HawkEye 360
EO
Other
Operational (nominal)
HawkEye 360
With the initial Pathfinder mission launched in December 2018, HawkEye is a commercially owned and operated constellation of 15 microsatellites, with an additional six planned, developed by HawkEye 360 Inc. The mission provides spaceborne geolocation of radio frequency (RF) emitters, both terrestrial and aerial, for a range of commercial applications. The HawkEye microsatellites are launched in clusters of three, with the most recent launch occurring in May 2022.
Quick facts
Overview
| Mission type | EO |
| Agency | HawkEye 360 |
| Mission status | Operational (nominal) |
| Launch date | 03 Dec 2018 |
| Instruments | SDR |
| Instrument type | Other |
| CEOS EO Handbook | See HawkEye 360 summary |

Summary
Mission Capabilities
Each HawkEye microsatellite carries two instruments, a software defined radio (SDR) and an RF front-end module. SDR consists of two components, an embedded processor, and three baseband signal processors. The baseband signal processors are integrated RF transceivers, utilising a combination of ADCs (Analogue to Digital Converter) and DACs (Digital to Analogue Converter), as well as RF amplifiers, for simultaneous processing of three receiver channels. The embedded processor system combines a dual-core ARM (Advanced RISC (Reduced Instruction Set Computer) Machine) processor with a Kintex FPGA (Field Programmable Gate Array). The two components of the processor system are integrated into a single chip, enabling simple cross-domain switching between the FPGA and processor units. The RF front end connects to the baseband processors, allowing a number of unique RF paths and antennae supporting a range of bands and frequencies. Custom filters are applied in each switchable path with Low Noise Amplifiers (LNA) and attenuators fixed to specific bands, as well as a Low Noise Block (LNB) to extend the SDR frequency range.
Performance Specifications
SDR is capable of frequency tuning of 70 MHz to 6 GHz, with two receiver and two transmitter channels, and an instantaneous bandwidth of up to 56 MHz. The two receiver channels are both tuned through a shared local oscillator (LO), limiting the tuning range of a single channel to within 56 MHz, the instantaneous bandwidth of the other. The RF front end’s use of a LNB extends the SDR frequency range to approximately 18 GHz (Ku-band), and quarter-wave dipoles, patches, and wide-band button and horn antennas allow for the desired frequency range, from VHF (Very High Frequency) to Ku-band.
The HawkEye constellation operates in a circular sun-synchronous orbit of altitude 575 km, inclination 97.77°, with the Pathfinder mission having an LTDN (Local Time on Descending Node) of 1030 hours. The target formation for the constellation positions groups of three spacecraft, creating 7 groups when fully operational, equally spaced along track and 125 km apart, with the middle spacecraft adjusted so that it has peak-to-peak out-of-plane oscillatory motion.
Space & Hardware Components
The HawkEye mission employs the NEMO (Next-generation Earth Monitoring and Observation) platform, developed by UTIAS/SFL (University of Toronto Institute of Aerospace Studies - Space Flight Laboratory), which is already active as part of a range of governmental and commercial missions. The spacecraft has dimensions 0.20 m x 0.20 m x 0.44 m, and a launch wet mass of 13.4 kg. Due to the RF sensitive nature of the payload, EMI (Electromagnetic Interference) prevention and mitigation was necessary in the design of its interior. The spacecraft is therefore partitioned into three separate zones, one for the payloads themselves, another for the balance of the platform, and a final zone for the external environment. These zones are established through Faraday cage boundaries, to significantly reduce noise. The spacecraft command and data handling (C&DH) is operated by two onboard computers (OBC), which interface with the uplink and downlink radios. The OBCs have different roles, with one responsible for telemetry collection, routing packets to and from the radios, payload operations, and execution of time tagged commands, and the other assigned the roles of polling attitude determination sensors, running the estimation and control algorithms, and commanding actuators.
HawkEye 360
Pathfinder Cluster Mission to identify RFI locations
Spacecraft Launch Mission Status Sensor Complement Ground Segment References
HawkEye 360 Inc. of Herndon VA (USA) has developed an innovative combination of classical and novel geolocation algorithms that will enable precise spaceborne geolocation of terrestrial and aerial radio frequency (RF) emitters related to a broad array of business enterprises. In late 2018, the HE360 Pathfinder mission, a formation-flying cluster of three microsatellites, will launch to demonstrate the commercial capability of HE360’s high-precision RFI (Radio Frequency Interference) geolocation technology. The spacecraft will be placed into a sun-synchronous orbit at an altitude of 575 km. 1) 2)
The Pathfinder mission serves to demonstrate the practicality of the geolocation mission and paves the way for a future commercial constellation. Initially, an eighteen satellite constellation (arranged as six clusters of three) is envisioned for commercial, global service. However, the final constellation size and geometry will depend on market factors including the results of the Pathfinder mission.
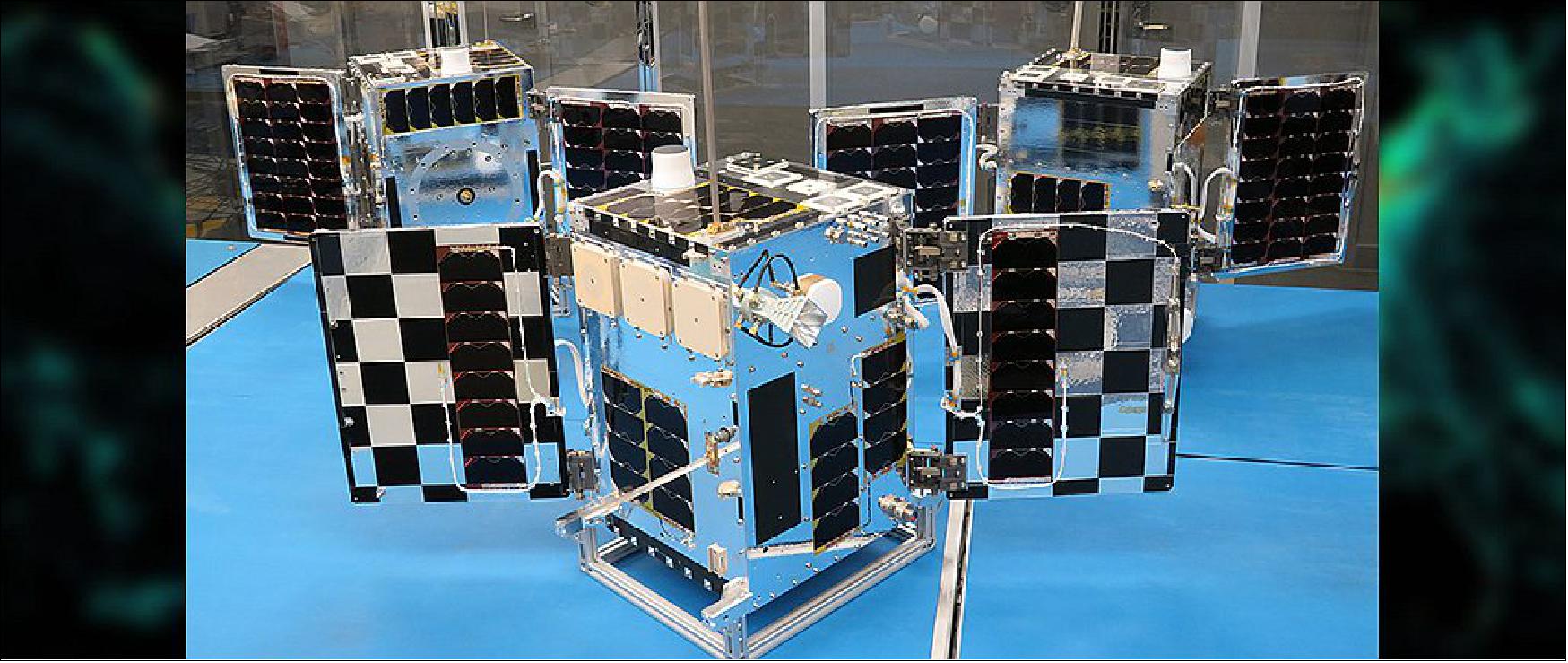
HE360 selected DSI (Deep Space Industries) of San Jose, CA and major subcontractor UTIAS/SFL (University of Toronto, Institute for Aerospace Studies/Space Flight Laboratory) to design the platform for the Pathfinder mission. DSI is the prime contractor, and the manufacturer of a novel water-fueled electro-thermal propulsion system which will fly on each spacecraft. SFL is responsible for the design and manufacturing all three spacecraft platforms. SFL’s versatile flight-proven 15 kg NEMO (Next-generation Earth Monitoring and Observation) microsatellite bus was selected for the mission. In addition to being a world leader in providing low-cost high-performance small spacecraft, SFL was selected for this mission as it is a pioneer in low-cost precision spacecraft formation flight, a key enabling technology for the HE360 mission. SFL has developed compact, low-cost formation flying technology at a maturity and cost that no other small satellite developer can credibly offer at present. This precise formation control was demonstrated on-orbit by SFL in the highly successful CanX-4/CanX-5 mission in 2014. 3) With 18 successful spacecraft missions on-orbit, SFL’s solutions have demonstrated high reliability and high availability products, which can be depended upon for a wide array of commercial applications. By leveraging SFL’s successful spacecraft platforms and formation flying technology, along with DSI’s pioneering innovations and next-generation propulsion systems, the mission will deliver unparalleled performance in smaller, affordable satellites.
The Mission
Clearly understanding the world around us is becoming more important than ever. Many of the big problems we face as a society require solutions that contextualize the world around us. This applies directly to the RF domain. HawkEye 360 is capitalizing on the explosive growth of RF signals and their application to tracking assets. Opportunities and applications that arise from this high-precision radio frequency mapping and analytics technology are enormous and appeal to a broad array of business enterprises and government users. The mission is filling a void by bringing a level of visualization to a domain that has historically only been understood by governments. For example, the ability to locate and characterize RF signals across many bands from space will allow regulators, telecommunications companies and broadcasters to monitor spectrum usage and to identify areas of RFI. In the field of transportation, RF signals transmitted from the air, ground or sea could be precisely monitored. The system may also be used to expedite search and rescue operations by quickly pinpointing activated emergency beacons.
RF geolocation as it pertains to this mission means the identification of a terrestrial signal emitter’s location through signal processing and analysis of the received signal at one or more remote observation platforms. In this case, the observation platforms are the three HE360 spacecraft in the Pathfinder cluster. Hereafter the spacecraft will be referred to as “Hawks” and individually as Hawk-A through Hawk-C.
As an example of the utility of the technology which will be made available by this mission, consider an AIS detection case. There are 21 different types of AIS (Automatic Identification System) messages, many of which include the maritime vessel’s location provided by the vessel’s GPS receiver. Many existing satellites decode or receive this information and use the embedded geolocation data for commercial or national purposes.
Unfortunately, it has been demonstrated that AIS data is not universally reliable. It is fairly easy for individuals, such as pirates or illegally operating fishing fleets to “spoof” their AIS emissions, effectively changing the GPS positions they report to make it look as if they are somewhere other than where they actually are or simply changing their identifier. Furthermore, bad actors with less technical capability frequently turn off their AIS transceivers - “going dark” and disappearing from port and satellite AIS data feeds while engaging in criminal activities. HE360 will demonstrate that independent geolocation of AIS and other signals is possible without having to trust potentially false data in the transmissions. In the event that an AIS transmitter is disabled, other well-known signals commonly transmitted by ships can be substituted to maintain position knowledge of an emitter when traditional AIS-receiving satellites would lose contact.
The three Hawks will fly in formation, with co-visibility of a large number of terrestrial emitters at any one time. Pairs of satellites or the entire trio may intercept the same transmission when the transmission originates from the common footprint of the intercepting satellites. The satellites will synchronize clocks using GPS receivers, and these same GPS receivers will stabilize the PLLs (Phase Locked Loops) governing the tuning frequency in the satellites’ digitizing RF tuner payload.
Signals will arrive at the three receivers at separate times corresponding to different slant ranges between the satellite and the emitter. Signals will arrive at different apparent center frequencies corresponding to velocity components in the direction of the signal’s path of travel from the transmitter to the receiver (Doppler effects). Comparing time-of-arrival (TOA) and frequency-of-arrival (FOA) measurements between pairs of receivers serves as a basis for discovering the position of the transmitter using multilateration. GPS receivers provide precise estimates for the position and velocity of the receivers, furnishing the remainder of the information required for multilateration.
Spacecraft
The HE360 Pathfinder mission employs the versatile flight proven NEMO platform of UTIAS/SFL. This state-of-the-art microsatellite bus has been employed by a wide range of commercial and government users, and depended upon in applications and business models which would only allow for a high-performance high-reliability yet affordable platform. Indeed, the NEMO bus has been selected by the Norwegian government for the NORSAT-1, -2, and -3 satellites (scientific, maritime AIS, VDES, and radar applications), the Indian government for NEMO-AM (aerosol monitoring), and GHGSat Inc. for the GHGSat Constellation (greenhouse gas emissions monitoring). The platform supports a full suite of heritage SFL subsystem hardware. The NEMO platform is configurable, with many design aspects tailorable, if needed. The NEMO-platform itself builds upon the extensive heritage gained from SFL’s widely used GNB (Generic Nanosatellite Bus). By leveraging heritage designs and experiences gained through many cumulative years of on-orbit operation, the cost, schedule, and risk associated with the Pathfinder mission was significantly reduced. 4)

The HE360 Pathfinder platform is essentially a 20 x 20 x 44 cm form factor with an additional ~7 cm high ‘mezzanine’, with a launch wet mass of 13.4 kg. Similar to spacecraft designed to the CubeSat standard, four launch rails interface with the separation system and guide the spacecraft during ejection from SFL’s XPOD separation system. An external view of the Pathfinder spacecraft is shown in Figure 1. The bus structure is predominantly lightweight magnesium, with careful arrangement of structural components to provide high mechanical margins. The structural concept of the spacecraft is a dual tray based design, as shown in Figure 2. Most of the platform avionics are clustered towards the +Y end of the spacecraft. This allows for integration and harness design ease, and offers considerable payload accommodation volume.
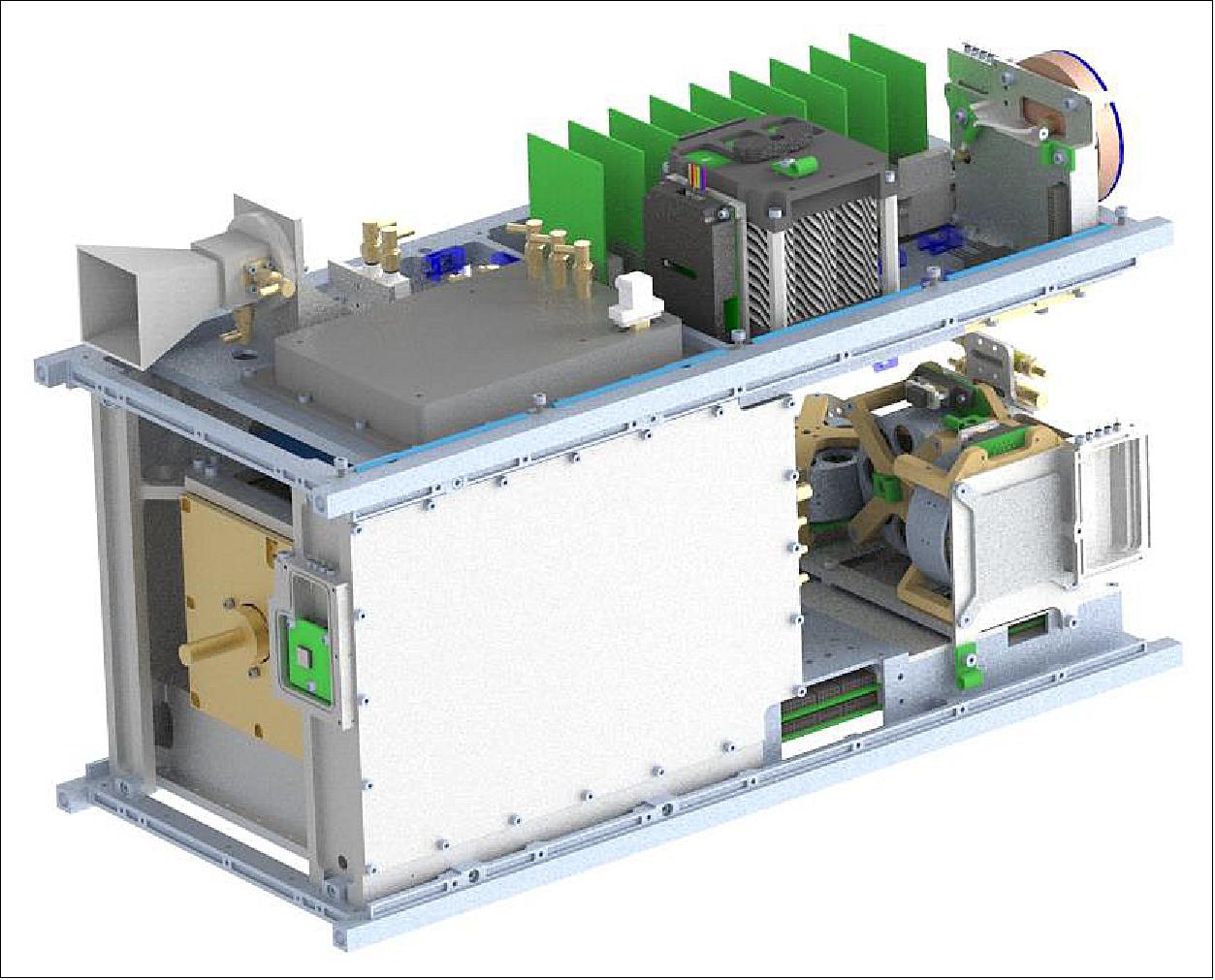
As the spacecraft carries a sensitive RF payload, EMI (Electromagnetic Interference) mitigation was an important consideration in the design. The spacecraft was segregated into three distinct RF zones: i) the payloads isolated within their enclosures, ii) the balance of the platform, and iii) the environment external to the spacecraft. The zones were setup by creating boundaries, essentially Faraday cages, which would significantly attenuate noise. This was accomplished by:
• The use of RC-filtered connectors, sized to reject signals above a design cut-off frequency
• The use of conductive gaskets to ensure DC and RF seals across all interfaces of the Faraday cages
• Strict aperture control, to significantly attenuate RF noise, but yet still comply with spacecraft venting requirements. This is particularly important for the spacecraft exterior, as strict aperture control was enforced to prevent transmission of noise which may otherwise be picked up by the payload receive antennas.
