Sherpa Rideshare Mission
Non-EO
Technology and Research
Launchers
Quick facts
Overview
| Mission type | Non-EO |
| Launch date | 03 Dec 2018 |
Sherpa Rideshare Mission
Overview Launch Mission Concept Flight Hardware Ground Segment References
The company Spaceflight Inc. of Seattle, WA, USA, founded in 2009, has the goal to revolutionize secondary payload flight services for fixed and deployable cargo and transport. As of 8 June 2023, Spaceflight Inc6). has been acquired by Firefly Aerospace. In 2012, Spaceflight formally started its Sherpa in-space tug service project, which is dedicated to hosting and deploying small and secondary payloads.
Since the termination of the Falcon 1 program, the opportunities for access to space for small spacecraft have been limited. Spaceflight, Inc. (Spaceflight) is addressing this market need by providing commercial launch services for secondary and hosted payloads by using its SSPS (Spaceflight Secondary Payload System) and Sherpa in-space tug. The SSPS is a system designed to transport up to 1,500 kg of secondary and hosted payloads to space using the excess capacity on Medium and Intermediate class commercial launch vehicles. The SSPS can accommodate up to five 300 kg spacecraft, or many smaller spacecraft, on each of its five ports and operates independently from the primary launch vehicle to simplify payload and mission integration. Sherpa is an in-space tug that builds upon the capabilities of the SSPS by incorporating propulsion and power generation subsystems, which creates a free-flying tug dedicated to maneuvering to an optimal orbit to place secondary and hosted payloads. Spaceflight has manifested the SSPS on a Falcon 9 launch in 2013 and the Sherpa on the inaugural launch in 2015. 1)
Background 2)
With the recent growth of the small satellite industry, demand for small satellite launch service has followed suit. Because most small satellites "rideshare" as auxiliary payloads on launch vehicles, finding exact launches to the optimal orbit can be difficult. Getting a seat at the table with a launch service provider more accustomed to launching satellites much larger than a CubeSat, nanosatellite, or microsatellite can be equally daunting. With good reason, the launch service provider's primary focus is on payloads that will generate significant revenue toward the cost of the entire launch vehicle.
In the past two years, the SmallSat market has seen tremendous growth as new commercial players have begun launching constellations to provide unprecedented optical resolution and revisit rate to the end user customer. While the economies of building small satellites has changed, the line-up of SmallSat launch vehicles has not kept pace. In order to lower launch costs for the SmallSat market, Spaceflight has acted as an aggregator, broker, and integrator to help improve the purchasing power of Spaceflight's SmallSat customers on medium lift launch vehicles. With Sherpa as an aggregator to more efficiently use mass and volume allotment on LEO missions, Spaceflight effectively opens up extra capacity on commercial launches and provides improved sales margin to the launch service provider through rideshare of multiple secondary spacecraft.
SmallSat spacecraft providers have a preferred orbit, but the primary payload commercial launch vehicles determines the orbital drop off destination, so often times the secondary payload orbit does not perfectly match the customer's needs. The most frequent launches with available rideshare capacity are 400 km to the ISS (International Space Station) and commercial launches to a sun synchronous orbit where the primary payload is dropped off at roughly 650 km.
From the launch vehicle provider's perspective, launching a number of SmallSats, and providing rideshare opportunities, often presents too great of a risk for too little a reward when the financial incentive is driven by the primary spacecraft. The level of integration and mission assurance does not diminish with the size of the spacecraft, so although there has been a huge growth in the small satellite market, the launch service provider views the additional payloads as extra work and not worth a sliver of additional margin.
Spaceflight arranges rideshare opportunities on Soyuz, H-IIA, Cygnus, Antares, Dnepr, Atlas V, and Falcon 9 launch vehicles, but the company believes that a path forward with nearly all launch service providers is to aggregate spacecraft into an integrated single package, thereby creating a win win scenario where the rideshare customer obtains a reduced price and the launch service providers receive additional revenue in excess of integration costs with little mission risks. Spaceflight's Sherpa is an in space transportation platform that simplifies spacecraft aggregation, integration, and deployment, a game changer that will open up new launch opportunities for the small satellite industry.
