GOES-R (Geostationary Operational Environmental Satellite-R)
EO
Atmosphere
Ocean
Cloud type, amount and cloud top temperature
Geostationary Operational Environmental Satellite - R (GOES-R), designated GOES-16 after launch, is a geostationary weather monitoring satellite operated by the National Oceanic and Atmospheric Administration (NOAA) and the National Aeronautics and Space Administration (NASA). GOES-R was launched in November 2016 on an Atlas-5 launch vehicle from Cape Canaveral, Florida, USA, with a minimum operational life of 14 years.
Quick facts
Overview
| Mission type | EO |
| Agency | NASA, NOAA |
| Mission status | Operational (nominal) |
| Launch date | 19 Nov 2016 |
| Measurement domain | Atmosphere, Ocean, Land, Gravity and Magnetic Fields |
| Measurement category | Cloud type, amount and cloud top temperature, Liquid water and precipitation rate, Cloud particle properties and profile, Aerosols, Multi-purpose imagery (ocean), Radiation budget, Multi-purpose imagery (land), Surface temperature (land), Gravity, Magnetic and Geodynamic measurements, Surface temperature (ocean), Atmospheric Winds, Lightning Detection |
| Measurement detailed | Cloud top height, Precipitation Profile (liquid or solid), Ocean imagery and water leaving spectral radiance, Downward long-wave irradiance at Earth surface, Cloud cover, Cloud optical depth, Precipitation intensity at the surface (liquid or solid), Aerosol optical depth (column/profile), Cloud type, Cloud ice content (at cloud top), Cloud imagery, Cloud liquid water (column/profile), Cloud drop effective radius, Fire temperature, Fire fractional cover, Downwelling (Incoming) solar radiation at TOA, Magnetic field (scalar), Magnetic field (vector), Land surface temperature, Sea surface temperature, Precipitation index (daily cumulative), Cloud top temperature, Wind profile (horizontal), Volcanic ash, Downward short-wave irradiance at Earth surface, Total lightning density |
| Instruments | DCS (GOES-R Series), SUVI, SEISS, ABI, GLM, EXIS, Magnetometer (GOES) |
| Instrument type | Imaging multi-spectral radiometers (vis/IR), Space environment, Magnetic field, Other, Data collection, Lightning sensors |
| CEOS EO Handbook | See GOES-R (Geostationary Operational Environmental Satellite-R) summary |

Summary
Mission Capabilities
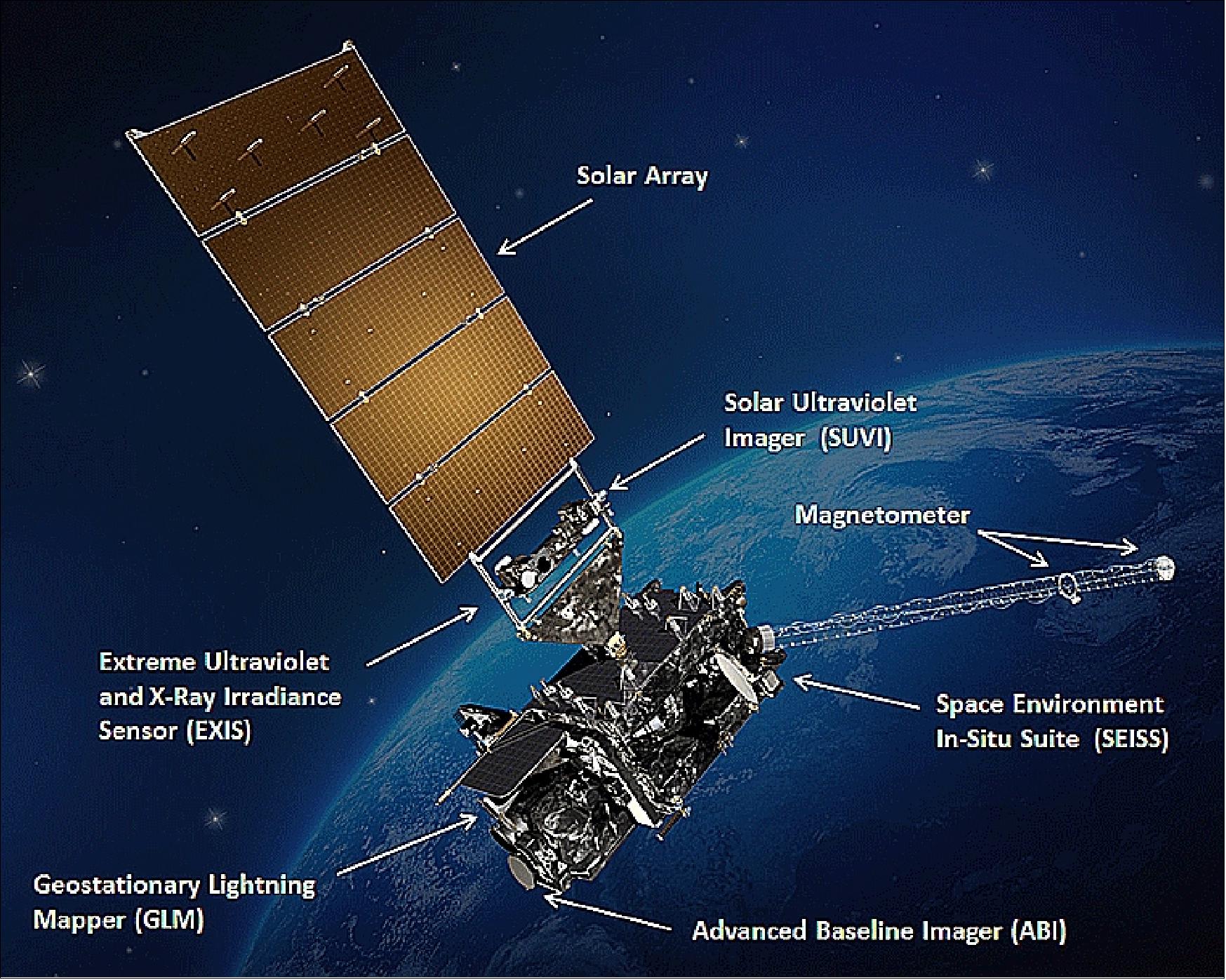
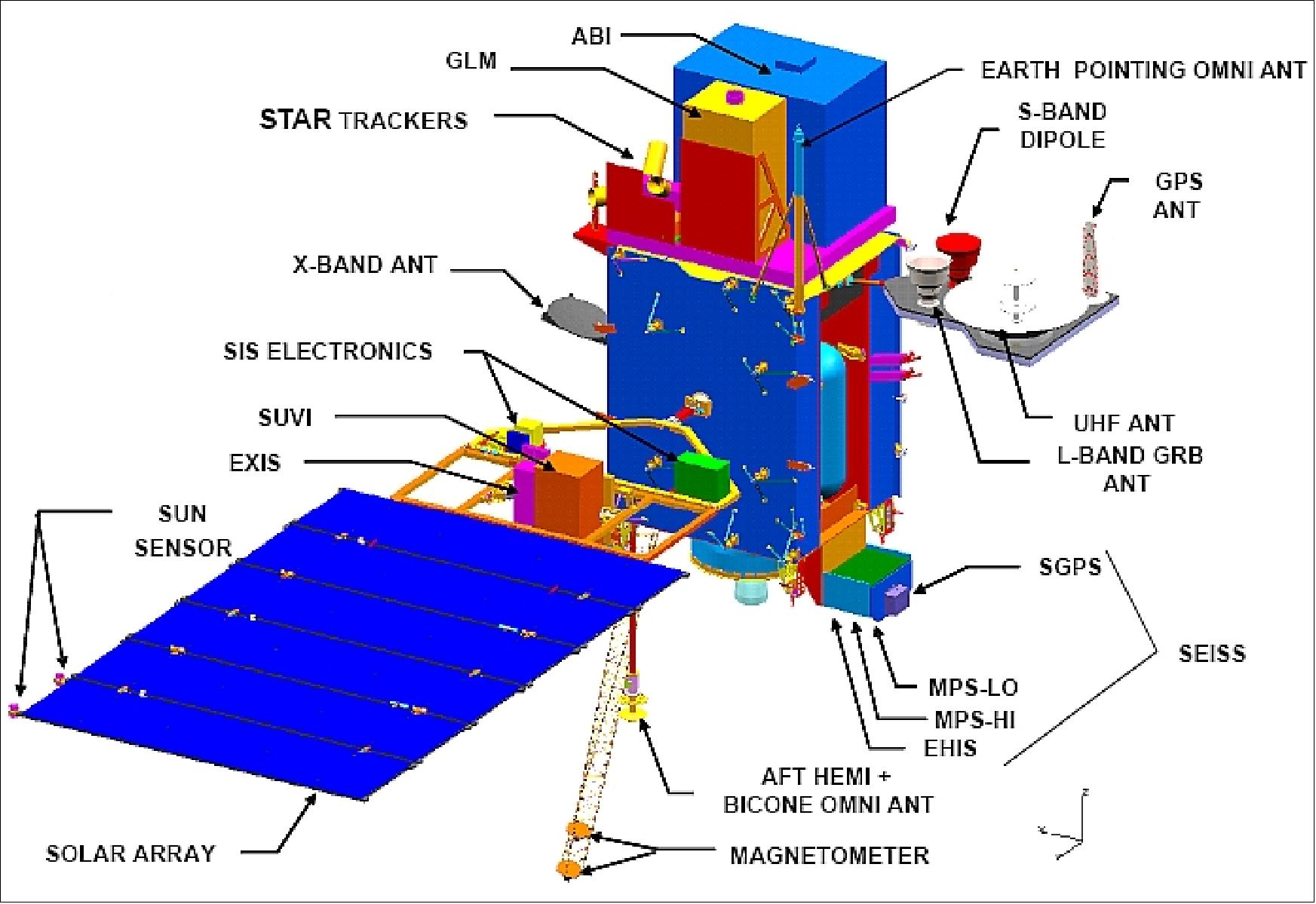
GOES-R carries six instruments, an Advanced Baseline Imager (ABI), Solar Ultraviolet Imager (SUVI), Extreme Ultraviolet and X-ray Irradiance Sensor (EXIS), Geostationary Lightning Mapper (GLM), Space Environmental In Situ Suite (SEISS) and a magnetometer (MAG).
ABI is a multispectral imager that provides high-resolution imagery and radiometric information of the Earth’s surface, in addition to atmosphere and cloud cover. Furthermore, the ABI has increased spectral resolution and faster imaging cycles when compared to the current imager. SUVI is a narrowband imager pointed at the sun that provides information on solar activity such as solar flares and its impacts on the Earth, while EXIS is a dual-disk instrument that measures ultraviolet flux, crucial for understanding how radiation affects heating in the thermosphere and creating the ionosphere. GLM is used to measure lightning activity and ice-phase precipitation, in both day and night conditions and continuously, with an overall purpose to study the electrosphere and develop improved forecast models based on close to real-time data. SEISS monitors near-Earth particles and the electromagnetic environment, which includes electrons, protons and heavy ions, and finally, MAG measures the magnetic field in the outer magnetosphere of the Earth.
Performance Specifications
ABI utilises a dual-axis radiometric imager that records data in two visual spectrum bands, and 14 infrared bands. The resolution is band-dependent, where the visible (VIS) band has a resolution of 500m at nadir, and the short wave infrared (SWIR) and medium wave infrared (MWIR) bands have resolutions 1 km and 2 km, respectively. ABI operates in two imaging modes with varying temporal resolution, where an image can be recorded every fifteen or five minutes depending on the mode, and has a data rate of 75 Mbit/s. For a full disk image, the field of view (FOV) is set at 17.76°.
GOES-R operates from GOES-EAST - a geostationary orbit at a longitude of 75° West, located above Central America and the Eastern USA.
Space and Hardware Components
The GOES-R satellite operates with ground segment capability, where data is transferred downlink to stations on the ground for processing, backup and storage. There are three active sites, in West Virginia, Maryland and Virginia.
The satellite bus used for GOES-R is a variant of the commercially available A2100 geosynchronous spacecraft bus, which has proven capabilities for precision imaging in previous missions. The SpaceWire bus was selected for onboard high-speed communications.
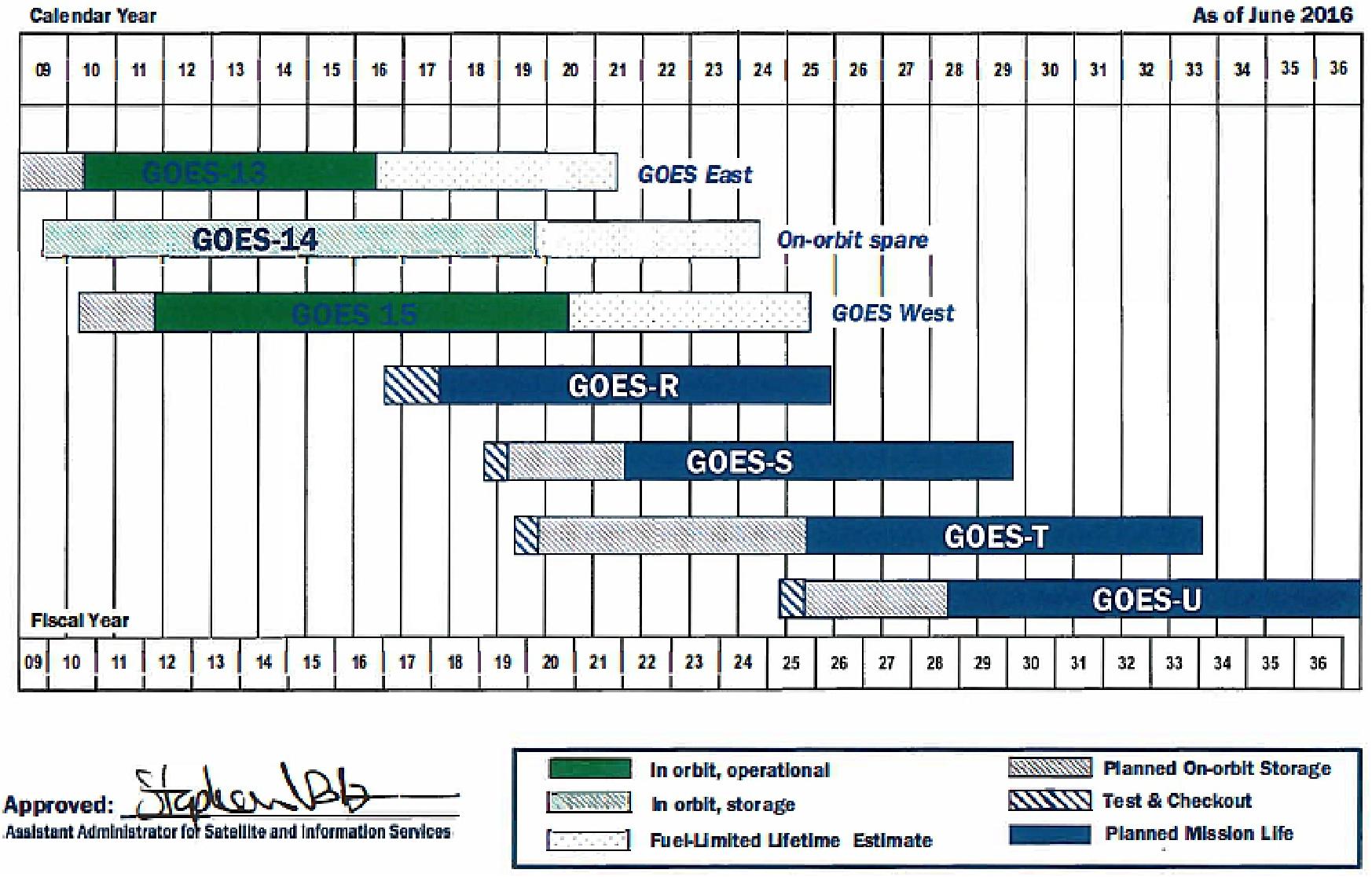
The GOES-R series comprises four missions, GOES-R, -S, -T and -U. GOES-S (GOES-17) was launched in March 2018 and operates as GOES-WEST at 137.2° West, while GOES-T (GOES-18) was launched in March 2022 and is expected to take over operations as GOES-WEST. Once launched, GOES-U is expected to become GOES-EAST. The satellites not in either operational positions (GOES-EAST or -WEST) operate as on-orbit storage and standby satellites.
GOES-R (Geostationary Operational Environmental Satellite-R) 3rd Generation Series
Space Segment Launch Mission Status Sensor Complement Ground Segment References
The next-generation (3rd) geostationary weather satellite family of NOAA, under development at NOAA and at NASA, will start with the GOES-R spacecraft and its newly defined sensor complement. Obviously, such an undertaking, truly of decadal dimension, represents a great challenge for any organization, since it involves the development of new space and ground segments, along with observation instruments, of spacecraft, new operation procedures and data processing algorithms - all on the basis of state-of-the-art technology, demanding user requirements, and available funding resources.
GOES-R is a collaborative development and acquisition effort between NOAA and NASA. The overall GOES Program is managed by NOAA of DOC (Department of Commerce), which establishes requirements, provides funding, and distributes environmental data for the United States. DOC is the approval authority for the GOES-R budget, Ground Segment Project procurement and overall program acquisition strategy. NOAA is accountable to DOC for successful GOES-R development and operational mission success. - NASA/GSFC is teaming with NOAA to manage the design and development of the spacecraft series and its sensor complement. Program activities occur at the co-located Program and Project Offices at Goddard Space Flight Center (GSFC), Greenbelt, MD.
The definition/requirements phase of the next-generation project started in 2000. The first GOES users conference followed in 2001 (May 22-24, 2001, Boulder CO). A major science objective is to provide considerably improved observation capabilities, relative to the GOES-I-M-O-P series, in four key areas: a) spatial resolution, b) spectral coverage and resolution, c) temporal refreshment rates (also detection, change diagnosis, and tracking of hurricanes), and d) radiometric sensitivity. 1) 2) 3) 4) 5) 6) 7) 8) 9) 10) 11)
The 3rd generation GOES spacecraft series will provide critical atmospheric, hydrologic, oceanic, climatic, solar, and space data. Additional capabilities include improved direct services, such as: GBR (GOES-R Re-Broadcast), S&R (Search & Rescue), DCS (Data Collection System), EMWIN (Emergency Managers Weather Information Network), and LRIT (Low Rate Information Transmission) communications.
The goals of the GOES-R mission are:
• Maintain continuous, reliable operational environmental, and storm warning systems to protect life and property
• Monitor the Earth's surface and space environmental and climate conditions
• Introduce improved atmospheric and oceanic observations and data dissemination capabilities (increased spatial, temporal and spectral resolution)
• Develop and provide new and improved applications and products for a wide range of federal agencies, state and local governments, and private users.
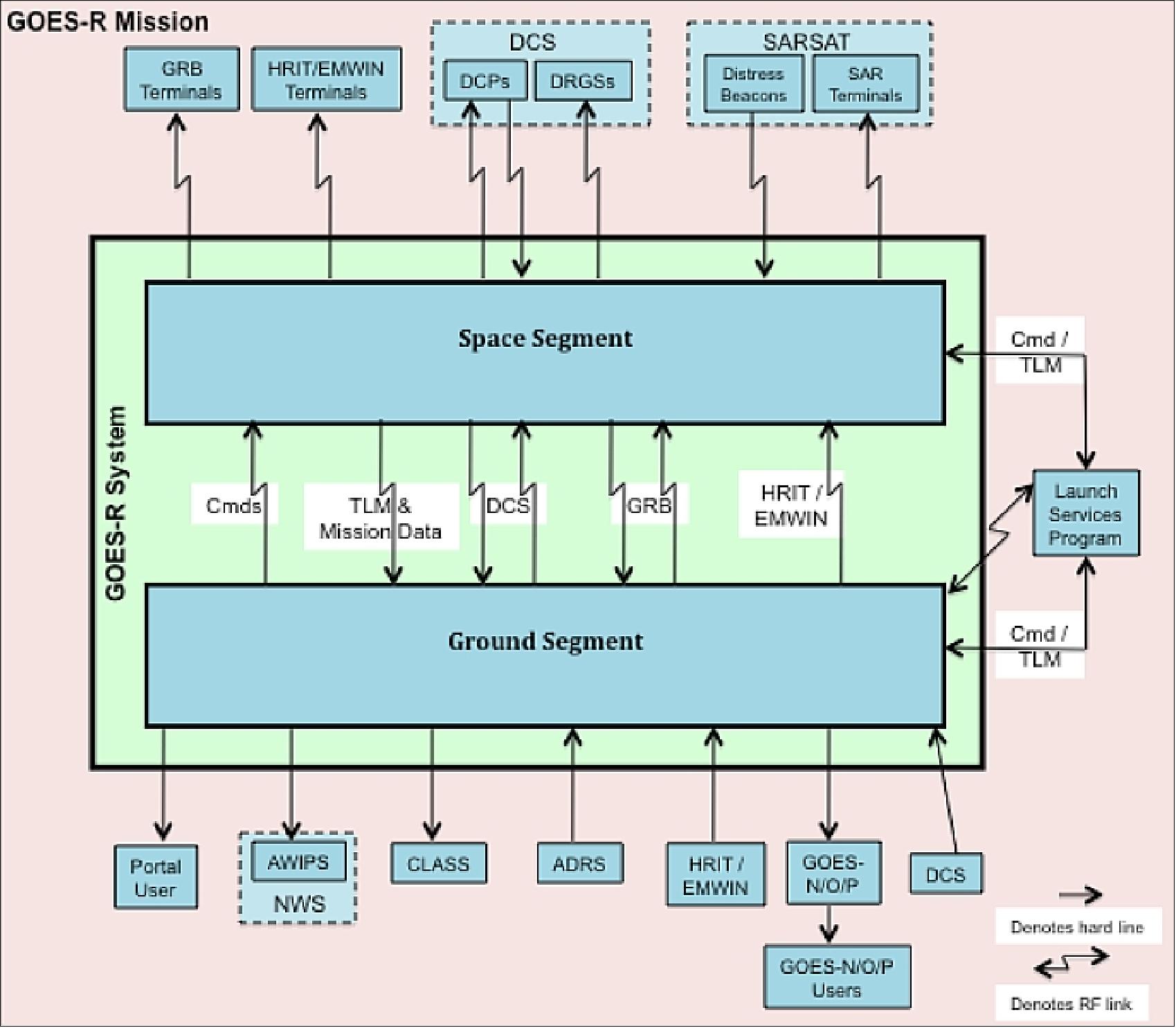
The GOES R system is planned to operate for a period of at least 14 years (design life), providing a remote sensing capability to acquire and disseminate regional environmental imagery and specialized meteorological, climatic, terrestrial, oceanographic, solar-geophysical and other data to central processing centers and distributed direct users. GOES R will operate with improved latency, full hemispheric coverage, including the periods of eclipse at the vernal equinoxes.
An overall consolidated architecture (space segment and ground segment) is considered that can evolve with time to meet at least some of the growing performance requirements of the user community in such service fields as data distribution and analysis.
Space Segment
The GOES-R space segment consists of a constellation of one or more satellites each nominally located at 75º West longitude (East location) and at 137º West longitude (West location) at geostationary altitude (~35,786 km), 0º inclination. 13)
The GOES-West location in the GOES-R series is to be 137º W instead of current 135º W -this eliminates conflicts with other satellite systems in X-band frequency at 135º W. During the on-orbit storage period, the satellites will be positioned at 105º West longitude and a Launch/Check-out position is reserved at 90º West longitude. 14) 15)

Mission orbit | GEO 75º W and 137º W longitude (and possible 105º W for reduced operations) |
Inclination | ±0.5º |
Launch vehicle | EELV medium |
Launch date | 2015 (launch of first spacecraft) |
Constellation size | 1 spacecraft cluster at each orbital slot |
System availability | > 0.82 |
Mission lifetime | Data and products until year 2030 |
Spacecraft design life | 15 years (10 operational, after 5 years on-orbit spare) |
RF communications | Collect and transmit up to 100 Mbit/s instrument payload data from each location continuously |
Rebroadcast | Continuous rebroadcast function at L-band up to 31 Mbit/s utilizing dual polarization |
Data collection, rescue | Provide improved continuing services (Search & Rescue, Data Collection, Emergency Manager’s Weather Information Network (EMWIN)) |
In December 2008, NASA, in coordination with NOAA, selected Lockheed Martin Space Systems Company of Denver to build the GOES-R series spacecraft. The contractor will design, develop and deliver the GOES-R series of spacecraft and provide pre-launch, launch and post-launch support. Lockheed will design and develop the spacecraft in its Newtown PA, Sunnyvale CA, and Denver CO facilities. 16) 17) 18)
In May 2009, NOAA and NASA presented a re-evaluation of the previous contract award resulting in a series of corrective actions. The basic contract is for two satellites with options for two additional satellites. 19)
GOES-R solution builds upon a derivative of the renowned A2100 geosynchronous spacecraft bus (a commercial-type bus with considerable space heritage) and proven precision imaging capabilities from previous remote sensing programs. The satellite dry mass (spacecraft and payloads) is estimated to be < 2800 kg; power capability > 4 kW (EOL). 20) 21)
On Nov. 9, 2012, the GOES-R Program successfully passed the Mission Critical Design Review (MCDR). 22)
C&DH (Command and Data Handling) subsystem: C&DH serves as the hub for all data received by and sent from the spacecraft. The CCSDS (Consultative Committee for Space Data Systems) recommendations for both packet telemetry and telecommand communications are being implemented.
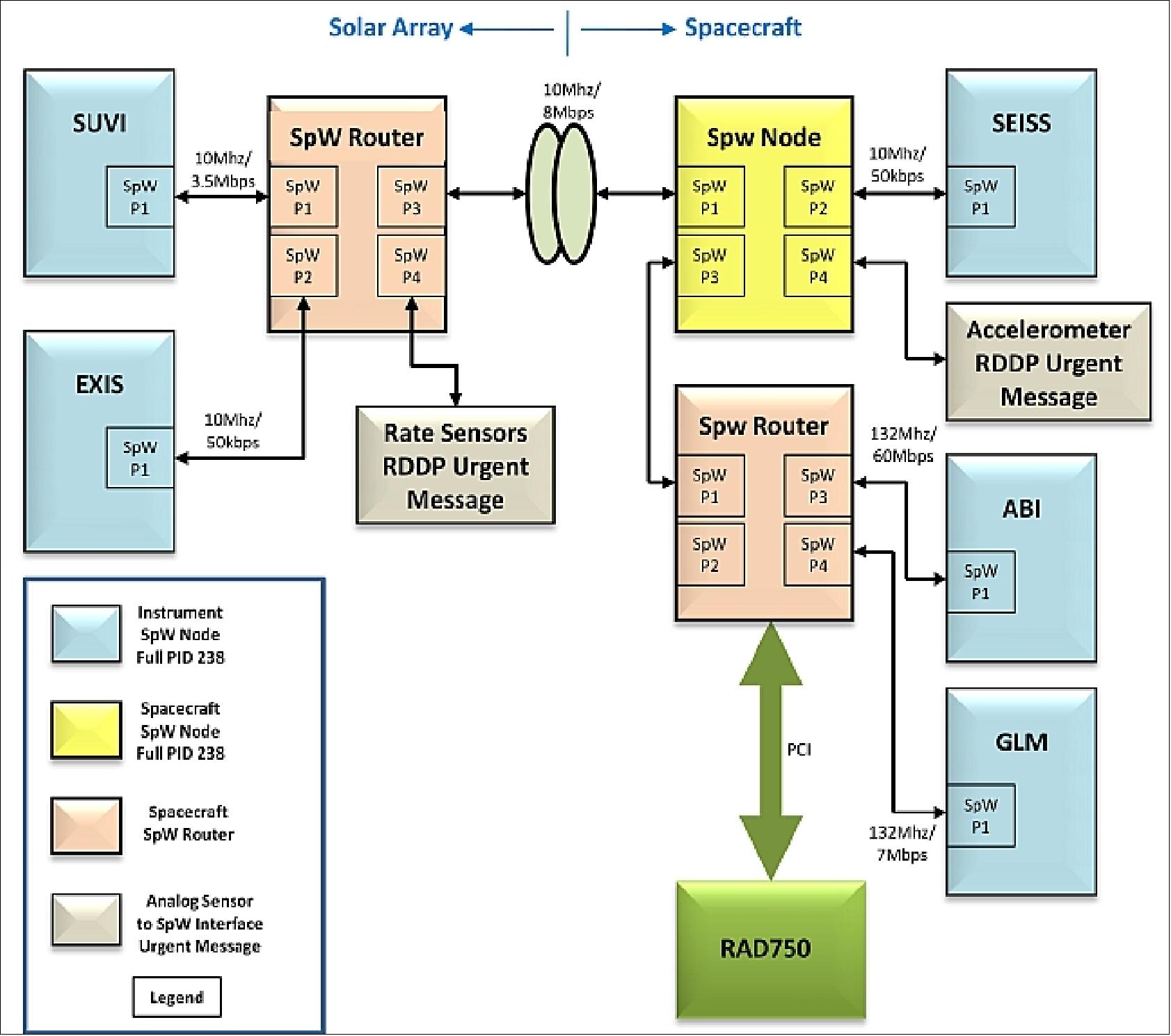
The SpaceWire bus was selected as the best solution for on-board high-speed communications. GOES-R instrument-to-spacecraft data rates are between 10 and 100 Mbit/s. Also, error detection and correction, at the source packet level, is needed. Early in the GOES-R development program, a decision was made to develop a GOES-R specific SpaceWire technology to aid in cost and risk reduction. In response to this direction reference hardware and software solutions have been fully developed and verified to be compliant with the SpaceWire standard and GOES-R Project requirements. A SpaceWire ASIC (Application Specific Integrated Circuit) was developed by BAE (British AeroSpace). 23) 24)
GOES-R project has developed a Reliable Data Delivery Protocol (GRDDP) that is based on SpaceWire capabilities for link connection and re-connection, error detection, virtual channels and routing. This protocol has been presented to and accepted by the SpaceWire Working Group and assigned a Protocol ID (PID) 238. GRDDP, also known as PID 238, does not attempt to duplicate or improve on the considerable capabilities provided by SpaceWire. This protocol builds on top of SpaceWire the ability to recover lost packets, reorder packets, and to ensure to higher level processes that packets are as error free as possible. 25)
The GOES-R requirements for PID 238 are to utilize the SpaceWire capabilities to provide a packet delivery protocol that is able to detect and recover lost packets. The protocol is also required to be flexible so that it can be adapted as needed to different host data throughput requirements and resources. PID 238 intentionally does not specify an implementation. It defines a set of capabilities, but does not require that all capabilities be implemented for all applications.
Of the 5 GOES-R instruments, 2 have implemented PID 238 in FPGAs, and the other three have implemented the protocol in software on the embedded microcontroller in the BAE SpaceWire ASIC. Each of the GOES-R instruments are implementing the SpaceWire and PID 238 interface as a point-to-point architecture. Modeling the proposed spacecraft data system has shown no changes are required in any instrument implementation including the addition of several SpaceWire routers.
The most simple instrument with very small data throughput requirements and minimal processor resources, the largest instrument with the highest data throughput requirements, and the spacecraft C&DH that interfaces to them all have implemented PID 238 to the same specification. All of the instruments as well as the spacecraft recognize a common method for detecting and recovering data link errors and lost packets.
GOES-R instrument data rates ranging from 50kb to 66MHz are easily managed by the combination of PID 238 over SpaceWire. Many parameters of PID 238 can be tuned to match the reliability requirements and a node’s ability to support the required complexity. PID 238 has proven able to adapt to those capabilities and data rates due to its inherent flexibility. PID 238 is documented and extensively tested. It is available and ready to be applied to SpaceWire applications (Ref. 25).
RF Communications
• HRIT (High Rate Information Transmission).
• LRIT (Low Rate Information Transmission). The LRIT service evolves from the current WEFAX system which provides a wide dissemination of GOES imagery and other data at the relatively low information rate of 128 kbit/s. The LRIT has a requirement to upgrade the user information rate to 256 kbit/s.
• EMWIN (Emergency Managers Weather Information Network). A service provided though a transponder onboard the GOES satellite. EMWIN is a suite of data access methods that make available a live stream of weather and other critical information to Local Emergency Managers and the Federal Emergency Management Agency (FEMA).
• GRB (GOES Re-Broadcast) services. GRB provides processed mission data to the user community. Raw data from the environmental sensors is processed into calibrated navigated data sets at the receive site. The processed data is then uplinked to GOES for broadcast to users within view of the satellite.

Development Status
• February 2, 2022: Preparations are underway for the launch of the next in a series of geostationary weather satellites that will also mark the end of a decades-long streak for one company. 28)

- At a briefing organized by the National Oceanic and Atmospheric Administration Feb. 1, representatives of several agencies and companies said they were on track for a March 1 launch of the GOES-T weather satellite on an Atlas 5 from Cape Canaveral, Florida. The spacecraft, the third of four in the GOES-R series, will replace GOES-17 at the GOES-West orbital location in geostationary orbit at 137º west.
- Scott Messer, program manager for NASA launch services at United Launch Alliance, said the company had started stacking the Atlas 5 that will launch GOES-T. The spacecraft, encapsulated within its five-meter payload fairing, is scheduled to be installed on the rocket Feb. 15 for final tests before rollout and launch.
- The launch campaign for GOES-T will be similar to its two predecessors, GOES-R and GOES-S, which also launched on the 541 version of the Atlas 5 with four solid-fuel boosters. Messer said there will be some minor adjustments in this launch to improve its accuracy and extend the life of GOES-T by reducing the amount of propellant the spacecraft itself uses to reach geostationary orbit.
- “With each successive GOES satellite, we have gone through a process of optimizing the trajectory that we fly in order to provide a better injection orbit to allow more spacecraft life,” he said. “In this case, we were able to do something that gave the spacecraft another four or five years’ worth of lifetime.”
- The GOES-T launch continues a streak for ULA and the two vehicle families it inherited when the joint venture was created more than 15 years ago. “ULA and our heritage launch vehicles, Atlas and Delta, have launched every GOES satellite that’s ever been launched,” Messer said. That dates back to the launch of GOES-A on a Delta rocket in 1975.
- That streak, though, ends with GOES-T. NASA announced in September it awarded a contract to SpaceX for the final spacecraft in the GOES-R series, GOES-U, slated for launch in April 2024 on a Falcon Heavy. ULA said it withdrew its bid because all of its remaining Atlas 5 vehicles had been assigned to other launches as the company prepares to transition to the Vulcan Centaur.
- GOES-T, which will be renamed GOES-18 after launch, will be rushed into service to replace GOES-17 because of problems with that spacecraft’s main instrument, the Advanced Baseline Imager (ABI). After two months of checkouts at 89.5 degrees west in GEO, the spacecraft will drift to the GOES-West slot for additional tests. Dan Lindsey, GOES-R program scientist at NOAA, said he expected GOES-18 to formally replace GOES-17 as the operational GOES-West satellite in early 2023.
- Larry Crawford, program manager for ABI at its manufacturer, L3Harris, said the company redesigned the instrument to avoid the blockages in its radiator by FOD (Foreign Object Debris) that the version of the instrument on GOES-17 suffered. “The hardware that we determined was the most likely cause for that FOD has been eliminated from the design,” he said. “That design has been thoroughly reviewed and extensively tested.”
• November 10. 2021: NOAA’s GOES-T, the third in the GOES-R Series of advanced weather observing and environmental monitoring satellites, arrived in Florida today to begin final preparations for an early 2022 launch. 29)
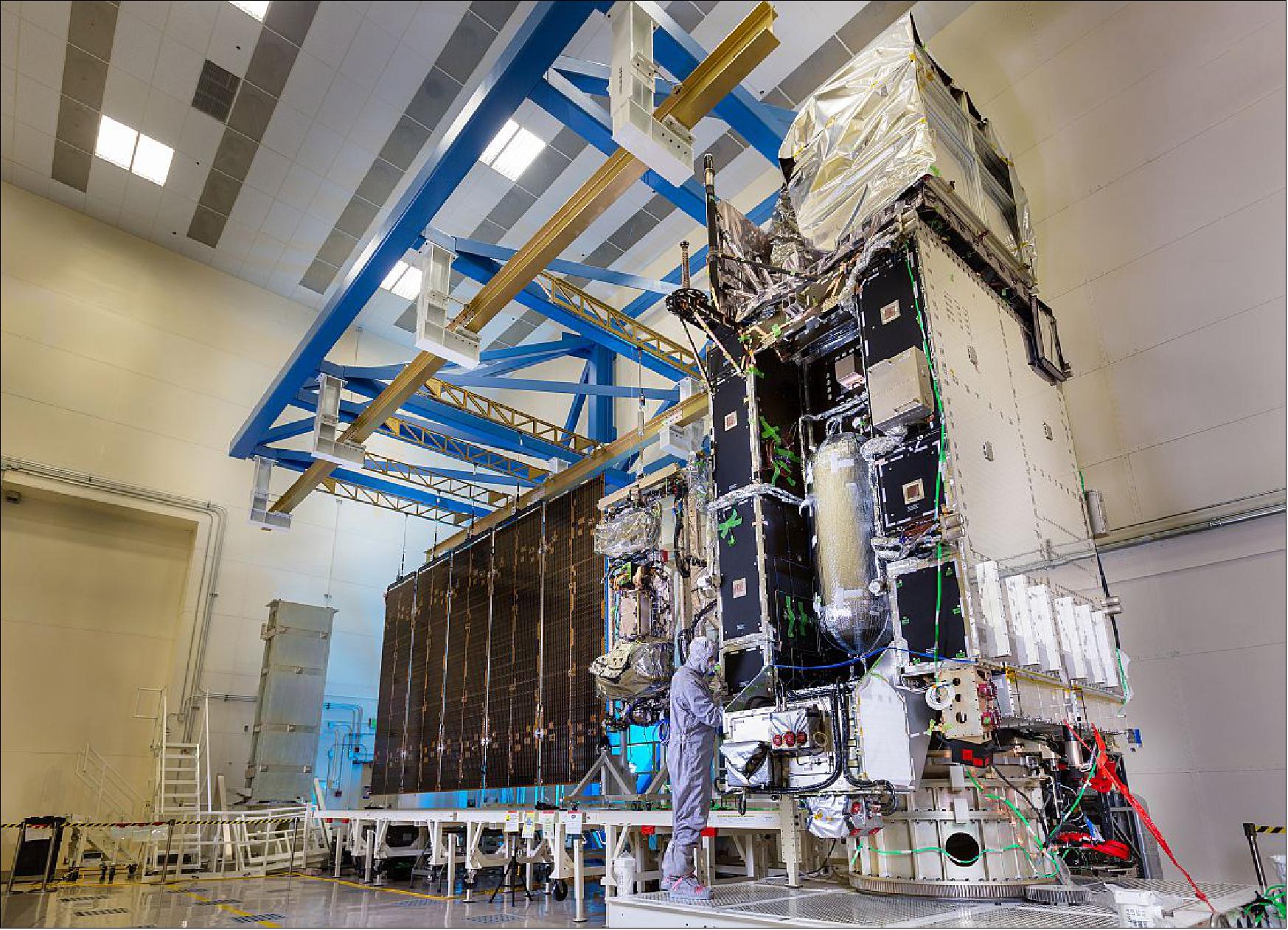
- Shipping a satellite is no small feat. GOES-T is the size of a small school bus and weighs over 6,000 pounds! (~3000 kg) The spacecraft team at Lockheed Martin in Littleton, Colorado, where GOES-T was built, carefully packed the satellite in a special shipping container that protected its sensitive instruments and functioned as a miniature clean room during transport. GOES-T was then driven to Buckley Space Force Base in Aurora, Colorado, where it hitched a ride aboard a C-5 Super Galaxy aircraft to Kennedy Space Center.
- GOES-T was then transported to a clean room at the Astrotech Space Operations spacecraft processing facility in nearby Titusville, where it was unpacked. The satellite will now undergo final preparations for an early 2022 launch from Cape Canaveral Space Force Station. GOES-T will launch aboard a United Launch Alliance Atlas V 541 rocket from Space Launch Complex-41.
- Upon reaching geostationary orbit after launch, GOES-T will be renamed GOES-18. After it completes checkout of its instruments and systems, the new satellite will go into operation as GOES West, replacing the current GOES-17. In the GOES West position, GOES-18 will watch over the U.S. West Coast, Alaska, Hawaii, Mexico, Central America, and the Pacific Ocean extending to Guam. The satellite will be ideally located to detect and monitor weather systems and environmental hazards that most affect this region of the Western Hemisphere, including wildfires, atmospheric rivers, coastal fog, dust storms, and volcanic eruptions. GOES-18 will also monitor the sun for solar eruptions and detect space weather hazards that can disrupt communications, navigation systems, and power utilities on Earth.
- NOAA oversees the GOES-R Series Program through an integrated NOAA-NASA office, operating the satellites, managing the ground system, and distributing the satellite data to users worldwide. NASA’s Goddard Space Flight Center oversees the acquisition of the GOES-R spacecraft and instruments and NASA’s Launch Services Program, based at Kennedy Space Center, launches the satellites. Lockheed Martin designs, builds, and tests the GOES-R Series satellites. L3Harris Technologies provides the main instrument payload, the Advanced Baseline Imager, along with the ground system, which includes the antenna system for data reception.

• September 10, 2021: NASA has selected Space Exploration Technologies (SpaceX) of Hawthorne, California, to provide launch services for the Geostationary Operational Environmental Satellite-U (GOES-U) mission. GOES-U will provide advanced imagery and atmospheric measurements of Earth’s weather, oceans, and environment, as well as real-time mapping of total lightning activity and improved monitoring of solar activity and space weather. 30)
- The total cost for NASA to launch GOES-U is approximately $152.5 million, which includes the launch service and other mission-related costs.
- The GOES-U mission is targeted to launch in April 2024 on a Falcon Heavy rocket from Launch Complex 39A at Kennedy Space Center in Florida. GOES-U is the fourth and final spacecraft in the GOES-R Series of geostationary weather satellites operated by the National Oceanic and Atmospheric Administration (NOAA). The GOES-R Series is a joint effort between NASA and NOAA and includes GOES-R, GOES-S, GOES-T, and GOES-U.
- NASA’s Launch Services Program at Kennedy Space Center in Florida is responsible for launch vehicle program management of the SpaceX launch service. NASA's Goddard Space Flight Center in Greenbelt, Maryland, manages the GOES-R Flight Projects office, which oversees the acquisition of the GOES-R series instruments and spacecraft. A collaborative NOAA and NASA team manages the GOES-R Program.
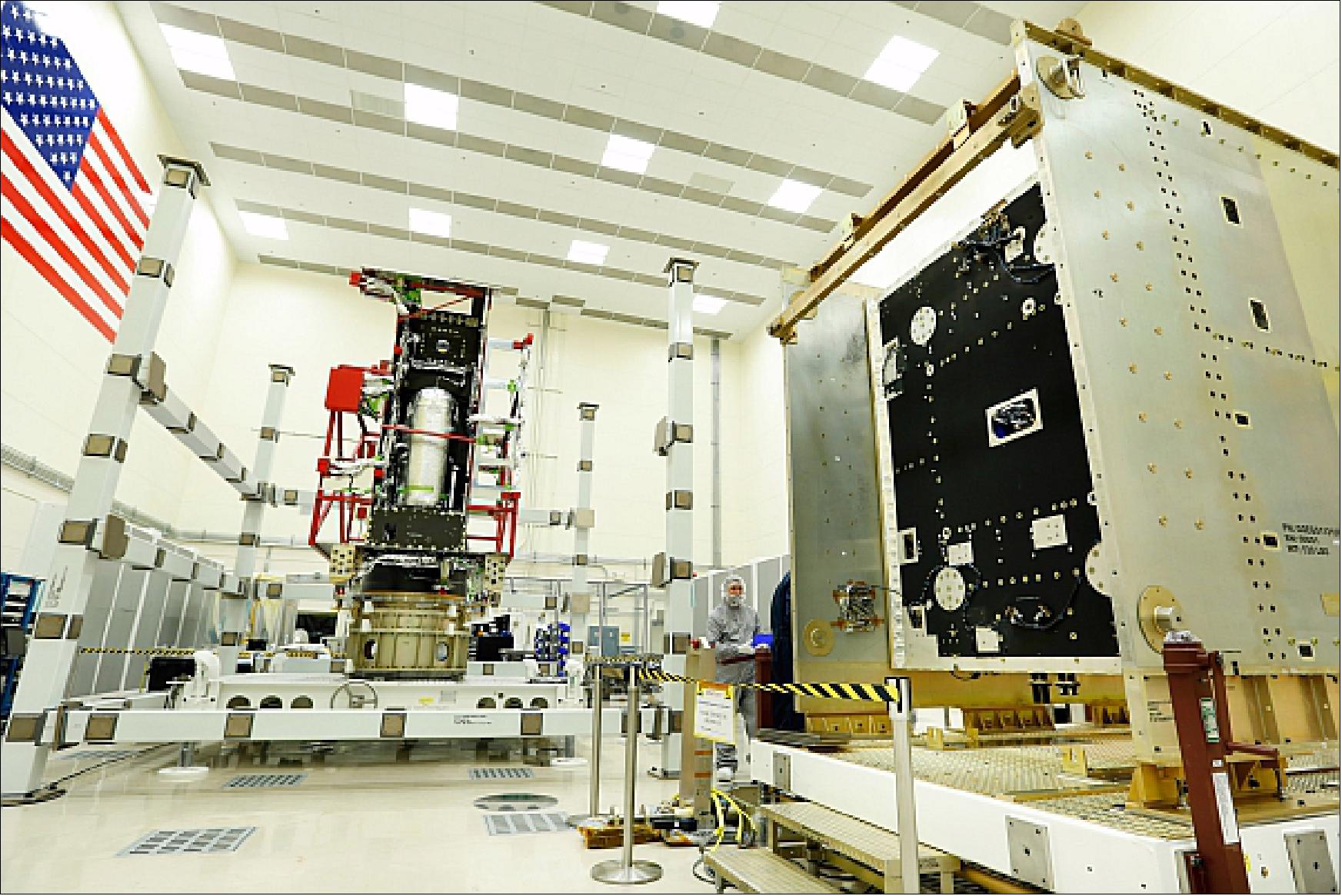
• September 29, 2020: GOES-T, the third satellite in NOAA’s GOES-R Series, is fully assembled and beginning a set of rigorous tests to ensure it can withstand the harsh conditions of launch and the space environment in which it will reside once it reaches geostationary orbit 22,236 miles above Earth. The testing is taking place at Lockheed Martin Corporation’s Littleton, Colorado, facility, where the spacecraft was built. 31)
- GOES-T is currently undergoing thermal vacuum testing in a large 29' x 65' chamber. During thermal vacuum testing, the spacecraft will experience a vast range of temperatures, with some parts reaching as high as 188º Fahrenheit (87º Celsius) and others dropping as low as minus 67º Fahrenheit (minus 55º Celsius). This testing simulates the extreme temperatures of launch and the space environment.
