Mars Perseverance 2020
Exploration
Mars 2020 Perseverance Rover Mission of NASA/JPL
Overview
The Mars 2020 Perseverance (former Mars 2020) rover mission is part of NASA's Mars Exploration Program, a long-term effort of robotic exploration of the Red Planet. The Mars 2020 Perseverance mission addresses high-priority science goals for Mars exploration, including key questions about the potential for life on Mars. The mission takes the next step by not only seeking signs of habitable conditions on Mars in the ancient past, but also searching for signs of past microbial life itself. The Mars 2020 Perseverance rover introduces a drill that can collect core samples of the most promising rocks and soils and set them aside in a "cache" on the surface of Mars. The mission also provides opportunities to gather knowledge and demonstrate technologies that address the challenges of future human expeditions to Mars. These include testing a method for producing oxygen from the Martian atmosphere, identifying other resources (such as subsurface water), improving landing techniques, and characterizing weather, dust, and other potential environmental conditions that could affect future astronauts living and working on Mars. 1) 2) 3)
The mission is timed for a launch opportunity in July/August 2020 when Earth and Mars are in good positions relative to each other for landing on Mars. That is, it takes less power to travel to Mars at this time, compared to other times when Earth and Mars are in different positions in their orbits. To keep mission costs and risks as low as possible, the Mars 2020 Perseverance design is based on NASA's successful Mars Science Laboratory mission architecture, including its Curiosity rover and proven landing system.
Mars 2020 Perseverance Science
The Mars 2020 Perseverance rover explores a site likely to have been habitable. It will seek signs of past life, set aside a returnable cache with the most compelling rock core and soil samples, and demonstrate technology needed for the future human and robotic exploration of Mars. 4)
Leveraging discoveries from past Mars missions about water and habitability on Mars, the Mars 2020 Perseverance rover represents a shift toward directly seeking signs of past microbial life.
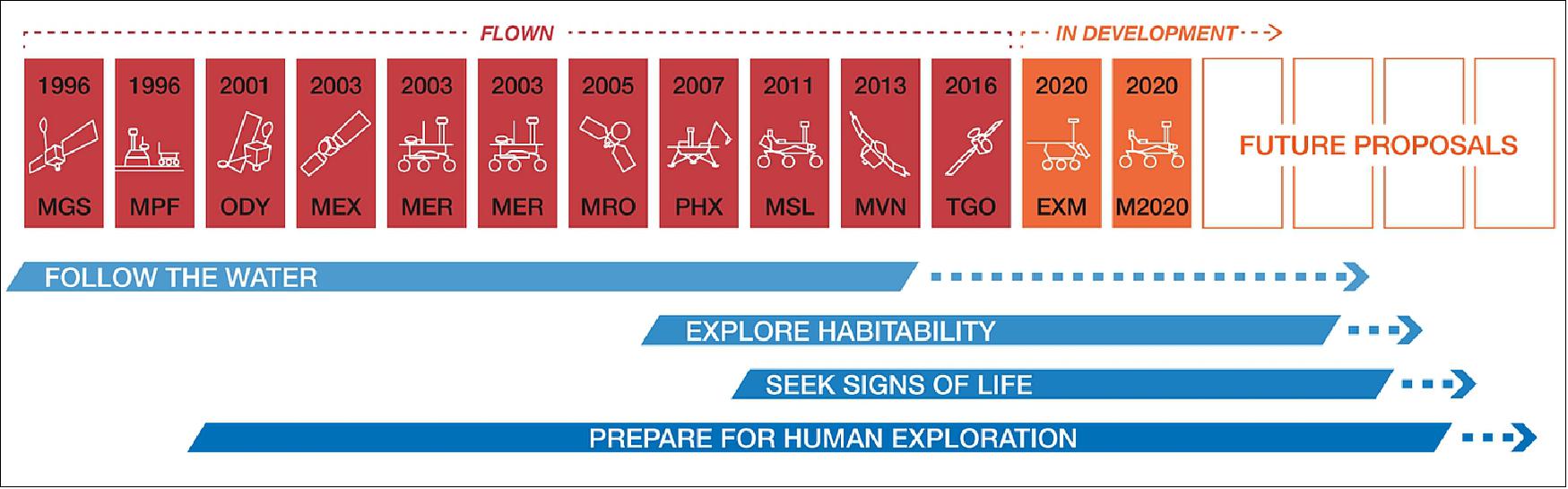
NASA's Mars Exploration Program has a long-term, systematic exploration plan for the Red Planet. Mars missions build on each other, with discoveries and innovations made by prior missions guiding what comes next. Mars missions are guided by evolving, discovery-driven science strategies that provide continuity in Mars science exploration themes.
The first framing theme guiding Mars exploration was "Follow the Water," as water is essential to habitable environments and life as we know it. It is also important to understanding the geologic and climatic history of Mars, and would likely play a role in supporting future human explorers.
With past orbiters, landers, and rovers finding evidence of water, the theme "Explore Habitability" emerged to look for additional conditions necessary to life, including chemical elements and compounds necessary for life as we know it. Findings from the Mars Science Laboratory's Curiosity rover marked a transition to the current science theme: "Seek Signs of Life."
While Curiosity is seeking evidence of habitable conditions (both past water and the chemistry needed for life), Mars 2020 Perseverance is seeking signs of past life itself in the geologic record.
Studying Mars' Habitability, Seeking Signs of Past Microbial Life, Collecting and Caching Samples, and Preparing for Future Human Missions. The science strategy for NASA's Mars Exploration Program (MEP) is to Seek Signs of Life. The Mars 2020 Perseverance rover contributes to this strategy, as well as to the Program's four long-term science goals: 5)
• Goal 1: Determine whether life ever existed on Mars. The mission of the Mars 2020 Perseverance rover focuses on surface-based studies of the Martian environment, seeking preserved signs of biosignatures in rock samples that formed in ancient Martian environments with conditions that might have been favorable to microbial life.
- It is the first rover mission designed to seek signs of past microbial life. Earlier rovers first focused on and confirmed that Mars once had habitable conditions.
• Goal 2: Characterize the Climate of Mars. Past Martian climate conditions are a focus of the Mars 2020 Perseverance rover mission. The rover's instruments are looking for evidence of ancient habitable environments where microbial life could have existed in the past.
• Goal 3: Characterize the Geology of Mars. The Mars 2020 Perseverance rover is designed to study the rock record to reveal more about the geologic processes that created and modified the Martian crust and surface through time. Each layer of rock on the Martian surface contains a record of the environment in which it was formed. The rover seeks evidence of rocks that formed in water and that preserve evidence of organics, the chemical building blocks of life.
• Goal 4: Prepare for Human Exploration. The Mars 2020 Perseverance rover is demonstrating key technologies for using natural resources in the Martian environment for life support and fuel. It is also monitoring environmental conditions so mission planners understand better how to protect future human explorers.
- This science goal relates to national space policy for sending humans to Mars in the 2030s. Similar to the history of the exploration of Earth's moon, robotic missions to Mars provide a crucial understanding of the environment and test innovative technologies for future human exploration.
- Investments in Mars 2020 Perseverance technologies include contributions from NASA's Human Exploration and Operations (HEO) Mission Directorate and Space Technology Program (STP) as part of NASA's long-term efforts to develop future capabilities for human space exploration.
Spacecraft
The spacecraft is the protective "spaceship" that enables the precious cargo (that is, the rover!) to travel between Earth and Mars. It is separate from the launch vehicle that carries the spacecraft and the rover outside of Earth's atmosphere and gravitational pull. The spacecraft includes the mechanical units that safely carry and maneuver the rover through the Martian atmosphere to a landing on Mars.
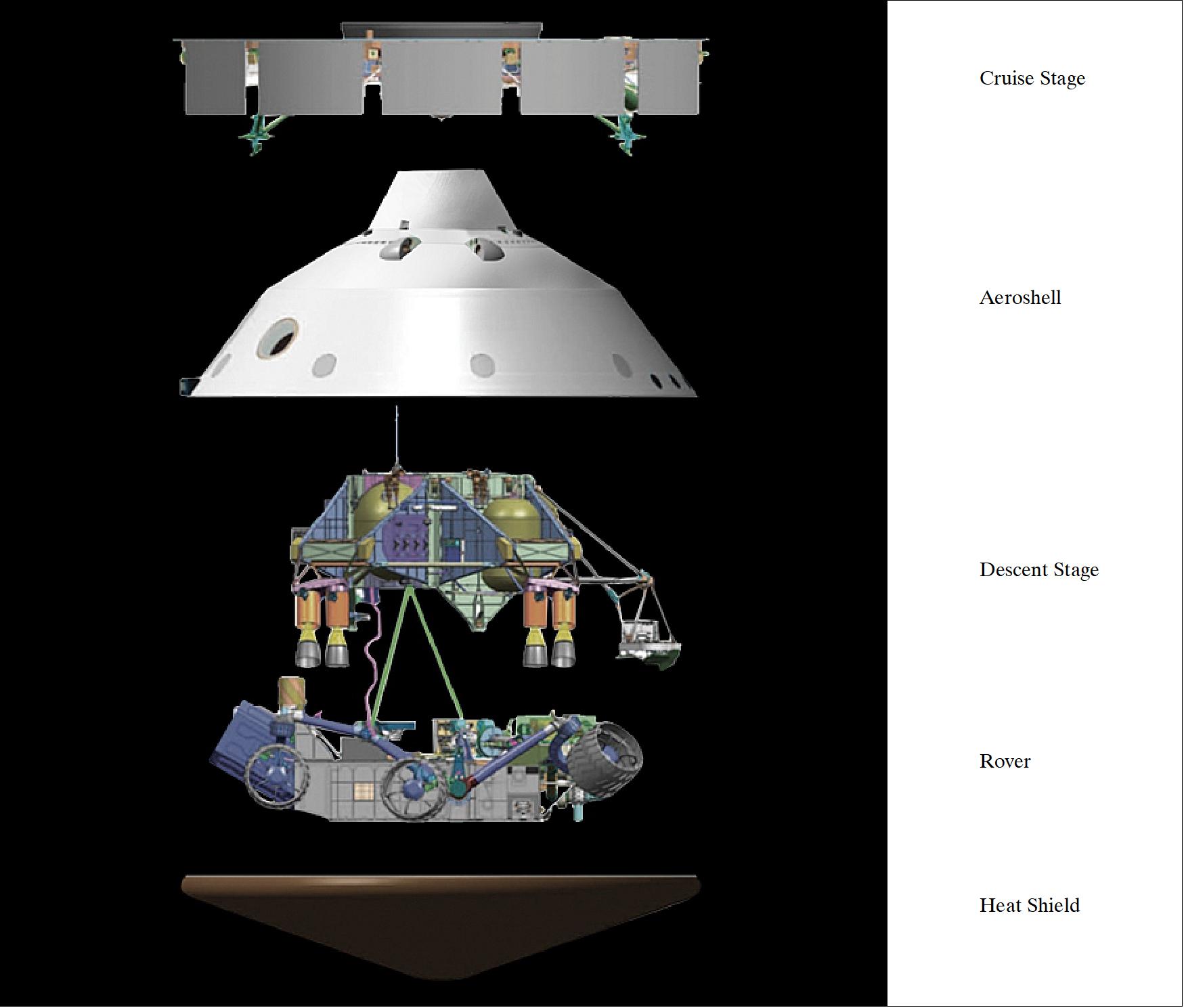
The three major parts of the Mars 2020 Perseverance mission spacecraft design are based on the successful Mars Science Laboratory mission:
• Cruise Stage: The configuration for travel between Earth and Mars that includes an aeroshell (backshell with heat shield) in which the rover and its landing system are enclosed.
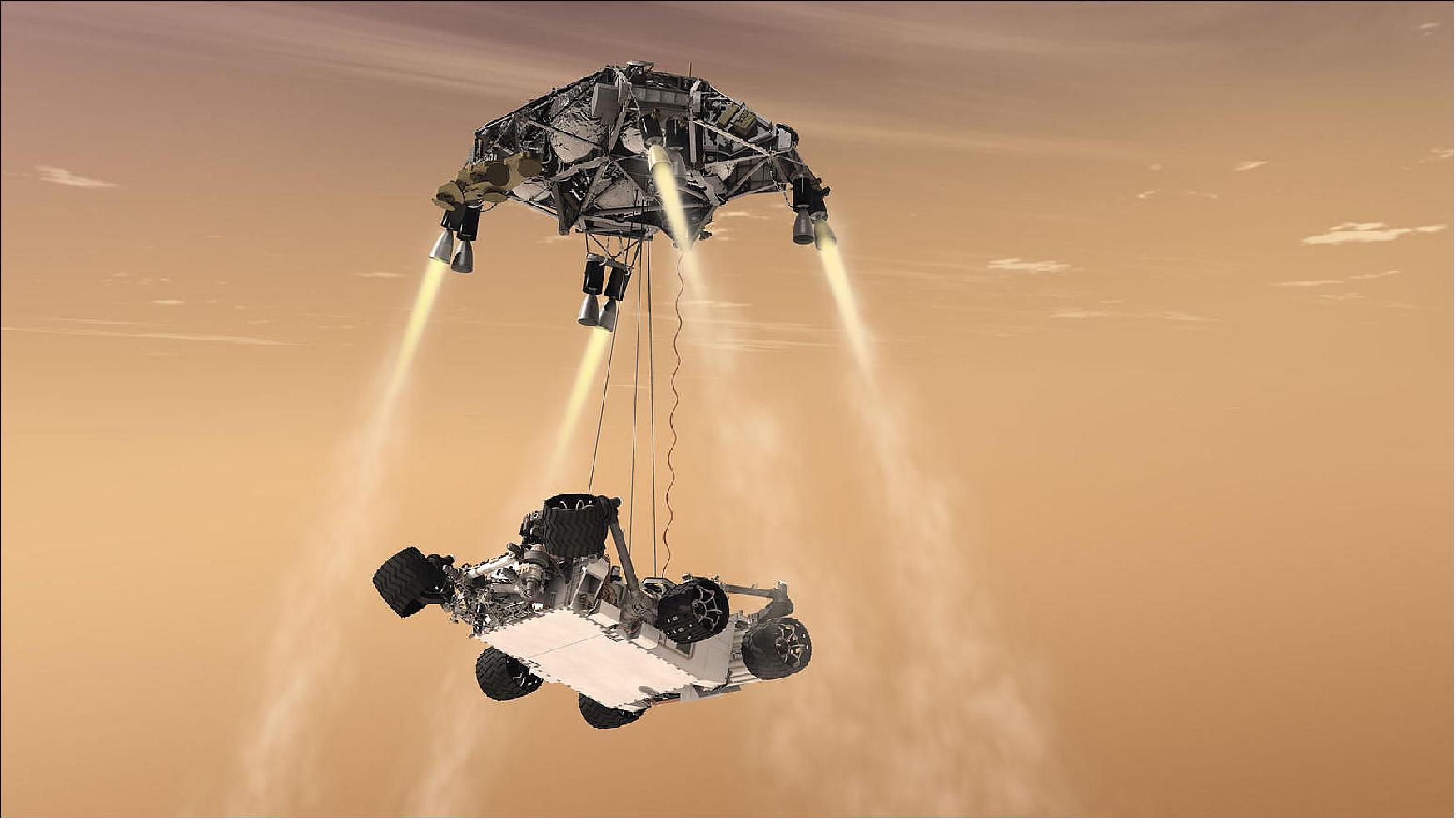
• Entry, Descent, and Landing System: The configuration for entry into the Martian atmosphere. Includes the aeroshell, parachute, descent vehicle, and structure for a sky-crane maneuver that will lower the rover to the Martian surface on tethers.
• Rover: A wheeled vehicle with science instruments for making discoveries on the Martian surface.
Technology Development
Each Mars mission is part of a continuing chain of innovation. Each relies on past missions for proven technologies and contributes its own innovations to future missions. This chain allows NASA to push the boundaries of what is currently possible, while still relying on proven technologies.
The Mars 2020 Perseverance mission leverages the successful architecture of NASA's Mars Science Laboratory mission by duplicating most of its entry, descent, and landing system and much of its rover design.
The mission advances several technologies, including those related to priorities in the National Research Council's 2011 Decadal Survey and for future human missions to Mars. Plans include infusing new capabilities through investments by NASA's Space Technology Program, Human Exploration and Operations Mission Directorate, and contributions from international partners.
Many innovations focus on entry, descent, and landing technologies, which help ensure precise and safe landings. They include sensors to measure the atmosphere, cameras and a microphone, and at least two key ways to reach the surface of Mars with greater accuracy and less risk (Range Trigger and Terrain-Relative Navigation).
