KhalifaSat Earth Observation Satellite Mission
EO
MBRSC
UAE SA
High resolution optical imagers
KhalifaSat (formerly DubaiSat-3) is the third satellite in the DubaiSat series, developed by MBRSC (Mohammed Bin Rashid Space Center) of UAE (United Arab Emirates) - former EIAST (Emirates Institution for Advanced Science and Technology). Launched in October 2018, KhalifaSat obtains high-resolution optical imagery for various purposes, including urban planning, monitoring environmental change, and aiding relief efforts for natural disasters.
Quick facts
Overview
| Mission type | EO |
| Agency | MBRSC, UAE SA |
| Mission status | Operational (nominal) |
| Launch date | 29 Oct 2018 |
| Measurement domain | Land |
| Measurement category | Multi-purpose imagery (land) |
| Measurement detailed | Land surface imagery |
| Instruments | KHCS |
| Instrument type | High resolution optical imagers |
| CEOS EO Handbook | See KhalifaSat Earth Observation Satellite Mission summary |
Summary
Mission Capabilities
KhalifaSat hosts a pushbroom HiRAIS (High-Resolution Advanced Imaging System) named KHCS (KhalifaSat Camera System). KHCS obtains high-resolution multispectral imagery across four channels in the visible and near-infrared spectral range. The colour, panchromatic and near-infrared imagery produced by KhalifaSat is multi-purpose with applications in environmental monitoring, land classification and urban planning.
Performance Specifications
KHCS provides a very high spatial resolution of 0.75 m in panchromatic bands, and 2.98 m in RGB (Red, Green and Blue) and NIR (Near Infrared) bands in LEO (Low Earth Orbit) at a nominal altitude of 613 km.
The imaging system can be operated in three modes:
- Single Strip imaging obtains images which are 12 km wide and up to 1,500 km long,
- Multi-Point imaging collects many targets located within 600 km of the ground track,
- Single-Pass Stereo imaging acquires an image of any target from two different angles for stereo pair image creation and DEM (Digital Elevation Model) extraction.
KhalifaSat follows a sun-synchronous orbit with an inclination of 97.13° and an altitude of 613 km.
Space and Hardware Components
KhalifaSat is a 3-axis stabilized minisatellite, developed and constructed primarily at EIAST, UAE under the consultancy of the Satrec Initiative (SI) of Daejeon, Korea. The hexagonal spacecraft bus has a total mass of approximately 350 kg and consists of 2 decks and an upper sun shield. The spacecraft also features four deployable solar panels and TT&C (Telemetry Tracking and Command) in S-band.
KhalifaSat Earth Observation Satellite Mission
Spacecraft Launch Sensor Complement Ground Segment References
KhalifaSat is a follow-up Earth observation mission in the successful DubaiSat series of MBRSC (Mohammed Bin Rashid Space Center), former EIAST (Emirates Institution for Advanced Science and Technology), UAE (United Arab Emirates). The overall goal is to develop and build the satellite in UAE under the consultancy of SI (Satrec Initiative) of Daejeon, Korea, the manufacturer of DubaiSat-1 and -2. Emirati experts and engineers are involved in the planning and designing of the KhalifaSat program, which is expected to strengthen the standing of the Arab region in the competitive field of space science.
In early 2014, the EIAST team presented the plans for EIAST's next mission KhalifaSat. On October 15, 2014, EIAST announced the completion of the KhalifaSat design after the CDR (Critical Design Review). KhalifaSat will be developed first at Satrec Initiative in Korea. Once, the new EIAST facilities are ready in 2015, the development of the spacecraft will be shifted to the UAE. 1) 2) 3) 4)
The first phase of building the new facilities was completed in November 2014. In this phase, the small clean rooms, and mechanical and electrical labs were completed. The second phase will be completed by end of 2015 when the complete clean rooms and testing facilities will be ready. 5) 6)
The program has been divided into two phases; the first phase was at the SI (Satrec Initiative) facilities in South Korea in which the team started the design work and preliminary and system design reviews. This phase was completed by end of January 2015. The second phase started in February 2015 when the EIAST team returned from South Korea to Dubai to continue the development of KhalifaSat in EAIST's new manufacturing facilities. In the spring of 2015, EIAST engineers are completing the mechanical structure and manufacturing of the EM (Engineering Model) in order to start the testing activities and review the results during the CDR (Critical Design Review) meeting in July 2015.
The main objectives of the KhalifaSat mission are to:
• Develop a sub-meter resolution small satellite system to be used for global imaging and download
• Establish the necessary infrastructure for the development of the satellites in the UAE
• Contribute locally and internationally with value-added products and services derived from KhalifaSat images.
