FY-3 (FengYun-3)
EO
Cloud profile and rain radars
Atmosphere
Ocean
The FenYung-3 (FY-3) series is the second generation of Chinese polar-orbiting meteorological satellites, following on from the FY-1 series. The series has been developed collaboratively by CMA (Chinese Meteorological Administration) and CNSA (China National Space Administration) and consists of five satellites, FY-3A, FY-3B, FY-3C, FY-3D and FY-3E, launched in May 2008, November 2010, September 2013, November 2017 and July 2021, respectively. FY-3A was decommissioned in 2018, and an additional five satellites (FY-3F, FY-3G, FY-3H, FY-3I and FY-3J) are scheduled to be launched between 2022 and 2025. The series objectives are to provide global measurements of 3-D temperature and moisture soundings, cloud and precipitation parameters, meteorological and hydrological events, biosphere anomalies and geophysical parameters in support of global change and climate monitoring.
Quick facts
Overview
| Mission type | EO |
| Agency | NRSCC, NSMC-CMA |
| Mission status | Operational (extended) |
| Launch date | 27 May 2008 |
| Measurement domain | Atmosphere, Ocean, Land, Gravity and Magnetic Fields, Snow & Ice |
| Measurement category | Cloud type, amount and cloud top temperature, Liquid water and precipitation rate, Atmospheric Temperature Fields, Cloud particle properties and profile, Ocean colour/biology, Radiation budget, Multi-purpose imagery (land), Surface temperature (land), Vegetation, Albedo and reflectance, Gravity, Magnetic and Geodynamic measurements, Surface temperature (ocean), Atmospheric Humidity Fields, Ozone, Trace gases (excluding ozone), Sea ice cover, edge and thickness, Soil moisture, Snow cover, edge and depth, Ocean surface winds, Atmospheric Winds |
| Measurement detailed | Cloud top height, Precipitation Profile (liquid or solid), Ocean chlorophyll concentration, Cloud cover, Precipitation intensity at the surface (liquid or solid), Cloud type, Cloud ice content (at cloud top), Color dissolved organic matter (CDOM), Cloud imagery, Cloud liquid water (column/profile), Land surface imagery, Upward short-wave irradiance at TOA, Upward long-wave irradiance at TOA, Vegetation type, Earth surface albedo, Downwelling (Incoming) solar radiation at TOA, Land cover, Atmospheric specific humidity (column/profile), O3 Mole Fraction, Atmospheric temperature (column/profile), Land surface temperature, Sea surface temperature, CH4 Mole Fraction, N2O (column/profile), Wind vector over sea surface (horizontal), Ocean suspended sediment concentration, Sea-ice cover, Snow cover, Soil moisture at the surface, Wind speed over sea surface (horizontal), Cloud top temperature, Normalized Differential Vegetation Index (NDVI), Wind profile (horizontal), CO2 Mole Fraction, Electron density profile, Auroral Emissions, Wind profile (vertical), Height of tropopause, Total electron content (TEC), Air temperature (near surface), Temperature of tropopause, Downward short-wave irradiance at Earth surface |
| Instruments | SES, PR, MWRI, MWHS-1, MWHS-2, MERSI, TOU/SBUS, ERM-1, ASI, ERM-2, MWTS-2, MWTS-1, SWS/SEM/IMS , VIRR, MERSI-2, MERSI-3, SWS/Tri-IPM , SSIM, MVIRS, GNOS, WindRAD, SIM-2, MERSI-LL, OMS, SIM, GAS, IRAS, HIRAS, SEM, SWS/SEM/HEPD, MERSI-S, WAI |
| Instrument type | Cloud profile and rain radars, Imaging multi-spectral radiometers (vis/IR), Earth radiation budget radiometers, Space environment, Scatterometers, Atmospheric chemistry, Imaging multi-spectral radiometers (passive microwave), Atmospheric temperature and humidity sounders |
| CEOS EO Handbook | See FY-3 (FengYun-3) summary |
Summary
Mission Capabilities
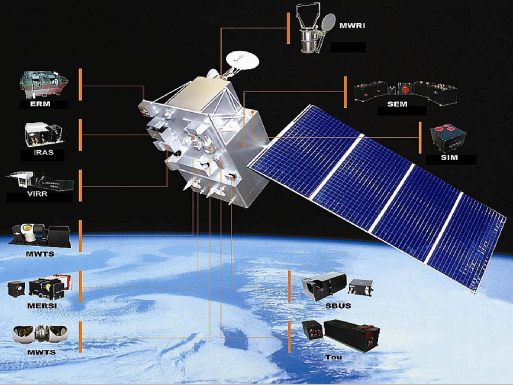
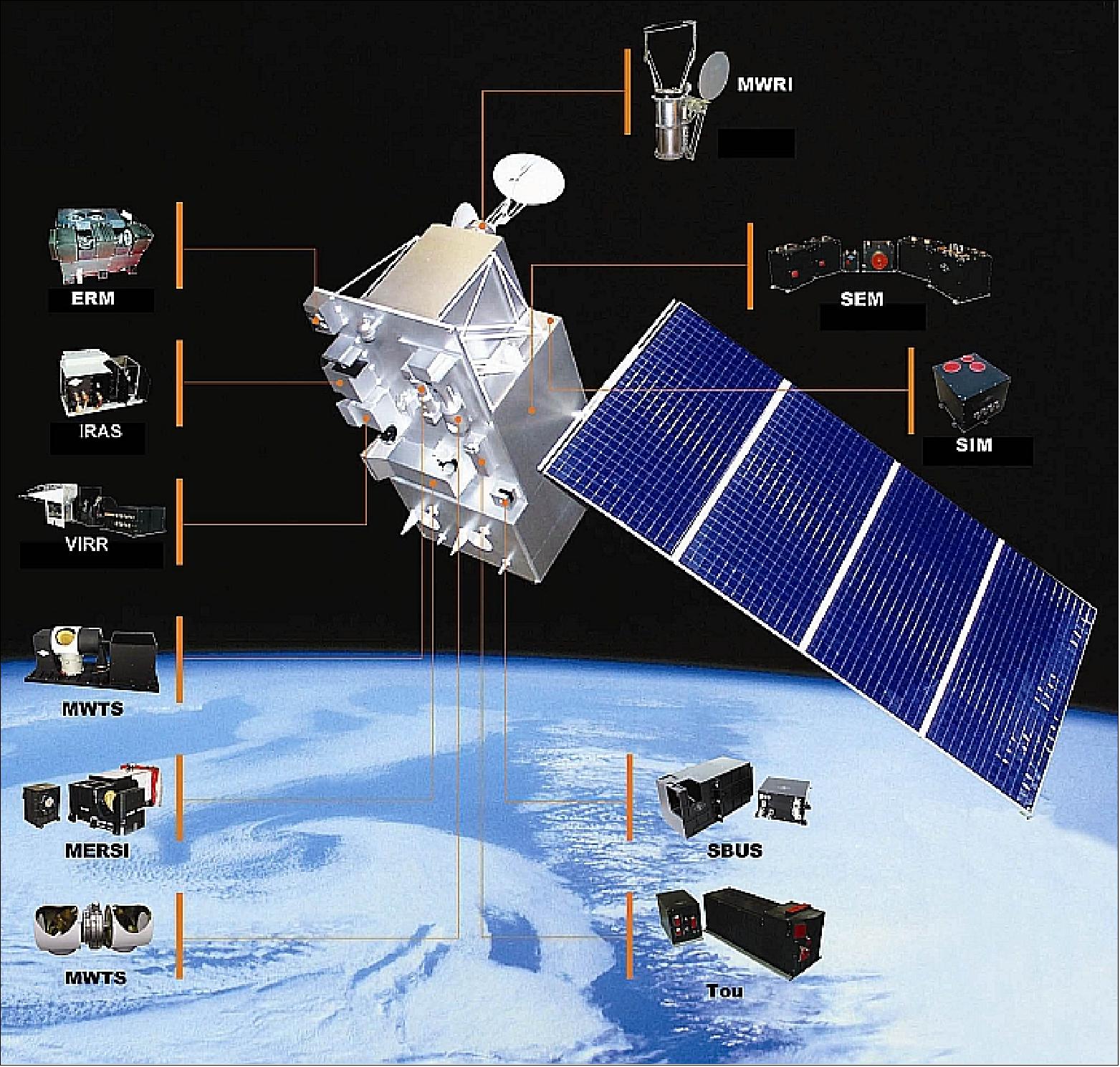
Initially, FY-3A and FY-3B were intended to be experimental missions with a reduced sensor complement, however, were later equipped with the full sensor complement. Each spacecraft has 12 instruments onboard which each cover a range of mission capabilities including the sounding, ozone and imaging missions.
Key sounding sensor complements include:
- Infrared Atmospheric Sounder (IRAS),
- Microwave Temperature Sounder (MWTS),
- Microwave Humidity Sounder (MWHS), which are used for atmospheric temperature and humidity profile, total ozone content, aerosol and surface parameters.
- To analyse total ozone distribution, ozone profile and total ozone, a Total Ozone Unit (TOU) and Solar Backscatter Ultraviolet Sounder (SBUS) are flown onboard each satellite.
- For imaging purposes, FY-3 satellites carry a Visible and Infrared Radiometer (VIRR), Medium Resolution Spectral Imager (MERSI), Microwave Radiation Imager (MWRI), and a Visible and Infrared Radiometer (VIRR).
- There is also an Earth Radiation Measurement (ERM), Space Environment Monitor (SEM) and Solar Irradiation Monitor (SIM) onboard each satellite.
Performance Specifications
As a result of the data collected by FY-3 satellites, researchers in environmental fields have been able to utilise stable, reliable and accurate remote sensing products. The advantages of the FY satellites include a high temporal resolution and large variety of band choices, for a large variety of applications.
FY-3 satellites undergo a sun-synchronous near-circular orbit with an average altitude of 836.4 km and inclination of 98.75°. Each has a period of approximately 101 minutes, with Local solar Time on Descending Node (LTDN) differing for each satellite within the range 1000 to 1400 hours.
Space and Hardware Components
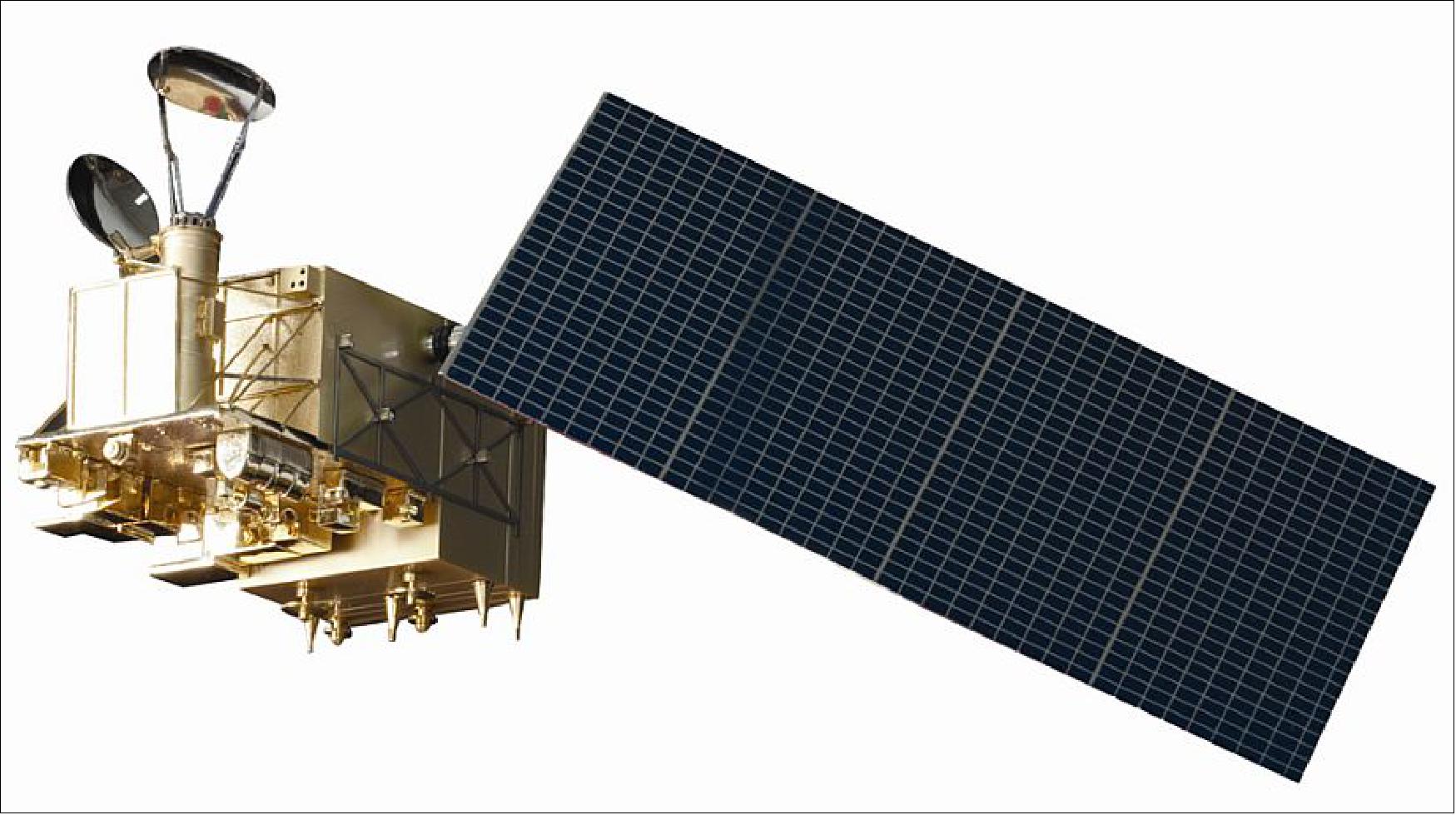
The FY-3 series spacecraft, developed at Shanghai Academy of Spaceflight Technology (SAST), features a 2450 kg hexahedron bus with one solar panel mounted on one side of the satellite’s main body. Each satellite has three-axis stabilisation, a star sensor for attitude sensing and active thermal control. Built with a design life of three years, the Telemetry, Tracking and Command (TT&C) system uses a unified S-band system assisted by GPS for all RF (Radio Frequency) communications.
There are four FY-3 satellites currently operational: FY-3B, FY-3C, FY-3D and FY-3E, with experimental mission FY-3A decommissioned in March 2018.
FY-3 (FengYun-3) 2nd Generation Polar Orbiting Meteorological Satellite Series
Spacecraft Launch Mission Status Sensor Complement Ground Segment References
The FY-3 series of CMA/NSMC (China Meteorological Administration/National Satellite Meteorological Center) represents the second generation of Chinese polar-orbiting meteorological satellites (follow-on of FY-1 series). The FY-3 series represents a cooperative program between CMA and CNSA (China National Space Administration); it was initially approved in 1998 and entered full-scale development in 1999. Key aspects of the FY-3 satellite series include collecting atmospheric data for intermediate- and long-term weather forecasting and global climate research. 1) 2) 3) 4) 5) 6) 7) 8) 9) 10) 11) 12) 13) 14)
The overall objectives of the FY-3 series are:
• To provide global measurements of 3-D temperature and moisture soundings of the atmosphere, and to measure cloud and precipitation parameters in support of NWP (Numerical Weather Prediction).
• To provide global imagery of large-scale meteorological and/or hydrological events and biosphere environment anomalies
• To provide geophysical parameters in support of global change and climate monitoring.
• To provide global and local meteorological information for specialized meteorological users working in services of aviation, marine, etc.
• To collect and relay environmental data from the ground segment.
• The FY-3 operational phase will have two polar-orbiting satellites in service (one in the AM and one in the PM orbit, the payload will be different for AM/PM satellites, and time slots could be coordinated through WMO).
Development Phases
There are two development phases considered for the FY-3 series
1) Experimental phase in the time period 2008-2010 with two spacecraft launches. These satellites have only limited sounding capabilities.
- FY-3A launch on May 27, 2008, LTDN (Local Time on Descending Node) = 10:00 hours.
- FY-3B launch on Nov. 4, 2010, LTDN = 14:00 hours.
2) Operational service phase beyond 2012. These satellites will have enhanced sounding and imaging capabilities.
- FY-3C launch on Sept. 23, 2013, LTDN = 10:00 hours.
- FY-3D launch on November 14, 2017, LTDN = 14:00 hours.
- FY-3E launch on July 4 2021, LTDN = 10:00 hours.
- FY-3F launch on August 4, 2023, LTDN = 10:00 hours.
- FY-3G launch on April 16, 2023, LTDN = 10:00 hours.
The CMA plans call for a constellation of two FY-3 spacecraft in orbit, one in the morning slot (AM) and one in the afternoon slot (PM).
Spacecraft | Launch (projected launch) | LTDN (Local Time on Descending Node) | Mission Service Type |
FY-3A | May 27, 2008 | 10:00 hours | R&D (Experimental) |
FY-3B | Nov. 04, 2010 | 13:30 hours | R&D (Experimental) |
FY-3C | Sept. 23, 2013 | 10:00 hours | Operational mission with MWHS-II |
FY-3D | Nov. 14, 2017 | 14:00 hours | Operational |
FY-3E | July 04, 2021 | 10:00 hours | Operational |
FY-3F | August 04, 2023 | 10:00 hours | Operational |
| FY-3G | April 16, 2023 | 10:00 hours | Operational |
In comparison with FY-1 spacecraft series, the principal improvements in the FY-3 series include:
1) Atmospheric-sounding capacity
2) Microwave imaging capacity
3) Optical imaging with spatial resolution from 1 km to 250 m
4) Atmospheric composition detecting capacity
5) Radiation budget measuring capacity
6) Global data acquisition from within one day to within two to three hours.
The FY-3 series represents in fact a new chapter in the history of Chinese meteorological satellites and satellite meteorology. The FY-3 series provides global air temperature, humidity profiles, and meteorological parameters such as cloud and surface radiation required in producing weather forecasts, especially in making medium numerical forecasting.
The FY-3 series satellites monitor large-scale meteorological disasters, weather-induced secondary natural hazards and environmental changes, and provides geophysical parameters for scientific research in climate change and its variability, climate diagnosis, and predictions. The FY-3 series renders global and regional meteorological information for aviation, ocean navigation, agriculture, forestry, marine activities, hydrology, and many other economic sectors.
Note: The FY-3C spacecraft is equipped with all of the 11 payloads, but MWTS is upgraded to MWTS-II, MWHS to MWHS-II, and a new payload, GNOS (GNSS Occultation Sounder), is on board FY-3C. MWTS-II will increase the channels from 4 to 13, and MWHS-II will increase the channels from 5 to 15. GNOS will improve the measured temperature and moisture profiles in the upper atmosphere. 15)
Tentative Schedule for Future FY LEO Series:
For the FengYun LEO satellites, after FY-3A/B, the future FY-3 models (FY-3C/D/E/F) have been approved. CMA plans to develop certain observational capabilities for the follow-up models, for instance, the WindRAD for sea winds, and the GAS for greenhouse gases absorption measurement. The atmospheric sounding shall be enhanced by replacing the current IRAS with HIRAS (Hyperspectral Infrared Atmospheric Sounder) and by the deployment of radio occultation sounder GNOS. Also, there is a plan to develop a rainfall measurement satellite: FY-3RM (2019), that shall carry Ku/Ka band radar, microwave sounding and imaging instruments. 16)
Feasibility Study on FY-3 Use of Early Morning Orbit:
FY-3 series serves at least for another 15 years with the additional four satellites. Sixteen (16) improved or new instruments will be configured on FY-3C/D/E/F. It is unrealistic for CMA to fly three orbits (AM, PM, and Early Morning) at the same time. Since FY-3C & 3D are being manufactured now, there is no chance to make them changed for the Early Morning orbit. FY-3E is possibly the only opportunity for CMA to fly early morning orbit before 2020.
