ISS: ERA (European Robotic Arm)
Non-EO
Quick facts
Overview
| Mission type | Non-EO |
| Launch date | 21 Jul 2021 |
ISS Utilization: ERA (European Robotic Arm)
ERA (European Robotic Arm) Smart Spacewalker Development Status Launch References
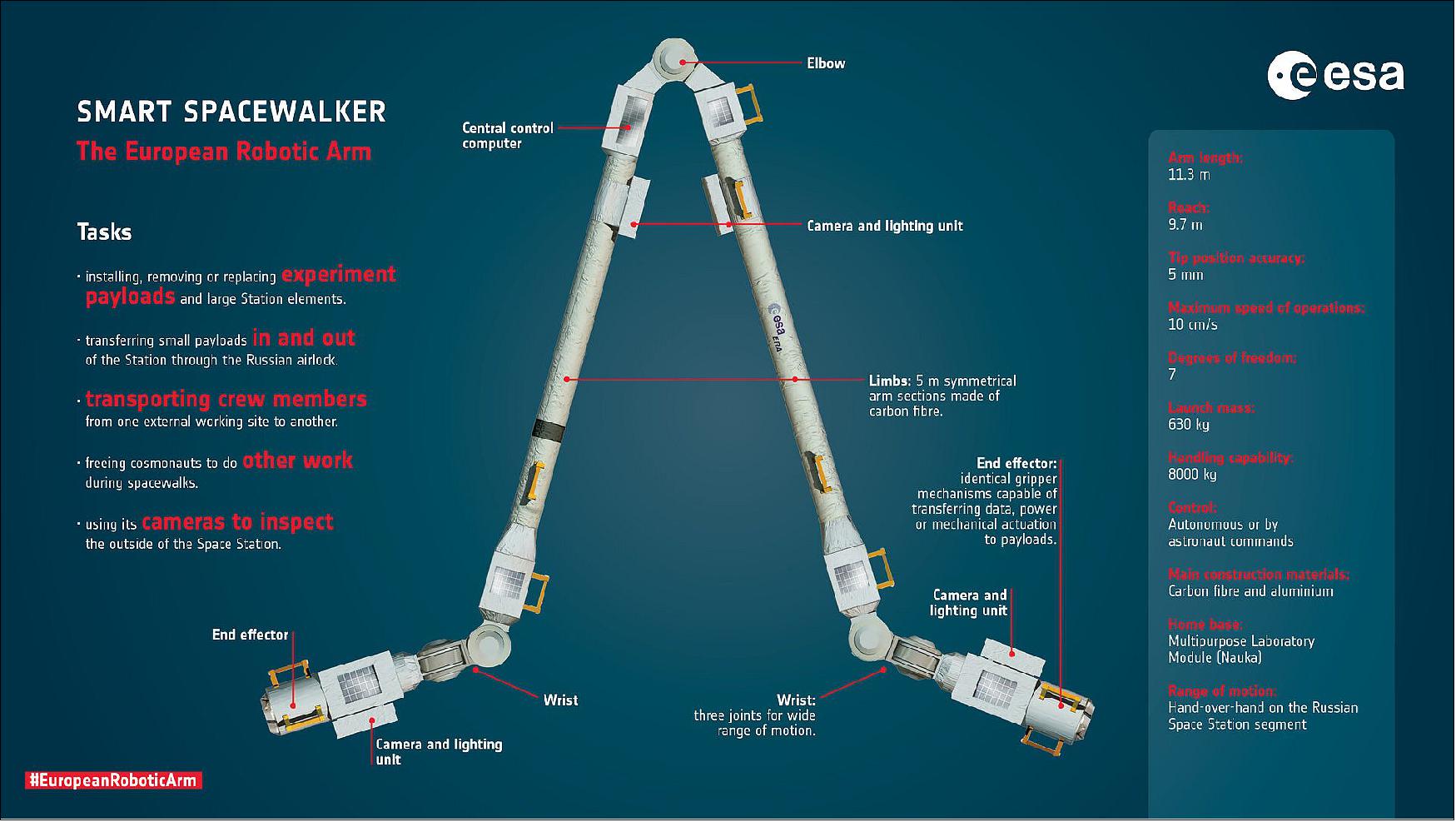
ERA is a robotic servicing system, which will be used to assemble and service the Russian segment of the International Space Station. The European Robotic Arm (ERA) will work with the new Russian airlock, to transfer small payloads directly from inside to outside the International Space Station. This will reduce the set-up time for astronauts on a spacewalk and allow ERA to work alongside astronauts. 1)
ERA acts as a tool for: Installation, deployment and replacement of elements of the Russian Segment of the Space Station, inspection of the Russian Segment, support/transfer of EVA cosmonauts, transfer of Orbital Replacement Units and other assembly tasks. The arm consists of 2 End Effectors, 2 Wrists, 2 Limbs and 1 Elbow joint together with electronics and cameras. Both ends act as either a “hand” for the robot or the base from which it can operate.
“The Russians wanted to give their spacewalkers the option of direct control over ERA,” explains ESA robotics engineer Lodewijk Aris. “So we built this external interface along with as a pair of internal interfaces. External control is one of the attributes that make ERA unique among the Station arms. The interface is designed to endure the space environment for at least a decade – when not in use the hinged cover is closed, to protect it from thermal extremes, radiation and micrometeorites.
