Picard Mission (Named After French Astronomer Jean Picard)
Non-EO
Atmosphere
Radiation budget
Mission complete
Quick facts
Overview
| Mission type | Non-EO |
| Agency | CNES |
| Mission status | Mission complete |
| Launch date | 15 Jun 2010 |
| End of life date | 04 Apr 2014 |
| Measurement domain | Atmosphere |
| Measurement category | Radiation budget |
| Measurement detailed | Upward long-wave irradiance at TOA |
| Instruments | SODISM, PREMOS, SOVAP |
| Instrument type | Earth radiation budget radiometers |
| CEOS EO Handbook | See Picard Mission (Named After French Astronomer Jean Picard) summary |
Picard Mission (Named After French Astronomer Jean Picard)
Picard is a CNES solar-terrestrial microsatellite mission of the Myriade series with French multi-institutional and international cooperation. The overall objective is to monitor the solar diameter, the differential rotation, the solar constant (simultaneous measurement of the absolute total and spectral solar irradiance), and to study the long-term nature of their interrelations.
The mission was named in honor of the 17th century French astronomer Jean Picard (1620-1682), who made the first long-term measurements of the solar diameter, observed sunspots, and determined the rotational velocity of the sun. Picard was also the first who accurately measured the length of a degree of a meridian (longitude line) and from that result estimated the size of the Earth. Beyond the determination of the Earth orbit eccentricity, the diameter measurements brought important information about the particular state of the sun during the so-called Maunder Minimum [named after E. W. Maunder (1851-1928), an English astronomer who studied solar records of the period 1645-1715], a period showing a quasi absence of sunspots as compared to the early 17th century. The Maunder Minimum coincided with the middle - and coldest part - of the so-called `Little Ice Age', during which Europe and North America, and perhaps much of the rest of the world, were subjected to bitterly cold winters. 1) 2) 3) 4) 5) 6) 7) 8) 9) 10) 11)
The cooperative mission agreement calls on CNES to develop and operate the microsatellite. The CNRS/SA (Service d'Aéronomie, Verrières-le-Buisson, France) provides the prime instrument as well as payload integration for all Picard payloads. CNRS/SA performs also the function of the Picard mission center (part of the user ground segment). The SOVAP instrument is provided by IRMB of Brussels, while the PREMOS device is supplied by the WRC (World Radiation Center) of Davos, Switzerland.
The Picard science team is composed from members of the following (additional) institutions: CNRS/CERGA (CNRS/Centre d'Etudes et des Recherches en Geodynamique et Astrometrie), Grasse, France; Université de Nice, Observatoire de Nice, IAS CNRS/Institut d'Astrophysique Spatiale), Orsay, France; Observatoire de Meudon, France; CNRS/LMD (CNRS/Laboratoire de Météorologie Dynamique), Palaiseau, France; ESA/ESTEC, Noordwijk, The Netherlands; Yale University, New Haven, CT, USA; NASA/JPL, Pasadena, CA, USA; NRL (Naval Research Laboratory), Washington, D.C., USA; University of Barcelona, Spain; NASA/GSFC, Greenbelt, MD, USA; and IIA (Indian Institute of Astrophysics), Bangalore, India.

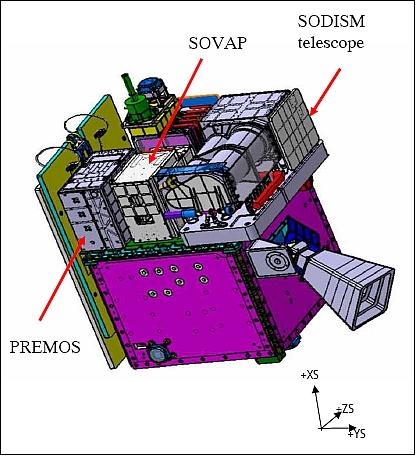
Spacecraft
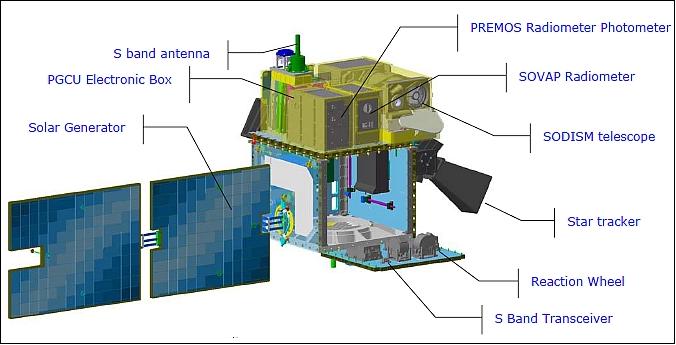
The Picard microsatellite consists of a box-like structure (90 cm x 80 cm x 110 cm) with a single solar panel. The platform structure is made of a massive aluminium base plate, interfacing with the launcher, 4 aluminium strouts supporting the payload plate, and 4 lateral honeycomb panels. An additional carbon carbon plate was added between the payload aluminium deck and the SODISM instrument, to provide a very stable interface and avoid the transmission of any effort to the SODISM mounting points.
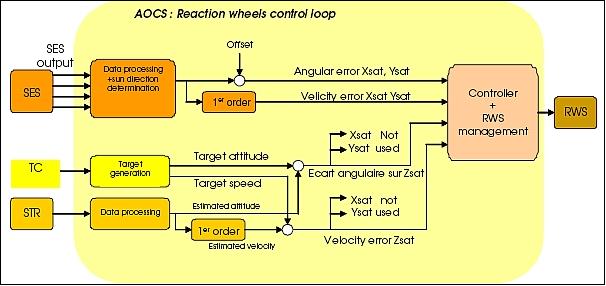
The platform is three-axis stabilized. The AOCS (Attitude and Orbit Control Subsystem) is required to provide a pointing accuracy of < 36 arcsec for the Z-axis of the S/C, a stability of < 5 arcsec/s of the X and Y axis, and 2 arcmin/s about the >Z-axis. This level of performance is higher than the performances guaranteed by a standard Myriade platform. Attitude sensing is provided by a star sensor, sun sensors, a magnetometer, and/or by the payload telescope; actuation is provided by a set of reaction wheels, and magnetic rods. 12)
A new sun sensor SES (Senseur d'Ecartométrie Solaire) was developed along with a new fine pointing mode to provide the stringent pointing requirements of Picard. SES is composed of two parts: an optical front part and an electronic back part. The optical part is a narrow bandwidth filter at 782 nm in the solar continuum allowing to be not disturbed by sunspots presence. The filtered Sun image is projected on the four quadrants detector of the electronic back part. Each photodiode of the detector provides a voltage output proportional to the received light intensity. The two parts of the SES are directly mounted on the SODISM instrument to minimize the misalignments. 13)
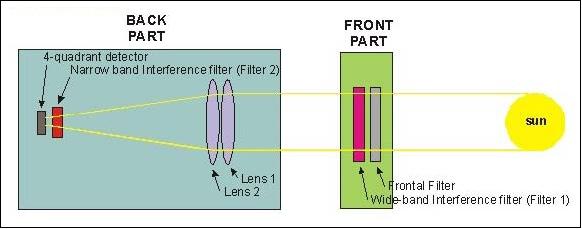
Parameter | Angle |
Sun field | 960 arcsec (0.27º) |
Maximum measurable depointing | 765 arcsec (0.21º) |
SES FOV (Field of View) | 2000 arcsec (0.55º) |
Angular resolution | 1 arcsec |
The SES is first pointed to the sun in normal mode using the star tracker. Once the sun pointing is stabilized, the fine pointing mode transition is authorized. This fine pointing mode is based on the normal mode but uses the SES measurements instead of the star tracker to determine the attitude around the X- and Y-axis. The star tracker is still used to determine the attitude around the Z-axis which is collinear to the SES line of sight.