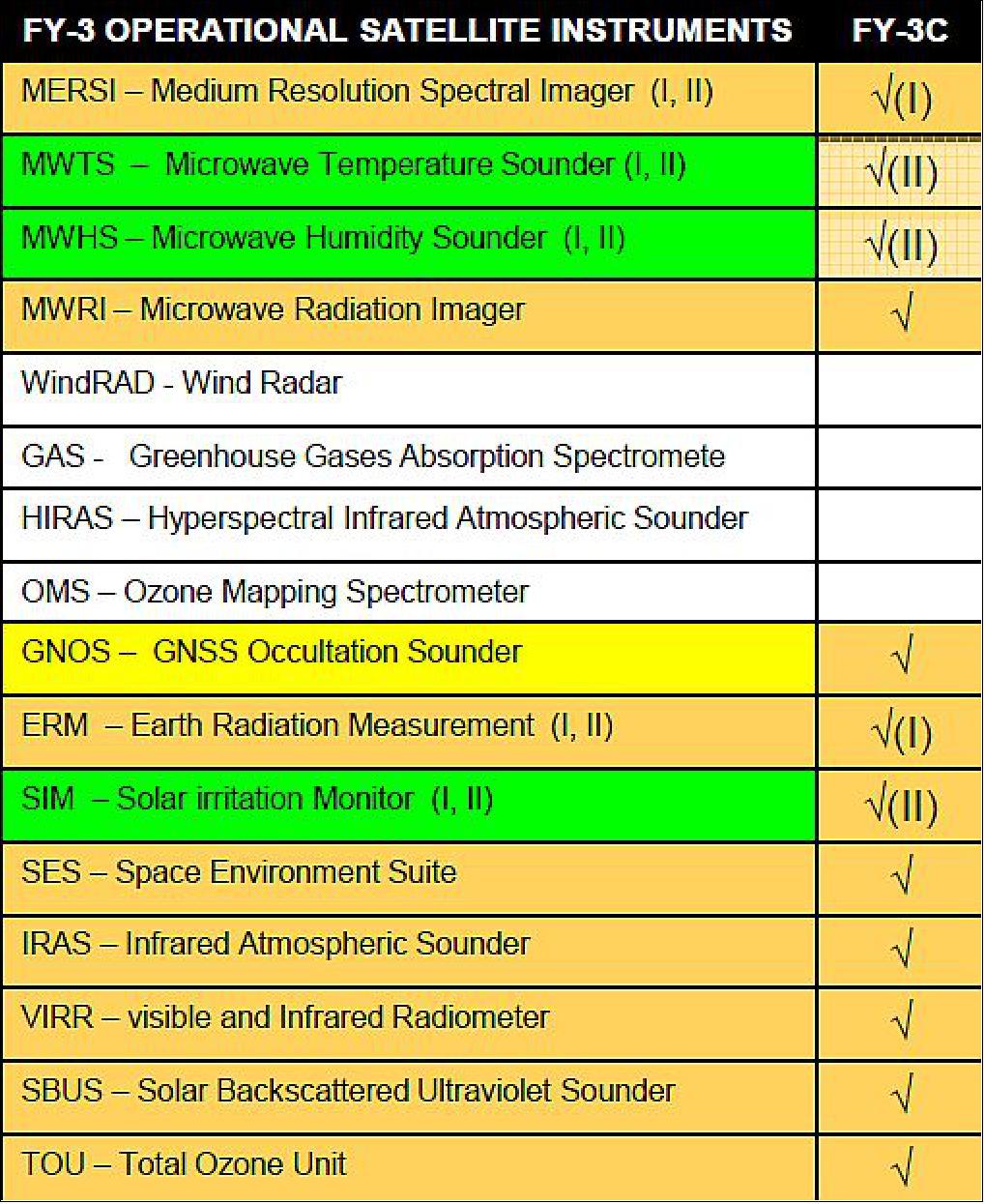
FY-3 Operational Satellite Instruments | FY-3C | FY-3D | FY-3E | FY-3F |
MERCI (Medium Resolution Spectral Imager) (I, II) | √ (I) | √ (II) | √ (II) | √ (II) |
MWTS (Microwave Temperature Sounder), (II) | √ | √ | √ | √ |
MWHS (Microwave Humidity Sounder). (II) | √ | √ | √ | √ |
MWRI (Microwave Radiation Imager) | √ | √ |
| √ |
WindRad (Wind Radar) |
|
| √ |
|
GAS (Greenhouse Gases Absorption Spectrometer) |
| √ |
| √ |
HIRAS (Hyperspectral Infrared Atmospheric Sounder) |
| √ | √ | √ |
OMS (Ozone Mapping Spectrometer) |
|
| √ |
|
GNOS (GNSS Occultation Sounder) | √ | √ | √ | √ |
ERM (Earth Radiation Measurement), (I, II) | √ (I) |
| √ (II) |
|
SIM (Solar Irradiation Monitor), (I, II) | √ (I) |
| √ (II) |
|
SES (Space Environment Suite) | √ | √ | √ | √ |
IRAS (Infrared Atmospheric Sounder) | √ |
|
|
|
VIRR (Visible and Infrared Radiometer) | √ |
|
|
|
SBUS (Solar Backscatter Ultraviolet Sounder) | √ |
|
|
|
TOU (Total Ozone Unit) | √ |
|
|
|
Spacecraft
The FY-3 series spacecraft are being designed and developed at SAST (Shanghai Academy of Spaceflight Technology). The spacecraft structure is a hexahedron of 4.4 m x 2.0 m x 2.0 m in a stowed configuration and 4.4 m x 10 m x 3.8 m in the deployed state. The total spacecraft launch mass is estimated to be 2450 kg. The FY-3 features one solar panel mounted on one side of the satellite's main body (making the span length of the satellite 10 m in flight configuration). The attitude control of the satellite employs three-axis stabilization (bias momentum control) with a pointing precision of 50 m on the ground. The ADCS (Attitude Determination and Control Subsystem) employs a star sensor for attitude sensing.
The FY-3 bus contains three major modules: a service module, a payload module, and a propulsion module. The spacecraft design life is 3 years.
Spacecraft structure | Separated bay design, the combined structure of centre supporting cylinder and guest board for service module and propulsion module; combined structure of baffle plate and truss. |
Thermal control | Thermal design for separated bay, relying mainly on passive thermal control assisted by active thermal control. |
Spacecraft dimensions | Body size: 4400 mm x 2000 mm x 2000 mm (x, y, z) |
Attitude and orbit control | Attitude pointing accuracy = 0.3º (x, y, z) |
Power supply | The solar array of 22.464 m2 with an output power of 2.48 kW (EOL), average = 1100 W |
RF communications | The TT&C system uses a unified S-band system assisted by GPS |
Data transmission | Real-time: L-band with BPSK modulation, data rate = 4.2 Mbit/s |
Onboard data recorder | 144 Gbit capacity |
Design life | 3 years with a goal of 4 years |
Spacecraft mass | 2300 kg at launch, the amount of hydrazine is about 64 kg |
Launch
FY-3A
The launch of the first satellite in the series, FY-3A, took place on May 27, 2008. The spacecraft was launched on an LM-4C launch vehicle from the Taiyuan Launch Center. 17)
The orbit of FY-3A: Sun-synchronous near-circular orbit, the average altitude of 836.4 km, inclination of 98.75º, period = 101.49 min, local solar time on descending node at 10:10 hours, 14.1735 orbits/day, the tropical cycle of about 6 days.
FY-3B
The FY-3B spacecraft was launched on Nov. 4, 2010 (UTC). The spacecraft was launched on an LM-4C launch vehicle from the Taiyuan Launch Center.
The orbit of FY-3B: Sun-synchronous near-circular orbit, the average altitude of 836.4 km, inclination of 98.75º, period = 101.49 min, local solar time on ascending node at 13:30 hours, 14.1735 orbits/day, the tropical cycle of about 6 days.
FY-3C
The FY-3C spacecraft was launched on Sept. 23, 2013. The spacecraft was launched on an LM-4C launch vehicle from the Taiyuan Launch Center. 18) 19)
The orbit of FY-3C: Sun-synchronous near-circular orbit, an average altitude of 836 km, inclination of 98.75º, period = 101.49 min, LTDN (Local solar Time on Descending Node) at 10:00 hours, 14.1735 orbits/day, the tropical cycle of about 6 days.
RF communications:
The spacecraft communications links are S-band, L-band and X-band. Commands are via S-band only. Command and telemetry links are active in parallel. The S-band section of the communications subsystem provides primary telemetry and command (TT&C) service to and from FY-3A ground stations. The L-band and X-band section of the communication subsystem provides the science and engineering data downlink for the FY-3A common spacecraft.
Three modes of operation are provided:
1) DPT (Delayed Picture Transmission) - a direct playback mode. All the stored science and engineering data onboard (except the MERSI data) is transmitted at a high data rate of 110 Mbit/s, to the NSMC national ground playback stations (Beijing, Guangzhou, Urumuqi, Jamusi, and Kiruna) whenever the satellite is passing over the acquisition range of these stations. The transmission band frequency will be within the range of 8025 - 8400 MHz, encoding: CONV (7, ¾).
2) MPT (Mission Picture Transmission). This mode provides the direct broadcast in X-band. The main function of this data format is for real-time broadcasting of the science and engineering data of the MERSI instrument with a data rate of 18.7 Mbit/s to any receiving station within view of the spacecraft. The broadcasting band frequency is in the range 7750-7850 MHz, QPSK modulation, encoding: CONV (7, ¾).
3) AHRPT (Advanced High-Resolution Picture Transmission) -also referred to as HRPT. The AHRPT transmission band frequency is within the frequency range of 1698-1710 MHz at the data rate of 4.2 Mbit/s (real-time global broadcasting). The modulation is QPSK (Quadra‐Phase Shift Keying), encoding: CONV (7, ¾), and real-time broadcasting. 20)
FY-3D
The FY-3D spacecraft was launched on 14 November 2017 (18:35 UTC; 2:35 Beijing Time on 15 Nov. 2017) on a LM-4C launch vehicle from the TSLC (Taiyuan Satellite Launch Center, China. 21)
The orbit of FY-3D: Sun-synchronous near-circular orbit, an average altitude of 836 km, inclination of 98.75º, period = 101.49 min, LTAN at 14:00 hours.
From the view of consistency of meteorological satellite sequence, FY-3D satellite will replace FY-3B which has been operated for 8 years in space, launch network observation with FY-3C, and stand on duty with FY-4A at 800 km and 36,000 km, respectively, constituting the new-generation high-low orbit meteorological satellite constellation.
FY-3E
The FY-3E spacecraft was launched on 4 July 2021 at 23:28 UTC (corresponding to 7:28 Beijing Time on 5 July) according to CASC (China Aerospace Science and Technology Corp.) on a Long March 4C vehicle from JSLC (Jiuquan Space Launch Center) in China. 22)
The orbit of FY-3E: Sun-synchronous near-circular orbit, altitude of ~ 800 km, the inclination of 98.7º. FF-3E crosses the equator in the early morning, local time, making it the first civilian weather satellite to launch directly into an early morning orbital plane.
The China Meteorological Administration said Fengyun 3E, designed for a service life of at least eight years, will fill a gap in the early morning orbit.
Chinese officials said the Fengyun 3E satellite joins two other Chinese polar-orbiting weather observatories, Fengyun 3C and Fengyun 3D, flying in mid-morning and afternoon orbits. Together, the satellites provide global weather measurements to feed into numerical weather prediction models at six-hour intervals.
Fengyun 3E hosts 11 payloads, including three brand-new weather monitoring instruments, according to CMA.
- The satellite’s payload includes microwave and infrared sounders to measure temperature and moisture profiles in the atmosphere, an instrument to derive atmospheric conditions and ocean winds using reflected navigation satellite signals, and a spectral imager to observe clouds and measure sea surface temperatures, a driver of tropical cyclone development.

FY-3G
The FY-3G spacecraft was launched on 16 April 2023, at 9:36 a.m on a Long March-4B rocket, from the Jiuquan Satellite Launch Center in northwest China.
The orbit of FY-3G: Drifting orbit, an average altitude of 407 km and an inclination of 50º
FY-3F
The FY-3F spacecraft was launched on 4 August 2023, at t 11:47 a.m on a Long March-4C rocket, from the Jiuquan Satellite Launch Center in northwest China.
The orbit of FY-3F: Sun-synchronous, an average altitude of 836 km and an inclination of 98.8º.
Spacecraft | Orbit | Status | Launch |
FY-3A (experimental) | SSO, AM (10:15 hrs on LTDN) | R&D, nominal operations | May 27, 2008 |
FY-3B (experimental) | SSO, PM (14:40 hrs on LTAN) | R&D, nominal operations | November 5, 2010 |
FY-3C | SSO, AM (10:00 hrs on LTDN) | 1st operational mission in series | September 23, 2013 |
FY-3D | SSO, PM (14:00 hrs on LTAN) | 2nd operational mission | November 14, 2017 |
FY-3E | SSO, EM (Early Morning) | 3rd operational mission | July 4, 2021 |
FY-3F | SSO, PM | 5th operational mission | August 4, 2023 |
FY-3 RF 1/2 (experimental) | Inclined orbit | planned R&D mission | 2022-2025, TBD |
FY-3G | Drifting | 4th operational mission | April 16, 2023 |
FY-3H | SSO, EM (Early Morning) | planned operational mission | 2023-2025, TBD |
To support global NWP (Numerical Weather Prediction) services within the coordination framework of CGMS (Coordination Group for Meteorological Satellites), Dr Zheng made a commitment in WMO (World Meteorological Organization) EC-66 in 2014 23) that CMA will adjust its satellite plan to develop an early morning orbit mission. Hence, the FY-3E mission has now been changed to an early morning orbit satellite rather than the previously assigned morning orbit (AM).
Mission Status
• August 4, 2023: The FY-3F spacecraft was launched from the Jiuquan Satellite Launch Center, in China. As the new member of “morning satellite” family among FY meteorological satellites, FY-3F will undertake the in-orbit operation of FY-3C, reinforce atmospheric component quantitative sounding, climate change monitoring, serving weather forecasting, atmospheric chemistry operation, research on the basis of ensuring near-earth orbit global imaging observation, and vertical atmospheric sounding operation. 61)
• April 16, 2023: The FY-3G spacecraft was launched from the Jiuquan Satellite Launch Center, in China. It is the third precipitation measurement satellite in the world which can realize proactive measurement. Since then, China has become the only country in the world which operates meteorological satellites in four near-earth orbits. 60)
• July 12, 2021: With more than 30 years of Earth observational data freely available to international partners, the Fengyun Meteorological Satellite program works as part of Earth's operational observation system, along with the United States National Oceanic and Atmospheric Administration satellites and Europe's polar-orbiting meteorological satellite series to provide a more complete picture weather events and their global impacts. 24)
- To highlight the Fengyun satellites' data applications and to encourage further research among domestic and international collaborators, Advances in Atmospheric Sciences published a special issue titled, "Fengyun Meteorological Satellites: Data, Application and Assessment," on 10 July 2021. It's the first time international communities' evaluation and application of Fengyun satellites are collectively published in a journal.
- The special issue is a culmination of research initiated at a 2019 conference for international users to develop a comprehensive, integrated approach for exchanging ideas and promoting global applications of satellite data, according to Peng Zhang, the deputy director of the National Satellite Meteorological Center of the China Meteorological Administration. More than 200 people representing more than 30 countries attended. Since then, international users have applied the data in various research projects, and Zhang said the intention is for collaborations to grow as the data capabilities expand.
- "In the last decade, great efforts have been made to improve the performance of the satellites and their on-board instrumentation," said Zhang, who organized the special issue. "With extensive, multi-modal observational capabilities on Fengyun satellites, international communities have and will continue to make use of this data."
- Such capabilities include image navigation, radiometric calibration, multiband optical imaging, atmospheric sounding, microwave imaging, hyperspectral trace gas detection, full-band radiation budget measuring and more — in short, an extensive list of ways to monitor weather events and atmospheric changes of Earth. Zhang also co-authored a data description paper (Ref. 26), which summarizes not only the data available but how international users can access it.
- The critical factor, Zhang said, is in how these data can be applied. The rest of the special issue features work undertaken in each of the 2019 conference's sections: retrieval algorithms, used to interpret raw data; products validation, which cross-references satellite data with earth-based observations; numerical weather predictions, or how to predict future weather using models of current atmospheric conditions; and climate and environmental predictions, which involves using satellite data to estimate surface effects of atmospheric changes.
- On 4 July, Fengyun 3E, the world's first early morning orbit weather satellite was launched, and it will improve global weather forecast by filling in the data gap at a certain time of the day and assist in achieving 100 per cent global data coverage every six hours.
- "Fengyun satellites will continue to play an important role in Earth sciences in the future, especially as the international community continues to collaborate and apply this data to research that benefits us all," Zhang said. "The new epoch for comprehensive Earth observations has begun."
Chinese References about the Fengyun Meteorological Satellite Series 25) 26)
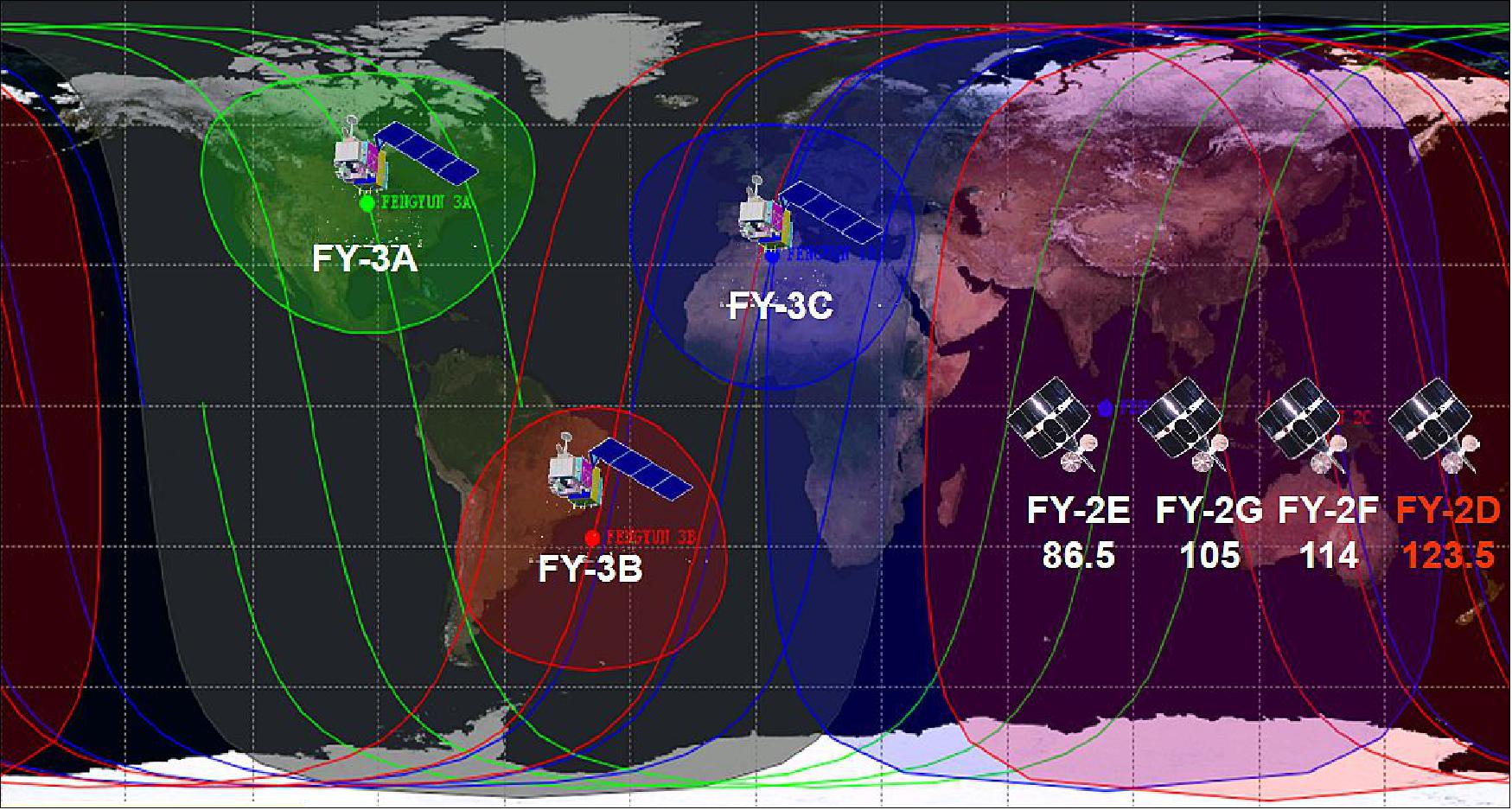
As of 2021, seven FY satellites operate in orbit, including three FY-2 satellites, three FY-3 satellites, and one FY-4 satellite. During the past decade, the new-generation FY polar and GEO satellites, FY-3A in 2008, and FY-4A in 2016 have been in operation. Multiple advanced instruments are mounted on the platform of the new-generation FY satellites, including multiband optical imaging, atmospheric sounding, microwave imaging, hyperspectral trace gas detection, and full-band radiation budget measuring devices. 25)
Meanwhile, the second-generation satellites focus on the accuracy and precision of satellite measurements. For example, the performance of the latest polar satellite FY-3D (launched in 2017) is comparable to the well-known EOS series of NASA. High-quality image navigation and radiometric calibration is essential to support various quantitative data applications, such as quantitative remote sensing and satellite data assimilation. The new epoch for comprehensive Earth observations has begun.
To facilitate domestic and international use of FY satellite data and products, the China Meteorological Administration(CMA) and China National Space Administration (CNSA) initiated the FY Satellite International User Conference. The purpose of this conference was to develop a comprehensive mechanism for international FY satellite users to exchange their applications, discuss an integrated approach to promote global applications of FY satellite data, and to better serve countries and users along the “Belt and Road”. More than 200 attendees from over 30 countries participated in the first conference during 15–17 November 2019 in Haikou, Hainan Province, China.
Compared with the first-generation polar orbital satellites in the FY-1 series, the new-generation polar orbital satellite FY-3 series expands the single onboard instrument to include more than 10 instruments. FY-3A and FY-3B have 11 instruments onboard, FY-3C has 12 instruments onboard, and FY-3D has 10 instruments onboard. The FY-3 series provides higher-resolution images with more spectral coverage from the ultraviolet, visible, infrared, to microwave bands. 26)
Based on space-ground architecture, the National Satellite Meteorological Center (NSMC) has developed a comprehensive data service system that has been available to the public since 2005. After more than 30 years of development, since the first FY satellite was launched, the usage of FY satellite data has dramatically increased, not only in the meteorological community but also in remote sensing applications and other benefitting fields. With the promotion of open access to the FY satellite data, many new potential applications have been emphasized. After over three decades of development, FY satellites have recorded and compiled extremely valuable information over a long period. These long-term datasets are especially useful in meteorological analysis, climate change monitoring, environment change detection, earth surface observation, and other related fields.
