ISS: JEM/Kibo
EO
JAXA
Operational (nominal)
Quick facts
Overview
| Mission type | EO |
| Agency | JAXA |
| Mission status | Operational (nominal) |
| Launch date | 11 Mar 2008 |
| CEOS EO Handbook | See ISS: JEM/Kibo summary |
ISS Utilization: JEM (Japanese Experiment Module) / Kibo
Overview Launch Facilities Ground Segment Utilization References
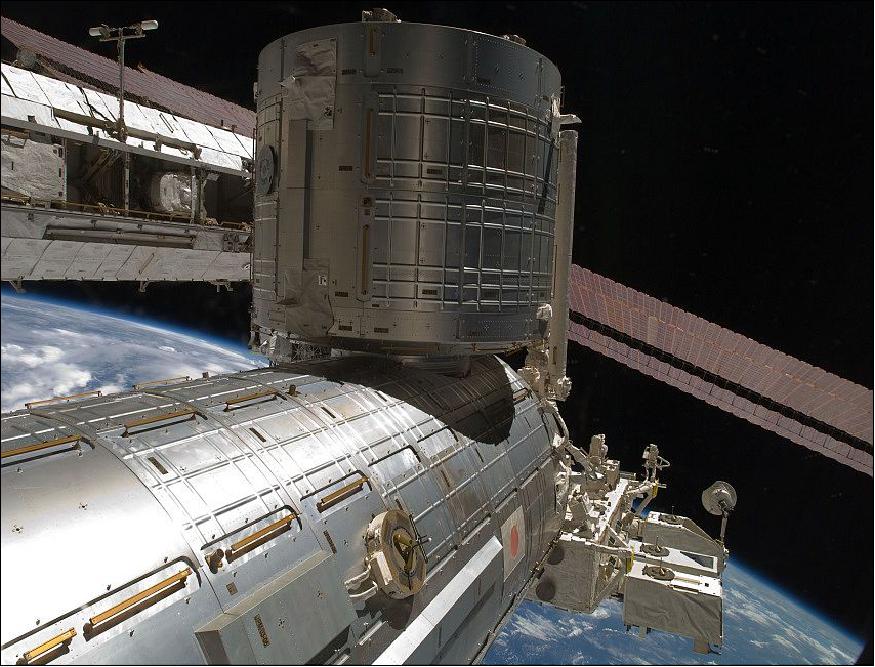
JAXA (Japan Aerospace Exploration Agency), formerly NASDA, participates in the ISS program with JEM (Japanese Experiment Module), referred to as Kibo (Hope) in Japan. JEM is Japan's first human space facility and enhances the unique research capabilities of the International Space Station. In this facility, a maximum of four astronauts can perform experimental activities in a pressurized laboratory as well as use the exposed facility for unpressurized experiments. 1) 2) 3) 4) 5)
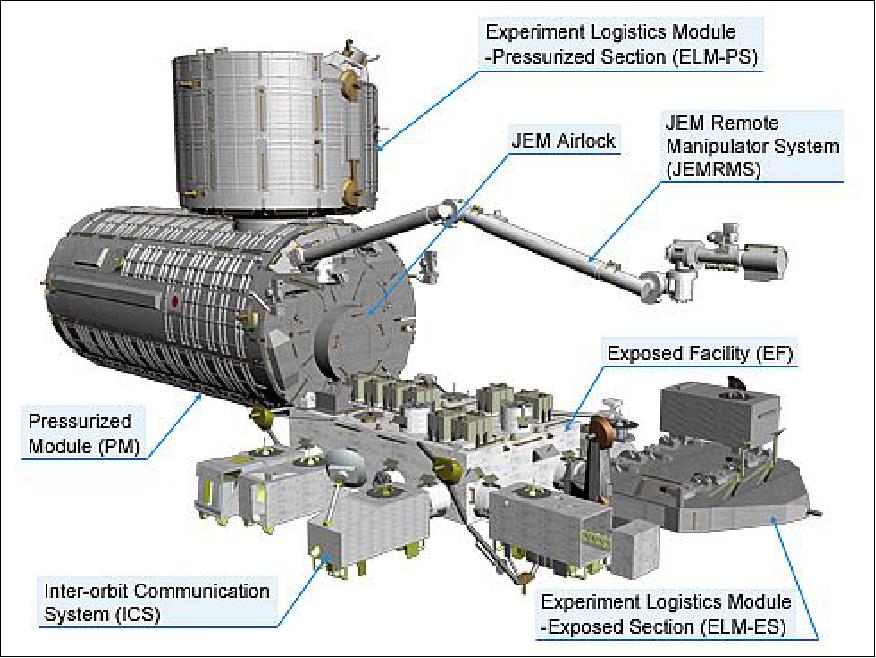
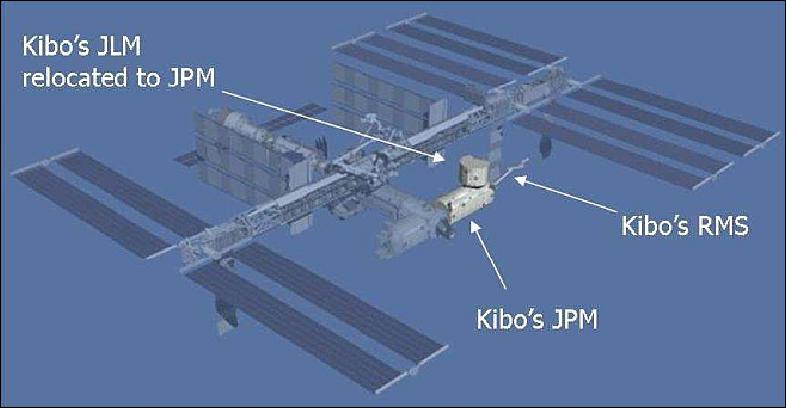
JEM, the largest module of ISS, consists of six elements or components, two of them are research facilities:
1) Pressurized Module (JEM-PM)
2) Exposed Facility (JEM-EF)
The following modules are attached to the facilities: 6)
• ELM-PS (Experiment Logistics Module-Pressurized Section) attached to the JEM-PM
• ELM-ES (Experiment Logistics Module-Exposed Section) attached to the JEM-EF
In addition, there are the service structures:
• JEM-RMS (Remote Manipulator System)
• JEM-ICS (Inter-orbit Communication System).
The JEM development in Japan was performed under the "All Japan" framework of cooperating space-related companies. JAXA performed the overall system integration, and MHI (Mitsubishi Heavy Industries, Ltd) manufactured the PM and ELM-PS elements. Other modules were fabricated as follows: the Exposed Facility (EF) by IA (IHI Aerospace Co. Ltd., formerly IHI Co., Ltd.), the Experiment Logistics Module-Exposed Section (ELM-ES) by IA (IHI Aerospace Co. Ltd., formerly Nissan Motor Co., Ltd.), and the Remote Manipulator System (RMS) by NTS/NEC (formerly Toshiba Corp.). The PM includes JAXA-provided domestic equipment such as the main computer, and the ISS common equipment procured from abroad. MHI fabricated and delivered the system that incorporated all this equipment. 7) 8)
Orbit: The near-circular orbit of the ISS is at a nominal altitude of ~400 km with an inclination of 51.6º. The ISS maintains usually a torque equilibrium attitude (TEA) during the microgravity mode of its operation. The ISS flight attitude (orientation relative to the plane of its orbit) is referenced to local-vertical/local-horizontal (LVLH) axes fixed with respect to the ISS's near-circular orbit.
