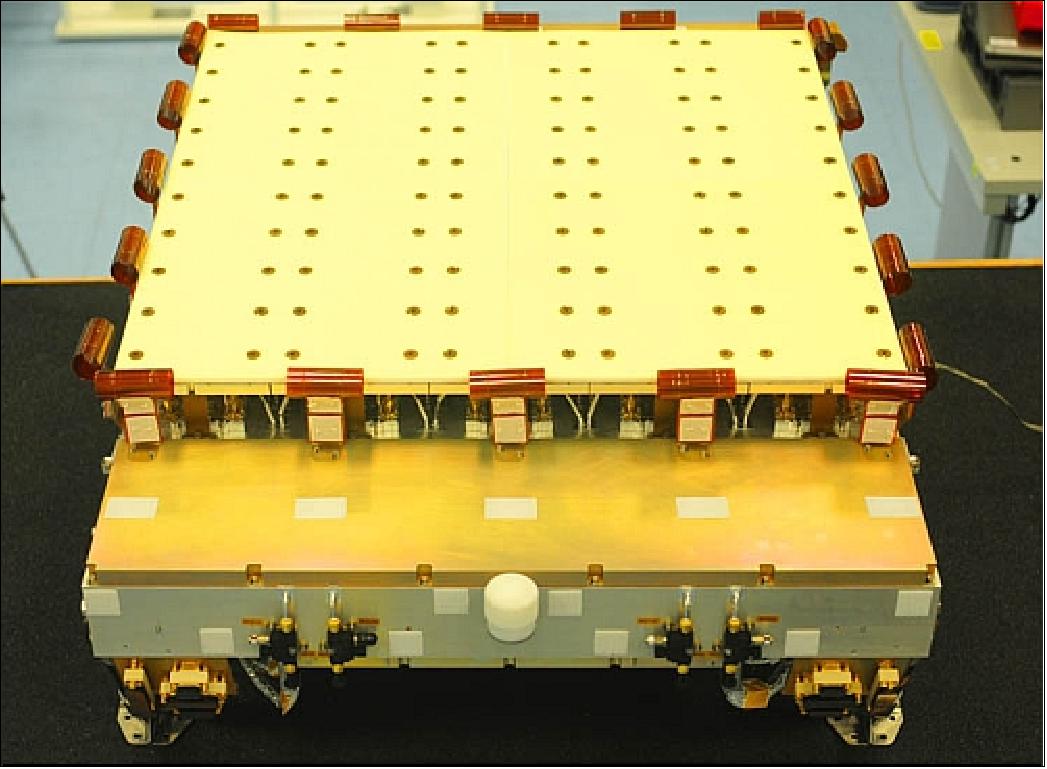
The antenna is composed by the next main functional subassemblies:
• Subarray subassembly: the subarrays are grouped in 2 x 2 radiating elements to provide a higher level of integration form the manufacturing point of view.
• Filter subassembly: Below each group of 4 subarrays, there is a group of 4 filters to provide the necessary out-of-band rejection.
• MCCM subassembly: Next to the filters there is a hybrid circuit which amplifies-filters-amplifies the signal before splitting to process the signals coming from the 4 subarrays block with the proper amplitude and phase for each one of the spot beams to be synthesized. Besides the control of the illumination coefficients, this MCCM (Multi-Chip Control Module) subassembly provides the first level of signal combinations and a first part of the needed gain of the active chain to fulfil both the G/T with the post-antenna noise figure and the output power requirements for each beam.
• Combiners subassembly: As said above, the combination is done in two levels. Instead of the combination of 100:1 in one level, the first level of combination 4:1 is implemented into the MCCM subassembly, and the second level of combination 25:1 is implemented by means of 6 combiners of 5:1 per each one of the spots beams.
• MCCM Signal Conditioner subassembly: Next to the combiners network there are 2 modified MCCM modules, called MCCM Signal Conditioner, which provide the last gain stage required. Each one of the modules handles the signals of 2 spot beams. This subassembly includes a variable attenuator after the amplification of the signal in order to allow properly programming and adjustment to optimum of the power depending on the different operational scenarios.
• Test coupler subassembly: A coupler at the output of each beam signal path is included to test during integration.
The signals coming from each subarray are filtered out and then processed in the MCCMs (Multi-Chip Control Modules), which constitute the core of the antenna. The modules include amplification, variable attenuation and phase shifter to individually control each beam. Combination is done by means of four specific passive combiners. In order to optimize the performance versus the payload I/F, a signal conditioner module has been included at the output of each port allowing output power level adjustment in a range.
The antenna is capable of synthesizing steerable spot beams with a given beamwidth in any direction over the Earth optimizing the following electrical parameters:
• G/T is optimized for every beam pointing, withstanding different beam directivities and minimizing equipment noise temperature. Moreover the antenna can be configured to reduce and even make negligible the noise temperature contribution of the payload it is integrated in.
• Output power can be set within a specified range. It is adjusted for every beam pointing to achieve levels and a dynamic range compatible with the payload sub-units the antenna liases with. Furthermore the output power values and dynamic range can be configured to different payload interface requirements and also for different power levels of uplink signals.
• Linearity, defined as C/I (Carrier to Interference) value. The antenna amplifies the signals received from Earth through synthesized beams with great linearity purity. The intermodulation noise is reduced to very low levels even in the worst operation scenarios. The antenna is capable of operating when up to 12 different channels in the Ku uplink band operate simultaneously at Hispasat AG1 mission maximum power levels and from the same Earth location. C/I levels higher than 50 dBc are guaranteed even in the extreme case.
• Pattern contour. Beamwidth and Side Lobe Level (SLL) for the case of spot beams. The patterns are optimized to maximize directivity values inside the required beamwidth keeping the cross-polar level and SLL below a specified value. In order to achieve that, a suitable power pattern synthesis algorithm is applied. Levels of cross-polar discrimination higher than 28 dB and SLL below 25 dB are achieved for a beamwidth diameter of 1.5º. The DRA performance for shaped beams depends on the contour areas required.
In addition to the RF functionality, the MCCM is in charge of the electronic control of the active antenna. MCCMs are comprised of digital/analogue ASIC electronics that are monitored and telecommanded by the antenna central control unit (ICU) that interfaces with the satellite. A power unit (PSU) is the responsible to provide the secondary voltages demanded by the DRA sub-units from the primary S/C supply.
Beam pointing or shaping is achieved by means of controlling the excitations (amplitude and phase) of the array radiating elements. These excitations are either internally stored or uploaded from ground into the antenna. The control system of the antenna can be commanded from ground station to update the excitation configurations and so, change the operating scenario in any moment. Main control capabilities of the antenna are the following:
• Providing the TM (Telemetry) necessary to know the status of the antenna equipment (temperatures, consumptions, etc) to be able to react in case of any failure.
• Processing the TC (Telecommands) from the on-ground station to load any of the array configurations stored in the data base of the antenna or to store and load any other new configuration if needed. In-orbit control makes the antenna capable of being well suited to a possible change of the mission (orbital position, repointing of the spot beams, definition of new coverages of interest, etc.).
• Controlling the switching on/off of the active subassemblies or nominal/redundant units of the antenna in order to preserve its correct operation. It provides the antenna with some capacity of reaction in the event of failures (subarray, amplifier, etc) readapting the illumination coefficients of the rest of the elements.
Thanks to a dedicated thermal design control based on MLI (Multi-Layered Insulation), heat pipes, heaters and loop heat pipes, the system equalizes and regulates the operating temperature points and excursions of the electronics for an optimized RF performance. This aspect is deemed critical to guarantee a low and stable noise temperature that will contribute to the mission G/T performance parameter.