The Pathfinder spacecraft employs a single-string design that results in a compact, low mass spacecraft. The power architecture is based on SFL’s modular power system (MPS), which generates power from the body mounted high-efficiency triple-junction solar arrays, and uses a 12 V lithium ion battery for energy storage. A solar array and battery regulator (SABR) unit within the MPS provides peak power tracking functionality to optimize power generation. The MPS also provides power conditioning to generate 3.3 V and 5 V regulated buses in addition to the unregulated 12 V bus, as well as load switching and protection against off-nominal voltage and current events.
C&DH: The command and data handling architecture is centered on two SFL-designed on-board computers (OBCs), which interface to the uplink and downlink radios and all other spacecraft hardware. One OBC is nominally designated as the house keeping computer (HKC), and is responsible for telemetry collection, routing packets to and from the radios, payload operations, and execution of time tagged commands. The second OBC is designated as the attitude determination and control computer (ADCC) and is responsible for polling attitude determination sensors, running the estimation and control algorithms, and commanding actuators. Both computers are cross-connected to all on-board hardware, providing a level of redundancy. In this configuration, either computer can take on the tasks of the other if required.
RF communication: Primary telemetry and command is provided in S-band and UHF, respectively. A SFL UHF receiver is used to provide the uplink channel at a fixed 4 kbit/s data rate. A variable data rate SFL S-band transmitter, which can operate between 32 kbit/s and 2048kbit/s (scaled on-the-fly), in either BPSK or QPSK modulation and 0.5 rate convolutional encoding, is used on the downlink. The platform is also equipped with dedicated high-data rate payload links: uplink in S-band, downlink in X-band and cross-link to other satellites in S-band. The X-band transmitter is capable of 3 – 50 Mbit/s usable data rate. The transmitter uses OQPSK (Offset Quadrature Phase Shift Keying ) and a ½ rate convolutional encoding FEC (Forward Error Correction) scheme. A high-rate S-band uplink is implemented within the payload SDR itself, with a LNA (Low Noise Amplifier) positioned between the radio and the body-mounted patch antenna. A SFL S-band inter-satellite link, although not required for the mission, is integrated to demonstrate the capability to perform the geolocation calculations entirely on orbit. In this scenario, information must be exchanged between the satellites so that all measurements reside on a single spacecraft where the geolocation problem can be solved.
ADCS (Attitude Determination and Control Subsystem): The ADCS employs six sun sensors, a three-axis magnetometer, and a three-axis rate sensor for attitude determination. Attitude control is achieved through three vacuum core magnetorquers and three reaction wheels. Orbit position and velocity measurements are sampled by a L1/L2 GPS receiver and active antenna. Several modes of attitude control are available including de-tumble (for initial stabilization after kick-off from the launch vehicle), inertial pointing, nadir tracking, align-constrain, and ground target tracking. This system allows for 2σ pointing accuracy with only 2.1º and 4.2º error in sunlight and eclipse respectively.
Propulsion system: DSI (Deep Space Industries) is providing a novel electro-thermal propulsion system that uses liquid water as the working fluid, significantly reducing integration and launch risks relative to other market options of similar performance. The unit has a qualified specific impulse (Isp) of 182 seconds, giving it exceptional performance with comparison to a typical cold-gas system. Conversely, while it has a lower Isp than newly available low-power electric propulsion systems, the higher thrust means that DSI’s system can be used quasi-impulsively. This reduces the time required for maneuvers. Electric propulsion systems also typically utilize high voltage power supplies or RF-amplifiers that produce wide-band RF noise, which is detrimental to the RF payload. The propulsion system on Pathfinder has a ΔV of 96 m/s, though, the system features an easily expandable propellant tank, allowing for simple propellant volume tailoring. The water propellant needs to stay liquid at all times. The thermal design of the spacecraft passively maintains the propellant in a liquid state, but auxiliary heaters are positioned to augment this in an emergency.

The Formation
SFL has a strong history in the development and implementation of technologies and algorithms aimed towards operational formation flying missions. The CanX-4 and CanX-5 spacecraft were the first nanosatellites to demonstrate autonomous formation reconfiguration and control with a control error of less than one meter (Ref. 3). This was enabled by a real-time relative navigation algorithm based on carrier-phase differential GPS techniques, which was shown to have a typical RMS error of better than 10 cm. In addition, the drift recovery and station keeping (DRASTK) software was developed and used successfully to design and implement a guidance trajectory for rendezvous following initial spacecraft separation from the launch vehicle, and to maintain a coarse along-track separation in a passively safe relative configuration by appropriately phasing in-plane and out-of-plane motions. 5) It is with this proven track-record of success in applied formation guidance and navigation that SFL is uniquely positioned to implement these techniques operationally for the HE360 Pathfinder mission.
The baseline orbit for the Pathfinder mission is a circular Sun-synchronous orbit with an altitude of 575 km and a local time of descending node of 10:30 hours. In the target formation, the three spacecraft are equally spaced along-track by 125 km. The middle spacecraft has its right ascension of the ascending node (RAAN) adjusted such that it has a 20 km peak-to-peak out-of-plane oscillatory motion, whose maxima are achieved at the equator. For a RAAN-offset orbit, the formation becomes co-linear at the maximum and minimum sub-latitudes of the cluster, which occurs near the northern and southern polar regions. The reduced geolocation precision in the polar regions is tolerable since the human population and activity in this region is limited. Also, the payload data will be downloaded to X-band earth stations in this region frequently. No inclination difference is desired, due to the large cost in maintaining this formation owing to the required RAAN corrections. This formation provides a good balance between ground target viewing geometry for geolocation of RF signals, and fuel cost of formation initialization and maintenance. The quasi-nonsingular mean orbital element set from [6] is adopted in this work for several reasons. First, this parametrization results in an intuitive geometric representation of the formation design variables given its relationship to the solutions of the Hill-Clohessy-Wiltshire equations of relative motion. Second, the equations of relative motion are significantly simplified, so formation guidance and control tasks can be moved onboard more easily. Finally, the use of orbital elements easily lends itself to analysis of “mean” or averaged relative motion, such that short-period and long-period oscillations are ignored and only linear drift in the formation is controlled. The quasi-nonsingular elements cannot be used in equatorial orbits, but this is not considered a detriment since such orbits are not beneficial to HE360 from a ground-coverage perspective.
The required formation control is 5 km (1σ), which must also be tolerant to 1 week ground station outages. The guidance, navigation, and control strategies selected can be implemented on-board the spacecraft, however at present control maneuvers are to be computed on the ground and uploaded to each spacecraft given the relatively coarse formation-keeping requirement. This strategy removes the complexity and risk in implementing autonomous relative navigation and control where it is not warranted. The target mission duration is two years, with a stretch goal of three years. Over this time, only two of the three spacecraft shall be actively controlled. From a power perspective, the spacecraft are constrained to applying orbit control maneuvers at least 45 minutes apart.
Conceptually the formation control strategy is broken down into two phases: formation initialization, and station keeping. Following a two-week commissioning period for the spacecraft systems, the initialization phase is expected to last approximately six weeks. During initialization two of the three spacecraft are maneuvered into the target formation – exactly which two depends on the initial relative configuration upon separation from the launch vehicle. It is expected that all three spacecraft will be deployed approximately five minutes apart from SFL’s XPOD separation system, each at a velocity of roughly 1.8 m/s in an uncontrolled direction relative to the local orbital frame. Given the GPS telemetry from each spacecraft, a guidance plan can be simulated for each permutation of controlled spacecraft. The spacecraft pair leading to minimum fuel consumption will be selected as the controlled spacecraft going forward. The total initialization phase is broken down into sub-intervals (ΔTinit), during which roughly 85% of orbits are allotted for control, while 15% are reserved as maneuver-free periods for the purpose of orbit determination used as input for the next initialization window.
The guidance law during formation initialization is based on 6), where the fuel-optimal reconfiguration from some initial state to a final desired state is framed as a problem of minimizing the net total change in the differential mean orbital elements. This is possible since incremental changes in the orbital elements can be equated to impulsive thrust maneuvers (i.e., instantaneous changes in velocity). The guidance plan generates a set of waypoints in differential mean orbital element space from the current time to the desired initialization time in ΔTinit intervals. The waypoint at the start of the next sub-interval is used as the target during the current control period.
The set of control maneuvers during each initialization sub-interval is computed using the method of Roscoe et al., which exploits a duality between the continuous and discrete time optimal formation reconfiguration problem in order to iteratively solve for a set of maneuver locations and magnitudes that result in a minimum-fuel maneuver plan to reach the target waypoint at the target time. 7) This control strategy is augmented to enforce a minimum time-spacing between maneuvers, and to prevent maneuvers from being planned inside configurable “no thrust” windows, which are specified by operators as a set of intervals.
The station keeping guidance law is designed to keep the spacecraft within a designated control window while keeping the spacecraft passively safe using the eccentricity/inclination vector separation concept. 8) The station keeping phase is conceptualized as a long period of no control (the drift period; approximately 1 week), followed by a short window within which the control maneuvers occur (the control period; approximately 4 orbits). The strategy is motivated by 9), whereby during each control window the active spacecraft targets a specific differential semi-major axis which will cause a drift from one side of the control window to the other. Likewise, the relative eccentricity vector is adjusted such that it will be parallel with the relative inclination vector half-way through the drift period, which maximizes safety during the drift period. The relative inclination vector is simply readjusted to its target value during each control period, since there is no drift desired here. The long drift period is allowable because control maneuvers are expected to be infrequent, owing to the fact that all spacecraft will mirror their attitudes thus minimizing the impact of differential drag on the formation. A side-benefit of this strategy is maximizing the time spent performing payload observations. 10)
The formation control simulations are performed with the aid of Systems Tool Kit (STK). The orbit model includes an EGM2008 gravity model of degree and order 30, third-body perturbations due to the Sun and moon, solar radiation pressure, and atmospheric drag with a Jacchia-Roberts atmospheric density model. Thrusts are modeled as impulsive with a mean error of zero and a standard deviation of 5%. A thrust timing error with standard deviation 10 seconds is applied as well. Thrust minimum impulsive bit and saturation effects are also accounted for, as well as attitude control errors with standard deviation of 2º.
Development Status
• February 15, 2022: HawkEye 360 Inc., the first commercial company to use formation-flying satellites to create a new class of radio frequency (RF) data and data analytics, today announced their Advisory Board Class of 2022: The Honorable Deborah Lee James, Ms. Essye B. Miller, Admiral Mike Rogers, and Admiral Paul F. Zukunft. 11)
- “HawkEye 360 is privileged to welcome a new extraordinary class of advisory board leaders,” said HawkEye 360 Chief Executive Officer John Serafini. “Their expertise will be consequential as we continue to position HawkEye 360 as the global leader in RF data and analytics.”
- The Honorable Deborah Lee James draws upon 30 years of senior homeland and national security experience in both the public and private sectors. As the 23rd Secretary of the Air Force, she was responsible for the organization, training, and welfare of 660,000 military and civilian personnel and a budget of nearly $140 billion. Prior to that role, she served as President of Science Applications International Corp.’s (SAIC) Technical and Engineering sector– a $2 billion, 8,700 person enterprise. Throughout her 12-year tenure at SAIC, Deborah worked on key governance, financial, business development, capture management, strategic planning, M&A and program execution areas.
- “I’m excited to join HawkEye 360–a high growth company that supports USG and international customers with never-before commercially available radio frequency geospatial data,” Deborah Lee James said. “Whether it’s monitoring suspicious activity on a national border, or supporting our warfighters with better situational awareness, HawkEye 360 is committed to protecting against emerging threats through innovation in space.”
- Ms. Essye B. Miller most recently served as the Principal Deputy, Department of Defense Chief Information Officer (DOD CIO). In this capacity, Miller assisted the DOD CIO as the primary advisor to the Secretary of Defense for Information Management / Information Technology (IT) and Information Assurance, as well as non-intelligence space systems, critical satellite communications, navigation, and timing programs. Miller was also appointed as the Acting DCIO for Cybersecurity from December 2017 to May 2018. Prior to joining the DOD CIO, Miller held information technology and cybersecurity leadership positions in the U.S. Air Force and U.S. Army. She is currently the President of Executive Business Management, LLC, a cybersecurity and technology consulting firm.
- “Innovation is key to the nation maintaining a competitive advantage in space technologies on the world stage,” Essye B. Miller said. “HawkEye 360 is undoubtedly leading the way in space-based analytics. I am honored to be included in their efforts to modernize the ways in which we achieve national security insights.”
- Admiral Mike Rogers retired from the Navy in 2018 following a 37 year career and after rising to the rank of four-star admiral. He culminated his career serving simultaneous positions as Commander, U.S. Cyber Command and Director, National Security Agency – creating the DOD’s then newest warfighting organization and leading the U.S. government’s largest intelligence organization. In those roles, he worked extensively with U.S. government leadership, the DOD, and the U.S. Intelligence Community as well as their international counterparts in the conduct of cyber and intelligence activities across the globe.
- “HawkEye 360 is one of the most dynamic leaders in intelligence technology as they are already spearheading the collection of critical geospatial data to make the world safer,” Admiral Mike Rogers said. “I look forward to helping HawkEye 360 deploy multi-intelligence solutions to our government, allied governments, and private partners to advance the security of our global landscape.”
- Admiral Paul F. Zukunft served as the 25th Commandant of the Coast Guard from 2014 until 2018. During his tenure as Commandant, the Coast Guard attained its highest appropriation in history to modernize its fleet and upgrade its infrastructure. His 41 years of active duty service and 8 commands included three Coast Guard cutters that spanned the globe and upheld the gold standard for promoting maritime safety and security. In 2010, he served as the Federal On-Scene Coordinator during the Deepwater Horizon oil spill where he directed over 47,000 first responders, a flotilla of more than 6,700 vessels and over 120 aircraft.
- “Having commanded three cutters in the Coast Guard, I lamented the effort and fuel expended in the maritime domain to “find a needle in the haystack,”’ Admiral Paul Zukunft said. “HawkEye 360 takes the guesswork out of detecting and monitoring to the point where you can vector a cutter, aircraft or UAV to a known threat far in advance before it reaches our Homeland. I look forward to working on critical maritime awareness capabilities that I wish I personally had while I was in command.”
- ”With these distinguished advisors, you see a reflection of the continued importance we place on supporting national security missions, broadening the applicability of commercial RF data and insights to address a wider array of public sector and global challenges, and ensuring the security and integrity of our capabilities,” said HawkEye 360 Chief Strategy Officer, Kari Bingen.
• January 11, 2022: The U.S. Air Force Research Laboratory (AFRL) awarded HawkEye 360 a $15.5 million contract to provide radio frequency analytics research and development, and to help the government test and evaluate its hybrid space intelligence, surveillance and reconnaissance architecture. 12)
- “This agreement is a tremendous opportunity for HawkEye 360 to showcase the whole spectrum of capability we offer the government as it develops its space architectures,” HawkEye 360 CEO John Serafini said in a statement. “We deliver value not only through the efficient tasking, collection and delivery of our RF data, which has never before been commercially available, but also through embedded operational support and enhanced analytics capabilities, deriving applicable insights for diverse end users. Ultimately, we hope to shape a pathway for further integration of valuable commercial capabilities into the government’s space architecture.”
- HawkEye 360 operates a constellation of nine satellites to detect, characterize and geolocate RF signals stemming from emitters like VHF marine radios, UHF push-to-talk radios, maritime and land-based radar systems, L-band satellite devices and emergency beacons.
- HawkEye 360 has supported AFRL exercises in the past, but has never done so through a direct contract vehicle, according to a Jan. 11 HawkEye 360 announcement.
- Under the new agreement, HawkEye 360 will support AFRL exercises in various ways, including providing personnel to support exercises, collecting data, and offering tools for data ingestion and analytics. The agreement covers HawkEye 360’s participation in military exercises to introduce new capabilities to the military personnel and to identify ways to improve and integrate the capabilities into military operations. For example, HawkEye 360 may support Rim of the Pacific 2022, an exercise scheduled to run from June to August in Hawaii that includes personnel from more than 20 nations.
- The AFRL awarded the funding to HawkEye 360 through an Experimental Purpose Agreement (EPA), a type of contract designed for rapid procurement of goods or services needed for experimentation, technical evaluation and assessment of operational utility, according to the Defense Acquisition University website.
- “The EPA contract vehicle is available for use by all Combatant Commands as they look to test and demonstrate innovative commercial RF data and analytics to include direct downlink to government ground stations,” according to the HawkEye 360 announcement.
- Charlene Jacka, AFRL technical program manager, said in a statement, “The Department of Defense constantly seeks to identify, evaluate and recommend commercial intelligence, surveillance and reconnaissance capabilities for integration into United States Air Force and United States Space Force workflows. We are pleased to have the opportunity to explore at greater scale and depth, using real-world scenarios, how a leading radio frequency data and analytics provider, such as HawkEye 360, can supplement and strengthen our hybrid satellite ISR architecture, and to develop new tactics, techniques and procedures to enable further utility assessments.”
- Alex Fox, HawkEye 360 executive vice president for global growth, said in a statement, “Our team is excited to be part of an AFRL program focused on developing and transitioning space capabilities for more effective and affordable warfighter missions. We share AFRL’s vision for a hybrid government and commercial ISR (Intelligence, Surveillance, and Reconnaissance) architecture to address growing global threats and to provide the warfighter with high-impact insights needed to support their mission.”
- HawkEye 360 of Reston, Virginia, raised $145 million for its RF data reconnaissance business in November, and recently announced another $5 million for the Series D investment round from Leidos.
• January 6, 2022: HawkEye 360 extended its Series D funding round to $150 million with a $5 million investment from Leidos. 13)
- After Reston, Virginia-based HawkEye 360 announced in November that it raised $145 million for its RF data reconnaissance business in Series D, Leidos signed on as an investor and strategic partner. “Leidos will use its expertise in developing advanced analytics to leverage HawkEye 360’s unique RF geospatial intelligence data,” according to the Jan. 6 announcement.
- “HawkEye 360 is pleased to welcome such a distinguished defense and intelligence leader as Leidos to our group of world class investors,” HawkEye 360 CEO John Serafini said in a statement. “We look forward to harnessing their support to create significant value not only for the defense, intelligence and national security communities, but also for organizations addressing some of the most complex global challenges facing humanity and the environment.”
