Meteor-M-2 Meteorological Mission
EO
Atmosphere
Ocean
Cloud type, amount and cloud top temperature
Launched in July 2014, Meteor-M-2 (also referred to as Meteor-M N2 or as Meteor-M2) is a follow-on polar-orbiting meteorological mission to Meteor-M-1. Jointly operated by the Russian Federal Space Agency (Roskosmos) and Federal Service for Hydrometeorology and Environmental Monitoring of Russia (Roshydromet), Meteor-M-2 provides global observations of the Earth’s surface and atmosphere, with applications in analysing and forecasting weather, global climate change, seawater, analysing and predicting space weather, solar wind, ionospheric research and Earth’s magnetic field.
Quick facts
Overview
| Mission type | EO |
| Agency | ROSKOSMOS, ROSHYDROMET |
| Mission status | Operational (nominal) |
| Launch date | 08 Jul 2014 |
| Measurement domain | Atmosphere, Ocean, Land, Gravity and Magnetic Fields, Snow & Ice |
| Measurement category | Cloud type, amount and cloud top temperature, Liquid water and precipitation rate, Atmospheric Temperature Fields, Cloud particle properties and profile, Aerosols, Multi-purpose imagery (ocean), Radiation budget, Multi-purpose imagery (land), Surface temperature (land), Vegetation, Albedo and reflectance, Gravity, Magnetic and Geodynamic measurements, Surface temperature (ocean), Atmospheric Humidity Fields, Ozone, Trace gases (excluding ozone), Sea ice cover, edge and thickness, Snow cover, edge and depth, Ocean surface winds |
| Measurement detailed | Cloud top height, Ocean imagery and water leaving spectral radiance, Cloud cover, Precipitation intensity at the surface (liquid or solid), Aerosol optical depth (column/profile), Cloud type, Cloud imagery, Aerosol Extinction / Backscatter (column/profile), Cloud liquid water (column/profile), Land surface imagery, Upward long-wave irradiance at TOA, Aerosol effective radius (column/profile), Fire fractional cover, Earth surface albedo, Magnetic field (scalar), Magnetic field (vector), Short-wave Earth surface bi-directional reflectance, Land cover, Atmospheric specific humidity (column/profile), O3 Mole Fraction, Atmospheric temperature (column/profile), Land surface temperature, Sea surface temperature, CH4 Mole Fraction, Sea-ice cover, Snow cover, Wind speed over sea surface (horizontal), Normalized Differential Vegetation Index (NDVI), Sea-ice thickness, Sea-ice type, Height of tropopause |
| Instruments | DCS, KMSS, IKFS-2, MTVZA-GY, MSU-MR, GGAK-M, Severyanin-M, MeteoSAR |
| Instrument type | Imaging multi-spectral radiometers (vis/IR), Space environment, Imaging multi-spectral radiometers (passive microwave), Data collection, Imaging microwave radars, Atmospheric temperature and humidity sounders |
| CEOS EO Handbook | See Meteor-M-2 Meteorological Mission summary |

Summary
Mission Capabilities
Meteor-M-2 carries seven instruments: the Low-resolution Multispectral Scanner (MSU-MR), Multispectral Scanning Imaging System (KMSS), Microwave Imaging/Sounding Microwave Radiometer (MTVZA-GY), Geophysical Monitoring System Komplex (GGAK-M), Infrared Fourier Spectrometer-2 (IRFS-2), Onboard Radar Complex (Severyanin-M OBRC) and Data Collection System (DCS).
MSU-MR images global and regional cloud cover, surface temperature, vegetation, snow and ice, while KMSS captures multispectral images of land and sea surfaces, and ice cover. MTVZA-GY monitors atmospheric temperature and humidity profiles, precipitation, sea-level wind speed and snow/ice coverage. GGAK-M monitors the space environment, IRFS-2 provides atmospheric temperature and humidity profiles, and Severyanin-M captures radar images in X-band for land and sea surface monitoring. DCS collects in-situ data from Data Collection Platforms (DCPs) in the ground segment with location capability.
Performance Specifications
MSU-MR provides imagery in six bands in the Visible (VIS) and Infrared (IR) spectral regions with a spatial resolution of 1 km and a swath width of 2800 km. Meanwhile, KMS comprises three pushbroom cameras in the Visible and near-infrared (VNIR) range with spatial resolution ranging from 60 - 120 m and swath widths ranging from 940 - 960 km. MTVZA-GY has a swath width of 1500 km and horizontal and vertical spatial resolutions ranging from 16 - 198 km and 1.5 - 7 km respectively, and Severyanin-M OBRC has a swath width of 450 - 600 km and spatial resolution of 400 - 1000 m.
Meteor-M-2 is in a sun-synchronous circular orbit, at an altitude of 825 km and an inclination of 98.8°. The Local Time on Ascending Node (LTAN) is at 0930 hours with a period of 101.41 minutes.
Space & Hardware Components
Meteor-M-2 was developed by the All-Russian Scientific Research Institute Of Electromechanics (VNIIEM), Moscow, as the prime contractor to Roskosmos.
