PROBA-1 (Project for On-Board Autonomy - 1)
EO
ESA
Atmosphere
Ocean
The Project for On-Board Autonomy - 1 (PROBA-1) is a minisatellite technology demonstration mission in ESA's General Study Program, aiming to tackle issues related to the on-board operational autonomy of a generic platform. Between its launch in October 2001 and its end of life in December 2021, PROBA-1 was repurposed to be a part of ESA’S Earth observation programme, providing the scientific community with numerous images of Earth for climate and environmental research.
Quick facts
Overview
| Mission type | EO |
| Agency | ESA |
| Mission status | Mission complete |
| Launch date | 22 Oct 2001 |
| End of life date | 31 Oct 2021 |
| Measurement domain | Atmosphere, Ocean, Land |
| Measurement category | Atmospheric Temperature Fields, Ocean colour/biology, Aerosols, Radiation budget, Multi-purpose imagery (land), Vegetation, Albedo and reflectance |
| Measurement detailed | Aerosol absorption optical depth (column/profile), Ocean chlorophyll concentration, Color dissolved organic matter (CDOM), Aerosol Extinction / Backscatter (column/profile), Land surface imagery, Vegetation type, Earth surface albedo, Short-wave Earth surface bi-directional reflectance, Leaf Area Index (LAI), Land cover, Atmospheric temperature (column/profile), Ocean suspended sediment concentration, Normalized Differential Vegetation Index (NDVI), Photosynthetically Active Radiation (PAR), Fraction of Absorbed PAR (FAPAR), Soil type |
| Instruments | CHRIS, HRC |
| Instrument type | Imaging multi-spectral radiometers (vis/IR) |
| CEOS EO Handbook | See PROBA-1 (Project for On-Board Autonomy - 1) summary |
Related Resources
Summary
Mission Capabilities
PROBA-1 features a Compact High Resolution Imaging Spectrometer (CHRIS) and an experimental High-Resolution Camera (HRC).
CHRIS is a hyperspectral imager of British funding, weighing 14 kg, designed by engineers from the Space Group of Sira Electro-Optics (acquired by Surrey Satellite Technology Ltd in 2006).
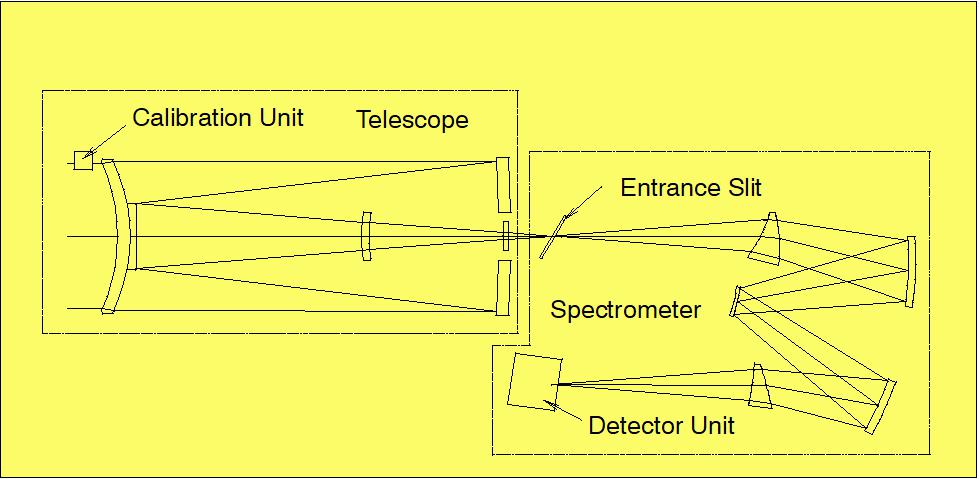
The CHRIS instrument design comprises a catadioptric telescope, an imaging spectrometer, and an area detector array at the focal plane of the spectrometer. All refracting elements in the design are made of fused quartz. The telescope is axially symmetrical and has only spherical surfaces.
CHRIS has been used for terrestrial and aquatic observation purposes, such as the investigation of crops leaves, water quality or the biomass of lichens and biological soil crusts in the Namibian Desert.
HRC is an ESA instrument, weighing 2.1 kg, with the objective of demonstrating a high-resolution imager, primarily intended for technology, educational and general public information purposes. It assists CHRIS in obtaining important images for scientific research.
Performance Specifications
The CHRIS imager provides 19 fully programmable spectral bands in the 400 - 1050 nm range at a spatial resolution of 17 m, but it can also be reconfigured to provide 63 spectral bands at a spatial resolution of about 34 m. The spectral resolution varies between 1.5 nm in the blue and 11 nm in the red, and the imager’s field of view is a square area with a side of 13.5 km. The same target can be viewed from five different angles due to the agility of the satellite.
The absolute pointing accuracy is 150 arcsec, while the relative pointing stability is 10 arcsec over a 10 second period.
HRC is a small imager, acquiring black-and-white 8 m resolution images with a size of 4 x 4 km, and a field of view of 0.358°. It is a Cassegrain telescope, with an aperture of 115 mm and a focal length of 2296 mm. 3D packaging technology is used in the CCD detector that captures the image within 1026 x 1026 pixels of 14 µm size.
PROBA-1 maintains a Sun-synchronous elliptical polar orbit, with an inclination of 97.9°, at a mean altitude of 615 km and a period of 96.97 minutes. The pointing capability of PROBA permits a CHRIS imagery repeat cycle of approximately two days at mid latitudes.
Space and Hardware Components
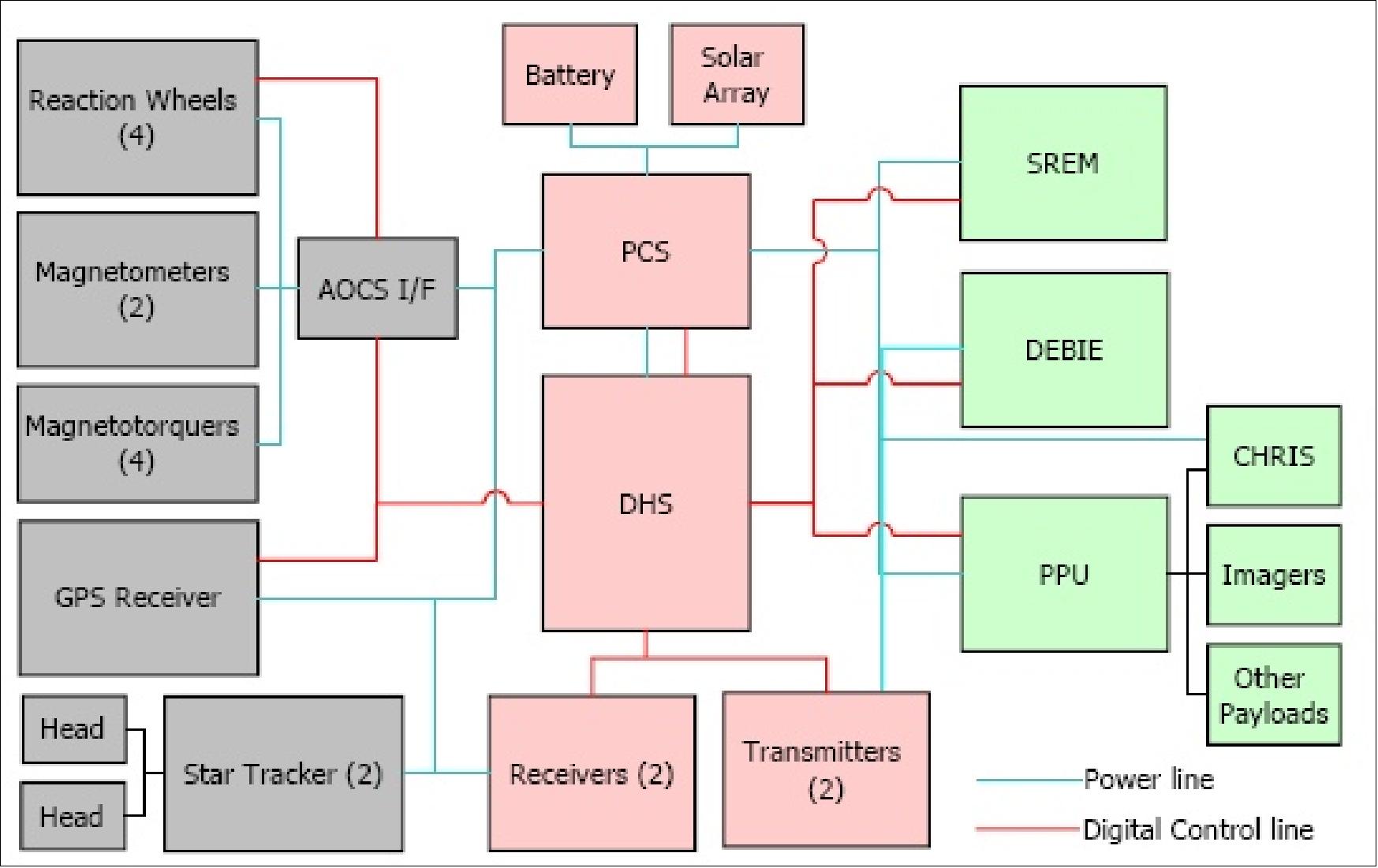
The satellite has an Attitude Control and Navigation Subsystem that performs autonomous on-board navigation, with the help of an autonomous star tracker (Advanced Stellar Compass), a GPS-based attitude sensor, gyroscopes and four three-axis magnetometers. The Data Handling System is a high-performance redundant central computer. There is also a Payload Processor Unit. PROBA-1 also contains SREM (Standard Radiation Environment Monitor), a sensor that measures energetic electrons, protons and heavy ions, as well as the total accumulated dose encountered during the mission.
PROBA-1 had a design life of 2 years, although it operated for 20 years. It has a total mass of 94 kg and is powered by solar cells mounted on its body, with the energy being stored by a lithium-ion battery.
PROBA-1 (Project for On-Board Autonomy - 1)
Spacecraft Launch Mission Status Sensor Complement References
PROBA is minisatellite technology demonstration mission in ESA's General Study Program with the objective to address issues of on-board operational autonomy of a generic platform. The following functional capabilities and/or techniques are to be demonstrated: 1) 2) 3) 4) 5)
• Command management coordination of on-board resources and house-keeping functions
• Scheduling, preparation, and execution of instrument observations (coordination of sensor settings, pointing angles, etc.)
• Source data handling functions (data collection, processing, storage, distribution)
• Source data communications management
• Performance evaluation and estimation of drifts, trends
• Failure detection and failure handling procedures
Further (secondary) objectives of PROBA are space environment investigation and Earth observation. The scientific interest relates to the use of the imaging spectrometer CHRIS. 6)

Spacecraft
PROBA was designed/developed by a consortium led by Verhaert Design and Development N. V. of Kruibeke, Belgium and sponsored by OSTC (Federal Office for Scientific, Technical, and Cultural Affairs) of Belgium.
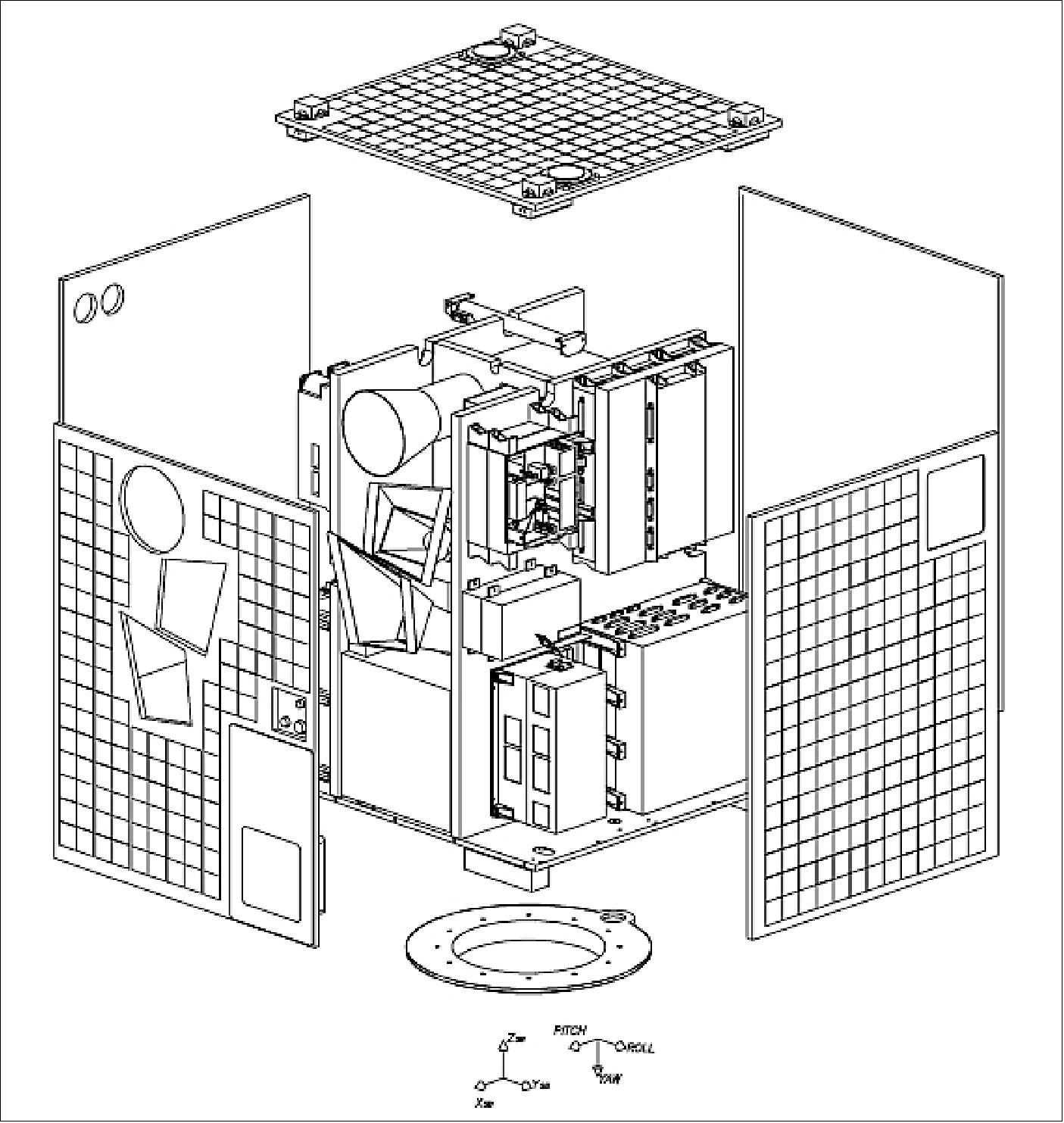
The S/C structure resembles a box (60 cm x 60 cm x 80 cm) of conventional honeycomb design with body-mounted solar panels (GaAs) on five sides. The satellite is three-axis stabilized. The ACNS (Attitude Control and Navigation Subsystem) performs autonomous on-board navigation. Attitude measurements are provided by an autonomous star tracker [referred to as ASC (Advanced Stellar Compass), a GPS-based attitude sensor (SRG-20), gyroscopes (one resonating gyro, built by Sagem of France, flies for the first time) and four three-axis magnetometers; attitude control is provided with four miniaturized reaction wheels and four magnetorquers. The absolute pointing accuracy is 150 arcsec; the relative pointing stability is 10 arcsec over a 10 s period. All ACNS sensors and actuators are controlled by the ACNS software package (developed at the Université de Sherbrouk) running on the central ERC-32 RISC processor. There is no propulsion capability for orbit correction.
S/C power = 90 W (peak) provided by body-mounted GaAs solar cells with integrated diode, a 36 Li-ion cell battery of 9 Ah capacity is used for energy storage (PROBA was the first ESA mission to use a Li-ion battery). A centrally switched 28 V regulated bus distributes power to all sensors and subsystems. PROBA has a Memory Management Unit (MMU) with a 1.2 Gbit capacity for data storage.
S/C total mass = 94 kg including the payload mass. The S/C design life is 2 years. The S/C provides nadir and inertial pointing capabilities; along-track body pointing is up to 38º, while cross-track pointing is up to 30º (the slew rate is up to 1º/s). Yaw steering of up to 24º is only used for calibration purposes. A further feature of the platform maneuvers is the ability to implement Forward Motion Compensation (FMC) during imaging to enable the CHRIS instrument to enhance signal to noise and increase the number of spectral bands that can be read out. The FMC factor is 5.
PROBA provides full on-board flight dynamics and orbital navigation computation, as well as automated onboard functions handling nominal spacecraft operations and control and resources management. Payload resources management, payload operations scheduling and execution, target fly-by prediction and computation, and the control of imager pointing and scanning from high-level requests from users (target latitude, longitude and altitude) are hence fully automated. 7) 8) 9) 10)
The avionics is composed by:
• A high-performance redundant central computer (DHS) responsible for spacecraft telecommand and telemetry, all spacecraft computing tasks and interfaces to every unit of the spacecraft
• PPU (Payload Processor Unit) with a solid-state recorder and a DSP for payload processing and data storage
• A redundant set of S-band receivers and transmitters.
