PUNCH (Polarimetry to Unify the Corona and Heliosphere)
Non-EO
NASA
Quick facts
Overview
| Mission type | Non-EO |
| Agency | NASA |
PUNCH (Polarimetry to Unify the Corona and Heliosphere)
Architecture Science instruments Spacecraft Design Launch Mission Design Development status References
PUNCH became the newest NASA Heliophysics SMEX (SMall EXplorer) mission on 20 June 2019 - with an expected launch in 2023. PUNCH is a transformative mission to reveal the as-yet largely unexplored region from the middle of the solar corona out to1 AU from the Sun: i.e., the “young solar wind”. Through direct, global, spatially continuous, 3D deep-field imaging, PUNCH observes the corona and heliosphere as elements of a single, connected system. PUNCH is uniquely suited to discern the cross-scale processes that unify the corona and heliosphere. 1)
PUNCH’s integrative science bridges a major gap that currently separates the fields of solar physics and heliospheric physics. For over 40 years, solar physics has focused on imaging and spectral measurements of the Sun itself, in visible, ultraviolet, and X-rays; and space physics has focused on in-situ and imaging measurements of the solar wind and its interaction with Earth’s magnetic field. However, the large-scale structure and evolution of the region relating these measurements – the transition from the solar corona to the heliosphere – has remained largely unexplored, limiting understanding of the Sun-Earth system. This limit is reflected in the difficulty of relating solar structures to their corresponding effects on the Earth (the “Space Weather Problem”). It also affects many fundamental questions of solar and heliospheric physics.
PUNCH is an innovative constellation mission that builds on well-understood instruments with extensive heritage and Class-D-appropriate spacecraft. This approach is at the vanguard of the recently demonstrated paradigm of using microsatellite constellations for high-reward missions at low risk. The space segment is four interchangeable microsatellites, carrying one polarizing visible-light camera each, in a 1+3 constellation of Observatories. One Observatory carries a Narrow-Field Imager (NFI), and three more each carry a Wide-Field Imager (WFI), sensitive to Thomson-scattered light from the corona and solar wind. The NFI and WFIs are matched and synchronized, with overlapping fields of view, to work together as a single globe-spanning “virtual instrument.” PUNCH images the entire inner solar system from 1.25º to 45º from the Sun, continuously for two years.
Data are merged on the ground to produce: 1) background-subtracted, 2D and 3D photometric images of solar wind features, with 10 x to 30 x improved sensitivity and resolution; and 2) velocity maps tracing evolution of flow in the young solar wind. PUNCH data are specifically designed for high utility and simple usage in the broader community. Images are disseminated widely in standard formats through the existing, widely-used Solar Data Analysis Center (SDAC) and Virtual Solar Observatory (VSO) at NASA/GSFC, and complemented by straightforward, accessible analysis tools distributed on standard platforms by the PUNCH team.
Science Objectives
The goal of PUNCH is to determine the cross-scale processes that unify the solar corona and the heliosphere. These range from small-scale inhomogeneities in the corona and solar wind, to large-scale features such as CMEs (Coronal Mass Ejections), CIRs (Corotating Interaction Regions), and associated shocks. Although their ultimate source is the solar corona, both evolution and interactions occur enroute to Earth, and substructures may form and change via plasma instabilities and turbulence. The currently unexplored region encompassing the outer corona and the inner heliosphere (the young solar wind) is the fundamental missing piece of the Sun-Earth connection. PUNCH bridges this gap via two Scientific Objectives: 1) to understand how coronal structures become the ambient solar wind; and 2) to understand the dynamic evolution of transient structures in the young solar wind. Each Objective is divided into three well-formed scientific Questions, which drive mission requirements. These are:
1a) How does the young solar wind flow and evolve on global scales? PUNCH produces the first routine, evolving global maps of solar wind flow.
1b) Where and how do microstructures and turbulence form in the solar wind? PUNCH determines the origin of the observed solar-wind variability at Earth, via low-noise, high-resolution, 3D tracking of wind structures as they form, evolve, and propagate.
1c) What are the evolving physical properties of the Alfvén surface? PUNCH yields the first maps of the evolving shape of the Alfvén surface (the dynamical outer boundary of the corona, recently shown to be a large region rather than a thin boundary), and probes the largescale physics of this topologically interesting, critical, and as-yet unexplored region of the heliosphere.
2a) How do CMEs propagate and evolve in the solar wind in 3D? PUNCH provides the first continuous, detailed 3D images of CME substructure propagating through the heliosphere, resolving long-standing mysteries of CME origin, variability, and geoeffectiveness.
2b) How do quasi-stationary CIRs (Corotating Interaction Regions) form and evolve? CIRs cause more space weather events than do CMEs, but are less well studied. PUNCH 3D imaging yields fronts as they form and interact with other solar wind structures such as CMEs.
2c) How do shocks form and interact with the solar wind across spatial scales? Time-resolved, high-resolution PUNCH images of interplanetary shocks enable breakthrough science, determining cross-scale effects and other energetic-particle-acceleration processes that are not currently accessible.
Mission Architecture
The PUNCH mission architecture is shown in Figure 1. The architecture comprises the classical system engineering segments of a Launch Segment (LS), a Space Segment (SS), and a Ground Segment (GS). Elements with a blue background are developed and operated by the PUNCH Project. Elements with a white fill are provided by NASA, and used by the PUNCH mission. Elements with a green background are provided by non-NASA entities outside the PUNCH Project Office.
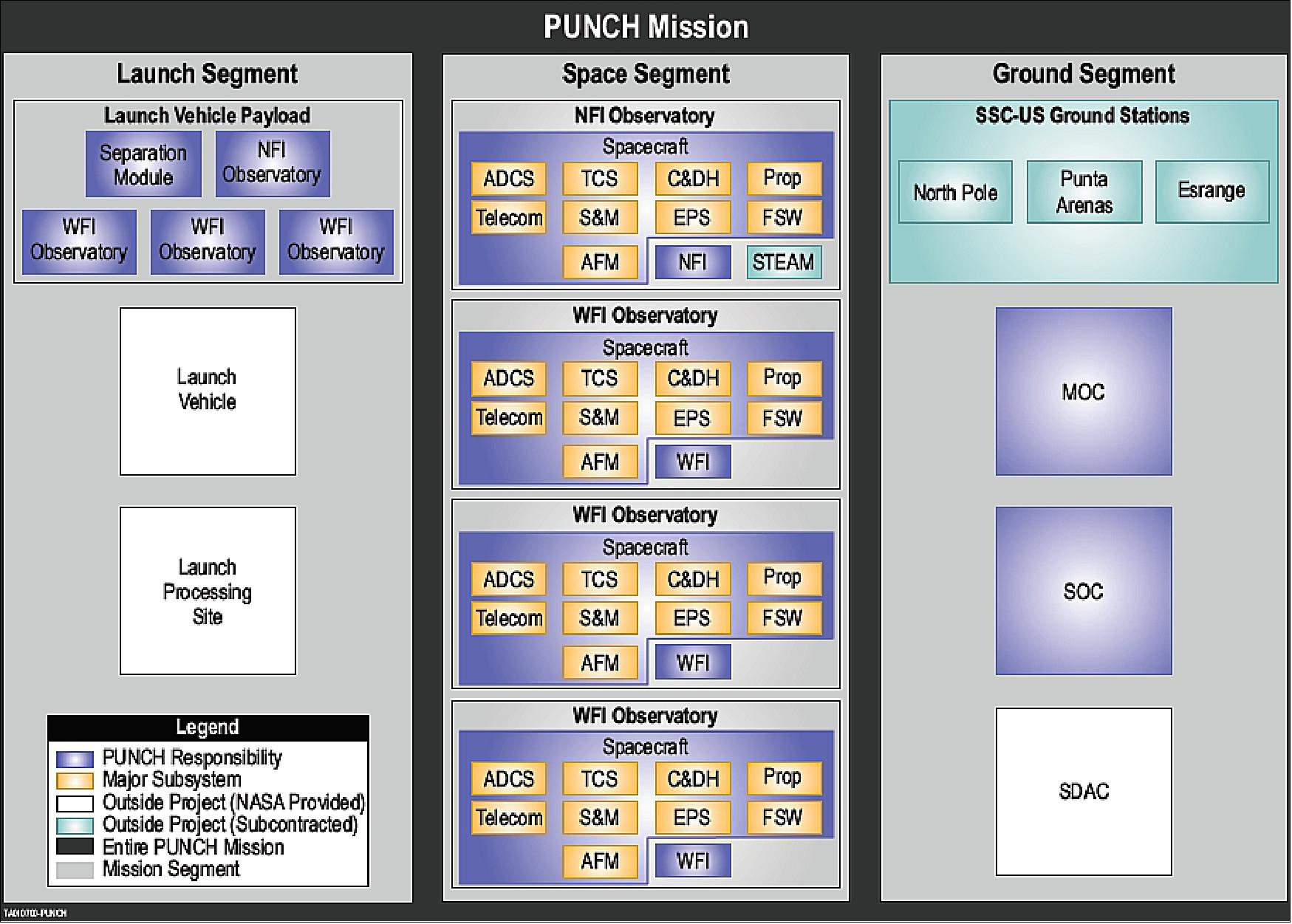
Figure 2 depicts the PUNCH LS, comprising a Separation Module (SM), with the four PUNCH Observatories in the stowed configuration attached. The PUNCH LS is the payload for the NASA-provided Launch Vehicle (LV).
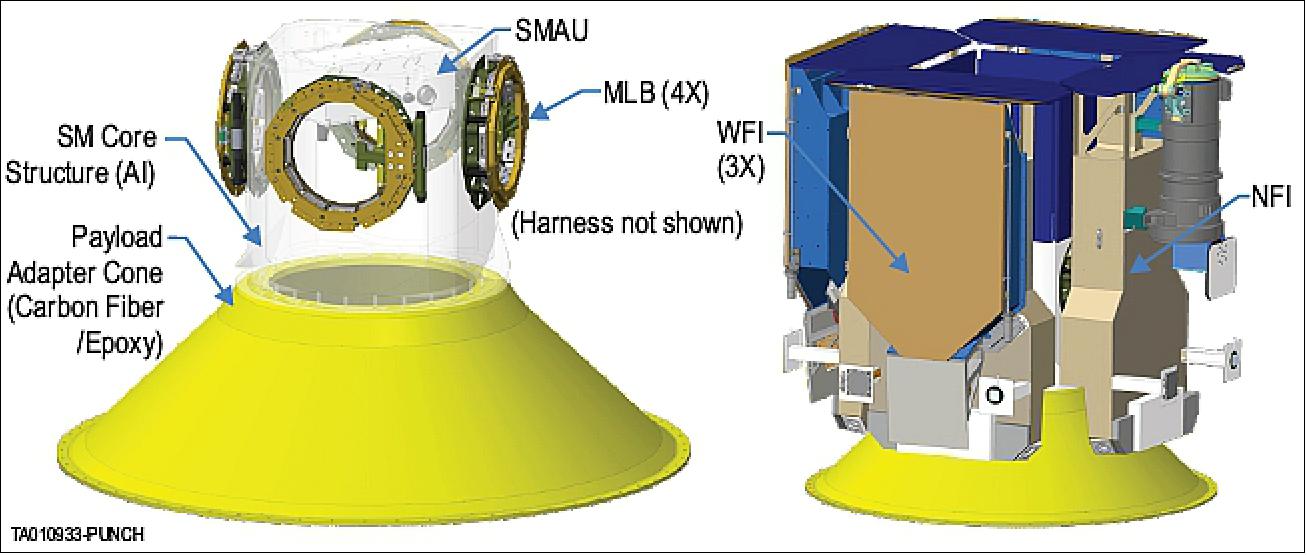

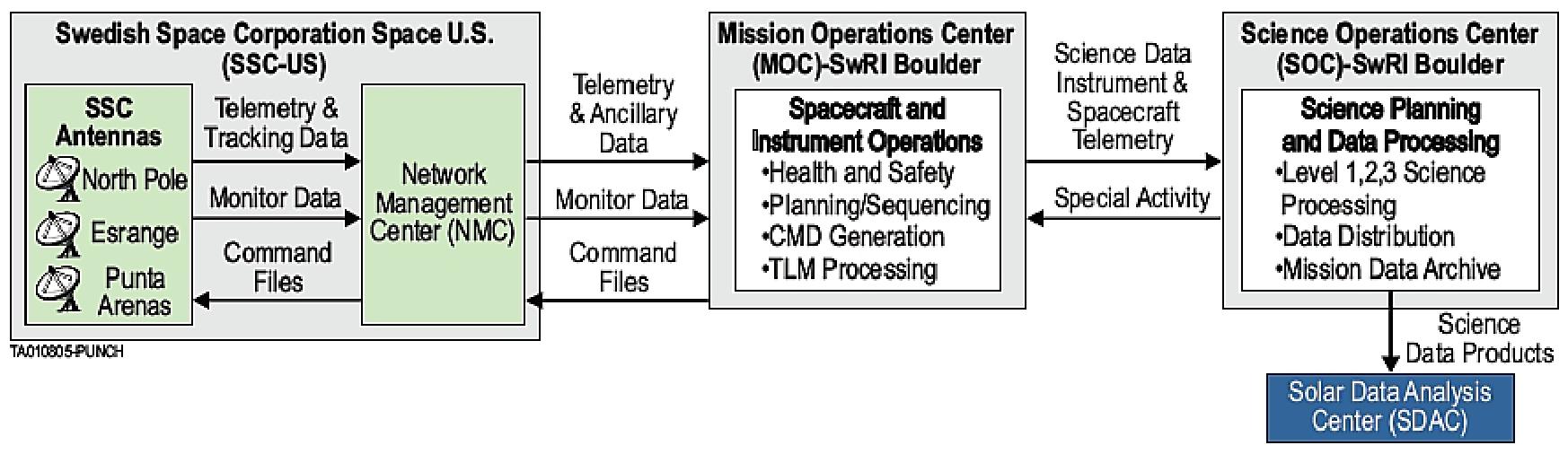
Figure 4 shows a distributed architecture diagram of the PUNCH GS, comprising the ground stations, the Mission Operations Center (MOC), the Science Operations Center (SOC), and the science data product NASA Archive Facility.
