RADARSAT Constellation
EO
Atmosphere
Ocean
Multi-purpose imagery (ocean)
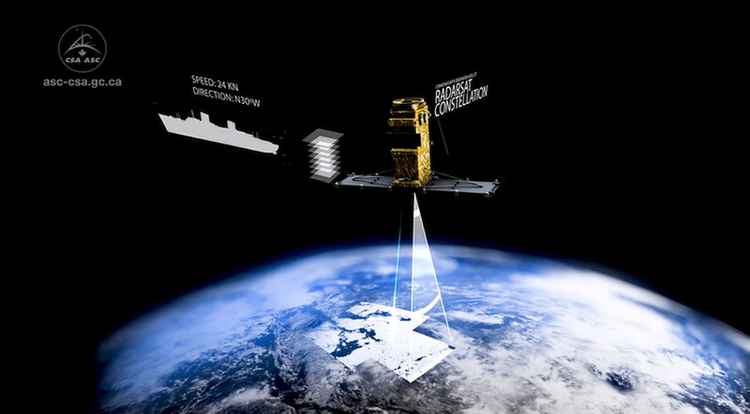
The RADARSAT Constellation Mission (RCM) is a three satellite constellation, developed and operated by CSA (Canadian Space Agency) with private sector support, primarily from MDA (MacDonald Dettwiler Associates Ltd.). Launched on the 12th of June 2019, RCM aims to provide C-Band data continuity for existing RADARSAT-1 & -2 users, and provide daily coverage of Canadian waters for ship, ice and oil spill monitoring.
Quick facts
Overview
| Mission type | EO |
| Agency | CSA, PSC, AAFC, DND, DFO, NRCAN, ECCC |
| Mission status | Operational (nominal) |
| Launch date | 12 Jun 2019 |
| Measurement domain | Atmosphere, Ocean, Land, Snow & Ice |
| Measurement category | Multi-purpose imagery (ocean), Multi-purpose imagery (land), Surface temperature (land), Vegetation, Albedo and reflectance, Landscape topography, Ocean topography/currents, Sea ice cover, edge and thickness, Snow cover, edge and depth, Ocean surface winds, Atmospheric Winds, Ocean wave height and spectrum, Ice sheet topography |
| Measurement detailed | Ocean imagery and water leaving spectral radiance, Land surface imagery, Vegetation type, Fire fractional cover, Earth surface albedo, Land cover, Ocean surface currents (vector), Land surface topography, Sea-ice cover, Snow cover, Wind speed over sea surface (horizontal), Snow water equivalent, Sea-ice thickness, Significant wave height, Bathymetry, Sea-ice type, Glacier motion, Ocean dynamic topography, Sea-ice sheet topography, Glacier cover, Oil spill cover, Soil type, Glacier topography, Above Ground Biomass (AGB), Permafrost, Surface Coherent Change Detection |
| Instruments | AIS (RCM), SAR (RCM) |
| Instrument type | Data collection, Imaging microwave radars |
| CEOS EO Handbook | See RADARSAT Constellation summary |
Related Resources
Summary
Mission Capabilities
Each of the three RCM satellites carry the SAR-RCM (Synthetic Aperture Radar for RADARSAT Constellation Mission) sensor module, a C-band radar imager with a centre radar frequency of 5.405 GHz. The SAR-RCM is capable of hybrid polarimetry, and is able to operate with single or dual polarisation in all imaging modes, with a specific mode for quad-polarisation. The SAR-RCM possesses multiple imaging modes, enabling imaging at a variety of resolutions, swaths, fields of regard and polarisations. Its primary mission objectives are monitoring of glacier cover, motion and topography, ice sheet and land surface topography, and sea-ice cover and type.
Performance Specifications
The SAR-RCM module has an imaging resolution of 3m-100m, and is capable of left or right hand variable pointing with a 350-500km wide field of regard (20-49° off-nadir). Utilising all three satellites which each cover a ground swath of 20km-500km, RCM has near global coverage in 4 days across all three satellites, when operating in a mode with low resolution. RCM is in a sun-synchronous orbit at an altitude of 600km with an LTDN (Local Time on Descending Node) of 6am, an inclination of 97.74° and a period of 96.4 minutes. The three component satellites of the mission fly in formation, dephased by 120°.
Space and Hardware Components
The bus design for the RCM was based on the Magellan MAC-200 bus, from Bristol Aerospace. All bus and payload electronic units are contained within the bus, with the SAR-RCM antennas stowed for launch and deployed in orbit. For the RF (Radio-frequency) communications, Tracking, Telemetry and Command data are transmitted using STDN (Spaceflight Tracking and Data Network) S-band compatible transponders, while payload data is transmitted in X-band, with 500 gigaBit on-board storage capacity. Each RCM satellite has a single, fixed, deployable solar panel and a Lithium-ion battery for power buffering.
RCM (RADARSAT Constellation Mission)
Spacecraft Launch Mission Status Sensor Complement Ground Segment References
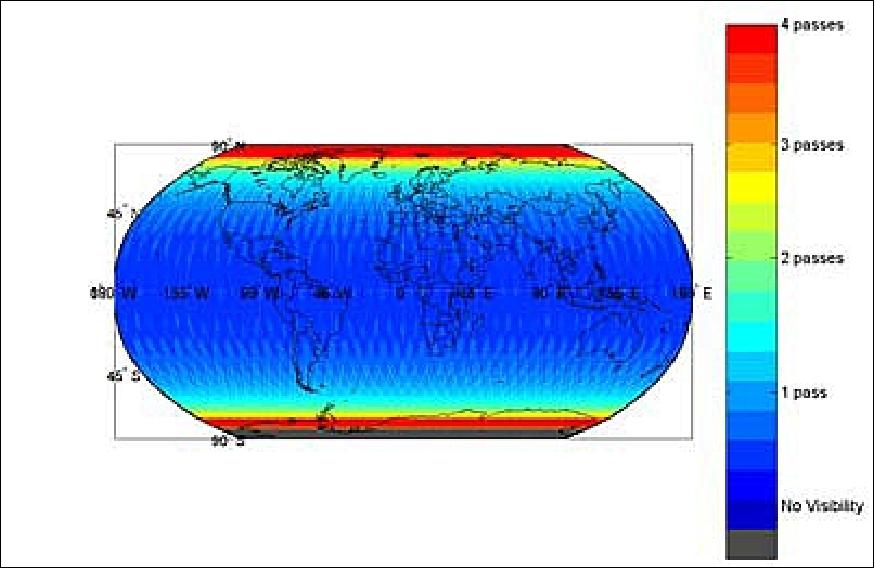
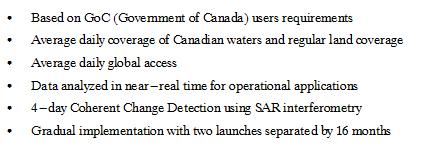
The successor (and complementary) mission to RADARSAT-2 will be the RADARSAT Constellation Mission (RCM), consisting of three (small) spacecraft (with a potential to increase the number to six). RCM is an evolution of the RADARSAT program with improved operational use of SAR data and improved system reliability. The overall objective of RCM is to provide C-band SAR data continuity for the RADARSAT-2 users, as well as adding a new series of applications enabled through the constellation approach. The SAR imagery is required by various Canadian government users (including the Canadian Forces) at frequent revisit rates (high temporal resolution). RCM will primarily collect wide-area data with an average daily revisit of Canada and daily access to 95% of the world. The main uses of the RCM data are expected to be in the areas of: 1) 2) 3) 4) 5) 6) 7) 8) 9) 10)
• Maritime surveillance/national security - which covers a broad range of potential applications areas, including ice and iceberg monitoring, marine winds, oil pollution monitoring and response, and ship detection.
• Disaster management (mitigation, warning, response and recovery)
• Ecosystem monitoring (agriculture, wetlands, forestry and coastal change monitoring).
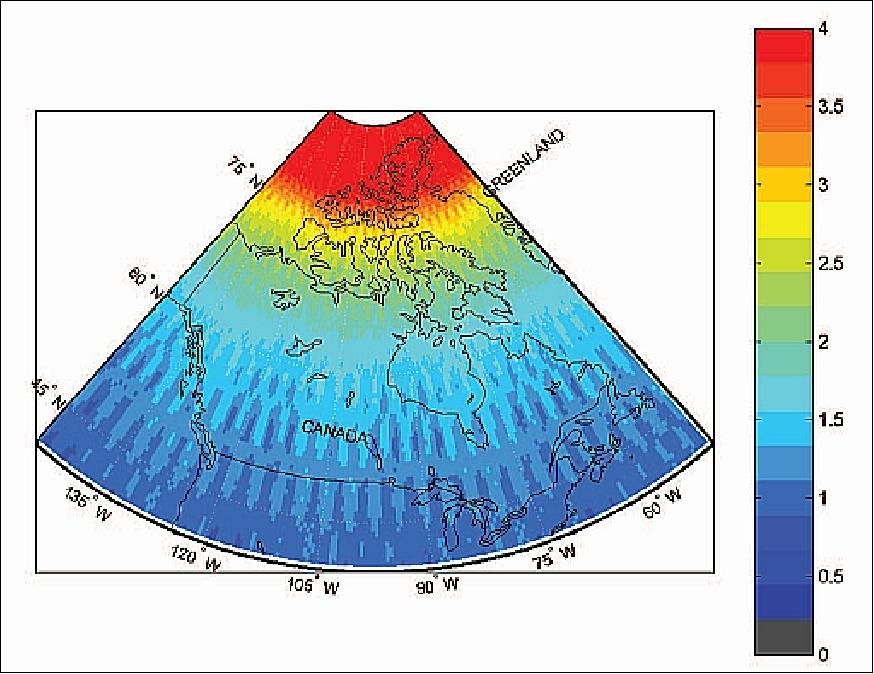
The primary areas of interest are the landmass of Canada and its surrounding Arctic, Pacific and Atlantic maritime areas (Canada has a coastline of 243,772 km in length, the longest of any country in the world). The images and derived information are required to be provided to Canadian government users at frequent area coverage rates.
Requirements | RADARSAT-2 | RCM |
Ice monitoring | 2-3 days at 100 m resolution | Daily (on average) at 50 m resolution |
Oil pollution monitoring | 3-4 days at 50 m resolution | Daily (on average) at 50 m resolution |
Ship detection | DND's (Department of National Defense) Middle Zone covered in 3- 4 days at 50 m resolution | DND's Middle Zone covered daily (on average) at 25 m resolution |
High-resolution map (Spot mode) | 3-4 days, azimuth resolution <1 m | Daily, azimuth resolution <1.3 m |
Coherent change detection | 24 days, orbit < 2 km | 4 days, orbit <200 m |
Revisit and Re-look: RCM will provide a four-day exact revisit, allowing coherent change detection using an InSAR mode. It will also provide an average daily global re-look capability in medium 50 m resolution mode. Most of the applications considered require re-look at least daily and an exact revisit once to twice weekly (interferometric change detection applications). The very frequent re-look capability is critical to certain disaster management applications. 11)
Timeliness and Data Latency: The timelines and data latency requirement is highly variable according to the application area. For many ecosystem monitoring applications, data delivered several days or in some cases several weeks later may be sufficient. However, maritime surveillance and disaster monitoring have much more demanding timeliness requirements. For ship detection in Canadian and adjacent waters within Canadian ground station masks, RCM will provide 10 minute data latency from acquisition to delivery of data, and 30 minutes for other maritime surveillance applications. For global and Canadian disaster management applications, the Constellation will provide 2 hour data latency from downlink to data delivery, and for ecosystem monitoring applications, 24 hour data latency from downlink to data delivery will be provided.