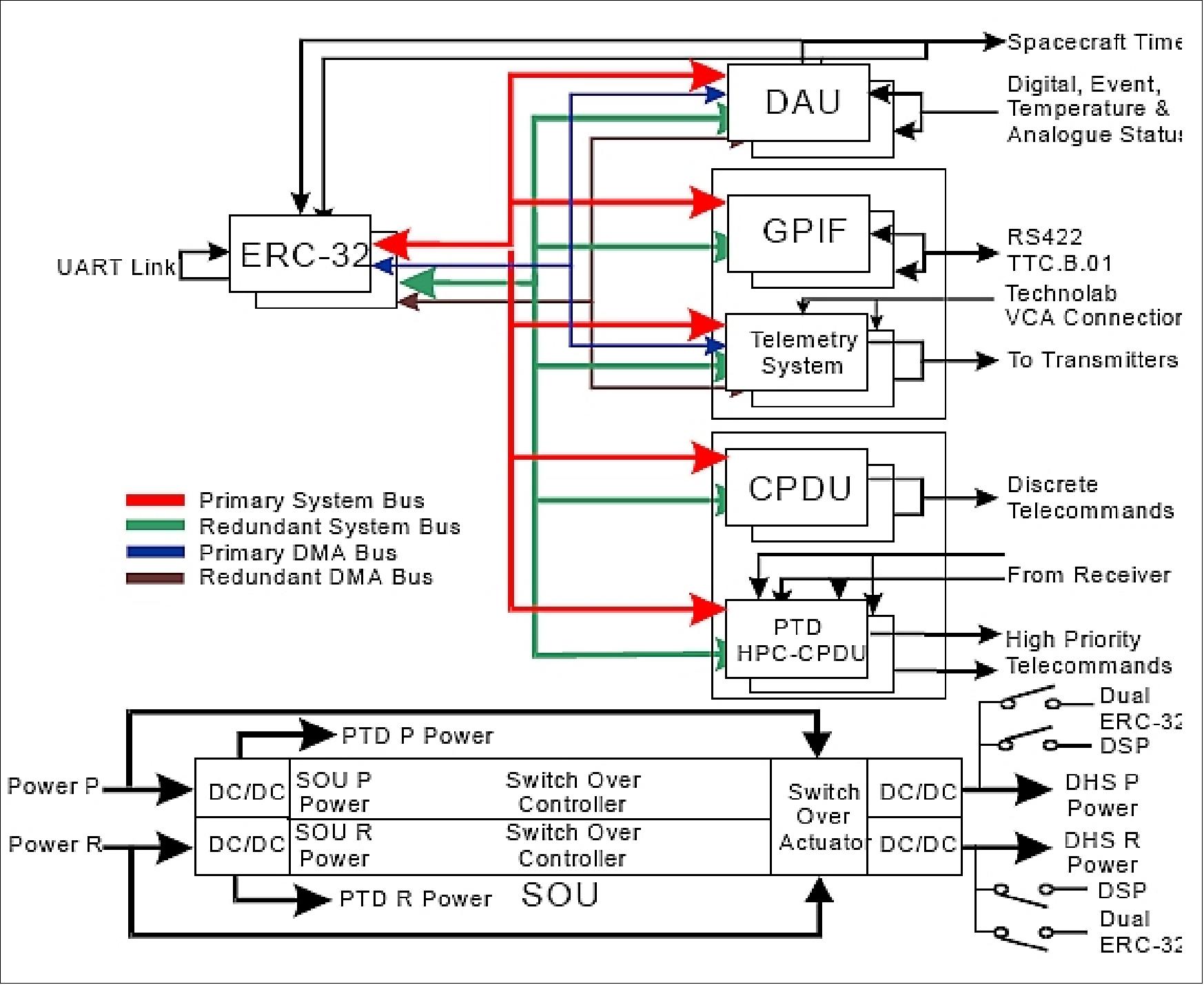
The DHS (Data Handling System) was designed to integrate in a single redundant unit all the core functions of the spacecraft avionics (Figure 3) and to provide sufficiently high-performance computing to support not only the traditional attitude control and data handling tasks but also spacecraft autonomy (i.e. the processing normally performed on-ground has been migrated on-board in the case of PROBA). A RISC processor, the ERC 32, has been used. The ERC 32 is a radiation tolerant (> 80 Krad) SPARC V7 processor providing 10 MIPS and 2 MFLOPS with a floating-point unit. A memory controller includes all the peripheral functions needed by the processor, such as the address decoders, the bus arbiter, the EDAC, 2 UARTS, 3 timers and a watchdog. The chip set is manufactured with the MHS 0.8 µm CMOS/EPI radiation tolerant technology.
Subsystem | Description |
Mechanical structure | - Spacecraft mass: 94 kg |
Thermal | Passive thermal control |
AOCS | - Attitude control: 3-axis stabilized providing high accuracy nadir and off-nadir pointing capabilities |
Avionics | - Processor: Cold redundant radiation tolerant ERC32 RISC processor |
PCS (Power Control Subsystem) | - Solar panels: 5 body mounted GaAs panels, 90 W peak power |
Software | - Operating system: VxWorks |
Launch
The PROBA spacecraft was launched on Oct. 22, 2001 on the PSLV-C3 launcher of ISRO (secondary payload to TES (Technology Experiment Satellite) of ISRO and BIRD of DLR) from SHAR (ISRO Sriharikota Range, the ISRO launch site on the East Coast of India).
RF communications: CCSDS-compatible uplink (2-4 kbit/s, PSK/PM modulation) and downlink (up to 1 Mbit/s, transmitter power of 2 W, BPSK modulation) packetized communications in S-band. Mission operations are located at the ESA Redu (Belgium) ground station. - The main elements of the ground segment are a fully steerable S-band antenna of 2.4 m diameter, the baseband equipment, a control system based on the ESA SCOS II system used also during the ground test and integration phase, a planning system and a data server. 11)
Orbit: Sun-synchronous elliptical polar orbit, perigee= 542 km, apogee=657 km (mean altitude of 615 km), inclination = 97.9º, period = 96.97 min, repeat cycle = 7 days (approximately), equator crossing time at 10:30 AM on descending node. The pointing capability of PROBA permits a CHRIS imagery repeat cycle of approximately 2 days at mid latitudes.
Mission Status
• October 22, 2021: Surrey Satellite Technology Ltd (SSTL) is today celebrating 20 years of operations in orbit for the CHRIS (Compact High Resolution Imaging Spectrometer) instrument on board the European Space Agency’s PROBA-1 satellite. PROBA-1, a microsatellite less than one 1m3 in size, was launched into a low earth orbit of 615 km on 22 October 2001, and the satellite is still in operation today. The CHRIS imager on board the satellite weighs only 14 kg and was designed by engineers from the Space Group of Sira Electro-Optics, which was acquired by SSTL in 2006: a number of engineers who designed and worked on the original imager are still employed at SSTL today. 12)
- Initially launched as a technology demonstration mission, PROBA-1’s design was highly innovative and the satellite platform and CHRIS payload effectively work as one to image the Earth. Using a star tracker for guidance, the satellite can roll off to ±25º off-nadir in the cross-track direction and ±55º in its along-track. This tracking ability allows PROBA-1 to compensate for the effective satellite groundtrack speed and this ‘forward motion compensation’ boosts its overall integration time per image, giving CHRIS an imaging performance and signal-to-noise equivalent to that of an instrument with an aperture area five times larger. This agility means that CHRIS can also view the same target from five directions, a unique feature of the mission and instrument and this capacity in particular that has proved invaluable to many scientists investigating the BRDF (Bi-Reflectance Distribution Function) of vegetation and other land cover features – meaning how the light they reflect changes with shifts in illumination or view angle. The wavelength and bandwidth of each spectral band is fully programmable, and 18 spectral bands can be selected in each image. This can be increased to 62 bands per image at a lower spatial resolution.
- The CHRIS imager records fine detail features of environmental and climatological interest on the Earth surface. Utilization of the data has been extensive over the last 20 years and continues daily at a high level with 219 sites imaged in 2021. Data has been provided to scientists in 25 countries covering every continent, a total of 945 unique sites. The scientific community uses the data to derive improved measures of a range of physical, chemical and biological properties that describe the `health' of our planet. This includes information on the albedo of the land surface (a critical parameter in climate models), plant biomass and chlorophyll content (vital information for precision farming), and the organic matter content in inland and coastal water bodies (to monitor, for example, so-called `red tides'). Other applications have included the identification of potential avalanche sites and oil spills and a novel technique of mapping underwater features, such as coastal reefs via analysis of wave motion.
- The CHRIS imager’s field of view is 13.5 x 13.5 km, and the spatial resolution is 17 m. The imager operates over a wavelength range of 400 to 1050 nm, and the spectral resolution varies between 1.5 nm in the blue and 11 nm in the red.

- A worldwide community of users have based their research on data from CHRIS and the following list represents a few examples of applications:
a) Teams in Switzerland, Germany and Australia have used CHRIS observations to classify the leaf angle and therefore maturity of maize, wheat and cotton crops respectively. CHRIS data tracks the angle of the leaves which increases as the crop grows and the heads dominate.
b) A team at the University of Kaiserslautern in Germany has employed CHRIS imagery to measure the coverage and estimate the biomass of lichens and biological soil crusts in the Namibian Desert. These crusts play an important ecological role, anchoring soil in place, so their loss over time can flag up erosion patterns.
c) A community of users are using CHRIS data to sample water quality, using multispectral data to derive standardized parameters such as chlorophyll content, total suspended soils and dissolved organic matter within inland water bodies.
d) A team at the University of New South Wales in Australia has developed an innovative algorithm to estimate the shallowness of coastal waters by identifying the shifting frequency of waves as they approach the coast or underlying reefs, employing the fact that the wave’s spatial frequency increases as the water gets shallower. This technique can be used in highly sedimented water without needing to rely on the optical visibility through the water as typically used in bathymetry.
PROBA-1 also flies an SSTL GPS receiver that provides crucial positional information for accurate image targeting.
• May 20, 2020: Plentiful parked airliners at Indira Gandhi International Airport in New Delhi, usually the busiest airport in India until the COVID-19 pandemic, as seen by ESA’s oldest operational Earth observation mission, PROBA-1. 13)
- The cubic-meter-sized satellite has been in orbit for more than 18 years. It left Earth from India: PROBA-1 was launched from the country’s Satish Dhawan Space Centre by Polar Satellite Launch Vehicle on 22 October 2001.
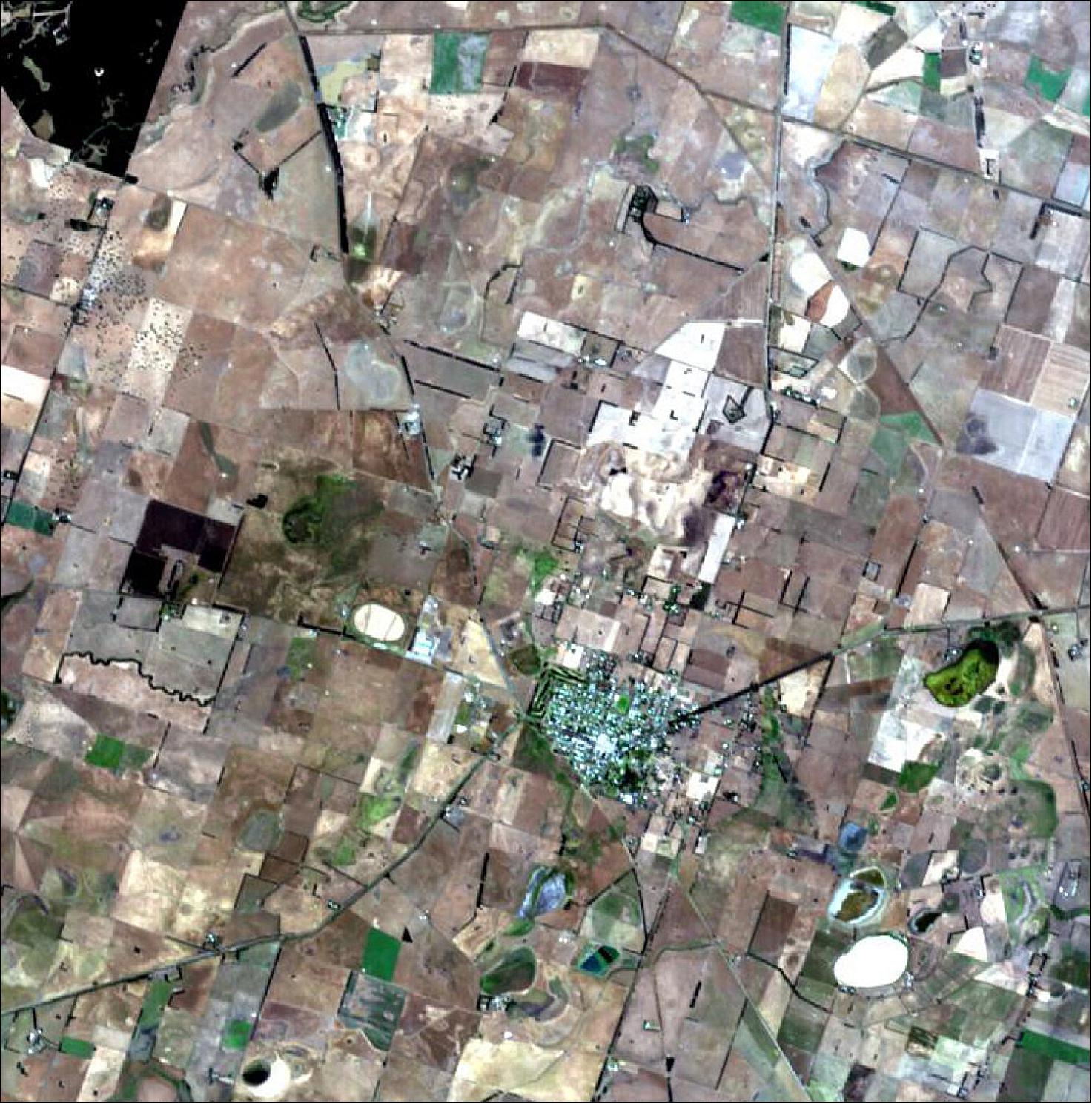
- The first in ESA’s family of ‘Project for On-Board Autonomy’ missions, PROBA-1 began life as a technology demonstration satellite, subsequently becoming an Earth observation mission. Its main hyperspectral Compact High Resolution Imaging Spectrometer is accompanied by the monochromatic High Resolution Camera, which took the 5-m spatial resolution image shown here.
- Overseen from ESA’s ESEC-Redu center in Belgium, the highly-automated PROBA-1 introduced various then-novel but now mainstream technologies to space, including lithium ion batteries, gallium arsenide solar panels, the use of star trackers for gyro-free attitude control and ESA-developed ERC-32 microprocessors running its flight computer.
- PROBA-1 continues to deliver imagery to scientific teams around the globe, while also providing useful data on the longevity of space systems and components.
- PROBA-1 was followed by the Sun-observing PROBA-2 in 2009 and vegetation-tracking PROBA-V in 2013, with the double-satellite PROBA-3 to demonstrate precision formation flying while studying the Sun’s corona planned for launch in 2022.

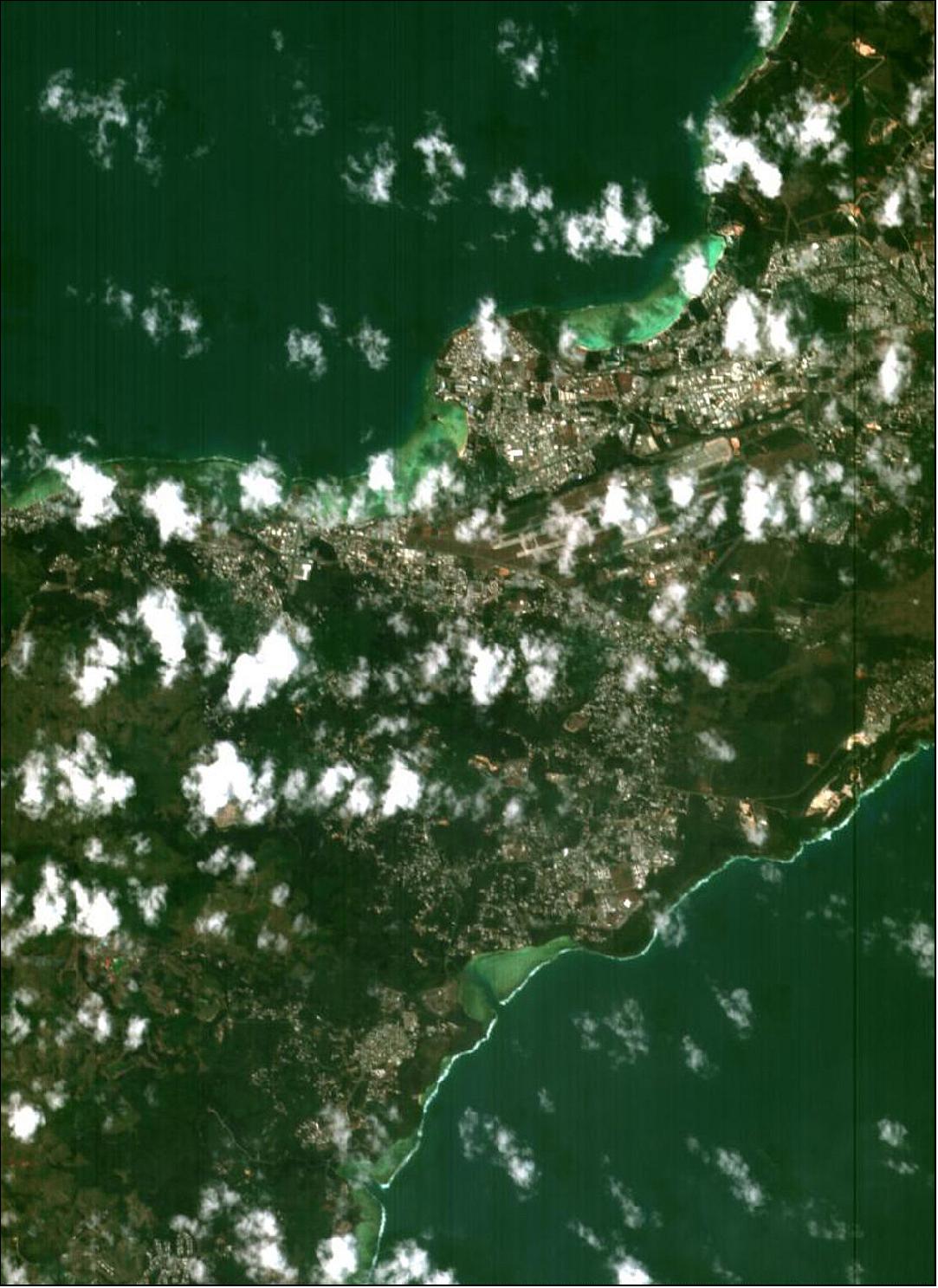
• July 18, 2018: A cloud-specked view of the US territory of Guam in the western Pacific Ocean, as seen by ESA’s PROBA-1 microsatellite, which is still observing Earth despite being launched 16 years ago. 14)
- The PROBA-1 microsatellite of 1 m3 volume was the first in ESA’s series of satellites aimed at flight-testing new space technologies. It was launched on 22 October 2001 but is still going strong as the Agency’s longest-serving Earth-observing mission.
- PROBA-1’s main hyperspectral CHRIS imager acquires 13 km2 scenes at 17 m spatial resolution across 18 programmable visible and near-infrared wavelengths. PROBA-1 additionally carries a 5 m-resolution black and white camera. The microsatellite’s agile nature means it can image the same scene from a variety of viewing angles.
- Onboard innovations include what were then novel gallium-arsenide solar cells, the use of star trackers for gyroless attitude control, one of the first lithium-ion batteries – now the longest such item operating in orbit – and one of ESA’s first ERC32 microprocessors to run PROBA-1’s agile computer.
