RazakSat / MACSAT
EO
Mission complete
Imaging multi-spectral radiometers (vis/IR)
MYSA
Quick facts
Overview
| Mission type | EO |
| Agency | MYSA |
| Mission status | Mission complete |
| Launch date | 14 Jul 2009 |
| End of life date | 21 Jul 2014 |
| Instrument type | Imaging multi-spectral radiometers (vis/IR) |
| CEOS EO Handbook | See RazakSat / MACSAT summary |
RazakSat / MACSAT
Spacecraft Launch Mission Status Sensor Complement References
MACSat (Medium-sized Aperture Camera Satellite) is a minisatellite Earth imaging mission, an international cooperative project between ATSB [Astronautic Technology (M) Sdn. Bhd.] of Kuala Lumpur, Malaysia, and SI (Satrec Initiative Co. Ltd.) of Daejeon, Korea. The major project funding is being provided by ATSB. The overall objectives are to demonstrate indigenous spacecraft design and manufacturing competence, to get involved in all aspects of high-resolution image observations and processing in a near equatorial LEO orbit (NeqO) for a number of applications in developing countries, and to develop technology for future missions. The cooperative agreement of ATSB with SI includes on-the-job training of ATSB engineers. The cooperative project started in 2000, a joint engineering team was formed in Nov. 2001. 1)
Note: The new name of MACSAT, namely RazakSat, was coined by Malaysia's Prime Minister Tun Mahathir Mohamad during his visit to ATSB on August 7, 2003 - in honor of the late Tun Abdul Razak Dato' Hussain, Malaysia's second Prime Minister. Hence, MACSat is the engineering name while RazakSat is the official name of the spacecraft.

Spacecraft
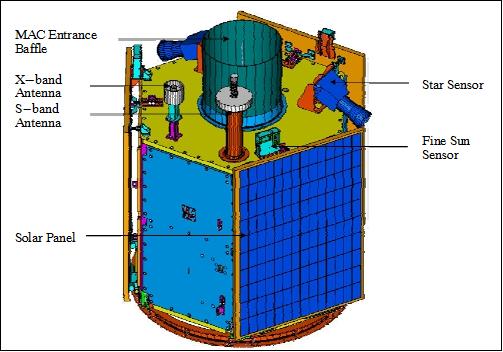
RazakSat is a three-axis stabilized minisatellite of hexagonal shape (size envelope: 1200 mm diameter, 1200 mm height). The RazakSat bus structure, also referred to as the SI-200 bus (of KitSat-3 and STSat-1 heritage), consists of aluminum honeycomb decks, side panels, and solar panels (subsystems are stowed in module boxes). The S/C has a mass budget of 190 kg. Electrical power of ≥ 330 W (EOL) is provided by three deployable solar panels using triple-junction GaAs solar cells. A NiCd battery (3 x 6 Ah capacity) provides power during eclipse phases of the orbit. The PCM (POwer Conditioning Module) regulates +28 V bus power and generates +5 V / ±12 V regulated power from BCR (Battery Charge Regulator) and batteries.
An attitude pointing accuracy of ≤ 0.2º (2σ) is supported by the ADCS (Attitude Determination and Control Subsystem) for all three axes. Attitude is sensed by coarse and fine sun sensors, magnetometers, two star sensors (used during imaging operations), and a gyroscope. The coarse sun sensor is only used for initial attitude acquisition in the post-launch phase. ADCS actuators are two magnetorquers and four sets of reaction wheels (zero momentum stabilization). 2) 3) 4) 5) 6) 7) 8) 9) 10)
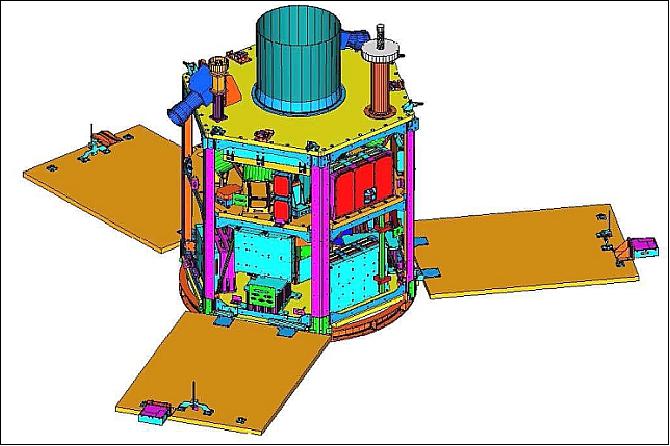
The spacecraft features in addition a body-pointing capability of up to ±30º in all directions and fiber optic gyros, thus providing a sufficient FOR (Field of Regard) for cross-track event monitoring as well as along-track stereo imaging. The C&DH (Command and Data Handling Subsystem) employs a mixture of star and distributed network architecture connected by serial links to an OBC.
