PROBA-2 (Project for On-Board Autonomy-2)
Non-EO
ESA
Operational (extended)
Quick facts
Overview
| Mission type | Non-EO |
| Agency | ESA |
| Mission status | Operational (extended) |
| Launch date | 02 Nov 2009 |
PROBA-2 (Project for On-Board Autonomy-2)
Spacecraft Launch Mission Status Sensor Complement Technology Demonstration / Experiment Ground Segment References
PROBA-2 is a follow-on ESA microsatellite technology demonstration mission to the PROBA mission (launch Oct. 21, 2001). The PROBA-2 goals embark on a scientific payload dedicated to sun observations and monitoring (space weather), and innovative platform subsystems with new advanced technologies such as propulsion systems with cold gas generator, Li-ion batteries, stellar compass and reaction wheels, solar array with concentrator, new central processor. The overall PROBA-2 mission includes a major Belgian contribution, on both platform and payload sides, and also on the ground segment part. 1) 2) 3) 4)
In June 2002, ESA released a general AO (Announcement of Opportunity), inviting proposals for the selection of the instrument complement for the PROBA-2 mission. 5) 6) 7)
The technologies and technical concepts envisaged for PROBA-2 include:
• Miniaturized attitude measurement sensors to exploit recent technology advances in micro electro-mechanical (MEM) devices, active pixel arrays and folded optics for the development of high performance and compact measurement sensor
• Attitude control systems for high spatial resolution, targeting actuator performance, advanced pointing capability and control law design
• Propulsion technology for small spacecraft
• Integrated data handling and power subsystem, to decrease the spacecraft platform mass and power, and to improve payload resource allocation
• Automatic code generation for onboard software.
Spacecraft
The PROBA-2 small satellite of the ESA General Support Technology Demonstration Program (GSTP), is being constructed by a consortium led by Verhaert Design & Development of Belgium, a subsidiary of QinetiQ, UK (Note: In Sept. 2005, QinetiQ bought the Verhaert Design and Development N. V. of Kruibeke, Belgium now referred to as QinetiQ Space N V). The technology demonstrations are in the field of avionics, spacecraft attitude control, power system and spacecraft propulsion. 8) 9) 10)
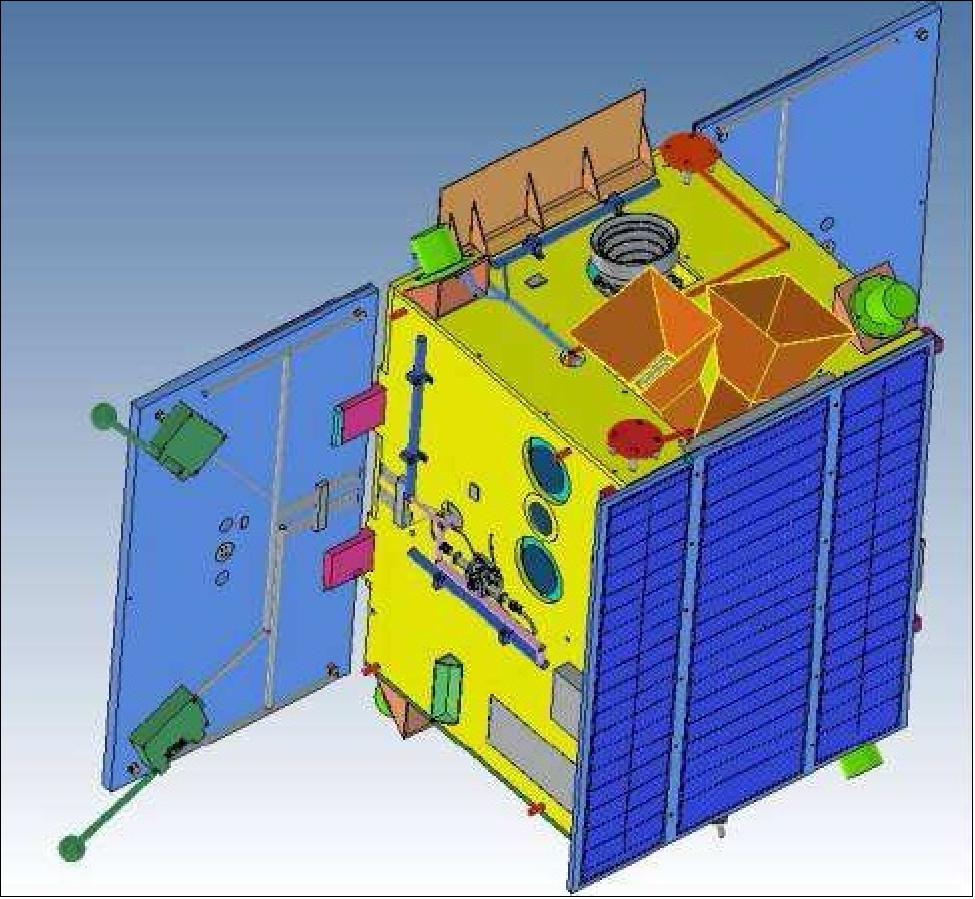
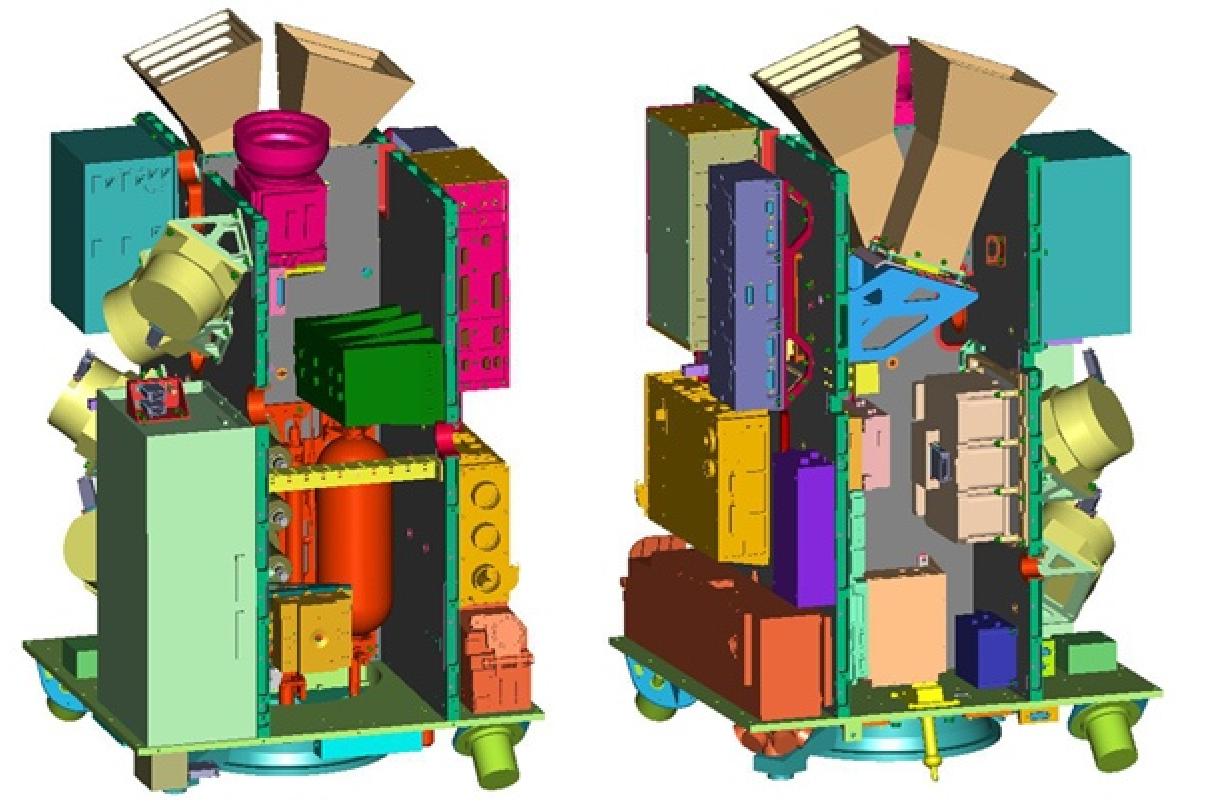
• The S/C platform is of PROBA-1 heritage. It uses an aluminum structure and CFRP (Carbon Fiber Reinforced Plastic) honeycomb panels. The carrying part of the structure is composed of 3 aluminum honeycomb panels mounted in an H-structure and a bottom board.
• ADPMS (Advanced Data and Power Management System), a next-generation avionics technology package, developed by Verhaert Space with ESA funding. The overall objectives are to make a larger percentage of the S/C resources available for the payloads. The ADPMS system design merges two bus units into one, where the DHS (Data Handling System) + PCS (Power Conditioning System) = ADPMS. Actually, the following conventional subsystem functions were merged under ADPMS into one system: 11) 12) 13) 14)
- PCS (Power Conditioning System)
- PDU (Power Distribution Unit)
- DHS (Data Handling System)
- MMU (Mass Memory Unit)
- PPU (Payload Processing Unit)
This results into resource optimization with a volume reduction of > 30% (smaller surface mount components), a mass reduction of 50%, and a power consumption reduction of 50% (low voltage technologies from 5 V to 3.3 V; PCI backplane back on signal reflection). A highly modular cPCI (Compact Peripheral Component Interface) bus is used. The ADPMS interfaces are distributed over the cPCI boards. The main modules consist of a processor board with memory, a TM/TC board, a spacecraft interface board, one or more data-acquisition boards, a camera board with mass memory and a reconfiguration board. Furthermore the integrated power system consists of a power conditioning module, several power distribution modules, and a cPCI power supply module.
All digital functions are implemented using custom logic in form of FPGAs. The computer boards communicate with each other via a high speed PCI backplane while communication to the power boards occurs via direct commanding. The design complexity and testability of the ADPMS have been significantly reduced by the implementation of some well-proven industrial specifications resulting in a higher uniformity of the FPGA and board designs.
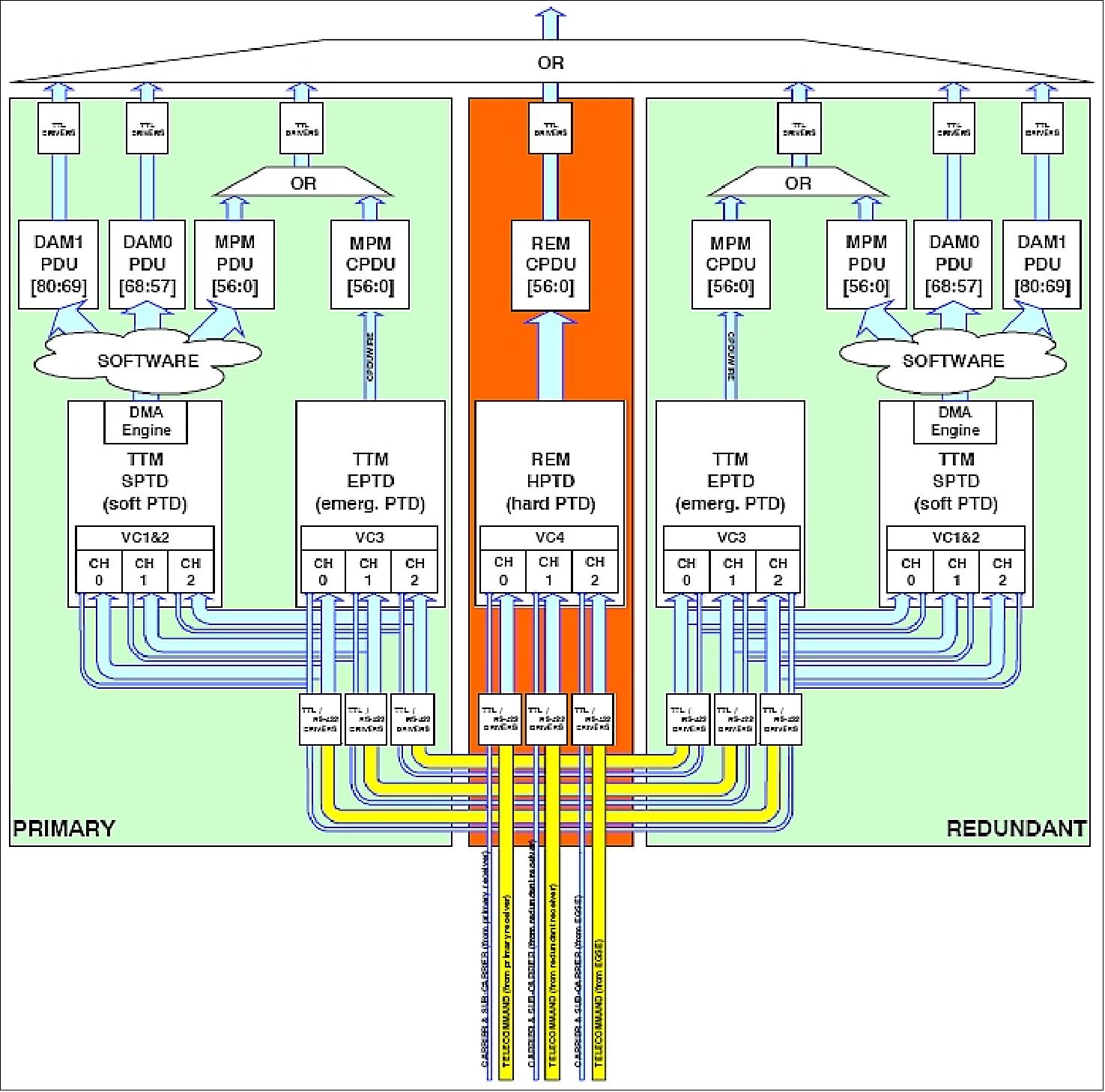
The ADPMS architecture defines a standard two-lane system with a switchover redundancy scheme. The nominal lane is fully powered and controls the platform, while the redundant lane is powered off. ADPMS implements two cold redundant nominal TC-decoders and compensates for the fact that they are cold redundant by the addition of a reconfigure and emergency command unit (RECU).
The ADPMS development has benefited from today's rapid evolution of electronics, by the usage of low power, low voltage components. The selection of lightweight connectors and the extensive utilization of surface mount technology. Furthermore the recent availability of large, radiation tolerant FPGA's made it possible to replace several smaller FPGA's and ASIC's by highly integrated System-on-a-Chip designs.
Thanks to the small form factor of the electronic boards the ADPMS housing has a limited height and the possibility to expand in the length while maintaining the same height. This makes this unit very suitable for small satellites with a high level of integration or a large payload to accommodate. The availability of test spy connectors on the opposite side of the box compared to the real flight connectors allows the box to be mounted on the satellite in a way that easy test access is guarantied even after full spacecraft integration. The thermal control of the box is fully passive and the box has been designed for vibration levels compliant with a wide range of launchers facilitating the selection of a piggyback launch.

Backplane data traffic | Up to 1.6 Gbit/s, multiprocessor support |
Processor board | - designed for 100 MHz operation with tunable clock frequency |
Telecommand | - 2 Mbit/s uplink capability (RS422) |
Telemetry | - 100 Mbit/s downlink (LVDS/RS422) |
Mass memory | 4 Gbit (with EDAC) |
Communication interfaces | - Up to 25 UART (Universal Asynchronous Receiver/Transmitter) channels (RS422) |
Analog interfaces | - Up to 80 analog inputs |
Power conditioning | - Max satellite peak power 300 W |
Power distribution | - 24 outputs of 28 V / 50 W |
Service functions | - H/W generated emergency telemetry |
Budgets | - Instrument mass: < 12 kg |
Parameter | PROBA-1 | PROBA-2 |
S/C mass distribution | ~30% for payloads | ~40% for payloads |
OBC (Onboard Processor) | ERC32 SPARC V7 | LEON2-FT, SPARC V8 from Atmel |
Bus performance increases | Peripheral FIFOs | DMA+Ring-buffers, PCI backplane at 33 MHz |
Power conditioning |
|
|
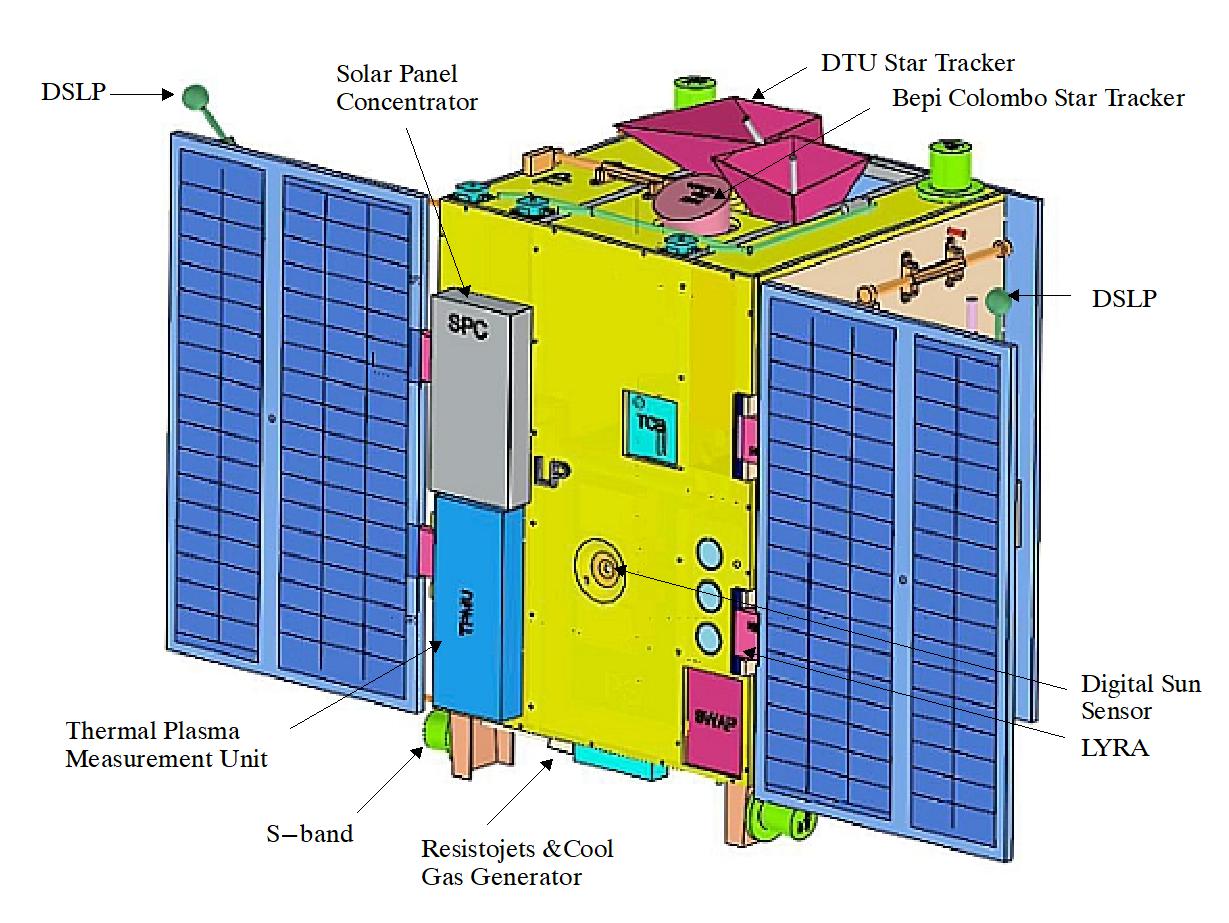
• The AOCS (Attitude and Orbit Control Subsystem) employs an autonomous CCD star tracker called µASC (micro Advanced Stellar Compass). The description of µASC is given under "Technology demonstrations" below. In addition, out-of-the-loop demonstration attitude sensors include an APS (Active Pixel Sensor) autonomous star tracker (AA-STR of Selex Galileo (former Galileo Avionica), a digital sun sensor (of TNO), two magnetometers (one magneto-resistive and one advanced fluxgate) and a fiber optics gyroscope.
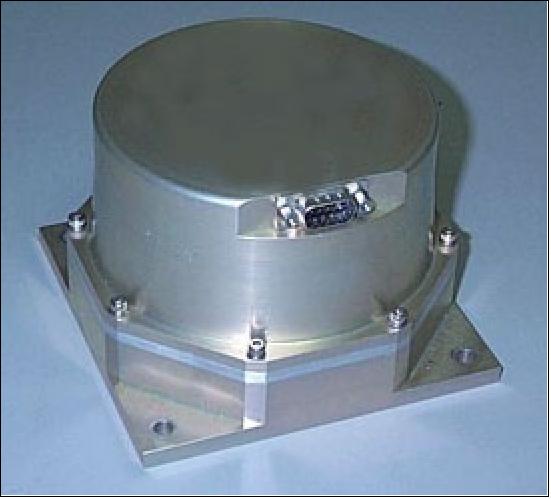
Reaction wheels (MicroWheel 1000 of Dynacon, Canada), evolving from those of the MOST [(Microvariability and Oscillations of Stars) a microsatellite mission of CSA, Canada] satellite, are the main actuators while conventional rod magneto-torquers are used for off-loading and for the safe de-tumbling mode. Instrument size = 129 mm x 129 mm x 88.5 mm, mass = 1.3 kg, speed range = 10,000 rpm, angular momentum capacity = 0.2-1.1 Nms (configurable), torque capacity = 30 mNm.
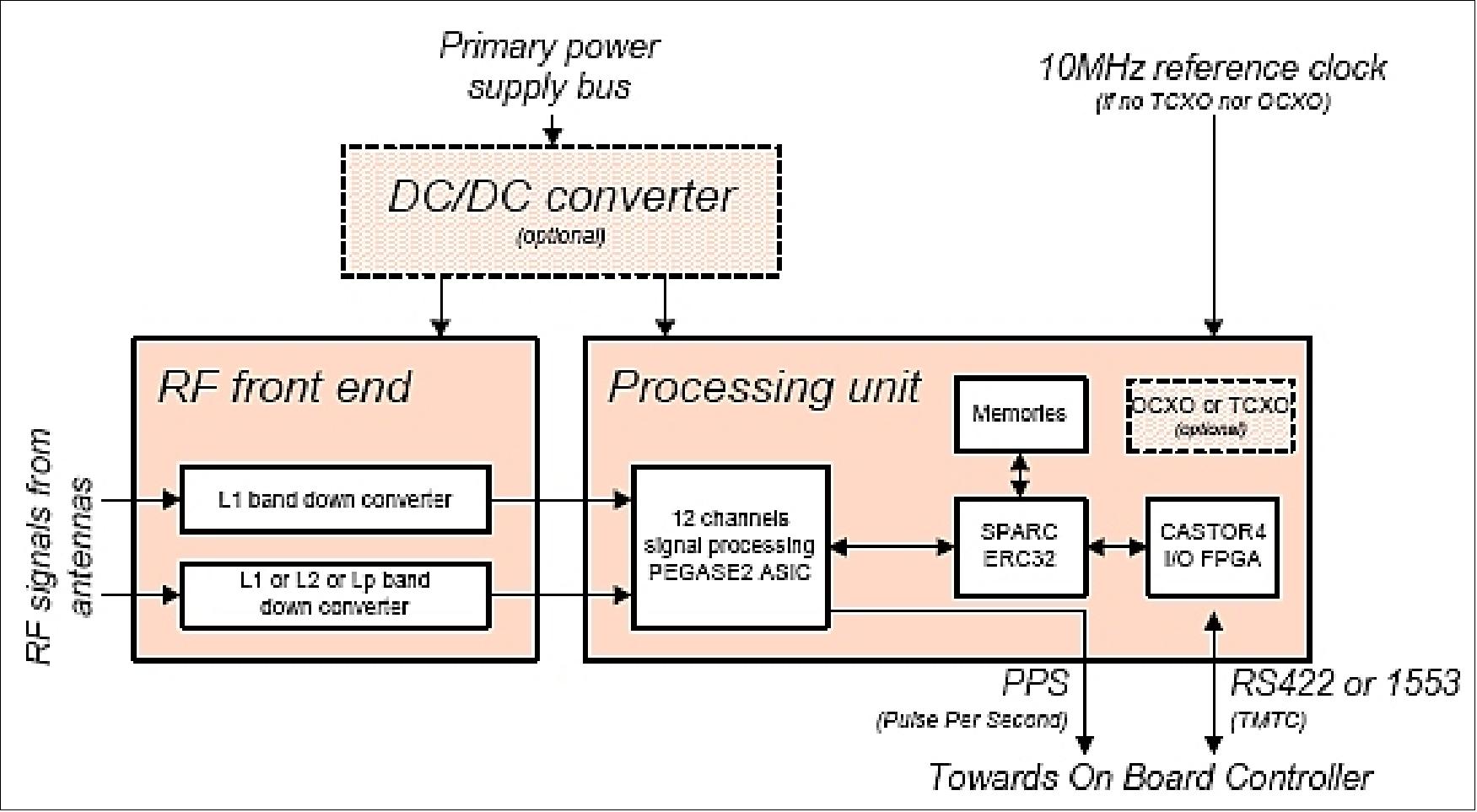
PROBA-2 employs a redundant set of Phoenix GPS receivers provided by DLR. These are miniature receivers specifically designed for high dynamics space applications. The set is based on SigTech's commercial-off-the-shelf MG5001 receiver board, but operates a proprietary firmware developed by DLR. Specific features of the Phoenix receiver software for LEO applications include optimized tracking loops for high accuracy code and carrier tracking, precision timing and integer ambiguities for carrier phase based relative navigation, a two-line elements orbit propagator for signal acquisition aiding, and an attitude interface to account for non-zenith pointing antennas in the channel allocation process. In general, the COTS single board low-power GPS receiver set (Phoenix) is used for routine navigation and time correlation.
In addition, a dual-frequency GPS space receiver, TopStar 3000 G2, (also referred to as T3000 G2) with L1 C/A and L2CS signal reception of TAS (Thales Alenia Space) and CNES is being used for demonstration purposes. The new more compact GPS receiver, developed under ESA and CNES contracts by TAS, implements innovative functions. Pseudolite tracking capability will be of most interest if the secondary lobes of future IIF GPS satellites radiate less than current IIA and IIR satellites. Processing of the L2CS signal will allow correction of the ionospheric propagation delay, thus allowing precise orbit determination on ground or radio-occultation applications. 15)
• Electric power is provided by triple-junction GaAs solar cells. The solar cells are body mounted on 1 panel and mounted on 2 deployable panels (Figure 1). The battery system uses Li-ion cells. A battery-regulated, centrally switched 28 V bus distributes the power to the units and the instruments. The power-bus topology, that has been selected for the ADPMS, is a battery regulated bus built around the effective utilization of a Li-Ion battery.
• SPCGG (Solid Propellant Cool Gas Generator) technology developed by TNO [Netherlands Organization for Applied Scientific Research/Physics and Electronics Laboratory (The Hague and Delft, The Netherlands)] and Bradford Engineering. The cold gas propulsion system, referred to as COGEX (Cool Gas Generator Experiment), demonstrates a resistojet using xenon for orbit maintenance applications. Solid-state cold gas generators re-inflate the tank with nitrogen as Xe is depleting. Four nitrogen cool gas generators will fly on the PROBA-2 satellite to feed the resistojet-based propulsion system already on board. PROBA-2 will provide demonstration the technology in space. 16)
• OBC: A high-performance computer, based on the radiation hardened LEON2-FT RISC processor, provides the computing power to the platform and for instrument data processing. It accommodates the memory for house-keeping data storage as well as a mass memory for the payload image data. This unit provides sufficient computing power to perform not only the traditional attitude control and data handling tasks, but also spacecraft autonomy as well as instrument data processing (image analysis and compression).
The PROBA-2 minisatellite has a launch mass of = 120 kg, a size of 60 cm x 70 cm x 85 cm (these dimensions exclude the two deployable solar panels), a peak power of 120 W, and a design life of 2 years.
System | Item | Description |
AOCS | Attitude control | 3-axis stabilized providing high accuracy sun-pointing, nadir, and off-nadir pointing capabilities |
Sensors | - Cold redundant dual head, advanced micro star trackers, | |
Actuators | 3 redundant magnetorquers, 4 reaction wheels | |
Absolute pointing accuracy | Better than 75 arcsec (2σ) | |
Absolute pointing knowledge | Better than 10 arcsec (2σ) | |
Avionics | Processor | Cold redundant radiation tolerant LEON2-FT RISC processor |
Memory | 64 MB + 4 Gbit RAM (EDAC protected), 4 MB FLASH | |
Interfaces | RS422, TTC-B-01, analog and digital status lines, direct high speed packetwire interface to Telemetry. Compact PCI boards for integration in main computer | |
Uplink communications | Hot redundant S-band receivers, 64 kbit/s | |
Downlink communications | Cold redundant S-band transmitters, 1 Mbit/s | |
Protocol | CCSDS packet standard | |
Power | Solar panels | - 1 body-mounted GaAs panel and 2 deployable GaAs panels, |
Battery | Li-ion, 11Ah, 28V | |
Power conditioning system | 28V battery regulated power bus, redundant battery charge and discharge regulators, power distribution system and shunt regulators. | |
Thermal |
| Mainly passive thermal control, heaters for battery |
Software | Operating system | RTEMS (Real-Time Executive for Multiprocessor Systems) |
Data handling/application software | Based on PROBA-1 and SMART-1 onboard software as well as newly developed for PROBA-2 | |
Spacecraft | Platform size | 60 cm x 70 cm x 85 cm |
Total mass | 120 kg | |
Design life | 2 years |

Launch
The PROBA-2 spacecraft was launched on Nov. 2, 2009 as a secondary payload to the SMOS satellite of ESA. Use of a Rockot launch vehicle (the 3rd stage of Rockot is Breeze-KM) of Eurockot Launch Services. The launch site was Plesetsk, Russia. The first burn of Breeze-KM was to acquire an elliptical transfer orbit. The second burn served to circularize the orbit to its nominal parameters.
Some 70 minutes after launch, SMOS successfully separated from the Rockot's Breeze-KM upper stage. Shortly thereafter, the satellite's initial telemetry was acquired by the Hartebeesthoek ground station, near Johannesburg, South Africa. The upper stage then performed additional maneuvers to arrive at a slightly lower orbit and PROBA-2 was released too, some 3 hours into flight. 17)
Orbit
Sun-synchronous circular orbit, mean altitude = 725 km, inclination =98.44º, local equator crossing time at 6:00 AM on ascending node (dawn-dusk orbit), orbit period of about 100 minutes. The targeted orbit is eclipse-free for 9 months per year, thus making the orbit well suited for the solar observing instruments. Maximum eclipse duration during the eclipse season is less than 20 minutes.
RF Communications
S-band with an uplink data rate of 64 kbit/s (SPL-PCM directly phase-modulated on the carrier is used for the uplink). The S-band with suppressed carrier modulation (BPSK) allows communication with the spacecraft at downlink data rates of up to 1 Mbit/s. The CCSDS protocol is being used in uplink and downlink. — The PROBA-2 spacecraft is being operated from ESA's Redu ground station in Belgium.
Mission Status
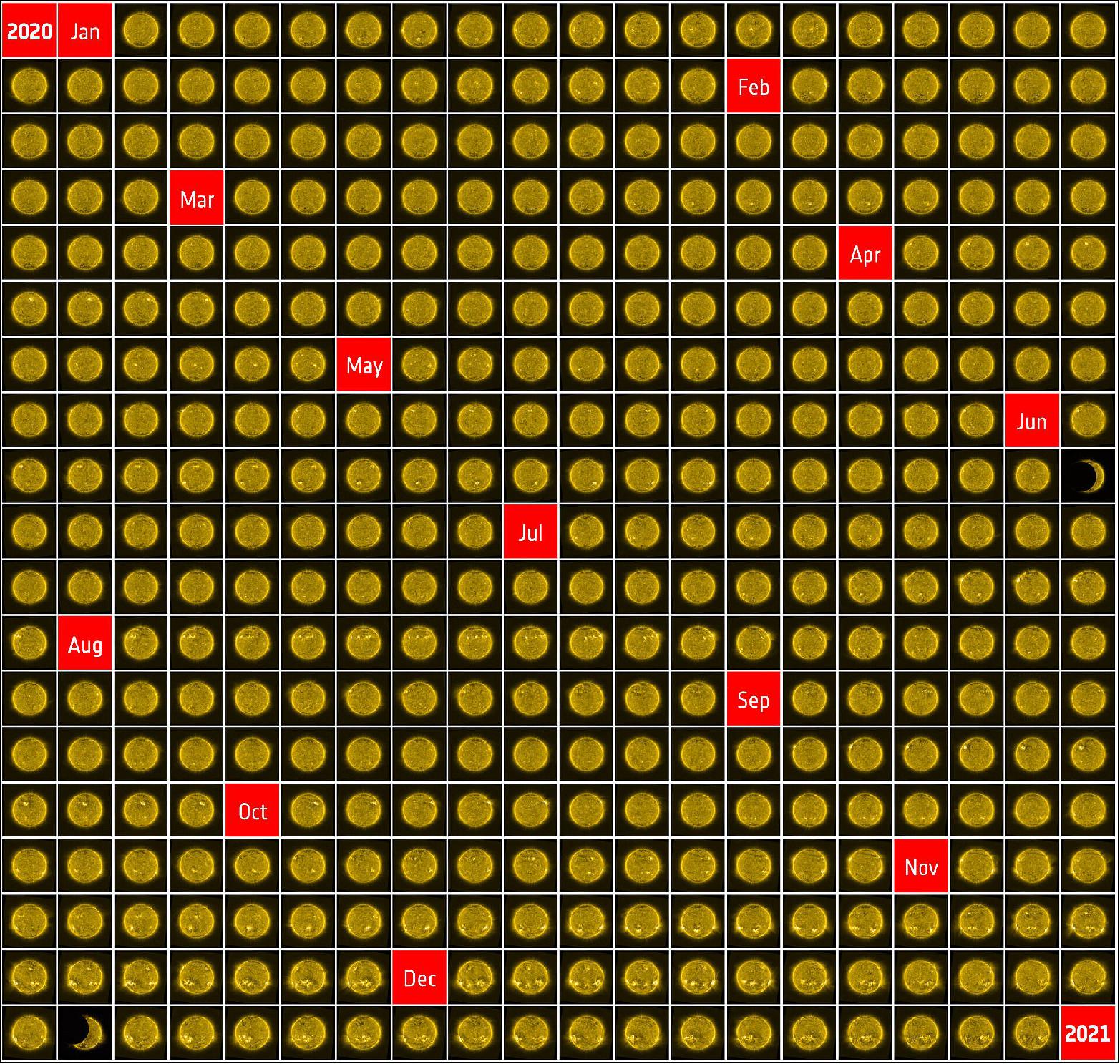
• January 7, 2021: These 366 images of the Sun were made by ESA's PROBA-2 satellite in 2020 (Figure 11). 18)
- 2020 marked the start of a new solar activity cycle – cycle 25 – which lasts about 11 years on average. At the beginning of the year the Sun still showed low levels of activity, but at the end of the year it already showed signs of waking up.
- In the images of November and December, multiple active regions are visible. These regions represent areas of intense magnetic activity that can produce some of the most dramatic space weather events, such as solar flares and coronal mass ejections. One of these powerful ejections was captured by the ESA/NASA Solar and Heliospheric Observatory (SOHO) on 29 November.
- 2020 was an important year for solar research, with the launch of ESA's Solar Orbiter mission on 10 February. One of the key questions for ESA's Solar Orbiter mission is to understand what drives the 11-year solar cycle.
- With its suite of 10 state-of-the-art instruments, Solar Orbiter will perform unprecedented close-up observations of the Sun and from high-latitudes, providing the first images of the uncharted polar regions of the Sun, and investigating the Sun-Earth connection. The mission will provide unprecedented insight into how our parent star works and how we can better predict periods of stormy space weather.
- PROBA-2 has already supported Solar Orbiter during the mission's preparation, as technology heritage has passed from the satellite's SWAP imager to the Solar Orbiter Extreme Ultraviolet Imager. PROBA-2 will continue observing the Sun and supporting scientific campaigns on Solar Orbiter and other missions in the coming years.
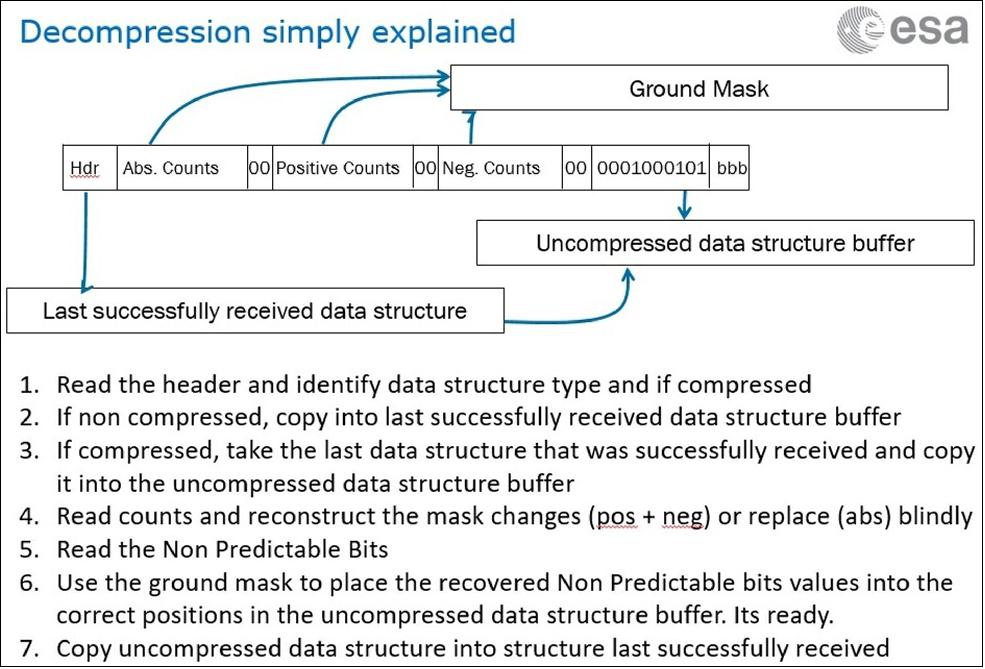
• March 17, 2020: The smarter space missions become, the more ‘housekeeping' data they generate. In theory, this is good news, enabling greater oversight for ground controllers. But with communication links limited in capacity, floods of this telemetry data risk crowding out payload data – the scientifically or commercially valuable information the mission is there to provide. A new ESA-patented data compression method, soon available for use by all missions, helps prevent this from happening. 19)
- ESA spacecraft operations engineer David Evans has invented a family of telemetry compression methods, one of which is about to turned into a data compression standard by the Consultative Committee for Space Data Systems (CCSDS), a multinational forum for the development and sharing of data standards and best practices.
- "Telemetry isn't payload data" explains David. "Bandwidth is always limited and if stuff isn't payload data, it's not productive. It's overhead, basically, taking up space that could otherwise be used to make money or do science.
- "The challenge is that the amount of telemetry has gone up tremendously, while our bandwidth hasn't. There are thousands and thousands of parameters available; we need to get as many as possible of them into the ground system, as fast as possible, without affecting the main mission.
- "I got involved with a project on smart telemetry to do just that, but discovered it was more complicated than it seemed. While there is a lot of redundancy in telemetry, it simply doesn't compress well with simple, fast algorithms. We tried it with one standard CCSDS compression software and the size of our data actually expanded!"
- The problem comes down to the way that housekeeping data are structured. There is a mix of all different types and lengths of information. David adds: "It's like having of dozens of different authors all writing their own books in various languages, but it's all being written down together at the same time.
- "This causes problems for compression algorithms that are searching for repeated elements then avoiding having to transmit them all. There's no way an algorithm can sort this mess out to find the repetition without some help to work out what's what."
- Data from the various parameters have some factors in common – imagine if they are all variations on the sentence ‘the cat runs up the hill.' But with the data coming in real time, word after word, then there is little ability to find and reduce the repetitious elements.
- Instead David's approach was to scrutinize the data differently, switching point of view to adopt a sentence level overview instead of word-by-word. "We make what is called a mask, assuming the standard sentence is ‘the cat runs up the hill.' We don't need that sent to us, just to notify us about the times when the mask changes – such as ‘the cat runs down the hill', ‘the dog runs up the hill' – and say what the changed word is."
- His first attempt was based on pre-processing of stored telemetry data, but David went on to realize that mission teams actually needed real-time compression to compress data packets as they are created. He invented a software system called POCKET, which was tested aboard ESA's technology demonstration minisatellite PROBA-2.
- "That showed it worked well overall, with an average fivefold compression factor, but it depended on a complex ground configuration to keep synchronized with the satellite," adds David. "The PROBA-2 experience taught us how painful this could be. So I began working on a follow-on, POCKET+, that could update its configuration automatically, without ground synchronization.
- "Meanwhile I met someone from the European Patent Office. I was under the understanding you can't patent software, which is true, but it turns out you can patent the method behind the software. So when I got back to ESA, I got in touch with our own patents team.
