IKAROS (Interplanetary Kite-craft Accelerated by Radiation Of the Sun)
Non-EO
JAXA
Quick facts
Overview
| Mission type | Non-EO |
| Agency | JAXA |
| Launch date | 20 May 2010 |
IKAROS (Interplanetary Kite-craft Accelerated by Radiation Of the Sun)
Overview Solar Sail Spacecraft Launch Mission Status Sensor Complement References
IKAROS is a small-sized solar sail spacecraft technology demonstration mission of JAXA. The overall goal is to explore a new solar electric sail technique which is becoming feasible by the advent of lightweight and extreme thin-film technology. An interplanetary piggyback flight of IKAROS to Venus is planned in 2010 to test the concept of a new solar power sail design which provides electricity from a thin-film solar cell layer on the sail (membrane) surface; in addition, the sail is being used to provide conventional photon propulsion. 1) 2) 3) 4) 5) 6) 7) 8) 9) 10) 11) 12)
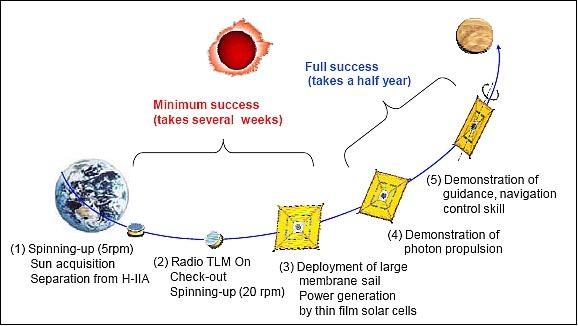
The success criteria of the IKAROS mission are summarized as follows:
1) Deployment of a large membrane sail in space using a similar mechanical device and procedures to those in a Solar Power Sailcraft. Required is housekeeping data that verify the expansion status of the membrane. The successful deployment of a solar sail in space represents an enabling technology.
2) Generation of electricity from the thin-film layer of solar cells on the membrane. This must be verified by housekeeping data.
3) Demonstration of the photon propulsion technique. This includes verification data of the reflectance parameters to determine the diffuse and specular properties of the radiation impinging on the sail. Also measurement of the overall sail reflectance, the temperature, and the condition of the sail surface under the influence of debris impacts.
4) Demonstration of GN&C (Guidance, Navigation and Control) techniques in support of solar sail propulsion. This involves navigation and orbit determination under the conditions of continuous but tiny acceleration. There must be means to control the acceleration direction and to maintain the attitude of the spacecraft.
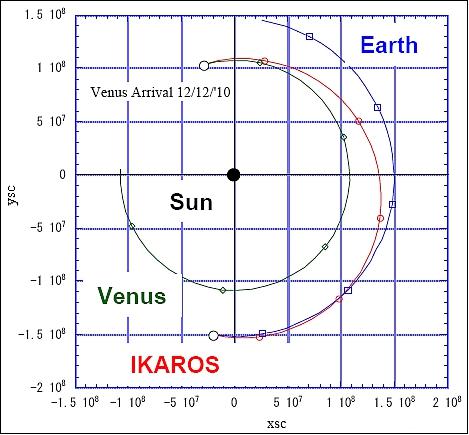
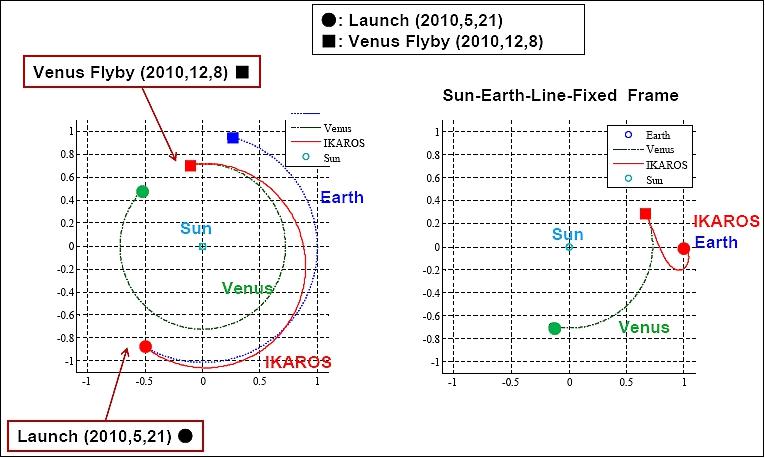
Items 1) and 2) are regarded as minimum criteria, while the additional accomplishment of items 3) and 4) represent the full success criteria of the mission. The major event scenario of the mission is illustrated in Figure 1. The flight period to the Venus is about half a year, during which the above listed IKAROS demonstrations are planned to be performed.
During the initial period after launch, auxiliary solar cells atop the IKAROS bus hub portion and RCS (Reaction Control System) thrusters are being used for the deployment operations and proper orientation of the spacecraft. The thin-film solar cells are not actually relied on, since they are part of the demonstration mission.
Solar Sail
JAXA uses a spin-type solar sail concept without a rigid support structure, where the sail membrane is attached to the center spacecraft hub and is deployed and extended using the centrifugal force of the spin motion. 13)
The spin-type solar sail can approximate an ideal solar photon sail because of its potential to realize almost the same weight/area ratio (or acceleration) as the thin-film membrane material. However, it has some disadvantages in terms of attitude control. First, the attitude motion is complicated because of the flexibility of the membrane, which does not have any support structure but relies on the centrifugal force for its shape maintenance. An impulsive torque input by conventional chemical thrusters will induce the oscillatory motion in the membrane. - Secondly, in terms of the propellant consumption for attitude control (or steering of the sail), the spin type has to change the orientation of the large angular momentum of the large spinning membrane. In some cases, the amount of propellant may limit the lifetime of the spinning solar sail. - On the other hand, it also has some advantages, as follows. It is resistant to an external disturbance torque induced by sail deformation, because the torque is averaged during the spin motion, which makes the attitude behavior fairly safe. It can even track the direction of the sun automatically (Ref. 13).
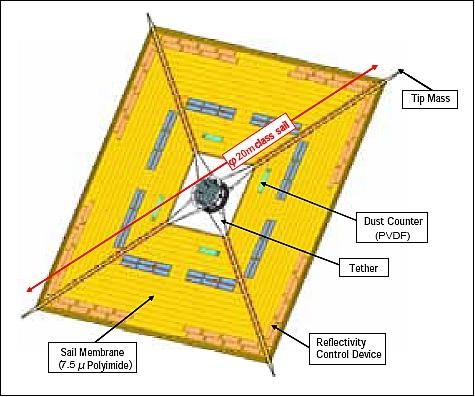
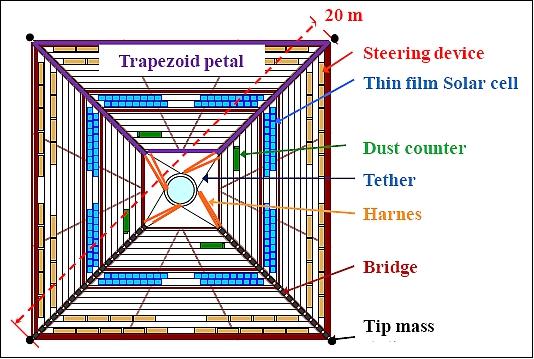
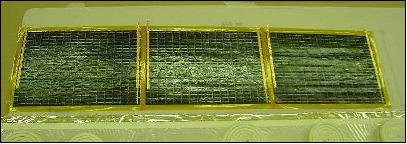
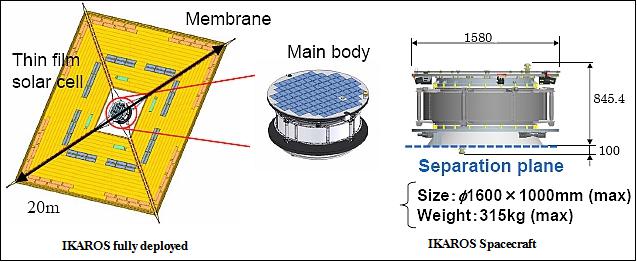
The deployed sail configuration is shown in Figures 2 and 5. The diagonal of the membrane is 20 m in length. The membrane fabric consists of polyimide with a thickness of 7.5 µm and covered with a 80 nm evaporated aluminum layer. The polyimide fabric features high thermal, mechanical and chemical resistance properties, along with a very light mass.
The membrane consists of four trapezoid petals. Thin-film Si solar cells are attached to certain areas of the membrane. They are capable of generating almost 500 W of power. The area covered by the thin-film solar cells covers only 5% of the total membrane surface area. The multilayer structure of the film prevents the solar cells from curling because of the symmetric mechanism. It also shields the solar cells from radiation. The thin-film solar cell layer is composed of Si cells whose thickness is 25 µm (Figure 6). 14)
By receiving the sunlight on the side of the aluminum layer, a thrust force can be generated by its high reflectivity. There are various devices mounted onto the sail membrane. The main devices are the FSA (Flexible Solar Array), the RCD (Reflectivity Control Device), and the PVDF (Poly Vinylidene DiFluoride) dust collector. The PVDF film is attached to the dust counter. The FSA is a thin power collector for sunlight.
Tip mass: Four masses are attached to the four tips (edges) of the membrane. The tip masses adjust the centrifugal force and the inertial momentum of the membrane.
Tether: The membrane should not contact the main body after the deployment. Hence, it is connected to the main body by tethers.
With the construction of a large power collection system by this FSA concept, it is possible to load a high power ion engine on the spacecraft. The propulsion system concept, consisting of a hybrid ion engine and a large size solar sail loading on a number of FSA, widens the service spectrum of future deep space missions.
Attitude control of a spinning solar sail using the solar radiation pressure: 15)
Figure 3 shows the concept of the attitude control system which utilizes the solar radiation pressure. In this system, a device is introduced which can control its optical parameters such as specular/diffusive reflectivity, and the devices are attached on the edge of the sail membrane. Then, an attitude control torque can be generated by changing the reflectivity of the devices and generating the unbalance of the solar radiation pressure applied on the edge of the sail. This system can generate a minute and continuous control torque input so that it does not excite unnecessary oscillation. And of course, this control system does not consume any fuel.
