PRISMA (Prototype Research Instruments and Space Mission technology Advancement)
Non-EO
CNES
DLR
SSC
Quick facts
Overview
| Mission type | Non-EO |
| Agency | CNES, DLR, SSC, DTU |
PRISMA (Prototype Research Instruments and Space Mission technology Advancement)
Overview Spacecraft Launch Mission Status Sensor Complement Ground Segment References
PRISMA is a Swedish-led technology mission to demonstrate formation flying and rendezvous technologies (in-orbit servicing), designed and developed by SSC (Swedish Space Corporation). The mission concept employs the small-satellite philosophy to demonstrate the functionality of a wide range of newly developed formation flying, proximity ranging and propulsion techniques with future use in a wide range of missions. The project is funded by the Swedish National Space Board (SNSB) with SSC as the prime contractor. Further international project participants/contributors are: DLR (German Aerospace Center), the Technical University of Denmark (DTU), and CNES, the French Space Agency. 1) 2) 3) 4) 5) 6) 7) 8) 9) 10) 11) 12) 13) 14) 15) 16) 17)
Note: In June 2011, OHB AG of Bremen, Germany, acquired the Space Systems Division from SSC. The new company is called OHB Sweden AB, Stockholm. 18)
The main goals of PRISMA are to perform GNC (Guidance, Navigation and Control) demonstrations and sensor technology experiments for a family of future missions where rendezvous and formation flying are a necessary prerequisite.
• The GNC demonstrations are: 1) Autonomous formation flying, 2) homing and rendezvous, 3) proximity operations or RV (Rendezvous) tests, including final approach and recede operations.
• The sensor technology tests are: GPS-based navigation (evaluation of real-time differential GPS used for autonomous formation flying), RF metrology, and a star tracker-based vision sensor to evaluate multi-range tracking.
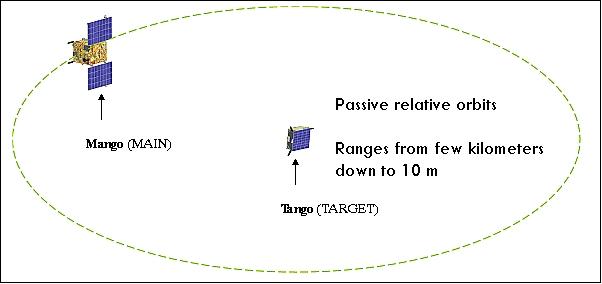
Mission Concept
The mission consists of two spacecraft, one advanced and highly maneuverable one, called MAIN, and a smaller S/C without a maneuvering capability, called TARGET. The latter one simply follows the trajectory into which it is injected by the launch system. The MAIN spacecraft has full translational capability, and will perform a series of maneuvers around the TARGET, on both close and long range approach, using the different sensors provided. Both S/C will be delivered into the same orbit. In most cases, the MAIN will fly along-track with respect to the TARGET, such that the MAIN can "look" at the TARGET.
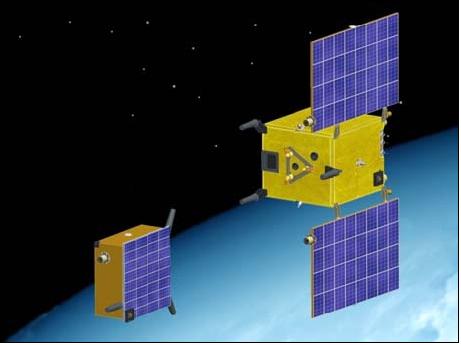
Spacecraft
The MAIN is a fully 3-axis stabilized spacecraft with 6 thrusters arranged to provide a torque-free translational capability in all directions. The MAIN performs all autonomous maneuvers and maintains communication to the ground.
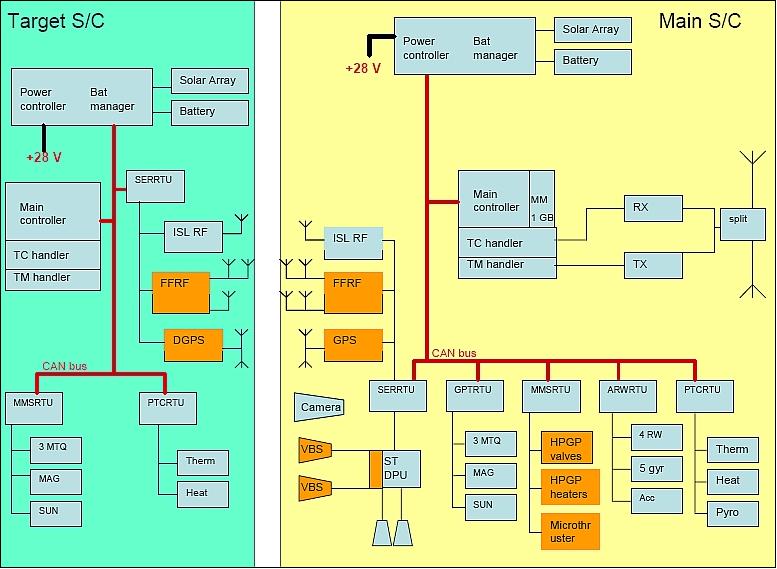
In contrast, the TARGET has a coarse 3-axis stabilization system by means of magnetic control only (magnetorquer) and GPS receivers, but without any ?V capability. It acts like a visible target for the MAIN, and communicates its position and status to the MAIN via a 450 MHz (UHF) intersatellite link (ISL). There are actually two ISLs between MAIN and TARGET, the primary ISL used for telecommands and telemetry (TMTC), and the ISL integrated into the RF-metrology sensor. The latter one is called the FFRF (Formation Flying Radio Frequency) unit which communicates with the corresponding unit on MAIN. Both MAIN and TARGET are equipped with GPS receivers. Relative position is either determined using GPS receivers, or with the VBS (Vision Based Sensor), depending upon the experiment. TARGET relies on one body-mounted solar panel providing about 90 W max.
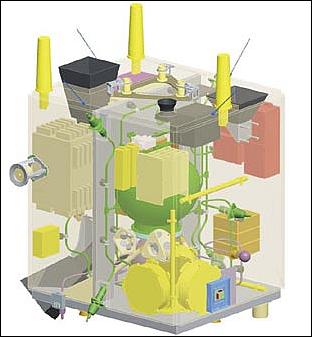
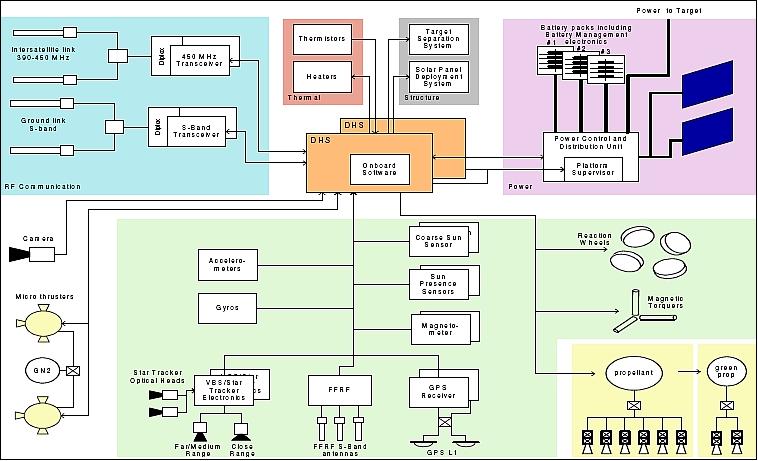
The structure of MAIN has a box shape of approximate size: 80 cm x 83 cm x 130 cm. There are 2 deployable solar panels (GaAs solar cells) of 2 m2 in total area. Power of about 300 W is provided. A Li-ion battery (3 packs of about 300 Wh in total) is used for eclipse operations. The ADCS uses four reaction wheels and six thrusters for actuation (1 N thrusters arranged to give torque-free translational capability in all directions), the angular momentum is managed through a magnetic torque-rod system. Attitude sensing is provided by two 3-axis magnetometers, a star tracker system with two camera heads (µASC) for inertial pointing, sun sensors, VBS, and two GPS receivers. The power subsystem has a regulated power controller.
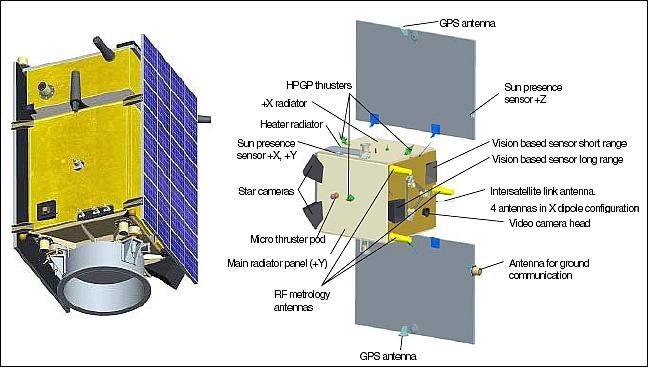
The DHS (Data Handling Subsystem) on MAIN employs a spacecraft controller based on a LEON3-FT (Fault Tolerant) microprocessor (as OBC) from Aeroflex Gaisler. LEON3-FT implements a 32-bit processor compliant with the SPARC V8 architecture which is particularly suited for embedded applications. LEON3-FT recognizes bit flips and is fault tolerant. Its implementation through a Field Programmable Gate Array (FPGA) of Actel Corporation (Mountain View, CA, USA) provides a performance of about 20 MIPS and accommodates one FPU (Floating Point Unit). The OBC communicates on a CAN (Controller Area Network) bus with the power subsystem and the 5 RTUs (Remote Terminal Units) on the MAIN, and 3 RTUs on the TARGET. Orbit control is achieved with the HPGP (High Performance Green Propulsion) thruster system (see "Sensor and actuator experiments" below).
The S/C masses are approximately 145 (wet mass) for the MAIN and 50 kg for the TARGET. The TARGET dimensions are: 80 cm x 80 cm x 31 cm. They are launched clamped together (referred to as "Combine") such that the first mission phase will be a joint operation of the 2 satellites where critical systems can be checked out.
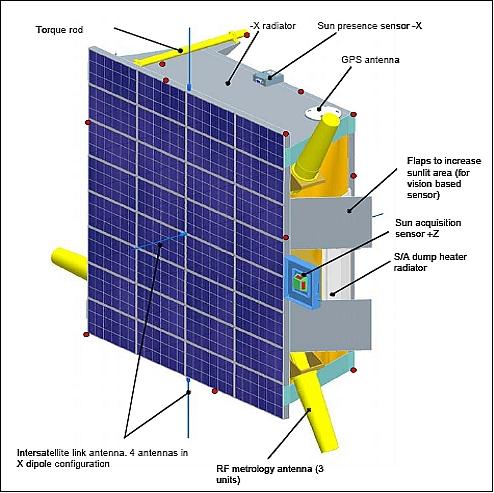
TARGET Spacecraft
The TARGET spacecraft is a small box with one surface-mounted solar panel (Figure 4) and with a panel area of about 0.5 m2 (GaAs solar cells); power of about 90 W is provided. Its nominal orientation is sun or zenith pointing. TARGET has coarse 3-axis stabilization by means of magnetic control only, but possesses no ?V capability.
The TARGET spacecraft is the reference satellite for the experiments performed by MAIN, either with a "cooperative" or "non-cooperative" attitude behavior. It carries instruments required for the different experiments: a GPS receiver, the FFRF (Formation Flying RF) sensor as well as a LED (Light-Emitting Diode) pattern used by the VBS (Vision Based Sensor) on MAIN. The TARGET mission requirements call for: 19)
• A robust safe mode shall be implemented to stabilize the spacecraft towards the sun in typically less than half an orbit after separation from MAIN (1 orbit in the case of a recovery after a failure), from any initial attitude and from angular rates of up to 2o/s.
• During normal operations, the GPS antenna shall point towards zenith ±20o to optimize conditions for relative GPS navigation (this requirement is relaxed when TARGET is "non cooperative").
• During normal operations, the solar array shall be sun pointing ±20o to provide enough power to the spacecraft
• TARGET shall also be able to mimic a non-cooperative spacecraft, tumbling with a low angular rate around one axis. This feature excludes the use of a gravity gradient boom on the spacecraft.
The TARGET spacecraft is a box of size 80 cm x 75 cm x 32 cm. The solar array covers the +z side. The attitude control uses magnetic torque rods only (maximum magnetic moment allowed: 2.5 Am2). The attitude estimation is based on magnetometer and sun sensor measurements. The sun sensors consist of six sun presence cells (one on each side) and a fine sensor in the +z direction (fine field of view ±25o). Sensors, actuators as well as associated electronics are cold redundant.
Note: the GPS is not used by the Attitude Control System on board TARGET. Rather, TARGET communicates its position to the MAIN via an ISL (Inter Satellite Link), and the relative position and velocity is calculated in real-time with centimeter accuracy.
Launch
The two PRISMA satellites were launched successfully on June 15, 2010 by ISC Kosmotras on a Dnepr-1 launch vehicle from the Yasny/Dombarovsky launch site, Russia. PRISMA is a secondary payload to the Picard mission (primary payload) of CNES, France. 20) 21) 22)
The launch had been delayed for months because of a dispute between Russia and Kazakhstan over the issue of rocket debris falling on Kazakh territory.
Along with the two spacecraft (PRISMA and Picard), an Advanced Avionics Unit-1 (BPA-1), a payload which remained attached to the upper stage, was delivered into orbit. BPA-1 is an experimental equipment designed for use in the navigation systems of civil airplanes, spacecraft and launch vehicles. The avionics unit was developed and manufactured by NPP Khartron-Arkos (Khar'kov, Ukraine) on order of National Space Agency of Ukraine (NSAU). 23)
Orbit
Sun-synchronous near-circular dawn-dusk orbit, altitude of about 720 km x 780 km, inclination of 98.2o, LTAN (Local Time of Ascending Node) of 6:00 hours (or 18:00 hours).
RF Communications
The MAIN communicates in S-band at a downlink rate of up to 1 Mbit/s and an uplink of 4 kbit/s. The communication protocol uses the CCSDS standard. - The TARGET does not have a dedicated ground link but communicates instead with the MAIN via an intersatellite link (ISL) in the 450 MHz band (UHF). The communication speed is 19.6 kbit/s in both directions.
The mission lifetime is planned for at least eight months to cover all demonstrations. The PRISMA ground station is Esrange (Kiruna) in northern Sweden. The mission will be operated from SSC at Solna, Sweden.
GNC (Guidance, Navigation and Control) Experiments
Initial Test Series
The experimental phase will be performed interlaced with a mix of `early harvest' experiments, sensor commissioning and extended experiments. The purpose is to ensure experimental results to all experiments already at the beginning of the experimental phase. 25)
Experiment set | Description | Separation (m) | Key sensors |
Autonomous formation flying | Closed-loop autonomous formation acquisition and keeping using various guidance and control laws | 5000 - 20 | GPS |
Homing and rendezvous | Autonomous approaches emulating rendezvous in GEO, assembly in escape orbits and sample return | 100,000 - 3 | VBS (Vision-Based Sensor) |
Precision 3D proximity operations | Technology demonstration using virtual structures for on-orbit servicing, inspection and assembly | 100 - 3 | GPS & VBS |
Final approach and recede maneuvers | Approaching as close as possible to demonstrate on-orbit servicing, inspection and assembly | 3 - 0 | VBS |
1) AFF (Autonomous Formation Flying): The AFF experiment concerns semi-passive relative periodic orbits that do not attempt to counteract the Earth's gravitational force. SSC and DLR will conduct separate experiments using separate guidance and control strategies. Both experiments are using the Differential GPS and navigation filters supplied by DLR.
The experiment set aims at demonstrating initialization, reconfiguration, and autonomous control of time-periodic motions. The objective is to show that the MAIN spacecraft can autonomously establish and maintain a fix time-periodic relative distance to the TARGET on typically decimeter-level of control, counteracting gravitational, drag and other disturbance forces with a minimum of fuel consumption and with no ground intervention. The relative distances are in the range of 30 cm to several hundred meters. The requirements call for a test validation in eccentric orbits as well as circular orbits.
The position and range measurements of the onboard navigation system are being performed by two independent systems, both are sponsored by DLR:
• Phoenix GPS receivers. These are 12-channel single frequency COTS receivers (redundant systems), space qualified by DLR, to provide absolute and relative orbit information in real-time. Two GPS antennas are used for non-zenith pointing attitude analysis. Both MAIN and TARGET are equipped with GPS receivers. The navigation system on the MAIN spacecraft will process local GPS measurements and raw code and carrier phase measurements transmitted from the TARGET by the intersatellite radio link (ISL). A sophisticated Kalman filter is being used for a dynamic modelling of the absolute orbits of both spacecraft (comprising the complex Earth's gravity field, atmospheric drag and empirical accelerations).26) 27) 28) 29) 30)
The Phoenix GPS receivers offers single-frequency Coarse/Acquisition (C/A) code and carrier tracking and can be aided with a priori trajectory information to safely acquire GPS signals even at high altitudes and velocities. Upon tracking, Phoenix outputs a 1 PPS signal and aligns the message time tags to integer GPS seconds which facilitates differential processing. Phoenix provides a code tracking accuracy of better than 0.5 m and a carrier-phase accuracy of better than 1 mm at 45 dB-Hz. With a mass of the receiver board of 70 gram and a power consumption of 0.85 W at BOL, the receiver is particularly suited for small satellite missions.
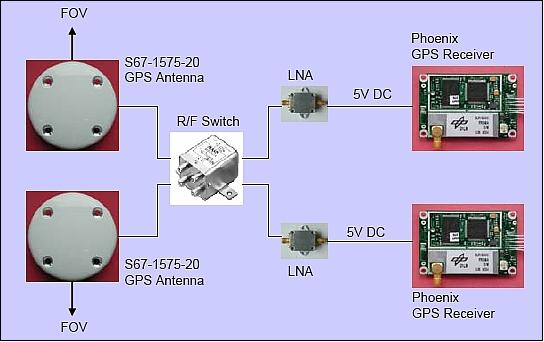
The architecture of the GPS hardware system is depicted in Figure 10. For redundancy purposes, each satellite will carry two independent GPS receivers. Increased flexibility for handling non-zenith pointing attitudes and to maximize the field of view (FOV) to the GPS constellation is provided by two independent GPS antennas. Using a radiofrequency relay, the active GPS receiver and the associated low noise amplifier (LNA) can be connected to the optimal antenna through ground command or an automated onboard process.
• SAFE (Spaceborne Autonomous Formation Flying Experiment) provided by DLR. SAFE complements other PRISMA experiment sets with the objective to demonstrate a fully autonomous, robust and precise formation flying of spacecraft. To this end, a fuel-optimized formation flying at typical distances of 100 to 2000 m is foreseen, which is representative of future bi-static radar satellite formation flying missions. SAFE aims at a position control accuracy of 10/20/10 m (R/T/N, 1?). Note: R/T/N are orbit frame components in radial (R), tangential (T), and normal (N) directions.
Maneuver executions are conveniently based upon requests for velocity increments issued by SAFE. Since the velocity increments are provided in an orbital frame, SAFE requires no attitude knowledge and complex propulsion system operations such as thruster pre-heating and thrust profile modeling which are being avoided. Including the formation acquisition phases, a velocity increment budget of 5 m/s is allocated for SAFE.
A total of six weeks will be allocated exclusively for SAFE operations, including one week of initial calibration and two weeks of open-loop operations. While initial calibration refers to the verification of GPS-based absolute and relative navigation, open-loop operations denote formation control phases which are not entirely performed autonomously.