Summary
As a result of the development of the FY meteorological satellites, researchers in the environmental fields have been able to utilize stable, reliable, and accurate remote sensing products. Over the next five years, six additional FY meteorological satellites will be developed and launched, and the observation area will be expanded. Meanwhile, the observation interval and capabilities will also increase. These upgrades will improve wildfire, lightning, and aerosol monitoring product quality and increase the number of potential applications.
Many of these products have been generated to monitor environment-related parameters using the capabilities of the FY meteorological satellites. Many efforts have been made to improve the data quality, timeliness, spatial resolution, and acquisition during the processing of the FY meteorological satellite ground segment. Compared with the same types of products generated by other satellites, vegetation and aerosol products have shown good accuracy and reliability. The advantages of the FY satellites include a high temporal resolution and more band choices. The lightning products are unique and provide a new parameter for analyzing conventions. Wildfire products have been tested and used to develop forest and environmental protection plans. In the future, more products, including greenhouse gas monitoring, water body environment detection, and land surface analysis products, such as soil moisture and land surface temperature, will be developed and shared with the public.
With the rapid development of the Internet and cloud technology, new technologies will be implemented to improve FY data access and utilization. A cloud-based data-sharing platform has been designed and will be built over the next two years. Massive amounts of FY data and products will be archived in this system. Users can transplant and run their own algorithms in this system with a universal plug-in standard. A scientific computing platform based on cloud computing and AI technologies will be brought to users to improve the potential FY data applications. In conclusion, FY data will be obtained and utilized in a more simple and convenient manner in the future.
• According to OSCAR of WMO, the FY-3D satellite is operational as of 19 August 2020.
• On 8 Dec. 2017, the FY-3D spacecraft acquired the first visible light image and transmitted it to the ground. 27)
- From mid-December, FY-3D will embark on a half-year in-orbit testing, and is on track to complete operational application before the flood season in 2018. At that time, it will form network observation operation with FY-3C.
- According to Yang Jun, director of NSMC (National Satellite Meteorological Center), FY-3D boasts a very high imaging quality judged by the detail and texture of the image. Marine and land information of the South China Sea, the Yarlung Zangbo River, the Qinghai-Tibet Plateau, and the Northwest Desert are all visible from the image, as well as endemic information in salt lake, alluvial fan, and snow cover.
- The mission of FY-3D’s first image was acquired by satellite ground stations in Guangzhou, Urumqi, and Kiamusze. At present, reception equipment in 5 ground stations at home and abroad in charge of global satellite data reception and transmission is in a functional state. Especially the activation of the Antarctica satellite data reception station ensures that 90% of global observation data is transmitted to China within 80 minutes after observation. Satellite-ground data transmission rate has augmented by 30%. The computing capacity is up by 17.5 times and the data storage capacity has multiplied by about 10 times.
• The FY-3C mission is operational in 2018.
• According to WMO, the FY-3C mission is operational in 2017 with the following exemptions: 28)
- MWTS-2 failed on 2 February 2015. Operational service was suspended on 31 May 2015 for anomaly investigation. Recovered from 30 July onwards.
- Power supply limitation has led to a turn-off of MERSI and MWTS on 31 May 2015.

• December 2016: Observations from MWHS-1 on board FY-3B and its more advanced successor, MWHS-2, onboard FY-3C have been received at the UK Met Office since 2012 and 2014, respectively. Since then, both instruments have been the subject of several validation studies conducted internally at the Met Office and in collaboration with ECMWF (European Centre for Medium-Range Weather Forecasts). These studies concluded that observations from MWHS-1 and MWHS-2 183 GHz channels are, once appropriately bias-corrected, of a quality matching well-established operational instruments of similar sounding capability. 29)
- Several low and high-resolution full-system experiments showed the benefit of adding MWHS-1 and MWHS-2 observations to the global model. As a consequence, MWHS-2 has been successfully integrated into parallel suite 37 in November 2015 and has been assimilated into operations since March 2016, while MWHS-1 has been successfully integrated to parallel suite 38 due to become operational on November 1, 2016.
- MWHS-2 operational monitoring showed the presence of a small residual bias in channels 11 and 12, and recurrent transient rises of temperature that are correlated to large bias changes affecting channels 13 and 14. Nevertheless, forecast sensitivity to observations impacts analyses confirmed that MWHS-2 contributes to a significant level to the reduction of model forecast errors.
- Work is currently underway to implement the assimilation of MWHS-2 183 GHz channels over land. The addition of land observations is expected to further reduce forecast errors. — Finally, a bilateral Met Office-ECMWF evaluation of FY-3C MWRI data will lead the way to pre-operational tests in 2017.
• The FY-3A spacecraft was retired on January 5, 2015, ending the global image coverage service. FY-3A provided a substantial contribution to ocean and ice monitoring and climate monitoring - and a significant contribution to atmospheric chemistry and space weather. 30)
- FY-3A mission instruments: MWRI failed soon after launch; IRAS failed in October 2008 (inactive); SBUS failed in December 2008 (inactive); ERM-1 failed in May 2008 (inactive); MWTS-1 failed in December 2012 (inactive).
• The FY-3B spacecraft is operating in 2016 providing operational meteorology. 31)
- FY-3B mission instruments: ERM-1 failed in August 2011 (inactive).
• The FY-3C spacecraft and its instruments are operating in 2016. 32)
- FY-3C mission instruments: MWTS-2 failed on Feb. 2, 2015. Operational service was suspended on 31 May 2015 for anomaly investigation. Recovered from 30 July onwards.
• Feb. 2015: A new methodology is developed to detect the cloud structures at different vertical levels using the dual oxygen absorption bands located near 60 GHz and 118 GHz, respectively. Observations from MWTS (Microwave Temperature Sounder) and MWHS (Microwave Humidity Sounder) on board the recently launched Chinese FengYun-3C satellite are used to prove the concept. It is shown that a paired oxygen MWTS and MWHS sounding channel with the same peak weighting function altitude allows for detecting the vertically integrated cloud water path above that level. A cloud emission and scattering index (CESI) is defined using dual oxygen band measurements to indicate the amounts of cloud liquid and ice water paths. The CESI distributions from three paired channels reveal unique three-dimensional structures of clouds and precipitation within Super Typhoon Neoguri which occurred in July 2014. 34)
• Status of FY-3 satellite series in January 2015: 35)
- FY-3A (launch on May 27, 2008): Only reduced operations are possible in 2015. MWRI failed soon after launch; IRAS failed in October 2008; SBUS failed in December 2008; ERM failed in May 2010; MWTS failed in December 2012.
- FY-3B (launch on Nov. 4, 2010): The FY-3B spacecraft and its payload are operating nominally in 2015.
- FY-3C (launch on Sept. 23, 2013): The FY-3C spacecraft and its payload are operating nominally in 2015.
• October 2014: FY-3C/MERSI has some remarkable improvements compared to the previous MERSIs including better SRF (Spectral Response Function) consistency of different detectors within one band, increasing the capability of lunar observation by space view (SV) and the improvement of radiometric response stability of solar bands. During the In-orbit verification (IOV) commissioning phase, early results that indicate the MERSI representative performance were derived, including the signal noise ratio (SNR), dynamic range, MTF, B2B registration, calibration bias and instrument stability. The SNRs at the solar bands (Bands 1–4 and 6-20) was largely beyond the specifications except for two NIR bands. 36)
• The FY-3C spacecraft and its payload was declared operational on May 5, 2014, according to CMA. 37) 38)
• The FY-3A and FY-3B spacecraft and their payloads are operating nominally in 2013 (Ref. 39).
The FY-3 project conducted cross-calibrations between the MWTS/FY-3 channels with those of the AMSU-A and AMSU-B channels of the NOAA fifth-generation satellites (NOAA-15, -16, -17, -18 and -19) using the RM (Ray-Matching) method over the South Pole and North Pole study area in 2011. 39)
The results show that the in-orbit calibrations of AMSU-A on the fifth-generation NOAA satellites are identical with averaging errors less than 0.45 K, except the channel 8, in which the averaging error is up to -1.53 K. No obvious impact of solar illumination on AMSU-A/NOAA channels was found. - The in-orbit calibrations of MWTS/FY-3 channels are basically consistent with those of the AMSU-A/NOAA-19 channels, and a small influence of solar illumination on MWTS/FY-3B channel 4 was observed.
Large in-orbit calibration discrepancies were found between the MWHS/FY-3 channels and the AMSU-B/NOAA-16 channels, especially in MWHS/FY-3A channel 5. Strong influences of solar illumination on MWHS/FY-3 channels 3, 4 and 5 were observed.
• The FY-3A and FY-3B spacecraft and their payloads are operating nominally in 2012. 40)
- On 16 December 2011, sounding data from FY-3B began to be received and test dissemination started on EUMETCast. The new products will be made available to EUMETSAT Member States on January 24, 2012. This is in addition to the data already received and disseminated from FY-3A since the end of 2010. 41)
The addition of FY-3B data to EUMETCast follows discussions between EUMETSAT and CMA. During a bilateral meeting between the two organizations in May 2011 in Geneva, CMA agreed to add FY-3B data to the FY-3A data it already shares with EUMETSAT and its Member States.
• On June 2, 2011, the FY-3B spacecraft started its operational service after finishing a six-month commissioning period (the spacecraft was launched on Nov. 4, 2010). The operational service was handed over to CMA on May 27, 2011. The FY-3B will join the FY-3A to create a comprehensive weather satellite system. 42)
The MWRI instrument of FY-3B is providing continuous and stable data sets since launch. Compared with the MWRI instrument on FY-3A, the MWRI instrument on FY-3B features a higher stability and a much lower nonlinearity. 43)
• In Jan. 2011, the FY-3B spacecraft is on-orbit (launch Nov. 4, 2010, in the afternoon orbit). All 11 instruments of the payload have been switched on. The spacecraft and its payload are currently in their commissioning phase conducted by the NSMC (National Satellite Meteorological Center) of CMA. 44) 45)
• The FY-3A spacecraft and its payload are operating nominally in 2011. 46)
• On Nov. 7, 2010, a first image of the VIRR instrument was obtained from the FY-3B spacecraft. 47)
• The FY-3A spacecraft and its payload are operating nominally in the fall of 2010. 48)
• FY-3A started its operational phase on January 12, 2009. After the completion of the commissioning phase, the spacecraft operations was handed over from CNSA to CMA. 49) 50)
• After launch (May 27, 2008) the spacecraft and its payload were in the commissioning phase. However, in the following months, FY-3A has served the Beijing 2008 Olympic Games and the flood season in 2008 at the same time.

Sensor Complement of FY-3A
Initially, it was planned that the two experimental spacecraft, FY-3A and FY-3B, would carry only a limited sensor complement, consisting of VIRR, MERSI and MWRI instruments. The follow-on spacecraft would fly the full sensor complement. However, it turns out that all FY-3 spacecraft are already equipped with the full sensor complement.
Instrument | Major characteristics | Primary use |
Sounding mission | ||
IRAS (Infrared Atmospheric Sounder) | Spectral range: 0.69 ~ 15.5 µm, channel numbers: 26, cross-track scanning: ±49.5º (2172 km), spatial resolution: 17.0 km | Atmospheric temperature profile, atmospheric humidity profile, total ozone content, cirrus, aerosol, etc. |
MWTS (Microwave Temperature Sounder) | Frequency range: 50 ~ 57 GHz, channel numbers: 4, cross-track scanning: ±48.6º (2088 km), spatial resolution: 50 ~ 75 km | Atmospheric temperature profile, rainfall, cloud liquid water, surface parameters, etc. |
MWHS (Microwave Humidity Sounder) | Frequency range: 150 ~ 183 GHz, channel numbers: 5, cross-track scanning: ±53.38º (2692 km), spatial resolution (SSP): 15 km | Atmospheric humidity profile, water vapor, rainfall, cloud liquid water, etc. |
Ozone mission | ||
TOU (Total Ozone Unit) | Spectral range: 309 ~ 361 nm, channel numbers: 6, cross-track scanning: ±56.0º (3020 km), spatial resolution: 50 km | Total ozone distribution |
SBUS (Solar Backscatter Ultraviolet Sounder) | Spectral range; 252 ~ 340 nm, channel numbers: 12, spatial resolution: 200 km | Ozone profile, total ozone amount |
Imaging mission | ||
VIRR (Visible and Infrared Radiometer) | Spectral range: 0.44 ~ 12.5 µm, channel numbers: 10, cross-track scanning: ±55.4º (2916 km), spatial resolution: 1.1 km | Cloud, vegetation, snow and ice, SST, LST, water vapor, aerosol, ocean color, etc. |
MERSI (Medium Resolution Spectral Imager) | Spectral range: 0.41 ~ 12.5 µm, channel numbers: 20, cross-track scanning: ±55.4º (2916 km), spatial resolution: 0.25 ~ 1 km | True color imagery, cloud, vegetation, snow and ice, ocean color, aerosol, rapid response products (fires, flooding, etc.) |
MWRI Microwave Radiation Imager) | Frequency range: 10.65 ~ 89 GHz, channel numbers: 10 (5 frequencies with H, V polarization), conical scanning: 110.8º (1430 km), spatial resolution: 15–80 km | Rainfall, soil moisture, cloud liquid water, sea surface parameters |
Instrument name | No of bands/channels | Spectral range | IFOV/line (pixels/scan line) | Spatial resolution at nadir (km) | Swath width (km) |
VIRR (Visible and Infrared Radiometer) | 10 | 0.43-12.5 µm | 2048 | 1.1 | 2800 |
IRAS (Infrared Atmospheric Sounder) | 26 | 0.69-15.5 µm | 56 | 17 |
|
MWTS (Microwave Temperature Sounder) | 4 | 50-57 GHz | 15 | 50/75 |
|
MWHS (Microwave Humidity Sounder) | 5 | 150-183 GHz | 98 | 15 | 2700 |
MERSI (Medium Resolution Spectral Imager) | 20 | 0.41-12.5 µm | 2048/8192 | 1.1/0.250 | 2800 |
SBUS (Solar Backscattering UV Sounder) | 12 | 250-340 nm | 240 | 70/10 |
|
TOU (Total Ozone Unit) | 6 | 308-361 nm | 31 | 50 |
|
MWRI (Microwave Radiation Imager) | 6 | 10.65-150 GHz | 240 | 15-70 | 1400 |
| |||||
ERM (Earth Radiation Measurement) |
|
|
|
|
|
SEM (Space Environment Monitor) |
|
|
|
|
|
SIM (Solar Irradiation Monitor) |
| 0.2~50 µm |
|
|
|
VIRR (Visible and Infrared Radiometer)
The objective is to obtain observations for the following applications: diurnal cloud charts, Earth surface temperature and sea surface temperature, land feature, cloud feature, vapor content in lower layer, and brine color. The instrument features 10 channels in the spectral range of 0.43 - 12.5 µm. The spatial resolution at nadir is 1.1 km on a swath of 2800 km (FOV=±55.4º). VIRR is a scanning whiskbroom radiometer by design.
Channel | Spectral range (µm) | Noise Equivalent Reflectance (%) or NEΔT (at 300 K) | Dynamic range |
1 | 0.58-0.68 | 0.1% | 0-100% |
2 | 0.84-0.89 | 0.1% | 0-100% |
3 | 3.55-3.95 | 0.3 K | 180-350 K |
4 | 10.3-11.3 | 0.2 K | 180-330 K |
5 | 11.5-12.5 | 0.2 K | 180-330 K |
6 | 1.58-1.64 | 0.15% | 0-90% |
7 | 0.43-0.48 | 0.05% | 0-50% |
8 | 0.48-0.53 | 0.05% | 0-50% |
9 | 0.53-0.58 | 0.05% | 0-50% |
10 | 1.325-1.395 | 0.19% | 0-90% |
The retrieval of atmospheric water vapor is intended to further understand the role played by the energy and water cycle to determine the Earth’s weather and climate. 53)
MERSI (Medium Resolution Spectral Imager)
The instrument is of MVISR (Multichannel Visible and IR Scanning Radiometer) heritage (flown on the FY-1 series) and is being built by SITP (Shanghai Institute of Technical Physics). The objective is to obtain imagery for the following applications: diurnal cloud charts, Earth's surface temperature and sea surface temperature, brine color, land feature, cloud feature, aerosol and atmospheric vapor. The instrument features 20 detecting channels in the spectral range of 0.44 - 12.5 µm. The instrument FOV is ±55.4º providing a swath of 2800 km. Due to its wide swath, MERSI has the capability to observe the entire Earth twice daily. 54)
Channel No | Center wavelength (µm) | Bandwidth (µm) | Spatial resolution (m) | Noise-equivalent reflectance (%), ΔT at 300 K | Dynamic range (max reflec., max T) | Primary use of data |
3 | 0.650 | 0.05 | 250 | 0.4 | 100% | Land/cloud/ |
4 | 0.865 | 0.05 | 250 | 0.45 | 100% | |
1 | 0.470 | 0.05 | 250 | 0.45 | 100% | Land/cloud/ |
2 | 0.550 | 0.05 | 250 | 0.4 | 100% | |
5 | 11.50 | 2.50 | 250 | 0.54 K | 330 k | |
19 | 1.640 | 0.05 | 1000 | 0.08 | 90% | |
20 | 2.130 | 0.05 | 1000 | 0.07 | 90% | |
6 | 0.412 | 0.02 | 1000 | 0.1 | 80% | Ocean Color/ |
7 | 0.443 | 0.02 | 1000 | 0.1 | 80% | |
8 | 0.490 | 0.02 | 1000 | 0.05 | 80% | |
9 | 0.520 | 0.02 | 1000 | 0.05 | 80% | |
10 | 0.565 | 0.02 | 1000 | 0.05 | 80% | |
11 | 0.650 | 0.02 | 1000 | 0.05 | 80% | |
12 | 0.685 | 0.02 | 1000 | 0.05 | 80% | |
13 | 0.765 | 0.02 | 1000 | 0.05 | 80% | |
14 | 0.865 | 0.02 | 1000 | 0.05 | 80% | |
15 | 0.905 | 0.02 | 1000 | 0.10 | 90% | Atmospheric water |
16 | 0.940 | 0.02 | 1000 | 0.10 | 90% | |
17 | 0.980 | 0.02 | 1000 | 0.10 | 90% | |
18 | 1.030 | 0.02 | 1000 | 0.10 | 90% |
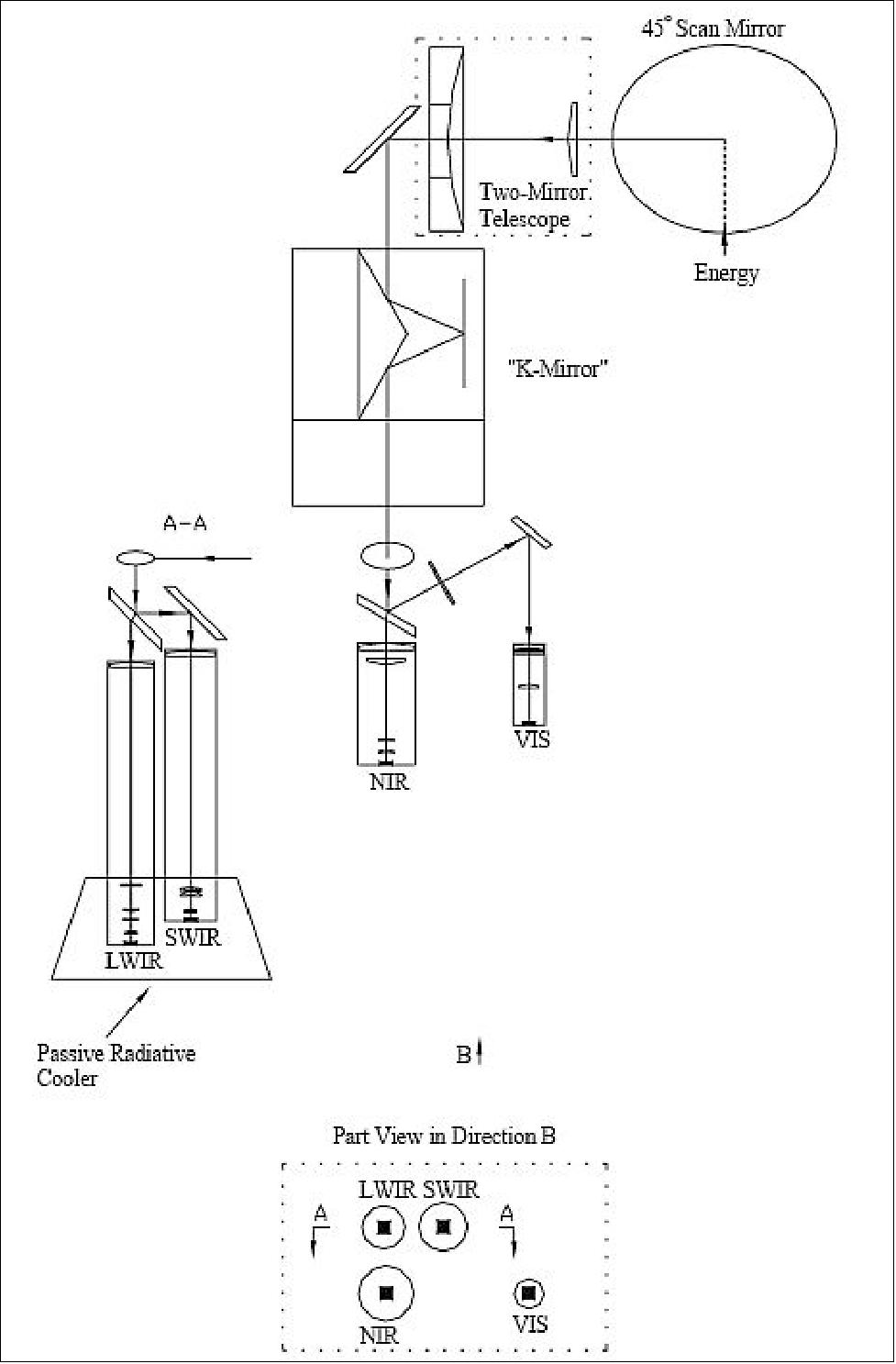
The SMA (Scan Mirror Assembly) uses a 45º rotating scan mirror, and a three-mirror system (K-mirror) to offset image rotation from 45º rotating scan mirror (Figure 10).