The C&DH subsystem is comprised of one primary OBC, one secondary OBC, four TMCs (Telemetry and Command Modules), and a GPS receiver, providing accurate time and position information in real-time for a number of onboard services. All onboard communication uses the SLIP (Serial Line Internet Protocol) protocol, relaying IP packets over serial line point-to-point connections. The S/C design life is three years. 11)
Spacecraft mass, power | 190 kg, ≥ 330 W @ EOL (End of Life) |
Spacecraft envelope | - 1200 mm diameter, 1200 mm height |
EPS (Electrical Power Subsystem ) | - GaAs/Ge solar cells on honeycomb substrate |
ADCS (Attitude Determination & Control Subsystem) | - Three-axis stabilization based on four (reaction wheels) |
Off-axis imaging capability | Up to ± 30º [body pointing to extend FOR (Field of Regard)] |
C&DH (Command & Data Handling Subsystem) | - Two on-board computers |
TT&C subsystem | - 9.6 kbit/s / 1.2 kbit/s S-band TT&C uplink |
Image transmission | 30 Mbit/s (X-band) |
Mission design life | > 3 years |
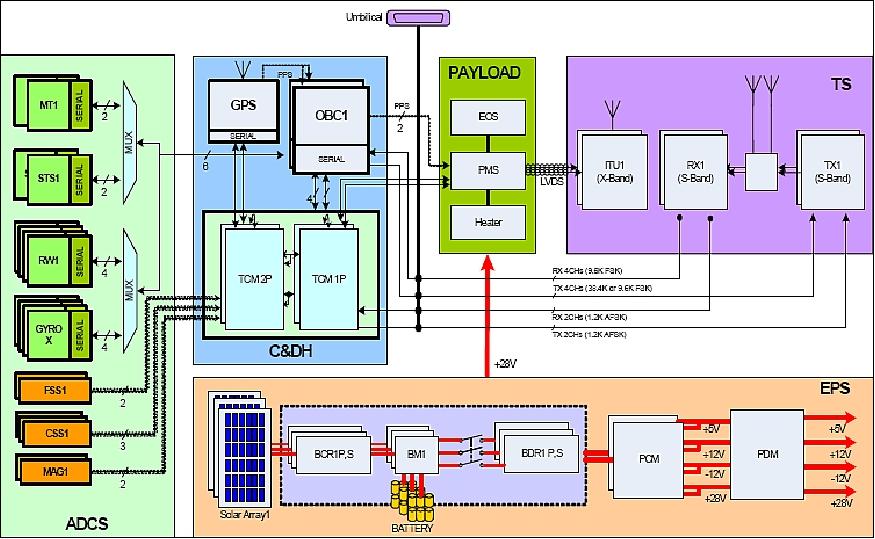
RF communication is provided in S-band (TT&C) at data rates of 1.2, 9.6 and 38.4 kbit/s (use of AX.25 protocol), FSK modulation. In addition, there is an X-band downlink for imagery transmission at 30 Mbit/s using the RazakSat packet frame protocol (QPSK modulation). A single IRPS (Image Receiving and Processing Station) in Kuala Lumpur with a 7 m diameter antenna dish is used to receive the imagery and to control the spacecraft.