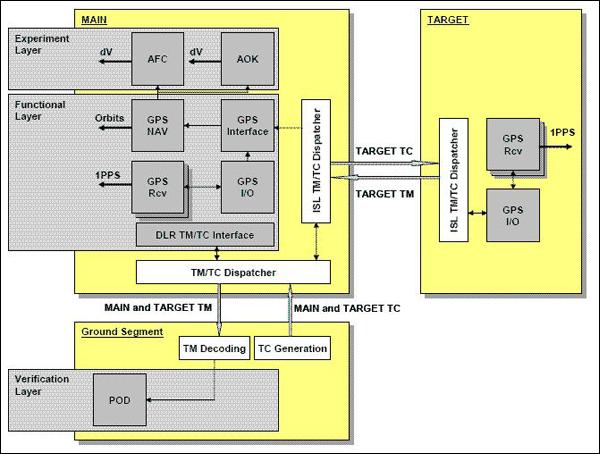
The overall GNC architecture is shown in Figure 11. Upon tracking, the GPS receivers provide a one Pulse-per-Second (1PPS) for onboard time synchronization and deliver data messages containing raw GPS code and carrier phases to the GPS navigation function. The navigation function performs a reduced-dynamic filtering of GPS raw data and provides absolute MAIN and relative TARGET with respect MAIN orbit information. Orbit information is, furthermore, provided to the autonomous formation control (AFC) and autonomous orbit keeping (AOK) applications for computing the requested velocity increments.
At the end of the mission after the formation release and evaporation, the AOK on-board software shall demonstrate MANGO satellite autonomous orbit control using a guidance law for the orbit's LAN (Longitude of Ascending Node) using GPS-based absolute navigation data. 31)
The GPS-based navigation system onboard MAIN will process the local raw GPS measurements as well as the code and carrier phase measurements transmitted from TARGET by an inter-satellite radio link. Spacecraft attitude information is applied to correct for the GPS antenna offset with respect to the spacecraft center of mass and orbit maneuver data is accounted for in the orbit prediction. The navigation system will provide absolute position and velocity data of MAIN and relative position and velocity data of TARGET with respect to MAIN at a 1 Hz data rate for GNC functions and PRISMA payload.
The formation control concept is based on a relative eccentricity/inclination (e/i) vector parameterization of the relative motion. This technique has its roots in the co-location of geostationary satellites and has been successfully adopted for the first time in LEO to safely switch the satellites of the GRACE formation. SAFE will exploit the versatility and generality of the relative e/i vector control in order to acquire and maintain robust and safe formation flying configurations, in complete autonomy, over long time intervals (weeks) and small spatial separations (< 2 km). 32) 33) 34)
2) Homing and rendezvous experiment. This test series involves long-range tracking and rendezvous operations by optical means. A VBS (Vision-based Sensor) is used to identify the TARGET as a non-stellar object at distances up to 500 km (TARGET will be quipped with switchable light diodes), and to track the TARGET down to very close range, typically 10 m during a sequence of autonomously scheduled approach maneuvers. For each experiment, MAIN is placed in a specific initial relative orbit with respect to TARGET by ground commands before enabling autonomy. The plane and phase of the initial relative orbit is already aligned with the TARGET's reference orbit. Then MAIN will autonomously locate TARGET and autonomously rendezvous within a predetermined approach corridor. MAIN will perform onboard orbit determination without GPS data, thereby mimicking a rendezvous mission beyond the reach of the GPS sphere.
3) Proximity operations. The test series includes final approach/recede maneuvers where the MAIN will navigate as close as possible to the TARGET. The guidance algorithms on the MAIN S/C will autonomously generate trajectories to traverse between various holding points in the TARGET body frame. The model mission technology demonstrations are: a) on-orbit servicing, b) on-orbit inspection, and c) on-orbit assembly, in both near-earth scenarios and beyond.
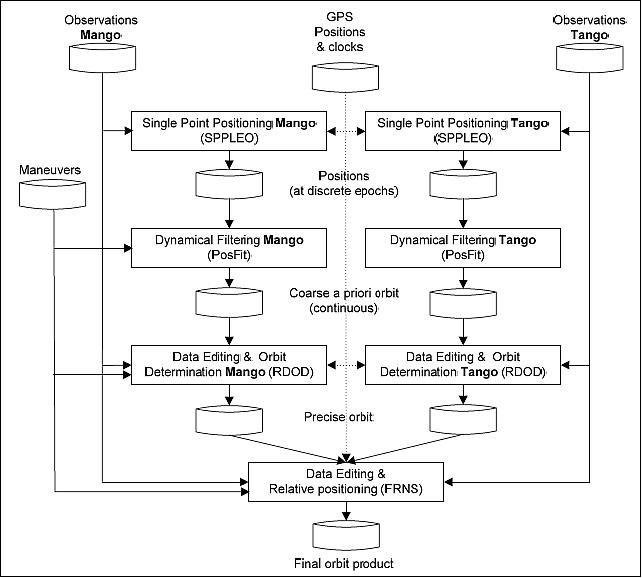
PRISMA POD (Precise Orbit Determination) Facility at DLR - GPS Software Suite Commissioned in the Fall of 2010 35)
The PRISMA POD facility is based on the GHOST (GPS High precision Orbit determination Software Tools) software package of DLR. This software suite is already used routinely to support many missions (GRACE, CHAMP, TerraSAR-X, TanDEM-X, PROBA-2) and has already proved its high-readiness level as well as its ability to provide reliable and accurate orbit products. The data processing for precise orbit determination follows the scheme depicted on Figure 12.
The onboard primary navigation system relies on GPS measurements to provide in real-time accurate absolute and relative navigation. The output of the PS-based navigation system is used to feed the numerous on-board feedback controllers and the safety monitoring and collision avoidance functions. As a consequence the navigation system has to provide the utmost accuracy to the experimental payloads and, at the same time, be robust and reliable to support fault detection isolation and recovery tasks. The commissioning of the GPS navigation system is therefore a crucial milestone for the mission. It has to be ensured that the onboard navigation solution is always reliable even in the presence of hardware anomalies and that the navigation performance satisfies the mission requirements.
The successful commissioning of the GPS navigation system in the fall of 2010 of the PRISMA mission demonstrates that GPS-based navigation is well suited for autonomous formation flying in low Earth orbit. In particular, thanks to its high technology readiness level, the GPS navigation system can be used for autonomous monitoring of the formation safety and may serve as real-time relative positioning sensor for close proximity (up to several meters) operations.
The COTS Phoenix receivers, used in the mission, are shown to provide excellent tracking capabilities and high measurement quality, which make them well suited to GPS-based absolute and relative navigation. The flight experience, gained during the first half year of the mission, shows that the radiation events on the Phoenix receivers are not destructive; their effects can be mitigated by implementing a proper onboard strategy for rapid fault detection and recovery and by complementing the GPS receivers with an onboard filter able to bridge any short data gaps.
The on-ground post-facto generation of precise orbit products, essential for the cross-validation of other experimental relative positioning sensors, has been successfully commissioned. Ultimate relative positioning accuracy is achieved using the resolution of integer double difference carrier phase ambiguities. The performance analyses done during the commissioning have shown that the resulting relative positioning is accurate at the (sub)-centimeter level. About 75% of the orbit products have been generated in 2010 using this method, which is still very sensitive to any perturbations. As a consequence, another more robust but less accurate method, based on the estimation of float ambiguities, is used to generate relative positioning products with an accuracy better than 10 cm when the integer ambiguity fixing fails. The resulting accuracy is still sufficient to monitor routinely the health of the onboard navigation.
Accurate absolute and relative navigation is provided in real time by the onboard filter, which processes directly the GPS raw measurements from the receivers. The navigation performance has been verified using the precise orbit products generated on-ground. Under nominal conditions, absolute navigation at the meter level and relative navigation at the sub-decimeter level can be expected. The filter is shown to be robust in all challenging conditions encountered during the mission, but is per design very sensitive to long data gaps. Robust but poor filter settings have been derived during the commissioning to cope with the mission phases affected by numerous data gaps. Minor software anomalies have been observed, which have either been fixed via a software patch or are currently under investigation.
For PRISMA, the GPS data are processed onboard in a real-time navigation filter to provide instantaneous estimates of the relative state. For reference purposes, a CDGPS (Carrier phase based Differential GPS) solution is furthermore computed on ground, which employs refined processing concepts and offers an improved accuracy. 36)
With respect to real-time applications, the sub-decimeter relative navigation accuracy demonstrated on PRISMA does not yet exploit the full potential of CDGPS positioning but reflects a compromise between technical complexity, mission requirements and the need for robust operation in widely different scenarios.
Mission Status
• December 2014: According to information from the PRISMA project of OHB-Sweden, the inspection phase of the Picard experiment was cancelled. During the rendezvous phase in August 2014, there was a problem with one of the propulsion systems on PRISMA and the PRISMA project couldn't catch the opportunity to execute the inspection before the fly-by of Picard. However, the PRISMA project managed to capture a few long range images of Picard. The project was also able to validate the relative on-ground navigation procedure by a mix of in-orbit captured and on-ground generated images. 37)
• May/June 2014: Since May 2013, the PRISMA Main (Mango) spacecraft is in a transfer orbit towards the French owned satellite Picard, the debris object on the list of candidates. [Note: The Picard mission ended its scientific operational mission in March 2013, but it pursued acquisitions to the end of March 2014, during technological operations on the satellite.] At the start of the drifting phase the difference of the two orbits (PRISMA Mango and Picard) was 28 km in semi major axis, 0.022o difference in inclination and about 14o difference in right ascension of the ascending node. 38) 39)
Phase | Status | Success criteria | Sensor(s) |
Tango Termination | Completed | RF instruments disabled | N/A |
Starting delta-V campaign | Completed | Transfer drift orbit reached | GPS |
Transfer drift orbit | On-going |
|
|
Stopping delta-V campaign/ Far range rendezvous | In preparation | Relative handover point reached | GPS, TLE (and VBS) |
Inspection (IRIDES) | In preparation | Captured high resolution images of the target satellite | GPS, VBS and DIVS |
Capture and/or Physical Interaction | Currently N/A | Currently N/A | Currently N/A |
Deorbit | In preparation | Minimizing decay time in orbit | GPS |
Characterization | Additional activity in preparation | Estimated pose and tumble rate of target satellite | N/A |
- The critical phase of the IRIDES experiment is the close range inspection of the non-cooperative satellite Picard and this phase is planned to start in the end of August 2014. It has the goal of capturing high resolution images of Picard from a close but safe distance while performing collision free fly-by trajectories and keeping the cameras correctly pointing. The nature of these relative trajectories is such that all possible illumination conditions will occur, including pointing the cameras towards the sun as well as pointing them into deep dark space. The camera for image capturing will not be the relative VBS sensor, but instead the high resolution color capturing DVS (Digital Video System) camera.
To achieve this goal the close range inspection is divided into the following steps:
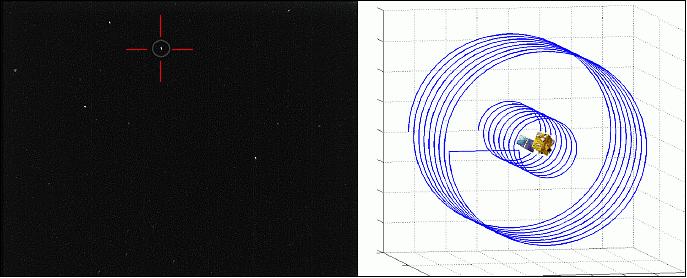
1) Estimate the Picard absolute orbit parameters with the VBS system from the current safe relative position. To do this, a known delta-V maneuver needs to be applied in the cross-track/radial plane to create observability of the relative distance to Picard. This delta-V maneuver is planned such as it will reduce the relative cross-track and radial components. A first glimpse of Picard is shown in the left of Figure 13, which was captured on March 18, 2014.
2) With the Picard orbit and hence the relative distance determined to a certain accuracy, a small long-track drift will be initiated to create a slow collision free helix shaped trajectory, circling the Picard satellite.
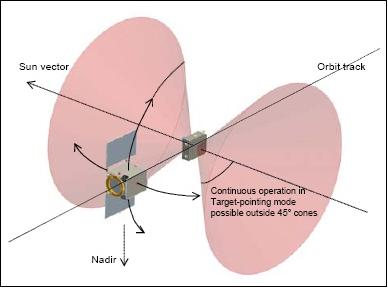
3) During this trajectory, the cameras on Mango will be pointing towards Picard based on either an attitude profile or using the autonomous target pointing mode on-board Mango. Due to the forced attitude, the solar panels will no longer be sun pointing and as much payload as possible needs to be powered off to be able to capture a long series of images with the DVS camera.
4) When safely at the other side of Picard, the relative drift will be stopped and the procedure will be repeated in the opposite direction until the accuracy of the estimated Picard orbit parameters is comparable with the stepwise constant cross-track/radial minimum distance.
The entire close range inspection procedure is illustrated in Figure 13, showing the helix trajectory closing in on Picard. The close range inspection needs to be finalized before the end of September.
- Capture and/or physical interaction: Should Mango have been equipped with a grappling device the close range inspection would have been extended to also include a capturing phase. In this phase the goal would have been to connect Mango and Picard mechanically to each other, and to detumble and control the resulting duo. However, no such device is installed on-board Mango and this step will not be performed within the IRIDES experiment.
- Deorbit: With the successful close range inspection finished it only remains to empty the propellant tanks in a way to minimize the remaining time Mango has left in orbit. To this end, it is deemed as a good decision to lower the semi major axis as much as possible; this in order to be complying with the intentions of current international space debris mitigation policies. The goal is to lower the perigee of Mango as much as possible.
The methodology for the deorbit will be similar to the drift start campaign, using the GPS receiver on Mango for orbit estimation and then apply manual delta-V maneuvers at apogee to lower the perigee as much as possible. Included in this maneuvering is to analyze the effect of each burn in advance by comparing the estimated post-burn TLE's with the current set of online TLE's provided by JSpOC in order to avoid unnecessary conjunctions. Decisions can then be taken to delay the maneuver sequence if necessary. This method will be gradually utilized for the far range rendezvous and the close range inspection as well.
- Object characterization: As a result of the close range experiment several image sequences of Picard will be available, captured with the DIVS. These images will be processed on-ground to estimate the relative pose and range of Picard, including its tumbling rate and spin axis. The goal is to develop object characterization algorithms that can produce estimates of the parameters needed for a capturing maneuver. This will have a challenging aspect due to the extreme variation of the illumination conditions formed by the relative helix trajectory. It is also important the image rate is adjusted appropriately to the timeframe of the relative motion to not have too sparse images. Different methods are considered depending on the rate of the images.
The object characterization phase is not considered part of the flight experiment since it is entirely ground based and is instead seen as a follow-on activity (Ref. 38).
• Fall 2013: In May 2013, the Mango spacecraft started an approximately one and a half year long journey towards another target object to demonstrate rendezvous and inspection within the IRIDES (Iterative Reduction of Inspection Distance with Embedded Safety) experiment. The Tango spacecraft was shut down permanently and a series of optimized orbit maneuvers were commanded to the Mango spacecraft in order to initiate the drift towards the new object. The rendezvous is expected in the second half of 2014 and will demonstrate optical relative navigation technologies and the characterization of the rendezvous object and its motion with the use of the on-board video system. The rendezvous strategy within IRIDES includes a series of collision free drift maneuvers past the rendezvous object gradually reducing the closest relative distance. IRIDES aims at demonstrating rendezvous and inspection of an uncooperative rendezvous target. The demonstrated technologies for this rendezvous are believed to play an important role in the future developments associated with space debris mitigation. 40)
The mission phase started with the decommissioning of Tango by permanently shutting down all systems on-board the spacecraft. This was a necessary step since Tango does not have any direct ground communication capability and only is possible to command via the intersatellite link from Mango.
The transfer start orbit was then executed in a series of delta-V maneuvers from May 13 to June 20, 2013. The total amount of delta-V was 32 m/s. Initially, the transfer start was planned to be performed by lowering the perigee only. This could be achieved by selecting the time for the maneuver when the perigee occurs on the equators. The advantage of this approach was that the lowering of the perigee introduces some additional drag which then is possible to utilize as additional delta-V. Unfortunately, the thruster pulse firing period took longer time than expected. The main reasons were to allow for proper performance evaluation of the propulsion systems as well as the assessment of feasibility to increase the duration of each thrust pulse. As a result, there was a period in the middle of the transfer start during which no thruster pulses were fired.
IRIDES phase: Only in the initial approach phase, the absolute GPS is the primary source for navigation. After this point, the VBS (Vision Based Sensor) will be the primary instrument for relative navigation while the absolute navigation based on the GPS is used for monitoring only.
The VBS is used in a relative navigation filter using optical line of sight measurement delivered from the sensor. The navigation is performed on-board using the navigation software that was validated within the PRISMA Autonomous Rendezvous experiment. The navigation performance at a distance of 50 m is expected to be better than 10 m along-track and 1 m in cross-track and radial direction.
Because of the expected relative navigation performance and the fact that the navigation target not is equipped with a LED-based cooperative system such as on Tango, it is not planned to start with an approach closer than 50 m along-track with zero separation in cross-track and radial. The proposed guidance strategy within IRIDES is based on establishing a constant separation between Mango and the rendezvous target in the cross-track radial plane at an early phase of the approach. The complete approach can be broken down into the following steps starting from the current state of Mango and the rendezvous object:
1) With a sequence of delta-V maneuvers, Mango's orbit is lowered such that the spacecraft approaches the rendezvous object.
2) After a long drift phase, a second sequence of delta-V maneuvers is performed to raise Mango's orbit such that its semi-major axis is the same as for the rendezvous object. This sequence of delta-V maneuvers is computed such that a separation in eccentricity and inclination is established. This will guarantee that the orbits of Mango and the rendezvous object do not cross regardless of any remaining relative drift along-track. The relative distance in this step is approximately 30 km.
3) A drift is initiated along-track to approach the rendezvous object.
The inspection of the rendezvous object is then implemented using the following iterative strategy:
1) Mango drifts to the other side of the rendezvous object still with a constant separation in the cross-track and radial plane.
2) The drift is stopped at a safe distance away from the object on the other side.
3) A delta-V is executed in order to reduce the distance in the cross-track and radial plane.
4) Establishment of the new cross-track and radial separation is verified.
5) A drift is again initialized to pass the rendezvous object again but now in the other direction.
The steps 2 through 5 are then repeated until it is decided that the distance between Mango and the rendezvous object can no longer be reduced while at the same time guaranteeing safety.
During the fly-by maneuvers of the rendezvous object, Mango will be target-pointing based on the measurements from the VBS allowing for sensor and digital video system image capturing of the rendezvous object. All control will be based on time-tagged delta-V maneuvers computed on-ground and uploaded to Mango.
All on-board navigation will be continuously evaluated on-ground against captured images and GPS data. During all steps of the IRIDES experiment, it will be possible to abort by commanding a simple delta-V along-track. This will result in an increasing distance between Mango and the rendezvous object for an extended period of time.
The proposed strategy will allow for a completely safe close approach between Mango and the rendezvous object. The final minimum relative distance depends on the evaluated achieved Vision Based navigation performance. With a performance close to what has been achieved during previous PRISMA experiments, the final safe relative distance could be as close as 10 m allowing for image capturing of the rendezvous object where a pixel would represent 4 x 4 mm with the Vision Based Sensor and 3 x 3 mm for the digital video system (Ref. 40).