Note: As of April 18, 2015, the former EIAST (Emirates Institution for Advanced Science and Technology) of UAE was renamed MBRSC (Mohammed Bin Rashid Space Center). 7)
In his capacity as Ruler of Dubai, Vice President and Prime Minister of UAE, His Highness Sheikh Mohammed bin Rashid Al Maktoum has issued a law establishing the Mohammed bin Rashid Space Center(MBRSC), which will work to support the country's efforts in the space field and supervise design and manufacturing and launch of Al Amal, or ‘Hope', the Arab world's first Mars probe to establish an integrated infrastructure to manufacture satellites in the country as well as taking advantage of its applications in all development areas. 8)
The third satellite to be conceptualized by Mohammed Bin Rashid Space Center, initially referred to as DubaiSat-3, was renamed to KhalifaSat by His Highness Sheikh Mohammed Bin Rashid Al Maktoum, in honour of His Highness Sheikh Khalifa Bin Zayed Al Nahyan, President of the UAE.
Spacecraft
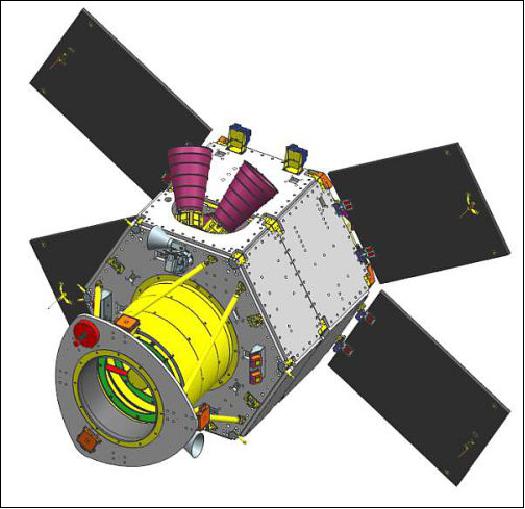
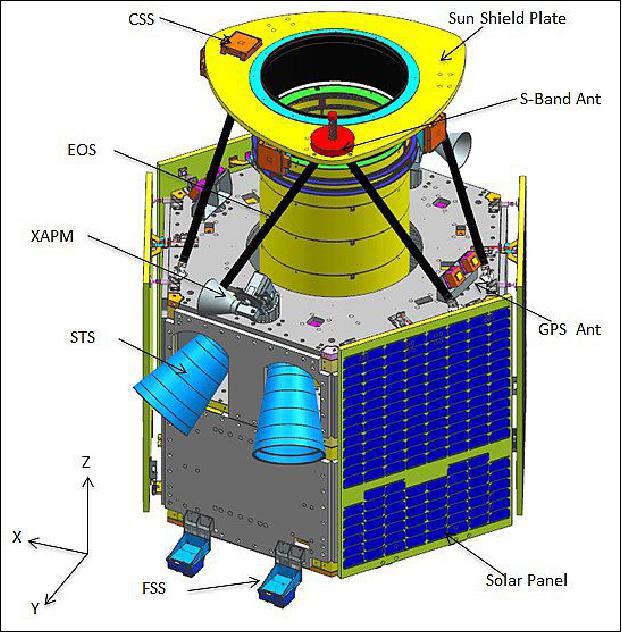
KhalifaSat is an Earth Observation minisatellite to provide very high-resolution images of 0.75m in LEO (Low Earth Orbit) at a nominal altitude of 613 km. It is being developed based on the platform and heritage of DubaiSat-2. The satellite bus features a hexagonal shape with four deployable solar panels. The coordinate system is defined as follows: +X is defined along the TDI scanning direction of the primary payload (KHCS), which is normal to the detector line, +Z is aligned with the KHCS optical axis, and +Y is the deployed direction of one of the solar panels and perpendicular to +X and +Z. The origin of the coordinate is defined at the centre of the adaptor (Ref. 5).
The spacecraft bus is comprised of 2 decks and an upper sun shield to protect the cold propellants from solar and Earth radiation. The electronics are being distributed on the decks and on the side panels. Four solar panels are attached to the sides of the satellite. Longerons and rails make up the bus structure frame. On the top, CFRP (Carbon Fiber Reinforced Polymer) struts hold the sun shield at the baffle of the very high-resolution imaging system. The KHCS (KhalifaSat Camera System) is being attached to the bus of the internal deck. The mechanical configuration of the satellite shall be less than 2 m in height and less than 1.5 m in diameter. The total mass of the spacecraft is estimated to be < 350 kg.
Orbit | Sun-synchronous orbit, nominal altitude = 613 km, inclination = 98.13º |
Spacecraft mass | 330 |
AOCS (Attitude and Orbit Control Subsystem) accuracy | 0.12º (full 3-axis stabilized) |
Generated power | 450 W @ EOL |
Mass storage SSR (Solid State Recorder) | 512 Gbit |
RF communications | TT&C (Telemetry Tracking and Command) in S-band, uplink and downlink data rate of 32 kbit/s |
Mission design life | 5 years |
KhalifaSat is an agile spacecraft with a body-pointing capability of up to ±45º roll tilt, and ±30º pitch tilt, like its predecessors DubaiSat-1 and DubaiSat-2.
