IXV (Intermediate eXperimental Vehicle)
Non-EO
ESA
Mission complete
Quick facts
Overview
| Mission type | Non-EO |
| Agency | ESA |
| Mission status | Mission complete |
| Launch date | 11 Feb 2015 |
| End of life date | 11 Feb 2015 |
IXV (Intermediate eXperimental Vehicle)
Overview Flight Segment Launch Mission Status References
The IXV project of ESA is developing and flight-testing the technologies and critical systems for Europe's future autonomous controlled reentry for return missions from LEO (Low Earth Orbit). Europe's ambition for a spacecraft to return autonomously from LEO is a cornerstone for a wide range of space applications, including space transportation, exploration and robotic servicing of space infrastructure. 1) 2) 3) 4)
Reentry technologies: Atmospheric reentry is a cornerstone for a wide range of applications in future space transportation, including next-generation launchers, planetary exploration, sample-return missions, space planes and crew and cargo transportation. 5)
For several years, significant importance has been accorded to the development of critical reentry technologies through several basic research and technology preparatory programs. Today, the flight verification of such technologies is an important aspect of European programmatic objectives, to be pursued within ESA's short-term undertakings.
Several technologies contribute to the consolidation of the European knowledge base for future reentry missions. Among the most important ones:
• Aerothermodynamics – validation of design tools and improvement of design performance, since the current lack of precise knowledge about phenomena occurring during re-entry induces the need for additional design margins. In fact, when re-entering from LEO ( Low Earth Orbit) the oxygen and nitrogen molecules in the air break apart to dissipate the high energies involved. When this happens, the ideal-gas laws normally used for simulations are replaced by complex, real-gas laws that are governed by phenomena that are difficult to predict.
• GNC (Guidance Navigation and Control) – improvement of the guidance algorithms, coupling of inertial measurement units with GPS for navigation, exploration of the combination of flaps and thrusters for flight control, addressing complex GNC issues related to the hypersonic phase of a reentry from LEO.
• Thermal Protection and Hot Structures – validation of the flight performance of thermal protection materials and complex design solutions (for example, thermal expansion, junctions between materials, seals, gaps, steps and singularities), addressing the complexities introduced by the severe thermo-mechanical environment for LEO reentry applications.
The IXV project objectives tackle the basic European needs for reentry from LEO, consolidating the knowledge necessary for the development of any future European reentry system while allowing risk limitation. Its end-to-end European mission on the Vega launcher is planned for February 2015.
Applications for controlled atmospheric reentry vehicles:
• Reusable launchers stages (lower and upper)
• Robotic exploration (for example, sample return from Mars or asteroid)
• Servicing of orbital infrastructures (for example, International Space Station)
• Servicing of future generation satellites (for example, in-orbit refuelling or disposal)
• Microgravity experiments (for example, optimum time/cost ratio)
• Earth sciences (for example, high-altitude atmospheric research)
• Earth observation (for example, crisis monitoring).
The knowledge gained from the IXV mission will be key in ESA's future plans involving controlled atmospheric reentry.
Some background: The IXV project dates back to 2004 when ESA's Future Launcher Preparatory Program was initiated to define, among other technological demonstrator projects, the IXV reentry system as a platform for the verification of in-flight performance of critical reentry technologies. In the two years that followed, different IXV design proposals were downselected ending up at a final concept of a lifting-reentry body designed to be launched and injected on a re-entry path by the Vega launcher using an equatorial trajectory taking the vehicle back to a landing in the Pacific Ocean.
In 2007, the project went through the System Requirements Review leading into Phase B of the program that was in progress in 2008 and 2009. The PRD (Preliminary Design Review) was passed, however, the project was set back somewhat by a number of redesigns that were necessary due to changes in the industrial organization at the prime and subcontractor levels. The CDR (Critical Design Review) and Equipment Qualification Reviews in 2011 paved the way for the next phase of the project – the manufacturing, assembly and testing of the complete spacecraft and ground support equipment for a launch in late 2014. IXV was delivered to the launch site in September 2014 to be loaded with propellants and installed on the Vega launcher for liftoff. Additional analysis of the launch trajectory required a delay of the mission into 2015 to clear any concerns with range safety. 6)
Flight Segment
Thales Alenia Space Italia (TAS-I) is the prime contractor for IXV's space and ground segments, integrating competences from around 40 other European companies, universities and research institutes.
The mission is primarily supported by seven member states of ESA: Italy, France, Switzerland, Spain, Belgium, Ireland and Portugal. Italy is providing the largest share of funding. Additional member states, such as Germany and the Netherlands, are providing complementary support to the mission. The Spanish industry took part in the development and execution of this mission through several companies, being Elecnor Deimos, SENER, GMV, GTD and RYMSA.
Design features: The experimental vehicle is 5 m long, 1.5 m high, and 2.2 m wide – about the size of a car – and weighs almost 2 tons (launch mass of 1845 kg). Its hypersonic lift-to-drag ratio of 0.7 guarantees the required aerodynamic performance.
The outer surface consists of advanced ceramic and ablative thermal protection materials that can withstand the severe reentry environment and protect the structural integrity. 7) 8) 9) 10) 11) 12)


The inner elements are built around carbon-fiber reinforced polymer structural panels, which provide the strength and stiffness to resist the extreme forces experienced during launch and landing.
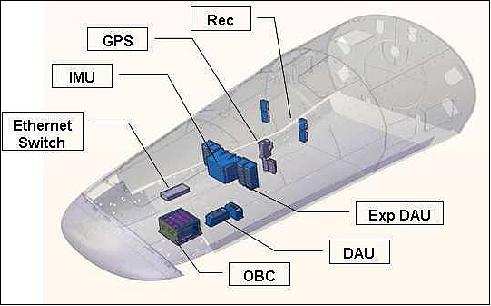
Components house the avionic components for power, data handling and telemetry, the parachute and floatation devices, and the controlling devices for the flaps and thrusters.
Avionics Architecture
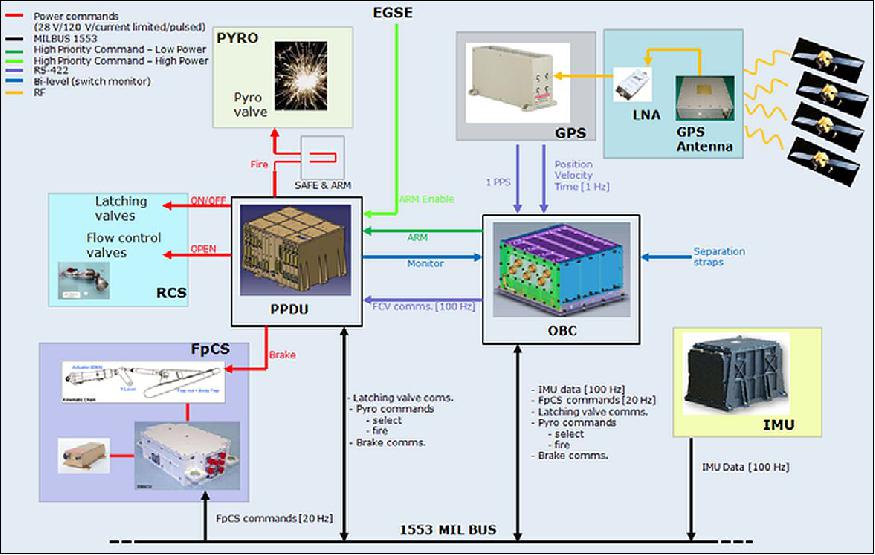
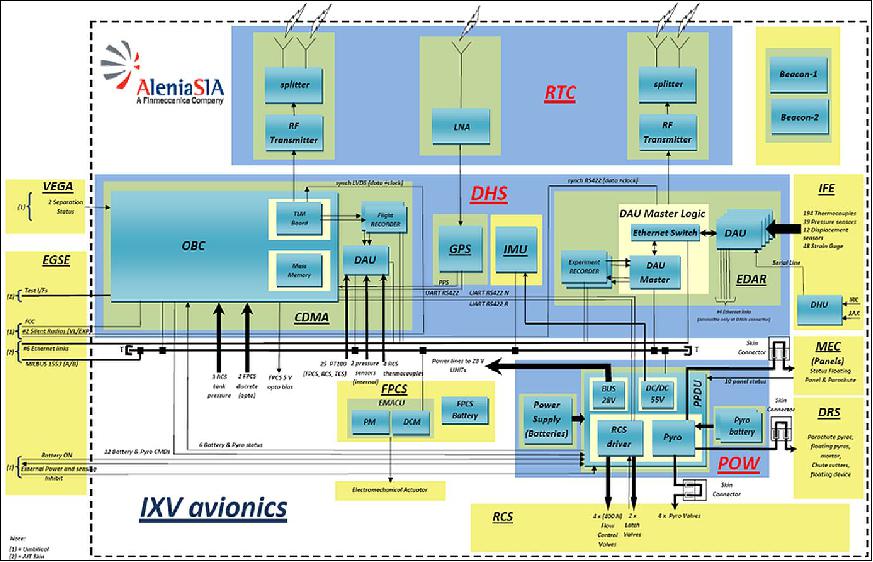
The IXV avionics is composed of three subsystems, namely: DHS (Data Handling Subsystem), EPS (Electrical Power Subsystem), and RTC (Radio Frequency Telemetry and Tracking). Dedicated focus has been put to increase the avionics reliability by, on the one hand simplifying the overall avionics architecture, and on the other hand implementing local redundancies whenever required. Figure 3 provides a global synthetic view of the IXV avionics architecture showing the key items PPDU (Power Protection and Distribution Unit, OBC (On Board Computer), IMU (Inertial Measurement Unit), GPS Receiver, Electro-Mechanical actuator for Flaps control) and their interfaces.
DHS (Data Handling Subsystem): This subsystem is the key element behind the complex and autonomous IXV operations. The main functions are to monitor the vehicle state and flight conditions and to safely manage the vehicle operative modes transitions and relevant actions on the basis of the Mission Timeline entries and external events (e.g. Separation from Launcher, Mach number, altitude, attitude).
