QSat-EOS
EO
Multi-purpose imagery (ocean)
Imaging multi-spectral radiometers (vis/IR)
Land
Quick facts
Overview
| Mission type | EO |
| Agency | Kyushu University |
| Mission status | Operational (nominal) |
| Launch date | 11 Jun 2014 |
| Measurement domain | Land, Gravity and Magnetic Fields |
| Measurement category | Multi-purpose imagery (ocean), Multi-purpose imagery (land) |
| Measurement detailed | Land surface imagery, Magnetic field (scalar) |
| Instruments | VNIR |
| Instrument type | Imaging multi-spectral radiometers (vis/IR), Magnetic field |
| CEOS EO Handbook | See QSat-EOS summary |
QSat-EOS (Kyushu Satellite for Earth Observation System Demonstration)
Spacecraft Launch Sensor Complement References
QSat is a microsatellite mission of Kyushu University (KU), Fukuoka, Japan. The project originated in mid-2005 as an initiative by graduate students of Kyushu University. At the time, JAXA encouraged Japanese universities to get involved in challenging self-defined small satellite projects and offered to launch some of the best developments as secondary payloads to its own missions.
The primary mission goal of QSat is the observation of the polar plasma regions to study Earth's auroral zones for a better understanding of spacecraft charging with particular interest in polar and equatorial regions where FACs (Field-Aligned Currents) are always present. The goal is also to compare the field-aligned current observed in orbit with ground-based MAGDAS (MAGnetic Data Acquisition System) observations. Secondary objectives involve the education and research opportunities for students in an activity combining space sciences and satellite engineering, the validation of space observations/components and techniques, as well as the cooperative environment of all parties in the project. 1) 2) 3) 4) 5) 6) 7) 8)
Change of project objectives and name: When in August 2008, MEXT (Ministry of Education, Culture, Sports, Science and Technology) of Japan announced a new "Research and Development Program of Small Satellite for Earth Observation" to universities, institutes, and technical colleges in Japan — Kyushu University changed the objectives of the QSat project from space science to those of Earth Observation and along with it a new project name, namely QSat-EOS to be eligible for funding support. 9) 10)
The overall objectives of the QSat-EOS mission are:
• Natural disaster monitoring with priorities: Kyushu > Japan > other world regions
• Earth magnetic field observation
• Micro debris detection
• Water vapor observation in the upper atmosphere.
The overall technical spacecraft requirements call for an implementation in the microsatellite class with a mass of ~ 50 kg, a cube size of ~ 50 cm sidelength, an average power consumption of 74 W, RF communications (uplink and downlink) in S-band and Ku-band, and a mission life of 2 years. In the post mission phase, a de-orbit augmentation sail shall be implemented for a quicker reentry of the spacecraft into Earth's atmosphere.
Spacecraft
The spacecraft bus is being developed at the Department of Aeronautics and Astronautics of KU in collaboration with the Fukuoka Institute of Technology (FIT). The Space Environment Research Center (SERC) of KU and the Laboratory of Spacecraft Environment Interaction Engineering of KIT (Kyushu Institute of Technology) are developing the payload instruments. 11)
The QSat project team consists of about 20 students and 10 faculty members of three universities and experts of local industries who cooperate in the manufacturing of the satellite hardware components.
Spacecraft mass, size | < 50 kg, 492 mm x 503 mm x 502 mm |
Power | Orbit average: 74 W (using GaAs cells) |
Mission life | 2 years |
Attitude control | 3-axis stabilization by using RWs (nominal), magnetorquers (detumbling) |
RF communications | - Mission data downlink: Ku-band, 30 Mbit/s |
Orbit | - Sun-synchronous orbit, altitude of 500-700 km |
Sensor complement | Primary mission: 2-band CMOS camera (VNIR) 3000 x 2000 pixels |
QSat is based on a practical satellite design using low-cost COTS (Commercial-of-the-Shelf) units and parts. The students have responsibilities to design the electronics units and mechanical devices in cooperation with experts. This includes also the software design and coding of all spacecraft functions.