- "Because 'd already published papers about my first compression method we couldn't patent that in Europe but we could in the USA if we were fast enough. It was a steep learning curve but we managed to raise e the first patent submitted by someone working at ESA's ESOC mission control center in Darmstadt, in a quarter of a century." David went on to submit three more successful patents in the POCKET series over the next ten years.
- David found the patent process to be valuable in various ways. "To start with, it's an endorsement. Whenever someone tries to do something new, there's resistance, and the first line of resistance is ridicule: your idea's no good. Having a patent confirms not only that your idea works but that it's genuinely new – the patent lawyer carries out a thorough survey of the present state of the art to ensure this.
- "As a matter of fact, that has helped stimulate the development process. In preparation for my second patent the patent team found that a researcher called Paul Staudinger had actually developed almost exactly the same pre-processing approach for ground-based databases. I was devastated!
- "We found this out the week before I was going before the patent board, and it meant I'd have to modify what I was doing or drop it. I remember staying up all night and thinking about how it could be improved , and it was then I came up with a way of compressing the stream of housekeeping data in real time.
- "It's a good process because it's intellectually challenging. It demands you explain in simple terms why your invention is useful, what's new about it and what would the market be."
- It is POCKET+ that is being adopted as a new CCSDS standard for telemetry data compression, once a rigorous process of endorsement by global space data experts is complete.
- In the meantime David has also developed and patented a further member of the family, POCKET++, which delivers added performance in certain circumstances.
- In parallel, he has opened up opportunities to perform much greater in-orbit testing of experimental software approaches, by devising and leading ESA's OPS-SAT mission. Launched in December 2019, OPS-SAT is a flying software laboratory with a powerful onboard computer expressed designed for the live testing of novel control systems.
- "From my POCKET experience, I found that the problem with any new idea like this is that it is difficult to get anyone to take it seriously until it has actually flown in space – which obviously has been really hard with mission-critical software. With OPS-SAT, that changes, and all kinds of innovative concepts will be tried out for real, so they can be taken further forward faster."
- The family of patents related to the telemetry compression methods invented by David Evans are managed by ESA's Technology Transfer and Patent Office (TTPO) and available for licensing by European companies for space and terrestrial applications.
- The TTPO also finances technology transfer ‘de-risking' activities in order to prove the relevance of a technology/know-how for another technology field.
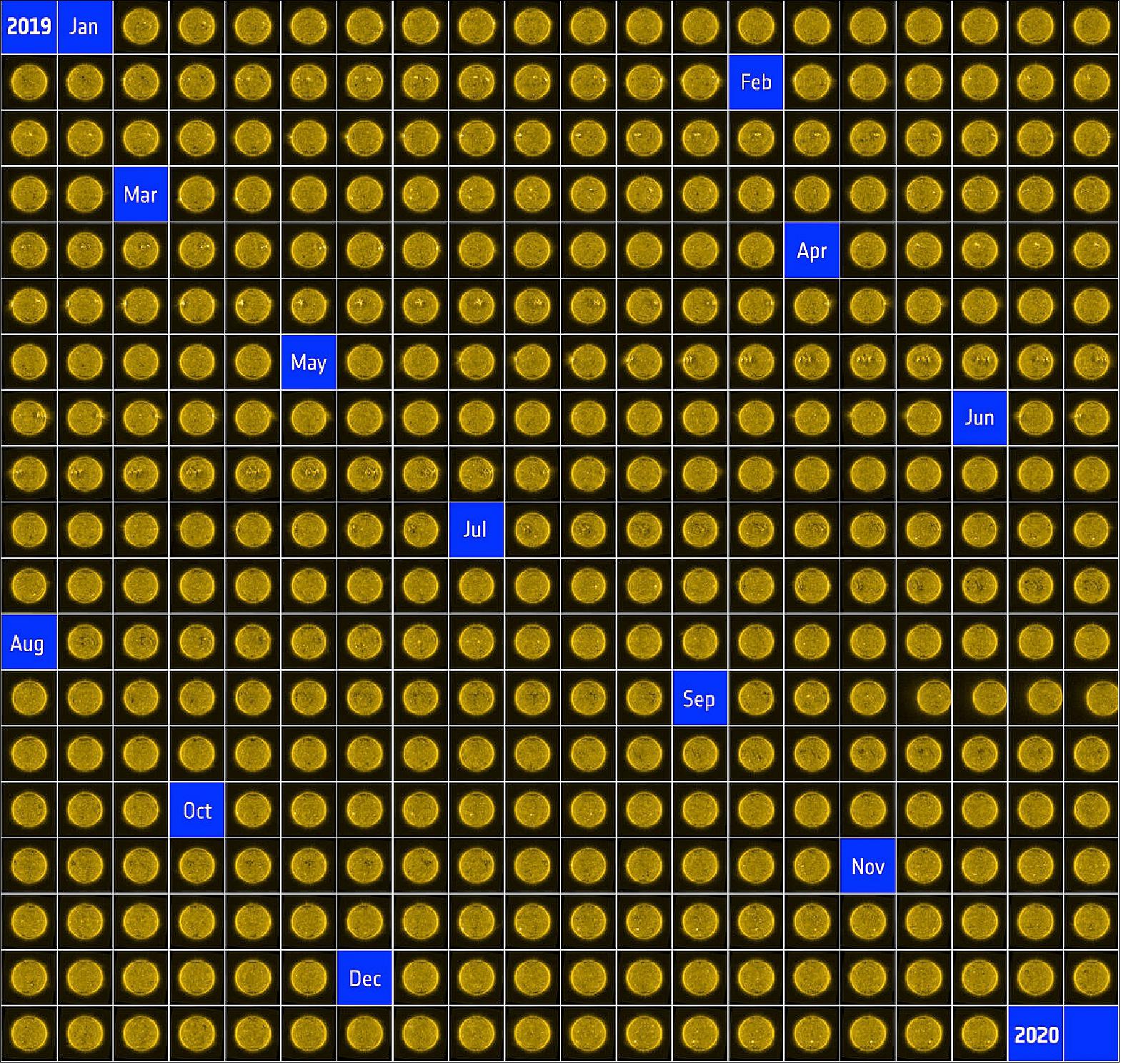
• January 20, 2020: The PROBA-2 satellite is continuously monitoring the Sun – one image was selected to represent each day of the year in this montage of 365 Suns. The images were taken by the satellite's SWAP camera, which works at extreme ultraviolet wavelengths to capture the Sun's hot turbulent atmosphere – the corona, at temperatures of about a million degrees. 20)
- Throughout 2019, the Sun showed low levels of activity, as it is currently at the minimum of its 11-year activity cycle. The most energetic flare of the year was observed on 6 May close to the eastern limb of the Sun (the left side of the Sun in the corresponding image). It was classified as a C9.9 class flare that divides solar flares according to their strength. The smallest are A, followed by B, C, M and X, with each letter representing a ten-fold increase in energy output such that an X-class flare is 100 times stronger than a C-class flare.
- PROBA-2 also performed various scientific campaigns in 2019. One of these campaigns is evident in the images above in early September, where the Sun is positioned to one side of the images. Throughout this period PROBA-2 provided extended images of the solar atmosphere to the east of the Sun, in support of a scientific study performed with NASA's Parker Solar Probe mission. To make these observations the whole satellite was reoriented to observe more of the solar atmosphere.
- PROBA-2 will continue to support scientific campaigns and missions throughout 2020, including ESA's Solar Orbiter mission, which is scheduled for launch on 5 February 2020 from Cape Canaveral, Florida, USA. PROBA-2 has already supported Solar Orbiter during the mission's preparation, as technology heritage has passed from the satellite's SWAP imager to the Solar Orbiter Extreme Ultraviolet Imager.
- With its suite of 10 state-of-the-art instruments, Solar Orbiter will perform unprecedented close-up observations of the Sun and from high-latitudes, providing the first images of the uncharted polar regions of the Sun, and investigating the Sun-Earth connection. The mission will provide unprecedented insight into how our parent star works in terms of the 11-year solar cycle, and how we can better predict periods of stormy space weather.
• November 12, 2019: ESA's PROBA-2 had a ring-side seat for the transit of Mercury on 11 November 2019. 21)
- Solar transits – where a celestial body is seen to pass across the solar disc from the perspective of Earth – are relatively rare events. Mercury undergoes around 13 transits a century, and will not occur again until 2032.
• November 10, 2019: Last week marked a milestone for ESA's PROBA-2 satellite: 10 years of operation in orbit around the Earth. Since its launch on 2 November 2009, PROBA-2 has probed the intricacies of the Sun and its connection to our planet, imaging and observing our star and investigating how it drives all manner of complex cosmic phenomena: from solar eruptions and flares to closer-to-home space weather effects. 22)
- Characterizing this part of the Sun is a key element of PROBA-2's solar science observations. Solar activity is closely tied to the space weather we experience closer to Earth. Understanding more about how the Sun behaves – and how this behavior changes over time, including whether it may be predictable – is crucial in our efforts to prepare for space weather events capable of damaging both space-based and terrestrial communications systems.
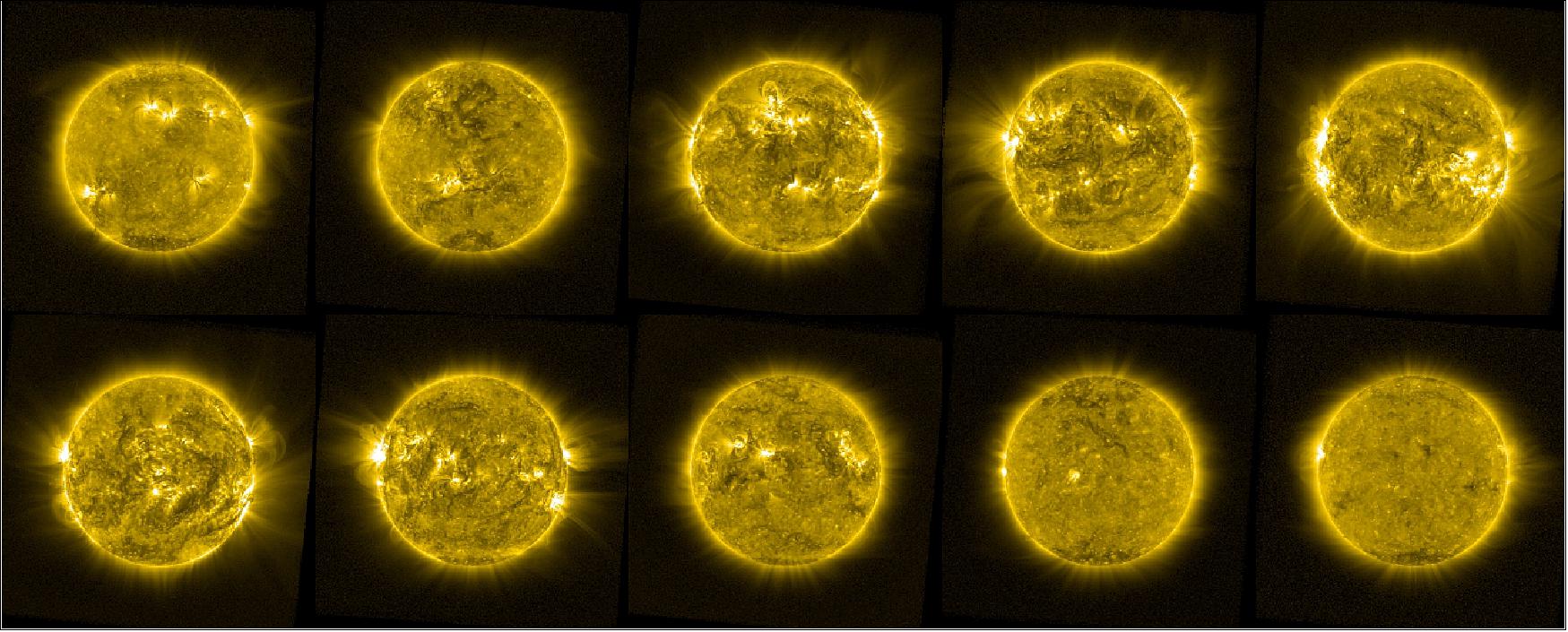
- The Sun's activity has a cycle of about 11 years, with the presence and strength of phenomena such as flares, coronal mass ejections, dark ‘coronal holes' and bright ‘active regions' fluctuating accordingly. These images were taken by PROBA-2's extreme-ultraviolet SWAP (Sun Watcher using APS detectors and image processing) instrument, and show a snapshot of the Sun in January or February of each year from 2010 to 2019 (with the oldest frame on the top left, and the most recent to the bottom right). This mosaic of Figure 15 thus neatly shows the variability in the solar atmosphere in beautiful detail, demonstrating how this cycle affects the Sun. The Sun begins in a phase of low activity (solar minimum: top left) in 2010; enters a phase of increasing activity and then shows highest activity in 2014 (solar maximum: top right). It slowly calms down again to enter a low-activity phase in 2019 (another minimum: bottom right).
- As its name suggests, PROBA-2 is the second satellite launched under ESA's ‘Project for Onboard Autonomy' umbrella: a series of small, low-cost missions that are testing a wide array of advanced technologies in space. These missions are helping us understand and develop everything from solar monitoring to vegetation mapping to autonomous Earth observation. Future members of the PROBA family will also be equipped to create artificial eclipses by flying two satellites together in formation to block the bright disc of the Sun for hours at a time, so that scientists can better observe fainter regions that are usually outshone.
- For now, Proba-2 will continue to monitor the Sun, including an upcoming celestial event: the satellite's SWAP camera will observe Mercury today as it transits across the face of the Sun, an event that only takes place around 13 times per century and will not occur again until 2032.
• November 4, 2019: Ten years ago, a small satellite carrying 17 new devices, science instruments and technology experiments was launched into orbit, on a mission to investigate our star and the environment that it rules in space. 23)
- On 2 November, 2009, PROBA-2 began its journey on board a Rockot launcher from the Russian launch base, Plesetsk, and was inserted into a Sun-synchronous orbit around Earth.
- Tracing this ‘dusk-dawn' line – where night meets day – PROBA-2 maintains a constant view of the Sun, keeping its batteries charged and its target in sight.
- The second in ESA's ‘Project for Onboard Autonomy' series, PROBA-2 is so advanced it is able to look after itself on a day-to-day basis, needing just a small team at the Agency's control station at ESEC (European Space Security and Education Center) in Redu, Belgium, to run the mission. The center has been operational since 1 January 1968. It occupies an area of 29,000 m2 (2.9 hectar), of which 3000 m2 are developed. Technical areas include control centers, technical equipment rooms and antenna bunkers. ESEC provides S-band links for ESA's network of ground stations, as well as in-orbit testing (IOT) for telecommunication and navigation satellites for which hosts all the facilities used to test the Galileo signal.
Instrumental Solar Observations
- PROBA-2 has two main solar instruments, SWAP and LYRA, designed for studying events at the Sun that could impact Earth.
- SWAP takes images of the Sun's corona, the roughly 1 million degree plasma-filled atmosphere that surrounds the star.
- With an extremely wide field-of-view, SWAP is able to see structures around the edge of the Sun, such as huge outbursts of hot matter known as coronal mass ejections, sudden flares releasing enormous amounts of light as well as eerie ‘coronal holes', dark shadowy regions spewing out fast-moving solar wind.
- The LYRA instrument monitors the Sun's ultraviolet output, and is able to make up to 100 measurements per second. This high rate means the instrument can make detailed studies of fast-moving ‘transient' events such as solar flares.
A Stellar Record
- During its decade in space, the small satellite - < 1m3 - has:
a) Orbited the Earth ~53,000 times
b) Produced ~30,000 LYRA data files on solar ultraviolet emission
c) Produced ~2,090,000 SWAP images of the solar disk
d) Passed our ground stations in Redu, Belgium and Svalbard, Norway (Arctic) 32,453 times
e) Helped produce more than 100 peer-reviewed papers.
What's Next for PROBA-2
- One of the many mysteries of our star is the way its activity rises and falls in 11 year cycles. From one cycle to the next, the Sun's north and south poles trade places and the number of flares, coronal mass ejections, sunspots and coronal loops fluctuate from many per day in active periods to weeks without any when it is quiet.
- In 2020, the 11th year of the PROBA-2 mission, it will have been monitoring the Sun for a full solar cycle.
- This landmark period will allow the satellite to probe the Sun's evolution over the long term, comparing the current quiet period with the last solar minimum, and ready for when the Sun again ‘wakes up' in 2024/2025.
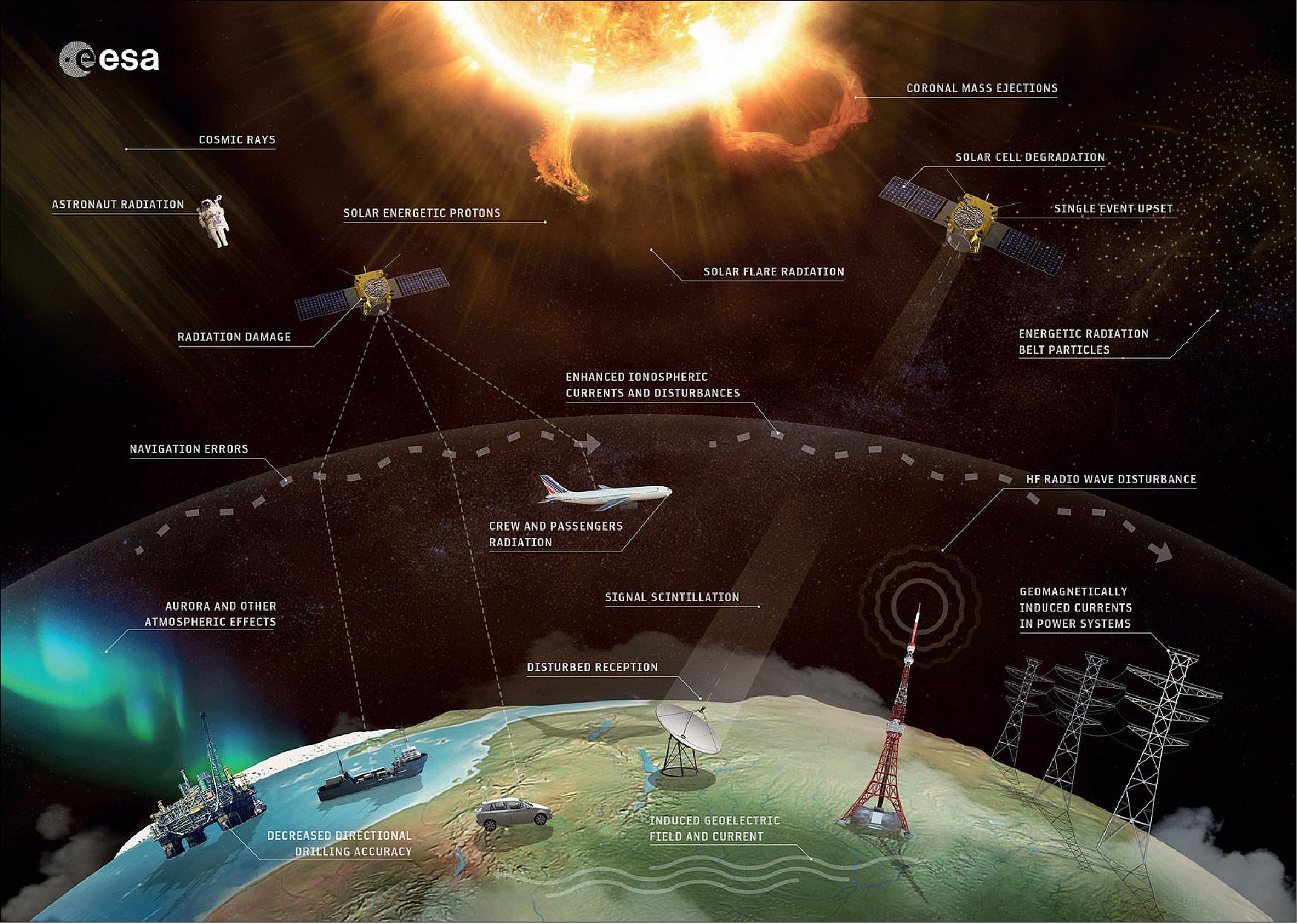
Space Weather Effects
- Unpredictable and temperamental, the Sun makes life on the innermost planets of the Solar System impossible due to intense radiation and colossal amounts of energetic material that it blasts in every direction, creating the ever-changing conditions in space known as ‘space weather'.
- At Earth, extreme solar events have the potential to disrupt and damage infrastructure in space and on the ground, and intense bursts of radiation threaten future explorers to the Moon and Mars.
- ESA's Space Weather Office, part of the agency's Space Safety activities, is working to help European operators of sensitive infrastructure including satellites, power lines, aviation and transport to avoid adverse impacts of space weather. The mission of the Space Weather Office is to develop a system that provides timely and accurate space weather information and forecasts to operational users and public in Europe.
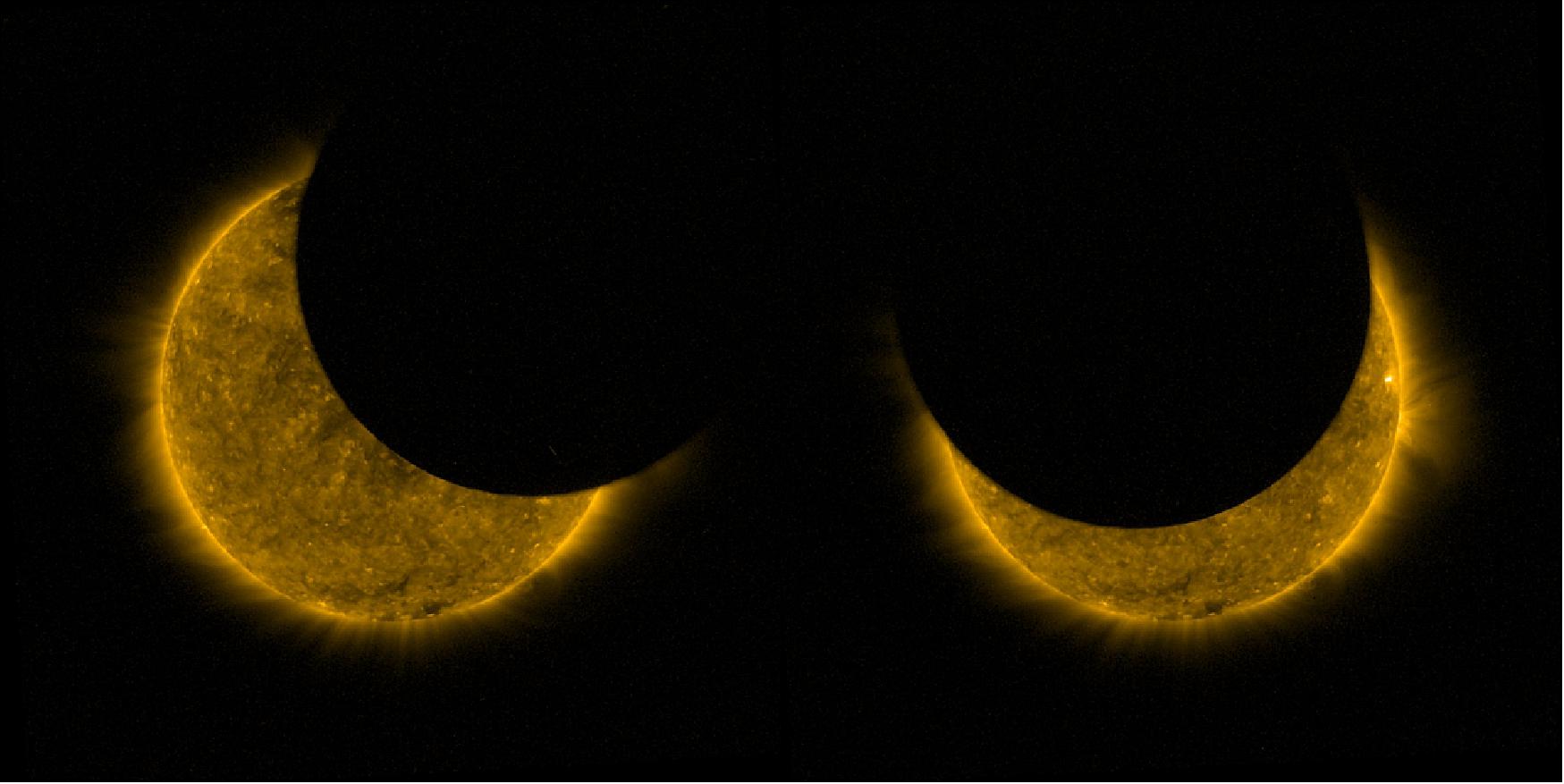
• July 3, 2019: ESA's PROBA-2 satellite observed four partial eclipses while observers in parts of South America witnessed a total solar eclipse on 2 July. 24)
- The video was produced from images taken by PROBA-2's SWAP imager, which images the Sun in ultraviolet light revealing the turbulent nature of the Sun's surface and corona – the Sun's extended atmosphere – stretching into space.
- During this eclipse the satellite was passing through the South Atlantic Anomaly at the time of the largest occultation. In this region the spacecraft is exposed to higher levels of radiation. The increased flux of energetic particles falling on the satellite's detector is the cause for all the bright dots and streaks in the images.
• June 27, 2019: On 2 July 2019, a total solar eclipse will be visible from the South Pacific, falling over land for some parts of Chile and Argentina, with other South American countries enjoying a partial eclipse. 25)
- Total solar eclipses occur thanks to the fact that the Moon's average distance from Earth is just right for it to appear as the same size in the sky as the significantly larger and more distant Sun. When the Moon slides directly between Earth and the Sun it appears to cover our star completely, temporarily blocking out its light and creating a total solar eclipse for those along the narrow path cast by the Moon's shadow.
- From space, ESA's PROBA-2 satellite, which orbits Earth 14.5 times per day, will capture four partial eclipses as it dips in and out of the Moon's shadow; a simulated view of what is expected 2 July is seen in the animation shown here. Click here to see how Proba-2 observed two partial eclipses during last year's celestial event.
- Back on Earth, a group of ESA astronomers from the CESAR educational initiative will be observing the eclipse from the European Southern Observatory's La Silla Observatory in Chile. The team is one of a small group selected to perform astronomical observations for science and outreach purposes during the eclipse.
- The eclipse will start just before 15:24 local time at ESO (21:24 CEST) and will conclude at around 17:47, just before sunset (23:47 CEST).
- ESO aims to provide a live webcast of the eclipse, should weather conditions be favorable and internet broadband perform as expected. The CESAR team also plan to provide live coverage as well as share images during and after the celestial event.
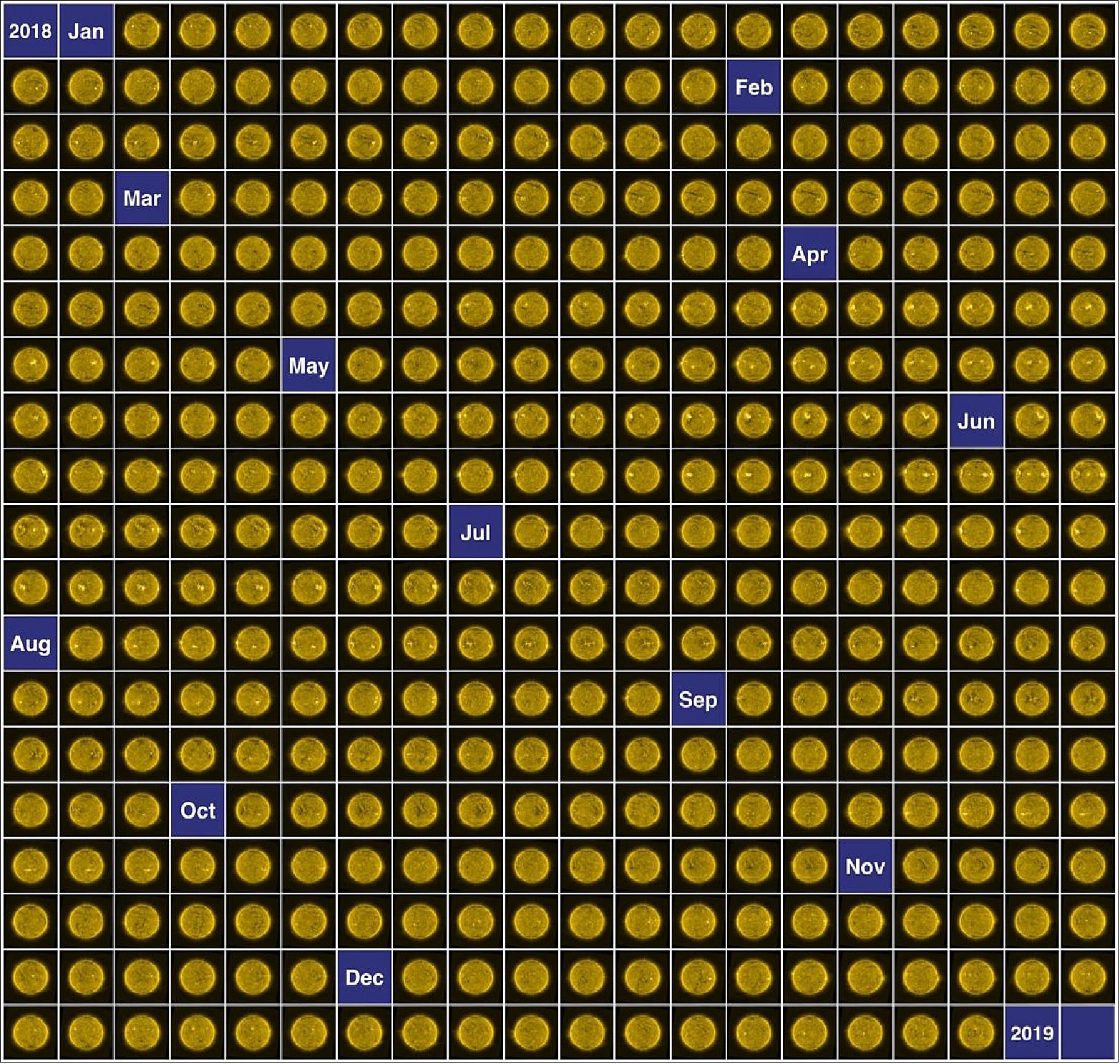
• January 28, 2019: The Proba-2 satellite of ESA is continuously monitoring the Sun – one image was selected to represent each day of the year (Figure 20). 26)
- The Sun typically follows an 11 year cycle of activity, and throughout 2018, it embraced its solar minimum, displaying few active regions – seen as the bright regions in the images.
- One way to assess the level of activity is by counting sunspots (dark spots in the images), or recording the strength of solar flares. The most energetic flare of 2018 was recorded on 7 February, from a small region located at central latitudes in the eastern hemisphere of the Sun (to the left of the center of the Sun in the corresponding image).
- It was classed as a ‘C-8.1' in the classification system that divides solar flares according to their strength. The smallest are A, followed by B, C, M and X, with each letter representing a ten-fold increase in energy output such that an X-class flare is 100 times stronger than a C-class flare.
- M and X flares, along with coronal mass ejections that launch vast clouds of solar matter out into space, can create such powerful bursts of radiation that if directed towards Earth have the potential to create geomagnetic storms that can disrupt our communication systems and power grids, and can harm satellites. This is one of the reasons why it is so important to continuously monitor the Sun – to be able to prepare for and mitigate the adverse effects of space weather.
- But the solar minimum is a useful time for studying the evolution of active regions without the complication of overlapping and interacting regions. Active regions can persist for days to months, and are observed to rotate across the Sun's face many times.
- The Sun, and the Sun-Earth interaction, is the focus for a number of active ESA and NASA missions, including – in addition to Proba-2 – ESA's Cluster satellite quartet, the ESA-NASA Solar and Heliospheric Observatory (SOHO), NASA's Solar Dynamics Observatory, and more recently, NASA's Parker Probe. Planned for launch next year, ESA's Solar Orbiter will provide close-up views of the Sun's polar regions, which is key for better understanding the solar cycle, and will also be able to watch activity building up on the side not visible from Earth.
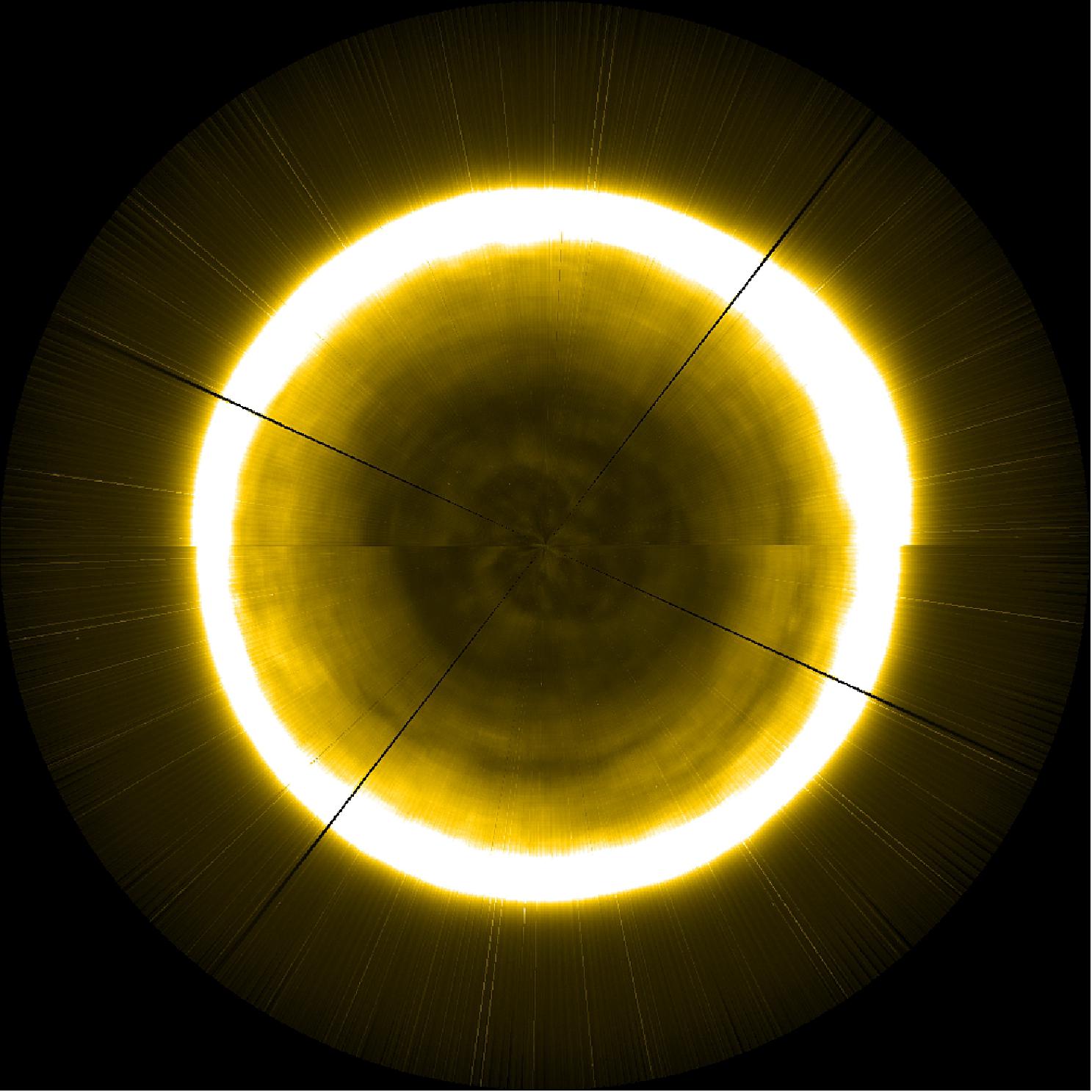
• December 3, 2018: We've sent numerous missions into space to study the Sun; past and present solar explorers include ESA's Proba-2 (PRoject for OnBoard Autonomy 2) and SOHO (SOlar Heliospheric Observatory) probes, NASA's SDO and STEREO missions (the Solar Dynamics Observatory and Solar Terrestrial Relations Observatory, respectively), and the joint NASA/ESA Ulysses mission. However, most of these spacecraft have focused mainly on the equatorial regions of the Sun, with the notable exception of Ulysses – this probe observed our star at a wide range of latitudes for nearly two decades, until the mission came to an end in 2009. 27)
- Despite Ulysses' insights, this focus on low solar latitudes has left the Sun's poles relatively unexplored. A lack of imaging data means that scientists must get creative in piecing together pictures of the Sun's polar regions – as seen here in this artificial image of the solar north pole.
- The image of Figure 22 extrapolates low-latitude Proba-2 observations of the Sun to reconstruct a view of the star's pole. While the poles cannot be seen directly, when spacecraft observe the solar atmosphere they gather data on everything along their line of sight, also viewing the atmosphere extending around the disc of the Sun (the apparent glow around the main disc of the Sun, which also extends over the poles). Scientists can use this to infer the appearance of the polar regions. In order to estimate the properties of the solar atmosphere over the poles, they continuously image the main disc of the Sun and take small slivers of data from the outer and upper regions of the star as it rotates, compensating for the fact that the Sun does not rotate at constant speeds at all latitudes. Over time, these small arrays of data can be combined to approximate a view of the pole, as shown in this view. More in-depth information on the process used to create this image can be found here.
- Signs of this patchwork approach can be seen in this image, which comprises data from Proba-2's extreme-ultraviolet SWAP imager. The line across the middle is created due to small changes in the solar atmosphere that occurred over the timeframe of creating this image. This image also shows a bright bulge on the upper-right side of the Sun; this is created by a low-latitude coronal hole rotating around the solar disc. The polar coronal hole region, which can be seen as the dark patch in the center of the solar disc, is a source of fast solar wind. It is seen here to contain a subtle network of light and dark structures, which may cause variations in solar wind speed.
- While such views go a way towards revealing the secrets of the Sun's poles – such as how waves propagate across our star, and how it may create phenomena such as coronal holes and ejections that go on to influence space weather around the Earth – direct observations of these regions are needed in order to build on past data gathered by Ulysses. ESA's Solar Orbiter aims to plug this knowledge gap when it launches in 2020. This mission will study the Sun in detail from latitudes high enough to explore its polar regions, also revealing how its magnetic field and particle emissions impact its cosmic environment – including the area of space that we call home.
• August 13, 2018: Thanks to a quirk of our cosmos, the Moon's average distance from Earth is just right for it to appear as the same size in the sky as the significantly larger Sun. Once in a while the Moon slides directly between Earth and the Sun such that it appears to cover our star completely, temporarily blocking out its light and creating a total solar eclipse for those along the narrow path cast by the Moon's shadow. 28)
- But sometimes the alignment is such that the Moon only partially covers the Sun's disc. Such a partial eclipse occurred on Saturday for observers located primarily in northern and eastern Europe, northern parts of North America, and some northern locations in Asia.
- ESA's Sun-watching PROBA-2 satellite orbits Earth about 14.5 times per day and with its constant change in viewing angle, it dipped in and out of the Moon's shadow twice during Saturday's eclipse.
- The images (Figure 23) were taken by the satellite's SWAP camera, which works at extreme ultraviolet wavelengths to capture the Sun's hot turbulent atmosphere – the corona – at temperatures of about a million degrees, which can be seen in the background.
