PLATO (PLAnetary Transits and Oscillation of Stars)
Non-EO
ESA
DLR
Planned
Quick facts
Overview
| Mission type | Non-EO |
| Agency | ESA, DLR |
| Mission status | Planned |
PLATO (PLAnetary Transits and Oscillation of Stars)
Spacecraft Development Status Launch Sensor Complement References
ESA selected the PLATO mission in February 2014 on the recommendation of the Space Science Advisory Committee as the third Medium-Class science mission within ESA’s Cosmic Vision Program, following the selection of the Solar Orbiter and Euclid projects in 2011 as ESA's first M-class missions. 1) 2) 3)
ESA‘s Cosmic Vision 2015-2025 is the continuation of the Horizon 2000 long-term scientific program. It aims to investigate basic questions of astronomy and astrophysics by the detection and characterization of terrestrial exoplanets around bright solar-type stars, with emphasis on planets orbiting in the habitable zone. 4)
The PLATO Mission Shall Explore
• The conditions for planet formation and the emergence of life
• The solar system origin and its behavior
• Fundamental physics of the universe
• Its origin and composition.
Major Science Goals of the PLATO Mission
• Photometric monitoring of a large number of bright stars for the detection of planetary transits and the determination of the planetary radii (around 2% accuracy)
• Asteroseismology for the determination of stellar masses, radii, and ages (up to 10% of the main sequence lifetime)
• Ground-based radial velocity follow-up observations for the determination of the planetary masses (around 10% accuracy)
• Identification of bright targets for spectroscopic follow-up observations of planetary atmospheres with other ground and space facilities.
PLATO will monitor relatively nearby stars, searching for tiny, regular dips in brightness as their planets transit in front of them, temporarily blocking out a small fraction of the starlight. By using 34 separate small telescopes and cameras, PLATO will search for planets around up to a million stars spread over half of the sky.
The PLATO space mission is planned to detect terrestrial exoplanets in the habitable zone of solar-type host stars, characterize their bulk properties and therefore provide key information needed to determine their habitability.
Data from ESA's Gaia mission (launched December 19, 2013) will help PLATO to provide precise characteristics of thousands of exoplanet systems. These systems will provide natural targets for detailed follow-up observations by future large ground- and space-based observatories.
Background
The PLATO mission was proposed in 2007 as a medium class candidate in response to the first call for missions of the Cosmic Vision 2015-2025 program for a launch in 2017–2018. The proposal was submitted by Claude Catala (Observatoire de Paris) on behalf of a large consortium of scientists from laboratories all across Europe. Following favorable reviews by ESA’s scientific Advisory structure, PLATO was selected in 2007 as one of the missions for which an ESA assessment study was carried out in 2008 and 2009. The PLATO mission was subsequently selected for a definition study, starting in February 2010. The definition study involved two concurrent industrial contracts for the definition of the mission profile, the satellite, and parts of the payload module. The PLATO Mission Consortium, involving more than 350 scientists and engineers in virtually all ESA Member States, as well as a few members from the U.S. and Brazil, carried out the study of the instrument and their contributions to the science ground segment. A specific industrial contract for the study of the CCDs procurement was issued by ESA. 5)
Following the non-selection of PLATO in October 2011 for the M1 or M2 launch opportunities, the ESA Science Program Committee endorsed the solicitation of a proposal to the PLATO Mission Consortium to be a candidate for the M3 launch opportunity in 2022–2024. This had considered the positive recommendation by ESA’s Advisory structure concerning the PLATO mission scientific competitiveness with the missions selected in response to the Cosmic Vision 2010 Call (the “M3 candidates”). The PLATO Mission Consortium responded with a proposal for the provision of the payload and science ground segment components formulated in the M3 mission framework. A major change was the transfer of the lead activities from France to Germany, with Heike Rauer (DLR) as new PLATO Mission Consortium lead. Subsequent to ESA’s review, PLATO has been a candidate for the M3 launch opportunity since March 2013.
The observation will be performed by four sets of 6 cameras with partly overlapping FOVs (Field of Views). These cameras generate imagettes with a sample rate of 25 seconds, which are consequently combined to yield a time series of sufficient length to observe low-frequency phenomena. The observation will enable the characterization of bulk parameters, i.e. radii (precision 2%) and ages (10 %). The planets’ masses are to be determined with an accuracy of 10 % from ground-based radial velocity follow-up. This goal is unique to PLATO, since it provides a set of data covering the full parameter space required to provide a complete and unbiased picture of the planet's bulk parameters.
The second scientific goal to be fulfilled by PLATO is the probing of stellar structure and evolution by asteroseismology, the study of the global oscillations of stars. The frequencies of these oscillations, which can be either trapped acoustic waves or internal gravity waves or a mixture of the two, depend on the radially varying density and internal speed of sound of the star. Thus, measurements of oscillation frequencies can be used to detect the structure of their upper layers. This information can be obtained by high-precision photometric measurements performed by PLATO which will generate information to determine stellar masses up to an accuracy of 10%, stellar radii up to 1-2% and stellar ages up to 10%.
One major and crucial advantage of PLATO over other planet detection missions such as CoRoT and Kepler is its ability to observe in many directions of the sky. PLATO will therefore perform two different observation phases during its mission, long continuous pointing phases which are devoted to small planets within the habitable zone of solar-like stars as well as short duration pointing phases which are devoted to shorter-period planet detection. Two fields within the galactic plane will be observed via long pointing phases which can last up to 3 years each. Afterwards, the short observation phase will cover several areas along the galactic disk where one measurement shall last between 2 and 5 months.
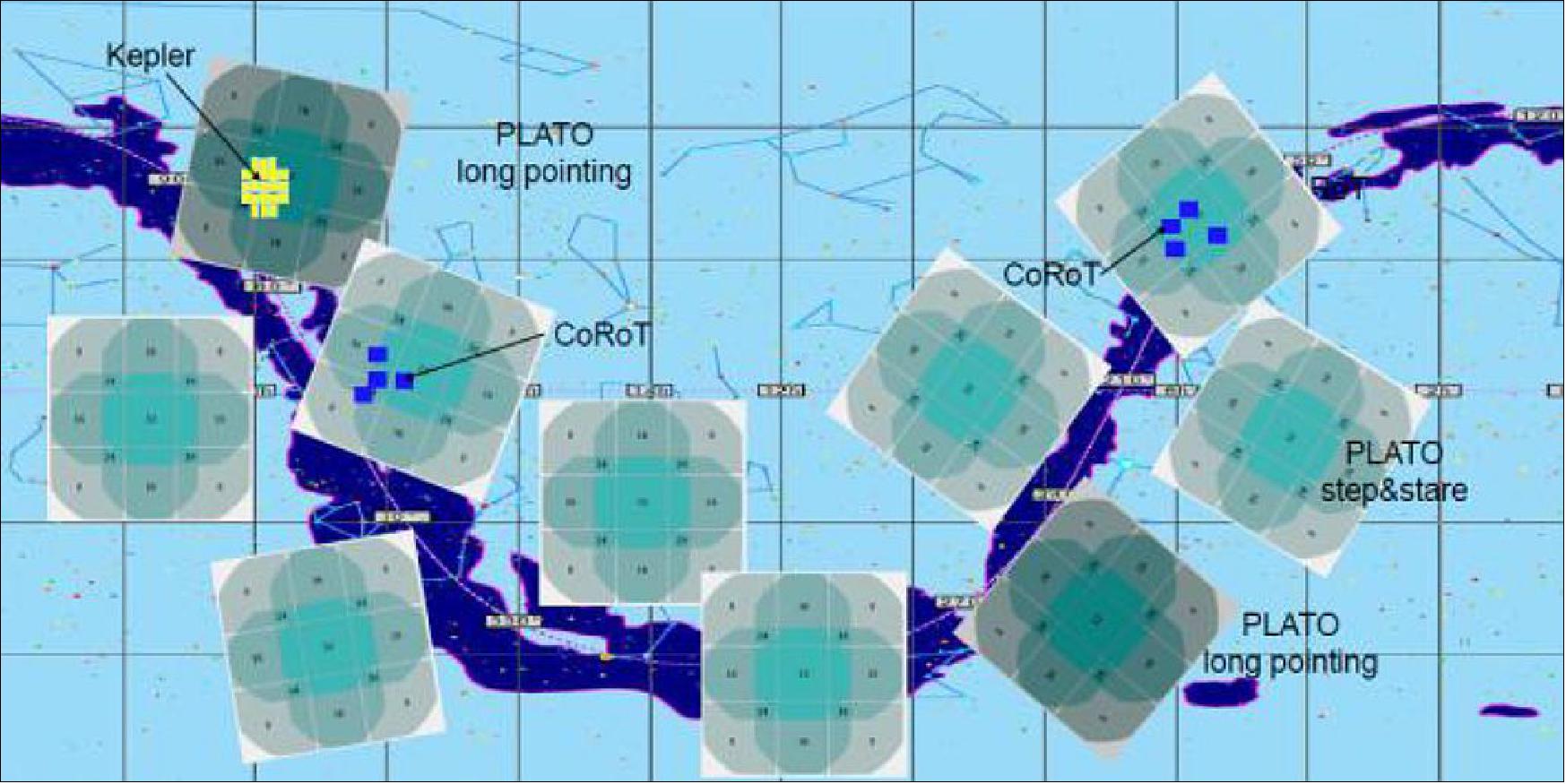
Legend to Figure 1: Schematic comparison of observing approaches. Blue squares: CoRoT target fields in the galactic center and anti-center direction. Upper left corner (yellow): the Kepler target field. Large squares: size of the PLATO field. A combination of short and long (darker) duration pointings is able to cover a very large part of the sky. Note that the final locations of long and step-and-stare fields will be defined after mission selection and are drawn here for illustration only.
PLATO will assemble the first catalogue of confirmed and characterized planets in habitable zones with known mean densities, compositions, and evolutionary ages/stages. This resource will be extremely valuable as these Earth-like planets will be the targets of future ESA missions that will be designed to characterize and probe their atmospheres.
PLATO Funding Agencies
• PLATO Lead Funding Agency:
- DLR (German Space Agency), Germany
• PLATO Contributing Funding Agencies
- ASI (Agenzia Spaziale Italiana), Italy
- CNES (Centre National d’études Spatiales), France
- FCT (Fundação Para a Ciência a a Tecnologia), Portugal
- HSO (Hungarian Space Office), Hungary
- MINECO (Ministerio de Economia, Industria y Competitividad del Reino de España), Spain
- UK Space Agency (The United Kingdom Space Agency), United Kingdom
- SNSB (Swedish National Space Board), Sweden
- SRON (Netherlands Institute for Space Research), The Netherlands
• PLATO Contributing Countries through ESA PRODEX:
For their contribution to the PLATO mission in the framework of the Scientific Experiment Development Program (PRODEX), the following countries have given funding authorization to ESA,
- FFG (Austrian Research Promotion Agency), Austria
- BELSPO (Belgium Science Project Office), Belgium
- SSC (Swiss Space Center), Switzerland.
Mission Architecture
The PLATO System Architecture Consists of the Following Major Elements 7)
• Space Segment, including:
- Payload, which includes 24 Normal cameras, responsible for light curve measurements, 2 Fast Cameras responsible for supporting attitude determination and payload electronics
- Payload module, which consists of an optical bench, support structure and the payload units themselves.
• Service module, which is responsible for making all required resources available in support of the successful operation of the payload
• Ground Segment, including Ground Station, Mission Operations Center, and Science Operations Center
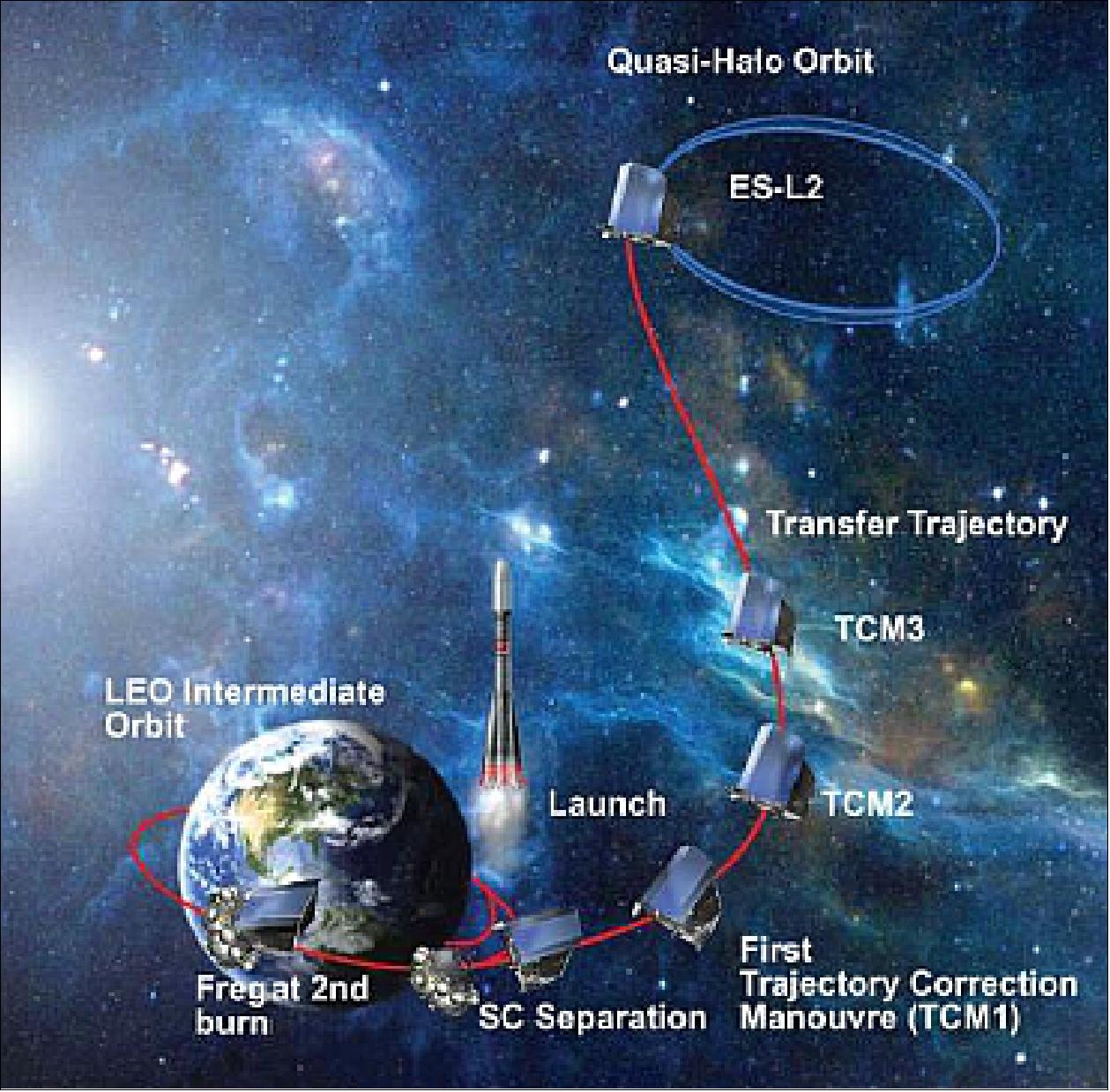
• Launch Segment: Soyuz 2-1b launching from Guiana Space Center, injecting the spacecraft into a transfer trajectory to Earth-Sun L2 (ES-L2).
