HIT-Sat (Hokkaido Institute of Technology Satellite)
Non-EO
Quick facts
Overview
| Mission type | Non-EO |
| Launch date | 22 Sep 2006 |
| End of life date | 18 Jun 2008 |
HIT-Sat (Hokkaido Institute of Technology Satellite)
HIT-Sat is a CubeSat development of the HIT-SAT Development Team (including students and researchers at Hokkaido Institute of Technology and Hokkaido University, and some volunteer engineers), Hokkaido, Japan. The overall objective is to demonstrate the performance of the HIT-Sat bus system on orbit. HIT-Sat is an engineering test CubeSat, which is being used as a scale model for a future “Hokkaido microsatellite” intended for Earth observation (to be launched in 2009). 1) 2)

Spacecraft
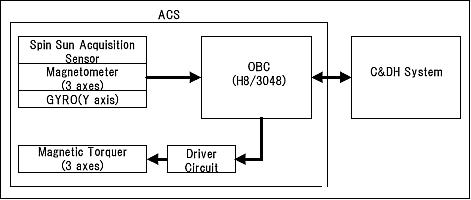
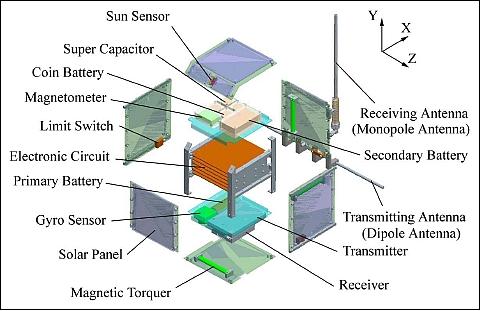
HIT-Sat is a “CubeSat” with a mass of about 3 kg and a side length of 12 cm (not a standard CubeSat). The spacecraft is spin-stabilized, pointing into the sun direction. The ACS (Attitude Control Subsystem) consists of three magnetic torquers (MTQ, total mass of 90 gram) as actuators, a magnetometer (Honeywell HMC2003), a sun sensor (FOV ±45º) and a gyroscope (range of ± 200º/s). A special separation system was developed for spacecraft deployment. After the separation, the initial attitude of the satellite is acquired thorough three control phases: de-spin, spin-up and sun acquisition (spin about the y-axis). The purpose of the attitude control is to stabilize the spin axis to the sun within a margin of about 10º. The spacecraft structure consists of four angle bars, six surface panels and two inner panels (use of aluminum alloys, AL2219 and AL5052). 3) 4) 5) 6) 7)
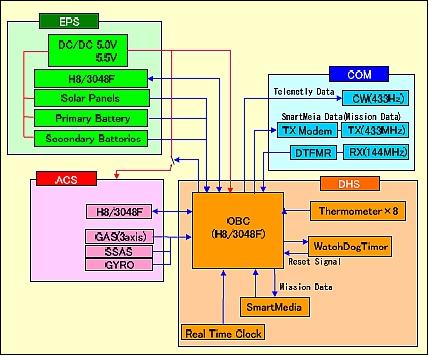
The EPS (Electric Power Subsystem) consists of six body-mounted solar panels, a primary battery (Li), secondary batteries (Li-polymer) and a H8/3048F microprocessor. The primary battery is used in particular for initial attitude acquisition. About 0.5 W of average power is needed for spacecraft operations.
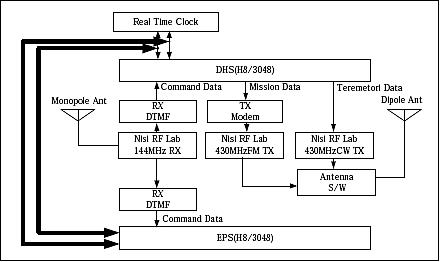
The DHS (Data Handling Subsystem) consists of a H8/3048F microprocessor, a real-time clock, and smart media (128 MB). A SmartMedia card is used to save sensor data in the initial attitude acquisition to be transmitted to the ground. DHS communicates with with EPS and ACS through serial links. DHS relays all data to/from the communication subsystem. Furthermore, malfunction detection and first-aid treatment are carried out autonomously in orbit.

The communication subsystem consists of a VHF receiver (145 MHz), a UHF transmitter (430 MHz band, CW and FM), a monopole and a dipole antenna (Figure 6). The ground station is located at the Hokkaido Institute of Technology. 8)
Launch
The launch of HIT-Sat took place on Sept. 22, 2006 (UTC). HIT-Sat is a secondary payload on the SOLAR-B mission. The launch vehicle was JAXA's M-V-7, the launch site was the Uchinoura Space Center at Uchinoura Kagoshima, Japan.
