ISS: SCaN (Space Communications and Navigation)
Technology Development
ISS Utilization - SCaN (Space Communications and Navigation) Testbed
The growth of SDR (Software Defined Radio) technology offers NASA the opportunity to improve the way space missions develop and operate space transceivers for communications, networking, and navigation. Reconfigurable SDRs with communications and navigation functions implemented in software provide the capability to change the functionality of the radio during a mission and optimize the data capabilities (e.g. video, telemetry, voice, etc.). The ability to change the operating characteristics of a radio through software once deployed to space offers the flexibility to adapt to new science opportunities, recover from anomalies within the science payload or communication system, and potentially reduce development cost and risk through reuse of common space platforms to meet specific mission requirements. SDRs can be used on space-based missions to almost any destination. 1) 2)
Software defined radios have emerged over the last decade as a viable approach to space communications. SDRs are capable of changing their characteristics through reprogrammable signal processing elements such as field programmable gate arrays (FPGA), or other technologies such as general purpose and multi-core processors. While SDRs have been considered or used in military domains, public safety, and cellular systems, SDRs are just beginning to emerge for space missions (Ref. 8).
Over the last 10-15 years, NASA has launched four missions and one demonstration carrying software defined radios.
• MRO (Mars Reconnaissance Orbiter), launch on August 12, 2005. The MRO mission provides relay communications between Mars proximity surface rovers and Earth.
• CANDOS (Communication and Navigation Demonstration on Shuttle), launch on Jan. 16, 2003, use of an SDR-based LPT (Low Power Transceiver).
• LRO (Lunar Reconnaissance Orbiter), launch on June 18, 2009.
• Curiosity MSL (Mars Science Laboratory) , launch Nov. 26, 2011; and MAVEN (Mars Atmosphere and Volatile Evolution), launch Nov. 18, 2013; each use an SDR as part of the mission.
To further expand the applicability of SDRs, reduce the perceived risk of using SDR technology, and understand SDR developments, operations, and performance in space; NASA has designed, built, launched, and installed a SDR-based communication system on the ISS (International Space Station), referred to as the SCaN Testbed.
CoNNeCT (Communications, Navigation, and Networking reConfigurable Testbed)
CoNNeCT is a NASA project with the objective to provide an on-orbit, adaptable, SDR (Software Defined Radio) facility located on ISS (International Space Station) along with the corresponding ground and operational systems. These facilities will enable experiments and technology development to conduct a suite of communications experiments. 3)
Internal to NASA, the “CoNNeCT” Project is funded to develop the Flight (space-based) and Ground (terrestrial-based) Systems, and to conduct mission operations.
External to NASA and for ISS operations, CoNNeCT is known as "SCaN Testbed" since the astronauts and ground operators needed a more specific name to avoid confusion.
The SCAN Testbed will be launched from Japan and is designed to operate for a minimum of two years.
The growth of SDR technology offers NASA the opportunity to improve the way space missions develop and operate space transceivers for communications, networking, and navigation. Reconfigurable SDRs with communications and navigation functions implemented in software provide the capability to change the functionality of the radio during a mission and optimize the data capabilities (e.g. video, telemetry, voice, etc.). The ability to change the operating characteristics of a radio through software once deployed to space offers the flexibility to adapt to new science opportunities, recover from anomalies within the science payload or communication system, and potentially reduce development cost and risk through reuse of common space platforms to meet specific mission requirements. SDRs can be used on spaceborne missions to almost any destination.
Mission objectives of the CoNNeCT project: The CoNNeCT Project will provide NASA, industry, other Government agencies, and academic partners the opportunity to develop and field communications, navigation, and networking technologies in the laboratory and space environment based on reconfigurable, software defined radio platforms and the STRS (Space Telecommunications Radio System) architecture. The CoNNeCT Project Experiments Program will devise, solicit, and conduct on-orbit experiments to validate and advance the open architecture standard for SDRs; advance communication, navigation, and network technologies to mitigate specific NASA mission risks and to enable future mission capabilities.
Identified are several research and technology areas the SCAN Testbed was designed to support:
• Software Defined Radios operating at S-, L-, and Ka-band
• On-board data management function and payload networking
• Radio Science experiments using the unique capabilities of the SDRs
• Precise Navigation and Timing.
The SCaN Testbed has been designed and built at NASA/GRC (Glenn Research Center) in Cleveland, Ohio. 4)
Launch
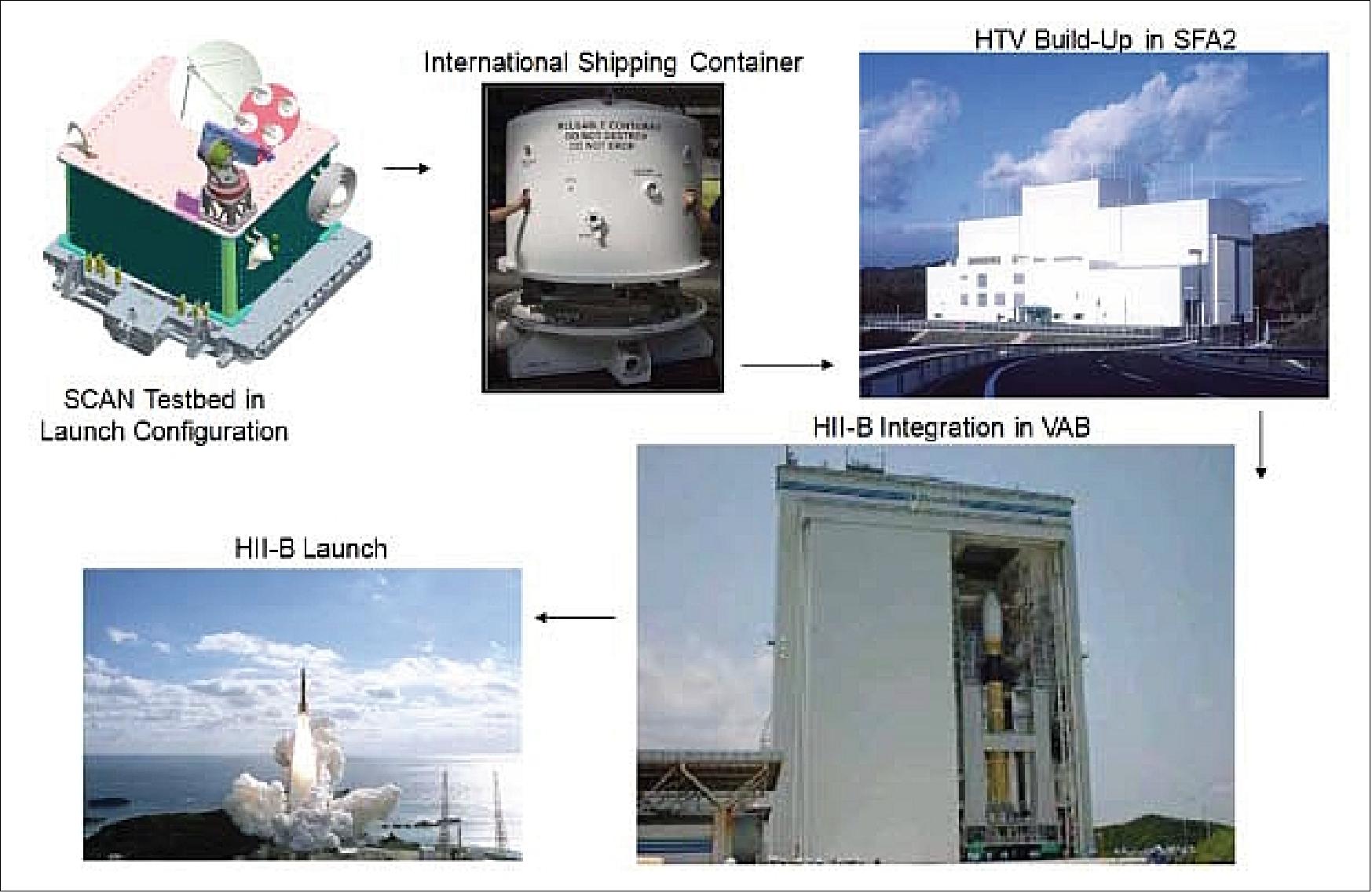
The SCaN Testbed was launched to the space station on July 21, 2012 from TNSC (Tanegashima Space Center) of JAXA, Japan on the launch vehicle H-IIB No 3. The cargo transfer vehicle was HTV-3 (nicknamed Kounotori3), which contained the SCaN Testbed as well as other cargo for the ISS and JEM. 5)
Orbit: ISS orbit at a nominal altitude range of 360-460 km, inclination = 51.6º.
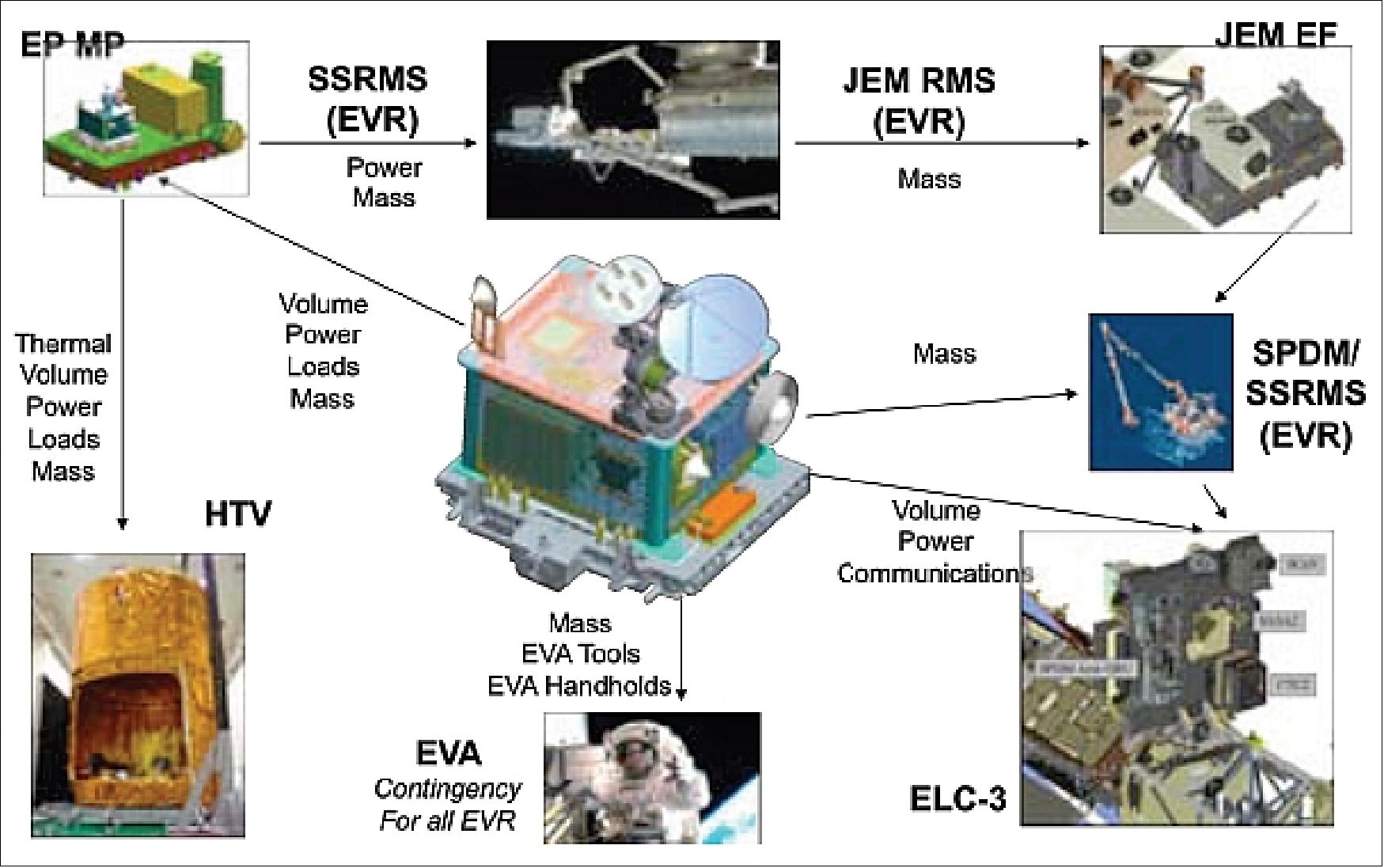
ISS and HTV integration: A standard ISS integration approach is used via the JSC (Johnson Space Center) PIM (Payload Integration Manager), with some extension of prior work since CoNNeCT is the first ELC payload installed on-orbit. The carrier physical interfaces are depicted in Figure 2 and the HTV launch processing is shown in Figure 3. The HTV delivers its cargo to the vicinity of the ISS where the ISS robotic arm operations conduct many transfers and installation.
Testbed location on ISS
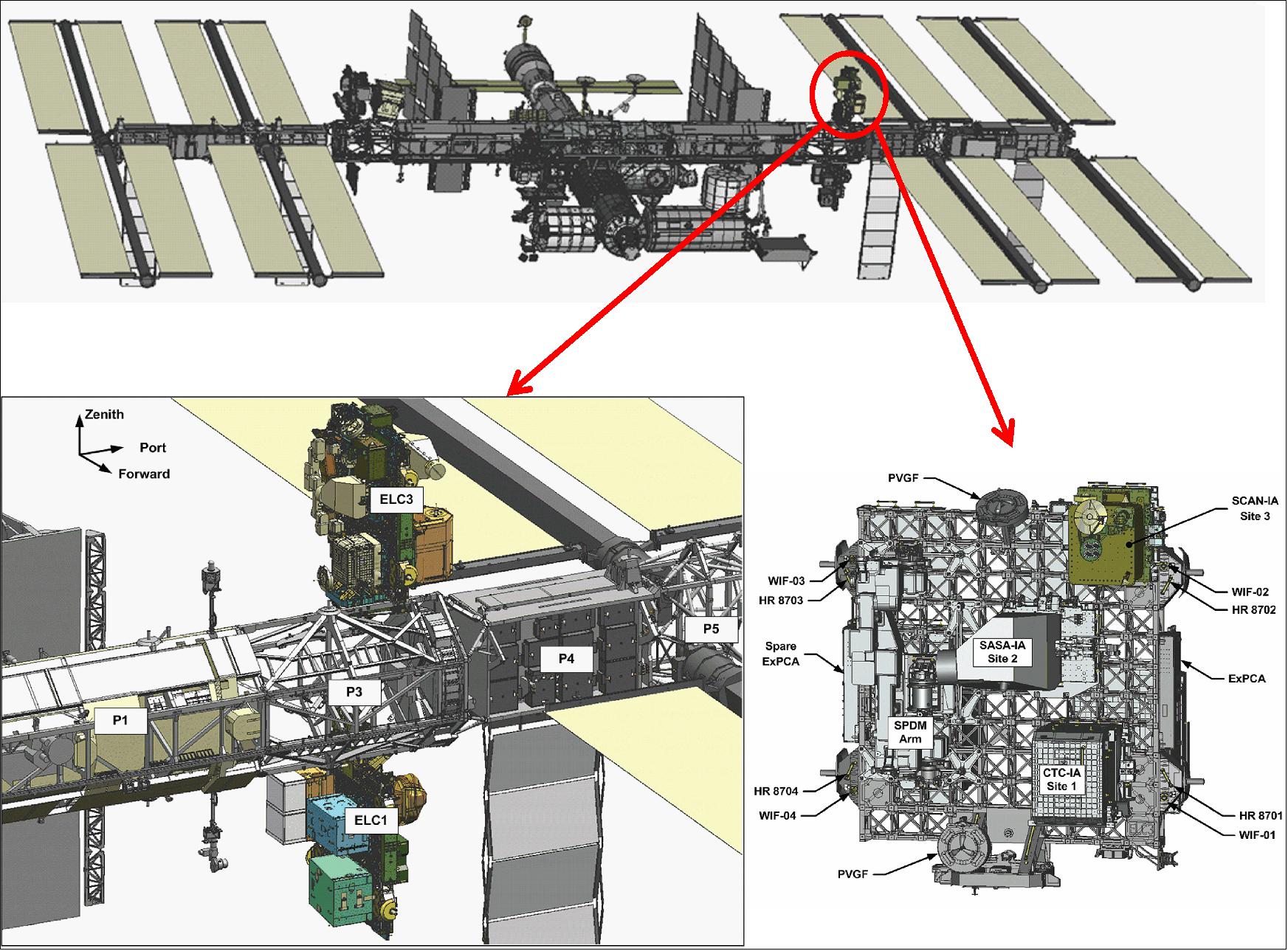
After ISS arrival and berthing of HTV-3, the SCAN Testbed will be transferred and installed via EVR (Extravehicular Robotics) to the ELC-3 (ExPRESS Logistics Carrier-3) in the inboard, ram-facing, zenith-facing payload location on an exterior truss of the ISS (Figure 4). The Testbed relies on the ISS ExPA (Express Pallet Adapter) to provide standardized structural, electrical and data interfaces with the ISS ELC (ExPRESS Logistics Carrier), the SSRMS (Space Station Remote Manipulator System), and the JAXA (Japanese Aerospace Exploration Agency) EPMP (Multipurpose Exposed Pallet). The SCaN Testbed location on the ISS is shown in Figure 4. 6) 7)
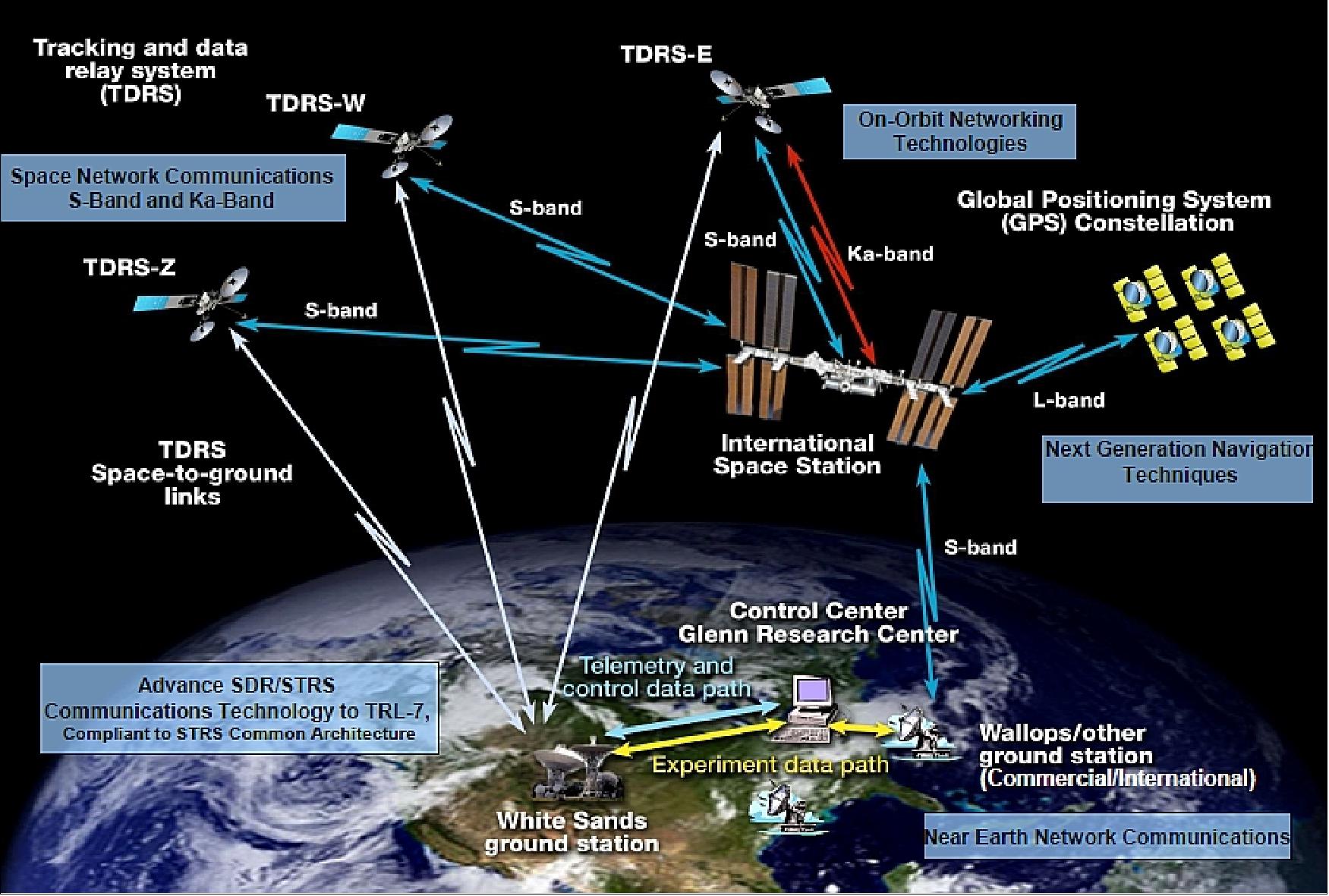
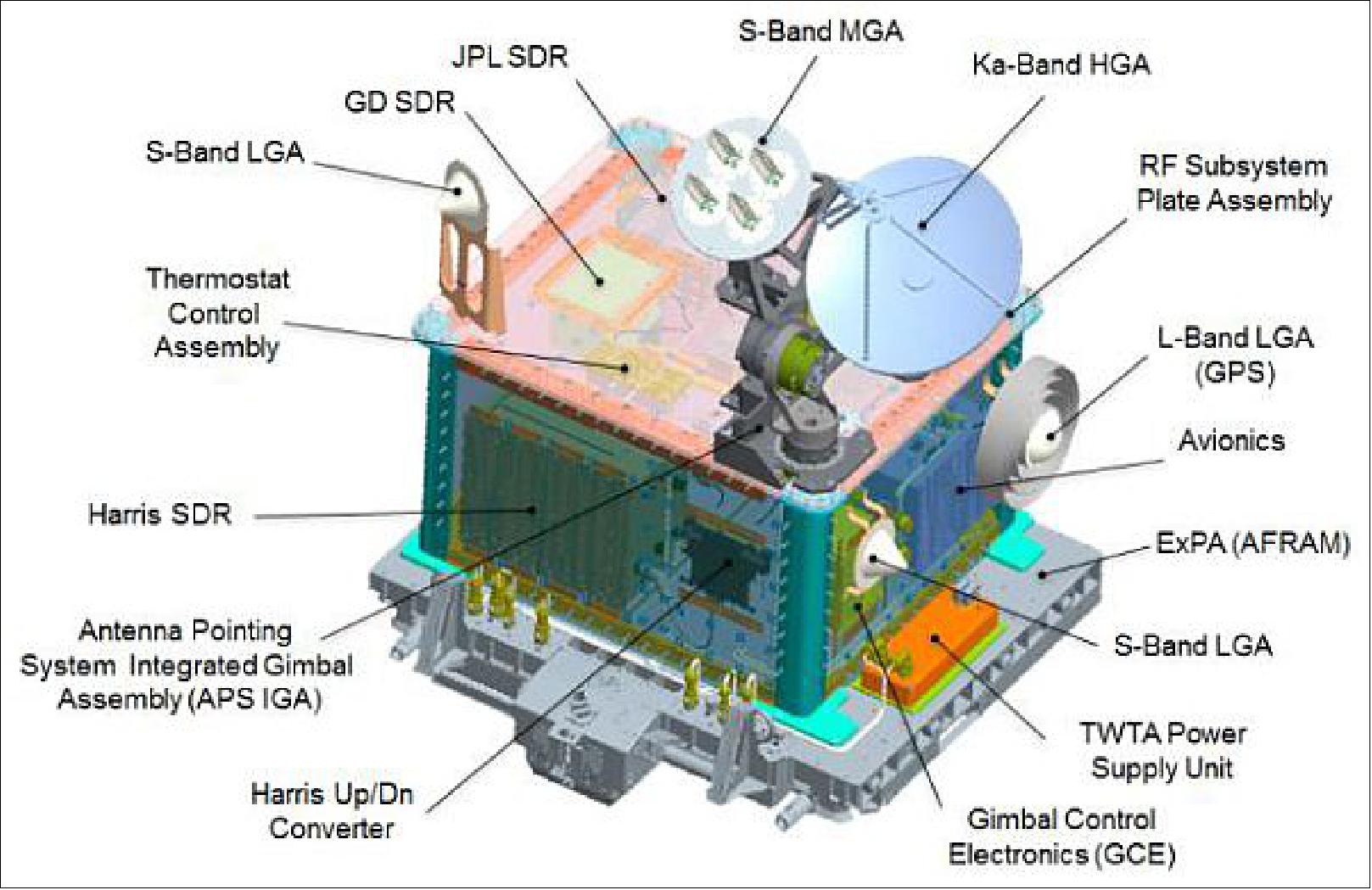
The SCaN Testbed will consist of reconfigurable and reprogrammable SDR (Software Defined Radio) transceivers/transponders operating at S-band, Ka-band, and L-band, along with the required RF/antenna systems necessary for communications. Designed to operate for a minimum of two years, the three SDRs will provide S-band duplex RF (Radio Frequency) links directly with the ground, [also referred to as the Near Earth Network (NEN)], S-band duplex RF links with the TDRSS (Tracking and Data Relay Satellite System), [also referred to as the Space Network (SN)], Ka-band duplex with TDRSS, and L-band receive-only with the GPSS (Global Positioning Satellite System). The SCaN Testbed will be in low earth orbit and has multiple antennas providing connectivity to a series of NASA Space Network (SN) TDRSS satellites in geosynchronous orbits and NASA Near Earth Network (NEN) stations. The major components of the SCaN Testbed are shown in Figure 5.
The SCaN Testbed uses a frequency assignment between ISS and TDRS at S-band and Ka-band to send and receive data from the radios and antenna system. SCaN Testbed commands are sent from the CoNNeCT Control Center located within the GRC Tele-Science Support (TSC) to the radios to configure and operate each radio. Communication with the SCaN Testbed through ISS is considered the primary path, this includes the wired path between the SCaN Testbed and ISS and the wireless path from ISS to the WSC (White Sands Complex ). The WSC is wired to the remaining ground station facilities consisting of the HOSC (Huntsville Operations Center), the NISN (NASA Integrated Service Network), and the CCC (CoNNeCT Control Center) located at GRC (Glenn Research Center), the CoNNeCT Experiment Center (CEC) is also part of the CCC.