The DHS of the IXV spacecraft consists of two elements – one handling spacecraft telemetry and commands, and one collecting data from the experimental flight sensors. The brain of the spacecraft is a central Onboard Computer using a LEON-2 microprocessor that is in charge of the execution of the flight software and the control of all mission tasks. The data system includes a number of redundant data recorders that are in charge of storing telemetry and experimental data sourced from a series of Data Acquisition Units based on a finite state machine design.
The data and command system of the spacecraft uses a combination of Ethernet and serial connections handling different data volumes throughout the mission with the primary objective of sustaining the data flow without overloading any systems. Serial links used on the spacecraft include a MIL-STD-1553 bus that builds the central link for commands and systems telemetry with an RS-422 bus used in certain interfaces.
The OBC is a radiation tolerant unit operating in a single-chain configuration using a LEON2-FT (Fault Tolerant) CPU operating at 50 MHz. The OBC is in charge of all in-flight operations including the execution of GNC (Guidance, Navigation and Control) tasks, the issuing of pyro commands and actuator commands. It is also in charge of encoding the Vital Layer Telemetry and storing it onboard as well as downlinking it to the ground.
The Vital Layer in the data system represents the systems in charge of actual spacecraft tasks such as GNC operations, and systems telemetry recording in two redundant recorders. Vital layer telemetry is collected by the OBC from the 1553 data bus that feeds data from the Inertial Measurement Unit, data from five Data Acquisition Unit that includes telemetry from all subsystems, and GPS data. Data is stored in two Solid State Recorders each with a capacity of 24 GB.
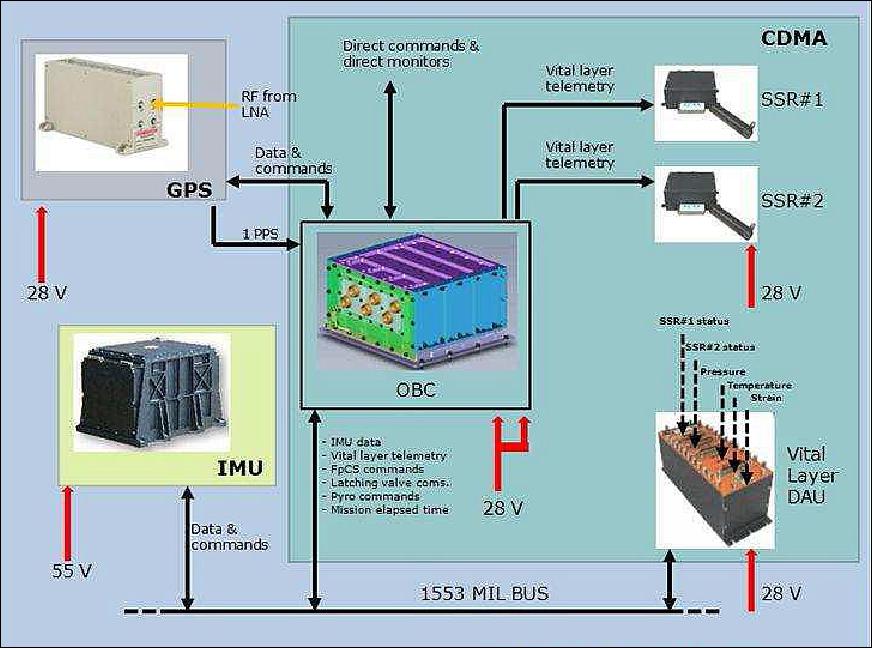
The GNC data for IXV is provided by a Quasar 3000 IMU ( Inertial Measurement Unit) and a GPS (Global Positioning System) receiver. The Quasar 3000 is a strapdown navigation platform based on linear accelerometers and ring-laser gyros that provide precise rotation measurements. Attitude data is delivered by the gyros while the local acceleration is delivered by the accelerometers and provided to the onboard computers as inertial attitude frames and delta-velocity measurements about the three axes. The IMU delivers data at a speed of 100Hz through the 1553 data bus.
The Experiment Layer is dedicated to the management of the in-flight experiment data generated by hundreds of sensors installed across the IXV. The system also uses a store and playback mechanism that downlinks data in real time when a ground station is visible and plays back stored data from periods of LOS (Loss of Signal).
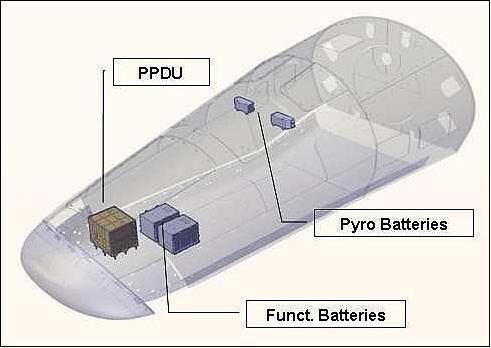
EPS (Electrical Power Subsystem): This subsystem performs vital functions essential to achieve the vehicle service and experimental objectives. The EPS primary aim is to provide and distribute electrical power to the vehicle throughout the entire mission: energy generated by two on-board 45 Ah Li-ion batteries is distributed through the PPDU (Power Protection and Distribution Unit) to the vehicle loads. - A segregated PPDU section distributes the power of two redundant pyrotechnical batteries to NEA/NSI pyrotechnical devices.
RTC (Radio frequency Telemetry and Tracking): The RTC subsystem provides the transmission capabilities to downlink, in a redundant scheme with respect to on-board recorders, the telemetry data and to receive GPS signal for navigation purposes. The RTC architecture reproduces the DHS segregated structure by implementing two transmission chains, each one constituted of one S-band transmitter, one power splitter and two antennas, for independent Experiment and Vital Layers telemetries relay. The subsystem includes also a GPS antenna.
These three avionic subsystems interface with the following subsystems:
- FpCS (Flap Control Subsystem) and RCS (Reaction Control Subsystem), in charge of attitude control commands implementation
- IFE (In-Flight Experiments) sensors and DHU (Data Handling Unit), caring for physical quantities transduction and digital streams collection
- MEC (Mechanism), devoted to jettisoning the IXV panels and sensing their status (Open / Closed)
- VEGA straps, dedicated to electrically sense the VEGA-IXV separation
- EGSE (Electrical Ground Support Equipment), performing control and monitoring during ground activities.
Data acquisition subsystem: The mission critical functions relevant to experimental data acquisition, storage and encapsulation is entrusted to the EDAR (Experiment Data Acquisition and Recording). Core of this system is the Ethernet-based distributed acquisition system constituted of:
COTS (Commercial Off The Shelf) data handling and recording equipment on board the IXV: One of the IXV mission success criteria was the collection and recovery of exploitable flight data and this objective was the driving factor behind requirements for the IXV data handling subsystem. The on-board data acquisition and recording system was designed using COTS equipment manufactured by Curtiss Wright. 13)
Figure 7 shows a block diagram of the data acquisition and recording system for the Experiment Layer of the IXV Data Handling System. The system was designed using COTS equipment originally developed for Flight Test applications. The system features four types of network devices - DAUs (Data Acquisition Units), a Network Switch, a Network Gateway and two Recorders.
Each of the four DAUs acquires data from a number of sensors. The acquired data is encapsulated into data packets and delivered to the Network Gateway via the Network Switch. A single Ethernet 100Base-TX data link is used for all required network services - data transfer, synchronization, configuration and management. In order to simplify the qualification testing and integration, all DAUs are identical and fully interchangeable.
The Network Switch connects the DAUs to the Network Gateway and ground support system. It was selected from the range of COTS NET-500 switches from Curtiss Wright. It features 8 Ethernet ports and an integrated IEEE 1588 Precision Time Protocol (PTP) Grandmaster.
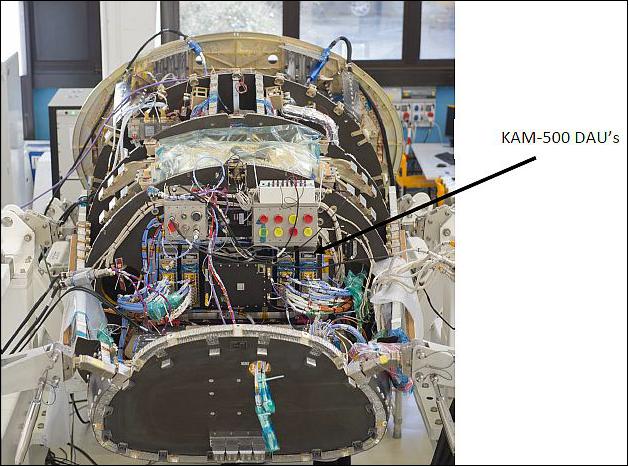
The Network Gateway receives data packets generated by the DAUs and encapsulates them into CCSDS transfer frames. The gateway creates three copies of CCSDS streams, one for each of the two recorders and one for the RF transmitter. At the data link level the Gateway is connected to the Recorders and Transmitter via an RS-422 link. Additionally, the gateway acts as a MIL-STD-1553 Remote Terminal, extracting predefined parameters from the received data packets and makes them available to the On-Board Computer via a MIL-STD-1553 bus. Like the DAUs, the Gateway is based on a COTS KAM-500 data acquisition system from Curtiss Wright.
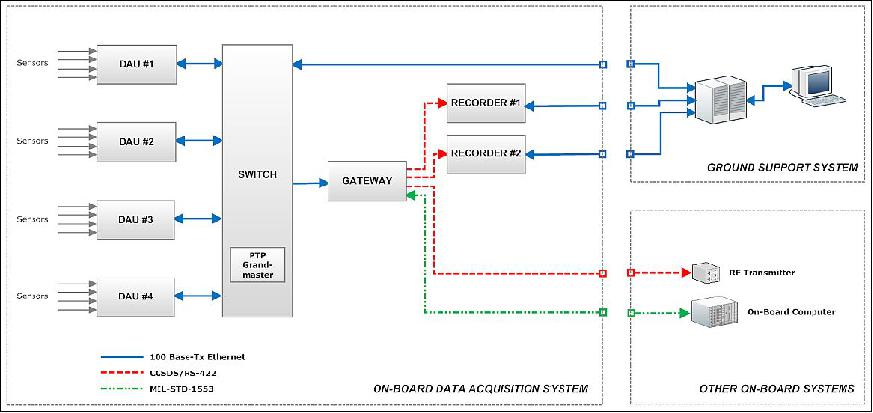
The data recording part of the system is dual-redundant. Each of the two Recorders is used to store a copy of CCSDS stream generated by the Gateway. The IXV Recorder was selected from the range of COTS SSR-500 recorders from Curtiss Wright. Because the CCSDS stream at bit-stream level is identical to the PCM stream, a standard network recorder with IRIG-106 PCM interface can be used. The data is stored in Packet CAPture (PCAP) files to a removable CompactFlash® card using the FAT32 file system. During the pre-flight and post-flight operations the ground support system can download recorded data from the recorders using the TFTP (Trivial File Transfer Protocol).
