IRS-1C/1D (Indian Remote Sensing Satellites-1C/1D)
EO
Mission complete
Imaging multi-spectral radiometers (vis/IR)
High resolution optical imagers
Indian Remote Sensing Satellites -1C and -1D (IRS-1C, -1D) were a part of the IRS series of optical imaging satellites operated by the Indian Space Research Organisation (ISRO). The identical satellites were launched in December 1995 and September 1997 respectively in order to observe and manage India’s natural resources as part of India’s National Natural Resources Management System (NNRMS). The missions of IRS-1C and -1D were completed in September 2007, and January 2010 respectively.
Quick facts
Overview
| Mission type | EO |
| Agency | ISRO |
| Mission status | Mission complete |
| Launch date | 28 Dec 1995 |
| End of life date | 02 Jan 2010 |
| Measurement domain | Land, Snow & Ice |
| Measurement category | Multi-purpose imagery (land), Vegetation, Albedo and reflectance, Landscape topography, Snow cover, edge and depth, Ice sheet topography |
| Measurement detailed | Land surface imagery, Vegetation type, Earth surface albedo, Land surface topography, Snow cover, Sea-ice sheet topography |
| Instruments | WiFS, PAN (IRS-1C/1D), LISS-III (IRS) |
| Instrument type | Imaging multi-spectral radiometers (vis/IR), High resolution optical imagers |
| CEOS EO Handbook | See IRS-1C/1D (Indian Remote Sensing Satellites-1C/1D) summary |
Related Resources
Summary
Mission Capabilities
IRS-1C and -1D carried three pushbroom sensors. Two were optical imagers with different swaths and spatial resolutions: Linear Imaging Self Scanner-III (LISS-III) and Panchromatic Sensor (PAN). The other sensor was an imaging radiometer called WiFS (Wide Field Sensor).
All instruments contributed to monitoring soil, crops, forests, snow cover, and land use.
Performance Specifications
LISS-III observed over a swath width of 148 km in four spectral bands: two visual (VIS), one near-infrared (NIR) and one short-wave infrared (SWIR).
The SWIR band had a spatial resolution of 70.5 m and all other bands had a resolution of 23.5 m. PAN was panchromatic and as such observed over the majority of visible wavelengths (0.5 - 0.75 µm). It did so with a resolution of 5.8 m over a swath of 70 km. WiFS observed over two bands: VIS red (0.62 - 0.68 µm) and NIR (0.77 - 0.86 µm), with a resolution of 188 m over a swath of 810 km.
IRS-1C and IRS-1D each maintained a polar sun-synchronous orbit with an altitude of 817 km, an inclination of 98.6°, and a repeat cycle of 24 days.
Space and Hardware Components
IRS-1C was launched aboard a Russian-built Molniya-M launch vehicle at the Baikonur Cosmodrome in Kazakhstan, while IRS-1D was launched aboard an ISRO PSLV-C1 (Polar Satellite Launch Vehicle) from the Satish Dhawan Space Centre in India.
Telemetry, Tracking, and Command (TT&C) communications were performed via S-band radio frequencies. Payload data was transferred via X-band with a rate of 42.5 Mbit/s for LISS-III and WiFS data, and a rate of 85 Mbit/s for PAN data.
IRS-1C and IRS-1D have both been decommissioned, reaching their end of life in 2007 and 2010 respectively.
IRS-1C/1D (Indian Remote Sensing Satellites-1C/1D)
IRS-1C is an ISRO-built (Indian Space Research Organization) second-generation remote sensing satellite with enhanced capabilities in terms of spatial resolution and spectral bands.