RF antenna architecture: Incoming signals from each subarray are filtered prior to being processed in the MCCMs (Multi-Chip Control Module) that includes LNAs (Low Noise Amplifiers), 1:4 divider, and variable attenuation and phase shifter to individually control each beam. After the processing, all signals are collected by means of a BFN (Beam Forming Network) comprised of two levels of 5:1 combiners to enhance the modularity of the antenna. Finally two modules, called MCCM-SC (Signal Conditioners), are placed at the output of the antenna. With these modules the antenna can adjust their electrical interface (mainly output power and noise figure) with the satellite payload (Ref. 60).
Subarray: The antenna aperture is made up of 100 subarrays arranged in a square lattice of 10 x 10. The subarray design is based on the recognized heritage of EADS CASA Espacio with printed patch antennas and arrays. Each subarray is made up of 4x4 circular disk patches fed up in linear polarization by the SSSL (Suspended Substrate StripLine) technology). This printed technology yields a very light and robust mechanical piece maintaining also very efficient electrical performance.
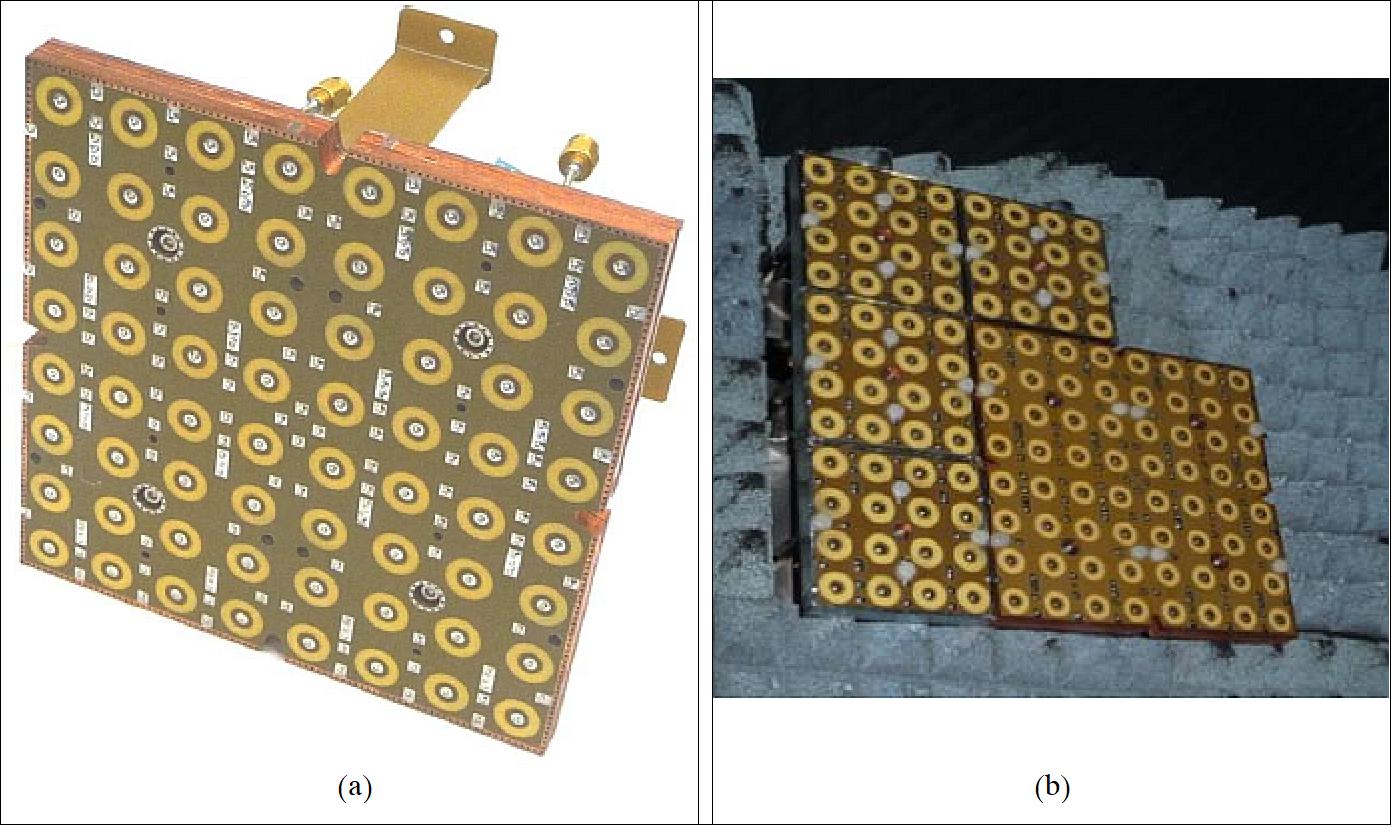
Figure 33a shows a subarray unit. The model has been mechanically built in blocks of 2 x 2 subarrays, for simplicity during integration. The patch has been designed to optimize the cross-polarization levels, achieving good efficiency and bandwidth performance, but mostly having a robust design in the Ku-band, able to withstand any manufacturing dispersions.
Figure 34 shows a normalized radiation pattern of the subarray at 14.50 GHz. The measurement has been performed with the configuration shown in Figure 33b surrounded by other subarrays to account for coupling effects that affect the final radiation pattern.
Cross Polar (XPD) inside the coverage is better than 32 dB, which is an excellent figure for the state-of-the-art and a very good reference for the antenna synthesis and final beam isolation. It can be observed that, near to boresight, XPD values exceed 40 dB. Measured subarray losses within the band are lower than 1.15 dB, including cables and connectors. The radiation efficiency is very important due to its direct influence in the antenna G/T performance.
All measured units showed an excellent agreement with predictions. The maturity of the design and manufacturing processes allow for an efficient development flow, first-shot and repetitive models.
Filter: A waveguide filter is placed right after the subarray in order to filter interference signals out of the antenna receiving band. Figure 35 shows a filter model. The filter is sized in such a way that interfering signals that are present in any telecommunication mission can be highly rejected. The filters have shown low insertion loss and rejection levels higher than 50 dB in Ku-band and 70 dB in Ka- and X-bands.
MCCM (Multi-chip Control Module): Based on EADS-CASA Espacio's heritage, a multi-chip hybrid module was developed for the DRA-ELSA. This module consists of a multi-layer ceramic package that houses thin film passive circuits, MMIC low-noise amplifiers (LNAs), phase shifter and attenuator chips, ASICs and other discrete components for control and telemetry.