Pointing and operating modes:
• The satellite is nominally sun pointed, with the axis of the CCD aligned with the solar rotation axis.
• For measuring the instrument optics distortion, a specific mode is implemented in order to discriminate between any defect at the level of the instrument, and the shape of the sun limb; the satellite will make a complete revolution around the satellite rotation axis by step of 30º, taking pictures of the sun at different wavelengths at each position.
• A last mode is the stellar calibration during which the satellite will make a full rotation, in order to point the direction of a star duet opposite to the sun direction. 20 images will be taken, which will permit to make an absolute calibration of the relationship between angle and pixel number.
EPS (Electric Power Subsystem). Solar power of 185 W and batteries of 9 Ah provide power all along the orbit (including the eclipse phases). The solar generator is steerable, thanks to a drive mechanism permitting a 360° rotation. The utilization of this feature is limited to the transition between the safe hold mode with the Solar Generator in direction of the rear face of the satellite and the nominal mode. The solar generator is equipped with upgraded triple junction AsGa cells with an efficiency of 26%.
Electrical power is managed by a unique PCDU (Power Conditioning and Distribution Unit) which provides the regulation of the SG (Solar Generator) power, manages the battery, converts the non regulated bar and distributes regulated bars, non regulated bars, pyro signals, and pulse width modulation tensions directly to the different platform and payload equipment. The battery is made of Li-ion cells and has a capacity of 14 Ah.
The data handling architecture is based on a central computer (OBC). It provides both a high level of integration low power consumption and high reliability and performances.
- The OBC is a T805 processor (20 MHz, with 256 MByte flash memory, and a 8 Gbit RAM) with four high speed data exchange links @ 5 Mbit/s, and a processing capacity of 2 MIPS
- Radiation hardened: 15 krad , SEL and SEU immune
- TM and TC coding and decoding according to CCSDS
- Input and output: configurable by micro software and addition of boards. A standard configuration includes 10 serial link RS422/ RS485, acquisition of 16 analog input 12 bit coded, control signals.
- The OBC power consumption is limited to 6 W maximum, and mass to 3 kg.
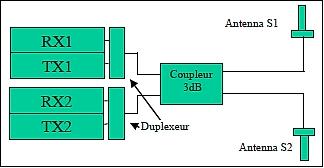
RF communications: The on-board recorder has a capacity of 8 Gbit. RF communications are provided in S-band (CCSDS protocol standard). The downlink data rate is 625 kbit/s. Mission operations are preformed at CNES. The Picard Mission Center (CMP) is located in Brussels, Belgium.
The S-band emitter and receiver are the only equipment which are fully redundant. The telemetry is active only when the satellite passes over a ground station. QPSK modulation with Viterbi coding and Reed Solomon coding. The RF power is 2 W. The two hemispherical antennas permit a 4π steradians RF coverage.
Spacecraft mass, power, size | 143 kg, 185 W, 0.9 m x 0.8 m x 1.1 m |
Pointing | Sun (nominal) + inertial (stars) |
Pointing accuracy | < 36 arcsec on transverse axis |
Pointing stability | < 5 arcsec/s |
Downlink data rate | 625 kbit/s, 2.6 Gbit/day |
Mission design life | 2 years with a goal of 3 years |
Launch
The Picard spacecraft was launched on June 15, 2010 on a Dnepr-1 launch vehicle (launch provider: ISC Kosmotras, Moscow; launch site is the Yasny/Dombarovsky launch site, Russia). The secondary payload on this mission was PRISMA of SSC (Swedish Space Corporation). 14)
The launch had been delayed for months because of a dispute between Russia and Kazakhstan over the issue of rocket debris falling on Kazakh territory.
Along with the two spacecraft (PRISMA and Picard), an Advanced Avionics Unit-1 (BPA-1), a payload which remained attached to the upper stage, was delivered into orbit. BPA-1 is an experimental equipment designed for use in the navigation systems of civil airplanes, spacecraft and launch vehicles. The avionics unit was developed and manufactured by NPP Khartron-Arkos (Khar’kov, Ukraine) on order of NSAU (National Space Agency of Ukraine). 15)
Orbit
Sun-synchronous near-circular orbit, altitude = 735 km, inclination = 98.29º, period = 99 minutes. A dawn/dusk orbit with LTAN (Local Time of Ascending Node) at 6:00/18:00 hours is being used.
The selection of a SSO orbit with LTAN of 6:00 permits to limit the period of eclipses to 40 days before and after the winter solstice and the duration of eclipses to a maximum of 20 minutes.
Mission Status
• The Picard mission ended its scientific operational mission in March 2013, but it pursued acquisitions to the end of March 2014, during technological operations on the satellite. The Picard payload was particularly vulnerable, because its optical elements and radiators were exposed to unshielded solar radiation. The low mass of the Picard spacecraft, low spacecraft altitude, and low electrical power allocated to the payload thermal control were constraints that limited the quality of measurements. 16)
- The SODISM instrument has suffered substantial degradation due to a combination of solar irradiation and instrumental contamination originating from the instruments and spacecraft that had caused irreversible deposition of this material on the instrument optical surfaces, in particular on the front window.
- The project team points out the high performance of the radiometers, the precise spacecraft pointing and in general the satisfying functioning of the mechanisms and electronics during the three years of operations.
- The ground component of the Picard mission showed a very good instrumental stability and appeared very complementary to the space mission. The team obtained consistent measurements of the TSI with the PREMOS and DIARAD instruments, around 1362 W/m2.
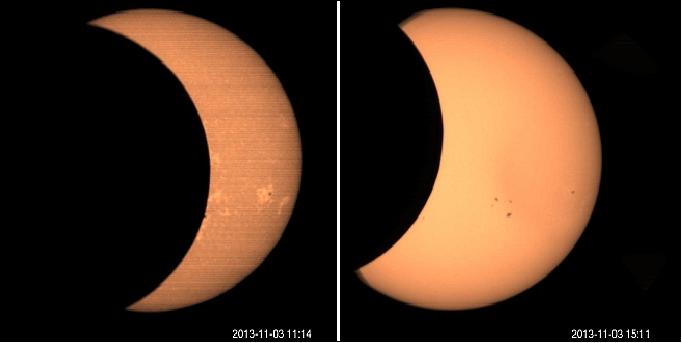
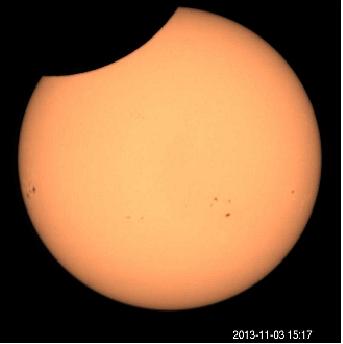
• November 2013: It was the ninth solar eclipse of this century and the second eclipse of the year 2013. The Moon played with the Sun for an exceptional hybrid eclipse, annular at the beginning, then total. This eclipse could be seen from the American continent to the African continent. The telescope of space mission Picard could "photograph" this event. Several observations have been done at different wavelengths (393.37, 535.7 and 607.1 nm). The Sun reveals the increase of activity that it is going through by showing dark spots and bright faculae. In fact, the Sun emitted a big eruption on November 5, 2013. 17)
• Oct. 21, 2013: The PICARD data are now available to the scientific community on the web (Ref. 17).