Development status of KhalifaSat:
• March 2017: The KhalifaSat flight model manufacturing and testing are expected to be completed in Q4 2017. Thereafter, the spacecraft will be transported to Japan for launch aboard the Mitsubishi Heavy Industries rocket H-IIA. 9)
• April 2015: Second CDR (Critical Design Review).
• January – March 2015: Satellite EM integration. This time period was focused on integrating the individual expansion modules of KhalifaSat into one structure. This was the final EM model for testing prior to launch (Ref. 4).
• December 2014: CDR (Critical Design Review). The engineers presented the results of the subsystem tests to assess the process for manufacture and assembly.
• August 2014: Model testing. Structural model testing commences in KARI and includes comprehensive vibration testing to ensure the KhalifaSat will withstand the launch.
• June 2014: Second DDR (Detailed Design Review). KhalifaSat will initially be constructed in South Korea by Emirati engineers. When in the Korean laboratory, the engineers present their individual designs to the rest of the team once again to finalize the complete design.
• May 2014: Manufacture begins. The process of assembling the satellite begins with the electronic modules and mechanical structure.
• April 2014: Initial Detailed Design Review.
Launch
The KhalifaSat spacecraft was launched on 29 October 2018 (04:08:00 UTC, 13:08:00 JST) on an H-IIA launch vehicle of MHI from TNSC (Tanegashima Launch Center), Japan, as a secondary payload to GOSAT-2/Ibuki-2 of JAXA. 10)
In March 2015, EIAST awarded a contract to MHI (Mitsubishi Heavy Industries, Ltd.) for launch services for the KhalifaSat observation satellite. 11)
Orbit: Sun-synchronous orbit, altitude = 613 km, inclination = 97.13º.
Secondary payloads on this mission:
• KhalifaSat, an Earth Observation minisatellite of MBRSC (Mohammed Bin Rashid Space Center), Dubai
• Diwata-2b, a Philippine EO microsatellite, developed at the Philippine DOST (Department of Science and Technology) in cooperation with the Tohoku University and Hokkaido University, Japan.
• PROITERES-2 (Project of Osaka Institute of Technology Electric-Rocket-Engine onboard Small Space Ship-2), a technology demonstration microsatellite (50 kg) of OIT (Osaka Institute of Technology), Japan.
• AUTcube-2, a CubeSat technology demonstration of Aichi University of Technology, Japan.
• Stars-O, a CubeSat technology demonstration of Shizuoka University, Japan.
• Ten-Koh is a technology demonstration minisatellite (220 kg) of the Kyushu Institute of Technology, Japan. The satellite is to observe LEO environments (magnetosphere observation) and the primary purpose is to provide valuable data for the future development of satellites or operations.
Sensor Complement
KHCS (KhalifaSat Camera System)
The KHCS (KhalifaSat Camera System) is the main payload of the satellite. KHCS utilizes the same camera structure as DubaiSat-2's payload HiRAIS (High-Resolution Advanced Imaging System) while improving the payload electronics. KHCS consists of three main subsystems: EOS (Electro-Optical Subsystem), SSR (Solid State Recorder), and ITU (Image Transmission Unit).
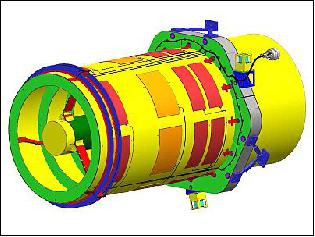
EOS in turn is comprised of a telescope (Figure 3) for the collection & focusing of incident radiation, FPA (Focal Plane Assembly) for the conversion of radiation into video signals, SPM (Signal Processing Module) for processing & digitization of video signals, and ACM (Auxiliary Camera Module) for power conditioning & distribution for FPA and SPM. The FPA is integrated with the telescope while the ACM and the SPM are located in the payload deck of the KHCS bus.
The objective is to provide high-resolution imagery using a CCD detector with a TDI (Time Delay Integration) function to capture reflected radiation from Earth's surface at high speed. 12)
Parameter | DubaiSat-2, HiRAIS | KhalifaSat, KHCS |
Sun-synchronous orbit, altitude, inclination | 600 km, 97.1º | 613 km, 97.13º |
Instrument type | Pushbroom imager | Pushbroom imager |
Instrument mass | 50 kg | < 70 kg |
Telescope clear aperture | 400 mm ∅ | 400 mm ∅ |
Attitude accuracy | 0.15º (full 3-axis stabilized) | <0.01º (full 3-axis stabilized) |
Power consumption | 100 W | 168 W |
Mass storage capacity of SSR (Solid State Recorder) | 256 Gbit | 512 Gbit |
Design life | 5 years | 5 years |
GSD (Ground Sample Distance) | 1.0 m Pan, 4 m MS | 0.75 m Pan, 2.98 m MS (4 bands, RGB+NIR) |
Swath or FOV (Field of View) | 12 km at nadir | 12 km at nadir (FOV> 1.15º for each band) |
Detector | TDI (Time Delay Integration) | TDI |
Data quantization | 10 bit | 10 bit |
Downlink data transmission speed | 160 Mbit/s | 320 Mbit/s |
The KHCS is a compact and lightweight instrument, built from composite material to maximize strength. It is a pushbroom type camera with a 0.75m GSD (Ground Sampling Distance) for panchromatic imagery and 2.98m GSD in four multispectral bands. The multispectral capability includes 4 channels in the visible and near-infrared spectral range (Red, Green, Blue, and NIR) with a radiometric resolution of 10 bits. The KHCS is based on a 40 cm Korsch telescope, which uses a three-mirror configuration to reduce optical irregularities and provide a wide field of view.
