SAC-C (Satélite de Aplicaciones Científicas-C)
EO
Atmosphere
Ocean
Atmospheric Temperature Fields
Quick facts
Overview
| Mission type | EO |
| Agency | CONAE |
| Mission status | Mission complete |
| Launch date | 04 Dec 1998 |
| End of life date | 04 Dec 1998 |
| Measurement domain | Atmosphere, Ocean, Land, Gravity and Magnetic Fields, Snow & Ice |
| Measurement category | Atmospheric Temperature Fields, Ocean colour/biology, Aerosols, Multi-purpose imagery (ocean), Radiation budget, Multi-purpose imagery (land), Vegetation, Albedo and reflectance, Gravity, Magnetic and Geodynamic measurements, Atmospheric Humidity Fields, Ocean topography/currents, Snow cover, edge and depth |
| Measurement detailed | Ocean imagery and water leaving spectral radiance, Land surface imagery, Vegetation type, Fire fractional cover, Earth surface albedo, Downwelling (Incoming) solar radiation at TOA, Magnetic field (scalar), Magnetic field (vector), Atmospheric specific humidity (column/profile), Atmospheric temperature (column/profile), Ocean suspended sediment concentration, Snow cover, Volcanic ash, Ocean dynamic topography, Gravity field, Active Fire Detection |
| Instruments | INES, MMP, GOLPE, MMRS, DCS (SAC-C), GPSDR, HRTC, WTE, HSTC, IST, ICARE |
| Instrument type | Imaging multi-spectral radiometers (vis/IR), Space environment, Magnetic field, Precision orbit, Data collection, Atmospheric temperature and humidity sounders |
| CEOS EO Handbook | See SAC-C (Satélite de Aplicaciones Científicas-C) summary |
SAC-C (Satélite de Aplicaciones Científicas-C)
SAC-C (Scientific Application Satellite-C) is an international cooperative Earth observation mission of Argentina, USA, Denmark, Brazil, Italy and France with CONAE (Comisión Nacional de Actividades Espaciales) of Buenos Aires (CONAE is the Space Agency of Argentina) and NASA as the main partners. CONAE provided the S/C bus and payload instrumentation, NASA provided launch services and two instruments, a GPS flight receiver (GOLPE) and SHM (Scalar Helium Magnetometer) part of the Ørsted-2 instrument. Denmark is contributing with the MMP (Magnetic Mapping Payload) that is a heritage from the Ørsted satellite, called Ørsted-2. INPE of Brazil is providing the system-level environmental testing facilities and its test support capabilities. Italy provided part of the solar panels and two technological experiments for orbit and attitude determination, IST and INES. The overall objective is to study the structure and dynamics of the Earth's surface, atmosphere, ionosphere and geomagnetic field. Specific science objectives are to: 1) 2) 3) 4) 5) 6) 7)
• Provide multispectral images of the Earth in order to monitor the condition and dynamics of the terrestrial and marine biosphere and environment
• Develop and utilize new GPS-based techniques to globally measure atmospheric phenomena for the study of weather, seasonal, inter-annual and long-term climate change
• Enhance the understanding of the Earth's magnetic field and related sun-Earth interactions
• Measurement of the high-energy radiation environment, trapped particles intensities and energy distribution and correlation with degradation of electronic components.

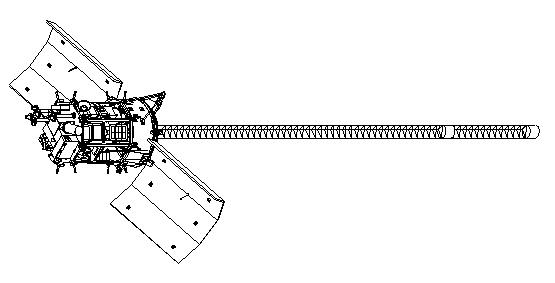
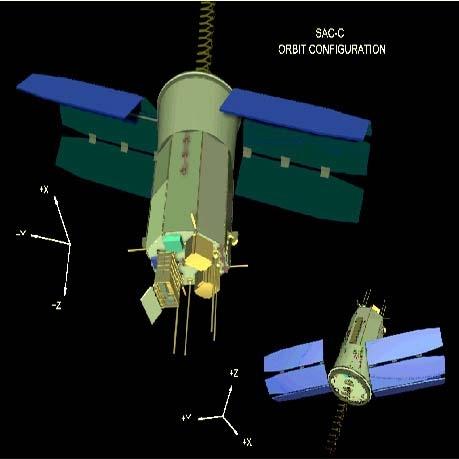
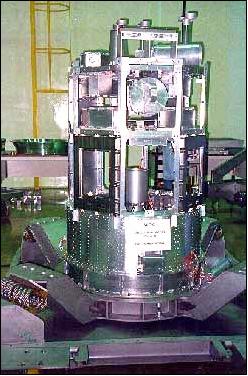
Spacecraft
The minisatellite structure has dimensions of 1.85 m x 1.68 m x 2.4 m with a total mass of 485 kg (payload = 104 kg, bus = 340.3 kg, fuel = 12.5 kg). The main body of the S/C features an aluminum structure. The antenna booms employ a CFRP (Carbon Fiber Reinforced Plastic) structure. Two fixed solar panels provide 360 W of EOL power (average power consumption of 221 W, solar cells: GaAs, 65 m2) and two redundant 12 Ah NiH batteries providing 100 W during eclipse phases of the orbit.