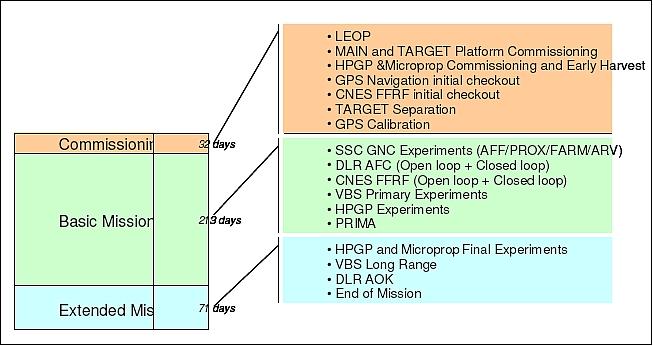
• As of May 2013, PRISMA has been orbiting the Earth for more than 1000 days. The mission has been divided into four phases as shown in Table 3. Only the first two phases were planned by the time of launch and both of them were supposed to be operated by OHB-SE (former Space Systems Division of SSC) in the purpose-built control room in Stockholm, Sweden, using the company's own GNC and platform experts to conduct the mission. 41)
Mission phase | Start date | Duration | Operator |
Nominal mission | June 15, 2010 | 273 days | OHB-SE (SSC) |
Extended mission | March 15, 2011 | 160 days | DLR/GSOC |
External parties mission | August 22, 2011 | 588 days | OHB-SE |
Final mission | April 01, 2013 | Ongoing | OHB-SE |
- The funding of mission operations was always a problem. In an effort to extend the use of the satellites and enable more experiments, DLR/GSOC offered to temporarily operate the satellites from their control center in Oberpfaffenhofen, Germany, for a period of five months during 2011, leading to the first phase shift of the mission into the "extended mission phase". Since the extended mission phase contained a finite set of predefined experiments, the phase ended when all activities were concluded and the satellite was returned back to OHB-SE.
- The "external parties mission" was designed such that any interested organization was invited to participate in the mission and conduct its own experiments according to its own needs and requirements, at the time when the satellite was already in orbit. However, the external parties phase also contained extended periods of idle time where the satellite was idling, waiting for new partners to come perform newly defined experiments. This idling time enabled the mission management to start planning for the grand finale, the final phase, where the Mango-Tango formation were supposed to be broken and Mango to start a journey on its own towards a space debris object to demonstrate rendezvous and inspection technologies with a non-cooperative space debris target.
- This last phase shift was recently conducted (start in April 2013) when the final phase was initiated by terminating the Tango spacecraft and large dV-maneuvers are applied to the Mango spacecraft to start approaching another object. The final phase is divided in several parts; transfer start, transfer orbit, transfer stop and debris orbit alignment, and finally the debris inspection part which is called IRIDES (Iterative Reduction of Inspection Distance with Embedded Safety).
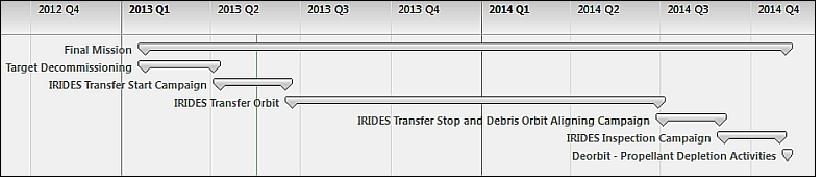
The IRIDES phase is expected to last until December 2014. This phase is divided into five parts according to Figure 14, which shows the current timeline planning. Only very limited resources are available to conduct this part of the mission. To meet these constraints, only daytime passes are considered which will be supported by the KSAT network. Furthermore, the number of passes has been limited to two passes/day during the high activity campaigns, and only four passes/ week during the non-campaign periods.
The goal of this phase is to abandon the Tango spacecraft and to reorient the Mango orbit in several steps to finally align with a space debris object. This is foreseen to take approximately two years since the available amount of propellant is limited, and relative orbit drift rate with the debris object must be kept small, not to exceed the ?V budget. When the Mango orbit is neatly aligned with the debris, the IRIDES inspection phase will begin.
In retrospect, a lot of experience has been gained from the mission, and the decision to transfer to and inspect a space debris object in orbit further demonstrates the capabilities of Prisma (Ref. 41).
• In the summer of 2012, the PRISMA mission is still in its extended parties mission phase - offering access to the platform to other organizations.42)
• As a result of its successful in-space demonstration on the PRISMA mission, the HPGP (High Performance Green Propulsion) technology now provides a low-hazardous, and flight-proven, capability enhancer for small and secondary satellites. Additionally, when implemented on such platforms, the multiple benefits of HPGP allow for completely new applications and mission opportunities. 43) 44)
- The results from the PRISMA mission clearly show that HPGP provides numerous benefits over monopropellant hydrazine, including: 32% higher volumetric efficiency and 8% higher missionaverage specific impulse, significantly reduced transportation/handling hazards and costs, and greatly simplified/shortened pre-launch operations. All this comes with the added benefit of retaining heritage propulsion system architectures, components and skillsets used for conventional hydrazine blow-down systems (Ref. 43).
• In 2012, the PRISMA mission is operational and in its "external parties mission phase". All primary and secondary objectives have been fulfilled during the so-called "basic mission phase" which ended in August 2011. - It is expected that the external parties mission phase will last until the Summer of 2012 (for ca. 1 year duration). During the external parties mission phase, old and new partners are invited to execute new experiments on PRISMA using the available platform. An example: DLR is again contributing to PRISMA with the ARGON (Advanced Rendezvous demo using GPS and Optical Navigation) experiment. 45)
Mission operations are under responsibility of OHB-Sweden AB (former Space System division of SSC), as well as the marketing of PRISMA to attract new "customers".
• In September 2011, SPACE-SI (Slovenian Centre of Excellence for Space Sciences and Technologies) and OHB Sweden performed a set of formation flying experiments. Three critical maneuvers for three types of missions were investigated with respect to the in-orbit performances: 46) 47)
1) In-flight simulated radar interferometry experiment, where one satellite simulated the SAR transmitter and receiver, while the other the receiver only. This experiment demonstrated, that speed estimation accuracy can reach 0.05 m/s, while in a similar cross-track constellation, with similar orbital parameters, the vertical accuracy of the digital elevation model production could reach 1 m.
2) Observation of non-cooperative objects - space debris experiment (Orbit identification and Close observation in order to derive a 3D model of the observed object). This experiment demonstrated, that space debris, a serious problem in near future, can be identified on the basis of the TLE data and optically tracked by a narrow FOV (14o) camera.
3) In-flight simulated distributed instrument experiment, where the first satellite simulated the holder of the optical system with lenses and/or mirrors and the other one the holder of the detectors (sensors). This experiment has shown, that very precise orbit maneuvering and navigation, required for exact focusing, cannot be achieved by the implemented thruster-control and GPS navigation technology.
• By the end of August 2011, PRISMA completed all of its nominal mission objectives. Starting from September 2011, a mission extension phase was started introducing new participants in the mission as well as additional experimental tasks performed by the original mission partners. 48) 49)
- PRISMA has more than 50 m/s of remaining ?V capability at the end of the nominal mission (Aug. 2011). This has allowed the project to invite PRISMA as well as external participants to suggest additional experiments.
- In September 2011, several such additional experiments are being prepared. These include GPS-based rendezvous motion shaping with simultaneous VBS data collection, Mango/Tango line-of-sight pointing, and combined VBS/RF navigation and control. The project has plans to to continue the mission extensions activities until June 29, 2012.
Between March 15 and August 23, 2011, PRISMA was operated from GSOC (German Space Operations Center) as part of an agreement between the SNSB and DLR. The purpose was to provide an opportunity to gather experience in operating multi-spacecraft missions while completing the experiments from the nominal PRISMA timeline. A complete operational environment based on OHB Sweden's command and control software RAMSES was cloned and installed at GSOC and operators were trained during PRISMA operations at OHB Sweden. During this period, the entire operations were transferred to GSOC in Germany and the satellites were operated by GSOC personnel. During this time, several DLR experiments were completed but also several experiments of OHB Sweden as well as of ECAPS (Ecological Advanced Propulsion Systems, Inc.), Washington, D.C.
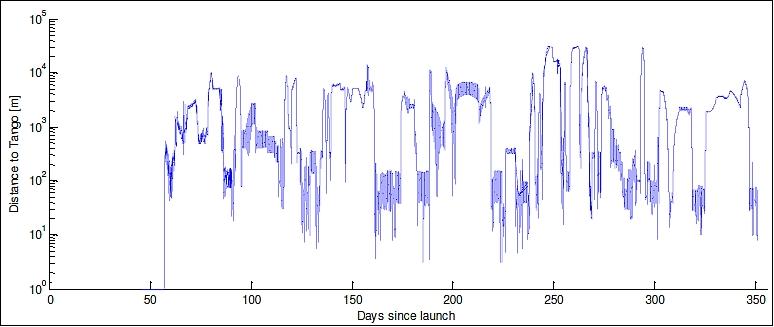
• Over the course of the 1-year mission so far, a large variety of relative orbits have been flown, with distances ranging from 2 m to 30 km in along-track separation, up to 1000 m in cross-track and to 2 km in radial distance. Figure 16 shows how the norm of the distance has varied over the basic mission. 51)
• Green propellant demonstration. The basic mission for the HPGP (High Performance Green Propulsion System) has been successfully completed and all primary objectives of TRL-7 (Technology Readiness Level-7) have been met - after 1 year of in-space demonstrations. In the summer of 2011, the HPGP technology is considered flight proven and ready for implementation on future missions. 52)
The in-space flight demonstration of the HPGP propulsion system was comprised of commissioning, four blocks of specific HPGP firings and a combined operation with the HPGP and hydrazine systems firing during different formation flying experiments.
- On June 23 2010, eight days after launch, the commissioning of the PRISMA HPGP propulsion system was performed as planned.
- The first in-space firings were performed on June 24, 2010. The first firing sequence was a pulse train of forty 100 ms pulses at a duty cycle of 1%. The firing was performed along-track and GPS data verified the predicted 2.1 cm/s ?V increase. The propellant consumption for the maneuver was nominal. The HPGP propulsion system was thus declared ready for operations.
- Up to the summer of 2011, more than 200 firing sequences have now been performed in orbit with an accumulated firing time of 2.3 hours. The HPGP propulsion system has been operated in the following operational firing modes:
Quasi steady-state (continuous firing)
Pulse mode (duty factors between 0.15 to 50%)
Off-modulation (duty factors between 50 to 99%)
Single pulse (single pulses or very low duty factors).
Future small satellite missions will benefit from HPGP due to its improved density impulse over hydrazine and significantly simplified pre-launch activities. From a performance perspective, the HPGP system is able to offer approximately 36% more propellant than hydrazine for any mission ?V. This allows more margin to be added to the mission lifetime, a larger ?V to be executed or a reduced tank size of the propulsion system, all of which are important criteria for any small spacecraft mission (Ref. 52).
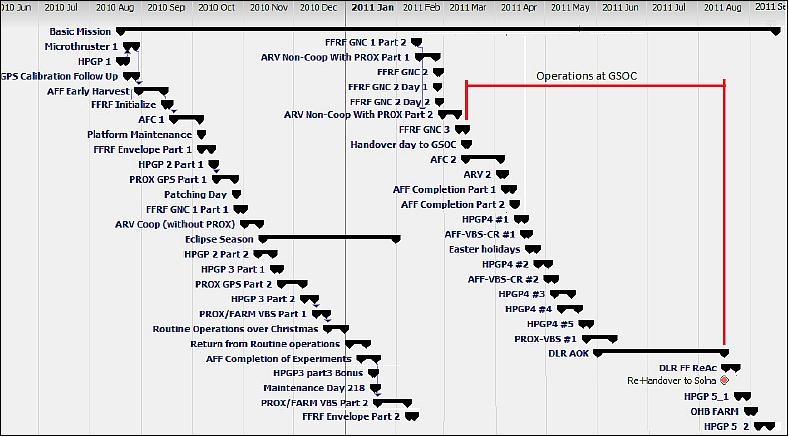
• On April 5 and 6, 2011, PRISMA performed the ARV (Autonomous RendezVous) experiment, this time under control by GSOC, and the experiment team residing in Stockholm. For this purpose, AFF (Autonomous Formation Flying) was used to create a distance of 30 km between Mango and Tango, and then Mango was released with a set of commands to start its ARV experiment. The goal: to autonomously detect Tango with the Vision Based Sensor, establish an estimate of its orbit, and maneuver to it until only a distance of 50m remains. All this without any intervention from ground operators and more over on optical line of sight information only.
The experiment lasted almost 30 hours, part of which was not possible to monitor from the ground when no visibility from the ground segment was available.
Experiment name | Experimenter | Duration of Experiment | Start of Experiment | End of Experiment |
H/O |
| 0 days | Mon 14.03.11 | Mon 14.03.11 |
H/O Ops | GSOC | 2 days | Mon 14.03.11 | Tue 15.03.11 |
AFC2 | DLR | 19 days | Wed 16.03.11 | Sun 03.04.11 |
AFF completion | SSC | 8 days | Mon 04.04.11 | Wed 13.04.11 |
HPGP 4 | ECAPS/SSC | 30 days | Thu 14.04.11 | Wed 25.05.11 |
ARV completion | SSC/GSOC | 8 days | Thu 26.05.11 | Mon 06.06.11 |
OOS Tumb | GSOC/SSC | 14 days | Thu 07.06.11 | Fri 24.06.11 |
AOK (Autonomous Orbit Keeping) | DLR | 30 days | Mon 27.06.11 | Tue 26.07.11 |
FF ReAc | GSOC | 10 days | Wed 27.07.11 | Tue 09.08.11 |
Re-H/O |
| 0 days | Mon 08.08.11 | Mon 08.08.11 |
• On March 15, 2011, GSOC (German Space Operations Center) of DLR in Oberpfaffenhofen took over the operation of the Swedish PRISMA mission. SSC (Swedish Space Corporation) implemented the transfer of control as part of a bilateral agreement. DLR/GSOC will be responsible for mission operations for a period of five months. The objective is to provide an opportunity to gather experience in operating multi-spacecraft missions while completing the experiments from the nominal PRISMA timeline plus two additional experiments allocated exclusively for GSOC.54)
The network of ground stations consists of the DLR antennas at Weilheim and the antennas operated by SSC in Sweden. Ten times a day, the two PRISMA satellites, Mango and Tango, transmit signals to the receiving stations and receive new commands from Oberpfaffenhofen. Three teams work there in shifts, looking after the flight control systems.
• The PRIMA mission is fully operational in 2011.
• Proximity GPS approach to 2 m in Dec. 2010: Two successful Mango approaches toward Tango were conducted on Dec. 22 where the closest distance was 2 m. Mango was controlled to within 0.3 m from the commanded approach and recede trajectory. This was a part of the SSC PROX GPS experiment, where the guidance and control have been developed by SSC and the GPS navigation by DLR.
• The Phoenix receiver of DLR provided the navigation function during the various support phases of the mission (Table 5). The COTS receiver is sensitive to high levels of radiations resulting in sporadic non-destructive latch-ups. The mission demonstrated that a proper strategy for onboard autonomous detection and recovery of hardware failures can minimize the impact of such events, causing only short interruptions during a few minutes. Overall the receiver presents good tracking capabilities which make it very well suited for relative navigation. 55)
Ultimate navigation performance is achieved by complementing the hardware with a real-time onboard navigation filter which processes the GPS raw measurements to provide absolute navigation accurate at the meter level and relative navigation better than 10 cm. The onboard filter presents also the ability to bridge short data gaps in case of hardware anomaly and is as such the indispensable companion of a commercial-off-the-shell receiver. PRISMA shows that a robust and accurate navigation can be achieved by a proper configuration of the filter throughout all the mission phases. Minor outliers in the relative navigation have been detected during certain antenna switches, which will require further investigations in the near future.
The PRISMA navigation system is finally complemented on ground with a facility for POD (Precise Orbit Determination), which uses more advanced techniques to generate routinely highly accurate orbit products. The resulting relative positioning accuracy goes down to the sub-centimeter level (Ref. 55). The POD facility at GSOC generates precise orbit products on a routine basis using the DLR's in-house GPS High precision Orbit determination Software Tools (GHOST).
Support phase | Time period | Formation status | Mango | Tango | Avoid SAA |
A | 15.06 to 19.06.2010 | Clamped | Sun pointing, GPS on | Sun pointing, GPS off | Yes |
B | 20.06 to 01.07.2010 | Clamped | Zenith pointing, GPS on | Zenith pointing, GPS off | Yes |
C | 02.07 to 02.08.2010 | Clamped | GPS off | GPS off | - |
D | 03.08 to 10.08.2010 | Clamped | Zenith pointing, GPS on | Zenith pointing, GPS on | Yes |
E | 11.08 to 08.09.2010 | Separated | Zenith pointing, GPS on | Zenith pointing, GPS on | Yes |
F | from 09.09 onwards | Separated | Zenith pointing, GPS on | Zenith pointing, GPS on | No |
• FFRF sensor flight results (first metrology stage for formation flying missions): First flight results appeared to be quite satisfactory. Absolute accuracies of 1 cm on distance and 1o on LOS (Line-of-Sight) are reached in configurations where the signal elevations on Mango and Tango are small. Both LOS and distance IAR processes appear to be less robust to high elevations because of high multipath errors. However, though LOS and distance may be biased, relative accuracy still remains very good. Besides, a multipath calibration process is under way and hopefully will greatly improve the accuracy.
In addition to the FFRF sensor characterization, the CNES FFIORD experiment is also testing various GNC algorithms. The first closed loop experiment was fully satisfactory and demonstrated full capability to maintain passively a safe relative orbit (Standby), to perform autonomous rendezvous from kilometers away down to a few hundred of meters, to perform proximity operations with a few cm accuracy and to trigger safe collision avoidance when necessary. - The FFIORD experiment success should thus help to build future FF missions relying on RF metrology like PROBA-3.
See the chapter "FFRF (Formation Flying Radio Frequency) configuration on the PRISMA constellation" below which contains most FFRF results of (Ref. 76).
• In Nov. and early December 2010, the HPGP (High Performance Green Propulsion) system tests were conducted successfully (all objectives were met). The operations included pulse mode and off-modulation firings. 56)
- The HPGP-3 pulse trains were performed in the along-track direction to improve the accuracy of GPS data, thus improving Isp performance measurements.
- The HPGP-2 firings have been performed with pulse durations from 50 ms up to 60 seconds over a wide range of duty cycles, i.e. from 0.1 to 99 %. Pulse trains lasting up to 90 minutes (90% of the orbit) has been executed. The firings have been performed mainly in cross track and a few along track. Since the beginning of the mission 6800 pulses have been fired during 100 sequences with the HPGP propulsion system. The accumulated firing time is more than 1 hour and 1 kg of the propellant has been consumed. The HPGP propulsion system's operational characteristics are nominal.
• Sept. 27, 2010: "AFF Early Harvest" was an experiment to flight qualify the guidance and control algorithms, developed and implemented by SSC, for satellite formation flying. It was the first set of experiments that successfully demonstrated closed loop satellite formation flying on PRISMA. The goal was to demonstrate acquisition and maintenance of a wide variety of different relative orbit configuration. The complete experiment lasted sixteen days between August 30 to September 14, 2010. The distance between Mango and Tango ranged up to 10 km and down as close as 18 m. - The many subsystems that are working together to make AFF possible have all performed a remarkable job. All goals have been fulfilled and AFF is ready to maintain the formation as well as establish initial conditions and work as a safe parking mode for all other formation flying experiments on PRISMA. 57) 58) 59)
• In Sept. 2010, several functions have successfully been tested and proved to be operational. These functions are e.g.: 60)
- the basic platform functions (power, thermal, data handling etc) on both Mango and Tango
- the highly robust GPS-based relative navigation system and the precise orbit determination
- the basic GNC functions and safe mode autonomy which ensures mission safety
- the robust and versatile propulsion system
- the flexible onboard S/W allowing for reprogramming e.g., GNC S/W
- the very promising FFRF (Formation Flying Radio Frequency) instrument performance
- the Mission Control which has proven to master the challenges of planning and executing operations for two closely operating satellites
- Autonomous formation flying in closed loop which is the hub for all future GNC experiments.
As a consequence, the PRISMA mission has proven itself to be the formidable test bench for advanced formation flying and rendezvous test bench as expected. Additionally, the new HPGP (High Performance Green Propulsion) propulsion system has demonstrated the desired performance.