KhalifaSat will have three main imaging modes which are: single-strip imaging, multi-point imaging, and single-pass stereo imaging.
- The Single Strip Imaging will allow collecting images which are 12 km wide and up to 1,500 km long.
- The Multi-point Imaging will allow the collecting of many targets located within 600 km of the ground track, performing agile manoeuvres between the targets.
- The Single Pass Stereo Imaging will allow acquiring an image of any target from two different angles. This option allows the generation of stereo pair images and DEM (Digital Elevation Model) extraction.
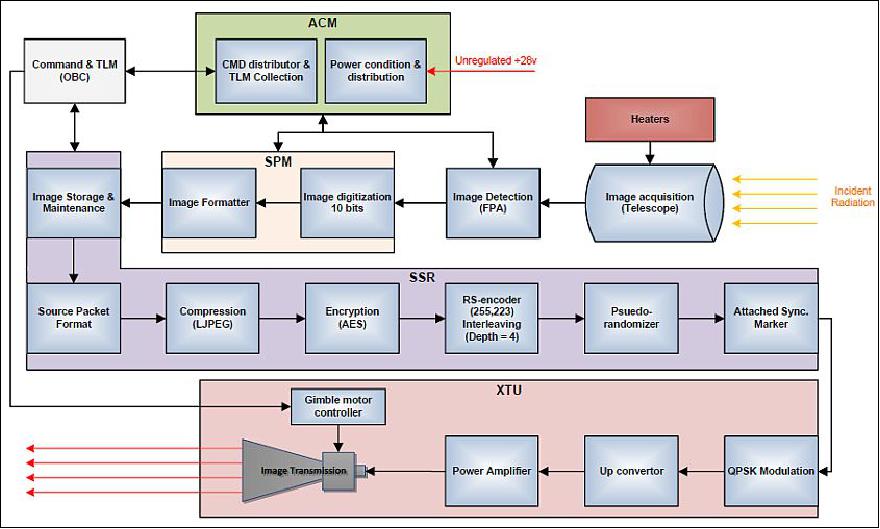
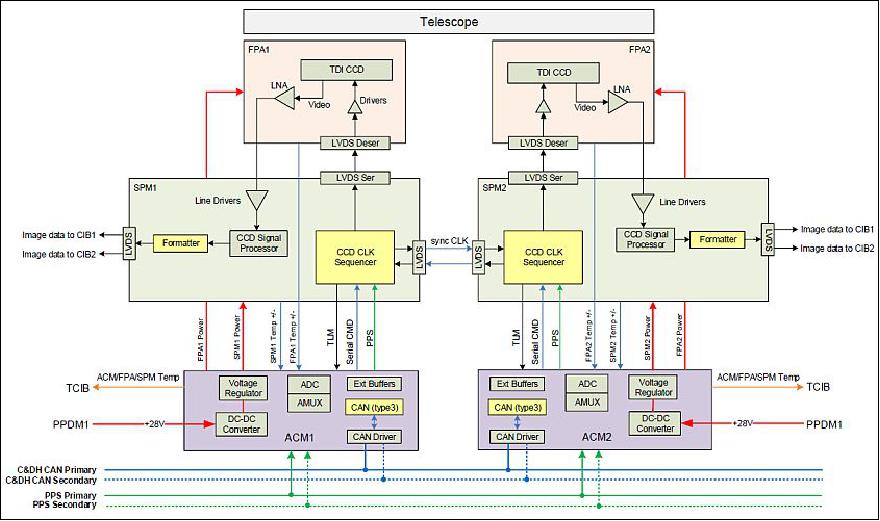
ACM (Auxiliary Camera Module): The ACM is a power supply module for the SPM and the FPA electronics. The ACM will receive unregulated +28 V from the bus and convert it into sufficient regulated power for the ACM internal circuits, SPM and FPA. The ACM will protect the load electronics from overvoltages and inrush currents.
The ACM will also have other three interfaces:
- with the CAN network for TMTC,
- with the PPS network for image synchronization
- with Thermal Interface Board for temperature telemetries.
The PPS signal, revised by ACM, will be forwarded to SPM which synchronizes the image operation between FPA1/SPM1 and FPA2/SPM2. The ACM and the SPM are separated from the FPA due to the box size, high power dissipation and interface routing with bus network (CAN, PPS and power).