The S/C is three-axis stabilized and nadir-pointing. The pointing accuracy required is 1.5º with a post-facto knowledge of 0.2º on three axis, the pointing stability is 0.1º/s. Attitude is maintained by two reactions wheels, three redundant torque rods, eight thrusters for orbit injection/maintenance (12.5 kg hydrazine), and a boom of 8 m in length; while attitude is measured by two partially redundant star trackers [referred to as ASC (Advanced Stellar Compass)], two redundant DGPS receivers, two horizon sensors, and a coarse sun sensor. All onboard communications are conducted via a MIL-STD-1553B bus. The S/C design life is 4 years. The prime contractor of the SAC-C spacecraft and its main payload, MMRS, was INVAP with headquarters in Rio Negro, Argentina. 8) 9) 10)
Launch
The SAC-C was launched on a Delta-2 (7320-10) launcher (as a secondary payload to the EO-1 spacecraft of NASA) from VAFB, CA, on Nov. 21, 2000.
Orbit: Sun-synchronous circular polar orbit, altitude = 705 km, inclination =98.2º, equatorial crossing on descending node at 10:21 AM (±6 min), repeat cycle = 16 days (with sub-cycles of 7 and 9 days).
RF communications: X-band and S-band data downlinks provide real-time and playback data transmissions. There are two S-band transmitters for MMRS low-resolution imagery transmission in real-time with a data rate of 0.9435 Mbit/s, recorder data are transmitted at 1.887 Mbit/s.
The S-band frequencies are 2076 MHz and 2255 MHz for onboard telemetry and control reception and transmission up- and downlink; and 2244 MHz for low-resolution data downlink transmission. In addition there are two X-band transmitters (8386 MHz) for high-resolution MMRS imagery at 3.774 Mbit/s. The onboard storage capacity is 768 Mbit. The UHF band, with a frequency of 401.75 MHz, is being used for South Atlantic Whale-Tracking System and low-resolution data downlink transmission.
The spacecraft mission is being operated by the CONAE Control Center at Cordoba, Argentina.
Mission Status
• Farewell to SAC-C: Three months before celebrating its thirteenth anniversary on orbit, communication with the Argentine SAC - C was lost suddenly on August 15, 2013 (Ref. 12). 11)
The SAC- C was the third satellite launched by CONAE on November 21, 2000 and was the first operational Earth observation , designed to meet the requirements of socio- productive areas of our country: agriculture, hydrology, coastlines, geology, health emergencies.
• In early 2013, the SAC-C mission is somehow in limbo. However, an upload of a new software patch is planned for late February 2013 in order to correct the position of SAC-C in its orbit (Ref. 12). After this event, the project is expects that some cameras can work again (like MMRS). The SAC-C data are available throughout the period 2000 to 2010.
• In Feb. 2011, the SAC-C mission is still operational, with some limitations. 12)
• On November 21, 2010, the SAC-C spacecraft was 10 years in orbit and still operational. 13)
• The SAC-C mission is operational in 2009 (in its 9th year and well beyond the design life of 4 years).
• On June 27, 2005, the SAC-C spacecraft left the “morning constellation” train and after a series of orbit maneuvers it acquired a new orbit on August 10, 2005 with the following parameters: 14)
Quasi sun-synchronous circular orbit, altitude = 707,6 km, inclination=98.0º, equatorial crossing on the descending node at 09:20 hours (drifting = -13 seconds/day), repeat cycle = 9 days.
