RASAT
EO
Mission complete
Imaging multi-spectral radiometers (vis/IR)
Land
Quick facts
Overview
| Mission type | EO |
| Agency | TUBITAK |
| Mission status | Mission complete |
| Launch date | 17 Aug 2011 |
| End of life date | 29 Aug 2023 |
| Measurement domain | Land |
| Measurement category | Multi-purpose imagery (land), Albedo and reflectance |
| Measurement detailed | Land surface imagery, Earth surface albedo |
| Instruments | RASAT VIS Panchromatic, RASAT VIS Multispectral |
| Instrument type | Imaging multi-spectral radiometers (vis/IR) |
| CEOS EO Handbook | See RASAT summary |
RASAT (Earth Observation Satellite)
Spacecraft Launch Mission Status Sensor Complement References
RASAT was a microsatellite imaging mission of TUBITAK-UZAY (Scientific and Technological Research Council of Turkey - Space Technologies Research Institute), Ankara, Turkey. The project was funded by the State Planning Office. Note: Prior to May 2006, TUBITAK-UZAY was referred to as TUBITAK-BILTEN.
RASAT was a Turkish word with a basic meaning of “observation”. There were connotations to Rasat as well, for instance the term “Rasathane” means 'astronomical observatory'. Hence, it was felt that “Earth Observation Satellite” was a most fitting interpretation of RASAT.
The overall objective was to establish and develop small satellite technologies in Turkey. It was the first remote sensing satellite that was being developed, and manufactured in Turkey by Turkish engineers. The predecessor mission was BILSAT which was launched on Sept. 27, 2003, a cooperative mission of TUBITAK-BILTEN, Turkey, and of SSTL, Surrey, UK - involving on-the-job training of a Turkish team of engineers at SSTL. BILSAT was part of the DMC (Disaster Monitoring Constellation) - it was operational until August 2006 when it experienced a failure in its battery system.
Although the mechanical design of the RASAT platform was mainly based on the one of BILSAT heritage, the RASAT spacecraft carried a number of new modules which were being designed, developed and integrated at the the TUBITAK-UZAY facilities. The main purpose of the RASAT program was to further improve the experience and skills acquired by the BILSAT program, as well as to further improve the infrastructure required to assemble, integrate and test small satellites in Turkey without receiving any foreign resources in terms of advisors or partners. 1) 2) 3) 4) 5) 6) 7) 8)
The RASAT project started in 2004. The CDR (Critical Design Review) took place in January 2008. The requirements called for an optical imager with a resolution of 7.5 m in the panchromatic band and 15 m in the multispectral bands. New components/payloads on RASAT were BILGE, ALP, GEZGIN-2, and the introduction of an X-band transmitter for an efficient downlink transmission rate.
Spacecraft
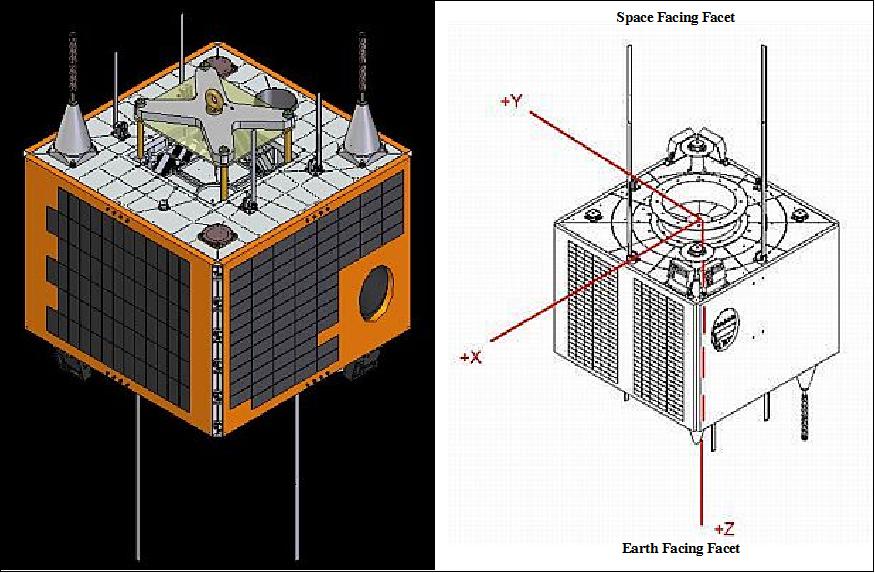
