PROCYON (Proximate Object Close Flyby with Optical Navigation)
Non-EO
JAXA
Exploration
Quick facts
Overview
| Mission type | Non-EO |
| Agency | JAXA |
| Launch date | 03 Dec 2014 |
| End of life date | 12 Mar 2015 |
PROCYON (Proximate Object Close Flyby with Optical Navigation)
Overview Spacecraft Launch Mission Status Experiment (I-COUPS) References
The University of Tokyo (UT) and JAXA/ISAS (Japan Aerospace Exploration Agency/Institute of Space and Astronautical Science) are developing a 50 kg-class microsatellite, named PROCYON, for deep space exploration. The goal is to realize a challenging deep space exploration mission with a small-scale microsatellite in a low-cost project. 1) 2)
The objective of PROCYON is to conduct two missions:
1) Demonstration of a microsatellite bus system for deep space exploration (primary mission)
2) The second (advanced) mission is the close flyby of an asteroid and the scientific observation mission (geocorona imaging mission).
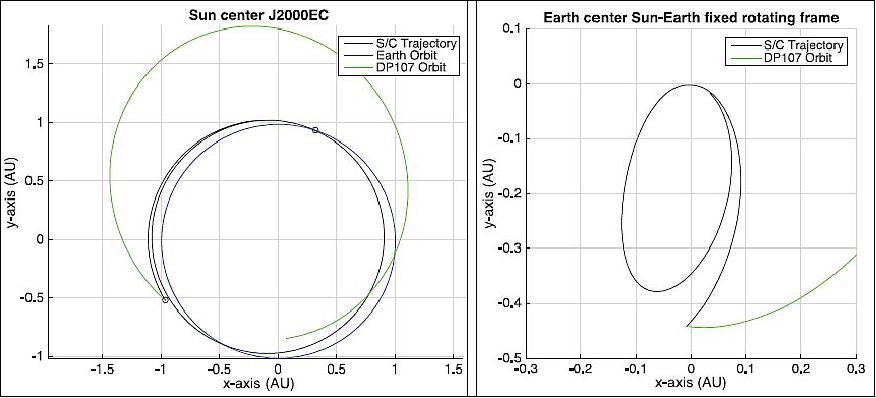
Mission overview: Figure 1 shows the mission sequence of PROCYON. PROCYON will be launched with Hayabusa-2 and initially inserted into an Earth resonant trajectory that allows the spacecraft to come back to the Earth by solar electric propulsion. Within several months after the launch, the first mission (demonstration of the bus system) will be completed. Then, PROCYON will perform a DSM (Deep Space Maneuver) ,using its miniature ion propulsion system so that the spacecraft will come back to the Earth for an Earth swingby.
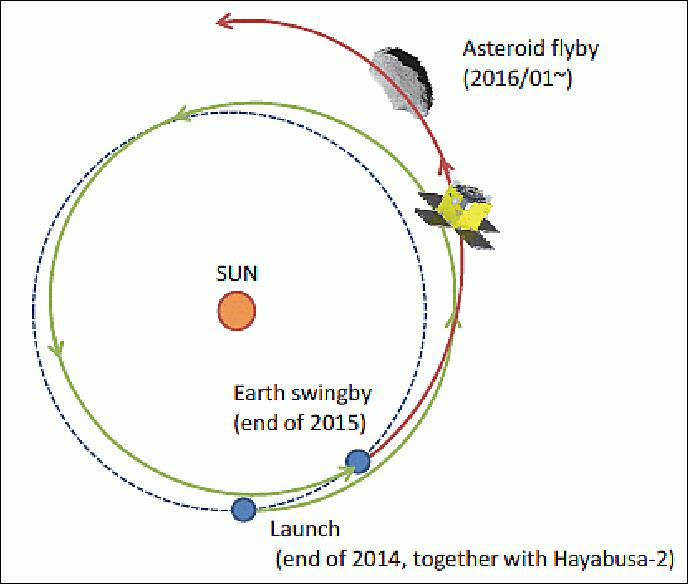
The Earth swingby, which is scheduled at the end of 2015, will direct the spacecraft trajectory to its target asteroid. In the Earth swingby, the project intends not to expand spacecraft velocity (V-infinity), but to change the direction of outgoing velocity — a retargeting maneuver. The Earth swingby will enable the spacecraft to expand a number of candidate asteroids for flyby operations. 3)
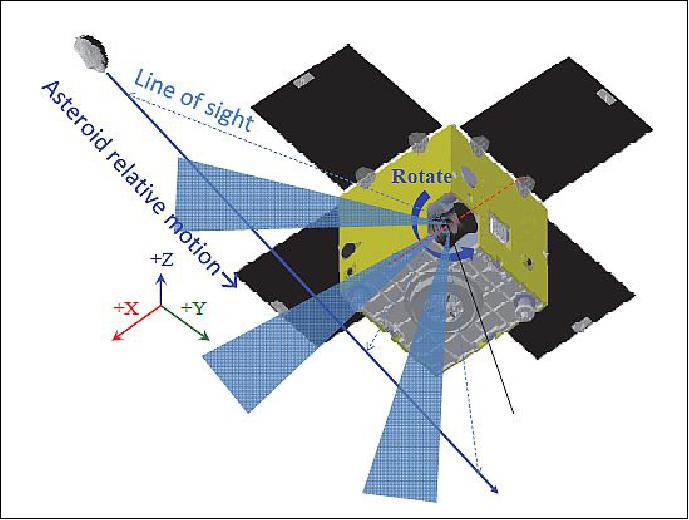
PROCYON will perform a close flyby trajectory, with guidance provided by optical navigation and will pass within 50 km distance from the asteroid. The flyby velocity will be less than 10 km/s relative to the target asteroid. During the close flyby, automatic tracking observation of the asteroid will be conducted using a camera with a scan mirror and onboard image feedback control which enables a LOS (Line of Sight) maneuver, while maintaining the spacecraft attitude (Figure 2).