• AFF (Autonomous Formation Flying): Enabling formation autonomy on PRISMA is a major step for the project. To enable autonomous formation control requires all other subsystems to perform nominally, pointing and momentum offloading for two spacecrafts, electrical and thermal stability, the onboard GPS navigation very precise and stable, thrusters that deliver accurate and repeatable impulses. These are just a few of the subsystems that need to deliver for AFF to be possible.
The Autonomous Formation Flying (AFF) experiments consist of passive formation flying based on GPS navigation. The passive orbit is obtained as the natural ideal relative motion between the two spacecraft when their orbits differ slightly from each other. The relative orbit is maintained with a control law based on fuel optimal Model Predictive Control principles using Linear Programming optimization methods.
The AFF passive formation flying experiments demonstrate typical mission scenarios which include passive apertures or loose formations. They also represent passive phases and situations occurring within virtual structure formations, on-orbit assembly and on-orbit inspection.
• By the beginning of September 2010, all essential equipment on the two satellites has been fully commissioned and the initial parts of the AFF in closed loop has been initiated.
Since Sept. 1, 2010, Mango (MAIN satellite) is fully authorized to make its own decisions on when, how long and in which direction it needs to fire a thruster in order to establish and maintain the constellation geometry, commanded from ground. While it is still too early to say anything about the long term performance, during the first 17 orbits (~28 hours) everything was nominal. Two reorientations of the constellation have been performed, the later one involved increasing the distance from about 800 m up to 5 km. This took nine orbits and required three short correction pulses of about 0.6 seconds burn time in total (about 3 mm/s correction in total). This is inline with the validation simulations which have been performed for this scenario.
Actually, testing of three experiments on PRISMA were conducted in parallel:
- AAF (Autonomous Formation Flying) of SSC
- FFRF (Formation Flying Radio Frequency) sensor of CNES
- VBS (Vision-based Sensor) of DTU.
• On Aug. 27, 2010, the fine tuning of the GPS navigation system was conducted for the coming experiments, final checkout of the Safe Orbit Guidance and initializing the relative orbit to a good relative state for the start of the AFF experiments on Sept. 1, 2010.
• The micropropulsion experiment was started for the first time on Aug. 23, 2010 when the two satellites, Mango and Tango, passed overhead the ground station in Kiruna on orbit 1000, some of the very first data from the MEMS thrusters where received on this pass.61)

• The two PRISMA satellites, Mango and Tango, were separated on Aug. 11 2010. The satellites have been clamped together since the successful launch in June. On orbit 823, telemetry verified that Tango was free flying and had stabilized itself in a slowly rotating sun pointing attitude.62)
• Collision avoidance maneuver of PRISMA (July 6, 2010): An acute maneuver of the PRISMA satellites has been performed to avoid collision with an object named COSMOS 2251 DEB. The object is one of numerous debris items resulting from the collision between an Iridium constellation satellite and the COSMOS satellite on Feb. 10, 2009. - SSC's PRISMA mission control team was warned one day ahead by the United States Joint Space Operations Center (JSpOC) that at 22.59 on 6 July, PRISMA would be only 144 m from the debris. A 10 s thrust maneuver of the hydrazine propulsion system was used to maneuver PRISMA out of the risk zone.63)
• On June 23, 2010, eight days after launch, the commissioning of the PRISMA HPGP system was performed as planned. The commissioning of the HPGP system became a "text book" exercise and all functions and data were nominal. The first in-space firings were performed on June 24, 2010 where 100 ms single pulses where fired. The first firing demonstration was a pulse train of forty 100 ms pulses at a duty cycle of 1%. The firing was performed along-track and GPS data verified the predicted 2.1 cm/s ?V increase. The propellant consumption for the maneuver was nominal (Ref.81). 64) 65)
• The MSC (Mission Control Center) of SSC received first contact with PRISMA via the ESRANGE ground station at 16:14 UTC on June 15, 2010. The operations team could verify that the solar array panels had been deployed as planned and that the satellites are in a nominal state. During the coming days, all subsystems on both satellites will be successively verified, leading up to the planned separation of the satellites – Mango and Tango – on August 3, 2010.
• Sixteen minutes after launch the CNES satellite Picard was released. This was followed by the release of the two PRISMA spacecraft which were clamped together in the launch configuration (they will remain in this configuration during the first weeks in orbit. The two PRISMA spacecraft were nicknamed Mango (MAIN satellite) and Tango (TARGET satellite).
Sensor Experiments
VBS (Vision-based Sensor)
VBS was jointly developed by DTU and SSC. Use of the µASC (Micro Advanced Stellar Compass) of DTU, Lyngby, Denmark. The DTU star camera, used in several space missions [GRACE, etc.), has the capability to track non-stellar objects and report the direction in global direction vectors. This capability shall be developed such that MAIN spacecraft can find the TARGET spacecraft from several hundred kilometers and deliver sufficient data in order to precisely determine the TARGET spacecraft orbit (either on board or on ground). The µASC is being flown on the PROBA-2 (launch Nov. 2, 2009) and the Flying Laptop missions (launch in late 2010). The µASC device is of ASC heritage flown on Orsted, SAC-C, CHAMP, GRACE, ADEOS-2, SMART-1, GOCE, etc.
With regard to the PRISMA mission, the objective of the VBS is to provide pose and position information of the Target spacecraft to the GNC core of Main in order to enable precise formation flying as well as facilitating rendezvous and docking maneuvers. The VBS instrument will act as a fully autonomous stand-alone instrument, which is able to locate the Target spacecraft, lock onto the detected object in the image, extract object features, and thereby determine its pose and position. 66) 67) 68)
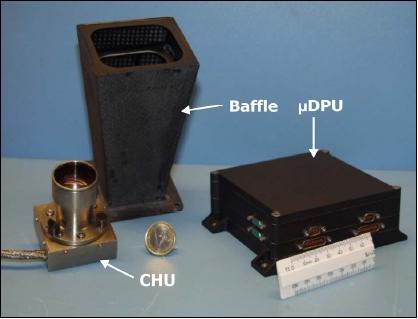
The VBS system is realized as an extension module to an already space proven instrument, the µASC which is capable of fully autonomous delivery of high precision attitude references based upon star observations. The µASC instrument is physically divided into a µDPU (Data Processing Unit) with hot/cold redundancy and CHU (Camera Head Unit), a µDPU may drive up to 4 CHUs in any cross-strapping configuration. The µASC delivers attitude information at S/C angular rates of up to 10o/s and thus enables rapid repointing of the platform to any object.
VBS is being used to identify the TARGET as a non-stellar object at distances up to 500 km, and to track the TARGET down to very close range, typically 10 m during a sequence of autonomously scheduled approach maneuvers. Areas to investigate are, among others, the degree of cooperativeness needed of the TARGET S/C (the TARGET will be equipped with switchable light diodes), the division of functionality between onboard S/W and ground control center, etc.
The VBS tests, conducted by the DTU team, are divided into three sections:
1) Long-range detection mode
2) Pose & range detection mode
3) Optical camera-based autonomous navigation.
The VBS system on PRISMA consists of a total of four CHUs, all connected to a double µDPU. Two of the CHUs will function as normal double startracker, providing attitude information to the spacecrafts guidance system. The two other CHUs are modified from the standard design, both having an electronic shutter implemented and have the fundamental use of providing the VBS system with image information.
One of these VBS CHUs is provided with a standard startracker lens, enabling it also to see stars and therefore also able to determine its attitude pointing. This CHU is denoted as the Far Range (FR) CHU. The other VBS CHU is provided with a smaller aperture and a filtered lens system in order for it to function when the spacecrafts are flying in close proximity. This CHU is denoted as the Short Range (SR) CHU.
VBS mission results: An extended functionality of the µASC, called the Vision Based Sensor (VBS), enables the camera system to render rendezvous and docking navigation information for a formation flying spacecraft. The VBS system facilitates different operation modes, enabling 6DoF solutions for spacecraft flying in close proximity, and inertial LOS (Line of Sight) solutions for any spacecraft reflecting more light than an Mv7 star.
The VBS on the PRISMA mission functions as a part of the instrument package forming the rendezvous and docking navigation test bench for the Main spacecraft. Here the VBS system has been enabled, based on the scheduled flight maneuvers in between the two spacecraft, autonomously providing the Main spacecraft with pose and position or LOS information of the Target spacecraft.
During different phases of the mission, full centroid information was captured from the CHUs (Camera Head Units ) of the µASC, which for these periods have enabled on-ground VBS reprocessing and deeper investigation of the detected objects and their statistical occurrences.
By post-processing of inflight recorded centroid data, it has been shown that the VBS system is very much capable of detecting and tracking several NOS (Non-Stellar Objects) simultaneously. - From a satellite orbiting the Earth, all satellites detectable by the star tracker CHUs can be tracked as soon as their inertial angular movement, with respect to the Main satellite, fits within the bandpass values provided to the VBS system. 69)
The VBS system is capable of providing high accuracy inertial pointings of all tracked objects in combination with key tracking information, that can be used for determine the confidence and precision of the detected object. Furthermore, dependent on which NOS objects that are of interest to search for, different boresight pointings relative to the flight path have shown a wide coverage range for the tracking of fast and slow moving NSOs.
By providing inertial pointing towards any NOS to a GNC core, approach maneuvers can easily be performed in the right direction. The VBS system is fully autonomous and can detect objects as soon as they can be detected by the star tracker CHUs. This is especially useful for missions with limited commandability, such as e.g. the Sample-Return missions.
FFIORD (Formation Flying In-Orbit Ranging Demonstration)
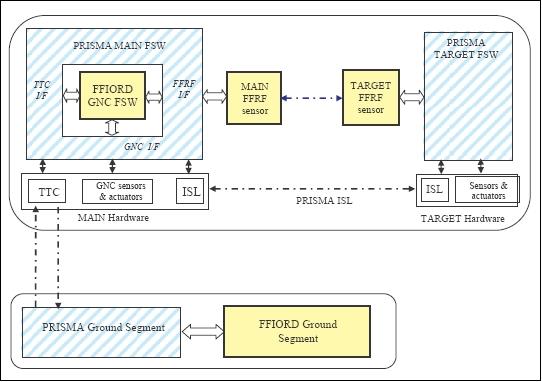
The FFIORD experiment represents the CNES contribution to PRISMA. The system is composed of the following elements under CNES responsibility:
• FFRF (Formation Flying Radio Frequency) sensor, a metrology subsystem developed by TAS (Thales Alenia Space), France (formerly Alcatel Alenia Space France) and sponsored by CNES. FFRF is to be validated on PRISMA; it is currently under development for the PROBA-3 and Darwin missions of ESA as well as for the SIMBOL-X mission of CNES/ASI.
• .GNC flight software module
• Ground segment, FMC (FFIORD Mission Center)
The FFIORD system includes also elements provided by SSC:
• FFRF sensor software driver
• Onboard and ground processing of TM/TC
• Data interfaces for FFIORD GNC flight software.
The FFIORD system is an integral part of PRISMA. Its interfaces with specific elements of PRISMA are shown in Figure 22. 70) 71) 72) 73) 74) 75)
The objective is to use the FFIORD passenger experiment as a coarse formation flying sensor for formation establishment down to the centimeter level, and collision avoidance. One FFRF device is mounted on each spacecraft in the formation of PRISMA. It uses a dual-frequency S-band communication link and a set of nominally seven antennas on each S/C. The position and direction to the neighboring units are calculated by means of measurements of pseudo-ranges and carrier-phase measurements for ranging, and single difference of carrier-phase measurements for direction.
The requirements call for a dynamic range of FFRF between 100 m to 30 km. The objective is to validate the sensor performance in acquisition time, stability and accuracy at different ranges and dynamic conditions. A flight test is especially important with respect to multipath phenomena. The FFRF sensor may also be used to test advanced GNC functions in closed loop intended for the future Darwin mission. The FFRF tests are being conducted by the CNES team.
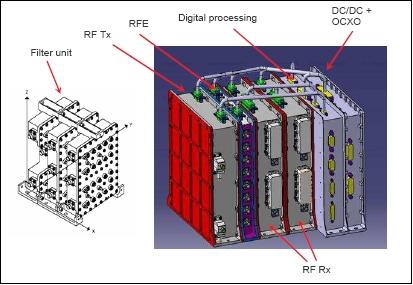
The FFRF subsystem is in charge of relative positioning of 2 to 4 satellites on formation flying missions. It produces relative position, velocity, and LOS (Line-of-Sight) as inputs for the GNC subsystem for which it provides coarse metrology measurements. As the first element in the metrology system chain, the FFRF sensor ensures initial good relative navigation accuracy for the subsequent optical metrology subsystems (coarse optical lateral metrology, fine optical metrology, and fine longitudinal metrology). The FFRF subsystem hardware consists of one terminal and up to 4 sets of antennas on each satellite in a constellation.
Measurement principle: The FFRF subsystem relies on an architecture inspired by GPS technology. Using multi-antenna bases and TDMA sequencing, each terminal transmits and receives a GPS C/A navigation signal modulated on two S-band carrier frequencies (S1 and S2) with BPSK/QPSK modulation. Since every terminal is equipped with transmitter and receiver, each satellite is then able to make ranging and LOS measurements with every other satellite. On S2, ISL (Inter Satellite Link) data are in quadrature with the ranging signal.
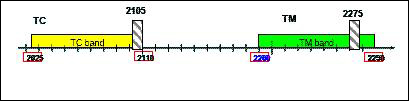
Frequency band: ITU regulations showed that the only frequency band where space-to-space communication could be done below 10 GHz is by sharing the TT&C band in S-Band (2025 - 2110 MHz and 2200 - 2290 MHz). For PRISMA, the resulting frequency plan was selected, putting the FFRF frequencies in the upper end of each part to the TTC band (Figure 23). The frequencies selected after these criteria are: S1 = 2275 MHz and S2 = 2105 MHz, while the TM is at 2214 MHz, the TC at 2035 MHz, as far apart as possible from S2. In addition, the signal at S2 has a deduced power compared to S1 so as not to interfere with the TC.
Signal characteristics: Location measurements are made with GPS. Using multi-antenna bases (triplets) and TDMA sequencing, each terminal transmits and receives a GPS C/A navigation signal modulated on two S-band carrier frequencies. On the first frequency, there are also data modulated in quadrature, on the second frequency, S2 the navigation signal has a reduced power.
Carrier frequency | S1 : 2275 MHz (in TM band) | S2 : 2105 MHz (in TC band) | |
Modulation | QPSK | BPSK |
|
Channel | I (ranging signal) | Q (data signal) | I (ranging signal) |
Ranging code | C/A (same as GPS) | - | C/A (same as GPS) |
Average data rate | - | 7.2 or 16.8 kbit/s | - |
To allow determination of relative position and relative speed, the FFRF subsystem is specified to provide the following information every second:
• Inter-satellite scalar distance (specified precision = 1 cm)
• Inter-satellite velocity with a precision of a few mm/s
• Azimuth and elevation of line-of-sight between two satellites (specified accuracy = 1o)
• Azimuth and elevation variations
• Clock bias between the two satellites.
Since every terminal is equipped with both transmitter and receiver, each satellite is then able to make ranging and LOS measurements with every other satellite. First, coarse measurements are made using the ranging from the C/A code, and then fine measurements with centimeter accuracy are performed using carrier phase measurements. The dual frequency allows the system to perform carrier ambiguity resolution using a wide lane, while 2-way measurements are used to account for the relative clock drift of the platforms. LOS measurements are made by measuring the carrier phase difference between the master and slave antennas on the triplet antenna base. Attitude, though, has to come from an external attitude sensor such as a star tracker.
On PRISMA, the TARGET satellite has only three Rx/Tx antennas on different facets to ensure full space coverage. Thus only the satellite MAIN, which is the only one equipped with a full antenna triplet, will perform the PVT (Position, Velocity, Time) algorithms to determine the precise positioning of satellite TARGET.
Navigation function: The RF navigation function, running at 1 Hz, estimates the relative position and velocity of the Mango satellite in the local orbital frame attached to Tango. This function is always active whenever the FFRF sensor is running: it is used in open loop during the sensor commissioning/characterization phase and in closed loop during the CNES FF experiment. The estimation algorithm relies on an extended Kalman filter that includes an absolute dynamics model of each spacecraft.
FFRF (Formation Flying Radio Frequency) configuration on the PRISMA constellation:
In the PRISMA context, FFRF configuration is not symmetrical (Figure 25). On one hand Tango satellite has three Rx/Tx antennas spread on different faces. It ensures full space coverage but does not provide fine LOS measurement. However, this is acceptable since Tango is the passive member of the formation. On the other hand Mango is equipped with a unique antenna triplet which only ensures half-space coverage. It can then achieve precise positioning of its companion satellite as long as its antenna face is aiming at it. 76)
Two FFRF flight models (FM), one for Mango and one for Tango, were integrated into the PRISMA satellites in October 2009. Since the antenna configurations are not symmetrical on Mango and Tango, the FM architectures differ slightly (Figure 25).
FFIORD timeline (Ref. 76) :
A. FFIORD Experimental Slot Overview. - Over the 8-month duration of the PRISMA mission, the FFIORD experiment will run for ~75 days. Tests will be spread over three different categories of experimental slots:
1) Passenger experiment: the spacecraft attitude and the relative trajectory are defined by the primary experiment and the data rate is rather limited for the passenger. Such experiments allow for FFRF sensor commissioning, routine characterization and extensive data collection any time opportunities are offered. The CNES RF navigation function can also be enabled during a passenger experiment. The passenger experimental slots were not considered during the overall FFIORD scenario definition process since the priority is given to the primary experiment and there is no guarantee for the passenger. However they offer a real plus value of the PRISMA mission and the first FFIORD passenger experimental slot was shown to be extremely fruitful when performing preliminary FFRF sensor commissioning.
2) Primary Open Loop Experiment (OL): during those experimental slots the spacecraft attitude and the relative trajectory are defined by the primary experiment but achieved using the PRISMA services (GPS based navigation function and Autonomous Formation Flying guidance and control function for the trajectory). It is used for the FFRF sensor full validation (calibration included) and also for testing CNES GNC functions in open loop.
3) Primary Closed Loop (CL): during those experimental slots the spacecraft attitude and the relative trajectory are defined by primary experimenter and the relative trajectory is achieved using experimenter GNC algorithms. It is dedicated to the FFIORD FF experiments.
B. FFIORD Experimental Activities. - The FFRF and GNC activities, to be performed during FFIORD experimental slots, are summarized hereafter.
1: FFRF activities:
a) Acquisition time: objective is to characterize the RF signal acquisition time (typical time is less than one minute) by periodically resetting the equipment and wait for 5 minutes. This test is to be performed within various relative geometries (LOS, distance) spanning the whole PRISMA allowed flight domain, with or without aiding data provided by GNC and for different Tango FFRF antennas in visibility.
b) Acquisition tracking thresholds: objective is to characterize the distance where the RF signal is lost (resp. reacquired). Typical distance is 3 km in Low Power, and 30 km in High Power. This test is to be performed on a slow drifting orbit with increasing (resp. decreasing) distance.
c Antenna handover: objective is to characterize the handover between Tango's 3 Rx/Tx antennas (which is autonomously performed) by setting Tango on a 360o rotation during 2 orbits. This test is to be performed at close distance (resp. far distance) in Low Power mode (resp. High Power mode).
d) Integer ambiguity resolution: objective is to validate IAR process on the LOS measurements as well as on distance measurements. The IAR on LOS consists in performing a 50o rotation along the Mango antenna bore sight axis during a few minutes. This test is to be performed for various azimuth / elevation to assess the robustness of the process with respect to multipath environment especially at high elevations. Following LOS IAR, distance IAR consists in letting the sensor filter the measurements over roughly 15 minutes to remove ambiguities on WL phase and F1 CP. The distance IAR (Integer Ambiguity Resolution) tests will be performed under various azimuth / elevation.
e) Performance: performance tests simply consist in letting the sensor run over long periods of time (many orbits) so as to assess both LOS and distance measurements performance by comparing with the GPS post processed data. It will enable distance and LOS bias calibration.
f) Multipath characterization: a cartography of multipath errors (for both LOS and distance) will be drawn and compared to the one obtained on-ground. Aim is to build multipath correction tables that will be uploaded within the instruments to improve final performance. This test requires to sweep a wide range of azimuths/elevations. On Mango side this will be performed by following a spiralling attitude profile, starting from a null elevation and progressively increasing this angle, while spinning around the antenna line of sight axis. On Tango side the attitude control subsystem does not allow for such an agility. Hence the test will be performed by setting Mango in Tango Pointing attitude mode, and by following a relative trajectory approaching Tango with increasing cross track and radial amplitude (one can think of a screw driver trajectory with a continuously increasing amplitude).
g) Ionosphere impact: the purpose is to assess presence of ionospheric bias as well as to evaluate the potential ionospheric variation over an orbit. The principle consists in comparing the relative evolution of the three distance raw measurements (code and carrier phases at frequency 2275 MHz, carrier phase at 2105 MHz): a relative drift will mean ionosphere error is not negligible. This test is almost continuously performed in parallel with the performance oriented tests.