Science Instruments
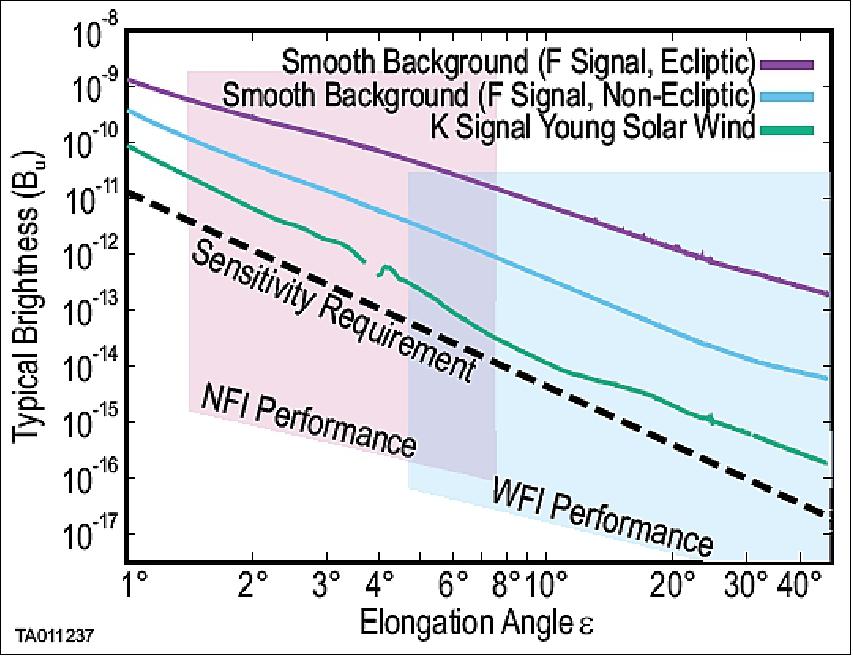
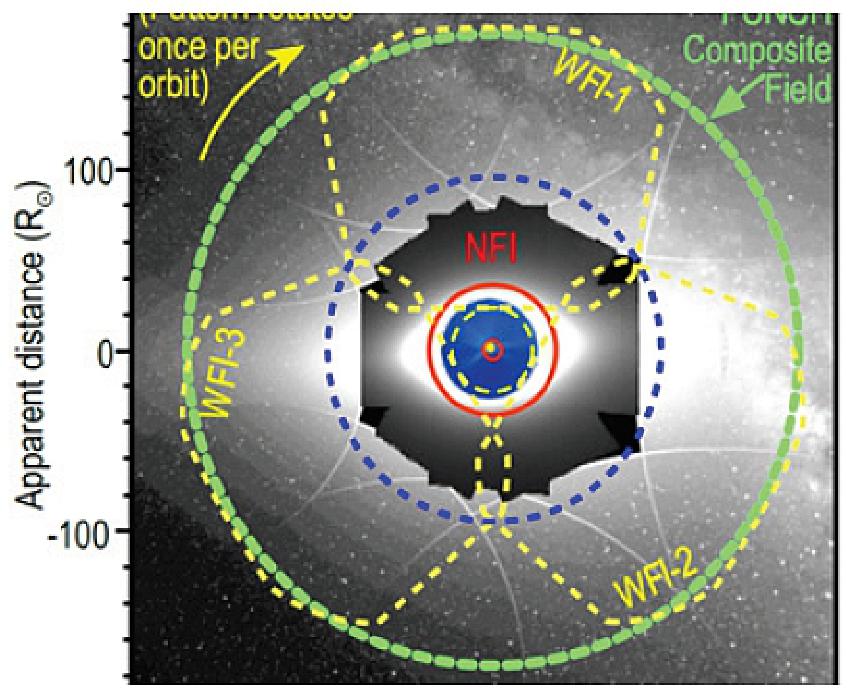
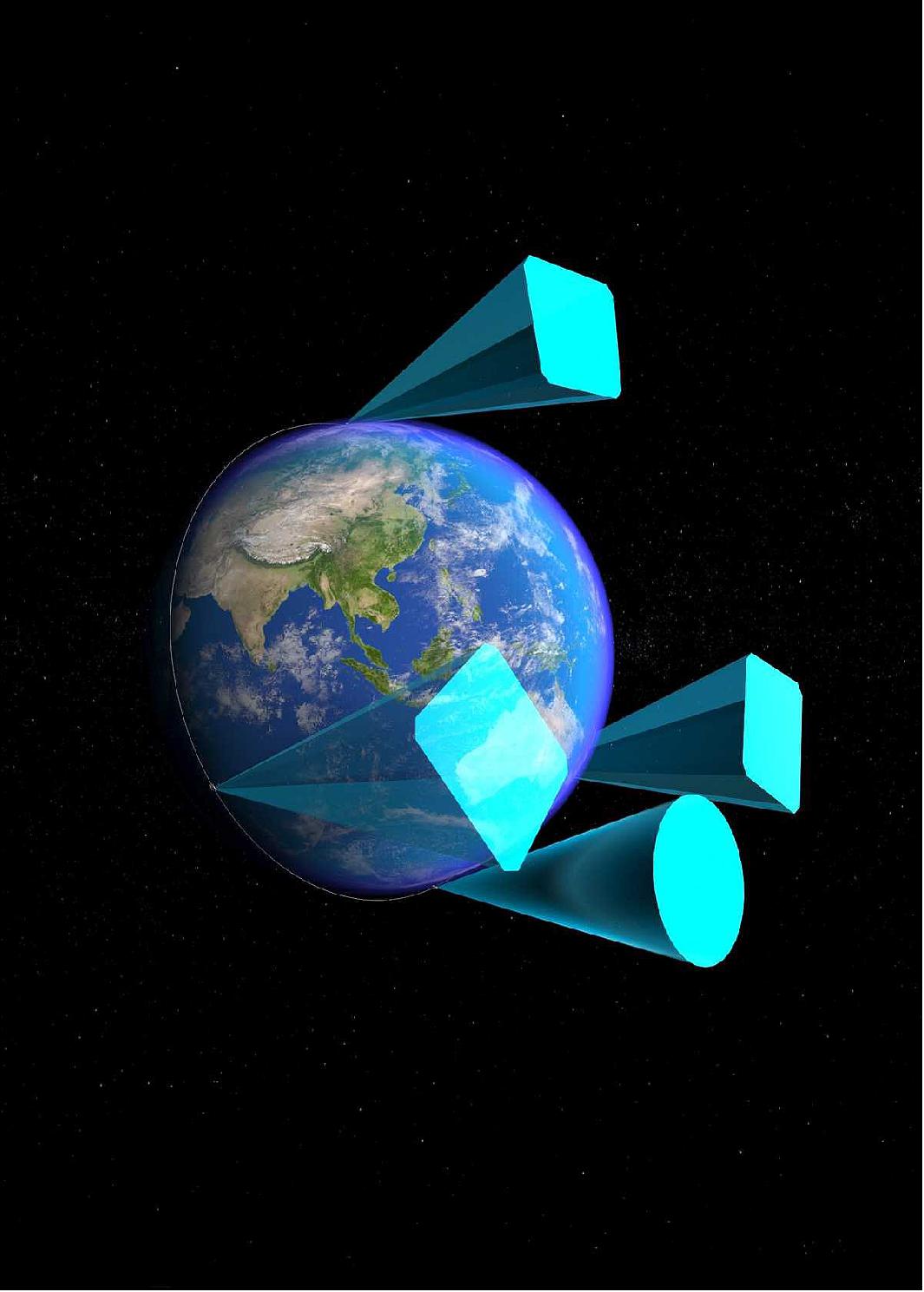
PUNCH combines two proven high-heritage instruments-specifically designed to work as a single virtual imager, to satisfy the level 1 baseline mission science requirements. The mission requires two instrument types to cover the large dynamic range of the corona and inner heliosphere for PUNCH science (Figure 5). The Principal Investigator (PI) chose a narrow field imager (NFI) and three wide field imagers (WFI) to provide highly integrated polarized imaging. PUNCH selects NFI, a compact coronagraph, for its compact design and high sensitivity over 5.4-32 Rο, and WFI a heliospheric imager, for its high sensitivity over 18-180 Rο. Figure 6 shows the integrated FOV, in the form of a trefoil projected onto the celestial sphere. The trefoil rotates about the Sun as the Observatories orbit Earth. Ground processing combines the images into a single view, using techniques developed, refined, and exploited by the PUNCH team over the last two decades. The Level 2 instrument requirements ensure the PUNCH images are matched for use. In particular, The synchronized NFI and WFIs image the same visible wavelength range (450-750 nm), overlap by 3º in elongation (ε), and use the same observing cadence.
Polarization is resolved using polarizing filter wheels. The detectors are CCDs operated in frame transfer mode. A CEB (Camera Electronics Box) interfaces to the spacecraft C&DH (Command and Data Handling) and EPS (Electrical Power Subsystem). Thermal control uses heritage COTS elements and is cold-biased with heaters.
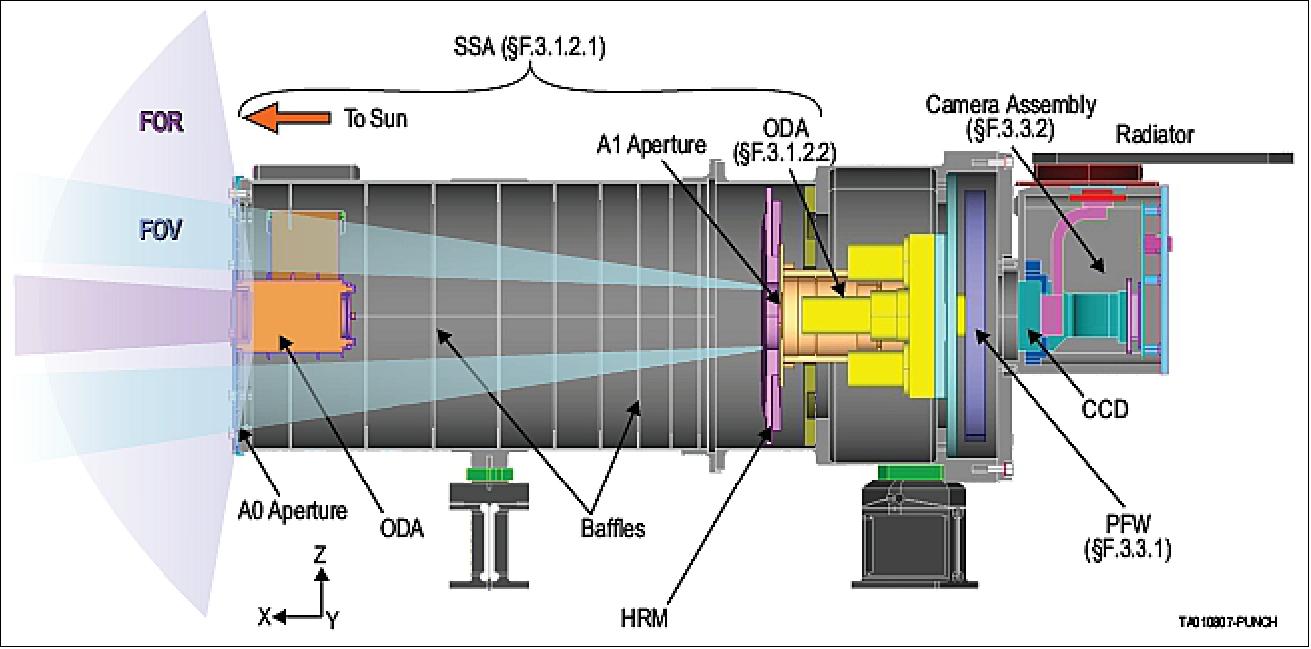
NFI is a polarized white-light coronagraph that derives direct heritage from the long line of successful space-borne polarizing coronagraphs developed by NRL, most recently COR2 (Coronagraph 2) on the STEREO (Solar-TErrestrial RElations Observatory) mission. The PUNCH NFI will be the first compact coronagraph to operate in space. NFI (Figure 7) comprises a stray-light suppression assembly (SSA), optical lens assembly (OLA), a common polarizing filter wheel (PFW) and charge coupled device (CCD) camera, and a mechanical tube structure protected by a one-time open door. A passive radiator cools the CCD. NRL developed a prototype occulter in Phase A, in 2017 (Figure 8).
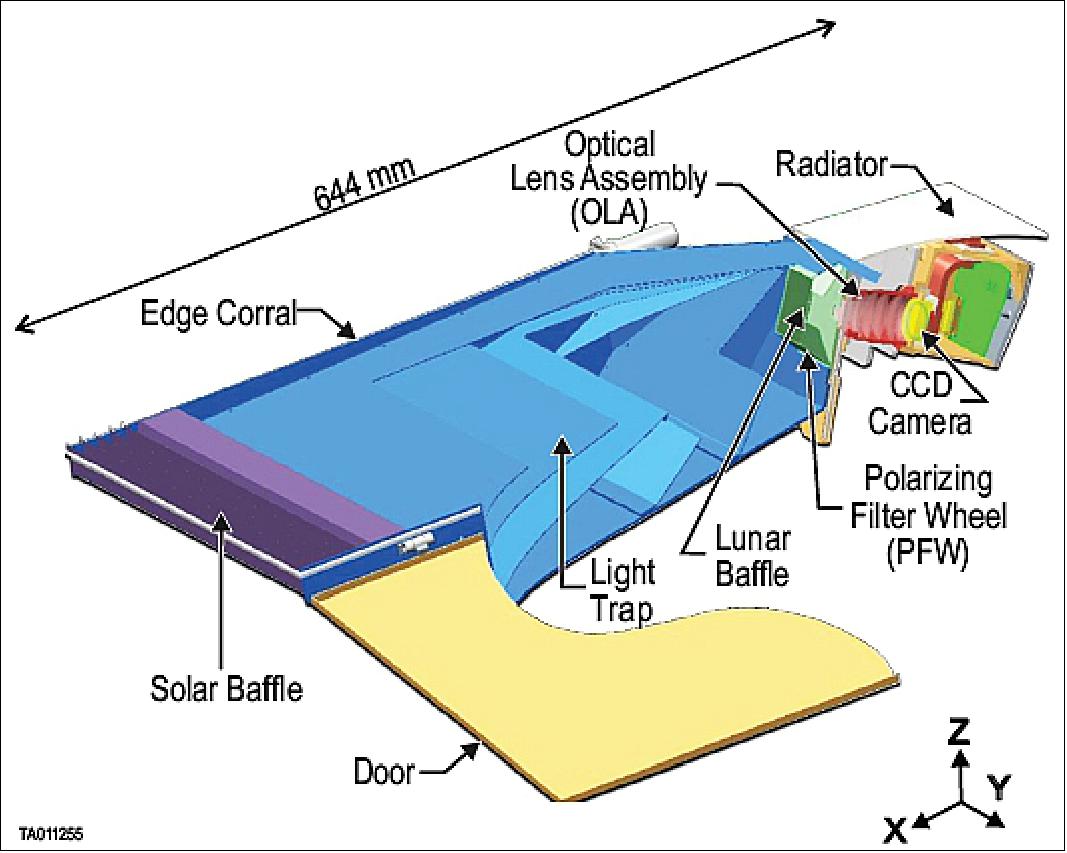
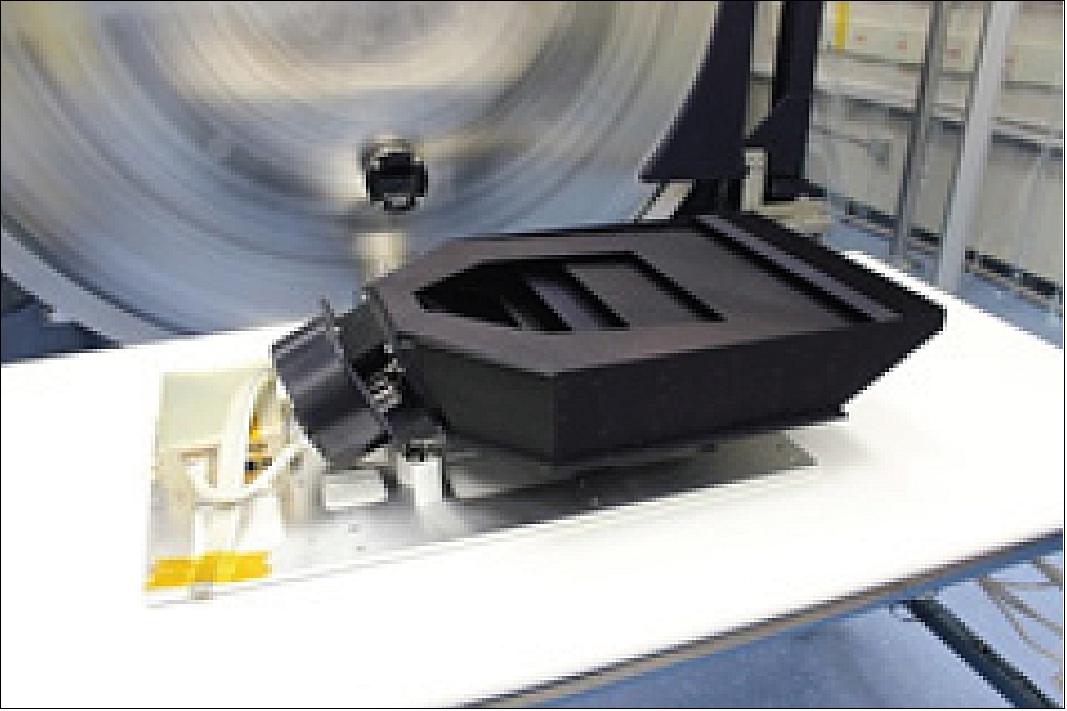
WFI (Figure 9) uses a conventional compound-lens camera with a 40.5° truncated square IFOV extending radially from 18-180° from the Sun with 2.8’ resolution. It uses a deep baffle modeled on existing instruments and optimized for PUNCH. The project developed a prototype WFI baffle, to demonstrate stray light rejection performance, during 2016, and a full instrument prototype in Phase A in 2017 (Figure 10).
