ORS-6 (Operationally Responsive Space-6)
EO
Cancelled
Atmosphere
Ocean
Quick facts
Overview
| Mission type | EO |
| Agency | ORSO |
| Mission status | Cancelled |
| Measurement domain | Atmosphere, Ocean, Snow & Ice |
| Measurement category | Ocean surface winds, Atmospheric Winds |
| CEOS EO Handbook | See ORS-6 (Operationally Responsive Space-6) summary |
ORS-6 (Operationally Responsive Space-6)
Spacecraft Launch Sensor Complement References
Overview
ORS-6 was a technology demonstration and future mission enabler for ocean vector wind measurement developed jointly by the ORS Office and the Space and Missiles Center Remote Sensing (SMC/RS) Program Directorate. The objectives of the ORS-6 technical demonstration of COWVR (Compact Ocean Wind Vector Radiometer) were risk reduction for the SMC/RS WSF (Weather System follow-on) program, a technical demonstration of MSV (Modular Space Vehicle), and a demonstration of the ORS Rapid Responsive Space works capability. Other ORS objectives include moving toward use of commercial practices and incorporation of commercial mass-manufactured components to lower cost, shorten delivery time and strengthen the industrial base. The approach used an alternative, non-heritage radiometer design to greatly reduce system complexity/cost by leveraging the NASA/ JPL-developed COWVR (Compact Ocean Wind Vector Radiometer) in combination with the MOSA (MSV Modular Open Systems Architecture) bus, previously developed for the ORS-2 mission.
The program aimed to address the immediate concern in the near-term to sustain a capability currently provided by an aging space vehicle (Coriolis/WindSat) which is projected to be near end-of-life. ORS-6 planned to drive down technology development risk and NRE (Non-Recurring Engineering) costs for the WSF (Weather System Follow-on) system. The ORS-6 mission was a rare example of demonstrating technology that will directly influence the future acquisition of a high cost objective system: the USAF (U.S. Air Force's) WSF mission, currently estimated to cost roughly $800 million and was planned to launch in the early 2020s. 1) 2)
Spacecraft
The ORS-6 spacecraft was under development for the USAF (United States Air Force) SMC-RSRW (Space and Missile Command Weather System Follow-On) by the Operationally Responsive Space office (SMC-ORS) under the Rapid Response Space Works contract. ORS-6 was planned to launch into a roughly 600 km, sun-synchronous orbit. This is an orbit that neither the bus nor the payload were designed for, yet because of the flexible design of the bus, with the MSV (Modular Space Vehicle) architecture, ORS will reconfigure the bus and payload in a timely and cost efficient manner to meet the critical needs of the Air Force and weather community.
ORS-6 was a minisatellite with a mass of just over 300 kg. Even though this mission represents an initial investment of NRE (Non-Recurring Engineering), the mission specific costs of the payload, with operational-like performance, the reconfiguration of the bus, the launch, and ground system are remarkably low. Furthermore, much of the technology investment in both the bus and payload design will serve as a template for future missions, once space qualified and demonstrated by this mission, thereby recouping much of the NRE costs. The ORS-6 spacecraft is an example of how small satellites can provide technology demonstrations that can enable, reduce the cost, and reduce the risk of large budget operational missions such as the WSF (Weather System Follow-On) mission.
The ORS-6 bus was originally designed and built for ORS-2, a synthetic aperture radar mission intended for a mid-inclination, ~400 km orbit.3) ORS-6 will space demonstrate the MSV architecture, an architecture specifically created to allow for straightforward reconfiguration and seamless integration with any payload and any mission parameters as seen in Figure 1.
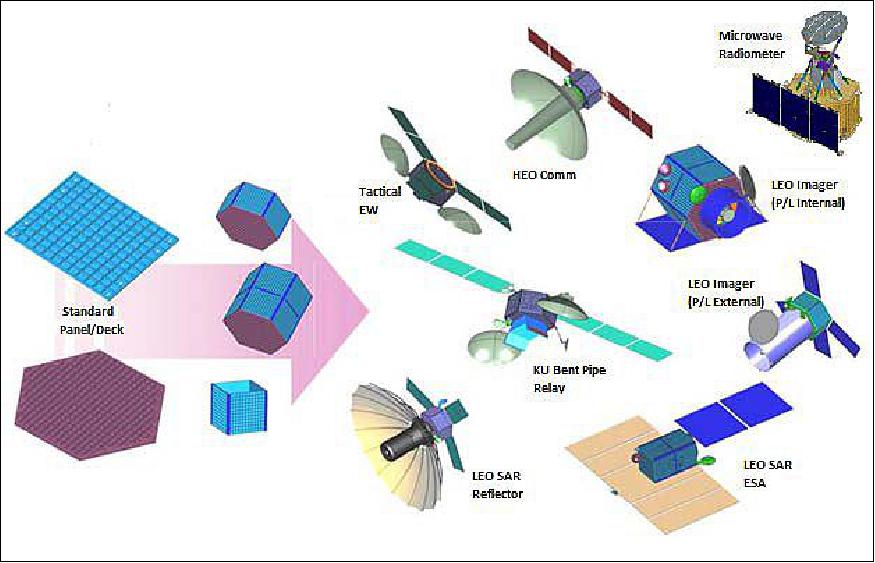
MSV implements a MOSA (Modular Open System Approach) that uses the Space Plug-n-Play Avionics (SPA) standard, facilitating seamless payload integration by treating the payload as another subsystem endpoint with a standard communication interface.