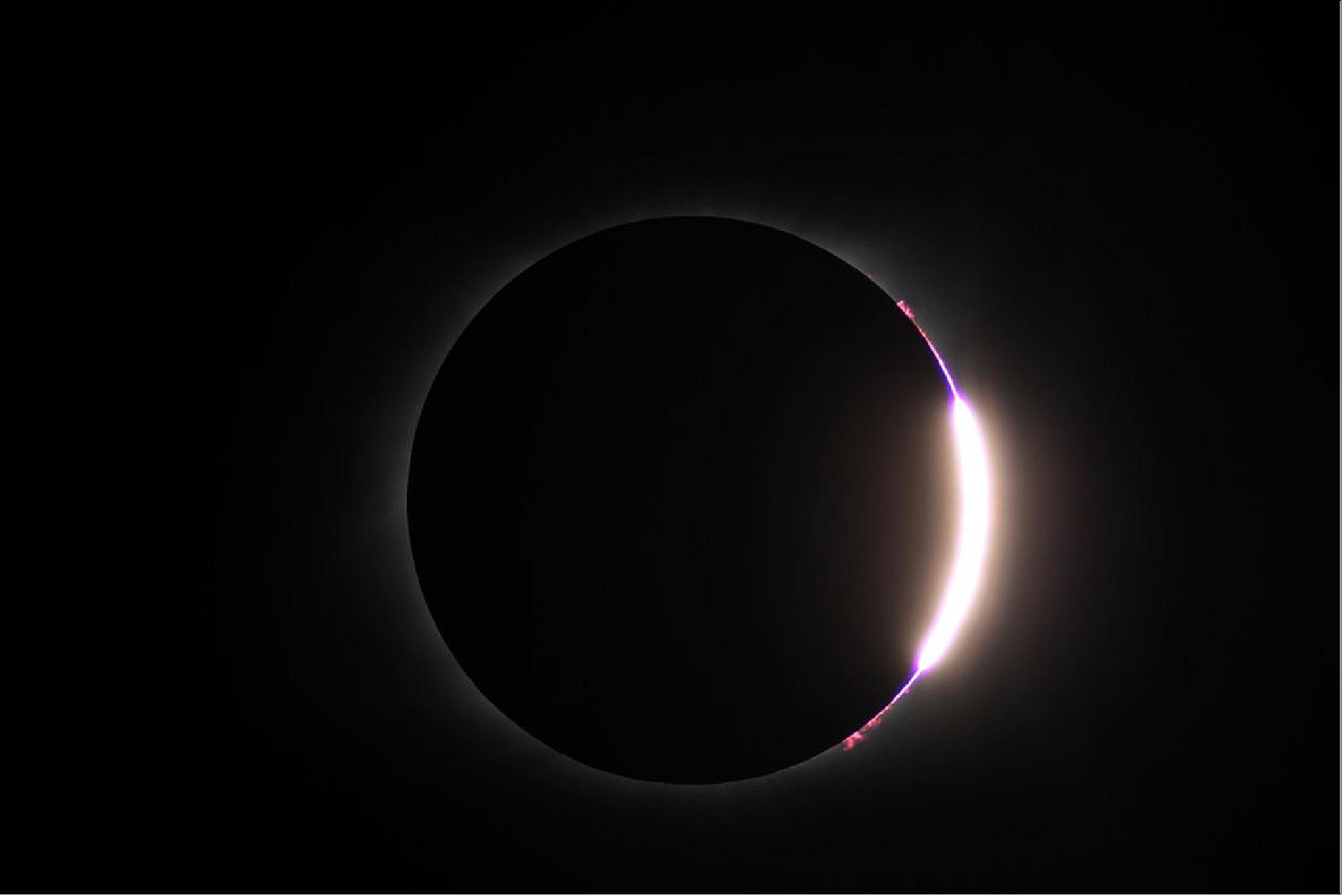
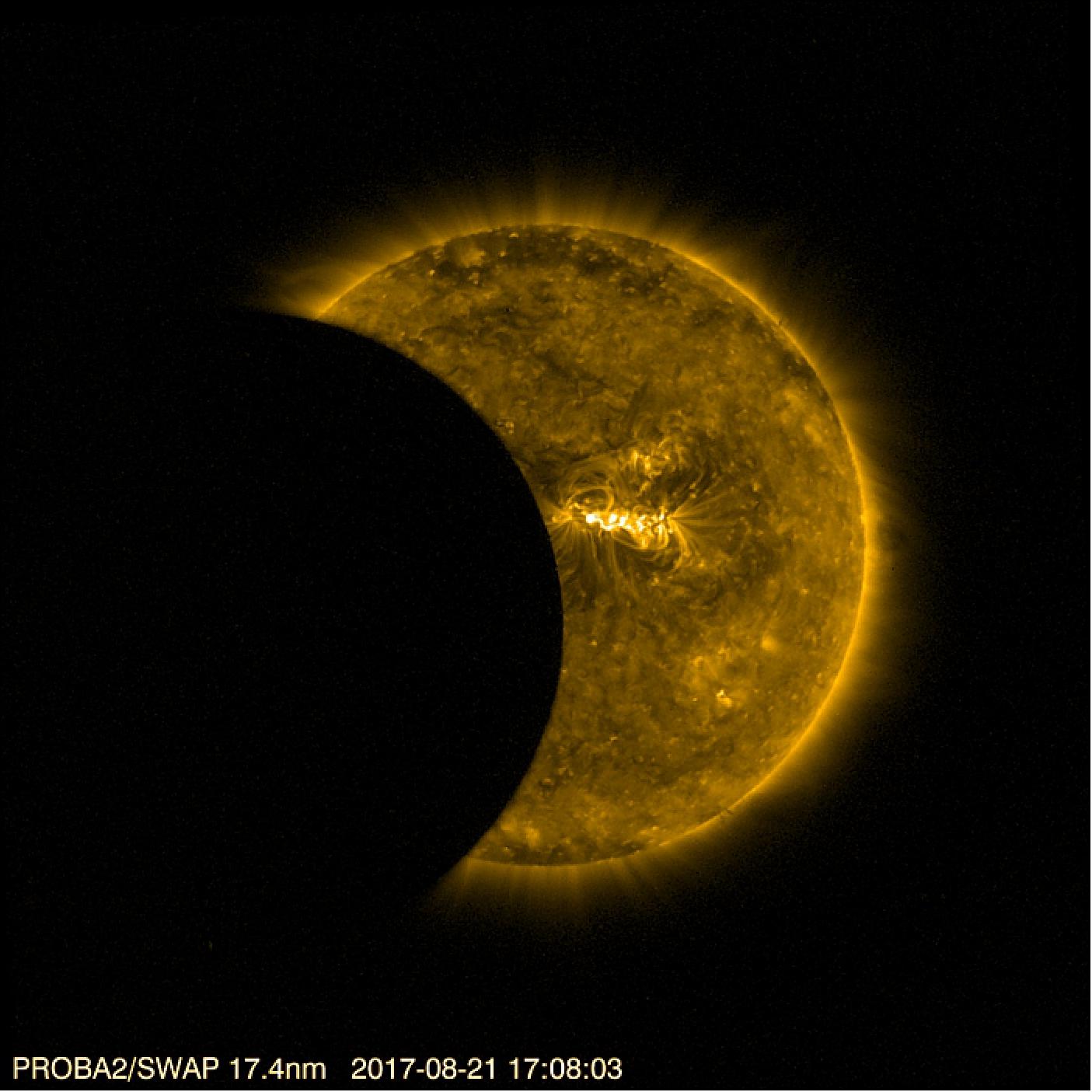
• February 12, 2018: Love is in the air this week! Whether you're a red rose enthusiast or are planning to eschew all involvement this year, we have a cosmic Valentine's treat to please even the most romance-averse: this bright and beautiful celestial ring (Figure 24). 29)
- Glimmering with color and light against a pitch-black sky, this ring was seen during the eclipse that took place on 21 August 2017 across the USA. This event was a total solar eclipse, meaning that the Moon slipped perfectly in front of the Sun and blocked the entirety of the star's light – an occurrence known as totality – for a band of observers across the country.
- The shadow of the eclipse took 1.5 hours to cross the USA, moving from Oregon to South Carolina, and gave eager eclipse-watchers within the totality belt up to 160 seconds of total darkness.
- The eclipse's likeness to a diamond ring is a well-documented effect within astronomy, and seen often in solar eclipses. It is known as, predictably, either the diamond ring effect or the Baily's beads effect. The beads refer to the tiny pearls and droplets of sunlight that can be seen forming around the Moon's dark outline. When the Moon moves on enough for the beads to draw together and form a more solid and extended band of light, Baily's beads are said to have formed the diamond ring effect – as seen here.
- The CESAR team took images at every stage of the eclipse, many of which show Baily's beads and other phenomena in more detail. These can be seen here.
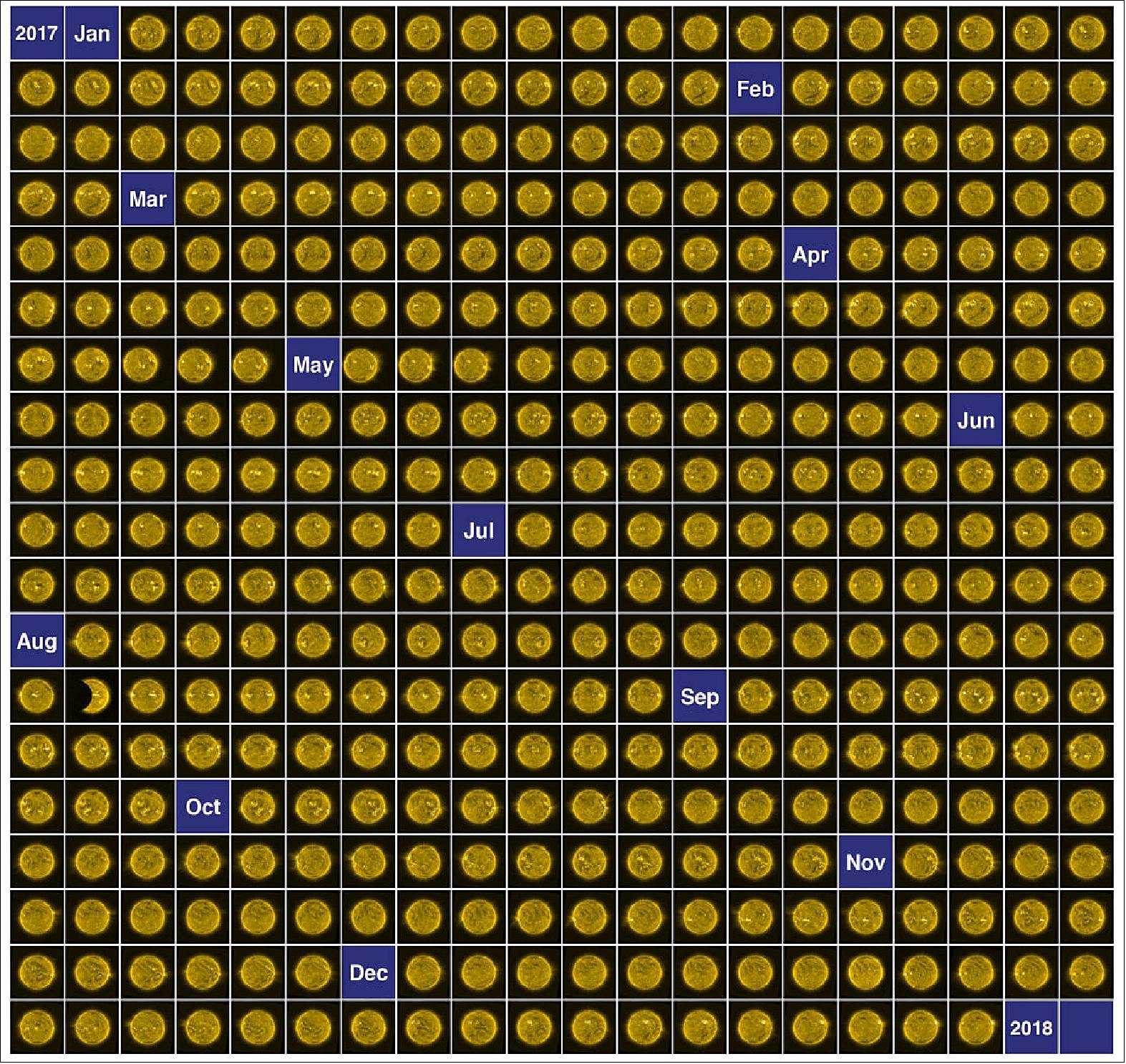
• January 8, 2018: This montage of 365 images shows the changing activity of our Sun through the eyes of ESA's PROBA-2 satellite during 2017, along with a partial eclipse for good measure. 30)
- The images were taken by the satellite's SWAP camera, which works at extreme ultraviolet wavelengths to capture the Sun's hot turbulent atmosphere – the corona, at temperatures of about a million degrees.
- In general, the Sun's 11-year activity cycle continued throughout 2017 towards a minimum, a period when the number of active regions (seen as bright regions in the images) diminish, and coronal holes (seen as darker regions) are larger and more prominent.
- Look closely and several images stand out as different. For around a week at the end of April/beginning of May the Sun is not centered in the field-of-view: this is deliberate, indicating ‘off-pointing' observations to study the extended atmosphere.
- Perhaps the highlight for many Sun-watchers last year was the total eclipse observed from Oregon to South Carolina in the US on 21 August. From its viewpoint in space, about 800 km above Earth, PROBA-2 passed through the Moon's shadow several times and observed three partial eclipses. One such moment is captured in the montage presented here.
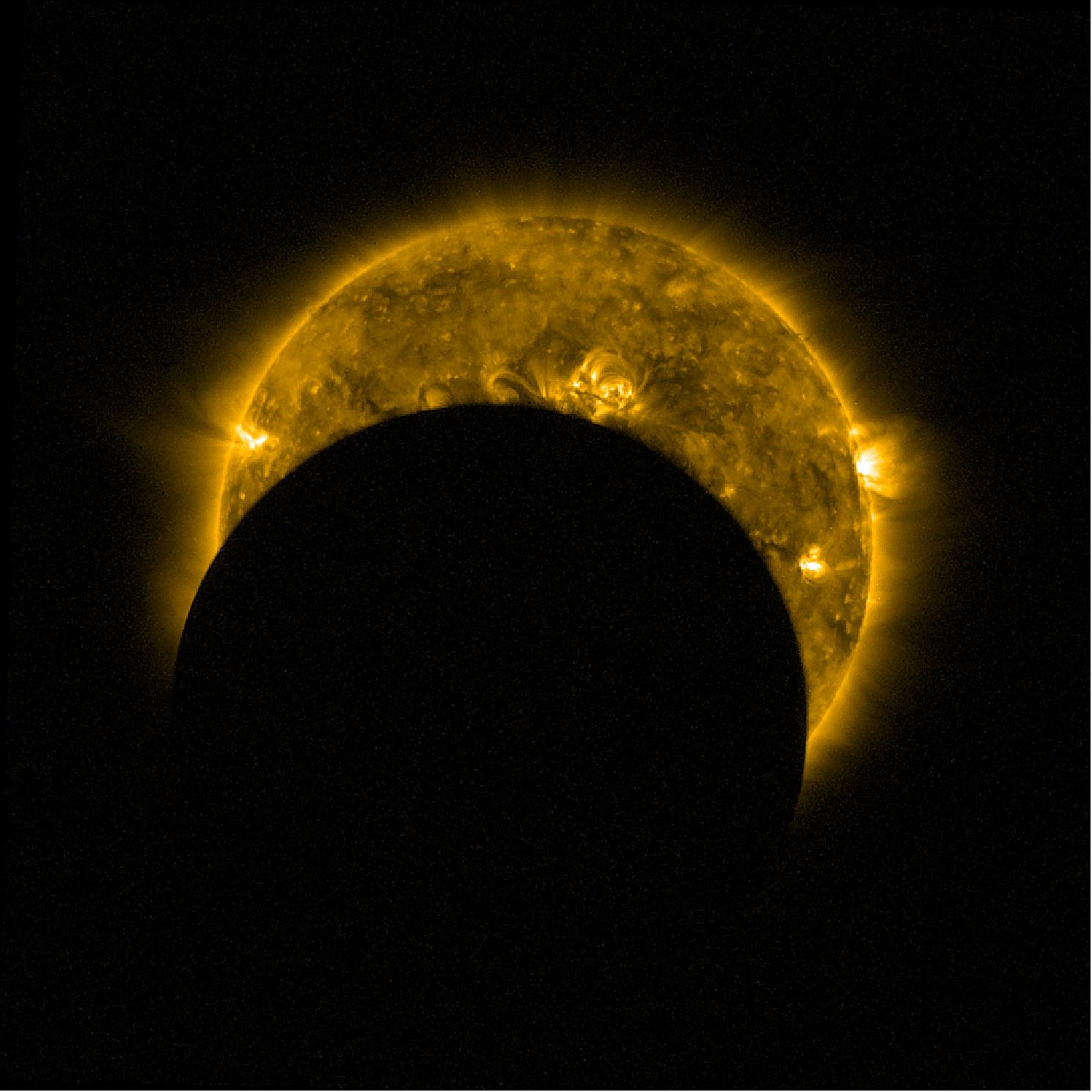
• August 22, 2017: While ground-based observers experienced the awe-inspiring view of a total solar eclipse yesterday, astronauts aboard the International Space Station, and our Sun-watching satellites, enjoyed unique perspectives of this spectacular sight from space. 31)
- Thanks to a quirk of our cosmos, the Moon's average distance from Earth is just right for it to appear as the same size in the sky as the significantly larger Sun: the Sun's diameter is 400 times wider than the Moon's, but it is also 400 times farther away.
When the two align such that the Moon slides directly between Earth and the Sun, it appears to cover our star completely, temporarily blocking out its light and creating a total solar eclipse for those along the narrow path cast by the Moon's shadow.
- From their unique vantage point 400 km above Earth's surface, astronauts aboard the International Space Station saw the Moon's fuzzy shadow on the surface of our planet during the eclipse. The space station crossed the path of the eclipse three times on its 90 minute-long orbits around the Earth.
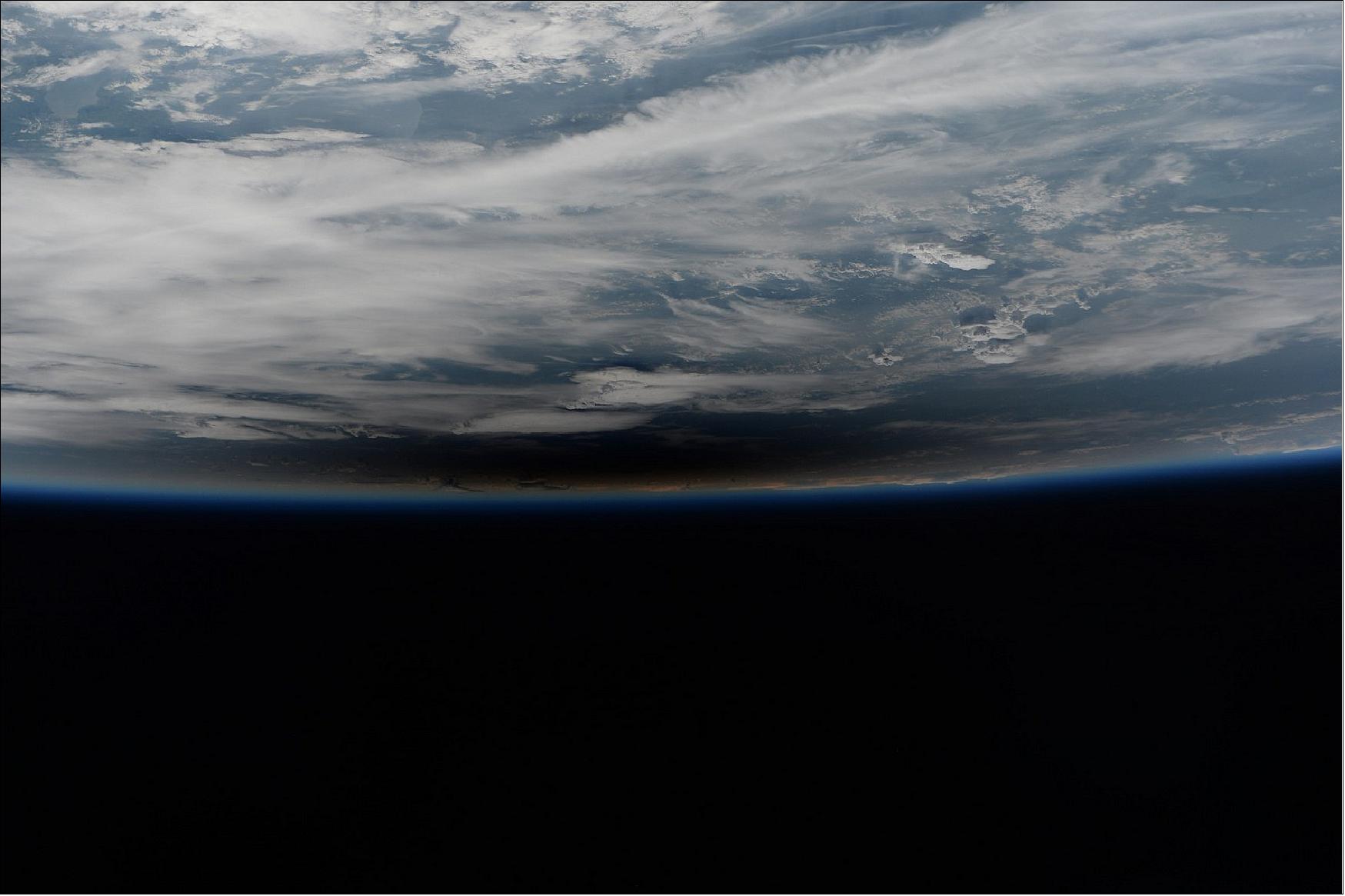
- On Aug. 21, observers situated along a 115 km-wide swath stretching from Oregon to South Carolina in the US, were under this path of totality. The eclipse shadow took about 1.5 hours to cross the continent, with the peak totality lasting for about 2 minutes 40 seconds (at any location).
A team of astronomers from ESA imaged the eclipse from the US and captured phenomena such as beads of light shining through gaps in the lunar terrain, and the glittering ‘diamond ring' effect as the last and first slither of sunlight glints through immediately before and after totality.

- Also orbiting Earth 14.5 times a day in its 800 km altitude polar orbit is ESA's PROBA-2 satellite, which was predicted to see the Moon pass four times through its field-of-view, with three partial eclipses.
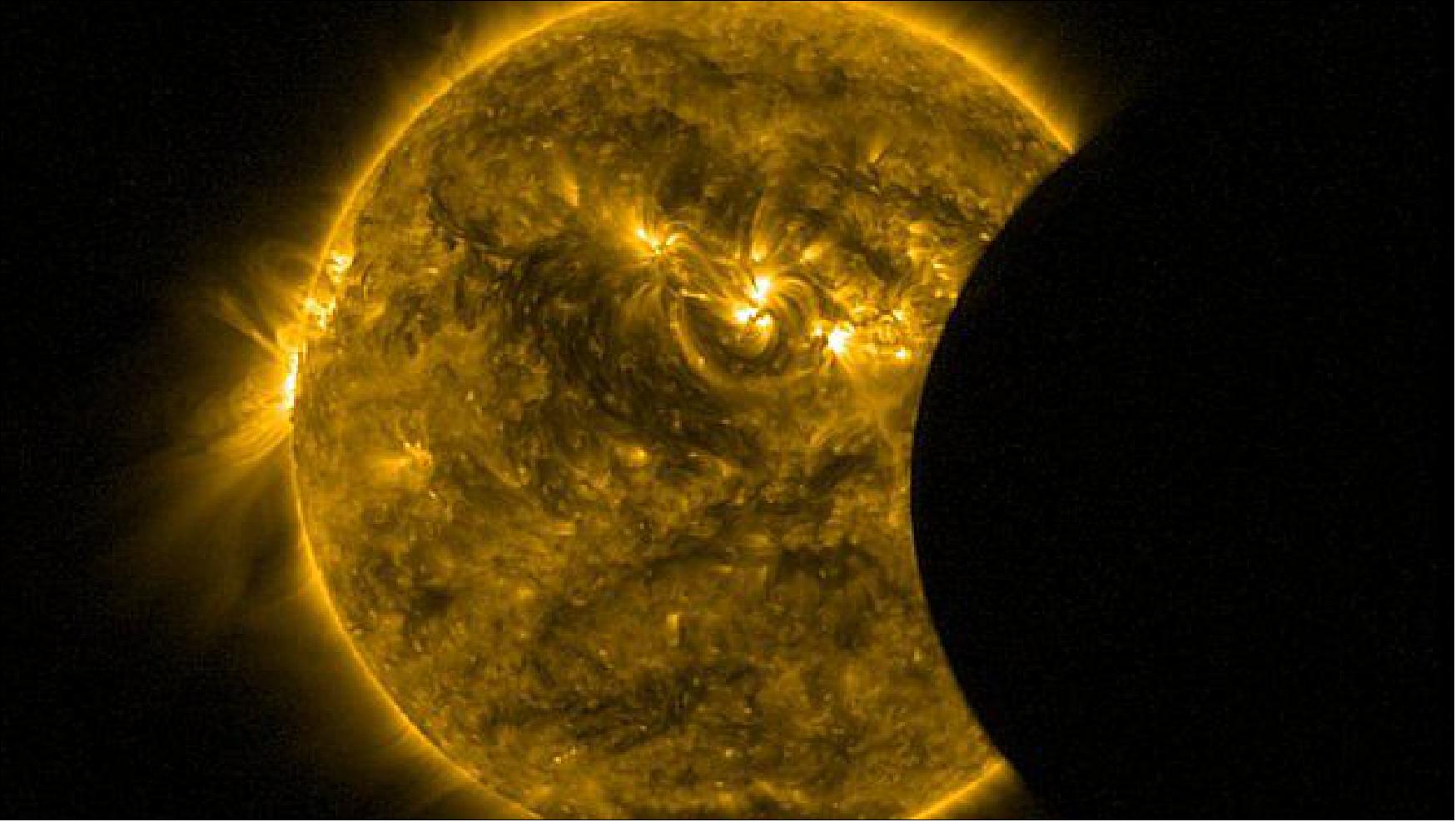
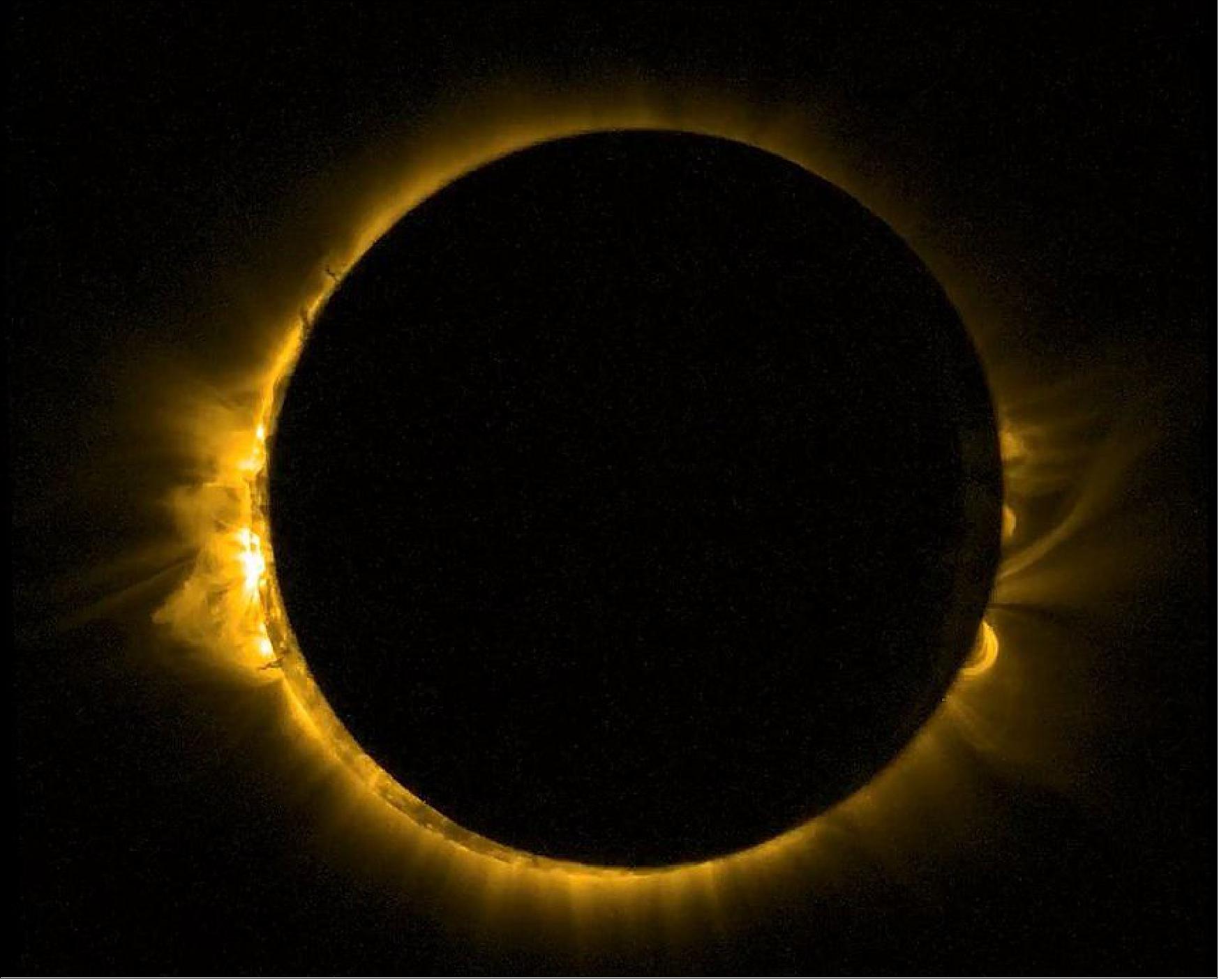
• On February 26, 2017, an annular solar eclipse took place over South America and Africa. A solar eclipse occurs when the Moon passes between Earth and the Sun, totally or partially blocking the Sun from Earth's point of view. In an annular eclipse, the apparent diameter of the Moon appears smaller than the Sun's diameter, such that a ring of the solar disc remains visible. 33)
- ESA's PROBA-2 satellite observed a series of partial eclipses from space. In fact, the Moon crossed the satellite's field of view four times, three times passing in front of the Sun.
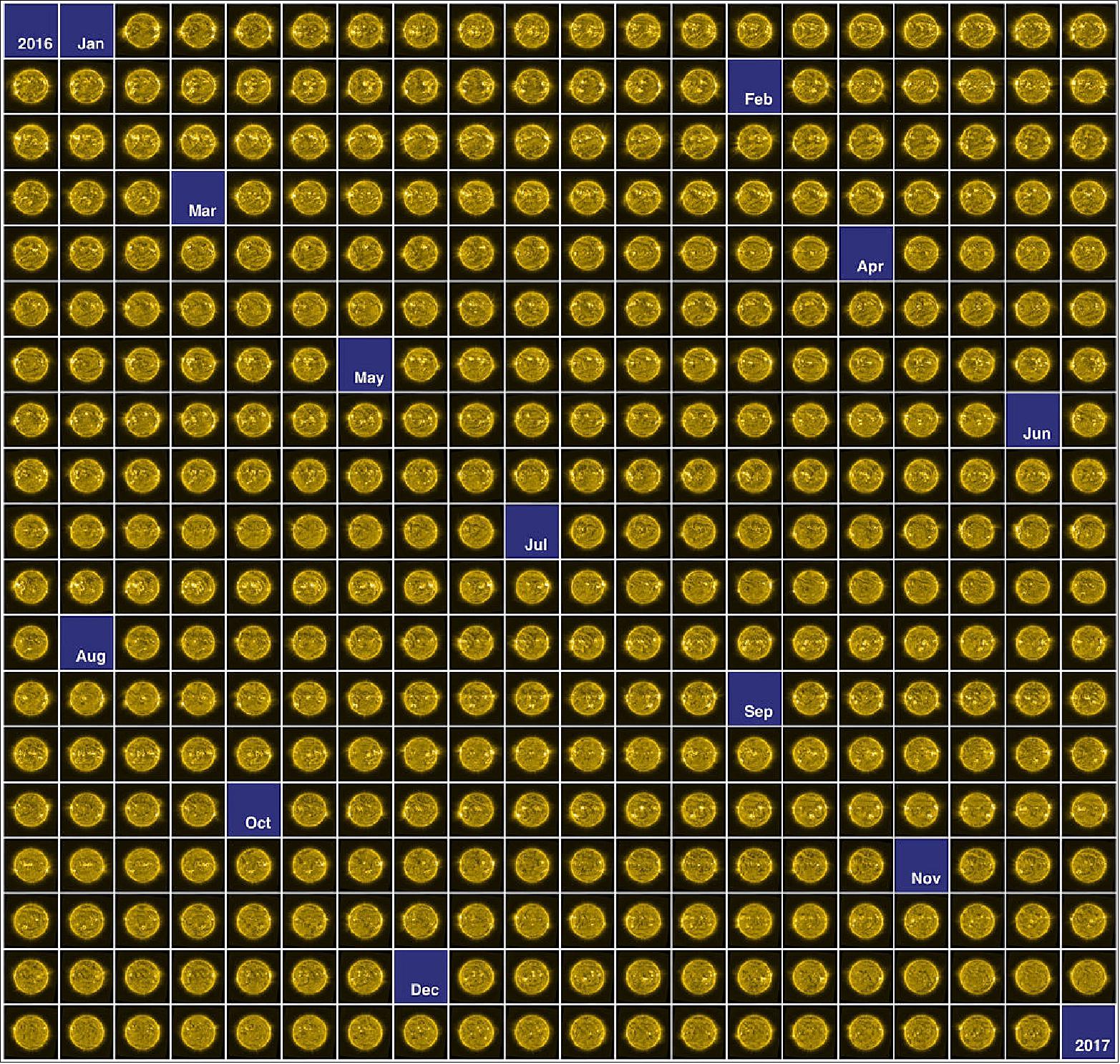
• January 16, 2017: An image a day of the Sun, taken by the PROBA-2 satellite throughout 2016 (Figure 30). 34)
- The satellite's SWAP (Sun Watcher with APS detector and Image Processing) camera works at extreme ultraviolet wavelengths to capture the hot turbulent atmosphere of the Sun, known as the solar corona. Each image was created from 30 separate images centered on 01:00 GMT each day, which were processed to enhance the features extending from the solar disk.
- Throughout 2016 the Sun's 11 year activity cycle continued towards its minimum, a period when the number of sunspots, active regions, solar flares and eruptions diminish. Nonetheless, the most active region of last year can be seen in the 17 July image. The bright region close to the center of the Sun produced eight of the 20 most powerful flares witnessed last year.
- Other prominent features are coronal holes – darker regions indicating lower levels of emission. However, coronal holes can produce streams of fast solar wind that can trigger geomagnetic storms on Earth. One of the largest holes observed last year can be seen towards the north of the Sun on 24 November, and was present for several solar rotations.
• November 22, 2016: ESA's Science Program Committee (SPC) has today confirmed two-year mission extensions for nine scientific missions in which the Agency is participating. This secures their operations until the end of 2018. — After a comprehensive review of their current operational status and the likely scientific return from each mission, the SPC decided to extend the operation of six ESA-led missions (Cluster, INTEGRAL, Mars Express, PROBA-2, SOHO and XMM-Newton) from 1 January 2017 to 31 December 2018. 35)
- The go-ahead was also given to continue ESA's contributions to the operations of three international collaborative missions: the Hubble Space Telescope and the Interface Region Imaging Spectrograph (IRIS), which are both led by NASA, as well as Solar-B (Hinode), which is a Japanese-led mission.
• On March 8-9, 2016, a solar eclipse took place over the Pacific Ocean. This eclipse was total – meaning that the entire solar disk was covered by the Moon – over Indonesia and the central Pacific, starting at sunrise over Sumatra and ending at sunset north of the Hawaiian Islands. Additionally, large parts of South-East Asia, Alaska and Australia witnessed a partial solar eclipse. The path of totality had a maximum width of 155 km and the maximum duration was 4 minutes and 9 seconds at the point of greatest eclipse, over the waters of the Pacific Ocean. 36)
- Nothing could be seen over Europe, but ESA's PROBA-2 minisatellite saw a partial solar eclipse from its 800 km altitude polar orbit. PROBA-2 used its SWAP imager to capture the Moon passing in front of the Sun. SWAP views the solar disc at extreme ultraviolet wavelengths to capture the turbulent surface of the Sun and its swirling corona.
- Due to its sun-synchronous orbit, PROBA-2 follows the terminator, the dividing line between day and night, and was therefore able to observe a partial solar eclipse. PROBA-2's 90 minute orbit meant it passed through the Moon's shadow to observe a partial solar eclipse two times on March 9 , between 00:40 UTC and 00:54 UTC, and again between 02:58 UTC and 03:13 UTC. Additionally, the Moon appeared two times in its field of view without obscuring the solar disk.
• Sept. 14, 2015: ESA's Sun-watching PROBA-2 satellite experienced three partial solar eclipses on 13 September 2015. On Earth, a single partial eclipse occurred over South Africa, the southern Indian Ocean and Antarctica. 37)
- During a total solar eclipse, the Moon moves in front of the Sun as seen from Earth, their alignment and separation such that the Moon, situated much closer to Earth, appears large enough to block out the light from the much more distant Sun.
- But, like yesterday, sometimes the alignment is such that the Moon only partially covers the Sun's disk. Meanwhile, ESA's PROBA-2 orbits Earth about 14.5 times per day, dipping in and out of the Moon's shadow around the time of a solar eclipse. The constant change in viewing angle of PROBA-2 meant that the satellite passed through the shadow three times during the eclipse yesterday. One of these partial eclipses is presented in Figure 32. All three, along with a fourth passage of the Moon close to the edge of the Sun, can be seen in the following movie. 38)
![Figure 32: This partial eclipse was captured with the SWAP imager at 06:32 GMT on 13 September 2015. SWAP views the solar disc at extreme UV wavelengths to capture the turbulent surface of the Sun and its swirling corona – a glimpse of which can be seen in the background [image credit: ESA, ROB (Royal Observatory of Belgium)]](/api/cms/documents/163813/6192177/PROBA2_Auto2E.jpeg)
• March 20, 2015: As Europe enjoyed a partial solar eclipse on the morning of Friday 20 March 2015, ESA's Sun-watching PROBA-2 minisatellite had a ringside seat from orbit, it caught two eclipses over the course of the morning. PROBA-2 used its SWAP imager to capture the Moon passing in front of the Sun. SWAP views the solar disc at extreme ultraviolet wavelengths to capture the turbulent surface of the Sun and its swirling corona. 39) 40)
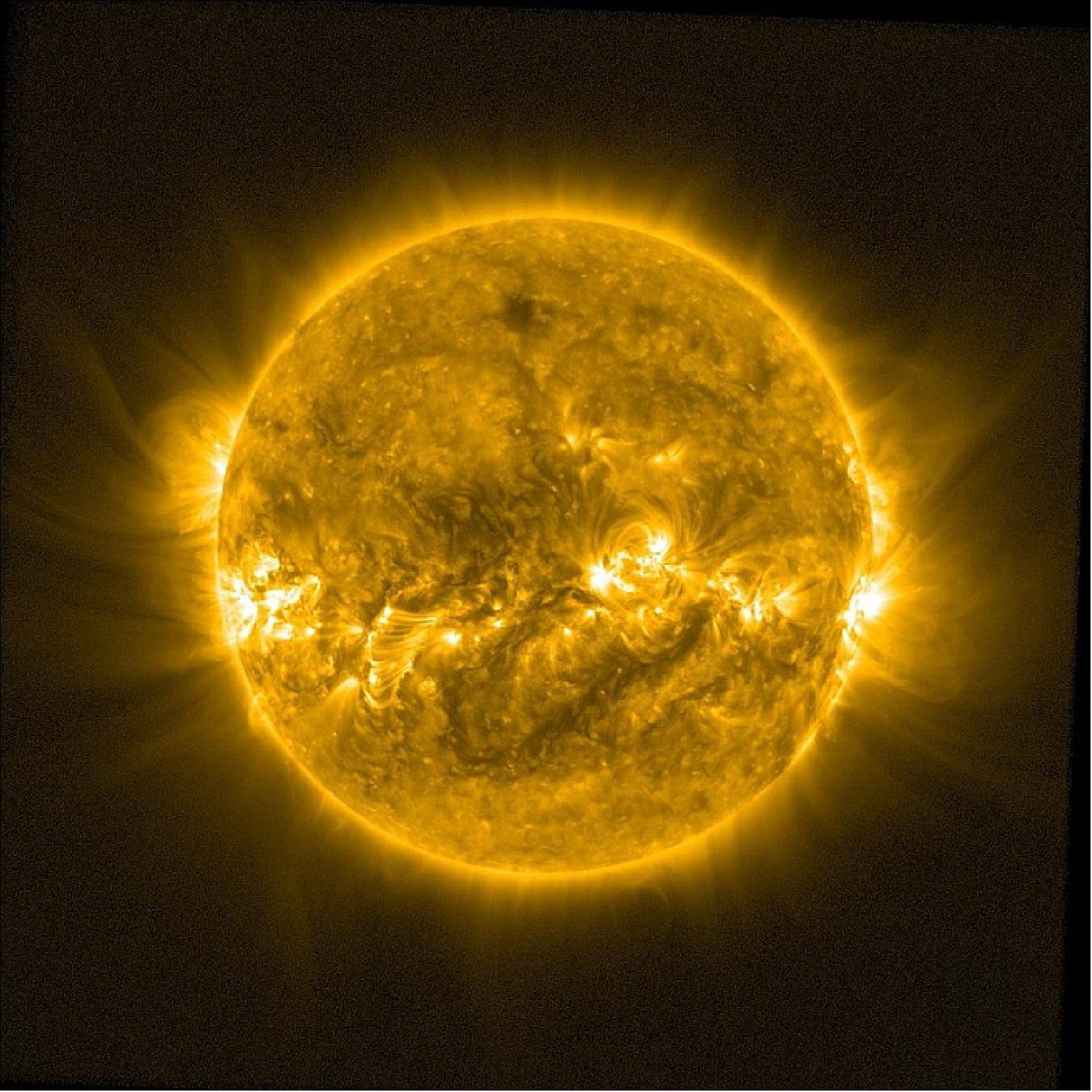
• ESA released the image of Figure 34 on March 16, 2015, showing a snapshot of our constantly changing Sun as it catches looping filaments and energetic eruptions on their outward journey from our star's turbulent surface. The disc of our star is a rippling mass of bright, hot active areas, interspersed with dark, cool snaking filaments that wrap around the star. Surrounding the tumultuous solar surface is the chaotic corona, a rarefied atmosphere of super-heated plasma that blankets the Sun and extends out into space for millions of kilometers. 41) 42)
- This coronal plasma reaches temperatures of several million degrees in some regions – significantly hotter than the surface of the Sun, which reaches comparatively paltry temperatures of around 6000ºC – and glows in ultraviolet and extreme-ultraviolet light owing to its extremely high temperature. By picking one particular wavelength, ESA's PROBA-2 SWAP (Sun Watcher with APS detector and Image Processing) camera is able to single out structures with temperatures of around a million degrees.
