GOMX-3 (GomSpace Express-3)
EO
ESA
GomSpace
GOMX-3 (GomSpace Express-3) was a collaborative mission between ESA (European Space Agency) and GomSpace ApS of Aalbord, Denmark with the aim of demonstrating new technologies and capabilities of nanosatellites.
GOMX-3 was launched in August 2015 as a secondary payload on the HTV-5 service mission of JAXA (Japanese Aerospace Exploration Agency). The satellite was in orbit for one year before ending its mission in October 2016.
Quick facts
Overview
| Mission type | EO |
| Agency | ESA, GomSpace |
| Launch date | Aug 2015 |
| End of life date | Oct 2016 |

Summary
Mission Capabilities
The sensor complement of GOMX-3 was the SDR (Software Defined Radio) that received ADS-B (Automatic Dependent Surveillance-Broadcast) signals from commercial aircraft. The signals contained information regarding aircraft identification, position, altitude, and intent. This system allowed aircraft tracking in remote areas where radar is unavailable, such as over oceanic regions.
Performance Specifications
GOMX-3 was capable of receiving flight data from aircraft with a latency of fewer than five minutes, including in oceanic regions where previously only estimates could be used. Positioning was then calculated to within, on average, 7 km. Data transmission was made at a rate of 19.2 kbit/s.
GOMX-3 held several antennas and transmitters with different parameters. The helical antenna received data at 1090 MHz, with 10 dB of gain. GOMX-3’s primary communication system, a half-duplex UHF transceiver, operates within the 435-438 MHz range. Finally, its patch antenna used by the satellite’s SDR is centred at 1592 MHz. The satellite had a pointing accuracy of 3°.
GOMX-3 followed a near-circular orbit at an altitude of approximately 400 km and an inclination of 51.6°, an orbit close to that of the ISS (International Space Station). GOMX-3 made 5 passes per day over Aalborg ground station, with an average pass length of 7.4 minutes.
Space and Hardware Components
Solar panels provide power which is regulated and handled by a NanoPower P31us EPS (Electrical Power Subsystem) and stored in a NanoPower BP4 battery pack. The ADCS (Attitude Determination and Control Subsystems) consists of sun sensors, magnetometers, and a rate gyro, and is controlled by a NanoMind A3200 ADCS mission computer. The computer also applies control laws with a Sliding Mode Controller and command actuators, including magnetorquers and four AstroFein RW-1 reaction wheels. A NanoMind A3200 OBC (On Board Computer) controls all other non-ADCS data. RF communications occur through a NanoCom AX100 UHF radio system, consisting of the first in-orbit Syrlinks EWC27 X-band transmitter. The NanoCom Ant430 canted turnstile UHF antenna, a helical ADS-B antenna, and a patch antenna are also in use for communications.
In October 2015, GOMX-3 was deployed from the ISS Japanese Kibo module airlock using the Kibo robotic arm.
Though the spacecraft was expected to end its orbit within six months, its lifetime was extended to one year due to the consistency of the ADCS in maintaining its attitude.
In October 2016, GOMX-3 finally re-entered the atmosphere.
GOMX-3 (GomSpace Express-3)
Spacecraft Launch Mission Status Sensor Complement References
The GOMX-3 mission is a collaboration between ESA (European Space Agency) and GomSpace ApS of Aalborg, Denmark to demonstrate new capabilities of nanosatellites focusing on attitude control, RF sensing, and high-speed data downlink. 1)
Work on the mission began in June 2014 under the IOD (In-Orbit Demonstration) element of the ESA GSTP (General Support Technology Program); the flight model was delivered one year later. The satellite was developed in compliance with the ESA-tailored ECSS (European Cooperation for Space Standards) engineering standards and product/quality assurance requirements for IOD CubeSat projects.
Background on CubeSat Communications
The space agencies are equipped with networks of tracking ground stations compatible with ITU and CCSDS (Consultative Committee for Space Data Systems) standards. These networks use EESS (Earth Exploration Satellite System) TT&C S-band (2025-2100 MHz for TeleCommand; 2200-2290 for Telemetry), and X-band (8025-8400 MHz for high data rate telemetry). More and more private ground tracking networks are also equipped with S-band and X-band ground stations, benefiting from a station cost reduction trend. 2)
CubeSats are presently generally fitted with UHF or S-band payload TM (telemetry) subsystems which allow downloading a few hundred Mbit per day. This data volume is limited because the telemetry bit rates are restricted to hundred of kbit/s in UHF and to a few Mbit/s in S-band to comply with the CCSDS spectral recommended occupation bandwidth (6 MHz maximum in EESS S-band). The use of a fraction of the ISM S-band (2400-2483.5 MHz) is also possible for telemetry, but this band is subject to interferences and is not associated with a separate ISM (Industrial, Scientific and Medical) S-band for TC. The diplexer of a 2.4 GHz TT&C equipment is therefore bigger than with 2/2.2 GHz equipment. To limit the number of antennas and equipment on board and to increase the TC (TeleCommanding) capacity (for software upload for instance), EESS S-band TCs looks appropriate.
Therefore, to increase transmission data rates and to allow compatibility with their existing ground tracking networks, CNES and ESA are interested in a miniature S-band TT&C transceiver, and a miniature X-band transmitter, both designed for CubeSats. ESA decided to design the OPS-SAT triple CubeSat to test new space operation control concepts using EES S- and X-bands. The launch of OPS-SAT is planned for 2017.
As of 2015, Earth observation or spectrum monitoring or astronomy or technological payloads can be embarked on very small platforms, but they require the capability to download a large volume of data with a high telemetry bit rate subsystem. The Syrlinks' EWC27 HDR-TM X-band transmitter combined with a miniaturized COTS antenna solves this problem and enables to download of up to 17 GB/day on a 3.4 m X-band station. CNES and Students are currently developing the EYE-SAT triple CubeSat, provided with an astronomical payload to observe zodiacal light. The needs in terms of data rate imposed the use of EWC27 X-band HDR-TM (High Data Rate-Telemetry).
To allow early in-orbit testing of the EWC27 HDR-TM as soon as in autumn 2015, CNES and ESA co-funded the end of the qualification process of this equipment and its integration into the GOMX-3 ESA triple CubeSat.
S-band system architecture:
The Syrlinks EWC31 TT&C transceiver has a CubeSat form factor with a height of about 4 cm including the diplexer and a 3 dB coupler when needed (its high is about 2.5 cm without the diplexer). Operational CubeSats might need such a diplexer, in order to connect two S-band patch Rx/Tx antennas mounted on opposite faces to the transceiver, through a 3 dB coupler. Doing so, whatever the CubeSat's attitude in orbit, there will be always one of the 2 antennas pointing roughly toward the ground. Therefore, such subsystem allows permanent TC and TM connections with the involved 2 GHz tracking ground station(s), even if the satellite is temporarily subject to uncontrolled tumbling.
The two S-band Rx/Tx patch antennas shall be provided with a single RF connector, used to input and output S-band TC and TM signals. If, as is generally the case, the using space agency ground network is provided with dual circular polarization parabolic antennas, the two patch antennas mounted on opposite faces of the CubeSat can have opposite circular polarization (case of EYE-SAT), to minimize the coupling between these 2 patches.
This can be done especially if the tumbling angular velocities are not high. The 2 flat antennas could also have the same polarization (case of OPS-SAT) to facilitate the ground S-band tracking operations, especially, when only single polarization ground stations are available, or when the maximum tumbling angular velocities to cope with are very high. In all cases, a careful global antenna pattern measurement provided by the two patch antennas mounted on a structure representative of the CubeSat is mandatory.
The choices of modulation and coding have a major impact on the S-band subsystems performances regarding the bit rate, consumption, and implementation complexity, but also interoperability possibilities with the ground segment.
X-band system architecture:
Existing nanosatellite telemetry systems (UHF or S-band) can dump only a few hundred Mb to 1 Gb per pass. The emerging need for higher dumping capacity on a CubeSat mission made a new solution (the X-band transmitter) emerge to provide a major improvement (for instance 6 to 14 Gbit/ pass), compatible with X- band stations (3.4 m to 5 m in diameter in that case), and affordable in the nanosatellite format (3U ): power consumption below 10 W peak, 1 W mean/orbit, 300 g, small antenna. The transmitter RF output power can be tuned up to 2 W (assuming 10 W peak consumption and 10% duty cycle). The telemetry antenna's gain is assumed to be 0 dBi at ± 60°, with 1 dB antenna loss, thus giving an EIRP of 2 dBW. The ground station can have for instance a diameter of 3.4 m (25 dB/K G/T): above 10° elevation, or 5 m (30 dB/K G/T): above 5° elevation.