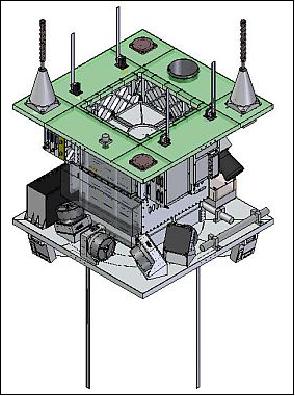
The RASAT microsatellite was based on the BILSAT bus and module heritage. The main stack uses the load carrying structure and employs trays for the various spacecraft subsystems. Unlike BILSAT’s honeycomb panels, the Earth and space facing facets were built of aluminum parts with an internal web structure; the reason: the domestic suppliers weren't familiar with high-precision honeycomb manufacturing processes. 9)
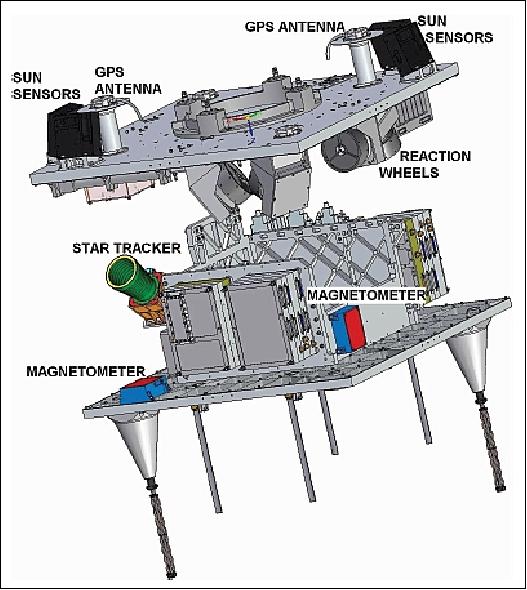
AODCS (Attitude and Orbit Determination and Control Subsystem): The spacecraft was 3-axis stabilized. AODCS used four reaction wheels and three magnetorquers as actuators. The attitude was measured with four analog fine sun sensors, two fluxgate magnetometers, a MEMS gyroscope, a star tracker and a GPS reciever. The AODCS hardware (wheels, gyro assembly, and star tracker) was controlled by the OBC using a dual redundant CAN bus. RASAT was a very agile spacecraft providing an off-nadir body-pointing capability of ±30º in all directions. 10)
OBC (On-Board Computer): The legacy OBC comprised a 386 based computer of BILSAT heritage. It accommodated a solid-state data recorder based on a PowerPC processor. BILGE – a new generation advanced OBC - actually served either as the OBC, or as a data storage unit, or both (the legacy system was intended to serve as backup). All the subsystems on RASAT were connected to a dual redundant CAN (Controller Area Network) bus. Also, two of the new subsystems, the new OBC (BILGE) and new SSDR (Solid-State Data Recorder) were furnished with the experimental MIL-STD-1553B bus. The heritage high-speed data links consisted of raw data transmission over the LVDS layer. These ran at speeds of 20 Mbit/s. In addition, BILGE featured radiation-hardened SDRAMs (Synchronous Dynamic Random Access Memory).
The new high-speed data links onboard RASAT made use of the ESA standard SpaceWire connections with data rates of 130 Mbit/s. The latter interface ran between the new OBC, SSDR, the signal processing subsystem, and a new X-band transmitter module. 11)
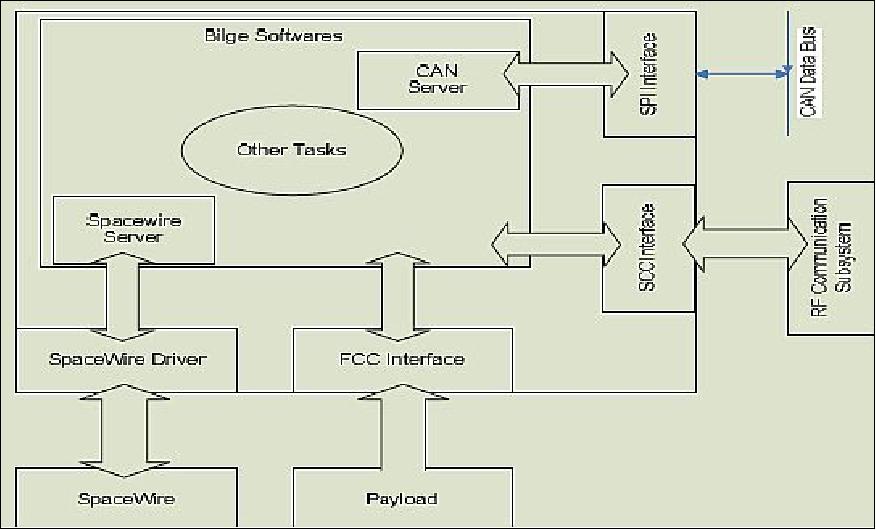
BILGE was basically a COTS PowerPC based computer of Freescale. The popular PowerQUICCII communications processor was employed at the heart of the system running at 50 MHz bus speed and at 200 MHz core speed. BILGE used the RTOS (Real Time Operating System) of Integrity with the feature of virtual address space. BILGE could communicate through various communication links. They could have been listed as follows:
- 2 ports of 1 Mbit/s CAN bus
- 2 ports of 1 Mbit/s MIL-STD-1553B bus
- 3 ports of 130 Mbit/s SpaceWire bus
- Up to 8 duplex ports of 8 Mbit/s HDLC over opto-isolated or LVDS (Low Voltage Differential Signaling) channels
- 3 ports of 25 Mbit/s DATA-CLK-DV raw data over LVDS.