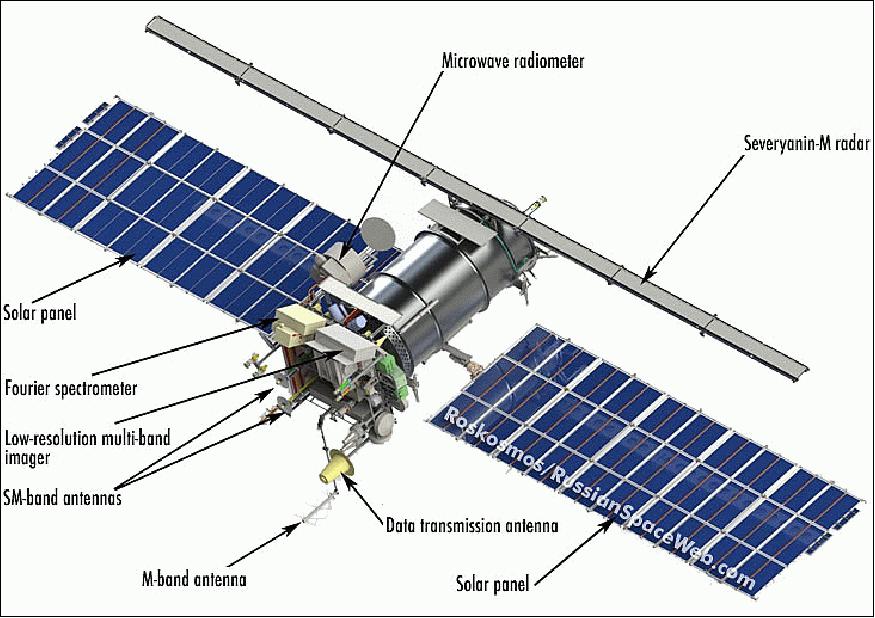
Meteor-M-2 is a three-axis stabilised satellite consisting of a large cylindrical body structure, two deployable sun-tracking solar arrays, a large deployable synthetic aperture radar antenna and a rectangular payload deck that hosts the majority of instruments and instrument apertures of the satellite being pointed to Earth for observations. The satellite’s launch mass was 2778 kg, with a payload mass of around 1200 kg.
Meteor-M-2 Meteorological Mission
Overview Spacecraft Launch Mission Status Sensor Complement Ground Segment References
The Meteor-M-2 (also referred to as Meteor-M2, or as Meteor-M N2) satellite is a Roskosmos/Roshydromet/Planeta (Moscow, Russia) follow-on polar-orbiting meteorological mission to Meteor-M-1 (launch Sept. 17, 2009). The overall objectives of the Meteor-M-2 mission are to provide global observations of the Earth's surface and its atmosphere. The data acquired by the satellite is used for the following purposes:
• Weather analysis and forecasting on global and regional scales
• Global climate change monitoring
• Sea water monitoring and forecasting
• Space weather analysis and prediction (solar wind, ionospheric research, Earth's magnetic field, etc.).
Status of the Current and Future LEO Satellite Systems
According to the Russian Federal Space Program, the polar-orbiting satellites system should consist of three hydrometeorological and one oceanographic satellite. 1)
The Meteor-M2 spacecraft was launched on July 8, 2014. Meteor-M2 consists of three operational hydro-meteorological satellites, designed to monitor global weather, the ozone layer, the ocean surface temperature and ice conditions to facilitate shipping in polar regions of our planet. Three additional satellites are planned for the series, launching in 2023, 2025 and 2026.
Overview of the Sensor Complement of the Meteor-M2 and Meteor-M2-1 Missions
• MSU-MR Scanning Radiometer (1 km spatial resolution multichannel scanning unit, 6 channels, VIS/IR)
• KMSS VIS Scanning Imager (6 channels implemented by 3 cameras, 50 m and 100 m spatial resolution)
• MTVZA-GY Imaging/Sounding Microwave Radiometer (module for temperature and humidity sounding of the atmosphere, 26 channels, 10.6-183 GHz)
• IRFS-2 Infrared FTS (Fourier Transform Spectrometer), an (IR atmospheric sounder, spectral range 5-15 µm, spectral resolution ~ 0.5 cm-1), also referred to as IKRS-2
• GGAK-M Heliogeophysical Measurements Suite
• Severjanin X-band Side-Looking Radar (500 m and 1000 m resolution)
• DCS (Data Collection System)
Roskosmos plans to launch five similar satellites with the same payload as Meteor-M2, i.e. Meteor-M2-1, Meteor-M2-2, Meteor-M2-3, Meteor-M2-4, Meteor-M2-5. The goal is to create a system of identical operational meteorological satellites in the morning and afternoon orbits.
Regarding the future Meteor-M3 oceanographic satellite, this spacecraft is currently under development. Its payload will consist of:
• Multimode radar based on APAA (Active Phased Array Antenna) technology (X-band, spatial resolution from 1 to 500 m, swath width of 10 - 750 km)
• Scatterometer (Ku-band; 25 x 25 km spatial resolution, swath 1800 km)
• Coastal Zone Scanner (4 channels, visible range, 80 m spatial resolution, swath 800 km)
• Ocean Color Scanner (8 channels, visible range, 1 km spatial resolution, swath 3000 km)
• Radio-occultation instrument (Radiomet).
Spacecraft
The Meteor-M spacecraft series are developed by RSC (Research and Production Corporation) VNIIEM , Moscow as prime contractor to Roskosmos. Each satellite in the series has a mass of ~2,800 kg including ~1,250 kg for the multi-instrument payload suite of the satellites. The Meteor-M satellites share a series of common instruments, but some instruments are specific to each spacecraft to increase the amount of available data.
The Meteor-M2 spacecraft consists of large cylindrical body structure, two deployable sun-tracking solar arrays, a large deployable synthetic aperture radar antenna and a rectangular payload deck that hosts the majority of the instruments and instrument apertures of the satellite being pointed to Earth for observations.
The spacecraft is three-axis stabilized. Attitude sensing is being provided with a star tracker, referred to as BOKZ-M. The S/C pointing accuracy is 0.1º, the angular drift rate is 0.0005º/s. A navigation subsystem (GPS/GLONASS receiver) provides orbit determination and timing services.
The BOKZ-M star tracker is of Resurs-DK1 (launch June 15, 2006) heritage. The BOKZ family instrument is a monoblock with the digital TV camera based on a CCD array detector, a signal processor based computer and a secondary power supply unit. The instrument is providing a pointing accuracy of 2 / 20 arcsec (x, y / z), the attitude data is updated at a frequency of 0.3 Hz, the instrument has a mass of 4 kg, power consumption of 11.2 W, and a size of 37 cm x 23 cm x 23 cm.