The modulation and coding, currently chosen are a power-efficient standard rather than spectrum efficient (as required for larger bit rate), to benefit from a 4 to 5 dB impact. This standard is compatible with usual ground stations and CCSDS: OQPSK (Offset Quadrature Phase Shift Keying) with convolutional coding (k=7, R= ½ + 255/223 Reed Solomon).
Outside its RF performances, OQPSK with k=7 R=½ + RS is also very interesting because convolutional and Reed Solomon coding operations can be split and performed in different locations. The first one can easily be implemented into the transmitter and realized in real-time. The second one can be performed with the framing at the mass memory or processor level in real time or by post-processing. Such repartition also facilitates the interface between the mass memory or processor and the transmitter because the data flow to modulate is continuous.
Using CBR (Constant Bit Rate), large and unexploited link budget margins occur at elevations higher than 20°. Using VBR (Variable Bit rate) with Nbr possible values of bit rates, the download capacity is multiplied by 1.6 with Nbr=2, and multiplied by 2 with Nbr=3 during a pass. During the bit rate change transition sequences, IDLE sequences are used to avoid data losses. The transition time percentage during the pass is estimated to be 5% with 3-bit rates (5 s / commutation). The ground station receiver could receive predictable commands to stations for bit rate switching, if not autonomous.
VBR with OQPSK and k=7, R= ½ convolutional + RS coding is CCSDS compatible, despite the signal spectrum variation during a pass, since CCSDS defines the "mission phases" as the mission period during which the signal parameters are constant. That means that a pass. using VBR is provided with N+1 "mission phases", when there are N bit rate commutations, with N = 2 x (Nbr-1). With a maximum bit rate of 50 Mbit/s, the maximum spectral width of the transmitted telemetry signal is significantly smaller than the 375 MHz available in the EESS X-band.
X-band transmission evolution towards DVB-S2 for Small Satellites 3) 4)
DVB-S2 (Digital Video Broadcasting - Satellite: Second Generation) is a CCSDS adaptation standard fully reusing the ETSI DVB-S2 mass-market telecommunication standard, thus providing the advantage of a wide diversity of very robust commercial mass-market receivers, cheaper than the receivers dedicated to space telemetry links. CNES is currently upgrading with Syrlinks an existing X Band Transmitter for CubeSats & nanosatellites (TRL 9) to use DVB-S2 CCSDS telemetry standard. The VCM (Variable Coding and Modulation) mode will provide a 60% increase in the downloaded data compared to CCM (Constant Coding and Modulation), a link budget improvement of about 2 dB in QPSK for the same transmitted power and better spectral efficiency.
All the CCSDS DVB-S2 features have already been coded by Syrlinks, they include the necessary DVB-S2 blocks: baseband encapsulation, channel coding, mapping, physical layer encapsulation and filtering.
EWC27 on GOMX-3 mission:
For telemetry data downlink, the satellite uses the Syrlinks EWC27 CubeSat X-band transmitter as well as an X-band patch antenna that has been designed by Syrlinks specifically for the GOMX-3 mission needs. The test results validate the correct operation of the Syrlinks X-band Transmitter (EWC27) and patch antenna that were used on board the GOMX-3 satellite.
Syrlinks and CNES are working on the implementation of the DVB-S2 CCSDS telemetry standard in CubeSat HDR transmitters, in the X-band. Syrlinks is also considering developing such equipment in Ka band. This equipment, complementary to the current EWC27 X-band OQPSK CC (7,1/2) HDR transmitter validated in orbit onboard GOMX-3, could satisfy data rate needs lower and also higher than 100 Mbit/s
Thanks to its excellent performances, the DVB-S2 standard with adaptive coding and modulation is getting widely adapted. All the DVB-S2 features have been implemented in a baseband card, validation is ongoing, and future operational DVB-S2 HDR equipment for CubeSat are therefore on a good track.
Spacecraft
Led by GomSpace in Denmark, GOMX-3 is a 3U CubeSat mission to demonstrate aircraft ADS-B (Automatic Dependent Surveillance-Broadcast) signal reception and geostationary telecommunication satellite spot beam signal quality using an L-band reconfigurable software-defined radio payload. A miniaturized high data rate X-band transmitter developed by Syrlinks and funded by the French space agency CNES will also be flown as a third-party payload. The satellite is planned to be deployed from the ISS (International Space Station). 5)
The satellite was developed, integrated, tested, and delivered over a period of 13 months using off-the-shelf components available from GomSpace. GOMX-3 uses the next generation of CubeSat OBC (NanoMind A3200) and UHF radio (NanoCom AX100). Both of these subsystems use a motherboard-daughterboard system designed to minimize stack height to fit more capability in a smaller volume. A P31us EPS and a BP4 battery pack complete the CubeSat bus. The 3U CubeSat features body-mounted triple-junction solar cells employing maximum power point tracking to optimize the performance of the arrays for the given illumination and thermal environment Ref. 2). 6)
Pointing is key to the GOMX-3 mission; the satellite uses a combination of advanced sensors (coarse sun sensors, IR horizon sensors, magnetometers, fine sun sensors, NovAtel GPS receiver) and actuators (in-panel magnetorquers, Astrofein momentum wheels) controlled by a dedicated ADCS A3200 computer. The GomSpace ADS-B receiver, a GomSpace SDR (Software Defined Radio) module, and the Syrlinks EWC27 CubeSat X-band transmitter complete the internal payload stack.
The overall satellite layout is shown in Figure 2. The bottom 1U of the satellite is dedicated to the OBC, COM, and EPS subsystems, while the middle 1U houses the ADCS, the ADS-B receiver, and the SOFT (aka SDR) radio. The upper 1U contains the X-band transmitter and the further ADCS support hardware. Externally, the satellite uses interstage boards to mount the fine sun sensors and collect sensor data from the solar panels. The stack breakout boards are used to electrically connect the 1U stacks. Additionally, GOMX-3 uses five RF antennas mounted on various external faces.
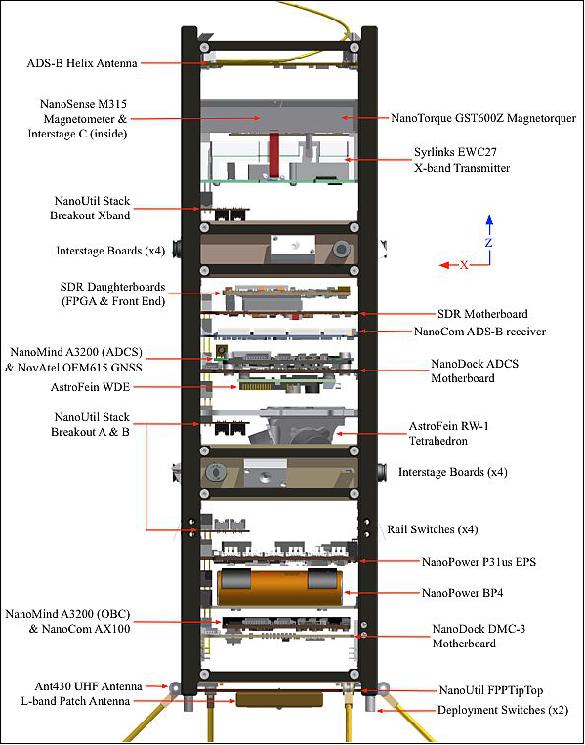
In Figure 2, the following components are considered part of the bus (Ref. 15)
- NanoPower P31us is the EPS (Electrical Power Subsystem) which features regulated 3.3 V and 5.0 V power with 6 independent switchable latch-up protected outputs. It also provides MPPT (Maximum Power Point Tracking) on 3 independent input converters used by GOMX-3 to handle solar power input from 4 satellite faces. Finally, the EPS is responsible for the critical task of battery handling.
- NanoPower BP4 is the battery pack used together with the EPS, consisting of 4 Li-Ion cells in series. The 38 Wh of stored energy ensures the DoD (Depth of Discharge) does not exceed 10% during nominal operations.