• March 28, 2018: ESA's PROBA-1 satellite captured a view of Egypt's famous Giza Pyramid Complex, looking from north to south (Figure 9). The smaller Pyramid of Menkaure is seen towards the center of the image, with the larger Pyramid of Khafre down and left of it, with the Great Pyramid of Giza – the largest and oldest of the three – below and left of that. 15)
- Three smaller pyramids are adjacent to the Pyramid Menkaure. The Giza Plateau sits on the edge of Cairo, fringed by suburbs.
- PROBA-1 is the first in ESA’s series of satellites aimed at flight-testing new space technologies. It was launched on 22 October 2001 but is still going strong, having recently became the Agency’s longest-serving Earth-observing mission.

• March 9, 2018: Originally designed as a two-year mission and launched on 22 October 2001, PROBA-1 is still going strong, providing very valuable hyperspectral data. PROBA-1 is ESA’s technology demonstration mission operated with the support of ESA’s Earthnet Program. On 9 March, with 5982 days in orbit, PROBA-1 surpassed ERS-2 mission, making it ESA’s longest operated Earth observation mission of all time. 16)
- ESA’s Director of Earth Observation Programs, Josef Aschbacher, states, “Belgium has entrusted PROBA-1 to ESA for its operation, for which I am very grateful. The spacecraft has impressed us all, not only for its excellent EO data provided by the CHRIS instrument but also for its longevity. My compliments to Belgium for developing such a robust satellite, but also to my ESA teams for its safe operation over the past 17 years.”
- The objectives of PROBA-1 are in-orbit demonstration and evaluation of new hardware and software spacecraft technologies and of on-board operational autonomy. Extensive use is made of automated functions onboard the spacecraft. Full onboard flight dynamics computation, in conjunction with automated ground segment functions such as pass automation and high-level user interfaces, satisfy the spacecraft autonomy requirements.

- A technology demonstrator turned into an Earth observation mission, the microsatellite – just 1 m3 in volume – has acquired endless environmental science images with its main Compact High Resolution Imaging Spectrometer (CHRIS), a hyperspectral imager able to record 17 to 34 meter resolution scenes across a programmable selection of up to 63 spectral bands, at five different viewing angles.
- Mission Manager for PROBA-1, Giuseppe Ottavianelli, says, “Firstly, I would like to thank my predecessor, Bianca Hoersch and the operations team, who have brought the satellite in great health up to today. The degradation of the power subsystem is very limited, with no significant impact on the mission performance and the available battery capacity provides operational margin.
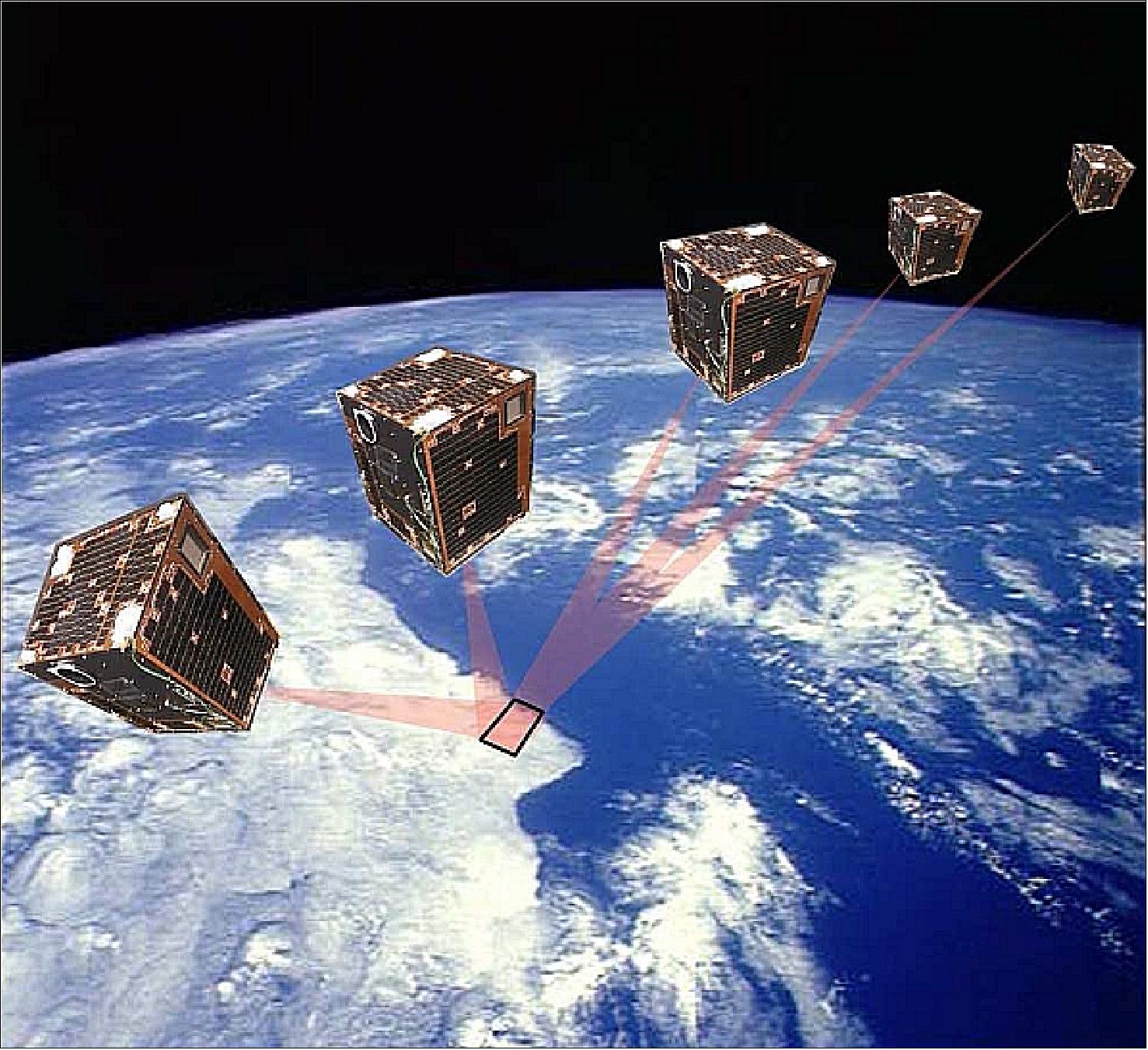
- “With a total of 1258 dedicated research projects by scientific teams from over 60 countries worldwide, PROBA-1 has supported environmental studies for the monitoring of forests, urban areas, glaciers, water bodies, agriculture and much more. Using PROBA's agile steering capabilities, it is possible to image the area of interest with five different along-track incidence angles for a single acquisition (Figure 12), allowing research in topographic mapping and reflectance calibration studies,” Ottavianelli adds.
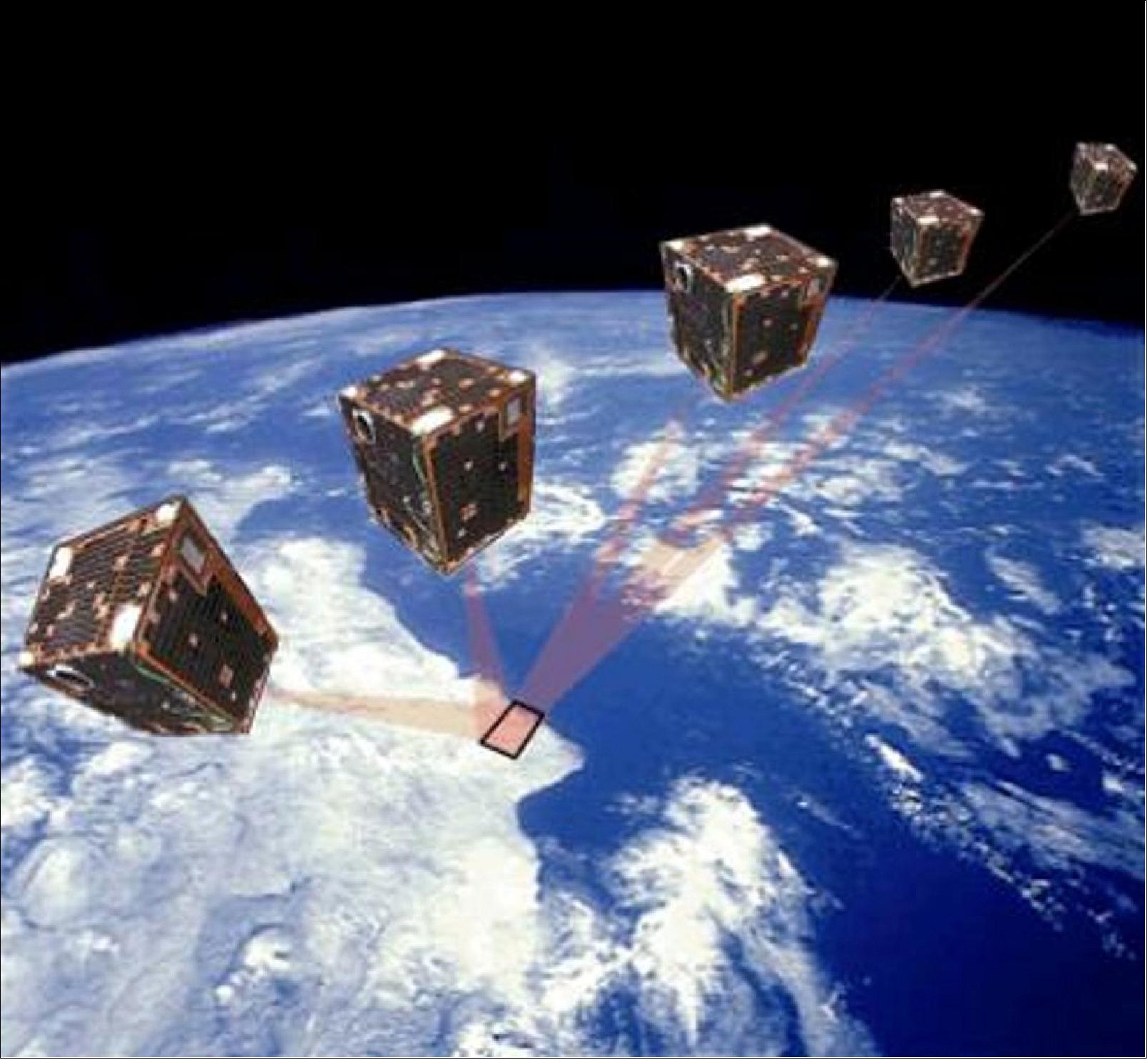
Legend to Figure 12: In addition, PROBA-1 can record up to five differently angled views of the same target, important for researchers investigating how vegetation changes appearance with shifts in view. Understanding the BRDF (Bi-Reflectance Distribution Function) has proved beneficial for mapping and classifying land cover, from forest monitoring in Canada to crop yield predictions in Europe, Australia and China.
- The CHRIS imager provides 19 spectral bands (fully programmable) in the VNIR range (400 - 1050 nm) at a GSD (Ground Sampling Distance) of 17 m. CHRIS can be reconfigured to provide 63 spectral bands at a spatial resolution of about 34 m. Each nominal image forms a square of 13 km x 13 km on the ground (at perigee). The observation of the square target area consists of five consecutive pushbroom scans by the single-line array detectors. Each scan is executed at different view angles to the target within a 55º cone centered at the target zenith.
- Mike Rast, ESA’s Senior Advisor for Earth Observation and hyperspectral expert, comments, “In its 17th year in orbit, the Compact High Resolution Imaging Spectrometer on the PROBA-1 technology demonstrator Earth observation mission has been a 'trailblazer' with the scientific and application oriented exploitation of its VIS/NIR hyperspectral data. Particularly, the programmability of CHRIS' spectral and spatial sampling gave rise to many investigations and findings, aiding the definition of future hyperspectral imaging missions for terrestrial and aquatic ecosystem observations, for scientific and service-oriented operational applications.”
“The future of Proba-1 is also encouraging”, Ottavianelli concludes. “The mission will continue supporting scientific studies. The targets’ visibility during the ascending part of the orbit will continue to improve and the wealth of knowledge in relation to hyperspectral imaging and processing methods will be extremely valuable for upcoming missions and instruments, such as EnMAP, PRISMA, HyperScout and APEX, and potentially also the CHIME (Copernicus Expansion Sentinel) candidate.”

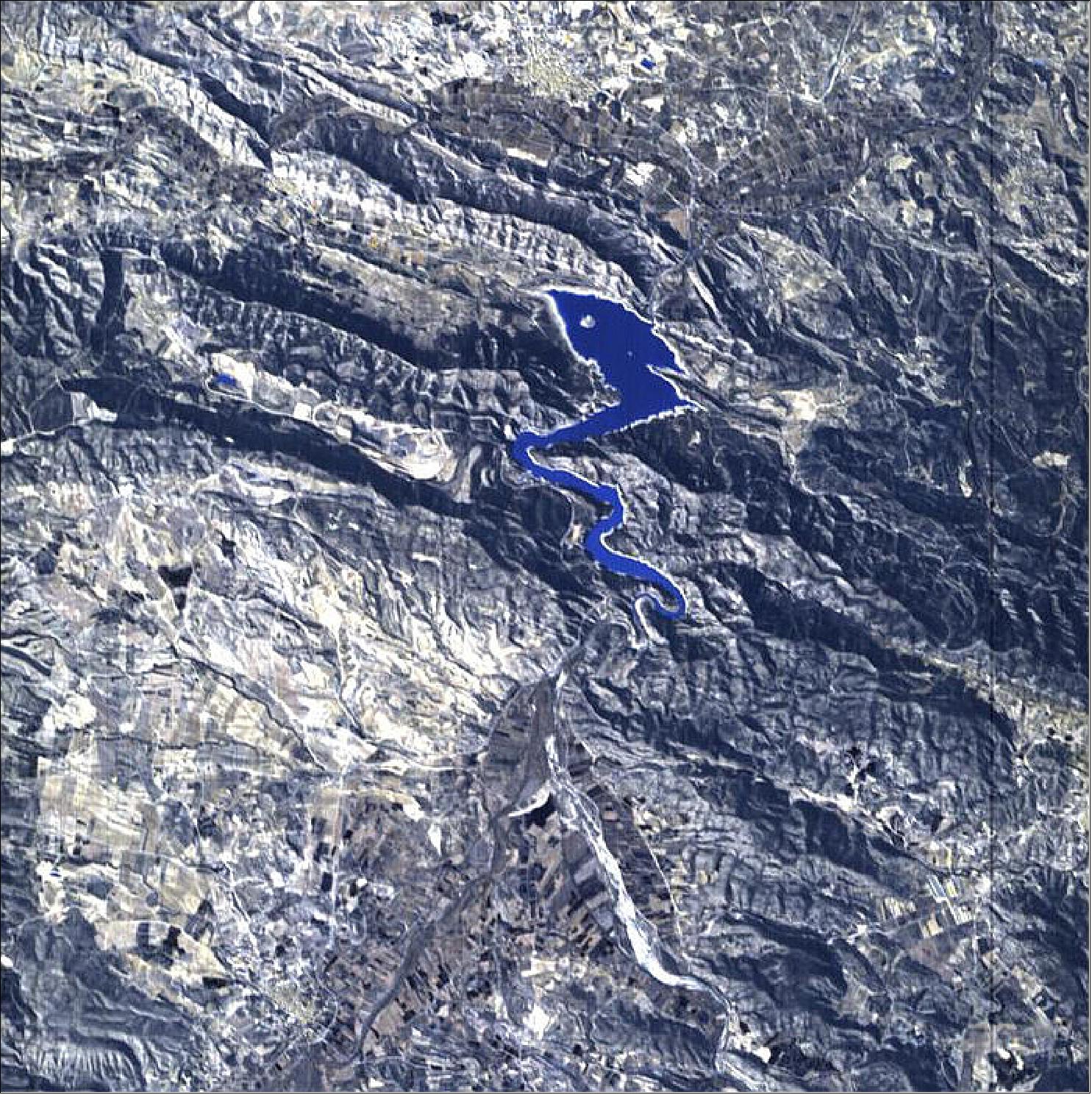
• April 20, 2017: The blue of the Calanda reservoir amid the rugged landscape of northeastern Spain, as seen by ESA’s oldest – and one of its smallest – Earth-observing missions, PROBA-1, midway through its 15th year of operations (Figure 14). 20)
- Located about 120 km southeast of the city of Zaragoza, and built within a surrounding gorge, the reservoir is used for agricultural irrigation and fishing. The town of Calanda is visible at the top of the image.
- Researchers can use PROBA-1’s hyperspectral camera to gather data on the reservoir’s water quality and phytoplankton content.
- The cubic-meter PROBA-1 is the first in ESA’s series of satellites aimed at flight-testing new space technologies. It was launched on 22 October 2001 but is still going strong, having since been reassigned to ESA’s Earth observation duties.
- PROBA-1’s main hyperspectral CHRIS imager records 15 m-resolution scenes across a programmable selection of up to 62 spectral bands, from a variety of viewing angles. It is supplemented by a 5 m-resolution black-and-white micro camera.
- Other innovations include what were then novel gallium-arsenide solar cells, the use of startrackers for gyroless attitude control, one of the first lithium-ion batteries – now the longest such item operating in orbit – and one of ESA’s first ERC32 microprocessors to run PROBA-1’s agile computer.
- PROBA-1 led the way for the Sun-monitoring PROBA-2 in 2009, the vegetation-tracking PROBA-V in 2013 and the PROBA-3 precise formation-flying mission planned for 2019.