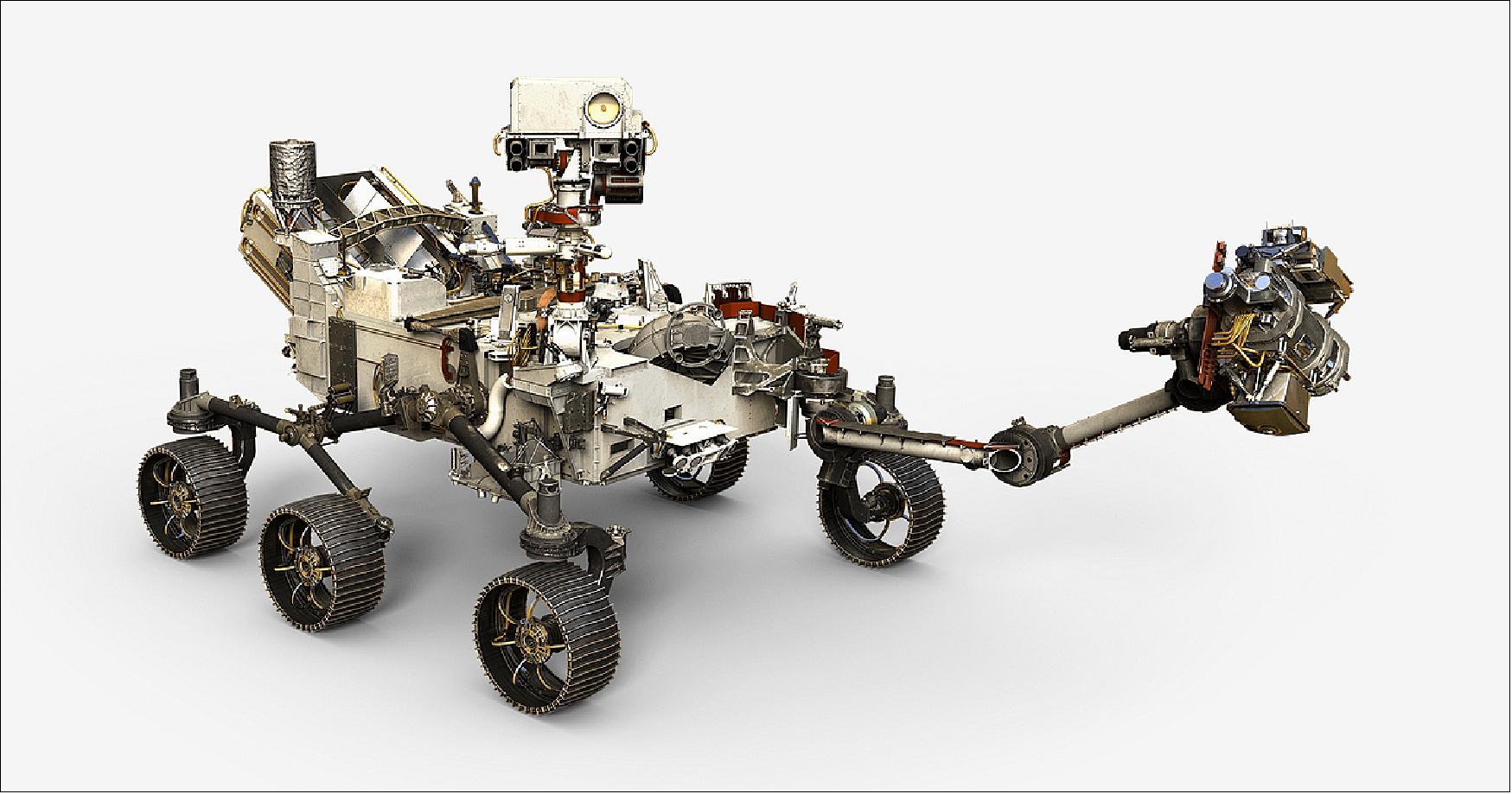
Perseverance Rover
The Mars 2020 Perseverance rover is car-sized, about about 3 m long, 2.7 m wide, and 2.2 m tall (not including the arm). But at 1,050 kg, it weighs less than a compact car. In some sense, the rover parts are similar to what any living creature would need to keep it "alive" and able to explore. 6)
The Mars 2020 Perseverance Rover has the following parts: 7)
• body: a structure that protects the rover's "vital organs"
• brains: computers to process information
• temperature controls: internal heaters, a layer of insulation, and more
• "neck and head": a mast for the cameras to give the rover a human-scale view
• eyes and ears : cameras and instruments that give the rover information about its environment
• arm and "hand": a way to extend its reach and collect rock samples for study
• wheels and legs: parts for mobility
• electrical power: batteries and power
• communications: antennas for "speaking" and "listening"
The Mars 2020 Perseverance rover body is based on the Mars Science Laboratory's Curiosity rover configuration. However, the Mars 2020 Perseverance rover has a new science and technology toolbox. An important difference is that this rover can sample and cache minerals. To do so, the rover has a new coring drill to collect samples. The samples are then sealed in tubes and placed on the surface of Mars. - In the future, another space mission could potentially pick up the samples and bring them to Earth for detailed analysis. 8)
Differences Between Perseverance and Curiosity
The large robotic arm on the front of the rover differs from Curiosity's for two main reasons:
1) Mars 2020 Perseverance will collect rock cores. Mars 2020 Perseverance needs to collect rock core samples and save them for possible future study by scientists. Curiosity studied samples collected onsite, using the rover's onboard laboratory.
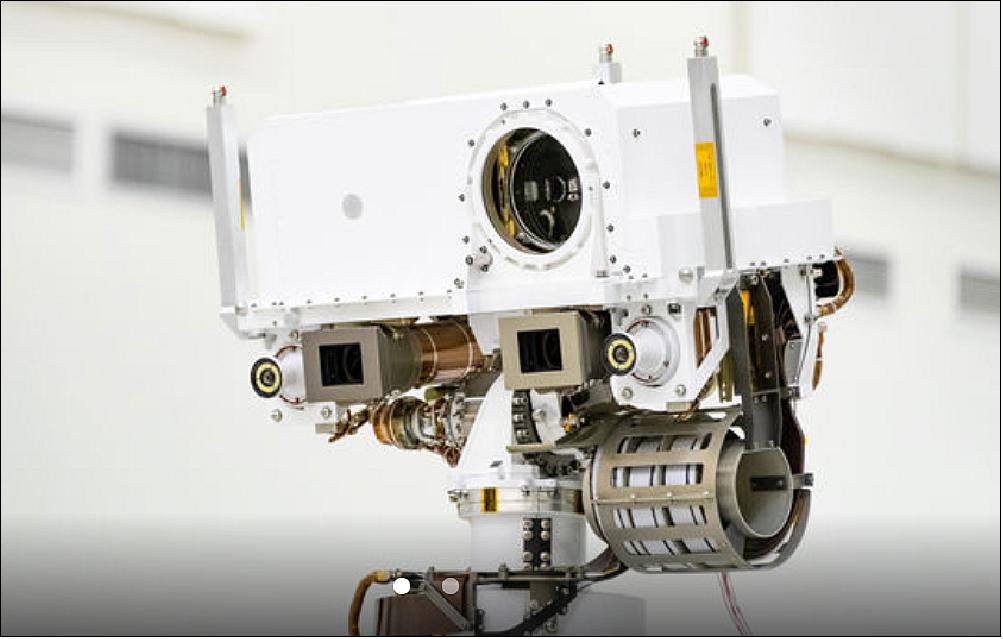
2) Mars 2020 Perseverance has a larger "hand," or turret. Mars Perseverance's new functions and new science tools means it must accommodate a larger turret at the end of the robot arm. This turret has the coring drill and two science instruments, plus a color camera for close-up surface inspection and also "selfies" for engineering health checkups.
There is an internal workspace inside the rover body that is dedicated to picking up, moving and placing drill bits and sample tubes within the Sample Caching System. New motors that drive these specialized movements were needed beyond those used on rover Curiosity. The rover motor controller electronics have been modified from the Curiosity design to accommodate these motors.
New Software to Operate the Rover
Mars 2020 Perseverance will operate very differently than Curiosity. The new rover will gather 20 sealed samples of Martian rocks and soil. The samples will be set aside in a "cache" on Mars. The team is building new software to run the rover. The software will be updated with improvements throughout the mission.
Besides just managing the new sampling operations, the Mars 2020 Perseverance rover manages all of its daily activities more efficiently to balance its on-site science measurements while also collecting samples for potential future analysis. To do that, the rover's driving software - the "brains" for moving around — was changed to give Mars 2020 Perseverance greater independence than Curiosity ever had.
This allows Mars 2020 Perseverance to cover more ground without consulting controllers on Earth so frequently. Also, engineers have added a "simple planner" to the flight software. This allows more effective and autonomous use of electrical power and other rover resources. It allows the rover to shift the time of some activities to take advantage of openings in the daily operations schedule.
New Wheels for Perseverance
Engineers redesigned the Mars 2020 Perseverance wheels to be more robust due to the wear and tear the Curiosity rover wheels endured while driving over sharp, pointy rocks. Mars 2020 Perseverance's wheels are narrower than Curiosity's, but bigger in diameter and made of thicker aluminum.
The combination of the larger instrument suite, new Sampling and Caching System, and modified wheels makes Mars 2020 Perseverance heavier than its predecessor, Curiosity.
Perseverance Rover's "Brains"
The computer module is called the Rover Compute Element (RCE) - there are actually two identical RCEs in the body so there is always a spare "brain." 9)
The RCE interfaces with the engineering functions of the rover over two networks which follow an aerospace industry standard designed especially for the high-reliability requirements of airplanes and spacecraft. In addition, the RCEs have a special purpose to direct interfaces with all of the rover instruments for exchange of commands and science data.
Technical specifications:
- Processor: Radiation-hardened central processor with PowerPC 750 Architecture: a BAE RAD 750. It operates at up to 200 MHz speed, 10 times the speed in Mars rovers Spirit and Opportunity's computers.
- Memory: 2 GB of flash memory (~8 times as much as Spirit or Opportunity). 256 MB of dynamic random access memory. 256 kB of electrically erasable programmable read-only memory.
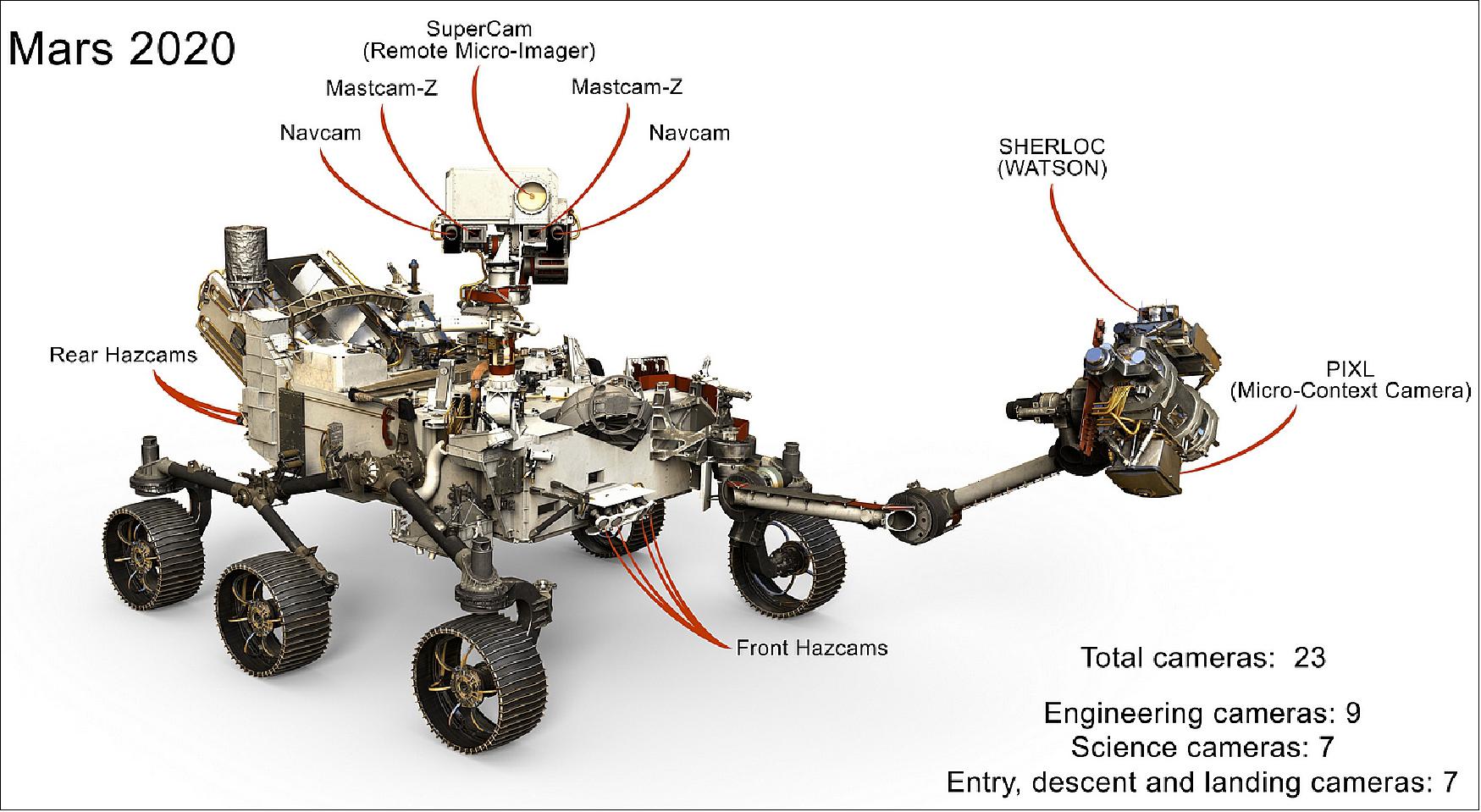
The Cameras on Perseverance Rover
The rover has several cameras focused on engineering and science tasks. Some help us land on Mars, while others serve as our "eyes" on the surface to drive around. We use others to do scientific observations and aid in the collection of samples. 10)
Technical specifications:
- Main function: Take pictures, looking up and down, during descent through Martian atmosphere.
- Location: Mounted on the fore-port-side of the rover, pointing toward the ground.
Technical specifications:
- Main function: Used for driving around on Mars and for positioning the tools on the robotic arm
- Location: Various places on the rover
- Mass: < 425 grams
- Image size: 5120 x 3840 pixels
- Image resolution: 20 Mpixel
• Science Cameras The science cameras are:
- MastCam-Z is a pair of cameras that takes color images and video, three-dimensional stereo images, and has a powerful zoom lens. Like the Mastcam cameras on the Curiosity rover, Mastcam-Z on Mars 2020 Perseverance consists of two duplicate camera systems mounted on the mast that stands up from the rover deck. The cameras are next to each other and point in the same direction, providing a 3D view similar to what human eyes would see, only better. They also have a zoom function to see details of faraway targets.
- SuperCam, fires a laser at mineral targets that are beyond the reach of the rover's robotic arm, and then analyzes the vaporized rock to reveal its elemental composition. Like the ChemCam on rover Curiosity, SuperCam fires laser pulses at pinpoint areas smaller than 1 mm from more than 7 meters away. Its camera and spectrometers then examine the rock's chemistry. It seeks organic compounds that could be related to past life on Mars. When the laser hits the rock, it creates plasma, which is an extremely hot gas made of free-floating ions and electrons. An on-board spectrograph records the spectrum of the plasma, which reveals the composition of the material.
- PIXL, uses X-ray fluorescence to identify chemical elements in target spots as small as a grain of table salt. It has a Micro-Context Camera to provide images of to correlate its elemental composition maps with visible characteristics of the target area.
- SHERLOC. Its main tools are spectrometers and a laser, but it also uses a macro camera to take extreme close-ups of the areas that are studied. This provides context so that scientists can see textures that might help tell the story of the environment in which the rock formed.
- WATSON. This camera is one of the tools on the "arm" or turret at the end of Curiosity's robotic arm. It is almost identical to the MAHLI hand-lens camera on the Curiosity rover. WATSON captures the larger context images for the very detailed information that SHERLOC collects on Martian mineral targets. WATSON provides views of the fine-scale textures and structures in Martian rocks and the surface layer of rocky debris and dust. Since WATSON can be moved around on the robotic arm, it also provides other images of rover parts and geological targets that can be used by other arm-mounted instruments. For example, it can be pointed at the oxygen-making experiment MOXIE to help monitor how much dust accumulates around the inlet that lets in Martian air for the extraction of oxygen. - A calibration target for WATSON is attached to the front of the rover body. It contains, a metric standardized bar graphic to help calibrate the instrument.
Communications
Mars 2020 Perseverance has three antennas that serve as both its "voice" and its "ears." They are located on the rover equipment deck (its "back"). Having multiple antennas provides operational flexibility and back-up options just in case they are needed. Antennas on rover deck: 11)
• UHF (Ultra-High Frequency) Antenna
UHF antenna: Most often, Mars 2020 Perseverance uses its ultra-high frequency (UHF) antenna (about 400 megahertz) to communicate with Earth through NASA's orbiters around Mars. Because the rover and orbiter antennas are within close range of each other, they act a little like walky-talkies compared to the long-range telecommunications with Earth provided by the low-gain and high-gain antennas.
It generally takes about 5 to 20 minutes for a radio signal to travel the distance between Mars and Earth, depending on planet positions. Using orbiters to relay messages is beneficial because they are much closer to the rover than the Deep Space Network (DSN) antennas on Earth. The mass- and power-constrained rover can achieve high data rates of up to 2 Mbit/s on the relatively short-distance relay link to the orbiters overhead. The orbiters then use their much larger antennas and transmitters to relay that data on the long-distance link back to Earth.
- Main function: Transmitting data to Earth through Mars Orbiters
- Radio frequency: UHF-band at ~400 MHz
- Transmission rates: Up to 2 Mbit/s on the rover-to-orbiter relay link.
X-band High-Gain Antenna: The high-gain antenna is steerable so it can point its radio beam in a specific direction. The benefit of having a steerable antenna is that the entire rover doesn't need to change position to talk to Earth, which is always moving in the Martian sky. Like turning your neck to talk to someone beside you rather than turning your entire body, the rover can save energy and keep things simple by moving only the antenna. Its high gain allows it to focus its beam, allowing higher data rates on the long link back to Earth.
- Main function: Transmitting data directly to and from Earth
- Radio frequency: X-band (7 to 8 GHz)
- Size: Hexagonally shaped, 0.3 m in diameter
- Transmission/ Reception Rates: 160/500 bit/s or faster to/from the Deep Space Network's 34 m diameter antennas or at 800/3000 bit/s or faster to/from the Deep Space Network's 70 m diameter antenna.
- Provided by: Spain.
X-band Low-Gain Antenna: Mars 2020 Perseverance uses its low-gain antenna primarily for receiving signals. This antenna can send and receive information in every direction; that is, it is "omnidirectional." The antenna transmits at low data rate to the Deep Space Network antennas on Earth. Because it doesn't need to be pointed, it provides a robust way to always communicate with the rover.
- Main function: Receiving antenna
- Radio frequency: X-band (7 to 8 GHz)
- Reception rates: Approximately 10 bit/s or faster from the Deep Space Network's 34 m diameter antennas or approximately 30 bit/s or faster from the Deep Space Network's 70 m diameter antenna.