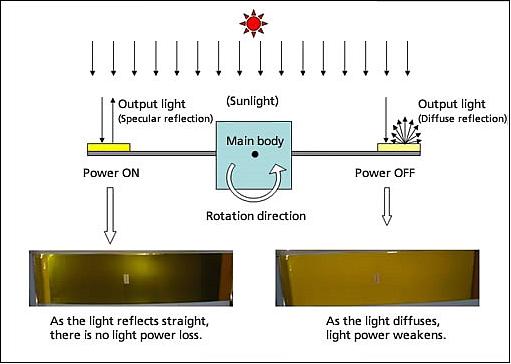
The RCD (Reflectivity Control Device) was developed as a key technology to realize this control system. RCD is a thin film device which can control the orientation of the liquid crystal component sandwiched between two electrodes by applying appropriate voltage to the electrodes. Based on the light control glasses for commercial ground use (Figure 4 a) which can switch between diffuse transmission and regular transmission, a thin-film radiation tolerant reflectivity control device was developed for spinning type solar sail. RCD can switch between specular reflection and diffuse reflection only by electric power (Figure 4 b). These pictures show the small sample of the developed device. When it is OFF or diffusive reflection, it looks cloudy. When it is ON or specular reflection, it looks glittering.
The RCDs are used as an optional (i.e. demonstration) attitude control system of the spacecraft. This device is mounted onto the edge of the sail membrane (8 blocks, Figures 2 and 5), it is capable of generating a torque by the change of the induced force on each element's surface. The RCD system employs a liquid crystal technology which is capable of translating the ratio of reflectivity between the specular and the diffuse radiation by applying a voltage (Ref. 44).
The most significant point of this control method other than the fuel-free feature is that a small and continuous control torque is applied directly to the sail which constitutes the majority of the large angular momentum of the spinning solar sail. This leads to a smaller oscillation of the membrane or smaller nutation of the center spacecraft. - If conventional chemical thrusters on the small center spacecraft are used for attitude control, a large attitude maneuver of the center spacecraft is required in order to realize reorientation of the large angular momentum of the sail, even if the reorientation angle is small. The sail, with the majority of the large angular momentum, does not quickly follow the attitude motion of the center spacecraft, and this large angular difference between the sail and the spacecraft will result in unnecessary oscillation of the membrane and the oscillation will continue for a long time until the damping effect in the membrane dissipates the oscillation energy (Ref. 13).
The thin-film RCDs are newly developed devices at JAXA/JSpEC for IKAROS and for future solar sailing missions of JAXA. They electrically switch between "specular reflection" and "diffuse reflection". The objective of the PVDF dust counter is to sense the debris impact onto the membrane - to obtain information about the impact density of these objects throughout the flight path.

The most significant point of this method is that the small but continuous control torque is applied directly to the sail which constitutes the greatest part of the large angular momentum of the spinning solar sail. This leads to the smaller oscillation of the membrane or smaller nutation of the center spacecraft. If conventional chemical thrusters on the center spacecraft are used for attitude control, the attitude of the sail is to be forcibly tilted by large attitude maneuver of the small center spacecraft, and this will lead to unnecessary oscillation of the membrane (Ref. 15).
Parameter | Satellite body structure | Sail membrane |
Shape | Cylinder (1.6 m diameter x 0.8 m height) | Square |
Size | 1500 mm (diameter) x 400 mm (height) | 14 m x 14 mm |
Mass | ~ 55 kg | ~ 14 kg + 2 kg of tip masses |
Material | Al7075, Al6061, CFRP, SUS304 | Polyimide |
Total mass of spacecraft | ~ 307 kg wet mass, (dry mass = 293 kg) | |
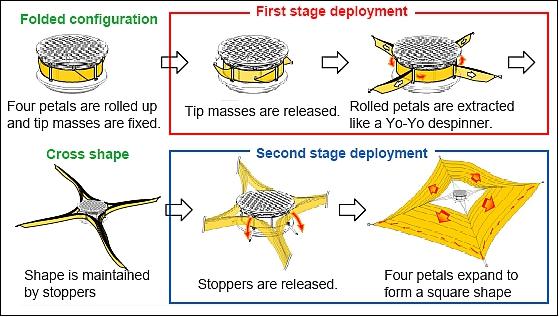
Sail Deployment System
The sail deployment scheme is shown in Figure 7. The membrane is deployed and kept flat by the spinning motion. Four masses are attached to the four tips of the membrane in order to support the deployment. Deployment consists of two stages. In the folded configuration, each petal is line-shaped and rolled up around the satellite as shown in (1). In the first stage, the rolled petals are extracted like a Yo-Yo despinner, and form a cross shape. The shape is maintained by stoppers as shown in item (3) of Figure 8.
The deployment sequence is defined as follows:
1) Separation from rocket with slow spin (5 rpm)
2) Spin down using RCS (5 rpm -> 2 rpm)
3) Release of launch lock
4) Spin up using RCS (2 rpm -> 20 rpm)
5) First stage of the deployment (20 rpm -> 5 rpm)
6) Second stage of the deployment (5 rpm -> 2 rpm)
7) Spin down using RCS (2 rpm -> 1 rpm)
8) Control of spin direction and rate using steering devices.
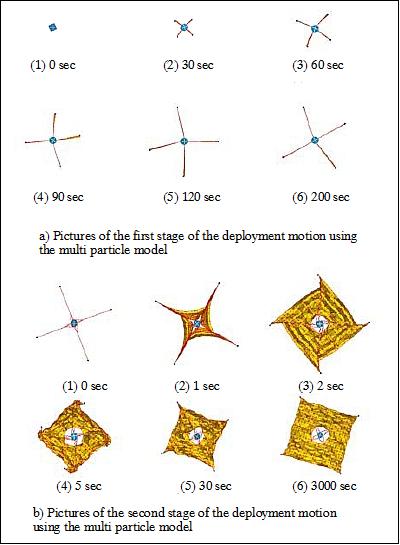
The spin rate in both deployment stages is decreased because the moment of inertia of the sail is increased. This deployment behavior has also been verified in numerical simulations (Figure 8) and in deployment tests. 16) 17)
Spacecraft
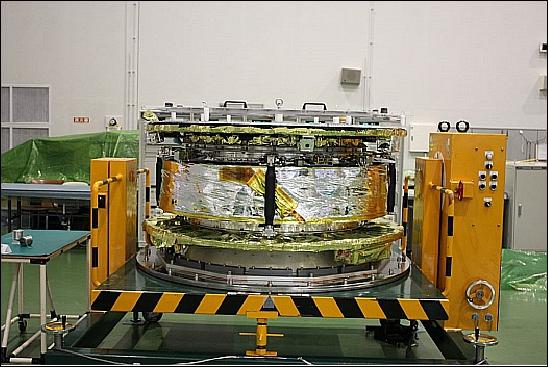
The IKAROS satellite was designed and developed at JSpEC (JAXA Space Exploration Center). JAXA/JSpEC is an organizational unit of JAXA established in 2007 with the objective to coordinate all space (and planetary) exploration activities at JAXA. Under contract and direction of JAXA, NEC Toshiba Space Systems Ltd. was engaged in the total system development, manufacturing, and testing of IKAROS. 18)
The IKAROS spacecraft has the cylindrical body (1.6 m Ø and 90 cm in height) - a drum around which the solar sail is wound to be re-wound on sail deployment via a special onboard mechanism. The spacecraft is spin-stabilized. The spacecraft design started in the winter of 2007, just 2.5 years prior to the launch.
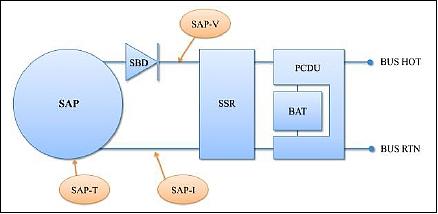
EPS (Electric Power Subsystem): Electric power is generated by SAP (Solar Array Panel), a circular and rigid-type panel mounted on the top of demonstrator body (Figure 10). SAP converts sunlight into electricity to supply the main bus with power to to be distributed to all equipments. To meet the temperature design requirements of < 184ºC in the Venus flyby orbit, the solar cells and the OSRs (Optical Solar Reflectors) are set alternately in array on the cell-side of SAP to prevent extra incident light and a temperature rise of SAP. In addition, SAP should be a circular panel for space limitation of PAF (Payload Attach Fitting), which is connected to the Akatsuki and the H-IIA launch vehicle); at launch, IKAROS is stored in PAF. 19)
SAP specification: It is 1,580 mm in diameter and 12 mm thick, and designed to supply > 238 W of power during six months at aphelion point (1.07 AU) and perihelion point near Venus (0.72 AU). SAP has a mass of 6.21 kg.
A fraction on the circumference of SAP is cut out for mounting of the following small antenna devices: XLGA1, XMGA, and VLBI-LGI, for the solar sensor (SSAS), as well as for the separation cameras DCAM1 and DCAM2 (Figure 31).
Due to strict mass limitations, high efficiency triple junction solar cells were used to realize the high power density. CMG coverglasses (100 µm thick) with AR coating cover each solar cell. The solar array configuration features 36 cells in series and 10 strings in parallel. Each solar array is separated electrically by SBDs (Schottky Barrier Diodes) for failure isolation.
In 2011, an analysis of the telemetry data verified that SAP of EPS worked nominally throughout all mission phases, although the solar intensity change more than doubled during the Venus flyby. Moreover, IKAROS keeps on sailing beyond Venus with all components of the EPS system functioning nominally (Ref. 19).