2: GNC activities: The GNC activities are intended to validate formation flying algorithms.
a) RF navigation: the Radio Frequency based navigation is permanently active when the FFRF sensor is powered on. During the FFRF sensor oriented tests the RF navigation function will be commissioned and tuned to improve accuracy. During the CNES closed loop experiment it will serve as input for the guidance and control algorithms.
b) Standby (SBY): this function is in charge of passively controlling Mango on a safe relative orbit with respect to Tango. Typical delta-V period is one per orbit, and typical relative distance is 300 m with an amplitude of the ellipsoid orbit of 20 m cross track and 20 m radial.
c) Proximity operations (PROX): the associated guidance and control functions are in charge of performing forced translations and station keeping in the vicinity of Tango (a few tens of meters).
d) Rendezvous (RDV): the rendezvous guidance function affords an autonomous capacity for safe rendezvous or deployment from a distance of about 10 km to 100 m. It is based on model predictive like control method with maneuver dates fixed on ground.
e) 2-maneuver transfer (2MT): this function performs a transfer between two relative Mango states (position and velocity) using two impulsive open loop control maneuvers and a defined drift period.
f) Collision avoidance (CA): if the Mango spacecraft enters into the Tango safety sphere, this function computes one instantaneous open loop maneuver (and a second one if this option is selected) that transfers the Mango spacecraft onto a relative orbit staying outside the safety sphere. The first option that can be considered consists in setting a relative drift between Tango and Mango. It appears to be very simple and very robust. The second option is inspired by geostationary spacecraft collocation and phases radial and normal separations so that when one of them cancels, the other one is maximal.
3: Synthesis:
Table 7 and Table 8 synthesize the FFRF and GNC activities and mention the number of executions for each of them. They clearly show the intensity of FFIORD activities onboard PRISMA. Finally, Table 9 summarizes the experimental slots allocated to FFIORD and the activities accommodated during those slots.
FFRF activity | Number of tests |
Test signal acquisition time | 40 |
Assess acquisition / tracking thresholds in LP | 2 |
Test Tango RF antennas handover | 6 |
Test Integer Ambiguity Resolution (IAR) | ~100 motion-aided LOS IAR (plus distance IAR) |
Performance assessment | 13 sessions |
Multipath characterization | 7 tests for Mango, 2 tests for Tango |
Assess ionosphere impact | In parallel of the performance activities |
GNC activity | Number of tests |
RF navigation | Continuously |
Standby | 5 nominal SBY and 2 with autonomous transfer |
Proximity operations | 7 sessions |
Rendezvous | 5 nominal RDV with distances up to 9 km and 2 reverse RDV |
N* 2 maneuvers transfer | 11 simple 2MT and 2 multi-orbit 2MT |
Collision avoidance | 3 double boosts and 2 single boost (drift) |
Experimental slot | Type, data, duration | Activities |
FFRF sensor checkout | Passenger, 21/06/10, 1 hour | - Basic health check via TM/TC exchange (no RF signal) |
FFRF sensor validation | Passenger, 30/08/10, 12 days | - FFRF sensor commissioning and basic characterization |
FFRF Init | Primary OL, 15/09/10, 3 days | - FFRF sensor characterization (all tests except multipath) on a relative orbit spanning from 100 m to 9 km |
FFRF envelope | Primary OL, 07/10/10, 6 days | - FFRF sensor characterization on a relative orbit spanning from 100 m up to 9 km - FFIORD GNC OL tests on a slow drift from 1000 m to 25 m |
FFRF GNC1 | Primary CL, 28/10/10, 4 days | - Sequential commissioning of all FFIORD GNC functionalities which constitutes the "core" part of the FFRF based closed loop operations |
FFRF Passenger Near | Passenger, 16/12/10, 18 days | - FFRF sensor characterization at medium distances and analysis of possible peculiar behavior observed during FFRF GNC1 activities |
FFRF GNC2 | Primary CL, 24/02/11, 2 days | - Repetition under different conditions of GNC1 activities |
FFRF Passenger Far | Passenger, 14/02/11, 20 days | - Validate FFRF sensor over its whole domain of operation (up to 30 km) by collecting data when spacecraft inter distance goes beyond PRISMA ISL range |
FFRF GNC3 | Primary CL, 09/03/11, 4 days | - Repetition under different conditions of GNC1 activities |
Early FFIORD Flight Results
A. FFRF sensor validation:
For the first time, the RF link was established between the two FFRF terminals. FFRF distance was initially based on smoothed code measurements (IAR was not yet performed). Post-processing of the data and comparison with the GPS POD showed a very good accuracy, prior to any FFRF distance calibration (40 cm bias and 3.8 cm noise). LOS (Line-of-Sight) accuracy could not be assessed yet as it required satellite rotation. The experimental slot consisted in a thorough functional commissioning of both FFRF sensor and RF-based navigation. Both proved to be very satisfactory.
In the last part of the scenario, multiple rotations of Mango around Tango were performed so as to test antenna handover on Tango FFRF. The objective of the test was twofold: first test antenna switching when RF link is established; second test cold start acquisition when signal has been lost. Both tests turned out to be successful. As for acquisition time (Table 10), it depends on Tango's antenna in visibility of Mango. Typical duration is between 50 to 60 seconds. Note that at the end of the acquisition time, the distance output by FFRF is based on code measurement. Final accuracy requires IAR process which lasts for 15 minutes.
Tango antenna in visibility of Mango | Minimum | Mean | Maximum |
RT1 | 46 s | 53 s | 82 s |
RT2 | 46 s | 58 s | 82 s |
RT3 | 50 s | 65 s | 87 s |
B. FFRF Init: This experimental slot was dedicated to characterization of FFRF sensor (acquisition time, LOS and distance performance) and RF-based navigation.
1) Acquisition time. All 32 acquisition tests were successful. They were all performed with Tango's FFRF antenna #1 in visibility. Minimum acquisition time was 42 seconds and mean acquisition time was 45 seconds.
2) LOS performance. 17 motion-aided LOS IAR tests were performed. For small elevations (< 30o) tests were successful. However ambiguity resolution failed for higher elevations. This was unexpected as tests performed in CNES anechoic chamber had all been successful even for elevation up to 80o. This abnormal behavior is currently under investigation.
When LOS IAR is successfully performed, resulting LOS is very accurate. For small elevations (< 30o) mean error is equal to 0.8o (this bias will be calibrated) and the standard deviation is equal to 0.2o.
3) Distance performance. The distance IAR process is very sensitive to biases (code, WL, CP) which are not calibrated. Indeed important biases on code and WL measurements cause WL IAR to fail. This results in a bias of 90 cm on final distance. However, the relative distance is very accurate with a standard deviation equal to 1 cm.
4) RF navigation. In parallel with the FFRF sensor tests, the RF navigation function was activated and showed excellent results when the Mango attitude mode was set to Tango pointing (FFRF elevation close to 0o). The navigation errors appeared to have a standard deviation of a few cm on the along-track (X) and nadir (Z) axis when comparing with the GPS POD (Figure 26). The cross track error (Y) is bigger since there is no dynamic coupling between the cross-track component and the accurate FFRF distance measurement.
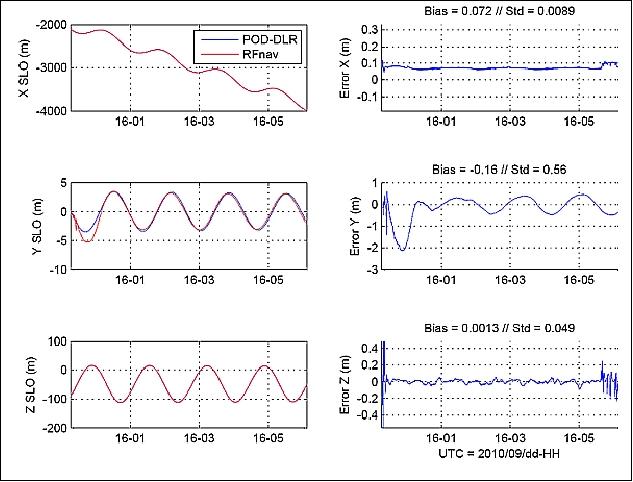
C. FFRF envelope part 1: In this second FFIORD primary experiment, FFRF and the RF-based navigation characterization were carried on. In addition the first multipath calibration was performed.
1) LOS performance. A lot of motion-aided LOS IAR were performed (52). The results confirmed the tendency observed during the INIT scenario. All 18 tests with elevation less than 35° were successful. However, for cases where elevation is greater (tested up to 57o), 19 IAR out of 34 failed. As previously, when the IAR was successful, the LOS accuracy is less than 1o, otherwise the error can reach 20o.
2) Distance performance. As for distance, IAR process appeared to be very sensitive to elevation angles. Multipath error magnitude increases with elevation on Mango or Tango and causes IAR to fail. At worst distance error can reach 90 cm. Without multipath calibration tables, alignment of satellite (i.e. elevation close to zero) is necessary. In that case error is less than 2 cm.
3) Multipath calibration. To improve IAR robustness we need to calibrate multipath error in function of azimuth/elevation (for both LOS and distance). The first multipath characterization was performed during this scenario thanks to a specific attitude profile (Figure 27). Error mapping for y-component of LOS vector can be seen in Figure 28. It ranges from -1 cm (-0.6o) to 2.5 cm (1.5o). Assuming that the other error contributors are negligible (Tango residual attitude movement inducing more multipath effect, Mango attitude estimation error, POD error, geometrical uncertainties ....) then this kind of computation gives access to the multipath error on Mango. The results are not available yet for the distance error as post-processing is more complex (it requires to remove other perturbing error contributors).
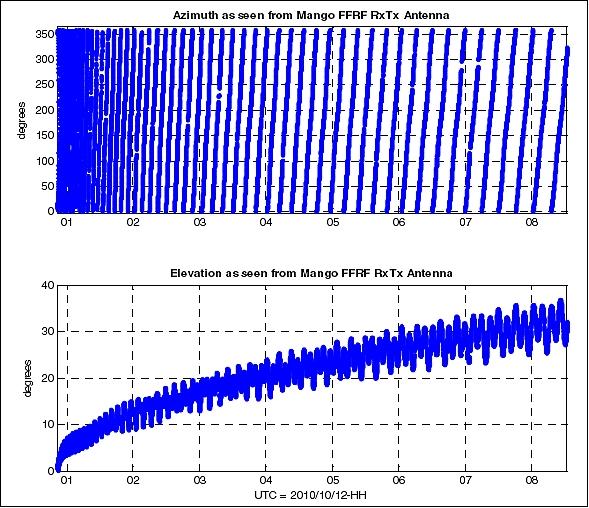
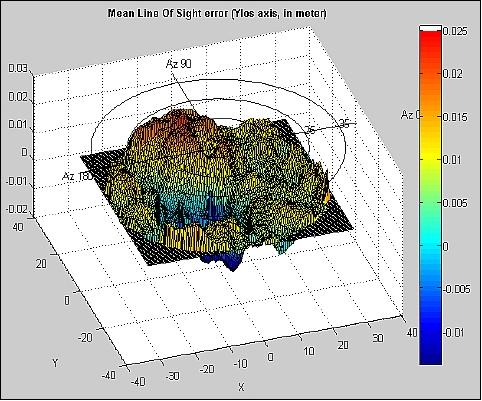
D. GNC1 part 1:
During GNC1 experimental slot, formation flying in close loop was performed for the first time. All FFIORD GNC functionalities were successfully demonstrated : maintain passively a safe relative orbit (Standby), perform autonomous rendezvous from km away down to a few hundreds of m, perform proximity operations with a few cm accuracy and trigger the safe collision avoidance when necessary.
As an example, results from day 2 and 3 of GNC1 are presented (Figure 29). It started with an autonomous Rendezvous from 5000 m away from Tango to reach an intermediate way point at 500 m along-track. Once arrived at this way point, a 2-Maneuver Transfer was computed and executed to go down to 100 m along-track. One trim maneuver was required to improve accuracy and precisely reach the goal ([1 cm, 1 m, 50 cm] error respectively along-track, cross-track and radial). The Proximity module was then activated to do station keeping at 100 m from Tango. The accuracy of this station keeping phase was very good. The RF navigation estimation showed a control error of 2.6 cm standard deviation along track, 12 cm cross-track and 5.7 cm radial. The next phase consisted in going down to 70 m by following a forced trajectory and doing some more station keeping. Once again the behavior was very good. Within the scenario a collision avoidance triggering had been planned to demonstrate the capability to safely go away in case anything goes wrong. It was successfully executed.
This scenario is very typical of the formation acquisition and reconfiguration that will be performed by future formation flying missions (e.g. telescope distributed over 2 satellites): the chaser spacecraft (e.g. detector satellite) shall autonomously acquire the formation from the post launch initial conditions and progressively reach its nominal position at a specific distance from the target spacecraft (e.g. at the focal point located a few tens of meters behind the focusing satellite), then it shall reduce the control box within a few cm to allow for stabilized observation. If necessary a transition to a more accurate optical metrology stage shall be performed so as to offer 1 or 2 orders of magnitude improvement on the state estimation accuracy and on the control error. Reconfiguration of the formation baseline (e.g. focal length reduction or telescope reorientation) is to be performed with forced trajectory like movements.
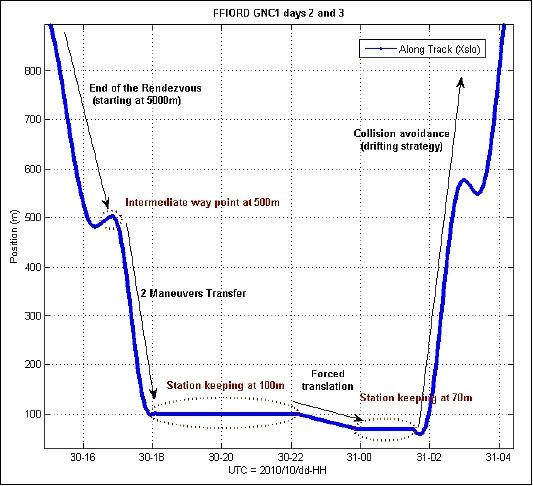
Results of the PRISMA/FFIORD Extended Mission
Several experiments have been performed by CNES during the extended PRISMA mission which started in August 2011. A first session in October 2011 addressed two objectives: (1) demonstrate angles-only navigation to rendezvous with a non cooperative object, (2) exercise transitions between RF based and vision based control during final formation acquisition. A complementary experiment in September 2012 mimicked some future astrometry mission and implemented the maneuver required to point the two satellite axes to a celestial target and maintain it fixed during some observation period. 77)
With FFRF (Formation Flying Radio Frequency), CNES provided a new metrology subsystem designed for future outer space FF missions and some on-board GNC software to perform a variety of formation flying experiments.
The FFRF Sensor is a distributed instrument designed to provide range and LOS (Line Of Sight) measurements at 1 Hz with a targeted accuracy of 1 cm and 1°. Its functional principle is inherited from a GPS receiver using dual frequency S-band signals. Its operating range is 3 m-30 km and its behavior has been characterized in flight over most of that domain. In its current design and accommodation, its main limitation comes from its sensitivity to multipath that may lead to initial range biases up to 1 m and bearing bias variations in the 0.5° range for 30° attitude changes. During the nominal mission, this instrument allowed anyway to achieve the various formation acquisition and formation-keeping objectives and demonstrate forced positioning with 1 cm stability.
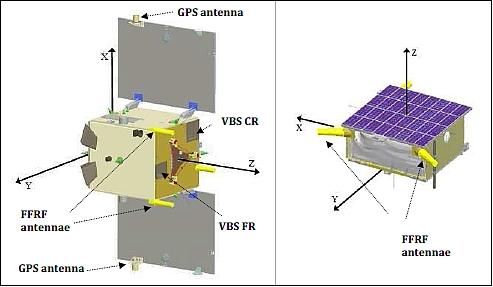
The Vision Based Sensors (VBS), whose design is derived from the µASC (Micro Advanced Stellar Compass) star tracker, have been specifically tailored to achieve two complementary navigation purposes: long distance detection and tracking of a moving target , VBS FR (VBS Far Range), relative position/attitude estimation of a cooperative target, VBS CR (VBS Close Range).
The Close Range camera (CR_VBS) detects the signal of the LEDs (Light Emitting Diodes) located on the Tango satellite. The CCD coordinates of all luminous objects are extracted and the detected pattern is compared with the model stored in the database. To improve robustness, the camera optical pass band is narrowed using a filter centered on the LED wavelength but the whole satellite remains visible. The instrument operates up to 40-50 m and delivers a localization estimate at 1 Hz with an accuracy that depends on the lighting conditions (a sub-millimeter accuracy for the position and below 1° for the relative pose was achieved in laboratory conditions at 10 m distance). In the nominal mission, this instrument allowed OHB-Sweden to achieve forced positioning with 1 cm accuracy at 10 m range.
The Far Range camera (FR_VBS) is a star tracker operating in a particular mode. In Far range mode, the camera processing unit is capable to detect the luminous objects that do not belong to the star catalog and that can be robustly spotted as potential orbital targets after a few acquisition cycles given their apparent motion. At long range, since stars are visible in the field of view, the camera can deliver an attitude quaternion that helps to get rid of the camera bias alignment problem. At smaller range, the target luminosity increases and the activation of the electronic shutter is necessary to avoid blooming effects (Intermediate mode) which limits the capability to estimate inertial attitude. At short range, the target becomes a large blob in the field of view and the camera processor uses some image processing algorithm to extract characteristic satellite feature and estimate the direction of its center of mass. Given the stringent lighting conditions, the robustness of this process is potentially weak and direction biases are likely to be observed.
The Phoenix GPS receivers allow to perform on-board relative navigation with an accuracy in the 10 cm range and this information is used to perform some FF experiments and ensure PRISMA formation safety in all circumstances. In addition, the raw GPS measurements processed on the ground allow to perform Precise Orbit Determination (POD) and reach a relative accuracy in the sub-cm range.
The propulsion system used for the FF and rendezvous experiments relies on 6 hydrazine 1N thrusters with a 0.7 mm/s MIB (Minimum Impulse Bit) at the mission start. Most maneuvers require the use of at least 2 thrusters, which push the effective MIB in the 1 mm/s range. This resolution level outline, the challenge of reaching the centimeter positioning accuracy , constituted an important performance limiting factor during the experiments with FFRF and CR_VBS.
Overview of the PRISMA/FFIORD extended mission results (Ref. 77)
The PRISMA extended mission enabled CNES to pursue its demonstration effort that was initiated in the formation flying domain and focused on radio-frequency navigation. Three new experiments were performed to exercise more challenging tasks in formation flying as well as autonomous rendezvous and this involved the addition of optical sensors in the loop.