Inaugural Flight
The first Sherpa mission was planned for 2015 but was pushed back until 2018. The mission addressed the limitations of current launch configurations by maximizing the number of payloads integrated into the structure. The Sherpa concept is well suited to support small spacecraft that range from CubeSats to 300 kg minisatellites. By developing unique adapters for the standard ports, Spaceflight has enabled many different sizes of spacecraft to deploy from Sherpa, including the DARPA eXCITe microsatellite, built by NovaWurks Inc. of Alamitos, CA (NovaWurks is a wholly owned subsidiary of Spaceflight Industries, Inc., Seattle) and two BlackSky Global Pathfinder satellites. Future planned configurations involve multiple Sherpa rings on a single launch, as well as support for much larger spacecraft on the forward section of the Sherpa ring. 3) 4)
One of the innovative microsatellites included on the manifest is a 160 kg system, developed and flown by NovaWurks. Based on the current customer inputs, this 125 kg to 250 kg minisatellite class will be an area of high demand. Spaceflight has concluded, that this is one of the worst served markets in terms of access to space. Historically, this category was served by foreign launch service providers and the U.S. Government. As technology advances, this class of spacecraft has begun to catch the interest of commercial satellite providers. This new group of customers does not have access to the Government's small launch vehicles, and, to date, commercial small launch vehicles are too expensive for the secondary market. While there are efforts underway to develop lower-cost commercial small launch vehicles, the efficiencies in cost provided by the Sherpa concept will remain a competitive means to access popular orbits.
Three microsatellites on the 2018 Sherpa mission supported the early phases of a constellation build out. With numerous spacecraft manifested on this mission, Spaceflight has had to consider not only the mass to orbit but also the volume consumed by any given spacecraft. By developing an adapter system that places two spacecraft on a single port, Spaceflight is able to maintain its Internet-advertised pricing. Customers can recognize the benefit of this pricing by designing to industry and Sherpa published standards. This will increase the number of rideshare opportunities available and keep the cost per kg low.
Spaceflight procured the ESPA [EELV (Evolved Expendable Launch Vehicle) Secondary Payload Adapter] Grande ring from Moog CSA Engineering, has chosen Innovative Solutions in Space's QuadPack as the CubeSat deployer, Planetary Systems Corporation motorized LightBand as the separation system for non-containerized spacecraft, and a RUAG separation system to separate Sherpa from the launch vehicle. Additionally, Spaceflight will utilize Andrews Space for command and data handling subsystems to be installed on Sherpa (Figure 1).
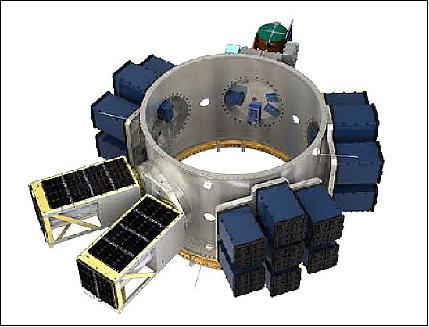
For the 2018 Sherpa mission Spaceflight utilised the modularity to fly a number of 6U CubeSats. Not only did the QuadPacks provide modularity in the CubeSat configuration, but the ability to integrate the system through multiple bolt-hole patterns enabled additional integration options. Spaceflight has designed an adapter plate that integrates the aft end to the plate. This design allows Spaceflight to place seven QuadPacks per SHERPA port.
The QuadPacks are compatible with CubeSats developed to the Cal Poly CubeSat Standards. This system also offers options to support some of the emerging trends in the CubeSat world; such as "tuna can" extrusion, and volume growth around the rail system.
Launch
All iterations of Sherpa have been launched from the Cape Canaveral Space Launch Complex in the United States on board a Falcon-9 rocket developed by SpaceX:
- 3 December 2018: Sherpa
- 24 January 2021: Sherpa-FX1
- 30 June 2021: Sherpa-FX2 and Sherpa-LTE1 were launched in the same rocket
- 25 May 2022: Sherpa-AC1
- 5 September 2022: Sherpa-LTC 2
Sherpa-ES1 is expected to launch in the future from the Kennedy Space Center Launch Complex on board a Falcon-9 rocket.
Mission Concept
A significant driver for the requirements of the 2018 Sherpa mission was the overriding concept of avoiding any additional risk to the primary spacecraft or the launch vehicle. Secondary payload mechanical and electrical designs have been addressed over the years at the Small Satellite Conference (Ref. 3).
The Sherpa is separated from the launch vehicle prior to any deployments. This operation enables Spaceflight to minimize the risk to the launch service provider because it is responsible for all deployments after Sherpa separation. This separation requirement drove Spaceflight to develop a robust avionics system at a competitive price. The avionics system had to be compatible with Spaceflight's advertised launch pricing. In the end, the company determined that developing their own system was the best solution.
The avionics incorporated into the 2018 Sherpa mission were kept as simple as possible and still meet mission requirements: battery, computer/sequencer, GPS and transmitter. The Sherpa system is powered off throughout the launch ascent phase (as a secondary payload itself) and activated via the separation event from the upper stage of the launch vehicle. Once initiated, the avionics perform the separation sequencing based on a timing script.
Timing the separation events was an important trade analysis. The first consideration was to avoid spacecraft re-contact. The second was to manage the forces imparted on the Sherpa because there is no system to maintain and control attitude. The third requirement was to deploy all the satellites and confirm the deployments prior to the end of battery life. The analyses and lessons learned are documented for use in future mission planning. Spaceflight have developed a separation plan that minimizes risk of contact and does so without control authority on the SHERPA.