- As seen in Figure 34, taken on 25 July 2014, the hot plasma forms large loops and fan-shaped structures, both of which are kept in check by the Sun's intense magnetic field. While some of these loops stay close to the surface of the Sun, some can stretch far out into space, eventually being swept up into the solar wind – an outpouring of energetic particle flow that constantly streams out into the Solar System and flows past the planets, including Earth.
- Even loops that initially appear to be quite docile can become tightly wrapped and tangled over time, storing energy until they eventually snap and throw off intense flares and eruptions known as CMEs (Coronal Mass Ejections). These eruptions, made up of massive amounts of gas embedded in magnetic field lines, can be dangerous to satellites, interfere with communication equipment and damage vital infrastructure on Earth.
- Despite the Sun being the most important star in our sky, much is still unknown about its behavior. Studying its corona in detail could help us to understand the internal workings of the Sun, the erratic motions of its outer layers, and the highly energetic bursts of material that it throws off into space.
![Figure 34: The solar corona acquired by the SWAP instrument of PROBA-2 on July 25, 2014 [image credit: ESA, ROB (Royal Observatory of Belgium)]](/api/cms/documents/163813/6192177/PROBA2_Auto2C.jpeg)
• Nov. 20, 2014: ESA's SPC (Science Program Committee) has given green light for the flotilla of spacecraft to continue their key scientific endeavors for at least another two years. After a comprehensive review by the Science Program's advisory structure of the current operational status and likely scientific return of each mission in the future, the SPC agreed to continue funding for six ESA-led missions (Cluster, INTEGRAL, Mars Express, PROBA-2, SOHO and XMM-Newton) for the period 1 January 2015 – 31 December 2016. 43)
• November 2, 2014: ESA's PROBA-2 celebrates five years in orbit today. From technology demonstrator to solar observatory and now space weather platform, the mission has provided triple value to European scientists. 44)
- In the first phase of its life, into early 2010, PROBA-2 was extremely successful in verifying, under harsh space conditions, new technologies that will make future European missions more capable and efficient. These included a new type of lithium-ion battery, an advanced data and power management system, combined carbon-fiber and aluminum structural panels, and new models of reaction wheels.
- Afterwards, PROBA-2 continued as a solar observatory, a science mission studying the Sun and the plasma environment surrounding the satellite. Information from the four solar and space weather sensors are helping scientists to understand our star's corona and magnetic fields and the mechanisms responsible for solar eruptions. This information is crucial to understanding ‘space weather' – the conditions above Earth that can affect spaceborne and ground-based systems and services, or even endanger property and human health.
- The importance of PROBA-2 data for European space weather services meant that ESA's Space Situational Awareness program has been managing the mission since July 2013. This program is developing precursor space weather services. In particular, the solar data are used by the Solar Weather Expert Service Center coordinated by the Royal Observatory of Belgium in Brussels. This center generates solar weather data products and services for various users throughout Europe, including industry, satellite operators and owners of sensitive ground infrastructure, such as power grids.
- PROBA's electron and ion measurements are useful in analyzing satellite anomalies and in designing improved spacecraft for the future. The PROBA-2 Science Center at the Royal Observatory of Belgium oversees scientific operations and data processing. The dedicated web portal for space weather services displays the latest ultraviolet observations in an easy-to-use and visually attractive format.
• In May 2014, PROBA-2, with a nominal mission life of two years, is in its second operational mission extension until the end of 2015, with the entire system still meeting full performances and, handed-over by ESA D/SRE (Directorate/Science and Robotic Exploration) in July 2013, is now operated in the frame of the ESA D/HSO's (Directorate/Human Space Flight and Operations) SSA (Space Situational Awareness) Program. Since launch, besides continuous operation of the Sun observation instruments, all technology demonstrators on-board have been successfully validated and are exercised and monitored on a regular basis. 45)
- PROBA-2 is an important mission to the Space Weather (SWE) Segment of the SSA Program, particularly because of the solar monitoring data produced by the LYRA and SWAP instruments. These observations are directly used by the Solar Weather ESC (Expert Service Center), coordinated by the ROB (Royal Observatory of Belgium) in the generation of solar weather data products and services to the end users. The latest LYRA data and SWAP images are available to the SSA end users through the SWE Segment service portal (http://swe.ssa.esa.int).
- Following in the footsteps of PROBA-1, currently operating since more than 12 years in orbit, PROBA-2 successfully proved again, within ESA's GSTP (General Support and Technology Program) concept, that it is possible to provide a fast and cost-effective satellite design, and to combine advanced technology objectives from Industry with focused objectives from the Science Community and the Agency. As in the case of its predecessor, PROBA-2 has demonstrated the importance of a very strong interaction and overlap between the mission's development and operations teams in both Industry and ESA, and the effectiveness of the adopted mission and platform development approach.
Observations and Lessons Learnt from Four Years of In-Flight Experience (Ref. 45)
• Radiation effects on platform units: After more than four years of exposure to the low-Earth orbit environment, all the platform's units' electronics are still smoothly running on their primary lanes, not showing any non-negligible effect of long term exposure to radiation on worsening of performance or interruptions of functionality.• Software upgrades: So far, only small modifications have been made to the OBSW (On-Board Software), to cover minor issues detected in the course of the mission, add new features, or for the tuning of parameters used by various OBSW modules and functions (e.g. monitoring limits defined in the on-board autonomy, LAR delay). While some of these modifications have been implemented as direct changes of the running code in the RAM memory (usually done for configuration parameters or parts of the OBSW with no critical function), some have been implemented loading the relevant software changes in specific areas of the ADPMS "Flash" memory, applied to the current OBSW version ("Flash image") at system boot.
• Technology demonstrators: All technology demonstrators embarked on PROBA-2 have been fully commissioned and are constantly, or have been repeatedly, exercised on-board, showing, in all cases, performances in accordance with expectations. This extensive testing and in-flight exploitation and verification of hardware units and software modules has allowed the developers to identify future work, improvement areas, and/or future operational application scenarios. Collection of a wealthy amount of data continues on a regular basis during the mission's operational phase in collaboration with the payloads' providers to evaluate the performances in several operating conditions and to assess ageing effects on hardware.
• PROBA-2 used as an orbiting test bench: Based on PROBA-2 in-flight results, several implementations, such as monitoring as part of the satellite's autonomy, various resources management features, at either unit's handling level and system modes' management level, etcetera, have been improved in the development of PROBA-V.
- An example of this is the automatic recovery of the GPS receiver. For PROBA-2, this is performed using an automatic detection and recovery module on ground. On PROBA-V, this is implemented as a fully autonomous on-board feature, next to an improvement of the GPS receiver's radiation hardening. The new OBSW implementation can also be retrofitted on PROBA-2 to relieve ground segment involvement.
- In a second example, PROBA-2 showed, that it was difficult to assess the full incoming power on the solar arrays at any given point in time. This was due to the autonomous power system performing a division of power over bus units, battery charging and excess power shunting. The PROBA-V design incorporates small hardware and software modifications, put in place to make more parameters of the power system observable for monitoring and therefore improving this aspect of the system health monitoring.
- Another example is represented by the 'Magnetic-based 3-Axes Stabilized Bdot Attitude Control Mode', included in the PROBA-2 AOCS software as a technology demonstration item, which, after a series of in-flight verification tests, aiming at the in-orbit validation of the results obtained in on-ground simulations, in terms of functionalities and performances, is now the baseline version of PROBA-V satellite's AOCS software and OBSW Safe Mode attitude control law.
- A further example is provided by the AOCS software environmental perturbation torque autonomous estimation algorithm. This navigation module, originally included in the PROBA-2 AOCS software as a technology demonstration, due to its effectiveness in improving the spacecraft's attitude knowledge performances, has been upgraded to a baseline function of the platform's AOCS, and is continuously used in operations. Furthermore, it has been included in the PROBA-V navigation software, where the algorithm is required to meet the mission's stringent AKE requirements.
• February, 2014: The PROBA-2 view of the post eruptive loops on the Sun. The image of Figure 35 demonstrates the Sun's magnetic field reconnecting in the form of loops. The distinctive belt of loops is in particular visible in the center and to the left of the solar disk. 46)
Legend to Figure 35: Coronal mass ejections are powered by energy stored in the magnetic field of the Sun's corona. This energy that can be released by the process of reconnection, in which oppositely oriented field lines are reconfigured to a more relaxed state and stored magnetic energy, is converted into the heat and kinetic energy needed to drive huge outward eruptions.
Fields that have recently reconnected are heated to many millions of degrees, then cooling to the one million degree temperatures that are visible to PROBA-2's SWAP imager. A second PROBA-2 sensor, LYRA, measures the Sun's energy intensity at the same time. Both instruments are operated for ESA by the Royal Observatory of Belgium.
• January 2014: The PROBA-2 mission is part of ESA's SSA (Space Situational Awareness) program for space weather since July 1, 2013. 47) Funding for the science operations of PROBA-2 was approved for the period 1 July 2013 to 31 December 2016. 48)
The SWAP (Sun Watcher using Active Pixel System detector and Image Processing) instrument of PROBA-2 provides a non-stop stream of coronal EUV (Extreme Ultraviolet) images at a cadence of typically 130 seconds. These images show the solar drivers of space-weather, such as flares and erupting filaments. The project has developed a software tool, SoFAST (Solar Flare Automated Search Tool), that automatically processes the images and localizes and identifies flares. On one hand, the output of this software tool is intended as a service to the Space Weather Segment of ESA's SSA program. On the other hand, the PROBA-2/SWAP images are considered as a model for the data from the EUI (Extreme Ultraviolet Imager) instrument prepared for the future Solar Orbiter mission (launch scheduled for 2017), where onboard intelligence is required for prioritizing data within the challenging telemetry quota. 49)
• ESA's PROBA-2 minisatellite contributes to a spectacular multiwavelength composite of the Sun dwarfed by its surrounding corona. A composite of space- and ground-based observations in different wavelengths gathered on the day of the solar eclipse of November 3, 2013. The result is an overall view of the Sun and its surrounding corona, extending far out into space (Figure 36). Image released in Dec. 11, 2013. 50)
![Figure 36: Multiwavelength solar view of: LASCO-C3 and LASCO-C2 on SOHO, ground-based observations from Cape Lopez (Port Gentil), Gabon and Pokwero, Uganda, AIA of SDO, and of SWAP on PROBA-2 [image credit: Kosmas Gazeas (University of Athens, Greece), P .Horálek - Observatory Úpice, J. Sládeček, M. Druckmüller, PROBA-2 (ESA/ROB), SDO (NASA)]](/api/cms/documents/163813/6192177/PROBA2_Auto2A.jpeg)
Legend to Figure 36: Close-in views of the solar disc and its surroundings in extreme-ultraviolet light are covered by the Royal Observatory of Belgium's SWAP instrument aboard ESA's PROBA-2 minisatellite and the AIA (Advanced Imaging Assembly) and HMI (Helioseismic and Magnetic Imager)instruments aboard NASA's SDO (Solar Dynamics Observatory) mission. The surrounding inner corona is depicted through a combination of white-light images acquired from the ground along the path of totality, from Port Gentil in Gabon and Pokwero in Uganda. The outer corona is depicted through the white-light LASCO-C2 and C3 coronagraph instruments aboard the ESA/NASA SOHO satellite. — The planet Saturn is visible at the top left of the picture as a bright saturated object, coincidentally giving an impression of rings.
• Mission operations extension: On June 19, ESA's SPC (Science Program Committee) approved funding for science operations of PROBA-2 for the period of July 1,2013 to December 31, 2016. 51)
In July 2013, PROBA-2 will be handed over to ESA's SSA (Space Situational Awareness) program. SSA will provide the mission operations, while the science program will continue to contribute for the science operations.
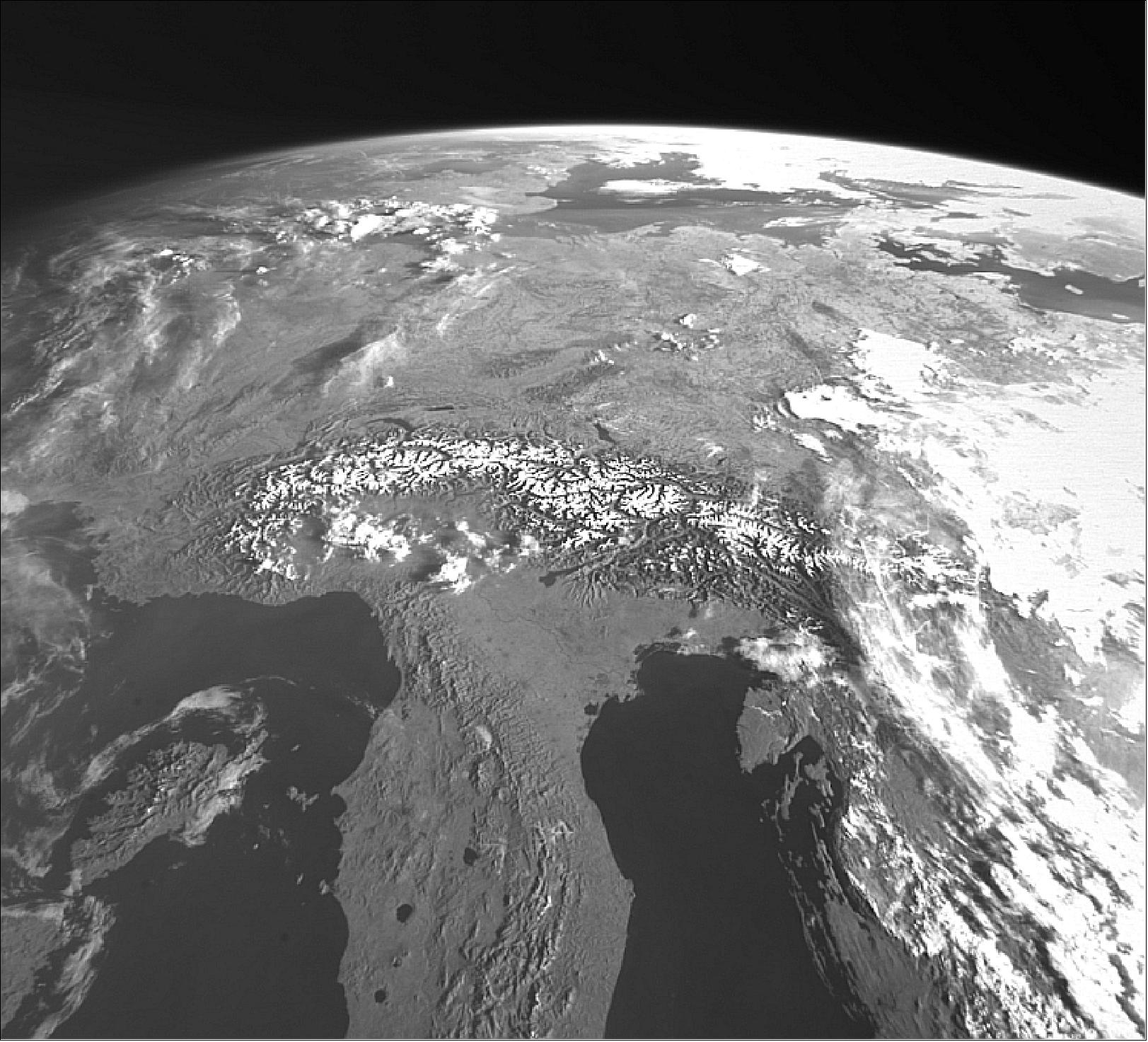
Legend to Figure 37: This cloudless view of central and northern Italy, the snow-capped Alps and the European heartland was snapped by an experimental camera, smaller than an espresso cup, aboard ESA's minisatellite PROBA-2. One of the 17 experimental technologies hosted on PROBA-2 is the compact Exploration Camera, X-Cam, manufactured by Swiss company Micro-Cameras & Space Exploration. Housed on the underside of the satellite, the monochrome X-Cam observes in the visible and infrared with a 100° field of view. 52)
• In 2013, the PROBA-2 mission is operating nominally; it was extended to the end of 2014. However, the mission will be operated under the SSA (Space Situational Awareness) program of ESA. 53)
• PROBA-2 celebrated its third birthday on Nov. 2, 2012. Since launch, the scientific instruments have acquired a continuous stream of data from our Sun: more than 700 000 solar disk images have been made available to the scientific community in raw and calibrated format, as still images or as movie files; over 1000 files of daily solar irradiance values in the extreme ultraviolet are available, also raw and calibrated. 54)
The solar eclipse of November 14, 2012 was observed four times as a geometric consequence of the spacecraft orbit. Besides direct scientific data analysis, the shape of the Moon on the solar disk can be used to analyze the in-field stray light of the SWAP imager. The in-field stray light is caused by photons that do not travel directly from the entrance onto a pixel on the detector, but instead are scattered randomly by tiny imperfections in the telescope optics. Once in orbit, it is very difficult to analyze this effect – except with the help of solar eclipses.
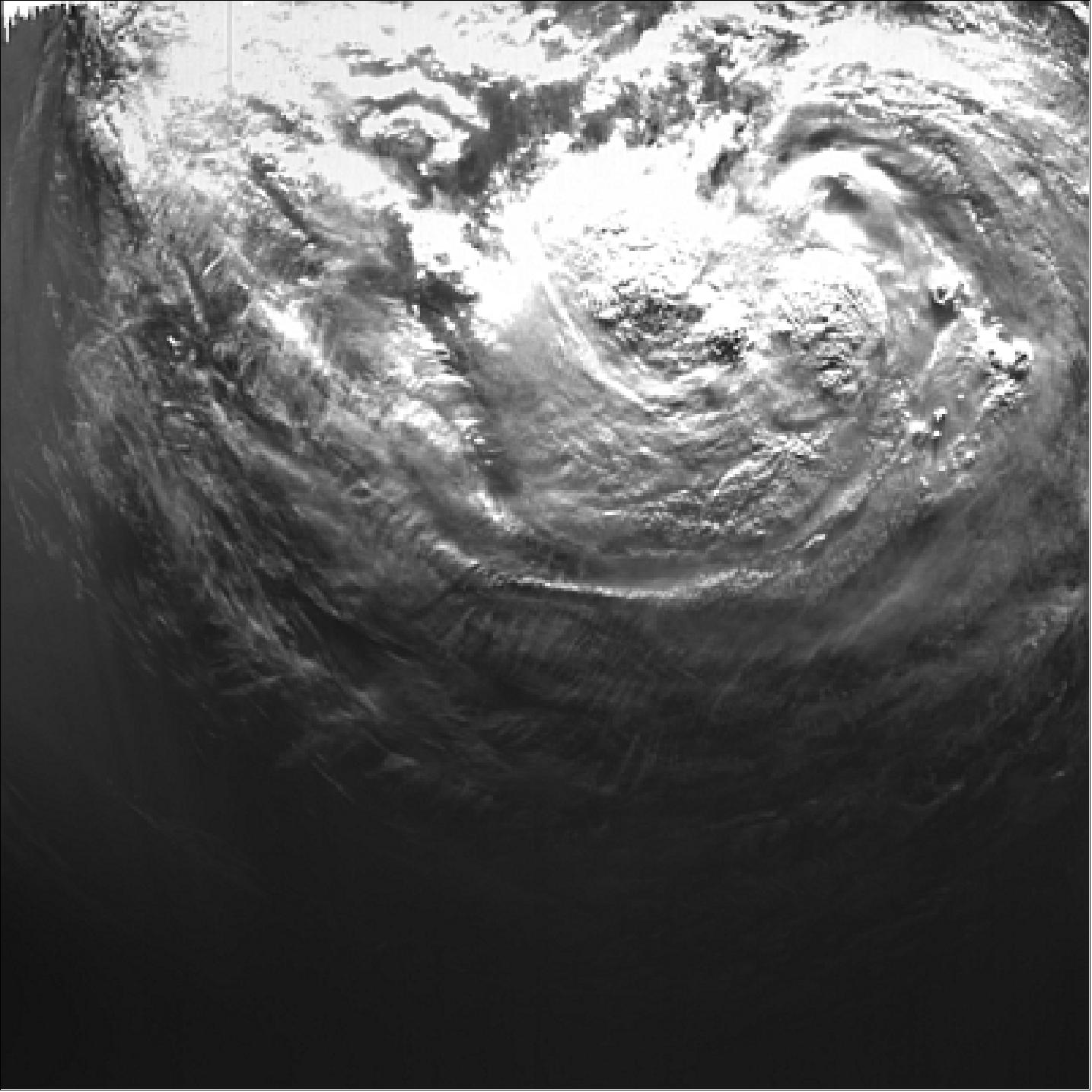
• The X-Cam (Exploration Camera ) on ESA's PROBA-2 microsatellite caught this view of soon-to-be Hurricane Isaac as it moved west of the Florida coast into the Gulf of Mexico at 11:38:33 GMT on Monday 27 August 2012. 55)
• In mid-2012, the PROBA-2 mission is now in its first mission extension period until the end of 2012, after having successfully completed its two year nominal operational phase. An additional mission extension until the end of 2014 is currently under discussion at ESA. The platform is exceeding its expectations concerning the required performance to operate the payloads and technology demonstrators. It has proven to be robust and stable and has been able to autonomously continue its operations unaffected by the space environment. Excellent solar images produced by the SWAP instrument are the visible result. The payload operations have continued throughout the nominal duration of the mission and into the first mission extension. Furthermore, all technology demonstrations are continuing their sequence of tests and have provided valuable data to the unit providers for identifying improvement areas and future applications. 56)
• The PROBA-2 spacecraft and its payload are operating nominally in 2012. PROBA-2 continues to acquire images of the solar disc and irradiance samples of solar flux through the increasing activity of solar cycle 24. The peak of this solar cycle is currently predicted for mid-2013. 57)
• As of early December 2011, the PROBA-2 mission gathered upwards of 400 000 images of the Sun and made almost 20 million in-situ ionospheric observations. 58)
• On August 16, 2011, a telecommand was sent from ESA's Redu ground station in Belgium to boost the gases in PROBA-2's unusual ‘resistojet' engine. The engine is used to maintain the microsatellite's orbit at 600 km altitude, this experimental engine runs on xenon gas heated before ejection to provide added thrust. 59)
The command added nitrogen gas to the fuel tank, bringing its pressure close to its launch level. The bottle-shaped cool-gas generators (see COGEX description and Figure 67) are filled with a rigid solid material that, once triggered, produces more than 250 times its own volume in pure nitrogen gas.
• The spacecraft and its payload are operating nominally in 2011.
• In March 2011, ESA announced the first calibrated measurements of solar irradiance made by the LYRA instrument. Future access to near-real-time data from both of the primary instruments on PROBA-2, SWAP and LYRA, is expected to provide new opportunities to study solar activity and space weather. 60)
• On January 4, 2011, PROBA-2 experienced a conjunction of the spheres, as the Sun, Moon and Earth all lined up in front of it. As people on Earth observed the 4 January partial solar eclipse, PROBA-2 provided a privileged top-of-atmosphere view – at least briefly. 61)
• In November 2010, ESA's Science Program Committee approved an extension of the PROBA-2 mission for 4 years up to the end of 2014, subject to confirmation in late 2012 on the regular two-year cycle. The extension for PROBA-2 will ensure that our Sun is closely watched during the rise to its next peak of magnetic activity, expected in 2013. 62) 63)
• In its first eight months of life, PROBA-2 has already returned more than 90 000 images of the Sun. 64)
• On April 3, 2010, the PROBA-2 SWAP instrument recorded a solar eruption event during the biggest geomagnetic storm of 2010 so far. The flare occurred on April 3 and was officially classed as ‘weak', though still involved temperatures of tens of millions of degrees (K). Significantly, this eruption was lined up with Earth, sending a vast number of charged particles hurtling towards us. Travelling at around 500 km/s, the front of this CME reached Earth the following Monday, April 5. The resulting geomagnetic storm was the most powerful in more than three years. It provoked dazzling auroras but no damage was reported to potentially susceptible systems such as satellites and GPS, communications and electrical power infrastructure. 65)
• In a dedicated campaign conducted by the ILRS (International Laser Ranging Service), PROBA-2 was tracked by 15 laser stations around the world for a two-week period in March and April 2010. Some 2000 observation points were collected during 120 passes.
Using these results, it was demonstrated that GPS-based precise orbit determination processed on the ground achieved an accuracy of 0.5 m – smaller than the satellite itself. Even on board, a remarkable 1–2 m positioning accuracy could be achieved with advanced real-time navigation filters embedded into the GPS receivers. This was a major milestone in the art of spaceborne navigation, and has proven these technologies for future European missions (Ref. 63).
• Phoenix XNS GPS receiver: Within the commissioning and early routine operations phase of PROBA-2 the receiver has demonstrated an excellent overall navigation performance that well exceeds the common expectations for low-cost, single-frequency GPS receivers. While the Phoenix onboard navigation solution is accurate to typically 2 m (3D rms) an accuracy of approximately 0.5 m can be obtained in the ground based post-facto orbit reconstruction using raw GPS data. Access to GPS raw data is enabled through a highly flexible onboard data handling system and an adequate telemetry bandwidth. This enables the full exploitation of the inherent GPS measurement quality for precise orbit determination and provides the required auxiliary data for receiver performance characterization or troubleshooting. Several experiment campaigns furthermore enabled a flight validation of the experimental XNS real-time navigation systems, where a 1 m level real-time navigation could be demonstrated. 66)
• The PROBA-2 mission has successfully completed its commissioning phase and has since end January 2010 entered its routine operational phase. The platform is providing the required performance to operate the payloads and technology demonstrators. Excellent solar images produced by the SWAP instrument are the visible result. Further payload operations have commenced in the routine phase of the mission. Furthermore, all technology demonstrations have successfully undergone their first tests and are being submitted to an ongoing sequence of tests in the routine phase (Ref. 9).
The ground segment as well is operating nominally and with a high level of automation for the day-to-day SWAP and LYRA science activities.
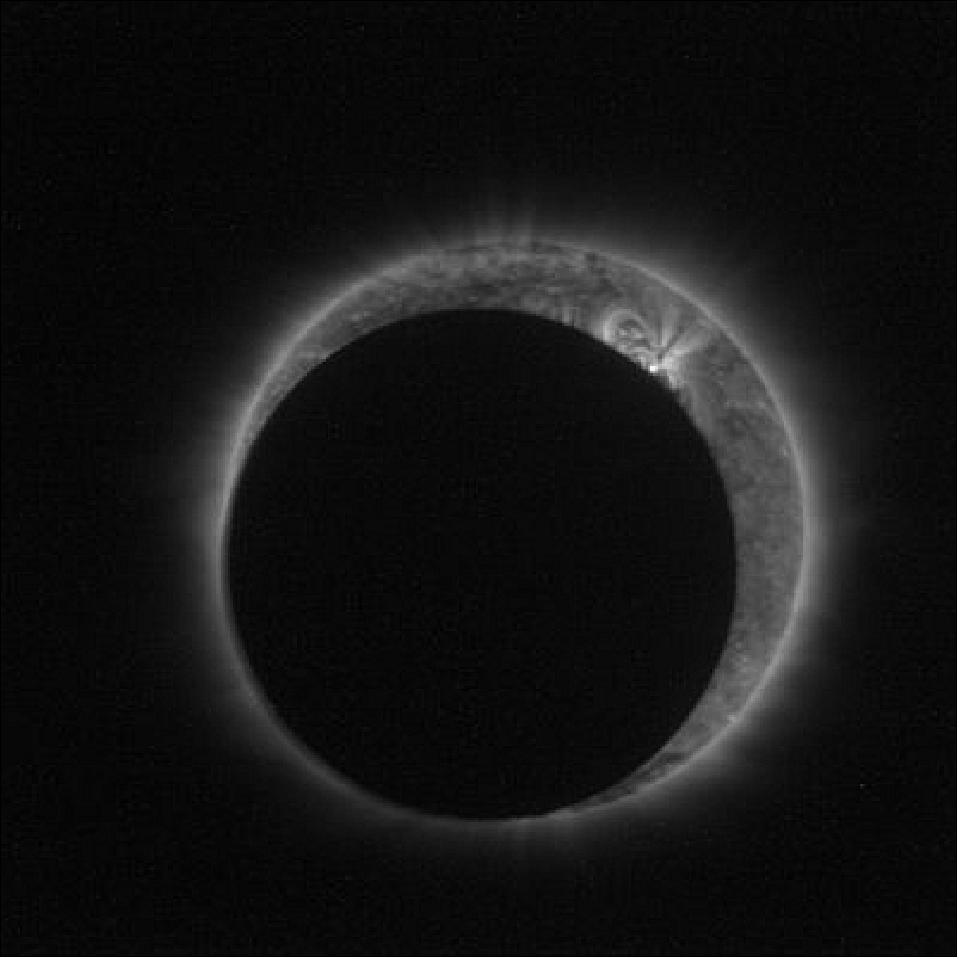
• At a press conference of the Royal Observatory of Belgium (ROB) in Brussels on 26.01.2010, the PROBA-2 team declared themselves extremely happy with its first three months of testing and first solar observations in orbit. ROB has the scientific responsibility for PROBA-2's two solar monitoring instruments, SWAP and LYRA. PROBA-2 is still in the commissioning phase in January 2010. On January 15, 2010 PROBA-2 was able to observe the annular solar eclipse by using SWAP (Figure 40). 67)
• Nov. 11, 2009: The PROBA-2 spacecraft is in excellent health. The project tested successfully the platform safe mode, including all platform-critical units of the AOCS. 68)
• After separation from the launcher, the PROBA2 spacecraft started-up and performed a fully automated sequence, including the deployment of solar panels, and finally entered its safe mode configuration. The first telemetry was received on ground at 04:51:07UTC on November 2, 2009. The initial angular velocity of the spacecraft (estimated using magnetometers measurements only) with respect to the magnetic field was less than 0.01rad/s (0.57º/s), well below the tested worst case (Ref. 9).
International Collaborative Observations of Solar Missions
On the international scene several other solar missions are flown in space at the very same time as PROBA-2. These include the SDO (Solar Dynamics Observatory) and the STEREO (Solar TErrestrial RElations Observatory ) missions of NASA and SOLAR-B (nicknamed HINODE) of JAXA. 69)
The two STEREO spacecraft were launched in October 2006. The mission concept is to observe the solar corona from two spacecraft drifting respectively ahead and trailing the Earth, in the Earth orbit around the Sun. After the nominal mission duration of two and a half years, the two spacecraft drifted apart by more than 80º. HINODE was launched from the Japanese Uchinoura Space Center in September 2006. The SDO spacecraft was launched in February 2010 from Cape Canaveral.
• SWAP contributes to the STEREO observations in 2 essential ways:
- The separation angle between the STEREO spacecraft has currently grown to more than 80º. SWAP on PROBA-2 provides a ‘third eye' in between the two STEREO perspectives and potentially improves tomographic reconstructions significantly. Note in this respect that the STEREO imager (EUVI) band pass, centered around 17.1 nm, is quiet close to the 17.5 nm band pass of SWAP and the similarity can be further improved through DEM reconstruction of the 4 EUVI bandpasses.
- The EUV imager and the inner coronagraph on each STEREO spacecraft have an overlapping field of view, which is important to compare the EUV characteristics and the white light characteristics of CMEs. However, this overlap region is relatively limited, especially taken into account that high speed CMEs can cross this overlap region in a relative short time interval. Due to its large FOV, as well as its flexible off-pointing capability, SWAP is well suited to extend the overlap region and facilitate EUV/white light comparisons.
• HINODE carries several instruments that are particularly complementary to SWAP:
- HINODE carries the XRT ( X-Ray Telescope) imaging the solar corona. As compared to SWAP, XRT will image the hotter corona (several million K as compared to 1 million K for SWAP) on a smaller FOV (>~ 30 arcmin, as compared to 54 arcmin for SWAP), with a much higher temporal resolution (cadence ~2 s, as compared to 1 min for SWAP). XRT and SWAP are thus imaging different regions in the solar atmosphere with a different FOV and temporal resolution.
- HINODE also carries EIS (EUV Imaging Spectrometer). EIS is able to make spectrally resolved images in the SWAP bandwidth at a higher cadence (~10 s), but on a smaller FOV (360" x 512"). Coordinated observations between EIS and SWAP are thus very useful for inflight characterization of the SWAP bandpass and mutual calibration. SWAP acts as a context imager for EIS, in the same way as SOHO/EIT served as a context imager for the SOHO/CDS operations. Complementary to the HINODE XRT, SWAP provides the context of the corona at its lowest temperatures (1 million K).
The SDO spacecraft carries AIA (Atmospheric Imaging Array), which takes high-resolution images (roughly 5 times better than SWAP) at high temporal cadence (roughly 6 times better than SWAP). The images will be taken in several spectral bands, one of them centered around 17.1 nm, which is very close to the SWAP spectral band. Yet, SWAP provides an extended FOV and provides the off-disc context to the AIA images, as the AIA will have a limited FOV (41 arcmin) whereas SWAP has a FOV of 54 arcmin.
The instruments onboard PROBA2 operate continuously since first light. Besides acquisitions with nominal settings, both SWAP and LYRA acquire data for scientific campaigns and calibration campaigns. A calibration campaign is the execution of data acquisition with the purpose to improve the on-ground calibration pipeline. Typical calibration campaigns for LYRA are:
- DC (Dark Current) acquisition: the covers of an individual unit are closed with the data acquisition ongoing.
- FF (Flat Field) acquisition: the spacecraft is off-pointing in such a way, that the LYRA sensor rasterizes the sky background with the Sun as center.
- LED (Light-Emission Diode) acquisition: the spacecraft is off-pointing and the LEDs are switched on to have the detector acquire always the same LED value. A changing value indicates a degradation of the detector.
- Detector bake-out: increase of detector temperature over 24 hours to anneal the detector and free it from decontaminating particles.
A scientific campaign is the acquisition of data using dedicated instrument settings or special off-pointings to support the analysis of a science question. For LYRA, these acquisitions are typically required during the eclipse phase. Once a year, the spacecraft is shaded by the shadow of the Earth. When entering and exiting the shadow, LYRA actually samples the Earth atmosphere. Dedicated instrument settings and the usage of two units is programmed to build up an occultation database.
Typical calibration campaigns for SWAP are:
- DC acquisition: achieved by off-pointing the spacecraft such that the solar disk is far out of the FOV.
- LED acquisition: achieved by off-pointing the spacecraft and the switch-on of LEDs.
- FF acquisition: raster scan of the solar disk to obtain equal input flux over the full detector.
- Detector bake-out: increase of detector temperature over 24 hours to anneal the detector.
The scientific campaigns of SWAP are manifold. JOPs (Joint Observations Program) are planned by several in-orbit or on-ground instrument teams. The image cadence or the detector pointing is then synchronized with the other instruments to achieve a better coverage of the event under analysis. The SWAP off-pointings are regularly executed e.g. in expectations of large flares or CMEs (Ref. 69).
Sensor Complement
Four instruments are being developed in the framework of the PRODEX (PROgramme de Développement d'EXperiences scientifiques) program of ESA. SWAP and LYRA, the major components of PROBA-2, are dedicated to the observation of the sun. They are being developed under CSL (Centre Spatial de Liège), Belgium, management, while TPMU and DSLP are being developed under the management of the Academy of Sciences of the Czech Republic in Prague. 70)
SWAP (Sun Watcher Using Active Pixel System Detector and Image Processing)
SWAP is an extreme ultraviolet (EUV) telescope to observe the sun. The SWAP design and development is at CSL (Centre Spatial de Liège), Belgium. SWAP is of EIT (Extreme ultraviolet Imaging Telescope) instrument heritage flown on the SOHO mission. The objective of SWAP is to provide imagery of the sun's corona in the Fe-XII line on the baseline of 1-minute cadence (extreme UV observations of the solar corona with a dedicated telescope). Observations in this spectral range permit the detection of solar flare phenomena, or so-called EIT-waves, associated with the early phase of solar flare ejections. 71) 72) 73) 74) 75) 76) 77)
SWAP observations are centered on the 17.4 nm emission line (EUV). SWAP is a single channel EUV imager, whereas EIT has 4 spectral pass bands. The SWAP bandpass was selected such, that solar flares do not saturate the individual pixels. The imagery is expected to give important information on the location of coronal holes (the source of high speed solar wind streams), active regions (potential source of solar flares) and filaments (potential eruption sites). Hence, SWAP is a solar monitor capable of recording the time-evolution of every event in the low solar corona that might be of relevance to the space weather.
The SWAP instrument uses an off-axis Ritchey-Chretien type telescope (no central obstruction of the primary mirror) equipped with an EUV enhanced CMOS/APS detector (STR-1000, coated with a scintillator layer, 1024 x 1024 pixels). An elliptical primary mirror, combined with a spherical secondary mirror, is used in quasi-normal incidence to focus the solar light on a detector implemented in a focal plane assembly (FPA). This type of detector has advantages that promise to be very profitable for solar EUV imaging from space such as: radiation resistance, improved noise reduction, shutterless operation, and non-destructive readout. The detector is being passively cooled (-20ºC) with an external radiator (cold finger type) viewing cold space to reduce the thermal noise.
The optical elements are mounted into an optical bench for system and thermal stiffness and stability (Figure 42). The FPA includes the proximity electronics required to readout the sensor, and drive the calibration diodes. The SWAP instrument provides images of size 1 Mpixel of the EUV solar corona at 17.5 nm in a square FOV (Field of View) of 54 arcmin. Hence, SWAP has a 20% larger FOV than EIT resulting in a better view on off-disc eruptions. These capabilities are further supplemented by the possibility to off-point the SWAP instrument. This is implemented by offpointing the spacecraft in a range of ± 3º, commanded via the SWAP commanding chain.
SWAP monitors the solar activity for CME (Coronal Mass Ejection) events. The data is sent to the ground after autonomous onboard selection.
SWAP takes one new image of the Sun every minute. This is a marked improvement on its nearest predecessor: The EIT (Extreme ultraviolet Imaging Telescope) instrument on the ESA/NASA SOHO mission only takes a new image around every 15 minutes. The shorter time interval between views should lead to new scientific discoveries and support space weather forecasting. In addition, SWAP has a broader view compared to EIT, being able to off-point from the solar center to track if plasma leaves the Sun.