NASA selected the proposed student collaboration experiment STEAM (Student Energetic Activity Module). The instrument is a pair of x-ray spectrometers (Amptek’s X123 series, Figure 11) to search for signatures of nanoflares or transient open-field release of solar wind into the corona.
Spacecraft
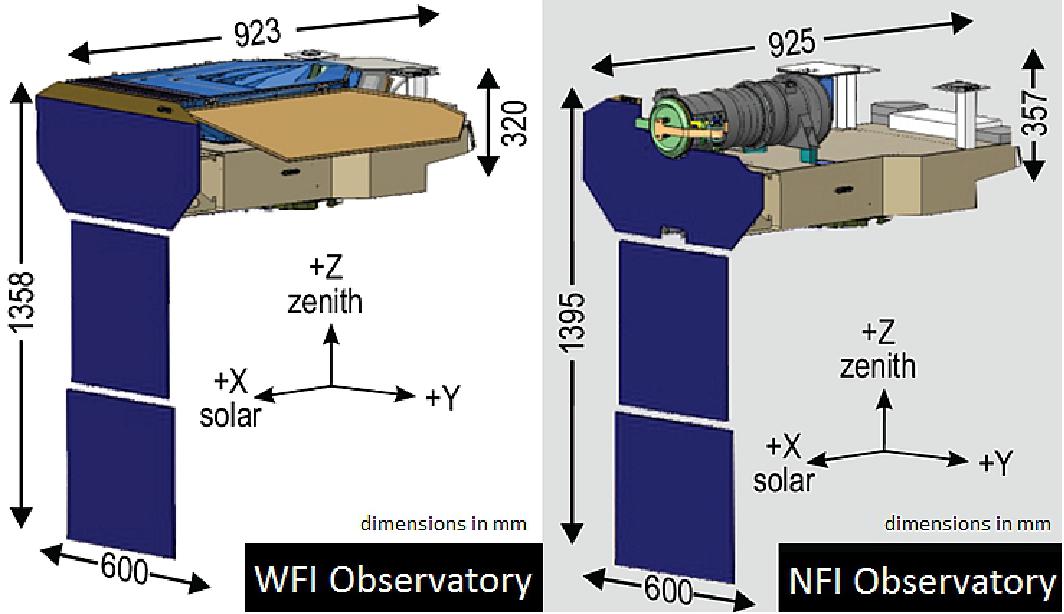
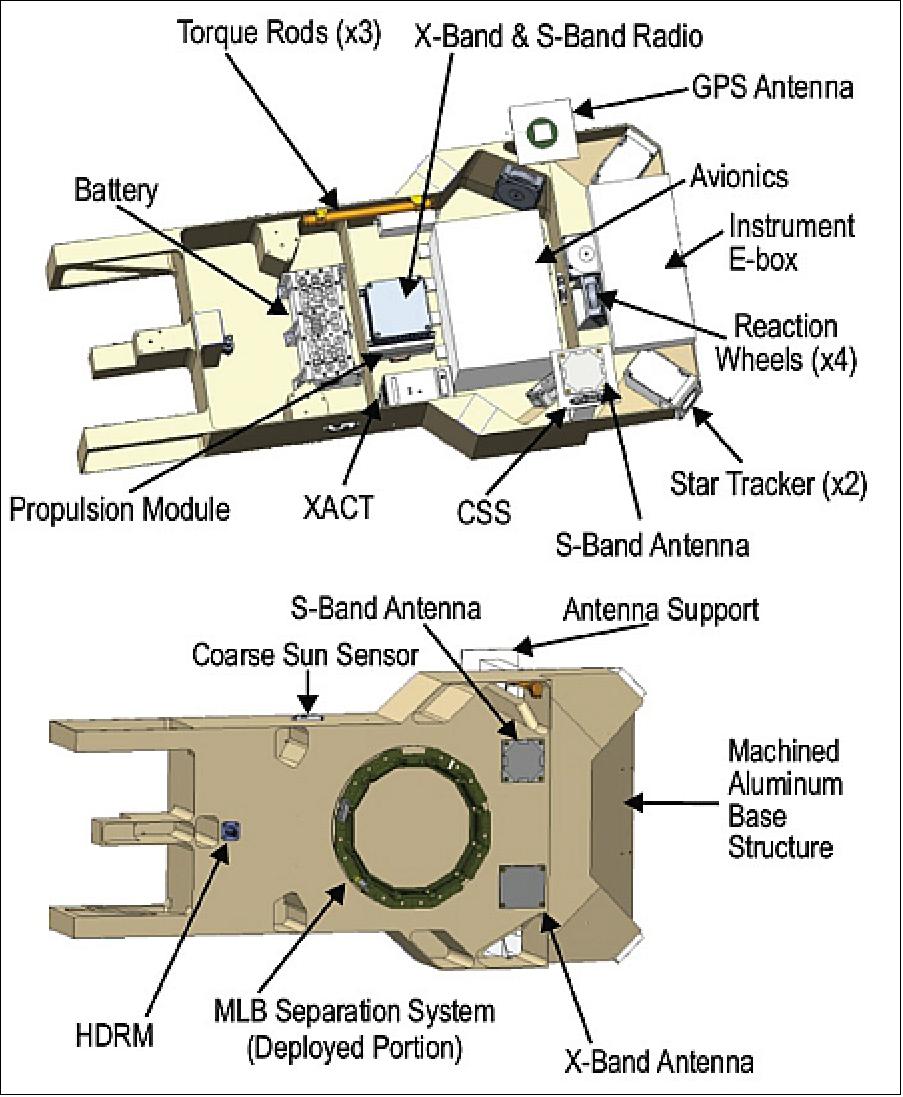
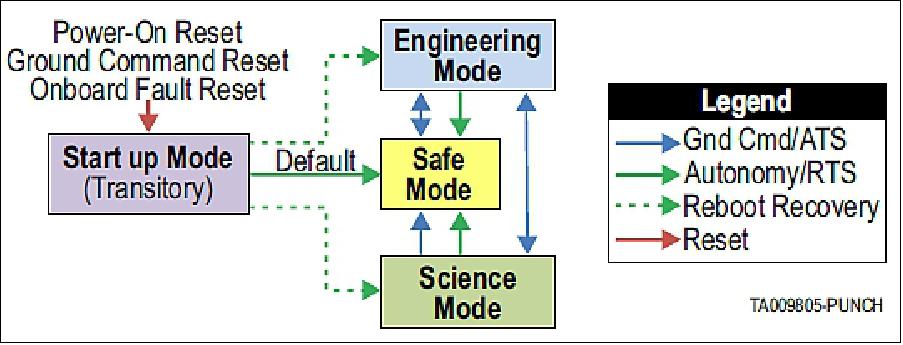
A common microsatellite design hosts either a NFI + STEAM, or a WFI. Science and instrument requirements allow for a common microsatellite design with identical NF/WFI power and data interfaces and only minor mechanical mounting differences. Figure 12 depicts the external configurations of the NFI and WFI Observatories. Figure 13 shows the common internal component layout. Figure 14 provides the common simple Observatory mode flow. A central chassis contains the PUNCH avionics, comprising four boards for C&DH, and power. Each microsatellite uses a single string hardware architecture, with functional and selective redundancy included for critical areas (Table 1).
Item | Redundancy description |
Constellation |
Threshold Science requirements with loss of both NFI and one WFI Observatory |
Propulsion | Propulsion on all 4 Observatories. Required on only 2 WFIs |
Instruments |
|
Deployables/mechanisms |
|
NFI/WFI door | Dual element heaters. Dual circuit interrupt to prevent overheating |
Telecommunications |
|
Thermal |
|
ADCS |
|
C&DH and FSW |
|
EPS |
|
Structures & Mechanisms (S&M): The S&M design includes the spacecraft structure, closeout panel, antenna support columns, MLB (Motorized Light Band) separation system, solar array HDRM (Hold Down Release Mechanism), mounting brackets, and thermal accommodations. LV separation, center of mass, fairing constraints, and the physical accommodation of WFI, NFI, STEAM, and the solar arrays drive the microsatellite layout. A single-piece Al enclosure with a microsatellite +Z close out panel comprises the body. The configuration is specifically optimized for PUNCH, with a zenith (+Z) mounting surface for the primary instruments (+X for STEAM), sun-normal solar arrays, deep-space-exposed radiating surfaces, and accommodation for deep space-pointed star trackers and instrument thermal radiators. Zenith and nadir surfaces maintain clear FOVs for S-band, X-band, and GPS antennas.
The microsatellite structure and component layout design optimize the center of mass to the centerline of the MLB separation system to minimize tipoff rates during LV/Observatory separation and the bending load on the MLB. The propulsion system is positioned to direct its thrust vector through the Observatory‘s center of mass, minimizing torque disturbance during maneuvers. The microsatellite layout positions the CEB (Camera Electronics Box) close to the WFI or NFI camera to minimize detector to CEB harness length. A tetrahedral configuration orients the four reaction wheels, to optimize performance in the case of a single wheel failure. Each spacecraft accommodates its primary instrument with a clear FOV in the +X and +Z directions. The NFI spacecraft also accommodates the STEAM experiment with a clear FOV in the +X direction.
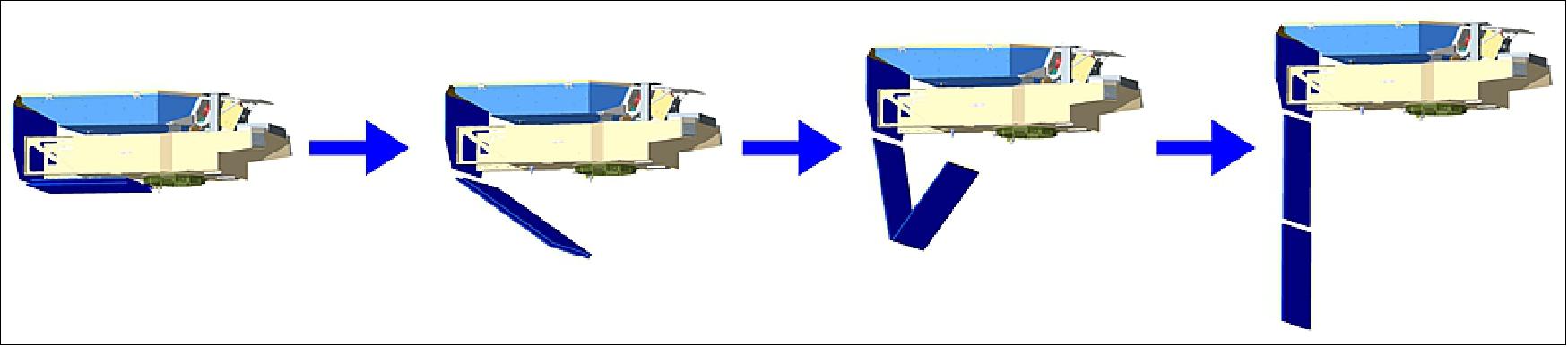
The PUNCH spacecraft design employs three solar array panels (one fixed and two deployed). The panel substrates are vented Al-honeycomb cores and M55J/EX-1515 carbon fiber/cyanate ester resin composite face sheets. The double-fold solar array wing performs a one-time deployment into a permanently locked position (Figure 15). In the stowed position, the cells on the exposed panel face outward, providing power pre-solar array panel deploy, maintaining PUNCH power-positive indefinitely. The deployable solar array is released from its stowed position by a non-explosive, HOP (High-Output Paraffin)-actuated HDRM. The arrays are deployed during initial ground station contacts, via ground command. Fault Management automatically deploys the solar array as a backup to ground-commanded deployment, should the battery SoC (State of Charge) fall below a pre-configured threshold.
RF communications: A Swift XTS S-band transceiver and X-band transmitter provide the core capability of the telecommunication subsystem. The software-defined radio architecture comprises a baseband processor with an RF stack configured for S-band (2 GHz) full duplex communications and X-band downlink (7-8.5 GHz). These links use fixed micro strip patch antennas from AntDevCo. Normal operations use the single S- and X-band antennas on the -Z (nadir) panel. A zenith-mounted, S-band antenna for anomaly recovery interfaces to the Swift XTS along with the nadir-mounted, S-band antenna via a passive coupler and diplexer. The coupler supports simultaneous operation through both S-band patches while the diplexer separates transmit and receive paths into the S-band transceiver.
The S-band downlink carries real-time instrument and spacecraft engineering telemetry and can serve as a lower-data-rate backup science downlink if needed. The S-band downlink implements Offset QPSK (Quadrature Phase-Shift Keying) at up to 5 Mbit/s with 223/255 rate Reed-Solomon Encoding, with nominal PUNCH downlink operation at 1 Mbit/s. The downlink bandwidth occupancy is compliant with the NTIA (National Telecommunications and Information Administration) bandwidth restriction of 5 MHz in S-band. The S-band uplink receiver employs BPSK (Binary Phase-Shift-Keying), supporting data rates up to 1 Mbit/s, with nominal PUNCH operations at 64 kbit/s.
The X-band downlink operates at a science data rate of 25 Mbit/s (28.57 Mbit/s with implemented forward error correction) to satisfy the required science data downlink volume, including 10% data volume contingency to cover image compression data performance uncertainty. Use of 16 APSK (Amplitude and Phase-Shift Keying) and LDPC (Low Density Parity Check) 7/8 keep the X-band downlink bandwidth compliant with the NTIA 10 MHz restriction. SSC-US (Swedish Space Corporation – US) ground stations support 16 APSK and LDPC 7/8 at X-band.