- After GOES-T is removed from the thermal vacuum chamber, several other tests will follow. The satellite will undergo vibration testing to simulate the stresses experienced during launch to ensure there are no structural weaknesses. Shock testing will make sure the spacecraft can withstand the shocks encountered during separation from the launch vehicle and deployment of the solar panels. Acoustics testing will use high-intensity horns to subject the satellite to extremely high sound pressure that simulates the noises created when the rocket is launched. Finally, GOES-T will undergo electromagnetic testing to ensure that the electromagnetic signals produced by satellite components do not interfere with its operation.
- At specific points during the testing, the Mission Operations Team (MOST) will conduct a set of end-to-end tests that command the spacecraft from the ground system. The end-to-end tests validate the compatibility of flight and ground hardware, software, and communications interfaces in a mission operations context. The full set of environmental, mechanical, end-to-end, and electromagnetic tests will take approximately ten months to complete.
- GOES-T faced some unique challenges to get to this point. In 2018, during post-launch testing of the GOES-17 Advanced Baseline Imager (ABI), scientists discovered an issue with the instrument’s cooling system. The loop heat pipe (LHP) subsystem, which transfers heat from the ABI electronics to the radiator, is not operating as designed. As a result, the ABI detectors can’t be maintained at their intended temperatures under specific orbital conditions, leading to a partial loss of infrared imagery at certain times.
- An investigation found the most likely cause of the thermal performance issue to be foreign object debris blocking the flow of the coolant in the loop heat pipes. As a result, an independent review team recommended changes to the design of the ABI radiator and loop heat pipes for GOES-T and GOES-U to decrease the chance of future cooling system anomalies. The new design utilizes a simpler hardware configuration that eliminates the filters that are susceptible to debris.
- In addition to changes in the ABI cooling system design, the GOES-T and GOES-U satellites will carry an upgraded magnetometer instrument from the one aboard GOES-16 and GOES-17. The magnetometer, built by NASA’s Goddard Space Flight Center and known as GMAG, is expected to provide improved performance to meet mission requirements. The magnetometer measures magnetic field variations that are associated with space weather.
- In response to COVID-19, new safety and social-distancing procedures have been put into place for personnel who remained on-site at facilities across the country, and new remote access and monitoring systems were implemented. "The safety and well-being of our people is always our top priority,” said Pam Sullivan, GOES-R System Program Director. “Our team continues to rise to the challenge and keep critical work going. I couldn’t be prouder of everyone for staying positive, being flexible and compassionate, and meeting adversity with determination and ingenuity.”
- GOES-T is scheduled to launch in December 2021 from Cape Canaveral Air Force Station in Florida. The satellite will be renamed GOES-18 once it reaches geostationary orbit, and is currently planned to reside in on-orbit storage until it transitions to operational service. It will also be available to provide backup operations for GOES-16 (GOES-East) and GOES-17 (GOES-West), which serve as NOAA’s current operational constellation. The centrally located on-orbit storage will allow GOES-18 to quickly move into position if either GOES-16 or GOES-17 experience an anomaly and to eventually transition to operations as GOES-West.
- The GOES-R Program is a four-satellite mission that includes GOES-R (GOES-16, launched in 2016), GOES-S (GOES-17, launched in 2018), GOES-T and GOES-U. GOES-U is currently scheduled for launch in 2024. The program is a collaborative effort between NOAA and NASA. NASA builds and launches the satellites for NOAA, which operates them. The satellites provide critical data for weather forecasts and warnings, detection and monitoring of environmental hazards like fire, smoke, fog, volcanic ash, and dust, and monitoring of solar activity and space weather.
• July 1, 2019: GOES-U, scheduled to launch in late 2024, won’t be an exact replica of its siblings in the GOES-R Series. That’s because GOES-U will accommodate an additional space weather instrument, the Naval Research Laboratory’s Compact Coronagraph (CCOR). CCOR recently completed its Critical Design Review, which affirmed that the design meets requirements and is ready to proceed with full-scale fabrication, assembly, integration and test. CCOR will image the solar corona (the outer layer of the sun’s atmosphere) and help detect and characterize CMEs (Coronal Mass Ejections). 32)
- CCOR will provide critical space weather measurements for the NOAA SPWC (Space Weather Prediction Center). CCOR will image the solar corona (the outer layer of the sun’s atmosphere) and help detect and characterize CMEs. CMEs are large expulsions of plasma and accompanying magnetic field from the corona. They can be remotely detected with white light imagery of the upper solar corona and CCOR is designed to capture this white light imagery. Sequences of CME images can be used to determine size, velocity, and density of CMEs. CME imagery is currently the only source of 1+ day watches of impending geomagnetic storm conditions.
- Geomagnetic storms are major disturbances of Earth’s magnetosphere caused by shock waves in the solar wind. Geomagnetic storms are the costliest type of space weather events as they can cause widespread damage to power grids, satellites, and communication and navigation systems. CMEs are the primary cause of geomagnetic storms.
- Currently, CME imagery at the Earth-sun line is provided by the Large Angle and Spectrometric Coronagraph (LASCO) instrument on board the European Space Agency (ESA)/NASA Solar and Heliospheric Observatory (SOHO) satellite, launched in 1995. As part of NOAA’s Space Weather Follow-On Program, CCOR was developed at the Naval Research Laboratory to ensure continuity of critical CME imagery. The first CCOR instrument will fly on GOES-U and subsequent CCORs will fly on other missions. CCOR-1 was optimized for geostationary orbit and for GOES-U interfaces.
- CCOR-1 will reside on GOES-U’s Solar Pointing Platform, along with the Solar Ultraviolet Imager (SUVI) and Extreme Ultraviolet and X-ray Irradiance Sensors (EXIS). CCOR was designed to meet NOAA’s observational requirements. CCOR will deliver imagery within 30 minutes of acquisition, compared to up to 8 hours from LASCO. CCOR will capture at least two images of each CME and will be capable of operating during intense solar storms and flares. The addition of CCOR to GOES-U will enhance NOAA’s space weather observational capabilities and improve forecasts.
• April-June 2019: GOES-T has a new launch date. The NOAA/NASA Agency Program Management Council approved a new launch commitment date in May and the program is planning for a December 2021 launch. Design changes to the ABI loop heat pipes to address thermal control issues detected on GOES-16 and -17, and parts issues with the Geostationary Lightning Mapper (GLM) required the GOES-R Program to re-plan the GOES-T schedule. The delay does not impact the overall availability of imaging from geostationary orbit; the operational satellites within NOAA’s geostationary constellation – GOES-17 as GOES West, GOES-16 as GOES East, and GOES-14 as the on-orbit spare – continue to deliver key Earth and space weather observations for the nation. The delay also does not increase the risk of a gap in the constellation. GOES-T, when it is launched, is planned to go into on-orbit storage and thus the delay only affects the length of the storage time and not its operational service. 33)
• January 25, 2018: Top officials from NOAA, NASA and the California Department of Forestry and Fire Protection will hold a media teleconference to discuss how NOAA’s GOES-S, the second in a series of next-generation geostationary weather satellites, will help provide faster, more accurate data for tracking lightning, storm systems, wildfires, dense fog and other hazards that threaten the western U.S., Hawaii and Alaska. 34)

• December 9, 2017: NOAA’s GOES-S satellite arrived safely at NASA's Kennedy Space Center Shuttle Landing Facility, Florida, to prepare for its launch planned for March 1, 2018. GOES-S was shipped from Lockheed Martin Space Systems, Littleton, Colorado, on Dec. 4 aboard a U.S. Air Force C-5M Super Galaxy cargo transport. 35)
- After its arrival, the GOES-S spacecraft was pulled from its shipping container, and is now undergoing additional testing and preparation for encapsulation on top of the rocket that will take it to its geostationary orbit of 35,786 km above Earth.
- “This is a major milestone for the GOES-S team. GOES-16, its sister satellite, is about to become operational and is proving to be a game-changer for weather forecasting and environmental hazard assessment,” said Tim Walsh, acting system program director for the GOES-R Series Program at NASA's Goddard Space Flight Center in Greenbelt, Maryland. “We are excited to get GOES-S into orbit and extend the area covered by this revolutionary new technology.”
- GOES-S is scheduled to launch aboard an Atlas V 541 rocket from Cape Canaveral Air Force Station in Florida. GOES-S will have a mass of ~4,990 kg at launch.
- GOES-S is the second satellite in NOAA’s GOES (Geostationary Operational Environmental Satellites) series, which includes GOES-R, GOES-S, GOES-T and GOES-U. GOES satellites are designated with a letter prior to launch and a number once they achieve geostationary orbit. GOES-R, the first satellite in the series, launched in November 2016 and is now GOES-16. GOES-16 will take its place as NOAA’s GOES-East satellite later this month, keeping an eye on the continental United States and the Atlantic Ocean.
- GOES-S will be designated GOES-17 upon reaching geostationary orbit. After a period of on-orbit test and checkout, GOES-17 will be operational as GOES-West, providing coverage of the western U.S., Alaska, Hawaii and the Pacific Ocean. An operational GOES-17 will give the Western Hemisphere two next-generation geostationary environmental satellites. Together, GOES-16 and GOES-17 will observe Earth from the west coast of Africa all the way to Guam.
- Like the other satellites in the series, GOES-S carries a suite of sophisticated Earth-sensing, lightning-detecting, solar imaging and space weather monitoring instruments. The advanced technology on board GOES-S will provide critical data and imagery in near-realtime on severe weather events such as thunderstorms, tornadoes, hurricanes and flash floods, as well as hazards like fog, aerosols, dust storms, volcanic eruptions and forest fires.
- The GOES-R Series is a collaborative acquisition and development effort between NOAA and NASA to develop, launch and operate the satellites. NOAA manages the GOES satellites while NASA oversees the acquisition of the spacecraft and instruments in addition to the management of the launch service through NASA’s Launch Services Program based at the agency's Kennedy Space Center in Florida.

• August 3, 2017: Progress continues on the development of NOAA's GOES-S and GOES-T spacecraft that will follow the successful launch of GOES-16 last November. The GOES-S satellite is fully integrated and is currently undergoing its final functional testing to confirm it successfully passed mechanical and thermal environmental testing. Advancement has also been made in the assembly of the third satellite of the GOES-R series, GOES-T. Five of its instruments were delivered to the Lockheed Martin facility in Littleton, Colorado. The majority of the spacecraft avionics have been integrated to the GOES-T system module and functional testing is underway. 36)
• Dec. 20, 2016: Lockheed Martin has completed assembly of NOAA's GOES-S weather satellite and is now beginning critical mechanical and environmental testing of the spacecraft. GOES-S is the second of four next-generation geostationary weather satellites called the GOES-R series, and will provide a major improvement in our nation's weather observation capabilities leading to more accurate and timely forecasts, watches and warnings. 37)
- The GOES-S satellite is now undergoing environmental testing to simulate the conditions of launch and the extreme environment the satellite will experience in space. It recently completed a reverberant acoustics test and sine vibration test, both designed to expose the satellite to the sound and vibrations of a launch on a United Launch Alliance Atlas V 541 rocket.
- "Mechanical and environmental testing is an important time for the program," said Tim Gasparrini, vice president and GOES-R Series program manager at Lockheed Martin Space Systems. "This period validates the satellite's overall design, assembly workmanship, and survivability during launch and on-orbit operation in the cold vacuum of space."
• Oct./Nov. 2016: The impact of deadly Cat 4 Hurricane Matthew on the Florida Space Coast on October 7, forced the closure of the vital Cape Canaveral Air Force Station (CCAFS) and the KSC (Kennedy Space Center) launch and processing vital facilities that ultimately resulted in a two week launch delay due to storm related effects and facilities damage.
- The launch of GOES-R is being rescheduled from November 16, 2016. The postponement was caused by the same minor Atlas V booster issue discovered on ULA's WorldView-4 mission scheduled to launch from Vandenberg Air Force Base. The team is actively working towards a resolution. NOAA will provide an update on a new launch date once it is established.
- Liftoff of the NASA/NOAA GOES-R weather satellite atop a United Launch Alliance (ULA) Atlas V rocket is now scheduled for Nov. 19, 2016. 38)
• Sept. 27, 2016: The fourth ABI (Advanced Baseline Imager) of Harris Corporation has completed a pre-ship review with NOAA (National Oceanic and Atmospheric Administration) and NASA. The instrument now is complete and will be ready for future integration onto the GOES-U (Geostationary Operational Environmental Satellite – U Series) spacecraft, which is part of NOAA’s next-generation weather satellite series. 39)
- ABI is the world’s most advanced geostationary weather instrument. It captures continuous images of Earth – scanning the entire globe in five minutes versus 26 minutes with the currently operational GOES satellites. For rapidly changing events like thunderstorms, hurricanes, or fires, ABI can take images as often as every 30 seconds. ABI also will provide images of conditions current GOES satellites cannot including dust, sea ice, volcanic ash, fog, clouds, water vapor, vegetation, winds and carbon dioxide.
- An international version of ABI is operational over Japan on board the Himawari-8 satellite, where it has tracked storms like Typhoons Nepartak and Soudelor. Harris has built seven ABIs: four for the United States, two for Japan, and one for South Korea. Harris also built the ground system for NOAA’s GOES-R series of satellites, which will command and control the satellites and all instruments on board, and process 60 times more data than today’s GOES satellites. The ground system will make it possible for meteorologists to receive critical weather data in 30 seconds by using a customized high-speed processing infrastructure designed to reduce information bottlenecks caused by the high data volume.
• August 26, 2016: NOAA's newest weather satellite, GOES-R, left its Colorado home where it was built and is now in Florida where it will undergo preparations for a Nov. 4 launch. On Aug. 22, Lockheed Martin shipped the next-generation satellite aboard an Air Force C-5M Super Galaxy cargo transport plane to its Astrotech Space Operations facility in Titusville, Florida. 40) 41) 42)

• May 11, 2016: The GOES-R team has begun a series of important rehearsals to simulate specific steps in the deployment of the satellite, such as spacecraft separation. Mission rehearsals use a satellite simulator to train operations personnel and test the readiness of the ground system. (The ground system is a global network of receiving stations linked to NOAA which distributes the satellite data and derived products to users worldwide). 43)
- These simulations help test different parts of launch, like orbit raising, post-separation events, solar array deployment, and propulsion system readiness. They simulate both nominal (normal) and contingency operations and are conducted at the NOAA Satellite Operations Facility (NSOF) in Suitland, Maryland. “Mission rehearsals are just that. They are practice for the main event, in this case, the launch of the GOES-R satellite,” said GOES-R Series Program Director, Greg Mandt. “By stepping through the engineering needed to operate the satellite, from the launch sequence to the operations of our ground system, we are ensuring our teams are prepared for launch across the board.”
- To date, GOES-R has completed two of six planned mission rehearsals. Four additional mission rehearsals will take place in the coming months and will simulate critical post-launch events like spacecraft separation from the launch vehicle, instrument activations and the magnetometer boom deployment.
• January 8, 2016: As NOAA's GOES-R satellite goes through mechanical testing in preparation for launch in October 2016, the remaining satellites in the series (GOES-S, T, and U) are also making significant progress. 44)
- All GOES-S instruments have been delivered for integration with the satellite and SUVI and EXIS are already installed on the sun-pointing platform. Significant progress has been made on the GOES-S spacecraft itself. Integration and test of the system module, the “brain” of the satellite, is complete. The “body” of the satellite, the core module comprising a majority of the structure and propulsion systems, was delivered in October. These modules were mated to form the spacecraft in late December.
• Nov. 5, 2015: The GOES-R Flight Operations Review (FOR) was held November 2–5, 2015 at the at the NOAA Satellite Operations Facility in Suitland, Maryland. The FOR was a milestone review in which the program presented its mission operations activities to an independent review team to demonstrate that compliance with all requirements have been verified and are able to execute all phases and modes of mission operations, data processing, and analysis. All criteria were rated "green" by the review board, reflecting the hard work the GOES-R team has put in to get this nationally important system ready for operations. 45)
• September 2015: The SUVI (Solar UV Imager) was the first GOES-S instrument to be delivered for integration with the satellite. SUVI was successfully installed on the GOES-S solar-pointing platform in September. Also in September, the EXIS (Extreme ultraviolet and X-ray Irradiance Sensors), ABI (Advanced Baseline Imager), and the SEISS instruments that will fly aboard GOES-S were delivered for integration.
• August 2015: Thermal vacuum testing of the GOES-R satellite, which began on July 1, concluded on August 24. During thermal vacuum testing, the satellite was subjected to extreme temperatures to simulate the harsh conditions of launch and the space environment. During the testing, the satellite experienced a vast range of temperatures, with some parts reaching 87ºC and others dropping as low as -55ºC.
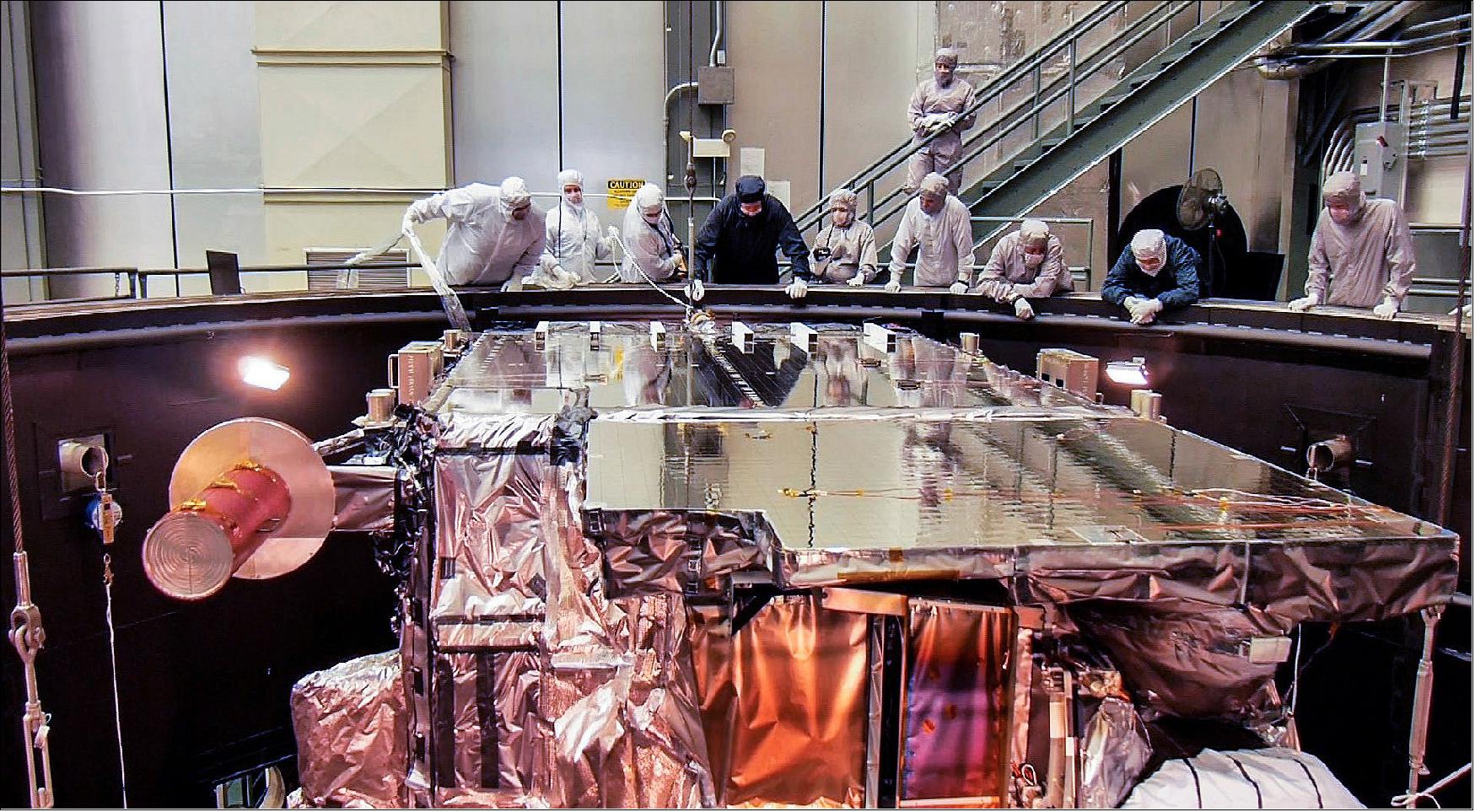
• June 3, 2015: Lockheed Martin has completed assembly of NOAA’s GOES-R weather satellite and is now beginning critical testing of the spacecraft. The first of four next-generation geostationary weather satellites, GOES-R will provide a major improvement in quality, quantity and timeliness of weather data collected over the current GOES (Geostationary Operation Environmental Satellite) system that monitors weather over North America. 46)
• May 21, 2015: The GOES-R satellite, slated to launch in 2016, is ready for environmental testing. Environmental testing simulates the harsh conditions of launch and the space environment once the satellite is in orbit. The GOES-R satellite and its instruments will undergo a variety of rigorous tests which includes subjecting the satellite to vibration, acoustics and temperature testing as part of this process. 47)
- The environmental testing will take place at Lockheed Martin Corporation’s Littleton, Colorado, facility where the spacecraft is being built. The satellite will be placed inside a large (8.8 m x 19.8 m) vacuum chamber, where it will remain through late summer. During the thermal vacuum test, the satellite is exposed to the extreme hot and cold temperatures it will experience in space as it orbits the Earth with temperatures ranging from -15 ºC to 50 º Celsius. The satellite will also undergo vibration testing to simulate the experience of launching into space aboard a rocket, and electromagnetic testing to ensure it is properly protected from electromagnetic phenomena in space, like solar flares.
- “The start of the environmental testing period is a critically important time for the spacecraft,” said GOES-R Series Program Director, Greg Mandt. “This milestone marks the shift from the development and integration of the satellite to the final testing phases that will prepare the satellite for the rigors of space before its delivery to the launch location later this year.”
• Jan. 12, 2015: All six instruments that will fly on the NOAA’s Geostationary Operational Satellite – R (GOES-R) satellite have now completed integration onto the spacecraft. The instruments are: ABI, GLM, SEISS, EXIS, SUVI and MAG. Together, these instruments will offer significant improvements for the observation of both terrestrial weather and space weather that impact life on Earth. The completion of the instruments integration marks another critical step in the development of the GOES-R satellite, scheduled for launch in March 2016. 48)
• Oct. 9, 2014: The GLM (Geostationary Lightning Mapper) instrument for GOES-R completed development and testing and is now ready for integration with the spacecraft. 49)
• In September 2014, a team of technicians and engineers at Lockheed Martin has successfully mated together the large system and propulsion modules of the first GOES-R series weather satellite at the company’s Space Systems facilities in Littleton near Denver, Colorado. The system module of the A2100-based satellite houses more than 70 electronics boxes that comprise the three major electrical subsystems; command and data handling, communication, and electrical power. The propulsion core contains the integrated propulsion system and serves as the structural backbone of the satellite. 50) 51)
- With the core spacecraft completed, the team will begin installing the six weather and solar-monitoring instruments onto the satellite. All six GOES-R instruments were delivered to begin spacecraft integration. They are: ABI (Advanced Baseline Imager), EXIS (Extreme X-ray Irradiance Sensors), GLM (Geostationary Lightning Mapper), SEISS (Space Environment In-situ Suite), SUVI (Solar Ultraviolet Imager ), and the Magnetometer. Two instruments, EXIS and SUVI were installed on the sun-pointing platform of the spacecraft. 52)
• July 30, 2014: The GOES-R Series Program SIR (System Integration Review) was successfully held July 22–24, 2014 at Lockheed Martin Space Systems Corporation in Littleton, CO. The SIR determines if the flight and ground segments and components are available and ready to be integrated into the overall system. It also reviews whether the facilities, support personnel and integration plans and procedures are ready for integration. 53)
• May 2014: Propulsion Core Module delivered to Lockheed Martin, Denver. With the delivery of the system module and the propulsion module, the weather satellite will now undergo the important integration and testing phase so that it can be available in late 2015. 54) 55)
In addition to four satellites in the series (R, S, T and U), Lockheed Martin is also designing and building the SUVI (Solar Ultraviolet Imager) and the GLM (Geostationary Lightning Mapper) instruments that will each fly aboard each of the spacecraft. The SUVI was recently installed on the GOES-R satellite’s sun pointing platform.
• April 2014: The GOES-R spacecraft system module Pre-Shipment Review was held April 11 at Lockheed Martin’s facility in Newtown, PA. The system module was shipped on April 14 and arrived at Denver International Airport via C-17 large military transport aircraft late on April 15. It then safely completed its journey to Lockheed Martin’s Littleton, CO, facility by convoy on April 16.
• May 2012: GOES-R Weather Satellite Passes CDR (Critical Design Review). The week-long review included a series of comprehensive presentations from each of the system and subsystem subject matter experts representing all facets of the spacecraft. The team demonstrated that the design and operations are understood and sufficiently mature to begin the build and integration phase. 56)
Launch
GOES-R
The GOES-R satellite was launched on November 19, 2016 (23:42:00 UTC) on an Atlas-5 541 vehicle from the Cape Canaveral Air Force Station, FL. The launch provider is ULA (United Launch Alliance). The GOES-R is the first of the 3rd generation series (R, S, T, U) and its sensor complement are expected to provide continued and significantly improved observation services for a period of at least 22 years. 57) 58)
Orbit: Geostationary orbit, altitude = 35,786 km, longitude = 75º W (GOES East).
GOES-R series satellites will have two operational locations: 75º W and 137º W longitude. Any GOES-R series satellite stored on-orbit will be located at 105º W longitude. Once in geostationary orbit, GOES-R will be known as GOES-16.
GOES-S
The GOES-S satellite,the second in a new series of four highly advanced geostationary weather satellites, was launched on March 1, 2018 (22:02:00 UTC) on a ULA Atlas-V 541 vehicle configuration from CCAFS (Cape Canaveral Air Force Station) SLC-41 in Florida. 59) 60)
Orbit: Geostationary orbit, altitude = 35,786 km, longitude = 137º W (GOES West). 61)
Once GOES-S is positioned in a geostationary orbit 36,786 km above the Earth, after approximately two weeks, it will be renamed GOES-17. Later this year, after undergoing a full checkout and validation of its six high-tech instruments, the new satellite will move to the GOES-West position and become operational. From there, it will constantly provide advanced imagery and atmospheric measurements, real-time mapping of lightning activity, and improved monitoring of solar activity and space weather.

GOES-T
NASA successfully launched the third in a series of next-generation weather satellites for the National Oceanic and Atmospheric Administration (NOAA) at 4:38 p.m. EST (21:38 UTC) on 1 March 2022. The GOES-T satellite launched on a ULA (United Launch Alliance) Atlas V 541 rocket from Cape Canaveral Space Force Station. 63)
GOES-T mission managers confirmed at 8:28 p.m. EST the spacecraft’s solar arrays successfully deployed and the spacecraft was operating on its own power.
About GOES-T: NOAA manages the GOES-R Series Program through an integrated NOAA-NASA office, administering its ground system contract, operating the satellites, and distributing their data to users worldwide.
GOES-T will be renamed GOES-18 once it reaches geostationary orbit. Following a successful orbital checkout of its instruments and systems, GOES-18 will go into operational service as GOES West. In this position, the satellite will provide critical data for the U.S. West Coast, Alaska, Hawaii, Mexico, Central America, and the Pacific Ocean.
The launch is managed by NASA’s Launch Services Program based at Kennedy, America’s multi-user spaceport. NASA’s Goddard Space Flight Center in Greenbelt, Maryland, oversees the acquisition of the GOES-R satellite and instruments. Lockheed Martin designs, creates, and tests the GOES-R Series satellites. L3Harris Technologies provides the main instrument payload, the Advanced Baseline Imager, and the ground system, which includes the antenna system for data reception.
Note: As of 17 December 2020, the previously single large GOES-R file has been split into two files, to make the file handling manageable for all parties concerned, in particular for the user community.
• Mission status in the period 2019-2017 for GOES-R
Mission Status
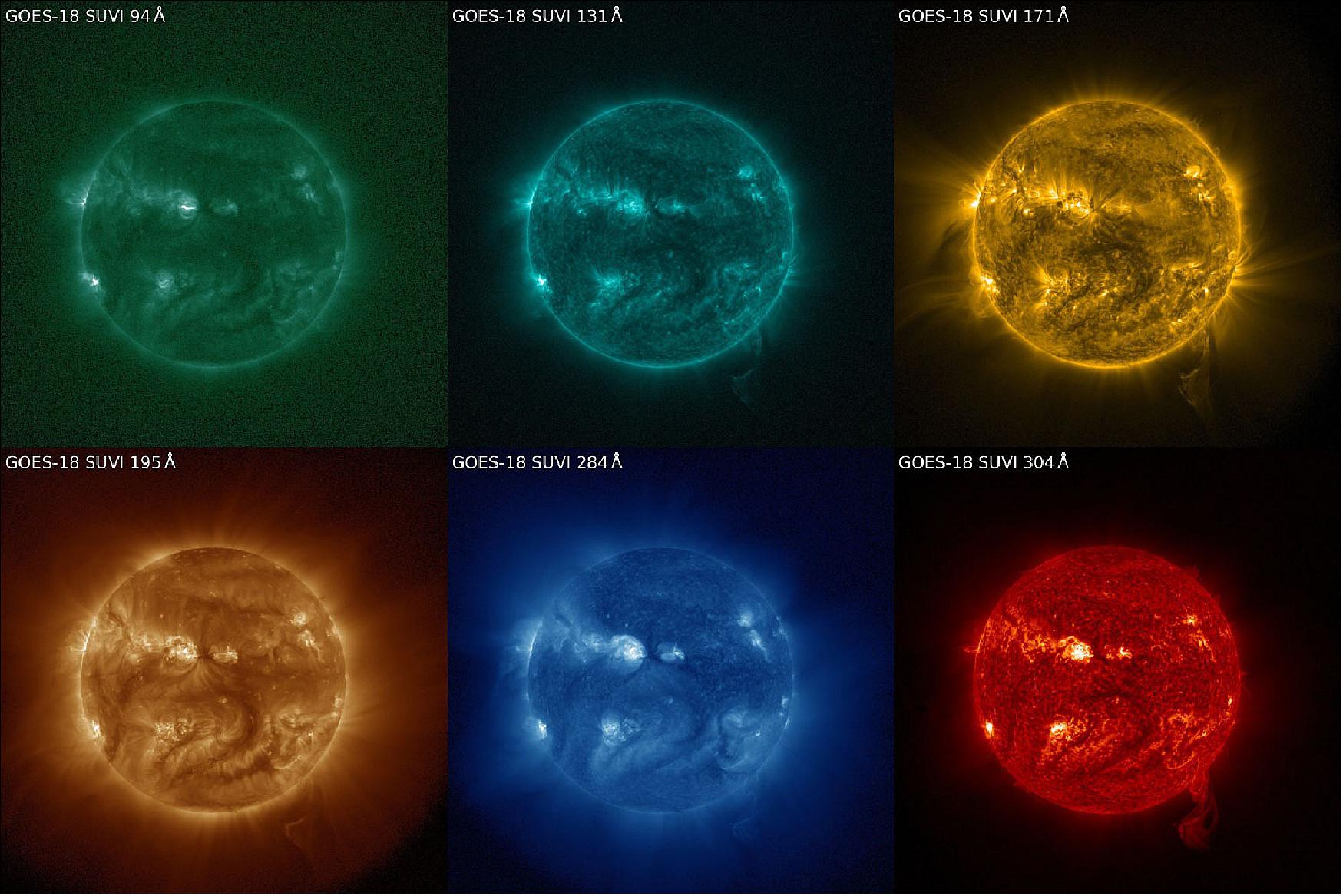
• July 19, 2022: The SUVI (Solar Ultraviolet Imager) onboard NOAA’s GOES-18 satellite, which launched on March 1, 2022, began observing the sun on June 24, 2022. The sun’s 11-year activity cycle is ramping back up, meaning phenomena such as coronal mass ejections (CMEs) and solar flares are increasing in frequency. GOES-18’s SUVI captured a CME on July 10, 2022. SUVI monitors the sun in the extreme ultraviolet portion of the electromagnetic spectrum. Depending on the size and the trajectory of solar eruptions, the possible effects to near-Earth space and Earth’s magnetosphere can cause geomagnetic storms, which can disrupt power utilities and communication and navigation systems. These storms may also cause radiation damage to orbiting satellites and the International Space Station. 64)
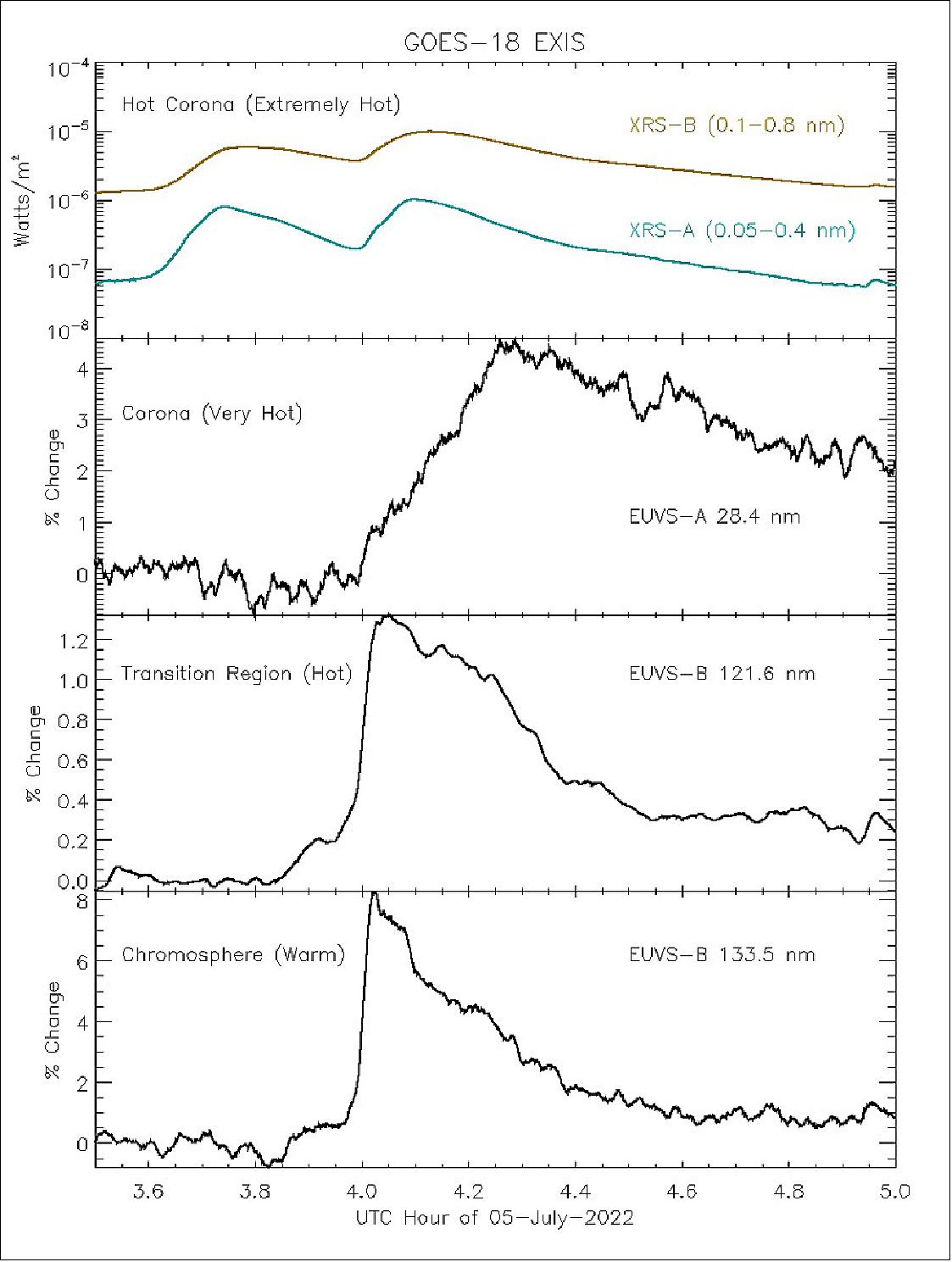
• July 13, 2022: The Extreme Ultraviolet and X-ray Irradiance Sensors (EXIS) onboard NOAA’s GOES-18 satellite are powered on, performing well, and observing the sun (Ref. 64).
• May 11, 2022: On May 11, 2022, NOAA shared the first images of the Western Hemisphere from its GOES-18 satellite. The satellite’s Advanced Baseline Imager (ABI) instrument recently captured stunning views of Earth. 65)
- GOES-18 orbits 22,236 miles above the equator at the same speed the Earth rotates. This allows the satellite to constantly view the same area of the planet and track weather conditions and hazards as they happen.
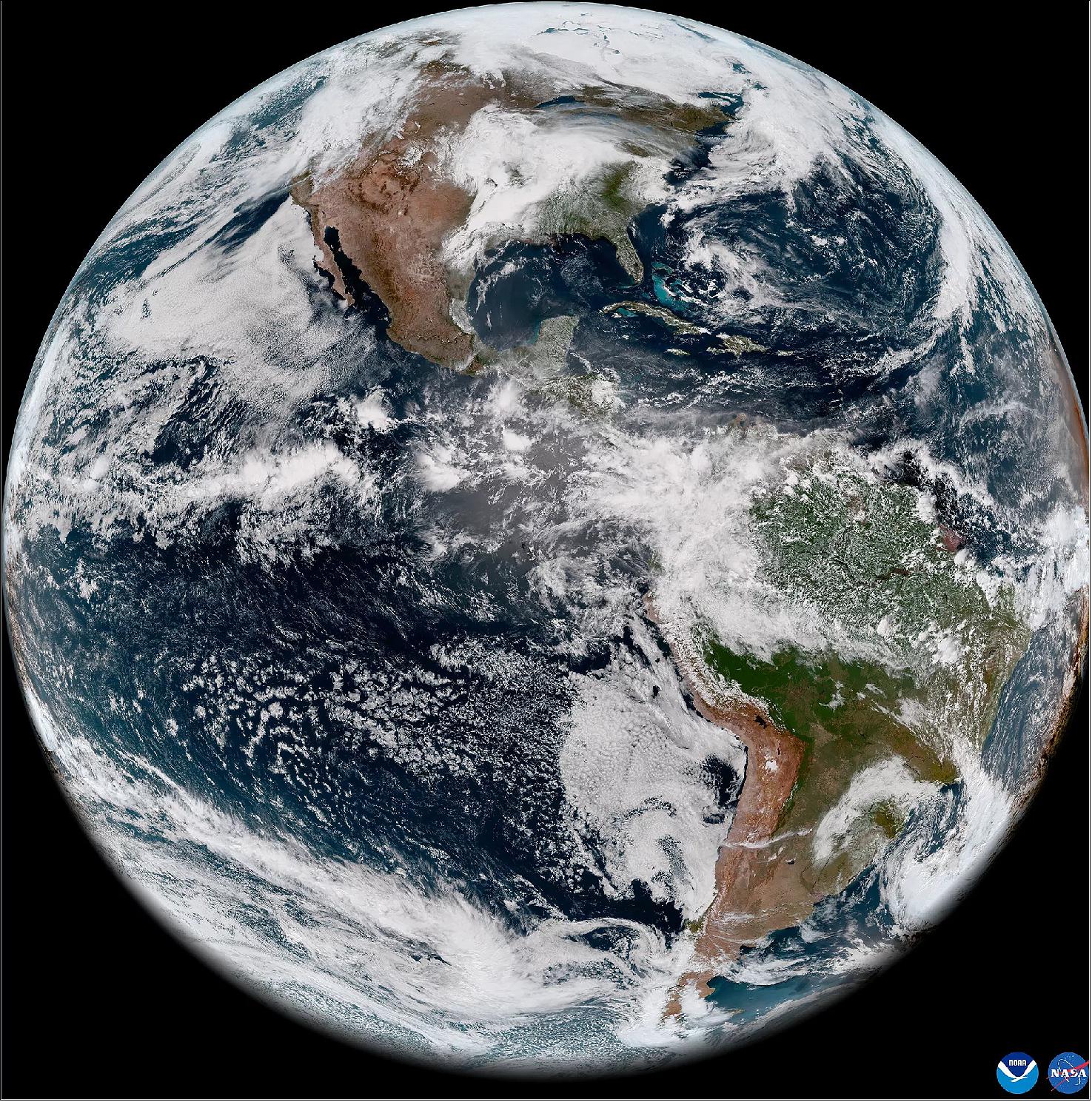
- The ABI provides high-resolution imagery and atmospheric measurements for short-term forecasts and severe weather warnings. ABI data is also used for detecting and monitoring environmental hazards such as wildfires, dust storms, volcanic eruptions, turbulence, and fog.
- Data from multiple ABI channels can be combined to create imagery that approximates what the human eye would see from space—a result known as GeoColor. Combining data from different channels in different ways also allows meteorologists to highlight features of interest.
- Recently, GOES-18 observed a number of weather events, environmental phenomena, and striking views of our planet. Storms across east Texas produced large hail, strong wind gusts, and tornadoes. Farther west in New Mexico, strong winds resulted in large areas of blowing dust and expansion of large wildfires. Fog blanketed parts of Chile in South America, and clouds and some thunderstorms formed along sea breezes in the Yucatan and south Florida.
- GOES-18 is currently undergoing post-launch testing, validation and calibration of its instruments and systems to prepare it for operations. The ABI cooling system is performing well, with no signs of the issue that affects its sister satellite, GOES-17. The ABI was redesigned for GOES-18 to reduce the likelihood of future cooling system anomalies. The new design uses a simpler hardware configuration that eliminates the filters that are susceptible to debris.
- GOES-18 will assist GOES-17 with GOES West operations in late summer 2022 and again in early fall. NOAA plans for GOES-18 to replace GOES-17 as GOES West in early 2023. Imagery from GOES-18 during the post-launch testing phase should be considered preliminary and non-operational.
• January 19, 2022: One of the most potent volcanic eruptions in decades has obliterated a small, uninhabited South Pacific island known as Hunga Tonga-Hunga Ha‘apai. Damage assessments are still ongoing, but preliminary reports indicate that communities in the island nation of Tonga have taken heavy damage from volcanic ash and a tsunami caused by the eruption. 66)
- The volcano had sporadically erupted multiple times since 2009. The most recent burst of activity began in late December 2021, with intermittent ejections of ash, steam, and tephra. An unusually large blast rocked the volcano on January 13, 2022, but it was an even larger explosion on January 15 that produced an atmospheric shock wave and tsunami that traveled around the world.
- Several Earth-observing satellites collected data during and after the eruption. Scientists affiliated with NASA’s Disasters program are now gathering imagery and data, and they are sharing it with colleagues around the world, including disaster response agencies.
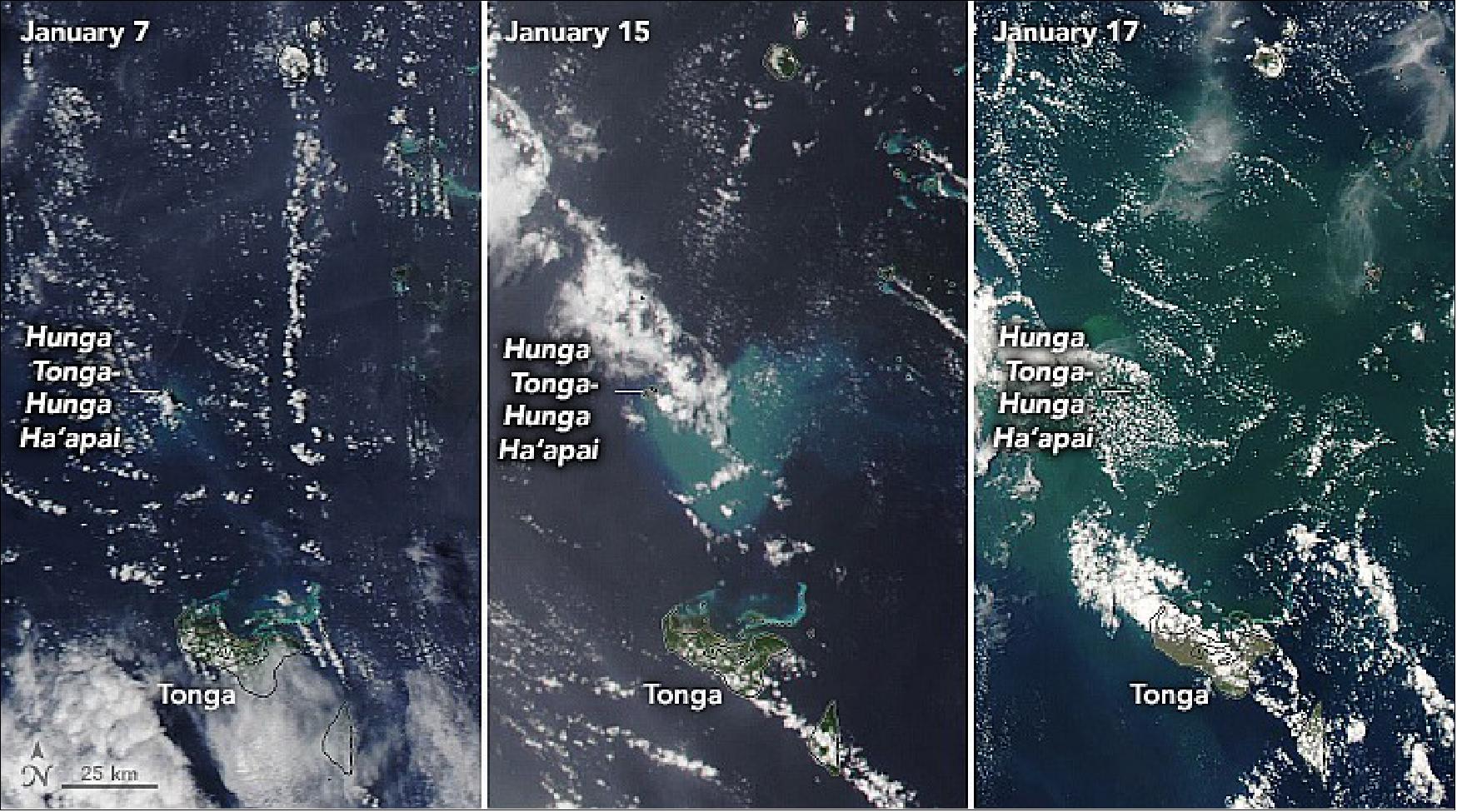
- Preliminary imagery from commercial satellites and European radar imagers suggest that very little of Hunga Tonga-Hunga Ha‘apai still stands above the water line. The volcanic island first rose out of the water in December 2014.
