NorSat-3 and 4
EO
Other
Operational (nominal)
Communications
NorSat-3 is the third microsatellite in the eponym series, constructed by the University of Toronto Institute for Aerospace Studies’ Space Flight Laboratories (UTIAS/SFL) for the Norwegian Space Agency (NOSA) and the Norwegian Defence Research Establishment (FFI). Launched in April 2021, the operational mission aims to replace two soon-to-be-decommissioned satellites from the AISSat constellation and to strengthen Norway’s capacity for maritime surveillance by demonstrating the viability of a new technology. NorSat-4 development is underway to further enhance Norway’s sea observation capabilities, with a planned launch in October 2023.
Quick facts
Overview
| Mission type | EO |
| Agency | NOSA, NDRE |
| Mission status | Operational (nominal) |
| Launch date | 29 Apr 2021 |
| Instruments | AIS, NRD, LLI |
| Instrument type | Other, Communications |
| CEOS EO Handbook | See NorSat-3 and 4 summary |

Summary
Mission Capabilities
NorSat-3 is equipped with an experimental ship NRD (Navigation Radar Detector) and an AIS (Automatic Identification System) receiver.
The NRD instrument consists of both an antenna and receiver electronics. Itcan detect and locate signals from civilian navigation radar systems. This will provide a more comprehensive picture of the maritime situation for the Norwegian Coastal Administration, as it will supplement and verify the accuracy of the AIS signals, which some ships might not emit, either because of errors or due to transponders being switched off.
The AIS receiver in NorSat-3 is identical to the flight-proven AIS receivers carried aboard NorSat-1 and -2. Generally, an AIS allows the electronic exchange of information on shore stations, as well as ship identification, position and velocity. Thanks to an improvement in the message and ship detection performance compared to previous generations of AIS receivers, the particular system on NorSat-3 offers improved ship tracking performance.
Performance Specifications
The estimated geolocation accuracy for NRD is within 10 km. Viewing the same area with different viewing angles further increases geolocation accuracy by employing triangulation trigonometry. The NRD antenna has a FOV (field of view) of 10° and is nominally pointed towards the horizon, maximising the area coverage. A zone of interest in Norwegian territory can be revisited between 10 and 15 times per day, depending on the orientation of the antenna.
The attitude knowledge requirement is 0.05° for up to three seconds during the measurement of a radar sweep.
NorSat-3 maintains a sun-synchronous orbit, at an altitude of 606 km, an orbital inclination of 97.8° and a period of 97 minutes.
Space and Hardware Components
The NorSat-3 spacecraft utilises the NEMO bus from UTIAS/SFL. It includes a star tracker, attitude sensors and reaction wheels in order to achieve precise attitude control. The signal processing capabilities of the Zynq Ultrascale+ system-on-chip enable the processing of radar signals while in orbit. Command uplink occurs in S-band at a speed of up to 32 kbit/s, while the speed for S-band data downlink goes up to 2 Mbit/s. The minisatellite weighs 16 kg and has dimensions 0.62 m x 0.56 m x 0.33 m for the bus and antenna array system.
NorSat-3 and NorSat-4 microsatellites
Sensor Complement Spacecraft Launch References
With the AISSat and NorSat constellation, Norway has acquired a unique and highly useful tool for assuring surveillance of the vast maritime areas in the north. However, AISSat-1 and -2 are now operating far beyond their nominal life time, and the constellation will have to be replenished within few years in order to assure a minimum operational capacity in the future. Therefore, NSC (Norwegian Space Center) and FFI (Norwegian Defence Research Establishment) have initiated development of NorSat-3. 1)
The satellite is similar to NorSat-1 and -2 in that it carries an ASR x50 AIS receiver, is based on the NEMO bus from UTIAS/SFL and carries an experimental auxiliary payload, which for NorSat-3 will be a Navigation Radar Detector (NRD). The satellite will operate from a 550-650 km sun synchronous orbit. The bus and satellite operations are funded by the NCA (Norwegian Coastal Administration), whereas the experimental NRD payload is funded by the Norwegian Ministry of Defence and developed by FFI in collaboration with Kongsberg Seatex.
The NorSat-3 mission, with expected launch Q2/Q3 2020, aims to enhance the Norwegian recognized maritime picture with an experimental ship NRD in addition to an AIS receiver. The NRD aims to geolocate ship navigation radars within 10 km circular error probable and verify AIS positions. The 10º NRD antenna field of view will nominally be pointed towards the horizon in order to maximize the area coverage and view of the ships’ navigation radar main lobe. Operating in a near polar low earth orbit the Norwegian area of interest may be covered between 10 and 15 times per day if pointing the antenna suitably. Achieving the desired geolocation accuracy and area coverage, while minimizing polarization loss, requires a highly capable attitude determination and control system. The signal processing capabilities of the Zynq Ultrascale+ system-on-chip enables the radar signal processing in orbit, although also requiring a large platform power generation capability. 2)
Building on past success, the NorSat-3 project is realized in cooperation between the Norwegian Space Agency (NOSA, formerly Norwegian Space Centre, NSC) and the Norwegian Defence Research Establishment (FFI), on assignment from the Norwegian Coastal Administration and the Norwegian Ministry of Defence. The satellite is built by the University of Toronto Institute for Aerospace Studies’ Space Flight Laboratories (UTIAS/SFL), that also delivered the previous AISSat and NorSat platforms.The AIS payload is procured from Kongsberg Seatex (KSX), while the NRD payload is a custom development by FFI undertaken in parallel with the satellite design and development.
From the Norwegian Space Agency perspective, AISSat-1 and -2 not only gave Norwegian governmental users invaluable data and improved greatly the maritime picture in remote areas, they also provided industrial growth in a whole new segment and showed Norwegian authorities and politicians that small satellites were a sensible and cost-efficient way for Norway to use new technology to the benefit of a variety of user groups. However, it was clear that the mass, volume, power and data budget resources available on the AISSat platforms were inadequate for a significant development of the AIS payload and potentially auxiliary payloads. Therefore, a larger and more powerful satellite bus was selected for the NorSat missions.
When launched together in 2017, NorSat-1 and -2 became Norway’s first multi-payload microsatellite with scientific payloads in addition to a more advanced AIS receiver. The larger and more powerful platform allowed additional instruments to do continuous measurements, though in case of conflicts between the payloads, the AIS receiver would get full priority.
The NorSat program has ensured AIS coverage in areas hard to reach with land-based stations, and increased redundancy and update frequency for the monitoring bodies. The introduction of auxiliary payloads has enabled the development of technologies that can enhance the maritime safety in Norwegian waters, while also allowing Norwegian space industry to gain experience in developing competitive products for space based maritime surveillance. The dual use concept has also allowed for multiple sources of funding and maximum distribution of the data among Norwegian governmental users.
Strategically, it is profitable for Norway to develop and operate national satellites in niche areas where NewSpace technology allows better coverage and ownership of data at a reasonable cost. New sensors are developed and space qualified in a stepwise manner as auxiliary payloads, thus allowing risk to be kept at a reasonable level, all while steadily improving the national capabilities. The developments take place nationally, where the knowhow and experience of research laboratories and industry have allowed for competitive technological developments, again allowing Norwegian industry to position itself on niche market segments on the payload side.
The primary objective of the NorSat-3 mission is to secure the long-term space-based AIS operational capability of the Norwegian Coastal Administration. The secondary objective is to demonstrate the operational capability of a ship navigation radar detector (NRD) to uncooperatively detect and geolocate ship radars operating on frequencies which the International Maritime Organization has allocated for civil navigational radars.
A typical ship navigation radar use a rotating antenna to scan its surroundings by emitting a narrow beam of radar pulses and measuring both the delay and returned pulse energy reflected from the surroundings for obstacle size, bearing and distance estimates. When unobstructed, the emitted radar pulses can also be detected in space with a suitably sensitive receiver such as the NRD payload. If the incoming radar pulse direction can be estimated, as the NRD payload does, a location on Earth's surface for the radar may be calculated.