• In the summer of 2012, the Picard spacecraft and its instruments are operating nominally. 18) 19)
Main goal: to show that SODISM is producing solar oblateness measurements within precision-accuracy compatible with the needs to advance solar physics, and the ability to observe p-mode at the limb and from intensity variation. Initial results are: 20)
- PICARD is producing reliable solar oblateness measurements
- The plans of the project are to continue the measurements towards the rising phase of the solar cycle to further explore the possible effect of magnetic activity on the oblateness. However, special caution will be taken into account concerning the active region effect on the inflection point determination.
- The presented measurements were obtained in the solar photospheric continuum at 782 nm. Observations at other wavelengths are needed.
- The detection of p-modes is usually made by Doppler and intensity measurements. It can now be performed at the limb. The advantage of this new method has to be studied in detail.
Note: The p-mode (or acoustic wave mode) is a type of solar oscillation mode where “pressure” acts as the prime restoring force; hence, the name p-mode. Their dynamics are determined by the variation of the speed of sound inside the sun. P-mode oscillations have frequencies > 1 mHz and are very strong in the 2-4 mHz range. P-modes at the solar surface have amplitudes of hundreds of kilometers and are readily detectable with Doppler imaging or sensitive spectral line intensity imaging. 21)
• In the fall of 2011, only very preliminary science results are available for publication. Due to the metrology characteristic of the mission, the scientific data need to be collected and processed over a long duration before meaningful results can be published. 22)
Results Associated with SODISM
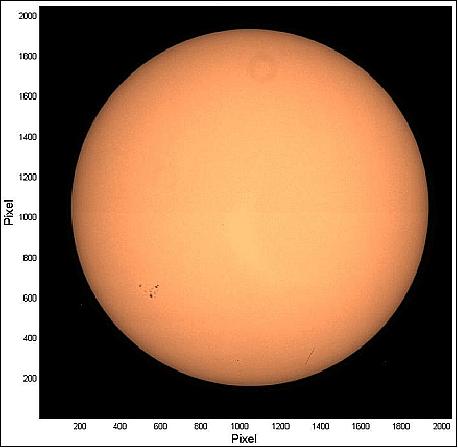
- The basic information is provided by images of the Sun either as full image (from center to limb) or a ring including the limb for measurements of the solar diameter and limb shape. Some typical images are:
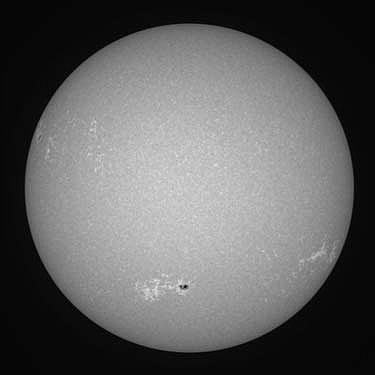
Legend to Figure 9: The figure displays the Sun surface at 393 nm on September 9, 2010, i. e., within the Fraunhofer line of Ca II. At this wavelength, the sunspots are present, depending of the magnetic activity of the star. Such an image type can be obtained at all wavelengths; however, at a frequency compatible with the telemetry rate and compatible with the mission resources.
- Solar oblateness: By rotation of the spacecraft step by step, the collected data allow to determine the solar oblateness and the distortion of the instrument optics. We found an equator pole change of 9 mas with a slight wavelength dependence. Using data at different time, a study of the oblateness as a function of the solar activity will be carried out.
- Solar diameter: The first measurements obtained in August 2010 were found close to values as expected from theoretical modeling. In particular, the diameter at 393 nm (Ca II line) was found greater than at 535 nm (in the photospheric continuum) by about 400 mas as predicted.
Using uncorrected images from flatfield, distortion, internal scale, and dark current, the project has detected a slow drift of the solar diameter, which is wavelength dependent. Presently, the project is studying the appropriate software to use the calibration data recorded in orbit for the purpose of corrections.
Results Associated with PREMOS
PREMOS has been continuously operating since the launch, except for mission interruption due to operational constraints. Data are gathered actively and processed before results can be released. It seems that measurements yield to a solar constant lower than the one measured by older space experiments, still to be confirmed.
Results Associated with SOVAP
SOVAP started measuring on 21/7/2010, with good solar pointing from 22/7/2010 onwards. Initially as default measurement mode, a shuttered open/close sequence of the right channel was chosen for the continuous measurement of the short term TSI variation, relevant for solar physics.
The project evaluated the SOVAP TSI variations and compared them with the reference variations obtained with older DIARAD/VIRGO instrument which is measuring from SOHO since 1996. The project finds that within the normal uncertainty of ±0.1 W/m2 SOVAP measures the same TSI variations as DIARAD/VIRGO in its nominal shuttered left and right channel operations. Also in the preliminary evaluation of the new continuously opened right channel mode, the project finds a good agreement between the SOVAP and DIARAD/VIRGO measurements (Ref. 22).
• On January 4, 2011 Picard observed the partial eclipse of the sun (Ref. 23). The spacecraft and its payload are operating nominally in 2011.
• The in-flight commissioning operations were successfully ended on October 8, 2010. The system was declared ready to begin the exploitation phase after the in-flight commissioning review (Oct. 15, 2010). 23)
• July 22, 2010: The first image of the sun taken by the SODISM instrument. It is a raw image, level L0, thus obtained before processing, at 607 nm wavelength in a very narrow band of 0.5 nm width. 24)
• June 2, 2010: end of LEOP. The first three instruments are operating nominally.
• On June 15, 2010: the LEOP (Launch and Early Orbit Phase) activities of the mission were started (the status was nominal after launch).
Sensor Complement
PICARD will measure in parallel several parameters of the sun, which will be used as inputs to constraint the solar models, and ultimately to study the influence of the sun on the Earth climate by using climate models. These parameters are:
• The limb shape, the diameter, the solar oblateness
• The differential rotation
• The TSI (Total Solar Irradiance) and spectral solar irradiance in UV , visible and near IR
• The solar oscillations (helioseismology)
• The variability of these quantities and their relationship.
Several of these quantities have been measured by previous space missions. However, the less reliable ones are the solar diameter and oblateness, mainly because these measurements were made from ground.
