OPS-SAT (Operations nanoSatellite)
EO
ESA
High resolution optical imagers
Land
OPS-SAT is an experimental satellite operated by ESA. It is the world’s first satellite mission dedicated to testing satellite control technology in orbit.
Quick facts
Overview
| Mission type | EO |
| Agency | ESA |
| Mission status | Operational (nominal) |
| Launch date | 18 Dec 2019 |
| Measurement domain | Land |
| Measurement category | Multi-purpose imagery (land) |
| Measurement detailed | Land surface imagery |
| Instruments | High-resolution Camera (OPS-SAT) |
| Instrument type | High resolution optical imagers |
| CEOS EO Handbook | See OPS-SAT (Operations nanoSatellite) summary |

Summary
Mission Capabilities
OPS-SAT hosts a number of payloads that have not been implemented on a nanosatellite or a regular satellite before. It features an Altera Cyclone V System-on-Chip (SoC) processor; a high-resolution camera; and a software-defined radio which makes OPS-SAT capable of monitoring radio signals. For its own positioning it has a fine Attitude Determination Control System (ADCS) consisting of gyroscopes, accelerometers, magnetometers, reaction wheels, magnetorquers, and a star tracker; and a GPS to ensure positioning data is obtained.
Furthermore, for communication with base stations it has an S-band transponder for the transmission of payload data, and Telemetry and Telecommand (TM/TC); an X-band transmitter; and an optical uplink that consists of a receiver that can receive commands from a laser ranging station on Earth.
Performance Specifications
The processing platform is 10 times more powerful than any other preceding ESA satellite. The highest uplink rate for a normal ESA spacecraft was 64 kbit/s but this transponder allows an uplink rate of 256 kbit/s and a downlink rate of 1 Mbit/s. The X-band transmitter provides a data transfer rate of 50 Mbit/s, and the optical receiver allows data transfer at a rate of 2 kbit/s via laser pulses. Furthermore, the camera has a resolution of 80 m.
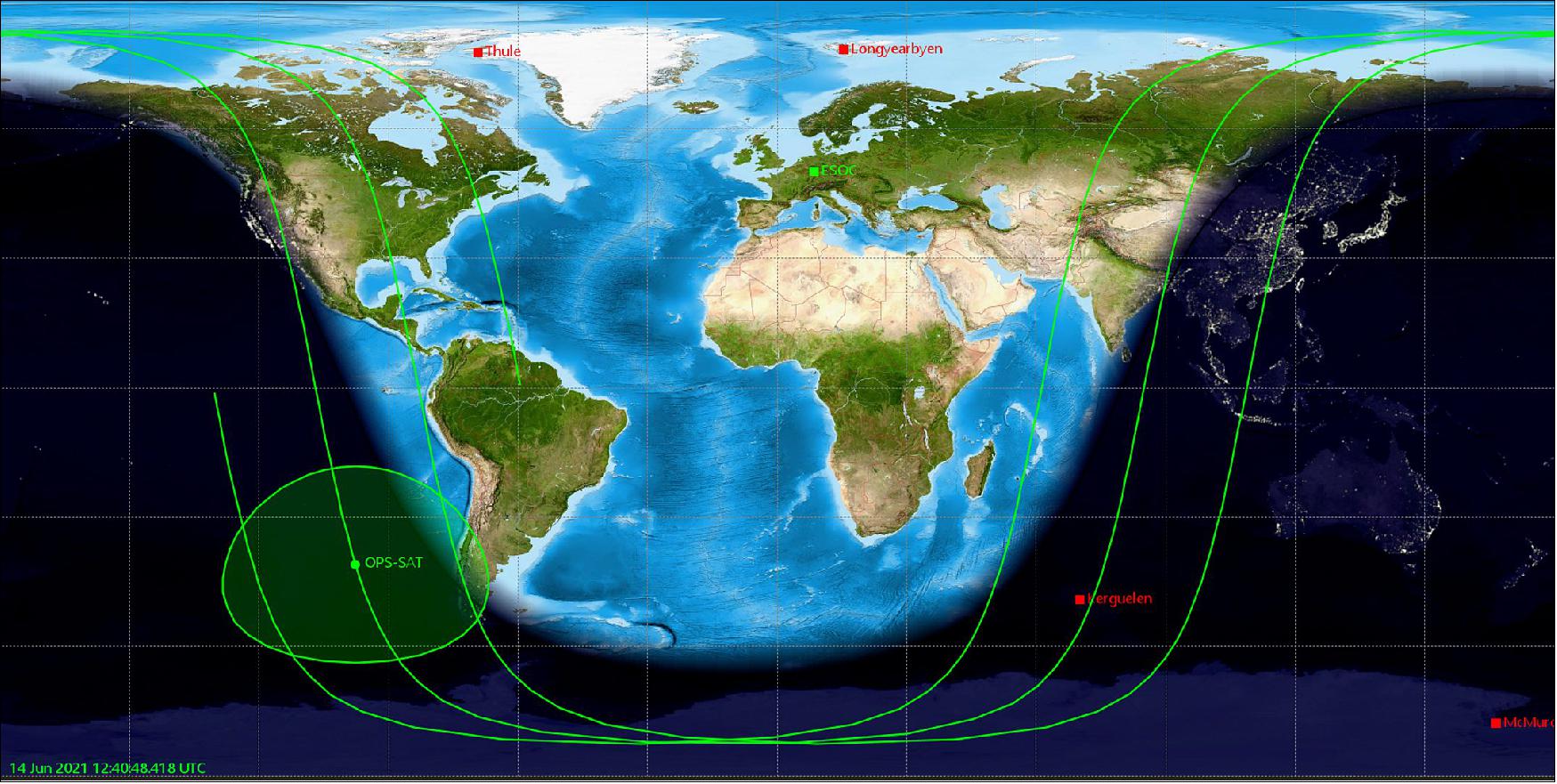
OPS-SAT is undertaking a sun-synchronous orbit with an altitude of 515 km.
Space and Hardware Components
OPS-SAT is a 3U CubeSat (0.3 m x 0.1 m x 0.1 m) with a mass of 5.4 kg, and was launched aboard the Arianespace Soyuz launch vehicle from the Guiana Space Centre in Kourou, Guiana.
ESA has allowed companies throughout Europe to submit experiments involving OPS-SAT which will then be executed at the Special Mission Infrastructure Lab Environment (SMILE) at the European Space Operations Centre (ESOC) in Germany. Companies can collaborate with ESA engineers to orientate the satellite and interact with its payloads in whichever way they desire.
OPS-SAT has been used for over 100 experiments thus far with some involving Artificial Intelligence (AI), data compression, and even financial transactions.
OPS-SAT (Operations nanoSatellite)
Spacecraft Launch Mission Status Payloads Operations Concept References
Overview
OPS-SAT marks ESA’s entry into the nanosatellite world - starting in 2012. This is a clear signal that this market segment has reached a certain maturity and this is good news for the blossoming European nanosatellite industry. The satellite will demonstrate a massive jump in capabilities for this class of spacecraft (communication rates, processor speeds, onboard memory, reconfigurable FPGAs etc). This will accelerate the rapid transition from supporting educational missions to supporting operational ones in this area.
The project will also be a chance for real European cooperation. For example, the project drew interest from CNES and DLR on the hardware side, but the agencies also support experiments demonstrating new CCSDS standards. 1) 2) 3) 4) 5) 6)
1) The young OPS-SAT development team came up with the following conceptual ideas: 7) 8)
• Develop a satellite specifically designed to allow constant experimentation with critical on-board and ground software using modern space-to-ground interfaces
• An operational perspective, the emphasis is to demonstrate innovation that is asked for by the operators rather than imposed on the operators.
• The nanosatellite should be representative, cheap, and quick to launch.
2) The general OPS-SAT CDF (Concurrent Design Facility) mission requirements are:
• Must allow easy and complete replacement of on-board software in flight - i.e. an open experimental platform
• Software should be able to be updated quickly, easily and often – a complete reload of the entire software in less than 3 passes
• Allow the use of standard terrestrial CPU, OS and Java – aim for the equivalent of mobile phone performances
• The satellite should be no bigger than a 3U CubeSat (30 x 10 x 10 cm) and compatible for launch in a P-POD
• COTS units shall be used wherever possible (no new developments)
• Cost to be kept below 2 MEuro
• Time to launch between 1-2 years from kick-off
• Single string implementation but reduce single-point failures to a minimum
• Make the satellite safe by design (even without the processor running)
• Do not assume that any unit will work all the time
• Always ensure the ground can recover any unit.
3) The experiments – both software & hardware:
• CCSDS mission operations services
• File-based operations
• Autonomy operations and opportunistic science
• Housekeeping telemetry compression
• Potentially many more SW experiments
• Miniature X-band transmitter.
4) Mission operations are considered an experiment:
• OPS-SAT is a special ESA project because it is meant to drive innovation and experimentation in the spacecraft control domain. Therefore the ground segment(s) and operations are experiments!
• The CDF treated them as such assuming that they will be funded from other sources and that normal ESA standards will not be applied in the development.
• Use of low-cost ground station alternatives (for instance the UHF/VHF/S band antenna in ESOC) was also assumed.
In the MRD (Mission Requirements Document) the mission statement is formulated as follows (Ref. 5): 9)
• OPS-SAT shall provide an in orbit platform that through reconfigurability shall allow experimenters to uplink and execute software experiments that will advance the state-of-the-art of mission operations and have a clear potential for use in future ESA missions.
• Experimenters are entities within ESA and within the European academic and industrial community that can deliver relevant software experiments compliant with the OPS-SAT capabilities. Software experiments shall have open access to all onboard resources and systems unless justified due to safety.
• The mission shall be realized as a nanosatellite mission levering CubeSat COTS components where possible, without compromising a minimum lifetime target of two years.
• The spacecraft shall be powered and thermally safe even if tumbling. The mission shall be robust against single-event upsets, latching events or faulty experimental software. It shall be demonstrated that despite using COTS components a reconfigurable and yet reliable platform can be delivered.
• The OPS-SAT payload shall deliver as a minimum; two processors running at 500+MHz with 500 MB of RAM, 10 GB solid storage and a reconfigurable FPGA.
• At least one configuration shall be representative of an ESA mission (including ground software and OBSW (On-Board Software).
• S-band uplink rates of at least 256 kbit/s and S-band downlink rates of 1 Mbit/s shall be supported. The high uplink data rate is due to the fact that this mission is focused on new software experiments. Therefore it is needed to upload the frequently changing software experiments at a reasonable time.
• The spacecraft shall be recoverable and resettable by at least two independent communications routes in hardware and software. The spacecraft shall be able to communicate with the respective ground station in any orientation
ESA and its European industry partners generate every year many new and innovative ideas for advancing European space technology regarding mission operations but the majority of these innovations never make it to orbit. OPS-SAT emerged, providing a low-cost in-orbit laboratory available for authorized experimenters to test, demonstrate and validate their development software experiments.
OPS-SAT is the first CubeSat designed by ESA and is a safe experimental platform which shall fly in a low-earth sun-synchronous orbit. OPS-SAT makes available a reconfigurable platform, at every layer from channel coding upwards, and it will be available for experimenters wishing to test and demonstrate new software and mission operation concepts.
Spacecraft
OPS-SAT is a nanosatellite (3U form factor) designed by ESA CDF (Concurrent Design Facility) to provide a platform for in-orbit validation of these new concepts developed by ESOC (European Space Operations Center), Darmstadt, Germany. OPS-SAT is the first CubeSat designed by ESA, integrating state-of-the-art components (such as a miniaturized X-band transmitter derived from the PROBA-V mission) allowing it to provide unmatched performances, up to several hundred times better than any other CubeSat flown before. - Note that this transmitter is now flying first on the GOMX-3 mission supported by ESA. 10) 11) 12)
The CDF and the supporting concurrent engineering environment were able to adapt successfully to this new type of application, providing tools and methodologies to enhance performances and reliability through architectural trade-offs. Fast iterations of the design process, helped by an updated concurrent engineering data model and rapid prototyping techniques allowed ESA to achieve a mission design that meets all the requirements.
In 2013 an Open Call for OPS-SAT experiment ideas was launched by ESA with more than 100 experiments being suggested, followed by a highly successful experimenters’ day with an attendance of more than 150 participants. In July 2013 two parallel Phase A/B1 study contracts were awarded to TU Graz and GOMSPACE, respectively. The team led by the Institute of Communication Networks and Satellite Communications of TU Graz presented the results in January 2014. In February 2015 the Phase B2/C/D/E1 contract was kicked off. The team led by TU Graz is composed of GMV and the Space Research Center Warsaw (Poland). BST (Berlin Space Technologies) and MEW Aerospace (Germany), GOMSPACE (Denmark) as well as MAGNA STEYR Engineering and Unitel (Austria). 13) 14) 15) 16)
The final avionics design of OPS-SAT can be viewed as four interconnected parts: a CubeSat bus, an ESA communications module, a payload and an FDIR (Failure Detection, Isolation and Recovery ) system. The payload can be further broken down into a processing core, various peripherals (camera, GPS, advanced ADCS subsystem) and several payloads of opportunity.
OPS-SAT bus
OPS-SAT is a 3U CubeSat having a size of 10 x 10 x 30 cm and a mass of approximately 5.4 kg. Two double-folded deployable solar array panels generate 30 W of electrical (peak) power. Key requirements of OPS-SAT are that at least one configuration must be representative of a standard ESA mission and that the spacecraft has to be inherently safe. Faulty software which experimenters may upload to the satellite cannot jeopardize the mission To achieve this, in the OPS-SAT design all potential single points of failures have been removed. The spacecraft will utilize a CCSDS-compatible S-band telemetry system. This is relatively new for CubeSats which normally rely on amateur packet radio technology and UHF/VHF telemetry.
OPS-SAT bus:
Approximately 1U of the satellite accommodates the CubeSat COTS components, including:
- the UHF antenna deployment system (as well as the software-defined radio receiver payload antenna)
- a motherboard with the UHF transceiver
- the NanoMind OBC (On-Board Computer)
- the BP4 battery pack with 4 battery cells
- the EPS (Electrical Power Subsystem), consisting of a motherboard accommodating two power input boards for the body-mounted and deployable solar array strings
- two power output boards for power regulation and distribution and the Z-axis magnetorquer integrated into a PCB (Printed Circuit Board).
The double deployable solar arrays are provided by ClydeSpace whereas the remaining components are provided by GomSpace. Using a quasi-single provider keeps the integration costs and risks of the satellite bus low. GOMSpace also provides the ground terminal for UHF communications. The one area where some development was required on the COTS components was the power conditioning subsystem. The mission sometimes generates over 30 W of peak power and is connected in 11 strings. To accommodate this GOMSpace proposed architecture with two separate power conditioning and distribution boards, each connected to half of the solar arrays on the satellite.
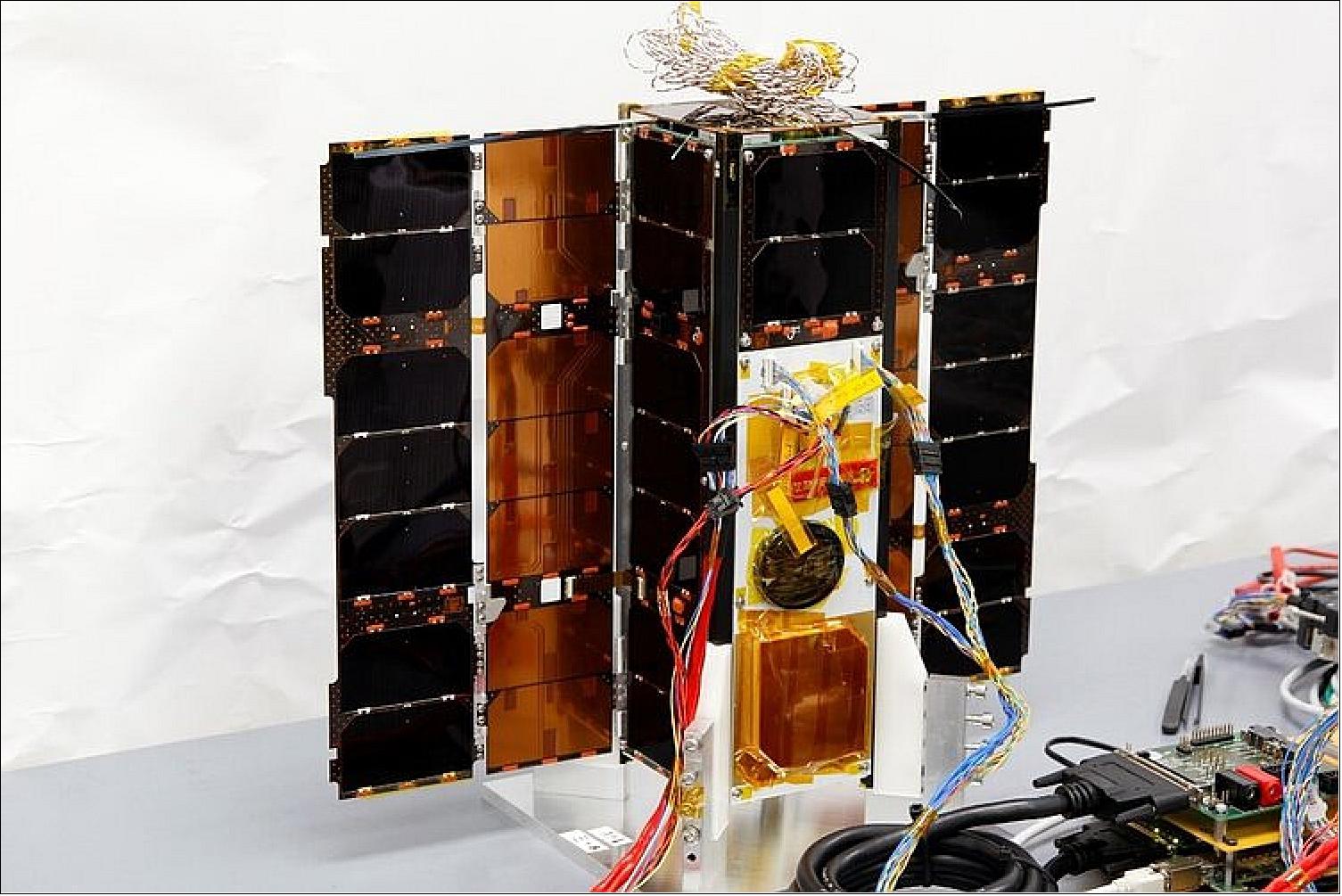
Solar arrays cover the satellite except for the Z faces, as shown in Figure 1 (right). The deployable solar arrays have integrated sun sensors and magnetorquers. The bus also includes a GPS unit which is linked to the NanoMind OBC to provide GPS functionality to the ADCS system. The GPS antenna is integrated into the –X panel next to the umbilical connectors of the spacecraft. As the GPS will be integrated with the CubeSat bus and not directly into the processing platform, all data from the GPS can be made available over the I2C payload bus interface from the NanoMind to the processing platform. In addition, the GPS will be used for timekeeping on the Nanomind OBC, which keeps the OBT (On-Board Time).