TCS (Thermal Control Subsystem): PUNCH uses a standard cold-biased thermal design, with WFI, NFI, and STEAM thermally isolated from their respective microsatellite structures via MLI and titanium flexures. MLI blankets, chemical conversion coating and standard epoxy high emissivity paint manage radiation heat transfer for the outer μsat surfaces. The thermal design assures thermal control of all subsystems and instruments for all expected conditions. Given the monolithic (1-piece machined) structure, internal conduction heat transfer readily occurs across the structure, without need for any additional thermal straps. Optimized thermal coupling of the reaction wheels and batteries to the μsat ensure meeting operating temperatures, while minimizing makeup heater power. All other microsatellite components conductively couple, sharing the primary microsatellite ±Y panel radiators for heat rejection. The cold-biased structure, along with modest makeup heater power, provides control of all components to keep them within their operating and survival ranges. Operational heater control makes use of thermistor feedback in the microsatellite avionics with Flight Software (FSW) configurable set points. The microsatellite also supplies thermostatically-controlled survival heater power to all instruments, ensuring components are maintained within their survival ranges throughout the mission.
EPS Electric Power Subsystem): A 3-panel, magnetically clean SNC solar array (Figures 12 and 15) generates and feeds power to the PUNCH 28 vdc primary power bus through a SwRI-designed PPT (Peak Power Tracker) module. The solar panel substrates feature flight-qualified, >29% efficient, triple-junction Emcore ZTJ cells, laid with an 85% packing density, including cover glass to improve thermal performance and ground handling. The NFI and WFI Observatories use identical deployable solar panels. The panel cells are strung to be electrically identical, with 32 cells per string, for a max open circuit voltage (Voc) of 99 V, and an active area (fixed plus deployed) of 4035 cm2. Under full illumination, the array provides, at the max power point, a voltage (Vmp) of 75 ± 14 V. The stringing arrangement produces a voltage range that works well with the heritage PPT design.
A build-to-print ABSL 4.5 A-hr Li-ion 8s3p battery, connected directly to the primary power bus, provides electrical storage and margin for eclipse operations and initial post-LV-separation Sun acquisition. Worst case eclipse is <28 minutes. PUNCH can operate in full science mode in eclipse for >40 minutes before reaching 50% battery DoD. Full Sun acquisition is expected in <30 minutes, while power demand is only 30 W (vs. 55.4 W for science mode). The PPT design provides high efficiency (~94%) power conversion between the solar array and primary bus. The PPT controls battery charging and maximizes Li-ion battery life by controlling charge rate, discharge level, and maximum Life of Charge based on aging and temperature, via FSW configurable parameters. An 83% efficient heritage SwRI LVPS board provides conditioned low-voltage power, and power switches for avionics boards and external components.
Propulsion Subsystem: The mission ΔV and propellant budgets appear in Table 2. WFI-2 has the largest ΔV requirement at 4.63 m/s, including 30% margin on all stochastic maneuvers. A 54.9 kg MPV (Maximum Possible Value) Observatory mass requires 276 N s of impulse.
PUNCH uses a 25 mN single thruster, cold gas, self-contained propulsion subsystem. The VACCO thruster, in a 10 cm3 configuration, contains 903 g of distilled R236fa (Freon) propellent, providing a total of 345 N s of impulse, at a Isp of 39 s, via a convergent-divergent nozzle. No chemical reactions take place during operation. Internal heaters and waste heat from the TUI transceiver heat the propellant. The plume contains no other constituents. The vapor pressure of the R236fa is 243 Pa at -90ºC, the coldest temperature any component of the Observatory ever reaches. No condensation of the plume materials takes place on any part of an Observatory.
Maneuver | ΔV (m/s) | Isp (s) | MOBS (g) | Mprop (s) |
Initial Spacing WFI-1 | 0.671 | 39 | 54,900 | 96.47 |
Initial Spacing WFI-2 | 1.01 | 39 | 54,900 | 145.27 |
Initial Spacing WFI-3 | 0.671 | 39 | 54,900 | 96.47 |
Initial Spacing NFI-1 | 0.335 | 39 | 54,900 | 48.14 |
Collision avoidance | 0.0169 | 39 | 54,803 | 2.43 |
Constellation spacing maintenance | 3.60 | 39 | 54,852-54,236 | 519.55 |
Total WFI-2 (worse case) | 4.628 | 39 | 54,900-54,236 | 667.25 |
Thruster operations take place during ground contacts, so the 28 W X-band transmit power maintains propellant temperature against blowdown cooling. To avoid saturating the RWs (Reaction Wheels), propulsive events are limited to <480 s each (given the requirement for deployed center of mass within 1 cm of propulsion system thrust axis) and are spaced at least one orbit apart to permit RW momentum unloading, using the torque rods. The plume is directed along -Z, opposite to the instrument mounting location on the +Z panel. This mounting geometry requires a ~90° roll about the X axis for each propulsive maneuver, so that the thrust vector is directed along the ±velocity vector. This does not permit propulsive maneuvers simultaneously with science observations. Each maneuver occupies one 8-minute interval. Typical COLA (COLlision Avoidance) maneuvers require 7 s. The post-commissioning orbital spacing burn requires 1473 s, distributed over 4 orbits with a <480 s burn each orbit.
ADCS (Attitude Determination & Control Subsystem): The ADCS comprises the BCT (Blue Canyon Technologies) XACT (fleXible ADCS Cubesat Technology) integrated ADCS product. The ADCS removes tip-off rates at separation and transitions to an inertial hold attitude with the solar array Sun-pointed. During science operations, it holds a precise Sun-point attitude, conducting a 30° roll about the X axis every 30° of orbital mean anomaly to keep the Earth out of the WFI FOR (Field of Regard).
The subsystem is built around the BCT XACT-100 module, which incorporates a Spartan 6 FPGA with CPU core; an IMU with 3-axis magnetometers, three rate gyros, and three accelerometers; with the addition of two external NSTs (Nano Star Trackers), three CSSs (Coarse Sun Sensors) and a GPS receiver. Control actuators include three 4 A m2 TRs (Torque Rods) and a tetrahedron arrangement of four 0.1 Nms RWs for increased reliability and redundancy. PUNCH points based on the celestial reference frame, using an uploaded solar ephemeris. This allows continuous WFI operations even during orbital eclipse season. The XACT performs sensor acquisition, attitude determination, Kalman filtering, orbit propagation, and response determination, via a 5 Hz control loop and RS-422 C&DH interface.
The angular momentum accrued in the four RWs is continuously “unloaded” using the three TRs. This is controlled by the XACT system, but can be shut down by command from the main microsatellite processor. The selected RWs provide ample margin in stability, authority, saturation, thermal performance, design life, and capability to absorb expected LV tip-off angular momentum.
The two NSTs are mounted roughly in the microsatellite XY plane (Figure 12), view away from the Sun, canted up 24° toward +Z to comply with the NST’s 27° half-width Earthshine keep-out zone during science data collection. The NSTs have an ~83° angle between their boresights, eliminating the otherwise large about-boresight error of a single NST and enabling precise pointing even while rolled 90° for maneuvers. The TRs are sized to dump one RW’s angular momentum capacity each orbit. If the PUNCH angular momentum is high enough for RW saturation, the ADCS disables the RWs, reduces angular momentum using the TRs alone, then re-enables the RWs. The CSSs are on the +X, ±Y, and -Z panels for safe mode pointing and Sun acquisition. GPS gives orbit determination and fundamental timing reference (backup via orbital element propagation and uplinked time codes and ephemerides).
The ADCS XACT has three primary operating modes: rate damping, safe-Sun, and fine-pointing. Rate damping is used after LV separation and for anomaly recovery. After rate damping, ADCS acquires the Sun and transitions to Sun-pointed safe mode. Fine-pointing is initiated via ground command and used for science operations and orbit maneuvers.
C&DH (Command & Data Handling) subsystem: The C&DH comprises SwRI’s Centaur 3U Single Board Computer (SBC) and a 3U SPAM (Stepper, Power, and Analog Module), both in the central avionics chassis. The C&DH subsystem also provides command and control of the EPS subsystem, via an I2C interface. The Centaur SBC includes a space-qualified, heritage Cobham dual-core SPARC V8 CPU, Microsemi rad-tolerant FPGA, 16 GB NAND flash memory, 256 MB SDRAM, 4 MB SRAM, and 4 MB of non-volatile MRAM for FSW images. The Centaur also provides CCSDS-compliant command and telemetry, performs all on-board science processing and image data compression, and provides interfaces to the instruments, propulsion module, EPS, Telecom and ADCS subsystems, and EGSE (Electrical Ground Support Equipment).
The C&DH SPAM board consists of an analog multiplexer, analog-to-digital converter, switches for heaters and bus power distribution, thermal monitoring inputs and circuitry, and a stepper motor driver circuit with position feedback. The stepper motor driver provides forward/reverse and full or half-step stepper motor circuitry for the PFW. The SPAM board also provides up to 24 temperature sensor inputs including AD590 temperature transducers, PRTs (Platinum Resistance Thermometers), and standard NTC thermistors, plus eight more analog inputs and, general purpose LVCMOS/TTL (Low Voltage Complementary Metal Oxide Semiconductor/Transistor Transistor Logic) outputs. Table 3 shows the data volume budget, including data storage margin due to use of 16 GB of on-board NAND (Not-And) Flash.
Incoming image data is temporarily buffered in SDRAM. After compression, the science data is packetized and padded with EDAC (Error Detection And Correction) parity bytes (single-error correct, double detect) and moved from SDRAM (Synchronous Dynamic Random Access) to non-volatile flash memory until it can be downlinked. When the Observatory is in view of a ground station, bursts of data are read from the Flash memory and again temporarily stored in SDRAM. The SDRAM maintains a steady flow of data to the virtual channel formatting engine, where it is framed into CCSDS (Consultative Committee for Space Data Systems) transfer frames before being sent to the X-band transmitter at a continuous rate of 25 Mbit/s. The FSW coordinates flash storage by providing a list of available sequential flash blocks to the Centaur FPGA, avoiding bad blocks. Similarly, the FSW coordinates flash playback by providing a list of sequential playback blocks to the FPGA, again skipping over bad blocks.
WFI and NFI utilize a common camera developed by RAL. The instrument’s SpaceWire interface is disconnected from the CPU, and instead connected directly to the on-board FPGA. Routing the instrument directly to the FPGA reduces CPU load and removes real-time requirements from the FSW.
The PUNCH science mission profile easily allows C&DH to autonomously control the instrument during normal science ops through the use of stored ATS (Absolute Time Sequences) and RTS (Relative Time Sequences). General Observatory commanding is achieved through standard uplink command services. Hardware validates all incoming command code blocks using standard BCH error detection and correction schemes before they are assembled and processed on-board the Centaur by the FSW. The Centaur also provides a FSW-independent L0 command set primarily used for fault recovery. All other commands are passed to the FSW Command Manager for execution, or to the Stored Command Sequence Manager as on-board ATSs and RTSs.
Data volume | NFI | WFI | Units/Notes |
Total Daily Image Data (Compressed) | 1.89 | 1.10 | GB/Day, including 10% contingency |
Daily Image Overhead/Meta-Data | 0.32 | 0.23 | MB/Day |
Daily Hardware Level 0 Telemetry | 1.12 | 1.12 | MB/Day |
Daily Flight Software Engineering Telemetry | 5.51 | 5.51 | MB/Day |
Total Daily Meta-Data/Telemetry | 6.95 | 6.86 | MB/Day |
Total Daily Date Volume/Observatory | 1.90 | 1.11 | GB/Day |
Actual X-band Unencoded Downlink Rate | 25 | 25 | Mbit/s |
CCSDS Frame Header & 7/8 Encoding | 14% | 14% |
|
Actual X-band Encoded Downlink Rate | 28.5 | 28.5 | Mbit/s |
Total Ground Station Pass Duration | 600 | 600 | Seconds |
Usable X-band Downlink Duration | 388 | 388 | Seconds, conservative |
Required Science Downlink Passes/Week | 11 | 6 | Per Observatory |
Budgeted Passes/Week | 12 | 7 | Per Observatory |
Daily Storage Volume/Observatory | 1.90 | 1.11 | GB/Day |
Available Flash Memory Storage/Observatory | 16 | 16 | GB |
Daily Memory Storage Utilization | 11.9 | 6.9 | % used/Day |
Days of Memory Storage Available | 8.4 | 14.4 | Days |
Memory Storage Requirement | 2 | 2 | Days |
Memory Storage Margin | 321 | 621 | % |
FSW (Flight Software): The microsatellite FSW is implemented in C and executes on a LEON3/SPARC8 processor running the RTEMS operating system. Because both WFI and NFI use the same camera and electronics box, the FSW onboard the NFI and WFI Observatories is identical. Any differences in observation cadences, thermal control set points, etc. are implemented in uploadable tables, ATSs, and RTSs. The WFI Observatories do not have a STEAM experiment. The FSW task for the STEAM interface is simply not spawned at FSW startup.
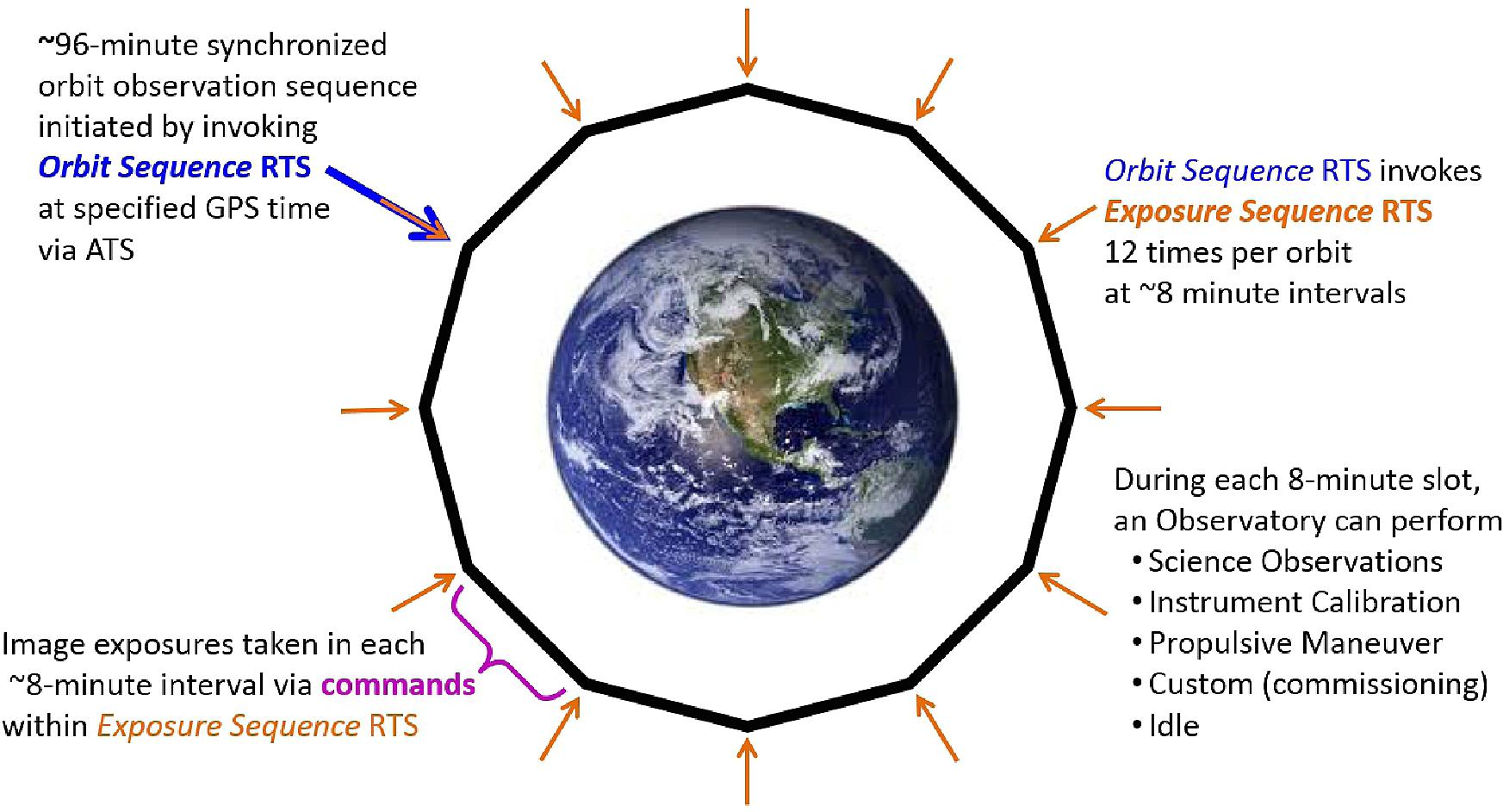
The FSW synchronizes observation sequences across the constellation, as each Observatory is synchronized with GPS time. As shown in Figure 16, each ~96-minute orbit observation sequence is initiated from the ATS on each Observatory. The ATS initiates the Orbit Sequence RTS that contains 12 commands to initiate an Exposure Sequence RTS every ~8 minutes. The Exposure Sequence RTS then executes the 8-minute science collection sequence. The ATS/RTS commands properly consider orbital eccentricity.
