ISS: GEDI (Global Ecosystems Dynamics Investigation Lidar)
EO
Lidars
NASA
Land
Global Ecosystems Dynamics Investigation (GEDI ) is a NASA-run Earth Ventures Instrument (EVI) mission. Installed on the International Space Station (ISS) in December 2018, scientific analysis of the data has been led by Professor Ralph Dubayah at the University of Maryland. GEDI uses laser-based technology to produce elevation profiles of the Earth’s forests and link this to habitat quality. GEDI operations were paused in March 2023, and resumed nominal science operations with all three lasers on June 11, 2024.
Quick facts
Overview
| Mission type | EO |
| Agency | NASA |
| Mission status | Operational (extended) |
| Launch date | 05 Dec 2018 |
| Measurement domain | Land |
| Measurement category | Vegetation |
| Measurement detailed | Above Ground Biomass (AGB), Vegetation Canopy (cover) |
| Instruments | GEDI |
| Instrument type | Lidars |
| CEOS EO Handbook | See ISS: GEDI (Global Ecosystems Dynamics Investigation Lidar) summary |
Summary
Mission Capabilities
GEDI utilises a LIDAR (light detection and ranging) imaging instrument, consisting of three laser transmitters. The three lasers are selected from the HOMER (High Output Maximum Efficiency Resonator) class laser system. The HOMER architecture reduces total part count, while maximising reliability. Alongside the HOMER lasers, the optical bench contains three Beam Dither Units (BDU), three beam expanders and three star trackers. Two beams are operated at maximum power, while the third is split into two beams, creating four exit beams in total.
An 80 cm telescope is used to receive the laser beams reflected off the Earth’s surface. These collected signals will be used to build up an elevation profile of the area below the satellite. The instrument will study a range of climates including forest canopy structure and tundra environments in the northern latitudes. The data will give scientists a better understanding of changes to natural carbon storage within the carbon cycle.
Performance Specifications
Each laser beam is transmitted at a wavelength of 1064 nm and an active-Q switch produces steady pulses of width 11 - 16 nanoseconds. Total beam output power is in the range of 10 - 17 mJ.
GEDI observes the Earth’s surface in the equatorial region between the latitudes ±51.6°. The five beams undergo optical dithering, directed across-track, to produce a total of eight tracks, equally spaced at approximately 600 m. This achieves a total across-track swath width of 5.4 km. Being installed on the ISS, GEDI orbits the earth with a period of 93 minutes, observing from an altitude of 407 km.
Space and Hardware Components
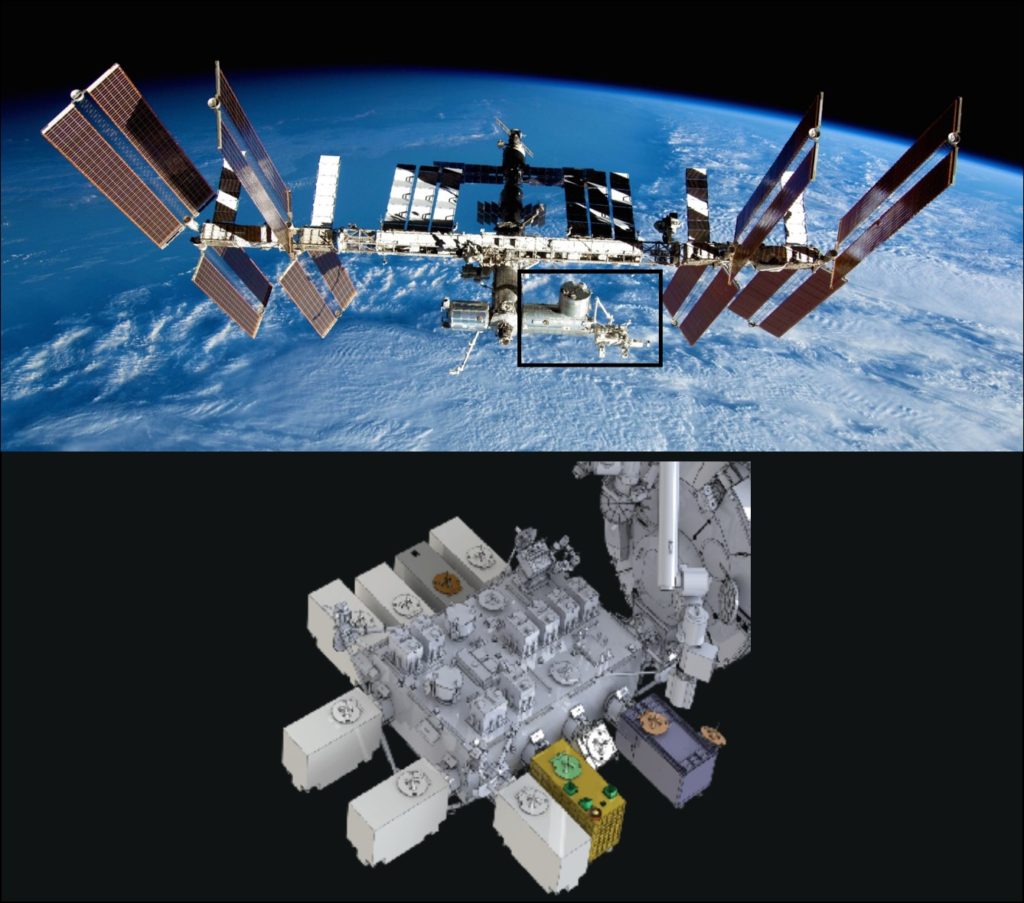
GEDI is mounted on the Japanese Experiment Module - Exposed Facility (JEM-EF), the largest single ISS module. GEDI employs active-track point systems to maximise the coverage of the Earth’s surface, and to eliminate coverage gaps arising from any repeated orbital tracks of the ISS.
GEDI began data collection in March 2019, upon completion of its on-orbit checkout. The expected mission duration was two years after launch. Following four years on orbit, GEDI was moved into storage in March 2023. It was restored in April 2024, with nominal science operations resuming on June 11, 2024.