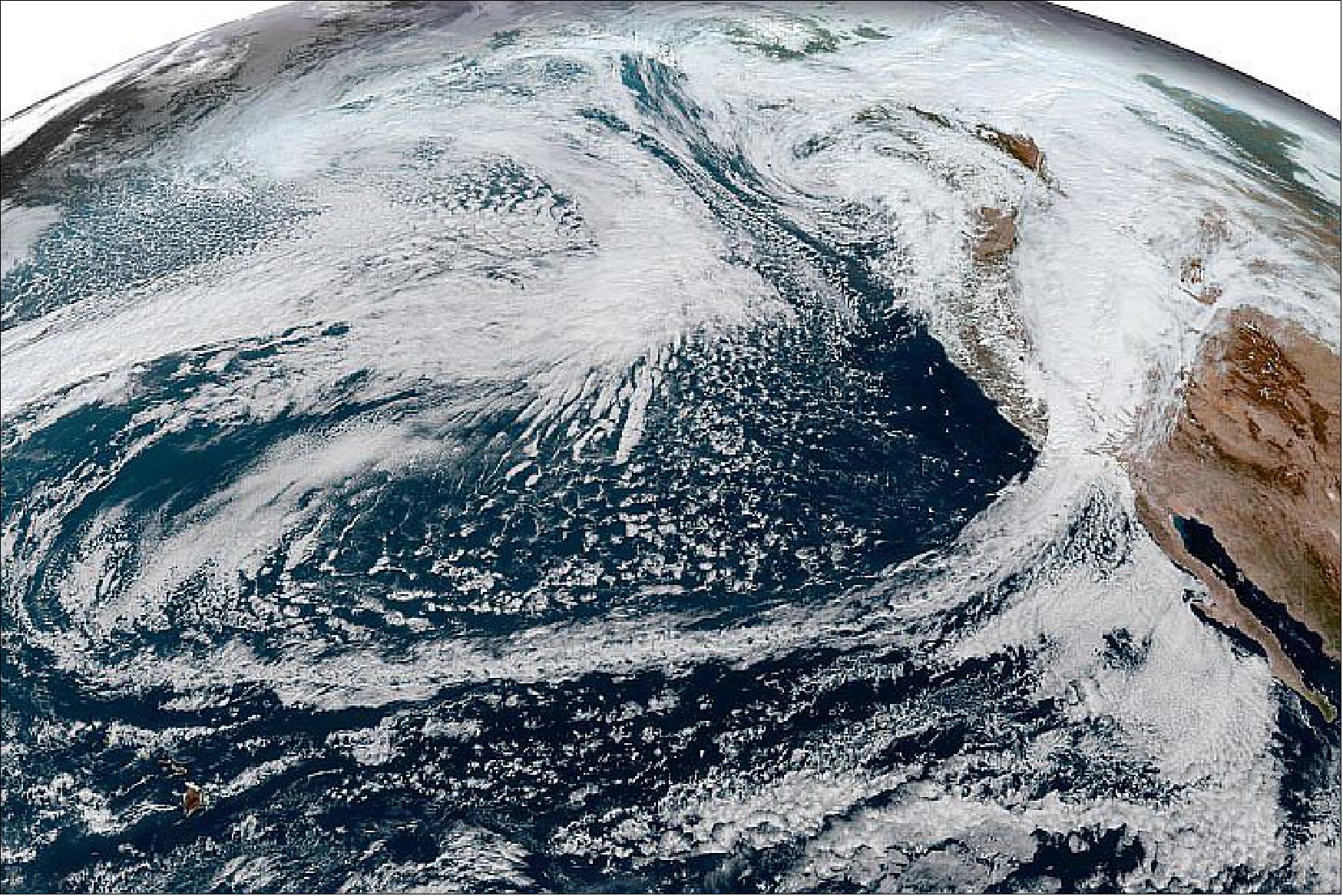
• October 26, 2021: One of the most intense extratropical cyclones ever to strike the Pacific Northwest drew an equally historic amount of moisture onto the West Coast of North America on October 24-25, 2021. The storm off the coast of Washington—with a central pressure of 942.5 millibars, equivalent to a category 4 hurricane—was the second extreme low-pressure storm in the North Pacific in a week. Both exhibited pressure drops of more than 24 millibars in 24 hours, making them “bomb cyclones.” 67)
- The two storm fronts directed streams of moisture from north of Hawaii toward the West Coast in long, narrow bands of moisture known as atmospheric rivers. Atmospheric rivers account for up to 50 percent of all rain and snow that falls in the western United States.
- The parade of storms brought high winds and extreme precipitation that doused wildfires and brought some relief from extreme drought to Central and Northern California. But the events also caused power outages, flooding, landslides, and mud and debris flows that washed out roads.
- Total precipitable water vapor is a measurement of the amount of water in a column of the atmosphere if all the water vapor in that column were condensed into liquid. The animation was derived from a NASA product known as the Goddard Earth Observing System Data Assimilation System (GEOS DAS), which uses satellite data and mathematical representations of physical processes to calculate what is happening in the atmosphere. Not all precipitable water vapor actually falls as rain. However, it is a useful indicator of regions where rainfall could be excessive.
- The Center for Western Weather and Water Extremes ranked the October 24-25 atmospheric river as a category-5 event for the San Francisco Bay Area. The 1 to 5 scale considers the longevity and the amount of water vapor carried by these rivers of moist air that travel ahead of cold fronts.
- In Marin County, the National Weather Service (NWS) reported that Mount Tamalpais received a 48-hour total of 16.55 inches of precipitation by the morning of October 25. Downtown San Francisco recorded 4.02 inches on October 24 alone, making it the wettest October day the city has seen since record keeping began.
- In Blue Canyon, California, 10.4 inches of rain fell in a 24-hour-period on October 24-25, breaking a record of 9.33 inches set in 1964, according to the NWS. Over the same period, downtown Sacramento saw 5.44 inches of rain, breaking a record set in 1880. Just one week before, Sacramento had broken another extreme record for the longest dry spell, marking 212 days without measurable rain.
- On October 24, the NWS issued flash flood warnings for 13 burn scar areas in California from wildfires that occurred between 2018 and 2021. The warnings included the Caldor fire burn scar near Lake Tahoe, where several more inches of rain were expected to fall on October 25.
- Up and down the California coast, NWS issued high surf warnings for swells of 16 to 24 feet on west to northwest facing beaches. At the same time, winter storm warnings were in effect in the Sierra Nevada, where multiple feet of snow were expected at high elevations. Remnants of the storm were expected to reach Southern California late on October 25.
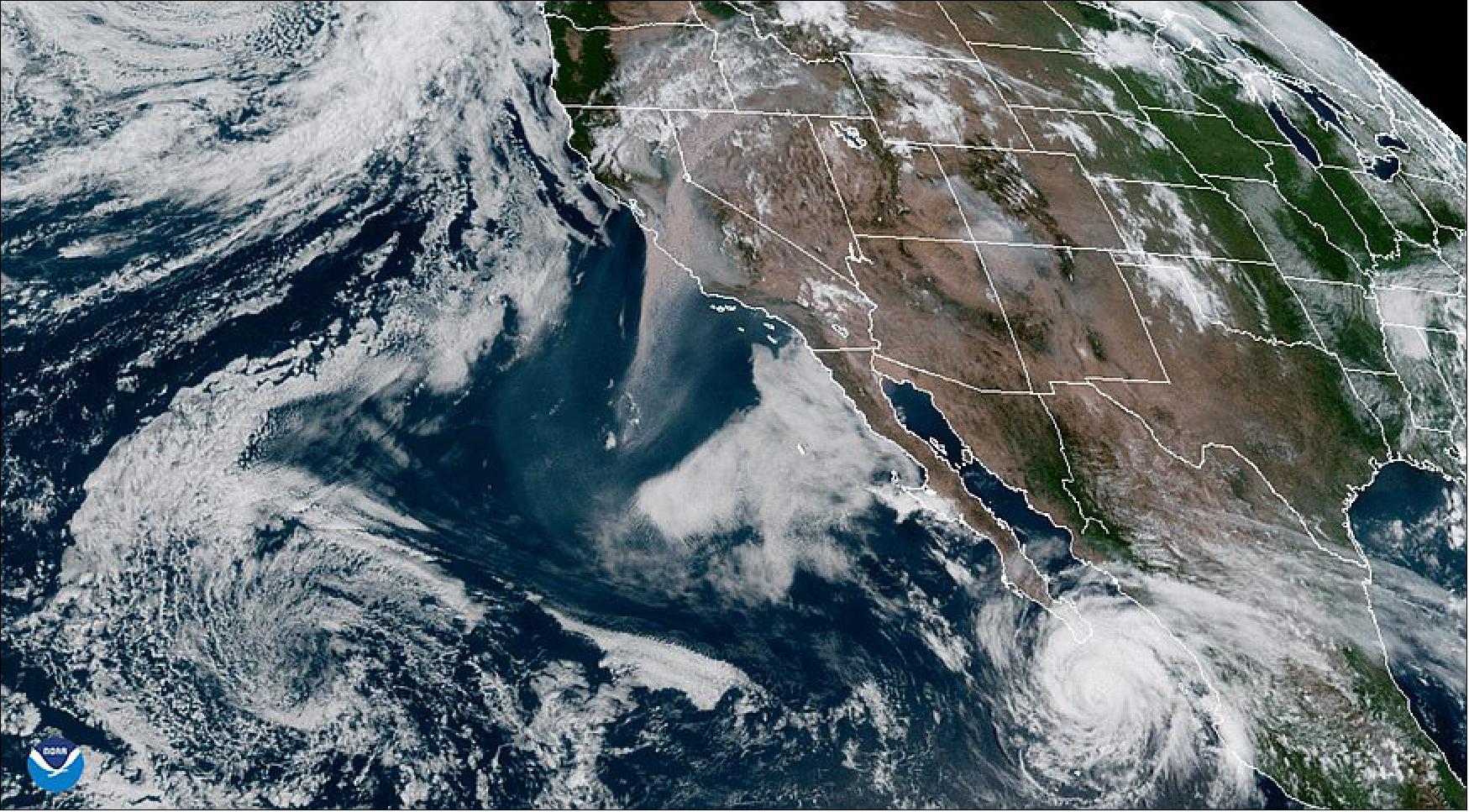
• August 19, 2021: The pace of hurricane activity around North America often accelerates in mid-to-late summer as seas warm, making it easier for tropical cyclones to develop and intensify. August 2021 was no exception. In fact, more storm activity has happened earlier in the year than usual. 68)
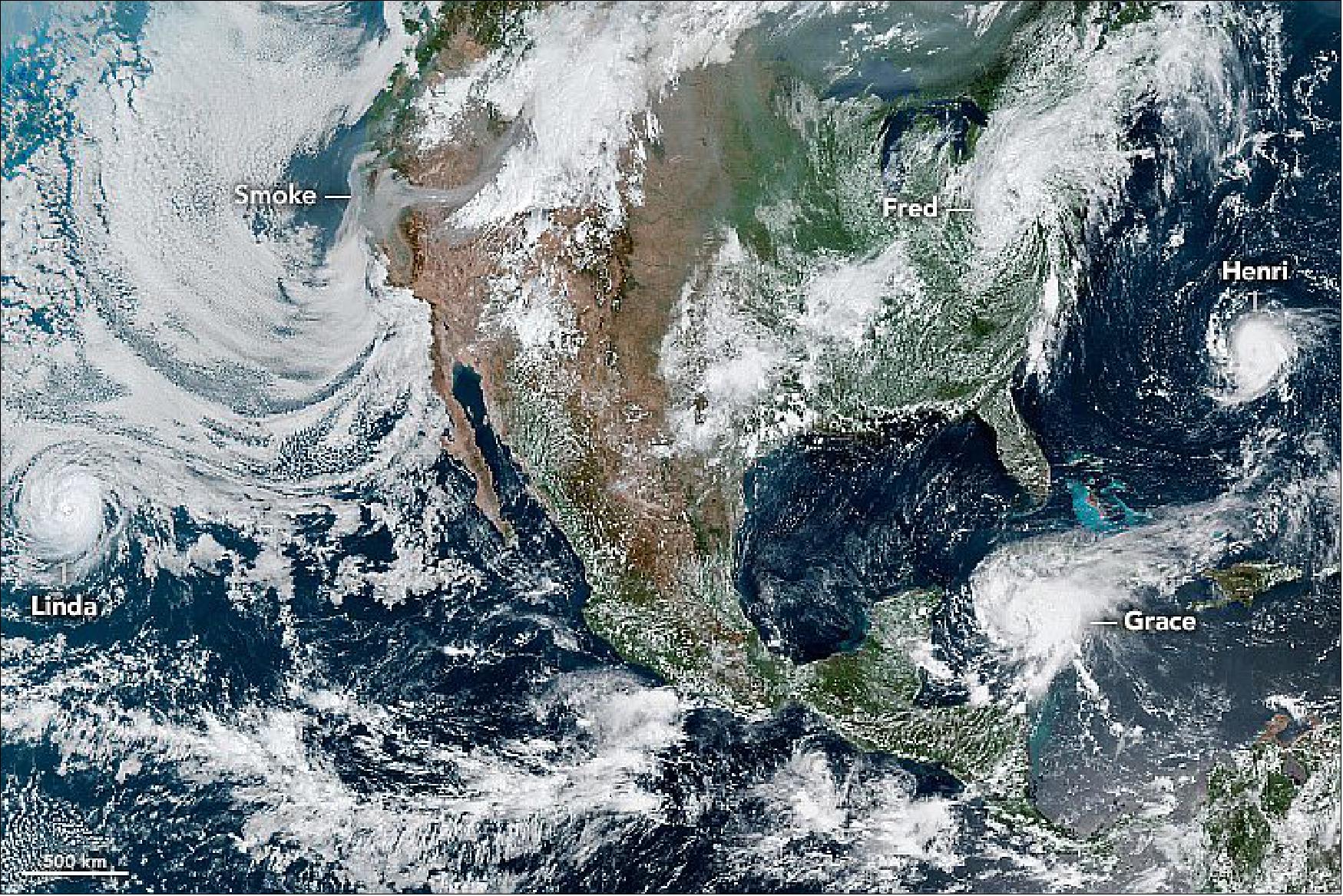
- After drenching Hispaniola, Hurricane Grace was strengthening and on a collision course with the Yucatan Peninsula. With a large ridge of high pressure in the U.S. Southeast blocking it from moving north, the storm was pushing west-northwest at 15 miles (24 km) per hour. Before its approach to Mexico, Grace unleashed intense downpours in parts of Haiti that were struck on August 14 by a magnitude 7.2 earthquake, complicating recovery efforts and increasing the risk of landslides.
- Meanwhile, the remnants of Tropical Storm Fred were moving northeast through the U.S. Mid-Atlantic after making landfall in the Florida Panhandle near Apalachicola. At landfall, the storm lashed that area with sustained winds of 65 miles (105 km) per hour and delivered several inches of rain to parts of Florida, Alabama, and Georgia as it moved inland.
- Fred was the fourth named storm to make landfall in the U.S. this year, following Claudette, Danny, and Elsa. There is a possibility that Henri, now offshore near the Bahamas, could become the fifth. Though the storm was far from the U.S. mainland when GOES acquired this image, National Hurricane Center forecasters say there is a possibility that the strengthening storm could veer west and cause direct impacts in the northeastern U.S.
- “Starting early last week, the large-scale conditions became especially favorable for tropical cyclone development in the Eastern Pacific and Atlantic basins,” said Patrick Duran, a hurricane expert based at NASA’s Marshall Space Flight Center. “The Madden-Julian Oscillation, a global-scale phenomenon that plays a role in tropical convection, became favorable for thunderstorm formation. At the same time, a large atmospheric wave called an equatorial Kelvin wave moved across the Atlantic, making conditions even more favorable for storm development.”
- In the Eastern Pacific, Linda achieved hurricane status on August 12 and remained a strong storm for several days. Though nowhere near land, the storm’s winds have reached as high as 130 miles (209 kilometers) per hour at times, enough for it to qualify as a category 4 hurricane.
- Of note to meteorologists tracking Linda is that it appears to be an annular hurricane—a type of intense hurricane. They typically have especially large and symmetrical eyes and few rain bands spiraling outward. Annular hurricanes tend to be significantly stronger and maintain their peak intensities longer than other tropical cyclones. “The annular structure makes these storms more resistant to the negative impacts of unfavorable conditions, like low ocean temperatures or high wind shear,” explained Charles Helms, a scientist based at NASA’s Goddard Space Flight Center.
- This simulated natural-color image was acquired at 1:20 p.m. Eastern Standard Time (17:20 Universal Time). It was captured by GOES 16’s Advanced Baseline Imager (ABI). The satellite is operated by the National Oceanic and Atmospheric Administration (NOAA); NASA helps develop and launch.
• July 23, 2021: NOAA’s GOES-17 (former GOES-S) is out of safe-hold mode and engineers expect its six instruments to return to normal operations soon. The probable cause of yesterday’s anomaly appears to be a memory bit error in the spacecraft computer. The engineering team says the computer has been responding correctly to commands. 69)
- Earlier this morning, the ABI (Advanced Baseline Imager) and Magnetometer were restored and data are flowing. The remaining four instruments are expected to come online later this morning. The team expects some minor, short-term data quality issues while the instruments are being recalibrated, but GOES-17 is on track for a full recovery with no lasting effects to the satellite.
- NOAA will provide an update as new information becomes available.
• July 22, 2021: NOAA Statement on GOES-17 Outage
- A team of experts is working tirelessly to restore operations to NOAA’s GOES-17 satellite, after an on-board computer reset triggered the satellite to be placed into a safe-hold mode at 1:37 a.m. EDT today. In this phase, all of GOES-17’s instruments were automatically turned off.
- The engineering team is currently conducting the recovery process. The next step is instrument reactivation and validation of the sensors. Once those are completed, the team will proceed with reinitiation of the data streams.
- The GOES-15 satellite is available as a backup if GOES-17 cannot be restored in a timely manner.
- NOAA will provide an update as new information becomes available.
• July 5, 2021: After a group of tornadoes emerged from a squall line on June 20, 2021, and one touched down in the Chicago suburb of Naperville, the effects on the ground were obvious. The EF-3 tornado had 140 mile/h (225 km/h) winds that toppled thousands of trees, injured 11 people, and cut electricity to tens of thousands. The tornado damaged at least 230 houses, including one that collapsed. 70)
![Figure 31: Detail image: From a satellite perspective, the dynamics of the storm system were more subtle, but they offered at least one early clue that the squall line had a good chance of unloading destructive weather. The cloud temperature data above, from the Advanced Baseline Imager (ABI) on the GOES-R satellite, was collected about 45 minutes before the tornado touched down. Warmer air is red and cooler air is blue. - “Notice the plumes of warm air downwind of updrafts—the cold overshooting cloud tops,” said Kristopher Bedka of NASA’s Langley Research Center. “Those are what we call ‘above-anvil cirrus plumes’ (AACPs)—cirrus clouds that were injected into the stratosphere.” [NASA Earth Observatory images by Joshua Stevens, using GOES-16 (former GOES-R designation) imagery courtesy of NOAA and the National Environmental Satellite, Data, and Information Service (NESDIS). Story by Adam Voiland]](https://www.eoportal.org/ftp/satellite-missions/g/GoesR_210722/GoesR_Auto2D.jpeg)
- Most thunderstorms can grow up to the tropopause, the boundary between the troposphere and the stratosphere. When strong storms reach the tropopause, their tops flatten out, giving them an anvil-like appearance. Above-anvil cirrus plumes form when especially intense updrafts puncture the tropopause and airflow draws cirrus cloud tops into the stratosphere. Cirrus plumes are typically warmer than underlying anvil clouds because the air temperature in the stratosphere increases with altitude.
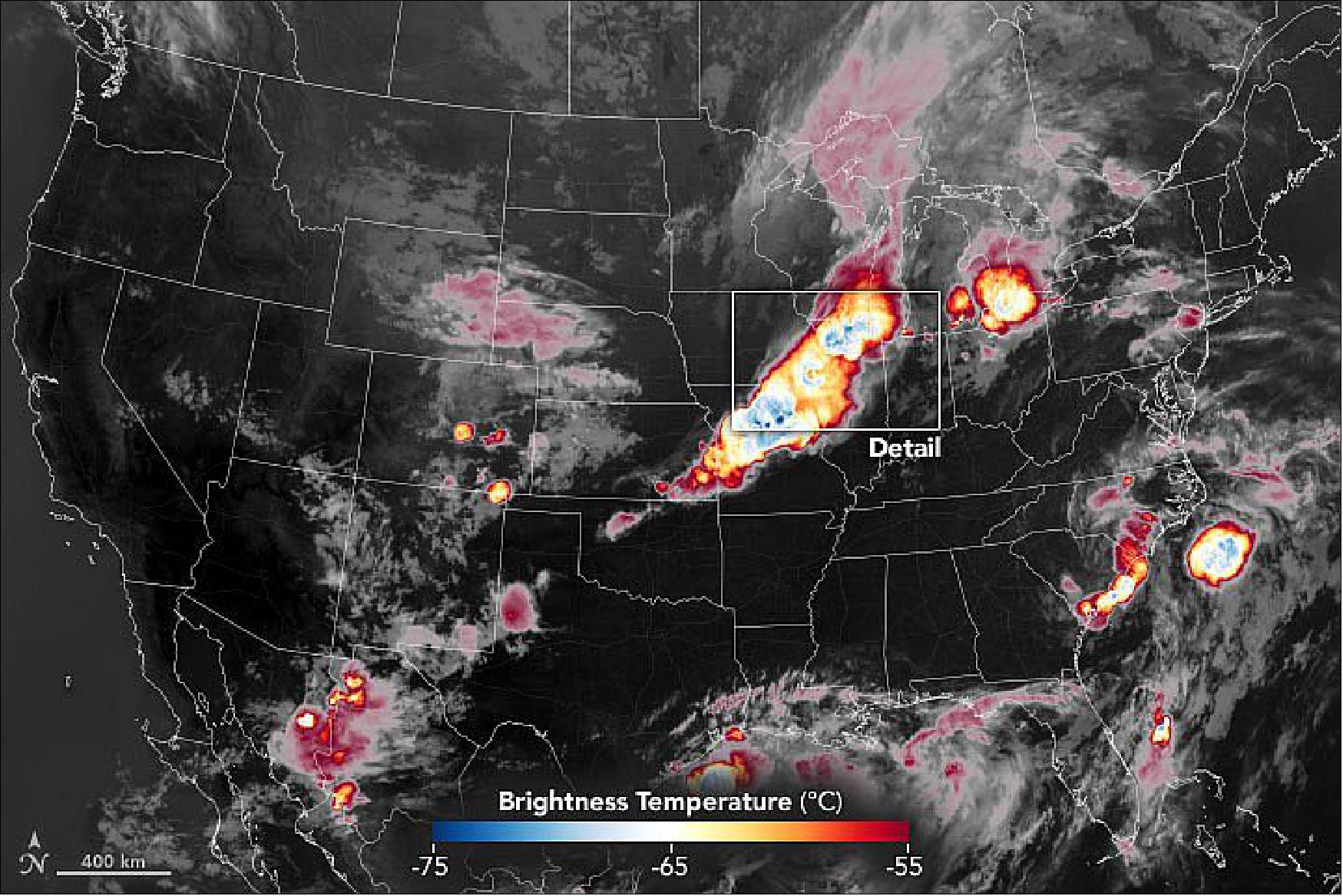
- “Detecting an AACP isn’t a guarantee that you’ll get a tornado or other severe weather like we saw with the Naperville event, but our analysis of more than 400 of these events observed by either GOES-14 or GOES-16 showed about three-quarters of the time these cirrus plumes appeared 10 minutes or more before the most severe weather hits,” said Bedka. “Cirrus plumes routinely occur atop the world’s most intense storms, and tracking them can provide valuable lead time that saves lives and property.”
• June 25, 2021: NOAA announced plans June 25 to move its geostationary weather satellite scheduled to launch in December into an operational role “as soon as possible.” 71)
- NOAA's GOES-T will replace the GOES-17 (prior to launch: GOES-S) satellite in the GOES West position because of problems with the satellite’s main instrument, the Advanced Baseline Imager (ABI), according to a NOAA news release.
- Within months of launching the GOES-17 satellite in 2018, NOAA discovered a blockage in ABI’s loop heat pipe that restricted the flow of coolant and caused the instrument to overheat. Engineers were able to mitigate the problems, but the resulting fixes decreased the satellite’s lifespan.
- To prevent similar issues with the two remaining satellites in the GOES-R Series, ABI manufacturer L3Harris Technologies redesigned ABI’s thermal management system.
- After launch, NOAA will rename the GOES-T satellite GOES-18. Then, the agency plans to spend two weeks ensuring GOES-T systems perform as expected before moving it into an operational role.
- GOES-16 and -17, known as GOES-R and GOES-S prior to launch, are the first two satellites in the four-satellite GOES-R series. NOAA continuously observes the United States, Mexico, Central America, South America, the Caribbean and much of the Pacific and Atlantic Oceans with two satellites working in tandem in the GOES East and GOES West orbital slots. The satellites provide extensive data for daily weather forecasts as well as alerts for storms, wildfires, fog and other hazards.
• June 2, 2021: Instead of chasing storms, NASA researchers are using new weather prediction methods to see storms ahead of time. 72)
- By studying lightning, the team of scientists is working to develop new ways to help forecast the intensity of incoming hurricanes. Typically, an increase in lightning within the storm signals that the storm is likely to strengthen. But sometimes even weakening hurricanes have large lightning outbreaks, so forecasters must carefully analyze additional data to determine what a lightning outbreak really means for predicting a hurricane's intensity.
- A team of scientists led by NASA researcher Patrick Duran recently published a study on the evolution of lightning flash density, flash size, and flash energy during Hurricane Dorian. Duran and his team support NASA's Research and Analysis Program, Weather Focus Area, as part of the Short‐term Prediction Research and Transition Center at NASA's Marshall Space Flight Center in Huntsville, Alabama. 73)
- Duran and his colleagues used a new tool on National Oceanic and Atmospheric Administration's latest series of Geostationary Operational Environmental Satellites called the Geostationary Lightning Mapper (GLM) to capture information about lightning in hurricanes. GLM continuously detects the size and energy of lightning flashes, even over the open oceans.
- "In this study," Duran said, "we were able to prove that the lightning flashes in Hurricane Dorian were larger and more energetic when the storm was intensifying than when it was weakening."
- Using GLM, the team analyzed the two most distinct lightning outbreaks in the innermost part – or inner-core – of Hurricane Dorian. The first outbreak occurred during intensification, including a period of rapid intensification (defined as an increase in 30 kts (35 mph) in sustained winds over 24 hours). During rapid intensification, the number of inner-core lightning flashes increased as flashes concentrated inside of the radius of maximum wind – or the distance between the center of the cyclone and its band of strongest winds. The second outbreak occurred during weakening. As weakening continued, numerous flashes still occurred within the radius of maximum wind, with a flash rate more than three times that during rapid intensification – a signal typically associated with strengthening. These flashes, however, were much smaller and less energetic than those during intensification.
- The GLM sensor provides continuous observations of lightning across most of the western hemisphere, including the Atlantic and Eastern Pacific tropical basins. The GLM sensor, effectively an optical event detector, measures changes in cloud top radiance produced by lightning. GLM's ability to detect not only flash location but average flash area and total optical energy enables the examination of lightning from a number of new perspectives.
- "We also argue that changes in the location of lightning flashes could help to identify processes that affect a storm's intensity," Duran said. "This information provides clues into how storm structure changes at peak intensity and can potentially help forecasters interpret whether a lightning outbreak signifies storm intensification or weakening."
- "In the future," Duran said, "we will analyze a large number of storms to discover how lightning patterns differ between storms that intensify and those that weaken. We think that these patterns could be especially useful in identifying rapid intensification, which is very difficult to predict."
- "We're still learning how to interpret and utilize the GLM in operational tropical cyclone analysis and forecasting," Stephanie Stevenson, meteorologist and programmer with the National Hurricane Center, said. "This study pushes us toward understanding how GLM's unique area and energy fields can be used in conjunction with lightning density to monitor a storm's evolution."
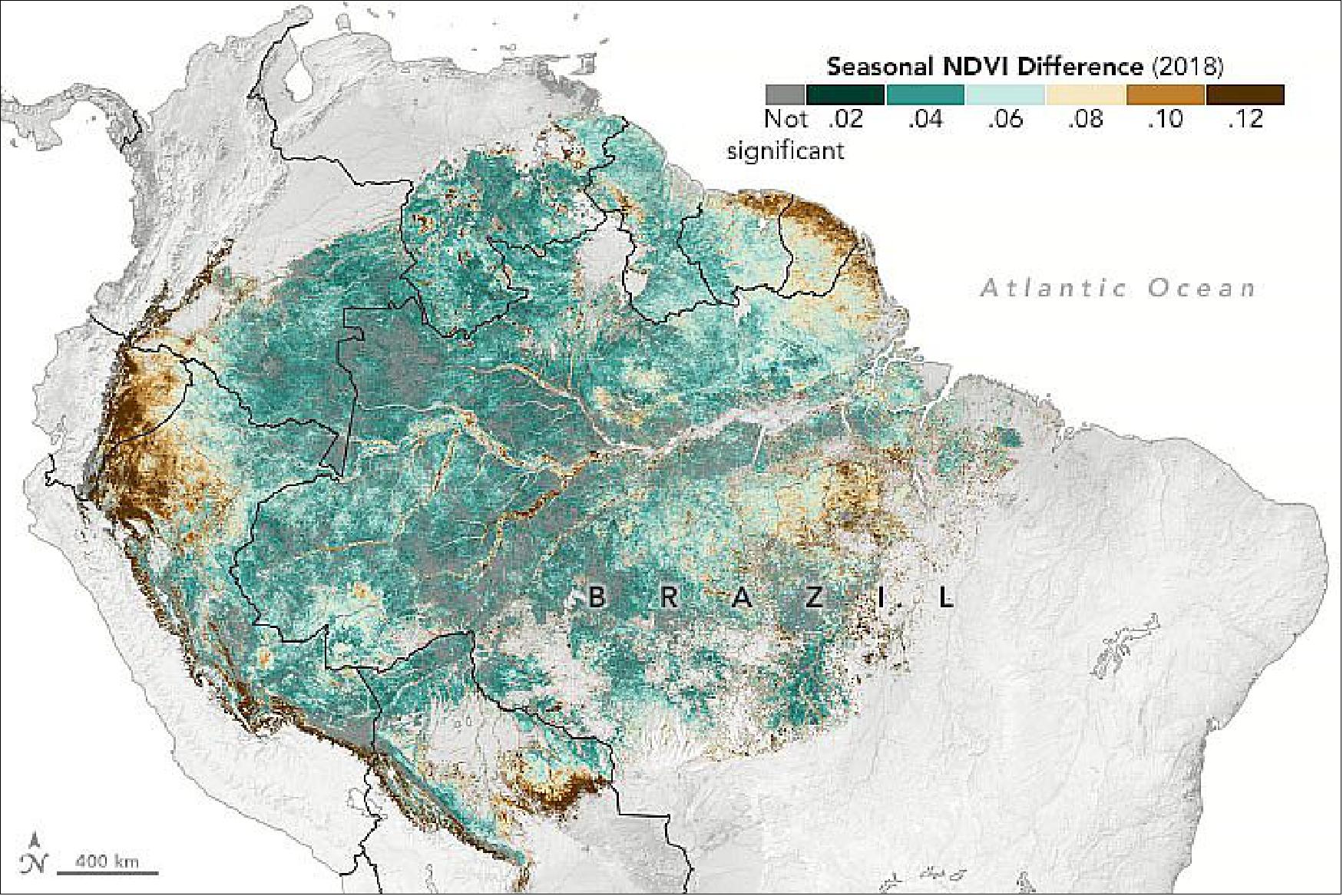
• June 1, 2021: In temperate deciduous forests, seasonal changes are hard to miss. Green forests turn red, yellow, or orange in autumn and brown by winter. 74)
- The Amazon rainforest experiences seasons as well, but the changes are far more subtle. Temperatures and sunlight remain pretty consistent year-round, but rainfall varies cyclically, becoming more common in certain months and less common in others. Though there are regional variations, June through September are generally the driest months, and December through March are the wettest. While it still rains a significant amount all year, precipitation often drops by half from the wettest months to the driest.
- In recent decades, scientists have been using satellite data to study whether these seasonal variations have a significant effect on the “greenness” of the rainforest canopy. While there have been some conflicting results over the years, multiple studies have suggested that a key measure of vegetation called the Normalized Difference Vegetation Index (NDVI) can detect subtle seasonal cycles.
- Analysis of data from a new generation of geostationary satellites supports this finding, according to research led by Hirofumi Hashimoto and Ramakrishna Nemani of NASA’s Ames Research Center. The map above, built with information collected by the Advanced Baseline Imager (ABI) on NOAA’s GOES-R satellite, offers a basin-wide view of the differences in vegetation greenness between wet and dry seasons in 2018 and 2019. The analysis found that 85 percent of forested areas exhibited some seasonality—with the most pronounced signals in Ecuador, western Peru, Bolivia, French Guiana, and Suriname.
- “What the satellite observations are showing us is that Amazon forests were slightly greener—about 10 to 15 percent on average—during the dry season,” said Nemani. “It’s a bit counterintuitive, but we see this pattern because some trees put out an extra flush of leaves in the beginning of the dry season in anticipation of the extra sunlight that clearer skies will bring.”
- The thickness of the Amazon canopy and the forest’s vast area means that even modest seasonal changes should have significant impacts on the region’s carbon and water cycles. While some recent findings indicate the Amazon rainforest may be close to becoming a source of carbon, it has generally functioned as an enormous carbon sink—an area that draws carbon out of the atmosphere and stores it in plant matter or the soil. It also pumps huge quantities of water into the air through a process called transpiration. That moisture fuels vast "flying rivers" and provides about half of the rain that falls back down on the region.
- While earlier studies of Amazon seasonality have mostly relied on polar-orbiting satellites that pass over the rainforest just once or twice per day (usually around midday), Hashimoto and Nemani turned to a satellite sensor that keeps its sights continually trained on the region. Since GOES sits in geostationary orbit, ABI collects new data every 10-15 minutes for entire days, giving researchers more opportunities to see the forest between the persistent clouds.
- Understanding Amazon seasonality should help scientists develop a more nuanced and accurate view of the carbon cycle. “Climate models have not generally included Amazon seasonality, and this research takes us one step closer to doing that,” said Hashimoto.
- “The huge increase in the volume of data we can get from a geostationary platform really gives us confidence that this is a real signal,” said Nemani. “With this type of platform, we are literally able to watch trees grow over the course of a day.” Nemani is one of the leaders of GeoNEX, a collaborative effort for generating Earth-monitoring products from geostationary satellite sensors. The project includes partnerships with NOAA, Japan Aerospace Exploration Agency (JAXA), Korea Aerospace Research Institute, Korea’s National Meteorological Satellite Center, and the Center for Environmental Remote Sensing at Chiba University.
- Scientists are cautious but optimistic about the seasonality estimates reported in the study. “There is still work that should be done to correct for and minimize artifacts in the data. Spatial variations in the satellite's viewing angle, sun-angle patterns, and the atmosphere may compromise the subtle seasonality effects reported here,” said Alfredo Huete, a remote sensing scientist at the University of Technology Sydney. “I also expect that we will see major advances when the geostationary satellite data is combined with data from FLUXNET, a ground-based network that measures forest canopy fluxes of carbon dioxide and other key environmental variables.”
• December 16, 2020: The first and only total solar eclipse of 2020 occurred on December 14, with the path of totality stretching from the equatorial Pacific to the South Atlantic and passing through southern Argentina and Chile. However, the view from above may have been better than the view most people got from the ground. 75)
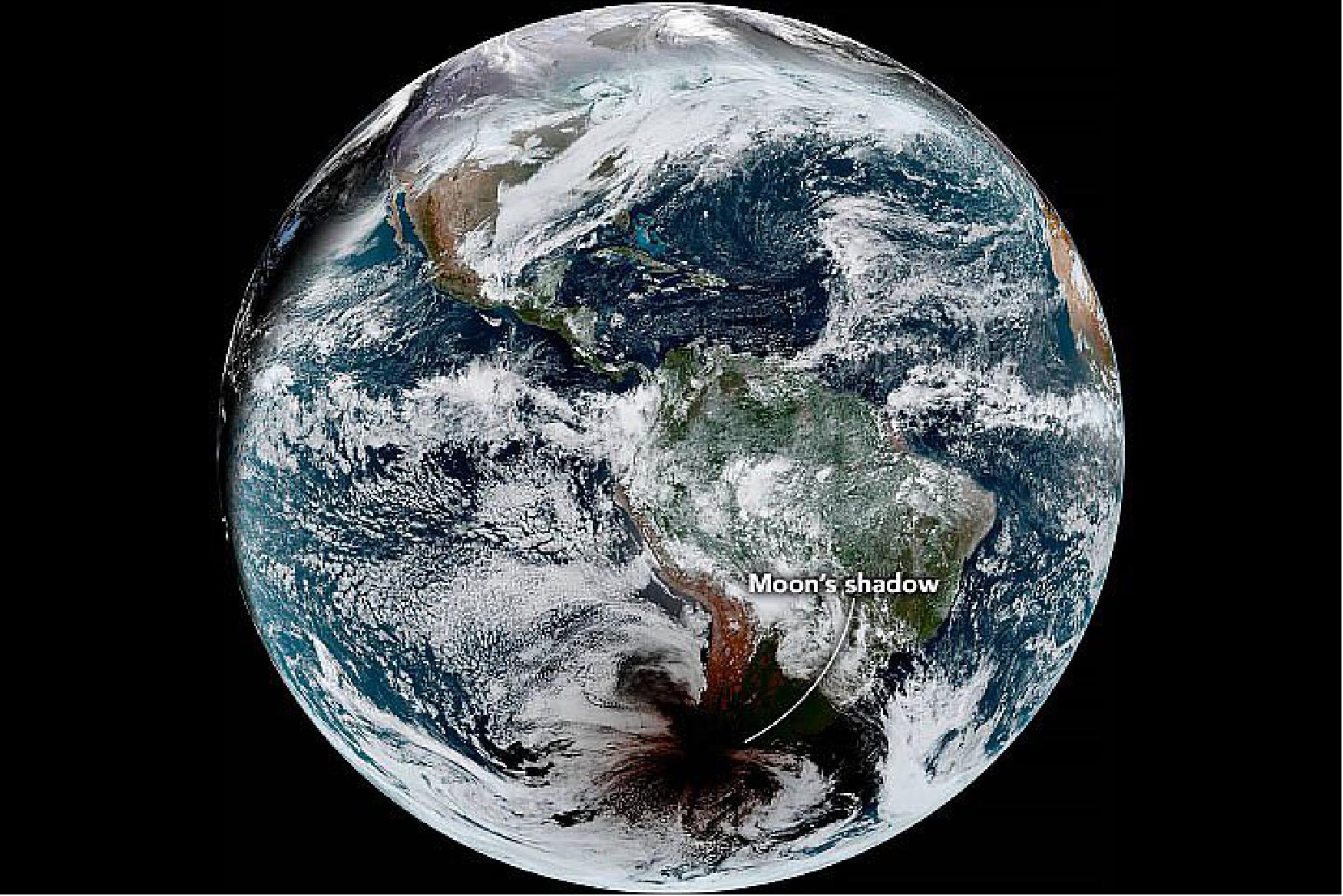
- The Advanced Baseline Imager (ABI) on GOES-16 (Geostationary Operational Environmental Satellite-16 ) captured these images of the shadow of the Moon crossing the face of Earth. GOES-16 is operated by the National Oceanic and Atmospheric Administration (NOAA); NASA helps develop and launch the GOES series of satellites.

• December 10, 2020: The 2020 Atlantic hurricane season will go down in history as a season of superlatives: the most named storms observed in a year (30); the most storms to make landfall in the continental United States (12); the most to hit Louisiana (5); and the most storms to form in September (10). The 2020 season was supercharged, and not just in the raw numbers. 76)
- “What really blew me away were the explosive intensification events,” said Jim Kossin, an atmospheric scientist with the National Oceanic and Atmospheric Administration (NOAA). “For instance, Hurricane Eta’s wind speeds increased around 80 miles (130 km) per hour in one day. There’s rapid intensification, and then there’s really rapid intensification, which is what we saw often this year.”
- For the past few decades, hurricanes have been rapidly intensifying more often, and their forward motion has been stalling more. 2020 continued both trends. A record-tying nine storms rapidly intensified, defined as wind speeds increasing at least 35 miles (56 km) per hour within 24 hours. Two named storms stalled; one (Sally) moved at just 2 miles per hour for a period—slower than a walking pace.
- During the 2020 season, nearly every mile of the U.S. Atlantic coast from Texas to Maine was under a tropical storm watch or warning at some point. It also marked the fifth year in a row with above-average hurricane activity.
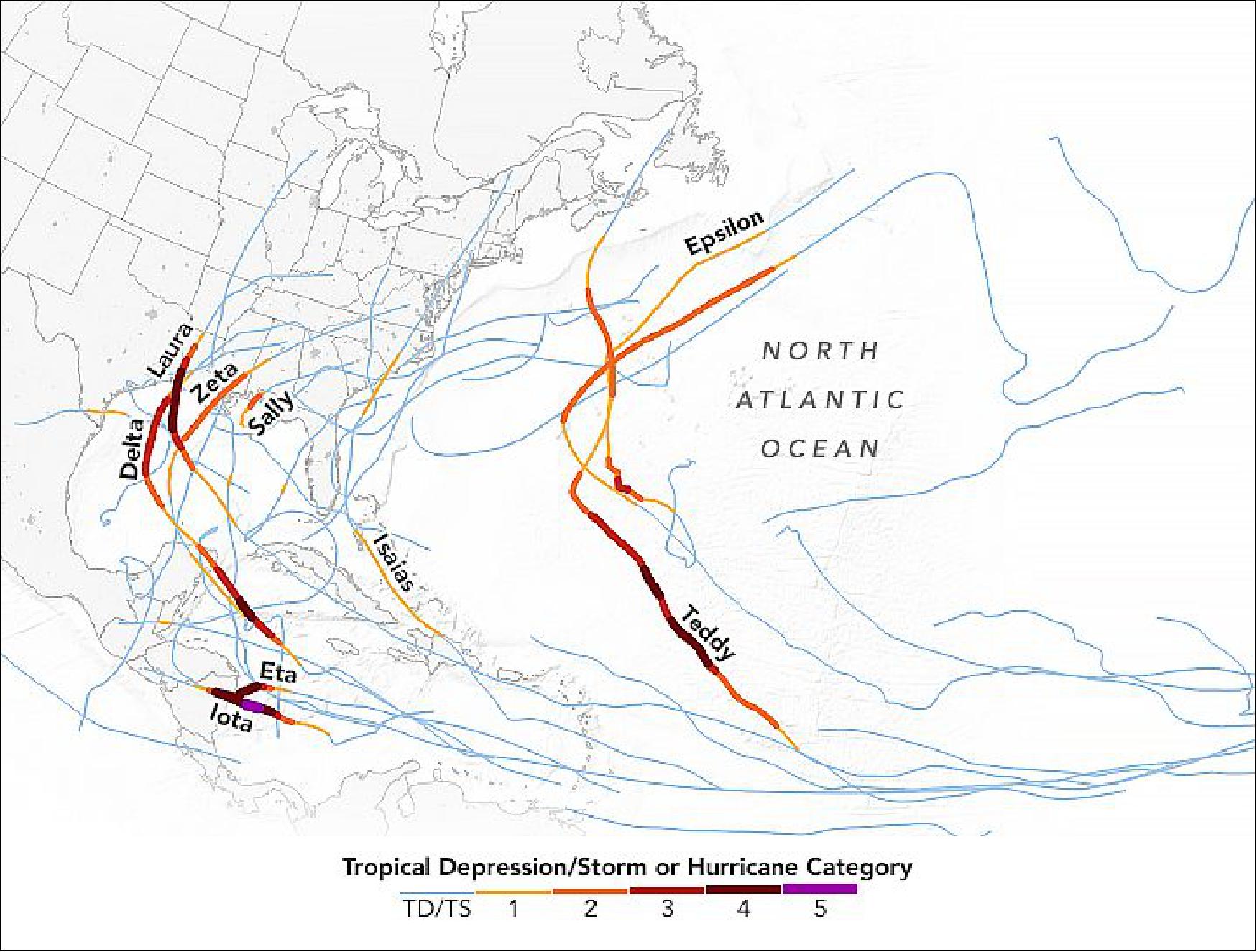
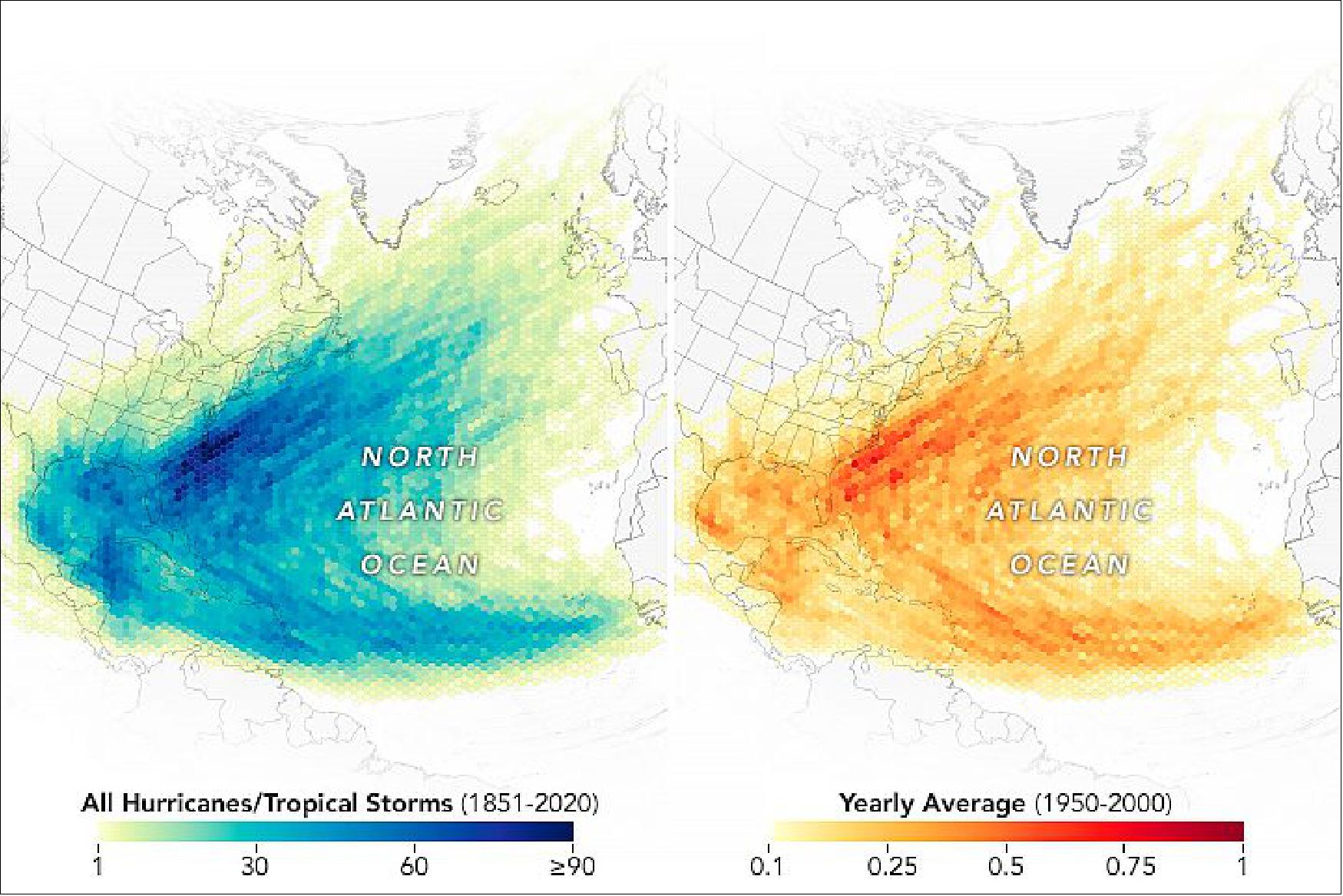
- “This year, the U.S. got hit a lot and the storms did a lot of damage, but the damage certainly could have been worse had the storms tracked slightly differently,” said Phil Klotzbach, a meteorologist at Colorado State University. “For Hurricane Laura, the storm surge could have devastated Lake Charles if the storm had tracked 20 miles farther west.”