The Curtiss Wright designers used the Space COTS Qualification approach to analyze and test the performance of COTS products in relevant space environments.
The test results achieved and the success of the IXV mission using the Space COTS Qualification methodology demonstrates, that COTS equipment can be used to replace costly highly specialized equipment and that Curtiss Wright Space COTS equipment provides a reliable and cost-effective solution for a wide range of space missions.
TPS (Thermal Protection System)
The IXV spacecraft relied on a large array of C-SiC (Carbon-Silicon Carbide)-based thermal protection systems, in development for many years, but only completely validated through the actual IXV flight. The Herakles-Safran Group of France was awarded a contract from TAS-I for the development of the TPS. 14)
The technology developed for these applications combines a high-temperature resistant C-SiC outer shell, mechanically fastened to the structure of the vehicle, and internal lightweight insulation layers. These systems have to comply with a set of very strict requirements related to the harsh environment of atmospheric reentry, combined aerodynamic shape control and mass objectives. Consequently, a large number of test campaigns have been performed throughout the detailed design phase, addressing the different components of the subsystems, with particular focus on C-SiC parts and on integrated subsystem performance.
The TPS concept is based on the "shingle design", which dissociates thermal and mechanical functions. A thin, heat resistant shell made of CMC (Ceramic Matrix Composite) is designed to withstand mechanical loads due to extreme heat fluxes while maintaining the outer aerodynamic line of the vehicle. And layers of insulation material underneath this skin absorb the heat load, and protect the cold structure from high temperatures (Figure 10). The 2 main advantages of this concept are that the CMC is heat resistant, and thus reusable (shingle TPS can withstand many reentries), and CMC and insulation mattresses are light-mass materials, which guarantees low mass TPS for the vehicle.
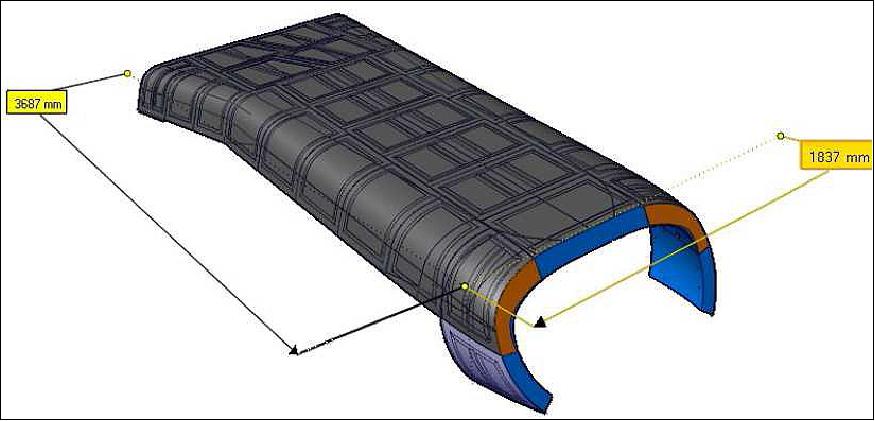
The TPS is comprised of three main components: CMC skins, insulation material and attachment system. The outer skin of the TPS is made of C-SiC (Carbon – Silicon Carbide) material. There are 30 panels for the windward (Figure 11), made of a thin outer layer with integrated woven stiffeners and attachment legs and one very large (>1.3 m wide), monolithic C-SiC part for the nose with integrated stiffener and attachment legs.
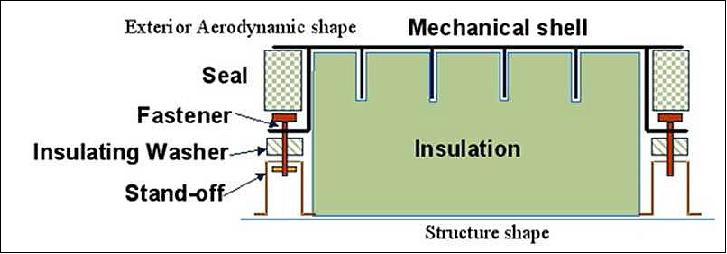
Each panel, and the nose, is equipped with insulating materials. Different materials are used, selected for their density, maximum allowable temperature and efficiency, from alumina blankets close to the outer surface to silica aerogels close to the cold structure. Those layers are encapsulated in light polyimide films to prevent dust release, and have patterns that do not match the windward pattern to prevent air infiltration from the airflow directly to the cold structure. Interfaces between panels are filled with peripheral seals, made of alumina fibers encapsulated in a braided heat-resistant sleeve made of ceramic fibers.
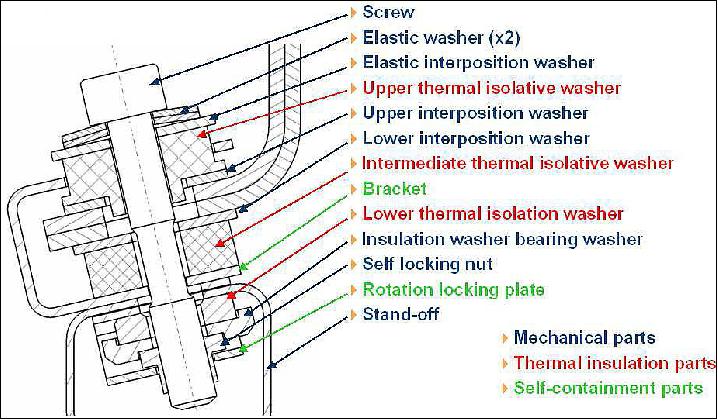
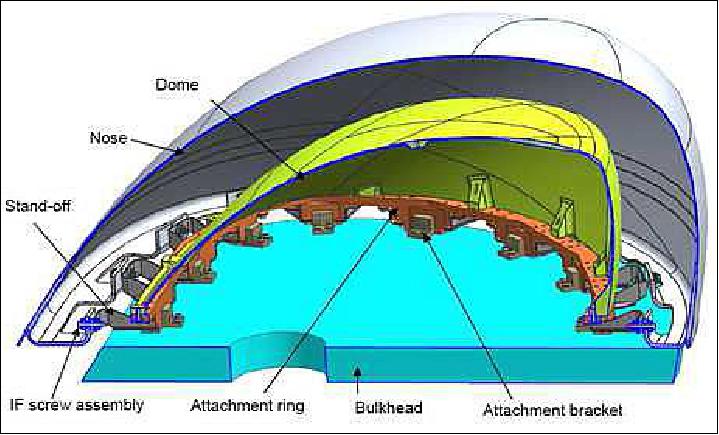
The panels are attached to the cold structure using specially designed "stand-offs" (Figure 12). They are made of metallic parts, designed to accommodate thermal distortion of the panel, while withstanding reentry mechanical loads. These standoffs also have a fastening system with ceramic washers that act as a thermal barrier to prevent structure overheating. The nose is attached to a metallic ring using 16 stand-offs (Figure 13). These stand-offs are designed to accommodate thermal expansion of the nose while withstanding mechanical loads. A metallic dome is fastened to the ring, and provides support to the insulating layers. The ring is equipped with brackets, which are then used to attach the nose to the cold structure.
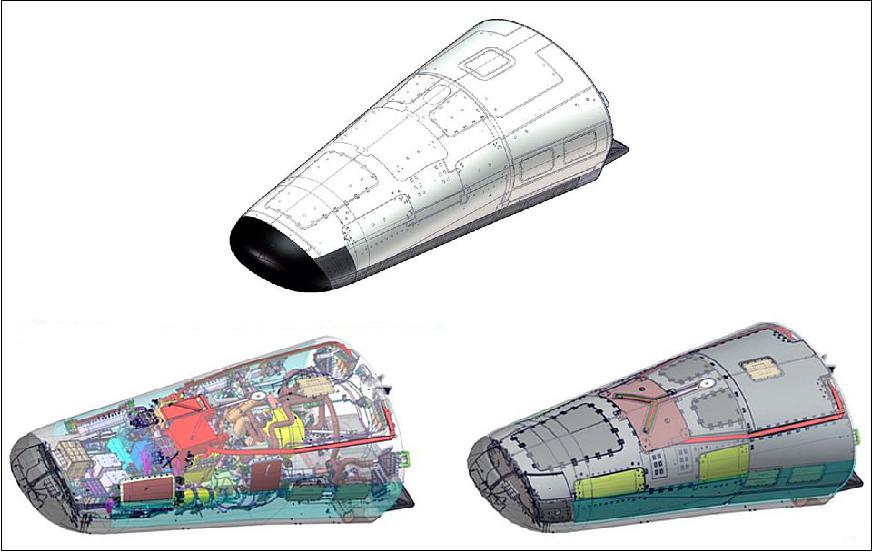
1) Spacecraft Configuration
From the outer to inner layers, IXV comprises:
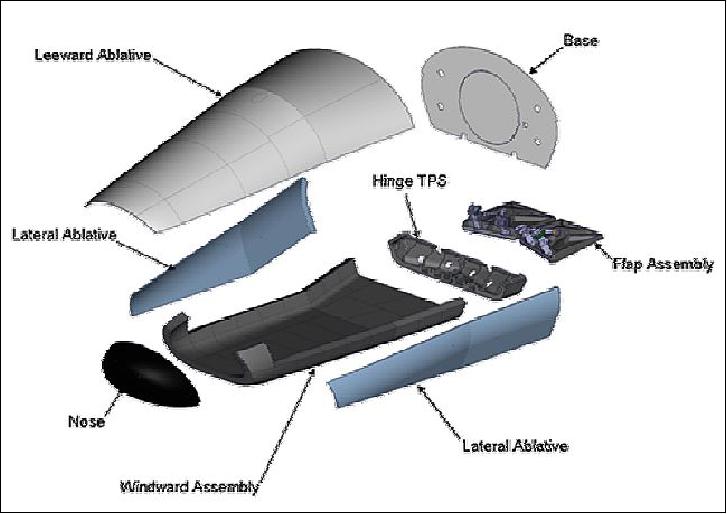
• TPS (Thermal Protection System) of ceramic material for the nose, windward, hinge and body flaps, and ablative material for the lateral, leeward and base areas.