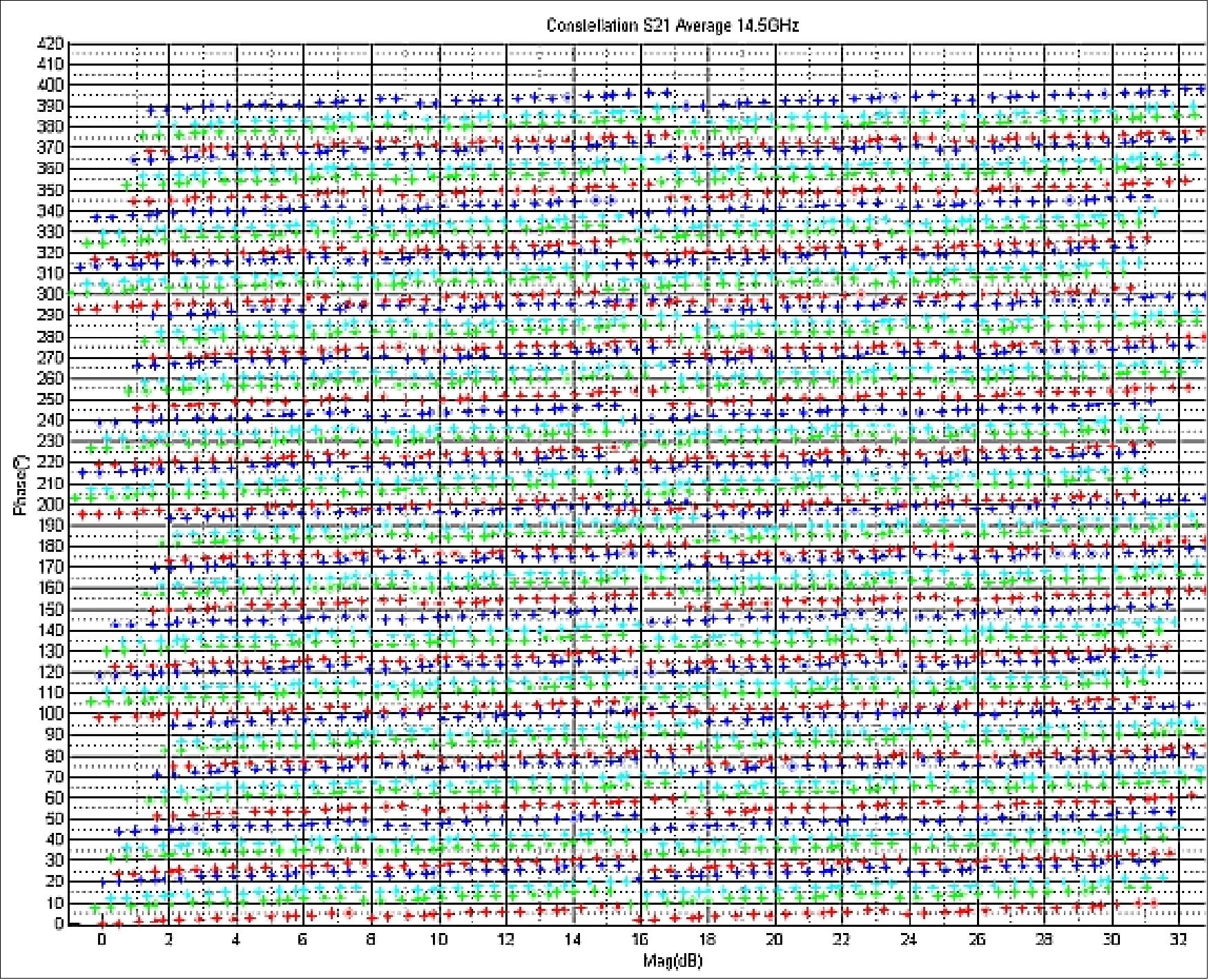
The main scope of this unit is to control the illumination coefficients (attenuation or phase) of the RF signal received from each subarray for the beam synthesis. Moreover, the signal must be amplified for a correct reception and noise figure balance. - Several MMIC dies were developed for the module: low noise amplifiers, digital phase shifter and digital attenuators. Figure 36 shows the discrete set of phase and attenuation states (the so-called “constellation”) that the MCCM can implement for each subarray to synthesize any required radiation pattern.
The control electronics of the MCCM is implemented with an integrated architecture based mix functionality on a specifically developed analog ASIC plus digital ASICs. The ASICs and their associated circuitry are in charge of commanding the Phase shifters and the Digital Attenuators, biasing the amplifiers and sensing current and/or temperature inside the hybrid module among other functionalities. The whole package is hermetically sealed with a lid, closed into an inert nitrogen environment.
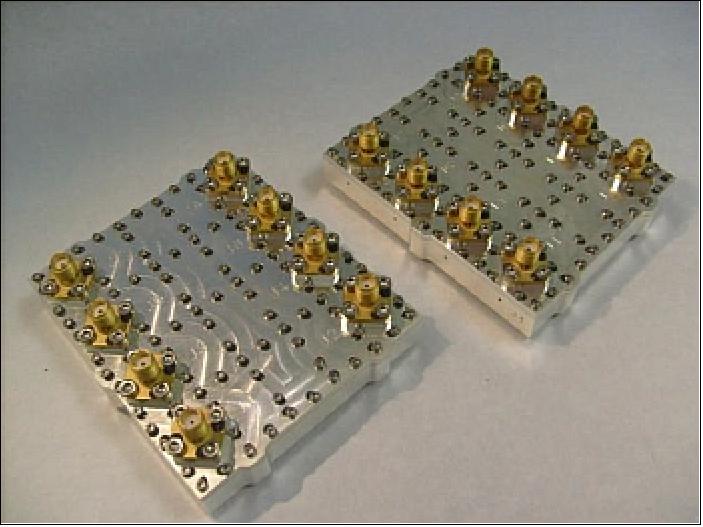
BFN (Beam Forming Network): The signals from all the MCCMs are collected into 4 RF outputs (one per beam) by means of two modular levels of combiners (5:1): a primary level of 20 5:1 combiners and then a secondary level of 4 5:1 combiners. Each combiner is of a Wilkinson type, which provides good input matching and a substantial level of isolation between the input signals.
The design is based on a 1:8 Wilkinson splitter, built with 1:2 splitters in a low-loss stripline technology. In this solution, 3 outputs are loaded. This solution has a related impact on insertion losses, absorbed by the DRA-ELSA configuration.