- Paul Engola, Leidos national security space executive vice president, said in a statement, “We’re confident this investment will strengthen our robust capabilities in the National Security Space arena. This will also create innovative pathways to deliver bold solutions to our customers as they work to safeguard U.S. and allied interests.”
- Leidos, one of the largest U.S. government contractors, works extensively with defense and intelligence agencies. Formerly known as SAIC, Leidos merged with Lockheed Martin’s Information Systems & Global Solutions in 2016. In 2020, Leidos acquired Dynetics and L3Harris’ Security Detection and Automation Systems division.
- HawkEye 360 operates a constellation of nine satellites in three clusters to detect, characterize and geolocate RF signals stemming from emitters like VHF marine radios, UHF push-to-talk radios, maritime and land-based radar systems, L-band satellite devices and emergency beacons.
• November 8, 2021: HawkEye 360 raised $145 million in a Series D investment round led by Insight Partners and Seraphim Space Investment Trust. 14)
- With the funding, HawkEye 360, an RF data reconnaissance firm, will expand its satellite constellation and ground infrastructure, while enhancing services to customers focused on humanitarian, environmental, commercial and national security missions, according to a Nov. 8 news release.
- Additional funding for HawkEye 360’s Series D round was provided by the Strategic Development Fund, the investment arm of the United Arab Emirate’s Tawazun Holding. Joining the round were new investors Jacobs, Gula Tech Adventures, 116 Street Ventures and New North Ventures, as well as existing investors including Advance, Razor’s Edge, NightDragon, SVB Capital, Shield Capital and Adage Capital.
- With the latest windfall, Herndon, Virginia-based HawkEye 360 has raised $302 million.
- “HawkEye 360 is pleased to be welcoming phenomenal new partners to our world class investment family, all of whom share our vision of using revolutionary commercial RF-monitoring capabilities to produce positive impacts for humanity and the environment,” HawkEye 360 CEO John Serafini said in a statement. “As a new, well-backed space data and analytics company with a unique dual-use technology, we are ideally situated not only to create great value for the defense, intelligence and national security communities, but also to change the paradigm for organizations confronting complex challenges like illegal fishing, poaching, maritime smuggling and environmental degradation.”
- HawkEye 360 operates a constellation of nine satellites in three clusters to detect, characterize and geolocate RF signals stemming from emitters like VHF marine radios, UHF push-to-talk radios, maritime and land-based radar systems, L-band satellite devices and emergency beacons.
- “We are excited to partner with HawkEye 360 as the company continues to scale up and to expand its geospatial intelligence technology capabilities for both government and commercial markets,” Nick Sinai, Insight Partners managing director who will join HawkEye 360’s board, said in a statement.
- Mark Boggett, Seraphim Space Investment Trust’s investment manager, said in a statement, “HawkEye 360 is the undisputed global champion in radio frequency analysis, a market we believe will grow to billions of dollars over the next few years.”
- Seraphim Space established a relationship with HawkEye 360 in 2017. The company also participated in the AWS Space Accelerator managed by Seraphim.
- Seraphim is contributing $25 to the Series D round. The investment “reflects the potential we believe this breakthrough technology will have across the environmental and security sectors,” said Boggett, who serves as Seraphim Space LLP CEO. “We are convinced that HawkEye 360 has both the technology advantage together with the commercial and governmental relationships to transform, reshape and develop the industry on a global scale at speed.”
- HawkEye 360 has won government contracts, including a contract with a base value of $10 million plus options to help the U.S. National Geospatial-Intelligence Agency (NGA) discover, characterize and map activities that emit RF signals. The U.S. National Reconnaissance Office awarded HawkEye 360 a study contract in 2019.
• August 22, 2021: HawkEye 360 is the latest company to join the Space Data Association (SDA), an international, non-profit association of satellite operators. 15)
- Formed in 2009, the SDA works to support the efficient and reliable sharing of crucial data to enhance safety of flight via sharing of operational data and promotion of best practices across the industry. Members include some of the world’s major satellite communications companies.
- HawkEye 360 is a Radio Frequency (RF) data analytics company that was founded in 2015. They operate a first-of-its-kind, commercial satellite constellation to identify, process and geolocate a broad set of RF signals. HawkEye 360 extracts and analyzes this data using proprietary algorithms to solve challenges and identify critical insight. Their customers include a range of commercial, government and international entities.
- The SDA enables operators to pool their orbital data in a secure and controlled manner through its Space Data Centre (SDC). With HawkEye 360 joining the SDA, the SDC now covers 275 GEO satellites and 506 LEO satellites.
- Pascal Wauthier, Chairman, Space Data Association, said, “We are pleased to welcome HawkEye 360 as the latest member of the SDA. With the number of objects in space continuing to rise, it is vital that more data is shared amongst operators to preserve flight safety and reduce threats of impact. This can only be achieved by more operators working together to share operational data that contributes to enhanced safety.”
- Lori Metzger, Director of Space, HawkEye 360, said, “It is the responsibility of all space-based operators to ensure the future of space safety. HawkEye is committed to contributing data and insights which can improve space situational awareness for all operators. We look forward to working with the SDA to achieve its mission.”
• May 11, 2021: The launch of the HawkEye 360 Cluster 3 mission is expected in June 2021 on the SpaceX Transporter-2 mission. he Cluster 3 launch further expands HawkEye 360’s next-generation satellite constellation, which detects and geolocates radio frequency signals. The Cluster 3 satellites are able to collect a greater quantity of data across a wider portion of the RF spectrum, creating valuable, actionable insights for maritime domain awareness, national security, environmental protection and more. 16)
• December 17, 2020: HawkEye 360 Inc. has shipped their second cluster of satellites to the launch site at Cape Canaveral, Florida. The satellites are scheduled to launch on a SpaceX Falcon 9 no earlier than January 2021 as part of Spaceflight Inc.’s SXRS-3 ride share mission. HawkEye Cluster 2 is the first of a series of next generation satellites HawkEye 360 is deploying to complete its baseline constellation. 17)
- This shipment milestone means that Cluster 2 will soon be joining the company’s Cluster 1 satellites in orbit. The three Cluster 2 satellites are larger and more powerful, able to collect multiple types of signals simultaneously for longer periods of time. These workhorse satellites will allow HawkEye 360 to offer increasingly robust space-based RF data insights to its US government, international government, and commercial customers across a wide range of frequencies.
- Each Cluster 2 satellite contains a customized RF payload developed by HawkEye 360. The satellite buses were manufactured by UTIAS/SFL (Space Flight Laboratory). Beyond Cluster 2, HawkEye 360 is fully financed for the launch of 15 more satellites in 2021 and early 2022. The company is completing development of satellites for Clusters 3 and 4, anticipating launch in the middle of 2021. Clusters 5, 6, and 7 are in development, with anticipated launches over the next 18 months. The average global revisit rate will be less than an hour.
- HawkEye 360’s growing constellation identifies and precisely geolocates a broad set of RF signals from emitters such as VHF marine radios, UHF push-to-talk radios, maritime and land-based radar systems, L-band satellite devices, and emergency beacons. HawkEye 360 processes and analyzes this data using proprietary algorithms to deliver actionable insights to customers.
- “The upcoming launch of HawkEye Cluster 2 firmly establishes HawkEye 360 as the most advanced provider of RF geoanalytics,” said John Serafini, CEO. “These new satellites continue to push the boundaries of commercial RF sensing. Cluster 2 has up to ten times the collection capacity of our current cluster and improved geolocation accuracy. Our customers are asking for more data over more regions, so these next generation satellites are critical to supplying our customers with relevant and timely RF geospatial intelligence for national security, maritime domain awareness, environmental protection, and countless other applications.”
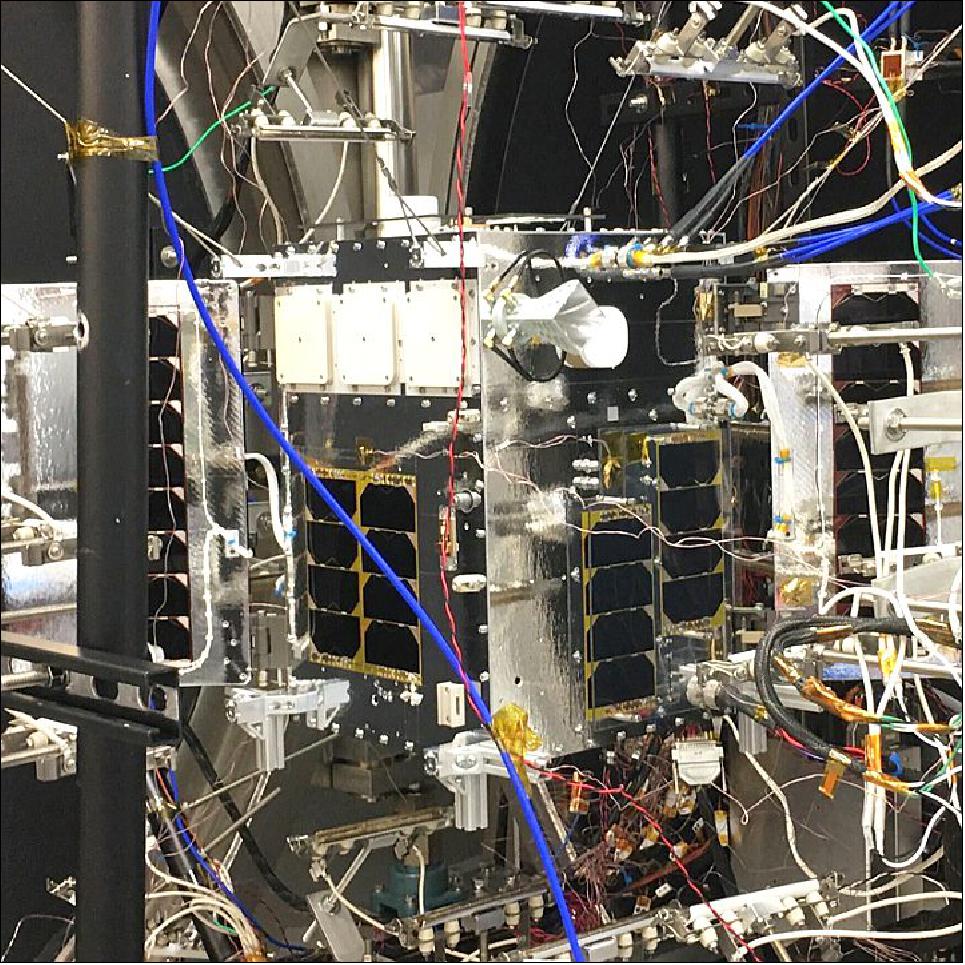
• July 16, 2020: HawkEye 360 Inc., the first commercial company to use formation flying satellites to create a new class of radio frequency (RF) data and data analytics, today announced it has successfully completed environmental testing of its second cluster of three satellites. This significant milestone for HawkEye Cluster 2 clears the way to prepare for launch, which is scheduled for late 2020. — HawkEye Cluster 2 will join the company’s first cluster of satellites that were launched in December 2018, doubling the size of HawkEye 360’s constellation. This is the first cluster in a series of next generation satellites that will improve revisit rates and bring increasingly robust RF data insights to US and international customers to inform their decision-making processes. 18)
- HawkEye 360 has five more clusters of satellites fully financed and under development for launch in 2021 and early 2022. This growing constellation identifies and precisely geolocates a broad set of RF signals from emitters such as VHF marine radios, UHF push-to-talk radios, maritime radar systems, AIS beacons, L-band satellite devices, emergency beacons and more. HawkEye 360 processes and analyzes this data using proprietary algorithms and machine-learning tools to deliver actionable insights to customers.
- HawkEye Cluster 2 features significant advancements:
a) Improved Capability: The satellites contain a new and improved software-defined radio (SDR) that can tune to a wide range of frequencies and gather higher-resolution signal data to deliver quality results to customers.
b) Greater Accuracy: With powerful updated on-board computing, the satellites can process data at a faster rate, leading to increased geolocations with an even greater degree of accuracy, so customers receive the best possible RF geospatial intelligence.
c) Simultaneous Collection: The satellites can simultaneously collect multiple signals over a single region for enhanced analytics that help customers make more informed decisions.
- “HawkEye 360’s investment to advance the field of space-based RF geoanalytics isn’t just about defense and intelligence missions, but it’s also about protecting our global commons by identifying and tracking illicit activities such as illegal fishing, human trafficking, and animal poaching,” said HawkEye 360’s Chief Executive, Officer John Serafini. “In just 18 months, our first cluster has tracked 20 million geolocations and signals of interest to feed growing demand from civil service and defense clients around the world. The successful environmental testing of our HawkEye Cluster 2 satellites brings us one step closer to our goal of a fully operational constellation that will transform invisible signals into insights that make the world a safer place.”
- HawkEye 360 built the RF payloads, which UTIAS/SFL ( Space Flight Laboratory) integrated into the satellite bus. SFL conducted the environmental testing efforts, which included vibration, thermal vacuum, and electromagnetic interference testing. These tests simulate the environment the satellites will encounter in space. The next step is to prepare the satellites for launch integration.
- “HawkEye 360’s investment to advance the field of spaceborne RF geoanalytics isn’t just about defense and intelligence missions, but it’s also about protecting our global commons by identifying and tracking illicit activities such as illegal fishing, human trafficking, and animal poaching,” said HawkEye 360’s CEO, John Serafini. “In just 18 months, our first cluster has tracked 20 million geolocations and signals of interest to feed growing demand from civil service and defense clients around the world. The successful environmental testing of our HawkEye Cluster 2 satellites brings us one step closer to our goal of a fully operational constellation that will transform invisible signals into insights that make the world a safer place.”
- “Each new cluster increases HawkEye 360’s capacity to collect more data that we can then process, analyze and deliver as relevant and robust data insights,” said HawkEye 360’s Chief Operating Officer, Rob Rainhart. “The highly advanced HawkEye Cluster 2 satellites can capture multiple signal layers at once to create a more accurate and detailed visual of activity and then bring that data down in a shorter period of time for our customers’ benefit.”

• December 19, 2019: The U.S. FCC (Federal Communications Commission) gave HawkEye 360 the approvals it needs to launch and operate 15 additional satellites for radio-frequency mapping from low-Earth orbit. The license, issued Dec. 10, permits HawkEye 360 to launch up to 80 satellites over 15 years in order to maintain a constellation of 15 operational spacecraft. 21)

- Herndon, Virginia-based HawkEye 360 has three pathfinder satellites in orbit today, and 15 more under construction by the Space Flight Laboratory at the University of Toronto Institute for Aerospace Studies. The FCC said the first three satellites will not count towards the 15 since they were authorized under an experimental license.
- Rob Rainhart, HawkEye 360’s chief operating officer, said the new FCC approval positions the company to operate six clusters of three satellites — enough to pinpoint radio signals with revisit rates of 30 to 50 minutes.
- ”It’s right in line with our business plan and gives us time to coordinate beyond that as the markets change,” he said in a Dec. 18 interview.
- HawkEye 360 asked the FCC to defer further evaluation of a filing the company submitted in January to begin laying the regulatory groundwork for an expanded constellation of 80-operational satellites.
- Rainhart said HawkEye 360 chose to take a piecemeal approach to licensing, focusing first on near-term needs instead of trying to coordinate spectrum for a potential larger constellation.
- “We don’t see any issues coordinating those remaining satellites,” he said. “It’s just something we chose not to do in the short term to get up to that full constellation.”
- Rainhart said HawkEye 360 doesn’t have a timetable for an 80-satellite constellation. The company has contemplated constellations of various sizes, he said, but has always had a baseline configuration of 18 satellites.
- There’s absolutely opportunities in the future to grow that much larger than that,” he said. “But we have time to work on that and pre-coordinate that, and we have time to design that.”
- HawkEye 360’s next trio of satellites is scheduled to launch in 2020 on an Indian Polar Satellite Launch Vehicle, Rainhart said. Those satellites, and the 12 others HawkEye 360 has under construction, will all have more power, payload volume and capacity than the company’s first three pathfinder satellites, he said.
- HawkEye 360 flies its satellites in clusters of three, keeping them in tight formation to geolocate signals. Its satellites can detect signals from radars, handheld devices, satellite terminals and other transmitters, enabling the company to identify activity patterns in maritime, defense and other sectors. The company has raised more than $100 million, and counts the National Reconnaissance Office among its customers.
Launch
Cluster 5
• HawkEye 360 Inc., the world’s leading commercial provider of space-based radio frequency (RF) data and analytics, today announced that its Cluster 5 satellites have successfully launched aboard a SpaceX Transporter-5 Falcon 9 rocket from Cape Canaveral on May 25, 2022. Once Cluster 5’s on-orbit checkout is complete (Hawk-5A, -5B and -5C), the recent launches in 2022 will have doubled capacity and revisit rates, expanding HawkEye 360’s constellation to 15 satellites. This significantly boosts the constellation’s ability to serve global customer demand and to monitor specific activities. 22)
- “Every enhanced satellite cluster we launch helps us deliver a higher density of valuable data to our government, commercial and humanitarian customers and partners – advancing our efforts to monitor global activities for a safer and more secure world,” said HawkEye 360 John Serafini. “Launch by launch, these space-based innovations are analyzing the knowns and uncovering the unknowns of the RF spectrum across the globe.”
- Cluster 5 includes enhanced antenna functions introduced with Cluster 4, which allow greater flexibility in geolocating signals across a wide range of frequencies important to customers. Cluster 4 launched on April 1 has been completing checkout and moving into final formation to begin collecting data in late June. Cluster 5 is slated to achieve initial operating capability in August 2022.
- These recent launches keep HawkEye 360 on track to exponentially increase the size of the constellation, with upcoming launches now scheduled every few months. HawkEye 360 will continue to grow the constellation to achieve revisit rates around 15 minutes in order to support timely defense, national security, and commercial applications.
Cluster 4
• HawkEye 360 Inc.’s Cluster 4 satellites successfully launched aboard the SpaceX Transporter-4 rideshare mission (40 satellites) with a Falcon 9 rocket from the Cape Canaveral, Florida, on 1 April 2022 at 16:24 UTC. 23)
The trio of HawkEye 360 microsatellites, each containing an RF payload developed by the company, has established communication with ground control and is set to commence its commissioning process to meet increasing client demand.
Cluster 4 expands HawkEye 360’s existing, nine-satellite constellation, which has collected more than 80 million emitter geolocations since 2019. The newly designed satellites include enhanced antenna functions which allow greater flexibility in detecting and geolocating signals across a wide range of frequencies important to our customers.