PLATO Mid-Term Schedule Overview 8)
Definition Phase B1 (three parallel Industrial studies)
- Phase B1 industrial studies kick-off: October 2014
- Payload Design Consolidation Review: March-April 2015
- Instrument System Requirement Review: October-November 2015
- Spacecraft System Requirement Review: February-March 2016
- Mission adoption & IPC approval: Q2 2016
Implementation Phase (one Prime Contractor):
- Industrial ITT for Phases B2/C/D/E1: July-Dec 2016
- Industrial Prime contractor kick-off: Jan 2017 (TBC)
PLATO Satellite Pointing Performance
The PLATO mission goal is to detect and study exoplanets; especially terrestrial planets around solar-like stars. The detection of the exoplanets is accomplished by the measurement of the so-called transit signal. This transit signal is caused by an orbiting planet passing through the line of sight towards Earth. The planet will dim the stellar flux detected by the satellite. Further information about the planet's bulk properties can be determined by studying the transit signal. 9)
PLATO will be placed in an orbit around the Lagrangian point L2 of the Sun-Earth system. 26 cameras (24 normal cameras and 2 fast cameras) are accommodated on the satellite to perform long (3.85 days), high-precision observations of large samples of stars. The detection and characterization of planetary transits that alter the observed light curves reveal the required information about the transiting planets.
The characterization of the light curves coming from these long, uninterrupted and highly stable observations is the key to the scientific goal of the PLATO mission. PLATO will measure the dimming of stellar flux by an orbiting planet passing through the line of sight of Earth (Transit measurement) and the intrinsic oscillations of stars (asteroseismology). These measurement concepts lead to pointing performance requirements that demand a highly stable Satellite pointing in the long term (3.85 days) as well as in the short term (during 25 s of image acquisition).
The low to medium frequency pointing requirements are partly formulated in the frequency domain and are to be verified by power spectral density estimation. The pointing requirements are demanding over a large frequency range of 3 µHz to 40 mHz. At low frequencies, thermoelastic effects are the dominant disturbance source and at higher frequencies, attitude control and determination is driving the pointing performance. Moreover, demanding requirements during image acquisition lead to the necessity of micro vibration analyses. All of these disturbance sources have been analyzed and it has been studied in detail how they affect the satellite pointing stability. Extensive long-term simulations and analyses taking into account all relevant disturbance sources have been accomplished.
The PLATO mission was adopted by the SPC (Science Program Committee) of ESA in June 2017, leading to the start of the Spacecraft implementation phase: Design, Development and Support to Launch and Post Launch Operations (Phase B2/C/D/E1). 10)
PLATO is a medium-class astronomical science mission dedicated to the detection and characterization of exoplanets. In order to fulfil this overall mission goal, PLATO has two main mission objectives:
1) Detection and characterization of the transit signature of terrestrial exoplanets up to the habitable zone of solar-type parent stars and characterization of their bulk properties needed to determine their habitability
2) Measurement of seismic oscillations of the central stars of exoplanetary systems and other selected stars to provide a unique, revolutionary, understanding of stellar interior and evolution models.
The observations will be performed by 24 normal cameras with partly overlapping FOVs that generate imagettes with a sample rate of 25 seconds. In addition, two fast cameras with a higher sample frequency (every 2.5s) are implemented to enable high-pointing stability. They will be developed and provided by a European scientific consortium (the PLATO Mission Consortium).
The objective to observe solar-like stars leads directly to the operational need to point the cameras’ mean LoS constantly at a stellar target field for one to two years.
Main PLATO Requirements
The main requirements for the PLATO spacecraft can be derived from the mission objectives and requirements above.
1) Thermal and thermoelastic stability for the cameras in order to achieve a high signal-to-noise ratio and long-term photometric stability. The resulting pointing requirements for the PLATO spacecraft affect mainly the areas of AOCS and TED (Thermo-elastic Distortions). A thorough study of the PLATO pointing requirements can be found in Ref. 9).
2) The second requirement is payload protection, leading to a very robust FDIR (Failure Detection, Isolation and Recovery) architecture in particular during separation from the launcher and in contingency operations. The Operations and FDIR architecture of the PLATO spacecraft has been discussed in detail (Ref. 9).
Mission Description
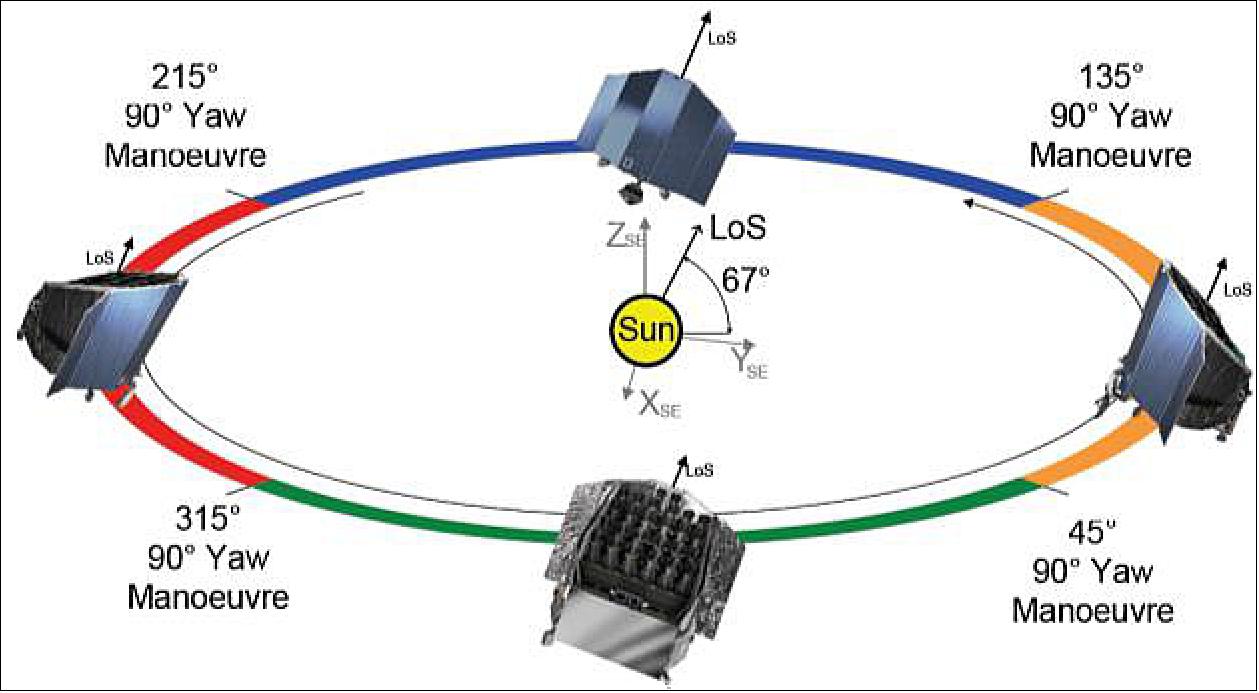
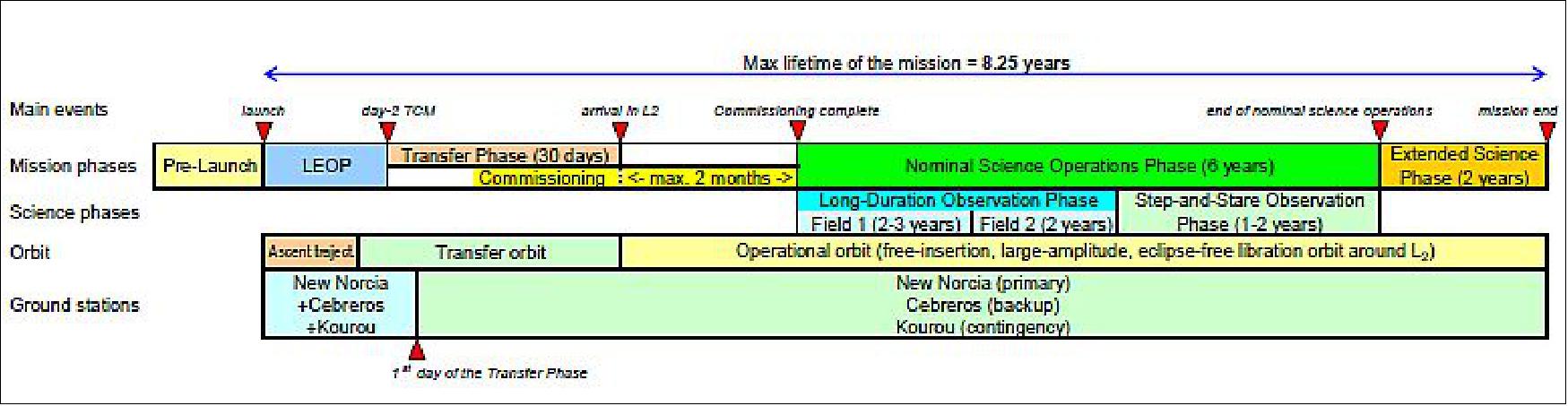
Each camera needs a very stable thermal environment to achieve stable measurements over long periods of time (months). This is provided by the L2 orbit depicted in Figure 4 as well as an optimized S/C and payload design. The spacecraft design enables a mission lifetime of up to 8.5 years.
In particular, the spacecraft continuously protects the cameras from sun illumination and keeps them pointing constantly for 90 days before performing a 90° yaw manoeuvre, as shown in Figure 5, leading to an invariant field of view over several years of uninterrupted observations.
Spacecraft
The satellite consists of a Payload Module and a Service Module. The SVM (Satellite Service Module) consists of the classical S/C subsystems to support the PLM (Payload Module) by providing structural support, command and data management, attitude and orbit control, thermal control, communications, and power generation, conditioning and distribution and the payload control electronics (Ref. 10).
The PLM consists of the Payload Cameras (24 normal and 2 fast cameras, consisting of an optical head and front-end electronics), the Optical Bench and the respective harness. The sun shield is considered part of the SVM.
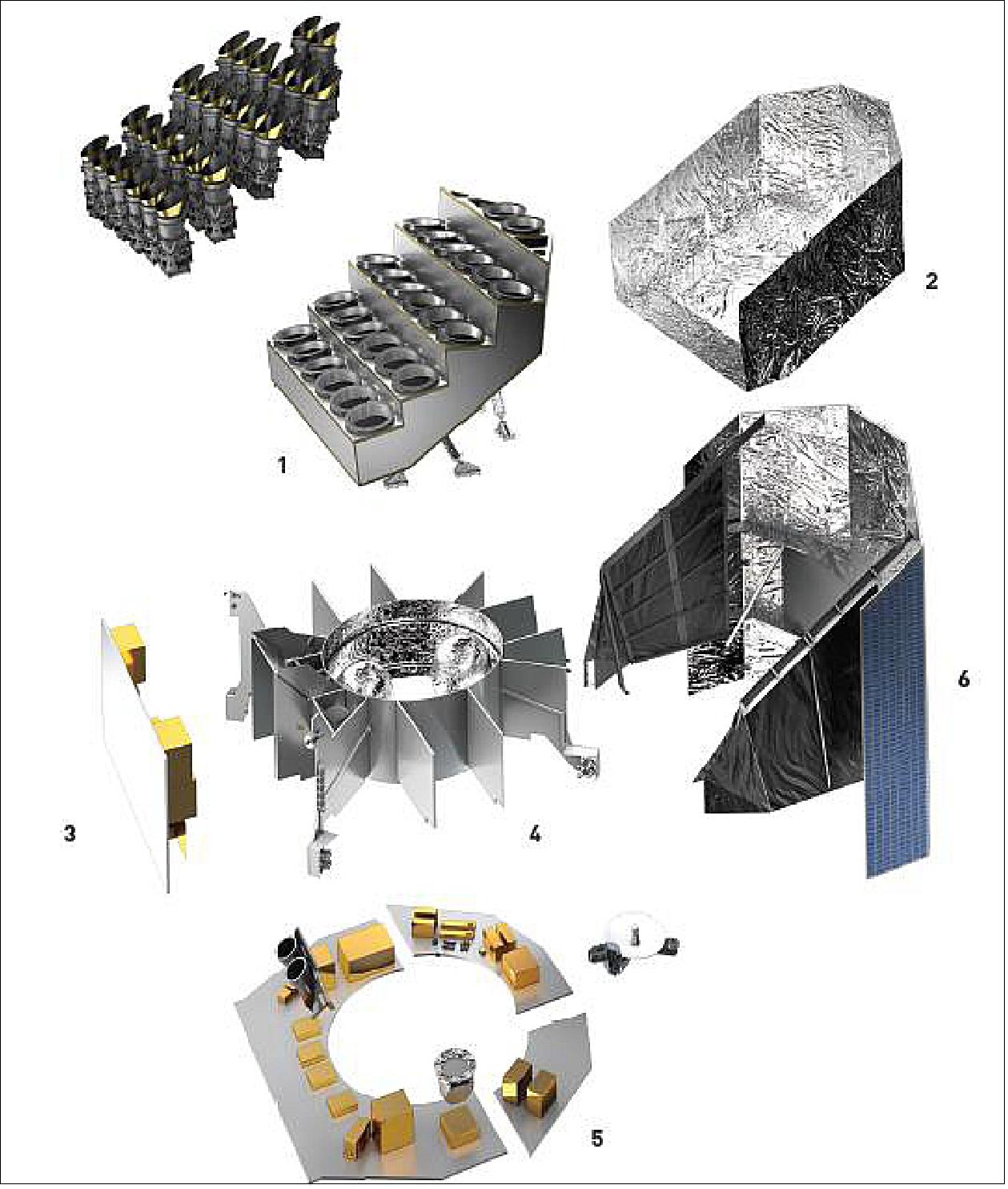
The major achievement in the Spacecraft design is the modular architecture depicted in Figure 6 and Figure 7, which has been recognized to be the optimal solution as opposed to other traded designs. The modularity allows high flexibility of the design in early phases and adaptation in front of the Instrument evolutions. Furthermore a parallel and independent early MAIT (Manufacturing, Assembly, Integration and Test) phase for Payload and Service modules is implemented, minimizing cross-linked schedule impacts. The modular design also allows for maximum thermal and thermoelastic isolation of the payload from the SVM.

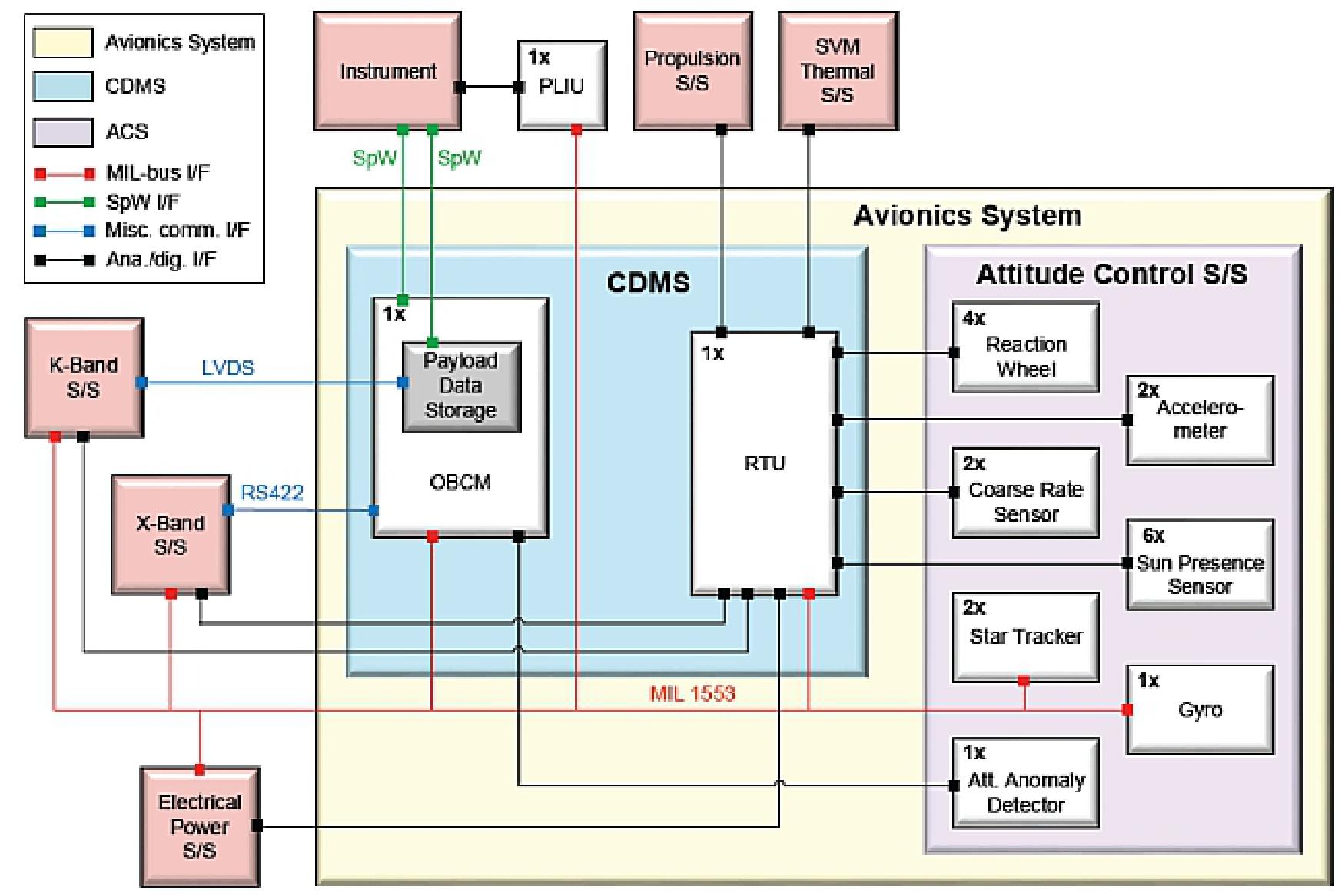
The avionics architecture depicted in Figure 8 is widely based on Euclid heritage, following the SAVOIR Functional Reference Architecture. The avionics is centralized around a single powerful On Board Computer (OBC) enhanced by a mass memory (referenced as OBCM) and a Remote Terminal Unit (RTU) implementing all I/O interfaces with the platform subsystems. The OBCM utilizes a standard MIL1553 data bus for communication within the platform and SpaceWire links for communication with the P/L units.