MCCM-SC (MCCM Signal Conditioner): MCCM-SC is implemented over a slightly modified version of the above described MCCM package. For each spot beam, there are four amplification MMIC stages and four digital attenuators plus the ASIC to command them. The signal conditioning makes the antenna output power suitable for a wide range of payload requirements:
- Adjustment of output power to the payload requirements in order to optimize the noise figure of the antenna plus payload, and therefore G/T performance.
- Protection and redundancy against failures.
- Robustness against component dispersion and degradation due to aging.
DRA RF performance
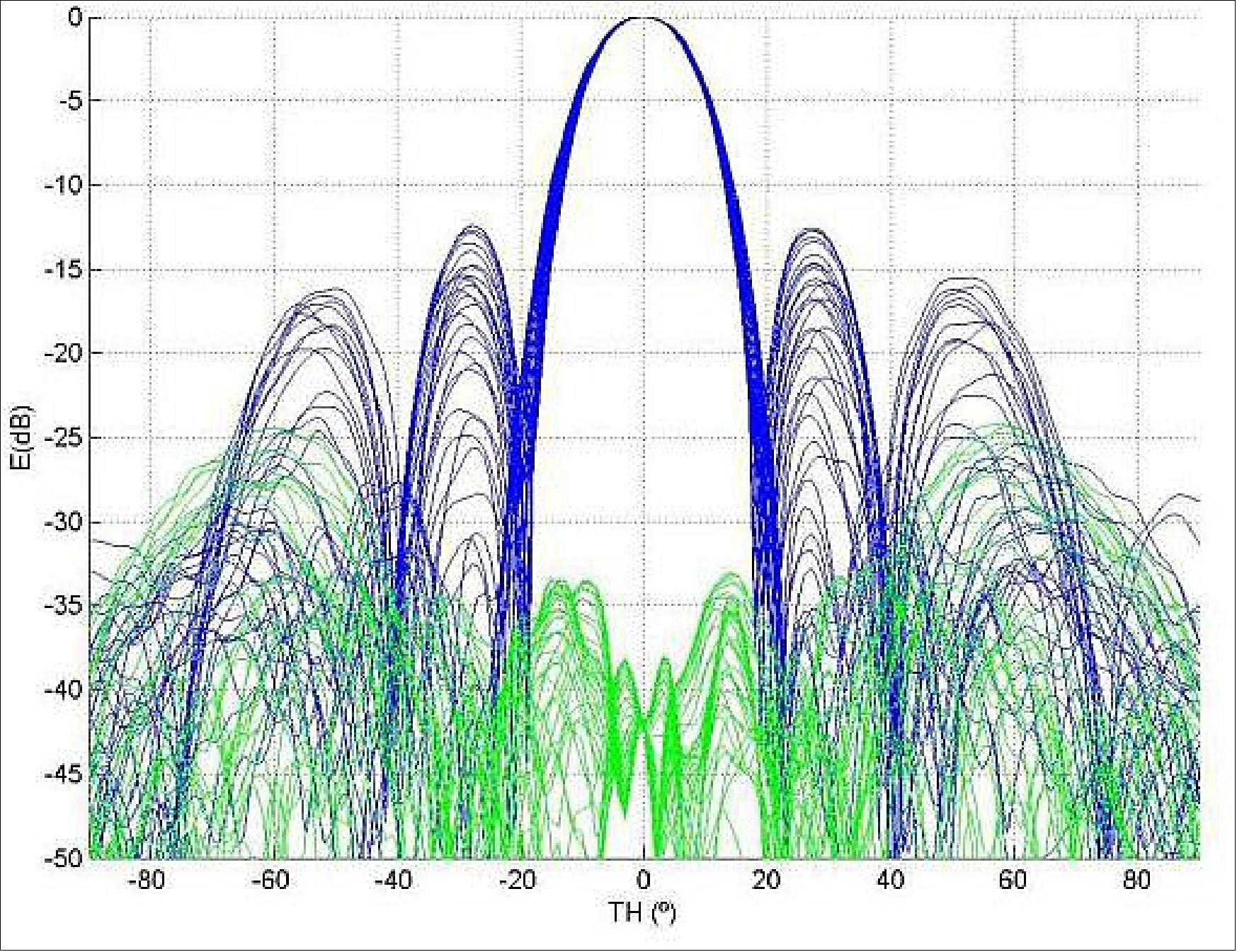
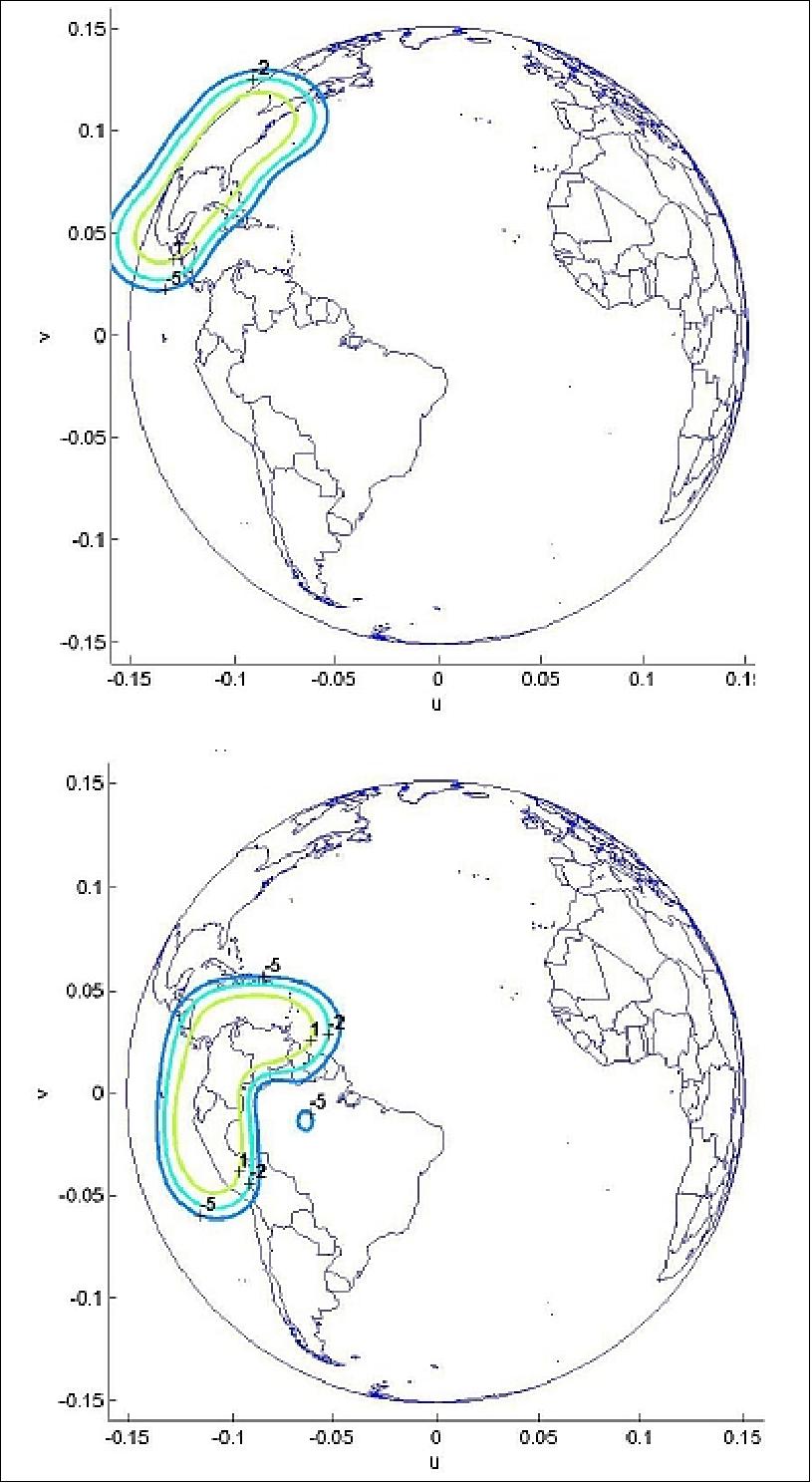
Pencil/spot beams: Figure 37 shows the G/T patterns for two spot beams pointing at Madrid and Rio de Janeiro at 14.25 GHz. The G/T performance offered by DRA-ELSA spot beams are significantly better than values typically offered by reflector antennas.
This is basically a consequence of the capability of the active antenna to adapt to the traffic demands in a specific area, optimizing the system utilization during the mission. It is important to note that one antenna beam could provide service for several areas using beam hopping services.
For this two pointing examples, side lobe levels (SLL) are lower than -25 dB, while cross-polar isolation (XPI) is around 32 dB (Madrid) and 42 dB (Rio).
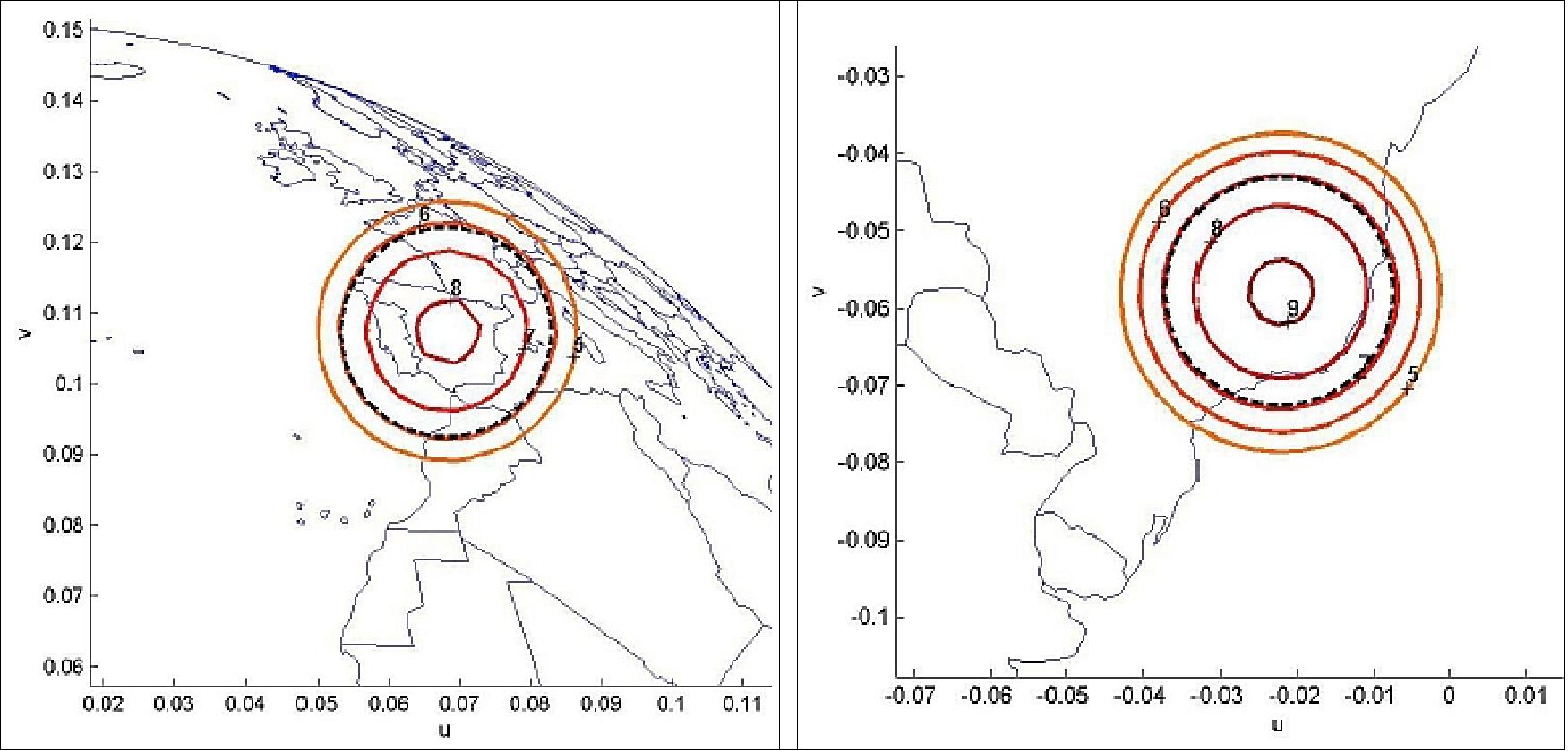
Figure 38 shows the G/T values for a spot beam as a function of its scanning angle off boresight. The array has a small penalization in directivity when it is pointed, due to grating lobe effects at the edge of the Earth.