SPM (Signal Processing Module):
The SPM main functions are to control the FPA timing and to convert the received video image signals from the FPA into 10-bit digital signals via the VSPs (Video Signal Processors) before sending them to the SSR. The SPM will receive operation commands and power for internal circuits from the ACM and will send telemetries back to the ACM. The SPM is designed to have 3 dedicated serializer links; two of them are used to send digitized image data to the SSR CIB1 and CIB2. The other link is used to transmit operation clocks to the FPA that are essential for CCD TDI sensor operations. The SPM1 and SPM2 will be interfaced together to share one operation clock that is important to synchronize the FPA1 and the FPA2 imaging time.
FPA (Focal Plane Assembly):
The FPA will operate CCD sensor to convert collected rays from the telescope into analogue data. The FPA will contain all driving circuits and TDI switched that are essential to operate the sensor. The FPA will receive digital clocks and TDI switch bi-level commands from the SPM through the high-speed serializer LVDS link. The FPA CCD output will be amplified and transmitted to the SPM through a coaxial cable.
SSR (Solid State Recorder):
The SSRU (Solid State Recorder Unit) receives digital imagery from the SPM. This image data is then stored, compressed, maintained and transmitted. The raw image data is stored during the imaging mode. This raw data is then compressed, encrypted and encoded before it is sent to the ITU (Image Transmission Unit). The SSRU sends the data to the ITU during downloading mode. The SSRU consists of 4 types of boards: PB (Power Boards), CIB (Control and Interface Boards), SB (Storage Boards) and BP (Backplane Board).
The SSR operates in four modes of operation. The first mode is the Power-Off Mode, where all boards are switched off. The Stand-On Mode, where SSR receives commands from the two CAN buses and transmits telemetry of the current internal data. This mode also maintains the image data stored in the SBs. The Imaging Mode is where the CIB operates the IF ports, allowing the storage of image data coming from the SPM to be stored in the SB. The final mode of operation is the Downloading Mode, where the CIB transfers the stored image data from the SB to the ITU. In the transfer process, the CIB compresses, encrypts and packetizes the image data and then converts it to I-Q data before sending it to the ITU.
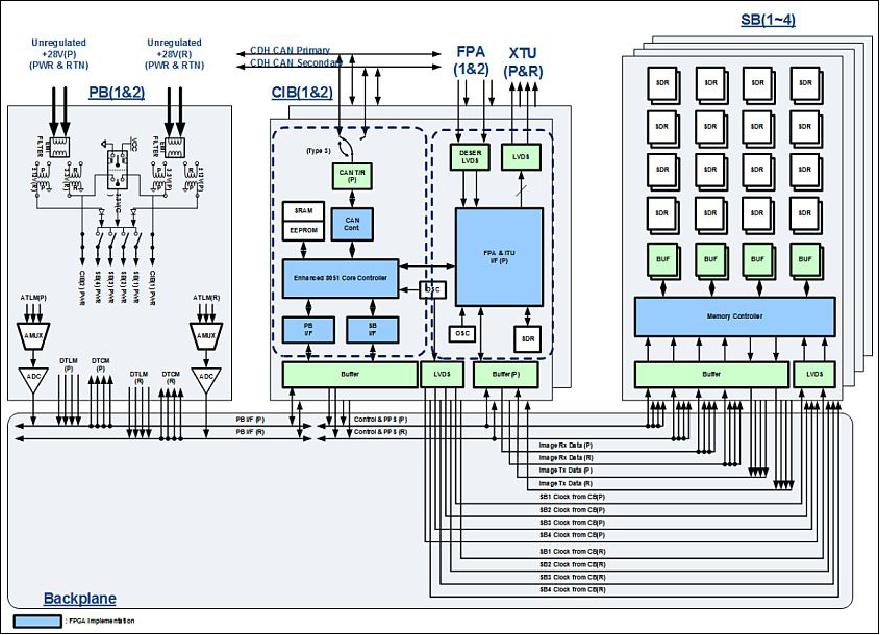
CIB (Control Interface Board):
The CIB control the whole SSRU and operates its functionality. The CIB has two main functions. The first function is to run a reliable link between the SSRU and the OBC ( Onboard Computer). The communication link uses a CAN bus protocol. This is achieved with the help of ACTEL's ProAsic3 FPGA. The CIB has two memory types. The first type of memory is the EEPROM which is used for booting processes. The second type of memory is the SRAM with an EDAC function for the payload tasks.
