ISS: ColAIS
EO
ESA
Mission complete
Quick facts
Overview
| Mission type | EO |
| Agency | ESA |
| Mission status | Mission complete |
| Launch date | 10 Sep 2009 |
| End of life date | 01 Feb 2015 |
| CEOS EO Handbook | See ISS: ColAIS summary |
ISS Utilization: ColAIS (Columbus Automatic Identification System)
Overview Launch Mission Status Ground Segment References
NorAIS (Norwegian Automatic Identification System) and LuxAIS (LuxSpace AIS) are two experimental instruments that were brought to the ISS by the Japanese HTV-1 (H-II Transfer Vehicle-1) flight. The NorAIS and LuxAIS receiver systems are also referred to at ESA as VIS (Vessel Identification System).
Launch
Both receivers of ColAIS (NorAIS and LuxAIS) were delivered to the Columbus module of ISS by Japan's HTV-1 supply ferry in September 2009 (launch Sept. 10, 2009 from TNSC, Japan; docking of HTV-1 on Sept. 23, 2009).
Both instruments were implemented through an ESA GSTP (General Support Technology Program) contract under the name of ColAIS (Columbus AIS), an in-orbit demonstration project of ESA. Both AIS receivers are designed for wide-area vessel detection on the oceans in VHF frequency. The aim is to demonstrate spaceborne ship monitoring techniques which can then serve as the basis of operational services via satellite constellations. 1)
The overall objective is to overcome signal collisions. The problem is that the AIS concept operates on a similar basis to mobile phone systems: ships within signal range form 'self-organizing cells' within which they coordinate automatic sharing of frequencies. When looking down on the ocean from orbit, however, many of these cells become visible simultaneously, leading to numerous transmission collisions.
So the challenge of the ColAIS (Columbus AIS) project has been to develop sophisticated receivers which can de-scramble AIS messages as well as take account of Doppler shifting caused by rapid orbital motion relative to the sea surface.
One receiver has been developed by the Norwegian FFI (Defence Research Establishment) – also serving as the project's prime contractor – with the Norwegian firm Kongsberg Seatex as subcontractor; and the second receiver, LuxAIS, was developed by the Luxembourg-based company LuxSpace.
AIS Atennas
The antennas for AIS and ARISS were constructed by the ARISS (Amateur Radio on the International Space Station) organization in collaboration with ESA. Both antennas were delivered by the STS-129 Shuttle mission to ISS (Nov. 16-27, 2009). They were installed on the Earth-facing starboard side of the Columbus module, the AIS antenna was placed forward and the ARISS antenna aft. The AIS antenna is connected to both ColAIS receivers which are installed inside the Columbus module.
The Shuttle mission STS-129 (Nov. 16-27, 2009) brought ESA's Columbus module a step nearer to beginning an ambitious experiment to track global maritime traffic from space. Astronauts Michael Foreman and Randolph Bresnik installed the AIS (Automatic Identification System) antenna on the outside of Columbus during their second spacewalk of the STS-129 mission, on November 21, 2009. This VHF antenna is designed to pick up signals from the standard AIS transponders carried by all international ships over 300 tons, cargo vessels over 500 tons and all types of passenger carriers. 2) 3)
Next to the AIS antenna, the astronauts installed also the ARISS (Amateur Radio on the International Space Station) antenna onto Columbus. Both AIS and ARISS antennas were developed by the ARISS organization in collaboration with ESA. They were installed on the Earth-facing starboard side of Columbus, the AIS antenna placed forward and the ARISS antenna aft.

Once the ColAIS experiment is ready, the receivers will operate alternately, switching every three months. Current planning calls for ColAIS operations to start in the summer of 2010.
The final element, needed to begin the two-year ColAIS experiment, is the ERNO-Box. It is a prototype computer based around a new generation of ESA-developed processor chips, its name coming from the German for ‘modular computer in low Earth orbit'. The ERNO-Box has been built by Astrium Space Transportation in Germany. Astrium is also responsible for the overall system integration of ColAIS.
