GOCE (Gravity field and steady-state Ocean Circulation Explorer)
EO
ESA
Mission complete
Gravity and Magnetic Fields
GOCE was a geodynamics and geodetics mission with the objective of determining the stationary gravitational field. The mission ended in October 2013 after it ran out of fuel.
Quick facts
Overview
| Mission type | EO |
| Agency | ESA |
| Mission status | Mission complete |
| Launch date | 17 Mar 2009 |
| End of life date | 21 Oct 2013 |
| Measurement domain | Gravity and Magnetic Fields |
| Measurement category | Gravity, Magnetic and Geodynamic measurements |
| Measurement detailed | Geoid, Gravity field, Gravity gradients |
| Instruments | SSTI, EGG, Laser Reflectors (ESA), GPS (ESA), LRR |
| Instrument type | Precision orbit, Gravity instruments |
| CEOS EO Handbook | See GOCE (Gravity field and steady-state Ocean Circulation Explorer) summary |
Related Resources
Summary
Mission Capabilities
GOCE carried the Electrostatic Gravity Gradiometer (EGG), Satellite to Satellite Tracking Instrument (SSTI), Ion Propulsion Assembly (IPA) and Laser Retro Reflector (LRR).
- EGG was the main payload of GOCE and measured the gravitational field of the Earth.
- SSTI was a GPS receiver designed to operate in low Earth environments to provide Satellite-to-Satellite Tracking - high/low (SST-hl) contribution to the gravity field recovery by simultaneously tracking up to 12 GPS satellite signals.
- IPA compensated for the drag force experienced by the satellite’s orbit in real-time, while LRR enabled tracking by ground-based satellite laser ranging stations.
The mission had various applications in oceanography, solid Earth, ice sheets, geodesy and sea level change.
Performance Specifications
GOCE had half-wavelength spatial resolutions in terms of geoid height and gravity anomaly accuracies varying from 20 - 20000 km depending on its application. The accuracy ranged from 0.002 - 0.03 m.
GOCE was in a sun-synchronous orbit at an average altitude of 250 - 270 km and an inclination of 96.7°. The equatorial crossing on dawn-dusk orbit was at 0600 hours and on dusk-dawn orbit was at 1800 hours on the ascending node. The satellite had a repeat cycle of 61 days with a subcycle of 20 days.
Space and Hardware Components
GOCE was built using a Drag-Free and Attitude Control System (DFACS), and was the first pure magnetically actuated Attitude & Orbit Control System (AOCS) implementation for a medium size Low Earth Orbit (LEO) scientific satellite.
The attitude of GOCE was ascertained by the subcomponents such as:
- Star Tracker (STR), which provided high accuracy and autonomous inertial attitude determination;
- Digital Sun Sensor (DSS), which provided high accuracy sun vector information;
- Magnetometer (MGM), used for magnetic torquer control.
GOCE (Gravity field and steady-state Ocean Circulation Explorer)
GOCE is an ESA geodynamics and geodetic mission, a combined SGG (Satellite Gravity Gradiometry) and SST (Satellite-to-Satellite Tracking) mission. It was selected as a core mission in the ESA Earth Explorer Program (selected at the Granada meeting Oct. 12-14, 1999; prime contract award in Nov. 2001).
The mission objectives are to determine the stationary gravity field - geoid and gravity anomalies with high accuracy (1 cm of geoid heights, and 1 mgal) at spatial grid resolutions of 100 km or less over the Earth's surface [Note: 1 gal is approximately 0.0010197g; hence, a mGal is a very small acceleration of about 10-6 g].
The data of GOCE provide unique models of the Earth's gravity field and of its equipotential reference surface, as represented by the geoid.
The GOCE mission serves to support the following multi-disciplinary science objectives: 1) 2) 3) 4) 5) 6) 7) 8) 9) 10) 11)
• To provide a new understanding of the physics of the Earth's interior including geodynamics associated with the lithosphere, mantle composition and rheology, uplifting and subduction processes
• To permit, for the first time, a precise estimate of the marine geoid, is needed for the quantitative determination, in combination with satellite altimetry, of absolute ocean circulation and transport of mass. The knowledge of the marine geoid to 1 cm at a scale of 100 km will ensure:
a) Mapping of short-wavelength features (100-200 km) of the dynamic topography to 1-2 cm accuracy on a global basis
b) Identification of practically all features within the mean geostrophic current field by the improved knowledge of the dynamic topography
• To estimate the thickness of the polar ice sheets through a combination of bedrock topography, derived from space gravity, and ice sheet surface elevation (from altimetry)
• To provide a high-accuracy global height reference system for datum connection. This may serve as a reference surface for the study of topographic processes, including the evolution of ice sheets and land surface topography. 12)
Application | Accuracy | Spatial Resolution | |
Geoid (cm) | Gravity (mgal) | ||
Solid Earth: |
|
|
|
Oceanography: |
|
|
|
Ice sheets: |
|
|
|
Geodesy: |
|
|
|
Sea-level change | Many of the above applications, with their specific requirements, are relevant to sea-level studies | ||
The overall mission objective is to obtain measurements with a high spatial resolution (a completely new range of spatial scales, in the order of 100 km) and high accuracy (homogeneous accuracy) such that global and regional models of the (static) Earth's gravity field and of the geoid (the equipotential surface of the Earth's gravity field potential) can be deduced with unprecedented precision. The GOCE mission is considered complementary to the CHAMP (launch July 15, 2000) and GRACE (launch March 17, 2002) missions.
Knowledge of the Earth's gravity field allows for exact orbit determination of satellites with regard to a unique reference plane, the geoid. This is then directly related to topics such as high-accurate point positioning using satellite techniques and mapping of ocean and land surfaces.
A second argument to determine the Earth's gravity field is related to Earth sciences: To better understand processes that take place within the Earth's interior, and on and above its surface.
Knowledge of the geoid allows for:
- studies of the solid Earth's mass distribution,
- interpretation of sea-level changes,
- ocean water flows/ocean heat transport,
- related climate studies- and predictions.
Three main concepts are being implemented in the GOCE mission for recovering the gravity field:
1) Precise orbit determination (POD) by SST (Satellite-to-Satellite Tracking). The SST technique is limited by progressive attenuation of the gravitational field at satellite altitudes, which prohibits the attainment of high spatial resolution
2) Satellite gravity gradiometry. An onboard gradiometer measures the components of the gravity gradient tensor exploiting the classical differential approach for enlightening the effect of small-scale features
3) DFACS (Drag-Free and Attitude Control System). To extract the gravitational field components from orbit and gradiometer measurements, non-gravitational forces must be accurately compensated by a drag-free control mechanism, and the spacecraft attitude must be accurately aligned to the Local Orbital Reference Frame (LORF), to which gravity measurements are referred.
Satellite gradiometry and POD by SST tracking are complementary. By means of POD, it is possible to reconstruct with high accuracy the lower harmonics of the gravity field, while gradiometry provides better performance at medium and high degrees.
Spacecraft
The GOCE satellite is being built by an industrial consortium led by TAS-I (Thales Alenia Space) of Turin, Italy (formerly Alcatel Alenia Space) as the prime contractor, EADS Astrium GmbH is responsible for the spacecraft platform.
Overall, the GOCE mission has a series of peculiarities not very common amongst Earth Observation satellites: 13)
1) Exceptionally low orbit (~260 km), required by the nature of the gravity field measurement.
2) Complex orbit maintenance system based on an Ion Propulsion Unit, able to counteract continuously the air drag (a.k.a. drag-free mode). The closed-loop orbit control is possible thanks to acceleration measurements that are part of the EGG science data.
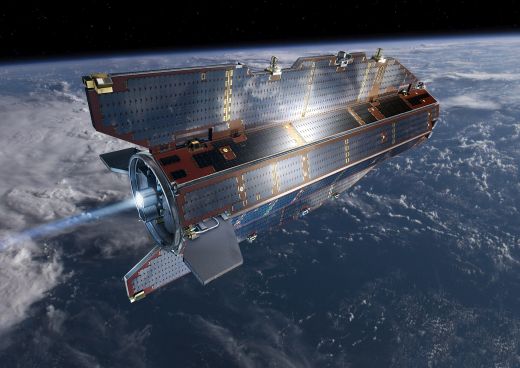
3) Aerodynamic shape of the Spacecraft body, as visible in Figure 3, helps to minimise the drag force.
The spacecraft design is driven by the need of providing the EGG (Electrostatic Gravity Gradiometer), also referred to as GRADIO, with a very quiet environment. The very high accuracy on the acceleration measurements imposes the absence of moving parts and ultra-high thermoelastic stability. The satellite configuration drivers have been:
- Aerodynamic shape with a low drag profile along the flight direction
- Fully symmetric configuration of XY-plane to adapt to the launch date
- Centre of Pressure (COP) behind Centre of Mass (COM) for passive aerodynamic stability (with winglets)
- Gradiometer instrument precisely mounted near the COM of the spacecraft.
The S/C structure consists of a long slender (octagonal) prism, with a cross-sectional area of 0.9 m2 (featuring total symmetry to minimise disturbances, there are no deployable appendages) and a length of 5.26 m. Within the structure, there are several platforms upon which the payload modules are mounted, and which subdivide the platform into 3 modules for ease of integration.
The cylinder's primary structure is made of CFRP (Carbon Fiber Reinforced Plastic) to achieve stiffness and weight requirements and to minimise the thermal elastic distortion of the spacecraft, to reduce the impacts of both the misalignment between the gradiometer and star sensors and the self-gravity effects to the gravimetric measurements. The S/C has a launch mass of 1077 kg, including up to 100 kg of propellant. A nominal mission duration of 20 months is planned.
The lower module contains AOCS/DFACS (Attitude and Orbit Control System/Drag-Free and Attitude Control System), and an IPA (Ion Propulsion Assembly) including the xenon tank. [Note: The combined AOCS/DFACS is simply referred to as DFACS]. The central bus module houses the EGG assembly and its electronics. In fact, the EGG assembly is located close to the center of mass of the S/C (and will stay within 10 cm of the center of mass throughout the S/C lifetime).
The upper module contains electrical equipment, data-handling and radio-frequency equipment, and a nitrogen gas tank. Electric power of 1.6 kW EOL is generated by fixed body-mounted solar arrays (about 5.0 m2) with GaAs cells (24-32 VDC unregulated bus). The S/C thermal design and control is based on passive insulation and radiation techniques.
The key element of the onboard AOCS/DFACS is the drag-free attitude and orbit control. The DFACS is designed to compensate for the effects that atmospheric drag forces and torques have on the gradiometer measurements. The DFACS design employs a 'yaw steering' mode, with magneto-torquers to control attitude. The IPA compensates for drag in the along-track direction.
The total error budget for the gradiometer is on the order of 4 mEHz-1/2 (Note: 1 E = 1 Eötvös = 10-9 s-2, a unit of gravity gradient measurement). S/C attitude control is provided with an absolute pointing accuracy of 0.38 mrad.
ARFS (Avionics and Radio Frequency Subsystem): The CDMU (Command & Data Management Unit) consists of two sections: the onboard computer and the remote unit. The CDMU is fully internally redundant and makes use of fault tolerance features (Figure 4). The ERC 32 32-bit RISC single-chip processor (17 MIPS / 3.6 MFLOPS at 24 MHz) is running the PASW (Platform Application Software) package. The software package is in charge of data management, thermal control, drag-free attitude control and overall fault detection, isolation and recovery.
The CDMU communicates with other GOCE equipment either via a redundant MIL-STD-1553B bus and/or indirectly via the remote unit and its > 500 discrete interfaces. Telemetry acquisition is supported by a 2 x 4 Gbit mass memory (Figure 7).
RF communications: Communications are in S-band (two coherent S-band transponders, two antennas and a radio frequency distribution unit, 1 W RF power) with data rates of 4 kbit/s in the uplink and up to 1.2 Mbit/s in the downlink.
The two S-band receivers are permanently active and are being fed by the combined signal coming from both nadir- and zenith-pointing antennas located on the edge of each solar array wing. The resulting full spherical antenna ensures reception of telecommands even in case of attitude loss.
Operated in cold redundancy, the S-band transmitter is active during passes over ground stations only and transmits via the same nadir antenna as the one used for reception. Two TM modes are supported. TM-1, a low data rate mode of 63.7 kbit/s that allows tone ranging, and the nominal mode TM-2 provides a 1.21 Mbit/s telemetry stream. Telecommands can be received at a bitstream of 4 kbit/s.
Due to the low orbit, ground station contacts turn out to be rather short. They typically last five minutes with a mean value of around 26 minutes per day. The satellite is able to autonomously operate for 72 hours without loss of scientific data.
Parameter | Comment |
S/C configuration | - Minimum cross-section in the direction of motion (approximately 1.1 m2) |
S/C structure | - Several carbon fiber, reinforced plastic structural compartments |
Thermal control | Passive system with heaters: high-thermal-stability gradiometer compartment (10 mK @ 5 mHz) |
Electrical power | - Unregulated bus at 24-32 VDC; protected and redundant lines |
Attitude control | - The S/C is nadir pointing |
Drag control | Ion thrusters commanded in a closed loop, based on gradiometer common-mode acceleration measurements |
RCS (Reaction Control System) | - Adjustable up to 20 mN Kaufman-type ion thrusters (2x) |
Data handling | - Packet telemetry: flexible packet sizes that can be reallocated |
RF communications | - S-band uplink and downlink and ranging |
S/C dimensions | Length = 5307 mm, cross-section = 1.1 m2, width S/A = 2366 mm |
S/C mass | 1050 kg (including about 205 kg of payload mass) |
Nominal mission | 20 months |
LEOP (Launch and Early Orbit Phase) | Expected duration 2 weeks; covering launch, separation, safe pointing mode acquisition, S-band link acquisition and initial S/C check-out |
COP (Commissioning Operational Phase) | Expected duration 1.5 months including S/C nominal operations and satellite check-out, verification of the DFACS, activation and check-out of the gradiometer, SSTI receiver and SREM |
POP1 (First Payload Calibration Operational Phase) | Expected duration 1.5 months including the calibration of the gradiometer, the SSTI receiver and the DFACS |
MOP1 (First Measurement Operational Phase) | Expected duration 6 months with continuous payload operations in nominal mode, the output of this phase are the geoid and earth gravity field products i.e. the mission scientific output, it ends at the beginning of the season of long eclipses |
HOP1 (First Hibernation Operational Phase) | Expected duration 4.5-month covering the orbit raise to a higher altitude and the subsequent orbit decay to the nominal altitude of POP2 |
POP2 (Second Payload Calibration Operational Phase) | Expected duration 2 weeks covering the re-activation of the DFACS and the re-activation and re-calibration of the gradiometer |
MOP2 (Second Measurement Operational Phase) | Expected duration 6 months with the same operations as MOP1 |
Extended mission | Consisting of the second hibernation phase (HOP2) and a third payload calibration phase (POP3) and measurement operation phase (MOP3) |
DFACS (Drag-Free and Attitude Control System)
The DFACS concept represents an innovative design with GOCE being the first European drag-free mission at an operational altitude of 240-280 km. It is also the first pure magnetically actuated AOCS implementation for a medium size LEO (Low Earth Orbit) scientific satellite. 15) 16) 17) 18)
The GOCE attitude is sensed by the following system components:
- STR (Star Tracker), 3 in number (Figure 10) providing high accuracy and autonomous inertial attitude determination from "lost in space" conditions.