Robotic Arm
Mars 2020 Perseverance's robotic arm can move a lot like yours. It has a shoulder, elbow and wrist "joints" for maximum flexibility. The arm lets the rover work as a human geologist would: by holding and using science tools with its "hand" or turret. The rover's own "hand tools" extract cores from rocks, takes microscopic images and analyzes the elemental composition and mineral makeup of Martian rocks and soil. 12)
Technical specification:
- Length: 2.1 m
- Degrees of freedom:
- There are five. They are made possible by tiny motors called "rotary actuators." The five degrees of freedom are known as the shoulder azimuth joint, shoulder elevation joint, elbow joint, wrist joint and turret joint.
- "Hand" turret: At the end of the arm is the "turret." It's like a hand that carries scientific cameras, mineral and chemical analyzers for studying the past habitability of Mars, and choosing the most scientifically valuable sample to cache.
- Names of tools on the turret: SHERLOC and WATSON, PIXL, GDRT (Gaseous Dust Removal Tool), Ground Contact Sensor, Drill
- Drill: The drill is a rotary percussive drill designed to extract rock core samples from the surface of Mars.
- Drill bits: A suite of interchangeable bits: coring bits, regolith bit and an abrader.
- Main function: Assist in Mars surface investigation and sample collection
- Diameter of drilled holes: 27 mm.
Sample Handling
The Mars 2020 Perseverance mission will gather samples from Martian rocks and soil using its drill. The rover will then store the sample cores in tubes on the Martian surface. This entire process is called "sample caching". 13)
Mars 2020 Perseverance will be the first mission to demonstrate this on Mars. It could potentially pave the way for future missions that could collect the samples and return them to Earth for intensive laboratory analysis.
The three major steps in sample handling are:
• Step 1: Collecting the Samples
• Step 2: Sample Sealing and Storing Onboard
• Step 3: Depositing the Samples on the Surface
Technical specifications:
- Objectives: Collect and store a compelling set of rock and soil samples that could be returned to earth in the future.
- Witness tubes: 5 tubes
- Sample containers: 43 containers
- Samples to be collected: at least 20 samples
Electrical Power
The Mars 2020 Perseverance rover requires electrical power to operate. Without power, the rover cannot move, use its science instruments, or communicate with Earth.
Mars 2020 Perseverance carries a radioisotope power system. This power system produces a dependable flow of electricity using the heat of plutonium's radioactive decay as its "fuel."
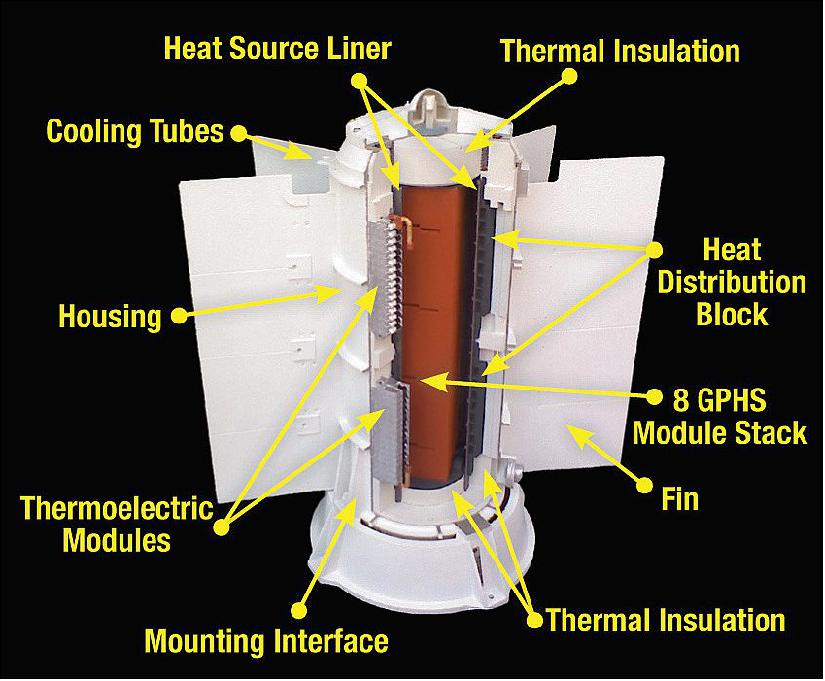
The power source is called the MMRTG (Multi-Mission Radioisotope Thermoelectric Generator). The MMRTG converts heat from the natural radioactive decay of plutonium into electricity. This power system charges the rover's two primary batteries. The heat from the MMRTG is also used to keep the rover's tools and systems at their correct operating temperatures.
The Department of Energy (DOE), in support of NASA, has developed several generations of such space nuclear power systems that can be used to supply electricity — and useful excess heat — for a variety of space exploration missions. The current RPS (Radioisotope Power System), called a Multi-Mission Radioisotope Thermoelectric Generator (MMRTG), was designed with the flexibility to operate on planetary bodies with atmospheres, such as at Mars, as well as in the vacuum of space. An MMRTG generates about 110 W of electrical power at launch, an increment of power that can be matched with a variety of potential mission needs. As with prior RPS, ensuring a high degree of safety is also a fundamental consideration. 14)
How RTGs work: RTGs work by converting heat from the natural decay of radioisotope materials into electricity. RTGs consist of two major elements: a heat source that contains the radioisotope fuel (mostly plutonium-238), and solid-state thermocouples that convert the plutonium's decay heat energy to electricity.
Conversion of heat directly into electricity is a scientific principle discovered two centuries ago. German scientist Thomas Johann Seebeck observed that an electric voltage is produced when two dissimilar, electrically conductive materials are joined in a closed circuit and the two junctions are kept at different temperatures. Such pairs of junctions are called thermoelectric couples (or thermocouples).
The power output from such thermocouples is a function of the temperature of each junction and the properties of the thermoelectric materials. The thermocouples in RTGs use heat from the natural decay of the radioisotope fuel to heat the hot-side junction of the thermocouple, and the cold of space to produce a low temperature at the cold-side junction
Technical specifications:
- Objective: Provide electricity to the rover
- Location: Aft end of the rover
- Size: 64 cm in diameter by 66 cm long
- Mass: ~45 kg
- Power system: Uses 4.8 kg of plutonium dioxide as the source of the steady supply of heat
- Electrical power produced: About 110 W at launch, declining a few percent per year
- Batteries: Two lithium-ion rechargeable batteries to meet peak demands of rover activities when the demand temporarily exceeds the MMRTG's steady electrical output levels.
- Reliability: The electrical power system on the Mars 2020 Perseverance rover is just like the one used on the Mars Science Laboratory Curiosity rover. NASA has used similar power systems reliably for decades, including the Apollo missions to the Moon, the Viking missions to Mars, and on spacecraft that flew to the outer planets and Pluto, including the Pioneer, Voyager, Ulysses, Galileo, Cassini, and New Horizons missions.
- Safety: Built with several layers of rugged protective material to contain its fuel in a wide range of potential launch accidents, verified through impact testing. The heat source plutonium is manufactured in a ceramic form, which helps it avoid being a significant health hazard unless broken into very fine pieces or vaporized, and then inhaled or swallowed. In the unlikely event of a Mars 2020 Perseverance launch accident, those who might be exposed could receive an average dose of 15-60 millirem. A resident of the United States receives, on average, 310 millirem of radiation each year from natural sources, such as radon and cosmic rays from space.
This power system provides several advantages:
• The 14-year operational lifetime of an MMRTG provides significant reserve for Mars 2020 Perseverance prime mission duration of 1.5 Mars years (three Earth years)
• It gives the rover greater mobility over a large range of latitudes and altitudes
• It allows scientists to maximize the capabilities of the rover's science instruments
• It provides engineers with a lot of flexibility in operating the rover (e.g., day and night, and through the winter season).
Note: As of July 2020, the previously single large Mars2020 file has been split into three files, to make the file handling manageable for all parties concerned, in particular for the user community. The chapter "Development Status" has so high-resolution imagery, that it had to be split into two files.
• Mars 2020 Development Status 2
• This file covers the Mars 2022 Perseverance mission and its imagery without the Development Status
Launch
The Mars 2020 Perseverance mission was launched from the Cape Canaveral Air Force Station (SLC-41) in Florida on July 30, 2020 (11:50 UTC) on a two-stage Atlas V-541 launch vehicle, provided by ULA (United Launch Alliance). The mission will land at the Jezero Crater on 18 February 2021. 15) 16)
- "With the launch of Perseverance, we begin another historic mission of exploration," said NASA Administrator Jim Bridenstine. "This amazing explorer's journey has already required the very best from all of us to get it to launch through these challenging times. Now we can look forward to its incredible science and to bringing samples of Mars home even as we advance human missions to the Red Planet. As a mission, as an agency, and as a country, we will persevere."
- The ULA Atlas V's Centaur upper stage initially placed the Mars 2020 spacecraft into a parking orbit around Earth. The engine fired for a second time and the spacecraft separated from the Centaur as expected. Navigation data indicate the spacecraft is perfectly on course to Mars.

The Mars 2020 spacecraft separated from the rocket's Centaur upper stage 57 minutes after liftoff and five minutes after a second burn of the Centaur that placed the spacecraft on a trajectory toward Mars.
Perseverance is based on the Curiosity rover that has been on Mars since August 2012, but with a number of modifications. "We're carrying about 50% more surface payload than Curiosity did, and that was by far the most complex thing we had ever done up until that time," Matt Wallace, Mars 2020 deputy program manager, said at a pre-launch briefing.
Much of that additional payload, and complexity, is for the rover's system to collect samples of Martian rocks. The rover will cache up to three dozen samples in tubes for return to Earth by two later missions that NASA is developing in cooperation with the European Space Agency for launch in 2026.
The rover includes several other upgrades. A terrain relative navigation system will compare images taken by the spacecraft during its descent to the Martian surface with maps on the spacecraft, and direct the spacecraft accordingly to enable a pinpoint landing. Engineers also upgraded the rover's wheels after rocks damaged the wheels on Curiosity.
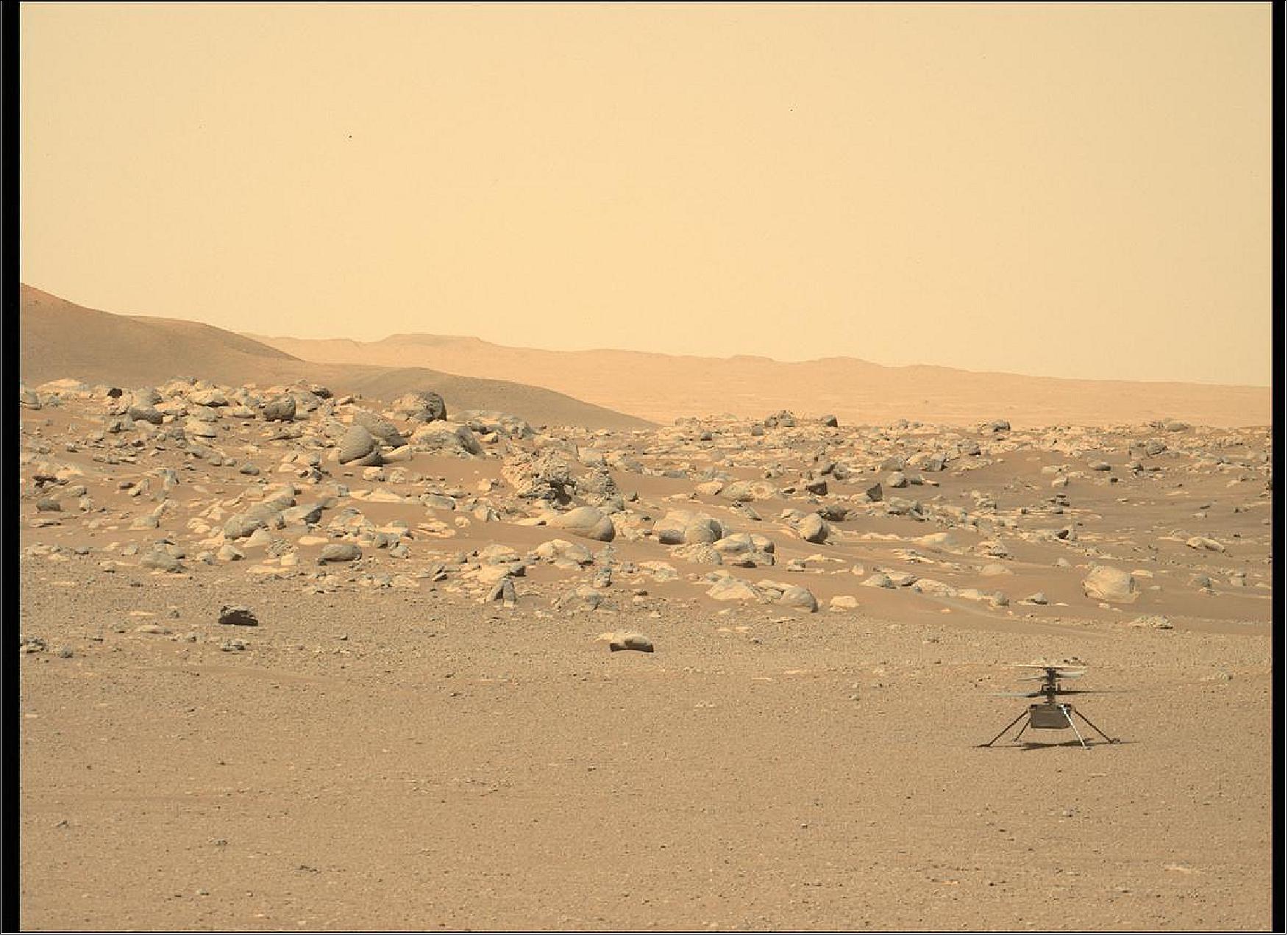
In addition to its payload of sample collection equipment and scientific experiments, Perseverance is carrying a small helicopter called Ingenuity. The 1.8-kilogram helicopter, stored on the rover's belly pan, will be released after landing for a series of flight tests.
"We as human beings have never flown a rotorcraft outside of our Earth's atmosphere, so this will be very much a Wright Brothers moment," said Mimi Aung, Ingenuity Mars Helicopter project manager at JPL, during a pre-launch briefing. Engineers hope to perform several flights of Ingenuity over 30 days to test its performance.
Aung compared Ingenuity to Sojourner, the small rover flown on the Mars Pathfinder lander mission in 1997, paving the way for larger rovers like Perseverance. "This Mars helicopter, Ingenuity, could lead to the opening of a whole new way to explore," she said.
Note: As of May 2022, the previously large Mars 2020 Perseverance file was split into two files, to make the file handling manageable for all parties concerned, in particular for the user community.
• Mars 2020 Perseverance mission status in the period 2021
Mission Status
• July 11, 2022: The six-wheeled explorer has inspected a stretch of the Red Planet to see if it is flat enough for NASA's next Mars lander. 17)
- NASA's Perseverance Mars rover is conducting its science campaign, taking samples at Jezero Crater's ancient river delta, but it's also been busy scouting. The rover is looking for locations where the planned Mars Sample Return (MSR) Campaign can land spacecraft and collect sample tubes Perseverance has filled with rock and sediment. The sites being scouted are under consideration because of their proximity to the delta and to one another, as well as for their relatively flat, lander-friendly terrain.
- Mars Sample Return is a historic endeavor that would retrieve and deliver samples of that faraway terrain for intensive study in laboratories on Earth to look for signs of past microscopic life on the Red Planet. The strategic partnership between NASA and ESA (European Space Agency) would involve multiple spacecraft, including a rocket that would launch from the surface of Mars.


- Engineers planning a Mars landing prefer to work with flatter ground because rocks and an undulating surface are harder to land on. With that in mind, the MSR Entry, Descent, and Landing team is looking for a pancake-flat landing zone with a 200-foot (60-meter) radius.
- "The Perseverance team pulled out all the stops for us, because Mars Sample Return has unique needs when it comes to where we operate," said MSR Program Manager Richard Cook of NASA's Jet Propulsion Laboratory in Southern California. "Essentially, a dull landing place is good. The flatter and more uninspiring the vista, the better we like it, because while there are a lot of things that need to be done when we arrive to pick up the samples, sightseeing is not one of them."
- Where is Perseverance Right Now?
Flat-Out Inspirational
- The first stage of MSR is already in progress: Perseverance has cored, collected, and sealed nine samples of Mars rock to date. The ninth, collected on July 6, is the first from Jezero Crater's ancient river delta. The plan is for Perseverance to drop, or cache, sample tubes on the surface to await later retrieval during MSR surface operations.
- Choosing an area that lacks large rocks (especially those over 7 1/2 inches, or 19 centimeters, in diameter), sand dunes, and steeply angled terrain would go a long way toward easing the path for an MSR recovery vehicle to efficiently grab tubes before heading to the MSR Sample Retrieval Lander and its Mars Ascent Vehicle.
Landing Strip
- The MSR team calls the area they've been looking at the "landing strip" because – at least from images taken from spacecraft in orbit – it appears to be as flat and long as a runway. But they needed a rover's-eye-view for a closer look.
- "We had been eyeing these locations since before Perseverance's landing, but imagery from orbit can only tell you so much," said Al Chen, Mars Sample Return Systems Engineering & Integration manager at JPL. "Now we have some up-close-and-personal shots of the landing strip that indicate we were right on the money. The landing strip will more than likely make our shortlist of potential landing and caching sites for MSR."
More About the Campaign
- NASA's Mars Sample Return Campaign promises to revolutionize humanity's understanding of Mars by bringing scientifically selected samples to Earth for study using the most sophisticated instruments around the world. The campaign would fulfill a solar system exploration goal, a high priority since the 1970s and in the last three National Academy of Sciences Planetary Decadal Surveys.
- This strategic NASA and ESA partnership would be the first mission to return samples from another planet and the first launch from the surface of another planet. The samples collected by NASA's Perseverance Mars rover during its exploration of an ancient lakebed are thought to present the best opportunity to reveal clues about the early evolution of Mars, including the potential for past life. By better understanding the history of Mars, we would improve our understanding of all rocky planets in the solar system, including Earth.