The windward area is protected by ceramic matrix composite C-SiC panels (shingles), with lightweight ceramic insulation (alumina/silica), and specific attachments made of superalloy bolts, flexible stand-offs, ceramic thermal barrier washers, and ceramic fibers seals. The nose assembly is derived from the windward technology to maximize synergies.
• Structural panels made of CFRP (Carbon-Fiber Reinforced Polymer) to hold inner elements in place during launch and landing.
• Functional and experimental subsystems equipment.
2) In-Flight Experimentation Activities
The technological objectives of the IXV mission are met by flying a large number of experiments that have been chosen among a wide range of European proposals. Since each experiment required a specific set of measurements, several synergies and commonalities were exploited to identify a global set of sensors covering all experimentation requirements.
Sensors are split into conventional (i.e. 37 pressure ports, 194 thermocouples, 12 displacement sensors, 48 strain gages) and advanced (i.e. infrared camera).
3) Structural Subsystem Activities
The structure of the vehicle is based on CFRP, whose matrix is based on a high temperature resin selected in order to withstand the high temperature reached by the structure during the reentry, with the design compliant with the challenging VEGA launcher requirements on stiffness, and mission requirements on strength induced by the sea landing impact.
4) Mechanisms Subsystem Activities
The mechanisms of the vehicle includes the panel jettisoning for the descent and recovery system deployment, and the umbilical connectors between the spacecraft and the launcher.
The panels jettisoning mechanisms avoid the use of pyro-cords thanks to the avionics architecture which is compatible with the implemented nonexplosive actuators.
5) Electrical and Avionics Subsystems Activities
The EPS (Electrical Power Subsystem) consists of a PPDU (Power Protection and Distribution Unit), two separate batteries and two dedicated pyro batteries, all using Li-Ion technology. The EPS is based on a 28V main bus, maximizing off-the-shelves equipment, with protected outputs, performing DC/DC conversion to 55 V for the IMU (Inertial Measurement Unit), with dedicated pyrotechnic section. Overall, the EPS architecture of IXV uses heritage from the Gaia, Sentinel-1 and ATV programs.
The Data Handling subsystem provides vital layer and experimental data acquisition, storage, recording, real time and delay transmission to the ground stations.
The Radio Frequency Telemetry subsystem is based on two independent chains for vital layer and experiment telemetries. It implements frequency and polarization diversity techniques for maximum coverage and data download capability.
6) GNC and Software Activities
The spacecraft GNC covers the three main mission phases (i.e. orbital, reentry, descent), thanks to the Flight Management function which interfaces on one side with the MVM (Mission and Vehicle Management), and on the other side with the three specific GNC functions (i.e. guidance, navigation and control).
The SW activities include the application SW (i.e. the Mission and Vehicle Management SW), the GNC SW, the SW embedded in the equipment's (IMU, GPSR, FPCS), and, last but not least, SW for the descent and landing system synthesis test.
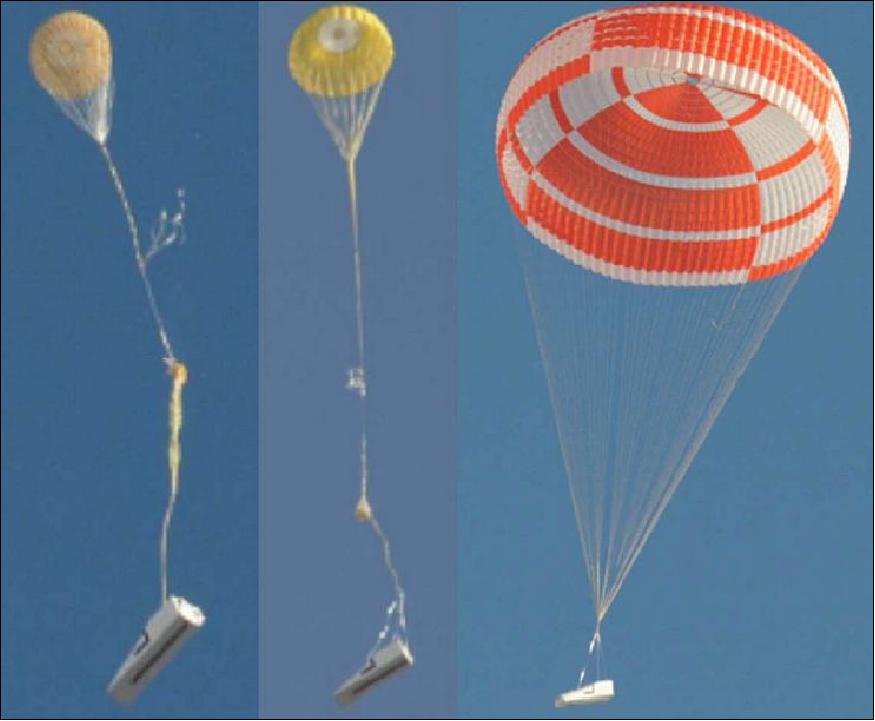
7) Descent and Recovery Subsystems Activities
The descent and recovery function is assured by two dedicated subsystems, the parachute subsystem for the descent phase, and the floatation subsystem for the recovery phase.
The descent subsystem is based on a four-stage parachute with consolidated technology, including one supersonic pilot, one supersonic ribbon drogue, one subsonic ribbon drogue, and one ringsail main parachute, with a mortar to extract the supersonic pilot and strap-cutters, and to separate the various parachute stages and the main parachute from the spacecraft after splashdown.
The recovery subsystem is also based on consolidated technology, including inflation devices (i.e. gas bottles, valves, hoses), floatation devices (i.e. balloons), and localization devices (i.e. beacons).
With the objective to mitigate the risk of failures occurring in the critical descent and landing phases, a dedicated Descent and Landing System Synthesis Test is planned in April 2013, where a system prototype shall be launched from a 3.0 km altitude by an helicopter in a test range in Sardinia (I), and shall verify the last phases of the IXV mission, including descent, water splash-down, balloons inflation, floatation and recovery operations.
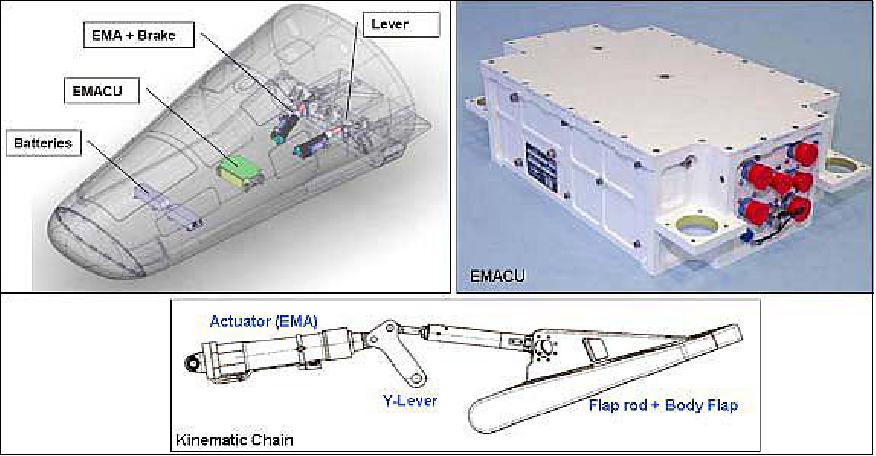
8) Flight Control Subsystems Activities
The flight control is assured by means of four 400 N thrusters and two aerodynamic body flaps. The German aerospace company MT Aerospace of Augsburg developed and qualified IXV's body flaps, the vehicle's only aerodynamic means of control during the reentry flight from velocities of Mach 25 down to parachute deployment. The body flaps are made of an innovative ceramic matrix composite material and had to withstand temperatures of up to 1,900ºC and aerodynamic loads corresponding to 1.5 tons.
The flaps are also located at the base of the vehicle to trim the vehicle on the longitudinal (symmetrical deflections) and lateral (unsymmetrical deflections) axes during the atmospheric reentry phase. These are actuated by two EMAs (Electro Mechanical Actuators), whose technology is inherited from the VEGA Zefiro thrust vector control system.
The Flap Control System is in charge of providing the motion and controlling the position of the two flaps during reentry, becoming active when the efficiency of the aerodynamic control surfaces increases with the dynamic pressure. The two flaps can be controlled through the elongation and retraction of the two electromechanical actuators. These commands are issued by the onboard computer to the EMA control unit (EMACU) through the 1553 bus with EMA converting the commands to mechanical outputs of the actuators. Two batteries are used in parallel to provide the power needed for the EMA movement.
Thrusters: The thrusters, manufactured by Airbus DS and inherited from the Ariane-5 SCA, are located at the base of the vehicle to control the attitude around the three axes during the orbital phase, the yaw during the atmospheric reentry, and providing additional control authority to the body flaps in pitch and roll during the reentry phase, if required.
The thrusters are fed from a single titanium tank with propellant lines including pyrotechnic latch valves. The 400N thruster is 32.5 cm in length with a nozzle diameter of 6.7 cm and a mass of 2.7 kg. Operating in blowdown mode, the thruster can tolerate inlet pressures of 6 to 26 bar and is capable of delivering 130 to 455 Newtons of thrust corresponding to specific impulses of 214 to 224 seconds. The flow control valves of each thruster are operated on command from the onboard computer through an RS-422 link.




ESA's experimental spaceplane, poised for liftoff on Vega, is set to showcase the latest technologies and critical systems to extend Europe's capability for space exploration.
Navigation Reentry
When ESA's IXV (Intermediate eXperimental Vehicle) descends into Earth's atmosphere it will be travelling at 27,000 km/h (7.5 km/s) – typical of a mission from LEO. Friction with the atmosphere will slow the craft but if the angle of entry is too steep the craft will burn up. If the angle is too shallow, IXV cannot reach the required landing point.