FSW controls power to the transmitters, instruments, operational heaters, and ADCS components. Operational thermal management is under FSW control, provided via nine heater zones with primary and alternate thermistors, and simple heater control upper and lower set points. The Autonomy CSC (Computer Software Component) implements telemetry monitors that can trigger fault RTSs. Fault rules can be individually disabled, and changes to fault responses are accomplished by uplinking new fault response RTSs.
AFM (Autonomy & Fault Management): Although largely implemented in the FSW, PUNCH treats AFM as a separate Observatory subsystem. The PUNCH AFM approach balances Observatory safety, constellation manageability, and science return. If subsystem data exceeds predefined safety constraints, AFM performs the designated response; if a fault is deemed recoverable, AFM makes a single attempt to correct the fault (e.g. by resetting a component) to avoid unnecessary Safe Mode transitions and maximize science return. If the initial response does not correct the fault, AFM transitions the Observatory to Safe Mode (Figure 14). Faults deemed unrecoverable result in an immediate transition to Safe Mode, and the Observatory waits for ground intervention.
All faults are reported in engineering telemetry. The PUNCH Safe Mode closes instrument light paths, sheds non-essential loads, and re-acquires the Sun, if necessary. Safe Mode pointing is inertial with +X pointed at the Sun. AFM fault trigger thresholds are table parameters, and responses are implemented using stored RTSs. Individual AFM fault rules and response RTSs can be modified or disabled on-orbit.
Heritage Centaur hardware-based provisions include watchdogs to monitor processor and FSW operations, thermostatically-controlled survival heaters that operate independent of FSW, and L0 command & telemetry capabilities allowing operators to monitor Observatory low-level status, shed power loads, issue commands to reset the processor, or boot an alternative FSW image. E.g., if the battery SoC is too low, AFM autonomously sheds non-essential loads, triggers transition to Safe Mode ,and awaits ground intervention.
The PUNCH Observatories are synchronized to ±1s. In event of a fault on one or more Observatories, cadences are re-synchronized by two heritage features: 1) reboot recovery logic to configure the Observatory for nominal science in case of SEU, and 2) ATS capability to “fast-forward” imaging sequences to the current timebased command. If a fault condition precludes this, observation cadences are re-synched later via ground command. PUNCH employs many fault prevention features and numerous selected redundancies, shown in Table 1. As an example, if X-band downlink fails, science data can be re-routed to the S-band downlink.
SM (Separation Module)
The SM secures the four Observatories, in stowed configuration, for launch and deploys them based on commands from the LV. The SM mates to the DRLV’s (Design Reference Launch Vehicle) 97 cm (38”) standard payload adapter Figure 2, left side). The SM core structure is a machined aluminum frame with a welded top plate. The mounting interface mates with the LSP (Launch Services Program)-provided Payload Adapter Cone. The Observatories mount radially 90° apart, using MLBs (Figure 2, right side). Each Observatory has a clear separation path. The SMAU (Separation Module Avionics Unit) mounts within the SM Structure. Modal analysis of the SM plus Observatories, using MPV (Maximum Possible Value) mass for each, indicates that the fundamental bending mode is well above the 20 Hz requirement.
A Mark II MLB (Motorized Light Band) imparts the separation ΔV to the Observatories, via the SMAU, in response to the LV provided initiation signal. Separation connectors housed on the MLB provide power and data interfaces to the Observatories prior to separation, then provide indication of successful Observatory separation used by both the LV and Observatory. The 20.32 cm (8”) diameter MLB provides required strength and stiffness margins. MLB spring quantity tunes the separation velocity, and spring placement to match final Observatory CG location reduces tip-off rates.
The LV PDU (Power Distribution Unit) directly powers the MLB redundant drive motors via a dedicated 9-pin connector, based on a separation sequence in the LV flight computer. Use of a 2-stage command, a single-fault tolerant actuator driver design, and a Safe/Arm connector that is armed the day of launch, ensures hardware safety. Each MLB uses three 15-pin connectors for Observatory power, data and separation sense. An additional separation switch is also used for separation sense.
Launch
A NASA-provided launch of PUNCH is planned for the time frame 2023 on a Pegasus XL DRLV (Design Reference Launch Vehicle).
Orbit: Sun-synchronous near -circular dawn-dusk orbit, initial altitude of 570 km.
Mission Design
The mission lasts 27 months, including 3 months of commissioning. The two mission critical events consist of Observatory separation and solar array deployment. The communication comprises S-band up/down, plus X-band down using SSC-US ground stations.
The PUNCH mission design satisfies key mission requirements by maximizing solar observation time over the course of the 2-year science mission. A Sun-synchronous, dawn-dusk orbit keeps all vehicles in direct view of the Sun at all times, other than an annual 3-month eclipse season centered on the December solstice. Spacecraft commissioning, instrument commissioning, and science data calibration/validation each last 30 days, during which the separation spring ΔV causes the WFI-1 and WFI-2 Observatories to drift near the correct orbital locations. Within 90 days after launch, propulsive maneuvers stabilize the WFI Observatory locations, and PUNCH transitions to 2-year science operations.
During science operations, the Observatories all maintain approximately inertial hold attitudes with their X-axes pointed toward the Sun. Every ~8 minutes, they conduct 30° roll maneuvers about the X axis using reaction wheels, keeping +Z near zenith. At scheduled SSC-US ground station passes, each Observatory downloads its stored data without interrupting science observations. The Observatories are able to remain in science mode during < 28 minute eclipses that occur surrounding winter solstice.
Propulsive maneuvers for constellation maintenance or collision avoidance require rolling the Observatory ±90° about its X axis to direct the thrust vector along or against the orbit velocity vector. Maintenance maneuvers, the longest planned, require a single 8-min hold interval.
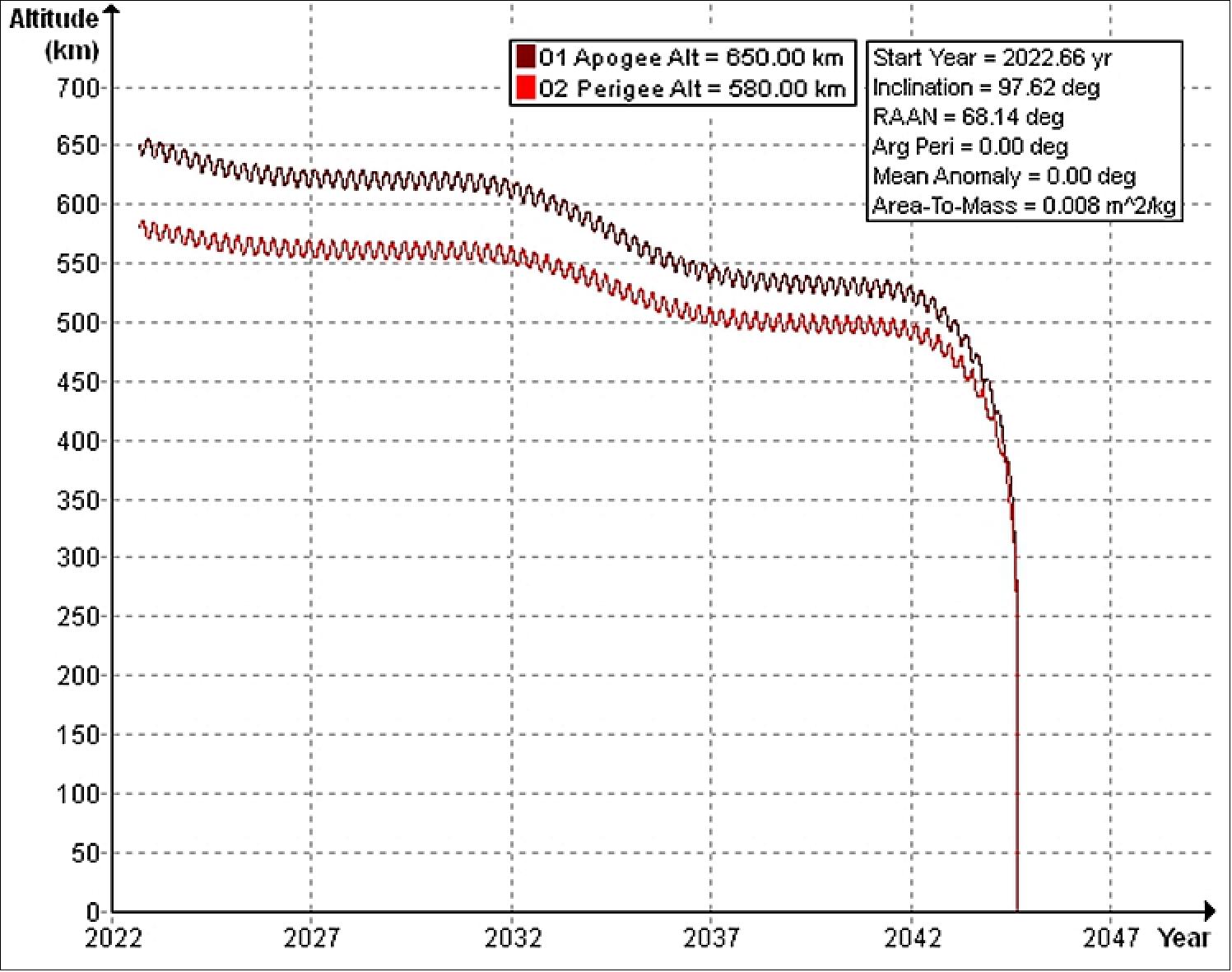
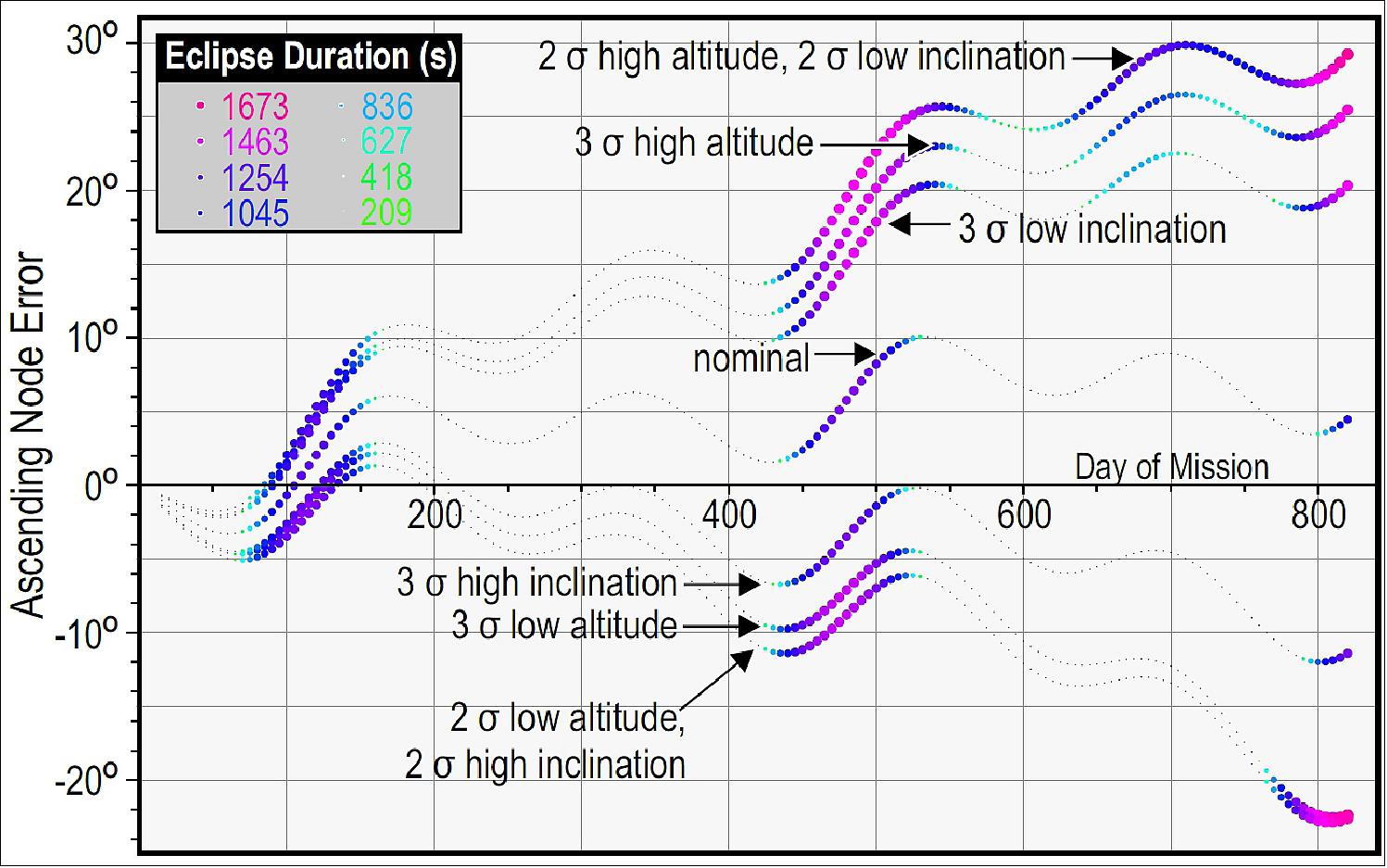
Target initial orbit altitude is 570 km, which optimizes the trade between radiation dose, mission longevity, and the passive reentry requirement. The PUNCH Mission Design (MD) studied precession rate errors induced by orbit injection altitude, eccentricity, and inclination dispersions. The Pegasus User’s Guide (PUG) indicates 3σ injection errors of 10 km on the injection apse, 80 km on the non-injection apse, and 0.15° on inclination. MD modeled area-to-mass ratio by estimating the total frontal area as a function of time (averaged over an orbit while accounting for Earth’s polar axis tilt, its influence on beta angle, the 30° roll maneuvers, and true-of-date Sun vector) and a Maximum Possible Value (MPV) mass of 54.9 kg. PUNCH adds ballast to bring each microsatellite to its MPV mass increasing its ballistic coefficient, minimizing the rate of altitude loss and dispersion between EOM (End-of-Mission) altitude for 3σ high and low launches, which is required to maintain ascending node close to the dawn-dusk terminator. DAS (Debris Assessment Software) 2.1.1, using the March 29, 2018 F10.7 file, produced the orbit altitude history (Figure 17) used to integrate the average precession rate of the ascending node. Figure 18 shows the angle between the Sun vector and the perpendicular to the line of nodes. Plotted cases include nominal, ±3σ inclination, ±3σ semi-major axis, and two combined 2σ cases exploring worst-case combinations of injection error. At EOM, the Observatories are passivated and naturally reenter within 22 years (worst-case, 3σ high orbit altitude injection) due to atmospheric drag, as shown in Figure 17.