- NanoMind A3200 OBC is the mission computer, which stores mission-specific commands. The OBC also collects telemetry from non-ADCS subsystems in order to generate the housekeeping beacons. It stores these beacons on its flash memory to allow for historical data download.
- NanoCom AX100 is a UHF radio system used as the primary RF communications method. It is both flexible and robust, allowing for adjustment of frequency, bitrates and data encapsulation formats in orbit.
- NanoDock DMC3 is a motherboard used to host the A3200 OBC and AX100 radio.
- NanoMind A3200 ADCS is a hardware-identical A3200 dedicated to ADCS operations. This computer is responsible for filtering the sensor data input (GOMX-3 uses magnetometers, fine & coarse sun sensors, and a rate gyro), applying control laws (GOMX-3 uses a Sliding Mode Controller), and commanding actuators (GOMX-3 uses magnetorquers and four AstroFein RW-1 reaction wheels).
- NovAtel OEM615 GNSS is a card-sized GNSS receiver capable of determining the position of GOMX-3 using both the GPS and GALILEO constellations. Its associated antenna is housed on the -Y/+Z interstage.
- NanoDock ADCS is a variation of the standard motherboard designed to house the OEM615 adjacent to a dedicated A3200 ADCS computer. It also provides the mechanical interface to a support board for the AstroFein RW-1 reaction wheels, as well as necessary power switches for the GPS and reaction wheels.
- AstroFein RW-1 is a nanosatellite reaction wheel assembled in a tetrahedron configuration aboard GOMX-3. The AstroFein WDE driver board is used to control four of these wheels.
- NanoUtil Interstages are small PCBs that collect ADCS sensor data and control antenna deployment. Eight of them are mounted in the interstage area between solar panels. Each of these houses FSS (Fine Sun Sensor), which provides a 2-axis sun vector measurement; each is canted 30 degrees to allow for near-complete sun coverage without using the ±Z faces. Four interstages control electronic knives which release the canted turnstile antenna elements. A ninth interstage is mounted within the internal magnetorquer; it controls the ADS-B helix antenna deployment.
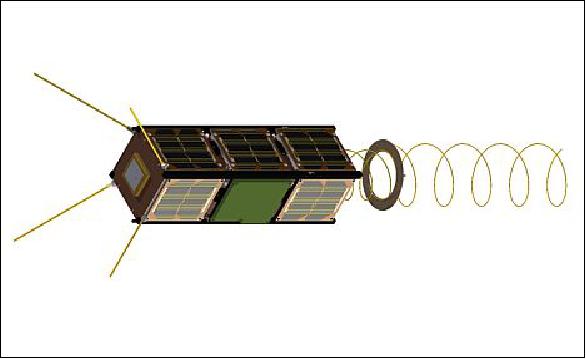
- NanoCom Ant430 is the canted turnstile UHF antenna. The 4 antenna elements are in a stowed configuration at launch; they are folded down along the satellite body and restrained to four Interstage boards using Dyneema wire. After deployment, the antenna provides an omnidirectional gain pattern that allows for attitude-independent communication.
RF Communications
The primary communications system of the satellite is a half-duplex UHF transceiver operating in the 435-438 MHz range to reach a nominal data rate of 9.6 kbit/s. The satellite makes use of a CubeSat Space Protocol, a network-type protocol implemented by all subsystems across the space link and the ground system, easing the integration and testing of systems as well as simplifying operations since every component is assigned a node with access to command resources available within the network.
X-band link:
The first in-orbit test of the Syrlinks EWC27 X-band transmitter will occur aboard GOMX-3. Syrlinks (Bruz, France) developed an X-band patch antenna considering the following initial requirements: Frequency band between 8.025 and 8.4 GHz, RHCP polarization, <3dB axial ratio, <3 dB between ±30°, >0 dBi Gain between ±30° from boresight, <12 dB return loss in a bandwidth of 400 MHz.
The available volume on the GOMX-3 platform for the antenna was limited, especially since the thickness was restricted to 7 mm. The as-built dimensions of the active part of the antenna are 73.5 x 73.5 m x 6.8 mm. The measured performances are in line with the simulation's results. Finally, some qualification tests (temperature cycling, vibration, thermal vacuum) were made in order to check the evolution of the performances after environmental testing.
CNES also participates in the GOMX-3 project by providing two X-band ground stations. The first station is new and is located at the French CSG ( Guyana Space Center), in Kourou, and will be used for experimental passes until the end of 2015. It has an antenna diameter of 11 m. The second one is a quite "old" 3 CNES X-band station provided with a 3.4 m antenna and has been transferred from the Operation directorate to the JANUS Student/CNES nanosatellite project. It is now physically implemented at the site of ENAC (Ecole Nationale de l'Aviation Civile), the French national civil aviation engineering school, and is presently being refurbished. It will be used in a second step, after the test period with the station in Kourou. The S/X-band architecture is able to deliver a considerable increase in data rate for nanosatellites.
Syrlinks works jointly with CNES, ESA, TU Graz, and GomSpace to develop advanced radio solutions for CubeSats. Syrlinks proposes CubeSat RF equipment using EESS (Earth Exploration Satellite System) X-band, EESS or ISM (International Manufacturing Services) S-band, or both S-band and X-band (Figure 3), and study also solution using other bands. The EWC27 X-band transmitter reuses an important part of the ESA PROBA-V telemetry hardware and provides up to 100 Mbit/s. The EWC31 S-band equipment is also fully CCSDS compatible with ranging and coherent transmission capabilities.

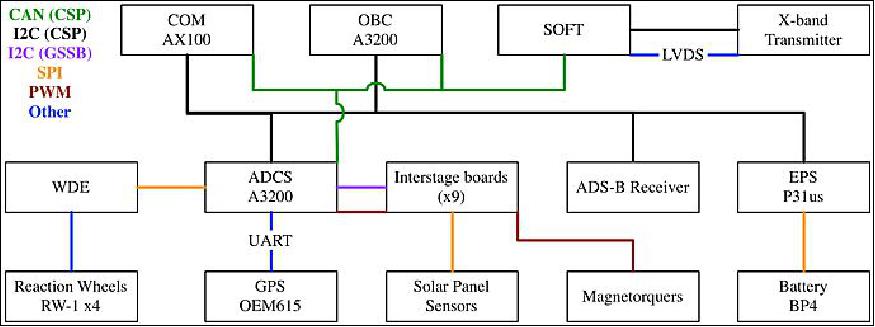
Data interfaces:
The CSP (CubeSat Space Protocol) is defined for a variety of physical buses; some subsystems support redundant buses and may be switched on-orbit. Figure 4 shows the data interfaces used aboard GOMX-3. CSP is the core of these interfaces and is responsible for the majority of the core subsystem communication. The ADCS sensors rely on the GomSpace Sensor Bus (GSSB), allowing interstage boards to act as intermediaries between sensors and the ADCS computer. Additionally, serial communication is used for some specialized payloads.
Method | Description |
COTS Components | Using COTS components allows newer, more efficient technology to be used in space (after proper qualification) |
Distributed Architecture | A distributed spacecraft has reduced system interdependency (simplifying test campaigns) and standardized communication (reducing development time through the reuse of this code). |
Parameter System | FRAM (Ferroelectric Random Access Memory)-based non-volatile storage allows configurations, calibrations, and more to be modified easily without a lengthy software upload. |
Watchdogs | These mitigate the risk of single-event upsets by resetting parameters, subsystems, or the entire system in the case of anomalous behaviour. |
In-the-loop Software Testing | The mission ADCS (Attitude Determination and Control Subsystem) software may be tested in the loop with a Simulink model, which simulates sensor output and accepts software-calculated actuator input. |
On-orbit Reprogramming | This critical functionality can save a mission if the software is not perfect at orbital insertion. Smart protections allow the software to revert to default after X reboots the new image. |
On-orbit Calibration | Many ADCS sensors may be adequately calibrated in orbit, which can reduce tedious ADCS ground testing. |
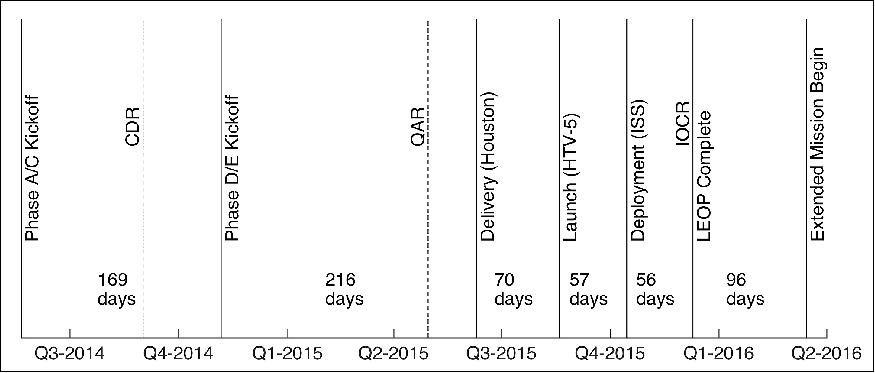
Launch
The GOMX-3 nanosatellite was a secondary payload on the HTV-5 service mission of JAXA (Japan Aerospace Exploration Agency) nicknamed Kounotori 5) to the ISS. HTV-5 was launched on August 19, 2015, at 11:50:49 UTC from the Tanegashima Launch Center, Japan, on the H-IIB vehicle of MHI (Mitsubishi Heavy Industries, Ltd.). The launch vehicle flew smoothly, and, at about 14 minutes and 54 seconds after liftoff, the separation of the Kounotori-5 was confirmed. 8)
Orbit: Near-circular orbit, altitude of ~400 km to ISS, inclination =51.6°.