This is the fourth set of satellites launched by the company and is slated to achieve initial operating capability in June 2022. HawkEye 360’s Cluster 5 is tested and ready to launch no sooner than June 2022. Together, Cluster 4 and the soon-to-launch Cluster 5 will double HawkEye 360’s on-orbit capacity and significantly expand its collection across the RF spectrum.
Two additional fully funded clusters are scheduled for launch in 2022. These clusters will enable the constellation to have a global revisit rate of less than one hour. This revisit rate is key to further enhancing our ability to monitor global activities and support timely defense, national security, and commercial applications.
“The successful launch of Cluster 4 marks another critical milestone achieved by HawkEye 360. I am proud to see our team continue to improve the cutting-edge capabilities we have on-orbit,” said company CEO, John Serafini. “Each capacity increase and technological advancement to our constellation opens new possibilities for delivering timely, unique insights to our government, commercial and humanitarian clients.”
HawkEye 360 is a Radio Frequency (RF) data analytics company. We operate a first-of-its-kind commercial satellite constellation to identify, process, and geolocate a broad set of RF signals. We extract value from this unique data through proprietary algorithms, fusing it with other sources to create powerful analytical products that solve hard challenges for our global customers. Our products include maritime domain awareness and spectrum mapping and monitoring; our customers include a wide range of commercial, government and international entities.
Cluster 3
The HawkEye 360 Cluster3 microsatellites (3 spacecraft) were launched as passenger payloads on the SpaceX Transporter-2 smallsat rideshare mission from SLC-40 of Cape Canaveral, Florida on June 30, 2021 at 3:31 p.m EDT (19:31 UTC). 24)
Deployment of the payload of 88 satellites started nearly 58 minutes after liftoff, once the upper stage performed a second burn of its engine to place it into a sun-synchronous orbit at an altitude of nearly 550 kilometers. The satellites, from a variety of government and commercial customers, were released over half an hour.
Cluster 2
January 24, 2021: HawkEye 360 Inc., the first commercial company to use formation-flying satellites to create a new class of radio frequency (RF) data and data analytics, today announced that Cluster 2 — the company’s second cluster of satellites — has successfully been deployed into orbit. 25)
- After launching aboard the SpaceX Falcon 9 this Sunday morning, the trio of satellites was dispensed from Spaceflight Inc.’s Sherpa-FX orbital transfer vehicle and has established communications with the HawkEye 360 satellite operations center. In the weeks ahead, the satellites will be fully tested, commissioned, and moved into their final formation needed to detect, characterize and geolocate RF signals.
- “The expansion of our pioneering constellation is the first of several strong steps we have planned to multiply our existing capabilities and explore new possibilities for RF geospatial intelligence,” said CEO John Serafini. “We are proud to be the leading provider of RF insights to U.S. government, international governments, commercial and humanitarian interests, and we believe our newest deployment, which increases the frequency, quality and quantity of insights we are able to deliver, will be an invaluable resource for our customers.”
- The company processes and analyzes RF signal data collected by the satellites to deliver actionable insights and a unique layer of knowledge for national security operations, maritime domain awareness, environmental protection and numerous additional applications.
- Cluster 2 follows the company’s first Pathfinder cluster of satellites, launched two years ago, but is significantly more powerful. The new satellites can process data at a faster rate — leading to increased geolocations with an even greater degree of accuracy — and are equipped with new software-defined radios (SDR) that can simultaneously collect signals from a wide range of frequencies. These workhorse satellites provide significant capacity increases to meet the demand for robust space-based RF data and analytics required by HawkEye 360’s customers.
- Now that the Pathfinder satellites have reached orbit, the company will initiate system checkout and begin to maneuver the satellites into position over the next several weeks. The satellites will be able to identify and precisely geolocate a broad set of RF signals from emitters such as VHS push-to-talk radios, maritime radar systems, AIS beacons, VSAT terminals, emergency beacons and more.
- “The core of our business is RF analytics, which is dependent upon high-quality, geolocated RF data,” said Chris DeMay, CTO and founder, HawkEye 360. “Each of these small satellites is equipped with a software-defined radio that can tune to different frequencies and pick up different RF signals. When we see the same signal from all three satellites, we triangulate it and figure out where the signal is coming from. We’ll continue growing our constellation to improve revisit rates with our next set of satellites already under development for launch later in 2019.”
- HawkEye 360 processes and analyzes signals using proprietary algorithms and machine-learning tools to deliver actionable insights. The company is developing foundational products that build global awareness of spectrum deployment, creating an RF data layer for the planet. The resulting analytical products will help customers assess suspicious vessel activity and risk, survey how frequencies are used, detect communication interference, evaluate communication outages during disasters and help rescuers search for people in distress.

Cluster 1
Three HawkEye 360 (HE360) microsatellites (13.4 kg each) were launched on 3 December 2018 (18:34 GMT) on the SSO-A ”dedicated rideshare” mission of Spaceflight Industries with a SpaceX Falcon 9 Block 5 vehicle from VAFB, CA. 26) 27) 28)

SpaceX statement: On Monday, December 3rd at 10:34 a.m. PST (18:34 GMT), SpaceX successfully launched Spaceflight SSO-A: SmallSat Express to a low Earth orbit from Space Launch Complex 4E (SLC-4E) at Vandenberg Air Force Base, California. Carrying 64 payloads, this mission represented the largest single rideshare mission from a U.S.-based launch vehicle to date. A series of six deployments occurred approximately 13 to 43 minutes after liftoff, after which Spaceflight began to command its own deployment sequences. Spaceflight’s deployments are expected to occur over a period of six hours. 29)
This mission also served as the first time SpaceX launched the same booster a third time. Falcon 9’s first stage for the Spaceflight SSO-A: SmallSat Express mission previously supported the Bangabandhu Satellite-1 mission in May 2018 and the Merah Putih mission in August 2018. Following stage separation, SpaceX landed Falcon 9’s first stage on the “Just Read the Instructions” droneship, which was stationed in the Pacific Ocean.
Orbit: Sun-synchronous circular orbit with an altitude of 575 km, LTDN (Local Time of Descending Node) of 10:30 hours.

Mission Status
• October 12, 2021: The third cluster of satellites launched by HawkEye 360 Inc., the world’s first commercial company to pioneer radio frequency (RF) data and analytics from space-based satellites, has achieved initial operating capability and has begun to deliver RF data and insights to clients. The trio of satellites, known as Cluster 3, entered orbit aboard a SpaceX Falcon 9 rocket 30 June and has moved into formation and completed functional testing. 31)
- “This latest launch and commissioning significantly expands the range of RF data and analytics HawkEye 360 is able to offer and extends our lead in this revolutionary commercial sector,” said CEO John Serafini. “We are pleased these satellites have transitioned into operation and are eager to see how the insights they yield will help our customers solve complex global challenges and change the world for the better.”
- The commissioning brings the total number of HawkEye 360 satellites on orbit to nine. Cluster 3 satellites include redundant systems for longevity, increased computing for on-board signal processing, a dedicated GNSS antenna to monitor GPS interference, and enhancements to boost geolocation accuracy, RF frequency coverage and collection capacity.
- “We are excited about the exceptional work our team has done to expand our constellation with the addition of Cluster 3. With seven additional clusters fully funded and scheduled for launch over the next seventeen months, Cluster 3 is just a preview of the advances to come, representing another important step in providing high-revisit global coverage of RF activity to meet our client demands,” said Alex Fox, Executive Vice President for Global Growth. “When we deploy the seven additional clusters, our initial ten Cluster constellation will provide near-persistent monitoring of global RF activity. This constellation will enable us to uniquely deliver unparalleled value for our clients in the defense, intelligence, environmental, telecommunications, and global commerce markets.”
• October 5, 2021: The proliferation of electronic devices designed to interfere with Global Positioning System signals is a problem for the Pentagon and for many industries that depend on GPS, as disruptions affect every aspect of operations. 32)

- One of the challenges is identifying the precise location and source of interference, said Rob Rainhart, chief operating officer of HawkEye 360, a geospatial analytics company that uses satellites to track ships, vehicles or any devices that emit radio frequency signals.
- HawkEye 360 is one of several remote sensing satellite operators demonstrating their technologies at the 2021 GEOINT Symposium this week (5-8 October 2021, St. Louis, MO).
- Rainhart said radio-frequency data collected by satellites can help to locate GNSS interference hotspots. GNSS is short for global navigation satellite system, or any satellite constellation that provides positioning, navigation, and timing (PNT) service.
- The company’s satellites, equipped with software-defined radios, fly in clusters of three: one in front, another behind and a third that oscillates back and forth. Three clusters are currently in orbit.
- Rainhart said HawkEye 360 has briefed government and commercial customers concerned about the impact of GPS disruptions on how they could apply RF data analytics to spot interference.
- The company has three clusters of satellites in orbit today and plans to launch more, which will “enable a much more fine-tuned interference monitoring toolkit,” he said.
- “We’ve participated in some trials with foreign partners, looking at GNSS interference,” he said. “There’s a lot of interest in the problem from customers across the globe.”
DoD seeks proposals for detection of GNSS disruption
- The Defense Innovation Unit (DIU), a Pentagon organization that works with commercial companies, wants to take advantage of the growing availability of data from space and other sources to geolocate GPS interference.
- A DIU solicitation in August asked for proposals on “situational awareness for intentional disruption of GNSS users.” DoD is especially interested in “persistent, large-area coverage of falsified GNSS emitters that result in localized spoofing phenomenology.”
- GPS signals can be denied through electronic jamming attacks. GPS users can also be attacked with falsified PNT data, a technique known as spoofing.
- “The entire world is dependent on GNSS-based systems, yet the GPS architecture and its users are vulnerable to denial and manipulation by adversarial actors,” said DIU.
- Nick Estep, DIU program manager, said the solicitation closed Aug. 23 and many proposals were received.
- The goal is to experiment with commercially available data sources, both space-based and terrestrial, Estep told SpaceNews.
- “There’s a whole commercial sector that plays within this domain and we’re certainly intrigued to tap into that,” he said.
- An example is the Automatic Identification System (AIS) — an onboard navigation safety device that transmits and monitors the location vessels at sea in real time. “That’s a commercial commodity out there that is available and actually has been used in some circumstances to characterize intentional GNSS disruptions and spoofing,” said Estep.
- “We’re not looking for a traditional program of record,” he said. “We want to leverage all these data sets and analytics that are already being used in a commercial setting or a commercial marketplace, and use this to complement the government capabilities.”
- DUI is agnostic on which type of data or sensors are used. “There could be terrestrial information that informs GNSS spoofing or disruptions or it could be space based,” Estep said.
- Many vendors from the space and data analytics sectors have responded to DIU’s solicitation, he said. DIU will select multiple companies this fall to make a pitch directly to military customers.
- “Vendors that are successful past phase two have the opportunity to engage in executive prototypes with DIU, work with coders in a collaborative manner.”
- A notable challenge for vendors is to show how they analyze data and draw conclusions from it, such as whether GPS interference is being perpetrated intentionally or if it’s accidental, said Estep.
- “There’s different types of effects, and categories of disruption, and part of the challenge that our vendors will have to do is to be able to characterize the effect and show us the confidence they have in what they’re seeing,” Estep said. “And to show us you know how you came to that conclusion.”
• September 30, 2021: HawkEye 360 Inc., the world’s first commercial company to pioneer radio frequency (RF) data and analytics from space-based satellites, today announced it has secured new contracts totaling over $50 million in potential value since the start of the year as its next generation satellites have become operational. 33)
- “HawkEye 360 is experiencing an exceptional year, with record growth in customer engagements and bookings,” said HawkEye 360 CEO John Serafini. “We’re building depth of customers across the United States, Americas, Europe, Middle East, and Asia, including transitioning from pilot programs into programs of record. We are rapidly launching satellites to have sufficient capacity to meet our rapidly growing backlog of customer demand. And our team has demonstrated resiliency even during the challenges posed by the coronavirus pandemic. The company has been doubling revenue each year and we expect this year to be no different.”
- HawkEye 360 successfully launched three satellites (Cluster 2) in January, introduced the Mission Space platform for analysis of RF geospatial intelligence in February, and launched three more satellites (Cluster 3) in June. The next launch is planned no earlier than January 2022 and will carry six satellites (both Clusters 4 and 5) into orbit simultaneously. The company has 15 additional satellites under production for launch to reach a total of 30 satellites on orbit, with average global revisit around 30 minutes.
- The company’s formation-flying satellites can detect, characterize, and geolocate devices such as radars and push-to-talk radios, which improves visibility of human activity and patterns of life. This new data produces actionable insights for national defense and homeland security operations, maritime domain awareness, environmental protection and a growing number of commercial applications.
• June 30, 2021: HawkEye 360 Inc. today announced that its HawkEye Cluster 3 satellites have successfully deployed to orbit and established communications with the company’s satellite operations center. HawkEye Cluster 3 joins the company’s HawkEye Cluster 2 on orbit as part of its second generation of advanced RF-sensing satellites. 34)
- “We’re pleased that our latest satellite cluster has reached orbit and we look forward to ramping up operations to fully integrate the satellites into our constellation to broaden our products and services,” said CEO John Serafini. “Our constellation is leading the commercial field in RF intelligence, and with the addition of our second-gen satellites, we’ll offer more frequent, timely and actionable data and insights to our government, commercial and humanitarian partners. At a milestone like this, we’re grateful for our excellent mission partners, UTIAS Space Flight Laboratory and Spaceflight, Inc., who work alongside our amazing HawkEye 360 team to make our operations possible.”
- HawkEye 360’s satellites were built on a bus designed by UTIAS Space Flight Laboratory and contain a state-of-the-art RF payload developed by HawkEye 360. The trio of satellites launched from Cape Canaveral on Wednesday aboard a SpaceX Falcon 9 and was dispensed from Spaceflight, Inc.’s Sherpa-FX orbital transfer vehicle. Once tested and moved into formation, Cluster 3 will significantly expand the current constellation’s global revisit and collection capacity.
- “The increased revisit and capacity Cluster 3 brings to our constellation are essential to detecting, characterizing, and understanding the continuously changing RF activity important to our clients,” said Alex Fox, Executive Vice President for Sales and Marketing. “Seven additional clusters are fully funded and scheduled for launch in 2021 and 2022 to achieve collection revisits as frequent as every 20 minutes. Each cluster will offer new innovations to address a rapidly growing set of requirements needed by our defense, security and commerce clients. We plan on expanding the constellation past the initial ten clusters to achieve near-persistent monitoring of global RF activity, which will drive even more value and ensure our continued dominance in the industry.”
- HawkEye 360 delivers a layer of intelligence — one never before commercially available — essential to understanding human activity on Earth. Today, many electronic systems across sea, air, and land generate RF signals. The HawkEye 360 constellation detects, characterizes and precisely geolocates these RF signals from a broad range of emitters, including VHF marine radios, UHF push-to-talk radios, maritime and land-based radar systems, L-band satellite devices and emergency beacons. By processing and analyzing this RF data, the company delivers actionable insights and a unique knowledge for national, tactical and homeland security operations, maritime domain awareness, environmental protection and a growing number of new applications, especially in the commercial sector.
• April 14, 2021: HawkEye 360 has raised $55 million in additional funding that the company says will allow it to complete its constellation of satellites that track ships and vehicles by their radio-frequency emissions. 35) 36)

- HawkEye 360 said that NightDragon, a venture capital firm that specializes in security and related industries, led its Series C round, announced April 12. Several existing investors also participated, including Advance, Razor’s Edge Ventures, Shield Capital, Dorilton Ventures, Adage Capital and Esri International.
- The company will use the funding for three additional clusters of three satellites each. The company, which has launched two such clusters to date, expects to have nine in orbit by the end of 2022. In addition, the funding will support work on ground infrastructure and data processing capabilities.
- NightDragon, which has previously invested in several cybersecurity companies, sees HawkEye 360 as providing a complementary service. “Satellite technology is the next frontier in today’s digital world,” Dave DeWalt, founder and managing director of NightDragon, said in a statement. “Filling this knowledge gap will allow governments, companies and organizations to maximize their digital ecosystems. This is about cyber meeting space, using HawkEye 360’s tools for better management and protection of critical infrastructure.”
- “HawkEye 360 continues to grow rapidly and improve our constellation to meet increasing customer demand,” John Serafini, chief executive of HawkEye 360, said in the statement. “This investment will further our goal of rapid revisit and low-latency data and data analytics, so our global customers can use this information to react quickly to pressing concerns.”
- HawkEye 360 last raised $70 million in a Series B round in August 2019. The company says it has raised more than $155 million to date.
- The funding round comes less than two weeks after the company announced it completed commissioning of its second cluster of satellites, launched Jan. 24 on the SpaceX Falcon 9 Transporter-1 rideshare mission. Those satellites, operating in groups of three, are able to pinpoint the location of radio-frequency emissions such as radars, radios and beacons. That’s attracted interest from both commercial and government customers, including the National Geospatial-Intelligence Agency.
- HawkEye 360 says its next cluster of satellites will launch in June, followed by another in October. Future clusters will launch quarterly through 2023. The full constellation, the company says, will allow revisit times of “considerably less than an hour” to monitor areas of interest.