The NRD detections are further intended to be used to verify AIS positions. Unverified AIS positions and ship radar positions without corresponding AIS information can be prioritized for further scrutiny. The main area of interest is the Norwegian High North and to enable frequent revisits and near real time data distribution for maximum operational capability, a near polar inclination orbit is required. The target altitude is between 550 and 720 km resulting from the trade-off between signal strength, area coverage, and minimum and maximum orbital lifetime considerations.
The NRD antenna array consists of four (4) patch antennas, mounted in a specific geometry to enable single satellite angle of arrival (AoA) estimates based on interferometric phase difference measurements with minimal ambiguity. Angle of arrival estimates can then be converted to locations on the earth surface when combined with satellite attitude information. The estimated geolocation accuracy is typically within 10 km circular error probable.
While the antenna pattern for the two monopole AIS antennas on NorSat-3 are near omnidirectional and less sensitive to the satellite attitude, the NRD antenna has a FOV (Field of View) of about 10º and must be pointed suitably. Nominally, the NRD antenna will be pointed towards the Earth horizon in order to maximize the area coverage and view of the ships’ navigation radar narrow main lobe.
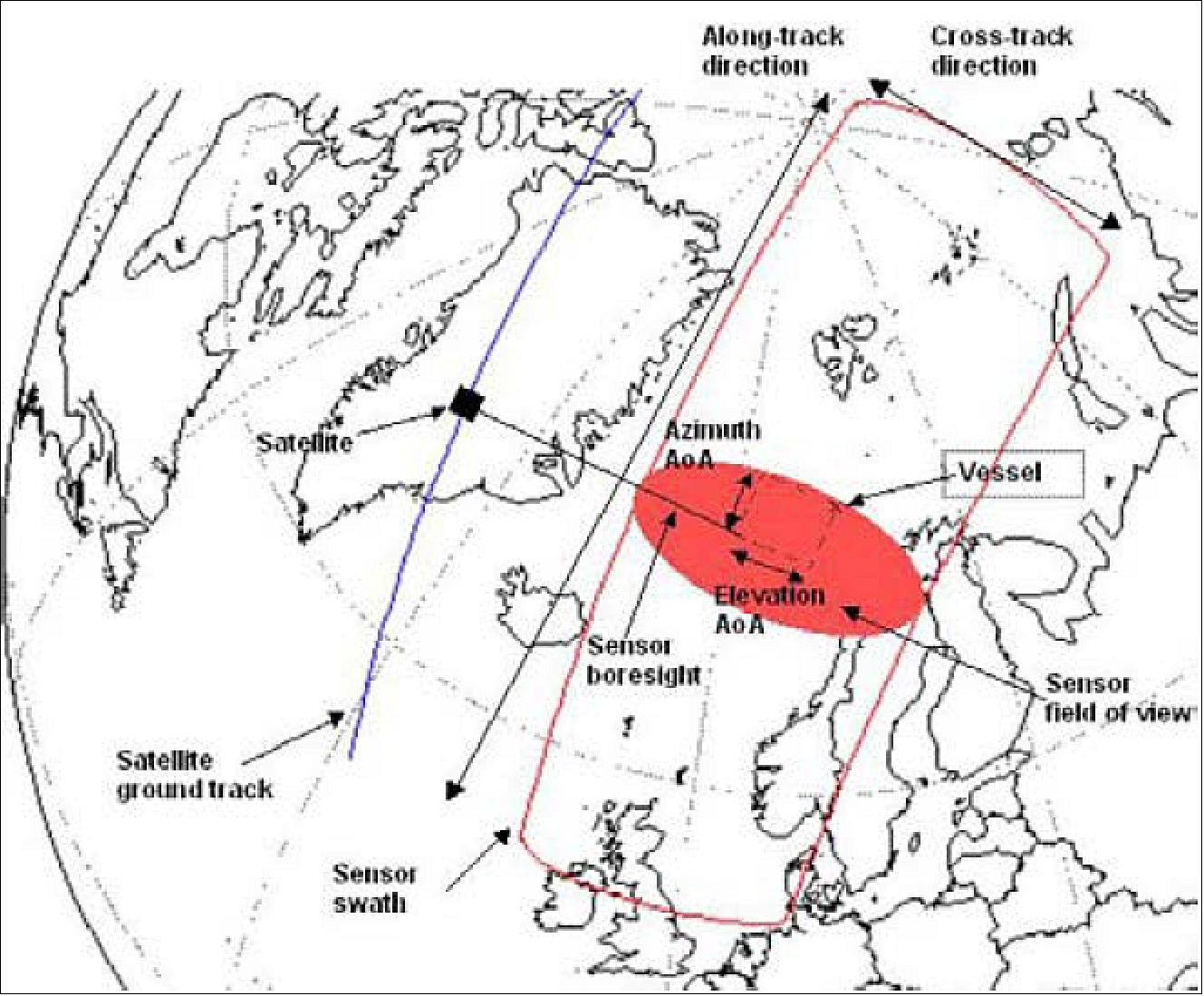
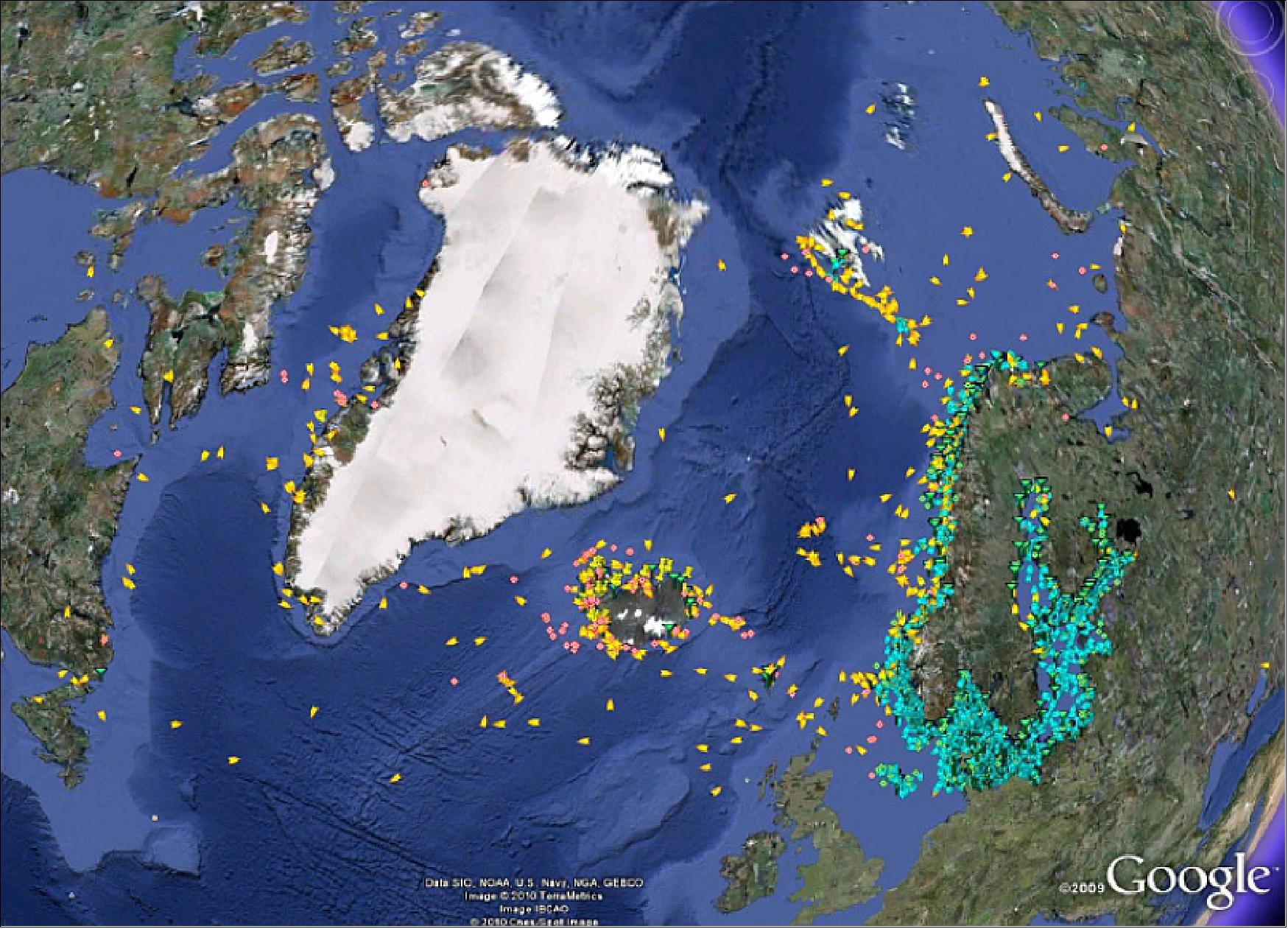
By default, the satellite attitude will be fixed in order to scan an area as the satellite moves as shown in Figure 1.
