ISS: STORRM
Technology Development
ISS Utilization: STORRM (Sensor Test for Orion RelNav Risk Mitigation)
STORRM represents a new sensor technology that will make it easier and safer for future (commercial) servicing spacecraft to rendezvous and dock to the ISS (International Space Station). The DTO (Development Test Objective) of this next generation navigation system is to advance the capability necessary for automated rendezvous and docking (determine shapes, intensity, and distance); the goal is to provide data from as far away as 5 km - three times the range of the current Shuttle navigation sensor.
The Orion Crew Exploration Vehicle (CEV) is a new crewed vehicle being designed by NASA and Lockheed Martin to ferry humans to/from the ISS and other possible exploration destinations. One particularly challenging flight phase of the Orion mission is RPOD (Rendezvous, Proximity Operations, and Docking). The unique requirements and constraints of the Orion vehicle make off-the-shelf relative navigation sensors insufficient for achieving the required relative navigation performance. Therefore, a new relative navigation sensor is being developed. 1)
Background: STORRM was developed by the Orion Project Office at NASA/JSC (Johnson Space Center), which is responsible for program management, technology evaluation, flight test objectives, operational concepts, contract management and data post-processing. Engineers at NASA/LaRC (Langley Research Center) were responsible for engineering management, design and development of the avionics, STORRM software application and reflective elements.
This new docking navigation system prototype consists of an eye-safe lidar VNS (Vision Navigation Sensor), a high-definition DC (Docking Camera), as well as the avionics and flight software. Both sensors will provide real-time three-dimensional images to future crews visiting the ISS with a resolution 16 times higher than the current Space Shuttle sensors. The industry partners of NASA, LMSS (Lockheed Martin Space Systems) and BATC (Ball Aerospace and Technologies Corporation), were responsible for the design, build and testing of the VNS and the DC. 2) 3) 4) 5)
• The first element of that technology — five retro-reflectors designed by NASA/LaRC in Hampton, VA, were delivered on Shuttle flight STS-131 (April 5-20, 2010, 14-day mission). The retro-reflectors are specialized reflectors that reflect light back with a minimum scattering of light. They will serve as the targets for the VNS. The retro-reflectors were placed onto the docking door of the space station in a precise pattern (Figure 1).

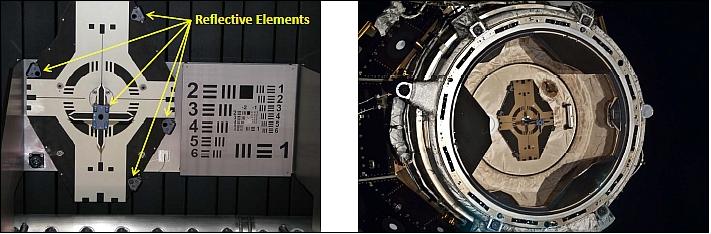
Legend to Figure 2: Approximate location of STORRM reflectors on the docking target (left); Image taken during STS-132 of docking target in PMA-2 after installation of STORRM reflectors (right).
• The STORRM system was delivered to the ISS on Shuttle flight STS-134 (May 16-June 1, 2011). A first demonstration of STORRM was conducted on May 30, 2011 after the Endeavour undocked from the ISS and performed re-approach maneuvers to the station. 6) 7)
Primary objectives:
- Characterize the ISS in the VNS wavelength (hot spots, reflectance map, etc.)
- Determine initial acquisition range
- Prove operation with large relative velocities
- Collect data through known break track and re-acquire conditions
- Provide tracking through accelerations while maneuvering
- Demonstrate transition between 3-DoF (Degree of Freedom) and pose modes
- Allow for overlap with ground testing facilities
- Collect data to support pose calculation
- Characterize ISS PMA-2 (Pressurized Mating Adapter-2) docking target
- Prove operation in harsh orbital lighting conditions
- Collect images to support assessment of validity for piloting cues.
