PEARL CubeSat Bus Initiative
Technology Development
PEARL - An initiative for an Advanced CubeSat Bus Standard
Researchers of PEARL (Picosatellite Exo-Atmospheric Research Laboratory), part of SDL (Space Dynamics Laboratory), a non-profit R&D corporation owned by USU (Utah State University) at Logan, UT, USA, developed a new CubeSat bus, referred to as PEARL. The overall objective is to support the very interest and needs of the science community. The design goals are to provide an architecture that is flexible and adaptable to support multiple mission types. In addition, the architecture must be upgradable to incorporate new capabilities as they are developed. Sophisticated CubeSat science missions under development in 2010 and onwards have in general higher requirements in such critical functional capabilities as: pointing control, on-board processing, data transmissions, reliability (higher quality parts, traceability, QA, etc.), and longer design lives than the simple CubeSat missions of the past. 1) 2) 3) 4) 5)
The general approach of the new “PEARL initiative” is to follow the CubeSat standard, but not the “commercial parts” philosophy of the existing CubeSat standard, which was initially intended for educational use. The goal of PEARL is to migrate eventually to an all space-grade components capability.
The PEARL bus initiative was developed with the needs of the military in mind, as its development was sponsored by AFRL (Air Force Research Laboratory) at Kirtland AFB, NM. The PEARL initiative is actually a prototype development for a larger constellation mission that will involve up to 100 CubeSats.
The PEARL spacecraft platform has been designed from the ground up to provide high capability in a CubeSat form factor. The initial 3U version of the platform is a highly capable spacecraft bus. Increased processing and pointing control provide the utility necessary for relevant scientific or military missions.
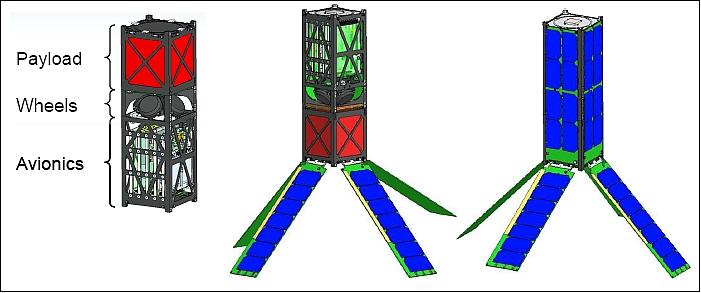
The PEARL bus is focused in particular on the 3U CubeSat form factor which incorporates the top-of-the-line in CubeSat subsystem technologies. The bus features four deployable solar arrays as well as four fixed, body-mounted panels. SDL has developed minireaction wheels for pointing that take up only 0.5U. In conjunction with the miniature reaction wheels is a miniature sun-sensor which has a targeted accuracy of 0.01º. The avionics chassis takes up 1.5U which leaves 1U available for the CubeSat payload.
With a size of 109 mm x 109 mm x 340 mm, the the 3U version of PEARL is one of the smallest spacecraft to provide such capabilities as a Vx Works operating system, 3-axis attitude control with a high order Kalman Filter, and floating point operations for navigation and mission data processing.
The PEARL architecture calls for the following design guidelines:
• Modular chassis sections:
- Payload chassis: 1.0 U available for payload + 1 PCI card in avionics; up to 1 kg of payload mass; up to 2 W continuous for a nadir pointing mission; chassis modifications possible to support viewing; mounting bosses on top and bottom corners; chassis sides can support additional mounting points.