In general, the ISS altitude range varies between 340 - 440 km. In order to keep this altitude range, the ISS is being reboosted periodically (about every 10 to 45 days) by using onboard thrusters. During such a reboost phase, the ISS attitude is being yaw-maneuvered by 180º.
The x-axis of ISS points along the orbital velocity vector (the ram direction) and the z-axis points radially toward the Earth's center (or toward the nadir direction.) The ISS attitude variation will never exceed ±15º in roll and yaw angles and +15º and -20º in pitch angle from the nominal LVLH attitude.
Space Shuttle launches of JEM elements
NASA launch schedule of the JEM complex elements in three Shuttle flights:
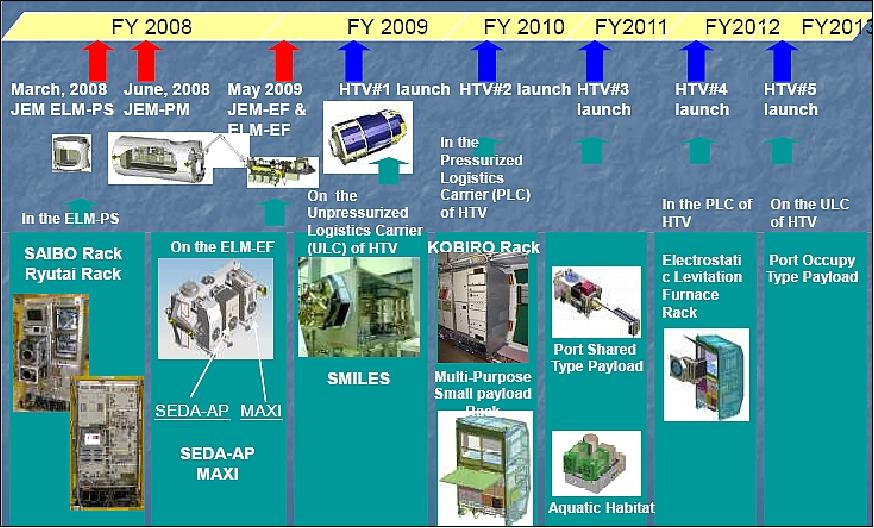
1) The ELM-PS (Experiment Logistics Module-Pressurized Section) was launched on the STS-123 assembly flight 1J/A of Endeavour, March 11-26, 2008.
In addition to the Kibo payload on STS-123, there is the SPDM (Special Purpose Dexterous Manipulator) payload, known simply as "Dextre", a two-armed robotic device, provided by CSA (Canadian Space Agency). It was installed on ISS a few days after its arrival.
2) The JEM-PM (Pressurized Module), System Racks, and JEM-RMS were launched on the STS-124 assembly flight 1J/B of Discovery, May 31-June 11, 2008 (10 day building mission, landing on June 14, 2008).
The laboratory's logistics module (ELM-PS), which was installed in a temporary location during STS-123 flight in March 2008, was now being attached to the new laboratory.
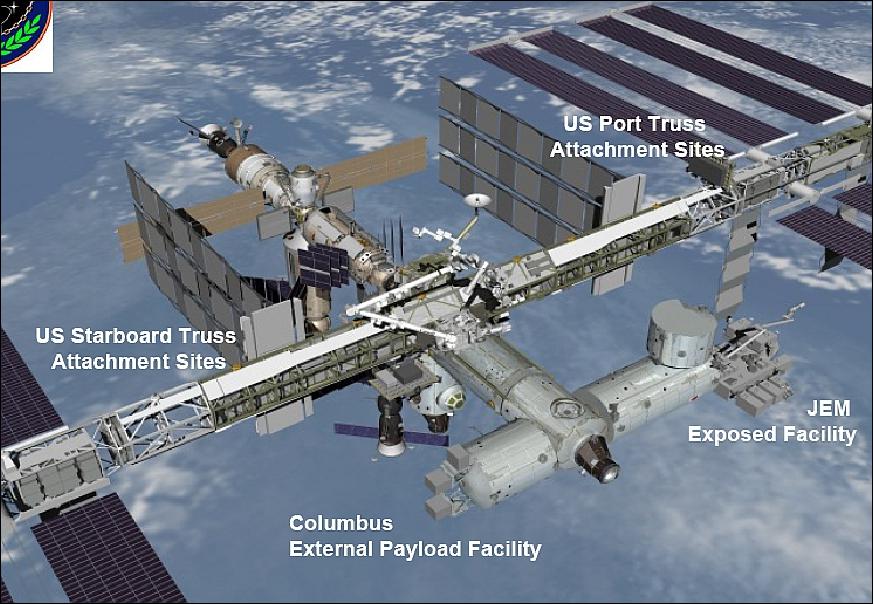
3) The JEM-EF (Exposed Facility) and the ELM-ES (Experiment Logistics Module-Exposed Section) were launched on STS-127, ISS assembly flight 2J/A of Endeavour (July 15 -31, 2009, 16 day mission). The primary objective was to deliver and install the final three components (MAXI, SEDA-AP, and ICS-EF) of the JEM/Kibo (Japanese Experiment Module): the Exposed Facility (JEM-EF), and the Exposed Section of the Experiment Logistics Module (ELM-ES). The ICS (Inter-orbit Communication System) is used to communicate between JEM/Kibo and the OCS (Operations Control System) at Tsukuba of JAXA via DRTS (Data Relay Test Satellite). 9)
The installation of the JEM/Kibo payloads on flight STS-127 concluded the assembly of the Japanese complex facility on the ISS.
PM (Pressurized Module) 11)
The PM is Kibo's main facility. All the system racks that are necessary for Kibo's on-orbit operations are installed in the PM. The PM is the largest pressurized module on the ISS (International Space Station). Up to 23 racks (10 of which are International Standard Payload Racks (ISPRs)) can be accommodated in the PM.
The pressurized interior of the PM is maintained at one atmosphere (1atm), thus providing a shirt-sleeve working environment. Most crew activities related to Kibo, such as experiments, robotic operations, voice communications with the ground, and checkout or maintenance activities, are mainly performed in or from the PM.