A RF data connection will provide a direct bi-directional connection between the radios and ground stations. This second communication path (commanding and bidirectional data) is the experimental link with the SN and the NEN, this is the wireless path between the SCaN Testbed and Ground Stations such as the Wallops Ground Station. The TSC facility, located at GRC, allows payload developers and scientists on Earth to monitor and control experiments onboard the ISS (International Space Station). Data from the radios are received at the White Sands Complex, Las Cruces, NM via TDRS and routed to GRC. For Global Positioning System (GPS) experiments, the JPL radio is configured to receive and process GPS signals. Data is collected on-board and sent to ground via TDRS or the primary path.
Testbed Design and SDRs (Software Defined Radios)
At the core of the SCaN Testbed are three unique SDRs (Software Defined Radios) provided by government and industry partners. All of the radios are compliant with the NASA Space Telecommunications Radio System (STRS) Architecture Standard. The SCaN Testbed also includes an avionics subsystem, RF switching, and a variety of antennas, two of which are on a gimbal.
The STRS architecture is an open, non-proprietary architecture that defines interfaces for the connections between radio components. It provides an operating environment to abstract the communication waveform application from the underlying platform specific hardware such as digital-to-analog converters, analog-to-digital converters, oscillators, RF attenuators, automatic gain control circuits, FPGAs, general-purpose processors, etc., and the interconnections among different radio components. 8)
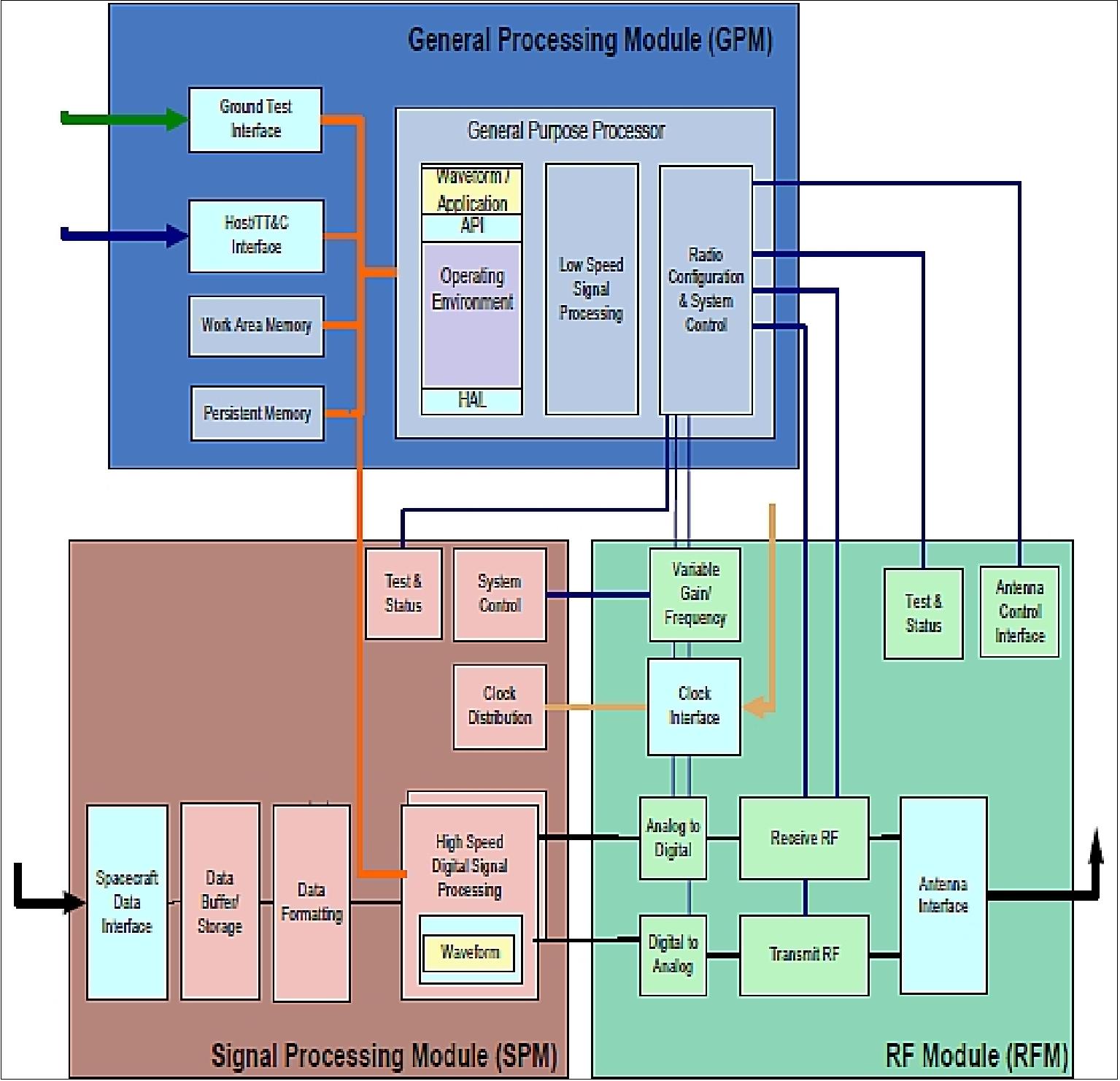
The three SDRs developed by JPL (Jet Propulsion Laboratory), GD (General Dynamics) and Harris Corporation each adhere to the functional diagram in Figure 7. The functional diagram illustrates three key elements of each SDR: a GPM (General purpose Processor Module), a SPM (Signal Processing Module), and the RFM (Radio Frequency Module). Each SDR is consistent with this type of architecture; however, specific implementations differ for each radio (Ref. 3). 9) 10)
The GPM contains the general purpose processor and associated memory elements for application processing and radio control. The STRS OE (Operating Environment) runs within the GPM to control the waveforms and other radio functions and platform services throughout the SPM and RFM. The GPM controls loading the waveform from persistent memory, e.g. EEPROM (Electrically Erasable Programmable Read-Only Memory), into the processor of FPGA as designed. Portions of the waveforms can run within the GPM or SPM and are abstracted from the underlying hardware by the STRS standard. The SPM includes the hardware for the high speed signal processing performed in each radio.
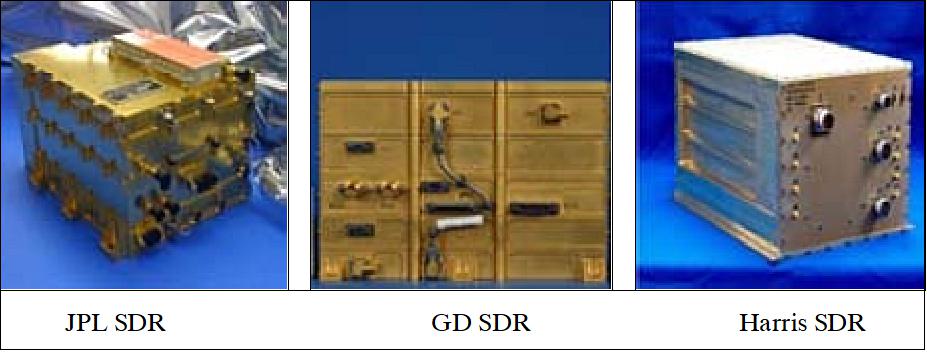
The GD (General Dynamics) SDR is S-band only, while the JPL (Jet Propulsion Laboratory) SDR has both S-band and L-band (GPS) capability. The HC (Harris Corporation) SDR is Ka-band. The operating systems and waveforms within these radios are reconfigurable and will be changed (modified or replaced) during on-orbit operations. The avionics subsystem provides general control and data handling, as well as supporting network routing. Just like the radios, the software loaded in the avionics subsystem will be changed for experiments. The radios are mounted to the Flight Enclosure and functionally interface with the avionics and RF (Radio Frequency) subsystems.
The STRS OE manages the functions within the SDR, including command and telemetry, inter-process communications among software elements, and control functions such as loading and unloading the waveforms from memory and executing the waveform. The key element of the software architecture is the application programming interface abstraction between the waveform application and the underlying hardware. User applications access the RTOS (Real-Time Operating System) of the operating environment through a POSIX (Portable Operating System Interface for Unix) interface and the waveforms access remaining OE functions through a set of APIs (Application Programming Interfaces) defined by the STRS architecture (STRS API).
Once a user waveform application is loaded on a platform, the POSIX and STRS APIs provide the software interfaces to the underlying hardware. On the firmware interfaces within the FPGA, the STRS standard calls out requirements for FPGA signal abstractions between the application and the platform hardware provided by the platform developer and certain documentation of abstractions for hardware resources (e.g., FPGA, DAC, ADC) available for future waveform developers.
SDR parameter / manufacturer | JPL | GD | Harris |
General purpose and signal processing modules | 66 MHz SPARC processor and 2 Xilinx Virtex II FPGAs | 60 MIP Coldfire processor and 1 Xilinx Virtex II Pro FPGA | 700 MIP Power PC processor and 4 Xilinx Virtex IV FPGAs |
RF module | Two (I/Q) 10 bit 50 Msps DAC and one 12 bit 50 Msps ADC: S-band duplex (2.1-2.2 GHz, 6 MHz tuning, and GPS receive at L1, L2 and L5 | S-band Duplex (2.1-2.2 GHz, 6 MHz tuning) | Two 12 bit 300 MHz DAC and one 300 MHz ADC. Ka-band (transmit: 25.5-25.7 GHz, 225 MHz tuning, receive: 22.5-22.7 GHz, 50 MHz tuning) |
Memory units | 128 MByte SDRAM and 512 MByte flash | 128 MByte SDRAM, and 4 MByte EEPROM; also 1 MByte Chalcedonide RAM as experiment | 256 MByte SDRAM |
OE (Operating Environment) | RIEM operating system; OE complies with STRS, V1.02 | VxWorks operating system; OE complies with STRS, V1.02 | VxWorks operating system; OE complies with STRS, V1.02 |
Command & Telemetry | MIL-STD-1553 | MIL-STD-1553 | SpaceWire |
Data format | SpaceWire | SpaceWire | SpaceWire |
Data rate class | 10's Mbit/s | 10's Mbit/s | 100's Mbit/s |
Output power amplifier | 10 W | 10 W | Ka converter drives 40 W TWTA |
The SCaN Office at NASA has developed an architecture standard for SDRs used in spaceborne and ground-based platforms to provide commonality among radio developments to provide enhanced capability and services while reducing mission and programmatic risk. The STRS (Space Telecommunications Radio System) architecture standard defines common waveform software interfaces, methods of instantiation, operation, and testing among different compliant hardware and software products. These common interfaces within the architecture abstract, or remove, the application software from the underlying hardware to enable technology insertion independently at either the software or hardware layer.
Technology Objectives
• Antenna technology: - The focus of this effort is on Ka-band transmit antenna arraying. The adaptive beamforming technique will be equally applicable to the DSN (Deep Space Network) and to spacecraft systems.
• DTN (Disruption Tolerant Networking): - The DTN program establishes a long-term, readily accessible communications test-bed onboard the ISS (International Space Station). Two CGBA (Commercial Generic Bioprocessing Apparatus), CGBA-5 and CGBA-4, will serve as communications test computers that transmit messages between ISS and ground Mission Control Centers.
• iROC (Integrated RF and Optical Communications): - Given the strong and continued momentum of development in the RF domain, what can be done from an integration standpoint to optically enhance the performance of a deep-space RF communications system.
• Ka-band atmosphere: - Statistical characterization of the diurnal, annual and secular path length fluctuations at candidate sites for future distributed ground based antenna systems operating at Ka-band applicable to all three of NASA’s current space communication ground communication networks.
• STRS (Space Telecommunications Radio System): - NASA’s SCaN Office has developed an architecture standard for SDRs used in space and ground-based platforms to provide commonality among radio developments to provide enhanced capability and services while reducing mission and programmatic risk.
Testbed
Among other items, the ExPA includes the active portion of a FRAM (Flight Releasable Attachment Mechanism), power and data connector panels, EVA (Extravehicular Activity) robotic interfaces and the payload adapter plate. The ExPA serves as the foundation of the CoNNeCT flight system.