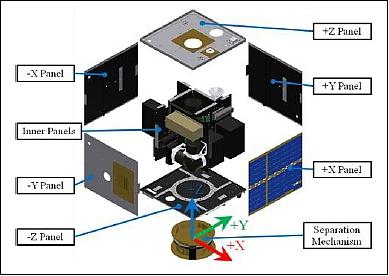
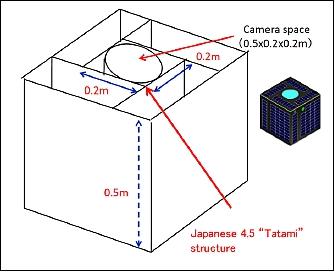
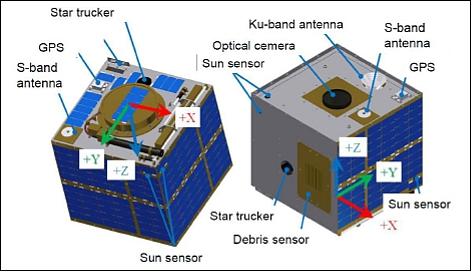
The spacecraft bus features a box structure of size: 492 mm x 503 mm x 502 mm. The bus structure is made of 10 aluminum alloy (A5052-H32) panels. Almost all equipments mount on the inner panels for a better load path layout. In particular, the 2-band CMOS camera mounts in the center of them because of the mass and the function. Two S-band antenna and the GPS (Global Positioning System) antenna mount diagonally on the +Z panel and –Z panel.
The separation mechanism, developed by Kyushu University and regional industry in the Kyushu area, is introduced instead of the conventional PAF (Payload Attach Fitting) 239M.
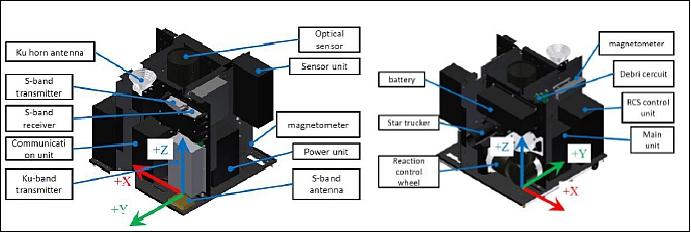
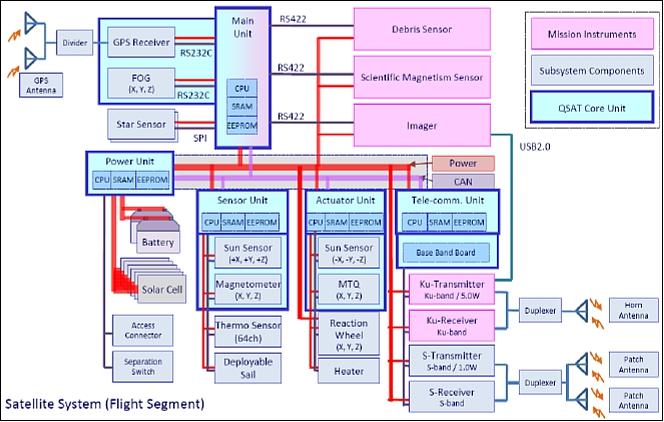
The QSat bus system has the following electronic subsystems as illustrated in Figure 6: ADCS (Attitude Determination and Control Subsystem), MCU (Main Control Unit), EPS (Electrical Power Subsystem), C&DH (Command & Data Handling) subsystem, TCU (Telecommunication Unit), and SU (Sensor Unit).
C&DH subsystem: The C&DH design employs a distributed linear architecture. The spacecraft on-orbit operations will be controlled by the OBC (Onboard Computer) of Renesas Technology Corp. (model H8/2638). Along with the OBC, an operating system was developed serving the applications of the various subsystems:
- The MCU provides the power control function and housekeeping data monitoring function. It also monitors the health status like power consumption, temperature, clock accuracy of all units via the CAN bus.
- The EPS uses 200 face mounted solar cells providing an average power of 74 W. EPS consists of the PWU (PoWer Unit) and the NiMH (Nickel Metal Hydride) BU (Battery Unit). The BU consists of 18 AA batteries connected in 6 serials and 3 parallels. The bus voltage is 7.2 V and the battery capacity is 10.5 Ah.