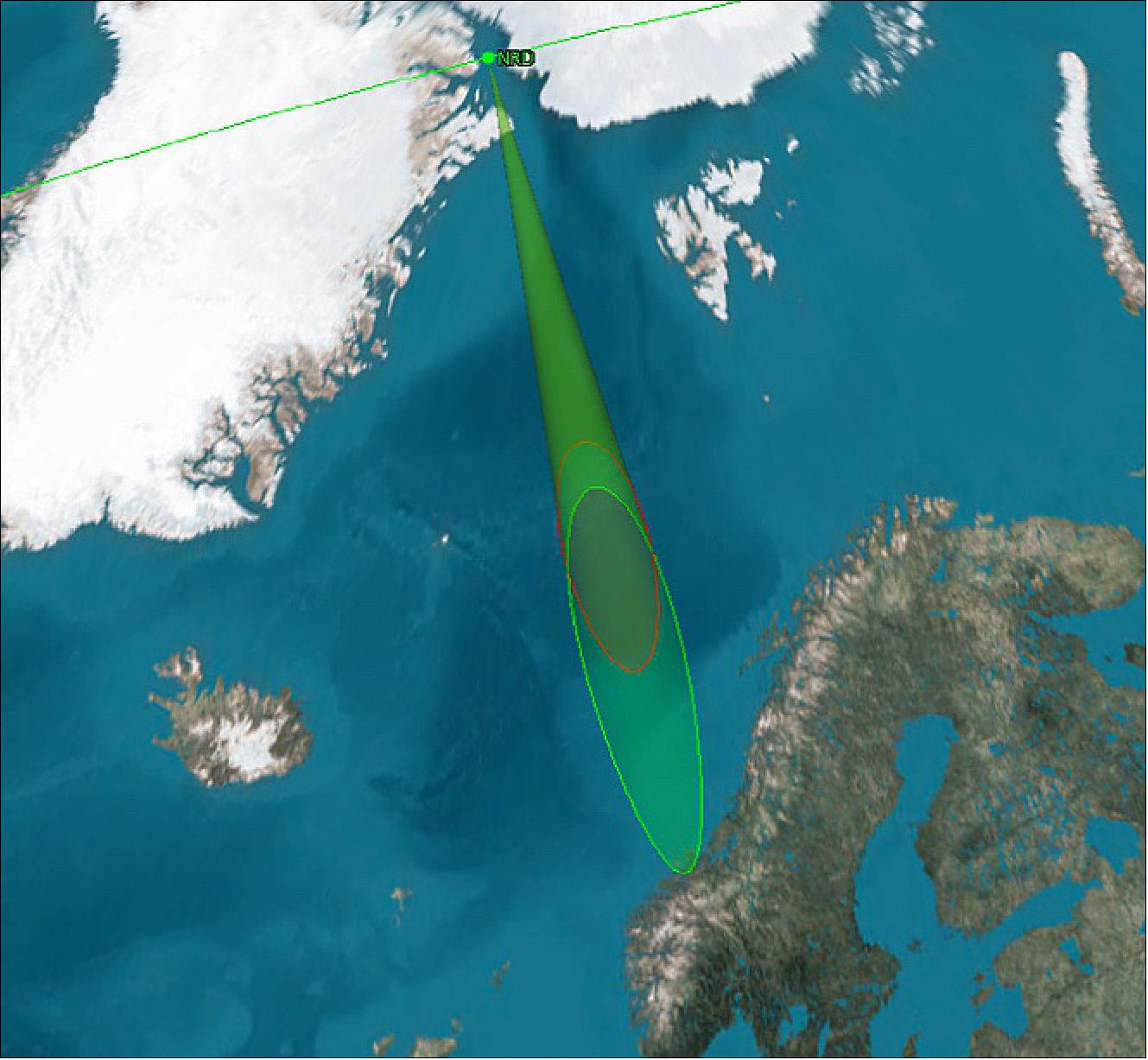
The instantaneous footprint when pointing towards the horizon is 1400 km along the antenna boresight axis and 450 km across. If the antenna boresight is pointed perpendicular to the satellite velocity direction as shown in Figure 1, the width of the track would be 1400 km as the satellites moves. If the antenna boresight is pointed parallel to the satellite velocity direction the width would be reduced to 450 km.
As the mission progresses more complex attitude strategies involving slews about the nadir axis will be tested in order to 1) increase the total coverage of a large area or 2) increase the view time of a particular area or 3) enable multiple views of multiple areas with different viewing angles. Viewing the same area with different viewing angles may increase geolocation accuracy by improved triangulation trigonometry.
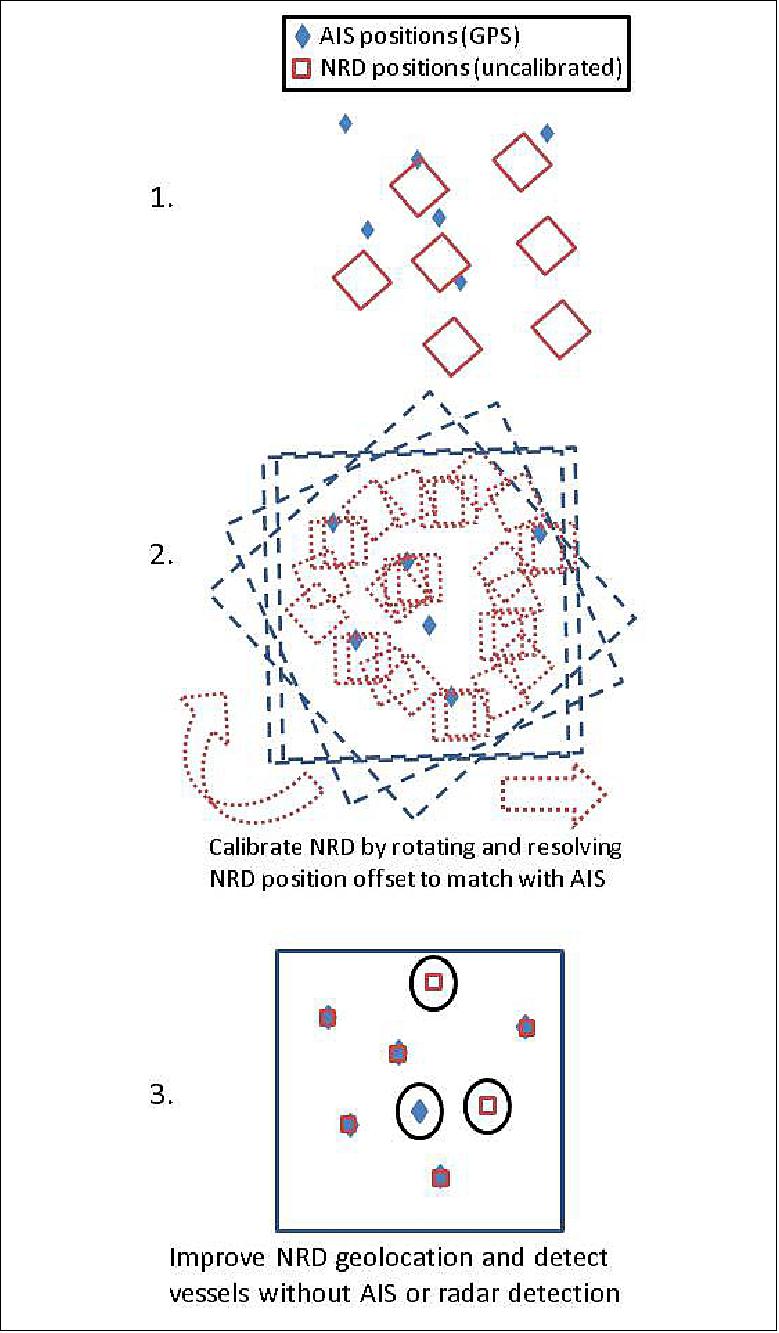
A significant amount of on-board processing will take place to reduce the data volume from individual radar pulse samples, to pulse description words and finally to scan description words where numerous pulse description words are associated with a single ship radar source. The scan description words are then downloaded in near real time and final geolocation calculations are done on ground by triangulation of multiple direction estimates from associated scan description words. Furthermore, similar to the principles of a star-tracker, the AIS positions can be used as a reference map for the NRD positions. By matching the NRD positions with the AIS positions, time varying or fixed NRD phase measurement offsets can be calibrated out and improve the geolocation accuracy of the NRD geolocation estimates as illustrated in Figure 2.