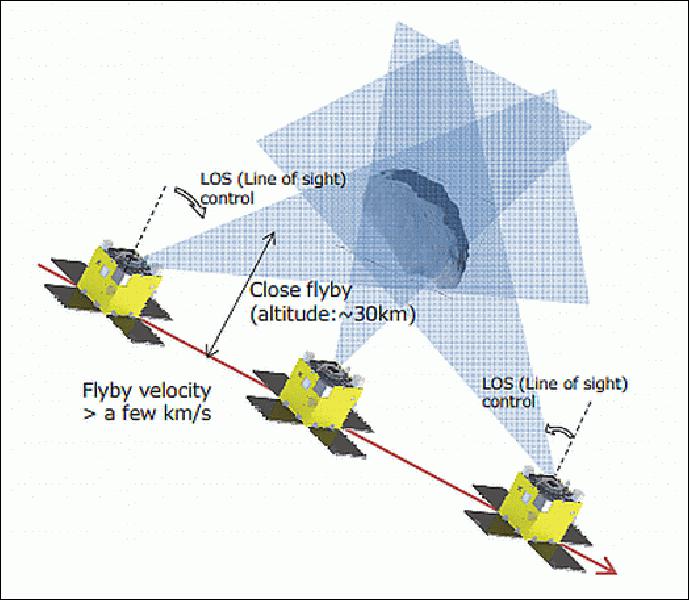
Within several months after the launch, the first mission (demonstration of the bus system) is conducted. Then, DSM (Deep Space Maneuver) using its miniature ion propulsion system is conducted so that the spacecraft will come back to the Earth for Earth swingby. The Earth swingby will direct the spacecraft trajectory to its target asteroid. PROCYON is intended to perform close flyby trajectory guidance by optical navigation and will pass within 30 km distance from the asteroid. The flyby velocity will be 5 -10 km/s relative to the target asteroid. During the close flyby, automatic tracking observation of the asteroid is conducted using a camera with a scan mirror and onboard image feedback control which enables LOS maneuver while maintaining the spacecraft attitude (Figure 3). 4)
Spacecraft
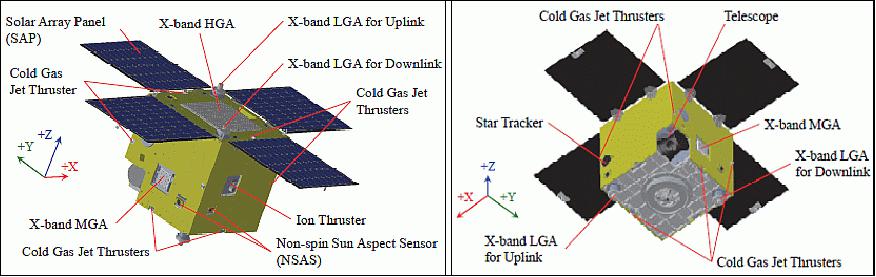
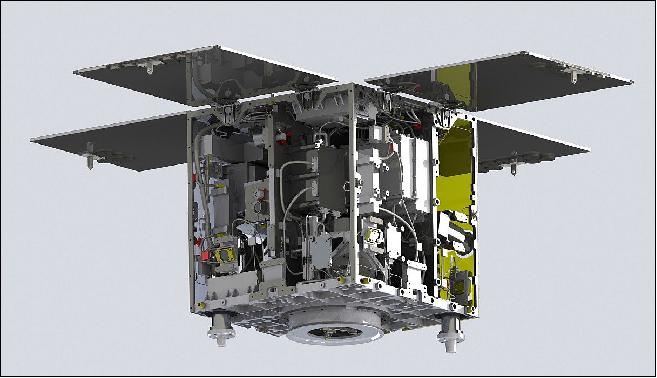
Most of the PROCYON spacecraft bus system is based on that of 50 kg-class Earth-orbiting microsatellite, which enables very quick and a low-cost spacecraft development. The COTS-based deep space communication system and miniature propulsion system are newly developed. The spacecraft is shown in Figure 3.
The spacecraft was developed primarily by the UT (University of Tokyo) and JAXA, in cooperation with a number of Japanese universities, such as Hokkaido University (thermal design), Nihon University (SAP hold & release mechanism), Tokyo Science University (OBC), Meisei University (asteroid observation telescope) and Rikkyo University (geocorona imager). All of the system integration and electrical tests were conducted at the University of Tokyo. System level environmental tests such as vibration test and thermal vacuum test were conducted at CENT (Center for Nanosatellite Testing) at Kyushu Institute of Technology, which is located in the west part of Japan.
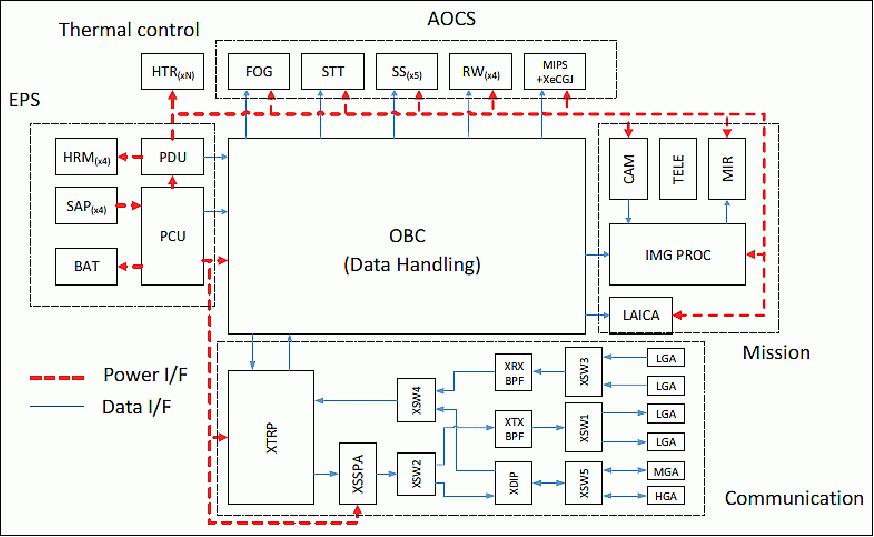
RF communication subsystem: The communication subsystem of PROCYON consists of XTRP (X-band Transponder), a high-power (15 W output) GaN-based SSPA (Solid State Power Amplifier), a tone generator for DDOR (Delta Differential One-way Range) orbit determination, isoflux LGAs (Low Gain Antennas), flat antennas (MGA and HGA) and other passive components (switches, diplexer and bandpass filters). The XTRP and SSPA were newly developed for this mission. Miniaturization is achieved by utilizing COTS (Commercial Off The Shelf) components. The communication subsystem of PROCYON is compatible with the 64 m Japanese deep space antenna, as well as with the DSN (Deep Space Network).