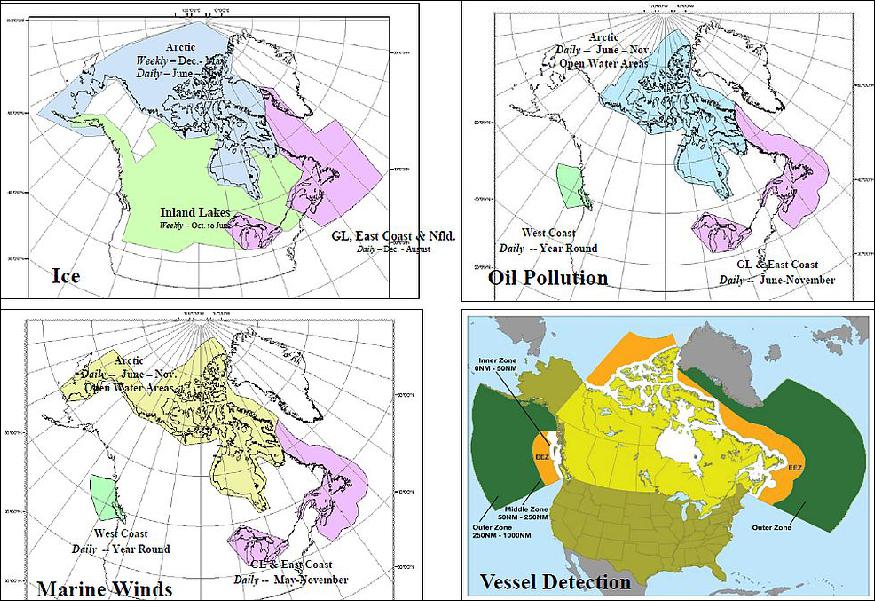
Some areas of SAR data applications: (Ref. 2)
• Ice monitoring: The largest operational user of Canadian SAR data is the Canadian Ice Service (CIS). RADARSAT data has proven to be a very cost-effective way of monitoring ice conditions to assure safe maritime navigation in the ice covered waters of the Arctic, the Great Lakes and the east coast of Canada. The CIS charts the distribution of sea ice, lake ice, river ice and icebergs in the navigable ice-covered waters around North America. For sea ice, lake ice and river ice, the primary parameters of interest are ice concentration, stage of development and floe size. These parameters can be measured effectively with ScanSAR wide-swath data at a resolution of 100 m. RCM will also monitor the iceberg distribution in the North Atlantic and in Alaskan waters.
• Oil spills: Satellite SAR has proven to be an effective and efficient method of detecting and monitoring oil spills. Oil spills form films of various thicknesses on the ocean and sea surfaces which result in dark signatures called slicks on the SAR images. The frequent revisit capability of RCM will offer enhanced potential to support oil spill control and cleansing. Near real-time SAR data will be provided to meet Integrated Satellite Tracking of Pollution (ISTOP) program’s requirements for both effective oil and ship detection.
• Flooding: The main issue with flood monitoring is timing. Civil security needs a flood map every morning to use it. Also knowledge of the terrain and water level evolution and predicted precipitation would help to mitigate risk and to issue warning. - The CSA is supporting the initiation of pilot projects that address disaster management from an end-to-end approach from mitigation, warning, response to recovery. These pilots ensure that satellite data are integrated into existing and planned systems and are used with a view to maximize benefits.
• Wind storms: RCM will likely contribute to the Hurricane Watch program by providing daily global coverage of the storms from space. Its capability to image in VV will benefit the hurricane’s application because available wind retrieval models are best developed for this particular polarization.
• Earthquakes: RCM SAR data can provide high-resolution imagery of earthquake-prone areas, high-resolution topographic data, and a high-resolution map of co-seismic deformation generated by an earthquake as well as monitoring of infrastructure. RCM will be able to provide interferometric pair of data every four days in between the three satellites maintained on a very tight orbit on a 12 day orbital cycle.
The CSA through CEOS contribute to the establishment of a series of sponsored geo-hazard supersites, which feature raw SAR data, GPS (Global Positioning System) data, and seismic data, among other data sources. Their aim is to ensure easy access to Earth science data in order to promote their use and to advance scientific research, ultimately helping to reduce the loss of life from natural hazards. SAR data collected over long periods to perform interferometric analysis can be used for a range of pre- and post-seismic event applications pertaining to vulnerable or damaged infrastructure.
Overview
In 2004, the Canadian government decided to continue its RADARSAT program beyond RADARSAT-2. However, in the next phase, a new approach is being employed which focuses on the use of low-cost small satellites flying in a constellation configuration. The overall objective is to ensure C-band data continuity beyond RADARSAT-2 and to provide SAR imagery for operational applications such as maritime surveillance (ship detection, sea ice cover mapping, coastal monitoring), disaster management, and environmental monitoring (oil spills, ocean winds and wave heights). In addition, the global land surface observation services for the SAR user community are to be continued to permit change detection monitoring of areas affected by geo-hazards, climate change related processes, and man-made activities. The current concept involves three satellites with an option of flying up to six spacecraft. The RADARSAT constellation is planned to be operational by 2016. 12) 13) 14) 15) 16) 17) 18) 19) 20) 21) 22)
In general, a constellation of SAR satellites can provide a larger coverage, increased revisits, and higher system reliability than is possible with a single spacecraft. Also, the constellation concept offers the capabilities of interferometric SAR (InSAR) observations. The project was accepted with three essential objectives:
1) Provide C-band data continuity to main Canadian Government users
2) Provide daily coverage of maritime approaches of Canada for ice, ship and oil spill detection
3) Meet a stringent cost cap. Taken together, these three objectives imposed several constraints on the payload.
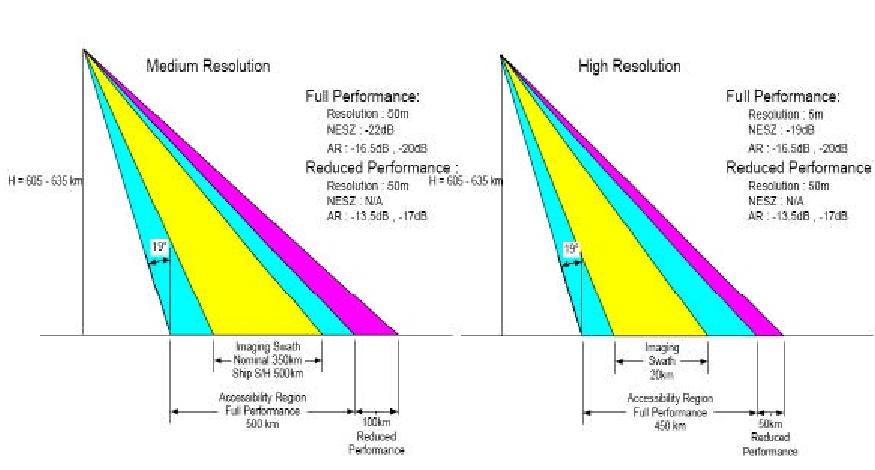
The requirements of C-band data continuity imposed the central frequency of 5.405 GHz, a bandwidth of 100 MHz, a minimum NESZ (Noise Equivalent Sigma Zero) of -22 dB and total ambiguity level below -16.5 dB. The coverage requirements for ice, ship and oil slick detection required that the payload can provide a compromise mode with a resolution of 50 m and four looks. To provide the desired coverage of Canada's maritime areas requires that the system provides an imaging swath of about 1000 km. A constellation of three satellites, each having an imaging swath of 350 km was selected to provide the desired coverage.
Moreover, to provide a daily access of the globe, a requirement was set to provide an access swath of at least 500 km. An additional access swath of 100 km was also defined but the ambiguity requirements are not enforced over that area. To ease up the selection of imaging areas, a requirement was made to provide four 350-km imaging swaths over the 600 km accessible area.
The low-cost approach requires that the design of the SAR system is in terms of mass, power consumption, volume, and antenna size, in compliance with the constraints imposed by using a low-cost launch vehicle and a small spacecraft bus.
RCM Specificities 23)
• The Government of Canada will own the RCM satellites and data, and will control data dissemination. CSA is the prime authority for its operation and management.
• 3 satellite constellation flying in the same orbit plane equally spaced (32 minutes). Will be controlled to fly in an “orbital tube” of radius 100 meters.
• Enhanced application flexibility through multi-polarization including Compact Polarisation (transmit circular and receive dual linear H and V).
• Average daily access to 95% of any point on the globe.
• Less than 4 hours fast tasking capability.
• Terrain subsidence using Phase Preserving ScanSAR Processing.
• High-grade Crypto Unit on-board each satellite for telecommand, telemetry and data (SAR & AIS).
• Includes a vessel Automatic Identification System (AIS) on each satellite.
Development Status
• February 1, 2019: The three RADARSAT Constellation Mission (RCM) spacecraft have been tested at MDA in the Montreal area and successfully delivered to California in preparation for the launch. The Primary Control Facility, located at the Canadian Space Agency (CSA) headquarters in Saint-Hubert, Quebec, the Back-up Control Facility in Ottawa, as well as satellite control and data reception antennas in different regions of the country, are ready to support the launch, commissioning and operations of the constellation. 24)
• September 30, 2018: After building and testing the RADARSAT Constellation Mission (RCM) for more than five years, MDA, the Prime Contractor for the RCM, safely delivered the third and final spacecraft to its California-based sister company SSL on 30 September 2018, in preparation for launch. 25)
• May 1, 2018: MDA, a Maxar Technologies company (formerly MacDonald, Dettwiler and Associates Ltd.), has signed a multi-million dollar contract with Nanowave Technologies Inc. of Toronto, Canada, a designer and manufacturer of advanced microwave, millimeter-wave and electro-optic multi-function modules and subsystems. 26)
• March 28, 2018: As of the latest update on the RADARSAT Constellation Mission (RCM) project, Spacecraft 1 and Spacecraft 3 are progressing as scheduled for their assembly, integration, and testing. However, Spacecraft 2 encountered an X-band issue, which has been resolved but resulted in some delays in the project timeline. The Ground Segment factory testing was completed in December 2017, with all equipment delivered to the Canadian Space Agency (CSA) for integration into the Primary Control Facility in early January 2018. The launch window, negotiated with SpaceX, is currently planned between October 29 to November 30, with optimistic scenarios aiming for a launch within this timeframe. 27)


• November 7, 2017: Insights on how RUAG Space supported MDA dispense 3 satellites from the same launcher simultaneously. 29)
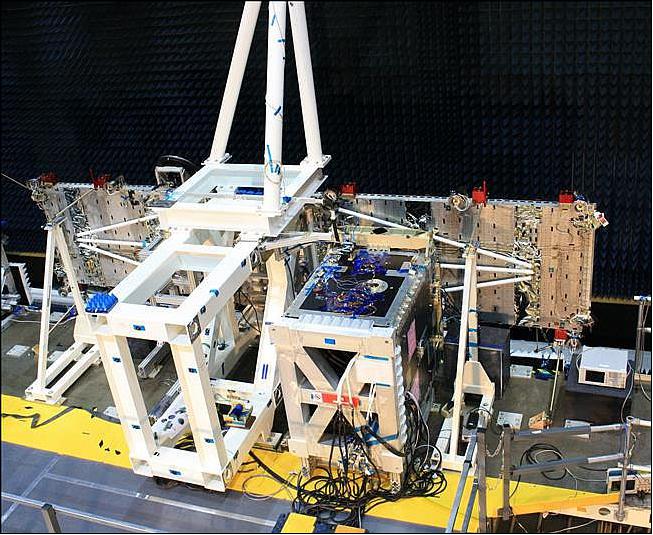
• In November 2015, the tests on the main parts of the payload for the first of the three satellites of the RCM were completed at MDA (MacDonald, Dettwiler and Associates Ltd.) at Sainte-Anne-de-Bellevue. These parts are the payload module, the SAR (Synthetic Aperture Radar) antenna and the data transmit antenna (Figure 8).