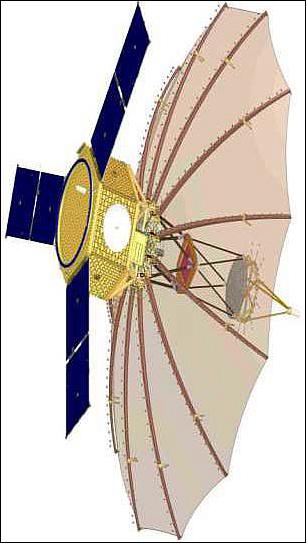
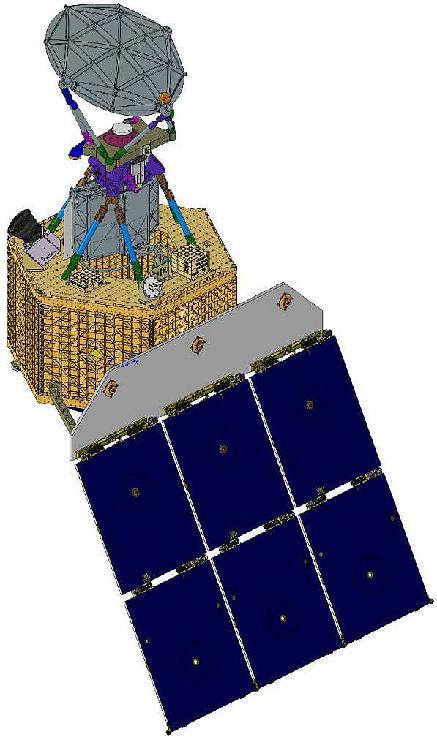
Repurposing the ORS-2 bus for the ORS-6 mission required only one major modification and three components to be made. The one reconfiguration was of the solar arrays, which were initially arranged in three sections (Figure 2) and were joined together into one unit for optimizing power generation in the sun-synchronous orbit, as shown in Figure 3. The PIU (Payload Interface Unit) is a replacement of an ORS-2 designed but never built payload SPA interface for power control, communications and electrical interface between the bus and the payload. Lastly, the ORS-2 mission was de-scoped before a communications system was designed and built. Therefore, two new items were being manufactured for the ORS-6 communication subsystem; the radio and the radio SPA interface.
A common hurdle in the development of a spacecraft is the frequency allocation and approval process, which can easily take a year to complete. In going through this process the decision was made to use a SDR (Software Defined Radio) that can dynamically change its receive and transmit frequencies and allow the project to use both USB (Universal S-Band) and SGLS (Space Ground Link System, L-band) for data uplink. This has given the program the assurance that if the frequency is not approved after months of going through the frequency approval process, there will not be large schedule and cost hits to change the requested frequency. Furthermore, because the spacecraft can now uplink at two different bands, this gives the program the ability to use both the AFSCN (Air Force Satellite Control Network) and the USN (Universal Satellite Network) ground stations.
In addition to the small modifications needed to change the bus from ORS-2 to ORS-6, there are a number of further realized successes stemming from the Modular Open System Approach spacecraft. The subsystems were designed for scalability: an additional battery, and an extra solar panel can be added to increase power storage, the ADCS (Attitude Determination and Control Subsystem) was simply scaled up to increase slew rates even before ORS-6, there are a number of empty network router ports that allow attachment of extra components or even additional routers, to name a few.
Adaptations to the new mission
Spacecraft buses, like almost every aspect of traditional space capabilities from stove pipe ground systems to dedicated launches, have historically been made as one-of-a-kind hardware specifically tailored to a given mission. While the development of CubeSats has helped to reduce the expensive one-off bus designs, this shift to reducing NRE has yet to be demonstrated in larger class satellites. To adapt the bus from a low inclination SAR mission to a sun-synchronous nadir pointing mission required a segmented bus with components that can easily be repositioned and are modifiable via software.
The hardware standards for the MSV architecture, including the Integrated System Engineering Team General Bus Standards 4), enables all bus components and subsystems to be moved anywhere on the inside or outside of the bus to within 5 cm. The goal of the MSV architecture is to have the essential bus components be building blocks with common interfaces that allow them to be located wherever needed on any of the bus panels. In the case of ORS-6, this enabled the star tracker to move a new location for easy alignment with the payload. The architecture also enabled ideal placement of course sun sensors and radio hardware, and simplified the mechanical design of the new payload and solar array interfaces.