Spacecraft | Size: 0.55 m x 0.55 m x 0.67 m + 4 SAPs (Solar Array Panels) |
AOCS (Attitude and Orbit Control Subsystem) | - Actuators: 4 Reaction Wheels (RW), 3-axis Fiber Optic Gyro (FOG) |
Propulsion subsystem (described below) | - RCS (Reaction Control Subsystem): Xenon cold gas jet thrusters x 8, ~20 mN thrust, 24 s Isp |
RF communications | - X-band (for deep space mission) |
EPS (Electrical Power Subsystem) | - SAP: Triple Junction GaAs, >240 W (at 1 AU, θs = 0, BOL) |
Component | Role | Specification |
FOG (Fiber Optic Gyro) | Angular velocity determination | Range:± 10º/s |
SAS (Sun Aspect Sensor) | Sun direction determination | Accuracy : 1 deg |
STT (Star Tracker) | Attitude determination in the inertial frame | Accuracy (boresight) : 0.02 deg |
RW (Reaction Wheels) | Attitude control | Moment of inertia: 7:16 x 10-4 kgm2 |
CGJ (Cold Gas Jet) thrusters | Angular momentum control | Fuel: Xenon (used as cold gas) |
Development Status
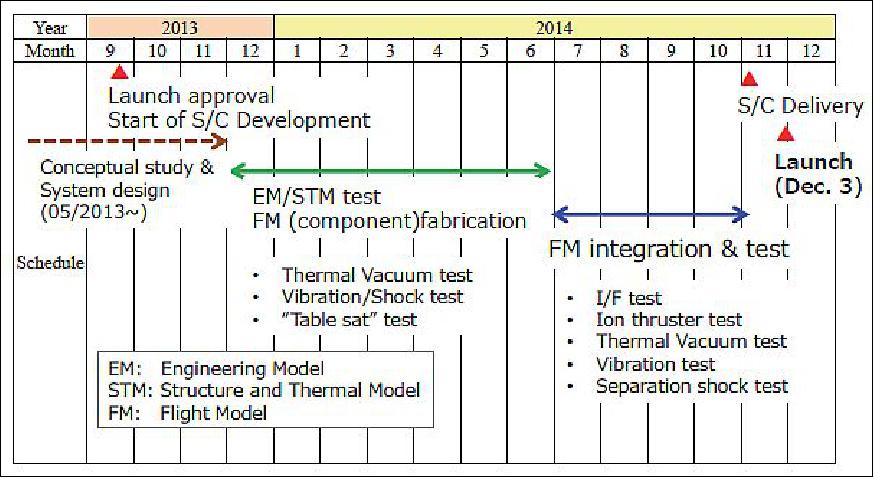
• The integration and test of flight model started on July 2014 (Figure 8), and it completed at the end of October 2014, taking about four months to conduct I/F test, ion thruster end-to-end test, thermal vacuum test, vibration test, and separation shock test. The spacecraft was delivered to JAXA at the beginning of November 2014, which was the end of the one year of the spacecraft development.

• The vibration and thermal vacuum tests for the STM (Structure and Thermal Model) were successfully conducted in March 2014 and in April 2014, respectively.
• The launch of the PROCYON mission was approved in September 2013; since then, the spacecraft has been developed. After the completion of the spacecraft system design, the project team built the STM (Structure and Thermal Model) to verify the mechanical and thermal design of the spacecraft.
Launch
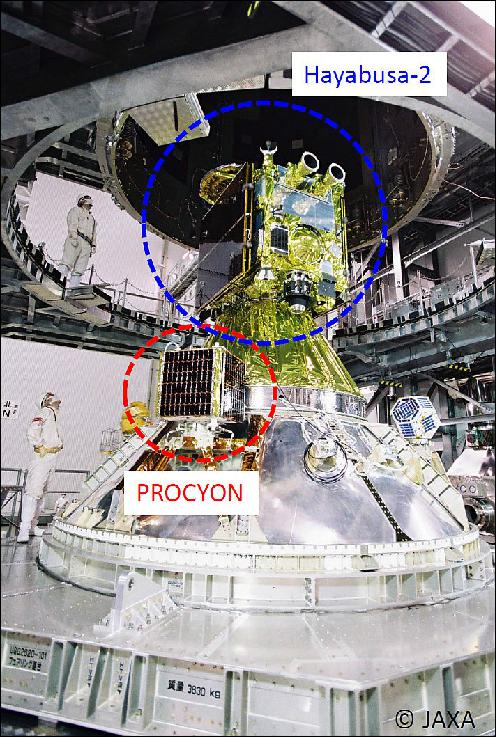
The PROCYON microsatellite was launched on December 3, 2014 (04:22:04 UTC) as a secondary payload to Japan's second asteroid sample return spacecraft, Hayabusa-2 (mass of 600 kg). The mission was launched on the H-IIA 202 launch vehicle No 26 of MHI (Mitsubishi Heavy Industries), the launch site was TNSC (Tanegashima Space Center). 7)
Secondary Payloads
• Shin'en-2, a nanosatellite technology demonstration mission (17 kg) of Kyushu Institute of Technology and Kagoshima University, Japan. The objective is to establish communication technologies with a long range as far as moon. Shin'en-2 carries into deep space an F1D digital store-and-forward transponder which offers an opportunity for earthbound radio amateurs to test the limits of their communication capabilities.
• ArtSat-2 (Art Satellite-2)/DESPATCH (Deep Space Amateur Troubadour's Challenge), a joint project of of Tama Art University and Tokyo University. DESPATCH is a microsatellite of ~30 kg. The microsatellite carries a "deep space sculpture" developed using a 3D printer, as well as an amateur radio payload and a CW beacon at 437.325 MHz.
• PROCYON (PRoximate Object Close flYby with Optical Navigation) is a microsatellite (67 kg) developed by the ISSL (Intelligent Space Systems Laboratory) of the University of Tokyo and JAXA. The objective is to demonstrate microsatellite bus technology for deep space exploration and proximity flyby to asteroids performing optical measurements. 8)
Orbit: PROCYON is launched with Hayabusa-2 and initially inserted into an Earth resonant trajectory that allows the spacecraft to come back to the Earth by solar electric propulsion. Within several months after the launch, the first mission (demonstration of the bus system) is conducted. Then, DSM (Deep Space Maneuver) using its miniature ion propulsion system is conducted so that the spacecraft will come back to the Earth for Earth swingby (Ref. 3).
The Earth swingby will direct the spacecraft trajectory to its target asteroid. PROCYON is intended to perform close flyby trajectory guidance by optical navigation and will pass within 30 km distance from the asteroid. The flyby velocity will be 5 to 10 km/s relative to the target asteroid. During the close flyby, automatic tracking observation of the asteroid is conducted using a camera with a scan mirror and onboard image feedback control which enables a LOS (Line Of Sight) maneuver, while maintaining the spacecraft attitude.
Mission Status
• August 2016: During its one-year deep space flight, PROCYON succeeded in the demonstration of a 50 kg class deep space exploration bus system, which includes a GaN-based SSPA (Solid-State Power Amplifier) with the world's highest RF efficiency; the demonstration of a novel DDOR (Delta Differential One-way Range) orbit determination method; and the world's first demonstration of a micro propulsion system with both trajectory and attitude control capabilities in deep space. Scientific observation by a Lyman alpha imager was also successfully conducted. These successes demonstrate the capability of this class of spacecraft for performing a deep space mission by itself and also demonstrated that it can be a low-cost and flexible tool for future deep space exploration. 9)
- The primary mission of PROCYON is the demonstration of a microsatellite bus system for deep space exploration, which is intended to show that a spacecraft of this scale (~50 kg) can conduct a deep space mission by itself. The secondary mission objectives (advanced missions) consist of engineering and scientific missions to advance or utilize deep space exploration. The engineering mission includes the low-thrust deep space maneuver for performing an Earth swing-by and changing the trajectory to flyby a Near-Earth asteroid and high-resolution observation of a Near-Earth asteroid during a close (<30 km) and fast (~10 km/s) flyby. The scientific mission is the wide-view observation of geocorona with LAICA (Lyman Alpha Imaging Camera) from a vantage point outside Earth's geocoronal distribution.