Launch
The RazakSat spacecraft was launched on July 14, 2009 (UTC) on a Falcon-1 vehicle of SpaceX (Space Exploration Technologies, El Segundo, CA). — Secondary small payloads are: InnoSat of three Malaysian universities (Universiti Sains Malaysia, Universiti Teknologi Malaysia and Universiti Malaysia Perlis), and a CubeSat developed by ATSB. 12)
Note: the launch was initially planned for late 2005 but due to the long delays and the launch failure of Falcon-1 on March 24, 2006 (maiden flight) the launch of RazakSat had to be postponed for a considerable amount time.
The launch site is the "Reagan Test Site" in the Kwajalein Atoll (part of the Republic of the Marshall Islands) in the Western Pacific. The Kwajalein Atoll is made up of nearly 100 coral islands surrounding a 2,300 km2 lagoon. The launch site is located at about 9.99º N latitude and 167.6º E longitude. The Kwajalein Missile Range (KMR) is a US military range and launch site (since World War II) for missiles and, occasionally, Pegasus and Falcon-1 launched small satellites.

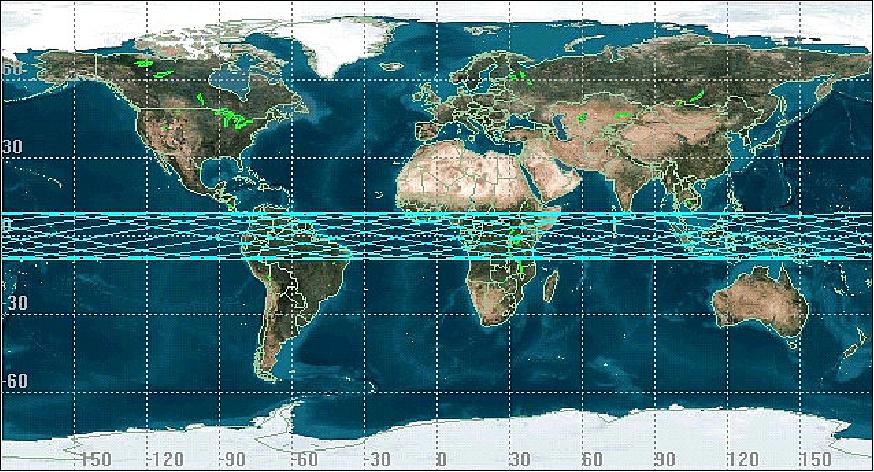
Orbit: Non-sun-synchronous NeqO (Near Equatorial LEO) circular orbit, altitude = 685 km (nominal), inclination = 9º. The near-equatorial orbit provides a high degree of temporal resolution (repeat coverage) for Malaysia and other equatorial countries.
Mission Status
• The operations of the RazakSat mission ended on July 21, 2014. 15)
• In a first study scientists have found the images suitable for feature extraction in an urban context to update the road network at a scale of 1:25,000. In a preceding project for land cover mapping the research team used the five available bands of RazakSat imagery. 16)
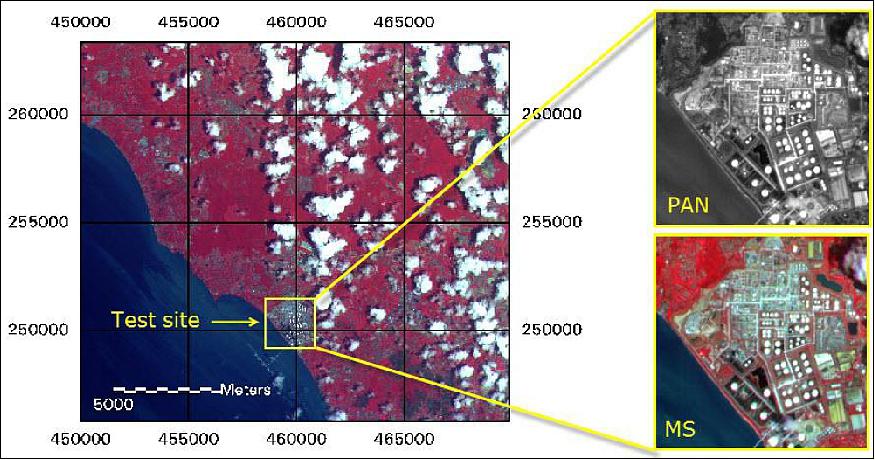
- Test site and data used: The research test site is located in Malaysia, on the west coast of the Malayan peninsular near Sungai Udang, about 10 km north of the cultural heritage town Melaka. This site was chosen because the data was available and already pre-processed for purposes of geometric and radiometric evaluation of the satellite sensor.