- Category 4 Hurricane Laura was the strongest to make landfall in the U.S. this season, bringing sustained winds of 150 miles (240 kilometers) per hour and storm surges ranging from 9 to 15 feet (3 to 5 meters). It dropped 5 to 10 inches of rain across a swath of Louisiana, Texas, and Arkansas.
- In Central America, category 4 hurricanes Eta and Iota made landfall within two weeks of one another in the same part of Nicaragua. Never have two Atlantic hurricanes hit the same area with such strength so close in time.
- “Eta stood out as one of the most catastrophic storms of the season, as it stalled and rapidly intensified at the same time,” said Tim Hall, a hurricane researcher at NASA’s Goddard Institute for Space Studies. “It also occurred in November, well after the season typically peaks.”
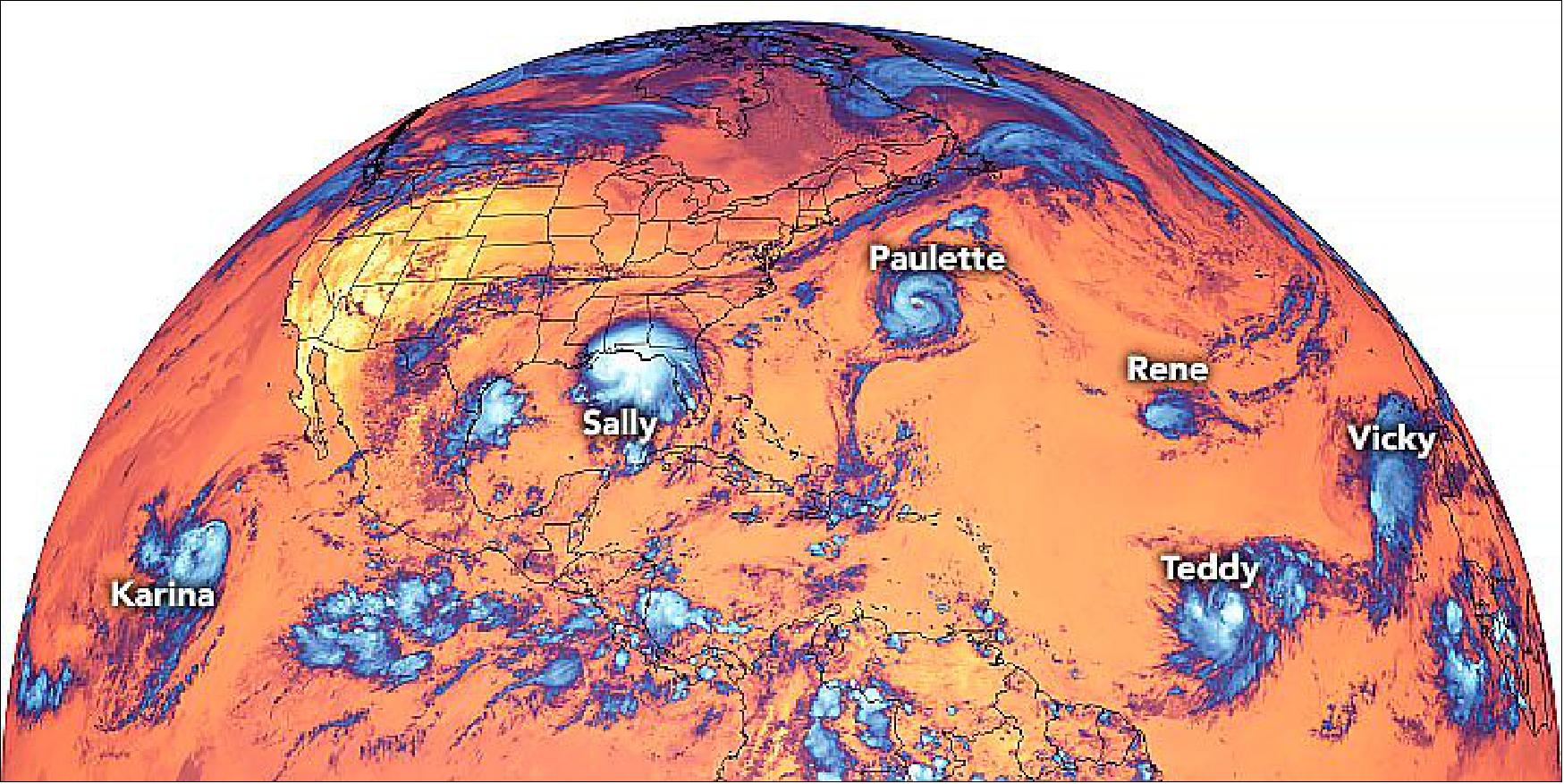
- A combination of environmental factors made the Atlantic basin favorable for storm development this year. Sea surface temperatures were abnormally warm at the beginning of the season—which led to a slew of early storms—and became warmer throughout the season. By August, a very active monsoon pattern took hold over northwestern Africa and helped produce the sort of robust atmospheric waves that can develop into storms. A moderate to strong La Niña also developed in the eastern Pacific Ocean and reduced the wind shear that can hinder hurricane formation and intensification across the tropical Atlantic.
- Local atmospheric and oceanic conditions also helped intensify individual hurricanes, Klotzbach noted. Weak easterly trade winds prevented upwelling (the process of bringing deeper, colder water to the ocean surface) in the Caribbean, allowing a deep pool of extremely warm water to develop. This provided potent fuel for rapidly intensifying storms like Eta and Iota.
- Though recent research suggests that warming seas may heighten hurricane activity in the future, the abundance of storms this year is not itself a signal of future storm trends. “There’s no observed trend globally on the frequency of storms. Some years and some ocean basins have more and then less,” said Hall. “But if you already have a hurricane formed, we have found that global warming signals are increasing a storm’s likelihood to stall, intensify into a major hurricane, and drop more rain.”
• August 21, 2020: After more than 10,000 lightning strikes in 72 hours, hundreds of wildfires erupted across California, particularly in the northern part of the state. The fires, which have been exacerbated by a historic heatwave, have burned more than 300,000 acres (1,200 km2) in the state since August 16, 2020. Smoke has spread across large swaths of the western United States and the Pacific Ocean. 77)
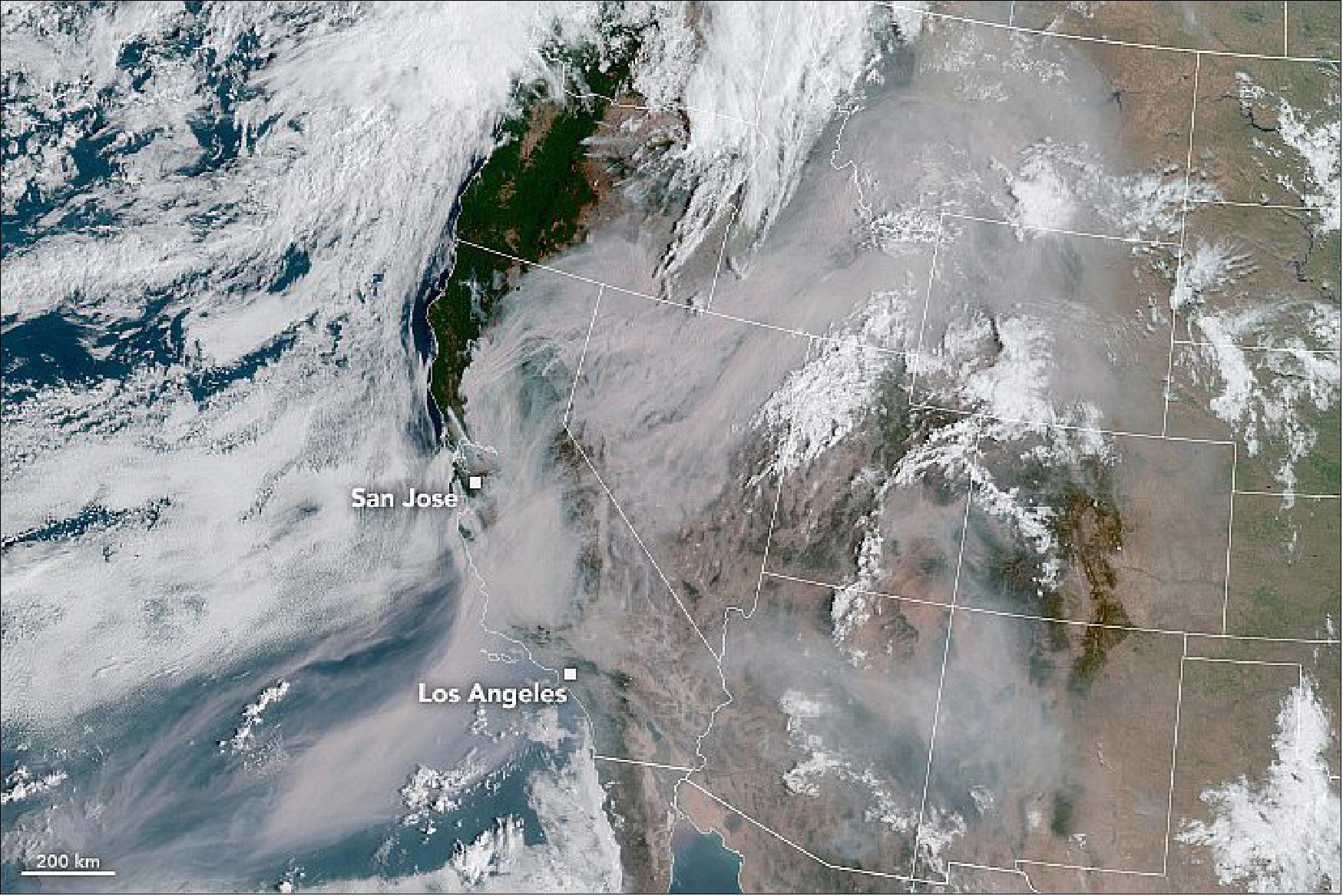
- Wildfire smoke is dangerous because it carries tiny, harmful particles into the air. Known as aerosols, these solid and liquid particles can degrade air quality and cause breathing and lung problems, particularly for people with asthma. Long-term exposure to air pollution can also contribute to heart disease and cancer.
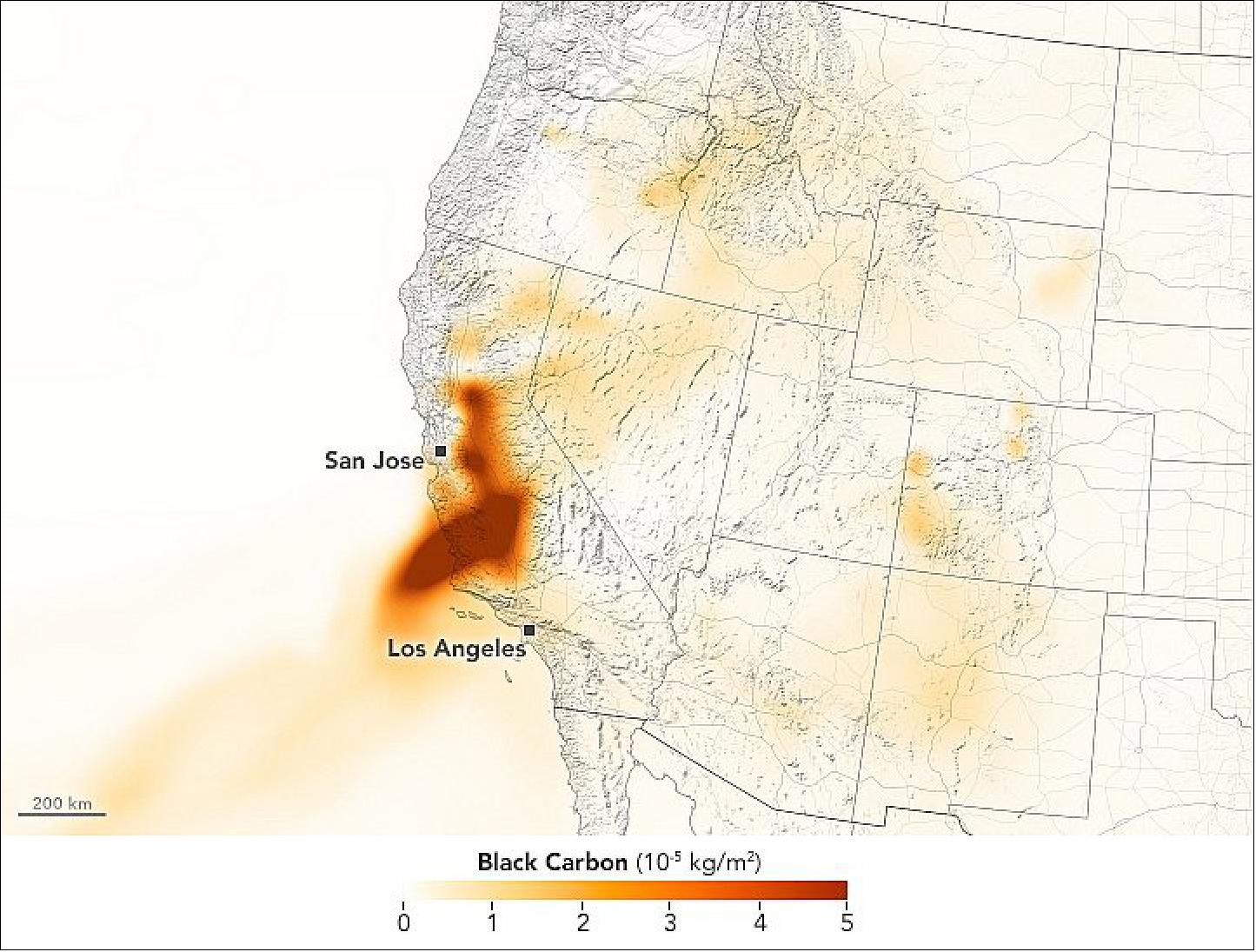
- On August 19, air quality monitors reported unhealthy levels of pollution across California as the smoke tinged skies with red haze. In fact, atmospheric testing showed Northern California had the worst air quality in the world on that day. Unhealthy air was also reported in Southern California and the Sacramento and Napa Valleys.
- “This amount of smoke is extremely unusual,” said Michael Garay, an air quality researcher at NASA’s Jet Propulsion Laboratory. “The amount of smoke is due to both the large number of individual fires, as well as large ‘fire complexes,’ which are extremely large fires.”
- As of August 20, the largest fire in the state was the SCU Lightning Complex near San Jose. It had burned more than 137,000 acres across five counties since igniting on August 18. The second-largest fire is the LNU Lightning Complex near Sacramento, which had burned more than 130,000 acres since August 17.
- How long the smoke stays in the air will depend a lot on the weather, Garay said. Excessive heat warnings are in effect for several parts of the state through August 21. The National Weather Service issued forecasted poor air quality in California’s Central Valley until the fires are extinguished.
• April 14, 2020: The output of solar energy systems is highly dependent on cloud cover. While weather forecasting can be used to predict the amount of sunlight reaching ground-based solar collectors, cloud cover is often characterized in simple terms, such as cloudy, partly cloudy or clear. This does not provide accurate information for estimating the amount of sunlight available for solar power plants. 78) 79)
- In this week’s Journal of Renewable and Sustainable Energy, from AIP Publishing, a new method is reported for estimating cloud optical properties using data from recently launched satellites. This new technique is known as SCOPE (Spectral Cloud Optical Property Estimation).
- In 2016, NASA began launching a new generation of Geostationary Operational Environmental Satellites, the GOES-R series. These satellites occupy fixed positions above the Earth’s surface. Each is equipped with several sophisticated instruments, including ABI (Advanced Baseline Imager), which can detect radiation upwelling from the Earth at specific wavelengths.
- The SCOPE method estimates three properties of clouds that determine the amount of sunlight reaching the Earth’s surface. The first, cloud top height, is the altitude corresponding to the top of each cloud. The second, cloud thickness, is simply the difference in altitude between a cloud’s top and bottom. The third property is the cloud optical depth, a measure of how a cloud modifies light passing through it.
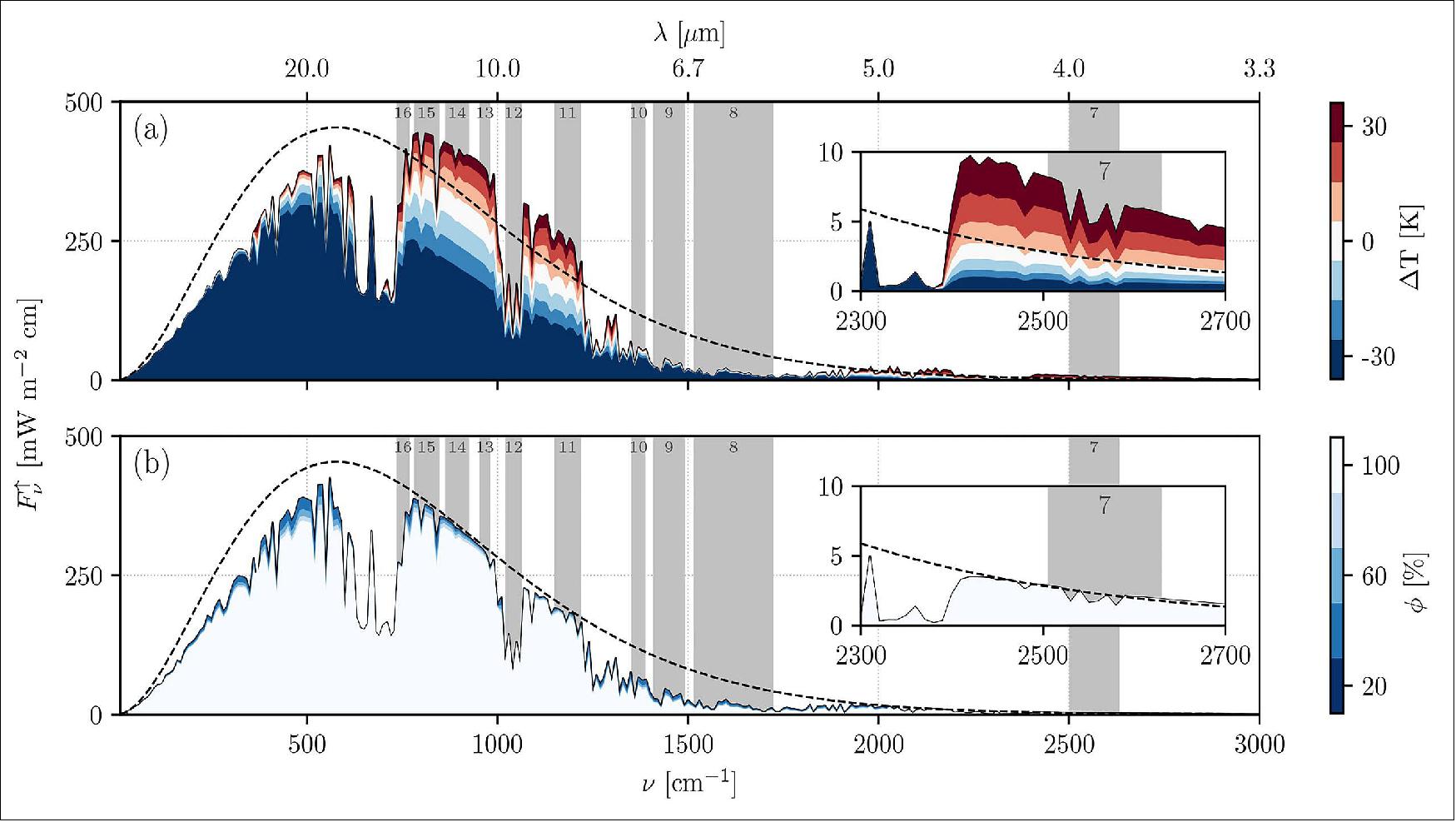
- Clouds are, essentially, floating masses of condensed water. The water takes multiple forms as liquid droplets or ice crystals of varying sizes. These different forms of water absorb light in different amounts, affecting a cloud’s optical depth.
- The amount of light absorbed also depends on the light’s wavelength. Absorption is especially variable for light in the wider infrared range of the spectrum but not so much for light in the narrower visible range.
- The SCOPE method simultaneously estimates cloud thickness, top height and optical depth by coupling ABI sensor data from GOES-R satellites to an atmospheric model. Two other inputs to the model come from ground-based weather stations: ambient temperature and relative humidity at the ground. These are used to adjust temperature and gas concentration vertical profiles in the model.
- The accuracy of the estimated cloud optical properties was evaluated using one year of data from 2018 for measurements taken at seven ground-based locations in the U.S. during both night and day, in all sorts of weather, and for a wide spatial coverage at 5-minute intervals.
- “SCOPE can be used during both day and night with reliable accuracy,” said co-author Carlos F. M. Coimbra. “Due to its high-frequency output during daytime, SCOPE is especially suitable for providing accurate real-time estimates of cloud optical properties for solar forecasting applications.”
Sensor Complement
The GOES (Geostationary Operational Environmental Satellite) family of satellites has a history of supporting meteorological and climate observations dating back to 1974.
Unlike the GOES-I/M and GOES-N/P series, the 3rd generation GOES-R series spacecraft do not contain a “sounder”. Legacy sounding products are derived based on ABI data through the GS (Ground System). - Instead, a GLM (Geostationary Lightning Mapper) will greatly improve storm hazard identification and increase warning lead-time during both day and night, providing continuous monitoring of lightning activity. In addition, the satellite will contain a similar, but more powerful, suite of solar ultraviolet imaging and space weather monitoring equipment in comparison to previous GOES satellites.
On the GOES-R “family tree” of instruments, there are three general classifications for the instrument payloads:
• Nadir-pointing
- Earth-pointed “business end” of GOES
- Highly stable, precision pointed platform
- Dynamically isolated from the rest of the spacecraft
- Supports operation of the ABI and GLM
• Solar-pointing
- Utilizes a Sun Pointing Platform (SPP) housed on the solar array yoke
- The SPP provides a stable platform that tracks the seasonal and daily movement of the sun relative to the spacecraft
- Supports operation of the SUVI and EXIS
• In-Situ
- SEISS and the Magnetometer provide localized measurements of particles and fields in geosynchronous orbit
- Accommodation challenges include: a) a wide variance in Field-of-View (FOV) requirements for the SEISS sensors, and, b) a boom to provide relative magnetic isolation for the Magnetometer.
Instrument | Instrument provider | Objectives and improvement |
ABI (Advanced Baseline Imager) | Harris (formerly ITT Corporation, Ft Wayne, IN) | Hurricane track & intensity forecast |
SUVI (Solar Ultra Violet Imager) | Lockheed-Martin Advanced Technology Corp (LM ATC), Palo Alto, CA | Power blackout forecasts due to solar flares |
EXIS (Extreme Ultra Violet and X-ray Irradiance Sensor) | Laboratory for Atmospheric and Space Physics (LASP), Boulder, CO | Solar flare warnings for communications and navigation |
GLM (Geostationary Lightning Mapper) | Lockheed-Martin Advanced Technology Corp (LM ATC), Palo Alto, CA | Thunderstorm & tornado warning lead time, |
SEISS (Space Environmental In-Situ Suite) | Assurance Technology Corporation (ATC), Carlisle, MA | Energetic particle forecasts |
MAG (Magnetometer) | Procured as part of the spacecraft contract, Lockheed Martin, Newtown, PA |
|
ABI (Advanced Baseline Imager)
ABI is the next-generation (3rd) multispectral imager, a 2-axis scanning radiometric imager, intended to begin a new era in US environmental remote sensing with greatly improved capabilities and features (more spectral bands, faster imaging cycles, and higher spatial resolution than the current imager generation of GOES-N to -P). The ABI instrument is a significant advancement over current imager generation.
The overall objectives of ABI are to provide high-resolution imagery and radiometric information of the Earth's surface, the atmosphere and the cloud cover (measurement of the emitted and solar reflected radiance simultaneously in all spectral channels). Data availability, radiometric quality, simultaneous data collection, coverage rates, scan flexibility, and minimizing data loss due to the sun, are prime requirements of the ABI system. 82) 83) 84) 85) 86) 87) 88)
The instrument is providing 16 bands of multispectral data, with two bands in VIS (0.47 µm & 0.64 µm) and 14 bands in IR (0.86 µm to 13.3 µm). The spatial resolution is band-dependent, the IGFOV (Instantaneous Geometric Field of View) ranges from 0.5 km at nadir for broadband visible, 1.0 km for SWIR, and 2.0 km for MWIR and TIR data. The instrument features three “imaging sectors” with a simultaneous observation capability, referred to as: FD (Full Disk), CONUS, and Mesoscale. Full Disk includes the synoptic Earth view from GEO. The CONUS (Contiguous USA) sector covers a target area of 5000 km x 3000 km; the Mesoscale sector covers a nominal region of 1000 km x 1000 km (at nadir projection). 89)
ABI has two imaging modes, namely Mode 3 and Mode 4. Mode 3 imaging can provide 1 FD image, 3 CONUS and 30 Mesoscale images, every 15 minutes. Mode 4 can provide 30 Mesoscale images every 15 minutes as well as a Full Disk every 5 minutes.
The following four requirements of the NWS (National Weather Service) are considered with highest priority: 90)
1) Continuous instrument operation capability including the eclipse phases at the vernal equinoxes of the GEO orbit
2) Simultaneous observation capability for the modes “full-disk” and “CONUS” (Contiguous USA).
3) Improvement of the temporal instrument imagery resolutions.
- Full-disk Earth observation within 15 minutes
- CONUS, or the equivalent of a nadir-viewed rectangle (3000 km x 500 km) every 5 minutes (goal of 1 minute)
- Imagery of minimum size 1000 km x 1000 km (nadir) every 30 seconds
- A capability must exist to observe concurrently the CONUS and full-disk imagery along with all other imaging activities, such as space locks, blackbody calibrations, and star observations
4) Improvement of the spatial resolution of the imagery. The current GOES Imager spatial resolution (1 km in VIS and 4 km in IR) must be doubled for ABI. The intent is to allow for better identification and tracking of cloud and moisture signatures.
The band selection has been optimized to meet all cloud, moisture, and surface observation requirements. The phenomena observed and the various applications are:
• VIS band (0.64 µm): Daytime cloud imaging, snow and ice cover, severe weather onset detection, low-level cloud drift winds, fog, smoke, volcanic ash, flash flood analysis, hurricane analysis, winter storm analysis
• SWIR band (1.6 µm): Daytime cloud/snow/ice discrimination, total cloud cover, aviation weather analysis for icing, smoke from low-burn-rate fires
• MWIR band (3.9 µm): Fog and low-cloud discrimination at night, fire identification, volcanic eruption and ash, daytime reflectivity for snow/ice
• MWIR band (7.0 µm): Middle-tropospheric water vapor tracking, jet stream identification, hurricane track forecasting, mid-latitude storm forecasting, severe weather analysis
• TIR band (11.2 µm): Continuous day/night cloud analysis for many general forecasting applications, precipitation estimates, severe weather analysis and prediction, cloud drift winds, hurricane strength and track analysis, cloud top heights, volcanic ash, winter storms, cloud phase/particle size (in mid-band products)
• TIR band (12.3 µm): Continuous cloud monitoring for numerous applications, low-level moisture, volcanic ash trajectories, cloud particle size (in mid-band products)
• TIR band (13.3 µm): Cloud top height assignments for cloud-drift winds, cloud products for ASOS supplement, tropopause delineation, cloud opacity.
Application spectrum of the five additional bands.
• VIS band (0.47 µm): This band is used for aerosol detection and visibility estimation
• VIS band (0.86 µm): This band provides synergy with AVHRR/3 band 2. The band is used for determining vegetation amount, aerosols and ocean/land studies.
• SWIR band (1.378 µm): This band is similar to a MODIS band. It does not see into the lower troposphere due to water vapor sensitivity, thus it provides excellent daytime sensitivity to very thin cirrus.
• TIR band (8.5 µm): This band permits the detection of volcanic cloud with sulfuric acid aerosols, thin cirrus in conjunction with 11 µm band and determination of cloud microphysical properties with the 11.2 µm and 12.3 µm bands. This includes a more accurate delineation of ice from water clouds during day or night
• TIR band (10.3 µm): The band permits the determination of microphysical properties of clouds with the 11.2 and 12.3 µm bands. This includes a more accurate determination of cloud particle size during the day or night.
In May 2001, NASA awarded formulation phase contracts to three companies: ITT Industries' Aerospace/Communications Division, Fort Wayne, IN; BATC (Ball Aerospace & Technologies Corp.) of Boulder, CO; and Raytheon SBRS (Santa Barbara Remote Sensing), Goleta, CA. Under terms of the contracts, each company developed detailed engineering plans for the future instrument. In Sept. 2004, NASA on behalf of NOAA has selected ITT Industries to design and develop the ABI instrument.
Note: In 2011, the ITT Corporation split into three companies: ITT, Xylem, and ITT Exelis. The ABI instrument was developed at ITT Exelis in Fort Wayne, IN.
Requirement | 2nd generation GOES Imager | ABI of GOES-R |
No of spectral bands | 5 | 16 |
Data rate | 2.6 Mbit/s | 75 Mbit/s |
Spatial resolution: |
|
|
Time for full disk scan | 26 minutes | 15 or 5 minutes |
Absolute INR (Image Navigation and Registration) | 54 µrad | 21 µrad (EW), 21 µrad (NS) |
Registration between images (15 minutes) | 36 µrad | 16 µrad (0.5, 1.0 km) |
Cross-channel image co-registration | 50 µrad (VIS to IR) | 6.3 µrad (0.5, 1.0 to2 km) |
VIS (reflective bands) calibration | No | Yes |
Requirement | Threshold | |
Spatial resolution | VIS (0.64 µm) | 0.5 km (14 µrad IGFOV) |
Spatial coverage | Full disk | 4 per hour (every 15 min one image) |
Operation during eclipse | Yes | |
Data timelines (when scanning is complete) | CONUS: <1 minute Full disk: <6 minutes | |
Simultaneity | Within 5 s for all bands at any FOV Within 30 s for any adjacent (n/S) pixels Within 15 s for any adjacent (E/W) pixels | |
Number of spectral bands | 8 (threshold), 12 (goal) Star sensing capability required | |
Spectral bands (µm), 8 bands at minimum | 0.64±0.05, 1.61±0.03; 3.9±0.1; 6.15±0.45; 7.0±0.2; 10.7±0.5; 12.0±0.5; 13.3±0.3 | |
Spectral bands (µm), goal of four additional bands | 0.86±0.05, 1.375±0.015, 8.5±0.2, 10.35±0.25 | |
Navigation | <1.0 km (28 µrad) | |
Registration within frame | <1 km (28 µrad) | |
Line-to-line registration | <25 km (7 µrad) | |
Registration image to image, VIS, IR | <0.75 km (<21 µrad), <1.0 km (<28 µrad) | |
Band-to-band co-registration, VIS-IR, IR-IR | <1.0 km (<28 µrad), <15% of FOV | |
On-orbit calibration | VIS, IR (goal) | Pre-launch to ±5%, On-board to ±3% 0.2 K repeatability, 1.0 K absolute accuracy |
IR band linearity | ±1% | |
Total instrument mass, power, volume | <125 kg, <256 W, <0.8 m3 | |
Lifetime | Ground storage On-orbit storage Mean mission life Design life | 2 years 2 years 8.4 Years 10 years |
Band No | FWHM wavelength range (µm) | Center wavelength (µm) | Nominal IGFOV (km) | Prime measurement objectives and use of sample data | Instrument heritage |
1 | 0.45-0.49 | 0.47 | 1 | Daytime aerosol over land, coastal water mapping | MODIS |
2 | 0.59-0.69 | 0.64 | 0.5 | Daytime clouds fog, insolation, winds | Current GOES imager/sounder |
3 | 0.846-0.885 | 0.885 | 1 | Daytime vegetation/burn scar and aerosols over water, winds | VIIRS, spectrally modified AVHRR/3 |
4 | 1.371-1.386 | 1.378 | 2 | Daytime cirrus cloud | VIIRS, MODIS |
5 | 1.58-1.64 | 1.61 | 1 | Daytime cloud-top phase and particle size, snow | VIIRS, spectrally modified AVHRR/3 |
6 | 2.225-2.275 | 2.25 | 2 | Daytime land/cloud properties, particle size, vegetation, snow | VIIRS, similar to MODIS |
7 | 3.80-4.00 | 3.90 | 2 | Surface and cloud, fog at night, fire, winds | Current GOES imager |
8 | 5.77-6.6 | 6.19 | 2 | High-level atmospheric water vapor, winds, rainfall | Current GOES imager |
9 | 6.75-7.15 | 6.95 | 2 | Mid-level atmospheric water vapor, winds, rainfall | Current GOES imager |
10 | 7.24-7.44 | 7.34 | 2 | Lower-level water vapor, winds and SO2 | Spectrally modified current sounder |
11 | 8.3-8.7 | 8.5 | 2 | Total water for stability, cloud phase, dust, SO2, rainfall | MAS (MODIS Airborne Simulator) |
12 | 9.42-9.8 | 9.61 | 2 | Total ozone, turbulence, winds | Spectrally modified current sounder |
13 | 10.1-10.6 | 10.35 | 2 | Surface and cloud | MAS |
14 | 10.8-11.6 | 11.2 | 2 | Imagery, SST, clouds, rainfall | Current GOES sounder |
15 | 11.8-12.8 | 12.3 | 2 | Total water, ash, SST | Current GOES sounder |
16 | 13.0-13.6 | 13.3 | 2 | Air temperature, cloud heights and amounts | Current GOES sounder/GOES-12 + imager |
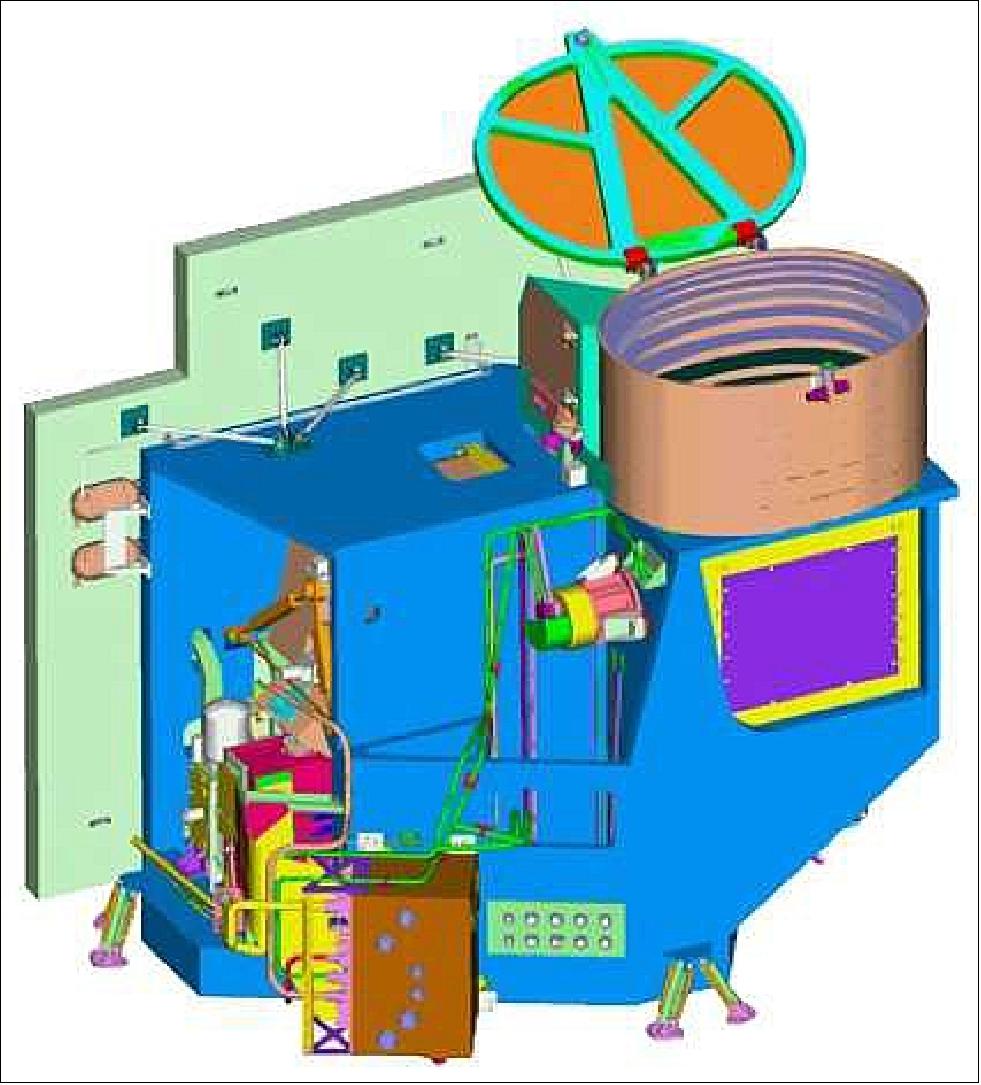
Support mode | FOV (Field of View) | 0.5 km resolution | 1 km resolution | 2 km resolution |
Full disk diameter | 17.76º | 22141 pixels | 11070 pixels | 5535 pixels |
CONUS height | 4.8129º | 6000 pixels | 3000 pixels | 1500 pixels |
CONUS width | 8.0215º | 10000 pixels | 5000 pixels | 2500 pixels |
Meso height/width | 1.6043º | 2000 pixels | 1000 pixels | 500 pixels |
ABI cryocooler: NGAS (Northrop Grumman Aerospace Systems) has developed and tested a two-stage pulse tube (PT) cooler of JAMI (Japanese Advanced Meteorological Imager) heritage flown on the Japanese MTSAT-1R mission (launch Feb. 26, 2005). The ABI cooler system incorporates an integral HEC (High Efficiency Cryocooler) pulse tube cooler and a remote coaxial cold head. The two-stage cold head was designed to provide large cooling power at 53 K and 183 K, simultaneously. 92) 93)
NGAS evolved the design from on-orbit pulse tube cooler designs that the company has built and launched over the past decade. No failures have been experienced on any of these coolers on the seven satellite systems launched to date; some of these coolers are now approaching 11 years of failure-free operation.
The PFM (Proto-Flight Module) cooler system for ABI consists of a linear pulse tube cold head that is integral to the compressor assembly and a coaxial remote pulse tube cold head; the two cold head design affords a means of cooling a detector array to its operational temperature while remotely cooling optical elements (to reduce effects of radiation on imager performance) and a second detector array. The two cooler systems are referred to as TDU (Thermo-Dynamic Units); in addition, there are two associated CCE (Cooler Control Electronics) units that provide power and control functions to the TDUs.
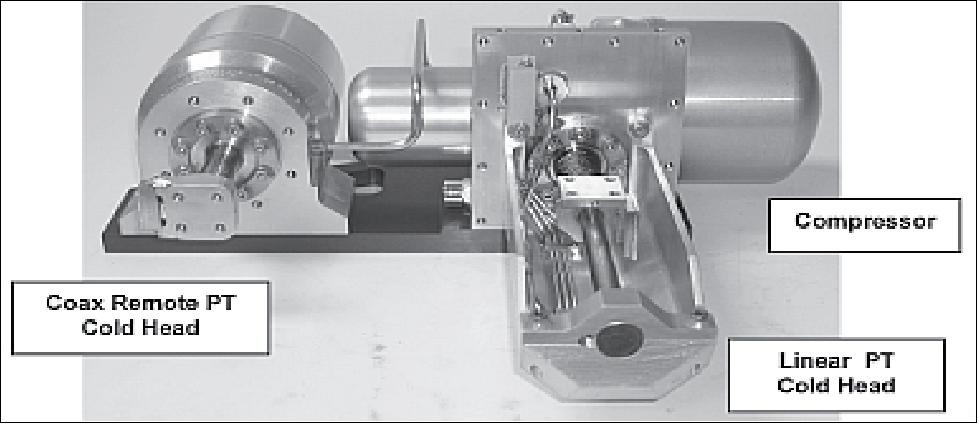
The TDU has a size of 370 mm x 350 mm x 130 mm (width x depth x height) with a mass of 5.5 kg. The size of CCE is 235 mm x 205 mm x 85 mm (width x depth x height) with a mass of 3.8 kg. The requirements on the cooler call for: 2.27 W of cooling at 53.0 K and 5.14 W of cooling at 183.1 K.
INR (Image Navigation and Registration)
Since ABI uses multiple focal plane modules for the channels of detector grids, the channel-to-channel registration can present a challenge if relative motion occurs from one focal plane module to another. This is especially the case given the ABI channel-to-channel registration requirements are at sub-pixel levels. 94)
INR on the current GOES program preceding GOES-R (2nd generation) employs image motion compensation (IMC) on board the spacecraft/imager to assure the image line of sight is accurately pointed to desired locations on the Earth scene. Once the image data are processed on ground, a series of manual landmarking registration techniques are applied to the image to improve the location of features in the image relative to known landmarks within the scene. The landmarking updates are also used to update the IMC coefficients for the following day’s operation.
ABI INR relies on a ground-based real time image navigation process to achieve increased knowledge accuracy using precise encoder readings and star image data. During an Earth scene collection, the instrument uses attitude information provided by the spacecraft to compensate for the spacecraft’s attitude motion; however the precise image navigation and registration is achieved through ground processing to determine where the image data were actually collected relative to the fixed grid scene.
ABI collects scene image data as well as star measurements to maintain line of sight knowledge. Image navigation uses ground processing algorithms to decompress, calibrate and navigate the image samples from the focal plane module detectors. The navigated samples are then re-sampled using a 4 x 4 sample kernel to form the 14 µrad pixels which form the Earth disk image.
Image collection performance for the ABI is governed by the attitude knowledge provided by the spacecraft, the control accuracy of the pointing servo control for the instrument and the diurnal line of sight variation. Per the GOES-R GIRD (General Interface Requirements Document), the spacecraft provides the following information to allow the instrument to collect scenes:
- Quaternion: ~ 100 µrad uncertainty (sampled at 1 Hz)
- Attitude rate measurements: < 20 µrad drift over 15 minutes (sampled at 100 Hz)
- Spacecraft position: 35 m in-track, 35 m cross-track and 70 m radial over 15 minutes (sampled at 1 Hz)
- Spacecraft velocity: < 6 cm/sec uncertainty per axis (sampled at 1 Hz).
Reference frame definitions: Image navigation and registration uses data and measurements defined in a number of different coordinate frames. The primary reference frame is J2000 which is the inertial frame in which the star catalog coordinates are defined. Star coordinates are updated to a True of date frame and then to an EFC (Earth Centered Fixed) coordinate frame with the X-axis oriented to the station longitude for GOES. Orbit determination and body axis attitude reporting are done relative to a frame defined by the velocity vector and nadir referred to as to ORF (Orbit Reference Frame). The ABI instrument alignment is referenced to a frame relative to the spacecraft body axis frame referred to as the IMF (Instrument Mounting Frame) and line of sight is referenced to a frame relative to the instrument mounting frame. ABI commanding and image navigation is defined relative to the Fixed Grid Frame defined as an ideal Geosynchronous orbit located at the GOES east or GOES west station longitude.