Instrument mass, power | 365 kg, 500 W |
Main processor speed | 763 MHz |
Flash memory | 64 GByte |
Software Lines of Code | >100,000 |
Radios | - GD/JPL S-band: 10 Mbit/s data rate class |
Mechanical subsystem: It provides structural support for the other subsystems; its design also allows thermal energy to be rejected to space via three radiating surfaces. The subsystem consists of a frame-and-panel flight enclosure, various mounting brackets, fasteners, and multilayer insulation on the two non-radiating exposure surfaces. The mechanical subsystem accounts for ~39% of the 365 kg Flight System mass.
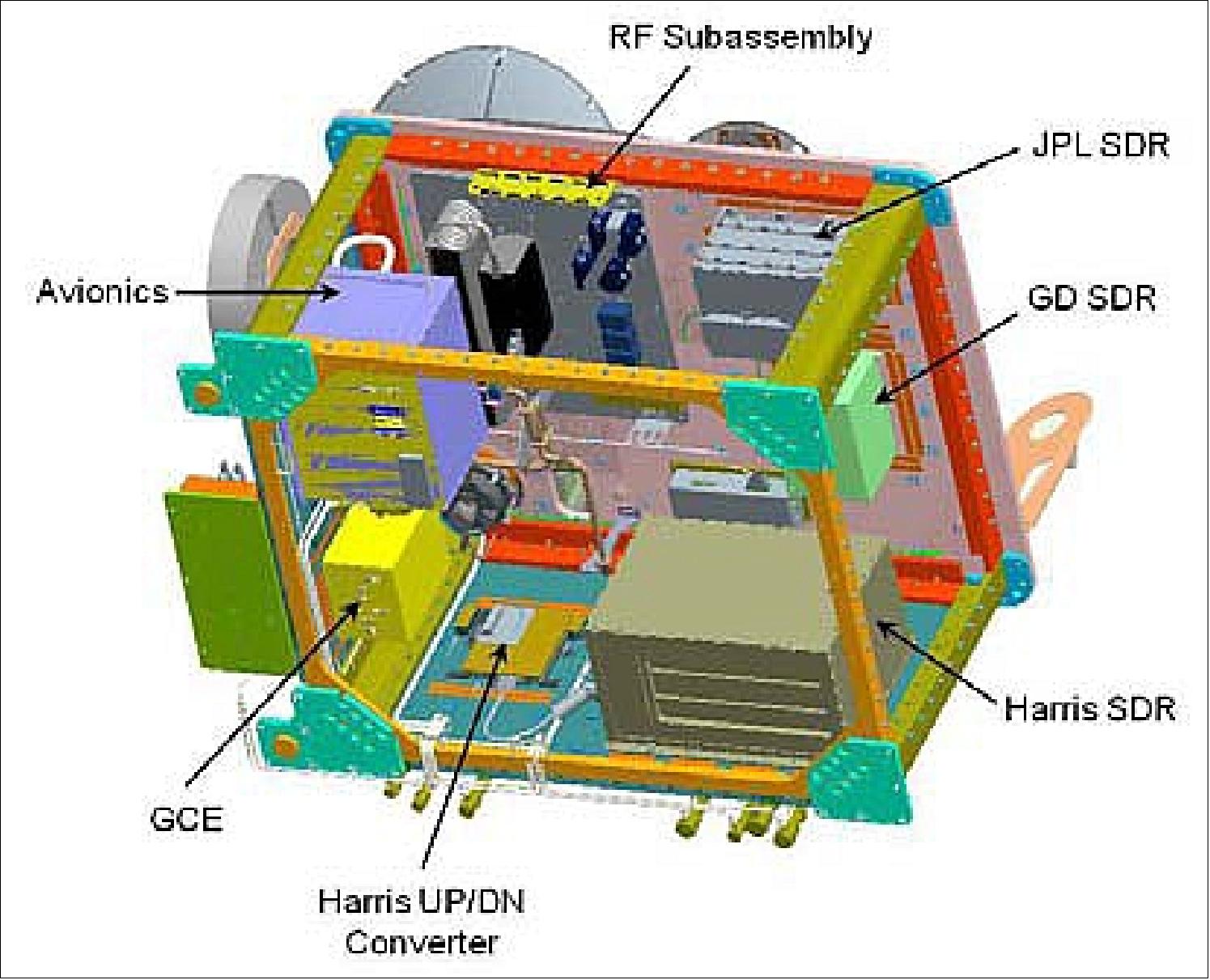
The Flight System is composed of the following four subsystems which are integrated on the ExPA: Avionics subsystem, RF subsystem, Antenna subsystem, and SDR (Software Defined Radios) as shown in Figure 10.
Avionics subsystem: The avionics subsystem provides the electrical and command & data handling interface between ISS systems and the SCaN Testbed systems. These interfaces include power distribution and control, grounding and isolation, communication (commanding and data) interfaces with ISS, flight system health and status, and SCaN Testbed subsystem communications and control as shown in Figure 9. The GSE (Ground Support Equipment) interface is for pre flight test only.
Electrical subsystem: It receives a maximum of ~ 500 W of electrical power from the ExPA, conditions it and transfers it to the electrical loads in the system. Digital communication between subsystems and overall system command and control is also provided by the subsystem. The electrical subsystem is comprised of 3 primary subassemblies [avionics, a TWTA PSU (Power Supply Unit), and TCA (Thermostat Control Assembly)] plus resistance heaters and the cabling interconnecting all of the subsystems. Functional interaction of the avionics portion of the electrical subsystem and other elements of the Flight System is shown in Figure 10.
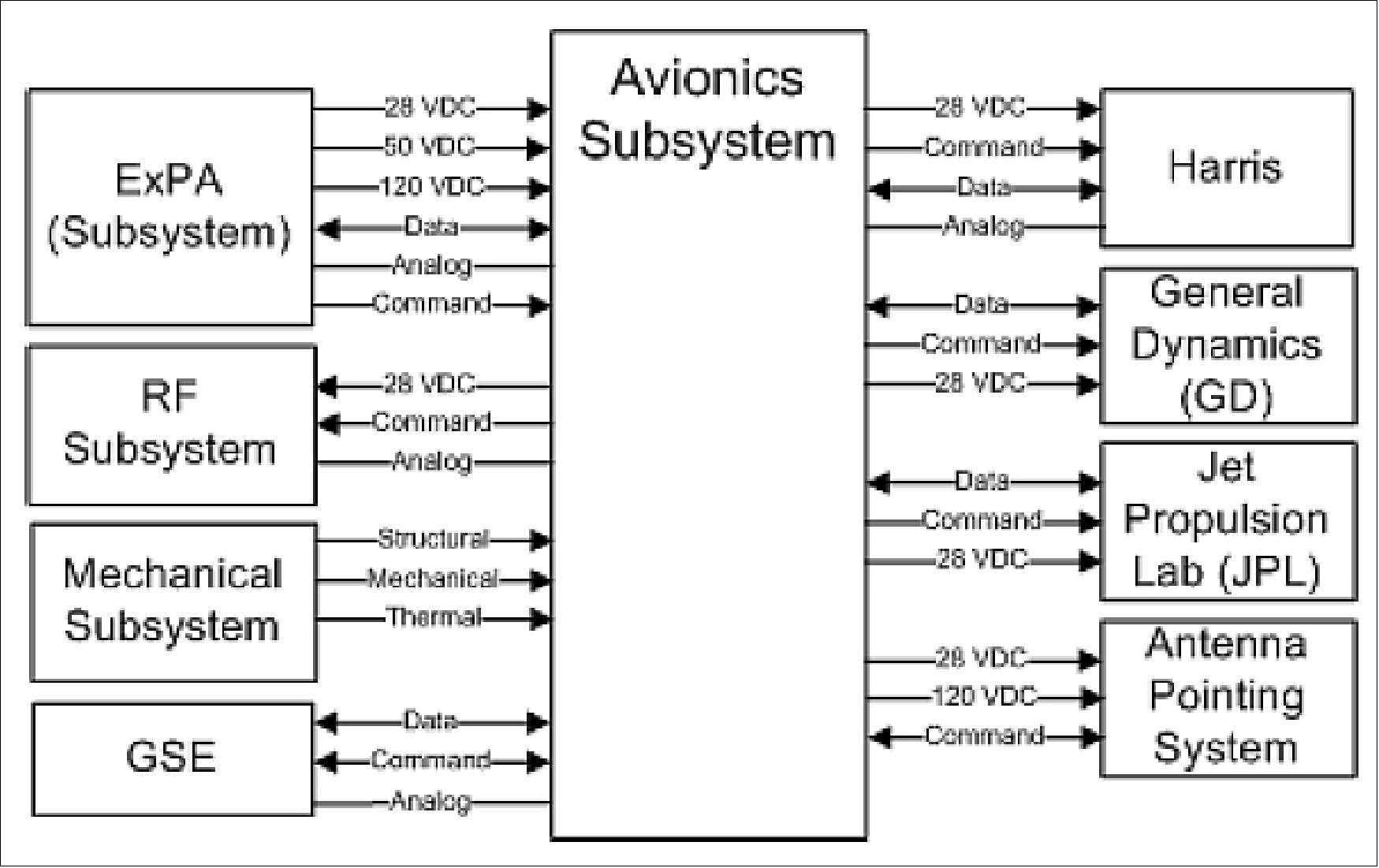
The avionics subsystem provides the command & data handling interface between ISS systems and the SCaN Testbed systems. These interfaces include power distribution and control, grounding and isolation, communication (commanding and data) interfaces with ISS, flight system health and status, and SCaN Testbed subsystem communications and control. The GSE (Ground Support Equipment) interface is for pre flight test only.
The C&DH (Command & Data Handling) subsystem uses a 733 MHz processor and 64 GB of flash memory to operate the Flight System. SpaceWire and MIL-STD-1553 buses are employed for command and telemetry as well as data flow. Each SDR has a command and control interface and data communications interface. The GD and JPL SDRs use MIL-STD-1553 for command and control and SpaceWire for the data interface. The Harris SDR has two separate SpaceWire interfaces, one for command/control and one for data. The RF subsystem TWTA (Traveling Wave Tube Amplifier and coax switches are controlled through discrete digital lines. The Antenna Pointing System GCE (Gimbal Control Electronics) also interfaces with the avionics package for command and control through a MIL-STD-1553 interface.
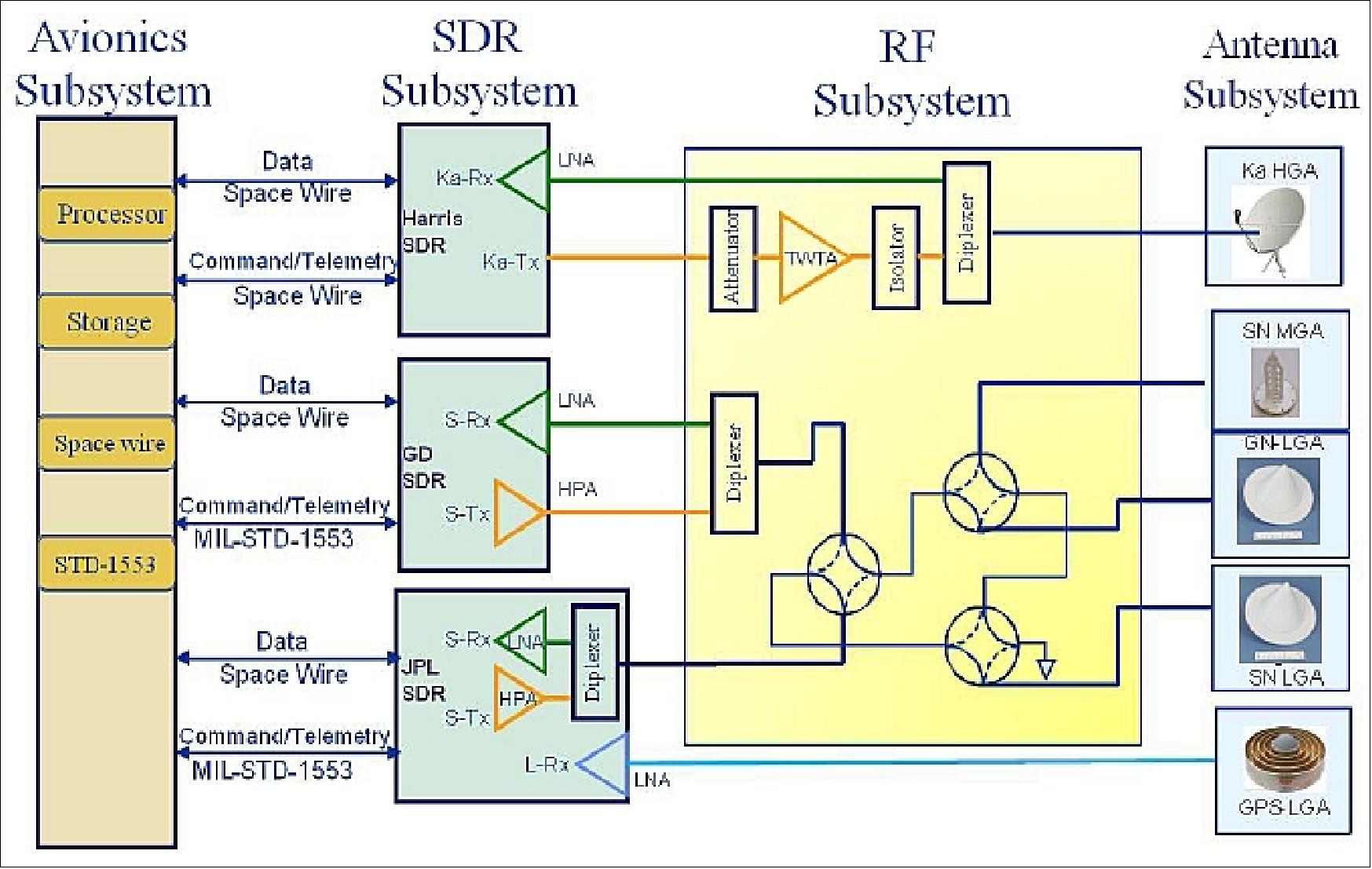
RF subsystem: It consists of an RF plate subassembly, a TWTA (Traveling Wave Tube Amplifier), five antennas and interconnecting transmission cable and waveguide. The RF plate subassembly contains a Ka-band isolator and attenuator and three coaxial transfer switches to route signals to and from different S-band antennas. Two low-gain S-band antennas and an L-band antenna are installed stationary with respect to the flight system. The medium-gain S-band antenna and the high-gain Ka-band antenna are jointly housed on an articulating arm for pointing. The RF subsystem and its interfaces are illustrated in Figure 10. The functional interactions of the RF subsystem are also shown in Figure 10.
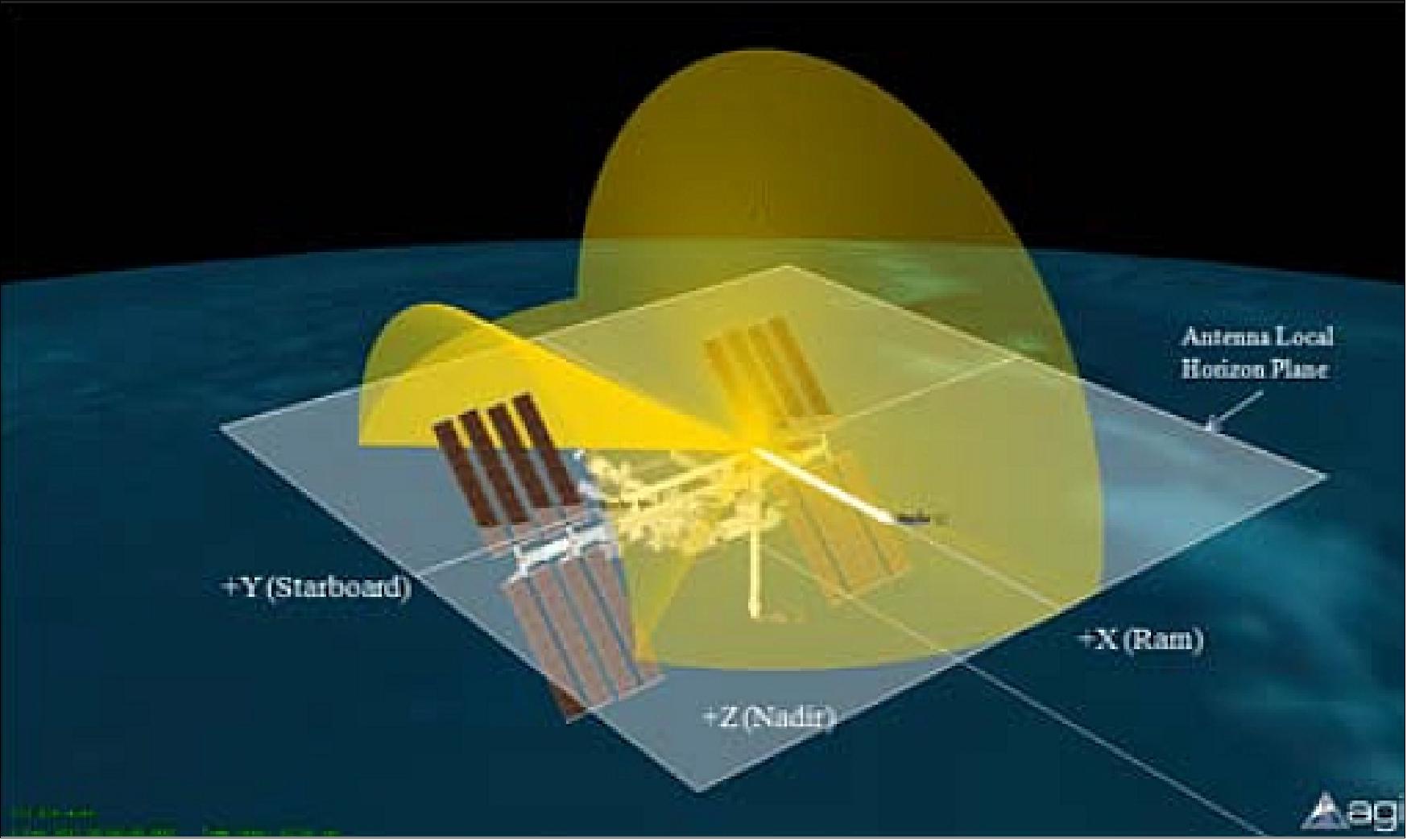
APS (Antenna Pointing Subsystem): The APS is used to point the medium-gain S-band and high-gain Ka-band antennas for communication with the TDRSS. In addition to a launch restraint and thermal control resistance heaters, two other main subassemblies combine to complete the APS: the IGA (Integrated Gimbal Assembly) and the GCE (Gimbal Control Electronics). The IGA contains two rotary actuators - one each for local elevation and azimuth adjustment.
The actuators in combination with the arm mechanism, in which they are housed, enable precision pointing of the antennas over a large viewing area. Restrained by physical hardstops to limit irradiation of ISS elements, the IGA rotation spans 174º in elevation and 76º in azimuth. The resultant boresight sweep limits are shown in Figure 11. This FOV allows the testbed to satisfy key availability requirements for monthly TDRS (Tracking and Data Relay Satellite) contacts.