Solar power of 2 kW (BOL) is provided by two deployed panels which are continuously sun pointed for optimum power generation (solar panel area of 23 m2, solar array span of 14 m).
The S/C launch mass is 2778 kg (payload mass of ~1200 kg). The S/C design life is 5 years with a goal of additional service provision.
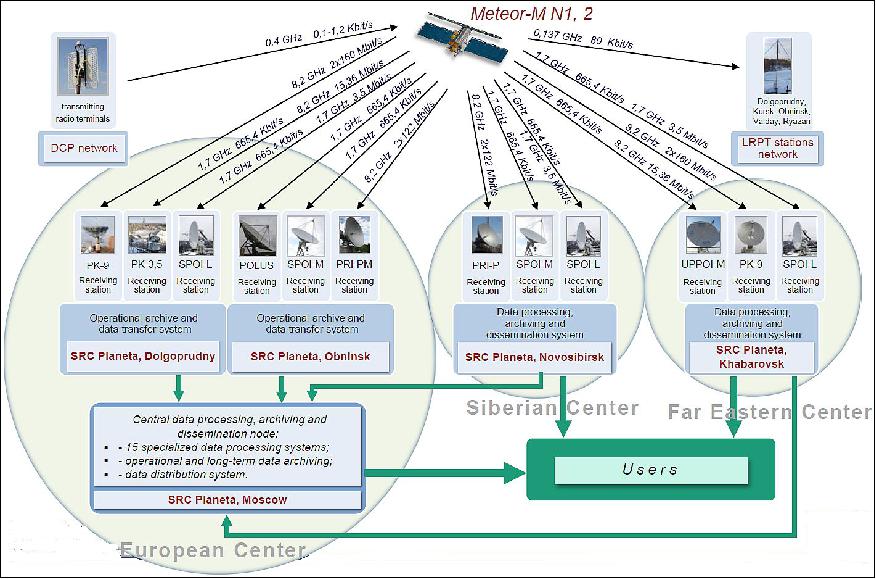
RF communications: Use of LRIT (Low Rate Information Transmission) and HRIT (High Rate Information Transmission) communication standards according to WMO (World Meteorological Organization) to permit data exchange on an international level.
1 | X-band data transmission | 8025-8400 MHz |
| Nominal carrier frequency | 8192 (T1); 8320 (T2) MHz |
| Data transmission rate | 15.36, 30.72, 61.44, or 122.88 Mbit/s (on each channel) |
| Transmitter output power | 10 W |
| Data modulation type | RFM, DRFM (Digital Radio Frequency Memory) |
2 | L-band data transmission | 1.69 - 1.71 GHz |
| Nominal carrier frequency | 1.7 GHz |
| Data transmission rate | 665.4 kbit/s (HRPT transmission) |
| Transmitter output power | 5 W |
| Modulation type | PSK (Phase-Shift Keying) |
3 | VHF-band data transmission | 137-138 MHz (MSU-MR bands in LRPT format) |
| Data transmission rate | 80 kbit/s (LRPT transmission) |
4 | Onboard data collection and transmission system from DCPs (Data Collection Platforms) | |
| No of DCPs in visibility zone, common | 150, < 500 |
| Message volume | 250 bit |
| Data transmission rate | 1200 or 400 bit/s |
| Location accuracy of DCP | 3.6 km (for one session) |
| Total volume of stored data for one orbital revolution | 300 kByte |
| Data reception frequency from DCPs | 401.2-402.0 MHz (UHF band) |
| Data transmission from S/C to ground | 1690-1710 MHz (L-band) |


Launch
The Meteor-M2 spacecraft was launched on July 8, 2014 (15:58:28 UTC) with a Soyuz-2.1b/Fregat launch vehicle of NPO Lavochkin. The launch site was the Baikonur Cosmodrome, Kazakhstan. 2) 3) 4) 5)
The planned mid-December 2013 launch has been delayed again following the latest series of issues with the primary satellite payload. Russia's Meteor-M2 polar-orbiting meteorological satellite has faced delays in the past that have kept the secondary payloads — Norway's AISSat-2, Canada's M3MSat, Britain's TechDemoSat-1 and UKube-1 among them — on the ground. 6)
The Soyuz delay follows a two-year grounding of the Russian-Ukrainian Dnepr silo-launched rocket, which small-satellite owners hope may now be returning to the market pending an agreement between Russia's military space forces and the Russian space agency, Roskosmos.
Secondary payloads on this flight were:
• MKA-PN2 (Relek), a microsatellite of Roskosmos, S/C developer NPO Lavochkin on the Karat platform (59 kg, study of energetic particles in the near-Earth space environment (ionosphere) including the Van Allen Belts.
• DX-1 (Dauria Experimental-1), the first privately-built and funded Russian microsatellite (22 kg) of Dauria Aerospace, equipped with an AIS (Automatic Identification System) receiver to monitor the ship traffic. 9)
• TechDemoSat-1 of UKSA/SSTL, UK with a mass of 157 kg
• SkySat-2 of Skybox Imaging Inc. of Mountain View, CA, USA, a commercial remote sensing microsatellite of 83 kg.
• M3MSat dummy payload of 80 kg.
• AISSat-2, a nanosatellite with a mass of ~7 kg of FFI (Norwegian Defense Research Establishment) Norway, built by UTIAS/SFL, Toronto, Canada.
• UKube-1, a nanosatellite (~3.5 kg) of UKSA/Clyde Space Ltd., UK.
Some background: At various points in time, the secondary payloads during the launch of Meteor-M2 also included the Baumanets-2 experimental satellite for the Bauman State Technical University in Moscow, the M3MSat for the Canadian Space Agency and Venta-1 (Ventspils University, Latvia). Baumanets-2 and Venta-1 were dropped from the mission at the early planning stage.