Requirement | EW (3σ) | NS (3σ) |
Navigation (Absolute location of any pixel) | ±21 µrad | ±21 µrad |
Frame-to-Frame Registration: 0.47, 0.64, 0.865, and 1.61 µm channels. | ±16 µrad | ±16 µrad |
Frame-to-Frame Registration: 1.378, 2.25, 3.9, 6.185, 6.95, 7.34, 8.5, 9.61, 10.35, 11.2, 12.3, and 13.3 µm channels | ±21 µrad | ±21 µrad |
Within Frame Registration: Angular separation of any two pixels in a Frame | ±21 µrad | ±21 µrad |
Swath-to-Swath Registration | ± 5.2 µrad | ± 5.2 µrad |
Channel-to-Channel Registration: 2 km to 2 km, 1 km, 0.5 km (wavelength/detector dependent) | ± 6.3 µrad | ± 6.3 µrad |
Channel-to-Channel Registration: 1 km to 1 km, 0.5 km (wavelength/detector dependent) | ± 5.2 µrad | ± 5.2 µrad |
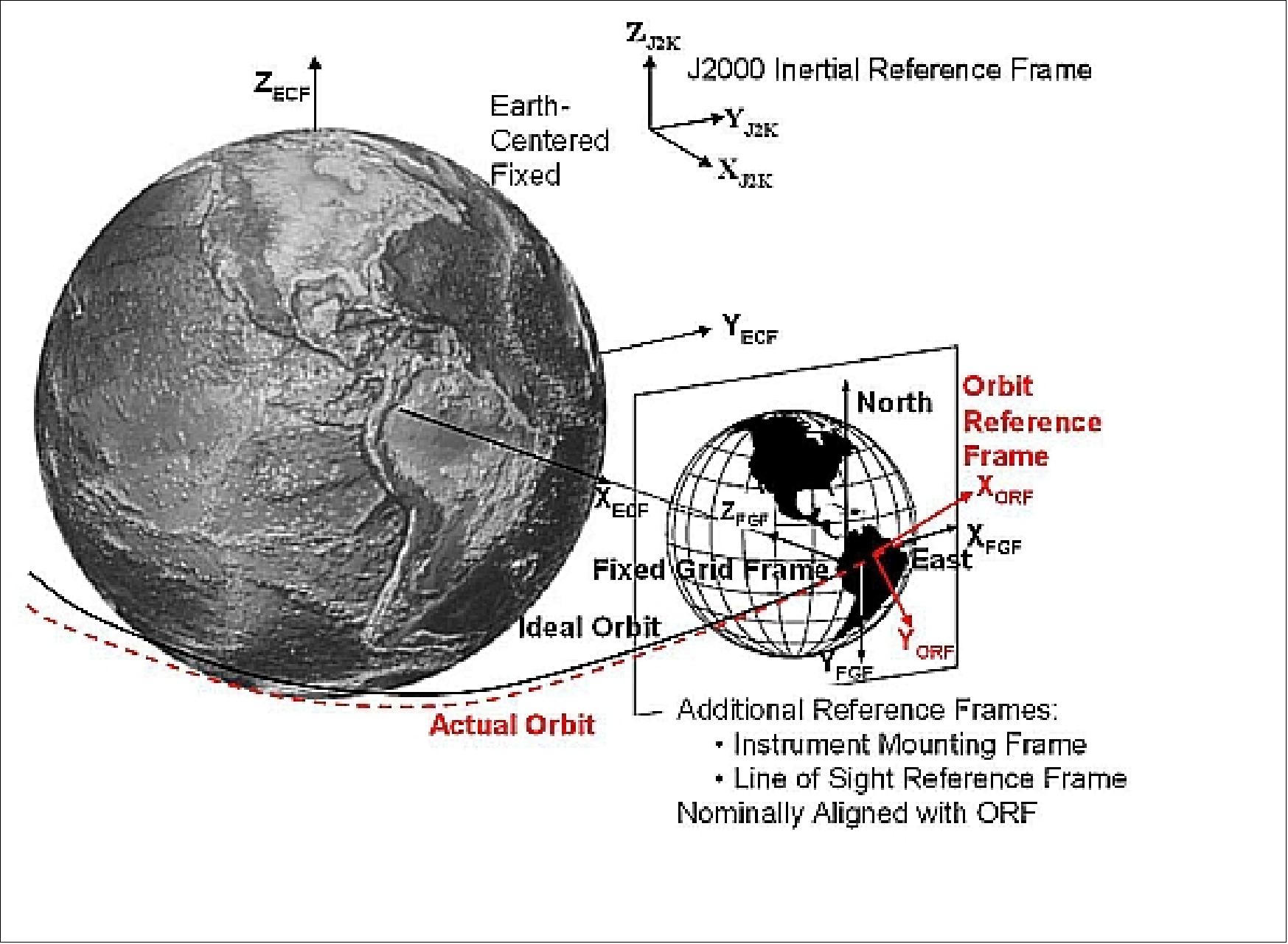
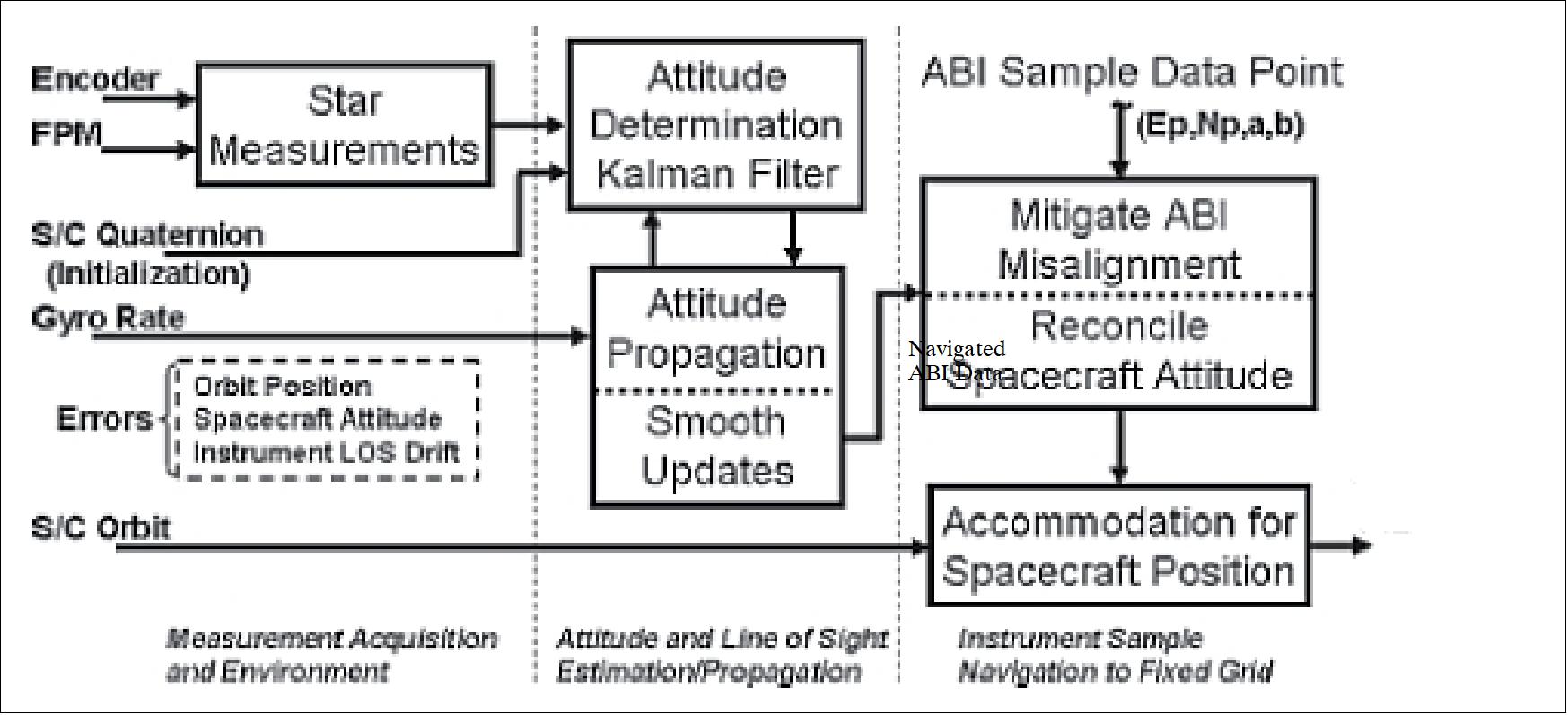
ABI's advanced design will provide users with twice the spatial resolution, six times the coverage rate, and more than three times the number of spectral channels compared to the current GOES Imagers. The operations flexibility permits consistent collection of Earth scenes, eliminating time gaps in coverage by the need to prioritize some areas over others. These improvements will allow tomorrow’s meteorologists and climatologists to significantly improve the accuracy of their products, both in forecasting and nowcasting. 95)

ABI Images: 97)
The ABI (Advanced Baseline Imager) will provide a paradigm shift in the United States’ geostationary weather imaging over the current GOES Imager:
• More than three times the channels (16 vs. 5)
• Four times the number of pixels (0.5, 1, and 2 km vs. 1 and 4 km)
• More than five times the temporal resolution (5 minute Full Disk vs. 26 minutes)
However, its most unique feature is its operational flexibility - one instrument seamlessly interleaving the collection of multiple images of different sizes, locations, and repetition intervals plus the ability to collect scan data in any direction. This enables the high temporal resolution imaging of severe weather events (hurricanes, typhoons, tornados, etc.) or vicarious calibration observations (e.g., moon, deserts, etc.) without interrupting Full Earth Disk and regional image collections.
ABI’s ability to interleave image collections ensures all regions will be imaged far more frequently than with the current imagers. Hence, ABI’s image collections can be simplified to just three standard images:
• Full Disk
• CONUS Continental United States (`lower 48 states')
• Mesoscale (aka meso)
The sizes of these images are provided in Table 8 and their locations are provided in Table 9. Note that all images are defined in radians. Degrees and kilometer equivalents are provided for convenience. (The size in kilometers is based on the conversion factor of 28 µrad/km.) This information is also provided visually in Figure 52, Figure 53, and Figure 54.
Mesoscale images can be located anywhere within the ABI FOR (Field of Regard). In Figure 6 some possible locations are shown (nadir, tornado in the mid-West, hurricane off the coast of Florida, lunar observation).
ABI Image | Shape | Size (degrees) | Size (radians) | km at nadir | |||
Height | Width | Height | Width | Height | Width | ||
Full Disk | Circle | 17.4º diameter | 0.303687 | N/A | |||
CONUS | Rectangle | 4.81º | 8.02º | 0.084 | 0.140 | 3000 km | 5000 km |
Mesoscale | Square | 1.60º | 1.60º | 0.028 | 0.028 | 1000 km | 1000 km |
ABI Image | Satellite Longitude | Center Offset | Center Location | ||
NS (rad) | EW (rad) | Latitude | Longitude | ||
Full Disk | all | nadir | |||
CONUS GOES-R East | 75º W | 0.086240 | -0.031360 | 30.083º N | 87.097º W |
CONUS GOES-R West | 137º W | 0.086240 | 0.000000 | 29.967º N | 137.000º W |
CONUS GOES-R Central | 89.5º W | 0.084560 | -0.005040 | 29.294º N | 91.406º W |
Mesoscale (meso) | all | Within 10º of nadir | |||
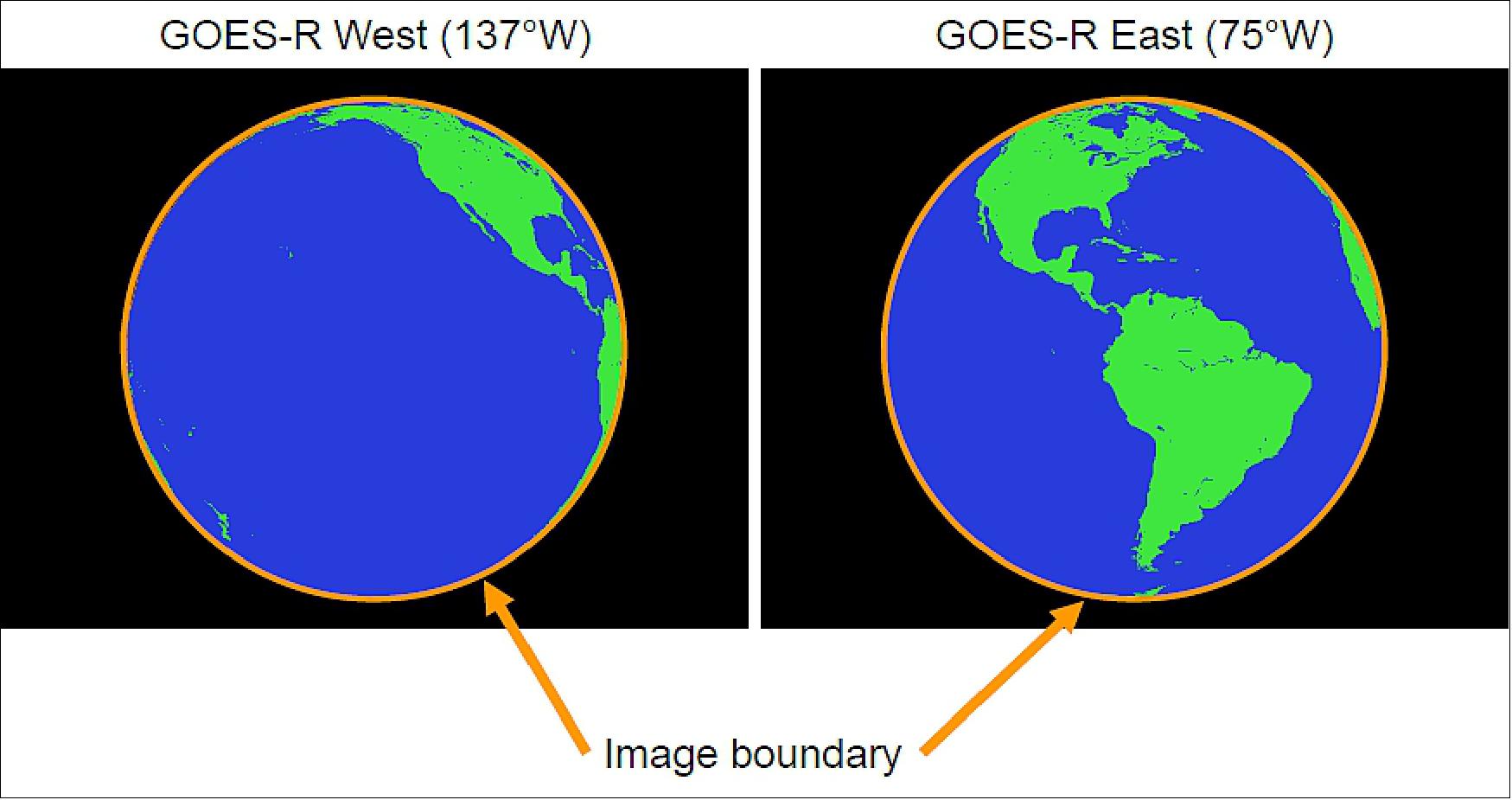
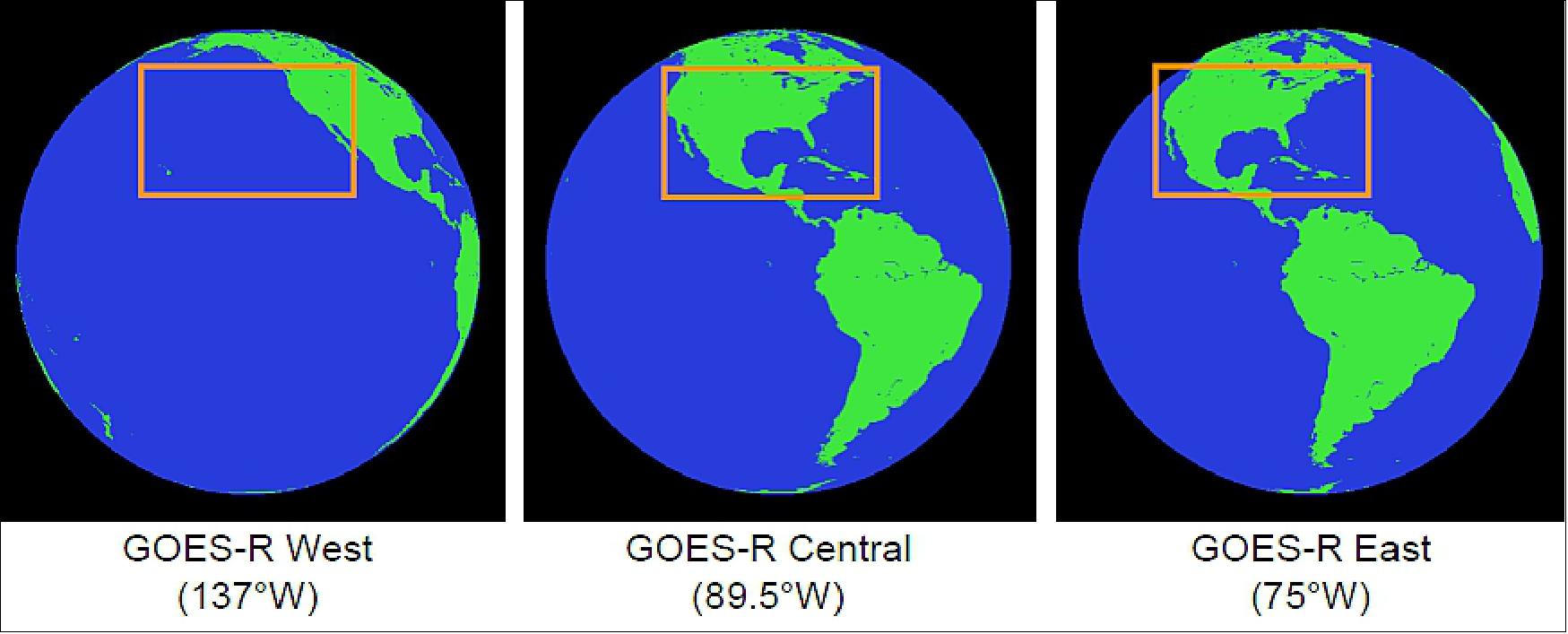
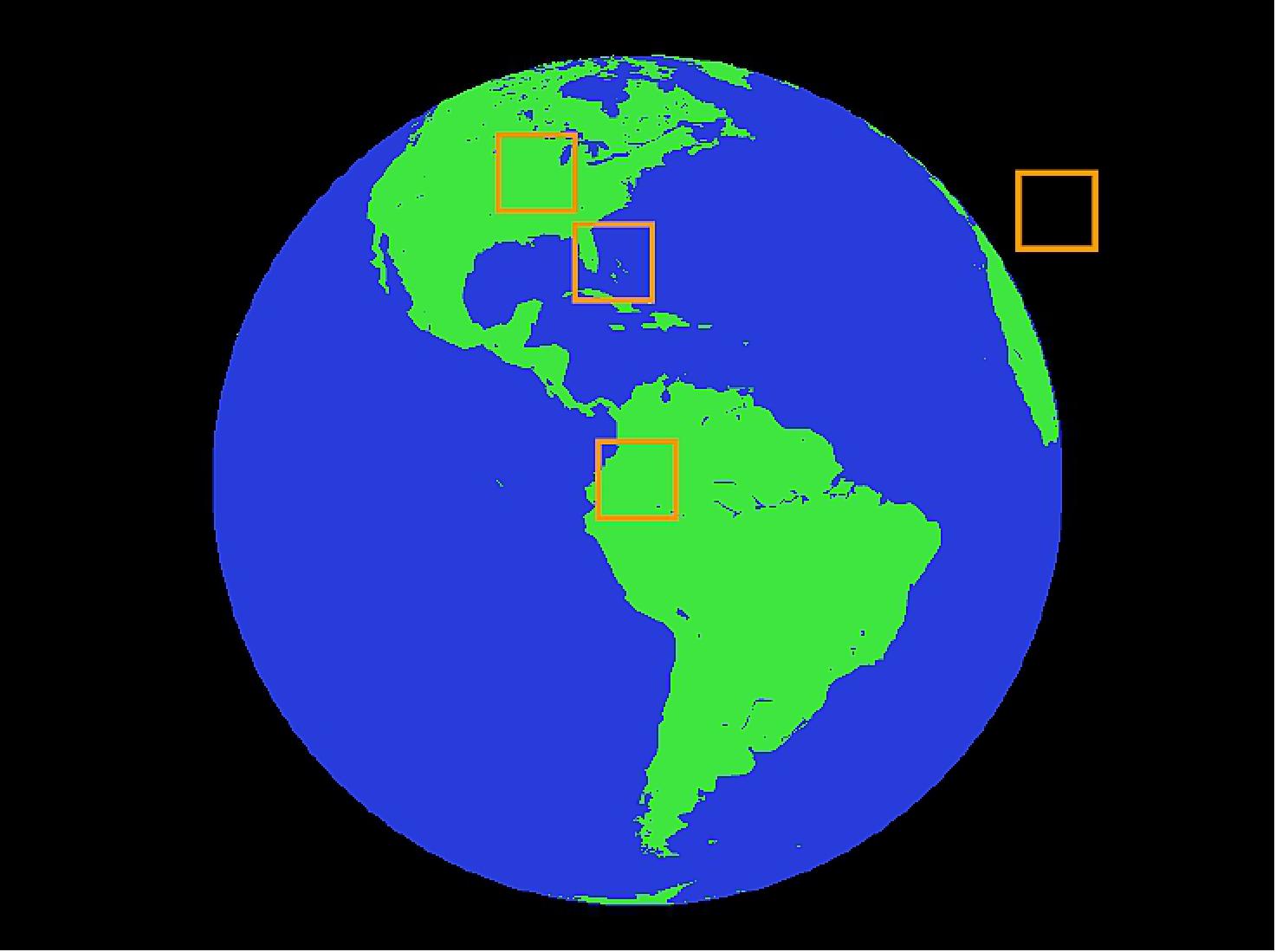
Note that the size of a “Full Disk” image varies by payload:
• GOES-R ABI: 17.4 degree diameter circle (Earth only)
• Himawari AHI: 17.8 degree diameter circle (Earth plus limb and space)
• GEO-KOMPSAT-2A AMI: 17.8 degree diameter circle (Earth plus limb and space)
• MTG FCI: 17.7 degree diameter circle (Earth plus limb)
ABI Timelines
An ABI scene definition defines the scan patterns needed to collect a desired image. Each scene is a collection of individual swaths. The ABI timeline defines when to collect each swath of each scene.
ABI currently has two operational timelines, created by Harris based on our customer’s requirements:
1) Continuous Full Disk (CFD)
• Timeline: ABI Scan Mode 4
• Images collected:
- 5-minute Full Disk images
2) Flex Mode (aka Storm Watch)
• Timeline: ABI Scan Mode 3
• Images collected (seamlessly interleaved):
- 30-second Mesoscale
- 5-minute CONUS
- 15-minute Full Disk
All operational ABI timelines include observations for radiometric and geometric calibration. All timelines start with a space look and blackbody observation and collect a space look at least every 30 seconds for radiometric calibration. Hence, blackbody observations occur at least every 15 minutes, far more frequently than required to meet the IR calibration accuracy requirements. All operational ABI timelines include visible stars observations on average at least every 100 s and IR stars observations on average at least every 300 s for navigation (i.e., geometric calibration).
Because the gain of the visible and near IR (VNIR) channels change far slower than the MWIR and LWIR channels, observations of the solar calibration target are required far less frequently than blackbody observations. Hence, observations of the solar calibration target are not included in the operational timelines. They are collected using a custom timeline, which is run approximately every two weeks at the start of the operational mission and less frequently later in the mission.
Custom scenes and timelines can be defined and uploaded at any time during the mission life. One such custom timeline has already been defined by Harris and is loaded in the ABI EEPROM (Electrically Erasable Programmable Read-Only Memory):
Super Flex Mode
• Timeline: ABI Scan Mode 6
• Images collected:
- 30-second Mesoscale
- 5-minute CONUS
- 10-minute Full Disk
This is not currently an operational timeline. However, it is expected to become an operational timeline once the GOES-R ground system parameters are updated to include processing and distribution of Full Disk image products on 10-minute intervals (in addition to the current 5 and 15 minute intervals) and the users’ systems have been updated to receive Full Disk products on 10-minute intervals.
ABI Images | Timeline Repetition Intervals (minutes) | ||||
Scan Mode 4 (Continuous Full Disk) | Scan Mode 3 (Flex Mode) | Scan Mode 6 (Super Flex Mode) | |||
Full Disk | 5 | 15 | 10 | ||
CONUS | — | 5 | 5 | ||
Mesoscale #1 | — | 0.5 | 1 | 0.5 | 1 |
Mesoscale #2 | — | — | 1 | — | 1 |
In the Scan Mode 3 and 6 timelines, a mesoscale image is collected every 30 seconds. However, ABI provides the user the option to define two different mesoscale image locations (Meso 1 and Meso 2) and collect both of them at 1 minute intervals. This means two severe weather events can be monitored simultaneously. — This is not an operational requirement for ABI. It is an enhancement provided by Harris to ensure our customers have the flexibility to address more than just the baseline scenarios.
ABI’s interleaved image collection approach can be easily seen in the “time-timeiii” diagram for the Scan Mode 3 Timeline provided in Figure 55. This diagram takes the 900 second timeline, breaks it into 30-second intervals and stacks them from top to bottom in sequential order. It is “read” chronologically just like reading a paragraph – left to right from the top to the bottom.
• This diagram shows how the mesoscale images are collected at precisely 30 second intervals and the CONUS images are at precisely 5-minute (300-second) intervals.
- When two mesoscale images are defined, their collections alternate, so there is no change in the timing of the timeline execution.
• The start of each Full Disk swath collection is staggered so the time interval across the swath boundary is precisely 30 seconds for all points.
• Nadir stares are added in time periods where there are no operational images to collect (no data is downlinked during nadir stares).
• Note that every Full Disk swath includes an autonomous space look observation. In time intervals where no Full Disk swaths are collected, explicit space look observations are performed.
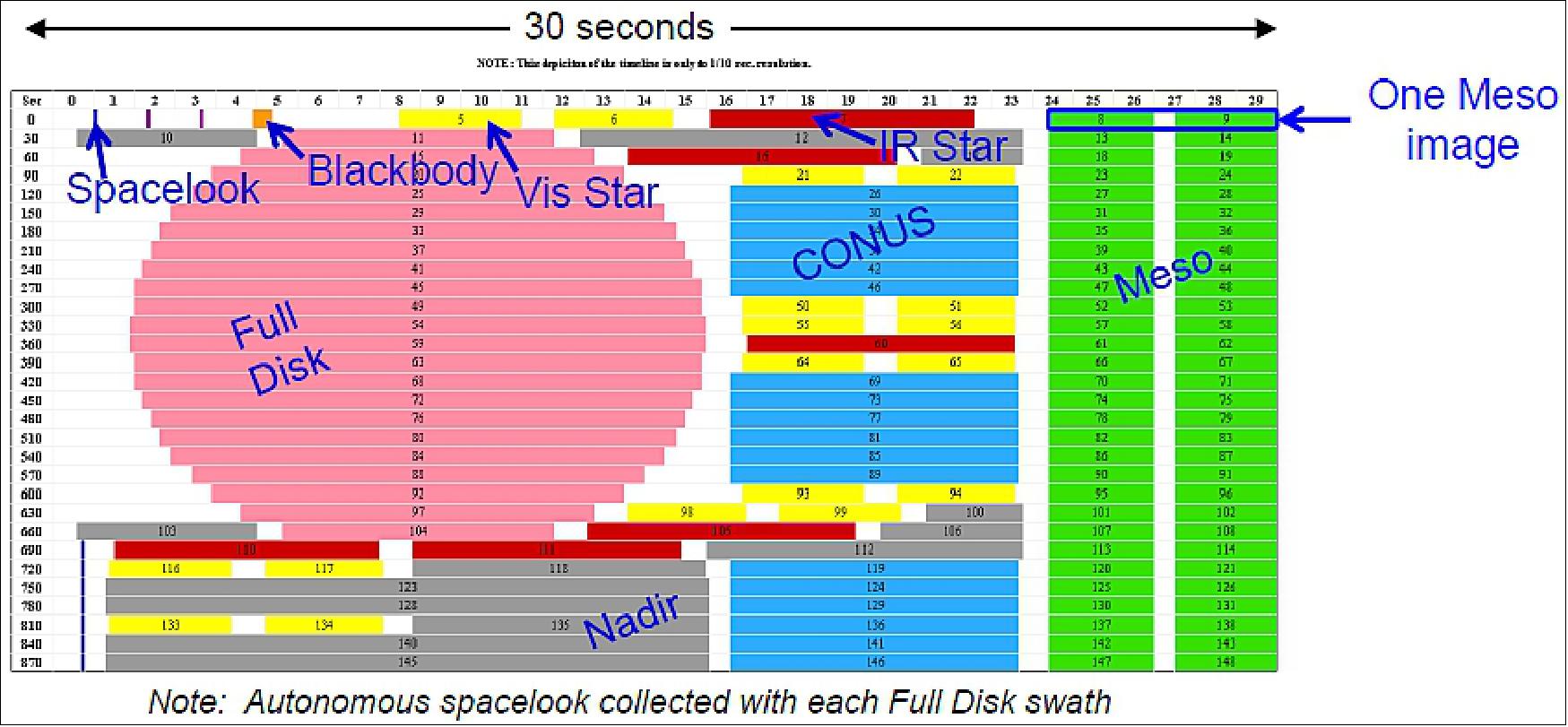
SUVI (Solar Ultra Violet Imager)
SUVI is a sun-pointed instrument, a normal-incidence multilayer-coated telescope, with the overall objective to provide information on solar activity and the effects of the sun on the Earth and the near-earth space environment. The SUVI provides narrowband imaging in the soft X-ray to EUV wavelength range (9.4 nm - 30.4 nm) at a high cadence (up to 3 images/s). SUVI will monitor the entire dynamic range of solar X-ray features including coronal holes and solar flares and will provide data regarding the rapidly changing conditions is the Sun’s atmosphere. These data are used for geomagnetic storm forecasts and for observations of solar energetic particle events related to flares. SUVI will continue the mission performed by the current GOES-M/P series SXI (Solar X-ray Imager) instrument. 98) 99)
In Sept. 2007, NASA awarded to LM ATC a contract to build the SUVI instrument. 100) In December 2009, SUVI has met all the requirements of a CDR (Critical Design Review). 101)
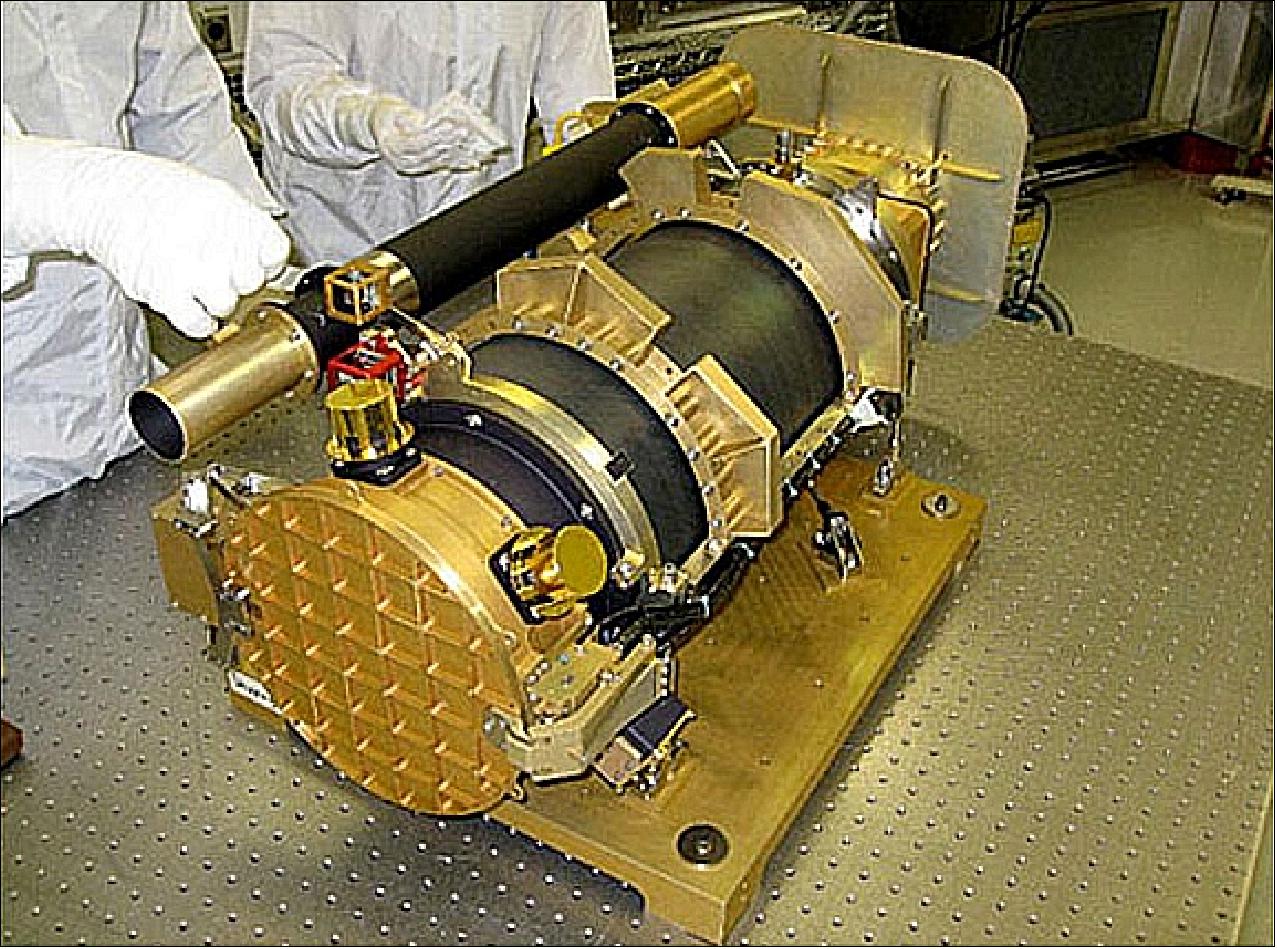
Status of SUVI
- In November 2012, the Lockheed Martin team met the requirements of a Pre-Environmental Review (PER). The Lockheed Martin SUVI instrument has met all requirements of the PER.
- The next major review will be the Pre-Ship or Pre-Storage Review in May 2013. The team is on plan for instrument delivery in Oct. 2013 to the Lockheed Martin Space Systems facility in Denver for integration with the spacecraft. 102)
- Dec. 2013: A Lockheed Martin team has completed the SUVI (Solar Ultraviolet Imager) instrument. The instrument will be delivered in 2014 for integration with the first GOES-R spacecraft at Lockheed Martin's Space Systems facility in Denver. 103)
- April 2014: Lockheed Martin has delivered the SUVI instrument for GOES-R integration. 104)
EXIS (Extreme Ultra Violet and X-ray Irradiance Sensor)
EXIS contains two full disk instruments, the EUVS (EUV Sensor) and the XRS (X-Ray Sensor). The EUVS is a full disk detector measuring EUV flux in the 5 - 127 nm range as compared to the 10 – 126 nm range for GOES-N. EUV radiation plays a key role in heating the thermosphere and creating the ionosphere. The EXIS instrument has been designed and developed at LASP (Laboratory for Atmospheric and Space Physics) at the University of Colorado, Boulder, CO (PI: Frank Eparvier). 105) 106)
NOAA requires the realtime monitoring of the solar irradiance variability that controls the variability of the terrestrial upper atmosphere (ionosphere and thermosphere). 107)
• The EUVS device monitors solar variations that directly affect satellite drag/tracking and ionospheric changes, which impact communications and navigation operations. This information is critical to understanding the outer layers of the Earth’s atmosphere.
- Through a combination of measurements and modeling, EUVS determines the solar EUV spectral irradiance in the 5 -127 nm range.
- Pre-GOES-R EUVS: Transmission grating spectrographs covering five broad bandpasses.
- EUVS for GOES-R: Three reflection grating spectrographs measuring specific solar emission lines from which fullspectrum is reconstructed with a model.
• The XRS instrument monitors solar flares that can disrupt communications and degrade navigational accuracy, affecting satellites, astronauts, high latitude airline passengers, and power grid performance.
- XRS measures the solar soft x-ray irradiance in two bandpasses at 0.05-0.4 nm and 0.1-0.8 nm
- Pre-GOES-R XRS: Ionization chamber instruments with limited dynamic range (solar min unresolved in noise and bright flares clipped)
- XRS for GOES-R: Solid state detectors that capture full dynamic range of solar variability.
Device | Parameter | Requirement | Design |
XRS | Spectral range | 0.05 - 0.8 nm | 0.05 - 0.8 nm |
Dynamic range | 10-9 - 10-3 W/m2 | 10-9 - 10-3 W/m2 | |
SNR (Signal/Noice Ratio) | 1:1 over 10 minute avearge | > 30:1 over 10 minute average | |
Data product accuracy | ≤20% over mission life | 14% over mission life | |
Cadence | ≤3 s | 3 s | |
EUVS | Specral range | 5 - 127 nm | 5 - 127 nm (data product) |
Spectral resulution | From 5-35 nm: 10 nm bins | 5-115 nm; 5 nm bins | |
SNR | 1:1 over 10 minute avearge | > 20:1 over 10 minute average | |
Data product accuracy | ≤20% over mission life | 18% over mission life | |
Cadence | ≤30 s | 27 s |
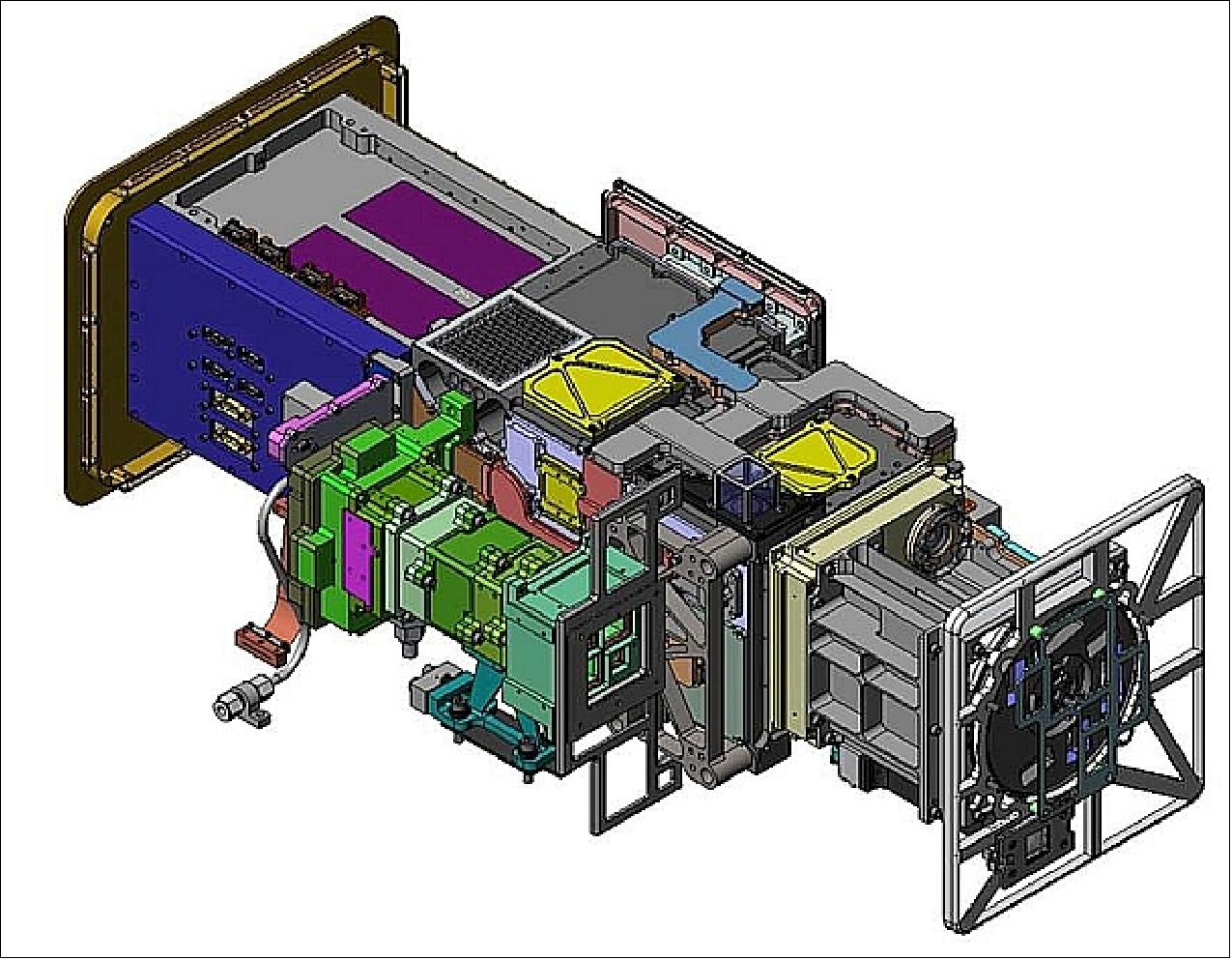
EXIS subsystems | EUVS (Extreme Ultraviolet Sensor) |
Instrument mass, power | 30 kg, 40 W |
Data rates | 7.2 kbit/s (X-band), 0.9 kbit/s (L-band) |
Instrument envelope | 76 cm x 30 cm x 37 cm |
Thermal control | Active control , 2 zones |
XRS monitors solar flares and helps predict solar proton events that can penetrate Earth’s magnetic field. The XRS is important in monitoring X-ray input into the Earth's upper atmosphere and alerts scientists to X-ray flares that are strong enough to cause radio blackouts and aide in space weather predictions (this is different from the SUVI instrument which monitors solar flares via images on the X-ray spectrum). EXIS will provide more information on solar flares and include a more complete and detailed report of solar variability than is currently available.
The EUVS will measure changes in the solar extreme ultraviolet irradiance which drive upper atmospheric variability on all time scales. EUV radiation has major impacts on the ionosphere. An excess can result in radio blackouts of terrestrial high frequency communications at low latitudes. EUV flares also deposit large amounts of energy in Earth’s upper atmosphere (thermosphere) causing it to expand into Low Earth Orbiting satellites, causing increased atmospheric drag and reduce the lifetime of satellites by degrading items such as solar panels.
GLM (Geostationary Lightning Mapper)
GLM is also referred to as LMS (Lightning Mapper Sensor). The GLM mission consists of an optical imaging instrument of GHCC (Global Hydrology and Climate Center) at NASA/MSFC (Marshall Space Flight Center, Huntsville, AL). The prime objective is to measure from GEO the total lightning activity on a continuous basis (under both day and nighttime conditions) over the Americas (North and South) and portions of the adjoining oceans. The GLM will provide continuous measurements of lightning and ice-phase precipitation. These measurements will be used to:
- Diagnose and forecast the transient evolution of severe storm events, such as tornadoes, microbursts, hail storms and flash floods
- Improve mesoscale model forecasts and satellite-based retrievals of convective properties
- Improve forecast models through rapid-update assimilation of lightning data
- Examine the seasonal to interannual variability of storms and to develop a lightning climatology.
GLM permits the study of the electrosphere over dimensions ranging from the Earth's radius down to individual thunderstorms. The instrument is capable of detecting all types of lightning phenomena at a nearly uniform coverage (detection of storm formulation and severity). Near real-time data transmission to MSFC is required for processing and quality assurance and redistribution of the data within 1 minute of reception. 109) 110) 111) 112)
Imager type | Staring CCD array imager with 1372 x 1300 pixels, pixel size (variable) 30 x 30 µm |
Spectral wavelength | 777.4 nm (filter center wavelength, single bandpass) |
Lens focal length, lens f number | 134 mm, 1.2 |
Lens FOV | ±8º |
Ground sample distance | 8-14 km |
Threshold | < 4.0 J m-2 sr-1 → A lightning event is identified whenever the selected signal difference threshold is exceeded |
Flash efficiency | 80% |
Event rate | 1 x 10 -5 s-1 |
SNR, dynamic range | 6, > 100 |
Detection efficiency, false alarm rate | > 90% of total events, <5% of total events |
Measurement accuracy | Location: 1 pixel; intensity: 10%; time tag at frame rate |
Temporal resolution | 2 ms frame rate (500 frames/s) |
Instrument mass, power | 125 kg, 290 W |
Data downlink communication | Data rate: 7.7 Mbit/s; modulation: PCM; quantization = 14 bit |
In Sept. 2007, a NASA/NOAA contract was awarded to LM ATC (Lockheed Martin Advanced Technology Corporation) of Palo Alto, CA to build the GLM instrument. 113)
The GLM instrument consists of a staring imager optimized to detect and locate lightning. The major subsystems of the instrument are: an imaging system, a focal plane assembly, real-time event processors, a formatter, power supply, and interface electronics. The imaging subsystem is a fast f/1.2 telescope with a 12 cm aperture diameter and a 1 nm bandwidth interference filter. A broadband blocking filter is placed on the front surface of the filter substrate to maximize the effectiveness of the narrowband filter.
GLM is a camera system that can be described in the usual terms of imaging systems (resolution, spectral response, distortion, noise, clock rates, bit depth, etc.), the science data output of the GLM instrument consists primarily of events, not images. To understand how GLM detects lightning, it helps to think of it as an event detector, and set aside for a moment our usual thoughts about cameras.

Event filtering approaches: The daytime lightning signals tend to be buried in the background noise; hence, special techniques are implemented to maximize the lightning signal relative to this background noise.
• Spatial filtering is used which matches the IFOV of each detector element in the GLM focal plane array to the typical cloud-top area illuminated by a lightning stroke (i.e., in the order of about 10 km). This results in an optimal sampling of the lightning scene relative to the background illumination.
• Spectral filtering is obtained by using a narrowband interference filter centered on a strong optical emission line (e.g., OI at 777.4 nm) in the lightning spectrum. This method further maximizes the lightning signal relative to the reflected daylight background.
• GLM employs temporal filtering which takes advantage of the difference in lightning pulse duration which is on the order of 400 µs versus the background illumination which tends to be constant on the time scale of seconds. In an integrating sensor, such as GLM, the integration time specifies how long a particular pixel accumulates charge between readouts. The lightning SNR improves as the integration period approaches the pulse duration. An integration time of 2 ms (technological limit) is used to minimize pulse splitting and maximize lightning detectability.
• Since the ratio of the background illumination to the lightning signal often exceeds 100 to 1 at the focal plane, a fourth technique, a modified frame-to-frame background subtraction is implemented to remove the slowly varying background signal from the raw data coming off the GLM focal plane. Each real-time event processor generates an estimate of the background scene imaged at each pixel of its section of the focal plane array. This background scene is updated during each frame readout sequence and, at the same time, the background signal is compared with the off-the-focal-plane signal on a pixel-by-pixel basis. When the difference between these signals exceeds a selected threshold, the signal is identified as a lightning event and an event processing sequence is initiated.