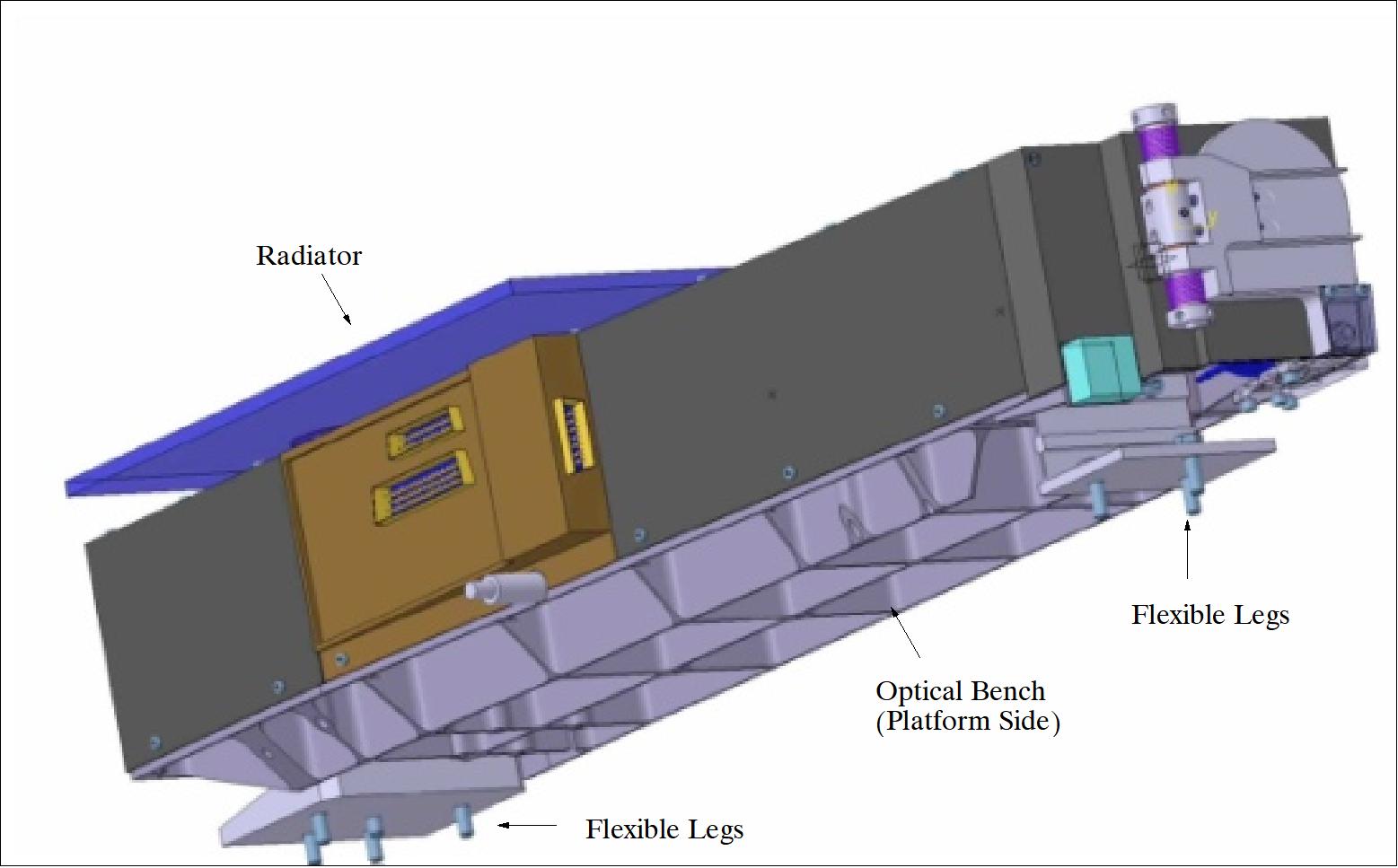
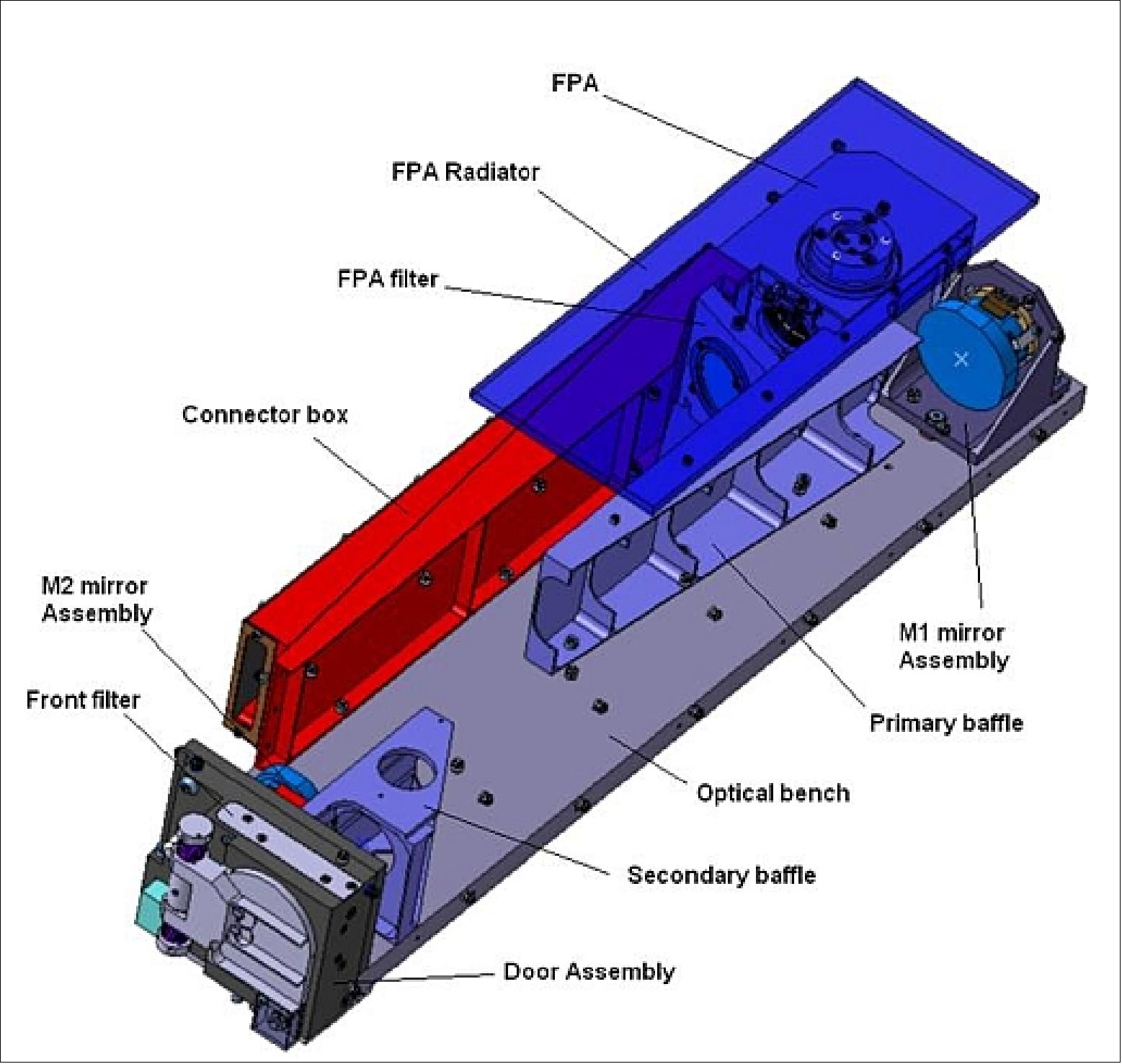
The mass budget of SWAP is 10 kg with a mean power dissipation lower than 5 W.
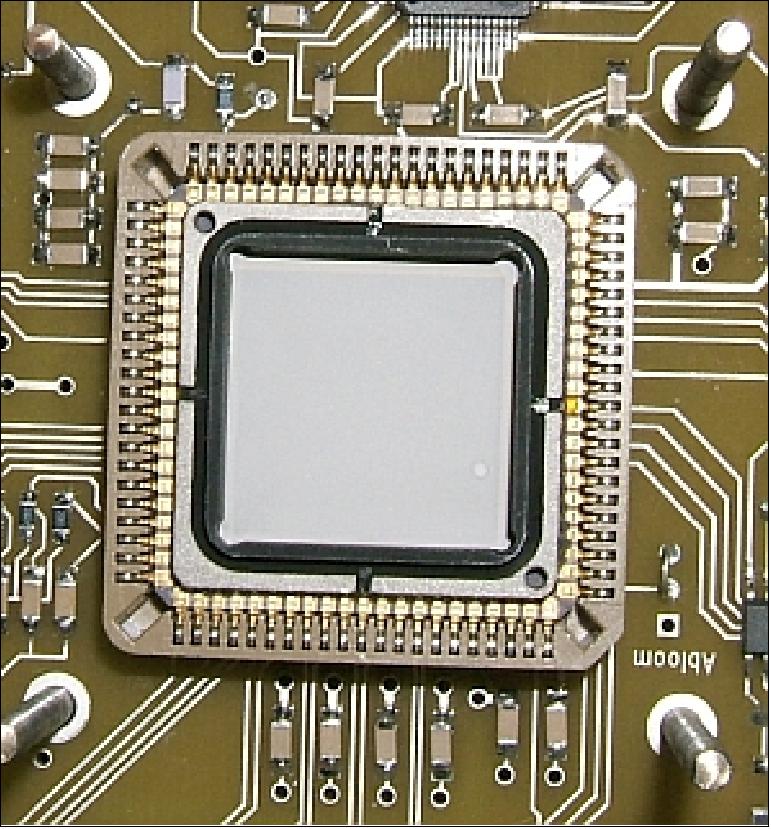
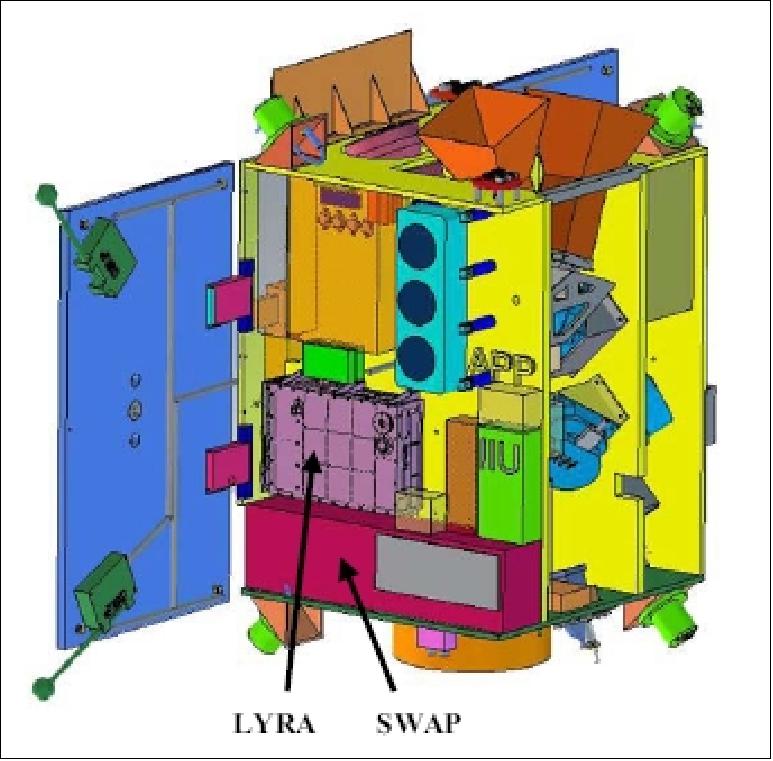
Some SWAP Performance Results Reported in October 2010 78)
• One of the first commissioning activities was to improve the spacecraft pointing to center the Sun in the SWAP images, the large angle rotation of the spacecraft (4 every orbit) effect, and improving the spacecraft stability. In parallel, the SWAP imaging parameters (integration time, detector offsets, compression mode and parameters, etc) were optimized. Automated image acquisition sequences were also validated. The integration time has so been fixed to 10 s and maximum cadence to 18 s. During the nominal operations, images are compressed using JPEG progressive compression (compression factor of 2.5 to 3).
• Dark current: Dark subtraction is a tricky problem for SWAP images as the detector is not at constant temperature so dark current is not constant. Furthermore, the SWAP detector temperature which was expected to be below -10ºC is varying around 0ºC, due to spacecraft temperature which is 15 to 20ºC higher than expected, resulting in a relatively high thermal noise.
• Instrument straylight: Taking advantage of the Earth eclipses that occurred at the beginning of the mission and of the spacecraft off-pointing capabilities, the straylight level has been quantified. Dark images have been taken over two orbits with a 3-arcdeg off-point (angle at which straylight should be negligible due to the instrument internal baffling design). Taking into account the detector temperature variation, the straylight level was then measured as less than 0.5 DN which is negligible. This analysis demonstrated that the LED images could be used for detector response monitoring, when used in off-point, without parasitic solar straylight.
• Bright pixels and cosmic rays: The SWAP detector is a CMOS-APS and not a CCD. The essential difference is that for a CMOS-APS detector every pixel has its own read-out transistors and thus behaves slightly different from the neighboring pixels. Essentially, of the one million individual pixels, a small fraction (<0.5%) is not behaving. With onboard processing, the project can adequately process these images before being sent to the ground, but a slight increase of these ‘hot pixels' (0.5% in 6 months) may be due to the orbit pass through the South Atlantic Anomaly (SAA).
• Image processing: The raw images are first reformatted, decompressed and saved into engineering (Level-0) FITS files with a header containing all information on acquisition and processing times, spacecraft pointing and position, instrument settings and parameter settings used to acquire the image. In a next step, they are further on-board and on-ground processed to produce base science (Level-1) FITS files:
- On-board correction of ‘bad' pixels replaced by their neighbors average, and of saturated or missing pixels
- On-ground subtraction of dark current, image orientation and centering, normalization to the exposure time. Additional extra processing is also performed to enhance the off-limb region.
• Overall, SWAP is a successful technological demonstration instrument. Its first use - a CMOS-APS for space solar science with specific scintillator coating. It also takes advantage of a low power passive thermal control providing nominal optical quality even at high operational temperature. Optical performances are also nominal (no grid effect, no visible straylight). In-flight performance analyses have been started during commissioning, and are continued to improve knowledge of the instrument behavior and capabilities. SWAP is thus a preparatory instrument for other similar EUV imagers, from which lessons will be derived and expertise gained with CMOS detectors camera will be re-used.
SWAP is also used in the frame of space weather and solar science, providing high temporal cadence up to 18 seconds (1 minute nominal), of 10 seconds exposure duration, with limited blooming due to CMOS detector, and onboard data processing and prioritization. Data are available in near-real time (9 passes/24 hours with image priorities). Off-pointing capabilities (automatically) also provide the capabilities of CME tracking up to a few degrees by a flexible commanding from the PROBA-2 Science Center.
LYRA (LYman-Alpha RAdiometer)
LYRA is a small solar VUV (Vacuum Ultraviolet) radiometer. The instrument is being designed, manufactured and calibrated by a Belgian-Swiss-German consortium led by CSL(Centre Spatial de Liège), Belgium, with ROB (Royal Observatory of Belgium) being the principal investigator. There are also important contributions from PMOD (Physikalisches-Meteorologisches Observatorium Davos), Switzerland. The objective of LYRA is to observe the total solar irradiance at a high cadence (> 20 Hz) in four UV wavelength ranges. The channels have been chosen for their relevance to aeronomy, space weather and solar physics applications: 79) 80) 81)
• Channel 1: 115-125 nm Lyman-alpha passband (121.6 nm)
• Channel 2: The 200-220 nm Herzberg continuum range (interference filters for the two former passbands)
• Channel 3: Al filter channels (17-80 nm) covering He II-30.4 nm
• Channel 4: XUV zirconium filter channel (6-20 nm), where solar variability is highest.
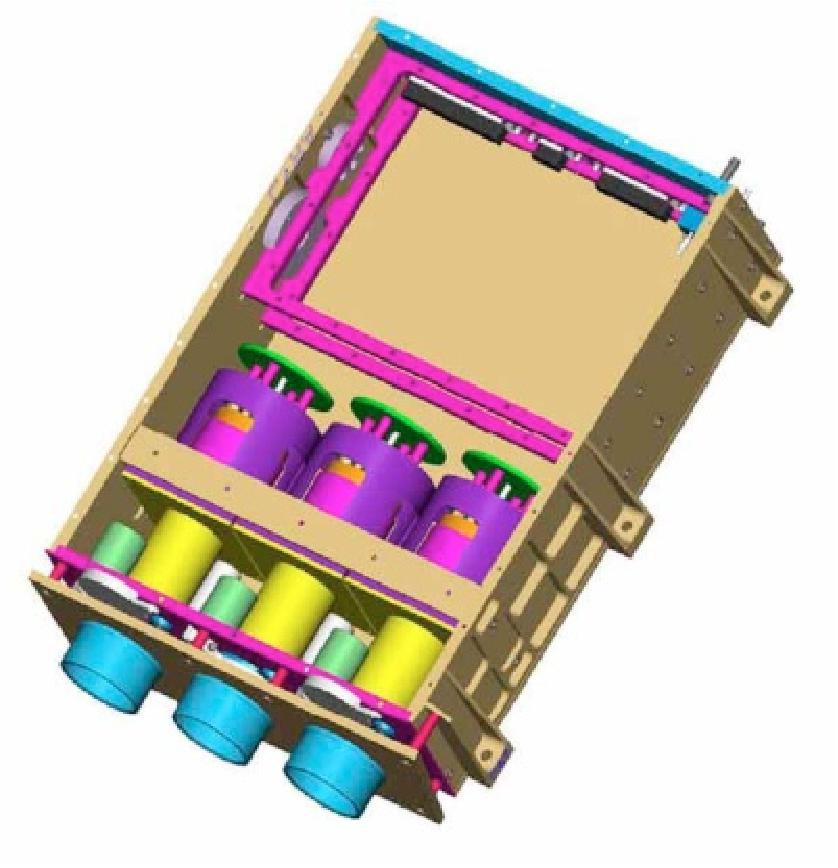
On the technological side, LYRA benefits from diamond detectors: it represents the first space assessment of the pioneering UV detectors program, originally initiated at the ROB. Diamond, the wide bandgap material, makes the sensors radiation-hard and "solar-blind," which allows suppressing the usual filters, that block the unwanted visible, but attenuate seriously the desired UV radiation.
The instrument concept features a set of 3 redundant heads. Each head includes 4 different spectral channels. Each channel corresponds to a collimator and a detector head (one detector, one filter, two calibration LEDs and a calibrated hole). The design of the heads takes also into account opening angle, cleanliness, and thermal issues. The LYRA optical design by PMOD (Physikalisch-Meteorologisches Observatorium Davos), Switzerland, employs photometers of VIRGO (Variability of Solar Irradiance and Gravity Oscillations) instrument heritage flown on SOHO.
The LYRA solar blind diamond detectors are designed and fabricated at IMOMEC (Institute for Materials Research in MicroElectronics), Diepenbeek, Belgium, with the collaboration of NIMS (National Institute for Materials Science), Tsukuba, Japan. The single pixel devices are photoconductors and pn junctions, depending on the channel. A dedicated spectral filter and a calibration diode complement each channel. The redundancy strategy uses 2 redundant heads. One is used on a weekly basis, while the other remains closed most of the time and is only used on a monthly basis. The intent is to receive relevant data to evaluate the aging of the sensors.
For LYRA, two types of detectors are developed: MSM (Metal-Semiconductor-Metal) and PiN (Positive Insulator Negative photo diode). Detectors based on CDV diamond consist of a thin epitaxial CVD (Chemical Vapor Deposition) diamond layer or an epitaxial multilayer structure deposited on a natural IIa or synthetic HPHT (High-Pressure High-Temperature) diamond substrate.
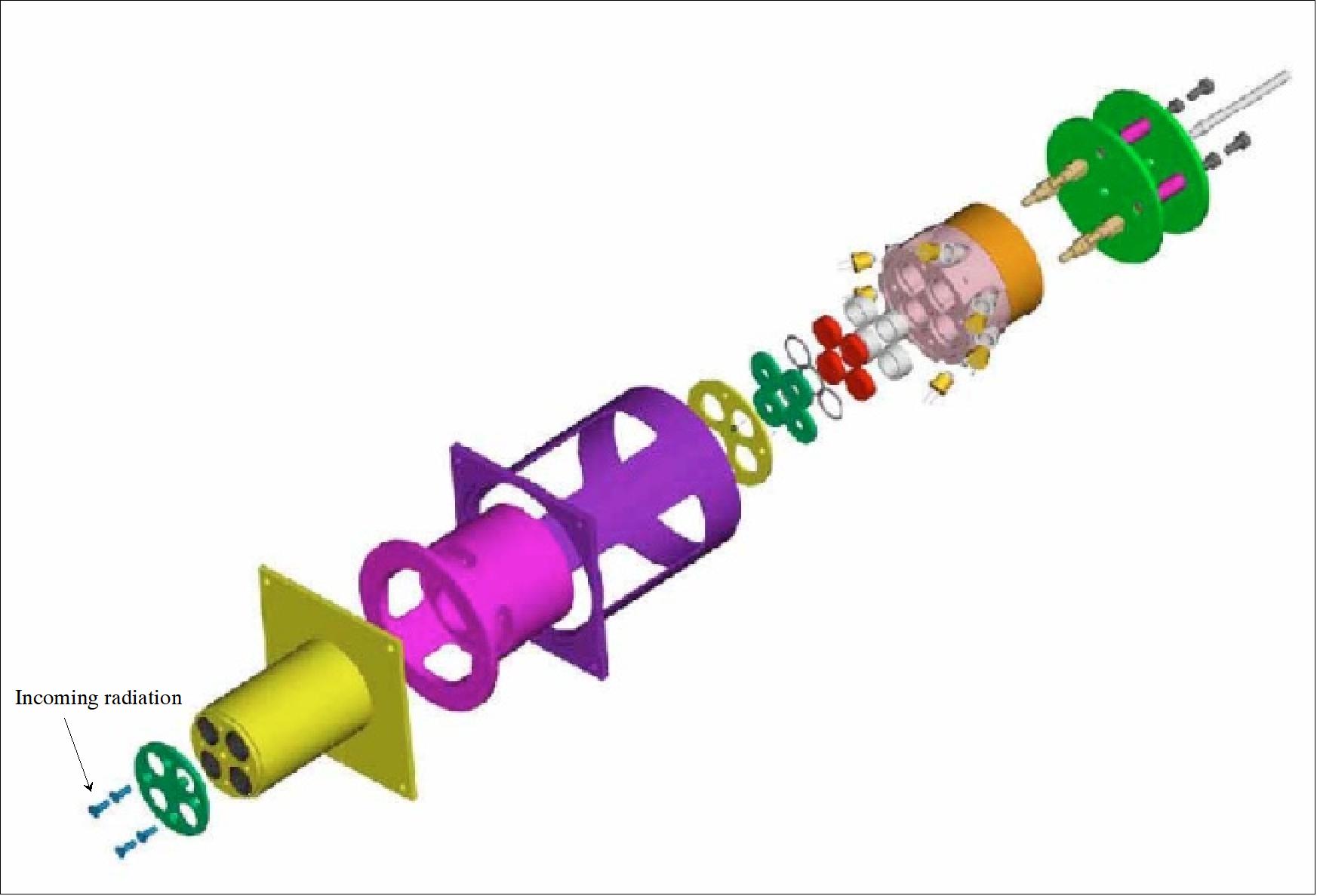
To calibrate and monitor the detector response during operation LEDs are being used. UV LEDs calibrate the UV response while the visible LEDs check if the solar blindness is changing due to e.g. radiation induced defects in the energy gap of the CVD diamond.
The LYRA instrument is a box of size: 315.0 mm x 92.5 mm x 220.0 mm in Aluminum alloy 6082 T6. The total mass is 4.9 kg which is just in the allocated mass specification of ≤ 5 kg.
Since LYRA is essentially a radiometer, a lot of care is taken concerning the radiometric design. LYRA is involved with the UV part of the solar spectrum, which is weak with respect to the visible part. This requires getting a high level of rejection of this visible part to avoid visible contamination of the UV-EUV region.
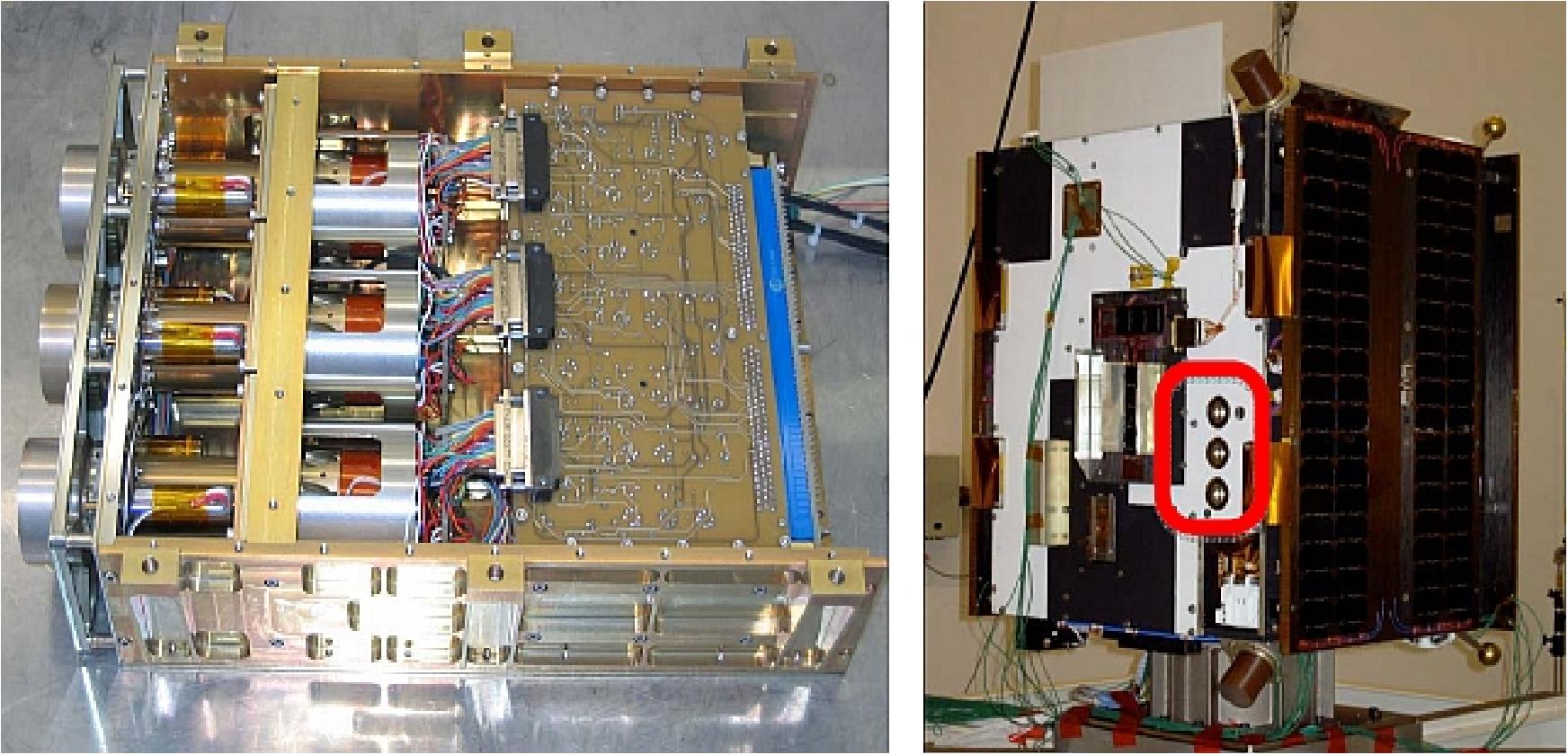
Some LYRA Performance Results Reported in October 2010 82)
• The operational temperature of LYRA is close to 40ºC instead of 25ºC as intended. Degradation of filter transmission on a spacecraft is unavoidable and the rate of sensitivity loss is a measure of the cleanliness of the satellite which in the case of LYRA is rather adverse. Despite the unfavourable thermal and cleanliness environment at spacecraft level, the instrument works correctly and provides relevant scientific results.
• LYRA is a successful technological demonstration instrument. It is the first use of diamond detectors (of two types, PIN and MSM) for space scientific research. In-flight performance analyses have been started during the commissioning phase and are continued to improve knowledge of the instrument performance and capabilities. LYRA is thus a preparatory instrument for other similar radiometer, from which lessons will be derived and expertise gained on diamond detectors in space applications.
• LYRA is also used in the frame of space weather and solar science, providing high temporal cadence data up to 20 Hz. Data are available in near-real time (9 passes/24 hours).
LYRA SAA Analysis Reported in June 2012 (Ref. 69)
The SAA (South Atlantic Anomaly) is an area over the South Atlantic where the Earth's inner Van Allen radiation belt comes closest to the Earth's surface due to the inclination of the Earth's magnetic axis to its rotational axis. The inner Van Allen Belt contains high concentrations of energetic protons and electrons with energies exceeding 100 MeV and hundreds of keV respectively, trapped by the magnetic fields in the region.
The LYRA data regularly contain noise of different strength and different duration. It is visible in Figure 48, that the signal strength and its variance increases for a period of about 5 minutes (here shown on the example of the LYRA unit 2, zirconium channel on 29 May 2011). An algorithm was developed to scan the LYRA detector data and derive a characterization of the noise by strength and position of the spacecraft at time of acquisition.
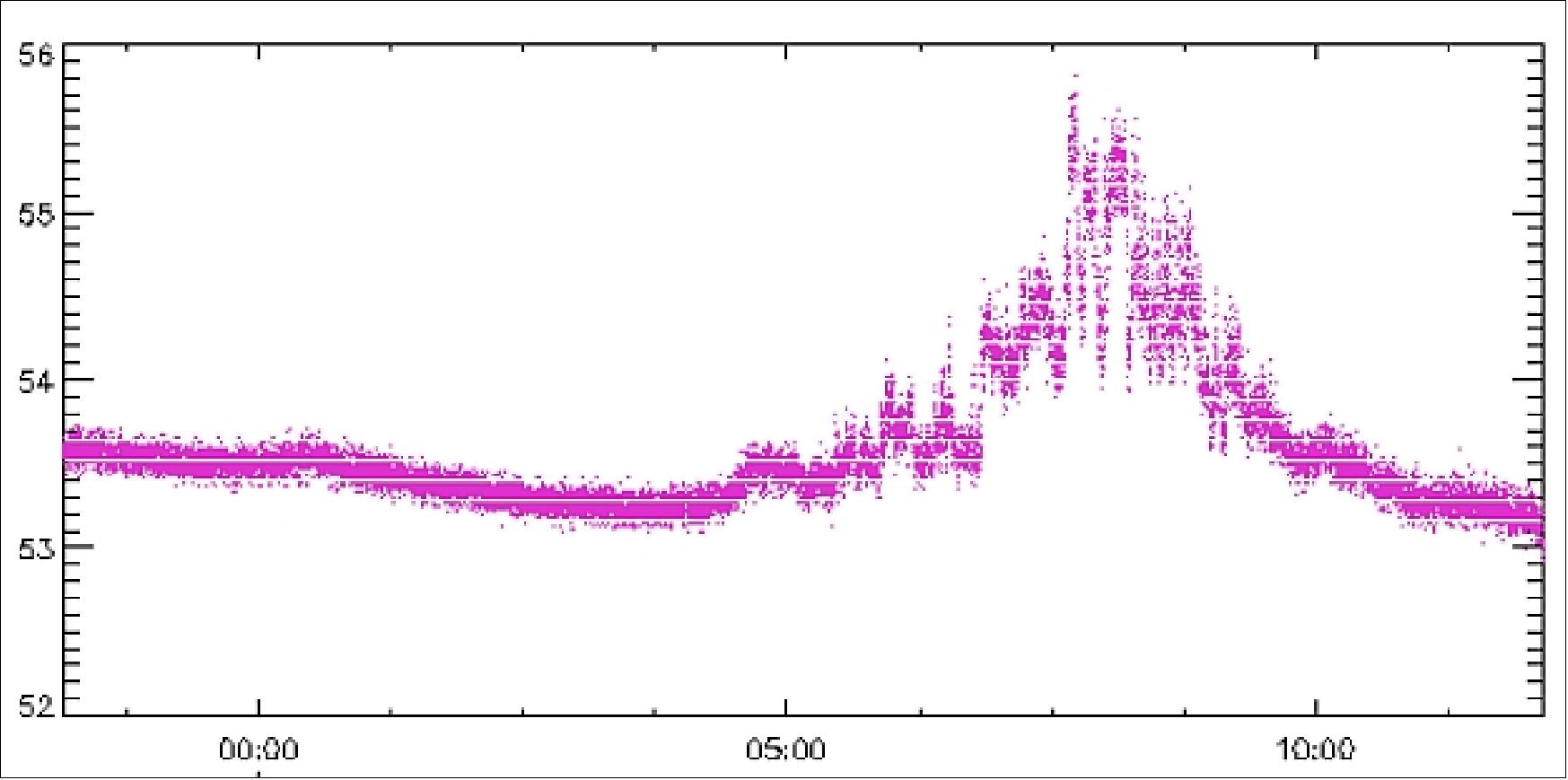
Figure 49 shows the result of the automatic noise detection algorithm. The size of the variance is measured in arbitrary units and displayed over the latitude and longitude of observation at the time instance of the strongest noise. The plot shows nicely the individual orbits during which the noise was measured.
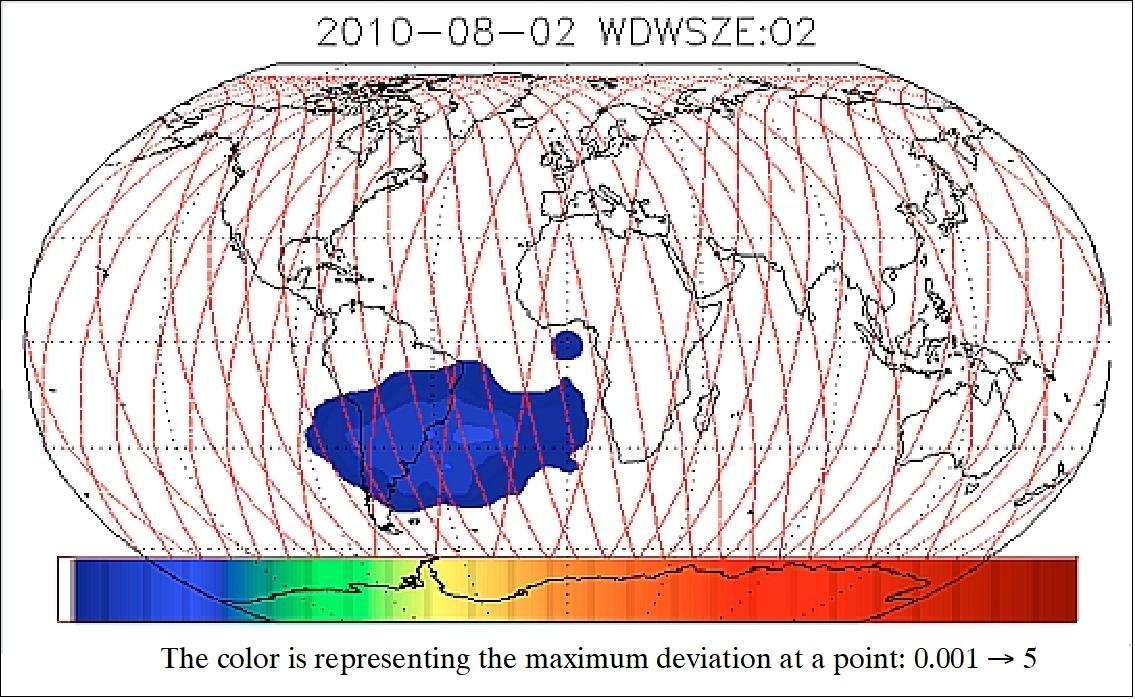
TPMU (Thermal Plasma Measurement Unit)
TPMU + DSPL (Dual Segmented Langmuir Probe) are designed and developed by the Institute of Atmospheric Physics (ASCR), Academy of Sciences of the Czech Republic (CAS), Prague, Czech Republic. PI: Frantisek Hruska. The main objective of the TPMU is the study of the ionosphere, its dynamics and response to solar and geomagnetic activity - to provide a measure of the electron temperature, floating potential, the ion temperature, concentration and composition - and to extend the series of similar plasma measurements carried out during last two decades onboard MAGION satellites. The goal is to develop a new more reliable and accurate low-cost instrument suitable for microsatellites by implementing a state-of-the-art design. 83) 84) 85)
Measurement Technique
The ion measurement is based on the RPA (Retarding Potential Analyzer) technique. RPA consists of planar sensor which is directed approximately along the spacecraft velocity vector. The sensor has internal grids. Subsequent steps of positive voltage are applied to the grids to retard the incoming ion flux that reaches the collector. The resulting ion-flux versus retarding potential measurements is used to derive the total ion concentration (Ni), the ion temperature (Ti) and the approximate ion composition.
The electron temperature measurement uses another principle and sensor. It is based on the radio frequency probe technique using the RF signal (~50 kHz) which is modulated by the square wave. The amplitude of RF is controlled in such a manner that the shift of probe potential is constant. The probe potential is periodically searched for minimum of electron temperature. The electron temperature is measured under the assumption of Maxwellian distribution.
Measured parameters: | Measurement range |
Instrument size, power, mass | 130 mm x 20 mm x 63 mm, 950 mW, 2.426 kg |
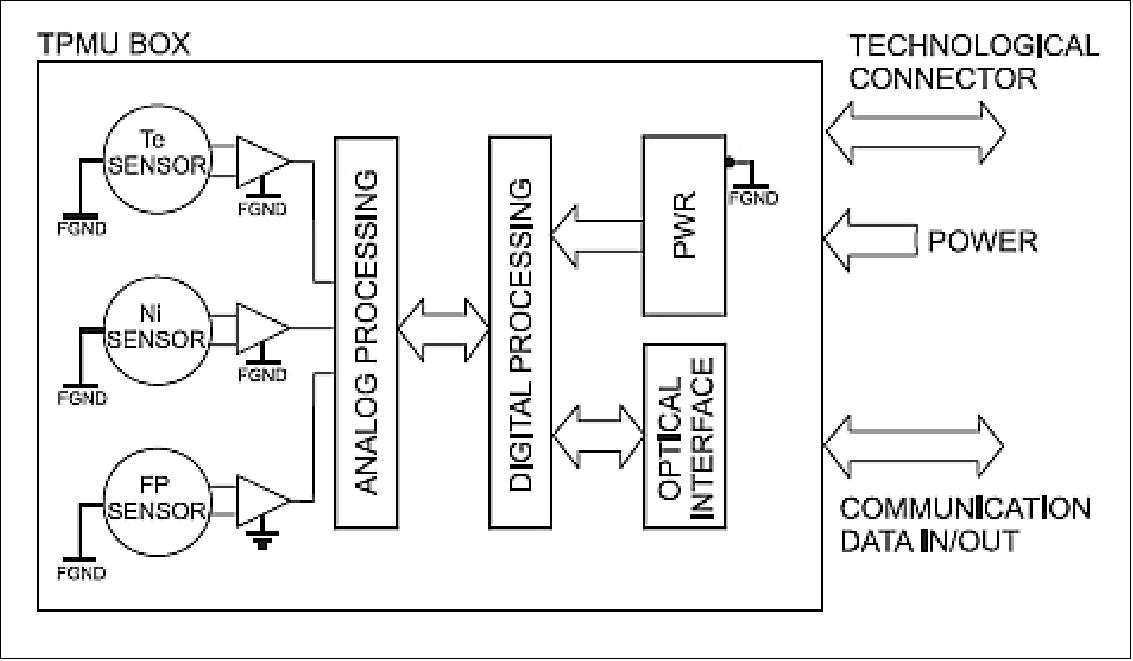

The TPMU is housed in an aluminum box together with the electronics of the DSPL experiment. Both experiments use the DPU (Digital Processing Unit) in common. The TPMU microprocessor (ADuC845) provides proper timing and control signals for the analog part, primary data processing and necessary calculations. It also communicates via an optocoupler-isolated interface with the DPU. The software is written in 8051 Pascal mode, the time resolution is set by commands from the DPU. All the electronics devices are accommodated on one PCB plate. The technical realization of the TPMU and DSLP box was made in cooperation with the Czech Space Research Center (CSRC), Brno, Czech Republic.
The FOV of the probes is oriented in the direction of the velocity vector. The TPMU contains 3 experiments which measure the total ion density and electron temperature, the ion composition and ion temperature, and the floating potential of the satellite body.
The electron temperature part uses three simple circular planar probes with guarding rings, developed at IKI (Institute of Space Research) Moscow, Russia. A constant voltage shift is kept by applying the proper amplitude of RF signal. The probe potential is periodically searched and adjusted for minimum of electron temperature.
The ion part uses a two-grid planar trap. The ion measurement can work in two modes. The first one is the measurement of the ion flux at plasma potential. The second one is the measurement of volt-ampere retarding characteristics. The analyzing voltage varies in 256 steps from 0 to 12 V. This voltage is given by the sum of the floating potential, the voltage difference between the plasma and the floating potential (calculated from Te probe) and the auxiliary voltage.
DSLP (Dual Segmented Langmuir Probe)
The instrument is of ISL (Instrument Sonde de Langmuir) heritage flown on the DEMETER mission of CNES (launch June 29, 2004). It was developed by the Institute of Atmospheric Physics, Academy of Sciences of the Czech Republic, Prague, Czech Republic. The objective is to use DSLP for measurements of the density of space plasma and its variations in the range 100 to 5 x 106 particles/cm3, the electron temperature in the 500-3000 K range, and the satellite potential in the range of ± 5 V. The instrument consists of two Langmuir probes, one is cylindrical the other is spherical with a 6 cm diameter segmented probe. The plasma density and temperature are determined from the Langmuir probe current-voltage curve.