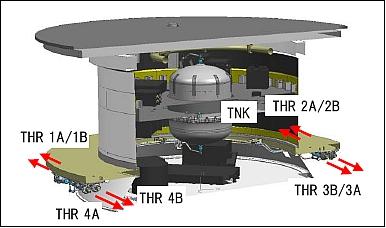
ACS (Attitude Control Subsystem): The attitude control of IKAROS is done primarily by RCS (Reaction Control System). IKAROS is equipped with a newly developed Gas-Liquid Phase-Equilibrium Thruster. This is a kind of the cold gas thruster, and the fuel is stored in the liquid phase. Chlorofluorocarbon, HFC-134a, is used as fuel. The fuel is in liquid phase in the tank and it is in the gas phase at the injection. As HFC-134a is non-flammable and non-toxic, it is easy to handle and quite suitable for a secondary payload. Since the fuel loses heat when liquid phase is changed to the gas phase, the temperature of the fuel tank and pipes are controlled to keep the phase transition and the control torque is given intermittently not continuously. It is important for this propulsion system to separate the gas from the liquid. For this purpose, a porous metal is placed in the tank to keep the liquid in it. IKAROS has eight thrusters for spin up/down control and for spin axis reorientation. 20)
The attitude control logic is as follows: The conventional RLC (Rhumb Line Control) and the ANC (Active Nutation Control) method are supported. - In addition to these conventional logic control methods, IKAROS is equipped with the extended control logic, namely: Flex-RLC/Flex-ANC attitude control logic. Figure 12 shows the outline of the Flex-RLC. The nutation rate is monitored with the rate gyros attached on the central body.
- If the control torque is expected to enlarge the nutation motion, the command is canceled (A)
- If the control torque is expected to attenuate the nutation motion, a control torque is given (B).
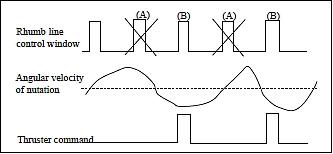
In reality, as the nutation motion is heavily-damped due to the structural attenuation of the sail.
The RCS (Reaction Control System) is used to spin up the spacecraft, before the centrifugal deployment of sail membrane, and control its attitude throughout the mission life. This system stores HFC-134a in liquid-phase in the tank, extracts the vapor of HFC-134a from the tank, and ejects the vapor from the thruster nozzle. The propellant mass of the RCS is 20 kg, providing a total impulse of 7000 Ns. 21)
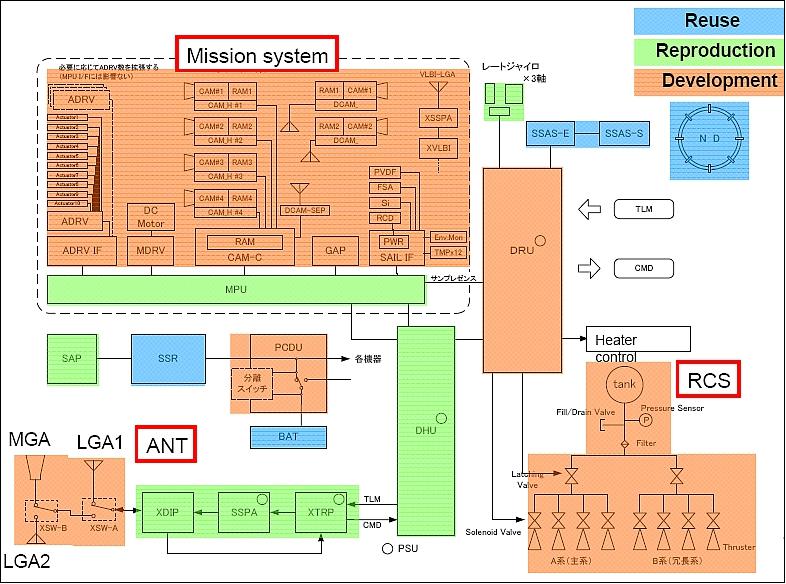
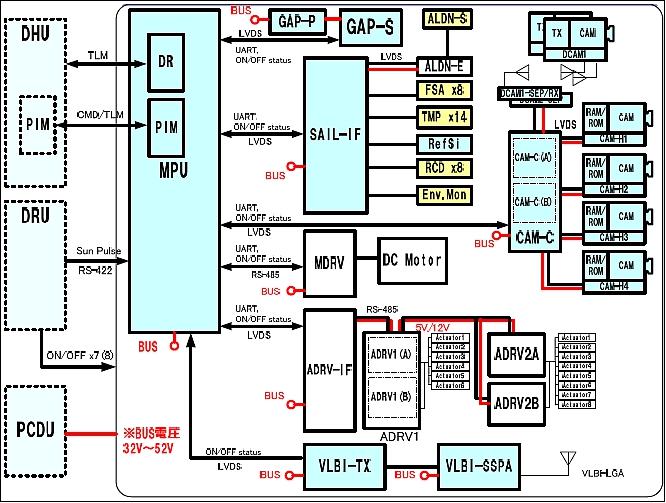
Legend to Figure 14: LGA = Low Gain Antenna; MGA = Medium Gain Antenna; ADVR = Actuator Driver; MDVR = Motor Driver; RCS = Reaction Control System; CAM-C = Camera Central controller; CAM-H = Camera Head; MPU = Mission Processor Unit; DRU = Driver Unit; DHU = Data Handling Unit; GAP = Gamma-ray burst Polarimeter; FSA = Flexible Solar Array; SSPA = Solid State Power Amplifier; SSR = Series Switching Regulator; XVLBI = X-band Very Long Baseline Interferometer.
Attitude determination strategy for spinner spacecraft:
The attitude determination of IKAROS is realized by the Sun and the Earth angles measurements. The Sun angle is measured by a SSAS (Spin Sun Aspect Sensor). The SSAS also provides the spin rate information. The Earth angle is measured by Doppler modulation of the downlink RF caused by the spacecraft rotation. For this purpose the antenna location is intentionally offset from the spin axis. The spin axis orientation can be determined by these two angles with the accuracy between 0.1º and 1º throughout the mission. 22) 23) 24)
Thus IKAROS is only equipped with a sun sensor as dedicated attitude sensor. The RF antenna is primarily for the telemetry/command operation, but is exploited also for extracting the Earth angle information.
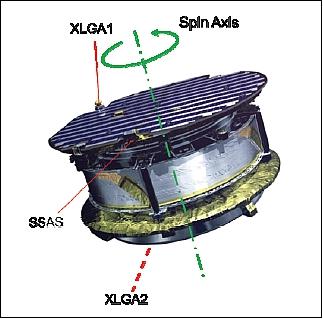
Attitude determination: The spacecraft is assumed to rotate about a fixed spin axis (i.e. single spin). The SSAS (Spin Sun Aspect Sensor) is the only dedicated attitude determination hardware required for this system. The SSAS has a narrow slit. The Sun pulse signal is generated when the Sun light comes into this slit. Since the Sun light crosses over the slit once per every spin period, successive Sun pulses provide the spin period information. The SSAS also provides the Sun angle (i.e. the angle between the spin axis and the Sun light vector), which is measured by a photovoltaic sensor inside the slit. Thus the Sun angle is obtained once per every rotation.
The low gain antenna (LGA) needs to be located off-centered from the spin axis to measure the Earth angle. IKAROS has two X-band LGAs (XLGA1 and XLGA2) to cover all around the spacecraft (Figure 15). When the RF signal from the LGA is received at the ground stations, Doppler modulation fluctuating at the spinning frequency is observed due to this off-centered LGA allocation. The Earth angle is obtained by precisely measuring the amplitude and the frequency of the Doppler modulation.
Once the Sun angle and the Earth angle are obtained, it is possible to calculate the spin axis orientation with respect to the inertial frame, with ambiguity of two solution candidates remained to be unsolved.
Note that, since this attitude determination method uses the ground-based Doppler measurement, a complete spin axis determination is possible only during ground contact, and the spin axis determination is processed on ground segments. Thus the attitude determination results are not available for the onboard software for the purpose of real-time processing. This drawback is, however, not a fundamental problem for many spinner spacecraft including IKAROS since attitude control for spinner spacecraft can be done only using the sun angle information.
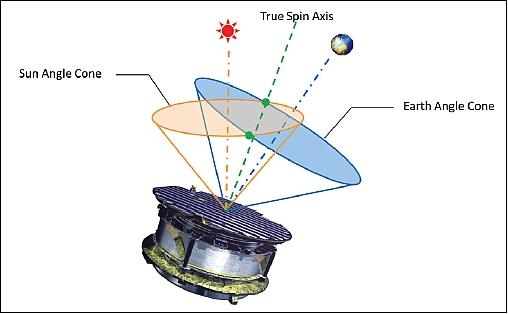
Legend to Figure 16: The spin axis is determined as an intersection of the Sun angle cone and the Earth angle cone, which has an ambiguity as indicated by two dots in Figure 16. Since the Sun and the Earth directions are given a prior from the orbit information, the two candidates of the spin axis vector is calculated with reference to the inertial frame, such as J2000EQ.
RF communications: Use of X-band communications (the IKAROS communication system is the same as the one of the Hayabusa spacecraft).
Launch
IKAROS was launched on May 20, 2010 (UTC) as a secondary payload to the primary missions VCO (Venus Climate Orbiter), also referred to as Planet-C (~ 500 kg), the nickname is Akatsuki. The launch vehicle is the H-IIA F17 of JAXA; the launch site is TNSC [(Tanegashima Space Center), Japan (Yoshinobu Launch Complex)]. The launch provider was Mitsubishi Heavy Industries, Ltd. 25) 26)
IKAROS was stowed inside the PAF (Payload Attachment Fitting) of the H-IIA-202 vehicle. The nickname of VCO is Ataksuki. The goal of the VCO mission is to elucidate the mechanism of the mysterious atmospheric circulation on Venus.
The secondary payloads on this mission were:27) 28)
• KSat [or AWVONS (Atmospheric Water Vapor Observation Satellite)], a CubeSat (~ 1.5 kg) of Kagoshima University, Japan
• IKAROS (308 kg) a minisatellite of JAXA
• Negai-Star, a CubeSat (1 kg) of Soka University, Japan. (deployment into LEO)
• UNITEC-1, a microsatellite (~21 kg) of UNISEC (University Space Engineering Consortium), Japan, flying toward Venus.
• Waseda-Sat2, a CubeSat (~1.2 kg) of Waseda University, Tokyo, Japan., (deployment into LEO)
Launch Sequence
- The three CubeSats, Waseda-Sat2, KSat, and Negai-Star will be loaded on the newly developed J-POD ( JAXA Picosatellite Deployer) to be aboard the launch vehicle.