ISS Utilization: GEDI (Global Ecosystems Dynamics Investigation Lidar)
Launch Status GEDI References
GEDI is NASA's selection of a laser-based instrument that will provide a unique 3D view of Earth's forests, helping to fill in missing information about their role in the carbon cycle. The system is one of two instrument proposals selected in 2014 for NASA's EVI (Earth Venture Instrument) program and is being led by the University of Maryland (UMD), College Park (PI: Ralph Dubayah). The instrument will be built at NASA's Goddard Space Flight Center in Greenbelt, Maryland. 1)
The overall objective of GEDI is to characterize the effects of changing climate and land use on ecosystem structure and dynamics to enable radically improved quantification and understanding of the Earth's carbon cycle and biodiversity. Focused on tropical and temperate forests from its vantage point on the ISS, GEDI uses lidar to provide the first global, high-resolution observations of forest vertical structure. GEDI addresses three, core science questions: 2) 3) 4)
1) What is the above-ground carbon balance of the land surface?
2) What role will the land surface play in mitigating atmospheric CO2 in the coming decades?
3) How does ecosystem structure affect habitat quality and biodiversity?
Answering these questions is critical for understanding the future path of global climate change and the Earth's biodiversity.
GEDI has four science objectives that address its core questions:
• Quantify the distribution of above-ground carbon at fine spatial resolution
• Quantify the changes in carbon resulting from disturbance and subsequent recovery
• Quantify the spatial and temporal distribution of forest structure and its relationship to habitat quality and biodiversity
• Quantify the sequestration potential of forests through time under changing land use and climate.
GEDI strongly supports the Science Focus Areas articulated in the Science Plan for NASA's Science Mission Directorate, particularly for Carbon Cycle and Ecosystems. GEDI science goals respond directly to Decadal Survey observational priorities, which emphasize the need for lidar vertical structure measurements to address key challenges in carbon cycling and biodiversity. GEDI's structure measurements also substantially enhance existing and planned NASA missions. GEDI's high biomass observations may be combined with the NASA-ISRO low biomass measurements and ICESat-2's boreal observations to produce global maps of biomass and provide important constraints and validation for regional scale estimates from OCO-2. GEDI further complements existing and planned pol-InSAR missions, such as DLR's TanDEM-X, JAXA's ALOS-2 and ESA's BIOMASS through its contribution of precisely geolocated canopy profile measurements for fusion with radar observations. Lastly, GEDI revolutionizes the previous forty years of the NASA land remote sensing archive by providing the missing vertical structure information, greatly extending land cover observations from NASA's Landsat and MODIS programs.
The GEDI Lidar employs 3 laser transmitters, beam-splitting optics, and an optical dithering device to produce 8 ground tracks spaced 500 m across-track (total swath width of 6.5 km). The transmitted pulse shape and returned waveform is recorded for each 25 m diameter footprint. The telescope, laser power, and detector sensitivity are designed to provide vegetation canopy penetration in even the densest forests.4) 5) 6)
In each year of operations, GEDI will fire 16 billion laser pulses at the Earth's surface between ± 51.6 º latitude (the inclination of the ISS orbit) and provide multiple passes through each 500 m cell on the surface. Approximately 50% of those footprints will return sufficient energy to provide high-fidelity return signal waveforms with a high SNR (Signal to Noise Ratio), while the remaining 50% will be degraded by or lost to cloud cover.
All of the required technologies are mature and flight-ready. The laser transmitters were developed in-house at NASA Goddard and have been tested to the equivalent of 6 years of operational lifetime without any damage and only minimal power degradation. GEDI will be mounted on the JEM-EF on ISS and will utilize an active pointing control system to systematically layout its ground tracks to achieve high-resolution coverage of the surface. GPS, star trackers, and an inertial measurement unit will provide precise position and pointing knowledge to achieve precise geolocation of each and every laser footprint on the surface.
Instrument Development Status
• November 7, 2018: The GEDI instrument is set to launch to the International Space Station in December 2018 will help scientists create the first three-dimensional map of the world's temperate and tropical forests. 8)
• August 31, 2018: GEDI is currently undergoing final environmental tests in anticipation of its planned launch on the SpaceX CRS-16 flight 2018. GEDI successfully completed acoustic, vibration and electromagnetic interference testing over the last several weeks. The instrument is now in the Space Environment Simulator (SES) chamber at NASA/GSFC to test the instrument's behavior in space-like temperature and pressure conditions. GEDI is scheduled to begin this last round of testing on 4 September 2018, followed by instrument turnover to SpaceX on 24 October 2018.
• May 4, 2018: A first-of-its-kind laser instrument designed to map the world's forests in 3-D is moving toward an earlier launch to the International Space Station than previously expected. The GEDI instrument is undergoing final integration and testing this spring and summer at NASA/GSFC (Goddard Space Flight Center) in Greenbelt, Maryland. The instrument is expected to launch aboard SpaceX's 16th commercial resupply services mission, targeted for late 2018. 9)
Launch
The GEDI instrument was launched on 5 December 2018 in a SpaceX CRS-16 Dragon Capsule on Falcon-9 Block 5 vehicle from Cape Canaveral SLC-40. 10)
Orbit: Near-circular orbit, altitude of ~ 400 km, inclination = 51.6º, period of ~ 92 minutes.
Mission Status
• June 11, 2024: GEDI resumed nominal science operations with all three lasers. 30)
• April 22, 2024: GEDI began its return to service on the ISS. 29)
• April 27, 2023: The International Space Station (ISS) partners have agreed to extend the operational period of the ISS. 28)
• March 17, 2023: Following four years on orbit, GEDI heads into storage on the ISS. The instrument is planned to remain in hibernation for 13 - 18 months. GEDI was moved from EFU-6 (Exposed Facility Unit - 6) to EFU-7, two ports on the JEM-EF (Japanese Experiment Module - Exposed Facility) by the JEMRMS (JEM Remote Manipulator System) robotic arm. 27)
Video playback is disabled during edit mode.
• May 13, 2022: Every now and then, a new map changes the way we view our planet. This is one of those maps. 11)
- But these astonishingly tall trees are the minority. According to a research team led by Nico Lang of the EcoVision Lab at ETH Zürich, only 5 percent of the Earth's land area in 2020 was covered with trees standing taller than 30 meters.