- The test site that has previously been used to evaluate the quality of the RazakSat medium-sized aperture camera (MAC) contains very diverse features and is very challenging. Apart from natural land cover types (water, trees, scrub) it has many man-made features, such as roads, pavement, buildings and many petroleum storage facilities that also extend in height. In addition, petrol pipelines in various dimensions connect the storage facilities, crossing roads that lead to the various facilities and buildings. The area is dominated by the Malaysian Petronas Refinery site Melaka.
- The MAC delivers five bands: four bands multispectral (MS: blue, green, red, near-infrared) at 5 m resolution and one panchromatic band (PAN: 510 – 730 nm) at 2.5 m resolution. The radiometric resolution is 8 bit. A full swath covers 20 x 500 km, the scenes are distributed as 20 x 20 km scenes. For this study the subset was taken out of the full scene and covers a 95% cloud-free region of 2.5 x 2.5 km. The location of the study site and an overview of the remote sensing image subsets are given in Figure 10.
• The RazakSat spacecraft is operating nominally as of December 2009. About 200 images have been recorded by the satellite at several locations in Malaysia between September and November 2009.

• The first image recorded by the satellite was on July 20 at Koh Samui, Thailand.
• On July 14, 2009, the RazakSat spacecraft was successfully placed into its targeted orbit. 18)
Sensor complement: (MAC)
MAC (Medium-sized Aperture Camera)
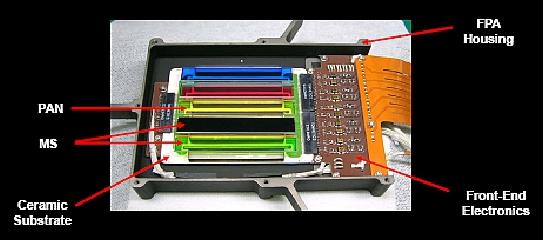
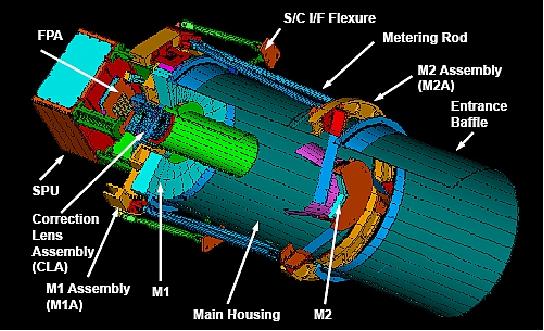
MAC is a high-resolution multispectral pushbroom imager featuring five linear CCD detector arrays aligned in parallel in its focal plane assembly (FPA). MAC consists of two subsystems: EOS (Electro-Optical Subsystem) and PMS (Payload Management Subsystem). The EOS includes a modified 300 mm aperture Ritchey-Chretien telescope (with two aspheric aluminum mirrors and two spherical correction lenses), the FPA (Focal Plane Assembly), and SPU (Signal Processing Unit). The mirrors are made of low-expansion glass, (Astro-Sital), the lenses are made of BK7 (a quality optical glass of Schott).
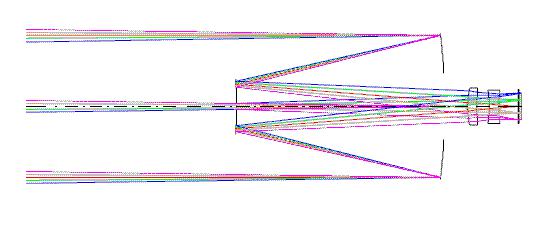
The telescope's structural elements employ different materials such as Super Invar, Invar, aluminum, stainless steel and titanium to protect the optical elements during launch and to maintain the optical performance during operation. Heaters are implemented to raise the telescope temperature when looking into deep space. The heaters are controlled by the PMS, their average power consumption is about 9 W.