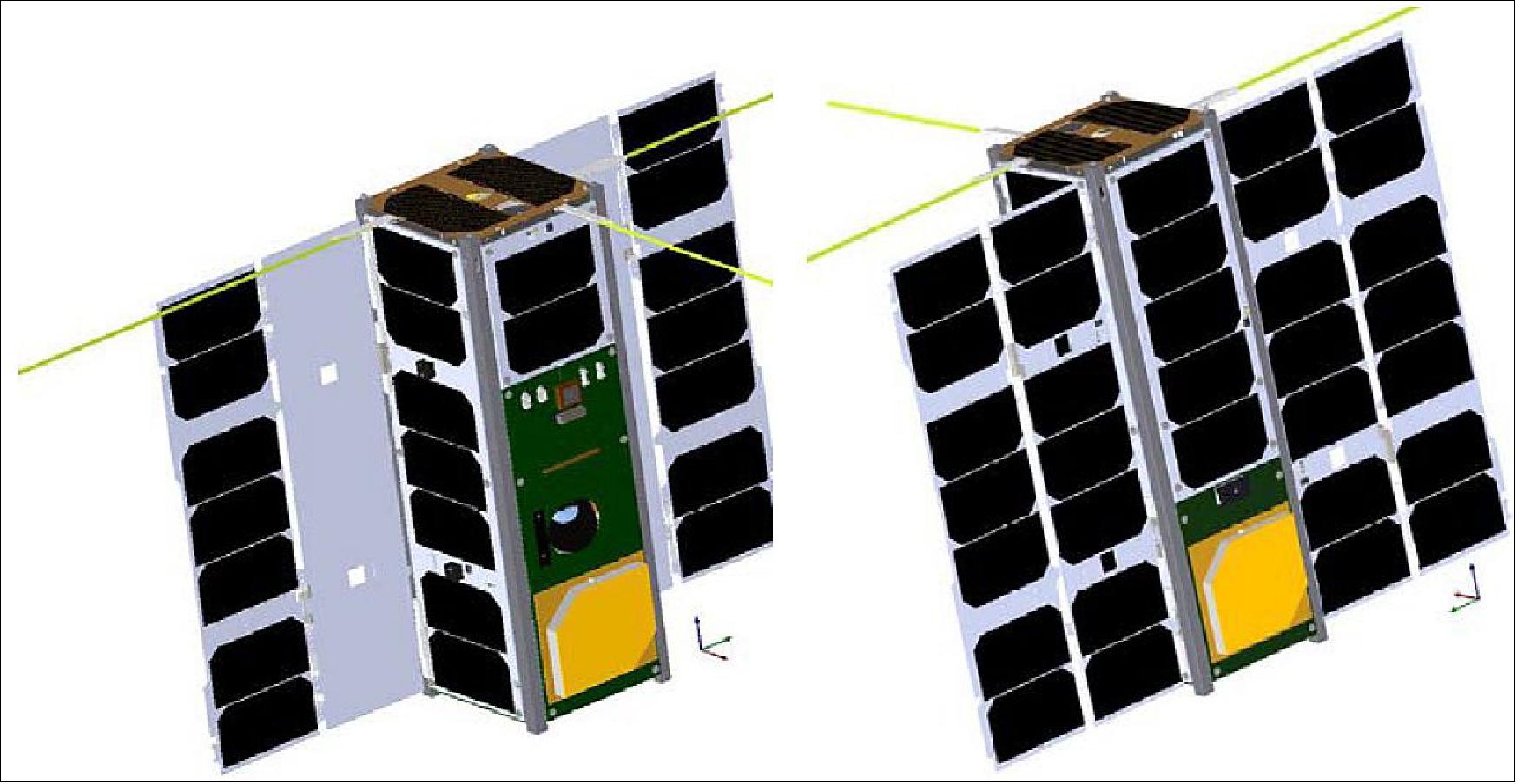
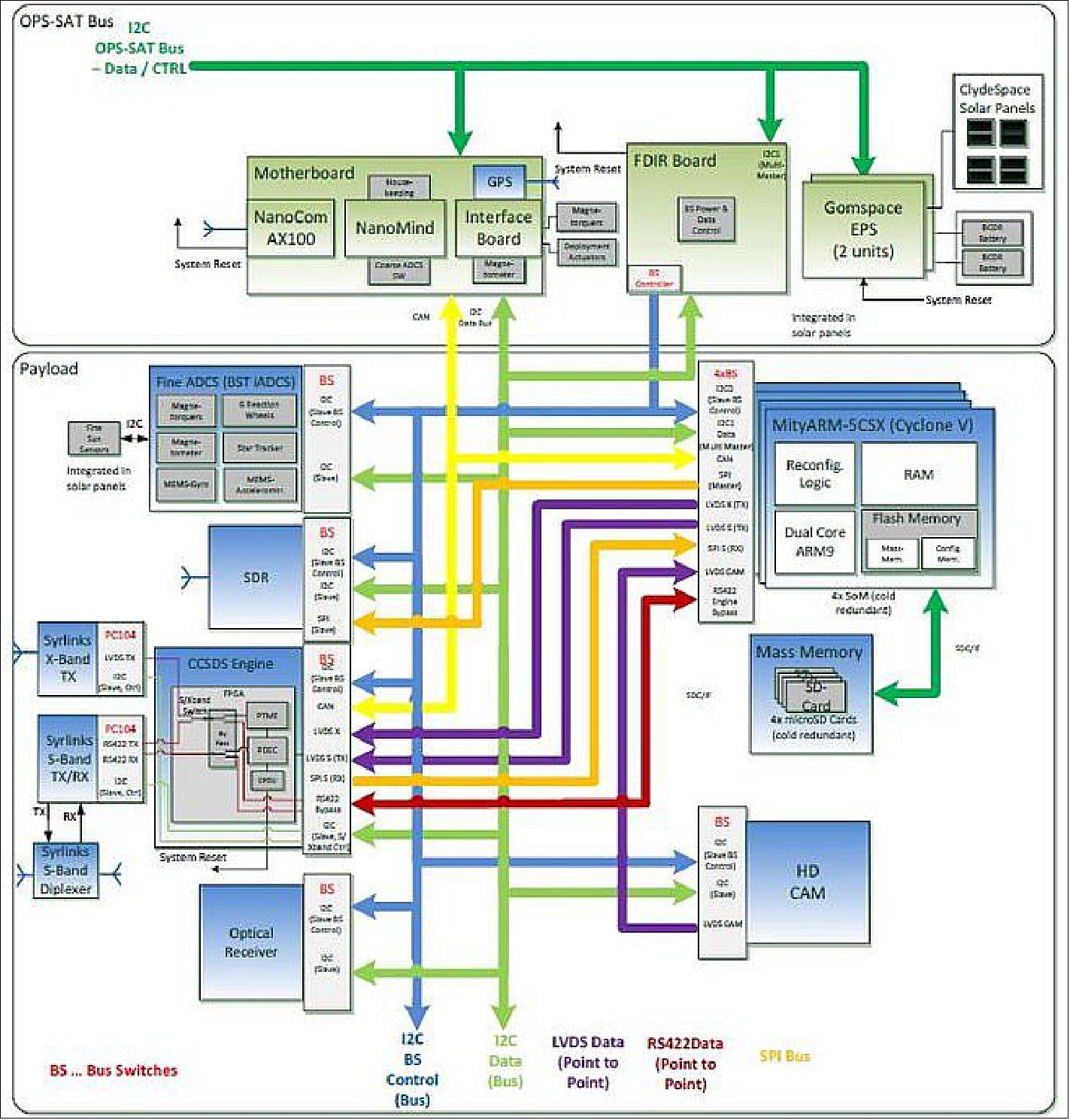
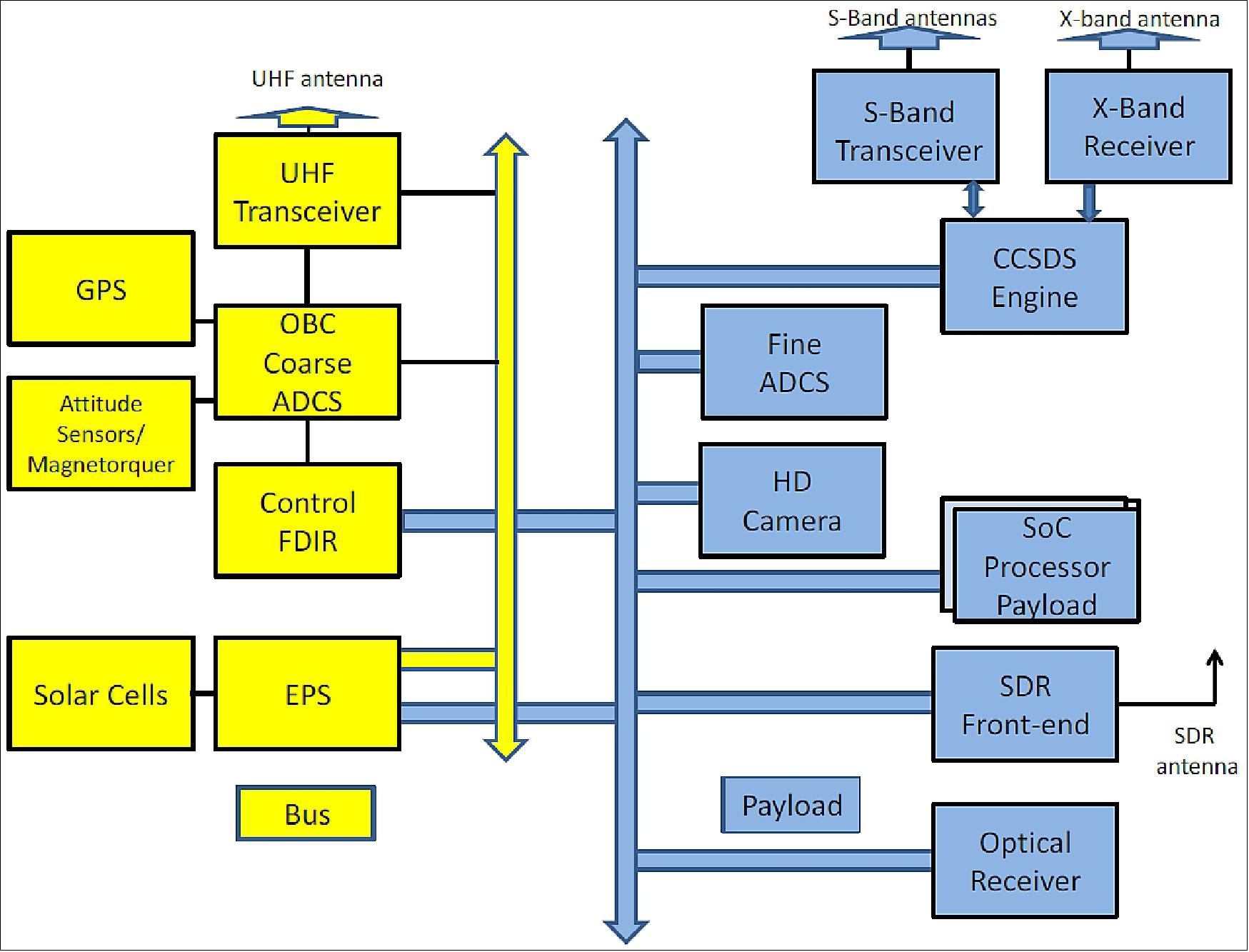
Figure 3 shows the block diagram of OPS-SAT. There are two sections, the satellite bus and the payload. The satellite bus consists of low-cost COTS subsystems developed for other CubeSat missions. A UHF/UHF telemetry provides a backup telecommand and control facility in addition to the CCSDS-compatible S-band. Other bus components include the OBC (On-Board Computer) with GPS receiver providing coarse attitude control and the power unit with batteries and charge/discharge regulators. An FDIR (Fault Detection, Isolation and Recovery) computer is responsible for monitoring the status of the payload subsystems and for controlling the data buses (I2C, SPI, LVDS, serial RS 422) as well as the power buses allowing to interconnect, activate and deactivate the payload subsystems as needed.
EPS (Electrical Power Subsystem)
The EPS includes the ability to selectively cut power to individual boards, controlled by I2C from the onboard computer. With two P31us power supplies in their default configuration, the OPS-SAT EPS will be able to provide sufficient power to all CubeSat Bus systems and payloads. The P31us power supplies will feed into a single power distribution board, which will provide at least 20 latch-up-protected configurable power outputs. Each of these will provide a single switchable power line to each subsystem as needed. These outputs allow full control by the OBC to remotely reset systems in a failure state without affecting the rest of the satellite. Each switch can be independently configured to deliver any desired voltage to its source and has a current range of 0.5-3.0 A.
A GomSpace BP-X battery pack with 8 cells will provide the power storage for OPS-SAT. By configuring the BP-X with multiple strings in parallel, the failure of an individual cell will not cut off the rest of the battery pack. By using 8 cells in the BP-X, OPS-SAT will have the same total battery capacity as 2 BP-4 packs, with easier mechanical and electrical integration. Additionally, by using a single battery instead of 2, failure of a single power supply will not degrade battery storage capacity.
RF communications module
A driving mission requirement is that a satellite configuration should exist that is indistinguishable from the ground from a typical ESA satellite. Among other things, this means that the spacecraft has to fly firmware and software that implements CCSDS protocols. The solution is to deploy the IP core of an ESA TM/TC encoder/decoder chip onto a commercially available FPGA. This unit is referred to as the CCSDS engine (Figure 45). This chain will be used for nominally communicating between the Nanomind OBC and the ESA ground control system. However, it will be possible for the experimenters to bypass this unit and go directly between the S-band transponder and the SEEP (Satellite Experimental Processing Platform). This will allow configurations that use non-CCSDS protocols such as TCP/IP on the mission.
Since over 90% of the experimenters want to load large software images onto the spacecraft as part of their experiment, it was decided that the mission had to allow the fast upload. The S-band receivers must therefore be able to accept an uplink signal at 256 kbit/s.
For comparison, the UHF transceiver on the Cubesat bus can only support data rates of 9.6 kbit/s. This is much higher than the highest uplink rate for normal ESA spacecraft which is 4 kbit/s rising to a maximum of 64 kbit/s in some rare cases. This requirement is already driving innovation on the ground as during ground prototype testing; ESA realized its ground segment could not produce such a fast telecommand stream without major modifications.
This presents the OPS-SAT project with a prime example of the nanosatellite world challenging long-standing and accepted limitations in the world of big space. On-board the new EWC31 S-band TT&C transceiver from Syrlinks of Bruz, France has been selected to provide this high uplink and a variable downlink with data rates of up to 1 Mbit/s. It will be a follow-up of the transceivers used for the Myriade microsatellite program of CNES and the PROBA-V mission. This is the company that is developing the mini X-band transmitter on behalf of CNES. 18) 19) 20) 21)
The new S-band system of Syrlinks represents a 60% reduction in mass and volume for that unit compared to the preliminary design. This has been one of the main reasons that the consortia have been able to improve the design to be much safer and meet much more of the experimenter’s requirements. The new unit will be able to sustain a data rate for the downlink of 1 Mbit/s and an uplink data rate of 256 kbit/s. CCSDS-compatible modulation and demodulation will be supported.
The first elements of a functional X-band prototype transmitter which is able to modulate data up to 100 Mbit/s, using fully CCSDS compatible filtered OQPSK modulation and convolutional coding (k=7, R= ½+RS coding), deliver up to 2 W RF with no more than up to 10 W DC/DC consumption and fit inside a 0.25 U form factor of a standard CubeSat. In the first half of 2014, an EQM has been developed and the final evaluation tests are ongoing (see a description of the Micro S-band transceiver and X-band transmitter under “Payloads/Experiments of opportunity”).
The S-band telemetry system consists of the miniaturized S-band transceiver which supports a data rate of 1 Mbit/s in the downlink and 256 kbit/s in the uplink. The compatibility with the CCSDS/PUS/SCOS protocol stack is provided by an IP core made available by ESA and integrated into a radiation-hard FPGA. Bypassing the IP core it will be possible to implement new protocols different from the CCSDS standard.
OBC (On-Board Computer)
The GomSpace NanoMind A712D, currently on-orbit with several CubeSat missions, serves as the OBC of OPS-SAT. The NanoMind gathers telemetry from the various on-board systems including the payload systems, via the I2C bus which runs the CSP (CubeSat Space Protocol). Additionally, the NanoMind will have another I2C bus that will serve as a secondary data interface between the CubeSat Bus and the payload (Ref. 4).
Fine ADCS (Attitude Determination and Control Subsystem)
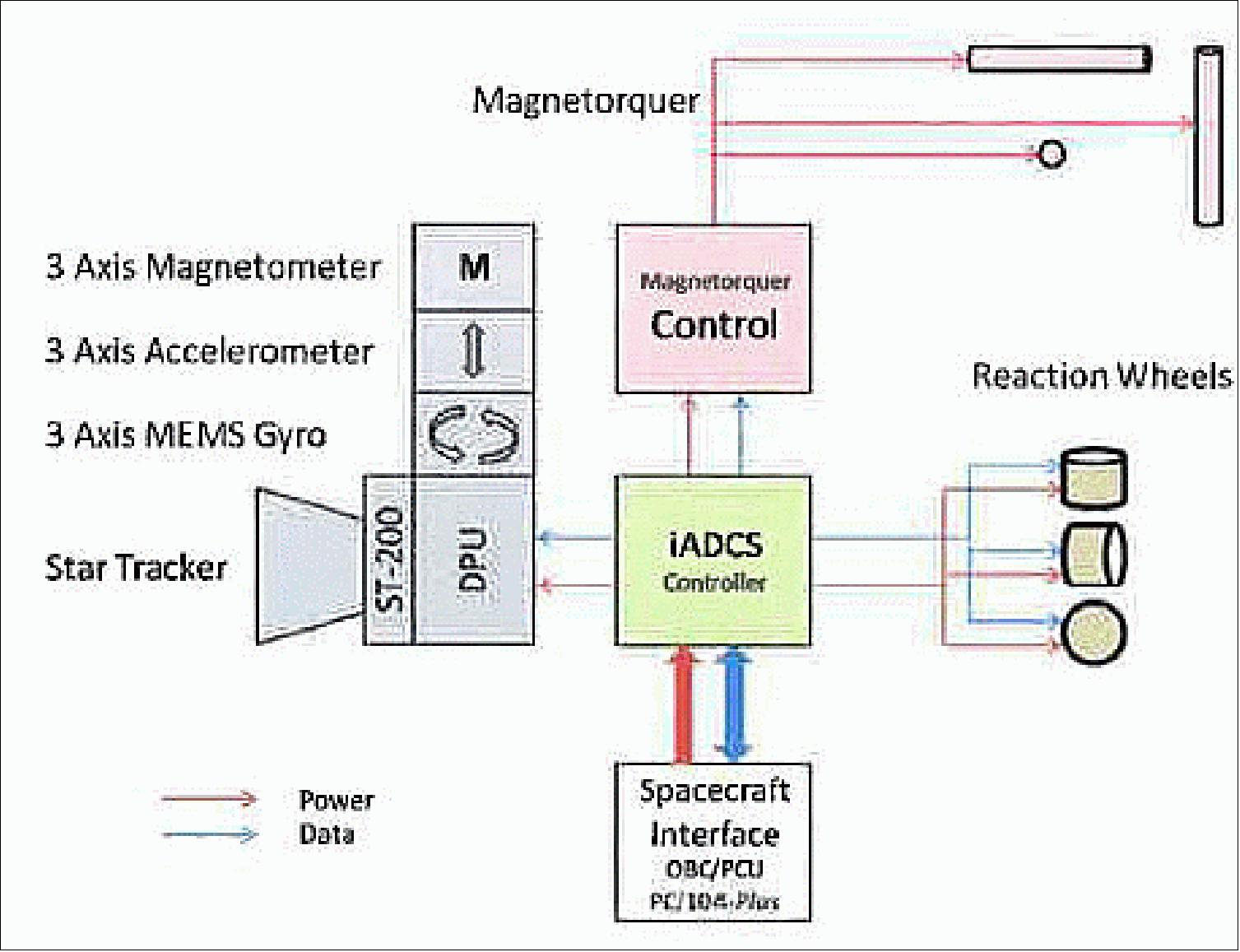
OPS-AT contains two ADCS systems. One is provided as part of the bus and is referred to as the coarse ADCS. The control algorithms are implemented on the Nanomind OBC and it relies on magnetotorquers as actuators and sun sensors and magnetometers as sensors. The other is implemented as part of the payload and is referred to as the fine-pointing ADCS or iADCS (integrated Attitude Determination and Control Subsystem). Experimenters can use this for carrying out attitude control experiments and to provide higher pointing accuracy for camera and optical data transmission experiments. Control algorithms can be placed directly on the iADCS FPGA or on the SEPP. The iADCS-100 by BST (Berlin Space Technologies) and Hyperion Technologies B.V. of Delft, The Netherlands (Figure 6) has been chosen allowing a pointing accuracy well below 1°. The iADCS provides a set of high-performance sensors and actuators such as the ST-200 star tracker and miniature reaction wheels. In combination with the proven ADCS algorithms derived from the renowned TUBSAT satellites, the iADCS-100 offers a number of autonomous modes such as nadir pointing and target pointing that were before only available for larger spacecraft.
The evaluation of the experimenters’ proposals showed that there is significant interest in camera experiments. Several experimenters will develop onboard processing algorithms for simple remote sensing applications.
The ADCS sensor inputs include sun sensors located on the exterior solar panels and a 3-axis Honeywell MC5843 magnetometer on the NanoMind. Additionally, a 3-axis gyro can be connected to the NanoMind to provide additional attitude determination capability. The NanoMind is a flight-proven system capable of providing ADCS processing. The NanoMind controls magnetorquers embedded in the body solar panels. The GomSpace body panels can include air core magnetorquers in single 1U loops for each axis of rotation. Combined with the NanoMind A712D, these magnetorquers have the capability to provide a pointing accuracy of approximately 12º (Ref. 4).
Development Status and Project Background
• December 13, 2019: Consumer electronics have gone through a revolution over the last 30 years with computers becoming ever faster, smaller and better. But when it comes to million- or even billion-euro satellites, their onboard hardware and software have not seen this revolution due to the risk of testing new technology in flight. 22)
- As spacecraft managers dare to fly only tried-and-tested hard and software in the harsh conditions of space, innovation on the operational side of satellites is a very slow-moving process. This is where OPS-SAT steps in, bringing down the barriers to spacecraft operations it provides a chance to safely test out new mission control techniques.
- Anyone can apply to become an 'experimenter' and test their innovative software and new mission operations techniques in space. Proving technology for future missions and paving the way for satellites to further evolve with minimum risk, OPS-SAT will be launched together with CHEOPS from Europe's spaceport in Kourou, French Guiana.
• December 12, 2019: Calling all radio amateurs! ESA is challenging anyone with amateur radio equipment to catch the first signals from OPS-SAT, ESA’s brand-new space software laboratory. 23)
- On 17 December, OPS-SAT will be launched into low-Earth orbit on a Soyuz rocket from Kourou, French Guiana, together with ESA’s Cheops exoplanet-tracker. Once launched, the satellite will deploy its solar panels and ultra-high frequency antenna, and then start to send signals back home.
- Could you be the first on Earth to catch them? ESA’s mission control team in Darmstadt are asking for your help to find the fledgling CubeSat.
In-space laboratory
- OPS-SAT is a first-of-its-kind CubeSat dedicated purely to experimentation. It carries various advanced payloads allowing ‘Experimenters’ to deploy and test their software and apps in space.
- Anyone can apply to be an Experimenter! Find out more about the mission, and how to apply, here.
The nitty gritty
- Lift-off is scheduled for 08:54:20 UTC on 17 December. The deployment will begin 15044.6 seconds later (T+15044.6 seconds), expected to be at 13:05:04 UTC.
- OPS-SAT will begin transmitting 15 minutes after satellite deployment and after ultra-high frequency, (UHF) antenna and solar array deployment have been confirmed. The first two passes over Europe are expected on the same evening.
- To track OPS-SAT, a preliminary launch TLE is available here and will be updated as soon as new orbital information is available.
Space segment transceiver | GomSpace NanoCOM AX100 |
Frequency | UHF – 437.2 MHz |
Modulation | GMSK |
Occupied bandwidth | 25 kHz |
Baud rate | 9k6 |
Modulation Index | 0.5 |
Set up your own mission control
- The OPS-SAT flight control team has developed open-source software which allows anyone to receive the UHF beacon of OPS-SAT and decode it. A set of ‘GnuRadio’ applications have been developed and are available here.
- You can use a wide range of ‘software-defined radios’ (SDRs) supported by GNURadio to receive the UHF signal. The application toolkit consists of a receiver and demodulator flowgraph as well as a GUI telemetry desktop, decoding data packets coming from space in real time.
- The first three radio amateurs to receive at least five correctly decoded frames and submit them to ESA get an exclusive invite to the OPS-SAT Experimenter day in March 2020, as well as a tour of the control facilities and ground stations at ESA in Darmstadt, and of course a certificate.
Submission
- After receiving the signal from OPS-SAT, amateurs wishing to participate must fill in this form, providing information on their location and submitting their ‘Logfile’.
• November 26, 2019: Testing OPS-SAT. Only 30 cm high, OPS-SAT packs a punch. Carrying an experimental computer is ten times more powerful than on any current ESA spacecraft. 24)
• May 28, 2019: OPS-SAT is ESA's flying laboratory that you can use to test out your experiments in orbit. The mission of OPS-SAT is to show what satellites are capable of when carrying powerful onboard computers, demonstrating improvements in mission control capabilities. 25)
- Entirely controlled via the SMILE lab at ESA’s ESOC Operations Center, Darmstadt, Germany, OPS-SAT is the world's first mission specifically dedicated to mission operations.