Near the December solstice, orbit inclination combines with the Earth’s axial tilt to cause eclipses at the northern orbit extremity. Figure 18 shows that under worst-case assumptions (4σ total combination of LV injection errors, perigee at North Pole) the maximum eclipse duration is 1672 s, and power balance is still positive with >25% margin at EOL. The orbit inclination minimizes RAAN (Right Ascension of the Ascending Node) error for the 3σ low-injection altitude case, reducing drag due to yaw at the poles and increasing orbit altitude at EOM. This results in a RAAN error near 30° at EOM for the 3σ high injection, enough to cause eclipses near the equator at EOM. However, eclipse durations are less than those at the second December solstice, the driving case. The selected initial RAAN favors the 3σ low-injection altitude case as the orbit is much more sensitive to drag and RAAN error contributes strongly to frontal area. If launch is delayed toward December, PUNCH switches to a 6 PM RAAN (6 AM launch), and eclipse season moves from December to June. No other aspects of mission operations change (including early-orbit contacts).
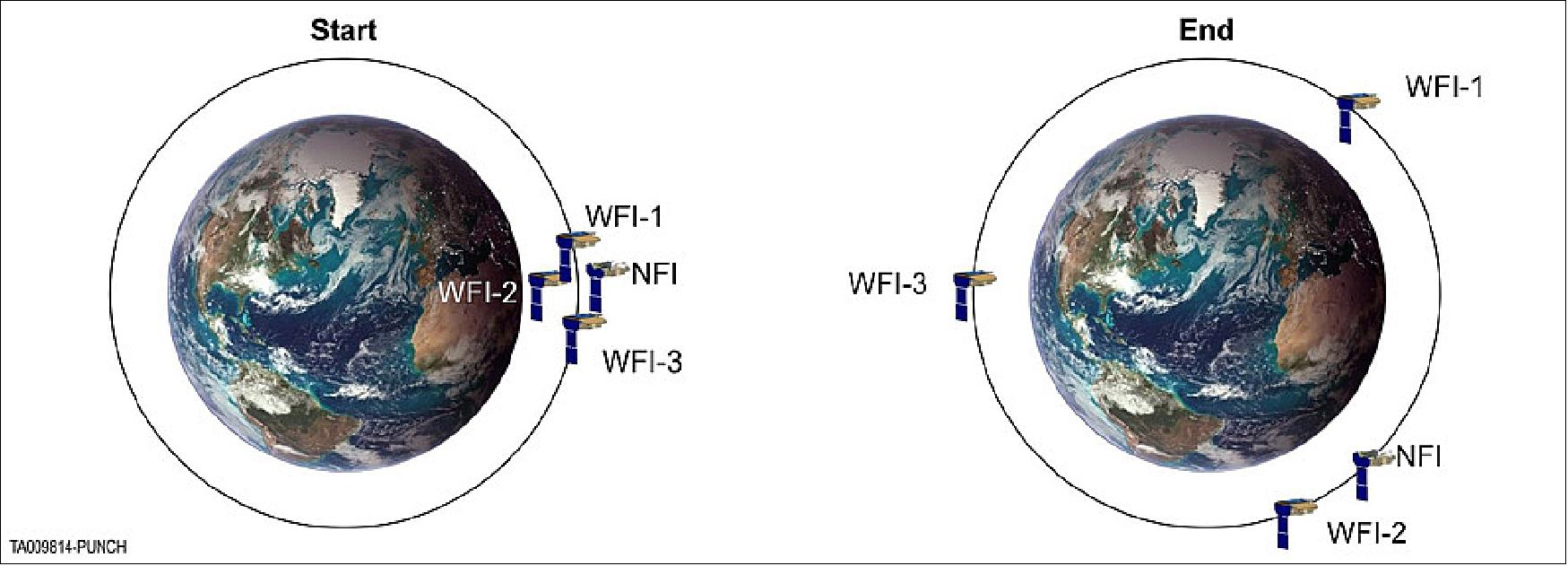
Orbital Position and Constellation Maintenance: Each Observatory carries a small cold-gas thruster used to stabilize constellation spacing, perform COLA (Collision- Avoidance) maneuvers, and counteract differential geoid disturbances that drive it out of formation. The thruster does not correct injection altitude errors, but is used in a sequence of propulsive maneuvers at the end of commissioning to null relative velocity imparted by the SM separation springs. The WFI-2 Observatory uses its thruster to return, after 60 days and well after the LV upper stage’s deorbit, to approximately the orbital mean anomaly it would have occupied with a zero-velocity separation, thus balancing the total drift durations and ΔV requirements for WFI-1 and WFI-3. WFI-1 and WFI-3 delay their maneuvers until they have drifted ±120° from WFI-2, then each thrusts to equalize its orbital period with WFI-2 (Figure 19). NFI halts its drift at 60°, halfway between WFI-2 and WFI-1, to evenly distribute ground contact pass times and prevent close approaches to any of the WFIs later in the mission. WFI 1 and 3 require 90 days (nominal) to reach their constellation stations.
Propellant margin enables any two of the WFI microsatellites to establish formation on the third if any one thruster fails. A specific orbital location is not required of NFI, so its thruster can also fail without affecting the ability to meet all mission requirements. During commissioning and throughout the mission, the thrusters are used to respond to COLA events with sufficiently high probability, expected to be less than one/Observatory/year, based on CYGNSS actual experience.
PUNCH MD used STK (Systems Tool Kit) to model various perturbations on the constellation formation in an extensive set of tests. As expected, and as demonstrated by CYGNSS, formation stability for vehicles in the same attitude is essentially unaffected by differential drag and solar radiation pressure. This study revealed that in the PUNCH orbit, orbital perturbations from tesseral harmonic terms in Earth’s gravitational field are the dominant disturbance. A Monte Carlo study showed that using a simple control law, the WFI Observatories maintain formation to within ±2°. Table 2 shows the mission ΔV budget, including allowance for 30% margin on COLA and constellation maintenance, the statistical maneuvers.
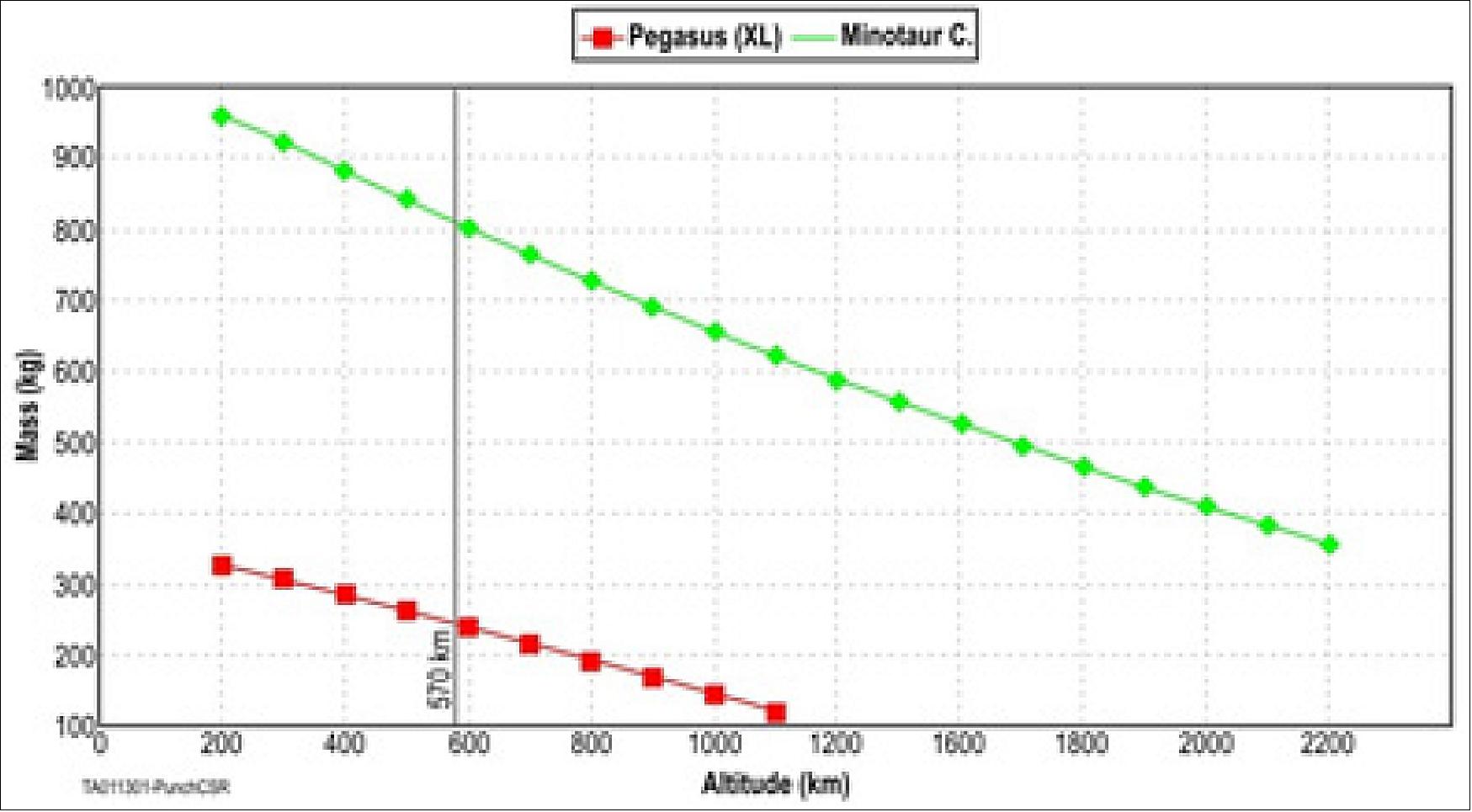
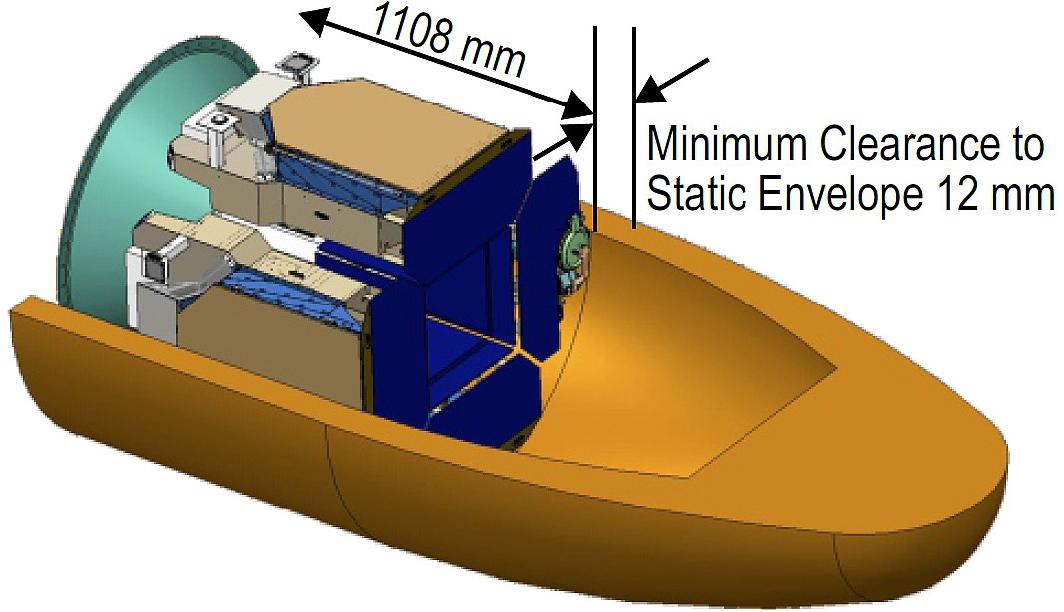
Launch Vehicle Compatibility: MD selected the Pegasus XL as the DRLV because it is the most challenging case, of the two LVs NASA offered (Figure21). DRLV mass-to-orbit capability, orbital parameter dispersions and pointing performance during Observatory separation meet PUNCH requirements with margin. The PUNCH LS fits within the Pegasus XL fairing with no static envelope intrusions, even assuming an isolation system keep out zone (Figure 21). PUNCH LS mass (Table 4) and CG location (53 cm from interface plane) meet the requirements in the PUG (245 kg for a 570 km circular orbit and 125 cm, respectively).
Launch and Early Operations Sequence: An evening launch south from VAFB on a Pegasus XL places the LV upper stage, with the SM and four PUNCH Observatories attached, into a 570 km, circular, 6 AM ascending node, Sun-synchronous orbit. Telemetry coverage for the majority of the LV’s powered flight is via VAFB ground asset, with a NASA-provided mobile ground asset in French Polynesia (costed as a PUNCH Mission Unique service) used to ensure telemetry coverage for the four Observatory separations. After stage 3 burnout and insertion into the PUNCH orbit, the LV pitches up 90°, rolls 27°, and holds a Positive Vehicle Velocity Local Horizontal (+VVLH) attitude for the two pair-wise Observatory mission critical separation events.
Separation is initiated by the LV mission sequencing computer shortly after orbit insertion and final stage burnout. The first separation event releases the WFI-1 and WFI-3 Observatories. The separation ΔV is mostly aligned in the along-track direction (27° from +VV for WFI-1 and 27° from -VV for WFI-3). The second separation event occurs 30 s later to release WFI-2 and NFI-1 orthogonal to the first pair.
Immediately prior to each separation event the LV disables its RCS (Reaction Control System), and re-enables it 2 s after Observatory separation. This allows time for the released Observatories to achieve sufficient LV clearance to avoid disturbance torques due to RCS thruster firing. The LV RCS uses clean GN2, and is not a contamination threat. PUNCH’s separation sequence is modeled on the successful CYGNSS (Cyclone Global Navigation Satellite System) sequence, but is less complex and more robust. PUNCH separates half as many Observatories; and the two separation axes are perpendicular. Disturbances due to asymmetric separation events along one separation axis do not strongly affect LV orientation along the other separation axis.
Approximately 10 minutes after separation, the LV reorients and performs a CCAM (Collision and Contamination Avoidance Maneuver) to lower its orbit and avoid any close approach with the Observatories. The CCAM is scheduled and directed to minimize contamination by the LV plume.