The key design parameters from the phase A study to enable the described mission are listed in Table 1.
Parameter | Value | Comment |
Orbit | 550 – 720 km altitude, high inclination | Design must comply with low earth orbit debris mitigation guideline |
Payload power budget | NRD: Nominal: 25 W, Max: 30 W | 20% duty cycle @ 25W for the NRD, but the satellite power system should accommodate 30W peak with reduced duty cycle equal to 5W orbit average. |
Payload data budget | 25 MByte | Orbit average |
Payload mass budget | 3.5 kg | Mounting plate/interface for antennas not included, assumed part of satellite structure |
Pointing requirement | 0.5 deg, 3-axis |
|
Attitude knowledge requirement | 0.05º | Short term during measurement of a radar sweep, up to 3 seconds |
Antenna element thermal range | -100ºC to +100ºC | Survival |
Sensor complement (NRD, AIS)
NRD (Navigation Radar Detector)
The spaceborne NRD payload design is based on heritage design from experimental terrestrial navigation radar detector systems developed by FFI. Performing similar tasks as the terrestrial heritage systems in space poses a series of new challenges for the payload. The environment is very different, with more extreme temperature loads and variations, vacuum and cosmic radiation to name a few differences. In addition, the much increased distance between the ship radars and the navigation radar detector yields significantly lower signal levels. 4)
The NRD instrument consists of both an antenna and receiver electronics. Both are developed by the Norwegian Defence Research Establishment (FFI) with partners. Often the receiver electronics is referred to as the NRD payload or simply the NRD, and the antenna as the NRD antenna, but strictly the NRD payload comprises both, receiver electronics and antenna.
NRD receiver electronics: The NRD receiver electronics are developed by the Norwegian Defence Research Establishment (FFI) in cooperation with Kongsberg Seatex (KSX). The NRD leverages both FFIs experience developing similar instruments for use on earth, as well as KSX experience from space-based AIS receiver design and other relevant positioning and navigation systems designs. KSX was responsible for the re-design and production of the electronics, while FFI was responsible for the specification, all S/W and testing. The structure was based on KSX ASRx50 AIS structure, modified and produced by FFI for the NRD.
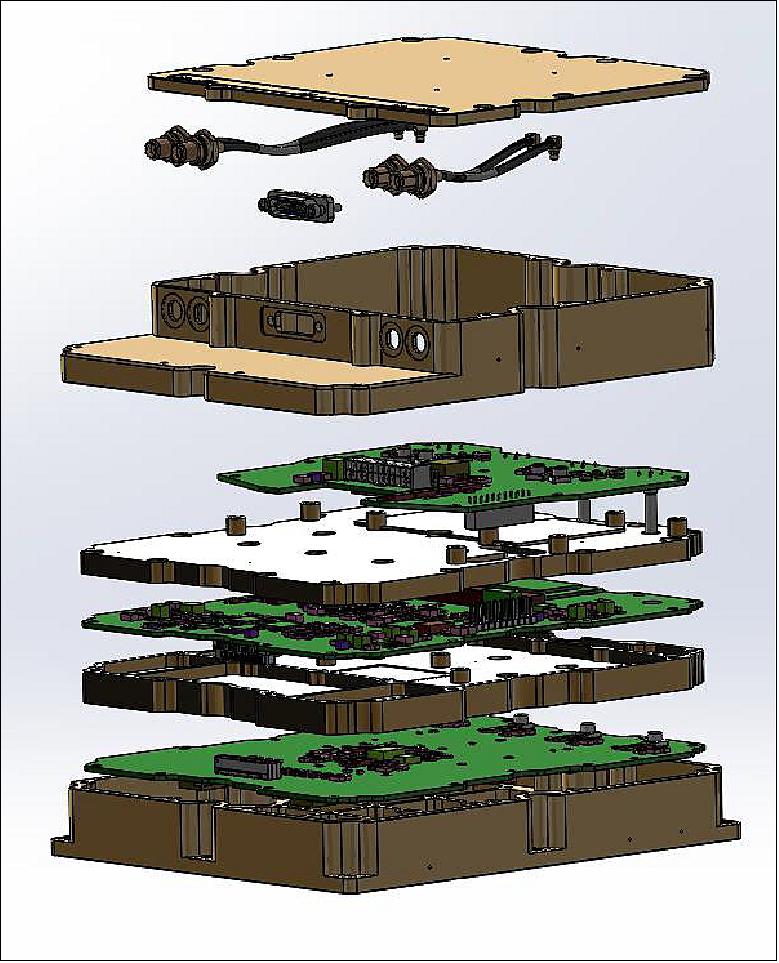
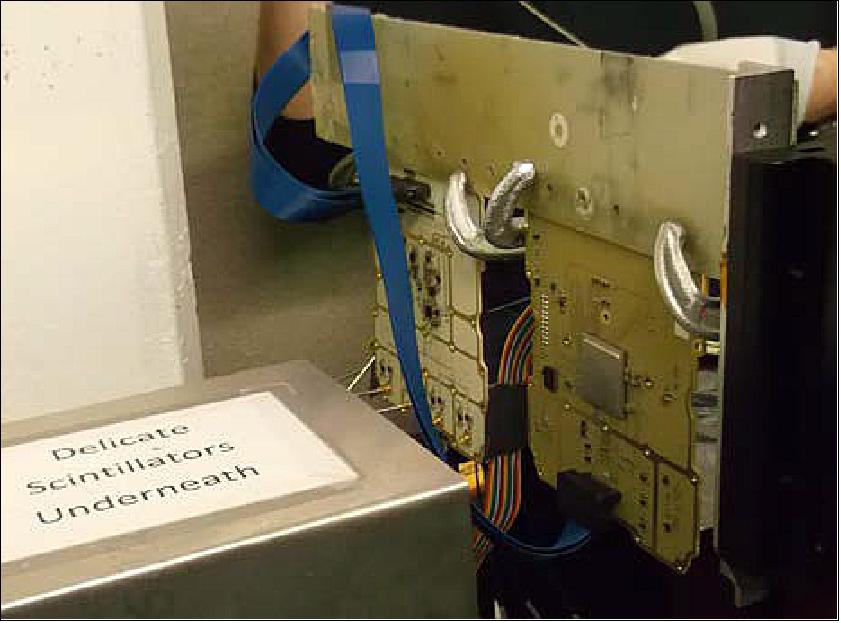
The NRD functionality is distributed over three (3) highly integrated PCB (Printed Circuit Board) assemblies as shown in Figure 3.