As for the data handling, the AOCS architecture and modes rely on heritage from Herschel and Euclid. The AOCS ensures a high level of performance and robustness, most specifically:
• The fine pointing performance is fully achieved in the Science Observation Mode by using the fine guidance data from the payload Fast Cameras
• The payload sun protection is always guaranteed, even in case of severe S/C anomalies and during S/C de-tumbling after launcher separation.
The centralized avionics architecture allows running all data handling and AOCS tasks within a single onboard software called Satellite Control Software (SCSW).
For the EPS (Electrical Power Subsystem), the PCDU distributes power to PLM and SVM with an unregulated 28 V bus which complies with the payload voltage range. A battery provides power during the initial operations after launch, and then a body-mounted solar array with two deployable wings is the main source of energy under all operational conditions of the mission.
The Communication S/S provides up and down links with the ground station in X-Band, while a K-Band downlink is dedicated to the download of the science data. The baseline Antenna subsystem consists of a High Gain Antenna Assembly (HGAA) and a Low Gain Antenna Assembly (LGAA). The steerable HGAA allows transmitting a high amount of payload science data at up to 72 Mbit/s, from the Spacecraft to the ground.
Launch mass | 2208 kg |
Power | 2200 W (capability EOL) |
Delta V | 100 m/s |
Launcher | Compatible with Soyuz ST 2-1B Fregat and Ariane 6.2 |
Propulsion | Monopropellant, blow-down system |
RF communications | X-band: TMTC and ranging |
Antenna | 2 fixed X-band Low Gain |
AOCS | 3 axis stabilized with 4 Reaction Wheels |
CDMS | On Board Computer with LEON-2 |
Solar array | 3 body mounted and 2 deployable panels |
Industrialization Approach
The core team is depicted in Figure 9. OHB, acting as prime contractorto the customer, leads a compact, highly competent industrial team, with well-established roles and responsibilities, and centralization of common activities.
The Core Team is Composed of
• OHB System AG, responsible for the overall project management and industrialization, system engineering, verification and instrument interfaces and AIT (Assembly, Integration and Test) of the spacecraft STM (Structural & Thermal Model), EFM (Electrical & Functional Model) and PFM (Proto Flight Model). Also responsible for electrical, communication, structure, thermal and propulsion subsystems;
• Thales Alenia Space (France and UK), responsible for Avionics architecture, AOCS (Attitude and Orbit Control Subsystem) design and development and AIT of the SVM (STM and PFM);
• RUAG Space Switzerland, responsible for the PLM structural engineering and Optical Bench MAIT(Manufacturing, Assembly, Integration and Test).
The core team hands out 8 subsystems to subcontractors to allow further contribution of external companies to the PLATO industrialization setup. The industrial team includes 21 companies from 14 different countries that have been pre-selected at the time of the prime proposal preparation, in order to guarantee the geographical return requirements for the critical countries. 13 of these companies are SMEs (Small and Medium sized Enterprises).
System Engineering and Verification
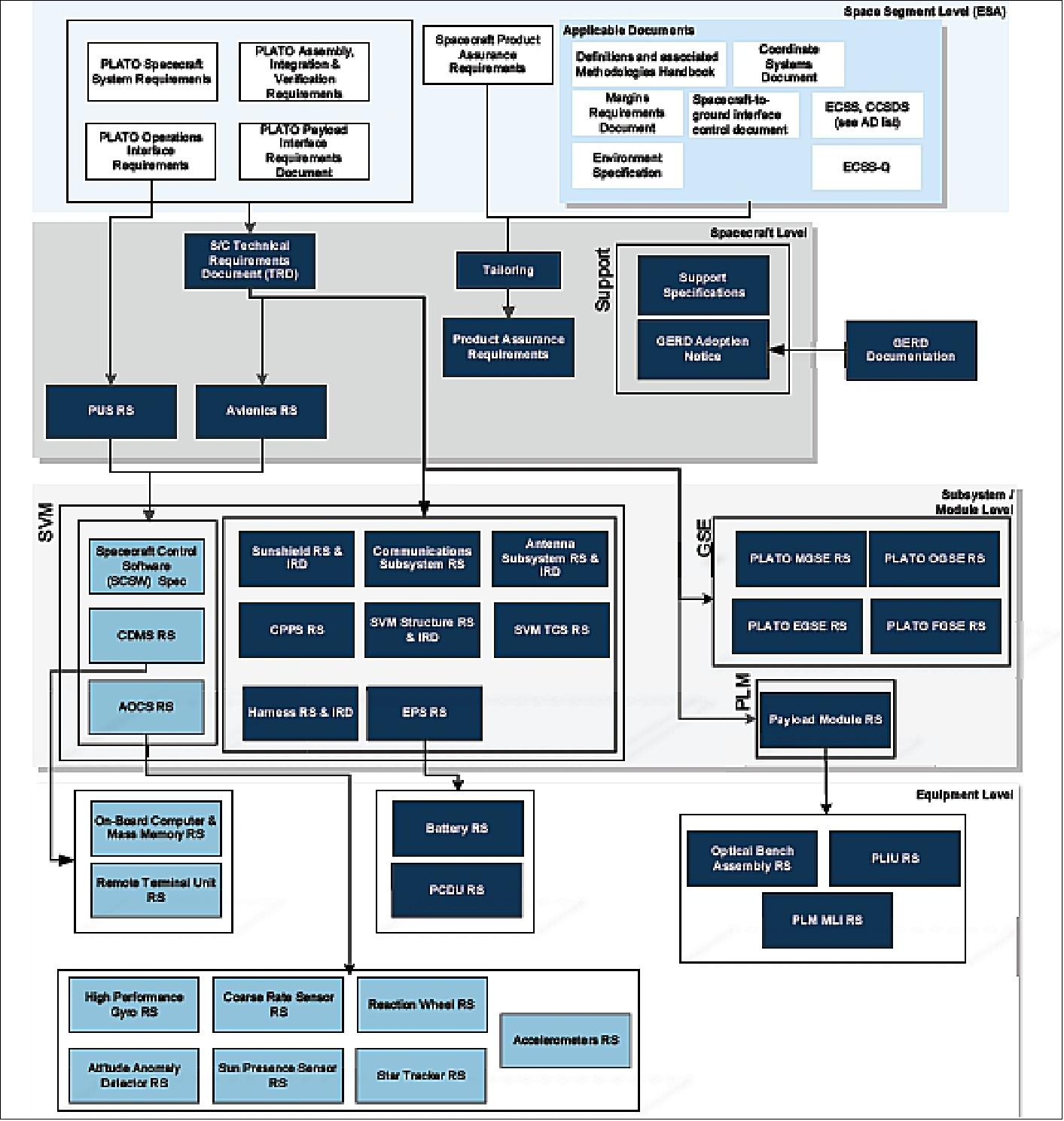
The specification tree can be seen in Figure 10: The ESA applicable documents have been thoroughly assessed and the requirements have been flown-down to the subsystems and equipment. The requirements management is under spacecraft level responsibility. The tree is based on three levels of specifications:
Spacecraft, Subsystem and Unit level. The S/C TRD (Technical Requirement Document) at Spacecraft Level establishes the requirements for the PLATO Spacecraft and provides full traceability with ESA system requirements. The GERD (General Equipment Requirements Documents) provide the support specifications that collects all generic design, interface and verification requirements applicable from S/C level down to equipment unit level and compliant with ECSS. GERD's are specifically tailored for the PLATO Project.
The model philosophy is shown in Figure 11.
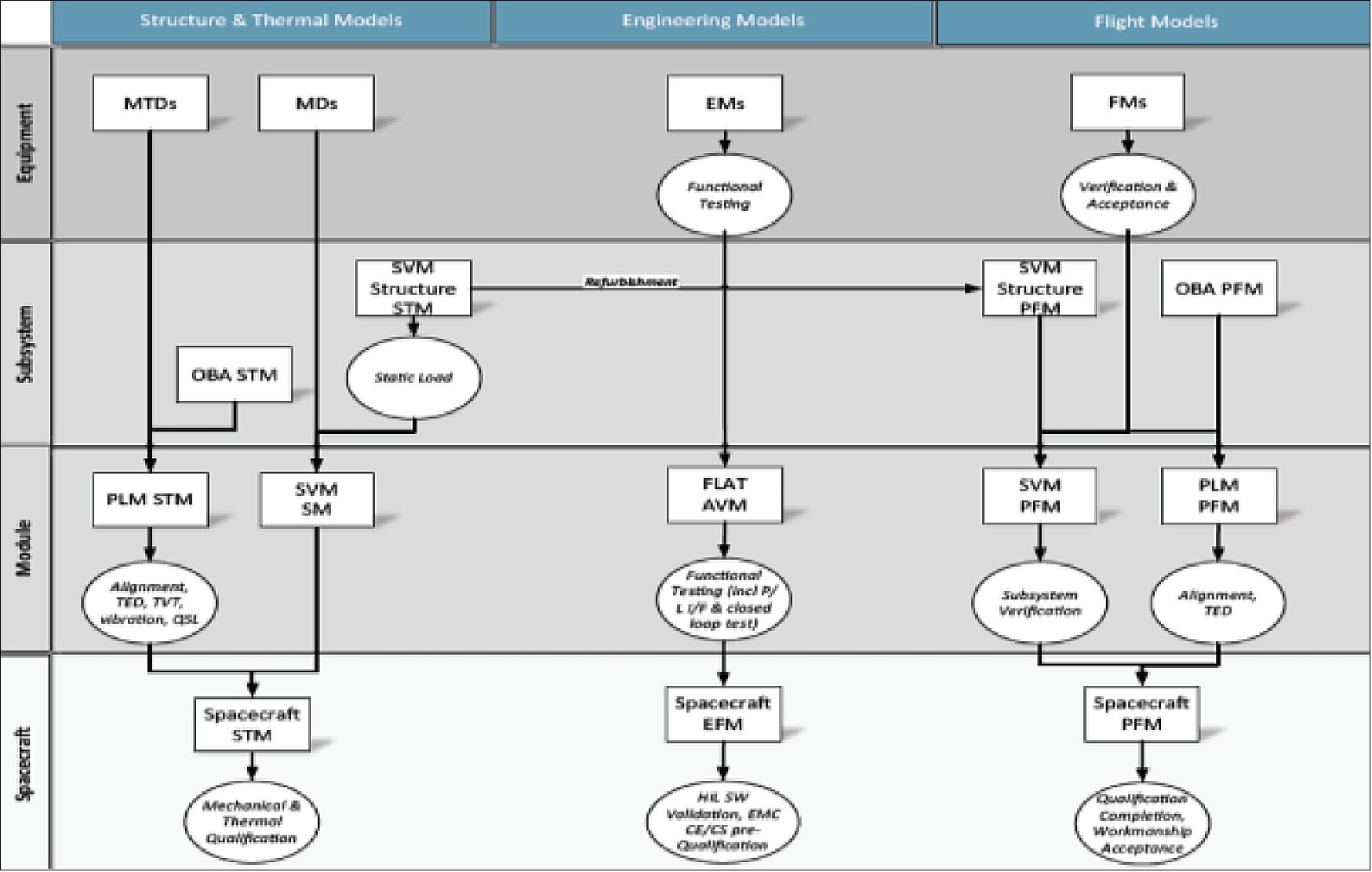
At Spacecraft Level
• Structural & Thermal Model (S/C STM): its aim is to achieve qualification with respect to environmental requirements relevant to the spacecraft structure and the thermal control system.
• Electrical & Functional Model (EFM): the objective is to validate the electrical architecture and the on board software. The EFM is fully representative of the flight spacecraft configuration and it includes Engineering Models of the payload. At EFM level, a characterization of the EMC performance is also performed.
• Proto-Flight Model (PFM): it is the final Spacecraft to be launched. The PFM integrates the flight models of the payload, provided in batches by the PLATO Mission Consortium. The S/C PFM completes the qualification process and it is subject to a complete test campaign.
At Service Module (SVM) Level
• Avionic Validation Model (AVM): developed in Phase 1 in order to anticipate the integration of the Fine Guidance Sensor (FGS) provided by PMC in the AOCS validation process and to perform anticipated verification of electrical / functional compatibility between avionics and instruments, supported by Spacecraft Interface Simulator (SIS).
• Structural Model (SM), including Sunshield structural thermal model, embedding STM or Mass Thermal Dummies (MTD) units. Thermal verification is limited to specific critical items.
• Proto-Flight Model (PFM), embedding PFM or FM units. The primary structure of SVM follows a refurbishment approach, which can be implemented as the interfaces can be frozen very early in the development program.
At Payload Module (PLM) Level
• PLM Demonstrator Breadboard (DMBB): to get early information on suitability of Optical Bench design w.r.t. thermoelastic stability requirements.
• PLM Structural & Thermal Model (PLM STM): it consists of the Optical Bench Assembly STM with thermal mass dummies of the cameras.
• PLM Proto-Flight Model (PLM-PFM): it integrates the P/L Flight units on the flight Optical Bench. Precise alignment and verification of thermoelastic stability is performed for the full qualification of the PLM, before spacecraft level integration.