Orbit of Meteor-M2: Sun-synchronous circular orbit , altitude of ~ 825 km, inclination = 98.8º, period = 101.41 minutes, LTAN (Local Time on Ascending Node) at 9:30 hours.
Orbit of the secondary payloads: Sun-synchronous near-circular orbit, altitude of ~ 635 km, inclination = 98.8º. The MKS-PN2 (Relek) was released first of the secondary payloads into an elliptical orbit of 632 km x 824 km.
The Meteor-M2-1 hydro-meteorological satellite (designed to monitor global weather, the ozone layer, the ocean surface temperature and ice conditions to facilitate shipping in polar regions of our planet), was launched on November 28, 2017, but was lost due to an upper stage problem.
The Meteor-M2-2 is a hydrometeorological satellite, like its predecessor, and was launched on July 5, 2019.
Orbit of Meteor-M2-2: Sun-synchronous orbit , altitude of 816.4 km, inclination = 98.8º, period = 101.1 minutes.
The Meteor-M2-3 is a hydrometeorological satellite like its predecessors, and is also used for military purposes. It was launched on June 27, 2023.
Orbit of Meteor-M2-3: Sun-synchronous orbit , altitude of 816.3 km, inclination = 98.8º, period = 101.1 minutes.
Mission Status
• June 27, 2023: A Soyuz-2-1b rocket lifted off from the Vostochny spaceport, carrying the Meteor-M2-3 weather and climate-monitoring spacecraft, along with a cluster of small satellites.
Based on the procurement deadlines for the Soyuz-2-1b rocket assigned to carry the mission, the launch of the Meteor M2-3 was planned to lift off before the end of 2020, but the project drifted several years behind schedule due to routine delays with the manufacturing.
The lift off for the mission was first set for May 25, 2023, at 20:34 Moscow Time, but a reported technical problem with the spacecraft on March 6, 2023, forced it to switch places in the launch manifest for the Vostochny spaceport with the Kondor-FKA No. 1 satellite, which was launched on May 27, 2023.
By the time the Meteor-M2-3 made it to Vostochny on May 6, 2023, its launch was postponed to June 27, 2023. 20)
• July 5, 2019: Russia launched a Soyuz-2-1b rocket from the Vostochny spaceport, carrying the Meteor M2-2 weather and climate-monitoring satellite, along with a cluster of 32 secondary payloads. The Meteor will replace its sibling destroyed in a launch mishap on November 28, 2017. It will be the fifth launch from Russia's far-eastern space center since its inauguration in April 2016, and the fourth mission for the Meteor-M series. 19)
• November 28, 2017: The second Soyuz rocket mission from Russia's new Vostochny spaceport lifted off, carrying the Meteor-M2-1 weather and climate-monitoring satellite, along with a cluster of 18 secondary payloads. 18)
The satellite failed to separate from the Fregat and the communication was later lost. The cause of failure was determined to be faulty programming. The satellite was programmed with a launch point of Baikonur Cosmodrome, instead of the Vostochny Cosmodrome, causing the satellite to enter an incorrect orbit. 21)
• November 2015: The Meteor-M-N2 spacecraft and its payload (some limitations on Severjanin) are operating nominally. 10)
- MSU-MR instrument is fully functional
- MTVZA-GY instrument is fully functional (absolute calibration work is still ongoing)
- KMSS instrument is fully functional
- IKFS-2 instrument is fully functional
- Severjanin instrument is functional with limitations (due to low signal/noise ratio)
- DCS is functional
- LRPT transmission is functional
- GGAK-M is functional.
• On January 15, 2015, Roskosmos announced that the flight testing of the Meteor-M-N 2 satellite had entered a final phase. The press-release stressed that the prolonged testing was the result of a long list of checks and the complexity of procedures providing the correct operation of onboard systems and high quality of remote-sensing data. The statement went on to say that all calibration and testing efforts provided enough data to conclude that the spacecraft had been ready for operations. By that time, Russian meteorological agency, Roshydromet, joined Roskosmos in processing the satellite's data, the space agency said (Ref. 3).
- Almost half a year after the launch of the Meteor-M2 satellite in July 2014, the Russian space agency, Roskosmos, published a number of press-releases on the flight testing of its newest meteorological satellite along with numerous photos delivered by its instruments. However as important was what was not said or shown — in particular any mentioning of the onboard radar. The 150 kg Severyanin (Northerner) X-band Synthetic Aperture Radar onboard Meteor-M2 satellites was designed to provide all-weather, day-and-night imagery of the Earth surface with a resolution as high as 400 m.
• First image of Meteor-M2 obtained with the MSU-MR instrument on July 25, 2014. 11)
Sensor Complement
MSU-MR (Low-resolution Multispectral Scanner)
MSU-MR was designed and developed by FSUE/RISDE (Federal State Unitary Enterprise) / Russian Scientific Institute of Space Device Engineering), Moscow. Objective: Global and regional cloud cover mapping, SST (Sea Surface Temperature), and LST (Land Surface Temperature). The optomechanical MSU-MR instrument provides imagery in six bands in the VIS and IR spectral regions (similar in performance and function to the AVHRR/3 instrument on the POES missions of NOAA) with a spatial resolution of 1 km.