- Lang, together with colleagues Konrad Schindler and Jan Wegner, produced the map by merging lidar data from NASA's Global Ecosystem Dynamics Investigation (GEDI) mission with optical imagery from the European Space Agency's Sentinel-2 satellites. GEDI's lidar profiles give detailed canopy heights, but the profiles cover limited areas; Sentinel-2 optical data has abundant coverage, but it is not designed to measure canopy height. The researchers used the GEDI data to train a deep-learning model capable of estimating canopy heights from Sentinel-2 images anywhere on Earth.
- On a very basic level, it works like this: A computer examines millions of examples of brightness patterns contained in the pixels of Sentinel-2 optical imagery. The algorithm is then given the tree height at the central pixel of each example region, as precisely measured by GEDI's lidar. The algorithm takes this information and teaches itself, learning which canopy heights are associated with certain textural and spectral patterns in the images. Once the model is trained, it only relies on the optical images to estimate canopy height.
- "Our focus in this work was twofold: First, we wanted to reduce the error associated with tall canopies, as they typically store large amounts of biomass and carbon," said Lang, a remote sensing scientist who developed the approach. "Second, our approach integrates probabilistic deep-learning techniques to estimate the uncertainty of each pixel estimate. This is an important aspect to inform downstream users about expected errors in the map."
- Scientists have mapped the planet's tree canopy heights before, but current technologies and the novel approach have allowed Lang and colleagues to achieve more detail. The length of each pixel on these maps equates to 10 meters on the ground—detailed enough to show some interesting patterns on local scales.
- Not all tall trees have this level of protection. Analyzing the global map, Lang and colleagues found that only 34 percent of the planet's tall canopies (above 30 meters) fall within protected areas.
- Maps like these could contribute to future studies on forest ecosystems and perhaps inform forest management. For example, research has shown that spotted owls in California prefer tall trees, as opposed to shorter, denser stands. The maps could also aid in climate studies, given that tall trees store abundant amounts of carbon above the ground in their trunks and branches.
- "We hope that this work will advance future research in climate, carbon, and biodiversity modeling," Lang said. "We also hope that our freely available map can support the work of conservationists."
• April 5, 2022: NASA's GEDI mission has reached a major milestone with the release of its newest data product, which provides the first near-global estimate of aboveground forest biomass and the carbon it stores – filling a key gap in climate research. 12)
- The data enables research into how Earth's forests are changing, what role they play in mitigating climate change, and the regional and global impacts of planting and cutting down trees.
- With the new data product from GEDI, the Global Ecosystem Dynamics Investigation, ecosystem and climate researchers can quickly locate their regions of interest and study forest structure and carbon content with greater precision than in the past.
- The new biomass product release comes as GEDI is within a one-year mission extension and represents the culmination of critical advancements in spaceborne lidar (a type of laser) research.
Counting Carbon in Earth's Forests
- GEDI is a high-resolution lidar instrument designed specifically to measure vegetation. From its vantage point aboard the International Space Station, GEDI rapidly bounces laser pulses off the trees and shrubs below to create detailed 3D maps of forests and land formations. The resulting data product, processed and gridded at a 1-km2 (0.39-square mile) resolution, allows researchers to study questions about forest ecosystems, animal habitats, carbon content, and climate change.
- In its first three years in orbit, GEDI has captured billions of measurements between 51.6 degrees north and south latitudes (approximately the latitudes of London and the Falkland Islands, respectively).
- The new data product combines data from GEDI with airborne and ground-based lidars to construct a global biomass map that reveals the amount of vegetation contained in an area.
- "One big area of uncertainty is that we don't know how much carbon is stored in the Earth's forests," said Ralph Dubayah, GEDI's principal investigator and a professor of geographical sciences at the University of Maryland. Trees pull carbon from the atmosphere to fuel their growth. But scientists need to know how much carbon forests store so they can predict how much will be released by deforestation or wildfires. Approximately half of plant biomass is composed of carbon.
- GEDI's new product is not the first global biomass product, but it is the first to include well-described uncertainty for its estimates using advanced statistical models. This means GEDI's biomass estimates also come with a sense of how accurate those measurements are. "That is, for each 1-kilometer estimate of average biomass, the mission knows how confident that estimate is," Dubayah said.
- The GEDI team has compared their results to forest inventories from the Food and Agriculture Organization of the United Nations and U.S. Forest Service Forest Inventory and Analysis data, and found that GEDI's biomass estimates compared favorably to both. Cases where the GEDI product differed from the inventories highlight opportunities for further study and calibration.
- "We can apply this framework to estimate biomass for entire countries – for example, many countries in the pan-tropical regions don't have national forest inventories," said John Armston, GEDI's lead for validation and calibration and an associate research professor at the University of Maryland. "Now we have the means to provide an estimate of aboveground biomass with known uncertainty that can be used to support climate reporting and a broad range of applications."
- In many countries of the world, Armston said, there is big interest in using GEDI to examine forest and woodland definitions for carbon monitoring, but also to characterize ecosystem structure for biodiversity assessments.
- "Resolving the structure of different forest and woodland ecosystems with much more certainty will benefit, not only carbon stock estimation, but also our understanding of their ecological condition and the impact of different land management practices," he said.
Laying a Foundation for Future Missions
- The team will continue to refine its biomass estimates going forward, and has extended the mission to January 2023, providing time to collect even more data. Additionally, the International Space Station recently adjusted its orbit from 262 miles (421 km) above Earth's surface to about 258 miles (417 km). The lower orbit will allow GEDI to have more uniform coverage, meaning fewer gaps in its data from east to west, giving the mission a more complete view of Earth's temperate and tropical forests.
- "With GEDI being able to collect data all the way to 2023, we're getting closer to collecting data at the same time as the next generation of lidar and radar missions – like NISAR (NASA-ISRO SAR, launching in 2024)," said Laura Duncanson, an assistant professor at the University of Maryland and one of GEDI's research scientists. "Eventually, the best products won't just be based on GEDI, but on a combination of satellite data sources."