EPS (Electric Power Subsystem): Spacecraft power was provided by 3 outside panels that were being covered with surface-mounted solar cells ( ±X and +Y sides). The 4th panel on the -Y side had an elliptical cutout of the solar panel to accommodate the star sensor. A maximum power of 65 W was provided (average on-orbit power of 42-52 W depending on the season. The power was distributed at 28 V and at 5 V. For heritage reasons, 6 Ah NiCd batteries at 28 V were used on RASAT. 12) 13)
In addition, new lithium-ion batteries, referred to as ALP, had been developed in the framework of the RASAT program.
RF communications: The TT&C links were provided in S-band as well as in UHF/VHF bands, the latter subsystem was used as a backup due to its long heritage in small space missions. Since a UHF/VHF implementation features better omni directional characteristics than S-band, the UHF/VHF subsystem was also used for the commissioning phase as the prime TT&C system.
The payload data was downlinked in X-band (8.23 GHz) at selectable data rates of up to 100 Mbit/s in QPSK/OQPSK (Quadrature Phase Shift Keying / Offset Quadrature Phase Shift Keying) modulation. The design and development of the X-band transmitter was an in-house project of TUBITAK-UZAY. The X-band transmitter (TREX) was considered an experimental module of the communication subsystem. 14)
The RASAT spacecraft had a total mass of ~95 kg and a design life of 3 years.
The following items were introduced with the RASAT project:
• System level design
• High performance flight computer (BILGE) and SpaceWire router
• All flight software
• All ground station software
• A 100 Mbit/s X-band transmitter
• Real-time processing, compression and encryption board (GEZGIN-2). GEZGIN-2 included the total integration of the JPEG2000 algorithm and new image processing and encryption capabilities.
• Li-ion battery, ALP (Intelligent Li-ion battery charge regulator).
Spacecraft structure | Load carrying tray structure |
ADCS | - 3-axis stabilization |
EPS (Electric Power Subsystem) | - Power: 65 W (max), 42-52 W on-orbit average |
BILGE processor | - 200 MHz, 32-bit PowerPC 603e |
Onboard communication | - Dual redundant CAN bus |
Memory | - 4 MByte TMR protected SRAM program memory |
Software | - Integrity RTOS (Real-Time Operating System) |
Options | - 4/6 port ESA SpaceWire router |
TREX-823 X-band transmitter | - Output power: 7 W (min); Output frequency: 8.23 GHz |
TT&C links | S-band (primary) and UHF/VHF band (heritage link) |
Spacecraft mass, design life | 95 kg, 3 years |
Spacecraft size | 700 mm x 700 mm x 554 mm |
Launch
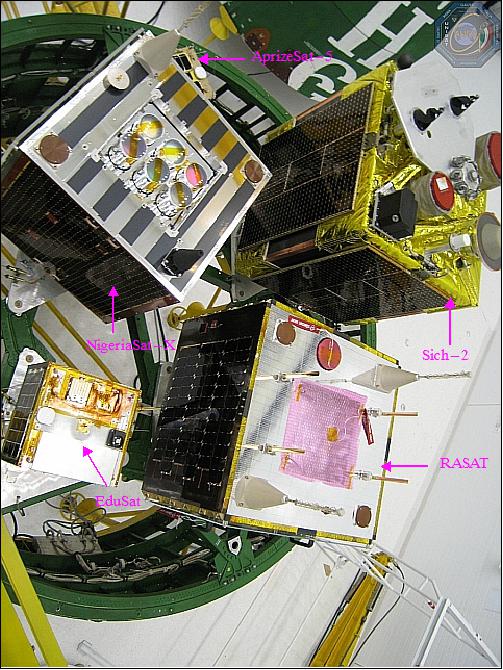
The RASAT spacecraft was launched as a secondary payload on August 17, 2011 on a Dnepr-1 launch vehicle using the SHM (Space Head Module) configuration from the Yasny/Dombarovsky launch site located in the Orenburg Region, Russia. The launch provider was ISC Kosmotras. 15) 16) 17)
The primary payload of the cluster launch was the Sich-2 spacecraft of NSAU (National Space Agency of Ukraine) with a launch mass of 175 kg.
The secondary payloads on this flight were:
• NigeriaSat-2 of NASRDA, Abuja, Nigeria, spacecraft mass = 270 kg
• NigeriaSat-X of NASRDA,, Abuja, Nigeria, spacecraft mass = 87 kg
• EduSat of the University of Rome (sapienza), Italy, spacecraft mass = 10 kg
• RASAT of Tubitak Uzay, Turkey, spacecraft mass = 95 kg
• AprizeSat-5 and AprizeSat-6 of AprizeSat, Argentina built by SpaceQuest, Fairfax, VA, USA, each microsatellite featured a next generation AIS (Automatic Identifictem System) payload. Each spacecraft had a mass of 14 kg. 18)
• BPA-2 (Blok Perspektivnoy Avioniki-2 — or Advanced Avionics Unit-2) of Hartron-Arkos, Ukraine. The BPA-2 experimental payload remained attached to the upper stage of the Dnepr-1 launch vehicle.