The input/output and the first part of the analog front end are implemented on the top board. The remainder of the analog front end and the intermediate frequency channels are implemented on the bottom board. The analog to digital converter and remaining digital signal processing as well as the command and control S/W is implemented on the middle board. The boards are shielded from each other as much as possible for electromagnetic interference mitigation in addition to aiding heat transfer. The NRD is made entirely of industrial, or in some cases automotive, grade commercial off-the-shelf components.
The signal processing capabilities are enabled by the latest generation Xilinx Zynq Ultrascale+ multi-processor system-on-chip (MPSoC) ZU9EG, together with an AD9694 Analog-to-Digital converter from Analog Devices. The digital signal processing functionality of the ADC offloads significant data processing out of the FPGA domain. Paired with the flexibility of the Zynq Ultrascale+ MPSoC, this allows us to create a powerful yet power efficient system, where the available resources can be largely tailored to our specific use-case.
When the preliminary design work/brainstorming for the NRD began in 2017, the Zynq Ultrascale+ MPSoC series stood out due to its built-in safety features and general versatility. The 16 nm Fin Field-effect transistor (FinFET) process the chip is manufactured in also promised increased radiation tolerance compared to previous generations of the Zynq family. At the time of project initiation, very little radiation test data was available for the Zynq MPSoC series. During the development, some radiation test results began to emerge12-15 and while no instantaneous destructive latch-up was reported, latch-ups were a common occurrence. The total dose tolerance was seemingly excellent. All NRD receiver electronics were put through a proton irradiation test at the TRIUMF facilities in Vancouver, Canada, 18-20 December 2018.
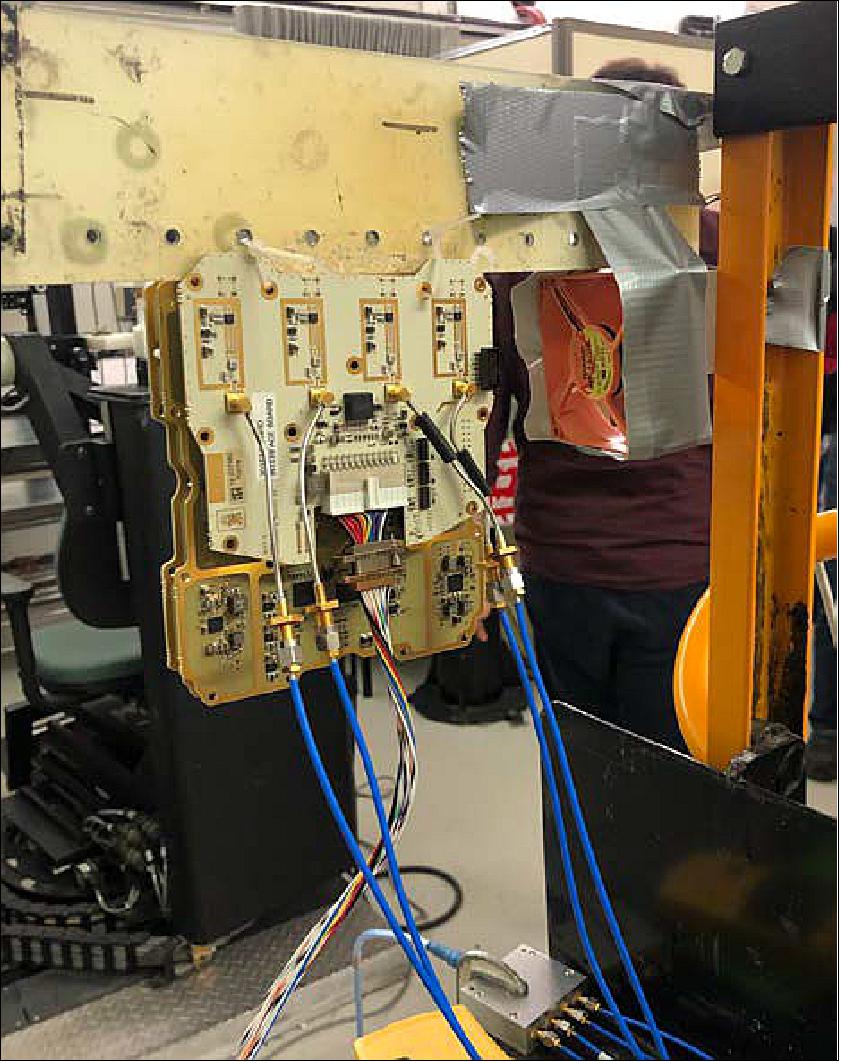
The test aimed to investigate the likelihood of destructive events and understand the expected in-orbit upset rate for the entire NRD electronics equipment and specific flight S/W implementation when subjected to ionizing radiation. Two beam energies were used, 480 MeV and 105 MeV with no destructive failures or death modes induced. First, individual components were targeted with small beam sizes using the 480 MeV beam as shown in Figure 5 to minimise the total dose accumulated while probing for latch-ups and mapping individual component single event upset behaviour. Finally, the full NRD electronics stack was irradiated with the 105 MeV beam as shown in Figure 6, with a beam size large enough to cover the entire instrument for a most in-orbit representative configuration and single event effect impact.
With the combination of regular power cycling (implicit from the 20% NRD duty cycle), external monitoring by the satellite and very low worst-case upset rate estimates of 1-3 upsets requiring a power cycle per year, the operational availability of the NRD is expected to be excellent and near 100% of the required duty cycle. For the Zynq in particular, five (5) latch ups were seen during 480 MeV irradiation (2.4 e10 protons/cm2 fluence), and four (4) during 105 MeV irradiation (9 e10 protons/cm2 fluence). All latch-ups were cleared from power cycling and were tolerated by the significant margin and de-rating of the power design. Some very large latch-ups (>1A) were seen, and on two occasions, when the latch-up was small, the test continued without power cycling and it was noticed that additional latch-ups occurred, building on top of the existing current draw.
The NRD only makes use of a limited amount of the available resources in the Zynq. However, the advanced power management features of the Zynq enables tailoring of resources to a specific architecture, without wasting additional power on idle processing elements. The system as a whole has been designed with this headroom in mind, meaning the NRD has room for more advanced algorithms that can be uploaded to the instrument later on in the mission, a strategy used with great success for the previous AISSat and NorSat missions. The NorSat-3 platform is designed to sustain 25 W NRD power consumption with 20% duty cycle, or 30 W with a corresponding reduction in duty cycle, but the current implementation only uses ca. 19 W, leaving significant margin for future upgrades. The Zynq MPSoC system also functions as a versatile utility for other projects to build on in addition to future iterations of the NRD itself.
In addition to being a piece of very sophisticated hardware, a Zynq Ultrascale+ is a very software "heavy" component. In the NRD, four (4) software applications work in concert for the system to process data. First, the bootloader initiates the Zynq system and puts all other peripherals on the NRD to sleep. On command, the Zynq power management application software is loaded, as well as the NRD's main command & control (C&C) application, which functions as the system master from that point on. When commanded again, the C&C application loads the FPGA configuration and data processing application. In terms of Zynq resource usage, the C&C application runs on the real-time processing unit (RPU) and the data processing application runs on the application processing unit (APU) processor cores of the Zynq, and are completely independent of each other.
NRD antenna: The NRD antenna consists of four (4) array antennas with separate phase centers. The array antennas are mounted in a specific geometry to enable single satellite angle of arrival (AoA) estimates based on interferometric phase difference measurements. While many different antenna element designs were considered, in the end a probe-fed patch antenna was selected due to the size, weight and extreme operating environment (secondary launch and ±100°C survival temperature) limitations imposed by the small satellite mission. In addition, the whole array antenna with feeding network could be made as a single PCB (Printed Circuit Board), with the stack-up as shown in Figure 7.