- After the first-time combustion of the second stage engine is cut off, the three small secondary payloads on the J-POD will be separated.
- After the second cutoff of the second stage engine, the Akatsuki will be injected into the Venus transfer orbit. The H-IIA will continue its coast flight and separate the IKAROS and UNITEC-1 from the Payload Attach Fitting (PAF900M, the PAF primarily for the main payload, Akatsuki).
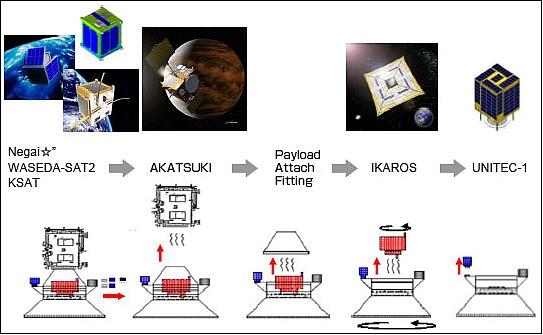
Orbit: The VCO/Planet-C spacecraft along with the secondary payloads are boosted into a transfer orbit bound for planet Venus. The secondary payloads are then being separated and deployed in a predefined series - including IKAROS as shown in Figure 1. The IKAROS spacecraft almost follows the trajectory of Planet-C, but will not actually be flown to Venus. Eventually, IKAROS will continue to rotate around the sun.
Mission Status
• May 29, 2015: Since May 21, the IKAROS project was not able to receive any more signals from the IKAROS spacecraft. Hence, the project determined that the demonstrator had shifted again to the hibernation mode for the fifth time as we expected. 29)
• April 30, 2015: The IKAROS spacecraft started to wake up for the fourth time from its hibernation mode in mid March 2015, and JAXA searched for it based on its attitude and orbit prediction to receive its radio waves. On April 23, 2015, the project successfully found the IKAROS spacecraft, which is flying at a distance of about 110 million km from the Earth. The project will continue to receive data from the IKAROS until May to confirm its condition and analyze the information. 30)
• June 4, 2014: The IKAROS seemed to wake up from its hibernation mode in mid-April 2014, and JAXA searched for it based on its attitude and orbit prediction to receive its radio waves. On May 22, 2014, the project successfully found the IKAROS, which is flying at a distance of about 230 million km from the Earth. The project will continue to receive data from the IKAROS until mid-June to confirm its condition and analyze the information. 31)
- The IKAROS, launched in May 2010, completed its mission, and is now revolving around the sun about every 10 months. Power generation is insufficient for seven months out of 10, hence IKAROS goes into hibernation mode for this period by shutting down instruments. For the remaining three months, IKAROS is awake with enough power so that the project can receive data from the spacecraft.
• Post flight analysis 2013: The solar and thermal radiation accelerations acting on the IKAROS solar sail membrane and spacecraft body during its operational mission were modeled and evaluated in detail. In particular, the predicted temperatures and actual in-flight thermistor measurements located on the membrane and on the spacecraft body are compared and evaluated. The results show excellent correspondences for the top of the body when accounting for power conversion. On the other hand, however, appreciable discrepancies were observed in the comparison of the temperatures of the virtual uniform sail and the thermistor measurements on the sail membrane. Therefore, the virtual sail model may not be representative of the IKAROS case. 32)
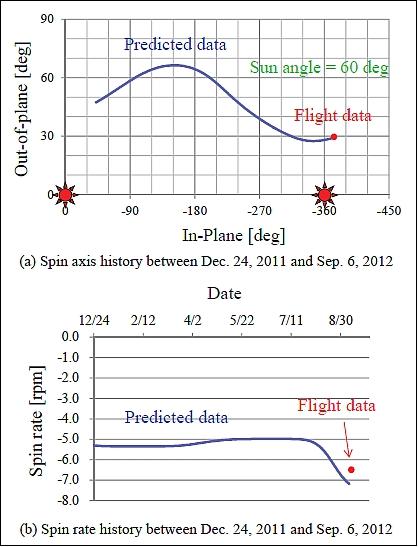
• On Sept. 6, 2012, the project succeeded in tracking IKAROS which came out of hibernation. Figure 21 shows the predicted attitude motion after moving to hibernation. - A solar power sail craft can save the fuel using a solar sail and it can also gain the necessary electric power using a vast area of thin film solar cells on the membrane even when it is away from the Sun. It can be a hybrid propulsion system with a solar sail by activating the ultra-high specific impulse ion engines with the power generated by thin film solar cells. Thus the solar power sail is suitable for the mission in the outer planetary region. 33)
• 2012: The IKAROS spacecraft was confirmed to have shifted itself into hibernation mode (or shutting down its onboard equipment due to low power generation) sometime before Jan. 6, 2012.
- After moving into hibernation mode, the IKAROS team has been searching for the IKAROS twice a month. On Sept. 6, 2012, a radio wave that appeared to be emitted from IKAROS, was detected. On Sept. 8, 2012, it was confirmed that the signal came from the IKAROS spacecraft; the project made sure that IKAROS came out of its hibernation mode (or recovered). The team is now checking the satellite's status. 34)
• On Oct. 18, 2011, JAXA performed a "reverse spin operation" of the IKAROS. As a result of the jet thrust to shift IKAROS's spin direction to the reverse way for about 20 minutes, the membrane successfully spun in the reverse course without being entangled. The IKAROS spacecraft is in good shape after reversing its spin, and its spin rate at the time of completing this operation was -0.24 rpm. 35) 36)
The project is currently evaluating if the mission should be continued. For a more detailed assessment, the following information must be acquired.
- Attitude related data from the onboard recorder that accumulated information during the reverse spin operations.
- Data necessary for predicting future attitude changes.
• In mid-July 2011, the IKAROS spacecraft is operating nominally in its extended mission phase. 37)
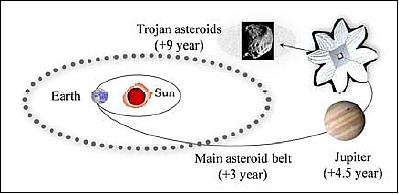
• The very success of the IKAROS mission so far caused JAXA to make plans for an advanced follow-on interplanetary solar sail mission. The goal of this mission is to explore the Jupiter and Trojan asteroids environment (launch at the end of this decade) with a hybrid photon/ion propulsion system taking advantage of thin film photovoltaic technology. The mission will feature a solar power sail of ~50 m in diameter and will have integrated ion-propulsion engines (Refs. 17) and 2).
• In April 2011, the IKAROS spacecraft had achieved its interplanetary flight for more than 11 months.
• By the end of January 2011, all mission performances tests were completed by the IKAROS team — when JAXA extended the IKAROS mission for a year until March 2012. 38) 39)
• In the second half of January 2011, the IKAROS mission is still active and operating nominally. 40)
- In its orbit to Venus, the IKAROS spacecraft experienced a so-called "wind-mill effect" due to the asymmetry of the sail's membrane shape. This effect was already expected by the project prior to launch. However, the spacecraft consumes propellant to maintain its spin rate. The project estimates, that the mission life of IKAROS will be determined by the amount of available fuel and expects an end of the mission sometime in the spring of 2011.
- In addition, the communication with the spacecraft is becoming more difficult due to the weakening signal strength with distance from Earth. IKAROS is equipped only with one omnidirectional antenna with a modest gain profile. Hence, the operations team is struggling to maintain radio communications during this mission phase.
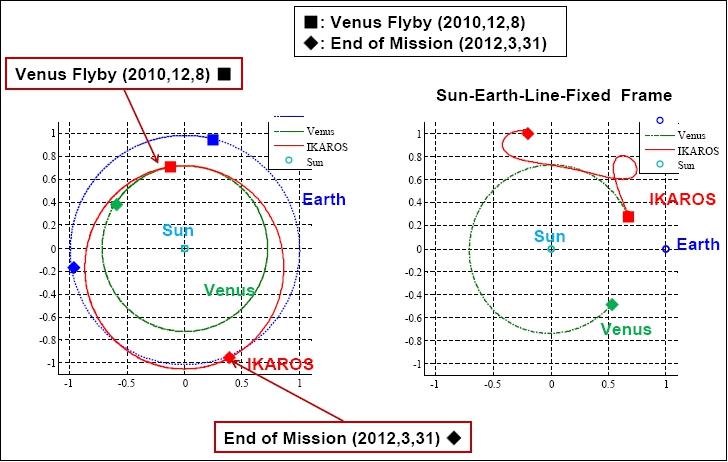
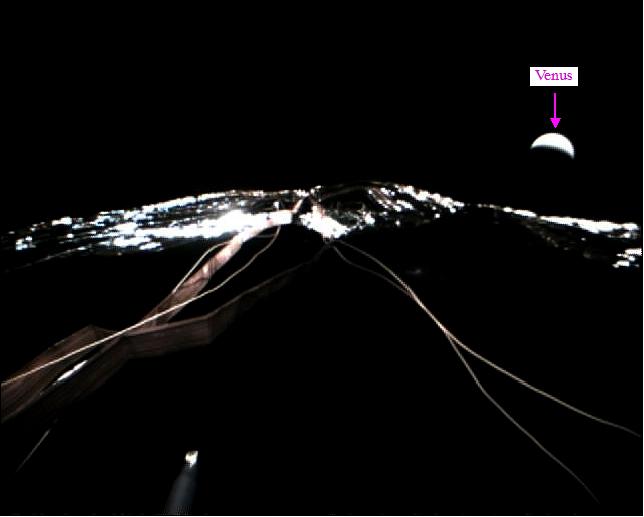
- The IKAROS Venus flyby occurred on December 8, 2010 at a distance of 80,000 km.