• February 2015: Figure 9 is a photo of one RCM spacecraft being prepared for modal test at Magellan Aerospace. 30)
• January 2015: In the ongoing Phase D of the project, all units are undergoing full flight manufacturing according to the established plan. The assembly, integration, and testing plan for the spacecraft are currently being finalized, indicating progress in this phase. Additionally, the preliminary design review for the ground segment system at the system level has been successfully completed, marking a milestone in the project's development. (Ref. 39).
• September 4, 2013: The Magellan Aerospace Corporation (Magellan) was awarded a contract of $110 million Cdn. From MDA for the manufacture of the three RCM spacecraft. 31)
• January 2013: The CDR (Mission Critical Design) review was held in November of 2012. The mission has now received the full go-ahead with award of a contract in January 2013 to MDA to build, launch, and operate the mission for the first year. 32) 33) 34)
• October 2010: Parallel efforts are in progress to implement new ground stations on the east and west cost and in the Northern part of Canada for data reception to support comprehensive maritime surveillance and monitoring of Canadian territory. There is also a plan to implement a TT&C station at Alert (located at 82º latitude in the Canadian North) in order to control the satellites on all orbits (Ref. 2).
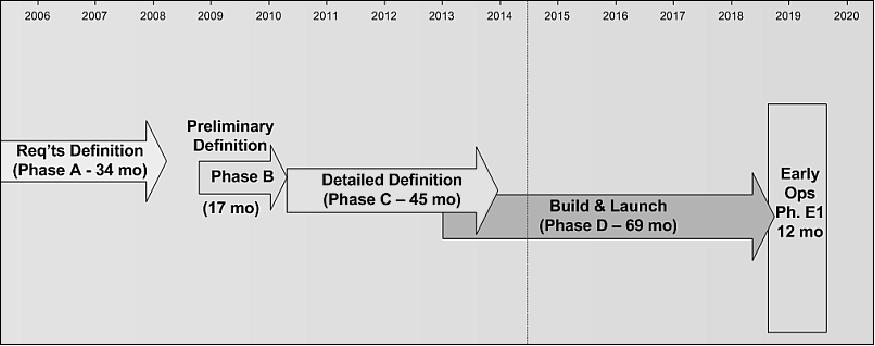
• February 2010: The RCM completed its Phase B iwith the mission's preliminary design review (PDR). Phase C started and is expected to last 22 months. During this Phase, Payload, Bus and Ground Segment Critical Design reviews will be achieved and the final satellite design will be approved (Ref. 20).
• 2007: The Phase A of the RADARSAT Constellation project was completed. During this phase, a conceptual design concept was completed based on the user requirements developed by a Canadian User and Science Team in consultation with an International User Team.
• March 2006: the Canadian Space Agency (CSA) awarded a contract to MDA (MacDonald, Dettwiler and Associates) of Richmond, BC, to carry out the conceptual design and mission definition (Phase A).
Spacecraft
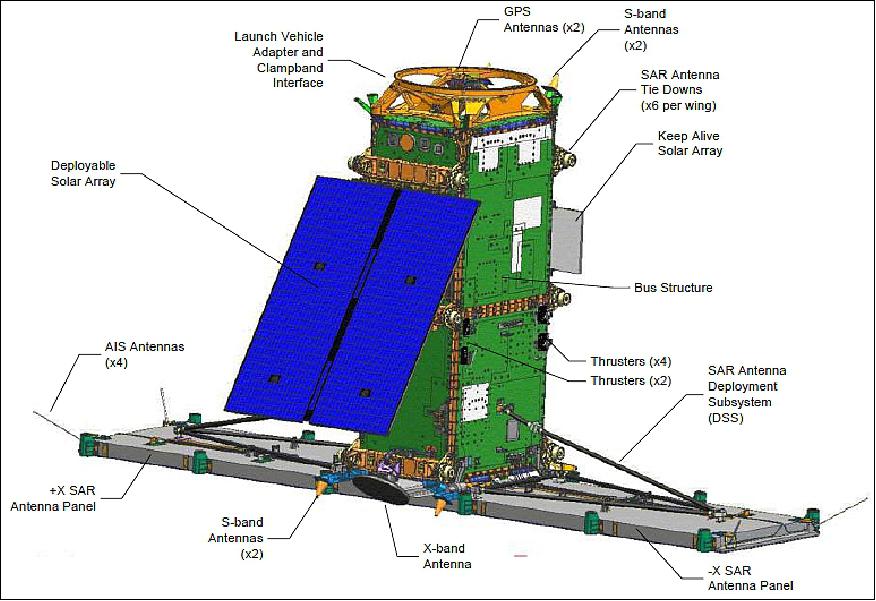
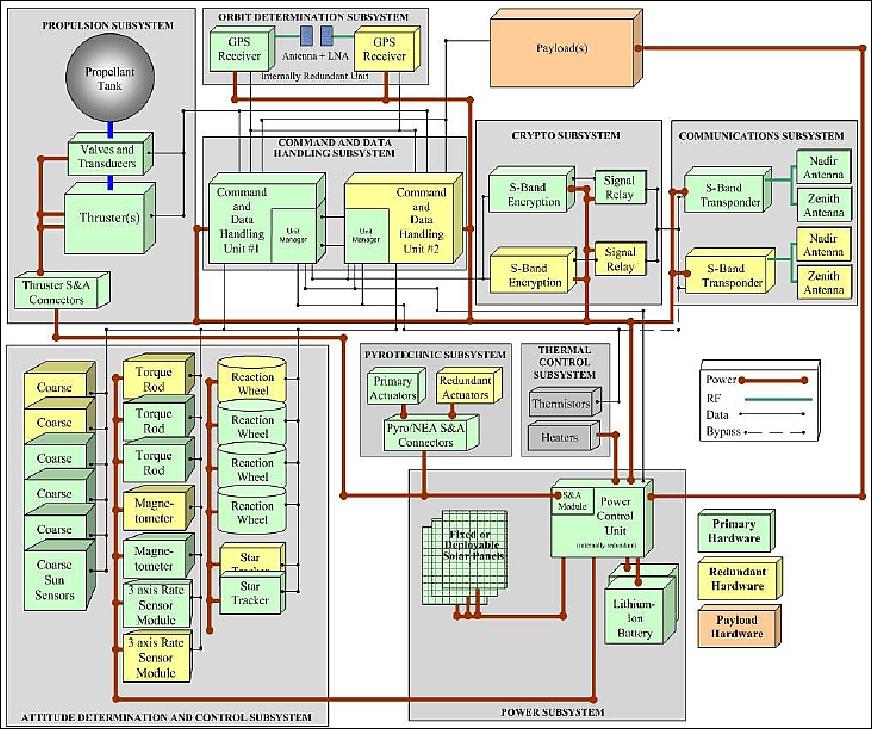
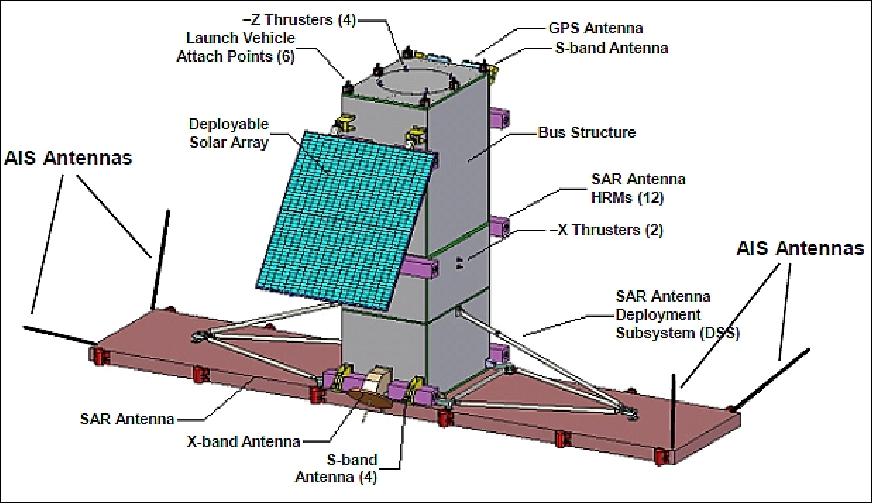
The RCM bus is based on the standard Magellan MAC-200 bus of Bristol Aerospace, Winnipeg, Manitoba, a division of MAC (Magellan Aerospace Corporation), Ottawa. The MAC-200 platform is also referred to as the Canadian Smallsat Bus. The spacecraft is box-shaped with a single fixed deployable solar panel. The SAR antennas are stowed for launch and deployed on orbit. The bus structure contains all bus and payload electronic units, with the payload units mounted within the bus structure. In May 2009, Bristol Aerospace received a contract from MDA for the preliminary design upgrade of the MAC-200 bus. 35) 36) 37) 38) 39)

The spacecraft is 3-axis stabilized. The ADCS (Attitude Determination and Control Subsystem) uses 6 CSS (Coarse Sun Sensors), 2 magnetometers, and 2 star trackers for attitude sensing. Actuation is provided by 3 torque rods and 4 reaction wheels. Onboard position knowledge (10 m, 2σ) is provided by a GPS receiver, the velocity knowledge is 0.15 m/s (2σ) on-orbit before processing.
The C&DH (Command & Data Handling) subsystem consists of two C&DH units (one active, one cold spare).All flight software, including the ADCS, resides on a fully redundant, high performance subsystem designed to meet a range of mission requirements. A unit manager performs watchdog functions and can switch between the two units. The C&DH is a multi-card system using an industry standard cPCI backplane to allow expandability for a multi-mission capability. The C&DH controls all bus functions; in addition, the subsystem provides the capability to perform payload processing through the addition of payload-unique interface cards. High speed interfaces, implemented in FPGAs, facilitate bus unit and payload command and telemetry handling. The payload data is stored in mass memory. The C&DH subsystem is CCSDS-compliant and provides up to 4 Mbit/s telemetry to the ground station with optional Reed Solomon encoding.