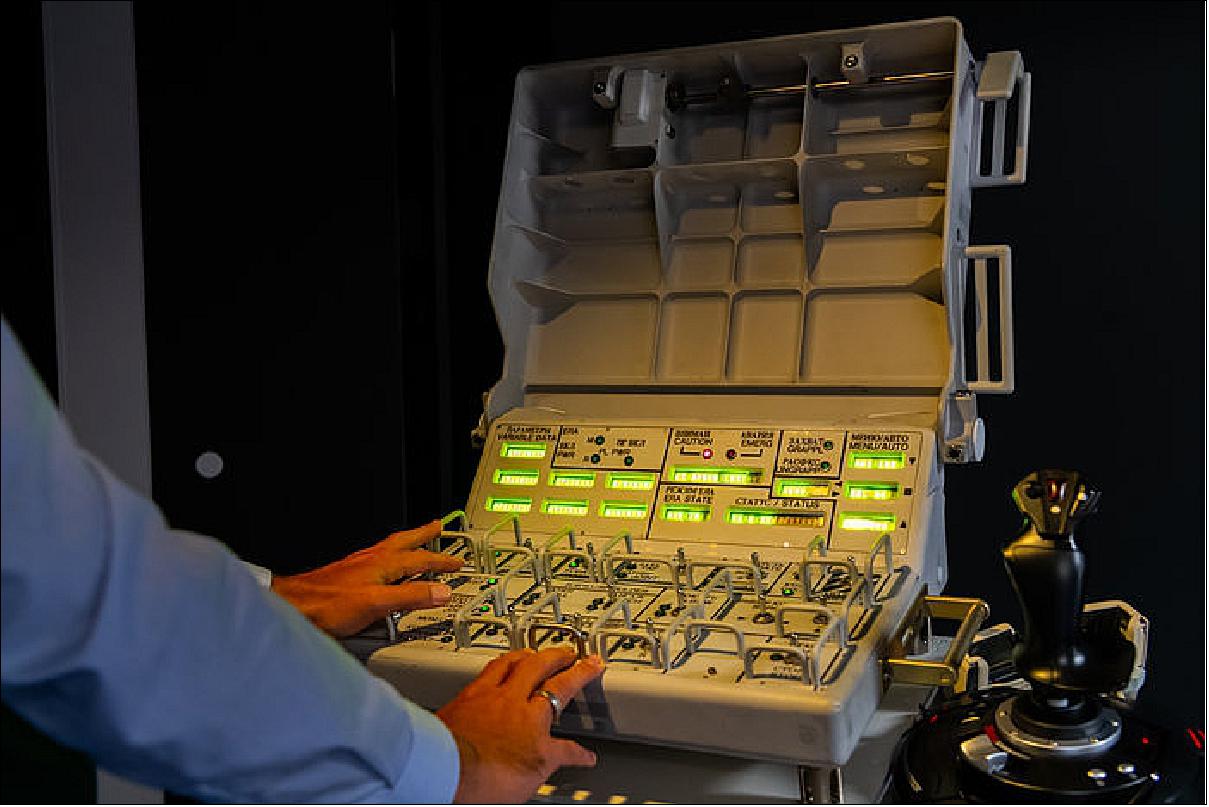
Known as the EMMI (External Man Machine Interface), it will be used to control the European Robotic Arm, which is due to reach the Station as part of Russia’s long-awaited Nauka (meaning ‘Science’) Multipurpose Laboratory Module (MLM) in July 2021.