The optical system consists of an aspherical telescope and four refractive objective assemblies which work in the VIS, VIS/NIR, SWIR and LWIR spectral regions to cover a total spectral range of 0.4 to 12.5 µm. The 20 cm aperture telescope is a coaxial two-mirror system, and there is an intermediate image behind the telescope.
The multi-sensor scanning technique is adopted. Each 1-km band has a 10-element linear detector array and each of the 250 m bands has a 40-element array, respectively.
A high-performance passive radiative cooler provides cooling to 100 K for the one LWIR spectral band on one HgCdTe FPA (Focal Plane Assembly). The cooler provides also cooling to 150 K for the two SWIR spectral bands on another HgCdTe FPA at the same time.
A novel photodiode-silicon readout technique for the visible and near infrared provides an unsurpassed quantum efficiency and low-noise readout with exceptional dynamic range. Analog programmable gain and offset and the FPA clock and bias electronics are located near the FPAs in two dedicated electronics modules, the SAM (Space-viewing Analog Module) and the FAM (Forward-viewing Analog Module). A third module, the MEM (Main Electronics Module) provides power, control systems, command and telemetry, and calibration electronics. The system also includes an on-board calibrator.
MWRI (Microwave Radiometer Imager)
The objective is to provide all-weather observation/derivation of parameters like: precipitation, cloud feature, vegetation, soil humidity, sea ice, etc. The instrument, a total power radiometer, provides conical beam scanning on a swath of 1400 km; it features 10 channels with five frequencies in the range 10.65-89 GHz. The nadir spatial resolution range varies from 15-85 km depending on frequency.
Center channel frequency (GHz) | 10.65 | 18.70 | 23.80 | 36.50 | 89 |
Polarization | V, H | V, H | Y, H | V, H | V, H |
Bandwidth (MHz) | 180 | 200 | 400 | 900 | 2300 |
Sensitivity NEDT (K) | 0.5 | 0.5 | 0.5 | 0.5 | 0.8 |
Calibration error (K) | 1.0 | 2.0 | 2.0 | 2.0 | 2.0 |
Dynamic range (K) | 30-340 | ||||
Sampling points/scan | 240 | ||||
Efficiency of main beam | ≥ 90% | ||||
Data quantization | 12 bit | ||||
Ground resolution (km x km) | 51 x 85 | 30 x 50 | 27 x 45 | 18 x 30 | 9 x 15 |
Scanning mode | Conical scanning | ||||
Swath width (km) | 1400 | ||||
Antenna angle of view | 44.8º ±0.1º | ||||
Scanning period | 1.7±0.1 | ||||
Error of scanning period | ±0.1 | ||||
The MWRI instrument has a mass of 175 kg and a power consumption of 125 W. It is comprised of an offset parabolic reflector with the dimensions of 977.4 mm x 897.0 mm which are illuminated by 4 separate feed horns. The reciewers at 18.7 and 23.8 GHz share one feed horn. The reflector and feed horn are mounted on a drum which contains the radiometers, digital data subsystem, mechanical scanning subsystem, and power subsystem. To realize an end-to-end calibration, the project developed two quasi-optical reflectors with diameters of 860 mm and 1300 mm, respectively, which are mounted on the opposite direction of hot load and the top of satellite platform. These reflectors can reflect the radiation from the hot load and cold space to the main reflector (Ref. 43).
IRAS (Infrared Atmospheric Sounder)
The objective is to measure atmospheric temperature, the humidity profile, and ozone. IRAS is a sounder with 26 channels in the spectral range 0.69 - 15 µm measuring profiles in the troposphere. The sub-satellite resolution is 17 km, the FOV (Field of View) is ±49.5º (symmetrical about nadir) with 56 measurements in cross-track.
Cha. | Center wavelength (nm) | Center wavelength (cm-1) | FWHM | Main species absorbed | Max scene temperature (K) | NEDT | Layer with max. contribution (hPa) |
1 | 669 | 14.95 | 3 | CO2 | 280 | 4.00 | 30 |
2 | 680 | 14.71 | 10 | 265 | 0.80 | 60 | |
3 | 690 | 14.49 | 12 | 250 | 0.60 | 100 | |
4 | 703 | 14.22 | 16 | 260 | 0.35 | 400 | |
5 | 716 | 13.97 | 16 | 275 | 0.32 | 600 | |
6 | 733 | 13.84 | 16 | CO2/H2O | 290 | 0.36 | 800 |
7 | 749 | 13.35 | 16 | 300 | 0.30 | 900 | |
8 | 802 | 12.47 | 30 | atm. window | 330 | 0.20 | Surface |
9 | 900 | 11.11 | 35 | atm. window | 330 | 0.15 | Surface |
10 | 1030 | 9.71 | 25 | O3 | 280 | 0.20 | 25 |
11 | 1345 | 7.43 | 50 | H2O | 330 | 0.23 | 800 |
12 | 1365 | 7.33 | 40 | H2O | 285 | 0.30 | 700 |
13 | 1533 | 6.52 | 55 | H2O | 275 | 0.30 | 500 |
14 | 2188 | 4.57 | 23 | N2O | 310 | 0.009 | 1000 |
15 | 2210 | 4.52 | 290 | 0.004 | 950 | ||
16 | 2235 | 4.47 | CO2/N2O | 280 | 0.006 | 700 | |
17 | 2245 | 4.45 | 266 | 0.006 | 400 | ||
18 | 2388 | 4.19 | 25 | CO2 | 320 | 0.003 | Atmosphere |
19 | 2515 | 3.98 | 35 | atm. window | 340 | 0.003 | Surface |
21 | 14500 | 0.69 | 1000 | atm. window | 100% A | 0.10% A | Cloud |
22 | 11299 | 0.885 | 385 | atm. window | 100% A | Surface | |
23 | 10638 | 0.94 | 550 | H2O | |||
24 | 10638 | 0.94 | 200 | ||||
25 | 8065 | 1.24 | 650 | ||||
26 | 6098 | 1.24 | 450 |
MWTS (Microwave Temperature Sounder)
The objective is to provide an all-weather detection capability for atmospheric profiles. The instrument features four channels. The ground resolution at nadir is 50-70 km, depending on the channel. The FOV is ±48.3º with 13 measurements in cross-track per scan line.
Cha. | Center frequency (GHz) | Constituent absorbed | Bandwidth (MHz) | Temp sensitivity NEDT (K) | Beam efficiency (%) | Dynamic range (K) | Accuracy (K) |
1 | 50.30 | Window | 220 | 0.3 | >90 | 3-340 | 1.2 |
2 | 53.596 ± 0.115 | O2 | 2 x 220 | 0.3 | >90 | 3-340 | 1.2 |
3 | 54.94 | O2 | 220 | 0.3 | >90 | 3-340 | 1.2 |
4 | 57.290 | O2 | 220 | 0.3 | >90 | 3-340 | 1.2 |
Viewing angle from nadir in cross-track direction | ±48.3º (FOV) |
Pixel/scan | 15 |
Scanning step angle | 6.9º |
Spatial resolution at nadir | 50~70 km |
Channel match accuracy | Beam pointing error: < 0.1º |
Scan time | 16 s |

MWHS (Microwave Humidity Sounder)
MWHS is designed and developed at CAS/CSSAR (Chinese Academy of Sciences/Center for Space Science and Applied Research), Beijing. MWHS is a dual-frequency, 5-channel millimeter-wave radiometer (similar to AMSU-B). The objective of MWHS is to provide meteorological sounding for the measurement of the global atmospheric water vapor profiles. The instrument is 1st version of the microwave humidity sounder to be deployed on FY-3 satellite, which is China's 2nd generation polar-orbiting meteorological satellite. 55)
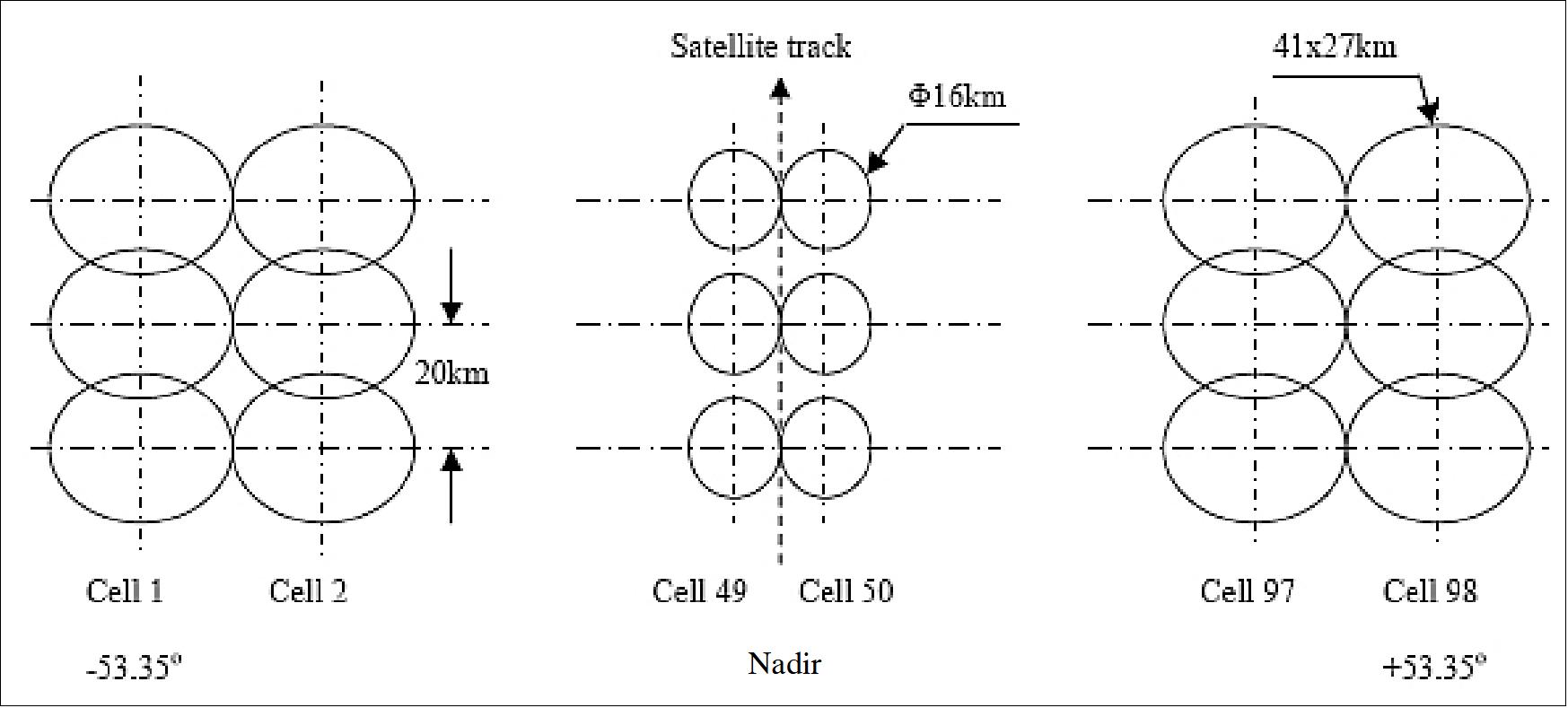
Viewing angle from nadir in cross-track direction | ±53.35º (FOV) |
Swath width | ~2700 km |
No of pixels | 98/scan |
Scanning period | 2.667 s ± 50 ms |
Spatial resolution (footprint size) | ~15 km diameter at nadir, |
Beam pointing accuracy | 0.1º |
Sensitivity | 1.1 K |
Calibration accuracy | 1.5 K |
Data rate | 7.5 kbit/s |
Instrument mass, power | 44 kg, 60 W |
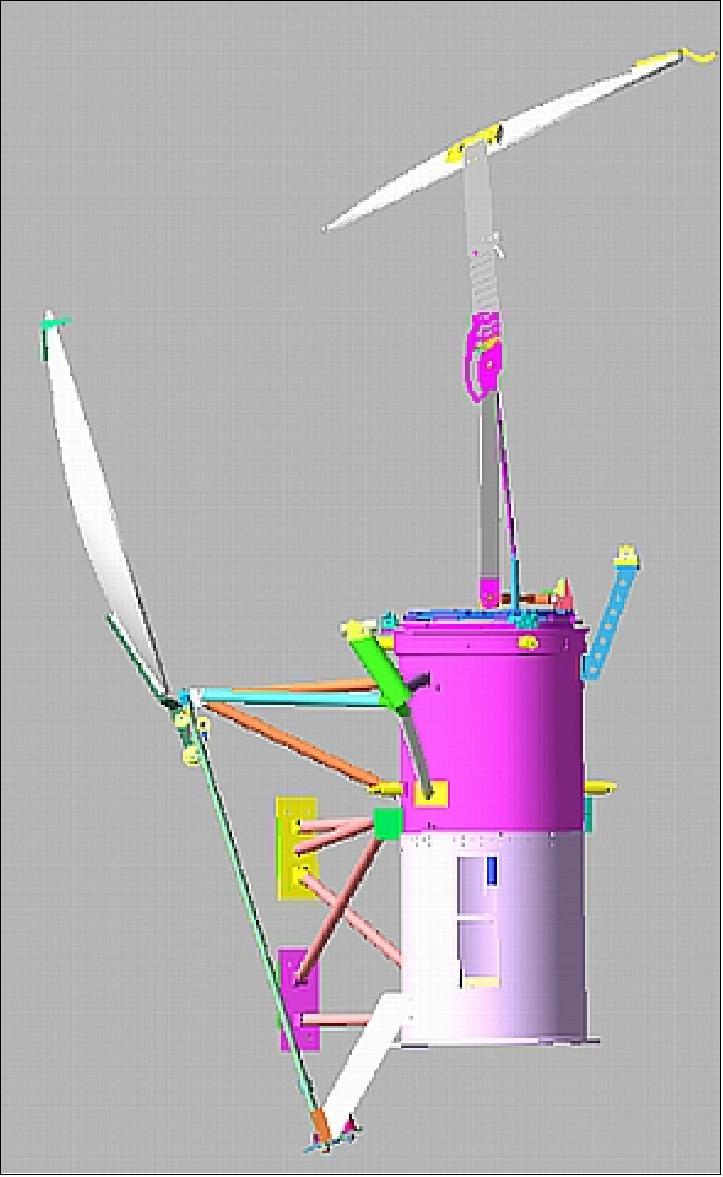
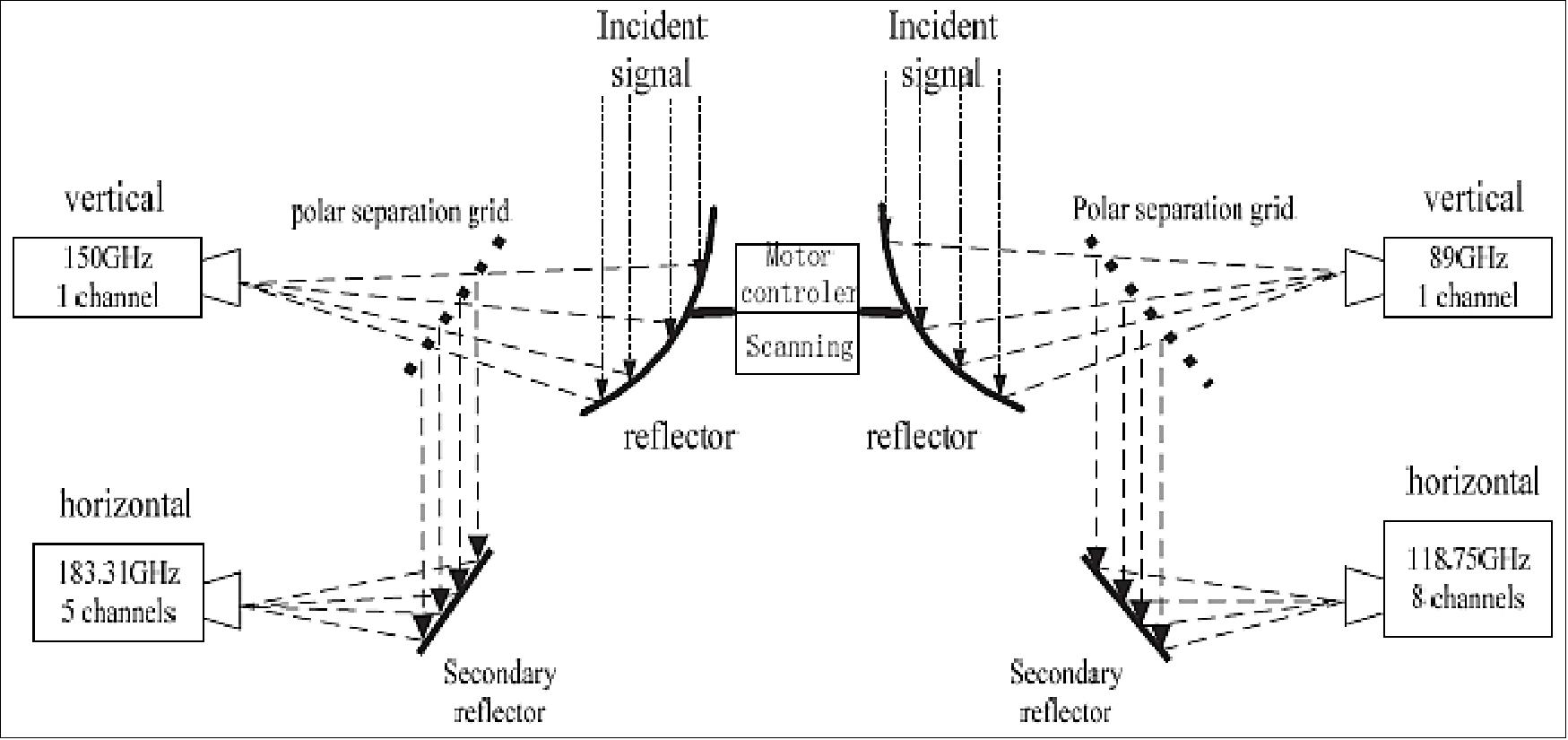
MWHS consists of three units: antenna and receiver unit, power supply unit and electronic unit (Figure 14). One motor drives two separated reflectors for the 150 GHz and the 183.31 GHz channels, respectively. The cross-track scanning is carried out by the rotation of the reflectors.