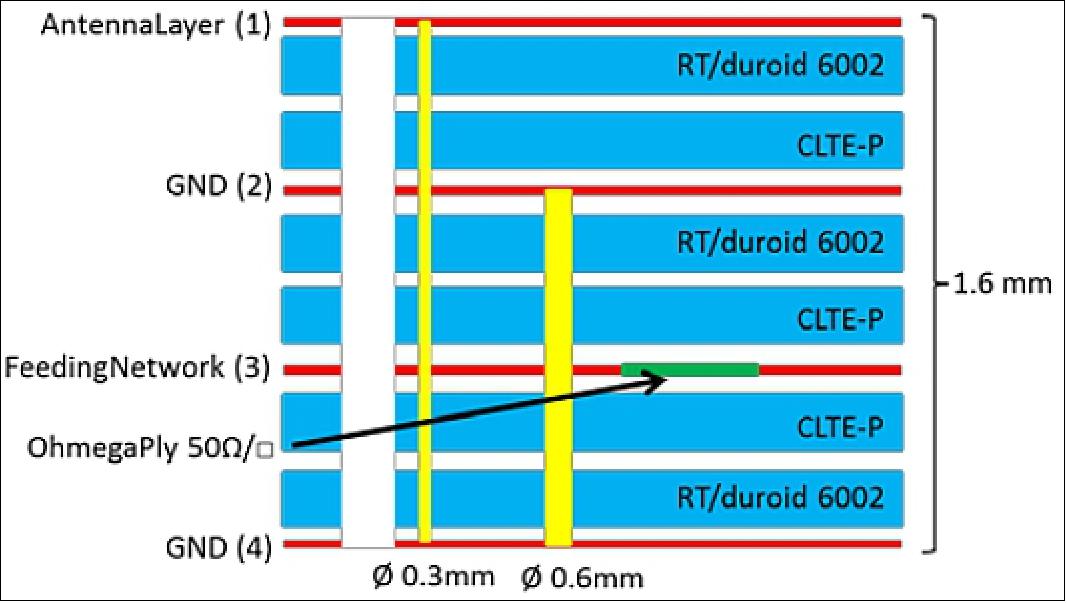
Due to the wide thermal range, it was especially important to match the thermal expansion coefficient (CTE) of the substrate with that of copper to minimise the stress on the vias (vertical interconnect access - VIA). The first material considered was the RO4003C which is a commonly used substrate for microwave applications. It was considered because of availability and flight heritage. However, the z-axis thermal expansion coefficient of RO4003C was poorly matched to copper. Calculations based on the IPC-TR-579 failure model showed that the vias would begin to fail due to thermal expansion induced fatigue well within a year in orbit. A redesign of the antenna elements using RT/duroid 6002 and fewer layers was therefore started in Q1 2018, with valuable support from the French Space Agency (CNES).
RT/duriod 6002 is a polytetrafluoroethylene (PTFE) based substrate with a thermal expansion coefficient well matched with copper and has prior flight heritage. CLTE-P (Figure 6), is an adhesive used to bond PTFE substrate layers together. In addition to these materials, OhmegaPly embedded resistors were used in the feeding network. None of these materials had defined properties over the entire temperature range specified, so thermal testing and characterisation was required. Antenna characteristics were measured during thermal cycling and an accelerated life time test was performed. The antenna characteristics did not change drastically over the temperature range and no failure in the vias or bonding were observed after the life time test.
The production of the antenna was a big challenge. Firstly, it was difficult to find a PCB manufacturer that had the necessary equipment and experience to work with the required materials. Secondly, making high quality vias in a PTFE based substrate is difficult because of smearing. Smearing occurs when the friction between drill bit and material causes the material to melt and smear around the inside of the hole. This leads to poor or non-existing contact between via and copper traces. The only way to avoid smearing in PTFE based substrates is to find correct drill parameters and use a low hit count for the drill bit. Determining the optimal drill parameters proved to be very difficult and the EM and QM antennas were delivered with smearing in Q3 2018. However, electrical and accelerated life time tests were successful and it was decided to build the FM. The PCB manufacturer continued extensive testing to find the optimal drill parameters and a maximum hit count of 50 was used in the end. This resulted in the FM antennas being produced without smearing and they were delivered Q1 2019.
Phase interferometry requires the phase difference between antennas phase centres to be measured. Ideally this phase difference only depends on the frequency, baseline and angle of arrival (AoA), such that the AoA can be estimated from the phase difference measurements. However, the actual positions of the antenna phase centres, and implicitly the baseline, are dependent on the angle of arrival. Thus, to be able to calculate the true angle of arrival estimates the NRD antenna must be characterised and the measured phase centre locations must be used in the AoA estimates. Furthermore, the cables, connectors and even the NRD electronics itself introduce a phase offset that must also be calibrated for true angle of arrival estimates. The phase offset introduced by cables and electronics is independent of angle of arrival however, but may vary with frequency and temperature.
Several calibration methods are possible, from fully in-orbit, via large outdoor test ranges, to smaller anechoic chamber facilities or a combination thereof. For the NorSat-3, the NRD antenna phase center offset and phase center variation as a function of signal direction are characterized in the far field for each antenna independently using an anechoic chamber. The final calibration will be performed continuously in-orbit based on recorded data and AIS association. While a very precise antenna characterisation on ground should make the in-orbit calibration simpler, launch and temperature variations in-orbit would likely introduce additional offsets that could not be accounted for during ground calibration in any case. As long as the antenna characterisation is not too coarse, there should be low vessel density areas where it is possible to associate radar locations with AIS positions to better characterize the antenna and calibrate the system in-orbit.