The expected solar radius variation range from 15 to 200 mas (milliarcseconds), the Picard measurements aim to achieve a precision of 3 mas, requiring a remarkable stability of the instrumentation throughout the measurement periods, which will be provided by using an on board angular reference and using star angular distances.
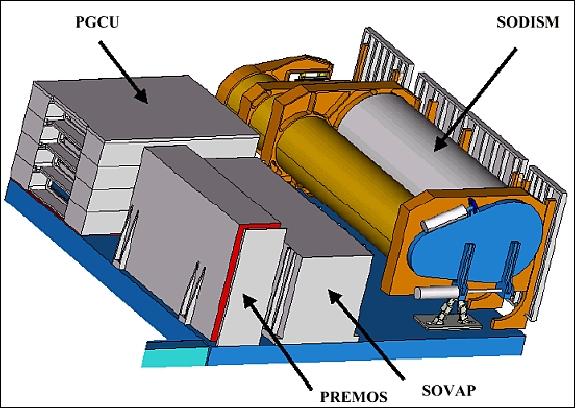
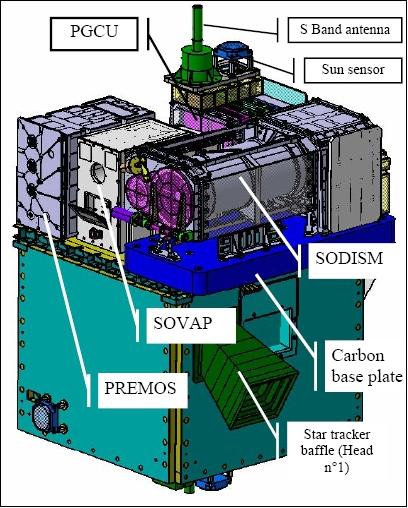
The payload is composed of three instruments: PREMOS, SODISM, and SOVAP plus an electronic box named PGCU (PICARD Gestion Charge Utile or simply: Payload Management Unit)integrating the electronics associated with SODISM and the processor in charge of the payload data handling and control. 25) 26)
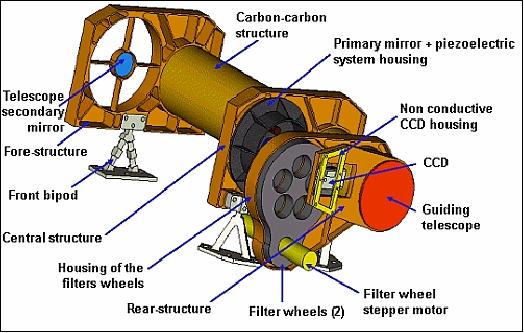
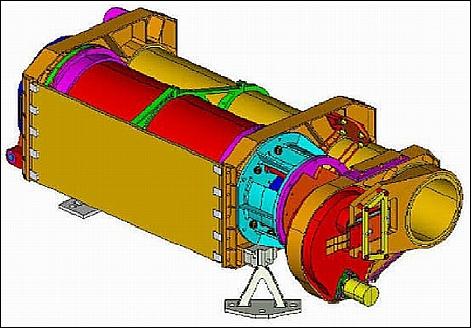
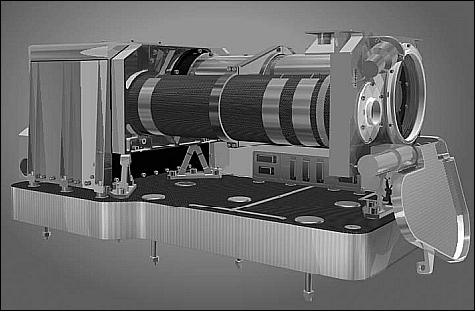
SODISM (Solar Diameter Imager and Surface Mapper)
SODISM is a CNRS/SA (Service d'Aéronomie, Verrières-le-Buisson, France) instrument. In addition to SA, OCA (Observatoire de la Cote d'Azur, IAS (Institut d'Astronomie Spatiale), and LESIA (Observatoire de Meudon) bring major contribution to this development.
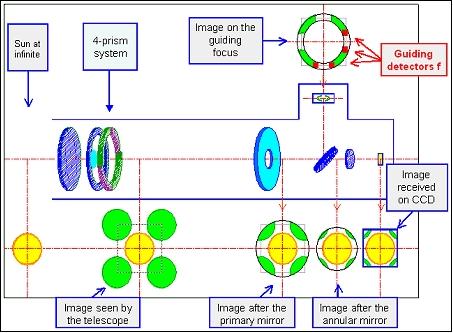
The objective is to observe the full image of the solar disk (limb). The requirements call for a pointing accuracy of 3 macrsec (3 σ) per image and a pointing knowledge of 1 marcsec (milli-arcsecond). The optical system made of a telescope, also includes four prisms. It collects the main solar images and a part of the solar images in each corner of the CCD. Some areas of the CCD are dedicated to dark current and scattered light measurements. 27) 28)
The instrument design takes great care of component mechanical and thermal stability (materials, structure, alignment, etc). The expected accuracy of the measurements is based on the very great dimensional stability, which is ensured by the use of stable materials (Invar brackets and carbon-carbon for the structure, Zerodur for the mirrors) and an accurate thermal regulation (< 1º C) of the entire instrument. The CCD itself is temperature controlled at -30ºC with a precision < 0.1ºC.
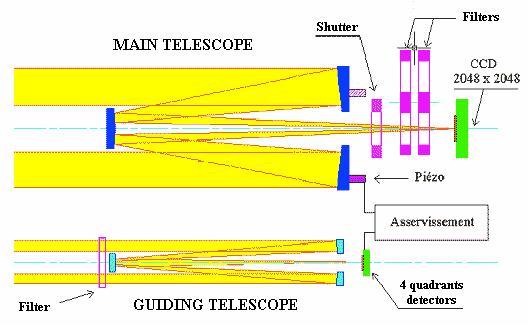
The instrument pointing is achieved in two steps: 29)
1) A guiding telescope which allows pointing of the spacecraft to better than 0.01º
2) A piezoelectric system acting on the telescope primary mirror which allows to stabilize the sun image on the CCD with an accuracy of 0.1 arcsecond.
The instrument consists of the following elements:
• A Ritchey-Chretien telescope with an aperture diameter of 110 mm
• A shutter placed before the filters to prevent their ageing
• Two filters wheels, carrying the interference filters allowing solar spectral observations and calibration functions
• A main door which will be locked for the launch
• A detector CCD of 2048 x 2048 useful pixels (CCD-EEV 42-80) of 13.5 µm size. The detector array employs thinned CCD arrays in a back-illuminated mode of operation to increase the short-wavelength quantum efficiency.
SODISM measures the solar irradiation in four spectral bands and two calibration bands (flat field and star field), using three cascading filter wheels (each with five positions). The diameter measurements are made through three filters centered at 535, 607 and 782 nm with narrow spectral domain in the solar continuum in order to avoid the presence of Fraunhofer lines.