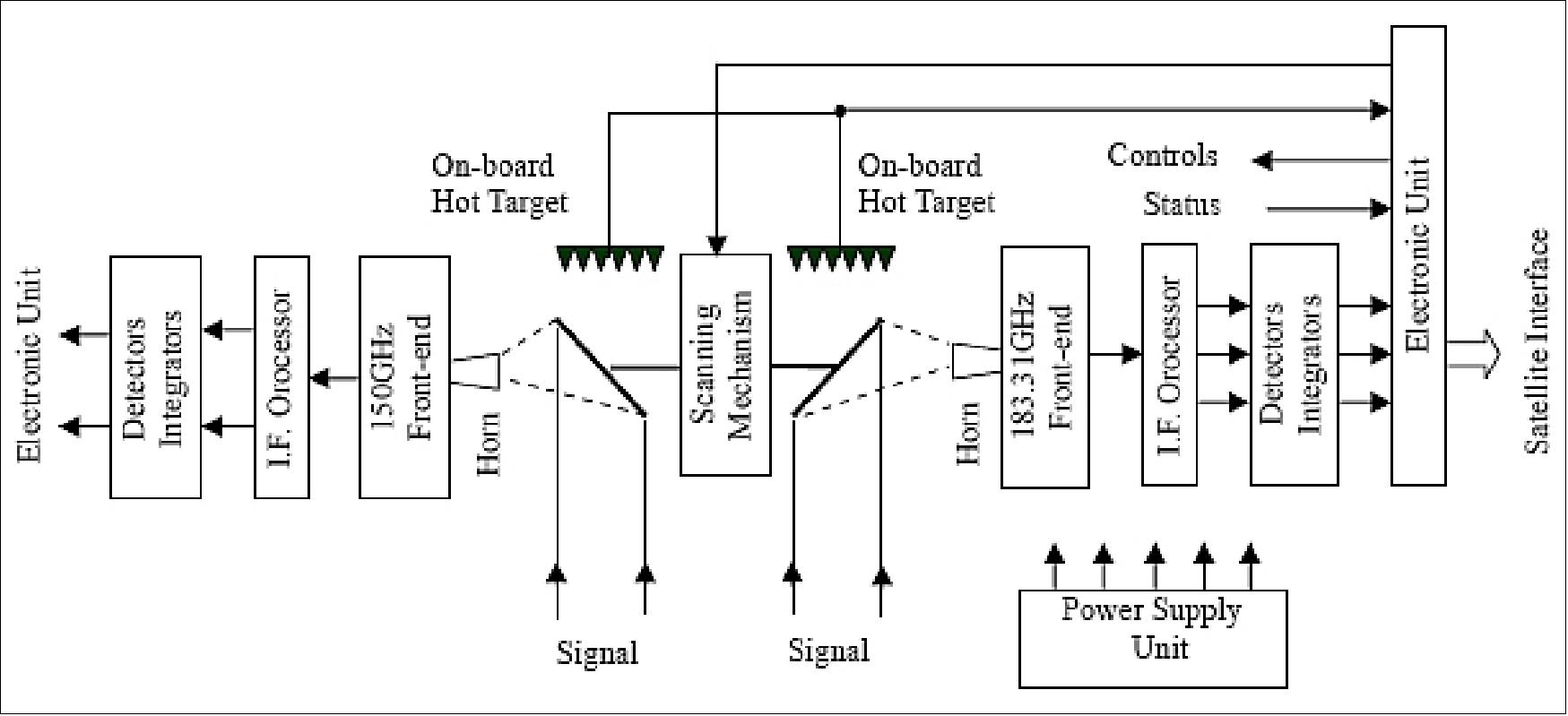
MWHS is a total power type microwave radiometer based on a heterodyne receiver. The water vapor vertical profile is retrieved from the measured brightness temperatures of 3 different frequency channels around the water vapor absorption line at 183.31 GHz. The antenna reflector is scanning in the cross-track direction. During each scan period, when the Earth surface is out of sight, a two-point calibration are performed to calibrate the receiver gain and noise. The calibration is implemented by observing an onboard hot target and the background emission of the cold sky. The separated 3-channel IF signals are detected, integrated, and digitized by the electronic unit. The detected data are finally transferred to the satellite through a MIL-STD- 1553B data bus. The electronic unit also controls the scanning mechanism and measures physical temperature of the on-board hot target for calibration.

Cha. | Center frequency (GHz) | Constituent absorbed | Bandwidth (MHz) | NEΔT(K) | Beam efficiency (%) | Dynamic range (K) | Polarization (V/H) | 3 dB beam width (º) |
1 | 150 | Window | 1000 | 0.9 | ≥ 95% | 3-340 | V | 1.1 |
2 | 150 | Window | 1000 | 0.9 | ≥ 95% | 3-340 | H | 1.1 |
3 | 183.31±1 | H2O | 500 | 1.1 | ≥ 95% | 3-340 | H | 0.9 |
4 | 183.31±3 | H2O | 1000 | 0.9 | ≥ 95% | 3-340 | H | 0.9 |
5 | 183.31±7 | H2O | 2000 | 0.9 | ≥ 95% | 3-340 | H | 0.9 |
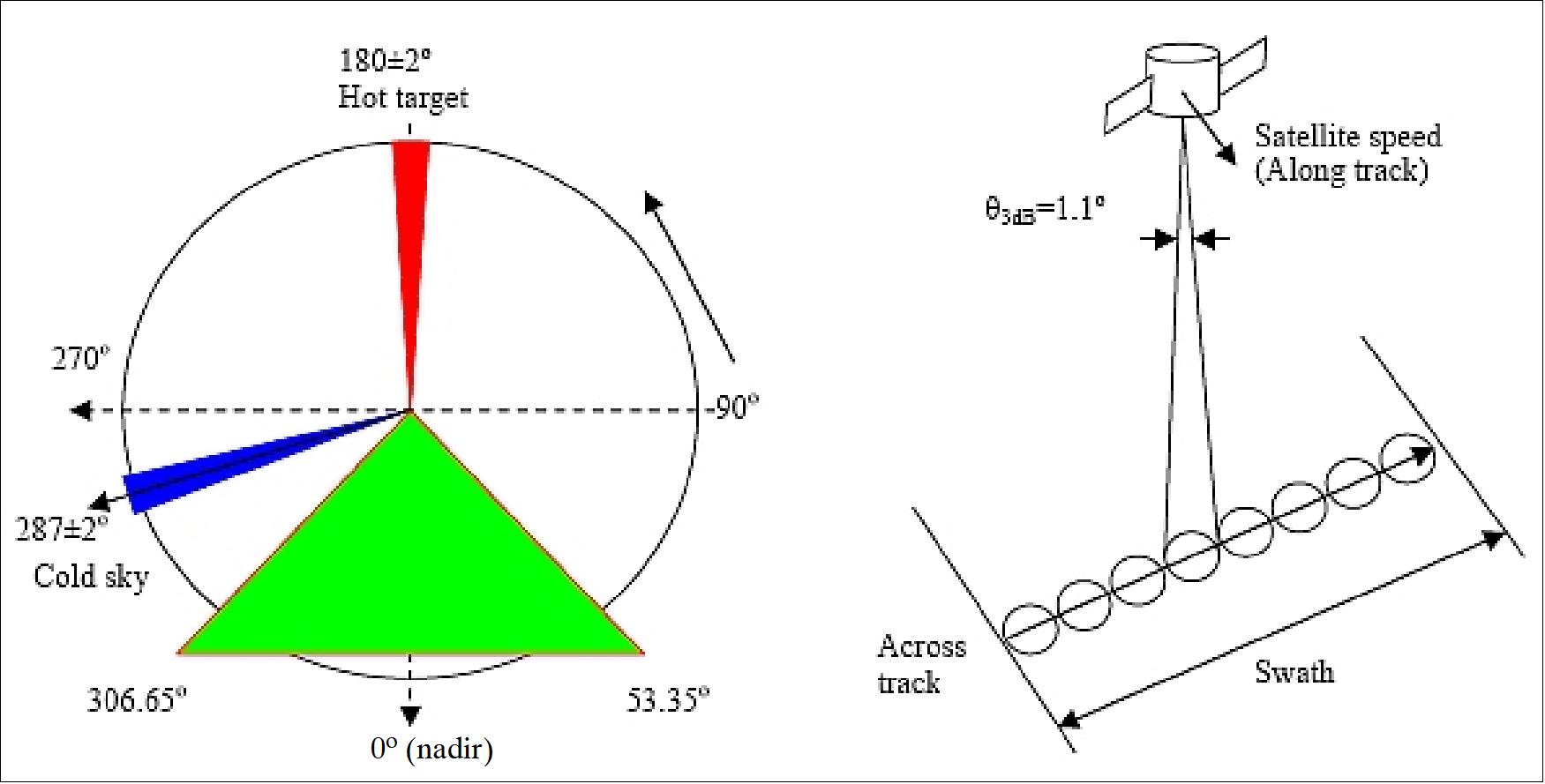
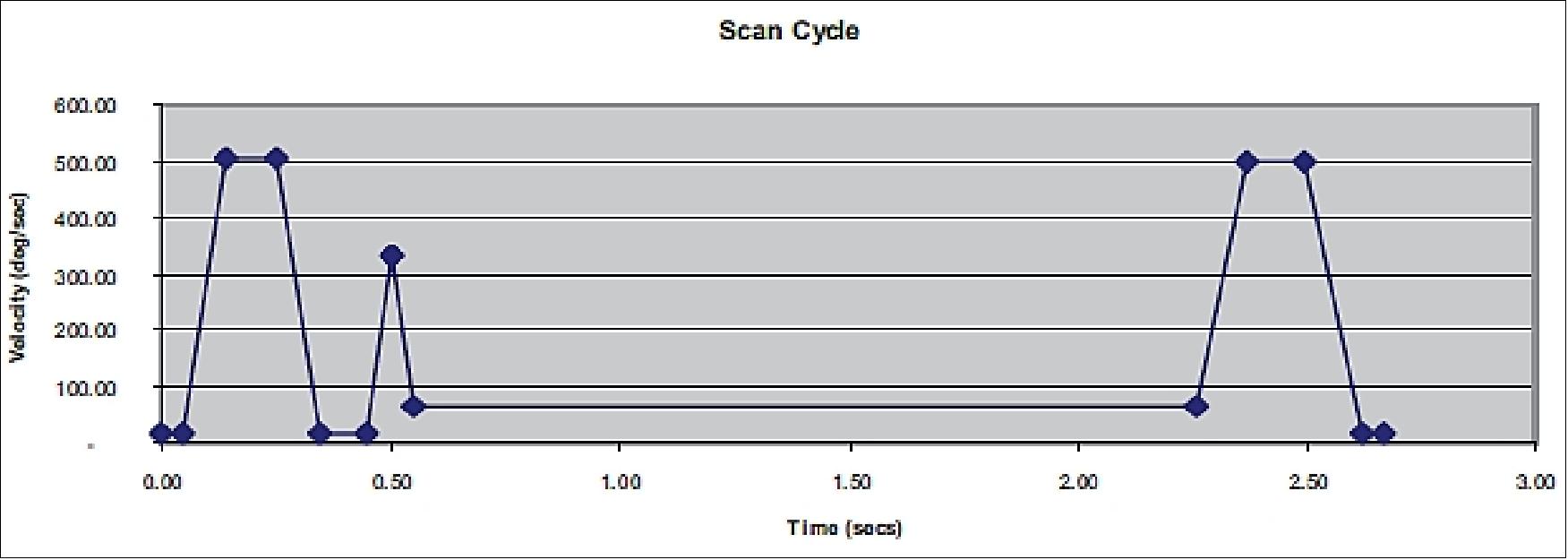
The main beams of the antenna scan over the observing swath (±53.35º from nadir) in the cross-track direction at a constant periodicity of 1.71s. The time for observing the internal calibration hot target and cold sky background is 0.1s, respectively. The residual time of the period are used for acceleration and deceleration of the motor. To satisfy both the integration time for the radiometric sensitivity requirement and the scan to scan interval, it is necessary to slow down the motor rotation during the Earth observation view and to speed it up during the period when observing the calibration targets (Figure 16).
MWHS-II (Microwave Humidity Sounder-II)
The MWHS-II instrument (2nd generation) includes many improvements when compared to the MWHS instrument onboard the FY-3A/B satellites, launched in 2008 and 2010, respectively. 56)
The MWHS-II instrument will be flown for the first time on the FY-3C mission (replacing MWHS). The rest of the sensor complement for FY-3C will be identical to the one flown on the FY-3A/3B missions.
MWHS-II is a four-frequency, fifteen-channel millimeter wave radiometer, a total power type radiometer based on a heterodyne receiver and performs cross-track scanning. When compared to MWHS, MWHS-II includes a 89 GHz (vertical polarization) in the atmospheric transparent window and oxygen absorbing lines around 150 GHz (vertical polarization), respectively. Furthermore, the mainly sounding channels are working at 118.75 GHz for 8 horizontal polarization channels and 183.31 GHz for 5 horizontal polarization channels.
Eight channels near 118.75GHz are being applied for the first time to improve the spatial resolution and investigate the temperature retrieval capabilities of MWHS-II. For antennas of the same size, the view pixels of 118.75 GHz channels are approximately half of them for 50-60 GHz channels. Since the channels near 118.75 GHz include more information about cloud and water vapor compared to the 50-60 GHz channels, combining the 183.31 GHz channels and window channels of 89 GHz and 150 GHz, MWHS-II can retrieve atmospheric temperature profiles, humidity profiles, and water vapor information simultaneously (Figure 18).
No | Center frequency (GHz) | Polarization V/H | Bandwidth (MHz) | NEΔT (K) | LO precision (MHz) | Calibration resolution (k) | 3 dB beamwidth (º) | Dynamic range (K) |
1 | 89.0 | V | 1500 | 1.0 | 50 | 1.3 | 2.0º±0.1º | 3-340 |
2 | 118.75±0.08 | H | 20 | 3.6 | 30 | 2.0 | 2.0º±0.1º | 3-340 |
3 | 118.75±0.2 | H | 100 | 2.0 | 30 | 2.0 | 2.0º±0.1º | 3-340 |
4 | 118.75±0.3 | H | 165 | 1.6 | 30 | 2.0 | 2.0º±0.1º | 3-340 |
5 | 118.75±0.8 | H | 200 | 1.6 | 30 | 2.0 | 2.0º±0.1º | 3-340 |
6 | 118.75±1.1 | H | 200 | 1.6 | 30 | 2.0 | 2.0º±0.1º | 3-340 |
7 | 118.75±2.5 | H | 200 | 1.6 | 30 | 2.0 | 2.0º±0.1º | 3-340 |
8 | 118.75±3.0 | H | 1000 | 1.0 | 30 | 2.0 | 2.0º±0.1º | 3-340 |
9 | 118.75±5.0 | H | 2000 | 1.0 | 30 | 2.0 | 2.0º±0.1º | 3-340 |
10 | 150.0 | V | 1500 | 1.0 | 50 | 1.3 | 1.1º±0.1º | 3-340 |
11 | 183.31±1 | H | 500 | 1.0 | 30 | 1.3 | 1.1º±0.1º | 3-340 |
12 | 183.31±1.8 | H | 700 | 1.0 | 30 | 1.3 | 1.1º±0.1º | 3-340 |
13 | 183.31±3 | H | 1000 | 1.0 | 30 | 1.3 | 1.1º±0.1º | 3-340 |
14 | 183.31±4.5 | H | 2000 | 1.0 | 30 | 1.3 | 1.1º±0.1º | 3-340 |
15 | 183.31±7 | H | 2000 | 1.0 | 30 | 1.3 | 1.1º±0.1º | 3-340 |
MWHS-II consists of three units: antenna and receiver unit, power supply unit and electronic unit. The antenna and receiver unit collect emissions from the atmosphere. The received signal is focused to the horn-feed and the first element of the high frequency front end, and then down-converted by a double side band mixer to IF; the IF signal is down-converted to LF by a detector, and then integrated. The electronic unit digitizes the LF signal, controls the scanning mechanism and measures physical temperature of the on-board hot target for calibration, and communicates with satellite through a MIL-STD-1553B data bus.
Viewing angle from nadir in cross-track direction | ±53.35º (FOV) |
Swath width | 2600 km |
No of pixels | 98/scan |
Scanning period | 2.667 s ± 50 ms |
Spatial resolution (footprint size) | ~15 km diameter at nadir, |
Beam pointing accuracy | ≤0.1º |
On-board calibration | Hot target and cold space |
Calibration method | Two points periodically |
Sensitivity | 1.1 K |
Data rate | 15 kbit/s |
Instrument mass, power | 60 kg, 116 W |
Figure 16 shows the scanning mode and observing geometry of channels operated at 183 GHz and 150 GHz of MWHS-II. For the 118 GHz and 89 GHz channels, the angle resolution is 2º. One motor drives two separated reflectors for 15channels, which realizes vertical and horizontal polarization with a polar separated grid, respectively. The scanning period is 2.667 s. The main beams of the antenna scan over the observing swath is ±53.35º (from nadir) in the cross-track direction at a constant periodicity of 1.71 s. During each period, a two-point calibration is performed to calibrate the receiver gain and noise. Figure 19 shows the time distribution in different scanning angles of the calibration period.
SBUS (Solar Backscattering UV Sounder)
The objective is the measurement of the vertical ozone distribution in the atmosphere. The instrument provides two operational modes: the atmospheric mode and the sun mode.
• The vertical ozone (O3) distribution (profile) is measured in the atmospheric mode by selecting among 12 channels in the spectral range of 250~340 nm.
• The sun mode is used in continuous scanning to measure the solar irradiance spectrum in incremental steps of 0.21 nm, the spectral range is 160~400 nm. The dynamic range of the instrument is 106 with stray ray ≤10-6. The FOV is 11.3º x 11.3º. The discrete solar mode involves the measurement of the solar irradiances in 12 channels.
Channel | Center wavelength (nm) | Bandwidth FWHM (nm) |
1 | 252.00±0.05 | 1+0.2, 0 |
2 | 273.62±0.05 | |
3 | 283.10±0.05 | |
4 | 287.70±0.05 | |
5 | 292.29±0.05 | |
6 | 297.59±0.05 | |
7 | 301.97±0.05 | |
8 | 305.87±0.05 | |
9 | 312.57±0.05 | |
10 | 317.56±0.05 | |
11 | 331.26±0.05 | |
12 | 339.89±0.05 | |
Cloud cover photometer | 379.00±1.00 | 3+0.3 |
TOU (Total Ozone Unit)
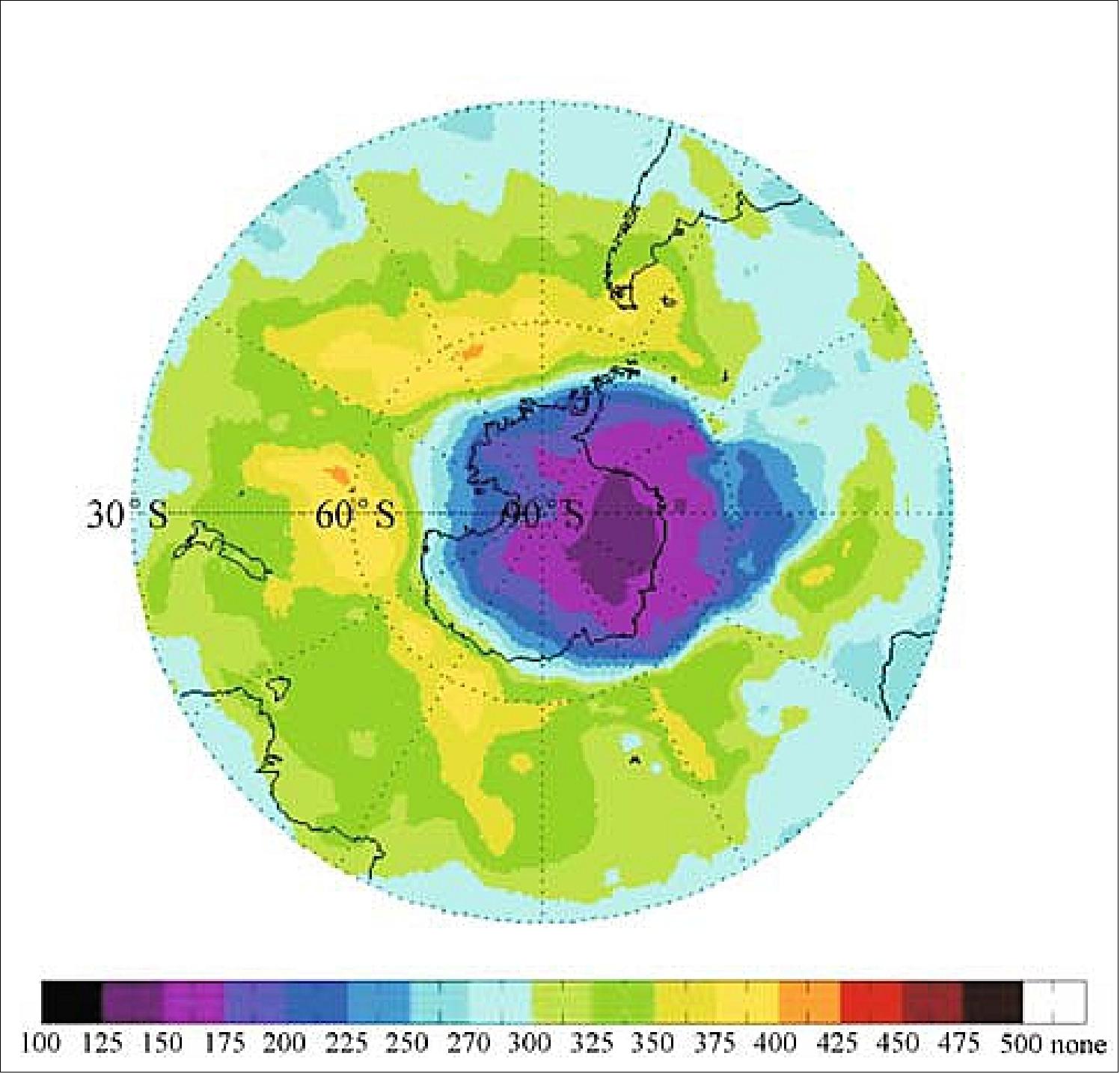
The objective of TOU is to measure the quantity of ozone in the atmosphere by selecting among 6 channels from 300-360 nm. The dynamic range is 104 with a stray ray of < 10-3. The ground resolution at nadir is 50 km; the FOV is ±56º using 31 measurement spots in cross-track per scan line. The relative calibration accuracy is 1% of radiation intensity and irradiance; spectrum 0.03 nm. 57)
Channel | Center wavelength (nm) | Bandwidth (nm) |
1 | 308.68±0.15 | 1+0.3, -0 |
2 | 312.59±0.15 | 1+0.3, -0 |
3 | 317.61±0.15 | 1+0.3, -0 |
4 | 322.40±0.15 | 1+0.3, -0 |
5 | 331.31±0.15 | 1+0.3, -0 |
6 | 360.11±0.15 | 1+0.3, -0 |
The UV TOU instrument is composed of the optical assembly and the electronics assembly. The optical assembly is a grating spectrometer with responsible for the selection of measuring channels, the measurement of their backscatter ultraviolet radiation and solar irradiance signals and onboard calibration. The electronics assembly is responsible for the power supply, operation control, data acquisition and communication with satellite.