Spaceflight also included a GPS for position knowledge and a radio to transmit telemetry as part of the Sherpa. Avionics will capture the GPS location of each separation event, and confirm deployment. The avionics provide the telemetry data to customers within 30 minutes of a successful ground station pass.
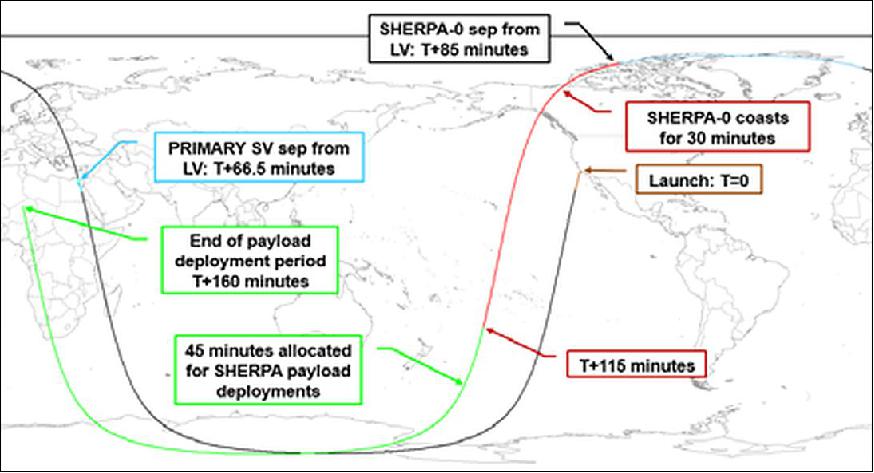
The overall mission timeline was as follows:
• Separation from the upper stage of the launch vehicle
• Avionic system initiated and mission sequence timing begins
• 30 minute coast – no Sherpa activity
• Enter payload deployment sequence
• 45 minute payload deployment time
• Continue to relay telemetry over selected ground sites until end of battery life approximately 10 hours post Sherpa separation.
Flight Hardware
Deployment Electronics: A common challenge in aerospace is defining a set of requirements that can be met through "off the shelf" solutions. In the case of the Sherpa, Spaceflight developed electronics capable of meeting mission requirements. Requirements included the electrical inhibits required by the launch service provider to ensure no inadvertent deployments.

Power is a considerable challenge when there are 87 spacecraft being deployed. Both the GPS and radio must be powered, for up to 10 hours. The design solution Spaceflight selected was the CORTEX Avionics Suite. The CORTEX battery is a Spaceflight COTS unit based on lithium-ion cells purchased from Yardney. Spaceflight also chose to keep the flight computer, or sequencer, in house. The CORTEX 160 flight computer performs the computing, command and storage functions needed for the mission.

Microsatellite adapters: Spaceflight developed two requirements that defined the final design of the adapter plates; modular and minimal mass. Overall mass is a significant concern in the business of purchasing excess launch capacity and then selling that capacity to satellite providers. The final designs are machined aluminum plates with the minimal mass required to support the flight configuration payloads under the anticipated launch load (Ref. 3).
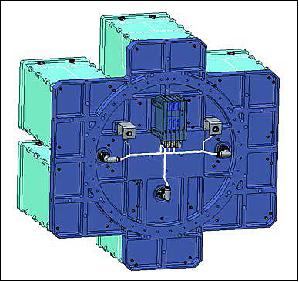
For the 2018 Sherpa mission, Spaceflight used 3 different plates (payload adaptors) to interface to the Moog ESPA Grande ring, the core of the Sherpa spacecraft. These payload adaptors allowed for 6 different satellite, separation or dispenser configurations. The plates were estimated to support 80% of the current customer base Spaceflight tracks. The radial port adapter is a flat plate for microsatellites greater than 50 kg. It bolts directly to the Sherpa 60.96 cm port interface and can provide separation diameter interfaces of either 29.8 cm or the 38.1 cm motorized LightBand. It is also capable of supporting a total mass of up to 150 kg.
The plate itself is machined from one piece of aluminum alloy. The diameter is just slightly wider than the 60.96 cm bolt pattern at 65.40 cm; it has a total mass of 13.3 kg. In addition to supporting the spacecraft, the backside of the plate is used to mount the various avionics components required for the 2015 Sherpa mission. The plate has accommodations for cable pass through.
The dual port adapter enables Spaceflight to fully utilize the volume available on a port and supports two spacecraft, each with a mass of up to 85 kg. This adapter is machined from a single piece of aluminum and has a mass of 21.7 kg. It attaches to the ESPA Grande ring via the 61 cm bolt hole pattern and has accommodations for both the 29.8 cm and 20.3 cm motorized LightBands.