Because the bus software was constructed with the SPA standard , every subsystem is treated in the same manner and uses the same software scheme, including the payload. 5) Any subsystem that is not a native SPA endpoint is translated to SPA using an ASIM (Applique SPA Interface Module, Ref. 10). Since all bus components utilize the SPA standard, which includes a standard harness, it further eases relocation of those components. If the existing harness is too short, a new piece can be daisy chained to make it the proper length while maintaining any existing routing or staking. The complicated payload interface is addressed by the Payload Interface Unit ASIM that provides the full electrical and communication connection between all bus subsystems and the payload.
SPA utilizes AIAA (American Institute of Astronautics and Aeronautics) standardized messages for communication between all components. All SPA components self-register on a universal network by subscribing to data sources and receiving commands through a standard query service in a Service Oriented Architecture. An xTEDS (eXtensible Transducer Electronic Datasheet ) is used exclusively to convey component information, both the messages it produces as well as its subscription messages. To add an additional component to the system, an xTEDS must be written and the device must be SPA compliant. Compliance can be attained through the use of an ASIM for legacy components that do not have a SPA interface.
Using the SPA standard also enables the flight software to be modular. Usually flight software is built as a single monolithic system and often by a third party with proprietary code. This makes changes, troubleshooting, and the cost savings of competition difficult to implement. With SPA, each subsystem has its own flight software that, just like the USB interfaces on a computer, plugs into the network with seamless integration. For ORS-6 we are upgrading our attitude determination and control software, as well as the new software needed for the payload interface and communications subsystem.
The COWVR instrument was designed for a dawn-dusk orbit. This orbit follows the terminator and, as a result, provides a very thermally stable environment as well as continuous power charging opportunity. Therefore, the payload was designed to use passive thermal control, but included operational heaters and an oversized (and masked) radiator in the design for flexibility. Choosing the ride-share launch meant a different orbit where the vehicle would go in and out of eclipse, which resulted in a less stable thermal environment and necessitated adding a yaw maneuver for power optimization. Remarkably, only two small changes to the payload were needed to accommodate the orbit change, one jumper and one harness modification, with no effect on instrument performance. The first change resulted in the bus providing pulse-width modulated heating control of the three payload heater zones. The second alteration was for a bus timing adjustment to the instrument calibration to maintain it at the edge of the scan orthogonal to the velocity for any yaw position of the vehicle. It should be noted that on a traditional spinning microwave radiometer, where the calibration sources are mechanically fixed to the instrument frame, it would not be possible to modify when calibrations were taken resulting in a loss of data when the yaw movement placed the targets in the fore and aft swath positions. On the bus side, both of these modifications were easily added to the list of Payload Interface Unit functions.
The combination of hardware (Integrated System Engineering Team) and software (SPA) standards that make up the MSV architecture on the bus enabled a rapid and low cost reconfiguration of the ORS-2 bus for the ORS-6 mission. The reconfiguration effort has already demonstrated the multi-mission capability of this design.
The program could have decided to optimize the bus, or even create a new one for the ORS-6 mission. The ORS-6 bus reaction wheels are larger than they need to be, adding an extra solar array could have prevented the need for the yaw maneuver, or a new component could have been built to compensate for the payload spun mass. But better is the enemy of good enough. Making these changes or starting from scratch with one of a kind bus would have, in the end, resulted in higher cost. Instead the program has made smart trades, such as choosing a software defined radio, simple design changes, such as reconfiguring the solar arrays rather than reinventing them, and not wasted time over-designing and over-analyzing, while still meeting mission requirements.
Rapid response with a flexible approach
The goal of the ORS office is to provide a rapid response to the joint-force commander's needs. Our knowledge of ocean winds and weather is currently relying on the WindSat payload on the Coriolis spacecraft. Coriolis has been on orbit for 13 years and, while WindSat continues to supply excellent data, the aging spacecraft has already lost its other payload. With the cancellation of NPOESS and DWSS (Defense Weather Satellite System) and with the WSF (Weather System Follow-on) not scheduled for launch until 2021, there will likely be a need to fill the gap between Coriolis and the WSF missions. ORS-6 will not only demonstrate the novel technology of the COWVR payload, providing nearly equal precision and accuracy as WindSat, it also has the potential to serve as a partial gap-filler providing ocean wind vector measurements thereby delivering critical weather information for military services, the intelligence community, and civil agencies like NOAA (National Oceanographic and Atmospheric Administration).