- DSS (Digital Sun Sensor), 2 in number - providing high accuracy sun vector information.
- CESS (Coarse Earth and Sun Sensor) assembly, providing robust attitude line of sight measurements with respect to the Sun and Earth for initial acquisition and coarse pointing (safe) mode. It consists of 6 omni-directional accommodated sensor heads, each head providing a 2-out-of-3 redundancy, and an associated software running in the on-board computer.
- MGM (3-axis Magnetometer), 3 in number. MGM is used for magnetic torquer control and as rate sensors. The readings from the three MGM on each axis are subject to a 2 out of 3 majority voting scheme.
In addition to the previous equipments, two payloads are present:
- the EGG (Electrostatic Gravity Gradiometer) for the gravitational measurements
- the SSTI (Satellite to Satellite Tracking Instrument) for GPS measurements.
Although EGG and SSTI are payloads, EGG (DFACS channel) and the SSTI measurements are also used in real-time by the DFACS.
The actuators available on GOCE are:
- IPA (Ion Propulsion Assembly), 2 in number for linear drag-free control and orbit semi-major axis control. The units are operated in cold redundancy.
- Three internally redundant magnetic torquers (MTR) for attitude control. Coarse and Fine current driver modes are available.
- One internally redundant cold-gas thruster assembly, referred to as GCD (Gradiometer Calibration Device). GCD consists of 8 thrusters used to shake the satellite for EGG calibration purposes.
DFACS has been organised in control modes (Figure 8), each one having specific requirements and constraints. The following control modes are defined:
• CPM (Coarse Pointing Mode): The main goals of CPM are to provide the services of satellite detumbling after separation, satellite sun pointing acquisition, and finally the achievement of a stable near-LORF pointing. CPM is an acquisition mode as well as a safe mode. - CPM performs rate damping by employing MGM ( 3-axis Magnetometer) and applying control torques by means of three orthogonal MTR.
• ECPM (Extended Coarse Pointing Mode): The objective of ECPM is to improve the LORF (Local Orbital Reference Frame) pointing to limit the altitude decay and to permit transition to the next higher mode (ensuring no star tracker blinding). ECPM also permits orbit-raising maneuvers in contingency conditions using IPA.
• FPM (Fine Pointing Mode): FPM is a transition mode, pointing performance improvements are achieved by the introduction of Star Tracker (STR) attitude measurements.
• DFM (Drag-Free Mode): DFM is the science mode which includes several sub-modes required to transit towards the scientific operating conditions and to achieve calibration of the gradiometer.
DFACS in-flight performance (Ref. 18)
In general, the DFACS has shown excellent performances in terms of control algorithms and of physical units. In particular, the two state-of-the-art units embarked by GOCE, the IPA and the EGG, used in the DFACS control loop, have demonstrated to work almost flawlessly since the beginning of the mission.
The IPA has been successfully used since the end of commissioning and has demonstrated excellent performance. The longest period of continuous usage of the IPA goes from January 05, 2011, up to the spring of 2011 time for a total of more than 4 months. The Ion Engine startup, including ignition and thrust extraction, has been successful at the first attempt since the end of commissioning, while no degradation of the unit has been detected so far.
A key indicator of the unit degradation is the number of beam-out events, which has maintained constant over the mission duration. A rate of 2 beam-outs per day was considered nominal by the manufacturer prior to launch, while the in-flight experience has demonstrated a sensibly lower rate of less than one beam-out per week on average. The only significant IPA-related anomaly was that twice in 20 months of operation, the engine's application software stopped working, leading to a shutdown of the engine and a fallback from DFM to FPM.
The EGG has also demonstrated excellent performances in general and specifically for what concerns the DFACS channel. Despite being the first of its kind, the only significant issue with the EGG is that the measurement data exhibits a slightly higher-than-expected noise in part of the measurement bandwidth. This has been minimised by an update of the gradiometer parameter and by a change in the proof masses control approach.
DFACS drag-free performance: (Ref. 18)
The orbit maintenance strategy is based on monitoring of the longitude of the ascending nodes and their evolution. When a boundary is hit, an altitude change is commanded through the setting of an acceleration bias in the DFACS linear control in order to correct the ground track evolution. As the DFACS drag-free performance proved to be excellent, such orbit maintenance maneuvers were significantly less frequent than originally expected.
Figure 12 shows the average altitude in DFM-FINE compared to the orbit decay rate in the last uninterrupted cycle of science operations, showing a very small drift of about -35 cm per day (constant over the mission duration) due to residual errors in drag-free control. In order to achieve this performance, a constant acceleration bias of 0.187 x 10 -6 m/s2 is applied to the DFACS linear control in order to compensate for the EGG measurement inaccuracy. This value has been calculated via an analysis of the orbit determination products in order to obtain the best DFACS performance in terms of correct ascending node crossing positioning.
Legend to Figure 12: The slight variation in orbit altitude is caused by the shape of the geopotential field. The periodicity visible is due to the repeat cycle of GOCE's orbit (61 days repeat cycle with three 20 days subcycles).
The unique drag-free control performed by the DFACS uses the IPA in a closed loop with the linear acceleration readings performed by the EGG to dynamically compensate for the air drag acting on the satellite. Figure 13 shows the instantaneous thrust produced by the IPA and the IPA thrust averaged over one orbit since the start of the scientific mission in October 2009. The average thrust data is provided only during periods spent in the scientific mode (DFM-FINE) while periods of the instantaneous thrust are also visible during operations in DFM-PREP (IPA firing at constant thrust level).
Legend to Figure 13: The varying thrust level when in drag-free mode is due to changes in solar activity. Periods of missing data are due to onboard failures.
The solar activity has been exceptionally low and practically constant since the start of the mission up to the beginning of 2011, with isolated peaks of IPA thrust corresponding for example to the effects of geomagnetic storms in April and March 2010. This has led to a low IPA actuation and to a Xenon consumption which is lower than what was expected in the mission design phase, the main factor for being able to extend the mission beyond its nominal end in April 2011 up to the end of 2012.
The solar activity increased significantly starting from March 2011, causing the average thrust level to jump from about 2.7 mN to 4 mN, with peaks of the instantaneous thrust of 7.6 mN. Of course, the GOCE's altitude is not affected as this is cancelled out by the DFACS linear control by an increase of the IPA thrust levels (see Figure 12 compared to Figure 13). Figure 13 also shows that since the start of the routine mission, there were 4 periods in which the drag-free mode was left due to onboard anomalies. Of particular significance were 2010's anomalies on the platform computers, leading to a prolonged interruption of the scientific mission.
Achieving the unprecedented quality of the scientific data provided by GOCE was only possible due to the excellent performance of the state-of-the-art technology embarked on board the satellite. With a one-of-a-kind spacecraft design for operating in an atmospheric drag environment at 260 km altitude, GOCE needs a unique attitude and orbit control system to implement the drag-free control needed for the mission.
The DFACS control loop is using acceleration data from GOCE's scientific payload – the Gradiometer – to measure non-gravitational perturbations, with a very precise compensation of the effects of the atmospheric drag achieved through closed-loop actuation of an ion propulsion engine.
The in-flight experience was special owing to the many peculiarities of operating a mission in a drag environment. Commissioning of the complete drag-free control system in the first few months of the mission was particularly challenging. The approach adopted was to perform careful step-wise checkouts of the various elements used in the drag-free control, prior to commissioning of the drag-free mode (Ref. 18).
Launch
The GOCE spacecraft was launched on 17 March 2009 on a Russian Rockot launch vehicle (with Breeze-KM) from Plesetsk, Russia. Eurockot Launch Services GmbH, a German/Russian company of Bremen, Germany, is the launch provider. 19)
Note: The launch preparations for GOCE at the Plesetsk Cosmodrome were interrupted in the fall of 2008 when definite proof of a glitch in the guidance and navigation subsystem of the Breeze KM third stage was found by the failure investigation team.
The problem: the control system in the Breeze upper stage did not execute the command to shut down the second stage's engine. After the CryoSat failure (launch Oct. 8, 2005), all Rockot launches were suspended until the cause was identified.
Orbit: Sun-synchronous circular low Earth orbit, average altitude = 250-270 km (240 to 280 km range), inclination = 96.70º, equatorial crossing at 6:00 hours (dawn-dusk orbit) or 18:00 hours (dusk-dawn orbit) on the ascending node. Global coverage outside the polar caps is reached after about 30-40 days.
Obviously, the lowest possible Earth orbit was selected to obtain the largest possible gravity signal changes within this orbit (due to tiny local changes in Earth's gravity field). According to theory, and assuming for the moment, a spherically symmetrical planet (a reasonable approximation for Earth), the strength of the gravity field at any given point is proportional to the planetary body's mass and inversely proportional to the square of the distance from the center of the body (the latter argument of "radius squared" implies the selection of a low Earth orbit).
The orbit has a repeat cycle of 61 days with a subcycle of 20 days. Figure 15 shows the characteristics of the GOCE orbit and the definition of the ACF (Attitude Control Frame) and of the LORF (Local Orbital Reference Frame). The selection between Dawn-Dusk and Dusk-Dawn was performed based on the launch date.
Mission Scenario
The separation altitude will be in the order of 295 km. A natural drag-induced decay after separation will be allocated for the early orbit and Commissioning Operation Phase (COP) which will be followed by the gradiometer calibration phase, called POP. 20)
The scientific mission will be carried out when the long eclipse season is over. Two Measurement Operation Phases of about six months (MOP1 and MOP2) are foreseen.
During these phases the air density average value will be about 5.6 x 10-14 g/cm3, corresponding to an altitude of around 260 km. In these phases, the DFACS (Drag Free and Attitude Control System) function will compensate for the non-gravitational forces experienced by the S/C in the flight direction and will align the spacecraft to the Local Orbital Reference Frame (LORF) in which the gravity measurements are referred.
Before the long eclipse, period is starting the measurements are suspended and GOCE will enter the Hibernation Operating Phase (HOP) reaching, by an orbit-raise maneuver, an orbit altitude in which the average density is about 3 x 10-14 g/cm3. The GOCE nominal mission is lasting 20 months as depicted in Figure 17 and in addition, an extended mission consisting of HOP2, POP3, MOP3 will be performed if allowed by the onboard consumables.
GOCE encounters two eclipse phases per year with maximum eclipse durations of up to 30 minutes.
Actual mission profile: The actual mission profile in terms of altitude and eclipse pattern is shown in Figure 18. The entire routine science operations phase of the mission has so far been performed at 259.6 km altitude, which offers a repeat cycle of 61 days (979 revolutions) at the baseline altitude of 268 km. Owing to the very low solar activity and consequent low atmospheric drag, there was no need to raise the orbit as originally foreseen. Only starting in 2011, the increase in solar activity towards the solar maximum, expected in 2013, had a noticeable impact on the drag experienced by GOCE (Figure 19). 21)
Legend to Figure 18: The change in the eclipse pattern is due to drift of the inclination. Spikes in the mean altitude plot after September 2009 indicate interruptions of science operations in drag-free mode at 259.6 km (decay of the orbit due to uncompensated atmospheric drag).
Mission Status
• March 9, 2022: It's very difficult to know what lies beneath a blanket of kilometres-thick ice, so it is hardly surprising that scientists have long contested the shape and geology of the ancient supercontinent from which East Antarctica formed over a billion years ago. An ESA-funded study can now lay some of this conjecture to rest. Using sensors on aircraft to measure changes in the gravity and magnetic signatures of the different rocks under the ice, scientists have discovered a huge bay the size of the UK formed part of the edge of East Antarctica. 22)
- Satellites orbiting Earth from pole to pole don't actually fly directly above the North and South Poles. This leaves two small circular gaps in the global data. To fill in these missing measurements for ESA's GOCE gravity satellite mission over the South Pole, an international team of scientists joined forces to take a multitude of measurements from aircraft as part of an ESA campaign called PolarGAP. The geoid is the surface of equal gravitational potential defined by the gravity field – crucial for deriving accurate measurements of ocean circulation and sea-level change, both of which are affected by climate change. It was therefore important to fill in the measurements that GOCE could not take at the poles owing to its orbit.
- As well as supplying these missing data for GOCE, the PolarGAP team has yielded new insights into the hidden geology at the South Pole, shedding new light on the extent and shape of the edge of East Antarctica. A paper, published in Nature Communications Earth & Environment, describes how the team flew over East Antarctica and used airborne sensors to measure changes in the magnetic and gravity signatures produced by the different rocks hidden beneath the ice. 23) This is important because East Antarctica is the least known region of Earth. Today, Antarctica is isolated from the rest of the world. But a billion years ago, before the ancient Pacific Ocean formed, East Antarctica may have been much closer to other huge landmasses, including North America – an idea that is hotly debated by geologists.
- The new data showed that an area of ancient rocks the size of the UK, which was thought to also make up part of East Antarctica's coast, is entirely missing. In its place, they found an embayment made up of younger rocks than expected. This newly discovered embayment is referred to as the Pensacola Embayment. This means that less of East Antarctica than was previously assumed formed part of the ancient Mawson Continent, which included part of East Antarctica and Australia, and which is inferred in some reconstructions to have been close to North America. The consequences of this finding will form the basis for a wide range of Antarctic research. It will help researchers build global reconstructions of Earth's ancient supercontinents and lead to a better understanding of how the ancient geology of East Antarctica influences the flow and stability of the modern ice sheet.
• March 11, 2021: Despite ESA's GOCE mission ending over seven years ago, scientists continue to use the satellite's gravity data to delve deep and unearth secrets about our planet. Recent research shows how scientists have combined GOCE data with measurements taken at the surface to generate a new model of Earth's crust and upper mantle. This is the first time such a model has been created this way – and it is shedding new light on processes of plate tectonics, which, in turn, are related to phenomena such as earthquakes and volcanic eruptions. 24) The lithosphere, which includes the planet's hard crust and the partially molten top part of the upper mantle, is fundamental to plate tectonics. Plate tectonics describes how the crust is divided into a mosaic of plates that slide laterally over the malleable top of the upper mantle and in doing so give rise to new seafloor along mid-ocean ridges, mountains, volcanoes and earthquakes.
- Geophysicists traditionally measure the speed at which seismic waves propagate when an earthquake occurs to determine the distribution of subsurface physical properties. The speed of seismic waves is governed mostly by the temperature of subsurface rocks and to a lesser extent by density. Here, gravity data from space can add to the picture because the strength of the gravity signal is related to density. In addition, data from satellites, like GOCE, is uniform in coverage and in accuracy, and satellites cover areas where ground measurements are scarce.
- Research published in Geophysical Journal International describes how scientists generated a new model of the lithosphere using the joint power of GOCE gravity data and seismological observations combined with petrological data, which comes from the study of rocks brought to the surface and from laboratories where the extreme pressures and temperatures of Earth's interior are replicated. 25) The new model produced in ESA's 3D Earth study showed for the first time how dissimilar the sub-lithospheric mantle is beneath different oceans, and provides insight as to how the morphology and spreading rates of mid-oceanic ridges may be connected with the deep chemical and thermal structure.