Principle of event detection: As a digital image processing system, GLM is designed to detect any positive change in the image that exceeds a selected detection threshold. This detection process is performed on a pixel-by-pixel basis in the RTEP (Real Time Event Processor) by comparing each successive value of the pixel (sampled at 500 Hz in the incoming digital video stream) to a stored background value that represents the recent history of that pixel. The background value is computed by an exponential moving average with an adjustable time constant k (Ref. 114).
The large data rate of about 5 Gbit/s is read out from the focal plane of GLM into several RTEPs for event detection and data compression. Each RTEP detects weak lightning flashes from the intense but slowly evolving background. The RTEP continuously averages the output from the focal plane over a number frames on a pixel-by-pixel basis to generate a background estimate. It then subtracts the average background estimate of each pixel from the current signal of the corresponding pixel. The subtracted signal consists of shot noise fluctuating about zero with occasional peaks due to lightning events. When a peak exceeds the level of a variable threshold, it triggers comparator circuits and is processed by the rest of the electronics as a lightning event.
An event is a 64-bit data structure describing the identity of the pixel, the camera frame (i.e. time) in which it occurred, its intensity with respect to the background, and the value of the background itself. Performing on-board image processing in the RTEPs, and reporting changes in the Earth scene by exception only (when an event is triggered) reduces the downlink data bandwidth of the instrument to a reasonable level, from 14 bit/pixel x (1372 x 1300) pixels/frame x 500 frames/s = 12.5 Gbit/s of raw video data to just ~6 Mbit/s of processed event data.
Operating at the Limits of Noise: The intensity of lightning pulses, like many phenomena in nature, approximately follows a power law. There are relatively fewer bright and easily detectable events, and a “long tail” of dim events that eventually get drowned out by instrument noise. To achieve high detection efficiency, GLM must reach as far into this long tail as possible by operating with the lowest-possible detection threshold. The challenge of lightning event detection is then to lower the detection threshold so low that it starts flirting with instrument noise, where random excursions in the value of a pixel can trigger a so-called “false” event that does not correspond to an optical pulse.
Architectural drivers: 114)
The GLM instrument, as built, is the result of years of trade-off studies and prototype testing that refined the present design. The architecture of GLM was driven by a number of important considerations, each of them with the common goal of maximizing lightning detection efficiency. The following list summarizes these considerations.
• Patented Variable Pixel Pitch: The GLM CCD was designed such that the GSD (Ground Sample Distance), i.e. the projected area of each pixel on the Earth’s surface, is approximately constant with a target value of 8 km matched to the typical size of a storm cell. When following the development of severe thunderstorms it is important to track the lightning flash rate of individual storm cells, and therefore constant ground sample distance over the Earth is necessary.
• RTEP (Real Time Event Processor) adjustability: A deliberate choice was made to separate imaging from event detection, by functionally partitioning the instrument into a Sensor Unit that performs digital video imaging and an Electronics Unit that performs digital signal processing. This partitioning approach, while it does cost mass and power, allows digital event detection algorithms and parameters to be more flexibly developed and optimized to operate reliably at the limits of instrument noise.
In the RTEP, it is critically important to be able to select the threshold on a pixel-by-pixel basis. The following simulated example provides further insight into the need for controlling TNR (Threshold-to-Noise Ratio)) in each pixel. Figure 59 shows a typical cloud scene near the terminator, simulated as GLM would see it, where grazing illumination creates a lot of contrast in the cloud tops.
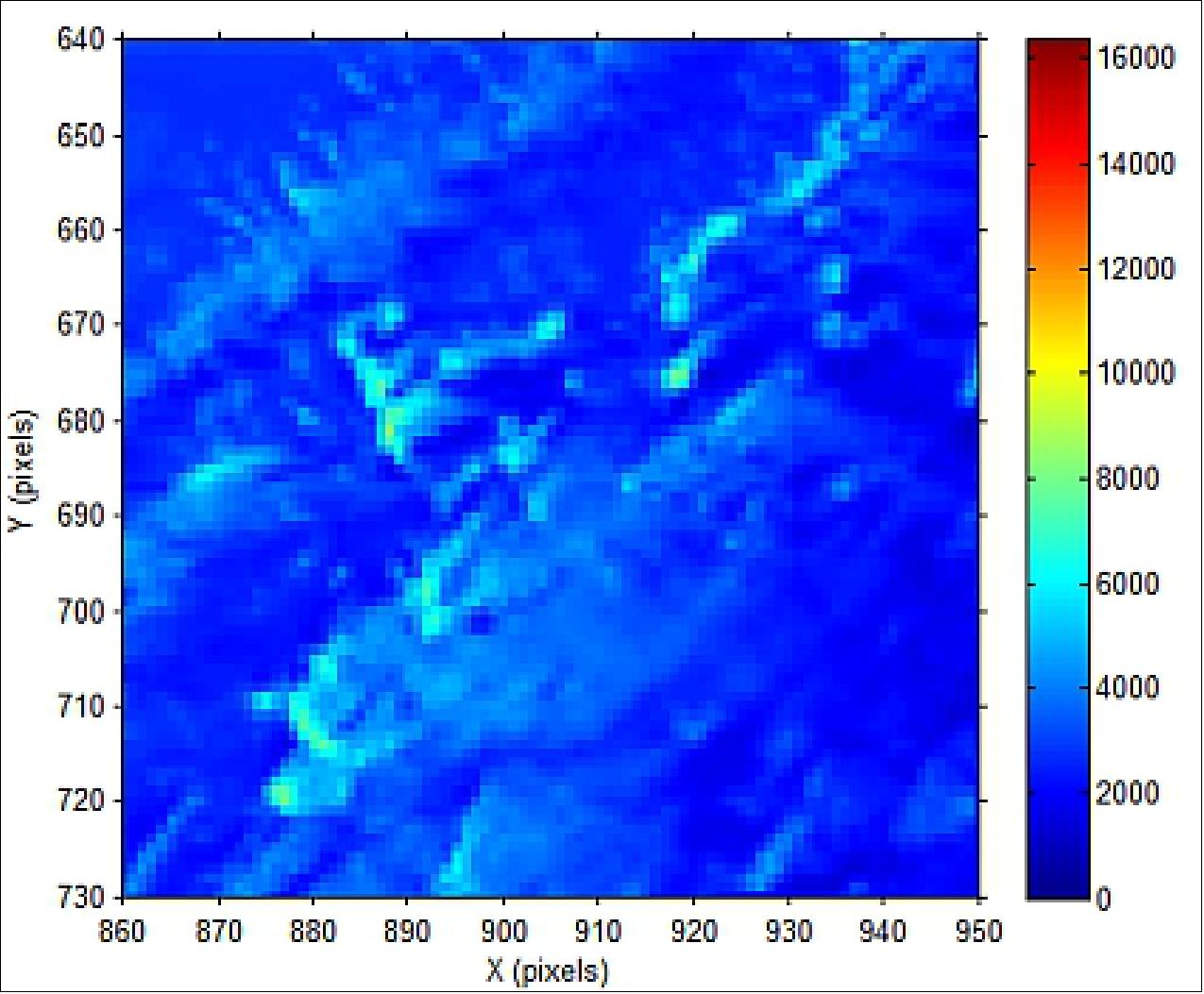
Because shot noise is of roughly the same order as electronics noise, pixels containing sunlit cloud tops will have more total noise than adjacent pixels containing shaded cloud tops. The total noise in each pixel (1σ, in units of DN) is simulated in Figure 60; note that it varies by several counts over small spatial scales.
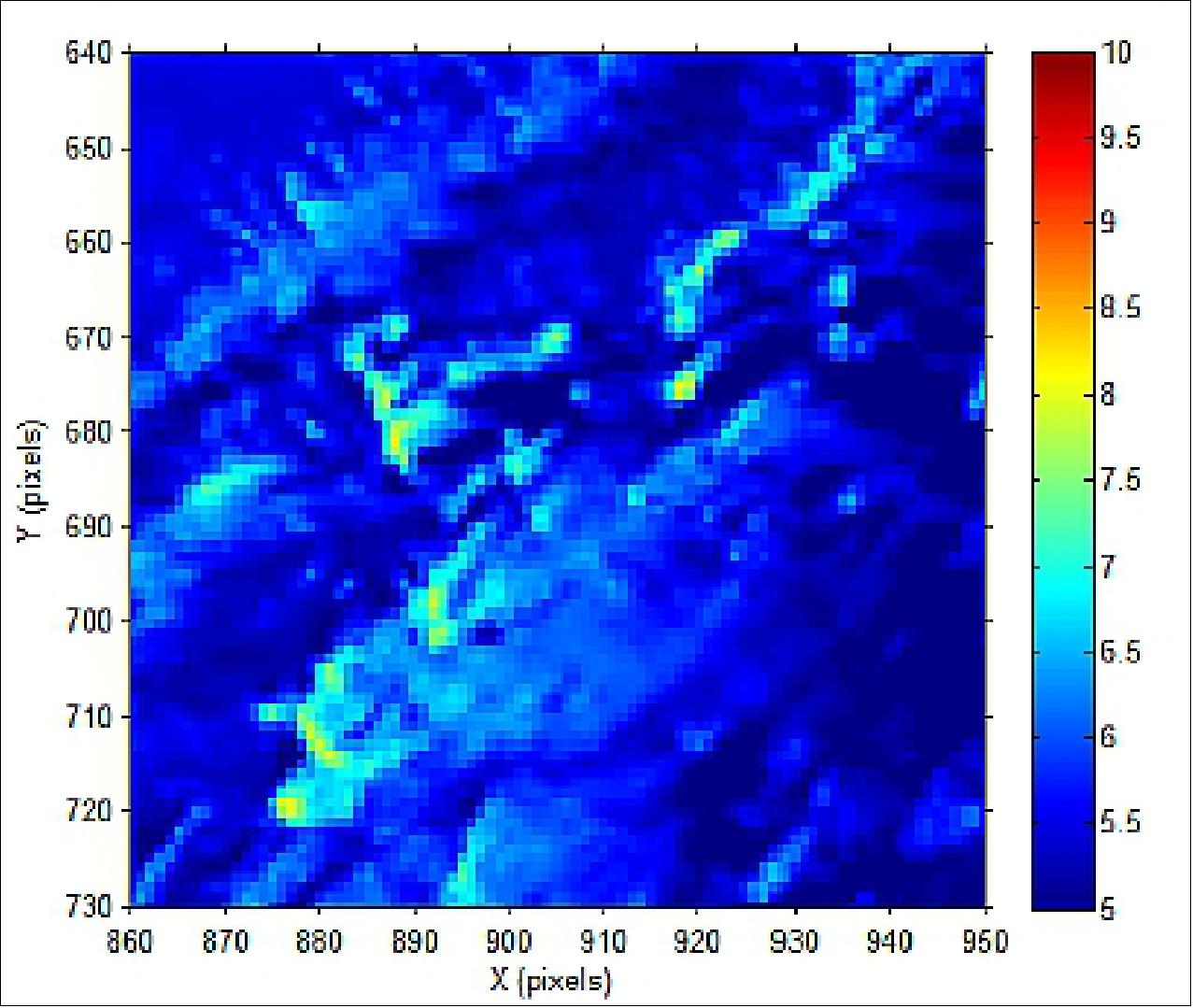
If one were to apply a single global detection threshold to this entire 90 x 90 pixel scene, selected such that the false event rate stayed below 100 events/s over this portion of the cloud scene, the global threshold would need to be 25 counts and the TNR would vary widely across the scene:
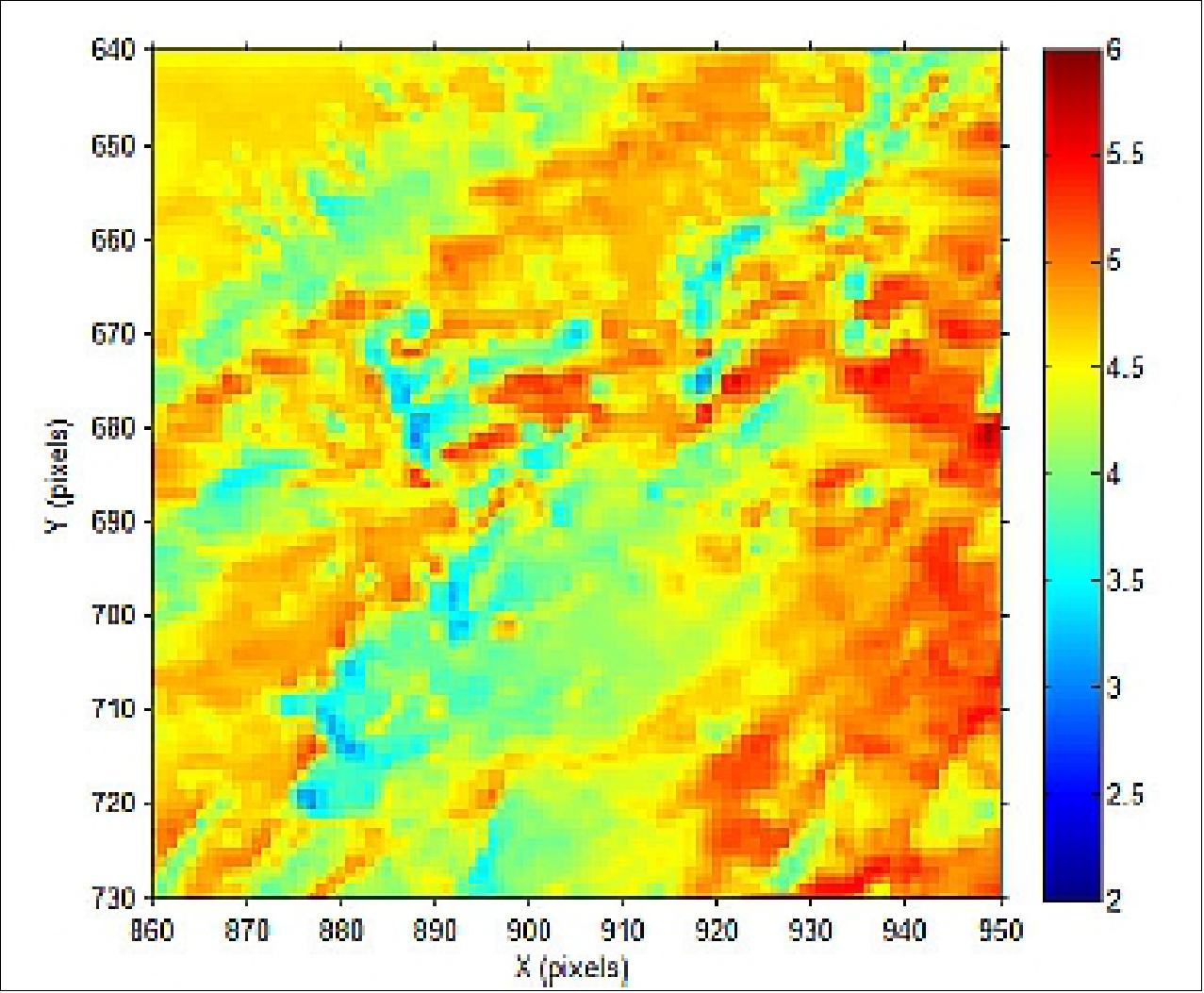
As a result, the false event rate is dominated by the brightly sunlit pixels, and detection efficiency suffers in pixels with shaded cloud tops (yellow, orange and red). - GLM does not use a global threshold in recognition of the fact that shot noise varies significantly from pixel to pixel due to the highly variable illumination of cloud tops. The event detection threshold is selected by the RTEP for each individual pixel from a 32-element lookup table indexed by the top five bits of the background in that pixel. Instead of applying a global threshold of 25, a different threshold value is selected for each pixel as shown in Figure 62. In this example, the threshold values were determined by the same criterion to keep the false event rate less than 100 events/sec.
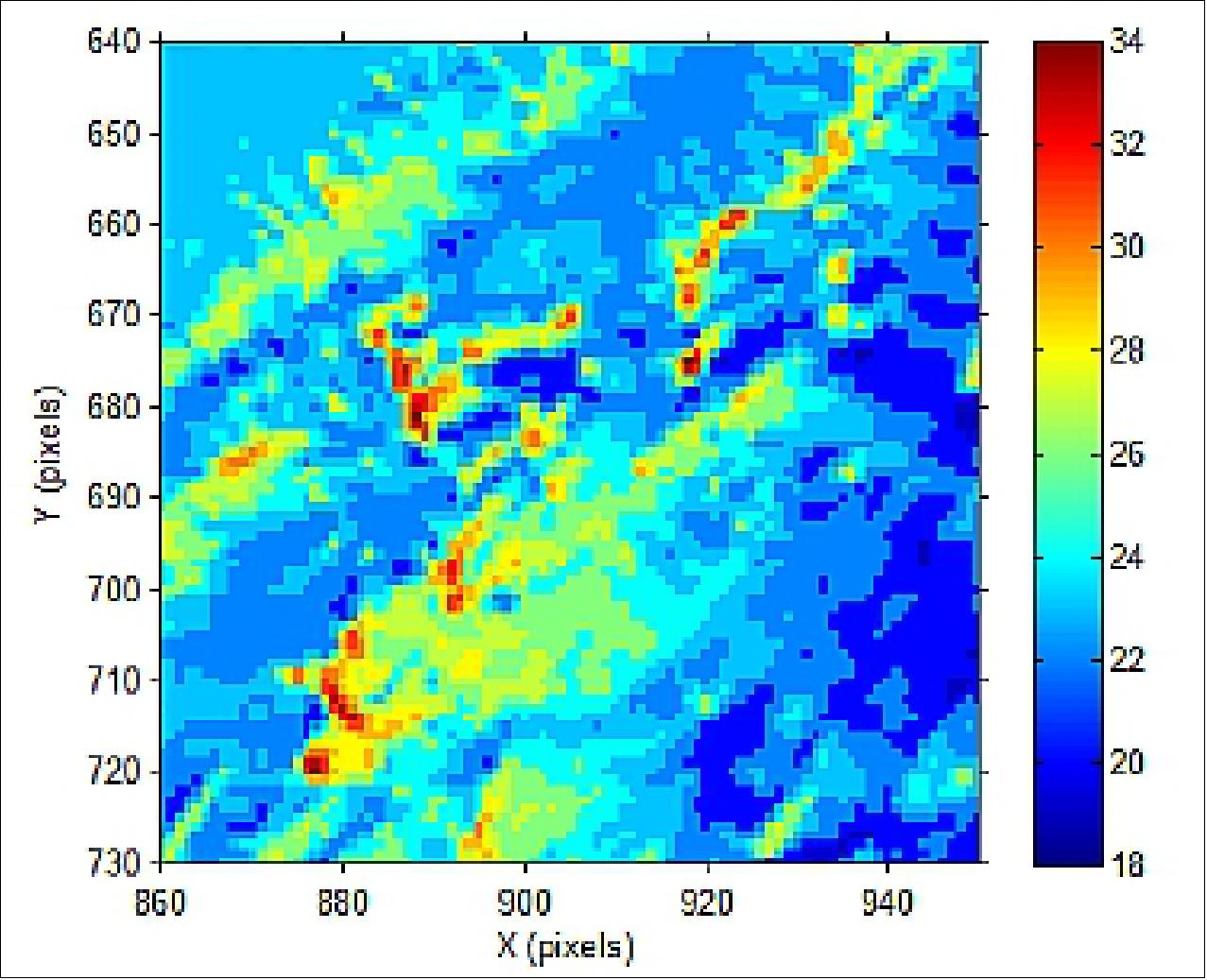
Note how a higher threshold is applied to brightly sunlit pixels, and a threshold less than 25 is applied to shaded pixels, enhancing detection efficiency in all the pixels shaded blue. In this example the false event rate is evenly distributed across this scene, as revealed by the uniformity of the corresponding TNR map, obtained simply by dividing the threshold by the total noise (Figure 63):
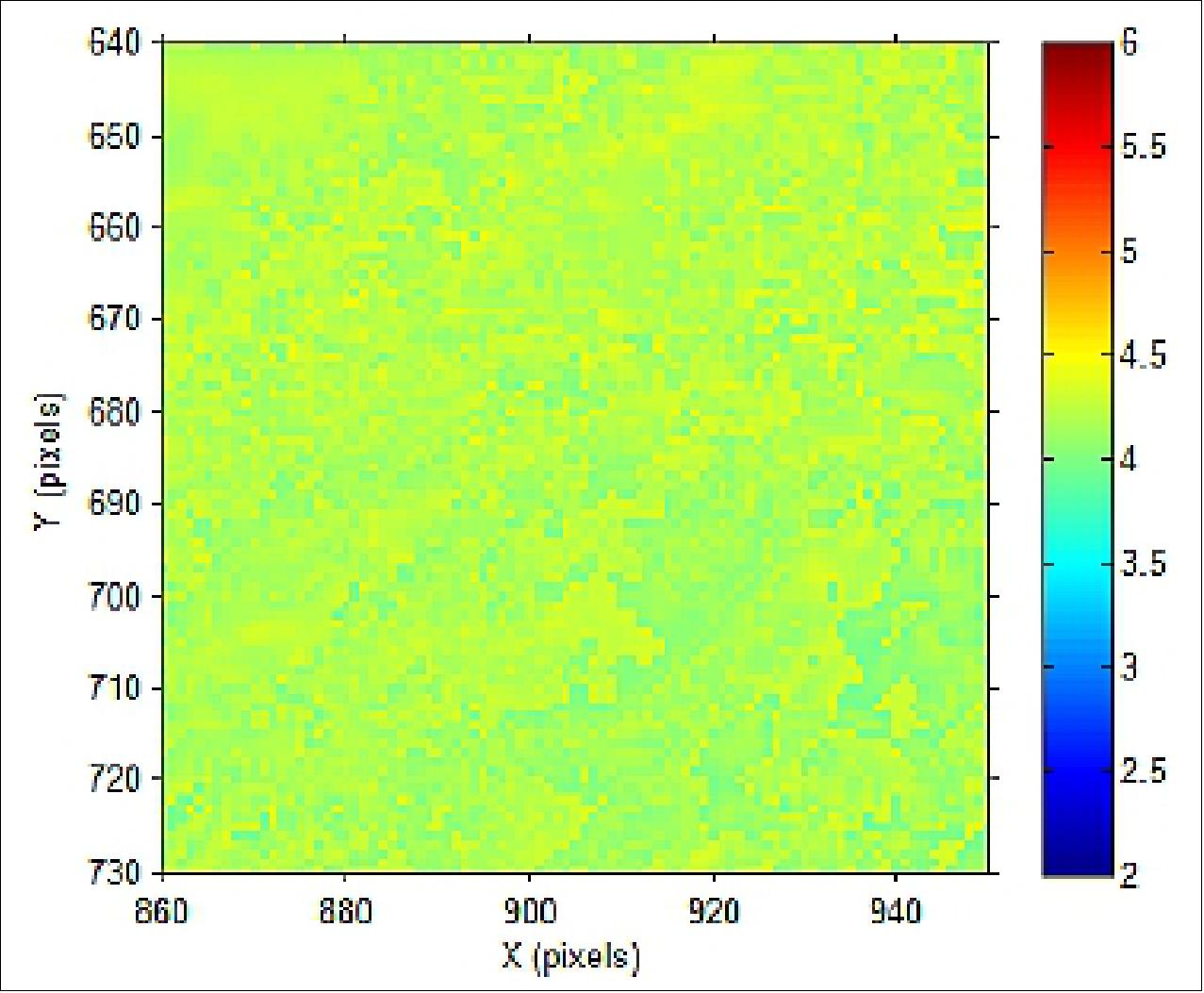
By controlling TNR on a pixel-by-pixel basis and preventing a few bright pixels from dominating the false event budget, GLM can maximize detection efficiency by lowering the threshold in each pixel to its optimal value, peering deeper into the noise and detecting the dimmest optical pulses in the long tail of the lightning intensity distribution. Threshold tables can be uploaded to the instrument and will be optimized during post-launch test.
Of course, detection thresholds are only one aspect of a robust RTEP design, and a number of other adjustable parameters are available to fine-tune the behavior of the background tracking. For example, RTEP settings can be adjusted to accommodate repeated events in the same pixel (to detect the continuing current events that often spark forest fires), to reduce spurious jitter events at contrast boundaries induced by minute disturbances in the instrument line of sight, or to mitigate the impact of stray light when entering and exiting eclipse. The GLM RTEP design benefits directly from years of on-orbit experience with the LIS (Lightning Imaging Sensor) flying on the TRMM satellite.
• Narrow Band Filter: The true test of a lightning mapper is its ability to detect dim lightning events emanating from a bright, zenith-illuminated cloud top. Clouds are nearly Lambertian reflectors with an albedo that sometimes approaches unity, so a large amount of undesired reflected sun light is present in the vicinity of the oxygen triplet. The worst-case spectral radiance of the cloud background is estimated in Figure 64, for all seasonal and diurnal illumination conditions.
This background cloud radiance creates shot noise which can drown out dimmer lightning events. It is necessary to cut down the background signal using optical filters that have the narrowest feasible bandpass while still passing the majority of the lightning oxygen triplet. GLM contains three filters of increasingly narrow spectral width: a SRF (Solar Rejection Filter) at ~30 nm FWHM that performs the task of rejecting the bulk of out-of-band radiation, a SBF (Solar Blocking Filter) at ~3 nm FWHM, and the key NBF (Narrow Band Filter) at ~1 nm FWHM. Due to their large size and stringent spectral requirements, these filters pushed the boundaries of manufacturing capabilities.
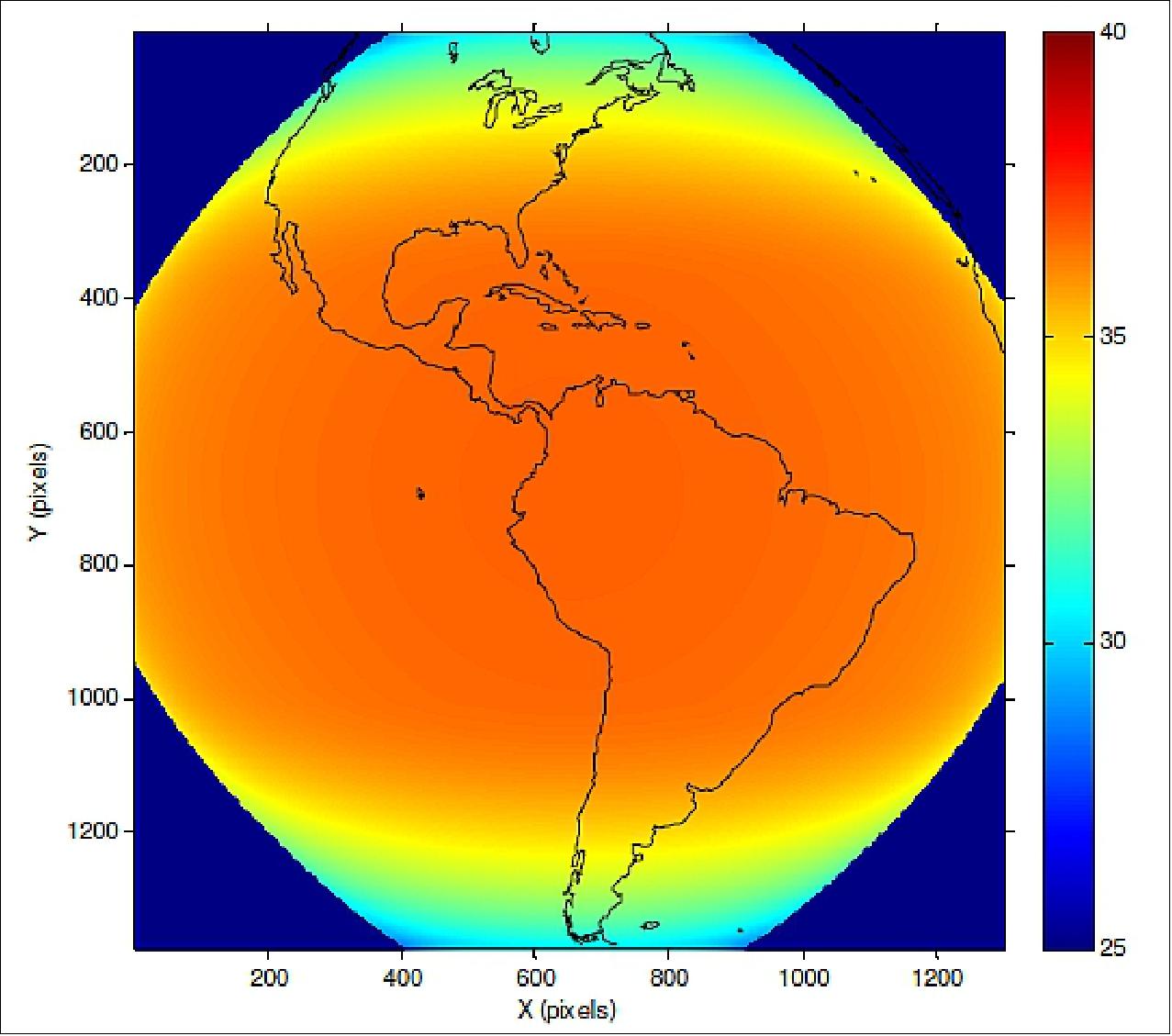
• Frame Rate and CCD Well Depth: GLM detects the individual optical pulses caused by lightning, on top of a bright background of sunlit clouds. In order to detect these pulses with good signal to noise, the frame rate must be optimized. The average duration of a lightning optical pulse is shown in Figure 65.
The frame rate should be closely matched to the average duration of the pulse. If the frame rate is too low, then additional background is detected with no additional signal, lowering signal to noise. If the frame rate is too high, then the signal is split into adjacent frames, reducing signal to noise. The GLM frame rate is 500 Hz, well matched to the duration of the lightning optical pulses. The frame rate and the CCD well depth must also be matched. Lightning most often occurs in optically thick clouds, in the afternoon when the clouds are well illuminated by the Sun. The CCD well depth must be large enough to accommodate the expected background from bright clouds, at the frame rate matched to the pulse duration, and with the optical filters matched to the oxygen triplet emission line. The GLM CCD has a well depth of approximately 2 million electrons to be able to accommodate the bright background while leaving room to detect lightning events. The frame rate, CCD well depth, and optical filters work together to optimize the signal to noise ratio for detecting lightning optical pulses.
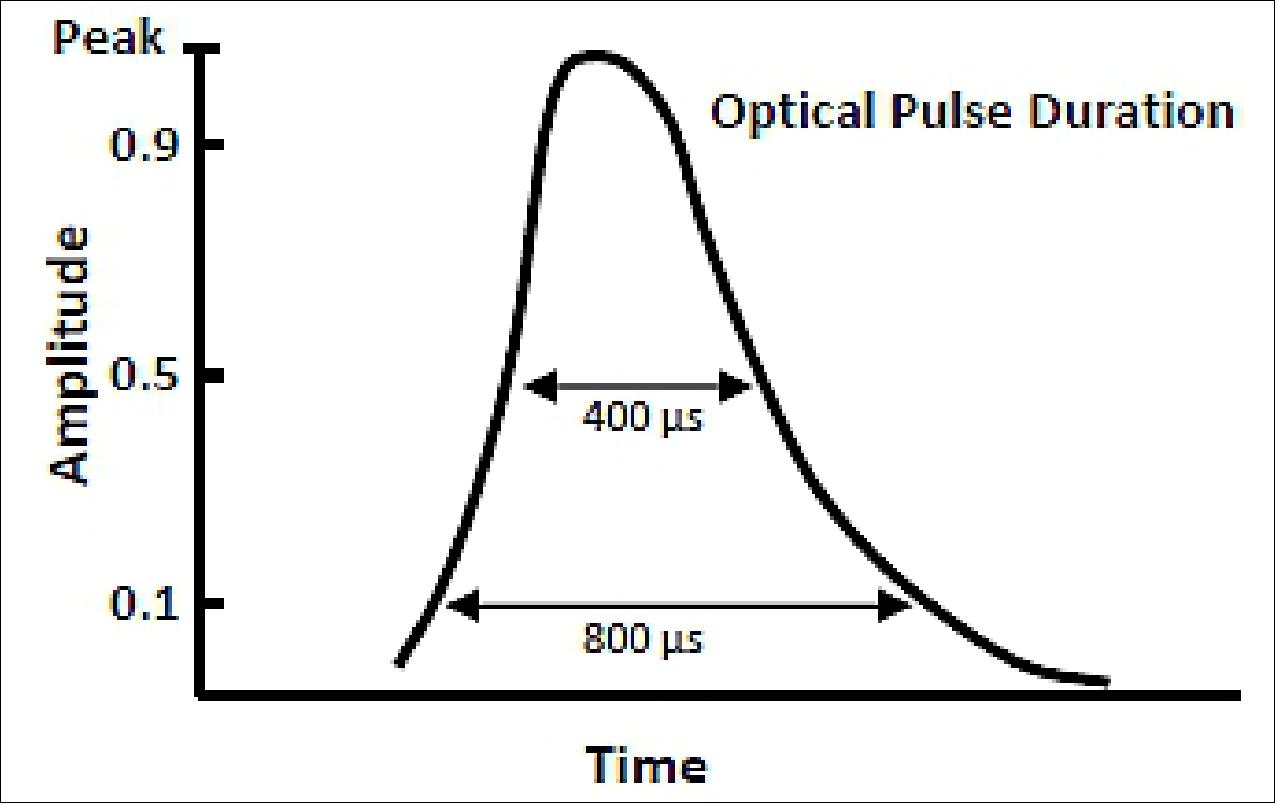
Coherency Filter: The GLM hardware is designed to detect events, including many events caused by noise, and sends all these events to the ground for further processing. The first step in the processing is to remove the non-lightning events from the data stream. The flashes are then identified by reviewing the remaining events. The ground processing algorithms include many filters designed to remove events not caused by lightning, including radiation hits and glint from Sun on the ocean. Most of the filters are based on work done on the LIS (Lightning Imaging Sensor). The most important filter is the coherency filter. This filter relies on the fact that true lightning events are coherent in time and space, whereas noise events are not. This is the filter that enables GLM to operate at the edge of the noise, sending many noise events to the ground and detecting fainter lightning events in the process.
As viewed from space, any given lightning flash will generate several to several tens of optical pulses. Flashes can be up to several seconds long, and contain multiple optical pulses detected in the same pixel or adjacent pixels. A noise event will not have this coherent behavior. Although many noise events may be triggered over the course of several seconds, they are unlikely to be in the same or adjacent pixels. The coherency filter calculates the probability that any given event is a noise event, based on the event intensity, the electronics noise, and the photon noise of the background. When another event occurs in this same pixel or an adjacent pixel, the filter calculates the probability that both of these events are noise events, based on the new event intensity, the instrument and photon noise, and the time elapsed between the two events. When two events have a sufficiently low probability of both being noise, the events are reported as lightning events. This probability threshold is adjustable to allow more or less stringent filtering of the data as desired by the user community.
Performance
The overall performance of GLM is measured in terms of the fraction of the lightning flashes that are detected and reported. We call this the detection efficiency. In order to do this calculation, one must know the characteristics of lightning flashes. For our truth data set,high-altitude airplane data is used which provides the distribution function of the energy density of the brightest pulse in a flash. The event detection thresholds of GLM is compared, converted into the energy density units using the instrument calibration data, to the distribution function of the brightest pulse in a flash. The threshold applied to a given pixel depends on the background in that pixel. An 80% cloud background albedo is assumed and the background of each pixel at a given time and illumination is calculated. The project can then determine which threshold will be selected for each pixel, and determine the detection efficiency of each pixel. Figure 66 shows an example of a predicted detection efficiency map.
The vertical banding visible in the areas east of the terminator (dark red) corresponds to a different detection threshold being selected, resulting in a step change in the detection efficiency. Areas on the sunlit limb (light blue) have the lowest detection efficiency under these illumination conditions. When averaged over 24 hours and over the entire field of view, GLM is expected to detect 80% of lightning flashes.
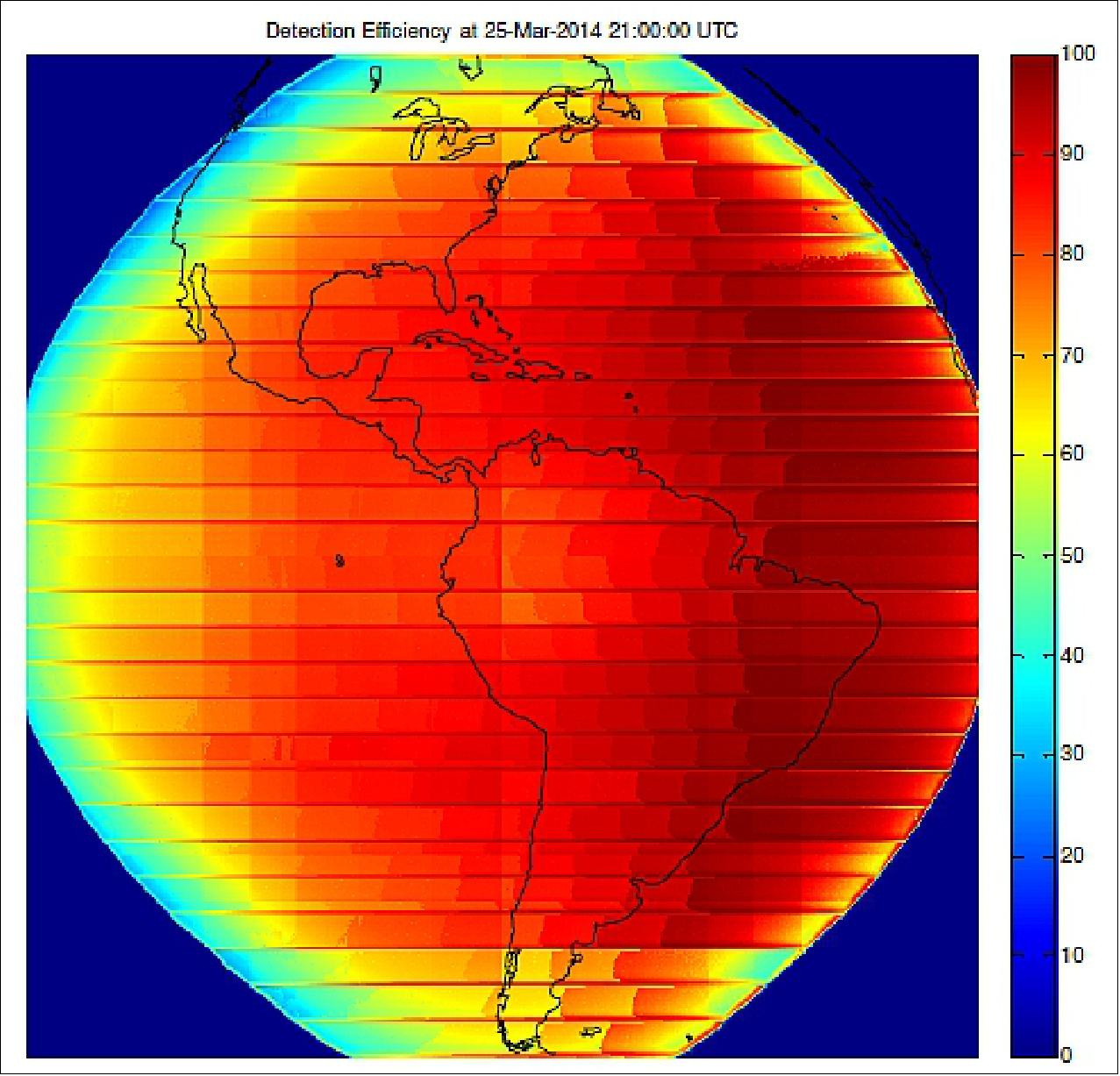
In conclusion, GLM will gather more spaceborne lightning data in the first few weeks of operations,than has been collected in the entire history of space flight. Hemispherical coverage combined with round-the-clock operation at 500 frames/s will enable near real-time reporting of lightning flashes, giving unprecedented insight into the energetics of severe weather.
GLM has the potential to reduce fuel consumption of the air transport network by providing near real-time lightning maps, augmenting traditional radar detection to optimize air traffic management around areas of convective weather.
Long-term trending of GLM lightning data will provide continuity with data sets from LIS (Lightning Imaging Sensor) flown on the TRMM satellite, and contribute to our understanding of decadal changes in the Earth’s climate.
Most importantly, GLM lightning data will be used in operational data products to forecast tornado activity with significantly greater warning time and reliability. Increased warning time and fewer false tornado warnings will save lives.
SEISS (Space Environmental In Situ Suite)
In Aug. 2006, NASA in coordination with NOAA awarded a contract to ATC (Assurance Technology Corporation) of Carlisle, MA to design and develop the SEISS package. 115) 116)
The SEISS instrument package monitors the near-Earth particle and electromagnetic environment in real-time. Monitoring of geomagnetically trapped electrons and protons; electrons, protons, and heavy ions of direct solar origin; and galactic background particles.
The SEISS package consists of the following instruments:
EHIS (Energetic Heavy Ion Sensor), was designed and developed at NHU (New Hampshire University). The objective of EHIS is to measure the proton, electron, and alpha particle fluxes at GEO. This includes particles trapped within Earth’s magnetosphere and particles arriving directly from the sun and cosmic rays which have been accelerated by electromagnetic fields in space. The information will be used to help scientists protect astronauts and high altitude aircraft from high levels of harmful ionizing radiation. The EHIS device incorporates a unique system design called ADIS (Angle Detecting Inclined Sensor).
MPS (Magnetospheric Particle Sensor). MPS is a three-axis vector magnetometer to measure the magnitude and direction of the Earth's ambient magnetic field in three orthogonal directions in an Earth referenced coordinate system. The magnetometer will provide a map of the space environment that controls charged particle dynamics in the outer region of the magnetosphere.
• MPS-LO: The sensor measures electron and proton flux over an energy range of 30ev to 30kev. MPS-LO will be able to tell scientists the amount of charging by low energy electrons that the GOES-R spacecraft is undergoing. Spacecraft charging can cause ESD and arcing between two differently charged parts of the spacecraft. This discharge arc can cause serious and permanent damage to the hardware on board a spacecraft, which affects operation, navigation and interferes with measurements being taken.
• MPS-HI: The sensor will monitor medium and high energy protons and electrons which can shorten the life of a satellite. High energy electrons are extremely damaging to spacecraft because they can penetrate and pass through objects which can cause dielectric breakdowns and result in discharge damage inside of equipment.
SGPS (Solar and Galactic Proton Sensor). The objective of SGPS is to measure the solar and galactic protons found in the Earth's magnetosphere. The data provided by SGPS will assist the Space Weather Prediction Center's Solar Radiation Storm Warnings. These particular measurements are crucial to the health of astronauts on space missions, though passengers on certain airline routes may experience increased radiation exposure as well. In addition, these protons can cause blackouts of radio communication near the Earth's poles and can disrupt commercial air transportation flying polar routes. The warning system allows airlines to reroute planes that would normally fly over Earth’s poles.
The instrument suite also includes the DPU (Data Processing Unit). Data from SEISS will drive solar radiation storm portion of NOAA space weather scales and other alerts and warnings and will improve energetic particle forecasts.
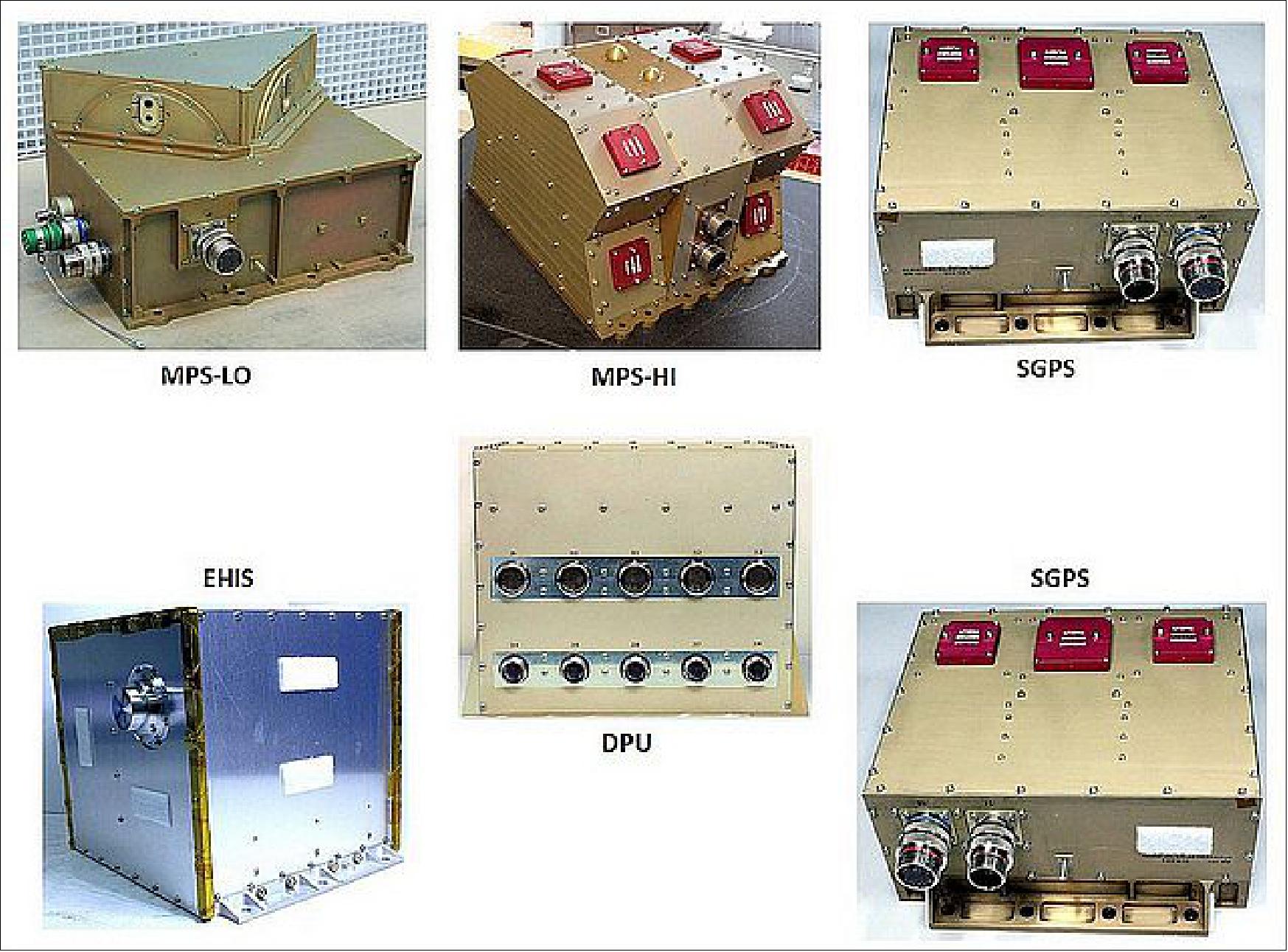
MAG (Magnetometer)
The MAG will provide measurements of the space environment magnetic field that controls charged particle dynamics in the outer region of the magnetosphere. These particles can be dangerous to spacecraft and human spaceflight. The geomagnetic field measurements are important for providing alerts and warnings to many customers, including satellite operators and power utilities. GOES Magnetometer data are also important in research, being among the most widely used spacecraft data by the national and international research community. The GOES-R Magnetometer products will be an integral part of the NOAA space weather operations, providing information on the general level of geomagnetic activity and permitting detection of sudden magnetic storms. In addition, measurements will be used to validate large-scale space environment models that are used in operations. The MAG requirements are similar to the tri-axial fluxgates that have previously flown. GOES-R requires measurements of three components of the geomagnetic field with a resolution of 0.016 nT and response frequency of 2.5 Hz. 117)
The MAG device is provided by Lockheed Martin, Newton, PA and is boom mounted on GOES-R.