The MAC-200 power subsystem is an unregulated (+28 V ± 6 VDC), PPT (Peak Power Tracking) subsystem that employs a Li-ion battery connected directly to the power bus. The power subsystem includes power monitoring and fault protection, with multiple levels of load shed function. An average power of 220 W is provided with a peak power of 1600 W.
Propulsion subsystem: The baseline design has a total of six 1 N thrusters, 2 on the -x face and 4 on the -z face (designated the 2X-4Z thruster configuration). A 50 liter nitrogen pressured fuel tank, containing 37 liter of hydrazine, is placed near the -z face of the spacecraft in a manner that fuel usage nominally causes a migration of the centre-of-mass in the +z direction.
RF communications: The TT&C data are transmitted in S-band (redundant NASA STDN compatible S-band transponders). The uplink is a CCSDS-compatible digital bit stream modulating a STDN subcarrier, with a bit rate of 4 kbit/s. The downlink is a CCSDS-compatible link using QPSK modulation and having variable bit rates up to 4 Mbit/s. The downlink includes optional Reed Solomon encoding to achieve bit error rates down to 1 x 10-9. Spacecraft tracking is supported through the coherent operation of the transponder. The bus supports a set of S-band omni-directional antennas oriented in such a manner to achieve 99% spherical coverage with a ground station.
The payload data are transmitted in X-band (2 x 150 Mbit/s); onboard data storage capacity of 500 Gbit (EOL).
Spacecraft bus | Canadian Smallsat Bus, MAC-200 (box-shaped version); bus mass = 760 kg |
Launcher | Falcon 9 launch vehicle (for design considerations) |
Total mass/spacecraft | ~ 1460 kg with margin |
SAR antenna size | 9.45 m2 (1.37 m x 6.88 m) |
Spacecraft power | < 1600 W peak; <220 W average |
Orbit | Sun-synchronous dawn-dust orbit (frozen), nominal altitude of 592.7 km |
Polarization | Single Pol / Dual cross selectable pol & Compact polarimetry available on all modes; One fully polarimetric mode |
Duty cycle (observations) | - 15 minutes/orbit (peak 25 minutes every three orbits) |
Design life | 7 years (each satellite) |
Parameter / Mission | RADARSAT-1 | RADARSAT-2 | RCM (RADARSAT Constellation Mission) |
Launch date | Nov. 4, 1995 | Dec. 14, 2007 | 12 June 2019 (RCM) |
Total launch mass | 2,750 kg | 2,200 kg | ~1,400 kg (4,200 kg total mass of 3 S/C) |
Mission design life | 5 years | 7 years | 7 years (each S/C) |
Complete coverage | 2-3 days | 2-3 days | Daily coverage |
SAR antenna dimensions | 15 m x 1.5 m | 15 m x 1.5 m | 6.75 m x 1.38 m |
Solar arrays (each) | 2.21 m x 1.32 m | 3.73 m x 1.8 m | 2.2 m x 1.7 m main power |
Spacecraft bus | 3.55 m x 2.46 m | 3.7 m x 1.36 m | Canadian SmallSat Bus |
Look direction | Right looking | Routine left- and right-looking operation | Right looking |
Polarization | Single HH | Single, Dual, Polarimetric | Single, Dual, Compact Pol, Polarimetric |
Imaging time/orbit | 28 minutes | 28 minutes | 15 minutes/satellite |
Altitude | 800 km | 800 km | 600 km |
Launch
On June 12, 2019 (14:17:10 UTC), SpaceX successfully launched the RADARSAT Constellation Mission for MDA (manufacturer), a Maxar company, from Space Launch Complex 4E (SLC-4E) at Vandenberg Air Force Base in California on a Falcon-9 vehicle. RCM is being owned and operated by CSA. 41) 42)
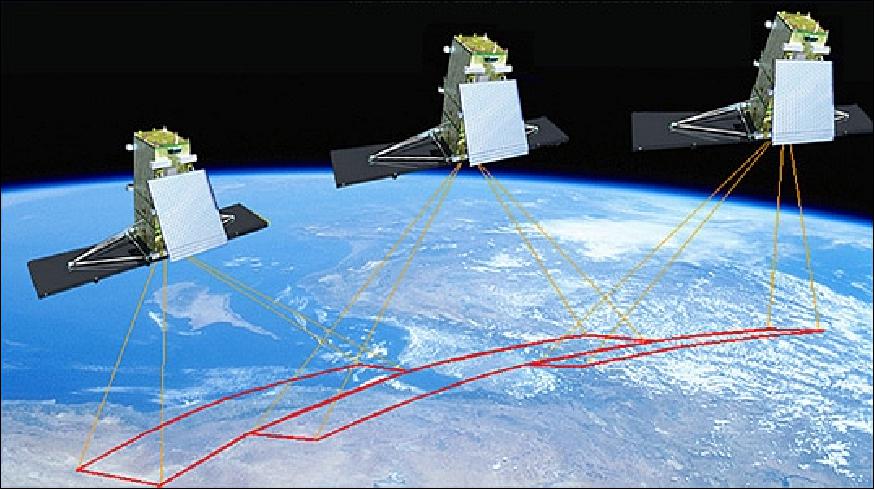
Orbit: Sun-synchronous circular orbit (dawn-dusk mission), nominal altitude = 592.7 km, inclination = 97.74º, period = 96.4 minutes. The three spacecraft will be spaced at equal distances on the same orbital plane (120º apart) with a repeat cycle of 179 orbits/12days. The orbit selection allows revisiting the same area for coherent change detection every four days, which should enable a whole suite of interferometric applications.
The satellites will be equally spaced in the same orbital plane, following each other with a time separation of ~32 minutes. While the ground track of each satellite is slightly shifted due to the Earth rotation, this orbital configuration provides the required ground coverage over the Canadian maritime zones using the medium resolution ScanSAR mode.
Orbital tube of 100 m in radius.

Parameter / Mission | RADARSAT-1 | RADARSAT-2 | RCM (RADARSAT Constellation Mission) |
Altitude | 793-821 km | 798 km | 592.7 km |
Inclination | 98.6º | 98.6º | 97.74º |
Orbital period | 100.7 minutes | 100.7 minutes | 96.4 minutes |
Descending node | 6:00 hours | 6:00 hours | 6:00 hours ±15 minutes |
Ascending node | 18:00 hours | 18:00 hours | 18:00 hours |
Sun-synchronous | 14 orbits per day | 14 orbits per day | 15 orbits per day |
Evolution of the RADARSAT series (Ref.10)
• RADARSAT-1: —→ Government-owned & operated
- Monitor the Canadian Arctic
- Radar for ice and marine applications
- R&D focus
- One operational user: Environment Canada (EC)
• RADARSAT-2: —→ Privately-owned and operated by MDA
- R&D within many departments
- Two operational users: EC (Environment Canada) and DND (Department of National Defense) for PE2 (Polar
Epsilon 2). DND’s PE2 capital equipment project will focus on exploitation of data from RCM.
• RCM (RADARSAT Constellation Mission):
- Operational focus of mission
Mission Status
• January 29, 2021: MDA has secured a contract from the Canadian Space Agency (CSA) to provide satellite flight operations and data management services for various Earth observation and space situational awareness missions, including the RADARSAT Constellation Mission (RCM), SCISAT, and NEOSSat. The contract, valued at CAD$36.6M for a three-year period with an option for renewal, will involve spacecraft health monitoring, operational analysis, data processing, and archiving from the CSA's Multi-Mission Control Centre in Longueuil, Quebec. MDA has collaborated with Calian Advanced Technologies and Mission Control Space Services for this endeavor, extending its role in RCM operations and solidifying its leadership in satellite operations. Additionally, MDA manages other important Canadian satellite missions such as Sapphire and RADARSAT-2 for national defense and Earth observation purposes, respectively. 43)
• December 19, 2019: The RADARSAT Constellation Mission (RCM) has achieved operational status, marking a milestone as federal government departments begin utilizing RCM data to enhance programs and services for Canadians. Since the operationalization of the three RCM satellites in December 2019, data acquisition has commenced, and certain RCM image products are now accessible to the public through the Earth Observation Data Management System, facilitated by Natural Resources Canada. The Satellite Operations Control Center, along with backup facilities and control antennas across Canada, are actively supporting the operational functions of the constellation from various locations, ensuring efficient data reception and satellite control. 44)
• July 5, 2019: The Canadian Space Agency has unveiled the inaugural engineering image from a satellite part of the RADARSAT Constellation Mission (RCM), showcasing a view of the sea ice in the Strait of Davis and the coast of Baffin Island, Nunavut, along with the community of Qikiqtarjuaq. Captured on June 29, 2019, the non-calibrated image was obtained at a resolution of 100 meters in a low noise ScanSAR mode, marking an early glimpse into the RCM's imaging capabilities. 45)
Sensor Complement
SAR Instrument
The technologies selected for the RCM antenna are derived from RADARSAT-2. The SAR antenna is a C-band, active phased array antenna that employs transmit and receive (T/R) modules, distributed across the antenna aperture. The baseline antenna concept provides a 9.45 m2 aperture but the aspect ratio varies between the two spacecraft concepts. The four-panel spacecraft concept consists of a 9.15 m x 1.03 m SAR antenna. The two-panel spacecraft concept consists of a 6.88 m x 1.375 m SAR antenna. The antenna mechanical interface to the bus is through HRMs (Hold Down and Release Mechanisms) when stowed and by an ESS (Extendable Support Structure) or support struts when deployed. Once deployed, the SAR antenna is required to point 37.5º off-nadir towards the dark side of the Earth. 46) 47)
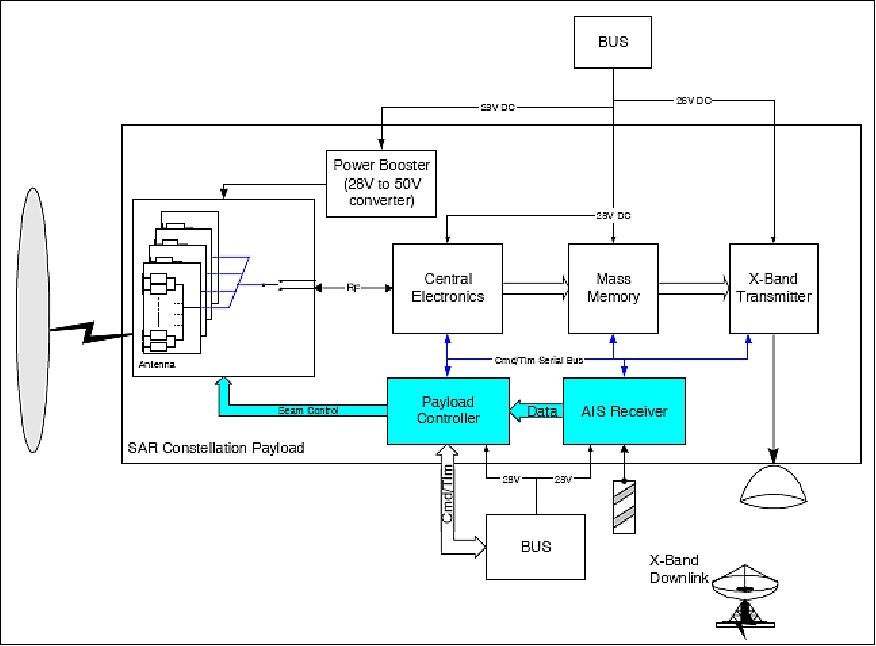
In addition to the SAR antenna, the RCM payload consists of several bus-mounted units including the Central Electronics (2), SSR (Solid State Recorder), the X-band transmitter (2) and the X-band antenna (1).