• December 9, 2019: Despite having completed its mission in orbit over six years ago, ESA's GOCE gravity mapper continues to yield new insights into our planet. Thanks to this extraordinary satellite, scientists now have a much clearer view of the secrets that lie deep below one of the most remote parts of the world: Antarctica. And while the vast expanse of white ice above may appear relatively uniform, it is a very different story below the bedrock. 26)
- A layer of ice up to 4 km thick, fierce winds and temperatures that can reach –60°C make Antarctica one of the harshest environments on Earth. This, coupled with the remoteness of this vast icy continent, means that it is difficult and expensive to carry out scientific research, particularly into what lies deep below. Thankfully, data collected from space can offer information that field experiments alone cannot. A paper, published in the Journal of Geophysical Research: Solid Earth, describes how scientists used gravity data from the GOCE satellite mission along with seismological models to reveal unprecedented insight into the crust and upper mantle, otherwise known as the lithosphere, below this frozen continent. 27)
- This new view of the deep 3D structure of the Antarctic has also led to findings about ‘glacial-isostatic adjustment'. These new findings about the deep structure of Antarctica are also crucial for understanding tectonics. The research was funded by ESA's GOCE+Antarctica 3D Earth projects. The international consortium of both projects consists of nine institutions in six European countries.
• March 20, 2019: Ten years ago, ESA launched one of its most innovative satellites. GOCE spent four years measuring a fundamental force of nature: gravity. 28) Because of factors such as the planet's rotation, the position of mountains and ocean trenches and different densities in materials in Earth's interior, the force of gravity at Earth's surface varies from place to place. Mapping these differences is important for measuring ocean circulation and sea-level change and for understanding otherwise hidden processes occurring deep inside the planet, for example. Orbiting as close to Earth as possible, GOCE mapped these subtle variations with extreme detail and accuracy. Just two years after it was launched, GOCE had gathered enough data to map our gravity field resulting in the most accurate model of the ‘geoid' – the surface of an ideal global ocean at rest.
- In fact, GOCE's four years in orbit resulted in a series of gravity models, each more accurate than the last. And, importantly, yet another even more accurate model will soon be released to the public. Since it was launched, scientists all over the world have been using GOCE data to discover more about the planet. For instance, by combining the new GOCE models with satellite altimetry data, which gives the actual height of the sea surface, the difference between the geoid height and the sea-surface height can be found.
- This is revealing greater insight into currents such as the Gulf Stream, different branches of the North Atlantic Current, the Kuroshio in the north Pacific, and the Antarctic circumpolar current. While the GOCE geoid is being used to understand how oceans transport huge quantities of heat around the planet and used to develop a global height reference system, the mission's gravity-field measurements are also shedding new light on Earth's interior. Geophysicists are using GOCE gravity gradient measurements to gain, for example, new insights into the geodynamics associated with the lithosphere. GOCE has also been used to produce the first global high-resolution map of the boundary between Earth's crust and mantle – the Moho, offering new clues into the dynamics of Earth's interior. It has also given us a new view of the remnants of lost continents hidden deep under the ice sheet of Antarctica. And, although it was not designed to map changes in gravity over time, ice being lost from parts of Antarctica was mirrored in GOCE's measurements, helping scientists to better understand glacial dynamics.
• November 7, 2018: It was five years prior that ESA's GOCE gravity-mapping satellite finally gave way to gravity, but its results are still yielding buried treasure – giving a new view of the remnants of lost continents hidden deep under the ice sheet of Antarctica. 29)
• November 5, 2018: Scientists from Germany's Kiel University and British Antarctic Survey (BAS) have used data from ESA's GOCE (Gravity field and steady-state Ocean Circulation Explorer) mission to unveil key geological features of the Earth's lithosphere - the rigid outer layer that includes the crust and the upper mantle. 30)
- Published in the journal Scientific Reports the study is a step forward in the quest to image the structure and setting of different continents using satellite gravity data, including Antarctica, the least understood piece of the whole plate tectonic puzzle. Satellite gravity provides a new tool to link the remote and ice-covered continent with the rest of the Earth. This improves our understanding of Antarctica's deep structure, which is particularly important, as the properties of its lithosphere can also influence the overlying ice sheets. 31)
- The new study presents a view of the Earth's continental crust and upper mantle not previously achievable using global seismic models alone. The authors noted that, despite their similar seismic characteristics, there are contrasts in the gravity signatures for ancient parts of the lithosphere (known as cratons), indicating differences in their deep structure and composition. These features are important. Because they form the oldest cores of the lithosphere, they hold key records of Earth's early history.
• June 22, 2018: Parts of Earth's crust are rising very slowly owing to post-glacial rebound, but using GPS, researchers have found that West Antarctica is rising faster than almost anywhere else in the world. And, ESA's GOCE gravity mission has, in turn, helped them to understand that the mantle below is unusually fluid. 33) Around 20,000 years ago, vast expanses of Earth's surface were covered in thick ice. In some places, the ice was 3 km thick – just like central Antarctica and Greenland today. Earth's hard rocky crust sits on top of the mantle. The mantle layer, which is some 2900 km-thick, is relatively soft and behaves like a viscous fluid that allows the crust, when weight-laden with thick ice, to be pushed down. - It is estimated that during the Ice Age, the land below the thickest ice sunk by as much as 500 m. When the ice eventually melted and Earth's surface was relieved of the weighty burden, the crust rose again, first very quickly owing to an elastic rebound effect, and then much slower. This process continues today, but the rate of rise, however, varies from place to place.
- Although Antarctica is still covered with thick ice, it too is on the rise. The paper published in Science, explains how scientists used data from GPS stations to reveal that the Amundsen Sea Embayment in West Antarctica is rising by up to 41 mm per year, one of the fastest rates ever recorded in glaciated areas. 34) In comparison, GPS in Greenland records an uplift of up to 30 mm per year, but this is caused by the immediate elastic spring-like rebound. The unusually fast bedrock rises in West Antarctica has led to new insight into the structure of the mantle below. While GPS offers information about rates of uplift, the GOCE mission provided measurements to generate a model of Earth's gravity field, which is used to investigate the structure of the inner Earth. And the uplift is getting faster. According to the research, in 100 years, these uplift rates will be up to three and a half times faster than they are at the moment. These results are compatible with what can be inferred from the GOCE gravity model. This validation serves as a reference for more accurate estimates of Earth's interior from GOCE, especially where there is no GPS coverage.
• July 27, 2015: Although the GOCE mission ended in October 2013, the gravity data from this super-low orbit has improved our understanding of Earth's interior, including identifying areas where oil and gas – the primary energy source for today's civilisations – might be present. 3D models of Earth's underground are traditionally based on information acquired on the ground. Gravity data from the GOCE satellite, however, provide homogeneous coverage in high resolution, which is being used to improve and validate models based on traditional datasets. 35)
- Models based on GOCE data show subsurface density and its vertical and lateral variability, which provides insight into varying geological compositions and temperatures. Estimating the structure and thermal state of Earth's crust provides clues into the heat of shallower sedimentary rocks, and thus the potential location of oil and gas accumulations. Subsurface areas with temperatures ranging over 60–200ºC indicate the maturity of the rock and, therefore, the likelihood of the presence of oil and gas.
• April 16, 2015: Results from the GOCE gravity satellite are now being used to produce maps for geothermal energy development. Geothermal energy is heat from under Earth's surface. From hot springs to magma, this energy provides a clean, sustainable resource that can be used to generate electricity, heat buildings, grow plants in greenhouses and many other applications. 36) These energy sites exist underground, but often in remote areas, making them difficult, expensive and time-consuming to explore and measure. While the potential of geothermal energy worldwide remains vast, more effort is needed to develop and harness it.
- To help facilitate their exploitation, scientists from ESA and the International Renewable Energy Agency (IRENA) have used gravity measurements from the GOCE mission to produce an online tool that indicates areas likely to possess geothermal potential, narrowing the search for prospectors. 37) The tool's maps show certain characteristics that may help in the search for geothermal reservoirs, including areas with thin crusts, subduction zones and young magmatic activity. After a potential site location has been selected using the online tool, ground surveys and seismic measurements are still needed to determine the exact points for energy extraction. Still, the new resource is a step towards developing a comprehensive geothermal prospecting technique. The maps outline two specific global gravity anomalies: ‘Bouguer' and ‘free air'.
Legend to Figure 29: The Bouguer anomaly distinguishes the thick from the thin crust by more negative and positive values. With a thin crust (red on the map) the hot mantle is shallower and thermal gradients are higher, increasing the chance of exploiting geothermal energy. The Bouguer anomaly is obtained by removing the effect of elevated regions and of oceanic water from the gravity disturbance.
- In geodesy and geophysics, the Bouguer anomaly (named after Pierre Bouguer) is a gravity anomaly, corrected for the height at which it is measured and the attraction of terrain. The height correction alone gives a free-air gravity anomaly. The free air gravity map (Figure 30) provides information on geological structures, while the Bouguer gravity anomaly map combines GOCE data with information on global topography to show differences in crustal thickness. Together, the maps depict characteristics unique to geothermal reservoirs.The two maps are complementary and form a basis to discriminate and classify different terrains at a country-wide scale. The GOCE mission ended in October 2013 when it ran out of fuel and subsequently reentered Earth's atmosphere. But its wealth of data continues to be exploited to improve our understanding of ocean circulation, sea level, ice dynamics and Earth's interior.
• November 25, 2014: A year after the satellite reentered the atmosphere, scientists using data from the GOCE satellite, made a breakthrough in our understanding of ocean currents. GOCE mapped variations in Earth's gravity with unrivalled precision, resulting in the most accurate shape of the ‘geoid' – a hypothetical global ocean at rest – ever produced. 38) While the mission is well known for its gravity measurements, the second mission objective as an ‘ocean circulation explorer' has reached a milestone. Using GOCE data, scientists produced the most accurate model of ocean current speeds to date. To do this, the GOCE geoid was subtracted from the mean sea-surface height measured over a 20-year period by satellites including ESA's veteran Envisat. The result shows that this GOCE-based model is more accurate than any other model based on space data to date. The new ocean current speed map is of particular interest to UNESCO's Intergovernmental Oceanographic Commission, which supports international cooperation and the understanding and management of oceans and coastal areas.
• September 26, 2014: Although not designed to map changes in Earth's gravity over time, ESA's extraordinary satellite has shown that the ice lost from West Antarctica over the last few years has left its signature. More than doubling its planned life in orbit, GOCE spent four years measuring Earth's gravity in unprecedented detail. 39) Changes in the mass of large ice sheets can also cause small local variations in gravity. Recently, the high-resolution measurements from GOCE over Antarctica between November 2009 and June 2012 have been analysed by scientists from the DGFI (German Geodetic Research Institute), Delft University of Technology in the Netherlands, the Jet Propulsion Lab, Pasadena, USA and the Technical University of Munich in Germany. Remarkably, they found that the decrease in the mass of ice during this period was mirrored in GOCE's measurements, even though the mission was not designed to detect changes over time. However, measurements from Grace are much coarser than those of GOCE, so they cannot be used to look at features such as Antarctica's smaller ‘catchment basins'.
- For scientific purposes, the Antarctic ice sheet is often divided into catchment basins so that comparative measurements can be taken to work out how the ice in each basin is changing and discharging ice to the oceans. By combining GOCE's high-resolution measurements with information from GRACE, scientists can now look at changes in ice mass in small glacial systems – offering even greater insight into the dynamics of Antarctica's different basins. In addition, GOCE data could be used to help validate satellite altimetry measurements for an even clearer understanding of ice sheet and sea-level change. This new research into GOCE's gravity data revealing ice loss over time is being carried out through ESA's Earth Observation Support to Science Element.
- The animation, based on measurements from ESA's GOCE satellite and the NASA–German Grace mission, shows that ice lost from West Antarctica has caused a dip in Earth's gravity. GOCE was not designed to show changes in gravity over time. However, high-resolution gravity gradients that GOCE measured over Antarctica between November 2009 and June 2012 were analysed by scientists from the German Geodetic Research Institute, the Delft University of Technology in the Netherlands, the Jet Propulsion Lab in the USA and the Technical University of Munich in Germany and reveal that ice lost during this period left its signature in Earth's gravity. The GOCE data complement those of the Grace mission, which was designed to show change but offers coarser resolution data than GOCE. This has allowed datasets from both gravity missions to be combined, offering even greater insight into the dynamics of Antarctica's different basins. The animation is available at: http://www.esa.int/spaceinvideos/Videos/2014/09/GOCE_senses_changing_gravity
• July 30, 2014: Although ESA's GOCE satellite is no more, all of the measurements it gathered during its life skirting the fringes of our atmosphere, including the very last as it drifted slowly back to Earth, have been drawn together to offer new opportunities for science. GOCE's four years in orbit resulted in a series of four gravity models, each more accurate than the last. These models have been used to generate corresponding ‘geoids' – the surface of a global ocean moulded by gravity alone. 40) 41)
- A fifth-generation GOCE gravity model has been produced. It incorporates data collected throughout the satellite's 42-month operational life. The previous geoid, released in March 2013, was based on 27 months of measurements. The fifth gravity model and geoid, which ESA has recently made available, includes these final precious measurements, right up until the satellite finally stopped working and ironically succumbed to the force it was designed to measure. - Scientists worldwide now have a satellite-based gravity field model at hand that will remain the de facto standard for many years to come.
• January 2014: The analysis of the GOCE gravity data has provided striking new visualisations of the Earth's deep interior. The analysis team shows that data from the GOCE mission can be used to probe our planet's deep mass structure. The team constructed global anomaly maps of the Earth's gravitational gradients at satellite altitude and used a sensitivity analysis to show that these gravitational gradients image the geometry of mantle mass down to mid-mantle depths. The maps highlight north–south-elongated gravity gradient anomalies over Asia and America that follow a belt of ancient subduction boundaries, as well as gravity gradient anomalies over the central Pacific Ocean and south of Africa that coincide with the locations of deep mantle plumes. The team interpret these anomalies as sinking tectonic plates and convective instabilities between 1,000 and 2,500 km depth, consistent with seismic tomography results. 42)
- By tracking the speed at which waves of energy from tremors propagate through rock, scientists can determine the structure of the Earth's interior - a technique known as seismic tomography. But to convert these speed variations into densities, seismic tomography leans on quite a few assumptions, including the temperature and composition of the rock at various depths. Determining these density differences is, however, essential to derive the relative buoyancy of material. This might be hotter, lighter material on its way up, such as in a plume of magma; or cold dense rock on its way down, such as a swath of oceanic crust descending at one of those subduction zones. GOCE offers some complementary information. The satellite, which flew from March 2009 until November 2013, gathered unprecedented information on the subtle changes in the pull of gravity around the Earth. These deviations reflect differences in the mass, and by extension the density, of material at depth. By viewing the rate of change, or gradient, in the acceleration due to gravity in three separate directions, the analysis team has been able to pull out a number of interesting features from the data. These include major mantle plumes in the Pacific and southeast of Africa. Also visible are ancient subduction zones running deep under Asia and along the Americas (Figure 34). What GOCE is probably seeing are the buried remnants of old plate material of Jurassic age (older than 150 million years ago) in the case of Asia, and of roughly Cretaceous age (older than about 60 million years ago) in the case of the Americas.