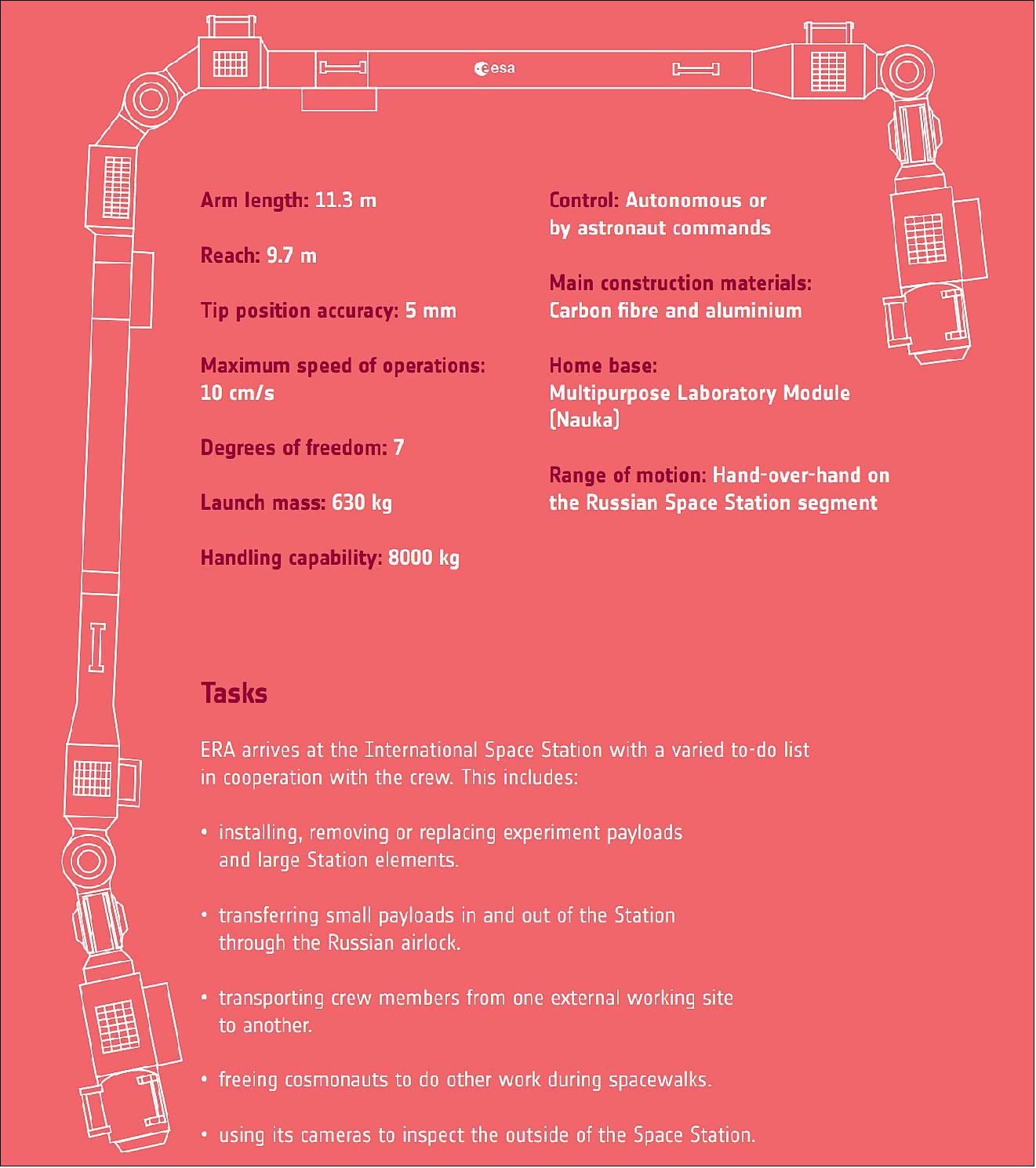
ESA (European Space Agency) designed the European Robotic Arm (ERA) as part of its contributions to the ISS. The 11.3-m long, seven degrees of freedom robotic manipulator will be the third arm to reach the Station, following Canada’s ‘Canadarm’ and Japan’s RMS (Remote Manipulator System). Serving the Russian segment of ISS, ERA will be able to manipulate payloads of up to 8 tons, with a positioning accuracy of 5 mm. 2)
“This is a qualification model – its flight model is with Russia’s Energia company along with ERA itself. The qualification model of ERA is also here in ESTEC, which we will be using for tests and anomaly investigations post-launch.
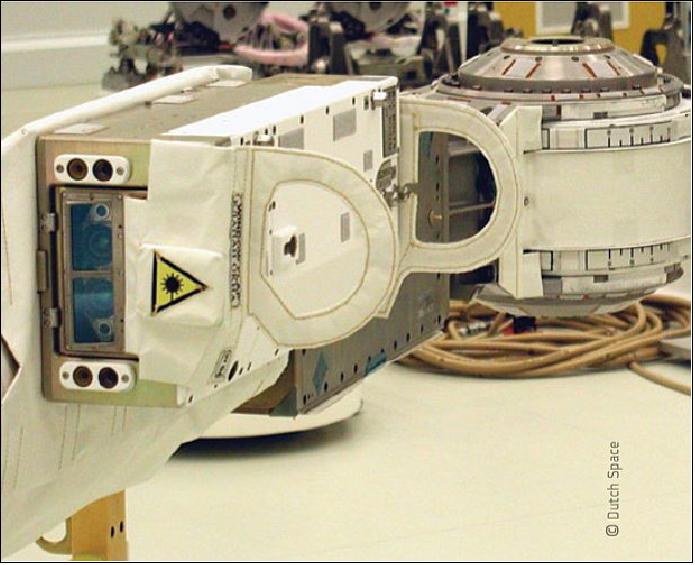
Able to move in a similar manner to a human arm, ERA is symmetrical in design around its central elbow joint, with both ends of the arm concluding in end effectors that can function together with their wrists either as ‘shoulders’ or ‘hands’.
Its shoulder side will be connected to one of four different ‘base plates’ around the MLM, providing data and power links, while its wrist-and-hand side will be able to take payloads from the module’s airlock and place them on a selection of payload mounting units. ERA will be relocated between base plates as required.