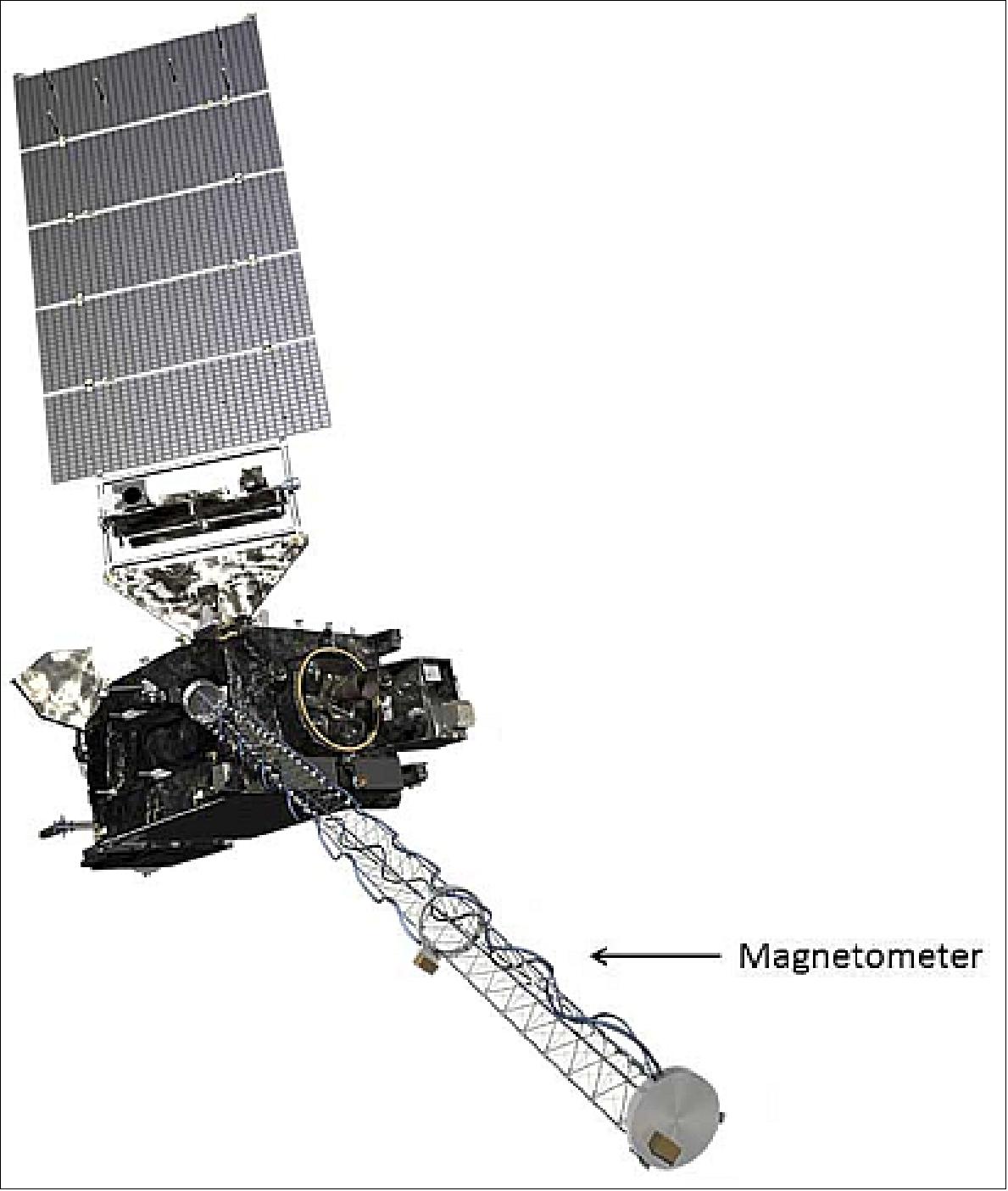
Ground Segment
For the first time in GOES history, the GOES-R series will also be delivered with an integrated GS (Ground System) that provides a cohesive capability to provide data processing, control, and monitoring capabilities in an integrated system. 118) 119)
• In May 2009, NOAA selected the Harris Corporation - Government Communications Systems Division of Melbourne, FLA, to develop the GOES-R ground system, which will capture, process and distribute information from NOAA's next generation geostationary satellite series to users around the world. 120) 121) 122) 123) 124) 125) 126) 127)
• In February 2015, Harris Corporation has delivered all hardware and completed installation and integration of the GOES-R ground segment IT infrastructure supporting operational systems at NOAA Satellite Operations Facility (NSOF) in Suitland, Maryland, Wallops Command and Data Acquisition Station (WCDAS) in Wallops, Virginia, and the Consolidated Backup (CBU) in Fairmont, West Virginia. — The system includes 2,100 servers, 149 racks of network equipment, 317 workstations, and storage services totaling three petabytes (3 PB). The system also contains 454 blade servers with 3,632 cores for product processing and distribution across all environments, delivering approximately 40 trillion floating point operations per second of processing power. 128)
The GS is comprised of a core development effort made up of mission management, product generation, product distribution, and enterprise management elements and supported by hardware and software infrastructure. Mission management will provide the primary data receipt and command and control as well as mission planning, scheduling, and monitoring functionality in order to support the satellite operations processes of the GOES-R series.
The product generation element will process raw instrument data into higher order products, including the creation of a direct broadcast data stream to be distributed hemispherically to the GOES user community. Product distribution will provide data dissemination capabilities to ensure GOES-R products reach the user community, including dedicated pathways to the NWS (National Weather Service) for low-latency, high-availability imagery.
The enterprise management element provides an integrated monitoring and reporting capability that will enable a comprehensive view of system status, while Infrastructure provides a pooled set of hardware and software resources to be used by the elements. In addition, the GS will provide a RBU (Remote Backup Facility), new and upgraded antenna capabilities to NOAA, and will develop a user distribution and access portal known as the GOES-R Access Subsystem.
The ground segment contract baseline and options include:
• Development of the core ground segment
- Mission management element
- Enterprise management element
- Product generation element
- Subset of product generation element: a) GRB (GOES Rebroadcast), b) AWIPS (Advanced Weather Information Processing System) distribution
- Internal telecommunications/networks (i.e., intra-site)
- Option 1: improved latency / option 2: additional L2+ products
• Total ground segment integration and checkout
- Integration of GFP systems, including antennas and GAS (GOES-R Access Subsystem)
- Interfaces to external systems, including CLASS and ADRS (Ancillary Data Relay System)
• Transition to NOAA operations.
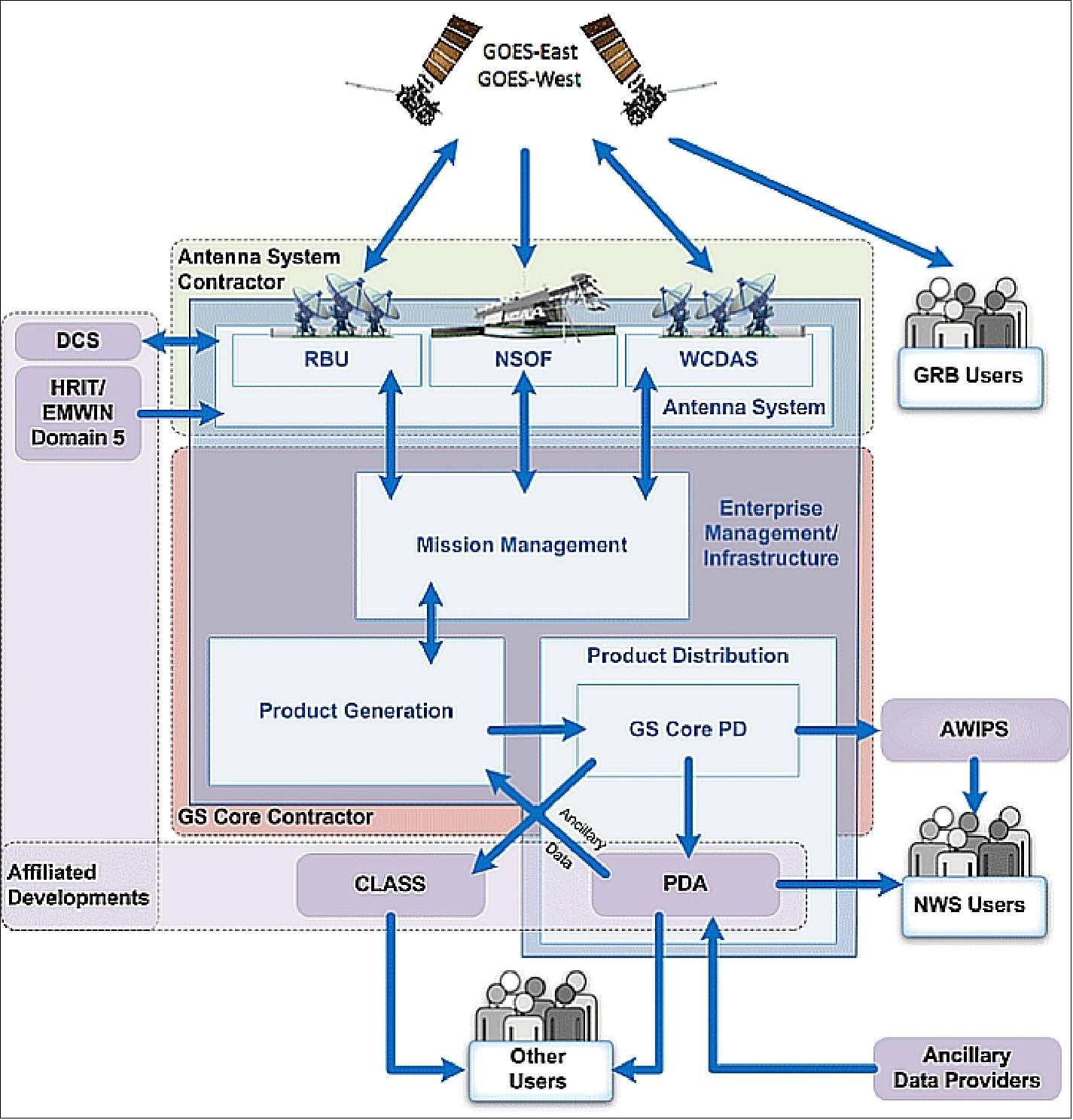
Function | GOES-N | GOES-R |
Instrument data downlink | 2.62 Mbit/s | ~55 Mbit/s (ABI only) |
Rebroadcast | 2.11 Mbit/s (GVAR) | ~30 Mbit/s (GRB) |
Level 1b products | 2.11 Mbit/s (GVAR) | ~30 Mbit/s |
Level 2/3 products | < 4.7 Mbit/s | TBS |
Product latency | Near real-time to hrs (product dependent) | Near real-time to 15 minutes (product dependent) |
No of types of products | 42 | TBS |
Planned data outage | > 300 hrs / yr | < 3 hrs / yr |
CLASS data storage per satellite | N/A | Daily: 1.9 TB; Yearly: 670 TB |
Temporary storage | 30 hrs of raw data; 7 days of product data | 5 days of raw data; 7 days of product data |
GOES-R Ground Segment Sites
The GOES-R GS will operate from three sites:
1) NSOF (NOAA Satellite Operations Facility) in Suitland, MD. NSOF will house the primary Mission Management (MM), Product Generation (PG), and Product Distribution (PD) functions.
2) WCDAS (Wallops Command and Data Acquisition Station), located at Wallops, VA. WCDAS will provide space communications services and selected Ground Segment functions.
3) RBU (Remote Backup) facility. RBU is a geographically isolated site, located in Fairmont, WV (West Virginia). RBU will function as a completely independent backup for designated MM, PG and PD functions for the production and delivery of critical cloud and moisture imagery products, and GOES Rebroadcast (GRB) data,and will be capable of remote operation from the NSOF and WCDAS. The RBU station will have visibility to all operational and on-orbit spare satellites. The Enterprise Management (EM) function supports GS components across all locations.
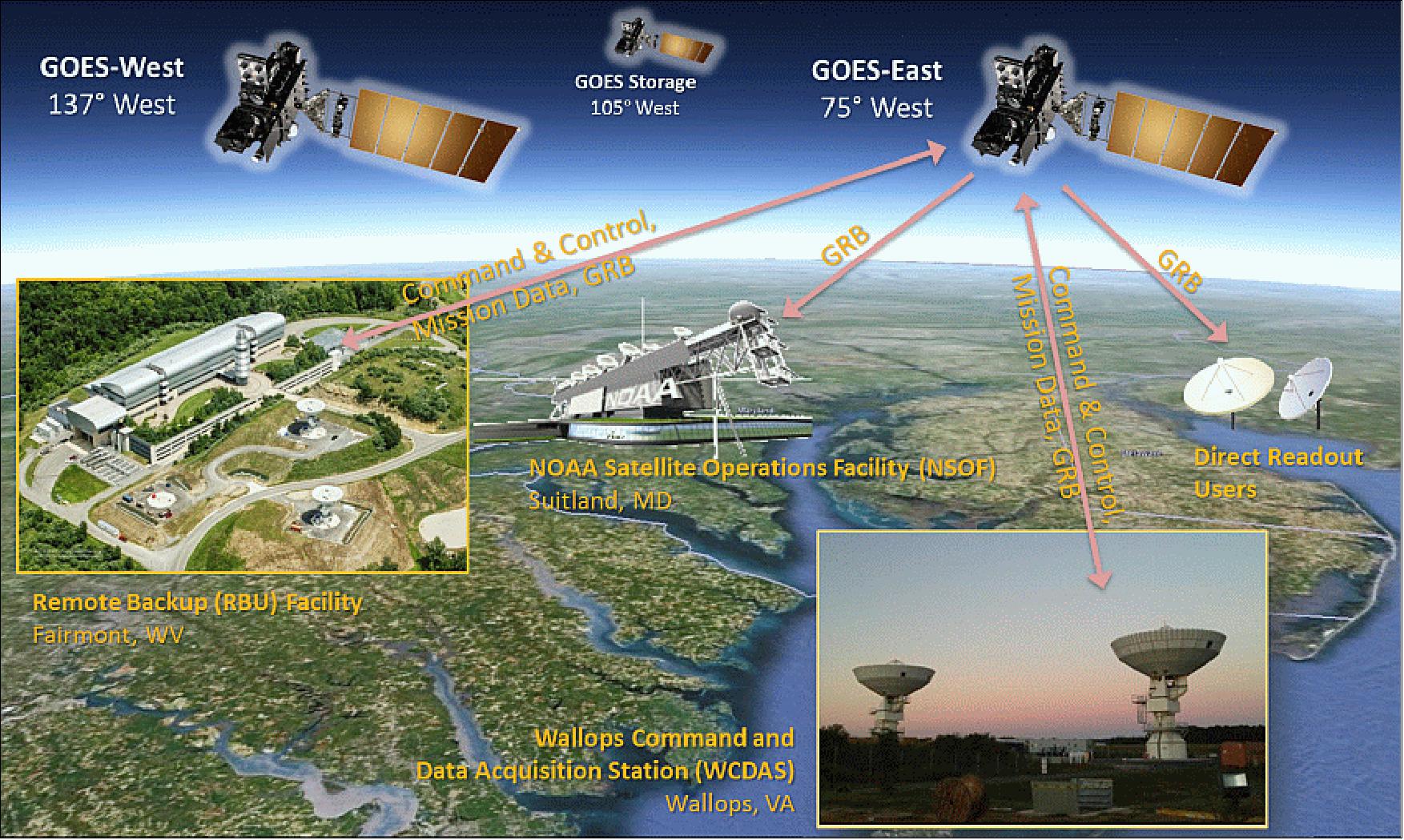
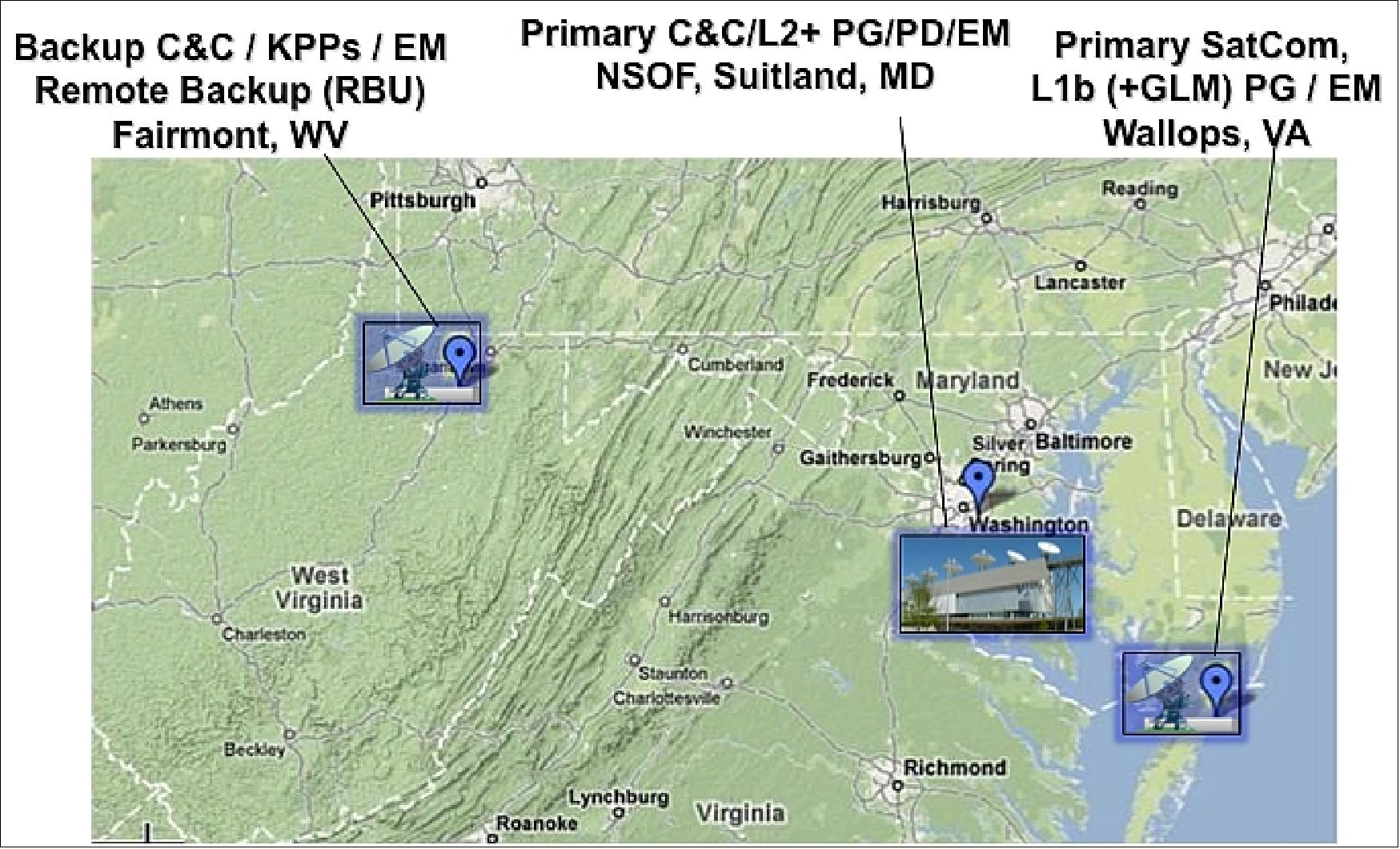
Spacecraft commands are generated by GS operators and are uplinked to the satellite through the primary command interface at the WCDAS (Wallops Command and Data Acquisition Station), located at Wallops, VA. Commands may also be generated at the NSOF (NOAA Satellite Operations Facility) in Suitland, MD and sent terrestrially to WCDAS for uplink via dedicated, high availability telecommunications circuits. Commands may also be generated from the RBU site in Fairmont, WV or may be distributed from one of the other two sites to RBU for uplink.
For GOES-R operations, the NSOF and WCDAS together comprise the “primary” sites and may be considered in certain respects as a single system. WCDAS provides the Earth-space communications functions, while primary console operations and higher-level product data functions are provided by NSOF. The RBU consolidates the mission-critical functionality of the NSOF and WCDAS into a single “backup” site that can operate completely independently.
Spacecraft telemetry data is received and processed at WCDAS during primary operations and at RBU in non-nominal or contingency situations. Telemetry includes both spacecraft health and safety information (engineering telemetry) and raw instrument data. Engineering telemetry is monitored by the system to support anomaly detection and resolution. Engineering telemetry is made available to operators at NSOF via terrestrial distribution.
Mission management provides the primary mission operations as well, including real-time console operations, offline engineering and trending, bus and instrument health and safety and performance monitoring, anomaly detection and resolution, procedure development, spacecraft resource accounting, and special operations planning and execution. These functions occur at NSOF and WCDAS during primary mission operations.
One key function associated with mission management operations is mission planning and scheduling. The GS will provide maneuver planning and scheduling for routine operations as well as special operations such as station keeping, annual yaw flips, and engineering or science investigations outside of normal operations.
Mission management also includes a detailed product monitoring function. Product monitoring enables the operations team to identify anomalies in the instrument data being generated by the GS. Product monitoring is focused on Level 1b processed data included in the GRB (GOES Rebroadcast) data stream. It also provides for the monitoring of the signal quality of the uplinked and downlinked communications signals to ensure integrity of the received data.

GOES-R GS Antenna System
Associated with the development of the GS is a set of new and upgraded antennas to support the transmission and receipt of GOES-R series satellite data, along with legacy GOES mission data. At WCDAS and RBU, these antennas will provide for raw data and telemetry receipt from the spacecraft in X-band. They will support command uplinking in S-band and will provide for the uplink of GRB L1b data at X-band. They will also be capable of receiving GRB data to perform quality monitoring of the GRB downlink in L-band.
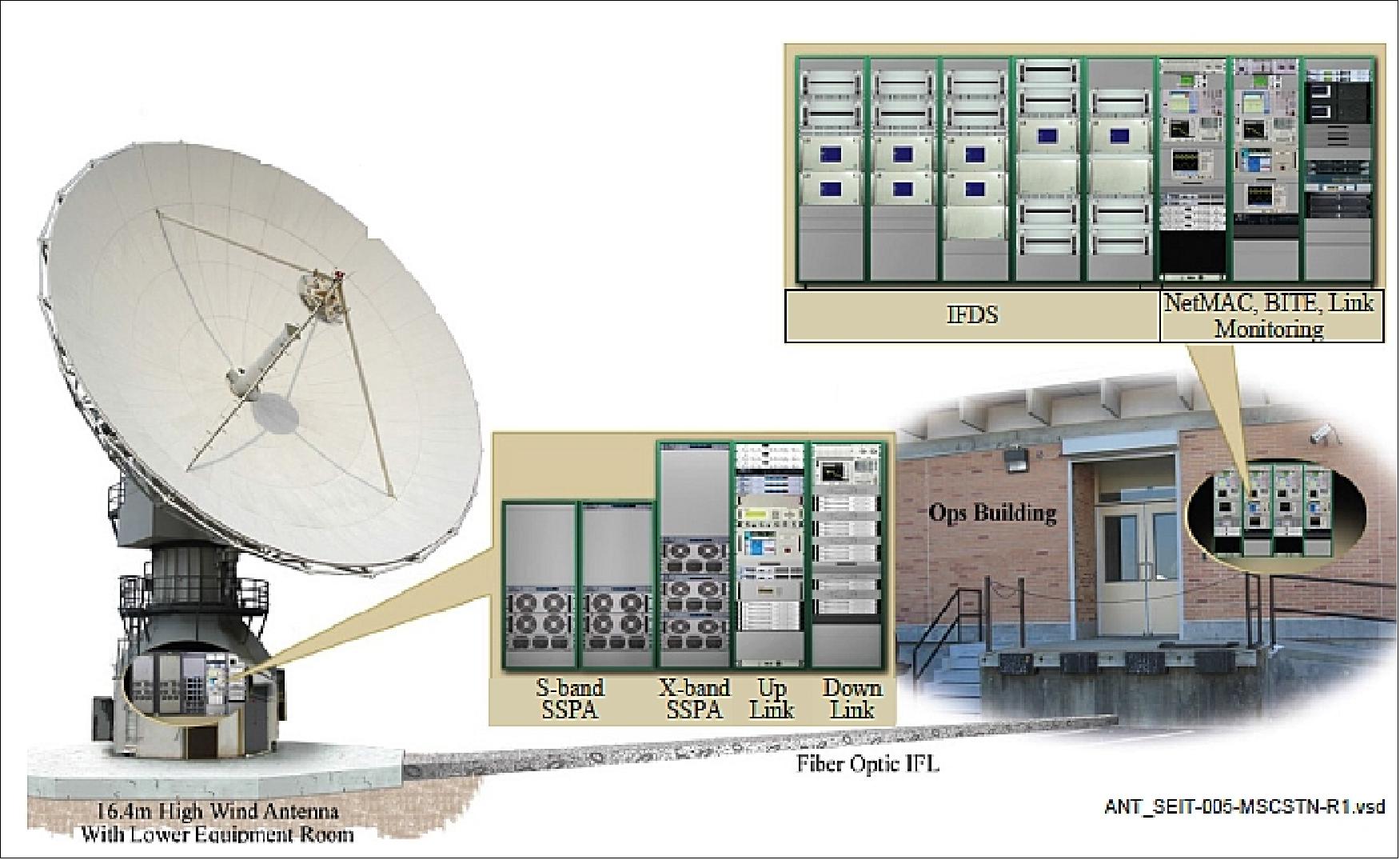
At WCDAS, three new 16.4 m antennas will be installed into the existing NOAA antenna infrastructure. One of the existing 18 m antennas will be replaced, and two additional antennas will be added. All three antennas will support both the GOES-R series and legacy GOES missions. They will be designed to operate through a Category 2 hurricane without performance degradation.
Three new antenna stations will also be installed at the GOES-R RBU site. These stations will be functionally identical to the WCDAS antennas and will also be capable of operating under more stressing conditions of ice and snow. Although the current GOES-R series mission does not include backup for legacy GOES at the RBU, the antennas at RBU will be capable of supporting both missions.
At NSOF, the existing 9.1 m antennas will be upgraded to be capable of receiving both GRB and legacy GVAR (GOES Variable) downlinks. This data receipt provides the primary path through which L1b data is sent to NSOF from WCDAS. Because the NSOF antennas are currently in use supporting GOES operations, they will be taken offline one at a time to be upgraded, tested, and re-installed.
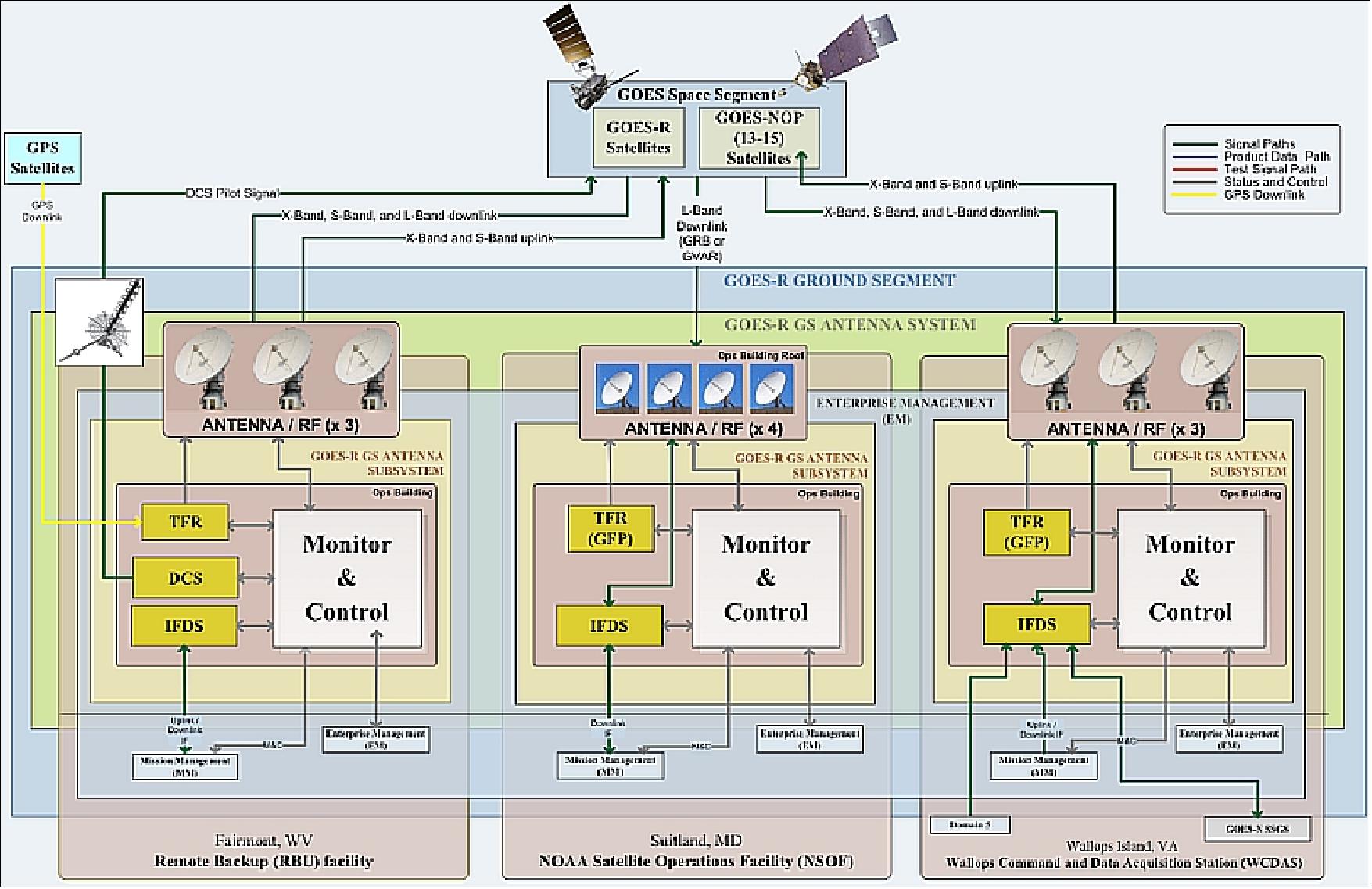
In addition to the primary data streams, the GOES-R series antennas will support a set of Unique Payload Services. The HRIT/EMWIN (High Rate Information Transmission/Emergency Manager’s Weather Information Network) is uplinked in S-band and downlinked in L-band at WCDAS and RBU. The HRIT/EMWIN broadcast provides low-resolution GOES imagery and products, along with emergency weather forecasts and warnings generated by the NWS (National Weather Service). - In parallel, the GOES-R series system will support the collection of in-situ environmental sensor data from DCS (Data Collection System) platforms and will transpond commands to DCS platforms using the GOES-R antennas at WCDAS. Interfaces between the Antenna System and the HRIT/EMWIN and DCS systems will mirror those in place at WCDAS today, but with new and upgraded capabilities to support more DCS terminals and higher data rate signals for HRIT/EMWIN.

Ground Segment Functions
The key functions of the Ground Segment are as follows:
1) MM (Mission Management):
The MM element provides the primary interface between the GS and the Space Segment. It is responsible for the following functional areas (Ref. 118):
• Space-ground communications
• Command generation
• Telemetry (TT&C) processing
• Mission operations
• Product monitoring.
Space-ground communications functions are necessary to process the radio-frequency (RF) signals received from the satellite into usable information, and to generate the RF signals transmitted from the GS back to the satellite. The antenna system being developed for GOES-R falls under the mission management element and serves as the front-end for transmission and receipt of the RF signals. An intermediate frequency (IF) interface between the antenna system and core GS passes these signals into the space-ground communications hardware, which turns them into information to be sent throughout the system.
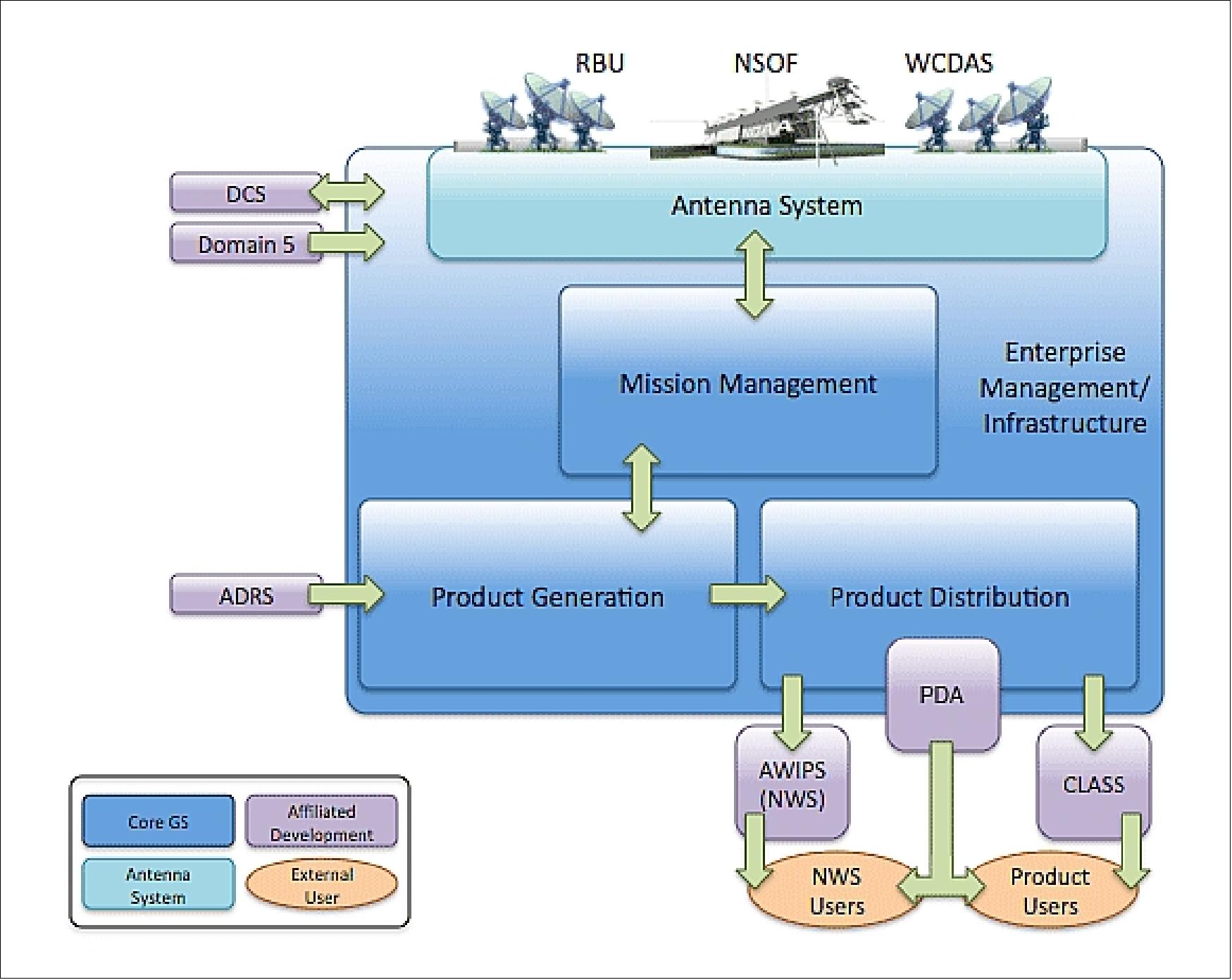
2) PG (Product Generation):
Raw data is received at WCDAS and processed through the antenna system and space-ground communications hardware until CCSDS-formatted packets are recovered. Those packets containing raw instrument data are recovered and processed to Level 0 (L0) data (reprocessed, unreconstructed instrument data at full resolution with communications artifacts removed). This L0 data is in turn radiometrically corrected (calibrated) and geometrically corrected (navigated) to produce a L1b radiance data set. For GLM (Geostationary Lightning Mapper) data, the data set is further processed algorithmically to produce a higher order Level 2+ (L2+) product. GLM L1b and L2+ data, along with the L1b data from all other instruments, is packaged for distribution via the GRB uplink. GRB is sent from PG through the space-ground communications equipment to be uplinked from WCDAS at X-band. The GRB link is transponded onboard the GOES-R Series satellites and downlinked in L-band within the satellite coverage area down to a 5º elevation angle. GRB data is freely available to any users within the coverage area who possess the appropriate equipment to receive the data.
GRB distribution is the primary means of providing L1b instrument data from WCDAS to NSOF. L1b is received at NSOF through the antenna system and is processed back to L1b data sets. This L1b data is then further processed through a set of algorithms to create higher order (L2+) science products. These include the GOES-R KPP (Key Performance Parameter) product of Cloud and Moisture Imagery, which is the critical higher order product required for mission success.
A total of 65 End-Products have been identified for the GOES-R GS. Of these, 56 are generated based on data from the ABI. ABI products focus on atmospheric, ocean, and land data and include subcategories such as clouds, radiation, and precipitation. In addition, the GLM will provide near real-time lightning data End-Products, and the space weather instruments will generate an additional 8 Level 1b End-Products. Each product has a set of performance parameter characteristics that identify the product’s resolution, accuracy, refresh rate, latency, and precision.
The algorithms are implemented by the GS development contractor based on ATBDs (Algorithm Theoretical Basis Documents) generated by NOAA’s Center for Satellite Applications and Research (STAR) in the case of L2+ End-Products and provided by the instrument vendor in the case of L1b End-Products. The capability to deliver these products is divided into three phases known as Releases. The implementations will be validated against a reference data set to ensure that the output of the implemented algorithm correlates with the STAR implementation.
Depending on the algorithm used for generation of each L2+ product, ancillary data inputs may be required to create a given product. These ancillary inputs are aggregated from multiple sources such as numerical weather prediction models and snow/ice analyses through the ADRS (Ancillary Data Relay System). ADRS is being developed in conjunction with the GOES-R GS and will be configurable to meet algorithm needs over the life of the mission. ADRS will provide the ancillary data to the PG L2+ processing system to support the generation of these higher order products. Currently, 20 of the L2+ End-Products listed above require ancillary data inputs.
The PUG (Product Definition and Users' Guide) is defined in the following reference: 129)
3) PD (Product Distribution):
Once the End Products are generated, the core GS PD (Product Distribution) element ensures that data and products are provided to the appropriate entities. The core GS distributes data to the GAS (GOES-R Access Subsystem) via a dedicated network interface located at NSOF. GAS is the primary source of L2+ data for the majority of GOES users Data is also provided directly to NWS via the AWIPS (Advanced Weather Interactive Processing System) interface and to NOAA’s CLASS (Comprehensive Large Array-data Stewardship System) via dedicated interfaces.
The GOES-R Access System is being developed as a component of an overall upgrade of NOAA’s ESPC (Environmental Satellite Processing Center) under the ESPDS (Environmental Satellite Processing and Distribution System) development effort. GAS will consist of a seven-day storage repository and a data distribution interface supporting both subscription-based and ad hoc data requests. GAS will also provide an API (Application Programming Interface) designed to support direct machine-machine distribution of data and products to outside systems. GAS will receive the L1b and L2+ products described in Figure 69, along with ancillary data, metadata, Instrument Calibration Data, sample outlier files for the ABI, and mission operations data (schedules, satellite configuration, operations schedules, and other operational information).
The core GS PD element will also provide sectorized cloud and moisture imagery directly to the NWS via the AWIPS interface. This interface is a high availability, low latency distribution channel that ensures that the NWS receives critical KPP data. The core GS will provide a product sectorization capability that will be configurable based on the following parameters:
• Geographic coordinate corner points
• Map projection (Mercator, Lambert conformal, Polar Stereographic, or Fixed Grid)
• Spatial resolution
• Bit depth
• ABI channel
• Periodicity.
A “stressing case” consisting of a representative set of AWIPS data has been defined between the GOES-R GS and the NWS and is being used to provide a baseline capability for the system’s performance. The system will remain operationally configurable to respond to changing NWS needs within the parameters defined above.
All Level 0, L1b, and L2+ GOES-R data and products will be archived in NOAA’s CLASS repository for long-term preservation. This data repository serves as the primary storage for long-term climatological studies, as well as serving as the data source for users requiring data older than the previous seven days. These non-operational users will interface with the CLASS via a we-based interface outside of the GOES-R system. In addition, Instrument Calibration Data, calibration coefficients, ancillary data, and L2+ parameter tables will be stored to enable detailed analysis and reprocessing by the meteorological and climatological communities. The GS-CLASS interface will be sized to support the distribution of over 2.5 TB of data per day per satellite.
Figure 77 depicts the complete flow of data from the satellite’s instruments through the products’ distribution to the user community.
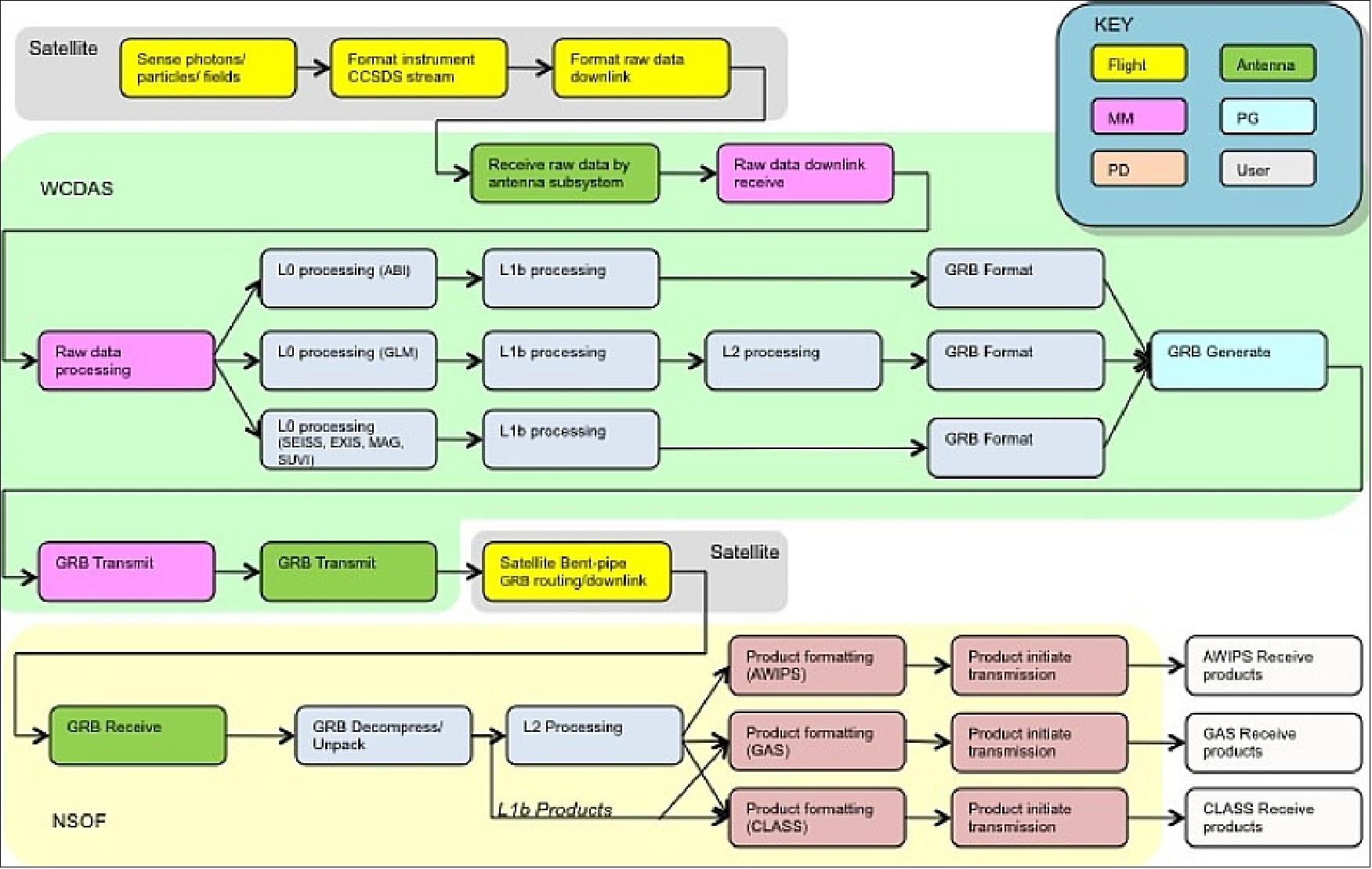
4) EM (Enterprise Management):
The EM element of the core GS supports operational functions by supervising the overall systems and networks of the core GS. In the GOES-R context, supervision is the ability to monitor, report, and enable an operator response to anomalous conditions. EM functions underpin the infrastructure that links the MM, PG, and PD functions and supports automation. While direct control of various systems may be implemented within the individual elements, EM provides a higher layer of supervision across the GS. GS operators at all sites will have access to the EM functionality for insight to their local site and to the distributed GS components, infrastructure, and interfaces.
The EM status is generally reported through an event message generated by a core GS component. Event messages provide a standardized means of communicating particular status information or alerts to EM from the other core GS components. As the EM functionality receives status and other information provided by the distributed GS functions, operators would be able to monitor, trend, and perform other supervisory activities. Components of the GS that are not a part of the core GS will report EM status through a core GS element (e.g., the Antenna system will report via MM and the GAS will report through PD).