Secondary objectives:
- Determine range of pose acquisition
- Prove tracking through TPI/TDA (Terminal Phase Initiation/Transition to Docking Axis)-type maneuver
- Long range LOS (Loss of Signal)
- Assess DC (Docking Camera) as potential backup to star tracker for mid-range bearings
- Collect images to support natural feature image recognition analysis.
The overall STORRM mission objectives are to test and validate the on-orbit performance of the VNS and the DC on three different trajectories:
1) A nominal Orbiter RPOD (Rendezvous, Proximity Operations, and Docking) trajectory to the ISS
2) A nominal Orbiter undocking trajectory from the ISS
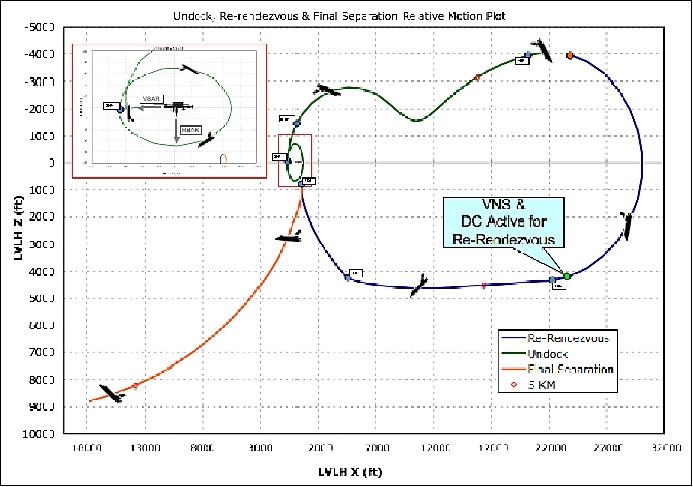
3) An Orion-like flight rendezvous/proximity operations trajectory to the ISS. To meet the third objective the Space Shuttle separated from the ISS and then performed an unprecedented re-rendezvous with the ISS to approximately 956 feet. The undock and re-rendezvous profile is shown in Figure 3.
Spacecraft
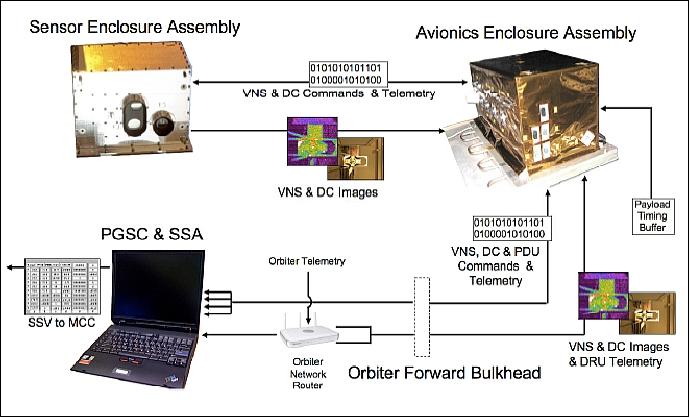
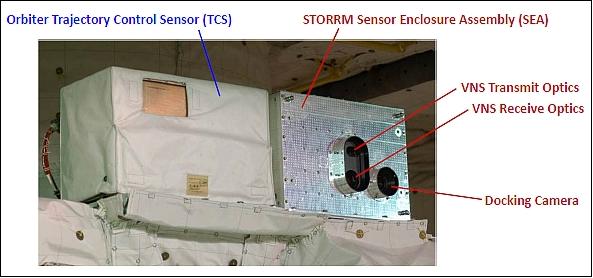
• SEA (Sensor Enclosure Assembly), located in the Orbiter Payload Bay. SEA is co-located with the ODS (Orbiter Docking System) Truss, adjacent to the TCS (Trajectory Control Sensor), for better truth comparison and to avoid line-of-sight limitations. The TCS is a scanning LIDAR system used by the Shuttle during proximity-operations and docking. The data collected from the TCS is used as “truth" measurements for comparison with the VNS data. The SEA houses the STORRM sensors, the VNS and the DC, and keep-alive heaters. These sensors were designed and built by BATC (Ball Aerospace Technologies Corporation) of Boulder, CO (Ref. 7).