- The TCU provides the functions of: data packet formatting based on the amateur radio protocol AX.25, GMSK (Gaussian-Minimum Shift Keying) modulation for downlink transmissions, FSK (Frequency Shift Keying) demodulation in the uplink, and the task of onboard data storage.
ADCS: QSat is designed for three-axis attitude control. The mission requirements call for an onboard attitude knowledge of < 5o. The ADCS uses six PSDs (Position Sensitive Devices) as sun sensors, a 3-axis magnetometer, a star sensor , and a FOG gyro rate sensor to determine the attitude of the spacecraft. Actuation is provided by magnetic torquers and reaction wheels.
- The SU-A/B is comprised of the sun sensors, the magnetometers, and the gyro rate sensors for attitude determination. To detect the sun direction, a new sun sensor concept was devised by using the two-dimensional PSD (Position Sensing Device) of Hamamatsu Photonics and a pinhole.
Unit design configuration: Each electronic unit has a common board (called "Control Board") and a specific board (called "Local Board") containing the devices to provide individual functions, e.g., sensor elements, A/D converters, power devices, modem IC, memory IC, etc. All electronic units consist of one Control Board, one or two Local Boards and a chassis. The Control Board and the Local Boards are connected with PC-104 stack-through connectors.

CPU | H8S/2638 (Renesas), built-in ROM: 256 kB |
Size, mass | 150 mm x 100 mm x 12 mm, 80 gram |
Clock | 19.44 MHz (error: 1.5 ppm) |
Operating temperature | - 45oC to 105oC |
External interface | Power 12V |
Internal interface | Stack-through connecting port (64 pin x 2) |

Mechanical Element
The S/C separation system employs the Marman-band concept, which aims to reduce the separation shock and the spacecraft tumbling rotation rate after separation. KU developed the system in cooperation with Nakashimada Engineering (Figure 9).

Launch
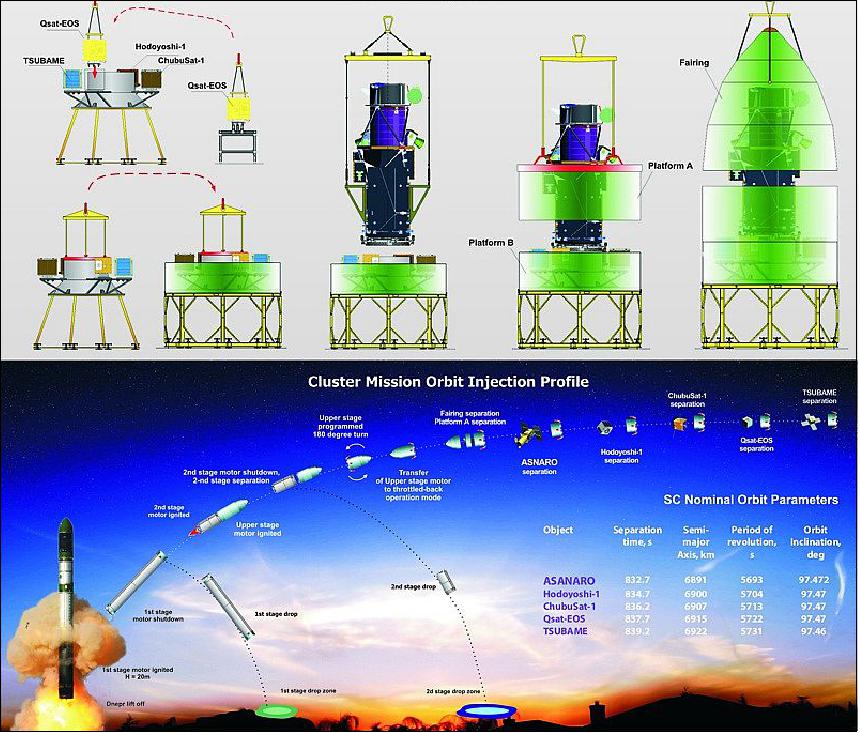
The QSat-EOS microsatellite was launched as a secondary payload on November 6, 2014 (07:35:49 UTC) on a Dnepr-1 vehicle from the Yasny Cosmodrome, Russia. The primary payload on this flight was the ASNARO minisatellite of USEF, Japan.