Using a MIL-STD-1553 interface, the GCE provides the power, control and telemetry path between the IGA and the avionics subassembly. Position and rate commands are sent from the avionics software to the GCE which then translates and sends the appropriate step commands to the actuators. Optical encoders on each actuator provide position indication telemetry that is transferred through the GCE to the avionics. Because of the wide beam width of the medium-gain antenna, the TDRS S-band links are easily established using open-loop pointing algorithms in the avionics software. However, for Ka-band communication with TDRS, closed-loop control based on signal feedback from the Harris SDR is used to accurately point and track using the APS.
Testbed Status
• January 13, 2021: NASA is developing capabilities that will allow missions at high altitudes to take advantage of signals from Global Navigation Satellite System (GNSS) constellations — like GPS commonly used in the U.S. These signals — used on Earth for navigation and critical timing applications — could provide NASA’s Artemis missions to the Moon with reliable timing and navigation data. NASA’s Space Communications and Navigation (SCaN) program is developing the technologies that will support this goal. 11)
- Interoperability of the GNSS constellations will be key to realizing this ambition. There are six GNSS constellations that provide Position, Navigation, and Timing (PNT) services, each hailing from different countries worldwide. Four constellations, those operated by the U.S., the European Union, Russia, and China, provide global coverage. The other two, operated by India and Japan, provide regional coverage.
- Using multiple constellations at once offers more signal availability, which can mean improved accuracy in navigation and timing for satellites. This could be especially helpful for spacecraft at higher altitudes where GNSS signals are less plentiful overall.
- However, each constellation has unique designs. This poses a challenge to engineers hoping to develop multi-GNSS systems that take advantage of multiple constellations.
Bobcat-1
- SCaN is supporting a number of flight experiments that will help develop multi-GNSS capabilities for spacecraft. Bobcat-1, developed by NASA’s Glenn Research Center in Cleveland and Ohio University, is one such example.
- Bobcat-1 was selected by the CubeSat Launch Initiative in 2018 to study GNSS signals from 250 miles overhead. The small satellite launched to the International Space Station aboard a Northrop Grumman Cygnus spacecraft on Oct. 2, 2020.

- On Nov. 5, 2020, the space station released the CubeSat to begin its mission. The spacecraft will orbit for about nine months, measuring signals from different GNSS constellations. Engineers will use these measurements to better understand GNSS performance, specifically focusing on timekeeping variations between the constellations.
- “GNSS users at high altitudes see fewer satellites. Time offsets between the constellations can be measured by the CubeSat and provided to these users to improve their positioning performance,” said Bobcat Co-Principal Investigator Frank Van Grass of Ohio University.
- Bobcat-1 builds on the legacy of the SCaN Testbed, which demonstrated multi-GNSS capabilities on the space station from 2012 to 2019. The GPS and Galileo Receiver for the International Space Station (GARISS) — an instrument developed in collaboration between NASA and ESA (European Space Agency) — received signals from both GPS and Galileo, the GNSS constellation operated by the European Union.
- The SCaN TestBed also laid the foundation for the Lunar GNSS Receiver Experiment (LuGRE), a Commercial Lunar Payload Services payload being developed in partnership with the Italian Space Agency. The payload will receive signals from both GPS and Galileo and is expected to obtain the first-ever GNSS fix on the lunar surface.
GNSS PNT Policy and Advocacy
- While NASA engineers develop the technologies necessary for multi-GNSS navigation at ever-higher altitudes, the SCaN team works with stakeholders in the U.S. government and internationally to advance GNSS interoperability in the policy sphere. They consult on the United Nations International Committee on GNSS, helping develop additional capabilities in the Space Service Volume and beyond.

- NASA recently worked to publish GPS antenna patterns from GPS satellites that launched between 1997 and 2000, collaborating with the U.S. Space Force, the U.S. Coast Guard, and Lockheed Martin, who built the satellites. The PNT team is also working to facilitate publication of antenna patterns for more recent GPS satellites. With this data, mission planners can better assess the performance of GNSS in high-Earth orbit and lunar space. This forthrightness also encourages other GNSS providers to be similarly transparent.
- “GNSS capabilities continue to revolutionize the ways spacecraft navigate in near-Earth space and beyond,” said NASA navigation engineer Joel Parker. “NASA’s longstanding relationships with the GNSS providers have advanced these capabilities to new heights and support the Artemis missions on and around the Moon.”
• October 26, 2020: NASA plans to rely primarily on industry-provided communications services for missions close to Earth by 2030. Rather than using government-owned relay satellites and ground stations, NASA’s Space Communications and Navigation (SCaN) program will work with private industry to furnish missions with comprehensive network services. 12)
• April 30, 2019: Space Communications and Navigation (SCaN) serves as the Program Office for all of NASA’s space communications activities. SCaN manages and directs the ground-based facilities and services provided by the Deep Space Network, Near Earth Network and Space Network. It is also responsible for the development of space communications and navigation technology. SCaN's national and international activities include its role in NASA's spectrum management and policy advocacy. 13)
What is SIP?
- The SCaN Internship Project (SIP) is a paid internship hosted by NASA's Glenn Research Center in Cleveland, OH, and NASA's Goddard Space Flight Center in Greenbelt, MD. SIP is open to students 16 or older who are pursuing a career in space communications and navigation, or have an interest in these areas. SIP is sponsored by the SCaN Policy and Strategic Communications Office at NASA Headquarters in Washington, D.C. SIP takes place during the summer, for 10 weeks, with potential continuation during the school year.
- The internship allows students to perform hands-on training with real mission scenarios, gain exposure and analyze powerful space communication systems, utilize networks software tools and effectively communicate their findings in a final presentation to NASA management. Each student is paired with an experienced and multidisciplinary mentor who counsels the student with his/her work, and also engages with career planning.
- Students are introduced to space communications and navigation knowledge and practices through their participation in the program. Each year, as the students’ knowledge matures, their corresponding NASA activities and training increase in complexity.
• April 24, 2019: SCaN Testbed (STB) led groundbreaking efforts to champion use of software defined radios for space communications. STB demonstrated routine reconfiguration of radios in space 888 times, challenging the perception that even a single reconfiguration was a significant mission risk. STB demonstrated the first Ka-band full duplex space transceiver, which is a R&D 100 award winning technology and now a successful commercial product line. This enabled STB to validate Ka-band performance of NASA’s TDRS satellites K, L, and M, as well as test many communication system upgrades on the ground for projects such as User Service Subsystem Component Replacement (USS-CR) and Space Network Ground Segment Sustainment (SGSS). STB also developed and contributed 6 radio waveforms, or reusable software components, to the Space Telecommunications Radio System (STRS) repository, allowing future missions seamless reuse of prior software investments. 14)
- SCaN Testbed paved the way for many firsts in communication and navigation technology. STB was the first to receive the Global Positioning System (GPS) Civil Navigation Message (CNAV) in space in June 2013. In 2018, STB became the first in-space user of the European Galileo E5A navigation signal, demonstrating the capability for merging Galileo and GPS to precisely determine orbits of spacecraft. The Testbed performed revolutionary study into cognitive communication techniques in 2015, demonstrating the ability for real-time adaptive link control; in 2018, it performed the first-ever demonstration of an adaptive space link controlled entirely by an artificial intelligence algorithm. These experiments enabled demonstrations of automatic communication service scheduling, or User Initiated Service, which allowed STB to request high-rate communications services in near real time, a significant improvement over the prior 3+ week turnaround time.
- The decommissioning of SCaN Testbed comes after 7 successful years and 4275 hours of pioneering accomplishments in the field of space communications. STB’s accomplishments have increased the trust that missions place in software defined radio technology, as well as show cased multiple mission use cases for the benefits of radio reconfiguration in space.
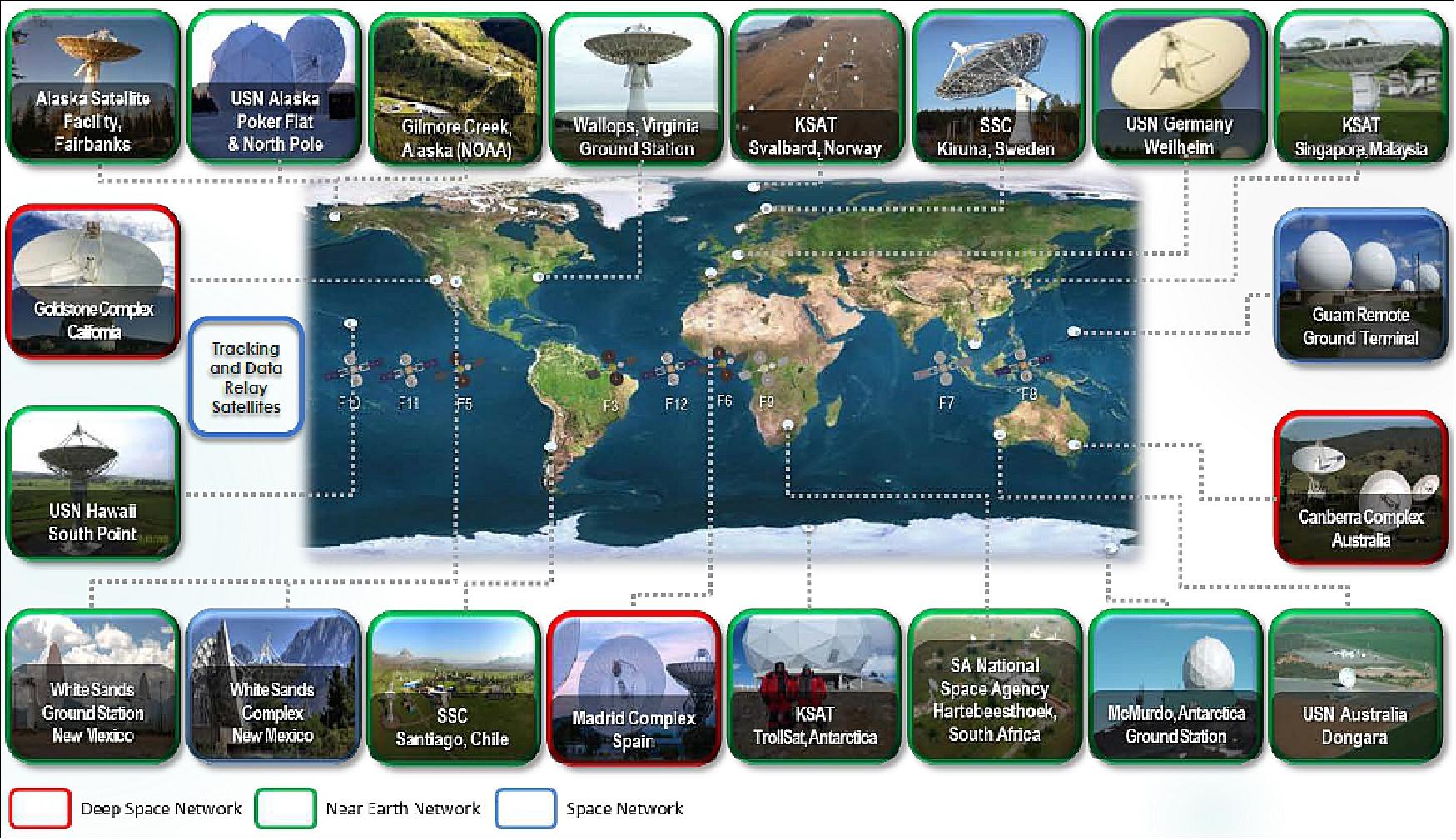
• February 2017: SCaN supports over 100 NASA and non-NASA missions. Some missions look down at the Earth and observe changes; others observe the Sun’s influence on the Earth; some study the Moon and the planets, while others study the origins of the universe. Three NASA networks, DSN (Deep Space Network), NEN (Near Earth Network) and SN (Space Network) provide support for SCaN. 15) 16)
1) DSN: 34 m and 70 m antennas designed to support missions from GEO to beyond the solar system.
2) NEN: Mixture of 9 m to 18 m antennas designed to support missions from LEO to the Moon. Mixture of government owned and commercially procured services.
3) SN: GEO Relay satellites to support missions from the Earth’s surface to GEO orbit.
• October 25, 2016: NASA, ESA and Qascom, an Italian company specializing in Galileo services, are collaborating to build the first GPS and Galileo receiver to be tested by SCaN (Space Communications and Navigation) on board the ISS. 17) 18)
- In May 2016, Qascom was awarded with the GARISS (GPS and Galileo Receiver for the ISS) activity in support of collaborative experimentation with ESA and NASA, which has the objective of developing and validating the acquisition and processing of combined GPS and Galileo signals on board the ISS SCaN Testbed. This is also the first attempt to develop software for the ISS SCaN as part of an international collaboration between the United States and Europe, according to Qascom.
- To date, the team has successfully acquired and processed GPS and Galileo signals on dual-frequency bands. Initial operations will use a single-frequency processing methodology, although the final mission will target dual-frequency GPS and Galileo operations.
- The initial signal acquisition was carried out by capturing the intermediate frequency signals onboard the ISS and processing these with software receivers on the ground. Operations have been performed both at NASA/GRC ( Glenn Research Center) and ESA/ESTEC.
- One of the challenges of GARISS is tracking the radionavigation signals in space with limited resources that suffer from high Doppler shift due to the orbital dynamics between the ISS in low Earth orbit and GPS/Galileo in medium orbit.
• Intelligent system concept: As the SCaN Testbed enters its fourth year of operations in the summer of 2015, the project is transitioning its experiment’s program to emphasize intelligent, and cognitive communication and network experiments and focus on applying cognition and automation to NASA’s networks to improve and increase data return from exploration and science mission spacecraft. Lessons from the SCaN Testbed project have shown the added flexibility of reprogrammable SDR-based systems which could help improve overall system reliability for future human exploration of the solar system. However, lessons have also shown that reconfigurable software-based systems add more complexity which cognition and automation could manage to reduce operations costs and risks. 19)
- Missions today generally send their data directly from the user spacecraft to the ground, either using a relay satellite or direct to ground stations. Data is sent while a connection exists between the two nodes or remains on the user spacecraft until a connection becomes available. Communication links are designed to operate during worst case (longest) range and provide sufficient margin for atmospheric and other propagation effects. The excess signal (margin) goes unused when conditions remain nominal. Signal characteristics remain the same for the mission duration.
- In the future, NASA envisions a more dynamic, flexible, and efficient network which optimizes mission data return while minimizing the user spacecraft resource burden. To support this vision, the SCaN Testbed is pursuing a number of experiments divided among cognitive engine development (local knowledge), system-wide knowledge and automation, and internetworking among spacecraft and ground nodes.
- Adaptive or cognitive applications which change operating parameters such as data rate, modulation, or frequency generally operate between the space and ground radio (although radio-to-radio control is also possible) to most efficiently use the link resources. These applications are self-aware and able to respond to link conditions. They monitor their environment (e.g. operating state, location, or signal performance) and adjust their communication signal characteristics through negotiation with the corresponding radio node. Efficiency may come through higher data rates when link conditions are strong and lower data rates during link impairments, or reduced power consumption when conditions allow.
- System-wide knowledge and automation manages and oversees the individual behavior of the local nodes. Much of the research in cognitive radio has been focused on the negotiation between two radio nodes to adjust their signal characteristics (e.g. frequency, modulation, power) for optimum performance. Options such as choosing the best frequency (e.g. dynamic spectrum access) or best modulation scheme are common adaptive and cognitive radio operations. While these optimizations are helpful to improve data exchange between radio nodes, there has been little published on the effects of the changes on the network as a whole, especially for space systems. For instance, if a space system radio encounters an anomaly, especially while changing modes, investigators will wonder what state the radio was last configured, what knowledge did the radio use to make its decision, etc.
- Relaying learned knowledge and changing configurations to mission control becomes increasingly important for space missions to maintain awareness of the overall system, monitor automated decisions, and conduct forensics during anomalies. In addition, in the future space network, intelligent user spacecraft will select communication links to use when and where they need them. Mission operations will be aided by spacecraft decisions intended to reduce the cost of extensive mission planning and coordination. Many of the decisions made by ground operators could be augmented by priority-based rules, understanding objectives, orbit geometries, and other constraints. These automations (and system knowledge) will help enable seamless connectivity among use spacecraft, satellite relays and ground stations.
- Internetworking among spacecraft will enable future CubeSat constellations, surface networks, and other planetary networks to use a reliable data transport network protocol to move data through the system in an efficient and reliable manner. NASA is investigating the use of the DTN (Disruption Tolerant Network) protocol as an overlay to the space relay infrastructure. DTN will allow reliable data transport through and among user spacecraft, relay spacecraft and ground systems. The SCaN Testbed provides an opportunity to assess DTN in a multi-node flight environment (using relay satellites, and direct to ground stations) and test alongside adaptive and cognitive communication links. The combination of DTN with adaptive and cognitive links in flight is a new area of research enabled by the SCaN Testbed.
- Over the past three years, experiments have demonstrated the utility of reconfiguration among different waveforms and assessed performance of the launch waveforms including NASA’s first Ka-band operation with TDRS at 100 Mbit/s with OQPSK modulation and convolutional encoding. Subsequent waveform development (and upload) on the Harris SDR has operated waveforms up to 575 Mbit/s, modulations including OQPSK, 8PSK, and 16-APSK, and NASA’s LDPC encoding at both rate 1/2 and rate 7/8. Additional experiments in position determination using GPS and unique measurements of ISS truss flexure have been completed.
- NASA’s future systems will include advanced concepts in cognitive communications, system automation, and inter-networking. Experiments underway on the SCaN Testbed are studying point-to-point cognitive protocols to optimize the data transfer between the radio nodes, system-wide knowledge of cognitive decisions and automated orbit access, and reliable data transport, implementing DTN across the SCaN Testbed and NASA DTN network. These experiments will provide important insights into these new capabilities and these new capabilities will provide lessons learned, data, and reusable waveform software for future missions and networks.
• Feb. 5, 2015: The SCaN Data Standards Project develops the necessary portfolio of internationally agreed and interoperable space communication standards for operational use by NASA missions and networks to lower the life cycle costs and risks, and provide innovative capabilities for current and future missions. 20)
- The SCaN has taken technical leadership roles in many of the CCSDS (Consultative Committee for Space Data Systems) working group activities to develop the specifications for the international standards and promote interoperability and cross support among cooperating space agencies. In addition, the SCaN represents NASA to chair the CCSDS management council and serve as the General Secretariat of the CCSDS.
These benefits of the standards effort conducted by the SCaN include:
- Promotes robust global interoperability that results in significant savings in cross support.
- Reduces mission complexity and risk.
- Reduces life cycle costs as a result of faster development and testing.
- Enables new space data, communications and navigation capabilities to be infused into the various tracking networks and flight missions.
• Fall 2014: During its first year(s) on-orbit, the SCaN Testbed has achieved considerable accomplishments to better understand SDRs and their applications. The SDR platforms and software waveforms on each SDR have over 1500 hours of operation and are performing as designed. 21)
There is considerable interest in conducting experiments using the SCaN Testbed from NASA, academia, commercial companies, and other space agencies. There are approximately 25 experiments or activities supported by the project underway or in development, with more proposals ready, as time and funding allow, and new experiment solicitations available. NASA continues development of new waveforms and applications in communications, networking, and navigation, the first university experimenters are beginning waveform development, which will support the next generation of communications engineers, and international interest is beginning with space agency partners from ESA (European Space Agency) and CNES (Centre National d'Etudes Spatiales).