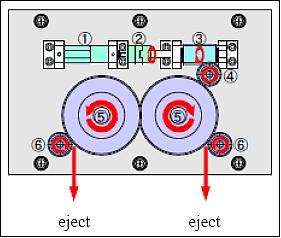
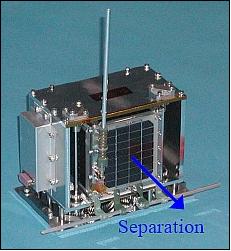
The HIT-Sat with rack gears was ejected into an orbit through a specially designed separation system consisting of a geared motor (1), a coupling (2), a worm (3), a worm wheel (4), spur gears (5), and pinion gears (6) of Figure 7. The separation system pushed the satellite out through gears driven by a electric motor to suppress excessive rotation of the satellite. The overview of the separation system is shown in Figure 8. The separation mechanism had a mass of 4.3 kg.
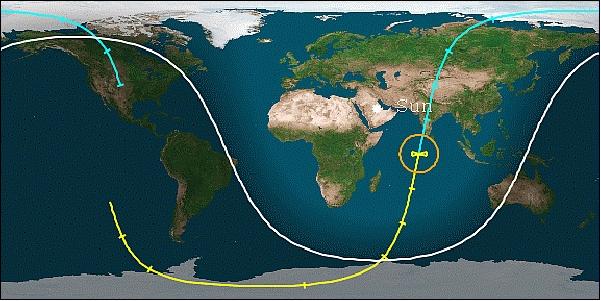
Orbit: Sun-synchronous orbit, altitude of 279 km x 648 km, inclination of about 98.32º, eccentricity: 0.037, period = 94 minutes.
The operational lifetime of the satellite is estimated to be about two months. The following success criteria were defined:
• Minimum success: Separation of the satellite and downlink reception capability
• Mission success: Stable power generation of the solar panels, uplink capability from the ground station, acquisition of the thermal data on orbit
• Full success: Spin stabilization into the direction of the sun
• Advanced success: Full functional demonstration of all subsystems.
Spacecraft structure and external elements | Size: 12 cm x 12 cm x 12 cm |
Spacecraft mass | 2.7 kg |
ACS (Attitude Control Subsystem) | Spin stabilization |
EPS (Electric Power Subsystem) | Evaluation of electrical charge and discharge circuit |
Thermal and structure subsystem | Separation of the satellite. |
Data handling subsystem | Function proof in radiation environment and |
RF communications | Uplink: VHF (145 MHz), DTMF (Dual-Tone Multi-Frequency) |
Mission Status
• An atmospheric reentry of the HIT-Sat spacecraft took place on June 18, 2008 (due to the low perigee). 9) 10)
• During the eclipse period of HIT-Sat (Feb. 3 - 14, 2007) it was not possible to communicate with the spacecraft. After Feb. 15, 2007, the CW beacon could be received intermittently. The recovery operation started in April 2007 (Ref. 3). The CW telemetry has also been received around the world by the radio amateur community (Hit-Sat = Oscar 59, International code: 2006-041F ).
• From the results of AVE (Angular Velocity Estimation), HIT-Sat had only a small magnitude of angular velocity at the start of initial attitude acquisition. The magnitude of angular velocity was increased by the action of magnetic torquers to about 1.5 rad/s in the spin-up experiment. HIT-Sat carried out the experiments of active attitude control on Sept. 24 and Oct. 30, 2006, respectivly. Through these experiments, HIT-Sat could obtain magnetometer and gyro data (Ref. 7). The angular spin estimation was conducted by using the received radio data from October 28, 2006 to January 15 2007.
• After launch, HIT-Sat separated from the launcher and acquired various data. The CW beacon is intermittently transmitted as of August 2007 after February 15, 2007, though the acquired data is limited (Ref. 3).