• IKAROS continued to be accelerated by the solar sail. A total ΔV of 100 m/s was achieved within half a year. The solar sail propulsion was verified using the radiometric tracking data. 41)
• On July 23, JAXA is reporting the results of an attitude control experiment by using the solar sail of IKAROS. The experiment employed the liquid crystal technology of the RCDs (Reflectivity Control Devices) mounted on the membrane (Figures 2, 3 and 27). The experiment was conducted on July 13, 2010. The surface reflection of the sail was changed by turning the power cyclically on/off of the thin-film devices resulting in a spin-up or spin-down motion of the sail, or in a change of spin direction — the desired action is depending on the synchronization with the spin cycle of the system. 42) 43)
In summary: 44)
- For a spinning solar sail, an oscillation-free and fuel-free attitude control system is essential in order to extend its possibilities and applicability
- In order to achieve stable and fuel-free attitude control of a flexible spinning solar sail, a thin film RCD (Reflectivity Control Device) is developed which can electrically change its optical property
- The RCDs are used as an optional control system for the IKAROS' solar sail; their full control performance and stable attitude control was successfully verified by on-orbit control experiments (Ref. 15).
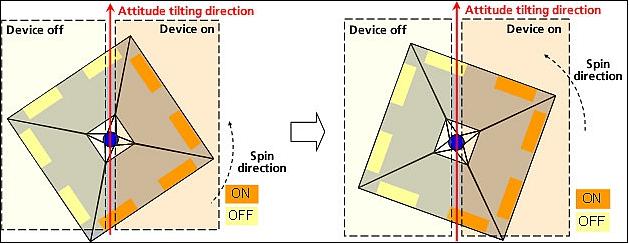
Attitude control logic: In order to generate an attitude control torque in a fixed direction in inertial coordinates, the 8 blocks of RCDs should be switched on and off synchronizing the spin motion. For example, if one wants to generate a torque in the upward direction in Figure 27, then the RCDs on the right-hand side should be switched ON, while the RCDs on the other side of the sail should be OFF. Therefore, the blocks of RCDs that should be ON vary during the spin motion. In order to achieve this control logic, the onboard controller receives a pulse signal from a slit-type sun sensor every spin motion so that it can calculate the spin period and the timing of on and off for each block of the RCDs.
Results of the attitude control experiment: An on-orbit attitude control experiment with the RCD technique was conducted. In this experiment, the attitude control was performed continuously for 23 hours. A spin axis precession torque was generated in the sun-pointing direction so that the attitude maneuver performance was simply measured by the telemetry of the sun angle sensor.
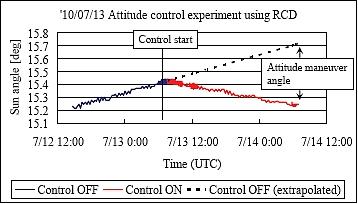
Figure 28 illustrates the experimental results in terms of the sun angle after a preliminary analysis was made. The horizontal axis shows the time, and the vertical axis is sun angle. The blue line represents the sun angle history prior to attitude control - the sun angle is slightly increasing due to the attitude drift motion. The attitude drift motion is a phenomenon which is produced by the solar radiation pressure. -When the attitude control experiment started at 7/13 7:35:00 UTC, the drift motion is suppressed by the torque of the RCDs, and the sun angle began to decrease as seen from the red line. If the blue line is extrapolated, the difference from the red line represents the attitude maneuver angle achieved by the RCDs.
In this experiment, about 94% of the attitude control performance was observed compared with the ground-based performance estimation. And of course, no nutation velocity excitation was observed during this control experiment. Therefore, it can be said that the goal of this control system, that is, a stable and fuel-free attitude steering of a spinning solar sail, was indeed verified (Ref. 15).
• The GAP (GAmma-ray burst Polarized light detector) device on IKAROS observed its first gamma-ray burst on July 7, 2010, JST (Japan Standard Time). 45)
• On July 9, 2010 JAXA/JSpEC engineers confirmed the photon acceleration of the IKAROS spacecraft when they determined the orbit after the sail separation. The thrust generated by solar light pressure was determined to be 1.12 mN (Ref. 1). Hence, it can be stated that IKAROS is the world's first solar power sail craft to demonstrate the functions of photon propulsion and of thin-film solar power generation during its interplanetary cruise. This represents a milestone for solar sailing. 46) 47) 48)
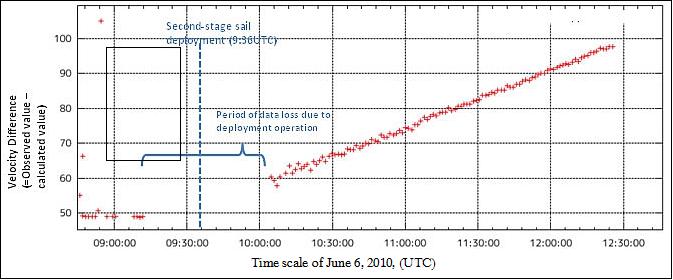
Figure 29 shows the difference between calculated value (without photon acceleration) and observed value (result of Doppler measurement) of IKAROS's line-of-sight velocity on June 9, when the second-stage sail deployment was carried out. The calculated value does not incorporate photon acceleration, thus, the graph shows a flat line if there is no photon acceleration. With photon acceleration, the line inclines. For about one hour around 9:36 (UTC) when the second-stage deployment was in operation, data was lost; however, you can clearly see that the graph line starts inclining after the second-stage deployment compared to the flat line prior to the event (Ref. 46).
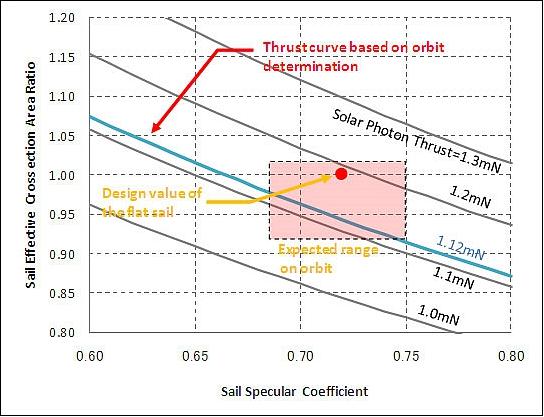
Figure 30 compares the IKAROS's orbit determination result and the sail's optical parameters at the time of it's manufacture (namely sail's effective cross section area ratio and sail's specular coefficient) since June 9, 2010. The estimated thrust by the solar light pressure due to the orbit determination this time is 1.12 mN and the sky blue curve line (Figure 30) shows the combination of the sail's optical parameters to realize the estimated thrust (Ref. 46).
• JAXA engineers started the deployment of the solar sail of IKAROS on June 3, 2010 in two stages. Confirmation of a successful sail deployment was arrived at on June 10, when the sail was generating power through its thin film solar cells at about 7.7 million km from the Earth. 49) 50)
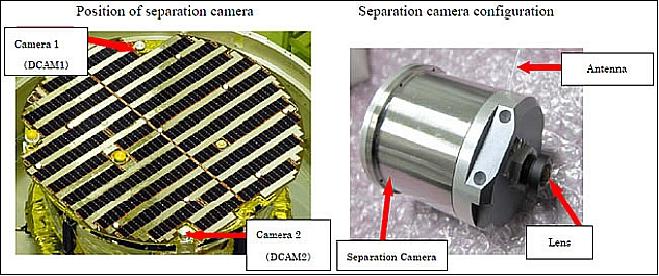
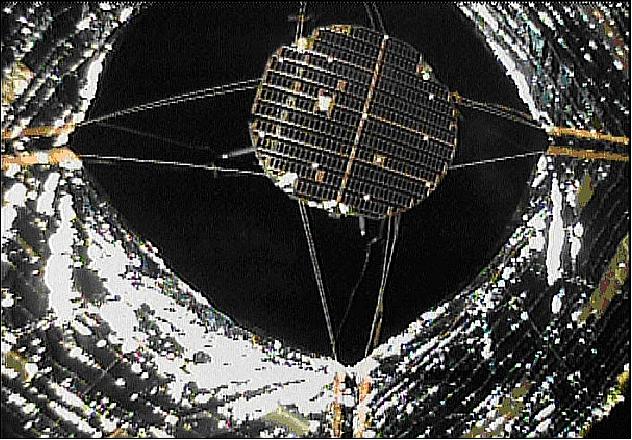
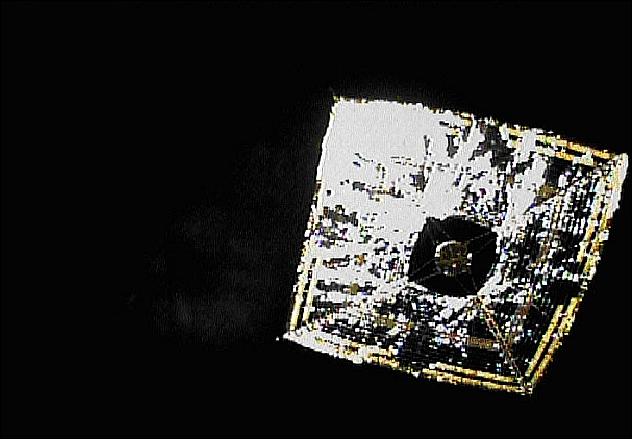
The two small separation cameras (DCAM1 and DCAM2, Figure 31) were ejected from IKAROS which took imagery of the partially and fully deployed sail on June 14 and 19, 2010, respectively (Figures 32 and 33). The cameras are quite small, cylindrical in shape about 6 cm in diameter and height. They were ejected from the sail using a spring, and then they looked back at IKAROS, and relayed the images wirelessly.