Orbit: Sun-synchronous orbit, altitude altitude = 700 km, inclination = 98.25º, the orbital period was about 98 min, the equatorial nodal crossing time was at 10:30 LTAN (Local Time on Ascending Node).
Mission Status
• August 28, 2022: Initially projected for a mission duration of three years, RASAT was retired after operating for 11 years. Over its lifetime, RASAT took 13,362 images over 58,726 orbits.
The 11th Anniversary Celebration Ceremony was held at TUBITAK UZAY Campus for RASAT, which left behind 11 years of service full of pride and success. Industry and Technology Minister Mustafa Varank, President of TUBITAK Prof. Dr. Hasan Mandal, TÜBİTAK UZAY İnstitute Director Mesut Gökten and the staff of the institute attended. 27) 28)
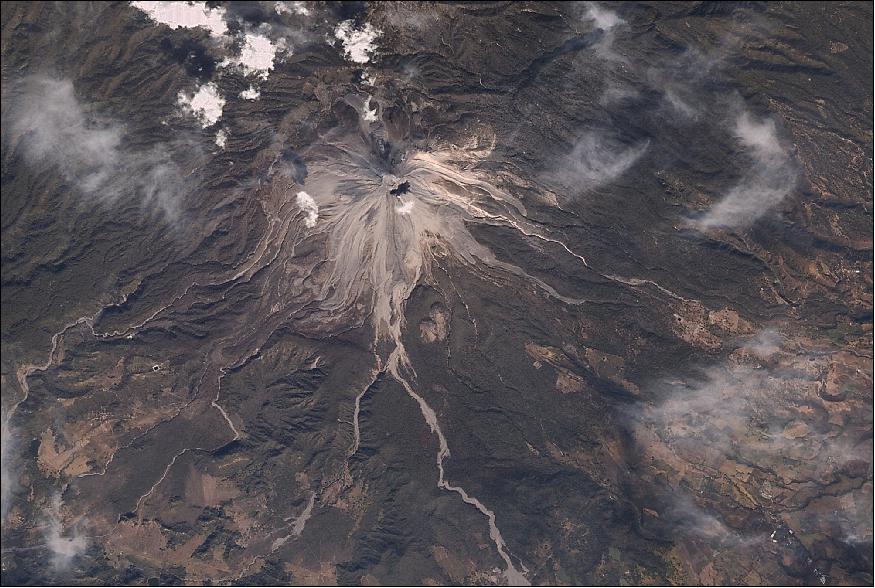
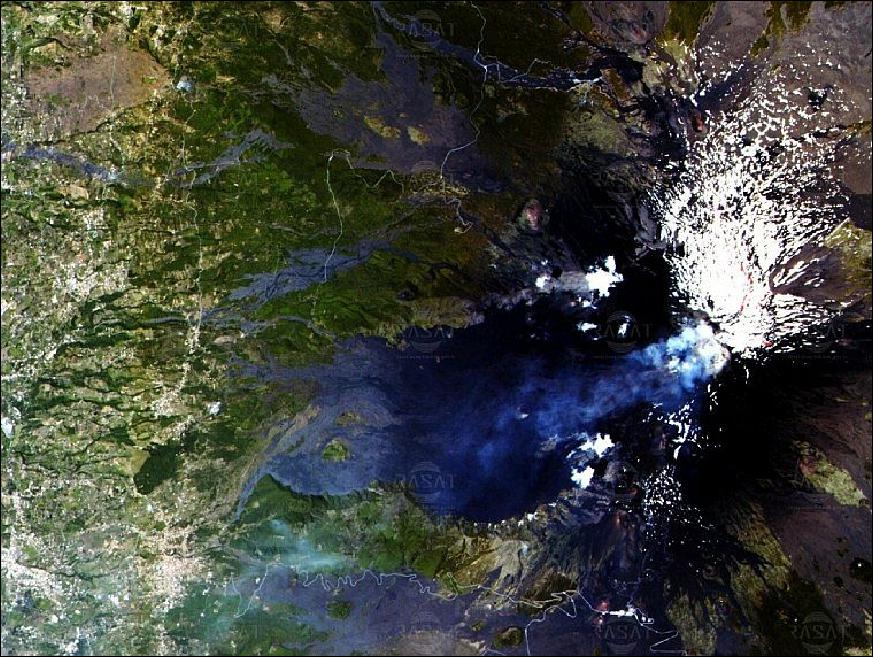
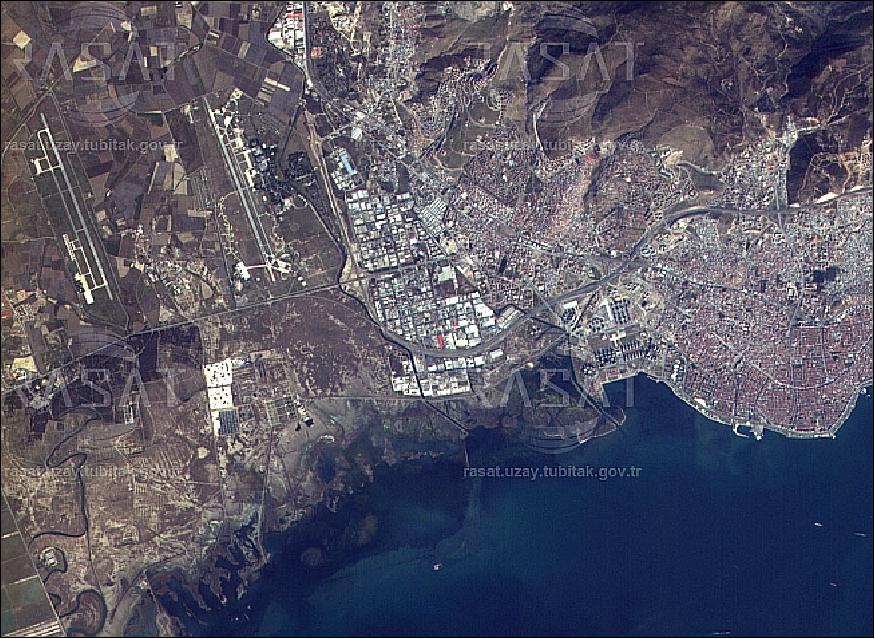
• January 2017: The Colima Volcano, the highest point in Mexico, at 3820 meters, is considered one of the most active volcanoes of the year 2016. The big bangs that started in December 2016 are continuing in January. 19) 20)
• July 2016: A study was made to evaluate the radiometric and geometric quality of RASAT images over a test field near the city of Edirne/Kesan in Turkey. Two overlapping images of the area from the year 2012 and 2015 are used for the investigations. The preliminary results have shown that the dynamic range (radiometric resolution) of the images are around 6 bits for the processed dataset. On the other side, the noise level is relatively low and no significant image artifacts have been observed. 21)
- Regarding the geometric quality, no absolute accuracy assessment has been performed so far. One RASAT panchromatic image pair was processed using a total of 21 ground control points in two different point configurations. The modelling of the exterior orientation parameters had been performed using polynomial