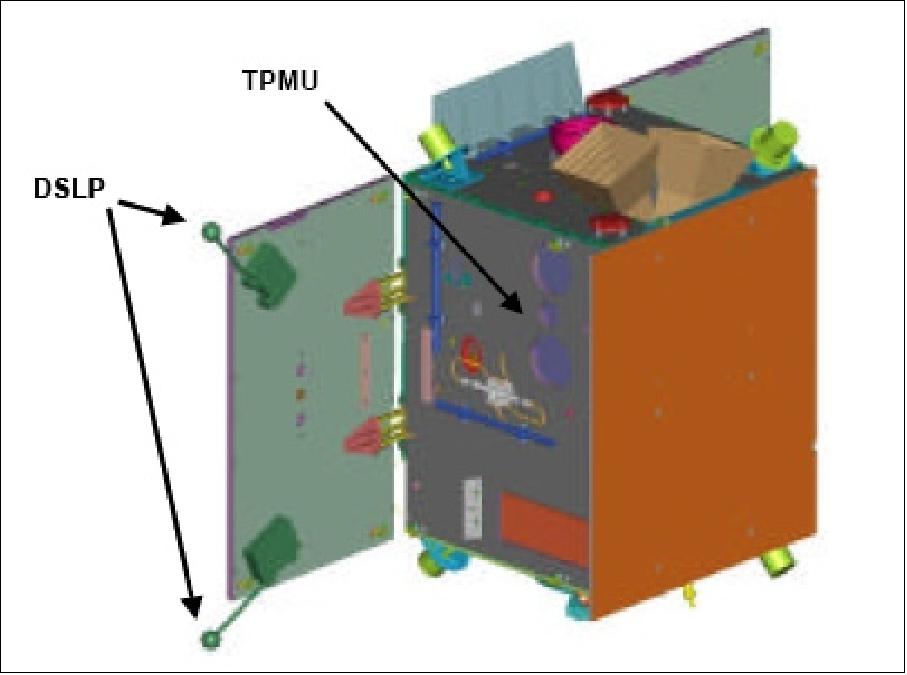
As a part of the PME (Plasma Measurement Equipment), the DSLP instrument will aim at studying characteristic macroscopic properties (e.g. density, temperature or flow dynamics) of ionospheric plasmas and, with use of SWAP and LYRA observations, try to identify observed irregularities with possible solar-terrestrial connection related to sudden space weather events.
The DSLP experiment represents a new type of a measuring device in the wide family of electrostatic Langmuir probes. The new technique used on this instrument consist in data acquisition from several independent sectors of a spherical shaped electrodes providing directional measurements of the plasma properties. This new concept, called SLP (Segmented Langmuir Probe), has originally been flown on the French microsatellite DEMETER. The DSLP design for the PROBA-2 mission comprises two identical sensors based on the SLP concept. Both are spherical shaped probes, 4 cm in diameter, divided into 7+1 independent segments (i.e., seven smaller disc shaped segments on the sphere plus the rest of the conducting surface of the electrode serving as the guard segment). The two sensors of the DSLP experiment are mounted on the back deployable solar panel at the end of short rigid booms. In the burst mode the plasma diagnostic is provided at 1 Hz from all segments of both sensors. In addition to the classical plasma diagnostic technique of electrostatic probes, the two identical SLP sensors of the DSLP instrument capable to provide E-field sampled at 2 MHz (Ref. 69).
Some DSLP Results Reported in June 2012 (Ref. 69)
As of 2012, more than 35 million scientific data samples were acquired including current-voltage characteristics from all DSLP segments and also electric field measurements between the two DSLP sensors. This represents about 10 thousand hours of ionospheric plasma survey from 5500 full PROBA-2 orbits.
Although the calibration and data analysis is still ongoing some preliminary scientific results are already available. Figure 54 shows a two year statistical analysis of one of the basic characteristics that is the probe to spacecraft potential as measured by both DSLP sensors, marked as SLPA (red dots) and SLPB (blue dots). The trend of daily potential averages is plotted versus the monthly average Sun spot numbers (black line), showing a clear correlation of the observed in-situ plasma environment to the increasing solar activity. The difference of a few tenths of Volts between the two measured potentials is mainly due to the known "V x B" effect, due to the satellite motion in the terrestrial magnetic field.
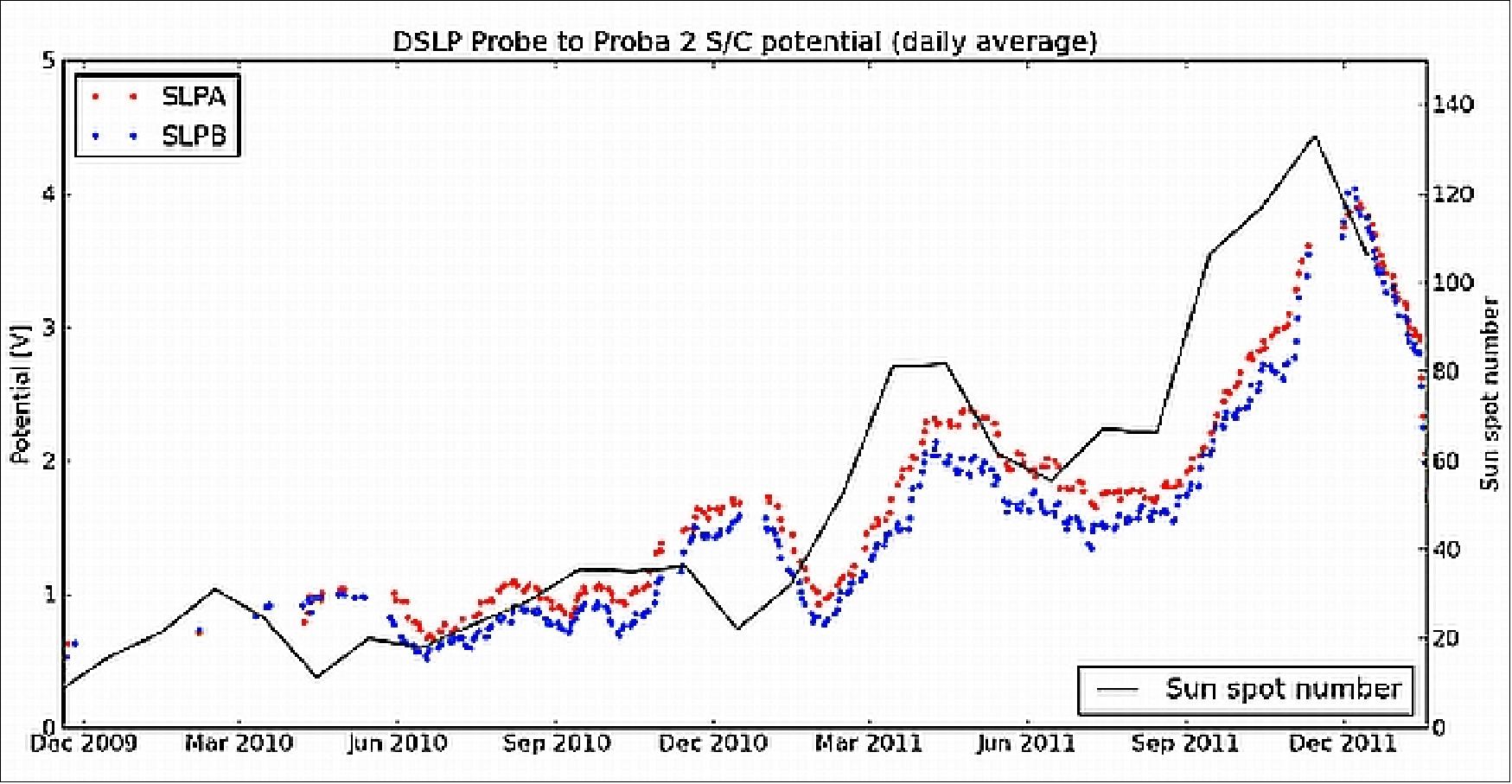
A particular effect of the variable solar activity is shown in Figure 12 for case of an X-class solar flare from 7th of March 2012. In the upper panel is displayed the X-ray Flux as observed by GOES satellites. The corresponding in-situ plasma properties, as derived from the DSLP measurements, show the three panels below. While standard orbital variations of the plasma properties are observed up to the midnight from March 6 to 7 (the density peaks corresponds to the dusk equatorial part of the orbit), clear perturbations of this pattern appear immediately after the flare event, namely in the measured floating potential (second panel from top) and electron plasma density (third panel). A slightly different behavior indicates the derived electron plasma temperature. While the density pattern is slowly being recovered, first temperature perturbations arrive later on the flare event (between 6:00 and 9:00 UTC).
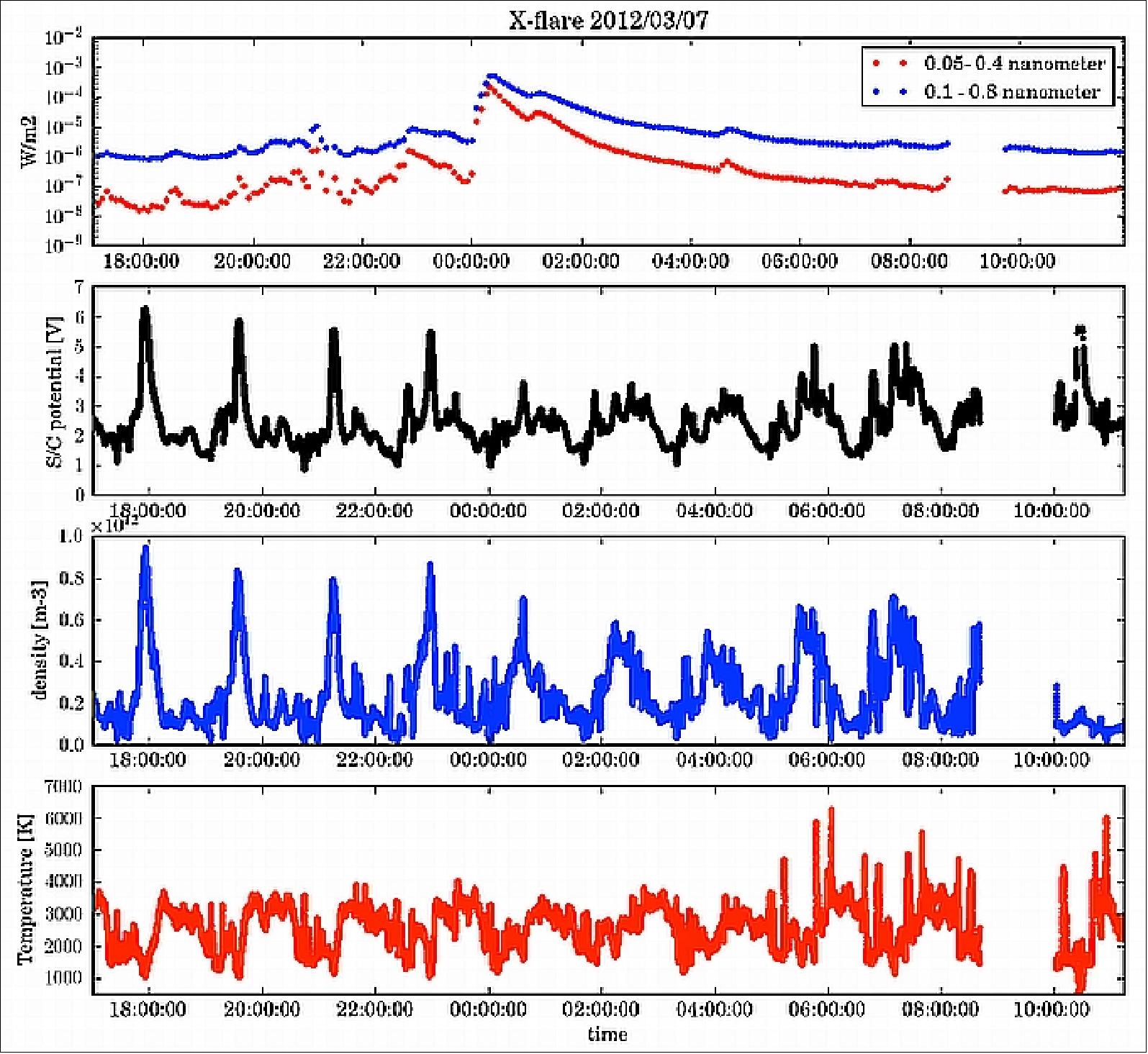
Technology Demonstrations / Experiments
PROBA-2 has a suite of of new technology demonstrators. Altogether there are seventeen new developments being flown on PROBA-2, divided into two groups: platform technologies which are part of the infrastructure and are mission critical and passenger technologies to gain flight heritage and experience before committing them to the infrastructure of other missions. 86)
DSS (Digital Sun Sensor)
DSS, also referred to as µDSS, was developed by TNO Science and Industry, Delft, The Netherlands with ESA funding (ARTES program). The DSS is a miniaturized device utilizing a 2-D APS (Active Pixel Sensor) detector array of 512 x 512 pixels, with the video processing embedded in a FPGA (Field Programmable Gate Array). 87)
Like the analog fine sun sensor, this digital sun sensor also employs collimating optics (without lenses), but this time a two-dimensional array detector is used. The position of the light spot, produced by the incident sunlight penetrating through the pinhole mask, forms a measure of the solar aspect angle in two axes directions This position can be measured on the pixel matrix, using centroiding, with an order of magnitude better accuracy than what can be achieved with the analog fine sun sensors. Another distinct advantage of the DSS is its tolerance to Earth (or other planet) albedo. The PFM (Protoflight Model) of DSS comes with a built-in DC-DC converter. The DSS of PROBA-2 has a FOV of 64º x 64º, mass of 475 g and power consumption of 1.4 W. 88) 89) 90)
Current developments in the DSS design go into the direction of a DSS by integrating the imaging sensor and the signal processing electronics in a single chip with the application of deep sub-micron CMOS processes.
Status of DSS in 2011
The sensor autonomously acquires and tracks the sun in its FOV with an accuracy in the order of ±0.01 degree of arc. The performance data sent to Earth reveals no sign of degradation in the course of mission flight time. There is also no sign of accuracy disturbance by Earth albedo, as expected for a sensor of this kind. The application of advanced CMOS active pixel sensors is supported by the positive results gained from the PROBA-2 DSS so far. 91)
BC-STR (Bepi Colombo Star Tracker)
An APS (Active Pixel Sensor) based autonomous and miniaturized device of Selex Galileo , Italy (former Galileo Avionica) using the HAS (High Accuracy Star tracker) detector technology by the Cypress/FillFactory featuring a noise level sensitivity of < 1 arcsecond. The HAS device integrates a 1024 x 1024 pixel array with a pixel pitch of 18 µm, providing a dual addressable y shift register for rolling shutter operation, programmable offset and gain amplifier and an on-chip 12 bit pipelined ADC (Analog Digital Conversion). The objective is to characterize this model on orbit. The star tracker, referred to as AA-STR (APS-based Autonomous Star Tracker)), is considered for the Bepi Colombo and the Solar Orbiter missions of ESA. 92) 93) 94)
Detector | HAS (High Accuracy Star tracker) with APS (Active Pixel Sensor) technology |
FOV (Field of View) | 20º full cone |
Attitude accuracy | 12 arcsec (2σ) in pitch and yaw; 100 arcsec (2σ) in roll |
Star magnitude limit | Mi = 5.4 |
Update rate | 10 Hz |
Outputs | Quaternion; angular rate; star unit vectors and index |
Instrument mass | 1.425 kg (including baffle with 40º exclusion angle |
Instrument size | 115 mm x 115 mm x 100 mm without baffle, 115 mm x 115 mm 183 mm with baffle |
Instrument power | 3.87 W at 0ºC; 6.97 W at 50ºC |
Input voltage | 16-40 V |
Data interface | Synchronous RS-422, MIL-STD-1553B |
Operating temperature | -20 to +50ºC |
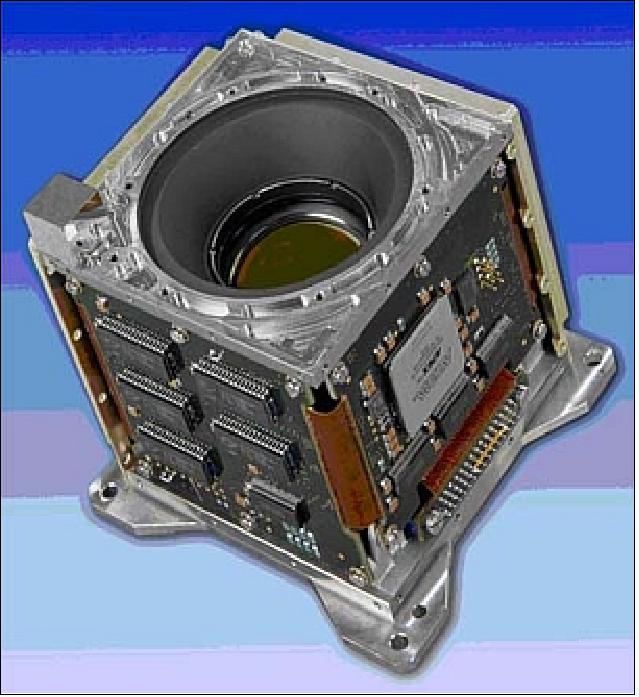
The PROBA-2 FCM (Flight Configuration Model) was the second AA-STR prototype built by SELEX Galileo, after the Demonstration Model for Bepi Colombo. This model includes the HAS2 APS on the focal plane. 95)
A dedicated baffle was designed and realized, mainly for thermal reasons. In fact the area of the S/C where the sensor is mounted on the PROBA-2 spacecraft is shadowed by a dedicated sun shield. The baffle therefore looks to the deep space and can be used as a radiator. The unit is thermally decoupled from the supporting baseplate.
The AA-STR FCM is flying as an experiment on board PROBA-2 and is not in the AOCS control loop. Although some limitation on available resources shall be accepted (telemetry data, mass memory, power, etc), this allows to execute tests on its functions and performance without impacting the spacecraft's operations, which is the actual scope of an in flight technology demonstration. Few days after launch, during the commissioning phase, AA-STR functionality was checked, and then test sequences aimed to verify in flight capability of attitude initialization and attitude tracking were performed.
In the period around January 2010 and June 2010, further test sessions were executed in order to characterize the attitude acquisition capability, the tracking performance under different dynamic conditions and the quality of images, by means of windows' dumps. During these months, AA-STR was usually switched off and it was switched on to allow tests' execution in specific time slots. This was posed by spacecraft's constraints, since S/C memory used for telemetry storage was shared with other payloads.
Following specific request of SELEX Galileo, the ESA PROBA-2 flight operations team performed modifications of operative procedures allowing AA-STR to remain continuously ON for longest possible periods, and to perform periodic TM recording.
Since July 2010, AA-STR has been continuously operating, with the exception of limited time slots where it was switched off by telecommand (TC) at the end of each ZMM (Zarm MagnetoMeter) test, and after which it was switched on again. This was due by the sharing of Switched Output between ZMM and AA-STR on board PROBA-2.

Since mid-July 2010, AA-STR was kept in STB (Stand-By) mode, where HAS2 APS is clocked, pixels are read for hot pixel detection/background computation, and APS/Optics temperatures are monitored. Every three days, AA-STR is interrogated for attitude acquisition and tracking: Housekeeping and telemetry are recorded for about 20 minutes (limit posed by PROBA-2 S/C memory) and then it is commanded to STB mode again.
Since the start of the mission, the AA-STR has accumulated about 6,000 hours of in flight operations and has performed more than 1,005,000 attitude tracking cycles and 119 attitude initializations. - A full on ground qualification campaign has been carried out successfully on the AA-STR and an in-flight qualification has been also achieved, with more than one and half year on board the ESA PROBA-2 mission (Ref. 95).
X-CAM (Exploration Camera)
X-CAM was developed by Micro-Cameras & Space Exploration, Neuchatel, Switzerland. X-CAM is an innovative concept of a very tiny observation system for generic monitoring purposes that can monitor the spacecraft separation from the launcher, its attitude, devices deployment, solar panel degradation, etc. The instrument is composed of two sub-units: 96) 97) 98)
- X-CAM microcamera fitted with a 100º diagonal FOV optics (radiation hardened)
- UART (Universal Asynchronous Receiver/Transmitter) module to interface the X-CAM microcamera with the ADPMS (Advanced Data and Power Management System) of the spacecraft.
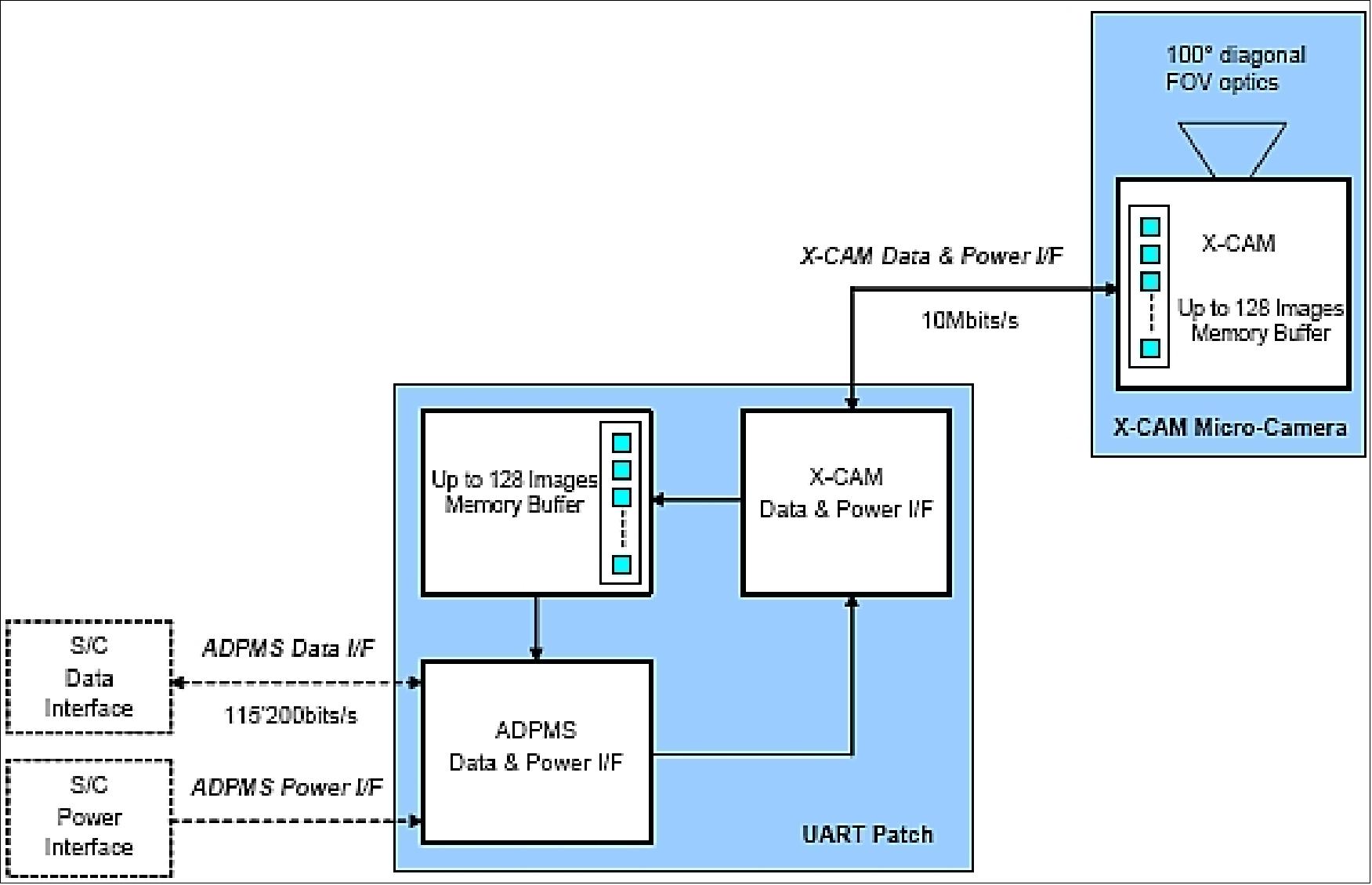
The X-CAM features a CCD detector of 1024 x 1024 pixels connected to an A/D converter with a conversion speed of 1 image/s and a selectable resolution of 16 or 8 bit. The microcamera communicates with the UART module through a RS-422 full duplex synchronous serial bus with a fixed speed of 10 Mbit/s. The microcamera has a mass of 221 g (including bracket), power of 1.8 W, and a size of 77 mm x 82 mm x 75 mm. The UART module has a mass of 413 g, power of 1.8 W, and a size of 55 mm x 110 mm x 86 mm.
Further Features
- 16 bit A/D conversion
- Embedded lossless image compression
- Autoexposure capability
- Multiple images storage capacity
- Local temperature measurement
- Dedicated electronics for data handling and power management.

FSD (Fiber-Optic Sensor Demonstrator)
FSD was developed by MPB Communications Inc., Pointe Claire, Québec, Canada. The objective is to demonstrate the use of fiber sensors for the measurement of temperature and pressure. FSD contains 6 external FOS (Fiber Optic Sensor) lines to measure the temperature at different locations in the propulsion system and in the spacecraft as well as the xenon tank pressure. The goal is to achieve a much improved monitoring capability of spacecraft systems; spacecraft monitoring is vital in all phases of a project, during ground validation as well as during the subsequent operation in the launch and space environment. In particular, the spacecraft propulsion subsystem requires a large number of different sensors to monitor the status of the system performance and to estimate the quantity of propellant remaining. Monitoring requirements include the propellant pressure, volume and usage; propellant leakage detection; pipeline temperature distributions, valve/actuator status; and thruster temperatures. 99) 100)
The FOS technique employs a signal link via an optical fiber, allowing the subsequent electronic processing to be located remotely from critical areas of the spacecraft. This facilitates minimization of electromagnetic interferences and avoids the safety issues associated with electronics near the propulsion subsystem. Signals on a fiber-optic line are bidirectional, allowing a single fiber to carry both the source signal to the optical sensor and the return signal back to the interrogation system. Due to the low signal loss, < 1 db/km, relatively long signal links are feasible with good signal integrity.
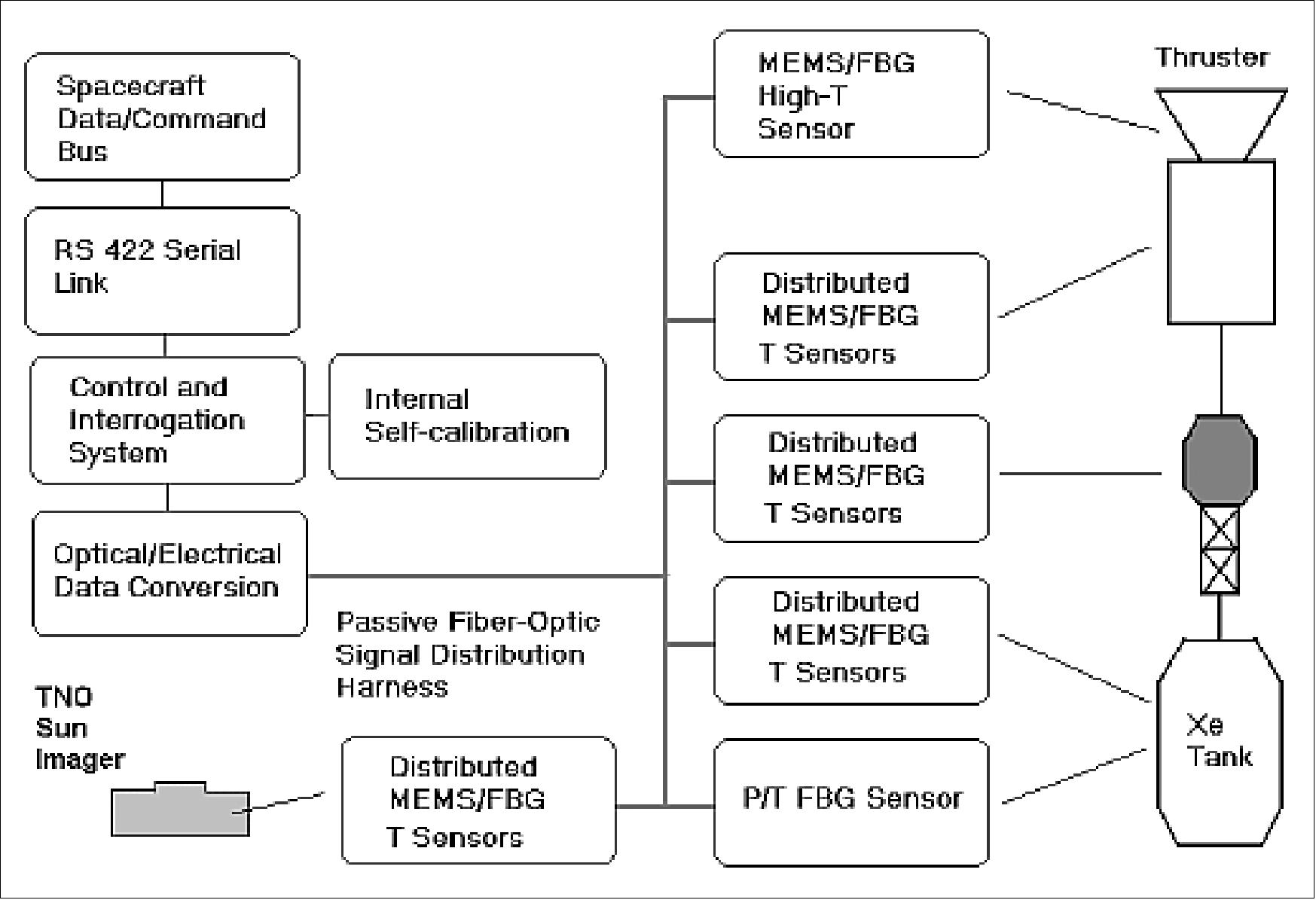
The FSD features a central interrogation system weighing under 1.3 kg and requiring less than 3.5 W peak power (Figure 61). A single tunable fiber-laser system with integral redundancy is employed to efficiently interrogate a variety of sensor types with approximately 1-2 pm resolution for changes in the sensor wavelength characteristics. The FSD is linked to the PROBA-2 via a redundant RS-422 link at 115,200 kbit/s. The system employs a novel tunable fiber-laser source operating near 1500 nm for both the illumination and interrogation of multiple, parallel strands of WDM-multiplexed Fiber-Bragg-Grating (FBG) or Fabry-Perot (FP) type of optical sensors. The FSD system represents the first demonstration of a full FOS network in the space environment on a satellite.

The compact central interrogation system is only 120 x 70 x 150 mm in size (see Fig. 2). The interrogation system will be located remotely from the fiber sensors, at an opportune location in the PROBA-2 spacecraft to optimize the usage of available space. The FSD electronics feature two electronic PCBs integrated on an Al support frame. The CPU PCB, as designed with Xiphos, features a fault-tolerant architecture with resettable latch-up protection, a FPGA microprocessor, and 768 kByte of SRAM for the data storage. Dual EEPROMs enable updating the software during the flight.
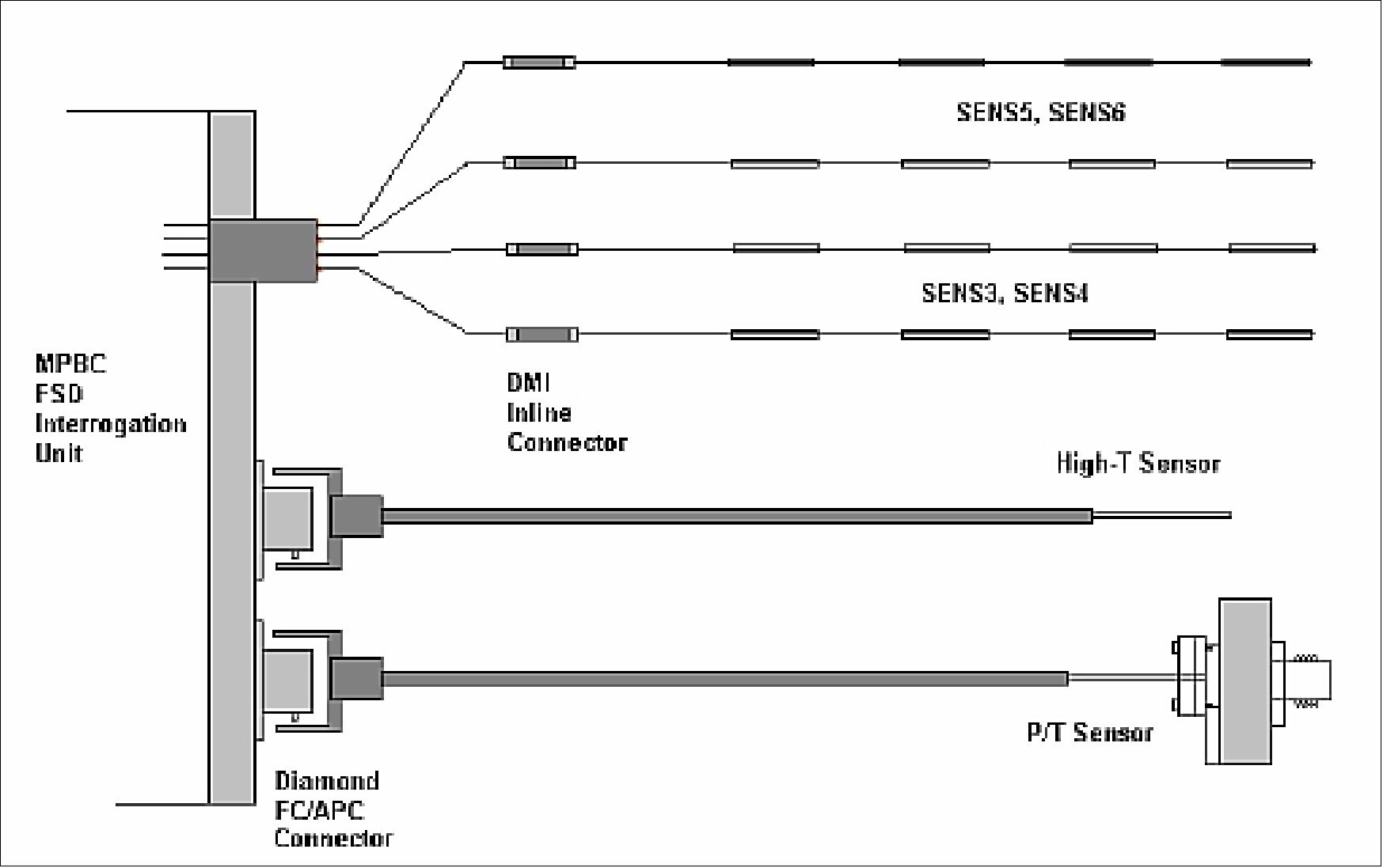
The FSD system provides six external fiber-optic I/O sensor lines (Figure 63). Four of these are being linked to provide backup monitoring for the SSTL propulsion system on PROBA-2. This includes separate connectorized fiber-optic signal lines with Diamond FC/APC connectors for the high-T thruster measurements and a P/T (Pressure/Temperature) sensor line for monitoring the Xe propellant pressure. Additional fiber-optic sensor lines (SENS3, SENS4) contain serially-multiplexed FBG sensors for measuring the temperature distribution at strategic points along the SSTL propellant pipeline. An additional sensor line (SENS5) is used to provide measurements of other payloads on PROBA-2.
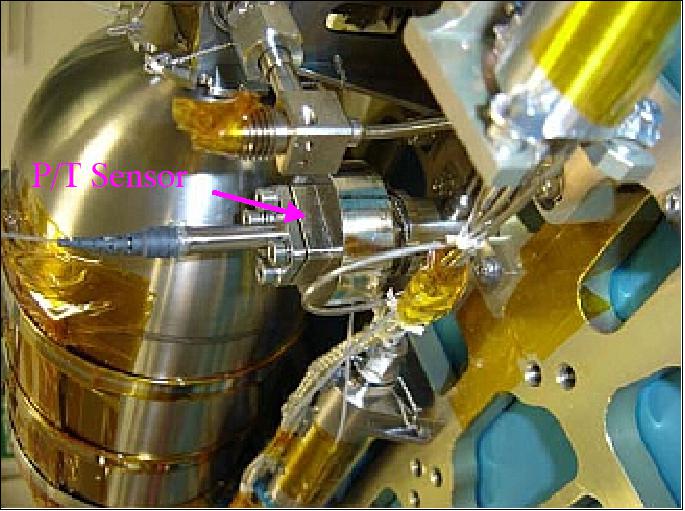
Some FSD Results Reported in October 2010 101)
The FSD for ESA's PROBA-2 is the first demonstration of a full fiber-optic sensor network in the space environment on a satellite. The FSD design incorporates both adaptations of standard fiber-optic components as well as custom-designed sensors and fiber-optic cabling to meet the requirements of operation in space and the monitoring needs of spacecraft propulsion systems:
• RS422 Communication is established successfully between FSD and PROBA-2
• The temperature reading from temperature sensor AD590 is acquired by the FSD 16 bit A/D converter
• Fabry Perot Interferometer line is operational
• Fiber line is operational
• No degradation of the fiber–optic signal levels after 10 months
• Successful power up/down of fiber laser
• Flight experiment and data analysis ongoing
• Next step to download all lines after establishing the optimal time delay, including High temperature sensor on the thruster and pressure sensor.
SPC (Solar Panel Concentrator)
SPC is a solar panel concentrator experiment, developed by CSL (Centre Spatial de Liège), Belgium. The objective is to study the the temperature behavior as well as the aging effects as a result of radiation and of the concentrated solar flux on the photo-voltaic cells. The experiment uses triple junction GaAs solar cells. 102)
Experiment Architecture
The experiment consists of one small experimental solar panel connected to telemetry electronics. The solar panel is equipped with 2 solar cell strings. One of them is submitted to concentration, surrounded by 2 self-deployable mirrors. The second string is in planar configuration without concentration and will be used during the mission as a reference for accurate assessment of the concentration factor achieved on the first string.
No power is provided by the experiment to any satellite subsystems, but the two solar cell strings are connected to multiple load and voltage measurement electronics. They can be connected to 4 different resistive loads or any combination of the 4 loads. The voltage at string ends is measured by telemetry electronics for any load case. Consequently, 16 different points of the I-V curves may be collected at any time over the mission.
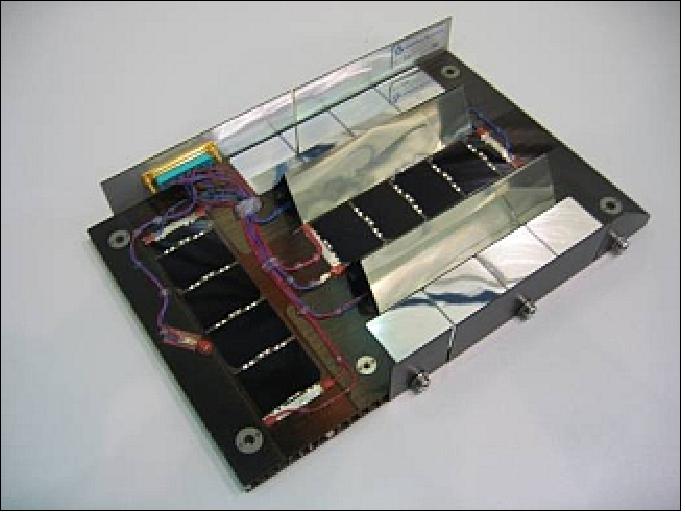
The in-flight measurements will provide a first set of data required for performance assessment and quantitative determination of contamination and aging effects on solar concentration technology. As the driving market for this technology is GEO telecommunication satellites, the thermal design of the experiment has been carefully adjusted in order to obtain solar cell temperature similar to GEO environment. Moreover, the knowledge acquired on this experiment will be crucial for the scientific deep-space missions, where lightweight concentration technology will save mass and lower costs on particularly large solar arrays.
SGVM (Science Grade Vector-field Magnetometer)
SGVM was developed by DTU, Denmark. SGVM is an advanced fluxgate magnetometer which delivers in real-time the components of the magnetic field with a very high precision calibrated to physical quantities in terms of nano Tesla (nT). 103)
The objective is to provide two instantaneous rotation angles to the star tracker for increasing the rate at which the highly accurate attitude is delivered. In addition, this method could also be used for alleviating the star tracker image processing if the satellite is rotating too rapidly. The mechanical stability of the magnetometer (providing relative orientations) with respect to the star tracker (giving the absolute orientation) must then be stable between two star tracker updates. SGVM has a total mass of < 1 kg, it consists of one triaxial fluxgate sensor unit and a cold redundant controlling electronics unit with dimensions of 54 mm x 46 mm x 33 mm and 100 mm x 100 mm x 50 mm, respectively. The power consumption of the instrument is < 0.5 W for continuous operation. SGVM provides vector measurements at a sampling rate of 50 Hz and with a precision equivalent to more than 21 bits.
The SGVM is designed also for high-precision measurements where the CSC (Compact Spherical Coil) sensor of ultra linearity is used instead. This configuration is baselined for the Swarm mission, which has the purpose of mapping of the Earth's magnetic field with high precision. The SGVM has been designed for full compatibility with the DTU µASC star tracker.