References
1) K. Ishimura, T. Totani, K. Sugimoto, D. Igarashi, S. Sakakibara, H. Hoshika, K. Matsushima, S. Era, A. Nakamura, T. Yasunaka, T. Uematsu, K. Hori, N. Hirota, R. Mitsuhashi, J. Nishidate, T. Sato, T. Yoneya, Y. Aoyanagi, T. Iwamoto, R. Miura, T. Sugawara, S. Satori, “Hokkaido Satellite Project: System Design of a Engineering Test CubeSat,” Proceedings of 25th ISTS (International Symposium on Space Technology and Science) and 19th ISSFD (International Symposium on Space Flight Dynamics), Kanazawa, Japan, June 4-11, 2006, paper: 2006-r-1-13
2) T. Totati, T. Sakakibara, T. Yasunaka, K. Ishimura, S. Satori, K. Sugimoto, D. Igarashi, H. Hoshika, T. Uematsu, S. Era, A. Nakamura, K. Hori, R. Mitsuhashi, J. Nishidate, T. Sato, T. Yoneya, Y. Aoyanagi, T. Iwamoto, “Hokkaido Satellite Project: Structural and Thermal Design of Engineering Test CubeSat,” Proceedings of 25th ISTS (International Symposium on Space Technology and Science) and 19th ISSFD (International Symposium on Space Flight Dynamics), Kanazawa, Japan, June 4-11, 2006, paper: 2006-r-1-14
3) Tatsuhiro Sato, Ryuichi Mitsuhashi, Shin Satori, Kosei Ishimura, Tsuyoshi Totani, Akihiro Nakamura, Kotaro Hori, Toshihiko Yasunaka, and the HIT-SAT development team, “Orbital experiment of nano-satellite "HIT-SAT" as a sub-payload of M-V rocket,” Proceedings of the 26th ISTS (International Symposium on Space Technology and Science) , Hamamatsu City, Japan, June 1-8, 2008, paper: 2008-u-15, published in Transactions of the Japan Society for Aeronautical and Space Technology Japan, Vol. 7, 2009, pp.Tu_47-Tu_50
4) http://www.hit.ac.jp/~satori/hitsat/index-e.html
5) Y. Aoyanagi, T. Sato, T. Yoneya, J. Nishidate, T. Ono, Y. Tanaka, T. Iwamoto, R. Mitsuhashi, S. Satori, K. Ishimura, T. Totani, K. Sugimoto, D. Igarashi, H. Hoshika, T. Sakakibara, T. Yasunaka, T. Uematsu, S. Era, K.Hori, A. Nakamura,, N. Hirota, “Hokkaido Satellite Project: Development of Magnetic Torquer for Engineering Test CubeSat,” Proceedings of 25th ISTS (International Symposium on Space Technology and Science) and 19th ISSFD (International Symposium on Space Flight Dynamics), Kanazawa, Japan, June 4-11, 2006, paper: 2006-r-1-15
6) Tatsuhiro Sato, Kyohei Takenami, Shinya Nishizato, Ryuichi Mitsuhashi, Shin Satori, Satoshi Kase, “Attitude estimation of small satellite HIT-SAT by fluctuation in receiving electric field power,” Proceedings of the 26th ISTS (International Symposium on Space Technology and Science) , Hamamatsu City, Japan, June 1-8, 2008, paper: 2008-f-24, URL: http://ap-s.ei.tuat.ac.jp/isapx/2008/pdf/1645149.pdf
7) Kouta Matsushima, Kosei Ishimura, Tsuyoshi Totani, Shin Satori, Ryuichi Mitsuhashi, Akihiro Nakamura, Toshihiko Yasunaka, Kotaro Hori, Norihisa Hirota, “The Attitude Determination of HIT-SAT from Magnetometer Data,” Proceedings of the 26th ISTS (International Symposium on Space Technology and Science) , Hamamatsu City, Japan, June 1-8, 2008,, paper: 2008-d-12
8) Hironori Yasumoto, Akihiro Nakao, Tatsuhiro Sato, Ryousuke Hayasaka, Ryuichi Mitsuhashi, “Quantitative Study of Received Power fluctuation by Nano-Satellite,” The 2009 International Symposium on Antennas and Propagation (ISAP 2009), October 20-23, 2009, Bangkok, Thailand, URL: http://ap-s.ei.tuat.ac.jp/isapx/2009/pdf/1358.pdf
9) http://reentrynews.aero.org/2006041f.html
10) “HITSAT re-entry,” Astronomy News, June 18, 2008, URL: http://astronomy.activeboard.com/forum.spark?aBID=58381&p=3&topicID=18351197&page=1&sort=newestFirst
The information compiled and edited in this article was provided by Herbert J. Kramer from his documentation of: ”Observation of the Earth and Its Environment: Survey of Missions and Sensors” (Springer Verlag) as well as many other sources after the publication of the 4th edition in 2002. - Comments and corrections to this article are always welcome for further updates(eoportal@symbios.space).