AIS (Automatic Identification System)
The AIS receiver in NorSat-3 is the state-of-the art ASR x 50 AIS receiver from Kongsberg Seatex AS, identical to the flight proven AIS receivers in NorSat-1 and NorSat-2. The ASRx50 has been shown to yield a significant AIS message and ship detection performance increase compared with previous generation AIS receivers, resulting in substantially improved ship tracking performance. 5)
Spacecraft
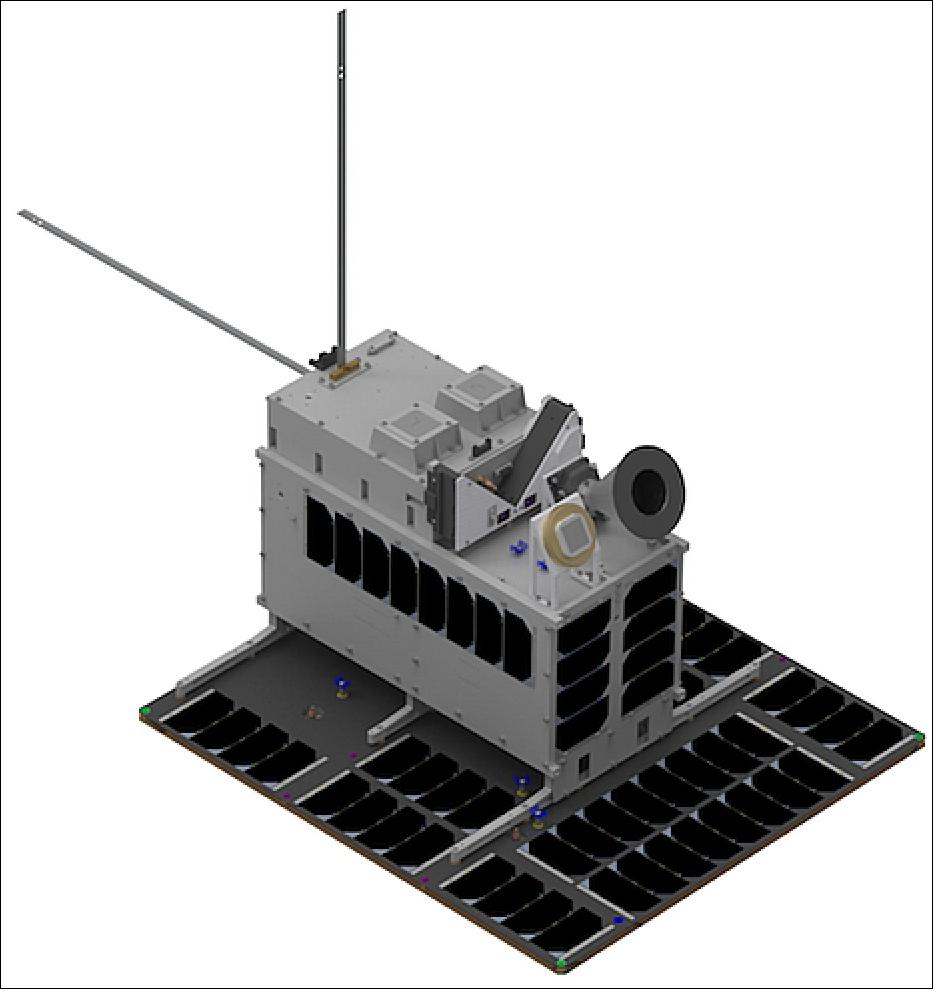
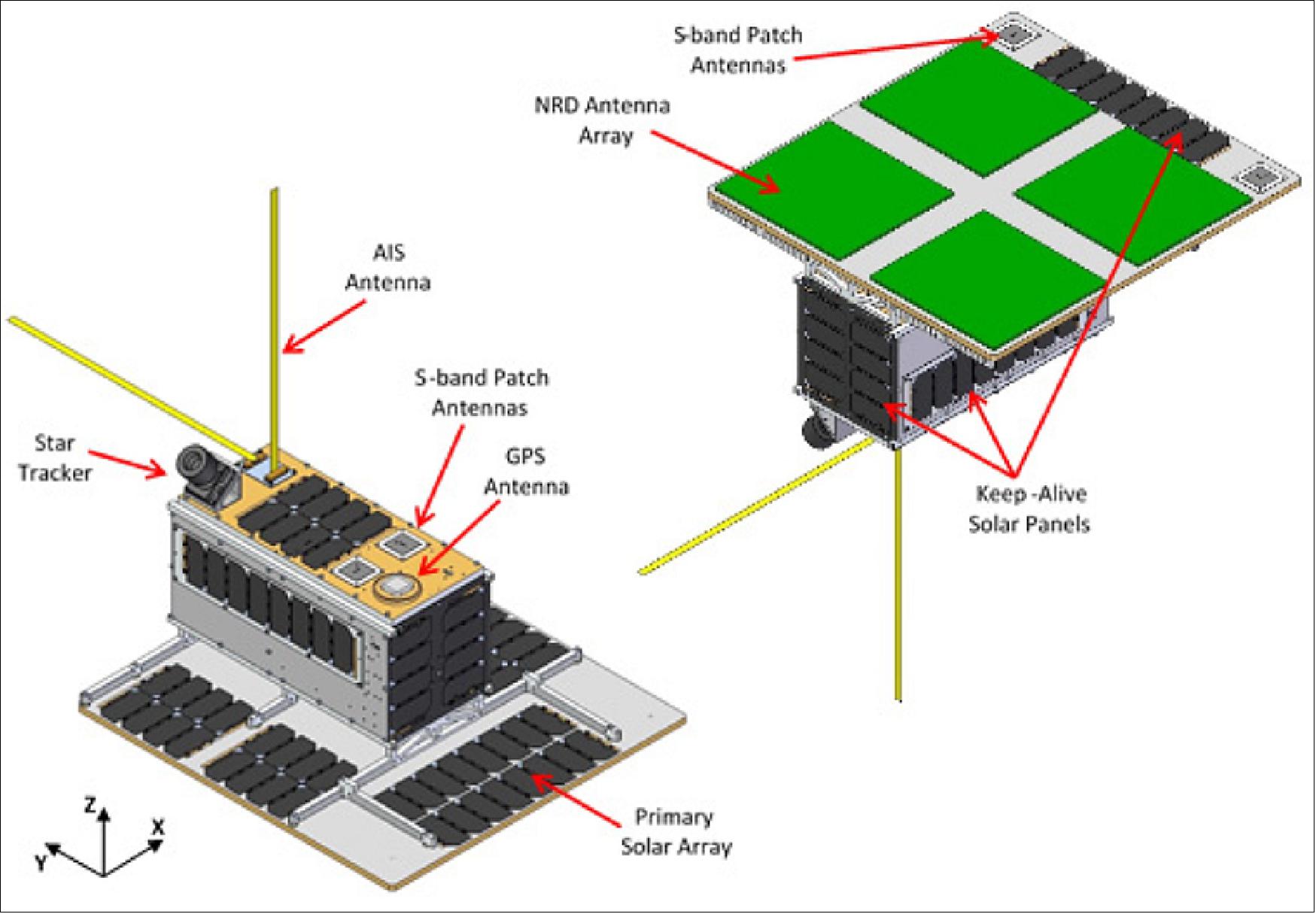
The NorSat-3 spacecraft is tailored to accommodate the new NRD payload while maintaining as much heritage design from NorSat-1 & NorSat-2 as possible. In order to support the large antenna array for the NRD payload, a composite panel is mounted to the exterior of the spacecraft. In addition to the NRD antenna, this composite panel is also used to support the primary solar array for the spacecraft. Overall, the spacecraft provides significant power generation and power handling to support the NRD payload. In addition to the suite of attitude hardware used on-board NorSat-1 and NorSat-2, the NorSat-3 spacecraft includes a star tracker. Along with the other attitude sensors, reaction wheels, and SFL’s attitude control software, the star tracker allows the pointing requirements for the NRD payload to be achieved. The overall spacecraft layout – including the placement of AIS antennas, star tracker, GPS antenna, and telemetry and command antennas – has been selected to maximize performance given the operational attitude profile for the NRD payload. The high performance, highly configurable NEMO platform is a key factor in making the NorSat-3 mission possible.
Design Characteristic / Performance Metric | Value |
Spacecraft mass | 16.0 kg |
Bus dimensions - without array | 0.44 x 0.27 x 0.2 m |
Bus dimensions - with array | 0.62 x 0.56 x 0.33 m |
Peak Power Generation (end-of-life) | 48 W |
Energy storage | 108 Whr |
Command uplink | S-band, 32 kbit/s |
Data downlink | S-band, up to 2 Mbit/s |
The spacecraft is compatible withUTIAS/SFL’s XPOD deployment system which allows for large pre-deployed appendages such as the NRD antenna and solar cell array. The deployment system also allows the AIS antennas to be held in a stowed position for launch and automatically released when the spacecraft is deployed from the launch vehicle. Power generation in all attitudes, along with omni-direction coverage for the S-band radio links ensures that the spacecraft is highly robust. A star tracker and reaction wheels allow for precise attitude control, enabled by SFL’s heritage on-board attitude software.
Launch: The NorSat-3 microsatellite was launched as a passenger payload on 29 April 2021 at 01:50 UTC (10:50 local time in Kourou on April 28), on a Vega launch vehicle operated by Arianespace which lifted off successfully from the Guiana Space Center, Europe’s Spaceport in French Guiana (South America). This mission marked Vega’s return to flight, and was also the second successful launch by Arianespace’s teams in less than 72 hours. - This launch orbited Pleiades Neo-3 as primary payload as the first satellite in the new very-high-resolution Earth observation constellation operated by Airbus, as well as five innovative small satellites using the advanced SSMS (Small Spacecraft Mission Service) system. 6) 7)
The development of NorSat-4 is ongoing with a launch foreseen in late 2022 (information provided by NOSA).
Passenger Payloads
Arianespace’s 18th Vega mission also deployed several small satellites using its innovative rideshare service SSMS (Small Spacecraft Mission Service).
• NorSat-3, a microsatellite of NOSA
• ELO Alpha (Eutelsat LEO for Objects), a 6U CubeSat built by Tyvak International SRL, to provide IoT.
• Bravo, a 6U CubeSat demonstration mission of Aurora Insight, Denver, CO, built by NanoAvionics. The objective is to gather data on terrestrial and satellite communications. The data is used to produce valuable information on RF spectrum and the networks that rely on it.
• Lemur-2 x 2, 3U CubeSats of Spire Global Inc., San Francisco, providing Earth observation. The company currently operates a fleet of more than 100 CubeSats.
On this flight, Vega made use of part of its ESA-developed Small Spacecraft Mission Service (SSMS) multiple payload adapter. The SSMS is a modular lightweight carbon-fibre structure, which can accommodate multiple light satellites with a mass of 1–500 kg (Ref. 7).