In order to provide the COWVR instrument data in a timely manner, the ORS-6 mission planned to utilize two leading-edge approaches to space. The first being the commercial rideshare launch. By using this launch service, the ORS-6 mission saved between 25-50% on launch costs and would have provided a faster ride into space than a traditional dedicated launch. Because ORS-6 was not a co-lead on the launch, and did not not have the ability to dictate launch date, the ORS team were motivated to keep the bus reconfiguration, assembly, integration, and test on schedule in order to meet the launch date. Although rideshares are the standard for CubeSats, pursing a commercial rideshare for a larger mission is a big step for the Air Force. Despite the fact that the lack of control over the launch date adds risk to the program, the cost savings and the successful history of commercial rideshares have tipped the scales toward enabling the government to use this resource.
The second modern tactic that the ORS-6 mission exercised the Air Force's EGS (Enterprise Ground System) architecture. The EGS design seeks to disassociate space missions from pipeline ground system approaches and standardize ground system software, hardware, and interfaces. The result is yet another modular, integrated system that is flexible enough to be run from any Space Operations Center and work with the Air Force Satellite Control Network or Universal Space Network ground stations. While the EGS implementation is still in its infancy, the ORS-6 mission, along with a handful of others, helped to solidify the EGS architecture so that future missions can easily, and cheaply, plug into a standard ground system solution.
Prior to actual integration, both the bus and the payload and ground system will have undergone extensive testing. With a test bypass system on the bus, the program is able to mimic on orbit scenarios by bypassing actual sensor component readings and injecting simulated data. Long before final end-to-end testing any issues on the bus will be discovered and fixed. Furthermore, within five days of delivery of the payload simulator the team was able to send commands with an emulated bus software on a beagle bone. Therefore, even before receipt of an engineering model of the PIU, we will be able to develop and troubleshoot the PIU flight software. Finally, with the ground control facility less than a mile from the assembly, integration, and test facility, the team will be able to fully exercise, and troubleshoot, satellite connections to the ground.
In summary, the careful design of the ORS-6 bus, the COWVR payload, the launch, and the ground system makes the ORS-6 mission a true demonstration not just of the novel bus and payload technology, but of a new approach by the US Air Force to provide a rapid, cost efficient response to an urgent need. In all but the most fortunate missions, change, whether it be budget fluctuations, leadership ebbs and flows, parts obsolescence, etc., is inevitable. In response to the near certainty of change, the ORS office decided to create a change-tolerant response construction that resulted in the MSV architecture. Leveraging a number of spacecraft standards such as SPA and EGS, the ORS-6 mission is a model of flexibility and adaptability and should serve as a template for future spacecraft, especially in situations where they may be uncertainty or ambiguity in defining the mission.
Launch
The ORS-6 spacecraft was scheduled to be launched as a rideshare payload in July 2018, according to the US commercial ELV launch manifest. The mission is referred to as SSO-A (Sun Synch Express) which is a SHERPA Rideshare mission managed by Spaceflight Industries Inc. with HQs in Seattle Washington. The launch vehicle is Falcon-9 v1.2 of SpaceX and the launch site is VAFB SLC-4E, CA 6)
The ORS-6 spacecraft was planned to launch as a commercial ride share mission. The commercial rideshare is among the first pursued by the SMC (Space and Missile Command) and provides significant cost savings over the traditional dedicated launch service. Nonetheless, as a rideshare payload ride, the program had limited control over the launch window and the orbital parameters, placing extra constraints and necessitating additional bus and payload modifications.
Orbit: Sun-synchronous orbit, altitude of about 600 km, inclination of ~97.5º.
The rideshare payloads on this flight are:
• SkySat (x2) EO microsatellites of Planet Labs, San Francisco.
• EU:CROPIS (Euglena and Combined Regenerative Organic-food Production in Space), a minisatellite (250 kg) of DLR (German Aerospace Center).
• ORS-6 (Operationally Responsive Space-6), a minisatellite (300 kg) of USAF.
• STPSat-5 (Space Test Program Satellite-5), a minisatellite of the DoD STP office. STPSat-5, which is administered by NASA's Ames Research Center; it is a free-flyer spacecraft for the DOD STP office, hosting five government furnished payloads provided by the Space and Naval Warfare Systems Command, the U.S. Air Force Academy, the Naval Research Laboratory and Office of Naval Research and the Air Force Research Laboratory. The spacecraft is designed by SNC (Sierra Nevada Corporation).
• BlackSky Global-1 to -4 of BlackSky Global, Seattle, WA, USA.
• NEXTSat-1, a microsatellite technology demonstration (~100 kg) of KAIST (Korea Advanced Institute of Science and Technology) 7)
• KazSTSAT, an EO microsatellite (110 kg) of Ghalam LLP of Astana, Kazakhstan, built by SSTL.
• BlackSky Global, four EO microsatellites (55 kg each) of BlackSky Global.
• HawkEye Pathfinder, three microsatellites (15 kg each) of HawkEye 360 Inc., for spaceborne radio frequency (RF) detection and geolocation technology.
• Flock-v (x?) EO nanosatellites of Planet Labs, San Francisco.