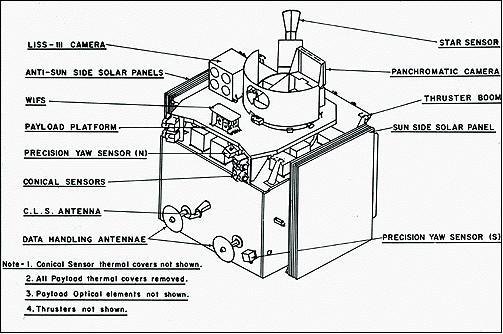
Spacecraft
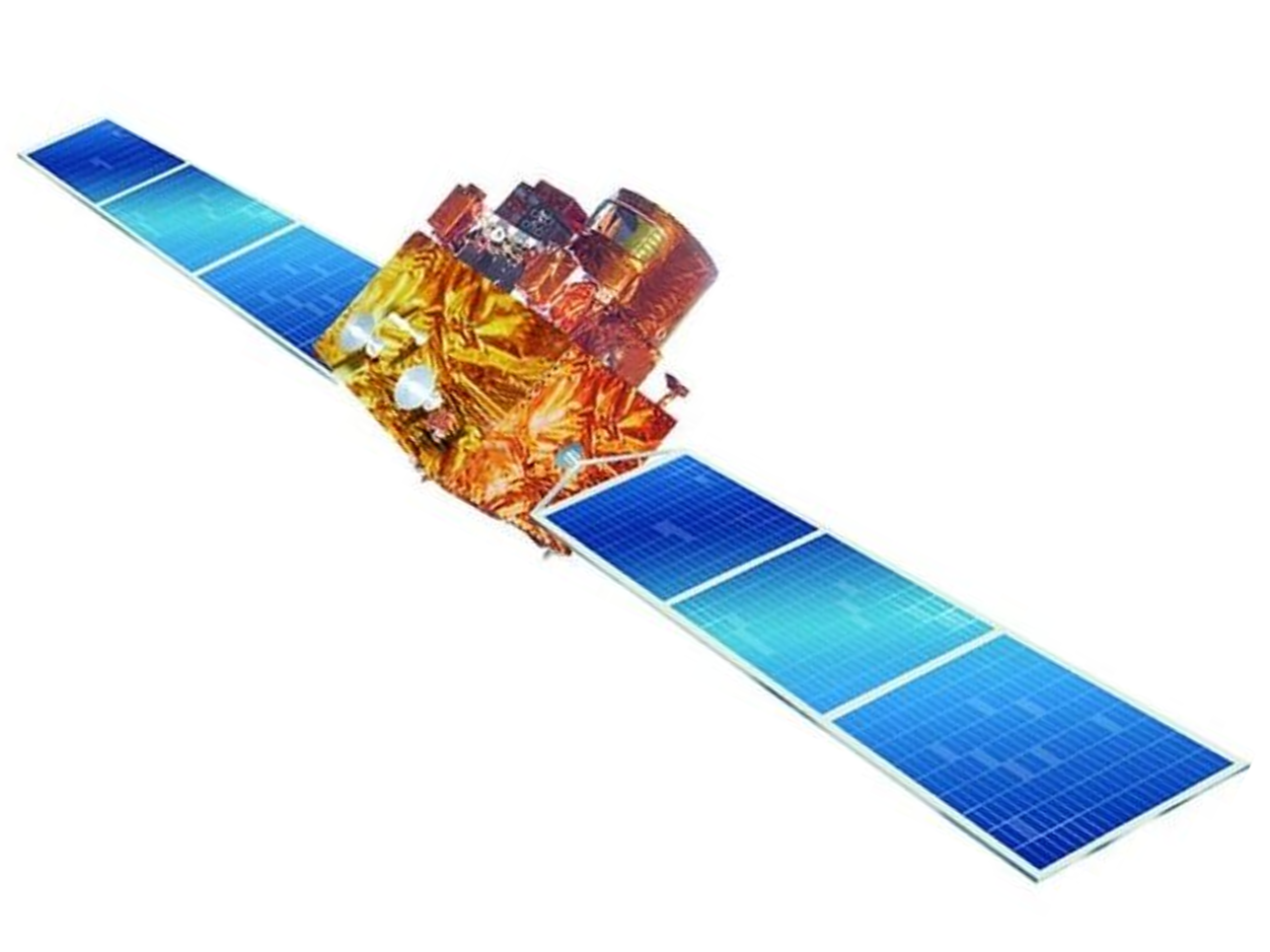
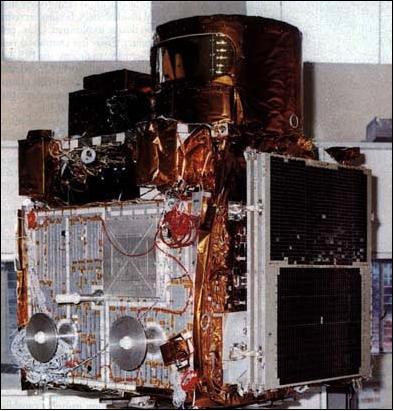
IRS-1C and IRS-1D are three-axis body-stabilized spacecraft (identical twins). The attitude is sensed by star sensors, Earth sensors and gyros. Actuators: four reaction wheels, two magnetic torquers, 16 one Newton hydrazine trusters; one 11 Newton thruster. Pointing accuracy (3σ): roll and pitch = ±0.15º, yaw = ±0.2º; the drift rate is (3σ): 3.6 x 10-4 º/s.