As with all atmospheric entries, accurate guidance, navigation and control is everything. IXV must come in at the right angle and keep within a ‘reentry corridor'.
IXV's sophisticated GNC (Guidance, Navigation and Control) system will use the body's lifting shape, two flaps and four thrusters to navigate through the atmosphere in a way to withstand the pressures and friction while heading to the landing point. The thrusters and flaps will work together to change IXV's flight attitude – an important advance on ARD (Atmospheric Reentry Demonstrator) thrusters only. 15) 16)
A new generation of large and advanced thermal protection panels will shield IXV from temperatures reaching around 1700ºC on reentry. The black panels that cover the underside are made from high-performance carbon fibers woven into a ceramic matrix pattern for heat resistance and strength.
The flow of heat across these panels will be mapped for the first time, by an infrared camera and 300 sensors spanning the spacecraft from nose to flaps. The panels are much larger than the alternative glued tiles.
In a world first, Europe will launch and land an unmanned spaceplane that has no wings but instead features an aerodynamic shape that produces the lift to fly through the atmosphere. Flaps and thrusters will autonomously steer it back to a splashdown at a precise point in the Pacific Ocean. 17)
Launch
The IXV technology demonstration spaceplane was launched on Feb. 11, 2015 (13:40 UTC) on top of a Vega rocket (VV04) from Kourou, Europe's Spaceport in French Guiana. 18) 19) 20) 21) 22)
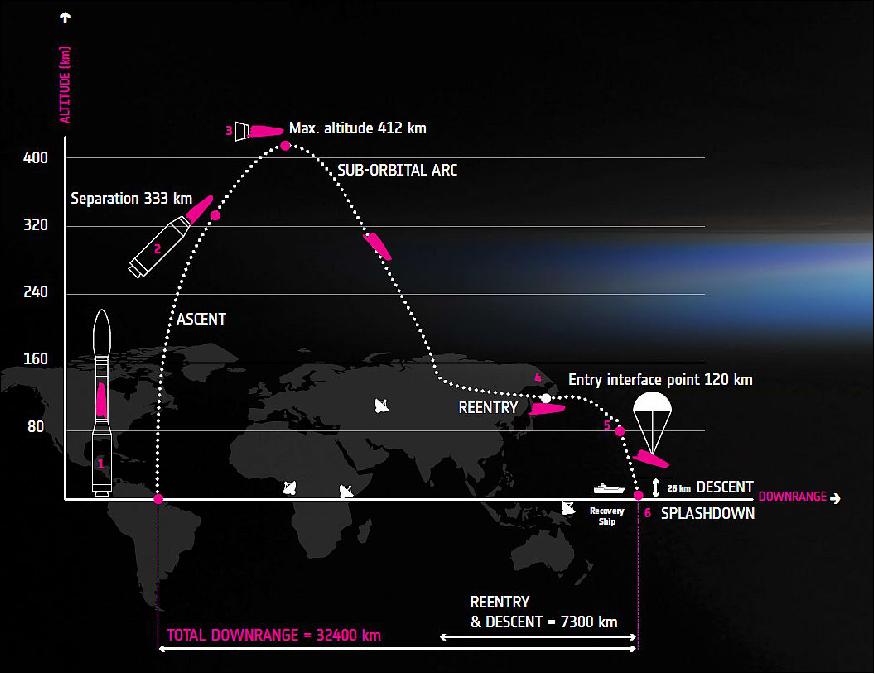
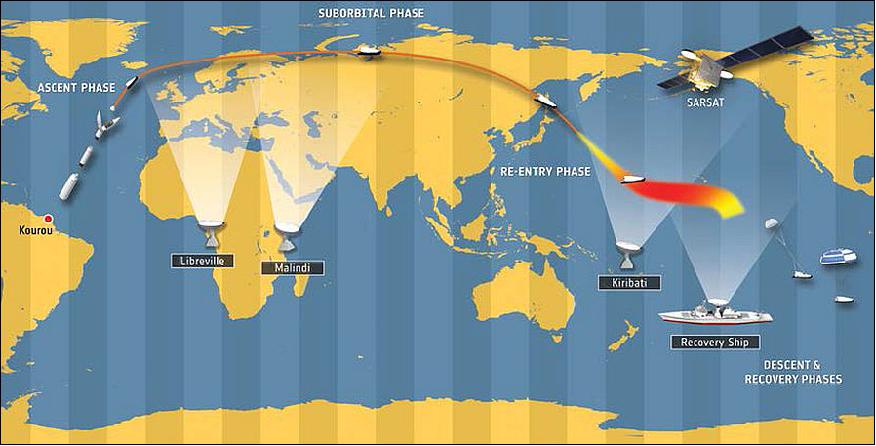
Orbit: IXV was launched 340 km into a semi-equatorial suborbital trajectory, climbing up to ~412 km before beginning a long glide back through the atmosphere. In the process, IXV gathered data on reentry conditions to help guide the design of future spaceplanes.
The main flight phases were: ascent, separation, ballistic, reentry, descent and splashdown. As the IXV spaceplane descended, it maneuvered to decelerate from hypersonic to supersonic speed. The entry speed of 7.5 km/s at an altitude of 120 km created the same conditions as those for a vehicle returning from low Earth orbit. IXV glided through the atmosphere before parachutes deployed to slow the descent further for a safe splashdown in the Pacific Ocean.
The spacecraft flew autonomously and was closely monitored from its Mission Control Center located at ALTEC (Advanced Logistics Technology Engineering Center) in Turin, Italy. Signals from the spacecraft were tracked by two ground stations in Africa and by an antenna on the recovery ship, Nos Aries, in the Pacific.
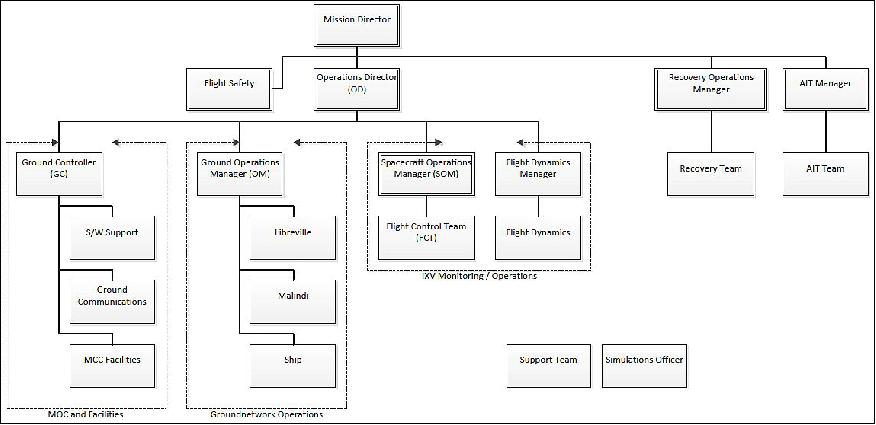
A team of ESA/ESOC in Darmstadt, Germany, will work at the IXV MCC (Mission Control Center), in Italy, the tracking stations in Africa and on board the recovery ship. 23)
Ground Segment
The ground segment comprises the mission control systems, data networks and tracking stations that support a spacecraft in flight. The focus of activity on flight day will be the MCC, housed at the Advanced Logistics Technology Engineering Center, in Turin, Italy, which will coordinate the entire ground segment, including the 10 m diameter dishes in Libreville (Gabon) and Malindi (Kenya), and the tracking antenna on the recovery ship, Nos Aries.
After separating from its carrier at an altitude of about 340 km, IXV will begin sending signals to be picked up first by the Libreville station around 18 minutes into flight. This first slice of telemetry will give an update on IXV status and enable the team to make refined calculations of the remaining trajectory and splashdown coordinates.
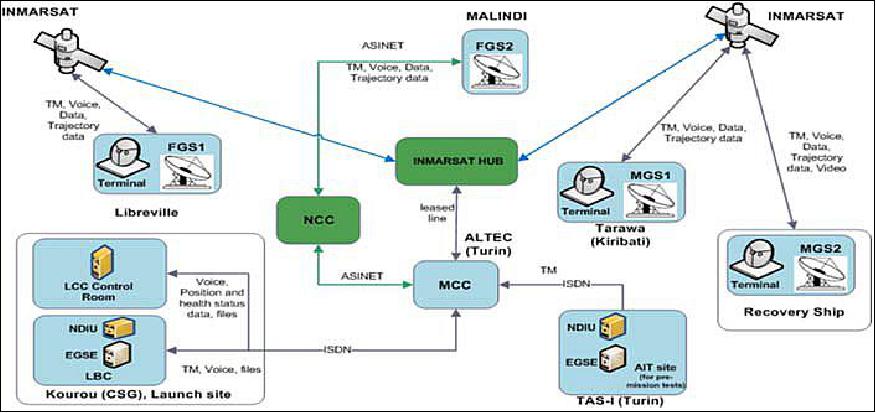
Throughout the flight, the Nos Aries, MCC in Turin and the Launch Control Room in Kourou will stay in contact with each other and with IXV via the ground stations using voice and data through cable links and Inmarsat satellites.
The IXV Communications Network (Figure 24) provided the means for interconnecting the various elements composing the IXV Ground Segment. It consisted of several branches and was implemented through the use of several technologies. In particular the network made use of serial leased lines, Ethernet lines, ISDN, IP Satellite Networks. It was designed and developed to support data, voice and video transmission. It relied on the use of the IP protocol for terminals interconnection. The TCP and UDP protocols were used on the transport layer. The network had a star topology centered at the MCC node which was connected with all the other elements.
The development phase was first carried out at interface level, i.e. by implementing and configuring the various required network capabilities in a lab environment, by emulating the mission protocols used during mission up to the transport layer, and then, in an incremental approach, increasing the loop by deploying items at their final destinations. The central node was first configured and integrated into the lab environment for network configuration and preliminary tests with the satellite IP provider, with the use of a representative remote site node also deployed in the lab. The two nodes were communicating through the IP satellite communication network. For what concerns the voice support system, the tests were conducted by interconnecting the already available equipment in ALTEC (re-used/shared with equipment devoted to ISS support) with those at lab environment, by means of ad-hoc networks. Within the lab, an emulated end IP satellite terminal has been configured, so as to implement an end-to-end loop involving also the satellite branch.