• On June 14, 2000, CONAE and NASA signed an amendment to the Memorandum of Understanding for the SAC-C mission in order that the SAC-C satellite, were included in a constellation - named ”morning constellation”. 15)
• Constellation flight: As of 2001, the SAC-C spacecraft became part of a “morning constellation” train, a formation consisting of the NASA spacecraft Landsat-7, EO-1, SAC-C and Terra (separation times are between 1-15 minutes). The objective is to explore new synoptic observational capabilities and to compare coincident imagery. 16) 17)

Sensor Complement: (MMRS, HRTC, HSC, Ørsted-2/SHM, IST, INES, GOLPE, ICARE, WTE, DCS)
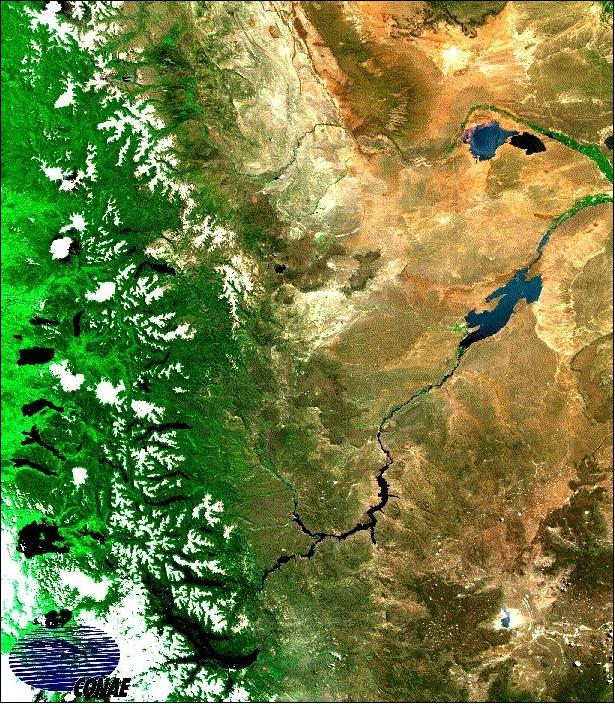
MMRS (Multispectral Medium Resolution Scanner)
MMRS is the prime instrument of SAC-C provided by CONAE. MMRS was designed and developed at INVAP as the prime contractor of the instrument. Objective: Monitoring of agricultural production and the influence of climatic anomalies over agriculture and forestry.
The instrument features a 5-band CCD linear array pushbroom imager with detection capability in VIS, NIR and SWIR ranges. The detector has a length of 2028 pixels. The swath width of the imagery is 360 km. There are two modes of operation: a high-resolution mode with a spatial resolution of 175 m, and a low-resolution mode of 350 m resolution (real-time transmission with low-resolution data). 18) 19) 20)
Spectral bands (5) in nm | 480-500 (blue) |
FOV (swath), IFOV (spatial resolution) | 29.42º (or 360 km), 0.014º (or 175 m) |
Optics system: effective focal length, f/number | 40 mm, f/3.1 |
Data quantization | 8 bit |
Detectors | 2048 x 4 silicon array (VNIR) , 2100 x 1 (SWIR) |
Data compression | Onboard JPEG data compression at rates of 4:1 to 10:1 |
Co-registration of bands | ±2 pixels (life time), ±0.25 pixel (one orbit) |
Data rate (downlink transmission) | 0.943 Mbit/s (low-rate mode) |
Instrument mass, power | 22 kg, 25 W (peak) |
Instrument pre-flight and on-orbit calibration of MMRS is provided. The onboard calibration system uses sunlight (in the south pole region of the orbit) for calibration. A cover mechanism in front of the instrument optics is partially opened for this purpose to reflect the sunlight into the optics and to perform a calibration. 21) 22)
HRTC (High-Resolution Technological Camera)
A CONAE panchromatic instrument with the objective to acquire high-resolution imagery over portions of MMRS scenes to aid in the data analysis. HRTC has a spectral range from 400 - 900 nm, a spatial resolution of 35 m, and a swath width of 90 km. A scene size of HRTC is 90 km x 1150 km. Imagery of HRTC is regularly stored onto the onboard recorder prior to downlink transmission. Some instrument characteristics: the CCD detector array has 2592 pixels; data quantization = 8 bit; IFOF = 0.0027º; FOV= 7º; instrument mass = 8.5 kg; power = 10.5 W. HRTC has a mirror capable of cross-track pointing. The objective is to locate the HRTC swath of 90 km anywhere within the bounds of the MMRS observation of 360 km width.