The SAR payload mass (including antenna, support structure and bus-mounted components) is approximately 600 kg. The peak power consumption is approximately 1270 W and the orbit average power consumption is approximately 200 W.
Radar center frequency | 5.405 GHz (C-band) |
Chirp bandwidth | 100 MHz |
Swath width | 20 - 350 km |
Accessible swath width | 500 km |
Spatial resolution (1 look) | 5 - 50 m |
Orbital altitude | 600 km (nominal) |
Imaging time | 12 minutes per orbit |
Repeat cycle | 12 days |
Polarization | Hybrid polarimetry (based on mixed polarization basis measurements) |
Introduction of hybrid polarimetry architecture in RCM SAR instrument 48) 49)
Contrary to the initial plans of a dual-polarization architecture, the SAR instrument of RCM will feature a hybrid-polarity implementation (as proposed by R. Keith Raney in 2007), which constitutes a significant advancement in the field of radar remote sensing. Such an architecture is included in the current Indian RISAT-1 satellite (launch April 26, 2012), and the Japanese ALOS-2 (Advanced Land Observing Satellite-2) mission (launch May 24, 2014). It will also be included in future SAR missions, such as the Canadian RCM (RADARSAT Constellation Mission). The main advantage of such SAR systems is that they have a greater amount of information than standard dual-pol mode (HH-VV), while covering much greater swath widths compared to quad-pol mode. RCM will transmit a right-circular polarization and receives two mutually coherent orthogonal linear polarizations (RH and RV), providing CP (Compact Polarimetry) as a primary imaging mode. CP parameters for sea ice discrimination have shown promise in preliminary studies49), and may have classification potential similar to that of fully polarimetric parameters. Furthermore, CP data will be available at swaths up to 500 km wide, making it operationally viable.
A variety of polarization capabilities are being implemented. In all imaging modes, the system can operate with single or dual polarization. With single polarization, the transmit and receive polarizations are individually selectable. In dual-polarization mode, the transmit polarization is one of H or V, and the receive polarizations are both H and V. A variation on dual-polarization is the compact polarization capability (Ref. 50).
In addition, two multi-polarization capabilities are provided.
- First, alternating polarization is available. It provides dual HH-VV polarization by operating in a burst mode, alternating HH and VV between bursts.
- Secondly, a quad-pol mode is provided. In this mode, the PRF is doubled compared to other modes, and H and V polarization are transmitted on alternate pulses. For each pulse transmitted, both H and V polarization are received. Thus the full scattering matrix is obtained.
Compact polarimetry: The objective of compact polarimetry is use a dual-polarization imaging mode to realize many (but not all) of the benefits of a quad-polarization mode without the severely reduced swath of quad-pol. The type of compact polarimetry supported by RCM involves the transmission of circular polarization, and dual reception of H and V polarization.
On RCM, compact polarimetry is achieved by a small modification to the T/R module design. The T/R modules were originally designed to transmit H or V polarization using separate transmit chains. The modification allows transmission on both chains simultaneously, thereby enabling the transmission of circular polarization (since circular polarization can be achieved by simultaneous H and V, but with a 90º phase shift between the H and V).
Doppler grid: The purpose of the Doppler grid capability is to support ocean current and marine wind applications by provision of a grid of Doppler centroid estimates in the product meta-data. These Doppler estimates will be provided on a 2 km x 2 km grid. By comparing the localized Doppler estimates to the overall Doppler estimates, an estimate of the component of the localized Doppler estimates due to ocean currents can be estimated. From such ocean current estimates, information about marine winds can also be deduced (Ref. 50).
The system is designed as a medium resolution mission primarily dedicated to regular monitoring of broad geographic areas. This provides a 'big picture' overview of Canada's land mass and proximate water areas. Combined with higher resolution imagery from foreign missions going forward in the same time-frame, the data are expected to dramatically enhance Canada's ability to manage resources and the environment and to improve security by providing an operational surveillance system.
RCM will offer interferometric data on a four day repeat interval. This feature will add benefits to a range of applications like earthquake, volcano, landslides and permafrost conditions monitoring. In support of ecosystem monitoring, RCM will assure support to sustained development of agriculture and forestry resources, contribute to protection of the global environment and enhance understanding of climate change and its impact on ecosystems. SAR satellite images will enable the detection of changes over time in Canada’s coastal, wetlands and wildlife habitats.
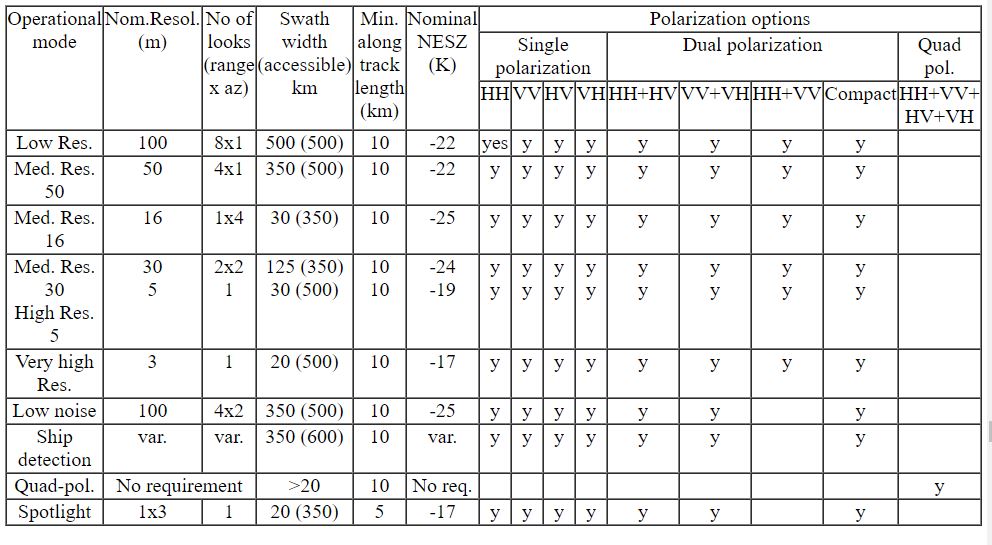
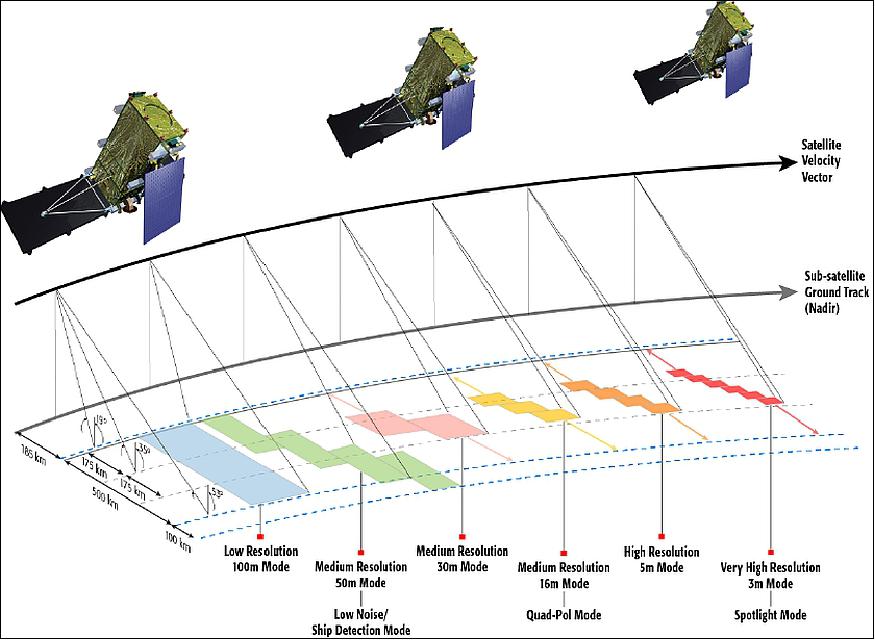
Operational imaging modes: The operational modes range from wide area surveillance with 500 km imaging swaths, to spotlight modes with resolution of 1 m in azimuth, and 3 m in range, as well as a large number of modes in between these extremes. The high resolution modes at 3 m and 5 m are primarily designed for disaster management. 50) 51)
- General-purpose wide-area surveillance: For wide area surveillance, and in particular, maritime surveillance, the need is for moderate resolution, while providing adequate sensitivity, a reasonable number of looks, and as wide a swath as possible with the given antenna aperture. With these objectives in mind, the Medium Resolution 50 m mode was designed. It is an 8-beam ScanSAR mode with approximately 50 m resolution in range and azimuth, NESZ of > -22 dB, 4 looks, and a 350 km imaging swath. It is comparable to the RADARSAT-1/2 ScanSAR narrow modes.
- Ship detection mode: To optimize ship detection performance, the fundamental need is to maximize the ship signal to “background noise” ratio. Here “background noise” is used to include two quite separate components: sea clutter and thermal noise. To maximize this ratio, separate strategies are available to separately maximize the ship signal, minimize sea clutter, and minimize noise.
One way to maximize ship signal level is to image with cell size resolution comparable to the size of ship to be detected, as clearly coarser resolution leads to lower signal level in a σο image, and finer resolution eventually leads to the ship RCS (Radar Cross Section) being spread over multiple pixels. Strategies to minimize the sea clutter level include imaging at high incidence where sea clutter is lower, and using cross-pol imaging which is known to have lower sea clutter level than co-pol imaging, at least at lower incidence. The main strategy to minimize noise is to use lower bandwidth imaging modes, as lower bandwidth means reduced noise.
- CCD (Coherent Change Detection): RCM is a constellation of three satellites, all in the same orbit plane, and all equally spaced around the orbit plane. Since the ground track repeat for each satellite is 12 days, there is a constellation CCD period of 4 days. To provide good CCD performance, a requirement for two dimensional bandwidth overlap of 75% has been imposed. This 75% bandwidth overlap requirement is prior to common band filtering and applies for slopes of up to 10% and over a range of incidence angles sufficient to give global access.
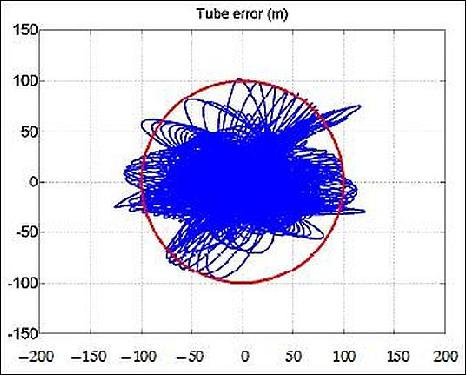
From the bandwidth overlap requirement, requirements for orbit maintenance and attitude control are derived. To maintain bandwidth overlap in range, the satellites must fly in a common orbit tube of radius on the order of 100 m. To maintain Doppler bandwidth overlap, very stringent attitude control in pitch and yaw is needed.