Parameter | Value |
Band No 1 (VIS= Visible) | 0.50 ± 0.2 - 0.70 ± 0.2 µm |
Band No 2 (VNIR=Visible Near Infrared) | 0.70 ± 0.2 - 1.10 ± 0.2 µm |
Band No 3 (SWIR= Short Wave Infrared) | 1.60 ±0.50 - 1.80 ± 0.50 µm |
Band No 4 (MWIR= Mid Wave Infrared) | 3.50 ± 0.50 - 4.10 ± 0.50 µm |
Band No 5 (TIR = Thermal Infrared) | 10.5 ± 0.50 - 11.5 ± 0.50 µm |
Band No 6 (TIR = Thermal Infrared) | 11.5 ± 0.50 - 12.5 ± 0.50 µm |
Scanning geometry-plane, scanning angle | 108º, 54º |
Swath width | 2800 km |
Angular resolution in all spectral channels | 1.2 +0.2 mrad |
Spatial resolution at nadir | 1 km |
SNR in bands 1 and 2, in band 3 | ≥ 200, ≥ 100 |
Overall relative measurement error of radiance in bands 1-3 | 10% |
Range of radiation temperature measured in bands 4-6 | 213-313 K |
NEDT (Noise Equivalent Differential Temperature) at 300 K |
|
Overall absolute measurement error at 333 K in bands 4-6 | 0.5 K |
Data quantization | 10 bit |
Calibration | Use of onboard calibration sources |
Data rate | 660 kbit/s |
Operational mode | Continuous |
Instrument mass | ≤ 70 kg |

KMSS (Multispectral Scanning Imaging System)
KMSS was designed and developed at IKI (Space Research Institute), Moscow. The objective is Earth surface monitoring. The instrument comprises three pushbroom cameras in the VNIR range; two cameras (MSU-100) have a focal length of 100 mm; the third one (MSU-50), has a focal length of 50 mm. The two MSU-100 cameras are tilted ±14º in cross-track to each side of nadir; together they cover a swath width of 960 km, which is close to the swath of MSU-50. 12)
Each camera has a focal plane with 3 CCD lines (each covered with a corresponding filter) behind a common lens. The three-line camera system (with 3 CCD-lines in a focal plane and 1 lens, the corresponding detector elements of different bands look necessarily in different along-track directions) provides the following along-track observation directions: ±17º and 0º (nadir) for MSU-50, and ±8.7º and 0º for MSU-100. The KMSS instrument represents simply the mounting fixture of three separate cameras, and the KMSS image will be an image of 3 separate cameras put together in ground processing.
Parameter | Value |
Swath width (2 MSU-100, 1 MSU-50) | 960 km (cumulative of 2 cameras), 940 km |
FOV (Field of View) in cross-track direction | 31º, 62º |
Spatial resolution | 60 m (MSU-100) |
Total No of spectral bands | 6 |
Spectral bands (µm) of MSU-100 | 0.535-0.575; 0.630-0.680; 0,760-,900; |
No of CCD elements in cross-track | 8000 |
Data quantization | 8 bit |
SNR for bright objects (clouds at high sun elevation) | 200 |
Source data rate per band | 9.8 Mbit/s |
Source data rate of 1 camera system, 2 camera system | ~30 Mbit/s, ~60 Mbit/s |
MSU-100 mass, power | 2.9 kg, 6.8 W (peak power consumption) |
MSU-100 size | 210 x 200 x 200 mm (the last size - along the optical axis) |
MSU-50 size | 210 x 200 x 140 mm (the last size - along the optical axis) |

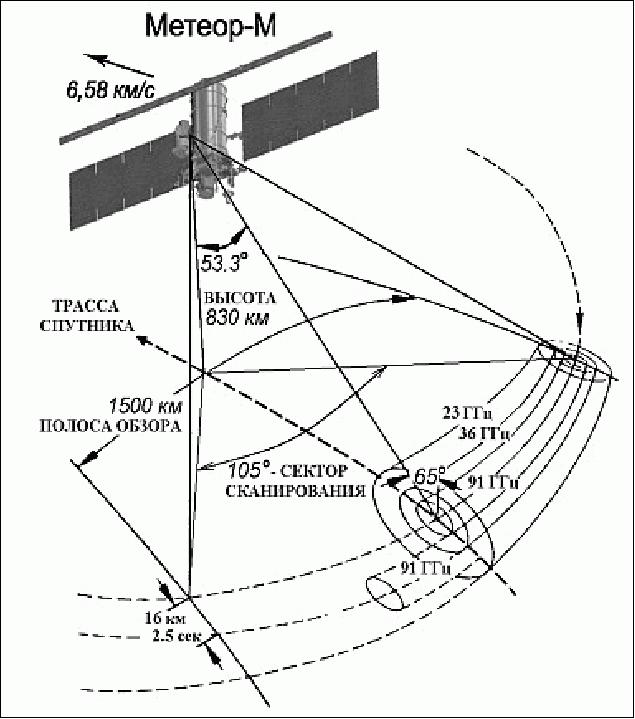
MTVZA-GY (Microwave Imaging/Sounding Microwave Radiometer)
MTVZA-GY was designed and developed at the Space Observations Center, Moscow, under contract to Roskosmos. The instrument is of MTVZA heritage flown on the Meteor-3M-1 mission (launch Dec. 10, 2001). MTVZA-GY is a passive 29-channel microwave radiometer - similar to the SSMIS (Special Sensor Microwave Imager Sounder) of the DMSP-F16 mission, as well as to NOAA's AMSU-A (Advanced Microwave Sounding Unit-A) and -B radiometers. Note: MTVZA-GY was named in memory of Gennady Ya Gus'kov (1919-2002, Moscow) - the Russian designer of various spaceborne instruments.
The objective of the MTVZA-GY instrument is to monitor ocean and land surfaces as well as global atmospheric parameters such as temperature and water vapor profiles and to obtain sea surface wind profiles. MTVZA-GY is a conical scanning instrument with a common field of view for imaging and sounding channels (simultaneous multispectral and polarization measurements), due to the single antenna design.
The operating frequencies are located in the transparent atmospheric windows at 10.6, 18.7, 23.8, 31.5, 36.7, 42, 48, and 91.65 GHz, as well as in the oxygen absorption lines at 52-57 GHz and water vapor at 183.31 GHz. 13) 14)

The instrument consists of a large rotating main reflector and an Instrument Support Structure facilitating the RF electronics and sensors as well as the spin mechanism and support systems. MTVZA-GY has a mass of 90 kg, requires 80 W of power and has a data rate of 35 kbit/s. The operating frequencies of the instrument cover the transparent atmospheric range, the oxygen absorption lines and the water vapor absorption range.