HSC (High Sensitivity Camera)
A small CCD imaging camera of CONAE with the objective to study a number of phenomena on the night pass of the orbit such as light intensities in urban regions, lightning in thunder storms, forest fires, and polar auroras. HSC has a spectral range from 450 - 850 nm, a spatial resolution of 300 m, and a swath width of 700 km.
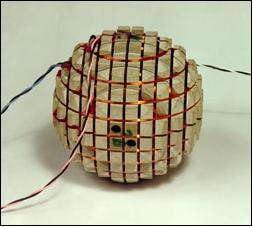
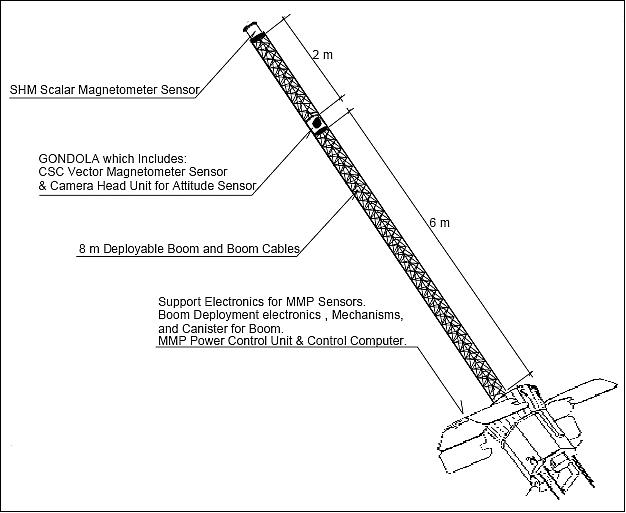
Ørsted-2 (Magnetic Mapping Payload)
Ørsted-2 is also referred to as MMP. Primary objective: mapping of the Earth's magnetic field. DSRI (Danish Space Research Institute) is providing the Ørsted-2 suite (of Ørsted heritage) sponsored by Denmark. Ørsted-2 consists of a deployable boom (8 m in length) mounted with a vector magnetometer and a star imager (0.5 arcseconds orientation), further included are the associated support electronics to control the sensors and the boom deployment, a power control unit and a command and data handling unit. A SHM (Scalar Helium Magnetometer) placed on the tip of the boom and associated support electronics from JPL completes the Ørsted-2 instrument package. The magnetic field measurements have a resolution of 1 nT at scalar and 2 nT at vector.
The overall objectives of Ørsted-2 are to perform highly accurate measurements of the Earth's magnetic field:
• To determine models of the main magnetic fields and its secular variation
- To study the physical properties of the fluid core and the electrical conductivity of the mantle
- To investigate the correlation between the geomagnetic fields and variations in the length of the day
- To study the lithospheric structure and evolution
• To study the interaction between the Earth's magnetic field and the solar wind
- Structure and variability of high-altitude fields and currents
- Relationships between field-aligned and ionospheric currents in the cleft and cusp
- External magnetic fields as functions of local time, season, and solar wind conditions
- Ionospheric signatures of localized processes in the outer magnetosphere
- Substorm processes.
The Ørsted-2 instrumentation on SAC-C represents essentially the same CSC (Compact Spherical Coil) vector magnetometer of DRSI as those flown on the Ørsted (launch Feb. 23, 1999) and CHAMP (July 15, 2000) missions. The autonomous instrument has a ± 65536 nT range with a resolution of 20 bits at 100 vector samples/s with a communication computer for telecommand/telemetry and control, and it includes Huffman encoding data compression. 23)
IST (Italian Star Tracker)
IST is an ASI-funded technology demonstration instrument developed by Alenia Spazio. 25) 26)The objective is to test a fully autonomous system for attitude determination using a star tracker. IST is able to provide in real-time the estimated attitude of the instrument boresight and its rotation rate, without any support from ground or other attitude sensors. IST is a prototype for a future multi-head system where a single EU (Electronic Unit) drives up to three Optical Heads (OH) to output absolute attitude and angular rate with high reliability and accuracy.