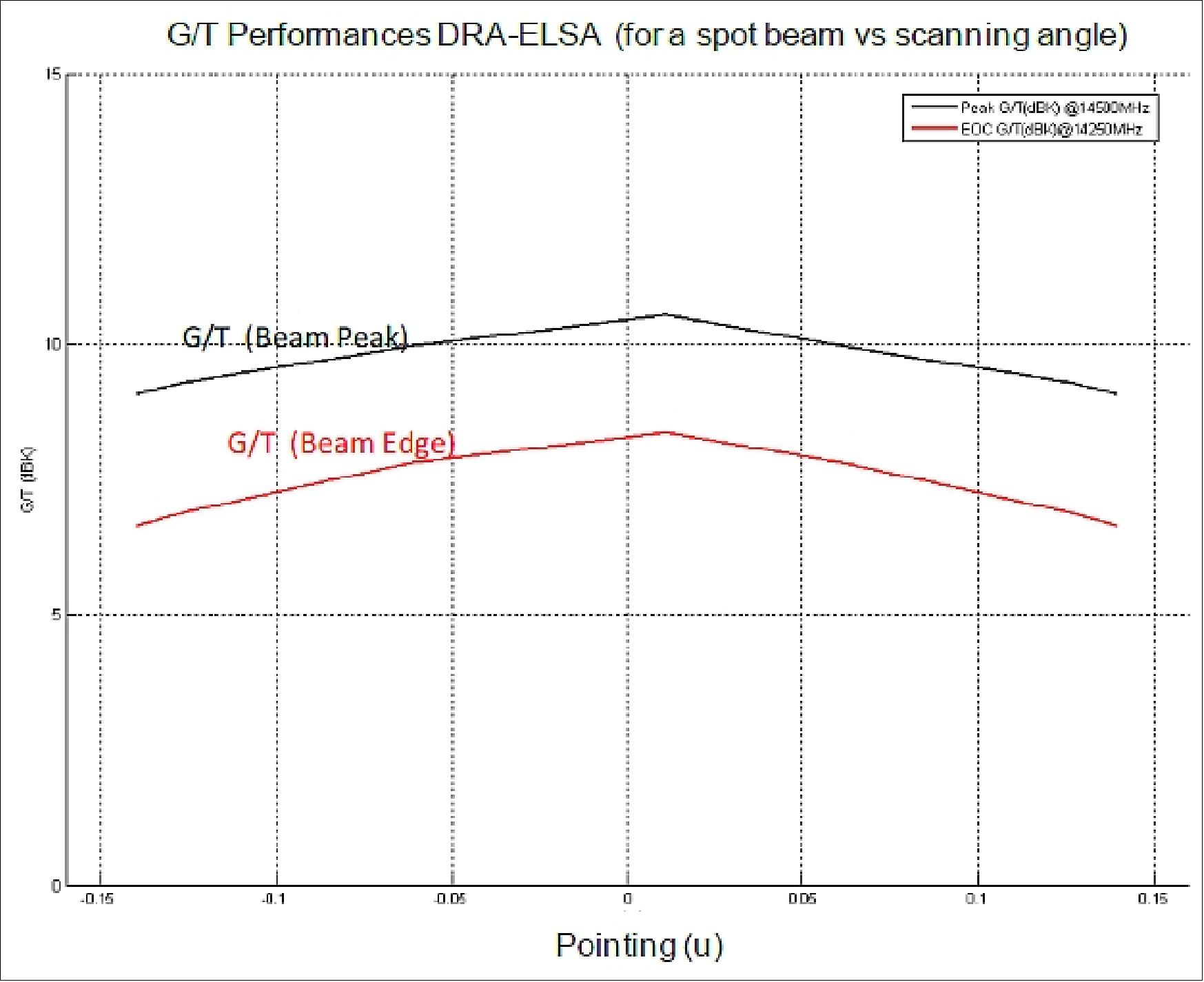
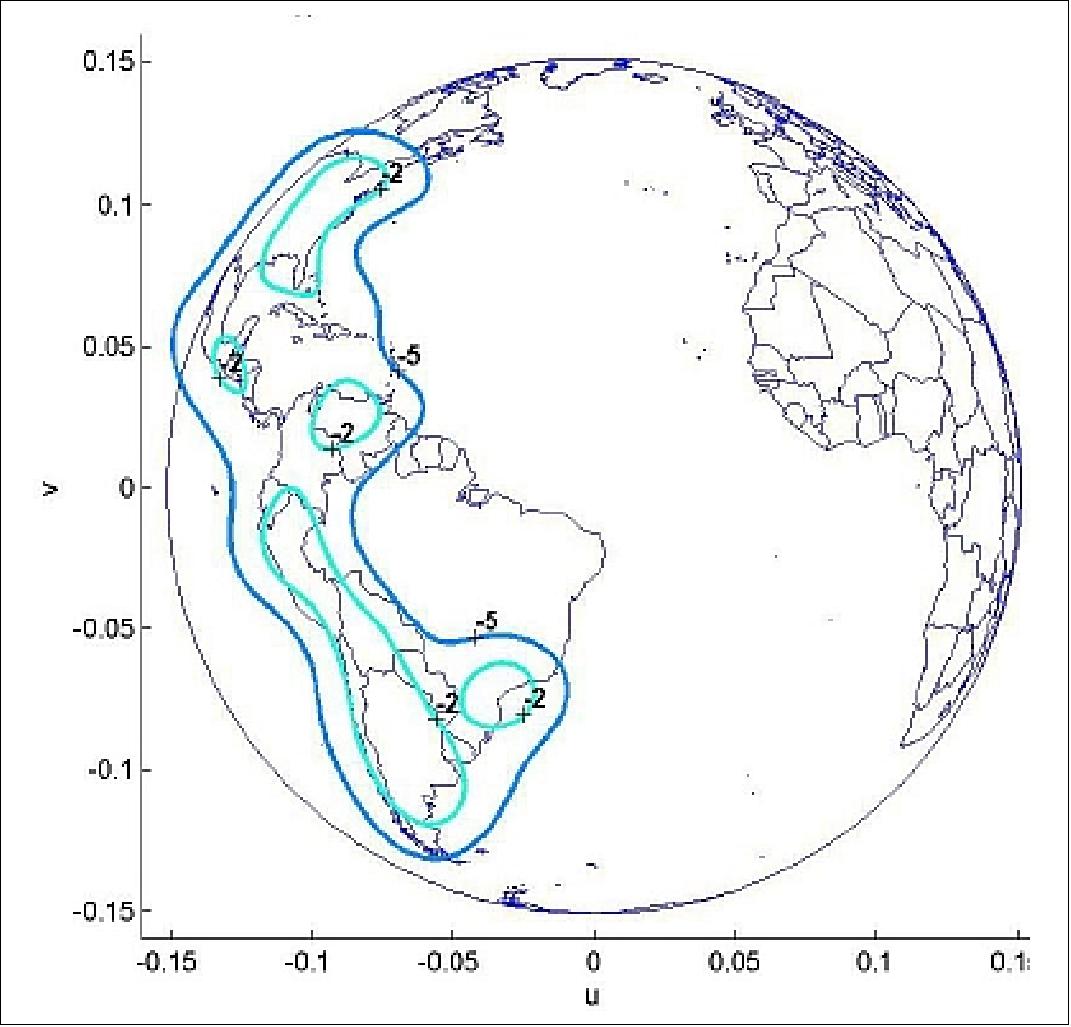
Shaped beams: The DRA-ELSA antenna provides the capability and flexibility to reshape beams over any location on the visible Earth. An assessment of the G/T performance of the DRA-ELSA is presented for several scenarios. Figure 39 shows an example of a shaped pattern over small areas in America.