• May 06, 2022: On Thursday, May 5, mission controllers at NASA's Jet Propulsion Laboratory received confirmation that the agency's Ingenuity Mars Helicopter had re-established communications with the Perseverance rover. Earlier in the week, the rotorcraft had missed a planned communications session with the rover – for the first time in over a year of operations on the Mars surface. Ingenuity relies on Perseverance as the base station that enables it to send data to and receive commands from Earth. While more data downlinks and analysis are needed, the Ingenuity and Perseverance teams believe they have determined a cause of the anomaly as well as a plan to return to normal operations. 18)
- Ingenuity became the first powered aircraft to operate on another world on April 19, 2021. Designed to perform up to five experimental test flights over a span of 30 Martian days (sols), or close to 31 Earth days, the rotorcraft has flown over 4.2 miles (6.9 kilometers) across 28 sorties and operated from the surface of the Red Planet for over a year.
- Data downlinked indicates that the communications dropout on May 3, Sol 427 of the Perseverance rover's mission at Mars, was a result of the solar-powered helicopter entering a low-power state, potentially due to the seasonal increase in the amount of dust in the Martian atmosphere and lower temperatures as winter approaches. The dust diminishes the amount of sunlight hitting the solar array, reducing Ingenuity's ability to recharge its six lithium-ion batteries. When the battery pack's state of charge dropped below a lower limit, the helicopter's field-programmable gate array (FPGA) was powered down.
- The FPGA manages Ingenuity's operational state, switching the other avionics elements on and off as needed to maximize power conservation. It also operates the heaters that enable the helicopter to survive frigid Martian nights, maintains precise spacecraft time, and controls when the helicopter is scheduled to wake up for communications sessions with Perseverance.
- When the FPGA lost power during the Martian night, the helicopter's onboard clock – which designates the time that communications with Perseverance occur – reset. And Ingenuity's heaters, so vital to keeping electronics and other components within operational temperatures – turned off. When the Sun rose the next morning and the solar array began to charge the batteries, the helicopter's clock was no longer in sync with the clock aboard the rover. Essentially, when Ingenuity thought it was time to contact Perseverance, the rover's base station wasn't listening.
- To make sure Perseverance would hear a call, Perseverance mission controllers at JPL commanded the rover to spend almost all of Sol 429 (May 5) listening for the helicopter's signal. It came at 11:45 a.m. local Mars time. The data transmitted was limited to deliberately preserve battery charge, but the helicopter's critical health and safety data were nominal. The radio link between Ingenuity and Perseverance was stable, spacecraft temperatures were within expectation, the solar array was recharging the battery at a rate expected for this season, and the battery was healthy, containing 41% of a full charge.
- But one radio communications session does not mean Ingenuity is out of the woods. The increased (light-reducing) dust in the air means charging the helicopter's batteries to a level that will allow important components (like the clock and heaters) to remain energized throughout the night presents a significant challenge.
- Each night for the past three sols, Ingenuity's heaters have kicked in when its battery temperature was below 5 degrees Fahrenheit (minus 15 degrees Celsius). While on, the heaters kept the temperature of vital helicopter components from dropping farther – down to the ambient environmental temperature of minus 112 degrees Fahrenheit (-80 º Celsius). But the team believes that the battery couldn't sustain the energy draw of the onboard heaters throughout the night.
- "We have always known that Martian winter and dust storm season would present new challenges for Ingenuity, specifically colder sols, an increase in atmospheric dust, and more frequent dust storms," said Ingenuity Team Lead Teddy Tzanetos of NASA's Jet Propulsion Laboratory in Southern California. "Every flight and every mile of distance flown beyond our original 30-sol mission has pushed the spacecraft to its limits each and every sol on Mars."
- The Ingenuity and Perseverance teams have designed a plan they hope will make a difference. Their goal is to help the helicopter's battery accumulate enough of a charge during the next few sols so that it could support all necessary spacecraft systems during the cold Martian night. Uplinked yesterday, the new commands lower the point at which the helicopter energizes its heaters from when the battery falls below 5 º Fahrenheit (-15º Celsius) to minus 40º Fahrenheit (-40 º Celsius). The helicopter then shuts down quickly, rather than consuming the battery charge with the heaters. The team hopes this strategy will allow the battery to retain whatever charge it collected during the day. The Ingenuity engineers hope that after several days of the helicopter's array soaking in the limited rays, the battery will have reached a point where the spacecraft can return to normal operations.
- Allowing the heaters to remain off overnight will conserve significant battery energy but will also expose components to the cold of Martian night. Developed as a technology demonstration to prove that powered, controlled flight on Mars is possible, the 4-pound (1.8 kg) rotorcraft carries many commercial off-the-shelf parts that weren't designed for the cold of deep space operations.
- "Our top priority is to maintain communications with Ingenuity in the next few sols, but even then, we know that there will be significant challenges ahead," said Tzanetos. "I could not be prouder of our team's performance over the last year, let alone our aircraft's incredible achievements on Mars. We are hopeful that we can accumulate battery charge in order to return to nominal operations and continue our mission into the weeks ahead."
• April 20, 2022: NASA's Perseverance Mars rover has captured dramatic footage of Phobos, Mars' potato-shaped moon, crossing the face of the Sun. These observations can help scientists better understand the moon's orbit and how its gravity pulls on the Martian surface, ultimately shaping the Red Planet's crust and mantle. 19)
- Captured with Perseverance's next-generation Mastcam-Z camera on April 2, the 397th Martian day, or sol, of the mission, the eclipse lasted a little over 40 seconds – much shorter than a typical solar eclipse involving Earth's Moon. (Phobos is about 157 times smaller than Earth's Moon. Mars' other moon, Deimos, is even smaller.)
- The images are the latest in a long history of NASA spacecraft capturing solar eclipses on Mars. Back in 2004, the twin NASA rovers Spirit and Opportunity took the first time-lapse photos of Phobos during a solar eclipse. Curiosity continued the trend with videos shot by its Mastcam camera system.
- But Perseverance, which landed in February 2021, has provided the most zoomed-in video of a Phobos solar eclipse yet – and at the highest-frame rate ever. That's thanks to Perseverance's next-generation Mastcam-Z camera system, a zoomable upgrade from Curiosity's Mastcam.
- "I knew it was going to be good, but I didn't expect it to be this amazing," said Rachel Howson of Malin Space Science Systems in San Diego, one of the Mastcam-Z team members who operates the camera.
- Howson noted that although Perseverance first sends lower-resolution thumbnails that offer a glimpse of the images to come, she was stunned by the full-resolution versions: "It feels like a birthday or holiday when they arrive. You know what's coming, but there is still an element of surprise when you get to see the final product."
- Color also sets this version of a Phobos solar eclipse apart. Mastcam-Z has a solar filter that acts like sunglasses to reduce light intensity. "You can see details in the shape of Phobos' shadow, like ridges and bumps on the moon's landscape," said Mark Lemmon, a planetary astronomer with the Space Science Institute in Boulder, Colorado, who has orchestrated most of the Phobos observations by Mars rovers. "You can also see sunspots. And it's cool that you can see this eclipse exactly as the rover saw it from Mars."
- As Phobos circles Mars, its gravity exerts small tidal forces on the Red Planet's interior, slightly deforming rock in the planet's crust and mantle. These forces also slowly change Phobos' orbit. As a result, geophysicists can use those changes to better understand how pliable the interior of Mars is, revealing more about the materials within the crust and mantle.
- Scientists already know that Phobos is doomed: The moon is getting closer to the Martian surface and is destined to crash into the planet in tens of millions of years. But eclipse observations from the surface of Mars over the last two decades have also allowed scientists to refine their understanding of Phobos' slow death spiral.
• April 19, 2022: Collecting samples as it explores an ancient and now-dry river channel is but one goal the six-wheeled geologist will pursue during its second Red Planet exploration. 20)
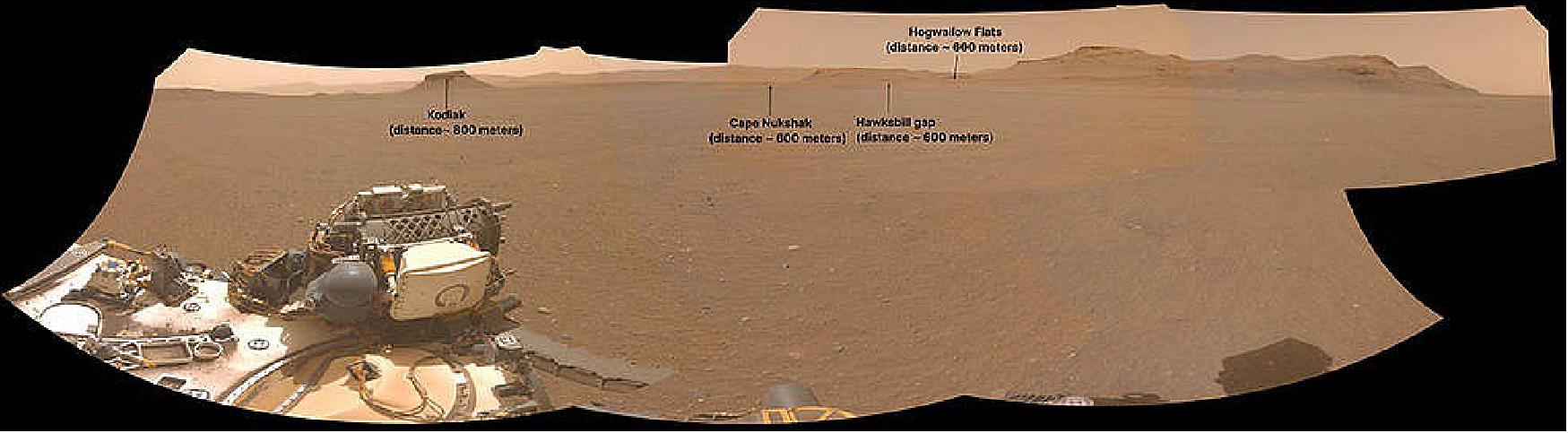
- After collecting eight rock-core samples from its first science campaign and completing a record-breaking, 31-Martian-day (or sol) dash across about 3 miles (5 kilometers) of Mars, NASA's Perseverance rover arrived at the doorstep of Jezero Crater's ancient river delta April 13. Dubbed "Three Forks" by the Perseverance team (a reference to the spot where three route options to the delta merge), the location serves as the staging area for the rover's second science expedition, the "Delta Front Campaign."
- "The delta at Jezero Crater promises to be a veritable geologic feast and one of the best locations on Mars to look for signs of past microscopic life," said Thomas Zurbuchen, the associate administrator of NASA's Science Mission Directorate in Washington. "The answers are out there – and Team Perseverance is ready to find them."
- The delta, a massive fan-shaped collection of rocks and sediment at the western edge of Jezero Crater, formed at the convergence of a Martian river and a crater lake billions of years ago. Its exploration tops the Perseverance science team's wish list because all the fine-grained sediment deposited at its base long ago is the mission's best bet for finding the preserved remnants of ancient microbial life.

- Using a drill on the end of its robotic arm and a complex sample collection system, Perseverance is gathering rock cores for return to Earth – the first part of the Mars Sample Return campaign.
- "We've been eyeing the delta from a distance for more than a year while we explored the crater floor," said Ken Farley, Perseverance project scientist at Caltech in Pasadena. "At the end of our fast traverse, we are finally able to get close to it, obtaining images of ever-greater detail revealing where we can best explore these important rocks."
Sticking a Fork in Three Forks
- The Delta Front Campaign kicked off Monday, April 18, with about a week's worth of driving to the southwest and then west. One goal of this excursion is to scope out the best route to ascend the delta, which rises about 130 feet (40 meters) above the crater floor. Two options, called "Cape Nukshak" and "Hawksbill Gap," look traversable. The science team is leaning toward Hawksbill Gap because of the shorter drive time needed to reach the top of the delta, but that may change as the rover acquires additional information on the two options.
- The Delta Front Campaign kicked off Monday, April 18, with about a week's worth of driving to the southwest and then west. One goal of this excursion is to scope out the best route to ascend the delta, which rises about 130 feet (40 meters) above the crater floor. Two options, called "Cape Nukshak" and "Hawksbill Gap," look traversable. The science team is leaning toward Hawksbill Gap because of the shorter drive time needed to reach the top of the delta, but that may change as the rover acquires additional information on the two options.
- After completing the descent, Perseverance will, according to current plans, again ascend the delta (perhaps via the other, untraveled route) to begin the "Delta Top Campaign," which will last about half an Earth year as well.
- "The delta is why Perseverance was sent to Jezero Crater: It has so many interesting features," said Farley. "We will look for signs of ancient life in the rocks at the base of the delta, rocks that we think were once mud on the bottom of ‘Lake Jezero.' Higher up the delta, we can look at sand and rock fragments that came from upstream, perhaps from miles away. These are locations the rover will never visit. We can take advantage of an ancient Martian river that brought the planet's geological secrets to us."
- Perseverance is kicking off its second science campaign more than a month earlier than planned due to the rover's ability to autonomously negotiate Jezero Crater's sandpits, craters, boulders, and fields of sharp rocks. The rover's six flight-grade-aluminum wheels completed 3,116.25 revolutions during the 16,617-foot (5,065-meter) journey to Three Forks. Averaging 692 feet (211 meters) per drive (no driving occurred on six sols), the rover's artificial-intelligence-assisted autonavigation capability, or AutoNav, assessed 10,744 navigation camera images during the road trip and commanded the rover to halt and turn in place to negotiate surface hazards 55 times.
• March 23, 2022: The team behind the agency's history-making rotorcraft soars, picking up high-profile awards alongside a new-and-improved system to assess asteroid orbits. 21)

- The Ingenuity team received the club's preeminent award, the Dr. Robert H. Goddard Memorial Trophy, which honors a person or team who has provided leadership in groundbreaking space or aeronautics achievements in the U.S. The helicopter landed last year on the Red Planet attached to the belly of NASA's Mars Perseverance rover and first took flight in the planet's extremely thin atmosphere April 19, 2021.
- Initially slated for no more than five flights, the 4-pound (2 kg) craft has completed 22, defying expectations and transitioning from a technology demonstration to an operational tool, acting as an aerial scout for Perseverance. With Ingenuity's mission extended through September 2022, it can continue testing its limits in order to support the design of future Mars air vehicles.
- "The Mars Helicopter team has always looked up to the great pioneers that laid the foundation of modern aerospace. Few better fit that description than the father of modern rocketry," said Ingenuity Team Lead Teddy Tzanetos, referring to the trophy's namesake. "Receiving the Goddard Memorial Trophy is not only a great honor for the team, but reinforces the idea that just as Robert H. Goddard's first liquid-fueled rockets of the 1920s led to inter-planetary missions, Ingenuity could lead us to a future filled with fleets of Mars aircraft soaring through its thin atmosphere."
- The same night, CNEOS received the National Space Club's Nelson P. Jackson Aerospace Award for the most outstanding contribution to the missile, aircraft, or space field. CNEOS calculates every known near-Earth object's orbit and assesses the possibility of a future impact with Earth in support of NASA's Planetary Defense Coordination Office at the agency's HQs in Washington. Its Sentry-II algorithm improves NASA's ability to evaluate the probability of impact of tens of thousands of near-Earth asteroids and went into operation in December 2021.

More Honors for Ingenuity
- The Ingenuity team has already accepted the John L. "Jack" Swigert, Jr. Award for Space Exploration from the Space Foundation, Aviation Week Network's 2021 Laureate Award, and the Royal Institute of Navigation's Duke of Edinburgh's Navigation Award for Outstanding Technical Achievement "for innovative autonomous navigation enabling a series of successful Ingenuity Mars Helicopter flights in 2021."
- And more honors are on the horizon: On March 24, the helicopter team will accept the Michael Collins Trophy for Current Achievement at the National Air and Space Museum's Steven F. Udvar-Hazy Center in Chantilly, Virginia. The esteemed award honors outstanding achievement in the field of aerospace science and technology. The Ingenuity team will be honored with the 2022 IEEE Spectrum Emerging Technology Award at a May 6 ceremony in San Diego.
- The Ingenuity team is also one of four finalists for the National Aeronautic Association's prestigious 2021 Collier Trophy. The winner will be presented with the award on June 9.
• March 18, 2022: The rover's self-driving capabilities will be put to the test this month as it begins a record-breaking series of sprints to its next sampling location. 22)
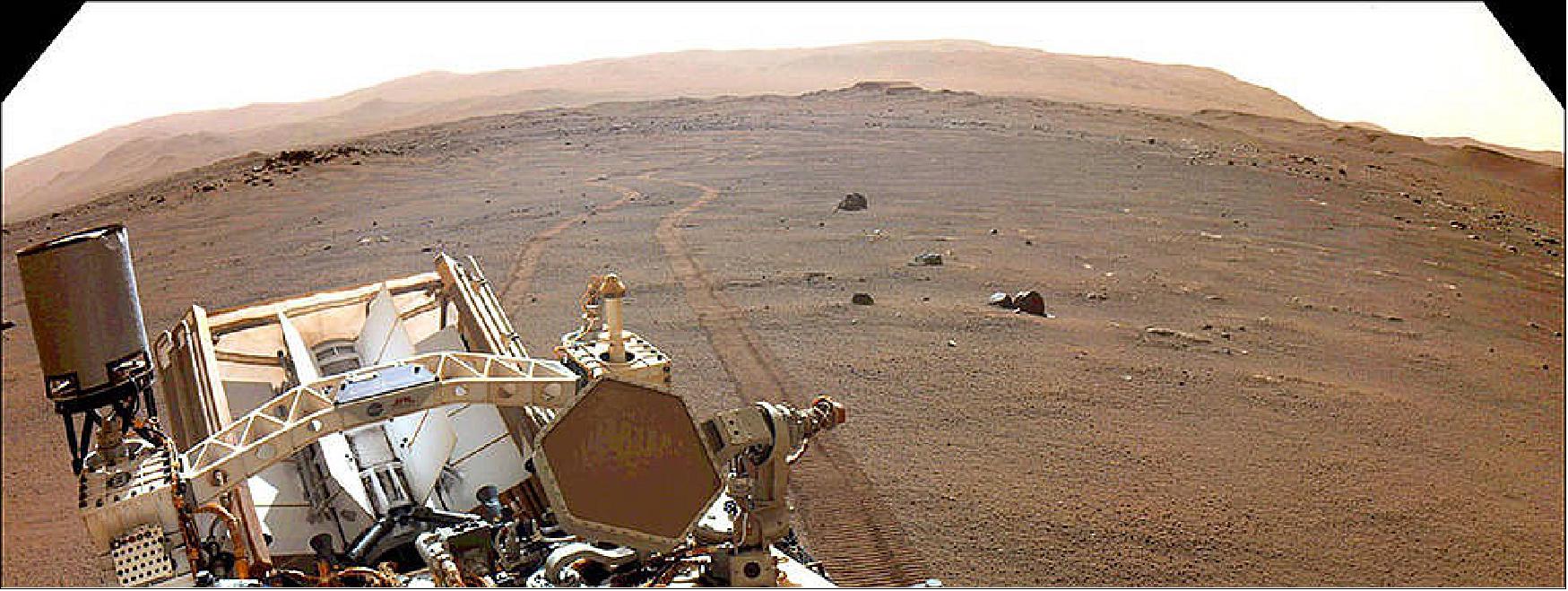
- NASA's Perseverance Mars rover is trying to cover more distance in a single month than any rover before it – and it's doing so using artificial intelligence. On the path ahead are sandpits, craters, and fields of sharp rocks that the rover will have to navigate around on its own. At the end of the 3-mile (5 km) journey, which began March 14, 2022, Perseverance will reach an ancient river delta within Jezero Crater, where a lake existed billions of years ago.