• March 31, 2021: HawkEye 360 Inc., the first commercial company to use formation-flying satellites to create a new class of radio frequency (RF) data and data analytics, today announced that its recently-launched “Cluster 2” satellites have achieved initial operating capability. The trio of satellites, which entered orbit aboard a SpaceX Falcon 9 rocket in January, have completed functional testing, moved into proper formation, and begun to geolocate RF signals. They are currently supplying RF data to customers and will soon ramp up output to reach full operating capability. 37)
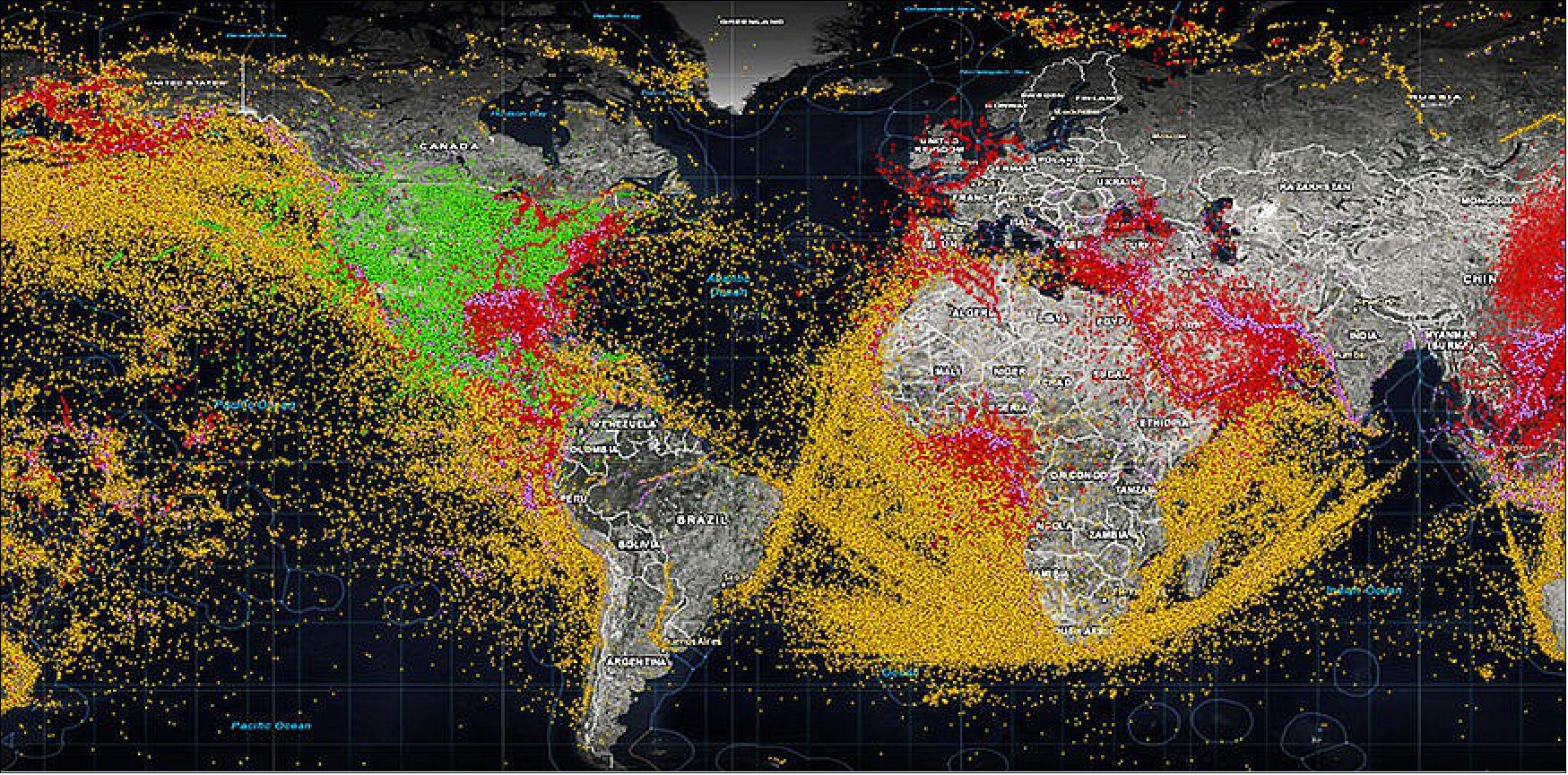
![Figure 16: The graphic uses HawkEye 360’s Mission Space software to display the X-band marine radar [X], VHF marine radio [V], and L-band mobile satellite device [L] signals geolocated by Cluster 2 satellites during the first week of operations, highlighting the busy East/West Mediterranean shipping corridor (image credit: HawkEye 360)](https://eoportal.org/ftp/satellite-missions/h/HawkEye_300522/HawkEye_AutoA.jpeg)
- “The commissioning of these satellites is a major breakthrough for commercial geospatial intelligence,” said CEO John Serafini. “As the leading global provider of space-based RF insights, HawkEye 360 is pleased that our newest satellites are performing exceptionally well and delivering high-quality RF data to our U.S. government, international government, commercial and humanitarian customers.”
- The Cluster 2 satellites greatly improve upon the capabilities of HawkEye 360’s first “Pathfinder” (Cluster 1) satellites. The new satellites have redundant systems for longevity, increased computing for on-board data processing, a dedicated GNSS antenna to monitor GPS interference, enhancements to HawkEye 360’s industry-leading geolocation accuracy, wider range of RF frequency coverage, and up to 10 times more collection capacity.
- “Cluster 2 and its associated ground systems symbolize our ability to rapidly deliver new impactful capability — capability essential for supporting our clients’ evolving requirements for global commercial RF data and analytics,” said Executive Vice President Alex Fox. “We have a robust roadmap for deploying the most advanced commercial RF solution required to support this high growth industry. In conjunction with Mission Space — our RF analytics platform — we are opening the door for customers across a wide array of industries to seamlessly harness valuable RF insights to further their operational objectives.”
- HawkEye 360 is launching five additional clusters (15 total satellites) to establish its baseline constellation. Cluster 3 is on track to launch June 2021, Cluster 4 for October 2021, and further launches planned every quarter thereafter through 2023. Once the baseline constellation is in orbit, the company will be able to maintain revisit rates of considerably less than an hour to support time-sensitive monitoring of developing defense, security, and environmental situations.
• February 11, 2021: HawkEye 360 Inc., the first commercial company to use formation-flying satellites to create a new class of radio frequency (RF) data and analytics, today launched Mission Space, the first commercial platform purpose-built to facilitate the analysis of RF geospatial intelligence. 38)
- Mission Space brings HawkEye 360 RF data and analytics together to create an intuitive experience. Through visualizing a holistic picture of worldwide RF activity, Mission Space bridges the interpretation gap between the collection and analysis of RF data.
- “Mission Space transforms the world of RF geospatial intelligence,” said Tim Pavlick, Vice President of Product, HawkEye 360. “We want any analyst to be able to discover new mission insights with our unique analytics. Before today, only highly trained experts could access and interpret RF data. With Mission Space, we democratize RF geospatial intelligence, and leverage automation to enable a larger community to understand and exploit insights derived from RF signals. Mission Space is the flagship of our growing product portfolio.”
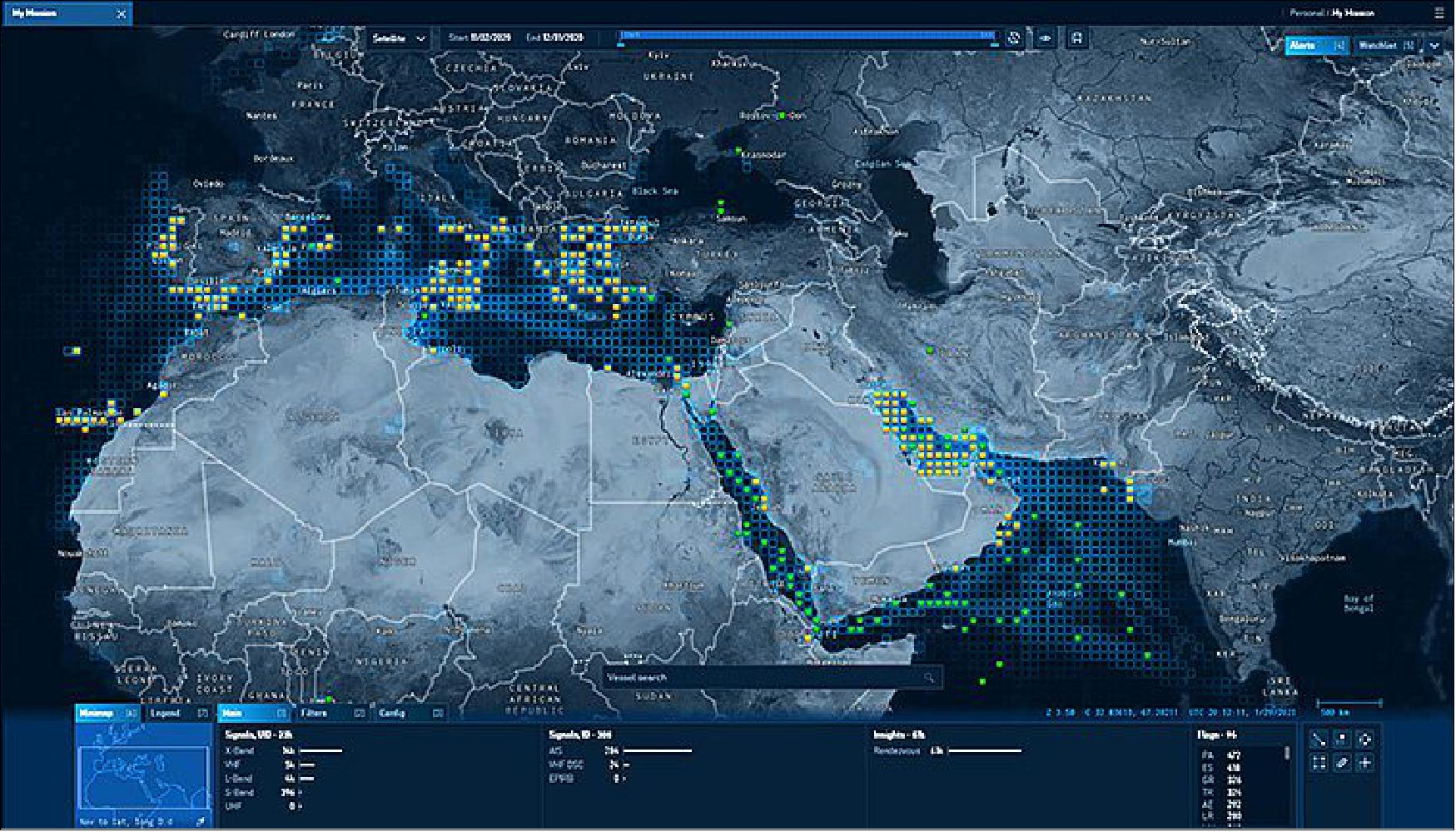
- Mission Space automates the ingestion and visualization of RF signal data and analytics, allowing analysts to intuitively manipulate and explore available information within one frame of view. Analysts can see trends and patterns and in-depth detail about RF signals, all while maintaining a summary of RF activity for context.
- ”Mission Space is a breakthrough for commercial RF mapping and is unrivaled in the commercial sector,” said Alex Fox, Executive Vice President, HawkEye 360. “The platform will empower our customers to efficiently extract immense value from our RF signal subscription services. It will accelerate user adoption of commercial RF analytics across the global defense, intelligence, commercial and humanitarian sectors.”
- Mission Space leverages HawkEye 360’s proprietary algorithms to automatically identify and characterize specific behaviors tied to RF signal data. Mission Space also merges contextual maritime information to specific RF geolocations to include a vessel’s identity, history, past sanction violations, and identified behavior, significantly enhancing situational awareness.
- With Mission Space, analysts can automate routine functions, such as identifying RF activity in designated areas of interest or vessel behavior patterns. By automating these workflows, analysts can identify critical insights and gather actionable intelligence more quickly to keep pace with evolving events.
• February 4, 2021: HawkEye 360 Inc., the first commercial company to use formation-flying satellites to create a new class of radio frequency (RF) data and data analytics, today introduced the HawkEye RF Data Explorer, an add-in for Esri’s leading geographic information system (GIS) ArcGIS Pro desktop software. 39)
- “HawkEye RF Data Explorer provides a powerful capability for our customers to integrate RF geospatial intelligence into fused, multi-intelligence analysis on the world’s leading GIS platform,” said Alex Fox, Executive Vice President, HawkEye 360. “By integrating the add-in into the ArcGIS ecosystem, analysts will significantly improve their ability to use and interpret RF data and analytics to enhance their understanding of global activity. This new dimension of information provides critical insights needed to effectively understand activity using a comprehensive set of intelligence sources.”
- HawkEye RF Data Explorer simplifies the experience of using the company’s RF data and analytics by streamlining the process of ingesting, visualizing, and analyzing information. Users can manipulate RF data by area of interest, timeframe, and signal type to identify patterns of life and associated abnormalities necessary to proactively impact targeted outcomes.
- The ArcGIS add-in integrates a variety of maritime geolocated RF signals and associated metadata to provide critical context on actors and activities. For example, users can view information related to a vessel’s identity, activities (such as past sanctions violations) and voyage history. Vessels can be added to a watch list for automated monitoring.
- “RF Data Explorer ingests HawkEye 360’s data directly from cloud datastores into our flagship analysis product, ArcGIS Pro, offering unique and valuable insights to data analysts from a variety of subject areas, said Robert Laudati, Director, Global Partners and Alliances, Esri. “We look forward to building on this innovative partnership with HawkEye 360 and providing users with powerful and integrated tools.”
- HawkEye 360 is a leading commercial provider of space-based RF data and analytics. After successfully deploying a pioneering cluster of RF satellites in 2019, the company will commission six additional satellite clusters with enhanced data collection and processing capabilities in 2021 and 2022. On January 24, 2021, the first of these next-generation clusters, Cluster 2, was successfully launched and is undergoing testing to transition into operations. HawkEye 360’s RF signal data and analytics delivers actionable insights and a unique layer of knowledge for national security operations, maritime domain awareness, environmental protection, and a wide range of additional applications.
- Access HawkEye RF Data Explorer in the ArcGIS Marketplace or learn more by visiting, https://web.archive.org/web/20210415025227/https://www.he360.com/products/rfdata-explorer/.
About HawkEye 360: HawkEye 360 is delivering a revolutionary source of global knowledge based on radio frequency (RF) geospatial intelligence to those working to make the world a safer place. The company operates the first-of-its-kind commercial satellite constellation to detect, characterize, and geolocate a broad range of RF signals. This unique RF data and analytics equip our global customers with high-impact insights needed to make decisions with confidence. HawkEye 360 is headquartered in Herndon, Virginia.
About Esri: Esri, the global market leader in geographic information system (GIS) software, location intelligence, and mapping, helps customers unlock the full potential of data to improve operational and business results. Founded in 1969 in Redlands, California, USA, Esri software is deployed in more than 350,000 organizations globally and in over 200,000 institutions in the Americas, Asia and the Pacific, Europe, Africa, and the Middle East, including Fortune 500 companies, government agencies, nonprofits, and universities. Esri has regional offices, international distributors, and partners providing local support in over 100 countries on six continents. With its pioneering commitment to geospatial information technology, Esri engineers the most innovative solutions for digital transformation, the Internet of Things (IoT), and advanced analytics. Visit us at esri.com.
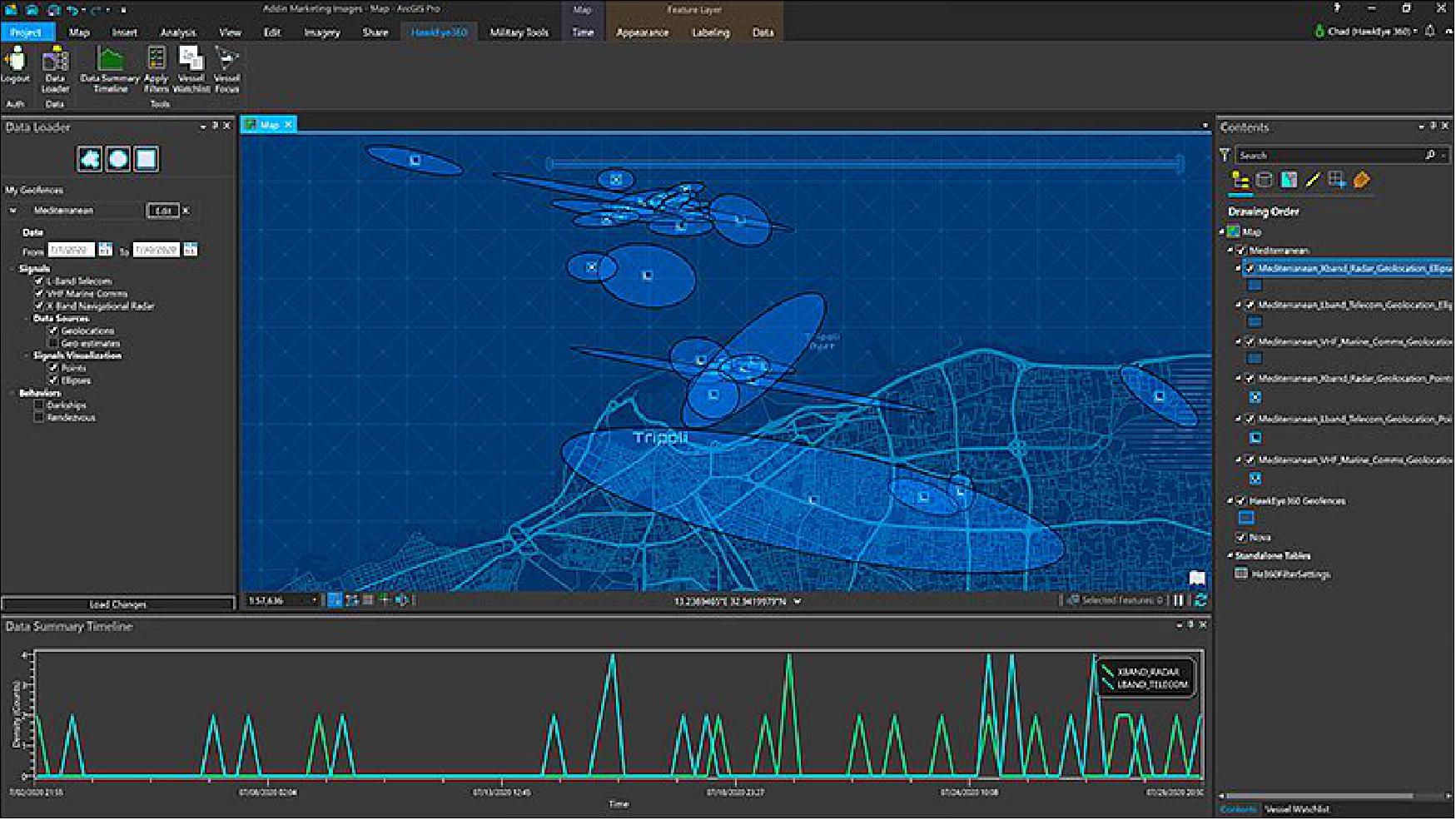
• December 16, 2020: HawkEye 360 Inc. is supporting a commercial radio frequency (RF) geospatial intelligence (GEOINT) pilot program for the United States National Geospatial-Intelligence Agency (NGA), using its constellation of formation flying satellites to deliver RF data and analytics to the agency and combatant commands so analysts can explore how this new source of commercial data can augment intelligence activities. 40)

- The commercial RF collected as part of this effort, is being examined for feasibility in supporting a variety of GEOINT applications, such as tipping and cueing of other data sources to include electrooptical and radar imaging satellites. United States combatant commands are also using the data to improve maritime awareness and cooperation with regional allies through unclassified sharable data and analytics.