The flexibility of the SSMS system allows spare capacity on Vega to be used to launch small satellites piggyback to the main customer payload. Using more than one burn of the upper stage means that they can be delivered into different orbits too.
Europe’s first use of the SSMS was a rideshare mission in September last year, carrying 53 small satellites. This demonstrated Vega’s new service to offer affordable routine access to space for multiple light satellites.
With a liftoff mass of 920 kg, Earth observation satellite Pléiades Neo-3 was the first to be released into its target Sun-synchronous orbit about 54 minutes into the mission.
This was followed about 47 minutes later by the coordinated release of Norway’s NorSat-3 microsatellite and four CubeSats: Bravo, two Lemur-2 satellites and Tyvak-128A.
Complying with debris regulations to help keep space clean, Vega’s upper stage fired a final time to ensure direct reentry and burn up high in the atmosphere over the ocean.
Development Status
• In spite of the significant problems and delays in manufacturing the NRD (Navigation Radar Detector) antenna, the overall schedule has not been delayed much thanks to a close cooperation between the partners. Furthermore, the NRD payload did not secure full funding until Q3 2017, which made the parallel development of the NRD payload and satellite challenging (Ref. 2).
- With a project start mid Q1 2017 the original target flight readiness review was ambitiously scheduled for the end of Q2 2019. As of June 2019, all payload flight models and satellite subsystems have passed their relevant unit environmental tests and a risk reduction integrated satellite level EMC test has been successfully completed after some debugging. The satellite integrated system level test campaign is scheduled to begin August 2019, with the flight readiness review now scheduled for November 2019.
- Once launched, based on previous experience, the AIS payload will go fully operational as soon as basic commissioning of the spacecraft is complete. The NRD instrument will possibly require a longer commissioning period to calibrate the instrument, followed by an experiments phase. The experiments phase will investigate the basic performance parameters such as detection probability and geolocation accuracy in addition to experimenting with instrument and satellite parameters to maximize said performance and the value added to the recognized maritime picture. The next step in the experiment phase is to develop operational procedures to configure and operate the instrument and satellite to maximize the utility for the users. The goal is to enter an operational capability demonstration phase after 1 year of experimentation.
• The NorSat-3 project passed successfully the CDR (Critical Design Review) in August 2018, and launch is currently scheduled for Q1 2020 (Ref. 1).
- In parallel with satellite and payload manufacturing, FFI is designing and developing an NRD Mission Center from which it will conduct experimental mission operations of the NRD payload for a nominal period of one year after satellite commissioning. Satellite operations will be conducted by Statsat AS from its AISSat and NorSat operations center at Skøyen, Oslo.
- NorSat-4 and further evolution: Norway is devoted to continuing the national effort to provide governmental users with relevant near real-time satellite-based maritime surveillance data. In this regard, more AIS satellites will be developed, including NorSat-4 for which phase A studies are expected to start in late 2018. NorSat-4 will be based on similar platform technology as the other NorSat satellites, and is foreseen to carry one or more auxiliary payloads relevant to the maritime domain. One option envisaged is an electro optical imager currently under study by FFI.
• January 10, 2018: SFL (Space Flight Laboratory) announced today that NorSat-3, a 15 kg microsatellite, has been ordered by the Norwegian Space Centre, and that construction is well underway. NorSat-3 follows from the highly successful NorSat-1 and NorSat-2 satellites also built by SFL. 8)
- NorSat-3 (Figure 1) will carry an experimental navigation radar detector to augment ship detection capabilities from its Automatic Identification System (AIS) receiver. NorSat-3 will add another satellite to Norway’s assets in space – four in total so far, all producing data related to maritime traffic monitoring. Combining a navigation radar detector and AIS receiver will potentially provide much better maritime awareness for the Norwegian Coastal Administration, Armed Forces and other maritime authorities.
- The satellite is funded by the Norwegian Coastal Administration and managed by the Norwegian Space Centre. The Norwegian Defence Research Establishment (FFI) is leading the development of the radar detector payload which is funded by the Ministry of Defence. NorSat-3 is designed to capture signals from frequencies which the International Maritime Organization has allocated for civil navigational radars.
- Automatic Identification System (AIS) message reception alone may not provide a complete picture of maritime traffic. The problem of missing or manipulated AIS messages can only be addressed through the use of supplemental sensing technology. In the case of NorSat-3, a navigation radar detector provides some supplemental support. Detections of navigation radar from ships will provide the ability to verify the accuracy of received AIS messages and also the ability to detect ships whose AIS messages have not been received.
- NorSat-3 represents another barrier breaking, paradigm shifting advance in smaller satellites using SFL’s Next-generation Earth Monitoring and Observation (NEMO) platform.
References
1) Jon Harr, Tyler Jones, Bo N. Andersen, Torkild Eriksen, Andreas N. Skauen, Knut Svenes, Eirik V. Blindheim, Ivar Spydevold, Alex Beattie, Laura M. Bradbury, Brad Cotten, Daniel Kekez, Payam Mehradnia Robert E. Zee, Frode Storesund, ”Microsatellites for Maritime Surveillance - an update on the Norwegian Smallsat Program,” Proceedings of the 69th IAC (International Astronautical Congress) Bremen, Germany, 1-5 October 2018, paper: IAC-18.B4.4.2, URL: https://iafastro.directory/iac
/proceedings/IAC-18/IAC-18/B4/4/manuscripts/IAC-18,B4,4,2,x45204.pdf
2) Andreas Nordmo Skauen, Berit Jahnsen, Tore Smestad, Eirik Skjelbreid Grimstvedt, Fredrik Gulbrandsen, Knut Svenes, Brad Cotten, Robert E. Zee, Eirik Voje Blindheim, Jon Harr, Harald Rosshaug, Kjell Kristiansen, Frode Storesund, ”NorSat-3 – next generation Norwegian maritime surveillance,” Proceedings of the 33rd Annual AIAA/USU Conference on Small Satellites, August 3-8, 2019, Logan, UT, USA, paper, SSC19-V-09, URL: https://digitalcommons.usu.edu/
cgi/viewcontent.cgi?article=4393&context=smallsat
3) ”NorSat-3 Ship Surveillance with a Navigation Radar Detector,” FFI Facts, September 2018, URL: https://www.startpage.com/do/dsearch?
query=Launch+of+NorSat-3+satellite&cat=web&pl=ext-ff&language=english
4) ”NorSat-3 Ship Surveillance with a Navigation Radar Detector,” FFI Facts, URL: https://publications.ffi.no/nb/item/asset/dspace:6141/FFI-Facts_NorSat_Engelsk_web.pdf
5) Andreas Nordmo Skauen, ”Ship tracking results from state-of-the-art space-based AIS receiver systems for maritime surveillance,” CEAS (Council of European Aerospace Societies) Space Journal, Online 11 April 2019, https://doi.org/10.1007/s12567-019-00245-z, URL: https://link.springer.com/content/pdf/10.1007%2Fs12567-019-00245-z.pdf
6) ”18th Vega mission marks Arianespace’s second successful launch in 72 hours,” Arianespace Press Release, 28 April 2021, URL: https://www.arianespace.com/press-release/vega-vv18-launch-success/
7) ”Vega’s first launch this year,” ESA Enabling & Support, 29 April 2021, URL: https://www.esa.int/Enabling_Support/Space_Transportation
/Europe_s_Spaceport/Vega_s_first_launch_this_year
8) ”NorSat-3 Ordered by Norwegian Space Centre, Satellite Under Construction at SFL,”UTIAS/SFL, 10 January 2018, URL: https://web.archive.org/web/20220817020451/https://www.utias-sfl.net/?p=2730
The information compiled and edited in this article was provided by Herbert J. Kramer from his documentation of: ”Observation of the Earth and Its Environment: Survey of Missions and Sensors” (Springer Verlag) as well as many other sources after the publication of the 4th edition in 2002. - Comments and corrections to this article are always welcome for further updates (eoportal@symbios.space).