The prototype demonstrated accuracies in the order of a few arcsecs, continuity of operation, capability to recover from “lost in space” within a few seconds. The system is based upon a library of algorithms for autonomous attitude determination including reduced star catalogues, pattern recognition, estimation and self-calibration algorithms. IST is a single-head prototype composed of:
• One EU, developed by Laben, is based on an ERC32 chip-set processor. The CPU is based on the TEMIC ERC32 chip set (SPARC V, 32-bit RISC, 10 Mips) 12 MHz, 2 Mbyte RAM, and 512 kByte EEPROM. An STD-MIL-1553B external bus interface is provided.
• One OH (including baffle) of Alenia Difesa Officine Galileo. The optical system employs radiation hardened lenses (double Gauss modified), FOV= 8.23º x 10.96º, focal length = 46 mm, f/1.5 number, spectral range of 550-950 nm, CCD array of 288 x 384 pixels, a Peltier cooling system (3 stages), IFOV of 103 arcsec, integration time of 10 ms to 1 s (in 10 ms steps), data quantization of 16 bit (100 kHz), CCD readout time of 35 ms.
• The software package with attitude determination algorithms is developed by Alenia Spazio and EICAS Automazione.
IST provides as output the attitude quaternion and angular rate estimates with a frequency of 10 Hz. The average accuracy of the system, estimated after the first months of operation, is: 12 arcsec (x axis), 4 arcsec (y axis), and 2 arcsec (z axis). The IST instrument mass is: 3 kg (EU)+2.5 kg (OH)+ 0.6 kg baffle, power of 19-26 W. 27)
INES (Italian Navigation Experiment)
INES is composed of two separate systems: the GPS Tensor receiver and LAGRANGE (Laben GNSS Receiver for Advanced Navigation, Geodesy, and Experiments) of Laben S. p. A. Vimodrone, Italy. Both instruments are funded by ASI.
• LAGRANGE is a 12-channel, dual GPS/GLONASS receiver that operates at L1 and L2 frequencies. It can provide raw data, including differential L1/L2 measurements that can be used for such applications as geodesy and atmospheric profiling. Navigation accuracies are 80 m for GPS and 10 m for GLONASS. Integrated Doppler precision, sampled at 1 Hz, is listed as 1 mm for GPS and GLONASS. The LAGRANGE design employs the AGGA (Advanced GPS/GLONASS ASIC) chip device, developed at ESA/ESTEC.
Note: LAGRANGE was operational for 56 days until Jan. 21, 2001 when it suffered a radiation-induced failure and ceased operations before the end of the commissioning phase. However, data were collected during the entire period and were made available for analysis. 28)
• The GPS Tensor unit is utilized by the SAC-C S/C as the primary AOCS sensor providing navigation and attitude solutions. The prime objective is to validate the attitude determination capabilities of the GPS Tensor instrument and to demonstrate new filtering techniques in combination with instrument solutions provided.
GOLPE (GPS Occultation and Passive reflection Experiment)
GOLPE is a NASA/JPL instrument called BlackJack with the objective to observe ionospheric electron content, to provide atmospheric soundings permitting the derivation of atmospheric profiles of density, pressure, and temperature (refractive occultation monitoring), and to study GPS signals reflected from the Earth's surface.
The GPS receiver assembly of GOLPE consists of a multi-antenna system (four independent high gain antennas pointed in the zenith direction, in the fore and aft direction, and in the nadir direction, respectively). The zenith-pointing antenna is used for simultaneous tracking of GPS satellites. The receiver performs phase measurements of both GPS frequencies L1 and L2, and derives pseudoranges from these measurements for orbit determination.
• In limb radio-occultation monitoring the high gain and aft antennas receive the signals from the setting and rising satellites of the GPS constellation. This permits to determine atmospheric temperature and water vapor at about 500 occultations per day which are fairly uniformly distributed over the globe.
• The nadir pointing antenna is used to determine the utility of GPS signals reflected from Earth's surface to characterize the elevation and roughness of the Earth's surface for applications such as the determination of oceanic circulation and surface winds.
• The dual frequency capability of the instrument receiver permits the determination of ionospheric total electron content (TEC) along the direct, refracted and reflected ray paths, thereby providing data valuable for the tomographic determination of ionospheric structure.
• The ionospheric TEC measurements capability is an important complementary measurement to the Ørsted-2 (MMP) instrument data, thus permitting the derivation of parameters as: ionospheric and magnetospheric currents and conductivity.
• The data of GOLPE also help to improve the estimates of ionospheric delay which degrade the accuracy of single-frequency radar altimeters.