Item | Description |
Shape of PM | Cylindrical |
Diameter | 4.4 m (outer; 4.2 m (inner) |
Length | 11.2 m |
Mass | 14,800 kg |
Number of rack places | - Total racks: 23 (six racks can be installed in a row on each of the four walls inside the PM, except the zenith wall. The zenith wall can hold five racks in a row) |
Power (provided from US segment) | Max. 24 kW, 120 V DC(Direct Current) |
Environment | Temperature: 18.3~26.7º; Humidity: 25~70% |
Lifetime | More than 10 years |
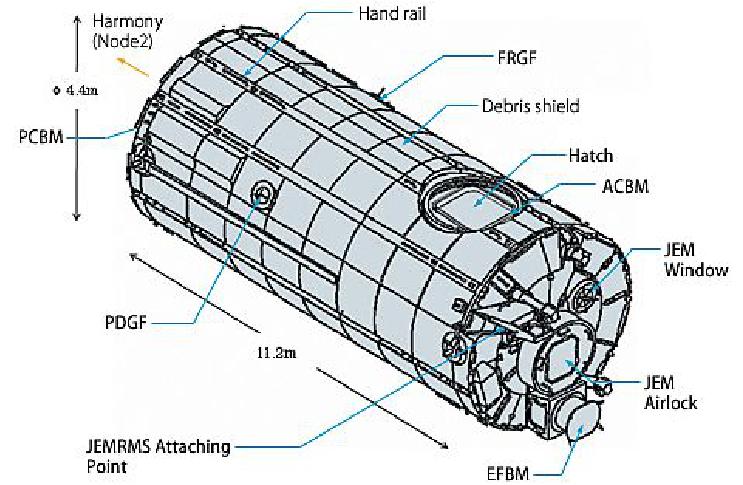
The PM body structure is designed to bear loads imposed during the space shuttle's launch, ascent, ISS attitude control and orbital maneuvers. The pressurized environment inside the PM is controlled by the ECLSS/TCS (Environment Control and Life Support System/Thermal Control System) and protected by the outer structure made of aluminum alloy. The PM's outer structure is covered by debris shield panels to protect the body from debris impacts. It has two windows on the port endcone. The hardware or tools aboard Kibo are mostly common for all of the ISS. However, some of the hardware or tools are Kibo-specific due to Kibo's unique design.
The PM is equipped with the following hardware:
• JEM Airlock: The PM has an airlock through which Exposed Facility (EF) payloads or Orbital Replacement Units (ORUs) can be transferred between the PM and the EF. This airlock is not designed for egress/ingress of EVA (Extravehicular Activity) crew members. The JEM Airlock is Kibo-specific hardware.
• JEM Windows: Two windows are located just the above the JEM Airlock.
• EFBM (Exposed Facility Berthing Mechanism): This is an attaching mechanism to connect the EF to the PM. The EFBM is mounted on the port endcone of the PM. This is Kibo-specific hardware.
• CBM (Common Berthing Mechanism): he PM has an ACBM (Active Common Berthing Mechanism ) on the zenith side of the PM for berthing the Japanese ELM-PS (Experiment Logistics Module-Pressurized Section), and a PCBM (Passive Common Berthing Mechanism) on the starboard side of the PM endcone to connect with the ACBM on the port side of the Harmony module (Node 2).
JEM/Kibo Facilities
Element | Pressurized Module | Experiment Logistics Module | EF (Exposed Facility) | RMS (Remote | |
ELM-PS (Pressurized Section) | ELM-ES (Exposed Section) | ||||
Structure type | Cylindrical | Cylindrical | Frame | Box | Main/small fine arm type |
Outer diameter | 4.4 m | 4.4 m | - | - | Main arm = 9.9 m |
Inner diameter | 4.2 m | 4.2 m | - | - | |
Width | - | - | 4.9 m | 5.0 m | |
Height | - | - | 2.0 m | 4.0 m | |
Length | 11.2 m | 3.9 m | 4.2 m | 5.6 m | |
Dry mass | 14,900 kg | 4,200 kg | 800 kg | 4,100 kg | 780 kg |
Payload/experiment equipment | 23 racks (total) including 10 experiment racks | 8 racks | 3 payloads | 10 payloads | Max. handling capability = 7,000 kg |
Electric power | 25 kW (max), 120 VDC (max) | ||||
Data management | 32-bit computer system, high-rate data link of 100 Mbit/s (max) | ||||
Crew | Two persons for normal operation, max. 4 with time limitation | ||||
Design life | Over 10 years | ||||
• JEM/Kibo-PM (Pressurized Module): A laboratory which enables the crew to conduct various space experiments in a normal working environment. There are a total of 23 racks, including 10 experiment racks, inside the PM providing a power supply, communications, air conditioning, hardware cooling, water control and experiment support functions. The PM structure is 11.2 m in length and 4.4 m in diameter. JEM-PM has been attached to a port of Node 2 of ISS.
• JEM-EF (Exposed Facility): EF is a unique platform on the ISS that is located outside of the Pressurized Module and is continuously exposed to the space environment. Astronauts exchange experiment payloads or hardware from the Pressurized Module through the scientific airlock using the Kibo Remote Manipulator System. Items positioned on the exterior platform focus on Earth observation as well as communication, scientific, engineering and materials science experiments. The EF platform has a size of 5.6 m (wide) x 5 m (high) x 4 m (long). It can hold and service up to 10 experiment payloads at a time.
Experiment Logistics Modules
• JEM-ELM-PS (Experiment Logistics Module-Pressurized Section, Figure 5): A container mainly used to store and resupply experiment specimens, various kinds of materials, and consumables and to transport the same between JEM and Earth. The pressurized interior of the ELM-PS is maintained at one atmosphere, thus providing a shirt-sleeve working environment. ELM-PS is a short cylinder attached to the top of the Pressurized Module that can hold eight experiment racks. It measures 4.4 m in diameter and is 3.9 m long.
The ELM-PS is equipped with the following hardware
- FRGF (Flight Releasable Grapple Fixture): The FRGF is used when the shuttle's robotic arm or station's robotic arm grapples, moves, and relocates the ELM-PS.
- CBM (Common Berthing Mechanism): This is a PCBM (Passive Common Berthing Mechanism) used for berthing with the PM.
- EFU (ELM-PS Exposed Facility Unit): This mechanism accommodates Kibo's ELM-ES (Experiment Logistics Module-Exposed Section) while the H-II Transfer Vehicle (HTV) is berthed to the Exposed Facility (EF) to unload payloads or cargo delivered by the HTV EP (Exposed Pallet).
- Trunnion: This is a fixing mechanism that holds a payload in the space shuttle's payload bay during the space shuttle's launch and ascent.
• JEM-ELM-ES (Experiment Logistics Module-Exposed Section): The ELM-ES is used as transportation pallet to carry the experiment devices aboard Shuttle. It is capable of transporting experiment devices aboard Shuttle The platform is directly exposed to the space environment for material experiments, scientific observations, communication experiments, and other activities requiring exposure to microgravity and high vacuum. ELM-EF is a pallet that can hold three experiment payloads. It measures 4.9 m (wide) x 2.2 m (high) x 3.9 m (long). 12)
Shape, total mass | Pallet type, 1,200 kg |
Size | 4.2 m x 4.9 m x 2.2 m (including payloads |
No of payloads to be serviced | 3 payloads (max) |
Electrical power | 1 kW (max), 120 V |
Design life | > 10 years |

ELM-ES is attached to the end of the Exposed Facility (EF) to provide payload storage space. The ELM-ES can carry up to three payloads at launch. In addition, the ELM-ES provides a logistics function where the ELM-ES can be detached from the EF and returned to the ground aboard the space shuttle.