Sensitivity | ≤ 0.004 µW cm-2 sr-1 nm-1 (S/N=1) |
Dynamic range | 104 |
Spectral stray light | < 10-3 |
Scan angle width | ± 54º |
Spatial resolution at nadir | ~ 50 km |
Wavelength accuracy | 0.03 nm |
Relative radiation calibration accuracy | 2% |
Goniometric accuracy of solar diffuser | 3% |
TOU has three work modes, i.e., scanning mode, radiometric calibration mode and wavelength monitoring mode. The scanning mode is a main operational mode, to collect the scientific data at six wavelengths. The radiometric calibration mode is operated once per orbit and the wavelength monitoring mode is operated about once per two days when the satellite moves in the shadow area of the orbit.
Scanning unit: TOU’s scanning unit uses a 45º scanning mirror in object space driven by a stepper motor. It scans perpendicular to the orbital plane in cross-track at ±54º from nadir in steps of 3.6º for a total of 31 samples.
Optical subsystem: The optical subsystem consists of foreoptics unit, monochromatic unit, wavelength selector and focusing unit, etc. The foreoptics unit is used to match TOU’s field of view with the f-number of the monochromator, and to depolarize the entrance light. The monochromatic unit features a single Ebert-Fastie monochromator with a fixed grating and an array of exit slits, which cooperates with the wavelength selector to achieve the selection of the detected wavelengths and the measurement of their signals and dark currents alternately. The focusing unit collects the ultraviolet radiation from the six exit slits on PMT photocathodes and reduces the non-uniform influence of PMT photocathode sensitivity.
Electronics subsystem: It consists mainly of the following components: electrometer circuit, the phase-locked steady velocity circuit, the stepper motor driver circuits, the high-voltage power supply, the wavelength monitor power supply, the signal acquisition-control interface circuit, the secondary power supplies, and the CPU- RTU.
The detector is a dual-alkaline cathode PMT device. The electrometer circuit amplifies the output of the PMT, and provides the A/D conversion. To achieve rapid signals response and the required dynamic range, the electrometer circuit includes three amplifiers in parallel with different gains. The high voltage power supply provides an operating voltage for the PMT. The phase-locked steady velocity circuit drives the brushless DC motor turn steadily. The stepper motor driver circuits drive the scanning motor and radiometric calibration motor to achieve a scene scan and the selection of the diffusers, respectively.
The wavelength monitoring power supply provides an ignition voltage for the mercury lamp. The signal acquisition-control interface circuit achieves signals and dark current collection, A/D conversion, data pre-procession and TOU operation control. The CPU-RTU realizes the collection and packaging of the scientific data and the engineering parameters; the communications with the satellite is provided via a MIL-STD-1553B bus.
TOU on the FY-3 series spacecraft represents the first instrument for global total ozone monitoring in China. TOU provides a daily global map of total ozone using the self-developed inversion method. The performance of TOU is at the same level as that of similar instruments. In addition, the total ozone product derived from TOU agrees with that of other in-orbit instruments, indicating that both instrument development and the method of retrieval in China have come to an initial success.
ERM (Earth Radiation-budget Measurement)
The overall objective is to measure accurately the incident sun radiation, and the reflected short-wave and long-wave radiation from the Earth-atmosphere system for the study of the Earth-atmosphere radiation budget. ERM consists of two units to measure the sun radiation and the Earth-atmosphere system respectively.
• Sun Irradiance Monitor. The instrument consists of three absolute cavity radiometers in the spectral range of 0.2 - 50 µm. The radiative flux can be measured in the range of 100-2000 W/m2; the measurement sensitivity is 0.2 W/m2 with a calibration precision of 0.5%.
• Earth-atmosphere Radiation Sounder. The instrument is capable to measure the Earth-atmosphere reflected radiation in two channels/modes: 1) a wide-field non-scanning mode and 2) a narrow-field scanning mode.
Channel (2 ranges) | 0.2 ~ 4.3 µm | 0.2 - 50 µm |
FOV (Field of View) | 120º | |
Measurement range of irradiation | 0 - 370 Wm-2 sr-1 | 0 - 500 Wm-2 sr-1 |
Calibration accuracy | 1% | 0.8% |
Instrument sensitivity | 0.4 Wm-2 sr-1 | |
Long-term stability (2 years) | <1% | |
Channel (2 ranges) | 0.2 ~ 4.3 µm | 0.2 - 50 µm |
FOV (Field of View) | 2º x 2º | |
Scanning range | ±50º | |
Measurement range of irradiation | 0 - 370 Wm-2 sr-1 | |
Calibration accuracy | 1% | 0.8% |
Instrument sensitivity | 0.4 Wm-2 sr-1 | |
Long-term stability (2 years) | <1% | |
SEM (Space Environment Monitor)
The instrument measures space environment parameters ensuring normal operation of the spacecraft. It consists of a high-energy ion detector, a high-energy electronic detector, three radiation dosage meters, two surface potential detectors and a single-particle event detector.
SIM (Solar Irradiation Monitor)
The objective is to provide solar irradiance monitoring. The instrument takes measurements of the sun in the spectral range of 0.2~50 µm. The SIM sensitivity is 0.2 W m-2.
GNOS (GNSS Occultation Sounder)
The GNOS mission is a GNSS (Global Navigation Satellite System) radio occultation mission of China for remote sensing of Earth’s neutral atmosphere and the ionosphere. GNOS will use both the GPS (Global Positioning System ) and the BeiDou navigation satellite systems on the China FY-3 series satellites. The first FY3-C spacecraft, with GNOS onboard, was launched on 23 September 2013. 58) 59)
The GNOS instrument was developed by CSSAR (Center for Space Science and Applied Research) of CAS (Chinese Academy of Sciences), Beijing, China. The GNOS instrument consists of three antennas, the PA (Positioning Antenna), the ROA (Rising Occultation Antenna), and the SOA (Setting Occultation Antenna) in physical structure or five antennas, the PA, the RIOA (Rising Ionosphere Occultation Antenna), the SIOA (Setting Ionosphere Occultation Antenna), the RAOA (Rising Atmosphere Occultation Antenna), and SAOA (Setting Atmosphere Occultation Antenna) in electrical structure. There are three RFUs (RF Units) and one GNSS EU (Electronics Unit). Each antenna is connected to its RFU with sharp cavity filters, which are placed close to the antennas to protect the GNOS from the complex RF environment on board FY3-C. Each RFU is connected to the EU.
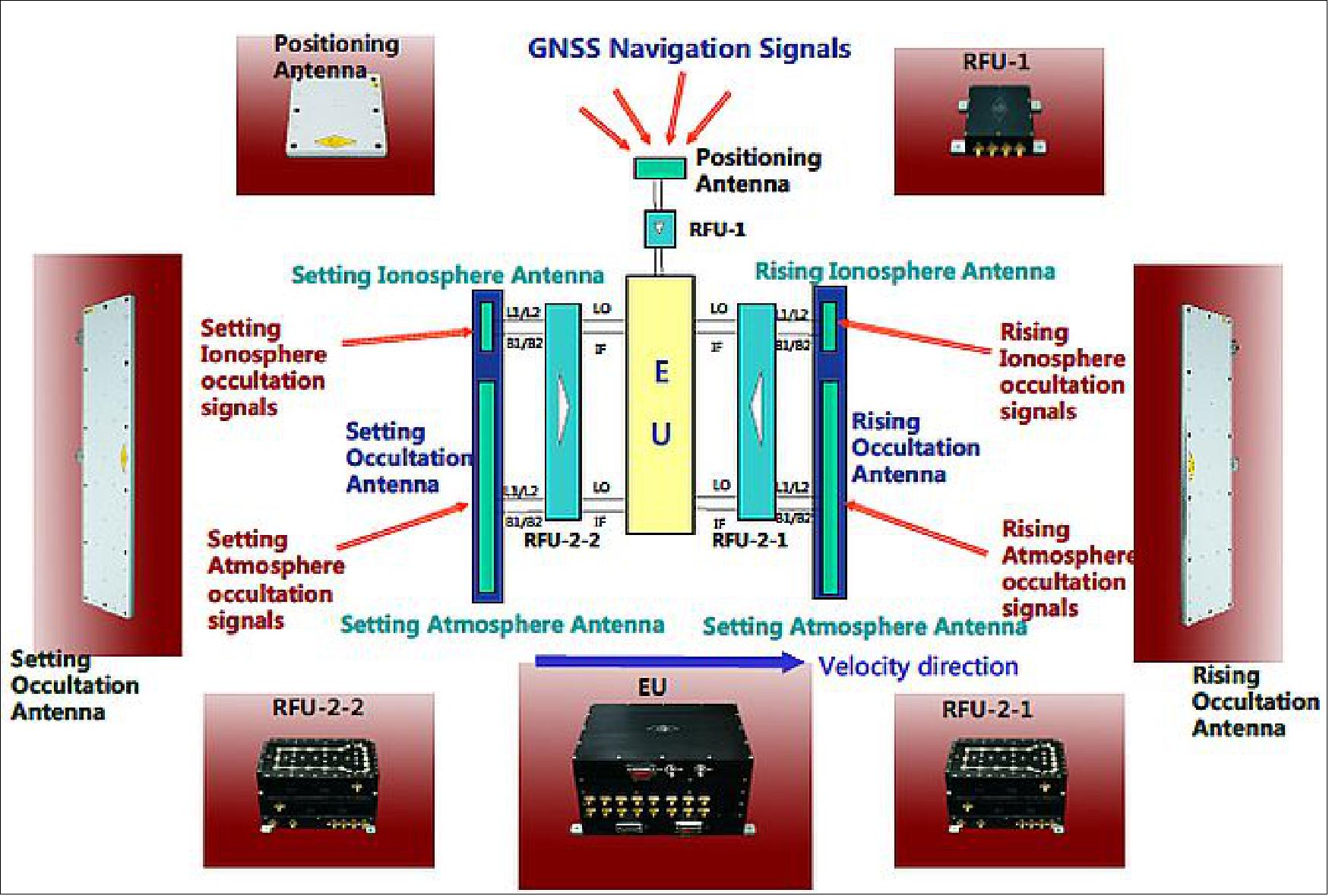
The PA is a wide beam with hemispherical coverage, low-gain antenna pointing into the zenith direction. The GNOS instrument is capable of tracking up to six BeiDou satellites and more than eight GPS satellites through this antenna. These measurements are used for realtime navigation, positioning as well as for precise orbit determination through post-processing on the ground.
The ROA ((including RIOA and RAOA) and anti-velocity viewing antennas SOA (including SIOA and SAOA) are used for rising and setting occultation tracking. The GNOS has the capability of tracking up to four BeiDou and six GPS occultations simultaneously. The atmosphere occultation antennas (including RAOA and SAOA) have a pattern that is wide in azimuth and narrow in elevation. A gain of approximate 10 dBi is reached over the coverage range between ±35º in azimuth and from ±7.5º in elevation.
The EU of GNOS is based on a FPGA (Field-Programmable Gate Array)+DSP (Digital Signal Processor) framework. After filtering and down-conversion in the RFU, the signals are digitally down converted with ADC (Analog to Digital Converter), then sampled at a high rate and transmitted to the channel processor of the EU, where the GNOS accomplishes navigation, positioning and occulting GNSS satellite prediction and selection, signal acquisition and tracking, and data handling. An USO (Ultra-Stable Oscillator) is used as a reference oscillator with very stable frequency (1 s Allan deviation of 10-12) in order to retrieve atmospheric measurements with high accuracy. It also allows using the zero-difference method to invert the excess phase measurements.
GNOS is a multi-frequency receiver with BeiDou/GPS compatibility, B1/B2 closed-loop (CL) tracking, GPS L2 codeless-mode operating for P code, GPS L2C closed-loop tracking and GPS L1 C/A closed-loop and open-loop (OL) tracking capabilities. The BeiDou and GPS-compatible instrument increases the number of transmitting sources and promises significant enhancements in throughput of the measurements. A multi-frequency operating instrument is needed for ionosphere parameter retrieval and ionospheric correction in pre-processing of atmospheric parameters. The receiver measures the following observable parameters for each tracked GPS and BeiDou satellite:
- L1 C/A-code phase
- L1 carrier phase
- L1 signal amplitude
- L2 P-code phase
- L2C code phase (if present)
- L2 carrier phase
- L2 signal amplitude
- B1I code phase
- B1 carrier phase
- B1 signal amplitude
- B2I code phase
- B2 carrier phase
- B2 signal amplitude.
In the lower part of the troposphere where highly dynamic signal conditions are frequently encountered due to the strong atmospheric modulation, the GPS L1 signal is tracked in open loop in parallel with the closed loop tracking. In open-loop tracking, the signal is down-converted using a numerically controlled oscillator, which generates a frequency given by an onboard Doppler model pre-calculated in GNOS without a feedback from received signal. Particularly, for the rising occultation, an a priori range model of the atmospheric delay is also calculated on board the GNOS. The baseband signal is then sampled at a rate of 100 kHz. Furthermore, a sample rate of 100 Hz of open-loop tracking is proven to be sufficient to capture the signal modulated by the atmosphere dynamics and uncertainties of the Doppler model.
The design specifications of GNOS are summarized in Table 29; it can be seen that some parameters of the FY-3 GNOS are comparable to those of COSMIC or MetOp/GRAS.
The mass for the whole GNOS instrument is around 14 kg. The power consumption in full operation (BeiDou and GPS, navigation and occultation) is about 40 W. The average GNOS data rate is 86 kbit/s, with peaks of up to 170 kbit /1. The characteristics of GNOS are displayed in Table 30.
Parameter | Content |
Constellation | GPS L1, L2; BeiDou B1, B2 |
Channel number | Positioning: 8; Occultation: 6 (GPS), 4 (BeiDou) |
Sample rate | Positioning & ionosphere occultation: 1 Hz; Atmosphere occultation: CL 50 Hz, OL 100 Hz |
Output observations | Type: L1C/A, L2C, L2P/ B1I, B2I; Contents: Pseudo-range/carrier phase/SNR |
Clock stability | 1x 10-12 (1 s Allan) |
Pseudo-range precision | ≤ 30 cm |
Carrier-phase precision | ≤ 2 mm |
Parameter | Occultation antenna (ROA & SOA) | Positioning antenna (PA) | Positioning RFU | Occultation RFU | EU |
Number | 2 | 1 | 1 | 2 | 1 |
Volume (mm) | 600 x 135 x 12 | 135 x 120 x 7.5 | 100 x 80 x 30 | 182 x 105 x 108.7 | 240 x 180 x 130 |
Mass | ≤2.0 kg x 2 | ≤0.4 kg | 0.4 kg | 2.1 kg | 5.0 kg |
Total mass | ≤14 kg |
|
|
|
|
Total power | ≤40 W |
|
|
|
|
The GNOS project performed measurements in closed-loop (CL) and open-loop (OL) modes, similar to COSMIC and MetOp. The results show that the GNOS instrument provides more than 500 GPS occultations plus about 200 BeiDou occultations per day. The performance of the GNOS instrument in laboratory tests was found to agree with requirements of the GNOS instrument. In mountain-based experiments, the refractivity profiles of GNOS from GPS and BeiDou were compared with those of nearby radiosonde data within 1 hour. The comparison showed that the refractivity profiles obtained by GNOS were consistent with those of the radiosonde. The rms difference between the GNOS and radiosonde was <3 %.
Sensor Complement of FY-3D Mission
Main mission: operational meteorology. Substantial contribution to ocean and ice monitoring, climate monitoring, atmospheric chemistry and space weather. 51)
GAS (Greenhouse Gases Absorption Spectrometer)
Grating spectrometer operating in four NIR/SWIR bands. Objective: Atmospheric chemistry, measurement of CO2, CH4, CO, N2O. Scanning technique: Two views, nadir or pointing to sunglint.
Spectral range (µm) | Spectral range (cm-1) | Spectral resolution | SNR @ expected input radiance |
0.75-0.77 µm | 13000-13300 cm-1 | 0.60 cm -1 | >300 |
1.56-1.72 µm | 5800-6400 cm-1 | 0.27 cm-1 | >300 |
1.92-2.08 µm | 4800-5200 cm-1 | 0.27 cm-1 | >300 |
2.20-2.38 µm | 4200-4550 cm-1 | 0.27 cm-1 | >300 |
GNOS (GNSS Radio Occultation Sounder)
Objective: Temperature/humidity sounding with highest vertical resolution; also space weather. Same description as for FY-3A.
HIRAS (Hyper-spectral Infrared Atmospheric Sounder)
HIRAS is a Michelson interferometer with three bands, 1370 channels (replacing IRAS on FY 3A, 3B and 3C ).
The objective is temperature/humidity sounding, ozone profile and total-column green-house gases.
Scanning type: 58 pixels / scan line, arranged in 2 x 2 arrays; swath width of 2250 km.
Instrument mass = 120 kg, power = 129 W.
Spectral range (µm) | Spectral range (cm-1) | Spectral resolution(unapodized) | NEΔT @ specified scene temperature |
8.80-15.39 µm | 650-1136 cm-1 | 0.625 cm-1 | 0.15-0.4 K @ 250 K |
5.71-8.26 µm | 1210-1750 cm-1 | 1.25 cm-1 | 0.1-0.7 K @ 250 K |
3.92-4.64 µm | 2155-2550 cm-1 | 2.5 cm-1 | 0.3-1.2 K @ 250 K |
MERSI-2 (Medium Resolution Spectral Imager -2)
MERSI-2 is a 25-channel VIS/IR spectroradiometer (replacing and merging MERSI-1 on FY-3A/3B and VIRR on FY-3A//3B/3C ). Scanning technique: Cross-track: 2048 detectors for channels at 1000 m resolution, or 8192 detectors for channels at 250 m resolution, swath 2900 km; Along-track: ten 10 km lines every 1.5 s.
Resolution: 250 m or 1.0 km at s.s.p. (sub-satellite point).
Coverage/Cycle: Global coverage once/day (VIS/NIR/SWIR channels), twice/day (MWIR/TIR).
Center wavelength | Bandwidth | SNR or NEΔT @ specified input | IFOV at s.s.p. |
412 nm | 20 nm | 300 @ 44.9 W m-2 sr-1 µm-1 | 1000 m |
443 nm | 20 nm | 300 @ 41.9 W m-2 sr-1 µm-1 | 1000 m |
470 nm | 50 nm | 100 @ 35.3 W m-2 sr-1 µm-1 | 250 m |
490 nm | 20 nm | 300 @ 32.1 W m-2 sr-1 µm-1 | 1000 m |
550 nm | 20 nm | 100 @ 29.0 W m-2 sr-1 µm-1 | 250 m |
555 nm | 20 nm | 500 @ 21 W m-2 sr-1 µm-1 | 1000 m |
650 nm | 50 nm | 100 @ 22 W m-2 sr-1 µm-1 | 250 m |
670 nm | 20 nm | 500 @ 10 W m-2 sr-1 µm-1 | 1000 m |
709 nm | 20 nm | 500 @ 6.9 W m-2 sr-1 µm-1 | 1000 m |
746 nm | 20 nm | 500 @ 9.6 W m-2 sr-1 µm-1 | 1000 m |
865 nm | 20 nm | 500 @ 6.4 W m-2 sr-1 µm-1 | 1000 m |
865 nm | 50 nm | 100 @ 25 W m-2 sr-1 µm-1 | 250 m |
905 nm | 20 nm | 200 @ 10.0 W m-2 sr-1 µm-1 | 1000 m |
936 nm | 20 nm | 100 @ 3.6 W m-2 sr-1 µm-1 | 1000 m |
940 nm | 50 nm | 200 @ 15.0 W m-2 sr-1 µm-1 | 1000 m |
1240 nm or 1030 nm | 20 nm | 100 @ 5.4 W m-2 sr-1 µm-1 | 1000 m |
1380 nm | 20 nm or 30 nm | 60/100 @ 6 W m-2 sr-1 µm-1 | 1000 m |
1640 nm | 50 nm | 200 @ 7.3 W m-2 sr-1 µm-1 | 1000 m |
2130 nm | 50 nm | 100 @ 1.2 W m-2 sr-1 µm-1 | 1000 m |
3.80 µm | 0.18 µm | 0.25 K @ 270 K | 1000 m |
4.05 µm | 0.155 µm | 0.25 K @ 300/380 K | 1000 m |
7.20 µm | 0.50 µm | 0.30 K @ 270 K | 1000 m |
8.55 µm | 0.30 µm | 0.25 K @ 270 K | 1000 m |
10.8 µm | 1.0 µm | 0.4 K @ 300 K | 250 m |
12.0 µm | 1.0 µm | 0.4 K @ 300 K | 250 m |
MWHS-2 (Micro-Wave Humidity Sounder -2)
Objective: Humidity sounding in nearly-all-weather conditions. Also, precipitation.