functions with different numbers of unknowns (polynomial orders). Although the dataset was far from being optimal, triangulation results in the order of 1-1.5 pixels could be obtained in the investigations. The difficulties encountered in the triangulation are manifold and the major ones could be listed as problems in point determination (i.e. few man-made targets with the given resolution) and measurement (i.e. radiometric differences between the images due to large time interval between the image acquisitions, finding suitable GCPs (Ground Control Points) in both images, etc.) and unavailability of the metadata (e.g. accurate satellite orbit and rotation data, interior orientation, etc.).
• April 2016: The RASAT spacecraft and its payload are operating nominally, in its 5th year on orbit (Ref. 24).
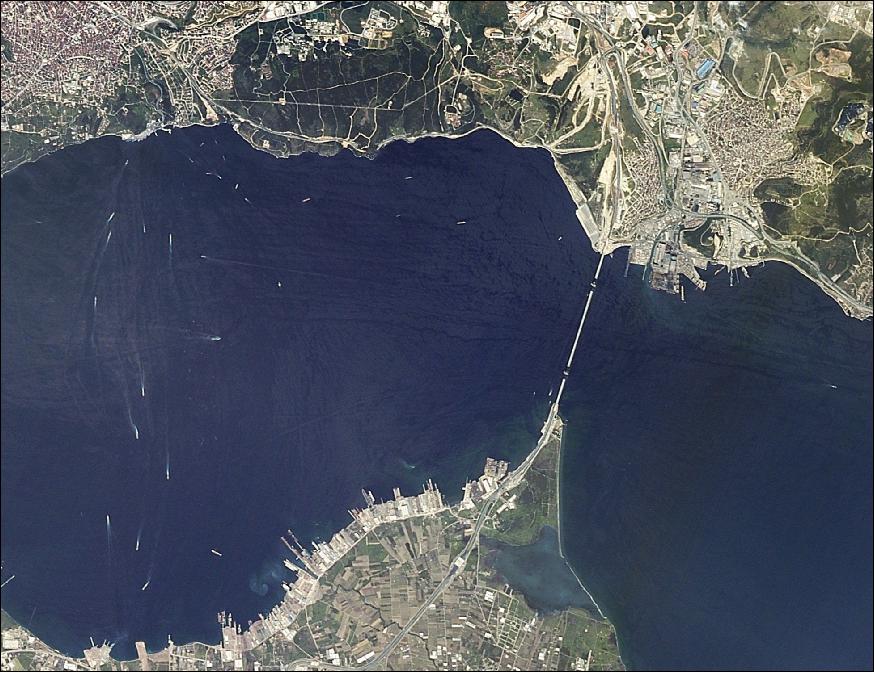
Legend to Figure 7: Izmit Bay Bridge includes a 3.3 km long suspension bridge with approach roads and a highway, which together provide a dual, 3-lane route across Izmit Bay, Turkey. The main span was the second longest in the world at 1688 m, with side spans of 560 m. Izmit Bay was in an earthquake zone, so the structure was designed to use both steel and concrete. High strength steel was used for the superstructure of the main bridge, including the towers and the spun cables. A Kvaerner-led Joint Venture, the Anglo-Japanese-Turkish Consortium, which included the Turkish contractor Enka, Japanese contractors IHI, MHI and NKK, and the trading houses Itochu and Marubeni, was recommended as the preferred BOT (Build-Operate-Transfer) proponent. The bridge, which was part of a new, extended highway system which linked the two Turkish metropoles Izmir and Istanbul, were the world’s fourth longest suspension bridge upon completion. — According to Turkish media, the third bridge across the Bosporus was going to be opened for traffic in the summer of 2016.