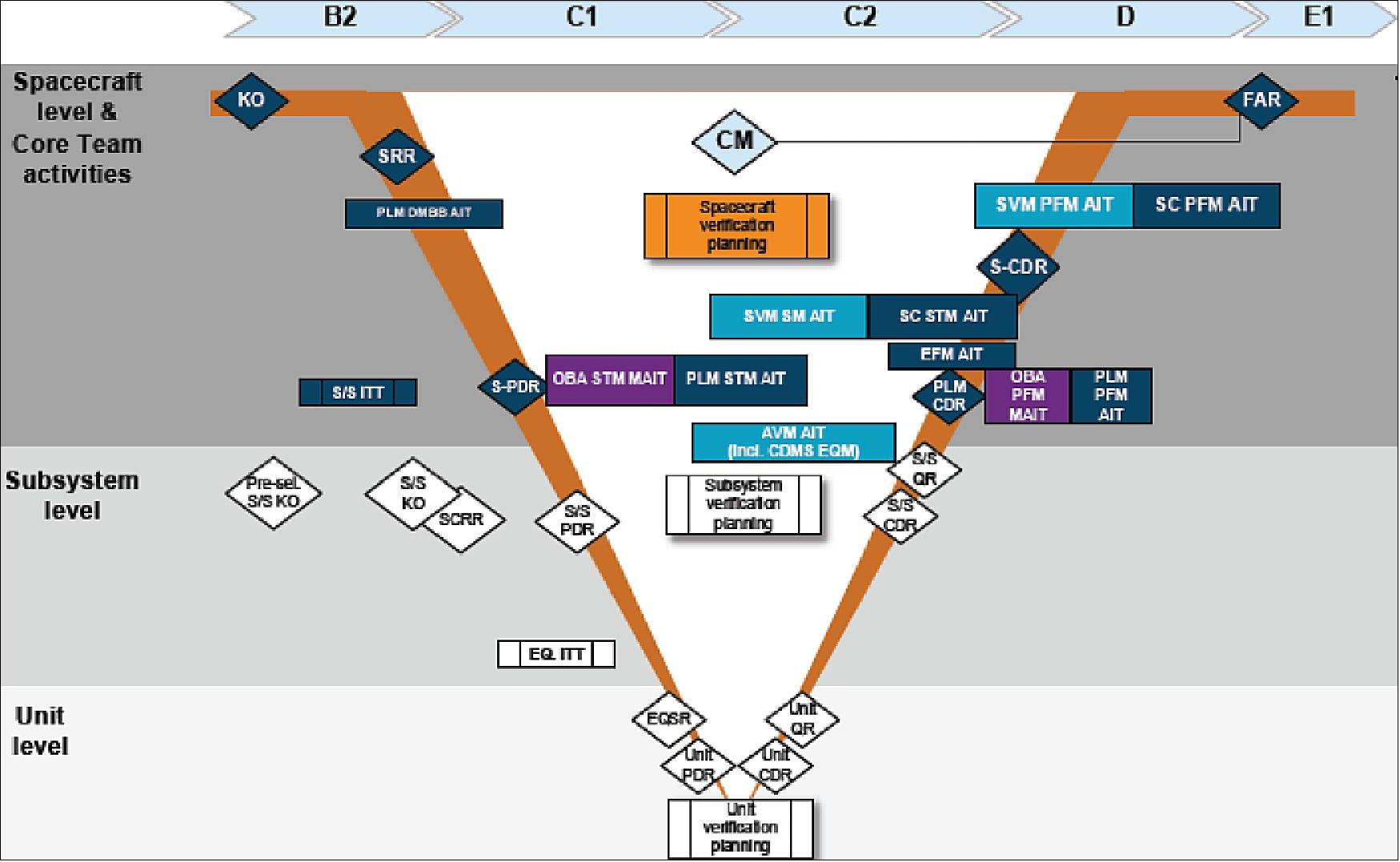
Figure 12 shows the development plan, which follows a classical V-approach. It takes the PLATO specific constraints into account:
• Phased development approach: Phase 1 is defined with a low expenditure profile until Critical Milestone (CM) after which the main hardware development and AIT activities can start.
• Early pre-verification of critical performances such as thermoelastic distortions (TED), AOCS pointing and EMC compatibility.
• Early provision of EM hardware and GSE to the PMC for payload EM testing activities.
• Critical Items developments by pre-selected suppliers in order to achieve TRL = 6 for all equipment at the system PDR.
Our development logic includes a full mechanical, thermal and TED qualification at PLM STM level to enter the Critical Milestone (CM) with mitigated risks. During Phase 1, the design and development efforts are concentrated on the PLM, allowing early PLM verification before the Critical Milestone. The Service Module (SVM) development is largely decoupled from the PLM development approach. The SVM core activities start in Phase 2 without significant impact on risk.
It is possible to finish the development and testing activities on SVM providing a verified product, which allows a hibernation of SVM activities in case of delayed payload deliveries.
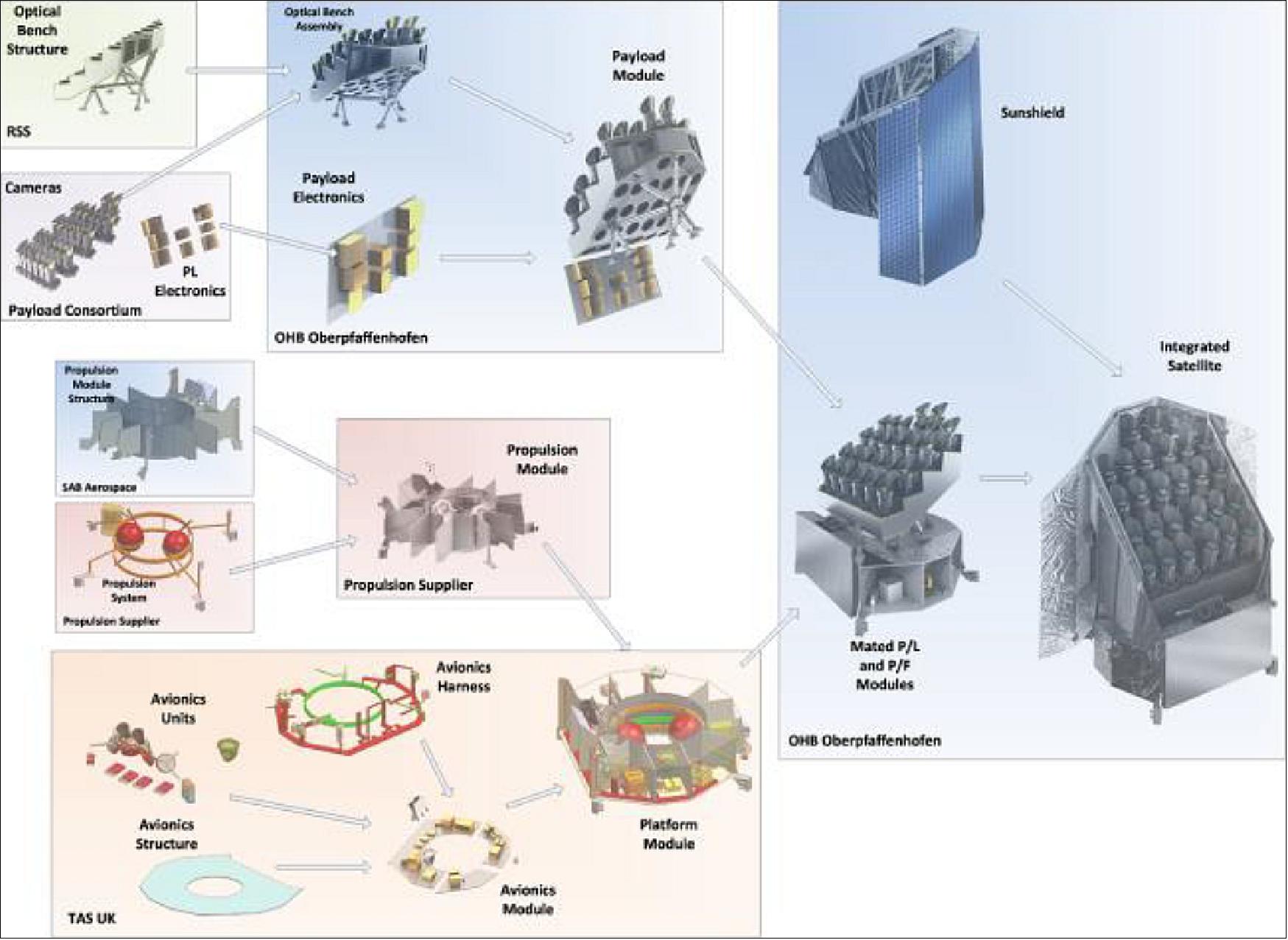
Assembly, Integration and Test
The main assets of the AIT approach at Service Module, Payload Module and Spacecraft levels are depicted in Figure 10:
1) Modularity, in order to parallelize activities and reduce the lead time.
2) Accessibility, in order to be reactive in case of troubleshooting.
3) Alignment performance achieved through adequate alignment strategies and accuracies and the respective AIT flows, in particular for the cameras and the sunshield.
Development Status
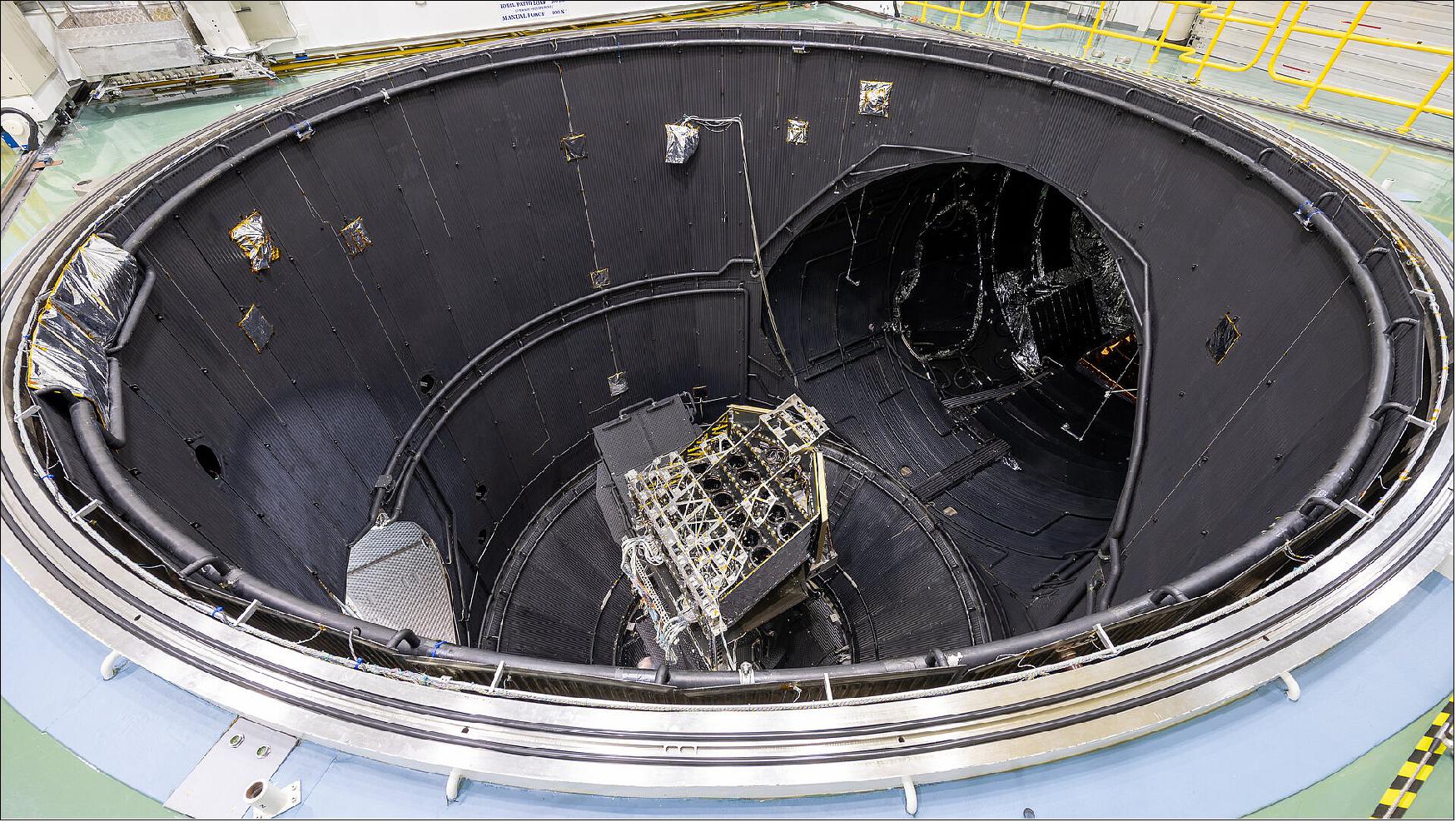
• June 01, 2022: A test version of the payload module of the exoplanet-detecting ESA’s Plato spacecraft underwent a prolonged vacuum soak within Europe’s largest thermal vacuum chamber, to evaluate its endurance of space conditions. 11)
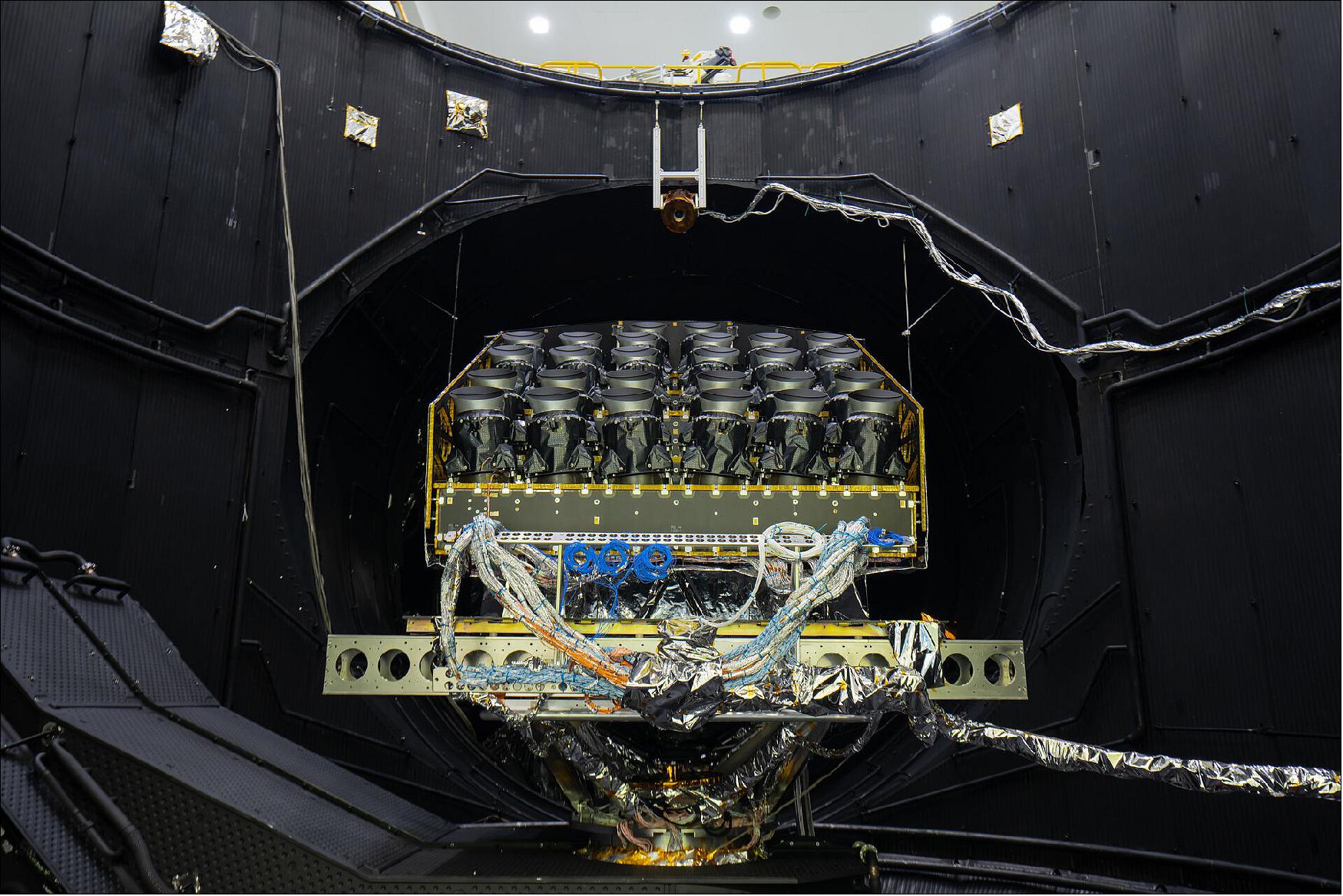
- But in order for the mission to perform as planned, the optical bench securing these cameras in place must maintain a fixed optical-quality rigidity, despite the extreme conditions of deep space, as Plato operates from out at the second Sun-Earth Lagrange point (L2), 1.5 million km from Earth.