CubeSat adapters: To date Spaceflight has flown over 76 CubeSats across a range of launch systems using a variety of different dispensers. With no slowdown in upcoming CubeSat deployments forecast, the QuadPack Plate was developed. It supports 7 QuadPacks per plate.
The initial Sherpa flight is based on the ESPA Grande ring, along with a number of adapters, which are paired with Spaceflight Systems electronics. The concept behind Sherpa is to make the configuration modular. With this set of adapters and electronics Spaceflight can mix and match components to suit most any set of payloads.
Ground Segment
Spaceflight's final piece of in-house capability is the newly developed Spaceflight Ground Station Network. Communications between the Sherpa and ground station are primarily accomplished using Spaceflight Networks. The system will be a global ground station network developed to support commercial and government satellites. It is available to Spaceflight customers on a pay per-minute basis. The network has a "bent-pipe" architecture: all ground stations are unmanned and controlled by the central network operations center located in Seattle, WA. The ground stations are connected via terrestrial fiber, and customers are given direct access (via TCP/IP) to communicate with their spacecraft during the designated communications window. Spaceflight Networks currently support communications in UHF, S, and X-bands. For commercial spacecraft, S-band uplink and X-band downlinks are used. For the 2015 Sherpa mission, Spaceflight will use three of the ground stations as well as support from NASA Wallops Flight Facility to downlink the mission telemetry (Ref. 3).
Future SHERPA Capabilities
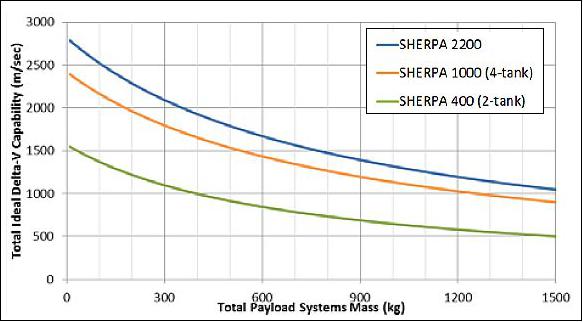
Spaceflight intends to solve the SmallSat challenge of deploying customers into the optimal orbit by including a propulsion system on Sherpa, providing the capability to perform LEO altitude shifts, as well as SmallSat missions to a geosynchronous transfer orbit and trans-lunar injection orbits.
Spaceflight will offer 4 main variants of Sherpa with the following performance:
Vehicle | Propellant system |
Sherpa | None |
Sherpa 400 | 2 tank monopropellant |
Sherpa 1000 | 4 tank monopropellant |
Sherpa 2200 | 4 tank bipropellant |
References
1) Jason Andrews, "Spaceflight Secondary Payload System (SSPS) and Sherpa Tug - A New Business Model for Secondary and Hosted Payloads," Proceedings of the 26th Annual AIAA/USU Conference on Small Satellites, Logan, Utah, USA, August 13-16, 2012, paper: SSC12-V-6, URL: http://digitalcommons.usu.edu/cgi/viewcontent.cgi?article=1049&context=smallsat
2) Phil Brzytwa, Curt Blake, "Spaceflight Sherpa mission Q3 2015; cost effective rideshare access to space for the growing smallsat industry," Proceedings of the 65th International Astronautical Congress (IAC 2014), Toronto, Canada, Sept. 29-Oct. 3, 2014, paper: IAC-14 D2.2.7
3) Kaitlyn Kelley, Mitch Elson, Jason Andrews, "Deploying 87 Satellites in One Launch: Design trades completed for the 2015 Sherpa flight hardware," Proceedings of the 29th Annual AIAA/USU Conference on Small Satellites, Logan, Utah, USA, August 8-13, 2014, paper: SSC15-II-2, URL: http://digitalcommons.usu.edu/cgi/viewcontent.cgi?article=3171&context=smallsat
4) "General Payload Users Guide," Spaceflight Inc., SF‐2100‐PUG‐00001, Rev F 2015‐22‐15, URL: [web source no longer available]
5) "Jason Andrews: 87 Small Sat launch via "Sherpa" on F9 from Vandenberg in Q1 2016 (date estimated)," Aug. 11, 2015, URL: https://www.reddit.com/r/spacex/comments/3gmpln/jason_andrews_87_small _sat_launch_via_sherpa_on/
6) “Firefly Aerospace Announces Strategic Acquisition of Spaceflight Inc. to Bolster On-Orbit Services”, Firefly Aerospace. 8 June 2023. URL: https://fireflyspace.com/news/firefly-aerospace-announces-strategic-acquisition-of-spaceflight-inc-to-bolster-on-orbit-services
Overview Launch Mission Concept Flight Hardware Ground Segment References Back to top