- Open access to all onboard resources and systems will be provided to ‘Experimenters’ – any ESA Member State institution or company able to carry out relevant software experiments in line with OPS-SAT’s capabilities.
- Combining a powerful onboard computer with state-of-the-art technologies, including a high-resolution camera, optical receiver, radio equipment and orientation systems, the tiny satellite makes it possible to perform a vast range of experiments on Europe’s flying laboratory.
Experimenters Day at ESOC
- Experimenters Day will take place on 18 June 2019, and will bring together teams and individuals who wish to use OPS-SAT to perform their own experiments in space at ESOC.
- The day gives experimenters the chance to interact with the OPS-SAT team, pitch their experiments and visit the SMILE control facilities, as well as network with others planning to use the flying laboratory.
- To date, more than 100 experiments have been registered, with submissions coming from start-ups to leading space players.
Apply to become an experimenter
- To become an experimenter, please contact the project manager David Evans, at david.evans@esa.int.
- Stay up-to-date on all the latest by registering to join the OPS-SAT community platform, here.
• March 10, 2019: New 'CubeSat’ technology and falling launch costs mean that businesses, universities and other organizations are increasingly able to launch their own small satellites. Now ESA is offering facilities and know-how to help them fly. 26)
- In an innovative offering for Europe’s emerging space ecosystem, ESA is providing access to ground facilities – control rooms and ground stations – as well as know-how for those aiming to get their own small satellites into space.
- The development of CubeSats – small-format satellites just a few cubic centimetres in size – and their miniature technology mean that start-up businesses, university students and research institutes can now build and launch their own missions, with the cost to get into orbit becoming historically cheap as numerous cubesats can be lofted into orbit in a single launch.
- Many of these businesses are new entrants to the spaceflight field and often require support to establish and maintain active control over their CubeSats, in particular with respect to the infrastructure needed on ground to communicate with and operate their satellites in space.
- That’s where the Agency’s mission control experts at the ESOC operations center, in Darmstadt, Germany, come in.
- “We have established a new facility, dubbed SMILE (Special Mission Infrastructure Lab Environment), that provides an open environment for supporting organizations in flying their missions,” says ESA's Pier Bargellini, responsible for ground facilities operations management.

ESA's expertise supports academia, business and startups
- The SMILE lab – known more formally as the Special Mission Infrastructure Lab Environment – offers a flexible operations control area, a suite of small antennas and ESA’s expertise and know-how to support academia, business and start-ups in the area of mission operations.
- One of the first customers for the SMILE facility will be the team flying ESA’s own cubesat, OPS-SAT, a new smallsat that, following launch, later this year, will be made available to European companies that need to test freshly developed an innovative on-board software, tools and techniques on an actual mission in the real conditions of space.
- SMILE has already supported testing and evaluations conducted by a university in Germany as well as a series of experiments for future rovers and the sophisticated, fault-tolerant networks needed to control them, most notably when ESA astronaut Tim Peake controlled a rover in the UK from the International Space Station.
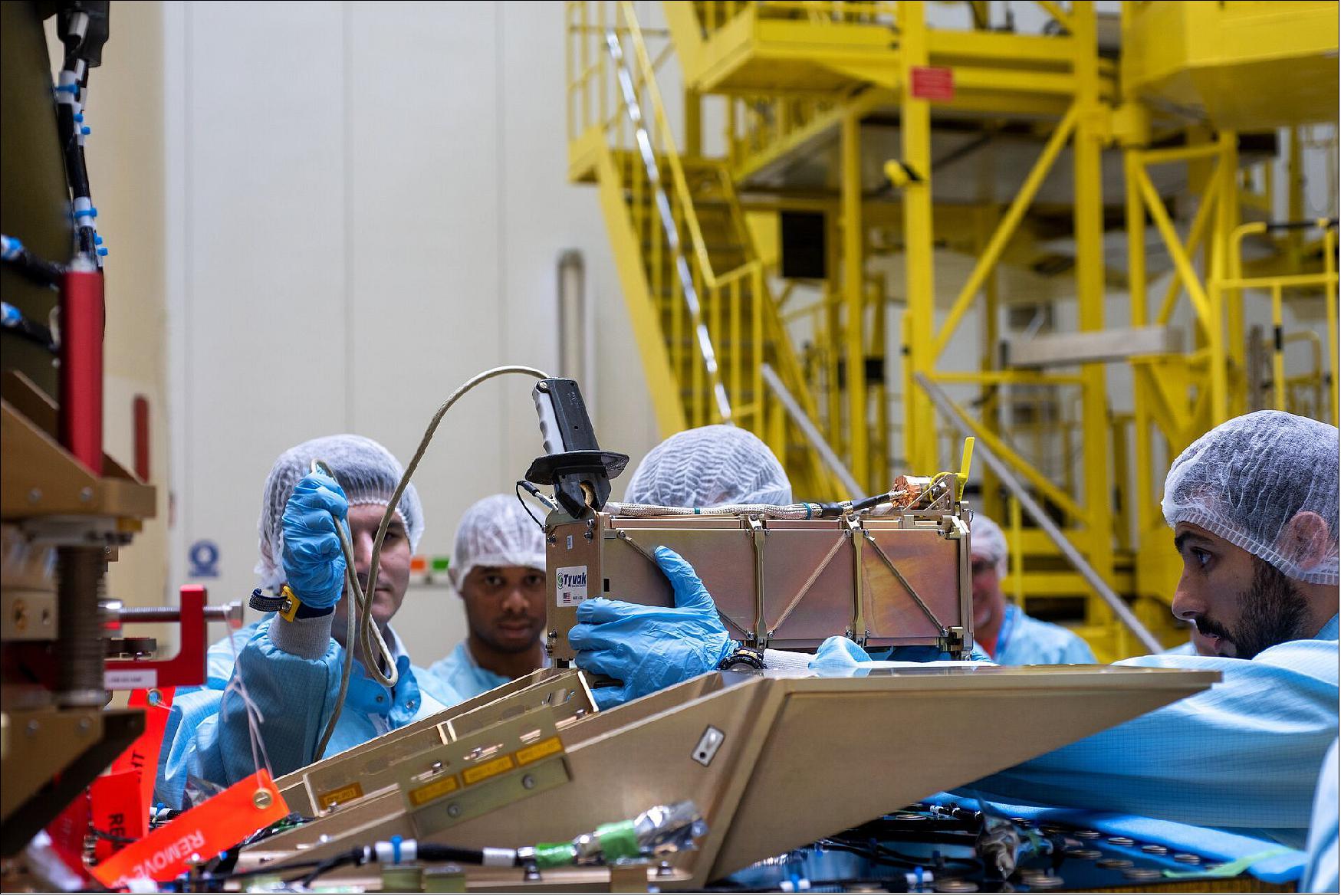
• April 27, 2017: This week, the engineering model of OPS-SAT, was for the first time connected to its control system. Both spacecraft and the ground system are using innovative new protocols to inter-communicate and both will now undergo an extensive testing and validation campaign. OPS-SAT contains an experimental computer, that is ten times more powerful than any current ESA spacecraft. 27)
• The OPS-SAT project is in Phase C (Ref. 5).
• OPS-SAT is an ESA nanosatellite mission designed exclusively to demonstrate ground-breaking satellite and ground control software under real flight conditions. The project is being led by ESOC (European Space Operations Center) in Darmstadt, Germany. Following a successful ESA Concurrent Design Facility (CDF) study early in 2012, the project kicked off with two parallel Phase AB1 studies in July 2013. These were led by TU Graz of Austria and GomSpace of Denmark, respectively. Phase B/C/D/E started officially in February 2015 and the satellite will be ready to launch in 2018. TU-Graz is now leading a consortium for Phase B/C/D/E. Core avionics will be delivered by GomSpace (Ref. 48).
• One of the major requirements of the mission is that at least one configuration shall be representative of an ESA mission (including ground-to-space interfaces). In simple terms, OPS-SAT has to look like a real ESA satellite on the ground and be compatible with the ESTRACK ground station network. During the CDF, this requirement was identified as a major challenge due to the lack of a CubeSat-sized CCSDS-compatible S-band transceiver on the market. The solution proposed was to mechanically modify an existing S-band transceiver to try to squeeze it into the CubeSat form factor. The solution was declared feasible but with a diplexer, it took up around half of the available volume of the satellite. The CDF declared that:
“All the requirements can be matched with the presented design but two options have been identified with the intention of reducing onboard resources requested by the communication subsystem and are as follows:
1) Development of a dedicated miniaturized Transponder/Transceiver with low power consumption RX as driver.
2) Development of a miniaturized Diplexer: a solution based on a dual port antenna can be of interest."
- The identification of the new EWC31 S-band transceiver from Syrlinks by the TU Graz led the team in Phase A/B1 has led to significant advantages for the mission as a whole. The 60% reduction in volume and power usage achieved in the new design has been exploited to remove the single-point failures in the CDF design and to drastically improve the capabilities of the payload. In turn, this has allowed significantly more of the proposed experiments for the mission to be accepted.
- Another fundamental OPS-SAT mission requirement is to be able to change the complete onboard software on a daily basis. This has led to the system requirement that uplink rates of a minimum of 256 kbit/s are required. This is way above the highest uplink rate for normal ESA spacecraft which is 4 kbit/s rising to a maximum of 64 kbit/s in some rare cases. This requirement is already driving innovation on the ESA ground segment and presents us with a prime example of the nanosatellite world challenging long-standing and accepted limitations in the world of big space. This high uplink data rate is supported by the transceiver.
- Finally, the mission requires that the ground can communicate with the satellite via S-band in any attitude. In fact, to minimize the amount of critical software, when OPS-SAT enters safe mode then the fine-pointing attitude control system is switched off. The spacecraft relies on solar panels being placed on most faces and a robust, passive thermal design to survive rather than going to any particular set attitude. Hence it is clear that the EWC31 S-band transceiver must serve two receive/transmit antennas (one on each side of the spacecraft) to provide the necessary quasi-omnidirectional coverage.
- While the EWC31 S-band transceiver was important in the latter parts of the core mission, the miniature EWC27 X-band HDR-TM (High Data Rate -Telemetry) transmitter was highly relevant in defining the OPS-SAT mission in the first place. CNES contacted ESA/ESOC with the idea of flying such a transmitter on board a CubeSat in 2011. Further discussions led to the conclusion that the required technology to fly a CCSDS compatible transponders on nanosatellites (even given the constraints on mass, power and volume) was on the verge of being available. This directly led to the concept of OPS-SAT being studied in the CDF and the EWC27 X band transmitter experiment was used to generate requirements for the platform design.
- In Phase AB1 the HDR-TM was included as a payload of opportunity i.e. to be considered once the margins left for such payloads were clear. It was subsequently selected to fly because it has a great deal of synergy with the other experiments (some want to download large amounts of data e.g. video). This would only be possible via an X-band or higher frequency transmitter.
- OPS-SAT will be a “laboratory in the sky”. The core is a system-on-chip module (Altera Cyclone-V) with dual ARM-9 processors and an FPGA allowing software and hardware reconfigurability for the experimenters. During an Open Call by ESA in 2013, more than 100 experiments were proposed, the majority being software experiments. 91 % of the experiments are feasible on OPS-SAT. To allow the fast upload of software images, the S-band transmitters must be able to uplink at 256 kbit/s. The UHF transceiver on the CubeSat bus can only support data rates of 9.6 kbit/s and is not suitable for the transfer of large software images. On the other hand, some experiments will generate substantial data volumes, e.g. when high-resolution images are taken. In this case the relatively high data rate of the S-band transmitter is beneficial.
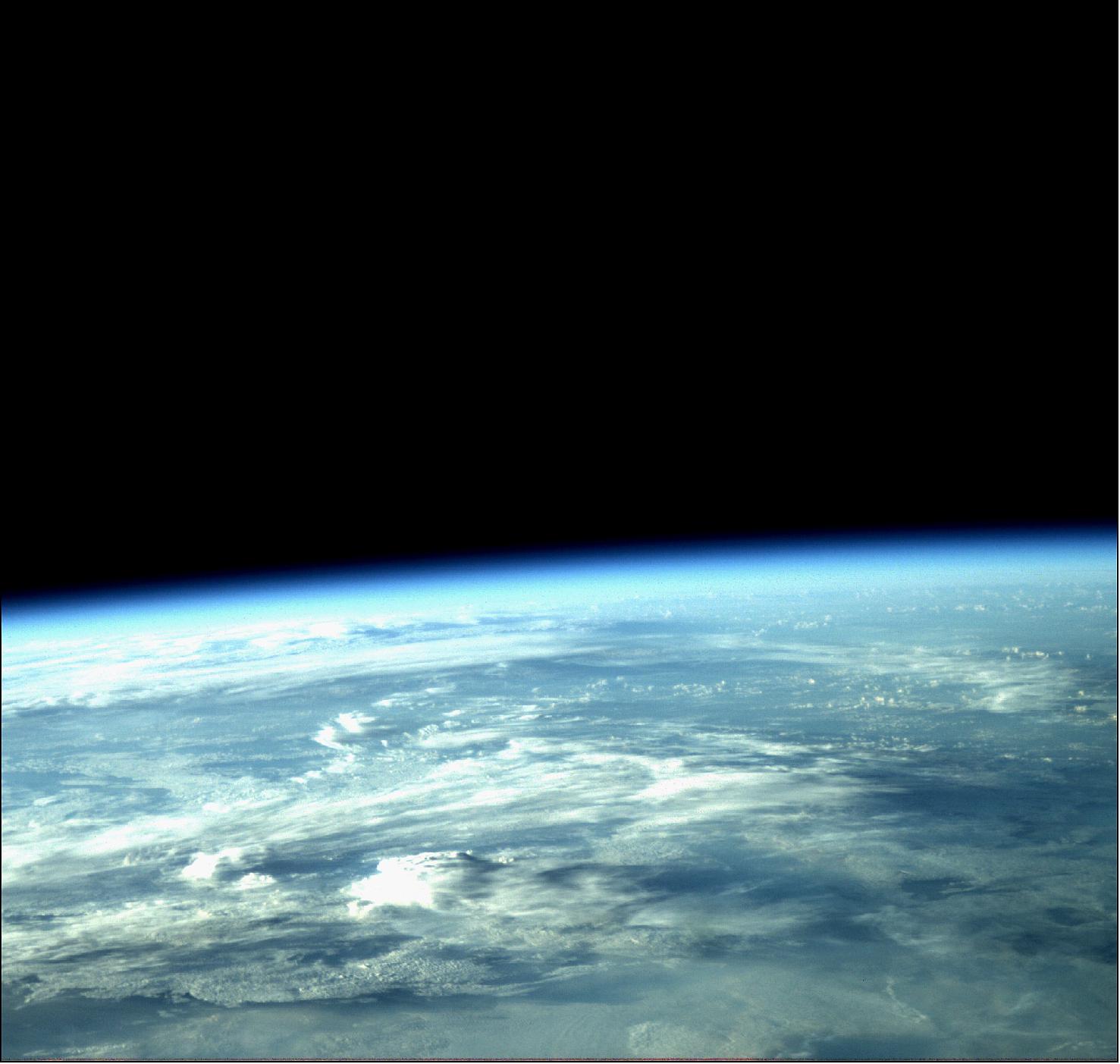
- OPS-SAT will also carry a camera with an estimated ground resolution of approximately 60 m. On-board image processing has been proposed This camera will support both still image and streaming video modes. In the latter case, a high downlink data rate is required. Such camera experiments will require substantial downlink data rates for which the EWC27 X-band transmitter will be needed, particularly when bearing in mind real-time applications and the short contact times (typically 10 minutes for a ground station pass).
- The S-band and X-band antennas for OPS-SAT were designed by TU Graz. The engineering models are currently (2015) undergoing subsystem tests.
- OPS_SAT mission statement: OPS-SAT is a safe, hard/software laboratory, flying in a LEO orbit, reconfigurable at every layer from channel coding upwards, available for authorized experimenters to demonstrate innovative new mission operation concepts (Ref. 12).
Launch: On 18 December 2019 (08:54:20 UTC), the OPS-SAT CubeSat of ESA was launched as a secondary payload on an Arianespace Soyuz rocket from the Guiana Space Center in Kourou. — The primary mission on this Soyuz flight was the first COSMO-SkyMed Second Generation (CSG-1), radar surveillance satellite for ASI, the Italian space agency. The Soyuz 2-1b (Soyuz ST-B) rocket used a Fregat upper stage. Flight VS23 was Arianespace’s third launch in 2019 using a medium-lift Soyuz, and the ninth overall this year across its full family of launchers – which also includes the heavy-lift Ariane 5 and lightweight Vega. 28) 29) 30) 31) 32) 33)
Secondary payloads
• CHEOPS (CHaracterizing ExOPlanets Satellite) minisatellite of ESA with a mass of 300 kg.
• EyeSat, a 3U CubeSat (5 kg) student satellite of the University Technological Institute (IUT) in Cachan, France and CNES.
• ANGELS (ARGOS Néo on a Generic Economical and Light Satellite), a microsatellite (30 kg) of CNES and NEXEYA, an innovative industrial group active in the aerospace market.
• OPS-SAT, a 3U CubeSat (6 kg) of ESA/ESOC that will allow on-orbit testing and demonstration of experimental and innovative software that may be used in future ESA missions and programs.
Orbit: Sun-synchronous LEO orbit with an altitude of ~700 km.
ESOC will operate the satellite through its Small Mission Infrastructure Laboratory Environment facilities. These include reconfigurable baseband equipment based on FPGA/Software Defined Radios, a small UHF/S-band ground station, computer hardware and the entire ground software control chain. ESOC also intends to deliver the onboard image and corresponding ground software to enable the CFDP (CCSDS File Delivery Protocol) to run on OPS-SAT.
Mission Status
• May 25, 2022: For decades now Earth observation satellites have been monitoring our ever-changing home planet; the next step is to enable them to recognise what they see. The latest public challenge for the machine learning community from ESA’s Advanced Concepts Team is to train satellite software to identify features within the images it acquires – with the winning team getting the unique opportunity to load their solution to ESA's OPS-SAT nanosatellite and test it in orbit. 34)
- “A satellite that learns to interpret its data would be much more autonomous and efficient,” comments ACT scientific crowd-sourcing expert Marcus Märtens. “It will be able to make decisions without having to continuously rely on human oversight – knowing for instance that images of rivers or agricultural fields should be downlinked to the ground, but others can be safely dumped to conserve scarce onboard memory.”
- Edge computing expert Gabriele Meoni of ESA’s Φ-lab at ESRIN, focused on Earth Observation – which has developed this challenge jointly with the ACT – explains: “ESA’s AI-equipped Φ-sat-1, aboard the Federated Satellite Systems (FSSCat) CubeSat, has already demonstrated the benefits of AI on-board – it is able to detect images filled with cloud cover and set these aside.
- ”With our new ‘OPS-SAT case’ competition, we seek to take this approach further. Participating teams receive 26 full-sized images acquired by the OPS-SAT CubeSat, which include small 200 x 200-pixel crops or ‘tiles’ identified with one of eight different classifications – Snow, Cloud, Natural, River, Mountain, Water, Agricultural, or Ice – with a total of ten examples of each type, representing a baseline for feature identification.”
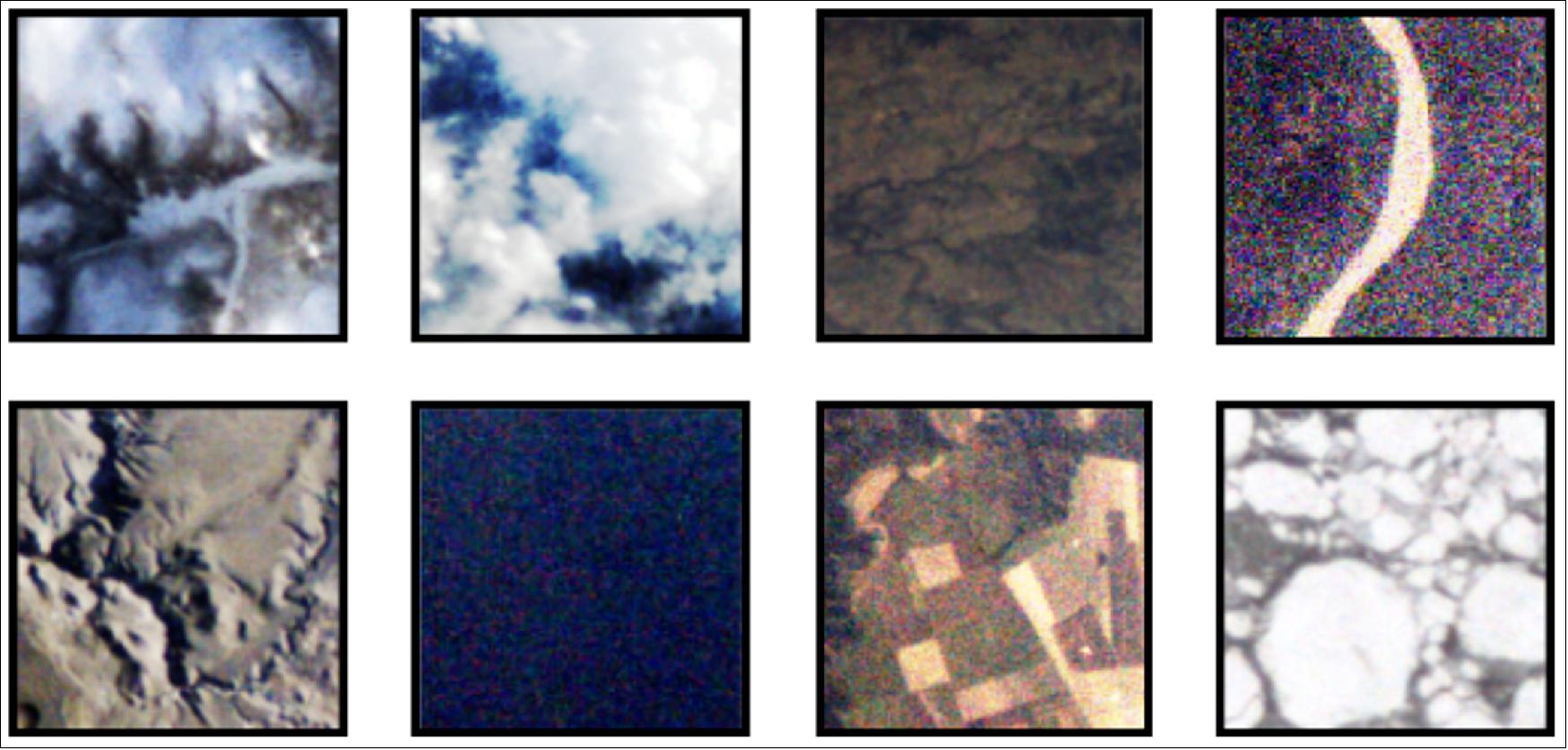
- Dario Izzo, heading the ACT, says: “This challenge is an example of AI ‘few-shot learning’. As humans we don’t have to see a lot of cats to learn what is or isn’t a cat, just a few glimpses will be enough. What is needed for future space missions is an AI system that can form a concept from only limited examples given. This is a very challenging and modern problem from the AI point of view, and there is no commonly recognised way of achieving this.”