λ (nm) | Δλ (nm) | Function |
215 | 7 | Sun activity, O3 measurement, diameter |
393.37 | 0.7 | Active regions observation |
535.7 | 0.5 | Diameter, oscillations (helioseismology) |
535.7 | 0.5 | Diameter |
607 | 0.8 | Diameter |
782.2 | 1.6 | Diameter |
FOV (Field of View) | 35 arcmin | |
Angular resolution | 1.06 arcsec | |
Measurement precision | < 3 marcsec (mas) per image | |
Flux resolution | < 10-5/pixel | |
Measurement parameters | Solar diameter, differential rotation of the full sun |
Telescope focal length, solar image | 2626 mm, 25 mm diameter |
Telescope optics | Primary diameter of 120 mm (110 mm are used) |
Detector array (EEV-4280 back-thinned CCD) | 2048 x 4096 square pixels of 13.5 µm (frame transfer mode, 2048 x 2048 pixels of the array are used) |
Guider acquisition range, | 1.2º |
Quad-cell image displacement | <10-2π sensitivity |
Piezo displacement range | ±6 µm (±1 arcmin) |
Absolute solar shape precision | Better than 10 marcsec (milli-arcseconds) |
Relative semi-diameter precision | Better than 1 marcsec |
Instrument mass, size | 27.7 kg, 30 cm x 30.8 cm x 37 cm |
Power (SODISM and PGCU) | 43.5 W |
Data flow | 2.2 Gbit/day, one image per minute |
The measurements provide a reference used to calibrate the structural changes in the focus or CCD dimensions which could affect the quality of the sun diameter measure (four prisms are used generating four auxiliary images placed in each corner of the CCD). These measurements enable to check the relationship between the angular distance of two points on the sun and the distance of their images on the CCD. The solar diameter will be referenced to the angular distances of doublets of stars so that the measurements which will be achieved in the next decades, referenced to the same doublets, enable to evaluate the long term evolution of our sun.
Pointing Mechanism (Ref. 29)
For the fine pointing, SODISM uses three piezoelectric devices acting on the primary mirror M1. The pointing mechanism design is shown in Figure 17. The pointing mechanism has been built by CNRS /LATMOS (formerly: Service d’Aéronomie).
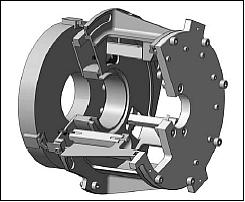
Piezo-electric actuators (Cedrat Technologies) have been modified to get a higher mechanical preload and include piezoelectric ceramics. The parallel pre-stressed actuator is a preloaded stack of low voltage piezoelectric ceramics. Piezoelectric displacement is 50 µm peak for 170 V peak. The capacitance of the piezoelectric is 2.7 µF. A tensile force test was performed to verify that the mechanical pre-stress is effectively applied to the correct level. The power consumption depends upon the quality of the pointing. Strain gages are used for each piezoelectric (repeatability on the positioning).
For the fine pointing, SODISM uses four photodiodes (API SD9973). Any unbalanced signal between pairs of detectors indicates a modification of the pointing. Photodiodes are semiconductors that generate a current or voltage when illuminated by light. A sapphire window is used. Sapphire is a very rugged radiation resistant optical material with a very broad transmission range. In this application, there is a preamplifier with a gain of 1 MΩ. The range of SODISM pointing is between 500 nm and 600 nm.
The main characteristics of the fine pointing are: the ability to have an offset alignment four-quadrant system / SODISM optical path of ±10 arcsec, pointing accuracy of ±0.2 arcsec, stability of the summit of the primary mirror in Z (optical axis) of ±0.2 µm and ability to image offset of ±20 arcsec. It is possible to fix the error signal photodiodes by offset (equivalent to a sliding): ±60 arcsec. The fine pointing is operational two seconds before taking the picture on the CCD and the functioning of the shutter.
Piezo Actuator PPA40M-NM-SV
The pointing mechanism of SODISM uses piezo actuators PPA40M-NM-SV. The parallel pre-stressed actuator is a preloaded stack of low voltage piezoelectric ceramics. The preload (or pre-stress) is obtained from an external spring frame made of stainless steel which protects the MLA (Multi-Layer Actuator) against tensile force and provides mechanical interfaces for the user allowing an easier integration. This pre-stressing frame applies an optimal preloading force to the MLA, which ensures a longer lifetime and better performance with dynamic applications than traditional preloaded actuators.
Piezoelectric devices have the unique property of generating a voltage when a pressure is applied, as well as the inverse property, expanding when a voltage is applied. Laser and photonics applications generally rely upon the latter: converting a voltage to a very accurate displacement for processes such as alignment of a fiber to a device or waveguide, control of the tilt of a harmonic crystal, making laser-cavity length adjustments, or scanning a tunable diode laser.
The pointing mechanism is operated by global onboard electronics named the PGCU (PICARD Gestion Charge Utile). Table 5 summarizes the main characteristics of the mechanism. Solar images are recorded every minute with SODISM and processed on-board. Every minute, the pointing mechanism is operational.
Mass, volume | 2.54 kg, 153 mm x 141 mm x 125 mm |
Power consumption | 2.0 W |
Pointing accuracy | ±0.2 arcsec |
Offset (rotation Rx, Ry) | ± 60 arcsec |
SOVAP (Solar Constant Variability, Picard)
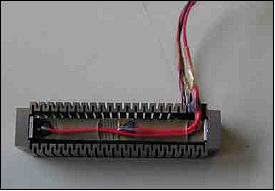
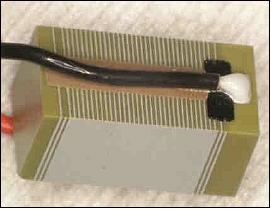
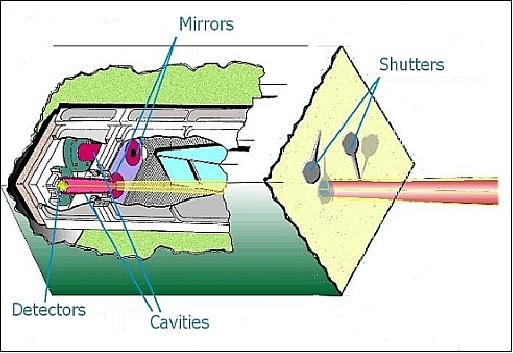
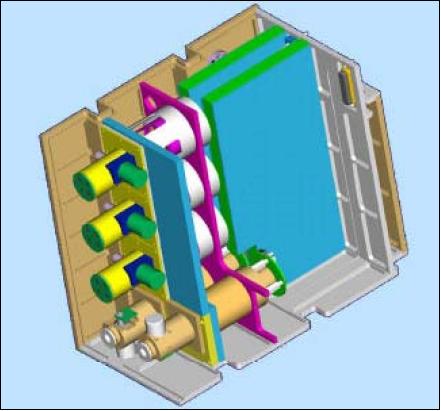
SOVAP was designed and developed at IRMB (Institut Royal de Météorologie Belgique) or the Royal Meteorological Institute of Belgium in Brussels. SOVAP is of SOVA and SOLCON heritage, flown on eight Shuttle flights (EURECA, 1992-93) in the time frame 1983 to 1998. SOVAP is a differential absolute solar radiometer with the objective to measure the solar constant to an accuracy of ±0.1%. The instrument consists of: 30) 31)
• Two cavities, one active and the other used as reference, connected to the same heat well through heat flux sensors. The two blackened cavities, mounted side-by-side on a common heat sink, provide the radiometric core of SOPVAP. A heat flux transducer is mounted between each cavity and the heat sink. The difference between the ouputs of the two transducers is the differential heat, in which the common part of the thermal surrounding, seen by the two cavities, is eliminated.