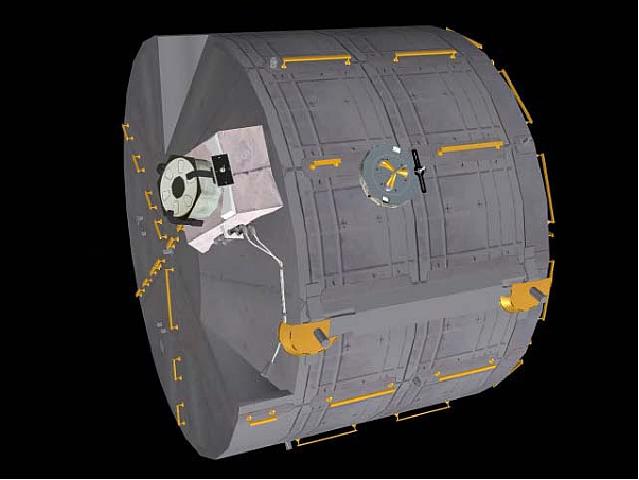
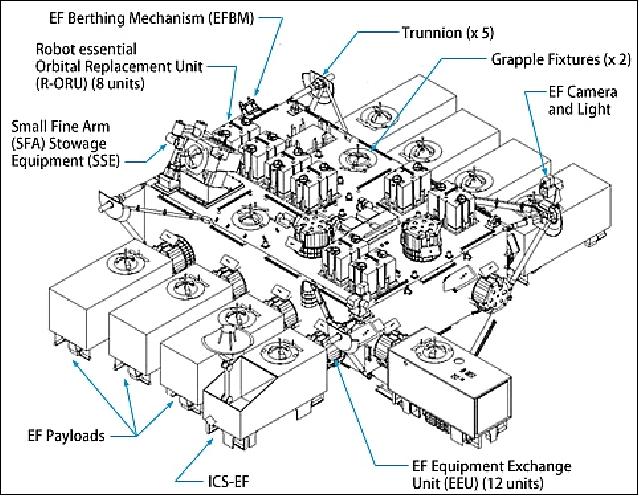
JEM/Kibo-EF (Exposed Facility ) Overview
Kibo's Exposed Facility (EF) is a multipurpose experiment platform where various scientific activities (including earth observation, space environment monitoring, astronomical observation, data communications and material experiments) can be performed using the microgravity and vacuum environment of space.
There are 12 payload attachment mechanisms called EEU (Equipment Exchange Units) on the EF, and therefore, a maximum of 12 payloads, such as the EF experiments, the ELM-ES, the ICS-EF (Inter-orbit Communication System Exposed Facility) and the HTV (H-II Transfer Vehicle) Exposed Pallet, can be accommodated on the EF.
The EF experiments are exchangeable in orbit so that several different types of scientific experiments can be conducted on the EF in the future. In order to support space-exposed experiments on the EF, the EF can provide the necessary resources for each payload and experiment, such as power, cooling and communications capabilities.

Size | 5.0 m (width) x 5.2 m (length) x 3.8 m (height) |
Mass | 4100 kg |
Number of payload attachment places | 12 (9 for EF experiments, 2 for JEM systems, and 1 for temporary storage) |
Electrical power provided | Max. 11 kW (max. 1 kW for systems, 10 kW for EF experiments) 120 V DC |
Data management system | 16-bit computer system; high-speed data link: max. 100 Mbit/s |
Environment control | Active thermal control system loop |
Life span | More than 10 years |
ICS-EF (Inter-Orbit Communication System-Exposed Facility)
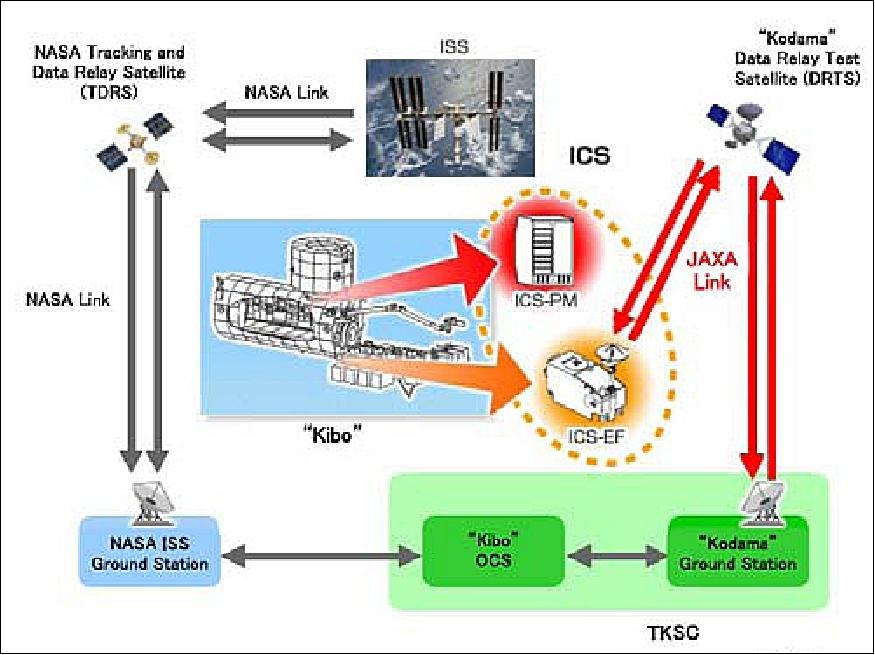
ICS connects Kibo to the ground station of JAXA at TKSC (Tsukuba Space Center) via DRTS (Data Relay Tracking Satellite), referred to as Kodama (Figure 9). In addition, ICS provides a dedicated Kibo secondary system for the ISS primary communication system via TDRSS. ICS manages the flexible handling of data unique to Kibo that is not affected by the ISS primary communication plan. ICS can also handle some NASA and ESA experiment data when requested. 14) 15)
The ICS realizes high-speed data handling compatible with the CCSDS Advanced Orbit System (CCSDS AOS), and can provide up to 50 Mbit/s downlink and 3 Mbit/s uplink data transmission. The ICS can handle uplink image data.
The ICS offers the following data services to users:
1) Telemetry and command service for the JEM system and payload. This is connected to the JCP via the MIL-STD-1553B data bus.
2) Experimental data processing. 1553B, optical and video experiment data are appropriately processed for downlink. Various data uplinked from the ground is demultiplexed and processed to retrieve original signals, thereby achieving a simple interface.
3) Ethernet communication realizing bidirectional data transmission between payload and users on the ground.
4) Data recording and replay for covering the ISS invisible area from the ground station.
5) Audio data processing per ITU-T G.722, realizing communication between JEM onboard crew and ground operators.