Observation geometry: MTVZA-GY is a conical-scanning radiometer rotating continuously about an axis parallel to the local spacecraft vertical with a period of 2.5 s (24 rpm). The view direction of the instrument is backwards (anti-velocity direction) with a viewing angle of 53.3º and an incidence angle of 65º (with respect the the surface). The scan direction is from the left to the right when looking in the aft direction of the spacecraft, with the active scene measurements in the range from -90º to +15º about the aft direction, resulting in a swath width of 1500 km.
Observation region | Parameter | Range of measurements | Error |
Ocean | SST Ice: age (gradations) |
| ±1.0 K |
Atmosphere | Temperature profile | up to 45 km | ±1.5 K |
Clouds: |
|
| |
Rain rate | 0-25 mm/h | ±5.0 mm/h | |
Land | Thickness of dry snow | up to 1.5 m | ±0.2 m |
Channel No | Center Frequency (GHz) | No of Passbands | Bandwidth (MHz) | Effective FOV | Pixel size (km x km) | Sensitivity (K/pixel) | Approx. peak sensitivity altitude (km) |
1 | 10.6 | 1 | 100 | 89 x 198 | 32 x 32 | 0.5 | - |
2 | 18.7 | 1 | 200 | 52 x 16 | 32 x 32 | 0.4 | - |
3 | 23.8 | 1 | 400 | 42 x 94 | 32 x 32 | 0.3 | - |
4 | 31.5 | 1 | 1000 | 35 x 76 | 32 x 32 | 0.3 | - |
5 | 36.5 | 1 | 1000 | 30 x 67 | 32 x 32 | 0.3 | - |
6 | 42 | 1 | 1000 | 26 x 60 | 32 x32 | 0.4 | - |
7 | 48 | 1 | 1000 | 24 x 43 | 32 x 32 | 0.4 | - |
8 | 52.80 | 1 | 400 | 21 x 48 | 48 x 48 | 0.4 | 2 |
9 | 53.30 | 1 | 400 | 21 x48 | 48 x 48 | 0.4 | 4 |
10 | 53.80 | 1 | 400 | 21 x 48 | 48 x 48 | 0.4 | 6 |
11 | 54.64 | 1 | 400 | 21 x 48 | 48 x 48 | 0.4 | 10 |
12 | 55.63 | 1 | 400 | 21 x 48 | 48 x 48 | 0.4 | 14 |
13 | 57.290344±0.3222±0.1 | 4 | 50 | 21 x 48 | 48 x 48 | 0.4 | 20 |
14 | 57.290344±0.3222±0.05 | 4 | 20 | 21 x 48 | 48 x 48 | 0.7 | 25 |
15 | 57.290344±0.3222±0.025 | 4 | 10 | 21 x 48 | 48 x 48 | 0.9 | 29 |
16 | 57.290344±0.3222±0.01 | 4 | 5 | 21 x 48 | 48 x 48 | 1.3 | 35 |
17 | 57.290344±0.3222±0.005 | 4 | 3 | 21 x 48 | 48 x 48 | 1.7 | 42 |
18 | 91.65 | 2 | 2000 | 14 x 30 | 16 x 16 | 0.6 | Surface |
19 | 183.31±7.0 | 2 | 1500 | 9 x 21 | 32 x 32 | 0.5 | 1.5 |
20 | 183.31±3.0 | 2 | 1000 | 9 x 21 | 32 x 32 | 0.6 | 2.9 |
21 | 183.31±1.0 | 2 | 500 | 9 x 21 | 32 x 32 | 0.8 | 5.3 |
All instrument channels are switched to four feed-horn antennas. MTVZA-GY employs a total-power radiometer design providing a better sensitivity (factor 2) over a conventional Dicke-switched system. The channels in the 10-48 GHz domain are direct amplification radiometers, while the channels in the 52-57, 91 and 183 GHz range are realized as as superheterodyne receivers using balanced mixers. The performance parameters are given in Tables 7 and 8. The following comment applies to Table 7:
• Channels 1-7 and 18 operate on both vertical and horizontal polarization
• Channels 13-17 operate on horizontal polarization only. - Hence, the total number of MTVZA-GY channels amounts to 29.
The antenna system of MTVZA-GY consists of an offset parabolic reflector of dimension 65 cm, illuminated by the four broadband feed-horn antennas. The antenna and radiometers are mounted on a drum for the purpose to provide an invariant viewing and polarization geometry for the reflector scan. The drum contains the various system components like digital data subsystem, power and the signal transfer assembly, which rotates continuously about an axis parallel to the local spacecraft vertical. The power, commands, all data, timing and telemetry signals pass through slip ring connectors to the rotating assembly.
Instrument calibration: Hot and cold reference absorbers are used for calibration. They are mounted on the non-rotating part of the instrument and are positioned such that they pass between the feed-horns and the parabolic reflector, occulting the feed-horns once on each scan. The temperature difference between the hot and cold target is expected to be 50-60 K.
Spatial resolution (km) | 16-198 (horizonal); 1.5 - 7 (vertical) | ||||||||
Conical scanning period | 2.55 s | ||||||||
Viewing angle | 53.3º | ||||||||
Incident angle | 65º | ||||||||
Swath width | 1500 km | ||||||||
Instrument mass, power | 90 kg, 80 W | ||||||||
Data rate, data quantization | 35 kbit/s; 16 bit | ||||||||
GGAK-M (Geophysical Monitoring System Komplex)
The geophysical Monitoring Complex is dedicated to the measurement of geophysical properties consisting of two instruments:
1) MSGI-MKA (Spectrometer for Geoactive Measurements), an electrostatic analyzer
2) KGI-4C (Radiation Monitoring System).