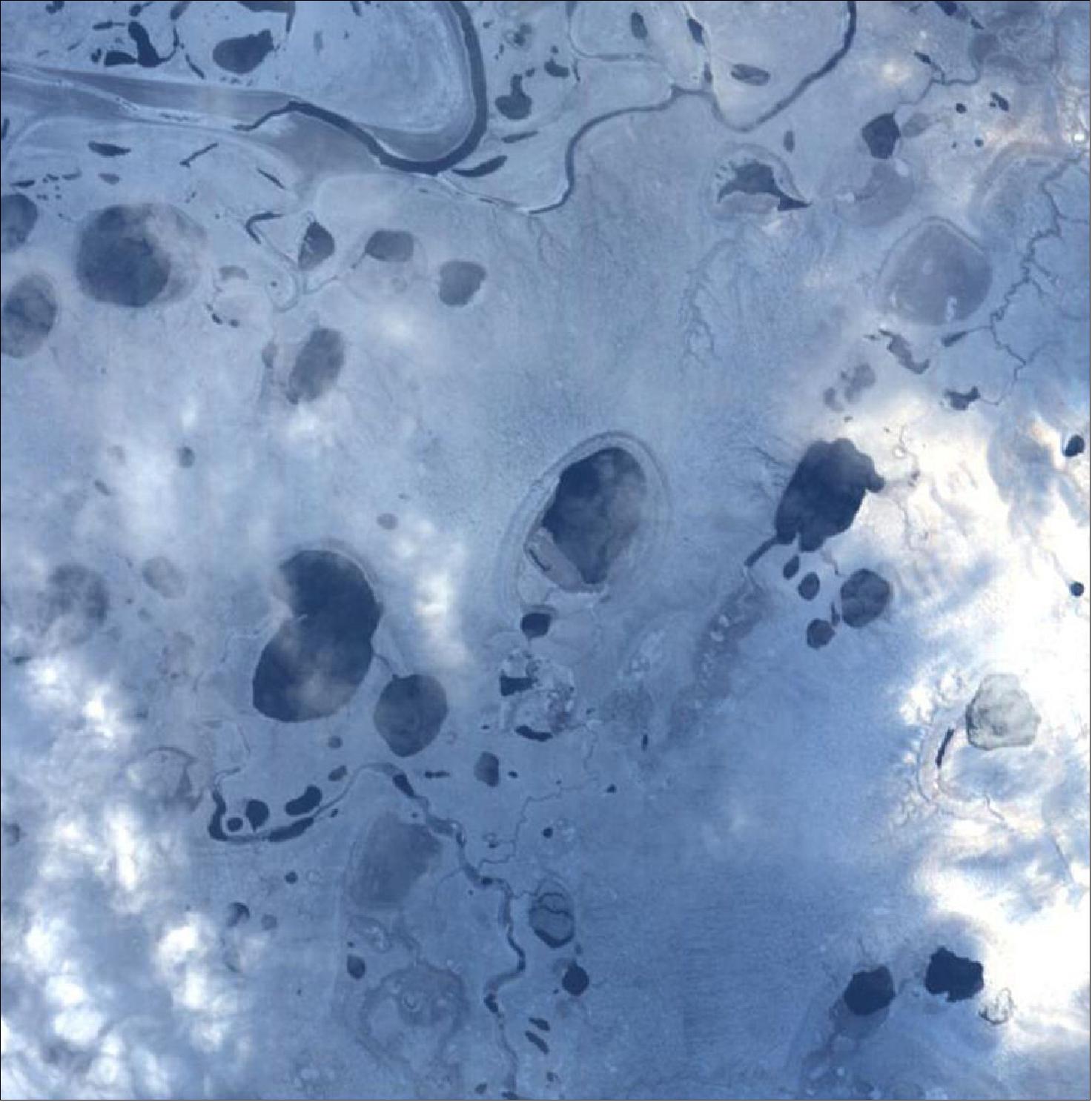
• October 27, 2016: Russia's Lena River is the 11th longest river in the world. It empties into the Laptev Sea through a 32 000 km2 delta, the largest such delta in the Arctic (Figure 15). Protected as a wilderness reserve and nominated as a UNESCO World Heritage Site, the Lena River Delta spends much of the year frozen, but blossoms into a verdant wetland during the brief polar summer. 21)
- The PROBA-1 minisatellite is the first in ESA’s series of satellites aimed at flight-testing new space technologies. It was launched on 22 October 2001 but is still going strong after 15 years on orbit, having since been reassigned to ESA’s Earth observation duties. PROBA-1’s main hyperspectral CHRIS imager records 15 m resolution scenes across a programmable selection of up to 62 spectral bands, from a variety of viewing angles. CHRIS is supplemented by a 5 m resolution black-and-white microcamera. 22)
- ESA acquires, processes and distributes PROBA-1 data as part of its 'Third Party Mission' data portfolio to more than 1000 users worldwide.
• April 21, 2016: The Svalbard Satellite Station sits on the Norwegian archipelago of Svalbard in the Arctic Ocean (Figure 16). Operated by KSAT (Kongsberg Satellite Services), it is the world’s largest commercial satellite ground station. Located halfway between mainland Norway and the North Pole, Svalbard can track all 14 daily passes of polar-orbiting satellites, and has performed downlink duties for numerous ESA Earth-observing missions up to the present day. It is also an important site for Europe’s Galileo navigation satellites, hosting a sensor station to monitor signal quality and an uplink station to transmit navigation message updates to the satellite fleet. 23)
- In addition, Svalbard hosts one of Europe’s three terminals for relaying distress beacons detected by Galileo and other satellites to regional search and rescue services.
- PROBA-1 is the first in ESA’s series of satellites aimed at flight-testing new space technologies. It was launched in October 2001 but is still going strong after more than 14 years, having since been reassigned to ESA’s Earth observation duties. PROBA-1’s main hyperspectral CHRIS imager is supplemented by the experimental HRC (High-Resolution Camera), acquiring black and white 5 m resolution images.
- Other innovations included what were then novel gallium-arsenide solar cells, the use of star trackers for gyroless attitude control, one of the first lithium-ion batteries – now the longest such item operating in orbit – and one of ESA’s first ERC32 microprocessors to run PROBA-1’s agile computer.
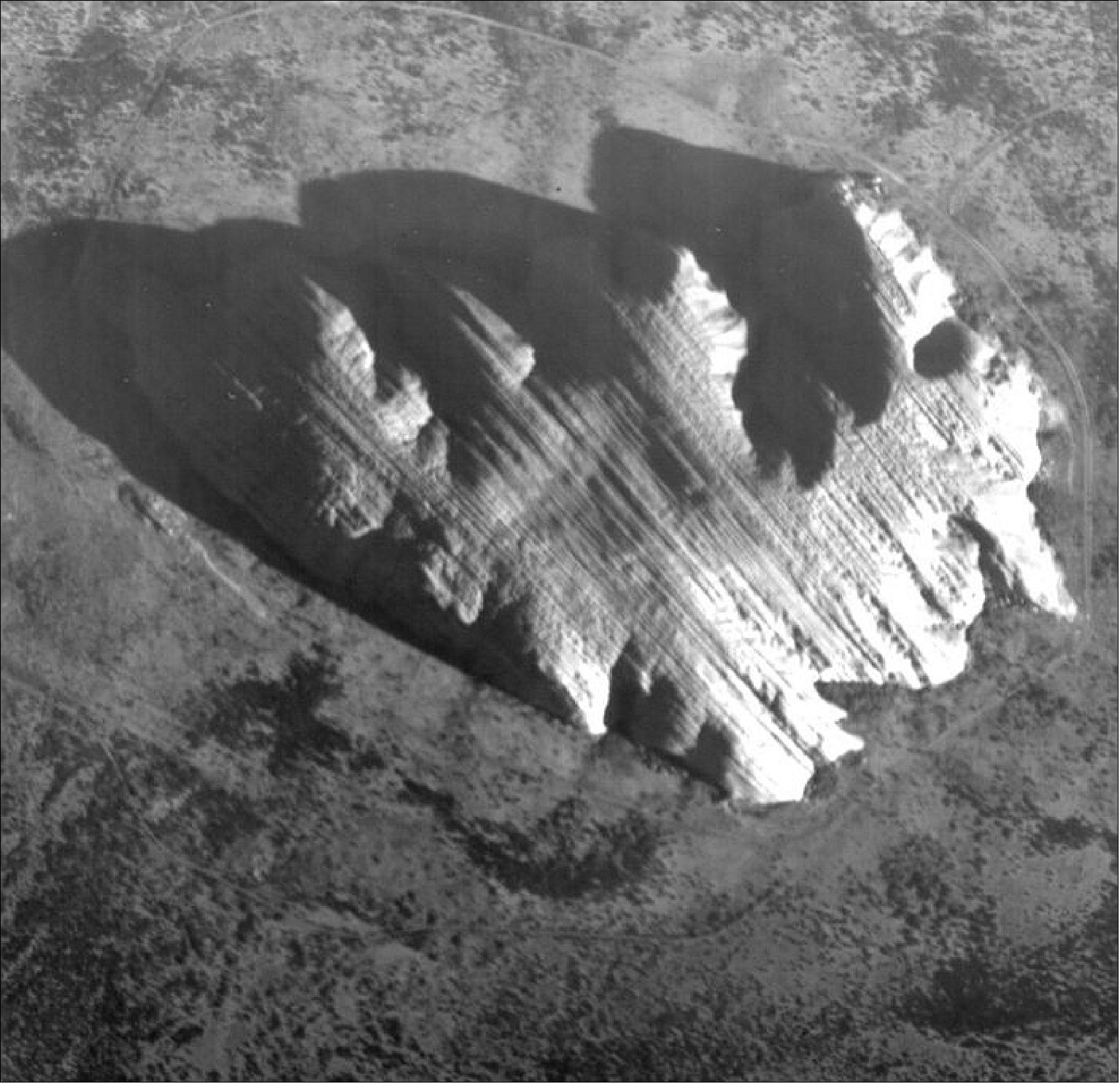
• January 14, 2016: Less than 1 m3 in volume,PROBA-1 is the first in ESA’s series of satellites aimed at flight-testing new space technologies. It was launched in October 2001 as an experimental mission but is still going strong after 14 years in orbit, having since been reassigned to ESA’s Earth observation team. 24)
- PROBA-1’s main hyperspectral CHRIS imager is supplemented by the experimental HRC (High-Resolution Camera), acquiring black and white 5 m resolution images. Other innovations included what were then novel gallium-arsenide solar cells, the use of star trackers for attitude control, one of the first lithium-ion batteries – now the longest such item operating in orbit – and one of ESA’s first ERC32 microprocessors to runPROBA-1’s agile computer.
- Towering 348 m above its surroundings, the monolithic Uluru/Ayers Rock was formed from compressed layers of sandstone when this part of Australia was a shallow sea, layers that were subsequently tilted and uplifted. The lines seen cutting across its top come from horizontal sandstone layering (Figure 17).
• October 2015: PROBA-1, which started as a technology demonstration mission for on-board autonomy, is currently still an operational Earth observation mission providing hyperspectral imagery to thousands of scientists around the world. With its 14 years of in-orbit operations, it exceeded by far the original 2 year imposed mission lifetime.
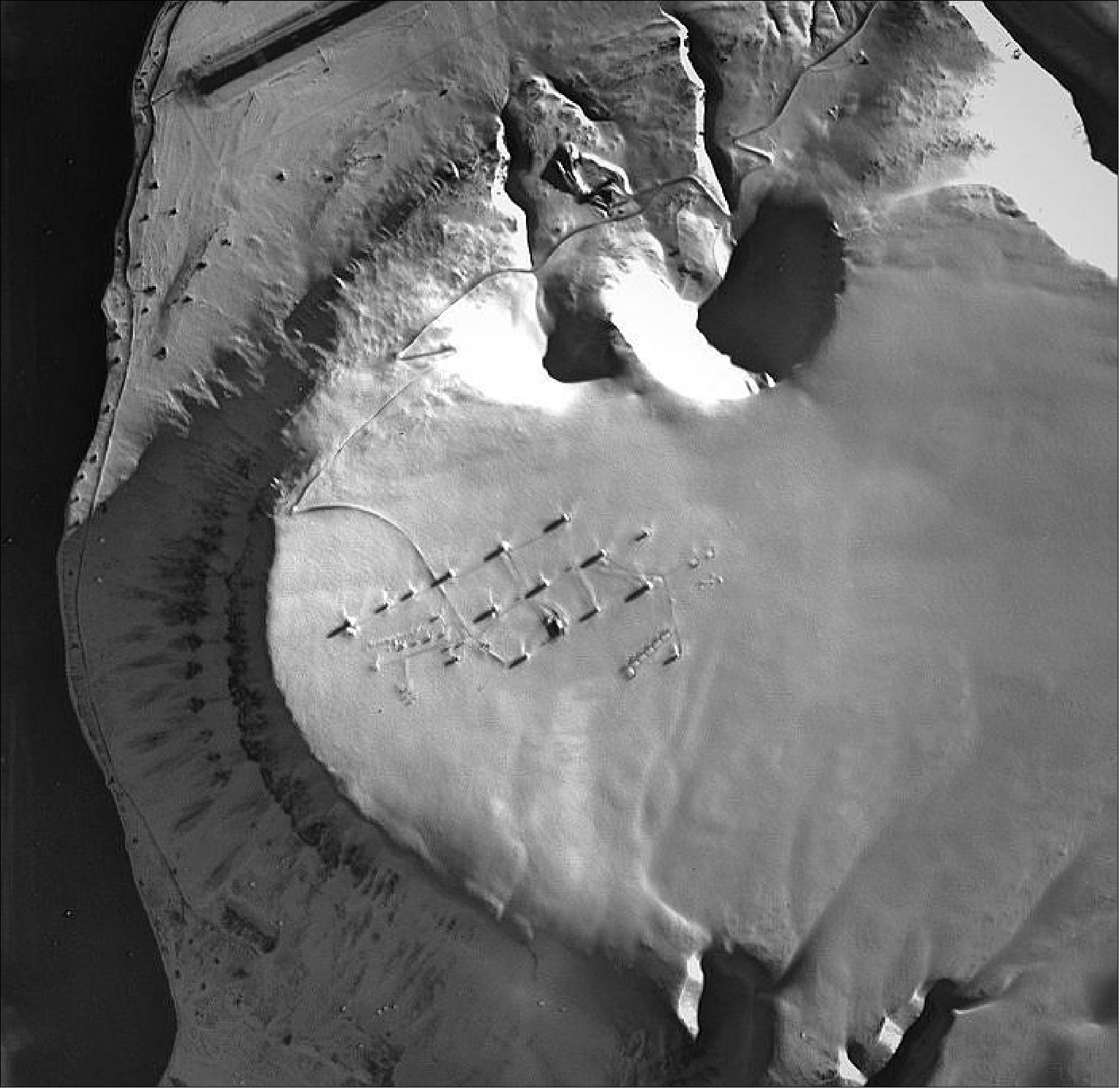
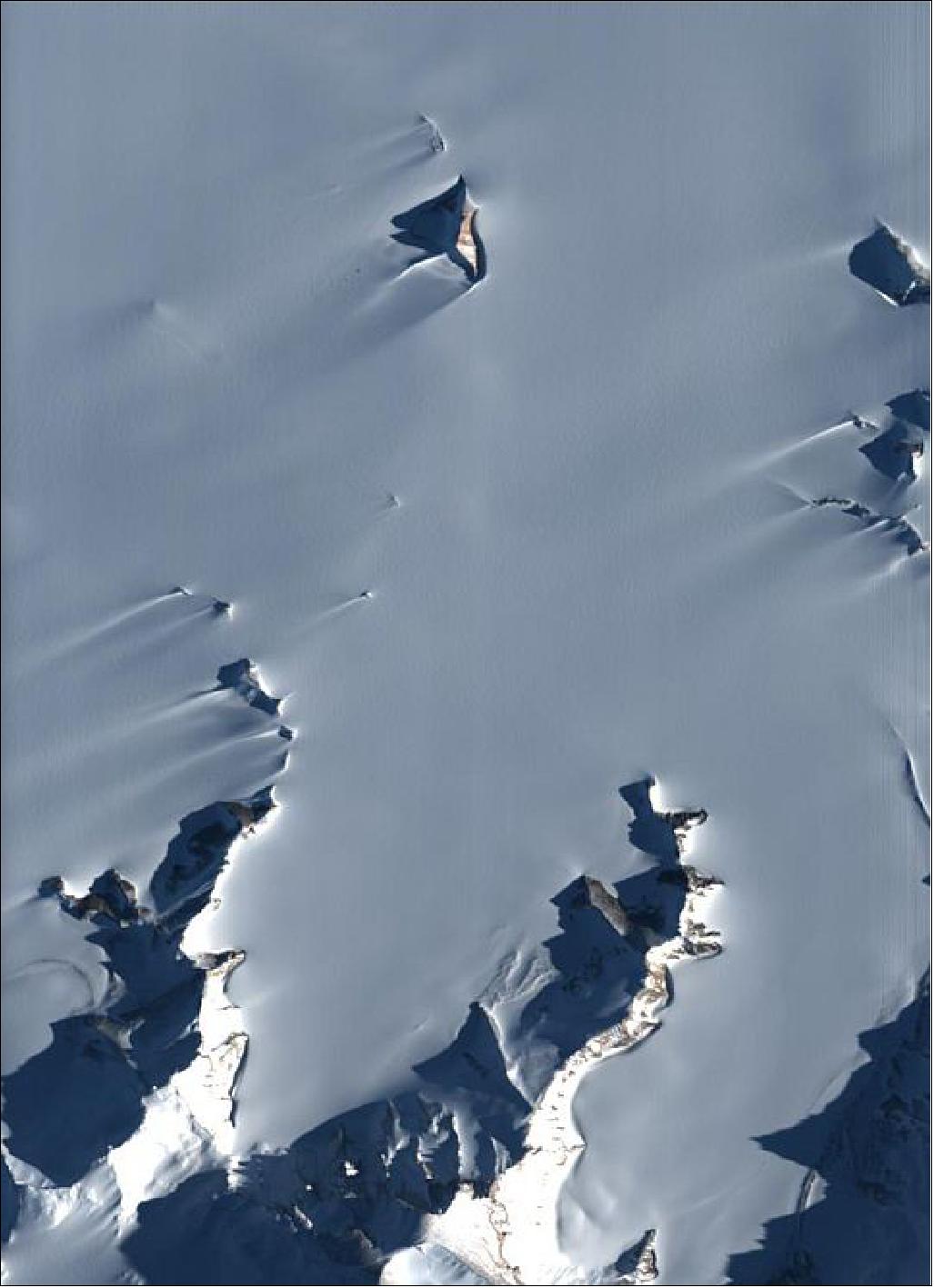
• July 1, 2015: Wind-swept mountain peaks peek above the ice of Dronning Maud Land in Antarctica, as seen by ESA’s PROBA-1 microsatellite, whose two-year design life has been extended by 11 years and counting. 25)
- The topmost ridge in Figure 18 is the site of Belgium’s Princess Elisabeth Base, the first zero-carbon station on the Southern Continent. The ridge is subject to gales of up to 300 km/h, so the base is powered by wind turbines supplemented with solar panels.
- Established in 2009, Princess Elisabeth’s buildings are aerodynamically contoured and held in place by anchors extending several meters down into the rock.
- PROBA-1, with < 1m3 in size, was launched on 22 October 2001 as an experimental mission but is still going strong, having since been reassigned to ESA’s Earth observation team.