- Gabriele comments: “What the teams have to come up with is a way of training a standardised satellite-sized neural network to accurately identify a further set of image tiles we have prepared from the images. The challenge is to achieve this with the relatively sparse set of examples we give them. The preferred route in machine learning is to use copious amounts of data – meaning thousands or even millions of images in practice – to train neural networks.”
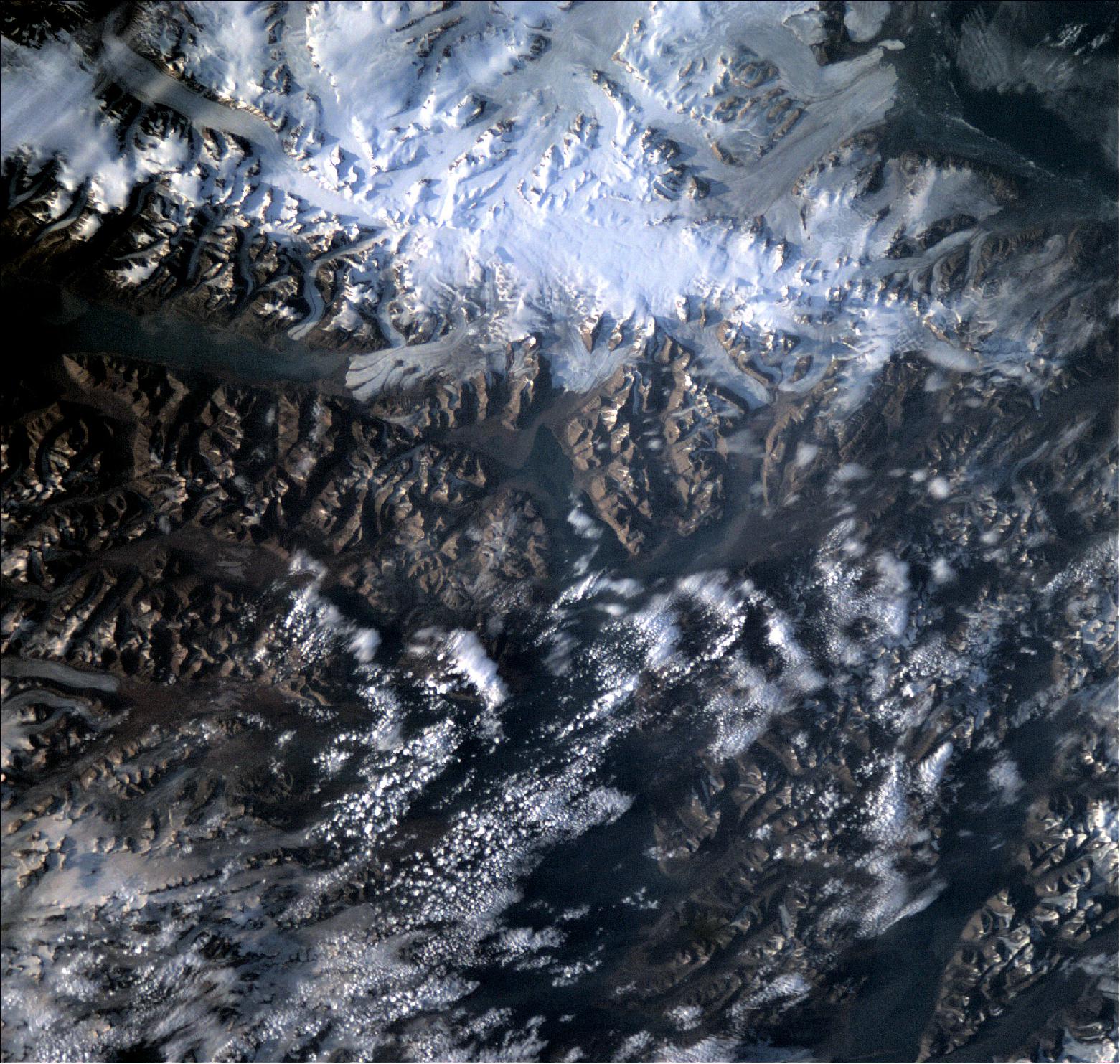
- The challenge is based on ESA’s OPS-SAT mission, launched in 2019 as a flying software laboratory that is also a working Earth observation satellite. Despite being smaller than a shoebox, at just 30 x 10 x 10 cm in size, this CubeSat-class mission hosts an experimental computer that is 10 times more powerful than that of any ESA mission before it. The dataset the teams receive will be raw, unprocessed images from OPS-SAT’s imager, including the annotated tiles.
- This is the latest in a series of public competitions aimed at the AI and machine learning community and hosted on the ACT’s Kelvins website.
- Dario explains: “This is different from what has come before because it is a deliberately data-centric challenge. The teams do not have to develop a software model, because this comes already in the form of the neural network aboard the satellite. What they have to do is devise a way to train this neural network so it can learn to classify the image tiles in an effective manner. They have to ask themselves: how can we present the data so that the neural network will adapt in the best possible way?”
- Marcus adds: “There are lots of constraints to the challenge, fitting with the idea of operating in space, and moving the decision-making process out to the edge, into orbit aboard the satellite, as much as possible. It’s a very experimental and risky challenge, with lots of room for interpretation, but we think it is possible and look forward to seeing what we get back.”
- For more information on the challenge and how to take part, click here. The competition commences on Friday 1 July.
• February 15, 2022: ESA's OPS-SAT is a Swiss army knife in orbit. The 30-cm CubeSat packs a powerful onboard computer and an array of instruments that make it the ideal laboratory for testing innovative new technologies in space. 35)
- Thanks to the ESA Discovery programme, 12 new experiments will be doing just that, as they develop software, concepts and protocols that push the robust CubeSat to its limits and that could one day be essential parts of future spacecraft missions.
- The OPS-SAT Space Lab is ESA's only spacecraft open to innovation for anyone in Europe and enables new and exciting ideas to be tested live in space without the risk of damaging a multi-million-Euro satellite. Last summer, ESA's Discovery programme issued a call for ideas for European industry and academia to apply to win funding and fly their experiments on a flight computer more powerful than any ESA has launched before.
- "We were overwhelmed by the quality of the proposals we received," says OPS-SAT spacecraft manager David Evans. "Our first task was to assess them on their innovativeness, with many more than we expected passing with flying colours. That made it really tricky to narrow them down."
- 55 proposals in total were submitted through ESA's Open Space Innovation Platform (OSIP). 12 have now been awarded funding. The experiment ideas covered a wide range of ESA's activities: telecommunications, spacecraft operations, Earth observation, technology development and more, to the excitement of many across ESA.
- "I am really impressed by the diversity of ideas people came up with for experiments that could be flown on OPS-SAT," adds David. "Particularly those using artificial intelligence. AI is a broad term for an effectively infinite toolbox, and it was great to see concrete applications using a variety of tools from across the field. It's clear to me that when we give academia and industry access to such a powerful processor on a satellite, there is no end to the creative things they’ll think to do with it."

More than the sum of their parts
- With its call for ideas for OPS-SAT experiments, ESA was looking for innovative proposals that would benefit from the opportunity to demonstrate their concept in orbit on an active spacecraft. Proven experience in space and the investment of ESA funding are important steps for a concept's development and can help further legitimise it in the view of other potential stakeholders.
- "The return on investment for all parties is improved when ESA shows its willingness to invest in these ideas," says David. "It's impressive what European industry produced with some initial seed funding. It has helped unlock further resources for industrial innovation by instilling confidence in the ideas."
- For many experimenters seeking to build confidence in the potential commercial applications of their work, OPS-SAT is a unique opportunity. As there are multiple different teams carrying out many different experiments on board the CubeSat at once, some experimenters can offer their experiments as services to others to the benefit of all.
- OPS-SAT experimenters designing flexible artificial intelligence algorithms for handling image data or designing generic ways to compress telemetry data, for example, can offer their own experiments as services to other teams that need to analyse images or send lots of data down to Earth. In doing so, the users don't have to reinvent existing applications and can focus on their experiments, while the service providers gain initial experience with feedback from end users representative of their potential future customers.
Innovation today, essential tomorrow
- One of the areas ESA was particularly interested in receiving ideas was on the potential uses of OPS-SAT's Field Programmable Gate Arrays (FPGAs).
- Not long ago, updating the software on a spacecraft after launch was a nail-biting affair. What if something went wrong while the spacecraft was rebooting? What if something didn't reboot correctly? While a spacecraft operator might still let out an audible sigh of relief after a software update today, they are a powerful and necessary tool for getting the most out of a satellite throughout its lifetime and for recovering a spacecraft experiencing issues.
- Now, reconfiguring hardware in flight is the new frontier. Spacecraft hardware is directly controlled by a layer of simple software known as firmware – more similar to the software in the integrated chip in your refrigerator than that running your web browser right now.
- Altering this firmware after launch is still risky business. But technologies like OPS-SAT's FPGAs open up new possibilities for reconfiguring satellite hardware in flight in a safe and controlled manner. This is one of the next big areas of opportunity for innovation in spacecraft operations and OPS-SAT offers a unique test bed for the experimental approaches today that may become important routine tools tomorrow.
The Open Space Innovation Platform
- OSIP provides a flexible platform that helps ESA discover novel ideas and invest in unconventional activities to support the advancement of the European space industry. The platform brings together exciting ideas from companies and institutions in Europe with ESA experts like David Evans to take them to the next level.
- "I was really impressed with how OSIP helped us reach new audiences and increase the awareness of OPS-SAT in academic and industrial communities in Europe," says David. "As a result, we have a good number of new faces who are running their first experiments on OPS-SAT under this campaign. We are very excited to see how they'll approach it."

- OSIP allows ESA to discover novel ideas and invest in new unconventional activities to foster advancement in the space industry. As the central European space body, ESA is ideally placed to coordinate such projects.
- The platform links ESA with businesses, organisations and individuals across the world. Working together in such a way is vital for effectively advancing space research and technology, and will contribute to the European space industry is a leader in this field.
- For those with brilliant ideas, it can be difficult to know how to present them to ESA. OSIP provides an efficient, easy-to-use entry point for these ideas. It brings together Calls for Ideas from across ESA, making it easier to find and respond to them.
• January 11, 2022: During CYSEC’s annual conference in April 2022, ESA’s OPS-SAT space lab will be made available to select, invited applicants to test their winning ideas in a controlled, robust environment – precisely the type of experiment the 30cm flying CubeSat was created for. The results will help ESA and European industry advance and further perfect cybersecurity in space. 36)

Poor cybersecurity hurts us all
- Exploitation of poor cyber-security does great damage to individuals, companies and our economies – as well as civil infrastructure including hospitals, public water supply systems and power grids. By interfering with critical services and blocking access to – or even destroying – data, poor cybersecurity that can be exploited by techniques such as hacking puts our modern world at risk.
- Cybersecurity threats can disrupt or deny the service that satellites provide, from internet connectivity to location and communication services to weather forecasting and climate science. According to one report, cyber-attacks cost some €530 billion worldwide annually.
- Nevertheless, in order to measure and improve the cybersecurity resilience of our systems and supporting processes we should seek to increase our understanding and awareness of these threats. One effective way of achieving this is to engage with cybersecurity experts and test our systems accordingly against representative cybersecurity threats.
The Target
- With a flight computer ten times more powerful than any current ESA spacecraft, OPS-SAT has already hosted in-flight experiments ranging across AI, deep learning and financial transactions to data relay, data compression and onboard automation.
- “The in-built robustness of OPS-SAT makes it the perfect flying platform for ethical hackers to demonstrate their skills in a safe but suitably realistic environment,” explains Dave Evans, OPS-SAT Mission Manager.
- “This is an exciting opportunity to engage with and learn from the best cybersecurity minds across Europe, using a platform specifically developed for learning lessons to improve our current and future missions.”
The task
- As part of the CYSAT conference to be held in Paris in April 2022, successful applicants selected from space and security professionals, students and other members of the public will have the chance to verify their cybersecurity experiments in space. The top three finalists will be judged on the creativity of their ideas, the technical feasibility of their proposed experiments, and the potential for storytelling.
- Ideas should be submitted by 18 February 2022 and successful proposals will be given controlled, technical access to OPS-SAT for a live demo during the conference. The event will be technically very demanding, as teams will only have six-minute communication slots available with the satellite.
- “Space assets play a critical role in many services that we use daily on Earth, so it makes sense to protect them as much as we do for security-critical services on the ground. We’re excited to bring our know-how around ethical hacking to this industry,” explains Romain Lecoeuvre, CTO of YesWeHack, a Paris-based software testing crowdsourcing company.
- Because of the space sector’s vital importance to our lives, ESA is working to boost cybersecurity not only within the Agency but also across Europe, helping make spaceflight more resilient to attack and accelerate the integration of space systems and services with the terrestrial economy.
• October 14, 2021: Between September 1982 and December 2020, at least 51,512 people were rescued on land and at sea with help from a network of Earth-orbiting satellites able to detect and locate emergency distress beacons. 37)
- ESA’s OPS-SAT Space Lab recently demonstrated that by processing data from these beacons in space, instead of on Earth as currently happens, the whole process could be made more efficient, saving data and perhaps helping to save lives.
The humanitarian initiative in space
- The international Cospas-Sarsat cooperative was established in 1979 and remains a fundamental, life-saving system. Using a network of instruments onboard more than 50 satellites, it detects emergency beacons from aircraft, ships and people anywhere on Earth, passing the coded information to ground stations to be processed and then forwarded to local Rescue Coordination Centers for a response.
- Distress beacons are fundamentally radio transmitters that can be activated in emergencies, either manually by pressing a button or automatically upon detection of certain triggers – a physical shock, contact with water, a sudden drop in altitude etc.
- The Cospas-Sarsat system detects radio transmissions in the protected 406-MHz frequency band, gathering information on the type of vessel in distress and relaying its signals to ground stations on Earth known as Local User Terminals (LUTs). While some beacons contain the location of the vessel in question, many don’t, and these ground stations must perform a mathematical analysis to determine the location of the beacon.
- Many satellites in low, medium and Geostationary orbit carry ‘repeater instruments’ which shift the frequency of the 406 MHz beacon transmissions to a different frequency in order to avoid interference with the original transmissions. The so-called ‘upconverted’ signals are sent to User Terminals where they are processed and decoded.
- Once verified, beacon information is forwarded to the nearest Rescue Coordination Centre.
ESA’s Space Lab: decoding signals in orbit
- ESA’s OPS-SAT Space Lab is an orbiting CubeSat, open for experimentation. It carries a very powerful onboard computer and the ability to reconfigure its firmware in space. It was created with the specific intention of testing new mission control abilities in orbit, something too risky to be attempted on pre-existing, expensive satellites.
- In a recent ‘In Orbit Demonstration’, OPS-SAT performed the first in-orbit decoding and processing of radio signals from emergency beacons on Earth, using open-source software running on the satellite.
- The small but powerful satellite successfully detected and decoded ‘reference beacons’ – periodic bursts emitted by ground stations in the Cospas-Sarsat network to monitor the system’s performance. The difference? OPS-SAT transmitted only the necessary information contained in the beacons down to ESA’s Mission Control in Darmstadt, Germany.
- Direct processing of distress beacons in space means the spacecraft only needs to send specific beacon signals back to the ground, rather than continuous recordings of the original raw signals (often empty as beacon transmissions are sporadic). The result? Far more efficient communications.
Why this matters
- First and foremost, this experiment shows that when spacecraft carry powerful onboard computers, they are able to efficiently take over some of the ‘thinking’ that is currently done on the ground. When they are not only acting as forwarding devices, picking up data and passing it on to more able people or machines on the ground, they can play a vital role in directly turning complex signals into actionable information. This successful demonstration clears the path for many future nanosatellites to join the current larger missions providing this essential service.
- More broadly, when satellites are designed to be flexible, they can be configured to best suit the evolving needs of the societies beneath them. This will be especially important as we enter the era of the ‘Internet of Things’ – when the physical objects around us are connected to each other via the internet, creating a wide network of technologies able to connect and exchange data with implications for our homes, healthcare systems and even industry and global infrastructures.
OPS-SAT’s future
- OPS-SAT is the first of its kind – a space mission open for the public to use to test their experiments in space.
- “I first proposed investigating if OPS-SAT’s on-board ‘Software Designed Radio’ (SDR) and antenna were sensitive enough to receive search and rescue signals even though it was not designed to do so,” explains Tom Mladenov, experimenter responsible for this in-orbit demonstration, as well as a member of the OPS-SAT Flight Control Team.
- Already, dozens of experiments have taken place demonstrating how clever computers in orbit can use deep learning to help identify fires on Earth, automate collision predictions and now improve efficiency in relaying details of people in distress.
- Coming up, a multitude more experiments pushing the boundaries of what satellites can do in orbit, for the benefit of people on Earth.

• October 1, 2021: Yesterday, ESA’s orbiting laboratory, OPS-SAT, hosted the first-ever stock trade in space. The successful experiment required developers at Europe’s leading online broker flatexDEGIRO to think far outside of the box and adapt their software to the technical demands and constrained bandwidth found on an orbiting platform at 500 km altitude. 38)
- The experiment provided a unique opportunity to test how to improve the reliability, storage efficiency, communication and security of financial transactions, some of the fundamental requirements for any trading business aiming to compete on a global stage.
First trade in orbit
- On 30 September, flatexDEGIRO used ESA’s OPS-SAT satellite to trade 100 of their own shares, which sold for about €200.00. The transaction, minuscule in comparison to the billions of euros traded every day through computers, networks and connections on Earth, was the first of its kind to happen in orbit.
- The trade execution was monitored by a team at ESA’s ESOC mission control center in Darmstadt, Germany, although the flexibility of the open-platform OPS-SAT laboratory meant that it could have been done from anywhere.
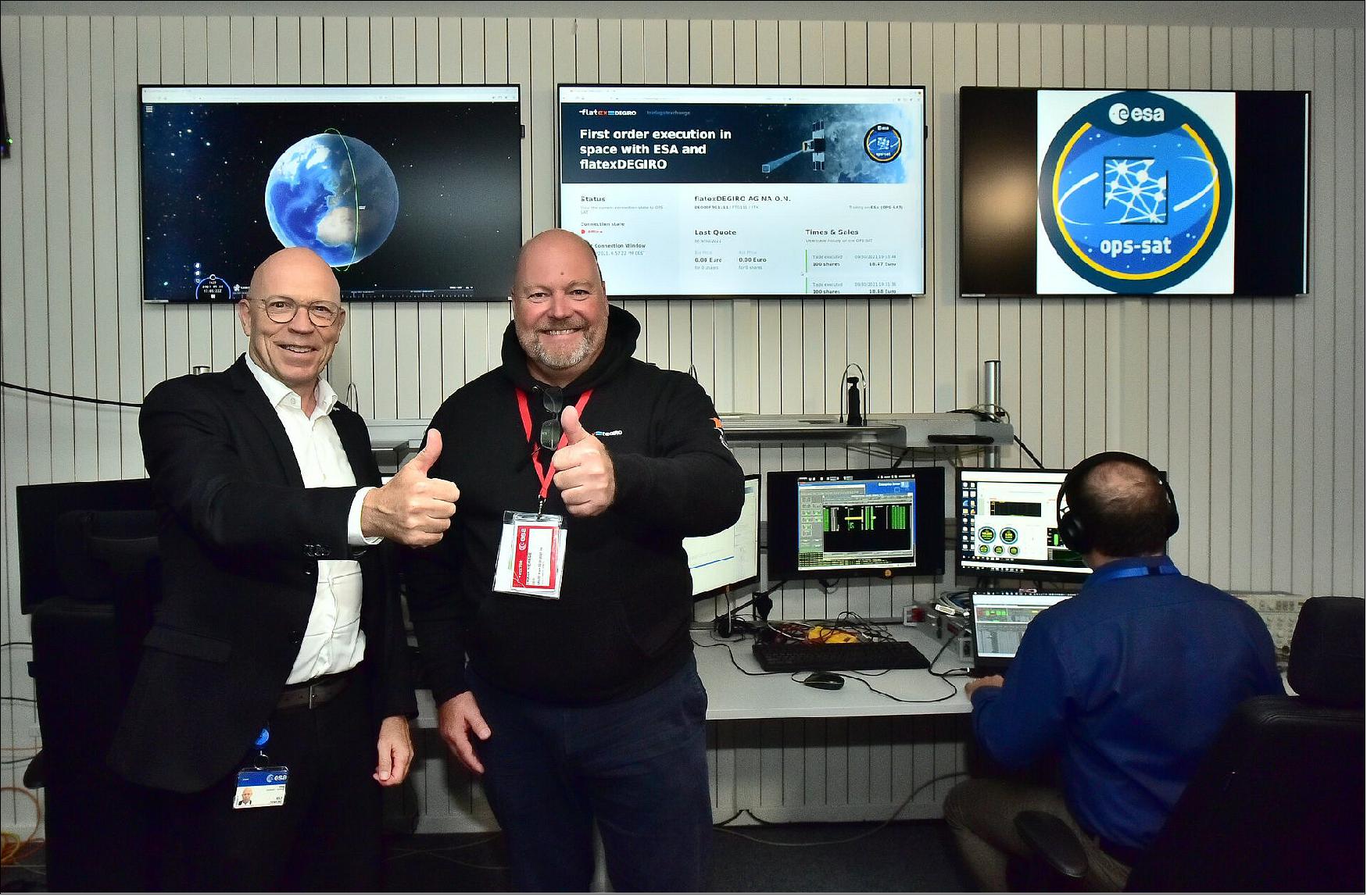
- “An online brokerage and its technical infrastructure are designed to make transactions simple and easy for customers, but they are exposed to daily attacks from hackers, latency issues and other technical challenges,” said Frank Niehage, CEO of flatexDEGIRO.