IRS-1C and IRS-ID introduced a heavier, more capable Earth observation platform. The S/C structure consists of the main platform and the payload platform (aluminium honeycomb structure). The S/C bus consists of a central cylinder (930 mm diameter x 1123 mm) attached to the bottom and the top decks on four sides of the S/C. In addition, a thermally isolated payload deck is introduced (better alignment stability for payload instruments).
The S/C power = 813 W (two sun-tracking type solar panels of 9.6 m2) plus two NiCd batteries of 21 Ah each; the SADA (Solar Array Drive Assembly) provides continuous articulation of the solar panels. The two un-canted solar panels view the sun, one on the sun side (SS) and another on the Anti Sun Side (ASS).
The S/C mass is 1250 kg; S/C design life = 3 years; the onboard recorder capacity is 62 Gbit with an input/output data rate of 42.45 Mbit/s. 1) 2) 3) 4) 5) 6) 7) 8)
Launch
IRS-1C was launched on December 28, 1995, with a Russian launcher (Molniya-M, launch provider: TsSKB-Progress) from Baikonur, Kazakhstan.
The IRS-1D launch with an ISRO PSLV-C1 launcher from Sriharikota (SHAR, India) took place on September 29, 1997.
The launch of the IRS-1D spacecraft with the PSLV-C1 was a significant event despite a minor snag; for the first time, an Indian-made launch vehicle had launched an operational satellite, also made in India, from Indian soil (i.e., after the two demonstration flights, namely: IRS-P2 and -P3).
RF communications:
Downlink transmission of payload data: 40 W of output power (X-band) is used to transmit 42.5 Mbit/s of LISS-3 and WiFS data and 85 Mbit/s of PAN data, both links are in X-band with QPSK modulation.- TT&C in S-band with PCM/FSK/FM/PM modulation (ISTRAC mission control centre at Bangalore, the NRSA data centre at Hyderabad is the focal agency for user interfaces).
Orbit:
Polar sun-synchronous orbit; altitude = 817 km, inclination = 98.69º, period = 101.23 min; local equatorial local crossing time at 10:30 AM on descending node; 24-day revisit period.
Note:
the IRS-1D went into an initial elliptical orbit of 817 km x 320 km (slight underperformance of the 4th stage of PSLV). In spite of this handicap, ISRO controllers were able to place the satellite into a functional sun-synchronous (near-circular) orbit of 737 km perigee and 821 km apogee (use of hydrazine thrusters).
Availability of IRS data.
Space Imaging of Thornton, CO (the Landsat-4 and -5 data distributor) bought the worldwide commercial distribution rights for IRS-1C/D imagery and follow-up IRS series data from Antrix Corp. of Bangalore (the commercial arm of India's Department of Space) in 1995. GAF of Munich, Germany, bought from Space Imaging the IRS distribution rights for Europe. Data reception of IRS-1C data for GAF started in the early summer of 1996 at the DLR/DFD station Neustrelitz.