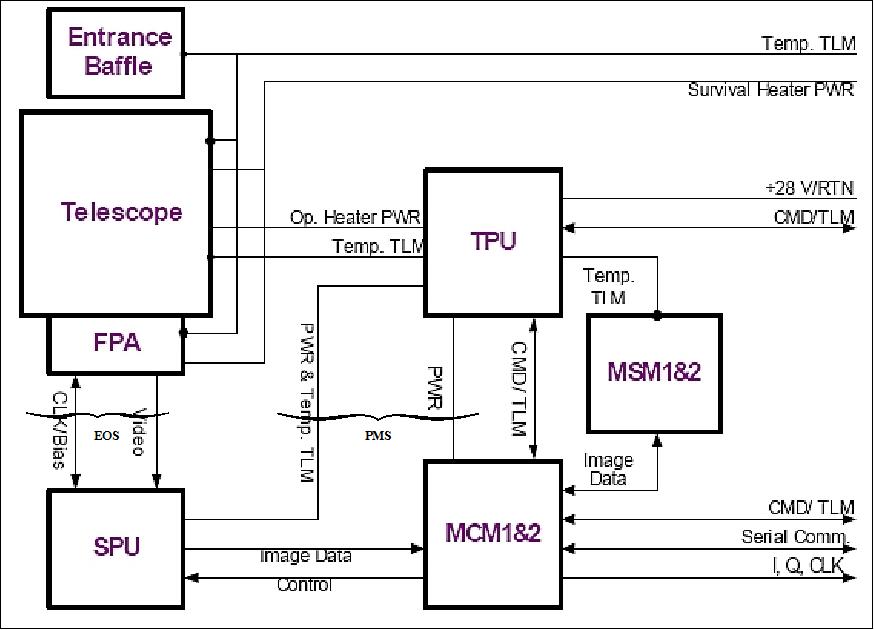
The FPA uses five identical linear CCD detector line arrays on a single PCB (Printed Circuit Board), without any beam splitters or optical butting. Each CCD line array has 8,192 active pixels with a pixel size of 7 µm. SPU is responsible for power provision to the FPA, operation of detectors, processing and formatting of video signals and the transmission of digital image data. 19) 20) 21) 22) 23)
The PMS includes TPU (Thermal Power Unit) and MMU (Memory Management Unit). MMU features two MSM (Memory System Module) in cold redundancy, responsible for the overall management of MAC (32 Gbit of data storage). Two different processors are being used for each MCM: TS68EN360 and XPC860. They synchronize the imaging operation to the signal from the RazakSat GPS receiver. MAC calibration: in-orbit radiometric calibration (relative calibration of the FPA) is being performed on a periodic basis requiring the view of special ground targets. 24)
Parameter | Value | Parameter | Value |
Spectral channels | - 1 (PAN), | GSD (Ground Sampling Distance) | - 2.5 m (PAN) |
IFOV (PAN) | 3.65 µrad | IFOV (MS) | 7.30 µrad |
PAN band (nm) | 510-730 | Swath width, (FOV) | ≥ 20 km, (1.675º) |
MS bands (nm) | 450-520, 520-600, 630-690, 760-890 | MTF @ Nyquist frequency | - PAM×> 8%, - MS > 15% |
SNR | ≥ 50 | Signal quantization | 8 bit |
Data storage capacity | 32 Gbit | Signal gain | Programmable |
Instrument mass | - 42.1 kg | - Peak power | - 63 W (all heaters on) |

Applications of MAC imagery
Panchromatic data:
• Urban development, urban or rural boundary studies infrastructure mapping
• Insurance assessment
• Stereo mapping for forestry use, agriculture application
• Monitoring of shipping routes and coastal monitoring, oil spill detection
• Logistics planning, terrain analysis
• Disaster response
Multispectral data:
• Infrastructure mapping, real-estate planning, land cover and land use
• Assessing hazards & damage
• Geology mapping, structural interpretation, range & water resources
• Coastal monitoring, pollution monitoring, management of marine ecosystem
• Detecting mines & missiles, monitoring refugee movements
• etc.