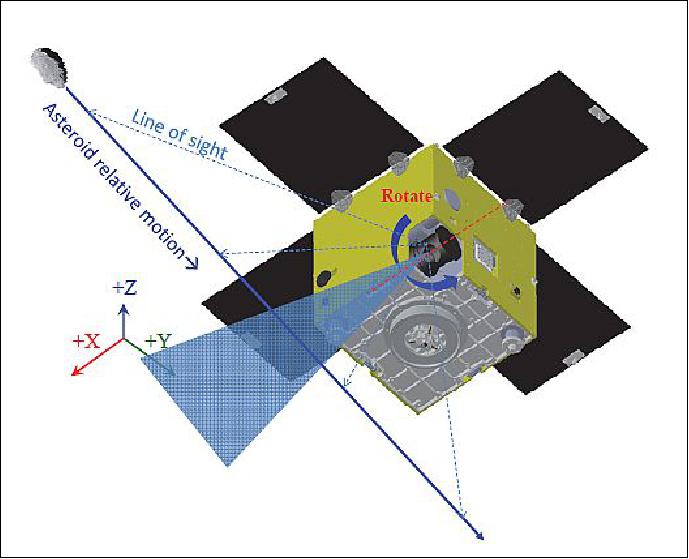
- During the close flyby, automatic tracking observation of the asteroid will be conducted using a camera with a scan mirror and onboard image feedback control, which enables a LOS (Line of Sight) maneuver while maintaining the spacecraft's attitude (Figure 11).
- The goal of the PROCYON project is achieved, which is to demonstrate that a low-cost small-scale spacecraft can be a useful tool for deep space exploration. The success of the PROCYON mission will contribute to the realization of high-frequency and challenging deep space exploration.
• Nov. 2015: After the successful completion of the initial operation (demonstration of the bus system, including the initial checkout of the IES (Ion Engine System), the project started the long time operation of the ion engine for the scheduled Earth swing-by; however, the project faced an ion engine trouble. The project has been trying to recover from the trouble, but the ion engine is still in the same situation. 10)
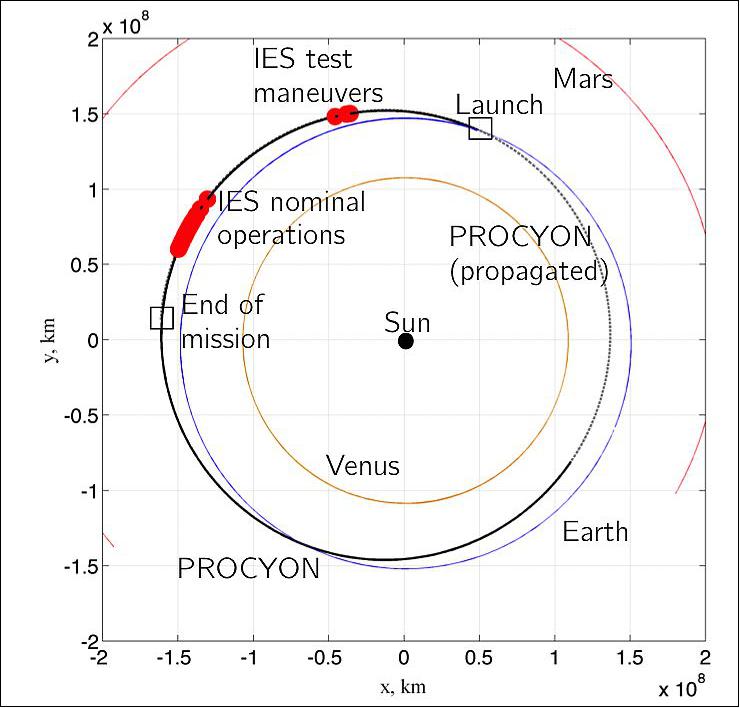
• Oct. 2015: PROCYON is the world's first deep-space microsatellite, and the world's first deep-space mission by an university. The mission primary objective is the technology demonstration of a micro-spacecraft bus for deep-space exploration; secondary objectives include a number of engineering and science experiments, most of which have been successfully executed. One secondary objectives has not been achieved: the flyby of the binary asteroid 2000 DP 107, which is enabled by low-thrust orbit control and an Earth flyby, cannot currently be attained because of a failure of the Ion Engine System (IES). 11)
- Despite this accident, PROCYON demonstrated that deep space exploration by a micro-spacecraft is feasible, and especially, that such a spacecraft can be developed in a little more than a year. Short development times enable frequent and low-cost access to deep-space exploration, with a tremendous impact to the space community, for both scientists and engineers. For this reasons, in the last year both ESA, JAXA and ESA released announcements of opportunities for interplanetary cubesat; the first interplanetary cubesat MARCO will be launched in 2016.
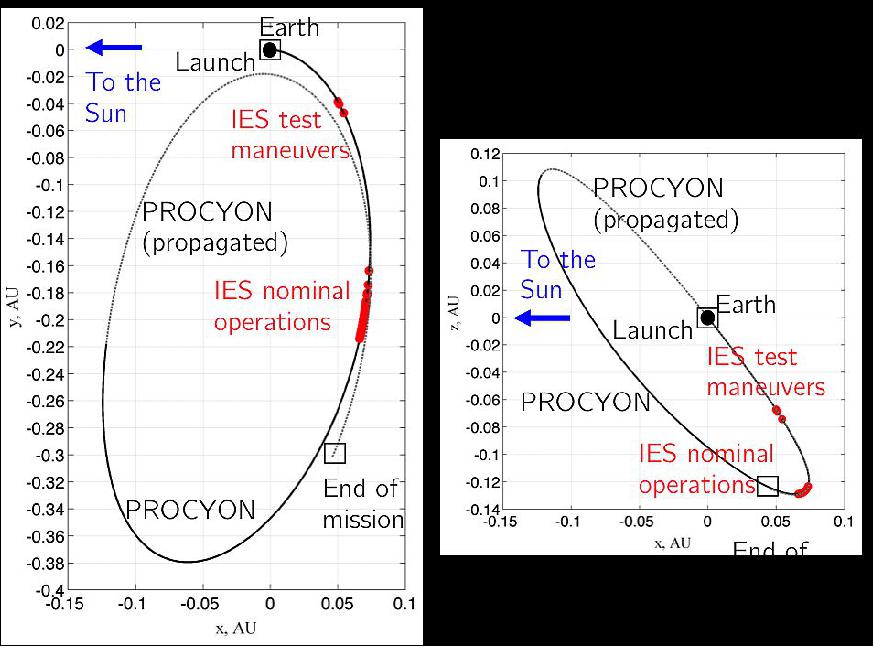
- The PROCYON trajectory is shown in Figure 12 in the ecliptic frame, and in Figure 13 in a Sun-Earth rotating frame, centered at the Earth.