An extended and larger coverage over the American continent is presented in Figure 40. The shaped area is extended to all higher coverage. In this case, the obtained G/T performance is comparable to G/T values provided by a standard large reflector antenna.
An added advantage is that this coverage can be reshaped to reinforce G/T performance over coverage areas with more demand or where a market had not been foreseen, a sports event takes place or where a new potential customer arises in an atypical coverage.
DRA-ELSA (Direct Radiating Array-Electronically Steerable Antenna) will be operated by HISPASAT in the Hispasat AG1 satellite mission. The antenna is meant to be the first reference of a very promising, entirely new generation of flexible and potentially adaptable broadcasting services for satellite telecommunication. It has been conceived to be an innovative and commercially attractive product capable of providing on-demand and flexible service definition Ref. 60).
References
1) “Small GEO Program moves forward with contract-signing,” ESA, Nov. 20, 2008, URL: http://www.esa.int/esaCP/SEMZW55DHNF_index_0.html
2) http://telecom.esa.int/telecom/www/object/index.cfm?fobjectid=25603
3) Omar Qaise, Alan Moorhouse, Dieter Birreck, “Operational Concept of the First Commercial Small-Geo Based Mission,” Proceedings of SpaceOps 2012, The 12th International Conference on Space Operations, Stockholm, Sweden, June 11-15, 2012, URL: http://www.spaceops2012.org/proceedings/documents/id1275667-Paper-001.pdf
4) Antonio Garutti, “Small GEO Satellite Initiative,” April 16, 2007, URL: http://telecom.esa.int/telecom/media/document/artes11-telecominfodaysv2a.pdf
5) Manfred Fuchs, “Small GEO - A Product for the Market,” 5th Capital Market Day, Bremen, February 11, 2009, URL: http://www.ohb-technology.de/tl_files/ohb/pdf
/praesentationen/Capital%20Market%20Day%202009/PF_OHB-System%20AG_final.pdf
6) “Small GEO Programme ARTES 11, ESA, 2012, URL: https://uppsagd.files.wordpress.com/2012/03/small-geo-artes-11-esa-20121102.pdf
7) “SmallGEO Extension offers further services,” ESA, Sept. 30, 2011, URL: http://telecom.esa.int/telecom/www/object/index.cfm?fobjectid=31331
8) Wei Sun, Frank Ellmers, Andreas Winkler, Herbert Schuff, Manuel Julián Sansegundo Chamarro, “European small geostationary communications satellites,” Acta Astronautica, Volume 68, Issues 7-8, April-May 2011, pp. 802-810
9) “HISPASAT signs with OHB and THALES ALENIA SPACE the contracts for the development of the Small GEO mission,” Madrid, June 18, 2009, URL: http://www.hispasat.com
/media//NotasDePrensa/EN/351-Nota%20SMALL%20GEO.ENG.pdf
10) “Thales Alenia Space signed a contract to provide HISPASAT AG1 satellite with REDSAT Advanced Communication Payload,” Le Bourget, France, June 18, 2009, URL: http://www.thalesgroup.com/Pages/PressRelease.aspx?id=8790&pid=1575
11) https://www.ohb-system.de/communication.html
12) H. Lübberstedt, A. Schneider, H. Schuff, Th. Miesner , A. Winkler, “Development of the European Small Geostationary Satellite SGEO,” Proceedings of the IAA Symposium on Small Satellite Systems and Services (4S), Rhodes, Greece, May 26-30, 2008, ESA SP-660, August 2008
13) Sten Berge, Jon Kronander, Emil Vinterhav, Peter Rathsman, Hendrik Lübberstedt, Peter Zentgraf, “Advanced AOCS Design for the Small GEO Telecom Satellite,” Proceedings of the AAS Guidance and Control Conference, Breckenridge, CO, USA, Feb. 1-6, 2008, AAS 08-002
14) Sten Berge, A. Edfors, T. Olsson, G. Pionnier, M. Björk, C. Chasset, T. Nordebäck, M. Rieschel, B. Lübke-Ossenbeck, Peter Zentgraf, “Advanced AOCS Design on the First Small GEO Telecom Satellite,” Proceedings of the 60th IAC (International Astronautical Congress), Daejeon, Korea, Oct. 12-16, 2009, IAC-09.C1.6.10, URL: http://www.fh-rosenheim.de/fileadmin/inhalte/Fakultaeten
/Ingenieurwissenschaften_KPE/Produktionstechnik/Mess-_und_Regelungstechnik
/IAC-09_C1_6_10_Berge_final.pdf
15) Camille Chasset, Nils Neumann, Staffan Persson, Torbjörn Olsson, Martin Björk, “AOCS design and EM test campaign for the Small GEO Telecom Satellite,” Proceedings of IAC 2011 (62nd International Astronautical Congress), Cape Town, South Africa, Oct. 3-7, 2011, IAC-11.C1.8.9
16) C. Chasset, N. Neumann, A. Edfors, S. Persson, T. Olsson, M. Björk, “ACOS design and testing for the Small GEO Telecom Satellite,” Proceedings of GNC 2011, 8th International ESA Conference on Guidance, Navigation & Control Systems, Carlsbad, Czech Republic, June 5-10, 2011
17) Uwe Schmidt, Boris Pradarutti, Klaus Michel, “Star Sensor ASTRO APS - A Comprehensive Space Flight Qualification for a Wide Range of Space Environments and Advanced Measures of Autonomy,” Proceedings of the GNC 2011, 8th International ESA Conference on Guidance, Navigation & Control Systems, Carlsbad (Karlovy Vary), Czech Republic, June 5-10, 2011
18) Peter Zentgraf, Sten Berge, Camille Chasset, Hannes Filippi, Eveline Gottzein, Ignacio Gutiérrez-Cañas, Mark Hartrampf, Peter A. Krauss, Christopher Kuehl, Bernhard Lübke-Ossenbeck, Michael Mittnacht, Oliver Montenbruck, Carsten Müller, Pablo Rueda Boldo, Attilio Truffi, “Preparing the GPS-Experiment for the Small GEO Mission,” 33rd Annual AAS Guidance and Control Conference, Breckenridge, CO, USA, Feb. 6-10, 2010, paper: AAS 10-038, URL: http://www.weblab.dlr.de/rbrt/pdf/AAS_10038.pdf
19) Carola Paarmann, Jens Müller, Thomas Mende, Carsten Börner , Rolf Mäscher, “Small‐GEO Solar Array – New Generation of Solar Arrays for Commercial Telecom Satellites for Power Ranges between 2.5 kW and 7.5 kW,” Proceedings of the 9th European Space Power Conference (ESPC), Saint Raphael, France, June 6-10, 2011, ESA SP-690
20) Marco De Tata, Pierre-Etienne Frigot, Stefan Beekmans, Hendrik Lübberstedt, Dieter Birreck, Alain Demairé, Peter Rathsman, Ekaterina Rezugina, Niccola Kutufà, “SGEO Electric Propulsion Subsystem Development Status and Future Opportunities,” Proceedings of the 33rd IEPC (International Electric Propulsion Conference), Washington, D.C., USA, Oct. 6-13, 2013, paper: IEPC-2013-144, URL: http://www.iepc2013.org/get?id=144