- This delta is one of the best locations on Mars for the rover to look for signs of past microscopic life. Using a drill on the end of its robotic arm and a complex sample collection system in its belly, Perseverance is collecting rock cores for return to Earth – the first part of the Mars Sample Return campaign.
- "The delta is so important that we've actually decided to minimize science activities and focus on driving to get there more quickly," said Ken Farley of Caltech, Perseverance's project scientist. "We'll be taking lots of images of the delta during that drive. The closer we get, the more impressive those images will be."
- The science team will be searching these images for the rocks they'll eventually want to study in closer detail using the instruments on Perseverance's arm. They'll also hunt for the best routes the rover can take to ascend the 130-foot-high (40-meter-high) delta.
- But first, Perseverance needs to get there. The rover will do this by relying on its self-driving AutoNav system, which has already set impressive distance records. While all of NASA's Mars rovers have had self-driving abilities, Perseverance has the most advanced one yet.
- "Self-driving processes that took minutes on a rover like Opportunity happen in less than a second on Perseverance," said veteran rover planner and flight software developer Mark Maimone of NASA's Jet Propulsion Laboratory in Southern California, which leads the mission. "Because autonomous driving is now faster, we can cover more ground than if humans programmed every drive."
How Rover Planning Works
- Before the rover rolls, a team of mobility planning experts (Perseverance has 14 who trade off shifts) writes the driving commands the robotic explorer will carry out. The commands reach Mars via NASA's Deep Space Network, and Perseverance sends back data so the planners can confirm the rover's progress. Multiple days are required to complete some plans, as with a recent drive that spanned about 1,673 feet (510 m) and included thousands of individual rover commands.
- Some drives require more human input than others. AutoNav is useful for drives over flat terrain with simple potential hazards – for instance, large rocks and slopes – that are easy for the rover to detect and work around.
Thinking While Driving
- AutoNav reflects an evolution of self-driving tools previously developed for NASA's Spirit, Opportunity, and Curiosity rovers. What's different for AutoNav is "thinking while driving" – allowing Perseverance to take and process images while on the move. The rover then navigates based on those images. Is that boulder too close? Will its belly be able to clear that rock? What if the rover wheels were to slip?
- Upgraded hardware allows "thinking while driving" to happen. Faster cameras mean Perseverance can take images quickly enough to process its route in real-time. And unlike its predecessors, Perseverance has an additional computer dedicated entirely to image processing. The computer relies on a single-purpose, super-efficient microchip called a field-programmable gate array that is great for computer vision processing.
- "On past rovers, autonomy meant slowing down because data had to be processed on a single computer," Maimone said. "This extra computer is insanely fast compared to what we had in the past, and having it dedicated for driving means you don't have to share computing resources with over 100 other tasks."
- Of course, humans aren't completely out of the picture during AutoNav drives. They still plan the basic route using images taken from space by missions like NASA's Mars Reconnaissance Orbiter. Then, they mark obstacles such as potential sand traps for Perseverance to avoid, drawing "keep out" and "keep in" zones that help it navigate.
- Another big difference is Perseverance's sense of space.
- Curiosity's autonomous navigation program keeps the rover in a safety bubble that is 16 feet (5 meters) wide. If Curiosity spots two rocks that are, say, 15 feet (4.5 m) apart – a gap it could easily navigate – it will still stop or travel around them rather than risk passing through.
- But Perseverance's bubble is much smaller: A virtual box is centered on each of the rover's six wheels. Mars' newest rover has a more sensitive understanding of the terrain and can get around boulders on its own.
- "When we first looked at Jezero Crater as a landing site, we were concerned about the dense fields of rocks we saw scattered across the crater floor," Maimone said. "Now we're able to skirt or even straddle rocks that we couldn't have approached before."
- While previous rover missions took a slower pace exploring along their path, AutoNav provides the science team with the ability to zip to the locations they prioritize the most. That means the mission is more focused on its primary objective: finding the samples that scientists will eventually want to return to Earth.
• February 14, 2022: Using carefully selected terrestrial rocks, engineers try to figure out how to work with crumbly rocks like the one the rover encountered on its first sampling attempt. 23)
- When NASA's Perseverance Mars rover tried to collect its first rock core sample last August, the outcome presented a puzzle for the mission team: The rover's sample tube came up empty. But why?
- Not long after, Perseverance successfully gathered a sample the size of a piece of chalk from a different rock. The team concluded that the first rock they had chosen was so crumbly that the rover's percussive drill likely pulverized it.
- But engineers at NASA's Jet Propulsion Laboratory in Southern California, which manages the mission, want to understand why that first sample, nicknamed "Roubion," turned to dust. The mission's scientists and engineers had run extensive test campaigns on dozens of rock types prior to launch, but they hadn't seen any react exactly like Roubion. So a new test campaign was started – one that would include a field trip, a duplicate of Perseverance's drill, and JPL's unique Extraterrestrial Materials Simulation Lab.

Remembering Roubion
- Re-creating the unique physical properties of Roubion would be key to the test campaign.
- "Of the rocks we've seen, Roubion had the most evidence of interaction with water," said Ken Farley of Caltech, Perseverance's project scientist. "That's why it fell apart."
- Rocks altered by water can be more susceptible to falling apart; they're also highly valuable to Perseverance's scientists. Water is one of the keys to life – at least on Earth – which is why Perseverance is exploring Jezero Crater. Billions of years ago, Jezero contained a river-fed lake, making it an ideal spot to look for signs of ancient microscopic life now. Perseverance is collecting samples that future missions could bring back to Earth to be studied in labs with powerful equipment too large to be sent to Mars.
Field Trip
- To find Roubion stand-ins, a handful of rover team members were granted permission to hunt rocks in the Santa Margarita Ecological Reserve, a two-hour drive from JPL. The team was searching for rocks that filled a geological sweet spot: weathered enough to be Roubion-like, but not so fragile that they would fall apart at the slightest touch. They eventually selected a half-dozen rocks.

- "It was very physical work," said JPL's Louise Jandura, chief engineer for sampling and caching, who has been leading the test campaign. "We were chipping away with rock hammers and crowbars. A couple rocks were big enough that it took all five of us holding on to a stretched-out canvas to get it into the bed of our truck."
- Next step: testing at JPL. One of the places where that happens is the Extraterrestrial Materials Simulation Lab, a kind of service center that prepares materials for testing elsewhere at JPL.
A Rock Superstore
- The low-slung building sits on a hillside above the Mars Yard. Barrels out front contain reddish dust called Mojave Mars Simulant, a special recipe for re-creating the messy conditions rovers travel in. Piles of rocks – some peppered with drill holes – are strewn about a forbidding industrial saw near the entrance. In back stands a concrete bunker with rock bins labeled with names that sound like Mad Libs for geologists: Old Dutch Pumice, China Ranch Gypsum, Bishop Tuff.
- "I like to say we do artisanal selection and preparation of materials," said Sarah Yearicks, a mechanical engineer who leads the lab. "Testing them is part manufacturing and part mad science."
- Yearicks is one of the people who picked out the rocks at the Santa Margarita Ecological Reserve excursion. For the testing on Roubion-like rocks, Yearicks' team worked with a construction-grade drill – not a coring drill – along with other tools, while Jandura's team used a "flight-like" duplicate of Perseverance's drill. The teams passed the rock samples back and forth, testing them in different ways.
Put to the Test
- Jandura's team ran their flight-like drill a few millimeters at a time, stopping to check that a core was still forming; if it had crumbled, they'd look at variables that might be the cause. For instance, the engineers tweaked the drill's rate of percussion and the weight placed on its bit. They also tried drilling into the rock horizontally instead of vertically, in case the build-up of debris was a factor.
- For every adjustment they made, it seemed, a new wrinkle would emerge. One was that fragile samples can still resist the percussive drill. When Jandura's team reduced the force of percussion to avoid powderizing the sample, the drill bit couldn't penetrate the surface. But choosing a spot that holds up to stronger percussion means choosing one that likely interacted less with water.
- Perseverance has so far captured six samples from highly weathered, water-altered rocks, and the team knows it's capable of many more. But their experience with Roubion has prepared them for some of the extremes Mars will throw at Perseverance in the future. If they find more rocks like Roubion, the Extraterrestrial Materials Simulation Lab will be ready with its menagerie of Mars-worthy materials.
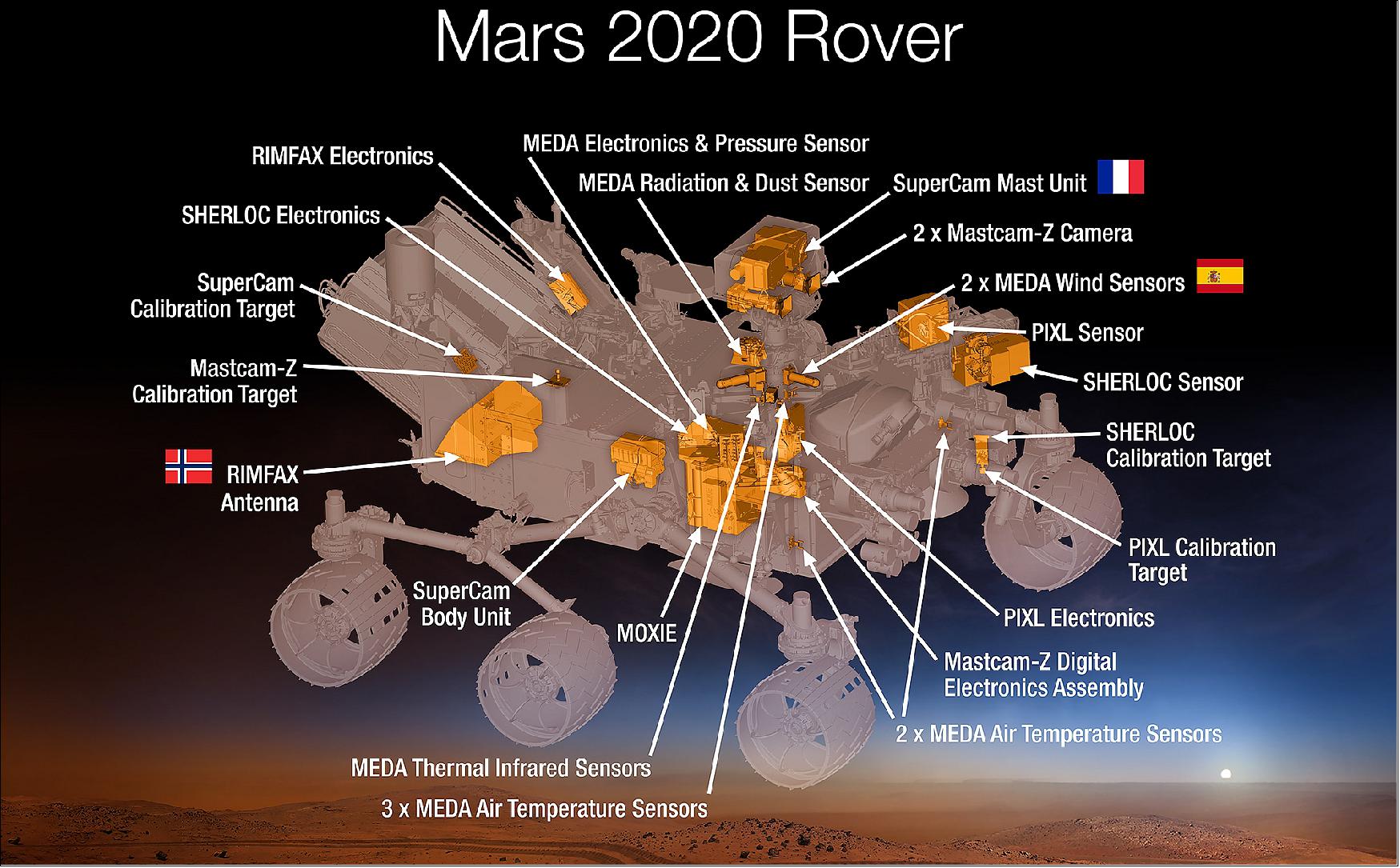
Sensor Complement
The next rover NASA will send to Mars in 2020 will carry seven carefully-selected instruments to conduct unprecedented science and exploration technology investigations on the Red Planet. 24) 25)
Scientists will use the Mars 2020 rover to identify and select a collection of rock and soil samples that will be stored for potential return to Earth by a future mission. The Mars 2020 mission is responsive to the science objectives recommended by the National Research Council's 2011 Planetary Science Decadal Survey.
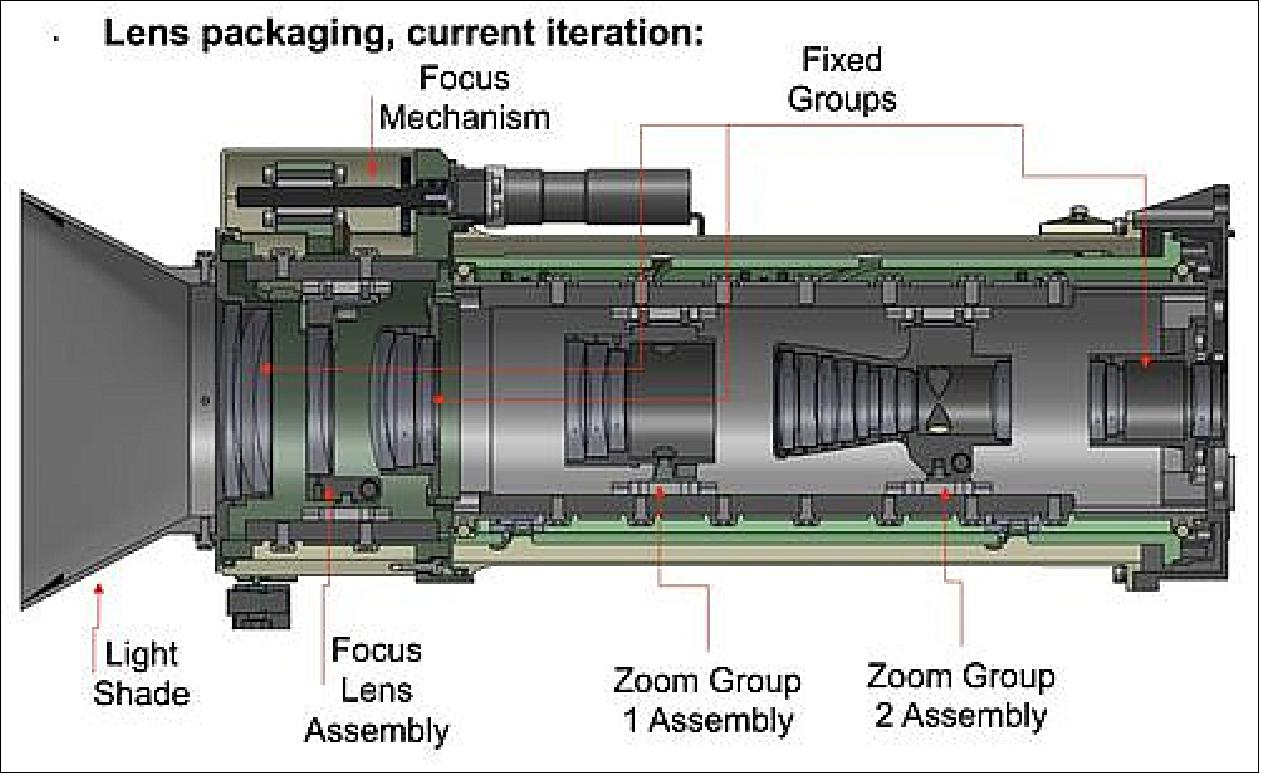
MastCam-Z (Mast-Mounted Camera System)
Mastcam-Z is an advanced camera system with panoramic and stereoscopic imaging capability with the ability to zoom. The instrument also will determine mineralogy of the Martian surface and assist with rover operations. The principal investigator is James Bell, ASU (Arizona State University) in Tempe. The instrument is based on the successful Mastcam instrument on NASA's Mars Curiosity rover. Mastcam-Z will be the main eyes of NASA's next Mars rover. 27)
From its position on the Mars-2020 Remote Sensing Mast (RSM), the Mastcam-Z imaging investigation acquires visible color (RGB), stereo panoramas of the Martian surface at resolutions sufficient to resolve ~1 mm features in the near-field (robotic arm workspace) and ~3-4 cm features 100 meters away. Mastcam-Z is also equipped with bandpass filters (400 - 1000 nm) that are used to distinguish unweathered from weathered materials and to provide important insights into the mineralogy of many silicates, oxides, oxyhydroxides, and diagnostic hydrated minerals. Mastcam-Z also images the sun directly using a pair of solar filters.