The launch provider was ISC Kosmotras. The launch was executed by the Russian Strategic Rocket Forces of the Russian Ministry of Defense with the support of the Russian, Ukrainian and Kazakhstan organizations, which are part of the ISC Kosmotras industrial team. 12) 13) 14)
Initially, QSat was planned to be launched with GOSAT in early 2009, but this arrangement didn't materialize.
Orbit: Sun-synchronous near-circular orbit, altitude = 504 km, inclination = 97.4o, LTDN (Local Time on Descending Node) = 11:00 hours.
The secondary payloads on this mission were: 15)
• ChubuSat-1, a microsatellite (50 kg) of Nagoya University and Daido University, Japan.
• Hodoyoshi-1, a microsatellite (60 kg) of the University of Tokyo and NESTRA (Next Generation Space System Technology Association)
• QSat-EOS, a microsatellite (49 kg) Kyushu University (KU), Fukuoka, Japan.
• Tsubame, a microsatellite (49 kg) of Tokyo Institute of Technology, Tokyo University of Science and JAXA.
Sensor Complement
Imager (Two-band VNIR Camera)
The QSat-EOS primary mission objective is Earth observation for disaster monitoring, for example, landslide events caused by heavy rainfall. In addition, the project expects to apply useful optical data for resource studies (agricultural, forestry and fisheries), for example, investigating of agricultural pest, red tide, and ocean eutrophication.
A staring imager is used with the following specifications:
• Optics configuration: aperture diameter = 100 mm, focal length = 400 mm
• Spectral bands (2): 525-605 nm, 774-900 nm
• FOV (Field of View): 10 km x 10 km from a reference orbital altitude of 700 km
• Detector type: CMOS with 2000 x 2000 pixels, providing a resolution of 5 m at nadir.
The following operational modes are provided:
1) Nadir pointing
2) Roll offset
3) Point staring.
Data flow:
• Capture image data in onboard storage device: 8 Gbit flash memory x 3 (volume of 500 images)
• Downlink the imagery on command via Ku-band at a data rate of 33 Mbit/s.
Magnetometer
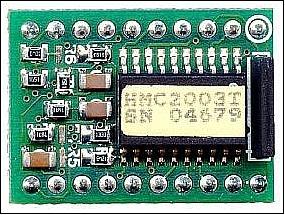
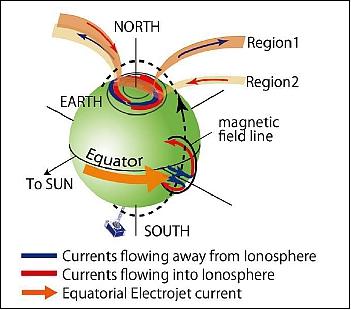
The objective of the fluxgate magnetometer is to measure the magnetic field variations caused by FACs (Field-Aligned Currents) in the polar and equatorial regions. Use of the COTS device: Honeywell HMC2003T magnetometer (Figure 11). - There are two types of large-scale FACs: one type of FAC flows from the ionosphere into the magnetosphere, and the other type does so in the opposite direction (Figure 12). It is anticipated that the study of FACs will advance to some extend the process of how energy is transported from the solar wind into the magnetosphere and the ionosphere. Specific science goals are:
• To better understand quiet and active FACs in the polar region, in consideration of spacecraft charging
• To investigate the FACs in the equatorial region (polar FACs are well understood, while equatorial FACs are not)
• To compare the FACs in orbit with the ground-based MAGDAS (MAGnetic Data Acquisition System) observation installed all over the world by the Space Environment Research Center of Kyushu University. 16)
Debris Sensor
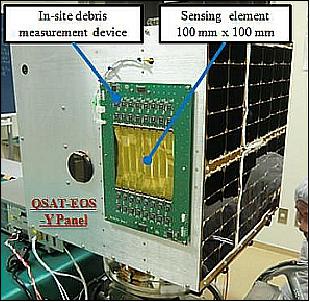
A secondary objective is in-situ debris measurement by using new detection system. JAXA has been developing an in-situ debris measurement system. The objective of the system is to measure small size debris (between 100 µm and several cm) . The distribution and flux of the debris of the size range are not well understood. The size range is difficult to measure from the ground observation, although the impact risk evaluation on space system caused by the size range is important. 17)
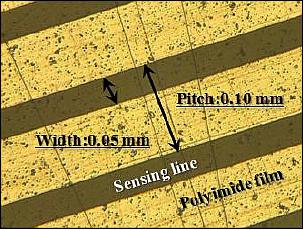
The in-site debris-measurement device is shown in Figures 13 and 14. It is mounted on the –Y panel of QSAT-EOS. Its mass is 159 g. The size is 190 mm x 270 mm , the sensing element is 100 mm x 100 mm. The sensing element consists of 100 mm long and 0.05 mm wide, thin copper lines mounted on a thin polyimide film with 0.10 mm intervals. Impacts of debris with diameters more than 0.10 mm can be detected by monitoring the currents through the copper sensing lines.