• January 24, 2020: NASA's GEDI (Global Ecosystem Dynamics Investigation) mission released its first publicly available data on January 21, 2020, giving researchers access to measurements of forests around the world. 13)
- GEDI surveys Earth's forests from aboard the International Space Station, using its three lasers to construct detailed 3-dimensional (3D) maps of forest canopy height and the distribution of branches and leaves in the forest. By accurately measuring forests in 3D, GEDI data play an important role in understanding how much biomass and carbon forests store and how much they lose when disturbed — vital information for understanding Earth's carbon cycle and how it is changing. Data from the mission can also be used to study plant and animal habitats and biodiversity, and how these may change over time.
- The first data release contains the first eight weeks of GEDI data: Hundreds of millions of data points, covering the globe between southern Canada and the tip of South America. By the time it reaches its 2nd birthday, GEDI will have collected an estimated 10 billion laser observations, representing the most comprehensive global satellite data set on forest structure ever produced.
- "Existing pan-tropical biomass maps use laser data acquired nearly 15 years ago and were based on less than 5 million laser observations in total," said Ralph Dubayah, GEDI principal investigator and a professor of geographical sciences at the University of Maryland. "GEDI collects 6 million laser observations every day. So over the tropics, we've already collected about two orders of magnitude more data than what was ‘state-of-the-art' before."
- What makes GEDI unique is more than just its number of measurements, however. GEDI has an ability to "see" into the forest better than any other space-borne instrument. It uses light detection and ranging (LIDAR), which bounces rapid laser pulses off objects to detect their 3D location and shape, the way radar detects shapes by bouncing radio waves.
- "Measurements over vegetation are challenging," said Bryan Blair, GEDI's deputy principal investigator and instrument scientist. "To make these accurate height measurements, we use a technique called waveform LIDAR that maps the 3-D structure of the forests. To do this accurately, we need to penetrate through the canopy and see a sometimes very weak ground signal. We've been using this measurement from aircraft for more than 25 years, but when you implement that in space, you have to be very efficient with resources like mass and power and you can't make the sensor too complex or expensive."
- GEDI's LIDAR, Blair said, uses several unique technologies including lightweight, energy-efficient lasers and innovative optics that split and scan the lasers into multiple beams, increasing coverage without adding weight. The instrument can also rotate to point at specific tracks on the ground, allowing it to make sure GEDI samples as much of the forest as possible.
- GEDI's view of a forest appears as a collection of waveforms that show the treetops, the ground, and the branches, leaves and open space in between. Put together, collections of waveforms begin to show the forest's structure — not only vertically, but horizontally as well. This allows scientists to calculate the amount of biomass and carbon contained in a given area of forest.
- Data on forests' vertical structure is a key missing piece for studies of biomass and biodiversity, Dubayah said. With a global map of the mass contained in forest tree trunks, branches and leaves, researchers can estimate how much carbon different forest areas contain and how it changes over time. By combining GEDI data with other satellite data sources, it is possible to estimate how forest biomass has changed in the past and how it might change in the future.
- "The amount of carbon that's being held in the land surface by trees, and how it has changed over time through disturbance and subsequent regrowth, is the least understood aspect of the global carbon cycle," Dubayah said. "Until we know how much carbon there currently is in Earth's forests, and how that's changed over the last 20-30 years, we will have a difficult time predicting how much more carbon forests will continue to absorb in the future, and what role they'll play in helping to mitigate or accelerate atmospheric carbon dioxide concentrations."
- Researchers will also be able to take their maps a step further and model biodiversity around the world and over time, he added. GEDI partners with public and private organizations dedicated to researching and protecting wildlife around the world.
- "By having vertical structure data everywhere, we can spot relationships between that structure and species diversity and abundance, and habitat quality," he said. "This should also enable us to identify biological and conservation hotspots."
- The team will continue to calibrate the data against airborne LIDAR data and make GEDI's algorithms more accurate, in many cases with the help of researchers from around the world using the data, the team said.
- "It's all very exciting!" said Michelle Hofton, a co-investigator with GEDI and research professor at the University of Maryland. "It's the ability to look globally at forest structure in a precise way that allows us to see such a variety of forest canopy conditions. And it is often in places we haven't been able to go with airborne instruments. Now we can see different portions of these areas every 90 minutes. It's fantastic!"
- GEDI is funded by NASA's Earth Ventures program, which competitively selects low-cost missions to address a variety of Earth science topics. GEDI was selected as cost-capped mission for $94.6 million, and has managed to not only stay within budget, but even launch early.
- "I am so impressed that we were able to launch the mission at this remarkably low cost, six months ahead of schedule, and now have almost a year of nearly flawless operation," Dubayah said. "To me, that is an amazing achievement and reflects the excellence of our NASA Goddard engineering partners and the entire GEDI Science Team."
• April 15, 2019: NASA's GEDI (Global Ecosystem Dynamics Investigation) mission launched in December 2018. From its perch aboard the International Space Station, GEDI's powerful lasers create detailed 3D maps of Earth's forests and topography – providing innovative and unique spaceborne observations. In January 2019, GEDI's lasers were turned on for the first time and the instrument is now giving scientists a first glimpse of the insights it will provide in the coming years. 14)
- GEDI's mission provides scientists detailed information about forest structure: How tall the forest is, how dense its branches are, and the vertical and horizontal distribution of its foliage. All of this yields crucial insights into Earth's global carbon cycle by fostering a better understanding of how forests store carbon and what happens to that carbon when they are cut down or disturbed. Forests support numerous plant and animal species, and understanding their structure can help biologists better understand Earth's forest habitats and biodiversity.
- "GEDI provides a vertical record, not only of how tall trees are, but how much canopy material there is at any height," said Ralph Dubayah, GEDI principal investigator and a professor of geographical sciences at the University of Maryland. "GEDI will make over 10 billion individual observations of canopy structures, which is orders of magnitude more than we have ever had."
- This level of detail is what sets GEDI apart and gives it the power to see the details of Earth's forests, the team explained.
- "The instrument team at Goddard did an amazing job delivering this incredibly capable science instrument. GEDI brings together several challenging and state-of-the-art technologies to enable this very difficult measurement that's needed to achieve our science goals," said Bryan Blair, GEDI's deputy principal investigator and instrument scientist.