• February 2014: The RASAT spacecraft and its payload are operating nominally. So far, the satellite captured images from all around the world with a total coverage area of 4,650,000 km2, corresponding .to about 6 times the area of Turkey. The imagery can be used for urban regional planning, forestry, agriculture, disaster management and many other purposes. The operational life of the spacecraft is expected to exceed the design life of 3 years. 24)
• In January 2013, the RASAT spacecraft and its payload are in good condition. One of the 2012 operational activities was to create a mosaic map of Turkey; the satellite accomplished a coverage of 98% of the area in 2012 (Ref. 26).
• The spacecraft and its payload are operating nominally in 2012.
- Being the first domestically built satellite, RASAT was very instructive for the TUBITAK- UZAY engineers and Turkey’s aerospace sector. During the design, manufacturing, testing, commissioning and operation of the spacecraft, many important lessons were learned including the AODCS related ones. The project learned that it is useful to account for smooth controller and flight computer switching. The experience has stressed the importance of hardware-in-the-loop tests which simulate satellite’s flight in space. The project learned also that in-orbit calibration is absolutely necessary and that using analog sensors can be very cumbersome and time-consuming as it complicates the calibration procedures (Ref. 10).
• The commissioning phase of RASAT ended in late December 2011. The spacecraft is operational since the start of 2012 (Ref. 26).
• As of late October 2011, the spacecraft is still in the commissioning phase; however, images are being downloaded successfully. The satellite is a test bed for the Turkish indigenous satellite flight computer, flight software, X-band transmitter, the mission planning software and image encryption and compression module designed by TUBITAK UZAY. Hence, the imagery is only a byproduct of the RASAT mission. The main goal is to test the equipments and to obtain flight heritage for the follow-on Turkish LEO missions. 26)
• The first contact with RASAT (on August 17, 2011) was made by TUBITAK UZAY’s additional ground station in Andoya, Norway. The second contact was made by TUBITAK UZAY’s main ground station in Ankara, Turkey.
Sensor Complement
OIS (Optical Imaging System)
OIS was a panchromatic (Pan) and multispectral (MS) snapshot imager designed and developed by SI (Satrec Initiative), Daejeon, Korea. The OIS instrument was a variant of the basic EOS-A system of SI to meet the requirements of the customer. 27)
OIS was a pushbroom imaging system that was comprised of two configurable units, namely EOU (Electro-Optical Unit) and the PCU (Processing & Control Unit). EOU consisted of the telescope and the FPA (Focal Plane Assembly). In turn, the PCU consisted of the SPM (Signal Processing Module), the CSM (Control & Storage Model), and the PSM (Power Supply Module).
The key system features of OIS are summarized in Table 2. The imaging system was capable of taking Pan images with a resolution of 7.5 m and MS images (RGB) with a resolution of 15 m from an orbital altitude of ~700 km.
• The detector of a Pan image scene had a size 4096 pixels x 4096 lines. This corresponds to volume of 16 MByte.
• The detector of a MS image scene had a size of 2048 pixels x 2048 lines. This corresponded to 4 MByte for a single MS frame (i.e. blue, green or red) or 12 MB for a full MS frame.
A total of 7 Gbit was available for memory allocation: 4 Gbit for Pan and 3 Gbit for MS imagery. In terms of “number of image scenes per orbit”, it can be concluded that the local memory was capable of storing approximately 31 scenes of Pan data and 31 scenes of MS data.
One Pan scene as well as one MS scene corresponded to an area of 30.7 km x 30.7 km on the ground.
Aperture size | 100 mm |
Spectral bands | Pan: (0.42 - 0.73 µm), |
GSD (Ground Sample Distance) | Pan: 7.5 m @ 700 km altitude, IFOV = 10.7 µrad |
Swath width | 30 km, FOV = 2.46º |
FOR (Field of Regard) | ~ 800 km (total cross-track field within the pointing range of the S/C) |
MTF (Modulation Transfer Function) | Pan: 8%, MS: 15% |
SNR (Signal-to-Noise Ratio) | ≥ 64 |
Mass storage capacity | 7 Gbit |
Instrument mass, power consumption | 6.5 kg, 22 W |
Instrument size | Telescope: 170 mm x 420 mm |
Source data rate | 25 Mbit/s |
The telescope was based on the Maksutov design with all spherical optical components made of Fused Silica. Its entrance pupil diameter is 104 mm and the effective focal length was about 466.7 mm. The optical design gave near diffraction-limited performance with a MTF (Modulation Transfer Function) value higher than 0.3 at the panchromatic pixel Nyquist frequency. Three baffles were used for stray-light control.