This achievement represents the first successful solar sail deployment in history - the most difficult step in solar sail unfolding technology and subsequent sailing activities. The solar sail of IKAROS employs both - photon propulsion and thin film solar power generation - during its interplanetary cruise. 51) 52)
• On May 24, 2010, JAXA completed the initial operation check of the Small Solar Power Sail Demonstrator "IKAROS." It will take a few weeks to carry out the first verification experiments, namely deployment of the solar sail and solar power generation by thin film solar cells. 53)
• On May 22, 2010, the signal from IKAROS was acquired at the Usuda Deep Space Station and confirmed its solar power generation and stable posture, and established communications. 54)
Sensor Complement
HP-IMAP (High Performance - IMage Acquisition and Processing)
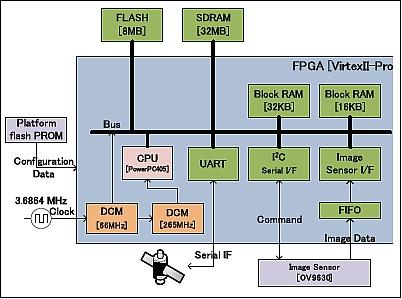
IKAROS features a small, high-performance image processing unit based on COTS (Commercial Off The Shelf) technologies. The objective is to obtain visual imagery for the documentation of the deployable sail structure. The HP portion of HP-IMAP has a 500 MIPS calculation capability in a single 50 mm x 50 mm PCB (Printed Circuit Board), and it incorporates various types of interfaces using FPGA (Field-Programmable Gate Array) technology. The camera assembly incorporates image processing capabilities. 55)
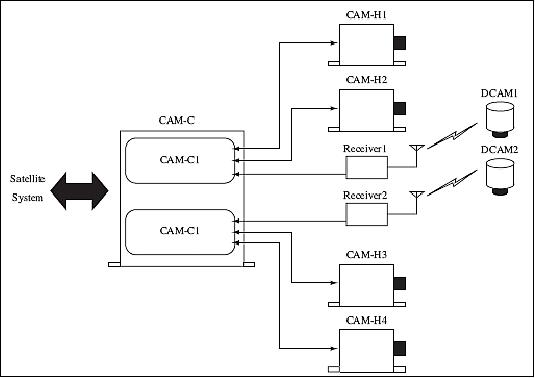
HP-IMAP consists of three types of units: CAM-C, CAM-H, and DCAM (Figure 35).
- CAM-H is a camera head fixed on the body of the IKAROS spacecraft structure for capturing high-resolution fixed point images of the deployable structure's membrane. Four CAM-Hs are accommodated in four directions in the HP-IMAP configuration for IKAROS. Since each CAM-H can acquire more than a 100º wide image, the image of the entire deployable structure can be acquired by four CAM-Hs used in a panorama viewing position.
- The DCAM separation cameras (DCAM1 and DCAM2) are being ejected from the spacecraft and are used for taking images of the solar sail and the spacecraft after the spin-up has been accomplished. Once the DCAMs are ejected, the images from them must be transmitted to the CAM-C by wireless means. The size of the DCAMs is very small so that the ejection does not affect the satellite's main structure; the transmission bandwidth between DCAM and CAM-C is narrow. A UHF analog transmission is adopted for the transmission of the images from the DCAM to CAM-C. The acquired images are encoded into NTSC analog video signals in the DCAM, and the CAM-C decodes the analog video signal into a digital data stream. The concept is a similar in structure to that of a wireless monitoring system.
- The CAM-C is a central controller of the HP-IMAP. Its most important function is to provide a command and telemetry interface between the HP-IMAP and the satellite bus system. The power conversion from the satellite bus power line to the HP-IMAP and the power supply control is also managed by the CAM-C. The CAM-C has two channels (that can be expanded to a maximum of 12) of analog video capturing function, and the NTSC analog video signal transmitted from the DCAM is converted into digital images. The CAM-C has also a data recorder function and is equipped with a 1 GByte SD-CARD memory to store the acquired and processed images.
Modular design of the processing board: To develop a high-performance processing environment efficiently, the CAM-H and CAM-C are being equipped with the same processing board. The FPGA technology and open source software technology effectively enable such a uniform development.
A Xilinx CPU core FPGA Virtex-II Pro is being used for the processor board microprocessor, providing a flexible interface with a 500 MIPS calculation performance and a SDRAM (Synchronous Dynamic Random Access Memory) of 64 MByte, all contained on a processor board of size 50 mm x 50 mm. In addition, an 8 MByte flash memory is installed for programming and operational storage functions (Figure 36). The FPGA technologies enable the processor board to support various protocols not only for the imager interface but also for interfacing to satellite systems, and the optimum interface can be selected depending on the satellite system.
Adopting an operating system for the built-in computer system greatly increases software productivity, although it comes at the cost of some memory and computational resources. Using device drivers and function calls enabled the project to call complex functions using simple statements; use of a popular operating system enables the use of software resources in a cross-platform manner. The Linux operating system was selected for the image processing unit. For the HP-IMAP unit, the project installed free software applications for JPEG compression and binary data compression. In addition to the original applications and device drivers, various other resources were utilized such as documentation on the Linux operating system.
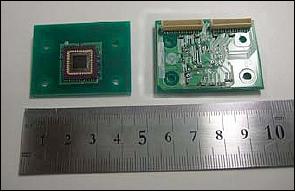
CAM-H: A COTS camera from Sakai Glass Engineering is being used. A mega-pixel CMOS imager (OV9630) is installed at the center of the imager board (Figure 37). The imager board is connected to the processor board through the imager data lines and the I2C (Inter-Integrated Communication) control-interface line.
Size; mass; power consumption | 50 mm x 70 mm x 55 mm; 264 g; 600 mW (peak) |
Processing unit | - FPGA-based universal processing board |
Image sensor | 8 mm, 1.3 Mpixel, color |
Image format | Raw / JPEG (101 steps) |
Image size | 1280 x 1024, 640 x 480, 320 x 240, 160 x 120, 80 x 60 |
Exposure time | 165 µs (min); 169 ms (max) |
Lens | Focal length = 2 mm; f/2.0 |
FOV (Field of View) | 107º x 94º |
I/O | 2 UART (Universal Asynchronous Receiver/Transmitter) |

CAM-C: CAM-C consists of two sets of the same functional unit, CAM-C1 and CAM-C2, for reasons of a redundancy. Each unit consists of three boards: the processing board, power board, and interface board. The processing board is identical to the CAM-H board, and an additional interface function is provided based on the FPGA technology.
The power board manages the voltage conversion and stabilization from the satellite bus power line to the HP-IMAP system (5 V). The power board also manages the power on/off function of the CAM-H and DCAM according to the processing board signal.
The interface board has two functions, one is the serial interface with the CAM-H and satellite mission processor (MP), and the other is an analog video interface with the DCAM. As for the serial interface, a 57.600 kbit/s UART base LVDS interface is equipped in five channels. Each unit has two channel interfaces to the CAM-H and one channel for the MP. An ADV7180 is adopted for the decoder chip for the DCAM. A 1 GB SD-CARD (Secure Digital - memory card) is also located on the interface board and connected to the processing board through a SPI (Serial Peripheral Interface).

DCAM: The two tiny cameras (DCAM1 and DCAM2) are being ejected from the spacecraft to acquire imagery from the outside. Each DCAM unit has an imager board of size: 1.6 cm x 2.8 cm.
Array size | 656 x 492 pixels |
Power consumption | 200 mW |
Optical format | 8 mm |
Sensitivity | 3.0 V / Lux ~sec |
SNR (Signal-to-Noise-Ratio), dynamic range | 48 dB, 60 dB |
Pixel size | 6.0 µm x 6.0 µm |
Operating temperature | -40ºC ~ +85ºC |

GAP (GAmma-ray burst Polarimeter)
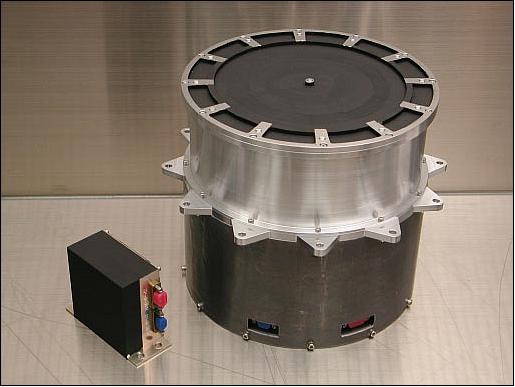
The objective is to observe polarization of gamma-ray bursts (GRB) and to determine the direction of the GRB. The instrument was jointly developed by Kanazawa University, Yamagata University, and Riken. The instrument mass is 3.7 kg, its size is 17 cm in diameter and 17 cm in height. The GAP instrument is attached to the IKAROS's main body (on the backside of the body).
ALADDIN (Arrayed Large-Area Dust Detectors for INterplanetary cruising)
The goal is to evaluate the dust distribution in the region of inner planets by PVDF (Poly Vinylidene Di-Fluoride) Piezoelectric Film. The PVDF sensors had a size of 0.54 m2. ALADDIN was deployed on the anti-Sun face of the thin polyimide sail membrane of Ikaros. 56)
The ALADDIN dust detector is arrayed by 8 channels of 9-20 µm thick PVDF sensors, which are capable of detecting hypervelocity impacts of micrometeoroids at >~10-12 g, according to ground calibration impact experiments. The sensors filter electronic, thermal and vibration noises and can record time, peak hold value above its threshold, and relaxation duration of each impact signal.
The first objective of ALADDIN is to test this large PVDF array system on thin sail membrane in the interplanetary operation and the second objective is to measure heliocentric flux variance inside the orbit of the Earth (~1.0 AU) down to the vicinity of Venus (~0.7 AU) continuously, and opportunistic detections of possible fine dust structures (e.g., flux anisotropy).
ALADDIN started its nominal measurement on June 30, 2010, and the last down linked data so far came in October 2011. During the 16-month cruising between the Earth's orbit and Venus' orbit (i.e., 1.0~0.7 AU of heliocentric distance) in 1.5 revolutions, ALADDIN has successfully measured about 2800 dust impacts, after screening noise signals and thus micrometeoroid flux between the Earth's orbit and Venus' orbit. - It was separated by a 24-hour bin, thus enabling to discuss heliocentric dependency of the flux variation in the finest detail among any previous spacecraft such as Helios-1/2 in the 1970's and Galileo in the 1990's at similar heliocentric distances.