- In addition, the GOCE gravity data contains a residual signal of the former Tethys Ocean. Subducted material is seen in the maps stretching from the Mediterranean to the Himalayas. The Tethys Ocean is thought to have closed in the past 40-50 million years as India and Asia collided. The main interest of these gravity gradient data is to use them in combination with seismic tomography because the maps of seismic velocity anomalies don't provide the mass. And the mass is a very important parameter to understand the dynamics of the mantle because it creates the buoyancy forces that drive material up and down. Now, by combining the structural information from seismic tomography and the mass sensitivity of the GOCE data, one can better understand the dynamics of the mantle's convective fluids. GOCE's ability to sense the uneven distribution of mass through the Earth has already allowed scientists to map the boundary globally between the Earth's crust and the mantle - the so-called Moho boundary. The famous "discontinuity" lies some 10-70 km below the surface and marks a sharp change in rock properties (Ref. 43).
• December 03, 2013: ESA's GOCE satellite revealed that the devastating Japanese earthquake of 2011 left its mark in Earth's gravity. Careful analysis shows the effects of the 9.0 earthquake that struck east of Japan's Honshu Island on 11 March 2011 are clearly visible in GOCE's gravity data. Large earthquakes not only deform Earth's crust but can also cause tiny changes in local gravity. 44) 45)
• November 11, 2013: ESA's GOCE satellite reentered Earth's atmosphere on a descending orbit pass that extended across Siberia, the western Pacific Ocean, the eastern Indian Ocean and Antarctica. As expected, the satellite disintegrated in the high atmosphere and no damage to property was reported. 46) According to the USSTRATCOM (United States Strategic Command) reentry estimation, the splashdown occurred at 00:16 UTC on Nov. 11, 2013, in the ascending node of the orbit: 60° West 56° South, about 360 km from the south-eastern tip of South America, or about 410 km south of the Falkland Islands in the Atlantic Ocean. 47)
• October 21, 2013: Following over 4.5 years of operations at altitudes around 260-229 km, fuel for GOCE's ion propulsion system was exhausted on, leading to rapid orbital decay and finally a re-entry of the S/C into the Earth's atmosphere 3 weeks later, on Nov. 11, 2013, close to the Falkland islands. 48) After three years of routine operations, it was decided to lower the mean altitude of the orbit from 260 to 229 km to maximise the scientific return of the mission. Given the unique characteristics of GOCE, with a spacecraft designed for operations in an atmospheric drag environment and the S/C re-entry just a few weeks away from the end of science operations, ESA decided to keep operating the mission as long as possible during the orbital decay phase, rather than just passivating it once running out of fuel. This allowed collecting a unique set of data, including observing the attitude and orbit control system perform nominally at drag levels of several N — far above what the S/C had been designed for —, and monitoring the heat up of the S/C due to atmospheric friction in the final days and hours before re-entry.
- From a scientific point of view, the GOCE deorbiting was of extreme interest to the engineering and scientific community since it allowed to evaluate the spacecraft and its subsystem performances outside of their design limits, and also to gather a set of unprecedented data usable for studying the atmospheric density.49) This phase was approached with extreme care and a series of studies were performed to outline a detailed plan for the campaign and to estimate the limits of the space and ground segments. Against all expectations, no passivation was needed and the spacecraft continued to operate up to 1.5 hours before reentry, with the last ground contact at KSAT's Troll station in Antarctica on Nov. 10, 2013, at 22:43 UTC. The spacecraft performance during this phase exceeded all predictions and even during the last hours, when the drag force was at extremely high levels, all subsystems were still functioning properly.
• October 21, 2013: The mission came to a natural end when it ran out of fuel. After mapping variations in Earth's gravity with unprecedented detail for four years (tripling nearly its planned lifetime), the end of mission has been declared of the GOCE satellite. Data acquisition and satellite operations continued for about two more weeks until its systems stopped working because of the harsh environmental conditions at such a low altitude. At this point, the satellite was switched off, marking the end of activities for the GOCE flight control team. 50) 51)
- An international campaign monitored the descent, involving the Inter-Agency Space Debris Coordination Committee. The situation is being continuously watched by ESA's Space Debris Office, which periodically issues reentry predictions. Although the planned mission was completed in April 2011, the fuel consumption was much lower than anticipated because of the low solar activity, enabling ESA to extend GOCE's life.
• August 2013: The orbital equatorial altitude of GOCE reached 223.88 km, in a repeat cycle of 143 days. GOCE was already and by far the lowest-orbiting research satellite worldwide at the time, a feat made possible by the satellite's unique accelerometer sensor and air drag compensation system. 52) The present measurement cycle was set to be the last. Having analysed all the available data on the xenon gas consumption by the electric propulsion system, as well as the updated air density predictions for the coming period, it was predicted that the mission would come to a natural end in late 2013. In an orbit as low as GOCE's, this would be followed swiftly by reentry into Earth's atmosphere. 53) 54)
• May 2013: In its fifth year of operations, GOCE continued to deliverdata in the form of gravity gradients and satellite-to-satellite tracking data, as well as gravity field models and derived quantities. The health of the satellite is excellent while running on the redundant main onboard computer. 55) The mission team executed its plan for lowering the satellite orbit by 20 km to significantly improve the spatial resolution of the gravity field data. A further lowering is under consideration for the very final phase of the mission. It is predicted that the mission will come to a natural end in late 2013. In an orbit as low as GOCE's, this will be followed swiftly by reentry into Earth's atmosphere.
• March 20, 2013: The fourth generation GOCE gravity field solutions based on the Time-wise (TIM) and Direct (DIR) methodologies, were processed and verified by the GOCE HPF (High-Level Processing Facility) team, and were made available to the public by ESA. 56) 57)
• March 2013: Exploiting GOCE data to the maximum, scientists from the Research Institute in Astrophysics and Planetology in France, the French space agency CNES, the Institute of Earth Physics of Paris and Delft University of Technology in the Netherlands, supported by ESA's Earth Observation Support to Science Element, studied past measurements. They discovered that GOCE detected sound waves from the massive earthquake that hit Japan on 11 March 2011. When GOCE passed through these waves, its accelerometers sensed the vertical displacements of the surrounding atmosphere in a way similar to seismometers on the surface of Earth. Wave-like variations in air density were also observed. 58) 59) 60) 61)
• February, 2013: For decades, scientists have disagreed about whether the sea is higher or lower heading north along the east coast of North America. Thanks to precision gravity data from ESA's GOCE satellite, this controversial issue was settled. The answer? It's lower. 62)
• November 2012: After coming down by 8.6 km, the satellite's performance and new environment were assessed by the GOCE team. Now, GOCE was again being lowered while continuing its gravity mapping. Finally, it is expected to reach an altitude of 235 km in February 2013. The expected increase in data quality was so high that scientists called it GOCE's ‘second mission.' 63) By the end of February, the third phase of the orbit lowering was completed. Having analysed all data on the xenon gas consumption by the drag-free control system, as well as the available neutral air density predictions for 2013. 64)
• August 2012: The GOCE mission control team initiated the lowering of GOCE at a rate of approximately 300 m/day. The objective was to bring the satellite down by 8.6 km by the end of August 2012 to increase the accuracy and spatial resolution of the GOCE measurements. 65) 66) After coming down by 8.6 km, the satellite's performance and new environment were assessed. GOCE was lowered once more while continuing its gravity mapping. Finally, it was expected to reach 235 km in February 2013. 69)
• July 2012: ESA's GOCE satellite mapped Earth's gravity with high precision, but also revealed new insight into air density and wind in space. Two example graphs based on GOCE data are shown below. 70)
• March 2012: The GOCE spacecraft completed 3 years on orbit. The health and performance of the satellite are excellent while running on the redundant main onboard computer. GOCE was originally planned to gather just one year's worth of data, so its operational lifetime had already more than doubled. This was partially due to an unusually tranquil solar cycle, meaning the top of the atmosphere has proved thinner and less turbulent than anticipated, meaning less of GOCE's finite xenon fuel supply has been needed to overcome air drag. 71)
- In early March 2012, the first global high-resolution map of the boundary between Earth's crust and mantle – the Moho (see Table 4) – was produced based on data from ESA's GOCE gravity satellite. Understanding the Moho will offer new clues into the dynamics of Earth's interior. 72) The GEMMA (GOCE Exploitation for Moho Modelling and Applications) project of ESA generated the first global high-resolution map of the boundary between Earth's crust and mantle based on data from the GOCE satellite. GEMMA's Moho map is based on the inversion of homogenous well-distributed gravimetric data.
• April 15, 2011: The nominal lifetime of GOCE ended. The GOCE mission entered its extended mission phase in the fall of 2011 (approved mission to the end of 2012, the lifetime prediction is even longer). No problems were identified. The actual lifetime of GOCE depended on solar activity, which dictates the net air drag and therefore the Xenon gas consumption. 73)
Based on measured gravity gradients and high/low satellite-to-satellite tracking data, the mission is continuously delivering new insights into the finer details of the gravity field, and thus providing an ever-better reference data set for all scientific domains and applications that are in need of gravity field information.
• March 2011: After just two years in orbit, ESA's GOCE satellite had gathered enough data to map Earth's gravity with high precision. The geoid is the surface of an ideal global ocean in the absence of tides and currents, shaped only by gravity. It is a crucial reference for measuring ocean circulation, sea-level change and ice dynamics – all affected by climate change. 74) 75)
• March 2, 2011: GOCE completed its two six-month measurement periods (Figure 17) of gravity-field mapping. In the following weeks, these data were calibrated and processed for scientists to create a unique model of the geoid. 76) Although GOCE has completed its planned mission, the low solar activity during the previous two years led to a lower fuel consumption than anticipated. Based on this fuel saving, the health of the satellite and the quality of its data, ESA decided in November 2010 to extend the mission until the end of 2012. This represented nearly a doubling of the mission's lifetime. 77)
- Once the gravity models are completed, they will be made available to all users, free of charge in line with ESA's data policy (Ref. 76). Preliminary versions of the second generation of gravity-field models have already demonstrated that GOCE is changing our understanding of the high-resolution gravity field. As a result, the application of such information is advancing rapidly. Recently, the first results in terms of ocean dynamic topography and ocean currents have shown that GOCE delivers a much sharper view of all the ocean's main current systems. 78)
GOCE satellite status and performance in the autumn of 2010 | |
• Satellite performs excellently meeting all design requirements • All subsystems and units except for the main onboard computer CDMU-A operate in their nominal chains • Science operations started at the end of 2009 • No data loss on the satellite during nominal operations • No degradation of the power subsystem, ~1300 W are available • Ion propulsion subsystem now 1.4 years in operation without any sign of degradation • Almost no "clanks" visible to the gradiometer observed, the microvibration control program during the satellite development phase was very successful • Drag-free control is extremely stable • Fine tuning maneuvers for satellite maintenance is in the order of < 10 m done on 1-2 month basis • So far there were 3 interruptions of science operations since Sept. 2009 - Spurious reboots of ion propulsion and gradiometer in Oct. 2009 and March 2010, respectively - Anomaly with main computer in Feb. 2010 • Very fruitful interactions with the science community of the vigilant HPF team. | |
GOCE mission concept and outlook | |
• Was originally based on two 7-month operational phases separated by a 135 day hibernation phase due to long eclipses • Low solar activity, good power situation and excellent suppression of micro disturbances allow all year round science operations • The drag remains low ⇒ no need for altitude raise during the long eclipse season from April to August 2010 • Continuation of uninterrupted science operations at same altitude til the nominal mission end in April 2011 • Preparation for mission extension • The consumables would allow operations until late 2013 (including increase of solar flux, max is estimated in 2013) | |
GOCE - on the observations | |
• 5 cycles of 61 days are nearly completed (979/61 repeat) • No data gaps in TM data stream from EGG and SSTI • Level-1B data come in two classes (OPER and CONS): the latter has a latency of ~ 1 week before delivery to Level-2 processing and is used for final gravity field retrieval • Single epoch outliers or "random" measurements occur a couple of times per month, due to limit cases in orbit-wise ground processing • Extremely quiet satellite environment, near-perfect for gravity field sensing. | |
GOCE - SSTI (Satellite-to-Satellite Tracking Instrument) | |
• Top class orbits: current POD (Precise Orbit Determination) consistency is at the 1-2 cm level in each of the 3 orthogonal directions • In most cases better than 2 cm 3D RMS • Rapid science orbits (< 1 day latency) are at around 6-7 cm • Validated by SLR (Satellite Laser Ranging) to within absolute differences of approximately 2 cm • Slightly increased orbit errors near the poles |
• September 29, 2010: Following recovery from a glitch that prevented ESA's GOCE gravity mission from sending any scientific data to the ground, the satellite was gently brought back down to its operational altitude and resumed normal service – delivering detailed gravity data to date. 80)
• August 30, 2010: The recovery from the "no SW telemetry" situation was achieved in the course of troubleshooting activities. As one of the few settings which could be changed without major overhead, the temperature of the CDMU was increased, adapting some of the Thermal Control software set points. The rationale was to try to induce a change in the functioning behaviour of the CDMU electronics (Ref. 13). The experience dealing with the temporary double failure condition of the GOCE CDMU illustrates up to which extent spacecraft on-board software can be adapted after launch in order to cope with situations in which fundamental hardware functionality is compromised (Ref. 13).
• July 8, 2010: A communications malfunction occurred when GOCE suddenly failed to downlink its payload data. Extensive investigations revealed that the problem was related to a communication link between the processor module and the telemetry modules of the main computer. Recovery from the situation came after software patches gained access to troubleshooting information via the slow trickle of data that was still reaching the GOCE ground stations. This new information allowed the team to develop an understanding of the state of all the onboard systems. As part of the action plan, the temperature of the floor hosting the computers was raised by some 7ºC, resulting in restoration of normal communications in early September 2010. 81)
• February 12, 2010: After almost 1 year of routine operations, the CDMU suddenly rebooted several times, eventually starting the Software on the redundant Processing unit. The restarts of the PASW were handled by the Reconfiguration Unit that attempted twice on the nominal side before switching over to the redundant Processing unit. In all cases, the Application Software ran for non-negligible time (~1 minute) before it was interrupted (Ref. 13).
• January 2010: The GOCE mission was in its routine operations phase nominally planned to last up to April 2011. However, due to the spacecraft health and big margin in consumables – the xenon consumption by the ion propulsion system was well below the budget due to the low solar activity level – an extension of the mission beyond its nominal lifetime seemed feasible. 82) 83)
Legend to Figure 44: The model illustrates the excellent capability of GOCE to map tiny variations in Earth's gravity field. The geoid is the shape of an imaginary global ocean dictated by gravity in the absence of tides and currents. It is a crucial reference for accurately measuring ocean circulation, sea-level change and ice dynamics – all affected by climate change.