- So this initial ‘structural and thermal model’ of Plato’s optical bench has been built specifically for testing in space-like conditions. Testing includes ‘thermal cycling’ to assess how the optical bench responds to the in orbit temperature variations, and ‘thermal balance’ to measure the operating temperature that it maintains in these conditions.
- Testing took place inside ESA’s Large Space Simulator, the largest thermal vacuum chamber in Europe. Standing 15m high by 10m wide the LSS is cavernous enough to encompass an upturned London double decker bus.
- Once the chamber’s top and side hatches are sealed, high-performance pumps create a vacuum a billion times sparser than standard sea-level atmosphere, and this can be held for weeks at a time during test runs. At the same time liquid nitrogen is pumped through the walls to recreate the cold of space in the shade.
- The LSS testing began at the end of March and was successfully completed in the third week of May.
- This current test campaign has been preceded by environmental testing of the Plato camera design, performed both at ESA’s ESTEC Test Centre in Noordwijk in the Netherlands and at SRON, the Netherlands Institute for Space Research.
- For the flight version of Plato, thermal vacuum testing of the 26 cameras required will be divided between SRON in Groningen, IAS in Paris and INTA in Madrid, running this autumn into 2024.
• January 14, 2022: Plato, ESA’s next-generation planet hunting mission, has been given the green light to continue with its development after the critical milestone review concluded successfully on 11 January 2022. 12)
- The review verified the maturity of the complete space segment (spacecraft platform and payload module), confirming the solidity of the spacecraft-to-payload interfaces, the payload schedule with particular focus on the series production of the 26 cameras, and the robustness of the spacecraft schedule. Plato will use the 26 cameras to discover and characterise exoplanets that orbit stars similar to our Sun.
- The critical milestone review was established specifically for Plato at the time of mission adoption because of the development risks associated with the series production of the cameras. The review was carried out during the period between July and December 2021. The review teams consisted of more than 100 people from ESA divided into two panels (one for the spacecraft and one for the payload) that submitted their findings to the board.
- The review board meeting was held on 11 January 2022. Nearly all aspects of the cameras production, assembly, and testing have been exercised successfully with the tests of structural, engineering and qualification models of the camera units carried out at several European facilities. The thermo-elastic properties of the optical bench, which hosts the cameras, were verified with a novel test technique developed by the spacecraft prime contractor, OHB System AG.

- With the achievement of this milestone, the second phase of the industrial contract, led by OHB System AG as prime contractor with Thales Alenia Space in France and RUAG Space System Switzerland as part of the core team, can start.
- The provision of the Plato payload is the responsibility of the European Space Agency in collaboration with a European consortium of institutes and industry, the Plato Mission Consortium (PMC) in accordance with the established Multi-Lateral Agreement (MLA) with the Agency.
- The next major milestone for Plato is the spacecraft critical design review in 2023, which will verify the detailed design of the complete spacecraft before proceeding with its assembly.
- “Plato continues a European tradition of excellence in all areas of space science,” said Filippo Marliani, project manager of Plato at ESA. “The mission will serve the science community to gather invaluable knowledge of planets in our galaxy, beyond our own solar system. The successful completion of the critical milestone and the formal start of the second phase of this extraordinary mission constitute an important boost of positive energy for the next challenges to be tackled with our industrial, institutional and academic partners.”
- After launch, Plato will travel to Lagrange point 2 in space, 1.5 million km beyond Earth in the direction away from the Sun. From this point the telescope will observe more than 200,000 stars during its four-year nominal operation, looking for regular dips in their light caused by the transit of a planet across the star’s disc. The analysis of these transits and of the stellar light variations will allow precise determinations of the properties of exoplanets and their host stars.
- “After this successful review we can continue the implementation of this exciting mission that will revolutionise our knowledge of exoplanets down to Earth size and open new venues in the study of the evolution of stars,” said Ana Heras, project scientist of Plato at ESA.
• March 5, 2021: Key technology for ESA’s exoplanet-hunting Plato spacecraft has passed a trial by vacuum to prove the mission will work as planned. This test replica of an 80-cm high, 12-cm aperture camera spent 17 days inside a thermal vacuum chamber. 13)
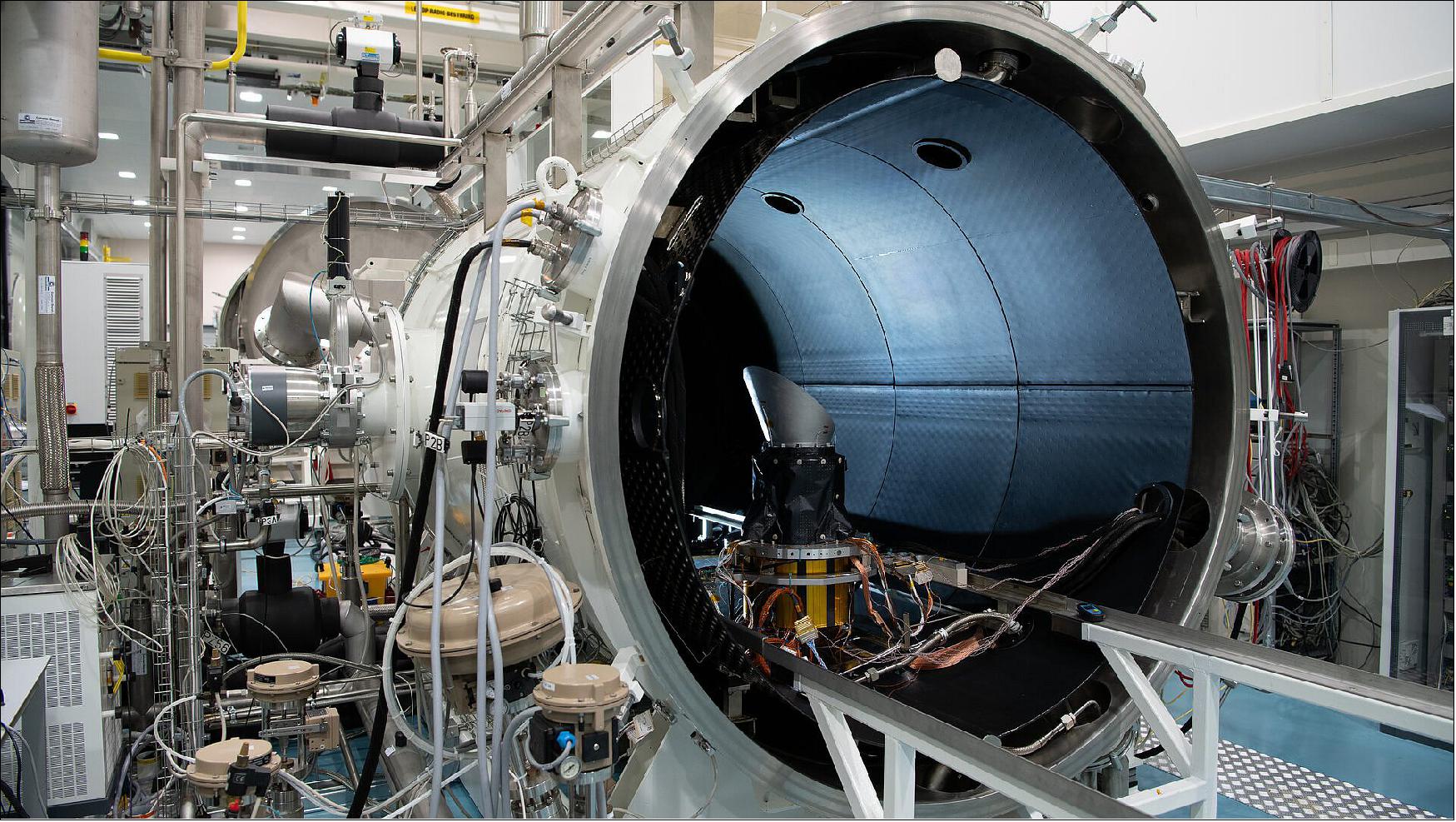
- “Located at the L2 Lagrange point, Plato ( PLAnetary Transits and Oscillations of stars) will have 26 of these cameras pointing at the same target stars. They will acquire images every 25 seconds – every 2.5 seconds for the two central cameras – for at least two years at a time to detect tiny shifts in brightness caused by exoplanets transiting these stars,” explains Yves Levillain, Plato’s Instrument System Engineer.
- “By observing with so many telescopes at once on a very steady basis we will attain a much higher signal-to-noise ratio than a single large telescope. Each telescope camera will host four CCDs producing 20.3 megapixel images adding up to 81.4 megapixel per normal camera and 2.11 gigapixels for the overall spacecraft – the most pixels ever for a space mission.
- “Away from the Sun’s brightness we expect to be able to detect the presence of Earth-like exoplanets, where life as we know it might be able to develop, and even to perform stellar seismology, gathering evidence of ‘starquakes’ in the stars we observe.”
- But first the team had to know their camera design was sound. The ‘Structural and Thermal Model’ of the camera, prepared by institutions and companies across Europe, was a near-replica of a flight model, except its lenses were not optically finished.
- “We placed the camera in our VTC-1.5 Space Simulator, using liquid nitrogen to keep it around -80°C,” says Matteo Appolloni of the ESTEC Test Centre. “First of all the team wanted to be sure that their thermal model was correct – that the camera responded as expected to temperature changes. The other purpose of the testing was to check an innovative temperature-based focusing method.”
- To reach the high optical precision required, the focal length of each Plato camera will be adjusted through very slight temperature shifts, causing it to expand or shrink. Changing the temperature by just 0.1ºC using a trio of camera heaters will adjust its focusing length by 1 µm – a thousandth of a millimeter.
- The testing was monitored on a 24 hour seven days per week basis by personnel from ESA’s Plato mission team, industry representatives and European Test Services – the company that operates the Test Centre for ESA – divided into three shifts daily. To observe COVID-19 protocols they worked apart and wiped down computers and surfaces before shift changes.
- “Over the days of the test campaign we were pretty confident of success, because the team has put a lot of work into the technical aspects,” adds Yves.
- “Our biggest worry was actually due to the pandemic, because if somebody caught COVID-19 then our testing might be disrupted. But now the basic design is validated, we’ll proceed to optical testing of engineering models of the camera, as well as data processing checks, then in the summer a full-scale STM of the Plato spacecraft platform minus the cameras will undergo testing here at the ESTEC Test Centre.”
• May 8, 2019: Teledyne e2v is pleased to announce the completion of the first delivery milestone for the supply of their CCD Bruyères image sensors to be used in the European Space Agency’s PLATO Mission. Earlier this year, the acceptance event was marked with a signing by the delivery review board at Teledyne e2v in Chelmsford, UK. The acceptance of the first flight model is significant, as with the first sensors meeting the requirements for flight, it allows Teledyne e2v to move forward with production of the devices and to complete the deliveries of a total of 112 flight grade sensors. The projected completion date for this €42 M contract for custom sensors is due through 2021. 14)
- PLATO will consist of 26 telescopes mounted on a single satellite platform. Each telescope will contain four 20 Mpixel Teledyne e2v CCDs in both full-frame and frame-transfer variants, for a full satellite total of 2.12 Gpixels. This is over twice the equivalent number for Gaia, the largest camera currently in space. As with Gaia, all of the PLATO CCD image sensors will be designed and produced in Chelmsford, UK.
- The CCD Bruyères (named after Teledyne e2v’s Jean-Francois Bruyères) is a 4510 x 4510 18 µm pixel custom image sensor that will be used to study a large number of extrasolar planetary systems, with an emphasis on the properties of terrestrial planets in the habitable zone around solar-like stars. The CCD Bruyères sensors will enable PLATO to observe the dimming of a star's light when a planet passes in front of it.
- Filippo Marliani, PLATO Project Manager at ESA, said: “This milestone establishes the first delivery of flight grade hardware of the whole PLATO project. It is a fundamental step for the progression of the complex integration and testing of the large number of telescopes in the satellite.”
- David J Morris, Principal Project Manager at Teledyne e2v, said: “Teledyne e2v are proud to be involved in this mission to identify earth-like exoplanets, to further our knowledge on how planets and stars form and the emergence of life in the universe in which we live.”
• April 11, 2019: The first batch of CCDs (Charge Coupled Devices), to be flown on ESA's PLATO space observatory, was accepted by ESA last month. This is an important milestone on the road to creating a groundbreaking spacecraft that will detect Earth-sized exoplanets in orbit around nearby stars. 15) 16)
- The first 20 CCDs for PLATO were accepted for delivery by ESA in mid March, and the remaining 84 detectors will be delivered in further batches before the end of 2020.
- "The delivery of the first detectors at this time is important because it secures the early availability of one of the key elements of the whole mission," said Bengt Johlander, PLATO payload manager at ESA. "It also enables the PLATO team to proceed with the first stage of the complex integration and testing of the large number of telescopes in the satellite."
- The PLATO CCDs produce each an image of 20 megapixels (or Mpixels), which is equivalent to the output of a mid-range commercial digital camera. Most of the CCDs will take measurements every 25 seconds, but eight of them will be fitted in two 'fast' telescopes that will make measurements of brighter stars every 2.5 seconds.
- Each telescope will therefore comprise about 80 Mpixels, resulting in a full satellite total of 2.12 gigapixels (Gpixels). This is over twice the equivalent number for ESA's Gaia mission, which currently features the largest camera ever flown in space.
- The large format of the CCDs – approximately 8 cm × 8 cm per detector – will result in a total optically sensitive surface of 0.74 m2. The detectors will work at a temperature lower than -65°C to maximize their sensitivity.
- PLATO will not only search for new planets but also study the properties of their host stars, and determine the planetary masses, sizes and ages with unprecedented accuracy, to improve our understanding of planetary system architecture and identify potentially habitable worlds.
• October 4, 2018: The construction of ESA's Plato mission to find and study planets beyond our Solar System will be led by Germany’s OHB System AG as prime contractor, marking the start of the full industrial phase of the project. The announcement was made today at the 69th International Astronautical Congress in Bremen, Germany, where the contract was formally signed. 17)
- The contract covers the delivery of the satellite, including the testing phase leading to launch, support during the launch campaign, and the in-orbit commissioning phase.
- Plato (PLAnetary Transits and Oscillations of stars) mission, will aim to find and study extrasolar planetary systems, with a special emphasis on rocky planets around Sun-like stars and their habitable zone – the distance from a star where liquid water can exist on a planet’s surface.
- “Does a second Earth exist in the Universe? is one of the exciting questions in astrophysics today,” says Johann-Dietrich Wörner, Director General of ESA. “With our Plato satellite we are focusing on Earth-like planets orbiting up to the habitable zone around other stars which are similar to our Sun. This will be a major step towards finding another Earth.”
- The spacecraft will be built and assembled by OHB together with Thales Alenia Space (France and the UK) and RUAG Space Switzerland; many ESA member States will also be involved in the construction of this European planet hunter.
- DLR (German Aerospace Center) and a consortium of various European research centers and institutes will provide the scientific instrument, consisting of an array of 26 cameras and electronic units, that will observe a large patch of the sky on the lookout for planets.
- “Plato is a next-generation exoplanet mission that will monitor thousands of bright stars over a large area of the sky in search of tiny, regular dips in their brightness caused by transiting planets,” says Ana Heras, Plato project scientist at ESA. “Since planets only block a minute portion of the light radiated by their parent star, this quest requires extremely precise, long-term photometric observations.”
- Plato will not only seek new planets but will also investigate the properties of their host stars, and determine the planetary masses, sizes and ages with unprecedented accuracy. This will help scientists understand the architecture of exoplanet systems and determine whether they might host habitable worlds. In addition, Plato will also perform asteroseismology – the study of seismic activity of stars – providing insight into stellar interiors and evolution.