The ICS provides its communication services to the ICS-PM (ICS-Pressurized Module) and the ICS-EF (ICS-Exposed Facility). The ICS-PM is located in the PM and handles baseband data. The ICS-EF is attached to the EF and handles radio frequency data. The ICS has a Ka-band parabolic antenna (80 cm in diameter) for the link with the DRTS. The antenna must be maintained in a position precisely through a control that requires attitude information unique to the ICS. For this purpose, the ICS has FSS (Fine Sun Sensor) and ESA (Earth Sensor Assembly) and an IRU (Inertial Reference Unit); it calculates the required attitude by using information from these sensors and GN&C (Guidance Navigation & Control) data provided by the ISS.

JEM/Kibo communication links: Three types of data communications links are provided by the ISS for onboard data communications:
1) MIL-STD-1553B payload bus
2) IEEE 802.3 Ethernet
3) Fiber-optic HRDL (High-Rate Data Link).
A high capacity recorder (20 GB) is available for JAXA experiments to cover the non-contact periods of data collection.
Introduction of new communication path 16)
The JAXA JEM mission control room is located in Tsukuba-city of the Ibaraki Prefecture in Japan, and it is named SSIPC (Space Station Integration and Promotion Center). The JFCT (JAXA Flight Control Team) uses two communication paths between SSIPC and JEM for sending commands and monitoring telemetry data.
• One is the way through NASA and its Tracking and Data Relay Satellite System (TDRSS) using Ku-band and S-band.
• The other is the direct way through JAXA DRTS (Data Relay Test Satellite) and the Inter-orbit Communication System (ICS) using Ka-band.
In 2013, JAXA established a new communication system between JEM and SSICP. That system is characterized by following points.
• Using Ku-band and Ethernet
• Establishing bidirectional communication. — JAXA named this system "Ku bidirectional communication". And it has been used in several scenes.
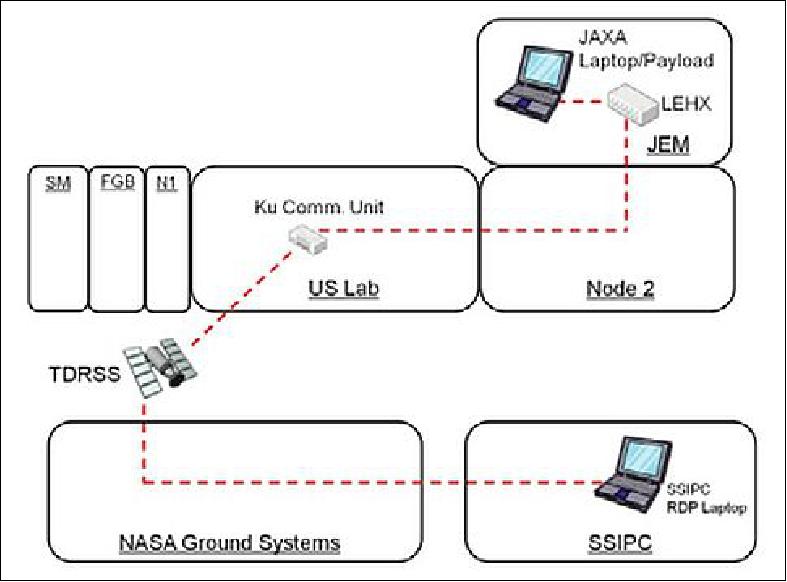
Ku bidirectional communication overview
As shown in Figure 11, JAXA established a ground connection line between the NASA Ground System and SSIPC. The communication between the NASA Ground System and 'Ku Comm. Unit' in the ISS is accomplished by Ku-band via TDRSS (Tracking and Data Relay Satellite System). The Ku Comm. Unit and LEHX (Layer 2 Ethernet Hub and Multiplexer) in JEM are logically connected by Ethernet. LEHX functions as a Layer 2 switch within the JEM Ethernet network.
Remote Desktop (RDP): JAXA and JAMSS (Japan Manned Space Systems Corporation) achieved the remote desktop function to the JAXA laptops in JEM from a SSIPC RDP laptop using 'Ku bidirectional communication'. Ground operators were able to reduce crew-time and ground operation time by this capability.
Crew- time reduction: Crew-time is precious. JAMSS estimated how much crew-time would be saved by remote desktop function. Onboard laptop power cycle can be achieved remotely and can reduce 5 minutes of crew-time. Also, the remote desktop function is used to acquire event logs from the laptops without crew intervention. In this case, 35minutes of crew-time can be saved. And it contributed to save 40 minutes of crew-time to complete file update to an experimental apparatus.
Grond-time reduction: The remote desktop function also contributed to relaxing ground operation time. Ground operators had to send commands to control laptops in JEM before remote desktop function was introduced. The process of using commands was more complex than that of using remote desktop function.
File transfer: Ku bidirectional communication made it possible to transfer files without sending commands from mission control room.
TV conference: A TV conference capability has also been established between SSIPC and JEM by Ku bidirectional communication. Weekly TV conference named "SSIPC conference" was held during the period of JAXA astronaut Koichi Wakata in the ISS.
The new communication system 'Ku bidirectional communication' has so far been used mainly for the following three services:
1) Remote desktop: The JAXA flight controller can access laptops in JEM and control them.
2) File transfer: The JAXA flight controller can transfer files between SSIPC and JAXA laptops in JEM.
3) TV conference: The JFCT (JAXA Flight Control Team) and JAXA astronaut Koichi Wakata held a SSIPC conference once a week and exchanged their opinions for successful missions.
JEMRMS (JEM -Remote Manipulator System)
JEM/Kibo has a Remote Manipulator System (JEMRMS), one of the four JEM elements (PM, EF, ELM and JEMRMS); it is operated by crew inside Pressurized Module (PM). The JEMRMS provides services for both: the EF, a space experiment platform, and the ELM-ES, a payload carrier. The JEMRMS consists of the MA (Main Arm), the SFA (Small Fine Arm) and the RMS Console. The MA handles the EF payloads such as the SEDA-AP and the MAXI; the SFA, the JEM elements such as the ELM-ES and the EP (Exposed Pallet) of the H-II Transfer Vehicle (HTV). The MA consists of three booms, six joints and Joint electronics, an end-effector, a base mechanism and two vision equipments (Figure 12). 17) 18)
The EE (End Effector) is similar to the SEE (Standard End Effector) of the SRMS (Space Shuttle Remote Manipulator System), and it features the JEM unique SPEE (Special Purpose End-Effector Mechanism) to mate/demate an electrical connector for power, data and video between the EE and the JEM unique EMGF (Electrical Mechanical Grapple Fixture). The EE interface is compatible with the FRGF (Flight Releasable Grapple Fixture) and the EMGF.