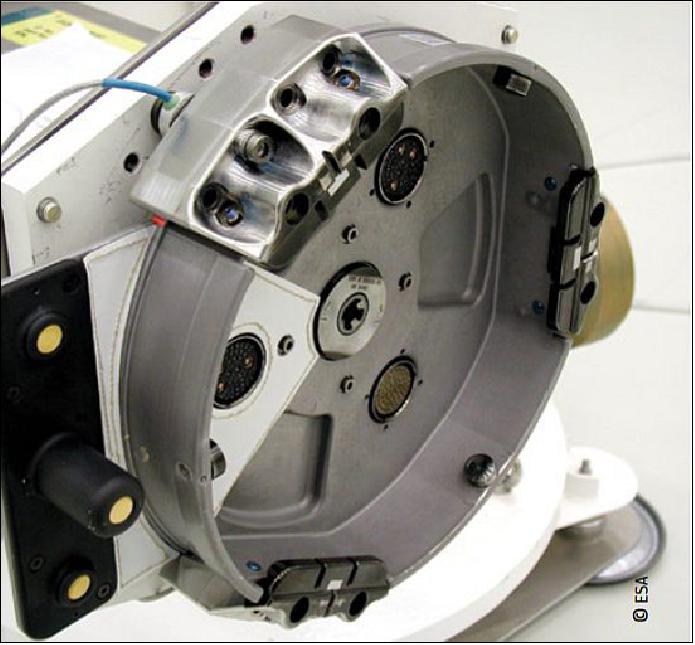
ERA’s end effectors also feature cameras for visual inspection and screwdriver-like ‘integrated service tool’ for securing payloads using a standardized pin latch attachment system. The combination of a laser-based lighting unit and force sensor will allow precise manipulation of payloads, including installing and removing them.
As a safety feature, ERA includes a detailed virtual map of the ISS to prevent any accidental collision with Station structure – which has been kept updated as the Station grew during its wait for flight.
“The MLM, equipped with its own solar panels, an airlock and Soyuz docking port as well as ERA should offer a significant boost to ISS science,” adds Aris. “Directly after its in-orbit validation phase, ERA will have the crucial role of installing the MLM’s radiator and airlock – with backup from the ERA operations room here in the ESTEC technical center in the Netherlands – before being formally handed over to the Russians for operational use.”

ERA (European Robotic Arm) Smart Spacewalker
It is much like a human arm. It has an elbow, shoulders and even wrists. The European Robotic Arm (ERA) is the first robot able to ‘walk’ around the Russian segment of the International Space Station. 3)
Light yet powerful, the orbital arm has the ability to anchor itself to the Station and move back and forward by itself, hand-over-hand between fixed base-points. This space robot looks like a pair of compasses and has a length of over 11 m. When stretched, it could pass a football from a penalty spot to the goalkeeper.
The robot will serve as main manipulator on the Russian part of the Space Station. Its seven joints can handle multi-tonne payloads with a large range of motion for assembly tasks.