The BlackJack receiver can be re-configured in orbit. In order to demonstrate the capabilities of performing precise autonomous orbit determination and maintenance, JPL's RTG (Real-Time GIPSY) software has been uploaded to the Blackjack receiver and run in real-time. The RTG orbit determination module is a compact and portable software package optimized for real-time processing and is designed for use on embedded systems. RTG makes use of an extended Kalman filter as well as precise dynamic models for orbiting receivers. Since it is not possible to receive GDGPS corrections onboard SAC-C (as is the case for CHAMP), uncorrected broadcast GPS ephemeris data are used for the onboard orbit determination, resulting in meter-level orbit determination accuracies. GPS position and velocity solutions are being computed in real-time onboard SAC-C using broadcast GPS orbits and clocks. These real-time results are downloaded to the ground and verified against SAC-C orbits precisely determined in a post processing using GIPSY/OASIS II. 29) 30)
ICARE (Influence of Space Radiation on Advanced Components)
ICARE is a radiation monitoring instrument of CNES, France. The objectives are to support: 31) 32) 33)
• The improvement of risk estimation models for radiation effects on the latest generations of IC technologies
• Updates of environment models for radiation responsible for electronic component degradations and breakdowns
• Real-time monitoring of environmental conditions for preventive measures.
ICARE is composed of a set of radiation detectors (electrons, protons, ions) associated with a component test board. The radiation detectors are made of silicon fully depleted solid state detectors used in single and coincident mode. The onboard measurements consist in accumulating energy loss spectra in the junctions over a programmable accumulation period. The spectra are generated through signal amplitude classification using 8 bit A/D converters and resulting in 256 channels histograms. The reference levels of the discriminators and gain of the amplifiers are programmable to provide for possible onboard tuning optimization. The accumulation time for the spectra can be programmed from 4 to 256 s.
The component test board functions independently of the detector modes. It can be switched on or off in each mode. The purpose of this board is to measure single event effects rates and total dose parametric drifts on a set of advanced components. In its present version, the test processor is an AD2101 signal processor, single event test devices, commercial sub-micron 1 to 4 Mbit SRAMs, 16 to 64 Mbit DRAMs, and total dose test devices bipolar and CMOS operational amplifiers. The component test board is a separate module that is assembled on the main instrument box by 6 screws. The module can be changed from one mission to another. The instrument is also able to function if no module is connected.
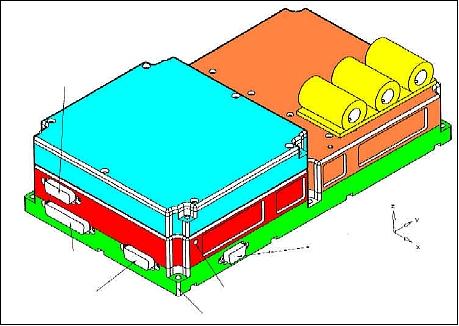
An ICARE communication interface is available for dialog through a single RS-422 or a MIL STD 1553B bus interface. The component experiment module downloads its results in an asynchronous way when its result buffer is filled with a certain amount of results. ICARE has a mass of 2.4 kg, a size of 28 cm x 15.5 cm x 7.1 cm, and a power consumption of 3 W. The data rate is 2.6 kbit/s (max.).
Figure 10 gives an overview of the instrument. The color code used for depicting the various subsystems is:
• yellow: particle detectors
• orange: acquisition electronics
• green: processing and bus interface
• red: power supply
• blue: removable component test module.
WTE (Whale Tracker Experiment)
WTE is a CONAE experiment (in cooperation with the Argentinean Secretariat of Natural Resources and Environment). The objective is to study the migration behavior of the Franca Australis Whale, to learn about its migration paths and to protect the species. WTE is in effect a regular data collection system consisting of two elements: a data collection module aboard the satellite and a number of data modules, the DCP (Data Collection Platforms) function, in the ground segment.
The goal was also to “install” a data module on a number of whales, each one containing a miniature GPS receiver to determine the whale location at any given time. In addition, the module contains two transducers to measure the water temperature and pressure. Communication with the space segment is provided by a transmitter and a data management unit. - The satellite module consists of a receiver to acquire the DCP data and the needed logic to handle the data.
Note: Several attempts were made to install a module on a whale; however, all attempts failed.
DCS (Data Collection System)
A “regular” CONAE-provided system (in addition to WTE) with the objective to collect data from user DCPs in the ground segment.