• Two shutters allowing to expose each cavity to the solar radiation or to prevent it to enter.
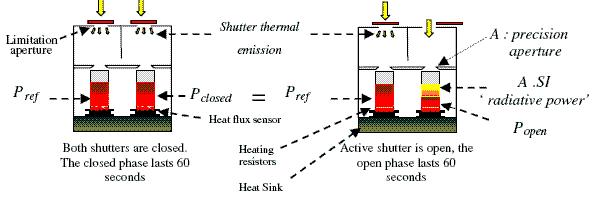
Operating principle: Electric power is applied to each cavity for thermal calibration (one cavity is directly heated by the solar flux, and the other is heated by Joule effect, but shielded from the sun by a shutter). The electric power applied to the active cavity is adjusted to reach the thermal equilibrium with the reference cavity. When opened, the active cavity absorbs the incident solar power. The active cavity shutter is alternately opened and closed. The necessary electric power to maintain the equilibrium during the opened phase is equivalent to the absorbed quantity of solar energy. Periodically, the reference cavity is used as active cavity to check the possible ageing of the most frequently used cavity.
Measured parameter, instrument noise | Total irradiance (W m-2), < 0.1 Wm-2 |
Absolute accuracy | ~700 ppm (i.e., 0.95 Wm-2 for a nominal value of 1368 Wm-2) |
Repeatability | 100 ppm through one solar cycle |
Number of channels, number of reference voltages | 2, 6 |
Cavity type | Cylindrical, diffuse black |
Diameter of precision aperture, slope angle | 1 cm, 2.5º |
Solar sampling period, duty cycle | 3 minutes, 50% |
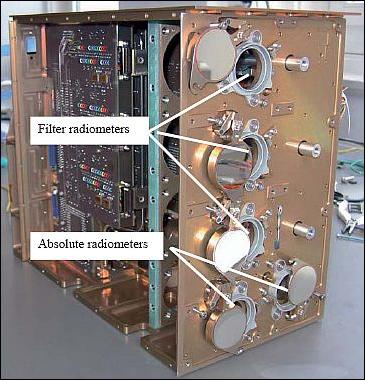
PREMOS (Precision Monitoring of Solar Variability)
PREMOS was designed and developed at PMOD/WRC (Physikalish-Meteorologisches Observatorium Davos and World Radiation Center) of Davos, Switzerland. PREMOS is of SOHO heritage as well as of other missions. The objective is to measure the total solar irradiance. PREMOS also measures the solar spectral irradiance in 4 channels: two in UV corresponding to the spectral domains specific of the ozone photochemistry, one in the visible and one in the infrared domain. Note: PREMOS uses the same principle as SOVAP, but is different in several details, particularly its operating mode for which only one cavity is exposed to the sun.
Measured parameter (center wavelengths) | Spectral irradiance (W m-2) at 215, 268, 535, 607, and 782 nm |
Bandwidth (FWHM) | 8 nm |
Number of photometers | 12 (3 sets of 4) |
Cavity type | Cylindrical, diffuse black |
FOV (Field of View), slope angle | 2.5º, 0.7º |
Diameter of precision aperture | 3 mm |
Accuracy of aperture area, cross talk | <10-3 , <10-5 |
The instrument package consists of four “filter radiometers,” the absolute cavity measurement technique is based on the principle of substitution of electrical power for radiative power, but with the preselection of a known and reduced spectral bandwidth. The sun radiation measurements are in four bands in the UV and visible range (3 radiometers). A fourth radiometer (PM06) is used to measure the total solar irradiance, as SOVAP does.
Three sets of four photometers are used, one set serves as reference to determine the aging effects. The 215 nm band has a dual function: 1) it monitors the UV flux and 2) it is used to estimate possible degradations of the SODISM CCD detectors.
λ (nm) | Relative accuracy | Function |
215 | 1000 ppm | UV flux in O3 sensitive wavelength. Observation of possible link between climate and solar irradiance variability |
268 | 1000 ppm | Same as 215 |
535 | 100 ppm | Same λ as SODISM to link diameter and solar irradiance variability |
607 |
| Used to constrain the temperature determination of the sun |
782 | 100 ppm | Same λ as SODISM to link diameter and solar irradiance variability |
The UV solar radiance significantly affects the stratospheric ozone formation and destruction. Consequently, the PREMOS measurements will be used (together with SOVAP total solar irradiance measurements and SODISM images) as entry point for GCM (Global Climate Monitoring) simulations to study the terrestrial atmosphere response to the solar irradiance variations.
The combined use of PREMOS absolute spectral measurements with the SOVAP total solar irradiance as well as the SODISM images will enable to verify and to refine the current theoretical understanding of the solar irradiance variations by observing the key parameters responsible for this variability at specific wavelengths.
Calibration
The aim is to provide long term sensitivity calibration for the solar imaging instrument SODISM on PICARD. 32)
Calibration Phases
Solar measurements can be performed by several sunphotometers as redundancies are foreseen. A photometer and a radiometer work quasi continuously except during the calibration phases for which the sunphotometerss are operated. The calibration phases are periodically executed. The frequency and the duration are selected during the In flight Acceptance Phase of the mission.
PREMOS is the first and so far only spaceborne radiometer with a SI-traceable irradiance calibration in vacuum. PREMOS is traceable to the irradiance calibration facility at LASP in Boulder, CO, referred to as TRF (Transaction Reporting Facility) which is traceable to NIST (National Institute of Standards and Technology), USA. 33)
In 2012, the PREMOS instrument is in excellent health. 34) 35)
• PREMOS-TSI is the most accurate absolute measurement; ±0.4 W/m2 or ±290 ppm
• After 2 years, PREMOS-TSI has at most 50 ppm relative deviation to TIM/SORCE.
PGCU (PICARD Gestion Charge Utile)
PGCU is an onboard electronics unit which includes all functions necessary to operate the three instruments: formatting of telemetry, reception of commands, thermal regulation system, image compression, measurements sequencing, power supply, and safety management.
Item | Mass (kg) | Power (W) | Data rate (Mbit/day) |
SODISM | 22.5 | 19 | 2291 |
SOVAP | 11.5 | 10.5 | 3 |
PREMOS | 11.0 | 13 | 66 |
PGCU | 12.6 | 17.5 | 35 |
Payload total | 61.1 | 60 | 2395 |
Instrument | Measurements | Wavelength (nm) | Sampling | Integration time |
SODISM | 22 pixels limb width | 535.7 | 2 nm | 4 s |
SODISM | 16 x 16 macropixels | 535.7 | 1 nm | 4 s |
PREMOS | Spectral irradiance | 215 | 0.1 s | 0.1 s |
PREMOS | Spectral irradiance | 268, 535, 607, 782 | 10 s | 10 s |
SOVAP | Bolometric measurement | All wavelengths | 10 s | 10 s |
SOVAP | TSI (Total Solar Irradiance) | All wavelengths | 3 nm | 10 s |
PREMOS | TSI (Total Solar Irradiance) | All wavelengths | 2 nm | 20 s |
Ground Segment
The Picard ground segment consists of two main units: 36)
• A Command Control Ground Segment, the MIGS (MIcrosatellite Ground Segment) which, for the operational phase, consists of at least 4 components:
- CCC (Command Control Center). This component consists in a nominal center and a spare center.