The metering structure was made of Invar and other materials. It protected optical components from static and dynamic loads during transportation and launch. It was also designed to minimize the deformation of optical surfaces and to maintain the optical tolerances during optical alignment / integration, integration with the satellite bus, and operation in orbit. A cutaway solid model of EOU is shown in Figure 11. EOU was designed to have the first natural frequency higher than 300 Hz.
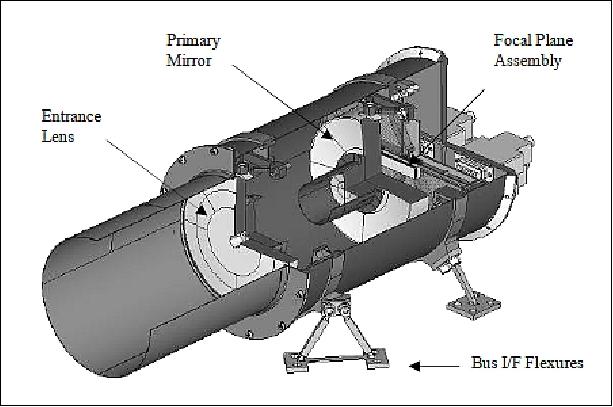
FPA housed a linear detector array for simultaneous imaging in one panchromatic and three multi-spectral channels. Its proximity electronics provided clock pulses and biases for the operation of the detector array. The pre-amplified analog video signals were transmitted to SPM for processing.
PSM generated all internal power from an unregulated +28 V of the satellite bus. When +28 V power was turned on, PSM automatically turned on CSM for communication with the satellite bus. PSM included solid-state power switches for other modules and it supported CSM for the internal telemetry data collection.
SPM generated timing pulses for the operation of FPA and processed analog video signals from FPA. It performed gain control for video signals, analog-to-digital conversion, and correlated double sampling. The digitized image data were transmitted to CSM in high-speed for storage. SPM had an auxiliary real-time image data port for the alignment of FPA.
Within CSM, a high-performance DSP (Digital Signal Processor) performed the overall management of operation and the storage / transmission of image data. The total image data storage capacity was 7 Gbit (4 for panchromatic image data). For communication with the satellite bus, primary and redundant CAN buses were used. CSM has four LVDS (Low Voltage Differential Signaling) image data ports dedicated for image data transmission for each channel and they operate at 25 MHz.
PCU EQM (Engineering Qualification Model): This was developed with an identical configuration with the flight model (FM) in order to verify its full functionality and performance. Along with functional test, environmental tests performed were as follows:
• EMI/EMC test per MIL-STD-461E
• Thermal cycling test
• Thermal vacuum/cycling test per ECSS-E-10-03A
• Random vibration test per ECSS-E-10-03A.

EOU (Electro-Optical Unit): For compact high-resolution imaging systems like OIS, careful attention had to be paid during opto-mechanical design and analysis. The metering structure had to be designed to protect sensitive optical components from static and dynamic loads and to meet the optical tolerance requirements for ground and space operation. EOU EQM was developed with the objectives to test its performance and to verify its optomechanical design against dynamic loads.

References
1) Gökhan Yüksel, Altuğ Okan, Uğur Murat Leloğlu, “First LEO Satellite Built in Turkey: RASAT,” Proceedings of the 3rd International Conference on Recent Advances in Space Technologies (RAST 2007), Istanbul, Turkey, June 14-16, 2007
2) A. Okan, “Feasibility study on thermal survivability of X-band subsystem on RASAT microsatellite,” Proceedings on the 2nd International Conference on Recent Advances in Space Technologies (RAST 2005), Istanbul, Turkey, June 09-11, 2005
3) Information provided by Baris Gencay of TUBITAK-Uzay (Space Technologies Research Institute), Ankara, Turkey
4) http://www.isprs.org/publications/highlights/highlights0607/tubitak.html
5) U. M. Leloğlu, “The Small Satellite Odyssey of Turkey,” Proceedings of the International Workshop on Small Satellites, 'New Missions, and New Technologies,' SSW2008, Istanbul, Turkey, June 5-7, 2008, URL: http://www.bilten.metu.edu.tr/tubitakuzay/yayinlar/SSW08_Manuscipt_Leloglu.pdf
6) Altug Okan, lknur Baylakoglu, “Environmental Testing Activities and Capabilities for Turkish Space Industry,” URL: http://uzay.tubitak.gov.tr/en/uydu-uzay/rasat
7) http://www.uzay.tubitak.gov.tr/tubitakUzay/en/projects/spaceApplications.php
8) “First micro satellite designed and built in Turkey: RASAT,” URL: http://www.uzay.tubitak.gov.tr/tubitakUzay/tr/aboutUs/brochures/enRasat.pdf