Mission Status
• The IRS-1D spacecraft completed its mission in January 2010 after serving for 12 years and 3 months on orbit. 9)
• The IRS-1C spacecraft completed its mission on September 21, 2007, after serving for 11 years and 8 months on orbit. 10)
• The IRS-1C mission is “still operational” as of 2007. However, for the last couple of years, the operations team had to devise and operationalize new/innovative procedures to maintain the attitude and continue the payload service due to power constraints and a decreasing local time.
After the 10th year completion of IRS-1C on-orbit life (Jan 2006 onwards), ASS (Anti Sun Side) panel was released in all orbits to manage the power. From September 2006, SS (Sun Side) panels release and arrest operations were performed in a controlled way similar to the ASS panel and released in all orbits from Jan. 2007 onwards. After the panels were released for rotation, an ASS panel stickup was observed only once but the SS panel was frequently disturbing the planned payload operations. 11)
• In the second half of this decade, performance degradations were observed, in orbit control and electro-mechanical systems. With constraints imposed by these systems, payload operation service was continued for a decade till now.
• After five years of on-orbit operations, the RCS (Reaction Control Subsystem) could not support inclination correction manoeuvres anymore (depletion of fuel, mission design life of 3 years) resulting in local time drift. This caused a gradual reduction in power generation and Sun to be out of the field of view of the yaw sun sensor. The power system was built to support payload operations in every orbit for a duration of 16 minutes.
• In the first half of this decade, IRS-1C operations were very smooth. Orbit control was good and the sun-synchronous orbit was maintained by periodical orbit manoeuvres. Local Time (LT) was maintained within 10:30 am ±5 min, GTS was maintained within ±1 km though the specification was ±5 km. Attitude control was as expected and pointing, drift rate was within the required limits. The spacecraft supported operations of all the payloads (PAN, LISS and WiFS) more than 10 times in a day. In every orbit payload ON duration was nearly 16 minutes.
The IRS-1D mission is also operational as of 2007.
Sensor Complement
The three sensors are cameras operating in the pushbroom scanning mode using solid-state charge-coupled device (CCD) detectors. 12) 13)
Instrument | Pixel size | Spectral range | No of pixels / swath width | Data quantization |
PAN | 6 m | 0.5 - 0.75 µm | 4096 / 70 km | 6 bit |
LISS-3, VNIR | 23.5 m | 0.52 - 0.59 µm | 6000 / 142 km | 7 bit |
LISS-3, SWIR | 70.5 m | 1.55 - 1.75 µm | 2100 / 148 km | 7 bit |
WiFS | 188 m | 0.62 - 0.68 µm | 2048 / 740 km | 7 bit |
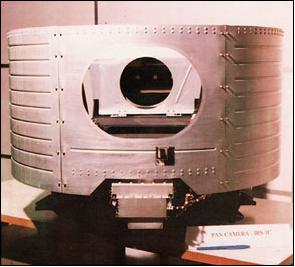
PAN (Panchromatic Camera)
PAN is a pushbroom imager using an all-reflective (off-axis f/4.5) folded mirror telescope (focal length = 982 mm) along with three separately mounted 4096-element CCD arrays, adding up to 12,288 pixels in the cross-track direction (there is some overlapping of the three subscenes of the image requiring special processing). Each detector array has separate interference filters and four LEDs along with a cylindrical lens. Two LEDs are for optical biasing and two are for inflight calibration of the sensor (calibration of CCDs excluding optics). A calibration cycle comprises 2048 lines (1.8 s for calibration cycle).