Background on the SAC program of Argentina
The SAC satellite program of CONAE, the Space Agency of Argentina, started in 1994 with the approval of the National Space Program by the government of Argentina. CONAE devised a plan, taking into account the available resources, and came up with a policy of international cooperative missions for an optimum in return of the investment. SAC is a key element in this program. 34)
Satellite | Launch Date | Prime Mission Objective | CONAE Partners in Mission |
SAC-B | Nov. 4, 1996 (launch failure) | Science | USA, Brazil, Italy |
SAC-A | Dec. 4, 1998 (STS-88 launch) | Technology | USA |
SAC-C | Nov. 21, 2000 from VAFB (secondary payload to EO-1) | Earth observation | USA, Denmark, Brazil, Italy, France |
SAC-D / Aquarius | Planned for 2010 | Earth observation with Aquarius as the prime instrument | USA, Italy, France |
The SAC-A payload consisted of the SAC-A satellite installed in a canister equipped with a Hitchhiker Pallet Ejection System (PES) and Hitchhiker Motorized Door Assembly (HMDA). For the STS-88 mission, SAC-A shared a common Hitchhiker Avionics Unit with MightySat I of AFRL (Kirtland AFB, NM). The SAC-A design life is six months. S/C mass = 64 kg, power = 36 W EOL. SAC-A is three-axis stabilized using momentum wheel, magnetic coils and a three-axis magnetometer. Attitude is measured by a DGPS receiver and an assembly of Si cells as a coarse sun sensor. A launch of STS-88 took place on Dec. 4, 1998. SAC-A was deployed on Dec. 14.
References
1) C. Alonso, “SAC-C Mission,” presented at the Euro-Latin-American Space Days in Mexico DC in November 1997
2) R. Colomb, C. Alonso, I. Nollmann, “SAC-C Mission and the International AM Constellation for Earth Observation,” Proceedings of the 3rd International Symposium of IAA, Berlin, April 2-6, 2001, pp. 433-437, URL: http://www.dlr.de/iaa.symp/Portaldata/49/Resources/dokumente/archiv3/1503.pdf
3) CONAE-NASA Workshop, Volume I and II, Dec. 1-2, 1993 - paper provided by J. L. LaBreque of NASA-HQ
4) F. R. Colomb, C. Alonso, C. Hofmann, I. Nollmann, “SAC-C mission, an example of international cooperation,” Advances in Space Research, Volume 34, Issue 10, 2004, pp. 2194-2199
5) http://www.conae.gov.ar/eng/satelites/sac-c.html
6) http://www.earthobservations.org/documents/committees/uic/200708_5thUIC/Platzcek-CONAE.pdf
7) F. R. Colomb, C. Alonso, C. Hofmann, I. Nollmann, “SAC-C mission, an example of international cooperation,” Advances in Space Research, Volume 34, Issue 10, 2004, pp. 2194-2199
8) https://web.archive.org/web/20100530200012/http://www.invap.net/space/sac-c/mission-e.html
9) http://www.nasa.gov/centers/goddard/pdf/110896main_FS-2000-11-012-GSFC-SAS-C.pdf
10) D. R. Barsellini, G. N. Garaventta, G. Bisaccio, A. Visintin, W. E. Triaca, “Operational performance of the SAC-C satellite nickel-hydrogen batteries,” Journal of the. Argentinian Chemistry. Society, Vol. 93 No.4-6, pp. 137-141, ISSN 0365-0375, Aug./Dec. 2005
11) “Farewell SAC-C,” CONAE, URL: http://www.conae.gov.ar/index.php/en/satellite-missions/sac-c/farewell-sac-c
12) Information provided by Sandra Torrusio, PI of the SAC-C mission at CONAE, Argentina
13) “Argentine Satellite SAC-C has reached ten years in orbit,” Nov. 21, 2010, URL: http://www.invap.com.ar/en/the-company/newsroom/630-sac-c-cumple-10-anos-en-orbita.html
14) Information provided by F. Raul Colomb, CONAE, Argentina
15) F. R. Colomb, C. Alonso, C. Hofmann, L. Frulla, L. Nollmann, J. Milovich, J. Kuba, F. Ares, M. Kalemkarian, “SAC-C Mission and the Morning Constellation,” Proceedings of the 34th COSPAR Scientific Assembly, The Second World Space Congress, Oct. 10-19, 2002, Houston, TX, USA