• December 26, 2009: Completion of first global mapping of the Earth with uniform longitude spacing at the equator of < 0.4º. 86)
• November 23, 2009: Control of the GOCE spacecraft was transferred to the operations teams at ESA, marking the end of its commissioning and calibration phase. The handover followed an In-Flight Test Review of the satellite's status, completed on 15 October, and a Payload Data Ground Segment Operations Readiness Review, completed on 11 November. 87)
• September 29, 2009: The GOCE mission turned operational. A little over six months after launch, GOCE started delivering the first set of data to build into the most detailed map of Earth's gravity field ever realised. Before entering this mode, the satellite was tested thoroughly. It was then gently brought down from an altitude of around 280 km to its current orbit slightly below 255 km, which is extremely low for an Earth observation satellite. 88) It was expected that the altitude of 255 km can be maintained throughout 2010. Uninterrupted science measurement phase until the end of the nominal mission (September 29, 2009 - April 2011), including eclipse periods. 85)
• September 13, 2009: The GOCE measurement altitude was reached which was followed by final calibration. The system proved able to reduce the drag accelerations one order of magnitude below the requirement. The scientific measurements taken after this first calibration, before the achievement of the operational orbit, were already promising. 89)
• May 2009: The GOCE mission demonstrated drag-free flight behavior - when the drag-free mode was enabled as part of the commissioning phase. The system was found to be working well, demonstrating that the electric ion thruster-based control system automatically produces the right amount of thrust to achieve drag-free flight. 90)
• April 7, 2009: The EGG (Electrostatic Gravity Gradiometer) was switched on and started producing data. In fact, all accelerometer sensor heads were working in very good health and provide meaningful data. 91)
• March 20, 2009: The GOCE satellite was formally declared ready for work. During the critical 'Launch and Early Orbit Phase' (LEOP) beginning with separation from its booster on March 17, GOCE was checked out to confirm that all of its control systems were operating normally. The satellite was ready for full commissioning of its scientific instruments. A major aim of LEOP was to bring the SSTI GPS receiver into full operation. The operation of SSTI meant the satellite could start performing its own autonomous orbit determinations. The functioning of SSTI was a precondition to bring the satellite into its final drag-free operations mode. 92)
• March 17, 2009: After launch, the GOCE spacecraft achieved an extremely accurate injection altitude of 283.5 km.
Since then, it has been free-falling at a rate of 150 to 200 m a day and will continue to do so until it enters the ‘drag-free mode' at an altitude of 273 km. At this altitude, the satellite actively compensates for the effect of air drag and its payload underwent a further six weeks of commissioning and calibration.
Sensor Complement
Technical concept: Satellite gradiometry is the measurement of acceleration differences between the test masses of an ensemble of accelerometers inside a satellite. The measured signal is the difference in gravitational acceleration inside the spacecraft, where the gravitational signal reflects the pull of the Earth's varying gravity field (caused by varying masses of mountains and valleys, ocean ridges and trenches, subduction zones and mantle inhomogeneities, etc.). 93)
The measured signals correspond to the second derivatives of the gravitational potential. The second-order derivatives are more sensitive to details of the gravitational field then the first-order derivatives would be, and this counteracts to some extent the attenuation of the field that is unavoidable at the altitude where the satellite is flying (250 km). Gradiometry is therefore ideally suited to measure the short-wavelength features of the gravitational field.
The gradiometer measurements are supplemented by SST (Satellite-to Satellite Tracking) measurements - in order to geo-locate the gradient observations. The orbit of the satellite will be continuously tracked using an on-board GPS receiver.
The two core instruments are SSTI (Satellite to Satellite Tracking Instrument) and EGG. SSTI incorporates a geodetic GPS receiver for high-low tracking between the satellites of the GPS constellation, and the low-flying GOCE spacecraft, referred to as SST-hl. The EGG is a three axis satellite gravity gradiometer (SGG). The gradiometer principle is based upon differential accelerometry. Drag and attitude control together with some fundamental properties of gradiometry - allow the separation of the gravitational signal from non-gravitational satellite skin forces and angular motion. Time variable effects of eigen-gravitation will be kept below the instrument noise level. The SSTI allows the retrieval of the long wavelength terms of the gravity field, while the EGG function is devoted to the medium and short wavelength terms. The instruments overlap in the low frequency range, around 0.005 Hz.
From the measurement principle point of view, the GOCE mission concept is unique by meeting four fundamental criteria for gravity field missions, namely:
• Uninterrupted tracking in three spatial dimensions
• Continuous compensation of the effect of non-gravitational forces
• Selection of a low orbital altitude for a strong gravity signal
• Counteracting of the gravity field attenuation at altitude.
EGG (Electrostatic Gravity Gradiometer)
The EGG has a double role. It is providing the gravity gradient measurements and it is also used as a main sensor in the DFACS. If this common mode acceleration in flight direction is not zero, the DFACS will respond by either increasing or decreasing the ion engine thrust to maintain the spacecraft in near-freefall conditions. 94) 95) 96) 97)
The main objective of EGG (or GRADIO) is to measure (for the first time) the three components of the GGT (Gravity-Gradient Tensor). The EGG instrument, designed and developed at ONERA (Office National d'Etudes et de Recherches Aérospatiales) and being manufactured at Thales Alenia Space (TAS), France, is based on an ambient temperature, closed loop, capacitive accelerometer concept. EGG is a three-axis gradiometer consisting of 3 pairs of three-axis servo-controlled capacitive accelerometers on an ultra-stable carbon-carbon structure. The thermal control (passive with heaters) provides 10 mK stability during 200 s. The performance is better than 4 mEHz-1/2 (or 4 x 10-13 g Hz-1/2). The EGG assembly has a mass of 150 kg and requires up to 75 W of electric power.
Type | - Three-axis diagonal gradiometer |
Design bandwidth | 5 x 10-3 to 10-1 Hz |
Baseline length (distance between accelerometers) | 0.5 m |
Sensitivity (detection noise) |
|
Resolution of accelerometer measurements | < 2.0 x 10-12 m s-2 Hz-1/2 |
Proof-mass positioning error | 6 x 10-8 m Hz-1/2 |
Absolute / relative scale factors | 10-3 / 10-5 |
Absolute / relative misalignment | 10-3 rad / 10-5 rad |
Mission, Accelerometer | Measurement level |
CHAMP, STAR (Space Three-axis Accelerometer for Research) | ~10-9 m/s2 |
GRACE, SuperSTAR (Super Space Three-axis Accelerometer for Research) | ~10-10 m/s2 |
GOCE, EGG (Electrostatic Gravity Accelerometer)) | ~10-12 m/s2 |
EGG consists of three pairs of identical ultra-sensitive accelerometers, mounted on three mutually orthogonal 'gradiometer arms' - also referred to as OAGs (One Axis Gradiometers). The distance between each sensor pair must not vary by more than 1% of an Ângstrom (the diameter of an atom!) over a mean time interval of approximately 3 minutes. Crucially, it is the difference between the gravity measured by each sensor pair (along the axis of each of the three arms) that is used to calculate the gravity gradient. The gradiometer's panels on which the accelerometers are mounted consist of a specific arrangement of carbon fiber layers that exhibit identical properties in all directions. These carbon fibers are embedded into a carbon matrix and assembled into skins that sandwich a carbon honeycomb. The end result is an integral carbon construction known as 'carbon-carbon'. Figure 47 shows the full arrangement of the three mutually orthogonal gradiometer arms on which the three accelerometer-pairs are mounted. The high stability of the supporting supporting structure ensure a constant relative positioning of the gradiometers. 98)
The principle of operation of the EGG is based on the measurement of the electric field needed to maintain a proof mass at the center of a cage. A six degree of freedom servo-controlled electrostatic suspension provides control of the proof mass in terms of translation and rotation. A pair of identical accelerometers, mounted on the ultra-stable structure, 50 cm apart, form a "gradiometer arm." The difference measured between accelerations measured by each pair of the accelerometers, in the direction joining them, is the basic gradiometric datum (differential measurement), while half the sum is proportional to the externally induced perturbing drag acceleration (common mode measurement).
Three identical arms are mounted orthogonally to one another and, the axes so defined are nominally aligned to the along-track, cross-track and vertical directions. The three differential accelerations provide direct, independent measurements: not only of the diagonal gravity components, but also of the perturbing linear and angular accelerations.
The overall chain functionality is obtained by integration of the following functions:
• The sensing function of the accelerometer is implemented in the Accelerometer Sensor Head (ASH). It is based on the controlled electrostatic levitation of a Platinum-Rhodium proof mass (PM)
• The conditioning function is implemented in the FEEU (Front End Electronic Unit). It includes sensors of the proof mass position, amplifiers for the control voltages to apply on electrodes, A/D and D/A converters
• The processing function is implemented in the GAIEU (Gradiometer Accelerometer Interface Electronic Unit). This latter unit is running real-time, full-digital control loops for the accelerometers (a total of 6 x 8 control laws), but also failure detection and recovery software, house-keeping monitoring, and data filtering and conditioning for DFACS (on board) and Science (downloaded) data.
The GGT measurement requirements call for a total of 6 accelerometers and conditioning functions, processed by one processing function. The 6 accelerometers are situated around the center of mass of the satellite.
In-orbit calibration of EGG: Calibration involves carefully planned coordination with S/C maneuvers and feedback from the gradiometer to the DFACS. Such calibrations will be repeated, to check parameter stability with respect to thermal drifts and fluctuations. The objective of in-orbit calibration is to enhance the level of balancing to 10-5 in both scale-factor matching and alignment.
SSTI (Satellite to Satellite Tracking Instrument)
The SSTI is a state-of-the-art GPS receiver that has been designed to operate in a low-Earth orbit environment. The objective is to provide the SST-hl (Satellite-to-Satellite Tracking - high/low) contribution to the gravity field recovery, by the simultaneous tracking of up to 12 GPS satellite signals. In addition, SSTI provides data for precise orbit determination; it is also used for real-time on-board navigation and attitude-reference-frame determination. The SSTI instrument is based on the Lagrange architecture, a flight-proven device of Laben, Milan, Italy, a unit of Thales Alenia Space, Italy. 100)
The instrument has a 12-channel dual-frequency GPS receiver with a codeless tracking capability. It processes, demodulates and decodes the signals from GPS satellites, received through a hemispherical antenna pointing in the zenith direction. The frequency bands L1 and L2 signals are used to allow the compensation of ionospheric delays by ground post-processing. Each channel of SSTI receives GPS signals and provides the following measurements: C/A (coarse acquisition) pseudo range (L1), L1 and L2 carrier phase, P1 and P2 code pseudo range (L1 and L2), L1-L2 differential carrier phase and P1-P2 differential pseudo range. In addition, SSTI provides the following capabilities:
• Position and velocity measurements from GPS and corresponding UTC time
• One pulse per second output synchronised with GPS time
• Measurement time-tagging with respect to instrument internal time
• Redundant communication interface
• The ability to turn off unused measurement channels for power saving.
The carrier phase noise is better than 1 mm. The mass of a receiver unit is about 5.35 kg with a peak power demand of < 33 W. The GPS antenna has a mass of 0.49 kg. A receiver unit consists of the following elements: RF/IF module, synch module, AGGA 2 module, processor module, power supply module + motherboard.
The GOCE project requires the computation of PSO (Precise Science Orbit) using GPS and other data. The PSO includes a reduced-dynamic and a kinematic orbit solution. 101)
Instrument mass, power | 6.1 kg (antenna inclusive), < 35 W |
Performance at 1 Hz |
|
IPA (Ion Propulsion Assembly)
IPA is provided by EADS Astrium GmbH. The IPA instrument package consists of the following subassemblies: 102) 103) 104) 105)
• ITA (Ion Thruster Assembly) and control algorithms plus flight software , provided by QinetiQ Ltd.
• IPCU (Ion Propulsion Control Unit), provided by EADS Astrium CRISA, including HV transformer and Ion Beam converter (Astrium GmbH)
• PXFA (Proportional Xenon Feed Assembly), provided by Bradford Engineering B.V., Bergen, The Netherlands. The objective is to provide xenon flow directly from tank to the ITA discharge chamber, cathode and neutraliser.
The objective of IPA is to compensate in real-time for the drag force experienced by the satellite operated in the GOCE orbit (the drag compensation keeps GOCE in orbit). The IPA design employs a cold redundant architecture, consisting of two ITA, which are powered and controlled by two IPCU. Propellant is fed directly from the tank by two PFXA. The assembly is completed by the Xenon storage tank and associated piping.
Heritage: The ITA [or RITA (Radio-Frequency Ion Thruster Assembly)] system was initially demonstrated (as RIT-10) on the EURECA-1 mission of ESA (launch July 31, 1992 - retrieval July 1, 1993). More recently in 2002, a RITA-10 propulsion system was used to recover the ARTEMIS data relay satellite of ESA (launch July 12, 2001).
The IPCU provides overall control of the system, receiving power, timing and enable commands directly from the spacecraft and thrust control commands from the DFACS via the MIL-STD-1553B. These control commands are interpreted by the IPCU, and converted into the appropriate demand signals for the ITA and PXFA. The IPCU design provides the following functions:
• Control Electronics - provide TC/TM communication with the spacecraft via the two MIL-STD-1553B interfaces, timing synchronisation with the spacecraft using a PPS signal, and implements the PXFA interface
• AC Inverter - converts the DC spacecraft power into two AC power outputs for the low voltage (LV) and high voltage (HV) power supplies
• Ion Beam Converter - converts the DC spacecraft power into the HV DC source required for the ion beam
• LV Control - provides auxiliary DC/DC conversion for internal IPCU functions and provides TM/TC links between the Control Electronics and the LV supplies and HV control
• LV Supplies - implements the LV power supplies, interfacing directly with the ITA
• HV Control - provides auxiliary DC/DC conversion for internal IPCU functions and provides the TM/TC link with the LV Control
• HV Supplies - implements the HV power supplies, interfacing directly with the ITA.
Total mass of IPCU | 17.5 kg |
Dimensions | 300 mm x 250 mm x 200 mm (approximately) |
Input voltage range | 22 - 37 V, extended input range to 20 V without degradation |
Maximum input current | 37 A @ 22 V |
IPCU electrical efficiency | Beam converter 92 - 95%, other supplies ≥ 92% |
Operating temperature range | -20ºC to +50ºC |
Operating lifetime | 15 years in orbit |
The ITA is based on the existing T5 MK-5 dished-grid design of QinetiQ. It consists of a quartz discharge chamber around which an RF field coil is wrapped, which induces the internal ionising electric field. Separate Xenon propellant streams feed the discharge chamber and a hollow-cathode neutraliser. A positive voltage on the screen grid attracts electrons into the discharge chamber from the neutraliser plasma, to initiate the discharge. A flat triple-grid system is used to extract the ion beam, with the thruster grid at +1200 V, the acceleration grid at - 500 V, and a grounded deceleration grid. To minimise erosion, the acceleration grid is made from graphite. The ITA system on GOCE is operated in the drag control range; it goes from 100 W for 1 mN to 500 W for 12 mN. The 20 mN required for orbit reboost require 625 W of power input. 106) 107)
Mass | 2 kg (including adjustable mounting bracket) |
Dimensions | Diameter of 180 mm x 200 mm long (including adjustable mounting bracket) |
Propellant ionisation | DC discharge, Kaufman configuration |
Demonstrated thrust range | 1 to 22 mN (throttleable) |
Thrust noise | 1.2 mN (Hz)-1/2 @ 1 mHz to 0.012 mN (Hz)-1/2 @ 100 Hz |
Power | 55 W to 585 W (across thrust range) |
Specific impulse | 500 - 3000 s (across thrust range) at 1-20 mN, respectively |
Total impulse capability | > 3 x 106 Ns @ 20 mN, 3200 s (> 1.5 x 106 Ns in GOCE continuous throttling conditions |
Cycle life | GOCE requirement: > 1000 On/Off cycles |
Thrust vector stability | < ± 0.1º (across thrust range) |
Beam divergence | < 12º (half-cone angle @ 20 mN, 3000s) |
Construction | Stainless steel and soft iron construction. Molybdenum and graphite ion extraction grids |
Operating temperature | -80ºC to +270ºC (at thruster TRP) |
Thermal control | Radiatively cooled, no thermal control coatings or conductive links to S/C or sun shielding required |
The PXFA provides regulated propellant flow to ITA without the need for an additional high pressure regulator. PXFA is designed to provide three independent flow branches to the ITA discharge chamber, cathode and neutraliser. The unit interfaces directly to the xenon storage tank and is capable of providing accurately regulated flow control. The PXFA employs a magneto-restrictive flow control valve enabling a relatively rapid flow control response rate while maintaining micro-disturbance levels to below 1.1 x 10-6 m/s2 Hz1/2.