Sensor Complement
NorAIS (Norwegian Automatic Identification System)
From the ISS orbit (~400 km, inclination =51.6º) the NorAIS receiver has a viewing range of ~ 4000 km covering the ocean areas between 68º north and 68º south several times per day. This means that ColAIS in the future could extend the range of ship-tracking services to also include trans-ocean traffic. 4)
The NorAIS instrument was developed by Kongsberg Seatex and the Norwegian Defence Research Establishment (FFI) in cooperation with other partners. NorAIS was built in a year. The fast development phase was partly due to the construction of its twin, made for use in the dedicated AISSat-1 (Automatic Identification System Satellite-1) mission. AISSat-1, a Norwegian (FFI) nanosatellite with a launch on July 12, 2010, performs similar measurements as NorAIS, but the data is downloaded in real time under different conditions.

The NorAIS receiver can both decode messages in real time and sample the baseband signal; the last operation mode is intended for experimentation and further development of the SDR (Software Defined Radio). After qualification, improved versions of the receiver will be uploaded.
NorAIS is being operated by FFI through the Norwegian control unit for experiments at the ISS, the N-USOC (Norwegian - User Space Operations Center) in Trondheim, Norway. N-USOC collects the data from the instrument and sends it to FFI every hour.
LuxAIS
The LuxAIS receiver stems from LuxSpace of Luxembourg, a company of OHB-System, Bremen, Germany. The LuxAIS receiver from the co-investigator in Luxembourg will be operated on a 50-50 time share basis with NorAIS. 5)

ERNO-Box
The ERNO-Box has been designed for operation in the Columbus module of the ISS. Built by Astrium Space Transportation in Bremen, Germany, it is a prototype computer based around a new generation of ESA-developed processor chips, its name coming from the German for ‘modular computer in low Earth orbit'.
The ERNO-Box was already part of the Columbus module from Feb. 2008 to July 2009. Its original purpose was to assess a new processor and other technologies in the space environment. Following its return to Earth with STS-127 in July 2009, the ERNO-Box was refitted to serve as a data relay for the ColAIS experiment, and will return to the Station once a flight is available, though not earlier than February 2010 depending on upload constraints for ESA payloads.
Re-Launch
The ERNO-Box was again flown to the ISS on Shuttle flight STS-132 (May 14- 26, 2010). The refurbished ERNO-Box was installed at Columbus' aft cone on May 21, 2010 by ISS Flight Engineer Timothy Creamer who switched on the equipment after making power and data connections. Hereafter Creamer installed the remaining AIS hardware and connected it up to the ERNO-Box (power/data) and the AIS antenna (RF). The ERNO-Box piece of hardware is used as a data relay for the Automatic Identification System (AIS), whose antenna was installed on the outside of Columbus during an EVA on November 21, 2009. 7) 8) 9)


Legend to Figure 6: ColAIS is operating from a modest amount of hardware fitted onto the cone of ESA's Columbus module, linked to a previously-installed external antenna. The 'ERNO-Box' control computer is the long black box - about the size of a car radio - while a RF filter is fitted below it, and the NorAIS receiver is installed beneath that. Every three months this Norway-built NorAIS receiver will be swapped over with another Luxembourg-built LuxAIS receiver.
Mission Status
• April 27, 2023: The International Space Station (ISS) partners have agreed to extend the operational period of the ISS. The United States, Japan, Canada and participant European Space Agency (ESA) countries will support operations until 2030, while Russia has committed to continuing station operations until 2028. 20)
• The NorAIS-2 (Norwegian Automatic Identification System-2) receiver of FFI replaced its predecessor, NorAIS-1, when it was installed on the International Space Station in February 2015. Four months later, the improvements from NORAIS-1 are significant, with an increase in number of ships tracked daily from roughly 26 000 to 33 000. 10)
- As expected, the NorAIS-2 algorithms are more robust against interference, showing even greater improvement in difficult high traffic zones. In the Gulf of Mexico for instance, the NorAIS-2 tracks more than twice as many vessels on a daily basis compared with NorAIS-1. — The result of the performance improvement of the NorAIS-2 receiver, with more messages detected from more ships, enables operational users of satellite AIS to build a more complete maritime picture, knowing which ships are where doing what.
The aggregated knowledge gained by FFI and Kongsberg Seatex during the four and a half years of NorAIS-1 operation was combined by Kongsberg Seatex to form the algorithms implemented in the NorAIS-2 Receiver.
In addition to running more advanced algorithms than NorAIS-1, the NorAIS-2 receiver operates on all four AIS frequencies, can sample up to 512 MByte of data while simultaneously decoding on all four channels, and still has room for much larger algorithms if required in the future. The four operating frequencies can be set to any frequency within the maritime VHF band for general signal environment measurements.