- Reaction wheels: 0.5 U
- Avionics chassis: 1.5 U
• Monolithic aluminum structure:
- Utilization of efficient on-site advanced machining practices
- Maximized strength-to-weight ratio
• Solar panel arrays:
- 4 x stationary
- 4 x deployable with adjustable deployment angle
• Avionics layout: a vertical vs. a horizontal card stack may be chosen
- Data throughput and processing requirements meant the data bus architecture had to change
- Chose to leverage off of existing space-designed avionics targeted for PnP (Plug-and-Play) distributed small satellite applications such as MODAS (Modular Avionics System)
- Same card standard can be used in both applications
- Significant harness improvement –connectors for all cards are located in a harness set-aside volume at top of avionics stack

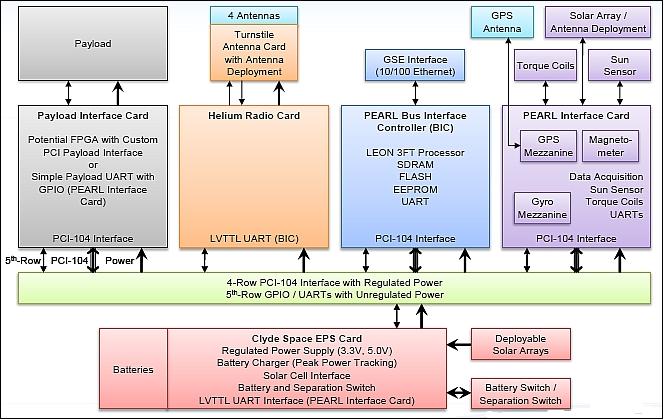
The PEARL bus uses an industry standard PCI (Peripheral Component Interface) bus architecture with the following layout:
• 33 MHz, 32-bit
• LEON 3FT general purpose CPU
• Serial ports: UART, SpaceWire, Ethernet
• IEEE-754 Floating Point Processor
• Electrically compliance: PCI-104
• CPU radiation tolerance: 300 krad
• Memory (EDAC protected + radiation test data)
- SDRAM: 128 MByte
- EEPROM: 512 kByte
- Flash: 512 MByte
• Upgrade path to 100 krad (Si) tolerance for the entire card
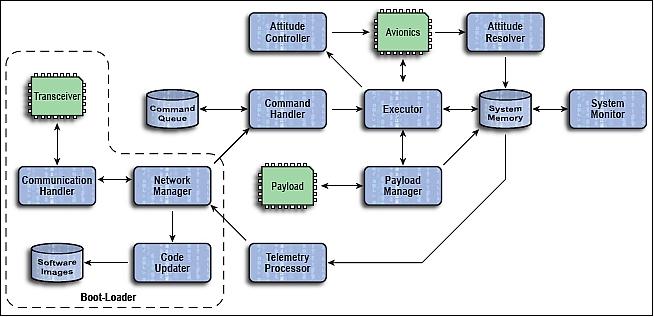
PEARLsoft Flight Software
PEARLsoft is the software solution that SDL provides for the PEARL CubeSat platform and the Modular Avionics System (MODAS). PEARLsoft operates on the MODAS Bus Interface Controller (BIC) single board computer (SBC). The MODAS BIC is designed around the radiation tolerant LEON3-FT SPARC V8e microprocessor and provides a configurable 11-66 MIPS processor with a floating point math processor on a PCI-104 backplane. PEARLsoft operates in the UNIX environment using the POSIX libraries. Support is currently provided for Wind Rivers Systems' VxWorks operating system, with future support planned for real-time Linux operating systems (Ref. 4). 6)
• Software real-time flight software
- Adapted from software currently flying on the NASA AIM-SOFIE mission
- Supported by VxWorks 6.5
- ISO-9001 development process with configuration control
• Multi-threaded architecture to provide design modularity
- High level of reuse
- Adaptable for broad range of mission requirements
- The following separate threads enable easy modification: a) communications, b) attitude control, c) payload management.
References
1) “PEARL (Picosatellite Exo-Atmospheric Research Laboratory) Fact Sheet of SDL, URL: https://web.archive.org/web/20100621095621/http://www.sdl.usu.edu/programs/pearl.pdf
2) Quinn Young, Robert Burt, Mike Watson, Lorin Zollinger, “PEARL CubeSat BusBuilding Toward Operational Missions,” CubeSat Summer Workshop –8-9 August 2009, URL: http://mstl.atl.calpoly.edu/~jfoley/Summer2009/Sat_1245_PEARL_Young_Final.pdf
3) Chalie L. Galliand, “Study of the Small: Potential for Operational Military Use of CubeSats,” Proceedings of the 24th Annual AIAA/USU Conference on Small Satellites, Logan, UT, USA, Aug. 9-12, 2010, SSC10-III-2
4) PEARLsoft (Picosatellite Exo-Atmospheric Research Laboratory Flight Software), Fact Sheet of SDL, URL: https://web.archive.org/web/20100621100308/http://www.sdl.usu.edu/programs/pearlsoft.pdf
5) “Study of the Small: Potential for Operational Military Use of CubeSats,” 2010, URL: http://mstl.atl.calpoly.edu/~workshop/archive/2010/Spring/Day%202/0910%20-%20Galliand%20-%20Study%20of%20the%20Small.pdf
6) Alexander Nucera, “Development of an Attitude Estimator for the PEARL CubeSat,” Master Thesis, Lulea University of Technology, Sweden, June 4, 2008, URL: http://epubl.ltu.se/1653-0187/2009/012/LTU-PB-EX-09012-SE.pdf
The information compiled and edited in this article was provided by Herbert J. Kramer from his documentation of: "Observation of the Earth and Its Environment: Survey of Missions and Sensors" (Springer Verlag) as well as many other sources after the publication of the 4th edition in 2002. - Comments and corrections to this article are always welcome for further updates (eoportal@symbios.space).