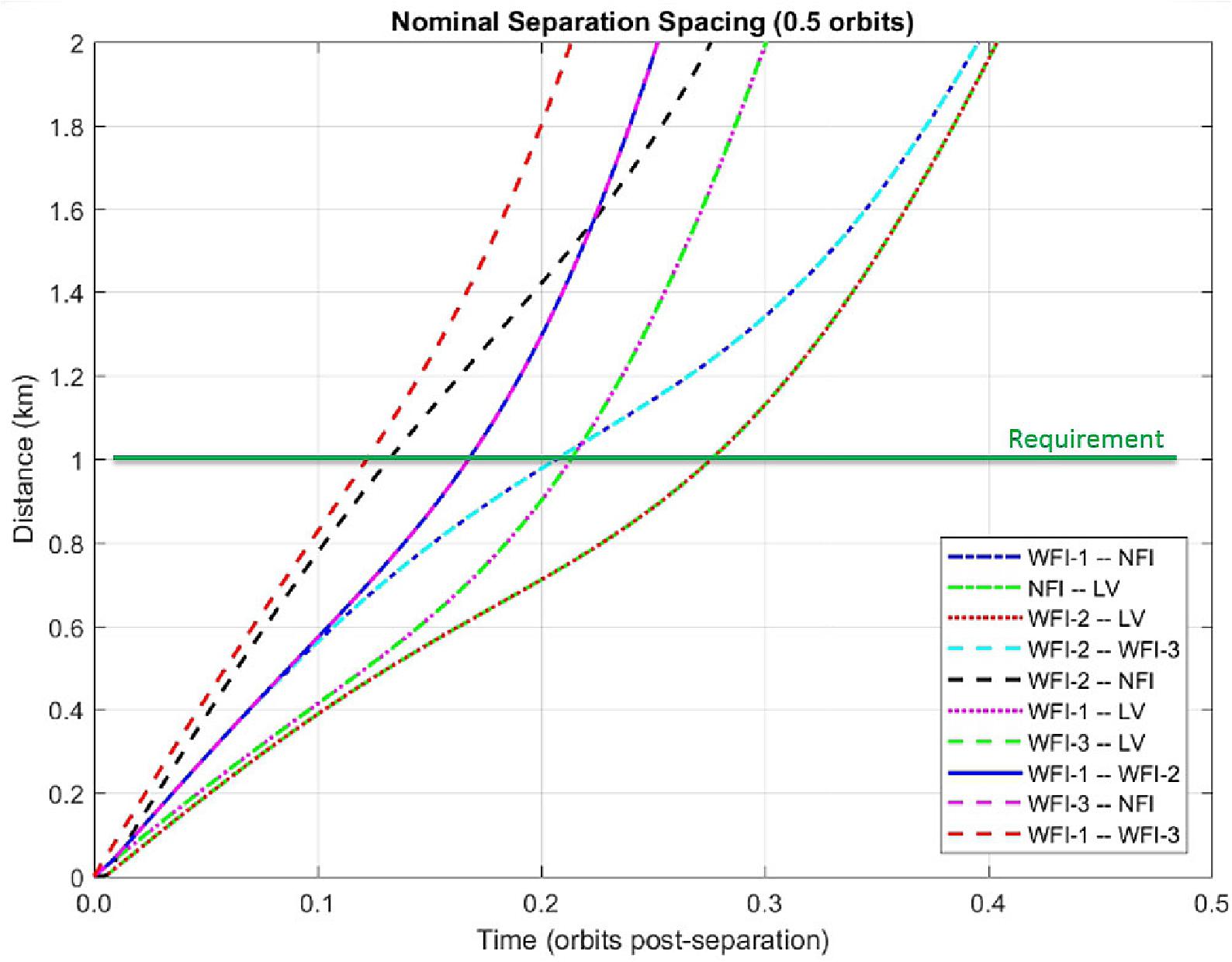
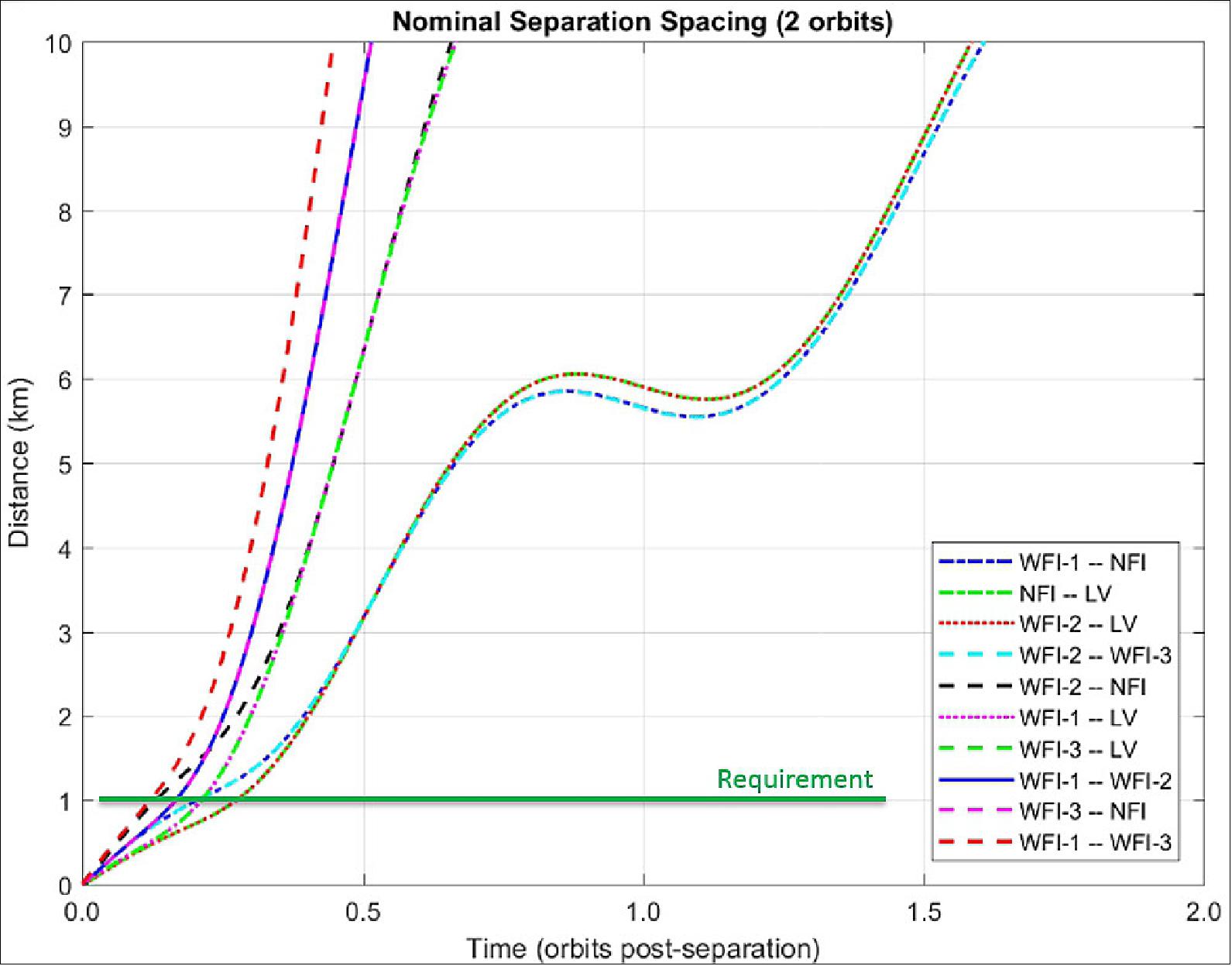
The LV attitude, combined with the arrangement of the PUNCH Observatories, maximizes the along-track separation between all pairs of adjacent vehicles, with equal separation ΔV, hence identical separation mechanics; Figure 22 shows relative Observatory/LV motion. This design maintains wide clearance from the LV even if it fails to perform a CCAM.
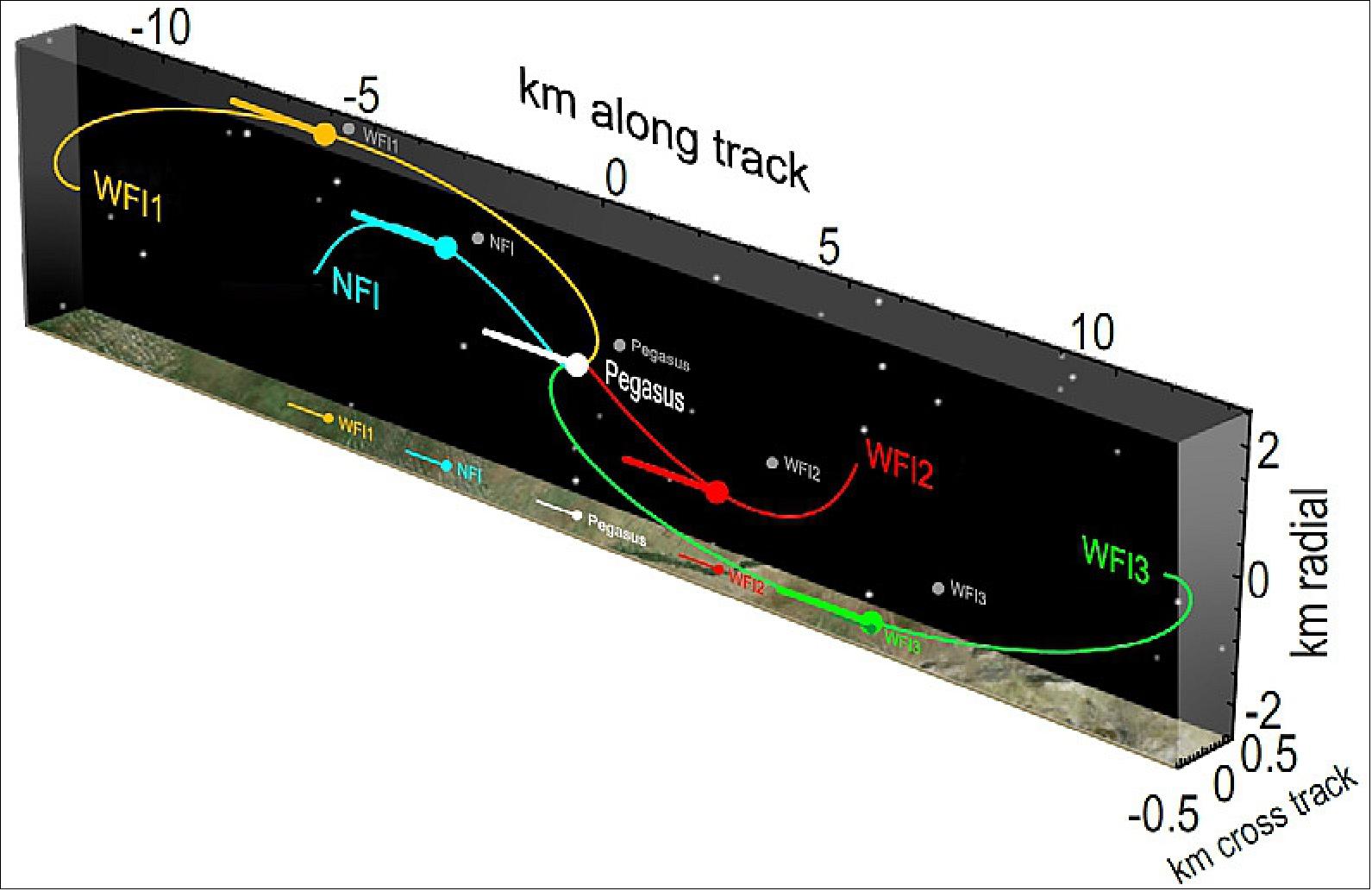
A 3000-run Monte Carlo simulation provides statistics on close approach distance between all pairs of vehicles, including a CCAM failure, within the first two orbits post-separation. The 3σ low result of 1.45 km is well above the 1 km PUNCH L2 (Level 2) requirement. The absolute closest approach across the ensemble is 0.71 km for a case with multiple parameters near their 3σ dispersed values. Figures 23 and 24 show the ever-increasing distance between all vehicles in the nominal case.
An MLB (Motorized Light Band) separation switch turns on each Observatory in Start Up Mode upon separation from the SM. Initial Observatory body rates are expected to be ±[10°, 5°, 2°/s] (3σ Gaussian probability distribution) MLB-induced, plus ±[2°, 0.2°, 0.2°/s] (uniform probability distribution) LV-induced about the microsatellite X,Y,Z axes, respectively. Observatory ADCS requires a worst case of <30 minutes to null these tip-off rates and point the X-axis at the Sun. Power analyses assumed a more conservative one-hour Sun acquisition, resulting in a 26% battery Depth of Discharge. The Observatories then enter Safe Mode. Once Sun-pointed, the Observatories are power positive and thermally stable indefinitely, pre-solar array deploy. Ample ground pass opportunities exist immediately post-separation. Ground stations at North Pole, Alaska and Esrange, Sweden (at high latitude) provide >55 minutes of combined contact time spread across 6 passes (3 on each station) within the first 4.5 hours (~3 orbits) post-separation. These passes verify the PUNCH Observatories’ stable Sun-point attitude and real-time command/verify mission critical solar array deployment.
In summary, Table 4 shows the resulting margins, for all of the key development resources for the PUNCH. The innovative science promise, plus the technical margins in Table 4, combined with the redundancies in Table 1, went a long way towards providing NASA with sufficient reason to select PUNCH for full mission development on 20 June 2019.
System | Parameter | Requirement | Capability | Margin (%) |
Launch vehicle | Pegasus XL mass to orbit (kg) | 192.6 | 245.0 | 27.2 |
NFI | Solar light attenuation | 3.0 x 10-13 | 3.0 x 10-14 | 900 |
WFI | Solar light attenuation | 1.0 x 10-14 | 3.0 x 10-16 | 3233 |
NFI & WFI | CCD lifetime (days) | 4 | 2.8 | 42.9 |
EPS | NFI filter wheel stepper motor cycles | 1.6 x 106 | 6 x 10-6 | 275 |
FSW | Solar array thermal cycles (1/eclipse) | 3100 | 26,000 | 739 |
Propulsion | CPU performance | 4.4 | 16 | 264 |
RF communications | Telemetry link margin: S-band downlink (dB) | 667.25 | 903 | 11.7 dB |
ADCS | Pointing control, pitch/yaw (arc seconds) Pointing stability (drift), pitch/yaw (arc seconds) | 3 | 11.9 | 3290 |
MOC | Data/telemetry throughput: compressed images (GB/day) | 300 | 60 | 488 |
SOC | Latency (days) | 14 | 5 | 180 |
Development Status
• July 27, 2021: On July 23, 2021, the Polarimeter to UNify the Corona and Heliosphere (PUNCH) mission achieved an important milestone, passing its latest NASA review and entering the final mission design phase with a new launch-readiness target of October 2023. Southwest Research Institute is leading PUNCH, a NASA Small Explorer (SMEX) mission that will integrate understanding of the Sun’s corona, the outer atmosphere visible during total solar eclipses, with the “solar wind” that fills the solar system. 2)
- “With PUNCH we will finally be able to see directly the connection between the star at the center of our solar system, and the solar wind that immerses our planet and gives rise to space weather here on Earth,” says SwRI’s Dr. Craig DeForest, the mission’s principal investigator. “To do that, we are building satellites and four cameras to photograph very faint rays of sunlight reflected by free electrons in interplanetary space.”
- PUNCH consists of four, suitcase-sized, Earth-orbiting satellites that will study the Sun’s outer atmosphere, the corona, and how the corona accelerates to become the solar wind that fills the solar system. PUNCH images will offer unprecedented detail, providing measurements that will bridge a long-standing gap between remote images of the corona and solar wind and direct in situ measurements of the solar wind. PUNCH will also provide ground-breaking 3D information about this region by taking advantage of the way light scatters off electrons.