The Mastcam-Z cameras have the capability to zoom, focus, acquire data at high-speed (video rates of 4 frames/sec or faster for subframes), and store large amounts of data in internal storage. These capabilities permit investigators to examine targets that are otherwise out of the rover's reach. The cameras can observe time-dependent phenomena such as dust devils, cloud motions, and astronomical phenomena, as well as activities related to driving, sampling, and caching. Mastcam-Z has improved stereo imaging capabilities compared to the Mars Science Laboratory rover's Mastcam and the Mars Exploration Rovers' Pancam. Mastcam-Z provides important advances in navigational and instrument-placement capabilities that help support and enhance the Mars 2020 rover's driving and coring/sampling capabilities.
Mastcam-Z observes textural, mineralogical, structural, and morphologic details in rocks and fines at the rover's field site. The cameras allow the science team to piece together the geologic history of the site via the stratigraphy of rock outcrops and the regolith, as well as to constrain the types of rocks present (e.g., sedimentary vs. igneous). The Mastcam-Z cameras also document dynamic processes and events via video (e.g., dust devils, cloud motions, and astronomical phenomena, as well as activities related to driving, sampling, and caching), observe the atmosphere, and contribute to rover navigation and target selection for investigations by the coring/caching system, as well as other instruments.
Technical specifications:
- Objectives: To take high-definition video, panoramic color and 3D images of the Martian surface and features in the atmosphere with a zoom lens to magnify distant targets.
- Location: Mounted on the rover mast at the eye level, 2 meters tall. The cameras are separated by 24.2 cm to provide stereo vision.
- Mass: ~4g
- Power: ~17.4 W
- Volume: Camera head, per unit: 11 x 12 x 26 cm; Digital electronics assembly: 22 x 12 x 5 cm; Calibration target: 10 x 10 x 7 cm.
- Data return: ~ 148 Mbit/sol on average
- Color quality: Similar to that of a consumer digital camera (2-megapixel)
- Image size: 1600 x 1200 pixels max
- Image resolution: Able to resolve between about 150 µm/pixel to 7.4 mm/pixel depending on distance.
SuperCam
SuperCam, an instrument that can provide imaging, chemical composition analysis, and mineralogy. The instrument will also be able to detect the presence of organic compounds in rocks and regolith from a distance. The principal investigator is Roger Wiens, Los Alamos National Laboratory, Los Alamos, New Mexico. This instrument also has a significant contribution from the Centre National d'Etudes Spatiales,Institut de Recherche en Astrophysique et Plane'tologie (CNES/IRAP) France.
SuperCam is a remote-sensing instrument for the Mars 2020 mission that uses remote optical measurements and laser spectroscopy to determine fine-scale mineralogy, chemistry, and atomic and molecular composition of samples encountered on Mars. 28) 29)
To enable these measurements, SuperCam is, in fact, many instruments in one.
• For measurements of elemental composition, it integrates the remote Laser Induced Breakdown Spectroscopy (LIBS) capabilities of the highly successful ChemCam instrument included in the payload of the Curiosity rover currently exploring Mars. LIBS uses a 1064 nm laser to investigate targets up to 7 m distance from the rover.
• In addition, SuperCam also performs Raman spectroscopy (at 532 nm to investigate targets up to 12 m distance from the rover), Time-Resolved Fluorescence (TRF) spectroscopy, Visible and InfraRed (VISIR) reflectance spectroscopy (400 – 900 nm, 1.3 – 2.6 µm) at a distance in order to provide information about the mineralogy and molecular structure of samples under consideration, as well as being able to search directly for organic materials.
• Finally, SuperCam also acquires high-resolution images of samples under study using a color remote micro-imager (RMI). The collection of data provided by this suite of correlated measurements on a sample can be used to determine directly the geochemistry and mineralogy of samples.
SuperCam measurements can be rapidly acquired without the need to position the rover or rover arm upon the target, facilitating rapid and efficient measurements during Mars operations. As demonstrated by ChemCam, the SuperCam laser can be used to "blast off" dust from surfaces at a distance in order to get a better look at solid surfaces on Mars, without having to drive up to samples and perform manipulations with the rover arm or associated tools.
SuperCam is a continuing effort between Los Alamos and the IRAP research institution in Toulouse, France, and the French Space Agency (CNES), with additional collaboration from the University of Hawaii and the University of Valladolid (UVA) in Spain.
Technical specifications:
- Objectives: To identify the chemical composition of rocks and soils, including their atomic and molecular makeup
- Location: The SuperCam instrument is mounted on the "head" of the rover's long-necked mast.
- Mass: The mast-mounted sensor head has a mass of 5.6 kg, the Rover body-mounted electronics have a mass of 4.8 kg. The calibration target has a mass of 0.2 kg.
- Power: 17.9 W.
- Volume: The volume of the Mast-mounted sensor head is 38 x 24 x 19 cm.
- Calibration target: 3 cm in size.
- Data return: 15.5 Mbit per experiment or about 4.2 Mbit per day.
SuperCam's laser is uniquely capable of remotely clearing away surface dust, giving all of its instruments a clear view of the targets.
PIXL (Planetary Instrument for X-ray Lithochemistry)
PIXL is an X-ray fluorescence spectrometer that will also contain an imager with high resolution to determine the fine scale elemental composition of Martian surface materials. PIXL will provide capabilities that permit more detailed detection and analysis of chemical elements than ever before. The principal investigator is Abigail Allwood, NASA's Jet Propulsion Laboratory (JPL) in Pasadena, California. 30)
The PIXL for the Mars-2020 rover is a microfocus X-ray fluorescence instrument that rapidly measures elemental chemistry at sub-millimeter scales by focusing an X-ray beam to a tiny spot on the target rock or soil and analyzing the induced X-ray fluorescence.
Scanning the beam reveals spatial variations in chemistry in relation to fine-scale geologic features such as laminae, grains, cements, veins, and concretions (Figure 27).
The high X-ray flux enables high sensitivity and short integration times: most elements are detected at lower concentrations than possible on previous landed payloads to Mars, and several new elements can be detected that were not previously detectable on these missions. Fast acquisition allows rapid scanning so that PIXL reveals the associations between different elements and the observed textures and structures. The same spectra can be summed for bulk analysis, allowing comparison with bulk chemistry measurements at sites previously explored on Mars. With PIXL's simple design comes operational efficiency and experimental flexibility—an instrument that can adapt to different scientific opportunities to produce a diverse set of scientifically powerful data products within the constraints of the mission.
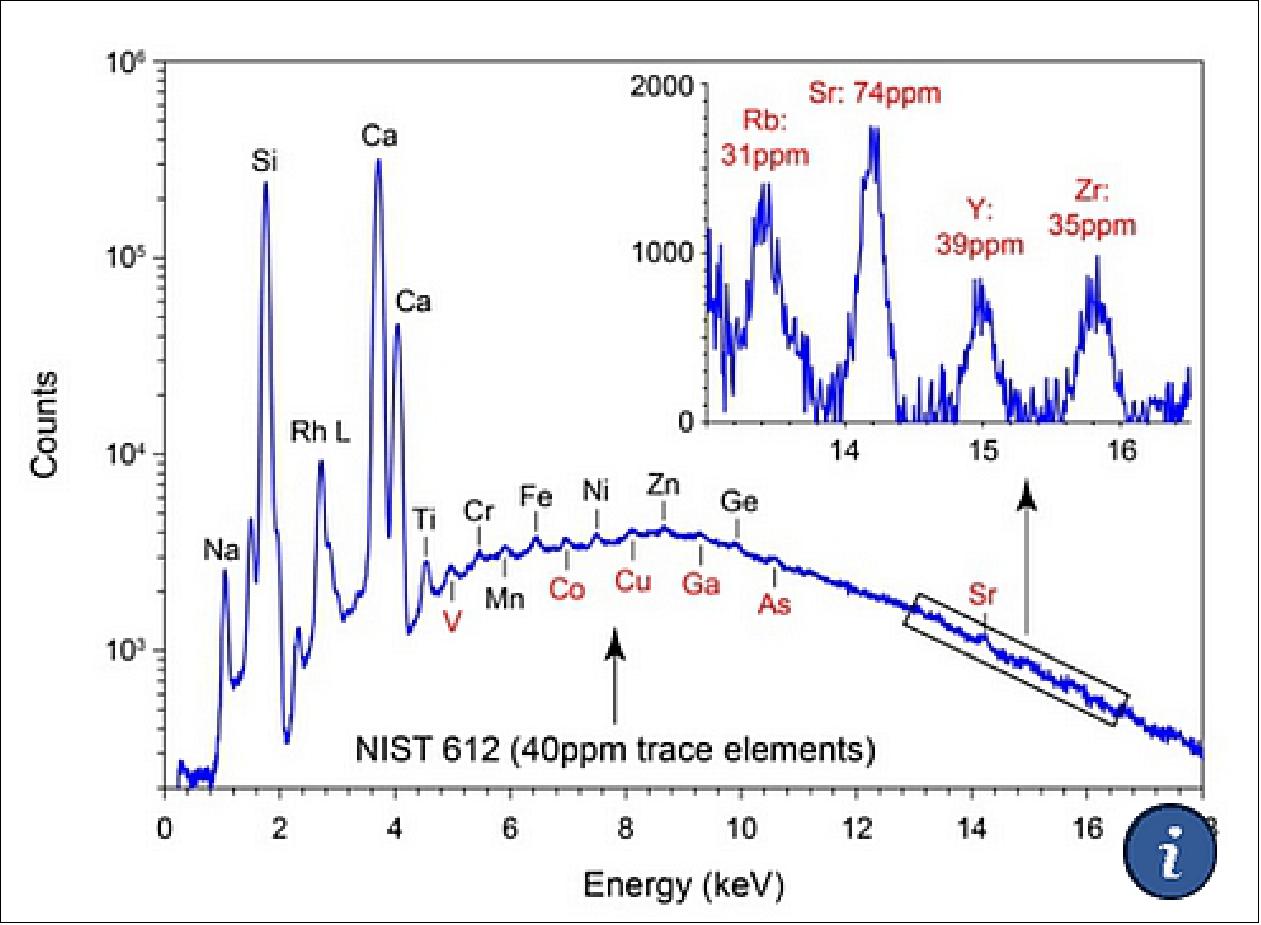
The instrument consists of a main electronics unit in the rover's body and a sensor head mounted on the robotic arm. The sensor head includes an x-ray source, X-ray optics, X-ray detectors, and high-voltage power supply (HVPS), as well as a micro-context camera (MCC) and light-emitting diode (LED). The PIXL can detect elements: Na, Mg, Al, Si, P, S, Cl, K, Ca, Ti, V, Cr, Mn, Fe, Co, Ni, Cu, Zn, Br, Rb, Sr, Y, Ga, Ge, As, and Zr, with important trace elements such as Rb, Sr, Y and Zr detectable at 10's ppm level. An example is shown in Figure 28.
The advantages of the PIXL instrument are:
• High spatial resolution with a 0.12 mm-diameter beam enabling sub-mm scale geochemistry correlated with texture
• Spatial coverage, targeting and position knowledge: fine step size and micro-context camera will provide resolution and footprint at hand-lens scale
• Fast spectral acquisition: measure most major and minor elements at 0.5 wt% in 5 seconds.
• Large range of detectable elements (26+ elements)
• High sensitivity: detect important trace elements at 10's ppm level
• Operational efficiency: The combined effect of PIXL's speed, sensitivity, resolution, coverage/targeting, and measurement flexibility allows PIXL to search efficiently and locate the places of interest and to observe small patches of clean rock
• Operational robustness: tolerant to surface roughness.
Technical specifications:
- Objectives: To measure the chemical makeup of rocks at a very fine scale
- Location: Mounted on the turret at the end of the robotic arm
- Mass: Arm-mounted sensor head: 4.3 kg; Body-mounted electronics: 2.6 kg; Calibration target: 0.015 kg
- Power: ~25 W
- Volume: Arm-mounted sensor head: 21.5 x 27 x 23 cm
- Calibration targets: Diameter of each of four disks: 5 mm; Pedestal base: 39 x 30 mm
- Data return: About 16 Mbit/experiment or about 2 MB/day.
If you are looking for signs of ancient life, you want to look at a small scale and get detailed information about chemical elements present.
SHERLOC (Scanning Habitable Environments with Raman & Luminescence for Organics and Chemicals)
SHERLOC is a spectrometer that will provide fine-scale imaging and uses an ultraviolet (UV) laser to determine fine-scale mineralogy and detect organic compounds. SHERLOC will be the first UV Raman spectrometer to fly to the surface of Mars and will provide complementary measurements with other instruments in the payload. The principal investigator is Luther Beegle, NASA/JPL. "Key, driving questions are whether Mars is or was ever inhabited, and if not, why not? The SHERLOC investigation will advance the understanding of Martian geologic history and identify its past biologic potential." 31)
SHERLOC is an arm-mounted, Deep UV (DUV) resonance Raman and fluorescence spectrometer utilizing a 248.6 nm DUV laser and <100 µm spot size. The laser is integrated to an autofocusing/scanning optical system, and co-boresighted to a context imager with a spatial resolution of 30 µm.
SHERLOC enables non-contact, spatially resolved, and highly sensitivity detection and characterization of organics and minerals in the Martian surface and near subsurface. The instrument goals are to assess past aqueous history, detect the presence and preservation of potential biosignatures, and to support selection of return samples. To do this, SHERLOC measures CHNOPS-containing mineralogy, measures the distribution and type of organics preserved at the surface, and correlates them to textural features.
SHERLOC operates over a 7 x 7 mm area through use of an internal scanning mirror. The 500 µm depth of view, in conjunction with the MAHLI heritage autofocus mechanisms, enables arm placements from 48 mm above natural or abraded surfaces without the need for rover arm repositioning/movement. Additionally, borehole interiors, after sample core removal, can be analyzed as a proxy for direct core analysis.
In addition to the combined spectroscopic and macro imaging component, SHERLOC also integrates a "second-eye" with a near-field-to-infinity imaging component called WATSON (Wide Angle Topographic Sensor for Operations and eNgineering), which is used for engineering science operations and science imaging. WATSON is a build-to-print camera based on the MSL (Mars Science Laboratory) Mars Hand Lens Imager (MAHLI). Integration is enabled by existing electronics within SHERLOC.
Science:
Deep UV-induced native fluorescence is very sensitive to condensed carbon and aromatic organics, enabling detection at or below 10-6 w/w (1 ppm) at <100 µm spatial scales. SHERLOC's deep UV resonance Raman enables detection and classification of aromatic and aliphatic organics with sensitivities of 10-2 to below 10-4 w/w at <100 µm spatial scales. In addition to organics, the deep UV Raman enables detection and classification of minerals relevant to aqueous chemistry with grain sizes below 20 µm grains.
SHERLOC's investigation combines two spectral phenomena, native fluorescence and pre-resonance/resonance Raman scattering. These events occur when a high-radiance, narrow line-width, laser source illuminates a sample. Organics that fluoresce absorb the incident photon and reemit at a higher wavelength. The difference between the excitation wavelength and the emission wavelength indicates the number of electronic transitions, which increases with increasing aromatic structures (i.e. number of rings). This phenomenon is highly efficient, with a typical cross section 105x greater than Raman scattering, and enables a powerful means to find trace organics.
The native fluorescence emission of organics extends from ~270 nm into the visible. This is especially useful, because it "creates" a fluorescence-free region (from 250 – 270 nm) where Raman scattering can occur. With SHERLOCs narrow-linewidth 248.6 nm DUV laser, additional characterization by Raman scattering from aromatics and aliphatic organics and minerals can be observed. Furthermore, excitation with a DUV wavelength enables resonance and pre-resonance signal enhancements (>100 to 10,000 x) of organic/mineral vibrational bonds by coupling of the incident photon energy to the vibrational energy. This results in high-sensitivity measurements, with low backgrounds, without the need of high-intensity of lasers, and avoids damage or modification of organics by inducing reactions with species such as perchlorates.
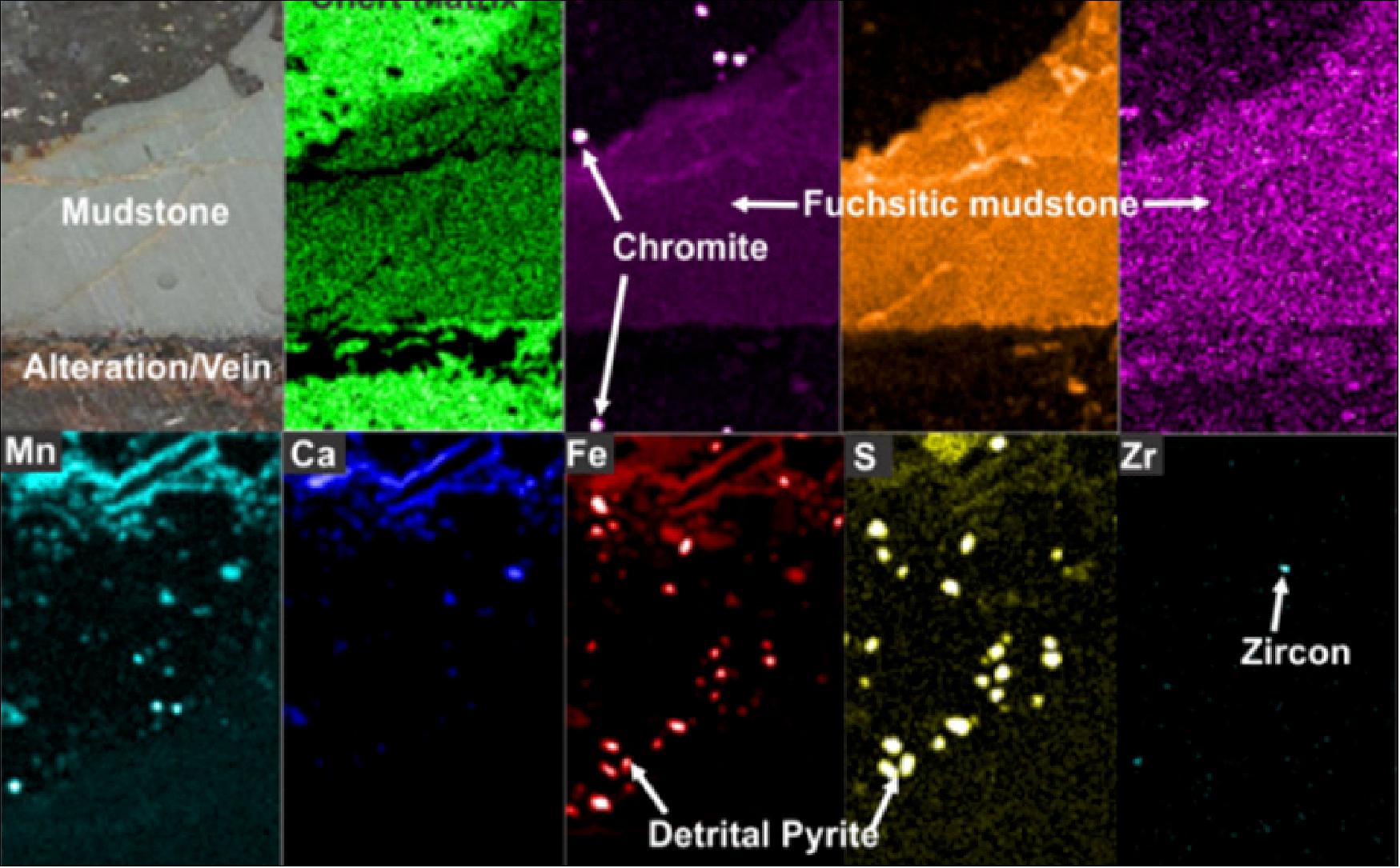
SHERLOC Ops: An Example Measurement on Fig Tree:
Using the SHERLOC testbed, an analysis of a piece of the astrobiologically interesting chert obtained from the Fig Tree Group is shown.