• ORS-7 (Operationally Responsive Space 7), two 6U CubeSats of the USGC (United States Coast Guard) with AIS payloads.
• COPPER-2 (Close Orbiting Propellant Plume and Elemental Recognition-2), a 3U CubeSat (technology demonstration) of Saint Louis University, Saint Louis, MO, USA.
• Audacy Zero, a 3U CubeSat built by Clyde Space as a pathfinder for the planned Audacy commercial data relay satellite constellation.
• Orbital Reflector, a 3U CubeSat which deploys a large reflective sculpture. The project is sponsored by by the Nevada Museum of Art. The deployed Orbital Reflector is a 30 m sculpture constructed of a lightweight material similar to Mylar. Sunlight reflects onto the sculpture making it visible from Earth with the naked eye — like a slowly moving artificial star as bright as a star in the Big Dipper.
• Fox-1C, a 1U CubeSat of AMSAT, Vanderbilt University, Virginia Tech and Penn State University. Fox-1C will also serve as a communications relay for amateurs worldwide via the onboard FM repeater system.
• KNACKSat [KMUTNB (King Mongkut's University of Technology North Bangkok) Academic Challenge of Knowledge SATellite], 1 U technology demonstration CubeSat of Thailand built by students.
• Elysium-Star 2, a 1U CubeSat of Elysium Space. The passive Cubesat holds trays with multiple individual capsules containing samples of cremated ashes.
• Jy1-Sat is Jordan's first 1U CubeSat mission, developed by a student team from various Jordanian universities. The satellite carries a 435/145 MHz (UHF/VHF) amateur radio linear transponder along with a Slow-Scan Digital Video system which will be used to broadcast clips of various local tourist attractions internationally. 8)
According to Spaceflight Industries, the SSO-A "dedicated rideshare" mission will deliver roughly 90 payloads with the SHERPA dispenser.
Mission Status
- December 21, 2021: COWVR and TEMPEST were launched to the ISS by SpaceX from the Kennedy Space Center on SpaceX’s 24th Commercial Resupply Mission (CRS-24). The instruments were deployed to the Japanese Experiment Module - Exposed Facility (JEM-EF) to begin a planned three year operation. 14)
- May 2018: US Air Force has cancelled plans to launch ORS-6 due to technical issues with the spacecraft’s bus. Space RCO (Rapid Capabilities Office) is looking at alternative approaches to demonstrate the satellite’s COWVR payload. 15)
Sensor complement
COWVR (Compact Ocean Wind Vector Radiometer)
The COWVR instrument was designed, built and tested by the Jet Propulsion Laboratory for an Air Force proof-of-concept technology demonstration mission. COWVR is a low-cost, low-mass, low-power fully-polarimetric imaging radiometer system operating at 18.7, 23.8 and 33.9 GHz and based on the Jason-2/3 AMR (Advanced Microwave Radiometer) design. The fully-polarimetric observations enable retrieval of ocean surface wind vector, as well as other key environmental parameters such as precipitable water vapor, cloud liquid water, precipitation rate and sea ice. The measurement of ocean surface vector winds using a polarimetric microwave radiometer was first demonstrated by the NRL (Naval Research Laboratory) WindSat radiometer (launched in 2003). 9)
Because this was a first-of-its-kind measurement, the system minimized use of new technology to ensure successful demonstration of the new measurement technique and consequently had a large mass and power (450 kg and 350 W). 10) -The COWVR system utilizes a novel design to reduce the system complexity which in turn significantly reduces the cost, mass, power and volume from the heritage WindSat sensor, yet is predicted to maintain the same wind vector retrieval accuracy.
Novel instrument design: Conically imaging passive microwave radiometer systems such as the Special Sensor Microwave Imager (SSM/I, SSMIS), the Advanced Microwave Scanning Radiometer (AMSR-E, AMSR-2) and WindSat, have been providing critical environmental data for over 30 years. But over this time, the overall sensor design has remained largely unchanged. These conical sensors have three basic attributes; (1) A large, massive spun portion containing the radiometer and electronics system; (2) A de-spun external un-polarized warm target and cold sky reflector and; (3) a large feedhorn array and individual receivers for each frequency and polarization. These design attributes drive the instrument mechanical complexity, spacecraft accommodation (e.g. momentum compensation) and instrument cost. For example, the WindSat needed to offset 189 Nms of spun momentum from the sensor. The sensors that were in development for NPOESS (CMIS and later MIS) were each expected to exceed 300 kg, 300 W and cost more than $100M. It is clear that a simplified design solution is needed to reduce the sensor mass, power, cost and accommodation, yet maintain the legacy performance.
The COWVR instrument uses an entirely different design to eliminate the instrument mechanical complexity that drives mass, power and cost. The enabling design features include (1) the use of a single multi-frequency feed horn permitting a simple antenna rotating about the feed axis, as opposed to having to spin the entire radiometer system and pass signals through the spin assembly; (2) internal calibration sources which enable fully polarimetric calibration and eliminate the need for an external warm load and cold sky reflector simplifying the mechanical design and enabling a complete 360º scan and; (3) a compact highly integrated MMIC polarimetric combining receiver implementation, lowering the system mass and power which in turn makes the system well suited for deployment on smaller class, lower cost satellites.