JAXA astronaut Kimiya Yui, a Flight Engineer for Expedition 44 and 45 aboard the ISS, was assigned to manipulate the SSRMS (Space Station Remote Manipulator System) for the operation of capturing Kounotori-5. It is the first time for Japanese astronauts to capture an HTV vehicle.
JAXA astronaut Koichi Wakata served as lead CAPCOM (Capsule Communicator) for the HTV-5 mission at the NASA MCC (Mission Control Center) in Houston, TX.
Secondary CubeSat payloads of the HTV-5 mission cargo. All CubeSats are part of the PLC (Pressurized Logistics Carrier): 9)
- 14 Flock-2b nanosatellites (3U CubeSats) of Planet Labs, San Francisco, to provide high-resolution (3-5 m) imagery of the Earth. Each nanosatellite has a mass of 5 kg.
- GOMX-3, a 3U CubeSat mission (~3 kg) of ESA developed by GomSpace in Aalborg, Denmark. Payload: SDR receiver and an ADS-B receiver to receive signals broadcast by civilian aircraft. The SDR is used to receive signals from communication satellites in GEO for an assessment of signal quality in the L-band range. 10)
- AAUSAT-5, a 3U CubeSat student satellite demonstration of Aalborg University (AAU), Denmark. AAUSAT-5 is to receive AIS (Automatic Identification System) beacons from ships. The beacons are used to identify and locate vessels to support collision avoidance and search and rescue efforts.
- SERPENS (Sistema Espacial para Realização de Pesquisa e Experimentos com Nanossatélites), a 3U CubeSat developed by a consortium of Brazilian Universities for technology demonstrations.
- S-Cube (Shootingstar Sensing Satellite) is a 3U CubeSat (4 kg) of PERC (Planetary Exploration Research Center) at the Chiba Institute of Technology and Tohoku University, Japan. The objective is meteor observation.
Mission Status
• April 2017: The GOMX-3 satellite was deployed from the International Space Station in October 2015 and completed its very successful mission a year later when it entered Earth's atmosphere. The mission was an In-Orbit Demonstration mission sponsored by ESA and performed by GomSpace. 11)
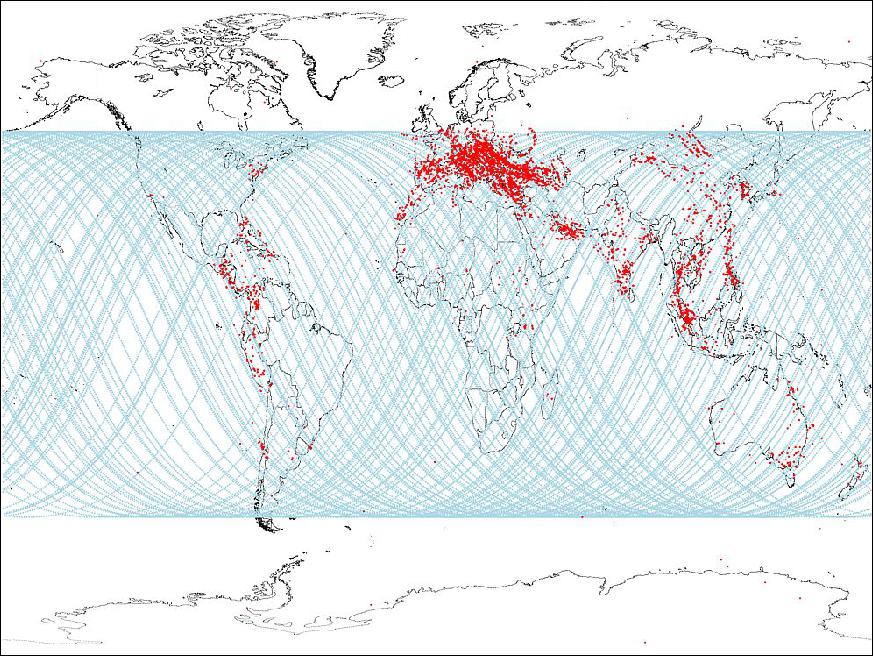
- The ADS-B receiver performed very well during the mission collecting ADS-B data globally (except in polar areas due to ISS orbit) and the flexibility of the receiver was demonstrated during the missions as new and improved software images were uploaded and employed by the receiver.
- Covering the North Atlantic region with downlink opportunities at the Aalborg ground station in Denmark, the collected ADS-B frames were downloaded immediately after recording, autonomously post-processed at the Airbus DS ground segment and delivered to Flightradar24 for display on their flight tracking website. 12)
- Although GOMX-3 was not designed for real-time data transmission, a latency of fewer than 5 minutes could be achieved in oceanic regions where previously only roughly estimated flight positions could be shown The autonomous data-handling and post-processing consumed only a few tenths of a second, demonstrating that an optimized data-streaming from the satellite to the ground could make latencies down to below 1.5 seconds – necessary for air traffic control in non-radar airspace – feasible. Statistical analysis of the live data takes to provide valuable insights into the performance that is achievable by future space-based aircraft surveillance systems and the benefits this could bring to global air traffic safety and efficiency.
- The near real-time ADS-B data take was a clear success – Flightradar24 users around the globe could observe aircraft positions obtained from space appearing on the screen with a delay of just 5 minutes – where previously only estimates could be displayed. In addition, the data generated in this experiment cross-referenced with the ground-based data contributed from the Flightradar24 database allowed the analysis of further key performance parameters such as the probability of message detection and the achievable update intervals. Above all, it could be shown that fruitful collaboration between an established large system integrator (such as Airbus DS) and young and growing start-up companies such as GomSpace and Flightradar24 is not just possible but very beneficial to all parties involved.
• November 4, 2016: ESA's first technology CubeSat burned up in the atmosphere after a year in orbit (reentry on Oct. 18, 2016). Following six months of demonstrating new technologies, the tiny satellite's working life was extended in order to gather wind data from aircraft in flight – a notable first, essentially making it Europe's smallest weather satellite. 13)
- Released from the International Space Station in October 2015, GomX-3 – built for ESA by GomSpace in Denmark – carried an experimental receiver to detect ‘ADS-B' tracking signals broadcast by aircraft in flight, as well as a software-defined radio for evaluating spot beams from telecom satellite signals, and an X-band receiver for high-bandwidth data downloads. — GomX-3's extended mission involved a collaboration with the Met Office, the UK's national weather service, trying out a new spaceborne method of wind measurement.
- Aircraft threading their way through the sky is increasingly regarded as a useful resource for weather forecasting. The Met Office has established a network of five ground receivers that gather wind and temperature data from aircraft across the country's airspace in response to air traffic control radar. "The information in these messages can be used to derive high-quality wind information" explains Edmund Stone, Met Office observations scientist. "This works by comparing the reported ground and air speeds and directions. We also retrieve lower-quality temperature data."
- Research is underway to assimilate these data into UK numerical weather models, to help improve forecast accuracy. "These messages are becoming more common across the globe," Edmund Stone adds. "This information will be useful in the future in increasing the global observation network coverage, both from the ground and also from orbit, which led us to the collaboration with ESA and GomSpace."