- “For our technical teams, working with ESA’s OPS-SAT platform allowed us to fly an experiment that helps expand our knowledge and expertise and increase flatexDEGIRO’s competitive edge to the benefit of our customers.”
- “We also aimed to gain insights into the feasibility of any future satellite-supported trading system in a practical test of securities trading.”
Surprising new use for ESA’s open platform
- ESA’s free-to-use OPS-SAT is specifically designed to trial and test innovative new software from European companies and other entities, including universities, research institutes and government agencies – who often find it a challenge to gain flight heritage for their newly developed applications and tools.
- OPS-SAT, launched in December 2019, is a CubeSat just 30 cm tall but it features powerful onboard systems and can host a range of experiments, spanning artificial intelligence, advanced communication protocols and compression techniques, software-defined radio, optical communication, advanced autonomous planning, web services in space and much else.
- To date, over 200 experimenters – most submitted by start-ups and small-to-medium enterprises – have flown their software in orbit.
- “Having a trading platform come on board OPS-SAT was a bit unexpected. But when you think about it, it makes perfect sense,” says ESA’s David Evans, OPS-SAT Mission Manager.
- “Executing stock trades and flying a satellite present many similar challenges, like the high cost of making a mistake, how to keep systems running around the clock and protection from cyberattack while remaining open to the Internet. Bringing these two worlds together is a unique and fruitful exchange.”

What are space agencies for?
- As space now underpins an enormous slice of Europe’s economy, while also becoming more accessible than ever before, initiatives like OPS-SAT illustrate ESA’s role – and the changing role of space agencies more generally – to enable the development of innovative new technologies, support businesses and lead the way to foster the commercialization of space.
- Agencies’ abilities to enable businesses to experiment and take risks shows what is possible in space, while also supporting new economic models and setting standards for responsible and sustainable spaceflight.
• July 28, 2021: ESA has successfully operated a spacecraft with Europe’s next-generation mission control system for the first time. The powerful software named the 'European Ground System - Common Core' (EGS-CC), will be the ‘brain’ of all European spaceflight operations in the years to come, and promises new possibilities for how future missions will fly. 39)
- On 26 June 2021, ESA’s OPS-SAT space lab became the first spacecraft to be monitored and controlled using the EGS-CC – proving that this software of the future is ready to be extended across current and future missions flown from Europe.
- The software was developed by ESA, European National Space Agencies and the space industry, and will be freely available to all European entities, ensuring the continents’ place at the competitive forefront of space exploration.
Space lab tests Europe’s new brain
- ESA’s OPS-SAT ‘Space Lab’ is a CubeSat developed with the sole intention of being a guinea pig for new operational software, too risky to test on other missions. And it is open for the public to experiment with!
- “During ESA’s recent test, the space lab became the first ever mission to fly with Europe’s new space brain,” explained Dave Evans, OPS-SAT Mission Manager.
- “Using the EGS-CC control system, teams at ESA’s ESOC Operations Centre monitored and controlled the 30 cm spacecraft – successfully sending a set of routine commands and receiving data from the mission.”
- After years of intensive industrial development, the EGS-CC system has finally been put to work at the task it was made for – ensuring the smooth and reliable operation of a real satellite in space.
- “This has been a hugely successful validation of this new versatile control system, demonstrating the exciting future of mission control technologies and Europe’s leading position in space”, said Klara Widegard, EGOS-CC Project Manager.
Why this matters
- More missions are being launched today than ever before, required to perform a wide variety of tasks from monitoring Earth’s landmasses, oceans and climate to peering out into deep space and even grabbing hold of defunct debris objects and bringing them back down to Earth.
- Operated by an ever-growing number of space actors, these missions all need to send their precious data home, receive vital commands, perform automated on-board tasks and even make use of artificial intelligence technologies as they continue to evolve.
- Clearly, designing a new control system to cater for each spacecraft’s needs and goals would use up precious time and resources. With a shared infrastructure any number of missions and mission types can share a “common core”, minimizing the need to tailor the software to each one and importantly meaning that missions can be flown by multiple operators.
- This new software opens up the possibility to operate bigger missions collaboratively, with multiple operators working in a distributed manner across countries and control centers, allowing them to work together to share expertise and support each other including during critical moments in a mission. It has been designed to encourage a collaborative approach in the space community bringing in flexibility and opportunities for exploitation not previously possible.

- The EGS-CC is the latest evolution in Europe’s shared space control system, and will bring with it a range of benefits including faster transitions between the life stages of a mission - from assembly to testing and ultimately in-space flight operations; reduced cost and risk for missions; evolving ground systems for missions of the future; working towards a ‘European Network of Centers’; and providing European industry with a powerful tool with which they can compete on the global market.
In orbit servicing, illustrating space’s flexible future
- As space fills with more and more debris, ESA’s plans to develop a range of ‘in-orbit servicing’ technologies that will refuel, refurbish and de-orbit spacecraft illustrate why the future of space needs to be flexible.

- For tasks such as these, missions will need to fly various instruments and adapt to unpredictable space conditions. Vitally, multiple missions operated by different organizations will need to work together at the same time, sharing the controls to their spacecraft - the EGS-CC will be adapted exactly for this task.
- Currently flown missions are already being selected to move over to the new software and from 2025 onwards, all future missions will be operated using this new generation of the mission control system in a truly multi-mission fashion, including future autonomous missions, ‘clean space’ solutions and concepts relying on distributed operations.
- “At its heart, this new software marks an important step in bringing to life the space technologies of the future’, said Rolf Densing, Head of ESA’s ESOC Operations Centre.
- “Close cooperation between space agencies and industry has made this possible, opening up opportunities for all space entities in Europe to fly exciting, innovative and important missions through space.”

• June 07, 2021: We provide the spacecraft, the tools and some funding. Your job? Come up with innovative experiments you want to run on it. 40)
- The OPS-SAT Space Lab is ESA’s only spacecraft ‘open to innovation from anyone’ and enables new ideas, concepts and software to be tested in space. Now, the Discovery element of ESA’s Basic Activities is supporting you to fly your experimental software or test your techniques on an in-space computer more powerful than any ESA has launched before.
- Submit your ideas via ESA’s Open Space Innovation Platform (OSIP) by 13 June.
A (funded!) opportunity like no other
- Space is an expensive business. Missions are planned years in advance, designed with a specific job in mind and operated according to tightly planned schedules, leaving little room or appetite to take risks.
- The OPS-SAT Space Lab – a 30-cm CubeSat launched in 2019 – was built with the purpose of testing and validating new ways to solve problems in space. With an experimental computer ten times more powerful than any current ESA spacecraft, and equipped with a full suite of actual or representative payload devices, like a camera and GPS, OPS-SAT is designed to be rock-solid, safe and robust. It can be pushed to its limits, broken, ‘rescued’, and reset for the next experiment. Then you get the feedback you need to prove your ideas work in space.
- The in-orbit laboratory has a high-resolution camera, a GPS receiver, S- and X- band communication links, processors, field-programmable gate arrays (FPGAs) and an attitude determination and control system, all of which can be used by experimenters to demonstrate new mission control and flight operations concepts, tools or techniques that would be too risky for existing missions.
- In pursuit of the ESA Technology Strategy target of a 30% faster development and adoption of innovative technology, ESA will use its Discovery element to boost novel experiments on OPS-SAT, the world’s first open, in-orbit testbed for new spacecraft software and applications.
- The best ideas will be funded with a budget between €20 000 and €50 000.
Examples of experiments run on the spacecraft so far include:
a) Testing image-compression software to improve the scientific return of Earth observation satellites
b) The first test of the ‘Ring Road’ in space — a new communications technology that allows experimenters to test an ‘interplanetary internet’ from the home office
c) Using Artificial Intelligence to identify and filter out low-quality images before they are transmitted back to Earth, saving precious downlink capacity
d) and much more.
• April 14, 2021: What would you do with a powerful space computer that can learn, react, photograph our planet and send and receive information in a variety of forms? The test of all knowledge is an experiment, as Richard Feynman once said, and OPS-SAT is the first ESA spacecraft that you can apply to experiment with. Tell us your ideas for new OPS-SAT experiments via the Open Space Innovation Platform (OSIP). 41)
- The first OPS-SAT experiments have already been carried out in orbit, with new technologies tested in areas such as artificial intelligence, data compression and space-based web services. The results exceeded expectations, so ESA is looking for new creative ideas to build on this success.
- "We are specifically looking for ideas for experiments that have never been thought of before," explains David Evans, OPS-SAT project manager. "The very best ideas will be given funding to develop the software experiments to a level that can be executed in orbit."
- OPS-SAT gives you the opportunity to test new spacecraft software applications. Your software could take control of almost any element of the satellite. You could use a camera, star tracker, gyros or magnet to explore all sorts of new technologies. It is a bit like developing a smartphone app, but the app runs onboard a high-tech flying satellite.
- To enable you to be as creative as possible, ESA has designed OPS-SAT to switch itself off at the first sign of trouble. This is key to allowing potentially risky experiments to be developed and fail fast, then be attempted again and again until they are successful.
What is OPS-SAT anyway?
- The sole purpose of the 30-cm-high OPS-SAT is to test and validate new techniques in mission control and onboard satellite systems. Testing new procedures, techniques or systems in orbit is often impossible, as nobody wants to take big risks with an existing, valuable satellite.
- OPS-SAT was developed and launched to meet this need. It contains an experimental computer ten times more powerful than any current ESA spacecraft and is safe and robust, giving flight control teams the confidence they need to upload and try out new, innovative software submitted by experimenters. OPS-SAT can be pushed to its limits, but can always be recovered if something goes wrong.
What kind of ideas are we looking for?
- "We want people to bring in ideas from their own fields of research, even if they've never thought about flying their software in space before," explains David. "One of the great things about OPS-SAT is that it provides the opportunity to spin-in technology from outside the space industry; by enabling access to space, we are accelerating the innovation cycle."
- "But we are particularly interested in ideas that exploit one of four unique features of OPS-SAT: using the satellite's reconfigurable integrated circuit to explore how updating hardware in space can revolutionize spacecraft operations; operating OPS-SAT using open-source software; experimenting with innovative ground-space communications protocols; and demonstrating how artificial intelligence can be deployed to make spacecraft more productive and enable them to perform new tasks."
- The robustness of the basic satellite itself will give ESA flight control teams the confidence they need to upload and try out new, innovative control software submitted by experimenters; the satellite can be pushed to its limits but can always be recovered if something goes wrong.
- Achieving this level of performance and safety at a low cost is a challenge. To do this, OPS-SAT combines off-the-shelf subsystems typically used with CubeSats, the latest terrestrial microelectronics for the on-board computer and the experience ESA has gained in operating satellites for the last 40 years in keeping missions safe.
How can you submit your ideas?
- Discover more and submit your ideas via OSIP, ESA's website for sourcing novel ideas for space technology and applications. Anybody is welcome to submit ideas through OSIP, including individuals wishing to contribute to space research and companies or research institutes seeking funding or support for new activities.
- This call for ideas is the latest to be run by the Discovery element of ESA's Basic Activities. After the idea submission deadline of 23 May, suitable ideas will be reviewed by a team of experts and ESA will invite the authors behind the most novel ideas to mature them into a full proposal. Successful proposals will be offered support for further development.
By conducting low-cost, low-risk experiments with OPS-SAT, teams from across Europe are ushering in a new era for European spaceflight innovation and commercial opportunity. 42)
a) OPS-SAT’s commissioning phase ended in September and the first experiments are now being carried out in orbit
b) Innovative new technologies are being tested on OPS-SAT in areas such as artificial intelligence, data compression, and space-based web services
c) Initial experimental results have exceeded expectations
d) Results from many more experiments are expected soon.
Visionary software
- One company in Spain, DAPCOM, is testing image-compression software using OPS-SAT’s camera system to greatly improve the image quality and scientific return of small Earth observation satellites.
- Larger satellites, such as the Sentinels of the European Copernicus program, use specialized hardware to ‘compress’ image data, reducing the data volume that is transmitted to Earth while maintaining a high image quality. But this hardware requires physical space on board and is not an option for tiny CubeSats or nanosatellites, which can be as small as just a few centimetres in size.
- “The initial results from DAPCOM are incredible,” says ESA’s David Evans, OPS-SAT Project Manager. “We never expected to produce such fantastic images with OPS-SAT’s camera and DAPCOM’s innovation helps us to download many times more of them.”
- DAPCOM’s software has now been made available to other OPS-SAT experimenters.
- “This is one of OPS-SAT’s greatest strengths,” says Evans. “Successful technologies can be immediately incorporated into OPS-SAT’s operational toolbox and made available to others for their own experiments.”
Interplanetary internet from the home office
- Another key feature of OPS-SAT is that ESA allows experimenters from across the European spaceflight community – industry, academia, start-ups, other agencies, clubs/schools – to remotely test-fly their software.
- Dresden, Germany, start-up D3TN became the first to successfully operate their OPS-SAT experiment from home over the internet.
- “As well as being the first time that OPS-SAT was controlled over the internet from an experimenter's home office, the D3TN experiment successfully tested a new communications technology called the ‘Ring Road’,” says Evans.
- “This technology could allow for a type of interplanetary internet that links extremely low-cost, large-scale satellite networks spanning from Earth to the Moon, or even to Mars.”
- The company’s OPS-SAT experiment marks the first time the ‘Ring Road’ has been tested in space.
Boosting European industry
- Tanagra Space, founded by OPS-SAT flight control member Georges Labrèche, is a European-based start-up focused on developing accessible artificial intelligence (AI) solutions for the space industry.
- During OPS-SAT’s commissioning phase, Labrèche faced challenges with the inconsistent pointing of OPS-SAT's camera system. He set out to save valuable communication bandwidth by ‘training’ a smart camera application powered by artificial intelligence to recognize poor or overexposed images and filter them out, preventing them from being transmitted back to Earth.
- Almost 5000 images taken by OPS-SAT were used to train the system. The accuracy of its predictions proved so good that the software was soon left to work without ground team supervision.
- "The software is so successful at distinguishing the good images from the bad, that it is now available to other OPS-SAT experimenters," says Evans. "They can easily improve on it by adding their own improvements to identify any images containing specific features they are looking for."
More results coming soon
- In addition to DAPCOM and D3TN, many more experiments are currently taking place on board OPS-SAT, with results expected in the coming weeks and months:
- The French space agency, CNES, (France), is testing automatic spacecraft maneuver planning and collision prediction in space.
- Airbus (Germany) are using OPS-SAT to test a completely new onboard software system in the space environment.
- STAR-Dundee (UK) is testing a next-gen high-speed communication protocol called SpaceFibre using OPS-SAT’s powerful reconfigurable hardware.
- IRT Saint Exupéry (France) is using a form of artificial intelligence called ‘deep learning’ to recognize patterns such as cloud formations or fires on Earth.
- TU Graz (Austria) is attempting to monitor signals emitted by devices in the 'Internet of Things' from space using OPS-SAT’s software-defined radio and will also test optical communications using their laser ground station.
- VisionSpace (Germany) and the Artificial Intelligence and Operations Innovation team at ESA’s ESOC mission control centre are testing the use of artificial intelligence to allow a spacecraft to analyze images on board and schedule and plan activities autonomously.
- CGI (Estonia) and another team at ESOC are testing a new way of interfacing on-board and ground mission-scheduling processes (this will be a world first).
• August 25, 2020: A flying laboratory, OPS-SAT is the very first of its kind. With an experimental computer ten times more powerful than any current ESA spacecraft, the 30-cm high CubeSat is devoted to demonstrating drastically improved mission control capabilities that will arise when satellites can fly more powerful onboard computers. Find out more about the mission, and how you could apply to use it to test out your experiment in space. 43)
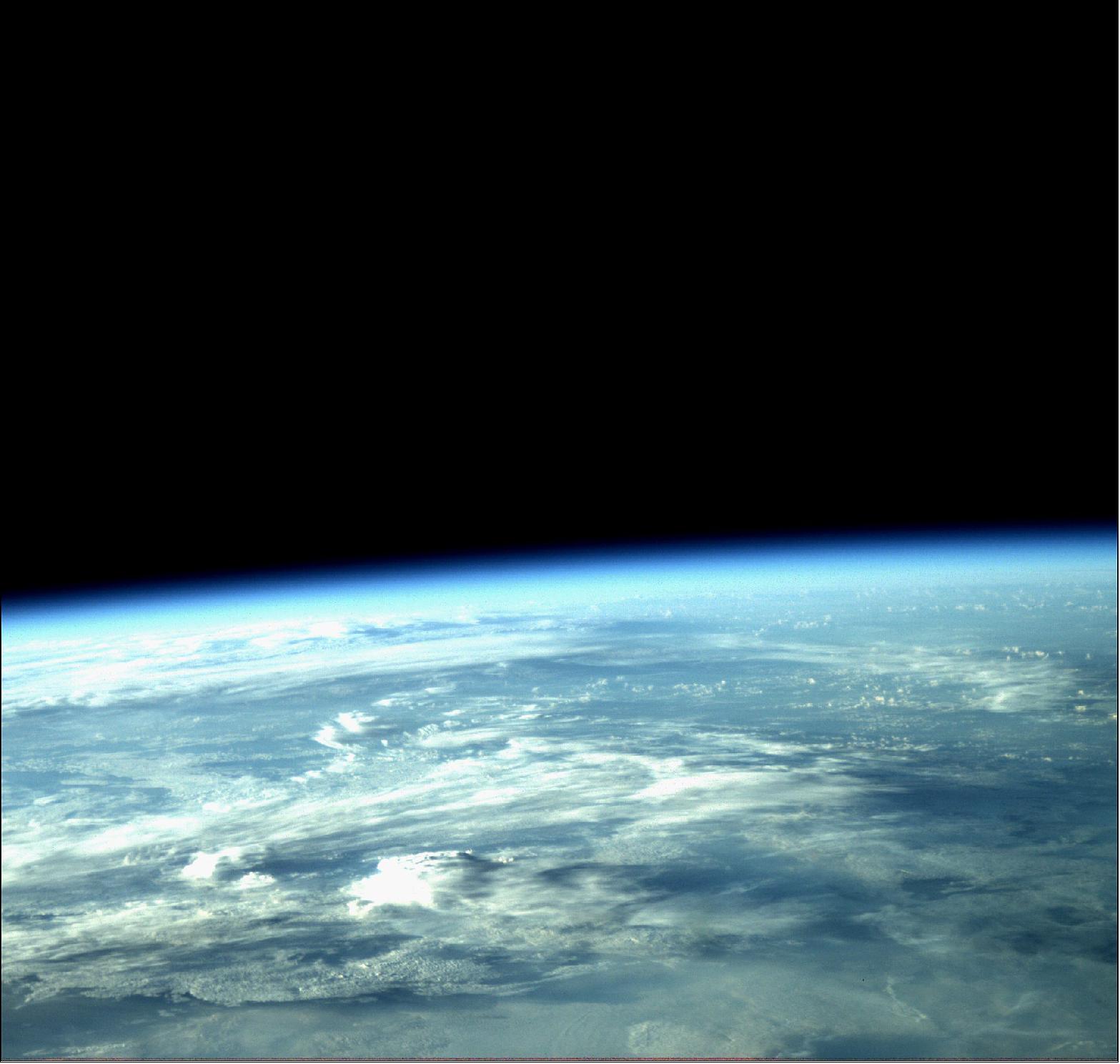

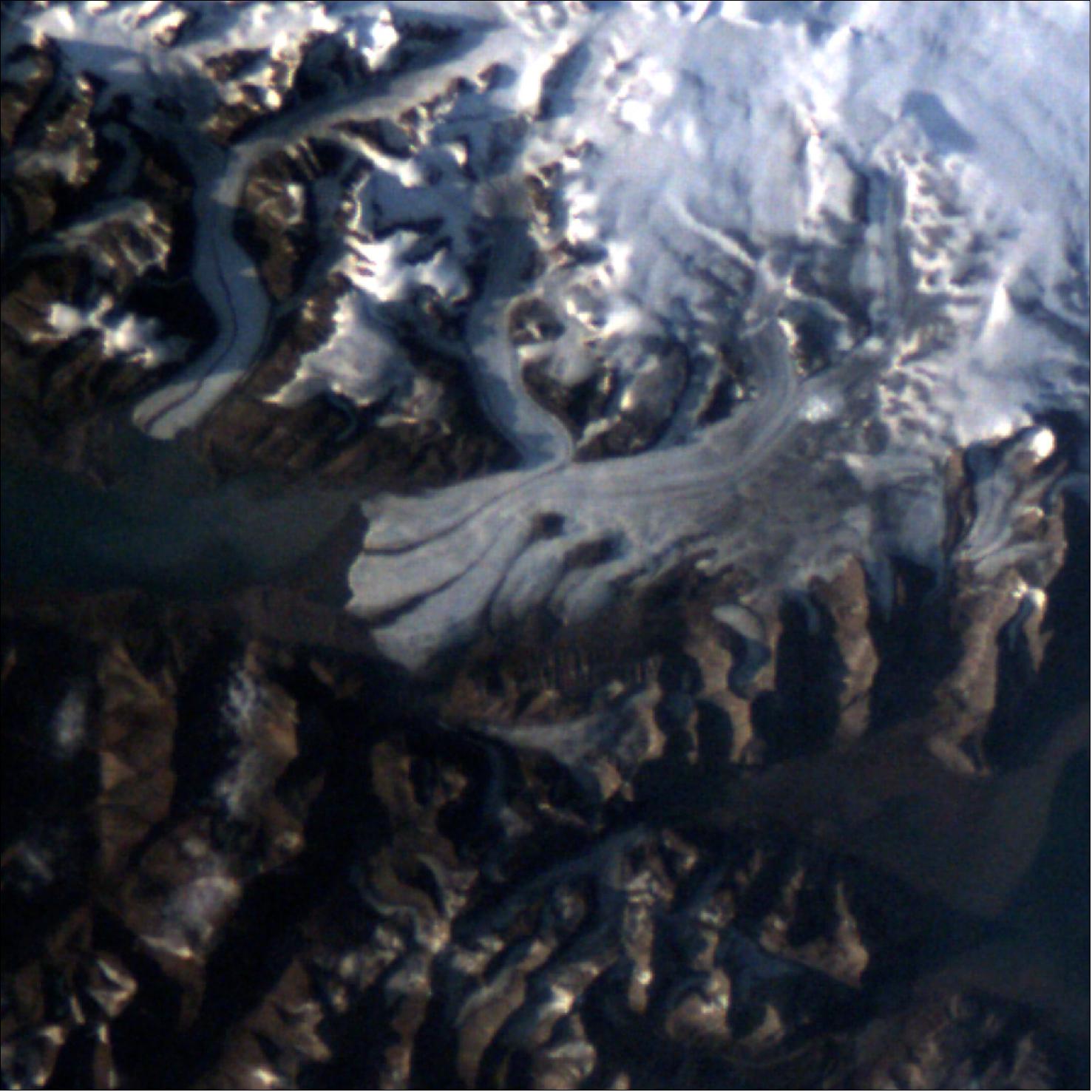
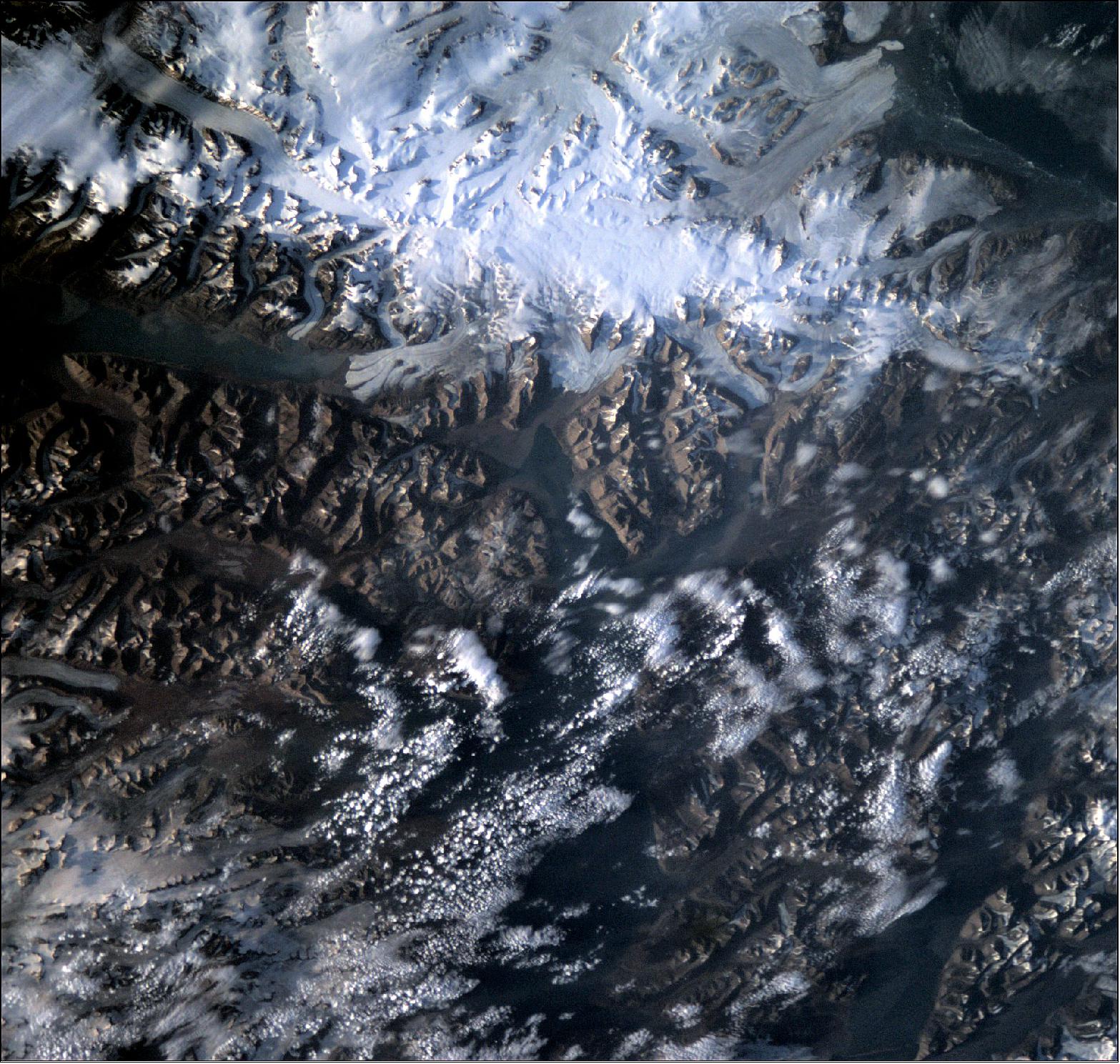
• December 20, 2019: ESA's OPS-SAT CubeSat is in orbit and sending healthy signals to mission controllers on Earth. The miniature satellite will work as a test lab in orbit, for experiments in new mission control software and techniques. 47)
- The nanosatellite rode to orbit aboard Soyuz VA23 flight from Europe’s Spaceport in French Guiana on 18 December, sharing the ride with Italy’s COSMO-SkyMed Earth-observing satellite, ESA’s Cheops exoplanet tracker and two other miniature CubeSats.