One of the biggest drivers for maintaining the orbit tube requirement is the orbit maintenance maneuver frequency. With a frequency of at most one maneuver per day, simulation and analysis have separately shown that the satellite can be maintained in the required tube (within 100 m radius for 99% of the time). Figure 20 shows the tube flying simulation result with daily maneuvers.
The three-satellite configuration will provide complete coverage of Canada's land and oceans offering an average daily revisit at 50 m resolution, as well as a significant coverage of international areas for Canadian and international users. It will also offer average daily access to 95% of the world. The satellites will be interoperable, enabling tasking from one satellite to the next and will be equally spaced in a 600 km low earth orbit. The constellation has a flexible design, allowing up to six satellites to fly in the same plane.
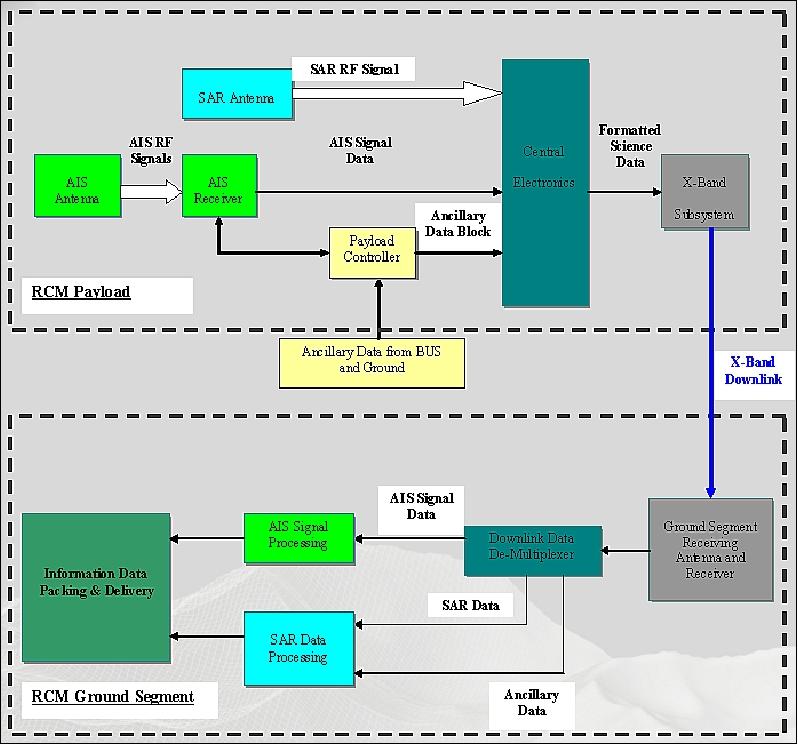
Architecture of the RCM payload CE (Central Electronics) subsystem (see also Figure 17 for context): 52)
The core data processing module in payload systems is often referred to as the CE (Central Electronics) subsystem. COM DEV Ltd. is the subcontractor to MDA for the CE. The main tasks of a CE subsystem are: demodulation, filtering and digitization of the SAR echo signals in the receive path, and generation of a Radar chirp, IF processing and RF power amplification in the transmit path. A simplified block diagram of the CE subsystem for the RCM payload is shown in Figure 21.
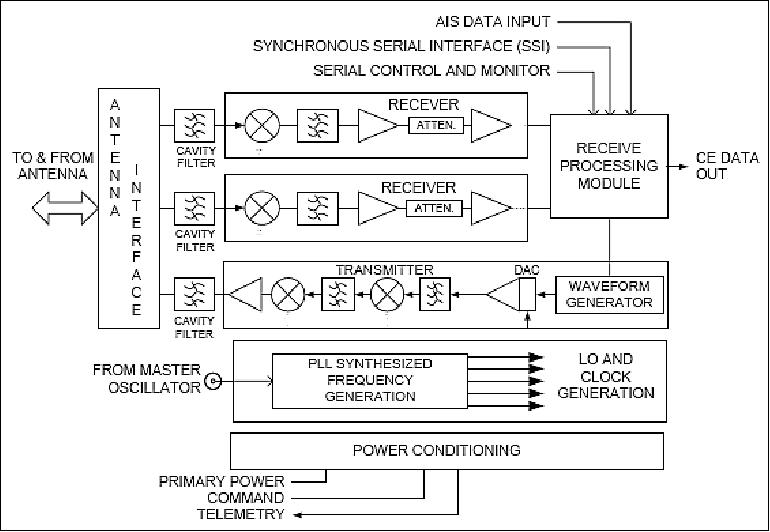
The CE poses many challenges in the analog, i.e., RF (Radio Frequency) domain. One of the challenges for the previous versions of the CE for RADARSAT-I and -II was in providing appropriate filtering for the multiple RBWs (Resolution Bandwidths). The present version of CE has to cater to 16 discrete RBWs ranging from 14 MHz to 100 MHz. The present design avoids the cumbersome SAW filter banks of previous versions by moving the RBW filtering to the digital domain. But the analog domain still is left with the serious challenge of meeting stringent system requirements on gain stability, noise figure, dynamic range, pulse distortion and spurious rejection – to name a few.
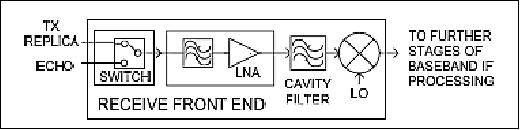
The receiver front end, shown in Figure 2, consists essentially of a switch to select between the transmit replica and the echo, a noise bandwidth limiting filter, the LNA, an image rejection filter that reduces the aliased thermal noise ratio (ATNR), and finally the mixer for down-converting the RF to the “baseband” IF which undergoes IF processing involving amplification and filtering before being digitized by the ADC (Analog Digital Converter).
Receive DSP architecture: The CE receiver is an oversampling system where the analog signals are sampled at a higher rate and then down-sampled in the digital domain to a lower rate based on the RBW. The oversampling helps increase the signal-to-quantization noise ratio (SQNR) by 3 dB for every down-sampling by a factor of 2. However, down-sampling requires careful design of anti-aliasing digital filters.
A functional block diagram of the CE receiver DSP module is shown in Figure 23. The received echo or the replica signal at IF goes through a high speed ADC. As a first step in the receiver chain, the ADC output is digitally down converted (demodulated) to baseband. The use of Fs/4 demodulation (Fs = sampling frequency), simplifies the down conversion operation to sign alteration of the ADC sample stream without any need for complex multiplication. The resulting I and Q baseband demodulated streams are passed through anti-aliasing low pass filter (LPF) followed by M:1 down-sampler. The LPF and down-sampler constitute a decimator that reduces the sampling rate of oversampled analog signal.

The design of the down-sampler and digital anti-aliasing filter is directed by two important criteria:
- The oversampling ratio, defined as the ratio between the actual sample rate and the Nyquist rate, should be optimized for all RBWs. The down-sampling ratio (M) of the CE receiver is carefully selected for different RBWs such that the oversampling ratio does not exceed 123 %.
- The number of taps in the resulting filters should not be too large for high decimation rates. This is generally achieved by two stage decimation where filter complexity in each stage is appropriate for the CE hardware.
Transmit DSP architecture: The basic requirement of the RCM CE transmitter is to provide high quality chirp waveforms at moderate power level suitable for distribution and amplification by the antenna T/R modules. Many of the quality aspects of the chirp waveform are related to the in-band chirp characteristics, timing, amplitude and phase, SNR, and out-of-band performance. Optimum RCM radar performance is achieved by using chirp waveforms that are not necessarily ideal up or down chirps with constant frequency slope and amplitude, but waveforms that may additionally embed some form of pre-distortion to correct for frequency-dependent distortions within the CE and/or the RCM radar payload.
IF sampling at the DAC puts a significant burden on storage and memory bus bandwidth requirements. As an alternative, the waveform samples can be generated at a lower rate that also meets the Nyquist requirements and eases the storage and memory bus bandwidth requirements. These samples can then be up-sampled and interpolated using low complexity digital filters before they can be fed to a DAC.
The basic functions of the Tx DSP module are waveform storage, high speed selection of waveform based on serial command, high speed memory retrieval of stored waveform selected, real time filtering, up-sampling and interpolating of the waveform to meet the DAC sampling rate requirement. A top-level view of the DSP subsystem within the CE transmitter is shown in Figure 24. The transmit pulse is generated digitally at baseband in the form of complex samples or I-Q pairs. Different from the CE receiver, the use of fixed sampling rate irrespective of the chirp RBW leads to a simpler design of the digital interpolation filter. The waveform samples are generated offline and stored in a flash on the DSP board that is capable of storing multiple chirp waveforms. Depending on the command from the ground station, one of the chirp waveforms is loaded into the SRAM from the flash.

Parameter / Mission | RADARSAT-1 | RADARSAT-2 | RCM (RADARSAT Constellation Mission) |
Active antenna | C-band | C-band | C-band |
Center frequency | 5.3 GHz | 5.405 GHz | 5.405 GHz |
Bandwidth | 30 MHz | 100 MHz | 100 MHz |
Polarization | HH | HH, VV, HV, VH | HH, VV, HV, VH, compact polarimetry |
Polarization isolation | > 20 dB | > 25 dB | > 28 dB |
Aperture length | 15 m | 15 m | 6.75 m |
Aperture width | 1.5 m | 1.37 m | 1.38 m |
Instrument mass | 679 kg | 750 kg | ~ 400 kg |
Deployment mechanism | ESS (Extendable Support Structure) | ESS | Simple strut deployment with a kinematically decoupled internal support structure |
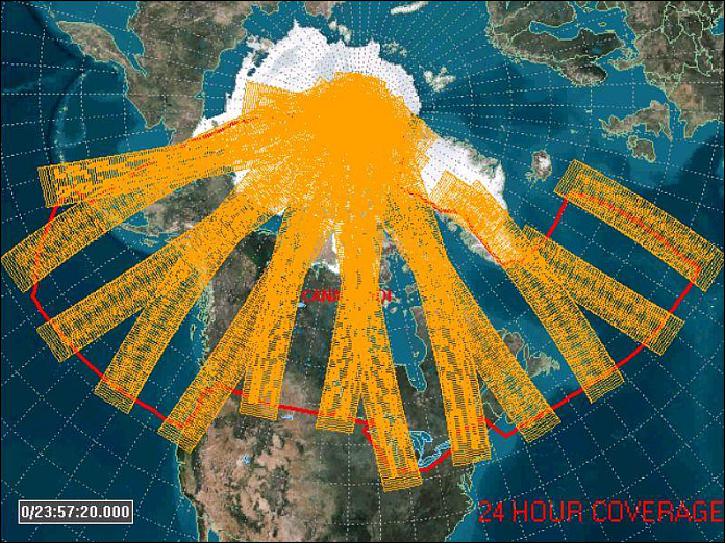
Increased Coverage Benefits:
• Current situation (1 satellite, RADARSAT-2):
- Mapping updated every 4 days
- Canadian land mass coverage update every 3.5 weeks
- Insufficient coverage for operational purposes (vessels, ice, pollution)
- Exact revisit every 24 days
- Northern and southern coverage limited ⇒ easy avoidance of detection
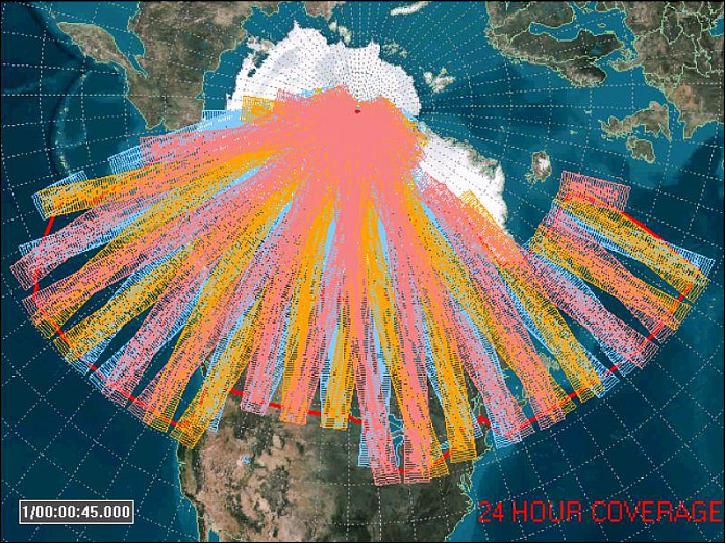
• With a 3-satellite constellation: (RCM)
- Daily coverage/mapping of Canadian areas of interest
- Canadian land mass coverage update better than weekly
- Operational responsiveness
- Exact revisit every 4 days
- Increased maritime probability of detection.