The next steps covered the progressive deployment and integration of the network equipment in their final configuration: all the equipment of the central node were deployed at MCC and integrated with other IXV equipment (i.e. MCC firewalls, acting as MCC demarcation point); all items needed for remote sites connection were integrated with the IXV TM kits and finally the IXV NDIU Point-of-Presence items were installed into the NDIU rack.
While performing the tests in final configuration and real protocols (i.e. SLE for TM exchange) some issues were discovered with the satellite IP network, that prevented the SLE Provider and User to have full session control, and this led, in some cases, to severe losses of TM. The SAT IP network inter nodes processing chain was identified as the root cause of this problem, thus preventing the SLE protocol to work nominally. This was solved thanks to the implementation of a GRE tunnel for the TM transfer, that granted full end-to-end visibility and control of the SLE session by the two SLE end users.
Final steps of integration and testing were conducted with the whole ground segment deployed in its final configuration, along with the implementation of a network monitoring station at MCC, from where all the network branches were kept under control and their performance monitored.
During the final stages of integration some transmission problems were experienced with the IP Satellite network branch. After some investigations it was discovered that the network was presenting very poor quality performances and lots of retransmissions were happening. The cause of the problem was found on the terrestrial link that connected the MCC with the Sat provider network interface. This link had been recently changed by the Satellite provider and a loose cable in an interconnection rack led to the high loss of frames. After the resolution of this problem the network was declared ready to support the mission.
Being a reentry vehicle, the operations of the IXV included some which were specific of the type of mission:
• Meteorological Sounding of the high atmosphere at the landing area. Several launches of balloons were performed the days and hours previous to the mission in order to verify the conditions for the opening of the supersonic parachute. The relevant equipment (sounding station and stratospheric balloons) had to be loaded on board the recovery ship. Special operators had to be enrolled and trained.
• Recovery Operations which included the localization, harnessing, hoisting and decontamination of the spacecraft. These involved specific equipment (e.g. hydrazine protection suits) and a multidisciplinary team made of divers, crane operators, spacecraft propulsion technicians, etc. that had also to be trained in realistic conditions.
The Ground Communications Network had to account also for the data and voice links required to support these operations.
Mission Status and Results
• The future: ESA's next step is the PRIDE (Program for Reusable In-orbit Demonstrator in Europe) program, with its objective now refocused towards the definition and development of an affordable reusable European space transportation system. This would be launched by Vega and be able to perform multiple future application missions in low Earth orbit, benefiting from existing launcher technologies, and addressing where relevant, the technological challenges with limited risks and minimal financial effort for Europe (Ref. 22).
- This new vehicle will be a step up from IXV and serve as an orbital platform to test in orbit technologies for multiple applications not only for future European Space Transportation, such as future reusable launchers stages, but also for Earth Observation, Robotic Exploration and Microgravity Experimentation.
- PRIDE will focus on verifying system and technology performance under all flight conditions: hypersonic, supersonic, transonic and subsonic. Participating states include Italy, France, United Kingdom, Spain, Switzerland, Sweden, Romania, Portugal, and Ireland.
• Autumn 2015 (Ref. 8): Mission data assessment.
The first results of the IXV mission telemetry analyses are reported for the three avionics subsystems. The pictures show the trend of main vehicle parameters with respect to the OBET (On-Board Elapsed Time).
The DHS subsystem has perfectly achieved its objectives autonomously operating the vehicle throughout the mission phases while collecting all foreseen experimental data.
The OBC/OBSW (On Board Software) did not detect SEL, SEU or double errors and did not reboot, allowing uninterrupted vehicle monitoring, data processing and control.
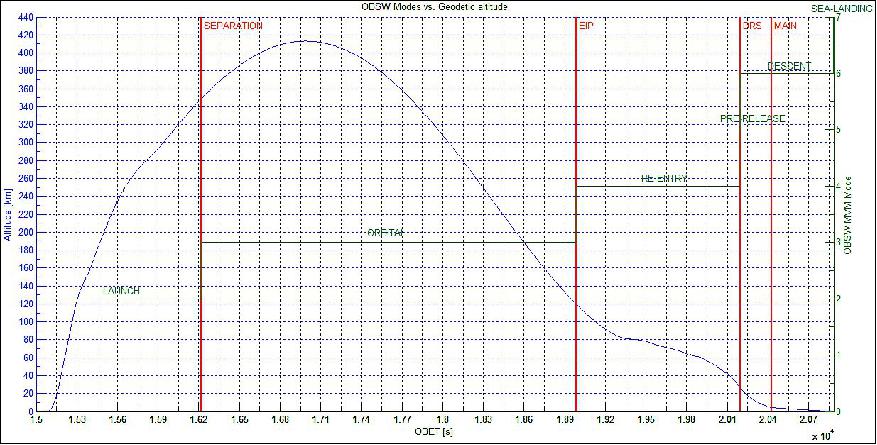
VEGA separation was sensed from the relevant straps and all Mission Operative Service actions were executed guaranteeing the mission completion. Triggering events and dynamics flight conditions were timely acquired allowing the subsequent OBSW mode transitions, as reported in Figure 28.
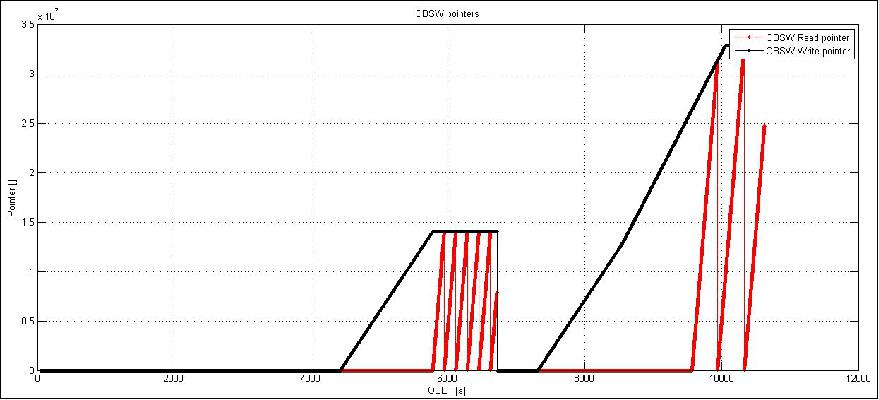
OBC generated the on board telemetry (TM) managing bandwidth allocation for realtime and delayed data virtual channels. Figure 29 shows the memory pointer policy and the complete delayed data playbacks performed during visibility windows:
- The black line represents the writing pointer (it increases when data are written in the memory buffer during periods with no visibility)
- The red line represents the reading pointer. Figure 29 clearly shows the cyclic playback approach that has been selected for IXV Mission: data are read from the buffer and when the reading pointer reaches the writing pointer it starts over for a new playback. This approach allowed for multiple playback transmissions during the 2 visibility windows, ensuring no data loss.
The TM was also stored locally into SSRs (Solid State Recorders), which have been successfully recovered.
The first GPS navigation fix (Figure 30) was acquired 218 seconds from AVUM separation, at a geodetic altitude of 378 km and about 1095 seconds after fairing opening and first GPS signal reception. The unobstructed constellation visibility from orbital altitude allowed periodic locks of all twelve GPS channels. During the orbital phase, GPS navigation was affected by 8 sudden losses of satellites lock, lasting from 1 to 32 seconds before re-acquisition, distributed in a 6 minutes interval between 355 and 270 km altitude.
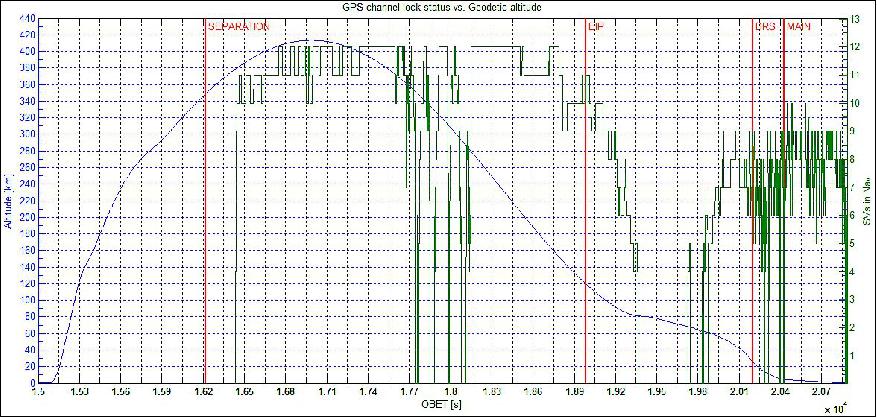
The IXV atmospheric reentry conditions such as attitude, plasma and horizon masking caused the GPS to stop navigating for 531 seconds, with intermediate unstable OBC-aided reacquisitions lasting up to 38 seconds. This blackout occurred between the geodetic altitudes of 81 and 60 km, in good accordance with 80-to-62 km forecast, based on L-band theoretical plasma attenuation estimation.
The agreement between planned and realized splashdown points has demonstrated the significant contribution of the GPS receiver in providing with fair continuity ECEF (Earth-Centered Earth-Fixed) position and velocity solutions to GNC SW.
Experiment data were acquired along the activation window of 1200 seconds between Entry Interface Point (altitude of 120 km) and supersonic parachute opening (altitude of 25 km) collecting roughly 1.3 million samples, digital infrared camera shots and accelerometers for an amount of 130 Mbit of data. The entire experiment telemetry was flawlessly transmitted to the naval station during the descent phase managing realtime storage and five complete delayed TM playbacks during the visibility window. The data has also been successfully recovered from on-board SSRs compact flash cards.
The S-band downlinks, guaranteed by the RTC subsystem, allowed for complete telemetry download to the ground. The RF links, with receiving stations located in Libreville and Malindi, was stable and continuous with no intermediate transition gap. The first visibility window AoS (Acquisition of Signal) occurred at transmitter power-on, while LoS (Loss of Signal) took place close to the geometric line of sight limit. The recovery ship mobile station AoS occurred before the theoretical TM blackout end and LoS happened close to 0° elevation angle, notwithstanding the IXV attitude dynamics due to parachute opening sequence. The RTC subsystem has performed very well, continuously transmitting data to ground, beyond the expected visibility window boundaries and without failures or degradation.