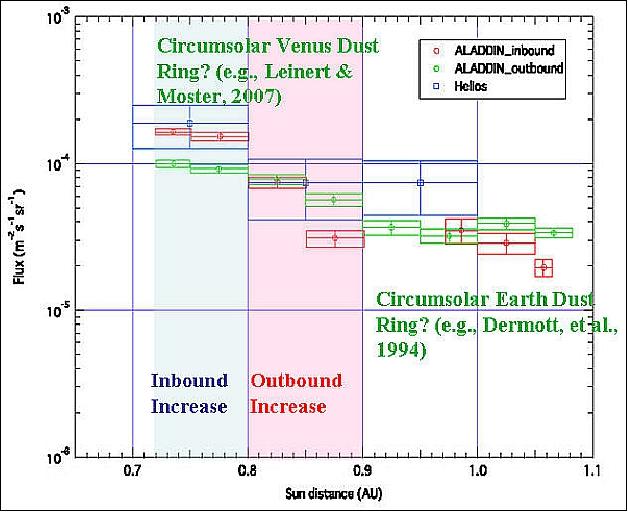
It is apparent that the micrometeoroid flux increases by approximately one order of magnitude from 1 AU to 0.7 AU during the 2010-2011 epoch. The temporal variance of the Helios flux data in the same region of 1 AU may be associated with difference of averaged solar activities during both epochs. Since the solar activity in the years 2010-2011 was around the minimum of the solar cycle, smaller micrometeoroids, which are more affected by solar radiation pressure than larger ones, may have survived longer than those in the Helios epoch, which covered from the minimum to the maximum of the solar cycle in late 1970's.
It is also evident that some fine structures in different locations and epochal variations at the similar heliocentric distance but different orbital position. It suggests that enhancement of micrometeoroid flux in the trailing edge blob of circumsolar orbits of the Earth and Venus, which are consistent with previous reports of larger dust grain enhancements observed by infrared telescopes. This also implies that the temporal flux enhancement of large micrometeoroids in the blob may have caused a cascading effect to produce smaller dust by collisions with sporadic meteoroids. 56)
VLBI (Very Long Baseline Interferometry)
VLBI (Very Long Baseline Interferometry) mission: DDOR (Delta Differential One-way Range) orbit determination technology demonstration. 57)
References
1) Osamu Mori, Yuichi Tsuda, Hirotaka Sawada, Ryu Funase, Takayuki Yamamoto, Takanao Saiki, Katsuhide Yonekura, Hirokazu Hoshino, Hiroyuki Minamino, Tatsuya Endo, Junichiro Kawaguchi and IKAROS Demonstration Team, "World's First Demonstration of Solar Power Sailing by IKAROS," Proceedings of the 2nd ISSS (International Symposium on Solar Sailing, New York, NY, July 20-22, 2010, URL: https://web.archive.org/web/20151002125635/http://www.citytech.cuny.edu/isss2010/presentations/2010July20/Mori_IKAROSDemo.zip
2) http://www.jspec.jaxa.jp/e/activity/ikaros.html
3) Jun'ichiro Kawaguchi, Yuya Mimasu, Osamu Mori, Ryu-Funase, Takayuki Yamamoto, Yuichi Tsuda, "Ikaros - Ready for Lift-Off as the World's First Solar Sail Demonstration in Interplanetary Space," Proceedings of the 60th IAC (International Astronautical Congress), Daejeon, Korea, Oct. 12-16, 2009, IAC-09.D1.1.3
4) Yuya Mimasu, Akifumi Kitajima, Tomohiro Yamaguchi, Ryu Funase, Osamu Mori, Yuichi Tsuda, Jun'ichiro Kawaguchi, "Photon Acceleration Model of Flexible Spinning Solar Sail," Proceedings of the 27th ISTS (International Symposium on Space Technology and Science) , Tsukuba, Japan, July 5-12, 2009, paper: 2009-k-44
5) Osamu Mori, Hirotaka Sawada, Ryu Funase, Mutsuko Morimoto, Tatsuya Endo, Takayuki Yamamoto, Yuichi Tsuda, Yasuhiro Kawakatsu, Jun'ichiro Kawaguchi, "First Solar Power Sail Demonstration by IKAROS," Proceedings of the 27th ISTS (International Symposium on Space Technology and Science) , Tsukuba, Japan, July 5-12, 2009, paper: 2009-o-4-07v, URL: http://archive.ists.or.jp/upload_pdf/2009-o-4-07v.pdf
6) Jun'ichiro Kawaguchi, Osamu Mori, Yuichi Tsuda, Takayuki Yamamoto, Ryu Funase, Hirotaka Sawada, Yasuhiro Kawakatsu, Mutsuko Morimoto, "World's first Solar Power Sail Demonstration Flight in Interplanetary Cruise in 2010," Proceedings of the 59th IAC (International Astronautical Congress), Glasgow, Scotland, UK, Sept. 29 to Oct. 3, 2008, IAC-08-A3.6.15
7) Jun'ichiro Kawaguchi, Yuya Mimasu, Osamu Mori, Ryu-Funase, Takayuki Yamamoto, Yuichi Tsuda, "IKAROS - Ready for Lift-Off as the World's First Solar Sail Demonstration in Interplanetary Space," Proceedings of the 60th IAC (International Astronautical Congress), Daejeon, Korea, Oct. 12-16, 2009, IAC-09.D1.1.3
8) Osamu Mori, Hirotaka Sawada, Fuminori Hanaoka, Junichiro Kawaguchi), Yoji, Shirasawa, Masayuki Sugita, Yasuyuki Miyazaki, Hiraku Sakamoto, "Development of Deployment System for Small Size Solar Sail Mission," Proceedings of the 26th ISTS (International Symposium on Space Technology and Science) , Hamamatsu City, Japan, June 1-8, 2008, paper: 2008-d-57
9) Yuya Mimasu, Jozef C. van der Ha, Tomohiro Yamaguchi, Ryu Funase, Yuichi Tsuda, Osamu Mori, Jun'ichiro Kawaguchi, "Estimation of Solar Radiation Pressure Parameters for Solar Sail Demonstrator IKAROS Considering Attitude Dynamics," 20th AAS/AIAA Space Flight Mechanics Meeting, San Diego, CA, USA, Feb. 14-17, 2010, AAS 10-231
10) Tomohiro Yamaguchi, Yuya Mimasu, Yuichi Tsuda, Hiroshi Takeuchi, Ryu Funase, Osamu Mori, Makoto Yoshikawa, "Solar Sail Force Modeling and its Estimation Approach of Solar Power Sail Spacecraft IKAROS," 20th AAS/AIAA Space Flight Mechanics Meeting, San Diego, CA, USA, Feb. 14-17, 2010, AAS 10-242
11) IKAROS Demonstration Team, "Introduction of Small Solar Power Sail Demonstrator IKAROS," URL: http://www.jaxa.jp/countdown/f17/pdf/presskit_ikaros_e.pdf
12) Ryu Funase, "Small Solar Power Sail Demonstrator "IKAROS" and Its Achievements," 23rd Microelectronics Workshop, Tuskuba, Japan, Nov. 10-11, 2010
13) Ryu Funase, Yoji Shirasawa, Yuya Mimasu, Osamu Mori, Yuichi Tsuda, Takanao Saiki, Junichiro Kawaguchi, "Fuel-free and Oscillation-free Attitude Control of IKAROS Solar Sail Spacecraft Using Reflectivity Control Device," Proceedings of the 28th ISTS (International Symposium on Space Technology and Science), Okinawa, Japan, June 5-12, 2011
14) Eriko Soma, Tatsuya Endo, Koji Tanaka, Masahiko Miyauchi, Rikio Yokota, Kazunori Shimazaki, Yuichi Tsuda,, Osamu Mori, "Flexible Solar Array of Small Solar Power Demonstrator IKAROS," Proceedings of the 28th ISTS (International Symposium on Space Technology and Science), Okinawa, Japan, June 5-12, 2011
15) Osamu Mori, Yuichi Tsuda, Yoji Shirasawa, Takanao Saiki, Yuya Mimasu, Junichiro Kawaguchi, "Attitude Control of IKAROS Solar Sail Spacecraft and Its Flight Results," Proceedings of the 61st IAC (International Astronautical Congress), Prague, Czech Republic, Sept. 27-Oct. 1, 2010, IAC-10.C1.4.3
16) Azusa Muta, Saburo Matunaga, Nobukatsu Okuizumi, "High vacuum experiment of spinning deployment using scaled-down model for solar sail," Proceedings of the 61st IAC (International Astronautical Congress), Prague, Czech Republic, Sept. 27-Oct. 1, 2010, IAC-10.C2.5.4
17) Hirokata Sawada, Osamu Mori, Nobukatsu Okuizumi, Yoji Shirasawa, Yasuyuki Miyazaki, Michihiro Natori, Saburo Matunaga, Hiroshi Furuya, Hiraku Sakamoto, "Evaluation of Solar Power Sail Deployment Mechanism of IKAROS," Proceedings of the 28th ISTS (International Symposium on Space Technology and Science), Okinawa, Japan, June 5-12, 2011
18) http://www.nec.com/global/solutions/space/satellite_systems/ikaros.html
19) Takayuki Ose, Yukishige Nozaki, Masayoshi Oya, Naoyuki Kaneko, Akihiko Miki, Hiroyuki Toyota, "Development and On-orbit Data of IKAROS Solar Array Panel," Proceedings of the 28th ISTS (International Symposium on Space Technology and Science), Okinawa, Japan, June 5-12, 2011, paper: 2011-q-14
20) Takanao Saiki, Yuichi Tsuda, Ryu Funase, Yuya Mimasu, Yoji Shirasawa, and the IKAROS Demonstration Team, "Attitude Operation Results of Solar Sail Demonstrator IKAROS," Proceedings of the 28th ISTS (International Symposium on Space Technology and Science), Okinawa, Japan, June 5-12, 2011, paper: o-4-11v
21) Yoshihiro Kishino, Masayuki Tamura, Takayuki Yamamoto, Osamu Mori, "Development of gas-liquid equilibrium propulsion system for IKAROS RCS," Proceedings of the 61st IAC (International Astronautical Congress), Prague, Czech Republic, Sept. 27-Oct. 1, 2010, IAC-10.B4.5.3
22) Yuichi Tsuda, Takanao Saiki, Yuya Mimasu, Ryu Funase, Kenji Kitamura, "Sun-Earth based spin axis determination for interplanetary missions and its applications to IKAROS," Proceedings of the AAS/AIAA Astrodynamics Specialist Conference, Girdwood, Alaska, USA, July 31- Aug. 4, 2011, paper: AAS-11-488
23) Ryu Funase, Yuya Mimasu, Yoshikazu Chishiki, Yoji Shirasawa, Yuichi Tsuda, Takanao Saiki, Jun'ichiro Kawaguchi, "Modeling and on-orbit performance evaluation of propellant-free attitude control system for spinning solar sail via optical parameter switching," Proceedings of the AAS/AIAA Astrodynamics Specialist Conference, Girdwood, Alaska, USA, July 31- Aug. 4, 2011, paper: AAS 11-517