16) C. Filici, M. Suarez, “SAC-C Positioning in the Earth Morning Constellation,” Proceedings of Third International Workshop on Satellite Constellations and Formation Flying, Pisa, Italy, Feb. 24-26, 2003
17) F. R. Colomb, C. F. Varotto, “SAC-C and the AM constellation: three years of achievements,” Proceedings of RAST-03 (Recent Advances in Space Technologies), Nov. 20-22, 2003, pp. 119-124, ISBN: 0-7803-8142-4
18) F. R. Colomb, C. F. Varotto, “ SAC-C and the AM constellation: three years of achievements,” Proceedings of the International Conference on RAST 2003 (Recent Advances in Space Technologies), Nov. 20-22, 2003, Istanbul, Turkey
19) Roberto Torra, “Subcontinental Geologic Mapping using the MMRS Sensor (SAC-C Satellite Mission-Matutine Constellation). - An example of central regions of South America,” Map India Conference, Jan. 28-30, 2004, New Delhi, India, URL: http://www.gisdevelopment.net/application/geology/geomorphology/mi04052.htm
20) https://web.archive.org/web/20100530195938/http://www.invap.net/space/sac-c/instrumentation-e.html
21) F. Etura Marcon, J. Bratina, J. Nastri, G. Izaguirre, L. A. Frulla, J. Milovich, “SAC-C MMRS Calibration/Validation and an overview of spectral signatures on the basis of AVIRIS information,” URL: [web source no longer available]
22) “Argentina's CONAE joins the International Disaster Charter,” ESA, July 16, 2003, URL: http://www.esa.int/esaCP/SEM0XKXO4HD_Protecting_1.html
23) http://www.dsri.dk/showpage.php3?id=82&printer=y
24) Per Lundahl Thomsen, Flemming Hansen, “Danish Ørsted Mission In-Orbit Experiences and Status of The Danish Small Satellite Program,” Proceedings of the 13th Annual AIAA/USU Conference on Small Satellites, Logan, Utah, USA, Aug. 23-26, 1999, SSC99-I-8, URL: [web source no longer available]
25) Information provided by Andrea Bacchetta of Alenia Spazio, Torino, Italy
26) C. Portelli, A. Bacchetta, G. Sechi, M. De Meo, “IST: A Flight Demonstration of the Stellar Autonomous Attitude Determination System on SAC-C,” 4th ESA International Conference on Spacecraft Guidance, Navigation and Control Systems, Oct. 18-21, 1999, pp. 247-254, ESA/ESTEC, Noordwijk, The Netherlands, (ESA SP-425, Feb. 2000)
27) A. Bacchetta, S. De Sanctis, M. Montagna, M. T. Ravazzotti, G. Sechi, “Italian Star Tracker: In-Orbit Experiences,” 5th ESA Conference on Guidance Navigation and Control Systems, Oct. 22-25, 2002, Frascati, Italy, ESA SP-516
28) S. Casotto, A. Zin, B. Padovan, “SAC-C orbit reconstruction using the experimental GPS/GLONASS receiver LAGRANGE,” ION-GPS 2002, Portland, OR, Sept. 24-27, 2002
29) A. Reichert, T. Meehan, T. Munson, “Toward Decimeter-Level Real-Time Orbit Determination: A Demonstration Using the SAC-C and CHAMP Spacecraft,” ION-GPS 2002, Portland, OR, Sept. 24-27, 2002
30) Angie Reichert Dorsey, Tom Meehan, Tim Munson, “Using SAC-C as a Testbed for Precise Onboard Orbit Determination,” AM Constellation Workshop, Dec. 3-5, 2003, URL: http://www.conae.gov.ar/simposio/am/Dorsey.pdf
31) Information provided by Robert Ecoffet of CNES
32) "ICARE Influence of Space Radiation on Advanced Components," URL: https://web.archive.org/web/20160321193924/http://craterre.onecert.fr//radiation_monitors/ICARE.html
33) R. Ecoffet, S. Barde, J. Cueto, D. Falguere, T. Nuns, S. Duellier, D. Boscher, S. Bouchardie, R. Colomb, C. Alonzo, C. Hoffman, “Observations of the dynamics of the radiative environment in polar orbit in the period 11/2000-11/2001,” URL: http://www.esa-spaceweather.net/spweather/workshops/SPW_W3/PROCEEDINGS_W3/SWWorkshop_Ecoffet2.PDF
34) D. Caruso, “CONAE's Satellite Missions,” IAA 2nd International Symposium on Small Satellites for Earth Observation, Berlin, April 12-16, 1999, pp. 375-381