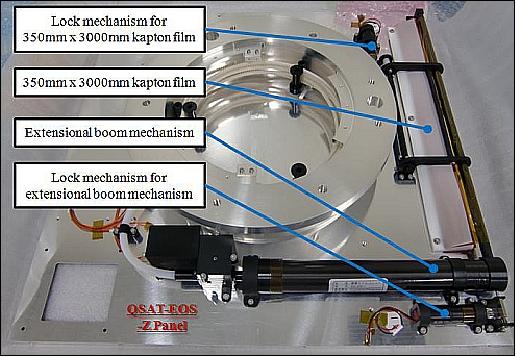
De-orbiting Activities at End of Mission
At mission end, the requirements of the IADC (Inter-Agency Space Debris Coordination) committee call for an accelerated removal of the microsatellite from its operational orbit within a 25 year lifetime limit. This requires a drag augmentation device (Figure 15) to comply with the 25-year rule. 18)
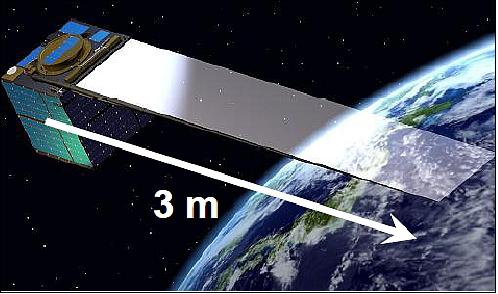
The drag augmentation device is developed by Ryokeiso CO., Ltd. The following sequence is used to deploy the drag augmentation device:
1) The microprocessor control board receives twice a command from the Main Unit
2) A lock mechanism for the extension boom turns off with DC motor
3) The lock mechanism for the 350 mm x 3000 mm kapton film turns off with DC motor
4) The boom extends and deploys the 350 mm x 3000 mm kapton film with the DC motor.
References
1) Yoshihiro Tsuruda, Toshiya Hanada, Jozef. C. van der Ha, "QSAT: A Low-Cost Design for 50 kg Class Piggyback Satellite," Proceedings of the 26th ISTS (International Symposium on Space Technology and Science) , Hamamatsu City, Japan, June 1-8, 2008, paper: 2008-f-20, URL: http://archive.ists.or.jp/upload_pdf/2008-f-20.pdf
2) Information provided by Yoshihiro Tsuruda and Toshiya Hanada of the Department of Aeronautics and Astronautics, Kyushu University, Fukuoka, Japan
3) Yoshihiro Tsuruda, Akiko Fujimoto, Naomi Kurahara, Toshiya Hanada, Kiyohumi Yumoto, Mengu Cho, "QSAT: The Satellite for Polar Plasma Observation," Earth, Moon, and Planets, Vol. 104, No 1-4, April 2009, DOI 10.1007/s11038-008-9281-8
4) http://ssdl.aero.kyushu-u.ac.jp/?EN%2FQSAT
5) Alexander Uryu, Jozef C. van der Ha, Hans-Peter Röser, Toshinori Kuwahara, "Development of Operations Concept and Mission Analysis of QSAT," 2009, URL: http://www.gfse.de/Dokumente_Mitglieder/studienpreis/sp_2009/arbeiten
/DA_AlexanderNatsuyaUryu_Zusammenfassung.pdf
6) Yoshihiro Tsuruda , Toshiya Hanada, Jozef C. van der Ha, "System Design and Project Management for University Satellites," Proceedings of ISTS (International Symposium on Space Technology and Science) 2009, Tsukuba City, Japan, July 5-12, 2009, paper: 2009-t-05, URL: http://archive.ists.or.jp/upload_pdf/2009-t-05.pdf
7) Yuya Mimasu, Jozef C. van der Ha, "Attitude Determination Concept for QSAT," Proceedings of the 26th ISTS (International Symposium on Space Technology and Science) , Hamamatsu City, Japan, June 1-8, 2008, paper: 2008-d-13
8) Takahiro Kato, Akira Sakurai, J. van der Ha, "Efficient Data Handling System Architecture for Small Satellite," Proceedings of the 26th ISTS (International Symposium on Space Technology and Science), Hamamatsu City, Japan, June 1-8, 2008, paper: 2008-f-27
9) Information provided by Shunsuke Onishi of Kyushu University (KU), Fukuoka, Japan.