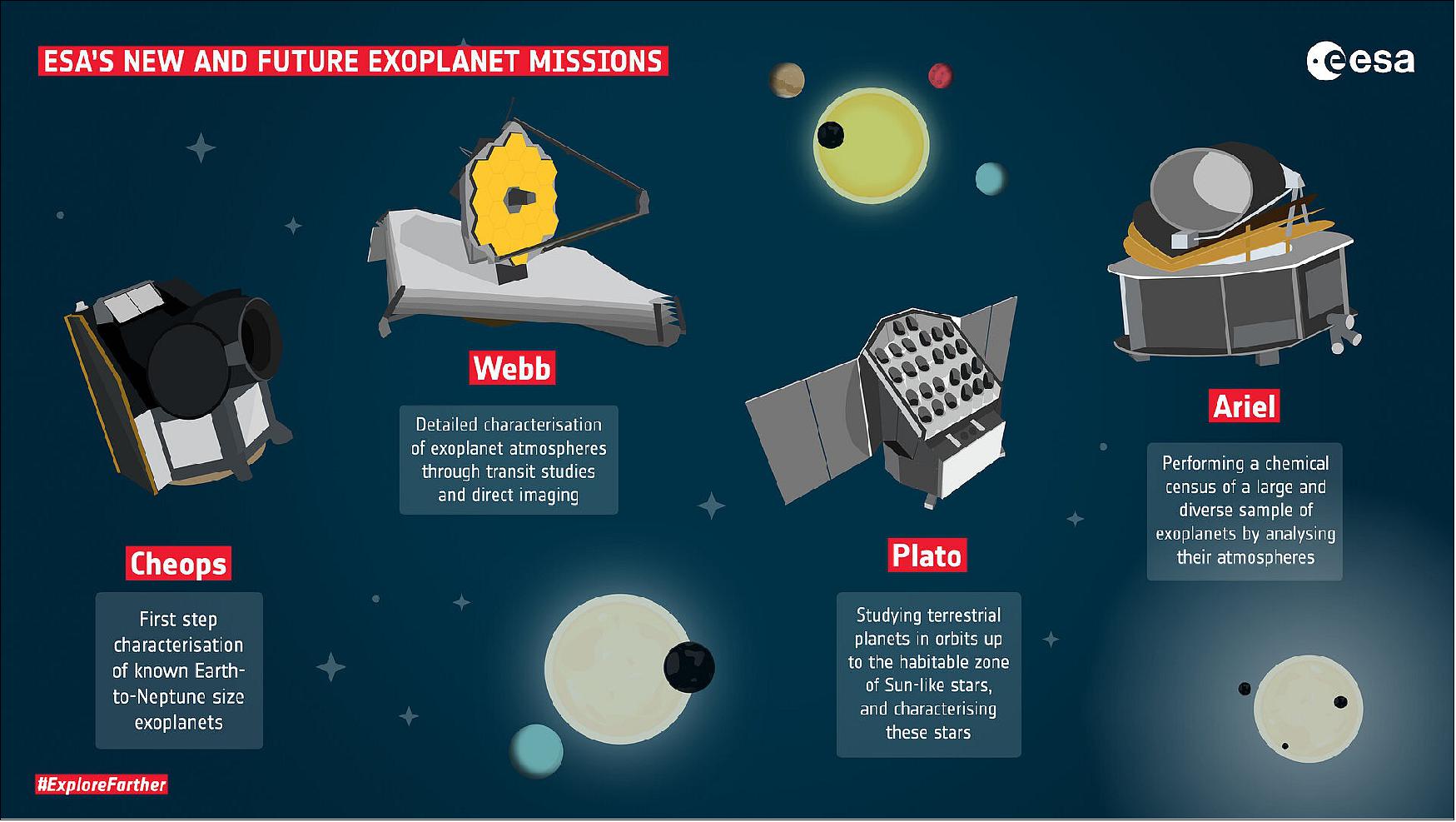
- The mission will expand on the work of Cheops, ESA’s upcoming exoplanet watcher, which will be launched next year to perform a first characterization of known planets. It will be followed by Ariel, which will observe a large and diverse sample of exoplanets to study their atmospheres in great detail.
- Plato will operate from the 'L2' virtual point in space 1.5 million km beyond Earth as seen from the Sun. From this vantage point, it will be our outpost to unravel the mysteries of a multitude of extrasolar worlds.
• April 26, 2018: OHB System AG has been selected by ESA as the industrial Prime to negotiate the implementation of the satellite. 18)
- PLATO is a satellite-based observatory for use in space to detect and conduct research into exoplanets1 orbiting in other solar systems. As the prime contractor, OHB will be able to rely on an existing industrial core team comprising Thales Alenia Space (France and UK) and RUAG Space of Switzerland to design and develop the satellite. The contract is valued at around 297 million euros. The negotiations between ESA and OHB are expected for mid-June, upon which the contract will be signed.
- Thales Alenia Space (France and UK) will be in charge of avionics and integration for the service module (SVM). The AOCS (Attitude and Orbit Control Subsystem) software proposed for PLATO draws on the expertise and processes developed over the last 20 years. Thales Alenia Space offers full expertise in satellite avionics development and testing, from initial equipment specifications to test benches and AIT (assembly, integration, testing). The avionics test bench will be integrated and operated at Thales Alenia Space’s Cannes facility, with teams from Thales Alenia Space in UK also heavily involved.
• June 20, 2017: On 20 June 2017, the European Space Agency (ESA) gave the go-ahead for the further development of the PLATO space telescope. The German Aerospace Center (Deutsches Zentrum für Luft-und Raumfahrt; DLR) is leading the international consortium responsible for the construction and scientific operation of the space telescope. ESA's SPC (Science Program Committee) assessed the status of the project positively and formally adopted the mission. This means that work can begin on the implementation of the spacecraft and its ground segment. 19)
- PLATO is Europe's next large-scale space mission; it will search for and characterize exoplanets. The primary goal of the mission is to look for Earth-like planets that show signs of having liquid water – in other words, planets that have the potential to support life. The aim is to determine the radius, mass and age of exoplanets with unprecedented accuracy.
- ESA is responsible for the construction and launch of the spacecraft, as well as for its operation. A consortium of several European research institutions will provide the payload – a scientific instrument comprised of 26 telescopes, the on-board computer, the data center and the scientific data analysis. The DLR Institute of Planetary Research in Berlin will head the consortium, and will also take on joint responsibility with the DLR Institute of Optical Sensor Systems for the readout electronics of the fast telescopes, as well as for the computer on board the spacecraft. France, Italy, Great Britain, Spain and Belgium are all making important contributions to the instrument. Part of the payload development, the data center and payload operations from 2025 are being supported by the DLR Space Administration with funds from the German Federal Ministry for Economic Affairs and Energy (Bundesministerium für Wirtschaft und Energie; BMWi). Over the past three years, the instrument consortium led by DLR has worked with ESA to develop the PLATO concept, which has now received a positive assessment.
- PLATO will observe hundreds of thousands of stars for a minimum of two years, and in doing so, will search for rocky planets orbiting Sun-like stars. According to DLR researcher and head of the PLATO instrument consortium Heike Rauer: "This scientific data will not only enable us to significantly expand our knowledge about exoplanets, but we will also learn a great deal about stars and how they evolve, and in turn, the development of our galaxy."
- The PLATO mission will allow us to study the myriad of stars and planetary systems in our galactic neighborhood. "By observing stellar oscillations, PLATO will be able to fully characterize these stars and their planets in terms of their mass, diameter and age," says Laurent Gizon, Director of the Max Planck Institute for Solar System Research and Head of the PLATO data center. "This will revolutionize our knowledge about the development of exoplanets and their host stars."
- 26 telescopes on the hunt for exoplanets: The PLATO mission will be the first of its kind to house multiple telescopes on one spacecraft. The instrument consists of 26 individual telescopes, two of which have a particularly fast response time and will be used for bright stars, color requirements, and fine guidance and navigation. Each telescope has an aperture of 12 cm and directs the incoming light onto its focal plane, which consists of four large-format CCD sensors. Rauer explained: "This concept and the high sensitivity of the instruments will enable us to search for and accurately characterize rocky planets that are orbiting Sun-like stars."
Launch
PLATO will be launched from Europe's spaceport in Kourou with a mid-sized launcher (Ariane 6.2 vehicle) for an initial six-year mission.
Orbit
The PLATO spacecraft will operate from a halo orbit around L2 (Lagrangian Point 2), a virtual point in space, 1.5 million km beyond Earth as seen from the Sun.
Sensor Complement
The PLATO payload comprises the cameras made of telescopes, their focal planes, all related electronics and the on-board DPS (Data Processing System). The PLATO Payload (provided by the PLATO mission consortium) plus the optical bench on which the 26 cameras are mounted (provided by ESA), constitute the PLATO Payload Module. 20)
Driven by science requirements calling for a very large FoV (Field of View), coupled with a sensitivity of a 1 m-class telescope, the PLATO instrument concept is based on a multi-telescope approach (cf. the rational beyond the segmentation of the optic design), involving a set of 24 Normal Cameras working at a cadence of 25 seconds and monitoring stars fainter than mV = 8, plus 2 Fast Cameras working at a cadence of 2.5 seconds, and observing stars in the magnitude range 4 to 8.
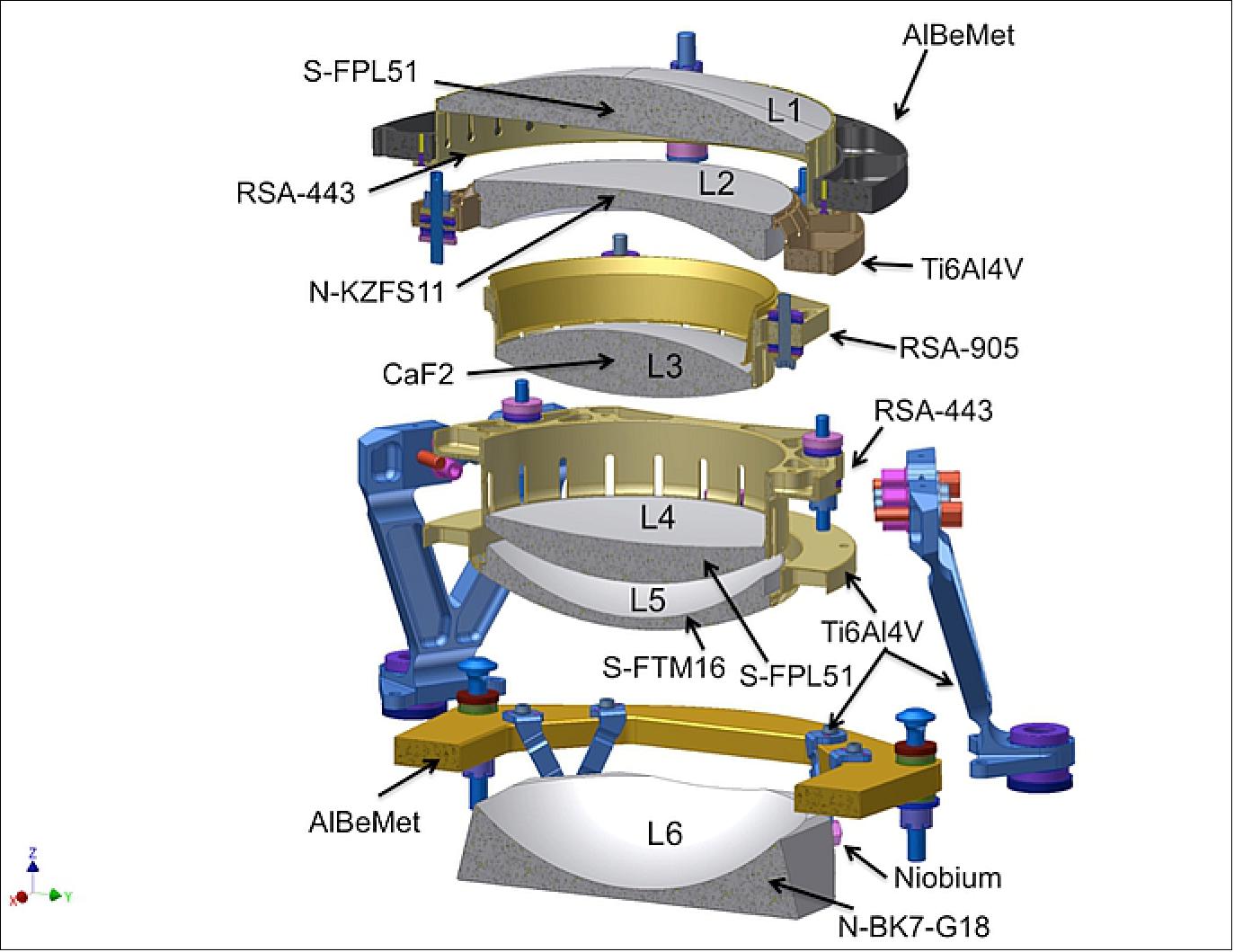
A camera includes a TOU (Telescope Optical Unit), a FPA (Focal Plane Assembly), which supports four CCD detectors, the FEE ( Front End Electronics) box, the FSS (FEE Support Structure), and related thermal equipment. The TOUs are based on a fully dioptric telescope including 6 lenses. There is no general difference in the TOU design for normal and fast telescopes, but the latter will include filters in form of special coatings on an optical surface of the optical train.
Each camera is equipped with its own, passively cooled FPA, comprised of 4 CCDs with 4510 x 4510 pixels each, working in full frame mode for the “normal” cameras, and in frame transfer mode for the “fast” cameras. This results in 1037º x 1037º effective FoV for the “normal” cameras and 619º x 619º FoV for each of the two “fast” cameras.
Besides providing star brightness measurements for bright stars, the “fast” cameras also work as fine guidance sensors for the attitude control system of the Spacecraft. In addition they allow measurements of stars in two spectral bands. For this purpose one of the “fast” cameras is equipped with a blue, the other one with a red bandpass filter.
The 24 “normal” cameras are arranged in 4 groups of 6 cameras. All 6 cameras of each group have exactly the same FoV. However, the lines of sight of the four groups are offset by an angle of 9.2° from the PLM (Payload Module) +Z axis.