MWHS-2 is an instrument with 15 frequencies, including bands of 183 GHz (for humidity), and 118 GHz (for supporting information on temperature). MWHS-2 is replacing the MWHS-1 of FY-3A and FY-3B.
Central frequency (GHz) | Bandwidth (MHz) | Polarizations | NEΔT |
89 | 1500 | V | 1.0 K |
118.75±5.0 | 2000 | H | 1.0 K |
118.75±3.0 | 1000 | H | 1.0 K |
118.75±2.5 | 200 | H | 1.6 K |
118.75±1.1 | 200 | H | 1.6 K |
118.75±0.8 | 200 | H | 1.6 K |
118.75±0.3 | 165 | H | 1.6 K |
118.75±0.2 | 100 | H | 2.0 K |
118.75±0.08 | 20 | H | 2.6 K |
150 | 1500 | V | 1.0 K |
183±7 | 2000 | H | 1.0 K |
183±4.5 | 2000 | H | 1.0 K |
183±3 | 1000 | H | 1.0 K |
183±1.8 | 700 | H | 1.0 K |
183±1 | 500 | H | 1.0 K |
MWRI (Micro-Wave Radiation Imager)
Objective: Multi-purpose imagery with emphasis on precipitation.
MWRI is a 5 frequencies, 10 channels instrument and a new development. Operations of MWRI on FY-3A stopped in 2010.
Scanning technique: Conical: 53.1° zenith angle, swath 1400 km. Scan rate: 35.3 scan/min = 11.2 km/scan
Resolution: Changing with frequency, consistent with an antenna diameter of 90 cm.
Coverage/cycle: Global coverage once/day
Instrument mass =175 kg, power = 125 W, data rate = 100 kbit/s.
Central frequency (GHz) | Bandwidth (MHz) | Polarizations | NEΔT | IFOV | Pixel size |
10.65 | 180 | V, H | 0.5 K | 51 x 85 km | 40 x 11.2 km |
18.7 | 200 | V, H | 0.5 K | 30 x 50 km | 40 x 11.2 km |
23.8 | 400 | V, H | 0.5 K | 27 x 45 km | 20 x 11.2 km |
36.5 | 400 | V, H | 0.5 K | 18 x 30 km | 20 x 11.2 km |
89 | 3000 | V, H | 0.8 K | 9 x 15 km | 10 x 11.2 km |
MWTS-2 (Micro-Wave Temperature Sounder - 2)
Objective: Temperature sounding in nearly-all-weather conditions
MWTS-2 is an evolution of MWTS-1 flown on FY-3A and FY-3B
Scanning technique: Cross-track: 30 steps of 32 km s.s.p., swath width = 2250 km
Resolution: 32 km at s.s.p.
Coverage/cycle: Near-global coverage twice/day
Central frequency (GHz) | Bandwidth (MHz) | Polarization | NEΔT |
50.30 | 180 | V or H | 1.2 K |
51.76 | 400 | V or H | 0.75 K |
52.8 | 400 | V or H | 0.75 K |
53.596 | 400 | V or H | 0.75 K |
54.40 | 400 | V or H | 0.75 K |
54.94 | 400 | V or H | 0.75 K |
55.50 | 330 | V or H | 0.75 K |
57.290 | 330 | V or H | 0.75 K |
57.290 ± 0.217 | 78 | V or H | 1.2 K |
57.290 ± 0.322 ± 0.048 | 36 | V or H | 1.2 K |
57.290 ± 0.322 ± 0.022 | 16 | V or H | 1.7 K |
57.290 ± 0.322 ± 0.010 | 8 | V or H | 2.4 K |
57.290 ± 0.322 ± 0.0045 | 3 | V or H | 3.6 K |
SES/IPM (Space Environment Suite / Ionospheric PhotoMeter)
Objective: X-ray spectrometry of the ionosphere
Description not available. Presumably, imaging spectrometer for the X-ray 3-100 keV
Scanning technique: Ionospheric viewing from a sun-synchronous orbit
Resolution: 80 km at the s.s.p.
Coverage(cycle: Global daily. Sampling at 60 s intervals.
SES/WAI (Space Environment Suite / Ionospheric PhotoMeter)
Objective: Observation of Aurora
Description not available. Presumably, UV imaging spectrometer for the range 115-180 nm (inclusive of the H Lyman-α line at 121.6 nm) and fluxmeter for the VIS range 427.8-630 nm
Scanning technique: Earth's limb observation from a sun-synchronous orbit
Resolution: 300 km (for the limb view)
Coverage/cycle: Full ionosphere, with sampling at 22 s (UV) and 180 s (VIS) intervals.
SES/SEM (Space Environment Suite / SEM (FY-3C))
SWS/SEM/HEPD: Space Weather Suite / Space Environment Monitor / High Energy Particle Detector
Objective: Space weather - Charged particles at platform level
Spectrometer for electrons (0.25-2.0 MeV), protons (6.4-38 MeV) and alpha-particles (15-60 MeV)
Scanning technique: N/A (in-situ in the platform environment)
SWS/SEM/IMS: Space Weather Suite / Space Environment Monitor / Ionosphere Measurement Sensor
Objective: To measure the ionospheric electron temperature and density, and platform charge and dose
Specially arranged Langmuir Probe for electron temperature (0-1 eV) and density in the 10- 106 e/cm3 range
Scanning technique: In-situ measurement in a sun-synchronous orbit.
Sensor Complement of FY-3G Mission
The main objective is to provide continuity of the Global Precipitation Measurement mission (GPM), and substantial contribution to climatology. 62)
PMR (Precipitation Measurement Radar)
The Precipitation Measurement Radar is a Ku-band (13.35±0.01 GHz) and Ka-band (35.55±0.01 GHz ) Precipitation Radar, with HH polarisation for both bands. The sensitivity is 0.5mm/hr forKu-band and 0.2mm/hr for Ka-band. 63)
The instrument will measure precipitation intensity and type.
The scanning technique across track scan is +/- 20.3 deg 300 km, and the resolution is 5 km horizontal and 250 m Vertical.
GNOS-2 (GNSS Radio Occultation Sounder - 2)
GNOS-2 measures the phase delay due to refraction during occultation between GPS and LEO, as well as the reception of signals received after reflection by the sea surface, co-processed with those from the precision-orbit-determination antenna, to infer wind speed. 64)
The main purpose is to monitor the temperature/humidity sounding with highest vertical resolution, and the space weather and sea surface wind speed.
GNOS-2 uses limb scanning from the satellite altitude to close-to-surface by time sampling a 90° azimuth sectors, fore and aft. There is also a separate earth-surface viewing antenna for reflectometry.
The resolution is about 300 km horizontal and 0.5 km vertical, and it will be monitored by Galileo and the BeiDou GNSS constellations tracking system.
GNOS-2 has an average spacing of 710 km, with a global coverage (300 km spacing) in 2 weeks, and 1000 soundings per day. The number of atmospheric occultations is less than a 1000 per day.
MERSI-RM (MERSI-Rainfall Measurement)
MERSI-RM is an 8-channel VIS/IR radiometer, which can provide multi-purpose imagery to support cloud and precipitation observations with PMR. 65)The instrument is a simplified version of MERSI for the Rainfall Mission, has a cross-track scanning technique of about 4096 samples, a swath of 2900 km, and a resolution of 500 m at s.s.p.It will provide global coverage once per day on VIS/NIR/SWIR channels, and twice per day on MWIR/TIR.
Detailed Characteristics:
| Center wavelength | Bandwidth | SNR or NEΔT @ specified input | IFOV at s.s.p. (sub-satellite point) |
|---|---|---|---|
| 650 nm | 50 nm | 150 @ 22 W m-2 sr-1 μm-1 | 500 m |
| 865 nm | 50 nm | 150 @ 25 W m-2 sr-1 μm-1 | 500 m |
| 940 nm | 50 nm | 150 @ 15.0 W m-2 sr-1 μm-1 | 500 m |
| 1380 nm | 30 nm | 150 @ 6 W m-2 sr-1 μm-1 | 500 m |
| 1640 nm | 50 nm | 340 @ 7.3 W m-2 sr-1 μm-1 | 500 m |
| 3.80 μm | 0.18 μm | 0.15 K @ 300 K | 500 m |
| 10.8 μm | 1.0 μm | 0.10 K @ 300 K | 500 m |
| 12.0 μm | 1.0 μm | 0.10 K @ 300 K | 500 m |
MWRI-RM (Micro-Wave Radiation Imager for the Rainfall Mission)
MWRI-RM provides multi-purpose imagery, with emphasis on precipitation. 66)This imager has 17 frequencies and 26 channels, including bands 54, 118 and 183 GHz for temperature and humidity, a conical scanning technique of 53.1° zenith angle, and a swath of 800 km.Its resolution changes with frequency, and it’s consistent with an antenna diameter of 180 cm. The coverage is limited to once per day, and consistent with the 50° orbital inclination. It is an improved version of the MWRI radiometer flown on the other FY-3 satellites.
| Center wavelength | Bandwidth | Polarization | NEΔT | IFOV |
|---|---|---|---|---|
| 10.65 GHz | 180 MHz | V,H | 0.5 K | 21×35 km |
| 18.7 GHz | 200 MHz | V,H | 0.5 K | 14×23 km |
| 23.8 GHz | 400 MHz | V,H | 0.5 K | 13×21 km |
| 36.5 GHz | 900 MHz | V,H | 0.5 K | 9×15 km |
| 50.30 GHz | 400 MHz | V,H | 0.5 K | 7×11 km |
| 52.61 GHz | 400 MHz | V,H | 0.5 K | 7×11 km |
| 53.24 GHz | 400 MHz | V,H | 0.5 K | 7×11 km |
| 53.75 GHz | 400 MHz | V,H | 0.5 K | 7×11 km |
| 89.0 GHz | 3000 MHz | V,H | 0.5 K | 5×8 km |
| 118.7503±3.2 GHz | 2x500 MHz | V | 0.8 K | 4×7 km |
| 118.7503±2.1 GHz | 2x400 MHz | V | 0.8 K | 4×7 km |
| 118.7503±1.4 GHz | 2x400 MHz | V | 0.8 K | 4×7 km |
| 118.7503±1.2 GHz | 2x400 MHz | V | 0.8 K | 4×7 km |
| 183.31±2.0 GHz | 2x1350 MHz | V | 0.8 K | 4×6 km |
| 183.31±2.0 GHz | 2x1500 MHz | V | 0.8 K | 4×7 km |
| 183.31±3.4 GHz | 2x1500 MHz | V | 0.8 K | 4×7 km |
| 183.31±7.0 GHz | 2x2000 MHz | V | 0.8 K | 4×7 km |
HAOC (High Accuracy On-board Calibrator)
HAOC is a VIS/SWIR imaging spectrometer aiming to support climate quality radiance measurements, in the VIS/SWIR spectral regions.Through its high-precision spectral imaging observations of the Earth and the Moon, it can achieve radiation reference transfer to other optical imagers on different platforms. 67)HAOC aims to provide an absolute radiance reference for VIS/SWIR observations. Its spectral range is 400nm-2300nm and its spectral resolution is 5 nm(<1000nm) - 20nm (>1000nm).
PMAI (Short-wave Infrared Polarized Multi-Angle Imager)
PMAI is an experimental instrument for FY-3G, created for aerosol and cloud measurements.This imager has three spectral bands centered at 1.03 um, 1.370um, 1.640 um. 68)
Ground Segment
NSMC / CMA (National Satellite Meteorological Center / China Meteorological Administration) is responsible for receiving, processing the data of Chinese and foreign meteorological satellites, and distributing the data and information products to users for application. Other responsibilities include establishing the ground segment of the Chinese meteorological satellite observation system, conducting applied research in satellite meteorology, making plans and programs for developing Chinese meteorological satellite system based on the national requirements.
The FY-3 ground segment is comprised with 5 receiving stations. One of the stations will be in high latitude place (Svalbard, Norway). The FY-3 data products will be transmitted via DVB-S (Digital Video Broadcast-Satellite).
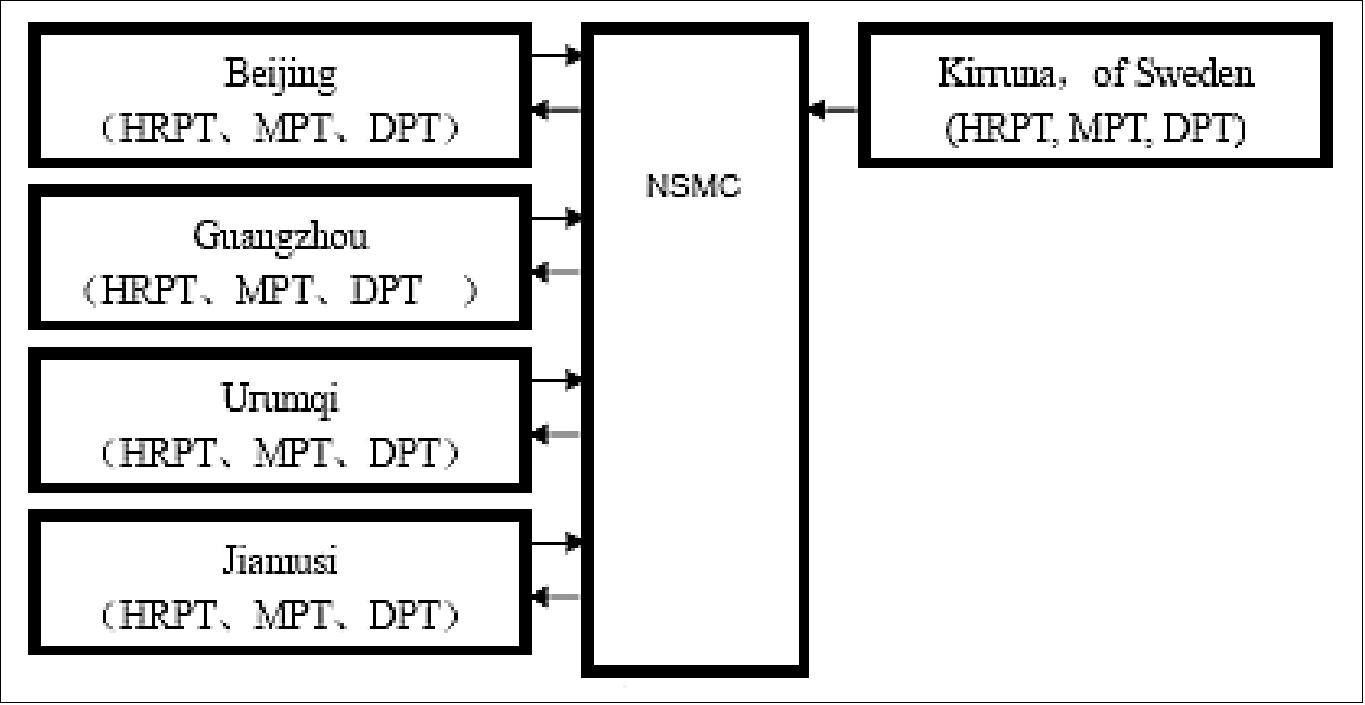
Station name | Longitude | Latitude |
Beijing Station | 116º 16' 36'' E | 40º 03' 06'' N |
Guangzhou Station | 113º 20' 20'' E | 23º 09' 52'' N |
Urumqi Station | 87º 34' 08'' E | 43º 52' 17'' N |
Jiamusi Station | 130º 22' 48'' E | 46º 45' 20'' N |
Kiruna Station | 21º 02' E | 67º 32' N |
The FY-3A ground segment includes the data processing center, operation and control center, ground receiving center, and data archiving center. The technical systems are the Data Acquisition System (DAS), Computer and Network System (CNS), Operation Control System (OCS), Data Pre-Processing System (DPPS), Products Generation System (PGS), Quality Control System (QCS), Utilization Demonstration System (UDS), Archive and Service System (ARSS), Monitoring and Analysis System (MAS), and Simulation and Technical Supporting System (STSS).
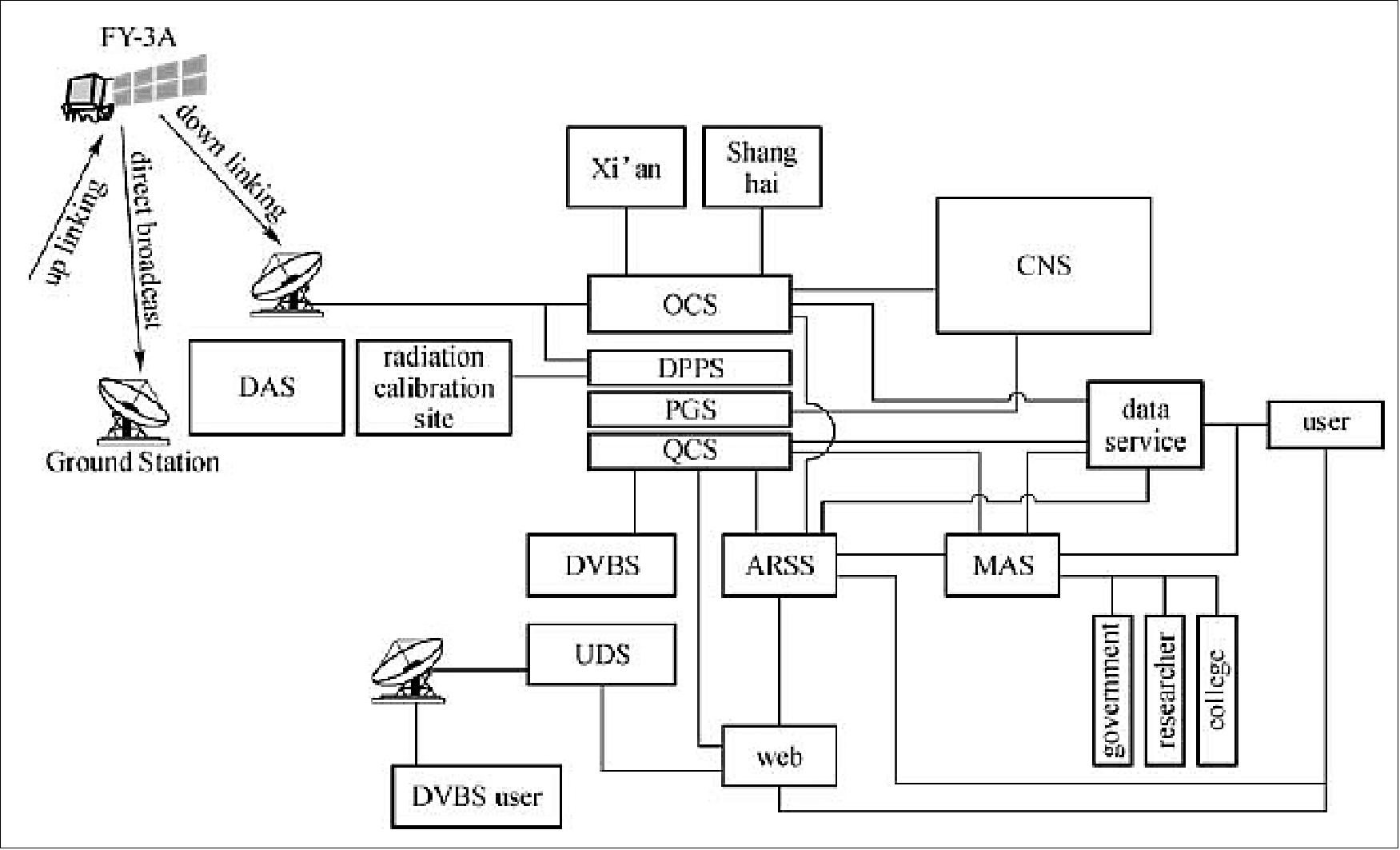
Data Sharing and Service (Ref. 15):
Fengyun satellite data is provided to both domestic and international users via the following ways.
1) Direct Broadcast Service. Users with appropriate receiving equipment can directly receive data transmission of each operational Fengyun satellite.
2) DVB-S Dissemination System. The CMACast system uses the DVB technology to disseminate realtime products to subscribers.
3) Internet. The Fengyun Satellite Data Service Network (Website: http://satellite.cma.gov.cn) is one of the ways to download realtime or historical products.
4) FTP Service. For users demanding for large bulk data in realtime or near-realtime, the system initiatively pushes the data to user-specified FTP servers.
5) Manual Service. If large volume data is requested and has been approved by CMA (China Meteorological Administration), manual service is also available.