References
1) B. J. Kim, S. Park, E. E. Kim, H.-S. Chang, W. Park, J. Seon, M. Ismail, A. Rasheed, A. S. Arshad, "MACSAT - A Mini-Satellite Approach to High Resolution Space Imaging," Proceedings of the AIAA/USU Conference on Small Satellites, Logan UT, Aug. 11-14, 2003, SSC03-VI-8, URL: http://digitalcommons.usu.edu/cgi/viewcontent.cgi?article=1787&context=smallsat
2) E. E. Kim, Y.-W. Choi, H. S. Yang, M.-S. Kang,, A. Rasheed, H. Nasir, R. Rosdi, A. H. Hai, I. Ismail, A. S. Arshad, et al., "Development of Engineering Model of Medium-sized Aperture Camera System," 4th IAA Symposium on Small Satellites for Earth Observation, Berlin, Germany, April, 7-11, 2003
3) Information and spacecraft illustration kindly provided by Ahmad Sabirin Arshad and by Ismail Maszlan of ATSB, Kuala Lumpur, Malaysia
4) H. Lee, "A Low-Cost Attitude Determination and Control Simulation for the Functional Verification of Embedded Control Software," 2004 KSAS-JSASS Joint Symposium on Aerospace Engineering, Seoul, Korea, Nov. 18-19, 2004
5) N. M. Yusoff, "RazakSAT - Technology Advent in High Resolution Imaging System for Small Satellite," Proceedings of the 26th ACRS (Asian Conference on Remote Sensing), Hanoi, Vietnam, Nov. 7-11, 2005, URL: http://www.a-a-r-s.org/acrs/proceeding/ACRS2005/Papers/ANS-5.pdf
6) H, J, Chun, B. J. Kim, H. S. Chang, E. E. Kim, W. K. Park, S. D. Park, A. S. Ashard, "RazakSAT - A High Performance Satellite Waiting for Its Mission in Space," Proceedings of the 20th Annual AIAA/USU Conference on Small Satellites, Logan, UT, Aug. 14-17, 2006, paper: SSC06-IV-6, URL: http://digitalcommons.usu.edu/cgi/viewcontent.cgi?article=1556&context=smallsat
7) B. J. Kim, "RazakSat - A Near Equatorial Earth Observation Minisatellite," May 2007, Daejon, Korea, URL: http://csplab.kaist.ac.kr/lecture/SatRec2007/lecture_notes/EE807_070531.pdf
8) Ahmad Sabirin Arshad, "Small Satellite Technology Developments in Malaysia," Information Exchange Meeting for Small Satellite Development, 11th Session of the Asia-Pacific Regional Space Agency Forum (APRSAF-11), November 2, 2004, Canberra, Australia, URL: http://www.aprsaf.org/data/p_saprsaf_data/repo_ap11cd/ss_info/6-SS_Malaysia.pdf
9) Norhizan Hamzah, "Malaysian Space Technology: Current Towards Future," Proceedings of Map Asia, Aug.18-20, 2008, Kuala Lumpur, Malaysia, URL: http://www.gisdevelopment.net/proceedings/mapasia/2008/plenary2-ma08_NorhizamHamzah.pps
10) https://web.archive.org/web/20100130091349/http://www.atsb.my/index.php/products-a-services/razaksat.html
11) Byungjin Kim, Salem Al Marri, Norhizam Hamzah, "SI-200 Mini-Satellite Platform for Earth Observation Missions," Proceedings of the 60th IAC (International Astronautical Congress), Daejeon, Korea, Oct. 12-16, 2009, IAC-09.B1.1.3
12) "SpaceX Successfully Launches Satellite Into Earth Orbit," July14, 2009, Space Travel, URL: http://www.space-travel.com/reports/SpaceX_Successfully_Launches_Satellite_Into_Earth_Orbit_999.html
13) Timothy D. Hall, Gary F. Duff, Linda J. Maciel, "The Space Mission at Kwajalein," Lincoln Laboratory Journal, Vol. 19, No 2, 2012, p. 62, URL: https://www.ll.mit.edu/publications/journal/pdf/vol19_no2/19_2_3_Hall.pdf
14) Shamsul Azwan Samsuddin, Norhizam Hamzah, Norhan Mat Yusoff, Jean-Philippe Thomarat, "RAZAKSAT™ Image Receiving and Processing Station (IRPS)," URL: http://a-a-r-s.org/aars/proceeding/ACRS2006/Papers/O-2_O9.pdf
15) Information provided by Adhwa Amir Tan of ANGKASA, Malaysia.