9) S. Ontaç, S. Dağ, M. I. Gökler, “Structural Finite Element Analysis of Stiffened and Honeycomb Panels of the RASAT Satellite,” Proceedings of the 3rd International Conference on Recent Advances in Space Technologies (RAST 2007), Istanbul, Turkey, June 14-16, 2007
10) Farid Gulmammadov, Çağatay Yavuzyilmaz, Özgür Kahraman, “The Lessons Learned from the Commissioning and Operation Phases of RASAT: An AODCS Perspective,” Proceedings of the UN/Japan Workshop and The 4th Nanosatellite Symposium (NSS), Nagoya, Japan, Oct. 10-13, 2012, paper: NSS-04-0319
11) Mehmet Durna, Hakan Urhan, Onur Turhan, Ömer Kozal, Melike Gürün, “A New Generation On-Board Computer and Solid State Data Recorder suitable for SpaceWire Platforms,” Proceedings of the 3rd International Conference on Recent Advances in Space Technologies (RAST 2007), Istanbul, Turkey, June 14-16, 2007
12) “Clyde Space wins contract for RASAT ,” 2008, URL: http://newsweaver.co.uk/aerospace/e_article000989473.cfm?x=b11,0,w
13) Clyde Space Delivers Battery Charge Controllers For RASAT,” Space Mart, Oct. 7, 2008, URL: http://www.spacemart.com/reports
/Clyde_Space_Delivers_Battery_Charge_Controllers_For_RASAT_999.html
14) D. Icoz, N. D. Kahyaoglu, M. Bolucek, E. Oncu, T. Kirilmaz, C. Dudak, H. Sunay, V. Akan, O. Sen, “Communication subsystem of RASAT,” Proceedings of 5th International Conference on Recent Advances in Space Technologies (RAST), Istanbul, Turkey, June 9-11, 2011
15) “Dnepr rocket boosts seven satellites into Earth orbit,” Spaceflight Now, August 17, 2011, URL: http://spaceflightnow.com/news/n1108/17dnepr/
16) “The first national Earth remote sensing satellite of Turkey will be placed into orbit by Dnepr launch vehicle as a part of a cluster launch in 2010,” URL: https://web.archive.org/web/20220529105710/http://www.kosmotras.ru/en/news/81/
17) “Turkey's first national satellite launched,” World Bulletin, Aug. 17, 2011, URL: http://www.worldbulletin.net/?aType=haberYazdir&ArticleID=77632&tip=
18) “Dnepr launches AprizeSat-5 and AprizeSat-6,” SpaceQuest, August 17, 2011, URL: http://www.spacequest.com/Articles/AprizeSat_Launch_8-17-11.pdf
19) ”A comment on "Colima volcano - Mexico, 11 January 2017",” Jan. 25, 2017, URL: http://blog.gezgin.gov.tr/?p=1931
20) Information provided by Aziz Koru, Senior Researcher Business Development Group, TUBITAK-UZAY, Ankara, Turkey
21) S. Kocaman, I. Yalcin, M. Guler, ”Radiometric and geometric accuracy analysis of RASAT PAN imagery,” Proceedings of the XXIII ISPRS ((International Society for Photogrammetry and Remote Sensing) Congress, Prague, Czech Republic, July 12-19, 2016, doi:10.5194/isprsarchives-XLI-B1-349-2016, URL:
http://www.int-arch-photogramm-remote-sens-spatial-inf-sci.net
/XLI-B1/349/2016/isprs-archives-XLI-B1-349-2016.pdf
22) http://blog.gezgin.gov.tr/
23) http://blog.gezgin.gov.tr/?p=332
24) The information was provided by Aziz Koru of TUBITAK UZAY, Ankara, Turkey.
25) Osha Gray Davidson, ”Turkey to Make RASAT Earth Observation Images Available Online,” earthzine, Oct. 9, 2013, URL:
http://earthzine.org/2013/10/09
/turkey-to-make-rasat-earth-observation-images-available-online/
26) The information was provided by Barış Gençay of TUBITAK UZAY, Ankara, Turkey.
27) Ee-Eul Kim; Young-Wan Choi; Woong Choi; Hyun-Gu Kim; Sang-Jin Park; Ji-Ho Yun; Myung-Seok Kang; Seong-Keun Jeong; “Integration and Testing of Optical Imaging System for RASAT ,” Proceedings of RAST (Recent Advances in Space Technologies) 2007, Istanbul, Turkey, June 14-16, 2007, URL:
http://www.satreci-us.com/documents
/papers/RAST%202007%20-%20Integration%20and%20Testing%20of%20RAST2007%20
Optical%20Imaging%20System%20for%20RASAT%20%28EE%20Kim%20et%20al.%29.pdf
28) Wikipedia, “RASAT”, URL: https://en.wikipedia.org/wiki/RASAT
29) Rail News, “First Domestic Observation Satellite RASAT Retired”, August 28, 2022, URL: https://raillynews.com/2022/08/ilk-yerli-gozlem-uydusu-rasat-emekliye-ayrildi/
The information compiled and edited in this article was provided by Herbert J. Kramer from his documentation of: ”Observation of the Earth and Its Environment: Survey of Missions and Sensors” (Springer Verlag) as well as many other sources after the publication of the 4th edition in 2002. - Comments and corrections to this article are always welcome for further updates (eoportal@symbios.space).
Spacecraft Launch Mission Status Sensor Complement References Back to top