- Having separated from its Soyuz Fregat upper stage around 14:00 CET (Central European Time), OPS-SAT’s first verified signal was received by Finnish radio amateur Petri Niemela at 14:24 CET on launch day.
- A detailed check-out of all the nanosatellite systems is now in progress.
- “Our tiny satellite is in good shape and for the next few weeks we will work on commissioning its systems including switching its communication link to high bit-rate,” says OPS-SAT mission manager Dave Evans.
- “Radio amateurs from around the world reported early reception of the OPS-SAT beacon signal and continue to post the data they receive from our satellite. The information they provided has been very useful to us – thank you to everyone for their excellent support.”
- Harnessing more flight computing power than any previous ESA spacecraft, OPS-SAT is an inflight testbed for all kinds of promising new operational software, tools and techniques.
- This low-cost nanosatellite works just like an extremely complex full-sized ESA satellite in terms of its ground interfaces. This will allow research teams from companies, research institutes or even school computer clubs to gain early space heritage for new technologies.
- OPS-SAT experiments will cover topics like AI and autonomous planning, fault detection and recognition – allowing satellites to recognize and self-correct errors – as well as new data compression and signal encryption techniques.
- The mission will also try out optical communications for cryptography experiments and a ‘spectrum analyzer in the sky’ experiment for radio signal monitoring.
- OPS-SAT was built for ESA by a consortium composed of partners from Austria, Poland, Germany and Denmark led by TU Graz and Unitel IT Innovationen in Austria, supported through the FLY element of ESA’s General Support Technology Program (GSTP), readying promising technologies for space.
Sensor Complement
Payloads/Experiments of opportunity
SEPP (Satellite Experimental Processing Platform): SEPP is the heart of the OPS-SAT payload. It is a powerful ALTERA Cyclone V system-on-chip module with sufficient onboard memory to carry out advanced software and hardware experiments. It is the reconfigurable platform required on OPS-SAT on which all major experiments will be processed. The Altera Cyclone V SX System-on-Chip (SoC) digital core logic device provides an 800 MHz CPU clock and 1GB DDR3 RAM a powerful processing capability. All Altera SoC SX devices consist of an internal HPS (Hard Processing System) and an FPGA (Field Programmable Gate Array) portion. The Altera Cyclone V SX SoC HPS is a fully functional computer and contains a dual-core ARM CPU with several built-in hardware blocks and device interfaces. It also has built-in ECC (Error Correction Coding) features.
The system offers the possibility to use DDR2, LPDDR2 or DDR3 RAM. The ARM CPU is connected to a large number of HPS hardware blocks. Bridges enable high-speed data exchange between FPGA and HP's portions. Linux is used as the default operation system (OS) for the SoC. All HPS blocks can be accessed from the installed OS application software. The HPS portion has to be configured at system startup. The SoC configuration data is part of the SEPP software image stored in the external memory. The image is based on the Altera reference Yocto Linux and U-Boot boot loader software.
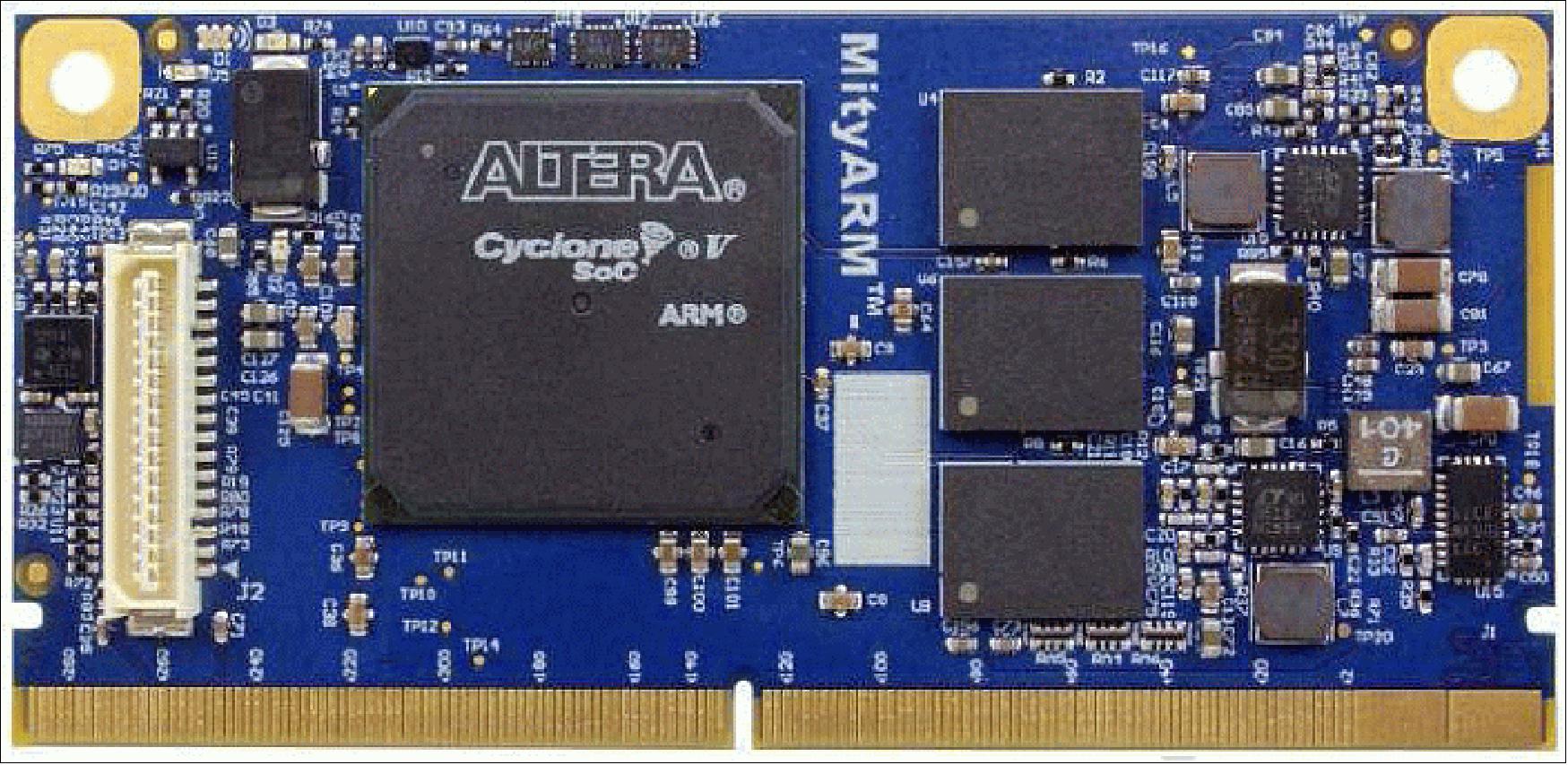
The system-level solution is to deploy four MitySOM-5CSX SoMs on a CubeSat-sized motherboard. They would operate in cold redundancy along with four 1 GB microSD cards for mass memory storage. These powerful units can output significant heat, especially if the FPGA fabric is highly clocked. The solution is to thermally couple the units to a surrounding mechanical aluminium structure which will allow the temperature to be passively managed. This solution also has the advantage that it will provide extra radiation shielding as these are non-radiation hard components. Another benefit, compared to other SoM platforms, is the availability of an ECC RAM system (in-built SEU mitigation).
• SEPP (Satellite Experimenters Processing Platform)
• Four systems in cold redundancy. Altera Cyclone V SX SoC.
- Dual Core ARM Cortex-A9
- Running up to 800 MHz
- FPGA Fabric
• Memory: 1 GB DDR3 RAM (+ ECC!)
• External Mass Memory: 8 GB
• ~5W power consumption (Linux).
Optical Camera
The baseline for the OPS-SAT optical camera is the BST IMS-100 instrument. This is a small space camera developed by Berlin Space Technologies based on the ST-200 star tracker. The ST-200 has been developed and tested for the Earth Video Camera project for the International Space Station. Sensor and MCU have been tested with proton irradiation of 130 MeV for a TID of 10 krad. It can provide still images as well as video, whereby image processing will be performed on the processor core (SEPP). For video download, the X-band transmitter will be used. The camera performance is provided in Table 2.
Parameter | Value | Comment |
Spatial resolution | 53 m | @ 600km orbit height |
Field of View / Scene | 135 km x 105 km | @ 600km orbit height |
Channels | 3 | RGB via on sensor Bayer Pattern |
Frame rate | 7 / 15 | 2600 x 2000pixels / 1300 x 1000 pixels |
Micro S-band transceiver and X-band transmitter
CNES and ESA are interested in a micro S-band TTC transceiver, and in a micro X-band transmitter, both designed for CubeSats. The goal is to provide considerably higher data rates for CubeSats and nanosatellites. This is especially important for experiments that want to record and transmit video to the ground. ESA decided to design the OPS-SAT triple CubeSat to test new space operation control concepts using EES (Earth Exploration Satellite) S- and X-bands (Ref. 21). 48) 49) 50)
The micro S-band TTC transceiver, the EWC31 of Syrlinks, takes some results from a multi-annual CNES R&D program related to low-cost base bricks for TTC, in terms of flexible power amplifiers (with a 1 to 10 W output power in S-band, and an optimized efficiency at the different RF powers), high-performance synthesizer and modem, and high integration of the TTC functions. The system architecture of this new product is generic. It was tested and fully validated on the first breadboard. All the key base-band functions are implemented in an FPGA. So this platform can be also easily adapted and provides the possibility to cover specific needs for new missions.
Transmitter | Receiver |
Frequency band: 2200-2290 MHz, RF power from 27 to 33 dBm | Frequency band: 2025-2110 MHz |
Data Rate: One fixed rate from 10 kbit/s to 3 Mbit/s | Modulation: PCM/SP-L/PM |
Modulation: QPSK/OQPSK, | Data Rate: One fixed rate selectable between at least 8, 16, 32, 64, 128, or 256 kbit/s |
Consumption (to be confirmed on EQM): <9.0W for 2W RF output; <6.5W for 1W RF output; <5W for 0.5W RF output | Doppler: ±66kHz (@1,8 kHz/s |
Some optimizations were made to provide a highly integrated solution with the following external dimensions (without diplexer) of: 96 x 90 x 24 mm3.

Another key subsystem is highly critical in this TTC function, the diplexer. A system analysis was made to balance the transceiver’s performances (TX and RX) with the diplexer’s size. Moreover, the specifics of using one or two antennas on the CubeSat platform were addressed and optimized solutions are available for these two configurations (Figure 39).
The coherent transponder option is currently in development for the microsatellite S-band TT&C equipment of Syrlinks, thanks to activities of ESA and CNES, the functionalities enabling ground stations to perform coherent Doppler and/or ranging measurements could be implemented in EWC31 advanced TT&C S-band equipment.

Micro X-band transmitter: The CNES-funded micro X-band transmitter from Syrlinks, referred to as EWC27 X-band HDR-TM transmitter, is capable of transmitting up to 50 Mbit/s. The objective is to produce synergies with many of the experiments since the mission data download capability is greatly increased.
The onboard camera will support both still image and streaming video modes and many experiments intend to exploit this. Such camera experiments will require substantial downlink data rates for which the EWC27 X-band transmitter will be needed, particularly when bearing in mind real-time applications and the short contact times (typically 10 minutes for a ground station pass, four times a day). In fact, the EWC27 has already flown as part of the ESA/GOMSpace mission GOMX-3 which was released from ISS on August 19th 2015. The unit has already been tested successfully at its maximum limit of 3 Mbit/s (due to ITU regulations).
The key specifications of this product are :
- Useful data rate from 2.8 up to 50 Mbit/s (up to 100 Mbit/s in constant bit rate)
- Configurable data rate (in flight up to 50 Mbit/s)
- Convolutive data coding: Puncturing rate ½, constraint length 7, polynomial generators 171 and 133
- Offset-QPSK modulation
- High-efficiency power amplifier
- Flexible RF output power between 27 – 33 dBm, with 1-dB step
- Power consumption: <7 W for 1 W RF output power; < 10 W for 2 W RF output power.
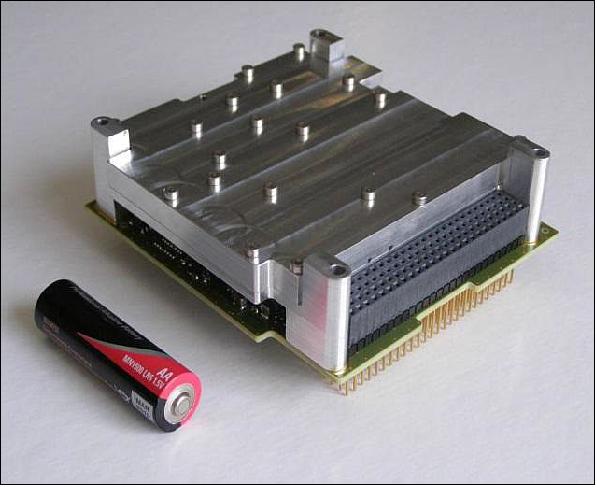
The micro X-band transmitter has a size of 96 x 90 x 24 mm3, its mass is < 400 g. The micro X-band transmitter can provide up to 50 Mbit/s using VBR (Variable Bit Rate), or up to 100 Mbit/s using CBR/CCM (Constant Bit Rate/Constant Coding Modulation). Syrlinks and CNES are currently studying a version of the EWC27 X-band HDR-TM compatible with some mod-cods of the CCSDS DVB-S2 telemetry standard.
Optical receiver
This optical communications experiment supports an optical uplink for the first time on a nanosatellite. It provides a transmission rate of 16 kbit/s using a small optical receiver which fits into OPS-SAT. A photon counting module with a built-in multi-pixel photon counter is the heart of this system. An avalanche detector array of 400 photodiodes is used. A prototype of the receiver was tested on ground and it was demonstrated that transmissions with the specified data rate can be carried out. For the uplink, the Satellite Laser Ranging Station operated by TU Graz and the Space Research Institute of the Austrian Academy of Sciences at the Lustbühel Observatory shall be used.
Laser energy | 300 µJ |
Pulse duration | 10 ps |
PRF (Pulse Repetition Frequency) | 2 kHz |
Pulse power | 30 MW |
Transmitted beam divergence | 20 arcseconds |
Total transmission (including atmosphere) | 0.1 |
Effective Tx telescope diameter | 5.5 mm |
Effective spot size at receiver (1000 km distance) | 193 mm |
Receiver aperture | 50 µm x 50 µm |
Space loss | 1.782 x10-27 |
Tx antenna gain | 1.049 x109 |
Rx antenna gain | 8.73 x104 |
Received power per pulse | 492 nW |
Number of photons per pulse | 13.1 |
Photon energy | 3.74 x 10-19 J |
The optical receiver will be connected to the SEEP so that uplink data can be received and processed by onboard experimental software. The laser ranging station at TU Graz will be used as the ground segment for the experiment. The laser ranging station at TU Graz will be used as the ground segment for the experiment. Optical retro-reflectors on the surfaces of the nanosatellite will provide the means to locate and track the spacecraft by laser tracking & ranging stations, assisted by an on-board GPS which is integrated in the core avionics.
An interesting aspect of the experiment is that this will be the first time a nanosatellite has been communicated with via an optical channel. Also, the application will allow the secure uplink of one-time pad encryption keys. These can be used on the RF downlink making the broadcast extremely secure. Such an experiment has never been done before.