21) Olivier Duchemin, Vaitua Leroi, Michael Öberg, David Le Méhauté, Ramón Pérez Vara, Alain Demairé, Mikael Björklund. Staffan Persson, Marco De Tata, Stefan Beekmans, Niccola Kutufa, “Electric Propulsion Thruster Assembly for Small GEO: End-to-End Testing and Final Delivery,” Proceedings of the 33rd IEPC (International Electric Propulsion Conference), Washington, D.C., USA, Oct. 6-13, 2013, paper: IEPC-2013-222, URL: http://www.iepc2013.org/get?id=222
22) Niccola Kutufa, Bent Ziegler, Hendrik Luebberstedt, Alain Demaire, Nicola Ierardo, “Small GEO Platform Propulsion Systems Overview,” Proceedings of Space Propulsion 2010, San Sebastian, Spain, May 3-6, 2010
23) Marco De Tata, Pierre-Etienne Frigot, Stefan Beekmans, Hendrik Lübberstedt, Dieter Birreck, “SGEO Development Status and Opportunities for EP-based Small European Telecommunication Platform,” 32nd International Electric Propulsion Conference (IEPC), Wiesbaden, Germany, Sept. 11 – 15, 2011, paper: IEPC-2011-203, URL: http://erps.spacegrant.org/uploads
/images/images/iepc_articledownload_1988-2007/2011index/IEPC-2011-203.pdf
24) Olivier Duchemin, Vaitua Leroi, Michael Öberg, Éric Bourguignon, Murielle Pardonge, Thierry Scalais, Alain Demairé, Staffan Persson, Hendrik Lübberstedt, “Electric Propulsion Thruster Assembly for Small GEO – Status Update,” 32nd International Electric Propulsion Conference (IEPC), Wiesbaden, Germany, Sept. 11 – 15, 2011, paper: IEPC-2011-167, URL: http://erps.spacegrant.org
/uploads/images/images/iepc_articledownload_1988-2007/2011index/IEPC-2011-167.pdf
25) H. Lübberstedt, Th. Miesner, A. Winkler, P. Rathsman, J. Kugelberg, “Solely EP based Orbit Control System on Small GEO Satellite,” 30th International Electric Propulsion Conference, Florence, Italy September 17-20, 2007, IEPC-2007-274
26) Sten Berge, Alain Demairé, Anders Edfors, Peter Rathsman, Bjarne Anderson, “The Electrical propulsion system on the Small GEO platform,” Proceedings of the 60th IAC (International Astronautical Congress), Daejeon, Korea, Oct. 12-16, 2009, IAC-09.C4.4.9
27) Stefano Naclerio, Jesús Soto Salvador, Ernesto Such, Raúl Avezuela, Ramón Perez Vara, “Small GEO Xenon Propellant Supply Assembly Pressure Regulator Panel: Test Results and Comparison with ECOSIMPRO Predictions,” Proceedings of the 3rd edition of the International Conference on Space Propulsion Bordeaux, France, May 7-10, 2012, URL: http://www.ecosimpro.com/download/articles/SpacePropulsion2012_2355255.pdf
28) Stefano Naclerio, Raúl Avezuela, Ramón Perez, Alain Demairé, Bjarne Andersson, Niccola Kutufa, “Development of a Propellant Supply Assembly for Small GEO,” Proceedings of Space Propulsion 2010, San Sebastian, Spain, May 3-6, 2010, URL: http://www.ecosimpro.com/download/articles/SpacePropulsion2010.s54_S.NACLEIRO_paper.pdf
29) N. Koch, S. Weis, M. Schirra, A. Lazurenko, B. Reijen, J. Haderspeck, A. Genovese, N. Puettmann, K. Ruf, “The High Efficiency Multistage Plasma Thruster HEMPT based Ion Propulsion System for the SmallGEO Satellite”, 47th AIAA/ASME/SAE/ASEE Joint Propulsion Conference & Exhibit, San Diego, CA, USA, August 2011
30) Norbert Koch, Stefan Weis, Martin Schirra, Alexey Lazurenko, Benjamin v. Reijen, Jens Haderspeck, Angelo Genovese, Norbert Püttmann, “The High Efficiency Multistage Plasma Thruster (HEMPT) based Ion Propulsion System for the SmallGEO Satellite,” 2nd International Vacuum Electronics Workshop 2010, Nov. 15 – 16, 2010, Physikzentrum Bad Honnef, Germany
31) Norbert Koch, Stefan Weis, Martin Schirra, Alexey Lazurenko, Benjamin van Reijen, Jens Haderspeck, Angelo Genovese, Peter Holtmann, Klaus Ruf, Norbert Püttmann, Hendrik Lübberstedt, “Development, Qualification and Delivery Status of the HEMPT based Ion Propulsion System for SmallGEO,” 32nd International Electric Propulsion Conference (IEPC), Wiesbaden, Germany, September 11 – 15, 2011, paper: IEPC-2011-148, URL: http://erps.spacegrant.org/uploads/images
/images/iepc_articledownload_1988-2007/2011index/IEPC-2011-148.pdf
32) Stefan Weis, Alexey Lazurenko, Benjamin van Reijen, Jens Haderspeck, Angelo Genovese, Peter Holtmann, Klaus Ruf, Norbert Püttmann, Martin Schirra, “Overview, Qualification and Delivery Status of the HEMPT based Ion Propulsion System for SmallGEO,” Proceedings of the 33rd International Electric Propulsion Conference (IEPC), Washington D.C., USA, Oct. 6-10, 2013, paper: IEPC-2013-299, URL: http://www.iepc2013.org/get?id=299
33) Norbert Püttmann, Klaus Ruf, “Electric Propulsion in Germany: System activities today, institutions involved, challenges coming up,” Proceedings of the 33rd International Electric Propulsion Conference (IEPC), Washington D.C., USA, Oct. 6-10, 2013, paper: IEPC-2013-257, URL: http://www.iepc2013.org
/get?id=257
34) B. van Reijen, S. Weis, A. Lazurenko, J. Haderspeck, A. Genovese, P. Holtmann, K. Ruf, N. Püttmann, “High Precision Thrust Vector Determination through Full
Hemispherical RPA Measurements assisted by Angular Mapping of Ion Energy Charge State Distribution,” Proceedings of the 33rd International Electric Propulsion Conference (IEPC), Washington D.C., USA, Oct. 6-10, 2013, paper: IEPC-2013-284, URL: http://www.iepc2013.org/get?id=284
35) E. Rezugina, A. Demaire, A. Edfors, B. Andersson, P. Rathsman, E. Lamoureux, F. Sjöberg, M. De Tata, “All EP Platform: Mission Design Challenges and Subsystem Design Opportunities,” Proceedings of the 33rd International Electric Propulsion Conference (IEPC), Washington D.C., USA, Oct. 6-10, 2013, paper: IEPC-2013-093, URL: http://www.iepc2013.org/get?id=093
36) Hans-Peter Harmann, Norbert Koch, Guenter Kornfeld, “Low Complexity and Low Cost Electric Propulsion System for Telecom Satellites Based on HEMP Thruster Assembly,” 30th International Electric Propulsion Conference, Florence, Italy, September 17-20, 2007, paper: IEPC-2007-114
37) G. Matticari, G. E. Noci, P. Siciliano, M. Miccolis, S. Strada, “Cold Gas Thruster Assembly for SGEO Platform: Review of Development activities by Thales Alenia Space Italia,” Proceedings of Space Propulsion 2010, San Sebastian, Spain, May 3-6, 2010