In addition to status and monitoring, EM provides configuration and asset management functionality for the GS. The GS uses a consolidated CMART (Configuration Management and Anomaly Reporting and Tracking) system to manage the configuration of software builds, licenses, and database schema. CMART also provides the ability to distribute software and database updates throughout the GS. The anomaly reporting and tracking components of CMART generates anomaly trouble tickets and supports the prioritization, tracking, and resolution of anomalies throughout the development and operations life cycle.
5) IS (Infrastructure):
Although not explicitly defined in the Government requirements, an Infrastructure element is being implemented within the core GS. Infrastructure provides a set of common services for the core GS that are utilized by multiple elements. These services include a network fabric, consolidated storage, database services, and an enterprise service bus. The network fabric is an IP (Internet-Protocol)-based network that provides intra-element and inter-element connectivity. It also provides connectivity across GS sites, connects to external interfaces, and supports a defense-in-depth IT (Information Technology) security strategy.
Consolidated storage provides a set of storage media and file structures that enable both short-term and long-term storage within the GS. The database services enable element-level databases through the use of relational database clusters. Finally, the enterprise service bus supports a common set of message exchanges for both intra-and inter-element communication. Consolidation of infrastructure functions under a common element enables more efficient hardware utilization, supports a standard design and implementation of common GS-wide functions, increases system flexibility, and helps centralize the management of the common functions of the system.
The GAMCATS (GOES-R Antenna Monitor, Control, and Test Subsystem) performs an analogous function to EM for the Antenna system. GAMCATS provides monitoring, control, and test functionality for the antenna control unit, receive elements, transmit elements, control ports of the switching system, RF switching, BITE (Built-In Test Equipment), environmental and fire suppression system monitoring, waveguide dehydrator, and other related equipment across all sites. During normal operations, the GOES-R antennas and associated equipment at both WCDAS and RBU will be monitored and controlled from the WCDAS operations room, with backup monitoring by operators at NSOF via remote GAMCATS workstation. GAMCATS will provide status information to the core GS MM element via event messages, and these will be relayed to the core GS EM element to provide a consolidated view of the GS status (Ref. 118).
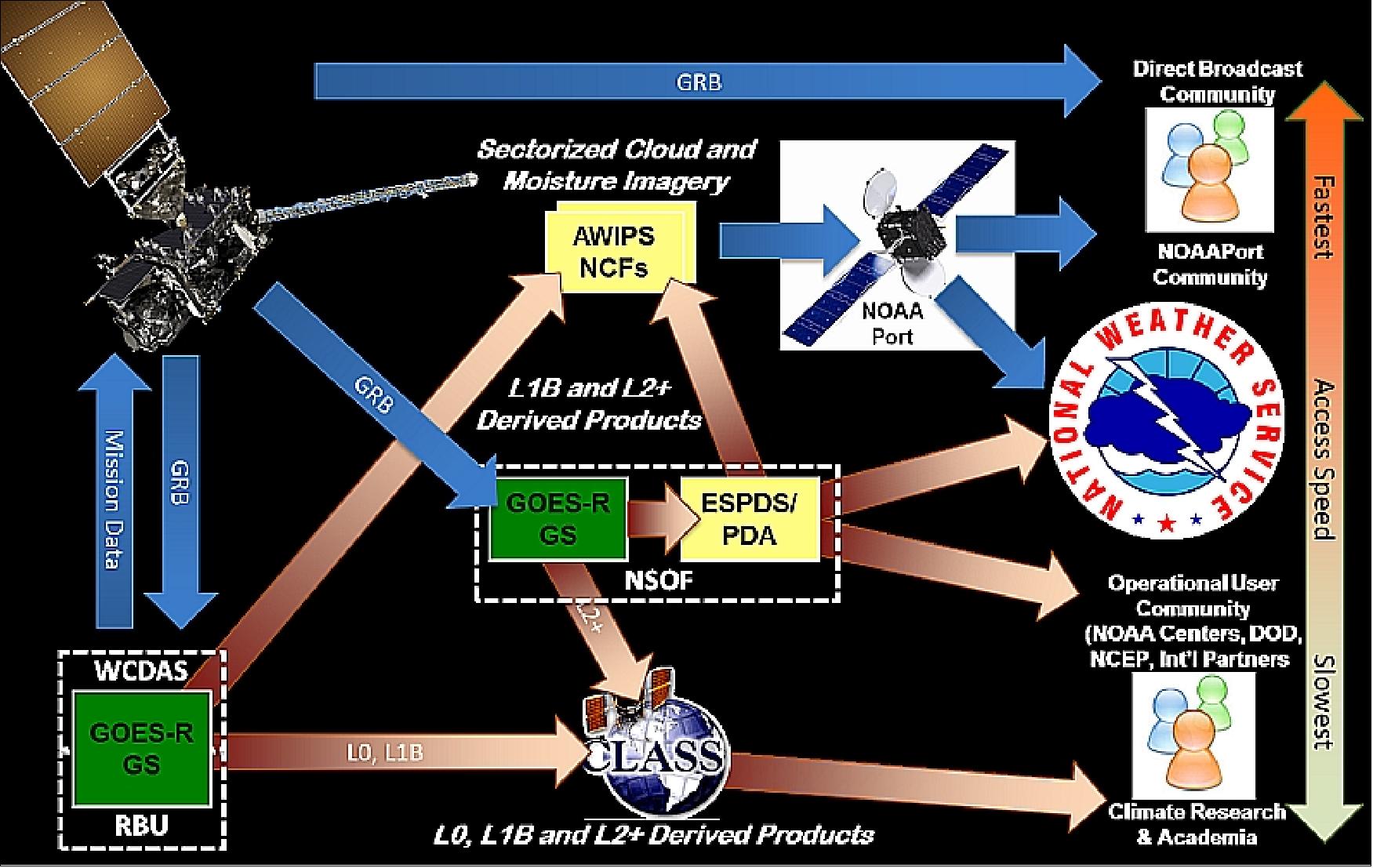
GOES-R UPS (Unique Payload Services)
The GOES-R Unique Payload Services suite consists of transponder payloads providing communications relay services in addition to the primary GOES mission data. The UPS suite consists of the following elements: 130)
• DCS (Data Collection System)
• HRIT/EMWIN (High Rate information Transmission / Emergency Managers Weather Information Network).
• GRB (GOES-R Rebroadcast). GOES-R Rebroadcast is the primary space relay of Level 1b products and will replace the GOES VARiable (GVAR) service. GRB will provide full resolution, calibrated, navigated, near-real-time direct broadcast data. The content of the data distributed via GRB service is envisioned to be the full set of Level 1b products from all instruments onboard the GOES-R series spacecraft. This concept for GRB is based on analysis that a dual-pole circularly polarized L-band link of 12 MHz bandwidth may support up to a 31-Mbps data rate – enough to include all ABI channels in a lossless compressed format as well as data from GLM, SUVI, EXIS, SEISS, and MAG.
Function | GVAR (GOES VARiable Format) | GRB (GOES Rebroadcast) |
Full Disk Image | 30 minutes | 5 minutes (Mode 4), 15 min (Mode 3) |
Other modes | Rapid Scan, Super Rapid Scan | 3000 km x 5000 km (CONUS: 5 minute) |
Polarization | None | DCP (Dual Circular Polarized) |
Receiver center frequency | 1685.7 MHz (L‐band) | 1686.6 MHz (L‐band) |
Data rate | 2.11 Mbit/s | 31 Mbit/s |
Antenna coverage | Earth coverage to 5º | Earth coverage to 5º |
Data sources | Imager and Sounder | ABI (16 bands), GLM, SEISS, EXIS, SUVI, MAG |
Space weather | None | ~2Mbit/s |
Lightning data | None | 0.5 Mbit/s |
• SARSAT (Search and Rescue Satellite Aided Tracking) System. NOAA operates the SARSAT system to detect and locate mariners, aviators, and other recreational users in distress almost anywhere in the world at anytime and in almost any condition. This system uses a network of satellites to quickly detect and locate distress signals from emergency beacons onboard aircraft, vessels, and from handheld PLBs (Personal Locator Beacons. The SARSAT transponder that will be carried onboard the GOES-R satellite will provide the capability to immediately detect distress signals from emergency beacons and relay them to ground stations - called Local User Terminals. In turn, this signal is routed to a SARSAT Mission Control Center and then sent to a Rescue Coordination Center which dispatches a search and rescue team to the location of the distress.
The GOES-R series continues the legacy GEOSAR (Geostationary Search and Rescue) function of the SARSAT system onboard NOAA’s GOES satellites which has contributed to the rescue of thousands of individuals in distress. The SARSAT transponder will be modified slightly for GOES-R by being able to operate with a lower uplink power (32 dBm) enabling GOES-R to detect weaker signal beacons.
Over its history, the SAR (Search and Rescue) office at NASA's Goddard Space Flight Center in Greenbelt, Maryland, has developed emergency beacons for personal, nautical and aeronautical use, along with ground station receivers that detect beacon activation. Space segment SAR instruments fly on many spacecraft in various orbits around the Earth. The GOES SAR transponders are geostationary, meaning that they appear "fixed" relative to a user on the surface due to their location over the equator and orbital period of 24 hours. 131)
"The SAR space segment isn't just one instrument in one orbit," said Tony Foster, SAR's deputy mission manager. "Rather it's a series of instruments aboard diverse satellites in various orbits, each working together to provide first responders with highly accurate locations."
The GOES search and rescue transponders, unlike SAR instruments in other orbits, are only able to detect the beacon signals, not help to determine location. This detection rapidly alerts the global SAR network, Cospas-Sarsat, of a distress beacon's activation. This gives the system valuable time to prepare before the signal's origin can be determined by SAR instruments on low-Earth-orbiting satellites.
Additionally, beacons with integrated GPS technology can send their location data through GOES to the SAR network. The network can then alert local first responders to the location of the emergency without the aid of the low-Earth-orbiting constellation of search and rescue instruments.
NASA's SAR team provides on-orbit testing, support and maintenance of the search and rescue instrument on GOES. The GOES satellites and SAR instruments are funded by NOAA.
"We are proud to support the Cospas-Sarsat program by hosting a search and rescue transponder aboard our satellites," said Tim Walsh, GOES-R series program acting system program director. "SAR is one of the many NOAA-NASA collaborations that translate into life-saving technology."
In the future, first responders will rely on a new constellation of instruments on GPS and other Global Navigation Satellite Systems currently in medium-Earth orbit, an orbit that views larger swathes of the Earth than low-Earth orbit due to higher altitudes. These new instruments will enable the SAR network to locate a distress signal more quickly than the current system and calculate their position with accuracy an order of magnitude better, from 1 km to approximately 100 meters.
In the meantime, the SAR transponders aboard GOES cover the time between the activation of a distress signal and detection by SAR instruments in low-Earth orbit.
"NASA's SAR office dedicates itself to speed and accuracy," said Lisa Mazzuca, SAR mission manager. "The instruments and technologies we develop endeavor to alert first responders to a beacon's activation as soon as possible. The GOES search and rescue transponders are crucial to this goal, providing near-instantaneous detection in the fields of view of the Earth."
DCS (Data Collection System)
The objective of DCS is to collect near real-time environmental data from more than 19,000 data collection platforms located in remote areas where normal monitoring is not practical. The DCS receives data from platforms on ships, aircraft, balloons and fixed sites. These data are used to monitor seismic events, volcanoes, tsunami, snow conditions, rivers, lakes, reservoirs, ocean data, forest fire control, meteorological and upper air parameters.
The transmissions can occur on predefined frequencies and schedules, in response to thresholds in sensed conditions, or in response to interrogation signals. The transponder on board the GOES satellite detects this signal and then rebroadcasts it so that it can be picked up by other ground-based equipment. Federal, state and local agencies then monitor the environment through the transmission of observations from these surface-based data collection platforms. The platforms can be placed in remote locations and left to operate with minimal human intervention. The Data Collection System thus allows for more frequent and more geographically complete environmental monitoring. Enhancements to the DCS program during the GOES-R era include expansion in the total number of user-platform channels from 266 to 433.
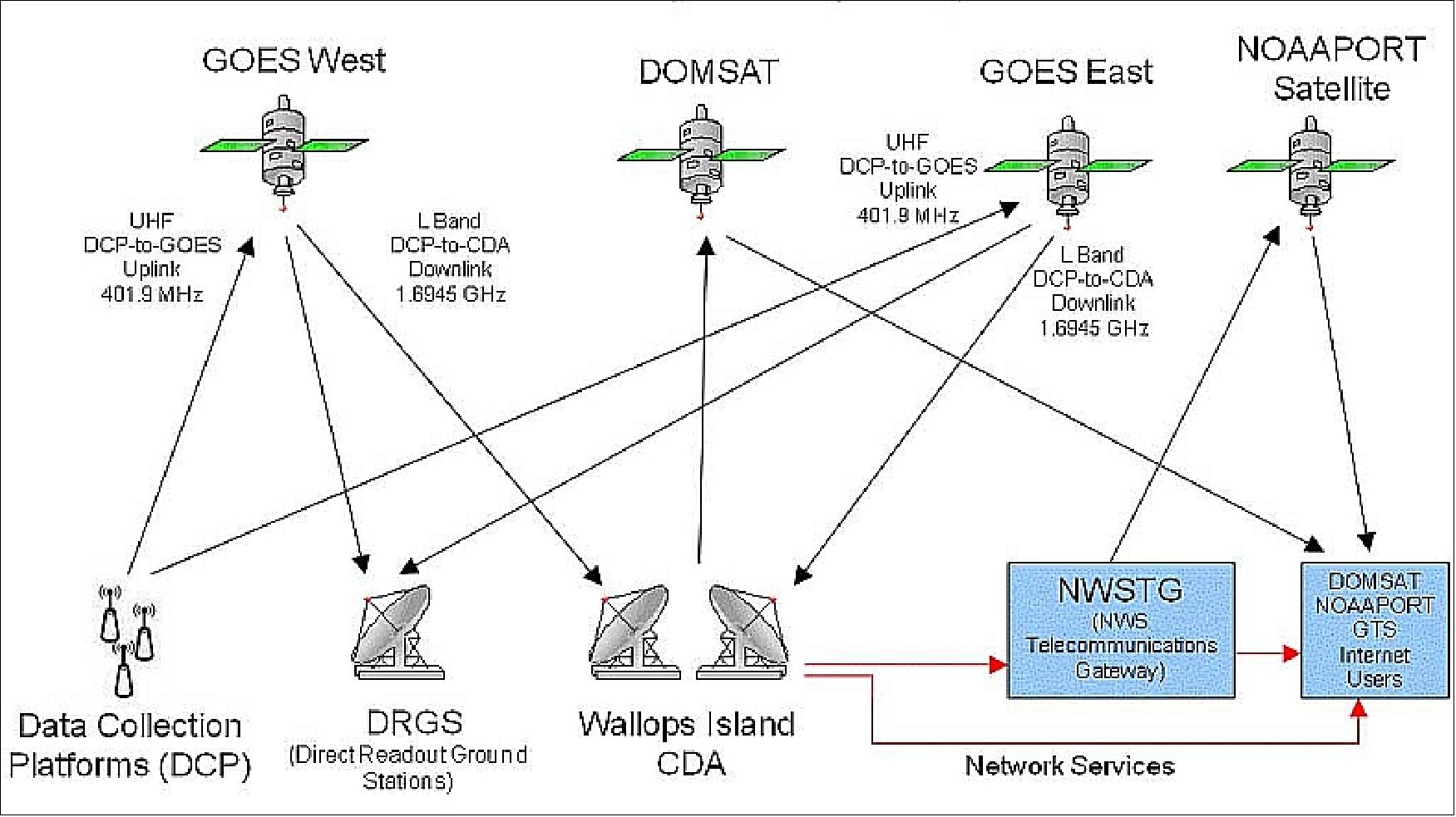
References
1) “GOES Advanced Baseline Imager, Technical Requirements Document,” GSFC, S-415-200, March 2000
2) E. Miller, M. Garant, L. Oringer, R. Reining, D. Shaffer, J. Sterling, A. Taub, “Economic Benefits from National Oceanic and Atmospheric Administration's (NOAA) - Next Generation Geostationary Satellite (GOES-R),” Proceedings of ISRSE, Honolulu, HI, Nov. 10-14, 2003
3) E. Miller, M. Madden, B. Nelson, “National Oceanic And Atmospheric Administration’s (NOAA) - Next Generation Geostationary Satellite (GOES R),” ISRSE, Honolulu, HI, Nov. 10-14, 2003
4) GOES-R Program Office, URL: http://www.goes-r.gov/
5) A. Krimchansky, D. Machi, S. A. Cauffman, M. A. Davis, “Next Generation Geostationary Operational Environmental Satellite (GOES-R Series): A Space Segment Overview,” URL: http://goes.gsfc.nasa.gov/text/Next_Generation_Geo_2006.pdf
6) Greg Mandt, “An Overview of the GOES‐R Program,” AMS 90th Annual Meeting, 6th Annual Symposium on Future National Operational Environmental Satellite Systems‐NPOESS and GOES‐R, January 19, 2010, URL: http://cimss.ssec.wisc.edu/goes_r/proving-ground/presentations/AMS-2010-Mandt_ProgramOverview.pdf
7) http://www.goes-r.gov/index.html
8) http://www.goes-r.gov/users/user-readiness-overview.html
9) http://www.goes-r.gov/downloads/tri-brochure.pdf
10) GOES Querterly Newsletter, January-March 2014, Issue 5, URL: http://www.goes-r.gov/resources/newsletters/docs/2014Q1.pdf
11) GOES-R Mission Overview, NOAA, NASA, URL: http://www.goes-r.gov/mission/mission.html
12) ”GOES-R Mission Overview,” NOAA, URL: http://www.goes-r.gov/mission/mission.html
13) W. H. Anderson, “The Geostationary Operational Satellite R Series (GOES-R) - SpaceWire Implementation,” International SpaceWire Conference, Dundee, UK, Sept. 17-19, 2007, URL: http://spacewire.computing.dundee.ac.uk/proceedings/Papers/Missions%20and%20Applications%201/anderson.pdf
14) Greg Mandt, “GOES-R Overview and Status,” The Fifth Annual Symposium on Future Operational Environmental Satellite Systems - NPOESS and GOES-R and The 16th Conference on Satellite Meteorology and Oceanography,” Phoenix, AZ, January 13-14, 2009, URL: http://www.goes-r.gov/downloads/2009_AMS_GOESR_SPD_Overview_Final.pdf
15) “GOES-R Spacecraft Overview,” URL: http://www.goes-r.gov/spacesegment/spacecraft.html
16) Steve Cole, Cynthia M. O'Caroll, John Leslie, “NASA Selects NOAA Goes-R Series Spacecraft Contractor,” Dec. 2, 2008, URL: http://www.nasa.gov/home/hqnews/2008/dec/HQ_C08067_GOES.html
17) “NASA Selects NOAA GOES-R Series Spacecraft Contractor,” Spacemart, Dec. 3, 2008, URL: http://www.spacemart.com/reports/NASA_Selects_NOAA_GOES_R_Series_Spacecraft_Contractor_999.html
18) “Geostationary Operational Environmental Satellite R-Series (GOES-R),” URL: http://www.lockheedmartin.com/us/products/geostationary-operational-environmental-satellite-r-series--goes.html
19) “NOAA, NASA Select Contractor to Build GOES-R Series Satellite,” May 7, 2009, URL: http://www.noaanews.noaa.gov/stories2009/20090507_goesr.html
20) Greg Mandt, “GOES-R Update,” GOES User's Conference, Nov. 3-5, 2009, Madison Wisconsin, USA, URL: http://cimss.ssec.wisc.edu/goes_r/meetings/guc2009/presentations_final/1103_1330_Mandt.ppt
21) Barbara B. Pfarr, “GOES-R Instrument Status and Accommodations,” AMS (American Meteorological Society) Conference, Atlanta, GA, USA, January 17-21,, 2010, URL: http://www.goes-r.gov/downloads/2010-AMS/Spacecraft_Intro_v3.pdf
22) “Next generation geostationary satellite program undergoes successful review,” NOAA, Nov. 28, 2012, URL: http://www.noaanews.noaa.gov/stories2012/20121128_goesr.html
23) William H. Anderson, “The Geostationary Operational Satellite R Series (GOES-R) SpaceWire Implementation,” URL: http://spacewire.computing.dundee.ac.uk/proceedings/Papers/Missions%20and%20Applications%201/anderson.pdf
24) Steve Parkes, Philippe Armbruster, “SpaceWire: Spacecraft onboard data-handling network,” Acta Astronautica, Volume 66, Issues 1-2, January-February 2010, pp. 88-95
25) Alexander Krimchansky, William H. Anderson, Craig Bearer, “The Geostationary Operational Satellite R Series SpaceWire Based Data System Architecture,” Proceedings of the International SpaceWire Conference 2010, St. Petersburg, Russia, June 22-24, 2010, URL: http://2010.spacewire-conference.org/proceedings/Papers/MissionsApplications/Krimchansky.pdf
26) “GOES-R Series Concept of Operations (CONOPS),” P417-R-CONOPS-0008, Version 2.5, October 2009, URL: http://www.goes-r.gov/downloads/CONOPS_V_2_5_final-11-6-09.pdf
27) Vanessa Griffin, “NOAA Satellite Operations Overview,” URL: https://3c.gmx.net/mail/client/dereferrer?redirectUrl=http%3A%2F%2Fwww.ofcm.gov%2Fcopc%2Fmeetings%2F2014-01%2F02-Last%2520Final%2520for%2520OSPO_Vanessa_COPC%2520May%25202014_Final.pptx
28) Jeff Foust, ””GOES-T launch preparations underway,” SpaceNews, 2 February 2022, URL: https://spacenews.com/goes-t-launch-preparations-underway/
29) ”NOAA’s GOES-T Satellite Arrives in Florida Ahead of 2022 Launch,”NOAA/ NESDIS, 10 November 2021, URL: https://www.nesdis.noaa.gov/news/noaas-goes-t-satellite-arrives-florida-ahead-of-2022-launch
30) ”NASA Awards Launch Services Contract for GOES-U Mission,” NASA Contract Release C21-025, 10 September 2021, URL: https://www.nasa.gov/press-release/nasa-awards-launch-services-contract-for-goes-u-mission
31) ”NOAA’s GOES-T Satellite Undergoes Testing to Simulate Launch and Orbit Conditions,” NOAA/NESDIS, 29 September 2020, URL: https://www.nesdis.noaa.gov/news/noaas-goes-t-satellite-undergoes-testing-simulate-launch-and-orbit-conditions
32) ”GOES-U Gets a New Instrument,” NOAA/NASA GOES-R Series, 1 July 2019, URL: https://www.goes-r.gov/featureStories/CCOR_feature.html
33) GOES-R Satellite Series Quarterly News Letter, April-June 2019, Issue 26, Available 15 July 2019, URL: https://www.goes-r.gov/downloads/multimedia/newsletters/GOESRQ22019.pdf
34) ”Experts to Preview March Launch of GOES-S Satellite,” NOAA/NESDIS, 25 Jan. 2018, URL: https://www.nesdis.noaa.gov/GOES-R-Series-Satellites
35) John Leslie, Rob Gutro, Tori MacLendon, ”NOAA’s GOES-S Arrives at NASA’s Kennedy Space Center for Launch Processing,” NASA, Release 17-34, 9 Dec. 2017, URL: https://www.nasa.gov/press-release/goddard/2017/noaa-s-goes-s-arrives-at-nasa-s-kennedy-space-center-for-launch-processing
36) ”NOAA’s GOES-S and GOES-T Satellites Coming Together,” NOAA, August 3, 2017, URL: https://www.nesdis.noaa.gov/GOES-16
37) ”Lockheed Martin Completes Assembly of NOAA's GOES-S Weather Satellite,” PR Newswire, Dec. 20, 2016, URL: http://www.prnewswire.com/news-releases/lockheed-martin-completes-assembly-of-noaas-goes-s-weather-satellite-300382042.html
38) ”GOES-R News, ” November 2016, NOAA/NASA, URL: http://www.goes-r.gov/mission/news.html
39) ”Harris Corporation’s Fourth Advanced Baseline Imager Complete and Ready for Weather Satellite Integration,” Harris Press Release, Sept. 27, 2016, URL: https://www.harris.com/press-releases/2016/09/harris-corporations-fourth-advanced-baseline-imager-complete-and-ready-for
40) ”Lockheed Martin delivers NOAA's GOES-R weather satellite to launch site,” Space Daily, Aug. 26, 2016, URL: http://www.spacedaily.com/reports/Lockheed_Martin_delivers_NOAAs_GOES_R_weather_satellite_to_launch_site_999.html
41) ”GOES-R takes another step towards space today!,” NOAA, Aug. 22, 2016, URL: http://www.nesdis.noaa.gov/GOES-R/index.html
42) ”NOAA’s GOES-R Arrives at NASA Kennedy for Launch Processing,” NASA, Aug. 23, 2016, URL: http://www.nasa.gov/feature/goddard/2016/noaas-goes-r-arrives-at-nasa-kennedy-for-launch-processing
43) ”GOES-R Rehearsals: Preparing to Deploy,” NESDIS News Archive, May 11, 2016: URL: http://www.nesdis.noaa.gov/news_archives/goes_r_rehearsals_preparing_to_deploy.html
44) ”NOAA's GOES-S, T and U Satellites Are Shaping Up,” Jan. 8, 2016, URL: http://www.goes-r.gov/mission/GOES_Satellites_are_shaping_up.html
45) ”GOES-R News,” Nov. 5, 2015, URL: http://www.goes-r.gov/mission/news.html
46) “Clearer Forecasts Ahead: Lockheed Martin Completes Assembly of NOAA’s Next-Generation Geostationary Weather Satellite,” Lockheed Martin, June 3, 2015, URL: http://www.lockheedmartin.com/us/news/press-releases/2015/june/0603-space-goesr.html
47) “NOAA's GOES-R Satellite Begins Environmental Testing,” NOAA, May 21, 2015, URL: http://www.goes-r.gov/mission/enviro_testing.html
48) Lauren Gaches, “All Instruments for NOAA’s GOES-R Satellite Now Integrated with Spacecraft,” NASA, Jan. 12, 2015, URL: http://www.nasa.gov/content/goddard/all-instruments-for-noaa-s-goes-r-satellite-now-integrated-with-spacecraft/
49) “First-of-its-kind Geostationary Lightning Mapper (GLM) Instrument Complete,” NOAA/NESDIS News Archive, Oct. 9, 2014, URL: http://www.nesdis.noaa.gov/news_archives/lightning_mapper_complete.html
50) “Lockheed Martin Successfully Mates NOAA GOES-R Satellite Modules,” Lockheed Martin, Sept. 18, 2014, URL: http://www.lockheedmartin.com/us/news/press-releases/2014/september/0918-ss-goesr.html
51) “GOES-R "Brain" and "Body" Are Mated, On Track for Launch,” NOAA/NESDIS, Sept. 18, 2014, URL: http://www.nesdis.noaa.gov/news_archives/goesr_mate.html
52) “GOES-R Program Milestones,” NOAA, URL: http://nws.noaa.gov/com/weatherreadynation/files/GOES-R%20milestones.pdf
53) http://www.goes-r.gov/mission/news.html
54) “GOES-R Propulsion and System Modules Delivered,” NASA, URL: http://www.nasa.gov/content/goddard/goes-r-propulsion-and-system-modules-delivered/#.VEuRDha_D_U
55) “GOES-R Weather Satellite Modules Delivered To Lockheed Martin,” Lockheed Martin, May 1, 2014, URL: http://www.lockheedmartin.com/us/news/press-releases/2014/may/0501-ss-goesr.html
56) “Lockheed Martin Completes GOES-R Weather Satellite Critical Design Review,” Lockheed Martin, May 1, 2012, URL: http://www.lockheedmartin.com/us/news/press-releases/2012/may/lockheed-martin-completes-goes-r-weather-satellite-critical-desi.html
57) ”GOES-R heads to orbit, will improve weather forecasting,” NOAA, Nov. 19, 2016, URL: http://www.noaa.gov/media-release/goes-r-heads-to-orbit-will-improve-weather-forecasting
58) Sean Potter, John Leslie, Connie Barclay, ”NASA Successfully Launches NOAA Advanced Geostationary Weather Satellite,” NASA, Release 16-109, Nov. 20, 2016, URL: https://www.nasa.gov/press-release/nasa-successfully-launches-noaa-advanced-geostationary-weather-satellite
59) ”NOAA’s GOES-S satellite roars into orbit,” NOAA, 1 March 2018, URL: http://www.noaa.gov/media-release/noaa-s-goes-s-satellite-roars-into-orbit
60) ”NASA Invites Media to Upcoming NOAA GOES-S Satellite Launch,” NASA, 29 Jan. 2018, URL: https://www.nesdis.noaa.gov/GOES-R-Series-Satellites
61) ”GOES-S High definition goes west,” NASA, URL: https://www.goes-r.gov/education/docs/2018GOES-S_OverviewFS.pdf
62) ”ULA's Launch of Weather Satellite GOES-S Up and Takes Huge Step Forward for NOAA and NASA,” Satnews Daily, 1 March, 2018, URL: http://www.satnews.com/story.php?number=864882825
63) ”NASA, ULA Launch NOAA’s Newest Earth Observing Satellite,” NASA Press Release 22-023, 2 March 2022, URL: https://www.nasa.gov/press-release/nasa-ula-launch-noaa-s-newest-earth-observing-satellite
64) ”NOAA Shares First Imagery from GOES-18 SUVI Instrument,” NOAA/NASA GOES-R News, 19 July 2022, URL: https://www.goes-r.gov/mission/news.html
65) ”Earth from Orbit: NOAA Debuts First Imagery from GOES-18,” NOAA News, 11 May 2022, URL: https://www.nesdis.noaa.gov/news/earth-orbit-noaa-debuts-first-imagery-goes-18
66) ”Hunga Tonga-Hunga Ha‘apai Erupts,” NASA Earth Observatory, Image of the Day for 19 January 2022, URL: https://earthobservatory.nasa.gov/images/149347/hunga-tonga-hunga-haapai-erupts
67) ”Extratropical Cyclones Drench West Coast,” NASA Earth Observatory, Image of the Day for 26 October 2021, URL: https://earthobservatory.nasa.gov/images/148999/extratropical-cyclones-drench-west-coast
68) ”Storms Churn Around North America,” NASA Earth Observatory, Image of the Day for 19 August 2021, URL: https://earthobservatory.nasa.gov/images/148725/storms-churn-around-north-america
69) ”NOAA Gives Update on GOES-17,” NOAA/NESDIS Press Release, 23 July 2021, URL: https://www.nesdis.noaa.gov/press
70) ”A Cirrus Sign of Tornadoes,” NASA Earth Observatory, Image of the Day for 5 July 2021, URL: https://earthobservatory.nasa.gov/images/148515/a-cirrus-sign-of-tornadoes
71) Debra Werner, ”NOAA to replace GOES17 satellite ahead of schedule,” SpaceNews, 25 June 2021, URL: https://spacenews.com/goes-t-to-become-goes-west/
72) Molly Porter, Lee Mohon, ”NASA Scientists Use Lightning to Help Predict Hurricane Intensity,” NASA News Release, 2 June 2021, URL: https://www.nasa.gov/centers/marshall/news/releases/2021/nasa-scientists-use-lightning-to-help-predict-hurricane-intensity.html
73) Patrick Duran, Christopher J. Schultz, Eric C. Bruning, Stephanie N. Stevenson, David J. PeQueen, Nicholas E. Johnson, Roger E. Allen, Matthew R. Smith, Frank J. LaFontaine, ”The Evolution of Lightning Flash Density, Flash Size, and Flash Energy During Hurricane Dorian's (2019) Intensification and Weakening,” Geophysical Research Letters, Published: 06 April 2021, https://doi.org/10.1029/2020GL092067
74) ”Satellite Senses Subtle Amazon Seasonality,” NASA Earth Observatory, Image of the Day for 1 June 2021, URL: https://earthobservatory.nasa.gov/images/148363/satellite-senses-subtle-amazon-seasonality
75) ”Shadows from a Solar Eclipse,” NASA Earth Observatory, Image of the Day for 16 December 2020, URL: https://earthobservatory.nasa.gov/images/147659/shadows-from-a-solar-eclipse?src=eoa-iotd
76) ”A Destructive Abundance,” NASA Earth Observatory, Image of the Day for 10 December 2020, URL: https://earthobservatory.nasa.gov/images/147643/a-destructive-abundance
77) ”Wildfire Smoke Shrouds the U.S. West,” NASA Earth Observatory, Image of the Day for 21 August 2020, URL: https://earthobservatory.nasa.gov/images/147151/wildfire-smoke-shrouds-the-us-west
78) ”Solar Power Plants Get Help from Satellites to Predict Cloud Cover,” Journal of Renewable and Sustainable Energy, 14 April 2020, URL: https://publishing.aip.org/publications/latest-content/solar-power-plants-get-help-from-satellites-to-predict-cloud-cover/
79) David P. Larson, Mengying Li and Carlos F. M. Coimbra, ”SCOPE: Spectral cloud optical property estimation using real-time GOES-R longwave imagery,” Journal of Renewable and Sustainable Energy, Vol. 12, 026501, Published Online: 14 April 2020 , https://doi.org/10.1063/1.5144350 , URL: https://aip.scitation.org/doi/pdf/10.1063/1.5144350?download=true
80) Hal Bloom, “GOES-R Instrument Operations,” Fifth annual Symposium on Future National Operational Environmental Satellite Systems - NPOESS and GOES-R, Phoenix, AZ, January 13-14, 2009, URL: http://www.goes-r.gov/downloads/AMS_2009_GOES-R_Instruments_v4.pdf
81) “GOES-R Multimedia - Space Segment - Instruments Image Gallery,” URL: http://www.goes-r.gov/multimedia/instr_images.html#exis
82) T. J. Schmit, J. J. Gurka, “2006 update on baseline instruments for the GOES-R series,” Proceedings of the 2006 EUMETSAT Meteorological Satellite Conference, Helsinki, Finland, June 12-16, 2006
83) T. J. Schmit, J. Gurka, M. M. Gunshor, W. P. Menzel, Jun Li, “The Advanced Baseline Imager (ABI) on Geostationary Environmental Satellites (GOES-r),” 21st International Conference on Interactive Information Processing Systems (IIPS) for Meteorology, Oceanography, and Hydrology, part of the 85th AMS Annual Meeting, San Diego, CA, Jan. 9-13, 2005, URL: http://ams.confex.com/ams/pdfpapers/83565.pdf
84) Timothy J. Schmit, James J. Gurka, Mathew M. Gunshor, Jun Li, “The ABI on the GOES-R series,” 5th GOES Users’ Conference New Orleans, LA, January 23, 2008, URL: http://cimss.ssec.wisc.edu/goes/abi/ABI_AMS_2008_schmit_final.pdf
85) Timothy J. Schmit, Kaba Bah, Mathew M. Gunshor, Jun Li, Scott Bachmeier, James J. Gurka, Steve Goodman, et al., “The ABI (Advanced Baseline Imager) on the GOES-R series,” 6th GOES Users’ Conference, Nov. 3-5, 2009, Madison Wisconsin, URL: http://cimss.ssec.wisc.edu/goes_r/meetings/guc2009/presentations_final/1103_1400_Schmit.ppt
86) James Gurka, “The ABI Instrument Development,” 6th GOES Users’ Conference, Nov. 3-5, 2009, Madison Wisconsin, URL: http://cimss.ssec.wisc.edu/goes_r/meetings/guc2009/presentations_final/1103_1415_Gurka.ppt
87) Timothy J. Schmit, Kaba Bah, Mathew M. Gunshor, Jun Li, Scott Bachmeier, James J. Gurka, Steve Goodman, “The ABI (Advanced Baseline Imager) on the GOES-R series,” 6th Annual Symposium on Future National Operational Environmental Satellite Systems - NPOESS and GOES-R, Atlanta, GA, USA, Jan. 17-21, 2010, URL: http://cimss.ssec.wisc.edu/goes_r/proving-ground/presentations/AMS-2010-ABI.pdf
88) “GOES-R Advanced Baseline Imager (ABI),” URL: http://www.goes-r.gov/education/docs/Factsheet_ABI_v6.pdf
89) ,Timothy J. Schmit, Mathew M. Gunshor, W. Paul Menzel, James J. Gurka, Jun Li, A. Scott Bachmeier, “Introducing the Next-generation Advanced Baseline Imager (ABI) on GOES-R, BAMS (Bulletin of the American Meteorological Society), Vol. No 8, Aug. 2005, pp. 1079-1096, URL: http://epssi.mtu.edu/seminar/i1520-0477-86-8-1079.pdf
90) http://cimss.ssec.wisc.edu/goes/abi/abi_cimss.pdf
91) Paul C. Griffith, “ABI Delivers Significantly Increased Capabilities Over Current Imagers,” http://www.goes-r.gov/downloads/GOES%20Users%27%20Conference%20IV/Complete%20Posters/GUC4_poster_Griffith.pdf
92) R. Colbert, G. Pruitt, T. Nguyen, J. Raab, S. Clark, P. Ramsey, “ABI Cooler System Protoflight Performance,” Proceedings of the 15th International Cryocooler Conference, June 9-12, 2008, Long Beach, CA, USA, URL: http://conferences.library.wisc.edu/index.php/icc15/article/download/186/186
93) P. Ramsey, S. Clark, A. Chuchra, R. Boyle, D. Early, R. Colbert, “Performance Characterization of the ABI Cryocooler,”Proceedings of the 15th International Cryocooler Conference, June 9-12, 2008, Long Beach, CA, USA, URL: http://conferences.library.wisc.edu/index.php/icc15/article/download/187/187
94) David A. Igli, Vincent N. Virgilio, Krishnaswamy Gounder, “Image Navigation and Registration For GOES-R Advanced Baseline Imager,” Proceedings of the 32nd AAS Guidance and Control Conference, Breckenridge, CO, USA, Jan. 31.- Feb. 4, 2009, AAS 09-041
95) Paul C. Griffith, “ABI Development Status,” AMS 6th Annual Symposium on Future National Symposium on Operational Environmental Satellite Systems-NPOESS and GOES-R, Atlanta, GA, USA, January 17-21, 2010,
96) “Advanced Baseline Imager (ABI),” URL: http://www.goes-r.gov/spacesegment/abi.html
97) Paul C. Griffith, ”Details of the Advanced Baseline Imager (ABI) images and timelines,” Proceedings of the EUMETSAT 2016 Meteorological Satellite Conference, Darmstadt, Germany, Sept. 26-30, 2016, availability of the proceedings at the end of December 2016, URL: http://www.eumetsat.int/website/home/News/ConferencesandEvents/DAT_2833302.html
98) W.F. Denig, S.M. Hill, “Improved Space Weather Monitoring,” 93rd AMS (American Meteorological Society) Meeting, Austin, TX, USA, Jan. 6-10, 2013, paper: J2.4, URL: http://www.goes-r.gov/downloads/AMS/2013/presentations/2.4-Denig-Hill.pdf
99) “Solar Ultraviolet Imager (SUVI),” URL: http://www.goes-r.gov/spacesegment/suvi.html
100) “Lockheed Martin Awarded NASA Contract to Design and Build Solar Ultraviolet Imager for Goes-R Satellite Series,” SpaceRef, Sept. 25, 2007, URL: http://www.spaceref.com/news/viewpr.html?pid=23607
101) “Solar Ultraviolet Imager For GOES-R Satellite Passes CDR,” Space Daily, Dec. 21, 2009, URL: http://www.spacedaily.com/reports/Solar_Ultraviolet_Imager_For_GOES_R_Satellite_Passes_CDR_999.html
102) “Lockheed Martin Team Passes Pre-Environmental Review For Solar Ultraviolet Imager For GOES-R Satellite Series,” PRNewswire, Jan. 8, 2013, URL: http://www.prnewswire.com/news-releases/lockheed-martin-team-passes-pre-environmental-review-for-solar-ultraviolet-imager-for-goes-r-satellite-series-186048252.html
103) “First Solar Ultraviolet Imager For GOES-R Satellite Series Completed,” Space Daily, Dec. 20, 2013, URL: http://www.spacedaily.com/reports/Lockheed_Martin_Team_Completes_First_Solar_Ultraviolet_Imager_SUVI_For_GOES_R_Satellite_Series_999.html
104) “Lockheed Martin—Designed To Investigate The Weather In Space (Satellite—Instrument),”, Satnews, April 17, 2014, URL: http://www.satnews.com/story.php?number=392195495#
105) Frank Eparvier, “Satellite instrument package to assess space weather ready for delivery by CU,” University of Colorado, May 2, 2013, URL: http://www.colorado.edu/news/releases/2013/05/02/satellite-instrument-package-assess-space-weather-ready-delivery-cu
106) “LASP-built space weather instrument ready for delivery,” LASP, May 2, 2013, URL: http://lasp.colorado.edu/home/blog/2013/05/02/lasp-built-space-weather-instrument-ready-for-delivery/
107) “EUV and X-Ray Irradiance Sensors (EXIS),” URL: http://www.goes-r.gov/spacesegment/exis.html
108) ”Extreme Ultraviolet and X-ray Irradiance Sensors (EXIS),” NOAA, NASA, URL: http://www.goes-r.gov/spacesegment/exis.html
109) H. J. Christian Jr., “Geostationary Lightning Mapper (GLM),” 2nd Conference on Meteorological Applications of Lightning Data, American Meteorological Society, Atlanta, GA, Jan. 30- Feb. 2, 2006, paper J2.3.
110) http://thunder.msfc.nasa.gov/lms/
111) Steven Goodman, R. Blakeslee, W Koshak, W A Petersen, L Carey, D Mach, “The Geostationary Lightning Mapper (GLM) on the GOES-R Series: A new operational capability to improve storm forecasts and warnings,” AMS 6th Annual Symposium on Future National Symposium on Operational Environmental Satellite Systems-NPOESS and GOES-R, Atlanta, GA, USA, January 17-21, 2010, URL: http://cimss.ssec.wisc.edu/goes_r/proving-ground/presentations/AMS-2010-GLM-Goodman.pdf
112) “Geostationary Lightning Mapper (GLM),” URL: http://www.goes-r.gov/spacesegment/glm.html
113) NOAA, NASA award GOES-R instrument contract,” Sept. 24, 2007, URL: http://www.publicaffairs.noaa.gov/releases2007/sep07/noaa07-052.html
114) Samantha Edgington, Clemens Tillier, “Geostationary Lightning Mapper,” Proceedings of the 65th International Astronautical Congress (IAC 2014), Toronto, Canada, Sept. 29-Oct. 3, 2014, paper: IAC-14-B1.3.6
115) “Space Environment In-Situ Suite (SEISS),” NOAA, NASA, URL: http://www.goes-r.gov/spacesegment/seiss.html
116) “GOES-R Series, Space Environment In-Situ Suite (SEISS), March 25, 2004, NASA, URL: http://sxi.ngdc.noaa.gov/docs/SEISS_PORD.pdf
117) ”Magnetometer (MAG),” NOAA, NASA, URL: http://www.goes-r.gov/spacesegment/mag.html
118) Andrew W. Royle, “GOES-R Ground Segment Architectural Overview,” 2011 IEEE Aerospace Conference, Big Sky, MT, USA, March 5-12, 2011
119) Andrew W. Royle, “GOES-R Ground Segment Operational Concepts,” 2011 IEEE Aerospace Conference, Big Sky, MT, USA, March 5-12, 2011
120) Vanessa Griffin, “GOES-R Ground Segment Project Update,” AMS (American Meteorological Society) Annual Meeting, Atlanta, Georgia, USA, January 17-21, 2010, URL: http://cimss.ssec.wisc.edu/goes_r/proving-ground/presentations/AMS-2010-GroundSegment.pdf
121) “NOAA Selects Contractor to Develop GOES-R Ground System,” NOAA, May 27, 2009, URL: http://www.noaanews.noaa.gov/stories2009/20090527_goesr.html
122) Tom Renkevens, “GOES-R Ground Segment Overview, Products and Data Distribution,” June 3, 2009, URL: http://www.ssec.wisc.edu/mcidas/mug_meeting/2009/presentations/espc_goes-r_products.ppt
123) Vanessa Griffin, “GOES R Ground Segment Project Status,” The Fifth Annual Symposium on Future Operational Environmental Satellite Systems - NPOESS and GOES-R and The 16th Conference on Satellite Meteorology and Oceanography,” Phoenix, AZ, January 13-14, 2009, URL: http://www.goes-r.gov/downloads/2009_AMS_GSP_Draft_v4.pdf
124) “GOES ReBroadcast (GBR) Downlink Specifications for Users,” August 6, 2012, Prepared by Harris Corporation, Melbourne, FL, USA, Harris DCN -7038312, Revision-C, June 14, 2012, URL: http://www.goes-r.gov/users/docs/GRB_downlink.pdf
125) “Ground Segment Overview,” URL: http://www.goes-r.gov/ground/overview.html
126) Farida Adimi, Satya Kalluri, Allan Weiner, Brian Haman, “GOES‐R Ground System Architecture for Product Generation,” Proceedings of GSAW 2014 (Ground System Architectures Workshop), Los Angeles, CA, USA, Feb. 24-27, 2014, URL: http://gsaw.org/wp-content/uploads/2014/03/2014s10adimi.pdf
127) “GOES-R Ground Segment.” Update Feb. 2014, URL: http://www.goes-r.gov/education/docs/Factsheet_GS.pdf
128) “Harris Corporation Completes IT Infrastructure Installation and Integration for NOAA's GOES-R Series Ground Segment,” Harris Corporation, Feb. 25, 2015, URL: http://harris.com/press/article.asp?id=3741
129) “Product Definition and Users' Guide (PUG), Volume 4: GOES-R ReBroadcast (GBR),” January 30, 2013, Prepared by Harris Corporation, Melbourne, FL, USA, Harris DCN -7035538, Revision-B.1, December 17, 2012, URL:http://www.goes-r.gov/users/docs/GRB_PUG_V4_B-1.pdf
130) “GOES-R Unique Payload Services (UPS),” URL: http://www.goes-r.gov/spacesegment/ups.html
131) Danny Baird, ”Weather satellites aid search and rescue capabilities,” NASA, 7 March 2018, URL: https://www.nasa.gov/feature/goddard/2018/weather-satellites-aid-search-and-rescue-capabilities
The information compiled and edited in this article was provided by Herbert J. Kramer from his documentation of: ”Observation of the Earth and Its Environment: Survey of Missions and Sensors” (Springer Verlag) as well as many other sources after the publication of the 4th edition in 2002. - Comments and corrections to this article are always welcome for further updates (eoportal@symbios.space).
Space Segment Launch Mission Status Sensor Complement Ground Segment References Back to top