1) The first experiment brought additional evidence that vision based navigation in LEO (Low Earth Orbit) represent a valid technique to perform rendezvous with non cooperative objects. Four consecutive rehearsals with ranges up to 10 km down to 50 m were successfully performed under realistic conditions of initial uncertainty. Using collected flight data, complementary runs in replay mode have also shown the technique robustness in the presence of data loss and larger uncertainty as well as its potential of improvement through some limited adaptation.
2) The second experiment involved transitions between RF and optical metrology at short range in several scenarios to acquire knowledge on the metrology, navigation and control issues that could occur in similar phases during future formation flying missions. Even though the second stage was not a real FF sensor candidate, the successful experiment allowed to exercise in the real world the filter tuning tasks and increase the maturity level of the software involved.
3) The third experiment enabled to emulate the type of maneuvers that will be required in future astrometry FF missions represented by the NEAT (Nearby Earth Astrometric Telescope)/µNEAT concepts. The formation was pointed successively to a set of celestial targets and the configuration was maintained fixed during time slots representing observation phases with a control stability better than 4 cm (1?). Under such stringent environmental and operational constraints, the good functional behavior and performance level constitutes a blatant illustration of the margins that should be available when going on a higher orbit and using finer equipment for both metrology and actuation.
The results of these experiments are important for future applications; they illustrated in particular their relevance for the active debris removal domain. Here, a representative mission scenario spanning the rendezvous and inspection phases was implemented on a numeric simulator that was built within a short timeframe using the output from three experiments: (1) the GNC system relied entirely on functional bricks developed and already flight validated; (2) the collected metrology data allowed to improve the fidelity of the sensor models. The simulation results presented illustrate the continuing work and outline the value of the PRISMA/FFIORD heritage.
As regards future formation flying, specifically challenging missions such as NEAT, another possible work axis may consist in reusing the RF metrology data in order to extrapolate the system behavior during the formation acquisition and re-pointing phases with different spacecraft and environment characteristics. This modest effort would allow to anticipate the achievable level of performance with the current technology on less perturbed orbits and participate to the promotion of these missions. Nothing will replace, however, the demonstration of positioning accuracy down to the millimeter range as it is envisioned for the future PROBA-3 technology mission of ESA.
PRISMA Propulsion Systems
The MAIN spacecraft uses the following propulsion systems:
1) Hydrazine RCS (Reaction Control System)
2) HPGP RCS
3) MEMS-based micropropulsion experiment
The hydrazine RCS is the MAIN platform propulsion system, while the HPGP system is considered a flight demonstrator, but will also contribute with ?V capability to the mission. The total ?V capability of the PRISMA propulsion is ~170 m/s, which is more than two times the mission requirement. The two propulsion systems are planned to be operated separately, but can be also be operated simultaneously, which adds redundancy. The thrust vectors are directed towards the COG (Center of Gravity) of the S/C, and are located such that torque-free motion can be created in all directions. Potential misalignment of the thrusters can be compensated with the reaction wheel torque. None of the thrusters are pointing directly in the rendezvous direction. 78) 79) 80)
• Hydrazine RCS, designed by SSC: It has six 1 N thrusters. The propellant tank contains 11 kg of usable fuel and gives approximately 120 m/s ?V over the mission.
• HPGP (High Performance Green Propulsion), an environmentally friendly and non-toxic chemical propulsion system developed by ECAPS (a subsidiary company of SSC), and supported by ESA. The objective is to provide a performance equal to or better than monopropellant hydrazine. The PRISMA mission serves as a flight technology demonstration for HPGP. The new monopropellant being used is storable, offers a reduced handling hazard, is environmentally benign, and gives a higher performance when compared with hydrazine. 81)
The instrument, mounted onto the MAIN spacecraft, features two 1 N thrusters such that a torque-free motion can be created in all directions (this is equivalent to six traditional hydrazine thrusters). The HPGP propellant tank contains 5.6 kg fuel and gives approximately 60 m/s ?V over the mission.
The on-orbit HPGP tests are performance-over-lifetime tests and are carried out at the beginning and end of the PRISMA mission. The first tests are performed while TARGET is still attached to MAIN. The purpose is threefold:
- To characterize the initial performance
- To commission the thruster system
- To increase the eccentricity of the orbit.
The system shall demonstrate performance by both steady state burns up to 30 seconds, down to minimum impulse bits of 0.1 Ns (requested typically at autonomous formation flying and proximity operations).
The new monopropellant for HPGP is based on ADN (Ammonium Dinitramide); the monopropellant LMP-103S is a blend of ADN (NH4N (NO2)2), water, methanol and ammonia. ADN is the oxidizer which is dissolved in water with methanol and ammonia as fuel components, where ammonia also acts as a stabilizer. The theoretical specific impulse (Isp) for LMP-103S is: Isp = 2477 Ns/kg (or Isp = 252 s) for an expansion ratio of 50:1, which is approximately 6 % higher than for hydrazine. The density for LMP-103S is 1.24 g/cm3 at 20oC (24% higher than hydrazine), which results in a density impulse which is 30 % higher than for hydrazine.
Research and development of ADN began in 1997 as a co-operation between SSC and the Swedish Defence Research Agency (FOI). The objective was to develop a propellant, which is safer and has better performance than hydrazine (hydrazine is highly toxic and carcinogenic; it is also volatile and very reactive). The R&D work has been performed under contract from SNSB (Swedish National Space Board) and ESA.

• Micropropulsion cold-gas thruster experiment, developed by Nanospace, a spin-off company from the Uppsala University, Sweden (partly owned by SSC). The objective is to test this new actuator system (as an experiment) on PRISMA capable of delivering continuous thrust levels between 10 µN to 1 mN. The main advantage over conventional motor systems is the very low and disturbance-free thrust, as well as the thrust feedback control which enables a continuous throttling between minimum and maximum thrust without discrete impulse bits. The development is supported by ESA. 82) 83) 84)
A generic micropropulsion system consists of the following major components/subassemblies (Figure 34):
- A high pressure-type propellant tank
- Two or more thruster pod subassemblies
- A pressure regulator
- A system filter
- Two pressure transducers
- A pressurant fill/vent valve
- A pressure relief valve
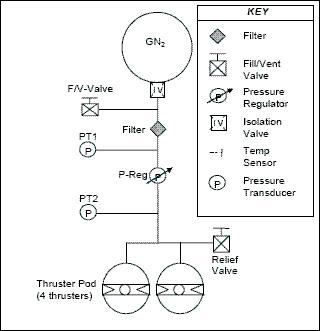
Propellant | N2 (G) |
Maximum thrust | > 1 mN |
Minimum thrust | < 10 µN |
Specific impulse (Isp) | > 100 s (hot N2); > 50 s (cold N2) |
Thrust noise | < 0.1 µN/Hz1/2 |
Total impulse | 10 kNs |
Design life | 8 years in orbit |
Power consumption | < 1 W/thruster |
Mass, size | < 100 g, 45 mm diameter |
The thruster pod, which differs significantly from a conventional cold gas thrusters, does in this case contain four individual mN (milli Newton) thrusters arranged in-plane and orthogonal to each other. The thruster pods include filters, heaters, and temperature-sensors. This offers a significantly reduced size and mass compared to four conventional cold gas thrusters.
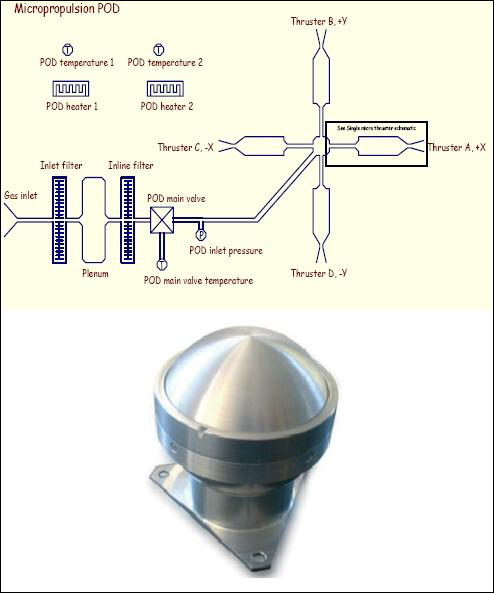
The thrusters are manufactured in MEMS technology in stacked silicon wafers with integrated thruster valves and a thrust feedback measurement system. The stack contains 4 orthogonally located thrusters, each integrated into a thruster pod. The pod system has approximately the size of a golf ball (Figure 35).
Micropropulsion Flight Experiment: The micropropulsion system does not require any additional sensors or software functionality other than the micro-thrusters themselves and their command interface since the thrusters are mounted on a three-axis stabilized and reaction-wheel controlled spacecraft. Two different methods to evaluate performance of the micropropulsion system are planned:
- Use of the reaction wheel response
- Use of post processed GPS-data for precise orbit determination.
Integrated propulsion system on PRISMA
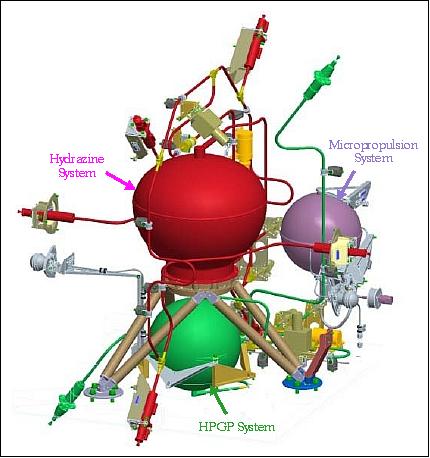
Legend to Figure 36: Hydrazine = red color; HPGP = green, Micropropulsion = purple.
The implementation on PRISMA (MAIN S/C) employs 2 pod systems in an arrangement such that all thrusters can be fired. The performance of the microthruster system will be measured by means of disabling the attitude control loop of the MAIN S/C and to register the attitude motion caused by the thrusters. - The cold gas micro-thruster tests are performed only open-loop through ground commands. The response is registered by post-analysis of the momentum build-up in the reaction wheels.
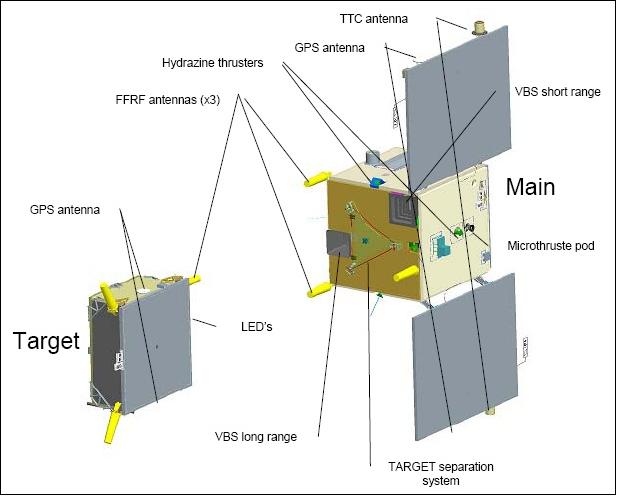
In summary, the PRISMA mission will demonstrate:
• Autonomous formation flying
• Autonomous proximity operations
• Vision based rendezvous sensor
• Test flight of Darwin mission (ESA) RF sensor
• Test flight of Green Propellant propulsion system
• Test flight of a MEMS-based micropropulsion system
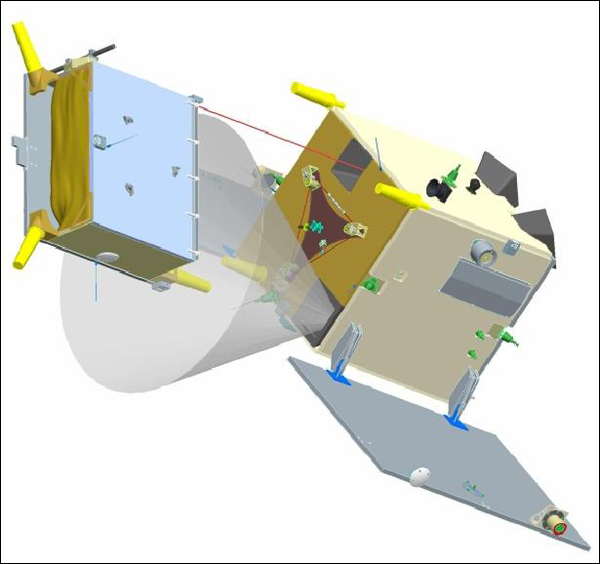
HVS (High-resolution Video System)
HVS is a compact digital video camera development of Techno System Developments of Pozzuoli (Naples), Italy. The instrument is also referred to as DVS (Digital Video System). The prime objective is to space-qualify the system and to demonstrate its performance in various applications. However, HVS is not linked to any navigation and control tasks of the PRISMA mission. HVS is installed on the MAIN S/C, it can be used to acquire images or video sequences related to the TARGET S/C during maneuvers. HVS can also take images of Earth's surface. 85)
HVS is composed of:
• Optical unit
• VMU (Video Management Unit).
The optical unit is in turn composed of the camera, objective, and baffle. The camera is based on a color camera with an interline transfer, progressive scan Kodak CCD sensor and it is able to acquire still color images and video sequences employing a Bayer (RGB) filter. The optical unit is provided with a fixed objective with a focal length of about 30 mm and FOV of ±14.0o (for both the horizontal and vertical views).

Sensor type | CCD Kodak KAI 4021 |
Pixel array size, pixel size | 2048 x 2048 pixels, 7.4 µm x 7.4 µm |
Frame rate | up to 30 fps (reduced resolution) |
Resolution (pixel value) | 8/10/12 bit |
Power | 12VDC (5.04 W) |
I/F to spacecraft | 2 HK5160R157L12 heaters, 5W @ 28V |
Environmental operating range | -20÷40oC, lower operative temperature by using built-in heater |
Characteristics | - Binning & ROI, - Color Bayer filter and mono |
Focal length, max aperture | 30 mm (±2%), f/2.8 |
Spectral range | Standard RGB, 430 to 680 nm |
Resolution | MTF>50% at 70 lp/mm |
Distortion, vignetting | Less than 0.5%, less than 30% |
FOV (Field of View) | ± 14.00o (H&V) |
Focus | Registered before installation |
The HVS is based on a modular and highly configurable unit, referred to as H2VMU (High-resolution / High-frame rate Video Management Unit), and developed by Techno System Developments. The device provides state-of-the-art capabilities in terms of image acquisition, data compression and on-board storage for space applications. The H2VMU is fully configurable in terms of numbers of video inputs, video data rate and storage capacity.
The H2VMU performs the following functions:
- high resolution/high frame rate camera acquisition
- real-time wavelet-based lossy or lossless compression
- on board storage
- real time transfer of compressed video data.
Video input data rate | up to 60 Mpixel/s for each video input module |
Pixel resolution | up to 12 bit |
Compression rate | up 20 Mpixel/s for each compression module |
Storage capacity | up to 3 Gbyte on volatile media or up to 64 Gbyte on non-volatile media for each storage module |
Storage data rate | up to 30 Mpixel/s |
Output | SpaceWire running up to 50 Mbit/s |
Mechanical size | from 112 x 128 x 143.5 mm to 234 x 128 x 143.5 mm |
Mass, power | from 2.125 to 4.370 kg, from 13 to 40 W |
The H2VMU configuration for PRISMA is based on the following modules:
• CIVA (Camera Interface and Video Acquisition) board for image grabbing
• WCM (Wavelet Compression Module) for image compression
• CCSM (Control, Communication & Storage Module) for unit control and data storage and transfer
• PCDM (Power Conditioning & Distribution Module) for unit powering.
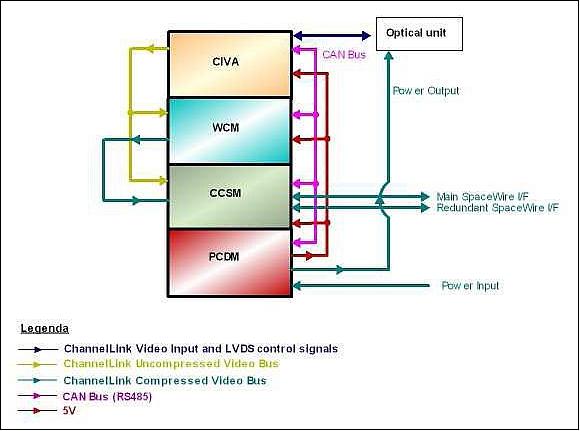
Ground Segment
The ground segment is implemented by SSC and utilizes both existing parts of the SSC Satellite Operations facilities in Kiruna, as well as introduces the newly developed check-out and control ground support equipment RAMSES (Rocket and Multi-Satellite EMCS Software). RAMSES is a new generation general software-based control system that includes the core functionality of a mission control system while offering great advantages compared to other control systems available on the market. 86)
The ground segment consists of the following elements (Ref. 15):
• OCC (Operations Control Center) located in the SSC Esrange satellite control center in Kiruna. The OCC provides the routine operations and surveillance and executes the TM/TC up/downloads according to MCC instructions. OCC utilizes existing antennas and infrastructure, but has been completed with a RAMSES installation.
• MCC (Mission Control Center) located in Solna, Stockholm. The MCC contains the Mission manager and the engineering and analysis power. MCC prepares the operations, generates and validates (via a simulator environment) the flight procedures and analyses generic platform performance flight data.
• ECC (Experiment Control Centers), one for each experimenter group. These can be located at SSC, but may also work remotely via internet. The ECCs prepare experiment scenario procedures (for MCC to validate) and analyses experiment data.
• A data archive (not depicted on the figure). All flight data (raw as well as processed data) will be located on the internet accessible for all experimenters.
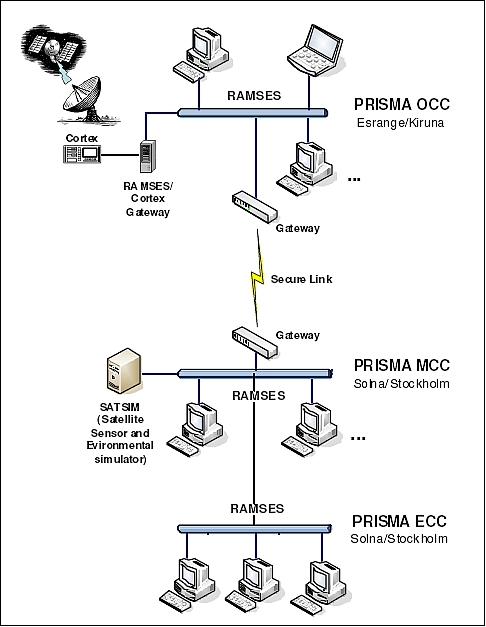
SATSIM (Multisatellite Simulator)
The Satellite simulator SATSIM at SSC was developed during the experimental PRISMA multi-satellite formation flying project, primarily to validate the GNC (Guidance, Navigation and Control) and On-board software (OBSW) in a simulated environment. The SATSIM system has as main features the ability to simulate sensors and actuators, spacecraft dynamics, RTUs (Remote Terminal Units), environmental disturbances, solar illumination conditions, solar and lunar blinding etc. 87)
SATSIM is the real-time simulator developed to handle and support the different phases of the PRISMA project. It is using MATLAB/Simulink model based design techniques and the RTW (Real-Time Workshop, a MATLAB code generation toolbox) to perform automated code generation.
SATSIM is running on the MATLAB real-time operating system xpcTarget. There are many advantages to use the model based design, the simulator model is always up to date with the code generated from it. Also the simulator has been designed in such a way that the dynamics, sensor and actuator models are possible to connect with the GNC flight software directly and run it in a pure Simulink environment. This makes it possible for the GNC engineers to test algorithms without having to generate any software.