The PAN instrument is placed on a platform with a Payload Steering Mechanism (PSM) enabling the camera to tilt in the cross-track direction with a pointing capability of ±26º, providing a FOR (Field of Regard) coverage of ± 398 km. This provides a revisit capability of a certain target area of 5 days. 14) 15)
Spectral range | 0.5 - 0.75 µm |
Spatial resolution | ≤ 10 m (5.6 m at nadir) |
Swath width | 70 km nadir view (91 km swath for the most inclined cross-track view) |
Off-nadir viewing capability | ± 26º swath steering range (with this a revisit cycle of 5 days is achieved) |
Repetition cycle | 24 days |
SNR at saturation radiance | >64 |
Data quantization | 6 bit |
Integration time | 0.8836 ms |
Image data rate | 84.9 Mbit/s |
Instrument mass, power | 230 kg, 55-65 W |
Calibration of the PAN camera:
The inflight calibration of the camera is being carried out using LEDs. LEDs have the advantage of low power consumption, low thermal dissipation and fast response time. The scheme envisages the calibration of CCDs excluding optics. The LEDs are operated in pulse mode at higher currents resulting in higher intensities. A calibration cycle is comprised of 2048 lines. The time taken for one calibration cycle for the PAN camera is approximately 1.8 s. The LEDs are operated at pulsed mode and the duration for which the LEDs are 'ON' is varied in specific steps. The CCD detector integrates the light falling on it during one readout period. Six non-zero exposure levels spanning the full dynamic range are provided for each detector.
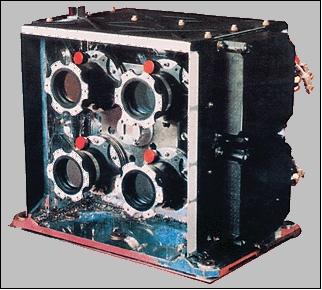
LISS-3 (Linear Imaging Self-Scanning Sensor)
Continuous service of multispectral imagery. Application: Land and water resources management. The pushbroom camera uses refractive optics in four spectral bands (separate optics and detector array for each band). The collecting optics consists of eight refractive lens elements with an interference filter in front. A linear CCD array of 6000 silicon-based elements is used for each VNIR band.
The SWIR-band device has a 2100-element InGaAs linear array (temperature controlled at -10ºC with a passive radiative cooler and an on-off heater control). The SWIR device itself consists of a lattice-mismatched heterojunction photodiode array for the detection of SWIR radiation and silicon-based CCD multiplexers for signal readout [seven identical modules are butted together to form a linear array of 2100 elements; each module consists of a two-sided InGaAs die of 300 photodiodes and two 150-element silicon-based CCD arrays on either side of the photodiode die to multiplex the signal from the photodiodes]. Instrument mass = 171 kg, power = 74-78 W. 16)
Calibration:
Inflight calibration of the LISS-3 camera is realized with LEDs (1.55 µm) as illuminating source and operated in pulsed mode to generate six intensity levels. A LED is mounted on either side of the photodiode array. Each LED is followed by diverging optics. A calibration cycle comprises 2048 scan lines (7.3 s for one cycle) and includes six intensity levels. Calibration is normally performed during the eclipse period of the satellite pass.
Spectral bands (4) | B2: 0.52 - 0.59 µm (VNIR) |
Spatial resolution | 23.5 m (VNIR) and 70.5 m (SWIR) |
Swath width | 142 km (VNIR) and 148 km (SWIR), FOV=±5º |
Repetition cycle | 24 days |
SNR at saturation radiance | > 128 |
Focal length of optics system | 346 mm for each VNIR band, 300 mm for SWIR band |
Data quantization | 7-bit (resolution of 128 grey levels) |
Integration time | 3.55 ms for VNIR, 10.65 ms for SWIR |
Data rate | 35.79 Mbit/s for VNIR, 1.39 Mbit/s for SWIR data |
Instrument mass, power | 171 kg, 74-78 W |
WiFS (Wide Field Sensor)
The WiFS camera is similar to LISS-1. Application: Vegetation index mapping. The camera provides two spectral bands in the VNIR range. The total swath is formed by using two optical heads (i.e., two lenses and two CCDs) per band. The WiFS camera employs refractive collecting optics consisting of eight refractive lens elements with an interference filter and a neutral density (ND) filter in the frontend assembly. Two linear CCD arrays are used with 2048 pixels/element (size of 13 µm/pixel). FOV=±26º. The two lenses are mounted with their optical axes canted at 13º on either side of nadir for each imager. Instrument mass = 41 kg, power = 22 W.