- PUNCH data will allow scientists to answer questions about how the Sun’s atmosphere becomes the solar wind, as well as how structures in the solar wind are created and how large magnetic explosions called coronal mass ejections propagate through the solar system. Such information can shed new light on how the Sun drives a vast system of space weather across the solar system, which can affect astronauts and technology on Earth and in space.
- The review, Key Decision Point C, evaluated the mission’s preliminary design and program plan to achieve launch by its target date. With the successful review, PUNCH now moves into the final phase of mission design and instrument fabrication. The four spacecraft will then go through final assembly and testing before their launch-readiness target in October 2023.
- Here on Earth, we can see the Sun’s corona during a total solar eclipse,” said PUNCH Mission Scientist Dr. Nicholeen Viall from NASA Goddard Space Flight Center. “By creating an artificial eclipse, PUNCH will continuously image the upper corona and solar wind and track coronal mass ejections with extraordinary detail and coverage.”
- The four PUNCH satellites will spread out around Earth along the day-night line to create a complete view of the corona and solar wind. One satellite carries a coronagraph, the Narrow Field Imager, that images the Sun’s corona continuously. The other three each carry SwRI-developed Wide Field Imagers, optimized to study the solar wind. These four instruments work together to form a field of view large enough to capture a quarter of the sky, centered on the Sun. All four cameras will be synchronized in flight, allowing the mission science team to combine their images seamlessly into a single, large field of view.
- PUNCH is led by Southwest Research Institute’s Boulder, Colorado, office. The mission is managed by Explorers Program Office at NASA’s Goddard Space Flight Center in Greenbelt, Maryland, which is managed by Goddard for NASA’s Science Mission Directorate in Washington, D.C. Southwest Research Institute will build the Wide Field Imagers and will build and operate PUNCH. The Naval Research Laboratory in Washington will build the Narrow Field Imagers and provide optical testing. RAL Space in the United Kingdom will provide detectors and calibration for the mission.
• June 10, 2020: Tethers Unlimited, Inc. (TUI) has announced the company has been contracted to provide key communications and propulsion capabilities to Southwest Research Institute (SwRI) in support of the NASA PUNCH Mission. 3)
- TUI will be delivering flight units of both its SWIFT®-XTS X-band software defined radio (SDR) and its HYDROS™-C water-electrolysis thruster.

- The SWIFT-XTS radio will be used for telemetry and control as well as main mission data downlink. The SWIFT-XTS radio is a compact and affordable S-band transceiver coupled with a high-speed X-band transmitter. Its “software defined” attributes make it readily configurable to support a wide range of mission needs, including in-flight adjustment of operating frequencies and modulations. The SWIFT software defined radios enable satellite operators to rapidly configure and tune their communications systems to maximize the amount of data they can deliver through the congested radio frequency spectrum.
- TUI will also be providing an 8W X-band RF power amplifier for this program to enable the satellites to reliably close the communications link to ground stations from their distant orbits. The company's SWIFT-XTS Software Defined Radio supports both reliable telemetry, tracking, and control (TT&C) and high-speed mission data delivery for small satellite missions.
- The HYDROS-C is a shoebox-sized propulsion module that uses water as propellant. Unlike other water-based thrusters that simply expel heated steam, TUI’s HYDROS-C module first uses electrolysis to split water into its constituent elements, hydrogen and oxygen. The HYDROS-C module then burns the hydrogen and oxygen in a traditional bipropellant thruster. This water electrolysis method enables HYDROS to deliver better thrust efficiency than existing electric propulsion options and provides higher fuel economy than chemical thrusters. By using water, HYDROS-C is a truly “green propellant” solution that is safe for personnel during satellite integration as well as for primary payloads during launch. The availability of water on the moon and near-Earth asteroids makes HYDROS-C appealing as a refuellable propulsion option for future exploration architectures.
- SwRI’s Dr. Craig DeForest, the PUNCH mission Principal Investigator, noted that procuring these complete spacecraft subsystems “off-the-rack” is critical to the PUNCH science. The growing commercial ecosystem for space enables a constellation of four, separate, high-capability spacecraft, within the cost of a single traditionally-built satellite.
- Dr. Rob Hoyt, TUI’s President, said understanding how the sun drives the solar wind is critical to understanding how the sun influences space weather near the Earth as well as the fundamental processes that create solar systems. Tethers Unlimited will contribute the firm's unique communications and propulsion technologies to enable these tiny spacecraft to accomplish such an important scientific mission.
• September 26, 2019: The PUNCH mission has entered Phase B, which marks the transition from concept study to preliminary flight design. The mission, led by Southwest Research Institute, is set to launch in early 2023 and will image the Sun's outer corona and beyond. 4)
- NASA selected SwRI in June 2019 to lead the PUNCH mission. PUNCH consists of four microsatellites the size of suitcases that will orbit the Earth in formation to study how the Sun's atmosphere, or corona, connects with the interplanetary medium, and to provide the first global images of how the solar corona infuses the solar wind with mass and energy.
- "In this phase, our team will advance the mission concept to a preliminary full design of the mission," said Dr. Craig DeForest, scientist and program director in SwRI's Space Science and Engineering Division. "The overall goal for the phase is to refine our existing concept design and make sure all the elements can come together on a practical level."
- Phase B will last nearly a full year. Throughout the process, SwRI will collaborate with the U.S. Naval Research Laboratory (NRL) and the Rutherford Appleton Laboratory in Oxfordshire, England.
- "SwRI's role is to build the four spacecraft and operate the mission, in addition to creating the Wide Field Imager, which is capable of imaging objects a thousand times fainter than the Milky Way," DeForest said.
- The NRL will produce the Narrow Field Imager, which captures the outer corona itself, and Rutherford will contribute the high sensitivity digital cameras used by each of the PUNCH instruments.
- In addition to the primary instruments, PUNCH includes a student-built instrument STEAM (Student Energetic Activity Monitor). The instrument is an X-ray spectrometer that captures a running X-ray spectrum of the Sun, providing valuable diagnostic data that can help the PUNCH team understand how the corona is heated as well as how the solar wind undergoes its initial acceleration from the surface of the Sun.
- "We're very excited to have an instrument created by undergraduate research students from all across Colorado," DeForest said. "The students will gain real, hands-on participation in a NASA project and that kind of experience is invaluable."
NASA has selected two new missions to advance our understanding of the Sun and its dynamic effects on space. One of the selected missions will study how the Sun drives particles and energy into the solar system and a second will study Earth’s response.
The Sun generates a vast outpouring of solar particles known as the solar wind, which can create a dynamic system of radiation in space called space weather. Near Earth, where such particles interact with our planet’s magnetic field, the space weather system can lead to profound impacts on human interests, such as astronauts’ safety, radio communications, GPS signals, and utility grids on the ground. The more we understand what drives space weather and its interaction with the Earth and lunar systems, the more we can mitigate its effects – including safeguarding astronauts and technology crucial to NASA’s Artemis program to the Moon.
“We carefully selected these two missions not only because of the high-class science they can do in their own right, but because they will work well together with the other heliophysics spacecraft advancing NASA’s mission to protect astronauts, space technology and life down here on Earth,” said Thomas Zurbuchen, associate administrator for the Science Mission Directorate at NASA Headquarters in Washington. “These missions will do big science, but they’re also special because they come in small packages, which means that we can launch them together and get more research for the price of a single launch.”
PUNCH: The PUNCH mission will focus directly on the Sun’s outer atmosphere, the corona, and how it generates the solar wind. Composed of four suitcase-sized satellites, PUNCH will image and track the solar wind as it leaves the Sun. The spacecraft also will track coronal mass ejections – large eruptions of solar material that can drive large space weather events near Earth – to better understand their evolution and develop new techniques for predicting such eruptions.
These observations will enhance national and international research by other NASA missions such as Parker Solar Probe, and the upcoming ESA (European Space Agency)/NASA Solar Orbiter, due to launch in 2020. PUNCH will be able to image, in real time, the structures in the solar atmosphere that these missions encounter by blocking out the bright light of the Sun and examining the much fainter atmosphere.
Together, these missions will investigate how the star we live with drives radiation in space. PUNCH is led by Craig DeForest at the SwRI (Southwest Research Institute) in Boulder, Colorado. Including launch costs, PUNCH is being funded for no more than $165 million.
TRACERS: The second mission is TRACERS (Tandem Reconnection and Cusp Electrodynamics Reconnaissance Satellites). This investigation was partially selected as a NASA-launched rideshare mission, meaning it will be launched as a secondary payload with PUNCH. NASA’s Science Mission Directorate is emphasizing secondary payload missions as a way to obtain greater science return. TRACERS will observe particles and fields at the Earth’s northern magnetic cusp region – the region encircling Earth’s pole, where our planet’s magnetic field lines curve down toward Earth. Here, the field lines guide particles from the boundary between Earth’s magnetic field and interplanetary space down into the atmosphere.
In the cusp area, with its easy access to our boundary with interplanetary space, TRACERS will study how magnetic fields around Earth interact with those from the Sun. In a process known as magnetic reconnection, the field lines explosively reconfigure, sending particles out at speeds that can approach the speed of light. Some of these particles will be guided by the Earth’s field into the region where TRACERS can observe them.
Magnetic reconnection drives energetic events all over the universe, including coronal mass ejections and solar flares on the Sun. It also allows particles from the solar wind to push into near-Earth space, driving space weather there. TRACERS will be the first space mission to explore this process in the cusp with two spacecraft, providing observations of how processes change over both space and time. The cusp vantage point also permits simultaneous observations of reconnection throughout near-Earth space. Thus, it can provide important context for NASA’s Magnetospheric Multiscale mission, which gathers detailed, high-speed observations as it flies through single reconnection events at a time.
TRACERS’ unique measurements will help with NASA’s mission to safeguard our technology and astronauts in space. The mission is led by Craig Kletzing at the University of Iowa in Iowa City. Not including rideshare costs, TRACERS is funded for no more than $115 million.
Launch date for the two missions is no later than August 2022. Both programs will be managed by the Explorers Program Office at NASA’s Goddard Space Flight Center in Greenbelt, Maryland. The Explorers Program, the oldest continuous NASA program, is designed to provide frequent, low-cost access to space using principal investigator-led space science investigations relevant to the work of NASA’s Science Mission Directorate in astrophysics and heliophysics. The program is managed by Goddard for the Science Mission Directorate, which conducts a wide variety of research and scientific exploration programs for Earth studies, space weather, the solar system and universe.
• August 1, 2017: NASA has selected Southwest Research Institute (SwRI) to further develop the concept for a small satellite mission to image the Sun’s outer corona. SwRI’s PUNCH (Polarimeter to Unify the Corona and Heliosphere) program was selected for a mission concept study through NASA’s SMEX (Heliophysics Small Explorers Program). 6)
- The PUNCH program proposes a constellation of four suitcase-sized satellites or “smallsats” that will orbit the Earth in formation to study how the Sun’s atmosphere, or corona, connects with the interplanetary medium. PUNCH could one day advance the understanding of how coronal structures fuel the solar wind with mass and energy.
- “The vacuum of space between the planets is not completely empty — it is actually filled with a very tenuous, hypersonic ‘solar wind’ streaming out from the Sun,” said PUNCH team leader, Dr. Craig Deforest, a scientist in SwRI’s Planetary Science Directorate in Boulder, Colorado. “The solar wind arises from the Sun’s corona, which will be visible from Earth during the solar eclipse next month. PUNCH will study how the corona and solar wind are connected by making global images of the poorly understood transition between them.”
- If selected for flight, PUNCH will track and measure the solar wind as it emerges from the solar corona, transitions to interplanetary space, and streams through the solar system, bathing the planets and other solar system bodies. It’s important to understand the direct connection between the star itself and the gusty, turbulent flow near Earth that causes terrestrial “space weather,” which can damage satellites, blackout power grids, and disrupt communication and GPS signals.
- In addition, the PUNCH satellites would track CMEs (Coronal Mass Ejections) as they erupt from the Sun out into interplanetary space. PUNCH will investigate new techniques to predict space weather via three-dimensional imaging.
- “Most of what we know about the solar wind and space weather comes from direct sampling by spacecraft embedded in it,” DeForest said. “This is like understanding global weather patterns based on detailed measurements from a few individual weather stations on the ground. PUNCH is more like a weather satellite that can track and measure a complete storm system as it evolves across an entire region.”
- “The Explorers Program seeks innovative ideas for small and cost-constrained missions that can help unravel the mysteries of the universe,” said Dr. Paul Hertz, director of NASA’s Astrophysics Division and the selection official. “These missions absolutely meet that standard with proposals to solve mysteries about the Sun’s corona, the Earth’s atmosphere and magnetosphere, and the solar wind.”
- In addition, SwRI is contributing to the TRACERS (Tandem Reconnection and Cusp Electrodynamics Reconnaissance Satellites) and FOXSI (Focusing Optics X-ray Solar Imager) proposals also selected for further development by NASA. SwRI’s Dr. Stephen Fuselier is deputy principal investigator of TRACERS, designed to investigate global variability in magnetic reconnection events through new, unique in situ measurements. TRACERS principal investigator is Dr. Craig Kletzing at the University of Iowa, in Iowa City. SwRI’s Dr. Amir Caspi is an instrument lead on FOXSI, a telescope that would detect hot plasma and energetic electrons released by the solar corona. FOXSI principal investigator is Dr. Steven Christe at NASA’s Goddard Space Flight Center.
- If the design studies go well, these missions could launch as early as 2022. The SMEX program provides frequent flight opportunities for world-class scientific investigations from space using innovative, efficient approaches within the heliophysics and astrophysics science areas.
References
1) William J. Kosmann, Mark Tapley, William Wells, Ronnie Killough, ”Polarimetry to UNify the Corona and Heliosphere (PUNCH) Mission Design,” Proceedings of the 70th IAC (International Astronautical Congress), Washington DC, USA, 21-25 October 2019, paper: IAC-19-B4.2.1, URL: https://iafastro.directory
/iac/proceedings/IAC-19/IAC-19/B4/2/manuscripts/IAC-19,B4,2,1,x49270.pdf
2) ”SwRI-led PUNCH mission advances toward 2023 launch,” SwRI Press Release, 27 July 2021, URL: https://www.swri.org/press-release/swri-led-punch-mission-advances-toward-2023-launch
3) ”Tethers Unlimited to Participate in NASA's PUNCH Mission,” Satnews Daily, 10 June 2020, URL: http://www.satnews.com/story.php?number=1261646482
4) ”PUNCH mission to image Sun's outer corona enters Phase B,” SwRI, 26 September 2019, URL: https://www.swri.org/press-release/
swri-led-punch-mission-image-sun-outer-corona-2023-mission-heliosphere
5) Grey Hautaluoma / Karen Fox, ”NASA Selects Missions to Study Our Sun, Its Effects on Space Weather,” NASA Press Release 19-047, 20 June 2019, URL: https://www.nasa.gov/
press-release/nasa-selects-missions-to-study-our-sun-its-effects-on-space-weather
6) ”SwRI small satellite mission moves forward,” SwRI, 1 August 2017, URL: https://www.swri.org
/press-release/swri-small-satellite-mission-moves-forward
The information compiled and edited in this article was provided by Herbert J. Kramer from his documentation of: ”Observation of the Earth and Its Environment: Survey of Missions and Sensors” (Springer Verlag) as well as many other sources after the publication of the 4th edition in 2002. - Comments and corrections to this article are always welcome for further updates (eoportal@symbios.space).
Architecture Science instruments Spacecraft Design Launch Mission Design Development status References Back to top