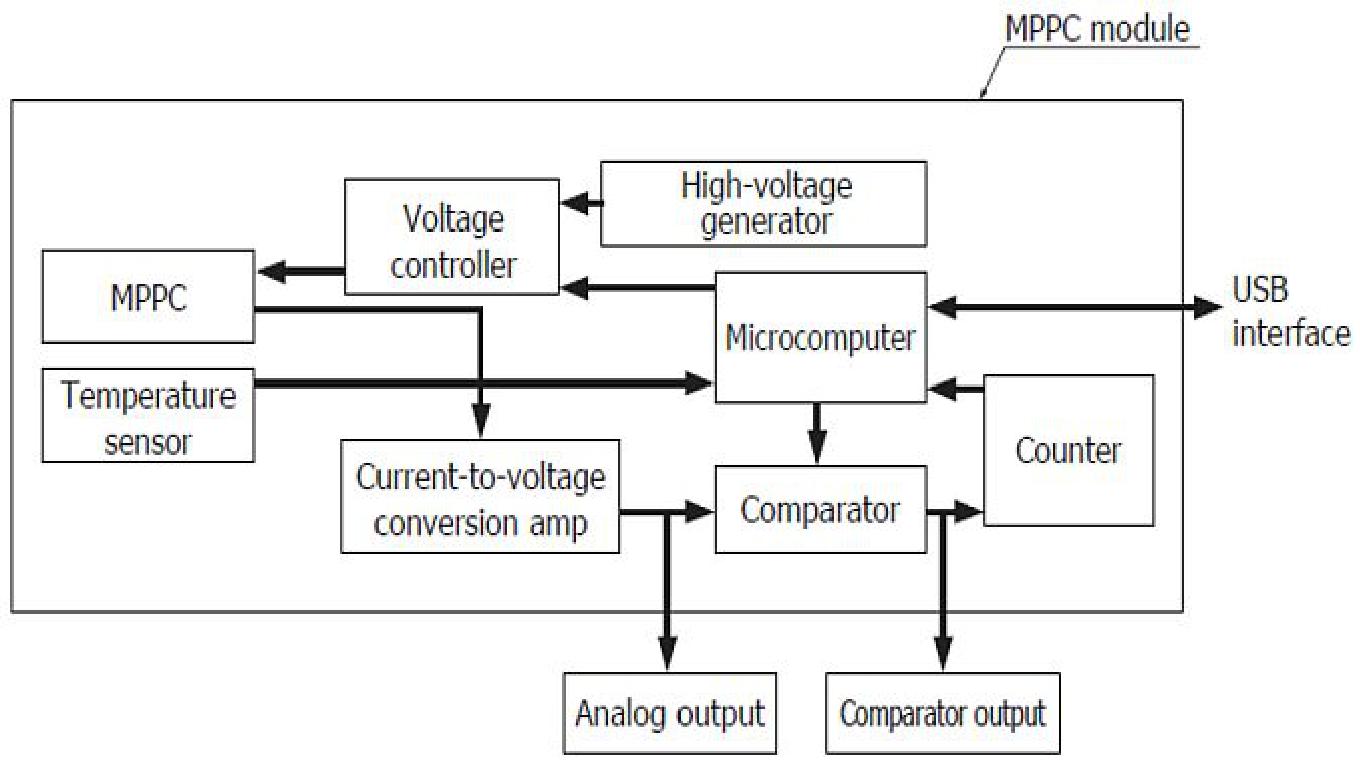
SDR (Software Defined Radio) front-end
This is a very small radio front-end consisting of a tuner, down-converter and ADC (Analog to Digital Converter). Complex signal samples are delivered to the SoMs where signal processing (e.g. demodulation and decoding) can be performed. This allows the monitoring and demodulation of radio signals for a wide frequency range.
The core of the SDR payload is an RF front-end consisting of a tuner (covering the frequency range from 300 MHz – 3.8 GHz), a down-converter and an A/D converter. This unit interfaces with the processing platform. Complex signal samples are delivered to the processor core, where signal processing (e.g. demodulation and decoding) can be performed. This facilitates the monitoring and demodulation of radio signals over a wide frequency range. Possible radio signal monitoring experiments include:
• ADS-B (Automatic Dependent Surveillance-Broadcast) for aircraft
• Interference level identification in different frequency bands and geographical areas.
RF front-end: The Myriad–RF 1 board was identified as a suitable candidate which is a multi-band, multi-standard RF module, based on the state-of-the-art LMS6002D transceiver IC by Lime Microsystems.
The Myriad-RF has one RF broadband output, and one RF broadband input with a digital baseband interface, established via a standard connector. The board also provides the user with pin headers for the power supply, reference clock, analogue I/Q input/output and SPI interface connections. It can be easily connected to baseband chipsets and FPGAs or run in standalone mode. The module is shown in Figure 3.
The RF front-end interfaces with the Cyclone V processor core where demodulation and signal processing takes place. The RF module delivers complex I/Q samples. Control of the board (e.g. of synthesizer centre frequencies etc.) is carried out by the processor core. Commands are sent via the I2C bus. A (shortened) deployable dipole antenna will be integrated into the top panel of the spacecraft perpendicular to the UHF antenna dipole. Interference is not possible as the UHF transmitter will be inactive during SDR experiments.
Form factor dimensions | 50 mm x 55 mm |
Mass, power consumption | 50 g, > 4 W |
TX/RX (Transmitter/Receiver) | TX and RX are possible |
Modes | Full duplex |
Uplink frequency | 300 MHz up to 3.8 GHz |
RX sensitivity | Low band: -103 dBm; High band: -90 dBm |
Downlink frequency | 300 MHz up to 3.8 GHz |
TX power | max. 10 dBm |
Interface | Analog I/Q input/output and SPI interface connections |
Supply voltage | 5 V |
Operating temperature | Chip: -40°C to 85°C |
TRL (Technology Readiness Level) | 3 |
SDR experiments: An interesting experiment will be the measurement of interference level measurement from Space. This experiment was triggered by the experience of TU Graz during the BRITE astero-seismological nanosatellite mission. Since October 2013, spacecraft operating in the 430-440 MHz amateur radio band experience significant ground interference over large parts of Europe. Having a “spectrum analyzer” in the sky offers valuable opportunities of potentially localizing and identifying the nature of the interferer. Since (unfortunately) in many officially coordinated bands unidentified interferers impair other missions and systems, the OPS-SAT mission may help to assist organizations such as the ITU (International Telecommunications Union).
For this experiment, algorithms are under development implementing classical spectrum analyzer functions. The center frequency, span, sweep time and resolution bandwidth can be selected via ground control.
It is also planned to implement synchronization algorithms on the processor core for automatic carrier tracking.
Another experiment which can be easily accommodated is an ADS-B receiver. Demodulation of the MSK signal and retrieval of the ADS-B datagrams will be carried out by the processor core. Since datagrams will certainly collide in high-density traffic regions, reconstruction of the datagrams can be done on board on Cyclone V, or on ground.
Optical Retro-Reflectors on Panels for Attitude Determination
This passive experiment will allow attitude monitoring and precise tracking using laser stations on the ground. There is an interest, especially among the space debris community to investigate the spacecraft dynamics of asymmetric objects such as OPS-SAT when uncontrolled. This can be done on this mission by simply disabling the actuation for periods when the mission is running and after mission termination using the laser reflections to determine attitude state and evolution as it slowly descends.
Mission Operations Concept
A major improvement in design in Phase AB1 has been the establishment of a robust but low-cost mission operations concept. The idea is to exploit the robustness of the satellite to allow experimenters to load their own complete images to the processing core on a daily basis without extensive checking by ESA. Experimenters will also be able to update the corresponding ground system. This will allow them to change the end-to-end control chain from a CCSDS ground-space control interface to a TCP-IP/web-based interface during a single ten-minute pass.
The concept relies on file exchange as the primary mode of changing configurations. On the ground, this will be done by allowing the experimenters to connect real-time TM and TC streams at different access points in the ground control chain. To change the configuration of the spacecraft, the experimenters will provide bootable memory images for the SoM as input. These images will be tested on a flatsat at ESOC to check they meet the basic safety requirements and then uploaded to the spacecraft’s memory, using a state-of-the-art protocol called CFDP (CCSDS File Delivery Protocol). This same protocol will be used to download the experimenter’s data once it has been compressed into a single file on-board. CFDP is targeted to be flown first on EUCLID (scheduled for launch in 2017). Hence OPS-SAT would be the first flight of this protocol. In order to reduce the sizes of the image uploads the mission will provide pre-loaded standard images with exit points. Experimenters can load new images which contain an identifier, indicating from which the preloaded image and exit point should start (Figure 44).

CCSDS MO (Mission Operations) Framework: 51)
A CCSDS Mission Operations On-Board Software Development Framework for Nanosatellites (NanoSat MO Framework) implementation is being developed by TU Graz in partnership with ESA (European Space Agency). The NanoSat MO Framework is based on the CCSDS Mission Operations concept and it is intended to be implemented and used by experiments on the future ESA OPS-SAT mission.
The SM&C (Spacecraft Monitoring & Control) Working Group of the CCSDS has defined a service-oriented architecture for space mission operations. The goal of the Working Group is to define a set of standardized, interoperable mission operation services, which allow rapid and efficient construction of cooperating space systems (Ground Segment, but also part of the Space Segment). For this purpose, the Working Group has defined a layered service framework, which allows mission operation services to be specified in an implementation and communication-agnostic manner. OPS-SAT will be the first in-orbit demonstration of a spacecraft with fully MO-based onboard software and ground implementations. 52) 53)
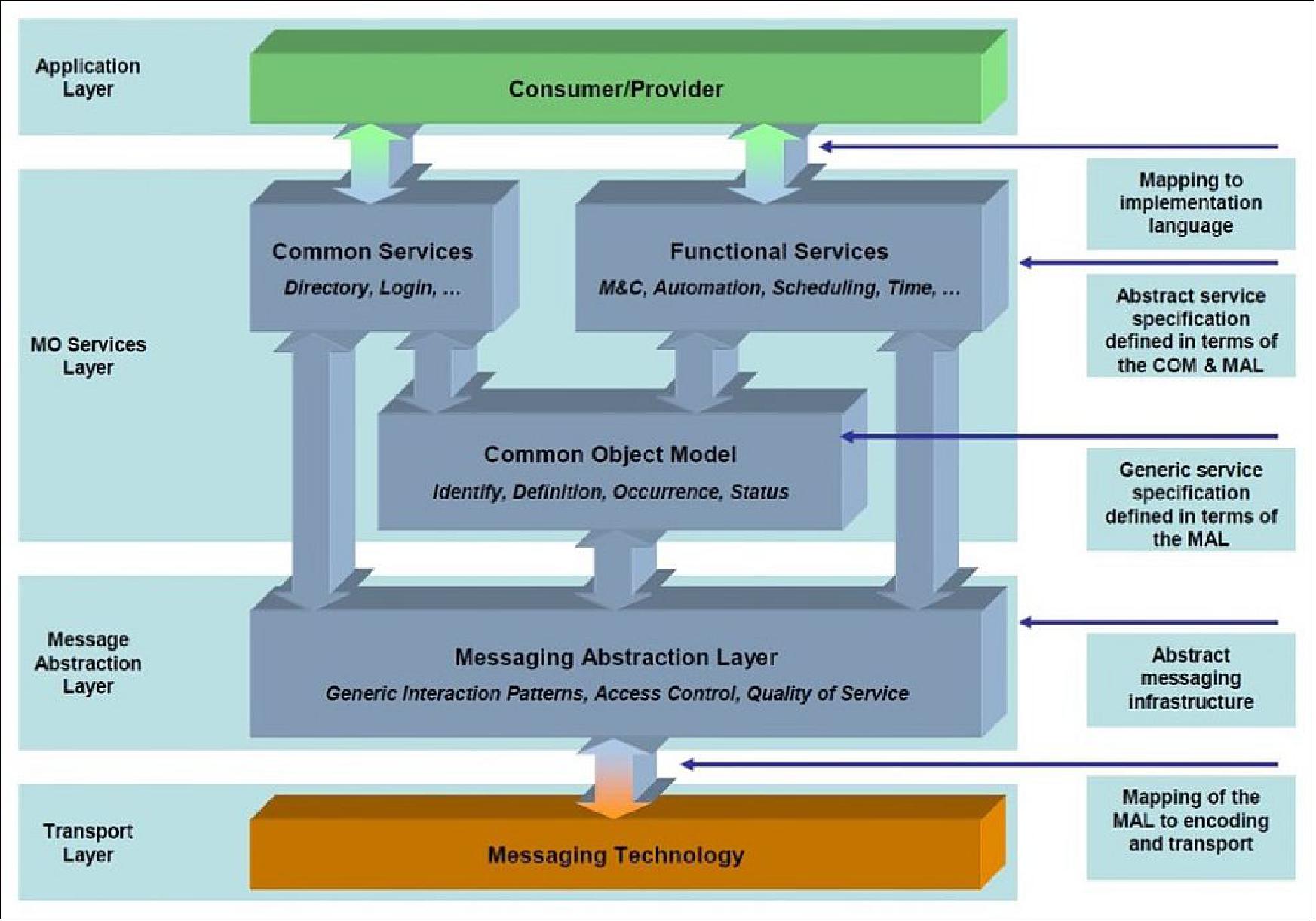
The main design characteristic of the NanoSat MO Framework software architecture is the introduction of independence between the application layer (app) and the underlying platform. In order to create this independence, a set of services shall be made available which can be used by the app both for interfacing with the peripherals and for communicating with ground. These services will be based on the CCSDS Mission Operations framework and can be divided into two main sets, the MO Standardized services (STD services) which are already defined by the CCSDS and the Peripheral services which will have to be defined. In the set of STD services, it shall provide two sets of standardized MO services: COM (Common Object Model) services, M&C (Monitor and Control) services. In the set of Peripheral services, it shall provide services such as:
a) Camera service,
b) ADCS service,
c) GPS service,
d) SDR (Software-defined Radio) service,
e) ODR (Optical Data Receiver Service).
Any app willing to use the NanoSat MO Framework shall be able to easily use the provided interface for both communicating with ground and interacting with the satellite peripherals. This abstraction, allows an easier and faster development of software untied from any particular satellite implementation. The initial design was motivated by the operability of OPS-SAT (reference implementation) therefore the design is focused on the available peripherals in OPS-SAT, but this does not prevent its usage in other nanosatellites. This could open the door for future software portability among different nanosatellites and also facilitate the testing of new software.
The NanoSat MO Framework will be freely available for download and it will provide a “ready to be used” implementation of all the up-to-date MO Standardized services and the defined Peripheral services.
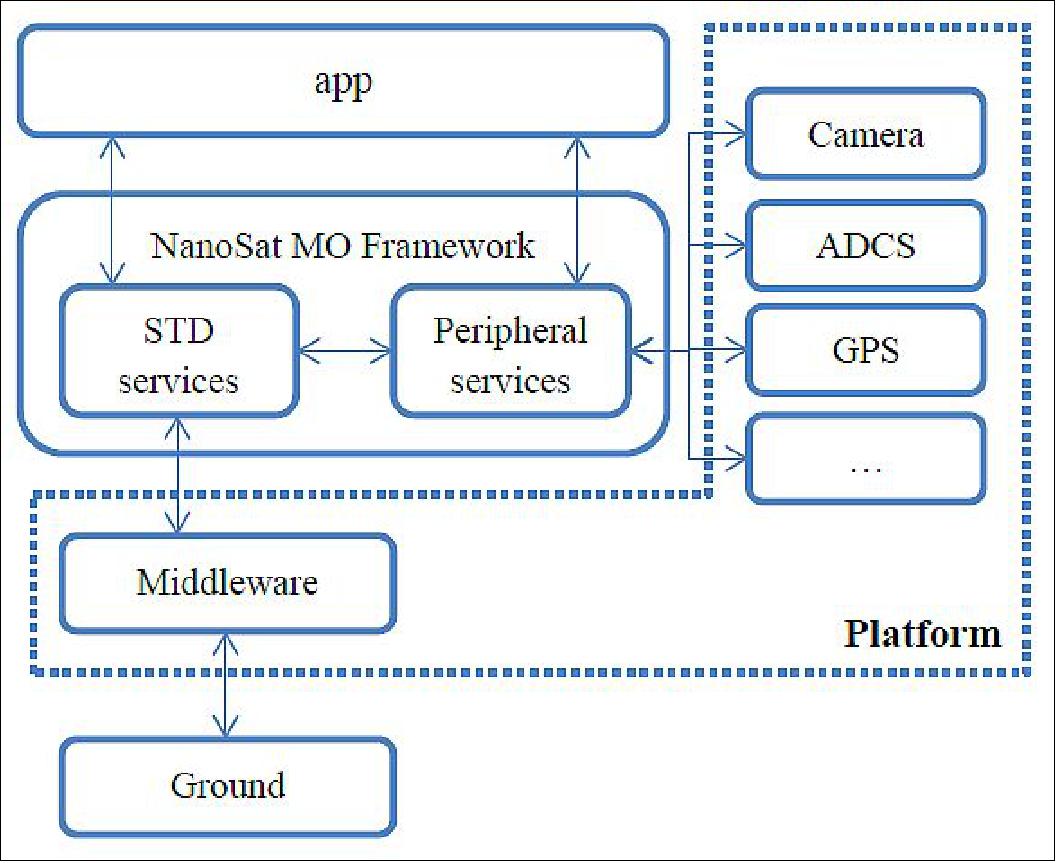
The separation of the services from the specific experiment code not only allows an easier embedding of standard MO services with the different experiments but also avoids the need to keep track of the specific MO service requirements by the experimenter. Moreover, the experimenter will be able to integrate these services in their experiment even if these services are in reviewing phase (at the moment, the M&C and Common). To get the latest version update, the experimenter will only have to do a “pull request” from the server.
Three java interfaces were defined to link the app to the STD services. These interfaces are for: Action invocations, Alert notifications, and Parameter status.
For the Peripheral services, the app can connect directly using the exposed MO service interfaces of those services. Between the Peripheral services and the satellite peripherals, java interfaces shall be defined to allow the implementation on a specific platform to allow re-usage of code. OPS-SAT peripherals will be used as a reference implementation.
Default parameters and actions shall be defined between the STD services and the Peripheral services to allow interaction with the peripherals from the STD services. If an OPS-SAT experimenter intends to use the NanoSat MO Framework, its experiment will be in the application layer (app) of the diagram in Figure 46. The process of integrating the experiment was designed to be easy and simple.
For the COM services, the experimenter will be able to select and use the services directly without any need for further modifications in the code.
For the M&C services, the experimenter will need to:
1) Select the desired services to be used from the NanoSat MO Framework
2) Implement the java interfaces for actions, alerts and parameters
3) Add default definition objects in the Archive service (if desired).
For the Peripheral services, the experiment can directly connect and exchange data with the peripherals or optionally use the STD services with the default parameters and actions.
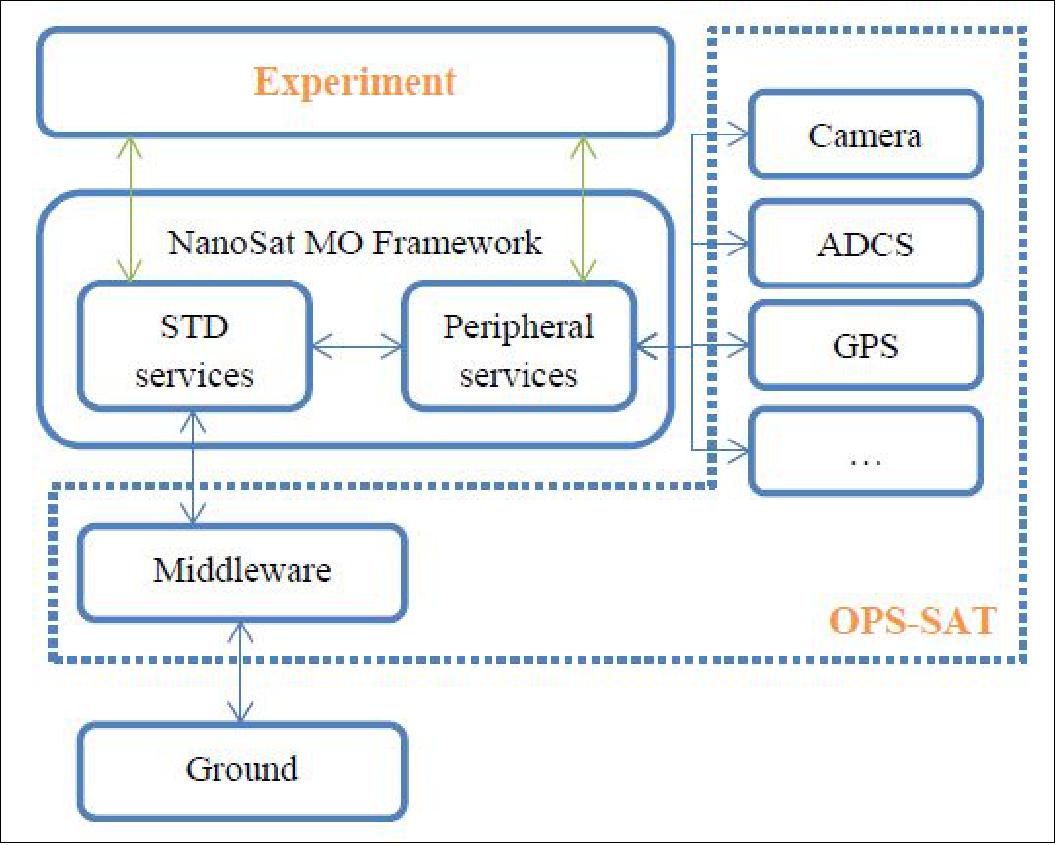
The green arrows of Figure 47 show the necessary modifications to be made by the experimenter: in the left it shall be necessary to implement the STD services interfaces to the particular experiment; in the right is presented the connection f the experiment to the Peripheral services which allows sending and receiving data from the peripherals on-board of OPS-SAT (which can also be optionally used through the default parameters and actions defined in the STD services).
A development environment is intended to be provided to all OPS-SAT experimenters in order to facilitate the development of experiments. In this development environment, experiment demos will show how to use and integrate the NanoSat MO Framework correctly with an experiment. A tutorial guide is also intended to be provided.
TU Graz in partnership with the European Space Agency and subcontractors from Austria, Denmark, Austria, Germany and Poland is currently developing the NanoSat MO Framework which can be used by experiments on-board of OPS-SAT.
Experimenters shall be able to use all the services or select, à la carte, from the NanoSat MO Framework the services which they desire to use for their experiments without having to write additional code related to the specific requirements from the MO standards. This almost effortless procedure will sharply decrease the difficulty of developing an experiment using MO services and, simultaneously, will increase the acceptance of MO services from the space community.
Experimenter Access
One special aspect of OPS-SAT is that the project allows the experimenters to communicate directly with their experiment running onboard, even in real-time. From the experimental processor, they can operate the camera, GPS unit, and fine ADCS (including reaction wheels, star tracker magnetorquers, magnetometers, sun sensors, and gyros) and they can also process data arriving from the software-defined radio, GPS unit and core avionics.
The project offers six different possibilities for the experimenters to access the OPS-SAT network and then communicate with the satellite or the testing facilities (Ref. 5):
1) They can exchange files via SFTP (Secure File Transfer Protocol) with a data relay server at ESOC which serves as the interface between the OPS-SAT LAN and the Internet. Files which contain the down-loaded telemetry of the experiments will be stored there. In the other direction, they can load their own software images which will then be uplinked to the experimental processor by the flight control team.
2) They can use the Mission Operations Services standards to monitor and control experiments running on the processing platform of the spacecraft. The raw MO messages are transferred between the user and the data relay server using TCP/IP over the Internet. These are then forwarded to the spacecraft and back automatically by the OPS-SAT ground segment.
3) Experimenters that don’t want to write their own MO-based M&C software can use Web-EUD for that purpose. Web-EUD is accessible through a web browser and connects to the experiment through MO. It provides the user with tools to monitor their experiment software and they also can send basic commands to their software.