COWVR Mission
COWVR is considered an Air Force proof-of-concept technology demonstration mission. The overall mission objective is the on-orbit performance demonstration of the COWVR alternative sensor design relative to the more complex heritage sensor design. The COWVR performance objectives are focused on the wind vector measurement. This is for two reasons. The DoD (Department of Defense) anticipates a measurement gap in the 2015 time frame and the wind vector measurement drives the overall sensor performance, meaning other products can be produced with sufficient accuracy if wind vector performance is met[e.g. PWV (Precipitable Water Vapor), TPW (Total Precipitable Water) sea ice]. The driving performance requirements for COWVR are to meet demonstrated WindSat wind vector performance. The mission is planned for a sun-synchronous dawn/dusk orbit. It is a 2-year mission with a 3-year goal.
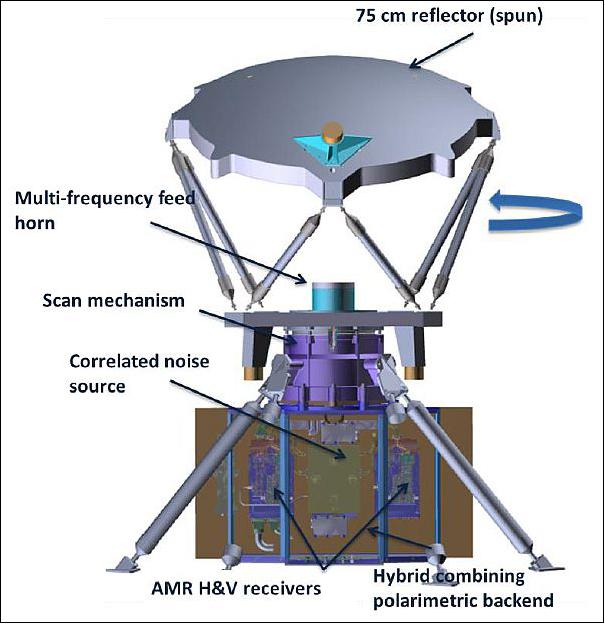
An illustration of the COWVR instrument design is shown in Figure 4. The instrument includes a single stationary multi-frequency feed horn that illuminates rotating reflector generating a 360º un-blocked conical scan. The reflector rotates at 30 rpm and provides a spatial resolution <35 km and a swath width of 1012 km from the mission orbit altitude of 450 km. After the feed, an orthomode transducer is used to separate the signal into two linear orthogonal components which are then fed via waveguide into MMIC multi-frequency receivers to amplify and filter the signals. The output from the receivers is input to a hybrid combining polarimetric backend unit which performs the analog in-phase and quadrature phase cross-correlation of the two signals to produce the ±45º and left and right circular polarized outputs.
The instrument is calibrated using PIN-diode switches internal to the receivers and a correlated noise source. The switches are used to toggle each receiver between an ambient reference load and the antenna. The correlated noise source is capable of generating known polarized signals by injecting correlated noise with a defined phase offset between the two receiver chains.
Because the feedhorn is fixed, the instrument polarization is fixed to the instrument frame and rotates relative to the Earth polarization basis. Because the instrument measures the full stokes vector, which completely describes the polarization state of the scene, a simple geometric transform is used in ground processing to rotate the polarization from the fixed instrument frame to the Earth frame. This technique has been previously used in ground-based and airborne radiometer systems and is commonly referred to as EPBR (Electronic Polarization Basis Rotation). 11) 12) This actually presents a calibration advantage.
The COWVR instrument mass is estimated to be 59 kg and the instrument power is estimated to be 47 W. Because the mission is a technology demonstration mission, the instrument mass and power hasn't been optimized and could be reduced for future implementations. A comparison of the COWVR design to WindSat is shown in Table 1. This table shows a clear reduction in mass, power and spun momentum from WindSat.
Parameter | Coriolis/WindSat | ORS-6/COWVR |
Channels (GHz) | 6.8 (x2), 10.7 (x6), 18.7 (x6), 23.8 (x2), 36.5 (x6) | 18.7 (x6), 23.8 (x6), 33.9 (x6) |
Feeds | 11 | 1 |
Receivers | 22 independent receivers | 2 three frequency polarimetric receivers |
Mass | 330 kg | 69 kg |
Power | 350 W | 90 W (instrument power) |
Spun momentum | 190 Nms | 4 Nms |
EDRs (Experiment Data Records) | Wind vector, TPW, CLW, precipitation, sea ice, SWE, soil moisture, SST (Sea Surface Temperature) | Wind vector, TPW, CLW (Cloud Liquid Water), precipitation, sea ice, SWE (Snow Water Equivalent) |
The COWVR instrument design has several advantages over the heritage sensor design in terms of calibration and performance. These advantages arise from the use of the EPBR (Electronic Polarization Basis Rotation) technique and the 360º un-obstructed observation geometry.