38) ”First SmallGEO makes its final terrestrial trip,” ESA, Dec. 1, 2016, URL: http://m.esa.int/Our_Activities/Telecommunications_Integrated_Applications
/SmallGEO/First_SmallGEO_makes_its_final_terrestrial_trip
39) ”OHB Communications Satellite for HISPASAT arrived at Launch Site,” OHB Press Release, Dec. 1, 2016, URL: https://www.ohb-system.de/press-releases-details
/ohb-communications-satellite-for-hispasat-arrived-at-launch-site.html
40) ”SmallGEO successfully passes mechanical tests,” ARTES, ESA, Jan. 15, 2016, URL: https://artes.esa.int/news/smallgeo-successfully-passes-mechanical-qualification
41) “OHB completing integration of the first geostationary communications satellite “Hispasat Advanced Generation 1,” OHB press release, Feb. 18, 2015, URL:
42) “The SmallGEO - Hispasat AG1 satellite: ready for testing,” ESA, August 19, 2014, URL: http://telecom.esa.int/telecom/www/object/index.cfm?fobjectid=33157
43) “A big milestone for SmallGEO,” ESA, Feb. 7, 2014, URL: http://telecom.esa.int/telecom/www/object/index.cfm?fobjectid=32885
44) ”OHB with a successful launch into a geostationary orbit,” OHB Press Release, Jan. 28, 2017, URL: http://www.ohb.de/press-releases-details/ohb-with-a-successful-launch-into-a-geostationary-orbit.html
45) ”Hispasat 36W-1,” Hispasat 2016, URL: http://www.hispasat.com/en/satellite-fleet/future-satellites
46) ”SmallGEO's first flight reaches orbit,” ESA, Jan. 28, 2017, URL: http://m.esa.int/Our_Activities/Telecommunications_Integrated_Applications
/SmallGEO/SmallGEO_s_first_flight_reaches_orbit
47) ”Happy third birthday to the SmallGEO satellite!,” ESA Applications, 14 September 2020, URL: https://www.esa.int/Applications/Telecommunications_Integrated_Applications
/Happy_third_birthday_to_the_SmallGEO_satellite
48) ”OHB telecommunications satellite demonstrating full functional capability in orbit,” OHB Press Release, June 2, 2017, URL: https://www.ohb-system.de/press-releases-details/ohb-telecommunications-satellite-demonstrating-full-functional-capability-in-orbit.html
49) ”First SmallGEO mission to start service,” ESA, June 6, 2017, URL: http://m.esa.int/Our_Activities/Telecommunications_Integrated_Applications
/SmallGEO/First_SmallGEO_mission_to_start_service
50) ”The H36W-1 satellite reaches its orbital position and becomes operational,” Hispasat Press Release, May 26, 2017, URL: https://www.hispasat.com/contenidos/notas-de-prensa/0/269-616---h36w-1_en.pdf
51) ”Europe's new geostationary satellite platform for the telecommunications market,” DLR, Jan. 28, 2017, URL: http://www.dlr.de/dlr/en/desktopdefault.aspx/tabid-10081/151_read-20802/year-all/#/gallery/25568
52) ”The Builder Is Beaming with Launch Success,” Satnews Daily, January 28, 2017, URL: http://www.satnews.com/story.php?number=1005578842
53) Hispasat AG1 mission logo unveiled ,” ESA, June 24, 2011, URL: http://telecom.esa.int/telecom/www/object/index.cfm?fobjectid=31149
54) M. Späth, R. Kurz, D. Thurnes, “Optical Fibre Based TM/TC Architecture for Future Communication Payloads,” ICSO 2010 (International Conference on Space Optics), Rhodes Island, Greece, Oct. 4-8, 2010
55) “A big milestone for SmallGEO,” ESA, Feb. 7, 2014, URL: http://telecom.esa.int/telecom/www/object/index.cfm?fobjectid=32885
56) Thales Alenia Space signed a contract to provide HISPASAT-AG1 satellite with REDSAT advanced communication payload,” June 18, 2009, URL: http://www.thalesgroup.com/Press_Releases/space_press_release_hispasat_AG1/
57) E. Martínez, K. Grange, R. Jansen, J. Ricart, E. Pun, J. López, E. Prefasi, M. García, M. Bustamante, L. de la Fuente, D. Peña, F. Gutiérrez, “High Power Distribution, Control and Monitoring ASIC (Smart Power) for Space,” 3rd International AMICSA (Analog and Mixed-Signal Integrated Circuits for Space Applications) 2010 Workshop, , Noordwijk, The Netherlands, Sept. 5-8, 2010, URL: http://microelectronics.esa.int/amicsa/2010
/7pm/ARQUIMEA%20HIGH%20POWER%20ASIC%20v6.pptx
58) “Key Hispasat-AG1 Redsat component now ready,” ESA, April 24, 2013, URL: http://telecom.esa.int/telecom/www/object/index.cfm?fobjectid=32385
59) Jennifer Campuzano, Antonio Montesano, Luis F. de la Fuente, Ana M. Trastoy, Miguel Bustamante, David Álvarez, “EADS CASA Espacio DRA-ELSA Patterns and G/T Predicted Performances,” Proceedings of the 32nd ESA Antenna Workshop on Antennas for Space Applications, Noordwijk, The Netherlands, Oct. 5-8, 2010, URL: https://web.archive.org/web/20140908140535/http://utopia.duth.gr/~iaitidis/ESA%20conference%202010/Papers/session%2014/FCXNL-10C09-2004450-1-2004450jcampuzano.pdf
60) David Álvarez, Antonio Montesano, Agustín Zornoza, Arturo Martín Polegre, Luis F. de la Fuente, Silvia Arenas, Miguel Bustamante, Jennifer Campuzano, Ana M. Trastoy, Ignacio Herrera, Eduardo González, Teresa Moreno, Christine Miquel, Eric Villete, “Hispasat AG1 DRA-ELSA active antenna: RF design and performance,” Proceedings of 33rd ESA Antenna Workshop on Challenges for Space Antenna Systems, ESA/ESTEC, Noordwijk, The Netherlands, Oct. 18-21, 2011
61) David Alvarez, David Peña, Antonio Montesano, Agustín Zornoza, Alberto Rubio, Diego Acevedo, Javier Lopez-Mateos Paino, Luis F. de la Fuente, Silvia Arenas, Christine Mique, Eric Villete, “Hispasat AG1 DRA-ELSA active antenna: thermo-mechanical design and control aspects,” Proceedings of 33rd ESA Antenna Workshop on Challenges for Space Antenna Systems, ESA/ESTEC, Noordwijk, The Netherlands, Oct. 18-21, 2011
62) “Hispasat, Astrium Launch Europe's First Configurable Ku-band Antenna,” Oct. 22, 2013, URL: http://www.satellitemarkets.com/productsservices
/hispasat-astrium-launch-europes-first-configurable-ku-band-antenna
The information compiled and edited in this article was provided by Herbert J. Kramer from his documentation of: ”Observation of the Earth and Its Environment: Survey of Missions and Sensors” (Springer Verlag) as well as many other sources after the publication of the 4th edition in 2002. - Comments and corrections to this article are always welcome for further updates (eoportal@symbios.space).
Spacecraft Propulsion Launch Mission Status Payload References Back to top