- The advanced mission objective of PROCYON was an asteroid close-flyby observation and optical navigation. The asteroid flyby was the main objective of the low-thrust trajectory design. Unfortunately, in March 2015 a failure in the IES (Ion Engine System) has caused the spacecraft to drift away from its nominal trajectory, and currently no asteroid flyby is planned for PROCYON.
• August 2015: PROCYON's command and telemetry operation is mainly being conducted via Japanese deep space stations (64 m and 34 m antenna). The project is receiving international cooperation from JPL and ESA when DDOR (Delta Differential One-way Range) experiments are being performed, which is an international collaboration experiment between JAXA, NASA, and ESA (Ref. 4).
- During the subsequent initial operation for a couple of months, the demonstration of the deep space microsatellite bus system was successfully conducted. All of the following functions were verified, which demonstrated that the microsatellite has a capability to conduct deep space exploration mission by itself (Table 3).
Overview of Functions
• Power generation/management (>240 W)
• Thermal design to accommodate wide range of Solar distance (0.9~1.5 AU) and power consumption mode (IES on/off)
• 3-axis attitude control with high stability (~0.01º)
• World's first deep space micro communication & navigation system
- High efficiency (GaN SSPA, >30%)
- High output (>15 W)
- Precise navigation by "Chirp DDOR" method
• World's first demonstration of micro propulsion system in deep space, which has both of:
- RCS for attitude control/momentum management (8 thrusters)
- Ion propulsion system, namely IES (Ion Engine System), for trajectory control (Isp=1000 s, thrust=300 µN)
Also, the scientific observation mission (wide-view observation of geocorona) was successfully conducted on January 5, 2015.
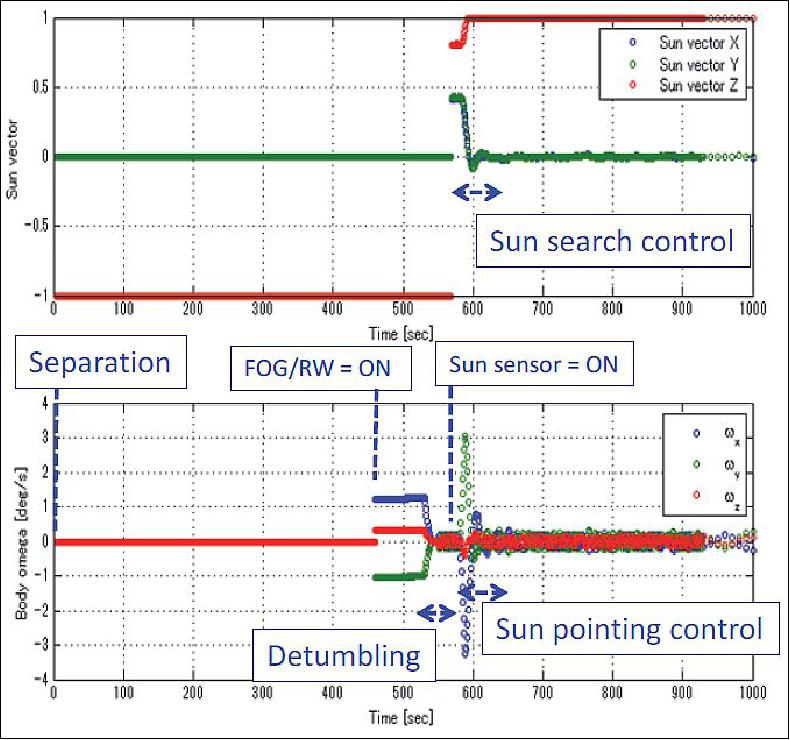
- The PROCYON spacecraft conducted a very smooth autonomous control sequence during the four hours of critical phase until the beginning of the first pass. The spacecraft successfully conducted SAP (Solar Array Panel) deployment, detumbling control, sun search control, and sun pointing control (Figure 14).
• Dec. 4, 2014: The University of Tokyo and JAXA received signals from the Micro deep-space explorer "PROCYON" at 11:51 (UTC) on December 3, 2014 to confirm it had been inserted into the scheduled interplanetary orbit. The satellite is now in its initial operation phase. 12)
• Dec. 3, 2014: The PROCYON microsatellite was separated from the launch vehicle as the last secondary payload at 2 hours 2 minutes and 21 seconds after liftoff (Ref. 7).
Sensor Complement
I-COUPS (Ion thruster and COld-gas thruster Unified Propulsion System)
I-COUPS was designed and developed by UT (University of Tokyo). The I-COUPS is a unified propulsion system of ion thrusters and cold-gas thrusters by sharing the same gas system. The combination of electric and chemical propulsion provides the spacecraft with both high ΔV maneuver and high thrust, in short-time maneuvers. The very simple structure of the cold-gas thrusters and sharing the same gas system with an ion thruster realize a very low-mass and compact reaction control system, suitable for small spacecraft. 13) 14) 15)
The ion thruster provides 250 µN of thrust with a specific impulse of about 1000 s, which is used for DSM. The cold-gas thrusters, which provide about 20 mN of thrust with 24 s of specific impulse, are used for both the reaction wheel desaturation and the asteroid flyby trajectory correction maneuver.
The mass of the propulsion system is <10 kg including about 2 kg of propellant (Xenon). Such a low-mass property is realized by sharing the gas system for both, the ion thruster and the cold-gas thrusters.
I-COUPS description:
Three propulsion capabilities are required for I-COUPS to realize the fly-by observation of small asteroids: 1) reaction control for wheel unloading, 2) high ΔV for the Earth gravity assist, and 3) high thrust for trajectory correction maneuver.
1) Spacecraft in planetary orbit have to install a reaction control system by thrusters. In general, disturbance torques due to solar pressure, atmospheric drag, and misaligned thrust vector change the angular momentum of spacecraft. The momentum is temporally accumulated into reaction wheels of the spacecraft, and is eventually released to the outside before the saturation. In the case of small/microsatellites in LEO, that release, called as "unloading", is conducted by using magnetic torques rather than thrusters in standard-sized spacecraft. However, spacecraft in planetary orbits cannot use the magnetic torques and have to install thrusters for it.
2) One year after the launch and orbit insertion, the spacecraft is performing Earth-gravity assist to change its trajectory toward the asteroid. The re-gathering with Earth requires an orbit transfer with a ΔV of 30 to 100 m/s or more. The exact value of that ΔV depends on the orbit insertion of the main payload, and a secondary payload needs to prepare ΔV as high as possible to fit to various cases.