The length of JEMRMS is approximately 10 m; the total RMS has a mass of 780 kg. JEMRMS is capable to handle masses of up to 7000 kg (Ref. 14). 19)
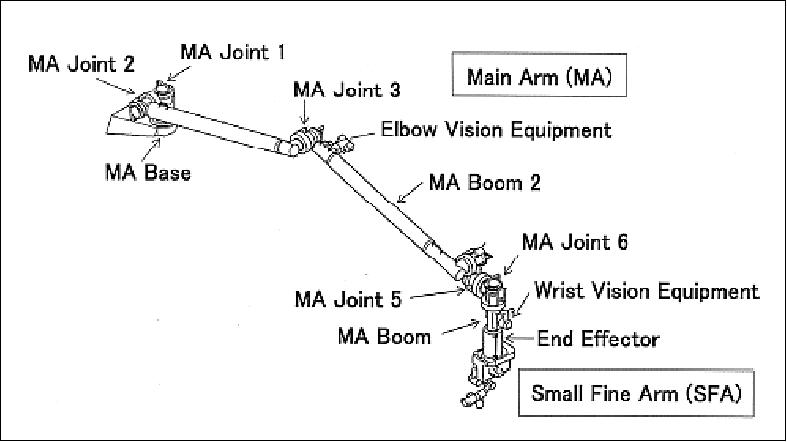
The SFA is grasped by the tip of the MA during operation; it is used for dexterous tasks such as the replacement of the EF ORU (Orbital Replacement Unit). The SFA consists of two aluminum booms, six joints, an electronics unit, an end-effector, a force/moment sensor and a TV camera on the tip. The electronics unit (SFAE) controls angular velocity of the six joints. The EMGF, grappled by the MA, is installed on the SFAE. The end-effector, which is called the "Tool", grasps the tool fixture and supplies torque to the bolt. Its extended length is approximately 2 m and its mass is approximately 180 kg. The MA and SFA are operated from the RMS Console by a crew member in the JEM-PM.
• The RMS Console and the ICS-PM were launched on STS-123 (Assembly Flight 1J/A), March 11-26, 2008.
• The MA was launched on the STS-124 (Flight 1J) in May 2008.
Both the MA (Main Arm) and SFA (Small Fine Arm) have six joints, thus a great amount of freedom is ensured and human-like movements are realized. The robotic control workstation, known as the JEMRMS Console, is used for manipulating the JEMRMS. TV cameras are mounted on the arms, so the crew members can manipulate the JEMRMS while watching the camera's image on the TV monitor on the JEMRMS Console inside the PM (Pressurized Module).
With these arms, the crew can exchange the EF payloads or ORU (Orbital Replacement Unit) on the EF and ELM-ES (Experiment Logistics Module-Exposed Section). The 10 m long Main Arm handles (grapples and moves) EF payloads and large objects, and the 2 m long Small Fine Arm handles the smaller items.
JEM/Kibo Ground System
NASA is responsible for overall ISS operations and safety. The SSCC (Space Station Control Center) at NASA/JSC (Johnson Space Center) is the key ground facility for the ISS integrated planning, monitoring and commanding to ensure operations integrity of the ISS. Under the oversight of SSCC, JEM specific planning, monitoring and commanding as well as payload operations and associated trainings are conducted at the TKSC (Tsukuba Space Center). 21)
The HOSC (Huntsville Operations Support Center) at NASA/MSFC (Marshall Space Flight Center) provides the data service for the JEM payload operations.
Under the above ISS distributed operations architecture, NASA provides the ISS main link to SSCC and HOSC (NASA-link) using TDRS (Tracking Data Relay Satellite) communication services. The JEM OCS (Operations and Control System) interfaces with SSCC for JEM system operations and HOSC for payload operations as illustrated in Figure 14.
In addition, JEM provides the ICS (Inter-orbit Communication System) link via DRTS to JAXA. The ICS link is considered a secondary string, serving the JEM system backup as well as the JEM payload high rate data transmission. Once the JEM real-time "mission" operation is being started, SSCC and JEM OCS have the capabilities to perform the "mission" operations and "simulation" simultaneously to support the pre-increment activities such as JMST (Joint Multi Segment Training) with NASA.

The JEM OCS consists of six subsystems (Figure 15):
• JCCS (JEM Command and Control Subsystem)
• SOSS (Science Operation Support Subsystem)
• DARS (Data Archives and Retrieval Subsystem)
• DCNS (Data Communications Network Subsystem)
• OCS Common Equipment (Voice, Video etc.)
• JTMS (JEM Telemetry Monitoring Subsystem)
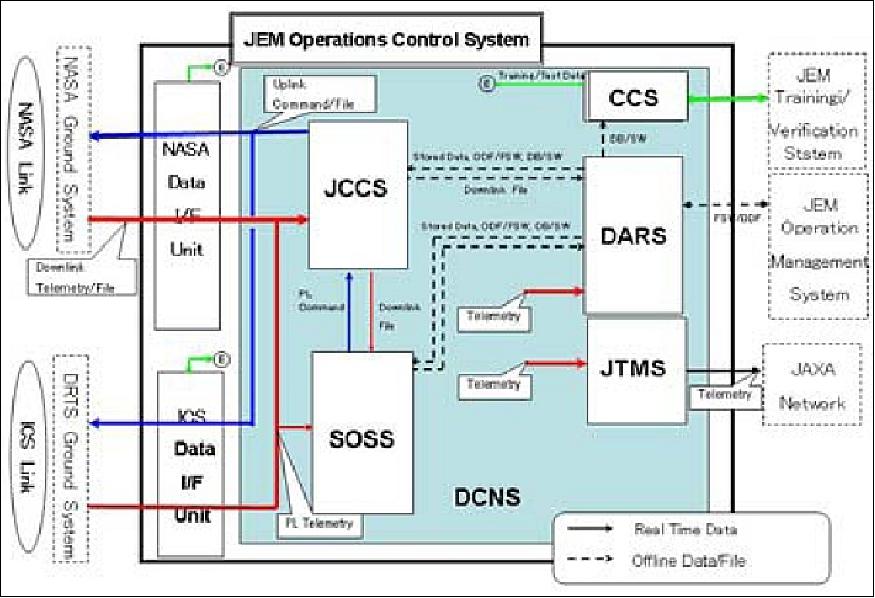
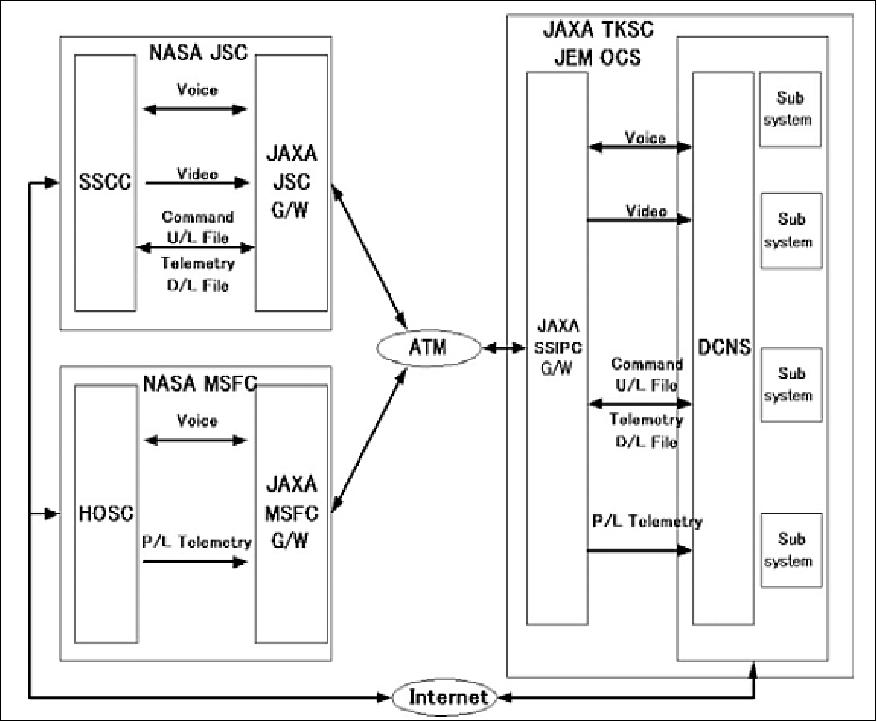
Figure 16 provides an overall interface architecture between JEM OCS and NASA SSCC and HOSC. Data exchanged between JEM OCS and the NASA facilities are categorized into two types based upon its operational characteristics:
• One is the data essential for real-time command and control such as telemetry, command, uplink/downlink files, authorized planning products, and voice/video. Real-time command which is sent to NASA SSCC from JEM OCS is encrypted by the communication path between JAXA SSIPC Gateway and JAXA JSC Gateway.