• January 2014: PROBA-1 is exploited as a 'Third Part Mission' by ESA's D/EOP (Directorate of Earth Observation Programs). The spacecraft is fully functional and multi spectral images are delivered to the CHRIS/PROBA registered scientists. 26)
• June 2012: To date PROBA-1 remains the most agile and stable satellite platform in its range. The company QinetiQ Space Belgium served as ESA’s prime contractor for the development of the mission (previously known as Verhaert Design and Development). For PROBA-1 — and the other PROBA missions that have followed — the approach that has been taken by QinetiQ Space and ESA was to develop small satellites at affordable costs where reliability is an important parameter. 27)
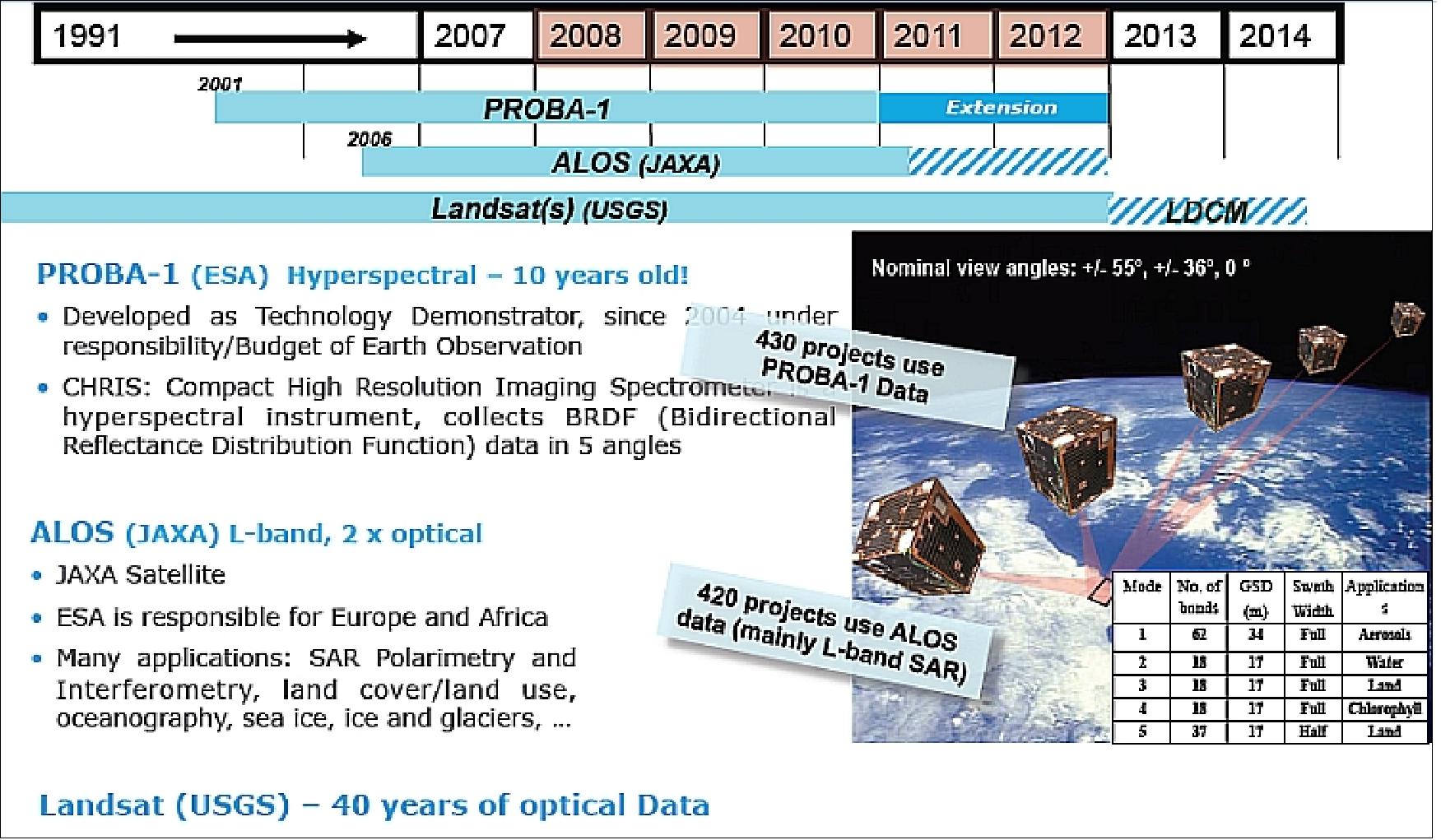
ESA acquires, processes and distributes PROBA-1 data as part of its ‘Third Party Mission’ data portfolio (together with international partner missions such as NASA’s Landsat satellites, the Japanese ALOS satellite, the French SPOT satellites or the UK–built DMC (Disaster Monitoring Constellation) missions). 28)
For the majority of Earth-observing missions, image acquisition is simply a matter of opening a viewing aperture, but PROBA-1 is very different. A technology demonstration satellite turned Earth observation mission, the satellite’s platform and payload effectively work as one. Using only a star tracker for guidance, the spacecraft can roll the satellite off to 25º off-nadir in the cross-track direction and 55º in its along-track. This tracking ability allows PROBA-1 to compensate for the effective satellite groundtrack speed. This ‘forward motion compensation’ boosts its overall integration time per image, giving CHRIS an imaging performance and signal-to-noise equivalent to that of an instrument with an aperture area five times larger. Cross-track tilts also increase the frequency with which the satellite is able to revisit areas of interest to less than a week.
PROBA-1 can acquire different views of the same target at up to five different viewing angles: at ±55º and 36º , as well as the standard nadir view. It is this capacity in particular that has proved invaluable to many scientists investigating the BRDF (Bi-Reflectance Distribution Function) of vegetation and other land cover features – meaning how the light they reflect changes with shifts in illumination or view angle.
A worldwide community of users have based their research over the past years largely on data from CHRIS (Compact High Resolution Imaging Spectrometer) on PROBA-1. The following list represents a few examples of application projects and achievements with the CHRIS instrument:
- CHRIS’s multi-angle observations of Canadian forests and associated land cover reduced classification errors by more than half compared to traditional multispectral data.
- Teams in Switzerland, Germany and Australia meanwhile have been using CHRIS observations to classify the leaf angle and therefore maturity of maize, wheat and cotton crops respectively (the angle of the leaves increases as the structure of the growing crops change, the stems and heads coming to dominate).
- A Beijing project has done the same for seasonal observations of wheat, cotton and apple orchards in the Hengshui area of China’s Hebei Province.
- Other CHRIS users within the land cover field concentrate on spectral data alone –multi-angular views not being relevant. A project team at the University of Kaiserslautern in Germany has employed CHRIS imagery to measure the coverage and estimate the biomass of lichens and biological soil crusts in the Namibian Desert. Such crusts play an important ecological role, anchoring soil in place, so their loss over time can flag up erosion patterns.
- CHRIS data has also found favor in combination with other, lower spatial and spectral resolution imagers, such as NASA’s MODIS (Moderate-resolution Imaging Spectroradiometer) or the MERIS (Medium Resolution Imaging Spectrometer) on ESA’s Envisat satellite. Here it can give extra detail (higher spectral resolution) of a local section of a larger satellite image acquired at lower spatial resolution.
CHRIS over water and imaging the air:
- A community of users are using CHRIS data to sample water quality, its multispectral imagery serving to derive standardized parameters such as chlorophyll content, total suspended soils and dissolved organic matter within inland water bodies such as the Rosarito Reservoir and the Aracena Dam in Spain – research of growing significance due to the European Commission’s Water Framework and Drinking Water Directives.
- PROBA-1 acquired a notable image of the 2010 Gulf of Mexico oil spill and has also been used to study spills within Venezuela’s Lake Maracaibo, one of the most ancient, oil-rich (and hence polluted) water bodies in the world. In Germany, CHRIS data has been harnessed to assess the ecological condition of abandoned open-cast mining areas, identifying impacts on vegetation, sediments and water – iron oxide tailings can not only turn water brown but also acidic.
- Similar techniques can be used within coastal waters, with one survey of chlorophyll and suspended particles performed off the coast of Ostend (also spelled Ostende) in Belgium. But CHRIS is also being used to survey the bathymetry of coastal waters as well as their contents: a team at the University of New South Wales in Australia has developed an innovative algorithm to estimate the shallowness of coastal waters by identifying the shifting frequency of waves as they approach the coast or underlying reefs, employing the fact that the wave’s spatial frequency increases as the water gets shallower. This technique can be used in highly sedimented water without needing to rely on the optical visibility through the water as typically used in bathymetry.
- CHRIS is also used for atmospheric aerosol monitoring; its higher resolution offering enhanced insight into highly polluted regions. A team at the University Polytechnic of Hong Kong adapted an algorithm, originally developed for MODIS, to retrieve AOT (Aerosol Optical Thickness) over Hong Kong, with results checked against by a Sun photometer and lidar measurements, as well as air quality data gathered by ground stations. They estimated an error of around 6%, compared to up to 20% from comparable MODIS data products – the entire sampling area of 11 km x 11 km being only slightly larger than a single MODIS AOT pixel (Ref. 27).
• In May 2012, PROBA-1 received a software update to fix its star tracker. After more than a decade in orbit, ESA’s PROBA-1 was showing its age – even hibernating last winter. But a software fix to its star tracker, radiation-impaired after surpassing its design lifetime fivefold, has returned the veteran Earth-observing microsatellite to full operation. The new software from DTU (Technical University of Denmark ) allows PROBA-1 to distinguish between genuine star constellations to measure its pointing direction versus clusters of radiation-induced ‘hotspots’. As a result, the mission is back in business. 30)
• The funding from Third Party Missions and the current Earth Observation Envelope Programs has ensured the mission operations until the end of 2012 (Ref. 33).
• November 2011; During the mission life of PROBA-1, the SREM (Standard Radiation Environment Monitor) device has been monitoring the high-energy charged particles, whether radiating from the Sun, the cosmos or trapped inside radiation belts entwined in Earth’s magnetic field. The monitor’s main purpose is to identify radiation hazards to its host mission but it is also building a detailed picture of the space radiation environment. 31)
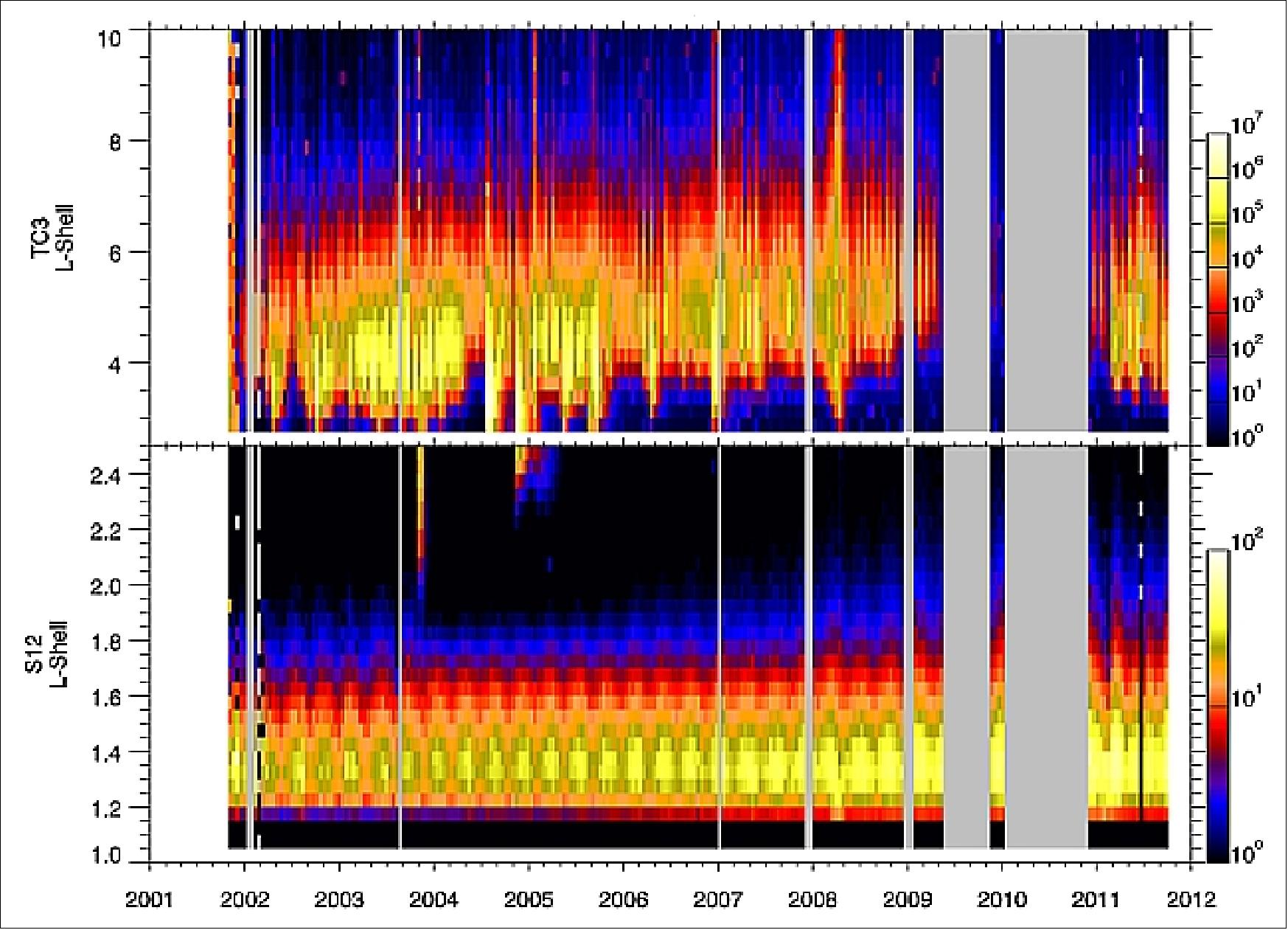
PROBA-1’s data (Figure 20) demonstrate how Earth’s radiation belts change with time and location, In particular, these data show the effects of magnetospheric storms and solar particle events that inject more radiation into the near-Earth environment. At high polar latitudes it crosses geomagnetic field lines that are linked to higher altitudes, allowing it to monitor the state of the ‘outer’ radiation belt.
Figure 20 provides a complete summary of the measurements from some of the PROBA-1 energy channels. It represents the evolution of a cross-section through the radiation belts during the mission. The upper panel shows the dynamic outer radiation belt where radiation levels can rise and fall as a consequence of 'solar storms' and vertical streaks appear where solar particle events occur. The vertical axis represents approximately where the field line crosses the equator in units of Earth-radii, and so is also closely related to geomagnetic latitude. - A field line with L = 6.6 Re crosses the equator up at about the geostationary orbit and crosses the PROBA-1 orbit at a geomagnetic latitude of around 65º.
The lower panel of Figure 20 shows the inner radiation belt encountered by PROBA-1 in the SAA (South Atlantic Anomaly). This is much more stable and the regular short term variations are due to orbital effects. The long term trend is due to the slow effect of the solar cycle on the Earth's atmosphere - radiation belt particles are lost in collisions with atmospheric neutrals and as solar activity declines the atmosphere shrinks, allowing radiation levels to rise. During much of 2009 and 2010 the SREM was kept switched off to control PROBA-1's internal temperature, but smart operations have allowed data acquisition to resume as before (Ref. 31).
• On October 22, 2011, the ESA PROBA-1 microsatellite was celebrating 10 years of on-orbit life. During its life, the CHRIS (Compact High Resolution Imaging Spectrometer) instrument has acquired nearly 20,000 environmental science images, used by a total of 446 research groups in 60 countries. 32) 33) 34)
- There are currently a total of 42 262 CHRIS data sets available for scientific users in the ESRIN data archive, each set comprising between one and five images of the same target. The archive also contains more than 13 000 HRC images.
- The only noticeable ageing effect experienced by the satellite comes from a combination of cumulative radiation damage and higher seasonal temperatures (counter-intuitively for us in the Northern hemisphere, Earth comes closest to the Sun in January, leading to an effective 10% increase in solar flux). After 10 years in orbit (and a design life of only two years) PROBA-1’s star tracker shows sensitivity to the resulting change in temperature.
- Time is gradually running out for PROBA-1 in another way, nothing to do with its design but resulting from stern laws of orbital mechanics. Like most Earth observation missions, PROBA-1 was placed into a sun-synchronous orbit, meaning it keeps pace with the Sun so that it crosses the equator northward at a fixed local time, helping to keep lighting conditions constant for comparing images.
At launch, this local time was 10:30 hours, the orbit chosen so it would advance up to 10:46 within the first three years and then gradually drift back earlier. This gave the ops team very good local times for about eight years. However, it’s becoming more of a problem as the local time moved past 9:00 hours, and there will come a point it simply gets too dark.
- The funding from Third Party Missions and the current Earth Observation Envelope Program has ensured the mission operations until the end of 2012. It would be great to have CHRIS around even longer until national hyperspectral instruments such as the Italian PRISMA or the German EnMAP missions become available, currently foreseen for 2013 and 2014, respectively (Ref. 33).
• In the spring of 2011, PROBA-1 is in its tenth year in orbit as an Earth Observation third-party mission. It is operating normally, acquiring about 450 images per month, at five angles (–55, –36, 0, +36, +55 degrees) and up to 62 spectral channels (400–1050 nm). It covers several types of observations: land and vegetation, inland water, coastal areas, atmosphere and snow and ice. The spacecraft and instruments are healthy, allowing a continuation of the mission for a few more years, despite the degradation of the local time of the descending node. 35)
• In 2010, the CHRIS instrument of PROBA-1 continuous to provide some exceedingly good images for the scientific applications. However, the platform drift with respect to the equator crossing time may well limit its utility before any significant instrument degradation. In Oct. 2009, PROBA completed its 9th year in orbit (Ref. 38).
• In the summer 2009, ESA conducted the Sentinel-3 Experiment (SEN3EXP) field campaign at different test sites in Southern Europe. The main purpose of this activity was proving feedback on key issues for the definition of Sentinel-3 OLCI and SLSTR instruments (GMES) and the development of data processing algorithms. Ground-based, airborne and spaceborne data were acquired from multi- and hyperspectral instruments over four study sites: Barrax in Spain, San Rossore in Italy, Boussole ocean buoy in the Ligurian Sea and the Acqua Alta Oceanographic Tower in the Adriatic Sea. The collected spaceborne data sets included observations of Envisat (MERIS, AASTR) and of PROBA (CHRIS). 36) 37)
• PROBA is operating nominally in 2009. Over the last eight years the mission has provided the opportunity for users to test a number of applications covering both land, aerosol and marine scenes and a large body of experience now exists in the use of satellite derived multi-angular hyperspectral data of the CHRIS instrument (see Figure 30). 38)
• PROBA is in its 8th year of operation, design life of 2 years, (so far no backup systems have been used) and continues to serve the science community with daily images. PROBA data are supporting 98 Earth-observation research projects in 26 countries. The relatively low operational cost of the mission (provided by autonomy and simplicity of operation) permit the extension of the project (several additional years of the mission are expected. 39) 40) 41)
- After a period of platform and payload commissioning in late 2001 and early 2002 a science program was established to formalize the prioritization of acquisitions.