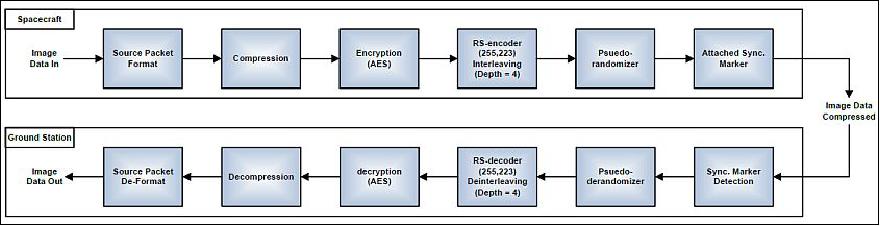
The second function of the CIB is to control the biasing of the SBs (Storage Boards) through the PB (Power Board). This is done during the imaging and downloading modes of operation. The third and main function of the CIB is controlling the connection between the SPM, SSRU and ITU. During the imaging mode, the CIB receives raw image data from the SPM serially. The data is then processed by the FPGA and redirected to the SB for storage. During the download mode, the CIB retrieves the image data, applies lossless compression, encryption, RS (Reed Salomon) encoding, interleaving and then send it to the ITU for transmission. The processes applied to the image data are shown in order in Figure 7. The CIB uses lossless JPEG compression standards. The compression ratio is 2:1.
SB (Storage Board):
The SBs, with the assistance of the CIB, store the raw image data incoming from the SPM. The SBs have the capability of storing up to 512 Gbit of data in all four similar boards. A single storage board contains 32 chips of SDRAM memory with a 4 Gbit capacity on each. This allows each board to store up to 128 Gbit for image storage and maintenance. The SBs also utilize the EDAC functionality for the correction of the data. During the download mode, the FPGA retrieves the data from the memory in the SBs. This is performed by the SDRAM controller core in the FPGA.
PB (Power Board):
The PB supplies all the SSRU boards with the required power. The PB receives unregulated +28 V and regulates and converts it into voltage levels suitable for powering up other module parts. The PB also measures the temperatures by using temperature sensors and relays the data to the Thermal Control Interface Board.
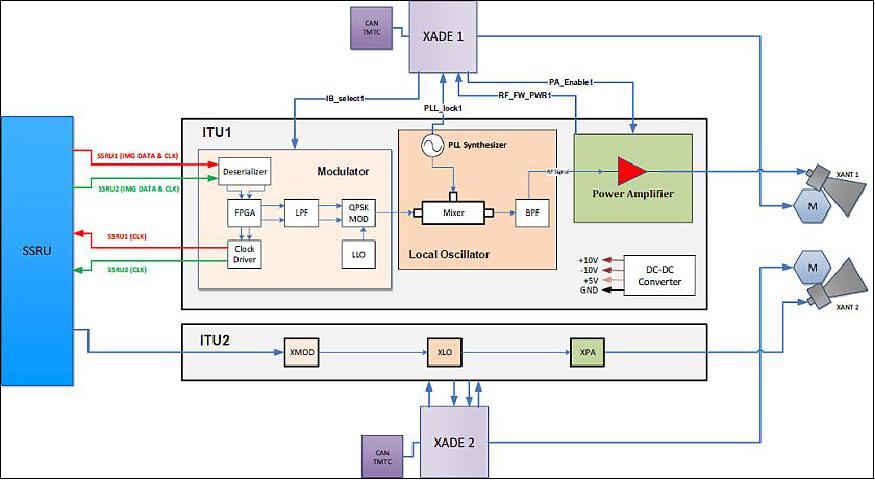
ITU (Image Transmission Unit):
The ITU transmits the data arriving from the SSRU through an X-band downlink at a speed of 320 Mbit/s. The ITU is divided into two main components: XTU (X-band Transmitter Unit) and high gain XANT (X-band Antenna). The XTU provides the RF data signal to the antenna; it consists of XMOD (X-band Modulator), XLO (X-band Local Oscillator), XPA (X-band Power Amplifier) and XPWR (X-band Power Module). The XMOD modulates the image data signal from the SSR using a QPSK modulation scheme. Then XLO mixes the modulated signal from the XMOD with the carrier signal. Finally, the XPA provides power amplification for the mixed RF signals from the XLO before it goes to the XANT. The XPWR provides the power required for the whole downlink chain. KhalifaSat features two cold redundant horn antennas with a septum polarizer. The antennas are integrated with the XAPM ( XANT Pointing Mechanism ) of ±90º through a one-axis steering motor that is driven by the XADE (X-band Antenna Driving Electronics). Each antenna has a gain of 18 dBi.
XMOD (X-band Modulator):
The XMOD board modulates the signal arriving from the SSRU to I and Q signals of 320 Mbit/s combined together. The signal first arrives at the deserializer chip. This chip covert the image differential data into digital signals that reach the FPGA which multiplexes the data and generates the IQ signals. These signals then enter a low-pass filter that removes the lower frequency harmonics and then inserts them into the IQ modulator chip. This chip modulates the signals to the L-band range with the assistance of the L-band local oscillator which then sends it to the XLO.
XLO (X-band Local Oscillator):
The XLO obtains the L-band modulated data, up-converts it and then sends it to the XPA for further amplification. The XLO consists of 3 segments: The mixer, the PLL synthesizer and the bandpass filter. The RF mixer combines the IF frequency signal generated from the XMOD with the 8 GHz X-band frequency. The PLL synthesizer generates the 8 GHz X-band frequency. The bandpass filter serves the purpose of limiting the bandwidth furthermore and generates a smoother signal shape.