The arm and its two control stations – one for inside and another for outside the orbital outpost – will be launched into space together with the Multipurpose Laboratory Module, called ‘Nauka’, from the Baikonur Cosmodrome, in Kazakhstan, on a Russian Proton rocket. he launch is set for the summer of 2021, after two decades of technical and programmatic challenges.
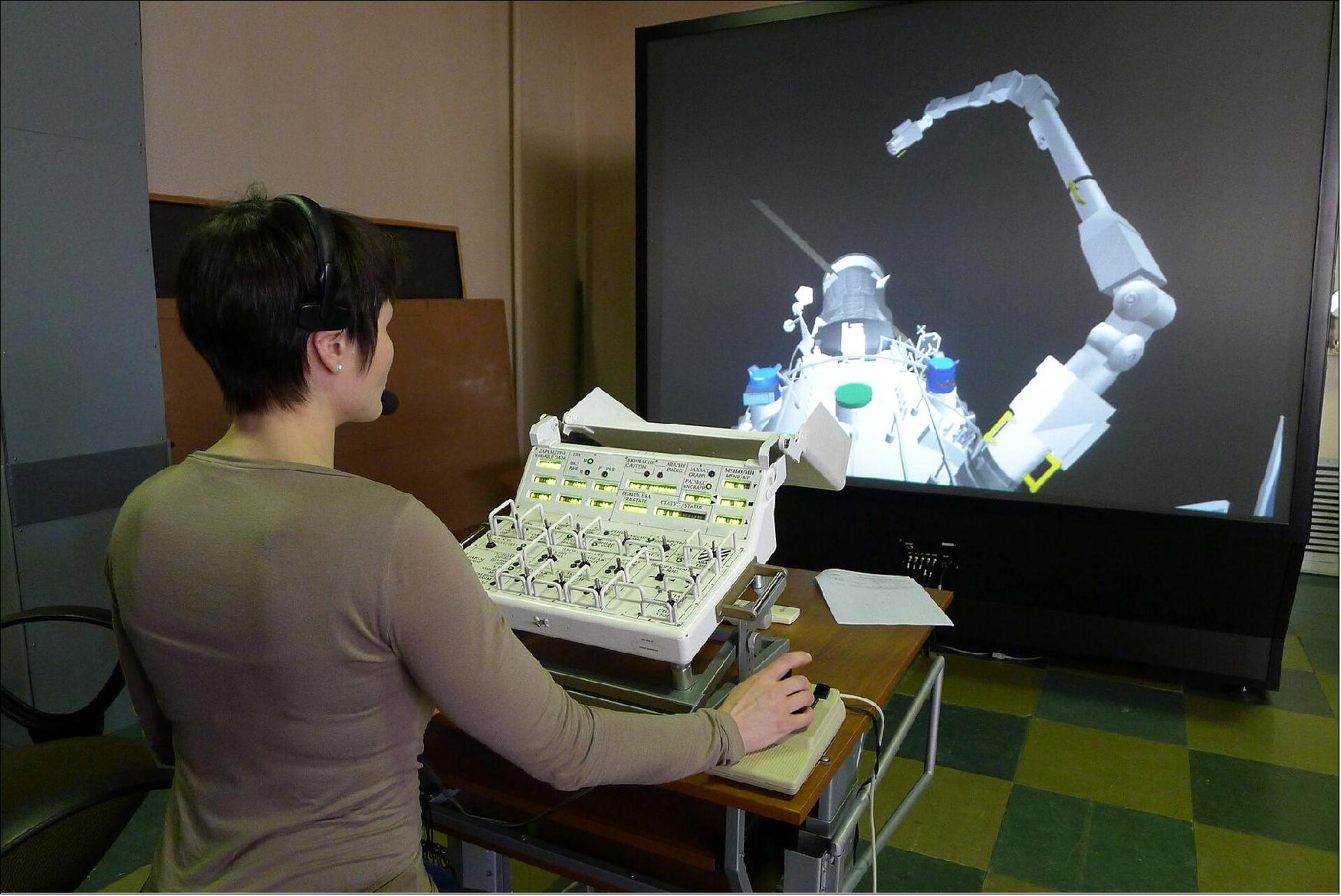
The robotic arm brings new ways of operating automated machines to the orbital complex. ERA has the ability to perform many tasks automatically or semi-automatically, can be directed either from inside or outside the Station, and it can be controlled in real time or preprogrammed.
Once it starts working from its home base at the Russian Multipurpose Laboratory Module the robot arm can help install, deploy and replace elements in outer space. ERA’s first tasks in orbit, after deployment and checkouts, are to set up the airlock and install a radiator for the latest module of the Space Station.
Astronauts will use the robotic arm to save time and effort in Space Station maintenance. It will act as a tool to transfer small payloads directly from inside to outside the Space Station without the need for spacewalks, but will also help spacewalkers by transporting them around like a cherry-picker crane. Its four infrared cameras will support inspections and operations outside the Space Station.
The Purpose of ERA
The International Space Station already features two robotic arms: Canadarm2 and the Japanese Experiment Module Remote Manipulator System. Both play a crucial role in berthing visiting vehicles and grappling external payloads on the US and Japanese modules.
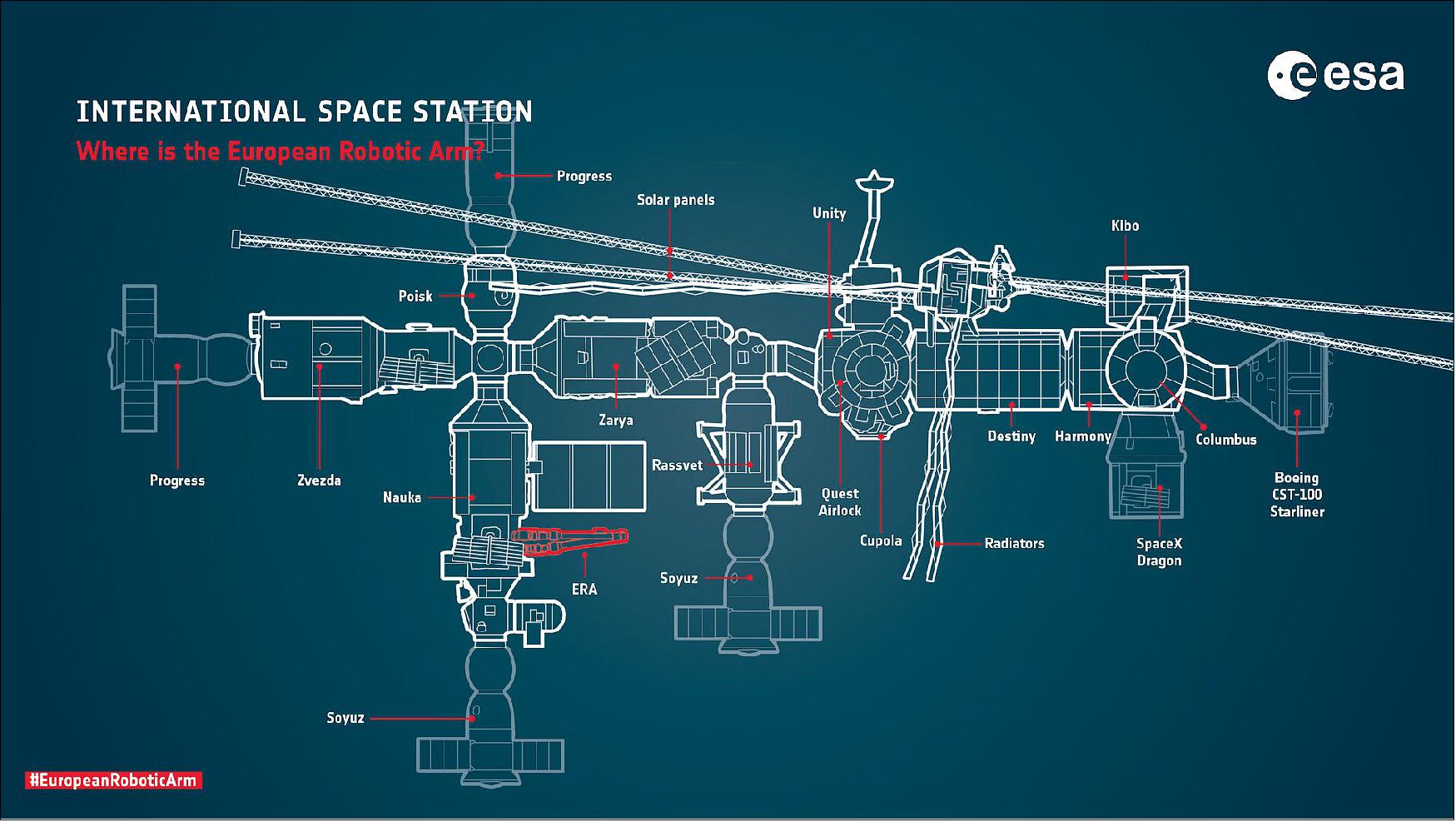
ERA's purpose is to service the Russian segment. Even though the Multipurpose Laboratory Module will be its home base, ERA’s design and it's flexibility means it can move hand-over-hand around the Russian parts of the Station. It will supplement the two ‘Strela’ cargo cranes.