3) In the final phase, proximity operation mission of the asteroid, the spacecraft has to correct its trajectory within a limited period to fly by the asteroid as close as possible. This period is estimated to a few days, and it requires more than 10 mN of thrust.
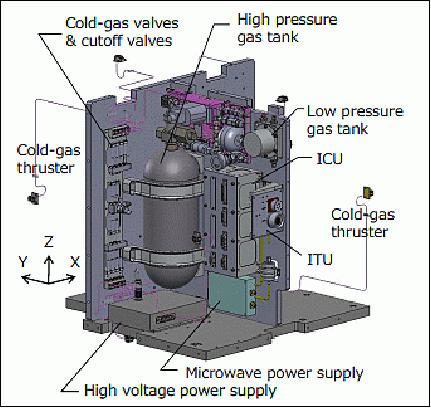
The propulsion system is illustrated in Figure 15. The ion thruster used here provides 300 µN of thrust with a specific impulse of around 1000 s. Hence, a ΔV of 95 m/s, enough for Earth gravity assist, is obtained by half-year thruster operation and 0.47 kg of propellant consumption for a 50 kg spacecraft. The cold-gas thrusters are used for both the reaction control and the trajectory correction maneuver, and a single thruster provides 25 mN of thrust with 24 s of specific impulse. The remarkable feature is the low mass of thruster head, < 10 g, which enables the implementation of eight thrusters for the reaction control system.
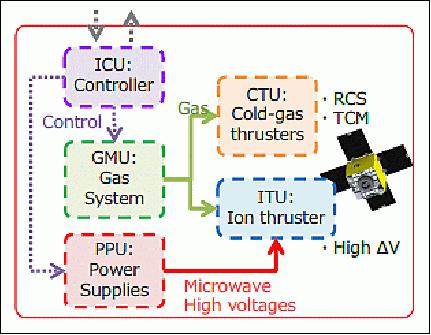
The I-COUPS assembly consists of five units: an ITU (Ion-Thruster Unit), a CTU (Cold-gas Thruster Unit), a PPU (Power Processing Unit), a GMU (Gas Management Unit), and an ICU (I-COUPS Control Unit). A simplified block diagram of the system is given in Figure 16.
The components and structure of I-COUPS are based on the miniature ion propulsion system: MIPS (Miniature Ion Propulsion System), which was developed for the 60 kg, LEO microsatellite Hodoyoshi-4 (launch June 19, 2014). The essential difference from the MIPS is the addition of CTU whose gas is extracted from the xenon GMU. The controller ICU implemented an additional board to handle newly added 12 valves, where eight are thruster valves and four are for the redundancy purposes. The ITU and PPU have no difference from the units as installed in MIPS.
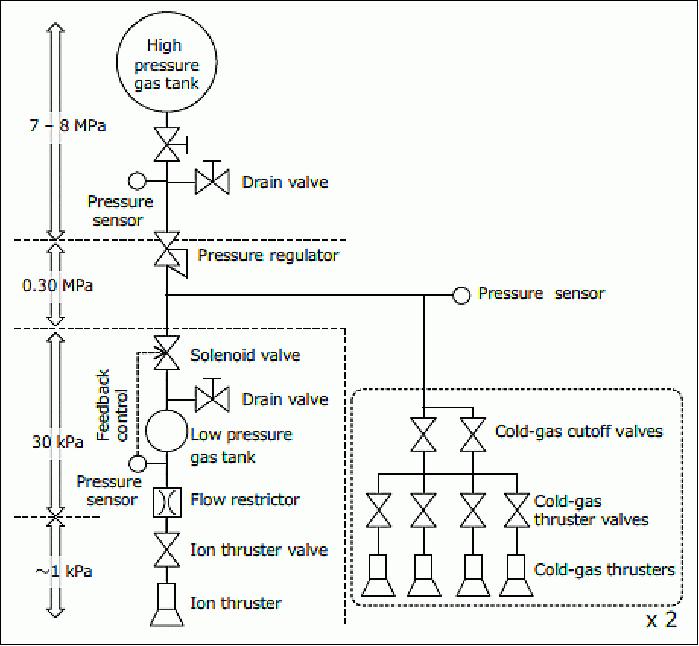
GMU (Gas Management Unit): A GMU controls the xenon flow rate by a "bang-bang control". Pressurized xenon is stored in a CFRP/GFRP tank. The capacity of the tank is 2.0 liter, its dry mass is 1.0 kg, and the service pressure is 19.6 MPa. The nominal charging pressure of the I-COUPS was set to 7.75 MPa at 30°C.
The GMU has a two-staged pressure regulation to provide two different mass flow rates for an ion thruster and cold-gas thrusters. The system diagram of the GMU is shown in the Figure 17. Firstly, the high pressure gas ( 8 MPa) is regulated down to 0.30 MPa by a prefixed mechanical pressure regulator. The gas line is divided to the ITU and CTU at this pressure. In the ITU, the 0.30 MPa gas is further regulated down to about 30 kPa, using a solenoid valve and a pressure sensor. A low pressure tank is installed as an accumulator to extend the control period. The exit of the low pressure tank is connected to the ITU through a flow restrictor. The pressure is controlled depending on the required mass flow rate. In the CTU, 0.30 MPa gas is directly used for cold gas thrusters.
ICU (I-COUPS Control Unit): The ICU is the only electrical interface with the spacecraft OBC (On-Board Computer). The ICU receives commands from the OBC, to open/close all of the valves and to switch on/off of the HVPS (High Voltage Power Supply) and MPS (Microwave Power Source). This control includes the open/close of the solenoid valve to regulate the pressure at the low pressure tank for the gas flow to the ITU. All of the analog telemetries and statuses of the propulsion components are gathered by the ICU and sent to the OBC after the electrical isolations and ADC (Analog-to-Digital Conversion).
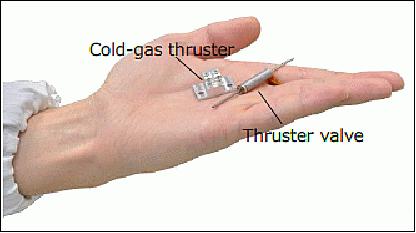
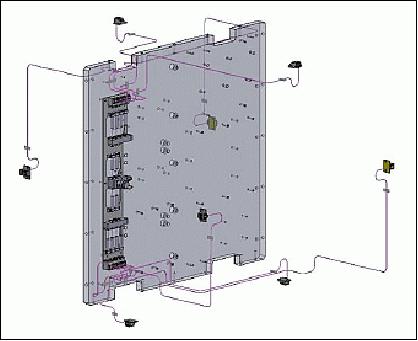
CTU (Cold-gas Thruster Unit): A CTU consists of simple thruster heads and valves shown in Figure 18. The thruster head is made of aluminum and has a conical nozzle and gas inlet port. A set of the thruster, valve, and stainless tube connecting those have a mass of < 25 g. There are a total eight thruster heads on the spacecraft. The operation of the thrusters is controlled by open/close cold-gas valves which are connected at the upstream of each thruster head. The eight thrusters are divided into two groups and parallel connected, two valves are connected at the further upstream of each group. Those valves, called as cut-off valves, are used as redundant systems for opened/closed failures of the cold-gas valves. All of the valves, twelve in total, are installed on a single plate. The locations of each thruster and routing of the tubes are shown in Figure 19. The lengths of stainless tubes range from 200 – 1100 mm.