- GomSpace reconfigured the ADS-B receiver on GomX-3 to record the information in the aircraft signals needed by the UK Met Office, and collected the data over a two-week period. "By processing the data, we were able to confirm that these could also be used to acquire good-quality, high-volume wind information. On a global scale it would improve global weather forecasting, particularly for areas where wind data are relatively scarce."
Legend to Figure 7: The Met Office already uses ground-based receivers that gather wind and temperature data from aircraft in flight across the country's airspace, using ADS-B and Mode-S Enhanced Surveillance messages can be used to derive high-quality wind information, by comparing the reported ground and air speeds and directions, plus lower quality temperature data. GomX-3 was used to investigate the feasibility of doing the same from orbit.
• August 2016: The satellite continues to operate with no loss of functionality. It is a success because of the vast reconfigurability of its subsystems, which use a variety of tools (parameter system, on-orbit image upload, watchdogs, distributed network topology) to ensure mission success given tight schedule constraints. The satellite has remained active enough to necessitate the development of an optimization tool to best determine payload scheduling given geometric and target constraints, which are realized via rapid attitude manoeuvring with up to 7 target changes per orbit. 15)
- Operations summary:
The GOMX-3 3U CubeSat deployed from the ISS on October 5, 2015, and immediately started a compressed commissioning schedule for its bus and advanced payloads. After 24 hours of on-orbit, the downlink was increased to 19.2 kbit/s to take advantage of the excellent communication capability. Its helical ADS-B antenna was deployed on day 2 of on-orbit operations and began collecting thousands of aircraft positions each day. After 96 hours in orbit, the satellite entered 3-axis control. In the weeks that followed, GOMX-3 used its 1-degree pointing capability to track nadir, ram, ground stations, and geostationary satellites. In addition, it successfully demonstrated its high-speed X-band downlink capability (based on a transmitter & antenna from Syrlinks and funded by CNES) using a CNES ground station located in Kourou, French Guinea. Finally, GOMX-3 successfully demonstrated its powerful SDR (Software Defined Radio) via a spectrum analysis of L-band signals in its ISS-like orbit.
- Hence, ESA maintains an IOD (In-Orbit Demonstration) element of its technology program, which "finds flight opportunities for innovative technologies". In this way, ESA reduces risk stepwise, allowing advanced technologies to trickle up (into larger programs which have a lower risk ceiling) or across (into other demonstration missions which rely on them to test more advanced technologies).
Advanced ADCS:
Because of the advanced goals of GOMX-3, some degree of on-orbit calibration was required for the ADCS. The attitude determination (and thus also the control system) relies on a variety of sensors uses as inputs: fine and coarse sun sensors, magnetometers, and a rate gyro. Each sensor was calibrated using a variety of techniques unique to each sensor. The satellite inertia matrix and magnetic dipole moment were also empirically determined by fitting them to on-orbit data. This process took a period of about one month, as large datasets are sometimes necessary for calibration.
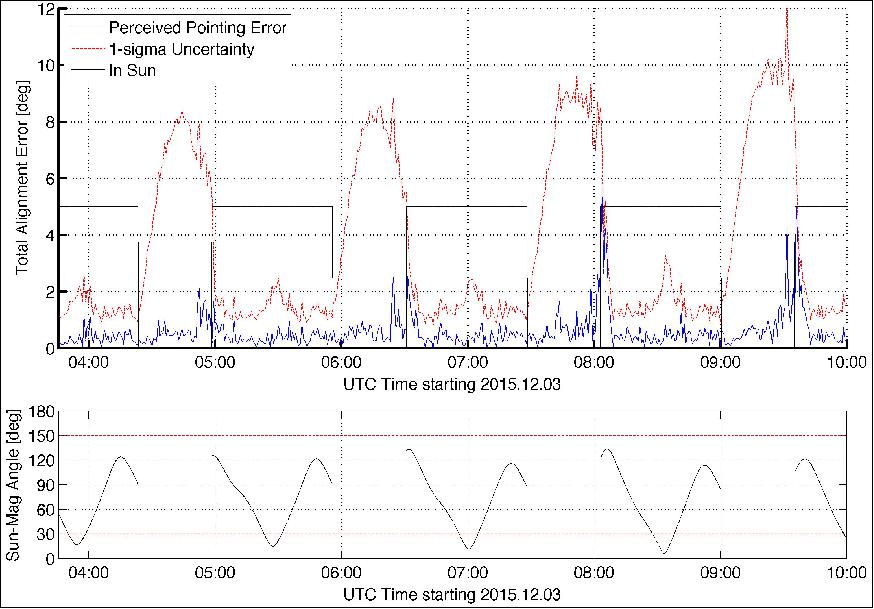
The UKF (Unscented Kalman Filter) itself also requires tuning to ensure that its estimates of attitude uncertainty are in line with reality. This was performed using standard methods. Figure 8 shows the attitude control and determination performance after calibration while flying in nadir-tracking mode. As shown, the satellite is capable of periods of 1 degree pointing (1σ) but suffers from worse performance when the orientation vectors (magnetic and sun) are close together or during the eclipse, when the sun vector is lost entirely and the magnetometer and gyro are used to propagate the satellite attitude.
The stability of the ADCS system is also of note. After proving momentum dumping via the magnetorquers, the GOMX-3 was set to nominally point its 1U face toward the local ram vector, a minimum drag configuration. The consistency of the ADCS in maintaining this attitude has extended the expected orbit lifetime from 6 months to well over 1 year, providing much more utility from the ISS orbit.
This ADCS consistency is shown in Figure 9, which shows the satellite's historical Bstar drag term, an estimate of the satellite ballistic coefficient normalized for altitude. After the satellite was set for ram pointing in early December 2015, the Bstar drag was significantly lowered. Note that the attitude is sometimes varied to allow for mission operations such as Earth object tracking or nadir-pointing.
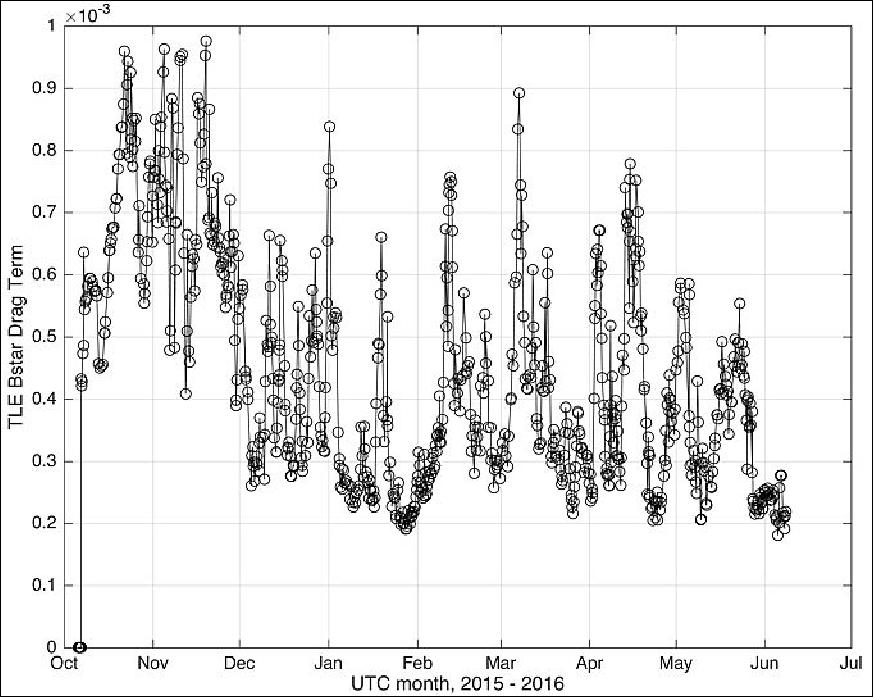
Figure 10 shows a three-week period (May to June 2016) of uninterrupted ram pointing. The onboard ADCS filters the onboard sensors to determine the perceived angular offset from the local ram vector. The mean perceived error is just 0.69º over this period.