Xenon Propulsion System with Resistojet
The xenon propulsion system was developed by SSTL, Surrey, UK. The objective is to characterize the performance of an already flight proven resistojet, but now using xenon as the propellant. Although propulsion is not needed to support the scientific part of the PROBA-2 mission, it can be used to compensate the orbital decay throughout the mission life. 104) 105) 106)
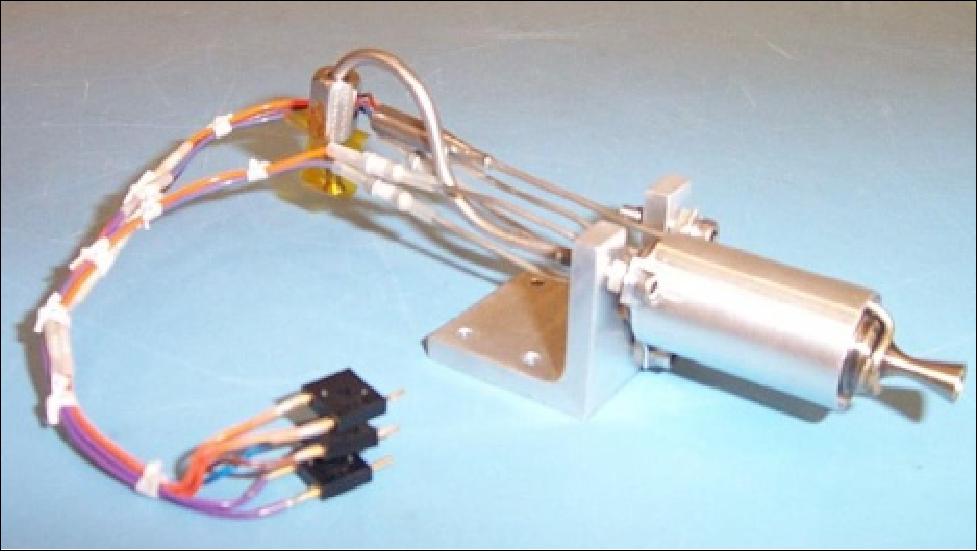
COGEX (Cool Gas Generator Experiment)
COGEX was developed by Bradford Engineering B. V. and TNO, The Netherlands. The objective is to repressurize the propulsion tank with nitrogen generated from solid state cartridges. Four cartridges are accommodated to demonstrate in-orbit operation and characterize the effect of the mission duration on its functioning and performance. 107)
The SPCGG (Solid Propellant Cool Gas Generator) technology produces pure gas through decomposition of a solid material, while the gasses leave the gas generator at ambient temperature. Due to the unique design no external filtering or cooling is needed for the gas, this giving a high storage efficiency. The gas generators can be sized from very small to large, covering application areas from small nanosatellites to large inflatable structure such as airbag landing systems for planetary landers.
The gaseous xenon fuel tank includes four special solid propellant cool gas generators which can be ignited to release gaseous nitrogen at room temperature, replenishing fuel tank pressure to squeeze out more performance. The gas is chemically bonded in solid material for storage in a low volume with no pressurization for long time periods.
An in-orbit demonstration of the SPCGG technology is planned for the end of 2010.

Some Background
The CGG ( Cool Gas Generator) technology has its roots in Russia's space program. Using a combination of solid materials that chemically binds gases, the Russian invention controls the release with an electrical current.
This mixture offers an interesting feature: comparable devices like car airbags disgorge very hot gas but this one emits gas at ambient temperature. Seeing potential applications both in space and on Earth, the Dutch research organization TNO negotiated for the rights outside of Russia. With funding from ESA's Technology Transfer Program and the Dutch government, TNO explored a number of applications, from space propulsion to inflating life vests.
The cool-gas generator has already been tested in space on ESA's PROBA-2 satellite, repressurising the propellant tank.
Supported by ESA, a Dutch start-up company, EXXFIRE™ is applying this space-age ‘cool-gas generator' to fighting fires in sensitive locations, like data centres, libraries and petrochemical plants. 108)
EXXFIRE BV of Noordwijk, The Netherlands, developed in 2010 this technology as 'Fire Suppression Inside' in the ESA incubation program with a fire extinguisher for ICT (Information and Communication Technology) servers. 109)
CCM (Credit Card Magnetometer)
CCM developed by Lusospace, Portugal. The objective of this demonstrator device is to measure the magnetic field along three orthogonal axes.
Topstar 3000G2 GPS Receiver
The GPS receiver was contributed by TAS (Thales Alenia Space), France. Topstar is a dual-frequency receiver with the objective is to demonstrate and validate L1 and L2C signal reception in orbit (maiden flight on PROBA-2). The dual-frequency tracking enables a direct elimination of ionospheric path delays and contributes to more accurate kinematic and dynamically filtered navigation solutions. Compared to the encrypted P(Y)-code signals, which require specialized and often proprietary semi-codeless tracking techniques, the new L2C signal can be tracked directly. This enables a more favorable signal-to-noise ratio and reduces the complexity of the correlator and receiver design. L2C signals have first been transmitted in late 2005 and are presently (2008) available on a total of 6 Block-IIR-M GPS satellites (Ref. 3) and Ref. 4).
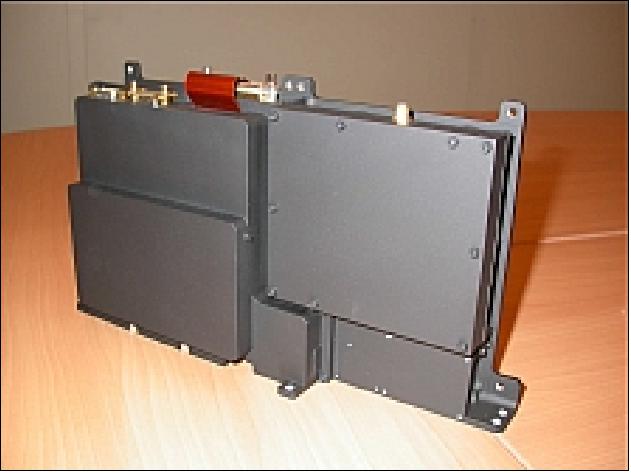
Although the full operational capability (with L2C transmitted by 8 Block-IIR-M satellites and 16 Block-II satellites) is not expected before 2013, a sufficient number (8 or more) of L2C capable GPS satellites should be available after the launch of PROBA-2 to enable a thorough in-flight validation of the T3000G2 receiver. The receiver itself makes use of a newly developed PEGASE2 correlator chip with a total of 12 tracking channels and supports a correlator spacing down to 1/16th of a chip. The tracking and navigation software is executed on a flight proven ERC32 processor. In the dual-frequency configuration considered for PROBA-2, a total of 6 GPS satellites can be tracked simultaneously. Initial tests conducted in a signal simulator test bed have demonstrated a typical pseudorange accuracy of 2.3 m for L1 C/A code tracking and 3.9 m for L2CS tracking.
Depending on the actual number of simultaneously tracked GPS satellites with L1 C/A and L2C signals, a post-facto orbit reconstruction of 0.2-0.5 m can be expected based on the T3000G2 receiver measurements.
The Topstar GPS receiver will be operated on PROBA-2 independently from the low-power GPS receiver set (Phoenix) which is used for the nominal control of the spacecraft.
Topstar 3000G2 operations (Ref. 4): As a technology demonstration, the T3000G2 receiver is not operated permanently but only during dedicated experiment slots. So far, such sessions have been conducted on about ten days in Jan./Feb and Sept. 2010. In view of onboard telemetry storage limitations, maximum activation periods of 5 hr could be supported at a 1 Hz data rate with the present ground station network. Within the most recent campaign, the Topstar 3000G2 could at least partly be operated in parallel with the Phoenix GPS receiver. While a direct comparison of the receiver raw data is still not feasible due to the non-synchronous measurement epochs, the orbit determination and navigation accuracy over the common data intervals can be compared on a consistent basis.
With only few exceptions the T3000G2 receiver has so far been operated in dual-frequency mode. Ignoring the unhealthy PRN 1 (SVN 49) spacecraft, a total of eight GPS satellites presently (Oct. 2010) transmit a civil (L2C) ranging signal on the L2 frequency. Out of these, only an average of 2-3 satellites can be jointly tracked by the T3000G2 receivers and the minimum of four satellites enabling a pure dual-frequency navigation fix is only reached for a small fraction of time: As such, the navigation solution provided in the dual-frequency configuration requires a mixed single/dual-frequency processing. This introduces inevitable inconsistencies and notably degrades the achievable real-time navigation accuracy.
Phoenix GPS Receiver
The Phoenix receiver was contributed by DLR, representing another experiment on PROBA-2. Phoenix is equipped with an eXtended Navigation System (XNS), that can be operated in parallel to the kinematic positioning supported by the standard Phoenix receiver software. The XNS software employs a reduced dynamic Kalman filter for real-time navigation (Ref. 3).
The Phoenix device is a miniature receiver specifically designed for high dynamics and space applications. It offers single-frequency C/A code and carrier tracking on 12 channels and can be aided with a priori trajectory information to safely acquire GPS signals even at high altitudes and velocities. The receiver is based on SigTech's commercial-off-the-shelf (COTS) MG5001 board but operates a proprietary firmware developed by DLR. At a power consumption of < 1 W and a board size of 50 mm x 70 mm, the receiver is among the smallest of its kind and particularly well suited for satellites with limited onboard resources.

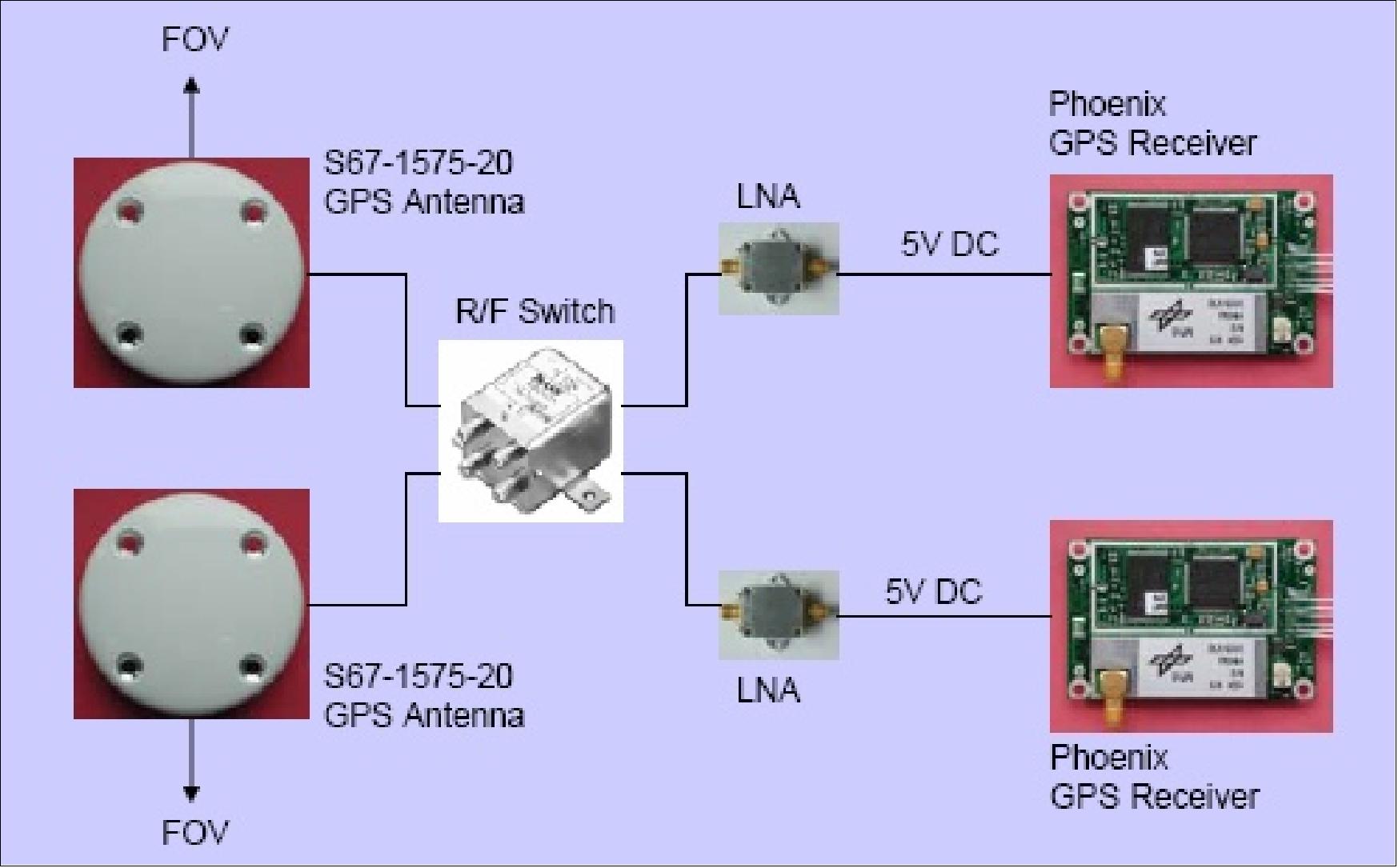
Phoenix GPS Operations (Ref. 4)
Even though the PROBA-2 spacecraft does not require accurate onboard information to perform its mission, the Phoenix GPS receiver is considered part of the PROBA-2 Attitude Control and Navigation System and was initially envisaged to operate on a continuous basis. However, an obvious sensitivity to high energy particle radiation was noted quickly after launch, which resulted in various latch-up events. Even though the receiver was immediately shut-off by a rapid fuse, it was nevertheless decided to minimize the receiver operation in order to avoid a possible damage or degradation. With the exception of dedicated experiment sessions conducted in January/February and March/April 2010, the receiver was therefore only operated during a single orbit per day while avoiding the South Atlantic Anomaly. This enabled a proper synchronization of the onboard time as well as coarse (10-100 m level) post-facto orbit reconstruction without imposing any risk on the receiver hardware.
As part of a dedicated proton accelerator test conducted by ESA in June 2010 at the Paul Scherrer Institute, Switzerland, the RAM memory was identified as the latch-up sensitive device. However, a proper protection of the receiver by the latch-up fuse could also be demonstrated within these tests over several hundreds of events. Starting in September 2010, the receiver Phoenix receiver was therefore again operated on a permanent basis. At that time, a new ground procedure had, furthermore, been implemented at the Redu control center, which automatically reboots the receiver whenever a latch-up event is reported in the telemetry.
GPS measurements obtained with the Phoenix receiver are routinely processed at DLR to determine the orbit of the PROBA-2 spacecraft. As a minimum, daily quick-look orbits are obtained from a filtering if the GPS position fixes and predicted for up to five days in advance to support the operation of the SLR network. Precise orbit solutions are, furthermore, generated whenever raw code and carrier phase measurements have been collected over sufficiently long data arcs.
PROBA-2 Navigation Architecture
The PROBA-2 spacecraft comprises the following navigation related hard- and software components (Figure 71): (Ref. 3) and Ref. 4).
• A cold redundant pair of Phoenix GPS receivers constitutes the basic sensor for navigation and timing information with regard to onboard usage and ground based mission support.
• The Phoenix receiver board is integrated into the "AOCS interface box" which provides the power conditioning, latch-up protection and line drivers. From here, it connects to the onboard computer in the ADPMS (Advanced Data Processing and Management System) for further processing.
• The primary and backup GPS receiver are operated from a common antenna via a power divider. However, each receiver employs an independent low noise amplifier (LNA), which is powered from the respective receiver via the radio frequency cable.
• While the Phoenix GPS receiver supports only single-frequency tracking, an L1/L2 antenna is employed for communality with the dual-frequency Topstar3000G2 receiver.
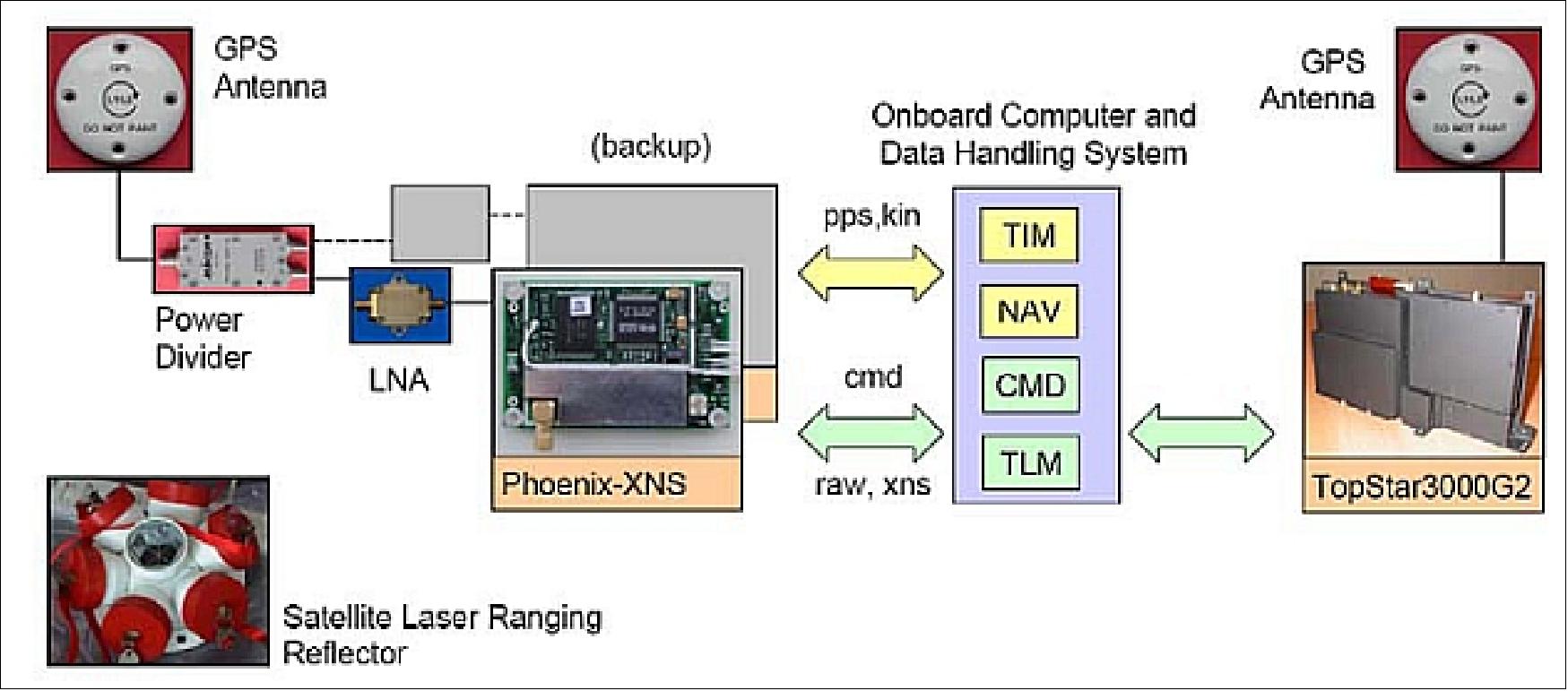
• The Navigation (NAV) function is part of the ACNS (Attitude Control and Navigation System) software designed by NGC Aerospace, Canada. It operates on a 32-bit LEON2-FT RISC processor with up to 100 MIPS, which is part of the ADPMS and serves as the onboard processor for attitude and orbit computations, data handling and payload processing.
The set of ACNS units includes 4 reaction wheels (Dynacon, Canada), 2 magnetometers (Billingsley, USA), a miniaturised µASC star tracker (DTU, Denmark) with two hot-redundant camera heads and cold-redundant DPUs, a cold redundant GPS receiver (DLR, Germany), and internally redundant magnetotorquers (ZARM, Germany). A cold redundant AOCS Interface Unit (Qinetiq Space NV, Belgium) is used to interface with the GPS receiver and the magnetotorquers and to control the solar panel holddown and release mechanisms. It also contains the electronics for the propulsion system and the COGEX system.
• The navigation function builds up on flight proven autonomous navigation concepts (Kalman filtering of GPS position fixes, twoline elements orbit propagator, event prediction) and extends the algorithms and functionality previously available on PROBA-1 by various PROBA-2 specific elements. The navigation function processes kinematic navigation solutions of the Phoenix receiver in a Kalman filter using a low complexity numerical orbit propagator.
• Based on the position and velocity information computed within the NAV function, attitude and pointing directions can be transformed between an inertial (star camera) reference frame and the local-horizontal local-vertical frame. Along with this, the NAV function provides predictions of auxiliary orbit information and events such as shadow times and Earth exclusion zones.
• PROBA-2 mission specifications require a 200 m (2σ) position accuracy on each axis, which is well below the native GPS measurement accuracy and minimizes the complexity of the required filtering algorithms.
• The Time Management function (TIM) of the ACNS software provides the synchronization of various time counters (GPS, star sensor, etc.) with the global UTC time scale and filters the jitter of the onboard time.
• The dual-frequency tracking of Topstar GPS receiver enables a direct elimination of ionospheric path delays and contributes to more accurate kinematic and dynamically filtered navigation solutions.
• Based on a high-grade dynamical modeling and the elimination of ionospheric path delays through a smart combination of code and carrier phase measurements, a 1 m level real-time navigation accuracy can be expected.
The GPS based navigation sensors and real-time navigation systems onboard PROBA-2 are complemented by a retro reflector for satellite laser ranging (SLR), which enables a fully independent performance characterization. The LRR (Laser Retro Reflector) flown on PROBA-2 has been built by the Russian Scientific Research Institute for Precision Instruments and is likewise employed for the GOCE and CryoSat-2 missions.
LRR is composed of seven individual prisms and supports laser ranging at angles of up to 70º relative to the normal of the mounting surface. For best tracking conditions, the LRR is mounted opposite to the star cameras and GPS antennas on the -z panel of the PROBA-2 spacecraft.
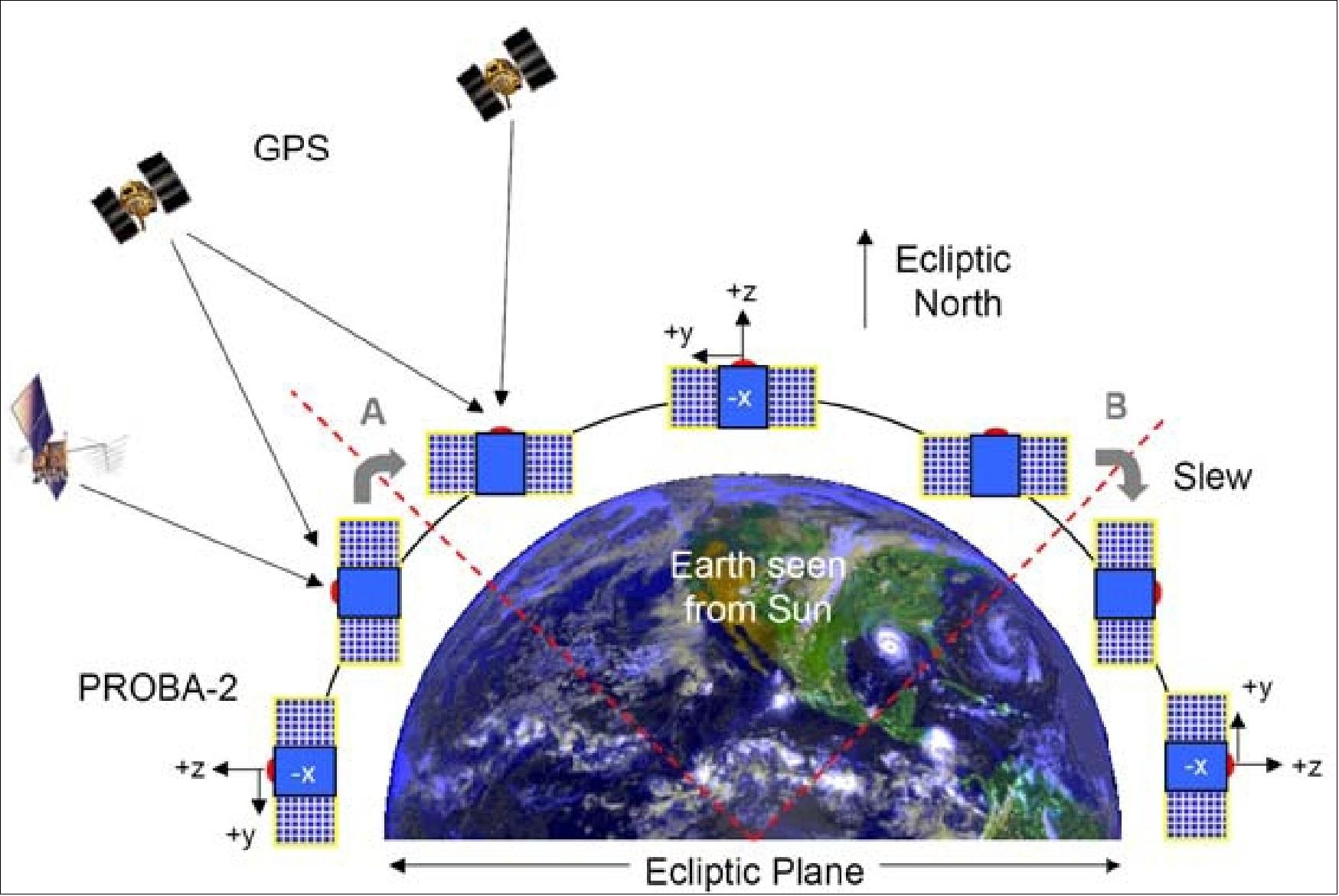
To improve the coverage with GPS tracking data in the PROBA-2 mission, the Phoenix receiver software has been upgraded with a PROBA-2 specific satellite selection and channel allocation algorithm. While the +z face of the spacecraft should ideally be oriented in the anti-Earth direction at all times to avoid star sensor obstructions and to ensure an optimum GPS visibility, a continuous roll about the x-axis would be highly undesirable from a payload operations point of view.
As a compromise, attitude changes of the PROBA-2 spacecraft are confined to discrete roll-maneuvers about the sun-pointing axis, which are nominally conducted four times per orbit (Figure 72). This maximizes the intervals for continuous Sun observations with the LYRA and SWAP instruments, avoids Earth blinding of the star sensors and ensures a reasonable sky coverage of the GPS antenna field of view.
AOCS SW Concept
It contains four main functions (NAV, GDC, CTL, and FDI). In each of these functions, new AOCS techniques will be incorporated and validated in flight as software experiments on PROBA-2. The objectives of these new techniques are two-fold:
- To increase the level of autonomy in spacecraft operations using lightweight, reliable and low-cost sensors coupled with simple estimation algorithms to determine the attitude and the orbit
- To increase the level of accuracy and numerical efficiency in the navigation function that estimates and propagates the spacecraft attitude and orbit.
The top-level functional breakdown of the AOCS software is mainly based on the PROBA-1 Attitude Control and Navigation Software (ACNS) implementation (developed by NGC Aerospace Ltd., Sherbrooke, Canada). The high-level architecture includes a simulator of the spacecraft dynamics and equipment, called the RWSW (Real-World SoftWare), and the AOCS Software (AOCS SW) itself, which is part of the onboard flight software. 110) 111) 112)
The objective is to validate the AOCS SW against the mission requirements using the RWSW, a high-fidelity simulator of the PROBA-2 satellite. The RWSW is used to accurately simulate the spacecraft equipment, dynamics and environment including: the actuators, the sensors, the attitude and orbit dynamics, as well as their perturbations and relevant planetary body ephemeris (i.e. sun and Earth). The AOCS SW contains the following high-level autonomous functions:
1) NAV (Navigation), consisting of an onboard Kalman-filter based autonomous estimation of the orbit using GPS measurements and the onboard autonomous gyroless determination of the attitude using data from the spacecraft advanced star tracker, digital sun sensor and magnetometers. The navigation function also includes the prediction for all the mission related orbital events (eclipses, next target passages, next station flybys, Earth exclusion angle, etc).
2) GDC (Guidance), consisting of the onboard autonomous generation of the commanded reference attitude profiles and maneuvers, depending, on the spacecraft operational mode. The guidance function also includes the computation of the control error, the difference between the desired and the current, estimated, dynamical state.
3) CTL (Control), consisting in the determination and execution of the necessary control commands that bring about the current dynamical state of the spacecraft coincident with the desired state i.e., the actions that bring the control error to zero in a stable and accurate way. The control function also includes the maintenance of internal dynamical variables within specified boundaries (e.g. reaction wheel speed). State feedback is used for fine-pointing while a sliding-mode is used for large-angle maneuvers.
4) FDI (Failure Detection & Identification), consisting in monitoring the inputs, the internal and output variables and parameters of the AOCS software to test them for numerical and/or physical validity. This function also includes the identification of the cause and origin of such a malfunction.
Each of the main functions presented above carries some self-contained functions providing the software with the flexibility to adapt to any operational mode. When sent by the ground station, any of these operational modes allows the AOCS SW to enable the functions required to perform this mode.
The PROBA-2 spacecraft can be operated in 7 different modes, 6 of which are basic modes and the last one, the `magnetic mode', is an in-orbit control experiment aimed at demonstrating the attitude determination and control of a spacecraft using only magnetic instruments. Transition between any of the modes is possible and can be commanded either by the ground station or, autonomously, by the on-board mission manager (collectively known as the System). The Bdot mode serves as the main rate reduction mode to remove the excess angular rate imparted to the spacecraft at separation and it also serves as the fallback safe mode in cases of anomalies.
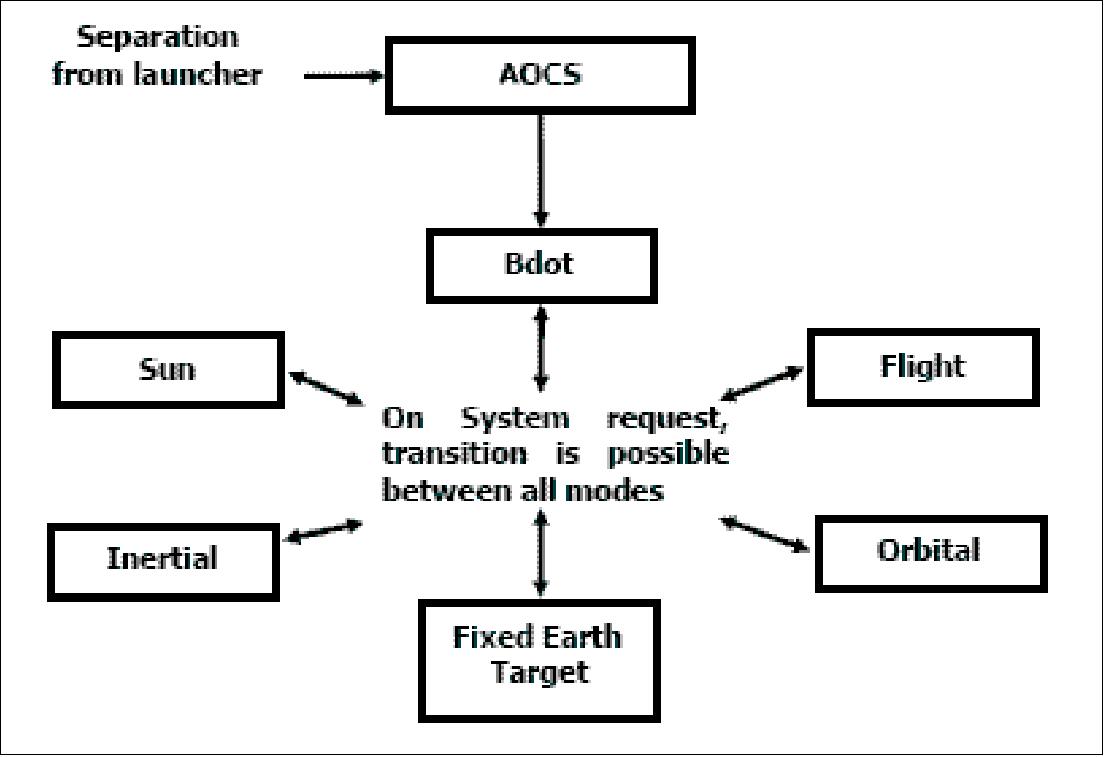
The PROBA-2 operational modes are briefly described (for further details the reader is referred to reference 110).Transition between any of the modes is possible and can be commanded either by the ground station or, autonomously, by the on-board mission manager. 113) 114)
• Inertial mode: The inertial mode is the mode in which the spacecraft attitude is controlled with respect to the inertial frame. It is used mainly for calibration.
• Orbital mode: It controls the spacecraft attitude with respect to the orbital frame (for nadir pointing).
•Flight mode: It controls the spacecraft attitude with respect to the orbital velocity, to execute propulsion maneuvers.
• Earth target mode: It controls the spacecraft attitude so that it points to a target on Earth.
• Sun mode: The sun mode is the mode in which the spacecraft attitude is controlled with respect to the sun frame. It is the main observation mode of the mission. Four times an orbit, the satellite performs autonomous large-angle rotation about the payload line of sight, in order to avoid star tracker blinding. It is the main observation mode of the mission (for the SWAP and LYRA payloads).
• Bdot mode: The Bdot mode uses interaction with the magnetic field to reduce spacecraft angular rates and serves as the main rate reduction mode to remove the excess angular rate imparted to the spacecraft at separation. It also serves as the fallback safe mode in cases of anomalies.
Among those AOCS modes, the Bdot mode and the sun mode are the critical modes enabling the system safe mode and sun observation mode required to provide an autonomous sun-observation scientific mission.
The nominal requirements for the pointing performance of PROBA-2 are 100 arcsec absolute error and 5 arcsec (2σ) over 5s relative error. These requirements are easily met as shown in Figure 74. The goal requirements (nice to have) specified a challenging RPE (Relative Pointing Error) of 1 arcsec (1σ) over 60 seconds. This requirement is not fully met, although the RPE over a period of 60 s is lower than 3 arcsec for 78% of the time (against the specified 99.8%). This pointing performance is reported in Figure 75 along with the indication where the large-angle rotations and/or momentum offloading occurred (red lines at the bottom).
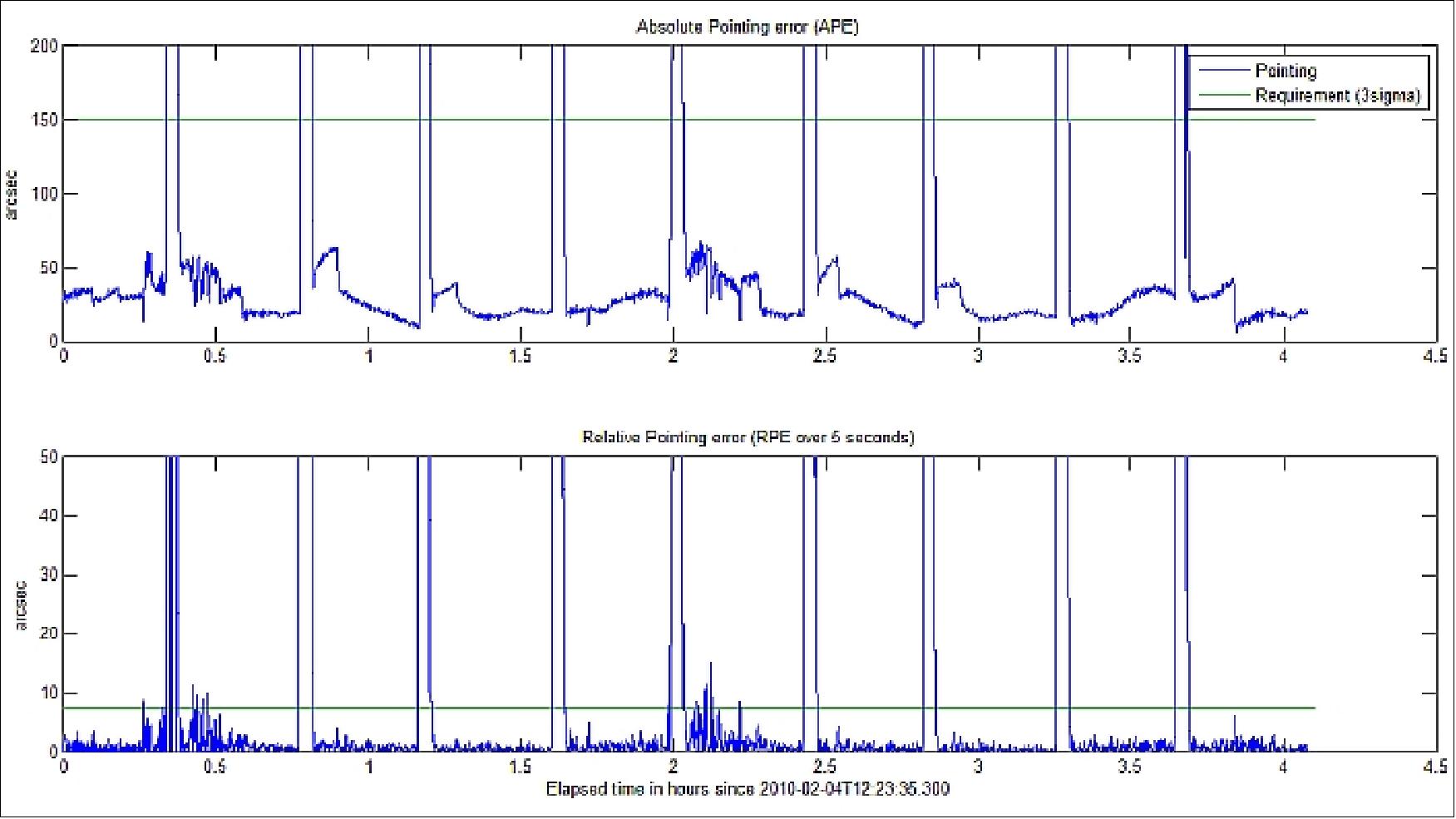
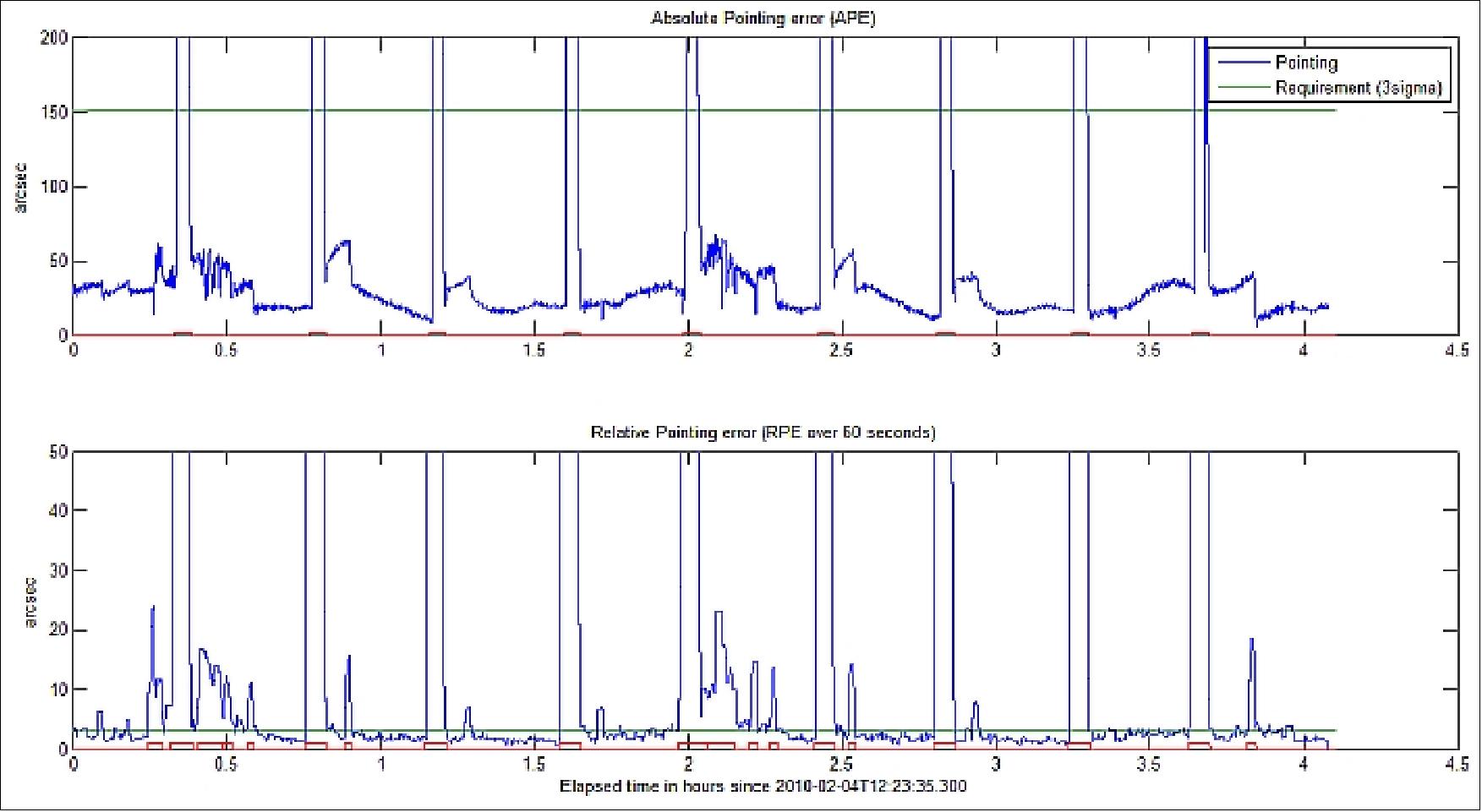
In order to complete the flight performance assessment of the sun observation mode, Figure 76 clearly shows that the pointing performances are well within the pointing requirements during the large-angle rotation such that the LYRA instrument can keep on measuring without loss of scientific data. In turn, this validates the sliding-mode controller that has been upgraded on PROBA-2 to perform rotation around a commanded fixed axis.