Control and monitoring of the PXFA is performed by the IPCU; the system is housed in a single enclosure to minimise S/C interfaces and ease of AIV (Assembly, Integration and Verification).
Mass | 7.5 kg (includes high pressure regulation direct from tank) |
Operating temperature range | -20ºC to +50ºC |
Operating lifetime | 15 years in orbit |
Micro disturbance level | < 1.1 x 10-6 m/s2 Hz1/2 |
LRR (Laser Retro Reflector)
LRR is a passive device providing a supplementary data set of range observations (satellite laser ranging by the SLR ground network) as backup for precise orbit determination post-processing. The LRR is a corner-cube array capable of reflecting laser pulses back along the incident light path. LRR has a total mass of 2.5 kg.
GOCE/GRACE (Gravity Recovery And Climate Experiment) Mission Comparison
GRACE and GOCE missions exploit different measurement concepts to map the Earth's gravity field. The GRACE K-band data are not sensitive to the cross-track gravity field component, and, therefore, result in a very anisotropic error behavior. On the other hand, the GOCE gravity gradiometer will measure all the diagonal components of the gravity gradient tensor, so that the error behavior will be much more isotropic. Finally, for both satellite missions accurate GPS tracking data are available, which can be used to compute precise kinematic satellite orbits and, ultimately, the Earth's gravity field. 108)
The GRACE mission (launch Mar. 17, 2002) complements GOCE by providing extremely high precision gravity measurements (an order of magnitude better than GOCE) at half-wavelengths exceeding 250 km. The advantage of GRACE data analysis is to recover temporal variations of the gravity field at these relatively longer spatial scales. The high resolution and accurate gravity field derived from GOCE in the 80 - 250 km half-wavelength range may also help to de-alias the shorter wavelengths of the gravity field of the GRACE analysis. A combination of the GRACE and GOCE results will permit construction of a gravity field model of the required precision on all relevant spatial scales.
• GRACE: Designed to measure the time variability of the gravity field at a low spatial resolution at the Earth's surface (typical values for half lambda are 1000 - 200 km).
• GOCE: Designed to measure the static gravity field at a high spatial resolution at the Earth's surface (typical values for half lambda are 200 - 80 km).
| 1/2 wavelength | 1/2 wavelength | 1/2 wavelength | 1/2 wavelength |
GRACE | < 0.001 cm | = 0.15 cm | = 15 cm | unmeasurable |
GOCE | = 0.04 cm | = 0.15 cm | = 0.8 cm | = 10 cm |
Ground Segment
The ground segment is a key segment of the mission for the generation and quality control of the GOCE mission data products. Overall, the concept and architecture of the ground segment is based on data-driven processing for all steps wherever possible. 109) 110) 111)
The GOCE mission uses the ground stations in Kiruna (Sweden, prime station) and on Svalbard (SvalSat station), located at 78.216º N, 20º E on the Norwegian Svalbard archipelago (also referred to as Spitzbergen), to exchange commands with the spacecraft and to downlink data to the ground. The Kiruna station is controlled remotely from ESOC's ESTRACK control center (Ref. 82).
The mission operations and control functions of the GOCE mission are allocated to ESOC, Darmstadt ,also referred to as FOS (Flight Operations Segment).
- The SCOS-2000 (Satellite Control and Operation System 2000 - the generic mission control system software of ESA) is running on Sun Solaris, with GOCE having redundant dedicated servers and sharing 4 client workstations in the control area with CryoSat-2.
- The SIMSAT-based spacecraft simulator is running the on board platform software on an ERC-32 emulator, thus offering a highly representative simulation environment.
- The Flight dynamics system is based on ESOC's ORATOS (Orbit and Attitude Operations) platform and is used to perform all activities related to orbit prediction and attitude monitoring.
- The main interface of the GOCE FOS is with the PDGS (Payload Data Ground Segment) at ESRIN, with the FOS providing all playback telemetry dumped from the spacecraft in raw format, and planning-related information exchanged between the two entities.
Orbit determination and prediction is performed daily based on the S/C position vector as obtained in SSTI telemetry, with the orbit prediction having to take into account the current and planned S/C mode (drag-free or in decay). Deviations with respect to the planned S/C mode need to be immediately communicated to the orbit prediction system in order to generate new predictions and update them at the ground stations. Orbit determination can also be based on ranging data, however this is nominally not done as it would require establishment of a low TM mode, the low bit rate of which would not allow the dump of playback telemetry.
Regarding the science data product generation, the key components of the ground segment are the Payload Data Ground Segment (PDGS), the High-level Processing Facility (HPF), and the Calibration Monitoring Facility (CMF). The HPF is a distributed processing chain developed and operated under ESA contract by a consortium of ten European institutes, known as the European GOCE Gravity Consortium (or EGG-C).
• The PDGS function is allocated to ESA/ESRIN (Frascati, Italy). Within the PDGS, the Payload Data Segment (PDS), which includes the Instrument Processing Facility (IPF) running all the processing computer code, produces the Level 0 and Level 1b data products and provides them, together with auxiliary parameter files, to the HPF.
The PDGS hosts also the LTA (Long-Term Archive) for data preservation and archiving purposes, the MUS (Multi-mission User Services) facilities through which the users can obtain access to the data, and the PMF (Performance Monitoring Facility) which monitors the overall mission data production and data flow.
• The HPF, allocated to SRON (The Netherlands), plays an instrumental role in the overall scientific calibration and validation of the Level 1b data products, as it generates Level 2 quick-look and final products, and also performs dedicated quality assurance functions on the incoming Level 1b data products.
• The CMF is responsible for the monitoring of the space segment, as well as the monitoring of the performance of the PDS products, in particular the calibration products.
Commissioning Sequence of Events
The commissioning of GOCE lasted from launch on 17th March 2009 up to start of the routine operations phase beginning of October 2009. Owing to the need to commission the complex subsystems and units required to actually perform drag-free mode, GOCE was injected at an altitude higher than the one foreseen for science operations (Ref. 82).
One of the activities in commissioning was to lower the orbit to the desired altitude. With GOCE not designed for performing orbit decay maneuvers, lowering of the orbit is achieved by not compensating the atmospheric drag. Depending on the atmospheric density (in turn highly dependent on the solar activity level), the resulting decay rate is in the order of a few hundred m/day. 112)
Figure 66 gives an overview of the S/C altitude from launch up to reaching the altitude for the routine science operations middle of September 2009. Several features in the figure are due to special commissioning activities affecting the spacecraft altitude, as explained in more detail here below.
1) LEOP (Launch and Early Orbit Phase), March 17-20, 2009.
The injection altitude of the GOCE spacecraft was 283.2 km. The main operations consisted in bringing the S/C to FPM (Fine Pointing Phase – the mode foreseen for the orbit decay phase), with the IPA (Ion Propulsion Assembly) not in use – and commissioning of the SSTI. - LEOP operations went smooth and with little unexpected events, also thanks to the activation of GOCE's more complex systems required for drag-free mode (e.g. ion propulsion, gradiometer) not being done in this phase.
2) Initial decay phase and unit-level checkouts, March 21 to May 4, 2009.
DFACS (Drag-Free and Attitude Control System) unit-level commissioning, with various unit calibration and checkout activities taking place.
The crucial activity of commissioning the ion propulsion system only started on March 30, after having waited 10 days for the completion of outgassing of the unit after launch. IPA commissioning lasted 4 days, including a thorough checkout of both IPA branches. Each engine was fired at a wide range of thrust levels (including maximum thrust), leading to a noticeable impact on the S/C orbit (Figure 66, label 1). This activity required close coordination with flight dynamics in order to properly account for the change in orbit in the orbit prediction used for pointing the ground station antennas.
The first safe mode of the mission occurred on April 1, 2009 due to problems with the attitude controller in DFACS mode FPM, requiring to continue commissioning in the next lower DFACS mode (ECPM) pending resolution of the FPM controller problems.
3) Commissioning of drag-free modes, May 5 to June 22, 2009.
Having recovered FPM through redesign of the FPM controller gains, and with both IPA and EGG (Electrostatic Gravity Accelerometer) commissioned successfully out of the DFACS loop, as from 5th May the drag-free modes DFM-COARSE and DFM-FINE were entered for the first time, leading to a stop of the orbit decay (Figure 66, label 2).
Drag-free modes commissioning was interrupted on May 12, 2009 by the second safe mode of the mission, caused by a flight software problem when performing the EGG K2 calibration for the first time in DFM-FINE. This event of a payload internal calibration, causing a satellite safe mode, clearly demonstrated the implications of using payload data for platform purposes, and the need to see the GOCE spacecraft as a single complex system. Following the safe mode, the orbit decayed further with the DFACS in FPM, while the anomaly was investigated and fixed. Eventually, a transition to DFM-FINE was performed on May 26, 2009 (Figure 66, label 3) to continue the checkout of the drag-free modes. The slight increase in altitude later in June as visible in Figure 66 was due to application of a positive thrust bias in drag-free mode, required for some of the checkout activities.
4) Decay to science altitude and start of routine operations phase, June 23 to Oct. 10, 2009.
The checkout of the drag-free modes was completed on June 23 and the orbit decay was resumed (Figure 66, label 4). Considering the continued low level of solar activity, it was decided to lower the orbit down to 259.6 km – below the originally foreseen 268 km– , to improve the quality of the measurement data.
About 3 months were spent with the orbit decaying. The level of activities in that phase was lower than in the earlier stages of commissioning –still, a large number of EGG-related calibration activities and special testing was carried out to help understanding some unexplained features in the EGG measurement data. In addition, several onboard software maintenance (OBSM) activities were carried out to correct some of the flight software problems found in commissioning.
The target altitude was finally reached on September 13 (Figure 66, label 5), with the routine operations phase starting in the first half of October 2009 following resumption of drag-free mode and execution of some additional EGG calibration activities.
Attitude Control in a Drag Environment
The GOCE spacecraft is unique in that it flies in a very strong atmospheric drag environment, with the aerodynamic forces constituting an important element for attitude control. The DFACS controller for the various modes had been designed taking assumptions on the range of atmospheric density encountered and on the aerodynamic properties of the spacecraft. The accuracy of these assumptions had been one of the main unknowns during the design phase of the satellite, on the one hand due to the limited predictability of the solar activity, and on the other hand due to the lack of comprehensive data on the properties of the residual atmosphere at the unexplored altitude of GOCE (Ref. 82).
As from the end of LEOP, the DFACS Fine Pointing Mode (FPM) controller had been under intense scrutiny, as the performance of the attitude control was not nominal, with the attitude errors larger than expected. Figure 67 depicts the evolution of the attitude error around yaw, showing a gradual increase of the peak attitude error. On April 1, 2009 the attitude errors started diverging rapidly, until failure detection mechanisms on the spacecraft side triggered and brought the system into safe mode. The DFACS successfully stabilised the spacecraft in CPM (Coarse Pointing Mode), the controller of which was working nominally.
The anomaly was found to be due to a lower than foreseen level of aerodynamic drag caused by the exceptionally low solar activity at the time of launch. It was also found that the aerodynamic properties of the S/C differed from what had been assumed. In combination, this resulted in the FPM controller settings as established before launch being inadequate for controlling the spacecraft in the environment encountered.
The problem was seen and partially understood before the safe mode entrance on April 1. A provisional set of controller gains was prepared by the spacecraft manufacturer and tested on the ESOC simulator shortly before the triggering of the safe mode. However, the design of GOCE does not allow replacing the currently active set of controller parameters – it requires first a transition to a different mode, which in this case was difficult and could not be performed on time. This could be considered as a possible lesson learnt for future implementations.
Following intense simulations and ground testing by the spacecraft manufacturer, on April 22, 2009 a new set of gains for FPM and for the higher DFACS modes were installed on the spacecraft. FPM was entered the day after, with the controller now working satisfactorily.
Orbit Prediction in a Drag Environment
One of the consequences of operating a spacecraft in a drag environment is that spacecraft attitude control performance can significantly affect the spacecraft orbit. Throughout the orbit decay phase in FPM lasting up to middle of September 2009, a large variation in the attitude error around yaw was observed, with the daily peak attitude error ranging from 5º up to 20º. This unexpected sensitivity of the controller – which is employing magnetic torquers as sole actuators for attitude control – to changes in the environmental conditions (e.g. the level of geomagnetic activities) caused a significant fluctuation of the orbit decay rate (Figure 68) and thus impacted the accuracy of ESOC's orbit prediction. Orbit prediction performance was well outside of the expected performance of having a prediction error of no more than 100/9000/100 m (across/along/radial) over a period of 3 days with the spacecraft not in drag-free mode (Ref. 82).
Since orbit prediction had anyway been planned to run on a daily basis, the prediction was still accurate enough to ensure correct pointing of the station antennas for acquiring the spacecraft. The weekly mission planning activity was affected, however. Throughout the decay phase a replanning activity was required in the middle of each week, with the orbit prediction not accurate enough for more than 1 week in the future as required by mission planning. It also had a negative impact on the provision of sufficiently accurate predictions to the ILRS (International Laser Ranging Service) for the tracking of GOCE.
Although the yaw variations are still present when GOCE is in drag-free mode, the orbit prediction is not affected, as the very purpose of the DFACS in that mode is to compensate the effects of the atmospheric drag. The performance of the drag-free mode turned out to be excellent, with a very small drift of less than 35 cm per day due to residual errors in drag-free control (Figure 69).
Another aspect of operating GOCE in a drag environment was that close coordination between the ESOC flight control team and the flight dynamics team was required in the first few months after launch for all commissioning activities impacting the orbit. This included nominally foreseen activities like commissioning of the ion propulsion system and commissioning of the drag-free modes –not all of which went fully according to plan, requiring an update of the orbit prediction, but also various contingencies encountered at the beginning of the mission which led to an unexpected interruption of the drag-free mode.