• The other is the data more like information that supports real-time critical operations such as planning products information and data available through the web base systems.
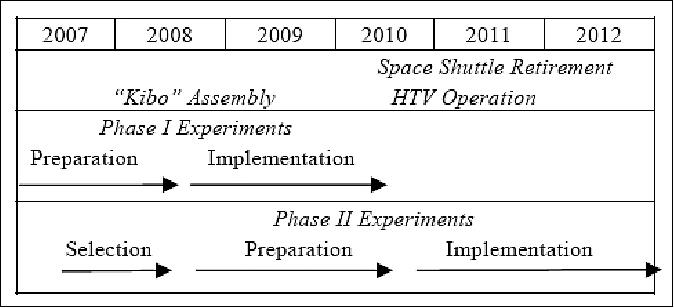
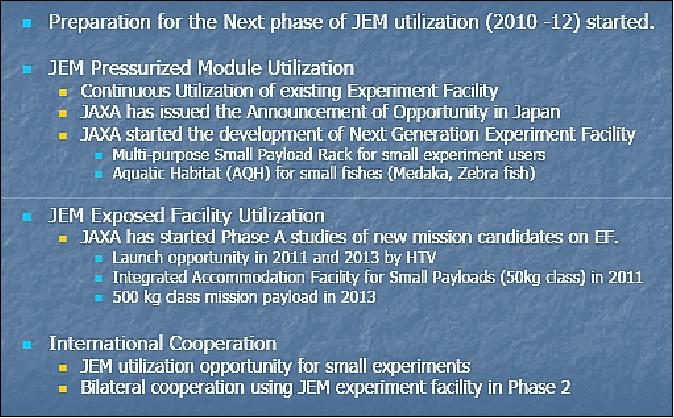
JEM/Kibo Utilization
The ISS utilization plan is coordinated among all international partners for each increment, which represents a unit period of about 6 months. One and a half years prior to the beginning of each increment, international coordination starts to allocate resources such as power, crew time, up-mass and down-mass. "Kibo" utilization started at increment 17, for March through September 2008. 22) 23) 24)
• Interface testing of the KIBO OCS and training for JAXA Flight Control Team have been conducted through operation simulations using the KIBO OCS, MCC-H, and KIBO simulators since 2006. As of 2008, JAXA is operating KIBO successfully.
KiboCUBE
• March 2016: UNOOSA ( United Nations Office for Outer Space Affairs) and JAXA (Japan Aerospace Exploration Agency) are pleased to announce the United Nations/Japan Cooperation Program on CubeSat Deployment from the International Space Station (ISS) Japanese Experiment Module (Kibo) "KiboCUBE". 25)
KiboCUBE is the dedicated collaboration between UNOOSA and JAXA in utilizing the ISS Kibo for the world. KiboCUBE aims to provide educational or research institutions from developing countries of United Nations membership with opportunities to deploy, from the ISS Kibo, cube satellites (CubeSats) which they develop and manufacture.
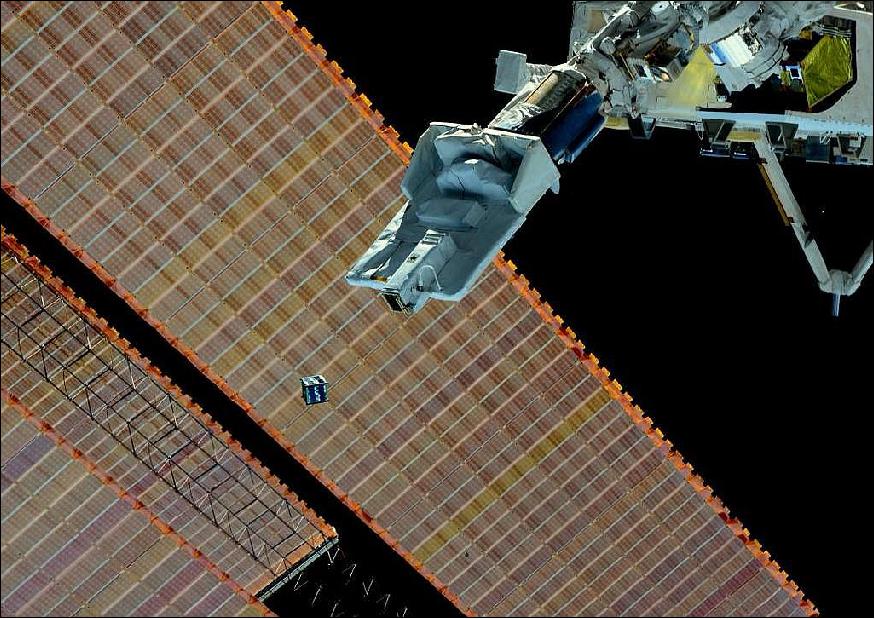
Currently, the only way to deploy CubeSats from the ISS is from Kibo. Kibo's unique capability is comprised of an airlock system and a robotic arm. The first orbital deployment of CubeSats from Kibo was successfully conducted in October 2012 through the J-SSOD (JEM-Small Satellite Orbital Deployer) developed by JAXA. Since then, nanosatellites and CubeSats from various countries around the world have been deployed from Kibo.
The deployment of CubeSats from ISS is easier than the direct deployment by a launch vehicle thanks to the lower vibration environment during launch. With this comparatively less demanding interface requirements, UNOOSA and JAXA believe that KiboCUBE will lower the threshold of space activities and will contribute to build national capacity in spacecraft engineering, design and construction.