The MSGI-MKA instrument can detect electrons in the energy range of 0.1 to 15 keV, protons at 0.1 to 15 keV in a high- and low-sensitivity channel. Integral electron fluxes can be measured up to 40 keV. The instrument features four channels for the measurement of the following parameters:
• Electron fluxes in the energy range of 0.1-15 keV (high-sensitivity channel)
• Ion (proton) fluxes in the energy range of 0.1-15 keV (high-sensitivity channel)
• Electron fluxes in the energy range of 0.1-15 keV (low-sensitivity channel)
• Monitoring of integral electron fluxes with a threshold energy of 40 keV
The FOV (Field of View) is 10º x 10º for each channel (3) and 20º x 20º for the integral electron flux. The instrument has a mass of 5 kg and a power consumption of 6.8 W.
KGI-4C (Radiation Monitoring System). The objective is to monitor flux densities within the following threshold energy ranges:
• Total proton flux threshold energy of: 5, 15, 25, 30, and 40 MeV
• Total electron flux threshold energy of: 0.17, 0.7, 1.7, 2.0 and 3.2 MeV
• Proton fluxes with threshold energies of: 25 and 90 MeV
The KGI-4C instrument has a mass of 12 kg and a power consumption of 6.8 W (max).
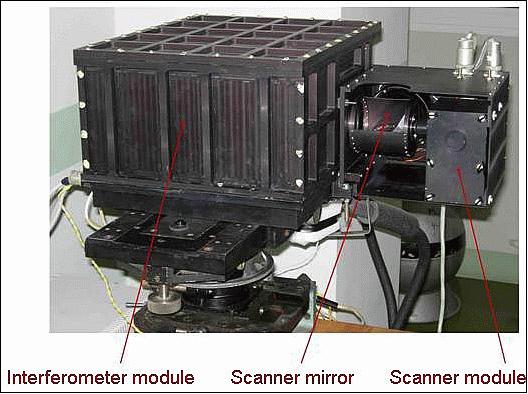
IRFS-2 (Infrared Fourier Spectrometer-2)
The instrument is an advanced infrared sounder with the objective to provide atmospheric temperature and humidity profiles. Note: The Russian abbreviation for the instrument is simply "IKFS".
The IRFS-2 instrument was designed and developed by the Keldysh Research Center. The instrument consists of an optical unit, a data processing and power supply unit and a radiative cooler that keeps the focal plane at an appropriate temperature to reduce the dark current of the detectors. The optical system is comprised of an interferometric module with a double pendulum interferometer and a radiometer, a pointing module and a calibration module. 15)
IRFS-2 covers a spectral range of 5 to 15 µm at a spectral resolution of 0.4 cm-1. The instrument covers a ground swath of 1,000 to 2,500 km with a spatial resolution of about 30 km. The radiometer operates at a radiometric accuracy of 0.5 K. The instrument covers the carbon dioxide absorption band to obtain temperature profiles, two atmospheric windows for cloud properties and surface parameters, the ozone absorption band for ozone sounding and the absorption bands of water, nitrous oxide and methane for moisture profiles and column amount measurement of these substances.
Parameter | Value |
Spectral range | 5.0-15 µm (2000-667 cm-1) |
Spectral resolution FWHM (Full Width Half Maximum) | 0.5 cm-1 |
Digitization interval | 0.25 s m-1 |
Detection limit [NESR (Noise-Equivalent Spectral Radiance)] |
|
Measurement error of object spectral brightness in terms of equivalent temperature at wavelength 11-12 µm and object temperature 280-300 K | 0.5 K |
IFOV (Instantaneous Field of View), corresponding to a spatial resolution at nadir | 40 mrad x 40 mrad, 30 km |
The measurements are made across the flight path with horizontal pitch depending on view width: | - 2500 km swath width, pitch = 100-110 km |
Periodicity of interferogram | ≤ 0.6 s |
Source data rate | ~600 kbit/s |
Instrument mass, power | ~50 kg, 50 W |
Band No | Spectral region | Absorption band | Application |
1 | 665 - 780 cm-1 | CO2 |
|
2 | 790 - 980 cm-1 | Atmospheric window | Surface parameters (Ts, εv) Cloud properties |
3 | 1000 - 1070 cm-1 | O3 | Ozone sounding |
4 | 1080 - 1150 cm-1 | Atmospheric window | Ts, εv (cloud properties) |
5 | 1210 - 1650 cm-1 | H2O, N2O, CH4 | Moisture profile, CH4, N2O column amounts |

Severyanin-M OBRC (Onboard Radar Complex)
The small size radar Severyanin-M (translation from Russian - "Northerner") is a part of the on-board hardware of the spacecraft Meteor-M series designed and developed by the Research Institute of Precise Instruments, Moscow, Russia. Serveryanin-M is an X-band side-looking radar instrument providing vertical polarization. The main objective is sea ice monitoring in the polar regions, but the radar imagery can also be used for land surface observation, for vegetation monitoring, and a number of other applications. The system consists of two main components: the antenna subsystem and the electric unit. The radar antenna consists of seven segments, six of which are deployed after launch with the central segment attached to the zenith-pointing deck of the satellite. The instrument has a mass of 150 kg and requires 1 kW of power when in operation, the source data rate is 10 kbit/s. 16)
The OBRC instrument operates at a center frequency of 9.623 GHz and an incidence angle range of 25 -48º. A 450 to 600 km ground swath is covered by the radar, depending on the observation mode as it can operate in low and medium resolution mode. In low resolution mode, the radar reaches a ground resolution of 700-1,000 m while the medium resolution mode leads to images with a spatial resolution of 400-500 m.
Parameter | Value |
Center frequency (X-band, 3.1 cm wavelength) | 9.623 GHz |
Incidence angle access range | 25-48º |
Swath width | 450-600 km |
Spatial resolution in medium resolution mode | 400-500 m |
Spatial resolution in low resolution mode | 700-1000 m |
Source data rate | 10 kbit/s |
The radar uses an uncontrolled antenna array, klystron transmitter, digital receiver and special digital device for forming the sounding signals, the echoed signals prefiltering and matching to the radiolink. It has embedded facilities for inner amplitude calibration. In addition there is possibility to change parameters of the sounding signal and some other radar parameters through the command radio-link from the Earth.