- The PROBA-1/CHRIS mission was initiated as part of a one-year technology demonstration program; however, the success of the program and the considerable interest in the utilization of the CHRIS hyperspectral data has led to the formation of an “operational” program to fully exploit the available data opportunities.
- Since the end of 2003, PROBA has been supporting the `International Charter on Space and Major Disasters' and collecting images of disaster areas on request, such as volcano eruptions, floods and forest fires.
- Having completed its demonstration objectives, PROBA-1 became an Earth Observation third-party mission in order to continue exploiting the excellent performance of its main scientific payload.
• On Oct. 22, 2006, the PROBA spacecraft reached the milestone of 5 years of successful operations in orbit. PROBA is powered by an ABSL Li-ion battery which is the longest serving in the industry.
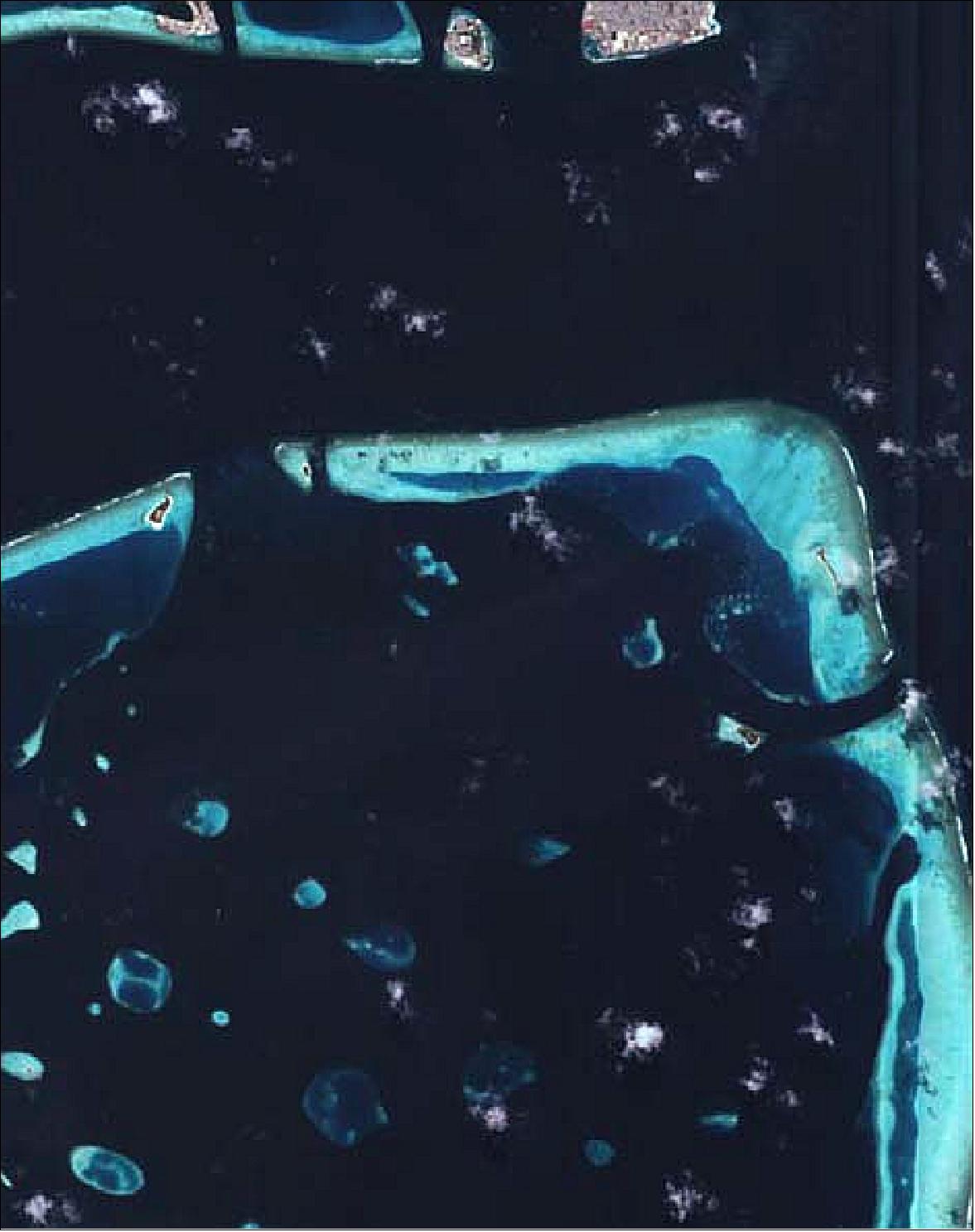
Legend to Figure 21: The Republic of Maledives in the Indian Ocean, formed by a double chain of twenty-six atolls, is the flattest country in the world, with altitudes no greater than 2.4 m above sea level (the average ground level is 1.5 m above sea level). The country sustained serious damage during the Indian Ocean Tsunami on December 26, 2004, where around a hundred people were killed or reported missing. - The atolls of the Maldives encompass a territory spread over roughly 90,000 km2, making it one of the world's most dispersed countries in geographic terms. Its population of 313,920 (2010) inhabits 200 of its 1,192 islands.
• 2004: As a result of the success of the technology and the continuing excellent performance of the satellite and its payloads, PROBA-1 became an ESA Earth observation ‘Third Party Mission’ in 2004 (Ref.40) . In addition, the success of the PROBA-1 mission resulted in a planning and preparation phase for a follow-up mission, namely PROBA-2 (as a secondary payload to SMOS of ESA) with a scientific payload dedicated to sun observations and monitoring of space weather. The PROBA-2 spacecraft was launched successfully on Nov. 2, 2009.
During its nominal design lifetime of 2 years, PROBA-1 has in particular demonstrated that: 42)
- A technology demonstration mission can also support a user oriented mission, Earth observation in the case of PROBA-1
- A microsatellite, using advanced platform and payload technologies, can support demanding and new scientific missions, using for example agility
- Embedded autonomy allows low cost and highly reactive missions and in particular the process by which the imaging of targets could be accomplished by specifying only its geographic coordinates, was demonstrated to be effective and simple for the ground operators and the users. The main goal of leaving PROBA-1 to operate itself with minimum ground control was long ago achieved.
- Advanced development methods (such as code generation) are sufficiently mature and are cost efficient
- An attitude control system based only on an autonomous star tracker is sufficient to support the pointing and stability requirements of an Earth observation mission, as well as the execution of fast and accurate attitude maneuvers requirement by the “point and stare” and the “BRDF” requirements.

Sensor Complement
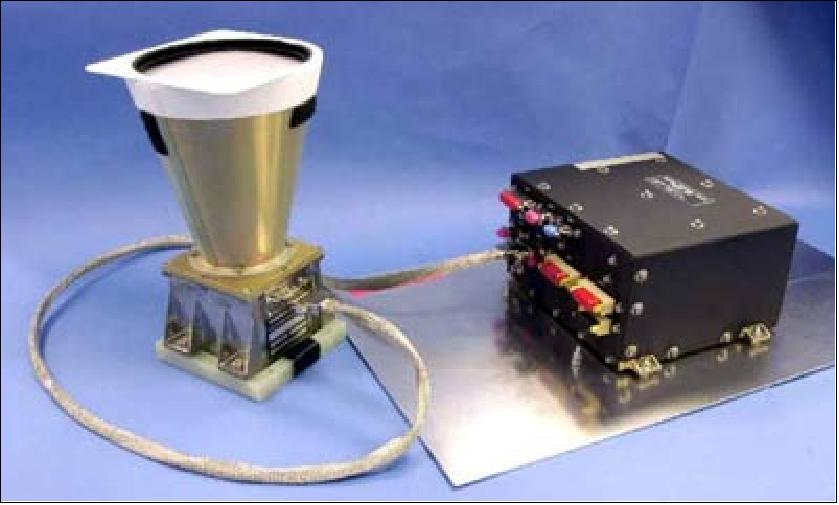
CHRIS (Compact High Resolution Imaging Spectrometer)
CHRIS is an AO hyperspectral instrument funded by the British National Space Agency (BNSC) and Sira Electro-Optics Ltd of Chislehurst, Kent, UK, and developed/built by Sira Technology Ltd (formerly Sira Electro-Optics Ltd). Objective: collection of BRDF (Bidirectional Reflectance Distribution Function) data for a better understanding of spectral reflectances. CHRIS is the prime instrument of the PROBA mission. Note: In April 2006, the Space Group of Sira Technology Ltd. was acquired by SSTL.
The technology objective is to explore the capabilities of imaging spectrometers on agile small satellite platforms. CHRIS provides 19 spectral bands (fully programmable) in the VNIR range (400 - 1050 nm) at a GSD (Ground Sampling Distance) of 17 m. Each nominal image forms a square of 13 km x 13 km on the ground (at perigee). The observation of the square target area consists in 5 consecutive pushbroom scans by the single-line array detectors, each scan is executed at different view angles to the target within a 55º cone centered at the target zenith. Furthermore, the pushbroom velocity at the target must be reduced by a factor of 5 compared to nominal nadir-pointing velocity in order to increase optimal exposure time. - CHRIS can be reconfigured to provide 63 spectral bands at a spatial resolution of about 34 m. The CHRIS design is capable to provide up to 150 channels over the spectral range of 400-1050 nm. The initial bandset selection for the science mission were defined prior to launch: 43) 44) 45) 46) 47) 48) 49) 50)
• Bands for full swath, high resolution land/aerosols (18 bands, plus 1 band for calibration)
• Water bands, full swath, high resolution (18 bands, plus 1 band for calibration)
• Full swath, 34 m resolution bands, all sites (62 bands, plus 1 band for calibration)
• Half swath, high resolution bands over land (37 bands, plus 1 band for calibration)
• Full swath, chlorophyll band set, high resolution (18 bands, plus 1 band for calibration)
Other band sets are utilized for calibration purposes. There is a very broad range of application areas, including vegetation mapping, agricultural crop forecasting, forestry, water quality, air quality and pollution monitoring.
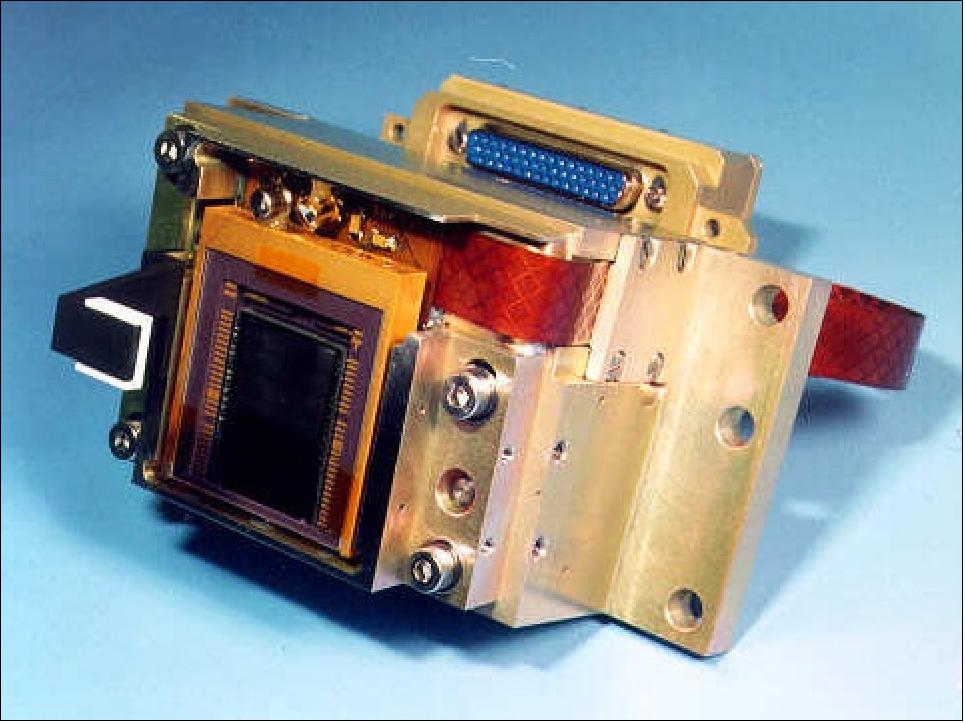
The CHRIS instrument design comprises a catadioptric telescope, an imaging spectrometer, and an area detector array at the focal plane of the spectrometer. The focal length of the telescope is 746 mm, the aperture diameter is 120 mm (f/6). All refracting elements in the design are made of fused quartz. The telescope is axially symmetrical and has only spherical surfaces.
The spectrometer uses “prisms” with curved surfaces integrated into a modified Offner relay. The dispersion of the spectrometer varies from about 1.25 nm to 11 nm across the spectral range, with the highest dispersion at 400 nm and the lowest at the high end (1050 nm) of the spectral range. A pixel registration of better than 5% is provided in the spectral and spatial directions, with resolution limited essentially by the detector pixel size.
An area-array CCD detector at the focal plane provides pushbroom imagery. The detector is a thinned, back-illuminated, frame-transfer CCD (1152 rows and 780 columns) - the rows are assigned to separate wavelengths, while the CCD columns are used to separate resolved points in the image. The detector array operates in a frame transfer mode, with image and masked storage zones. The spectrometer fills < 200 of the CCD rows, part of the nominally-unexposed area is used to calibrate for stray light and CCD smear effects.
Telescope |
746 mm |
Spectrometer |
|
Spectral range | Sensitivity range 400 nm to 1050 nm |
Spectral resolution | 1.25 nm to 11 nm |
Spectral band sets | 19 band readout at 17 m GSD, |
GSD | 17 m at nadir, integration to 34 m, 68 m, etc. |
Image size or FOV | 13 km x 13 km at nadir (748 x 748 pixels) |
Radiance range | albedo 1 |
Radiometric resolution | 0.5% at 20% albedo |
Body pointing capability | ±25º in cross-track and ±55º in along-track direction (measured at ground). |
CCD detector area array | 748 nominal resolved elements per swath width (cross-track direction) 576 lines in the along-track direction (about 150 lines are used for spectral resolution - others are used for smear/stray-light correction) The total frame time for 17 m ground sampling is 12.7 ms |
Electronics features | Programmed line integration and dumping on chip for spectral band selection Pixel integration on chip for spatial resolution control |
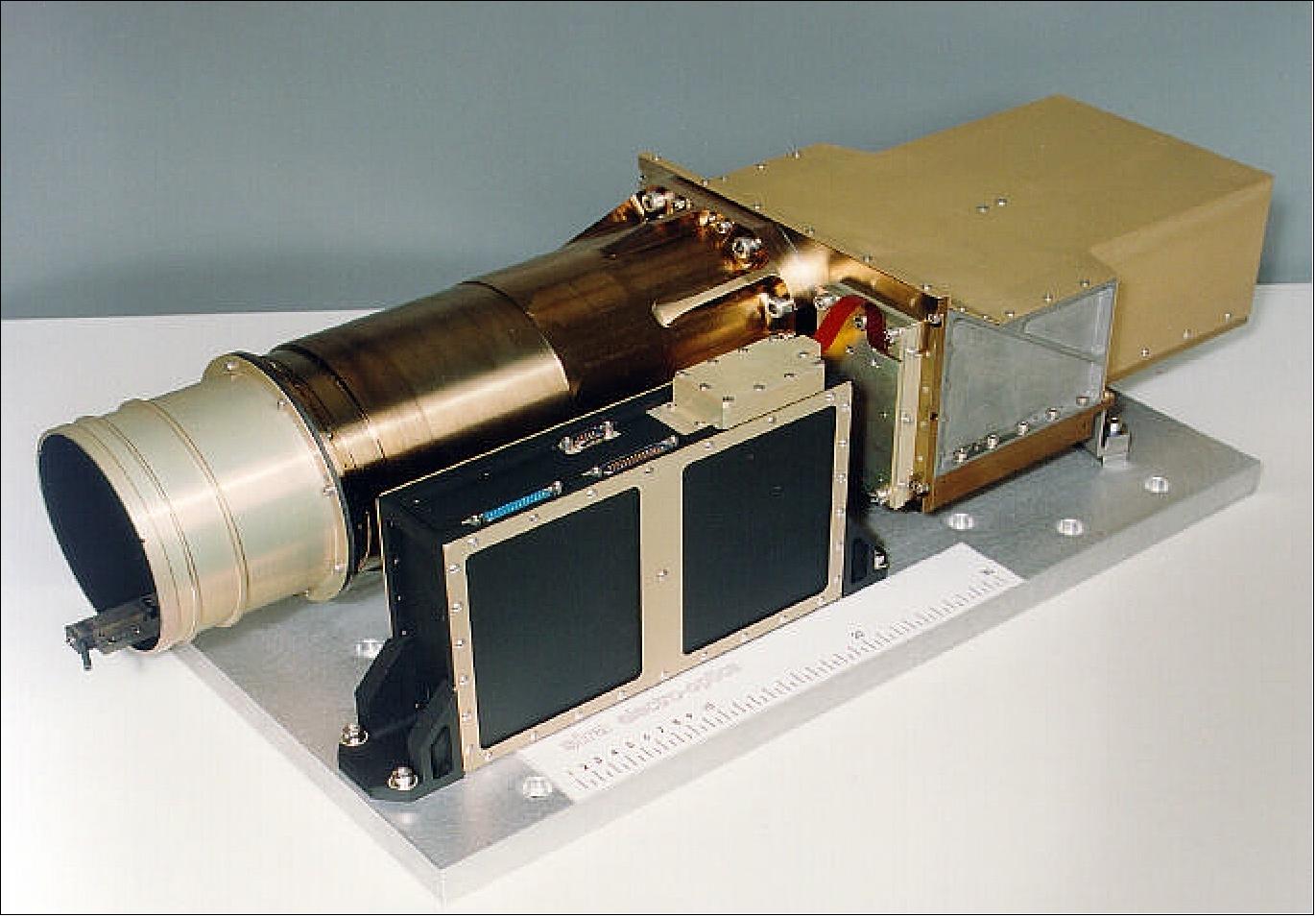
Instrument size | 200 mm x 260 mm x 790 mm |
Instrument mass, power | < 14 kg, 8 W |
The absolute pointing accuracy of 150 arcsec and the relative pointing stability of 10 arcsec over 10 s, as well as the spacecraft agility (along- and across-track) and slew rate requirements (up to 1º/s), enable multiple images acquisition (typically 5) of the same target during a single orbital overpass.