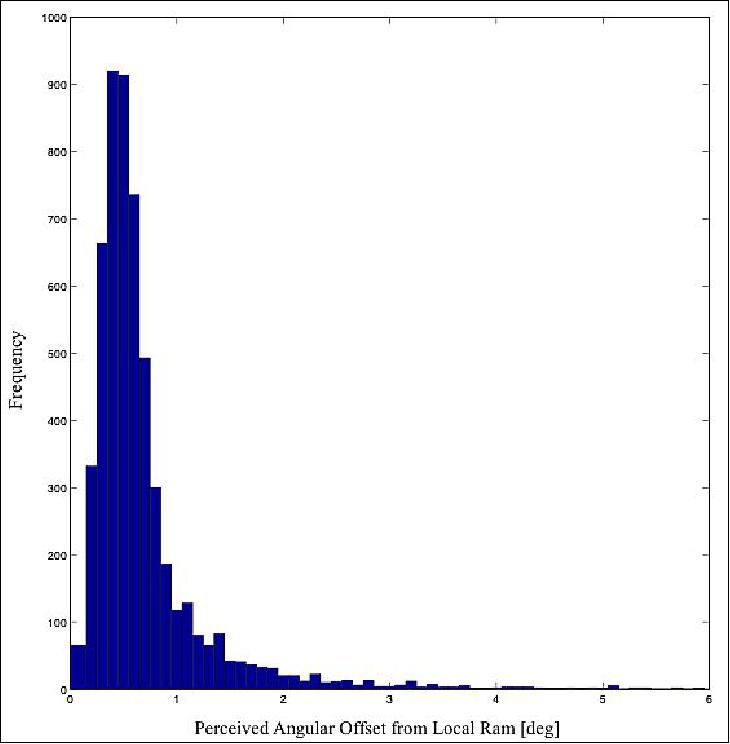
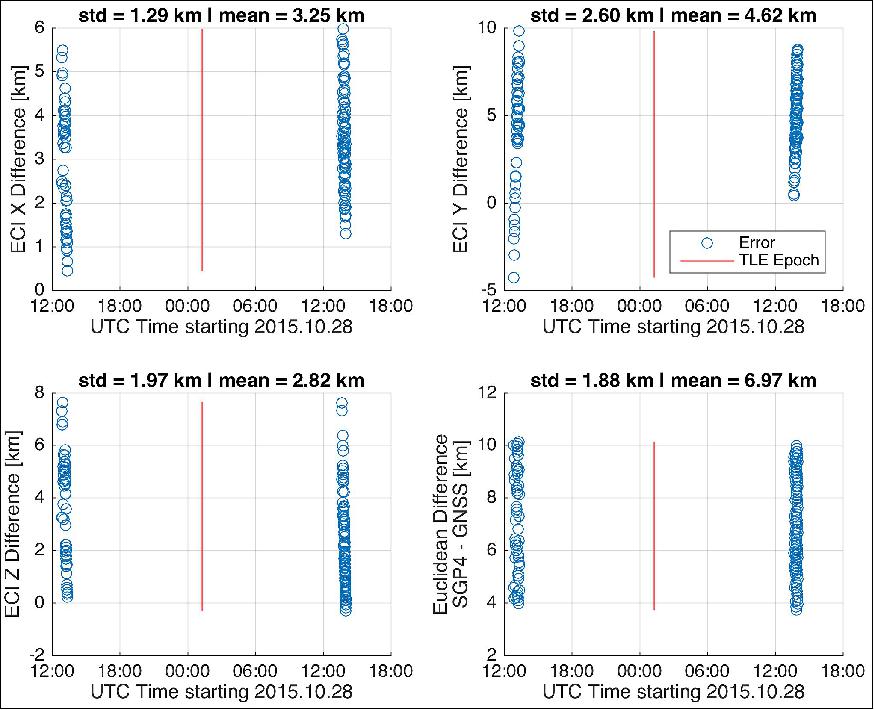
Figure 11 shows the results of the verification of the NovAtel GNSS receiver aboard GOMX-3. In both tests, the receiver maintained a lock for a period of 20 to 30 minutes. Each of these attempts was about 12 hours away from a TLE epoch which was used to determine a relative position error between the SGP4-based (Simplified General Perturbation 4) position and the receiver's reported position. As shown, the Euclidean difference between the SGP4- and GNSS-reported positions varies from 4 to 10 km with an average of 7 km. This is in good agreement with previous nanosatellites comparing TLE-to-GPS position errors.
ADS-B receiver:
After initial communication checks to the ADS-B receiver, the next step was the deployment of the helix antenna designed for data collection at 1090 MHz. Immediately after antenna deployment, the satellite recorded its first ADS-B signals. To date, the ADS-B receiver has regularly collected thousands of plane positions per day and continues to operate nominally.
NanoCom SDR:
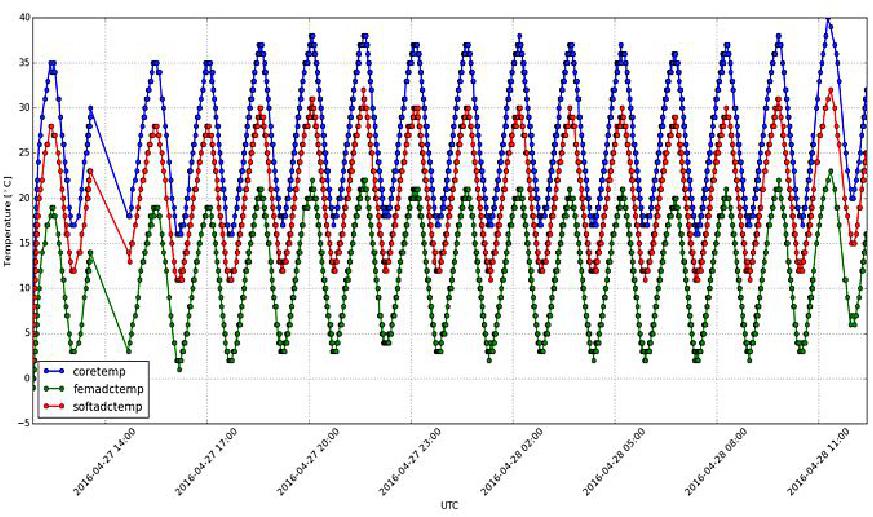
On-orbit tests began by simply powering the device on and monitoring its behaviour. As shown in Figure 12, the highly capable SDR maintains temperatures within operational bounds, even over long time spans. Next, the spectrum monitoring capabilities proceeded to monitor the UHF environment during GOMX-3 transmissions. With this sanity check complete, the system was used to record the spectrum in the L-band while tracking specific geostationary satellites. The patch antenna used by the GOMX-3 SDR is centred at 1592 MHz with a VSWR (Voltage Standing Wave Ratio) ≤3 the bandwidth of 175 MHz.
Mission Success:
Over eight months after the deployment from the ISS, GOMX-3 is still fully operational and has fulfilled all its mission requirements. It has been a complete mission success. In fact, the operations of the satellite have been consistent enough to allow for the development of an automated experiment scheduling tool. This tool maximizes the utility of the payloads while maintaining the battery charge level above a critical threshold. - The satellite now continues operations in its extended mission.
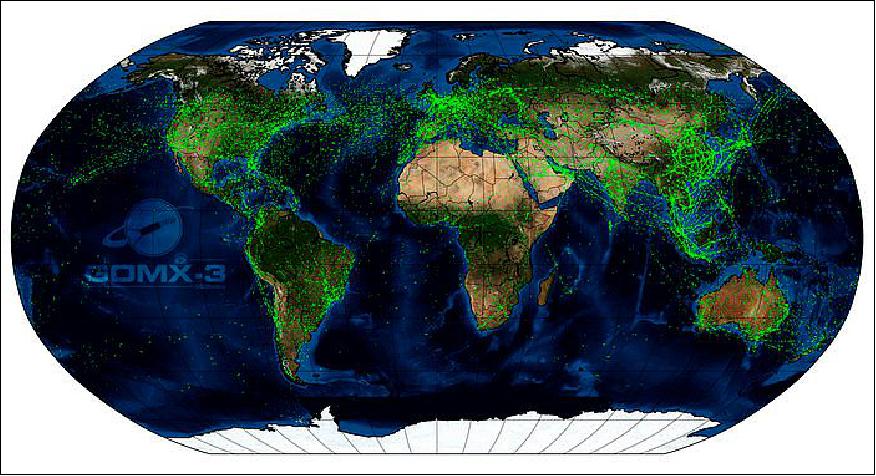
• April 7, 2016: GomX-3's distinctive helical antenna has detected millions of signals from aircraft, building a detailed map of global aviation traffic. These signals are regularly broadcast from aircraft, giving flight information such as speed, position and altitude. All aircraft entering European airspace are envisaged to provide such automatic surveillance in the coming years. Built for ESA by GomSpace in Denmark, the GomX-3 CubeSat was ejected from the International Space Station on 5 October 2015, along with a Danish student satellite. 16)
- "This 3U GomX-3 is ESA's very first technology CubeSat to fly. We were able to make it operational within only 96 hours of its release from the Space Station, with a wide variety of tests taking place during the following months," explains Roger Walker, overseeing ESA's technology CubeSat effort. "Being small and low-cost, they make ideal platforms for rapidly flight testing experimental technologies."