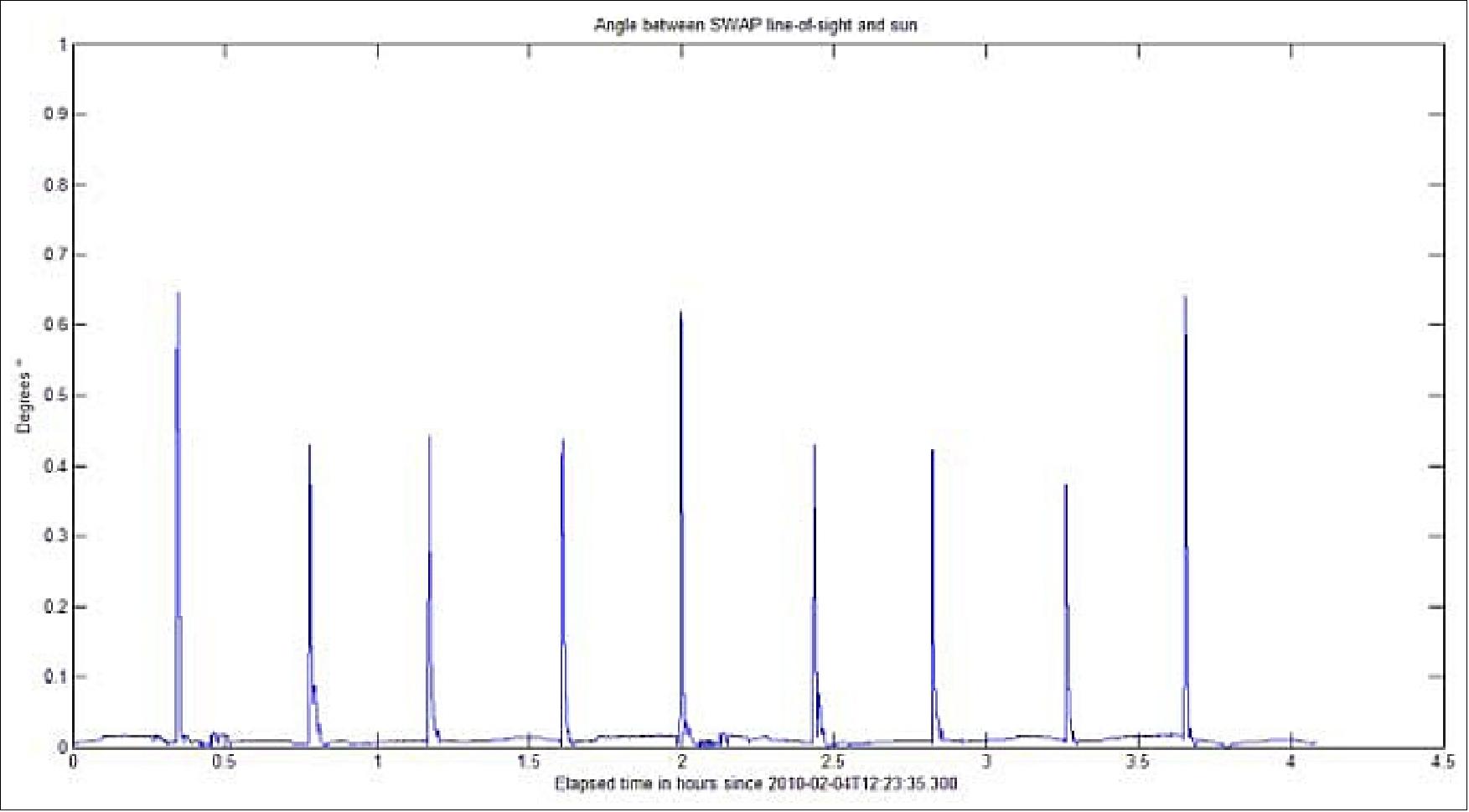
In-flight performance of the safe mode: The safe mode of PROBA-2 is based on the so-called Bdot algorithm which uses the Earth magnetic field to dump the excess angular momentum of the spacecraft and stabilize it relative to the magnetic field. As indicated by its name, this control law computes a torque as a function of the time derivative of the Earth magnetic field (Bdot) with respect to the spacecraft frame. The natural dynamic of the spacecraft in Bdot mode is such that the total angular momentum vector of the spacecraft converges to align itself along the orbit normal. Based on this behavior, reaction wheels are used to create a momentum bias in a direction which ensures that the solar arrays are pointing in the desired direction (i.e. toward the sun) while minimizing the platform wobbling. The other two axes are hooked to the magnetic field with the spacecraft RMM (Residual Magnetic Moment) more or less parallel to it, just like a compass aligns itself to the magnetic field (Ref. 113).
Platform Technology Demonstrations
The demonstrations include:
• Li-ion battery from SAFT, France
• First use of the `medium-rate' uplink standard for faster commanding
• A major part of one of the telecommand decoders being implemented in software (all hardware decoders are implemented in parallel for critical CPDU commands)
• Combined CFRP - aluminum structure from APCO
• Reaction wheels from Dynacon
• GPS (Phoenix receiver) from DLR
• ADPMS (Advanced Data and Power Management System) avionics from Verhaert. ADPMS provides a series of telecommand decoders as well as telemetry generators supporting up to 5 virtual channels. The PROBA-2 onboard software running on ADPMS can be divided in 3 domains: a) the mission dependant domain, b) the mission independent domain, and c) the platform domain.
• µASC (micro Advanced Stellar Compass), star tracker of DTU. The µASC is a next generation attitude measuring device developed by the Technical University of Denmark (DTU). µASC is of ASC (Advanced Stellar Compass) heritage which is being flown on over 15 missions (Ørsted, SAC-C, CHAMP, GRACE, ADEOS-2, including the PROBA-1 and SMART-1 spacecraft of ESA). The new µASC design (first flights on PROBA-2 and Flying Laptop) is focused on a more compact, higher performance, less power consuming and more flexible instrument.
Autonomous star sensors (or star trackers) offer considerable advantages in the S/C design, in particular for the AOCS. Autonomous star trackers measure and report directly and accurately the S/C orientation relative to an inertial reference frame. Autonomous, small and reliable implies that redundant units may be implemented with some minor penalties. At the same time considerably increasing the instrument's performance, especially when they can be operated simultaneously, e.g., in a hot redundant, cross-strapped configuration. 115) 116) 117) 118)
Star Tracker Class | Requirement | ASC | µASC (dual redundant, *) |
Initial acquisition (solve lost-in-space problem) | < 1 minute | 300 ms | 80 ms |
Pointing accuracy (EOL) | 30 arcsec (3 σ) | 3 arcsec (3 σ) | 2 arcsec (3 σ) |
Attitude rate | Up to 1º/s | Up to 7º/s | Up to 20º/s |
Update rate | Up to 4 Hz | Up to 4 Hz | Up to 32 Hz |
Operational availability | 99.9% | 99.995% | 99.995% |
Instrument mass, power | < 2 kg, <10 W | 1 kg, 7.8 W | 0.425 kg (*), 3.6 W |
Instrument size | 10x10x10 cm, proc. unit | DPU:10x10x10 cm | DPU: 12x10x4 cm (*) |
Lifetime | 3-5 years | 11 years | 30+ years |
Reliability | 99.995% | 99.95% | 99.999% |

The new µASC device expands the multiple CHU (Camera Head Unit) concept of the ASC - being able to operate up to 4 CHUs in parallel, thus providing full immunity to simultaneous blinding. In addition, the standard µASC is built with 2 hot/cold redundant µDPU (micro Data Processing Units). The µASC specifications are given in Table 6. - The µASC design features an improved radiation tolerance to perform during extreme periods of radiation events encountered in the SAA (South Atlantic Anomaly), in the Van Allen belts, or in solar storms. The radiation tolerance of µASC applies for the cases: total-dose radiation, dose-rate for SEU (Single Event Upset), and SEL (Single Event Latch-up).
Ground Segment
The PROBA2 Ground Segment for the operational configuration consists of three main elements: (Ref. 9)
- Ground stations
- MOC (Mission Operation Center), including the MDS (Mission Data Server)
- SOC (Science Operation Center).
The PROBA-2 MOC is located at the ESA Ground Station of Redu (Belgium). Flight dynamics, operations planning and spacecraft operations are conducted from the MOC. The MOC makes use of two ground stations, located in Redu (Belgium) and Svalbard (Spitzbergen, Norway), to increase the S/C-ground contact time and to maximize the scientific data return.
The MOC is designed such that nominal operations are performed in an automated way, including satellite pass prediction, pass activity scheduling, scientific request processing, spacecraft data collection and distribution. Operator intervention is only needed for off-nominal activities, e.g. specific test requests for any of the technology demonstrators. The facilities at the MOC are partly shared between the PROBA-1 and the PROBA-2 missions (e.g. ground antennas, pass planning system, web server).
The SOC is located at the facilities of the Royal Observatory of Belgium (ROB) in Ukkel (Brussels). Planning requests for the two main payloads (SWAP and LYRA) are sent from there to the MOC where they are automatically taken into account by the pass planning system. After reception of the scientific data from the spacecraft, they are automatically transferred to the SOC for further processing.

Although there were no data availability requirements in view of the experimental nature of the mission, the overall mission design (spacecraft and ground segment) has proven that it is capable of acquiring and delivering science data on a continuous daily basis, (about 70 SWAP images per contact, delivered within 30 minutes to the SOC). In addition, thanks to the ground segment automation, the SOC is able to interact in an almost direct way with the payloads and can submit modifications to payload operations up to 20 minutes before each contact (Ref. 63).
References
1) K. Gantois, F. Teston, O. Montenbruck, P. Vuilleumier, P. V. D. Braembussche, M. Markgraf, "PROBA-2 - Mission and New Technologies Overview," `Small Satellite Systems and Services,' The 4S Symposium, Chia Laguna, Sardinia, Italy, Sept. 25-29, 2006, URL: http://ilrs.gsfc.nasa.gov/docs/ESA4S_06_11d.pdf
2) P. Rochus, J. M. Defisc, D. Berghmans, J. F. Hochedez, M. Nesladek, W. Schmutz, U. Schühle, P. Nicolosi, et al., "PROBA-II Payload: A Belgian Mini Space Weather Observatory," Proceedings of IAC 2004, Oct. 4-8, 2004, IAC-04-IAA.4.11.2.07
3) O. Montenbruck, M. Markgraf, J. Naudet, S. Santandrea, K. Gantois, P. Vuilleumier, "Autonomous and Precise Navigation of the PROBA-2 Spacecraft," AIAA/AAS Astrodynamics Specialist Conference and Exhibit, Honolulu, HI, USA, Aug. 18-21, 2008, URL: http://www.weblab.dlr.de/rbrt/pdf/AIAA_ASC_087086.pdf
4) O. Montenbruck, M. Markgraf, J-L. Issler, F. Mercier, S. Santandrea, A. Garcia, J. Naudet, S. Serre, "GPS-Based Precise Orbit Determination and Real-Time Navigation of the PROBA-2 Spacecraft," Proceedings of NAVITEC 2010 (5th ESA Workshop on Satellite Navigation Technologies and Europen Workshop on GNSS Singnals and Signal Processing), Noordwijk, The Netherlands, Dec. 8-10, 2010
5) http://esamultimedia.esa.int/docs/industry/Proba%20call%20for%20ideas%20June%202002.pdf
6) http://www.esa.int/export/esaCP/ESAAU9OED2D_Benefits_0.html
7) "About PROBA-2," ESA, last update: Dec. 17, 2012, URL: http://www.esa.int/Our_Activities/Technology/Proba_Missions/About_Proba-2
8) Information provided by Pieter van den Braembussche of Verhaert Design and Development N. V., Kruibeke, Belgium
9) Dennis Gerrits, Joris Naudet , Frederic Teston, Karsten Strauch, Kristof Gantois, Stefano Santandrea, "PROBA-2 In Orbit Results," Proceedings of the Symposium on Small Satellite Systems and Services (4S), Funchal, Madeira, Portugal, May 31-June 4, 2010
10) Jo Bermyn, "PROBA Spacecraft Family: Small Mission Solutions for Earth Observation Applications," IGAC (International Global Atmosphere Chemistry) Geomatic Week, Bogota, Colombia, October 2009, URL: http://www.isprs.org/proceedings/XXXVII/congress/1_pdf/159.pdf
11) K. Puimège, E. Jansen, S. Landstroem, D. Hardy, "The ADPMS Experience - An advanced Data & Power management system for small satellites," Proceedings of the 4S Symposium: `Small Satellite Systems and Services,' Chia Laguna Sardinia, Italy, Sept. 25-29, 2006, ESA SP-618
12) K. Puimège, S. Landstroem, D. Hardy, "The ADPMS Ready for Flight - An Advanced Data and Power Management System for Small Satellites and Missions," Proceedings of the 6th IAA Symposium on Small Satellites for Earth Observation, Berlin, Germany, April 23-26, 2007
13) K. Puimège, S. Landstroem, D. Hardy, "The ADPMS Ready for Flight - An Advanced Data and Power Management System for Small Satellites and Missions," Proceedings of the International Workshop on Earth Observation Small Satellites for Remote Sensing Applications (EOSS 2007), Kuala Lumpur, Malaysia, Nov. 20-23, 2007
14) Koen Puimège, Jo Bermyn, "The ADPMS Ready for Flight: An Advanced Data & Power Management System for Small Satellites and Missions," Proceedings of the 23nd Annual AIAA/USU Conference on Small Satellites, Logan, UT, USA, Aug. 10-13, 2009, SSC09-V-4
15) Stéphane Serre, Claude Boyer, Alberto Garcia-Rodríguez, Jean-Luc Issler, Michel Grondin, "A Dual Frequency Receiver (L1/L2C) for Space Applications," Proceedings of NAVITEC 2008, 4th ESA Workshop on Satellite Navigation User Equipment Technologies GNSS User Technologies in the Sensor Fusion Era, Dec. 10-12, 2008, Noordwijk, The Netherlands
16) "About PROBA-2," ESA, Nov. 3, 2010, URL: http://www.esa.int/esaMI/Proba/SEMJJ5ZVNUF_0.html
17) "Two new ESA satellites successfully lofted into orbit," ESA, Nov. 2, 2009, URL: http://www.esa.int/esaCP/SEMNEYAOE1G_index_0.html
18) "The Sun in 2020," ESA Science & Exploration, 7 January 2021, URL: https://www.esa.int/ESA_Multimedia/Images/2021/01/The_Sun_in_2020
19) "New inventions putting squeeze on satellite data," ESA / Enabling & Support / Space Engineering & Technology, 17 March 2020, URL: http://www.esa.int/Enabling_Support/Space_Engineering_Technology
/New_inventions_putting_squeeze_on_satellite_data
20) "The Sun in 2019," ESA Science & Exploration, 20 January 2020, URL: http://www.esa.int/ESA_Multimedia/Images/2020/01/The_Sun_in_2019
21) "Proba-2 watches Mercury transit," ESA Science & Exploration, 12 November 2019, URL: http://www.esa.int/ESA_Multimedia/Videos/2019/11/Proba-2_watches_Mercury_transit
22) "Ten Suns for 10 years," ESA Science & Exploration, 10 November 2019, URL: http://www.esa.int/ESA_Multimedia/Images/2019/11/Ten_Suns_for_10_years
23) "A decade probing the Sun," ESA, 04 November 2019, URL: http://www.esa.int/Enabling_Support/Operations/A_decade_probing_the_Sun
24) "Proba-2 views four partial eclipses," ESA, 3 July 2019, URL: http://www.esa.int/spaceinvideos/Videos/2019/07/Proba-2_views_four_partial_eclipses
25) "Proba-2's predicted view of 2 July eclipse," ESA, 27 June 2019, URL: http://www.esa.int/spaceinvideos/Videos/2019/06/Proba-2_s_predicted_view_of_2_July_eclipse
26) "The Sun in 2018," ESA, 28 January 2018, URL: http://m.esa.int/spaceinimages/Images/2019/01/The_Sun_in_2018
27) "An artificial Proba-2 view of the solar north pole," ESA, Space Science Image of the Week, 3 December 2018, URL: http://m.esa.int/spaceinimages/Images/2018/12/An_artificial_Proba-2
_view_of_the_solar_north_pole
28) "Partial solar eclipse from space," ESA Space Science Image of the Week, 13 August 2018, URL: http://m.esa.int/spaceinimages/Images/2018/08/Partial_solar_eclipse_from_space
29) "Diamond ring," ESA Space Science Image of the Week: Last year's total eclipse brought not only darkness to US observers but also this celestial jewelery, 12 Feb. 2018, URL: http://m.esa.int/spaceinimages/Images/2018/02/Diamond_ring
30) "The Sun in 2017," ESA Space Science Image of the Week: The changing face of our Sun in 2017, as seen through the eyes of PROBA-2 ," 8 Jan. 2018, URL: http://m.esa.int/spaceinimages/Images/2018/01/The_Sun_in_2017
31) "Solar Spectacular seen from Earth and space," ESA, Aug. 22, 2017, URL: http://www.esa.int/Our_Activities/Space_Science/Solar_spectacular_seen_from_Earth_and_space
32) "Moon's shadow on Earth," ESA, Aug. 21, 2017, URL: http://www.esa.int/spaceinimages/Images/2017/08/Moon_s_shadow_on_Earth
33) "PROBA-2 partial eclipse, 26 February 2017, ESA, March 3, 2017, URL: http://www.esa.int/Highlights/Week_In_Images_27_February_03_March_2017
34) "The Sun in 2016," ESA, Space Science Image of the Week, Jan. 16, 2017, URL: http://m.esa.int/spaceinimages/Images/2017/01/The_Sun_in_2016
35) "Two-year extensions confirmed for ESA's science missions," ESA, Nov. 22, 2016, URL: http://sci.esa.int/director-desk/58589-two-year-extensions-confirmed-for-esa-s-science-missions/
36) "Pacific solar eclipse seen from PROBA-2," ESA, March 9, 2016, URL: http://www.esa.int/spaceinvideos/Videos/2016/03/Pacific_solar_eclipse_seen_from_Proba-2
37) "PROBA-2 eclipse," ESA, Sept. 14, 2015, URL: http://www.esa.int/spaceinimages/Images/2015/09/Proba-2_eclipse
38) http://www.esa.int/spaceinvideos/Videos/2015/09/Proba-2_partial_eclipses
39) "ESA views the eclipse," March 20, 2015, URL: http://www.esa.int/Highlights/ESA_views_the_eclipse
40) "ESA's Proba-2 minisatellite saw Europe's eclipse from orbit, twice," ESA, March 20, 2015, URL: http://www.esa.int/spaceinvideos/Videos/2015/03/Two_solar_eclipses_for_Proba-2
41) "Solar corona viewed by PROBA-2," ESA, featured in the series 'Space Science Image of the Week,' March 16, 2015, URL: http://www.esa.int/spaceinimages/Images/2015/03/Solar_corona_viewed_by_Proba-2
42) "SWAP spies acrobatics in Sun's shape-shifting atmosphere," ESA, March 16, 2015, URL: http://sci.esa.int/proba2/57922-swap-spies-acrobatics-in-sun-s-shape-shifting-atmosphere/
43) "Working life extensions for ESA's science missions," ESA, Nov. 20, 2014, URL: http://sci.esa.int/director-desk/54999-working-life-extensions-for-esas-science-missions/
44) "Five years in space: one satellite, three missions," ESA, Nov. 2, 2014, URL: http://www.esa.int/Our_Activities/Operations/Space_Situational_Awareness
/Five_years_in_space_one_satellite_three_missions
45) S. Santandrea, D. Gerrits, J. Naudet, S. Ilsen, J. P. Luntama, E. Tilmans, C. Baijot, J. de Lafontaine, M. Dominique, D. B. Seaton, S. Štverák, P. Trávníček, F. Teston, "PROBA‐2: Over Four Years of Autonomy, Technology Demonstration, Solar Science and Space Weather Monitoring," Proceedings of the 4S (Small Satellites Systems and Services) Symposium, Port Petro, Majorca Island, Spain, May 26-30, 2014
46) "Week in Images," ESA, Feb. 21, 2014, URL: http://www.esa.int/Highlights/Week_In_Images_17_21_February_2014
47) Information was provided by Frédéric Teston, Head of Systems & Cost Engineering Division, ESA
48) "ESA science missions continue in overtime," ESA, June 20, 2013, URL: http://sci.esa.int/director-desk/51944-esa-science-missions-continue-in-overtime/
49) K. Bonte, D. Berghmans, A. De Groof, K. Steed, S. Poedts, "SoFAST: Automated Flare Detection with the PROBA-2/SWAP EUV Imager," Solar Physics, Vol. 286, Issue 1, Aug. 2013, pp. 185-199
50) Multiwavelength Solar View," ESA, Dec. 11, 2013, URL: http://spaceinimages.esa.int/Images/2013/12/Multiwavelength_solar_view
51) "ESA Science Missions continue in overtime," ESA, June 20, 2013, URL: http://sci.esa.int/director-s-desk/51944-esa-science-missions-continue-in-overtime/
52) http://www.esa.int/Highlights/Week_in_Images36
53) Information provided by Frederic Teston of ESA/ESTEC, PROBA Project Manager of ESTEC.
54) "PROBA-2 status," ESA Bulletin, No 153, February 2013, p. 66
55) "Proba-2's espresso-cup microcamera snaps Hurricane Isaac," ESA, Aug. 28, 2012, URL: http://www.esa.int/esaCP/SEMU0J4Y96H_index_0.html
56) D. Gerrits, J. Naudet, S. Ilsen, S. Santandrea, F. Teston, J. Zender, E. Tilmans, C. Baijot, A. St-Amour , A. Kron, "PROBA-2, two years of in-orbit experience," Proceedings of the 4S (Small Satellites Systems and Services) Symposium, Portoroz, Slovenia, June 4-8, 2012
57) "PROBA-2 status," ESA Bulletin, No 150, May 2012, p. 81
58) "ESA's space weather box Proba-2 tracks stormy Sun," ESA, Dec. 2, 2011, URL: http://www.esa.int/esaCP/SEMUAK2XFVG_index_0.html
59) "Proba-2 fuel tank refilled from ‘solid gas'," ESA, August 24, 2011, URL: http://www.esa.int/esaCP/SEMNOJRTJRG_index_0.html
60) "First release of calibrated LYRA data from PROBA-2," ESA, March 10, 2011, URL: http://sci.esa.int/science-e/www/object/index.cfm?fobjectid=48519
61) "Sun, Moon and Earth line up for Proba-2," ESA Jan. 6, 2011, URL: http://www.esa.int/esaCP/SEMEAL0SDIG_index_0.html
62) "Europe maintains its presence on the final frontier," Nov. 22, 2010, URL: http://www.esa.int/esaSC/SEMR1MIRPGG_index_0.html
63) Kristof Gantois, Stefano Santandrea, Frederic Teston, Karsten Strauch, Joe Zender, Etienne Tilmans, Dennis Gerrits, "Big Year for Small Satellite: ESA's second in-orbit technology demonstration mission: PROBA-2," ESA Bulletin No 144, November, 2010, pp. 22-33
64) "Proba-2 tracks Sun surging into space," ESA, June 30, 2010, URL: http://www.esa.int/SPECIALS/Technology/SEM9XUOZVAG_0.html
65) "Proba-2 shows solar eruption that touched Earth," April 14, 2010, URL: http://www.esa.int/esaCP/SEMM5H9MT7G_index_0.html
66) M. Markgraf, O. Montenbruck, S. Santandrea, J. Naudet, "Phoenix GPS Navigation System onboard the PROBA-2 Spacecraft - First Flight Results," Proceedings of the Symposium on Small Satellite Systems and Services (4S), Funchal, Madeira, Portugal, May 31-June 4, 2010
67) "Technology-testing Proba-2 opens new eye on the Sun," ESA, January, 26, 2010, URL: http://www.esa.int/esaCP/SEMYNUKOP4G_index_0.html
68) "Seeing stars, Proba-2 platform passes its first health check," ESA, Nov. 11, 2009, URL: http://www.esa.int/SPECIALS/Proba/SEM8OR3VU1G_0.html
69) J. J. Zender, A. De Groof, D. Berghmans, D. B. Seaton, M. Dominique, S. Štverák, "PROBA2, Two Years of Scientific Operations," Proceedings of the 4S (Small Satellites Systems and Services) Symposium, Portoroz, Slovenia, June 4-8, 2012
70) P. Rochus, J. M. Defise, J. H. Lecat, D. Berghmans, J. F. Hochedez, A. Ben Moussa, M. Nesladek, W. Schmutz, S. Koller, U. Schühle, P. Nicolosi, et al., "PROBA-II Payload: A Belgian Mini Space Weather Observatory," 55th IAC (International Astronautical Congress), Vancouver, Canada, Oct. 4-8, 2004, IAC-04-IAA.4.11.2.07
71) J. M. Defise, J. H. Lecat, Y. Stockman, D. Berghmans, J. F. Hochedez, N. Bogdan, W. Schmutz, S. Koller, U. Schühle, K. Haenen, P. Gloesener, V. Thomas, et al., "SWAP and LYRA: Space Weather from a small spacecraft," Proceedings of the 2nd International Conference on Recent Advances in Space Technologies (RAST), Istanbul, Turkey, June 9-11, 2005
72) J.-M. Defise, J.-H. Lecat, E. Mazy, D. Berghmans, J.-F. Hochedez, U. Schühle, et al., "SWAP: Sun Watcher with a new EUV Telescope on a Technology Demonstration Platform," Proceedings of the 5th International Conference on Space Optics, March 30-April 2, 2004, Toulouse, France, ESA SP-554
73) J.-M. Defise, J.-H. Lecat, E. Mazy, P. Rochus, L. Rossi, , T. Thibert, J.-M. Gillis, D. Berghmans, J. F. Hochedez, U. Schühle, "SWAP: Sun Watcher with a new EUV Telescope on a Technology Demonstration Platform," Proceedings of the 5th International Conference on Space Optics, March 30-April 2, 2004, Toulouse, France, ESA SP 554
74) V. Van Grootel, "Thermal design of the SWAP instrument on board PROBA-II," Proceedings of the 56th IAC 2005, Fukuoda, Japan, Oct. 17-21, 2005, IAC-05-C2.P.04
75) D. Berghmans, J. F. Hochedez, J. M. Defise, J. H. Lecat, B. Nicula, V. Slemzin, G. Lawrence, A. C. Katsyiannis, R. Van der Linden, A. Zhukov, F. Clette, P. Rochus, E. Mazy, T. Thibert, P. Nicolosi, M.-G. Pelizzo, U. Schühle, "SWAP onboard PROBA 2, a new EUV imager for solar monitoring," Advances in Space Research, Vol. 38, Issue 8, 2006, pp. 1807-1811
76) J.-M. Defise, J.-P- Halain, D. Berghmans, F. Denis, E. Mazy, T. Thibert, J.-H. Lecat, P. Rochus, B. Nicula, A. De Groof, J.-F. Hochedez, U. Schühle, M.-F. Ravet, F. Delmotte, "SWAP: a novel EUV telescope for space weather," Proceedings of the SPIE, 'Solar Physics and Space Weather Instrumentation II," Edited by S. Fineschi, R. A. Viereck, Vol. 6689, 2007, pp. 66890S-66890S
77) A. de Groof, D. Berghmans, B. Nicula, J.-P. Halain, J.-M. Defise, T. Thibert, U. Schühle, " CMOS-APS Detectors for Solar Physics: Lessons Learned during the SWAP Preflight Calibration," Solar Physics, Vol. 249, Issue 1, pp.147-163
78) J.-P. Halain, D. Berghmans, J.-M. Defise, P. Rochus, B. Nicula, A. De Groof, D. Seaton, "Performances of SWAP on-board PROBA-2," ICSO 2010 (International Conference on Space Optics), Rhodes Island, Greece, Oct. 4-8, 2010, URL: http://congrex.nl/ICSO/Papers/Session%204b/FCXNL-10A02-1980806-1-HALAIN_ICSO_SWAP.pdf
79) J.-F. Hochedez, W. Schmutz, Y. Stockman, U. Schühle, A. BenMoussa, S. Koller, K. Haenen, D. Berghmans, J.-M. Defise, J.-P. Halain, A. Theissen, V. Delouille, V. Slemzin, D. Gillotay, D. Fussen, M. Dominique, F. Vanhellemont, D. McMullin, M. Kretzschmar, A. Mitrofanov, B. Nicula, L. Wauters, H. Roth, E. Rozanov, I. Rüedi, C. Wehrli, A. Soltani, H. Amano, R. Van der Linden, A. Zhukov, F. Clette, S. Koizumi, V. Mortet, Z. Remes, R. Petersen, M. Nesládekj, M. D'Olieslaegerj, J. Roggen, P. Rochus, "LYRA, a solar UV radiometer on Proba-2," Advances in Space Research, Volume 37, Issue 2, 2006, pp. 303-312
81) J. M. Defise, J. H. Lecat, Y. Stockman, P. Rochus, E. Mazy, F. Denis, J. P. Halain, L. Rossi, T. Thibert, D. Berghmans, J. F. Hochedez, N. Bogdan, A. Ben Moussa, G. Lawrence, T. Katsiyannis, W. Schmutz, S. Koller, U. Schühle, K. Haenen, P. Gloesener, V. Thomas, "SWAP and LYRA: Space Weather from a small spacecraft," Proceedings of the 2nd International Conference on Recent Advances in Space Technology, Istanbul, Turkey, June 9-11, 2005
82) Y. Stockman, A. BenMoussa, I. Dammasch, J.-M. Defise, M. Dominique, J.-P Halain, J.-F. Hochedez , S. Koller, W. Schmutz , U. Schühle, "In-Flight Performance of the Solar UV Radiometer LYRA / PROBA-2," ICSO 2010 (International Conference on Space Optics), Rhodes Island, Greece, Oct. 4-8, 2010, URL: http://congrex.nl/ICSO/Papers/Session%202a/FCXNL-10A02-2015522-1-STOCKMAN_ICSO_PAPER.pdf
83) F. Hruska, J . Base, J . Chum, J . Klas, I. Kolmasova, J. Smilauer , V. Truhlik, "Thermal Plasma Measurement Unit for Microsatellites," Proceedings of the 6th IAA Symposium on Small Satellites for Earth Observation, Berlin, Germany, April 23 - 26, 2007, URL: http://www.ufa.cas.cz/html/upperatm/TPMU%20info.pdf
84) F. Hruska, J. Chum, I. Kolmasova, J. Smilauer, V. Truhlik, "Thermal Plasma Measurement Unit for Microsatellites," 4th IAA Symposium for Earth Observation, Berlin, Germany, Apr. 7-11, 2003
85) "PROBA-2 - TPMU," Czech Space Office, URL: http://www.czechspace.cz/en/proba-2-tpmu
86) Frederic Teston, "ESA small satellites and associated technologies," 22nd Microelectronics Workshop, Tsukuba, Japan, Oct. 15-16, 2009, URL: https://eeepitnl.tksc.jaxa.jp/mews/en/22nd/data/15_05.pdf
87) Johan Leijtens, Kees de Boom, "TNO and the `Kees' of the incredibly shrinking sun sensor," Proceedings of the 4S Symposium: `Small Satellite Systems and Services,' Chia Laguna Sardinia, Italy, Sept. 25-29, 2006, ESA SP-618
88) C, W. de Boom, J. A. P. Leijtens, L. M. H. v. Duivenbode, N. van der Heiden, "Micro Digital Sun Sensor: System in a Package," Proceedings. of the ICMENS (International Conference on MEMS, NANO and Smart Systems), IEEE Computer Society, Aug 25-27, 2004, Banff, Alberta, Canada, pp. 322-328
89) C, W. de Boom, N. van der Heiden, "A Novel Digital Sun Sensor: Development and Qualification for Flight," Proceedings of the 54th International Astronautical Congress, Sept. 29 to Oct. 3, 2003, Bremen, Germany, IAC-03-A.P.20
90) "TNO's roadmap to microsystems," URL: https://escies.org/download/webDocumentFile?id=1675
91) C. W. de Boom, N. van der Heiden, J. Sandhu, H. C. Hakkesteegt, J. L. Leijtens, L. Nicollet, J. Bouwmeester, G. van Craen, S. Santandrea, F. Hannoteau, "In-Orbit Experience of TNO Sun Sensors," Proceedings of the GNC 2011, 8th International ESA Conference on Guidance, Navigation & Control Systems, Carlsbad (Karlovy Vary), Czech Republic, June 5-10, 2011
92) F. Boldrini, D. Procopio, S. P. Airy, I. Giulicchi, "Miniaturized star tracker (AA-STR) ready to fly," Proceedings of The 4S Symposium: Small Satellites, Systems and Services (ESA SP-571), Sept. 20-24, 2004, La Rochelle, France
93) "Active Pixel Sensor based Star Tracker: Galileo Avionica," Feb. 18, 2011, URL: http://telecom.esa.int/telecom/www/object/index.cfm?fobjectid=13411
94) F. Boldini, E. Monnini, D. Procopio, "Applications of APS Detector to GNC Sensors," 5th ESA International Conference on Spacecraft Guidance, Navigation and Control Systems, Oct. 22-25, 2002, Frascati, Italy, URL: http://www.dlr.de/iaa.symp/Portaldata/49/Resources/dokumente/archiv4/IAA-B4-0709P.pdf
95) R. Bettarini, F. Boldrini, D. Procopio, D. Temperanza, "The APS based Star Tracker after one year and half of in-flight life," Proceedings of the GNC 2011, 8th International ESA Conference on Guidance, Navigation & Control Systems, Carlsbad (Karlovy Vary), Czech Republic, June 5-10, 2011
96) S. Beauvivre, V. Cessa, D. Kraehenbuehl, M. Fasano, J. Pittet, F. Teston, P. Vuilleumier, "X-CAM Instrument Onboard PROBA-2," Proceedings of the 4S Symposium: `Small Satellite Systems and Services,' Chia Laguna Sardinia, Italy, Sept. 25-29, 2006, ESA SP-618
97) http://www.microcameras.ch/
98) "Sun-watching Proba-2 keeps small eye on Earth," May 13, 2010, URL: http://www.esa.int/esaCP/SEMM8G19Y8G_index_0.html
99) R. V. Kruzelecky, J. Zou , N. Mohammed, E. Haddad, W. Jamroz, F. Ricci, J. Lamorie, E. Edwards, I. McKenzie, P. Vuilleumier, "Fiber-optic Sensor Demonstrator (FSD) for the Monitoring of Spacecraft Subsystems on ESA's PROBA-2," Proceedings of the 13th Canadian Astronautics Conference, ASTRO 2006, Montreal, QC, Canada, organized by CASI (Canadian Astronautics and Space Institute), April 25-27, 2006
100) Nikos Karafolas, Josep Maria Perdigues Armengol, Iain Mckenzie, "Introducing Photonics in Spacecraft Engineering: ESA's Strategic Approach," Proceedings of the 2009 IEEE Aerospace Conference, Big Sky, MT, USA, March 7-14, 2009
101) Roman V. Kruzelecky, Jing Zou, Emile Haddad, Wes Jamroz, Francesco Ricci, Eric Edwards, Iain McKenzie, Pierrik Vuilleumier, "Fiber-Optic Sensor Demonstrator (FSD) Preliminary Test Results on PROBA-2," ICSO 2010 (International Conference on Space Optics), Rhodes Island, Greece, Oct. 4-8, 2010, URL: http://congrex.nl/icso/Papers/Session%207a/KRUZELECKY%20MPBC_FSD_ICSO_2010-1.pdf
102) V. Ruelle, L:Rossi, T. Thibert, K. Fleury, F. Rabecki, F. Denis, A. Carapelle, J. H. Lecat, S. Habraken, J. P. Collette, J. M. Defise, E. Ferrando, G. D'Accolti, P. Hodgetts, "Low Concentration Solar Array Experiment On-board PROBA-2," Proceedings of the 8th European Space Power Conference, Constance, Germany, Sept. 14-19, 2008, ESA SP-661, Sept. 2008
103) J. M. G. Merayo, P. Brauer, F. Primdahl. J. L. Jørgensen, "The Science Grade Vector Magnetometer for the PROBA-2 Mission," Proceedings of the 4S Symposium: `Small Satellite Systems and Services,' Chia Laguna Sardinia, Italy, Sept. 25-29, 2006, ESA SP-618
104) A. M. Baker, A. da Silva Curiel, J. Schaffner, M. Sweeting, "Advanced Low Cost Propulsion Concepts for Small Satellites beyond LEO," 55th International Astronautical Congress 2004, Vancouver, Canada, Oct. 4-8, 2004, IAC-04-S.1.08
105) I. G. Coxhill, D. Gibbon, "A Xenon Resistojet Propulsion System for Microsatellites," 41st AIAA/ASME/SAE/ASEE Joint Propulsion Conference & Exhibit, July 10-13, 2005, Tucson, Arizona, USA,
106) http://bradford-space.com/#missions/proba_2
107) "Solid Propellant Cool Gas Generators," URL: http://www.tno.nl/downloads/def_lucht_gasgeneratoren2.pdf
108) "Not just cool - it's agas," ESA, Sept. 12, 2014: URL: http://www.esa.int/Our_Activities/Technology/TTP2/Not_just_cool_it_s_a_gas
109) http://www.exxfire.com/home/company
110) J. de Lafontaine, J. Côté, A. Kron, P. Vuilleumier, S. Santandrea, P. Van den Braembussche, "Innovative Autonomous Navigation and Control Functions on-board the Minisatellite PROBA-2," Proceedings of the 13th Canadian Astronautics Conference, ASTRO 2006, Montreal, QC, Canada, organized by CASI (Canadian Astronautics and Space Institute), April 25-27, 2006
111) J. de Lafontaine, J. Côté, A. Kron, P. Vuilleumier, S. Santandrea, P. Van den Braembussche, "Validation of Innovative State Estimation and Control Techniques on PROBA-2," Proceedings of the 6th International ESA Conference on Guidance, Navigation and Control Systems, Loutraki, Greece, Oct. 17-20, 2005 (ESA SP-606, Jan. 2006)
112) J. de Lafontaine, J. Côté, J. Naudet, A. Kron, Stefano Santandrea, "PROBA-2: AOCS Software Validation Process and Critical Results," Proceedings of the 7th International ESA Conference on Guidance, Navigation & Control Systems (GNC 2008), June 2-5, 2008, Tralee, County Kerry, Ireland
113) J. Côté, J. Naudet, A. Kron, S. Santandrea, J. de Lafontaine, "PROBA-2 Attitude and Orbit Control System: In-Flight Validation Results," 18th IFAC World Congress, Milano, Italy, Aug. 28, - Sept. 2, 2011, URL: http://www.nt.ntnu.no/users/skoge/prost/proceedings/ifac11-proceedings/data/html/papers/3163.pdf
114) J. Côté, A. Kron, J. de Lafontaine, J. Naudet, S. Santandrea, "PROBA-2 Attitude and Orbit Control System: In-Flight Results of AOCS Flight Experiments," Proceedings of the GNC 2011, 8th International ESA Conference on Guidance, Navigation & Control Systems, Carlsbad (Karlovy Vary), Czech Republic, June 5-10, 2011
115) T. Denver, J. L. Jørgensen, R. Michelsen, P. S. Jørgensen, "The microASC Star Tracker- Generic Developments and Performance," Proceedings of the 4S Symposium: `Small Satellite Systems and Services,' Chia Laguna Sardinia, Italy, Sept. 25-29, 2006, ESA SP-618
116) P. S. Jørgensen, J. L. Jørgensen, T. Denver, P. van den Braembussche, "The Micro Advanced Stellar Compass for ESA's PROBA-2 Mission," 5th IAA Symposium on Small Satellites for Earth Observation, Berlin, Germany, April 4-8, 2005
117) J. L. Jørgensen, T. Denver, M. Betto, P. S. Jørgensen, "MicroASC A Miniature Star Tracker," 4th IAA Symposium on Small Satellites for Earth Observation, Berlin, Germany, April 7-11, 2003
118) G. Thuesen, P. B. Guldager, J. S. Jørgensen, "Application specific radiation tests for COTS EEE components," 4th IAA Symposium on Small Satellites for Earth Observation, Berlin, April 7-11, 2003
The information compiled and edited in this article was provided by Herbert J. Kramer from his documentation of: "Observation of the Earth and Its Environment: Survey of Missions and Sensors" (Springer Verlag) as well as many other sources after the publication of the 4th edition in 2002. - Comments and corrections to this article are always welcome for further updates (eoportal@symbios.space).
Spacecraft Launch Mission Status Sensor Complement Technology Demonstration / Experiments
Ground Segment References Back to top