- "We're very excited that GEDI is now in orbit and taking measurements," said Michelle Hofton, a research associate professor at the University of Maryland and a GEDI co-investigator. "This ability to precisely capture Earth's surface structure and its underlying topography is unique to GEDI. We're thrilled at the expansive coverage we're getting every day and looking forward to the discoveries that will be made using the data."
- "It took a combination of high-powered lasers, sensitive detectors, precisely-designed optical components, high-speed electronics, and on-board software algorithms for GEDI to be able to make these challenging measurements," said Bryan Blair, GEDI's deputy principal investigator and instrument scientist. "This is a truly unique sensor that can make these detailed measurements of the canopy top, the canopy interior, and the ground below, even in the most challenging tropical and dense temperate forests."
• March 25, 2019: GEDI has finished its on-orbit check-out!! This marks the beginning of our two-year science data collection period. Major kudos to the sensor development team @NASAGoddard for all the hard work to get us to this point. 16)
• February 1, 2019: GEDI was successfully launched on 5 Dec ember 2018 from Cape Canaveral, Florida in the Dragon capsule of a SpaceX Falcon 9 rocket and subsequently installed in its new home on the Japanese Experiment Module-Exposed Facility on 13 December. Due to various issues on-board the International Space Station, the initiation of commissioning was essentially delayed until 2 January. Since that time GEDI has moved ahead towards commissioning which should be completed in February. Once out of the commissioning phase, GEDI will begin collecting planned science data. These early data will be used to refine science calibration efforts leading to operational production of GEDI data products. 17) 18)
- GEDI commissioning is led by GEDI mission engineers and scientists at the NASA Goddard SPOCC (Science and Planetary Operations Control Center). Mission execution is led by the GEDI MOC (Mission Operations Center), and science calibration and validation activities occur at the GEDI SOC (Science Operations Center), both of which are housed within the SPOCC.
- To date, GEDI achievements on the road to commissioning include: all GEDI subsystems are powered up, other than the Pointing Control Mechanism (which begins testing soon); all 8 laser beams are returning waveforms; laser pulses are consistent with pre-launch performance, and noise performance is good with all channels; laser boresight alignment for all three lasers are good and well within field of view.
Sensor Complement
GEDI Lidar Instrument
The scientific goal of the GEDI lidar instrument is to characterize the effects of changing climate and land use on ecosystem structure and dynamics to enable radically improved quantification and understanding of the Earth's carbon cycle and biodiversity. Focused on tropical and temperate forests from its vantage point on the ISS (International Space Station), GEDI uses lidar to provide the first global, high-resolution observations of forest vertical structure. GEDI addresses three, core science questions: (Q1) What is the above-ground carbon balance of the land surface? (Q2) What role will the land surface play in mitigating atmospheric carbon dioxide in the coming decades? (Q3) How does ecosystem structure affect habitat quality and biodiversity? Answering these questions is critical for understanding the future path of global climate change and the Earth's biodiversity.
NASA/GSFC is building the GEDI lidar instrument. GEDI will use 3 NASA-developed laser transmitters to produce 12 parallel tracks of 25 m footprints on the Earth's surface, via an active optical system, necessary for accurate global biomass assessment. The Lasers and Electro-Optics Branch at GSFC (Goddard Space Flight Center) has been tasked with building these units as well as a dedicated unit for life testing, and taking them all through environmental qualification. 19) 20)
The fundamental architecture of the GEDI laser makes use of the HOMER (High Output Maximum Efficiency Resonator) class laser system. The HOMER laser has been developed for over a decade; designed to reduce part count and maximize reliability for space flight applications. The system has evolved from an Armandillo et. al design since its first bread-boarded results in 1997.21) 22)
This laser architecture has largely remained unchanged through many years of efforts to achieve this high level of reliability and long demonstrated life. Mechanically, the laser has evolved and tested continually through several improvements, both at the component and system levels. All the cavity components for the HOMER design have been tested to the TRL (Technology Readiness Level) 6 level, or have flown on previous missions (TRL9). HOMER's success was leveraged for the GEDI program and has since been modified again to achieve the required laser output performance to achieve the science mission goals. 23) 24)
The GEDI laser overview and interface summary can be seen in Figure 20. The GEDI laser is primarily responsible for providing 10 mJ Q-switched laser pulses at 1064 nm. The oscillator-only laser consists of the optical bench and pump module, discussed later, and is kept in a pressurized laser enclosure. Inside the enclosure will be the high voltage Q-switch electronics, a start pulse optical pick-off, pressure and temperature sensors, and internal harnessing. Electrically, the laser interfaces with the LEU (Laser Electronics Unit), which provides the Q-switch voltage and trigger along with laser diode drive current, and receives the temperature and pressure level telemetry. A liquid-based chiller plate and TEC (Thermal Electric Cooler) will hold the diodes at 35ºC, and mounted to the housing exterior. Optically, there is a monolithic mini-beam expander to provide the output divergence needed for the mission. Finally, the 3 titanium flexures mount to the GEDI optical bench. The JEM module and GEDI instrument can be seen in Figure 21.
Table 1 summarizes the driving requirements for the GEDI laser design. The GEDI project has been very careful to flow down requirements to the laser team that maximizes science with achievable hardware goals from an engineering perspective. These requirements along with a list of driving test parameters will be trended through the build of the ETU (Engineering Test Unit) and flight units.