Basic information about a vessel such as identity, position, speed and heading are transmitted in type 1,2,3 and 27 AIS messages and consequently utilized by space-based AIS services.
A typical day's distribution of vessels as seen by the NorAIS-2 receiver are presented in video for type 1-3 (white) and type 27 (red) AIS messages respectively. The type 27 message was designed to increase the detection probability in high traffic zones from space, and by comparison of the North Sea high ship traffic area it is evident that more ships are seen in type 27 data than the type 1-3 data. So far, only a minority of ships has started to use the type 27 message, which is why so many fewer ships are detected globally compared with the type 1-3 messages.
Furthermore, as more and more ships start using the type 27 message on the two new AIS channels, the capability of receiving messages on all four channels simultaneously is a significant improvement to a space-based AIS service.
• May 28, 2014: The NorAIS-1 receiver on the Columbus module of ESA is still working well in its 5th year of operations. The SDR (Software Defined Radio) has been upgraded 4 times resulting in substantial improvements to its performance in challenging areas with thousands of ships within the FOV (Field of View), i.e. the Mediterranean, the South China Sea, Gulf of Mexico and the North Sea and Baltic Sea (Ref. 11).
- Besides being used for development purposes, NorAIS has been used for demonstrations and pilot projects for ESA and the EU, as well as in support of counter-piracy operations in the Indian Ocean.
- NORAIS operations are expected to continue at least until the end of 2015, most probably even longer. The LuxAIS receiver has not been re-sent to orbit, so NorAIS is operated on a continuous basis.
- The NorAIS data from the ISS is received by the Col-CC (Columbus Control Center), located at DLR in Oberpfaffenhofen, Germany and then sent to the N-USOC in Trondheim, Norway.
• March 2013: The NorAIS receiver is operating nominally. The AIS receiver is essentially a software defined radio; the project continues to work on AIS message decoder improvements with uploads of new versions of the software. 11)
• As of March 25, 2012, all AIS data reception on Columbus so far has only been done with the NorAIS receiver. Although, the original plan called for alternate operations support periods of the NorAIS and LuxAIS receivers on a three month basis, the LuxAIS receiver failed to communicate with the standard ISS interfaces when the first swap of receivers was initiated on Sept. 27, 2010. 12)
- The failed LuxAIS receiver was returned to Earth on Soyuz 24S on March 16, 2012.
• NorAIS: The NorAIS receiver has a sample mode that can collect the raw signal, digitize it and send it to ground for analysis of signal quality, which is proving very helpful in making additional improvements/ refinements to the system in extremely crowded shipping areas where the possibility of lost signals or mixed signals can occur. 13)
This is used both to investigate the signal environment and to evaluate the performance of new receiver technologies on the ground. Several hundred data sets have been collected and processed with new candidate algorithms for next generation receivers.
The results of the analyses have been very good. On a good day, approximately 400,000 ship position reports are received from more than 22,000 different ship identification numbers MMSI (Maritime Mobile Service Identity). In a summary made in Oct. 2011, the total number of position reports received exceeded 110 million messages from more than 82,000 different MMSI numbers.
As an addition to the original technical topics, operational experimentation has been included in the investigations. Near-real-time data transfer is crucial to meet the requirement of SATAIS (Satellite-borne AIS) set by ESA in cooperation with operational users.
After an upgrade of the ground systems in the N-USOC, 10 days of near-real-time data show that 80% of the messages collected in the period could be delivered through the station's communications network with data latency significantly less than 1 hour. The near-real-time data delivery has been part of routine operations since Nov. 2011.
In the spring of 2012, a new version of the decoder algorithm, developed by Kongsberg Seatex as part of the technology development contract with ESA, is being tested. The development benefits from the investigations of the sampled data and ongoing work in other ESA projects. - The firmware was uploaded to the NorAIS receiver through the station's communications network and verified and activated in Jan. 2011. The preliminary results indicate that the performance in terms of decoded messages has increased by a factor of between 1.5 and 2.0 for the high traffic zones that ESA has specified should be monitored with high performance.
The work on better algorithms continues. A second NorAIS receiver upgrade is planned in May 2012. The results of the development will support the design and development of a space-based AIS system in general as well as the performance of the AIS receiver on the station (Ref. 13).