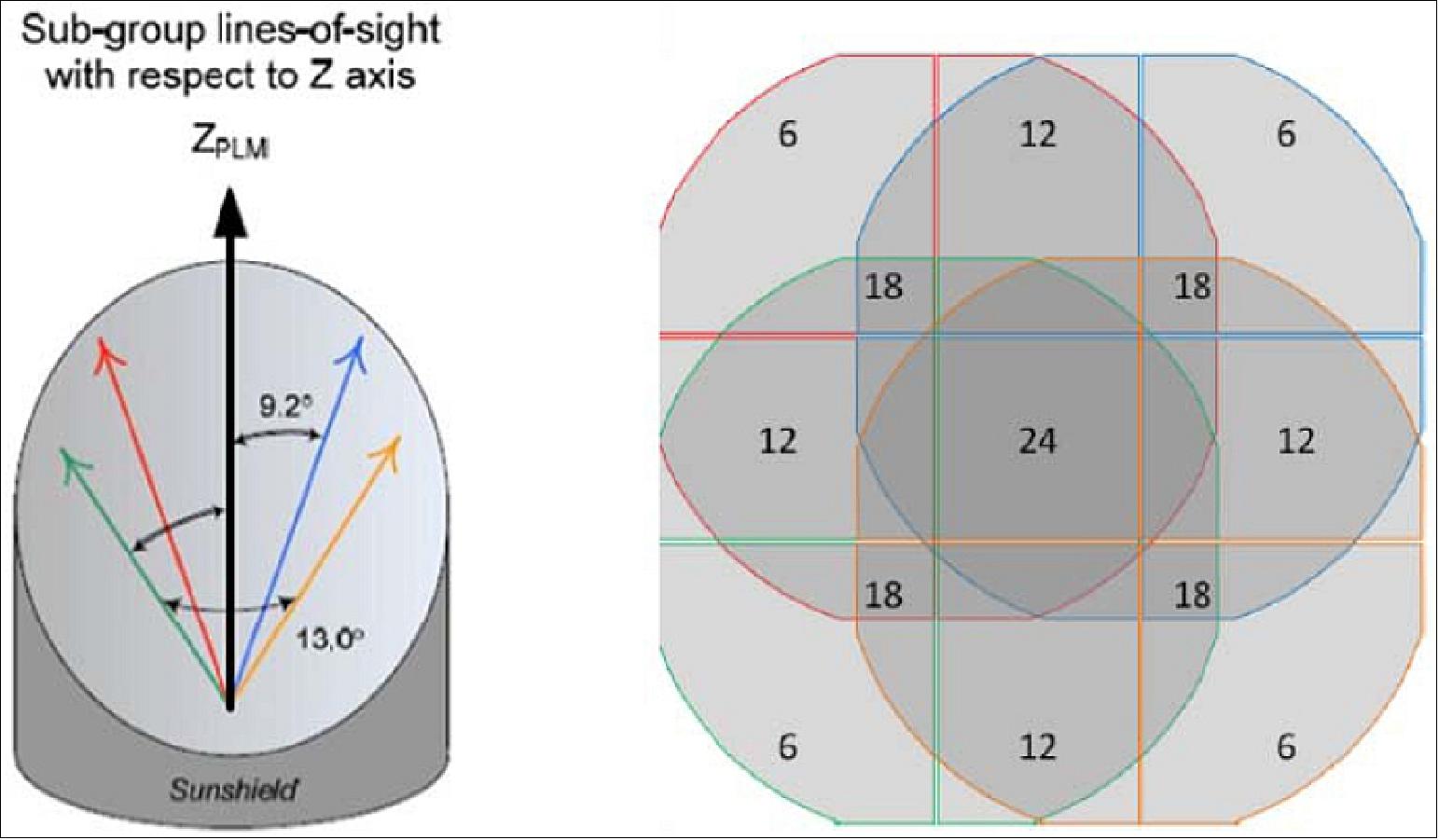
This particular configuration allows PLATO to survey a total field of about 2232º x 2232º per pointing, with various parts of the field monitored by 24, 18, 12 or 6 cameras. This strategy optimizes both the number of targets observed at a given noise level and their brightness. The satellite will be rotated around the mean line of sight by 90º every 3 months, resulting in a continuous survey of exactly the same region of the sky.
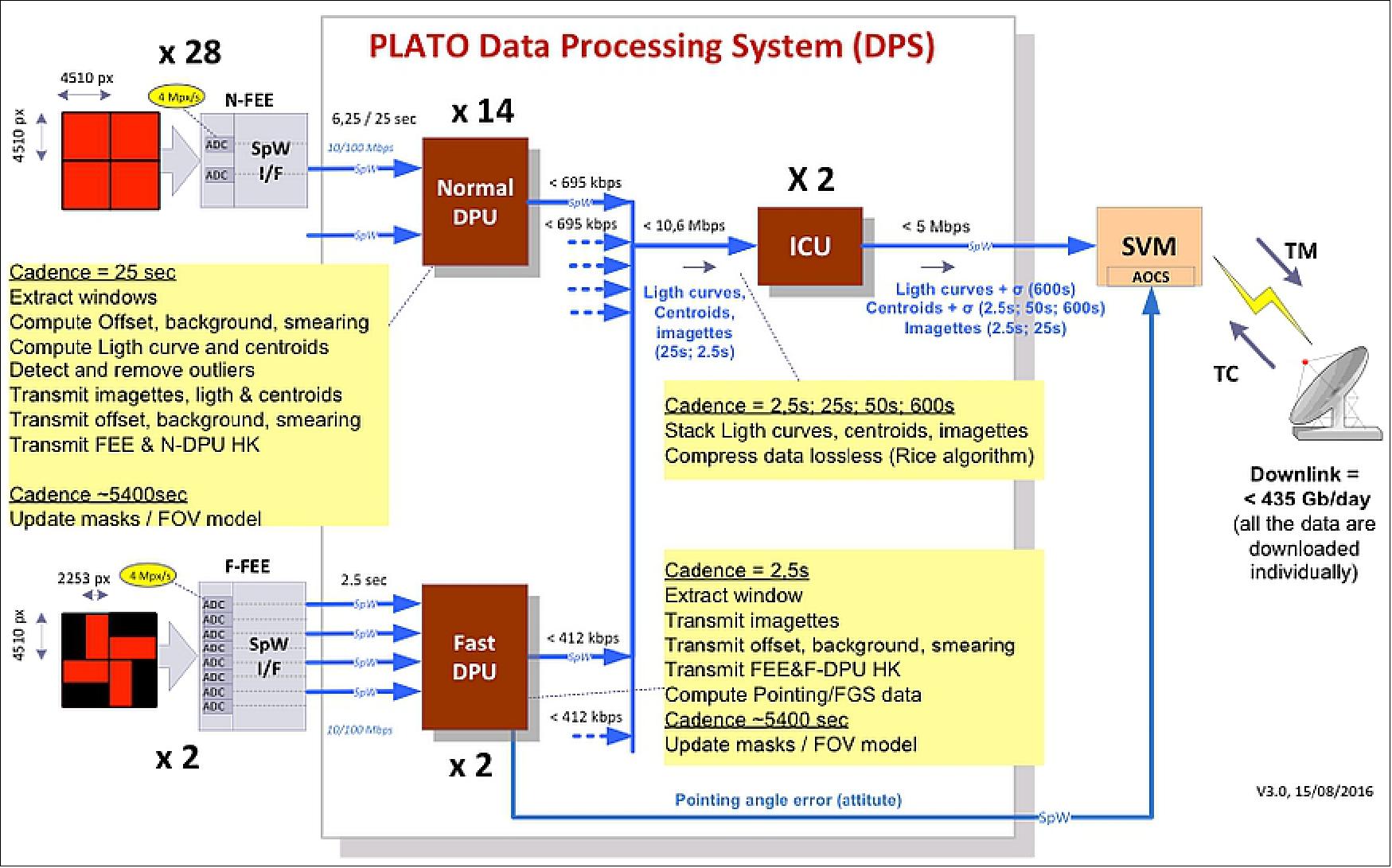
At the beginning of each pointing full images will be transferred to ground to serve deriving the PSF (Point Spread Function) at each target position. To reduce the high data volume produced on-board during operation, each assigned target star will be allocated a CCD window around it from which all the pixel values will be gathered, forming a small image called an “imagette”. The size of this window is typically 636 pixels (939 pixels for the fast cameras), large enough to contain the whole image of the target star. These imagettes will either be sent as raw data to ground or processed on-board to get centroids and light curves to further reduce the telemetry data volume. The raw imagettes are used on ground to derive the PSF at different positions of the detector, a step which is needed to verify the quality of the photometric and centroiding data. For calibration purposes and to define imagette positions after re-pointings, also full frame images will be transmitted to ground.
There is one Data Processing Unit (DPU) per two “normal” cameras performing the basic photometric tasks and delivering a set of light curves, centroid curves and imagettes to a central Instrument Control Unit (ICU), which stacks and compresses the data, then transmits them to the SVM for downlink. Data from all individual cameras are read-out every 25 s and transmitted to the ground, where final instrumental corrections, and e.g. jitter correction, are performed. The DPUs of the fast cameras will also deliver a pointing/attitude error signal to the AOCS, at a cadence of 2.5 s.
Each DPU of the “normal” cameras (N-DPU) is associated with two FEEs. They are grouped together in a Main Electronics Unit (MEU). There are 2 MEUs containing 14 N-DPUs for the 28 normal cameras, each one including its own power supply electronics.
The fast DPUs (F-DPU) are functionally associated to the fast FEE. There are 2 F-DPUs, one per fast FEE, grouped in one box called Fast Electronics Unit (FEU), also including its power supply.
Plato’s payload will have a mass of about 600 kg and use about 800 W of power. It will produce 103 Gb of data each day.
Telescope Optical Unit (TOU)
There is no general difference in the TOU design for normal and fast telescopes, but the latter will include filters in form of special coatings on an optical surface of the optical train.
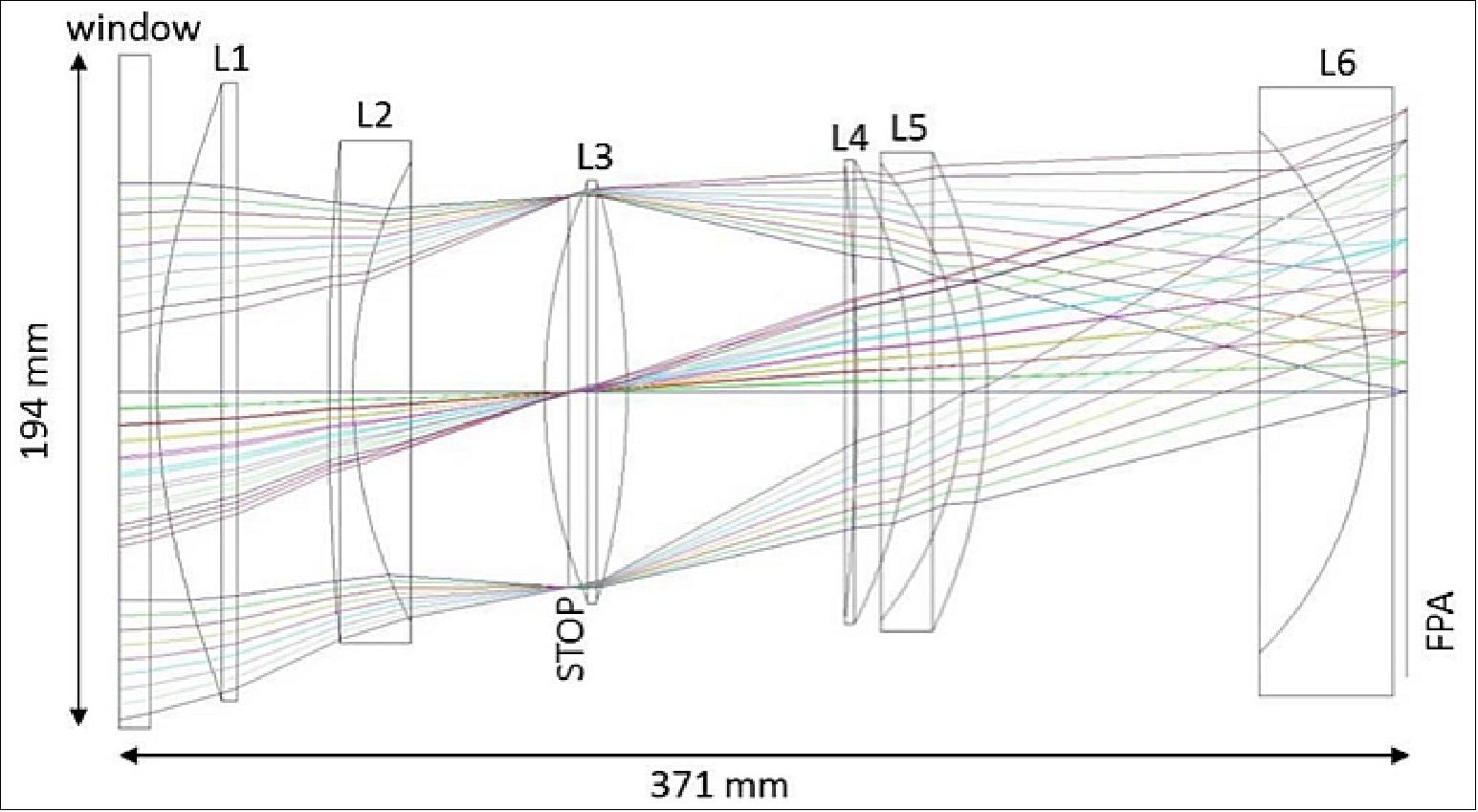
The optical configuration consists of 6 lenses, plus one window, placed at the entrance of the telescope, providing protection against radiation and thermal shocks. The first surface of the first lens contains even aspherical terms (K, a4, a6), while the second surface is flat in order to facilitate the interferometric surface measure during the aspheric manufacturing.
All the other lenses are standard spherical surfaces. The first surface of the third lens is the optical system stop and guarantees a real entrance pupil diameter of 120 mm. This configuration provides a corrected FoV up to 18.9° accepting slightly degraded image quality, as well as a ~14% vignetting, in this small region at the edge of the field.
Spectral range | 500 – 1000 nm |
Entrance pupil diameter | 120 mm |
Working f/# | 2.06 @ 700 nm |
FoV (Field of View) | ~1037º x 1037º |
Image quality | 90% enclosed energy within 2.532.5 pixel2 for 95% of nominal camera FoV |
Maximum field distortion | 3.84% |
Plate scale | 15 arcsec/pixel |
Working temperature | -80ºC |
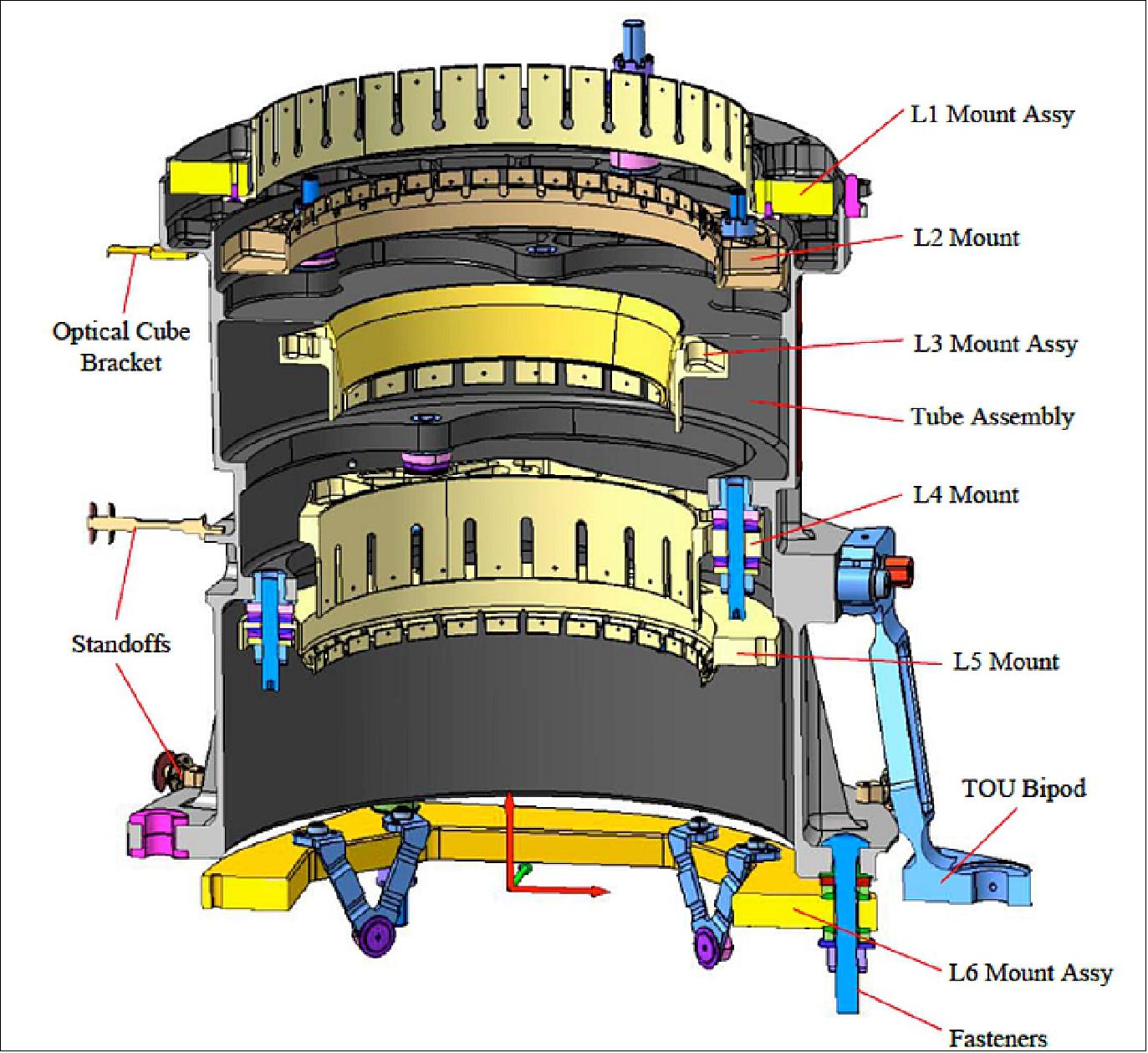
The TOU main structure consists of a machined tube with all the interface planes, threads and holes necessary to mount the other components.