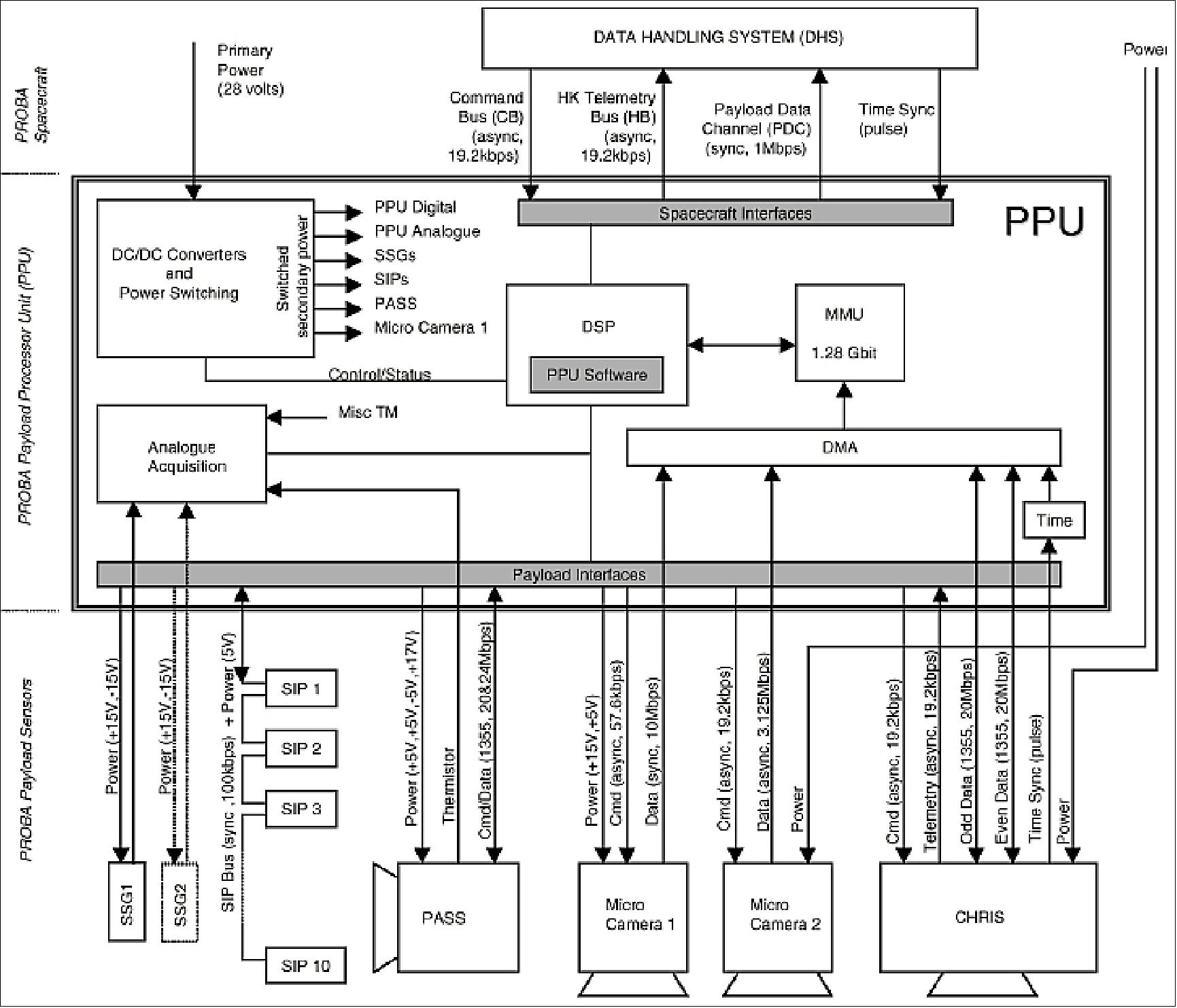
The CHRIS commands are transferred from the platform telemetry system to CHRIS via a TEMIC DSP (Data Signal Processor), a radiation tolerant and space-qualified TSC 21020 device (TSC 21020 is commercially available since the end of 1998). The resulting images are stored in MMU (Memory Management Unit). Both the DSP and MMU are part of PPU (Payload Processing Unit). 51) 52)
The PPU provides also several additional interfaces for other on-board experiments, interfaces to solid state gyroscopes (SSG), an interface to an extra star tracker (PASS), and an interface to a house-keeping bus.
The platform/instrument can be commanded to perform the following functions:
• Target location - requiring roll maneuvers to point cross-track
• Viewing directions for each target in one orbit - requiring pitch maneuvers to point along-track
• Spectral bands and spectral sampling interval in each band
- Programmed line integration and dumping on chip for spectral band selection
- Pixel integration on chip for spatial resolution control
- Correlated double sampling (noise reduction circuit)
- .Dynamic gain switch for optimum usage of the ADC resolution
• Spatial sampling interval
Atmospheric science objectives of CHRIS focus on aerosols, which as well as being important for weather and climate, are also a consideration for accurate atmospheric correction of satellite data. Operational plans call for a total of 30 test sites: 15 for aerosol/atmosphere studies, 10 for land surface studies and 5 for coastal studies. Aerosol studies include a number of different continental, marine, urban and desert test sites. Land surface sites include temperate agricultural areas, boreal forests and semi-arid areas.
The combination of the PROBA platform and the CHRIS instrument provides unique potential for Earth imaging. It allows hyperspectral image data to be obtained at up to five different sensor view angles during a single orbital overpass through along-track pointing and, cloud-cover permitting, up to 15 looks at the same target within a period of a few days from multiple orbital overpasses. These data can be used to derive information on the biophysical and biochemical properties of the land surface, atmosphere and coastal and inland waters through, for example, the numerical or analytical inversion of BRDF models. The latter describe the physical mechanisms by which solar radiation is scattered anisotropically at the Earth surface.
Operating mode | No of bands | GSD (m) | Swath width | Application |
1 | 62 | 34 | Full | Aerosols |
2 | 18 | 18 | Full | Water |
3 | 18 | 18 | Full | Land |
4 | 18 | 18 | Full | Chlorophyll |
5 | 37 | 18 | Half | Land |


SREM (Standard Radiation Environment Monitor)
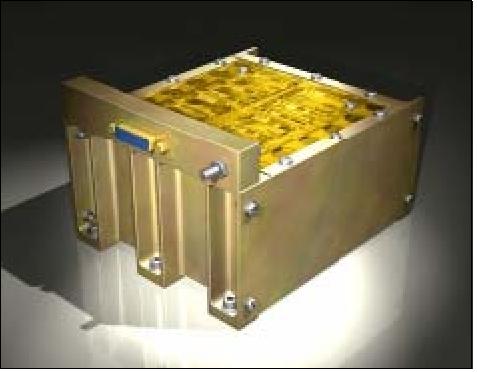
SREM is an ESA/ESTEC instrument of REM heritage flown on STRV-1b, PROBA, the MIR space station (Oerlikon-Contraves of Switzerland is the prime contractor of the instrument), Integral (launch Oct. 17, 2002), Rosetta, and Planck. The objective of SREM is to measure energetic electrons (0.3-6 MeV), protons (8-300 MeV), and heavy ions, as well as the total accumulated dose, encountered during the mission. Thus, SREM provides data on the space weather conditions in the vicinity of the spacecraft.
Performance: | |
Design parameters: b) Instrument size: 95 mm x 122 mm x 217 mm, c) Use of standard OBDH/RTU interfaces, |

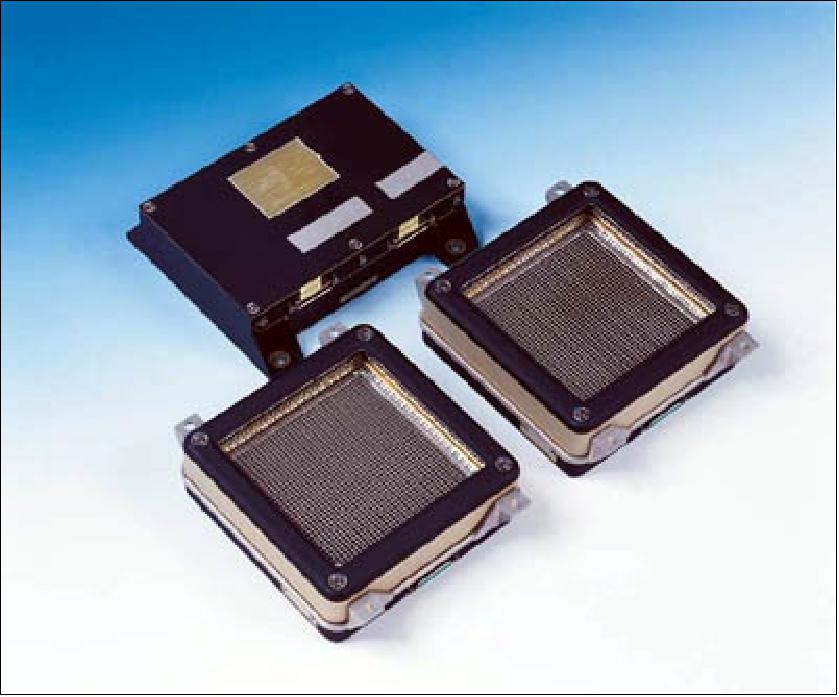
DEBIE (DEBris In-orbit Evaluator)
DEBIE was built by Metorex International and Patria Finavitec, both of Oy, Finland. The objective is to monitor sub-millimeter sized particles which impact the detector surfaces - measurement of mass (>10-14 g), impact speed and penetration power. The instrument consists of a central processing unit and up to 4 separate sensor units (each 10 cm x 10 cm) which can be placed on different spacecraft surfaces (two are on the ram side and two on the deep space face). DEBIE uses a combination of impact ionization, momentum and foil penetration detection. The instrument is designed as a standard detector to be flown on different spacecraft and missions with little or no modifications (planned to fly on ISS). DEBIE on PROBA uses two impact detectors located on the panel; one detector is looking in the flight direction, the other detector is looking in the cross-track direction. The DEBIE data is used in risk assessment models and for the design of protective shielding. 53)
Demonstration of Autonomy Technologies
The attitude control and avionics subsystems accommodate the core technologies for S/C autonomy. The particular subsystems are:
• SGR-20 (Space GPS Receiver 20), built by SSTL, UK (heritage of UoSat-12 and TMSat). Objective: demonstration of autonomous operations for orbit and attitude determination (alternatively to ASC). The instrument consists of a 24 channel GPS L1 and C/A receiver, and four antennas for position and medium-accuracy attitude determination. The SRG-20 instrument is designed to be tolerant to radiation effects.
• ASC (Advanced Stellar Compass), developed and built by DTU (Technical University of Denmark). ASC is already flown on Ørsted, a Danish geomagnetic research microsatellite mission that was launched Feb. 23, 1999 (see also ASC description under Ørsted and CHAMP). ASC is an autonomous star tracker, the main attitude sensor of PROBA, with the objective to provide full-sky coverage and to achieve a high pointing accuracy (precision of a few arcseconds) for Earth observation. ASC is capable to reconstruct autonomously the S/C inertial attitude starting from the condition “lost in space.” The camera of the star imager is a 752 x 588 pixel CCD device. ASC consists of a camera head unit (CHU) connected to a DPU (Data Processing Unit), i.e. a microcomputer fitted to a frame-grabber. The CHU acquires star images within its FOV, while the DPU provides the processing power to perform image analysis, pattern recognition, data reduction, and communication.
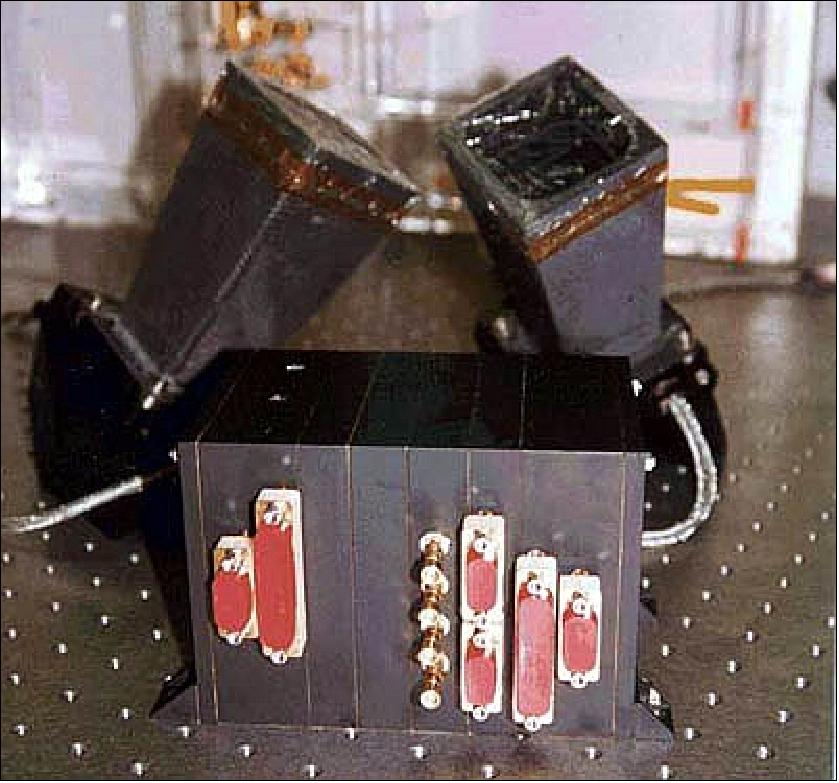
• PASS (Payload Autonomous Star Sensor), developed and built in collaboration by Sira Electro-Optics Ltd and MMS (UK) for a demonstration flight on PROBA. 54) The instrument is an autonomous star tracker with a FOV of 19.3º x 14.4º, capable of immediate recovery from a “lost-in-space” condition. The PASS elements are:
• An optical head (50 mm focal length, f/2) with a CCD detector array (770 x 576) and an ADC unit (12 bit quantization)
• A DSP-based processor (radiation-tolerant STAR DSP board), which reads relevant pixels from the head buffer, calculates centroids of star events, and hosts the star identification software
• Star identification software, which identifies stars in each camera frame and estimates the pointing direction from this data
PASS provides pointing accuracies of 3 arcseconds in pitch and yaw and 30 arcseconds in roll at update rates of 5 Hz (up to 20 Hz with reduced accuracy). The instrument has a mass of about 2.4 kg, power consumption of 9 W, and standard RS 422 / IEEE 1355 interfaces.
Note: There are several names for the instrument: a) WASS (Wide Angle Star Sensor), the original name used for the first customer, DERA; b) PASS (Payload Autonomous Star Sensor) is the name used in the PROBA technology demonstration; and c) AST20 (Autonomous Star Tracker 20) is the name chosen for commercial applications.
• VMC (Visual Monitoring Camera) is a stand-alone wide-angle digital camera system, based on CMOS APS imaging technology, and designed and built by DSS/OIP and IMEC of Belgium. The camera is modular, offering a choice of various support options with regard to interfaces, detectors, color or grey-scale, and exchangeable optics. VMC accepts image capture and exposure control commands, performs image acquisition, and is capable of storing one image in an on-board buffer to facilitate readout at a lower data rate. In addition, VMC accepts commands from, and transmits imagery to, standard serial digital interfaces such as TTC-B-01 synchronous and RS-422-like asynchronous.

VMC employs IMEC's IRIS-1 (Integrated Radiation-tolerant Imaging System), a single-chip integrating CMOS imager. IRIS-1 was developed for general purpose imaging applications in space, including visual telemetry, robot vision, planetary imaging, and land/rover imaging. The following functions are integrated on one chip: a focal plane detector array, double sampling readout structures, ADC (Analog Digital Converter), and control/interfaces. VMC flown on PROBA implies a technology demonstration.
Spectral range | 400 - 650 nm, providing color imagery or B&W |
Focal length, F-number | 12.2 mm, f/5 |
FOV (Field of View) | 40º x 31º - using IRIS-1 |
Distortion | <0.5% |
Resolution | 10 cycles/mm in detector plane |
Detector size | 640 x 480 pixels; 14 µm pitch (IRIS-1) |
Data quantization | 7 bits |
Image capture speed | 200 ms |
Image download speed | 1 image/s (max) |
Operational modes | autonomous or command-interactive operation |
Interfaces | Synchronous serial TTC-B-01-like up to 1 Mbit/s, or |
Power supply | either 28 VDC or 10 VDC |
Power consumption | 3.0 W (28 V version); 2.0 W (10 V version) |
Instrument size (mm) | 65 (width) x 60 (height) x 103/108 (depth) |
Instrument mass | 0.430 kg (excluding mounting bracket) |
• ERC-32 high-performance RISC processor, funded by ESA, is provided by TEMIC Semiconductors (the DHS uses two of these processors). ERC-32 is a space version of a standard commercial processor, a high-performance radiation tolerant (>80 krad) SPARC V7 processor, providing 10 MIPS and 2 MFLOPS with a floating point unit. A memory controller includes all peripheral functions. The ERC32 computer is able to support a number of on-board processing functions including science data processing (image compression). This capability enhances the S/C autonomy with respect to data distribution through the selective use of the downlink and the on-board mass memory.
In addition, a TCS 21020 DSP (Digital Signal Processor) is employed (>100 krad, 15 MIPS, 45 MFLOPS). This processor provides the processing power for the imaging payloads.