- Six 2 GHz (S-band) emission and reception stations [TTCET (Telemetry and TeleCommand Earth Terminal)]
- DCN (Data Communication Network)
- SEF (Server for Exchange of data Files) which includes all data files to be exchanged with the Mission Center.
• A User Ground Segment consisting of two units:
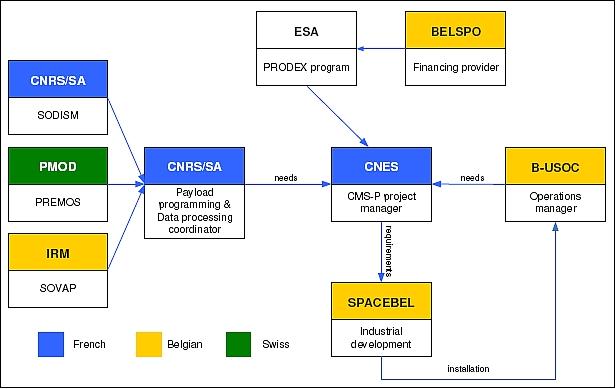
- Picard Scientific Mission Center-Picard (CMS-P), located in Brussels, mainly dedicated to the processing of the payload data. This is also referred to as the Picard Payload Data Centre as well as B-USOC (Belgian User Support and Operations Centre), funded by BELSPO (Belgian Scientific Policy Office). Since Belgium is member of the PRODEX (Programme de Développement d'EXpériences scientifiques) from ESA (European Space Agency), an agreement has been established between CNES, ESA, and BELSPO. Figure 26 depicts the project organization.Definition, development and validation of the PICARD Payload Data Centre is under CNES responsibility. 37)
- Picard Scientific Expert Centers. These are divided within the three laboratories in charge of the instruments development, namely: LATMOS (France) for SODISM, IRMB (Belgium) for SOVAP, PMOD (Switzerland) for PREMOS, and CERGA (OCA) for operations and data processing of the ground based instruments.
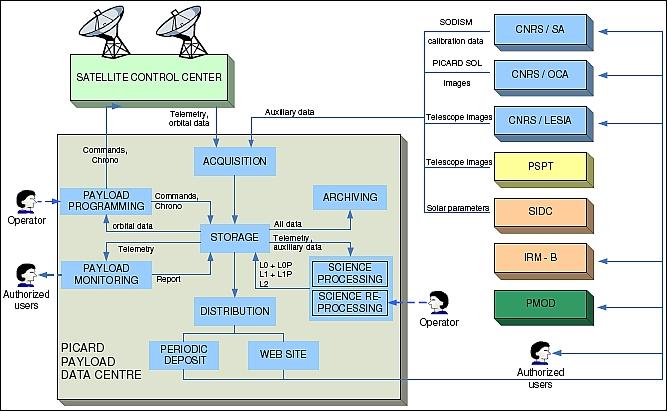
Note: B-USOC is located at the Institute for Space Aeronomy in Brussels, Belgium.
References
1) G. Thullier, S. Dewitte, W. Schmutz, The Picard team; “Simultaneous measurement of the total solar irradiance and solar diameter by the PICARD mission,” Advances in Space Research, Vol. 38, Issue 8, 2006, pp. 1792-1806, doi:10.1016/j.asr.2006.04.034
2) Luc Dame, Mireille Meissonnier, Bernard Tatry, “Picard Microsatellite Program,” 5th International Symposium on Small Satellites Systems and Services, La Baule, France, June 19-23, 2000, URL: http://solarnet.projet.latmos.ipsl.fr/fichiers_pdf/Proc_PICARD_LaBaule.pdf
3) http://smsc.cnes.fr/PICARD/index.htm
4) L. Dame, D. Cugnet, M. Hersé, D. Crommelynck, S. Dewitte, A. Joukoff, I. Ruedi, W. Schmutz, C. Wehrli, C. Delmas, F. Laclare, J.-P. Rozelot, “Picard: Solar Diameter, Irradiance and Climate,” 2nd Picard Scientific Meeting, Le Mas du Calme, Grasse, France, March 28-29, 2000
5) T. Corbard, P. Assus, B. Gelly, A. Irbah, M. Meissonnier, G. Thuillier, and the Picard Team, “Solar Astrometry, Radiometry and Seismology with PICARD,” 2004, URL: http://www.obs-nice.fr/corbard/CONF/2004/yale_poster.pdf
6) G. Thuillier, “Status of solar global properties measurements, PICARD mission,” Mem. S.A.It. Vol. 76, 901, SAIt 2005 (XLIX Congresso della Società Astronomica Italiana), Catania, Italy, May 2-7, 2005, http://sait.oat.ts.astro.it/MSAIt760405/PDF/2005MmSAI..76..901T.pdf
7) L. Damé, D. Cugnet, M. Hersé, D. Crommelynck, S. Dewitte, A. Joukoff, I. Ruedi, W. Schmutz, C. Wehrli, C. Delmas, F. Laclare, J.-P. Rozelot, "Picard: Solar Diameter , Irradiance and Climate," URL: http://solarnet.projet.latmos.ipsl.fr/fichiers_pdf/pro_picard_SOLSPA.pdf
8) L. Dame, M. Herse, G. Thuillier, T. Appourchaux, D. Crommelynck, S. Dewitte, A. Joukoff, C. Fröhlich, F. Laclare, C. Delmas, P. Boumier , “ PICARD: simultaneous measurements of the solar diameter, differential rotation, solar constant and their variations,” Advances in Space Research, Vol. 24, No 2, July 1999, pp. 205-214
9) F. Buisson, M. Meissonnier, G. Thuillier, W. Schmutz, S. Dewitte, and the Picard team, “The PICARD microsatellite: a tool for advanced sun investigation,” Proceedings of the 59th IAC (International Astronautical Congress), Glasgow, Scotland, UK, Sept. 29 to Oct. 3, 2008, IAC-08.B4.2.8
10) “Picard - Studying solar variability and its possible effects on Earth's climate,” URL: http://www.cnes.fr/web/CNES-en/5728-picard.php
11) Gérard Thuillier, “The Picard Mission,” Bozeman, MT, USA, June 6, 2008, URL: http://solar.physics.montana.edu/SVECSE2008/pdf/thuillier_svecse.pdf
12) F. Buisson, M. Meissonnier, J. M. Mouret, P. Samson, G. Thuillier, W. Schmutz, S. Dewitte, “Sun observation with a microsatellite: The Picard project,” Proceedings of the 4S Symposium: `Small Satellite Systems and Services,' Chia Laguna Sardinia, Italy, Sept. 25-29, 2006, ESA SP-618
13) L. Joannes, J. L. Dewandel, R. Ligot, V. Pascal, D. Bolsée, A. Michel, W.Peetermans, P. Califice, “Solar Ecartometry Sensor with 1 arcsec Resolution for the Picard Satellite,” Proceedings of the 7th ICSO (International Conference on Space Optics) 2008, Toulouse, France, Oct. 14-17, 2008
14) “Picard and PRISMA in orbit,” CNES, June 15, 2010, URL: http://www.cnes.fr/web/CNES-en/8589-gp-picard-and-prisma-in-orbit.php
15) “Successful Launch of PRISMA and PICARD Satellites,” June 22, 2010, URL: https://web.archive.org/web/20220630005912/http://www.kosmotras.ru/en/news/94/