Requirement | Value |
Laser Wavelength | 1064.5 nm ± 0.2 nm in vacuum |
Maximum Allowable Laser Energy | 10 mJ ±5% fully-apertured beam at the output |
Laser Output Polarization Ratio | ≥ 200:1 |
Pulse Repetition Rate | 242 ± 2 Hz |
Pulse Width | ≤ 16 ns FWHM (Full Width Half Maximum) |
Laser Lifetime | 3.2 Billion Shots |
LDA (Laser Diode Array) Operating Temperature | 35 ±2ºC |
Laser Design
The HOMER class design used for the GEDI laser is a flight quality Nd:YAG, diode-pumped solid state oscillator-only cavity producing beam qualities and pulse energies typically associated with MOPA (Master Oscillator Power Amplifier) systems. The HOMER lasers achieve this with high efficiency, low part count, and a demonstrated long life, running continuously for over 2 years (>16 billion pulses). This laser employs a side-pumped zigzag slab in a stable cavity which can make it difficult to achieve a TEM00 mode without the use of passive beam shaping. The use of porro-prisms and/or intra-cavity apertures can be used to produce quality single mode beams. However, these items have proven to generate intense optical diffraction effects and reduce overall optical damage resistance. These induced optical perturbations reduce the effective, average optical damage threshold of all the cavity's components by introducing optical spiking, temporal and spatial, and constructive interference effects within the optical materials and coated surfaces. This hinders the total reliability, introduces intensity jitter, and ultimately degrades the performance of the final laser system. If one is successful with the implementation of these methods in producing damage free operation TEM00 in such a laser, the optical efficiency is always reduced and the many of the zigzag slab advantages are lost. Alternatively, with a Graded Reflectivity Mirror GRM-based cavity design, in concert with an optimally pumped zigzag slab, these issues are greatly reduced and the finer details of safe cavity operation can be studied. 25)
Using a GRM (Graded Reflectivity Mirror) as the output coupler, TEM00 pulse energies are readily obtainable from a >10 mJ oscillator-only design and are suddenly highly scalable because a relatively large intracavity low-fluence beam is created as the system's beam quality foundation. The final optical design makes use of a 40 cm cavity length. It employs a positive (concave) radius of curvature (ROC), 99.9% HR mirror along with the negative (convex) 237 cm ROC GRM using an effective average reflectivity and peak reflectivity of approximately 32% and 65%, respectively. To produce a gain-switched laser pulse of 1064 nm, an active Q-switch is employed, comprised of an electro-optic (EO) pockel's cell, and a pair of passive polarizing optics; a quarter wave plate and TFP (Thin Film Polarizer). As part of the GEDI program, all delivered optics that have coatings will have witness samples go through LIDT (Laser Induced Damaged Testing). Using the LIDT values along with models and verified experimental results over the past decade allow the laser team to know what energy level is safe for the laser to run at for a specific configuration. The optical layout is seen in Figure 23.
Laser Gain Pumping Scheme
HOMER's gain module, or laser head, employs 7 stacks of 4-bar 809 nm LDAs which pump a 22-bounce zigzag slab of 1.1% doped Nd:YAG. These highly astigmatic beams from these 28 bars are concentrated with the use of a long, planoconvex cylindrical lens made of undoped:YAG. This produces a highly concentrated gain region of similar dimension across the Nd:YAG's cross section, normal to the cavity optic axis, from which its stored energy is efficiently extracted by the resonant cavity mode. In fact because the system is so efficient the diode pump is significantly derated giving the laser system plenty of margin to recover from any unexpected laser loss. The diodes being employed can run at least as high as 100 A and 200 µs. Comparatively, when the laser is configured to run with an output energy of 10 mJ the diodes are pumped at 50 A and as little as 40 µs. When assembling the diode pump module, the distance between the pump lens to the diode faces is closely monitored, as placing them in regions where small absorption peaks along the pump surface has been proven to produce and trigger optical damage from microlensing effects (Figure 24).
Mechanical Summary
The GEDI laser mechanical design allows for subcomponent modularity and is divided into 3 major sections: the enclosure, the pump module, and the optical bench. All three sections are primarily made of aluminum with the exceptions of some of the optical mounts and the titanium flexures interfacing with the instrument optical bench. Each are have design requirements principally driven by maintaining GEDI bore sight over the environmental conditions through the life time of the mission. Finite element modeling has been performed on the entire design and was found to meet all the bore sight jitter and alignment requirements. Further the laser enclosure is required to keep the laser pressurized at least 1 atm over the life time of the mission. An identically made enclosure will be made to qualify the pressure seal design. The mechanical design requirements will be confirmed with the ETU during environmental qualification testing as well.
This modular hardware design, levied by the laser team, allows for frequent optical inspections throughout the assembly and alignment process. Any issues that may occur over the laser builds can be quickly resolved with minimum invasive techniques, and without the need for cavity realignment. Furthermore, the optical bench, shown in Figure 23, can be removed from the pump module, Figure 24, fully aligned and operated without the enclosure if necessary. Therefore, both can be manufactured, tested, and characterized independently and in parallel. This nonlinear manufacture capability helps to reduce schedule and cost. The full aluminum assembly, sans the Titanium optical mounts, will be a little more than 9 kg in mass, shown in Figure 5.
Thermal Considerations
The GEDI laser design requires active conductive cooling in order to maintain the desired Nd:YAG absorption pump wavelength from the LDAs (Laser Diode Arrays). Additionally, stable operating temperature must be maintained in order to guarantee the required turn-on time while in orbit. The JEM-provided liquid cooling loop requires additional active control since the fluid's temperature arriving at each laser experiences a 6ºC temperature swing, depending on the other heat loads in its path. Therefore, a pair of TECs (ThermoElectric Coolers) will reside between the laser base and the JEM liquid thermal plate. This will keep the pedestal and LDAs within the 350 (±2)ºC when the laser if off or in standby mode. Otherwise, the optical bench and enclosure are designed such that internal thermal stresses will not affect laser performance. The laser system will be tested over a full survival range of 50ºC to -10ºC during thermal vacuum testing.
Laser Performance Summary
Each GEDI laser fires at 242 Hz and produces 11-16 ns Q-switched pulses at 10-17 mJ, with a TEM00 beam quality at 1064 nm. This mission needs a reliable laser that will last a minimum of 3.2 billion shots (33% duty cycle on average per orbit) over the lifetime of the mission. We recently published a complete lifetime dataset where we ran our HOMER-2 laser for over 15 x 109 shots. This was the equivalent of 2 years of continuous operation with a measured decay rate of only ~ 0.1 mJ/Billion. Therefore, this laser design provides plenty of life-time margin for the GEDI mission.