Over the past year, SCaN Testbed has demonstrated Ka-band communications capabilities with NASA’s TDRSS (Tracking and Data Relay Satellite System) using both open- and closed-loop antenna tracking profiles. A number of technical areas need to be addressed for successful transition to Ka-band. The smaller antenna beamwidth at Ka-band increases the criticality of antenna pointing, necessitating closed loop tracking algorithms and new techniques for received power estimation. Additionally, the antenna pointing routines require enhanced knowledge of spacecraft position and attitude for initial acquisition, versus an S-band antenna. Ka-band provides a number of technical advantages for bulk data transfer. Unlike at S-band, a larger bandwidth may be available for space missions, allowing increased data rates. The potential for high rate data transfer can also be extended for direct-to-ground links through use of variable or adaptive coding and modulation. 22) 23)
Ka-band tracking overview: The Ka-band HGA (High Gain Antenna) can be controlled via the APS (Antenna Pointing System) using open-loop pointing or closed-loop tracking. The difference between the two modes is the presence or lack of a feedback signal for the gimbal control system. Either mode utilizes a pre-generated nominal pointing routine. If closed-loop is enabled, a feedback signal derived from the received signal strength is used to maximize signal strength by redirecting the pointing direction. The closed-loop tracking functionality is made up of two modes: an acquisition spiral and an autotrack mode.
The two closed-loop modes can be enabled separately, but both are required for closed-loop tracking to function properly. The spiral track mode enables a growing spiral of user-defined lap size to be added to the nominal pointing routine, such that the received signal is observed until it reaches a user-defined threshold. At that threshold point, the mode switches to autotrack functionality, where dither is performed on a single axis at a time for the purpose of determining how to optimize received signal strength so that the derivative of the signal over the dither period is zero. The autotrack mode also has a cross-over threshold; if the received signal crosses below a certain level, the spiral search mode can be restarted so that the peak signal can be reacquired.
To implement the SCaN Testbed closed-loop tracking process, the input signal is received first by the Ka-band HGA and then it is provided to the Harris SDR via the Ka-band RF subsystem. The Ka-band antenna pattern, determined in-situ on ISS, is provided in Figure 16. This antenna pattern is mapped to expected received signal strength indicators from the Harris SDR to determine the nominal thresholds to use for Ka-band closed-loop tracking purposes.
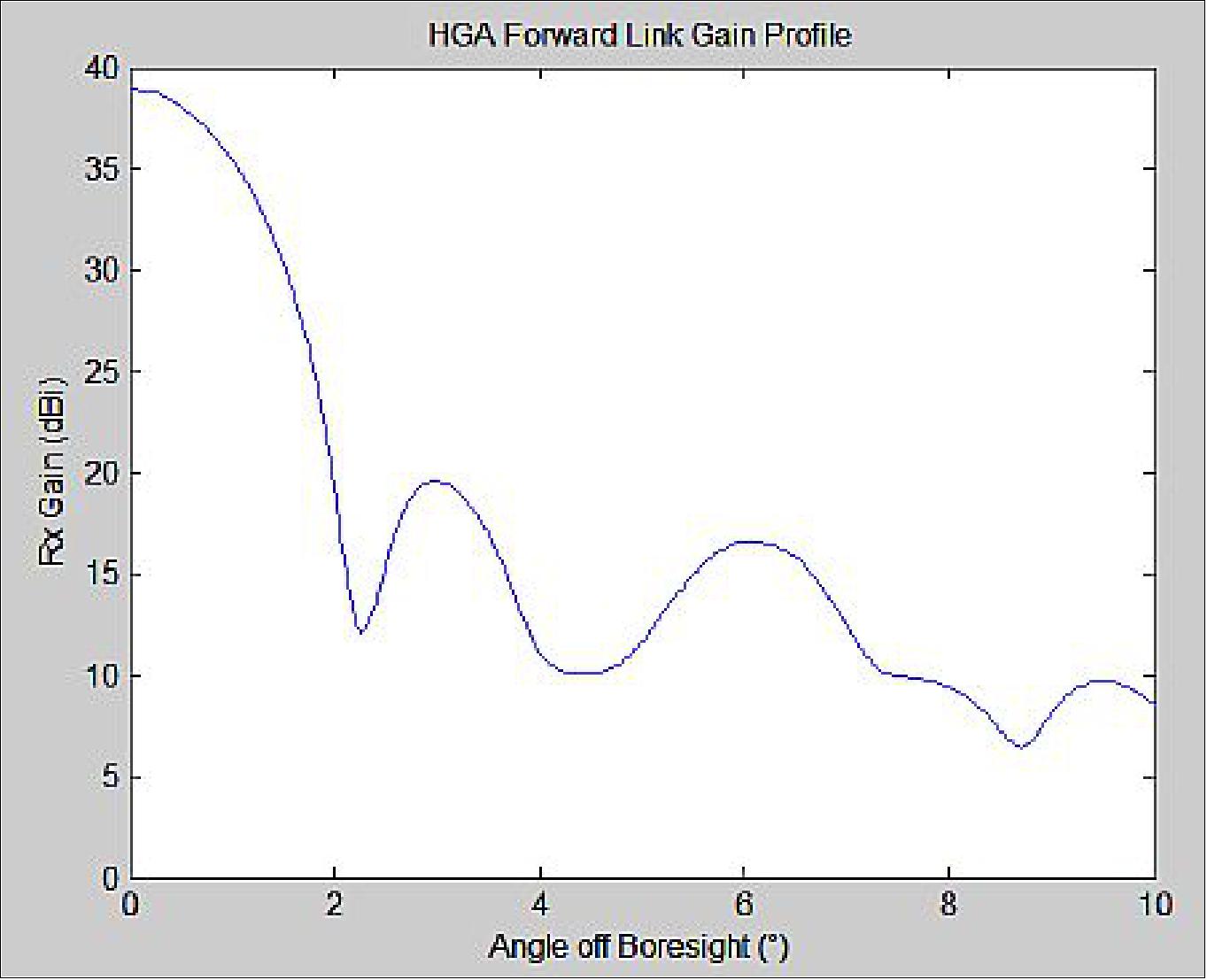
As there exists roughly 20 dB between the peak of the receive pattern and the peak of the first side lobe, the thresholds are set roughly 10 dB above the received power level of the first side lobe, so that any received signal above threshold is guaranteed to be on the HGA main beam. Second, the thresholds are set roughly 1 dB apart (spiral to autotrack transition and autotrack to spiral transition) so as to minimize inadvertent transitions between tracking modes. Based on the beamwidth, the spiral track lap size is set to 1°, so that a spiral lap cannot miss the received signal, as it would if the lap size were set too large. Setting the lap size smaller would allow more opportunities for finding the peak, though increasing the acquisition time for running through the spiral motion. The APS was tuned via ground-based testing, of which the closed-loop proportional and integral gains were obtained that best suited the received signal properties with the model of the underlying control of the APS.
The spiral track search process is optimized to minimize the acquisition process of the TDRSS signal, and thus maximize the time spent during the event with accurate pointing. However, it is important to consider that the closed-loop tracking algorithm’s overall performance cannot overcome all shortcomings in the underlying pointing profile. Errors in the pointing profile originate from pointing vectors, commonly called TLE (Two-Line Element) vectors for spacecraft, as well as attitude errors in the receiving spacecraft.
Given the orientation of SCaN Testbed on ISS, and more importantly the orientation of the APS axes on SCaN Testbed, nominal TLE staleness related errors induce pointing errors in the APS azimuth axis, which are errors associated with changes in the ISS argument of periapsis or altitude, as opposed to pointing errors in the APS elevation axis that are associated with changes to the ISS ascending node. Both types of error are possible given TLE staleness, though the dominating error is the error that changes the APS azimuth position. One common observation from this phenomenon is that scheduled events (access performed up to three weeks before the event) can have up to several minutes of waiting time before the TDRSS spacecraft actually enters the gimbal space field of view, where the majority of the event is limited to the movement through the azimuth axis. Therefore, closed loop tracking cannot fully overcome TLE staleness.
Regarding attitude errors, the ISS attitude is determined nominally at the center of mass for ISS, which is located near the center of the ISS. However the SCaN Testbed is located on the ELC3 truss, which is out away from the center of the ISS. The attitude that is observed from SCaN Testbed has two error components. First, the nominal attitude profile is only a control point, for which three axis attitude errors oscillate around the control point periodic with the ISS orbital period. Second, as the ISS moves through the orbital period, the truss, where the SCaN Testbed is located, suffers from a flexure that induces additional periodic attitude error. Attitude errors directly induce pointing error, from either the unknown pre-existing attitude vector error, or from the several degree pointing error due to flexure. These attitude errors are specific to the ISS platform and must be overcome for testing on SCaN Testbed.
Closed-loop tracking is preferred, as the many forms of error prohibit open-loop pointing to be performed without very stable and reliable information on current TLE, attitude, and flexure. TLE staleness causing 14 seconds of delay of the signal entering the gimbal space induces a pointing error of 1°, which is already the 3dB antenna beamwidth. In addition to that, the variations of the center of ISS attitude can also induce at most roughly 1º to 2º at the peak of the attitude axis errors. Finally, flexure can add an additional 1º to 2° of attitude error to the pointing error. Together, the cumulative of these errors can easily force the HGA to rarely be aligned in an open-loop mode of operation. The closed-loop tracking routine quickly resolves these errors and maintains lock on the source signal.
Launch Waveform Performance: The Ka-band SDR was launched with a relatively simple waveform (WF), compatible with the legacy Space Network. Table 3 describes receive and transmit parameters of the software defined waveform application. The waveform frequencies are programmable, however the SCaN Testbed regulatory frequency allocation restricts the center frequency.
Parameter | Receive | Transmit |
Modulation | BPSK (Quadrature Phase Shift Keying) | SQPSK (Staggered Quadrature Phase Shift Keying) |
Data rate | 2 Mbit/s | 100 Mbit/s |
FEC (Forward Error Correction) | ½ rate Viterbi | ½ rate convolutional |
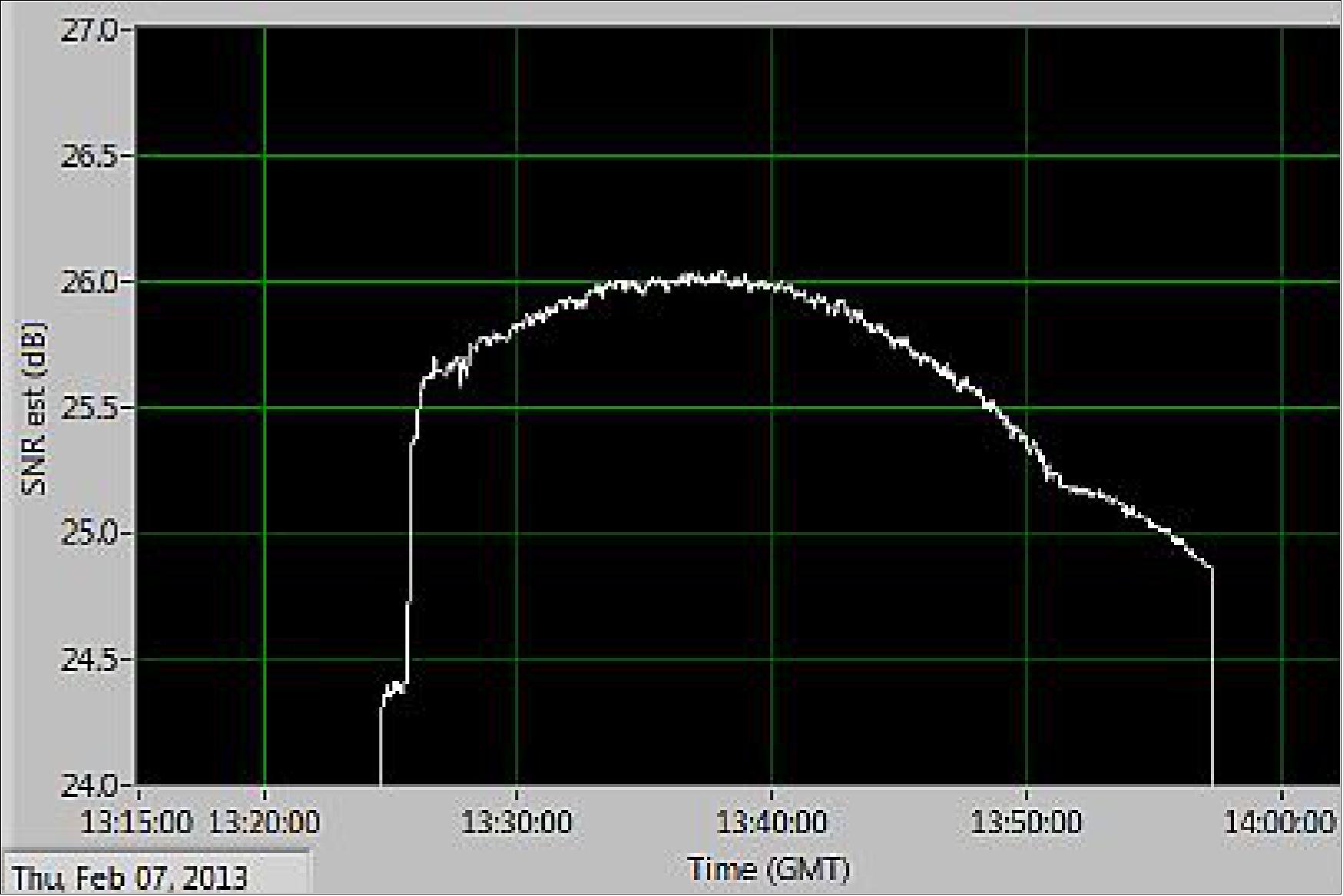
The launch WF performance on-orbit met predictions based on system link margin and pre-flight characterization. A typical forward link SNR profile is shown in Figure 17, illustrating the system’s relatively high and steady signal strength with less than 2 dB of variation. The EIRP (Effective Isotropic Radiated Power) is sufficient to maintain a BER of 10-8 on both the forward and return links. For these reasons on-orbit tests typically run error-free over the approximately 40 minute pass time even at the highest data rates. The link budget summary is presented in Table 4, yielding ample margin for the given parameters. Closed loop antenna pointing is assumed here but accurate open loop pointing has also been successfully demonstrated in specific cases with fresh TLE information lower data rates when link margins are higher and accurate pointing is less critical.
Parameter | Forward Link (SDR Receive) | Return Link (SDR Transmit) |
Frequency | 22.68 GHz | 25.65 GHz |
Data rate | 9.5 Mbit/s | 100 Mbit/s |
Modulation | BPSK | SQPSK |
Convolutional coding | ½ rate | ½ rate |
Bandwidth | 38 MHz | 200 MHz |
EIRP (Effective Isotropic Radiated Power) | 63 dBW | 49.2 dBW |
G/T [(receiver) Gain / (noise) Temperature] | 2.69 | 26.51 |
Required BER(Bit Error Rate) | 10-8 | 10-8 |
Range | 43550 km | |
Link margin | 3.0 dB | 2.4 dB |
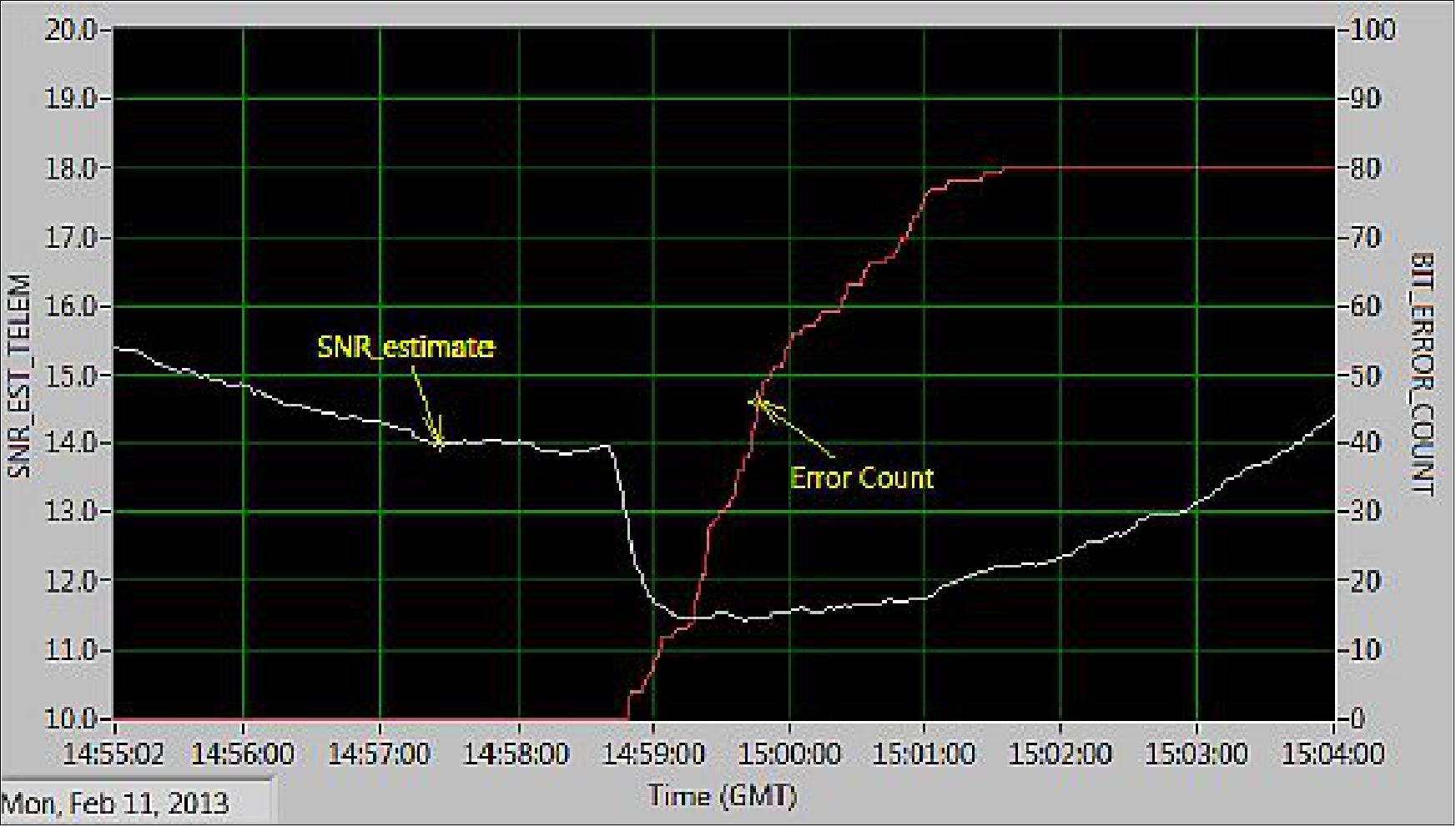
Since the link margin is nominally high for the system, some testing was done with planned programmed APS offsets to mis-point the high-gain antenna so as to generate bit errors for performance measurement. Figure 18 shows some 3 Mbit/s forward link test data from which a performance point of 2.7 x 10-7 BER at an 11.5 dB Eb/N0 can be extracted. This performance agrees with pre-flight performance at the same Eb/N0 level.