Legend to Figure 69: The slight variation in orbit altitude is caused by the shape of the geopotential field. The periodicity visible is due to the repeat cycle of GOCE's orbit (61 days repeat cycle with three 20 days subcycles).
In conclusion, the unique characteristics of the GOCE mission and the resulting high complexity of the spacecraft had a significant impact on operations, making the control of GOCE by ESA/ESOC a special experience. The main challenges encountered were the following: (Ref. 82)
• The exceptionally low GOCE orbit of about 260 km altitude results into very short ground station contacts (less than five minutes of commanding), requiring a high level of automation of routine pass activities. Other effects of the low orbit were apparent in many different areas, e.g. with the Kiruna antenna not fast enough to follow the spacecraft in overhead passes, and eclipse predictions for the spacecraft inaccurate due to refraction of the sunlight in the Earth's atmosphere.
• Control of a spacecraft in an atmospheric drag environment: a major revision of the DFACS mode controller gains was required early in the mission, as the default gains turned out to be inadequate for the drag environment encountered, leading to a loss of S/C attitude control. Orbit prediction during the decay phase was heavily affected by an unexpected variation in the S/C attitude errors, leading to a significant fluctuation of the orbit decay rate.
• A significant number of post-launch on-board software corrections were performed, reflecting the high complexity of the GOCE spacecraft and its flight software.
The first set of GOCE products is going to be issued in the first half of 2010. Throughout this year, the solar activity will be monitored, being one of the main drivers for defining the operational altitude of GOCE. In case an increase of the solar activity levels towards a new possible solar maximum is observed, this may eventually entail a raise of the GOCE orbit (Ref. 82).
References
1) J. J. Johannessen, G. Balmino, C. Le Provost, R. Rummel, R. Sabadini, H. Sünkel, C. C. Tscherning, P. Visser, P. Woodworth, C. W. Hughes, P. LeGrand, N. Sneeuw, F. Perosanz, M. Aguirre-Martinez, H. Rebhan, M. R. Drinkwater, "The European Gravity Field and Steady-State Ocean Circulation Explorer Satellite Mission: Impact in Geophysics," Surveys in Geophysics, Vol. 24, 2003, pp. 339-386
2) M. R. Drinkwater, R. Floberghagen, R. Haagmans, D. Muzi, A. Popescu, "GOCE: ESA's first Earth Explorer Core mission," In Beutler, G. B., M. R. Drinkwater, R. Rummel, and R. von Steiger, "Earth Gravity Field from Space - from Sensors to Earth Sciences," In the Space Sciences Series of ISSI, Vol. 18, pp. 419-432, Kluwer Academic Publishers, Dordrecht, The Netherlands. ISBN: 1-4020-1408-2, 2003 URL: http://esamultimedia.esa.int/docs/Drinkwater_ISSI_Mar03.pdf
3) M. R. Drinkwater (Ed.), Proceedings of the Second International GOCE Workshop, March 8-10, 2004, ESA/ESRIN, URL: http://earth.esa.int/goce04/
4) M. R. Drinkwater, R. Floberghagen, R. Haagmans, D. Muzi, A. Popescu, 2003, "GOCE: ESA's first Earth Explorer Core Mission," GOCE Publication Reprint, in G. B. Beutler, M. R. Drinkwater, R. Rummel, R. von Steiger (Eds), "Earth Gravity Field from Space - from Sensors to Earth Sciences," Space Sciences Series of ISSI, Vol. 18, 419-432, Kluwer Academic Publishers, Dordrecht, The Netherlands, ISBN: 1-14020-1408-2
5) A. Popescu, "GOCE Satellite Design Status," 3rd International GOCE User Workshop, Nov. 6-8, 2006, ESA/ESRIN, Frascati, Italy, URL: http://earth.esa.int/workshops/goce06/participants/337/pres_popescu_337.pdf
6) M. Drinkwater, R. Haagmans, M. Kern, "GOCE Mission Objectives and Requirements," 3rd International GOCE User Workshop, Nov. 6-8, 2006, ESA/ESRIN, Frascati, Italy, URL: http://earth.esa.int/workshops/goce06/participants/11/pres_drinkwater_11.pdf
7) ESA's Gravity Mission, GOCE Brochure, BR-209, June 2006, URL: http://esamultimedia.esa.int/docs/BR209web.pdf
8) http://earth.esa.int/workshops/goce06/programme.html
9) M. Drinkwater, R. Haagmans, M. Kern, D. Muzi, R. Floberghagen, "GOCE: Obtaining a Portrait of Earth's Most Intimate Features," ESA Bulletin, No 133, February 2008, pp. 4-13, URL: http://www.esa.int/esapub/bulletin/bulletin133/bul133b_drinkwater.pdf
10) M. Fehringer, G. Andre, D. Lamarre, D. Maeusli, "A Jewel in ESA's Crown - GOCE and its Gravity Measurement Systems," ESA Bulletin, No 133, February 2008, pp. 14-23, URL: http://www.esa.int/esapub/bulletin/bulletin133/bul133c_fehringer.pdf
11) R. Ullio, P. C. Marucchi Chierro, M. Notarnicola, G. Catastini, S. Cesare, S. Capitanio, "Characterization and Verification of Micro-Vibration Environment in GOCE Satellite," Proceedings of the 59th IAC (International Astronautical Congress), Glasgow, Scotland, UK, Sept. 29 to Oct. 3, 2008, IAC-08-C2.3
12) "Gravity Field and Steady-State Ocean Circulation Mission," ESA publication SP-1233 (1), July 1999
13) A. Da Costa, C. Steiger, A. Weigl, W. Rubel, R. Eilenberger, G. Lautenschläger, P. Väisänen, E. Maestroni, P. P. Emanuelli, "Adaptive On-Board Software Maintenance: The GOCE Mission Recovery Cases," Proceedings of the DASIA (DAta Systems In Aerospace) 2011 Conference, San Anton, Malta, May 17-20, 2011, ESA SP-694, August 2011
14) "GOCE System Critical Design Review (CDR)," Executive Summary, May 2005, URL: http://esamultimedia.esa.int/docs/GOCE_System_Critical_Design_Review.pdf
15) G. Sechi, G. André, D. Andreis, M. Saponara, "Magnetic Attitude Control of the GOCE Satellite," Proceedings of the 6th International ESA Conference on Guidance, Navigation and Control Systems, Loutraki, Greece, Oct. 17-20, 2005 (ESA SP-606, Jan. 2006)
16) P. Martella, G. Sechi, E. Canuto, "The GOCE Drag Free and Attitude Control - Design Aspects and Expected Performance," 5th International ESA Conference on GNC Systems, Frascati, Italy, Oct. 22-25, 2002
17) http://www.esa.int/esapub/br/br209/br209.pdf
18) Massimo Romanazzo, Christoph Steiger, Gianfranco Sechi, Massimiliano Saponara, Mehrdad Rezazad, Ana Piris Nino, Andrea Da Costa, Michael Fehringer, Rune Floberghagen, Gerard André, Pier P. Emanuelli, "In‐Orbit experience with the Drag‐Free Attitude and Orbit Control System of ESA's Gravity Mission GOCE," Proceedings of the GNC 2011, 8th International ESA Conference on Guidance, Navigation & Control Systems, Carlsbad (Karlovy Vary), Czech Republic, June 5-10, 2011
19) "ESA launches first Earth Explorer mission GOCE," March 17, 2009, URL: http://www.esa.int/SPECIALS/GOCE/SEMH3NITYRF_0.html
20) A. Allasio, D. Muzi, "GOCE: ESA's first Gravity and Ocean Circulation Explorer," 58th IAC (International Astronautical Congress), International Space Expo, Hyderabad, India, Sept. 24-28, 2007, IAC-07-B1.2.10
21) Christoph Steiger, Andrea Da Costa, Pier P. Emanuelli, Rune Floberghagen, Michael Fehringer, "Evolution of Flight Operations for ESA's Gravity Mission GOCE," Proceedings of SpaceOps 2012, The 12th International Conference on Space Operations, Stockholm, Sweden, June 11-15, 2012, URL: http://www.spaceops2012.org/proceedings/documents/id1262715-Paper-002.pdf
22) "Filling the GOCE data gap unearths South Pole's geological past," ESA Applications, 9 March 2022, URL: https://www.esa.int/Applications/Observing_the_Earth/FutureEO/GOCE/Filling_the_GOCE_data_gap_unearths_South_Pole_s_geological_past
23) Tom A. Jordan, Fausto Ferraccioli & René Forsberg, "An embayment in the East Antarctic basement constrains the shape of the Rodinian continental margin," Nature Communications Earth & Environment, Vol. 3, Article Number 52, Published: 9 March 2022, https://doi.org/10.1038/s43247-022-00375-z, URL: https://www.nature.com/articles/s43247-022-00375-z.pdf
24) "Gravity mission still unearthing hidden secrets," ESA Applications, 11 March 2021, URL: https://www.esa.int/Applications/Observing_the_Earth/GOCE/Gravity_mission_still_unearthing_hidden_secrets
25) J. Fullea, S. Lebedev, Z. Martinec, N. L. Celli, "WINTERC-G: mapping the upper mantle thermochemical heterogeneity from coupled geophysical-petrological inversion of seismic waveforms, heat flow, surface elevation and gravity satellite data," Geophysical Journal International, ggab094, Published: 10 March 2021, https://doi.org/10.1093/gji/ggab094
26) "GOCE reveals what's going on deep below Antarctica," ESA / Applications / Observing the Earth / GOCE, 9 December 2019, URL: http://www.esa.int/Applications/Observing_the_Earth/GOCE/GOCE_reveals_what_s_going_on_deep_below_Antarctica
27) F. Pappa, J. Ebbing, F. Ferraccioli, W. van der Wal, "Modeling Satellite Gravity Gradient Data to Derive Density, Temperature, and Viscosity Structure of the Antarctic Lithosphere," Journal of Geophysical Research-Solid Earth, Published 25 October 2019, https://doi.org/10.1029/2019JB017997 URL: https://agupubs.onlinelibrary.wiley.com/doi/epdf/10.1029/2019JB017997
28) "Taking gravity from strength to strength," ESA, 20 March 2019, URL: http://m.esa.int/Our_Activities/Observing_the_Earth/GOCE/Taking_gravity_from_strength_to_strength
29) "ESA's gravity-mapper reveals relics of ancient continents under Antarctic ice," ESA, 7 November 2018, URL: http://m.esa.int/Our_Activities/Observing_the_Earth/GOCE/ESA_s_gravity-mapper_reveals_relics_of_ancient_continents_under_Antarctic_ice
30) "Enhanced views of Earth tectonics," BAS Press Release, 5 November 2018, URL: https://www.bas.ac.uk/media-post/enhanced-views-of-earth-tectonics/
31) Jörg Ebbing, Peter Haas, Fausto Ferraccioli, Folker Pappa, Wolfgang Szwillus, Johannes Bouman, "Earth tectonics as seen by GOCE – Enhanced satellite gravity gradient imaging," Scientific Reports, Vol. 8, Article number: 16356, published online 05 November 2018, URL: https://www.nature.com/articles/s41598-018-34733-9.pdf
32) "The satellite on the edge of space," ESA, Operations image of the week, 29 August 2018, URL: http://m.esa.int/spaceinimages/Images/2018/08/The_satellite_on_the_edge_of_space
33) "Earth's squishy interior gives rapid rise to Antarctica," ESA, Operations image of the week, 22 June 2018, URL: http://www.esa.int/Our_Activities/Observing_the_Earth/GOCE/Earth_s_squishy_interior_gives_rapid_rise_to_Antarctica
34) Valentina R. Barletta, Michael Bevis, Benjamin E. Smith, Terry Wilson, Abel Brown, Andrea Bordoni, Michael Willis, Shfaqat Abbas Khan, Marc Rovira-Navarro, Ian Dalziel, Robert Smalley Jr., Eric Kendrick, Stephanie Konfal, Dana J. Caccamise II, Richard C. Aster, Andy Nyblade, Douglas A. Wiens, "Observed rapid bedrock uplift in Amundsen Sea Embayment promotes ice-sheet stability," Science, 22 Jun 2018, Vol. 360, Issue 6395, pp. 1335-1339, DOI: 10.1126/science.aao1447
35) "Searching for underground energy sources from space," ESA, July 27, 2015, URL: http://www.esa.int/Our_Activities/Observing_the_Earth/GOCE/Searching_for_underground_energy_sources_from_space
36) "GOCE helps tap into sustainable energy resources," ESA, April 16, 2015, URL: http://www.esa.int/Our_Activities/Observing_the_Earth/GOCE/GOCE_helps_tap_into_sustainable_energy_resources
37) "Global Gravity Maps in Support to Geothermal Energy Sourcing," IRENA, April 16, 2015, URL: http://www.lithoflex.org/IRENA/
38) "Understanding the 'OC' in GOCE," ESA, Nov. 25, 2014, URL: http://www.esa.int/Our_Activities/Observing_the_Earth/GOCE/Understanding_the_OC_in_GOCE
39) "GOCE reveals gravity dip from the ice loss," ESA, Sept. 26, 2014, URL: http://www.esa.int/Our_Activities/Observing_the_Earth/GOCE/GOCE_reveals_gravity_dip_from_ice_loss
40) "Lifetime of gravity measurements heralds new beginning," ESA, July 30, 2014, URL: http://www.esa.int/Our_Activities/Observing_the_Earth/GOCE/Lifetime_of_gravity_measurements_heralds_new_beginning
41) "ESA releases the fifth generation of GOCE gravity field solutions," ESA, July 18, 2014, URL: [web source no longer available]
42) Isabelle Panet, Gwendoline Pajot-Métivier, Marianne Greff-Lefftz, Laurent Métivier, Michel Diament, Mioara Mandea, "Mapping the mass distribution of Earth's mantle using satellite-derived gravity gradients," Nature Geoscience, Jan. 19, 2014, doi:10.1038/ngeo2063
43) Jonathan Amos, "Europe's GOCE gravity satellite probes Earth's mantle," BBC News, Jan. 27, 2014, URL: http://www.bbc.co.uk/news/science-environment-25911846
44) "Earth's Gravity Scarred by Earthquake," ESA, Dec. 03,2013, URL: http://www.esa.int/Our_Activities/Observing_the_Earth/GOCE/Earth_s_gravity_scarred_by_earthquake