Spectral bands | 0.62 - 0.68 µm, 0.77 - 0.86 µm |
Spatial resolution | 188 m |
Swath width | 810 km |
Repetition cycle | 5 days |
SNR at saturation radiance | >128 |
Detector array | 2 x 2048 pixels |
Data quantization | 7-bit (radiometric resolution of 128 grey levels) |
Integration time | 28.42 ms |
Data rate | 2.06 Mbit/s |
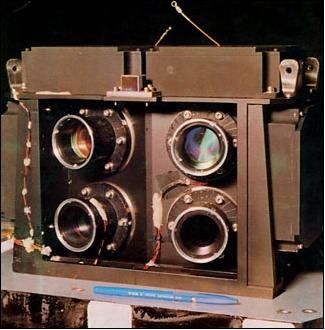
Figure 6: The WiFS camera illustration (image credit: ISRO)
References
1) IRS-1C Executive Summary, IRS-1C/1D Project, May 1990, ISRO
2) ”India's IRS-1C Satellite to offer sharper Images,” Space News, May 25-31, 1992 p. 11
3) ”India Readies Sharper IRS-1C for Molniya Launch,” Space News, January 9-15, 1995, p. 3
4) S. Kalyanaraman, ”Technologies Developed for IRS Program,” Journal of Spacecraft Technology, Vol. 9, No 1, 1999, pp. 1-13
5) K. Kasturirangan, et al., ”Indian remote sensing satellite (IRS)-1C - The beginning of a new era,” Current Science, Vol. No. 7, April 10, 1996, pp. 495-500
6) ”IRS-1C Data Users Handbook,” NRSA (India) document provided by Euromap (of GAF), September 1995
7) http://www.euromap.de/docs/doc_015.html#payload_platform
8) http://www.fcnym.unlp.edu.ar/catedras/geofoto/geo_html/informacion/pdf/Euroimage/irs.pdf
9) http://www.isro.org/satellites/irs-1d.aspx
10) http://www.isro.org/satellites/irs-1c.aspx
11) K. Malarmani, M. Pitchaimani, P. Soma, S. K. Shivakumar, “Innovative Techniques adopted in Extending the Mission life of IRS-1C Spacecraft beyond a Decade,” 58th IAC (International Astronautical Congress), International Space Expo, Hyderabad, India, Sept. 24-28, 2007, IAC-07-C1.5.01
12) G. Joseph, et al., ”Cameras for Indian remote sensing satellite IRS-1C,” Current Science, Vol. 70, No. 7, April 10, 1996, pp. 510-515
13) “IRS-1C User's Handbook,” Euromap, URL: http://www.euromap.de/docs/doc_013.html
14) K. Jacobsen, ”Geometric Potential of IRS-1C PAN-Camera,” Proceedings of ISPRS Symposium on Earth Observation Systems for Sustainable Development, Feb. 25-27, 1998, pp. 131-136, ISRO, Bangalore
15) http://www.euromap.de/docs/doc_002.html
16) A. S. Kirankumar, P. N. Babu, R. Bisht, ”A Study of On-Orbit Behavior of InGaAs SWIR Channel Device of IRS-1C/1D LISS-III Camera,” Proceedings of International Symposium on Earth Observation System for Sustainable Development,” Feb. 25-27, 1998, Bangalore, India, pp. 303-307
The information compiled and edited in this article was provided by Herbert J. Kramer from his documentation of: ”Observation of the Earth and Its Environment: Survey of Missions and Sensors” (Springer Verlag) as well as many other sources after the publication of the 4th edition in 2002. - Comments and corrections to this article are always welcome for further updates (eoportal@symbios.space).