The simulator model was also designed in such a way that sensors and actuator characteristics might be modified with tunable parameters. The sensors or actuators characteristics can hence be modified either from procedure scripts before actually starting the simulation, or by changing the behavior during the simulation (simulating different error conditions). All the tunable parameters are defined in MATLAB scripts. As part of the simulator release procedure, all these parameters are documented and summarized in a readable format with the help of MATLAB scripts. The documentation is therefore always updated and tagged to the specific simulator version.
SATSIM-RAMSES communication: To be able to control the SATSIM from RAMSES an application is executing on one of the RAMSES machines, SatsimIF. This application is responsible for establishing a TCP/IP connection with the Satsim computer. It is also responsible for uploading the simulated model on to the xpcTarget machine. After the connection is established the SatsimIF will listen on the RAMSES multicast UDP network and redirect all commands required to control the simulation in progress, i.e. start/stop simulation and changes of tunable parameters.
SATSIM configurations: SATSIM was designed in such a way that it is possible to reuse the same functionality for different test purposes by only reconfiguring tunable parameters. There are five different configurations of SATSIM used in the PRISMA project.
1) GAS, the most basic functionality of SATSIM. It is a pure software configuration. GNC connected to S/C models directly.
2) SATLAB (Satsim Lab a lab test bench that consists of SATSIM and OBCs) is used and configured for test with the S/W on the actual OBC.
3) AIT (Assembly Integration and Test) where none, some or all of the RTUs are included in the test loop.
4) GSS, where a GPS signal simulator is part of the test loop.
5) OPSIM, operational simulator that is used by the ground station operational team to run the experiments timeline in advance before it is uploaded to the S/C.
GAS configuration: In this configuration the GNC software is connected to the core models of the simulator all implemented in pure MATLAB/Simulink. This configuration does not contain any external hardware and is used for test of the GNC S/W algorithms. This system is a faster than realtime system and it is used to speed up the simulations in order to give the GNC engineers a fast response on new simulations. This environment is also reused during the operation to validate the timeline of GNC operation.
In this configuration the RAMSES product is not involved in neither commanding nor the TM archiving. The commands are setup in advance and the TM is saved in MATLAB directly. For the operational scenarios the command scripts are first translated into the command line as a MATLAB variable. When the simulation is started the commands will be executed (one at a time) according to the contents of the command variable. There is no possibility to send new, on-the-fly commands during the simulation in this configuration.
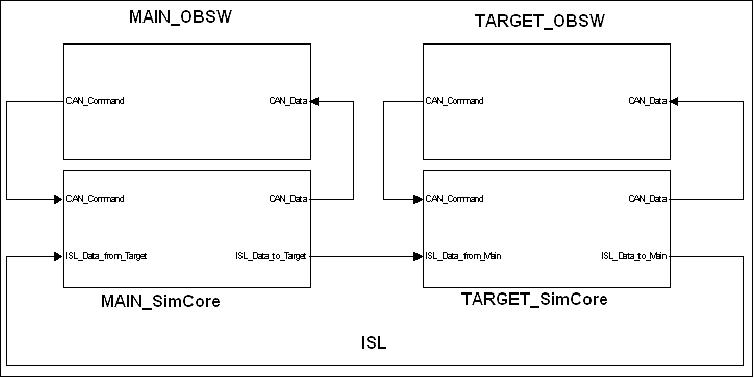
Legend to Figure 42: In this configuration, the GNC S/W is connected with the simulator in the Simulink environment. This configuration is used both for a quick test of GNC algorithm development but also for validating the operational timeline.
SATLAB configuration: The SATLAB configuration is a real-time system containing also the flight on-bard computers. In this configuration the RTUs are simulated and the SATSIM is connected with the OBC through the CAN bus. In the normal case in this configuration none of the RTU H/W are in the loop and they are completely simulated by SATSIM. The simulation input are the control commands received from the OBSW and the output is CAN data from the simulated RTUs, sensor-, actuator, power- and thermal models. Both the S/C and the simulator are commanded from the RAMSES software with the help of the PLUTO procedure scripts, thereby making it is possible to automate the tests. Since the timing of the tests is handled by the scripts the tests can be re-run hence making the timing of the tests deterministic.
A big advantage of using the same control environment is that the flight procedures currently used by the operational team are the same procedures which have been used during the test and validation of the S/Cs. With this configuration the project has also the possibility to test and attend to timing issues of the space segment on ground before it is commanded to the real spacecrafts in orbit.
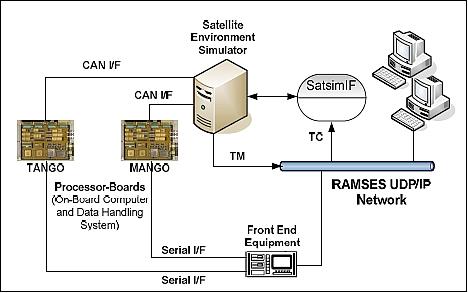
Legend to Figure 43: SATSIM is connected to the RAMSES environment via the RAMSES LAN. To enable communication with the SATSIM, an application SatsimIF is executing on one of the RAMSES computers which handle the control of the simulation.
AIT configuration: In the AIT (Assembly Integration and Test) configuration, the SATSIM is no longer simulating the RTUs. The design of SATSIM facilitates the possibility to have a mix of real and simulated RTUs. This is very useful since HW availability during the tests might be limited. The SATSIM is physically connected to the S/C RTUs and sensor testports via the PUSIMs (Platform Unit Simulators).
SATSIM is still connected to the CAN bus, but it is no longer generating any CAN traffic. It only listens to the on board control commands to update the dynamics. Based on the received command, SATSIM will then instruct the PUSIMs by sending them telecommands over the RAMSES network. In this configuration most of the S/C HW is part of the closed loop. Sensors which have a test port are also in the loop, such as rate-sensors, GPS, ST and VBS. SATSIM calculates the voltage, currents and serial data that the sensors generates and feed the RTUs with stimuli by sending commands to the generic PUSIMs.
The PUSIMS are designed to receive commands send from the simulator (or RAMSES in open loop tests) over the RAMSES LAN and generates the currents, voltages which normally the sensors generate. In this configuration it is possible to run both of the S/Cs in closed loop and only keep sensors without test ports out from the loop. The AIT configuration test ensures the confidence in the system and gives the tester a great possibility to initiate a fast transition to the test they want to conduct and with the initial conditions they prefer.
SATSIM control the S/C sensor(s) by sending commands to the PUSIMs.
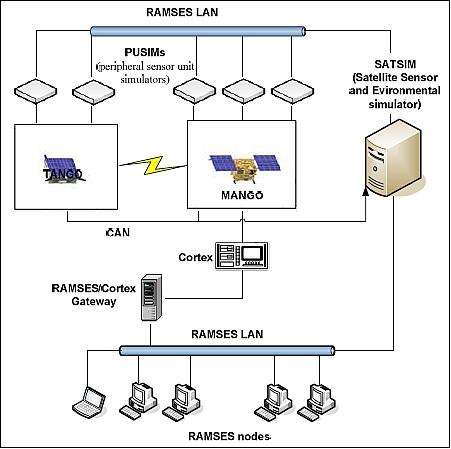
GSS configuration: Due to the importance of the GPS system for the PRISMA project it was decided to verify the whole GPS chain in closed loop simulations. In this configuration a GSS (GPS Signal Simulator) was added to the system to allow this advanced test to be performed. The GSS used is the GSS7700 Spirent. Due to the nature of the GPS signals, the oscillator in the SATSIM PC is not accurate enough to control the GSS signal output, the clock drift rate was as large as 0.7 seconds per hour corresponding to about 5 km in distance.
This situation was not acceptable in a system with a claim of centimeter precision. To allow for the GSS to be in closed loop, it is therefore necessary to change the xpcTarget interrupt source from using its own PC clock - to use the GSS very stable oscillator. However, this is not a very difficult task, requiring the selection of one of the parameters, when generating the code with the RTW parameter. By connecting the GSS 100PPS output to the parallel port interface and regenerating the code with the new xpcTarget/RTW parameter, it is possible to run the SATSIM with an external interrupt source.
The SatsimIF is responsible for establishing the connection between SATSIM and GSS. SATSIM calculates the orbital and attitude information and sends it on to the RAMSES network in form of TCs. These commands are then redirected by SatsimIF towards the GSS that generates GPS signals which are transmitted and received by the S/C GPS antennas. The timing of the start of the SATSIM and the GSS has also to be synchronized. Since all simulation control commands are received by the SatsimIF software, there is no problem to handle the synchronization from this application.
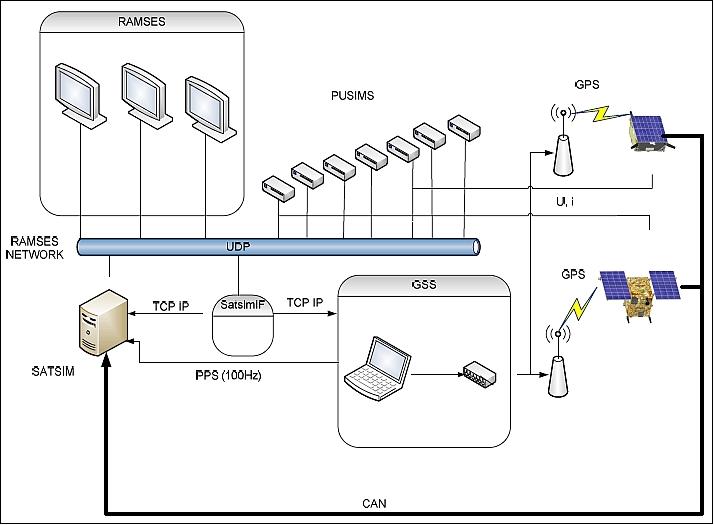
Legend to Figure 45: SATSIM controls the GSS by sending attitude and orbit commands to the GSS. The GSS generates the GPS signals which are transmitted to the GPS antennas on the S/Cs.
OPSIM configuration: With the OPSIM configuration, the SATSIM is configured for the operational validation. In this configuration only one RTU is in the loop and the other RTUs are simulated. This configuration also have an FFRF simulator which is an application running on a separate PC implementing the flight FFRF sensor software. This configuration is part of the operational configuration and can easily be switched to or from the actual ground control station using liveGate, a server application that enables tunnelling of data between separate LANs. This configuration is used to test the project experimental timeline before it is uploaded to the S/C. It was also heavily used for mission operation training and development of flight procedures before launch.
Simulation models: The complexity and the high level of precision of the PRISMA project require high fidelity requirements on all sensors, actuators, subsystems and RTU models, such as:
• Reaction Wheels (RW)
• Magnet Torquers (MT)
• Hydrazine Thrusters
• Micro propulsion Thrusters
• Sun Sensors (SS)
• Magnetometer (MAG)
• Accelerometer (ACC)
• GPS models (including the PPS HW signal)
• FFRF (Formation Flying Radio Frequency) model
• Startracker (ST) and Visual based sensor (VBS)
• Intersatellite link (ISL)
• Solar panels
• Batteries
• Power conditioning and distribution unit (PCDU)
• All RTUs
• Space environment: perturbation forces, solar pressure, drag.
For the RW model, the wheel speeds consist of the feedback data from the real S/C in the AIT configuration in order to achieve a representative simulation for unloading and S/C dynamics (to compensate for the actual RW friction). The sun-sensor model contains shading from S/C geometry. Startracker blinding by earth/moon and sun are part of the models. The power system contains both attitude dependency on solar panels and the dynamics of the batteries loading/unloading.
The impulse from the separation of TANGO from MANGO is also a part of the models together with the changes in the inertial matrix. This makes it possible to simulate the separation sequence at the moment the S/Cs are separated from each other. For the Intersatellite Link (ISL), the noise and bit errors are modelled based on attitude and measured antenna gain pattern and the distance between the S/Cs.
During the PRISMA test and operational phase, SATSIM together with RAMSES has been a stable and extremely important tool, not only to test the spacecraft segment, but also to train the operational team and to support the development of the flight procedures. Since the OBCs are part of the simulator, all commands and functions onboard can always be accessed, tested and tried out on the ground. The operational team can be confident in performing a task, because they can always choose to test the procedure in SATSIM prior to running the same procedure on the S/C.
References
1) S. Persson, B. Jacobsson, "PRISMA - Swedish in-orbit testbed for rendezvous and formation flying," Proceedings of the 57th IAC/IAF/IAA (International Astronautical Congress), Valencia, Spain, Oct. 2-6, 2006, IAC-06-D1.2.02
2) S. Persson, P. Bodin, E, Gill, J. Harr, J. Jörgensen, "PRISMA - An Autonomous Formation Flying Mission," Proceedings of the 4S Symposium: `Small Satellite Systems and Services,' Chia Laguna Sardinia, Italy, Sept. 25-29, 2006, ESA SP-618, URL: http://elib.dlr.de/46839/1/ESA4S_06_10a.pdf
3) E. Clacey, N. Pokrupa, S. Persson, A, Rosenqvist, "Using Small Satellites for New Applications: Next Generation Swedish Space Corporation Spacecraft," Proceedings of the 20th Annual AIAA/USU Conference on Small Satellites, Logan, UT, Aug. 14-17, 2006, paper: SSC06-III-10
4) S. Persson, B. Jakobsson, E. Gill, "PRISMA - Demonstration Mission for Advanced Rendezvous and Formation Flying Technologies and Sensors," Proceedings of the 56th IAC 2005, Fukuoda, Japan, Oct. 17-21, 2005, IAC-05-B5.6.B.07, URL: http://www.weblab.dlr.de/rbrt/pdf/IAC_05B56B07.pdf
5) S. Berge, B. Jakobsson, P. Bodin, S. Persson, "Rendezvous and Formation Flying Experiments within the PRISMA in-orbit Testbed," 6th International ESA Conference on Guidance, Navigation and Control Systems, Loutraki, Greece, Oct. 17-21, 2005
6) E. Gill, O. Montenbruck, S. D'Amico, S. Persson, "Autonomous Satellite Formation Flying for the PRISMA Technology Demonstration Mission," 16th AAS/AIAA Space Flight Mechanics Meeting, Tampa, Florida, Jan. 22-26, 2006
7) "PRISMA - Demonstration mission for advanced rendezvous and formation flying technologies and sensors," nordicspace, Vol. 13, No. 4, 2005, pp. 14-19, URL: http://www.nordicspace.net/PDF/NSA142.pdf
8) R. Larsson, S. Berge, P. Bodin, U. Jönsson, "Fuel Efficient Relative Orbit Control Strategies for Formation Flying and Rendezvous within PRISMA," 29th Annual AAS Guidance and Control Conference, Breckenridge, CO, Feb. 4-8, 2006, AAS 06-025
9) http://www.prismasatellites.se/?sid=9028
10) S. Persson, S. Veldman, P. Bodin, "PRISMA - A Formation Flying Project in Implementation Phase," 58th IAC (International Astronautical Congress), International Space Expo, Hyderabad, India, Sept. 24-28, 2007, IAC-07-B4.2.09
11) F. Nilsson, P. Bodin, C. Chasset, B. Jakobsson, R. Larsson, R. Noteborn, E. Vinterhav, "Autonomous Rendezvous Experiments on the PRISMA In-Orbit Formation Flying Test Bed," Proceedings of the 3rd International Symposium on Formation Flying, Missions and Technology, ESA/ESTEC, Noordwijk, The Netherlands, April 23-25, 2008, ESA SP-654, June 2008
12) Staffan Persson, "PRISMA Formation Flying Project in System Test Phase," Proceedings of the IAA Symposium on Small Satellite Systems and Services (4S), Rhodes, Greece, May 26-30, 2008, ESA SP-660, August 2008
13) Jean-Paul Aguttes, Thomas Grelier, Laurent Lestarquit, Eric Péragin, Jon Harr, Jean Luc Issler, Jean-Luc Gerner, Alberto Garcia, Jean-Baptiste Thevenet, Christian Mehlen, Christophe Ensenat, Nicolas Wilhelm, Ana-Maria Badiola Martinez, "A Formation Flying Radio Frequency technique and technology," Proceedings of the 59th IAC (International Astronautical Congress), Glasgow, Scotland, UK, Sept. 29 to Oct. 3, 2008, IAC-08- D1.2.1
14) Staffan Persson, Simone D'Amico, Michel Delpech, Jon Harr, Ron Noteborn, "The Validation and Testing of the PRISMA Formation Flying Project," Proceedings of the 59th IAC (International Astronautical Congress), Glasgow, Scotland, UK, Sept. 29 to Oct. 3, 2008, IAC-08-B4.2.2
15) Hans Hellman, Staffan Persson, Bengt Larsson, "PRISMA – a Formation Flying Mission on the Launch Pad," Proceedings of the 60th IAC (International Astronautical Congress), Daejeon, Korea, Oct. 12-16, 2009, IAC-09.B4.2.4
16) Per Bodin, Ron Noteborn, Robin Larsson, Camille Chasset, "System Test Results from the GNC Experiments on the PRISMA In-Orbit Test Bed," Proceedings of the 60th IAC (International Astronautical Congress), Daejeon, Korea, Oct. 12-16, 2009, IAC-09.C1.4.10
17) Thomas Greiler, Alberto Garcia, Eric Peragin, Laurent Lestaquit, Jon Harr, Dominique Seguela, Jean-Luc Issler, Jean-Baptiste Thevenet, Nicolas Perriault, Christian Mehlen, Christophe Ensenat, Nicolas Wilhelm, Ana.Maria Badiola Martinez, Pablo Colmenarejo, "GNSS in Space, Part 1, Formation Flying Radio Frequency Missions, Techniques, and Technology," Inside GNSS, Nov/Dec. 2008, pp.40-46, URL: http://www.insidegnss.com/auto/novdec08-wp-webversion.pdf
18) "OHB AG acquires Space Systems Division from Swedish Space Corporation," Space Daily, June 28, 2011, URL: http://www.spacedaily.com/reports/OHB_AG_acquires_Space_Systems_Division-rom_Swedish_Space_Corporation_999.html
19) C. Chasset, S. Berge, P. Bodin, B. Jakobsson, "3-axis magnetic control with multiple attitude profile capabilities in the PRISMA mission," Proceedings of the 57th IAC/IAF/IAA (International Astronautical Congress), Valencia, Spain, Oct. 2-6, 2006, IAC-06-C1.2.3
20) "Successful launch of the Swedish PRISMA satellites," SSC, June 15, 2010, URL: [web source no longer available]
21) "Picard and PRISMA in orbit," CNES, June 15, 2010, URL: http://www.cnes.fr/web/CNES-en/8589-gp-picard-and-prisma-in-orbit.php
22) Peter B. de Selding, "Dnepr Rocket Lofts Trio of European Satellites," Space News, June 15, 2010, URL: http://www.spacenews.com/launch/dnepr-rocket-boosts-european-satellites-into-orbit.html
23) "Successful Launch of PRISMA and PICARD Satellites," June 22, 2010, URL: https://web.archive.org/web/20220630005912/http://www.kosmotras.ru/en/news/94/
24) R. Larsson, J. Mueller, S. Thomas, B. Jakobsson, P. Bodin, "Orbit Constellation Safety on the PRISMA In-Orbit Flying Test Bed," Proceedings of the 3rd International Symposium on Formation Flying, Missions and Technology, ESA/ESTEC, Noordwijk, The Netherlands, April 23-25, 2008, ESA SP-654, June 2008
25) http://www.weblab.dlr.de/rbrt/GpsNav/Prisma/Prisma.html
26) O. Montenbruck, E. Gill, M. Markgraf, "Phoenix-XNS: A miniature real-time navigation system for LEO satellites," 3rd ESA Workshop on Satellite Navigation User Equipment Technologies, NAVITEC-2006, Noordwijk, The Netherlands, Dec. 11-13, 2006, URL: http://elib.dlr.de/46828/01/NAV_06a.pdf
27) S. D'Amico, S. De Florio, J.-S. Ardaens, T. Yamamoto, "Offline and Hardware-In-The-Loop Validation of the GPS-based Real-time Navigation System for the PRISMA Formation Flying Mission," Proceedings of the 3rd International Symposium on Formation Flying, Missions and Technology, ESA/ESTEC, Noordwijk, The Netherlands, April 23-25, 2008, ESA SP-654, June 2008
28) E. Gill, S. D'Amico, O. Montenbruck, "Autonomous Formation Flying for the PRISMA Mission," Journal of Spacecraft and Rockets, Vol. 44, No. 3, May-June 2007, pp. 671-681, URL: http://www.weblab.dlr.de/rbrt/pdf/AIAA_JSR_07671.pdf
29) O. Montenbruck, M. Delpech, J.-S. Ardaens, N. Delong , S. D'Amico, J. Harr, "Cross-validation of GPS- and FFRF-based relative navigation for the PRISMA Mission," Proceedings of NAVITEC 2008, 4th ESA Workshop on Satellite Navigation User Equipment Technologies GNSS User Technologies in the Sensor Fusion Era, Dec. 10-12, 2008, Noordwijk, The Netherlands
30) S. D‘Amico, O. Montenbruck, "Differential GPS: An Enabling Technology for Formation Flying Satellites," Proceedings of the 7th IAA Symposium on Small Satellites for Earth Observation, Berlin, Germany, May 4-7, 2009, IAA-B7-1403, URL of presentation: http://media.dlr.de:8080/erez4/erez?cmd=get&src=os/IAA/archiv7/Presentations/1403%5FIAA%2DB7%2D1403%2DDamico%2Dnew.pdf
31) Sergio De Florio, Simone D'Amico, Gianmarco Radice, "Operation Concept of the Precise Autonomous Orbit Keeping Experiment on the PRISMA Mission," 8th IAA (International Academy of Astronautics) Symposium on Small Satellites for Earth Observation, Berlin, Germany, April 4-8, 2011
32) S. D'Amico, E. Gill, O. Montenbruck, "Relative Orbit Control Design for the PRISMA Formation Flying Mission," AIAA Guidance, Navigation, and Control Conference and Exhibit, Keystone, CO, USA, Aug. 21-24, 2006
33) S. D'Amico, E. Gill, M. Garcia, O. Montenbruck, "GPS-Based Real-Time Navigation for the PRISMA Formation Flying Mission," NAVITEC 2006, Noordwijk, The Netherlands, Dec. 11-13, 2006, URL: http://www.weblab.dlr.de/rbrt/pdf/NAV_06c.pdf
34) S. D'Amico, O. Montenbruck, R. Larsson, C. Chasset, "GPS-Based Relative Navigation during the Separation Sequence of the PRISMA Formation," AIAA Guidance, Navigation and Control Conference and Exhibit, Aug.18-21, 2008, Honolulu, Hawaii, USA, AIAA 2008-6661
35) Jeab-Sébastien. Ardaens, Simone D'Amico, Oliver Montenbruck, "Final Commissioning of the PRISMA GPS Navigation System," Proceedings of the 22nd International Symposium on Space Flight Dynamics (ISSFD), Feb. 28 - March 4, 2011, Sao Jose dos Campos, SP, Brazil, URL: http://www.issfd22.inpe.br/S1-Orbit.Dynamics.1-ODY1/S1_P1_ISSFD22_PF_009.pdf
36) Oliver Montenbruck, Simone D'Amico, Jean-Sebastien Ardaens, Martin Wermuth, "Carrier Phase Differential GPS for LEO Formation Flying - The PRISMA and TanDEM-X Flight Experience," Proceedings of the AAS/AIAA Astrodynamics Specialist Conference, Girdwood, Alaska, USA, July 31- Aug. 4, 2011, paper: AAS 11-489
37) Information provided by Thomas Karlsson of OHB-Sweden.