XPA (X-band Power Amplifier):
The XPA receives the modulated RF signal generated from the XLO and amplifies it to a sufficient level that can be received by the ground station. The XPA produces an RF signal of 10 W RF power and then sends it to the XANT for transmission. The XPA consists of a 3-stage amplifier and bias circuitry to operate the power amplifiers during the download mode only.
XPWR (X-band Power):
The XPWR supplies power to all the boards in the ITU. It receives +28 V unregulated voltage and converts it into different voltage levels that the other boards require. The conversion is possible by using DC-DC converters and regulators to provide the exact amount of power.
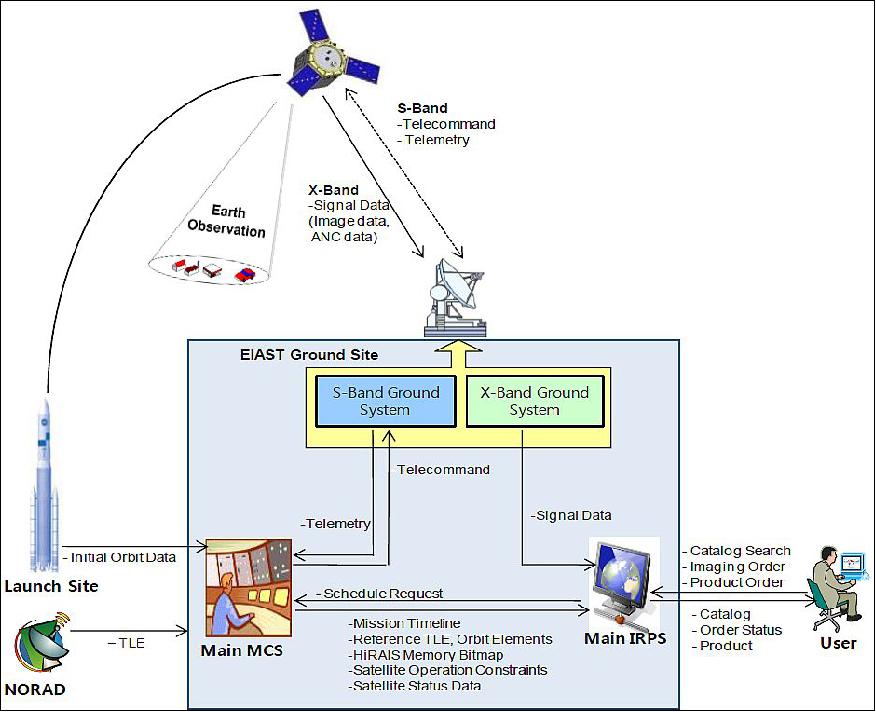
Ground Segment
The EIAST ground station in Dubai is the main ground system in support of KhalifaSat.
The ground system consists of three main subsystems which are:
- Antenna and Radio Frequency (RF) subsystem,
- MCS (Mission Control Station),
- IRPS (Image Receiving and Processing Station). 13)
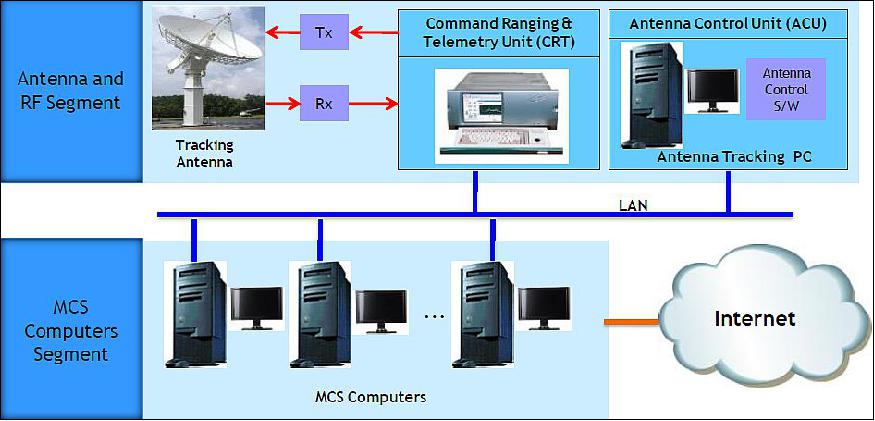
The antenna and RF subsystem consist of an 11.28 m antenna system, an S-band transmitter feed, an S-band receiver feed, an X-band receiver feed, and a tracking system. The RF equipment, including the transmitting and receiving antennas, is being used to communicate with the satellite. The Antenna & RF subsystem will receive X-band signals and will perform RF processing. The subsystem will produce a demodulated and bit-synchronized data stream from the X-band signals.
In general, the main functions of the antenna & RF subsystem are to:
- Transmit imaging orders and command the satellite through the S-band transmitter feed,
- Receive information and health status from the satellite through the S-band receiver feed,
- Download the images through the X-band feed.