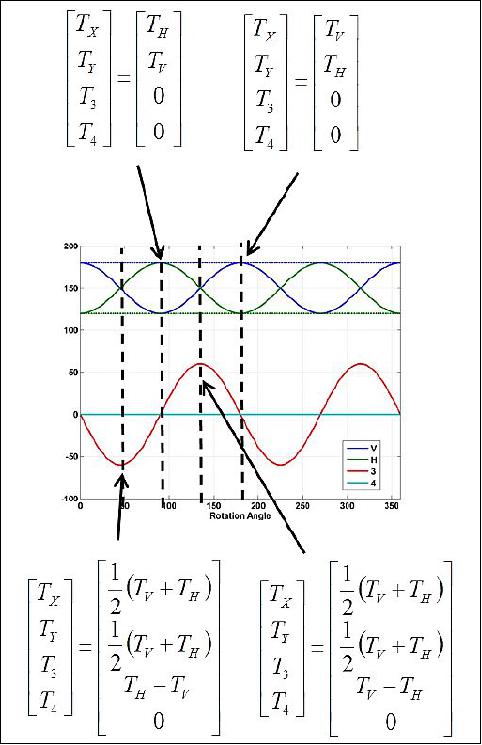
Calibration Advantages: On long time scales, the polarized global mean ocean brightness temperature (TB) becomes un-correlated with the instrument scan (azimuth) position. This assumption has been shown to be valid to better than 0.05 K on times scales greater than 10-days using WindSat data. For traditional conically imaging radiometers, a long-term average of the TBs over scan position would yield a distinct constant TB value for each receiver (V, H, ±45º,LCP, RCP). Because the polarization basis of COWVR rotates with the scan position, this azimuthally constant polarized signal from the Earth is modulated in a known way based only on the instrument geometry. Furthermore, the relative amplitudes of the signals for each Stokes parameter are related and deterministic. This is illustrated in Figure 5. The dotted lines illustrate the global mean ocean TB as a function of scan azimuth in the Earth polarization basis and the solid lines show the modulated signal in the COWVR fixed polarization basis. Not only does this provide a powerful constraint on the polarimetric gain and offset calibration of the receivers, it also forces inter-calibration consistency between the polarizations.
A second unpolarized warm target, such as the Amazon rain forest will also be used. The Amazon target, along with the ocean, provides sufficient constraints to simultaneously solve for gain, offset and mixing terms.
Performance Advantages: Another advantage arises because COWVR has an un-blocked 360º scan, meaning it makes observations of each scene at two azimuth angles. This has advantages in terms of wind direction retrieval and also observations of a 3D storm structure.
The wind direction signal from the ocean is periodic. Observations of this signal at a single azimuth (as is currently done with WindSat), produces up to 4 ambiguous solutions. The addition of a second observation at a widely separated azimuth angle greatly improves the retrieval algorithm skill and accuracy. Monte-Carlo simulations were performed to assess the improvement of the COWVR 2-look retrievals over single look retrievals. The metrics assessed were:
- Skill: The percentage of time the first ranked solution is true solution
- First rank error: The RMS error of the best solution
- Closest ambiguity error: The error after nudging using a NWP first guess and
- Mean number of solutions: The number of ambiguities meeting the chi-square criteria.
A comparison of the two algorithms is shown in Table 2. It is clear that the two-look algorithm offers a more accurate solution and requires less reliance on a priori information for ambiguity removal.
Average over 5-200 m/s | 1-Look | COWVR 2-Look |
Skill | 65% | 90% |
First rank error | 28º | 18º |
Closest ambiguity error | 19º | 16º |
Mean number of solutions | 2.7 | 2 |
Finally, the fore/aft observations can be used to reveal the structure of storms. This has been shown to be useful for tropical cyclone monitoring by revealing tilted eyes walls which are an indicator of upper level sheer. 13)
References
1) Kasandra O'Malia, Shannon Brown, William Schum, Edward Kern, George Moretti, Charles Finley, Benjamin Cook, "New Mission, New Orbit, No Problem—Applying the Responsive Space Capability to Meet the ORS-6 Mission," Proceedings of the 30th Annual AIAA/USU SmallSat Conference, Logan UT, USA, August 6-11, 2016, paper: SSC16-VI-6, URL:
http://digitalcommons.usu.edu/cgi/viewcontent.cgi?article=3380&context=smallsat
2) Josh Cossuth, "New satellite data and applications for tropical cyclone operations by 2025: Agency and Interagency plans -NRL Perspective," March 16, 2016, URL:
http://www.ofcm.gov/ihc16/Presentations/Panel%202/03-NRL_satellite.pdf
3) Charles J. Finley, Kimberly Richards, Jose C. Cabanillas, III, Denny Gudea, Phil Katz, Sarah Ray, George Moretti, Demosthenes Tsairides, "HOW ORS – Modular Space Vehicle on the T2E Mission," Proceedings of the AIAA/USU Small Satellite Conference, Logan, UT, USA, Aug. 8-11, 2011, paper: SSC11-VII-4, URL: http://digitalcommons.usu.edu/cgi/viewcontent.cgi?article=1145&context=smallsat
4) James Lyke, Quinn Young, Jacob Christensen, David Anderson,"Our Decade in Space Plug-and-play Avionics (SPA)," Proceedings of the 28th Annual AIAA/USU Conference on Small Satellites, Logan, Utah, USA, August 2-7, 2014, URL: http://digitalcommons.usu.edu/cgi/viewcontent.cgi?