Station | AoS [MET s] | LoS [MET s] | Duration [s] |
Libreville | 1151 | 1510 | 359 |
Malindi | 1409 | 2027 | 618 |
Naval | 4816 | 5795 | 976 |
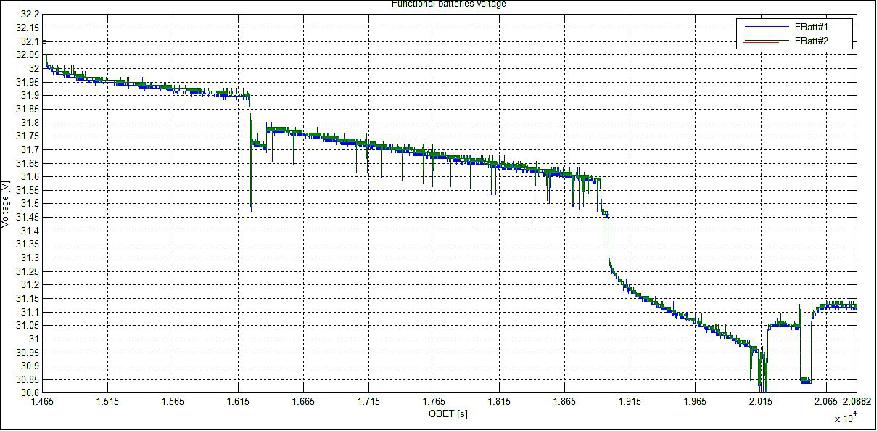
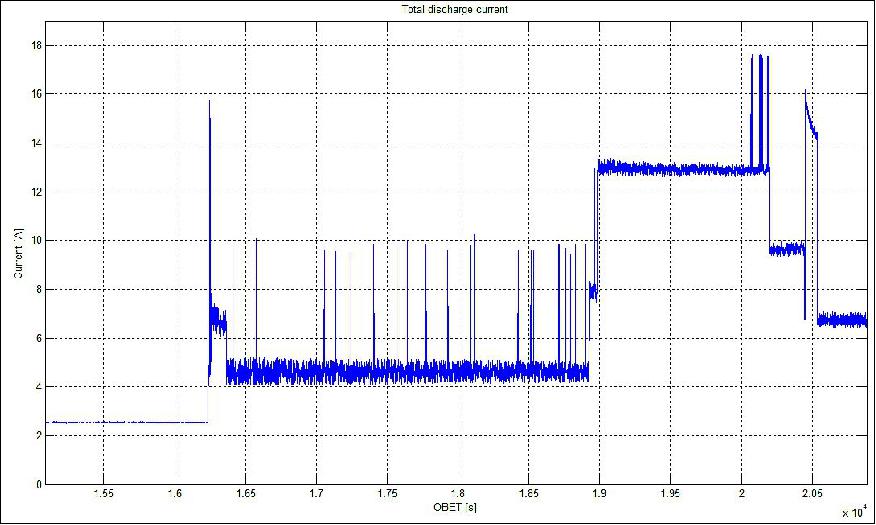
Two redundant EPS chains were commanded to switch to IXV internal power supply 5 minutes before lift-off. The 28 V unregulated bus and 55 V regulated bus were stable, characterized by low voltage ripple and outlets currents well within expectations not requiring limiting interventions.
All bi-levels, analogs and serial interfaces behaved nominally collecting pyro valves, LCL (Latching Current Limiter) / FCL (Foldback Current Limiter), pyro selection monitors and flawlessly transferring telemetry to and receiving commands from OBC, for mission critical LCL, thrusters, LVs (Latching Valves), actuators and pyro operations.
The IXV batteries provided power for all of the spacecraft's subsystems for a duration of 1h 43 min. The predicted power levels before launch were approximately 700 W, corresponding to 27.7% DoD (Depth of Discharge) for nominal two-batteries mission. The minimum battery voltage observed from test was 30.4 V at IXV maximum power mission profile. Actual loads in flight and waiting days on launch pad have not been as high as those used for analysis and test. The actual battery DoD has been about 10%. Figure 31 displays the variation of the battery voltage over the entire mission and shows that both batteries reached a minimum voltage of 30.8 V. This is higher than the 30.4 V from ground testing due to the shallower DoD in flight. Current share between batteries has been excellent, as evidenced by identical voltage profiles throughout the mission.
• Autumn 2015 (Ref. 14): The first post-flight inspection performed on the complete vehicle, without dismounting, shows that the C-SiC outer skin material is in very good shape, with no apparent evolution of the material structure (Figure 33). Note that the white color is due to the accumulation of salt resulting from the immersion in sea water after splashdown.

• Autumn 2015: IXV Recovery Operations report. The IXV recovery in the Pacific Ocean was fully successfully completed. Thanks to an actually nominal flight, with a splashdown extremely close to the expected point, the vehicle localization was performed quickly and in the time frame expected, almost by visual detection. The recovery operations went smoothly following the nominal procedures without the need to apply contingency cases during each part of the recovery. 25)
Flight and experiment data retrieval was completed without issues, also thanks to the nominal behavior of the associated avionic units during the flight as well as the absence of any structural damages to the AIT doors and inner vehicle portion where the avionic was allocated.
The successful completion of the operations planned for the IXV recovery provided an enormous improvement in knowledge and know how for operations in open sea and with re-entry spacecrafts, demonstrating the correctness of the procedures associated even in quite harsh environmental conditions.
• June 16, 2015: The IXV spaceplane is being displayed this week at the Paris Air and Space Show. All of the flight hardware and data were recovered: telemetry and onboard recordings are complete and consistent from the various sensors. The continuing analysis of the data is yielding important information that will allow ESA's aerothermodynamics experts to check their computer reentry models against observed reality. Future reentry missions can now be more precisely designed with narrower error margins. 26)
- The IXV results have confirmed many assumptions but also produced new findings. The external temperatures were lower than predicted, fuel consumption was higher than expected but compensated for by better aerodynamic performance, and the shorter blackout time during reentry allowed better communications.
- The infrared camera at the back of the vehicle monitoring the flap temperatures recorded unprecedented data throughout the reentry to splashdown. Engineers are also evaluating the reusability of all the craft's components.

• May 2015: European cooperation (Ref. 22). The IXV mission can be considered to be an extraordinary example of European cooperation. From the industry side, it has brought together competences from several European countries (Italy, France, Spain, Switzerland, Belgium, Ireland and Portugal, with the support of Germany and the Netherlands).
- It harmonized the teamwork of about 40 companies, research centers and universities for an experimental mission that required industrial, technological and scientific expertise.
- The mission also brought together competences from ESA and national agencies for the day-by-day follow-up of the industrial activities, as well as for the review of the industrial activities results at the completion of each critical design, development and qualification phase.
• March 27, 2015: ESA's recovered IXV spaceplane arrived at the Port of Livorno in Italy on March 26, 2015 and is set to be taken to Turin for final analysis. The hardware will be removed for engineers to evaluate the reusability of components and the effects of heat, pressure and shock during the mission. 27)
- The results will allow ESA's aero-thermodynamics experts to check their reentry models against observed reality, meaning future reentry missions can be more precisely designed with narrower margins. The mission will also contributing to future reentry missions, IXV results could lead to reusability of rocket stages and cheaper access to space.
- The general public will have the opportunity to see IXV displayed at various events around Europe this year. Its final destination will be ESA's ESTEC technology center in the Netherlands.
• Feb. 24, 2015: ESA's IXV spaceplane, launched on a Vega rocket on 11 February, is now on its way to Europe for a detailed study in Italy. Nos Aries will arrive in Genoa in Italy towards the end of March. IXV, still packed inside its container, will then travel to Turin for inspection and further analysis. 28)
- IXV looks to be in great shape and shows only light scorching from the blazing plasma of reentry.
- While reentering from this suborbital path, it recorded a vast amount of data from more than 300 advanced and conventional sensors studding the carbon-fiber panels of its underbody.
- IXV's fully controlled reentry from orbital velocity and altitude represents an important first for Europe. The information gathered from this mission will shape the design of future reusable reentry vehicles.


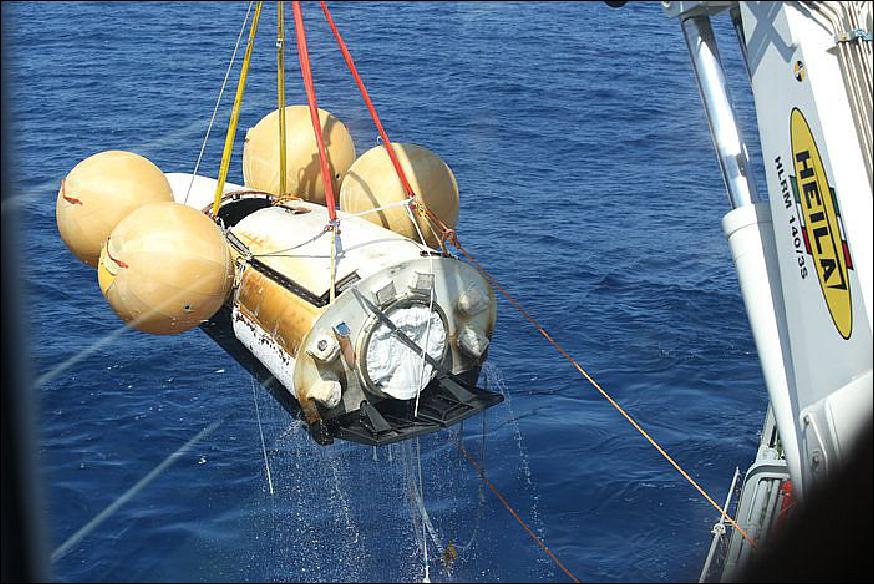
• Feb. 12, 2015: Shortly after splashdown, the IXV was spotted and hoisted on board the Nos Aries recovery ship (Figure 37). It will now travel back to Europe for further analysis. 29)
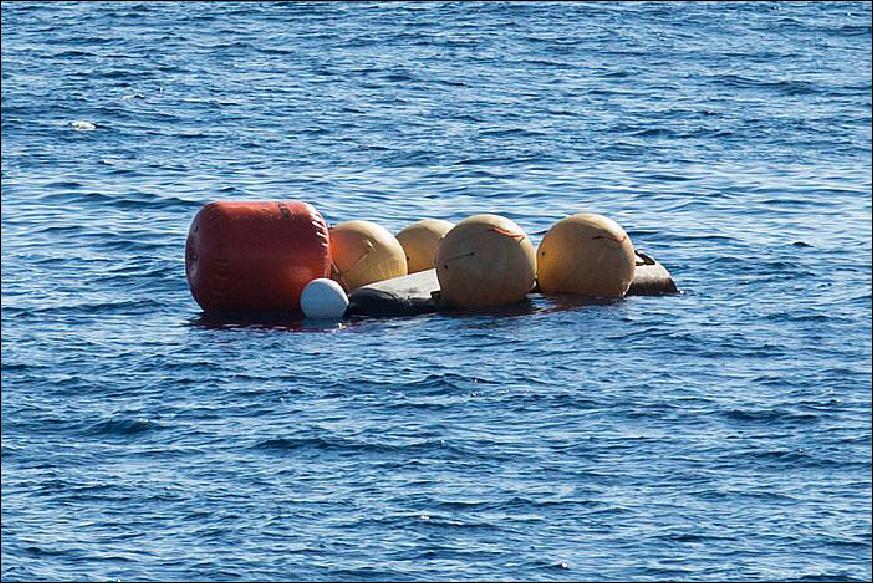
• ESA's IXV (Intermediate eXperimental Vehicle) flew a flawless reentry and splashed down in the Pacific Ocean just west of the Galapagos islands. Balloons are now keeping IXV afloat while the recovery vessel hurried to pick it up. It will be returned to Europe for detailed analysis at ESA/ESTEC in Noordwijk, The Netherlands. 30)
• Recovery: Prior to launch, mission engineers set sail from Panama on the Nos Aries ship, heading for the Pacific Ocean to await the splashdown of ESA's unmanned IXV spaceplane.