10) Shigeru Aso, Tetsuo Yasaka, Yasuhiro Tani, Toshiya Hanada, Masahiko Murozono, Masatoshi Omura, Yoshihiro Tsuruda , Shunsuke Onishi, Kohei Arai, Mengu Cho, Masanori Nishio, "QSAT-EOS: 50kg-class Small Satellite for Earth Observation System Demonstration," Proceedings of the 28th ISTS (International Symposium on Space Technology and Science), Okinawa, June 5-12, 2011, paper: 2011-f-28
11) Shunsuke Onishi, Sigeru Aso, Haruhiko Ohta, Masahiko Murozono, Tetsuo Yasaka, "Thermal and Structural Design of QSAT-EOS," Proceedings of the 28th ISTS (International Symposium on Space Technology and Science), Okinawa, June 5-12, 2011, paper: 2011-f-29
12) "Dnepr Launch of ASNARO and 4 piggyback microsatellites," ISC Kosmotras, Nov. 6, 2014, URL: https://web.archive.org/web/20220522003851/http://kosmotras.ru/en/Launch18/
13) Patrick Blau, "Dnepr Rocket successfully Launches five Satellites for Japan," Spaceflight 101, Nov. 6, 2014, URL: http://www.spaceflight101.com/dnepr---japanese-cluster-launch-2014.html
14) "Dnepr launches five Japanese satellites," Russia in Space, Nov. 6, 2014, URL: http://www.russianspaceweb.com/dnepr_asnaro.html
15) Information provided by Shunsuke Onishi of Kyushu University, Japan.
16) Tamiki Ueno, Akiko Fujimoto, Kiyohumi Yumoto, Keisuke Ushijima, Hideki Mizunaga, Toshiya Hanada, "Measurement of QSAT Residual Magnetism," Memoirs of the Faculty of Sciences, Kyushu University, Series D Earth and Planetary Science" Vol. 32, No 1, Feb. 1, 2008, pp.7-23
17) Yukihito Kitazawa, Haruhisa Matsumoto, Toshiya Hanada, Toshifumi Yanagisawa, Atsushi Karaki, Akira Sakurai, Funakoshi Kunihiro, Tetsuo Yasaka, Sunao Hasegawa, "Development of In-Situ Micro-Debris Measurement System," Proceedings of IAC 2011 (62nd International Astronautical Congress), Cape Town, South Africa, Oct. 3-7, 2011, paper: IAC-11.A6.3.11
18) Shunsuke Onishi , Kunihiro Funakoshi, Shoji Nakajima, "Orbital Decay Accelerator: A case of QSAT-EOS," Proceedings of the 3rd Nanosatellite Symposium, Kitakyushu, Japan, December 12-14, 2011, paper: NSS-03-0306
The information compiled and edited in this article was provided by Herbert J. Kramer from his documentation of: "Observation of the Earth and Its Environment: Survey of Missions and Sensors" (Springer Verlag) as well as many other sources after the publication of the 4th edition in 2002. - Comments and corrections to this article are always welcome for further updates (eoportal@symbios.space).