- The RF GEOINT pilot, which started in September, leverages HawkEye 360’s commercial integration study contract with the National Reconnaissance Office to access commercial RF data that is then integrated into NGA’s Predictive GEOINT Prototype (PGP), which supports an agile development approach for exploring new commercial sources and analytics.
- HawkEye 360 is the first company to deliver commercial RF data and analytics using formation flying satellites. HawkEye 360 launched its initial three satellites in December 2018 to globally identify and geolocate a broad range of RF signals. HawkEye 360 is growing the constellation to improve capacity and revisit rate, starting with the planned launch of HawkEye Cluster 2 this January 2021. Cluster 2 provides over four times the collection capacity as Cluster 1.
• July 28, 2020: HawkEye 360 Inc. today announced that it is offering a daily Regional Awareness Subscription (RAS) service. Leveraging the company’s RFGeo product, RAS delivers mission-critical insights by allowing organizations to identify, monitor, and analyze signal behavior over time. Large-scale RF signal mapping provides deeper situational awareness in these regions, with the data sets enabling trend analysis using traditional and artificial intelligence algorithms. 41)
- “We’re offering a massive collection of data across a broad area. We are also enabling organizations to access periodic data and analytics for areas they want to monitor,” said Tim Pavlick, VP of Product, HawkEye 360. “Subscribers will receive a daily collection of RF data, allowing them to gain comprehensive insight into their regions, establish historical analysis, and augment other geospatial intelligence solutions.”
- HawkEye 360 will work with customers to define a Regional Awareness Subscription that can span millions of square kilometers. Current RAS collection areas include the Mediterranean, South China Sea, and the Korean Peninsula. HawkEye 360 curates a collection plan that routinely gathers a combination of high-demand signals. The company delivers the data in an open standard GeoJSON format that seamlessly integrates with most applications.
- “With our Regional Awareness Subscription service, we provide customers with a dependable source of timely, trusted RF signal insights that have been detected, characterized, and geolocated over the region,” said Alex Fox, EVP Business Development, Sales and Marketing, HawkEye 360. “These insights allow our customers to identify, understand, and respond to activities important to their operations more effectively.”
- HawkEye 360’s RFGeo product identifies and geolocates RF signals collected by HawkEye 360’s proprietary satellite constellation. RFGeo is the first commercially available product offering global spectrum awareness across a broad range of radio signals. HawkEye 360 plans to expand the RAS offering to include new areas of interest important to customers.
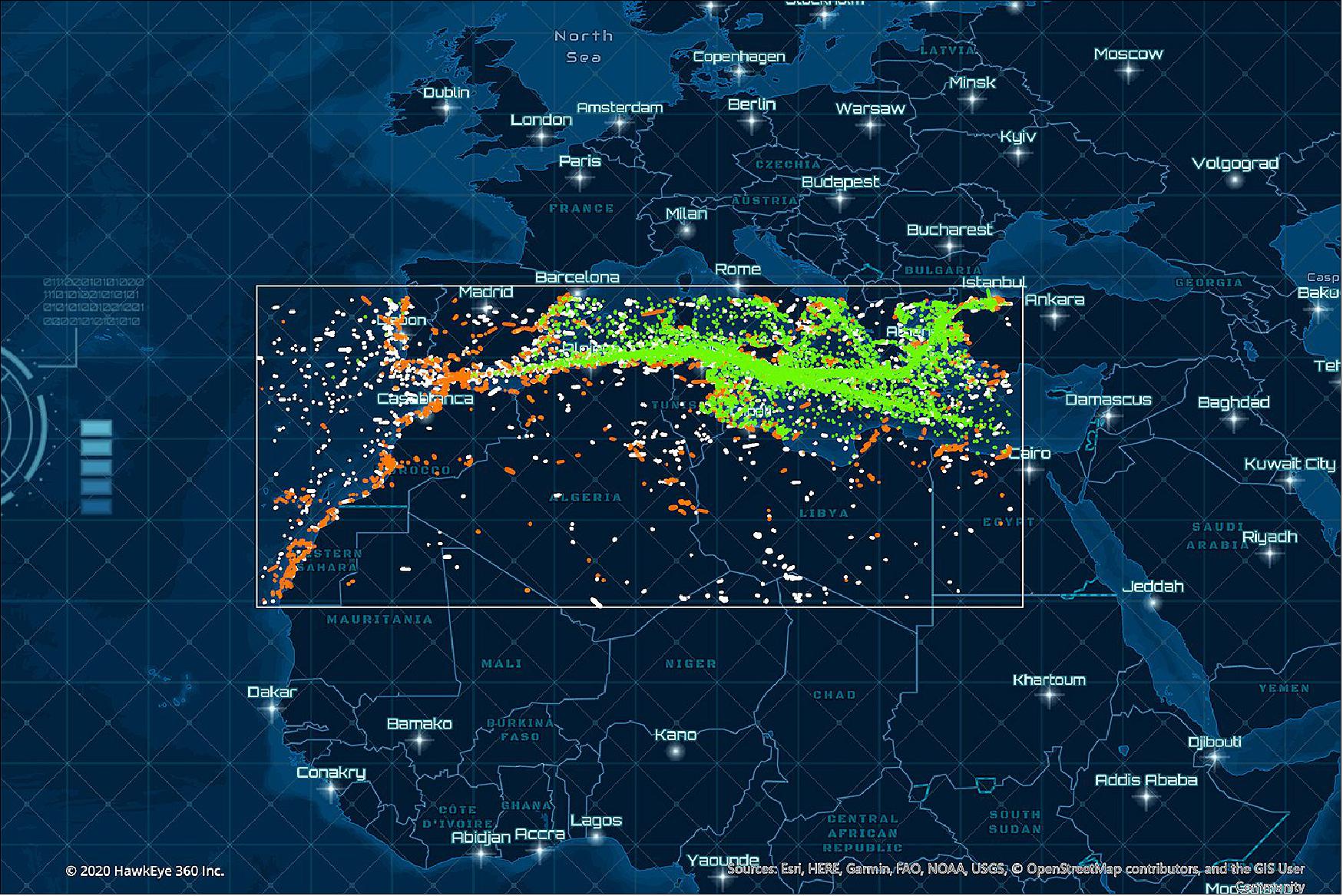
• June 25, 2020: HawkEye 360 Inc., the first commercial company to use formation flying satellites to create a new class of radio frequency (RF) data and data analytics, today announced that the company’s flagship RFGeo product can now map an expanded catalog of marine navigation radar signals to further improve global maritime situational awareness. With this update, HawkEye 360 introduces the first S-band radar signal and quadruples the number of X-band radar signals in the company’s library. HawkEye 360 can now cover the most used frequencies for X-band magnetron-based radar systems, providing a more comprehensive view of maritime activity. 42)
- “We’re addressing critical gaps in Maritime Domain Awareness by revealing an entirely new data layer for vessel monitoring,” said John Serafini, Chief Executive Officer, HawkEye 360. “We’re excited to introduce our first signal in the S-band frequencies. By expanding our signal catalog, we’re not just collecting new and diverse RF data sets, we’re providing actionable intelligence to support the increasing number and scale of our customers’ missions.”
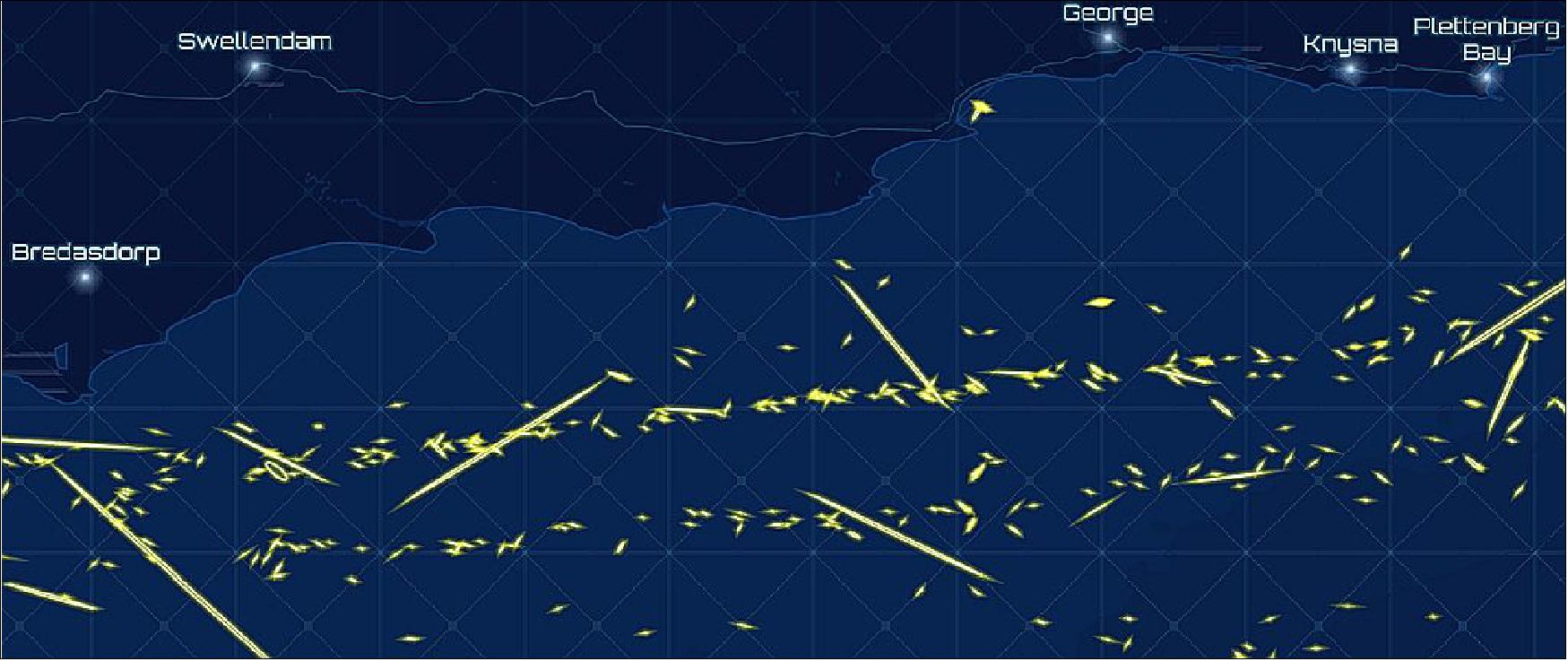
- Vessels continuously operate marine radars to safely navigate from point to point and avoid nearby obstacles, making them an excellent means to track vessels that have otherwise ceased AIS transmissions and gone dark. Commercial vessels 300 gross tonnage or larger are required to be equipped with X-band radars (9 GHz). The largest vessels also carry S-band radars (3 GHz) to penetrate deeper through rain or fog. Each new signal improves HawkEye 360’s ability to develop vessel profiles. This data helps clients identify dark vessels that might be involved in illicit activities, such as smuggling or illegal fishing.
- “Our customers need to maintain accurate and consistent visibility of vessels,” said Alex Fox, Executive Vice President for Business Development, Sales and Marketing, HawkEye 360. “Vessels are continuing to evade AIS detection to conduct illicit activities, making it difficult for organizations to identify and monitor their behaviors. We’re able to provide unique data sets that enable our customers to keep their finger on the pulse of vessel activity.”
- HawkEye 360’s RFGeo identifies and geolocates RF signals collected by HawkEye 360’s proprietary satellite constellation. RFGeo is the first commercially available product offering global spectrum awareness across a broad range of radio signals. In addition to the newly announced signals, RFGeo can independently geolocate marine VHF marine radios, UHF push-to-talk radios, L-band mobile satellite devices, EPIRB (Emergency Position Indicating Radio Beacon) marine emergency distress beacons, and vessel Automatic Identification Systems (AIS). HawkEye 360 is continually adding signals to the catalog to broaden the reach of RF identification across land, sea, and air domains.

• March 3, 2020: HawkEye 360 Inc. today announced that a model of its Pathfinder satellite has been transferred to the Smithsonian’s permanent collection and will be displayed in a future gallery at the National Air and Space Museum in Washington DC. This comes one year after HawkEye 360’s Pathfinder satellites were formally commissioned into service to geolocate RF signals. 43)
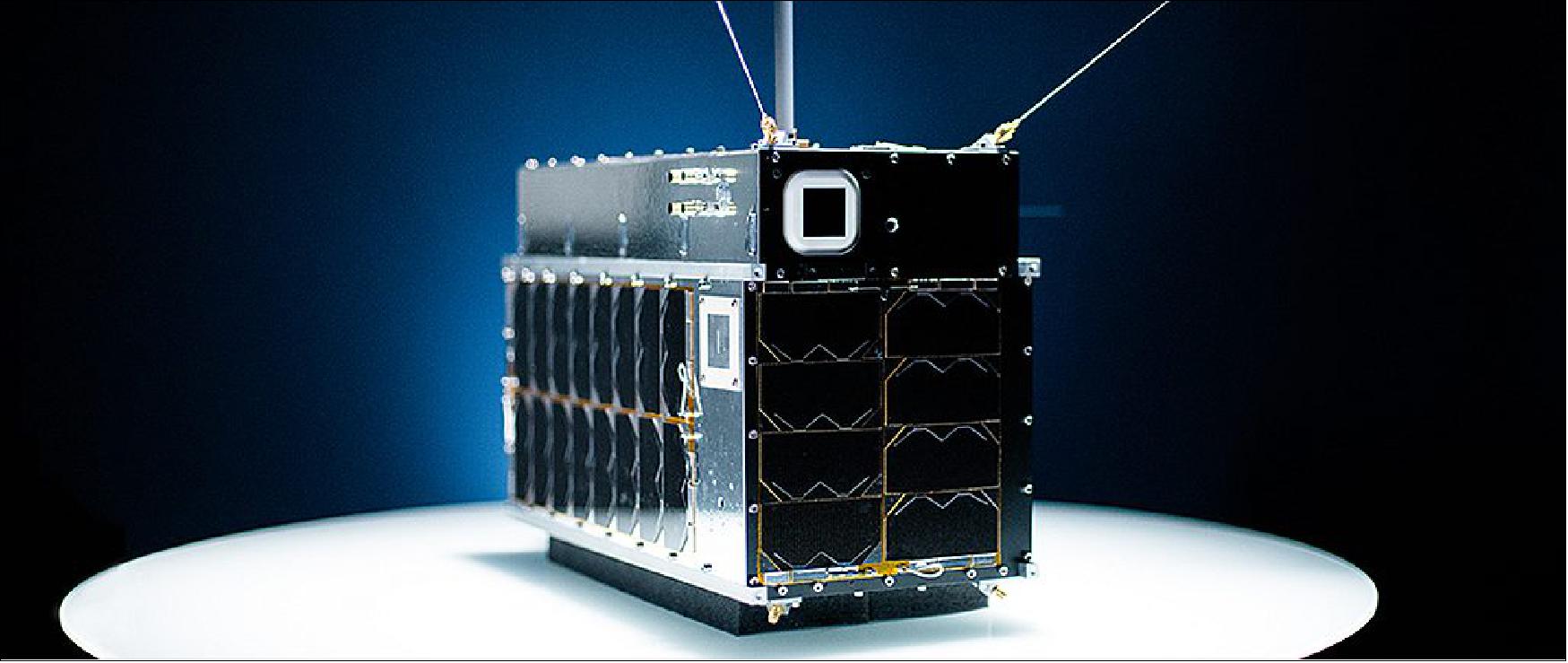
- “It’s an incredible honor for the Smithsonian to select our Pathfinder satellites for its collection,” said John Serafini, Chief Executive Officer, HawkEye 360. “Small satellites are changing what we can achieve in space, and we’re excited to be on the cutting edge of that revolution. We hope that our satellites inspire the next generation of talented minds.”
- HawkEye 360’s cluster of three satellites have successfully geolocated over eleven million RF signals in the past year. This data enables a safer world by supporting many applications, such as finding dark ships that may be engaged in smuggling or illegal fishing.
- “The Pathfinder is an excellent representation of how small satellites are transforming the space industry,” said James David, curator in the Space History Division at the National Air and Space Museum. “We look forward to displaying this commercial RF signals satellite, a first-of-its-kind, to help tell the story of the space age.”
- The Pathfinder satellite is scheduled to go on display when the National Air and Space Museum’s renovation is completed, slated for 2025. The Smithsonian is the world’s largest museum, education and research complex. The National Air and Space Museum is one of 19 museums that make up the Smithsonian.
- HawkEye 360 is fully funded to deploy an additional five clusters, to reach a total of 18 satellites in orbit by the end of 2021. HawkEye 360 is currently building a second cluster of satellites, set for launch in fall 2020.
• January 20, 2020: HawkEye 360 Inc., the first commercial company to use formation flying satellites to create a new class of radio frequency (RF) data and analytics, today announced that it has formed a strategic partnership with Airbus, a global leader in the aerospace and defense industry. Through the partnership, Airbus and HawkEye 360 will deliver high-impact geospatial intelligence solutions not currently available. Both companies can leverage the platforms and services of the other partner to address client mission needs. 44)

- “Airbus is an exceptional partner and investor as we develop and deliver our vision for the future of space-based RF data and analytics,” said John Serafini, Chief Executive Officer, HawkEye 360. “Together with Airbus, we will be able to build sophisticated products and services that intelligently leverage a more comprehensive range of data than previously commercially available.”
- This partnership enables HawkEye 360 and Airbus to fuse complementary data sets to maximize value to customers. Airbus will distribute HawkEye 360’s RF data and analytics across Europe to augment its maritime, defense, and intelligence products. HawkEye 360 will offer Airbus’ earth observation optical and synthetic aperture radar (SAR) products jointly with its RF solutions to serve defense and intelligence customers.
- “HawkEye 360 is a pioneer in space-based RF data and analytics and an ideal partner in our mission to improve global situational awareness for our defense, security, and civil customers,” said François Lombard, Director of the Intelligence Business for Airbus Defence and Space. “I look forward to deploying these innovations to serve the growing needs of our customers.”
- “The world’s first EO, SAR, and RF commercial constellation offers unique capabilities, such as a tip-and-cueing Multi-INT system for unprecedented global situational awareness,” said Alex Fox, EVP of Business Development, Sales and Marketing, HawkEye 360. “Integrating these analytics will provide customers valuable insights to execute more informed decisions. We are excited about the business opportunities this unique relationship will bring for both Airbus and HawkEye 360.”