ITU (Ion Thruster Unit): An ITU consists of an ion beam source, a neutralizer, a thruster valve, a gas distributor, a gas isolator, and DC-blocks. The ion beam source and the neutralizer have ECR (Electron Cyclotron Resonance) plasma sources driven by microwave injection respectively and both sources have almost identical design. Both plasmas need the same amount of microwave power, each typically 1.0 W. The ion beam source installs a two-grid system to accelerate and exhaust ions. The neutralizer installs a four-holed orifice, instead of the grid system, for electron emission. Contrasting to the microwave power, lower gas conductance of the neutralizer orifice causes the half gas flow rate of the neutralizer compared with the ion beam source.
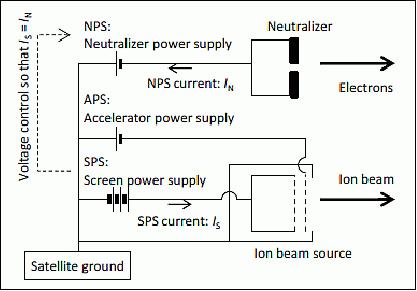
Applying three types of DC voltages to the ITU generates thrust by the ion beam exhaust and its neutralization by the electrons. The three types of voltages are provided by a SPS (Screen Power Supply), an APS (Accelerator Power Supply), and a NPS (Neutralizer Power Supply). Electrical connections of those supplies are shown in the Figure 20. The NPS applies negative voltage to the neutralizer to emit electrons. The voltage of the NPS is controlled such that the NPS current equals to the SPS current. The NPS does not necessarily need the ion propulsion system, if the potential drop of the satellite is accepted to emit the electrons. Actually, a number of ion propulsion systems were operated without this power supply and electrons are emitted by a slight potential drop of the satellite. The reasons the project employs the NPS for the MIPS is to avoid the potential drop and also to monitor the status of the neutralizer (health-check).
PPU (Power Processing Unit): A PPU consists of a HVPS (High Voltage Power Supply ) accelerating ions and generating thrust and a MPS (Microwave Power Source) generating the plasma. The HVPS includes the SPS (Screen Power Supply), the APS (Accelerator Power Supply), and the NPS (Neutralizer Power Supply). All of the power supplies are operated by an unstable 28 V (typically 24-32 V). The output voltage of the SPS is 1.5 kV and its maximum current is at 7.0 mA. The output voltage of the APS is -200 V and its typical current is <50 µA. Output of the NPS can range from 0 to -100 V, depending on the required current and the plasma status. The typical voltage is from -10 to -40 V and this voltage is referred to as the contact voltage. The total energy conversion efficiency was about 50% depending on the output current, where the efficiency was defined as summation of the output powers of three supplies divided by the input unstable 28 V power.
The MPS has two outputs of the microwave power of 1.4 W by each output. The 1.4 W microwaves are transmitted to the ion source and neutralizer, respectively. The semi-rigid cables and DC-blocks, installed between the transmission lines, have a total of 7% transmission loss, and the 1.3 W microwaves are transmitted to the ion source and neutralize, respectively. The MPS includes an oscillator of 4.25 GHz (microwave), GaN amplifiers, dividers, and isolators. The microwave isolators were implemented after the divider on both lines to prevent unexpected coupling by reflected waves.
The final-stage of the amplifier is a GaN-FET, to achieve high energy conversion efficiency. The conversion efficiency of the MPS-BBM (Breadboard Model) showed the maximum efficiency of 48%, from three DC powers to the output microwave power (single output). The three DC voltages are 24 V to the FET (Field-Effect Transistor) drain, -5 V to the FET gate, and 5.0 V for the oscillator. The flight operation of the MPS needs to consider two more efficiencies. DC/DC conversion from an unstable 28 V, which is supplied from the satellite bus; to regulate those three has a typical efficiency of about 70%. Splitting and isolating the output microwave power has an efficiency of about 80%. As a result, the MPS-FM had about 20% of the total efficiency.
Development of STM (Structural and Thermal Model):
The structure and components of PROCYON and I-COUPS are based on Hodoyoshi-3/4 and MIPS, respectively. The development of PROCYON and I-COUPS started from its STM to check the differences. The major difference of I-COUPS from the MIPS is to addition of CTU and modification of GMU. Cold-gas thrusters and its gas tubes are completely new developments. The valves used for CTU are the same as RV and IV of MIPS and have already cleared required environmental tests. As to the GMU, the size of high pressure tank increased from 1.1 L of MIPS to 2.0 L of I-COUPS. The mechanical structure, supporting the tank, was newly designed. Additionally, several modifications were performed to increase the reliability of the GMU, because it is a critical component providing reaction control for the spacecraft. This is in contrast to the Hodoyoshi-4, where MIPS was installed as a mission component, and its failure does not have a fatal impact to the satellite.