16) C Pohl, M Hashim, "Increasing the potential of RazakSat images for map-updating in the Tropics," 8th International Symposium of the Digital Earth(ISDE8), IOP Conference Series:Earth and Environmental Science, Vol. 18 (2014) 012029, URL: http://iopscience.iop.org/article/10.1088/1755-1315/18/1/012029/pdf
17) [web source no longer available]
18) "Malaysian RazakSAT Successfully Reached The Targeted Orbit After Many Delays," Satreci, July 17, 2009, URL: http://www.satreci.com/eng/ds1_1.html?tno=100&db=pr_board&no=7
19) Ee-Eul Kim, Y.-W. Choi, Eugene D. Kim, S.-K. Jeong, M.-S. Kang, H. Md. Nasir , Md. Rushdan Md. Rosdi, Asma Hani Ad. Hai, "Integration and Testing of a High-Resolution Camera for Small Satellites," RAST 2005 (Recent Advances in Space Technology), Istanbul, Turkey, June 9-11, 2005
20) Y.-W. Choi, E. D. Kim, M.-S. Kang, S.-K. Jeong, S.-U. Yang, J. Kim, Ee-Eul Kim, S.-D. Park, H.-S. Yang, M. Ismail, A. S. Arshad, "Pre-Flight Performance Characterization of RazakSAT Medium-sized Aperture Camera (MAC)," Proceedings of SPIE Conference `Optics & Photonics 2005,' Vol. 5882, San Diego, CA, USA, July 31-Aug. 4, 2005
21) E. D. Kim, Y.-W. Choi, M.-S. Kang, E.-E. Kim, H.-S. Yang, A. A. Rasheed, A. S. Arshad, "Medium-sized Aperture Camera for Earth Observation," Proceedings of the 5th International Conference on Space Optics, March 30 - April 2, 2004, Toulouse, France
22) Ee-Eul Kim, Young-Wan Choi, Ho Soon Yang, Myung-Seok Kang, Seong-Keun Jeong, Seung-Uk Yang, Jong-Un Kim, "Development of Engineering Model of Medium-Sized Aperture Camera System," 4th IAA Symposium on Small Satellites for Earth Observation, Berlin, Germany, April 7-11, 2003, IAA-B4-0701, URL: http://www.dlr.de/iaa.symp/Portaldata/49/Resources/dokumente-archiv4/IAA-B4-0701.pdf
23) Ee-Eul Kim, Young-Wan Choi, Myung-Seok Kang, Seong-Keun Jeong, "Development of Earth Observation Sensors for Small Satellites in SaTReC Initiative," 5th IAA Symposium on Small Satellites for Earth Observation, Berlin, Germany, April 4-8, 2005, URL: http://www.dlr.de/iaa.symp/Portaldata/49/Resources/dokumente/archiv5/0705P-Ee-EulKim.pdf
24) Ng Su Wai, Adhwa Amir Tan, Jessica Wong Soo Mee, Maszlan Ismail, Mustafa Din Subari, "Preflight Radiometric Calibration of RazakSAT," Proceedings of the 4th International Conference on Recent Advances in Space Technologies (RAST 2009), Istanbul, Turkey, June 11-13, 2009
The information compiled and edited in this article was provided by Herbert J. Kramer from his documentation of: "Observation of the Earth and Its Environment: Survey of Missions and Sensors" (Springer Verlag) as well as many other sources after the publication of the 4th edition in 2002. - Comments and corrections to this article are always welcome for further updates (eoportal@symbios.space).
Spacecraft Launch Mission Status Sensor Complement References Back to Top