• AEA (Avionics Enclosure Assembly), located on the sidewall of Payload Bay 3. The AEA consists of two DRUs (Data Recorder Units) that receive and store data from the sensors in the SEA, and a PDU (Power Distribution Unit) that distributes power to the SEA and AEA. The AEA also passes sensor configuration commands and telemetry to/from the PGSC and SEA. - The PDU served two important roles in STORRM. The first was to open and close power relays on command, allowing systems to be powered automatically via command to a set of computer controlled relays. Physical inhibit switches for PDU power were also available to the crew. The second role was that the PDU was the central hub of all the low-level system health and status telemetry. The PDU provided 72 telemetry items that described currents, voltages, temperatures, and op-codes that represented the state of the system.
• PGSC (Payload General Support Computer), located in the flight deck of the Orbiter crew cabin. This laptop computer was loaded with the STORRM Software Application (SSA) that initiated data collection from the sensors, moded the DRUs, and allowed the crew and the ground to monitor the health and status of the systems. The experiment was controlled via crew inputs to the SSA. The SSA connected to the orbiter system via seven separate paths:
1. RS-422 serial line for PDU command and telemetry
2. RS-422 serial line for VNS command and telemetry
3. RS-422 serial line for DC command and telemetry
4. TCP/IP network line for DRU1 command and telemetry
5. TCP/IP network line for DRU3 command and telemetry
6. TCP/IP network line connecting to Orbiter Onboard network (via shared hub)
7. S-Video line for near real-time telemetry observation.
GOS (Ground Operations Station). GOS consisted of computer terminals located in the MCC (Mission Control Center) at the NASA/JSC ( Johnson Space Center) in Houston, Texas, which also had access to real-time Orbiter telemetry and voice loops. The STORRM personnel monitored the sensor experiment data on the ground at the MCC. The primary vehicle used for data observation was as follows:
The STORRM PGSC was configured to render a virtual screen and send the contents of that virtual screen, or extended desktop into the Orbiter Photo-TV stream via the S-Video cable. The Orbiter Photo-TV stream is downlinked, decoded and broadcast on the internal TV monitors within MCC. Using this method a table of parameters could be rendered by the STORRM PGSC and ultimately it would be visible to the GOS personnel for recording and trending.
• Set of five retro-reflective elements attached to the docking target at the PMA-2 (Pressurized Mating Adapter-2) of the ISS (Figures 1 and 2). These reflective elements were designed to be highly reflective in the VNS laser wavelength, but opaque in the TCS and visible wavelengths. Each of the STORRM reflective elements are housed in a titanium bracket that fastens to the docking target. The reflective element housings also have fiducial markings to aid in the accurate measurement of the reflector locations. The reflective material was chosen after extensive ground bake-out tests found the other, runner-up, materials were susceptible to deterioration and decay in the space environment. The placement of the reflectors was also chosen after considerable trades showed that alternative patterns did not perform as well with respect to the criteria of separation, visibility and non-ambiguous relative geometry. The reflective elements were attached to the existing ISS docking target during the STS-131 mission.
The overarching goal of the experiment was to test the VNS and DC in the same environment that the sensors would experience on the first Orion rendezvous to the ISS. On Orion, these sensors are expected to be located in the hatch window of the crew module.