- Airbus was among the investors who participated in HawkEye 360’s $70 million Series B funding in August 2019. The Committee on Foreign Investment in the United States (CFIUS) provided approval for Airbus to close its investment transaction Jan. 8. The Series B funding enables HawkEye 360 to build and launch the full commercial satellite constellation and develop a full line of RF analytic products.
• December 19, 2019: The U.S. FCC (Federal Communications Commission) gave HawkEye 360 the approvals it needs to launch and operate 15 additional satellites for radio-frequency mapping from LEO (Low Earth Orbit). The license, issued Dec. 10, permits HawkEye 360 to launch up to 80 satellites over 15 years in order to maintain a constellation of 15 operational spacecraft. 45)
- Herndon, Virginia-based HawkEye 360 has three pathfinder satellites in orbit today, and 15 more under construction by the SFL (Space Flight Laboratory) at UTIAS (University of Toronto Institute for Aerospace Studies). The FCC said the first three satellites will not count towards the 15 since they were authorized under an experimental license.
- Rob Rainhart, HawkEye 360’s chief operating officer, said the new FCC approval positions the company to operate six clusters of three satellites — enough to pinpoint radio signals with revisit rates of 30 to 50 minutes.
- “It’s right in line with our business plan and gives us time to coordinate beyond that as the markets change,” he said in a Dec. 18 interview.
- HawkEye 360 asked the FCC to defer further evaluation of a filing the company submitted in January to begin laying the regulatory groundwork for an expanded constellation of 80-operational satellites.
- Rainhart said HawkEye 360 chose to take a piecemeal approach to licensing, focusing first on near-term needs instead of trying to coordinate spectrum for a potential larger constellation.
- “We don’t see any issues coordinating those remaining satellites,” he said. “It’s just something we chose not to do in the short term to get up to that full constellation.”
- Rainhart said HawkEye 360 doesn’t have a timetable for an 80-satellite constellation. The company has contemplated constellations of various sizes, he said, but has always had a baseline configuration of 18 satellites.
- “There’s absolutely opportunities in the future to grow that much larger than that,” he said. “But we have time to work on that and pre-coordinate that, and we have time to design that.”
- HawkEye 360’s next trio of satellites is scheduled to launch in 2020 on an Indian PSLV (Polar Satellite Launch Vehicle), Rainhart said. Those satellites, and the 12 others HawkEye 360 has under construction, will all have more power, payload volume and capacity than the company’s first three pathfinder satellites, he said.
- HawkEye 360 flies its satellites in clusters of three, keeping them in tight formation to geolocate signals. Its satellites can detect signals from radars, handheld devices, satellite terminals and other transmitters, enabling the company to identify activity patterns in maritime, defense and other sectors. The company has raised more than $100 million, and counts the National Reconnaissance Office among its customers.
• December 11, 2019: HawkEye 360 Inc., the first commercial company to use formation flying satellites to create a new class of radio frequency (RF) data analytics, today announced it has been awarded a contract for a commercial RF survey study from the National Reconnaissance Office (NRO). Through the contract, HawkEye 360 will examine the integration of commercial RF capabilities and products into the NRO’s geospatial intelligence architecture. 46)
- “This award from the NRO will further our efforts to make our RF data readily accessible to serve the U.S. government,” said John Serafini, Chief Executive Officer, HawkEye 360. “We believe our satellites can complement traditional government systems, introducing a commercial signals capability that is easy to access and share in support of mission needs.”
- Under the study contract, HawkEye 360 will perform assessments, demonstrations, and analysis to validate that commercial RF survey, ordering, cataloging, and data products can integrate into the NRO architecture. These demonstrations will support the review and enhancement of commercial processes for the development of an end-to-end management system.
- HawkEye 360 launched its initial three satellites in December 2018 to globally identify and geolocate a broad range of RF signals. Since achieving commercial operation in April 2019, HawkEye has been working closely with customers to test and bring multiple products to market.
• November 8, 2019: HawkEye 360 Inc., the first commercial company to use formation flying satellites to create a new class of radio frequency (RF) data analytics, today announced that Advance has become the company’s largest shareholder after successfully purchasing Allied Minds’ minority stake. Additionally, Advance has committed to investing $15 million of primary capital into HawkEye 360’s previously announced Series B funding, subject to regulatory approval, and will replace Allied Minds on the company’s board of directors. 47)
- “This shift from Allied Minds to Advance reaffirms our heritage as an American owned, operated, and headquartered corporation, which we know to be essential for leadership in the emerging RF sensing market,” said John Serafini, Chief Executive Officer, HawkEye 360. “Allied Minds was a critical, early institutional investor for HawkEye 360 and we’re proud to have delivered an excellent return to them.”
- HawkEye 360 was founded as one of Allied Minds’ portfolio companies in 2015. On Nov. 6, 2019, Allied Minds’ shareholders voted in favor of selling its shares in HawkEye 360 to Advance. The transaction, which closed today, represents the first significant exit for an institutional investor within the new space industry in the last five years.
• October 4, 2019: HawkEye 360 Inc., the first commercial company to use formation flying satellites to create a new class of radio frequency (RF) data analytics, today announced that the RFGeo product can now map an expanded catalog of signals to address new markets such as border security or anti-poaching efforts. RFGeo identifies and geolocates RF signals collected by HawkEye 360’s satellite constellation. It is the first commercially available product offering global spectrum awareness across a broad range of radio signals. 48)
- “We are excited to introduce an expanded signal catalog to address new markets as we rapidly scale the company after closing our Series B funding,” said Alex Fox, Executive Vice-President for Sales and Marketing, HawkEye 360. “We continue to innovate and rapidly advance our capabilities as the world leader in the emerging space-based RF data and analytics market. These new signals deliver a more comprehensive view of the world to improve the utility of our RF analytics.”
- With this update, HawkEye 360 expands beyond VHF and X-band to include the first RFGeo signals in the UHF and L-band frequencies. In the UHF band, RFGeo is now mapping signals for push-to-talk radios commonly used across land. Through mapping these types of radios, HawkEye 360 can help clients uncover anomalous behaviors for applications such as finding cross-border smuggling operations or poaching activities in nature preserves.
- “Our homeland security customers need affordable services to monitor and secure the borders,” said Tim Pavlick, Vice President of Product, HawkEye 360. “They need timely insights to identify activity and security threats. For example, there are almost 6,000 miles of land border between the continental United States, Mexico, and Canada. HawkEye 360’s unique data and analytics will help our customers maintain better visibility along this border.”
- This RFGeo release includes two additional feature updates:
a) VHF 70 Enhanced – Vessels often program a Maritime Mobile Service Identity (MMSI) code into their digital VHF marine channel 70 broadcasts. HawkEye 360 uses a proprietary process to extract the MMSI identifier, making it possible to match a VHF signal with a specific vessel.
b) RFGeo Catalog – Since February, the HawkEye 360 satellites have collected millions of data points. Customers can now place orders to access archived geospatial data. This data set is useful for developing a richer understanding of patterns of life.
- The RFGeo product launched commercially in April of this year. In addition to the newly announced signals, RFGeo can independently geolocate marine X-band radar, marine VHF radio channels 16 and 70, EPIRB marine emergency distress beacons, and vessel Automatic Identification System (AIS). HawkEye 360 is continually adding signals to the catalogue to broaden the reach of RF identification across land, sea, and air.
• April 4, 2019: HawkEye 360 Inc. today announced that it has launched RFGeo, a first-of-its-kind radio frequency (RF) signal mapping product. RFGeo uses the unique data generated by the HawkEye Constellation of space-based RF sensing satellites to identify and geolocate RF signals, providing a new global geospatial data layer. RFGeo is the company’s first commercially available product. 49)
- “With the launch of RFGeo, HawkEye 360 is now fulfilling customer orders,” said HawkEye 360 Chief Executive Officer John Serafini. “Through RFGeo, customers will access the powerful RF analytics generated by our satellite constellation so they can gain a more comprehensive view of the world. We are much more than just a data source. HawkEye 360 is bringing truly compelling RF analytics to the market, further cementing our position as an exciting and fast-growing leader in the new space field.”
- Although RF signals are ubiquitous, there has never before been a commercially available product that can independently locate, process and track a broad range of signals. RFGeo will initially support identification and geolocation of maritime VHF radio channels, marine emergency distress beacons and vessel Automatic Identification System (AIS) signals. In the coming months, HawkEye 360 will expand the signal catalog to support more applications. Mapping RF signals will provide valuable insights for many markets, such as defense, border security, maritime, emergency response and telecommunications.
- “RFGeo provides our customers with a new view of activities on Earth using the RF spectrum,” said HawkEye 360 Director of Product Brian Chapman. “We are enabling customers to link RF signal geolocations from our RFGeo product to events occurring around the world. RFGeo will help customers monitor RF signals to support a wide range of high-value applications and missions, such as maritime domain awareness.”
- RFGeo is part of HawkEye 360’s core product line for delivering global spectrum awareness. The product simplifies the complexity of understanding RF signals by providing the coordinates and observed characteristics of the identified emitters. RFGeo delivers the RF analytics in a standardized format for loading into common commercial GIS software tools for further analysis.
• February 26, 2019: HawkEye 360 Inc. has successfully commissioned its three Pathfinder satellites and begun geolocating radio frequency (RF) signals. HawkEye 360 satellites fly in a commercially unique formation that independently pinpoints the geographical origin of a wide range of RF signals. Early test results have already demonstrated successful geolocation of VHF Channels 16 and 70, EPIRB (Emergency Position-Indicating RadioBeacon) , and AIS signals as well as identifying marine radar signals. This proprietary source of data enables HawkEye 360 to locate and analyze previously undetected activity, providing new insights for maritime, emergency response, and spectrum analysis applications. 50)
- “We are generating an entirely new data source for important commercial, defense, and intelligence applications around the world,” said HawkEye 360 CEO (Chief Executive Officer) John Serafini. “As the first to be delivering this type of commercial data, HawkEye 360 will help our customers make more timely and precise decisions. Our team has shown unbelievable dedication and passion to reach a new milestone in space technology in just a few short years.”
- In the maritime sector, data gathered by HawkEye 360 can provide visibility for law enforcement into suspicious vessel behavior, giving them better information in their pursuit of illicit activity. Search and rescue efforts can be aided through geolocation of emergency beacons, even when broadcasting incorrect GPS coordinates. HawkEye 360’s spectrum analysis can survey usage of RF bands to maximize communication spectrum and avoid interference.
- “We are thrilled by the breadth of RF data our Pathfinder satellites are gathering from hundreds of miles above the Earth,” said Rob Rainhart, Executive Vice President of Engineering for HawkEye 360. “We’ve achieved much with our early testing and continue to expand the types of signals we can geolocate. It’s exciting to have strong momentum as we prepare to go to market with a full suite of commercially available analytics products over the course of 2019.”
- The company is using the Pathfinder satellites to perform data verification and strategic demonstrations with select customers. These efforts will inform enhancements to the next cluster of satellites currently under development for launch later this year. This next-generation of satellites will broaden the signal range, on-board-processing, and data capabilities as HawkEye 360 expands the constellation to achieve near persistent global coverage.
• January 7, 2019: UTIAS/SFL (Space Flight Laboratory) announced the in-service activation success of the company's three, formation-flying smallsats that were built by SFL under a contract to Deep Space Industries (now integrated into Bradford Space) for HawkEye 360 Inc. 51)
- John Serafini, the CEO of HawkEye 360, said this is the first time a commercial company has used formation-flying satellites for RF detection.
• December 4, 2018: The first moment of first contact with all three of Hawkeye 360's Pathfinder satellites last night! Initial status is good and we'll now begin detailed system checkout. 52)
Sensor Complement
Each spacecraft will have an identical payload, consisting of two high-level components: i) the SDR, comprised of an embedded processor and FPGA resource, and a baseband signal processor, and ii) a custom-RF front-end with antennas, as illustrated in Figure 24.
SDR (Software Defined Radio)
The SDR, flown on the Pathfinder satellites, is comprised of an embedded processor system and three baseband processors. The baseband processor is built around the Analog Devices 9361 product. This is a highly integrated RF transceiver that combines high-speed ADCs and DACs, RF amplifiers, filtering, switching and more on a single chip. The transceiver product is capable of tuning from 70 MHz to 6 GHz, with an instantaneous bandwidth of up to 56 MHz. The 9361 has two receive chains and two transmit chains. Although the device has transmit capability, it is not intended to be used for the receive-only Pathfinder mission. The payload supports three 9361s so that up to three receive channels can be processed simultaneously and on separate frequencies. Although the 9361 has two receive channels, they are tuned via a common local oscillator (LO), which limits the tuning range of one channel to within the instantaneous bandwidth of the other. The embedded processor system is based on the Xilinx Zynq 7045 SOC, which combines a dual-core ARM processor with a Kintex FPGA. The two devices are very tightly integrated on a single chip, which facilitates easy cross-domain switching between the processor and FPGA. This is advantageous for signal processing applications.
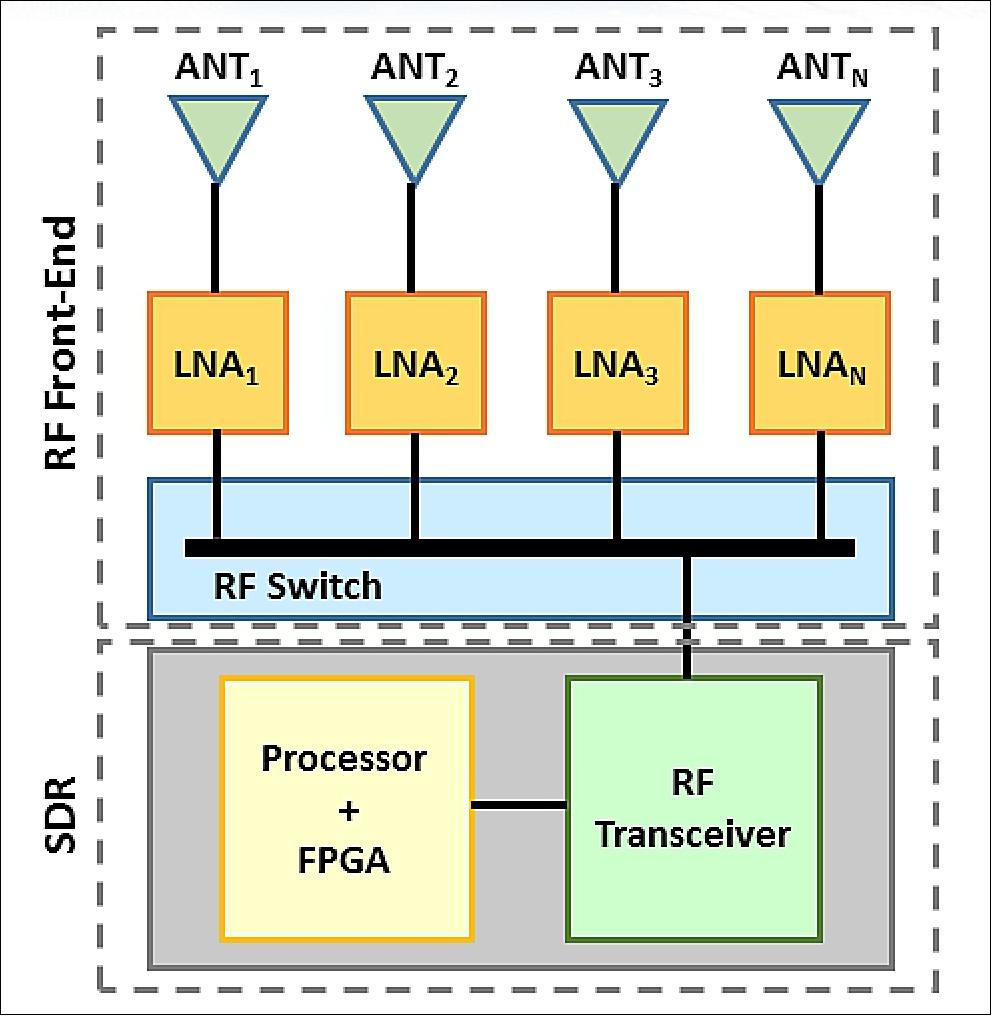
RF Front-End
The HE360 designed custom-RF front end connects to the baseband processors and provides a number of unique, switchable RF paths and antennas to support a range of bands and frequencies of interest. Each switchable path has custom filters, low noise amplifiers (LNA) and even attenuators tailored to a specific band. A low noise block down-converter (LNB) is included to extend the SDR’s frequency range up to Ku-band (~18 GHz). A range of antennas, including quarter-wave dipoles, patches, and wide-band button and horn antennas support the full frequency range, from VHF to Ku-band.
The processor system takes advantage of open-source signal processing software and firmware to maximally mimic desktop SDR products. This allowed ground development to proceed agnostic of the final space hardware and foster adoption of a “fly as you try” philosophy. For the software side, GNURadio will be used. The GNURadio is “a free and open-source toolkit for software radio.” It is widely used in small space projects for ground software processing and may have been used on previous spacecraft in similar embedded environments.
In operation, the payload can be commanded to tune the baseband processor to a center frequency and stream samples at a given sample rate. Nominally, the baseband processor will produce complex (quadrature) samples. The RF front end will also be configured based on the signal of interest. Samples will be conditioned to some extent in the FPGA, including filtering and balancing associated with the ADCs. HawkEye, however, will maximize on-board processing wherever doing so contributes to the bottom line in terms of the product delivered2. 53) Constraints inherent to the mission in terms of downlinking and crosslinking data motivate reducing full-take RF to meta-data surrounding that RF. To accomplish this reduction, user-defined signal processing chains optimized for the embedded platform are implemented.
The payload had gained considerable in-field aerial test experience in parallel with development, building confidence prior to the actual launch of the Pathfinder mission. Indeed, the SDR payloads and receiving antennas were fitted onto three rented aircraft, flown in diverse formations over live RF emitters (including maritime vessels and commercial maritime radar, amongst other targets), yielding RF signal detection and geolocation with unprecedented accuracy.