AIS (Automatic Identification System)
AIS is a payload of CSA and DND (Department of National Defense), Canada. Each satellite will include an AIS instrument. The overall objective is to monitor the ship traffic in the extensive waters of Canada (wide area surveillance capability). 54) 55)
AIS is a mixed ship and shore-based broadcast transponder system, operating in the VHF maritime band, which sends ship identification, position, heading, ship length, beam, type, draught and hazardous cargo information, to other ships as well as to shore. Of significance is that AIS can be monitored from satellites.
• Swath coverage of AIS: 800 km
• Accuracy of AIS: Better than 90% ship detection, for class A ships, when ships are in view for a minimum of 5 minutes.
• Waveband: VHF (162 MHz)
• AIS Antennas: two orthogonal monopole pairs mounted on the SAR panel.
- Provides omni-directional coverage (horizon to horizon)
- Provides circular polarization for receiving linearly polarized transmit signals that may have experienced Faraday rotation while propagating through the atmosphere
The AIS JIB monopole antennas are small self-deployable low-mass antennas provided by Northrop Grumman's Astro Aerospace business unit of Carpinteria, CA. 56)
• AIS Receiver: Filters, amplifies, frequency down converts and digitizes the AIS signals
• AIS Processor (ground based): Performs data demodulation, signal de-collision and message extraction.
| Data rate | Operation time | Daily data volume | Percentage |
Baseline | 3 Mbit/s | 17 | 45.6 | 3.6% |
Global coverage | 3 Mbit/s | 97 | 260.2 | 20.6% |
Baseline + 1/3 global | 3 Mbit/s | 43.7 | 117.1 | 9.3% |
Global using onboard decoder | 25 kbit/s | 97 | 2.2 | 0.2% |

Ground Segment
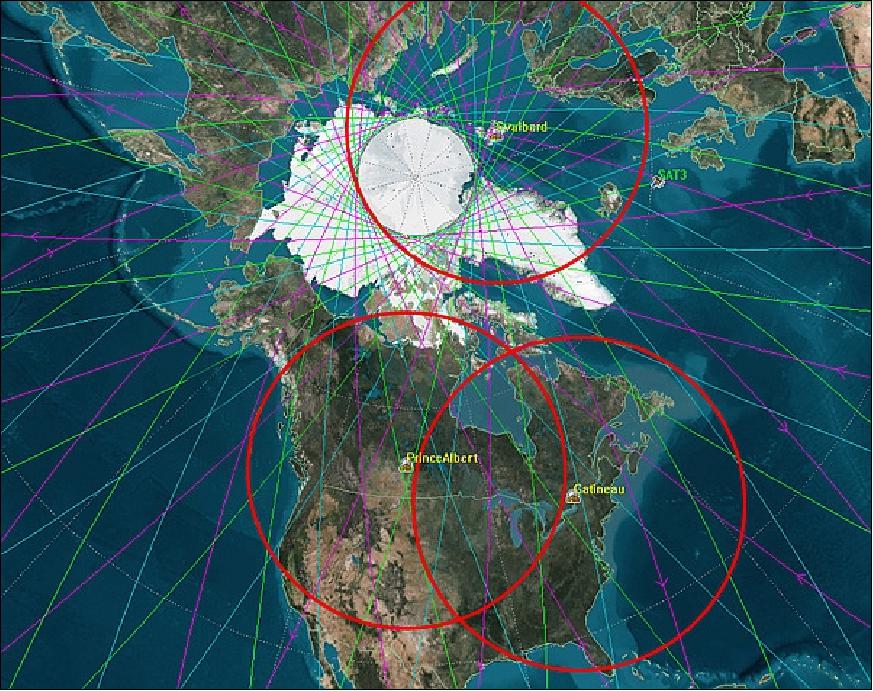
• The ground segment is driven by requirements for fast delivery of images acquired over Canada, and for fast tasking over international areas.
• It will be based on upgrades to the existing RADARSAT-1 and RADARSAT-2 Ground Segment facilities to allow basic constellation operations.
• The West and East Polar Epsilon stations will be used to support near real-time Maritime Surveillance
• Foreign stations, such as Svalbard, will be used for latency or data volume requirements.
The RCM ground segment is based on upgrades to the existing RADARSAT-2 ground segment, using the Gatineau and Prince Albert stations for data reception, the St-Hubert and Saskatoon stations for TT&C and the Svalbard station as a backup for TT&C and data reception. It will be harmonized for data reception at the Polar Epsilon coastal stations in order to support near-real time maritime surveillance. It will also include a fast tasking capability allowing access to the satellites on every orbit, likely achieved through international partnerships.
The ground segment baseline includes (Ref. 11):
• A MOC (Mission Operation Center) for mission operations and associated equipment and software, namely for data ordering, mission planning, satellite control, processing, image quality assessment and dissemination, at the CSA headquarters in Saint-Hubert
• The Natural Resources Canada (NRCan/CCRS) satellite ground stations network and EODMS for long-term data archiving and access
• The DND (Department of National Defence) PE (Polar Epsilon) ground stations on the East and West coasts, primarily for RCM data reception, processing, and exploitation in the context of their Polar Epsilon project
• A BCF (Backup Control Facility) at the CSA DFL (David Florida Laboratory) in Ottawa
• Access, through the MOC (Mission Operation Center), to a foreign ground station for occasional command and control of the satellites and data reception for urgent near real-time data acquisitions and down-linking.
RCM Data Policy Principles — as approved by the Deputy Ministers Governance Committee on Space (February 2014)
• Canadian interests first
- Give priority to GoC (Government of Canada) requirements in support of sovereignty, security and safety
- Fuel prosperity and advance foreign policy objectives
• Economic growth
- Strengthen Canadian industry’s capacity to commercialize value added application products and services, at home and abroad
• Support partnerships
- Enable cooperation with allies/partners to meet socio-economic and security objectives
- Support international organizations related to safety, humanitarian programs and other initiatives of benefit to Canadians
• Commercial distribution of RCM data
- Enable the commercial distribution of RCM data, while being compliant with the Open Government Strategy.
• Next Step:
- Baseline Policy currently within internal approval chain
- Initiate work on the Data Policy Implementation document for SAR and AIS data.
Data Utilization: The project scope includes an applications development program to assist government users to make optimum use of the data when the system becomes operational. The DUAP (Data Utilization and Applications Program) will provide technical assistance to federal departments to upgrade their applications and develop new ones exploiting data generated by the RCM; as well as to integrate applications into operational systems. These applications are needed to transform the data into value-added information and to assist user departments in making the transition from RADARSAT-2 to RCM data. The requirement arises because the orbiting and imaging parameters of the RCM satellites differ from those of predecessors RADARSAT-1 and RADARSAT-2, and to account for the abundance of data to be generated by the three satellites which will require high-volume automated information processing capacity at the users’ premises.