A context image of the sample is acquired. Using the internal scanning mirror, a 50-micron laser spot is systematically rastered over the surface. On the same CCD, spectra in the range 250-360 nm are obtained. Analysis of the fluorescence region (>270 nm) identifies regions where organic material is present. Analysis of the fluorescence spectra identifies number of aromatic rings present, and identifies regions of high organic content. In order to achieve higher specificity, a longer integration can be used to collect deep UV Raman spectra. The Raman spectra shown on the right are from the two circles shown in the context image.
By studying the fluorescence and Raman data we can conclude that our analysis indicates that:
• The chert has not been altered uniformly — pressure/temperature exposures are evident from carbon maturity variation.
• The majority of matrix is thermally mature carbon — anthracitic to sub-bituminous.
• An intrusion of silica with much younger carbon invaded the main matrix.
Potential for biosignature preservation in the matrix is low due to thermal history of the sample, with high preservation in the thermally unaltered vein material.
Technical specification:
- Objective: Fine-scale detection of minerals, organic molecules and potential biosignatures
- Location: SHERLOC is mounted on the turret at the end of the robotic arm
- Mass: The turret is 3.11 kg; the body is 1.61 kg
- Power: The turret consumes 32.2 W, the body 16.6 W
- Volume: 26.0 x 20.0 x 6.7 cm
- Data return: 79.7 Mbit (raw)
- Spatial resolution: Context imager: 30 µm; Laser: 50 µm
- FOV (Field of View): Imaging: 2.3 x 1.5 cm; Spectroscopy: 7 x 7 mm.
Key, driving questions are whether Mars is or was ever inhabited, and if not, why not? The SHERLOC investigation will advance the understanding of Martian geologic history and identify its past biologic potential.
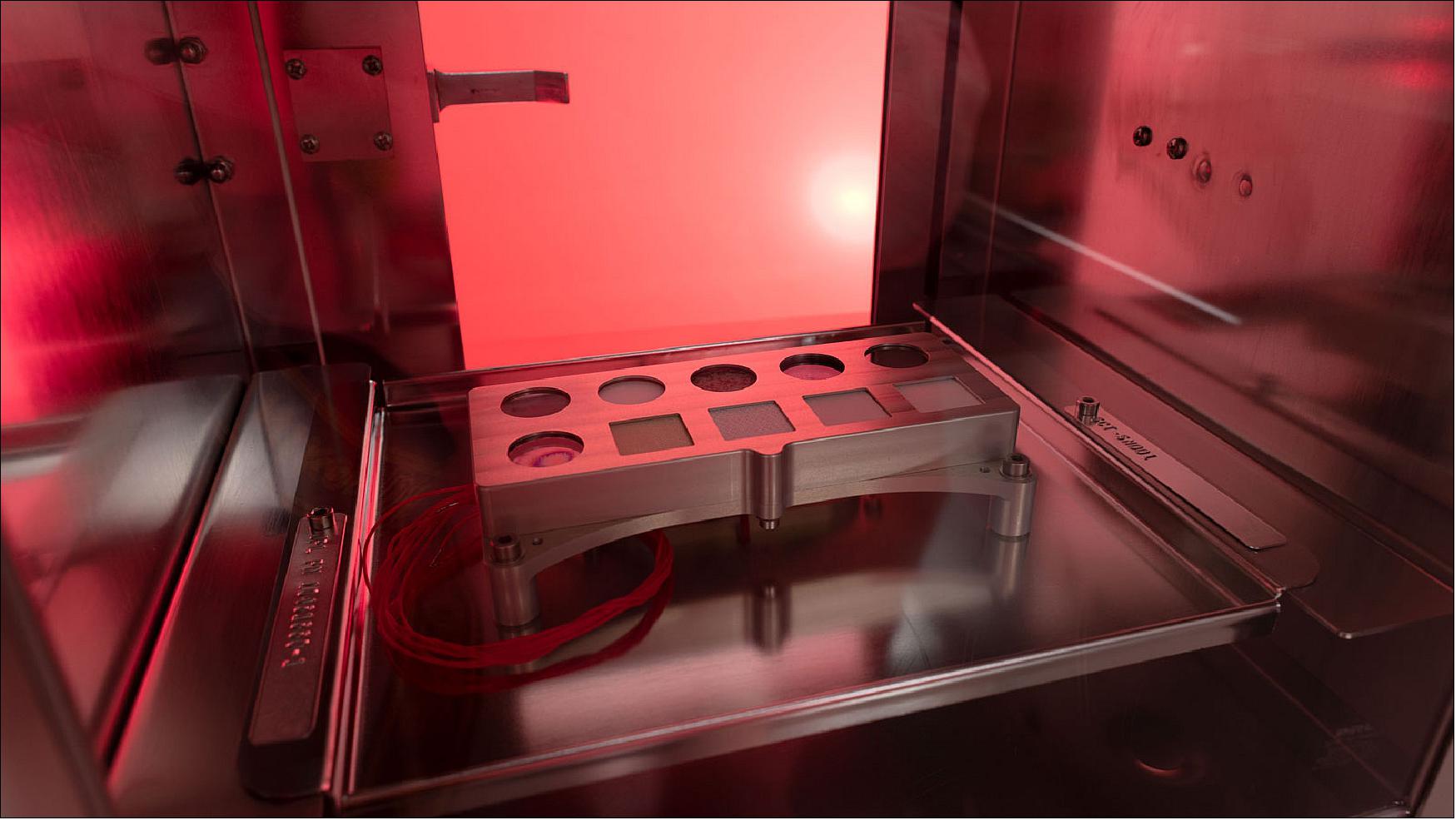
The SHERLOC instrument will be used to detect chemicals on the Martian surface that are linked to the existence of life. To keep the instrument working well, a team from the Astromaterials Research and Exploration Science (ARES) division at NASA's Johnson Space Center (JSC) recently built a new calibration device for the rover to check SHERLOC's function and properly tune it during the upcoming mission.
"SHERLOC is pretty complicated, and we came up with a list of 11 things that all have to be calibrated on this instrument," said Marc Fries, ARES planetary scientist and Mars 2020 instrument co-investigator. "This sophisticated calibration device is also going to be used for a lot of other scientific and engineering investigations, and we're really excited that it's JSC's contribution to the Mars 2020 rover."
On Target:
SHERLOC is mounted on the end of the rover's 2.1 m robotic arm and includes a laser, camera and chemical analyzers, called spectrometers. The sensitive components will be used together to search for substances that have been altered by water and possibly reveal evidence of past microscopic life on Mars.
"The rover's scientific instruments go through all sorts of harsh conditions from the time they leave the lab until they arrive on the surface of Mars. SHERLOC needed a way to make sure it still operates as expected once it's on the surface and throughout the duration of the mission," said Trevor Graff, a scientist from Jacobs who works for ARES.
The solution was to create the calibration target, or "cal target" for short. The device is approximately the size of a large cell phone and mounted on the front of the rover. On its face are 10 "targets," which consist of samples of different materials. The idea is that researchers will occasionally check SHERLOC's function by directing it to scan the different materials on the cal target. The researchers will already know what the readings on those materials should be when SHERLOC is working correctly. If the actual readings are off, they'll make adjustments to SHERLOC to get it set properly, or know to compensate for the errors when they analyze the data later.
Science on the side:
In addition to tuning SHERLOC, the targets on the calibration device are serving double duty in other tests and experiments. For example, a number of the targets hold spacesuit materials that could one day be used to protect astronauts exploring Mars. SHERLOC's scans of those materials will not only help tune the instrument, but measure how the advanced fabrics and other suit materials will hold up in the Martian environment, too.
"We also plan to build a small Mars exposure instrument here at JSC, and match the conditions inside it with weather data from the rover," Fries said. "We'll then place an identical set of spacesuit samples inside the chamber and periodically remove them to, for example, test the strength of fabrics or the clarity of helmet visor plastics. The result is we'll be able to test spacesuit materials in Mars-like conditions long before astronauts ever go there."
Another target contains an actual sample of a meteorite ejected from Mars long ago and discovered on Earth in 1999. Researchers plan to closely watch the rock sample to see how the Martian environment alters it over time, which will help them understand the chemical interactions between the planet's surface and its atmosphere.
Finally, the target includes the first off-planet "cache" for geocaching enthusiasts to locate, with more details on that to be released soon.
MOXIE (Mars Oxygen ISRU Experiment)
MOXIE is an exploration technology investigation that will produce oxygen from Martian atmospheric carbon dioxide. The principal investigator is Michael Hecht, MIT (Massachusetts Institute of Technology), Cambridge, Massachusetts.
"When we send humans to Mars, we will want them to return safely, and to do that they need a rocket to lift off the planet. Liquid oxygen propellant is something we could make there and not have to bring with us. One idea would be to bring an empty oxygen tank and fill it up on Mars."
NASA is preparing for human exploration of Mars, and the MOXIE investigation on the Mars 2020 mission aims to address key knowledge gaps, including: 34)
• demonstration of In-Situ Resource Utilization (ISRU) technologies to enable propellant and consumable oxygen production from the Martian atmosphere, and
• characterization of atmospheric dust size and morphology to understand its effects on the operation of surface systems.
MOXIE collects CO2 from the Martian atmosphere, then electrochemically splits the CO2 molecules into O2 and CO. The O2 is then analyzed for purity before being vented back out to the Mars atmosphere along with the CO and other exhaust products.
Figure 31 shows the MOXIE functional block diagram. The CO2 Acquisition and Compression (CAC) system pulls Martian atmosphere from outside the Rover through a filter and pressurizes it to ~1 atmosphere. The pressurized CO2 gas is then regulated and fed to the Solid OXide Electrolyzer (SOXE), where it is electrochemically split at the cathode to produce pure O2 at the anode, a process equivalent to running a fuel cell in reverse.
The SOXE operates at 800° C, requiring a sophisticated thermal isolation system, including input gas preheating and exhaust gas cooling. There are O2 exhaust and CO2/CO exhaust streams, which are then analyzed to verify O2 production rate and purity and for process control. The electrical current through the SOXE is a direct result of the oxide ions transported across the electrolyte, and provides an independent measurement of O2 production rate.
Based on conversion efficiency calculated from flow rates and composition measurements, SOXE control parameters such as CO2 input flow rate, temperature, and applied voltage are used to optimize O2 production under Mars environmental conditions. The cooled exhausts are then filtered to satisfy planetary protection requirements and vented from the Rover. Process telemetry is reported to the Rover for downlink.
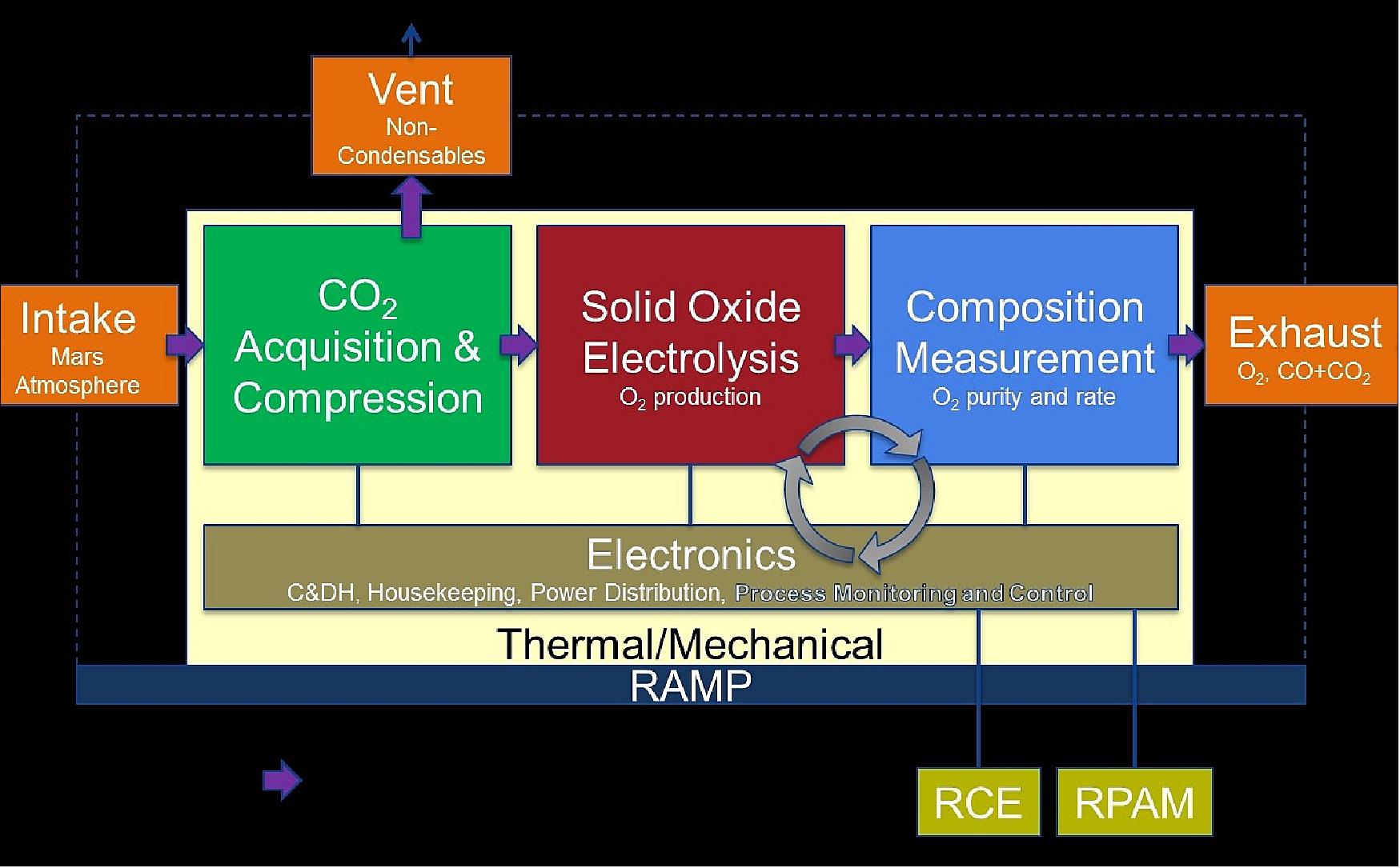
Technical specifications:
- Objective: To produce oxygen from the Martian carbon-dioxide atmosphere
- Power: 300 W
- Volume: 23.9 x 23.9 x 30.9 cm
- Oxygen production rate: About 10 grams per hour
- Operation time: Approximately two hours of oxygen (O2) production per experiment, which will be scheduled intermittently over the duration of the mission.
MEDA (Mars Environmental Dynamics Analyzer)
MEDA is a set of sensors that will provide measurements of temperature, wind speed and direction, pressure, relative humidity and dust size and shape. The principal investigator is Jose Rodriguez-Manfredi, Centro de Astrobiologia, Instituto Nacional de Tecnica Aeroespacial, Spain. 35)
MEDA is a suite of environmental sensors designed to record dust optical properties and six atmospheric parameters: wind speed/direction, pressure, relative humidity, air temperature, ground temperature, and radiation in discrete bands of the UV, visible, and IR ranges of the spectrum.
The radiation sensor is part of an assembly with two arrays of photodiodes that also capture low elevation angle scattered light and a sky-pointing camera; these data are combined to characterize the properties of atmospheric aerosols.
Systematic measurement is the main driver for MEDA operations. Over the entire mission's lifetime, with a configured cadence and frequency in accordance to resource availability, MEDA records data from all sensors. Implementation of this strategy is based on a high degree of autonomy in MEDA operations. MEDA wakes itself up each hour and after recording and storing data, goes to sleep independently of rover operations. It records data whether the rover is awake or not, and both day and night.
The main science objectives for the science team are:
• Signature of the Martian general and mesoscale circulation on phenomena near the surface (e.g., fronts, jets)
• Microscale weather systems (e.g., boundary layer turbulence, heat fluxes, eddies, dust devils)
• Local hydrological cycle (e.g., spatial and temporal variability, diffusive transport from regolith)
• Dust optical properties, photolysis rates, ozone column, and oxidant production.
As an environmental instrument, MEDA's different sensors are in direct contact and exposed to the ambient:
• The radiation/dust sensor assembly is located on top of the rover deck.
• The pressure sensor is located inside the rover body and connected to the atmosphere through a dedicated pipe.
• All other sensors are located around the Remote Sensing Mast (RSM):
- Two wind sensor booms oriented at 120 degrees from each other measure winds approaching the RSM,
- Five sets of thermocouples measure the air temperature
- A thermal infrared sensor measures downward and upward thermal infrared radiation as well as surface skin temperature.