The mounting points on the Russian segment are optimized for the robotic arm. With ERA Russian spacecrafts dock automatically.
Seven Degrees of Freedom
ERA strongly resembles the upper human body giving it a 'human' element. It consists of two wrists, two limbs, two end effectors and one elbow joint together with electronics and cameras.
ERA is functionally symmetrical. Both ends act as either a ‘hand’ for the robot, or the base from which it can operate. After arm relocation on the Station, the wrist can change into a shoulder and vice versa.
Its seven rotational joints – roll, yaw and pitch joints – provide a larger range of motion than a human arm. The robot can walk end-over-end grappling standard fixtures of the Russian segment in an inchworm-like movement.
The limbs are designed for efficiency. A carbon-fibre-wound tube is used to minimize mass and has titanium fittings bonded onto it. Strength and flexibility are key for this spacewalker.
The Arm that Sees
The Brain
The central control computer is embedded next to the elbow and interfaces with other parts of the arm. This ‘brain’ runs automated sequences under the supervision of a human operator. These commands allow astronauts to closely supervise ERA’s tasks and actions.
ERA is able to rethink its movements. During arm motion, several control loops add layers of safety. Proximity sensors and real-time collision avoidance algorithms compensate for misalignments as the arm approaches the target. Torque and force sensors also provide a sense of touch that prevents errors during payload pick-up and insertion.
Hand-On Robot
Human-Robot Teamwork
Human and robot will work shoulder-to-shoulder in space. ERA is supposed to provide an aid to
Human–machine interfaces are the essential connections that allow the crew to control the robotic arm in orbit. Designed and tested by space experts, including astronauts, these interfaces reduce the preparation time for a spacewalk and will allow ERA to work alongside astronauts.
The crew can control ERA from both inside and outside the Space Station, a feature that no other robotic arm has offered before.
From Inside
Using a laptop, the crew will have full control over ERA from inside the Space Station. Operators will see real-time models of the robotic arm and its surroundings on the screen.

Mission/Development Status
• April 27, 2023: The International Space Station (ISS) partners have agreed to extend the operational period of the ISS. The United States, Japan, Canada and participant European Space Agency (ESA) countries will support operations until 2030, while Russia has committed to continuing station operations until 2028. 12)
• July 6, 2021: ERA (European Robotic Arm) of ESA will be launched to the International Space Station together with the Russian Multipurpose Laboratory Module, called ‘Nauka’.
• June 23, 2021: The European Robotic Arm is the first robot that can ‘walk’ around the Russian part of the International Space Station. 4)
- The European Robotic Arm is the first robot that can ‘walk’ around the Russian part of the International Space Station. ERA has a length of over 11 m, and can anchor itself to the Station in multiple locations, moving backwards and forwards around the Russian segment with a large range of motion. Its home base will be the Multipurpose Laboratory Module, called ‘Nauka’.
- Astronauts will find in the European Robotic Arm a most valuable ally – it will save them precious time to do other work in space.
- The crew in space can control ERA from both inside and outside the Space Station, a feature that no other robotic arm has offered before.
- 100% made-in-Europe, this intelligent robotic arm consists of two end effectors, two wrists, two limbs and one elbow joint together with electronics and cameras. Both ends act as either a 'hand' for the robot.

• May 20, 2021: ERA, designed by Fokker Space, is a robotic arm planned to be attached to the Russian Segment of the International Space Station during 2021. As the main Robotic arm of the Russian segment of the International Space Station, it will provide installation and removal of target loads on the surface of the station and monitoring of the state of the external surface of the station, as well as remotely controlled movement of astronauts in a portable workplace during spacewalks. 7)
- In accordance with the schedule of work during the installation of the ERA on the locking units, high-precision control of the position of the manipulator in the folded configuration and comprehensive tests of the fixing tools on the module housing were carried out.