- GomX-3 also carries a miniaturized X-band transmitter, developed by Syrlinks in France, which has demonstrated the rapid download of data.
- In addition, the CubeSat is measuring radio signals emitted by telecom satellites to assess their overall transmission efficiency and how their signal quality changes with respect to distance from their target footprints.
- "GomX-3 has in contrast to many other CubeSats demonstrated three-axis control, so it can be pointed as required, whether downwards or upwards, to an accuracy of 3º," explains Roger. "A success in terms of planning, speed of development and technical achievements, GomX-3 has now completed its planned six-month technology demonstration mission and continues to operate normally. With its orbit naturally decaying from atmospheric drag, the satellite is predicted to reenter and burn up in September of this year." Meanwhile, GomSpace is developing a follow-up 6U CubeSat called GomX-4B, also supported by ESA, scheduled for launch in the second half of 2017.
• October 16, 2015: ESA's first technology-testing CubeSat, released last on Oct. 5, 2015, from the International Space Station, is in good health and is set to start work on its six-month mission. The project is taking its first steps towards putting its technology payloads through its paces. 18)
- Despite its small size of 10 x 10 x 30 cm, the nanosatellite precisely controls its orientation by spinning miniaturized ‘reaction wheels' at varying speeds. This precision is an important factor in the effectiveness of the mission's technology-testing payloads. One task will see GOMX-3 pointing up to detect radio signals from telecom satellites in geostationary orbit to assess their overall transmission efficiency. The processing software can be changed in flight, allowing the receiver to be reconfigured and used in extremely flexible ways, of wider interest for future ESA missions.
- The CubeSat also carries a miniaturized version of a transmitter being flown on ESA's PROBA-V minisatellite for downloading data rapidly at X-band radio frequencies. Developed by the French Syrlinks company in cooperation with France's CNES space agency, the antenna will aim at X-band ground stations in the CNES network. Once the communications link has been tested over the coming months, the transmitter will be available to fly on future nanosatellites to boost their amount of downloaded data.
- GOMX-3 also sports a receiver to detect navigation signals from aircraft. The satellite points its distinctive helical antenna to Earth and has already picked up tens of thousands of ADS-B (Automatic Dependent Surveillance–Broadcast) signals from aircraft since the day after deployment from the ISS. - ESA's 2013-launched PROBA-V first confirmed the feasibility of ADS-B detection from orbit, opening up the prospect of a global aircraft monitoring system incorporating remote regions not covered by ground-based air traffic control.
- Due to the near-ISS orbit of GOMX-3, its Aalborg, Denmark ground station has an average of 5.0 passes per day, with an average pass length of 7.4 minutes. After the first 37 minutes of communication with the on-orbit satellite, the GOMX-3 bus was confirmed to be healthy in all aspects: power, communication, and attitude determination & control. This was made possible by designing for on-orbit operation, as well as careful planning and rehearsing of critical ground passes (Ref. 15).
• Deployment of AAUSAT-5 and GOMX-3:
On October 5, 2015, at 15:55 CEST (Central European Standard Time), two ESA CubeSats, the student-built AAUSAT-5 of Aalborg University in Denmark and the professional technology demonstrator GOMX-3, were deployed from the ISS Japanese Kibo module airlock using the Kibo robotic arm.

Sensor Complement
ADS-B (Automatic Dependent Surveillance-Broadcast)
Background:
The main payload of GOMX-3 is the SDR ( Software Defined Radio) which can receive ADS-B signals from commercial aircraft. These signals represent periodic transmissions of data by an aircraft's Mode-S transponder at the 1090 MHz frequency (L-band), containing the aircraft ID, its position, altitude and intent. 19)
The ADS-B signals are used by air traffic control for areas in which a ground receiving architecture is present, but given the short range of the ADS-B signals, they are not useful over land areas with poor infrastructure and oceanic coverage is very limited. Nevertheless, ADS-B has become a significant part of air traffic control, being used in the same manner as information provided by radars. ADS-B will become mandatory for all aircraft in the near future and there is a strong desire to ultimately phase out the traditional radars and purely rely on ADS-B since the receivers are much easier to maintain.
The ADS-B system is today standard equipment on new commercial aircraft and it is estimated that 70% of the current fleet is equipped. Recent decisions taken by the various aviation authorities such as Eurocontrol (Brussels) and FAA (Federal Aviation Administration, Washington DC) mean that ADS-B will become mandatory equipment on all high-performance aircraft from 2015 and 2020, respectively.
ADS-B Receiver Payload
The ADS-B receiving payload on the GOMX-3 satellite consists of a helical antenna deployed after launch, providing a 10 dB gain at the desired 1090 MHz frequency. Furthermore, the payload is comprised of an RF front end interfacing with the antenna, an FPGA (Field Programmable Gate Array) used as a receiver and a Main Controller handling data acquired by the system and transmitting it for storage in the spacecraft memory. Signal decoding is provided by the FPGA, receiving and digitizing the ADS-B signal blocks that consist of a preamble for time synchronization and 112 bits of data sent at a symbol rate of 1 MHz.
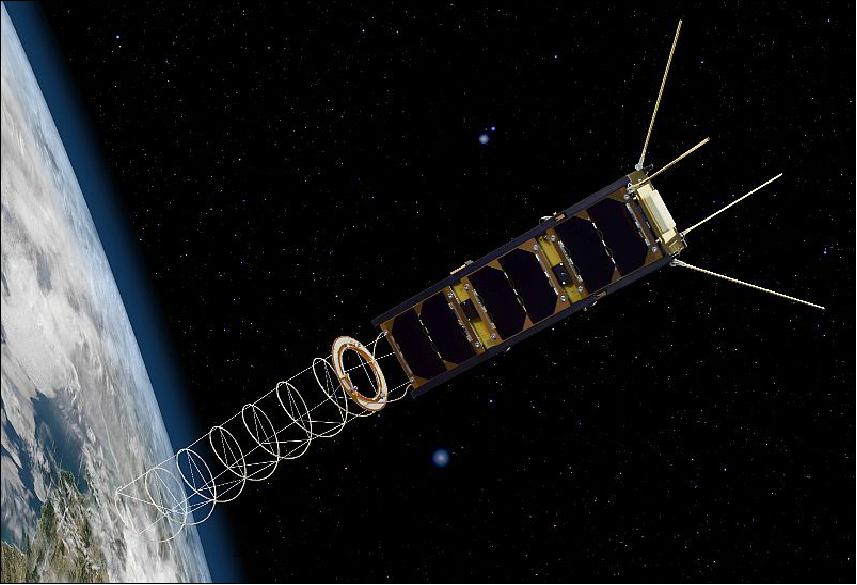
A top-level block diagram of the ADS-B receiver payload is provided in Figure 16. The antenna is a deployable helical antenna depicted in Figure 1, which provides 10 dB of gain at 1090 MHz.
Note: The ADS-B payload was also flown on GOMX-1, launched on Nov. 21, 2013. The ADS-B payload is described in the GOMX-1 file.
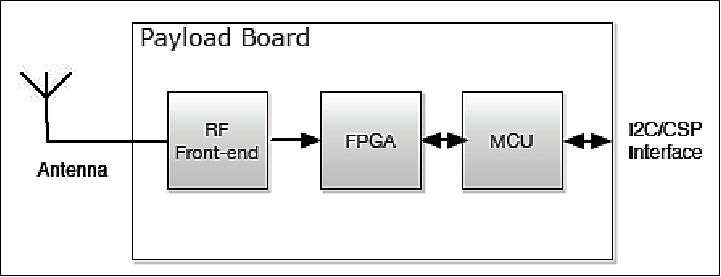
The RF front-end provides amplification and initial down-conversion of the signal. To compensate for the increased path loss due to the receiver location in space in contrast to the 80 NM nominal range of the system, the RF front-end has carefully been designed to provide the required sensitivity to be able to decode the signal.