filename=0&article=3043&context=smallsat&type=additional
5) Jeffrey Scott, James Lyke, Patrick McGuirk, Mark Shaw, Don Fronterhouse, "Appliqué Sensor Interface Module: An Enabling Technology for Space Plug-and-Play Systems," Proceedings of the 21st Annual AIAA/USU Conference on Small Satellites, Logan, UT, USA, Aug. 13-16, 2007, paper: SSC07-X-1, URL: http://digitalcommons.usu.edu/cgi/viewcontent.cgi?article=1494&context=smallsat
6) http://www.sworld.com.au/steven/space/uscom-man.txt
7) http://satrec.kaist.ac.kr/e_02_03.php
8) "Jordan's first ever JY1-SAT CubeSat satellite heralds a new era of space exploration for the country," Muslim Science, 22 Dec. 2017, URL: http://muslim-science.com
/jordans-first-ever-jy1-sat-cubesat-satellite-heralds-a-new-era-of-space-exploration-for-the-country/
9) Shannon Brown, Paolo Focardi, Amarit Kitiyakara, Frank Maiwald, Oliver Montes, Sharmila Padmanabhan, Richard Redick, Damon Russell, James Wincentsen, "The Compact Ocean Wind Vector Radiometer: A new class of low-cost conically scanning satellite microwave radiometer system," 94th American Meteorological Society Annual Meeting, Atlanta, GA, USA, Feb. 2-6, 2014, URL:
https://ams.confex.com/ams/94Annual/webprogram/Manuscript
/Paper241605/COWVR_2014_AMS_extended_abstract.pdf
10) Peter W. Gaiser, Karen M. St. Germain, Elizabeth M. Twarog, Gene A. Poe, William Purdy, Donald Richardson, Walter Grossmann, W. Linwood Jones, David Spencer, Gerald Golba, Jeffrey Cleveland, Larry Choy, Richard M. Bevilacqua, Paul S. Chang, "The WindSat Spaceborne Polarimetric Microwave Radiometer: Sensor Description and Early Orbit Performance," IEEE Transactions on Geoscience and Remote Sensing, Vol. 42, No 11, Nov. 2004, pp.2347-2361, URL:
http://www.nrl.navy.mil/WindSat/pdfs/TGRS04_WindSat_Gaiser.pdf
11) A. J. Gasiewski, D. B. Kunkee, "Laboratory demonstration of electronic polarization basis rotation," Microwave Symposium Digest, 1992., IEEE MTT-S International , Vol. No 1, pp:329-332, 1-5 June 1992: doi: 10.1109/MWSYM.1992.187979
12) J. Lahtinen, A. J. Gasiewski, M. Klein, I. S. Corbella, "A calibration method for fully polarimetric microwave radiometers," IEEE Transactions onGeoscience and Remote Sensing, ,Vol.41, No.3, pp:588-602, March 2003: doi: 10.1109/TGRS.2003.810203
13) F. J. Turk, S. DiMichele, J. Hawkins, "Observations of tropical cyclone structure from WindSat," IEEE Transactions on Geoscience and Remote Sensing, Volume44 , Issue: 3, pp: 645-655, March 2006, doi: 10.1109/TGRS.2006.869926
14) "COWVR and TEMPEST on Space Test Program-Houston 8 (STP-H8)," NASA JPL, 21 December, 2021, URL: https://podaac.jpl.nasa.gov/COWVR-TEMPEST
15) Marc Selinger, "Air Force Studying Alternatives To Troubled ORS-6 Satellite," Defense Daily, 1 June, 2018, URL: https://www.defensedaily.com/air-force-studying-alternatives-troubled-ors-6-satellite/air-force/
The information compiled and edited in this article was provided by Herbert J. Kramer from his documentation of: "Observation of the Earth and Its Environment: Survey of Missions and Sensors" (Springer Verlag) as well as many other sources after the publication of the 4th edition in 2002. - Comments and corrections to this article are always welcome for further updates (eoportal@symbios.space).