- Further work on the technical complex will be carried out by specialists of RSC Energia and the Yuzhny Space Center (branch of the Center for Operation of Ground Space Infrastructure Objects, part of Roscosmos) as part of the regular preparation for launch. During this period, it is planned to install solar panels, place the delivered goods and weigh the module, assemble the space head, refuel the module tanks with fuel components and the overall assembly of the Proton-M space rocket.
- The "Nauka" (Russian for 'science') multipurpose laboratory module, developed by RSC Energia in cooperation with the Khrunichev State Research and Production Space Center, is a component of the International Space Station (ISS) that is expected to expand the functionality of the Russian segment of the ISS.
Launch
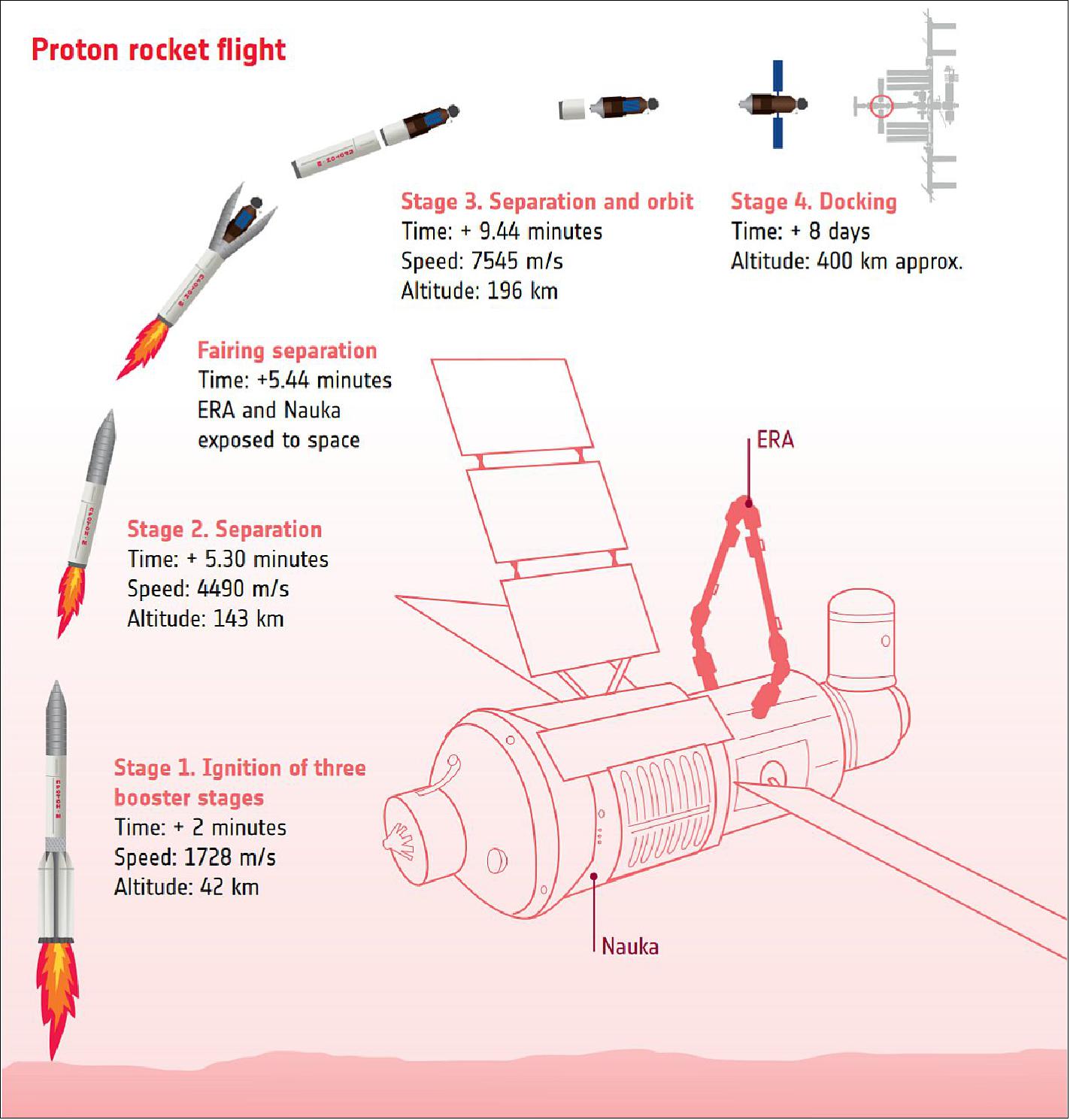
On 21 July 2021, the European Robotic Arm (ERA) is on its way to the International Space Station after being launched on a Proton rocket from the Baikonur Cosmodrome, in Kazakhstan, at 16:58 CEST (14:58 UTC) today.- The 11-m-long robot is travelling folded and attached to what will be its home base – the Russian MLM (Multipurpose Laboratory Module), also called ‘Nauka’, a 20 ton module. The Proton-M booster placed Nauka and ERA into orbit around 10 minutes after liftoff, nearly 200 km above Earth. 8)
'This arm was made for walking'
The ISS already has two robotic arms; Canadian and Japanese robots play a crucial role in berthing spacecraft and transferring payloads and astronauts. However, neither arm can reach the Russian segment.