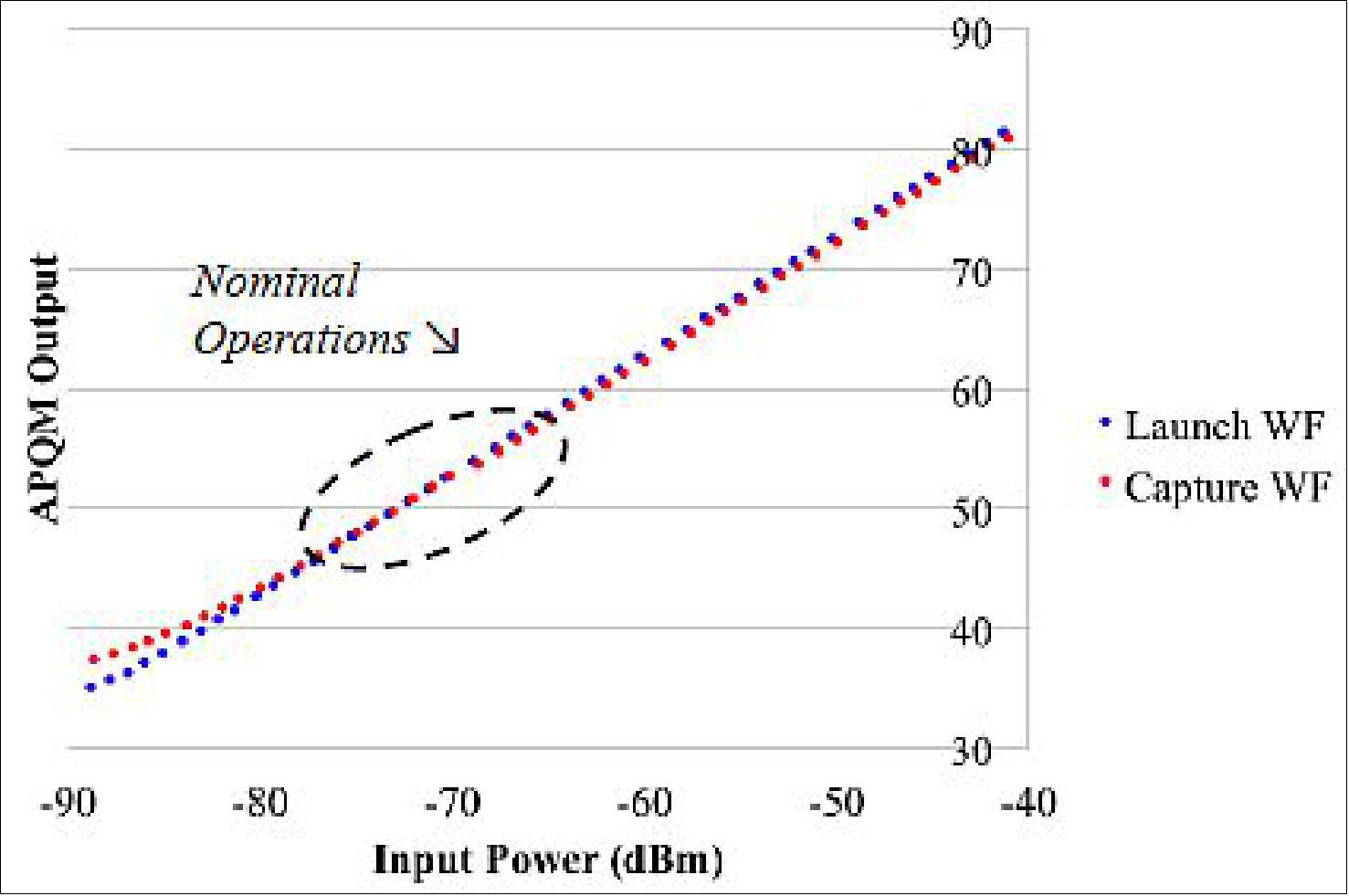
A fundamental component of the launch WF’s pointing capability is the generation of the APQM (Antenna Pointing Quality Metric). This metric is effectively a linear signal strength indicator with decibel units and strong out-of-band noise rejection. The APQM strategy works well for closed-loop antenna pointing based on characterization data, and it is designed for tracking BPSK-modulated data.
An independent APQM design was developed at NASA/GRC as part of a generic signal capture waveform application. The purpose of the signal capture application is to record raw samples from the SDR analog-to-digital converter, allowing processing of arbitrary waveforms on the ground. One of the motivations for this development is that the new algorithm handles any modulation scheme and is not limited to strictly BPSK. Additionally, the GRC-based APQM generator has the option of disabling wideband-noise rejection, and this has proven useful for tracking noise sources (such as the sun) for calibration purposes.
The new APQM design has been successfully demonstrated on-orbit, and its performance was indistinguishable when compared to the launch WF, as shown in the nominal operations region of Figure 19. Additionally, the GRC-based APQM module will be available in the STRS Application Repository, providing other Ka-band missions an opportunity to reuse this flight-demonstrated approach. - The APQM is a necessary feature of a Ka-band radio to allow closed-loop antenna pointing. As noted above, the design of the APQM should take into account the spectral characteristics of the signal that is being tracked.
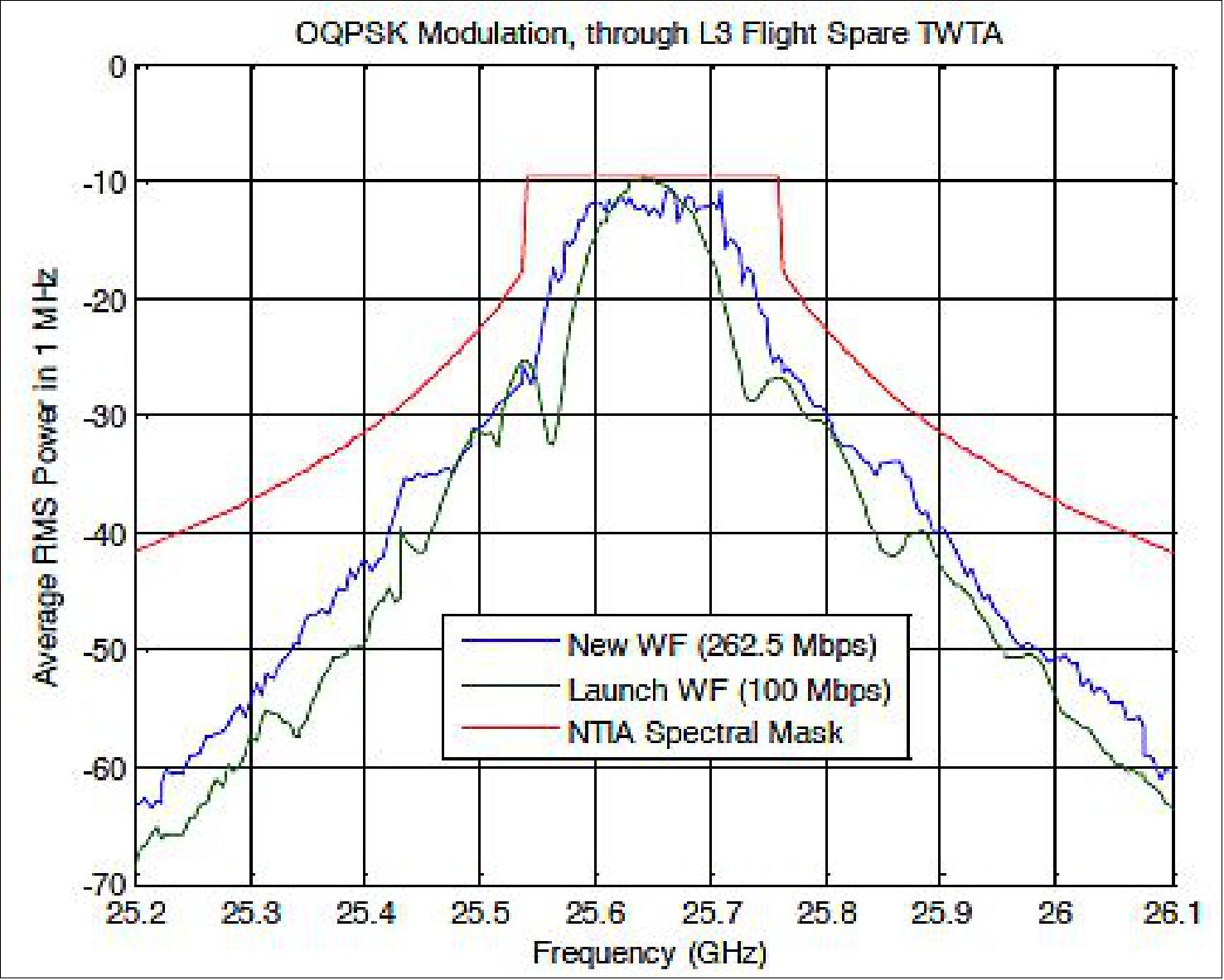
Testing new waveforms: A high-rate bandwidth-efficient waveform experiment has been developed for the Harris SDR. The new waveform employs bandwidth-efficient techniques such as GMSK (Gaussian Minimum Shift Keying) and pulse-shape filtered M-order phase-shift keying (M-PSK) and M-order quadrature amplitude modulation (M-QAM), and modern coding schemes such as LDPC (Low Density Parity Check) codes. The objective of this waveform is to maximize the data-rate over the 225 MHz TDRSS Ka-band service while improving the spectral efficiency. Higher order modulations allow the transfer of larger amounts of data in a shorter time, which minimize mission communication cost and power requirements.
The bandwidth-efficient waveform will support higher data flow using the same or less spectrum as the launch waveform (Figure 20). The waveform is designed to be aligned with future upgrades to NASA’s Space Network (Space Network Ground Segment Sustainment Project - SGSS), which includes 8-PSK modulation and LDPC decoding. The waveform also supports high-order modulations, such as 16-APSK (Asymmetric Phase Shift Keying) and 16-QAM (Quadrature Amplitude Modulation), which will be evaluated for performance and potential use for band-limited channels.
Higher-order modulation schemes are more sensitive to channel impairments, such as band-limiting filters, phase noise, gain flatness / phase distortion and nonlinear amplification. This experiment will evaluate the performance and demonstrate the ability of space-qualified SDRs to compensate for channel impairments. Digital pre-distortion algorithms have been incorporated into the waveform to compensate for the nonlinear distortions of the amplifier. A combination of prefiltering on the transmitter and channel equalization on the ground receiver will be necessary to maximize performance.
On-orbit testing with SQPSK modulation has successfully demonstrated data rates up to 300 Mbit/s, which is the highest rate the current TDRSS Space Network receivers can support operationally. Additional on-orbit testing is planned to evaluate higher rates using prototype ground modems at the NASA White Sands Complex.
Model Ka-band user spacecraft: The IOAG (Interagency Operations Advisory Group) completed a 26 GHz Ka-band study in June 2013 . 24) The purpose of the study was to determine the viability of direct-to-ground Ka-band communication links from low earth orbit. The report focused on the user mission terminal side and less on the infrastructure requirements. The model 26 GHz communications system is shown in Figure 21, with blocks circled that can be evaluated easily using the SCaN Testbed. Although the testbed is designed for space-to-space Ka-band links, several challenges identified in the report are also relevant for space links – specifically:
- Adaptive coding and modulation schemes
- On-board steerable antennas and pointing
- High-rate data interfaces and on-board storage.
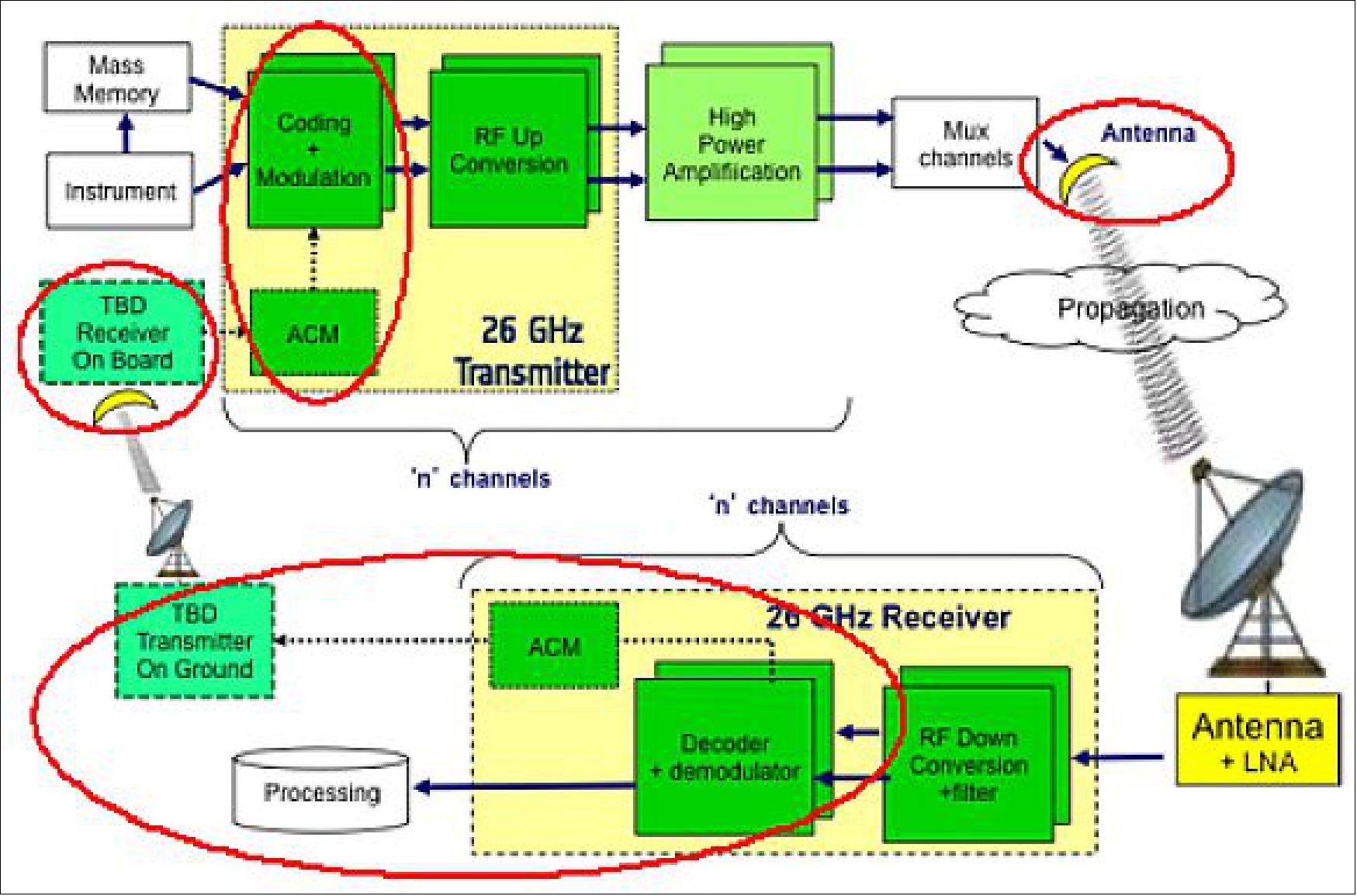
The SCaN Testbed Ka-band research presently is focused on coding and modulation schemes, which are applicable across the space and ground domains. Some of the ISS truss flexure investigation results (i.e., unstable platforms) and related APQM and antenna pointing algorithms will help to answer questions related to the user terminal on-board antenna pointing. - Finally, SCaN Testbed implements a high-rate SpaceWire link between the Harris SDR and the avionics processor. Although specific experiments have not been identified to address storage, a parallel or multi-threaded method for storage of high-rate data would be an excellent potential area for study.
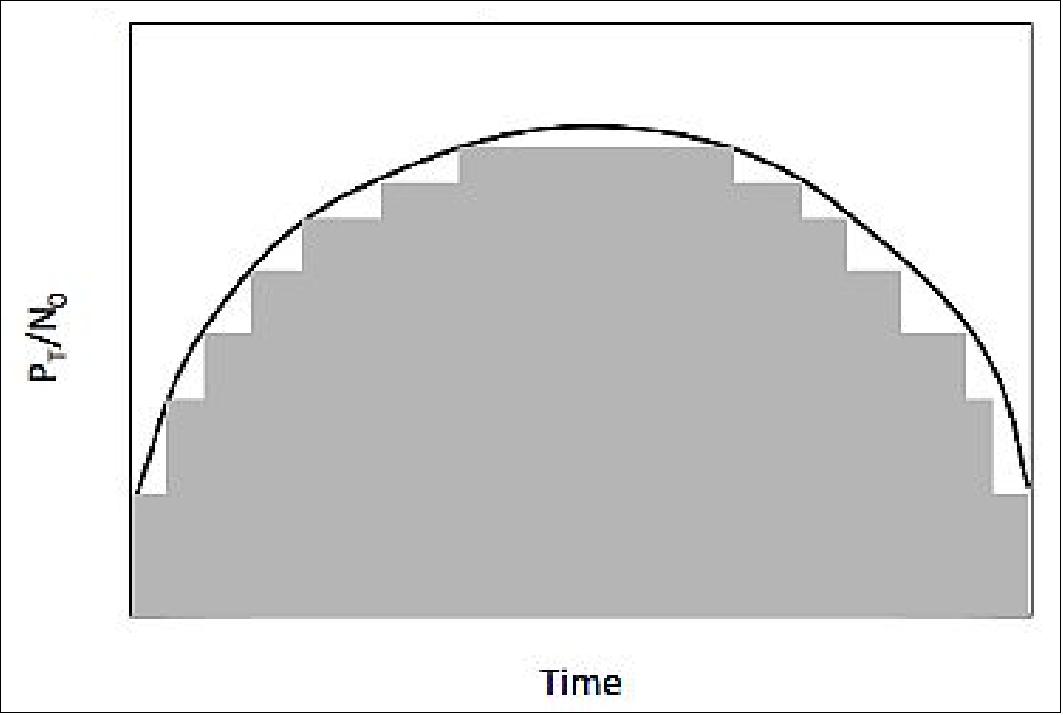
The IOAG report calls for adaptive data rate, coding, and modulation techniques that would make use of available link margin as it changes over time (Figure 22). Specifically, for the ground case, the report indicates that the link could change by over 15 dB during a pass. If the waveform does not adapt to the changing link, a significant amount of link margin is available during the middle of a RF event. Although SCaN Testbed does not see a 15 dB variation with TDRSS, the Ka-band antenna can be mis-pointed in order to simulate such a change and allow for the development of direct-to-ground waveforms.
Future work is planned to study variable/adaptive coding and modulation advancements for SCaN Ka-band systems to further enhance their capabilities, performance, and reliability. Existing standards, such as DVB-S2, will be considered to leverage working terrestrial protocols and adapt to NASA’s unique Ka-band mission architectures. Upon the adaptive techniques, automation and eventually cognitive systems will be built, responding to changing environments, data flow, and spacecraft resource considerations. This research is planned to continue beyond the life of SCaN Testbed.
• April 16, 2014: NASA/GRC invites partners (experimenters) to participate in the development, integration, and on-orbit execution of research and technology experiments and demonstrations using the SCaN (Space Communication and Navigation) Testbed aboard the International Space Station (ISS).