4) They can use the Space Packet Protocol to monitor and control experiments running on the processing platform of the spacecraft, also via TCP/IP over the Internet. These are then forwarded to the spacecraft and back automatically by the OPS-SAT ground segment.
5) For experimenters wanting to communicate with their experiments over a non-CCSDS protocol then the OPS-SAT ground segment will offer a direct connection at ground station baseband level i.e. just before modulation.
6) For experimenters that use CCSDS standards and are interested in real-time data but do not want to process it themselves we offer a web-based monitoring solution using an ESOC-developed solution called WebMUST. The experimenters can access advanced display, store and retrieval functions with a web browser.
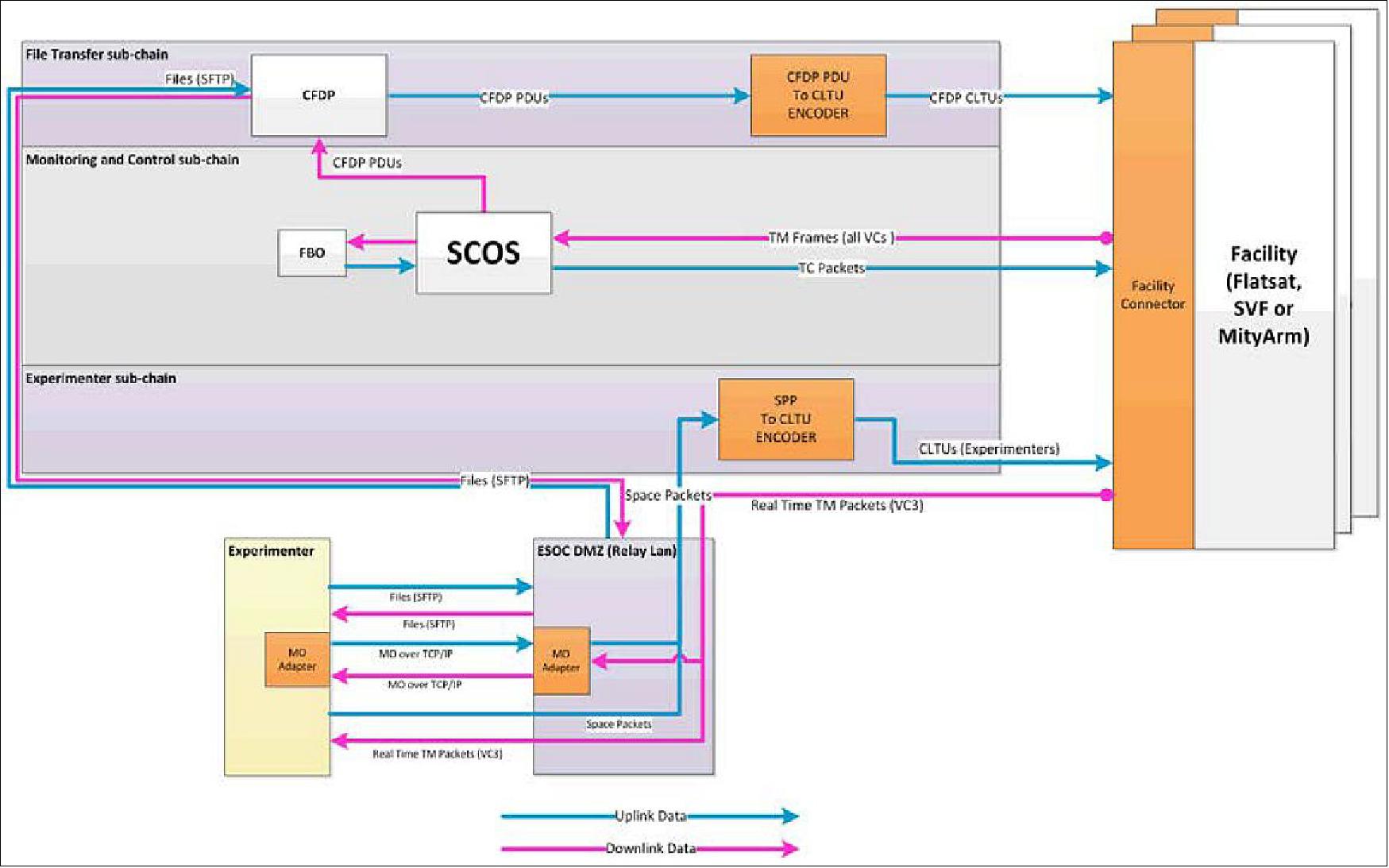
Legend to Figure 48: SCOS-2000 (Spacecraft Control & Operation System-2000) is the generic mission control system software of ESA.
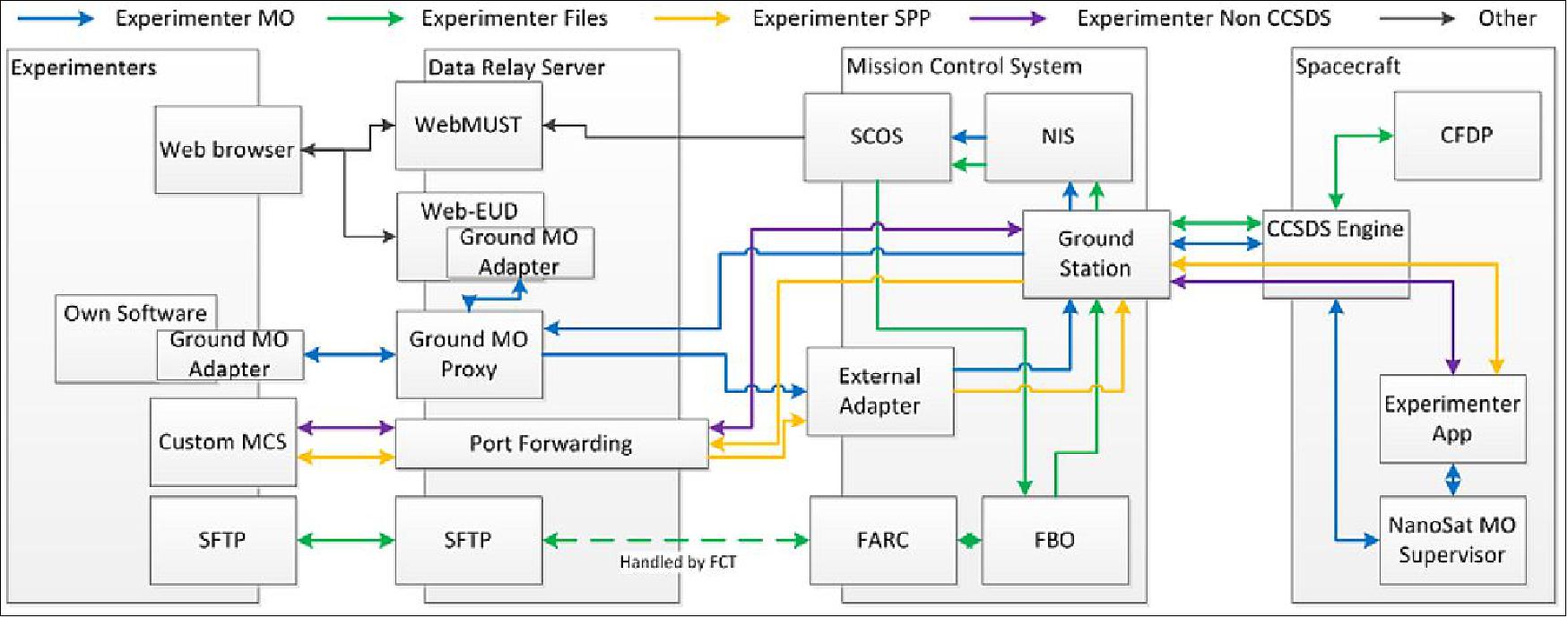
References
1) David Evans, “OPS-SAT: an ESA CubeSat,” Proceedings of the 4S (Small Satellites Systems and Services) Symposium, Portoroz, Slovenia, June 4-8, 2012, paper: C10
2) David Evans, Mario Merri, “OPS-SAT – Evolving Software Technology for Spacecraft Operations,” March 23, 2012, URL: http://www.esa.int/esaMI/Operations/SEMY5CKOXDG_0.html
3) Innovative nanosat will test space software,” ESA/ESOC, April 20, 2012, URL: http://www.esa.int/SPECIALS/ESOC/SEMMMEKWZ0H_0.html
4) D. Evans, O. Koudelka, L. Alminde, K. Schilling, “The ESA OPS-SAT CubeSat Mission,” Proceedings of the 4S (Small Satellites Systems and Services) Symposium, Port Petro, Majorca Island, Spain, May 26-30, 2014
5) David Evans, Alexander Lange, ”OPS-SAT: Operational Concept for ESA’S First Mission Dedicated to Operational Technology,” Proceedings of the 14th International Conference on Space Operations (SpaceOps 2016), Daejeon, Korea, May 16-20, 2016, paper: AIAA 2016 2354, URL: http://arc.aiaa.org/doi/pdf/10.2514/6.2016-2354
6) David Evans, Otto Koudelka, ”ESA’s OPS-SAT Cubesat Mission,” Proceedings of the 4S (Small Satellites, System & Services) Symposium, Valletta, Malta, May 30-June 3, 2016, URL: http://congrexprojects.com/docs/default-source/16a02_docs/4s2016_final_proceedings.zip?sfvrsn=2
7) D. Evans, R. Biesbroek, “OPS-SAT Concurrent Design– Does size matter?,” 5th International Workshop on Systems & Concurrent Engineering for Space Applications, SECESA 2012, Lisbon, Portugal, Oct. 17-19, 2012, URL: http://www.congrexprojects.com/docs/12c12_docs/1300-biesbroek.pdf?sfvrsn=2
8) Gert Villemos, Dave Evans, “Rethinking Satellite Operations - OPS-SAT, the experimental operations platform,” Proceedings of GSAW 2014 (Ground System Architectures Workshop), Los Angeles, CA, USA, Feb. 24-27, 2014, URL: http://gsaw.org/wp-content/uploads/2014/03/2014s09villemos.pdf
9) Lars K. Alminde, “OPS-SAT Phase A-B1,” ESA, June 25, 2014, Version 1.0, URL: http://esamultimedia.esa.int/docs/gsp/C4000108683ExS.pdf
10) “Space Mission Operations – Designing for the Future,” ESA, Feb. 23, 2012, URL: http://www.esa.int/SPECIALS/CDF/SEM0N72YRYG_0.html
11) O. Koudelka, M. Wittig, David Evans, M. Unterberger, P. Romano, “Communications Experiments Using the Reconfigurable Payload of OPS-SAT,” Proceedings of the 65th International Astronautical Congress (IAC 2014), Toronto, Canada, Sept. 29-Oct. 3, 2014, paper: IAC-14.B2.3.5
12) Otto Koudelka, M. Wittig, David Evans, ”The OPS-SAT Nanosatellite Mission,” ITU-R Symposium and Workshop on small satellite regulation, Prague, Czech Replublic, March 2-4, 2015, URL: http://www.itu.int/en/ITU-R/space/workshops/2015-prague-small-sat/Presentations/OPS-SAT-ITU.pdf
13) David Evans, Mario Merri, “OPS-SAT: A ESA nanosatellite for accelerating innovation in satellite control,” SpaceOps 2014, 13th International Conference on Space Operations, Pasadena, CA, USA, May 5-9, 2014, paper: AIAA 2014-1702, URL: http://arc.aiaa.org/doi/pdf/10.2514/6.2014-1702
14) “OPS-SAT,” ESA, URL: http://www.esa.int/Our_Activities/Operations/OPS-SAT
15) Otto Koudelka, Manfred Wittig, David Evans, “ESA’s OPS-SAT Nanosatellite Mission – A Laboratory in the Sky,” 10th IAA Symposium on Small Satellites for Earth Observation, Berlin, Germany, April 20-24, 2015, paper: IAA-B10-1001, URL of presentation: http://www.dlr.de/iaa.symp/Portaldata/49/Resources/dokumente/archiv10/pdf/1001_OPS-SAT-Koudelka.pdf
16) Otto Koudelka, David Evans, ”The OPS-SAT Nanosatellite Mission- A Flexible Platform for On-Board Experiments,” Proceedings of the 11th IAA Symposium on Small Satellites for Earth Observation, Berlin, Germany, April 24-28, 2017, paper: IAA-B11-0901
17) ”OPS-SAT,” ESA, URL: http://m.esa.int/Our_Activities/Operations/OPS-SAT
18) “X-band transmitter can transmit up to 13.3 GB per pass with a 5 m station, designed for CubeSat and NanoSatellites (LEO),” Syrlinks, URL: http://www.syrlinks.com/en/products/cubesats/hdr-x-band-transmitter.html
19) E. Peragin, H. Diez, F. Darnon, D. Belot, J-P. Millerioux, J-L. Issler, T. Dehaene , Y. Richard, G. Guillois, F. Sépot, D. Simon, “X-band Telemetry Solution for CubeSat,” Proceedings of the 4S (Small Satellites Systems and Services) Symposium, Portoroz, Slovenia, June 4-8, 2012
20) E. Peragin, H. Diez, F. Darnon, D. Belot, J-P. Millerioux, J-L. Issler, T. Dehaene , Y. Richard, G. Guillois, F. Sépot, D. Simon, “X-band Telemetry Solution for CubeSat,” Proceedings of the 26th Annual AIAA/USU Conference on Small Satellites, Logan, Utah, USA, August 13-16, 2012, paper: SSC12-VI-7, URL: http://digitalcommons.usu.edu/cgi/viewcontent.cgi?article=1058&context=smallsat
21) J-L.Issler, A. Gaboriaud, F. Apper, A. Ressouche, D. Evans, O. Koudelka, P. Romano, M. Unterberger, T. Dehaene, B. Lechevalier, G. Guillois, M. Fernandez, “CCSDS communication products in S- and X-band for CubeSats,” Proceedings of the AIAA/USU Conference on Small Satellites, Logan, Utah, USA, August 2-7, 2014, paper: SSC14-P4-10, URL: http://digitalcommons.usu.edu/cgi/viewcontent.cgi?article=3014&context=smallsat
22) ”OPS-SAT: the flying laboratory,” ESA / Enabling & Support, 13 December 2019, URL: http://www.esa.int/ESA_Multimedia/Videos/2019/12/OPS-SAT_the_flying_laboratory
23) ”Calling radio amateurs: help find OPS-SAT!,” ESA / Enabling & Support / Operations, 12 December 2019, URL: http://www.esa.int/Enabling_Support/Operations/Calling_radio_amateurs_help_find_OPS-SAT
24) ”Testing OPS-SAT,” ESA, 26 November 2019, URL: http://www.esa.int/ESA_Multimedia/Images/2019/11/Testing_OPS-SAT
25) ”OPS-SAT - your flying laboratory,” ESA 28 May 2019, URL: http://www.esa.int/Our_Activities/Operations/OPS-SAT_your_flying_laboratory
26) ”ESA helps business fly in space,” ESA, 10 March 2019, URL: https://www.esa.int/Our_Activities/Operations/ESA_helps_business_fly_in_space
27) ”Tiny sat, big ambitions,” ESA, Operations image of the week, April 27, 2017
28) ”Successful satellite launch for Graz University of Technology, Austria,” Space Daily, 19 December 2019, URL: http://www.spacedaily.com/reports/Successful_satellite_launch_for_Graz_University_of_Technology_Austria_999.html
29) ”Arianespace’s last mission of the year a complete success: COSMO-SkyMed Second Generation, CHEOPS, OPS-SAT, EyeSat and ANGELS now in orbit,” Arianespace, 18 December 2019, URL: https://www.arianespace.com/press-release/arianespaces-last-mission-of-the-year-a-complete-success-cosmo-skymed-second-generation-cheops-ops-sat-eyesat-and-angels-now-in-orbit/
30) ”Liftoff for Cheops, ESA’s exoplanet mission,” ESA Science & Exploration, 18 December 2019, URL: http://www.esa.int/Science_Exploration/Space_Science/Cheops/Liftoff_for_Cheops_ESA_s_exoplanet_mission
31) ”Exoplanet mission launch slot announced,” ESA, 23 November 2018, URL: http://sci.esa.int/cheops/60949-exoplanet-mission-launch-slot-announced/
32) ”Ariane launch manifest, ” 22 October 2018, URL: http://www.sworld.com.au/steven/space/ariane-man.txt
33) “Exoplanet mission gets ticket to ride,” ESA, April 6, 2017, URL: http://www.esa.int/Our_Activities/Space_Science/Exoplanet_mission_gets_ticket_to_ride
34) ”Teach an Earth-observing satellite to know what it sees,” ESA Enabling & Support, 25 May 2022, URL: https://www.esa.int/Enabling_Support/Space_Engineering_Technology/Teach_an_Earth-observing_satellite_to_know_what_it_sees
35) ”Innovation by the dozen: ESA funds 12 OPS-SAT experiments,” ESA Enabling & Support, 15 February 2022, URL: https://www.esa.int/Enabling_Support/Preparing_for_the_Future/Discovery_and_Preparation/Innovation_by_the_dozen_ESA_funds_12_OPS-SAT_experiments
36) ”Live demonstration for cyber resilience,” ESA Safety&Security, 11 January 2022, URL: https://www.esa.int/Safety_Security/Live_demonstration_for_cyber_resilience
37) ”A first for search and rescue from space,” ESA Enabling & Support, 14 October 2021,URL: https://www.esa.int/Enabling_Support/Operations/A_first_for_search_and_rescue_from_space
38) ”Trading space: ESA bolsters European business,” ESA Enabling & Support, 01 October 2021, URL: https://www.esa.int/Enabling_Support/Operations/Trading_space_ESA_bolsters_European_business
39) ”First test of Europe’s new space brain,” ESA Enabling & Support, 28 July 2021, URL: https://www.esa.int/Enabling_Support/Operations/Ground_Systems_Engineering/First_test_of_Europe_s_new_space_brain
40) ”Experiment and innovate on our spacecraft,” ESA Enabling & Support, 07 June 2021, URL: https://www.esa.int/Enabling_Support/Operations/Experiment_and_innovate_on_our_spacecraft
41) ”Fly your software in space,” ESA Enabling & Support, 14 April 2021, URL: https://www.esa.int/Enabling_Support/Preparing_for_the_Future/Discovery_and_Preparation/Fly_your_software_in_space
42) ”Interplanetary internet & cameras in space: ESA’s OPS-SAT first results,” ESA Enabling & Support, 18 December 2020, URL: https://www.esa.int/Enabling_Support/Operations/Interplanetary_internet_cameras_in_space_ESA_s_OPS-SAT_first_results
43) ”OPS-SAT captures our home in space,” ESA Enabling & Support, 25 August 2020, URL: https://www.esa.int/ESA_Multimedia/Images/2020/08/OPS-SAT_captures_our_home_in_space
44) ”OPS-SAT over October Revolution Island,” ESA Enabling & Support, 25 August 2020, URL: https://www.esa.int/ESA_Multimedia/Images/2020/08/OPS-SAT_over_October_Revolution_Island
45) ”First OPS-SAT photos capture frosty fjord,” ESA Enabling &Support, 25 August 2020, URL: https://www.esa.int/ESA_Multimedia/Images/2020/08/First_OPS-SAT_photos_capture_frosty_fjord
46) ”Space laboratory sees snowy Svalbard,” ESA Enabling & Support, 25 August 2020, URL: https://www.esa.int/ESA_Multimedia/Images/2020/08/Space_laboratory_sees_snowy_Svalbard
47) ”OPS-SAT in orbit: a stepping stone to smarter space operations,” ESA / Enabling & Support / Operations, 20 December 2019, URL: http://www.esa.int/Enabling_Support/Operations/OPS-SAT_in_orbit_a_stepping_stone_to_smarter_space_operations
48) M.A. Fernandez, G. Guillois, Y. Richard, J-L. Issler, P. Lafabrie, A. Gaboriaud, D. Evans, R. Walker, O. Koudelka, P. Romano, K. T. Hansen, D. Gerhardt, ”A Game-changing radio communication architecture for cube/nanosatellites,” Proceedings of the 29th Annual AIAA/USU Conference on Small Satellites, Logan, Utah, USA, August 8-13, 2015, paper: SSC15-P-48, URL: http://digitalcommons.usu.edu/cgi/viewcontent.cgi?article=3258&context=smallsat
49) Franz Teschl, Patrick Ramano, Otto Koudelka, ”S- and X-band antenna design for ESA’s upcoming OPS-SAT nanosatellite,” Proceedings of the 66th International Astronautical Congress (IAC 2015), Jerusalem, Israel, Oct.12-16, 2015, paper: IAC-15-B2.4.6
50) M.A. Fernandez, G. Guillois, Y. Richard, J-L. Issler, P. Lafabrie, A. Gaboriaud, D. Evans, R. Walker, O. Koudelka, P. Romano, K. T. Hansen, D. Gerhardt, ”New game-changing on cube and nanosatellites radios,” Proceedings of the 66th International Astronautical Congress (IAC 2015), Jerusalem, Israel, Oct.12-16, 2015, paper: IAC-15-B2.4.5
51) César Coelho, David Evans, Otto Koudelka, “CCSDS Mission Operations Services on OPS-SAT,“ 10th IAA Symposium on Small Satellites for Earth Observation, Berlin, Germany, April 20-24, 2015, paper: IAA-B10-1301, URL of presentation: https://www.dlr.de/iaa.symp/Portaldata/49/Resources/dokumente/archiv10/pdf/1301_CCSDS_NanoSat_MO_Framework_KW.pdf
52) CCSDS “Mission Operations Services Concept,” Green Book., December 2010, URL: http://public.ccsds.org/publications/archive/520x0g3.pdf
53) Sam Cooper, "CCSDS Mission Operations Services in Space," Proceedings of SpaceOps 2012, The 12th International Conference on Space Operations, Stockholm, Sweden, June 11-15, 2012, URL: http://spaceops2012.org/proceedings/documents/id1291637-Paper-001.pdf
The information compiled and edited in this article was provided by Herbert J. Kramer from his documentation of: ”Observation of the Earth and Its Environment: Survey of Missions and Sensors” (Springer Verlag) as well as many other sources after the publication of the 4th edition in 2002. - Comments and corrections to this article are always welcome for further updates (eoportal@symbios.space).
Spacecraft Launch Mission Status Payloads Operations Concept References Back to Top