ERA is the first robot capable of ‘walking’ around the Russian parts of the orbital complex. It can handle components up to 8000 kg with 5 mm precision, and it will transport astronauts from one working site to another.
“Moving hand-over-hand around the Russian parts of the Station, the European Robotic Arm will bring more freedom, more flexibility and more skills to space operations,” says ESA Director of Human and Robotic Exploration David Parker.
“We are giving the Space Station a mid-life upgrade after 20 years in orbit through our Columbus 2030 program – an opportunity to modernize space with a commercial approach,” he adds.
The launch and installation of the European Robotic Arm is a first for Europe and Russia in space. A consortium of 22 European companies from seven countries built the robot for ESA. The long-awaited premiere of this European-made robot follows 14 years of perseverance.
Arrival on the ISS
It will take Nauka eight days to slowly raise its orbit and catch up with the Space Station. On 29 July at 15:26 CEST, the new module will use its engines to dock automatically to Zvezda at the heart of the Russian segment.
ESA astronaut Thomas Pesquet will welcome the robot arm and assist in setting it up. Five spacewalks are planned to get ERA ready and perform its first space operations, some of which will be carried out by ESA astronauts Matthias Maurer and Samantha Cristoforetti.
The crew can control ERA from both inside and outside the Space Station, a feature that no other robotic arm offers.
Team Effort for The Future
Together with the international partners, Europe is preparing to extend the life of the Space Station for years to come.
“Our home in space is constantly being improved. Europe’s Columbus lab is getting new science racks, ultra-fast data connections and external and internal platforms, commercially provided, for more users. ESA astronaut Thomas Pesquet has even been helping to upgrade the Station’s power with new solar arrays,” points out David Parker.
The symbolic European-Russian handshake in space will help demonstrate autonomous and real-time telerobotic operations, key for future missions to the Moon and Mars.
References
1) ”European Robotic Arm,” ESA, International Space Station, 17 April 2014, URL: https://www.esa.int/Our_Activities/Human_and_Robotic_Exploration
/International_Space_Station/European_Robotic_Arm
2) ”External control interface for European Robotic Arm,” ESA, 18 September 2019, URL: http://www.esa.int/spaceinimages/Images/2019/
09/External_control_interface_for_European_Robotic_Arm
3) ”ERA (European Robotic Arm), the International Space Stations's latest Upgrade,” ERA brochure, 2021, URL: https://esamultimedia.esa.int/docs/science/ERA_brochure_EN.pdf
4) ”European Robotic Arm installation on Nauka,” ESA Science & Exploration, 23 June 2021, URL: https://www.esa.int/About_Us/Week_in_images/Week_in_images_21_-_25_June_2021
5) ”European Robotic Arm specs,” ESA Science & Exploration, 23 June 2021, URL: https://www.esa.int/Science_Exploration/Human_and_Robotic_Exploration
/International_Space_Station/European_Robotic_Arm
6) ”European Robotic Arm installation on Nauka,” ESA Science & Exploration, 23 June 2021, URL: https://www.esa.int/Science_Exploration/Human_and_Robotic_Exploration
/International_Space_Station/European_Robotic_Arm
7) ”European Robotic Arm Installed on the Nauka MLM,” Russia News, Space, 20 May 2021, URL: https://dfnc.ru/en/kosmos/european-robotic-arm-installed-on-the-nauka-mlm/
8) ”European Robotic Arm is launched into space,” ESA Science& Exploration, 21 July 2021, URL: https://www.esa.int/Science_Exploration/Human_and_Robotic_Exploration
/European_Robotic_Arm_is_launched_into_space
9) ”ERA launch replay,” ESA Science & Exploration, 21 July 2021, URL: https://www.esa.int/ESA_Multimedia/Videos/2021/07/ERA_launch_replay
10) ”A new arm for space,” ESA Science & Exploration, 21 July 2021, URL: https://www.esa.int/Science_Exploration/Human_and_Robotic_Exploration
/European_Robotic_Arm_is_launched_into_space
11) ”European Robotic Arm on the Space Station,” ESA Science & Exploration, 24 June 2021, URL: https://www.esa.int/Science_Exploration/Human_and_Robotic_Exploration
/International_Space_Station/European_Robotic_Arm
12) Garcia, Mark. “Partners Extend International Space Station for Benefit of Humanity – Space Station.” NASA Blogs, 27 April 2023, https://blogs.nasa.gov/spacestation/2023/04/27/partners-extend-international-space-station-for-benefit-of-humanity/
The information compiled and edited in this article was provided by Herbert J. Kramer from his documentation of: ”Observation of the Earth and Its Environment: Survey of Missions and Sensors” (Springer Verlag) as well as many other sources after the publication of the 4th edition in 2002. - Comments and corrections to this article are always welcome for further updates (eoportal@symbios.space).
ERA (European Robotic Arm) Smart Spacewalker Development Status Launch References Back to top