• Spring 2014: Lessons learned from operating the SDRs include understanding the skill set required for developing and operating SDRs, which exceed traditional communication radios, understanding how to manage SDR flexibility such that it does not lead to additional complexity and cost, characterizing the SDR platform along with applications, and providing a flexible method to add commands and telemetry (Ref. 8).
• March 7, 2014: NASA's SCaN Testbed is now the world’s first flight-validated, in-space U.S. GPS-European Galileo Global Navigation Satellite System (GNSS) receiver. This achievement and flight validation of GNSS signal reception in the space environment enhances GNSS interoperability while enabling more precise and robust orbital predictions, more diverse multi-frequency GNSS capabilities and improved applications such as on-board autonomous spacecraft operations and scientific measurements. 25)
- Recent efforts have now expanded the scope of the SCaN Testbed’s capabilities to include the European GNSS constellation, Galileo, in addition to GPS: a recent test successfully recorded simultaneous navigation signals from both the European Galileo and the U.S. GPS constellations. Data recorded by the SCaN Testbed on orbit was downloaded and successfully correlated to both Galileo and GPS satellite signals in post-processing, confirming signal reception from both constellations
• June 10, 2013: The project successfully performed the first on-orbit PAS (Payload Avionics Software) update. Various checks on the subsystems and radios were performed, with all checks and activities running nominally. The PAS update included necessary heartbeat telemetry support to enable the JPL GPS experiment, gaining operational efficiencies (scripting capability for operators), and corrective actions to various other bugs and issues.
- The very next day, the SCaN Testbed executed the JPL GPS experiment to operate the JPL SDR as a GPS receiver. The software (waveform) successfully tracked civil pseudo-range and phase GPS signals at L1, L2, and L5, and this is the first known civilian GPS receiver to track L5 from space.
• April 23, 2013: The SCaN testbed has begun its experiments after completing its checkout on the ISS (International Space Station). Initial experiments under way include advancing in S-band and Ka-band SDR technology and enhancing the capabilities of the existing communications paths, especially in the Ka-band. Researchers expect the testbed to operate aboard the space station for as long as six years. 26) 27)
• March 2013: The project completed the first round of SDR commissioning operations. The overarching objectives of SDR Commissioning are to verify the end-to-end data flow of the SCaN Testbed and ground systems, and to verify that the radio links’ performance is predictable. SDR Commissioning activities are really the beginning stages of the in-house experiments, by virtue of the launch waveforms going through more operating hours. Support from White Sands (WSC) and the Space Network has been excellent, as inline measurements and delogs at WSC are not typical services for Ka-band users. Thanks to the team for supporting the Commissioning here at GRC and WSC. They worked long hours and through the weekend too. 28)
Mission Operations Network Overview
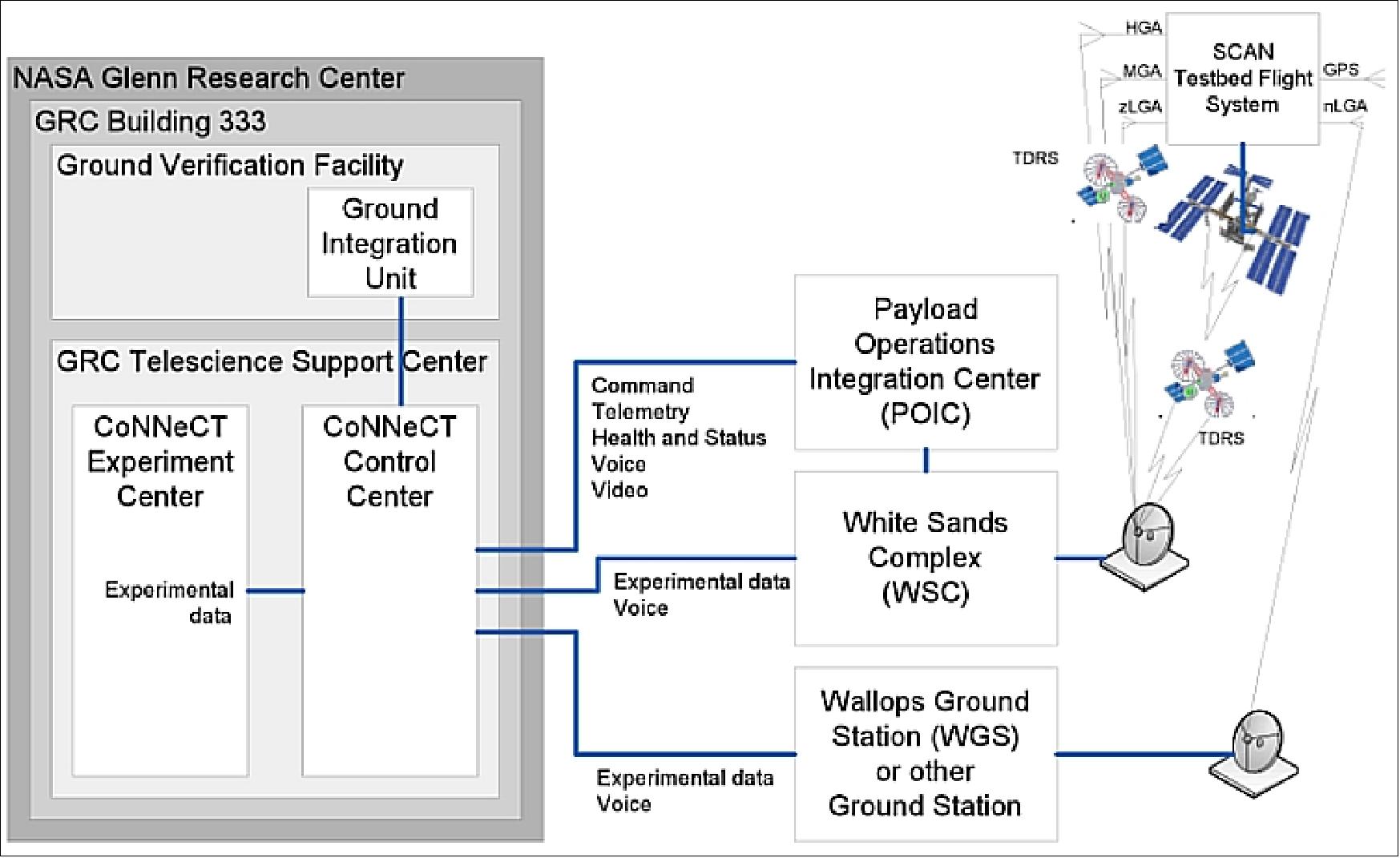
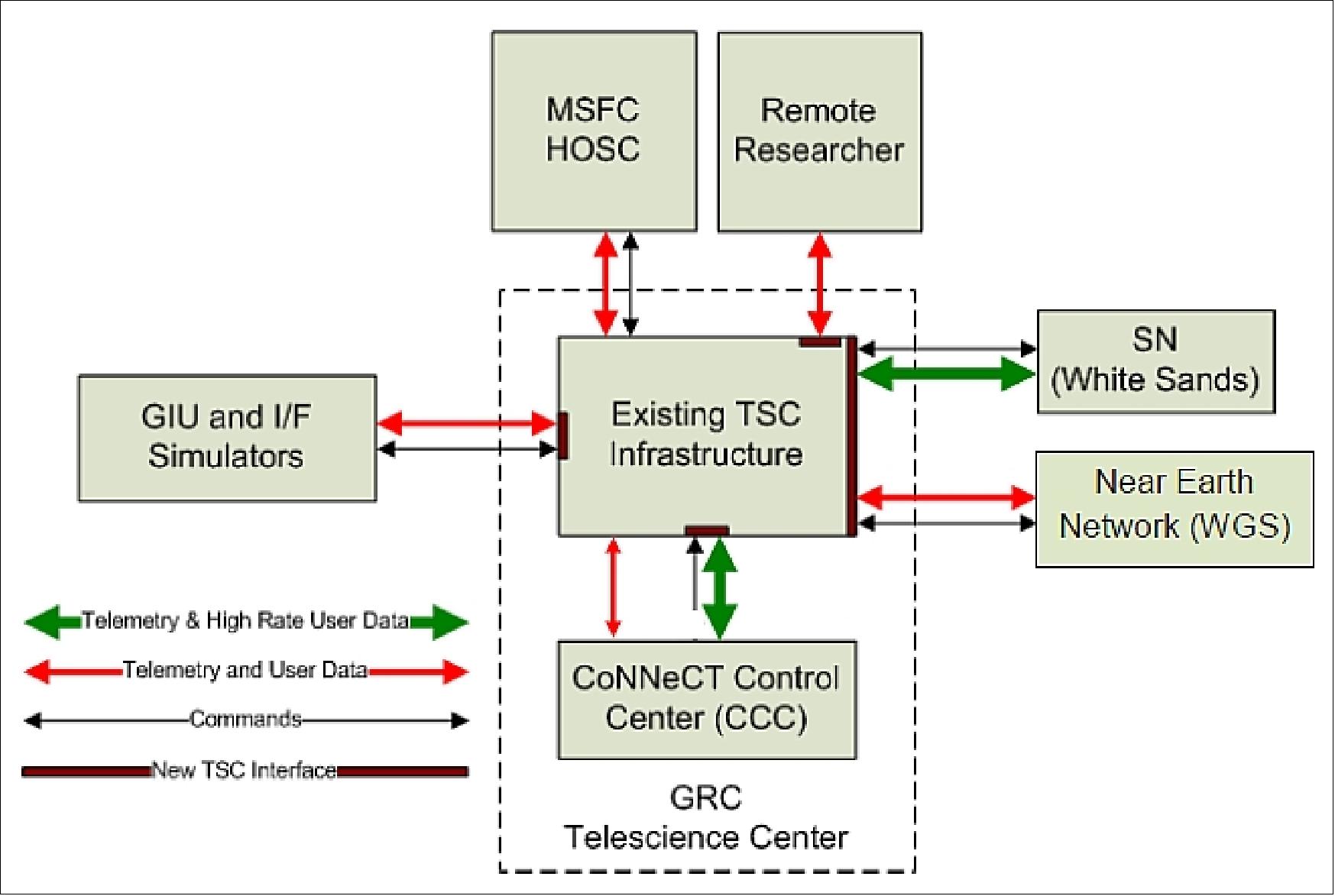
The Ground System consists of the CCC (CoNNeCT Control Center), the CEC (CoNNeCT Experiment Center), the GFV (Ground Verification Facility), and the external ground systems and their interfaces located at HOSC (Huntsville Operations Support Center), WSC (White Sands Complex), and WGS (Wallops Ground Station). The NISN (NASA Integrated Services Network) is the network that connects these entities. Other ground stations beyond WGS may also be used during operations, including White Sands 1, or user supplied ground stations. However, WGS is currently the baseline station and was used for operations planning and link analysis.
The SCaN Testbed and Ground System send and receive commands and data, and manipulate (stores, routes, and processes) data. The Flight System and Ground System interface with external systems to send and receive RF signals to and from space. The RF signals carry commands and data between the two CoNNeCT elements. The Ground System provides terrestrial control of the Flight System through the CoNNeCT Control Center, a top-level schematic of the Ground System is shown in Figure 23.
Primary communication path elements: There are two communication paths for the CoNNeCT mission. The primary communications path (commanding and telemetry) will exist through the ISS S-band and Ku-band links. This link will be coordinated through HOSC at MSFC (Marshall Space Flight Center). The HOSC will receive the data from the SN and forward it to the GRC (Glenn Research Center) CCC (CoNNeCT Control Center) through existing architecture.
The SCaN Testbed uses both the primary and experimental paths for commanding. Nominal commanding will use the primary path. Commands will originate from the GRC TSC except for 13 critical commands. The critical commands will be sent by the PRO (Payload Rack Officer) from the HOSC. The critical commands will reside only in the POIC (Payload Operations Integration Center) database. In the future the SCaN Testbed will have the capability to use its RF links to send non-critical commands through the SDRs to the Avionics.
HOSC/POIC: The POIC, located within MSFC's HOSC (Huntsville Operations Support Center), houses the ground systems for managing the execution of on-orbit ISS (International Space Station) payload operations including telemetry, command, voice, video, information management, data reduction, and payload planning systems. All POIC ground systems are distributed to the CCC.
The POIC contains several data and network systems that provide various capabilities: The PDSS (Payload Data Services System) is used to receive, process, store (for 2 years), and distribute ISS 150 Mbit/s payload telemetry data to the POIC, International Partners, Telescience Support Centers and other remote user facilities.
The EHOSC (Enhanced Huntsville Operations Support Center) performs command processing and real-time and near real-time telemetry processing for simulation, training, and flight operations.
The PPS (Payload Planning System) provides a set of software tools to automate the planning, scheduling, and integration on ISS payload operations during pre-increment planning, weekly planning, and real-time operations execution.
Experiment Communication Path Elements: The second communication path (commanding and bidirectional data) is the experimental link with the SN and the NEN. This link will be scheduled directly by the CCC with the supporting elements. This link includes S-band and Ka-band services to the Space Network and S-band to the NEN. Users will coordinate their ground station use with the CCC.
• Forward Link: GRC CCC through NISN to White Sands to TDRSS to SCaN Testbed
• Return Link: SCaN Testbed to TDRSS to White Sands through NASA Integrated Services Network NISN to GRC CCC
• Uplink: GRC CCC through NISN to Ground Station (e.g. WFF) to SCaN Testbed
• Downlink: SCaN Testbed to Ground Station (e.g. WFF) through NISN to GRC CCC.
Experiment operations:
Once on-orbit, the CoNNeCT SCaN Testbed will be available to experiments from NASA, industry, academia and other organizations. Based on announcement of opportunities offered by NASA, experimenters will propose investigations to conduct using the SCaN Testbed. The experiments will entail new software applications that run on the SDRs or within the flight computer (avionics) along with experiment specific ground hardware or software. The experiment software applications will demonstrate new communications signal formats (e.g., modulation, coding), networking (e.g., on-board routing and DTN) and assessment of navigation techniques based on GPS signals at L1, L2, and the emerging L5 GPS frequencies.
Once a proposal is submitted to NASA, an Experiment Review Board will assess the objectives and advancements proposed and recommend experiments for use with the SCaN Testbed that meet the solicitation criteria. Once approved, experimenters will begin development of their new experiment application and ground hardware. After development has progressed beyond the design and initial development stage, experimenters will be provided access to the SDR and avionics breadboards and engineering models at NASA/GRC to continue, refine and complete their waveform or avionics application development. When an experimenter completes their SRD application, the waveform will be tested for STRS compliance and verified for operation with the flight system. After verification, the application software will be uploaded to the flight system for on-orbit experiment operations.
To conduct the on-orbit portion, experimenters will generally work form the Experiment Center at NASA/GRC, working closely with the CCC (CoNNeCT Control Center). Experiment specific ground hardware will reside at the CEC (CoNNeCT Experiment Center). The CEC is linked to the SN (Space Network) Control Center where experiment data is exchanged with the WSC (White Sands Complex) and transmitted to CoNNeCT via TDRSS. Experimenter hardware will send and receive data directly with the SCaN Testbed through the CoNNeCT ground system infrastructure.
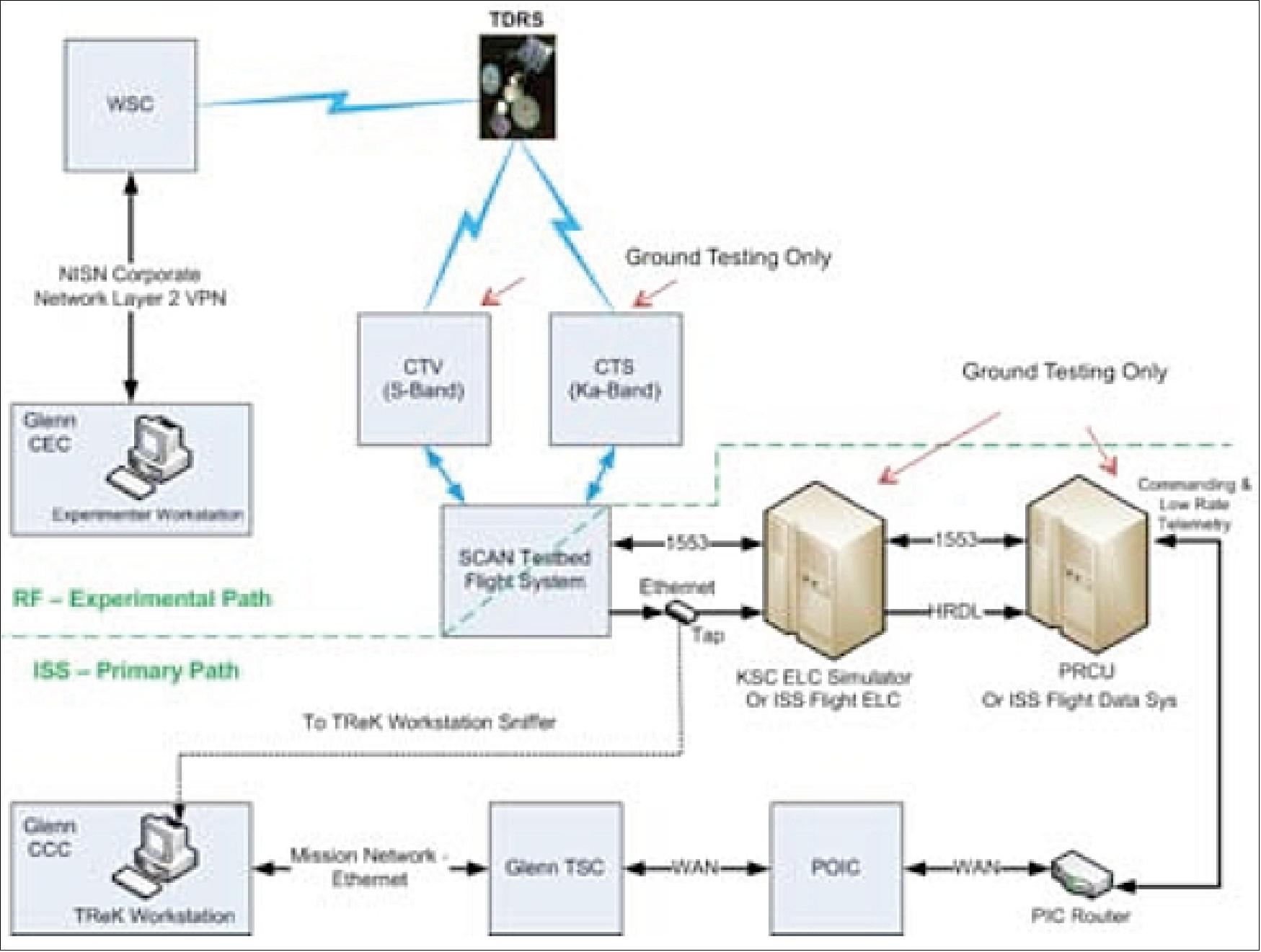
As shown in Figure 25, the experiment data links at Ka-band and S-band exist between CoNNeCT and NASA's TDRSS and WSC ground station or may use an S-band direct to ground link (not shown in Figure 25). During pre-flight testing, simulators are used for the ELC interface and ISS command processing.