This life test demonstrated the advantages of an oscillator-only design, with a specific set of requirements, over an equivalent MOPA system when producing TEM00 laser pulses under 20 mJ. Even with the extensive development history, qualification, and data sets of the HOMER laser design, the GEDI mission laser performance requirements required that design be modified slightly from the HOMER-2 TRL6 system. These modifications have since been implemented in the HOMER-1 engineering unit which readily achieved 3.2 billion shots (the mission requirement) at the necessary energy output levels in a recent long term run. Pre-, and post-run inspections show damage-free operation at these parameters, further demonstrating the validity of the HOMER oscillator concept. Any remaining laser performance requirements were tested on the GEDI laser breadboard system. It is to be noted that as part of this testing, known damage triggers for the laser system, including longitudinal model beating and small scale self focusing, are monitored continuously through out the testing process. Finally, the highest risk optics, determined from laser induced damage testing and high precision mathematical models, (the GRM and laser slab), are inspected for optical damage after each major experiment or any step change in operation. A summary of the laser performance can be seen in Figure 26.
Laser Build and Test Plan Overview
The laser team has been tasked with delivering an ETU (Engineering Test Unit) laser, three flight units, and a flight spare. The GEDI ETU laser hardware has been fabricated and has started assembly. The ETU and flight lasers will go through the same assembly and test processes with the general exception that "lessons learned" during the ETU build will be carefully documented, evaluated and implemented on the flight builds. Both ETU and flight units will use custom designed electrical and optical GSE (Ground Support Equipment). The electrical GSE will have the role of simulating the LEU along with taking all of the required data needed to record laser performance. The comprehensive performance test will be run in this configuration before and after each phase of environmental testing. The optical GSE seen in Figure 7.
The GEDI Laser units will run vibration testing as spelled out in the GEDI Structural/Mechanical Loads Document. The lasers will be tested unpowered in the X, Y and, Z axis. The laser will be performance tested in between vibration runs primarily looking for any change in laser beam quality and any movement on the alignment bore sight.
The ETU and Delivered flight units will carry out TVAC (Thermal Vacuum ) tests as spelled out in the GEDI Thermal Interface Control Document. At this time each flight laser will go through 8 survival cycles. Survival temperatures range from 50 to -10 ºC. During each cycle the laser will pause at the operating temperature ranges to check powered on laser performance. The TVAC test will also serve as another confirmation of the pressurized cavity design.
Once the environmental testing is completed the ETU will start life testing well before the delivery of the flight units. During the testing monitoring laser requirements will be monitored continuously and it will engineering unit interface testing with other hardware such as the BDU (Beam Dithering Unit). The flight units will be delivered straight for integration with the GEDI instrument and then will support instrument level performance and environmental as required.
In summary, the GEDI Instrument installed on the ISS JEM platform will produce a valuable 3D, multi-seasonal, global biomass data set. The GEDI mission is employing a robust HOMER class laser, which has been thoroughly tested over several different models, and meeting key performance parameters. The GEDI laser has large overhead in LDA derating, well known and measureable damage triggers, and quantified margins in thermal and optical space. Sound and proven development processes, qualification plans, and infrastructure hardware is in place or under assembly at this time as the project readies for the completion of the ETU unit, and prepares for the arrival of flight hardware soon after. Finally, based on HOMER's extensive data set, and the GEDI laser's solid foundation and relative performance adjustments, the riskspace for each laser is approximately equal, and thus the project expects a similar life time capability should the GEDI mission be extended.
GEDI: Using Lidar Waveforms to Measure Canopy Structure 26)
GEDI will address its mission science questions by making lidar waveform (i.e., vertical profile) observations between 51.6° N and S latitudes. Each GEDI laser shot will result in a waveform that contains information about the vegetation canopy and the topography underneath. Scientists will use this information to quantify canopy vertical structure, canopy height, and ground elevation (Table 2).
The GEDI instrument includes three identical laser transmitters. One will be used at full power, while the output from the other two will be split into two beams each, creating a total of five beams. Each of the beams will be optically dithered across-track to create a total of ten ground tracks, with between-track spacing of ~600 m, and a total across-track width of 5.4 km. The average along-track distance between the footprints will be 60 m). The across-track dithering is fully programmable on orbit so that any pattern of along-track contiguous footprint patterns are possible. By the time the beam reaches the surface it has an approximate diameter (footprint) of 22 m —as illustrated below.
Note: Dithering of the beam creates two parallel ground tracks for each beam instead of one, which increases across-track coverage.
Product | Description | Resolution |
Level-1 | Geolocated waveforms | 22 m diameter |
Level-2 | Canopy height and profile metrics | 22 m horizontal; 0.5 m vertical |
Level-3 | Gridded Level-2 metrics | Nominal 1 km grid |
Level-4 | Above-ground biomass | 22 m footprint; 1 km grid |
Legend to Table 2: * Several Level-4 "demonstration" products are planned to be produced later in the mission; they will have various gridded sizes that will be specified at a later date.
GEDI data enable important opportunities for vegetation studies other than biomass estimation, by producing example products for specified regions globally.