UNOOSA and JAXA are looking forward to many applications!! Both agencies are pleased to announce a new joint cooperation program that provides an opportunity for orbital deployment of a CubeSat from the ISS Kibo. In line with the mission and objectives of UNOOSA initiatives BSTI (Basic Space Technology Initiative) and HSTI (Human Space Technology Initiative), and JAXA's demonstrated commitment to promoting space science and technology in developing countries, this new cooperation program entitled KiboCUBE is intended to contribute to broadening space activities and applications and to capacity-building in space science and technology. 26)
JAXA carries out Japan's space program conducting research and development on launch systems, satellites, and manned space facilities. JAXA developed the JEM/Kibo and has been operating it since 2008.
References
1) H. Kitahara, "Status of Japan's ISS Program," Proceedings of 54th IAC, Bremen, Germany, Sept. 29 - Oct. 3, 2003
2) http://iss.sfo.jaxa.jp/iss/doc09_e.html
3) http://www.nasa.gov/mission_pages/station/structure/elements/jem.html
4) Kibo Handbook, JAXA, Sept. 2007, URL: http://iss.jaxa.jp/kibo/library/fact
/data/kibo-handbook_en.pdf
5) Yoshiyuki Hasegawa, Ryosuke Futamata, "Japan's ISS Program Status," Proceedings of the 60th IAC (International Astronautical Congress), Daejeon, Korea, Oct. 12-16, 2009, IAC-09.B3.1.2
6) K. Suzuki, K Oikawa , K. Arai, .K. Imagawa, "Japanese Experiment Module (JEM) Flight 2J/A Assembly Scenario," Proceedings of the 26th ISTS (International Symposium on Space Technology and Science) , Hamamatsu City, Japan, June 1-8, 2008
7) Koji Otsuka, Takashi Ohno, Nobuo Morishita, Shuichi Yoshida, Shinya Watanabe, Sadamu Ito, "Kibo: The Successful Launch and Start of Permanent Manned Space Operations," URL: http://www.mhi.co.jp/technology/review/pdf/e454/e454020.pdf
8) Kuniaki Shiraki, Tetsuro Yokoyama, Kesatoshi Kuraoka, Junichi Sakai, "Extended Utilazation of Japan's ISS Program," Proceedings of IAC 2011 (62nd International Astronautical Congress), Cape Town, South Africa, Oct. 3-7, 2011, paper: IAC-11-B3.1.3
9) STS-127, Press Kit, NASA, June 2009, URL: http://www.nasa.gov/pdf/358018main_sts127_press_kit.pdf
10) "Japan's first manned space activities facility," JAXA, August 29, 2008, URL: http://iss.jaxa.jp/en/kibo/about/kibo/
11) "Pressurized Module," JAXA, August 29, 2008, URL: http://iss.jaxa.jp/en/kibo/about/kibo/jpm/
12) "Experiment Logistics Module-Exposed Section," JAXA, Sept. 5, 2014, URL: http://iss.jaxa.jp/en/kibo/about/kibo/jle/
13) http://kibo.jaxa.jp/en/about/kibo/jef/
14) Fumihiro Kuwao, Hiroki Kumagai, Masaki Tanaka, "Overview of the Remote Manipulator System and The Inter-orbit Communication System of Kibo" Proceedings of the 27th ISTS (International Symposium on Space Technology and Science) , Tsukuba, Japan, July 5-12, 2009 , paper: 2009-o-2-05v
15) "Inter-orbit Communication System," JAXA, August 29, 2008, URL: http://iss.jaxa.jp/en/kibo/about/kibo/ics/
16) Noriyuki Okuda, Akira Tsuchida, Ayako Kato, "The new user friendly bidirectional communication via Ku comm unit," Proceedings of the 65th International Astronautical Congress (IAC 2014), Toronto, Canada, Sept. 29-Oct. 3, 2014, paper: IAC-14.B3.4-B6.5.9
17) Tamiki Hosokawa, Fumiya Tsutsui, Hitoshi Morimoto, Hiroshi Ueno, Shinobu Doi, Fumihiro Kuwao, Masaki Tanaka, Masanobu Nishio, Akiko Otsuka, Tomoki Tagegai, "Kibo Manipulator Initial Checkout Operation," Proceedings of the 60th IAC (International Astronautical Congress), Daejeon, Korea, Oct. 12-16, 2009, IAC-09.B6.1.07
18) Kazuya Imaki, Shinobu Doi, Kazutaka Watanabe, Shitoshi Hasegawa, Norio Fukui, "Japanese Experiment Module Remote Manipulator System (JEMRMS) Operations for HTV-1 Mission," Proceedings of the 61st IAC (International Astronautical Congress), Prague, Czech Republic, Sept. 27-Oct. 1, 2010, IAC-10-B13.3.11
19) "Japanese Experiment Module Remote Manipulator System," JAXA, August 29, 2008, URL: http://iss.jaxa.jp/en/kibo/about/kibo/rms/
20) http://www.nasa.gov/pdf/216157main_sts123_factsheet.pdf
21) M. Hisa, K. Kobayashi, "Overview of JEM Ground System for JEM Launch Operation," Proceedings of the 26th ISTS (International Symposium on Space Technology and Science) , Hamamatsu City, Japan, June 1-8, 2008, paper: 2008-f-09
22) M. Takaoki, S. Umemura, T. Tanaka, "How the Utilization of ISS and its Japanese Experiment Module, "Kibo" Will Facilitate Technological Advances," Proceedings of the 26th ISTS (International Symposium on Space Technology and Science) , Hamamatsu City, Japan, June 1-8, 2008, paper: 2008-o-2-04v
23) Yoshiyuki Hasegawa, Fumiaki Tanigaki, "Japan's ISS Program Status," Proceedings of the 59th IAC (International Astronautical Congress), Glasgow, Scotland, UK, Sept. 29 to Oct. 3, 2008, IAC-08-B3.1.2
24) Tetsuo Tanaka, "ISS/JEM Utilization Program in JAXA," APRSAF-15 (15th Session of the Asia-Pacific Regional Space Agency Forum), Hanoi & Ha Long Bay, Vietnam, Dec 9-12, 2008, URL: http://www.aprsaf.org/data/aprsaf15_data/seuwg/Tanaka_ISS_JEM.pdf
25) "The United Nations/Japan Cooperation Program on CubeSat Deployment from the ISS (International Space Station) Japanese Experiment Module (Kibo) KiboCUBE," UNOOSA, March 2016, URL: http://www.unoosa.org/oosa/en/ourwork/psa/hsti/kibocube.html
26) "United Nations/Japan Cooperation Program on CubeSat Deployment from the International Space Station (ISS) Japanese Experiment Module (Kibo) KiboCUBE," UNOOSA Announcement of Opportunity, Sept. 8, 2015, URL: http://www.unoosa.org/documents/pdf/psa/hsti/KiboCUBE/AO1.KiboCUBE.UNOOSA.pdf
The information compiled and edited in this article was provided by Herbert J. Kramer from his documentation of: "Observation of the Earth and Its Environment: Survey of Missions and Sensors" (Springer Verlag) as well as many other sources after the publication of the 4th edition in 2002. - Comments and corrections to this article are always welcome for further updates (eoportal@symbios.space).
Overview Launch Facilities Ground Segment Utilization References Back to top