The spacecraft specifics dictated restrictions on the following radar characteristics:
- radar power consumption: not more than 1 kW
- radar mass: not more than 150 kg (including the antenna mass – not more 40 kg)
- data transfer rate of the radio-link used: not more than 10 kbit/s.
DCS (Data Collection System)
The objective is to collect in-situ data from DCPs (Data Collection Platforms) in the ground segment with location capability.
No description available.
Ground Segment
References
1) "Report on the status of current and future Russian satellite systems," CGMS (Coordination Group for Meteorological Satellites)-42 ROSH/ROSCWP-01, 25 April 2014, URL: http://www.eumetsat.int/website/wcm/idc/idcplg?IdcService=GET_FILE&RevisionSelectionMethod=LatestReleased
&Rendition=Web&dDocName=CWPT_1210
2) "Soyuz rocket with seven satellites lifts off from Baikonur," ITAR-TASS, July 8, 2014, URL: http://en.itar-tass.com/non-political/739563
3) Anatoly Zak, "Russia launches new weather watcher," July 9, 2014, URL: http://www.russianspaceweb.com/meteor_m2.html
4) Patrick Blau, "Soyuz successfully Launches Meteor-M #2 & Six Secondary Payloads," Spaceflight 101, July 8, 2014, URL: http://www.spaceflight101.com/soyuz-2-1b---meteor-m-2-launch-updates.html
5) https://web.archive.org/web/20141231054219/http://www.tsenki.com/en/launch_services/help_information/launch/2014/?EID=111586
6) Peter B. de Selding, "Latest Soyuz/Fregat Delay Underscores Issue for Small-satellite Owners," Space News, Sept. 27, 2013, URL: http://www.spacenews.com/article/launch-report/37416latest-soyuzfregat-delay-underscores-issue-for-small-satellite-owners
9) "Dauria Aerospace and Samsung will launch the first in Russia private artificial satellite of the Earth," Oct. 15, 2013, URL: http://all-rss.com/item-1070741-dauria-aerospace-and-samsung-will-launch-the-first-in-russia-private-artificial-satellite-of-the-earth/#.UwSE3s7ihqM
10) Iurii S. Chetyrin, "Roshydromet space-based observation system: current status and development perspectives," Sixth Asia/Oceania Meteorological Satellite Users' Conference, November 9 - 13, 2015, Tokyo/Japan, URL: http://www.data.jma.go.jp/mscweb/en/aomsuc6_data/oral/s01-08.pdf
11) http://orbiterchspacenews.blogspot.de/2014/07/first-image-obtained-with-spacecraft.html
12) Information provided by Boris Zhukov of IKI, Moscow
13) I. V. Cherny, G. M. Chernyavsky, N. N. Gorobets, "Spaceborne Microwave Image/Sounder MTVZA," Proceedings of 25th ESA Antenna Workshop on Satellite Antenna Technology, ESTEC, Noordwijk, The Netherlands, Sept. 18-20, 2002, pp. 523-527
14) I. V. Cherny, G. M. Chernyavsky, "Microwave Imager/Sounder MTVZA of Space Meteor-3M," Proceedings of 7th International Conference on Remote Sensing for Marine and Coastal Environments, Miami, FLA, May 20-22, 2002
15) A. B. Uspensky, A.N. Rublev, Y. M. Timofeev, A. V. Polyakov, F. S. Zavelevich, Y. M. Golovin, D. A. Kozlov, "Atmospheric and surface parameters retrieved with IR-sounder IRFS-2 data – numerical modeling," IASI Infrared Accuracy from Space In a fragile world, Hyères Les Palmiers, France, 4-8 February 2013, URL: http://smsc.cnes.fr/IASI/PDF/conf3/10_04-Uspensky_Alexander.pdf
16) Sergey Vnotchenko, Michail Dostovalov, Vladimir Dudukin, Alexander Kovalenko, Tomas Musinyants, Viktor Riman, Aleksey Selyanin, Stanislav Smirnov, Andrey Telichev, Valentin Chernishov, Anatoliy Shishanov, "Wide-Swath Spaceborne SAR System "Severyanin-M" For Remote Sensing: First Results," Proceedings of EUSAR 2012 (9th European Conference on Synthetic Aperture Radar), Nuremberg, Germany, April 23-26, 2012
17) Gunter's Space Page, “Meteor-M 2-1, 2-2, 2-3, 2-4, 2-5, 2-6”https://space.skyrocket.de/doc_sdat/meteor-m-2-1.htm
18) Anatoly Zak, “Soyuz fails to deliver 19 satellites from Vostochny”, Russian Space Web, December 3, 2017, URL: https://www.russianspaceweb.com/meteor-m2-1.html
19) Anatoly Zak, “Soyuz launches fresh Meteor weather watcher and 32 small satellites”, Russian Space Web, July 4, 2019, URL: https://www.russianspaceweb.com/meteor-m2-2.html
20) Anatoly Zak, “Soyuz launches a Meteor weather satellite and hitchhikers”, Russian Space Web, June 26, 2023, URL: https://www.russianspaceweb.com/meteor-m2-3.html
21) Wikipedia, “Meteor-M No.2-1”, URL: https://en.wikipedia.org/wiki/Meteor-M_No.2-1
The information compiled and edited in this article was provided by Herbert J. Kramer from his documentation of: "Observation of the Earth and Its Environment: Survey of Missions and Sensors" (Springer Verlag) as well as many other sources after the publication of the 4th edition in 2002. - Comments and corrections to this article are always welcome for further updates (eoportal@symbios.space).
Overview Spacecraft Launch Mission Status Sensor Complement Ground Segment References Back to top