References
1) Elizabeth Zubritsky, "New NASA Probe Will Study Earth's Forests in 3-D ," NASA, Sept. 8, 2014, URL: http://www.nasa.gov/content/goddard/new-nasa-probe-will-study-earth-s-forests-in-3-d/#.VN9yrC7-Y_c
2) "GEDI - Global Ecosystem Dynamics Investigation Lidar," NASA Science Missions, September 2014, URL: http://science.nasa.gov/missions/gedi/
3) Ralph Dubayah, "GEDI Lidar: Global Ecosystem Dynamics Investigation," POLinSAR 2015 and 1st BIOMASS Workshop, ESA/ESRIN, Frascati, Italy, Jan. 26-30, 2015 , URL: http://seom.esa.int/polinsar-biomass2015/files/D3S3_BIOMASSIsNotAlone_2.pdf
5) J. Bryan Blair, Ralph Dubayah, "Global Ecosystem Dynamics Investigation (GEDI) Lidar for mapping the vertical structure of vegetation from the International Space Station," Proceedings of the IGARSS (International Geoscience and Remote Sensing Symposium) 2015, Milan, Italy, July 26-31, 2015
6) Ralph Dubayah, "Remote Sensing of Ecosystem Structure and Dynamics - GEDI Lidar," URL: http://kiss.caltech.edu/study/ecosystem/Presentations/Dubayah%20KISS%20GEDI%20Short%20Course2.pdf
7) Julie A. Robinson, William L. Stefanov,"Earth Science Research on the International Space Station," Committee on Earth Science and Applications from Space (CESAS) Space Studies Board National Academies of Science, Engineering, Medicine, 29 March 2016, URL: http://sites.nationalacademies.org/cs/groups/ssbsite/documents/webpage/ssb_171788.pdf
8) "A New Hope: GEDI to Yield 3D Forest Carbon Map," NASA, 7 November 2018, URL: [web source no longer available]
9) May the Forest Be With You: GEDI Moves Toward Launch to Space Station," NASA Press Release, 4 May 2018, URL: https://www.nasa.gov/feature/goddard/2018/may-the-forest-be-with-you-gedi-to-launch-to-iss
10) "NASA Sends New Research, Hardware to Space Station on SpaceX Mission," NASA Press Release 18-111, 5 December 2018, URL: https://www.nasa.gov/press-release/nasa-sends-new-research-hardware-to-space-station-on-spacex-mission
11) "Scientists Show How Forests Measure Up," NASA Earth Observatory, Image of the Day for 13 May 2022, URL: https://earthobservatory.nasa.gov/images/149793/scientists-show-how-forests-measure-up
12) Jessica Merzdorf Evans, "NASA Releases Breakthrough Forest Biomass-Carbon Product," NASA Feature, 5 April 2022, URL: https://www.nasa.gov/feature/goddard/2022/nasa-releases-breakthrough-forest-biomass-carbon-product
13) Jessica Merzdorf, Sara Blumberg, "NASA Forest Structure Mission Releases First Data," NASA, 24 January 2020, URL: https://www.nasa.gov/feature/goddard/2020/nasa-forest-structure-mission-releases-first-data
14) "Return of GEDI's First Data Reveals the Third Dimension of Forests," NASA, 15 April 2019, URL: https://web.archive.org/web/20230101003545/https://www.nasa.gov/feature/goddard/2019/return-of-gedi-s-first-data-shows-forests-topography/
15) "Return of the GEDI's First Data," NASA Earth Observatory, URL: https://earthobservatory.nasa.gov/images/144818/return-of-the-gedis-first-data.
16) https://twitter.com/GEDI_Knights
17) "GEDI Status – Feb 1," UMD (University of Maryland), 1 February, 2019, URL: https://gedi.umd.edu/gedi-status-feb-1/
18) Lori Keesey, "Innovative GEDI instrument now gathering forest data," NASA/GSFC, 1 February 2019, URL: https://phys.org/news/2019-02-gedi-instrument-forest.html
19) Paul R. Stysley, D. Barry Coyle, Gregory B. Clarke, Erich Frese, Gordon Blalock, Peter Morey, Demetrios Poulios, Michael Hersh,"Laser production for NASA's Global Ecosystem Dynamics Investigation (GEDI) lidar," Proceedings of SPIE, Vol. 9632, 'Laser Radar Technology and Applications XXI,' paper: 9832-39, Baltimore MD, USA, April 19-20, 2016, DOI: 10.1117/12.2239889
20) D. Barry Coyle, Paul R. Stysley, Demetrios Poulios, Greg B. Clarke, Richard B. Kay, "Laser transmitter development for NASA's Global Ecosystem Dynamics Investigation (GEDI) lidar ," Proceedings of SPIE, Vol. 9612, 'Lidar Remote Sensing for Environmental Monitoring XV,' 961208 (September 1, 2015), doi:10.1117/12.2191569
21) Donald B. Coyle, R. B. Kay, S. J. Lindauer, "Design and performance of the vegetation canopy Lidar (VCL) laser transmitter," IEEE Aerospace Conference Proceedings 3,1457-1464 (2002)
22) Errico Armandillo, Callum Norrie, Alberto Cosentino, Paolo Laporta, Paul Wazen, Patrick Maine, "Diode-pumped high-efficiency high-brightness Q-switched ND:YAG slab laser," Optics,Letters, Vol. 22, Issue 15,pp: 1168-1170, 1997, doi: 10.1364/OL.22.001168
23) Donald B. Coyle, Richard B. Kay, Paul R. Stysley, Demetrios Poulios, "Efficient, reliable, long-lifetime, diode-pumped Nd:YAG laser for space-based vegetation topographical altimetry," Applied Optics, Vol. 43, Issue 27, pp: 5236-5242, 2004
24) Paul R. Stysley, D. Barry Coyle, Richard B. Kay, Robert Frederickson, Demetrios Poulios, Ken Cory, Greg Clarke, "Long term performance of the High Output Maximum Efficiency Resonator (HOMER) laser for NASA's Global Ecosystem Dynamics Investigation (GEDI) lidar," Optics & Laser Technology, Vol. 68, pp: 67-72, 2015
25) M. Morin, "Graded Reflectivity Mirror Unstable Laser Resonators," Optical and Quantum Electronics,August 1997, Volume 29, Issue 8, pp: 819-866
26) Suzanne Marselis, John Armston, Ralph Dubayah, "Summary of the Second GEDI Science Team Meeting," The Earth Observer,Volume 28, Issue 6, pp: 31-36, November-December 2016, URL: https://eospso.nasa.gov/sites/default/files/eo_pdfs/Nov-Dec%202016%20color%20508.pdf
27)"GEDI update," Twitter, March 17, 2023 URL: https://twitter.com/GEDI_Knights/status/1636840018353291265
28) Garcia, Mark. “Partners Extend International Space Station for Benefit of Humanity – Space Station.” NASA Blogs, 27 April 2023, https://blogs.nasa.gov/spacestation/2023/04/27/partners-extend-international-space-station-for-benefit-of-humanity/
29) GEDI UMD, "Return of (the) GEDI", April 22, 2024. URL: https://gedi.umd.edu/return-of-the-gedi/
30) CEOS MIM Database, "GEDI-on-ISS". URL: https://database.eohandbook.com/database/missionsummary.aspx?missionID=766