Sensor Complement
VNS (Vision Navigation Sensor)
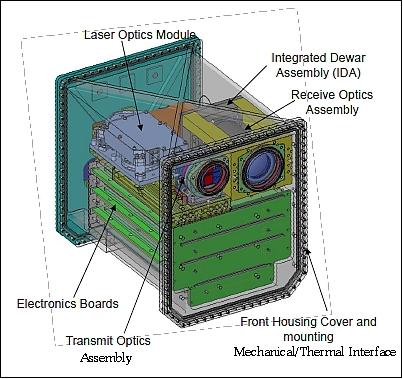
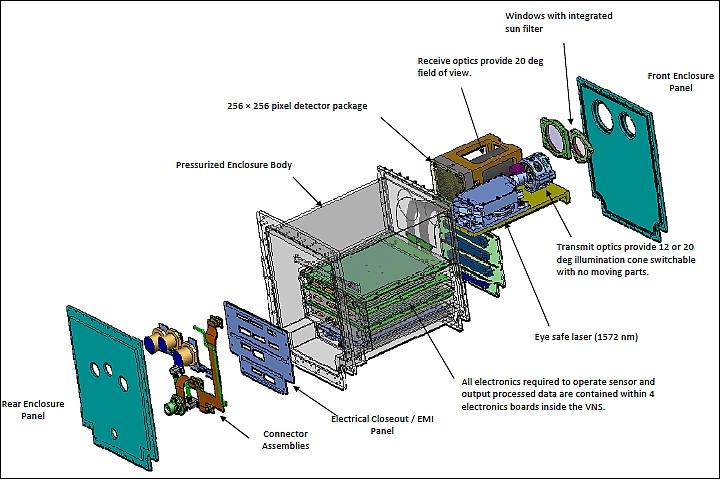
The VNS is an eye-safe flash LiDAR (Light Detection and Ranging) system that provides an image of the target, in this case the space station – along with range and bearing data to precise accuracies. The docking camera is designed to provide high resolution, color images. 8)
The VNS housing was highly integrated into the design of the overall the SEA. The VNS was cantilevered on the +Z axis side of the SEA in the Orbiter Body Frame. Additionally, the VNS connectors and -Z side (Orbiter Body Frame) were designed such that the unit could be easily accessed without a complete disassembly of the SEA. Internally to the VNS housing resides a 256 x 256 pixel focal plane array. The VNS has a variable field of illumination that can be selected to be 12º or 20º. Additionally the VNS FOV is 20º, full cone (Ref. 7). 9)
VNS characteristics (Ref. 5):
• The flash LiDAR technology is emerging as THE laser imaging sensor, building on the advancements of scanning LiDARs, stereo video and video guidance sensors
• Operates from 5 km to docking for 3-D relnav, 15 m to docking for 6-D relnav
• Lighting independence
• Target vehicle cooperation not required
• Eye-safe (1570 nm) laser
• Low power (max of 30 W)
• No moving parts -- no scanning mirrors or adjustable optics
• Does not require image manipulation or subtraction (like AVGS, ACVS or VDM)
• 3-D imagery output: range and bearing to fiducials, relative 6-DOF solution from imagery data based on target knowledge
• FPA (Focal Plane Array) advances are aiding technology maturity
• Can be used for RPODU, hazard detection and landing. Other terrestrial uses are undergoing field tests (automotive & robotic)
• VNS acquires a complete 3-D image of a scene with a single laser shot.
- Pulsed laser flash illuminates objects in VNS field of view
- Objects reflect laser pulse back to VNS receive optics
- VNS detector captures time of flight (range) and intensity (brightness) for each pixel.
• Images acquired and output real-time at 30 Hz rate. The images are processed to identify targets and determine range and bearing to reflectors
• VNS instrument mass = 13 kg, volume: 17.8 liter.
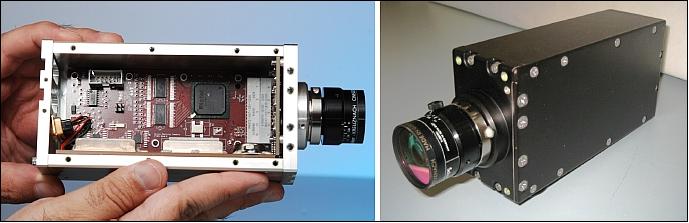
DC (Docking Camera)
The DC of BATC is comprised of the following elements/parameters:
• Space radiation tolerant COTS 5 megapixel CMOS imager
• Modular, ruggedized COTS lens
• Automatic gain & exposure control
• Instrument mass: 0.77 kg; volume: 737 cm3 (or 0.737 liter); power: 3 W (max).