STRS (Space Telecommunications Radio System) Repository:
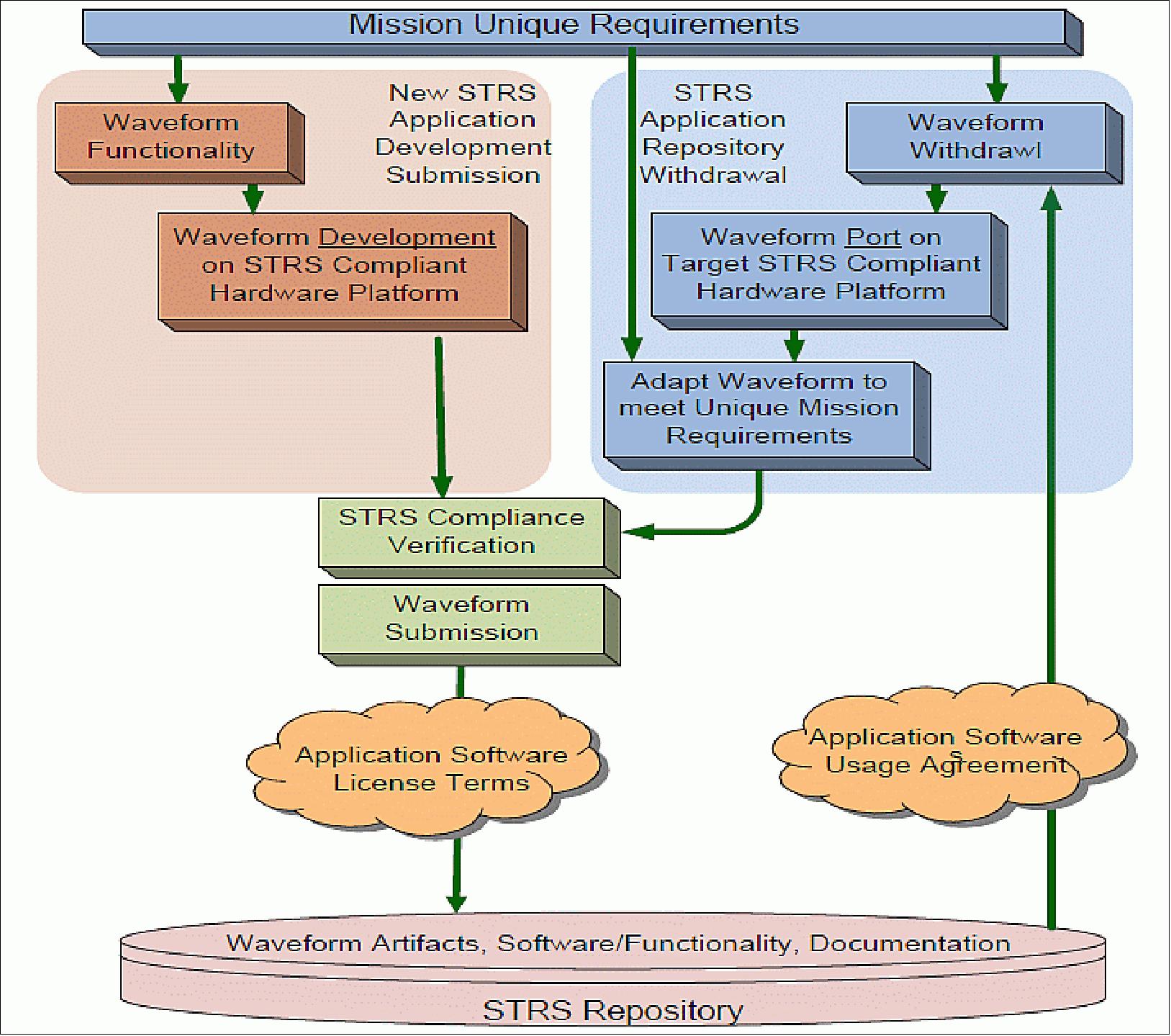
Software defined radios present a unique opportunity to develop applications that have long term value for NASA. A repository will accept software artifacts (e.g. VHDL, XML, and documentation) developed for experiments, to enable future experimenters access to past applications, according to the STRS Architecture. The STRS Repository retains software, documents, and ultimately the application information so that the application knowledge may be passed from one mission to another as missions change. Any artifacts and documentation supporting the waveform application, including source code, models and algorithms, process flow diagrams, and documentation (e.g. design, test) are an integral part of the repository. Contributions may include proprietary content, or third party software components (e.g. IP cores for FPGA), so the repository documents the licensing and other usage restrictions. The goal is to build a repository of waveforms for NASA’s use, while protecting the products and innovation of the developers. Figure 26 illustrates the concept of waveform submissions.
GRC (Glenn Research Center) verifies that platform software and waveform applications comply with the STRS architecture and certify the modules submitted to the library for future reuse. The STRS architecture will evolve through appropriate change process and controls to ensure that the architecture continues to meet evolving mission needs and allows mission to infuse new technology.
Individual missions will apply the STRS architecture to meet specific requirements and radio development needs. Mission designers will determine the implementation approach for a particular platform by specifying the particular type of radio required, with the set of features and operating functions needed to accomplish the mission. The missions will tailor the architecture for the specific radio use and implementation while remaining compliant with the architecture. The library of software modules provides mission designers a starting point for waveform applications. Missions will both submit their waveforms to the repository or use waveforms from the repository. Designers could adapt modules used from the library to meet individual requirements and needs reducing their project costs. Waveforms used from the repository will be shared with appropriate use agreements to protect he original developers. Designers will also provide valuable feedback to improve the architecture definition for uses and accommodate current or available technology.
Communication radio providers within the space products industry will develop architecture compliant radios to meet architecture & mission requirements through traditional acquisition procedures. The repository offers an opportunity to reduce develop costs by allowing developers to reuse existing software from NASA’s STRS repository and utilize elements of compliant designs over multiple missions to reduce radio costs.
SDR (Software Defined Radio) Experiment Experience
Having SDRs in space offers many opportunities for test and evaluation of new concepts both for the SDR applications and signaling and with the operational use of SDR technology. A few of the lessons associated with the SDR technology itself include: the SDRs require personnel with a wide skill set, SDR flexibility leads to complexity, software management includes both space and ground assets, characterize SDR platform along with applications, and provide a flexible method to add commands and telemetry (Ref. 8).
SDR personnel skill set: SDRs are small and compact, yet they are complete communication systems. For hardware, they often include digital signal processing, up and down frequency conversion, transmit or receive RF sampling, stable oscillator subsystems, and RF amplifiers. In software they include many functions beyond just the “modem”. They now include the software infrastructure (such as STRS), radio services such as power amplifier monitoring, temperature control or protection, file management, and others. Applications include traditional modem functions such as modulation and encoding, but could also include many more software functions such as data framing, network routing (e.g. Internet Protocol (IP) or Disruptive Tolerant Networking (DTN), and applications using these different capabilities. In addition, many of NASA’s services conform to the Consultative Committee for Space Data Standards (CCSDS), thus requiring additional skills. While it’s possible to have the software engineer only worry about the infrastructure, they cannot discount what the waveform application might require from the platform operating environment. The waveform developer must understand the RF portions of the platform, to better understand their own requirements and needed performance along with adherence to any applicable standards. And finally, the system engineer needs to oversee the entire link end-to-end, with much of the space link processing (in this case) within the SDR itself.
SDR flexibility leads to complexity: While a mission may never reconfigure its complete function everyday like the SCaN Testbed for obvious reasons, SDRs still provide a lot of flexibility which could lead to considerable complexity if not managed properly. The entire process of developing new software requires a ground unit SDR mostly identical to the flight unit. The SCaN Testbed engineering models generally used flight parts (for functionality) but with less screening (for cost) than the flight radio. Even with these measures, an early waveform still experienced peculiar on-orbit behavior over temperature, not experienced on the engineering model. While the tolerances for temperature were designed for the on-orbit ranges, adjustments still had to be made. At issue seemed to be how the FPGAs were instantiated upon waveform load. Modifying the load software along with verifying the instantiation helped resolve the problem.
Software management: The software for both development of new waveforms (i.e. development tools) and the on-orbit waveform or infrastructure software must be carefully managed. Software development tools (and sometime the development hardware itself) go obsolete long before the space hardware fails. This creates issues to have compatible development boards and tool chains for new waveform development. The array of developers (e.g. infrastructure, applications, application integrators) provide multiple versions of different software, sometime for each new waveform. It’s imperative to use good configuration practices, for both ground and flight, and be able to manage all combinations (e.g. OE 1 and WF 1, OE2 and WF2, OE2 and WF1, etc. especially when the OE is part of a waveform build). Due to on-orbit anomalies, the project had circumstances where it used older versions of infrastructure software, but with a newer waveform. This creates an issue if one wants to verify by test every combination on the ground, versus doing verification by analysis or inspection to reduce time/cost to get something on-orbit.
One way to manage or reduce the complexity with SDRs is with new automated functions or adding cognition within the SDR to offload operations. The SCaN Testbed plans to develop a number of applications (both flight and ground) to look at how these new functions such as cognition could be useful in a space mission, and what functions make sense to perform with the radio. Link management, data management, and in the future, spectrum management will all be investigated.
Characterize SDR platform along with applications: Platform hardware is generally much more capable than what initial waveforms might use initially during a mission. SCaN Testbed initial waveforms were compatible with the existing services at Space Network (NASA’s space infrastructure), but the project envisioned advancing new waveforms for future uses. The requirements for future capability must be flowed down to the platform developer and the system developer in such a way to document the launch capability and understand the performance of the radio in the system. Requirements must reflect platform capability (not just initial waveforms) for verifications. Platform providers could also provide test waveforms for the verifications. Having waveform tools for such tasks as recording raw ADC samples for post processing (variable sample rates, durations, etc), transmitting arbitrary signals or perhaps data from a stored file provide significant capability once the radio is integrated into the system. These tools alone provide transmit and receive capability to test the entire system without using a specific modulation and coding combination that might be used for the mission. In addition, lower level radio services (non-waveform software) to measure receiver gain, receive power level, transmit power level (may require hardware sensor), and frequency tuning are all key items to control or measure.
Flexible method to add commands and telemetry: Because SDRs are reprogrammable on-orbit, there needs to be an architecture developed at requirements formulation time to add new waveforms and provide a path for the associated new commands and telemetry. These requirements may have impact on the platform developers. The operations centers for space SDRs will originate the commands and display telemetry of the SDRs. In the STRS model, new waveforms could come from a third party developer who needs the platform to deliver their telemetry to the ground and they may require new commands be added to the platform.
Due to the compressed schedule, the SCaN Testbed accepted the command/telemetry interface from each platform developer “as is”, and it provides an opportunity to see three different approaches. The GD SDR uses a very efficient, but more stringent command and telemetry interface. Bit positions within 1553 structure indicate operational modes and telemetry measurements. Changing waveforms on-orbit entails changing the 1553 bit structure and definition on the radio and within the avionics (flight computer). The Harris SDR uses a name value pair defined by the waveform application. This provides more flexibility for new waveforms, but also introduces configuration files to define the name and value pairs.
The JPL SDR infrastructure provides a few words of telemetry (sent to the ground periodically) for new waveforms but relies more on a serial console looking interface providing text over 1553, with variable size and rate, and a free format. While it is most flexible, this now creates a file on the ground which is saved separate from the spacecraft telemetry data. Thus in all these options, the command and telemetry architecture needs to consider the new waveform telemetry, how to bring the data down to the ground (with spacecraft telemetry or separately), how to store the telemetry (filed with spacecraft data or separate), flexibility to add telemetry or commands, including updates to the command dictionary (both on-board and documentation), and overall data management.
On the ground, for all the radios, screens display telemetry from the launch waveforms. New waveform telemetry generally requires new screens be developed within the ground software to display new telemetry. In some circumstances, new raw telemetry may reuse existing screens, but will lack any engineering conversion on the ground before display. To minimize changes on the ground, an architecture that uses perhaps name value pairs, and then builds screens based on the new configuration will reduce development time and costs for new waveform updates.
References
1) ”Space Communications and Navigation (SCAN) Testbed,” NASA, 28 October 2012, URL: https://www.nasa.gov/directorates/heo/scan/engineering/technology/txt_scantestbed.html
2) “Space Communications and Navigation Overview,” NASA, URL: http://www.nasa.gov/pdf/701062main_SCaN%20101.pdf
3) Ann P. Over, Michael J. Barrett, Richard C. Reinhart, James M. Free, Harry A. Cikanek III, “Design, Development, and Pre-Flight Testing of the Communications, Navigation and Networking Reconfigurable Testbed (CoNNeCT) to Investigate Software Defined Radio Architecture on the International Space Station (ISS),” Proceedings of IAC 2011 (62nd International Astronautical Congress), Cape Town, South Africa, Oct. 3-7, 2011, paper: IAC-11-C2.1.7
4) Priscilla Vega, “Advanced Communications Testbed for Space Station,” NASA, Feb. 13, 2012, URL: http://www.nasa.gov/centers/jpl/news/tech20120213_prt.htm
5) “Launch Result of H-IIB Launch Vehicle No.3 with H-II Transfer Vehicle "KOUNOTORI3" (HTV3) Onboard,” MHI, 21 July 2012, URL: https://www.mhi.com/notice/notice_120721.html
6) “Technology Overview and Operations Concept for SCaN Testbed,” NASA/GRC, June 2011
7) “Unique Testbed Soon Will Be in Space,” NASA, Feb. 9, 2012, URL: http://www.nasa.gov/centers/glenn/exploration/Connect.html
8) Richard C. Reinhart, James P. Lux, “Space-based Reconfigurable Software Defined Radio Test Bed aboard International Space Station,” SpaceOps 2014, 13th International Conference on Space Operations, Pasadena, CA, USA, May 5-9, 2014, paper: AIAA 2014-1612, URL: http://arc.aiaa.org/doi/pdf/10.2514/6.2014-1612
9) Courtney B. Duncan, David E. Robison, Cynthia Lee Koelewyn, “Software Defined GPS Receiver for International Space Station,” ION 2011 International Technical Meeting, Session 4 'Remote Sensing Using GNSS,' San Diego, CA, USA, January 24-26, 2011
10) Thomas Kacpura, Richard Reinhart, Sandra Johnson, “Software Defined Radio Developments and Verification for Space Environment on NASA’s Communication Navigation, and Networking Testbed (CoNNeCT),” IDGA’s (Institute for Defense and Government Advancement)Cognitive Radio Summit, Washington DC, USA, February 27-29, 2012
11) Danny Baird, ”NASA Advancing Global Navigation Satellite System Capabilities,” NASA Feature, 13 January 2021, URL: https://www.nasa.gov/feature/goddard/2021/
nasa-advancing-global-navigation-satellite-system-capabilities
12) Danny Baird, ”NASA to Commercialize Near-Earth Communications Services,” NASA Feature, 26 October 2020, URL: https://www.nasa.gov/feature/
Goddard/2020/nasa-to-commercialize-near-earth-communications-services
13) ”SCaN Internship Project (SIP),” NASA, 30 April 2019, URL: https://www.nasa.gov/directorates/heo/scan/communications/outreach/internships
14) SCaN Testbed Update,” NASA/GRC (Glenn Research Center), 24 April 2019, URL: https://web.archive.org/web/20211206215101/https://www1.grc.nasa.gov/space/scan/acs/scan-testbed/scan-testbed-update/
15) https://www.nasa.gov/directorates/heo/scan/services/overview/index.html
16) Charles Niederhaus, ”Space Communication and Navigation,” 2017, URL: http://sbir.nasa.gov/sites/default/files/Presentation15_CharlesNiederhaus.pdf
17) ”NASA and ESA to Test GPS and Galileo Receivers on Board the International Space Station,” Galileo GNSS, Oct. 25, 2016, URL: http://galileognss.eu/
nasa-and-esa-to-test-gps-and-galileo-receivers-on-board-the-international-space-station/
18) ”NASA and ESA to Test GPS/Galileo Receivers on Board the International Space Station,” Inside GNSS, Oct. 25, 2016
19) Richard C. Reinhart, ”Using International Space Station for Cognitive System Research and Technology with Space-based Reconfigurable Software Defined Radios,” Proceedings of the 66th International Astronautical Congress (IAC 2015), Jerusalem, Israel, Oct.12-16, 2015, paper: IAC-15-B2.5.6
20) Thuy Mai, “Data Standards,” Feb. 5, 2015, URL: http://www.nasa.gov/directorates/heo/scan/engineering/datastandards/index.html
21) Richard C. Reinhart, John M. Sankovic, Sandra K. Johnson, James P. Lux, “Recent Successes and Future Plans for NASA’s Space Communications and Navigation Testbed on the International Space Station,” Proceedings of the 65th International Astronautical Congress (IAC 2014), Toronto, Canada, Sept. 29-Oct. 3, 2014, paper: IAC-14-B2.4.7
22) David Chelmins, Richard Reinhart, Dale Mortensen, Bryan Welch, Joseph Downey, Michael Evans, “Studying NASA’s Transition to Ka-Band Communications for Low Earth Orbit,” Proceedings of the 65th International Astronautical Congress (IAC 2014), Toronto, Canada, Sept. 29-Oct. 3, 2014, paper: IAC-14-B2.3.2, URL: http://ntrs.nasa.gov/archive/nasa/casi.ntrs.nasa.gov/20140016968.pdf
23) David Chelmins, Bryan Welch, “Comparing On-Orbit and Ground Performance for an S-Band Software Defined Radio,” Proceedings of the 65th International Astronautical Congress (IAC 2014), Toronto, Canada, Sept. 29-Oct. 3, 2014, paper: IAC-14-B2.8-YPVF.3.10, URL of presentation: http://ntrs.nasa.gov/archive/nasa/casi.ntrs.nasa.gov/20140017163.pdf
24) “Low Earth Orbit (LEO) 26 GHz K-band Study Group”, Interagency Operations Advisory Group, IOAG.T.LEO26SG.2012.V1, URL: https://www.ioag.org/Public%20Documents/Forms/AllItems.aspx
25) Brian Dunbar, Thuy Mai, ”Space Communications Testbed Successfully Validated in Space as a Multi-frequency Global Navigation Satellite System Receiver,” NASA, March 7, 2014, URL: http://www.nasa.gov/content/space-communications-testbed-successfully
-validated-in-space-as-a-multi-frequency-global/#.VYlimUY_PRI
26) Rachel Kraft, Katherine K. Martin, “Space Station Communications Test Bed Checks Out; Experiments Begin,” NASA, April 23, 2013, URL: http://www.nasa.gov/
home/hqnews/2013/apr/HQ_13-116_SCaN_Up_and_Running.html
27) “ISS Communications Test Bed Checks Out; Experiments Begin,” Space Travel, April 26, 2013, URL: http://www.space-travel.com/reports/
ISS_Communications_Test_Bed_Checks_Out_Experiments_Begin_999.html
28) “Space Communications and Navigation Testbed (SCAN Testbed),” NASA, April 3, 2013, URL: https://www.nasa.gov/mission_pages/station/
research/experiments/explorer/Investigation.html?#id=156
The information compiled and edited in this article was provided by Herbert J. Kramer from his documentation of: ”Observation of the Earth and Its Environment: Survey of Missions and Sensors” (Springer Verlag) as well as many other sources after the publication of the 4th edition in 2002. - Comments and corrections to this article are always welcome for further updates (eoportal@symbios.space).