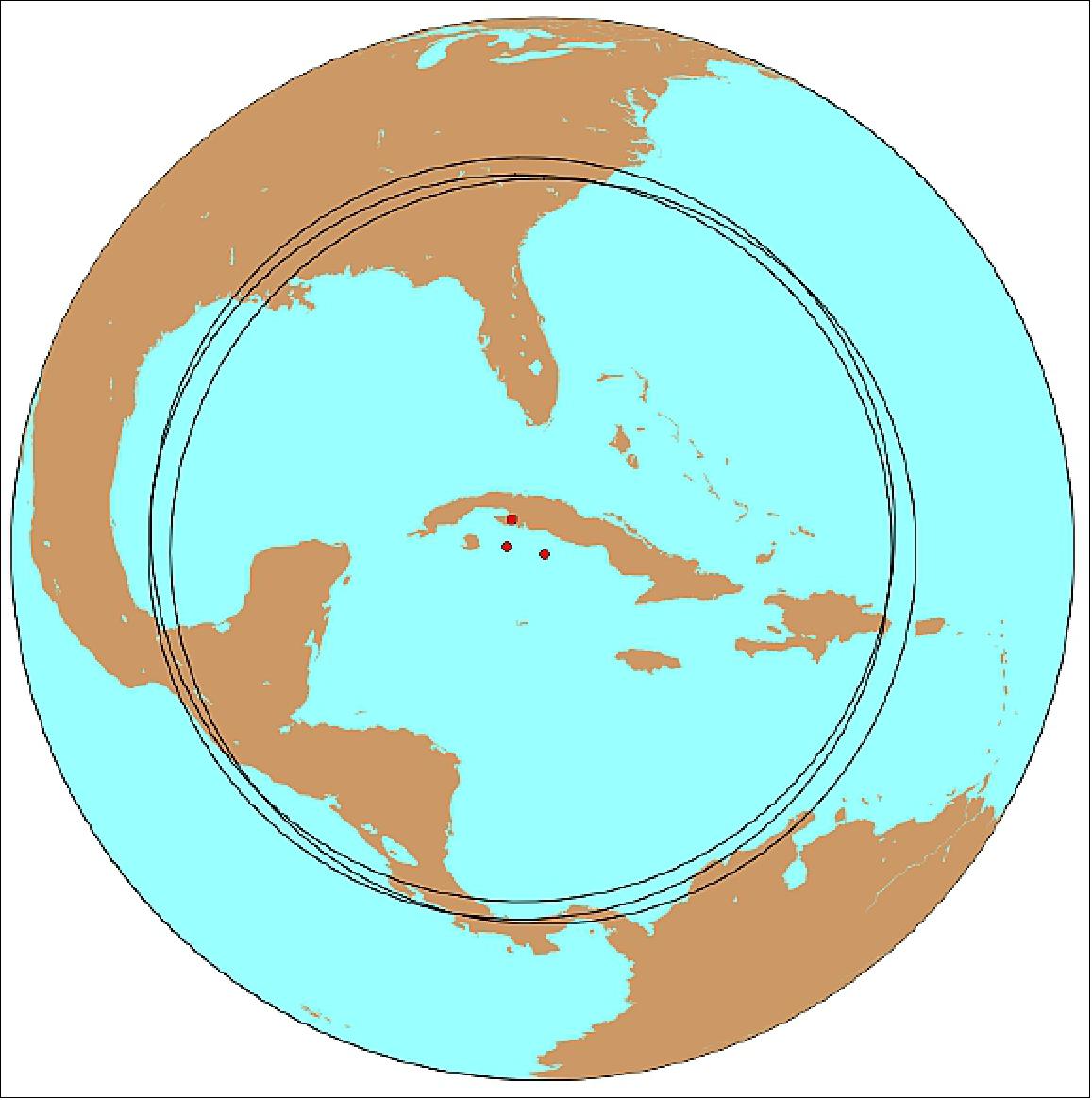
Ground Segment
The Pathfinder mission will utilize commercial Earth station services. In April 2018, HawkEye 360 selected Norway’s Kongsberg Satellite Service (KSAT) to provide ground station services for its pathfinder mission. KSAT is a leading provider of ground station communication services to LEO satellites, with a special focus on polar orbits. From its headquarters in Norway, the company has been pioneering the ground segment business for 50 years. Its Svalbard Ground Station, located on 78º North latitude, is the world’s largest commercial ground station that, due to the unique location, provides all-orbit support. 54)
Utilization of the Svalbard ground station will enable fresh and timely data reception of HawkEye 360 data. HawkEye 360 will be using the KSAT Lite product platform, an industry-leading new space network developed by KSAT. The standardized KSAT Lite solution will also enable HawkEye 360 to tie in additional stations in KSAT’s global network to further enhance near real-time delivery of their data product.
References
1) K. Sarda, N. Roth, R. E. Zee, Dan CaJacob, Nathan G. Orr, ”Making the Invisible Visible: Precision RF-Emitter Geolocation from Space by the HawkEye 360 Pathfinder Mission,” Proceedings of the 32nd Annual AIAA/USU Conference on Small Satellites, Logan UT, USA, Aug. 4-9, 2018, paper: SSC18-II-06, URL: https://digitalcommons.usu.edu/cgi/viewcontent.cgi?article=4075&context=smallsat
2) Russ Matijevich, ”Making The Invisible... Visible,” SatMagazine, September 2016, URL: http://www.satmagazine.com/story.php?number=2060893990
3) G. Bonin, N. Roth, S. Armitage, J. Newman, B. Risi, R. E. Zee, “CanX-4 and CanX-5 Precision Formation Flight: Mission Accomplished!”, Proceedings of the 29th Annual AIAA/USU Conference on Small Satellites, Logan, Utah, USA, August 8-13, 2015, paper: SSC15-I-4, URL: https://digitalcommons.usu.edu/cgi/viewcontent.cgi?article=3167&context=smallsat
4) Daniel CaJacob, Nicholas McCarthy, Timothy O’Shea, Robert McGwier, ”Geolocation of RF Emitters with a Formation-Flying Cluster of Three Microsatellites,” Proceedings of the 30th Annual AIAA/USU SmallSat Conference, Logan UT, USA, August 6-11, 2016, paper: SSC16-VI-5, URL: https://digitalcommons.usu.edu/cgi/viewcontent.cgi?article=3379&context=smallsat
5) Josh Newman, Robert E. Zee, “Drift Recovery and Station Keeping Results for the Historic CanX-4/CanX-5 Formation Flying Mission”, Proceedings of the 29th Annual AIAA/USU Conference on Small Satellites, Logan, Utah, USA, August 8-13, 2015, paper: SSC15-VIII-1, URL: https://digitalcommons.usu.edu/cgi/viewcontent.cgi?article=3218&context=smallsat
6) G. Gaias, S. D’Amico, J.-S. Ardaens, ”Generalized Multi-Impulsive Maneuvers for Optimum Spacecraft Rendezvous,” 5th International Conference on Spacecraft Formation Flying Missions and Technologies, Munich, Germany, 30 May 2013, URL: https://pdfs.semanticscholar.org/7c2d/421723cfd75722ddaa987d3d9f4f4727197e.pdf
7) Christopher W. T. Roscoe, Jason J. Westphal, Jacob D. Griesbach, Hanspeter Schaub, ”Formation Establishment and Reconfiguration Using Differential Elements in J2-Perturbed Orbits,” Journal of Guidance, Control, and Dynamics, Vol. 38, No. 9, pp. 1725-1740, Sept. 2015, https://doi.org/10.2514/1.G000999
8) Simone D'Amico; Oliver Montenbruck, ”Proximity Operations of Formation-Flying Spacecraft Using an Eccentricity/Inclination Vector Separation", Journal of Guidance, Control, and Dynamics, Vol. 29, No. 3 (2006), pp. 554-563, https://doi.org/10.2514/1.15114
9) S. D'Amico, ”Autonomous Formation Flying in Low Earth Orbit,” PhD Dissertation, TU Delft, 2010, URL: https://repository.tudelft.nl/islandora/object/uuid:a10e2d63-399d-48e5-884b-402e9a105c70/datastream/OBJ/download
10) K. Sarda, R. E. Zee, Dan CaJacob, Nathan G. Orr, ”Making the Invisible Visible: Precision RF-Emitter Geolocation from Space by the HawkEye 360 Pathfinder Mission,” Proceedings of the 69th IAC (International Astronautical Congress) Bremen, Germany, 1-5 October 2018, paper: IAC-18-B4.4.1, URL: https://iafastro.directory/iac/proceedings/IAC-18/IAC-18/B4/4/manuscripts/IAC-18,B4,4,1,x42239.pdf
11) ”HawkEye 360 Announces Advisory Board Class of 2022,” HawkEye 360, 15 February 2022, URL: https://www.he360.com/hawkeye-360-announces-advisory-board-class-of-2022/
12) Debra Werner, ”HawkEye 360 wins $15.5 million AFRL contract,” SpaceNews, 11 January 2022, URL: https://spacenews.com/hawkeye-360-wins-15-5-million-afrl-contract/
13) Debra Werner, ”Leidos signs on as HawkEye 360 investor and strategic partner,” SpaceNews, 6 January 2022, URL: https://spacenews.com/leidos-invests-in-hawkeye-360/
14) Debra Werner, ”HawkEye 360 raises $145 million in Series D round,” SpaceNews, 8 November 2021, URL: https://spacenews.com/hawkeye-360-series-d/
15) ”Space Data Association (SDA) Welcomes HawkEye 360,” Satnews, 22 August 2021, URL: https://news.satnews.com/2021/08/22/space-data-association-sda-welcomes-hawkeye-360/
16) Jodi Sorensen, ”Who’s onboard SXRS-5 (SpaceX Transporter-2)?,” Spaceflight, 11 May 2021, URL: https://spaceflight.com/whos-onboard-sxrs-5-spacex-transporter-2/
17) ”HawkEye 360’s Cluster 2 Smallsats Ship To Cape Canaveral For Upcoming Launch,” HawkEye360 Press Release, 17 December 2020, URL: https://www.he360.com/hawkeye-360s-next-gen-satellites-ship-to-cape-canaveral-for-launch/
18) ”HawkEye 360 Completes Milestone in Preparation to Launch Second Cluster,” HawkEye 360, 16 July 2020, URL: https://www.he360.com/hawkeye-360-completes-milestone-in-preparation-to-launch-second-cluster/
19) ”HawkEye 360 Completes Milestone in Preparation to Launch Second Cluster,” UTIAS/SFL, 17 July 2020, URL: https://www.utias-sfl.net/?p=3367
20) https://www.he360.com/technology/constellation/
21) Caleb Henry, ”FCC approves HawkEye 360 application for 15 satellites,” SpaceNews, 19 December 2019, URL: https://spacenews.com/fcc-approves-hawkeye-360-application-for-15-satellites/
22) ”HawkEye 360 Launches Next-Generation Cluster 5 Satellites,” HawkEye 360 Press Release, 24 May 2022, URL: https://www.he360.com/hawkeye-360-launches-next-generation-cluster-5-satellites/
23) ”HawkEye 360’s Cluster 4 Satellites Successfully Travel To Orbit,” Satnews, 4 April 2022, URL: https://news.satnews.com/2022/04/04/hawkeye-360s-cluster-4-satellites-successfully-travel-to-orbit/
24) Jeff Foust, ”SpaceX launches second dedicated rideshare mission,” SpaceNews, 30 June 2021, URL: https://spacenews.com/spacex-launches-second-dedicated-rideshare-mission/
25) ”HawkEye Cluster 2 — The launch of HawkEye Cluster 2 from Cape Canaveral kick-starts a new era for RF geospatial intelligence with the most advanced commercial constellation.,” HawkEye360, 24 January 2021, URL: https://web.archive.org/web/20210413054723/https://www.he360.com/technology/constellation-cluster-2/
26) ”HawkEye 360 Announces Successful Launch of First Three Satellites,” HawkEye 360, 3 December 2018, URL: http://www.he360.com/hawkeye-360-announces-successful-launch-of-first-three-satellites/
27) Stephen Clark, ”Spaceflight’s 64-satellite rideshare mission set to last five hours,” Spaceflight Now, 3 December 2018, URL: https://spaceflightnow.com/2018/12/03/spaceflights-64-satellite-rideshare-mission-set-to-last-five-hours/
28) Stephen Clark, ”Spaceflight preps for first launch of unique orbiting satellite deployers,” Spaceflight Now, 23 August 2018, URL: https://spaceflightnow.com/2018/08/23/spaceflight-preps-for-first-launch-of-unique-orbiting-satellite-deployers/
29) ”Spaceflight SSO-A: SmallSat Express Mission,” SpaceX, 3 December 2018, URL: https://web.archive.org/web/20181204085402/https://www.spacex.com/news/2018/12/03/spaceflight-sso-smallsat-express-mission
31) ”HawkEye 360’s Third Satellite Cluster Begins Commercial Operations,” HawkEye 360, Press Release 12 October 2021, URL: https://www.he360.com/hawkeye-360s-third-satellite-cluster-begins-commercial-operations/
32) Sandra Erwin,”Space data used to detect sources of GPS disruptions,” SpaceNews, 5 October 2021, URL: https://spacenews.com/space-data-used-to-detect-sources-of-gps-disruptions/
33) ”HawkEye 360 Reaches Contractual Milestone for Delivering Space-based Radio Frequency Mapping,” HawkEye 360 Press Release, 30 September 2021, URL: https://www.he360.com/hawkeye-360-reaches-contractual-milestone-for-delivering-space-based-radio-frequency-mapping/
34) ”HawkEye 360 Successfully Launches Next Generation RF Satellites,” HawkEye 360, 30 June 2021, URL: https://www.he360.com/hawkeye-360-successfully-launches-next-generation-rf-satellites/
35) Jeff Foust, ”HawkEye 360 raises $55 million,” SpaceNews, 14 April 2021, URL: https://spacenews.com/hawkeye-360-raises-55-million/
36) ”HawkEye 360 Secures $55 Million Series C Funding Round,” HawkEye Press Release, 12 April 2021, URL: https://www.he360.com/hawkeye-360-secures-55-million-series-c-funding-round/
37) ”HawkEye 360 Announces Commissioning of Second Satellite Cluster,” HawkEye 360, 31 March, 2021, URL: https://www.he360.com/hawkeye-360-announces-commissioning-of-second-satellite-cluster/
38) ”HawkEye 360 Introduces the Mission Space Platform for Analysis of Radio Frequency Geospatial Intelligence,” HawkEye 360 Press Release, 11 February 2021, URL: https://www.he360.com/hawkeye-360-introduces-the-mission-space-platform-for-analysis-of-radio-frequency-geospatial-intelligence/
39) ”HawkEye 360 Introduces “HawkEye RF Data Explorer” for Esri ArcGIS to Improve the Accessibility of Radio Frequency Intelligence,” HawkEye360 Press Release, 4 February 2021, URL:
40) ”HawkEye 360 Supporting NGA’s RF Geoint Pilot Program,” Satnews, 16 December 2020, URL: https://news.satnews.com/2020/12/16/hawkeye-360-supporting-ngas-rf-geoint-pilot-program/
41) ”HawkEye 360 Announces a Global Radio Signal Monitoring Service,” HawkEye360 Press Release, 28 July 2020, URL: https://www.he360.com/hawkeye-360-announces-a-global-radio-signal-monitoring-service/
42) ”New HawkEye 360 Radar Signals Delivers Comprehensive Maritime Awareness,” HawkEye 360, 25 June 2020, URL: https://www.he360.com/new-hawkeye-360-radar-signals-delivers-comprehensive-maritime-awareness/
43) ”HawkEye 360 Pathfinder Selected for Exhibition in New Smithsonian Gallery,” HawkEye360 Press Release, 3 March 2020, URL: https://www.he360.com/hawkeye-360-pathfinder-selected-for-exhibition-in-new-smithsonian-gallery/
44) ”HawkEye 360 and Airbus Form Strategic Partnership,” HawkEye360 Press Release, 20 January 2020, URL: https://www.he360.com/hawkeye-360-and-airbus-form-strategic-partnership/
45) Caleb Henry, ”FCC Approves HawkEye 360 Application for 15 Satellites,” SpaceNews, 19 December 2019, URL: https://www.he360.com/fcc-approves-hawkeye-360-application-for-15-satellites/
46) ”HawkEye 360 Awarded Study Contract by the National Reconnaissance Office,” HawkEye360, 11 December 2019, URL: https://www.he360.com/hawkeye-360-awarded-study-contract-by-the-national-reconnaissance-office/
47) ”Allied Minds Completes Sale of HawkEye 360 Stake,” HawkEye360 Press Release, 8 November 2019, URL: https://www.he360.com/allied-minds-completes-sale-of-hawkeye-360-stake/
48) ”HawkEye 360 Expands Signal Catalog to Address New Markets,” HawkEye360 Press Release, 24 October 2019, URL: https://www.he360.com/hawkeye-360-expands-signal-catalog-to-address-new-markets/
49) ”HawkEye 360 Launches First Commercial Product – RFGeo,” HawkEye360, 4 April 2019, URL: [web source no longer available]
50) HawkEye 360 Begins First-of-its-Kind Commercial Geolocation of Radio Frequency Signals from Space — Identifying and Locating Signals Will Bring Clarity to Previously Undetectable Activity,” HawkEye 360, 26 February 2019, URL: https://www.he360.com/hawkeye-360-begins-first-of-its-kind-commercial-geolocation-of-radio-frequency-signals-from-space/
51) ”The On Orbit Hawkeye360 Pathfinder Smallsats Activated Successfully by Space Flight Laboratory,” Space Daily, 7 January, 2019, URL: http://www.satnews.com/story.php?number=1268258787
52) ”HawkEye 360,” HawkEye, 4 December 2018, URL: https://twitter.com/hawkeye360/status/1069963687207886851
53) Daniel CaJacob, Nicholas McCarthy, Timothy O’Shea, Robert McGwier, ”Geolocation of RF Emitters with a Formation-Flying Cluster of Three Microsatellites”, Proceedings of the 30th Annual AIAA/USU SmallSat Conference, Logan UT, USA, August 6-11, 2016, paper: SSC16-VI-5, URL: https://digitalcommons.usu.edu/cgi/viewcontent.cgi?article=3379&context=smallsat
54) ”HawkEye 360 Selects Norway’s Kongsberg Satellite Service (KSAT) to Provide Ground Station Services for Pathfinder Mission,” HawkEye 360, 18 April 2018, URL: http://www.he360.com/hawkeye-360-selects-norways-kongsberg-satellite-service-ksat-to-provide-ground-station-services-for-pathfinder-mission/
The information compiled and edited in this article was provided by Herbert J. Kramer from his documentation of: ”Observation of the Earth and Its Environment: Survey of Missions and Sensors” (Springer Verlag) as well as many other sources after the publication of the 4th edition in 2002. - Comments and corrections to this article are always welcome for further updates (eoportal@symbios.space).
Spacecraft Launch Mission Status Sensor Complement Ground Segment References Back to top