24) Yuya Mimasu, Tomohiro Yamaguchi, Masaki Nakamiya, Ryu Funase, Takanao Saiki, Yuichi Tsuda, Osamu Mori, Jun'ichiro Kawaguchi, "Orbit Control Method for Solar Sail Demonstrator IKAROS via Spin Rate Control," Proceedings of the AAS/AIAA Astrodynamics Specialist Conference, Girdwood, Alaska, USA, July 31- Aug. 4, 2011, paper: AAS 11-633
25) "Launch Result of the Venus Climate Orbiter "AKATSUKI" (PLANET-C) aboard H-IIA Launch Vehicle No.17," May 21, 2010, URL: http://www.jaxa.jp/press/2010/05/20100521_h2a-f17_e.html
26) "Venus Climate Orbiter 'AKATSUKI'," Press Kit, URL: http://www.jaxa.jp/countdown/f17/pdf
/presskit_akatsuki_e.pdf
27) "Overview of Public Offering for Small Secondary Satellite Launch Opportunity," JAXA Press Kit, URL: http://www.jaxa.jp/countdown/f17/pdf/presskit_subpayload_e.pdf
28) "Overview of Secondary Payloads," URL: http://www.jaxa.jp/countdown/f17/overview/sub_payload_e.html
29) "IKAROS enters hibernation mode for 5th time," JAXA, May 29, 2015, URL: http://global.jaxa.jp/projects/sat/topics.html
30) "IKAROS wakes up from hibernation mode for the 4th time," JAXA, April 30, 2015, URL: http://global.jaxa.jp/projects/sat/ikaros/topics.html#topics4577
31) "IKAROS wakes up from hibernation mode for third time," JAXA, June 4, 2014, URL: http://global.jaxa.jp
/projects/sat/ikaros/topics.html#topics2522
32) Jozef C. Van der Ha, Yuya Mimasu, Yuichi Tsuda, Osamu Mori, "Solar and Thermal Radiation Pressure Models & Flight Evaluation for IKAROS Solar Sail," Proceedings of the 29th ISTS (International Symposium on Space Technology and Science), Nagoya-Aichi, Japan, June 2-8, 2013, paper: 2013-d-50
33) Osamu Mori, Ryu Funase, Yoji Shirasawa, Yuya Mimasu, Yuichi Tsuda, Takanao Saiki, Hajime Yano, Shuji Matsuura, Daisuke Yonetoku, Junichiro Kawaguchi, "IKAROS Extended Operation for Advanced Solar Power Sail Mission," Proceedings of the 29th ISTS (International Symposium on Space Technology and Science), Nagoya-Aichi, Japan, June 2-8, 2013, paper: 2013-k-44v
34) "IKAROS to wake up from hibernation," JAXA, Sept. 11, 2012, URL: http://www.jaxa.jp/projects
/sat/ikaros/topics_e.html
35) "Result of IKAROS 'reverse spin operation'," JAXA, October 18, 2011, URL: http://www.jaxa.jp/projects
/sat/ikaros/topics_e.html
36) "IKAROS: Details of reverse spin operation result and hibernation mode," JAXA, January 6, 2012, URL: http://www.jaxa.jp/projects/sat/ikaros/topics_e.html
37) Information provided by Junichiro Kawaguchi, and by Yuichi Tsuda, both of JAXA
38) "Japan's IKAROS Solar Sail Mission Extended for a Year," January 26, 2011, URL: http://news.sciencemag.org/scienceinsider/2011/01/japans-ikaros-solar-sail-mission.html?rss=1
39) "IKAROS regular operations completed," JAXA, Jan. 26, 2011, URL: http://www.jaxa.jp/projects
/sat/ikaros/topics_e.html
40) Information provided by Junichiro Kawaguchi, Program Director, JSPEC (JAXA Space Exploration Center) /JAXA
41) Osamu Mori, Yuichi Tsuda, Hirotaka Sawada, Ryu Funase, Takanao Saiki, Takayuki Yamamoto, Katsuhide Yonekura, Hirokazu Hoshino, Hiroyuki Minamino, Tatsuya Endo, Junichiro Kawaguchi, and the IKAROS Demonstration Team, "IKAROS and Extended Solar Power Sail Missions for Outer Planetary Exploration," Proceedings of the 28th ISTS (International Symposium on Space Technology and Science), Okinawa, Japan, June 5-12, 2011
42) "Small Solar Power Sail Demonstrator 'IKAROS' Successful Attitude Control by Liquid Crystal Device," JAXA, July 23, 2010, URL: http://www.jaxa.jp/press/2010/07/20100723_ikaros_e.html
43) Yuichi Tsuda, Osamu Mori, Ryu Funase, Hirotaka Sawada, Takayuki Yamamoto, Takanao Saiki, Tatsuya Endo, Junichiro Kawaguchi, "Flight Status of IKAROS Deep Space Solar Sail Demonstrator," Proceedings of the 61st IAC (International Astronautical Congress), Prague, Czech Republic, Sept. 27-Oct. 1, 2010, IAC-10.A3.6.8
44) Ryu Funase, Yoji Shirasawa, Yuya Mimasu, Yoshinobu Okano, Yuichi Tsuda, Takanao Saiki, Osamu Mori, Junichiro Kawaguchi, "Oscillation-Free Attitude Controller Design for Spinning Solar Sail "IKAROS" and Its Flight Results," Proceedings of the 2nd ISSS (International Symposium on Solar Sailing, New York, NY, July 20-22, 2010, URL: https://web.archive.org/web/20151002191151/http://www.citytech.cuny.edu/isss2010/presentations/2010July20/Funase_AttitudeControllerDesign.pdf
45) Small Solar Power Sail Demonstrator 'IKAROS' Successfully Observed Gamma-ray Burst," JAXA, July 14, 2010, URL: http://www.jaxa.jp/press/2010/07/20100714_ikaros_e.html
46) "Small Solar Power Sail Demonstrator 'IKAROS' Confirmation of Photon Acceleration," JAXA, July 9, 2010, URL: http://www.jaxa.jp/press/2010/07/20100709_ikaros_e.html
47) Hirotaka Sawada, "Development of IKAROS mission system to expand solar power sail," Proceedings of the 61st IAC (International Astronautical Congress), Prague, Czech Republic, Sept. 27-Oct. 1, 2010, IAC-10.C2.2.10
48) "IKAROS: Successful sail deployment and solar power generation! Hooray!!" The Planetary Society, June 10, 2010, URL: http://planetary.org/blog/article/00002541/
49) "Small Solar Power Sail Demonstrator 'IKAROS' Successful Solar Sail Deployment," JAXA, June 11, 2010, URL: http://www.jaxa.jp/press/2010/06/20100611_ikaros_e.html
50) "Small Solar Power Sail Demonstrator 'IKAROS' Successful Image Shooting by Separation Camera," JAXA, June 16, 2010, URL: http://www.jaxa.jp/press/2010/06/20100616_ikaros_e.html
51) "Small Solar Power Sail Demonstrator 'IKAROS' - Successful image shooting of solar sail by IKAROS separation camera," JAXA, June 16, 2010, URL: http://www.jaxa.jp/press
/2010/06/20100616_ikaros_e.html
52) Toshiyuki Nishihara, Saburo Matunaga, Osamu Mori, Yoji Shirasawa, "Study on 3 Dimensional Reconstruction Using Separation Camera Images and Achievement of IKAROS Based on Flight Images," Proceedings of the 29th ISTS (International Symposium on Space Technology and Science), Nagoya-Aichi, Japan, June 2-8, 2013, paper: 2013-c-46
53) "IKAROS moves to Verification Experiment Phase," JAXA, May 24, 2010, URL: http://www.jaxa.jp/press/2010/05/20100524_ikaros_e.html
54) "The Operation Status of the Small Solar Power Sail Demonstrator 'IKAROS'," JAXA, May 22, 2010, URL: http://www.jaxa.jp/press/2010/05/20100522_ikaros_e.html
55) S. Kimura, M. Terakura, M. Miyasaka, N. Sakamoto, H. Sawada, R. Funase, "A high-performance image acquisition and processing system fabricated using FPGA and free software technologies," Proceedings of the 61st IAC (International Astronautical Congress), Prague, Czech Republic, Sept. 27-Oct. 1, 2010, IAC-10,D1,2,10,x7929
56) Hajime Yano, Takayuki Hirai, Chisato Okamoto, Masayuki Fujii, Makoto Tanaka, IKAROS-ALADDIN Team, "Micrometeoroid Flux Measurement by ALADDIN in the Earth-Venus Space during Round Trip Cruising of the IKAROS Solar Sail," Proceedings of the 29th ISTS (International Symposium on Space Technology and Science), Nagoya-Aichi, Japan, June 2-8, 2013, paper: 2013-k-45
57) Hiroshi Takeuchi, Shinji Horiuchi, Chris Phillips, Phil Edwards, Jamie McCallum, John Dickey, Simon Ellingsen, Tomohiro Yamaguchi, Ryu-ichi Ichikawa, Kazuhiro Takefuji, Shinobu Kurihara, Ben Ichikawa, Makoto Yoshikawa, Atsushi Tomiki, Hirotaka Sawada, Ping Jinsong, "Delta-DOR Observations for the IKAROS Spacecraft," Proceedings of the 28th ISTS (International Symposium on Space Technology and Science), Okinawa, Japan, June 5-12, 2011, paper: 2011-o-4-14v
The information compiled and edited in this article was provided by Herbert J. Kramer from his documentation of: "Observation of the Earth and Its Environment: Survey of Missions and Sensors" (Springer Verlag) as well as many other sources after the publication of the 4th edition in 2002. - Comments and corrections to this article are always welcome for further updates (eoportal@symbios.space).
Overview Solar Sail Spacecraft Launch Mission Status Sensor Complement References Back to top