- The relative humidity sensor is also attached to the RSM.
The full set of sensors is controlled by the Instrument Control Unit (ICU) inside the rover body.
A suite of sensors to characterize the Martian low atmosphere and dust properties:
• Air temperature: Located around the RSM are three air temperature sensors (ATS). Two more are on the rover body to ensure that one of them is upwind. Placed on small thermal inertia forks, and outside the rover thermal boundary layers, these five sets of three thermocouples measure atmospheric temperature. The measurement range is 150 to 300 K, with a required accuracy of 5 K and a resolution of 0.1 K.
• Humidity: Located at the RSM inside a protecting cylinder, a humidity sensor (HS) measures the relative humidity with an accuracy of 10% in the 200-323 K range and with a resolution of 1%. A dust filter surrounds the cylinder to protect the sensor from dust deposition.
• Pressure: Located inside the rover body and connected to the external atmosphere via a tube, a pressure sensor (PS) collects pressure measurements. The tube exits the rover body through a small opening with protection against dust deposition. Its measurement range goes from 1 to 1150 Pa with an end-of-life accuracy of 20 Pa (calibration tests give values around 3 Pa) and a resolution of 0.5 Pa. As this component is in contact with the atmosphere, a HEPA filter is placed on the tube inlet to avoid contaminating the Martian environment.
• Radiation & dust: Located on the rover deck, the radiation and dust sensor (RDS) is composed of eight upward looking photodiodes in the following ranges:
- 255 ± 5 nm for the O3 Hartley Band center,
- 295 ± 5 nm for the O3 Hartley Band edge,
- 250-400 nm for total UV,
- 450±40 nm for MastCam-Z cross-calibration,
- 650 ± 25 nm for SuperCam cross-calibration,
- 880 ±5 nm for MastCam-Z cross-calibration,
- 950 ± 50 nm for NIR, and
- one panchromatic (at least 300-1000 nm) filter, with an accuracy better than 8% of the full range for each channel, computed based on Mars radiation levels and minimum dust opacity.
The photodiodes face the zenith direction and have a field of view of 30 degrees except for the panchromatic one with its 180º field of view.
A second array of side-looking photodiodes at 880 nm characterizes the low angle light scattering at different azimuth angles. They cover at least 270º or a circle with fields of view of ±15º and separated about 45º from each other.
A dedicated camera with ±60º around the zenith measures the intensity of the solar aureole.
The assembly of photodiodes and camera are placed on the rover deck without any dust protection. To mitigate dust degradation, magnetic rings are placed around each photodiode with the aim of maximizing their operational time. Nevertheless, to evaluate dust deposition degradation, images of the sensor are recorded periodically, with their readings compared with opacities from other Mars 2020 optical instruments such as MastCam-Z. A comparison of the differences in estimated sky opacities between MEDA and MastCam-Z permits evaluations of the level of dust deposition.
• Thermal radiation: Attached to the RSM and pointing to the front right side of the rover, the thermal infrared sensor (TIRS) measures the net infrared thermal radiation near the surface of Mars with a set of five thermopiles:
- three downward-pointing thermopiles with bands 16-20, 6.5-cut-on and 8-14 µm, and
- two upward-pointing thermopiles with bands 6.5-cut-on and 14.5-15.5 µm.
• Wind: Attached to the RSM, two wind sensors (WS) measure wind speed and direction. These magnitudes are derived based on the information provided by six two-dimensional detectors on each boom. The detectors are located on six boards 60 degrees apart around the boom axis. Each records local speed and direction in the plane of the board. The combination of the 6 boards per boom serves to determine wind speed, as well as pitch and yaw angle of each boom relative to the flow direction.
The requirement is to determine horizontal wind speed with 2 m/s accuracy in the range of 0 to 40 m/s, with a resolution of 0.5 m/s. The directional accuracy is expected to be better than 22.5 degrees. For vertical wind, the range is 0 to 10 m/s, and the accuracy and resolution are the same as for horizontal wind.
The booms hold the detectors out of the RSM's thermal boundary layer, aiming to minimize the wind flow perturbation by the RSM at the boom tip where the these detectors are located. The two booms are separated in azimuth to help ensure that at least one of them will record clean wind data when the other is in the wake of the rover.
To correct for the perturbations at the booms by the RSM and the rover on the environmental temperature and wind field, a variety of numerical analyses and wind tunnel tests are used during calibration under Mars conditions. Numerical simulations are used to obtain results where tests conditions cannot be reproduced on Earth.
Technical specifications:
- Objectives: To measure weather and monitor dust with sensors from the surface of Mars
- Location: Sensors are located on the rover's mast "neck" and on the deck, front and interior of the rover's body
- Mass: Approximately 5.5 kg for all components
- Power: Up to 17 W, depending on scheduled measurements
- Volume:
a) Air temperature sensors: Each of five sensors is 5.75 x 2.75 x 6.75 cm
b) Radiation and dust sensor: 13.2 x 11.5 x 12.5 cm
c) Relative humidity sensor: 6.25 x 5.75 x 5.75 cm
d) Wind sensors: Wind Sensor 1 is 5 x 17 cm, wind sensor 2 is 5 x 40 cm
e) Instrument control unit and pressure sensor: 14 x 14 x 13 cm
- Data return: Approximately 11 MB.
MEDA will help prepare for human exploration by providing daily weather report and information on the radiation and wind patterns on Mars.
RIMFAX (The Radar Imager for Mars' Subsurface Exploration)
RIMFAX is a ground-penetrating radar that will provide centimeter-scale resolution of the geologic structure of the subsurface. The principal investigator is Svein-Erik Hamran of FFI (Norwegian Defence Research Establishment), Norway.
"No one knows what lies beneath the surface of Mars. Now, we'll finally be able to see what's there."
RIMFAX builds on mature tried-and-true GPR technology used on Earth for a wide variety of scientific and engineering applications, adapted for use in a rover platform on the surface of Mars. Its ultra wideband design, operating from 150 MHz to 1.2 GHz, affords a theoretical limit of 14.2 cm for vertical (range) resolution in free-space. The instrument is composed of an electronics box, installed within the interior of the rover, and a nadir-point antenna affixed to the exterior (rear) of the rover. 36)
RIMFAX will operate as the rover drives and will be commanded to produce individual soundings in different modes, where some modes are for shallow and others are for deep penetration. The default operation will produce interleaved pairs of shallow- and deep-soundings at every 10 cm along a rover traverse. The expectation is for RIMFAX signals to achieve penetrations of 10 m, but it may well exceed that for subsurface conditions that are friendly to the propagation of radar waves.
The overarching goal of RIMFAX is to image the subsurface structure and constrain the nature of the material underlying the landing site. This is made possible because the propagation of radar waves is sensitive to the dielectric properties of materials, such that variations in composition and porosity across geologic strata yield radar reflections that can be identified, mapped, and interpreted in the geological sense.
Specifically, RIMFAX supports and enhances the Mars 2020 investigation in the following, but not limited, ways:
• Assess the depth and extent of regolith;
• Detect different subsurface layers and their relationship to visible surface outcrops;
• Characterize the stratigraphic section from which a cored-and-cached sample derives, including crosscutting relations and features indicative of past environments.
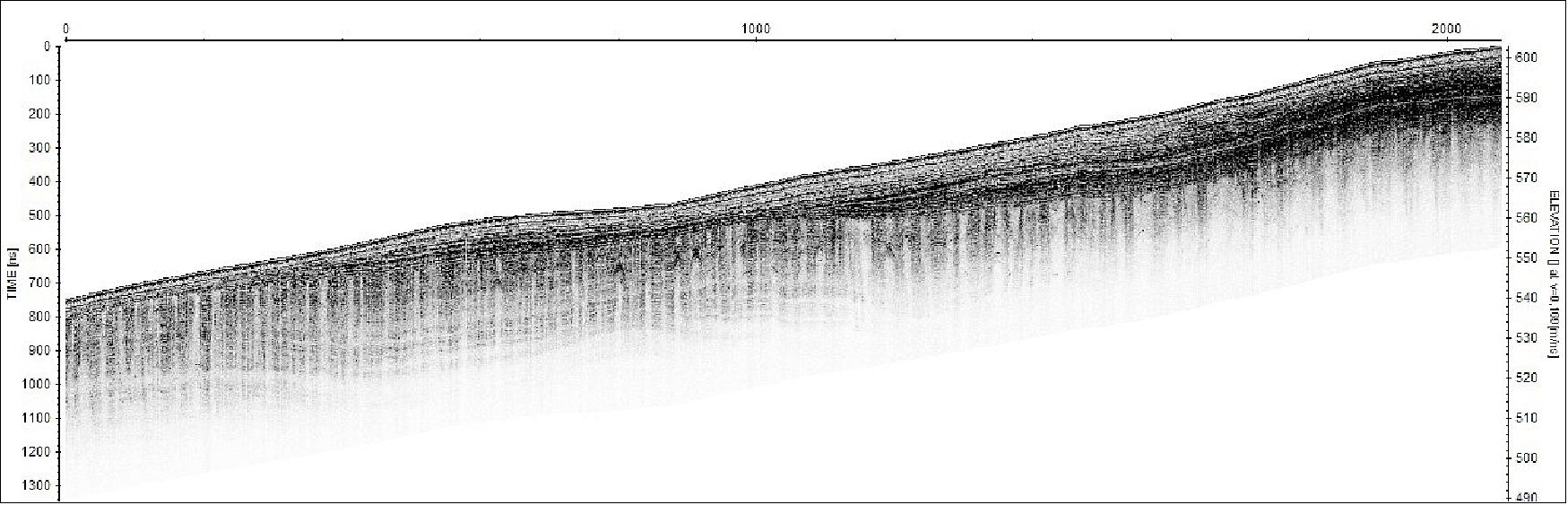

Technical specifications:
- Objective: To see geologic features under the surface with ground-penetrating radar
- Location: The radar antenna is on the lower rear of the rover
- Mass: < 3 kg
- Power: 5-10 W
- Volume: 196 x 120 x 66 mm
- Data return: 5 to 10 kB per sounding location
- Frequency range: 150 to 1200 MHz
- Vertical resolution: As small as about 7.5 - 30 cm thick
- Penetration depth: > 10 m deep depending on materials
- Measurement interval: About every 10 cm along the rover track.
Ground Segment
NASA's Mars 2020 mission uses the NASA's Deep Space Network (DSN), an international network of antennas that provides communication links between planetary exploration spacecraft and their mission teams on Earth. 37)
The DSN consists of three deep-space communications complexes placed approximately 120 degrees apart around the world: at Goldstone, in California's Mojave Desert; near Madrid, Spain; and near Canberra, Australia. This strategic placement permits constant links to distant spacecraft even as the Earth rotates on its own axis.
As with previous Mars landers and rovers, the Mars 2020 mission relies on Mars-orbiting spacecraft to relay data from the rover to the antennas of the Deep Space Network.

Figure 34: The Goldstone 70 m antenna tracks under a full moon (image credit: NASA)
References
1) ”Mars 2020 Mission Overview,” NASA, 4 August 2017, URL: https://www.nasa.gov/mars2020/overview
2) ”Mars 2020 homepage,” NASA, URL: https://mars.nasa.gov/mars2020/
3) ”Mars 2020,” NASA Facts, June 2015, URL: https://mars.nasa.gov/mars2020/files/mars2020/Mars2020_Fact_Sheet.pdf
4) ”Mars 2020 Connection to the Mars Exploration Program Science Strategy: Seek Signs of Life,” NASA, URL: https://mars.nasa.gov/mars2020/mission/science/
5) ”Mars 2020 Mission Contributions to NASA's Mars Exploration Program Science Goal,” NASA, URL: https://mars.nasa.gov/mars2020/mission/science/goals/
6) ”Mars 2020 mission,” NASA,17 June 2019, URL: https://mars.nasa.gov/mars2020/mission/rover/
7) ”Mars 2020 Mission, Rover,” NASA, URL: https://mars.nasa.gov/mars2020/mission/rover/
8) ”Rover body,” NASA, URL: https://mars.nasa.gov/mars2020/mission/rover/body/
9) https://mars.nasa.gov/mars2020/mission/rover/brains/
10) https://mars.nasa.gov/mars2020/mission/rover/cameras/
11) ”Mars 2020 Mission Communications,” NASA, URL: https://mars.nasa.gov/mars2020/mission/rover/communications/
12) https://mars.nasa.gov/mars2020/mission/rover/arm/
13) https://mars.nasa.gov/mars2020/mission/rover/sample-handling/
14) ”Multi-Mission Radioisotope Thermoelectric Generator (MMRTG),” NASA Facts, 2020, URL: https://mars.nasa.gov/internal_resources/788/
15) ”NASA, ULA Launch Mars 2020 Perseverance Rover Mission to Red Planet,” NASA Press Release 2020-077, 30 July 2020, URL: https://www.nasa.gov/press-release/nasa-ula-launch-mars-2020-perseverance-rover-mission-to-red-planet
16) Jeff Foust, ”Atlas 5 launches Mars 2020 mission,” Space News, 30 July 2020, URL: https://spacenews.com/atlas-5-launches-mars-2020-mission/
17) ”NASA’s Perseverance Scouts Mars Sample Return Campaign Landing Sites,” NASA/JPL News, 11 July 2022, URL: https://www.jpl.nasa.gov/news/nasas-perseverance-scouts-mars-sample-return-campaign-landing-sites?utm_source=iContact&utm_medium=email&utm_campaign=nasajpl&utm_content=LatestNews-Perseverance20220711
18) David Agle, ”NASA’s Ingenuity in Contact With Perseverance Rover After Communications Dropout,” NASA Mars Helicopter, 06 May 2022, URL: https://mars.nasa.gov/technology/helicopter/status/379/nasas-ingenuity-in-contact-with-perseverance-rover-after-communications-dropout/
19) ”NASA’s Perseverance Rover Captures Video of Solar Eclipse on Mars,” NASA/JPL News, 20 April 2022, URL: https://www.jpl.nasa.gov/news/nasas-perseverance-rover-captures-video-of-solar-eclipse-on-mars?utm_source=iContact&utm_medium=email&utm_campaign=nasajpl&utm_content=daily20220420
20) ”NASA’s Perseverance Rover Arrives at Delta for New Science Campaign,” NASA/JPL News, 19 April 2022, URL: https://www.jpl.nasa.gov/news/nasas-perseverance-rover-arrives-at-delta-for-new-science-campaign?utm_source=iContact&utm_medium=email&utm_campaign=nasajpl&utm_content=daily20220419
21) ”NASA’s Ingenuity Helicopter and Asteroid-Monitoring System Honored,” NASA News, 23 March 2022, URL: https://www.jpl.nasa.gov/news/nasas-ingenuity-helicopter-and-asteroid-monitoring-system-honored?utm_source=iContact&utm_medium=email&utm_campaign=nasajpl&utm_content=daily20220323-1
22) ”NASA’s Perseverance Rover Hightails It to Martian Delta,” NASA Feature, 18 March 2022, URL: https://www.nasa.gov/feature/jpl/nasa-s-perseverance-rover-hightails-it-to-martian-delta
23) ”Testing Rocks on Earth to Help NASA’s Perseverance Work on Mars,” NASA/JPL News, 14 February 2022, URL: https://www.jpl.nasa.gov/news/testing-rocks-on-earth-to-help-nasas-perseverance-work-on-mars?utm_source=iContact&utm_medium=email&utm_campaign=nasajpl&utm_content=perseverance20220214-1
24) Mars 2020 mission instruments, NASA News, 31 July 2014, URL: https://mars.nasa.gov/mars2020/mission/instruments/
25) ”NASA Announces Mars 2020 Rover Payload to Explore the Red Planet as Never Before,” NASA News, 31 July 2014, URL: https://mars.nasa.gov/news/nasa-announces-mars-2020-rover-payload-to-explore-the-red-planet-as-never-before/
26) ”Mars 2020,” NASA Fact Sheet, URL: https://mars.nasa.gov/mars2020/files/mars2020/Mars2020_Fact_Sheet.pdf
27) ”Mastcam-Z for Scientists,” NASA Mars 2020 mission, URL: https://mars.nasa.gov/mars2020/mission/instruments/mastcam-z/for-scientists/
28) ”SuperCam for Scientists,” NASA, URL: https://mars.nasa.gov/mars2020/mission/instruments/supercam/for-scientists/
29) ”All About the Laser (and Microphone) Atop Mars 2020, NASA's Next Rover,” NASA/JPL, 7 February 2020, URL: https://www.jpl.nasa.gov/news/news.php?release=2020-026
30) ”PIXL for Scientists,” NASA, URL: https://mars.nasa.gov/mars2020/mission/instruments/pixl/for-scientists/
31) ”SHERLOC for Scientists,” NASA, URL: https://mars.nasa.gov/mars2020/mission/instruments/sherloc/for-scientists/
32) ”Johnson-Built Device to Help Mars 2020 Rover Search for Signs of Life,” NASA/JSC, 12 June 2019, URL: https://mars.nasa.gov/news/8448/johnson-built-device-to-help-mars-2020-rover-search-for-signs-of-life/
33) ”SHERLOC Calibration Target in the Clean Room,” NASA, 12 June 2019, URL: https://mars.nasa.gov/resources/22534/sherloc-calibration-target-in-the-clean-room/
34) ”MOXIE for Scientists,” NASA, URL: https://mars.nasa.gov/mars2020/mission/instruments/moxie/for-scientists/
35) ”MEDA for Scientists,” NASA, URL: https://mars.nasa.gov/mars2020/mission/instruments/meda/for-scientists/
36) ”RIMFAX for Scientists,” NASA, Mars 2020 Mission, URL: https://mars.nasa.gov/mars2020/mission/instruments/rimfax/for-scientists/
37) ” Communications with Earth,” NASA, Mars 2020 Mission, URL: https://mars.nasa.gov/mars2020/mission/communications/
The information compiled and edited in this article was provided by Herbert J. Kramer from his documentation of: ”Observation of the Earth and Its Environment: Survey of Missions and Sensors” (Springer Verlag) as well as many other sources after the publication of the 4th edition in 2002. - Comments and corrections to this article are always welcome for further updates (eoportal@symbios.space).