• On Oct. 27, 2010, the ISS crew swapped the LuxAIS receiver of VIS back to the NorAIS receiver - due to the communications issue with the LuxAIS receiver. Following the swap, telemetry data from NorAIS was immediately received by N-USOC via the Col-CC. The VIS had been working extremely well for several months with the NorAIS receiver and had already acquired an extensive amount of data prior to its swap to the LuxAIS receiver in September. 14)
• October 22, 2010: ESA is reporting that no AIS activities were carried out in the period since September 27, 2010. The VIS (Vessel Identification System) had been working extremely well for several months and has already acquired an extensive amount of data based on the NORAIS receiver. As no communication has been established with the LuxAIS receiver after it had been connected, plans are being put in place to swap back to the NORAIS receiver in the near future. The data telemetry for VIS , for both receivers, is received by the N-USOC (Norwegian User Support and Operation Center) in Trondheim via ESA's Col-CC (Columbus Control Center) at DLR in Germany. 15)
• On Sept. 27, 2010, the system's NorAIS receiver was exchanged for the LuxAIS receiver by the ISS crew. However, it turned out that communications could not be established with the LuxAIS receiver. Even help from the ground experts didn't provide a solution. 16)
• In late August 2010, the NorAIS receiver is nearing the end of its third month of continuous operations on ISS (a switchover to the LuxAIS receiver is scheduled to start in Sept. 2010). The NorAIS ship-tracking experiment has experienced a marked increase in data quality and is now operating alongside with AISSat-1 of Norway (launch July 12, 2010), developed in parallel with the NorAIS receiver. Both, the NorAIS and AISSat-1 receivers follow the same design and are operating in parallel, but from different orbits and inclinations. This means they provide perfect data for comparing and investigating the prospect of an operational AIS satellite constellation. 17)
The Norwegian Defence Research Establishment (FFI) and Kongsberg Seatex are responsible for the NorAIS receiver being employed for the first three months of operations, switching to the LuxAIS receiver in September, which has been developed by Luxembourg-based LuxSpace and EmTroniX.
The results from NorAIS are being used for AISSat-1 as well as being ground-truthed against other data sources. The NorAIS team, based near Oslo, receive results via Norway's User Support and Operations Centre (N-USOC) in Trondheim. Part of the European USOC network, this national hub serves ISS experimenters and maintains operational control of the ColAIS experiment, liaising with the Columbus Control Center in Oberpfaffenhofen, Germany (Figure 9).
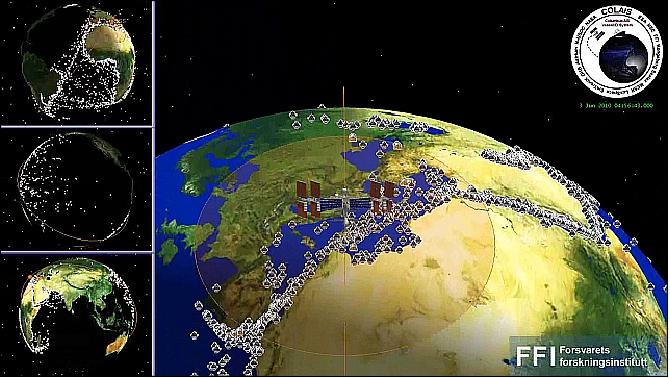
• On June 1, 2010, the ColAIS experiment with the NorAIS receiver was switched on. More than 90,000 Class A AIS messages were gathered between 19:00 GMT on June 2 and 09:00 GMT on June 3, 2010 (Figure 7). 18)

Ground Segment
The European ISS Program for Columbus consists of two major components, which are termed 'space segment' and 'ground segment', respectively. The space segment refers to the on-orbit ISS elements (including the vehicles that service the ISS), and the ground segment includes all of the ground-based facilities that support the activities involved in the Payload Lifecycle. Based on a decision made by the Manned Space Program Board in 1998, ESA decided to adopt a decentralized infrastructure for the operation of European payloads on board the ISS, based on the concept of USOCs (User Support and Operations Centers). 19)
Under the overall management of ESA, the European USOCs carry out the majority of tasks related to the preparation and inflight operations of multi-user facilities. USOCs are based on already existing National User Centers. This approach makes the USOCs instrumental for the implementation of the ISS ground segment for payload operations preparation, real-time data dissemination and provision of instantaneous experiment command processing, as well as immediate support to the on board crew during experiment execution. The USOCs act as a link between the user community and ESA's ISS utilization organization.