References
1) "IXV: Intermediate eXperimental Vehicle," ESA Factsheet, URL: http://esamultimedia.esa.int/docs/launchers/IXV_factsheet20150123.pdf
2) "IXV Spacecraft," ESA, URL: http://www.esa.int/Our_Activities/Launchers/IXV/IXV_spacecraft
3) J. Huart, "IXV Intermediate eXperimental Vehicle," ESA, URL: http://esamultimedia.esa.int/multimedia/publications/ixv/offline/download.pdf
4) Jean-Pierre Tribot, S. Dutheil, P. Viguier, J-L Vérant, D Charbonnier, J Vos, P Van Hauwaert, M Spel, D Ferrarella, V Mareschi, G Rufolo, "Intermediate Experimental Vehicle - Extrapolation Ground to Flight Wind Tunnel and CFD Approach," Proceedings of the 65th International Astronautical Congress (IAC 2014), Toronto, Canada, Sept. 29-Oct. 3, 2014, paper: IAC-13,D2.6.5, URL: [web source no longer available]
5) "Reentry Technologies," ESA: URL: http://www.esa.int/Our_Activities/Launchers/IXV/Reentry_technologies
6) Patrick Blau, "IXV - Intermediate Experimental Vehicle," URL: http://www.spaceflight101.com/ixv.html
7) Giorgio Tumino, "The IXV Development Status and Perspectives," 7th European Workshop on TPS-HS, Noordwijk, The Netherlands, 8 April 2013, URL:
http://www.congrexprojects.com/docs/default-source/13c06_docs/session-1-tumino.pdf?sfvrsn=2
8) Giovanni Malucchi, Stephane Dussy, A. Drocco, I. Boscolo, "IXV avionics, from design to mission results," Proceedings of the 66th International Astronautical Congress (IAC 2015), Jerusalem, Israel, Oct.12-16, 2015, paper: IAC-15-D2.6.4
9) Rodrigo Haya Ramos, Gonzalo Blanco, Irene Pontijas Fuentes, Davide Bonetti, Roberto Angelini, Salvatore Mancuso, "Mission and Flight Mechanics of IXV from design to postflight," Proceedings of the 66th International Astronautical Congress (IAC 2015), Jerusalem, Israel, Oct.12-16, 2015, paper: IAC-15-D2.6.2
10) Frank Preud'homme, Stephane Dussy, Nico Fleurink, Steven De Cuyper, "A high reliability computer for autonomous missions, demonstrated on the ESA IXV flight," Proceedings of the 66th International Astronautical Congress (IAC 2015), Jerusalem, Israel, Oct.12-16, 2015, paper: IAC-15-D2.6.5
11) Carlos Flores, Santiago Urueña, Nuria Pérez , Bruno N. Calvo, Giacomo Peretto, Andreas Jung, "The challenges of the autonomous software for the Intermediate eXperimental Vehicle (IXV)," Proceedings of the 66th International Astronautical Congress (IAC 2015), Jerusalem, Israel, Oct.12-16, 2015, paper: IAC-15-D2.6.6
12) Juan Antonio Béjar-Romero, Silvio Maina, Elio Zaccagnino, Ricardo Yague, J. P. Preaud, "Paving the European reentry way: The IXV Vehicle Model Identification Subsystem," Proceedings of the 66th International Astronautical Congress (IAC 2015), Jerusalem, Israel, Oct.12-16, 2015, paper: IAC-15-D2.6.7
13) Milos Melicher, Danny Gleeson, "The use of Space Qualified COTS Data Handling Equipment for the ESA Intermediate Experimental Vehicle (IXV) Mission," 31st Space Symposium, Colorado Springs, CO, USA, April 13-16, 2015, URL: http://www.spacesymposium.org/sites/default/files
/downloads/D.Gleeson_31st_Space_Symposium_Tech_Track_paper.pdf
14) Thierry Pichon,Francois Buffenoir, "CMC Windward TPS and Nose of the IXV Vehicle : Qualification, Integration, and Flight," Proceedings of the 66th International Astronautical Congress (IAC 2015), Jerusalem, Israel, Oct.12-16, 2015, paper: IAC-15-D2.6.3
15) Giovanni Malucchi, Elio Zaccagnino, A. Drocco, Stephane Dussy, Jean-Philippe Preaud, "The European Re-entry Program, from IXV to ISV - GNC / Avionics Development Status and Challenges," AIAA Guidance, Navigation and Control Conference, Boston, MA, USA, Aug. 19-22, 2013, paper: AIAA 2013-4774
16) Murray Kerr, Rodrigo Haya, Luis Peñín, Gabriele De Zaiacomo, David Mostaza, Victor Marco, "IXV Re-entry Guidance, Control & DRS Triggering: Algorithm Design and Assessment," AIAA Guidance, Navigation and Control Conference, Minneapolis, MN, USA, Aug. 13-16, 2012, paper: AIAA 2012-4841
17) "What's new about Europe's reentry mission?," ESA, Feb. 6, 2015, URL: http://www.esa.int/Our_Activities/Launchers/IXV/What_s_new_about_Europe_s_reentry_mission
18) "ESA experimental spaceplane completes research flight," ESA, Feb. 11, 2015, URL: http://www.esa.int/Our_Activities/Launchers
/IXV/ESA_experimental_spaceplane_completes_research_flight
19) "IXV mission timeline," ESA, February 9, 2015, URL: http://www.esa.int/Our_Activities/Operations/IXV_mission_timeline
20) "Vega ready to launch spaceplane," ESA, Jan. 14, 2015, URL: http://www.esa.int/Our_Activities/Launchers/IXV/Vega_ready_to_launch_spaceplane
21) "Mission success for the IXV atmospheric reentry demonstrator, developed by Thales Alenia Space !," TAS, Feb. 11, 2015, URL: https://www.thalesgroup.com/en/worldwide/space
/case-study/intermediate-experimental-vehicle-ixv-new-challenge-thales-alenia-space
22) Giorgio Tumino and the IXV team, "The 100-Minute Mission — The flight of the Intermediate eXperimental Vehicle," ESA Bulletin No 161, May 11, 2015, pp. 20-29, URL:
http://esamultimedia.esa.int/multimedia/publications/ESA-Bulletin-161/offline/download.pdf
23) "IXV: 100 minutes of critical teamwork," ESA, Feb. 3, 2015, URL: http://www.esa.int/Our_Activities/Operations/IXV_100_minutes_of_critical_teamwork
24) Gerhard Billig, José M. Gallego, Gianfranco Santoro, Alessandro Bellomo, Ivano Musso, Giovanni Martucci, Diego Bussi, "The Ground Segment and Operations of ESA's Intermediate eXperimental Vehicle (IXV)," Proceedings of the 14th International Conference on Space Operations (SpaceOps 2016), Daejeon, Korea, May 16-20, 2016 2504, paper: 2016 URL: http://arc.aiaa.org/doi/pdf/10.2514/6.2016-2504
25) Stefano Bologna, Gianfranco Santoro, "IXV Recovery Operations," Proceedings of the 66th International Astronautical Congress (IAC 2015), Jerusalem, Israel, Oct.12-16, 2015, paper: IAC-15-D2.6.9
26) "ESA spaceplane on display," ESA, June 16, 2015, URL: http://www.esa.int/Our_Activities/Launchers/IXV/ESA_spaceplane_on_display
27) "ESA's spaceplane back on dry land," ESA, March 27, 2015, URL: http://www.esa.int/Our_Activities/Launchers/IXV/ESA_s_spaceplane_back_on_dry_land
28) "ESA's spaceplane is coming home," ESA, Feb. 24, 2015, URL: http://www.esa.int/Our_Activities/Launchers/IXV/ESA_s_spaceplane_is_coming_home
29) "IXV recovery," ESA, Feb. 12, 2015, URL: http://www.esa.int/spaceinimages/Images/2015/02/IXV_recovery4
30) "IXV floating and waiting for recovery," ESA, Feb. 11, 2015, URL: http://www.esa.int/spaceinimages/Images/2015/02/IXV_floating_and_waiting_for_recovery
The information compiled and edited in this article was provided by Herbert J. Kramer from his documentation of: "Observation of the Earth and Its Environment: Survey of Missions and Sensors" (Springer Verlag) as well as many other sources after the publication of the 4th edition in 2002. - Comments and corrections to this article are always welcome for further updates (eoportal@symbios.space).
Overview Flight Segment Launch Mission Status References Back to top