Data Storage, Retrieval & Downlink
The entire design of the STORRM experiment was based around two fundamental needs. The first was that the ground personnel should have insight into the system operation in near real-time. The second fundamental need was that the system should allow the flexibility to a change configuration of the sensors during the mission. Prior experience has shown that simple insight into system status and the ability to reconfigure a setting can be the determining factor in avoiding failure (Ref. 7).
During the Orbiter Rendezvous and Proximity Operations, raw data from the VNS and DC were stored as binary blocks on DRUs in the payload bay. This process, called Data Recording Mode, also yielded three other types of data:
1) Single sensor image frames, or `snapshots', forwarded to the STORRM PGSC at 30 second, or 60 second intervals for VNS and DC, respectively.
2) Command and telemetry logs stored from each subsystem on the STORRM PGSC in a log folder.
3) A set of critical telemetry items rendered to the STORRM PGSC virtual screen, interleaved into the Orbiter SSV (Sequential Still Video) and broadcast to TV monitors in the MCC.
Initial Results
In general, STORRM system performance during rendezvous, docking, undocking, flyaround and re-rendezvous was excellent! Some minor issues were encountered during rendezvous, but timely response from the STORRM team put onboard contingency procedures in motion resulting in minimal disruption to STORRM activities. Unfortunately, prior to undock, it was discovered that the DRU (Data Recorder Unit) which records DC images, lost the ability to initialize, resulting in the inability to operate the DC or record its images (however, the problem could be resolved).
STORRM collected a total of 368 GB of VNS data and 232 GB of DC data on-orbit. The STORRM team was able to observe through periodic data snapshots that the VNS performed as expected in terms of moding and laser firing. The VNS performed very well in imaging the ISS, and exceeded expectations for its long-range acquisition of the ISS. The team was also able to see impressive images from the docking camera in real-time (Ref. 7).
References
1) John A. Christian, Heather Hinkel, Sean Maguire, “The Sensor Test for Orion RelNav Risk Mitigation Development Test Objective,” URL: http://ntrs.nasa.gov/archive/nasa/casi.ntrs.nasa.gov/20110005446_2011004705.pdf
2) Amy Johnson, “A Perfect STORRM,” Space Travel, Aug. 2, 2010, URL: http://www.space-travel.com/reports/A_Perfect_STORRM_999.html
3) “A STORRM is Coming,” NASA, April 1, 2010, URL: http://www.nasa.gov/topics/shuttle_station/features/storrm.html
4) “Ball Aerospace And LockMart Demo New Docking System Technology,” Space Travel, July 27, 2010, URL: http://www.space-travel.com/reports/Ball_Aerospace_And_LockMart_Demo_New_Docking_System_Technology_999.html
5) “Sensor Test for Orion Rel-Nav Risk Mitigation (STORRM),” Aviation Week, July 28, 2010, URL: http://cxamdb.com/download.asp?artid=116&ct=5
6) http://www.spaceflight101.com/storrm.html
7) John A. Christian, Heather Hinkel, Christopher N. D'Souza, Sean Maguire, Mogi Patangan, “The Sensor Test for Orion RelNav Risk Mitigation (STORRM) Development Test Objective,” June 1, 2011, URL: http://ntrs.nasa.gov/archive/nasa/casi.ntrs.nasa.gov/20110013437_2011014090.pdf
8) http://www.ballaerospace.com/page.jsp?page=30&id=388
9) K. L. Miller, J. Masciarelli, R. Rohrschneider, I. Gravseth, “Critical Advancement in Telerobotic Servicing Vision Technology," AIAA SPACE 2010 Conference & Exposition, Anaheim, CA, USA, 30 Aug - 2 Sept 2010.
The information compiled and edited in this article was provided by Herbert J. Kramer from his documentation of: ”Observation of the Earth and Its Environment: Survey of Missions and Sensors” (Springer Verlag) as well as many other sources after the publication of the 4th edition in 2002. - Comments and corrections to this article are always welcome for further updates (eoportal@symbios.space).