38) Thomas Karlsson, Robin Larsson, Björn Jakobsson, Per Bodin, Bengt Larsson, "The IRIDES Experiment: PRISMA Rendezvous with the non-cooperative Satellite Picard," Proceedings of the 4S (Small Satellites Systems and Services) Symposium, Port Petro, Majorca Island, Spain, May 26-30, 2014
39) T. Karlsson, R. Larsson, B. Jakobsson, P. Bodin, B. Larsson, "PRISMA IRIDES: Performance at the end of the drift phase and planned rendezvous experiments," Proceedings of GNC 2014: 9th International ESA Conference on Guidance, Navigation & Control Systems, Porto, Portugal, June 2-6, 2014, URL: http://www.esa-gnc.eu/papers/porto2014/Session%204b/1725_Bodin.pdf
40) Per Bodin, Thomas Karlsson, Robin Larsson, Björn Jakobsson, Niklas Ahlgren, Bengt Larsson, Magnus Paulsson, "IRIDES: New Rendezvous Objectives for the PRISMA Mission," Proceedings of the 64th International Astronautical Congress (IAC 2013), Beijing, China, Sept. 23-27, 2013, paper: IAC-13-C1.5.13
41) Thomas Karlsson, Robin Larsson, Björn Jakobsson, Per Bodin, "The PRISMA story: Achievements and final Escapades," Proceedings of the 5th International Conference on Spacecraft Formation Flying Missions and Technologies (SFFMT), Munich, Germany, May 29-31, 2013, URL: http://www.sffmt2013.org/PPAbstract/4088p.pdf
42) N. Ahlgren, T. Karlsson, R. Larsson, R. Noteborn, "PRISMA Mission Extension: Adapting Mission Operations to New and Changing Mission Objectives," Proceedings of SpaceOps 2012, The 12th International Conference on Space Operations, Stockholm, Sweden, June 11-15, 2012, URL: http://www.spaceops2012.org/proceedings/documents/id1287986-Paper-001.pdf
43) Aaron Dinardi, Mathias Persson, "Benefits, Applications and Opportunities for Small and Secondary Satellites provided by High Performance Green Propulsion (HPGP)," Proceedings of the 4S (Small Satellites Systems and Services) Symposium, Portoroz, Slovenia, June 4-8, 2012
44) K. Anflo, B. Crowe, "Two Years of In-Space Demonstration and Qualification of an ADNBased Propulsion System on PRISMA," AAAF/ESA/CNES Space Propulsion Conference, Bordeaux, France, May 7-10, 2012.
45) Information provided by Simone D'Amico of DLR/GSOC, Oberpfaffenhofen, Germany.
46) Drago Matko, Tomaž Rodič, Sašo Blažič, Aleš Marsetič, Robin Larsson, Eric Clacey, Christian Svärde, Thomas Karlsson, Krištof Oštir , Gašper Mušič , Luka Teslić, Gregor Klančar, "SPACE-SI Formation Flying Experiments on Prisma Satellites," Proceedings of the 4S (Small Satellites Systems and Services) Symposium, Portoroz, Slovenia, June 4-8, 2012
47) Drago Matko, Tomaž Rodič, Sašo Blažič, Aleš Marsetič, Robin Larsson, Eric Clacey, Thomas Karlsson, Krištof Oštir, Gašper Mušič, Luka Teslić, Gregor Klančar, "Lessens learned from SPACE-SI experiments on PRISMA mission,"Proceedings of the 5th International Conference on Spacecraft Formation Flying Missions and Technologies (SFFMT), Munich, Germany, May 29-31, 2013, URL: http://www.sffmt2013.org/PPAbstract/4080p.pdf
48) Ron Noteborn, Robin Larsson, Camille Chasset, Thomas Karlsson, Per Bodin, "The GNC Experiments on the PRISMA Formation Flying Mission: Summary of Results from the Nominal Mission," Proceedings of IAC 2011 (62nd International Astronautical Congress), Cape Town, South Africa, Oct. 3-7, 2011, paper: IAC-11-C1.7.2
49) Thomas Karlsson, Christian Svärd, Robin Larsson, Ron Noteborn, Per Bodin, "The PRISMA Formation Flying Mission: Summary of the Nominal Mission and Overview of the Extended Mission," Proceedings of IAC 2011 (62nd International Astronautical Congress), Cape Town, South Africa, Oct. 3-7, 2011, paper: IAC-11-B4.3.8
50) Thomas Karlsson, Niklas Ahlgren, Ralf Faller, Benjamin Schlepp, "PRISMA Mission Control: Transferring Satellite Control Between Organisations," Proceedings of SpaceOps 2012, The 12th International Conference on Space Operations, Stockholm, Sweden, June 11-15, 2012, URL: http://www.spaceops2012.org/proceedings/documents/id1287645-Paper-001.pdf
51) Nils Pokrupa, Niklas Ahlgren, Thomas Karlsson, Per Bodin, Robin Larsson, "One Year of In-Flight Results from the Prisma Formation Flying Demonstration Mission," Proceedings of the 25th Annual AIAA/USU Conference on Small Satellites, Logan, UT, USA, Aug. 8-11, 2011, paper: SSC11-III-2
52) Kjell Anflo, Ben Crowe, "In-Space Demonstration of High Performance Green Propulsion and its Impact on Small Satellites," Proceedings of the 25th Annual AIAA/USU Conference on Small Satellites, Logan, UT, USA, Aug. 8-11, 2011, paper: SSC11-IX-2
53) Jörn Spurmann, "PRISMA Experiment Operations at GSOC," April 21, 2011, URL: http://www.dlr.de/blogs/en/desktopdefault.aspx/tabid-7371/12399_read-394/
54) "The German Space Operations Center takes over operation of the Swedish PRISMA satellite mission," DLR, March 15, 2011, URL: http://www.dlr.de/dlr/en/desktopdefault.aspx/tabid-10081/151_read-760/year-2011/151_page-3/
55) J.-S. Ardaens, S. D'Amico, O. Montenbruck, "Flight Results from the PRISMA GPS-Based Navigation," Proceedings of NAVITEC 2010 (5th ESA Workshop on Satellite Navigation Technologies and Europen Workshop on GNSS Signals and Signal Processing), Noordwijk, The Netherlands, Dec. 8-10, 2010
56) Kjell Anflo, "ECAPS In-Space Demonstration of the High Performance Green Propulsion (HPGP) System Successfully Completed," Dec. 14, 2010
57) Robin Larsson, Ron Noteborn, Camille Chasset, Per Bodin, Thomas Karlsson, Anna Carlsson, Staffan Persson, "Flight Results from SSC's GNC Experiments within the PRISMA Formation Flying Mission," Proceedings of the 61st IAC (International Astronautical Congress), Prague, Czech Republic, Sept. 27-Oct. 1, 2010, IAC-10,C1,5,11,x8180
58) Sergio De Florio, Simone D'Amico, "Flight Results from the Autonomous Navigation and Control of Formation Flying Spacecraft on the PRISMA Mission," Proceedings of the 61st IAC (International Astronautical Congress), Prague, Czech Republic, Sept. 27-Oct. 1, 2010, IAC-10.C1.5.12
59) Thomas Karlsson, Per Bodin, Ron Noteborn, Robin Larsson, Anna Carlsson, "PRISMA operational concept: servicing a variety of experimental teams for the flight demonstration of formation flying technologies," Proceedings of the 61st IAC (International Astronautical Congress), Prague, Czech Republic, Sept. 27-Oct. 1, 2010, IAC-10,B4,3,1,x8200
60) Staffan Persson, Simone D'Amico, Jon Harr, "Flight Results from PRISMA Formation Flying and Rendezvous Demonstration Mission," Proceedings of the 61st IAC (International Astronautical Congress), Prague, Czech Republic, Sept. 27-Oct. 1, 2010, IAC-10-B4.2.9
61) "Two new milestones achieved by the fabulous PRISMA Satellites last night," SSC, Aug. 24, 2010, URL: [web source no longer available]
62) "The Swedish PRISMA Satellites have separated," SSC, Aug. 12, 2010, URL: [web source no longer available]
63) "Collision avoidance maneuver of PRISMA," SSC, July 7, 2010, URL: http://www.lsespace.com/?id=9504&cid=17040&Year=2010
64) "Successful tests of rocket engines open doors for ECAPS," SSC, June 24, 2010, URL: http://www.sscspace.com/successful-tests-of-rocket-engines-open-doors-for-ecaps
65) PRISMA's High Performance Green Propulsion system is now commissioned," June 24, 2010, URL: http://www.spaceportsweden.com/?id=9504&cid=16981&Year=2010
66) M. Benn, J. L. Jorgensen, "Short Range Pose and Position Determination of Spacecraft using a µ-Advanced Stellar Compass," Proceedings of the 3rd International Symposium on Formation Flying, Missions and Technology, ESA/ESTEC, Noordwijk, The Netherlands, April 23-25, 2008, ESA SP-654, June 2008
67) Mathias Benn, John L. Jorgensen, "Range Management of a Vision Based Rendezvous and Docking Navigation Sensor," Proceedings of the 60th IAC (International Astronautical Congress), Daejeon, Korea, Oct. 12-16, 2009, IAC-09.C1.4.4
68) Mathias Benn, John L. Jorgensen, "Inflight Calibration of a Vision Based Sensor for Pose and Position Determination Inbetween Satellites," Proceedings of the Symposium on Small Satellite Systems and Services (4S), Funchal, Madeira, Portugal, May 31-June 4, 2010
69) M. Benn, J. L. Jorgensen, "Autonomous Vision Based Detection of Non-stellar Objects Flying in Formation with Camera Point of View," Proceedings of the 5th International Conference on Spacecraft Formation Flying Missions and Technologies (SFFMT), Munich, Germany, May 29-31, 2013, URL of paper: http://www.sffmt2013.org/PPAbstract/4152p.pdf, URL of presentation: http://www.sffmt2013.org/PPAbstract/4152pr.pdf
70) .J. Harr, M. Delpech, L. Lestarquit, D. Seguela, "RF Metrology Validation and Formation Flying Demonstration by Small Satellites," The 4S Symposium: Small Satellite Systems and Services, Chia Laguna Sardinia, Italy, Sept. 25-29, 2006
71) R. Frankiel, C. Mehlen, E. Pierre, M. Sghedoni, "Radio-frequency technology and GNC (Guidance Navigation and Control) for formation flying," Proceedings of the 57th IAC/IAF/IAA (International Astronautical Congress), Valencia, Spain, Oct. 2-6, 2006, IAC-06- C1.3.7
72) L. Lestarquit, J. Harr, T. Grelier, E. Peragin, N. Wilhelm, C. Mehlen, C. Peyrotte, "Autonomous Formation Flying RF Sensor Development for the PRISMA Mission," Proceedings of 19th ION GNSS 2006, Sept. 26-29, 2006, Fort Worth, TX, USA
73) J. Harr, M. Delpech, T. Grelier, D. Seguela, S. Persson, "The FFIORD Experiment - CNES' RF Metrology Validation and Formation Flying Demonstration on PRISMA," Proceedings of the 3rd International Symposium on Formation Flying, Missions and Technology, ESA/ESTEC, Noordwijk, The Netherlands, April 23-25, 2008, ESA SP-654, June 2008
74) J.-B. Thevenet, C. Mehlen, C. Peyrotte, T. Grelier, L. Lestarquit, A. Garcia, J.-L. Gerner, "A Generic Radio-Frequency Subsystem for High-Altitude Formation-Flying Missions," Proceedings of the 3rd International Symposium on Formation Flying, Missions and Technology, ESA/ESTEC, Noordwijk, The Netherlands, April 23-25, 2008, ESA SP-654, June 2008
75) http://smsc.cnes.fr/PRISMA/index.htm
76) T. Grelier, P.-Y. Guidotti, M. Delpech, J. Harr, J.-B. Thevenet, X. Leyre, "Formation Flying RadioFrequency Instrument : First Flight Results from the PRISMA Mission," Proceedings of NAVITEC 2010 (5th ESA Workshop on Satellite Navigation Technologies and Europen Workshop on GNSS Signals and Signal Processing), Noordwijk, The Netherlands, Dec. 8-10, 2010
77) M. Delpech, J. C. Berges, T. Karlsson, F. Malbet, "Results of PRISMA/FFIORD Extended Mission and Applicability to future Formation Flying and Active Debris Removal Missions," Proceedings of the 5th International Conference on Spacecraft Formation Flying Missions and Technologies (SFFMT), Munich, Germany, May 29-31, 2013, URL of paper: http://www.sffmt2013.org/PPAbstract/4101p.pdf, URL of presentation: http://www.sffmt2013.org/PPAbstract/4101pr.pdf
78) K. Anflo, S. Persson, P. Thormählen, G. Bergman, T. Hasanof, T.-A. Grönland, R. Möllerberg, "Flight demonstration of an ADN-based propulsion system." Proceedings of the 57th IAC/IAF/IAA (International Astronautical Congress), Valencia, Spain, Oct. 2-6, 2006, IAC-06-C4.1.08
79) R. Larsson, S. Berge, P. Bodin, U. Jönsson, "Fuel Efficient Relative Orbit Control Strategies for Formation Flying and Rendezvous within PRISMA," Proceedings of the 29th Annual AAS GNC 2006 (Guidance & Navigation Conference), Breckenridge, CO, USA, Feb. 4-8, 2006, AAS 06-025
80) K. Anflo, R. Möllerberg, "Flight demonstration of new thruster and green propellant technology on the PRISMA satellite," 58th IAC (International Astronautical Congress), International Space Expo, Hyderabad, India, Sept. 24-28, 2007, IAC-07-C4.1.05
81) K. Anflo, B. Crowe, M. Persson, "The First In-Space Demonstration of a Green Propulsion System," Proceedings of the 24th Annual AIAA/USU Conference on Small Satellites, Logan, UT, USA, Aug. 9-12, 2010, SSC10-XI-2
82) T.-A. Grönland, P. Rangsten, M. Nese, M. Lang, "Miniaturization of Components and Systems for Space using MEMS Technology," Proceedings of the 57th IAC/IAF/IAA (International Astronautical Congress), Valencia, Spain, Oct. 2-6, 2006, IAC-06-B5.5.12
83) Hakan Johansson, Kerstin Jonsson, Johan Bejhed, Maria Björklund, Pelle Rangsten, Tor-Arne Grönland, "Cold Gas Micropropulsion Flight Tests on the PRISMA Satellites," Proceedings of Space Propulsion 2010, San Sebastian, Spain, May 3-6, 2010
84) Pelle Rangsten, Hakan Johansson, Maria Bendixen, Kerstin Jonsson, Johan Bejhed, Tor-Arne Grönland, "MEMS Micropropulsion Components for Small Spacecraft," Proceedings of the 25th Annual AIAA/USU Conference on Small Satellites, Logan, UT, USA, Aug. 8-11, 2011, paper: SSC11-X-2
85) G. Capuano, M. Severi, F. Cacace, R. Lirato, P. Longobardi, G. Pollio , M. DeNino, M. Ippolito, "Video System for Prisma Formation Flying Mission," Proceedings of the IAA Symposium on Small Satellite Systems and Services (4S), Rhodes, Greece, May 26-30, 2008, ESA SP-660, August 2008
86) Christian Svärd, Martin Johnsson, Theresa Carlstedt-Duke, Milan Battelino, Anna Carlsson, "Monitoring and Control in the PRISMA Mission – A Multi-Satellite Formation Flying Experiment Platform," Proceedings of the DASIA (DAta Systems In Aerospace) 2011 Conference, San Anton, Malta, May 17-20, 2011, ESA SP-694, August 2011
87) Matti Nylund, Milan Battelino, "SATSIM - a real-time multi-satellite simulator for test and validation in formation flying projects," Proceedings of the 61st IAC (International Astronautical Congress), Prague, Czech Republic, Sept. 27-Oct. 1, 2010, IAC-10.D1.4.4
The information compiled and edited in this article was provided by Herbert J. Kramer from his documentation of: "Observation of the Earth and Its Environment: Survey of Missions and Sensors" (Springer Verlag) as well as many other sources after the publication of the 4th edition in 2002. - Comments and corrections to this article are always welcome for further updates (eoportal@symbios.space).
Overview Spacecraft Launch Mission Status Sensor Complement Ground Segment
References Back to top