In Figure 2, the following components are considered to be part of the payload (Ref. 15)
NanoCom ADS-B is an update of the hardware which flew aboard GOMX-1. Hardware and software updates make it more resilient to single-event upsets. GOMX-3 collects the ADS-B signals using a deployable helix antenna located on the body +Z face.
NanoCom SDR (aka SOFT) is a software-defined radio built around the Xilinx Zynq Z7030 FPGA. A single FPGA daughterboard may be augmented with up to 3 Front End Modules which may interface to multiple antennas each. GOMX-3 uses one Front End Module connected to an L-band patch antenna located on the -Z face of the satellite.
Syrlinks EWC27 is an X-band transmitter designed and manufactured by Syrlinks and housed on GOMX-3. The transmitter is capable of up to 100 Mbit bitrate, but GOMX-3 used a set bitrate of 3 Mbit for its first on-orbit test. The X-band patch antenna was also provided by Syrlinks and is located on the +Y face of the satellite. The NanoCom SDR provides the CCSDS data stream to the transmitter.
References
1) "GOMX-3 CubeSat," ESA, January 6, 2015, URL:
http://www.esa.int/spaceinimages/Images/2015/01/GOMX-3_CubeSat
2) M.A. Fernandez, G. Guillois, Y. Richard, J-L. Issler, P. Lafabrie, A. Gaboriaud, D. Evans, R. Walker, O. Koudelka, P. Romano, K. T. Hansen, D. Gerhardt,"New Game-changing on cube and nanosatellites radios," Proceedings of the 66th International Astronautical Congress (IAC 2015), Jerusalem, Israel, Oct.12-16, 2015, paper: IAC-15-B2.4.5
3) Miguel Fernandez, Anis Latiri, Thomas Dehaene, Gabrielle Michaud, Philippe Bataille, "X-band transmission evolution towards DVB-S2 for Small Satellites," Proceedings of the 30th Annual AIAA/USU SmallSat Conference, Logan UT, USA, August 6-11, 2016, paper: SSC16-VII-6, URL:
http://digitalcommons.usu.edu/cgi/viewcontent.cgi?article=3386&context=smallsat
4) Miguel Fernandez, Anis Latiri, Thomas Dehaene, Gabrielle Michaud, Philippe Bataille, Clément Dudal, Philippe Lafabrie, Alain Gaboriaud , Jean-Luc Issler , F. Rousseau, A. Ressouche, J-L. Salaun, "X-band transmission evolution towards DVB-S2 for Small Satellites," Proceedings of the 67th IAC (International Astronautical Congress), Guadalajara, Mexico, Sept. 26-30, 2016, paper: IAC-16-B4.6B,2
5) Jesper A. Larsen, David Gerhardt, Morten Bisgaard, Lars Alminde, Roger Walker, Miguel Fernandez, Jean-Luc Issler, "Rapid Results: The GOMX-3 CubeSat Path to Orbit," Proceedings of the 4S Symposium: `Small Satellite Systems and Services,' Valletta, Malta, 30 May – 3 June 2016
6) "ITU Symposium and Workshop on small satellite regulation and communication systems," Prague, Czech Republic, March 2-4, 2015, URL: http://www.itu.int/en/ITU-R
/space/workshops/2015-prague-small-sat/Presentations/GomSpace.pdf
7) "GomX-3 being built," ESA, Aug. 19, 2015, URL:
http://www.esa.int/spaceinimages/Images/2015/08/GomX-3_being_built
8) "Launch Success of H-II Transfer Vehicle Kounotori-5," JAXA Press Release, Aug. 19, 2015, URL: http://global.jaxa.jp/press/2015/08/20150819_h2bf5.html
9) Patrick Blau, "HTV-5 Cargo Overview," Spaceflight 101, URL:
http://www.spaceflight101.com/htv-5-cargo-overview.html
10) "Technology CubeSat hitch-hiker on today's HTV launch," ESA, Aug. 19, 2015, URL:
http://www.esa.int/Our_Activities/Space_Engineering_Technology
/Technology_CubeSat_hitch-hiker_on_today_s_HTV_launch
11) Helmut W. Zaglauer, Didier Alary, Lars Alminde, Jacob Nissen, Morten Jensen, Philip Plantholt, Sean Atkinson, "Demonstration of near real-time collection of aircraft ADS-B data with the GOMX-3 CubeSat," Proceedings of the 11th IAA Symposium on Small Satellites for Earth Observation, Berlin, Germany, April 24-28, 2017, paper: IAA-B11-0904
12) Note: Flightradar24 is a Swedish Internet-based service that shows real-time aircraft flight information on a map. It includes flight tracks, origins and destinations, flight numbers, aircraft types, positions, altitudes, headings and speeds. It can also show time-lapse replays of previous tracks and historical flight data by airline, aircraft, aircraft type, area or airport. It aggregates data from multiple sources but, outside of the United States, mostly from crowdsourced information gathering by volunteers with ADS-B receivers.
The data come primarily from a proprietary, crowd-sourced network of 12,000+ terrestrial ADS-B receivers hosted by private individuals and companies all over the world and tracks in total of 150,000+ flights per day. This network of ADS-B receivers is the largest in the world and in addition to ADS-B data, Flightradar24 is able to get positional data for non-ADS-B equipped aircraft through the use of Multilateration (MLAT). The ADS-B and MLAT data is merged with schedule and flight status data from airlines and airports to create a unique global flight tracking data service. - Flightradar24 continuously invests in developing its global ADS-B network and the company has a track record of bringing new technology and innovative solutions into its service.
13) "ESA CubeSat found answers blowing in the wind," ESA, Nov. 4, 2016, URL: http://m.esa.int
/Our_Activities/Space_Engineering_Technology/ESA_CubeSat_found_answers_blowing_in_the_wind
14) "GomX-3 orbit and weather data retrievals," ESA, Nov. 4, 2016, URL: http://m.esa.int/spaceinimages/Images/2016/11/GomX-3_orbit_and_weather_data_retrievals
15) David Germardt, Morten Bisgaard, Lars Almide, Roger Winkler, Miguel Angel Fernandez, Anis Latiri, Jean-Luc Issler, "GOMX-3: Mission Results from the Inaugural ESA In-Orbit Demonstration CubeSat," Proceedings of the 30th Annual AIAA/USU SmallSat Conference, Logan UT, USA, August 6-11, 2016, paper: SSC16-III-04, URL: http://digitalcommons.usu.edu/cgi/viewcontent.cgi?article=3347&context=smallsat
16) "Tiny CubeSat tracks worldwide air traffic," ESA, April 7, 2016, URL: http://www.esa.int
/Our_Activities/Space_Engineering_Technology/Tiny_CubeSat_tracks_worldwide_air_traffic
17) "Aircraft detections from GomX-3," ESA, April 7, 2016, URL: http://www.esa.int/spaceinimages/Images/2016/03/Aircraft_detections_from_GomX-3
18) "ESA's first technology nanosatellite reporting for duty," ESA, Oct. 16, 2015, URL:
http://www.esa.int/Our_Activities/Space_Engineering_Technology
/ESA_s_first_technology_nanosatellite_reporting_for_duty
19) Lars K. Alminde, Johan Christiansen, Karl Kaas Laursen, Anders Midtgaard, Morten Bisgard, Morten Jensen, Bjarke Gosvig, Alex Birklykke, Peter Koch, Yannick Le Moullec, "GomX-1: A Nano-satellite Mission to Demonstrate Improved Situational Awareness for Air Traffic Control," Proceedings of the 26th Annual AIAA/USU Conference on Small Satellites, Logan, Utah, USA, August 13-16, 2012, paper: SSC12-I-6, URL of paper: http://digitalcommons.usu.edu/cgi/viewcontent.cgi?article=1019&context=smallsat, URL of presentation: http://digitalcommons.usu.edu/cgi/viewcontent.cgi?filename=0&article=1019&context=smallsat&type=additional
The information compiled and edited in this article was provided by Herbert J. Kramer from his documentation of: "Observation of the Earth and Its Environment: Survey of Missions and Sensors" (Springer Verlag) as well as many other sources after the publication of the 4th edition in 2002. - Comments and corrections to this article are always welcome for further updates (eoportal@symbios.space).
Spacecraft Launch Mission Status Sensor Complement References Back to top