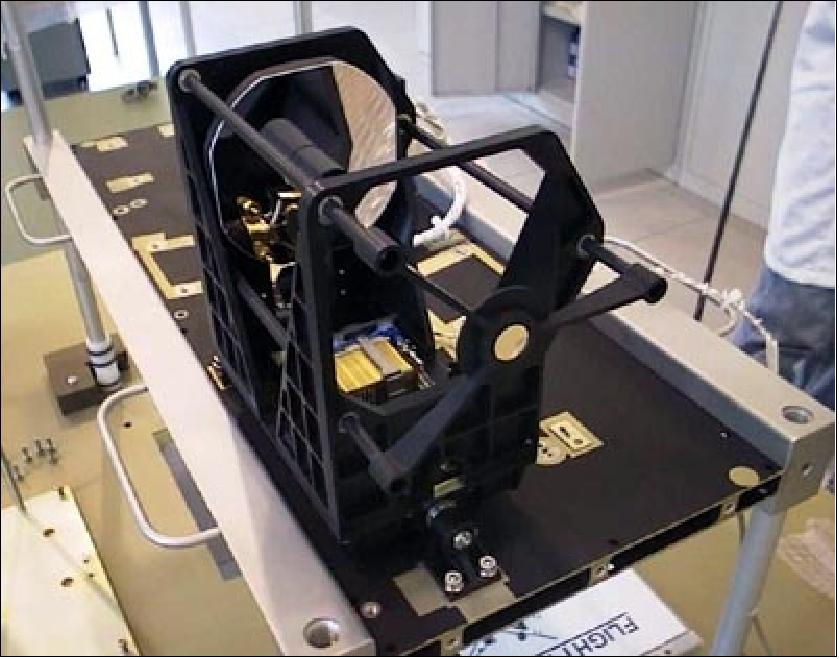
• HRC (High Resolution Camera), an ESA/ESTEC instrument built by DSS/OIP of Belgium. HRC is of VTS (Visual Telemetry System) heritage, test-flown on TEAMSAT and XMM (X-Ray Multi-Mirror Mission) of ESA. The objective is to demonstrate a high-resolution imager, primarily intended for technology, educational and general public information purposes. HRC is a miniaturized imager providing gray scale images of size 4 km x 4 km with a ground resolution of 8 m (from an altitude of 600 km). The field of view is 0.358º. The telescope is of Cassegrain type with an aperture size of 115 mm and a focal length of 2296 mm. The CCD detector array uses 3D packaging technology. It contains 1026 x 1026 pixels of 14 µm size. Images are digitized to 10 bits before transmission to the spacecraft. HRC has a total mass of 2.1 kg.
Mission Operations Concept
PROBA features four operational modes each characterized by the hardware units and SW modules used. 55)
• In “safe mode” all ACNS HW units are switched off and the ACNS SW is not computing. The spacecraft is then free tumbling. The PROBA S/C is designed as such that, even in this case, the body-mounted solar cells provide enough energy to guarantee S/C survival.
• The “magnetic mode” uses a limited set of sensors and actuators and relies mainly on the magnetometer and the magnetotorquers. The mode is used to detumble the S/C after the separation from the launcher. Due to its robust behavior, this mode is also used in case of onboard problems.
• The “celestial mode” uses the star tracker and the reaction wheels and allows pointing to celestial targets, such as for emergency sun pointing and sensor calibration.
• The “terrestrial mode” uses the same HW as the celestial mode plus the GPS receiver. This mode consists of the following submodes:
- The nominal nadir-pointing attitude
- The fixed-target mode where the cameras are pointed to an Earth-fixed target
- The imaging mode for the CHRIS spectrometer, where pitch and roll profiles are generated to provide the five back-and-forth scans of the target
- The high-power-generation mode where an inertially-fixed rotation of the spacecraft is superimposed on the nominal nadir-pointing attitude to increase solar electrical input power.
PROBA software provides considerable flexibility in the allocation of on-board resources and in scheduling of operations when compared to the relatively rigid concepts used in conventional missions. In particular, the following operations functions are being planned for implementation on PROBA:
1) On-board housekeeping: PROBA monitors autonomously all routine housekeeping and resource management tasks. This includes also the decision-making process in the case of (foreseeable only!) anomalies, i.e. failure detection, failure identification and first-level recovery actions. A summary of the information available on-board is downlinked to the control centre at regular intervals.
2) On-board data management: PROBA takes care autonomously of all management tasks related to the on-board data handling, storage, and downlinks. The S/C uses a 1 Gbit mass memory for data recording and a tuneable 2 Kbit/s to 1 Mbit/s downlink. As a worst case, two passes of about 10 min every 12 hours are available for downlink of telemetry data (as well as for command uplinks).
3) On-board resources usage: PROBA takes care autonomously of all management tasks related to the on-board power usage. Any excess power and energy (above the basic spacecraft control requirements during daylight and eclipse phases) is allocated to the instruments and to the spacecraft subsystems supporting the specific operations of the instruments, for instance to the wheels for attitude maneuvers. The allocation is performed on a dynamic basis, resolving task constraints and priorities. Constraints include for each activity the power and data storage area needed, the pointing requested, etc.
4) Instrument commanding: All preparatory, commanding, and data processing activities related to the instrument operations are performed on-board (after an appropriate initialization period). This includes the planning, scheduling, resource management, navigation, and instrument pointing as well as the downlinks of the processed data. In the case of CHRIS, the main EO instrument, a specific attitude (pointing and rates) of the S/C is required to perform its Earth observation function. The calculations of the relevant slew characteristics are based on a request file (containing the coordinates of the target area and the observation duration) which is uplinked from ground.
5) Science data distribution: The collected science data are normally downlinked to the (nominal) ground station from where they may be routed automatically or on request to a user's site using Internet links. Furthermore, it is planned to demonstrate an automatic direct data distribution capability to different user ground antennae upon their requests without human involvement and with minimum possible delay. The optimal downlink times may be uplinked in the request file or calculated on-board.
The in-flight performance analysis of PROBA is in line with the payload mission requirements. Besides, the PROBA mission successfully demonstrated innovative AOCS technology, such as:
• Attitude estimation with delayed measurement
• Onboard generation of attitude guidance profiles
• Optimal large-angle attitude control
• High-accuracy attitude control during imaging
• Failure detection and identification
• MATRIX case tool: testing, code size and CPU load
The ground segment of PROBA is based on a portable ground station, located at Redu, Belgium, and additional support from small stations to validate the concept of distributed users. Users around the world can ask the satellite to take pictures by sending a request through internet. A web server at the ground station handles the request and uplinks it to the satellite, which schedules autonomously and takes the imagery. The picture data are stored in the on-board mass memory unit, they are downlinked during a ground station pass, after which it becomes available to the user.
References
1) D. Bernaerts, F. Teston, J. Bermyn, “PROBA (Project for On-Board Autonomy),” Proceedings of the 6th ISU Symposium on Smaller Satellites: Bigger Business?, Strasbourg, France, May 21-23, 2001
2) F. Teston, R. Creasey, J. Bermyn, D. Bernaerts, K. Mellab, “PROBA: ESA's Autonomy and Technology Demonstration Mission,” Proceedings of the 13th AIAA/USU Conference on Small Satellites, Logan UT, Sept. 23-26,1999, SSC99-V-8, http://www.estec.esa.nl/wawww/ES/PROBA.html
3) M. A. Cutter, “A Small Satellite Hyperspectral Mission,” Proceedings of the 4S Symposium: Small Satellites, Systems and Services, Sept. 20-24, 2004, La Rochelle, France
4) F. Teston, “PROBA-1,” CHRIS/PROBA Workshop, April 28, 2004, URL: http://earth.esa.int
/workshops/chris_proba_04/pres/2_FTeston.pdf
5) http://www.esa.int/SPECIALS/Proba_web_site/ESA6AKTHN6D_0.html
6) F. Teston, R. Creasey, J. van der Ha, “PROBA: ESA's Autonomy and Technology Demonstration Mission,” IAA-97-1.3.05, 48th International Astronautical Congress, Oct. 6-10, 1997, Turin, Italy
7) J. de Lafontaine, J. Buijs, P. Vuilleumier, P. van den Braembussche, “Development of the PROBA Attitude Control and Navigation Software,” 4th ESA International Conference on Spacecraft Guidance, Navigation and Control Systems, Oct. 18-21, 1999, pp. 427-442, ESA/ESTEC, Noordwijk, The Netherlands, (ESA SP-425, Feb. 2000)
8) F. Teston, M. Barnsley, J. Settle, P. Vuilleumier, S. Santandrea, “PROBA: An ESA Technology Demonstration Mission with Earth Imaging Payload. First Year of In-Orbit Results,” 4th IAA Symposium on Small Satellites for Earth Observation, Berlin, Germany, April 7-11, 2003
9) Announcement of Opportunity: Instruments for PROBA-2,” ESA, June 3, 2002, URL: : http://esamultimedia.esa.int/docs/industry/Proba%20call%20for%20ideas%20June%202002.pdf
10) “PROBA - Project for On-board Autonomy,” January 2001, URL: http://www.netronics.nl/pdf/proba.pdf
11) E. Tilmans, “The PROBA Ground Infrastructure and Mission Operations,” STEC 2004 (Space Technology Education Conference), April 14-16, 2004, Lausanne,Switzerland
12) SSTL Celebrates 20th Anniversary of CHRIS Hyperspectral Imager on ESA's PROBA-1 satellite, SSTL Press Release, 22 October 2021, URL: https://www.sstl.co.uk/media-hub/latest-news/2021/sstl-celebrates-20th-anniversary-of-chris-hyperspe
13) ”ESA’s oldest Earth-observer images Delhi airport,” ESA Applications, 20 May 2020, URL: http://www.esa.int/ESA_Multimedia/Images/2020/05/ESA_s_oldest_Earth-observer_images_Delhi_airport
14) ”PROBA-1 view of Guam,” ESA, Technology image of the week, 18 July 2018, URL. http://m.esa.int/spaceinimages/Images/2018/07/Proba-1_view_of_Guam
15) ”PROBA-1 view of the Great Pyramids,” ESA Technology image of the week, 28 March 2018, URL: http://m.esa.int/spaceinimages/Images/2018/03/Proba-1_view_of_the_Great_Pyramids
16) ”PROBA-1 sets new record,” ESA, March 2018, URL: http://m.esa.int
/Our_Activities/Observing_the_Earth/Proba-1/Proba-1_sets_new_record
17) ”Focusing in on Australia,” ESA, March 2018, URL: http://m.esa.int
/spaceinimages/Images/2018/03/Focusing_in_on_Australia
18) ”Agile PROBA-1 rolls in its orbit to take images,” ESA, March 2018, URL: http://m.esa.int
/spaceinimages/Images/2011/10/Agile_Proba-1_rolls_in_its_orbit_to_take_images
19) PROBA-1’s first image, ESA, March 2018, URL: http://m.esa.int
/spaceinimages/Images/2018/03/Proba-1_s_first_image
20) ”PROBA-1 images Calanda reservoir,” ESA, 20 April 2017, URL: http://www.esa.int
/spaceinimages/Images/2017/04/Proba-1_images_Calanda_reservoir
21) ”PROBA-1 view of Lena River Delta,” ESA, Oct. 27, 2016, URL: http://m.esa.int
/spaceinimages/Images/2016/10/Proba-1_view_of_Lena_River_Delta
22) ”PROBA-1 celebrates 15 years in orbit,” ESA, Nov. 10, 2016, URL: https://web.archive.org/web/20200812103053/https://earth.esa.int/web/guest/missions/esa-operational-eo-missions/proba/news/-/article/proba-1-celebrates-15-years-in-orbit
23) ”PROBA-1 images Svalbard ground station,” ESA, April 21, 2016, URL: http://www.esa.int
/spaceinimages/Images/2016/04/Proba-1_images_Svalbard_ground_station
24) ”Uluru imaged by PROBA-1 HRC,” ESA, Jan. 14, 2016, URL: http://www.esa.int
/spaceinimages/Images/2016/01/Uluru_imaged_by_Proba-1_HRC
25) “Site of Princess Elisabeth Base seen by PROBA-1,” ESA, released on July 1, 2015, URL: http://www.esa.int/spaceinimages/Images/2015/
07/Site_of_Princess_Elisabeth_Base_seen_by_Proba-1
26) Information was provided by Frédéric Teston, Head of Systems & Cost Engineering Division, ESA
27) Bianca Hoersch, Frédéric Teston, “Autonomy in Action: Ten Years in PROBA-1,” Proceedings of the 4S (Small Satellites Systems and Services) Symposium, Portoroz, Slovenia, June 4-8, 2012
28) “ESA Third Party Missions,” URL: https://earth.esa.int
/web/guest/missions/3rd-party-missions/overview
29) Henri Laur, “ESA >EO missions,” 3rd GSCB (Ground Segment Coordination Body) Workshop, 2012, ESA/ESRIN, Frascati, Italy, June 6-7, 2012, URL: http://earth.esa.int
/gscb/papers/2012/12-ESA_missions.pdf
30) “‘Eye operation’ puts Proba-1 back in business,” ESA, May 14, 2012, URL: http://www.esa.int/export/SPECIALS/Proba_web_site/SEMDBPNW91H_0.html
31) “PROBA-1 charting Earth’s radiation belts for a decade,” ESA, Nov. 7, 2011, URL: http://www.esa.int/esaMI/Proba_web_site/SEMX52TWLUG_0.html
32) “Small but agile Proba-1 reaches 10 years in orbit,” ESA, October 21, 2011, URL: http://www.esa.int/esaCP/SEMCT3GURTG_index_0.html
33) Sean Blair, “Autonomy in Action, Ten years of PROBA-1,” ESA Bulletin, No 148, Nov. 2011, pp. 23-31, URL: http://earth.esa.int/pub/ESA_DOC/Autonomy-in-action.pdf
34) “First Belgian satellite celebrates its 10th anniversary,” QinetiQ Space, URL: http://www.space.qinetiq.com/news/pressreleases/
Pages/First-Belgian-satellite-celebrates-its-10th-anniversary.aspx
35) “PROBA status,” ESA Bulletin, No 145, February 2011, p. 86
36) “ESA campaign reveals glimpse of future Sentinel-3 imagery,” Sept. 9, 2009, URL: http://www.esa.int/esaEO/SEMOW432BZF_index_0.html
37) Alessandro Barducci, Donatella Guzzi, Cinzia Lastri, Vanni Nardino, Ivan Pippi, Federico Magnani, Maurizio Pieri, Fabio Maselli, “CHRIS/PROBA-1 Acquisition on San Rossore Test Site for the ESA SEN3EXP Campaign,” Proceedings of the Hyperspectral Workshop 2010, Frascati, Italy, M;arch 17-19, 2010, ESA SP-683
38) Mike Cutter, Frédéric Teston, “A Small Satellite Mission Demonstrating Multi-Angular Hyperspectral Applications Over a Period of Eight Years,” Proceedings of the 60th IAC (International Astronautical Congress), Daejeon, Korea, Oct. 12-16, 2009, IAC-09.B4.2.8
39) M. A. Cutter, “CHRIS Hyperspectral Mission -Five Years since Launch,” Proceedings of the Asian Space Conference 2007, Nanyang Technological University (NTU), Singapore, March 21-23, 2007
40) Frederic Teston, Pierrik Vuilleumier, David Hardy, Etienne Tilmans, Kristof Gantois & the PROBA-1 Project Team, “PROBA Proves the Technology,” ESA Bulletin, No. 129, Feb. 2007, pp. 48-53, URL: http://www.esa.int/esapub/bulletin/bulletin129/bul129f_teston.pdf
41) In-orbit demonstration - Testing new technology in Earth orbit,” ESA, June 22, 2009, URL: http://www.esa.int/SPECIALS/Technology/SEMCPNBDNRF_0.html
42) F. Teston, D. Bernaerts, K. Gantois, “PROBA, an ESA technology demonstration mission, results after 3 years in orbit,” Proceedings of the 4S Symposium: Small Satellites, Systems and Services,” Sept. 20-24, 2004, La Rochelle, France, ESA SP-571
43) M. A. Cutter, D. R. Lobb, T. L. Williams, R. E. Renton, “Integration & Testing of the Compact High-Resolution Imaging Spectrometer (CHRIS),” Proceedings of SPIE, Vol. 3753, Denver, CO, July 19-21, 1999, pp. 180-191
44) M. A. Cutter, D. R. Lobb, R. A. Cockshott, “Compact High Resolution Imaging Spectrometer (CHRIS),” IAA 2nd International Symposium on Small Satellites for Earth Observation, Berlin, April 12-16, 1999, pp. 205-208
45) http://www.rsacl.co.uk/chris/mission/instrument.htm
46) “Exploitation of CHRIS data from the PROBA Mission,” Experimenters Handbook, Issue 4, Oct. 18, 1999
47) M. Cutter, D. Lobb, “Design of the Compact High-Resolution Imaging Spectrometer (CHRIS), and Future Developments,” Proceedings of the 5th International Conference on Space Optics, March 30-April 2, 2004, Toulouse, France, ESA SP-554, URL: http://earth.esa.int/
pub/ESA_DOC/PROBA/Sira5thICSO2004CHRISpaperSP-554.PDF
48) M. A. Cutter, “Review of a Small Satellite Hyperspectral Mission,” Proceedings of the 19th AIAA/USU Conference on Small Satellites, Logan, UT, USA, Aug. 8-11, 2005, SSC05-IV-02
49) M. A. Cutter, “The PROBA-1 / CHRIS Hyperspectral Mission - Five Years Since Launch,” Proceedings of the 4S Symposium: `Small Satellite Systems and Services,' Chia Laguna Sardinia, Italy, Sept. 25-29, 2006, ESA SP-618
50) M. Cutter, “Compact High Resolution Imaging Spectrometer (CHRIS),” URL: http://www.research.plymouth.ac.uk/geomatics/research/chris/SIRA-4_July_2000.pdf
51) TEMIC was a daughter of Daimler-Benz until 1997 when it was acquired by Vishay and in 1998 sold to Amtel (with plants in Heilbronn, Germany and Nantes, France)
52) http://www.esa.int/esaMI/Proba_web_site/ESARBKTHN6D_1.html#subhead2
53) “PROBA-1 payloads,” ESA, URL: http://www.esa.int/esaMI/Proba_web_site/ESARBKTHN6D_0.html
54) R. Cockshott, D. Purll, N. Fillery, V. Lewis, “The UK Wide Angle Star Sensor (WASS),” Presented at the poster session of the 4th ESA International Conference on Spacecraft Guidance, Navigation and Control Systems, Oct. 18-21, 1999, Noordwijk.
55) P. van den Braembussche, J. de Lafontaine, J. Buijs, P. Vuilleumier, “PROBA Attitude Control and Guidance In-Orbit Performance,” 5th International ESA Conference on Guidance Navigation and Control Systems, Frascati, Italy, Oct. 22-25, 2002, ESA SP-516
The information compiled and edited in this article was provided by Herbert J. Kramer from his documentation of: ”Observation of the Earth and Its Environment: Survey of Missions and Sensors” (Springer Verlag) as well as many other sources after the publication of the 4th edition in 2002. - Comments and corrections to this article are always welcome for further updates (eoportal@symbios.space).
Spacecraft Launch Mission Status Sensor Complement References Back to top