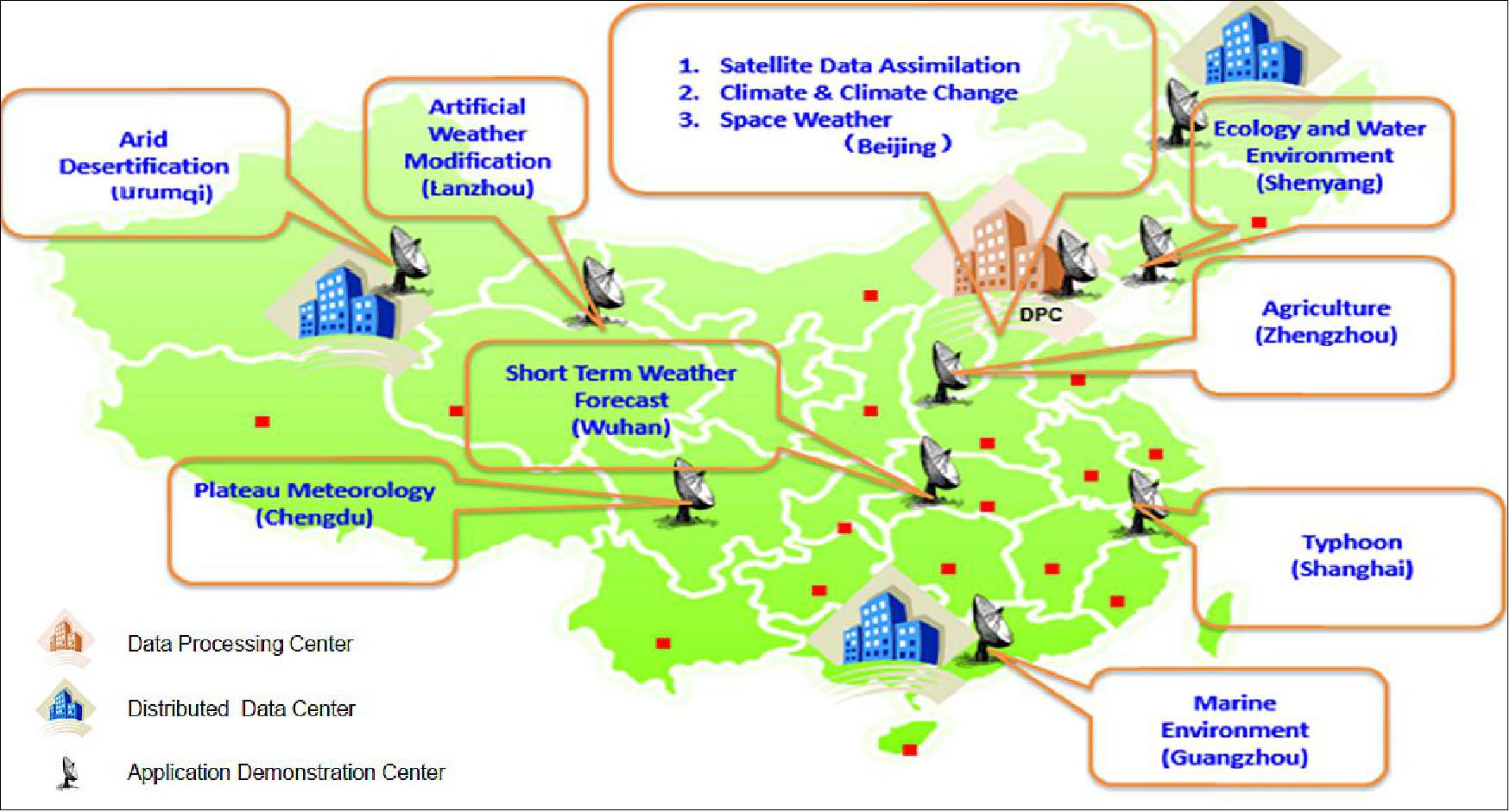
Figure 23: Satellite application facilities in China (image credit: CMA/NSMC)
| Service | Direction | Frequency (MHz) | Bandwidth (kHz) | D/A |
|---|---|---|---|---|
| MPT | S-E | 7784 MHz - 7796 MHz | - | D |
| DPT | S-E | 8025 MHz - 8400 MHz | - | D |
References
1) Z. Meng, Y. Sun, Y. Dong, “FY-3 China's Second Generation Polar Orbit Meteorological Satellite,” Proceedings of 53rd IAC and World Space Congress, Oct. 10-19, 2002, Houston, TX, IAC-02-B.2.10
2) C. Dong, W. Zhang, “China's Current and Future Meteorological Satellite Systems,” The 2004 EUMETSAT Meteorological Satellite Conference, May 31-June 4, 2004, Prague, Czech Republic, URL: http://www.eumetsat.int/Home/Main/Publications/Conference_and_Workshop_Proceedings
/groups/cps/documents/document/pdf_conf_p41_s1_dong_v.pdf
3) W. Zhang, “FY-3 Series, The Second Generation of Polar-Orbiting Meteorological Satellites of China,” Proceedings of ACRS 2002, Nov. 25-29, 2002, Kathmandu, Nepal
4) J. Zhang, “Applications of FY-2C Meteorological Satellite in China,” EUMETSAT Meteorological Satellite Conference, Dubrovnik, Croatia, Sept. 19-23,2005
5) W. Zhang,, C. H. Dong, J. Xu, J. Yang, “Current and Future Meteorological Satellite Program of China,” ITSC-14 (International TOVS Study Conference), Beijing, May 25-31, 2005, URL: http://cimss.ssec.wisc.edu/itwg/itsc/itsc14/presentations/session9/9_2_zhang.pdf
6) Chaohua Dong, Jun Jang, Jianmin Xiu, Naimeng Lu, “The Status of Chinese Meteorological Satellites,” The 15th International TOVS Study Conference (ITSC-15), Matera, Italy Oct. 4-10, 2006, URL: http://cimss.ssec.wisc.edu/itwg/itsc/itsc15/presentations/session10/10_3_chaohua.pdf
7) Hu Yang, Naimeng Lu, “An Introduction of FY3 Satellite Project - Status and Future Plan,” 7th GPM International Planning Workshop, Dec. 5-7, 2007, Tokyo, Japan, URL: http://www.eorc.jaxa.jp/GPM/ws7/pdf/5thDEC2007/PM/5_pm13.pdf8) Chaohua Dong, Wenjian Zhang, “Progress on the New Generation of Chinese Meteorological Satellites and Some Applications,” URL: http://cimss.ssec.wisc.edu
/itwg/itsc/itsc13/proceedings/session6/6_2_chaohua.pdf
9) Jun Yang, Chaohua Dong, Peng Zhang, Gang Ma, “The 2ndGeneration of Chinese Polar-orbiting Satellite-Fengyun-3 Series: Status Report,” Proceedings of ITSC-16 (16th International TOVS Study Conference), Angra dos Reis, Brazil, May 6-13, 2008, URL: http://cimss.ssec.wisc.edu/itwg/itsc/itsc16/presentations/11_05_ma.pdf
10) Jun Yang, “China’s FengYun Meteorological Satellite Programs,” 6th GOES Users' Conference, Madison, WI, USA, Nov. 3-5, 2009, URL: http://cimss.ssec.wisc.edu
/goes_r/meetings/guc2009/presentations_final/1103_1204_Yang.ppt
11) Chaohua Dong, Jun Yang, Wenjian Zhang, Zhongdong Yang, Maimeng Lu, Jinming Shi, Peng Zhang, Jujie Liu, Bin Cai, “An Overview of Chinese New Weather Satellite FY-3A,” BAMS (Bulletin of the American Meteorological Society), Volume 90, Issue 10, Oct. 2009, pp. 1531–1544, URL: http://journals.ametsoc.org/doi/pdf/10.1175/2009BAMS2798.1
12) Peng Zhang, “Present and Future Chinese Meteorological Satellite Mission for Atmospheric Remote Sensing,” URL: http://earth.eo.esa.int/dragon/Opening-L1-ZhangP.pdf
13) http://www.nsmc.cma.gov.cn/NewSite/NSMC_EN/Channels/100097.html
14) Jinsong Wang, “National Satellite Meteorological Center, CMA,” 24th CEOS Plenary, Rio de Janerio, Brazil, Oct. 12-15, 2010, URL: https://web.archive.org/web/20160306144516/http://www.dpi.inpe.br/ceos/apresentacoes/Item_02_NSMC-Rio.pdf
15) Yunqiu Tang, Jiashen Zhang, Jingsong Wang, “FY-3 Meteorological Satellites and the Applications,” Space Science Activities in China, 2014, URL: http://english.nssc.cas.cn/ns/NU/201410/W020141016603623483749.pdf
16) “Status of Investigation on Using Early Morning Orbit by FY-3,” 41st Meeting of the CGMS-41(Coordination Group for Meteorological Satellites), CMA-WP-09, Tsukuba, Japan, July 8-12, 2013, URL: http://www.cgms-info.org/documents/documents-cgms/2067839.pdf
17) “China Launches Weather Satellite For Olympic Games,” Spacemart, May 28, 2008, URL: http://www.spacemart.com/reports/China_Launches_Weather_Satellite_For_Olympic_Games_999.html
18) “The FY-3C satellite was successfully launched,” NSMC, Sept. 23, 2013, URL: http://www.nsmc.cma.gov.cn/newsite/NSMC_EN/Contents/100480.html
19) Patrick Blau, “Chinese Long March Rocket launches Fengyun Weather Satellite,” Spaceflight 101, Sept. 23, 2013, URL: http://www.spaceflight101.com/china-long-march-4c-fengyun-3c-launch.html
20) “FY-3A Satellite to Ground Interface Control Document (HRPT),” URL: http://mdkenny.customer.netspace.net.au/FY3_HRPT.pdf
21) ”China successfully launched FY-3D polar orbiting meteorological satellite,” CMA, 15 Nov. 2017, URL: http://www.cma.gov.cn/en2014/news/News/201711/t20171115_456104.html
22) Stephen Clark, ”China launches Fengyun weather satellite into polar orbit,” Spaceflight Now, 5 July 2021, URL: https://spaceflightnow.com/2021/07/05/
china-launches-fengyun-weather-satellite-into-polar-orbit/
23) WMO EC-66 (Executive Council-66), Geneva Switzerland, June 18, 27, 2014
24) ”Observing Earth: How more than 30 years of China's meteorological satellite data is used by the world,” EurekAlert News Release, Institute of Atmospheric Physics,CAS, 12 July 2021, URL: https://www.eurekalert.org/pub_releases/2021-07/ioap-hmt071221.php
25) Peng Zhang, Jun Yang, Jinsong Wang, and Xinwen Yu”Preface to the Special Issue on Fengyun Meteorological Satellites:Data, Application and Assessment,” Advances in Atmospheric Sciences, Vol. 38, August 2021, pp: 1265-1266, https://doi.org/10.1007/s00376-021-1002-5
26) Di Xian, Peng Zhang, Ling Gao, Ruijing Sun, Haizhen Zhang, and Xu Jia, ”Fengyun Meteorological Satellite Products for Earth System Science Applications,” Advances in Atmospheric Sciences, Vol. 38, August 2021, pp: 1267-1284, https://doi.org/10.1007/s00376-021-0425-3, URL: https://link.springer.com/content/pdf/10.1007/s00376-021-0425-3.pdf
27) ”High quality image from FY-3D was successfully received,” CMA, 11 Dec. 2017, URL: http://www.cma.gov.cn/en2014/news/News/201712/t20171211_457918.html
28) ”FY-3C satellite,” WMO, OSCAR (Observing Systems Capability Analysis and Review Tool), accessed on May 29, 2017, URL: https://www.wmo-sat.info/oscar/satellites/view/115
29) Fabien Carminati, William Bell, ”Assimilation of FY-3 data at the MET Office,” Proceedings of the EUMETSAT 2016 Meteorological Satellite Conference, Darmstadt, Germany, Sept. 26-30, 2016, availability of the proceedings at the end of December 2016, URL: http://www.eumetsat.int
/website/home/News/ConferencesandEvents/DAT_2833302.html
30) NSMC (National Satellite Meteorological Center), update of July 30, 2015, URL: https://web.archive.org/web/20200208183019/http://www.nsmc.org.cn:80/en/NSMC/Channels/FY_3A.html
31) https://web.archive.org/web/20211022070321/http://www.nsmc.org.cn/en/NSMC/Channels/FY_3B.html
32) https://web.archive.org/web/20211022070322/http://www.nsmc.org.cn/en/NSMC/Channels/FY_3C.html
33) Ruixia Liu, ”Status of Current and Future Satellite Programs of China Meteorological Administration,” The 1st KMA International Meteorological Satellite Conference, Seoul, Korea, November 16-18, 2015, URL: http://www.kmaimsc.kr/html/menu1_sub4.php
34) Yang Han, Xiaolei Zou, Fuzhong Weng, “Cloud and precipitation features of Super Typhoon Neoguri revealed from dual oxygen absorption band sounding instruments on board FengYun-3C satellite,” Geophysical Research Letters, Volume 42, Issue 3, pp: 916–924, 16 February 2015, URL: http://onlinelibrary.wiley.com/doi/10.1002/2014GL062753/full
35) http://www.wmo-sat.info/oscar/satellites/view/113
36) Xiuqing Hu, Na Xu, Ronghua Wu, Lin Chen, Min Min, Ling Wang, Hanlie Xu, Ling Sun, Zhongdong Yang, Peng Zhang, “Performance assessment of FY-3C/MERSI on early orbit,” Proceedings of SPIE, Vol. 9264, 'Earth Observing Missions and Sensors: Development, Implementation, and Characterization III,' 92640Y (November 26, 2014); doi:10.1117/12.2071190, Beijing, China, October 13, 2014
37) “China's polar-orbiting meteorological satellite now operational,” Space Daily, May 8, 2014, URL: http://www.spacedaily.com/reports/
Chinas_polar_orbiting_meteorological_satellite_now_operational_999.html
38) ”FengYun-3 C satellite has been taken delivery in orbit,” NSMC/CMA, May 6, 2014, URL: http://www.nsmc.cma.gov.cn/NSMC_EN/Contents/100497.html
39) Geng-Ming Jiang, Wei Zhou, “Comparison of the in-orbit calibrations between the Microwave Sounders on NOAA and FY-3 Satellites,” Proceedings of IGARSS (IEEE International Geoscience and Remote Sensing Symposium), Melbourne, Australia, July 21-26, 2013
40) Information provided by Shenwei Zhang of CSSAR/CAS (Center for Space Science and Applied Research/ Chinese Academy of Sciences), Beijing, China
41) “EUMETCast expands global dissemination to include FY-3B data,” EUMETSAT, Jan. 20, 2012, URL: http://www.eumetsat.int/Home/Main/News/CorporateNews/814949?l=en
42) “China's Fengyun-3B satellite goes into official operation,” Space Daily, May 31, 2011, URL: http://www.spacedaily.com/reports/China_Fengyun_3B_satellite_goes_into_official_operation_999.html
43) Hu Yang, Liqing lv, Hongxin Xu, Jiakai He, Shengli Wu, “Evaluation of FY-3B MWRI instrument on-orbit calibration accuracy,” Proceedings of IGARSS (International Geoscience and Remote Sensing Symposium), Vancouver, Canada, July 24-29, 2011
44) “Launching of FY-3B a Complete Success,” NSMC/CMA, January 6, 2011, URL: http://www.nsmc.cma.gov.cn/NewSite/NSMC_EN/Contents/100359.html
45) http://fy3.satellite.cma.gov.cn/ArssEn/default.aspx
46) http://www.nsmc.cma.gov.cn/NewSite/NSMC_EN/Channels/100184.html
47) http://fy3.satellite.cma.gov.cn/ArssEn/StaticContent/Load_Profile/html/virr.html
48) CEOS EO Handbook, Oct. 2010, NRSCC agency summary, URL: http://database.eohandbook.com/database/agencysummary.aspx?agencyID=20
49) “Fengyun-3A Weather Satellite Begins Weather Monitoring,” Spacedaily, Jan. 13, 2009, URL: http://www.spacedaily.com/reports/Fengyun_3A_Weather_Satellite_Begins_Weather_Monitoring_999.html
50) Chaohua. Dong, Jun Yang, Zhongdong Yang, Neimeng Lu, Jinming Shi, Peng Zhang, Yujie Liu, Bin Cai, “A New Remote Sensing Resource from Chinese FY-3A Satellite,” URL: http://www.a-a-r-s.org
/acrs/proceeding/ACRS2008/Papers/TS%2011.6.pdf
51) Information from WMO OSCAR (Observing Systems Capability Analysis and Review Tool), URL: https://www.wmo-sat.info/oscar/satellites/view/116
52) Chaohua. Dong, Wenjian Zhang, “The Sounding Instruments on Second Generation of Chinese Meteorological Generation of Chinese Meteorological Satellite FY Satellite FY-3,” ITSC-13, Sainte Adele, Canada, Oct. 29-Nov. 4, 2003, URL: http://cimss.ssec.wisc.edu/itwg/itsc/itsc13/session6/6_1_chaohua.pdf
53) Jing Zheng, Chun-Xiang Shi, Qi-Feng Lu, Zheng-Hui Xie, “Evaluation of Total Precipitable Water over East Asia from FY-3A/VIRR Infrared Radiances,” Atmospheric and Oceanic Science Letters, Vol. 3, No. 2, 2010, pp. 93-99, URL: https://web.archive.org/web/20160308034856/http://www.lasg.ac.cn/staff/xie/papers/2010_zheng_AOSL.pdf
54) Xinhua Niu, Lei Ding, “MERSI in FY-3 Meteorological Satellite,” Proceedings of the 59th IAC (International Astronautical Congress), Glasgow, Scotland, UK, Sept. 29 to Oct. 3, 2008, IAC-08-B1.3.6
55) Shengwei Zhang, Jing Li, Jingshan Jiang, Yunhua Zhang, Zhenzhan Wang, Xiaolong Dong, “Microwave Humidity Sounder (MWHS) of Chinese Meteorological Satellite FY-3,” Proceedings of the `Microwave Technology and Techniques Workshop -Enabling Future Space Systems,' ESA/ESTEC, Noordwijk, The Netherlands, May 15-16, 2006, ESA SP-632
56) Shengwei Zhang, Jing Li, Zhenzhan Wang, Hongjian Wang, Maohua Sun, Jingshan Jiang, Jieying He, “Design of the second generation Microwave Humidity Sounder (MWHS-II) for Chinese Meteorological Satellite FY-3,” Proceedings of IGARSS (International Geoscience and Remote Sensing Symposium), Munich, Germany, July 22-27, 2012
57) YongMei Wang, YingJian Wang, WeiHe Wang, Zhong Mou Zhang, Jian Gong Lü, LiPing Fu, Fang Jiang, Ji Chen, Ji Hong Wang, Feng Jun Guan, Fu Xiang Huang, Xing Ying Zhang, “FY-3 satellite Ultraviolet Total Ozone Unit,” Chinese Science Bulletin, Vol. 55, No 1, January 2010, pp. 84-89, doi: 10.1007/s11434-009-0335-8, URL: http://www.springerlink.com/content/tm78t2v025102170/fulltext.pdf
58) Weihua Bai, Yueqiang Sun, Qifei Du, Guanlin Yang, Zhongdong Yang, Peng Zhang, Yanmeng Bi, Xianyi Wang, Cheng Cheng,Ying Han, “An introduction to the FY3 GNOS instrument and mountain-top tests,” Atmospheric Measurement Techniques, Vol. 7, pp: 1817–1823, 2014, URL: http://www.atmos-meas-tech.net/7/1817/2014/amt-7-1817-2014.pdf
59) YanMeng Bi, ZhongDong Yang, Peng Zhang, YueQiang Sun, WeiHua Bai, QiFei Du, GuangLin Yang, Jie Chen, Mi Liao, “An introduction to China FY3 radio occultation mission and its measurement simulation,” Advances in Space Research, Volume 49, Issue 7, 1 April 2012, pp: 1191–1197
60) World Meteorological organization, “FY-3G meteorological satellite, the first precipitation measurement satellite of FY-3 series, successfully lifted off - China Meteorological Administration”, April 18, 2023, URL: https://public.wmo.int/en/media/news-from-members/fy-3g-meteorological-satellite-first-precipitation-measurement-satellite-of
61) World Meteorological organization, “FENGYUN-3F meteorological satellite successfully lifted off: China Meteorological Administration”, Aust 4, 2023, URL: https://public.wmo.int/en/media/news-from-members/fengyun-3f-meteorological-satellite-successfully-lifted-china-meteorological
62) Oscar, “Satellite: FY-3G”, URL: https://space.oscar.wmo.int/satellites/view/fy_3g
63) Oscar, “Instrument: PMR (FY-3)”, URL: https://space.oscar.wmo.int/instruments/view/pmr_fy_3
64) Oscar, “Instrument: GNOS-2 ”, URL: https://space.oscar.wmo.int/instruments/view/gnos_2
65) Oscar, “Instrument: MERSI-RM”, URL: https://space.oscar.wmo.int/instruments/view/mersi_rm
66) Oscar, “Instrument: MWRI-RM”, URL: https://space.oscar.wmo.int/instruments/view/mwri_rm
67) Oscar, “Instrument: HAOC”, URL: https://space.oscar.wmo.int/instruments/view/haoc
68) Oscar, “Instrument: PMAI”, URL: https://space.oscar.wmo.int/instruments/view/pmai
The information compiled and edited in this article was provided by Herbert J. Kramer from his documentation of: ”Observation of the Earth and Its Environment: Survey of Missions and Sensors” (Springer Verlag) as well as many other sources after the publication of the 4th edition in 2002. - Comments and corrections to this article are always welcome for further updates (eoportal@symbios.space).
Spacecraft Launch Mission Status Sensor Complement Ground Segment References Back to top