45) Martin J. Fuchs, Johannes Bouman, Taco Broerse, Pieter Visser, Bert Vermeersen, "Observing coseismic gravity change from the Japan Tohoku-Oki 2011 earthquake with GOCE gravity gradiometry," Journal of Geophysical Research: Solid Earth, Volume 118, Issue 10, pp: 5712–5721, October 17, 2013, DOI: 10.1002/jgrb.50381
46) "GOCE gives in to gravity," ESA, Nov. 11, 2013, URL: http://www.esa.int/Our_Activities/Observing_the_Earth/GOCE/GOCE_gives_in_to_gravity
47) Patrick Blau, "GOCE reentry updates," Spaceflight 101, Nov. 1, 2013, URL: http://www.spaceflight101.com/goce-re-entry.html
48) Christoph Steiger, Massimo Romanazzo, Pier P. Emanuelli, Rune Floberghagen, Michael Fehringer, "The Deorbiting of ESA's Gravity Mission GOCE – Spacecraft Operations in Extreme Drag Conditions," SpaceOps 2014, 13th International Conference on Space Operations, Pasadena, CA, USA, May 5-9, 2014, paper: AIAA 2014-1934
49) C. E. Ghisi, C. Steiger, M. Romanazzo, P. P. Emanuelli, "Drag-Free Attitude and Orbit Control System Performance of ESA's GOCE Mission during Low Orbit Operations and De-orbiting," SpaceOps 2014, 13th International Conference on Space Operations, Pasadena, CA, USA, May 5-9, 2014, paper: AIAA 2014-1934 06
50) "ESA's GOCE mission comes to an end," ESA, News Release No 33-2013, October 21, 2013, URL: http://www.esa.int/For_Media/Press_Releases/ESA_s_GOCE_mission_comes_to_an_end
51) "GOCE completes its mission," ESA, URL: http://www.esa.int/Our_Activities/Observing_the_Earth/GOCE/GOCE_completes_its_mission
52) "GOCE Status," ESA Bulletin No 155, Aug. 2013, p. 82
53) "ESA GOCE Mission to end this year," ESA, Sept. 13, 2013, URL: http://www.esa.int/Our_Activities/Observing_the_Earth/GOCE/ESA_s_GOCE_mission_to_end_this_year
54) Viet Duc Tran, Federica Passone, Christoph Steiger, Massimo Romanazzo, Pier Paolo Emanuelli, Rune Floberghagen, Michael Fehringer, "Flying at the edge -extremely low altitude operations for the GOCE mission," Proceedings of the ESA Living Planet Symposium, Edinburgh, UK, Sept. 9-13, 2013 (ESA SP-722, Dec. 2013)
55) "GOCE Status," ESA Bulletin No 154, May 2013, p.70
56) "ESA releases the fourth generation GOCE gravity field solutions," ESA GOCE News, March 20, 2013, URL: https://web.archive.org/web/20130730022531/https://earth.esa.int/web/guest/-/esa-releases-the-fourth-generation-goce-gravity-field-solutions
57) Th. Gruber, R. Rummel, "The 4th Release of GOCE Gravity Field Models – Overview and Performance," EGU General Assembly 2013, Session G4.2, 12.4.2013, URL: http://tinyurl.com/pfg6rua
58) "GOCE: The First Seismometer in Orbit," ESA, March 8, 2013, URL: http://www.esa.int/Our_Activities/Observing_the_Earth/The_Living_Planet_Programme/Earth_Explorers/GOCE/GOCE_the_first_seismometer_in_orbit
59) Raphael F. Garcia, Sean Bruinsma, Philippe Lognonné, Eelco Doornbos, Florian Cachoux, "GOCE: the first seismometer in orbit around the Earth," accepted article of GRL (Geophysical Research Letters), 2013, DOI: 10.1002/grl.50205
60) "GOCE 'feels' quake," ESA, March 11, 2013, URL: http://www.esa.int/Our_Activities/Observing_the_Earth/GOCE/Highlights/GOCE_feels_quake
61) "Earth Explorers - New Views of Dynamic Earth," URL: http://esamultimedia.esa.int/multimedia/publications/BR-314/offline/download.pdf
62) "GOCE Settles Debate on Sloping Sea," ESA, Feb. 15, 2013, URL: http://www.esa.int/Our_Activities/Observing_the_Earth/The_Living_Planet_Programme/Earth_Explorers/GOCE/GOCE_settles_debate_on_sloping_sea
63) "GOCE's second mission improving gravity map," ESA, Nov. 16, 2012, URL: http://www.esa.int/esaCP/SEMFCFGPI9H_index_0.html
64) "GOCE status," ESA Bulletin No 153, February 2013, p. 70
65) "GOCE orbit lowering," ESA, August 10, 2012, URL: [web source no longer available]
66) Dan Thisdell, "ESA to skim atmosphere in risky gravity measurement experiment," Flightglobal, Sept. 20, 2012, URL: http://www.flightglobal.com/news/articles/esa-to-skim-atmosphere-in-risky-gravity-measurement-experiment-376671/
67) "GOCE Status Report," ESA Bulletin, No 151, August 2012, p. 75
68) Th. Gruber, R. Floberghagen, M. Fehringer, R. Rummel, "NoordwijkTheGOCE Mission & itsGravityFieldModels –Status & OutlookGRACE," GRACE Science Team Meeting, Potsdam, Germany, Sept. 17-19, 2012, URL: [web source no longer available]
69) "GOCE's Second Mission Improving Gravity Map," Science Daily, Nov. 16, 2012, URL: http://www.sciencedaily.com/releases/2012/11/121116085548.htm
70) "Gravity satellite to benefit future missions," ESA, July 19, 2012, URL: http://www.esa.int/esaLP/SEMQ24VTP4H_index_0.html
71) "GOCE producing global maps of ocean currents," ESA Earthnet Online, March 2012, URL: https://earth.esa.int/web/guest/news/featured-stories/-/asset_publisher/7ipD/content/goce-producing-global-maps-of-ocean-currents
72) "Mapping the Moho with GOCE," ESA, March 9, 2012, URL: http://www.esa.int/esaEO/SEMMC68YBZG_index_0.html
73) Th. Gruber, R. Floberghagen, M. Fehringer, R. Rummel, "Mission Status & Performance of GOCE GravityFieldModels," GRACE Science Team Meeting, Austin, TX, USA, August 8-10, 2011, URL: http://www.espace-tum.de/mediadb/1651163/1651164/201108_GRACE_SWT_GOCE.pdf
74) "Earth's gravity revealed in unprecedented detail," ESA, March 31, 2011, URL: http://www.esa.int/esaCP/SEM1AK6UPLG_index_0.html
75) "ESA's Gravity Mission," GOCE Newsletter 2, Issue 2, March 2011, URL:http://www.scribd.com/doc/52167477/Goce-Newsletter-Issue2
76) "GOCE delivers on its promise," ESA, March 4, 2011, URL: http://www.esa.int/esaCP/SEMQC9VTLKG_index_0.html
77) "ESA's gravity mission granted 18-month extension," Nov. 25, 2010, URL: http://www.esa.int/esaLP/SEM4EDGMTGG_index_0.html
78) "GOCE status," ESA Bulletin, No 145, Feb. 2011, p. 82
79) Jerome Benveniste, "ESA Earth Observation Program and Missions Status," 2010 OSTST (Ocean Surface Topography Science Team) meeting, Lisbon, Portugal, Oct. 18-20, 2010, URL http://www.aviso.oceanobs.com/fileadmin/documents/OSTST/2010/oral/Benveniste.pdf
80) "GOCE fully operational again," ESA, Sept. 29, 2010, URL: http://www.esa.int/esaLP/SEMW4YPOHEG_LPgoce_0.html
81) "GOCE gravity mission back in action," ESA, Sept. 7, 2010, URL: http://www.esa.int/SPECIALS/GOCE/SEM4UQGONDG_0.html
82) Christoph Steiger, Juan Piñeiro, Pier P. Emanuelli, "Operating GOCE, the European Space Agency's Low-flying Gravity Mission," Proceedings of the SpaceOps 2010 Conference, Huntsville, ALA, USA, April 25-30, 2010, paper: AIAA 2010-2125
83) Jonathan Amos, "Europe's GOCE satellite probes Earth's gravity," BBC News, Dec. 24, 2009, URL: http://news.bbc.co.uk/2/hi/science/nature/8408957.stm
84) "GOCE giving new insights into Earth's gravity," ESA, June 29, 2010, URL: http://www.esa.int/SPECIALS/GOCE/SEMY0FOZVAG_0.html
85) M. Fehringer, D. Muzi, R. Floberghagen, J. Pineiro, Ch. Steiger, "Status and Performance of the GOCE Satellite," AGU Fall Meeting, 2009, URL: http://earth.esa.int/pub/ESA_DOC/GOCE/Status_and_Performance_of_the_GOCE_Satellite.pdf
86) R. Rummel, D. Muzi, M. Drinkwater, R. Floberghagen, M. Fehringer, "GOCE: Mission Overview and Early Results," AGU Fall Meeting, Dec. 26, 2009, URL: http://earth.esa.int/pub/ESA_DOC/GOCE/Mission_Overview_and_Early_Results.pdf
87) "‘Keys' to GOCE satellite handed over," Nov. 25, 2009, URL: http://www.esa.int/SPECIALS/GOCE/SEM8LT60A2G_0.html
88) "GOCE delivering data for best gravity map ever," Sept. 30, 2009, URL: http://www.esa.int/esaCP/SEMNBNKIWZF_index_0.html
89) Stefano Cesare, Miguel Aguirre, Andrea Allasio, Bruno Leone, Luca Massotti, Danilo Muzi, Pierluigi Silvestrin, "The measurement of Earth's gravity field after the GOCE Mission," Proceedings of the 60th IAC (International Astronautical Congress), Daejeon, Korea, Oct. 12-16, 2009, IAC-09.B1.2.7
90) "GOCE achieves drag-free perfection," May 26, 2009, URL: http://www.esa.int/esaCP/SEMGUV0OWUF_index_0.html
91) "GOCE's ‘heart' starts beating," ESA, April 8, 2009, URL: http://www.esa.int/SPECIALS/GOCE/SEMUKIEH1TF_0.html
92) "GOCE completes early orbit phase," ESA, March 20, 2009, URL: http://www.esa.int/SPECIALS/GOCE/SEMZ8TJTYRF_0.html
93) M. Drinkwater, M. Kern, "Calibration & Validation Plan for L1b Data Products," EOP-SM/1363/MD-md, issue: 1.2, 11.05.2006, URL: http://esamultimedia.esa.int/docs/GOCE_CalValPlan_L1b_v1_2.pdf
94) J.-P. Marque and the GOCE team of ONERA, "Six Ultra Sensitive Accelerometers for the GOCE Mission," Proceedings of IAC 2004, Vancouver, Canada, Oct. 4-8, 2004, IAC-04-B.3.03
95) http://www.esa.int/esaLP/SEMQLEZ7QQE_LPgoce_0.html
96) J.-P. Marque, B. Christophe, F. Liorzou, G. Bodovillé, B. Foulon,. J. Guérard, V. Lebat, The Ultra Sensitive Accelerometers of the ESA GOCE Mission," Proceedings of the 59th IAC (International Astronautical Congress), Glasgow, Scotland, UK, Sept. 29 to Oct. 3, 2008, IAC-08-B1.3.7
97) Guillaume Bodoville, Vincent Lebat, "Development of the accelerometer sensor heads for the GOCE satellite: Assessment of the critical items and qualification," Proceedings of the 61st IAC (International Astronautical Congress), Prague, Czech Republic, Sept. 27-Oct. 1, 2010, IAC-10.C2.1.13
98) Martine Lutz, Laurence Cornillon, Laurent Pambaguian, Yann Vitupier, "Evaluation of ultrastable Carbon/Carbon sandwich structures joined with ceramic cement," Proceedings of the 61st IAC (International Astronautical Congress), Prague, Czech Republic, Sept. 27-Oct. 1, 2010, IAC-10.C2.4.10
99) Bernard Foulon, Bruno Christophe, Yannick Bidel, "Two Decades of electrostatic accelerometers for space geodesy: past or future?," Proceedings of IAC 2011 (62nd International Astronautical Congress), Cape Town, South Africa, Oct. 3-7, 2011, paper: IAC-11-B1.3.4
100) A. Zin, S. Landenna, A. Conti, "Satellite to Satellite Tracking Instrument," 3rd International GOCE User Workshop, Nov. 6-8, 2006, ESA/ESRIN, Frascati, Italy, URL: http://earth.esa.int/workshops/goce06/participants/375/pres_zin_375.pdf
101) H. Bock, A. Jäggi, D. Svehla, G. Beutler, U. Hugentobler, P. Visser, "Precise Orbit Determination for the GOCE Satellite Using GPS," Committee on Space Research 36th COSPAR Scientific Assembly Beijing, China, July 16-23, 2006
102) R, Blott, N. Wallace, H. Simpson, M Hutchins, "Ion Engine Products and Application by QinetiQ Ltd.," Proceedings of the 57th IAC/IAF/IAA (International Astronautical Congress), Valencia, Spain, Oct. 2-6, 2006, IAC-06-C.4.4.05
103) C. H. Edwards, N. C. Wallace, C. Tato, P. van Put, "The T5 Ion Propulsion Assembly for Drag Compensation on GOCE," Proceedings of the 2nd International GOCE User Workshop, Frascati, Italy, March 8-10, 2004, URL: http://earth.esa.int/goce04/goce_proceedings/46_edwards.pdf
104) C. Tato, J. Palencia, F. de La Cruz, "The Power Control Unit for the Propulsion Engine of GOCE Program," Proceedings of the 4th International Spacecraft Propulsion Conference (ESA SP-555), June 2-9, 2004, Chia Laguna (Cagliari), Sardinia, Italy
105) G. Saccoccia, "European Activities in Electric Propulsion," 39th AIAA/ASME/SAE/ASEE Joint Propulsion Conference and Exhibit, Huntsville, Alabama, July 20-23, 2003, AIAA-2003-5271
106) R. Blott, N. Wallace, H. Simpson, M. Hutchins, "Ion Engine Products and Applications by Qinetiq Ltd.," Proceedings of the 57th IAC/IAF/IAA (International Astronautical Congress), Valencia, Spain, Oct. 2-6, 2006, IAC-06-C4.4.05
107) Neil Wallace, Chris Saunders, Michael Fehringer, "The ESA GOCE mission and the T5 ion propulsion assembly," Proceedings of Space Propulsion 2010, San Sebastian, Spain, May 3-6, 2010
108) P. Ditmar, X. Liu, R. Klees, "Synergy of the GOCE and GRACE satellite missions," 3rd International GOCE User Workshop, Nov. 6-8, 2006, ESA/ESRIN, Frascati, Italy, URL: http://earth.esa.int/goce06/participants/142/pres_ditmar_142.pdf
109) R. Floberghagen, M. Drinkwater, R. Haagmans, M. Kern, "GOCE's Measurements of the Gravity Field and Beyond," ESA Bulletin, No 133, February 2008, pp. 24-31, URL: http://www.esa.int/esapub/bulletin/bulletin133/bul133d_floberghagen.pdf
110) "GOCE Ground Segment," URL: http://www.esa.int/esaLP/ESAPGO1VMOC_LPgoce_0.html
111) J. A. González, A. Canales, J. R. Acarreta, E. López-Hazas, D. de Candia, S. Salzo, R. Floberghagen, "The GOCE Calibration and Monitoring Facility (CMF)," 3rd GOCE User Workshop, ESA ESRIN, November 6-8, 2006, URL: http://earth.esa.int/goce06/participants/271/pres_gonzalez_271.pdf
112) Dirk Kuijper, M. A. García Matatoros, "GOCE Flight Dynamics Operations from an Orbital Perspective," Proceedings of the 22nd International Symposium on Space Flight Dynamics (ISSFD), Feb. 28 - March 4, 2011, Sao Jose dos Campos, SP, Brazil, URL: [web source no longer available]
Spacecraft Launch Mission Status Sensor Complement Ground Segment References Back to top