The heat dissipated by the CCD needs to be transported through the TOU structure, which therefore must be made of material with high thermal conductivity. In addition, the large temperature difference between integration and operation requires a design able to accommodate the dimensional changes of the assembled components without leading to unacceptable mechanical stresses. The TOU is quasi-static mounted to the Camera Support Structure with three bipods.
TOU Team: The Telescope Optical Units are responsibility of Italy, with the contribution of Switzerland, and Sweden.
Focal Plane Assembly (FPA)
The PLATO detectors are CCDs provided by e2v, model CCD270, specifically developed for this mission. They are built with two separately connected sections to allow full frame (FF) or frame transfer (FT) readout modes. They are back-illuminated, back-thinned devices, non-inverted type (cf. CCD characteristics, Figure 21).
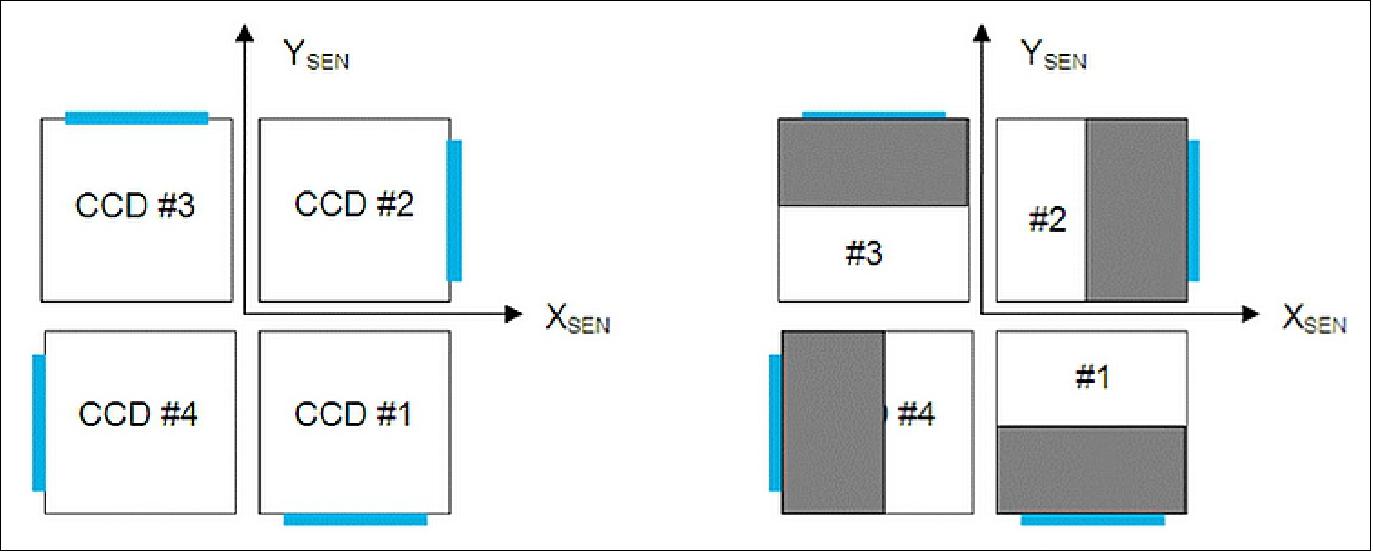
An antireflection coating on its sensitive surface provides for the highest quantum efficiency over a broad wavelength range. Only one readout register with two outputs is required for both the FF and FT devices. The detectors will work at a temperature lower than –65°C to minimize dark current and radiation damage.
Each Focal Plane Assembly structure supports 4 CCDs via quasi-static mount on a support plate, ensuring a very good planarity. The support plate is made in Titanium, attached to the telescope structure by 3 bipods, also in Titanium. It has the possibility to be adjusted in position (along the optical axis and around the camera transverse axes) by using 3 shims located at the interface between the FPA bipods and the telescope structure. It is electrically isolated from the telescope, and the thermal power dissipated at FPA level is evacuated to the telescope structure by means of 3 flexible thermal straps thermally connected to the CCD packages.
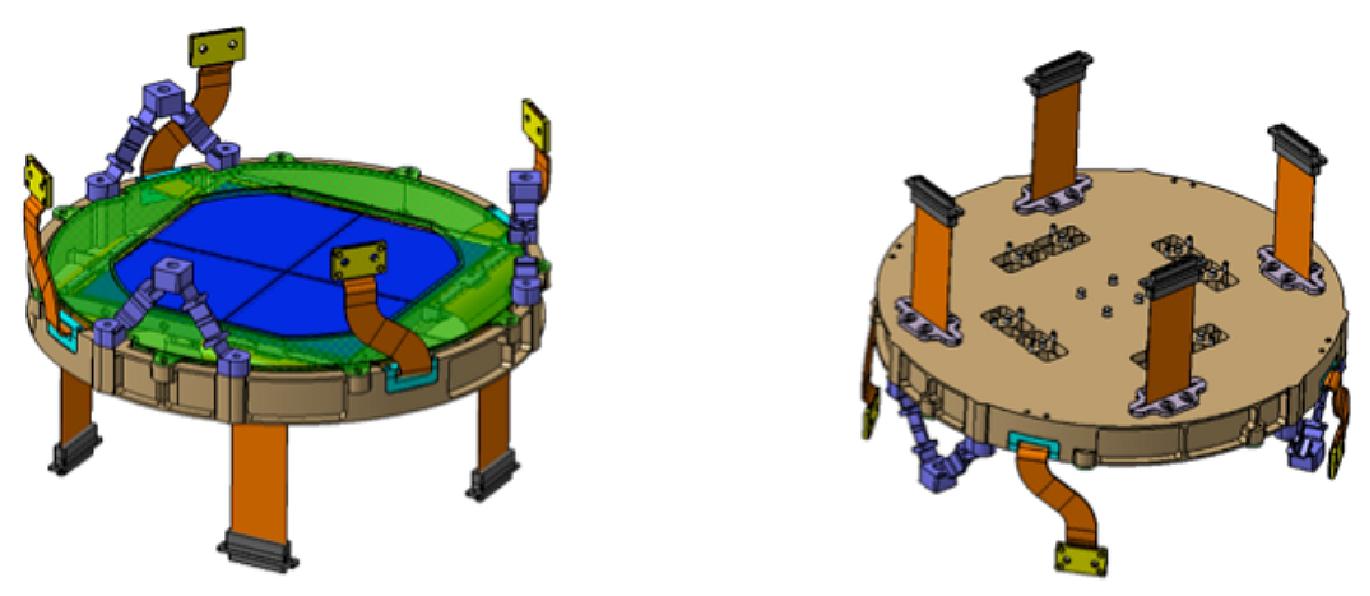
The flexi-cables connecting each CCD to the FEE have a free length of ~ 80 mm from the bottom of the FPA to the top of the FEE. The distance between FPA and FEE is limited to a nominal value of 65 mm to get slightly bended flexi-cables allowing small misalignments, displacements or rotations between them during AIT, and launch.
Extensive analysis has been performed to guarantee the PLATO FPA performances in terms of vibration robustness, flatness, CCD temperature, while remaining within mass and power budget. Finally, integration and verification procedures for the FPA have been defined and tested using a mock-up manufactured in Al.
FPA Team: The Focal Plane Array is under responsibility of Spain.
Front End Electronics (FEE)
The N-FEE operates the 4 CCDs of a normal camera, digitizes the image data and transfers them to the DPU. Each normal CCD has an integration time of 22.5 s and a readout time of ~2.5 s. The readouts are staggered at every 6.25 s, in equal intervals of the 25 s frame time. The readout and data transfer to the DPU are arranged such that the readout of one CCD is finished before the next begins, in order to minimize crosstalk and interference effects.
The cameras receive their power from the Ancillary Electronics Units (AEUs), one AEU per fourteen “normal” cameras and one AEU for both “fast” cameras. The AEUs also provide synchronization signals for data acquisition and cameras thermal control. The payload is controlled by two ICUs used in cold redundancy. The two ICUs are grouped in a single box with their own power supply.
In addition, the instrument includes on-board software, operating on the DPUs and ICUs, which can be modified during the flight.
The cameras receive their power from the Ancillary Electronics Units (AEUs), one AEU per fourteen “normal” cameras and one AEU for both “fast” cameras. The AEUs also provide synchronization signals for data acquisition and cameras thermal control. The payload is controlled by two ICUs used in cold redundancy. The two ICUs are grouped in a single box with their own power supply.
In addition, the instrument includes on-board software, operating on the DPUs and ICUs, which can be modified during the flight.
An FPGA is the core of the N-FEE, and receives command packets from the DPU and timing and synchronization data from the AEU. It generates all the clocks necessary for driving the 4 CCDs and drives the DACs responsible for providing the bias voltages.
The interface between N-FEE and N-DPU is made by two SpaceWire links. The protocol used is RMAP in all cases, but the command interface is actually simulated RMAP with e.g. control registers, HK data, memory mapped for simple access.
The F-FEEs operate the CCDs of the two fast cameras. It has many aspects in common with the N-FEE: commanding, CCD bias supplies, clock waveforms, and housekeeping. Other aspects are significantly different due to the use of frame-transfer devices and shorter integration times: FPGA and programming, number of SpaceWire interfaces and data rate.
For the fast cameras, the 4 CCDs are read out simultaneously every 2.5 s. Due to less critical noise requirements, the F-FEE uses an integrated analog front-end (AFE) electronics, instead of the non- integrated 16-bit AFE used by N-FEE. As for the N-FEE, synchronization of the two cameras is ensured by receiving from the associated F-AEU a high frequency signal (50 MHz) and a signal giving the information of the 2.5 s period beginning, also synchronized with the 25.0 s period of the normal cameras.
FEE Team: The N-FEE is responsibility of UK, while the F-FEE is responsibility of Germany, with the involvement of France and Belgium.
References
1) ”ESA selects planet-hunting PLATO mission,” ESA, Feb. 19, 2014, URL: http://sci.esa.int/plato/53707-esa-selects-planet-hunting-plato-mission/
2) ”PLATO - Revealing habitable worlds around solar-like stars,” URL: https://www.cosmos.esa.int/web/plato/
4) ”PLATO Revealing habitable worlds around solar-like stars,”Definition Study Report,ESA-SCI(2017)1, April 2017, https://platomission.files.wordpress.com/2018/05/plato2-rb.pdf
5) ”Announcement of Opportunity for Community Scientists in the PLATO mission,” ESA, 11 April, 2018, URL: https://www.cosmos.esa.int/web/plato-cs-2018
6) ”Searching for exoplanetary systems,” ESA, 19 February 2014, URL: http://m.esa.int/spaceinimages/Images/2014/02/Searching_for_exoplanetary_systems
7) Bastian Burmann, Maren Homeister, Farid Gamgami, Markus Czupalla, Alison Gibbings, Csaba Gal, Francisco Javier Atapuerca Rodriguez de Dios, ”System Design Challenges of High-Precision Photometry Observation for the PLATO Mission,” Proceedings of the 66th International Astronautical Congress (IAC 2015), Jerusalem, Israel, Oct.12-16, 2015, paper: IAC-15-A7.3.1
8) ”PLATO spacecraft, payload and mission operation,” ESA, URL: http://www.oact.inaf.it/plato/PPLC/ScientificProgramTao_files/2014-12-03Gondoin.pdf
9) Anneke Monsky, Antonio García, Alexandre Garus, Jose Lorenzo Alvarez, Oliver Nicolay, Torben Runte, ”PLATO satellite pointing performance – paving the way for characterization of Earth-like extrasolar planets,” Proceedings of the 69th IAC (International Astronautical Congress) Bremen, Germany, 1-5 October 2018, paper: IAC-18.A7.3.5, URL: https://iafastro.directory/iac/proceedings/IAC-18/IAC-18/A7/3/manuscripts/IAC-18,A7,3,5,x42024.pdf
10) Antonio F. García Marín, Fabrizio Urbinati, Guy-Pierre Dragan, Oliver Nicolay, Sascha Mahal, Frank Steier, Anneke Monsky, Bastian Burmann, Uwe Brammer, Carsten Reese, Pierre-Etienne Frigot, Daniel Bindel, Jose Lorenzo Alvarez , Thomas Walloschek, ”PLATO: a satellite designed to find the second Earth,” Proceedings of the 69th IAC (International Astronautical Congress) Bremen, Germany, 1-5 October 2018, paper: IAC-18.A7.1.2, URL: https://iafastro.directory/iac/proceedings/IAC-18/IAC-18/A7/1/manuscripts/IAC-18,A7,1,2,x46409.pdf
11) ”Plato’s cave: vacuum test for exoplanet detection,” ESA Enabling & Support, 01 June 2022, URL: https://www.esa.int/ESA_Multimedia/Images/2022/06/Plato_s_cave_vacuum_test_for_exoplanet_detection
12) ”Plato exoplanet mission gets green light for next phase,” ESA Science & Exploration, 14 January 2022, URL: https://www.esa.int/Science_Exploration/Space_Science/Plato_exoplanet_mission_gets_green_light_for_next_phase
13) ”Planet-hunting eye of Plato,” ESA Enabling & Support, 5 March 2021, URL: https://www.esa.int/ESA_Multimedia/Images/2021/03/Planet-hunting_eye_of_Plato
14) ”Teledyne e2v has reached a critical milestone in the ESA PLATO mission for the supply of custom image sensors,” Teledyne e2v, 8 May 2019, URL: https://web.archive.org/web/20200804201353/https://www.teledyne-e2v.com/news/teledyne-e2v-has-reached-a-critical-milestone-in-the-esa-plato-mission-for-the-supply-of-custom-image-sensors/
15) ”Delivery of first detectors for PLATO's exoplanet mission,” ESA, 11 April 2019, URL: http://sci.esa.int/plato/61280-delivery-of-first-detectors-for-platos-exoplanet-mission/
16) ”First detectors for the PLATO exoplanet space telescope delivered,” DLR, 11 April 2019, URL: https://www.dlr.de/dlr/en/desktopdefault.aspx/tabid-10212/332_read-33197/year-all/#/gallery/33989
17) ”Construction of Europe's exoplanet hunter Plato begins,” ESA, 4 October 2018, URL: http://m.esa.int/Our_Activities/Space_Science/Construction_of_Europe_s_exoplanet_hunter_Plato_begins
18) ”OHB System AG proposal for PLATO project selected by ESA,” OHB, 25 April 2018, URL: https://www.ohb.de/en/investor-relations/ir-news/ad-hoc-announcements/ohb-system-ag-proposal-for-plato-project-selected-by-esa/
19) ”ESA PLATO mission reaches next milestone in the search for exoplanets - Green light for European space telescope PLATO,” DLR, June 20, 2017, URL: http://www.dlr.de/dlr/en/desktopdefault.aspx/tabid-10081/151_read-22858/year-all/#/gallery/27241
20) ”Payload Module,” ESA, 8 June 2018, URL: https://platomission.com/2018/06/08/payload-module/
The information compiled and edited in this article was provided by Herbert J. Kramer from his documentation of: ”Observation of the Earth and Its Environment: Survey of Missions and Sensors” (Springer Verlag) as well as many other sources after the publication of the 4th edition in 2002.
Spacecraft Development Status Launch Sensor Complement References Back to top