References
1) “RADARSAT Constellation,” CSA, Nov. 2011, URL: http://www.asc-csa.gc.ca/eng/satellites/radarsat/
2) Guy Séguin, “Radarsat constellation an evolution in the Canadian contributions to disaster management,” Proceedings of the 61st IAC (International Astronautical Congress), Prague, Czech Republic, Sept. 27-Oct. 1, 2010, IAC-10.B1.1.4
3) Dean Flett, Yves Crevier, Ralph Girard, “The RADARSAT Constellation Mission: Meeting the Government of Canada's Needs and Requirements,” Proceedings of IGARSS (IEEE International Geoscience and Remote Sensing Symposium) 2009, Cape Town, South Africa, July 12-17, 2009
4) Guy Séguin, Daniel Gratton, “RADARSAT Constellation Mission Overview,” Proceedings of ASTRO 2010, 15th CASI (Canadian Aeronautics and Space Institute) Conference, Toronto, Canada, May 4-6, 2010
5) Alan A. Thompson, “Innovative Capabilities of the RADARSAT Constellation Mission,” Proceedings of ASTRO 2010, 15th CASI (Canadian Aeronautics and Space Institute) Conference, Toronto, Canada, May 4-6, 2010
6) M. Manore, R. DeAbreu, V. Zabeline, M. Arkett, D. Bradley, “The RADARSAT Constellation Mission (RCM): Extending Operational Marine Surveillance for Environment Canada,” Proceedings of ASTRO 2010, 15th CASI (Canadian Aeronautics and Space Institute) Conference, Toronto, Canada, May 4-6, 2010
7) Yves Crevier, Dean Flett, “The RADARSAT Constellation Mission Overview and Capabilities for Marine Monitoring”,SeaSAR 2010, 3rd International Workshop on Advances in SAR Oceanography, January 25-29, 2010, Frascati, Italy, URL: http://earth.eo.esa.int/workshops/seasar2010/participants/592/pres_592_Crevier.pdf
8) Jérôme Colinas, Guy Séguin, Patrick Plourde, “RADARSAT Constellation, Moving toward Implementation,” Proceedings of IGARSS (IEEE International Geoscience and Remote Sensing Symposium) 2010, Honolulu, HI, USA, July 25-30, 2010
9) James Fergusson, “Thinking Big: Canada's RADARSAT Constellation,” SpaceRef, Nov. 2011, URL: http://spaceref.ca/space-policy/is-canada-thinking-big-enough.html
10) Daniel De Lisle, Paris W. Vachon“From RADARSAT-2 to RADARSAT Constellation Mission data continuity,” Proceedings of SeaSAR 2012, The 4th International Workshop on Advances in SAR Oceanography, Tromsø, Norway, June 18-22, 2012, URL: https://earth.esa.int
/c/document_library/get_file?folderId=233696&name=DLFE-2152.pdf
11) Daniel De Lisle, Steve Iris, ”RADARSAT Constellation Mission Status Update,” Proceedings of EUSAR 2016, 11th European Conference on Synthetic Aperture Radar, Hamburg, Germany, June 6-9, 2016
12) G. Séguin, “A Canadian Constellation of C-Band SAR Satellites,” Proceedings of the 56th IAC 2005, Fukuoda, Japan, Oct. 17-21, 2005, IAC-05-B1.2.07
13) P. Allan, A. Baylis, D. Kefallinos, L. Martins-Camelo, “Progress in the RADARSAT Follow-on Constellation Payload Design,” Proceedings of the 56th IAC 2005, Fukuoda, Japan, Oct. 17-21, 2005, IAC-05-B1.3.02
14) D. Geudtner, G. Séguin, “Capabilities of Canada's planned RADARSAT Constellation,” Proceedings of EUSAR 2006, Dresden, Germany, May 16-18, 2006
15) Dirk Geudtner, Guy Séguin, “Application Potentials of the planned RADARSAT Constellation,” Proceedings of the International Radar Symposium 2007 (IRS 2007), Cologne, Germany, Sept. 5-7, 2007, URL: http://elib.dlr.de/58505/1/IRS_07_RCM_geudtner_paper145.pdf
16) http://earth.esa.int/workshops/polinsar2007/presentations/48_delisle.pdf
17) J. Hornsby, “The RADARSAT Story Yet to Come,” EOBN 2008 (Earth Observation Business Network), May 13-14, 2008, Richmond, BC, Canada
18) G. Séguin, R. Girard, Y. Crevier, “RCM Capabilities for Ice & Sea-Ice Applications,” 8th IICWG (International Ice Charting Working Group) Meeting, Frascati, Italy, Oct. 22-26, 2007
19) Guy Séguin, Daniel Gratton, “RADARSAT Constellation Project Status and Application to Disaster Monitoring,” Proceedings of the 27th ISTS (International Symposium on Space Technology and Science) , Tsukuba, Japan, July 5-12, 2009, paper: 2009-n-01
20) Savi Sachdev, Guy Séguin, “Radarsat Constellation An evolution of the Radarsat program,” Proceedings of the 60th IAC (International Astronautical Congress), Daejeon, Korea, Oct. 12-16, 2009, IAC-09.B1.6.5
21) Stéphane Chalifoux, et al., “RADARSAT Missions,” POLINSAR 2011, The 5th International Workshop on Science and Applications of SAR Polarimetry and Polarimetric Interferometry, Frascati, Italy, January 24-28, 2011, URL: http://earth.eo.esa.int/pub/polsarpro_ftp/POLinSAR2011
/Monday24/Mission/2_Chalifoux_POLinSAR_final.pdf
22) Steve Iris, “RADARSAT Constellation Mission Status,” Proceedings of the IGARSS (International Geoscience and Remote Sensing Symposium) 2015, Milan, Italy, July 26-31, 2015
23) Éric Laliberté, “RADARSAT Constellation,” Proceedings of the 65th International Astronautical Congress (IAC 2014), Toronto, Canada, Sept. 29-Oct. 3, 2014, paper: IAC-14,B1,2,9
24) ”Current status of RCM,” CSA, 1 February 2019, URL: http://www.asc-csa.gc.ca
/eng/satellites/radarsat/updates.asp
25) ”RADARSAT Constellation: A major milestone reached,” CSA, 30 September 2019, URL: http://www.asc-csa.gc.ca/eng/blog/2018/10/16/radarsat-constellation-a-major-milestone-reached.asp
26) ”MDA and Nanowave join forces to produce an innovative radar transceiver payload,” Satnews Daily, 01 May 2018, URL: http://www.satnews.com/story.php?number=606126748
27) Information provided by Daniel De Lisle,RADARSAT Constellation Mission Manager of CSA (Canadian Space Agency).
28) Heather McNairn, Daniel De Lisle, ”The RADARSAT-Constellation Mission (RCM),” URL: http://eofsac.org/sites/default/files/2018-02/McNairn%20Delisle%20RADARSAT%20Constellation_0.pdf
29) ”RUAG Space and the RADARSAT Constellation Mission,” URL: https://www.youtube.com
/watch?v=eWu2fjevhFg
30) “The structure of one of the RADARSAT Constellation spacecraft,” CSA, Feb. 1, 2015, URL: http://www.asc-csa.gc.ca/eng/search/images/watch.asp?id=4247
31) “Magellan Aerospace Awarded $110 Million Contract for RADARSAT Constellation Manufacture,” Sept. 4, 2014, URL: http://www.newswire.ca/en/story/1218963/
magellan-aerospace-awarded-110-million-contract-for-radarsat-constellation-manufacture
32) “The Government of Canada Launches Final Stage of RADARSAT Constellation Project,” CSA, Jan. 9, 2013, URL: http://www.asc-csa.gc.ca/eng/media/news_releases/2013/0109.asp
33) Alan A. Thompson, “Maritime Surveillance Capabilities of the RADARSAT Constellation Mission,” Proceedings of IGARSS (IEEE International Geoscience and Remote Sensing Symposium), Melbourne, Australia, July 21-26, 2013
34) “Radarsat Constellation, Status: In development,” CSA, January, 09, 2013, URL: http://www.asc-csa.gc.ca/eng/satellites/radarsat/default.asp
35) S. Beaudette, J. de Carufel, D. McCabe, W. Whitehead, R. Buckingham, C. Pye, P. Tremblay, D. Kefallinos, A. Thompson, “RADARSAT Constellation Mission Phase A Spacecraft Bus Development - Work to Date,” Proceedings of the 13th Canadian Astronautics Conference, ASTRO 2006, Montreal, QC, Canada, organized by CASI (Canadian Astronautics and Space Institute), April 25-27, 2006
36) http://www.asc-csa.gc.ca/eng/satellites/radarsat/default.asp
37) “Magellan Aerospace Awarded Contract For RADARSAT Constellation Mission,” Space Mart, May 29, 2009, URL: http://www.spacemart.com/reports/
Magellan_Aerospace_Awarded_Contract_For_RADARSAT_Constellation_Mission_999.html
38) “Components and Specifications,” CSA, Feb. 28, 2011, URL: http://www.asc-csa.gc.ca
/eng/satellites/radarsat/components.asp
39) Stéphane Chalifoux, “RADARSAT Constellation Mission Update,” POLinSAR 2015, ESA/ESRIN, Frascati, Italy, Jan. 26-30, 2015, URL: http://seom.esa.int/polinsar-biomass2015/files/D1S2_Missions_3.pdf
40) Raymond Harris, Diane Kotelko, Ian Walkty, Walter Czyrnyj, Paul Harrison, Dave McCabe, “Small Satellite Bus Evolution at Magellan Aerospace,” Proceedings of ASTRO 2010, 15th CASI (Canadian Aeronautics and Space Institute) Conference, Toronto, Canada, May 4-6, 2010
41) ”RADARSAT CONSTELLATION MISSION,” SpaceX, 12 June 2019, URL: https://www.spacex.com/webcast
42) Stephen Clark, ”Three Canadian radar surveillance satellites ride SpaceX rocket into orbit,” Spaceflight Now, 12 June 2019, URL: https://spaceflightnow.com/2019/06/12/
three-canadian-radar-surveillance-satellites-ride-spacex-rocket-into-orbit/
43) ”MDA extends satellite operations capability through contract award by the Canadian Space Agency,” PR Newswire, 29 January, 2021, URL: https://www.newswire.ca/news-releases/
mda-extends-satellite-operations-capability-through-contract-award-by-the-canadian-space-agency-872140362.html
44) ”Current status: Regular operations,” CSA, December 2019, URL: https://www.asc-csa.gc.ca
/eng/satellites/radarsat/updates.asp
45) ”CSA Releases First Image from a RADARSAT Constellation Mission Satellite,” CSA, 5 July 2019, URL: https://spaceq.ca/csa-releases-first-image-from-a-radarsat-constellation-mission-satellite/
46) P. Allan, A. Baylis, D. Kefallinos, L. Martins-Camelo, “SAR Constellation Mission Payload Design,” Proceedings of EUSAR 2006, Dresden, Germany, May 16-18, 2006
47) R. Girard, P. Plourde, G. Séguin, “The RADARSAT Constellation Payload Design,” Proceedings of IGARSS 2007 (International Geoscience and Remote Sensing Symposium), Barcelona, Spain, July 23-27, 2007
48) M. Dabboor, T. Geldsetzer, “On the classification of sea ice types using simulated RADARSAT Constellation Mission (RCM) compact polarimetric SAR parameters,” ASPRS 2014 Annual Conference, collocated with JACIE Workshop, Louisville, Kentucky, USA, March 23-28, 2014, URL: http://www.asprs.org/a/publications/proceedings/Louisville2014/Mohammed_Dabboor.pdf
49) F. J. Charbonneau, B. Brisco, R. K. Raney, H. McNairn, C. Liu, P. W. Vachon, J. Shang, R. DeAbreu, C. Champagne, A. Merzouki, T. Geldsetzer, “Compact polarimetry overview and applications assessment,” Canadian Journal of Remote Sensing, 2010, Vol. 36, Issue S2, pp: 298-315, DOI: 10.5589/m10-062
50) Alan A. Thompson, “Innovative Capabilities of the RADARSAT Constellation Mission,” Proceedings of EUSAR 2010, 8th European Conference on Synthetic Aperture Radar, June 7-10, 2010, Aachen, Germany
51) http://www.asc-csa.gc.ca/eng/satellites/radarsat/description.asp
52) R. Warrier, F. Shah, A. Macikunas, A. Veenstra, “Design of a Next Generation of Central Electronics System for RADARSAT Constellation Mission,” Proceedings of ASTRO 2010, 15th CASI (Canadian Aeronautics and Space Institute) Conference, Toronto, Canada, May 4-6, 2010
53) http://www.asc-csa.gc.ca/eng/satellites/radarsat/radarsat-tableau.asp#tphp
54) G. Séguin, A. Eddy, “RADARSAT Constellation: Changing the Paradigm of Maritime Surveillance,” OceanSAR, 2006, St. John's Newfoundland, Canada, Oct. 23-25, 2006, URL: http://www.oceansar2006.com/presentations/75.pdf
55) Danielle Renton, “RADARSAT Constellation Mission and AIS,” Sept. 2010, URL: http://www.gmsa.gov/TEXAS/briefs/RCM-AIS%20TEXASIV%20presentation_v3.ppt
56) “JIB Antennas Will Support Ship ID Capability Being Added to Canadas RADARSAT Constellation Mission,” Space Daily, Sept. 09, 2013, URL: http://www.spacedaily.com/reports/JIB_Antennas_Will_Support_Ship_ID_
Capability_Being_Added_to_Canadas_RADARSAT_Constellation_Mission_999.html
57) Paris W. Vachon, Robert Quinn, “Operational Ship Detection in Canada using RADARSAT: Present and Future,” Proceedings of SeaSAR 2012, The 4th International Workshop on Advances in SAR Oceanography, Tromsø, Norway, June 18-22, 2012, URL: https://earth.esa.int
/c/document_library/get_file?folderId=233885&name=DLFE-2181.pdf
Spacecraft Launch Mission Status Sensor Complement Ground Segment References Back to top