The Col-CC (Columbus Control Center), located at DLR in Oberpfaffenhofen, Germany, coordinates the European ground operations of the Columbus Module on ISS including the USOC interfaces.

References
1) "Columbus to host worldwide sea traffic tracking experiment," ESA, Sept. 18, 2009, URL: http://www.esa.int/SPECIALS/Space_Engineering/SEMWN5W0EZF_0.html
2) Atlantis leaves Columbus with a radio eye on Earth's sea traffic," Dec. 4, 2009, URL:http://www.esa.int/esaMI/Operations/SEMIHX49J2G_0.html
3) "STS-129 leaves Columbus with a radio eye on Earth's sea traffic," Dec. 4, 2009, URL: http://spacefellowship.com/news/art16615
/sts-129-leaves-columbus-with-a-radio-eye-on-earth-s-sea-traffic.html
4) "Tracking Ships From ISS - Norwegian Monitoring Equipment at Place in the Space Station," Nordic Space, URL: http://www.nordicspace.net/PDF/NSA240.pdf
5) LuxSpace Sarl, The Luxemburg Space System and Application Company, Oct. 2009, URL: http://earth.eo.esa.int/workshops/spaceandthearctic09/Ruy_luxspace2.pdf
6) http://www.luxspace.lu/index.php/Services.html
7) "Columbus ESA ISS Science & System - Operations Status Report # 68, Increment 23," May 21, 2010, URL:http://www.esa.int/SPECIALS/Columbus/SEM9EU4XT9G_0.html
8) "AIS on ISS: Assembling the experiment," ESA, June 15, 2010, URL: http://www.esa.int/esaCP/SEMHFQPK2AG_index_0.html
9) "Space Station keeps watch on world's sea traffic," ESA, Aug. 19, 2010, URL: http://www.esa.int/esaMI/HSF_Research/SEMILOPK2AG_3.html
10) "NORAIS-2: Securing a better maritime picture," FFI, May 20, 2015, URL: http://www.ffi.no/no/Forskningen/Aveling-Land-og-luftsystemer/Sider/NORAIS-2.aspx
11) Information provided by Richard B. Olsen of FFI (Norwegian Defence Research Establishment), Kjeller, Norway
12) "Columbus ESA ISS Science & System - Operations Status Report # 114 Increment 30," ESA, March 25, 2012, URL: http://www.esa.int/esaMI/Columbus/SEMM2T4SZLG_0.html
13) "ISS Keeps Watch on World's Sea Traffic," Space Daily, April 2, 2012, URL: http://www.spacedaily.com/reports/ISS_Keeps_Watch_on_World_Sea_Traffic_999.html
14) "Columbus ESA ISS Science & System - Operations Status Report # 80, Increment 25," ESA, Nov. 5, 2010, URL: http://www.esa.int/esaMI/Columbus/SEM56656JGG_0.html
15) "Columbus ESA ISS Science & System - Operations Status Report # 79, Increment 25," October 22, 2010, URL: http://www.esa.int/esaMI/Columbus/SEMQIG4PVFG_0.html
16) "Columbus ESA ISS Science & System - Operations Status Report # 78, Increment 24," ESA, Oct. 8, 2010, URL: http://www.esa.int/esaMI/Columbus/SEMHM2WO1FG_0.html
17) "ISS ship-tracker operating alongside Norwegian satellite;" ESA, Aug. 26, 2010, URL: http://www.esa.int/SPECIALS/Technology/SEMA7AZNZBG_0.html
18) "Space Station keeps watch on world's sea traffic," ESA, June 15, 2010, URL: http://www.esa.int/esaCP/SEMILOPK2AG_index_0.html
19) "User Support and Operations Centers (USOCs)," ESA, URL: http://www.esa.int/SPECIALS/HSF_Research/SEMEUJKIWZF_0.html
20) Garcia, Mark. “Partners Extend International Space Station for Benefit of Humanity – Space Station.” NASA Blogs, 27 April 2023, https://blogs.nasa.gov/spacestation/2023/04/27/partners-extend-international-space-station-for-benefit-of-humanity/
The information compiled and edited in this article was provided by Herbert J. Kramer from his documentation of: "Observation of the Earth and Its Environment: Survey of Missions and Sensors" (Springer Verlag) as well as many other sources after the publication of the 4th edition in 2002. - Comments and corrections to this article are always welcome for further updates (eoportal@symbios.space).
Overview Launch Mission Status Ground Segment References Back to top