LAICA (Lyman Alpha Imaging Camera)
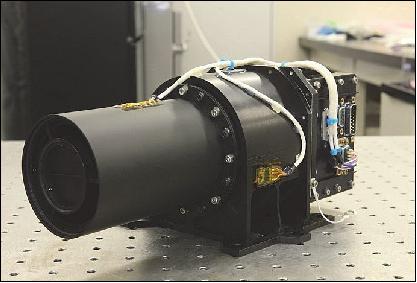
The LAICA instrument is composed of a spherical Cassegrain telescope, a bandpass filter, a detector, and electronics. The detector is composed of a MCP (Microchannel Plate) and a resistive anode encoder, the design of which is similar to the FUV (Far Ultraviolet Detector) for PHEBUS (Probing of the Hermean Exosphere By Ultraviolet Spectroscopy) onboard the Mercury Planetary Orbiter in the BepiColombo mission. Figure 21 shows the flight model of LAICA. Its dimensions are 130 mm x 160 mm x 300 mm, and its mass is 2.14 kg. Using two spherical mirrors, the angular resolution is 0.023° (Ref. 9). 16)
References
1) Ryu Funase, Hiroyuki Koizumi, Shinichi Nakasuka, Yasuhiro Kawakatsu, Yosuke Fukushima, Atsushi Tomiki, Yuta Kobayashi, Jun'ichi Nakatsuka, Makoto Mita, Daisuke Kobayashi, Taku Nonomura, "50kg-class Deep Space Exploration Technology Demonstration Micro-spacecraft PROCYON," Proceedings of the AIAA/USU Conference on Small Satellites, Logan, Utah, USA, August 2-7, 2014, paper: SSC14-VI-3, URL: http://digitalcommons.usu.edu/cgi/viewcontent.cgi?article=3102&context=smallsat
2) Hiroshi Takeuchi, "Status of Delta-DOR-related activities in JAXA," CCSDS Fall 2013, URL: http://cwe.ccsds.org/sea/docs/SEA-D-DOR/Meeting%20Materials/2013.10.San%20Antonio/CCSDS%20Fall%202013%20-%20JAXA%20presentation.pdf
3) N. Ozaki, R. Funase, et al., "Preliminary Mission Design of PROCYON: A MicroSpacecraft to Asteroid", 24th International Symposium on Space Flight Dynamics, Laurel, Maryland, USA, May 2014
4) Ryu Funase, Takaya Inamori, Satoshi Ikari, Naoya Ozaki, Hiroyuki Koizumi, Atsushi Tomiki, Yuta Kobayashi, Yasuhiro Kawakatsu, "Initial Operation Results of a 50kg-class Deep Space Exploration Micro-Spacecraft PROCYON," Proceedings of the 29th Annual AIAA/USU Conference on Small Satellites, Logan, Utah, USA, August 8-13, 2015, paper: SSC15-V-5, URL: http://digitalcommons.usu.edu/cgi/viewcontent.cgi?article=3198&context=smallsat
5) Takahiro Ito, Satoshi Ikari, Toshihiro Nakatani, Masataka Fujimoto, Kaito Ariu, Kenshiro Oguri, Takaya Inamori, Ryu Funase, Shin-ichiro Sakai, Yasuhiro Kawakatsu, "Reliable and Robust Implementation of Attitude Determination and Control Subsystem and Initial Flight Operation Results of 50 kg Class Interplanetary Spacecraft Procyon," Proceedings of the 25th International Symposium on Space Flight Dynamics, Munich, Germany, Oct. 19-23, 2015, URL: http://issfd.org/2015/files/downloads/papers/058_Ito.pdf
6) Ryu Funase, "World's First Deep Space Exploration Micro-Satellite PROCYON-my experience from CanSatto deep space mission," The 3rd UNISEC Global Meeting, The University of Tokyo, Japan, July 3-5, 2015, URL: http://www.unisec-global.org/pdf/uniglo3/procyon.pdf
7) "Launch Success of H-IIA Launch Vehicle No. 26 with "Hayabusa2" Onboard," JAXA Press Release, December 3, 2014, URL: http://global.jaxa.jp/press/2014/12/20141203_h2af26.html
8) Bruno Victorino Sarli, Yoshihide Sugimoto, Chit Hong Yam, Stefano Campagnola, Naoya Ozaki, Hongru Chen, Shintaro Nakajima, Satoshi Ogura, Ryu Funase, Yasuhiro Kawakatsu, Shinichi Nakasuka, "PROCYON Mission: A Micro-Spacecraft to an Asteroid," Proceedings of the 65th International Astronautical Congress (IAC 2014), Toronto, Canada, Sept. 29-Oct. 3, 2014, paper: IAC-14, A3.P, 41
9) Ryu Funase, Takaya Inamori, Satoshi Ikari, Naoya Ozaki, Shintaro Nakajima, Kaito Ariu, Hiroyuki Koizumi, Shingo Kameda, Atsushi Tomiki, Yuta Kobayashi, Taichi Ito, Yasuhiro Kawakatsu, "One-year Deep Space Flight Results of the World's First Full-scale 50-kg-class Deep Space Probe PROCYON and Its Future Prospects," Proceedings of the 30th Annual AIAA/USU SmallSat Conference, Logan UT, USA, August 6-11, 2016, paper: SSC16-III-05, URL: http://digitalcommons.usu.edu/cgi/viewcontent.cgi?article=3348&context=smallsat
10) Information provided by Ryu Funase of the University of Tokyo.
11) Stefano Campagnola, Naoya Ozaki, Yoshihide Sugimoto, Chit Hong Yam, Hongru Chen, Yosuke Kawabata, Satoshi Ogura, Bruno Sarli, Yasuhiro Kawakatsu, Ryu Funase, Shinichi Nakasuka, "Low-thust trajectory design and operations of PROCYON, the first deep-space micro-spacecraft," Proceedings of the 25th International Symposium on Space Flight Dynamics, Munich, Germany, Oct. 19-23, 2015, URL: http://issfd.org/2015/files/downloads/papers/072_Campagnola.pdf
12) "Flight Status of Micro Deep-Space Explorer PROCYON," JAXA Press Release, Dec. 4, 2014, URL: http://global.jaxa.jp/press/2014/12/20141204_procyon.html
13) Hiroyuki Koizumi, Tadashi Inagaki, Yusuke Kasagi, Taro Naoi, Tomoyuki Hayashi, Ryu Funase , Kimiya Komurasaki, "Unified Propulsion System to Explore Near-Earth Asteroids by a 50 kg Spacecraft", 28th Annual AIAA/USU Conference on Small Satellites, Logan, Utah, USA, August 2-7, 2014, paper: SSC14-VI-6, URL: http://digitalcommons.usu.edu/cgi/viewcontent.cgi?article=3105&context=smallsat
14) Hiroyuki Koizumi, Kimiya Komurasaki, Yashihiro Arakawa, "Development of the Miniature Ion Propulsion System for 50 kg Small Spacecraft," 48th AIAA/ASME/SAE/ASEE Joint Propulsion Conference & Exhibit, Atlanta, GA, USA, July 30 - August 1, 2012, doi: 10.2514/6.2012-3949
15) Yosuke Kawabata, Chit Hong Yam, Yasuhiro Kawakatsu, Yoshihide Sugimoto, Ryu Funase, Stefano Campagnola , Naoya Ozaki, Bruno Sarli, Hongru Chen , Satoshi Ogura, Shinichi Nakasuka, "Thruster Parameters Estimation for a Micro Deep Space Explorer: PROCYON," Proceedings of the 25th International Symposium on Space Flight Dynamics, Munich, Germany, Oct. 19-23, 2015, URL: http://issfd.org/2015/files/downloads/papers/157_Kawabata.pdf
16) S. Kameda,I. Yoshikawa, M. Taguchi, M. Sato, M. Kuwabara, "Observation of Geocorona Using Lyman Alpha Imaging Camera (LAICA) Onboard the Very Small Deep Space Explorer PROCYON", 40th COSPAR Scientific Assembly, Moscow, Russia, August 2-10, 2014
The information compiled and edited in this article was provided by Herbert J. Kramer from his documentation of: "Observation of the Earth and Its Environment: Survey of Missions and Sensors" (Springer Verlag) as well as many other sources after the publication of the 4th edition in 2002. - Comments and corrections to this article are always welcome for further updates (eoportal@symbios.space).
Overview Spacecraft Launch Mission Status Experiment (I-COUPS) References Back to Top