The MCS is located within the MBRSC ground station in Dubai, UAE. The MCS controls the satellite by using telecommands and monitors the satellite's status through the telemetry received from the satellite.
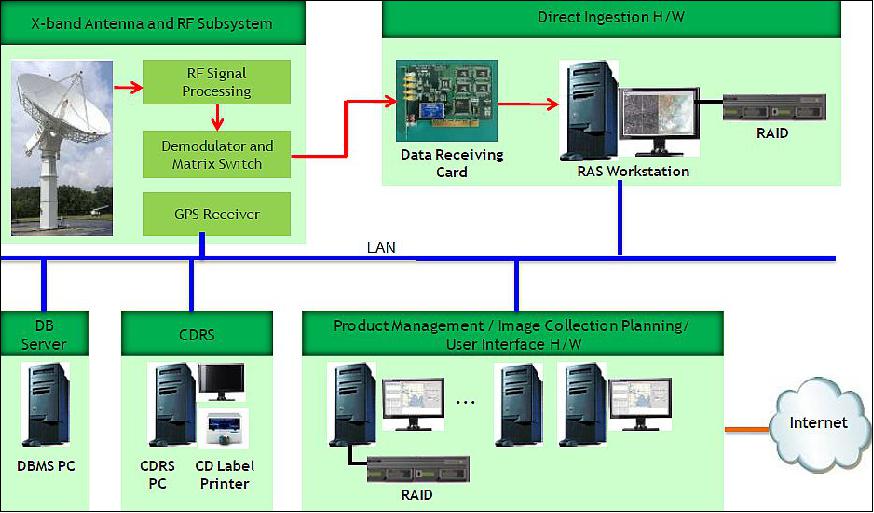
The IRPS is located in EIAST's ground station receiving imaging orders and process orders from the user community. The IRPS performs imaging and download planning for the user's imaging order.

The second component of the ground segment is the MCS which will plan and operate the entire space mission, including the configuration and scheduling of resources for both space and ground elements. It will also monitor and command the satellite.
The third component of the ground system is the IRPS. Its main objectives are to: provide real-time receiving and processing of X-band downlink data, generate standard image products and catalogs, integrate systems and manage archives, and interface with customers IRPS.
References
1) "EIAST showcases DubaiSat-2 results, plans for KhalifaSat at space conference in Singapore," Space Daily, Feb. 26, 2014, URL: http://www.spacedaily.com/reports/EIAST_showcases_DubaiSat_2
_results_plans_for_KhalifaSat_at_space_conference_in_Singapore_999.html
2) "KhalifaSat design completed," EIAST, Oct. 15, 2014, URL: http://eiast.ae/en/news/khalifasat-design-completed
3) "Satellite imaging services for commercial and government applications," EIAST, URL: http://khalifasat-thejourney.com/?lang=en
4) "KhalifaSat — The most advanced and sophisticated UAE satellite," URL: http://mbrsc.ae/en/page/khalifa-sat
5) Salem Al Marri, "KhalifaSat Mission Overview," 10th IAA Symposium on Small Satellites for Earth Observation, Berlin, Germany, April 20-24, 2015, paper: IAA-B10-0203; URL of the presentation: http://www.dlr.de/iaa.symp/Portaldata/49/Resources/dokumente/archiv10
/pdf/0203_Khalifasat_Mission_Overview.pdf
7) Information provided by Adnan Mohammad Alrais of MBRSC, UAE.
8) "VP establishes Mohammed bin Rashid Space Centre," July 11, 2015, URL: http://mbrsc.ae/enkg
9) Information provided by Fatma Ali AlSumatti (Officer, Business Development & External Relations) of MBRSC (Mohammed Bin Rashid Space Center), Dubai.
10) "Launch Results of the H-IIA F40 Encapsulating GOSAT-2 and KhalifaSat," JAXA Press Release, 29 October 2018, URL: http://global.jaxa.jp/press/2018/10/20181029_h2af40.html
11) "EIAST orders Satellite Launch Services from Mitsubishi Heavy Industries, Ltd. ," EIAST, March 12, 2015, URL: http://eiast.ae/en/news/eiast-orders-satellite-launch-services-from-mitsubishi-heavy-industries-ltd
12) Suhail AlDhafri, Hamad AlJaziri, Mohammad Naji, "Enhanced Payload electronics Systems of the KhalifaSat Satellite Mission," Proceedings of the 65th International Astronautical Congress (IAC 2014), Toronto, Canada, Sept. 29-Oct. 3, 2014, paper: IAC-14,B4,6A.10
13) Zakareyya AlShamsi, Mahmood Al Nasser, Mohammed Al Harmi, "Proceedings of the 14th International Conference on Space Operations (SpaceOps 2016), Daejeon, Korea, May 16-20, 2016, paper: AIAA 2016 2426, URL: http://arc.aiaa.org/doi/pdf/10.2514/6.2016-2426