16) M. Rouzé, A. Hauchecorne, J. F. Hochedez, A. Irbah, M. Meftah, T. Corbard, S. Turck-Chièze, P. Boumier, S. Dewitte, W. Schmutz, “The PICARD Scientific Mission: status of the program,” SpaceOps 2014, 13th International Conference on Space Operations, Pasadena, CA, USA, May 5-9, 2014, paper: AIAA 2014-1705, URL: http://arc.aiaa.org/doi/pdf/10.2514/6.2014-1705
17) “A solar eclipse happened on November 3, 2013,” PICARD News, Nov. 3, 2013, URL: http://smsc.cnes.fr/PICARD/GP_actualites.htm
18) Picard Scientific Workshop Presentations, Paris, France, April 10, 2012, URL: http://smsc.cnes.fr/PICARD/agenda_WS_2012_04.htm
19) Picard News, URL: http://smsc.cnes.fr/PICARD/GP_actualites.htm
20) Gérard Thuillier, Alain Hauchecorne, Sabatino Sofia, Abdenour Irbah, Mustapha Meftah, P. Boumier, “SODISM Results,” Picard Scientific Workshop Presentations, Paris, France, April 10, 2012, URL: http://smsc.cnes.fr/PICARD/Docs/WS_10_04_2012/2-Atelier_SODISM_GT.pdf
21) “Helioseismology,” URL: http://en.wikipedia.org/wiki/Helioseismology
22) François Buisson, G. Pradels; J. Y. Prado; M. Meissonnier, G. Thuillier, W. Schmutz, S. Dewitte, and the PICARD team, “First in flight results from the sun investigation microsatellite PICARD,” Proceedings of IAC 2011 (62nd International Astronautical Congress), Cape Town, South Africa, Oct. 3-7, 2011, paper: IAC-11.B4.2.2
23) http://smsc.cnes.fr/PICARD/GP_actualites.htm
24) http://picard.busoc.be/sitools/index.jsp
25) http://smsc.cnes.fr/PICARD/GP_instruments.htm
26) L. Dame, T. Appourchaux, G. Berthomieu, P. Boumier, D. Cugnet, B. Gelly, J. Provost, T. Toutain, “PICARD: Solar Diameter Measure and g-Mode Search,” URL: http://www.ias.u-psud.fr/virgo/psfiles/picard.pdf
27) P. Samson, C. Fallet, “Picard - High pointing performances with a microsatellite,” Proceedings of the 7th International ESA Conference on Guidance, Navigation & Control Systems (GNC 2008), June 2-5, 2008, Tralee, County Kerry, Ireland
28) M. Meftah, A.J. Vieau, A. Irbah, J.F. Hochedeze, A. Hauchecorne, G. Thuillier, “The Space instrument SODISM, a visible light solar telescope in space,” Picard Scientific Workshop Presentations, Paris, France, April 10, 2012, URL: http://smsc.cnes.fr/PICARD/Docs/WS_10_04_2012/7-PICARD-SODISM_Meftah.pdf
29) M. Meftah, A. Irbah, R. Le Letty, A. Bataille, E. Ducourt, G. Poiet, M. Privat, “The Picard/SODISM Pointing Mechanism: From the Design to the Flight Performances,” Proceedings of the 14th European Space Mechanisms & Tribology Symposium – ESMATS 2011, Constance, Germany, Sept. 28–30 2011 (ESA SP-698)
30) Werner Schmutz, “Solar Irradiance (Swiss contributions to ILWS),” 4th ILWS general meeting, Beijing, June 22-23, 2006, URL: http://ilwsonline.org/china_swiss.ppt
31) Steven Dewitte, “Instrument modes and calibration of the Sova-Picard TSI Instrument,” Picard Scientific Workshop Presentations, Paris, France, April 10, 2012, URL: http://smsc.cnes.fr/PICARD/Docs/WS_10_04_2012/9-Sovap042013cal.pdf
32) Werner Schmutz, André Fehlmann, Gregor Hülsen, Peter Meindl, Rainer Winkler, Gérard Thuillier, Peter Blattner, François Buisson, Tatiana Egorova, Wolfgang Finsterle, Nigel Fox, Julian Gröbner, Jean-François Hochedez, Silvio Koller, Mustapha Meftah, Mireille Meisonnier, Stephan Nyeki, Daniel Pfiffner, Hansjörg Roth, Eugene Rozanov, Marcel Spescha, Christoph Wehrl, Lutz Werner, Jules U. Wyss, “The PREMOS/PICARD instrument calibration,” Metrologia, Vol. 46, No 4, 2009, pp. S202-S2006, doi: 10.1088/0026-1394/46/4/S13
33) Werner Schmutz, “Long term monitoring of Total Solar Irradiance: Results and Challenges,” Proceedings of the 49th Session of UNCOPUOS-STSC (UN Committee on the Peaceful Uses of Outer Space-Scientific and Technical Subcommittee), Vienna, Austria, Feb. 6-17, 2012, URL: http://www.oosa.unvienna.org/pdf/pres/stsc2012/tech-20E.pdf
34) Werner Schmutz, “PREMOS/PICARD Instrument Status, First Results, Part 2 – Total Solar Irradiance,” Picard Scientific Workshop Presentations, Paris, France, April 10, 2012, URL: http://smsc.cnes.fr/PICARD/Docs/WS_10_04_2012/8-PREMOS.pdf
35) G. Cessateur for the PREMOS team, “PREMOS Instrument status and first results,” Picard Scientific Workshop Presentations, Paris, France, April 10, 2012, URL: http://smsc.cnes.fr/PICARD/Docs/WS_10_04_2012/4-PREMOS_Instrument_status_and_first_results.pdf
36) http://smsc.cnes.fr/PICARD/GP_segment_sol.htm
37) G.. Pradels, T. Guinle, G.. Thuillier, A. Irbah, J-P. Marcovici, C. Dufour, D. Moreau, C. Noel, M. Dominique, T. Corbard, M. Hadjara, S. Mekaoui, C. Wehrli, “The PICARD Payload Data Centre,” SpaceOps 2008, Heidelberg, Germany, May 12-16, 2008, paper: AIAA 2008-3231
The information compiled and edited in this article was provided by Herbert J. Kramer from his documentation of: ”Observation of the Earth and Its Environment: Survey of Missions and Sensors” (Springer Verlag) as well as many other sources after the publication of the 4th edition in 2002. - Comments and corrections to this article are always welcome for further updates (eoportal@symbios.space).